Isogeometric shell analysis: The Reissner–Mindlin shell
14
Isogeometric shell analysis: The Reissner–Mindlin shell D.J. Benson a, * , Y. Bazilevs a , M.C. Hsu a , T.J.R. Hughes b a Department of Structural Engineering, University of California, San Diego, 9500 Gilman Drive, La Jolla, CA 92093, USA b Institute for Computational Engineering and Sciences, The University of Texas at Austin, 201 East 24th Street, 1 University Station C0200, Austin, TX 78712, USA article info Article history: Received 10 February 2009 Received in revised form 5 May 2009 Accepted 7 May 2009 Available online 23 May 2009 Keywords: Isogeometric analysis NURBS Shells User-defined elements abstract A Reissner–Mindlin shell formulation based on a degenerated solid is implemented for NURBS-based iso- geometric analysis. The performance of the approach is examined on a set of linear elastic and nonlinear elasto-plastic benchmark examples. The analyses were performed with LS-DYNA, an industrial, general- purpose finite element code, for which a user-defined shell element capability was implemented. This new feature, to be reported on in subsequent work, allows for the use of NURBS and other non-standard discretizations in a sophisticated nonlinear analysis framework. Ó 2009 Elsevier B.V. All rights reserved. 1. Introduction Isogeometric analysis is a new computational method that is based on geometry representations (i.e., basis functions) developed in computer-aided design (CAD), computer graphics (CG), and ani- mation, with a far-reaching goal to bridge the existing gap between CAD and analysis [29]. For the first instantiation of the isogeomet- ric methodology, non-uniform rational B-splines (NURBS) were chosen as a basis, due to their relative simplicity and ubiquity in the worlds of CAD, CG, and animation. It was found that not only are NURBS applicable to engineering analysis, in many cases they were better suited for the application at hand, and were able to deliver accuracy superior to standard finite elements (see, e.g., [1,2,4–6,19,30,40]). Subdivision surfaces [15–17] and, more re- cently, T-splines [3,20], were also successfully employed in the analysis context. It should be emphasized that isogeometric refers only to using the same basis functions for analysis as for the geom- etry, and is not restricted to NURBS [29]. CAD, CG and animation make use of boundary or surface representations to model geometrical objects, while analysis often requires a full volumetric description of the geometry. This makes integration of design and analysis a complicated task because no well-established techniques exits that allow one to go from a boundary to a volumetric representation in a fully automated way. A polycube spline technique developed by Wang et al. [41] constitutes a promising solution to this problem. A well-developed branch of computational engineering, with a wide range of industrial applications, that does not require a volu- metric description of the underlying geometry is shell analysis. As a result, bridging design and shell analysis does not constitute such a daunting task. Provided that the geometry surface description makes use of basis functions with good approximation properties, and that they are conforming to a given function space, one may, in principle, perform shell analyses directly off of CAD data. Unfortu- nately, most CAD descriptions make use of the trimmed surface technology, which is not directly applicable to analysis. Höllig and co-workers developed the concept of web splines, based on appropriate boundary weighting functions, to address the issue of trimmed surfaces in the B-spline finite element method [25]. Although good computational performance was achieved on a set of benchmark problems, this technique appears somewhat cum- bersome for real-life applications. An alternative solution to the trimmed surface problem for both CAD and animation was recently proposed by Sederberg et al. [38] in which a trimmed spline sur- face is replaced by a locally refined T-spline representation. The latter, in principle, leads to an explicit, analysis-suitable discretiza- tion of the resulting surface, and, in our opinion, constitutes a solu- tion to the trimmed surface problem that can be applied to problems of engineering interest. Of course, numerical evidence and mathematical theory must be provided in support of this claim. The shell formulation presented here was implemented using the LS-DYNA user-defined elements. The elements, which may have an arbitrary number of nodes, are defined entirely in the in- put file by the integration rule and the values of the basis functions and their derivatives at the integration points. This capability was 0045-7825/$ - see front matter Ó 2009 Elsevier B.V. All rights reserved. doi:10.1016/j.cma.2009.05.011 * Corresponding author. E-mail address: [email protected] (D.J. Benson). Comput. Methods Appl. Mech. Engrg. 199 (2010) 276–289 Contents lists available at ScienceDirect Comput. Methods Appl. Mech. Engrg. journal homepage: www.elsevier.com/locate/cma
-
Upload
independent -
Category
Documents
-
view
6 -
download
0
Transcript of Isogeometric shell analysis: The Reissner–Mindlin shell

Comput. Methods Appl. Mech. Engrg. 199 (2010) 276–289
Contents lists available at ScienceDirect
Comput. Methods Appl. Mech. Engrg.
journal homepage: www.elsevier .com/locate /cma
Isogeometric shell analysis: The Reissner–Mindlin shell
D.J. Benson a,*, Y. Bazilevs a, M.C. Hsu a, T.J.R. Hughes b
a Department of Structural Engineering, University of California, San Diego, 9500 Gilman Drive, La Jolla, CA 92093, USAb Institute for Computational Engineering and Sciences, The University of Texas at Austin, 201 East 24th Street, 1 University Station C0200, Austin, TX 78712, USA
a r t i c l e i n f o
Article history:Received 10 February 2009Received in revised form 5 May 2009Accepted 7 May 2009Available online 23 May 2009
Keywords:Isogeometric analysisNURBSShellsUser-defined elements
0045-7825/$ - see front matter � 2009 Elsevier B.V. Adoi:10.1016/j.cma.2009.05.011
* Corresponding author.E-mail address: [email protected] (D.J. Benson).
a b s t r a c t
A Reissner–Mindlin shell formulation based on a degenerated solid is implemented for NURBS-based iso-geometric analysis. The performance of the approach is examined on a set of linear elastic and nonlinearelasto-plastic benchmark examples. The analyses were performed with LS-DYNA, an industrial, general-purpose finite element code, for which a user-defined shell element capability was implemented. Thisnew feature, to be reported on in subsequent work, allows for the use of NURBS and other non-standarddiscretizations in a sophisticated nonlinear analysis framework.
� 2009 Elsevier B.V. All rights reserved.
1. Introduction
Isogeometric analysis is a new computational method that isbased on geometry representations (i.e., basis functions) developedin computer-aided design (CAD), computer graphics (CG), and ani-mation, with a far-reaching goal to bridge the existing gap betweenCAD and analysis [29]. For the first instantiation of the isogeomet-ric methodology, non-uniform rational B-splines (NURBS) werechosen as a basis, due to their relative simplicity and ubiquity inthe worlds of CAD, CG, and animation. It was found that not onlyare NURBS applicable to engineering analysis, in many cases theywere better suited for the application at hand, and were able todeliver accuracy superior to standard finite elements (see, e.g.,[1,2,4–6,19,30,40]). Subdivision surfaces [15–17] and, more re-cently, T-splines [3,20], were also successfully employed in theanalysis context. It should be emphasized that isogeometric refersonly to using the same basis functions for analysis as for the geom-etry, and is not restricted to NURBS [29].
CAD, CG and animation make use of boundary or surfacerepresentations to model geometrical objects, while analysis oftenrequires a full volumetric description of the geometry. This makesintegration of design and analysis a complicated task because nowell-established techniques exits that allow one to go from aboundary to a volumetric representation in a fully automatedway. A polycube spline technique developed by Wang et al. [41]constitutes a promising solution to this problem.
ll rights reserved.
A well-developed branch of computational engineering, with awide range of industrial applications, that does not require a volu-metric description of the underlying geometry is shell analysis. Asa result, bridging design and shell analysis does not constitute sucha daunting task. Provided that the geometry surface descriptionmakes use of basis functions with good approximation properties,and that they are conforming to a given function space, one may, inprinciple, perform shell analyses directly off of CAD data. Unfortu-nately, most CAD descriptions make use of the trimmed surfacetechnology, which is not directly applicable to analysis. Hölligand co-workers developed the concept of web splines, based onappropriate boundary weighting functions, to address the issueof trimmed surfaces in the B-spline finite element method [25].Although good computational performance was achieved on a setof benchmark problems, this technique appears somewhat cum-bersome for real-life applications. An alternative solution to thetrimmed surface problem for both CAD and animation was recentlyproposed by Sederberg et al. [38] in which a trimmed spline sur-face is replaced by a locally refined T-spline representation. Thelatter, in principle, leads to an explicit, analysis-suitable discretiza-tion of the resulting surface, and, in our opinion, constitutes a solu-tion to the trimmed surface problem that can be applied toproblems of engineering interest. Of course, numerical evidenceand mathematical theory must be provided in support of thisclaim.
The shell formulation presented here was implemented usingthe LS-DYNA user-defined elements. The elements, which mayhave an arbitrary number of nodes, are defined entirely in the in-put file by the integration rule and the values of the basis functionsand their derivatives at the integration points. This capability was

D.J. Benson et al. / Comput. Methods Appl. Mech. Engrg. 199 (2010) 276–289 277
developed to facilitate the rapid prototyping of elements withoutprogramming, and therefore the execution speed is much less thanthe standard elements within the LS-DYNA. A detailed descriptionwill be provided in a future article.
The paper is outlined as follows: in Section 2 we give a briefreview of isogeometric analysis based on NURBS. In Section 3 wedescribe the details of the Reissner–Mindlin shell formulation. InSection 4 we solve a linear benchmark problem from the shellobstacle course, the pinched cylinder and computationalresults for several nonlinear elastic–plastic cases. We draw con-clusions and outline current and future research directions inSection 5.
2. NURBS-based isogeometric analysis fundamentals
Non-uniform rational B-splines (NURBS) are a standard tool fordescribing and modeling curves and surfaces in computer aideddesign and computer graphics (see, e.g., Piegl and Tiller [35], Rog-ers [36], and Cohen et al. [18]). The aim of this section is to intro-duce them briefly and to present an overview of isogeometricanalysis, for which an extensive account has been given in Hugheset al. [29].
B-splines are piecewise polynomial curves composed of linearcombinations of B-spline basis functions. The coefficients arepoints in space, referred to as control points. A knot vector, N, isa set of non-decreasing real numbers representing coordinates inthe parametric space of the curve:
N ¼ fn1; n2; . . . ; nnþpþ1g; ð1Þ
where p is the order of the B-spline and n is the number of basisfunctions (and control points) necessary to describe it. The interval½n1; nnþpþ1� is called a patch.
Given a knot vector, N, B-spline basis functions are definedrecursively starting with p ¼ 0 (piecewise constants):
Ni;0ðnÞ ¼1 if ni 6 n < niþ1;
0 otherwise:
�ð2Þ
For p ¼ 1;2;3; . . ., the basis is defined by the following recursionformula:
Ni;pðnÞ ¼n� ni
niþp � niNi;p�1ðnÞ þ
niþpþ1 � n
niþpþ1 � niþ1Niþ1;p�1ðnÞ: ð3Þ
Using tensor products, B-spline surfaces can be constructed startingfrom knot vectors N ¼ fn1; n2; . . . ; nnþpþ1g and H ¼ fg1;g2; . . . ;
gmþqþ1g, and an n�m net of control points xi;j, also called the controlmesh. One-dimensional basis functions Ni;p and Mj;q (withi ¼ 1; . . . ;n and j ¼ 1; . . . ;m) of order p and q, respectively, are de-
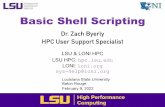
Fig. 1. NURBS mesh of a quarter hemisphere consisting of 6� 6 quadratic elements. Selwhich is represented exactly.
fined from the corresponding knot vectors, and the B-spline surfaceis constructed as:
Sðn;gÞ ¼Xn
i¼1
Xm
j¼1
Ni;pðnÞMj;qðgÞxi;j: ð4Þ
The patch for the surface is now the domain ½n1; nnþpþ1� � ½g1;
gmþqþ1�. Identifying the logical coordinates ði; jÞ of the B-spline sur-face with the traditional notation of a node, A, and the Cartesianproduct of the associated basis functions with the shape function,NAðn;gÞ ¼ Ni;pðnÞMj;qðgÞ, the familiar finite element notation isrecovered, namely,
Sðn;gÞ ¼Xnm
A¼1
NAðn;gÞxA: ð5Þ
Non-uniform rational B-splines (NURBS) are obtained by augment-ing every point in the control mesh xA with the homogenous coor-dinate wA, then dividing the expression (5) through by theweighting function, wðn;gÞ ¼
PnmA¼1NAðn;gÞwA, giving the final spa-
tial surface definition,
Sðn;gÞ ¼Pnm
A¼1NAðn;gÞwAxA
wðn;gÞ ¼Xnm
A¼1
NAðn;gÞxA: ð6Þ
In Eq. (6), NAðn;gÞ ¼ NAðn;gÞwA=wðn;gÞ, are the rational basis func-tions. These functions are pushed forward by the surface mappingSðn;gÞ in (6) to form the approximation space for NURBS-based shellanalysis. Note that wA’s are not treated as solution variables, theyare data coming from the description of the NURBS surface. InFig. 1 we present an example consisting of a 6� 6 quadratic NURBSmesh of a quarter hemisphere and selected corner, edge, and inte-rior NURBS basis functions defined on the actual geometry.
In the remainder of the paper, we will suppress the superposedbar on the rational basis functions.
3. The Reissner–Mindlin shell formulation
The primary applications for the shell element involve largedeformation plasticity, and therefore it is formulated using an up-dated Lagrangian approach. Although the increased continuity (C1
or higher) of the NURBS basis functions permits a Kirchhoff–Loveformulation, a Reissner–Mindlin formulation, for which a C0-con-tinuous discretization is sufficient for well-posedness, is used herebecause it is more appropriate for metal forming applications thatoften involve sharp creases in both the initial geometry andsolution. For and excellent review of shell theories and numericalformulations see Bischoff et al. [14].
ected corner, edge, and interior basis functions are plotted on the actual geometry,

278 D.J. Benson et al. / Comput. Methods Appl. Mech. Engrg. 199 (2010) 276–289
3.1. The principle of virtual power
The starting point is the principle of virtual power in threedimensions,Z
Vðqa � dv þ r : dDÞdV ¼
ZC
t � dv dCþZ
Vb � dv dV ; ð7Þ
where q is the density, a is the acceleration, r is the Cauchy stress, tis the traction, b is the body force, and V and C are the volume andthe appropriate surface area, respectively. On the boundary Cv i
, thevelocity component v i is specified, and the virtual velocity compo-nent dv i is zero. The virtual rate of deformation, dD, is defined as
dL ¼ @dv@x
; dD ¼ 12ðdLþ dLTÞ: ð8Þ
3.2. Shell kinematics
The shell kinematics are based on the degenerated solid ele-ment approach developed by Hughes and Liu [27]. They are de-rived by starting with a solid element that has linearinterpolation through the thickness coupled with the desired formof interpolation on the laminae. Pairs of control points on the upperand lower surfaces define a material fiber, y, that remains straightduring the deformation. The motion of the fiber is therefore a rigidbody motion (although this contradicts the zero normal stress con-dition) that may be described in terms of three translational veloc-ities and either two or three rotational velocities (the rotationabout the axis of the fiber does not contribute to the deformationbut it is simpler computationally to use three angular velocitiesin the global coordinate system).
The kinematics are therefore reduced to approximating a shellby a surface in space defined by the translational coordinates ofa set of nodes, and the rotation of the fiber vectors attached tothem. The current shell geometry is therefore expressed mathe-matically by
xðnÞ ¼X
A
NAðn;gÞ xA þhA
2fyA
� �; ð9Þ
where x is the current coordinate vector, n is the vector of paramet-ric coordinates ðn;g; fÞ;h is the thickness, and y is the unit fiber vec-tor. The coordinates n and g are from the parametric space, andtherefore their ranges are defined by the appropriate knot vectors,and the third coordinate, f 2 ½�1;þ1�, is used with the standard lin-ear interpolation functions through the thickness of the shell.
To simplify the notation, the dependence of the functions on theparametric coordinates is dropped, however, all are assumed to beevaluated at the integration point under consideration. Addition-ally, since the product of NA and f appears throughout the termsassociated with the rotational degrees of freedom, the additionalfunctions bNA ¼ NAf are introduced. For example, the expressionfor the current geometry is now written as
x ¼X
A
NA xA þhA
2bNAyA
� �ð10Þ
and the resulting Jacobian, J, is therefore
J ¼ @x@n¼X
A
@NA
@nxA þ
hA
2@ bNA
@nyA
!: ð11Þ
The velocity, v , is defined in terms of the translational velocity, vA,and the angular velocity, xA, of the control points, both in the globalcoordinate system,
v ¼X
A
NAvA þhA
2bNAxA � yA
� �: ð12Þ
This choice is motivated by the simplicity of joining multiple non-smooth surfaces (e.g., a honeycomb structure). Using three rota-tional degrees of freedom introduces a singularity associated withthe rotation about y for smooth surfaces, which we address later.The test space, or virtual velocity, dv has the same structure asthe velocity field,
dv ¼X
A
NAdvA þhA
2bNAdxA � yA
� �: ð13Þ
3.3. Departures from the standard formulation
The basic degenerated solid formulation is modified in threeways, motivated by Belytshcko et al. [8,9]. First, y is replaced byn, the unit normal in the shell laminae, throughout. This is consis-tent with the default choice for the fiber vector in the current LS-DYNA implementation of the Hughes–Liu element. LS-DYNA alsoallows the use of fiber vectors that are uniquely defined at eachnode on the mesh and for fiber vectors that are defined elementby element. Since the overall formulation remains the same, inde-pendent of the choice made for the unit vector, the notation y isretained in subsequent equations. The motivation for this simplifi-cation is to alleviate the artificial thinning that sometimes occurswith explicit time integration. The rotational inertias are scaledup so that their modes do not control the time step size. Due tothe large inertias, the orientation of a fiber vector updated by therotational velocity field may depart significantly from the geomet-ric normal defined by the translational degrees of freedom, leadingto spurious, transient thinning. Additionally, the definition of a un-ique fiber direction for structures with intersecting shell surfaces isoften problematical.
Second, in contrast to the standard formulations, which are fo-cused on elements with linear basis functions, nothing is done toalleviate shear locking in the current formulation because we areinterested in the higher order NURBS basis functions where shearlocking is generally not a problem. For lower degree NURBS, thegeneralization of B for volumetric locking developed for isogeo-metric elements [21] may be modified for shear locking.
Finally, a corotational formulation [9] for the stress is used hereinstead of the Truesdell rate originally used by Hughes and Liu[27]. This choice was motivated by our desire to use the isogeomet-ric shells for metal forming, where the corotational formulationhas been found to provide extra robustness.
3.4. Discrete gradient operator
The spatial velocity gradient, Lg , and spatial virtual velocity gra-dient, dLg , in global coordinates, are given by
Lg ¼ @v@x¼X
A
@NA
@xvA þ
hA
2@ bNA
@xxA � yA
!; ð14Þ
dLg ¼ @dv@x¼X
A
@NA
@xdvA þ
hA
2@ bNA
@xdxA � yA
!ð15Þ
and the corresponding rates of deformation, Dg and dDg , are
Dg ¼ 12½Lg þ ðLgÞT � and dDg ¼ 1
2½dLg þ ðdLgÞT �: ð16Þ
The B matrix is defined by
Dg ¼ Bv and dDg ¼ Bdv; ð17Þ
where Dg is the strain rate vector obtained using Voigt notation,
Dg ¼ Dg11 Dg
22 Dg33 2Dg
12 2Dg23 2Dg
31
� �ð18Þ

D.J. Benson et al. / Comput. Methods Appl. Mech. Engrg. 199 (2010) 276–289 279
and v is the generalized velocity vector,
v ¼ f. . . ; vA1; vA2;vA3;xA1;xA2;xA3; . . .g: ð19Þ
The contribution of control point A to B ¼ ½B1 . . . BA . . . Bn� is
BA ¼ ½BvA ;B
xA �; ð20Þ
where
BvA ¼
@NA@x1
@NA@x2
@NA@x3
@NA@x2
@NA@x1
@NA@x3
@NA@x2
@NA@x3
@NA@x1
26666666666664
37777777777775; ð21Þ
BxA ¼
hA
2
� @eN A@x2
yA3@eNA@x2
yA1
@eNA@x3
yA2 � @eNA@x3
yA1
� @eN A@x1
yA3@eNA@x2
yA3@eNA@x1
yA1 � @eNA@x2
yA2
@eNA@x2
yA2 � @eNA@x3
yA3 � @eNA@x2
yA1@eNA@x3
yA1
@eNA@x1
yA2@eNA@x3
yA3 � @eNA@x1
yA1 � @eNA@x3
yA2
26666666666664
37777777777775:
ð22Þ
3.5. Definition of the local coordinate system
The local corotational coordinate system, e‘i ; i ¼ 1;2;3, for thestress is defined at the integration points using the invariantscheme of Hughes and Liu [27] with the convention that e‘3 is thedirection normal to the reference surface. The tangent vectors ti
are defined as
ti ¼X
A
@NA
@nixA ð23Þ
and the normal vector is
p ¼ t1 � t2; ð24Þ
n ¼ e‘3 ¼pkpk ; ð25Þ
where k � k is the usual three-dimensional Euclidean norm. Definingta and tb by
ta ¼t1 þ t2
kt1 þ t2k; ð26Þ
tb ¼n� ta
kn� tak; ð27Þ
the remaining local coordinate vectors are
e‘1 ¼ffiffiffi2p
2ðta � tbÞ; ð28Þ
e‘2 ¼ffiffiffi2p
2ðta þ tbÞ: ð29Þ
The rotation matrix from the local to the global coordinate system,vg ¼ Rv ‘, is
R ¼ e‘1 e‘2 e‘3�
: ð30Þ
3.6. Stress update in the corotational formulation
The stress is updated in the local coordinate system using thelocal rate of deformation, D‘,
D‘ ¼ RT DgR: ð31Þ
The normal component, D‘33, is calculated within the constitutive
model to satisfy the zero normal stress condition r‘33 ¼ 0. The algo-
rithm for calculating D‘33 depends on the particular constitutive
model [24,37,39]. The updated stress is rotated into the global coor-dinate system at the end of the time step for evaluating the residual,
r ¼ Rr‘RT : ð32Þ
3.7. Evaluation of the residual, the stiffness matrix, and the rotationalstiffnesses
The integration of the residual and the stiffness matrix are per-formed using the standard tensor product of one-dimensionalGauss quadrature rules over the lamina and through the thickness[26]. The parametric domain for an element over the lamina is½ni; niþ1� � ½gj;gjþ1�, the product of adjacent pairs of knots in eachparametric direction. Note that repeated knots routinely occur inthe knot vector definitions for B-splines and NURBS, introducingelements with zero area that are skipped within the element eval-uation loop.
The residual contribution from the stress is
F ¼ Fv
Fx
� ¼ �
ZV
ðBvÞT
ðBxÞT
" #rdV : ð33Þ
where the stress tensor has been reduced to a vector using Voigtnotation, r ¼ fr11;r22;r33;r12;r23;r31gT .
The material tangent contribution to the stiffness matrix is
K ¼ Kvv Kvx
Kxv Kxx
� �¼Z
V
ðBvÞT
ðBxÞT
" #C Bv Bx�
dV ; ð34Þ
where C is the material tangent constitutive matrix.The singularity of the stiffness matrix associated with the rota-
tions about the normal direction at the control points is addressedby adding a small rotational stiffness in the normal direction on acontrol point-by-control point basis,
KxxAA Kxx
AA þ sknA � nA; ð35Þ
where KxxAA is the 3� 3 diagonal sub-matrix associated with control
point A; s is a small number on the order of 10�4—10�6; k is the max-imum value along the sub-matrix diagonal, and nA is the normal fornode A. This procedure was adopted during the current research forexpediency, and because it has been successfully used in LS-DYNAfor many years for some of its shell elements. The formulation ofthe geometric stiffness is omitted because the only implicit problemconsidered later is linearly elastic; all the large deformation calcu-lations are explicit.
3.8. Mass matrix
A lumped mass based on row summing is used with the explicitformulation. The translational mass for node A contributed by anelement is
MA ¼Z
VqNA dV ¼ h
ZAqNA dA; ð36Þ
where dV ¼ hdA, where dA is the differential area on the referencelamina. The rotational inertia is
JA ¼ ah3
12
ZAqNA dA ¼ a
h2
12MA; ð37Þ
where a is chosen so that the time step is not controlled by the rota-tional inertia [26]. Note that, due to the pointwise positivity ofNURBS, NA, and consequently MA, is guaranteed to be positive. Moresophisticated lumping schemes [26] have been tested, but there

Fig. 2. Pinched cylinder: problem description. Cylinder is constrained at each endby a rigid diaphragm, ux ¼ uy ¼ hz ¼ 0.
Number of control points per side
Dis
plac
emen
t(in
)
0 5 10 15 20 25 30 35 400
2E-06
4E-06
6E-06
8E-06
1E-05
1.2E-05
1.4E-05
1.6E-05
1.8E-05
2E-05
Reference
Cubic
Quartic
Quadratic
Quintic
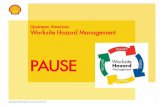
Fig. 4. Pinched cylinder: displacement convergence under the point load.
280 D.J. Benson et al. / Comput. Methods Appl. Mech. Engrg. 199 (2010) 276–289
was no significant difference between them for the problems pre-sented later in this paper.
3.9. Boundary conditions
Distributed boundary conditions, such as contact and pressureloads, are currently handled in an approximate manner. Each iso-geometric element is uniformly subdivided in the parametric coor-dinate system into a patch of n� n interpolation quadrilateralelements defined by ðnþ 1Þ2 nodes that are interpolated fromthe isogeometric element geometry,
xIB ¼
XA
NAðnB;gBÞxA; ð38Þ
where the superscript I indicates a variable associated with aninterpolation node. After the distributed loads are evaluated forinterpolated nodes and elements using the standard routines withinLS-DYNA, the contribution from an interpolation elements to thecontrol point forces are evaluated
FA ¼XNIN
B¼1
NAðnB;gBÞFIB ð39Þ
and assembled into the global force vector where NIN is the numberof interpolated nodes.
The accuracy of this approximation of the distributed loading isclearly a function of the number of interpolation elements used to
Fig. 3. Pinched cyli
approximate the isogeometric element geometry. In the examplecalculations, the number of interpolation elements in each direc-tion is equal to the order of the interpolation, p. A quadratic isogeo-metric element is divided into four interpolation elements withbilinear basis functions. The example calculations presented herethat use these approximate boundary conditions are thereforeaccurate, but do not attain the maximum accuracy possible withthe isogeometric formulation.
3.10. Time step size estimation
Since the cost of an explicit simulation is inversely proportionalto the stable time step size, an accurate estimate of time step size isnecessary for efficient simulations. The traditional approach toobtaining the time step size invokes two mathematical boundson the maximum frequency of the structural model. The firstbound is the maximum frequency of the system is bounded fromabove by the maximum of the individual maximum frequenciesof the elements,
xsystemmax 6 max
e¼1;NELðxe
maxÞ: ð40Þ
A short proof is given in [26], where the original proofs were attrib-uted to Irons [31] and Hughes et al. [28].
The second required bound is on the maximum frequency of theindividual elements. The first bounds of this type were originally
nder: meshes.

Fig. 5. Plate loaded by pressure impulse: problem description. All sides of the plate are simply supported.
Fig. 6. Plate loaded by a uniform pressure: meshes.
D.J. Benson et al. / Comput. Methods Appl. Mech. Engrg. 199 (2010) 276–289 281
obtained for finite difference methods using linear basis functionsin one dimension,
Dte6
2xe
max¼ ‘e
ceeff
; ð41Þ
where ‘e is the length of the element and ceeff is the effective sound
speed (which is a function not only of the material properties butalso the shock viscosity formulation [11]). Each constitutive modelused in an explicit analysis therefore calculates effective elasticmoduli in addition to updating the stress and internal history vari-ables. This applies even to materials that may not have a classicalelastic response, e.g., a viscous fluid. In two and three dimensions,the same expression is often used with a heuristic formula for acharacteristic element length. A more rigorous bound [22] has beenobtained in terms of the discrete gradient operator.
Fig. 7. One element in the quartic mesh and its associated control points.
A more precise estimate of the maximum system frequencymay be obtained using the power iteration method developed byBenson for multi-material arbitrary Lagrangian Eulerian (MMALE)methods [12]. Power iteration [42] obtains the maximum eigen-value of the system by the iterative scheme
ðx2maxWÞ
iþ1 ¼ M�1KWi; ð42Þ
ðx2maxÞ
iþ1 ¼ maxn¼1;NEQN
ðx2maxWÞ
iþ1n
Win
!; ð43Þ
where M and K are the mass and elastic stiffness matrices of thesystem, i is the iteration number, n is the equation number, andNEQN is the number of equations in the system. Twelve iterationsare usually sufficient for convergence.
In practice, in an explicit code, the product KWi is evaluatedusing the standard strategy of evaluating the internal force contri-bution on the element level from the strain calculated from theeigenvector and the effective elasticity matrix, C, that is calculatedfrom the same effective elastic moduli used in the sound speed cal-culation, namely,
�W ¼ BWi; ð44ÞrW ¼ C�W; ð45Þ
KWi ¼Z
BTrW dx ð46Þ
and then the element contribution is assembled into the global vec-tor. Note that boundary conditions, such as contact, that contributeterms to the stiffness matrix also contribute to the product KWi.
The ratio, R, of the actual maximum system eigenvalue and thebound obtained from a traditional element characteristic lengthevaluation has been observed to change slowly with time evenfor problems involving large strains and material nonlinearities[12], allowing the actual maximum stable time step size to besafely approximated as
Dtactual � RDte; ð47Þ
where Dte is the traditional bound obtained by taking minimumtime step size over all the elements. In practice, the ratio R is

Time (s)
Dis
plac
emen
t(in
)
0 0.0002 0.0004 0.0006 0.0008 0.001 0.00120
0.05
0.1
0.15
0.2
0.25
0.3
Reference8 8, p = 2
4 4, p = 2
2 2, p = 2
Time (s)
Dis
plac
emen
t(in
)
0 0.0002 0.0004 0.0006 0.0008 0.001 0.00120
0.05
0.1
0.15
0.2
0.25
0.3
Reference8 8, p = 3
4 4, p = 3
2 2, p = 3
(a) p = )b(2 p = 3
Time (s)
Dis
plac
emen
t(in
)
0 0.0002 0.0004 0.0006 0.0008 0.001 0.00120
0.05
0.1
0.15
0.2
0.25
0.3
Reference
8 8, p = 4
4 4, p = 4
2 2, p = 4
(c) p = 4
Fig. 8. Plate loaded by a uniform pressure: center point displacement histories and convergence to the reference solution under h-refinement.
Fig. 9. Roof loaded by velocity impulse: problem description. The curved ends of the roof are hinged and the lateral boundaries are fixed.
282 D.J. Benson et al. / Comput. Methods Appl. Mech. Engrg. 199 (2010) 276–289

D.J. Benson et al. / Comput. Methods Appl. Mech. Engrg. 199 (2010) 276–289 283
updated infrequently, with one power iteration performed eachtime step, for a fixed small number of time steps in a larger timeinterval. The time interval between the updates of R depends onthe particular problem; see Benson [12] for more details.
3.11. Time integration
The explicit central difference method and implicit Newmarkmethod are used in LS-DYNA to advance the solution in time,and either may be used with the element formulation presentedhere. Since the example calculations are explicit, the central differ-ence method is briefly summarized. Using the lumped mass ma-trix, the accelerations are calculated from the assembled forces attime step n, and the velocities are updated to nþ 1=2,
vnþ1=2A ¼ vn�1=2
A þ DtanA; x
nþ1=2A ¼ x
n�1=2A þ Dt _xn
A: ð48Þ
The time integral of the angular velocities is not a valid measure ofangular displacement, and, therefore, is not evaluated. The transla-tional velocities are integrated to give the current control pointcoordinates,
xnþ1A ¼ xn
A þ Dtvnþ1=2A : ð49Þ
Fig. 10. Roof loaded by velo
Time (s)
Dis
plac
emen
t(in
)
0 0.0002 0.0004 0.0006 0.0008 0.0010
0.2
0.4
0.6
0.8
1
1.2
1.4
ExperimentBelytshko-Tsay (coarse)Belytshko-Tsay (fine)
p = 2
p = 4Mesh 1
p = 3
(a) Mesh 1
Fig. 11. Roof loaded by velocity impulse: displacement histories and convergen
Note that the only use of the angular velocity in this formulation isthe evaluation of the strain rate. If the fiber vector ynþ1
A was updatedfrom yn
A, as was done in the original Hughes–Liu formulation [27], itwould be updated using an incremental rotation matrix calculatedfrom Dtxnþ1=2
A [9].
4. Numerical examples
In this section we present one linear elastic and four nonlinearelastic–plastic computational examples. In all cases pþ 1 integra-tion points in each in-plane direction between knots, and threeintegration points in the through-thickness direction are em-ployed, where p is the polynomial order of the NURBS basis. We de-note by E; m;q;ry, and EH the Young’s modulus, Poisson’s ratio,density, initial yield stress, and plastic hardening modulus,respectively.
4.1. Linear elastic benchmark example – Pinched cylinder
To assess the accuracy and convergence of the proposed ap-proach, we solve a pinched cylinder linear elastic shell problemfrom the so-called ‘‘shell obstacle course” described in Belytschkoet al. [10]. This problem was also solved using trivariate NURBS
city impulse: meshes.
Time (s)
Dis
plac
emen
t(in
)
0 0.0002 0.0004 0.0006 0.0008 0.0010
0.2
0.4
0.6
0.8
1
1.2
1.4
ExperimentBelytshko-Tsay (coarse)Belytshko-Tsay (fine)
p = 2
Mesh 2
p = 3
p = 4
(b) Mesh 2
ce to the reference solution under k-refinement on meshes with C0 lines.

284 D.J. Benson et al. / Comput. Methods Appl. Mech. Engrg. 199 (2010) 276–289
in [29] and, more recently, trivariate T-splines in [3]. Note that theuse of rational functions allows the exact representation of theproblem geometry.
The problem setup is illustrated in Fig. 2. The loading consists ofthe application of inward directed point loads at the diametricallyopposite locations on the cylinder surface. The displacement underthe point load is the quantity of interest. A sequence of five meshesobtained by global h-refinement is used for this example. The first,third and fifth mesh from the sequence are shown in Fig. 3. Qua-dratic through quintic NURBS are employed, with maximal conti-nuity of the basis (i.e., p� 1) in each case. One eighth of thegeometry is modeled with appropriate symmetry boundaryconditions.
Displacement convergence under the point load is presented inFig. 4. The quadratic NURBS exhibit locking, which is graduallyalleviated with the increasing order and continuity of NURBS.
Fig. 12. The effect of the smoothness of the velocity boundary condition on the final reselements of cubic mesh 1.
Fig. 13. Roof loaded by velocity
Our results are essentially identical with those reported for volu-metric NURBS [29] and T-splines [3].
4.2. Nonlinear elasto-plastic examples
Conventional higher-order elements using Lagrangian interpo-lation are well known for their sensitivity to element distortion.To assess the robustness of the proposed elements in the presenceof significant mesh distortion, a series of nonlinear shell exampleproblems are solved, with each successive example problem exhib-iting larger mesh distortion at the final state. The first problem, aplate loaded by a pressure impulse, undergoes very little mesh dis-tortion, while the last problem, the buckling of a square tube in theaccordion mode, has severely distorted elements along the edges ofthe tube. Improved performance of volumetric NURBS under se-vere mesh degeneration and distortion relative to standard finite
ults. Initial velocities (left) and final displacements (right) are taken from 1 row of
impulse: refined meshes.

D.J. Benson et al. / Comput. Methods Appl. Mech. Engrg. 199 (2010) 276–289 285
element interpolations was noted in the recent work of Lipton et al.[33].
4.2.1. Plate loaded by a uniform pressureThe problem setup is given in Fig. 5. A simply supported plate is
subjected to a uniform pressure load that is applied suddenly att ¼ 0 and remains constant. An elastic–perfectly-plastic materialis considered. Material parameters and problem dimensions aretaken from Belytschko et al. [8] and are summarized in Fig. 5.
Time (s)
Dis
plac
emen
t(in
)
0 0.0002 0.0004 0.0006 0.0008 0.0010
0.2
0.4
0.6
0.8
1
1.2
1.4
ExperimentBelytshko-Tsay (coarse)Belytshko-Tsay (fine)
Mesh 1
p = 3
p = 3, refined w/o C0
Fig. 14. Roof loaded by velocity impulse: displacement histories and convergenceto the reference solution on cubic meshes without C0 lines. The C0 results are shownfor comparison.
Fig. 15. Buckling of a cylindrical tube: problem setup. P is the pressure load. Slidincompression due to pressure fz ¼ PR
2
�at the two edges are applied.
Fig. 16. Cylind
The full problem is modeled without symmetry assumptions incontrast to Ref. [8]. Meshes of 2� 2;4� 4 and 8� 8 quadratic, cu-bic, and quartic NURBS elements are used in the computations andare shown in Fig. 6. To emphasize that the locations of the controlpoints are not in one-to-one correspondence with the domains ofelements, the locations of the control points for a quartic elementmesh are shown in Fig. 7. Computational results employing a meshof 64� 64 bi-linear Belytschko–Tsay shell elements are taken asthe reference.
Fig. 8 shows the time histories of the displacement of the centerpoint of the plate for quadratic, cubic, and quartic NURBS. The fin-est mesh solutions closely approximate the reference result for allpolynomial orders. Fig. 8 also suggests that higher-order and high-er-continuity NURBS perform better than their lower-order, lower-continuity counterparts on coarser meshes.
4.2.2. Roof loaded by velocity impulseThe problem setup is given in Fig. 9. This problem was also ta-
ken from [8] and consists of a 120� cylindrical panel loaded impul-sively by specifying an initial velocity distribution. The problemdimensions and material data are summarized in Fig. 9. An initialvelocity normal to the shell surface is specified over a regionmarked on the figure.
Quadratic, cubic, and quartic isogeometric elements are used inthe calculations. The meshes are shown Fig. 10. Maximum continu-ity NURBS are used almost everywhere except along the paramet-ric lines that define the region where the initial pulse is prescribed.Along these mesh lines the continuity of the NURBS basis is re-duced to C0 by repeating the appropriate knots so as to confinethe impulse to the desired area. Reducing the continuity of the ba-sis functions also reduces the continuity of the deformations. Thenormal velocity is specified on the control points by first extractinga consistent normal (see [23]) and then multiplying it with a
g boundary conditions ðux ¼ uy ¼ 0; hx ¼ hy ¼ hz ¼ 0Þ at the end zones and axial
er mesh.

286 D.J. Benson et al. / Comput. Methods Appl. Mech. Engrg. 199 (2010) 276–289
prescribed velocity magnitude. The problem is solved on the entiredomain with no symmetry assumptions.
Displacement histories of the point, initially located atx ¼ 0; y ¼ 3, and z ¼ 6, on each mesh are shown in Fig. 11. Resultsare compared with the reference computations employing twomeshes of 224 and 4512 Belytschko–Tsay elements, as well asexperimental data from [34]. All the isogeometric and Bely-tschko–Tsay elements used three integration points through thethickness. The quadratic NURBS solutions on the coarse mesh exhi-bit some locking, while on the fine meshes, all the NURBS resultsare nearly identical to those using the finest Belytschko–Tsaymesh.
We attempted to solve the problem without isolating the im-pulse region with C0 lines on the same meshes as in Fig. 10. In thiscase, the full continuity of the solution space is preserved. The ini-tial conditions are imposed using the same definition of the controlpoint normal as before. The initial velocity distributions and thecomparison between the final roof shapes are given in Fig. 12aand b. Due to the increased support of the fully continuous basisfunctions, the impulse discontinuity is smeared over a larger num-ber of elements. It is also clear from the figure that the final shape
Fig. 17. Experimental result
Fig. 18. Computational results using 1440 cubic NURBS elements and 9216
of the roof in this case is significantly different from the expectedresult.
In order to obtain a better solution using a fully-continuous ba-sis (i.e., no C0 lines), we constructed a new set of meshes, shown inFig. 13, in which we added small elements around the impulse re-gion to reduce the spreading of the discontinuity. The initial veloc-ity profile and the final shape are shown in Fig. 12c. In this case, animproved response is obtained. The displacement history pre-sented in Fig. 14 is nearly identical to the C0 case.
This example demonstrates that in nonlinear shell analysis rel-atively small perturbation in the initial data may lead to drasticallydifferent results. One should keep this point in mind when design-ing automated procedures for going from design to analysis.
4.2.3. Buckling of a cylindrical tubeThis test case deals with nonlinear dynamic buckling of an im-
ploded cylindrical tube. The problem geometry, boundary condi-tions, and material parameters are given in Fig. 15. An isotropicelastic–plastic material with linear plastic hardening is used tomodel the material response. The problem is driven by an externalpressure. Quadratic, cubic, and quartic NURBS are used in the
s from Kyriakides [32].
Beltyschko–Tsay. Contours of plastic strain on the final configuration.

Fig. 20. Buckling of a square tube: problem description and the mesh. Only onequarter of the geometry is modeled with appropriate symmetry boundaryconditions.
D.J. Benson et al. / Comput. Methods Appl. Mech. Engrg. 199 (2010) 276–289 287
computations. The computational mesh consisting of 1440 NURBSelements is shown in Fig. 16. The end zones with the slidingboundary conditions are isolated with C0 mesh lines from the restof the cylindrical domain.
The experiment by Kyriakides [32] provides a test of how wellthe NURBS elements model dynamic buckling. The experimentalresults, which show the tube collapsed in its third buckling mode,are shown in Fig. 17. An analytical solution [32] to the bucklingproblem predicts a pressure of 441.43 psi to initiate buckling inthe third mode, while the critical pressure in the experiment wasfound to be 410 psi.
Simulation results using 9210 Beltyschko–Tsay elements in LS-DYNA are also used for comparison. In the calculations, in all cases,the pressure is linearly ramped up over a period of 1.0 ms and thenheld constant; the meshes are perturbed in the third mode by scal-ing the x and y coordinates of the control points by 1þ 1
20 cosð3hÞ[7]. We also note that no failure criterion is included in the calcu-lations to model the fracture near the ends of the tube that is pres-ent in the experimental results.
The computational results are presented in Figs. 18 and 19. Thefinal shapes of the buckled tube are shown. The primary effect ofelevating the degree and smoothness was a reduction in the pres-sure required for initiating buckling. Evidence of small amounts ofshear locking in the quadratic elements is indicated by the 435 psirequired to cause the buckling, while the cubic and quartic ele-ments buckled at 405 psi. There was some variation in the maxi-mum plastic strain on the mid-surface lamina, with the higherpressures giving slightly higher values for a fixed degree. For exam-ple, the cubic solution had a maximum plastic strains of 0.266 at435 psi and 0.214 at 405 psi, while the quartic solution had max-ima of 0.252 and 0.241 at 435 and 405 psi, respectively. The refer-ence solution with Belytschko–Tsay elements (see Figs. 18 and 19)buckled at 410 psi, with a peak plastic strain of 0.226.
Fig. 19. Sectioned view of
One interesting result noted in the computations that does notappear in the experiment is that the cylinder bounced back out-ward after the implosion, as indicated by the lobes near the axis,see Fig. 19. There are many possible reasons for the discrepancy,ranging from the absence of modeling the fracture in the experi-ment to the choice of the surface stiffness used in the penalty con-tact, however the reason definitely appears to be independent ofthe underlying basis functions employed.
the buckled cylinders.

288 D.J. Benson et al. / Comput. Methods Appl. Mech. Engrg. 199 (2010) 276–289
4.2.4. Buckling of a square tubeThe simulation of a square tube buckling into an accordion
mode is a good test of the robustness of a shell element under largedeformations. Originally solved as a demonstration of the singlesurface contact method [13] and now routinely used in automobilecrashworthiness calculations, it remains a popular problem, evenappearing on the cover of an excellent recent textbook [9].
The problem definition, geometry, material parameters and theNURBS mesh of the quarter of the domain are all given in Fig. 20.An isotropic elastic–plastic material with linear plastic hardeningis used to model the material response. The deformation is drivenwith a constant velocity at one end of the tube with the other endfixed. Quadratic and quartic NURBS meshes of 640 elements, andwith 858 and 1156 control points, respectively, are used in the cur-rent simulations with symmetry boundary conditions. The stan-dard single surface contact algorithm in LS-DYNA [13] is appliedto the interpolation elements, where each quadratic and quartic
Fig. 21. A sequence of deformed shapes for the buckling o
Fig. 22. The final deformed shapes for the quadratic (left) and quartic
isogeometric element is subdivided into 4 and 16 interpolation ele-ments, respectively.
A geometric imperfection with an amplitude of 0.05 mm, asshown in Fig. 20, triggers the buckling at a height of 67.5 mm fromthe base. This imperfection is implemented by perturbing the ini-tial coordinates of a mesh line of control points on the y� z faceby 0.05 mm in the x direction and the mesh line on the x� y faceby �0.05 mm in the z direction. Since the meshes are uniformlyquadratic and quartic, the imperfections are slightly different be-tween the two calculations.
A sequence showing the formation of the buckles with quarticelements is shown in Fig. 21, and the final states of the quadraticand quartic element calculations are shown in Fig. 22. This is aproblem that is sensitive not only to the geometry of the initialperturbation, but also to the element formulation. Given the differ-ences between initial perturbations, the agreement between thetwo solutions is very good. To the best of our knowledge, this
f a square tube using quartic isogeometric elements.
(right) shell elements solutions for the buckling of a square tube.

D.J. Benson et al. / Comput. Methods Appl. Mech. Engrg. 199 (2010) 276–289 289
problem has never been solved before with quadratic, much lessquartic, shell elements.
5. Conclusions
An isogeometric formulation of the Reissner–Mindlin sheardeformable shell theory has been developed by extending thedegenerated solid element approach of Hughes and Liu [27]. Theimplementation uses the new user-defined element capability inLS-DYNA, defining the elements entirely through the input file.The current implementation is therefore not optimized for perfor-mance, but an examination of the formulation indicates that theisogeometric formulation should be no more expensive than ele-ments using Lagrange interpolation polynomials of equal order.Full integration, without any attempt to reduce shear locking,was used on the quadratic, cubic, and quartic elements in theexample calculations.
Based on the numerical results, the following conclusions aredrawn:
� The isogeometric shell elements converge for the linear elasticshell problem as well as the isogeometric solid elements inRef. [29] that used quadratic displacements in the thicknessdirection.
� There is a small amount of shear locking still present in the qua-dratic elements, but it almost entirely disappears in the cubicelements.
� The level of continuity maintained near discontinuities in theboundary conditions is an important analysis decision with asubstantial effect on the accuracy of the solution.
� Higher order Lagrange element are notoriously sensitive tomesh distortion. For example, the mid-side nodes of quadraticelements are sometimes deliberately positioned to model thesingularity of a crack tip for linear fracture analysis [26]. Thissensitivity to distortion prevents their use in many types of largedeformation problems. In contrast, isogeometric elements usingNURBS basis functions appear to be quite robust out to at leastp ¼ 4. In the study of Lipton et al. [33], it is noted that robustnessof isogeometric NURBS elements increases with order. Thisrobustness make them potentially attractive for many largedeformation problems of industrial interest including sheetmetal stamping and automobile crashworthiness.
Acknowledgements
This research was supported by NSF Grant 0700204 (Dr. Joyce-lyn S. Harrison, program officer) and ONR Grant N00014-03-0236(Dr. Luise Couchman, contract monitor).
References
[1] I. Akkerman, Y. Bazilevs, V.M. Calo, T.J.R. Hughes, S. Hulshoff, The role ofcontinuity in residual-based variational multiscale modeling of turbulence,Comput. Mech. 41 (2008) 371–378.
[2] Y. Bazilevs, V.M. Calo, J.A. Cottrel, T.J.R. Hughes, A. Reali, G. Scovazzi,Variational multiscale residual-based turbulence modeling for large eddysimulation of incompressible flows, Comput. Meth. Appl. Mech. Engrg. 197(2007) 173–201.
[3] Y. Bazilevs, V.M. Calo, J.A. Cottrell, J.A. Evans, T.J.R. Hughes, S. Lipton, M.A. Scott,T.W. Sederberg, Isogeometric analysis using T-splines. Comput. Meth. Appl.Mech. Engrg. 199 (2010) 229–263.
[4] Y. Bazilevs, V.M. Calo, T.J.R. Hughes, Y. Zhang, Isogeometric fluid–structureinteraction: theory algorithms and computations, Comput. Mech. 43 (2008) 3–37.
[5] Y. Bazilevs, V.M. Calo, Y. Zhang, T.J.R. Hughes, Isogeometric fluid–structureinteraction analysis with applications to arterial blood flow, Comput. Mech. 38(2006) 310–322.
[6] Y. Bazilevs, T.J.R. Hughes, NURBS-based isogeometric analysis for thecomputation of flows about rotating components, Comput. Mech. 43 (2008)143–150.
[7] T. Belytschko, Personal Communication, 2008.[8] T. Belytschko, J.I. Lin, C.S. Tsay, Explicit algorithms for the nonlinear dynamics
of shells, Comput. Meth. Appl. Mech. Engrg. 42 (1984) 225–251.[9] T. Belytschko, W.K. Liu, B. Moran, Nonlinear Finite Elements for Continua and
Structures, Wiley, West Sussex, England, 2001.[10] T. Belytschko, H. Stolarski, W.K. Liu, N. Carpenter, J.S.-J. Ong, Stress projection
for membrane and shear locking in shell finite elements, Comput. Meth. Appl.Mech. Engrg. 51 (1985) 221–258.
[11] D.J. Benson, Computational methods in Lagrangian and Eulerian hydrocodes,Comput. Meth. Appl. Mech. Engrg. 99 (1992) 2356–2394.
[12] D.J. Benson, Stable time step estimation for multi-material Eulerianhydrocodes, Comput. Meth. Appl. Mech. Engrg. 167 (1998) 191–205.
[13] D.J. Benson, J.O. Hallquist, A single surface contact algorithm for thepostbuckling analysis of shell structures, Comput. Meth. Appl. Mech. Engrg.78 (1990) 141–163.
[14] M. Bischoff, W.A. Wall, K.-U. Bletzinger, E. Ramm, Models and finite elementsfor thin-walled structures, in: E. Stein, R. de Borst, T.J.R. Hughes (Eds.),Encyclopedia of Computational Mechanics, Solids Structures and CoupledProblems, vol. 2, Wiley, 2004 (Chapter 3).
[15] F. Cirak, M. Ortiz, Fully C1-conforming subdivision elements for finitedeformation thin shell analysis, Int. J. Numer. Meth. Engrg. 51 (2001) 813–833.
[16] F. Cirak, M. Ortiz, P. Schröder, Subdivision surfaces: a new paradigm for thinshell analysis, Int. J. Numer. Meth. Engrg. 47 (2000) 2039–2072.
[17] F. Cirak, M.J. Scott, E.K. Antonsson, M. Ortiz, P. Schröder, Integrated modelingfinite-element analysis and engineering design for thin-shell structures usingsubdivision, Comput. Aided Des. 34 (2002) 137–148.
[18] E. Cohen, R.F. Riesenfeld, G. Elber, Geometric Modeling with Splines: AnIntroduction, A K Peters, Natick, MA, 2001.
[19] J.A. Cottrell, A. Reali, Y. Bazilevs, T.J.R. Hughes, Isogeometric analysis ofstructural vibrations, Comput. Meth. Appl. Mech. Engrg. 195 (2006) 5257–5297.
[20] M.R. Dörfel, B. Jüttler, B. Simeon, Adaptive isogeometric analysis by local h-refinement with T-splines, Comput. Meth. Appl. Mech. Engrg. 199 (2010) 264–275.
[21] T. Elguedj, Y. Bazilevs, V.M. Calo, T.J.R. Hughes, B and F projection methods fornearly incompressible linear and non-linear elasticity and plasticity usinghigher-order NURBS elements, Comput. Meth. Appl. Mech. Engrg. 197 (33–40)(2008).
[22] D.P. Flanagan, T. Belytschko, A uniform strain hexahedron and quadrilateralwith orthogonal hourglass control, Int. J. Numer. Meth. Engrg. 17 (1981) 679–706.
[23] P.M. Gresho, R.L. Sani, Incompressible Flow and the Finite Element Method,Wiley, New York, NY, 1998.
[24] J.O. Hallquist, LS-DYNA theoretical manual, Technical Report, LivermoreSoftware Technology Corporation, 1998.
[25] K. Höllig, Finite Element Methods with B-Splines, SIAM, Philadelpia, 2003.[26] T.J.R. Hughes, The Finite Element Method Linear Static and Dynamic Finite
Element Analysis, Dover, 2000.[27] T.J.R. Hughes, W.K. Liu, Nonlinear finite element analysis of shells: part I three-
dimensional shells, Comput. Meth. Appl. Mech. Engrg. 26 (1981) 331–362.[28] T.J.R. Hughes, K.S. Pister, R.L. Taylor, Implicit–explicit finite elements in
nonlinear transient analysis, Comput. Meth. Appl. Mech. Engrg. 17/18 (1979)159–182.
[29] T.J.R. Hughes, J.A. Cottrell, Y. Bazilevs, Isogeometric analysis: CAD finiteelements NURBS exact geometry and mesh refinement, Comput. Meth. Appl.Mech. Engrg. 194 (2005) 4135–4195.
[30] T.J.R. Hughes, A. Reali, G. Sangalli, Duality and unified analysis of discreteapproximations in structural dynamics and wave propagation: comparison ofp-method finite elements with k-method NURBS, Comput. Meth. Appl. Mech.Engrg. 197 (2008) 4104–4124.
[31] B.M. Irons, Applications of a theorem on eigenvalues to finite elementproblems, Technical Report CR/132/70, University of Wales, Department ofCivil Engineering, Swansea, UK, 1970.
[32] S. Kyriakides, Personal Communication, 2008.[33] S. Lipton, J.A. Evans, Y. Bazilevs, T. Elguedj, T.J.R. Hughes, Robustness of
isogeometric structural discretizations under severe mesh distortion. Comput.Meth. Appl. Mech. Engrg. 199 (2010) 357–373.
[34] L. Morino, J.W. Leech, E.A. Wittmer, An improved numerical calculationtechnique for large elastic–plastic transient deformations of thin shells: part 2– evaluation and applications, J. Appl. Mech. (1971) 429–435.
[35] L. Piegl, W. Tiller, The NURBS Book (Monographs in Visual Communication),second ed., Springer-Verlag, New York, 1997.
[36] D.F. Rogers, An Introduction to NURBS With Historical Perspective, AcademicPress, San Diego, CA, 2001.
[37] S. Schoenfeld, D.J. Benson, Quickly convergent integration methods for planestress plasticity, Commun. Appl. Numer. Meth. 9 (1993) 293–305.
[38] T.W. Sederberg, G.T. Finnigan, X. Li, H. Lin, H. Ipson, Watertight trimmedNURBS, ACM Trans. Graph. 27 (3) (2008).
[39] J.C. Simo, T.J.R. Hughes, Computational Inelasticity, Springer, New York, 2000.[40] W.A. Wall, M.A. Frenzel, C. Cyron, Isogeometric structural shape optimization,
Comput. Meth. Appl. Mech. Engrg. 197 (2008) 2976–2988.[41] H. Wang, Y. He, X. Li, X. Gu, H. Qin, Polycube splines, Comput. Aided Des. 40
(2008) 721–733.[42] J.H. Wilkinson, The Algebraic Eigenvalue Problem, Oxford University Press,
1965.