
Konsep Penentuan Posisi dengan GNSS dari Akuisisi hingga Memperoleh Koordinat UTM
38
Sistem Penentuan Posisi dan Navigasi - 2014 Page 1 TUGAS DISKUSI KELOMPOK Dosen Pengampu : Dr. Ir. T. Aris Sunantyo, M.Sc. MATAKULIAH SISTEM PENENTUAN POSISI DAN NAVIGASI “KONSEP PENENTUAN POSISI 3 DIMENSI DIATAS ELLIPSOID DAN POSISI PADA BIDANG PROYEKSI UTM DARI DATA PENGAMATAN SATELIT GNSS” OLEH : NURHADI BASHIT ANINDYA SRICANDRA PRASIDYA MAGISTER TEKNIK GEOMATIKA PROGRAM PASCASARJANA, FAKULTAS TEKNIK UNIVERSITAS GADJAH MADA YOGYAKARTA 2014
Transcript of Konsep Penentuan Posisi dengan GNSS dari Akuisisi hingga Memperoleh Koordinat UTM

Sistem Penentuan Posisi dan Navigasi - 2014 Page 1
TUGAS DISKUSI KELOMPOK
Dosen Pengampu : Dr. Ir. T. Aris Sunantyo, M.Sc.
MATAKULIAH SISTEM PENENTUAN POSISI DAN NAVIGASI
“KONSEP PENENTUAN POSISI 3 DIMENSI DIATAS ELLIPSOID DAN POSISI PADA BIDANG
PROYEKSI UTM DARI DATA PENGAMATAN SATELIT GNSS”
OLEH :
NURHADI BASHIT
ANINDYA SRICANDRA PRASIDYA
MAGISTER TEKNIK GEOMATIKA
PROGRAM PASCASARJANA, FAKULTAS TEKNIK
UNIVERSITAS GADJAH MADA
YOGYAKARTA
2014

Sistem Penentuan Posisi dan Navigasi - 2014 Page 2
TUGAS DISKUSI KELOMPOK
Dosen Pengampu : Dr. Ir. T. Aris Sunantyo, M.Sc.
MATAKULIAH SISTEM PENENTUAN POSISI DAN NAVIGASI
“KONSEP PENENTUAN POSISI 3 DIMENSI DIATAS ELLIPSOID DAN POSISI PADA BIDANG
PROYEKSI UTM DARI DATA PENGAMATAN SATELIT GNSS”
Yogyakarta, 6 Oktober 2014

Sistem Penentuan Posisi dan Navigasi - 2014 Page 3
Problem :
Bagaimana konsep menentukan posisi 3D di atas bidang proyeksi UTM
jika dengan mengamati satelit GNSS ?
Jawaban :
PETA KONSEP PENENTUAN POSISI 3D DENGAN GNSS
Untuk menjawab problem diatas, diajukanlah sebuah peta konsep jawaban yang komprehensif
dan menyeluruh, mulai dari dasar-dasar teori dalam penentuan posisi, pembahasan setiap
komponen penentuan posisi dengan GPS, hingga ilmu-ilmu yang terkait seperti proyeksi peta,
system koordinat, hitung perataan, transformasi koordinat, dan lain-lain. Kata kunci-kata kunci
utama dalam peta konsep ini adalah Posisi, 3 Dimensi, Satelit GNSS, Pengamat, dan UTM. Peta
konsep diberikan pada gambar 1 berikut.
Gambar 1. Konsep awal penentuan posisi 3 Dimensi

Sistem Penentuan Posisi dan Navigasi - 2014 Page 4
Konsep awal yang telah dibuat diatas dapat dijabarkan sebagai berikut:
1. Posisi adalah letak suatu benda pada suatu waktu tertentu terhadap titik acuan tertentu.
Posisi mengacu terhadap suatu sistem koordinat tertentu, yang secara umum dibagi menjadi
sistem koordinat raster dan sistem koordinat vector. Dalam hal ini, posisi pengamat di
permukaan bumi salah satunya dapat diukur dengan pengamatan satelit GNSS, sedangkan
pengamat berada pada system koordinat vector yang 3 dimensi.
2. Tiga dimensi dimaksudkan untuk menentukan posisi pengamat pada model bumi matematis
yang menggunakan 3 buah salib sumbu sebagai acuannya.
3. UTM (Universal Transferese Mercator) adalah salah satu bidang proyeksi yang dipakai
untuk membawa ukuran pada model bumi lengkung (ellipsoid) menjadi ukuran pada bidang
datar.
Kemudian pada setiap komponen kata kuncinya dijelaskan dalam sebuah konsep yang lebih
detail, dalam pembahasan ini dibagi menjadi beberapa bagian dari Konsep Posisi, Satelit GNSS,
Pengamat, dan UTM.
KONSEP POSISI : SISTEM KOORDINAT
Dalam penentuan posisi dengan menggunakan data pengamatan GNSS sangat terkait dengan
posisi sebuah titik dalam ruang. Posisi di dalam ruang sendiri bisa dinyatakan dalam dua system
koordinat, system koordinat vector dan system koordinat raster. Masing-masing system
koordinat memiliki karaktersitik yang saling berbeda. Adapun karaktersitik kedua macam system
koordinat ini dijelaskan sebagai berikut :
1. Sistem koordinat vector
Sistem koordinat vector menyatakan posisi suatu titik melalui panjangan proyeksi titik
tersebut terhadap salib salib sumbu. Sistem koordinat vector hanya memiliki satuan
panjang dan bukan berupa besaran baris dan kolom. Sistem koordinat vector sering
merujuk pada pengertian system koordinat kartesi. Salib sumbu sendiri mempunyai titik

Sistem Penentuan Posisi dan Navigasi - 2014 Page 5
nol di origin, jumlah salib sumbu sendiri bisa dua atau tiga, adapun orientasi sistemnya
bisa Right Hand System (RHS) atau Left Hand System (LHS). Jika jumlah salib sumbu
adalah 2 buah, maka dikenal sebagai system koordinat 2-Dimensi, begitupula ketika salib
sumbunya 3 buah, maka disebut system koordinat 3-Dimensi. Karakteristik system
koordinat vector sebagai berikut :
a. Memiliki satuan
b. Memiliki salib sumbu (bisa 2, 3, atau 4)
c. Memiliki origin sebagai titik nol salib sumbu
d. Memiliki orientasi system (bisa RHS atau LHS)
e. Sudah ada satuan skala yang rigid (pasti).
Gambar contoh system koordinat vector 2D disajikan sebagai berikut :
Gambar 2. Sistem koordinat vector kartesi 2D
Adapun contoh system koordinat kartesian 3D (X,Y,Z) disajikan pada gambar berikut :
Gambar 3. Sistem koordinat vector kartesi 3D

Sistem Penentuan Posisi dan Navigasi - 2014 Page 6
Adapun system koordinat geodetic 3D (φ, , h) disajikan pada gambar berikut :
Gambar 4. Sistem koordinat geodetic 3D
Dalam penentuan posisi dengan GNSS, posisi dinyatakan memakai system koordinat
geodetic 3D maupun system koordinat kartesi 3D, hal ini dikarenakan posisi satelit yang
mengorbit mengacu pada sebuah ellipsoid WGS 1984. Sehingga hasil pengukurannya
pun mengacu pada ellipsoid yang sama, akan tetapi bisa juga dikonversikan menjadi
koordinat kartesi dengan konversi.
2. Sistem koordinat raster
Sistem koordinat raster merupakan system koordinat yang menyatakan posisi suatu titik
dengan memakai himpunan titik atau sel yang disebut dengan piksel yang terangkai
dalam struktur grid (Fakhrurazi, 2011). Piksel sendiri dinyatakan posisinya dengan baris
dan kolom. Baris adalah elemen sel (piksel) yang memanjang dari origin horizontal ke
kanan, dan bertambah nilainya apabila sudah berpindah secara vertical. Adapun kolom
adalah himpunan piksel memajang dari atas ke bawah secara vertical, dan bertambahnya
nilai kolom apabila berpindah secara horizontal. Sistem koordinat ini dipakai biasanya

Sistem Penentuan Posisi dan Navigasi - 2014 Page 7
dalam citra atau foto dan tidak dipakai dalam penentuan posisi seperti GNSS maupun
pengukuran topografi dengan alat terrestrial lainnya. Gambar system koordinat raster
ditunjukkan pada gambar. Sistem koordinat raster terdiri dari :
1. Origin : berada di pojok atas – kiri
2. Nilai w : sepanjang baris
3. Nilai h : sepanjang kolom
4. Resolusi grid : dimensi piksel pada permukaan tanah. Makin Makin kecil ukuran
piksel, makin tinggi resolusi grid, namun tidak selalu berarti meningkatnya ketelitian
grid.
Gambar 5. Sistem koordinat raster
Dalam system koordinat raster dikenal juga pixel area dan pixel point. Pixel area
adalah nilai piksel pertama yang mengisi sel grid kotak dengan dibatasi pada atas-kiri
= (0,0) dan bawah-kanan = (1,1). Adapun Pixel Point adalah nilai piksel yang
merealisasikan nilai titik yang berada pada (0,0). Berikut gambaran pixel area dan
pixel point.
Gambar 6. Piksel area (kiri) dan piksel point (kanan)

Sistem Penentuan Posisi dan Navigasi - 2014 Page 8
Adapun karakteristik system koordinat raster adalah :
1. Tanpa satuan (hanya baris dan kolom)
2. Berupa matriks baris dan kolom
3. Memiliki piksel (picture element)
4. Memiliki Origin di pojok atas-kiri
5. Hanya berupa 2 Dimensi
6. Selalu terkait dengan maksimal penskalaan
3. Perbandingan system koordinat raster dan vector
Sistem koordinat raster dan vector selalu dipakai dalam penentuan posisi di dalam ilmu
geodesi. Untuk beberapa aplikasi SIG, terkadang diperlukan konversi antara system
koordinat raster dan vector ataupun sebaliknya. Vektorisasi maupun rasterisasi ini
menjadi bagian yang penting juga dalam penentuan posisi. Untuk memperoleh gambaran
tentang konversi ini, maka disajikanlah perbandingan antara siste koordinat raster dan
vector sebagai berikut :
Gambar 7. Contoh konversi data vector ke raster
Pada gambar , diketahui bahwa dalam representasi fitur dengan system vector tidak
memiliki keterbatasan penskalaan tidak seperti pada raster. Konversi dari vector ke raster
selalu terjadi distorsi informasi yang besarnya tergantung resolusi grid yang ada pada
raster. Untuk mengetahui konversi vector ke raster dan sebaliknya disajikanlah gambar
berikut :

Sistem Penentuan Posisi dan Navigasi - 2014 Page 9
Gambar 8. Konversi data vector ke raster
Raster ke Kartesian:
Raster (0,0) Kartesian (-w/2, h/2) ................................. (1)
Raster (w,0) Kartesian (w/2, h/2) ................................. (2)
Raster (0,h) Kartesian (-w/2, -h/2) ................................. (3)
Raster (w,h) Kartesian (w/2, -h/2) ................................. (4)
Kartesian ke Koordinat Kutub:
√ ................................. (5)
(
) ................................. (6)
Koordinat Kutub ke Kartesian:
x = r cos(θ) ................................. (7)
y = r sin(θ) ................................. (8)
Kartesian ke Raster:
RasterX = x + w/2 ................................. (9)
RasterY = h/2 – y ................................. (10)

Sistem Penentuan Posisi dan Navigasi - 2014 Page 10
KOORDINAT PENGAMAT DINYATAKAN DALAM POSISI 3 DIMENSI
Posisi pengamat pada penentuan posisi dengan GNSS di permukaan bumi mengacu pada
pendekatan model bumi matematis yakni berupa ellipsoid 3 Dimensi. Koordinat yang dipakai
untuk menyatakan posisi pengamat pada receiver GPS adalah dalam koordinat geodetic 3D
dan/atau koordinat kartesi 3D yang mengacu pada ellipsoid WGS‟84. Adapun pada satelit
GLONASS, posisi pengamat dinyatakan pada system koordinat yang sama dengan GPS akan
tetapi berbeda ellipsoid acuan. Ellipsoid acuan yang dipakai pada satelit GLONASS adalah
ellipsoid PZ-90 yang dikeluarkan oleh Rusia. Koordinat geodetic dinyatakan dalam (φ, , dan h),
sedangkan koordinat katersi dinyatakan dalam X,Y, dan Z. Untuk menggabungkan data posisi
dari kedua satelit tersebut digunakan transformasi datum yang akan dijelaskan pada bagian .
Koordinat pengamat bisa dihasilkan dengan metode absolut positioning (receiver hanya berdiri
pada satu titik tanpa didifferensialkan posisinya dengan titik lainnya), maupun secara relative
yakni dengan mendifferensialkan hasil ukuran satu receiver dengan receiver yang lain. Konsep
penentuan posisi absolut dengan GNSS disajikan pada gambar 9 . Adapun konsep penentuan
posisi relative dengan GNSS disajikan dalam gambar 10 .
Gambar 9. Penentuan posisi secara absolut dengan GNSS

Sistem Penentuan Posisi dan Navigasi - 2014 Page 11
Penentuan posisi secara relative memakai minimum 2 receiver yang terpisah suatu jarak akan
tetapi secara bersama-sama (simultan) mengamat satelit GNSS. Secara teoritis penentuan posisi
ini menghasilkan ketelitian yang lebih baik karena mereduksi beberapa kesalahan dan bias saat
pengamatan satelit GNSS oleh receiver. Gambar menunjukkan konsep penentuan posisi relative
ini.
Gambar 10. Penentuan posisi secara differensial (Prasidya, 2014)
Merujuk pada persamaan gambar , maka kita bisa mendapatkan koordinat kartesi dari koordinat
geodetic maupun sebaliknya. Perumusannya sebagai berikut :
1. Sistem Koordinat Geodetik keSistem Koordinat Kartesi 3D
f(N, φ, , h) = f(X,Y,Z)
e2 =
aba
2
22
................................. (11)
N =
sin22
1 e
a
................................. (12)
X = (N + h) cos φ cos ................................. (13)
Y = (N + h) cos φ sin ................................. (14)

Sistem Penentuan Posisi dan Navigasi - 2014 Page 12
Z = (N (1-e2) + h) sin φ ................................. (15)
2. Sistem Koordinat Kartesi 3D ke Sistem Koordinat Geodetik
f(X,Y,Z) = f(N, φ, , h)
φ = hN
Z
sin1
................................. (16)
= tan-1
X
Y
................................. (17)
h = NP
cos
................................. (18)
a = jari-jari ekuator
b = setengah sumbu pendek ellipsoid referensi
λ,φ,h = koordinat geodetik
N = jari-jari lengkung normal utama
X,Y,Z = koordinat dalam system kartesian
SATELIT GNSS
Dasar penentuan posisi dengan satelit navigasi GNSS adalah terkait dengan posisi satelit di luar
angkasa yang ditentukan posisinya pada system koordinat orbit melalui system koordinat langit,
karena satelit navigasi merupakan satelit orbital. Selain terkait dengan system koordinat orbit,
juga terkait dengan system koordinat toposentrik yang menyatakan posisi satelit mngacu pada
ellipsoid acuan sebagai representasi matematis dari bumi. Akan tetapi sebelum membahas jauh
tentang system koordinat yang menyatakan posisi satelit GNSS, sebelumnya akan diterangkan
tentang hukum-hukum dasar fisika yang dipakai pada satelit sehingga bisa mengorbit.
A. Hukum Dasar Orbit Satelit
Hukum-hukum tersebut adalah Hukum Keppler dan Hukum Newton tentang gerak benda dan
gravitasi. Hukum Keppler di rumuskan untuk menjelaskan perilaku orbit planet mengelilingi

Sistem Penentuan Posisi dan Navigasi - 2014 Page 13
matahari. Dalam penerapannya, hukum Kepler bersama dengan hukum Newton digunakan untuk
mempelajari perilaku orbit satelit bumi buatan.
1. Hukum Keppler tentang orbit benda di luar angkasa
Hukum Kepler untuk menjelaskan gerak orbit satelit bumi buatan dapat dirumuskan sebagai
berikut (Fakhrurrazi, 2008) :
(1) Orbit satelit berbentuk elips dengan bumi berada pada salah satu titik apinya.
(2) Untuk selang waktu yang sama, garis hubung satelit ke pusat bumi menyapu luasan yang
sama pada bidang orbit elips.
(3) Pangkat dua periode orbit satelit sebanding dengan pangkat tiga jarak rerata
satelit ke pusat bumi.
Keterangan gambar :
F : titik api elips
a : setengah sumbu panjang elips
b : setengah sumbu pendek elips
Perigee: titik terdekat satelit ke bumi
Apogee : titik terjauh satelit ke bumi
Apabila:
b
a
t 3
t 4
t2
t1
F
bumi A34
A12
Perigee Apogee
Gambar 11. Elips orbit satelit

Sistem Penentuan Posisi dan Navigasi - 2014 Page 14
A12 : luasan yang disapu oleh garis hubung satelit-pusat bumi dari waktu t1 ke t2
A34 : luasan yang disapu oleh garis hubung satelit-pusat bumi dari waktu t3 ke t4
(t 2 - t 1 ) = (t 4 - t 3 )
maka : A12 sama dengan A34
Apabila:
T1 dan T2 adalah masing-masing periode orbit satelit S1 dan S2
r1 dan r2 adalah masing-masing jarak rerata satelit S1 dan S2 ke pusat bumi
maka: (T1 )2 : (r1 )
3 = (T2 )
2 : (r2 )
3
2. Hukum Newton tentang gravitasi
Hukum Newton tentang gerak benda adalah sebagai berikut:
(1) Tiap benda akan tetap berada dalam keadaan diam atau bergerak dengan
kecepatan tetap pada arah garis lurus sampai ada gaya yang memaksa merubah
kedudukan tersebut.
(2) F = m . r ................................. (19)
F : vektor gaya yang bekerja terhadap massa m
r : vektor percepatan, diukur relatif terhadap suatu kerangka acuan inersial
tertentu yang tidak mengalami percepatan maupun perputaran.
(3) Setiap aksi senantiasa ada reaksi (sama tetapi dengan arah yang berlawanan).
Hukum Newton tentang gravitasi adalah sebagai berikut:
Dua benda saling tarik-menarik dengan gaya yang sebanding dengan hasil kali
massa kedua benda dan berbanding terbalik dengan pangkat dua jarak antara
kedua benda yang bersangkutan. Untuk selanjutnya, besaran-besaran vektor dituliskan dengan
huruf tebal (bold) sedangkan besaran-besaran skalar dalam huruf biasa (regular).
Fg = - GM m / r 2 ) ( r / r ) = - GM m / r
3 ) r ......................... (20)
r = ( r1 2 + r2
2 + r3
2 )
1/2 ............................................... (21)

Sistem Penentuan Posisi dan Navigasi - 2014 Page 15
Fg : vektor gaya yang bekerja pada massa m karena massa bumi M
r : vektor posoisi m (relatif terhadap titik pusat massa M)
G : konstanta gravitasi 6670 X 10- 8
cm3 / g / detik
2
GM 3,986008 X 1014
m3 / detik
2
Fg = - GM m / r 2 ) ( r / r ) = - GM m / r
3 ) r ......................... (22)
r = ( r1 2 + r2
2 + r3
2 )
1/2 ............................................... (23)
Fg : vektor gaya yang bekerja pada massa m karena massa bumi M
r : vektor posoisi m (relatif terhadap titik pusat massa M)
G : konstanta gravitasi 6670 X 10- 8
cm3 / g / detik
2
GM 3,986008 X 1014
m3 / detik
2
Hukum Newton tentang gravitasi ini diterapkan untuk benda-benda yang dapat dianggap sebagai
titik atau diwakili oleh titik massa.
B. Sistem Koordinat Terkait Penentuan Posisi dengan GNSS
Seperti yang telah disebutkan sebelumnya, posisi kostelasi satelit di luar angkasa bisa dinyatakan
dalam berbagai sistem koordinat, antara lain sistem koordinat Orbit yang mengacu pada sistem
koordinat langit dan sistem koordinat toposentrik. Berikut akan dijelaskan masing-masing sistem
koordinat tersebut :
r2
r
r1
r3
m
Fg
M
Gambar 12. Hukum Newton tentang gravitasi

Sistem Penentuan Posisi dan Navigasi - 2014 Page 16
1. Posisi satelit pada sistem koordinat Orbit dalam SKL
Sistem Koordinat Langit (SKL) berorigin pada pusat massa bumi (geosentrik) dengan
orientasi sumbu-X positif ke arah Vernal Equinox (VE), sumbu-Z positif ke arah kutub
utara langit (kutub utara sesaat), dan sumbu-Y positif melengkapinya menjadi sistem
tangan kanan koordinat kartesi 3D. Posisi VE di langit mengalami variasi karena
fenomena precessi dan nutasi. Apabila hanya diperhitungkan precessi saja maka
diperoleh posisi VE menengah dan sistem koordinatnya disebut Conventional Celestial
Reference System (CCRS) atau SKL menengah, sedangkan apabila diperhitungkan
precessi dan nutasi, maka diperoleh posisi VE sejati dan sistem koordinatnya disebut
True Celestial Reference System (TCRS) atau SKL sejati. SKO terorientasi terhadap
SKL oleh tiga besaran, yaitu Asensio Rekta Ascending Node (), kemiringan bidang
orbit ( i ), dan argumen perigee (). Ascending Node adalah titik lintas orbit satelit pada
bidang ekuator langit dalam manuvernya dari belahan langit selatan ke belahan langit
utara, sedangkan Descending Node adalah titik lintasnya pada bidang ekuator langit
dalam manuvernya dari belahan langit utara ke belahan langit selatan (Fakhrurrazi,
2008).
Gambar 13. Posisi satelit dalam sistem koordinat orbit dalam SKL

Sistem Penentuan Posisi dan Navigasi - 2014 Page 17
Keterangan gambar :
Elemen Kepler terdiri dari enam besaran, yaitu :
a = setengah sumbu panjang elips orbit
e = eksentrisitas elips orbit
M = anomali menengah (atau anomali eksentrik E)
= Asensio rekta Ascending Node
i = kemiringan bidang orbit terhadap bidang ekuator langit
= argumen perigee
Vektor posisi dan kecepatan orbit satelit dalam SKL dapat diperoleh dengan
mentransformasikan vektor posisi dan kecepatan orbit satelit dalam SKO sebagai berikut:
[ r ]SKL = R3 (- ) R1 (- i ) R3 (- ) [ r ]SKO ........................... (24)
r = ( X 2 + Y
2 + Z
2 )1/2
.............................................. (25)
[ r ]SKL = R3 (- ) R1 (- i ) R3 (- ) [ r ]SKO ........................... (26)
V = ( X 2 + Y
2 + Z
2 )1/2
............................................... (27)
Apabila besaran-besaran , i , dan mengacu pada SKL menengah, maka [ r ]SKL dan
[ r ]SKL mengacu pada SKL menegah. Demikian juga apabila besaran-besaran tersebut
mengacu pada SKL sejati, maka [ r ]SKL dan [ r ]SKL mengacu pada SKL sejati. Karena
dari waktu ke waktu baik SKL menengah maupun SKL sejati senantiasa mengalami
variasai maka penerapan SKL perlu menunjuk kepada epoch tertentu.
2. Posisi satelit pada sistem koordinat Toposentrik
Sistem Koordinat Toposentrik merupakan sistem koordinat kartesi 3D yang berorigin
pada titik pengamat (di permukaan bumi) dan mengacu pada normal elipsoid atau garis
arah unting-unting (plumb line) di titik origin. Orientasi sumbu-sumbu sistem koordinat
toposentrik yang mengacu pada normal elipsoid didefinisikan sebagai berikut:
1. sumbu-w (sumbu ke-3) berimpit dengan normal elipsoid, positif kearah zenit.
2. sumbu-u (sumbu ke-1) positif ke arah utara geografik.
3. sumbu-v (sumbu ke-2) positif kearah timur, melengkapi sistem tangan kiri.

Sistem Penentuan Posisi dan Navigasi - 2014 Page 18
Definisi di atas juga diterapkan untuk sistem koordinat toposentrik yang mengacu pada
garis arah unting-unting; Perbedaan dasarnya ialah sumbu-w (sumbu ke-3) berimpit
dengan garis arah unting-unting yang melewati origin. Dengan demikian maka
perbedaan (relatif) orientasi sumbu-sumbu koordinat kartersi kedua sistem koordinat
toposentrik tersebut ialah disebabkan karena fenomena defleksi vertikal yang harganya
bervariasi dari satu titik ke titik yang lain.
Gambar 14. Posisi satelit dalam sistem koordinat toposentrik
Untuk menghitung vektor posisi satelit dalam sistem koordinat topsentrik, maka terlebih
dahulu dihitung vektor posisi satelit relatif terhadap titik pengamatan dalam SKT yang
merupakan selisih vektor posisi satelit dengan vektor posisi titik pengamatan. Vektor
posisi titik pengamatan [ rA ]SKT dihitung dari koordinat geodetik ( A, A, hA):
( N + h A ) cos A cos A
[ rA ]SKT = ( N + h A ) cos A sin A ................................. (28)
[ N ( 1 - ee2 ) + h A ] sin A

Sistem Penentuan Posisi dan Navigasi - 2014 Page 19
N = ae / ( 1 - ee2 sin
2 A )
1/2 ........................................... (29)
Dalam rumus di atas, N adalah jejari kelengkungan vertikal utama di titik pengamatan
yang berkoordinat geodetik (A , A , hA ), sedangkan ae dan ee adalah masing-masing
setengah sumbu panjang dan eksentrisitas elipssoid acuan. Vektor posisi satelit dalam
Sistem Koordinat Toposentrik diperoleh dengan mentransformasikan selisih vektor posisi
satelit dengan vektor posisi titik pengamatan dalam SKT sebagai berikut:
u
- v = R2 ( A - 90o ) R3 ( A - 180
o ) [ r ]SKT - [ rA ]SKT …….. (30)
w
Visibility atau kenampakan satelit dari titik pengamatan P dapat diketahui dari azimut dan
elevasi satelit yang dapat dihitung dengan rumus sebagai berikut:
Azimut = tan-1
[ v / u ] ........................................... (31)
Elevasi = tan-1
[ w / ( u 2 + v
2 )1/2
] ........................................... (32)
Harga elevasi positif berarti satelit berada di atas horison dan kemungkinan dapat diamat.
C. Sinyal Satelit GNSS
Sinyal-sinyal yang diberikan oleh GNSS ke pengamat pada prnsipnya adalah
menginformasikan pengamat tentang posisi satelit yang teramat beserta jarak dan waktunya
terhadap receiver, dan juga informasi-informasi lainnya. Sinyal GPS terdiri dari 3 komponen
(Abidin, 1995) : penginformasian jarak (kode), penginformasian posisi satelit (navigation
message), dan gelombang pembawa (carrier wave ). Karakteristik masing-masing sinyal
dijelaskan berikut ini :
1. Penginformasian jarak (kode)
Ada dua jenis kode pseudo-random noise (PRN) yang dipakai untuk menginformasikan
jarak, yaitu kode P (P = Precise or Private) dan kode C/A (C/A = Coarse Acquisition
or Clear Access). Rangkaian kode-kode ini punya arti matematis walau kelihatannya
hanya rangkaian nilai 0 dan 1. Setiap satelit memiliki struktur kode yang unik dan saling

Sistem Penentuan Posisi dan Navigasi - 2014 Page 20
berbeda satu dengan yang lain, sehingga bisa dikenali sinyal yang datang dari satelit
yang berbeda. Struktur sinyalnya sebagai berikut :
Gambar 15. Struktur frekuensi sinyal GPS (Abidin, 2007)
Adapun prinsip pengukuran jarak dari satelit GNSS ke receiver dipermukaan bumi
dengan informasi kode ini, dilaksanakan dengan mengalikan waktu yang diperlukan oleh
kode P atau C/A tersebut saat menempuh jarak dari satelit ke pengamat (dt) dengan
konstanta kecepatan cahaya (c) dengan ditambah koreksi-koreksi lain. Secara umum
prinsipnya sebagai berikut :
Gambar 16. Penentuan jarak pseudorange
Karena jam receiver tidak sinkron dengan jam satelit, jarak diatas masih terpengaruh
oleh kesalahan waktu, sehinggak jarak tersebut dinamakan pseudorange.
Sistem Penentuan Posisi dan Navigasi - 2014 Page 21
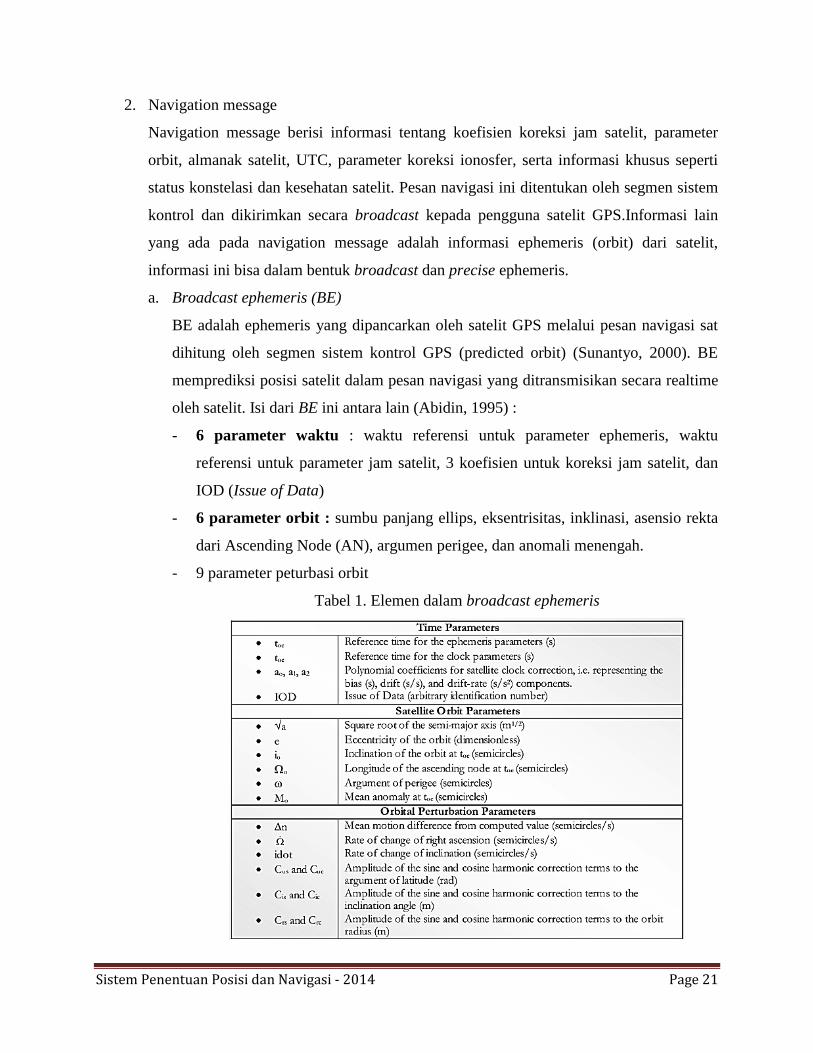
2. Navigation message
Navigation message berisi informasi tentang koefisien koreksi jam satelit, parameter
orbit, almanak satelit, UTC, parameter koreksi ionosfer, serta informasi khusus seperti
status konstelasi dan kesehatan satelit. Pesan navigasi ini ditentukan oleh segmen sistem
kontrol dan dikirimkan secara broadcast kepada pengguna satelit GPS.Informasi lain
yang ada pada navigation message adalah informasi ephemeris (orbit) dari satelit,
informasi ini bisa dalam bentuk broadcast dan precise ephemeris.
a. Broadcast ephemeris (BE)
BE adalah ephemeris yang dipancarkan oleh satelit GPS melalui pesan navigasi sat
dihitung oleh segmen sistem kontrol GPS (predicted orbit) (Sunantyo, 2000). BE
memprediksi posisi satelit dalam pesan navigasi yang ditransmisikan secara realtime
oleh satelit. Isi dari BE ini antara lain (Abidin, 1995) :
- 6 parameter waktu : waktu referensi untuk parameter ephemeris, waktu
referensi untuk parameter jam satelit, 3 koefisien untuk koreksi jam satelit, dan
IOD (Issue of Data)
- 6 parameter orbit : sumbu panjang ellips, eksentrisitas, inklinasi, asensio rekta
dari Ascending Node (AN), argumen perigee, dan anomali menengah.
- 9 parameter peturbasi orbit
Tabel 1. Elemen dalam broadcast ephemeris

Sistem Penentuan Posisi dan Navigasi - 2014 Page 22
b. Precise Ephemeris (PE)
PE adalah ephemeris yang diperoleh melalui data aktual tracking yang telah
dilakukan perhitungan secara post-processing untuk mendapatkan posisi satelit yang
lebih akurat. PE lebih akurat dari BE, karena ia bukanlah prediksi namun data aktual
tracking. Data PE ini banyak dikeluarkan oleh instansi seperi IGS, CDDIS, dan lain-
lain.
3. Gelombang pembawa
Ada dua gelombang pembawa yang dipakai yaitu L1 dan L2. Gelombag L1 membawa
kode-kode P dan C/A beserta pesan navigasi, sedangkan L2 membawa kode P dan pesan
navigasi,
Gambar 17. Struktur sinyal pembawa
Walaupu gelombang pembawa didesain untuk membawa data kode dan pesan navigasi,
akan tetapi data fase dari sinyal ini bisa juga dipakai untuk menentukan jarak dari satelit
ke pengamat. Untuk mengubah data fase menjadi jarak, ambiguitas fase N harus
ditentukan terlebih dahulu nilainya. Penentuan nilai ambiguitas fase yang tepat akan
membuat data ukuran jarak menjadi sangat teliti, akan tetapi hal ini tidaklah mudah
dalam prakteknya. Konsep penentuan jarak dengan data fase ini diberikan sebagai
berikut (Abidin, 1995):

Sistem Penentuan Posisi dan Navigasi - 2014 Page 23
Gambar 18. Penentuan jarak dengan data fase
KOMPONEN PENGAMAT DALAM PENGAMATAN SATELIT GNSS
A. Model Bumi
Pengamat yang mengamat satelit GNSS di permukaan bumi, selalu direpresentasikan posisinya
dengan pendekatan model bumi. Model bumi mendeskripsikan bentuk permukaan bumi beserta
posisi-posisi atau lokasi-lokasi geografi dari unsur-unsur permukaan bumi. Karena tidak
mungkin menyamai bumi asli, maka dibuatlah model pendekatan bentuk bumi. Diantara model
bumi adalah model bumi Fisik dan Model Bumi matematis. Model Bumi Fisik merupakan
pendekatan dari geoid yang merupakan bidang ekipotensial yang memiliki nilai sama yang
dianggap berimpit dengan MSL dalam keperluan praktis. Model Bumi Matematis bisa disajikan
dalam bentuk bidang datar dan bidang lengkung seperti Bola atau ellipsoid.
Untuk kebutuhan hitungan-hitungan geodesi, maka permukaan fisik bumi diganti dengan
permukaan yang teratur dengan bentuk dan ukuran yang mendekati bumi. Permukaan yang
dipilih adalah bidang permukaan yang mendekati bentuk dan ukuran geoid. Seperti telah
disinggung di muka, geoid memiliki bentuk yang sangat mendekati ellips putar dengan sumbu
pendek sebagai sumbu putar yang berimpit dengan sumbu putar bumi. Ellipsoid ini kemudian
disebut sebagai ellipsoid referensi (permukaan referensi geometrik).
Ellipsoid referensi didefinisikan oleh nilai-nilai jari-jari ekuator (a) dan pegepengan (f) ellips
putarnya. Sedangkan parameter-parameter seperti setengah sumbu pendek (b), eksentrisitas

Sistem Penentuan Posisi dan Navigasi - 2014 Page 24
(e), dan lainnya dapat dihitung (atau diturunkan) dengan menggunakan ke dua nilai parameter
pertama di atas. Dengan memperhatikan kondisi-kondisi fisik permukaan (bentuk geoid) beserta
faktor lainnya, tidak semua negara di dunia menggunakan ellipsoid yang sama. Karena itu,
banyak dijumpai ellipsoid referensi. Jika ellipsoid referensi yang digunakan dipilih berdasarkan
kesesuaiannya (sedekat mungkin) dengan bentuk geoid lokalnya (relatif tidak luas), maka
ellipsoid referensi tersebut dapat disebut juga sebagai ellipsoid lokal. Jika ellipsoid referensi
yang digunakan sesuai dengan bentuk geoid untuk daerah yang relatif luas (tingkat regional),
maka ellipsoid referensi tersebut juga dikenal sebagai ellipsoid regional.
Gambar 19. Datum ellipsoid dan hubungannya dengan Geoid
Datum geodesi merupakan sekumpulan konstanta yang digunakan untuk mendefinisikan sistem
koordinat yang digunakan untuk kontrol geodesi (sebagai contoh untuk keperluan penentuan
hitungan koordinat-koordinat titik-titik di permukaan bumi). Untuk mendefinisikan datum
geodesi yang lengkap, paling sedikit diperlukan delapan besaran :
- tiga konstanta (Xo, Yo, Zo) untuk mendefinisikan titik awal sistem koordinat,
- tiga besaran untuk menentukan arah sistem koordinat, dan

Sistem Penentuan Posisi dan Navigasi - 2014 Page 25
- dua besaran lainnya (setengah sumbu panjang (a), dan pegepengan (f) untuk mendefinisikan
dimensi ellipsoid yang digunakannya.
Meskipun demikian, sebelum datum geosentrik ini digunakan seperti pada saat ini, datum
geodesi didefinisikan oleh lima besaran saja : koordinat titik awal (bujur lintang), sudut azimuth
dari titik awal ini (α), dan dua besaran yang mendefinisikan ellipsoid referensi yang digunakan
(setengah sumbu panjang (a), dan pegepengan (f) ellipsoid). Datum terbagi berdasarkan cakupan
wilayahnya meliputi (Gambar ) :
Gambar 20. Jenis ellipsoid (datum) berdasarkan cakupannya
1. Datum Lokal
Datum lokal adalah datum geodesi yang menggunakan ellipsoid referensi yang dipilih
sedekat mungkin (paling sesuai) dengan bentuk geoid lokal (relatif tidak luas) yang
dipetakan-datumnya menggunakan ellipsoid lokal.
2. Datum Regional
Datum regional adalah datum geodesi yang menggunakan ellipsoid referensiyang
dipilih sedekat mungkin (paling sesuai) dengan bentuk geoid untuk area yang relatif
luas (regional).
3. Datum Global

Sistem Penentuan Posisi dan Navigasi - 2014 Page 26
Datum global adalah datum geodesi yang menggunakan ellipsoid referensi yang
dipilih sedekat mungkin (paling sesuai) dengan bentuk geoid untuk seluruh permukaan
bumi.
4. Datum Horizontal
Ellipsoid referensi paling sering digunakan sebagai bidang referensi untuk penentuan
posisi horizontal (lintang dan bujur). Oleh karena itu, datumnya sering pula disebut
sebagai datum horizontal. Koordinat posisi horizontal ini beserta tingginya di atas
permukaan ellipsoid dapat dikonversikan ke sistem koordinat kartesian 3D yang
mengacu pada sumbu-sumbu ellipsoid yang bersangkutan.
5. Datum Vertikal
Untuk mempresentasikan informasi ketinggian atau kedalaman, sering digunakan
datum yang berbeda. Pada peta laut umumnya digunakan suatu bidang permukaan air
rendah (chart datum) sebagai bidang referensi, sehingga nilai-nilai kedalaman yang
dipresentasikan oleh peta laut ini mengacu pada pasut rendah (low tide).
B. Datum WGS 1984 dan Datum PZ-90
Datum penting sebagai acuan nilai bagi posisi dipermukaan bumi. Dalam penentuan posisi
dengan GNSS, datum yang dipakai yakni WGS-84 untuk GPS dan PZ-90 untuk GLONASS.
Datum WGS84 yang dikembangkan oleh oleh DOD dan defense mapping agency (DMA)
merepresentasikan pemodelan standpoint (yaitu posisi titik dimana pengamatan atau pengukuran
dilakukan di dalam survey pemetaan), gravitasional (gaya berat bumi yang bersifat fisis),
geodetik, dan geometrik. WGS (World Geodetic System) atau Sistem Geodesi Dunia adalah
standar yang digunakan dalam pemetaan, geodesi, dan navigasii terdiri dari bingkai koordinat
standar Bumi, Datum geodetik, (referensi permukaan standar bulat (acuan atau referensi
elipsoid) untuk data ketinggian mentah, dan permukaan ekuipotensial gravitasi (geoid) dipakai
sebagai pendefinisian tingkat nominal laut. Revisi terbaru adalah Sistem Geodesi Dunia 1984
(versi tahun 1984 kemudian dilakukan direvisi pada tahun 2004).

Sistem Penentuan Posisi dan Navigasi - 2014 Page 27
Dalam datum referensi Earth-Centered Earth-Fixed (ECEF) PZ-90 yang didefinisikan sebagai
berikut [ICD, 2002]:
1. Titik origin berada pada pusat bumi.
2. Sumbu-Z diarahkan ke Conventional Terrestrial Pole (CTP) sebagaimana direkomendasikan
oleh International Earth Rotation Service (IERS).
3. Sumbu-X diarahkan pada titik pertemuan bidang equator dan meridian nol yang dibuat oleh
BIH.
4. Sumbu-Y mengikuti sistem koordinat menggunakan tangan kanan.
Koordinat geodetik titik pada sistem koordinat PZ-90 mengacu pada elipsoid dimana sumbu
semi-major dan factor pengepenggan.
Tabel 2. konstanta geodetic dan parameter PZ-90 [ICD, 2002]
C. Transformasi Datum
Untuk menyamakan Datum WGS 84 dan PZ-90 perlu suatu model transformasi berdasarkan
transformasi koordinat bumi. Prinsip transformasi datum adalah pengamatan pada titik-titik yang
sama atau disebut titik sekutu. Titik sekutu ini memiliki koordinat-koordinat dalam berbagai

Sistem Penentuan Posisi dan Navigasi - 2014 Page 28
datum. Dari koordinat koordinat ini dapat diketahui hubungan matematis antara datum yang
bersangkutan. Selanjutnya titik titik yang lain dapat ditransformasikan. Prinsip transformasi
datum adalah pengamatan pada titik-titik yang sama. Selanjutnya, titik-titik sekutu ini memiliki
koordinat-koordinat dalam berbagai datum. Dari koordinat-koordinat ini dapat diketahui
hubungan matematis antara datum-datum. Hubungan matematis antara datum ini dapat
dinyatakan dengan 7 parameter transformasi : Translasi titik asal (origin) dx, dy, dz; rotasi
sumbu koordinat rx, ry, rz; dan skala S.
.................. (33)
Gambar 21. Transformasi datum PZ-90 ke WGS-84
WGS ‘84 PZ-90

Sistem Penentuan Posisi dan Navigasi - 2014 Page 29
Parameter transformasi dari PZ-90 ke WGS-84 adalah :
Pada dasarnya yang dimaksud dengan system koordinat adalah suatu system yang digunakan
untuk menyatakan suatu posisi atau titik baik dalam dua dimensi ataupun dalam tiga dimensi.
System koordinat didefinisikan dengan menspesifikasi tiga parameter, yaitu:
1. Lokasi titik asal ( titik nol ) dari system koordinat
2. Orientasi dari sumbu – sumbu koordinat
3. Besaran( kartesian, kurvalinear) yang digunakan untuk mendefinisikan posisi suatu titik
dalam sistem koordinat tersebut.
MODEL BUMI MATEMATIS DAN PROYEKS UTM
A. Model Bumi Ellipsoid
Pendekatan secara matematis (model) dari bumi fisis yang digunakan adalah ellipsoid dengan
besaran-besaran tertentu. Parameter ellipsoid dinyatakan dengan setengah sumbu panjang ellip
(a) dan setengah sumbu pendek ellip (b) serta penggepengan/flattening (f) (Muryamto, 1994).
Proyeksi adalah suatu cara dalam usaha menyajikan dari suatu bentuk yang mempunyai dimensi
tertentu ke dimensi lainnya. Dalam hal ini adalah dari bentuk matematis bumi (Elipsoid atau Elip
3 dimensi) ke bidang 2 dimensi berupa bidang datar. Sesuai dengan teori Newton, bahwa gaya
sentrifugal menyebabkan Bumi mengalamai pemampatan, jari-jari kutub pada ellipsoid lebih
pendek daripada jari-jari ekuatornya.

Sistem Penentuan Posisi dan Navigasi - 2014 Page 30
Gambar 22. Proyeksi peta dari permukaan bumi ke bidang datar (sumber : Mutiara, 2004).
Model bumi ellipsoid ini sangat diperlukan untuk perhitungan jarak dan arah (sudut jurusan) yg
akurat dgn jangkauan yg sangat jauh. “Gambaran” atau geometrik bumi telah berevolusi dari
abad-ke-abad hingga menjadi lebih baik (mendekati bentuk fisik sebenarnya), mulai dari model
bumi sebagai bidang datar seperti cakram hingga ellips putar (ellipsoid). Sebenarnya bentuk
bumi adalah spheroid (ellipsoid), radius pada equator sedikit lebih besar dari kutub-kutub
(Basofi, 2013).
Gambar 23. Bentuk Ellipsoid dari permukaan bumi (sumber : Basofi, 2013)
Karena permukaan bumi yang tidak rata/teratur, maka tidak dapat dijadikan sebagai bidang
(referensi) hitungan geodesi. Agar bisa untuk kebutuhan hitungan, maka permukaan fisik bumi
diganti dengan permukaan yang teratur, dengan bentuk dan ukuran yang mendekati bumi, dalam
hal ini dipilih bidang permukaan yang mendekati bentuk dan ukuran geoid, karena memiliki
bentuk yang sangat mendekati geometri ellips-putar dengan sumbu pendek sebagai sumbu putar
yang berimpit dengan sumbu putar bumi.

Sistem Penentuan Posisi dan Navigasi - 2014 Page 31
Gambar 24. Struktur permukaan bumi (sumber : Basofi, 2013)
Geometri ellipsoid referensi biasanya didefinisikan oleh :
a = jari-jari ekuator
f = penggepengan (f = flattening) ellips putarnya
Sedang parameter lain, seperti Sumbu pendek (b) dan eksentrisitas (e) dapat dihitung
(diturunkan) dengan ke dua nilai parameter pertama diatas.
Gambar 25. Geometri Ellipsoid (sumber : Basofi, 2013)
................................. (34)
................................. (35)
Karena kondisi fisik permukaan bumi (bentuk geoid) beserta faktor lain pada suatu lokasi/negara
tidak sama, maka tidak semua negara menggunakan ellipsoid (referensi) yang sama. Untuk
menentukan suatu ellipsoid referensi, berdasarkan kesesuaian (sedekat mungkin) dgn bentuk
permukaan geoidnya. Terdapat beberapa kategori ellipsoid berdasar coverage areanya meliputi:

Sistem Penentuan Posisi dan Navigasi - 2014 Page 32
1. Ellipsoid Lokal
Jika ellipsoid referensi yang digunakan dipilih berdasarkan kesesuaian (sedekat mungkin)
dengan bentuk geoid lokalnya (relatif tidak luas).
2. Ellipsoid Regional
Jika ellipsoid referensi yang digunakan dipilih sesuai dengan bentuk geoid untuk daerah yang
relatif luas (tingkat regional).
3. Ellipsoid Global
Jika ellipsoid referensi yang digunakan dipilih sesuai/mendekati dengan bentuk geoid untuk
keseluruhan permukaan bumi.
Tabel 3. Macam-macam ellipsoid yang digunakan di seluruh dunia

Sistem Penentuan Posisi dan Navigasi - 2014 Page 33
B. Macam-macam Bidang Proyeksi
Pada daerah yang relatif kecil (30 km x 30 km) permukaan bumi diasumsikan sebagai bidang
datar, sehingga pemetaan daerah tersebut dapat dilakukan tanpa proyeksi peta dan tetap
memenuhi semua persyaratan geometrik. Namun karena permukaan bumi secara keseluruhan
merupakan permukaan yang melengkung, maka pemetaan pada bidang datar tidak dapat
dilakukan dengan sempurna tanpa terjadi perubahan (distorsi) dari bentuk yang sebenarnya
sehingga tidak semua persyaratan geometrik peta yang „ideal‟ dapat dipenuhi (Mutiara, 2004).
Bidang proyeksi adalah bidang yang digunakan untuk memproyeksikan gambaran permukaan
bumi. Bidang proyeksi merupakan bidang yang dapat didatarkan. Menurut bidang proyeksi yang
digunakan, jenis proyeksi peta adalah:
1. Proyeksi Azimuthal : Bidang proyeksi yang digunakan adalah bidang datar. Sumbu simetri
dari proyeksi ini adalah garis yang melalui pusat bumi dan tegak lurus terhadap bidang
proyeksi.
2. Proyeksi Kerucut (Conic) : Bidang proyeksi yang digunakan adalah kerucut. Sumbu
simetri dari proyeksi ini adalah sumbu dari kerucut yang melalui pusat bumi.
3. Proyeksi Silinder (Cylindrical) : Bidang proyeksi yang digunakan adalah silinder. Sumbu
simetri dari proyeksi ini adalah sumbu dari silinder yang melalui pusat bumi.
Gambar 26. Jenis bidang proyeksi peta (sumber : Mutiara, 2004)

Sistem Penentuan Posisi dan Navigasi - 2014 Page 34
Menurut posisi sumbu simetri bidang proyeksi yang digunakan, jenis proyeksi peta adalah:
1. Proyeksi Normal (Polar) : Sumbu simetri bidang proyeksi berimpit dengan sumbu bumi
2. Proyeksi Miring (Oblique) : Sumbu simetri bidang proyeksi membentuk sudut terhadap
sumbu bumi
3. Proyeksi Transversal (Equatorial) : Sumbu simetri bidang proyeksi tegak lurus terhadap
sumbu bumi
Tabel 4. Jenis proyeksi peta menurut bidang proyeksi dan posisi sumbu simetrinya (sumber :
Mutiara, 2004).
Ditinjau dari kedudukan bidang proyeksi terhadap bumi, proyeksi peta dibedakan menjadi :
1. Proyeksi Tangent (Menyinggung) : Apabila bidang proyeksi bersinggungan dengan
permukaan bumi
2. Proyeksi Secant (Memotong) : Apabila bidang proyeksi berpotongan dengan permukaan
bumi

Sistem Penentuan Posisi dan Navigasi - 2014 Page 35
Gambar 27. Kedudukan bidang proyeksi terhadap bumi (sumber : Mutiara, 2004)
Menurut ketentuan geometrik yang dipenuhi, proyeksi peta dibedakan menjadi :
1. Proyeksi Ekuidistan : Jarak antara titik yang terletak di atas peta sama dengan jarak
sebenarnya di permukaan bumi (dengan memperhatikan faktor skala peta)
2. Proyeksi Konform : Besar sudut atau arah suatu garis yang digambarkan di atas peta sama
dengan besar sudut atau arah sebenarnya di permukaan bumi, sehingga dengan
memperhatikan faktor skala peta bentuk yang digambarkan di atas peta akan sesuai dengan
bentuk yang sebenarnya di permukaan bumi.
3. Proyeksi Ekuivalen : Luas permukaan yang digambarkan di atas peta sama dengan luas
sebenarnya di permukaan bumi (dengan memperhatikan faktor skala peta)
C. Proyeksi UTM (Universal Transverse Mercator)
Proyeksi UTM merupakan pengembangan dari proyeksi yang dikemukakan olehMercator.
Proyeksi UTM ini hampir sama dengan proyeksi Mercator,yakni sama-sama menggunakan
bidang proyeksi silinder dengan posisisumbu tegak lurus dengan sumbu Bumi dan baik untuk
menggambarkandaerah equator. Perbedaan UTM dengan Mercator antara lain,
daripersinggungannya proyeksi UTM memotong bidang proyeksi (secantial)sehingga daerah
kutub utara maupun selatan tidak tergambarkan, garisproyeksi meridiannya berupa garis
lengkung yang menghadap ke meridiantengah, garis proyeksi parallel berupa garis lengkung
yang menghadap kearah proyeksi kutub utara untuk yang berada di belahan Bumi utara
danmenghadap ke proyeksi kutub selatan untuk yang berada di Bumi belahan selatan, dan semua
koordinat geodetic dihitung terhadap Meridian Greenwich sebagai bujur nol dan terhadap

Sistem Penentuan Posisi dan Navigasi - 2014 Page 36
lingkaran equator sebagai lintang nol. Proyeksi UTM adalah proyeksi yang memiliki mercator
yang memiliki sifat-sifat khusus. Sifat-sifat khusus yang dimiliki oleh proyeksi UTM adalah :
a. Proyeksi : Transvere Mercator dengan lebar zone 6°.
b. Sumbu pertama (ordinat / Y) : Meridian sentral dari tiap zone
c. Sumbu kedua (absis / X) : Ekuator
d. d.Satuan : Meter
e. Absis Semu (T) : 500.000 meter pada Meridian sentral
f. Ordinat Semu (U) : 0 meter di Ekuator untuk belahan bumi bagian Utara dan 10.000.000
meter di Ekuator untuk belahan bumi bagian Selatan
g. Faktor skala : 0,9996 (pada Meridian sentral)
h. Penomoran zone : Dimulai dengan zone 1 dari 180° BB s/d 174° BB,Tzone 2 dari 174°
BB s/d 168° BB, dan seterusnya sampai zone 60 yaitu dari 174° B s/d 180° BT.
i. Batas Lintang : 84° LU dan 80° LS dengan lebar lintang untuk masing-masing zone
adalah 8°, kecuali untuk bagian lintang X yaitu 12°.
j. Penomoran bagian derajat lintang: Dimulai dari notasi C , D, E, F sampai X (notasi huruf
I dan O tidak digunakan).
Gambar 28. Pembagian Zone Proyeksi UTM
Sistem Penentuan Posisi dan Navigasi - 2014 Page 37
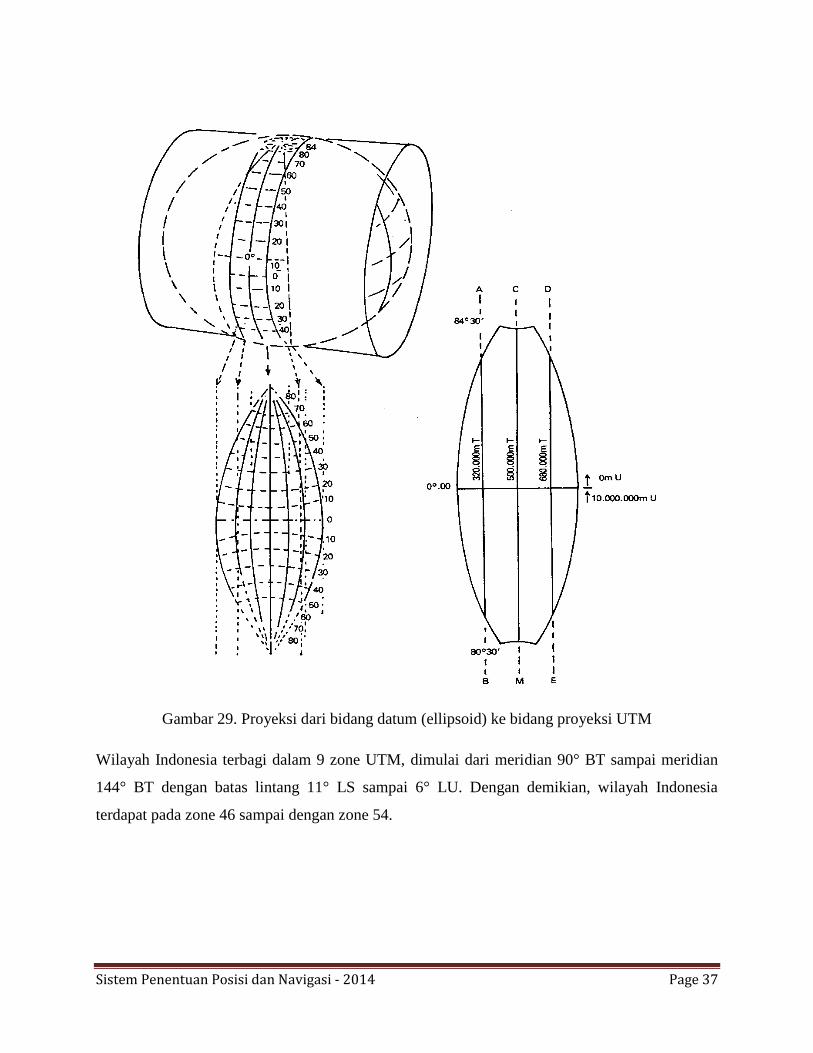
Gambar 29. Proyeksi dari bidang datum (ellipsoid) ke bidang proyeksi UTM
Wilayah Indonesia terbagi dalam 9 zone UTM, dimulai dari meridian 90° BT sampai meridian
144° BT dengan batas lintang 11° LS sampai 6° LU. Dengan demikian, wilayah Indonesia
terdapat pada zone 46 sampai dengan zone 54.

Sistem Penentuan Posisi dan Navigasi - 2014 Page 38
REFERENSI
Abidin, H.Z., 1995, Penentuan Posisi dengan GPS dan Aplikasinya. PT. Pradnya Paramita :
Jakarta
Abidin, H.Z. 2007. Lecture Slide of GD 3211 Satellite Surveying. Geodesy & Geomatics
Engineering Department, ITB : Bandung.
Basofi, A. 2013, Konsep Geodesi Data Spasial, Politeknik Elektronika Negeri Surabaya
Fakhrurrazi, D., 2008. Bahan Ajar Geodesi Satelit. Jurusan Teknik Geodesi, FT-UGM :
Yogyakarta
Kurniawan, W., http://allaboutgeo.wordpress.com/2013/11/28/proyeksi-peta-2/, diakses tanggal
4 oktober 2014
Muryamto, R., 1994, Hitungan Proyeksi Peta, Jurusan Teknik Geodesi Fakultas Teknik
Universiatas Gadjah Mada.
Mutiara, I. 2004, Pendidikan Dan Pelatihan (Diklat) Teknis Pengukuran Dan Pemetaan Kota,
FAKULTAS TEKNIK SIPIL DAN PERENCANAAN INSTITUT TEKNOLOGI
SEPULUH NOPEMBER, Surabaya
Prasidya, A.S. 2014. Pengaruh Variasi Nilai Constraint Koordinat Tititk Ikat IGS Terhadap
Nilai Koordinat dan Akurasi Posisi Empat Stasiun CORS BPN DIY Menggunakan
Perangkat Lunak GAMIT/GLOBK. Skripsi Jurusan Teknik Geodesi FT-UGM :
Yogyakarta.
Prihandito, A. 2010. Proyeksi Peta. Gadjah Mada University Press : Yogyakarta
Sunantyo, T.A. 2000. Diktat Pengantar Survei Pengamatan Satelit GPS. Jurusan Teknik
Geodesi, FT-UGM : Yogyakarta




















