Large-eddy simulation of laser-induced surface-tension-driven flow
12
Large-Eddy Simulation of Laser-Induced Surface- Tension-Driven Flow DIPANKAR CHATTERJEE and SUMAN CHAKRABORTY The turbulent flow inside a laser-generated molten pool is investigated by an adapted large-eddy simulation (LES) model that incorporates physical considerations pertaining to the solid-liquid phase change. A single-domain, fixed-grid enthalpy-porosity approach is utilized to model the phase-change phenomena in the presence of a continuously evolving solid/liquid interface. The governing transport equations are simultaneously solved by employing a control-volume formulation, in conjunction with an appropriate enthalpy-updating closure scheme. To demonstrate the performance of the present model in the context of phase-change materials processing, simulation of a typical high-power laser melting process is carried out, where effects of turbulent transport can actually be realized. It is found that the present LES-based model is more successful in capturing the experimental trends, in comparison to the k-–based turbulence models often employed to solve similar problems in contemporary research investigations. I. INTRODUCTION LASER surface melting refers to a generic materials- processing operation, constituting the basis of several manu- facturing processes of technological relevance (such as laser-beam welding and laser cladding, for example), in which the workpieces are locally melted by an intense laser source, followed by a subsequent solidification of the sub- strate. The mechanical strength and microstructure of the workpieces are strongly dependent on the thermal histories in the fusion zone and the nearby unmelted region during these processes. Further, fluid flow in the molten region is known to have a considerable effect on these thermal histories and solidification processes. Therefore, in order to predict the thermal behavior of the process accurately, it is very important to have a thorough knowledge of the transport mechanisms inside the laser-melted pool. Numerical studies of heat transfer and fluid flow in laser- melted pools have been performed by several researchers in the past, [1–6] typically employing laminar transport models. However, it has been observed that in the case of surface- tension-driven flows, the flow becomes turbulent if the surface-tension Reynolds number is greater than 100. [7] It can be shown that typically, for a high-power laser melting, the surface-tension Reynolds number is much greater than 100. Accordingly, in most laser melting situations where the power input is high, the melt-pool convection can be turbulent. Turbulence modeling in the context of phase-change materials processing, in general, is a relatively recent prac- tice. [7–13] Most of the researchers in this field have preferred the k- model for its inherent simplicity. This has been primarily motivated by the fact that the Reynolds-averaged Navier–Stokes (RANS) equations represent transport equa- tions for the mean flow quantities only, with all the scales of the turbulence being apparently modeled. The approach of permitting a solution for the mean flow variables greatly reduces the computational effort. If the mean flow is steady, the governing equations will not contain time derivatives, and a steady-state solution can be obtained economically. A computational advantage is seen even in transient situa- tions, since the time-step will be determined by the global unsteadiness in the mean flow rather than by the turbulent fluctuation scales. It is imperative to understand here that the k- model simply attempts to capture the turbulence by performing time or space averaging. Under certain conditions, this method can be very accurate, but it might not be very suitable for all transient flows, since the averaging process wipes out most of the important characteristics of a time- dependent and large-scale coherent flow structure. Further, the k- model may not perform satisfactorily in recirculating flows, since it is based on the Boussinesq hypothesis, which does not take into account the rotationality in motion and turbulence anisotropy. However, unfortunately, no single turbulence model is universally accepted as being superior for all classes of problems. The choice of turbulence model would eventually depend on considerations such as the physics encompassed in the flow, the established practice for a specific class of problem, the level of accuracy required, the available computational resources, and the amount of time available for the simulation. As such, most of the research currently taking place in the field of computational fluid dynamics (CFD) concerns the capacity of various math- ematical models to be able to mimic real-life turbulent flows in a reasonably accurate and physically consistent manner. To that end, many models have been put forth to provide accurate solutions to these flows. Ideally, a direct numerical solution (DNS) would turn out to be the best choice in this respect, because of its inherent capability to solve for all time and spatial scales associated with the turbulence. How- ever, from a practical perspective, DNS is virtually ruled out for most of the complicated CFD problems, such as the laser surface-melting problem referred to here, for example, since it is too computationally intensive. In practice, to resolve all spatial and temporal scales in a laser surface- melting problem, the time and space resolutions would need to be extremely refined, resulting in a discretization that METALLURGICAL AND MATERIALS TRANSACTIONS B VOLUME 36B, DECEMBER 2005—743 DIPANKAR CHATTERJEE, Senior Research Fellow, and SUMAN CHAKRABORTY, Assistant Professor, are with the Department of Mechan- ical Engineering, Indian Institute of Technology, Kharagpur - 721302, India. Contact e-mail: [email protected] Manuscript submitted January 25, 2005.
Transcript of Large-eddy simulation of laser-induced surface-tension-driven flow

Large-Eddy Simulation of Laser-Induced Surface-Tension-Driven Flow
DIPANKAR CHATTERJEE and SUMAN CHAKRABORTY
The turbulent flow inside a laser-generated molten pool is investigated by an adapted large-eddysimulation (LES) model that incorporates physical considerations pertaining to the solid-liquid phasechange. A single-domain, fixed-grid enthalpy-porosity approach is utilized to model the phase-changephenomena in the presence of a continuously evolving solid/liquid interface. The governing transportequations are simultaneously solved by employing a control-volume formulation, in conjunctionwith an appropriate enthalpy-updating closure scheme. To demonstrate the performance of the presentmodel in the context of phase-change materials processing, simulation of a typical high-power lasermelting process is carried out, where effects of turbulent transport can actually be realized. It is foundthat the present LES-based model is more successful in capturing the experimental trends, in comparisonto the k-�–based turbulence models often employed to solve similar problems in contemporary researchinvestigations.
I. INTRODUCTION
LASER surface melting refers to a generic materials-processing operation, constituting the basis of several manu-facturing processes of technological relevance (such aslaser-beam welding and laser cladding, for example), inwhich the workpieces are locally melted by an intense lasersource, followed by a subsequent solidification of the sub-strate. The mechanical strength and microstructure of theworkpieces are strongly dependent on the thermal historiesin the fusion zone and the nearby unmelted region duringthese processes. Further, fluid flow in the molten region isknown to have a considerable effect on these thermal historiesand solidification processes. Therefore, in order to predictthe thermal behavior of the process accurately, it is veryimportant to have a thorough knowledge of the transportmechanisms inside the laser-melted pool.
Numerical studies of heat transfer and fluid flow in laser-melted pools have been performed by several researchers inthe past,[1–6] typically employing laminar transport models.However, it has been observed that in the case of surface-tension-driven flows, the flow becomes turbulent if thesurface-tension Reynolds number is greater than 100.[7] It canbe shown that typically, for a high-power laser melting, thesurface-tension Reynolds number is much greater than 100.Accordingly, in most laser melting situations where the powerinput is high, the melt-pool convection can be turbulent.
Turbulence modeling in the context of phase-changematerials processing, in general, is a relatively recent prac-tice.[7–13] Most of the researchers in this field have preferredthe k-� model for its inherent simplicity. This has beenprimarily motivated by the fact that the Reynolds-averagedNavier–Stokes (RANS) equations represent transport equa-tions for the mean flow quantities only, with all the scalesof the turbulence being apparently modeled. The approach
of permitting a solution for the mean flow variables greatlyreduces the computational effort. If the mean flow is steady,the governing equations will not contain time derivatives,and a steady-state solution can be obtained economically.A computational advantage is seen even in transient situa-tions, since the time-step will be determined by the globalunsteadiness in the mean flow rather than by the turbulentfluctuation scales. It is imperative to understand here thatthe k-� model simply attempts to capture the turbulence byperforming time or space averaging. Under certain conditions,this method can be very accurate, but it might not be verysuitable for all transient flows, since the averaging processwipes out most of the important characteristics of a time-dependent and large-scale coherent flow structure. Further,the k-� model may not perform satisfactorily in recirculatingflows, since it is based on the Boussinesq hypothesis, whichdoes not take into account the rotationality in motion andturbulence anisotropy. However, unfortunately, no singleturbulence model is universally accepted as being superiorfor all classes of problems. The choice of turbulence modelwould eventually depend on considerations such as thephysics encompassed in the flow, the established practicefor a specific class of problem, the level of accuracy required,the available computational resources, and the amount oftime available for the simulation. As such, most of theresearch currently taking place in the field of computationalfluid dynamics (CFD) concerns the capacity of various math-ematical models to be able to mimic real-life turbulent flowsin a reasonably accurate and physically consistent manner.To that end, many models have been put forth to provideaccurate solutions to these flows. Ideally, a direct numericalsolution (DNS) would turn out to be the best choice in thisrespect, because of its inherent capability to solve for alltime and spatial scales associated with the turbulence. How-ever, from a practical perspective, DNS is virtually ruledout for most of the complicated CFD problems, such as thelaser surface-melting problem referred to here, for example,since it is too computationally intensive. In practice, toresolve all spatial and temporal scales in a laser surface-melting problem, the time and space resolutions would needto be extremely refined, resulting in a discretization that
METALLURGICAL AND MATERIALS TRANSACTIONS B VOLUME 36B, DECEMBER 2005—743
DIPANKAR CHATTERJEE, Senior Research Fellow, and SUMANCHAKRABORTY, Assistant Professor, are with the Department of Mechan-ical Engineering, Indian Institute of Technology, Kharagpur - 721302, India.Contact e-mail: [email protected]
Manuscript submitted January 25, 2005.

744—VOLUME 36B, DECEMBER 2005 METALLURGICAL AND MATERIALS TRANSACTIONS B
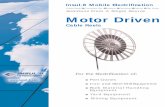
Fig. 1—Schematic diagram of a typical laser surface-melting process.
would take an extraordinarily long time to solve, even withthe best of computational facilities available these days.
Large-eddy simulation (LES) provides an alternative yet amore practical approach, in which the large eddies are com-puted in a time-dependent simulation that uses a set of fil-tered equations. Filtering is essentially a manipulation of theexact Navier–Stokes equations to remove only eddies that aresmaller than the size of the filter, which is usually taken asthe mesh size. Since small eddies contain less turbulent kineticenergy, they have a more “universal” behavior. Hence, theyare more isotropic (based on the Kolmogorov hypothesis) andare easier to be modeled. Like Reynolds averaging, the fil-tering process creates additional unknown terms that mustbe modeled in order to achieve closure. Statistics of the meanflow quantities, which are generally of most engineering inter-est, are gathered during the time-dependent simulation. Theattraction of LES is that, by modeling less of the turbulence(and solving more), the errors induced by the turbulence modelare greatly reduced. One might also argue that it ought to beeasier to find a universal model for the small scales, whichtend to be more isotropic and less affected by the macroscopicflow features than the large eddies. However, in a sense thatLES computes at least the larger eddies participating in theoverall transport process within the problem domain, it isexpected to represent the physics of the problem in a muchmore mathematically consistent manner than the way in whichthe commonly used RANS-based models do the same. In thatrespect, LES can be thought of as a reasonable compromisebetween some of the oversimplified turbulence models com-monly employed in engineering analysis and the compu-tationally overintensive DNS approach. However, to date,no single attempt has been reported in the literature to modelthe laser melting process using LES-based mathematical mod-els. Accordingly, the aim of the present work is to develop aLES model capable of addressing turbulent molten-metal-poolconvection in the presence of a continuously evolving phase-change interface. In order to take into account the phase-changeaspects of the present problem, a modified enthalpy-porositytechnique is used, which is consistent with the continuumapproach adopted for the modified LES model. Finally, wesimulate a typical high-power laser surface-melting processand validate the present results with available experimentalresults reported in the literature.
II. MODEL AND THEORY
A. Physical Problem
Figure 1 shows a schematic diagram of a typical lasermelting process, in which a continuous-beam laser strikesthe opaque surface of a base metal (taken as iron in thepresent study). Only a part of the heat available from thelaser beam heats the surface of the workpiece and leads tothe formation of a molten pool. Hence, in the thermal mod-eling of laser melting, the actual power (q) that goes intothe workpiece as heat input is usually specified through theparameter �, the laser-beam efficiency, by the followingrelation:
[1]
where Q represents the total laser power. As the substratereaches the molten state, the absorbed energy induces a
q � hQ
surface-tension-driven flow at the top surface. This is due toa very high temperature gradient caused by intense heatingwith the laser. It is important to note here that the resultantconvection plays a significant role in governing the overalltransport in a laser-melted pool. Although this convectionis a combined effect of buoyancy and surface-tension forces(Marangoni forces), the latter ones are found to dominate intypical applications of laser surface melting.
B. The LES Model Formulation
1. Governing equations for LESThe governing equations employed for LES are obtained
by filtering the time-dependent Navier–Stokes equations ineither Fourier (wave-number) space or configuration (phys-ical) space. In the LES, the flow field is effectively dividedinto large eddies that are fully resolved on the computationalgrid and small eddies that are filtered out with a chosen filterby employing the aforementioned filtering procedure. Dueto the relatively universal character of the small eddies, itis expected that small eddies are easier to be modeled thanthe large eddies.
Following Erlebacher et al.,[14] the flow variables aredecomposed into the resolved (supergrid-scale) and unre-solved (subgrid-scale) components by a spatial filteringoperation such that , where the overbar denotesthe resolved-scale and the prime symbol denotes the unre-solved subgrid-scale quantities. A spatial filtered variable(denoted by an overbar) is defined by
[2]
Here, G is the filter kernel (specifically, a box filter) witha filter width of �, defined as, � � (�x�y�z)1/3, where �x,�y, and �z are the grid sizes in the axial, transverse, andspanwise directions, respectively. In Eq. [2], xi is the coor-dinate direction (i � 1, 2, or 3) and zi is the domain of theflow, defined following the Einstein summation convention.
The filtering operation is normalized by imposing that
[3]∫��
��
G 1xi � zi,� 2dzi � 1
f� 1xi,t;�2 � ∫��
��
f 1zi, t 2G 1xi � zi;�2dzi
f � f� � f ¿

METALLURGICAL AND MATERIALS TRANSACTIONS B VOLUME 36B, DECEMBER 2005—745
It follows from Eqs. [2] and [3] that, for equally spaced andweakly stretched grids, and .Filtering reduces the high-wave-number Fourier componentsof the flow variables and separates the resolved-scale compo-nents from the subgrid scales. In this study, a box filter isemployed, which is appropriate for finite-volume schemes.[15]
The filter function G (in any direction of x) is defined as
[4]
Applying the filtering operator to the conservation equa-tions of mass, momentum, energy, and species results inthe following spatially filtered Navier–Stokes equations. Itcan be noted here that all conservation equations are volumeaveraged over individual phases, so as to obtain a single setof conservation equations over the entire domain, therebyeliminating any requirement of explicit phase-front tracking.
a. Conservation of mass (continuity equation)The equivalent single-phase continuity equation for an
incompressible fluid is given by
[5]
where � is the density and is the large-scale (or resolved-scale) velocity component along the Cartesian direction xi,obtained from grid filtering.
b. Conservation of linear momentumThe equivalent single-phase linear momentum-conserva-
tion equation is given by
[6]
where is the resolved scale pressure, is the dynamicviscosity, gi is the acceleration due to gravity in the ith direction,T is the volumetric expansion coefficient of heat, and Tm is themelting temperature of the base material. The term is intro-duced as a consequence of spatial filtering. It is the so-calledsubgrid-scale stress tensor, written as .The source term originates from the consideration that themorphology of the phase-change domain can be treated as anequivalent porous medium that offers a frictional resistancetoward fluid flow in that region. In a single-domain, fixed-gridenthalpy-porosity formulation, this resistance can be conve-niently formulated using Darcy’s model in association withthe Cozeny–Karman relationship[16] as
[7]
where fl is the liquid fraction, given as beingthe latent enthalpy content of a control volume and L beingthe latent heat of fusion. The term is given by the fol-lowing expression:
[8]
In Eq. [7], km is a large number (�106) and b is a smallnumber (�10�3), to avoid division by zero. The aforemen-
� 0: T � Tm
h�L � f (T) � L: T � Tm
h�L
fl � h�L/L, h�L
A � �km c (1 � fl)2
fl3 � b
d
Au� i
tijSGS � r[uiuj � u� iu� j]
tijSGS
p�
� Au� i � rgibT 1T � Tm2
t 1ru� i 2 �
xj 1ru� iu� j2 � �
p�
xi�
xj am
u� i
xj b �
tSGSij
xj
u� i
r
t�
(ru� i)
xi� 0
G � e1/� ��/2 � |x � z| � �/2
0 otherwise
f / xi � f� / xi f / t � f / ttioned formulation effectively ensures that the velocity under-goes a smooth transition from a zero value in the solid regionto a finite value in the liquid region. The details of theenthalpy-porosity formulation can be found in an article byBrent et al.[16]
c. Conservation of energyThe equivalent single-phase energy conservation equation
(neglecting the energy transfer due to viscous dissipationand pressure work) becomes
[9]
In Eq. [9], is the total enthalpy, given as ,where is the sensible enthalpy and is the latententhalpy, is the resolved-scale temperature obtainedfrom grid filtering, c is the specific heat, and K is the thermalconductivity. In Eq. [9], is the subgrid total enthalpyflux, defined as .
2. Subgrid closuresa. Momentum closureThe model for the subgrid stress tensor is usually
derived by drawing an analogy between the viscous stressesin the unfiltered Navier–Stokes equation and the subgridstresses in the filtered equations. Hence, the deviatory partof the subgrid stresses is assumed to be proportional to thedeviatory part of the resolved rate of strain,
[10]
The subgrid stress tensor can be split into deviatory andisotropic parts as , where the deviatorypart is modeled as and the iso-tropic part is given as . Hence, the totalsubgrid stress tensor can be expressed as
[11]
Here, t is the subgrid eddy viscosity and kSGS is the subgridkinetic energy, which is to be modeled in order to obtain closurefor the subgrid stresses. The evolution equation for subgridkinetic energy, following Menon et al.,[17] is given as
[12]
The terms PSGS and �SGS in Eq. [12] are, respectively, theproduction and dissipation of subgrid kinetic energy. Thecoefficient Prt is the turbulent Prandtl number and is takento be 0.9.[18] Spectral-closure theories of Kraichnan[19] andLesieur[20] predict the following expression for eddy viscosityat large scales:
[13]
where kc(�1/�) is the cut-off wave number correspondingto the smallest resolved wave number in LES. By substitutingthe following form of the energy spectrum,[21]
[14]E(k) � a�2/3k�5/3exp C�(3/2)a(kh)4/3 D
mt � 0.2611E(kc)/kc
�
xi ar mt
Prt kSGS
xib
t 1rkSGS 2 �
xi 1ru� i k
SGS 2 � PSGS � �SGS
tijSGS � �2mt[S�ij � S�kkdij/3] � (2/3)rkSGS
dij
tkkSGS � (2/3)rkSGS
dij
tij,dSGS � �2mt[S� ij � S�kk dij/3]
tijSGS � tij,d
SGS � tkkSGS
S�ij �1
2 a u� i
xj�
u� j
xib
(tijSGS)
HiSGS � r[uiH � u� iH ]
HiSGS
Th�Lh�S 1�c T 2 H � h�S � h�LH
t 1rH 2 �
xi 1ru� iH 2 �
xi aK
c H
xi b �
HiSGS
xi

746—VOLUME 36B, DECEMBER 2005 METALLURGICAL AND MATERIALS TRANSACTIONS B
which is valid in both the inertial and dissipation range,Chakravarthy and Menon[22] obtained the following expres-sion for the eddy viscosity:
[15]
where � � 1.4 is the Kolmogorov constant, is the Kolmogorov length scale, and �t is the total dissipa-tion rate. The contribution of the exponential term is negli-gible if kc lies in the inertial range, and, hence, an approximateform of the subgrid eddy viscosity[22] is given as
[16]
The subgrid dissipation (�SGS) is obtained by integratingthe dissipation spectrum (D(k) � �2k2E(k)) over the unre-solved wave number[22] to get
[17]
Finally, the subgrid production term is modeled as
[18]
b. Scalar closureThe subgrid total enthalpy flux is modeled using
the eddy diffusivity model as
[19]
It can be noted here that, since large-scale motion isresolved in LES, the associated countergradient processesin the resolved scales are also resolved (even though agradient closure is employed for ).
3. Boundary conditionsBoundary conditions for the thermal and flow variables
with reference to the workpiece can be stated as follows.
a. Top surfaceConsidering Gaussian heat input and convective and
radiation loss, the boundary condition can be written in thefollowing form:
[20]
where K is the thermal conductivity, ht is the convective heat-transfer coefficient, T� is the ambient temperature, �r is theemissivity of the top surface, and �rad (� 5.67 � 10�8 W/m2 K4) is the Stefan–Boltzmann constant.
The heat flux (q�(r)) is given as
[21]
where r is the distance from the laser center and rq is halfof the laser-beam width.
From the free-surface shear balance between viscous forceand surface tension force,
[22]
[23]m w
y� sT
T
z
m u�
y� sT
T
x
q¿¿(r) �q
prq2 exp 1�r2>rq
2 2
�K T
y� �q¿¿(r) � ht 1T � T� 2 � �r srad 1T 4 � T�
4 2
HiSGS
HiSGS � �
mt
Prt H
xi
(HiSGS)
PSGS � �tijSGS
u� i
xj
�SGS � 0.916 1kSGS 23/2>�
mt � 0.0671kSGS�
hk � �t�1/4
n3/4
mt � 0.0671kSGS �exp C�(3/2)a(khk)4/3 D
where �T is the surface-tension coefficient of temperature.Considering the flat-surface condition at the top, it is
possible to specify the vertical mean velocity as
[24]
b. Side facesThe four side faces are subjected to the convective heat-
transfer boundary condition:
[25]
where n is the direction of outward normal to the surfaceinvolved, and hs is the corresponding convective heat-transfercoefficient. Since the heat input is in the form of a Gaussianlaser source that is applied on the top surface alone, thereis no explicit heat input on the side faces. Consequently, theradiation effect on the side faces is neglected.
It needs to be noted here that the convection coefficientsat the top surface and the side faces strongly depend on thehydrodynamic, thermal, and concentration boundary layersdeveloped on the respective surfaces. It is very difficult tomathematically estimate their exact values. Instead, a nondi-mensional analysis can be helpful in this regard, which sug-gests that the Nusselt number and the Sherwood number arethe nondimensional temperature and concentration gradientsat the surfaces. From an idea of the order of magnitude ofthe Nusselt number, the convection coefficients can be esti-mated. The aforementioned methodology in conjunction withthe literature is used to predict the same. In the presentnumerical simulations, ht � 15 W/m2.K and hs � 10 W/m2.Kare used.
c. Bottom faceThe face being insulated, the corresponding thermal
boundary condition is
[26]
d. Solid/liquid interfaceIt is apparent that the solid/liquid interface in this problem
acts as a wall, and the same needs to be treated appropriately.However, according to the enthalpy-porosity formulation,one does not need to track the interface separately and imposevelocity or temperature boundary conditions on the same,since the interface comes out as a natural outcome of thesolution procedure itself.
III. NUMERICAL PROCEDURE
The coupled conservation equations are solved using apressure-based finite-volume method according to the SIM-PLE algorithm.[23] A second-order implicit temporal dis-cretization, which is supposed to give better results for LES,is used here. The upwind scheme should be avoided, becauseit may unduly damp out the energy of the resolved eddies.Consequently, the central differencing scheme is used forall equations and for both convective and diffusive terms.The enthalpy porosity technique is used to numerically handlethe phase-change aspect of the problem. The latent enthalpy
T
y� 0
�K T
n� hs 1Twall � T�2
v� � 0

METALLURGICAL AND MATERIALS TRANSACTIONS B VOLUME 36B, DECEMBER 2005—747
content of each computational cell is updated according tothe following equation:[16]
[27]
where n is the iteration level and aP and are the nodal-point coefficient and coefficient associated with the transientpart of the discretized energy equation. The function is the inverse latent-heat function, the prescription of whichplays a pivotal role in successful numerical implementationconsistent with the physical situation on hand. In the presentwork, this is determined based on the work of Chakrabortyand Dutta[24] as
[28]
The physical-property values used in the computationare presented in Table I. The calculations for equivalentmixture properties are carried out at each time-step after solv-ing the energy conservation equation. The results presentedin this study correspond to a typical value of process param-eters as follows: Q � 2.4 kW, � � 0.15, and rq � 0.9 mm.
A. Choice of Grid Size
The appropriate grid size for the present problem is bestfound by trial and error. To capture sufficient flow detailsinside the surface-tension-driven boundary layer at the topsurface, at least a few (typically, five) grid points are accom-modated inside the same. Accordingly, we choose a depthof 4.0 � 10�6 m for the topmost grids. Just below this, thegrid depths are taken as 8.0 � 10�6 m, followed by a depthof 1.2 � 10�5 m over a three-grid spacing, and, subsequently,2.4 � 10�5 m, 4.1 � 10�5 m, 4.9 � 10�5 m, 5.3 � 10�5 m,and 9.8 � 10�5 m, respectively, in the negative y direction.Thereafter, a uniform grid spacing of 3.75 � 10�4 m isemployed for most of the remaining part of the pool. Thegrid spacing is gradually made coarser in the negative ydirection. Outside the molten pool, a nonuniform coarse gridis chosen. In the x and z directions, an optimized grid sizenear the solid/liquid interface is found to be 6.45 � 10�5 m,after which the grid size is increased gradually to 2.66 �
F�11h�L 2 � cTm
F�11h�L 2aP
0
Ch�LDn�1 � Ch�LDn � 1aP /aP0 2l1 CHP Dn � F�11h�L 2 2
10�4 m away from the wall. Overall, a 69 � 35 � 69 gridsystem is used to discretize the working domain (8 � 4 �8 mm), as shown in Figure 2. A grid-independence studyhas been carried out for a set of different-sized grids. It isfound that the present grid turns out to be a reasonable opti-mization from the point of view of numerical accuracy andcomputational economy.
B. Choice of Time-Step
A dynamic time-step consistent with the phase-changephysics is adopted in the present simulation. Initially, a rel-atively larger time-step (about 0.001 seconds) is chosen toallow the substrate to melt through pure conduction. Afterabout 0.005 seconds, the base metal melts and the high-temperature gradient in the pool sets up a strong Marangoniflow, leading to a convection-dominated transport. Since,over this time span, convection in the molten pool developsrapidly, the solution is very sensitive to the time-step chosen.It is observed that a time-step size only as small as about0.0005 seconds can lead to monotonic convergence of thesolution during this period of initial transience. Typically,after about 0.025 seconds, the molten pool reaches a statein which changes in dependent variables between the consec-utive time-steps are relatively small. At this stage, slightlyhigher time-steps (typically, about 0.001 seconds) can safelybe used to save computational time. After 0.4 seconds, thepool becomes sufficiently developed, which allows time-steps as high as 0.002 seconds without any oscillation.Finally, the simulation is carried out up to 1 second in orderto achieve a quasi-steady state. During this period, themaximum relative variations in the values of dependentvariables between two consecutive time-steps are found tobe less than 10�5 pct.
The Courant number (Cr � vav�t/�x, where Cr is Courantnumber, vav is the average linear flow velocity, �t is themaximum time-step, and �x is the maximum grid spacing)varies with simulation time. Initially, during the conductionperiod, Cr was equal to 0; then, during the initial convectionperiod, it increased to 1.34, then further increased to 2.67,and, finally, when the pool became sufficiently developed,
Table I. List of Physical Properties
Physical Properties (Constants) Values
T 1.0 � 10�5 K�1
Tm 1809.15 KL 2.47196 � 105 J/kg� 7800 kg/m3
�T �4.9 � 10�4 N/m KPhysical Properties (Variables)
(Pa � s)K
74.8 W/m K41.0 W/m K44.0 W/m K
c456.0 J/kg K658.6 J/kg K804.0 J/kg KT � 1809 K
373 K � T � 1809 K273 K � T � 373 K
T � 1809 K373 K � T � 1809 K273 K � T � 373 K
exp (41,400/RT )3.3699 � 10�4
Fig. 2—Grids used to discretize the computational domain.

748—VOLUME 36B, DECEMBER 2005 METALLURGICAL AND MATERIALS TRANSACTIONS B
a larger value of about 5.34 was set up to a quasi-steadystate.
C. Convergence Criteria
Within a particular time-step, convergence for all the inde-pendent variable values are checked after eachiteration. Convergence is taken to be achieved if the fol-lowing tolerance is satisfied at each grid point (based on themethod of relative error):
[29]
where � is the value of the general variable at a particulargrid point at the current iteration level, �old is the value ofthe general variable at the same grid point at the previousiteration level, and �max is the maximum absolute value ofthe same over the entire domain.
IV. RESULTS AND DISCUSSION
In the absence of an established criterion for the onset ofturbulent Marangoni convection in a molten metal pool, itmay be realistic to assume that the critical Reynolds number(for the onset of turbulence) based on a length scale in thetransverse direction of flow is of the order of 102, followingthe criterion suggested by Bejan.[25] Since, in the presentcase, molten-pool convection is dominated by Marangonieffects, a Reynolds number may be defined based on themaximum surface velocity (as the characteristic velocityscale) and the pool width (as the characteristic length scalein the transverse direction of fluid flow). Accordingly, wedefine a Reynolds number, Re � �umaxr/, where umax isthe maximum velocity in the direction perpendicular to thepool axis and r is the width of the molten pool. Since it isdifficult to establish the corresponding value of a criticalReynolds number theoretically, we employ a scaling analy-sis[26] to choose a range of process parameters that yieldsufficiently high values of the Reynolds number to ensureturbulent transport. From an implementation point of view,initially we start the simulation with a laminar model and,subsequently, activate the LES model when the surface-tension Reynolds number exceeds 600, following the criteriongiven by Atthey.[27]
For appropriate depiction of the flow statistics, in termsof the instantaneous, mean, and variance of the spatiallyfiltered flow quantities, Figures 3 through 5 are plottedcorresponding to a fully developed molten pool (about1 second physical time). The time-averaged variance of atypical spatially filtered flow quantity is defined as
, where denotes a time-averagedvalue. A radially outward flow structure can be observed onthe top surface, as evident from the velocity vector plotsdepicted in Figures 3(a) and 4(a). As the surface-tensioncoefficient of temperature is negative for the present case,a fluid element located in the vicinity of the laser sourcewill have a lower surface tension than another fluid elementlocated further away from the source, both fluid elementsbeing located on the top (free) surface. This differential ofsurface tension gives rise to the aforementioned flow
� #��(f� (xi,t) � �f� (xi,t)�)2�
�f¿2� �
` f � fold
fmax` � 10�4
(u� ,v�,w, and T )
phenomena. The forces, which influence the laser-meltedpool dynamics, are primarily the surface-tension force,viscous force, and buoyancy force. Among all these forces,the surface-tension force is predominant and is the mostimportant one, as it initiates the flow within the molten pool.Such clear surface-tension-dominated flows are apparentfrom Figures 3 and 4. Further, it can be interpreted from thevector plots that the velocity vectors at certain locations(typically, near periphery of the pool) are not very smooth,indicating the existence of smaller eddies of different length
(a)
(b)
(c)
Fig. 3—Instantaneous-velocity vector plots at 1 s: (a) top view, (b) viewof the longitudinal midplane, and (c) view of the cross-sectional midplane.

METALLURGICAL AND MATERIALS TRANSACTIONS B VOLUME 36B, DECEMBER 2005—749
(a)
(b)
(c)
Fig. 4—Mean-velocity vector plots at 1 s: (a) top view, (b) view of thelongitudinal midplane, and (c) view of the cross-sectional midplane.
scales, thereby enhancing the mixing process. It is alsoobserved that the longitudinal and cross-sectional views ofthe velocity vector plots (Figures 3(b) and 4(b), respectively)show the development of a prominent hydrodynamic bound-ary layer near the top surface, on account of an enhancedeffective diffusion strength for momentum transport in thevertical direction, which cannot be disturbed by a relativelyweaker advection strength in that direction. Variances of thevelocity components (the summation of which is propor-tional to the mean turbulent kinetic energy and is calculatedfrom the positive root-mean-square derivation, rendering all
(a)
(b)
(c)
Fig. 5—Time-averaged variance of velocity components plot at 1 s: (a) topview, (b) view of the longitudinal midplane, and (c) view of the cross-sectional midplane.

750—VOLUME 36B, DECEMBER 2005 METALLURGICAL AND MATERIALS TRANSACTIONS B
Fig. 6—Instantaneous-vorticity plot of the top surface at 1 s.
(a)
(b)
(c)
Fig. 7—Reynolds stress on a line at the middle of the top surface. (a) UUReynolds stress, (b) UV Reynolds stress, and (c) UW Reynolds stress. Thevalues shown are in m2/s2. Here, U, V, and W refer to velocity compo-nents along x, y, and z directions, respective sense.
vectors to point in the positive x-y directions) also turn outto be high near the solid/liquid interface (refer to Figure 5),which acts like a wall in the present simulation (turbulencegenerated in the wall shear layer). To further illustrate theflow and the turbulence structure, instantaneous vorticesobtained from the LES simulation
are plotted in Figure 6. A coherent recir-culatory flow structure as well as large-scale vortices at thecenter of the top surface can be seen from Figure 6. Twotypes of vortices can clearly be distinguished from this figure.The central one is related to somewhat well-organized coher-ent flow structures, whereas the outer ones are related to therandom turbulent eddies of smaller sizes, leading to wormlikevortices. At the solid/liquid interface, due to the high degreesof the generation of anisotropic turbulence, small-scalevortices are found to appear. Figure 7 shows the Reynoldsshear-stress plots on a line parallel to the x-axis at the middleof the top x-z plane. Since variances in velocity components(or equivalently, turbulent kinetic energy) are generated ina thin shear layer adhering to the top surface, there is a sig-nificant variation in the Reynolds stress components, pri-marily attributable to the three-dimensional vortex dynamicsof turbulent eddies that redistribute turbulent energetic fluctu-ations to different directions. However, it is observed thatthis nature of redistribution is not quite isotropic in nature,which is clearly captured by the present LES-based model.Figure 8 represents the mean temperature contours at thetop surface, longitudinal midplane, and cross-sectional mid-plane, respectively. The molten pool is found to be geomet-rically spherical in an approximate sense, which is consistentwith the findings of Chao and Szekely[10] for turbulent gastungsten-arc welding pools. This kind of pool shape, asobserved from the present simulation, is a consequence ofan enhanced diffusion process in the case of a turbulentmolten pool. In the present case, the net thermal energyavailable to the pool is predominantly transported along
( v�/ x � u�/ y)k)� jy j � jzk � ( w/ y � v�/ z) i � ( u� / z � w/ x)j �
(j � § � V � jx i

METALLURGICAL AND MATERIALS TRANSACTIONS B VOLUME 36B, DECEMBER 2005—751
(a)
(b)
(c)
Fig. 8—Mean-temperature contour plots at 1 s: (a) top view, (b) view ofthe longitudinal midplane, and (c) view of the cross-sectional midplane.All the values shown on the contours are in Kelvin.
the longitudinal and sidewise directions by the Marangoniadvection, along with the molecular as well as eddy thermaldiffusion process. The downward advection of heat is smallcompared to the longitudinal and spanwise advection becauseof the much smaller magnitude of the downward velocitycomponent, as compared to the magnitudes of the longitu-dinal and spanwise components. In the case of turbulenttransport, due to an enhanced mixing process, the meanadvection strength goes down, which results in a decreasein longitudinal and sidewise advection strength. On the otherhand, an enhanced effective diffusion process due to inter-actions between the fluctuating velocity components of eddiesin a turbulent pool tries to increase the length and width ofthe pool by propagating the influence of thermal disturbanceacross a relatively larger distance. The resultant pool geom-etry is, therefore, a consequence of the two aforementionedcounteracting effects, active in tandem.
Figure 9 shows a contour plot of the subgrid-scale tur-bulent kinetic energy in the molten pool. It is observed fromFigures 9(a) through (c) that the turbulent kinetic energyattains a maximum value near the solid/liquid interface. Atthe solid/liquid interface, the temperature gradients are higherthan in the rest of the domain. Consequently, the localvelocity gradients would also be higher. Since the productionof subgrid turbulent kinetic energy is proportional to the fil-tered velocity gradient (refer to Eq. [18]), the subgrid-scaleturbulent kinetic-energy generation is at a maximum nearthe solid/liquid interface. The dissipation is considered asan important quantity, since it provides a direct measure ofthe energy emanating from the system. In the context ofLES, in addition to the resolved scale dissipation, whichaccounts for the direct loss of energy from the resolved scaleto dissipation, there is also subgrid-scale dissipation, whichaccounts for the net transfer of energy from the resolved
(a)
(b)
(c)
Fig. 9—Subgrid turbulent kinetic-energy plots at 1 s: (a) top view, (b) viewof the longitudinal midplane, and (c) view of the cross-sectional mid-plane. All the values shown on the contours are in m2/s2.

752—VOLUME 36B, DECEMBER 2005 METALLURGICAL AND MATERIALS TRANSACTIONS B
scales to the subgrid scales and, eventually, to heat. Theresolved-scale dissipation and the corresponding subgrid-scale dissipation in nondimensional form can be given by
and , respectively, withRe being the Reynolds number. Hence, the ratio of thesubgrid- to resolved-scale dissipation becomes �SGS/�RES ��t /(1/Re). Figures 10 and 11, respectively, show the iso-contours of the subgrid-scale dissipation at the top surfaceand the ratio of the subgrid- to resolved-scale dissipationplot on a line parallel to the x-axis at the middle of the topx-z plane. It is revealed from these figures that unresolvedsmall scales account for substantial dissipation. It can benoted here that an enhanced strain field associated withstagnation-point flow near interfaces also contributes to asignificant amount of dissipation, typically somewhat awayfrom the center of the pool.
�SGS � 2ntS�ijS�ij�RES � (2/Re)S�ij S�ij
Figures 12 and 13 depict the time-series analysis ofvelocity and temperature at the centroidal point on the topsurface. From the analysis, it can be inferred that the velocityas well as the temperature are fluctuating substantially fromtheir respective means, which, in turn, suggests that the flowis turbulent. The fluctuations seem to subside after about0.025 seconds, where an almost quasi-steady state is sup-posedly reached.
A comparison of the present results with the corres-ponding laminar and k-� model predictions is presentedin Table II. It can be seen that the laminar model predictshigher values of maximum temperature and velocity in thedomain, in comparison to the turbulence-model estima-tions. This is physically obvious, since, with a lower netdiffusive strength, there is always a chance that laminar-flow assumptions may overpredict the values of local flowand thermal variables. With a more realistic accountingof energy-cascading mechanisms and subsequent dissipationover diffusive-length scales, the LES model predicts values
Fig. 10—Contour of subgrid-scale dissipation at 1 second on the top sur-face. All the values shown on the contours are in m2/s3.
Fig. 11—Plot of the ratio of subgrid-scale dissipation to resolved-scaledissipation on a line at the middle of the top surface at 1 s.
Fig. 12—Time-series analysis of velocity at the centroidal point on thetop surface.
Fig. 13—Time-series analysis of temperature at the centroidal point onthe top surface.

METALLURGICAL AND MATERIALS TRANSACTIONS B VOLUME 36B, DECEMBER 2005—753
A comprehensive grid-sensitivity study was carried outand is presented in Table III. It is revealed that thepercentage errors with respect to maximum temperaturepredictions and maximum velocity predictions in the meltpool are within 2 pct of the results obtained for the meshsize used in the computation (69 � 35 � 69), whichaffirms that the choice of the mesh size is optimal for thepresent case.
V. CONCLUSIONS
An LES model is developed for analyzing surface-tension-driven flows during phase-change laser materials processing.It should, however, be stressed here that the application of LESto phase-change materials processing simulations is currentlyin its infancy. As highlighted in a related review publication,[30]
typical applications to date have been only exercised for simplegeometries, without involving any changes in phase. This ismainly because of the extremely rich computational resourcesrequired to resolve the turbulent eddies. To date, the mostsuccessful LES simulations have been executed using high-order spatial discretization schemes, with great care being takento resolve all scales larger than the inertial subrange. The degra-dation of accuracy in the mean flow quantities with poorlyresolved LES is, however, not well documented. Significantresearch needs to be executed in this regard to standardize LES-based models for simulation of transport phenomena in phase-change materials processing with a greater level of confidence.
ACKNOWLEDGMENTS
The authors gratefully acknowledge the financial grantsprovided by the Department of Science and Technology,Government of India, for carrying out this research.
NOMENCLATURE
discretization equation coefficientsb small number to avoid division by zeroc specific heat (J/kg K)fl liquid fractiong acceleration due to gravity (m/s2)G filter functionh convective heat-transfer coefficient (W/m2 K)H total enthalpy (J/kg)km a large numberkSGS subgrid kinetic energy (m2/s2)K thermal conductivity (W/m K)L latent heat of fusion (J/kg)
aP,aP0
Table II. Comparison of Various Simulation Results
Maximum Temperature Maximum VelocityModel Rise (K) Prediction (m/s)
Laminar 2720 2.35k-� 2590 1.85LES 2550 1.50
Table III. Grid Sensitivity Study
Pct Error in Pct Error in Maximum Maximum
Grid Size Temperature Velocity
59 � 25 � 59 1.0 0.865 � 35 � 65 0.8 0.679 � 45 � 79 1.2 0.9
Note: The percentage error is calculated using |� � �z|/�, where �z isbased on 69 � 35 � 69 grids.
Fig. 14—Variation of aspect ratio of the pool with boundary heating factor.
of maximum temperature and velocity that are even lessin comparison to the corresponding k-� model predictions.Such predictions from the LES-based model eventuallyturn out to be more realistic than other commonly usedmathematical models. This can be further justified fromexperimental results[28,29] reported in the literature, asrepresented in Figure 14, where the variations of aspectratio of the pool with boundary heating factors (normalizedlaser input power) are shown. The boundary heating factorcan be derived by defining the normalized parameters as
, where is the normalized temperature; t* is thenondimensional time (Fourier number); x*, y*, and z* arethe nondimensional lengths; L is a characteristic length(L rq), and T� and Tm are as defined earlier. Using thesenormalized parameters, the top-surface thermal-bound-ary condition (Eq. [20]) assumes the form
, where Bf � q� (r) L/K(Tm � T∞) is theboundary heating factor and
is an effective heat-transfer coefficient. It can beobserved that the aspect ratio (ratio of pool width to depth)decreases with boundary heating factors. From the numer-ical simulations, it can be found that the width of the pooldoes not change appreciably with the variation of the afore-mentioned parameter (once the size of the heat source isfixed). In contrast, the depth increases more rapidly withincrease in heat input. Hence, the aspect ratio decreaseswith increase in boundary heating factor. This trend canalso be verified from the experimental and numerical resultsof Sekhar[28] and Chatterjee and Chakraborty.[29]
1T � T�2 heff � ht � �r srad 1T 2 � T2� 2 Bf � 1heff L /K2u� u�/ y* �
u�z* � z/Ly* � y/L, andt* � at/L2, x* � x/L,u� � T � T� /Tm � T�,

754—VOLUME 36B, DECEMBER 2005 METALLURGICAL AND MATERIALS TRANSACTIONS B
P pressure (N/m2)PSGS subgrid production term (m2/s3)Q net power (W)q� heat flux (W/m2)Q actual power input (W)rq radius of laser beam (m)R universal gas constant (J/Kmol K)T temperature (K)t time (seconds)U x component of velocity (m/s)v y component of velocity (m/s)w z component of velocity (m/s)x, y, and z coordinate system
Greek symbols
T volumetric expansion coefficient of heat (K�1)� laser efficiency�k Kolmogorov length scale dynamic viscosity (Pa . s)t Eddy viscosity (Pa . s)
latent enthalpy (J/kg)�SGS subgrid kinetic-energy dissipation rate (m2/s3)�r emissivity�t total dissipation rate (m2/s3)� relaxation factor
normalized temperature� density (kg/m3)�rad Stefan–Boltzmann constant (W/m2 K4)�T surface-tension coefficient (N/m K)� vorticity vector (m/s2)
Subscripts
max maximum valuen iteration level/normal directionold old iteration valueref reference� ambient
Superscripts
SGS subgrid term
REFERENCES1. C.L. Chan, J. Mazumdar, and M.M. Chen: Mater. Sci. Technol., 1987,
vol. 3, pp. 306-11.
u�
h�L
2. C.L. Chan, J. Mazumdar, and M.M. Chen: Metall. Trans. A, 1984,vol. 15A, pp. 2175-84.
3. C.L. Chan, J. Mazumdar, and M.M. Chen: J. Appl. Phys., 1988, vol. 64,pp. 6166-75.
4. B. Basu and J. Srinivasan: Int. J. Heat Mass Transfer, 1988, vol. 11,pp. 2331-38.
5. S. Kou and Y.H. Wang: Metall. Trans. A, 1986, vol. 17A, pp. 2265-70.6. J.C. Chen and Y.C. Huang: Int. J. Heat Mass Transfer, 1990, vol. 34,
pp. 663-71.7. M.R. Aboutalebi, M. Hassan, and R.I.L. Guthrie: Num. Heat Transfer,
1995, vol. 28, pp. 279-99.8. W. Shyy, Y. Pang, G.B. Hunter, D.Y. Wei, and M.H. Chen: Int. J. Heat
Mass Transfer, 1992, vol. 15, pp. 1229-45.9. K. Mundra, T. DebRoy, T. Zacharia, and S. David: Welding J., 1992,
vol. 71, pp. 313-20.10. R.T.C. Chao and J. Szekely: Welding J., 1994, vol. 73, pp. 25-31.11. K. Hong, D.C. Wakeman, and A.B. Strong: Trends in Welding Research,
Proc. 4th Int. Conf., Gatinberg, TN, 1995, ASM INTERNATIONAL,Metal Park, OH, 1995, pp. 399-404.
12. N. Chakraborty, S. Chakraborty, and P. Dutta: Int. J. Num. MethodsHeat Fluid Flow, 2003, vol. 13, pp. 7-30.
13. N. Chakraborty, D. Chatterjee, and S. Chakraborty: Num. Heat Transfer,2004, vol. 46, pp. 1009-32.
14. G. Erlebacher, M.Y. Hussaini, C.G. Speziale, and T.A. Zang: J. FluidMech., 1992, vol. 238, pp. 155-85.
15. U. Schumann: J. Comput. Phys., 1975, vol. 18, pp. 376-404.16. A.D. Brent, V.R. Voller, and K.J. Reid: Num. Heat Transfer, 1988,
vol. 13, pp. 297-318.17. S. Menon, P.K. Yeung, and W.W. Kim: Comput. Fluids, 1996, vol. 25,
pp. 165-80.18. W.W. Kim, S. Menon, and H.C. Mongia: Combust. Sci. Technol., 1999,
vol. 143, pp. 25-62.19. R.H. Kraichnan: J. Atmos. Sci., 1976, vol. 33, pp. 1521-36.20. M. Lesieur and O. Metais: Ann. Rev. Fluid Mech., 1996, vol. 28,
pp. 45-82.21. Y.H. Pao: Phys. Fluids, 1965, vol. 8, pp. 1063-70.22. V.K. Chakravarthy and S. Menon: Combust. Sci. Technol., 2001,
vol. 162, pp. 175-222.23. S.V. Patankar: Numerical Heat Transfer and Fluid Flow, Hemisphere,
Washington, DC, 1980.24. S. Chakraborty and P. Dutta: Metall. Trans. B, 2001, vol. 32B,
pp. 562-64.25. A. Bejan: Convection Heat Transfer, 2nd ed., John Wiley & Sons,
New York, NY, 1995.26. N. Chakraborty, D. Chatterjee, and S. Chakraborty: J. Appl. Phys.,
2004, vol. 96, pp. 4569-77.27. D.R. Atthey: J. Fluid Mech., 1980, vol. 98, pp. 787-801.28. J.A. Sekhar: Ph.D. Thesis, University of Illinois, Urbana–Champaign,
Urbana, IL, 1982.29. D. Chatterjee and S. Chakraborty: Phys. Lett. A, 2005, vol. 341,
pp. 320-30.30. B.A. Galperin and S.A. Orszag: Large Eddy Simulation of Complex
Engineering and Geophysical Flows, Cambridge University Press,Cambridge, United Kingdom, 1993.