Landscape-level optimization using tabu search and stand density-related forest management...
18
O.R. Applications Landscape-level optimization using tabu search and stand density-related forest management prescriptions Pete Bettinger a, * , Kevin Boston b , Young-Hwan Kim c , Jianping Zhu a a Warnell School of Forest Resources, University of Georgia, Athens, GA 30602, United States b Department of Forest Engineering, Oregon State University, Corvallis, OR 97331, United States c Department of Forest Resources, Oregon State University, Corvallis, OR 97331, United States Received 25 March 2004; accepted 23 September 2005 Available online 10 January 2006 Abstract Spatial and temporal scheduling of forest management activities is becoming increasingly important due to recent developments in environmental regulations, goals and policies. A forest planning model was developed to select activ- ities for stands in a forested area (178,000 ha), from a set of stand-centric optimal prescriptions, to best meet a higher- level landscape objective. The forest-level management problem addressed is complex, if not impossible to solve optimally, with current computing technologies, as integer decision variables are assumed. The higher-level landscape objective is to achieve the highest even-flow of timber harvest volume. Three types of tabu search processes were exam- ined in the model: (1) a process with 1-opt moves only; (2) a process with 1-opt moves and a region-limited 2-opt move process; and (3) a process with 1-opt moves and 10 iterations through a smaller region-limited 2-opt move process. Aspiration criteria and short-term memory were employed within tabu search in an attempt to avoid becoming trapped in local optima. While the 1-opt move process alone created solutions (forest plans) that were adequate, and contained higher average harvest volumes than the other methods, the addition of the 2-opt move processes improved the solu- tions generated by intensifying the search around local optima. The solutions produced using the 2-opt move processes had less variation in periodic harvest volumes across the planning horizon. While the basic 1-opt tabu search process provides adequate feasible solutions to large, complex forest planning problems, we reinforce the notion suggested, but not proven with previous research, that 2-opt neighborhoods can help improve quality of large scale forest plans gen- erated by tabu search. The contribution of this research is the description of a process which be developed for large forest planning problems (the problem examined is at least 1 order of magnitude greater than previous research, in terms of forested stands modeled), a process that could enable one to produce more efficient forest planning solutions than one could otherwise with standard 1-opt tabu search. In addition, we describe here the use of a set of optimal stand-level prescriptions to choose from when utilizing the 2-opt process, rather than a set of clearcut periods to 0377-2217/$ - see front matter Ó 2005 Elsevier B.V. All rights reserved. doi:10.1016/j.ejor.2005.09.025 * Corresponding author. Tel.: +1 706 542 1187; fax: +1 706 542 8356. E-mail address: [email protected] (P. Bettinger). European Journal of Operational Research 176 (2007) 1265–1282 www.elsevier.com/locate/ejor
-
Upload
independent -
Category
Documents
-
view
4 -
download
0
Transcript of Landscape-level optimization using tabu search and stand density-related forest management...

European Journal of Operational Research 176 (2007) 1265–1282
www.elsevier.com/locate/ejor
O.R. Applications
Landscape-level optimization using tabu search andstand density-related forest management prescriptions
Pete Bettinger a,*, Kevin Boston b, Young-Hwan Kim c, Jianping Zhu a
a Warnell School of Forest Resources, University of Georgia, Athens, GA 30602, United Statesb Department of Forest Engineering, Oregon State University, Corvallis, OR 97331, United States
c Department of Forest Resources, Oregon State University, Corvallis, OR 97331, United States
Received 25 March 2004; accepted 23 September 2005Available online 10 January 2006
Abstract
Spatial and temporal scheduling of forest management activities is becoming increasingly important due to recentdevelopments in environmental regulations, goals and policies. A forest planning model was developed to select activ-ities for stands in a forested area (178,000 ha), from a set of stand-centric optimal prescriptions, to best meet a higher-level landscape objective. The forest-level management problem addressed is complex, if not impossible to solveoptimally, with current computing technologies, as integer decision variables are assumed. The higher-level landscapeobjective is to achieve the highest even-flow of timber harvest volume. Three types of tabu search processes were exam-ined in the model: (1) a process with 1-opt moves only; (2) a process with 1-opt moves and a region-limited 2-opt moveprocess; and (3) a process with 1-opt moves and 10 iterations through a smaller region-limited 2-opt move process.Aspiration criteria and short-term memory were employed within tabu search in an attempt to avoid becoming trappedin local optima. While the 1-opt move process alone created solutions (forest plans) that were adequate, and containedhigher average harvest volumes than the other methods, the addition of the 2-opt move processes improved the solu-tions generated by intensifying the search around local optima. The solutions produced using the 2-opt move processeshad less variation in periodic harvest volumes across the planning horizon. While the basic 1-opt tabu search processprovides adequate feasible solutions to large, complex forest planning problems, we reinforce the notion suggested, butnot proven with previous research, that 2-opt neighborhoods can help improve quality of large scale forest plans gen-erated by tabu search. The contribution of this research is the description of a process which be developed for largeforest planning problems (the problem examined is at least 1 order of magnitude greater than previous research, interms of forested stands modeled), a process that could enable one to produce more efficient forest planning solutionsthan one could otherwise with standard 1-opt tabu search. In addition, we describe here the use of a set of optimalstand-level prescriptions to choose from when utilizing the 2-opt process, rather than a set of clearcut periods to
0377-2217/$ - see front matter � 2005 Elsevier B.V. All rights reserved.doi:10.1016/j.ejor.2005.09.025
* Corresponding author. Tel.: +1 706 542 1187; fax: +1 706 542 8356.E-mail address: [email protected] (P. Bettinger).
1266 P. Bettinger et al. / European Journal of Operational Research 176 (2007) 1265–1282
consider. With this in mind, this research represents a fundamentally new application of operations research techniquesto realistic forest planning problems.� 2005 Elsevier B.V. All rights reserved.
Keywords: Heuristics; Combinatorial optimization; Large scale optimization; Environment; Forest landscape planning
1. Introduction
The introduction or modification of land useregulations in the last 30 years has resulted inincreasingly complex goals and objectives for themanagement of forests in the United States. As aresult, both spatial and temporal characteristicsof desired future conditions have increasinglybecome important measures of forest plan success,as they seek to emulate realistic responses to man-agement. Compliance with regulatory restrictions,voluntary forest certification programs, and orga-nizational goals and policies related to landscapeconditions now outweigh economic objectives forforests in many areas of the world, particularlyareas with a high proportion of public land owner-ship. Economic objectives are still important, how-ever, as the feasibility of forest management playsa significant role in the dynamics of local commu-nities. Forest landscape planning efforts that incor-porate complex, yet realistic economic, ecological,and social goals therefore play a significant role indecision-making (Jørgensen, 2000).
When one ponders the changing nature of for-est planning, two general bodies of research anddevelopment can be observed. The first body ofresearch is one that seeks to find ways to incorpo-rate complex goals into traditional, exact algo-rithms (i.e., linear and integer programming).Some examples of this work include Bevers andHof (1999), Hof et al. (1994), and Hof and Joyce(1992). Snyder and ReVelle (1996) and McDilland Braze (2000, 2001) demonstrated integer pro-gramming approaches that address the harvestunit adjacency problem in forest planning. Hogan-son and Borges (1998) provided a dynamic pro-gramming approach to the spatial harvestscheduling problem. The second body of researchseeks to find alternative scheduling methods toaccommodate complex management goals. This
area of research centers on the use of integer deci-sion variables and heuristic or simulation tech-niques. Some examples of this work include theuse of tabu search (Bettinger et al., 1997, 1998,2002; Boston and Bettinger, 1999; Murray andChurch, 1995), simulated annealing (Bettingeret al., 2002; Boston and Bettinger, 1999; Murrayand Church, 1995; Van Deusen, 1999), thresholdaccepting (Bettinger et al., 2003), genetic algo-rithms (Ducheyne et al., 2004; Falcao and Borges,2001) and other hybrid methods (Boston and Bett-inger, 2002; Clark et al., 2000). Heuristics, in fact,have been demonstrated as useful tools for forestplanning problems that consider general forestmanagement issues (Hoganson and Rose, 1984),wildlife management goals (Arthaud and Rose,1996; Haight and Travis, 1997; Bettinger et al.,1997; Kurttila et al., 2002), aquatic system con-cerns (Bettinger et al., 1998), biological diversitygoals (Kangas and Pukkala, 1996), and foresttransportation systems (Nelson and Brodie, 1990;Weintraub et al., 1995).
Natural resource management problems thatrely on the use of integer variables are combinato-rial problems by nature, and as the problem sizeincreases, the solution space also increases, yet ata disproportionately greater rate (Lockwood andMoore, 1993). The natural resource managementproblem we address is complex, and difficult, ifnot impossible to solve with traditional exactmethods, using current computing technologies,as we assume that the decision variables associatedwith a large forest planning problem are integers.Mixed integer programming and integer program-ming techniques have been used to produce natu-ral resource management plans that includediscrete decision variables, but these techniqueshave substantive limitations (related to problemsize) when applied to large management problems(Lockwood and Moore, 1993). As a result, the use

P. Bettinger et al. / European Journal of Operational Research 176 (2007) 1265–1282 1267
of heuristic techniques for natural resource man-agement planning is becoming more prevalent,and there is a need to elucidate their advantagesand disadvantages when applied to large, realisticproblems.
This work seeks to explore strategies for devel-oping forest plans that choose among optimaldecisions developed for individual forest standsin an effort to achieve a higher-level landscapeobjective. The optimal stand-level decisions (man-agement prescriptions) consist of a set of harvestentries over a 100-year time horizon given 10 setsof alternative assumptions related to minimumoperability conditions. The assumptions behindthe management prescriptions were developedbased on knowledge of the stand-level goals ofthe dominant landowner (US federal government)in the region studied (eastern Oregon, USA), andassumptions regarding minimum levels of harvestvolumes per unit area that may be required beforeharvest is considered economically feasible. Addi-tional assumptions regarding the minimum andmaximum tree sizes that can be harvested are alsomade. Environmental concerns are built into thestand-level prescriptions, as each prescriptionseeks to maintain stand conditions within a rangeof stand density that has been noted by managersfamiliar with the landscape as desirable for main-taining healthy forest conditions. A single manage-ment prescription, indicating the timing and levelof treatment over a 100-year time period, will beassigned to each forested stand, thus the need forinteger decision variables. The objective is to thenarrange the choice of prescriptions through spaceand time so that an even-flow of timber harvestvolume can be obtained from the landscape. Theeven-flow objective is then considered a higher-level landscape objective, since individual stand-level decisions do not necessarily lead to itsattainment.
This research reports on a portion of a largerlandscape modeling effort. Here, we describe theforest-level planning process, where a set (10) ofoptimal stand-level management regimes for eachstand is considered in conjunction with a higher-level forest goal (even-flow of timber harvest vol-ume). The larger landscape problem (results tobe provided a future paper) integrates a spatial
wildfire model with the activity scheduling processto simulate the effect of fire on forest-level goals.While the more common spatial constraints (adja-cency and green-up) associated with clearcuttingactivities are not used here, the spatial locationof activities is important in the modeling of wild-fire behavior. Therefore, we utilize integer vari-ables to represent management activities assignedto stands.
Previous work in this area (Bettinger et al.,1999, 2002; Heinonen and Pukkala, 2004) illus-trated the potential for using 2-opt tabu searchneighborhoods on small forest planning problems,with the suggestion that 2-opt neighborhoodscould also benefit the development of forest plansfor larger areas. However, the computational costof using a 2-opt neighborhood for a large forestplanning problem seemed daunting, even thoughit was shown as an efficient method for fine-tuningsolutions generated with tabu search that primar-ily used 1-opt search neighborhoods. Caro et al.(2003) also provided insight into enhancing tabusearch with 2-opt moves, but only to correct infea-sibilities associated with 1-opt choices. With theexception of Heinonen and Pukkala (2004), whostudied the 2-opt search neighborhood in conjunc-tion with four different heuristics (including simu-lated annealing and tabu search), all of theprevious research in forestry has centered on theuse of 2-opt moves in conjunction with tabusearch. In addition, all of the work has illustratedthe usefulness of 2-opt moves on relatively smallproblems (1000 ha or less). Here, we will developand use two different 2-opt search strategies todirectly shape the development of a forest plan,and apply them to a large (178,000 ha), realisticlandscape. Advances in computer technology overthe past several years facilitate a further exploita-tion of the use of 2-opt search strategies in largeforest management problems, as the associatedcomputational cost has declined substantially.
2. Methods
The difference between long-range strategic for-est planning models and tactical forest planningmodels is becoming less clear as planning models

1268 P. Bettinger et al. / European Journal of Operational Research 176 (2007) 1265–1282
accommodate large areas and long time framesincreasingly also include spatial restrictions andstand-level detail typical of short-range goals (Ses-sions and Bettinger, 2001). The old paradigm thattactical planning focuses on spatial relationshipsand short planning horizons may no longer beapplicable with advances in computer technologyand the development of search algorithms whichfacilitate solving large, complex problems.
This work focuses on an actual managementdilemma in the US interior northwest region.In this region, the temptation is to manage alandscape using stand-level goals to promote thedevelopment of forest structural conditions repre-sentative of healthy forests. However, planningat the stand-level may ignore higher-level objec-tives, thus making implementation tenuous. Anexample of such a situation would be to developa plan of action that exceeds the harvest and mill-ing production capacity of an area one year, whilesupplying very low amounts of harvest the nextyear. The results may indicate that investment by
Fig. 1. The 178,000 ha landscape in eastern Oregon (USA
the private sector in these regions is difficult to jus-tify given the uncertainty of timber supply, andmay also force associated employment uncertain-ties on local communities. We therefore illustratea process by which a higher-level goal is soughtgiven a set of optimal stand-level decisions. Thefollowing sections describe the landscape to whichthe problem formulation is applied, the forestplanning problem formulation, and the heuristicsearch algorithms used to facilitate the develop-ment of feasible forest plans.
2.1. Landscape characteristics
The landscape examined consists of 178,000 haof forest and range just west of La Grande, Ore-gon (USA), most of which is in public ownership.The landscape has been classified into its currentsilvicultural condition by public land managers,and is described by 17,246 polygons, or stands(Fig. 1). About 700 tree lists, data used to modelresponses of forests to various silvicultural pre-
), and its associated 17,246 forest stands (polygons).
P. Bettinger et al. / European Journal of Operational Research 176 (2007) 1265–1282 1269
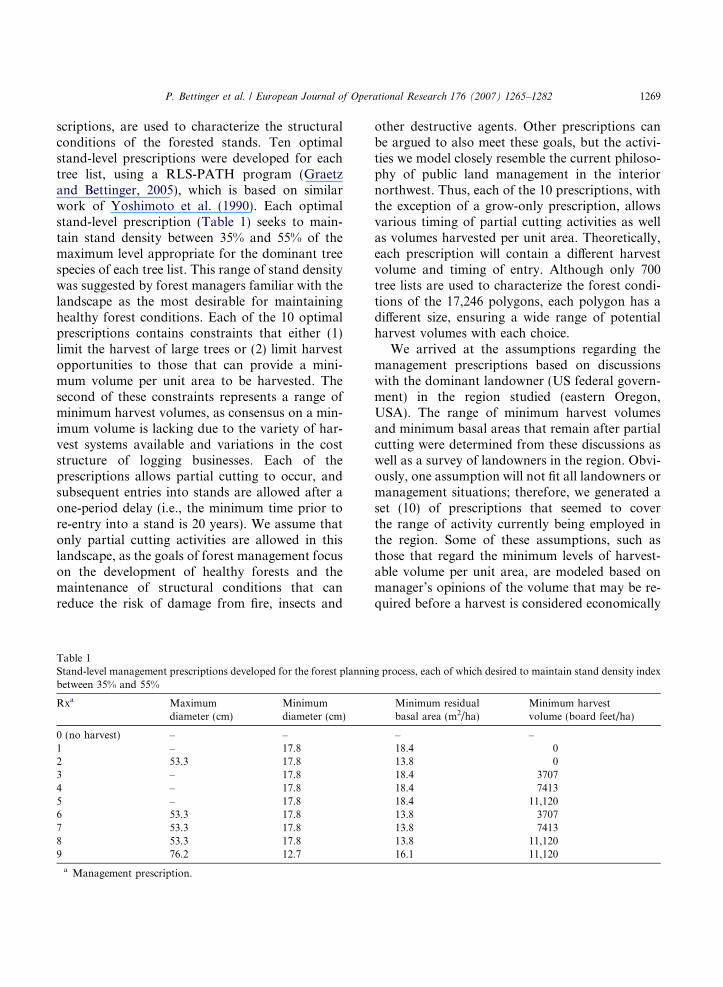
scriptions, are used to characterize the structuralconditions of the forested stands. Ten optimalstand-level prescriptions were developed for eachtree list, using a RLS-PATH program (Graetzand Bettinger, 2005), which is based on similarwork of Yoshimoto et al. (1990). Each optimalstand-level prescription (Table 1) seeks to main-tain stand density between 35% and 55% of themaximum level appropriate for the dominant treespecies of each tree list. This range of stand densitywas suggested by forest managers familiar with thelandscape as the most desirable for maintaininghealthy forest conditions. Each of the 10 optimalprescriptions contains constraints that either (1)limit the harvest of large trees or (2) limit harvestopportunities to those that can provide a mini-mum volume per unit area to be harvested. Thesecond of these constraints represents a range ofminimum harvest volumes, as consensus on a min-imum volume is lacking due to the variety of har-vest systems available and variations in the coststructure of logging businesses. Each of theprescriptions allows partial cutting to occur, andsubsequent entries into stands are allowed after aone-period delay (i.e., the minimum time prior tore-entry into a stand is 20 years). We assume thatonly partial cutting activities are allowed in thislandscape, as the goals of forest management focuson the development of healthy forests and themaintenance of structural conditions that canreduce the risk of damage from fire, insects and
Table 1Stand-level management prescriptions developed for the forest planninbetween 35% and 55%
Rxa Maximumdiameter (cm)
Minimumdiameter (cm)
0 (no harvest) – –1 – 17.82 53.3 17.83 – 17.84 – 17.85 – 17.86 53.3 17.87 53.3 17.88 53.3 17.89 76.2 12.7
a Management prescription.
other destructive agents. Other prescriptions canbe argued to also meet these goals, but the activi-ties we model closely resemble the current philoso-phy of public land management in the interiornorthwest. Thus, each of the 10 prescriptions, withthe exception of a grow-only prescription, allowsvarious timing of partial cutting activities as wellas volumes harvested per unit area. Theoretically,each prescription will contain a different harvestvolume and timing of entry. Although only 700tree lists are used to characterize the forest condi-tions of the 17,246 polygons, each polygon has adifferent size, ensuring a wide range of potentialharvest volumes with each choice.
We arrived at the assumptions regarding themanagement prescriptions based on discussionswith the dominant landowner (US federal govern-ment) in the region studied (eastern Oregon,USA). The range of minimum harvest volumesand minimum basal areas that remain after partialcutting were determined from these discussions aswell as a survey of landowners in the region. Obvi-ously, one assumption will not fit all landowners ormanagement situations; therefore, we generated aset (10) of prescriptions that seemed to coverthe range of activity currently being employed inthe region. Some of these assumptions, such asthose that regard the minimum levels of harvest-able volume per unit area, are modeled based onmanager’s opinions of the volume that may be re-quired before a harvest is considered economically
g process, each of which desired to maintain stand density index
Minimum residualbasal area (m2/ha)
Minimum harvestvolume (board feet/ha)
– –18.4 013.8 018.4 370718.4 741318.4 11,12013.8 370713.8 741313.8 11,12016.1 11,120

1270 P. Bettinger et al. / European Journal of Operational Research 176 (2007) 1265–1282
feasible. Obviously, the forest-level solution willonly be as good as the quality of the stand-levelmanagement prescriptions. We made a concertedattempt, therefore, to develop what we felt werereasonable prescriptions for the landowners andregion studied. While the results are optimal atthe stand-level, given the assumptions we madefor each prescription, the flexibility provided fromthe set of 10 should provide a forest-level solutionwith a higher even-flow volume than would befound if a smaller set (or even simply one prescrip-tion) were used.
2.2. Problem formulation
The forest plans developed cover a 100-yeartime horizon that is divided into 10 planning peri-ods (decades). The objective function of the plan-ning problem is one that seeks to maximize theeven-flow of timber harvest volume by minimizingthe squared deviation of the difference between thescheduled timber harvest volume and a target har-vest volume
minimizeXT
t¼1
ðtarget volume� HtÞ2; ð1Þ
where t is a time period (decade); T, the total num-ber of time periods in the planning horizon; tar-get_volume; a target periodic harvest volumedefined a priori; and Ht is the actual scheduledharvest volume in each time period t.
Only one of the 10 optimal stand prescriptionsare assigned to each of the stands in an effort toachieve the landscape-level objective in Eq. (1),thus the decisions are modeled using binary integervariables
XP
p¼1
X ip 6 1; 8i; ð2Þ
where p is a single management prescription; P,the entire set of potential management prescrip-tions; i, a forested stand; Xip, a binary integerdecision variable defining the management pre-scription p assigned to stand i.
Equations similar to accounting rows used in lin-ear programming problem formulations are used toaggregate the harvest volume for each time period
XN
i¼1
XP
p¼1
ðX ipV iptÞ ¼ H t; 8t; ð3Þ
where N is the total number of forested stands;Vipt, the available timber harvest volume duringtime period t, from stand i, when managed underprescription p.
Once harvest volumes have been aggregated foreach time period, they are used in the objectivefunction to evaluate the quality of the resultingschedule of activities (i.e., the objective functionvalue of the resulting forest plan).
2.3. Heuristic search algorithm
Since integer decision variables are used todetermine which prescription is assigned to eachstand, and given the number of forested stands(17,246) and potential prescriptions available(10), the size of the integer planning problembecomes rather large. A heuristic search process,tabu search, was therefore employed to scheduleprescriptions for each stand. Tabu search was ini-tially developed by Glover (1989, 1990) for appli-cation to industrial problems, and later appliedto forest management problems by Bettingeret al. (1997, 1998, 2002), Boston and Bettinger(2002), Brumelle et al. (1998), and Richards andGunn (2000). Tabu search was chosen becausewe have previously shown it is as good (or better)than other heuristics for these types of forest-levelplanning problems (Bettinger et al., 2002; Bostonand Bettinger, 1999). Our implementation of tabusearch uses three strategies of diversification andintensification.
In the first search strategy, 1-opt moves are usedto incrementally develop a forest plan. Each movein the neighborhood developed consists of achange of prescription to a single stand. The 1-opt neighborhood [N(xj,rpi)] of the current solu-tion xj is the set of choices that can be reachedfrom xj by a move rpi (the choice of managementprescription p for stand i). Two neighborhoodsizes are used: the full neighborhood (17,246stands · 10 prescriptions), and a region-limited,smaller neighborhood (2000 stands · 10 prescrip-tions). The full neighborhood is used once every10 iterations of the tabu search process, since it

P. Bettinger et al. / European Journal of Operational Research 176 (2007) 1265–1282 1271
requires a significant amount of computationaltime to develop. The region-limited neighborhoodis developed for each set of 2000 sequentially num-bered stands (1 to 2000, 2001 to 4000, . . ., 16,000 to17,246). This first tabu search strategy also usesaspiration criteria (accept the move if tabu, yetthe resulting solution is the best observed) andshort-term memory (tabu state = 1000 iterations,based on several trials using tabu states rangingfrom 500 to 5000 moves). The tabu state wasassigned to the stand itself, regardless of prescrip-tion selected. The 1-opt search process stops if2000 iterations pass without an improvement inthe value of the best solution.
The second search strategy uses moves madefrom a 2-opt neighborhood. This strategy is initi-ated at the conclusion of the 1-opt move processdescribed above. The 2-opt moves consist of swap-ping the prescription assigned to one stand withthat assigned to another. This process is similar tomethods used in traveling salesman problems. The2-opt neighborhood ½Nðxj; rpip0i0 Þ� of the currentsolution xj is the set of choices that can be reachedfrom xj by a move rpip0i0 (the swapping of manage-ment prescription p assigned to stand i with man-agement prescription p 0 assigned to stand i 0). The2-opt move process is, however, region-limited,where a window of 1000 sequentially numberedstands are examined. The region shifts by 20 standswith each 2-opt move made. For example, the first2-opt move selection comes from the set of poten-tial management prescription swaps among standsnumbered 1–1000, the second 2-opt move selectioncomes from the set of stands numbered 21–1020,and so on. This second tabu search strategy movesthrough the 2-opt process only once.
The third search strategy uses moves made from10 loops through a region-limited 2-opt neighbor-hood. This strategy is initiated at the conclusion ofthe 1-opt move process described above. However,the region-limited neighborhood is only 400 standsin size. With this third strategy we experimentedwith 2-opt region-limited neighborhoods rangingfrom 100 to 2000 stands in size, and found that asize of 400 stands provided the best solutions withthe least computational cost.
A number of enhancements to the tabu searchprocess were considered, yet not implemented,
leaving an analysis of the marginal benefit of theseto the current problem for future consideration.The processes considered included diversifyingthe search by periodically forcing into the solutionmoves that had been selected less frequently, stra-tegic oscillation (e.g., Richards and Gunn, 2000),random tabu tenures (Caro et al., 2003), and theuse of metaheuristic processes (e.g., Boston andBettinger, 2002). The region-limited 2-opt moveprocess has been employed because previous work(Bettinger et al., 1999; Caro et al., 2003) indicatedthat this was an efficient method for fine-tuningsolutions generated with tabu search that primar-ily used 1-opt search neighborhoods.
Sixty different forest plans (solutions or runs)were generated from each of the three search strat-egies. Each run began with a random assignmentof active management prescriptions (those otherthan the no-cut prescription) to 10% of the stands.We initially investigated randomly assigning activemanagement prescriptions to all of the stands,however, the higher-level even-flow objective limitsthe number of activities allowed due to a pinch-point in the periodic harvest volumes (the timeperiod that limits the achievement of higher levelsof even-flow volume). This is a typical feature ofeven-flow forest planning problems. Here, the sec-ond time period (decade) limited the achievementof even-flow, where potential harvests from standswere the most scarce in the set of prescriptionsdeveloped. Therefore, a significant number ofstands are not assigned an active management pre-scription in the resulting 60 solutions from thethree search strategies.
The resulting objective function values from thethree sets of 60 solutions (squared deviations froma target even-flow volume) were then tested todetermine whether they fit a Weibull distributionin a statistically significant manner. If so, theresulting location parameter of the Weibull distri-bution was used as an estimate of the global opti-mum solution. The use of extreme value theory forestimating the global optimum solution to inexactsearch processes (i.e., those that do not guaranteea global optimum solution has been located) hasbeen described previously in McRoberts (1971),Dannenbring (1977), Golden and Alt (1979), Losand Lardinois (1982), Bettinger et al. (1998,
1272 P. Bettinger et al. / European Journal of Operational Research 176 (2007) 1265–1282
2002), and Boston and Bettinger (1999). One of themain assumptions behind the use of this process isthat each resulting solution can be considered anindependent sample from a larger population ofsamples, because each search process started witha randomly defined solution. Since each of thesolutions were developed by attempting to reachthe same global optimum solution value, thisassumption is tenuous, but considered appropriate(Golden and Alt, 1979; Los and Lardinois, 1982;Bettinger et al., 1998). In addition, the use ofextreme value theory assumes that the values arisefrom a continuous distribution of numbers.Although combinatorial problems possess a dis-crete distribution of potential solutions, wherethe number of solutions possible is finite, weassume that our solution space approximates acontinuous distribution due to the large numberof variables used.
A linear programming problem formulation,consisting of about 7000 continuous decision vari-ables (700 tree lists · 10 management prescrip-tions) was also developed to provide a relaxedsolution to the forest planning problem. Here,the total area represented by each tree list was con-sidered a ‘‘bin’’ of hectares from which prescrip-tions could be applied. Due to the continuousnature of the linear programming solution, theexact spatial location of each prescription, how-ever, may be difficult to locate. The resultingeven-flow timber harvest volume of the relaxedproblem was found to be 200,716 thousand boardfeet (MBF) per decade, which was used as the tar-get harvest level in the problem formulationdescribed above.
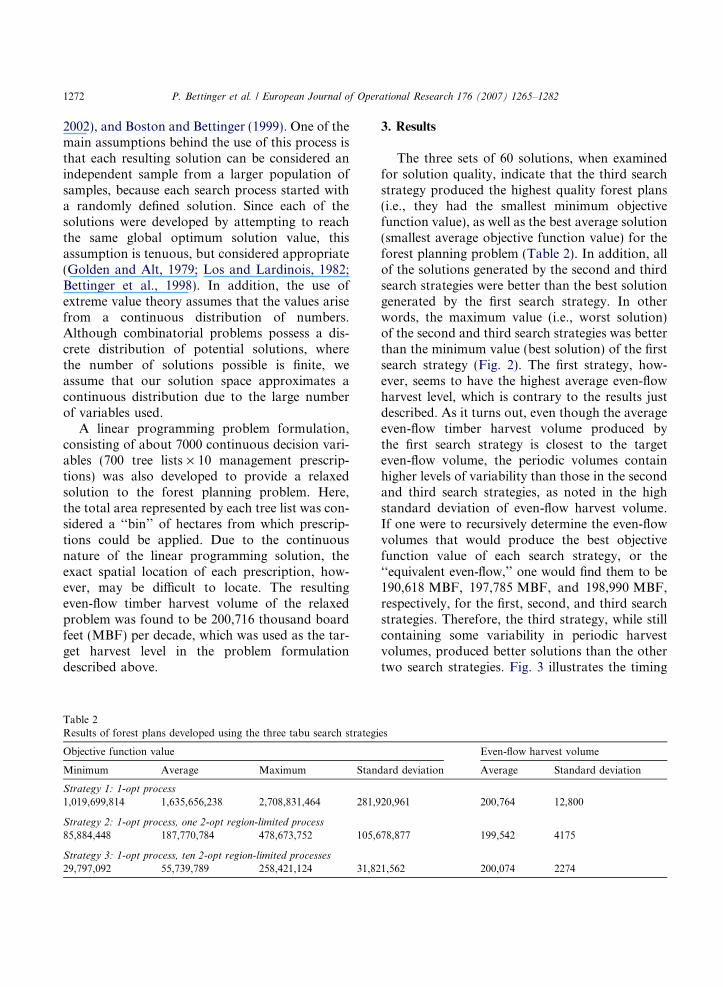
Table 2Results of forest plans developed using the three tabu search strategi
Objective function value
Minimum Average Maximum Stand
Strategy 1: 1-opt process
1,019,699,814 1,635,656,238 2,708,831,464 281,9
Strategy 2: 1-opt process, one 2-opt region-limited process
85,884,448 187,770,784 478,673,752 105,6
Strategy 3: 1-opt process, ten 2-opt region-limited processes
29,797,092 55,739,789 258,421,124 31,82
3. Results
The three sets of 60 solutions, when examinedfor solution quality, indicate that the third searchstrategy produced the highest quality forest plans(i.e., they had the smallest minimum objectivefunction value), as well as the best average solution(smallest average objective function value) for theforest planning problem (Table 2). In addition, allof the solutions generated by the second and thirdsearch strategies were better than the best solutiongenerated by the first search strategy. In otherwords, the maximum value (i.e., worst solution)of the second and third search strategies was betterthan the minimum value (best solution) of the firstsearch strategy (Fig. 2). The first strategy, how-ever, seems to have the highest average even-flowharvest level, which is contrary to the results justdescribed. As it turns out, even though the averageeven-flow timber harvest volume produced bythe first search strategy is closest to the targeteven-flow volume, the periodic volumes containhigher levels of variability than those in the secondand third search strategies, as noted in the highstandard deviation of even-flow harvest volume.If one were to recursively determine the even-flowvolumes that would produce the best objectivefunction value of each search strategy, or the‘‘equivalent even-flow,’’ one would find them to be190,618 MBF, 197,785 MBF, and 198,990 MBF,respectively, for the first, second, and third searchstrategies. Therefore, the third strategy, while stillcontaining some variability in periodic harvestvolumes, produced better solutions than the othertwo search strategies. Fig. 3 illustrates the timing
es
Even-flow harvest volume
ard deviation Average Standard deviation
20,961 200,764 12,800
78,877 199,542 4175
1,562 200,074 2274

Fig. 2. Distribution of 60 objective function values (best solutions) developed by the three solution processes. These values reflect thesquared deviations from a target even-flow volume.
P. Bettinger et al. / European Journal of Operational Research 176 (2007) 1265–1282 1273
of logging entries into the landscape (by decade)for a solution generated with strategy 3.
The estimated global optimum solutions weregenerated for each search strategy using a three-parameter Weibull estimation process containedin the HATT model (Bettinger, 2003). Althoughthe fit of the Weibull distribution to the datafor both the second and third search strategieswas not statistically significant, the resulting esti-mates of the global optimum even-flow were191,162 MBF, 197,820 MBF, and 199,049 MBF,respectively, for the first, second, and third searchstrategies. The solutions generated by strategy 3,in fact, are represented with a Weibull shape factorof about 0.8, because many of the solutions werevery close together in value, and a few very far awayin value. A process of removing from considerationthe worst solutions may lead to a better fit ofthe data to a Weibull distribution, although weleave this area of investigation for future researchefforts.
The heuristic search process used to solve thisforest management planning problem was devel-
oped within the Microsoft Visual Basic 6.0 (profes-sional edition) environment, and implemented ona personal computer equipped with a 2.4 GHzprocessor. The amount of time required to developa solution for the first search strategy (1-opt movesonly) was about 30 minutes. The amount of timerequired to develop a solution for the secondsearch strategy (1-opt moves, and one region-lim-ited 2-opt process) was about 102 minutes. Theamount of time required to develop a solutionfor the third search strategy (1-opt moves, and10 region-limited 2-opt processes) was about96 minutes. If the search processes were re-codedinto a compilable language with optimal memoryfeatures, we would expect that the time requiredto develop a solution would be reduced by a factorof about 20. What is noteworthy about these pro-cessing characteristics is that the third search strat-egy, using 10 loops through a small region-limited2-opt neighborhood, produced better solutions inless time than the second search strategy, whichused one pass through a larger region-limited 2-opt neighborhood.
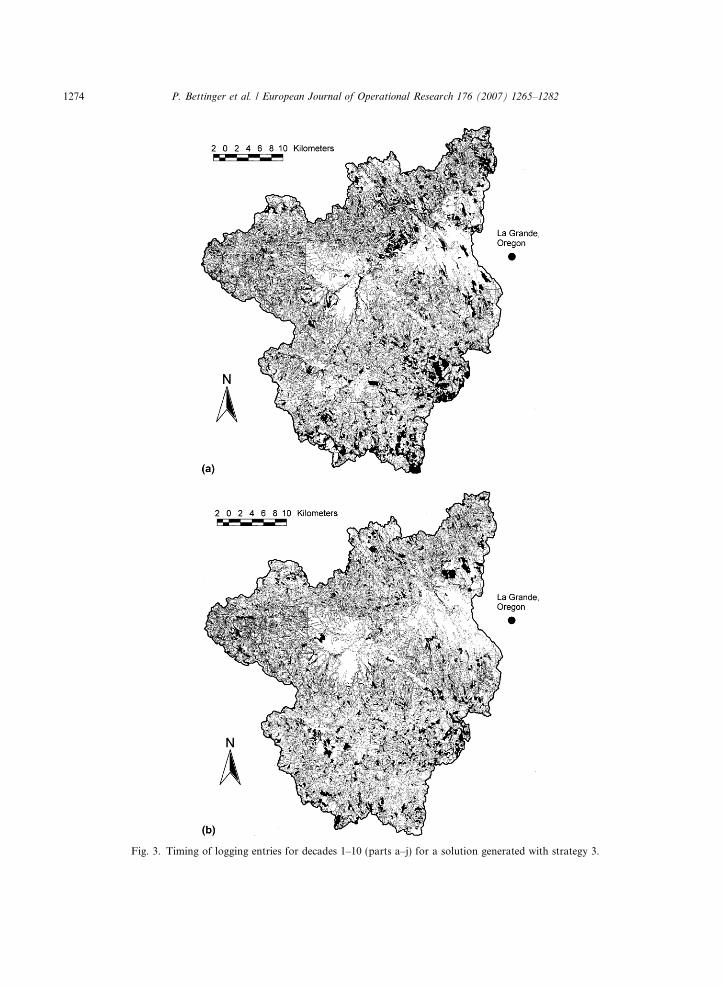
Fig. 3. Timing of logging entries for decades 1–10 (parts a–j) for a solution generated with strategy 3.
1274 P. Bettinger et al. / European Journal of Operational Research 176 (2007) 1265–1282

Fig. 3 (continued)
P. Bettinger et al. / European Journal of Operational Research 176 (2007) 1265–1282 1275
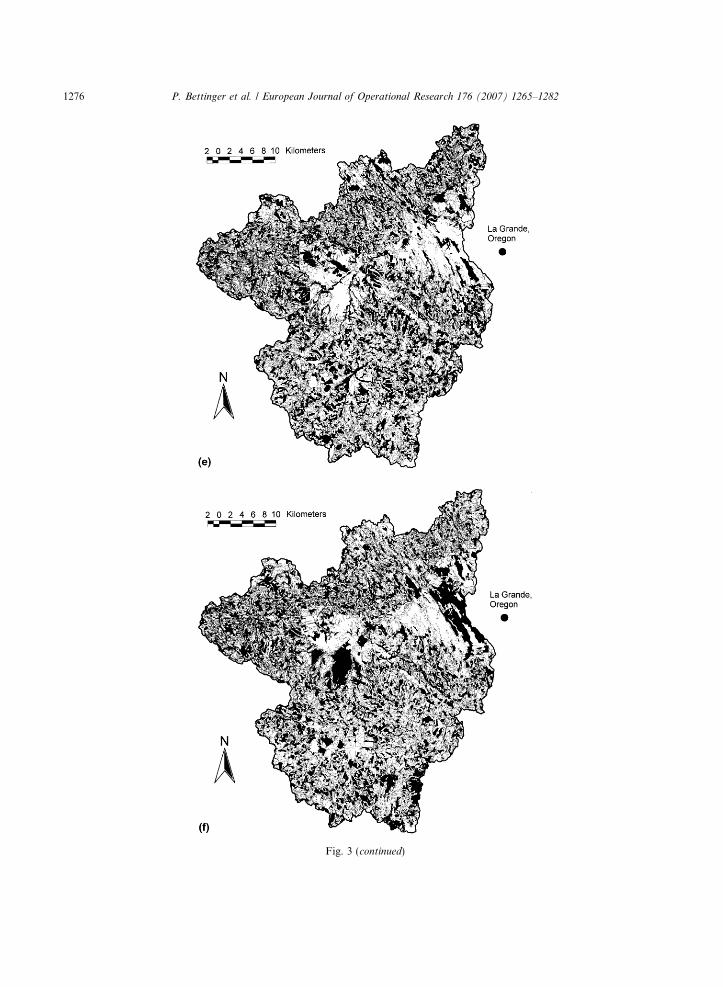
Fig. 3 (continued)
1276 P. Bettinger et al. / European Journal of Operational Research 176 (2007) 1265–1282

Fig. 3 (continued)
P. Bettinger et al. / European Journal of Operational Research 176 (2007) 1265–1282 1277
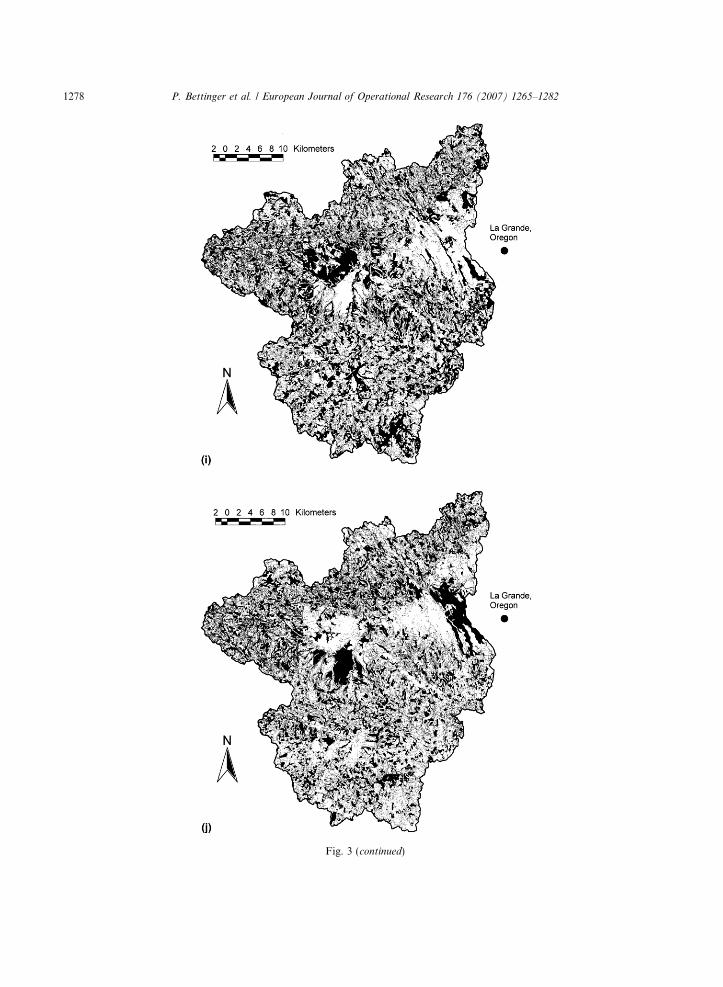
Fig. 3 (continued)
1278 P. Bettinger et al. / European Journal of Operational Research 176 (2007) 1265–1282

P. Bettinger et al. / European Journal of Operational Research 176 (2007) 1265–1282 1279
4. Discussion
The even-flow objective is a common compo-nent in the development of alternative forest plansin the western United States. Other commonlyused objectives include net present value, cashflow, and others related to economic value or com-modity production objectives. We chose even-flowhere due to the difficulty it poses to the develop-ment of forest plans. That is, the optimal land-scape-level solution is not obvious from a simplesummation of the optimal stand-level prescrip-tions, as it might be when using a net present valueoptimization assumption. The main drawback ofdeveloping a forest plan with an even-flow objec-tive is that the harvest level in one time periodcan limit the harvest levels in all others, dependingon the initial landscape conditions. For example,in our problem, the potential harvest levels in thesecond decade constrain the achievement of ahigher even-flow harvest levels. Potential harvestlevels are higher in every other time period, in factsometimes three times higher. However, since eachtime period must have roughly the same harvestlevel, we observe a build-up of standing timbervolumes over time, as growth in later time periodsexceeds harvest. The trade-off of harvest stabilityversus economic maximization would undoubtedlyarise as forest plans with even-flow objectives arecompared to plans with other objectives.
The set of possible choices (10 potential man-agement prescriptions) for each forest stand weredeveloped a priori to the landscape modelingeffort. Most forest planning problems presentedin the literature assume a small set of potentialmanagement prescriptions can be assigned to for-est stands. Here, we have integrated optimalstand-level management prescriptions into thedevelopment of a large-scale forest plan thatincluded a higher-level objective. Since the con-straints included in each management prescriptiondiffered, the timing and level of harvest also dif-fered. These, in addition to the 20-year minimumreturn interval, limit the achievement of higher-level landscape objectives. For example, any pre-scription that included a harvest in the first timeperiod allowed a subsequent harvest, at the earli-est, in the third time period. Most prescriptions
were found to behave in this manner, as the needto reduce the stand density of the forests in theregion is evident. Therefore, our results could quitepossibly be significantly affected by the patternsinherent in the set of optimal stand-level prescrip-tions, suggesting the need for managers to re-eval-uate the shape and complexity of stand-levelmanagement prescriptions. Hence, a new (or lar-ger) set of stand-level management prescriptions,particularly those that avoid harvests in the firstdecade, may be necessary to provide higher even-flow harvest levels.
We allude to a landscape-level optimizationprocess in this work due to the forest-level even-flow objective. In fact, spatial restrictions on thelocation and timing of activities are not included,mainly because clearcutting activities are not mod-eled. However, integer variables are used to assignprescriptions to stands, because this work repre-sents only a portion of a larger modeling effortthat requires the exact location of activities to beknown. In this larger modeling effort, where resultsare forthcoming, a spatial fire model is used tosimulate the development and spread of wildfireacross the landscape. Up to this point, however,we have simply solved a large conventionalforest-planning problem using a refined operationsresearch technique. We leave the deeper integra-tion of other aspects of spatial planning (e.g.,fire modeling, and spatial contiguity issues associ-ated with biodiversity conservation) for furtherwork.
If one were to assume that clearcutting activitieswould be utilized in this region, the use of spatialharvest scheduling techniques for controllingclearcut sizes might be incorporated into thismethodology as a constraint. Either the unitrestriction model or the area restriction model(see Murray, 1999) could relatively easily be addedto the model structure to control the sizes of clear-cuts within a green-up period. What might also beof interest to land managers are two spatial con-straints that more closely relate to the problemdescribed herein. First, land managers may beinterested in grouping (or blocking) together par-tial cutting operations. Second, the partial cuttingoperations that are grouped together might also beassigned the same management prescription

1280 P. Bettinger et al. / European Journal of Operational Research 176 (2007) 1265–1282
(perhaps from the set of 10 we described). Whilemanagers have not expressed an interest in seeingthese types of results, one could incorporate theminto the planning process with a moderate amountof work, and facilitate the modeling of forest plansthat may seem more operationally feasible toindustrial land managers (although the dominantland manager is a governmental agency).
Tabu search represents a reasonable heuristicprocess for developing feasible and efficient forestplans. The deterministic approach we employedmay intuitively seem advantageous over the sto-chastic nature of other heuristic search processes,such as simulated annealing or threshold accept-ing, although we did not test that here. However,given the large number of stands involved andthe choices available to each, a deterministicapproach may improve the efficiency of the searchprocess once local optima have been located. How-ever, until the search has reached local optima inthe solution space, a significantly large numberof computations are required (i.e., a neighborhoodneeds to be created prior to making each choice).Processes using a stochastic approach may allowthe search, when applied to complex problemssuch as these, to more easily move into and awayfrom local optima, although that remains to betested. An area of future work would be to deter-mine whether a combination of two approaches ismeaningful: a strategy that allows the search pro-cess to quickly reach a local optima (using a sto-chastic approach), then fine-tunes the solutionwith an intensification of the search (using a deter-ministic approach).
5. Conclusions
We have demonstrated that tabu search couldbe used to assist in the development of a large-scale forest plan that uses a set of optimal standmanagement prescriptions to achieve a higher-level landscape objective. The landscape-level goalwas to obtain an even-flow of timber harvest vol-ume over a 100-year planning horizon, and sinceeach stand-level management prescription mayprovide a different timing and level of harvest,the task was to assign to each stand the appropri-
ate prescription to achieve the highest, and mosteven harvest levels. We have shown that a 1-opttabu search allows the development of adequateforest plans for large areas with complex, higher-level objectives. However, enhancing the searchprocess to include 2-opt moves improves the qual-ity of forest plans, and may be the minimumenhancement one should accommodate to allowa fine-tuning of the results. The main drawbackof using 2-opt moves is the computational timerequired to develop the 2-opt neighborhood. Ourresults may have been constrained by the set ofmanagement prescriptions allowed for each stand.While we attempted to develop a diverse set (albeitwithin limits suggested by managers familiar withthe landscape), forcing the set to contain addi-tional prescriptions that have harvests in periodsthat represent the pinch-points of the achievementof even-flow may result in higher-quality forestplans.
This research represents more than modestrefinements of previously published formulations.Other 2-opt formulations involved, explicitly,clearcutting and adjacency restrictions in the con-text of forest planning efforts. What is differentabout the current research is the size of the prob-lem (at least one order of magnitude greater thanprevious research, in terms of forested stands mod-eled), the use of a set of optimal stand-level pre-scriptions to choose from when using the 2-optprocess (rather than a set of clearcut periods toconsider), and since integer variables are required,the description of a process which can be devel-oped for large problems to enable one to producemore efficient forest planning solutions than onecould otherwise with standard 1-opt tabu search.With this in mind, this research represents a funda-mentally new application.
References
Arthaud, G.J., Rose, D., 1996. A methodology for estimatingproduction possibility frontiers for wildlife habitat andtimber value at the landscape level. Canadian Journal ofForest Research 26 (12), 2191–2200.
Bettinger, P., 2003. Heuristic Algorithm Teaching Tool(HATT), Warnell School of Forest Resources, Universityof Georgia, Athens, GA. Available from: <http://war-

P. Bettinger et al. / European Journal of Operational Research 176 (2007) 1265–1282 1281
nell.forestry.uga.edu/Warnell/Bettinger/planning/index.htm>(accessed 2/13/05).
Bettinger, P., Sessions, J., Boston, K., 1997. Using Tabu searchto schedule timber harvests subject to spatial wildlife goalsfor big game. Ecological Modelling 94 (2/3), 111–123.
Bettinger, P., Sessions, J., Johnson, K.N., 1998. Ensuring thecompatibility of aquatic habitat and commodity productiongoals in eastern Oregon with a Tabu search procedure.Forest Science 44 (1), 96–112.
Bettinger, P., Boston, K., Sessions, J., 1999. Intensifying aheuristic forest harvest scheduling search procedure with 2-opt decision choices. Canadian Journal of Forest Research29 (11), 1784–1792.
Bettinger, P., Graetz, D., Boston, K., Sessions, J., Chung, W.,2002. Eight heuristic planning techniques applied to threeincreasingly difficult wildlife planning problems. Silva Fen-nica 36 (2), 561–584.
Bettinger, P., Johnson, D.L., Johnson, K.N., 2003. Spatialforest plan development with ecological and economicgoals. Ecological Modelling 169 (2/3), 215–236.
Bevers, M., Hof, J., 1999. Spatially optimizing wildlife habitatedge effects in forest management linear and mixed-integerprograms. Forest Science 45 (2), 249–258.
Boston, K., Bettinger, P., 1999. An analysis of Monte Carlointeger programming, simulated annealing, and tabu searchheuristics for solving spatial harvest scheduling problems.Forest Science 45 (2), 292–301.
Boston, K., Bettinger, P., 2002. Combining tabu search andgenetic algorithm heuristic techniques to solve spatialharvest scheduling problems. Forest Science 48 (1), 35–46.
Brumelle, S., Granot, D., Halme, M., Vertinsky, I., 1998. Atabu search algorithm for finding good forest harvestschedules satisfying green-up constraints. European Journalof Operational Research 106 (2/3), 408–424.
Caro, F., Constantino, M., Martins, I., Weintraub, A., 2003. A2-opt tabu search procedure for the multiperiod forestharvest scheduling problem with adjacency, greenup, oldgrowth, and even flow constraints. Forest Science 49 (5),738–751.
Clark, M.M., Meller, R.D., McDonald, T.P., 2000. A three-stage heuristic for harvest scheduling with access roadnetwork development. Forest Science 46 (2), 204–218.
Dannenbring, D.G., 1977. Procedures for estimating optimalsolution values for large combinatorial problems. Manage-ment Science 23 (12), 1273–1283.
Ducheyne, E.I., De Wulf, R., De Baets, B., 2004. Single versusmultiple objective genetic algorithms for solving the even-flow forest management problem. Forest Ecology andManagement 201 (2/3), 259–273.
Falcao, A.O., Borges, J.G., 2001. Designing an evolutionprogram solving integer forest management schedulingmodels: An application in Portugal. Forest Science 47 (2),158–168.
Glover, F., 1989. Tabu search—Part I. ORSA Journal onComputing 1 (3), 190–206.
Glover, F., 1990. Tabu search—Part II. ORSA Journal onComputing 2 (1), 4–32.
Golden, B.L., Alt, F.B., 1979. Interval estimation of a globaloptimum for large combinatorial problems. Naval ResearchLogistics Quarterly 26 (1), 69–77.
Graetz, D., Bettinger, P., 2005. Determining thinning regimesto reach stand density targets for any-aged stand manage-ment in the Blue Mountains of eastern Oregon. In: Bevers,M., Barrett, T.M. (Comps.), Systems Analysis in ForestResources: Proceedings of the 2003 Symposium, USDAForest Service, Pacific Northwest Research Station, Port-land, OR. General Technical Report PNW-GTR-656,pp. 255–264.
Haight, R.G., Travis, L.E., 1997. Wildlife conservation plan-ning using stochastic optimization and importance sam-pling. Forest Science 43 (1), 129–139.
Heinonen, T., Pukkala, T., 2004. A comparison of one- andtwo-compartment neighborhoods in heuristic search withspatial forest management goals. Silva Fennica 38 (3),319–332.
Hof, J.G., Joyce, L.A., 1992. Spatial optimization for wildlifeand timber in managed forest ecosystems. Forest Science38 (3), 489–508.
Hof, J., Bevers, M., Joyce, L., Kent, B., 1994. An integerprogramming approach for spatially and temporallyoptimizing wildlife populations. Forest Science 40 (1),177–191.
Hoganson, H.M., Borges, J.G., 1998. Using dynamic program-ming and overlapping subproblems to address adjacency inlarge harvest scheduling problems. Forest Science 44 (4),526–538.
Hoganson, H.M., Rose, D.W., 1984. A simulation approachfor optimal timber management scheduling. Forest Science30 (1), 220–238.
Jørgensen, S.E., 2000. Editorial: 25 years of ecological model-ling by Ecological Modelling. Ecological Modelling 126 (2/3), 95–99.
Kangas, J., Pukkala, T., 1996. Operationalization of biologi-cal diversity as a decision objective in tactical forestplanning. Canadian Journal of Forest Research 26 (1),103–111.
Kurttila, M., Pukkala, T., Loikkanen, J., 2002. The perfor-mance of alternative spatial objective types in forestplanning calculations: A case for flying squirrel and moose.Forest Ecology and Management 166 (1–3), 245–260.
Lockwood, C., Moore, T., 1993. Harvest scheduling withspatial constraints: A simulated annealing approach. Cana-dian Journal of Forest Research 23 (3), 468–478.
Los, M., Lardinois, C., 1982. Combinatorial programming,statistical optimization and the optimal transportationnetwork problem. Transportation Research 16B (2), 89–124.
McDill, M.E., Braze, J., 2000. Comparing adjacency constraintformulations for randomly generated forest planning prob-lems with four age-class distributions. Forest Science 46 (3),423–436.
McDill, M.E., Braze, J., 2001. Using the branch and boundalgorithm to solve forest planning problems with adjacencyconstraints. Forest Science 47 (3), 403–418.

1282 P. Bettinger et al. / European Journal of Operational Research 176 (2007) 1265–1282
McRoberts, K., 1971. A search model for evaluating combina-torially explosive problems. Operations Research 19 (6),1331–1349.
Murray, A.T., 1999. Spatial restrictions in harvest scheduling.Forest Science 45 (1), 45–52.
Murray, A.T., Church, R.L., 1995. Heuristic solutionapproaches to operational forest planning problems. ORSpektrum 17 (2/3), 193–203.
Nelson, J., Brodie, J.D., 1990. Comparison of a random searchalgorithm and mixed integer programming for solving area-based forest plans. Canadian Journal of Forest Research 20(7), 934–942.
Richards, E.W., Gunn, E.A., 2000. A model and tabu searchmethod to optimize stand harvest and road constructionschedules. Forest Science 46 (2), 188–203.
Sessions, J., Bettinger, P., 2001. Hierarchical planning: Pathwayto the future? In: Proceedings of the First International
Precision Forestry Symposium, University of Washington,Seattle, WA, pp. 185–190.
Snyder, S., ReVelle, C., 1996. Temporal and spatial harvestingof irregular systems of parcels. Canadian Journal of ForestResearch 26 (6), 1079–1088.
Van Deusen, P.C., 1999. Multiple solution harvest scheduling.Silva Fennica 33 (3), 207–216.
Weintraub, A., Jones, G., Meacham, M., Magendzo, A.,Magendzo, A., Malchuk, D., 1995. Heuristic proceduresfor solving mixed-integer harvest scheduling—transporta-tion planning models. Canadian Journal of Forest Research25 (10), 1618–1626.
Yoshimoto, A., Haight, R.G., Brodie, J.D., 1990. A compar-ison of the pattern search algorithm and the modifiedPATH algorithm for optimizing an individual tree model.Forest Science 36 (2), 394–412.