Introduction to astrometry
213
Introduction to Astrometry Toshio FUKUSHIMA National Astronomical Observatory of Japan 2006
Transcript of Introduction to astrometry

Introduction to Astrometry
Toshio FUKUSHIMANational Astronomical Observatory of Japan
2006

Index0. Summary1. Observation2. Time3. Space4. Coordinate System5. Motion of Celestial Bodies6. Rotation
7. Earth Rotation8. Keplerian Motion9. Signal Propagation10. Least Squares Method11. Crush Course ofGeneral Relativistic Effects12. References

0. Summary
What is Astrometry?General PrinciplesBasic Elements of Astrometry
References: Time, Space, UnitsMotion: Linear, Orbital, RotationalSignal Propagation: 1-way, Round-trip
Mathematical Tools

Astrometry is …Quest for Universe through Position/Motion of Celestial Objects
Also called: Fundamental AstronomyAstronomy in “Astronomy & Astrophysics”
Related withCelestial MechanicsGeodesySpecial/General Theories of Relativity

General Principles
4-dim. Continuous SpacetimeLaw of CausalityTime Arrow DefinitenessDeterministic PrincipleExistence of Inertial FramePrinciples of Relativity

Reference SystemsRS=Coordinate System + Unit SystemTime Coordinate System
Astronomical, Physical, BroadcastingSpace Coordinate System
Horizontal, Equatorial, EclipticSolar System Barycentric, Geocentric, Terrestrial(=Earth-Crust-Fixed)
Unit System: International, Astronomical

MotionCosmic ExpansionQuasi-Linear Motion: Far Objects
Stars, Galaxies, QuasarsOrbital Motion
Quasi-Keplerian: Binary, Comet, AsteroidComplicated: Planet, Satellite, Space Vehicle
RotationEarth, Moon, Planet, Satellite, Asteroid, etc.

Signal PropagationElectro-Magnetic Wave
Visible, IR, Radio, UV, X, GammaGeometric Optics Approx.: Photon PathRelativistic Treatments
Cosmic Ray = High Energy ParticleGravitational Wave

Mathematical ToolsVector AnalysisLinear AlgebraSolution of Non-Linear EquationMethod of Least SquaresFourier AnalysisNumerical Integration of Ordinary Differential Equations

1. ObservationGlobal Quantities: Non-Measurable
Coordinates, Finite Length
Local Quantities: MeasurableClock Reading, Angle, Frequency, etc.
Measuring MethodsPassive, Semi-Passive, Active
New Observing Facilities

Observables
Clock ReadingEpoch: Arrival Time, Emission TimeTime Interval = Duration Time
Angle: Difference in Incoming VectorsOthers
Frequency = EnergyPattern, Code Embedded Artificially

Passive ObservationAstro-Camera: 2D Angles
CCD Array, Video, Photographic Plate
Theodolite, Meridian Circle: 1D AngleInterferometer: Precise 1D Angle
VLBI=Very Long Baseline InterferometerRadio, Optical, IR, X-ray, …
Ground-based VS in-the-Space

Passive Observation (2)Detector: Arrival Time, Energy
PMT (Photo Multiplier Tube), Photo DiodeCCD (Charge Coupled Device), Bubble Chamber
Clock ReadingEvent Time: Arrival, Eclipse, Occultation, etc.
Time Series: Light Curve, Decay PatternDoppler Shift: Radial Velocity
Spectrometer, Emission/Absorption Lines

Semi-Passive Obs.
Doppler ShiftUp/Down Link with Artificial Satellite or Space Vehicle
Integrated Doppler Shits ~ Range DifferenceNNSS, DORIS/PRARE
Semi-Passive VLBI: ALSEP, RISEDifference Time Obs.: GPS, GLONASS, GALILEO

Global Positioning System
US DoDFlying Atomic Clocks

Active ObservationRADAR Bombing
Inner Planets, Near-Earth AsteroidsRange and Range-Rate (R&RR)
Artificial Satellite, Space VehicleRadio Transponding
Artificial Satellite, Space VehicleLASER Ranging
Artificial Satellite (SLR), Moon (LLR)

LASER RangingSatellite LRLunar LR
3 Apollo + 2 Luna

RADAR BombingHaystack, MITArecibo

New FacilitiesOptical/IR Interferometer
NPOI, PRIMA/VLTI, SIM, TPF-IOrbital Telescope
HIPPARCOS, JASMINE, GAIAVLBI
VLBA, VSOP, VERA, e-VLBI

NPOIUS Navy Prototype Optical InterferometerFlagstaff, Arizona, USA

PRIMA/VLTIPhase-Referenced Imaging and MicroarcsecondAstrometryESO, ChileVLT Outrigger

SIMSpace Interferometer Mission, NASA

TPF-ITerrestrial Planet Finder-Interferometer

HIPPARCOS
First Satellite dedicated to AstrometryESAGreat Achievements

JASMINEJapanese Astrometry Satellite Mission

GAIAPost-HIPPARCOSESAWill be Launched in Summer 2011
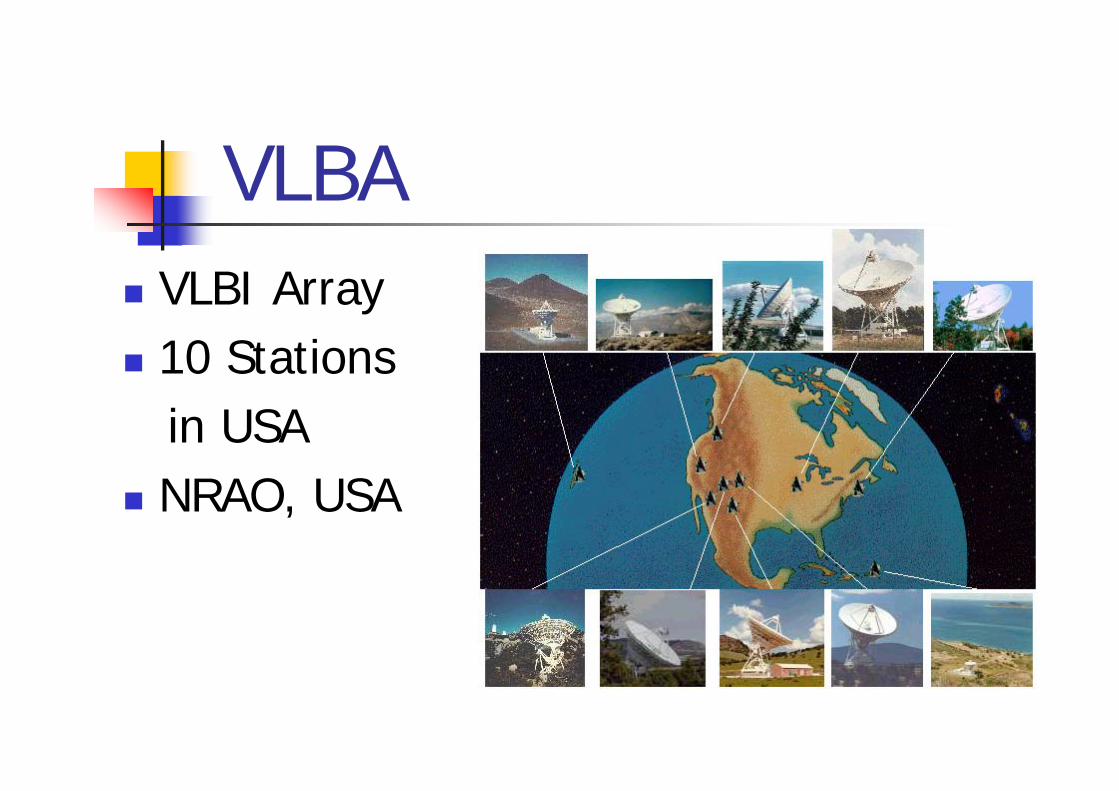
VLBAVLBI Array10 Stationsin USANRAO, USA

VSOPFirst Space VLBI MissionISAS/NAOJ, Japan

VERAJapanese VLBI Array4 Stationsin JapanTwo Beam Differenced ObservationNAOJ

e-VLBIOnline VLBI via High Speed Internet

2. TimeBasic ConceptsIdeal Time Systems
Integrated, Dynamical, BroadcastingPractical Time Scales
Atomic Time, Universal TimeSolar System Barycentric/Coordinate Time
Units and ExpressionJulian Date

Concepts of TimeNewtonian ViewpointAbsolute TimeTime Transformation: 1 to 1Ordering: ChronologyPrecision VS Accuracy
Essential Question on Repeatability
)(τft =

Integrated Time System
Assumption: Constant Duration of A Certain PhenomenonTime = Number of PhenomenaExample
Astronomical: Day, Month, YearMechanical: Pendulum, SpringPhysical: Quartz, Molecule, Atom

Dynamical Time System
Time Argument in Equation of MotionEpoch Determined Inversely from ObservationExample
Mean Longitude of the SunL(T)=Epehemeris Time: ET=T(L)
2089113129602769044841279 T". T". ".' ++

Broadcasting Time System
Time Signals in the Air: JJY, TV, NTTNTP: TS on Computer NetworkGPS Time: TS from GPS Satellites
Standard TimeTime Zone: 15 degree = 1 Hour
Japan Standard Time: JSTJST = UTC + 9 h

Atomic TimeDefinition of SI Second: CGPM (1967)
9192631770 PeriodsSpecific Radiation from Cesium 133
International Atomic Time: TAISteered by BIPM (Paris)Hundreds of Cesium Atomic Clocks+ Several Hydrogen Maser ClocksRelative Precision: 15-16 Digits

Cesium Atomic ClockHP/Agilent 5071A

Atomic Fountain Clock

Hydrogen Maser Clock

Universal TimeDynamical TS based on Earth Rotation
UT = GMT (Greenwich Mean Solar Time)3 Variations: UT0, UT1, UT2Monitored by IERS
UTC (Coordinated Universal Time)Leap Second
Secular Deceleration of Earth Rotation

Solar System Dynamical Time
Official TS of IAU (1984-1991)General Relativistic Effects ConsideredTDB: SS Barycentric Dynamical TimeTDT: Terrestrial Dynamical TimeUnit Adjustment: <TDB> = <TDT>
TDT = TAI+32.184s

Solar System Coordinate TimeOfficial TS of IAU (1991-)
No Unit AdjustmentTCB: SS Barycentric Coordinate TimeTCG: Geocentric Coordinate TimeTT: Terrestrial TimeTT = TDT = TAI+32.184s
TCB-TCG: Time EphemerisHarada and Fukushima (2003)

Time Units1 day=24 hours=1440 min.=86400 sJulian Century: jc, Julian Year: jy
1 jc = 100 jy = 36525 days
Besselian Year = Mean Solar Year = 365.2421897… daysms, μs, ns, ps, fs, …Speed of Light: c = 299792458 m/s

Time ExpressionYear, Month, Day, Hour, Minute, Second
Day of Week, Day of Year
Julian Date: JDJ2000.0 = 12 O’clock, Jan. 1st, 2000= JD2451545.0
Modified Julian Date: MJDMJD = JD – 2400000.5

Julian DateFrom (Y, M, D, h, m, s) to JD
L=int((M-14)/12);I=1461*(Y+4800+L);J=367*(M-2-12*L);K=int((Y+4900+L)/100);N=int(I/4)+int(J/12)-int((3*K)/4)

Julian Date (2)JD0=N+D-32075;JD1=JD0-0.5;JD2=h/24.0+m/1440.0+s/86400.0;JD=JD1+JD2 or JD = (JD1,JD2)

Julian Date (3)From JD to (Y, M, D, h, m, s)
JD0=int(JD-0.5); JD1=JD0-0.5;L=JD0+68569;N=int((4*L)/146097);K=L-int((146097*N+3)/4);I=int(4000*(K+1))/1461001); P=K-int((1461*I)/4)+31;

Julian Date (4)J=int((80*P)/2447);D=P-int((2447*J)/80); Q=int(J/11);M=J+2-12*Q; Y=100*(N-49)+I+Q;JD2=JD-JD1;h=int(JD2*24)m=int(JD2*1440-h*60);s=JD2*86400-h*3600-m*60;

Day of Week
I=JD0-7*int((JD0+1)/7)+2;I: 1,2,3,4,5,6,7I=1: Sunday

3. SpaceSpace Coordinate and UnitSpacial Coordinate Transformation
Rectangular, Spherical, SpheroidalInertial Coordinate System
Parallel Transport of Coordinate Origin, Rotation around Origin
Velocity and Acceleration

Spatial CoordinatesRectangular
Spherical
Spheroidal
),,( zyx
),,( ),,( λφλθ rr
),,( hλϕ

Spherical CoordinateHorizontal
EclipticEquatorialGalactic
)Az,El();Az,Alt();,();,( , AaAzr
δαπ ,,, ,r β λ
,, bπ
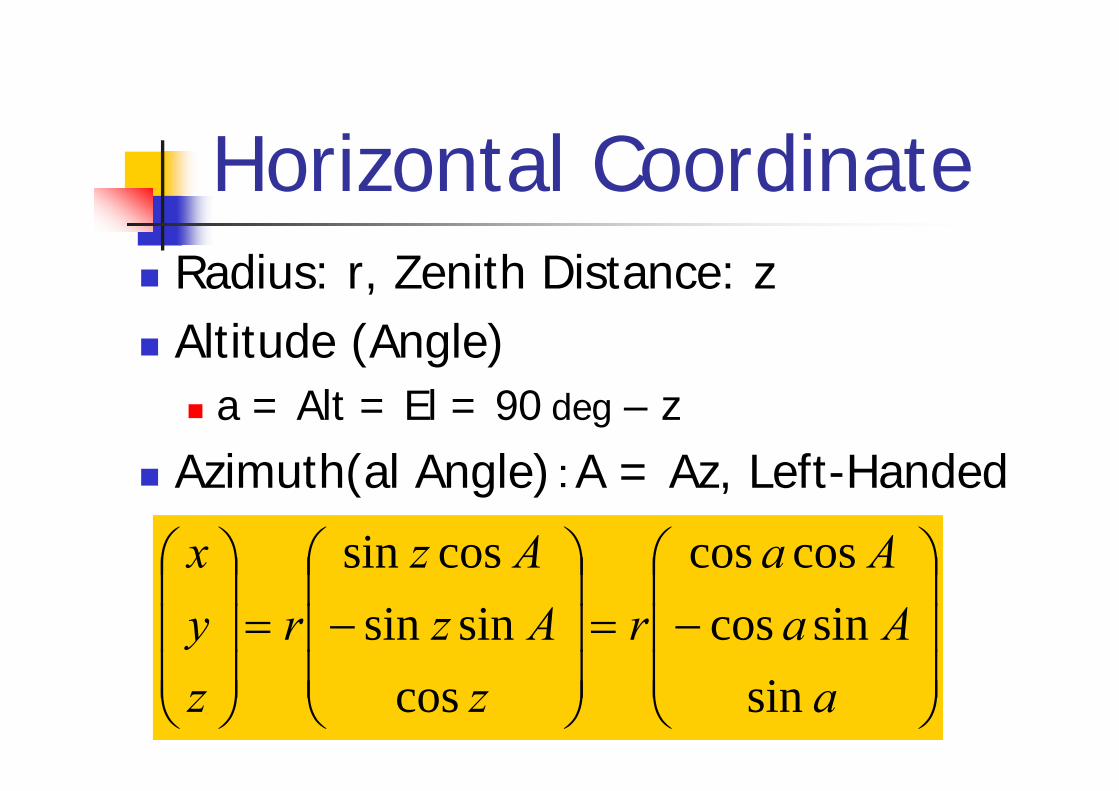
Horizontal CoordinateRadius: r, Zenith Distance: zAltitude (Angle)
a = Alt = El = 90 deg – z
Azimuth(al Angle):A = Az, Left-Handed
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−=
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−=
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
aAa
Aar
zAz
Azr
zyx
sinsincos
coscos
cossinsin
cossin

Ecliptic CoordinateEcliptic ~ Mean Earth OrbitFor Solar System ObjectsObliquity of Ecliptic: ε
Radius: rLongitude: λLatitude: β
ε
Ecliptic
Equator
Vernal Equinox

Equatorial CoordinateBasic Representation
Right Ascension (R.A.) = αDeclination (Decl.) = δ(Annual) Parallax: π
1 AUsinr
π − ⎛ ⎞= ⎜ ⎟⎝ ⎠
π
AU
r
S
E
P

Angle UnitsRadian: rad
180 deg = π rad
Degree: deg = °Minute of Arc: min = arc minute = 'Second of Arc: second = arc second = " = arcsec = as

Angle Units (2)1 deg = 60 arcmin = 3600 arcsec180 deg = π rad1 arcsec ~ 4.848 μrad
20 arcsec ~ 0.1 mrad: Aberration0.001 arcsec = milli-arcsec: mas0.000001 arcsec = micro-arcsec: μas

Length UnitsSI meter: Defined via SI Second
Speed of Light: c = 299792458 m/s
Astronomical Unit (of Length): AURough: Mean Radius of Earth OrbitRigorous: AU = cτ, τ = 499.00478353… s
Parsec (pc), Light Year (ly)1 pc = AU/sin 1” ~ 30.9 Pm ~ 3.26 ly1 ly = c x 1 jy ~ 9.5 Pm

Spheroidal CoordinateGeographic Latitude: ϕLongitude: λHeight from Reference Ellipsoid: h
cos coscos sin
sin
N
N
Z
xyz
ρ ϕ λρ ϕ λ
ρ ϕ
⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟=⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠

Geographic LatitudeGeocentric Latitude: φGeographic/Geodetic Latitude: ϕ
φ ϕEquator
PoleP
r
Geocenter H
Zenith
Nadir
Horizon
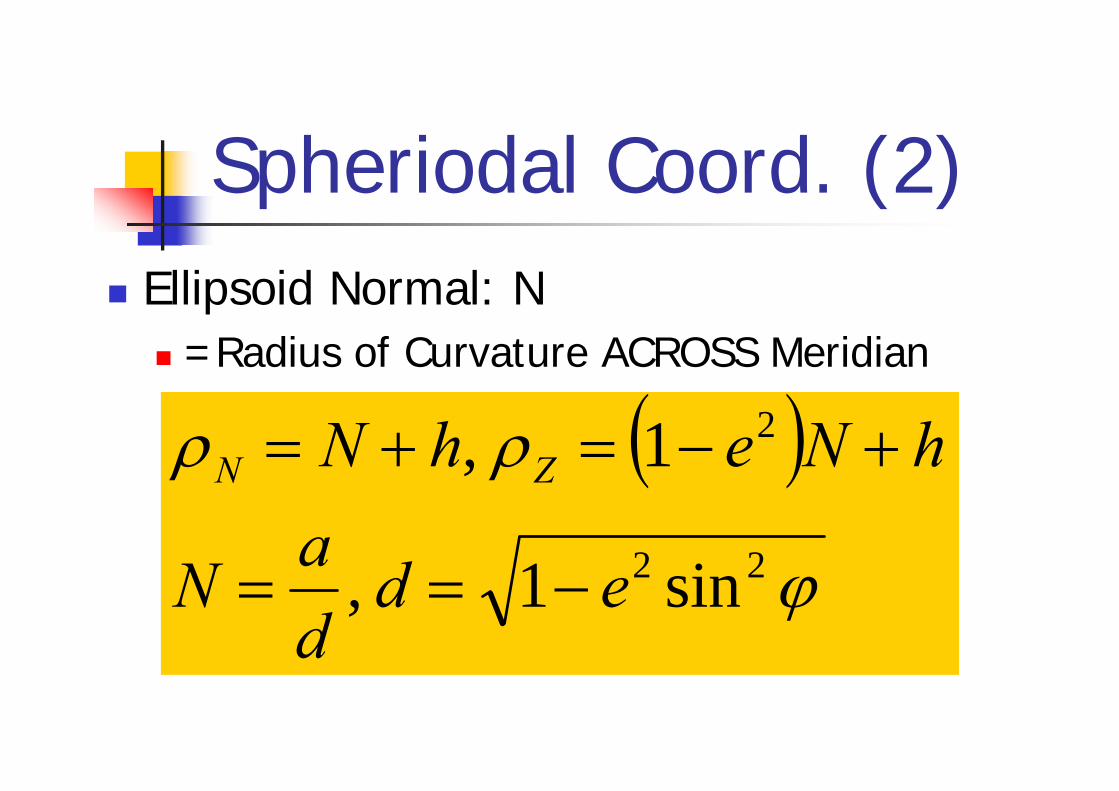
Spheriodal Coord. (2)Ellipsoid Normal: N
=Radius of Curvature ACROSS Meridian
( )ϕ
ρρ
22
2
sin1 ,
1 ,
eddaN
hNehN ZN
−==
+−=+=

EllipseSemi-Major Axis: aSemi-Minor Axis: b
12
2
2
2
2
2
=++bz
ay
ax
a
b

Flattening FactorFlattening Factor: fEccentricity: e, Complimentary Ecc.: ec
2
2 22 2
2
, 1 1
2
ca b bf e e f
a aa be f f
a
−≡ ≡ = − = −
−≡ = −

Spherical to Rectangular
sin cos cos cossin sin cos sin
cos sin
xy r rz
θ λ φ λθ λ φ λθ φ
⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟ ⎜ ⎟= =⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ ⎝ ⎠

Rectangular to Spherical
),atan2
),,atan2sin
),,atan2cos
,
1
1
22222
x(y
p(zrz
z(prz
yxpzyxr
=
=⎟⎠⎞
⎜⎝⎛=
=⎟⎠⎞
⎜⎝⎛=
+=++=
−
−
λ
φ
θ

Spheroidal to Rectangular
cos coscos sin
sin
N
N
Z
xyz
ρ ϕ λρ ϕ λ
ρ ϕ
⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟=⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
( )ϕ
ρρ
22
2
sin1 ,
1 ,
eddaN
hNehN ZN
−==
+−=+=

Rectangular to Spheroidal
Difficult Inverse ProblemEasy: LongitudeEliminating Longitude
-> Latitude Equation
),atan2 x(y=λ
( )( )( )
2 2
2
cos
1 sin
N h p x y
N e h z
ϕ
ϕ
⎧ + = ≡ +⎪⎨
− + =⎪⎩

Latitude EquationAfter Elimination of h
2 2
2
sin cossin cos1 sin
where
Cp ze
C ae
ϕ ϕϕ ϕϕ
− =−
=

Latitude Equation (2)Variable TransformationTransformed EquationDerivation and Solution
cott ϕ=
2
2
( ) 0
where 1
Ctf t zt pg t
g e
≡ + − =+
≡ −

Derivation of Lat. Eq.
( )
2 2
2 2 2 22
2
2 2
1sin ,cos1 1
111 1 1 11
1
1
tt t
p zt C tt t t te
tCtp zte t
ϕ ϕ= =+ +
∴ − =+ + + +−
+
− =− +

Solution of Lat. Eq.
(0) 0, ( ) 00
f p f zt Ct= − ≤ +∞ ≈ + ≥
∴ ≤ ≤ +∞
Localization (Northern Hemisphere)Variable Domain after Localization
Newton MethodInitial Guess 0 /
ptz C g
=+
z≤0

Newton MethodEffective to Solve Nonlinear Eq.
EssenceLinearization
Newton Iteration
0)( =xf
)(')()(*
xfxfxxf −≡)(* xfx →
y=f(x)
xx0 x1x
y

Newton Method (2)Quadratic Convergence
Doubling Effective DigitsFast but UnstableSlow when Multiple RootsKey Points
Bracketing to Assure UniquenessSelecting Stable Starters

Stable StarterBracketing
Assumption 1
Assumption 2
Stable Starter: Upper Bound of Solution
RL xxx <<
( ) ( )RL xfxf << 0
0)('',0)(' >>→<< xfxfxxx RL

Application to Lat. Eq.Preparation
( )
( )
( )
2
32
52
( )
( 0 ) 0
'( ) 0
3''( ) 0
C tf t z t pg t
f p fC gf t z
g t
C g tf tg t
≡ + −+
= − ≤ ≤ + ∞
= + >+
−= <
+

Application (2)Newton Iteration
Stable Starter: Lower Bound of Solution*
0 0 (0)/
pt fz C g
= → =+
( )( )
32 3
*3
2
( )( )'( )
p g t Ctf tf t tf t z g t Cg
+ −≡ − =
+ +

Velocity & AccelerationVelocity = Variation of PositionAcceleration = Variation of VelocityJerk = Variation of Acceleration
2 3
2 3
d d d, , dt dt dt
= = =x x xv a j

Velocity in Spherical CS
d d d ddt dt dt dt
r r
rr
v v vφ φ λ λ
φ λφ λ
⎛ ⎞∂ ∂ ∂⎛ ⎞ ⎛ ⎞= = + +⎜ ⎟ ⎜ ⎟⎜ ⎟∂ ∂ ∂⎝ ⎠ ⎝ ⎠⎝ ⎠= + +
x x x xv
e e e
d d d, , cosdt dt dtrrv v r v rφ λ
φ λφ= = =
Vector Representation
Component Representation

Coordinate Triad in Spherical CS
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=⎟
⎠⎞
⎜⎝⎛∂∂
≡φλφλφ
sinsincoscoscos
rrxe
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−−
=⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
≡φ
λφλφ
φφ
cossinsincossin
1 xer
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−=⎟
⎠⎞
⎜⎝⎛∂∂
≡0
cossin
cos1 λ
λ
λφλxe
r

Velocity in SpheroidalCS
d d ddt dt dt h hh v v v
h ϕ ϕ λ λϕ λ
ϕ λ⎛ ⎞∂ ∂ ∂⎛ ⎞ ⎛ ⎞= + + = + +⎜ ⎟ ⎜ ⎟⎜ ⎟∂ ∂ ∂⎝ ⎠ ⎝ ⎠⎝ ⎠
x x xv e e e
( )( )
2
32 2
d d d, , cosdt dt dt
1,
1 sin
h M N
M
hv v v
a eM h M
e
ϕ λϕ λρ ρ ϕ
ρϕ
= = =
−= + =
−
Vector Representation
Component Representation

Coordinate Triad in Spheroidal CS
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=⎟
⎠⎞
⎜⎝⎛∂∂
≡ϕ
λϕλϕ
sinsincoscoscos
hhxe
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−−
=⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
≡ϕ
λϕλϕ
ϕρϕ
cossinsincossin
1 xeM
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−=⎟
⎠⎞
⎜⎝⎛∂∂
≡0
cossin
cos1 λ
λ
λϕρλxe
N
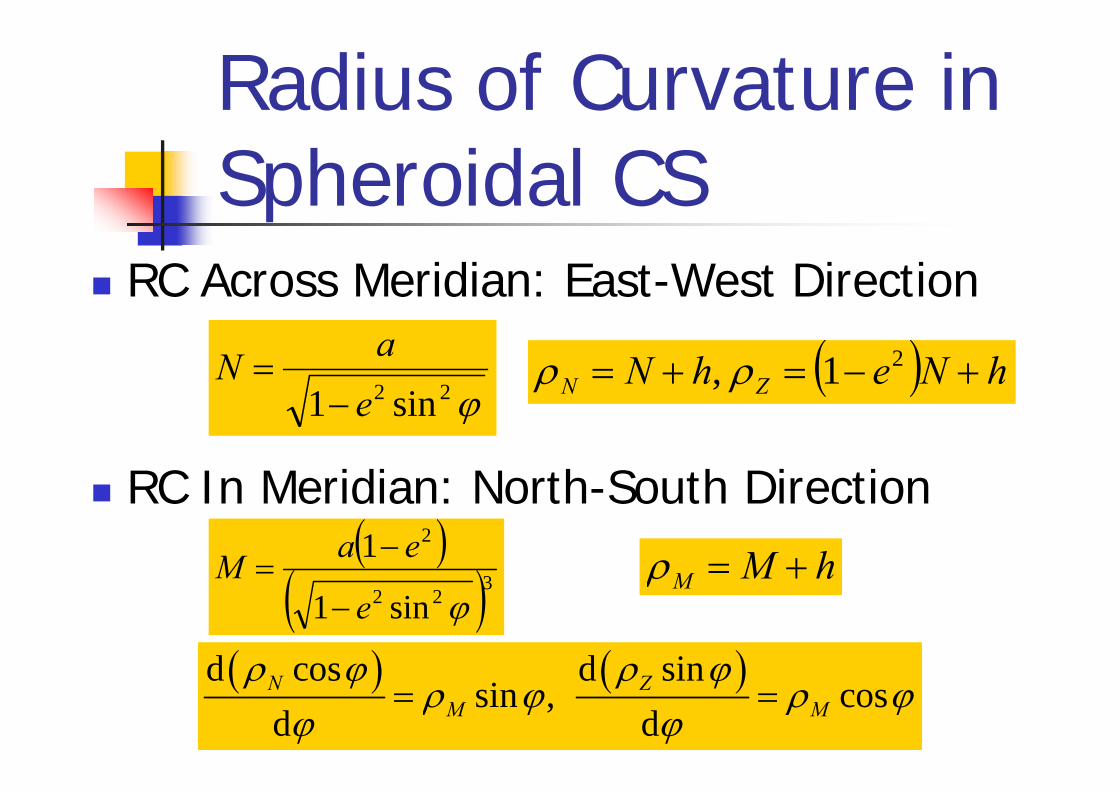
Radius of Curvature in Spheroidal CS
RC Across Meridian: East-West Direction
RC In Meridian: North-South Direction( )
( )322
2
sin1
1
ϕe
eaM−
−=
ϕ22 sin1 eaN
−=
( ) ( )d cos d sinsin , cos
d dN Z
M M
ρ ϕ ρ ϕρ ϕ ρ ϕ
ϕ ϕ= =
( ) hNehN ZN +−=+= 21 , ρρ
hMM +=ρ

Inertial Coordinate System
CS where Law of Inertia HoldsNewton’s Law of Inertia
No Force -> Linear Motion
Galilei’s Principle of RelativityLaw of Physics is Invariant at Any ICS
Parallel Transport of Coordinate OriginICS to ICS

Parallel Transport of Coordinate Origin
Galactic Center in Quasar-Rest FrameCosmic Expansion
Local Standard of Rest in Galactic CSLocal Standard of Rest (LSR) = Solar System BarycenterFeature of Local Motion: Oort’s Constant

Parallel Transport of Coordinate Origin (2)
Geocenter in Solar System Barycentric CSPlanetary Ephemeris
Averaged Crust in Geocentric CSEarth Rotation
Observer in Terrestrial CSFixed to Earth Surface (= Averaged Crust)Surface Motion (Aircraft, Ship, Car, etc)

Ephemeris and AlmanacNumerical Table on Complicated Motion
Orbit: Planets, Satellites, AsteroidsRotation: Planets, Satellites
Astronomical Almanac (US+UK)Japanese EphemerisNASA/JPL DE series, DE413/408
Most Precise, Machine Callable

Spatial Coordinate Transformation
General Transf.
Taylor Expansion w.r.t. New Coordinates
( )txXXx kjjk ,=←
( ) ( )
( ) ( ) ++=
+∂
∂+=
∑
∑
=
=
kk
jkj
kk k
jjj
xtBtA
xtxX
tXX
3
1
3
1,0,0

Linear Transformation
( ) ( )xAX tt B+=General Affine Transformation
Static: 12-Parameter Transformation
xAX B+=

Coefficient MatrixΘ++= SDB
Scaling: Diagonal Component
Shear: Non-Diagonal, Symmetric
Infinitesimal Rotation: Asymmetric
kjjk ≠= if 0D
( )S S S 0 if jk kj jk j k= = =
kjjk Θ−=Θ

7-Parameter Transformation
CT between Similar Two CSIsotropic ScalingOrigin ShiftRotation
Ex.: Transf. among Geocentric CSsWorld Geod. System (ITRFnn, GRS80)Tokyo Datum and JGD 2000
( )xXX Θ++= Is0

5. Motion of Celestial Bodies
Rest: QuasarLinear: Most of StarsRotation: Earth, the Moon, SatelliteKepler: BinariesQuasi-Kepler: Asteroid, SatelliteComplicated: Planet, Space Vehicle

Resting BodyQuasar: Practically Being RestPosition Expression
EpochMean Place at EpochParallax at Epoch
Quasar Catalogs: IAU, ICRFnn
0t( )00 ,δα
0π

Linear Motion
Different Treatment for Radial Comp.Proper Motion = Linear Motion on Celestial Sphere
( ) ( )000 ttt −+= vxx
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
δαδαδ
sinsincoscoscos
rx ( )0
0
0
0
ttVrr R
−⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛+⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛≅
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
δ
α
μμ
δα
δα

Star CatalogEpoch, Mean Place, and ParallaxPropor MotionRadial VelocityAstrophysical Information
Luminosity, Color, Variability, etc.Astrometric Star Catalogs
HIPPARCOS, FKn, PPM, AGKn
( )δα μμ ,
RV

6. RotationRotation = Orthogonal Transformation
Infinitesimal Rotation: Vector ProductFinite Rotation: Orthogonal Matrix
Euler’s TheoremFundamental RotationAngular Velocity

OrthogonalTransformation
Distance Invariant in Euclidean Space
Rotation: A Linear Transformation
Orthogonality
( ) ( )22 xX Δ=Δ
xX Δ=Δ R
( ) ( )TT
T
RRIRRRRR==∴
Δ=ΔΔ=Δ1
2T2
or -
xxxx

Finite Rotation
Expression: Matrix, Spinor, QuarternionRotational Operation: Matrix ProductRotation Matrix = Coordinate Triad
= Trio of Orthonormal Basis
( )TX Y Z= e e eRX
YZ

Euler’s Theorem
Any Finite Rotation = Triple Product of Fundamental Rotation Matrices
Euler Angles = 3 Fundamental Rotation Angles
( ) )()()(,, αβγγβα ijkijk RRRRR ≡=
( )( ) ( )αβγγβα −−−=− ,,,, 1kjiijk RR

Fundamental Rotation OperationRotate around z-axis by the angle θ
)()(3 θθ zRR =
θ X
Y
xy P

Fundamental Rotation Operation (2)
Rotation Around j-th Axis by θ
Reverse Rotation
)(θjR
( )( ) ( )θθ −=−jj RR 1

Fundamental Rotation Matrix
Ex.: Ecliptic-Equatorial Transf. Obliquity of Ecliptic
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−=
1000cossin0sincos
)(3 θθθθ
θR
( )ε1Rε

Fundamental Rotation Matrix (2)Small Angle Approximation
( )
( ) ×⎟⎟⎠
⎞⎜⎜⎝
⎛−≅∴
×−=⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−+≅
∑∏j
jjj
jj e
e
θθ
θθθ
θ
IR
IIR 33 0000000

Euler RotationCombinations of Euler Angles: 3x2x2=123-1-3 (=X) Convention
Most Popular, the Euler AnglesUsed in Classic Rotational Dynamics
( ) ( ) ( ) ( )ψθφφθψ 313313 ,, RRRR =

3-1-3 Rotation Matrix
( )⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−+−−−+−
=
θφθφθ
θψφθψφψφθψφψ
θψφθψφψφθψφψ
φθψCCSSS
SCCCCSSSCCCSSSCCSSCSCSCC
,,313R
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−+−−−+−
=θφθφθθψφθψφψφθψφψθψφθψφψφθψφψ
coscossinsinsinsincoscoscoscossinsinsincoscoscossinsinsincoscossinsincossincossincoscos

3-1-3 Euler Angles
X
Z
YN
P
ψ
θ
φ

Weak Point of 3-1-3 Convention
( ) ×⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
+−≅
ψφ
θφθψ 0,,313 IR
Degeneracy in Small Angles
RecipeUse 3-2-1 and Other Convention with All Different Indices

3-2-3 ConventionAlias: Y-Convention, Ex.: Precession
Screw: Rotation Around Fixed Direction
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
ϕλϕλϕ
cossinsincossin
n
( ) ( ) ( )323 , , I+ sin 1 cosλ ϕ χ χ χ= ×+ − × ×n n nR
( )AAA z−−= ,,323 θζRP

Other Conventions1-3-1: Nutation
2-1-3: Polar Motion + Sidereal Rotation
1-2-3: Aerodynamics, Attitude ControlOne of Most Desirable Conventions
( )( )εεψε Δ+−Δ−= AA ,,131RN
( )pp xy −−Θ= ,,312RWS

Rotation and Velocity Transformation
= ⇒
= +
= −Ω= − ×
X x
V v x
v xv ω x
RdRRdt
RR

Angular Velocity
( )
dddt dt
j j j jjj
jj
j
θ θ
θ
⎛ ⎞= ≅ − ×⎜ ⎟
⎝ ⎠⎡ ⎤⎛ ⎞
= − × = − × = −Ω⎢ ⎥⎜ ⎟⎝ ⎠⎣ ⎦
∑∏
∑
e
e ω
∵R R I
R
ddt
jj
j
θ=∑ω e

Infinitesimal Rotation3D Anti-Symmetric Matrix ~ Axial Vector
True Meaning of Vector Product
xθx Δ×=ΘΔ
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−−
−=Θ
00
0
xy
xz
yz
θθθθθθ
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
z
y
x
θθθ
θ

Small Angle Rotation( )
×⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−≅
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−++−−+−+
=
=
γβα
αβγγβα
αβαββ
αγαβγαγαβγβγ
αγαβγαγαβγβγ
I
RRRR
CCSCSSCCSSCCSSSCSSSCSCCSSSCCC
)()()(,, 123123

7. Earth RotationBase of Coordinate Transformation between Geocentric and Terrestrial Coordinate SystemSidereal Rotation (S) … Rotation Angle UT1Motion of Figure Axis
Quasi-Diurnal: Polar Motion = Wobble (W)Others: Precession (P) + Nutation (N)
Matrix Representation
WSNPR =

Precession + NutationFigure Axis Motion (Other than Wobble)2 Components in Ecliptic CS
Longitude, ObliquityPrecession=Very Long Periodic Motion
50 arcsec/y, ~26000y PeriodNutation=Other Periodic Motion
18.6y, 0.5y, 9.3y, etcNew Model Soon Appears
Ecliptic
Ecliptic Pole
z

PrecessionDiscovery: Hipparchus (~150BC)Old Model: IAU1976
Lieske et al. (1976, A&A)Dynamics: Newcomb’s TheoryCorrection of Planetary MassesAdding Geodesic Precession
Theory: in Ecliptic CSFormula: in Equatorial CS

Precession (2)
3 Precession Angles in Equatorial CS
Unit: 1 arcsecT =(JD-2451545.0)/36525
( )AAA z−−= ,,323 θζRP
32
018203.0041833.0
017998.0
09468.142665.0
30188.0
2181.23063109.20042181.2306
TTTzA
A
A
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−+
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−+
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛θζ

Precession (3)Approximation of Precession Matrix
Correction in R.A. and Decl.
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛ −−≅
1001
1
A
A
AA
θφ
θφP AAA z+≡ζφ
tan sin , cosP A A P Aα φ θ δ α δ θ αΔ = + Δ =

Precession (4)Approximation of Precession Angle
Precession (Speed) in R.A. and Decl.
Approximate Correction Formula
TnTm PAPA ≅≅ θφ ,
/jy"3109".2004 ,/jy"4362.4612 == PP nm
( )( )Tn
Tnm
PP
PPP
αδαδα
cos ,sintan
≅Δ+≅Δ

NutationDiscovery: Bradley (1747)Old Model: IAU1980
Seidelmann et al. (1981, CM)Rigid Earth: Kinoshita (1977, CM)Non-Rigidity: Wahr (1981, GJRAS)
Mean Obliquity (Lieske et al., 1976)
32 001813".000059".0
8150".46448".21'2623
TT
TA
+−
−°=ε

Nutation (2)
( )( )εεψε Δ+−Δ−= AA ,,131RNMatrix Representation
Nutation in Longitude ΔψNutation in Obliquity ΔεAnalytic Expression
∑∑=
=⎟⎟⎠
⎞⎜⎜⎝
⎛=⎟⎟
⎠
⎞⎜⎜⎝
⎛ΔΔ 5
1
,cossin
jjjk
k kk
kk ΩnAAA
εψ
εψ

Delauney AnglesMain 5 Angles in Nutation Theory
Mean Anomaly of MoonMean Anomaly of SunMean Argument of Latitude of MoonMean ElongationMean Longitude of Ascending Node of Moon
Details: Seidelmann et al. (1981)
'F
'LLD −≡
Ω

Rough Approx. of NutationPrecision: 0.1 arcsecUnit: 1 arcsec
+⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟⎠
⎞⎜⎜⎝
⎛−+
⎟⎟⎠
⎞⎜⎜⎝
⎛−
+⎟⎟⎠
⎞⎜⎜⎝
⎛−+⎟⎟⎠
⎞⎜⎜⎝
⎛−=⎟⎟
⎠
⎞⎜⎜⎝
⎛ΔΔ
0sin1.0
0'sin1.0
2cos1.02sin2.0
2cos1.02sin2.0
'2cos6.0'2sin3.1
cos2.9sin2.17
LL
ΩΩ
LL
ΩΩ
εψ

Approx. NutationApproximation of Nutation Matrix
Nutation in R.A. and Decl.
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
ΔΔΔ−ΔΔ−Δ−
≅1
11
ενεμνμ
N
AA εψνεψμ sin,cos Δ=ΔΔ=Δ

Approx. Nutation (2)Correction in R.A. and Decl.
( )αεανδ
αεανδμαsincos
,cossintanΔ+Δ=Δ
Δ−Δ+Δ=Δ
N
N

Sidereal Rotation
( )3= ΘS R
Almost Uniform Quasi-Diurnal RotationΩ0 = 7.2921150(1) x 10-5 radian/s
Angular Rotation = 360 degree/Sidereal Day ~ 365.2422.../366.2422... Rot./DayGreenwich Apparent Sidereal Time (GAST) Θ

Deviation from Uniform Rotation
UTC → UT1 → GMST → GASTDUT1 = UT1-UTC: UnpredictableGMST = GMST0 + r UT1 + ...Ratio of Sidereal/Universal Time: rr ~ 1.0027379... GAST = GMST + Δψ cos ε + ...
Length of Day (LOD) = 2π/Ω

Polar Motion = Wobble
( ) ( )2 1p px y= − −W R R
Slow Motion of Pole Viewed on EarthSymbol: (xp, yp), Size: 0.1 arcsec ~ 30mPeriods: Annual, Chandler (~14 month)
Unpredictable = To be Monitored

EOPEarth Orientation Parameters
DUT1, LOD, xp, yp,, Pole OffsetsOld Terms: Earth Rotation Parameters (ERP)
Pole Offset = Error in Prec./Nut. TheoryInternational Earth Rotation Service (IERS)
Since 1984, Joint Service of IAU and IUGGHomepage: http://www.iers.org/

8. Keplerian MotionSolution of Two-Body ProblemGravitational Constant
Orbital Element = 6 ConstantsShape of OrbitOrientation of Orbital PlaneLocation in Orbit
xx32
2
rdtd μ−
=( )mMG +=μ
ea,ω,, IΩ
T

Unit of MassSI Unit of Mass: kgAstronomical Unit: Solar MassUniversal Constant of Gravitation: GObservable = GM = Gravitational Constant of Central Body
Heliocentric GC = Sun’s GMGeocentric GC = Earth’s GM
SGM
EGM
SM

Orbital ElementsSemi-Major Axis: aOrbital Eccentricity: eLongitude of Ascending Node: ΩOrbital Inclination: IArgument of Pericenter: ωTime of Pericenter Passage: T

EllipseSemi-Major Axis: aSemi-Minor Axis: b
12
2
2
2
=+by
ax
a
b

Orbital EccentricityEccentricity: e, Complimentary Ecc.: e’
22
22
1' , eabe
abae −=≡
−≡
ae
F

Orbital Plane3-1-3 Euler Angles of Orbital Plane
3 Important Direction VectorsOrigin of Longitude: X-axisAscending Node: NPericenter: P
( ) ( ) ( ) ( )Ω=Ω 313313 ,, RRRR II ωω

Z
P
γ
NΩ
I
ω
Orbital Plane (2)

Keplerian OrbitElliptical: e < 1
Planet, Satellite, BinaryParabola: e = 1
Good Approximation of Comet OrbitQuasi-Parabola: e ~ 1
Comet, Peculiar AsteroidsHyperbolic: e > 1
Space Vehicle, Close Encounter

Element to Position and Velocity (Elliptic)
Solve (Elliptic) Kepler’s Equation
Speed of Ecc. Anomaly EPV in Orbital Plane
( )⎩⎨⎧
=−=Eb
eEasin
cosη
ξ
( )TtnEeE −=− sin
EenEcos1−
=
⎩⎨⎧
=−=
EEbEEa
cossin
ηξ

Element to Position and Velocity (Parabolic)
Solve Barker’s Eq. = Parabolic Kepler’s Eq.
Speed of τPV in Orbital Plane
( )21
2
q
q
ξ τ
η τ
⎧ = −⎪⎨
=⎪⎩
( )3
33 2t T
qτ μτ + = −
2 3
11 2q
μττ
=+
22
ξ ττη τ
⎧ = −⎨
=⎩

Element to Position and Velocity (Hyperbolic)
Solve (Hyperbolic) Kepler’s Equation
Speed of FPV in Orbital Plane
( )coshsinh
a e Fb F
ξη
⎧ = −⎨
=⎩
( )sinhe F F n t T− = −
cosh 1nF
e F=
−
sinhcosh
aF FbF F
ξη
⎧ = −⎨
=⎩

Element to PV (2)Reverse Euler Rotation
( ) ( )⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−−−=00
,, ηξ
ηξ
ω ΩI, 313Rvx

Kepler’s EquationFirst Transcendenal Equation in HistoryElliptic
Parabolic
Hyperbolic
MEeE =− sin
PM=+3
3ττ
HMFFe =−sinh

Elliptic Kepler’s Eq.Eccentric Anomaly: E Mean Anomaly: MKepler’s 3rd LawTrue Anomaly: f
MEeE =− sin
( )⎩⎨⎧
===−=
frEbfreEa
sinsincoscos
ηξ
32an=μ
( )M n t T= −

Solution of Kepler’s Eq.
Domain Reduction
Newton Method
( )
( ) ( )( )
( )
*
* cos sin' 1 cos
E f E
f E M e E E Ef E E
f E e E
→
− −≡ − =
−
( ) 0sin =−−≡ MEeEEf
0 0M M Eπ π−∞ < < ∞⇒ ≤ < ⇒ ≤ <

Stable Starter of Newton Merthod
Stability Theory ofNewton MethodUpper Bound as Stable StarterExamples
( ) ( )( ) ( ) 0'',0'
,00>>
<≤EfEf
ff π
( ) ( )
⎟⎠⎞
⎜⎝⎛
++
+−
=
⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛=
eeMeM
eM
fffE
1 ,,
1min
,2
,0min ***0
π
ππ
( )0* Ef

Perturbed KeplerianOrbit
Element = Slow Function of Time
Perturbation TheoryPolynomials + Fourier Series
( ) ( )tΛTΩIeaΛ =≡ ,,,,, ω
( )∑ ++
+++=
kkkkk tStC
tΛtΛΛΛνν sincos
2210

Complicated OrbitEq. of MotionSolution
Numerical: Numerical IntegrationAnalytical: Perturbation Theory
Parameters Estimation by Fitting Solution to Obs. DataResult: Astronomical Ephemeris
+−
= xx32
2
rdtd μ

Astronomical EphemerisNumerical: DE (NASA/JPL, USA)Analytical: VSOP/ELP (BdL, France)DE: Available through NAOJ/ADAC
Software (Fortran/C) + Binary FilesDE408: BC10000-AD10000, UNIX/Win/MacPV of Sun, Moon, and 9 Major Planets
Whole Solar System Bodies: HORIZONShttp://ssd.jpl.nasa.gov/

9. Signal PropagationGeometric Optics ApproximationBasic: One-way PropagationApplication: Multi-way Prop.Light Direction: Aberration & ParallaxDoppler ShiftPropagation Delay

One-Way PropagationPhoton: Linear Motion
Constant Speed of LightSpecial Theory of Relativity
( ) ( )000 ttt −+= VXX
c=0V
Source
Observer
t = t0
t = t1
Photon

Passive ObservablesArrival Epoch
Incoming Direction
Observed Wavelength
1t
1d
1λ

Eq. of Light TimeWithin Solar SystemDeparture EpochArrival EpochLight Time = Duration
Equation to Solve LT ( )10c Rτ τ=
S
O
01 tt −≡τ
0t1t

Eq. of Light Time (2)Diff. in Departure/Arrival Position
( )1 0 1 0t t− = −x x V
Evaluate Magnitude of Diff. Vector
Assume that Source/Observer Motions are Known
10R Vτ=
( ) ( )tt OS xx ,

Eq. of Light Time (3)
V c=
( ) ( ) ( ) ( )( ) ( ) ( ) ( )
0 0 1 1 10 10
10 1 0 1 1
, , ,S O
O S S
t t R
t t t
τ τ
τ τ
= = ≡
= − = − −
x x x x R
R x x x x
Use Constant Speed of Light
Final: Equation of Light Time
( )10c Rτ τ=

Eq. of Light Time (4)
Newton Method
Correction Formula
( ) ( ) 0f c Rτ τ τ≡ − =
( )*fτ τ→
( ) ( )( )
( ) ( )( )
* '' '
f R Rf
f c Rτ τ τ τ
τ ττ τ
−′ ≡ − =−

Eq. of Light Time (5)Initial Guess: Infinite Speed of LightOne Newton Correction
Next Stage: General Relativity Needed
( ) ( )1 * 0 SO
SO
Rfc V
τ ≡ =−
( ) ( )( ) ( )( )1 1 1 11 1 , S S
SO S SOSO
t tR t V
R− ⋅ −
= − =v v x x
x x

Light Direction
Aberration: Effect of Observer’s VelocityParallax: Effect of Observer’s PositionPeriods: Annual, Diurnal, Monthly, etc. Correction for Light Time: MUST within Solar System
101
1 10R−−
= =RVd
V

AberrationBradley (1727)Finiteness of Speed of Light
Ex.: Raindrops Trails on Side WindowVector Expression of Aberration
( ) ( )1 1
1 1
' cc c
− − − ⋅+= = ≈ +
− +1 1 1
1
V v v d v dd vd dV v d v
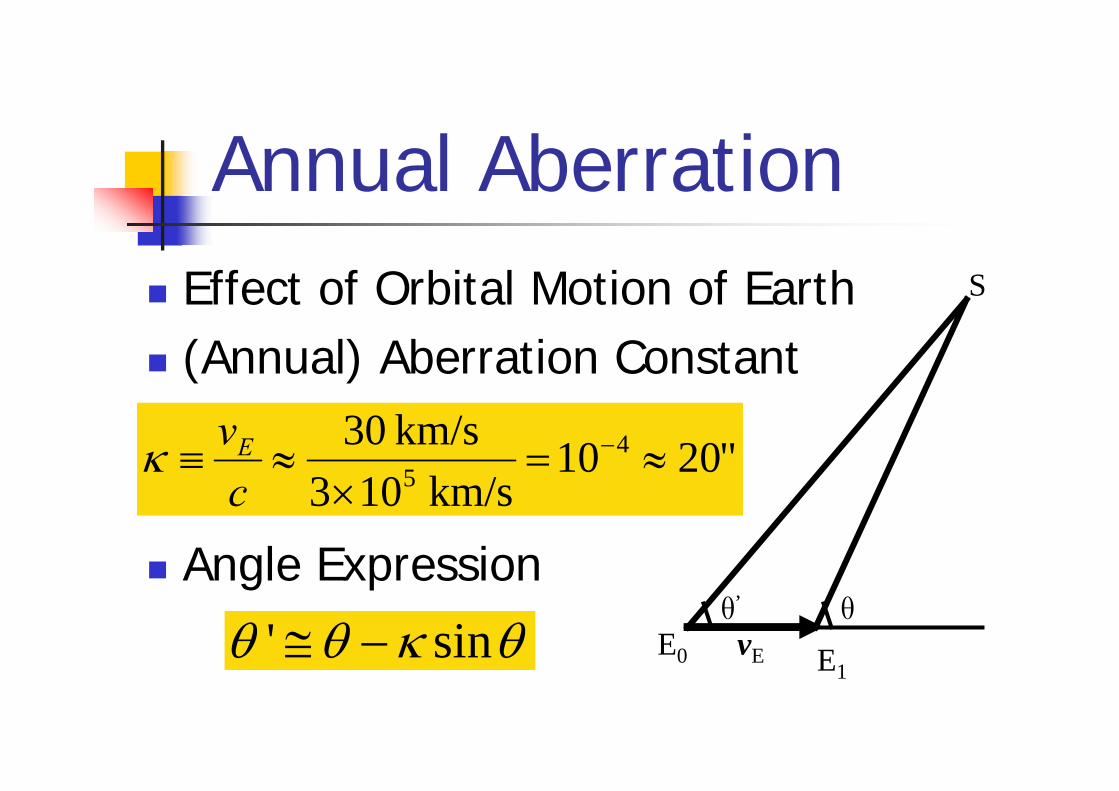
Annual AberrationEffect of Orbital Motion of Earth(Annual) Aberration Constant
Angle Expression
"2010km/s 103
km/s 30 45 ≈=
×≈≡ −
cvEκ
' sinθ θ κ θ≅ −
S
E0
θ’
E1
θvE

Annual Aberration (2)Ecliptic Coordinate System is UsefulApproximation Formula
Mean Longitude of Sun: LAberration Ellipse
( )( ) ( )⎩⎨⎧
−−≈Δ−≈Δ
λκλβλβκβ
LL
A
A
coscossinsin
( ) 1sin
cos22
=⎟⎟⎠
⎞⎜⎜⎝
⎛ Δ+⎟
⎠⎞
⎜⎝⎛ Δ
βκβ
κλβ AA

Diurnal AberrationEffect of Earth RotationEquatorial CS is UsefulDiurnal Aberration Constant
Approx.Formula
Sidereal Rotation Angle: Θ, Geoc. Lat.: φ
( )( ) ( )⎩⎨⎧
−Θ−≈Δ−Θ≈Δ
αφκαδαδφκδ
coscos''cossinsincos''
A
A
"3.0106.1m/s103
m/s480' 68 ≈×=
×≈≡ −
cR EEωκ

ParallaxBessel (1838): 81 CygniDeviation of Observer’s Position from its Mean Value
Ex.: Direction Difference between Right/Left Eye’s View
Vector Expression of Parallax( )1 0 1 00 1 0 1 0
00 1 0 1 0 0
rR r r
− ⋅− −= = = ≈ −
− −x d x dx x d xRd d
x x d x

Annual ParallaxEffect of Earth Orbital MotionAlternative Distance Measure
Angle Expression0
AU 1r
≈π
00 sinθπθθ +≈Sun E
S
θ0 θ

Annual Parallax (2)Approximation Formula in Ecliptic CS
Note: 90 deg Phase Diff. from AberrationParallactic Ellipse
( )( ) ( )⎩⎨⎧
−≈Δ−≈Δ
00
00
sincoscossin
λπλβλβπβ
π
π
LL
( ) 1sin
cos2
0
20 =⎟⎟
⎠
⎞⎜⎜⎝
⎛ Δ+⎟
⎠⎞
⎜⎝⎛ Δ
βπβ
πλβ ππ

Diurnal ParallaxEffect of Earth Radius: Moon, Artificial Sat.Approximation Formula in Equatorial CS
Yet Another Distance Measure: Horizontal Parallax
( )( ) ( )⎩⎨⎧
−Θ≈Δ−Θ≈Δαφπαδαδφπδ
π
π
sincos''coscossincos''
πππ 51 104AU1
sin' −− ×≈⎟⎠⎞
⎜⎝⎛≈⎟
⎠⎞
⎜⎝⎛≡ EE R
rR

Doppler ShiftClassic (= Non-Relativistic) Approximation
Outgoing Object = Red ShiftIncoming Object = Blue Shift
( )c
z dvv ⋅−=
−≡ 10
0
01
λλλ

Doppler Shift (2)Similar to Aberration
Again Aberration Constant
Annual Doppler Shift
Diurnal Doppler Shift
( )λβκ −≈Δ Lz sincos
( )αδφκ −≈Δ Θz sincoscos''

Propagation DelayVacuum Delay: General Relativity
Color Independent
Medium DelayEminent in Longer Wavelength (Radio, etc.)Inter-Galactic/Stellar Matter, Solar CoronaIonosphere, TroposphereAtomosphere

Wavelength-Dependent Delay
Elimination by Multiple Wave ObservationGeodetic VLBI: S-band + X-bandGPS: L1-band + L2 bandSpace Vehicle: Up-Link + Down-Link
Use of Empirical Model: Not-GoodSolar Corona, Ionosphere, Troposphere
( ) +++=Δ 2fC
fBAfτ

Delay ModelSolar Corona
Muhleman and Anderson (1981)
Troposphere (Chao 1970): Zenith Angle, z
∫=Δ dsNcf e2CORONA
3.40τ += 6rANe
045.0cot0014.0cos
ns7TROP
++
=Δ
zz
τ

RefractionVariation in Incidental Zenith Angle
Saastamoinen (1972)
P: Atmosph. Pressure (Unit: hP)PW: Water Vapor Pr. (Unit: hP) T: Absolute Temperature (Unit: K)
++=Δ zbzaz 3tantan
z⎟⎠⎞
⎜⎝⎛ −
=T
PPa W156.0271".16

Multi-Way PropagationAppl. of One-Way Prop.Series of Eq. of Light Time
Ex.: Three-Way (t3, t2, t1, t0 )
Delay in RelayOptical: 0Radio: Constant
Specific to Transponder
Source
Observer
Relay 1
Relay 2
t0
t1
t2
t3

Round-Trip PropagationTypical Active ObservationObservable
Emission/Reception EpochsUseful even when Target Motion is UnknownSum of One-way Prop.Cancellation at 1st Order Observer
Target
t2
t0
t1

Round-Trip Light TimeApproximation of Reflection Epoch
Approximation of Distance at Reflection
20 2 2 0
1 2 2t t t tvt O
c⎛ ⎞+ −⎛ ⎞⎛ ⎞= + ⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟⎝ ⎠ ⎝ ⎠⎝ ⎠
( ) ( ) ( )2
2 01 11 ,
2SO SO S O
c t t vR O R t tc
⎡ ⎤− ⎛ ⎞= + = −⎢ ⎥⎜ ⎟⎝ ⎠⎢ ⎥⎣ ⎦
x x

Quasi-Simultaneous Propagation
t2
Almost Same ArrivalPair of Eq. of Light TimeDifference in Arrival Epoch
t1
t0
Observer 1
Observer 2
Source
b
k12 tt −=τ

Interference Observation Equation
( )( )
2 1
0 1 2
0 1 2
/ 2/ 2
= −
− +=
− +
b x xx x x
kx x x
Difference in Eq. of Light TimeAlias: VLBI Observation Eq.
Baseline Vector bMidpoint Direction k
cτ = − ⋅b k

Quasi-Periodic Propagation
Arrivals with Similar IntervalSeries of Eq. of Light TimeInitial Arrival Epoch
AssumptionConst. Interval at Source
0N Nt t tΔ = −
T0 ,X0
Observer
t0 , x0
…
TN ,XN
tN , xN
Source
N-th
0N NT T T N TΔ = − = Δ
0th

Arrival-Time Observation Equation
( ) ( )0 0
0 00
0 0
N N N= − − −
−=
−
B x x X XX xKX x
Diff. from Initial Eq. of Light TimePulsar Arrival-Time Observation Eq.
Baseline Vector BInitial Direction K
00
NN N
Bc t cN T OR
⎛ ⎞Δ = Δ − ⋅ + ⎜ ⎟
⎝ ⎠B K

10. Least Square Method (LSM)
Gauss (1801): Ceres Orbit DeterminationTypical Optimization ProblemObjective Function: Φ(λ)
Optimization = 0 PD of Objective Function= Set of Linear Equation (=Normal Eq.)
( ) ( ) 2,j j
jf t gλ λ⎡ ⎤Φ = −⎣ ⎦∑

Application of LSMData Analysis by Model Fitting
Linear Motion: Mean Place/Proper MotionKepler Ellipse: Binary Orbit DeterminationKepler Parabola: Comet Orbit DeterminationOffset: Correction to Existing ModelModel Parameters: Geopotential CoefficientsInitial Conditions: Numerical EphemerisProper Elements: Analytical Orbit Theory

Zero Partial DerivativeOptimization = Zero PDTaylor Expansion
Usage of Newton MethodNormal Equation H bλΔ = −
( )2
0 0
jji i i j
λ λλ λ λ λ
⎛ ⎞⎛ ⎞ ⎛ ⎞∂Φ ∂Φ ∂ Φ= + Δ +⎜ ⎟⎜ ⎟ ⎜ ⎟ ⎜ ⎟∂ ∂ ∂ ∂⎝ ⎠ ⎝ ⎠ ⎝ ⎠
∑
0iλ
∂Φ=
∂
Normal EquationHessian Matrix: Positive Def., SymmetricStandard: Modified Cholesky MethodCaution!: Rank Deficiency, DegeneracyRecipe
General Inverse: Popular in GeodesyOrthogonal Basis ExpansionCheck Correlation Among VariablesGood Initial Guess
Extension of LSMWeighted LSM
Chi-Square FittingNon-Linear LSM
Gaussian Approx., Quasi-Newton Method
LSM Associated with Dynamical SystemIntegration of Variational Eq. of Motion

Error EstimationVariance-Covariance Matrix: Correlation among ParametersDiagonalization of Hessian Matrix
Determine Error EllipsoidMinimum of Obj. F.
No Meaning if Non-DiagonalizedPractical Estimate: Very Difficult
02j
jjHσ Φ
=

11. Crush Course of General Rel. EffectsTheories and PrinciplesGalilean ApproximationNewtonian ApproximationPost-Galilean ApproximationPost-Newtonian ApproximationDragging of Inertial Frame

Relativistic Theory
Special Theory of RelativityEinstein’s General Theory of RelativityOther Gravitational Theories
Brans-Dicke, Nordvegt, Ng, …Scalar-Vector, Scalar-Tensor, …Parametrized Post-Newtonian (PPN) Approximation

PrinciplesSpecial Theory of Relativity (STR)
Principle of Special RelativityPrinciple of Constancy of Light SpeedPrinciple of Limit of STR
General Theory of Relativity (GTR)Principle of General RelativityPrinciple of EquivalencePrinciple of Limit of GTR

Principle of LimitUnspoken but ImportantSpecial Theory of Relativity
Limit of Infinite c = Newton MechanicsGeneral Theory of Relativity
Limit of Infinite c = Newton Mechanics + Law of Universal AttractionLimit of Zero Gravity = STR

4-Dim. Spacetime3+1 Dimension Expression
Metric Tensor
( )0,1,2,3 =μμx
( )3
2
, 0
d d ds g x xμ νμν
μ ν =
= ∑
ctx =0

Proper Time
( ) ( )2 22 d dc sτ = −Definition
Reading of a Clock Moving with Observer4-Velocity d
dxuμ
μ
τ=
RTN

Galilean Metric
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛−
≡≅
1000010000100001
μνμν ηg
⎟⎟⎠
⎞⎜⎜⎝
⎛−=≅
I00T
HG1

Lorentz Transformation
( )( ) ( )
cosh sinh sinh cosh
T
Lψ ψ
ψ ψ⎛ ⎞
= ⎜ ⎟⎜ ⎟⊗⎝ ⎠
nn n n
Basic Formula (1-D Space)
General Formula (3-D Space)
ˆ cosh sinhˆ sinh cosh
c tc txx
ψ ψψ ψ
Δ⎛ ⎞Δ ⎛ ⎞⎛ ⎞=⎜ ⎟ ⎜ ⎟⎜ ⎟ΔΔ ⎝ ⎠⎝ ⎠⎝ ⎠
1tanh vc
ψ −=
vvn =

Poincare TransformationNatural Extension of Lorentz Transf.
= Parallel Shift of Origin + Lorentz Transf. + Rotation
( ) μαμ
αμα xPxxx Oˆˆˆ +=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
R001
RP LR=

Newtonian Metric
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ +−≅I0
0T
cG 2
21 φ
Gravitational Force Function φNote Signature: φ > 0

Time DilatationNewtonian Approximation
Lorentzian TD: Moving Clock DelaysGravitational TD: Delay Under Grav. F.Meaning of Effective Grav. Potential
2eff
2 2
d 11 1dt 2
vc c
φτ φ⎛ ⎞
≈ − + = −⎜ ⎟⎝ ⎠

Wavelength ShiftPhase = Gauge Invariant
Independent on Choice of CS
2nd Order Doppler ShiftGravitational Red Shift
ττ
ωωθ Δ−
=Δ
=Δ
⇒=Δff0

Post-Galilean Metric
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
⎟⎠⎞
⎜⎝⎛ +
+−≅
I1 2
2
2
21
c
cG
T
γφ
φ
0
0

PPN Formalism
C.F. Will (1981)Parametrized Post-Newtonian (PPN) F.PPN Parameters: α=1, β, γ, …α=1
Principle of EquivalenceOne of Principles of Limit (GTR)

PPN ParameterGTR: β=γ=1、他は0Nonlinearity of Grav. F.: βSpatial Curvature: γAll Experiments Support GTR
Planetary Motion: β = 1.00Radio Bending by Sun: γ = 1.000

GeodesicExtension of Straight Line
Extended Law of Inertia in GTR
Timelike Geodesic: World Line (WL) of Massive ParticleNull Geodesic: WL of Particle with Zero Rest Mass (Photon, etc.)Spacelike Geodesic: Spatial Coord. Axis

Eq. of GeodesicPrinciple of Equivalence
Gravity is Not A Force
Path of Free-Fall Particle = GeodesicEquation of Timelike Geodesic
d 0dua Γ u uμ
μ μ ν ρνρτ
= + =

Christoffel’s Symbol
⎟⎟⎠
⎞⎜⎜⎝
⎛∂
∂−
∂
∂+
∂
∂= ρ
μννμρ
μρνλρλ
μν xg
xg
xg
gΓ21
Not A Tensor = Depends on CSCan Be 0 at One Point by Coord. Transf.
Extension of Gravitational Acceleration
Inverse Metric Tensor νλ
μνλμ δ=gg

Eq. of Motion of PhotonPath of Photon = Null Geodesic
Newtonian Gravitational Acceleration: aSolution by Successive Approximation
0dk Γ k kd
μμ ν ρνρλ
+ =
( )2 2
d 1 dt c c
γ ⋅⎡ ⎤+⎛ ⎞⇒ = + −⎢ ⎥⎜ ⎟⎝ ⎠ ⎣ ⎦
a v vv 0 a

Gravitational LensingGrav. Field = Convex LenseDeflection Angle
Large Defl.: 2~4 Images, RingMicrolensing = Light Amplification
Detection of MACHO
( )2
1tan
2S
SEc rγ μ ψθ
+Δ = S
Δθ
E
P
ψ

Gravitational DelayShapiro Effect (Shapiro 1964)
Radar Bombing of PlanetsPulsar Arrival Time Observation
Solar System: Sun, Jupiter, EarthBinary Pulsar: Companion
S
P
E
( )3
1logS SE SP PE
SE SP PE
r r rc r r rγ μ
τ+ ⎛ ⎞+ +
Δ = ⎜ ⎟+ −⎝ ⎠

Post-Newtonian Metric
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
⎟⎠⎞
⎜⎝⎛ +
++−≅
I1 23
342
2
221
cc
ccΦ
cG
T
γφ
φ
g
g
Nonlinear Scalar PotentialVector (Gravito-Magnetic) Potential g
2Φ βφ= +

4-Acceleration4-Dim. Acceleration
Absolute Derivative, DProper (=Rest) Mass, m4-Force
D dd du ua Γ u uμ μ
μ μ ν ρνρτ τ
≡ = +
μμ maf =

PN Eq. of MotionEIH(Einstein, Infeld, Hoffmann)Eq. of Motion
( )2 2
ddt
1 3 4
KK
J JK JK JK JKJ
J K JK JK
A Bc r r
μ γ≠
=
⎛ ⎞ ⎡ ⎤++ + +⎜ ⎟ ⎢ ⎥
⎝ ⎠ ⎣ ⎦∑
v a
r v a
3 , J JKK JK J K
J K JKrμ
≠
= = −∑ ra r r r

PN Eq. of Motion (2)
( ) ( )
( ) ( )
( ) ( )
2
22
,
2 2 1
3 1 2 1 ,2 2
2 2 1 2
JK J K
L LJK K
L K L JKL JL
JK J JK JJ J K
JK
JK JK K J
Ar r
r
B
μ μβ γ β γ
γ γ
γ γ
≠ ≠
= −
= − + − − +
⎛ ⎞⋅ ⋅+ + − + ⋅ − +⎜ ⎟
⎝ ⎠= ⋅ + − +⎡ ⎤⎣ ⎦
∑ ∑
v v v
v
r v r av v v
r v v

Dragging of Inertial Frame
Locally Parallel Shift of Origin ≠ Global Non-Rotation
No Coriolis Force ≠ Rest w.r.t. Quasar
Fermi TransportationGR Extension of Parallel Shift of Origin
Proper CS = Fermi-Transported CS

Dragging of Inertial Frame (2)
Rotation Velocity of Proper CSSTR: Thomas PrecessionGTR
Geodesic Precession~1.92 arcsec/jcDe Sitter (1917)
Lense-Thirring EffectGravito-Magnetic Effect
3cav×
( )3
1c
γ φ+ ×∇v
3c∇×g

12. ReferencesKovalevsky et al. (eds); 1989, Reference Frames, Kluwer Acad. Publ.Seidelmann (ed.); 1992, Expl. Suppl. To Astr. Almanac, Univ. Sci. Books.Soffel; 1989, Relativity in Astrometry, Cele. Mech. & Geodesy, Springer-Verlag.Woolard and Clemence; 1966, Spherical Astronomy, Acad. Press.

References (2)Kovalevsky and Seidelmann; 2004, Fundamentals of Astronomy, Cambridge Univ. Press.McCarthy and Petit (eds); 2004, IERS Convention 2003, IERS Tech. Note 32.Smart; 1956, Spherical Astronomy, Cambridge Univ. Press.

AuthorToshio FUKUSHIMA,Prof. Dr.National AstronomicalObservatory of Japan (NAOJ)2-21-1, Ohsawa, MitakaTokyo 181-8588, Japan [email protected]://chiron.mtk.nao.ac.jp/~toshio/