
Impact damping and friction in non-linear mechanical systems ...
179
Impact damping and friction in non-linear mechanical systems with combined rolling-sliding contact Dissertation Presented in Partial Fulfillment of the Requirements for the Degree Doctor of Philosophy in the Graduate School of The Ohio State University By Sriram Sundar, B. E. Graduate Program in Mechanical Engineering The Ohio State University 2014 Dissertation Committee: Prof. Rajendra Singh, Advisor Prof. Dennis A Guenther Prof. Ahmet Kahraman Prof. Vishnu Baba Sundaresan Dr. Jason T Dreyer
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of Impact damping and friction in non-linear mechanical systems ...

Impact damping and friction in non-linear mechanical systems with
combined rolling-sliding contact
Dissertation
Presented in Partial Fulfillment of the Requirements for the Degree Doctor of Philosophy
in the Graduate School of The Ohio State University
By
Sriram Sundar, B. E.
Graduate Program in Mechanical Engineering
The Ohio State University
2014
Dissertation Committee:
Prof. Rajendra Singh, Advisor
Prof. Dennis A Guenther
Prof. Ahmet Kahraman
Prof. Vishnu Baba Sundaresan
Dr. Jason T Dreyer

Copyright by
Sriram Sundar
2014

ii
ABSTRACT
This research is motivated by the need to have a better understanding of the non-
linear contact dynamics of systems with combined rolling-sliding contact such as cam-
follower mechanism, gears and drum brakes. Such systems, in which the dominant
elements involved in the sliding contact are rotating, have unique interaction among
contact mechanics, siding friction and kinematics. Prior models used in the literature are
highly simplified and do not use contact mechanics formulation hence the dynamics of
the system are not well understood. The main objective of this research is to gain a
fundamental understanding of the non-linearities and contact dynamics of such systems,
for which a cam-follower mechanism is used as an example case. Specifically, the non-
linearities, impact damping and coefficient of friction are analyzed in this study. The
problem is examined using a combination of analytical, experimental, and numerical
methods.
First, the various non-linearities (kinematic, dry friction, and contact) of the cam-
follower system with combined rolling-sliding contact are investigated using the Hertzian
contact theory for both line and point contacts. Alternate impact damping formulations
are assessed and the results are successfully compared with experimental results as
available in the literature. The applicability of the coefficient of restitution model is also
critically analyzed. Second, a new dynamic experiment is designed and instrumented to

iii
precisely acquire the impact events. A new time-domain based technique is adopted to
accurately calculate the system response by minimizing the errors associated with
numerical integration. The impact damping force is considered in a generalized form as a
product of damping coefficient, indentation displacement raised to the power of damping
index, and the time derivative of the indentation displacement. A new signal processing
procedure is developed (in conjunction with a contact mechanics model) to estimate the
impact damping parameters (damping coefficient and index) from the measurements by
comparing (on the basis of three residues) them to the results from the contact mechanics
model. Also few unresolved issues regarding the impact damping model are addressed
using the experimental results. Third, the coefficient of friction under lubrication is
estimated using the same experimental setup (operating under sliding conditions). A
signal processing technique based on complex-valued Fourier amplitudes of the measured
forces and acceleration is proposed to estimate the coefficient of friction. An empirical
relationship for the coefficient of friction is suggested for different surface roughnesses
based on a prior model under lubrication. Possible sources of errors in the estimation
procedure are identified and quantified.
Some of the major contributions of this research are as follows. First, impact
damping model was determined experimentally and related unresolved issues were
addressed. Second, coefficient of friction for a cam-follower system with point contact
under lubricated condition was estimated. Finally, better understandings of the effect of
non-linearities and shortcomings of coefficient of restitution formulation are obtained.

iv
Dedication
To the lotus feet of my spiritual master
His Holiness Sri Rangaraamaanuja Mahaadesikan

v
ACKNOWLEDGEMENTS
First, I would like to thank my advisor, Prof. Rajendra Singh, for his patience and
guidance throughout my graduate study. His tremendous experience and knowledge has
been helped me overcome the difficulties faced during this process. I also would like to
express my deepest appreciation to Dr. Jason Dreyer for his extremely valuable support
in the experimental work and many technical discussions. I would like to thank my
committee members, Prof. Guenther, Prof. Kahraman and Prof. Sundaresan for their time
to review my work. I also would like to thank Caterina Runyon-Spears for her careful
reviews of this work and all the members of Acoustics and Dynamics Lab for their
providing with an amicable atmosphere over the past four years. Special thanks to
Laihang for helping me record the experimental data. I would like to thank the Vertical
Lift Consortium, Inc., Smart Vehicles Concept Center (www.SmartVehicleCenter.org)
and the National Science Foundation Industry/University Cooperative Research Centers
program (www.nsf.gov/eng/iip/iucrc) for partially supporting this research.
I am most grateful to my parents, brother, fiancée and other family members for
their constant faith, support and patience. I would like to thank all my friends especially,
Adarsh, Ranjit, Sriram, Saivageethi and Darshan who made my graduate life, away from
home, a memorable one. Also a special thanks to Sriram’s mom, for her mother-like care
during all her visits in these four years.

vi
VITA
December 25, 1985……………………………… Born - Chennai, India
2003……………………………………………… B. E. Mechanical Engineering
Anna University,
Chennai, India
2009 – Present…………………………………… University Fellow/ SVC Fellow
Graduate Research Associate
The Ohio State University
Columbus, OH
PUBLICATIONS
1. S. Sundar, J. T. Dreyer and R. Singh, Rotational sliding contact dynamics in a non-
linear cam-follower system as excited by a periodic motion, Journal of Sound and
Vibration, (2013).
2. S. Sundar, J. T. Dreyer and R. Singh, Effect of the tooth surface waviness on the
dynamics and structure-borne noise of a spur gear pair, SAE Technical Paper 2013-01-
1877, 2013, SAE Noise and Vibration Conference.
FIELDS OF STUDY
Major Field: Mechanical Engineering
Main Study Areas: Mechanical Vibrations, Nonlinear Dynamics, Sliding Contact
Systems, Contact Mechanics.

vii
TABLE OF CONTENTS
Page
ABSTRACT……………………………………………………………...……………… ii
DEDICATION…………………………………………………………………………... iv
ACKNOWLEDGEMENTS……………………………………………………...………. v
VITA……………………………………………………………………………..…….... vi
LIST OF TABLES ............................................................................................................ xi
LIST OF FIGURES ........................................................................................................ xiii
LIST OF SYMBOLS ...................................................................................................... xix
CHAPTER 1: INTRODUCTION....................................................................................... 1
1.1 Motivation ........................................................................................................ 1
1.2 Literature review............................................................................................... 2
1.3 Problem formulation......................................................................................... 4
References for Chapter 1 ..................................................................................... 10
CHAPTER 2: ROTATIONAL SLIDING CONTACT DYNAMICS IN A NON-LINEAR
CAM-FOLLOWER SYSTEM AS EXCITED BY A PERIODIC MOTION………..… 16
2.1 Introduction .................................................................................................... 16
2.2 Problem formulation………………………………………………………... 17
2.3 Analytical model……………………………………………………….…… 20
2.3.1 Relationship between the coordinate systems……………….……. 20

viii
2.3.2 Equations of motion………………………………………………. 21
2.3.3 Static equilibrium and linearized natural frequency……………… 24
2.3.4 Contact damping and dry friction models……………………….... 25
2.4 Examination of the contact non-linearity and alternate damping models…... 27
2.5 Assessment of the coefficient of restitution (ξ) concept……………………. 33
2.6 Study of the line and point contact models in the sliding contact regime….. 38
2.7 Analysis of the friction non-linearity……………………………………….. 40
2.7.1 Effect of direction………………………………………………… 40
2.7.2 Dynamic bearing and friction forces……………………………… 40
2.8 Study of kinematic non-linearity…………………………………………… 47
2.9 Conclusion………………………………………………………………….. 49
References for Chapter 2 ..................................................................................... 53
CHAPTER 3: ESTIMATION OF IMPACT DAMPING PARAMETERS FROM TIME-
DOMAIN MEASUREMENTS ON A MECHANICAL SYSTEM……………...…….. 58
3.1 Introduction…………………………………………………………...…….. 58
3.2 Problem formulation……………………………………………………...… 59
3.3 Design of the laboratory experiment and instrumentation………………….. 61
3.4 Analytical model……………………………………………………………. 62
3.4.1 Kinematics of the system……………………………………….… 62
3.4.2 Non-contact regime……………………………………………..… 65
3.4.3 Contact regime…………………………………………………..... 66
3.5 Estimation of the impact damping parameters (β and n)…………………… 68

ix
3.5.1 Time-domain based technique to estimate the system response….. 68
3.5.2 Signal processing procedure to estimate β and n…………………. 70
3.6 Error and sensitivity analyses on the estimation procedure……………….... 72
3.6.1 Error analysis…………………………………...………………… 72
3.6.2 Sensitivity analysis……………………………………..…………. 76
3.7 Estimation of the impact damping from the measurements………………… 79
3.8 Equivalent coefficient of restitution………………………………………… 84
3.8.1 Governing equation………………………………………..……… 84
3.8.2 Estimation of the equivalent ξ model……………………...……… 86
3.8.3 Justification of the estimated impact damping parameters……….. 90
3.9 Conclusion………………………………………………………………….. 91
References for Chapter 3……………………………………………………….. 93
CHAPTER 4: ESTIMATION OF COEFFICIENT OF FRICTION FOR A
MECHANICAL SYSTEM WITH COMBINED ROLLING-SLIDING CONTACT
USING VIBRATION MEASUREMENTS………………………………………..…… 98
4.1 Introduction………………………………………………………………..... 98
4.2 Problem formulation……………………………………………………...… 99
4.3 Contact mechanics model……………………………………………...….. 102
4.4 Experiment for the determination of µ………………………………….…. 107
4.5 Identification of system parameters…………………………………..…… 108
4.5.1 Identification of geometrical parameters…………………..…..... 108

x
4.5.2 Identification of the modal damping ratio………………………. 113
4.6 Signal processing technique to estimate µ……………………………….... 114
4.7 Experimental results and friction model…………………………………... 119
4.8 Potential sources of error in the estimation of µ…………………...……… 123
4.9 Conclusion…………………………………………………………...……. 130
References for Chapter 4 ................................................................................... 132
CHAPTER 5: CONCLUSION……………………………………………………...… 137
5.1 Summary ………………………………………………………………..… 137
5.2 Contributions …………………………………………………………...… 138
5.3 Future work ……………………………………………………………..… 139
References for Chapter 5 ................................................................................... 141
BIBLIOGRAPHY…………………………………………………………………..…. 142

xi
LIST OF TABLES
Table Page
3.1 Comparison of average residues per impact (Λ1, Λ2 and Λ3) using two simulations
(S1 and S2) with 1 2 2.524.7 GNsmS Sβ β −= = and 1 2 1.5S S
n n= = ………………….. 75
3.2 Comparison of normalized average residues per impact (1 2 3, andΛ Λ Λ ) using
simulation S2 ( 2 2.524.7 GNsmSβ −= and 2 1.5S
n = ) with e/rc = 0.2 and Ωc = 16 Hz.
a) For different values of 1Sβ in the proximity of 2Sβ with constant value of
1 2S Sn n= .b) For different values of 1S
n in the proximity of 2Sn with constant value
of 1 2S Sβ β= ………………………...………………………………………...…. 78
3.3 Error in the estimation of ξ model using time histories from simulation S3
( )3 0.8s/mSγ = ………………………………………………………………...….. 88
4.1 Comparison of measurements and predictions (from the contact mechanics model)
with µ = 0.51 and e/a = 0.116 at the harmonics of Ωc = 11.55 Hz…………....… 122
4.2 Error in the estimation of µ for the mechanical system with a circular cam for
different values of e at Ωc = 11.55 Hz………………………………………..…. 127
4.3 Error in the estimation of µ for the mechanical system with circular cam for
different cam speeds with e/a = 0.1…………………………………………...… 128

xii
4.4 Error in the estimation of µ for the mechanical system with an elliptic cam at Ωc =
8.33 Hz and e = 0.1 a…………………………………………………………..... 130

Figure
1.1
1.2
2.
2.2
2.3
2.4
2.5
Figure
1.1 Analytical model of typical cam
formulation
1.2 Cam-follower experiment designed
view of the cam
contact………………………………………………………………………………
2.1 Cam-follower system in the general state where a non
model, k
2.2 Free body diagram of the follower in the sliding contact regime
2.3 Normalized d
Coulomb friction (Model I);
2.4 Comparison
mechanics
model C;
from literature [8];
2.5 Comparison of predicted
data at Ω
Analytical model of typical cam
formulation………………………………………………………
follower experiment designed
view of the cam-follower experiment built using a lathe; b) Closer view of the
contact………………………………………………………………………………
follower system in the general state where a non
kλ(ψi(t)), is employed
Free body diagram of the follower in the sliding contact regime
Normalized dry friction models (equations are given in Section
Coulomb friction (Model I);
Comparison of r
rmsα
mechanics formulation with damping model A
model C; , damping model D;
from literature [8];
Comparison of predicted
data at Ωc = 155rpm.
LIST OF
Analytical model of typical cam
………………………………………………………
follower experiment designed
follower experiment built using a lathe; b) Closer view of the
contact………………………………………………………………………………
follower system in the general state where a non
, is employed……………………………
Free body diagram of the follower in the sliding contact regime
ry friction models (equations are given in Section
Coulomb friction (Model I);
r
rms and r
pα at lower speeds.
formulation with damping model A
, damping model D;
, prior analytical result from literature
Comparison of predicted ( )r tα
= 155rpm. Key: ,
xiii
LIST OF FIGURES
Analytical model of typical cam-follower system with contact mechanics
………………………………………………………
follower experiment designed to study the contact mechanics. a) Isometric
follower experiment built using a lathe; b) Closer view of the
contact………………………………………………………………………………
follower system in the general state where a non
……………………………
Free body diagram of the follower in the sliding contact regime
ry friction models (equations are given in Section
, Smooth
r
p at lower speeds.
formulation with damping model A
, damping model D; , damping model E;
, prior analytical result from literature
( )t using different damping models with experimental
, contact mechanics formulation with damping model
FIGURES
follower system with contact mechanics
………………………………………………………
to study the contact mechanics. a) Isometric
follower experiment built using a lathe; b) Closer view of the
contact………………………………………………………………………………
follower system in the general state where a non
……………………………
Free body diagram of the follower in the sliding contact regime
ry friction models (equations are given in Section
, Smoothened Coulomb friction (Model II)
at lower speeds. (a)r
rmsα
formulation with damping model A; , damping model B;
, damping model E;
, prior analytical result from literature
using different damping models with experimental
contact mechanics formulation with damping model
follower system with contact mechanics
…………………………………………………………………
to study the contact mechanics. a) Isometric
follower experiment built using a lathe; b) Closer view of the
contact………………………………………………………………………………
follower system in the general state where a non-linear contact stiffness
………………………………………..
Free body diagram of the follower in the sliding contact regime…………
ry friction models (equations are given in Section 2.
ened Coulomb friction (Model II)
r
rms ; (b) r
pα . Key:
, damping model B;
, damping model E; , experimental result
, prior analytical result from literature [2.8]
using different damping models with experimental
contact mechanics formulation with damping model
follower system with contact mechanics
…………...…..
to study the contact mechanics. a) Isometric
follower experiment built using a lathe; b) Closer view of the
contact………………………………………………………………………………
linear contact stiffness
…………..……...…….
……………...…
2.3.4). Key:
ened Coulomb friction (Model II)
. Key: , contact
, damping model B; , damping
, experimental result
[2.8]….…….....
using different damping models with experimental
contact mechanics formulation with damping model
Page
follower system with contact mechanics
…..… 6
to study the contact mechanics. a) Isometric
follower experiment built using a lathe; b) Closer view of the
contact……………………………………………………………………………… 7
linear contact stiffness
….. 19
… 22
3.4). Key: ,
ened Coulomb friction (Model II)... 28
contact
, damping
, experimental result
... 31
using different damping models with experimental
contact mechanics formulation with damping model

2.6
2.7
2.8
2.9
2.10
A; , damping model B;
model E;
2.6 Comparison of experimental and analytical results for
domain comparison; (b) Frequency domain comparison. Key:
contact mechanics formulation with damping model D;
from Alzate et al.
2.7 Map of
model;
from Alzate et al.
technique (given in Section
2.8 Map of
mechanics formulation;
analytical results from Alzate et al.
energy balance technique (given in Section
2.9 Identification of contact domains based on
with e = 0.1
2.10 Comparison of
showing harmonics of
Key:
, damping model B;
model E; , prior experimental result from literature
Comparison of experimental and analytical results for
domain comparison; (b) Frequency domain comparison. Key:
contact mechanics formulation with damping model D;
from Alzate et al. [2.8]
Map of r
pα vs. Ωc
, experimental results from Alzate et al.
from Alzate et al.
technique (given in Section
, ξ = 0.6………………………………………………………………..
Map of r
pα vs. Ωc
mechanics formulation;
analytical results from Alzate et al.
energy balance technique (given in Section
, ξ = 1. ………………………………
Identification of contact domains based on
= 0.1rc………………………………
Comparison of spectra (with
showing harmonics of
, de-energizing system with line contact (
αɺɺ
, damping model B; , damping model C;
, prior experimental result from literature
Comparison of experimental and analytical results for
domain comparison; (b) Frequency domain comparison. Key:
contact mechanics formulation with damping model D;
[2.8]………………….
at lower speeds. Key:
, experimental results from Alzate et al.
from Alzate et al. [2.8];
technique (given in Section 2.4.2) with
………………………………………………………………..
over a broad range of speeds. Key:
mechanics formulation; , experimental results from Alzate et al.
analytical results from Alzate et al.
energy balance technique (given in Section
………………………………
Identification of contact domains based on
………………………………
spectra (with
showing harmonics of Ωc; (b) Spectra showing natural frequency of the system
energizing system with line contact (
xiv
, damping model C;
, prior experimental result from literature
Comparison of experimental and analytical results for
domain comparison; (b) Frequency domain comparison. Key:
contact mechanics formulation with damping model D;
………………….…………………………….
at lower speeds. Key:
, experimental results from Alzate et al.
, prediction based on approximate energy ba
4.2) with ξ = 0.05;
………………………………………………………………..
over a broad range of speeds. Key:
, experimental results from Alzate et al.
analytical results from Alzate et al. [2.8];
energy balance technique (given in Section
………………………………
Identification of contact domains based on
………………………………
spectra (with µm = 0.3, ζ
; (b) Spectra showing natural frequency of the system
energizing system with line contact (
, damping model C; , damping model D;
, prior experimental result from literature
Comparison of experimental and analytical results for α
domain comparison; (b) Frequency domain comparison. Key:
contact mechanics formulation with damping model D;
…………………………….
at lower speeds. Key: , predictions from
, experimental results from Alzate et al. [2.8]
, prediction based on approximate energy ba
= 0.05;
………………………………………………………………..
over a broad range of speeds. Key:
, experimental results from Alzate et al.
, prediction based on approximate
energy balance technique (given in Section 2.4.2) with
…………………………………………………………………
Identification of contact domains based on ks - Ωc mapping at a constant cam speed
……………………………………………………...
ζD
= 0.01 and
; (b) Spectra showing natural frequency of the system
energizing system with line contact (lλ
, damping model D;
, prior experimental result from literature [2.8]…….
rα at Ωc = 155rpm
domain comparison; (b) Frequency domain comparison. Key:
contact mechanics formulation with damping model D; , experimental result
…………………………….
, predictions from contact mechanics
[2.8]; , prior analytical results
, prediction based on approximate energy ba
, ξ = 0.2;
………………………………………………………………..
over a broad range of speeds. Key: , predictions from
, experimental results from Alzate et al.
, prediction based on approximate
4.2) with ξ = 0.2;
…………………………………
mapping at a constant cam speed
……………………...…………
and βD
= 4.25
; (b) Spectra showing natural frequency of the system
lλ = 0.0016m,
, damping model D; , damping
…….………….
= 155rpm. (a) Time
domain comparison; (b) Frequency domain comparison. Key: , analytical
experimental result
……………………………..…………..
contact mechanics
, prior analytical results
, prediction based on approximate energy ba
= 0.2; , ξ = 0.4;
………………………………………………………………..…
, predictions from contact
, experimental results from Alzate et al. [2.8]; , prior
, prediction based on approximate
, ξ = 0.6;
………………………………….
mapping at a constant cam speed
…………...…..
s/m). (a) Spectra
; (b) Spectra showing natural frequency of the system
= 0.0016m, Ωc = 300 rpm
, damping
…………... 32
. (a) Time
, analytical
experimental result
………….. 33
contact mechanics
, prior analytical results
lance
= 0.4;
… 37
contact
, prior
, prediction based on approximate
= 0.6;
... 38
mapping at a constant cam speed
….. 42
(a) Spectra
; (b) Spectra showing natural frequency of the system.
= 300 rpm);

xv
, self-energizing system with line contact (lλ = 0.0016m, Ωc = -300 rpm);
, de-energizing system with point contact (Ωc = 300 rpm)……….……….. 43
2.11 Comparison of Fn(t) for different direction of cam rotation with line contact (lλ =
0.0016m, µm = 0.3, ζD
= 0.01 and βD
= 4.25 s/m). Key: , de-energizing (Ωc =
300 rpm); , self-energizing (Ωc = -300 rpm)…………………………….… 44
2.12 Comparison of relative sliding velocity vr(t) for two dry friction models of Fig. 2.3
(with Ωc = 50 rpm, e = 0.7rc , ζD
= 0.01 and βD
= 4.25 s/m). Key: , Coulomb
friction; , Smoothened Coulomb friction…………………….….………… 45
2.13 Comparison of forces for two dry friction models of Fig. 2.3 (with Ωc = 50 rpm, e =
0.7rc, ζD
= 0.01 and βD
= 4.25 s/m). (a) Nx(t); (b) Ff(t). Key: , Coulomb friction;
, Smoothened Coulomb friction……………………………………...……. 46
2.14 Comparison of relative sliding velocity vr(t) for two dry friction models of Fig. 2.3
(with ωc = 40 rpm, e = 0.7rc, ζD
= 0.01 and βD
= 4.25 s/m). Key: , Coulomb
friction; , Smoothened Coulomb friction………….………………………. 47
2.15 Comparison of forces for two dry friction models of Fig. 2.3 (with ωc = 40 rpm, e =
0.7rc, ζD
= 0.01 and βD
= 4.25 s/m). (a) Ff(t); (b) Nx(t). Key: , Coulomb friction;
, Smoothened Coulomb friction……………………………………..…….. 51
2.16 Comparison of spectra (with µm = 0.3, Ωc = 300 rpm, ζD
= 0.01 and βD
= 4.25
s/m). (a) Spectra showing harmonics of Ωc; (b) Spectra showing natural frequency
of the system. Key: , Non-linear system; , Linear system…….……. 52
3.1 Cam-follower experiment designed to determine impact damping parameters…. 61
3.2 Analytical contact mechanics model of the experiment shown in Fig. 3.1…….... 64
αɺɺ

xvi
3.3 Regimes of contact and impact for the system (with parameters given in section
3.6.1) via Ωc vs. e/rc. Key: , Operational points (with periodic impacts) selected
for the purpose of error analyses……………………………………………..….. 74
3.4 Comparison of hysteresis loops for single impacts during simulation S2 (
2 2.524.7 GNsmSβ −= and 2 1.5S
n = ) and simulation S1 ( 1 2S Sβ β= and 1 2S Sn n= )
given e/rc = 0.2 and Ωc = 16 Hz. Key: , Simulation S1; , Simulation
S2………………………………………………………………………………… 76
3.5 Time histories of the measured forces and acceleration with e/rc = 0.13 and Ωc =
14 Hz (with other parameters given in section 3.6.1). a) Normalized reaction force
along ˆx
e ; b) Normalized reaction force along ˆy
e ; c) Angular acceleration of the
follower………………………………………………………………….………. 81
3.6 Sample measured forces and acceleration during the contact sub-event from a
single impact from measurements shown in Fig. 3.5. a) Reaction forces; b)
Angular acceleration. Key: , Normalized reaction force along ˆx
e ; ,
Normalized reaction force along ˆy
e …………………………………….………. 82
3.7 Comparison of the hysteresis loops from measured data of Fig. 3.6 and simulation
S1 (using the impact damping model selected based on minimization of Λ1). Key:
, Measured; , Simulation S1 (with 1 -2.549.3 GNsmSβ = and
1 1.5S
n = )………………………………………………………………..……….. 83
3.8 Comparison of the hysteresis loops from measured data of Fig. 3.6 and simulation
S1 (using viscous damping model selected based on minimization of Λ1) Key:

xvii
, Measured; , Simulation S1 with viscous damping ( 1 0S
n = and
1 1.47 kNs/mSβ = )………………………………………………………….....… 85
3.9 Variation in estimated iξ (during different impacts) with b
iψɺ given e/rc = 0.10 and
Ωc = 18 Hz. Key: , Simulation S3 ( 3 0.8 s/mSγ = ) ; , Estimated ξ model
with γ = 0.799 s/m (using least square curve-fitting technique)…………..…….. 89
3.10 Variation in estimated iξ (during different impacts) with b
iψɺ for the experimental
data of Fig. 3.5. Key: , Experimental data for different impact; ,
Estimated ξ model with γ = 0.758 s/m (using least square curve-fitting technique).
…………………………………………………………………………………… 90
4.1 Example case: A mechanical system with an elliptic cam and follower supported by
a lumped spring (ks)………………………………………………………..……. 101
4.2 Free-body diagram of the follower; refer to Fig. 4.1 for the two coordinate
systems……………………………………………………………………..……. 106
4.3 Mechanical system experiment used to determine the coefficient of friction (µ) at
the cam-follower interface………………….……………………………..…….. 110
4.4 Classification of response regimes of the mechanical system with a circular cam in
terms of Ωc vs. e/a map with the parameters of section 4.5. Key: ,
Operational range of the experiment…………………………….………………. 112
4.5 Slide-to-roll ratio for the cam-follower system with e/a = 0.12 and Ωc = 11.55 Hz
and other parameters of section 4.5…………………………...……………...…. 113

4.6
4.7
4.8
4.9
4.10
4.6 Impulse experiment to determine the viscous damping ratio associated with the
lubricated contact regime. a) Experimental setup; b) Top view of the dowel pin
arrangement showing the three
4.7 Relative accelerance spectra in the vicinity of the system resonance. Key:
dry (unlubricated);
oil…………………………………………………………………………
4.8 Estimated
range) for the dry friction regime
ISO 32 oil;
pin with steel disk
4.9 Comparison of the modified Benedict
with friction values reported in the literature
for AGMA 4EP oil (
lubrication regime
Grunberg and Campbell
4.10 Classification of response regimes of a mechanical system with an elliptic cam in
terms of a
4.5. Key:
Impulse experiment to determine the viscous damping ratio associated with the
lubricated contact regime. a) Experimental setup; b) Top view of the dowel pin
arrangement showing the three
Relative accelerance spectra in the vicinity of the system resonance. Key:
dry (unlubricated);
…………………………………………………………………………
Estimated µ for different
range) for the dry friction regime
ISO 32 oil; , dry contact
pin with steel disk [4.13]
Comparison of the modified Benedict
with friction values reported in the literature
for AGMA 4EP oil (
lubrication regime),
Grunberg and Campbell
Classification of response regimes of a mechanical system with an elliptic cam in
terms of a Ωc – b/a
Key: , Operational range of simulation
Impulse experiment to determine the viscous damping ratio associated with the
lubricated contact regime. a) Experimental setup; b) Top view of the dowel pin
arrangement showing the three
Relative accelerance spectra in the vicinity of the system resonance. Key:
dry (unlubricated); , lubricated with AGMA 4EP oil;
…………………………………………………………………………
for different Rm values and comparison with prior values (including the
range) for the dry friction regime
, dry contact - iron pin with steel disk
[4.13]……………………
Comparison of the modified Benedict
with friction values reported in the literature
for AGMA 4EP oil (EHL regime
), , Shon et al.
Grunberg and Campbell [4.34];
Classification of response regimes of a mechanical system with an elliptic cam in
a map with e
, Operational range of simulation
xviii
Impulse experiment to determine the viscous damping ratio associated with the
lubricated contact regime. a) Experimental setup; b) Top view of the dowel pin
point contacts. Key:
Relative accelerance spectra in the vicinity of the system resonance. Key:
, lubricated with AGMA 4EP oil;
…………………………………………………………………………
values and comparison with prior values (including the
range) for the dry friction regime [4.13]. Key:
iron pin with steel disk
……………………
Comparison of the modified Benedict-Kelley model from the results of
with friction values reported in the literature
EHL regime);
, Shon et al. [4.16]
; , Furey [4.35]
Classification of response regimes of a mechanical system with an elliptic cam in
e = 0.1a and other parameter values given in section
, Operational range of simulation
Impulse experiment to determine the viscous damping ratio associated with the
lubricated contact regime. a) Experimental setup; b) Top view of the dowel pin
point contacts. Key: , contact point…….……..
Relative accelerance spectra in the vicinity of the system resonance. Key:
, lubricated with AGMA 4EP oil;
…………………………………………………………………………
values and comparison with prior values (including the
. Key: , With AGMA 4EP oil;
iron pin with steel disk [4.13]
……………………………………………………
Kelley model from the results of
with friction values reported in the literature [4.16, 4.33
, Model for ISO 32 oil (
[4.16]; , , Xu and Kahraman
[4.35]……………………
Classification of response regimes of a mechanical system with an elliptic cam in
and other parameter values given in section
, Operational range of simulation………………………
Impulse experiment to determine the viscous damping ratio associated with the
lubricated contact regime. a) Experimental setup; b) Top view of the dowel pin
, contact point…….……..
Relative accelerance spectra in the vicinity of the system resonance. Key:
, lubricated with AGMA 4EP oil; , lubricated with ISO 32
…………………………………………………………………………
values and comparison with prior values (including the
, With AGMA 4EP oil;
[4.13]; , dry contact
………………………………
Kelley model from the results of
4.33 - 35]. Key:
, Model for ISO 32 oil (
, Xu and Kahraman
……………………
Classification of response regimes of a mechanical system with an elliptic cam in
and other parameter values given in section
……………………
Impulse experiment to determine the viscous damping ratio associated with the
lubricated contact regime. a) Experimental setup; b) Top view of the dowel pin
, contact point…….……..
Relative accelerance spectra in the vicinity of the system resonance. Key:
, lubricated with ISO 32
…………………………………………………………………………..…….
values and comparison with prior values (including the
, With AGMA 4EP oil; , With
, dry contact - copper
………………………………..…..
Kelley model from the results of Fig.
. Key: , Model
, Model for ISO 32 oil (mixed
, Xu and Kahraman [4.33]
…………………………..……
Classification of response regimes of a mechanical system with an elliptic cam in
and other parameter values given in section
……………………...….
Impulse experiment to determine the viscous damping ratio associated with the
lubricated contact regime. a) Experimental setup; b) Top view of the dowel pin
, contact point…….…….. 115
,
, lubricated with ISO 32
……. 116
values and comparison with prior values (including the
, With
copper
….. 121
Fig. 4.8
, Model
mixed
[4.33];
…… 124
Classification of response regimes of a mechanical system with an elliptic cam in
and other parameter values given in section
…. 129

xix
LIST OF SYMBOLS
List of symbols for Chapter 1
c Damping
F Dynamic force
k Stiffness
α Angular displacement of the follower
δ Indentation
κ Arbitrary constant
µ Coefficient of friction
η Arbitrary constant
Θ Angular displacement of the cam
Subscripts
k Stiffness
s Spring
λ Contact
Operators
, First and second derivative with respect to time
List of symbols for Chapter 2
c damping
d Length from cam pivot point to the point where follower spring base

xx
E Cam pivot point
e Eccentricity or runout
)ˆ,ˆ( yx ee Fixed co-ordinate system along vertical and horizontal directions
f Frequency
F Dynamic force
h Non-linear function (for Jacobian method)
G Center of gravity point
I Mass moment of inertia
J Jacobian matrix
)ˆ,ˆ( ji Moving co-ordinate system (with being parallel to the follower)
k Translational stiffness
L Length
l Length of line contact
N Bearing reaction force
n Impact damping index
O Contact stiffness location
P Follower pivot point
Q Origin of , coordinate system
r Radius of the cam
t Time
T Kinetic energy
u Velocity of the contact point along iɵ
v Sliding velocity
V Potential energy
w width
Y Young’s modulus

xxi
α Rotation of the follower from the horizontal in both the coordinate systems
β Impact damping factor
ξ Coefficient of restitution
∆ Change
χ Moment arm of the normal force on the follower about the pivot point.
Ξ State space vector
( ),i j
ψ ψ Translational displacement variables for the cam in the )ˆ,ˆ( ji coordinate system
ε Generalized state space variable
Ω Angular velocity
ω Angular frequency of oscillation
Θ Angular displacement variable of the cam in the (, ) coordinate system
θ Angular displacement variable of the cam in the (,) coordinate system
µ Coefficient of friction
σ Regularizing factor for smoothing (hyperbolic tangent) function
ν Poisson’s ratio
ζ Damping ratio
ϑ Natural frequency
Subscripts
b Follower
c Cam
e Equivalent
f Friction
l Linearized
m Static
n Normal
λ Denotes contact parameters

xxii
p Peak to peak
r Relative
rms root-mean-square
s Spring
x, y horizontal and vertical directions
Superscripts
a After impact
b Before impact
c Out of contact
0 Zero displacement state
i In contact
P Denotes moment (or) moment of Inertia about the follower pivot point
r Residual
u uncompressed
* Static equilibrium point
A-E Damping model numbers
I,II,.. Friction model numbers
Operators
, First and second derivative with respect to time
( ) Normalized
δ( ) Small increment
sgn Signum function
List of symbols for Chapter 3
c damping
d Length from cam pivot point to the point where follower spring base
E Cam pivot point

xxiii
e Eccentricity or runout
)ˆ,ˆ( yx ee Fixed co-ordinate system along vertical and horizontal directions
f Frequency
F Dynamic force
h Non-linear function (for Jacobian method)
G Center of gravity point
I Mass moment of inertia
J Jacobian matrix
)ˆ,ˆ( ji Moving co-ordinate system (with being parallel to the follower)
k Translational stiffness
L Length
N Bearing reaction force
O Contact stiffness location
P Follower pivot point
Q Origin of , coordinate system
r Radius of the cam
S Simulation
t Time
v Sliding velocity
w width
Y Young’s modulus
α Rotation of the follower from the horizontal in both the coordinate systems
β Impact damping factor
γ Velocity factor in COR
κ Arbitrary constant
χ Moment arm of the normal force on the follower about the pivot point.
xxiv
Ξ Function to output time of return of follower
( ),i j
ψ ψ Translational displacement variables for the cam in the )ˆ,ˆ( ji coordinate system
ξ Coefficient of restitution
Ω Angular velocity
Λ Residue
Θ Angular displacement variable of the cam in the (, ) coordinate system
µ Coefficient of friction
ν Poisson’s ratio
ζ Damping ratio
ϑ Natural frequency
Subscripts
1 Trial values
2 Known values
a End of contact event
c Cam
b Follower
d Dowel pin
e End of the impact cycle
f Friction
l Linearized
m maximum
λ Denotes contact parameters
r Relative
s Spring
x, y horizontal and vertical directions
Superscripts

xxv
0 Zero displacement state
S1 Simulation S1
S2 Simulation S2
i experimental impact event
K known values
T Trial values
P Denotes moment (or) moment of Inertia about P
u uncompressed
* Static equilibrium point
Operators
, First and second derivative with respect to time
( ) Normalized
sgn Signum function
List of symbols for Chapter 4
A Semi-major axis point
a Semi-major axis of the elliptic cam
B Semi-minor axis point
b Semi-minor axis of the elliptic cam
c Translational viscous damping
C Arbitrary constants for B-K model
D Arbitrary point on the cam circumference
d Length from cam pivot point to the point where follower spring is attached to the ground
E Cam pivot point
e Eccentricity
)ˆ,ˆ( yx ee Fixed co-ordinate system along vertical and horizontal directions
f Frequency
xxvi
F Dynamic force
g Acceleration due to gravity
G Center of gravity point
I Mass moment of inertia
J Jacobian matrix
, Moving co-ordinate system (with being parallel to the follower)
k Translational stiffness
L Length
l Length of line contact
m Mass
N Bearing reaction force
O Contact stiffness location
P Pivot point
p Hertizian pressure
Q Origin of , coordinate system
q Arc length of the ellipse
R Roughness
S Scoring
s slope
t Time
u Velocity of the contact point
v Sliding velocity
w width
Y Young’s modulus of the material
α Rotation of the follower from the horizontal in both the coordinate systems
( ),i j
ψ ψ Translational displacement variables for the cam in the )ˆ,ˆ( ji coordinate system
χ Moment arm of the normal force on the follower about the pivot point.

xxvii
Ξ State space vector
β Impact damping factor
γ parameter of the ellipse in canonical form
ε Generalized state space variable
Ω Angular velocity
ρ Radius of curvature
ς Fourier amplitude of trigonometric functions of α
ω Angular frequency
Θ Angular displacement variable of the cam in the )ˆ,ˆ( yx ee coordinate system
θ Angular displacement variable of the cam in the )ˆ,ˆ( ji coordinate system
µ Coefficient of friction
ν Poisson’s ratio
ζ Damping ratio
η dynamic viscosity
ϑ Natural frequency
Subscripts
a Average
b Follower
c Cam
d dowel pin
e Entrainment
f Friction
h Hertzian
l Linearized
n Normal
λ Denotes contact parameters

xxviii
p Peak to peak
r Relative
rms root-mean-square
s Spring
x, y horizontal and vertical directions
Superscripts
d DC term
k kinematically calculated
e Equivalent
0 Zero displacement state
P Denotes moment (or) moment of Inertia about P
r Reconstructed
u uncompressed
* Static equilibrium point
Operators
, First and second derivative with respect to time
( ) Normalized
sgn Signum function
List of symbols for Chapter 5
F Dynamic force
δ Indentation
κ Arbitrary constant
µ Coefficient of friction
ξ Coefficient of restitution
Subscripts

xxix
k Stiffness
λ Contact
Operators
, First and second derivative with respect to time

1
CHAPTER 1
INTRODUCTION
1.1 Motivation
Cam-follower systems, gears and drum-brakes are widely used in vehicles and
machineries. The dynamics of such systems significantly differ from the translational
sliding contacts due to the unique non-linear interaction of contact mechanics and sliding
friction in the source regime with the kinematics of system. The knowledge of the contact
dynamics of these systems is limited and its effect on the response of the system is not
well understood. For better understating of the dynamics, a fundamental investigation of
the system with combined rolling-sliding contact is required. In scientific literature,
simpler systems are often investigated (as it aids in more controlled research) to
understand the dynamics of similar systems; thus, a cam-follower system is selected for
this research.
The dynamics of cam-follower systems have traditionally been described by
lumped parameter, linear system theory for the follower with motion input from the cam,
as reported by Chen [1.1] in a literature survey (1977). Alzate et al. [1.2] used the
coefficient of restitution concept to model the contact between the cam and follower.
Such coefficient of restitution type models usually have several deficiencies as stated by

2
Gilardi and Sharf [1.3]. Overall, the contact stiffness and damping non-linearities of a
cam-follower system are yet to be rigorously studied. Also the effect of friction and its
non-linearity has been neglected in the cam-follower models [1.4 - 11] since there is no
motion along the direction of friction. Since friction plays a significant role in the
dynamics of such systems under sliding contacts [1.12 - 14], the value of the coefficient
of friction (µ) must be accurately estimated. The methodology adopted to estimate µ in
prior experimental studies (specific to translational sliding contact) [1.15 - 18] cannot be
directly employed for a system with combined rolling-sliding contact system, since the
kinematics at the contact is different. Furthermore, impacts commonly occur in cam-
follower systems with [1.1, 1.2, 1.10] at high cam speeds, affecting the dynamic
response. Hence the impact is a very important phenomenon to be analyzed.
Therefore, one of the primary motivations for this research is the need to
understand the non-linearities of combined rolling-sliding contact cam-follower system
(only in the context of a single degree-of-freedom system). Hence, the proposed
formulation would include kinematic, friction and contact non-linearities. Next, having a
precise model for impact damping is mandatory to achieve accurate prediction of the
dynamics of impacting systems. Finally, there is a need to have an experiment to estimate
µ for combined rolling-sliding contact systems.
1.2 Literature review
The sliding and/or rolling contacts are of interest in many mechanical systems
such as pin-disk models [1.19 - 1.22], geared transmission systems [1.23 - 1.25], and
bearings [1.26]. However, the dynamics of the sliding contact is sometimes studied using

3
simple translating systems [1.27 - 29]. In the case of combined rolling-sliding contact
models, investigators have employed piecewise linear systems to study the loss of contact
in a cam-follower system [1.4 - 6], and some studies [1.7 - 9] have examined the stability
issues. Hence the non-linear dynamics of the combined rolling-sliding contact systems is
examined in this research using contact mechanics principles [1.30].
Contact mechanics formulation (with impact damping model) has been employed
by few researchers [1.33, 1.34] for analyzing systems undergoing impacts. The widely
used contact force formulation [1.33, 1.35] is of the following form where the force due
to contact damping is proportional to force due to stiffness,
( )1 .k
F Fλ κδ= + ɺ (1.1)
Here, Fλ is the contact force (with λ representing contact parameter), Fk is the contact
stiffness force, δ is the indentation distance and κ is an arbitrary constant. However, other
models such as 1/ 4
kF Fλ ηδ δ= + ɺ (where η is a constant) also have been used [1.34] to
represent the contact force during impacts. Hence a more generalized formulation for the
contact force of the form n
kF Fλ βδ δ= + ɺ should be analyzed experimentally.
Furthermore, among the experimental work done in rotational systems to determine µ,
investigators have analyzed a pin-disk apparatus [1.36, 1.37], two rotating circular plates
[1.38], and a radially loaded disk-roller system [1.39, 1.40]. However, none of the
previous combined rolling-sliding contact experiments rely on vibration measurements.
Hence there is a need to develop an experimental method to determine µ for combined
rolling-sliding contact systems with vibration measurements.

4
Based on the available literature on the dynamics of cam-follower system, some
of the major unresolved issues are as follows,
a. Is coefficient of restitution model applicable to such a system during impacts?
b. What are effects of different non-linearities on the dynamics?
c. Is the contact damping force proportional to contact stiffness force during impact?
d. Is the equivalent viscous damping model appropriate for impacts?
e. Can the coefficient of friction be estimated from the vibration measurements of
reaction forces and acceleration?
f. What is the generalized friction model for combined rolling-sliding contact systems
under lubrication?
1.3 Problem formulation
Fig. 1.1 shows a typical single degree-of-freedom (SDOF) cam-follower system
(when the cam and follower are not in contact) which is considered for analysis in this
research. The circular cam rotates about the fixed pivot, which is at a distance from the
geometric center of the cam. The angular displacement of the cam is given by Θ(t), which
is also the motion input to the system. The follower consisting of a long bar of square
cross-section is hinged at one of its end to a frictionless pivot. The angle α(t) made by the
follower with the horizontal line in the clockwise direction is the only generalized
coordinate. The follower is supported by a linear follower spring (ks). The contact
mechanics between the cam and follower is represented by means of non-linear contact
stiffness (kλ) and damping (cλ) terms. The coefficient of friction between the cam and
follower is given by time-varying µ(t). During the operation, the system can be in either

5
the sliding contact regime or the non-contact regime at a given instant based on the cam
speed, and hence the system should be studied on both contact and non-contact regimes.
The experiment designed for this study is shown in Fig 1.2. The reaction forces at the
follower pivot and the acceleration of the follower are measured from this experiment.
The scope of this study is restricted to the following:
i) A single degree-of-freedom cam-follower system with combined rolling-
sliding contact having contact, friction and kinematic non-linearities.
ii) Cam with elliptical profile is analyzed using the analytical model, while only
a circular cam is studied experimentally.
iii) Though line and point contacts are studied analytically, only point contact is
taken up for experimental studies.
iv) Dynamics of the system is examined with constant cam speed.
v) The angular velocity of the cam is restricted to 1500 rpm (25 Hz) in the
experiments, much below the natural frequency of the system (≈1400 Hz for
point contact).
vi) The non-linear dynamics of the system is investigated only under stable and
deterministic conditions.
vii) Variation in the surfaces of the cam and follower due to ageing is not
considered.
The major assumptions of this study are as follows,
1. The bearings at the pivots of the cam and follower are frictionless and rigid,
allowing only rotation without any translation.

6
2. The axes of rotation of the cam and the follower do not change under any load.
3. The cam and follower are elastic bodies, and their contact follows Hertzian
contact theory.
4. Kelvin-Voigt model is used to represent the contact.
5. The bending moment of the follower is negligible.
6. The angular velocity of the cam is constant and unaffected by the frictional
load.
Fig. 1.1. Example case: Cam-follower system with contact mechanics formulation.
Cam
Follower
Follower
spring
Cam pivot
Follower
pivot

7
Fig. 1.2. Cam-follower experiment designed to study the contact mechanics. a)
Isometric view of the cam-follower experiment built using a lathe; b) Closer view of the
contact.
a)
b)
Rigid fixture
Lathe
Cam
SpringAccelerometer
Follower
Point contact
Roller
bearings
Tri-axial
load cell

8
The specific objectives of this dissertation are outlined along with sub-objectives, to
resolve the major issues state above. The objectives are organized to parallel Chapters 2
to 4.
Objective 1: Study the non-linear dynamics of the cam-follower system with combined
rolling-sliding contact (Addressed in Chapter 2).
(1a) Develop a contact mechanics model for the cam-follower system with
combined rolling-sliding contact.
(1b) Examine the applicability of different viscous and impact damping models
and the coefficient of restitution concept by comparing the predictions with
the experimental results reported by Alzate et al. [1.2].
(1c) Study the effects of contact and friction non-linearities in the sliding contact
regime.
(1d) Analyze the effect of kinematic non-linearity of the system by comparing it
with a linearized model.
Objective 2: Determine the impact damping parameters (β and m) for the mechanical
system using time-domain measurements (Addressed in Chapter 3).
(2a) Design a controlled cam-follower experiment with lubricated point contact to
directly measure forces and motion under periodic impacts.
(2b) Propose and evaluate time-domain based signal processing techniques to
determine β and m from the measured data.
9
(2c) Verify if the contact damping force proportional to contact stiffness force
during impact.
(2d) Analyze the applicability of the viscous damping model to impacting
conditions.
Objective 3: Estimate the coefficient of friction for a mechanical system with combined
rolling-sliding contact using vibration measurements under lubrication (Addressed in
Chapter 4).
(3a) Develop a contact mechanics model for a mechanical system with a
combined rolling-sliding contact to design a suitable experiment and to
predict the dynamic response.
(3b) Design a controlled laboratory experiment for the cam-follower system to
measure dynamic forces and acceleration.
(3c) Propose a signal processing technique to estimate µ using Fourier amplitudes
of measured forces and acceleration
(3d) Suggest an empirical formula for µ and compare the estimated values with
the literature.

10
References for Chapter 1
[1.1] F. Y. Chen, A survey of the state of the art of cam system dynamics. Mechanism
and Machine Theory 12 (3) (1977) 201–224
[1.2] R. Alzate, M. di Bernardo, U. Montanaro, and S. Santini, Experimental and
numerical verification of bifurcations and chaos in cam-follower impacting
systems. Nonlinear Dynamics 50 (3) (2007) 409–429
[1.3] G. Gilardi, I. Sharf, Literature survey of contact dynamics modeling. Mechanism
and Machine Theory 37 (2002) 1213–1239.
[1.4] T.L. Dresner, P. Barkan, New methods for the dynamic analysis of flexible
single-input and multi-input cam-follower systems. ASME Journal of Mechanical
Design 117 (1995) 150.
[1.5] N.S. Eiss, Vibration of cams having two degrees of freedom. ASME Journal of
Engineering for Industry 86 (1964) 343.
[1.6] R.L. Norton, Cam Design and Manufacturing Handbook, Industrial Press Inc.,
2009.
[1.7] L. Cveticanin, Stability of motion of the cam–follower system. Mechanism and
Machine Theory 42 (9) (2007) 1238–1250.
[1.8] G. Osorio, M. di Bernardo, S. Santini, Corner-impact bifurcations: a novel class
of discontinuity-induced bifurcations in cam-follower systems. Journal of Applied
Dynamical Systems 7 (2007) 18–38.

11
[1.9] H. S. Yan, M. C. Tsai, M. H. Hsu, An experimental study of the effects of cam
speeds on cam-follower systems. Mechanism and Machine Theory 31 (4) (1996)
397–412.
[1.10] R. Alzate, M. di Bernardo, G. Giordano, G. Rea, S. Santini, Experimental and
numerical investigation of coexistence, novel bifurcations, and chaos in a cam-
follower system. SIAM Journal on Applied Dynamical Systems 8 (2009) 592–
623.
[1.11] M.P. Koster, Vibrations of Cam Mechanisms: Consequences of Their Design,
Macmillan, 1974.
[1.12] C.A. Brockley, R. Cameron, A.F. Potter, Friction-induced vibration, Journal of
Tribology 89 (2) (1967) 101–107.
[1.13] A.H. Dweib, A.F. D’Souza, Self-excited vibrations induced by dry friction, part 1:
Experimental study, Journal of Sound and Vibration 137 (2) (1990) 163–175.
[1.14] A.F. D’Souza, A.H. Dweib, Self-excited vibrations induced by dry friction, part 2:
Stability and limit-cycle analysis, Journal of Sound and Vibration 137 (2) (1990)
177–190.
[1.15] B.N.J. Persson, Sliding friction, Surface Science Reports 33 (3) (1999) 83–119.
[1.16] H.D. Espinosa, A. Patanella, M. Fischer, A novel dynamic friction experiment
using a modified kolsky bar apparatus, Experimental Mechanics 40 (2) (2000)
138–153.

12
[1.17] E.R. Hoskins, J.C. Jaeger, K.J. Rosengren, A medium-scale direct friction
experiment, International Journal of Rock Mechanics and Mining Sciences 5 (2)
(1968) 143–152.
[1.18] K. Worden, C.X. Wong, U. Parlitz, A. Hornstein, D. Engster, T. Tjahjowidodo, F.
Al-Bender, D.D. Rizos, S.D. Fassois, Identification of pre-sliding and sliding
friction dynamics: Grey box and black-box models, Mechanical Systems and
Signal Processing 21 (1) (2007) 514–534.
[1.19] V. Aronov, A.F. D’Souza, S. Kalpakjian, I. Shareef, Interactions among friction,
wear, and system stiffness. Part 2. Vibrations induced by dry friction. ASME
Journal of Lubrication Technology 106 (1984) 59–64.
[1.20] Y. Masayuki, N. Mikio, A fundamental study on frictional noise (1st report, the
generating mechanism of rubbing noise and squeal noise). Bulletin of JSME 22
(1979) 1665–1671.
[1.21] Y. Masayuki, N. Mikio, A fundamental study on frictional noise (3rd report, the
influence of periodic surface roughness on frictional noise). Bulletin of JSME 24
(1981) 1470–1476.
[1.22] Y. Masayuki, N. Mikio, A fundamental study on frictional noise (5th report, the
influence of random surface roughness on frictional noise). Bulletin of JSME 25
(1982) 827–833.
[1.23] S. He, R. Gunda, R. Singh, Effect of sliding friction on the dynamics of spur gear
pair with realistic time-varying stiffness. Journal of Sound and Vibration 301
(2007) 927–949.

13
[1.24] S. Kim, R. Singh, Gear surface roughness induced noise prediction based on a
linear time-varying model with sliding friction. Journal of Vibration and Control
13 (2007) 1045–1063.
[1.25] Y. Michlin, V. Myunster, Determination of power losses in gear transmissions
with rolling and sliding friction incorporated. Mechanism and Machine Theory 37
(2002) 167–174.
[1.26] M.N. Sahinkaya, A.-H.G. Abulrub, P.S. Keogh, C.R. Burrows, Multiple sliding
and rolling contact dynamics for a flexible rotor/magnetic bearing system.
IEEE/ASME Transactions on Mechatronics, 12 (2007) 179 –189.
[1.27] B. L. Stoimenov, S. Maruyama, K. Adachi, and K. Kato, The roughness effect on
the frequency of frictional sound. Tribology International 40 (4) (2007) 659–664.
[1.28] M. Othman, A. Elkholy, Surface-roughness measurement using dry friction noise.
Experimental Mechanics 30 (3) (1990) 309–312.
[1.29] M. Othman, A. Elkholy, A. Seireg, Experimental investigation of frictional noise
and surface-roughness characteristics. Experimental Mechanics 30 (4) (1990)
328–331.
[1.30] G.G. Gray, K.L. Johnson, The dynamic response of elastic bodies in rolling
contact to random roughness of their surfaces. Journal of Sound and Vibration 22
(1972) 323–342.
[1.31] P.R. Kraus, V. Kumar, Compliant contact models for rigid body collisions, in:
IEEE International Conference on Robotics and Automation, 1997, pp. 1382 –
1387 vol.2.

14
[1.32] O. Ma, Contact dynamics modelling for the simulation of the space station
manipulators handling payloads, in: IEEE International Conference on Robotics
and Automation, 1995, pp. 1252 –1258 vol.2.
[1.33] C. Padmanabhan, R. Singh, Dynamics of a piecewise non-linear system subject to
dual harmonic excitation using parametric continuation. Journal of Sound and
Vibration 184 (1995) 767–799.
[1.34] D. Zhang, W.J. Whiten, The calculation of contact forces between particles using
spring and damping models. Powder Technology 88 (1996) 59–64.
[1.35] M.A. Veluswami, F.R.E. Crossley, G. Horvay, Multiple impacts of a ball between
two plates - part 2: mathematical modelling, Journal of Engineering for Industry
97 (1975) 828–835.
[1.36] S.C. Lim, M.F. Ashby, J.H. Brunton, The effects of sliding conditions on the dry
friction of metals, Acta Metallurgica 37 (3) (1989) 767–772.
[1.37] M. Wakuda, Y. Yamauchi, S. Kanzaki, Y. Yasuda, Effect of surface texturing on
friction reduction between ceramic and steel materials under lubricated sliding
contact, Wear 254 (3 - 4) (2003) 356–363.
[1.38] S. Mentzelopoulou, B. Friedland, Experimental evaluation of friction estimation
and compensation techniques, Proceedings of the American Control Conference,
Baltimore, MD, USA, June 29 – July 1, 1994, 3132-3136.
[1.39] S. Shon, A. Kahraman, K. LaBerge, B. Dykas, D. Stringer, Influence of surface
roughness on traction and scuffing performance of lubricated contacts for
aerospace and automotive gearing, Proceedings of the ASME/STLE International

15
Joint Tribology Conference, Denver, USA. Oct 7 - 10, 2012, Paper # IJTC2012-
61212.
[1.40] G.H. Benedict, B.W. Kelley, Instantaneous coefficients of gear tooth friction,
ASLE Transactions 4 (1) (1961) 59–70.

16
CHAPTER 2
ROTATIONAL SLIDING CONTACT DYNAMICS IN A NON-LINEAR CAM-
FOLLOWER SYSTEM AS EXCITED BY A PERIODIC MOTION
2.1 Introduction
The dynamics of cam-follower systems have traditionally been described by
lumped parameter, linear system theory for the follower with motion input from the cam,
as reported by Chen [2.1] in a literature survey (1977). More recent investigators have
employed piecewise linear system models to study the loss of contact in a cam-follower
system [2.2 - 4], and some studies [2.5 - 7] have examined the stability issues. In
particular, Alzate et al. [2.8, 2.9] and Koster [2.10] studied bifurcations in a non-linear
cam-follower system, though they did not focus on the kinematic non-linearity. Alzate et
al. [2.8] used the coefficient of restitution concept to model the contact between the cam
and follower. Such coefficient of restitution type models usually have several deficiencies
as stated by Gilardi and Sharf [2.11]. Overall, the contact stiffness and damping non-
linearities of a cam-follower system are yet to be rigorously studied. Also the effect of
dry friction non-linearities has been neglected in the cam-follower models [2.1 - 10] since
there is no motion along the direction of friction. The chief goal of this paper is,
therefore, to overcome the void in the literature and study the combined rolling-sliding

17
contact dynamics (only in the context of a single degree-of-freedom system) given a
periodic motion by the cam rotating about a fixed pivot. The proposed formulation would
include kinematic, friction and contact non-linearities.
The sliding and/or rolling contacts are of interest in many mechanical systems
such as pin-disk models [2.12 - 15], geared transmission systems [2.16 - 18], and
bearings [2.19]. However, the dynamics of the sliding contact is sometimes studied using
simple translating systems [2.20 - 26]. The rolling contacts have been investigated by
Remington using a lumped system model [2.27] and experiments [2.28]. Gray and
Johnson [2.29] have analyzed the rolling contact problem using a simple vibration model
that included the contact mechanics concept. This paper will examine only the combined
rolling-sliding contact and utilize some of the contact mechanics principles employed in
other mechanical system [2.30, 2.31].
2.2 Problem formulation
Fig. 2.1 shows a single degree-of-freedom (SDOF) cam-follower system in the
general position, when the cam and follower are not in contact. The fixed orthogonal
coordinate system )ˆ,ˆ( yx ee describes the horizontal and vertical directions, with its origin
at E. The circular cam of radius, rc, is considered; it rotates about the fixed pivot E, which
is at a distance, e, from the geometric center of the cam (Gc). The angular movement of
the cam is given by Θ(t), the angle made by c
G E
with the horizontal line in the counter-
clockwise direction; it is also the motion input to the system. The follower is described by
a rectangular bar (with width, wb), which is pivoted at its center of gravity to a fixed pivot
P which is at a distance, dy, above the ground. The angle α(t) made by the follower with

18
the horizontal line in the clockwise direction is the only generalized coordinate. The
follower is supported by a linear follower spring (ks) at a distance, dx, from P. The contact
between the cam and follower is represented by means of non-linear contact stiffness
(kλ(ψi(t))) and damping (cλ(ψi(t))) terms. Contact points in the follower and cam are Ob
and Oc, respectively. During the operation, the system can be in either the sliding contact
regime or the non-contact regime at a given instant, which is determined by the sign of
ψi(t). The coefficient of friction between the cam and follower is given by time-varying
µ(t). When the follower just touches the cam ( 0c
QO =
) for a given Θ0, the state of the
system is denoted as the 0-state. This 0-state (where Q0,
0
bO and
0
cO are coincident) is
used to define the geometry of the cam-follower system and to derive the relationship
between the fixed coordinates and moving coordinates )ˆ,ˆ( ji as attached to the follower
at Q. This system is similar to the cam-follower experiment that has been studied by
Alzate et al. [2.8]; the results will be discussed later in section 2.4.
The cam-follower system, as discussed in this thesis includes kinematic (from the
geometry of the system), dry friction, and contact non-linearities. The friction non-
linearity arises due to the dependence of the friction force, Ff(t), on the magnitude as well
as on the direction of the relative velocity of sliding, vr(t). The contact non-linearity is
from the non-linear Hertzian point contact model, the non-linear contact damping model
(function of the displacement and velocity of contact points), and the discontinuity during
the contact. The key assumptions in the proposed formulation include the following: (i)
the bearings at the pivots of the cam and follower are frictionless and rigid, allowing only
rotation without any translation; (ii) cam and follower are elastic bodies, and their

19
surfaces are smooth; (iii) the contact force between the cam and follower follows the
Hertzian theory [2.32]; and (iv) the bending moment of the follower is negligible.
Fig. 2.1. Cam-follower system in the general state where a non-linear contact stiffness
model, kλ(ψi(t)), is employed
The objectives of this chapter are as follows: (a) Develop a contact mechanics
model for the cam-follower system with combined rolling-sliding contact; (b) Examine
the applicability of different viscous and impact damping models and the coefficient of
restitution concept by comparing the predictions with the experimental results reported
by Alzate et al. [2.8]; (c) Study the effects of contact and friction non-linearities in the
CamFollower
Follower
spring

20
sliding contact regime; and (d) Analyze the effect of kinematic non-linearity of the
system by comparing it with a linearized model. Since all the non-linearities are inter-
related with each other, the dynamic system is very complex even with a single degree-
of-freedom formulation.
2.3 Analytical model
2.3.1 Relationship between the coordinate systems
In Fig. 2.1, is represented by ˆ ˆ( ) ( )i jt i t jψ ψ+ in the moving coordinate
system, and ψi(t) and ψj(t) are used to calculate the contact force and the moment
imparted by the cam on the follower, respectively. A non-negative value of ψi(t) indicates
that the cam and follower are not in contact. When ψi(t) is negative, the system is in the
sliding contact regime with the magnitude of ψi(t) representing the deflection of the
contact spring. At any instant, ψi(t) and ψj(t) can be calculated for a given α(t) and Θ(t)
from the system geometry as shown below. From Fig. 2.1 the vectors are calculated as
follows:
,b c c b
PO PE EG G O= + +
(2.1)
( ) ( ) ( ) ( )ˆ ˆ( )cos ( ) sin ( ) ( )sin ( ) cos ( ) ,2 2
b bb x y
w wPO t t t e t t t eχ α α χ α α
= + + − +
(2.2)
( ) ( )ˆ ˆcos ( ) sin ( ) ,c x y
EG e t e e t e= − Θ − Θ
(2.3)
( ) ( ) ( ) ( )ˆ ˆ( ) sin ( ) ( ) cos ( ) .c b c i x c i yG O r t t e r t t eψ α ψ α= − + − +
(2.4)
cQO

21
Here, χ(t) = χ0-ψj(t), where χ(t) and χ
0 are the components of
bPO
and 0
bPO
respectively along ɵj . The constant vector PE
is evaluated based on the 0-state as
follows, where α0 is the angle of the follower at the 0-state:
( ) ( ) ( )
( ) ( ) ( )
0 0 0 0
0 0 0 0
ˆcos sin cos2
ˆsin cos sin .2
bc x
bc y
wPE r e e
wr e e
χ α α
χ α α
= + + + Θ
+ − + + + Θ
(2.5)
Using Eqs. (2.2) to (2.5) in Eq. (2.1) and rearranging, ψi (t) and ψj(t) are evaluated as,
( ) ( )( )
( ) ( )
0 0 0
0
( ) sin ( ) cos ( ) 12
[sin ( ) sin ( ) ( ) ],
bi c
wt t r t
e t t t
ψ χ α α α α
α α
= − + + − −
+ + Θ − + Θ (2.6)
( ) ( )
( ) ( )
0 0 0
0
( ) 1 cos ( ) sin ( )2
cos ( ) cos ( ) ( ) .
bj c
wt t r t
e t t t
ψ χ α α α α
α α
= − − + + −
− + Θ − + Θ
(2.7)
Next, differentiate Eqs. (2.6) and (2.7) with respect to time to yield the following:
( ) ( )
( ) ( )( )
0 0 0
0
( ) cos ( ) ( ) sin ( ) ( )2
cos ( ) ( ) cos ( ) ( ) ( ) ( ) ,
bi c
wt t t r t t
e t t t t t t
ψ χ α α α α α α
α α α α
= − − + −
+ + Θ − + Θ + Θ
ɺ ɺ ɺ
ɺɺ ɺ
(2.8)
( ) ( )
( ) ( )( )
0 0 0
0
( ) sin ( ) ( ) cos ( ) ( )2
sin ( ) sin ( ) ( ) ( ) ( ) .
bj c
wt t t r t t
e t t t t t
ψ χ α α α α α α
α α α α
= − + + −
+ + Θ − + Θ + Θ
ɺ ɺ ɺ
ɺɺ ɺ
(2.9)
2.3.2 Equations of motion
Fig. 2.2 shows the free body diagram of the follower in the sliding contact regime.
The moment balancing about P yields the following equation of motion for the follower

22
in the sliding contact regime, where P
bI is the mass moment of inertia of the follower
about P:
( ) ( ) ( ) ( ) 0.5 ( ) .P
b s x n f bI t F t d F t t F t wα χ= − + −ɺɺ (2.10)
Fig. 2.2. Free body diagram of the follower in the sliding contact regime
The elastic force (Fs(t)) from the follower spring is given by the following, where u
sL is
the un-deflected length of the follower spring:
( ) ( )( ) tan ( ) 0.5 sec ( ) .u
s s s y x bF t k L d d t w tα α = − + − (2.11)
The normal contact force (Fn(t)) is given by
( ) ( )( ) ( ) ( ) ( ) ( ).n i i i i
F t k t t c t tλ λψ ψ ψ ψ= − − ɺ
(2.12)

23
The Hertzian theory [2.32] for line contact is used to define kλ(ψi(t)) as follows, where lλ
is the length of line contact, and Y is the equivalent Young’s modulus (with subscript e
denoting equivalent):
( )( ) .4
i ek t Y lλ λ
πψ =
(2.13)
The equivalent Ye of the two materials in contact is calculated based on the Hertzian
theory [2.32] as well:
12 21 1
.c be
c b
YY Y
ν ν−
− −= +
(2.14)
Here, ν is the Poisson’s ratio of the material, and the subscripts b and c represent the
follower and cam, respectively. The force Ff(t) due to sliding friction exerted on the
follower by the cam is ( ) ( ) ( )f n
F t t F tµ= where two models for time varying µ(t) are
utilized (discussed later in this section). The equation of motion for the system in the non-
contact regime is derived below, similar to the sliding contact regime, but now with Fs(t)
= 0 and Fn(t) = 0.
( ) ( ) .P
b s xI t F t dα = −ɺɺ
(2.15)
Eqs. (2.10) and (2.15) are numerically solved using MATLAB’s [2.33] ODE solver for
stiff problems (which uses simultaneous first and fifth order Runge-Kutta formulations)
for a given initial value of α(t). These results were found not to differ significantly from
the results from the slower but accurate fourth and fifth order Runge-Kutta formulations
for some test cases. One must, however, keep track of the condition for switching

24
between the contact regimes (‘event detection’ feature of MATLAB [2.33] is used) based
on the value of ψi(t) as discussed earlier.
2.3.3 Static equilibrium and linearized natural frequency
The force Fs(t) is assumed to be sufficiently large at the static equilibrium point to
maintain the cam-follower contact. The equations for the static equilibrium point (given
by superscript *) are derived for Θ(t) = Θ0 by replacing α(t), ψi(t), and ψj(t) with the
corresponding values at the static equilibrium point (α*, ψi*, and ψj*, respectively), and
forcing all time derivative terms to zero in the Eqs. (2.6), (2.7) and (2.10), as follows:
( ) ( )0 0 0sin * cos * * 0,
2 2
b bc c i
w wr rχ α α α α ψ
− + + − − + − =
(2.16)
( ) ( )0 0 01 cos * sin * * 0,2
bc j
wrχ α α α α ψ − − + + − − =
(2.17)
( ) ( ) ( )0tan * 0.5 sec * * * 0.4
u
s x s y x b e i jk d L d d w Y lλ
πα α ψ χ ψ − − + − + − =
(2.18)
Simultaneous Eqs. (2.16) to (2.18) are numerically solved to find α*, ψi*, and ψj*. The
system is then linearized about the static equilibrium point. Writing the linearized
equation of motion of the system in the sliding contact regime in state space form as
)(Ξ=Ξ hɺ , where
( ) ( )1 2( ), ( ) ( ), ( ) ,T T
t t t tα α ε εΞ = =ɺ 1 2( ) ( ( ), ( )) .Th h hΞ = Ξ Ξ (2.19 a, b)
The state space equations are derived below from Eq. (2.10) as,
1 2 1( ) ( ) ( ),t t hε ε= = Ξɺ
2 2
[ ( ) ( ) ( ) 0.5 ( )]( ) ( ).
s x n b f
P
b
F t d F t t w F tt h
I
χε
− + −= = Ξɺ (2.20 a, b)

25
The Jacobian matrix (J) at the static equilibrium point is
*
; , 1, 2.i
j
hJ i jε
∂= = ∂
(2.21)
The following partial derivatives are calculated to evaluate J at the static equilibrium
point:
*
1
1
0;h
ε
∂=
∂
*
1
2
1;h
ε
∂=
∂
*
*
2
1
0.5
;
fs nx n b
P
b
FF Fd F w
h
I
χχ
α α α αε
∂ ∂ ∂ ∂− + + − ∂ ∂ ∂ ∂ ∂=
∂
*
*
2
2
0.5
.
fs nx n b
P
b
FF Fd F w
h
I
χχ
α α α αε
∂ ∂ ∂ ∂− + + − ∂ ∂ ∂ ∂ ∂=
∂
ɺ ɺ ɺ ɺ (2.22 a- d)
The linearized natural frequency (ϑ) is calculated as follows where the operator, Im,
yields the imaginary part of the operand, and the operator, Eig, gives the eigenvalues of a
square matrix:
[ ]( )0.5
Im Eig Jϑ = (2.23)
2.3.4 Contact damping and dry friction models
Five different damping models are utilized for cλ(ψi(t)), as described in Eq. (2.12),
to examine the dissipation of energy by impact and other mechanisms. First is the pure
viscous damping formulation (denoted as damping model A) where the damping
coefficient ( )( )A
ic tλ ψ is time-invariant and is calculated as follows from Eqs. (2.10) and

26
(2.12) using the linearized modal viscous damping ratio ζ (with a superscript representing
the damping model) and 0 ** jχ χ ψ= − :
( )( )
2
2( ) .
*
A PA b
i
Ic tλ
ζ ϑψ
χ=
(2.24)
Two pure impact damping formulations (denoted as damping models B and C) are
analyzed next; these models are suggested by Padmanabhan et al. [2.34] and Zhang et al.
[2.35], respectively; here β is the impact damping factor:
( )( ) ( );B B
i ic t k tλ λψ β ψ=
(2.25)
( )0.25
( ) ( ) .C C
i ic t tλ ψ β ψ=
(2.26)
The dissipation of energy in the system might be through impact from the point of
contact (at t = ta) to the point of maximum deformation of the contact spring (at t = t
b and
where 0iψ =ɺ ), and then through the material until the follower goes out of contact of the
cam (at t = tc). Therefore, combined viscous-impact damping formulations (as denoted
damping models D and E) are proposed as follows:
( )( )
2
( );
( ) ;2;
*
D a b
i
D D Pb ci b
k t t t t
c t It t t
λ
λ
β ψ
ψ ζ ϑ
χ
< <
= < <
(2.27 a, b)
( )
( )
0.25
2
( ) ;
( ) .2;
*
E a b
i
E E Pi b cb
t t t t
c t It t t
λ
β ψ
ψ ζ ϑ
χ
< <
= < <
(2.28 a, b)
The time-varying coefficient of friction between the cam and follower is described using
two well known dry friction formulations: Coulomb friction (model I) and Smoothened

27
Coulomb friction (model II). Fig. 2.3 shows these as a function of the vr(t) between the
cam and follower; here, vr(t) is given by
( )( )( )( ) ( ) sin ( ) ( ) ( ) ( )r j c
v t t r e t t t tψ α α= − + + Θ + Θɺɺ ɺ . Model I (with a maximum value of
µm) is given by ( )( ) sgn ( )I
m rt v tµ µ= and has a sharp discontinuity at vr(t) = 0, which is
smoothened by model II using a regularizing factor (σ) for the hyperbolic tangent
function as: ( )( ) tanh ( )II
m rt v tµ µ σ= .
2.4 Examination of the contact non-linearity and alternate damping models
The proposed contact mechanics model is used to represent the physics of the
cam-follower experimental system as reported by Alzate et al. [2.8]. In the prior
experiment [2.8], the follower (along with its spring) is above the cam, unlike in Fig. 2.1
where the follower (and its spring) is placed below the cam. The follower is pivoted at its
center of gravity, and the magnitude of Fs(t) is assumed to be the same in tension or
compression. Consequentially, the proposed contact mechanics model is representative of
the cam-follower experiment [2.8], and hence calculations can be compared with the
reported measurements.

28
Fig. 2.3. Normalized dry friction models (equations are given in Section 2.3.4). Key:
, Coulomb friction (Model I); , Smoothened Coulomb friction (Model II).
The results are viewed in terms of the residual response (αr(t)) for a given
constant rotational speed of the cam (Ωc), where the measurements are available at 110,
135, 143, 148, 150, 155, and 159 rpm. Mathematically, αr(t) is given by α
r(t) = α(t) -
αi(t), where α
i(t) is the response assuming the follower to be in contact with the cam, and
αi(t) is calculated from the kinematics of Fig. 2.1 as follows:
( )0.5
4 2 2 22
1
2 2
( 0.5 ) ( 0.5 )
( ) cos .c c c c c b c c b
x x y x yi
c cx y
PG PG PG PG r w PG r w
t
PG PG
α −
+ − + + + = +
(2.29)
rv
-1 -0.5 0 0.5 1
-1
-0.5
0
0.5
1

29
Here, c
xPG
and c
yPG
, the magnitudes c
PG
along x and y directions, respectively, are
functions of Θ(t). At any Ωc, αr(t) is predicted using the contact mechanics model with
the parameter values given in [2.8], and the input is Θ(t) = Θ0+Ωct with the static
equilibrium point as the initial condition. The contact stiffness is evaluated using the
Hertzian theory [2.32] for a steel cam and follower (with Yc = 200 GPa, Yb = 200 GPa, νc
= 0.3, and νb = 0.3) and by assuming line contact of length lλ as 16 mm. For several
measurement cases, the cam-follower system impacts and stays in the non-contact regime
for most of the time. Consequentially, friction model I is used with µm = 0.3 since the dry
friction does not play a major role in the response. Alternate damping models are first
used to predict the root-mean-square of residual response (r
rmsα ) using the contact
mechanics model, and then appropriate damping parameter(s) are identified for each
model based on the best correlation with the measurements [2.8]. The following damping
parameters are identified where superscripts denote the model type: ζA
= 0.125, βB
= 3.25
s/m, βC
= 0.325 MNs/m1.25
ζD
= 0.119, βD
= 4.25 s/m, ζE
= 0.096 and βE
= 0.325
MNs/m1.25
.
Fig. 2.4 shows the variation in r
rmsα and the peak-to-peak of the residual
amplitude ( r
pα ) for five damping models (using these identified parameters), along with
the digitized experimental and analytical results of Alzate et al. [2.8]. Fig. 2.5 compares
predicted normalized residual responses ( ( )rtα ) with different damping models along
with experimental data [8] in the time domain. The cam-follower system in [2.8] is
observed to go into a chaotic state beyond 155 rpm, and it is accompanied by increased

30
amplitude. From Fig. 2.4 and Fig. 2.5 it is inferred that damping models A and C are still
periodic (at Ωc = 155 rpm), while damping model E seems to yield chaotic motions even
before 155 rpm. Only two damping models (B and D) start to behave chaotically for Ωc >
155 rpm; this is similar to the previous experiment [2.8]. Hence, these two damping
models are deemed more applicable to the cam-follower system during impacts. The pure
viscous damping model and the impact damping model suggested by Zhang et al. [2.35]
do not seem to predict the physics for the current example. Even though the applicability
of contact damping models are specific to a given contact element or mechanical system,
damping models A, C or E should be suitable for other impacting systems.
The combined damping model D (with ζD
= 0.119 and βD
= 4.25 s/m) is utilized
for further analyses. Fig. 2.6 shows sample time domain and frequency domain
comparisons of the normalized residual responses (rα ) at Ωc = 155 rpm; the predictions
from the contact mechanics model is compared with the experimental result [2.8]. The
normalized time scale ( t ) is calculated based on the period required for one revolution of
the cam; the normalized frequency scale ( f ) is calculated based on the speed of the cam,
and ( )rtα is calculated based on the time average of α
r(t) for one revolution of the cam.
A good correlation between the previous experiment [2.8] and the proposed formulation
is observed both in time and frequency domains. Using the inverse kinematics [2.36], the
Ωc needed for the follower to lose contact is predicted as 130 rpm from the contact
mechanics model, which closely matches the measured value of 125 rpm as reported by
Alzate et al. [2.8]. These comparisons validate the contact mechanics model.

mechanics formulation with damping model A;
Fig. 2.4. Comparison of
mechanics formulation with damping model A;
C; , damping model D;
Alzate et al.
(a)
(b)
Comparison of
mechanics formulation with damping model A;
amping model D;
Alzate et al. [2.8]
(a)
(b)
1100
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
1100
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1
Comparison of r
rmsα and α
mechanics formulation with damping model A;
amping model D; , damping model E;
[2.8]; , prior a
115 120 125
115 120 125
31
r
pα at lower speeds. (a)
mechanics formulation with damping model A;
amping model E;
prior analytical result from Alzate et al.
125 130 135
125 130 135
Ωc
Ωc
at lower speeds. (a)
, damping model B;
amping model E;
nalytical result from Alzate et al.
135 140 145
135 140 145
[rpm]
[rpm]
r
rmsα ; (b) . Key:
amping model B;
, experimental result from
nalytical result from Alzate et al.
145 150 155
145 150 155
r
rmsα r
pα
. Key: , contact
, damping model
xperimental result from
nalytical result from Alzate et al. [2.8].
155 160
155 160
ontact
amping model
xperimental result from

experimental data at
Fig. 2.5
experimental data at
model A
damping model E;
0
0
1
2
3
4
5
6
5. Comparison of predicted
experimental data at Ωc = 155rpm.
model A; , damping model B;
damping model E;
0.5
Comparison of predicted
= 155rpm. Key:
, damping model B;
damping model E; , prior experimental result from literature
1
32
Comparison of predicted using different damping models with
Key: , contact mechanics formulation with damping
, damping model C;
, prior experimental result from literature
1.5
t
( )rtα using different damping models with
contact mechanics formulation with damping
, damping model C;
, prior experimental result from literature
1.5
t
using different damping models with
contact mechanics formulation with damping
, damping model D;
, prior experimental result from literature
2
using different damping models with
contact mechanics formulation with damping
, damping model D;
, prior experimental result from literature [2.8].
2.5
contact mechanics formulation with damping
,
3

33
Fig. 2.6. Comparison of experimental and analytical results for at Ωc = 155rpm. (a)
Time domain comparison; (b) Frequency domain comparison. Key: , analytical
contact mechanics formulation with damping model D; , experimental result from
Alzate et al. [2.8].
t
f
(a)
(b)
0 0.5 1 1.5 2 2.5 3
0
1
2
3
4
0 1 2 3 4 5
0.5
1
1.5
2
rα

34
2.5 Assessment of the coefficient of restitution (ξ) concept
Alzate et al. [2.8] assumed the coefficient of restitution, ξ, to be a function of Ωc.
They empirically determined ξ for various Ωc using a linear interpolation for which no
reference was cited. Also, they employed a very small range of Ωc with very few
measured data points to estimate ξ as a function of Ωc. According to Goldsmith [2.37]
and Stronge [2.38], ξ should decrease as Ωc or the velocity of impact increases.
Nevertheless, Alzate et al. [2.8] have estimated ξ to increase with Ωc. This contradiction
suggests that the ξ estimation by Alzate et al. [2.8] is not accurate, and thus this issue is
examined next.
An approximate energy balance technique has been developed next using the
coefficient of restitution concept in order to predict r
pα at different Ωc. The velocity of
the contact point (Ob or Oc) along the direction of i is represented by u; the subscripts b
and c denote the contact point in follower and the cam, respectively, while the
superscripts a and b denote the velocities after and before impact, respectively. The
following assumptions are made in this technique: (i) the follower is at rest before
impact, and the cam and follower impact at the static equilibrium point; (ii) the velocities
a
cu and
b
cu are equal to eΩc (the maximum possible velocity of Oc along the direction of
iɵ ) during impact; and (iii) ξ is constant for all values of Ωc. From the definition of ξ the
following relationship is derived as,
.a a
b c
b b
c b
u u
u uξ
−=
− (2.30)

35
Based on the assumption made, b
bu = 0. Using this value of
b
bu and the assumptions in
Eq. (2.30), a
bu is calculated as,
(1 ) .a
b cu eξ= + Ω (2.31)
The maximum angular velocity of the follower after impact is (1 ) / *ceξ χ+ Ω .
Therefore, the kinetic energy (T) of the follower after impact is,
( )2
0.5 (1 ) / * .P
b b cT I eξ χ= + Ω (2.32)
This kinetic energy, Tb, is equal to an increase in the potential energy (∆V) of the system
essentially deflecting the follower spring. The increase in the potential energy of the
system is given by,
( ) ( )
( ) ( ) ( )2*
tan 0.5 sec.
sec 0.5 sec tan
pu
s s y x b
x b
k L d d wV d
d w
α
α
α αα
α α α
− + − ∆ = − ∫ (2.33)
By equating and ∆V (from the Eqs. (2.32) and (2.33), respectively) , αp, and hence
, are calculated at each Ωc. Fig. 2.7 shows a map of r
pα vs. Ωc for the approximate energy
balance technique (with ξ = 0.05, 0.2, 0.4 and 0.6). Results from the contact mechanics
model and the literature [2.8] are also given. It is inferred that below 160 rpm, ξ should
be less than 0.05 for successfully predicting r
pα with the approximate energy balance
technique. In contrast, Alzate et al. [2.8] have used much higher values of ξ say from 0.37
(Ωc = 130 rpm) to 0.6 (Ωc = 155 rpm). This clearly suggests an ambiguity in using the
coefficient of restitution method for predicting the non-linear the response of the system.
bT r
pα

36
The study using the contact mechanics model is extended to higher speeds in Fig. 2.8
where the proposed model, the previous experiment [2.8], and the approximate energy
balance technique (with ξ = 0.2, 0.6 and 1) are compared. Also from Fig. 2.8, it is
inferred that Alzate et al. [2.8] have analyzed a very small range of Ωc in their study. As
observed, r
pα is very low for Ωc < 160 rpm. With an increase in speed, r
pα increases and
saturates at 1.36 rad, which corresponds to α = 90o. Unlike the contact mechanics model,
the approximate energy balance technique using the coefficient of restitution concept
yields only a global (but a smooth) trend for different values of ξ. This supports the claim
made by Gilardi and Sharf [2.11] that the coefficient of restitution model has inherent
problems.

37
Fig. 2.7. Map of vs. Ωc at lower speeds. Key: , predictions from contact mechanics
model; , experimental results from Alzate et al. [2.8]; , prior analytical results from
Alzate et al. [2.8]; , prediction based on approximate energy balance technique
(given in Section 2.4.2) with ξ = 0.05; , ξ = 0.2; , ξ = 0.4; , ξ = 0.6.
0 20 40 60 80 100 120 140 1600
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
Ωc [rpm]
ξ = 0.4
ξ = 0.2
ξ = 0.6
ξ = 0.05
r
pα

38
Fig. 2.8. Map of vs. Ωc over a broad range of speeds. Key: , predictions from
contact mechanics formulation; , experimental results from Alzate et al. [2.8]; ,
prior analytical results from Alzate et al. [2.8]; , prediction based on approximate
energy balance technique (given in Section 2.4.2) with ξ = 0.2; , ξ = 0.6;
, ξ = 1.
Ωc [rpm]
100 200 300 400 500 600 700 800 9000
0.2
0.4
0.6
0.8
1
1.2
1.4
ξ = 0.2
ξ = 0.6
ξ = 1
1.36 rad
r
pα

39
2.6 Study of the line and point contact models in the sliding contact regime
The speed, Ωc, at which the follower would lose contact with the cam, is
calculated for different values of ks using inverse kinematics [2.36]. Fig. 2.9 shows the
sliding contact and impacting regimes in terms of ks - Ωc map given e = 0.1rc for a
constant speed of the cam. Higher Ωc is needed to lose the contact with the increase in ks.
For further analysis in the sliding contact regime ks = 2000 N/m and Ωc = 300 rpm are
chosen. The non-linear analyses in the sliding contact regime, as reported in this study,
cannot be obviously performed using the coefficient of restitution model developed in
[2.8].
Recall that a line contact (with lλ =16 mm) is assumed between the cam and
follower in the previous section. However, this contact can be approximated as a non-
linear Hertzian point contact [2.32] for small lλ as,
( ) ( )0.54
( ) ( ) .3
i e c ik t Y r tλ ψ ψ=
(2.34)
To have a meaningful comparison of the line and point contact stiffness models, lλ has
been reduced to 1.6 mm. Only the Coulomb friction (with µm = 0.3) and combined
damping model D (with ζD = 0.01 and β
D = 4.25 s/m) are utilized in the comparison of the
spectra of both line and point contact models as shown in Fig. 2.10 for e = 0.1rc. The
spectra with the two contact models do not differ in the lower frequencies shown in
Fig. 2.10 (a) which are dominated by the harmonics of Ωc. However, the spectra differ at
the resonant peaks shown in Fig. 2.10 (b). For the line contact, the frequency is 2182 Hz
but for the point contact the frequency is 1331 Hz, mainly because the linearized contact
αɺɺ
αɺɺ

40
stiffness at the static equilibrium point for line and point contacts are 138 MN/m and 34.2
MN/m respectively.
2.7 Analysis of the friction non-linearity
2.7.1 Effect of direction
The dynamic effects of friction non-linearity are studied for the cam-follower
system next since such issues are of importance in mechanical systems [2.39-41]. The
system is a self-energizing type when vr(t) > 0 (the cam rotates clockwise), as the friction
force tends to increase the normal force; and the system is a de-energizing type when vr(t)
< 0 (the cam rotates counter-clockwise). The comparison of the spectra for the two
different systems with the same cam speed (300 rpm) with the Coulomb friction model is
shown in Fig. 2.10. Due to different directions of Ff(t), ϑ is 2182 Hz for the de-energizing
system and 2125 Hz for the self-energizing system, which can be identified by the peaks
in the spectrum in Fig. 2.10 (b). The harmonics of Ωc (in the lower frequency range) of
both systems match well, as seen in Fig. 2.10 (a). The effect of change in the direction of
rotation is more pronounced in the Fn(t) time history that is displayed in Fig. 2.11. The
self-energizing system has a higher mean component of Fn(t) compared to the de-
energizing system; this is because the Ff(t) increases the Fn(t) in the self-energizing
system which in turn increases Ff(t).
2.7.2 Dynamic bearing and friction forces
The friction models are found to more significantly affect the dynamic forces than
the displacement or the acceleration. As such, the response of the system with the
alternate friction models is found not to vary significantly as long as vr(t) stays in the
αɺɺ

41
same direction. Consequentially, a change in direction in vr(t) is introduced (twice per
revolution of the cam) by increasing e to 0.7rc as observed from Fig. 2.12; the system is
verified to be in the sliding contact regime at 50 rpm, using the inverse kinematics [2.36].
The force time histories Ff(t) and Nx(t) (dynamic bearing force along horizontal direction)
are shown in Fig. 2.13 (a) and (b), respectively, for the alternate dry friction models. Note
that Nx(t) is calculated from Fig. 2.2 as,
( ) ( )( ) ( ) cos ( ) ( ) sin ( )x f nN t F t t F t tα α= + (2.35)
As seen from Fig. 2.13 the forces Ff(t) and Nx(t) with friction model I (with µm = 0.3) are
discontinuous during the change in direction of vr(t) followed by some high frequency
oscillations. This discontinuity is smoothened by using a small value of σ = 10 for friction
model II, but the result of the friction model II should be close to that of the friction
model I for a high value of σ.
Next, it is assumed that the cam oscillates with a particular frequency (ωc); the
motion of the cam is described by Θ(t) = Θ(0)+0.5Θp sin(ωct), where Θp is the peak-to-
peak value of Θ(t). Fig. 2.14 shows that vr(t) < 0 for nearly half the period of oscillation
(π/ωc), and vr(t) > 0 for the other part of the period; here Θp = π rad, ωc = 40 rpm, and e =
0.7rc. Hence, the system acts as self-energizing and de-energizing types on a cyclic basis.
Fig. 2.15 shows the periodic profiles of the forces Ff(t) and Nx(t) where a discontinuity is
observed for friction model I when vr(t) changes its sign; this discontinuity is smoothened
using the friction model II. When |vr(t)| >> 0, the forces Ff(t) and Nx(t) predicted by
model I and II are very close.

42
Fig. 2.9. Identification of contact domains based on ks - Ωc mapping at a constant cam
speed with e = 0.1rc.
Ωc
[rp
m]
ks [N/m]
0 500 1000 1500 2000 2500 3000 3500 40000
500
1000
1500
Sliding contact regime
Impacting regime

43
Fig. 2.10. Comparison of spectra (with µm = 0.3, ζD
= 0.01 and βD
= 4.25 s/m). (a)
Spectra showing harmonics of Ωc; (b) Spectra showing natural frequency of the system.
Key: , de-energizing system with line contact (lλ = 0.0016m, Ωc = 300 rpm);
, self-energizing system with line contact (lλ = 0.0016m, Ωc = -300 rpm); , de-
energizing system with point contact (Ωc = 300 rpm).
f [Hz]
f [Hz]
(a)
(b)
1000 1500 2000 2500
10-7
10-6
10-5
10-4
10-3
0 5 10 15 20 25 30
10-6
10-4
10-2
100
102
αɺɺ

44
Fig. 2.11. Comparison of Fn(t) for different direction of cam rotation with line contact (lλ
= 0.0016m, µm = 0.3, ζD
= 0.01 and βD
= 4.25 s/m). Key: , de-energizing (Ωc =
300 rpm); , self-energizing (Ωc = -300 rpm).
t
Fn(t
)[N
]
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 237
38
39
40
41
42
43
44
45
46

45
Fig. 2.12. Comparison of relative sliding velocity vr(t) for two dry friction models of Fig.
2.3 (with Ωc = 50 rpm, e = 0.7rc , ζD
= 0.01 and βD
= 4.25 s/m). Key: , Coulomb
friction; , Smoothened Coulomb friction.
t
v r(t
)[m
/s]
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1

46
Fig. 2.13. Comparison of forces for two dry friction models of Fig. 2.3 (with Ωc = 50
rpm, e = 0.7rc, ζD
= 0.01 and βD
= 4.25 s/m). (a) Nx(t); (b) Ff(t). Key: , Coulomb
friction; , Smoothened Coulomb friction.
t
t
Nx(t
)[N
]F
f(t)
[N]
(a)
(b)
0 0.5 1 1.5 2
-5
0
5
10
15
20
0 0.5 1 1.5 2-15
-10
-5
0
5
10
15

47
Fig. 2.14. Comparison of relative sliding velocity vr(t) for two dry friction models of Fig.
2.3 (with ωc = 40 rpm, e = 0.7rc, ζD
= 0.01 and βD
= 4.25 s/m). Key: , Coulomb
friction; , Smoothened Coulomb friction.
2.8 Study of kinematic non-linearity
The system is linearized next by assuming small angles and by carrying out a
perturbation analysis about the static equilibrium point with the following limitations: (i)
the system must always be in the sliding contact regime, and (ii) µ(t) must be time-
invariant, hence the Coulomb friction model (where the magnitude of µ(t) is constant for
t
v r(t
)[m
/s]
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-1.5
-1
-0.5
0
0.5
1
1.5

48
all vr(t)) must be used, and the sign of vr(t) must be time-invariant. By implementing the
above limitations, the friction non-linearity and the contact non-linearity (in the equations
for the sliding contact regime as discussed in section 2.3.2) have been eliminated
resulting in only the kinematic non-linearity of the system. The linearized equation of
motion for this particular system with line contact is derived below by replacing α(t) = α*
+ δα(t) in Eq. (2.10), where δα(t) is the perturbation of α(t) about α*:
( )( )
( )
( )
0 0 0
0
0 0 0
sin(2 *) 2 ( )1 cos(2 *)
( )0.5
2cos( *) 2sin( *) ( )1 cos(2 *)
cos( * ) cos( * )( )
( 0.5 )sin( * )* 0.5
sin( * ) ( 0.5 ) cos( * )
u xs y
P
b s x
b
c b
b
c b
dL d
I t k dw
e
r wk w
r wλ
α δ αα
δ α
α α δ αα
χ α α αδ α
α αχ µ
χ α α α α
− + + +
+ − + +
− + +Θ+
− + − + −
− + + −
ɺɺ
( )( )
( )
0
0 0 0
0
1
sin( * ) sin * ( )
cos( * ) ( 0.5 )sin( * )* 0.5 ( ) 0.
cos( * )
c b
b
e e t
r wc w
eλ
α α
χ α α α αχ µ δ α
α
− + +Θ − +Θ
− − + − + − =
+ +Θ ɺ
(2.36)
Rearrange Eq. (2.36) and write it in the standard form as follows:
( )( ) ( ) ( ) ( ).P
b l l lI t C K F tδ α δ α δ α+ + =ɺɺ ɺ
(2.37)
Here, the effective damping coefficient (Cl), stiffness (Kl), and time-varying forcing
function (Fl(t)) are given as follows:
( )0 0 0
0
cos( * ) ( 0.5 ) sin( * )* 0.5 ,
cos( * )
c b
l b
r wC c w
eλ
χ α α α αχ µ
α
− − + −= −
+ +Θ
[ ]( )
0 0 0
0
cos( * ) cos( * )2 sin( *)* 0.5 ,
1 cos(2 *) ( 0.5 ) sin( * )
s x b
l b
c b
ek d wK k w
r wλ
χ α α ααχ µ
α α α
− + +Θ−= + −
+ − + −

49
( )( )
( )
* 0
0 0
0 0
sin(2 *) cos( *)( )
1 cos(2 *)
( 0.5 ) cos( ) 1
0.5 .sin( * )sin( * )
sin * ( )
u x bl s x s y
c b
b
d wF t k d L d
r w
k we
t
λ
α α
α
α α
χ µ αχ α α
α
−= − − + +
+ − − +
− − +Θ− + − +Θ
(2.38 a- c)
The spectra of the linearized and the non-linear systems are compared in Fig.
2.15. Observe that the linear system has only the fundamental harmonic of Ωc while the
non-linear system exhibits the super-harmonics of Ωc as shown in Fig. 2.16(a). The linear
system has a single peak at the natural frequency of the system, but the non-linear system
displays side bands associated with this peak as seen in Fig. 2.16 (b). Therefore, the
linear system approximation does not accurately predict the results of the system with
only kinematic non-linearity.
2.9 Conclusion
The non-linear dynamics of the cam-follower system have been analyzed in this
study. First, a contact mechanics formulation for a cam-follower system with combined
rolling-sliding contact has been developed, and the predictions with combined viscous-
impact damping models are successfully compared with the experimental results reported
by Alzate et al. [8]. Second, the accuracy of the coefficient of restitution concept is
analyzed using the approximate energy balance technique, and the estimated value of the
coefficient of restitution by Alzate et al. [2.8] is found to be much lower than the
estimates of this study; this suggests that there is some ambiguity in employing this
concept for the cam-follower system. Third, the effect of friction non-linearity on the
dynamic forces is studied using discontinuous and smoothened dry friction models.
αɺɺ

50
Finally, a linearized system is found to be inadequate in representing the system with
only kinematic non-linearity.
Several contributions emerge from this study over the current literature on the
cam-follower dynamics [2.1-10]. The new contact mechanics formulation successfully
predicts the dynamics of the cam-follower system with combined rolling-sliding contact
in both impacting regime and sliding contact regimes. A better understanding of the
applicability of different damping models and the inaccuracies of the coefficient of
restitution model to the cam-follower system during impacts is obtained. Even though the
applicability of contact damping models are specific to the cam-follower system, this
thesis provides better insights into the damping mechanisms of a family of mechanical
systems. This analysis also yields a better understanding of the roles of the friction and
kinematic non-linearities in the sliding contact regime. The chief limitation of the chapter
is the utilization of a single degree-of-freedom model that assumes the cam is rigidly
pivoted about its center of rotation. This deficiency should be removed in future study
with a higher degree-of-freedom system. Also, semi-analytical solutions can be sought.

51
Fig. 2.15. Comparison of forces for two dry friction models of Fig. 2.3 (with ωc = 40
rpm, e = 0.7rc, ζD
= 0.01 and βD
= 4.25 s/m). (a) Ff(t); (b) Nx(t). Key: , Coulomb
friction; , Smoothened Coulomb friction.
t
t
(a)
(b)
Nx(t
)[N
]F
f(t)
[N]
0 0.5 1 1.5 2-15
-10
-5
0
5
10
15
0 0.5 1 1.5 2-10
0
10
20
30

52
Fig. 2.16. Comparison of spectra (with µm = 0.3, Ωc = 300 rpm, ζD
= 0.01 and βD
=
4.25 s/m). (a) Spectra showing harmonics of Ωc; (b) Spectra showing natural frequency
of the system. Key: , Non-linear system; , Linear system.
f [Hz]
f [Hz]
(a)
(b)
1000 1500 2000 250010
-7
10-6
10-5
10-4
10-3
0 5 10 15 20 25 30
10-6
10-4
10-2
100
102
αɺɺ

53
References for Chapter 2
[2.1] F. Y. Chen, A survey of the state of the art of cam system dynamics. Mechanism
and Machine Theory 12 (3) (1977) 201–224.
[2.2] T.L. Dresner, P. Barkan, New methods for the dynamic analysis of flexible
single-input and multi-input cam-follower systems. ASME Journal of Mechanical
Design 117 (1995) 150.
[2.3] N.S. Eiss, Vibration of cams having two degrees of freedom. ASME Journal of
Engineering for Industry 86 (1964) 343.
[2.4] R.L. Norton, Cam Design and Manufacturing Handbook, Industrial Press Inc.,
2009.
[2.5] L. Cveticanin, Stability of motion of the cam–follower system. Mechanism and
Machine Theory 42 (9) (2007) 1238–1250.
[2.6] G. Osorio, M. di Bernardo, S. Santini, Corner-impact bifurcations: a novel class
of discontinuity-induced bifurcations in cam-follower systems. Journal of Applied
Dynamical Systems 7 (2007) 18–38.
[2.7] H. S. Yan, M. C. Tsai, M. H. Hsu, An experimental study of the effects of cam
speeds on cam-follower systems. Mechanism and Machine Theory 31 (4) (1996)
397–412.
[2.8] R. Alzate, M. di Bernardo, U. Montanaro, and S. Santini, Experimental and
numerical verification of bifurcations and chaos in cam-follower impacting
systems. Nonlinear Dynamics 50 (3) (2007) 409–429.

54
[2.9] R. Alzate, M. di Bernardo, G. Giordano, G. Rea, S. Santini, Experimental and
numerical investigation of coexistence, novel bifurcations, and chaos in a cam-
follower system. SIAM Journal on Applied Dynamical Systems 8 (2009) 592–
623.
[2.10] M.P. Koster, Vibrations of Cam Mechanisms: Consequences of Their Design,
Macmillan, 1974.
[2.11] G. Gilardi, I. Sharf, Literature survey of contact dynamics modeling. Mechanism
and Machine Theory 37 (2002) 1213–1239.
[2.12] V. Aronov, A.F. D’Souza, S. Kalpakjian, I. Shareef, Interactions among friction,
wear, and system stiffness. Part 2. Vibrations induced by dry friction. ASME
Journal of Lubrication Technology 106 (1984) 59–64.
[2.13] Y. Masayuki, N. Mikio, A fundamental study on frictional noise (1st report, the
generating mechanism of rubbing noise and squeal noise). Bulletin of JSME 22
(1979) 1665–1671.
[2.14] Y. Masayuki, N. Mikio, A fundamental study on frictional noise (3rd report, the
influence of periodic surface roughness on frictional noise). Bulletin of JSME 24
(1981) 1470–1476.
[2.15] Y. Masayuki, N. Mikio, A fundamental study on frictional noise (5th report, the
influence of random surface roughness on frictional noise). Bulletin of JSME 25
(1982) 827–833.

55
[2.16] S. He, R. Gunda, R. Singh, Effect of sliding friction on the dynamics of spur gear
pair with realistic time-varying stiffness. Journal of Sound and Vibration 301
(2007) 927–949.
[2.17] S. Kim, R. Singh, Gear surface roughness induced noise prediction based on a
linear time-varying model with sliding friction. Journal of Vibration and Control
13 (2007) 1045–1063.
[2.18] Y. Michlin, V. Myunster, Determination of power losses in gear transmissions
with rolling and sliding friction incorporated. Mechanism and Machine Theory 37
(2002) 167–174.
[2.19] M.N. Sahinkaya, A.-H.G. Abulrub, P.S. Keogh, C.R. Burrows, Multiple sliding
and rolling contact dynamics for a flexible rotor/magnetic bearing system.
IEEE/ASME Transactions on Mechatronics, 12 (2007) 179 –189.
[2.20] B. L. Stoimenov, S. Maruyama, K. Adachi, and K. Kato, The roughness effect on
the frequency of frictional sound. Tribology International 40 (4) (2007) 659–664.
[2.21] M. Othman, A. Elkholy, Surface-roughness measurement using dry friction noise.
Experimental Mechanics 30 (3) (1990) 309–312.
[2.22] M. Othman, A. Elkholy, A. Seireg, Experimental investigation of frictional noise
and surface-roughness characteristics. Experimental Mechanics 30 (4) (1990)
328–331.
[2.23] A. Le Bot, E. Bou Chakra, Measurement of friction noise versus contact area of
rough surfaces weakly loaded. Tribology Letters 37 (2010) 273–281.

56
[2.24] A. Le Bot, E. Bou-Chakra, G. Michon, Dissipation of vibration in rough contact.
Tribology Letters 41 (2011) 47–53.
[2.25] H. Ben Abdelounis, H. Zahouani, A. Le Bot, J. Perret-Liaudet, M.B. Tkaya,
Numerical simulation of friction noise. Wear 271 (2011) 621–624.
[2.26] A. Soom, J.-W. Chen, Simulation of random surface roughness-induced contact
vibrations at Hertzian contacts during steady sliding. ASME Journal of Tribology
108 (1986) 123–127.
[2.27] P.J. Remington, Wheel/rail rolling noise, I: Theoretical analysis, Journal of the
Acoustical Society of America 81 (1987) 1805–1823.
[2.28] P.J. Remington, Wheel/rail rolling noise, II: Validation of the theory, The Journal
of the Acoustical Society of America 81 (1987) 1824–1832.
[2.29] G.G. Gray, K.L. Johnson, The dynamic response of elastic bodies in rolling
contact to random roughness of their surfaces. Journal of Sound and Vibration 22
(1972) 323–342.
[2.30] P.R. Kraus, V. Kumar, Compliant contact models for rigid body collisions, in:
IEEE International Conference on Robotics and Automation, 1997, pp. 1382 –
1387 vol.2.
[2.31] O. Ma, Contact dynamics modelling for the simulation of the space station
manipulators handling payloads, in: IEEE International Conference on Robotics
and Automation, 1995, pp. 1252 –1258 vol.2.
[2.32] K.L. Johnson, Contact Mechanics, Cambridge University Press, Cambridge,
1987.

57
[2.33] MATLAB User’s Guide, The Math Works Inc., Natick, MA, 1993.
[2.34] C. Padmanabhan, R. Singh, Dynamics of a piecewise non-linear system subject to
dual harmonic excitation using parametric continuation. Journal of Sound and
Vibration 184 (1995) 767–799.
[2.35] D. Zhang, W.J. Whiten, The calculation of contact forces between particles using
spring and damping models. Powder Technology 88 (1996) 59–64.
[2.36] F.Y. Chen, Mechanics and Design of Cam Mechanisms, Pergamon Press, 1982.
[2.37] W. Goldsmith, Impact: The Theory and Physical Behavior of Colliding Solids,
Dover Publications, New York, 2001.
[2.38] W.J. Stronge, Impact Mechanics, Cambridge University Press, New York, 2000.
[2.39] F.-J. Elmer, Nonlinear dynamics of dry friction. Journal of Physics A:
Mathematical and General 30 (1997) 6057–6063.
[2.40] M. Vaishya, R. Singh, Sliding friction-induced non-linearity and parametric
effects in gear dynamics. Journal of Sound and Vibration 248 (2001) 671–694.
[2.41] R.I. Leine, D.H. van Campen, A. de Kraker, L. van den Steen, Stick-Slip
vibrations induced by alternate friction models. Nonlinear Dynamics 16 (1998)
41–54.

58
CHAPTER 3
ESTIMATION OF IMPACT DAMPING PARAMETERS FROM TIME-DOMAIN
MEASUREMENTS ON A MECHANICAL SYSTEM
3.1 Introduction
Periodic impacts commonly occur in mechanical systems having clearance or
backlash; these include geared systems [3.1 - 5], cam-follower mechanisms [3.6 - 9], and
four-bar linkages [3.10 - 12]. There is a significant body of literature on such impacting
systems employing linear system method [3.13, 3.14], non-linear analysis [3.15], stability
investigations [3.16 - 18] and energy dissipation analyses [3.19, 3.20]. However, only a
few researchers [3.15, 3.21, 3.22] have utilized contact mechanics formulation (with an
impact damping model) for such systems. The commonly used contact force formulation
[3.21, 3.23 - 25] is of the form,
( )1 .kF Fλ κδ= + ɺ (3.1)
Here, Fλ is the contact force (with λ representing a contact parameter), Fk is the contact
stiffness force, δ is the indentation displacement and κ is an arbitrary constant.
Additionally, alternate formulation such as 1 / 4
kF Fλ η δ δ= + ɺ (where η is a constant)
also has been used [3.22] to represent the contact force during impacts. Overall, there is a
clear need to experimentally determine the most appropriate impact damping model, but

59
the direct measurement of the contact force during impact is a challenge. Therefore, the
main goal of this chapter is to propose a new method that would combine time domain
measurements and analytical predictions to estimate damping parameters.
3.2 Problem formulation
A generalized model for the contact force is proposed below where n is the
damping index and β is the impact damping coefficient,
.n
kF Fλ βδ δ= + ɺ (3.2)
Hertzian contact theory [3.26] could be used to find Fk since it gives a reasonable
estimate of the elastic force as suggested by Veluswami et al. [3.23]. The values of β and
n could then be experimentally determined, though only a limited number of researchers
[3.27] have conducted experimental studies using an impact damping model.
Nevertheless, the following key questions remain unanswered: a) Is eq. (3.2) in a general
form, with experimentally estimated values of β and n, consistent with eq. (3.1), which
has been used for impacting systems without much experimental corroboration? b) Could
the hysteresis loop and the contact force be utilized to estimate β and n? c) What is the
relative significance of the numerical values of β and n? d) How could one justify the
numerical values of β and n, given the literature for a typical system? e) Is the equivalent
viscous damping model appropriate for this problem? The scope of this study is
accordingly formulated to address the above mentioned questions, though this work is
restricted to impacts with point contacts between two objects made of steel under
lubricated conditions. The key objectives of this chapter are defined as follows: (i)
Design a controlled cam-follower experiment with lubricated point contact to measure
60
forces and motion (in time domain) under periodic impacts; (ii) Propose an analogous
analytical model for the experiment with contact mechanics formulation; (iii) Develop
and evaluate a signal processing procedure to experimentally determine β and n without
directly measuring the contact force; and (iv) Determine an equivalent coefficient of
restitution model from the same experiment and then justify the estimated value(s) of β
using the relationship suggested by Hunt and Crossley [3.24].
The cam-follower system proposed for this study is shown in Fig. 3.1, which is a
representative experiment for impacting systems. The system consists of a cylindrical
steel cam rotating about an axis not passing through its centroid but parallel to the axis if
the cylinder. The follower consists of a long bar of square cross-section attached to a thin
cylindrical steel dowel pin as shown in Fig. 3.1, and pivoted at its end by a pair of roller
bearings. The follower is supported along the vertical direction ( ˆye ) by a coil spring
which is always compressed, thereby forcing it towards the rotating cam. The main
assumptions regarding the experiment are: a) The axes of rotation of the cam and the
follower remain unchanged at any load; b) The bearings at the follower pivot are
frictionless; and c) The angular velocity of the cam (Ωc, subscript c denoting the cam) is
constant and unaffected by the impact loads. The following conditions are to be
considered in designing the cam-follower experiment to achieve a good estimate of β and
n. First, the sliding friction force at the contact during impacts should not interfere with
the impact dynamics of the system. Second, the effect of flexural vibrations of the
follower caused by impacts should not affect the measured force and acceleration. Third,
the responses have to be accurately measured during the impacts which take place within
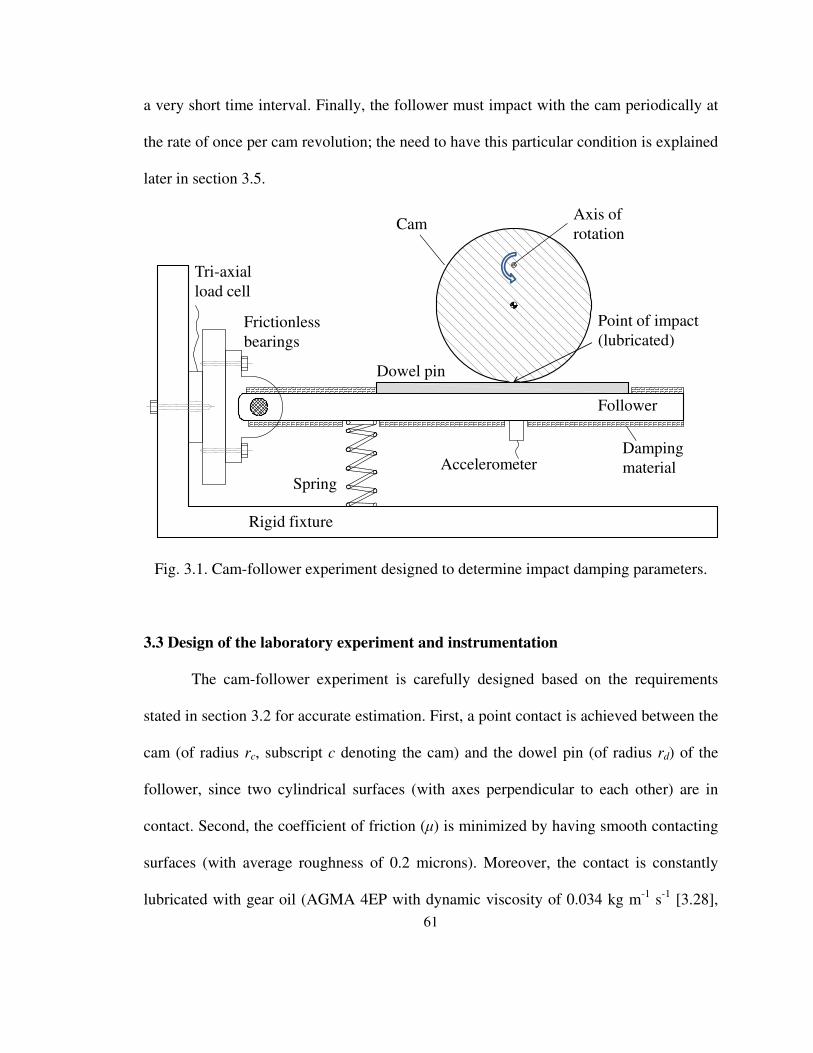
61
a very short time interval. Finally, the follower must impact with the cam periodically at
the rate of once per cam revolution; the need to have this particular condition is explained
later in section 3.5.
Fig. 3.1. Cam-follower experiment designed to determine impact damping parameters.
3.3 Design of the laboratory experiment and instrumentation
The cam-follower experiment is carefully designed based on the requirements
stated in section 3.2 for accurate estimation. First, a point contact is achieved between the
cam (of radius rc, subscript c denoting the cam) and the dowel pin (of radius rd) of the
follower, since two cylindrical surfaces (with axes perpendicular to each other) are in
contact. Second, the coefficient of friction (µ) is minimized by having smooth contacting
surfaces (with average roughness of 0.2 microns). Moreover, the contact is constantly
lubricated with gear oil (AGMA 4EP with dynamic viscosity of 0.034 kg m-1
s-1
[3.28],
Spring
Follower
Frictionless
bearings
Accelerometer
Rigid fixture
Dowel pin
Tri-axial
load cell
Point of impact
(lubricated)
Cam
Damping
material
Axis of
rotation

62
[3.29]), hence µ is taken to be as low as 0.2. Third, the flexural vibrations in the follower
(of width wb, subscript b denoting the bar) are minimized using a damping material (Sika
damp 620 [3.30]). Fourth, a tri-axial force transducer (PCB 260A01 [3.31]) located at the
follower hinge measures the reaction forces along ˆx
e (horizontal) and ˆye directions,
while the shock accelerometer (PCB 350B02 [3.32]) attached to the follower near the
contact point (at a distance of la from follower pivot) measures its tangential acceleration.
Both these transducers (capable of accurately recording the impacts) are simultaneously
sampled at a very high frequency of 204800 Hz using the LMS Scadas III [3.33] data
acquisition system. Finally, the contact is maintained when Ωc is low; however, the
follower (of length lb) starts losing contact and making impacts as Ωc is increased
considerably. As observed by Alzate et al. [3.8], the system quickly goes into a chaotic
state once Ωc is increased beyond a certain limit. Hence a variable speed electric motor is
used to carefully control Ωc, so that the system does a periodic impact of exactly once per
revolution of the cam. A digital tachometer (Neiko tools, USA) is used to accurately
measure Ωc. The variation in Ωc during the impacts is found to less than 2.5% of the
mean value, which is the same even when there is no load on the cam (follower is not in
contact with the cam).
3.4 Analytical model
3.4.1 Kinematics of the system
Fig. 3.2 shows a sketch of the analytical model with a contact mechanics
formulation for the experiment. The cylindrical cam rotates about E which is at a distance
e from the centroid (Gd). The linear stiffness of the coil spring supporting the bar is ks and

63
it is grounded at a distance dy below the bearing pivot P and at a distance of dx from it
along ˆx
e . The angle made by the follower with ˆx
e is given by α(t) measured in the
clockwise direction, while the angular displacement of the cam in the counter-clockwise
direction is given by Θ(t). The instantaneous points of contact in the cam and the follower
are given by Oc and Ob, respectively. A moving coordinate system ˆ ˆ( , )i j attached to the
follower is defined with its origin at Q where i is orthogonal to the follower. The vector
cQO
in the ˆ ˆ( , )i j coordinate system is given by ˆ ˆi ji jψ ψ+ as shown in Fig. 3.2. The 0-
state is defined with Θ0 and α
0 (with superscript 0 representing the 0-state), as discussed
by Sundar et al. [3.9] for a similar system. The contact mechanics is represented by point
contact stiffness (kλ) and impact damping (cλ) elements. The chief assumptions in the
analytical formulation are as follows: (1) The friction does not affect the impact
mechanism and it follows a Coulomb friction model; (2) The coil spring supporting the
follower is linear; and (3) The bending moment in the follower is negligible, while the
amplitude of flexural vibrations are negligibly small compared to the amplitude of
angular oscillations due to impact;
At the 0-state, α0 and Θ
0 is defined as the following,
( )
( )
4 2 2 2 2
0 1
2 2
0.5 2
0.5 2cos ,
b d cx x y x
b d cy
x y
PE PE PE PE w r r e
PE w r r e
PE PE
α −
+ − + + +
+ + + + = +
(3.3)
0 0 .2
π αΘ = − (3.4)

64
Fig. 3.2. Analytical contact mechanics model of the experiment shown in Fig. 3.1.

65
Here x
PE
and y
PE
are the magnitudes of PE
along ˆx
e and ˆye , respectively. Using
the procedure discussed by Sundar et al. [3.9], the moving coordinates (ψi(t) and ψj(t))
and their time derivates are calculated using the following equations:
( ) ( ) ( )( )( ) ( )
0 0 0
0
( ) sin ( ) 2 0.5 cos ( ) 1
[sin ( ) sin ( ) ( ) ],
i c d bt t r r w t
e t t t
ψ χ α α α α
α α
= − + + + − −
+ + Θ − + Θ (3.5)
( ) ( ) ( )
( ) ( )
0 0 0
0
( ) 1 cos ( ) 2 0.5 sin ( )
cos ( ) cos ( ) ( ) ,
j c d bt t r r w t
e t t t
ψ χ α α α α
α α
= − − + + + −
− + Θ − + Θ
(3.6)
( ) ( ) ( )
( ) ( )( )
0 0 0
0
( ) cos ( ) ( ) 2 0.5 sin ( ) ( )
cos ( ) ( ) cos ( ) ( ) ( ) ( ) ,
i c d bt t t r r w t t
e t t t t t t
ψ χ α α α α α α
α α α α
= − − + + −
+ + Θ − + Θ + Θ
ɺ ɺ ɺ
ɺɺ ɺ (3.7)
( ) ( ) ( )
( ) ( )( )
0 0 0
0
( ) sin ( ) ( ) 2 0.5 cos ( ) ( )
sin ( ) sin ( ) ( ) ( ) ( ) .
j c d bt t t r r w t t
e t t t t t
ψ χ α α α α α α
α α α α
= − + + + −
+ + Θ − + Θ + Θ
ɺ ɺ ɺ
ɺɺ ɺ (3.8)
Here, 0 ( ) ( )jt tχ χ ψ= + , where χ(t) is the moment of the Fλ(t) about P and is given by the
instantaneous magnitude of bPO
along j .
3.4.2 Non-contact regime
When the instantaneous value of ψi(t) > 0 the follower is not in contact with the
cam, the equation of motion depends only on the dynamics of the follower and coil
spring. It is given by the following, where P
bI is the moment of inertia of the follower
(along with the damping material) about P, mb is the mass of the follower (along with the
damping material), lb is the distance from the center of gravity of the follower (Gb) from
P:

66
( )( ) cos ( ) ( ) .P
b b g s xI t m gl t F t dα α= −ɺɺ (3.9)
Here, Fs(t) is the elastic force from the coil spring which is given as follows, where u
sL is
the undeflected length of the spring,
( ) ( )( ) tan ( ) 0.5 sec ( ) .u
s s s y x bF t k L d d t w tα α = − + + (3.10)
The eq. (3.9) is solved numerically for a given value of Ωc, as long as ψi(t) > 0. The
system goes to a contact regime once ψi(t) goes less than 0 and the response of the system
has to be calculated using the contact mechanics formulation, which is discussed next.
3.4.3 Contact regime
Using the contact mechanics formulation, the response of the system is calculated
using Hertzian contact theory [3.26]. The contact stiffness for a point contact is
calculated as,
( ) ( )0.54
( ) ( ) .3
e e
i ik t Y tλ ψ ρ ψ= (3.11)
Here, Y is the Young’s modulus (with superscript e denoting equivalent) given by the
following, where ν is the Poisson’s ratio,
12 21 1
.e c b
c b
YY Y
ν ν−
− −= +
(3.12)
The equivalent radius of curvature at the contact (ρe) is given by,
11 1( ) ( ) .e
c dr rρ
−− − = + (3.13)
The impact damping is defined as,
( )( ) ( ) .n
i ic t tλ ψ β ψ= (3.14)

67
The total contact force is given by,
( ) ( )( ) ( ) ( ) ( ) ( ).i i i iF t k t t c t tλ λ λψ ψ ψ ψ= − − ɺ (3.15)
Taking the moment balance of the forces acting on the follower about P, the equation of
motion in the contact regime is calculated as,
( ) ( )( ) cos ( ) ( ) ( ) ( ) ( ) 0.5 2 .P
b b g s x f b dI t m gl t F t d F t t F t w rλα α χ= − + − +ɺɺ (3.16)
Here, Ff(t) is the friction force given by
( )( ) ( ) sgn ( ) .f rF t F t v tλµ= (3.17)
Here, vr(t) is the relative sliding velocity at the contact point given by
( ) ( )( ) ( ) sin ( ) ( ) ( ) ( ) .r j cv t t r e t t t tψ α α= − + + Θ + Θ ɺɺ ɺ (3.18)
Note that from eq. (3.16), Ff(t) does not significantly affect the dynamics of the
system as its moment arm (0.5wb + 2rd) is very small compared to χ(t) and moreover µ is
very low. The system response is computed in the non-contact regime by solving eq.
(3.9), while in the contact regime by solving eq. (3.16). The system constantly switches
between these two regimes when Ωc is greater than a certain value, depending on the
system. At the very beginning of the simulation (0) *α α= and (0) 0α =ɺ are used as
initial conditions, where α* is the value of α(t) at the static equilibrium point (with
superscript *). This is evaluated using eqs. (3.5), (3.6) and (3.16) in the Jacobian matrix
method as discussed by Sundar et al. [3.9]. After this the initial conditions for each
regime is taken from the final state of the previous regime.

68
3.5 Estimation of the impact damping parameters (β and n)
3.5.1 Time-domain based technique to estimate the system response
The reaction forces along ˆx
e and ˆye (Nx and Ny, respectively, as shown in Fig.
3.2) and ( )tαɺɺ (calculated by dividing the measured tangential acceleration of the follower
by la) are the experimental data measured in the time-domain. The geometrical
parameters and inertia are obtained directly from the experiment. The entire procedure is
performed in the time-domain as impacts excite a wide range of frequencies (including
the natural frequencies of the cam-follower system and flexural vibrations of the
follower), and hence the frequency domain data cannot be used directly. Some of the
important numerical issues for which care needs to be taken in this estimation process are
as follows. First, the measured ( )tαɺɺ is numerically integrated obtain ( )tαɺ , which is
numerically integrated again to obtain the system response ( ( )tα ). The integration
process does not give the DC component of the signal, moreover numerical integration
process has inherent errors [3.34] (truncation and round-off) associated with it. Also since
integration has to be performed twice, these errors would have a cumulative effect on
α(t). Thus, higher accuracies can be achieved by having a shorter time resolution (τ) and a
smaller length of integration vector. Second, the magnitude of indentation (ψi(t)) during
contact is very small compared to the maximum value of α(t) in the non-contact regime
and the time of impact is very short. Hence it is very difficult to accurately estimate ψi(t)
during impacts from the experimental data.
The following technique is adopted to minimize the errors due to the numerical
integration and to estimate the DC component of α(t). The impact damping estimation

69
procedure discussed later in section 3.5.2 can be employed even without adopting this
technique, if α(t) can be accurately calculated from the experiment. The measured time-
domain data (forces and acceleration) have many impacts, but each impact is considered
an independent event for the purpose of analysis. Furthermore, each impact event is
divided into two sub-events, namely contact and non-contact. The contact sub-event
begins when the cam and the follower are just in contact (ti = 0, superscript i represents
experimental data for an impact event) with 0i
iψ = and ends when the follower looses
contact with the cam ( i i
at t= ). Then the non-contact sub-event starts and lasts until the
follower next comes into contact with the cam ( i i
et t= ). The experimental angular
acceleration for each impact event is measured as ( )i itαɺɺ and its time-average
( )( )i
i i
ttαɺɺ should be 0 since the impacts are periodic (as stated in section 3.3).
However, generally this is not the case as the measured data has some errors, and hence
( )i
i i
ttαɺɺ is subtracted from ( )i i
tαɺɺ . Then ( )i itαɺɺ is integrated numerically using the
Runge-Kutta method to get ( )i itαɺ . Though ( )
i
i i
ttαɺ should be 0, it is not due to the
errors of the numerical integration technique. This is eliminated by subtracting ( )i
i i
ttαɺ
from ( )i itαɺ . The resultant signal is again integrated numerically to get ( )i i
tα . The fact
that the follower impacts exactly once per revolution of the cam, is used again to
calculate the DC component of ( )i itα . For a given system, the time period of each
impact ( i
et ) depends on its state at the end of the contact sub-event. Writing it

70
mathematically as follows where Ξ is a function that gives the time required by the
follower to return to its initial position based on initial conditions,
( )( ), ( ) .i i i i i
e a at t tα α= Ξ ɺ (3.19)
Equation (3.9) is solved iteratively with known ( )i i
atαɺ and different values of α as initial
conditions to evaluate Ξ. The time required for the follower to come back to same initial
position is calculated for each α. The value of α for which the calculated time matches
with i
et , is chosen ( )i i
atα since 0i
at ≈ (due to extremely short time of contact sub-event).
The DC component of ( )i itα (calculated by numerical integration) is adjusted so that
( ) ( )i i
a
i i i i
at tt tα α
== . The angle of the cam at t
i = 0 ( )(0)iΘ is calculated from eq. (3.5) by
replacing α(t) with (0)iα , forcing ψi(t) = 0 and solving for Θ(t). Thus the time-history of
Θ can be calculated as,
( ) (0) .i i i i
ct tΘ = Θ + Ω (3.20)
3.5.2 Signal processing procedure to estimate β and n
It is not possible to have a direct method to estimate the impact damping
parameters, because of their inter-relationship with the measured acceleration and
reaction forces. Hence they are identified using an indirect method of comparing the
experimental data for each impact with the results from analytical model with trial values
of β and n which is defined as simulation S1 (where S1 represents simulation with trial
values). To aid in the comparison process, the ( )i iF tλ
during contact ( 0 i i
at t< < ) is
calculated from the measured data using the force balance as,
( ) ( )( ) ( ) ( ) sin ( ) ( ) ( ) cos ( ) .i i i i i i i i i i i i i
b g x y s bF t m l t N t t N t F t m g tλ α α α = + + + − ɺɺ (3.21)

71
Here ( )i
sF t is calculated from eq. (3.10) by replacing α(t) with ( )i itα . Also the maximum
amplitude of response ( )i
mα is calculated as the following where ‘max’ is a function that
returns the maximum value of a set of inputs,
( )max ( ) .i i i
m tα α= (3.22)
The results of simulation S1 are obtained for each impact event by solving the
equations of motion of the contact sub-event (eq.(3.16)) with (0)iα and (0)iαɺ as initial
conditions from the experimental data of the impact event, followed by the equation of
motion in the non-contact sub-event (eq. (3.9)) until 1S i
et t= (superscript S1 represents
results with simulation S1 with trial values of β and n for the corresponding impact event).
Simulation S1 is conducted using different trial values of β and n for each impact event to
compare with the experimental results. Similar to the experimental results 1 1( )S S
F tλ,
1 1( )S S
i tψ and 1S
mα are estimated for each simulation. The following residues are defined to
compare the experimental results with that of simulation S1:
1
1 ,
S i
m m
i
m
α α
α
−Λ =
( )
( )
12
0
2
2
0
( ) ( ) .
,
( ) .
ie
ie
t
Si
t
i
F t F t dt
F t dt
λ λ
λ
−
Λ =∫
∫
( ) ( )( )
1 1 1
3
( ). ( )..
( ).
S S Si i i
i i i i
i i i
i i
F d F d
F d
λ λ
λ
ψ ψ ψ ψ
ψ ψ
−Λ =
∫ ∫∫
(3.23 a - c)

72
The maximum response of the system after the impact is the criterion considered for the
first residue (Λ1). The second residue (Λ2) is based on the root mean square difference in
the contact forces from the experiment and the simulated data in time-domain, while the
third residue (Λ3) uses the area under the hysteresis loop. The appropriate numerical
values for β and n are identified based on the impact damping model which gives the
minimum value of the average of the residues of all impact events. The estimation
procedure can be based on either of the residues. Hence the accuracy of the estimation
process using these residues will be discussed in section 3.6.
3.6 Error and sensitivity analyses on the estimation procedure
3.6.1 Error analysis
Before employing the procedure discussed in section 3.5, the robustness (using
error analysis) and accuracy (using sensitivity) of the procedure have to be critically
studied. The robustness can be better understood by the error in the residues for an ideal
case, since an indirect method of comparison is being employed for the estimation
process. Simulation S2 (where S2 represents simulation with known values) is defined as
solving the analytical model for each impact event with given initial conditions using
known values of damping parameters ( 2Sβ and 2Sn , superscript S2 represents simulation
S2). The force and acceleration time-histories from simulation S2 are used instead of the
experimental data in the procedure discussed in section 3.5 and the residues are
calculated using the simulation S1 with the 1 2S Sβ β= and 1 2S Sn n= . Ideally all three
residues should be 0, but that is not the case due to the approximations in the estimation
procedure.

73
The following parameters for the cam-follower experiment are selected to have an
accurate estimation of impact parameters: mb = 0.257 kg, rc = 17.5 mm, Ib = 3300 kg-
mm2, lg = 173 mm, la = 63 mm, lb = 86 mm, wb = 12.7 mm, rd = 3.2 mm, ks = 3319 N/m,
u
sL = 53 mm, dx = 35 mm and dy = 58 mm. The relative positions of the pivot points of
the cam and the follower are given by ˆ ˆ89 mm 27 mmx y
PE e e= +
. The material properties
for a steel cam and a steel follower are Yc = Yb = 210 GPa and νc = νb = 0.3. Inverse
kinematic analysis discussed by Sundar et al. [3.9] is employed for the current system
with the given parameters to obtain the regions on impact on an e/rc vs. Ωc map as shown
in Fig. 3.3. Table 3.1 gives the average residue per impact, calculated using simulation S1
and S2 with 1 2 2.524.7 GNsmS Sβ β −= = and 1 2 1.5S S
n n= = for different values for e/rc and
Ωc in the impact regime (shown in Fig. 3.3). As observed, the residues for all cases are
very low, which shows that the estimation procedure is very robust for these examples.
Also, it can be inferred that as e/rc increases, Λ1 reduces and reaches a minimum at e/rc =
0.2 and starts increasing again. With the increase in e/rc the signal to noise ratio
increases; hence Λ1 reduces, but for very high values of e/rc the system operates close to
a chaotic state. The noise here might be from experimental measurements or from the
numerical error (in solving equations of motion). Similar trends are not observed in the
cases of Λ2 and Λ3. As observed, the values of Λ1 are the lowest, followed by Λ3, with Λ2
being the highest. Fig. 3.4 compares sample hysteresis loops of simulations S1 and S2, for
a case with e/rc = 0.2, where */i iF F Fλ λ λ= and */i i
i i iψ ψ ψ= . It is observed that for this
case, a point contact the maximum value of Fλ during impact is about 3 orders of

74
magnitude greater than *Fλ
while the maximum value of ψi during impact is only about 2
two orders of magnitude greater than *
iψ . Also even for an ideal case there is not a very
good match in the hysteresis loop for low values of indentation. The relative accuracies
of the residues in estimating the damping parameters should not be decided from the Λ
values in Table 3.1, but should be decided from the sensitivity of these residues to
variation in β and n. Hence it is analyzed next.
Fig. 3.3. Regimes of contact and impact for the system (with parameters given in section
3.6.1) via Ωc vs. e/rc. Key: , Operational points (with periodic impacts) selected for the
purpose of error analyses.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.45
10
15
20
25
30
35
40
Impacting regime
Contact regime
e/rc
Ωc
[Hz]

75
e/rc Ωc (Hz) Average Λ1 Average Λ2 Average Λ3
0.05 23 0.0056 0.0849 0.0024
0.10 18 0.0361 0.1032 0.0033
0.15 17 4.75 x 10-7
0.0703 0.0041
0.20 16 0.78 x 10-7
0.0728 0.0039
0.25 15 1.65 x 10-7
0.0834 0.0043
Table 3.1 Comparison of average residues per impact (Λ1, Λ2 and Λ3) using two
simulations (S1 and S2) with 1 2 2.524.7GNsmS Sβ β −= = and 1 2 1.5
S Sn n= = .

76
Fig. 3.4. Comparison of hysteresis loops for single impacts during simulation S2 (
2 2.524.7GNsmSβ −= and 2 1.5S
n = ) and simulation S1 (1 2S Sβ β= and 1 2S S
n n= ) given
e/rc = 0.2 and Ωc = 16 Hz. Key: , Simulation S1; , Simulation S2.
3.6.2 Sensitivity analysis
Table 3.2a gives the values of normalized residues ( Λ ) for simulation S2 (
2 2.524.7 GNsmSβ −= and 2 1.5S
n = ) and simulation S1 with 1 2S Sn n= with different values
of 1Sβ in the close proximity of 2Sβ . The residues are normalized based on its value
when 1 2S Sβ β= . The sensitivity of the residues to a change in β can be understood from
this table. It can be easily inferred that 1Λ has a very high sensitivity even to a very small
change in the value of β, compared to that of 2Λ and
3Λ . Also ideally Λ should be
lowest for 1 2S Sβ β= , but that is not the case with 2Λ and
3Λ , which may lead to an
0 10 20 30 40 50 60 700
200
400
600
800
1000
i
iψ

77
incorrect estimation of β. A similar analysis is performed to study the sensitivity of
residues to a change in n and the result is shown Table 3.2b. Compared to the other two
residues 1Λ is more sensitive to changes in n. Also unlike
1Λ , the lowest value does not
occur at 1 2S Sn n= for
2Λ and 3Λ . Thus Λ1 is more accurate than other residues and hence
it will be used in the estimation of the impact damping model for the experimental
system. Note that the estimation procedure using Λ1 uses only the measured acceleration
and not the forces.
The reasons for the inaccuracies of Λ2 and Λ3 are as follows. The residue Λ2 is
inaccurate because it is based on the calculated Fλ during the impact which is for a very
short time period. Since Λ2 uses the integration of Fλ over time even a small error in the
estimation of Fλ is magnified in the residue calculation. The residue Λ3 is based on
hysteresis loop where Fλ is plotted against ψi which is very small in magnitude (< 50 µm)
during contact compared to the magnitude of ψi (~ 20 mm) during non-contact.
Moreover, ψi(t) is calculated using α(t) which has some error caused by numerical
integration. Hence, even a small error in the estimation of ψi results in a very high error in
the hysteresis loop. Thus, the sampling frequency should be much higher (than the one
which is used in this experiment) to use Λ2 and Λ3 in the estimation procedure.

78
Normalized
Residue
1 20.98S Sβ β= 1 20.99S Sβ β=
1 2S Sβ β=
(Ideal
case)
1 21.01S Sβ β= 1 21.02S Sβ β=
1Λ 1.17 x 10
5 0.582 x 10
5 1 0.574 x 10
5 1.14 x 10
5
2Λ 0.94 0.95 1 1.05 1.06
3Λ 0.95 0.96 1 1.05 1.06
a) For different values of 1Sβ in the proximity of 2Sβ with constant value of 1 2S Sn n= .
Normalized
Residue
1 20.98S Sn n= 1 20.99S S
n n=
1 2S Sn n=
(Ideal case)
1 21.01S Sn n= 1 21.02S S
n n=
1Λ 17.24 x 10
5 8.94 x 10
5 1 9.42 x 10
5 19.2 x 10
5
2Λ 2.49 1.67 1 0.76 1.16
3Λ 2.07 1.52 1 0.49 0.0086
b) For different values of 1Sn in the proximity of 2S
m with constant value of 1 2S Sβ β= .
Table 3.2 Comparison of normalized average residues per impact (1 2 3, andΛ Λ Λ ) using
simulation S2 (2 2.524.7GNsmSβ −= and 2 1.5
Sn = ) with e/rc = 0.2 and Ωc = 16 Hz.

79
3.7 Estimation of the impact damping from the measurements
The procedure discussed in section 3.5.2 had been employed to estimate the
impact damping parameters for the experimental system shown in Fig. 3.1. The
experiment was conducted for a given value of e/rc and the Ωc is slowly increased until a
one impact per revolution of the cam is achieved. The distinct impacts are visible in the
time histories of the normalized measured reaction forces ( *( ) ( ) /x xN t N t Fλ= ,
*( ) ( ) /y yN t N t Fλ= ) and measured acceleration shown in Fig. 3.5 from which T is
obtained and its relationship with 1/Ωc is verified. Fig. 3.6 shows normalized reaction
forces and acceleration data measured during the contact sub-event of a sample impact
from the experiment with e/rc = 0.13 and Ωc = 14.05 Hz (with measured T = 0.0712 s),
with all other parameters being the same as given in section 3.6.1, where the normalized
time is given by /i i i
at t t= . The values of the impact damping parameters identified
using minimization of Λ1 are β = 92.6 GNsm-2.55
and n = 1.55 (Note that the unit of β
depends on the numerical value of n, since n
i iβ ψ ψɺ should have the units of force).
The estimated value of n from the experimental data agrees closely with n = 1.5 which
would fit the contact force formulation of ( )1kF Fλ κδ= + ɺ , which is used by many
researchers [3.21, 3.23 - 25]. Hence the same procedure is followed by forcing n = 1.5
and β is evaluated as 49.3 GNsm-2.5
. Fig. 3.7 shows a comparison of the contact forces
of sample impact from the experimental data and the simulation S1 (with
1 -2.549.3 GNsmSβ = and 1 1.5S
n = ). As it can be inferred, though the damping
parameters have been selected based on the αm there is a good match in the shape and

80
peak value of the contact force. Also it is very important to note that for a very small
change in the value of n (about 3%) there is a very significant change in the estimated
value of β of about 46%. Hence n is more critical than β in the impact damping
formulation. Instead, if n is taken as 1.45, β is estimated as 29.3 GNsm-2.45
. The
experiment was repeated with different values of e/rc and Ωc and the same estimation
procedure had been followed to obtain β and n values.

81
Fig. 3.5. Time histories of the measured forces and acceleration with e/rc = 0.13 and Ωc
= 14 Hz (with other parameters given in section 3.6.1). a) Normalized reaction force
along ˆx
e ; b) Normalized reaction force along ˆy
e ; c) Angular acceleration of the follower.
0 0.5 1 1.5 2 2.5 3
-40
-30
-20
-10
0
10
20
30
40
50
a)
b)
c)
t [s]
0 0.5 1 1.5 2 2.5 3-30
-20
-10
0
10
20
30
0 0.5 1 1.5 2 2.5 3
-20
-10
0
10
20
30
40
[kra
d/s
2]

82
Fig. 3.6. Sample measured forces and acceleration during the contact sub-event from a
single impact from measurements shown in Fig. 3.5. a) Reaction forces; b) Angular
acceleration. Key: , Normalized reaction force along ˆxe ; , Normalized
reaction force along ˆy
e .
[kra
d/s
2]
0 0.2 0.4 0.6 0.8 1-10
0
10
20
30
40
50
a)
b)
it
0 0.2 0.4 0.6 0.8 1-20
-10
0
10
20
30
40

83
Fig. 3.7. Comparison of the contact forces (in the contact sub-event) from measured data
of Fig. 3.6 and simulation S1 (using the impact damping model selected based on
minimization of Λ1). Key: , Measured; , Simulation S1 (with
1 -2.549.3 GNsmSβ = and
1 1.5S
n = )
it
0 0.2 0.4 0.6 0.8 10
50
100
150
200
250

84
Since the estimated values of β and n were consistent, the repeatability of the experiment
and the accuracy of the estimation procedure are validated. Also, Sundar et al. [3.9]
estimated the values of κ for a similar system under dry conditions ranging from 3.25
s/m to 4.25 s/m which are comparable to κ = 3.8 s/m to 6.5 s/m (for n = 1.45 to 1.5,
respectively) for the current lubricated system.
To check if a viscous damping model can be used to represent an impact event, n
is forced to 0 and the same procedure is followed to obtain β = 1.47 kNs/m. A sample
hysteresis loop comparing the experimental data and simulation S1 (with 1 0S
n = and
1 1.47 kNs/mSβ = ) for the same is shown in Fig. 3.8. As it can be easily inferred there is
a very clear variation in the shape of the hysteresis loops. Furthermore, Fλ goes to a
negative value (tensile force) for part of the loop which is impractical, hence a viscous
damping model is not a good approximation to model impacts.
3.8 Equivalent coefficient of restitution
3.8.1 Governing equation
The equivalent ξ model is determined from the same measurements and it is used
to justify the impact damping parameters. Though researchers [3.9, 35] have assumed ξ =
constant, a more general model of the form is considered for the current analysis as given
by the following,
1a
vξ γ= − (3.24)

85
Fig. 3.8. Comparison of the hysteresis loops from measured data of Fig. 3.6 and
simulation S1 (using the viscous damping model selected based on minimization of Λ1).
Key: , Measured; , Simulation S1 with viscous damping ( 1 0S
n = and
1 1.47 kNs/mSβ = ).
Here, ξ decreases with the velocity of approach (va) at a constant rate of γ as suggested by
Hunt and Crossley [3.24]. Instead of using eq. (3.16) in the contact regime (for the
contact mechanics formulation), the state of the system after the impact (with superscript
a) is calculated for ξ formulation using the state of the system before impact (with
superscript b). From the definition of ξ,
0 5 10 15 20 25 30 35-50
0
50
100
150
200
250
300
i
iψ

86
a
i
b
i
ψξ
ψ= −ɺ
ɺ (3.25)
Since b
a iv ψ= ɺ , as per eq. (3.24),
1 b
iξ γ ψ= − ɺ (3.26)
From eqs. (3.25) and (3.26) the velocity of separation is calculated as
( )1a b b
i i iψ ψ γ ψ= − −ɺ ɺ ɺ . The state of the system before impact is obtained from the response
of the system in the non-contact regime when ψi(t) = 0. Rearranging the eq. (3.7) aαɺ is
calculated as
( )( ) ( ) ( )
( ) ( )
0 0 0
0
cos
cos 0.5 2 sin
cos cos
a a a
ia
a a
c b d
a a a
e
r w r
e
ψ αα
χ α α α α
α α
+ + Θ Θ=
− − + + −
+ + Θ − + Θ
ɺɺɺ (3.27)
Mathematically, in ξ formulation the system is in contact just for a single instant and
hence αa and Θ
a are approximated by their corresponding values before impact.
3.8.2 Estimation of the equivalent ξ model
Unlike the estimation of impact damping, a direct method can be employed to
estimate ξ. Since the state of the system just before impact (with superscript b) is needed
for this purpose, it is calculated using a numerical backward difference technique as
given by the following equations,
( ) (0) (0),b i i iα α τ α τα= − = − ɺ
( ) (0) (0),b i i iα α τ α τα= − = −ɺ ɺ ɺ ɺɺ
( ) (0) (0).b i i iτ τΘ = Θ − = Θ − Θɺ (3.28 a - c)

87
Velocity of approach ( b
iψɺ ) is calculated from eq. (3.7) by replacing ( )tα , ( )tαɺ and Θ(t)
with bα ,
bαɺ and bΘ , respectively, while the velocity of separation ( )a
iψɺ is the value of
( )i
i tψɺ when ( )itαɺ reaches maximum. Using eq. (3.25), ξ
i is estimated for each impact.
From ξi and ( )a
iψɺ , γ is identified using least square curve-fitting technique.
Analysis similar to the one discussed in section 3.6.1 has been performed to
evaluate the error in the estimation of ξ. Force and acceleration time histories from
simulation S3, which is an analytical model with known 3 0.8 s/mSγ = (other parameters
are same as given in section 3.6.1) is taken as reference. The ξi is estimated for each
impact for cases with different e/rc. The estimated γ and the % error associated with its
estimation is given in Table 3.3. It is inferred from the magnitude of errors that this
procedure yields very accurate γ for all the cases of e/rc. Fig. 3.9 shows the variation of ξi
with i
av on a normalized basis (on a scale of 0 to 1), for a sample case with e/rc = 0.1 and
Ωc = 18 Hz. The normalized ξi and i
av are calculated as follows, where ‘min’ is a function
that returns the minimum value of a set of inputs,
( ) ( )min( )
,max min
ii ξ ξ
ξξ ξ
−=
− (3.29)
( )( ) ( )
min.
max min
i
a ai
a
a a
v vv
v v
−=
− (3.30)
Fig. 3.9 also shows the ξ model estimated using the least square curve-fitting technique
with γ = 0.799 s/m.

88
For the same measured data (shown in Fig. 3.5), ξi is estimated for each impact
using the procedure (discussed in section 3.8.2) and the results are shown on a
normalized basis (using eqs. (3.29) and (3.30)) in Fig. 3.10. The least square curve-
fitting technique was applied to estimate γ as 0.758 s/m using data the measured data
and line of fit is also shown in Fig. 3.10. The average of the estimated ξ for all the
impacts is 0.75 with velocity of approach of 0.34 m/s which is similar to the value of ξ =
0.65 reported by Seifried et al. [3.35] for va of 0.3 m/s, under similar impacting
conditions.
e/rc Ωc (Hz)
Estimated γ
(s/m)
% error = 100r
r
γ γ
γ
−×
0.05 23 0.8 0
0.10 18 0.799 0.13
0.15 17 0.8 0
0.20 16 0.76 5.0
0.25 15 0.8 0
Table 3.3 Error in the estimation of ξ model using time histories from simulation S3
( )3 0.8s/mSγ = .

89
Fig. 3.9. Variation in estimated iξ (during different impacts) given b
iψɺ with e/rc = 0.10
and Ωc = 18 Hz. Key: , Simulation S3 (3 0.8s/m
Sγ = ) ; , Estimated ξ model
with γ = 0.799 s/m (using least square curve-fitting technique).
i
av
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1

90
Fig. 3.10. Variation in estimated iξ (during different impacts) with b
iψɺ for the
experimental data of Fig. 3.5. Key: , Experimental data for different impact; ,
Estimated ξ model with γ = 0.758 s/m (using least square curve-fitting technique).
3.8.3 Justification of the estimated impact damping parameters
The relationship between coefficient of restitution and impact damping
formulations has been derived by Hunt and Crossley [3.24] for vibroimpacts. Using this
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
i
av

91
formula the equivalent β for the estimated γ (0.758 s/m) is obtained as 9.1 GNsm-2.5
,
which is comparable to the values estimated experimentally in section 3.7 (49.3 GNsm-2.5
for n = 1.5 and 29.3 GNsm-2.45
for n = 1.45). Some reasons for the difference between the
β values are: a) Hunt and Crossley [3.24] derived the relationship for vibroimpacts under
dry condition assuming pure metal to metal contact, but the experiments were under
lubricated condition; b) Even a small change in n value affects β significantly; and c) the
ξ concept has inherent drawback [3.9, 3.23] and hence the experimental estimation of γ
might have some inaccuracies. Taking these points into consideration, the estimated
values for impact damping parameters are justified on an order of magnitude basis.
3.9 Conclusion
The major contributions of this experimental study are as follows. First, a new
cam-follower experiment has been designed for periodic impacts, and instrumentation
and data acquisition parameters have been carefully chosen to accurately measure forces
and motion during impacts which takes place within a very short time interval. Second, a
novel time-domain based technique to estimate α(t) is developed, which minimizes the
effect of errors associated with the numerical integration. Also a new signal processing
procedure using only the measured acceleration has been developed to estimate impact
damping parameters. Third, a better understanding of the impact damping model is
obtained, and the following issues (stated in section 3.2) have been resolved: a) The
contact mechanics model given by eq. (3.1) is an acceptable formulation for impacting
systems; b) The residue using αm is more accurate than other residues (using hysteresis
loop and contact forces) for the purpose of damping parameter estimation; c) The impact

92
damping model is more sensitive to the damping index (n) than the damping coefficient
(β); d) The estimated value of n is successfully compared with those reported in the
literature, while the value of β is justified on an order of magnitude basis; and e) The
viscous damping model is not appropriate for impacting systems. Since the proposed
signal processing procedure (using Λ1) does not require force measurements, it could be
extended to other mechanical systems. The chief limitation of this study is the indirect
estimation of impact damping model; thus future work may be directed towards
development of a direct method, possibly for a line contact.
93
References for Chapter 3
[3.1] R. Singh, H. Xie, R.J. Comparin, Analysis of automotive neutral gear rattle.
Journal of Sound and Vibration 131 (1989) 177–196.
[3.2] M.Y. Wang, R. Manoj, W. Zhao, Gear rattle modelling and analysis for
automotive manual transmissions. Proceedings of the Institution of Mechanical
Engineers, Part D: Journal of Automobile Engineering 215 (2001) 241–258.
[3.3] S. Theodossiades, S. Natsiavas, Periodic and chaotic dynamics of motor-driven
gear-pair systems with backlash. Chaos, Solitons & Fractals 12 (2001) 2427–
2440.
[3.4] T. Sakai, Y. Doi, K. Yamamoto, T. Ogasawara, M. Narita, Theoretical and
experimental analysis of rattling noise of automotive gearbox. Society of
Automotive Engineers (1981) SAE paper 810773.
[3.5] K. Karagiannis, F. Pfeiffer, Theoretical and experimental investigations of gear-
rattling. Nonlinear Dynamics 2 (1991) 367–387.
[3.6] F.Y. Chen, A survey of the state of the art of cam system dynamics. Mechanism and
Machine Theory 12 (1977) 201–224.
[3.7] R. Alzate, M. di Bernardo, G. Giordano, G. Rea, S. Santini, Experimental and
numerical investigation of coexistence, novel bifurcations, and chaos in a cam-
follower system. SIAM Journal on Applied Dynamical Systems 8 (2009) 592–
623.

94
[3.8] R. Alzate, M. di Bernardo, U. Montanaro, S. Santini, Experimental and numerical
verification of bifurcations and chaos in cam-follower impacting systems.
Nonlinear Dynamics. 50 (2007) 409–429.
[3.9] S. Sundar, J.T. Dreyer, R. Singh, Rotational sliding contact dynamics in a non-
linear cam-follower system as excited by a periodic motion. Journal of Sound
and Vibration 332 (2013) 4280–4295.
[3.10] S.H. Cho, S.T. Ahn, Y.h. Kim, A simple model to estimate the impact force
induced by piston slap. Journal of Sound and Vibration 255 (2002) 229–242.
[3.11] R. Wilson, J. N. Fawcett, Dynamics of the slider-crank mechanism with
clearance in the sliding bearing. Mechanism and Machine Theory 9 (1974) 61–
80.
[3.12] E.E. Ungar, D. Ross, Vibrations and noise due to piston-slap in reciprocating
machinery, Journal of Sound and Vibration. 2 (1965) 132–146.
[3.13] G.S. Whiston, Impacting under harmonic excitation. Journal of Sound and
Vibration 67 (1979) 179–186.
[3.14] R. Palej, J. Niziol, On a direct method of analyzing impacting mechanical
systems. Journal of Sound and Vibration 108 (1986) 191–198.
[3.15] R.J. Comparin, R. Singh, Non-linear frequency response characteristics of an
impact pair. Journal of Sound and Vibration 134 (1989) 259–290.
[3.16] C.N. Bapat, N. Popplewell, K. McLachlan, Stable periodic motions of an impact-
pair. Journal of Sound and Vibration 87 (1983) 19–40.

95
[3.17] C.K. Sung, W.S. Yu, Dynamics of a harmonically excited impact damper:
Bifurcations and chaotic motion. Journal of Sound and Vibration 158 (1992)
317–329.
[3.18] S. Chatterjee, A.K. Mallik, Bifurcations and chaos in autonomous self-excited
oscillators with impact damping. Journal of Sound and Vibration 191 (1996)
539–562.
[3.19] D.M. Egle, An investigation of an impact vibration absorber. Journal of
Engineering for Industry 89 (1967) 653–657.
[3.20] S.W. Shaw, P.J. Holmes, A periodically forced impact oscillator with large
dissipation, Journal of Applied Mechanics 50 (1983) 849–857.
[3.21] C. Padmanabhan, R. Singh, Dynamics of a piecewise non-linear system subject
to dual harmonic excitation using parametric continuation. Journal of Sound and
Vibration 184 (1995) 767–799.
[3.22] D. Zhang, W.J. Whiten, The calculation of contact forces between particles using
spring and damping models. Powder Technology 88 (1996) 59–64.
[3.23] M.A. Veluswami, F.R.E. Crossley, G. Horvay, Multiple impacts of a ball
between two plates - part 2: mathematical modelling, Journal of Engineering for
Industry 97 (1975) 828–835.
[3.24] K.H. Hunt, F.R.E. Crossley, Coefficient of restitution interpreted as damping in
vibroimpact. Journal of Applied Mechanics 42 (1975) 440.
[3.25] R.C. Azar, F.R.E. Crossley, Digital simulation of impact phenomenon in spur
gear systems. Journal of Engineering for Industry 99 (1977) 792–798.

96
[3.26] G.G. Gray, K.L. Johnson, The dynamic response of elastic bodies in rolling
contact to random roughness of their surfaces. Journal of Sound and Vibration 22
(3) (1972) 323–342.
[3.27] M.A. Veluswami, F.R.E. Crossley, Multiple impacts of a ball between two plates
- part 1: some experimental observations. Journal of Engineering for Industry 97
(1975) 820–827.
[3.28] http://www.tribology-abc.com/ (Accessed 15 Aug 2013)
[3.29] http://www.doolittleoil.com/faq/viscosity-sae-iso-or-agma (Accessed 15 Aug
2013).
[3.30] http://gbr.sika.com (Accessed 15 Aug 2013)
[3.31] M. Eriten, A.A. Polycarpou, L.A. Bergman, Development of a lap joint fretting
apparatus. Experimental Mechanics 51 (8) (2011) 1405–1419.
[3.32] PCB piezotronics Inc., sensors for acceleration, shock, vibration and acoustic
measurements: Product catalog (Model 350B02). (http://www.pcb.com;
Accessed 15 Aug 2013), Depew, NY, 2004.
[3.33] LMS instruments. LMS SCADAS III data acquisition front-end,
(http://www.lmsintl.com, Accessed 15 Aug 2013), Breda, The Netherlands,
2008.
[3.34] P.J. Davis, P. Rabinowitz, Methods of Numerical Integration, Courier Dover
Publications 2007.

97
[3.35] R. Seifried, W. Schiehlen, P. Eberhard, Numerical and experimental evaluation
of the coefficient of restitution for repeated impacts. International Journal of
Impact Engineering 32 (2005) 508–524.

98
CHAPTER 4
ESTIMATION OF COEFFICIENT OF FRICTION FOR A MECHANICAL
SYSTEM WITH COMBINED ROLLING-SLIDING CONTACT USING
VIBRATION MEASUREMENTS
4.1 Introduction
Friction plays a significant role in the dynamics of mechanical systems under
sliding contacts [4.1 - 4.7]. The friction force is often modeled using the Coulomb
formulation, though the analyst must judiciously select the value of the coefficient of
friction (µ). In many prior experimental studies, µ is found from a simple translational
sliding contact system as summarized by Persson [4.8]. For instance, Espinosa et al. [4.9]
used a modified Kolsky bar apparatus, while Hoskins et al. [4.10] used sliding block of
rocks to estimate the normal and friction forces. Furthermore, the translational sliding
experiments were employed by Worden et al. [4.11] to estimate the dependence of
friction forces on displacement and velocity, and then by Schwingshackl et al. [4.12] to
model the non-linear friction interface. Such experiments (specific to translational sliding
contact) cannot be directly employed for a system with combined rolling-sliding contact
to estimate µ, since the kinematics at the contact is different. Accordingly, several
investigators have conducted sliding contact experiments using a pin-disk apparatus

99
[4.13, 4.14], two rotating circular plates [4.15], and a radially loaded disk-roller system
[4.16, 4.17]. Also, Kang and Kim [4.18] determined the Coulomb friction in sight
stabilization equipment using torque and angular displacement characteristics, while
Povey and Paniagua [4.19] estimated the bearing friction for a turbomachinery
application. Further, Radzimovsky et al. [4.20] conducted experiments on gears to
determine the instantaneous µ over a mesh cycle. However, none of the previous
combined rolling-sliding contact experiments rely on vibration measurements. Hence
there is a need to develop a combined rolling-sliding contact experiment to determine µ
for a mechanical system with vibration measurements under certain conditions.
Some researchers have experimentally studied cam-follower mechanisms [4.21,
4.22] from the stability and bifurcation perspective under impacting conditions. In
contrast, a cam-follower mechanism with combined rolling-sliding contact (with no
impacts) is used to experimentally determine µ in this study. Since µ cannot be directly
measured from vibration experiments, an analogous contact mechanics model [4.23] is
developed to aid the process. The goal is to vary the surface roughness, slide-to-roll ratio,
lubrication film thickness, contact pressure and velocities at contact (sliding and
entrainment). The proposed system could then be utilized to simulate the contact
conditions seen in drum brakes and geared systems.
4.2 Problem formulation
Fig. 4.1 shows the mechanical system with an elliptic cam (with semi-major and
minor axes as a and b, respectively). The cam is pivoted at E along its major axis with a
radial runout, e, from its centroid (Gc, with subscript c denoting cam). The angle made by

100
the end point of the major axis (A) with the horizontal axis ( ˆxe ) is Θ(t), which is an
excitation to the system (where t represents the time). The equation of the elliptic cam is
given by the following, where r is the radial distance from Gc to any point on the
circumference of the cam, and ∆ is the polar angle of that point,
( )( ) ( )
2 2.
sin cos
abr
a b
∆ =∆ + ∆
(4.1)
The cam is in a point contact (at Oc) with the follower (at Ob, with subscript b denoting
follower), which consists of a thin cylindrical dowel pin (of radius rd) attached to a bar
(of length lb) of square cross-section (of width wb). The center of gravity of the follower
lies at Gb at a distance of lg from the pivot point P (using roller bearings) which is at dy
distance about the ground. The follower is supported by a linear spring (ks) along the
vertical direction ( ˆye ), which is at a distance of dx from P as shown in Fig. 4.1. The
angular motion of the follower is given by α(t) in the clockwise direction from the ˆx
e
axis; it is also the only dynamic degree-of-freedom of the system. The contact mechanics
at O between the cam and the follower is represented by non-linear contact stiffness (kλ)
and viscous damping (cλ) elements. A coordinate system ˆ ˆ( , )i j attached to the follower is
defined with its origin at Q where i is orthogonal to the follower. The angle subtended by
c cGO
from xe is given by φ(t), which is used in the following equation to calculate the
∆O(t) for the contact point Oc as,
( )( ) mod ( ) ( ),2 .O t t tϕ π∆ = −Θ (4.2)

101
Here, “mod” is the modulus function defined as: mod( , ) .floor( / )x y x y x y= − , if y ≠ 0.
The vector cQO
is represented in the ˆ ˆ( , )i j coordinate system by ˆ ˆi ji jψ ψ+ . When the
instantaneous value of ψi(t) is negative, that would ensure that the cam and the follower
are in contact.
Fig. 4.1 Example case: A mechanical system with an elliptic cam and follower
supported by a lumped spring (ks).

102
The scope of the current study is restricted to an estimation of µ under a mixed
lubrication and elastohydrodynamic lubrication (EHL) regimes. The key assumptions in
the proposed system are as follows: (i) The bearings at the follower pivot are frictionless
and rigid; (ii) the surfaces of the cam and follower have no other irregularities with the
exception of random surface roughness; (iii) the sliding friction between cam and the
follower can be described by the Coulomb friction model; (iv) the contact force can be
represented by the Hertzian point contact model [4.23]; and (v) the bending moment of
the follower is negligible. The specific objectives of this study are: (1) Develop a contact
mechanics model for a mechanical system with a combined rolling-sliding contact to
design a suitable experiment and to predict the dynamic response; (2) Design a controlled
laboratory experiment for the cam-follower system to measure dynamic forces and
acceleration; and (3) Propose a signal processing technique to estimate µ using Fourier
amplitudes of measured forces and acceleration an empirical formula for µ will be
suggested and potential sources of errors will be identified.
4.3 Contact mechanics model
The 0-state of the system (represented by superscript 0) is defined as the state
when 0cQO =
and the major axis is parallel to the follower (0 0α = −Θ ). In the 0-state
Q0, Ob
0 and Oc
0 are coincident. From the geometry of the system, α and the magnitude of
bPO
along j (χ) are calculated in the 0-state as,

103
( ) ( )4 2 2 2 2
0 1
2 2
0.5 2 0.5 2
cos ,b d b d
x x y x y
x y
PE PE PE PE w r b PE w r b
PE PE
α −
+ − + + + + +
= +
(4.3)
0 0 0cos( ) sin( ) .x y
PE PE eχ α α= − −
(4.4)
Here, x
PE
and y
PE
represent the magnitudes of PE
along ˆx
e and ˆy
e , respectively.
The instantaneous values of the moving coordinates ψi(t) and ψj(t) are determined from
α(t), Θ(t) and the system geometry using the following vector equation,
.b b c cPE PO O O O E= + +
(4.5)
Employing the vector polygon procedure discussed by Sundar et al. [4.24], the equations
for ψi(t) and ψj(t) are obtained as,
( ) ( ) ( )( ) ( )( ) ( ) ( ) ( )
0 0 0( ) sin ( ) ( ) 0.5 2 cos ( )
( ) sin ( ) ( ) sin ( ) ( ) 0.5 2 ,
i o b d
o b d
t e t r t w r t
r t t t e t t w r
ψ χ α α α α
α ϕ α
= + − + ∆ + + −
+ ∆ + − + Θ − + (4.6)
( ) ( ) ( )( ) ( )( ) ( ) ( )
0 0 0 0( ) cos ( ) ( ) 0.5 2 sin ( )
( ) cos ( ) ( ) cos ( ) ( ) .
j o b d
o
t e t r t w r t
r t t t e t t
ψ χ χ α α α α
ϕ α α
= − + − + ∆ + + −
− ∆ + + + Θ(4.7)
Differentiating Eqs.
(4.6) and (4.7) with respect to time, ( )i
tψɺ and ( )j
tψɺ are obtained as
follows:
( ) ( ) ( )( ) ( )( ) ( )( ) ( ) ( )
( )( )
0 0 0( ) cos ( ) ( ) ( ) 0.5 2 sin ( ) ( )
( ) cos ( ) ( ) ( ) ( ) ( ) sin ( ) ( )
cos ( ) ( ) ( ) ( ) ,
i o b d
o o
t e t t r t w r t t
r t t t t t r t t t
e t t t t
ψ χ α α α α α α
α ϕ α ϕ α ϕ
α α
= + − − ∆ + + −
+ ∆ + + + ∆ +
− + Θ + Θ
ɺ ɺ ɺ
ɺ ɺ ɺ
ɺɺ
(4.8)

104
( ) ( ) ( )( ) ( )( ) ( )( ) ( ) ( )
( ) ( )
0 0 0( ) sin ( ) ( ) ( ) 0.5 2 cos ( ) ( )
( ) sin ( ) ( ) ( ) ( ) ( ) cos ( ) ( )
sin ( ) ( ) ( ) ( ) .
j o b d
o o
t e t t r t w r t t
r t t t t t r t t t
e t t t t
ψ χ α α α α α α
ϕ α ϕ α ϕ α
α α
= + − + ∆ + + −
+ ∆ + + − ∆ +
− + Θ + Θ
ɺ ɺ ɺ
ɺ ɺ ɺ
ɺɺ
(4.9)
Here,
( )( ) ( )
( )( ) ( )( )
2 2
1.52 2
0.5 sin 2 ( ) ( ) ( )( ) .
sin ( ) cos ( )
o
o
o o
ab b a t t tr t
a t b t
ϕ − ∆ − Θ ∆ = ∆ + ∆
ɺɺɺ (4.10)
The angle φ(t) corresponding to the contact point Oc is determined at every instant
for a given α(t) and Θ(t) by locating the point on the elliptic profile of the cam which is
tangential to the follower. Hence the slope of the follower, sb(t) = tan(-α(t)), should be
equal to the slope of cam at Oc ( ( )c
Os t ) which is calculated as follows,
( )
21
2( ) tan ( ) tan
tan ( ) ( )
c
O
bs t t
a t tϕ−
= Θ + −
− Θ (4.11)
Equating sb(t) and ( )c
Os t and rearranging, φ(t) is calculated by the following:
( )
21
2( ) ( ) tan
tan ( ) ( )
bt t
a t tϕ
α−
= Θ − − Θ
(4.12)
The equation of motion of the follower when it is in contact with the cam is
derived by balancing the moments (from Fig. 4.2) about P as,
( ) ( )( ) cos ( ) ( ) ( ) ( ) ( ) 0.5 2 .P
b b g s x n f b dI t m gl t F t d F t t F t w rα α χ= − + − +ɺɺ (4.13)
Here, P
bI is the moment of inertia of the follower about P, mb is the mass of the follower,
g is the acceleration due to gravity, and χ(t) is the moment arm of the contact force about

105
the pivot P. The elastic force from the spring, Fs(t), is given by the following, where u
sL
is the original length of the follower spring:
( ) ( )( ) tan ( ) 0.5 sec ( ) .u
s s s y x bF t k L d d t w tα α = − + + (4.14)
The normal force (Fn(t)) arising from the point contact with the cam is given by,
( )( ) ( ) ( ) ( ).n i i iF t k t t c tλ λψ ψ ψ= − − ɺ
(4.15)
The non-linear contact stiffness is defined for a point contact based on the Hertzian
contact theory [4.23] as,
( ) ( )0.54
( ) ( ) ( ) .3
e e
i ik t Y t tλ ψ ρ ψ=
(4.16)
Here, Y is the Young’s modulus (with superscript e denoting equivalent) in accordance
with the Hertzian contact theory given by the following, where ν is the Poisson’s ratio,
12 21 1
.e c b
c b
YY Y
ν ν−
− −= +
(4.17)
The equivalent radius of curvature at the contact (ρe(t)) and the radius of curvature of the
elliptical cam at Oc (ρc(∆o(t))) are given by,
( )( )1
1 1( ) ( ) ( ) ,e
c o dt t rρ ρ
−− − = ∆ +
(4.18)
( )( )( ) ( )( )
1.52 2
0
sin ( ) cos ( )
( ) .o o
c
a t b t
tab
γ γρ
∆ + ∆ ∆ = (4.19)

106
Fig. 4.2 Free-body diagram of the follower; refer to Fig. 4.1 for the two coordinate
systems.
The viscous contact damping is given by the following expression, where ζ is the modal
damping ratio which will be experimentally found under lubricated conditions, as
explained later in section 4.4,
( )2
2.
*
P
bIcλ
ζϑ
χ= (4.20)
Here, ϑ is the linearized natural frequency of the system, and χ* is value of χ(t) at the
static equilibrium point (discussed in later in this section). The friction force is given as,

107
( )( ) ( )sgn ( ) .f n r
F t F t v tµ= (4.21)
Here the relative sliding velocity, vr(t) is given by,
( ) ( ) ( ) ( )( ) ( ) ( ) sin ( ) ( ) sin ( ) ( ) ( ) ( ) .r j
v t t r t t t e t t t tψ ϕ α α α= − ∆ + + + Θ + Θ ɺɺ ɺ (4.22)
The static equilibrium point is used as the initial condition while numerically
solving Eq. (4.13). In Eqs. (4.6), (4.7) and (4.13), α(t), ψi(t), and ψj(t) are replaced with
their corresponding values at the static equilibrium point (with superscript *), and all
time-derivative terms are set to zero and solved. Using the method of Jacobian matrix as
discussed by Sundar et al. [4.24], ϑ is then calculated at the static equilibrium point.
4.4 Experiment for the determination of µ
Since the measured time domain signals are bound to have significant noise, a
frequency domain based signal processing technique is preferred for the estimation of µ.
Accordingly, measured forces and acceleration must not be affected by discontinuities
and system resonances. Design criteria for the experimental system can be given by the
following. First, the follower must always be in contact with the cam, as a loss in contact
would generate impulses in force and acceleration signals. Second, vr(t) should not
change direction during the operation, as that would induce a sudden change in the
direction of the Ff(t), thereby making the measured forces discontinuous. Furthermore,
the variation in vr(t) should be minimal. Third, the cam should rotate with a constant
speed (Ωc) in order to accurately measure the spectral contents of forces and acceleration.
Fourth, at least the first five harmonics of Ωc should lie in the stiffness controlled regime.
Fifth, the experiment should permit a mixed lubrication and EHL regimes. Finally, a
variation in the slide-to-roll ratio should be possible in the experiment.

108
Fig. 4.3 shows the schematic of a cam-follower experiment having a hollow
cylindrical cam of outer radius, a, driven by the output shaft of an electric motor. The
radial runout between the center of the rotation (axis of the shaft) and the centroid of the
cam can be easily varied. A point contact is obtained, as the cam and the dowel pin have
cylindrical surfaces with their axes oriented orthogonal to each other. The contact is
continuously lubricated using either a heavy gear oil (AGMA 4EP) [4.25, 4.26] or a light
hydraulic oil (ISO 32) [4.25, 4.26]. The follower is hinged at one of its ends with two
frictionless rolling element bearings and is supported by a coil spring. A tri-axial force
transducer (PCB 260A01 [4.27]) located at the follower hinge measures the reaction
forces, Nx(t) and Ny(t), along ˆxe and ˆ
ye , respectively. An accelerometer (PCB 356A15
[4.28, 4.29]) located at the end of the follower measures its tangential acceleration. These
are dynamic transducers with a very high frequency bandwidth [4.27, 4.29]. Both force
and acceleration signals are simultaneously sampled.
4.5 Identification of system parameters
4.5.1 Identification of geometrical parameters
The following parameters for the cam-follower system are carefully chosen to
satisfy the design constraints stated in section 4.4: mb=0.21 kg, a = b = 17.5 mm, Ib =
2020 kg-mm2, lg = 179 mm. lb = 89 mm, wb = 12.7 mm, rd = 3.2 mm, ks = 2954 N/m, u
sL
= 57 mm, dx = 40 mm and dy = 61 mm. The relative positions of the pivot points of the
cam and the follower are given by ˆ ˆ86mm 24mmx yPE e e= +
. The averaged surface
roughness (R) and root-mean-square roughness (Rrms) of the cam and follower surfaces
are measured using an optical profilometer. For the precision ground surfaces used in the

109
experiment Rc = 0.29 µm and Rb = 0.25 µm, while for sand-blasted surfaces Rc = 0.36 µm
and Rb = 0.89 µm. The key parameters that dictate a loss of contact between the follower
and the cam and the sign reversal in vr(t) are e and Ωc. Inverse kinematics [4.30] is
employed, as explained below, to predict a range of values for these two parameters over
which the system neither has a loss of contact nor a sign reversal in vr(t). For a given
value of e and Ωc, the angle of the follower (assuming it is just in contact) with the cam
(αk(t)) is kinematically calculated for different values of Θ(t) in the range [0, 2π]
(superscript k represents values calculated using the inverse kinematics). By setting ψi = 0
in Eq. (4.6), α
k(t) is calculated using the following equation,
( ) ( ) ( )( ) ( )( ) ( ) ( ) ( )
0 0 0sin ( ) ( ) 0.5 2 cos ( )
( ) sin ( ) ( ) sin ( ) ( ) 0.5 2 0.
k k
o b d
k k k k
o b d
e t r t w r t
r t t t e t t w r
χ α α α α
α ϕ α
+ − + ∆ + + −
+ ∆ + − + Θ − + = (4.23)
Here, rk(∆o(t)) is obtained using Eqs. (4.1) and (4.2) as,
( )( ) ( )
2 2( ) .
sin ( ) ( ) cos ( ) ( )
k
ok k k k
abr t
a t t b t tϕ α ϕ α
∆ = − + −
(4.24)
Equations (4.23) and (4.24) are solved along with Eq. (4.12) after replacing α(t) with
αk(t), to get r
k(∆o(t)), α
k(t) and φ
k(t). Then, differentiating α
k(t) with respect to t, ( )k
tαɺ
and ( )ktαɺɺ are obtained. The normal force is estimated (as stated below) from the
moment balance about P and by neglecting the moment due to Ff(t) in comparison with
the moment due to Fn(t) because of system geometry,
( )( ) ( ) ( )
( ) ( )
0 0 0
( ) ( ) cos ( )( ) .
cos ( ) 0.5 2 sin ( )
( ) cos ( ) ( )
P k k k
b s x b bk
n k k
b d
k k k
o
I t F t d m gl tF t
t b w r t
r t t t
α α
χ α α α α
α ϕ
+ −= − − + + − + ∆ −
ɺɺ (4.25)

110
Fig. 4.3 Mechanical system experiment used to determine the coefficient of friction (µ) at
the cam-follower interface.
Here, ( )k
sF t is calculated from Eq. (4.14) corresponding to αk(t). If the minimum value of
( )k
nF t calculated from Eq. (4.25) is negative, it would indicate that the follower would
lose contact with the cam during the steady-state operation. Similarly, the relative
velocity ( ( )k
rv t ) is kinematically calculated to check for any sign reversal from Eqs. (4.9)
and (4.22) by replacing α(t) and φ(t) with αk(t) and φ
k(t), respectively. The procedure
mentioned above is repeated for different values of e and Ωc to calculate the Ωc - e/a map
as shown in Fig. 4.4; the regimes with and without loss of contact and reversal in the
sliding velocity direction are clearly marked. All experiments are conducted in the e/a
Spring
Follower
Frictionless
bearings
Cam
Accelerometer
Rigid fixture
Dowel pin
Tri-axial
load cell
Output shaft of
the electric motor
Housing for electric motor
Lubricated
interface

111
range from 0.05 to 0.15, and Ωc is varied only between 10.1 Hz and 11.7 Hz; thus the
system is well within the contact regime (as shown) with a constant sgn(vr(t)) = -1 and
minimal variation in vr(t). With these parameters, the linearized natural frequency of the
system is found to be 1040 Hz for a steel cam and a steel follower (Yc = Yb = 200 GPa; νc
= νb = 0.3); thus the first five harmonics of Ωc lie in the stiffness controlled regime. Also,
the lubrication regime is identified based on the “lambda ratio” (Λ), which is the ratio of
minimum lubrication film thickness [4.31] to the composite surface roughness
( )( )0.52 2
, ,rms c rms bR R+ . With AGMA 4EP oil [4.25, 4.26] (with dynamic viscosity, η = 0.034
kg m-1
s-1
, pressure viscosity coefficient = 20x10-9
m2/N at 60° C) the system lies in the
EHL regime as Λ is approximately between 2 and 5. The system lies in the mixed
lubrication regime when ISO 32 oil [4.25, 4.26] (with η = 0.012 kg m-1
s-1
, pressure
viscosity coefficient = 18x10-9
m2/N at 60° C) is used, as lower values of Λ (0.7 to 1.5) is
utilized. Since the temperature at the contact is higher than the ambient (due to
continuous sliding), it is assumed that the interfacial oil operates at 60° C. Furthermore,
the slide-to-roll ratio which is given by the ratio of vr(t) (as given in Eq. (4.22)) and
entrainment velocity (ve(t) as defined below), varies between 0.75 and 1.25 for e/a =
0.116 and Ωc = 11.55 Hz as shown in Fig. 4.5. Here,
( ) ( ) ( ) ( )( ) ( ) ( ) sin ( ) ( ) sin ( ) ( ) ( ) ( ) .e j
v t t r t t t e t t t tψ ϕ α α α= + ∆ + + + Θ + Θ ɺɺ ɺ (4.26)
The slide-to-roll ratio ( )( ) ( )r e
v t v t could be easily changed by altering the geometry,
such as PE
, a, b and e.

112
Fig. 4.4 Classification of response regimes of the mechanical system with a circular cam
in terms of Ωc vs. e/a map with the parameters of section 4.5. Key: , Operational
range of the experiment.
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
10
15
20
25
30
e/a
Ωc
[Hz]
Loss of contact
regimeIn-contact
regime
No sign
reversal of vr(t)
Sign reversal
of vr(t)

113
Fig. 4.5 Slide-to-roll ratio for the cam-follower system with e/a = 0.12 and Ωc = 11.55 Hz
and other parameters of section 4.5.
4.5.2 Identification of the modal damping ratio
The modal damping ratio under lubrication depends on the oil viscosity and the
materials in contact; hence it is determined experimentally using the half-power
bandwidth method with both lubricants. The experimental setup consists of two masses
(m1 = 1.4 kg and m2 = 1.8 kg) connected by three identical point contacts which are
lubricated as shown in Fig. 4.6. These point contacts are obtained by placing three dowel
0 0.2 0.4 0.6 0.8 1
0.8
0.9
1
1.1
1.2
1.3
t [s]
Sli
de-
to-r
oll
rat
io

114
pins (rd = 3.2 mm) attached to m1 in one direction and two more dowel pins attached to
m2 in the orthogonal direction, as shown. The system is placed on a compliant base
(foam), and two accelerometers are attached to each mass. An impulse excitation is
imparted to the system in the vertical direction with an impact hammer. The response
accelerance spectrum of each mass along the vertical direction is then found by averaging
signals from two accelerometers. Impact tests are conducted with two lubricants. Fig. 4.7
shows the relative accelerance spectra (between m1 and m2), focusing on the system
resonance (~ 1000 Hz). As observed, there is a reduction in the amplitude and the natural
frequency with lubrication. For a single point contact, the damping ratio (ζ) with
unlubricated, ISO 32 oil and AGMA 4EP oil conditions are found to be 1.8%, 1.9% and
4.1%, respectively. Note that the damping for ISO 32 oil is very close to the dry case. It is
assumed that these values of ζ are also valid for the running cam-follower experiment.
4.6 Signal processing technique to estimate µ
The µ is estimated from measured reaction forces (Nx(t) and Ny(t)) along the ˆxe
and ˆy
e directions, respectively, and the tangential acceleration ( ( )b
l tαɺɺ ) of the follower at
its free end. By dividing the measured tangential acceleration by lb, ( )tαɺɺ is obtained, and
then numerically integrating it twice w.r.t. time, the time-varying component of α(t) is
computed, while the integration constant (αd) is obtained from the time-averaged value of
αk(t). The instantaneous elastic force Fs(t) is calculated from α(t) using Eq. (4.14). From
Fig. 4.2, Nx(t) and Ny(t) are evaluated as follows,
( ) ( ) ( )( ) ( )sin ( ) ( )cos ( ) ( )sin ( ) ,x n f b gN t F t t F t t m l t tα α α α= + − ɺɺ (4.27)

115
( ) ( )
( )
( ) ( )cos ( ) ( )sin ( )
( )cos ( ) ( ).
y n f
b b g s
N t F t t F t t
m g m l t t F t
α α
α α
= −
+ − −ɺɺ (4.28)
Fig. 4.6 Impulse experiment to determine the viscous damping ratio associated with the
lubricated contact regime. a) Experimental setup; b) Top view of the dowel pin
arrangement showing the three point contacts. Key: , contact point.
Dowel pins
Impact hammera)
b)
Triaxial
accelerometer
Dowel pins

Rel
ativ
e ac
cele
ran
ce[m
/N-s
2]
Fig. 4.7 Relative accelerance spectra in the vicinit
, dry (unlubricated);
Rel
ativ
e ac
cele
ran
ce[m
/N-s
2]
850
1
5
10
15
Relative accelerance spectra in the vicinit
, dry (unlubricated);
900
Relative accelerance spectra in the vicinit
, dry (unlubricated); , lubricated with AGMA 4EP oil;
Frequency [Hz]
900
116
Relative accelerance spectra in the vicinit
, lubricated with AGMA 4EP oil;
32 oil.
Frequency [Hz]
950
Relative accelerance spectra in the vicinity of the system resonance. Key:
, lubricated with AGMA 4EP oil;
Frequency [Hz]
1000
y of the system resonance. Key:
, lubricated with AGMA 4EP oil; , lubricated with ISO
1050
y of the system resonance. Key:
, lubricated with ISO
1050 1100
y of the system resonance. Key:
, lubricated with ISO
1100

117
Rearrange Eqs. (4.27) and (4.28) to yield the friction and normal forces as,
( ) ( )( ) ( )cos ( ) ( ) ( ) sin ( ) ,f x b y s
F t N t t m g N t F t tα α = + − − (4.29)
( ) ( )( ) ( ) ( )sin ( ) ( ) ( ) cos ( ) .n b g x y s b
F t m l t N t t N t F t m g tα α α = + + + − ɺɺ (4.30)
Since the dynamic force transducer used does not measure the DC component, a
technique to estimate µ is proposed that utilizes complex-valued Fourier amplitudes while
maintaining the phase relationship among the measured signals. First, the measured Nx(t),
Ny(t) and ( )tαɺɺ are converted to the frequency domain using the fast Fourier transform
(FFT) algorithm. Then, the harmonic reaction forces are reconstructed (with superscript
r) using only their DC components (with superscript d) and the fundamental harmonic
component of Ωc (with superscript 1) as,
( )1( ) cos ,r d
x x x cN t N N t= + Ω ( )1( ) cos .r d
y y y cN t N N t= + Ω (4.31 a, b)
In the above equation, 1
xN and
1
yN (where, ~ represents a complex-valued signal) are
known from measurements while d
xN and d
yN are unknown. Similarly, the following
harmonic signals have also been reconstructed as the following where, ( )( ) sin ( )s
t tς α=
and ( )( ) cos ( )c
t tς α= :
( )1( ) cos ,r d
s s s ct tς ς ς= + Ω
( )1( ) cos ,r d
c c c ct tς ς ς= + Ω
( )1( ) cos ,r d
n n n cF t F F t= + Ω ( )1( ) cos ,r d
f f f cF t F F t= + Ω
( )1( ) cos .r d
s s s cF t F F t= + Ω (4.32 a-e)
Since ( )tαɺɺ does not have a DC component, it is written as,

118
( )1( ) cos .r
ct tα α= Ωɺɺ ɺɺ (4.33)
Substituting these reconstructed harmonic signals in Eqs. (4.29) & (4.30) and
rearranging, the following DC components and first harmonic components of ( )r
fF t and
( )r
nF t are found as,
1 1 1 1 1 10.5 ,d d d d d d d d
f x c y s s s b s x c y s s sF N N F m g N N Fς ς ς ς ς ς ς= − + − + + − − (4.34)
1 1 1 1 1 1 1 1 ,d d d d d d
f x c y s x c y s b s s s s sF N N N N m g F Fς ς ς ς ς ς ς= − + − + − − (4.35)
1 1 1 1 1 1
0.5,
0.5
d d d d
b b s c b cd d d d d
n x s y c
x s y c s c
m l F m gF N N
N N F
α ς ςς ς
ς ς ς
+ −
= + + + + +
ɺɺ
(4.36)
1 1 1 1 1 1 1 1 10.5 .d d d d d d
n x s y c x s y c b c s c s c b bF N N N N m g F F m lς ς ς ς ς ς ς α= + + + − + + + ɺɺ (4.37)
From Eq. (4.21) and since sgn(vr(t)) = -1 is a constant, the following relationships can be
derived:
,d d
f nF Fµ= − (4.38)
1 1 .f n
F Fµ= (4.39)
Since ( )r
fF t and ( )r
fF t are exactly out-of-phase,
1 1.f nF F∠ = −∠ (4.40)
Substituting Eqs. (4.34) to (4.37) into Eqs. (4.38) to (4.40), three non-linear equations
with three unknowns (µ, d
xN andd
yN ) are obtained. These equations are numerically solved

119
to estimate µ. In order to computationally validate this technique, predicted forces and
acceleration from the contact mechanics model with e/a = 0.3, Ωc = 11.55 Hz and a
known µ = 0.3 are used. The signal processing technique (with 9460 Hz sampling
frequency and frequency resolution of 1.15 Hz) yields an estimate of µ as 0.302, which is
about 99.3% accurate. This method also accurately estimates d
xN andd
yN as -2.26 N and -
12.88 N, respectively, compared to the known values of -2.26 N and -12.7 N,
respectively.
4.7 Experimental results and friction model
Spectral tests are conducted under lubricated conditions with different surface
roughness levels at the contact. Care is taken during the experiments to record the steady
state force and acceleration measurements only after the initial transients have
sufficiently decayed. Using the measured data in the signal processing technique
discussed in section 4.6, the µ
(estimated value of µ) is indentified for various values of
mean surface roughness 0.5*( )m c b
R R R= + as shown in Fig. 4.8. This µ
is compared
with the values reported in the literature [4.13] for dry friction contact. A higher range is
observed in the case of a pure dry friction regime in comparison with µ
for the
lubricated contact. Also, observe that µ
with ISO 32 lubricant (with a low Λ value) is
similar to the dry friction contact case [4.13].
He et al. [4.32] used the Benedict-Kelly friction model [4.17] to develop an
empirical relationship between µ and Rm, but this was specific to a line contact in gears.
Hence that relationship is generalized for both point and line contacts as the following,
where < >t is the time-average operator,

120
1
2
2
log .( ) ( )m r et t
pC
C R v t v t
λµη
= −
(4.41)
Here, C1 and C2 are the arbitrary constants and pλ is the time-averaged Hertzian contact
pressure given by,
( )3
.2 ( ) ( )
n
e
i t
F tp
t tλ
π ρ ψ= (4.42)
With a non-linear curve-fitting technique, the constants of Eq. (4.41) are found from the
experimental results for each lubricant: C1 = 0.0288 µm and C2 = 2.03 µm for AGMA
4EP oil, and C1 = 0.0509 µm and C2 = 1.6512 µm for ISO 32 oil.
The measured force and acceleration spectra are compared with the contact
mechanics model (with estimated µ
) in Table 4.4 for a typical case with e/a = 0.116, Ωc
= 11.55 Hz and µ
= 0.51. The contact mechanics model successfully predicts the forces
and acceleration at the first three harmonics of Ωc, which are dominant compared with the
higher harmonics.

Fig.
the range) for the
32 oil;
Fig. 4.8 Estimated
the range) for the
32 oil; , dry contact
00
0.2
0.4
0.6
0.8
1
1.2
Estimated µ for different
the range) for the dry friction regime [13].
, dry contact - iron pin with steel disk
0.1
for different Rm
dry friction regime [13].
iron pin with steel disk
steel disk
0.2
121
m values and comparison with prior
dry friction regime [13]. Key:
iron pin with steel disk [2.13]
steel disk [2.13]
Rm
0.3
values and comparison with prior
Key: , With AGMA 4EP oil;
[2.13]; , dry contact
[2.13].
m [µm]
0.4
values and comparison with prior values (including
, With AGMA 4EP oil;
, dry contact -
0.5
values (including
, With AGMA 4EP oil; , With ISO
- copper pin with
0.6
values (including
With ISO
copper pin with
0.7

122
Harmonic of Ωc
αɺɺ (rad/s2)
Nx (N) Ny (N)
Measured Predicted Measured Predicted Measured Predicted
1 122.7 122.6 0.99 0.99 2.48 2.47
2 3.2 5.5 0.08 0.07 0.07 0.07
3 0.2 1.3 0.02 0.003 0.02 0.003
Table 4.4 Comparison of measurements and predictions (from the contact mechanics
model) with µ = 0.51 and e/a = 0.116 at the harmonics of Ωc = 11.55 Hz.
The normalized coefficient of friction ( µ ) for the empirical model of Eq. (4.41)
is defined as,
10 2
.
log( ) ( )
r et t
p
v t v t
λ
µµ
η
=
(4.43)
From Fig. 4.9 it is observed that µ monotonically increases with Rm. Also µ is lower
with AGMA 4EP (EHL regime) as compared to ISO 32 oil (mixed lubrication regime).
Fig. 4.9 compares some results of prior friction experiments [4.16, 4.33 - 35] in terms of
selected µ values which are calculated based on certain assumptions given a lack of
pertinent data. For instance, Shon et al. [4.16], Xu & Kahraman [4.33] and Furey [4.35]
conducted experiments under EHL regime, and hence their µ values are very low.
Conversely, Grunberg and Campbell [4.34] conducted experiments under poorly
lubricated conditions (mixed lubrication regime). It can be easily inferred that µ

123
decreases as Λ increases. There are some differences in the µ values from (Eq. (4.41))
and the ones reported in the literature; these may be attributed to different lubrication
regimes as well as potential sources of error in the µ estimation process which is
discussed next.
4.8 Potential sources of error in the estimation of µ
Some of the common measurement errors which are difficult to minimize include
the following. First, a variation in the frictional load torque on the cam causes small
variations in Ωc during the experiment. This in turn introduces inaccuracy in the
harmonic contents of the measured forces and acceleration, thereby affecting the
estimated µ. Second, a small error in the angular alignment (κ) of a force transducer could
measure Ny(t) cos(κ) instead of the actual Ny(t). From the static analysis it is found that
for κ = 5°, the µ estimate has only a 0.5 % error. Third, if the follower spring is oriented
at an angle of σ (from the vertical in the clockwise direction), the elastic force Fs(t) will
be as follows as opposed to the one given by Eq. (4.14),
( )( )
( ) ( )cos ( )
( ) tan ( ) 0.5 sec ( ) .cos ( )
s u
s s y x b
k tF t L d d t w t
t
αα α
α σ = − + + −
(4.44)

124
Fig. 4.9 Comparison of the modified Benedict-Kelley model from the results of Fig. 4.8
with friction values reported in the literature [4.16, 4.33 - 35]. Key: , Model for
AGMA 4EP oil (EHL regime) ; , Model for ISO 32 oil (mixed lubrication
regime), , Shon et al. [4.16]; , Xu and Kahraman [4.33]; , Grunberg and
Campbell [4.34]; , Furey [4.35].
Rm [µm]
µ
0 0.1 0.2 0.3 0.4 0.5 0.6 0.70
0.01
0.02
0.03
0.04
0.05
0.06

125
Also the reaction forces will have to be calculated from the following instead of using the
expressions of Eqs. (4.27) and (4.28),
( ) ( )
( ) ( )
( ) ( )sin ( ) ( )cos ( )
0.5 ( )sin ( ) ( )sin ,
x n f
b b s
N t F t t F t t
m l t t F t
α α
α α σ
= +
− −ɺɺ (4.45)
( ) ( )
( ) ( )
( ) ( )cos ( ) ( )sin ( )
0.5 ( )cos ( ) ( )cos .
y n f b
b b s
N t F t t F t t m g
m l t t F t
α α
α α σ
= − +
− −ɺɺ (4.46)
Based on the static force balance, the error in the estimation of µ is about 9% with only σ
= 1°, which is very significant.
The estimation of µ involves some error-prone numerical methods [4.36]. For
instance, bias errors [4.37] might be caused in the computation of the spectral contents of
forces and acceleration due to a coarse frequency resolution (constrained by the length of
the measured time domain signal) and the usage of Hanning window. Furthermore,
equations (4.38) to (4.40) are solved using the Levenberg-Marquardt algorithm which has
limited accuracy as dictated by its relative and absolute tolerance values [4.38].
The error in µ is simulated for the system with a circular cam for different values
of e under a constant Ωc = 11.55 Hz. Using the predicted force and acceleration responses
from the contact mechanics model (with known µ = 0.3) in signal processing technique,
µ
is calculated and the results are given in Table 4.5. For a very low value of e/a, the
error in µ
is high because the amplitude of αɺɺ (and the reaction forces) at the first
harmonic of Ωc is very small. As the amplitude of αɺɺ at the fundamental harmonic of Ωc
increases, the error reduces and reaches a minimum at e/a = 0.3 (error = 0.67%). Beyond
e/a = 0.3, the error again starts increasing since the amplitude of αɺɺ at the second

126
harmonic of Ωc becomes significant compared with that of the first. Next the error is
calculated for different Ωc with a constant e. The error monotonically decreases (as
observed from Table 4.6) with an increase in Ωc; this is because the amplitude of αɺɺ (and
the reaction forces) at the first harmonic of Ωc increases, while the amplitude ratio of the
second harmonic to the fundamental harmonic is a constant.
A similar analysis is done for the system with an elliptic cam given e/a = 0.1, for
different values of eccentricity ( )0.5
2
21 ba
∈= −
with known µ = 0.3 (other parameters
remaining the same as in section 4.5). Fig. 4.10 gives a map of Ωc - b/a, showing
different regimes that are obtained using the inverse kinematics procedure of section 4.5.
Comparison of Fig. 4.10 with Fig. 4.6 suggests that ϵ for an elliptic cam provides a
similar motion input as e does for a circular cam. Care is taken so that the system lies in
the regime without a loss of contact and no direction reversal of the vr(t). Table 4.7 shows
the µ
values for an elliptic cam for different ϵ at Ωc = 8.33 Hz. Only a small variation in
the error is observed. However, an increase in the ϵ increases the acceleration amplitude
at the second harmonic of Ωc due to a change in the type of motion input to the system.
Overall, it is inferred that µ can be satisfactorily estimated even for a system with an
elliptic cam.

127
Table 4.5 Error in the estimation of µ for the mechanical system with a circular cam for
different values of e at Ωc = 11.55 Hz.
e/a
αɺɺ (rad/s2) Estimated
µ
% error = –
100
known
known
µ µ
µ×
At the first
harmonic of Ωc
At the second
harmonic of Ωc
0.05 52.5 1.01 0.284 5.3
0.10 105.0 4.02 0.286 4.7
0.15 157.5 9.05 0.288 4.0
0.20 210.0 16.1 0.292 2.8
0.25 262.5 25.1 0.296 1.3
0.3 315.1 36.2 0.302 0.7
0.35 367.6 49.3 0.31 3.1
0.4 420.1 64.4 0.32 6.0
0.45 472.7 81.5 0.33 9.4

128
Table 4.6 Error in the estimation of µ for the mechanical system with circular cam for
different cam speeds with e/a = 0.1.
Ωc
[Hz]
αɺɺ [rad/s2] Estimated
µ
% error =
– 100
known
known
µ µ
µ×
At the first
harmonic of Ωc
At the second
harmonic of Ωc
2 3.24 0.135 0.28 6.7
5 20.26 0.84 0.281 6.3
8 51.77 2.15 0.283 5.7
11 97.9 4.1 0.285 5.0
14 158.5 6.6 0.288 4.0
17 233.8 9.7 0.292 2.7
21 356.7 14.9 0.297 1.0

129
Fig. 4.10 Classification of response regimes of a mechanical system with an elliptic cam
in terms of a Ωc – b/a map with e = 0.1a and other parameter values given in section 4.5.
Key: , Operational range of the simulation.
0 0.2 0.4 0.6 0.8 1
8
10
12
14
16
18
20
22
24
ϵ
Ωc
[Hz]
Loss of contact
regime
In-contact
regimeNo sign
reversal of vr(t)
Sign reversal
of vr(t)

130
Table 4.7 Error in the estimation of µ for the mechanical system with an elliptic cam at
Ωc = 8.33 Hz and e = 0.1 a.
4.9 Conclusion
The major contributions of these analytical and experimental studies are as
follows. First, a new vibration experiment has been designed to estimate µ for a
mechanical system with combined rolling-sliding contact under lubrication. This
experiment permits the contact pressure, “lambda ratio”, contact velocity (sliding and
entrainment), lubrication regime and surface roughness to be changed while satisfying the
design constraints. Thus, the same experiment can be used to estimate µ for similar
ϵ
αɺɺ (rad/s2) Estimated
µ
% error =
– 100
known
known
µ µ
µ×
At the first
harmonic of Ωc
At the second
harmonic of Ωc
0 52.2 2.18 0.283 5.7
0.31 52.1 52.7 0.281 6.2
0.44 52.1 104.9 0.281 6.2
0.53 52.05 156.8 0.284 5.5
0.6 52.0 208.4 0.288 4.2
0.66 51.95 259.7 0.294 2.2

131
combined rolling-sliding contact systems such as gears and drum brakes. Second, an
improved contact mechanics model for a mechanical system with an elliptic cam and
follower is formulated that successfully predicts the system responses, as theory and
experiment match well. This mathematical model yields a better understanding of the
system dynamics as well as the accuracy of the µ estimation procedure. Third, an
improved signal processing method is proposed to calculate µ using the complex-valued
Fourier amplitudes of measured forces and acceleration. The DC components of the
measured signals are also estimated by this method (along with µ) by numerically solving
a set of nonlinear equations. The chief limitation of this study is related to the angular
alignment of the follower spring. Also the error in µ
is controlled by the choice of
system geometry and cam speed; in particular the speed should be fairly low in order to
avoid impacting conditions.

132
References for Chapter 4
[4.1] C.A. Brockley, R. Cameron, A.F. Potter, Friction-induced vibration, Journal of
Tribology 89 (2) (1967) 101–107.
[4.2] A.H. Dweib, A.F. D’Souza, Self-excited vibrations induced by dry friction, part 1:
Experimental study, Journal of Sound and Vibration 137 (2) (1990) 163–175.
[4.3] A.F. D’Souza, A.H. Dweib, Self-excited vibrations induced by dry friction, part 2:
Stability and limit-cycle analysis, Journal of Sound and Vibration 137 (2) (1990)
177–190.
[4.4] J. Kang, C.M. Krousgrill, The onset of friction-induced vibration and spragging,
Journal of Sound and Vibration 329 (17) (2010) 3537–3549.
[4.5] R.I. Leine, D.H. van Campen, A. de Kraker, L. van den Steen, Stick-Slip
vibrations induced by alternate friction models, Nonlinear Dynamics 16 (1)
(1998) 41–54.
[4.6] H. Ouyang, J.E. Mottershead, M.P. Cartmell, D.J. Brookfield, Friction-induced
vibration of an elastic slider on a vibrating disc, International Journal of
Mechanical Sciences 41 (3) (1999) 325–336.
[4.7] G. Sheng, Friction-induced vibrations and sound: Principles and applications,
CRC Press/Taylor & Francis Group, Boca Raton, 2008.
[4.8] B.N.J. Persson, Sliding friction, Surface Science Reports 33 (3) (1999) 83–119.
[4.9] H.D. Espinosa, A. Patanella, M. Fischer, A novel dynamic friction experiment
using a modified kolsky bar apparatus, Experimental Mechanics 40 (2) (2000)
138–153.

133
[4.10] E.R. Hoskins, J.C. Jaeger, K.J. Rosengren, A medium-scale direct friction
experiment, International Journal of Rock Mechanics and Mining Sciences 5 (2)
(1968) 143–152.
[4.11] K. Worden, C.X. Wong, U. Parlitz, A. Hornstein, D. Engster, T. Tjahjowidodo, F.
Al-Bender, D.D. Rizos, S.D. Fassois, Identification of pre-sliding and sliding
friction dynamics: Grey box and black-box models, Mechanical Systems and
Signal Processing 21 (1) (2007) 514–534.
[4.12] C.W. Schwingshackl, E.P. Petrov, D.J. Ewins, Measured and estimated friction
interface parameters in a nonlinear dynamic analysis, Mechanical Systems and
Signal Processing 28 (2012) 574–584.
[4.13] S.C. Lim, M.F. Ashby, J.H. Brunton, The effects of sliding conditions on the dry
friction of metals, Acta Metallurgica 37 (3) (1989) 767–772.
[4.14] M. Wakuda, Y. Yamauchi, S. Kanzaki, Y. Yasuda, Effect of surface texturing on
friction reduction between ceramic and steel materials under lubricated sliding
contact, Wear 254 (3 - 4) (2003) 356–363.
[4.15] S. Mentzelopoulou, B. Friedland, Experimental evaluation of friction estimation
and compensation techniques, Proceedings of the American Control Conference,
Baltimore, MD, USA, June 29 – July 1, 1994, 3132-3136.
[4.16] S. Shon, A. Kahraman, K. LaBerge, B. Dykas, D. Stringer, Influence of surface
roughness on traction and scuffing performance of lubricated contacts for
aerospace and automotive gearing, Proceedings of the ASME/STLE International

134
Joint Tribology Conference, Denver, USA. Oct 7 - 10, 2012, Paper # IJTC2012-
61212.
[4.17] G.H. Benedict, B.W. Kelley, Instantaneous coefficients of gear tooth friction,
ASLE Transactions 4 (1) (1961) 59–70.
[4.18] Y.S. Kang, K.J. Kim, Friction identification in sight stabilization system at low
velocities, Mechanical Systems and Signal Processing 11 (3) (1997) 491–505.
[4.19] T. Povey, G. Paniagua, Method to improve precision of rotating inertia and
friction measurements in turbomachinery applications, Mechanical Systems and
Signal Processing 30 (2012) 323–329.
[4.20] E.I. Radzimovsky, A. Mirarefi, W.E. Broom, Instantaneous efficiency and
coefficient of friction of an involute gear drive, Journal of Manufacturing Science
and Engineering 95 (1973) 1131–1138.
[4.21] R. Alzate, M. di Bernardo, G. Giordano, G. Rea, S. Santini, Experimental and
numerical investigation of coexistence, novel bifurcations, and chaos in a cam-
follower system, SIAM Journal on Applied Dynamical Systems 8 (2) (2009) 592–
623.
[4.22] R. Alzate, M. di Bernardo, U. Montanaro, S. Santini, Experimental and numerical
verification of bifurcations and chaos in cam-follower impacting systems,
Nonlinear Dynamics 50 (3) (2007) 409–429.
[4.23] G.G. Gray, K.L. Johnson, The dynamic response of elastic bodies in rolling
contact to random roughness of their surfaces, Journal of Sound and Vibration 22
(3) (1972) 323–342.

135
[4.24] S. Sundar, J.T. Dreyer, R. Singh, Rotational sliding contact dynamics in a non-
linear cam-follower system as excited by a periodic motion, Journal of Sound and
Vibration 332 (18) (2013) 4280–4295.
[4.25] http://www.tribology-abc.com/ (Accessed 25 May 2013)
[4.26] http://www.doolittleoil.com/faq/viscosity-sae-iso-or-agma (Accessed 25 May
2013)
[4.27] M. Eriten, A.A. Polycarpou, L.A. Bergman, Development of a lap joint fretting
apparatus, Experimental Mechanics 51 (8) (2011) 1405–1419.
[4.28] A. Gunduz, J.T. Dreyer, R. Singh, Effect of bearing preloads on the modal
characteristics of a shaft-bearing assembly: Experiments on double row angular
contact ball bearings, Mechanical Systems and Signal Processing 31 (2012) 176–
195.
[4.29] PCB Piezotronics Inc., ceramic shear ICP® accelerometer (Model 356A15):
Installation and operating manual (http://www.pcb.com; Accessed 25 May 2013).
[4.30] F. Y. Chen, Mechanics and Design of Cam Mechanism, Pergamon Press, 1982.
[4.31] H. S. Cheng, A Numerical Solution of the Elastohydrodynamic Film Thickness in
an Elliptical Contact, Journal of Lubrication Technology 92 (1970) 155–161.
[4.32] S. He, S. Cho, R. Singh, Prediction of dynamic friction forces in spur gears using
alternate sliding friction formulations, Journal of Sound and Vibration 309 (3-5)
(2008) 843–851.

136
[4.33] H. Xu, A. Kahraman, N.E. Anderson, D.G. Maddock, Prediction of mechanical
efficiency of parallel-axis gear pairs, Journal of Mechanical Design 129 (1)
(2007) 58.
[4.34] L. Grunberg, R. B. Campbell, Metal transfer in boundary lubrication and the
effect of sliding velocity and surface roughness, Proceedings of the Conference on
Lubrication and Wear, Institution of Mechanical Engineers, London, 1957, 297-
301.
[4.35] M. J. Furey, Surface roughness effects on metallic contact and friction, ASLE
Transactions 6 (1) (1963) 49–59.
[4.36] J. Stoer, R. Bulirsch, R. Bartels, W. Gautschi, C. Witzgall, Introduction to
Numerical Analysis, Springer, New York, 1993.
[4.37] H. Herlufsen, S. Gade, Errors involved in computing impulse response functions
via frequency response functions, Mechanical Systems and Signal Processing 6
(3) (1992) 193–206.
[4.38] D. W. Marquardt, An algorithm for least-squares estimation of nonlinear
parameters, Journal of the Society of Industrial and Applied Mathematics 11 (2)
(1963) 431–441.

137
CHAPTER 5
CONCLUSION
5.1 Summary
This study examines the non-linear dynamics and contact mechanics of system
with combined rolling-sliding contact using a cam-follower mechanism. The contact
dynamics especially coefficient of friction and impact damping are estimated using
analytical, experimental and numerical methods.
In chapter 2, the non-linearities of the cam-follower system have been
analyzed in this study. A contact mechanics formulation for a cam-follower system with
combined rolling-sliding contact has been developed, and the predictions with combined
viscous-impact damping models are successfully compared with the experimental results
reported by Alzate et al. [5.1]. The inaccuracy of the coefficient of restitution (ξ) concept
is analyzed using the approximate energy balance technique. The effect of friction non-
linearity on the dynamic forces is studied using discontinuous and smoothened dry
friction models. Finally, a linearized system is found to be inadequate in representing the
system with only kinematic non-linearity.
In chapter 3, the parameters of impact damping model for a point contact under
lubricated condition are estimated from time-domain measurements. An experiment is
138
designed and instrumented to measure force and acceleration in a system during periodic
impacts. A new time-domain based technique is developed to accurately calculate the
system response. An indirect signal processing estimation procedure (using residue
minimization) is developed to get the damping parameters using an analogous contact
mechanics model. Three different residues were defined and their accuracies were
analyzed. The estimated values of damping parameters were justified using literature
[5.2] and equivalent ξ model.
In chapter 4, a new experimental method to estimate the coefficient of friction (µ)
under lubricated condition for a system with combined rolling-sliding contact is
developed. The cam-follower experiment is designed to have continuous contact. A
contact mechanics model with an elliptic cam is developed from which the experimental
parameters satisfying the design constraints are obtained. A new signal processing
technique had been developed to estimate µ from the Fourier amplitudes of the measured
forces and acceleration. This technique has a very good numerical accuracy, as inferred
from the error analysis conducted. An empirical relation to get µ is derived based on
Benedict-Kelley model [5.3]. The different types of errors in the estimation process are
analyzed and it is found that, even a minor misalignment in the angle of the follower
spring causes large error in µ estimation.
5.2 Contributions
In this dissertation, several contributions emerge that are related to the
improved understanding of the non-linear contact dynamics of systems with combined
rolling-sliding contact. Some of the major contributions are as follows. First, the impact

139
damping model is estimated using the measurements of periodic impact events with point
contact, with the help of a new signal processing procedure (minimizing the inherent
errors associated with the numerical integration). Also some of the major issues regarding
impact damping model (stated in section 3.2) have been resolved. Furthermore, the
applicability of ( )1k
F κδ+ ɺ formulation and the inaccuracy of viscous damping for an
impacting system have been experimentally verified.
Second, the coefficient of friction has been determined for the cam-follower
system with combined rolling-sliding contact from the measured forces and acceleration
(without the DC component) using a new frequency-domain based technique. A
generalized model to predict µ for a given surface roughness under lubricated condition
(with point contact) is proposed. Also the major sources of error in the estimation process
have been quantified. Some of the other contributions from this research are the
following. This research yields better understanding of the inaccuracies of coefficient of
restitution formulation during impacts and the roles of the friction and kinematic non-
linearities in the sliding contact regime.
5.3 Future work
There are several paths to further extend the examination of the non-linear
dynamics and contact mechanics of systems with combined rolling-sliding contact. Each
path should be independent and build upon the knowledge gained from this research:
1. Improve the analytical model by developing a higher degrees-of-freedom
(DOF) system for a cam-follower system by relaxing the rigid pivot

140
assumption. The improved model will more accurately represent the real
system under higher loads.
2. Analyze the non-linear dynamics of system with different scenarios of cam
motion like, constant acceleration, constant deceleration, oscillating speeds
and friction torque dependent speed variation.
3. Seek semi-analytical solutions to the non-linear differential equations of motion
to achieve improved accuracy in the prediction of system response.
4. Perform similar experimental study with line contacts to widen the knowledge
of the contact mechanics of such system. A very high degree of precision is
required to obtain a line contact experimentally.
5. Develop a direct method to obtain the impact damping parameters with higher
accuracy, instead of using indirect method discussed in this research.
6. Examine the non-linear dynamics of cam-follower system with two
kinematically liked followers in contact with the cam. A 3 DOF system can be
developed for this purpose with a rotational DOF each for the followers and
the cam. Friction induced vibrations like stick-slip and sprag-slip can be
experimentally analyzed using this system, which is a simplified model of a
drum brake.

141
References for Chapter 5
[5.1] R. Alzate, M. di Bernardo, U. Montanaro, S. Santini, Experimental and numerical
verification of bifurcations and chaos in cam-follower impacting systems.
Nonlinear Dynamics. 50 (2007) 409–429.
[5.2] K.H. Hunt, F.R.E. Crossley, Coefficient of restitution interpreted as damping in
vibroimpact. Journal of Applied Mechanics 42 (1975) 440.
[5.3] G.H. Benedict, B.W. Kelley, Instantaneous coefficients of gear tooth friction, ASLE
Transactions 4 (1) (1961) 59–70.

142
BIBLIOGRAPHY
R. Alzate, M. di Bernardo, G. Giordano, G. Rea, S. Santini, Experimental and numerical
investigation of coexistence, novel bifurcations, and chaos in a cam-follower system.
SIAM Journal on Applied Dynamical Systems 8 (2009) 592–623.
R. Alzate, M. di Bernardo, U. Montanaro, and S. Santini, Experimental and numerical
verification of bifurcations and chaos in cam-follower impacting systems. Nonlinear
Dynamics 50 (3) (2007) 409–429.
V. Aronov, A.F. D’Souza, S. Kalpakjian, I. Shareef, Interactions among friction, wear,
and system stiffness. Part 2. Vibrations induced by dry friction. ASME Journal of
Lubrication Technology 106 (1984) 59–64.
R.C. Azar, F.R.E. Crossley, Digital simulation of impact phenomenon in spur gear
systems. Journal of Engineering for Industry 99 (1977) 792–798
A. Bacchiocchi, Impact damping system applicable to sport shoes, U.S. Patent No.
5,086,574, 1992.
C.N. Bapat, N. Popplewell, K. McLachlan, Stable periodic motions of an impact-pair.
Journal of Sound and Vibration 87 (1983) 19–40.
H. Ben Abdelounis, H. Zahouani, A. Le Bot, J. Perret-Liaudet, M.B. Tkaya, Numerical
simulation of friction noise. Wear 271 (2011) 621–624
G.H. Benedict, B.W. Kelley, Instantaneous coefficients of gear tooth friction, ASLE
Transactions 4 (1) (1961) 59–70.
C.A. Brockley, R. Cameron, A.F. Potter, Friction-induced vibration, Journal of Tribology
89 (2) (1967) 101–107.
S. Chatterjee, A.K. Mallik, Bifurcations and chaos in autonomous self-excited oscillators
with impact damping. Journal of Sound and Vibration 191 (1996) 539–562

143
F. Y. Chen, A survey of the state of the art of cam system dynamics. Mechanism and
Machine Theory 12 (3) (1977) 201–224.
F.Y. Chen, Mechanics and Design of Cam Mechanisms, Pergamon Press, 1982
H. S. Cheng, A Numerical Solution of the Elastohydrodynamic Film Thickness in an
Elliptical Contact, Journal of Lubrication Technology 92 (1970) 155–161
S.H. Cho, S.T. Ahn, Y.h. Kim, A simple model to estimate the impact force induced by
piston slap. Journal of Sound and Vibration 255 (2002) 229–242.
R.J. Comparin, R. Singh, Non-linear frequency response characteristics of an impact pair.
Journal of Sound and Vibration 134 (1989) 259–290
L. Cveticanin, Stability of motion of the cam–follower system. Mechanism and Machine
Theory 42 (9) (2007) 1238–1250.
P.J. Davis, P. Rabinowitz, Methods of Numerical Integration, Courier Dover
Publications 2007
T.L. Dresner, P. Barkan, New methods for the dynamic analysis of flexible single-input
and multi-input cam-follower systems. ASME Journal of Mechanical Design 117 (1995)
150.
A.F. D’Souza, A.H. Dweib, Self-excited vibrations induced by dry friction, part 2:
Stability and limit-cycle analysis, Journal of Sound and Vibration 137 (2) (1990) 177–
190.
A.H. Dweib, A.F. D’Souza, Self-excited vibrations induced by dry friction, part 1:
Experimental study, Journal of Sound and Vibration 137 (2) (1990) 163–175.
N.S. Eiss, Vibration of cams having two degrees of freedom. ASME Journal of
Engineering for Industry 86 (1964) 343.
D.M. Egle, An investigation of an impact vibration absorber. Journal of Engineering for
Industry 89 (1967) 653–657
F.J. Elmer, Nonlinear dynamics of dry friction. Journal of Physics A: Mathematical and
General 30 (1997) 6057–6063
M. Eriten, A.A. Polycarpou, L.A. Bergman, Development of a lap joint fretting
apparatus. Experimental Mechanics 51 (8) (2011) 1405–1419

144
H.D. Espinosa, A. Patanella, M. Fischer, A novel dynamic friction experiment using a
modified kolsky bar apparatus, Experimental Mechanics 40 (2) (2000) 138–153.
R.D. Friend, V.K. Kinra, Particle impact damping. Journal of Sound and Vibration 233
(2000) 93–118.
M. J. Furey, Surface roughness effects on metallic contact and friction, ASLE
Transactions 6 (1) (1963) 49–59
G. Gilardi, I. Sharf, Literature survey of contact dynamics modeling. Mechanism and
Machine Theory 37 (2002) 1213–1239.
W. Goldsmith, Impact: The Theory and Physical Behavior of Colliding Solids, Dover
Publications, New York, 2001
G.G. Gray, K.L. Johnson, The dynamic response of elastic bodies in rolling contact to
random roughness of their surfaces. Journal of Sound and Vibration 22 (1972) 323–342.
L. Grunberg, R. B. Campbell, Metal transfer in boundary lubrication and the effect of
sliding velocity and surface roughness, Proceedings of the Conference on Lubrication
and Wear, Institution of Mechanical Engineers, London, 1957, 297-301
S. He, R. Gunda, R. Singh, Effect of sliding friction on the dynamics of spur gear pair
with realistic time-varying stiffness. Journal of Sound and Vibration 301 (2007) 927–
949.
A. Gunduz, J.T. Dreyer, R. Singh, Effect of bearing preloads on the modal characteristics
of a shaft-bearing assembly: Experiments on double row angular contact ball bearings,
Mechanical Systems and Signal Processing 31 (2012) 176–195.
H. Herlufsen, S. Gade, Errors involved in computing impulse response functions via
frequency response functions, Mechanical Systems and Signal Processing 6 (3) (1992)
193–206
E.R. Hoskins, J.C. Jaeger, K.J. Rosengren, A medium-scale direct friction experiment,
International Journal of Rock Mechanics and Mining Sciences 5 (2) (1968) 143–152.
K.H. Hunt, F.R.E. Crossley, Coefficient of restitution interpreted as damping in
vibroimpact. Journal of Applied Mechanics 42 (1975) 440.
K.L. Johnson, Contact Mechanics, Cambridge University Press, Cambridge, 1987
J. Kang, C.M. Krousgrill, The onset of friction-induced vibration and spragging, Journal
of Sound and Vibration 329 (17) (2010) 3537–3549

145
Y.S. Kang, K.J. Kim, Friction identification in sight stabilization system at low
velocities, Mechanical Systems and Signal Processing 11 (3) (1997) 491–505.
K. Karagiannis, F. Pfeiffer, Theoretical and experimental investigations of gear-rattling.
Nonlinear Dynamics 2 (1991) 367–387
S. Kim, R. Singh, Gear surface roughness induced noise prediction based on a linear
time-varying model with sliding friction. Journal of Vibration and Control 13 (2007)
1045–1063.
M.P. Koster, Vibrations of Cam Mechanisms: Consequences of Their Design,
Macmillan, 1974.
P.R. Kraus, V. Kumar, Compliant contact models for rigid body collisions, in: IEEE
International Conference on Robotics and Automation, 1997, pp. 1382 –1387 vol.2.
A. Le Bot, E. Bou Chakra, Measurement of friction noise versus contact area of rough
surfaces weakly loaded. Tribology Letters 37 (2010) 273–281.
A. Le Bot, E. Bou-Chakra, G. Michon, Dissipation of vibration in rough contact.
Tribology Letters 41 (2011) 47–53.
R.I. Leine, D.H. van Campen, A. de Kraker, L. van den Steen, Stick-Slip vibrations
induced by alternate friction models. Nonlinear Dynamics 16 (1998) 41–54.
S. Li, A. Kahraman, A tribo-dynamic model of a spur gear pair, Journal of Sound and
Vibration 332 (2013) 4963–4978.
S.C. Lim, M.F. Ashby, J.H. Brunton, The effects of sliding conditions on the dry friction
of metals, Acta Metallurgica 37 (3) (1989) 767–772.
O. Ma, Contact dynamics modelling for the simulation of the space station manipulators
handling payloads, in: IEEE International Conference on Robotics and Automation,
1995, pp. 1252 –1258 vol.2.
Q.L. Ma, A. Kahraman, J. Perret-Liaudet, E. Rigaud, An investigation of steady-state
dynamic response of a sphere-plane contact interface with contact loss, Journal of
Applied Mechanics 74 (2007) 249–255.
D. W. Marquardt, An algorithm for least-squares estimation of nonlinear parameters,
Journal of the Society of Industrial and Applied Mathematics 11 (2) (1963) 431–441

146
K.S. Marhadi, V.K. Kinra, Particle impact damping: effect of mass ratio, material, and
shape. Journal of Sound and Vibration 283 (2005) 433–448.
Y. Masayuki, N. Mikio, A fundamental study on frictional noise (1st report, the
generating mechanism of rubbing noise and squeal noise). Bulletin of JSME 22 (1979)
1665–1671.
Y. Masayuki, N. Mikio, A fundamental study on frictional noise (3rd report, the
influence of periodic surface roughness on frictional noise). Bulletin of JSME 24 (1981)
1470–1476.
Y. Masayuki, N. Mikio, A fundamental study on frictional noise (5th report, the influence
of random surface roughness on frictional noise). Bulletin of JSME 25 (1982) 827–833.
MATLAB User’s Guide, The Math Works Inc., Natick, MA, 1993.
S. Mentzelopoulou, B. Friedland, Experimental evaluation of friction estimation and
compensation techniques, Proceedings of the American Control Conference, Baltimore,
MD, USA, June 29 – July 1, 1994, 3132-3136.
Y. Michlin, V. Myunster, Determination of power losses in gear transmissions with
rolling and sliding friction incorporated. Mechanism and Machine Theory 37 (2002) 167–
174.
R.L. Norton, Cam Design and Manufacturing Handbook, Industrial Press Inc., 2009.
G. Osorio, M. di Bernardo, S. Santini, Corner-impact bifurcations: a novel class of
discontinuity-induced bifurcations in cam-follower systems. Journal of Applied
Dynamical Systems 7 (2007) 18–38.
M. Othman, A. Elkholy, Surface-roughness measurement using dry friction noise.
Experimental Mechanics 30 (3) (1990) 309–312.
M. Othman, A. Elkholy, A. Seireg, Experimental investigation of frictional noise and
surface-roughness characteristics. Experimental Mechanics 30 (4) (1990) 328–331.
H. Ouyang, J.E. Mottershead, M.P. Cartmell, D.J. Brookfield, Friction-induced vibration
of an elastic slider on a vibrating disc, International Journal of Mechanical Sciences 41
(3) (1999) 325–336
C. Padmanabhan, R. Singh, Dynamics of a piecewise non-linear system subject to dual
harmonic excitation using parametric continuation. Journal of Sound and Vibration 184
(1995) 767–799.

147
R. Palej, J. Niziol, On a direct method of analyzing impacting mechanical systems.
Journal of Sound and Vibration 108 (1986) 191–198
B.N.J. Persson, Sliding friction, Surface Science Reports 33 (3) (1999) 83–119.
T. Povey, G. Paniagua, Method to improve precision of rotating inertia and friction
measurements in turbomachinery applications, Mechanical Systems and Signal
Processing 30 (2012) 323–329
E.I. Radzimovsky, A. Mirarefi, W.E. Broom, Instantaneous efficiency and coefficient of
friction of an involute gear drive, Journal of Manufacturing Science and Engineering 95
(1973) 1131–1138
P.J. Remington, Wheel/rail rolling noise, I: Theoretical analysis, Journal of the
Acoustical Society of America 81 (1987) 1805–1823.
P.J. Remington, Wheel/rail rolling noise, II: Validation of the theory, The Journal of the
Acoustical Society of America 81 (1987) 1824–1832.
M.N. Sahinkaya, A.-H.G. Abulrub, P.S. Keogh, C.R. Burrows, Multiple sliding and
rolling contact dynamics for a flexible rotor/magnetic bearing system. IEEE/ASME
Transactions on Mechatronics, 12 (2007) 179 –189.
T. Sakai, Y. Doi, K. Yamamoto, T. Ogasawara, M. Narita, Theoretical and experimental
analysis of rattling noise of automotive gearbox. Society of Automotive Engineers (1981)
SAE paper # 810773.
C.W. Schwingshackl, E.P. Petrov, D.J. Ewins, Measured and estimated friction interface
parameters in a nonlinear dynamic analysis, Mechanical Systems and Signal Processing
28 (2012) 574–584
R. Seifried, W. Schiehlen, P. Eberhard, Numerical and experimental evaluation of the
coefficient of restitution for repeated impacts. International Journal of Impact
Engineering 32 (2005) 508–524
R. Singh, H. Xie, R.J. Comparin, Analysis of automotive neutral gear rattle. Journal of
Sound and Vibration 131 (1989) 177–196.
A. Soom, J.-W. Chen, Simulation of random surface roughness-induced contact
vibrations at Hertzian contacts during steady sliding. ASME Journal of Tribology 108
(1986) 123–127.
S.W. Shaw, P.J. Holmes, A periodically forced impact oscillator with large dissipation,
Journal of Applied Mechanics 50 (1983) 849–857

148
G. Sheng, Friction-induced vibrations and sound: Principles and applications, CRC
Press/Taylor & Francis Group, Boca Raton, 2008
S. Shon, A. Kahraman, K. LaBerge, B. Dykas, D. Stringer, Influence of surface
roughness on traction and scuffing performance of lubricated contacts for aerospace and
automotive gearing, Proceedings of the ASME/STLE International Joint Tribology
Conference, Denver, USA. Oct 7 - 10, 2012, Paper # IJTC2012-61212.
J. Stoer, R. Bulirsch, R. Bartels, W. Gautschi, C. Witzgall, Introduction to Numerical
Analysis, Springer, New York, 1993
B. L. Stoimenov, S. Maruyama, K. Adachi, and K. Kato, The roughness effect on the
frequency of frictional sound. Tribology International 40 (4) (2007) 659–664.
W.J. Stronge, Impact Mechanics, Cambridge University Press, New York, 2000
S. Sundar, J.T. Dreyer, R. Singh, Rotational sliding contact dynamics in a non-linear
cam-follower system as excited by a periodic motion. Journal of Sound and Vibration
332 (2013) 4280–4295.
C.K. Sung, W.S. Yu, Dynamics of a harmonically excited impact damper: Bifurcations
and chaotic motion. Journal of Sound and Vibration 158 (1992) 317–329
S. Theodossiades, S. Natsiavas, Periodic and chaotic dynamics of motor-driven gear-pair
systems with backlash. Chaos, Solitons & Fractals 12 (2001) 2427–2440
E.E. Ungar, D. Ross, Vibrations and noise due to piston-slap in reciprocating machinery,
Journal of Sound and Vibration. 2 (1965) 132–146
M. Vaishya, R. Singh, Sliding friction-induced non-linearity and parametric effects in
gear dynamics. Journal of Sound and Vibration 248 (2001) 671–694
M.A. Veluswami, F.R.E. Crossley, G. Horvay, Multiple impacts of a ball between two
plates - part 2: mathematical modelling, Journal of Engineering for Industry 97 (1975)
828–835.
M. Wakuda, Y. Yamauchi, S. Kanzaki, Y. Yasuda, Effect of surface texturing on friction
reduction between ceramic and steel materials under lubricated sliding contact, Wear 254
(3 - 4) (2003) 356–363.
M.Y. Wang, R. Manoj, W. Zhao, Gear rattle modelling and analysis for automotive
manual transmissions. Proceedings of the Institution of Mechanical Engineers, Part D:
Journal of Automobile Engineering 215 (2001) 241–258

149
G.S. Whiston, Impacting under harmonic excitation. Journal of Sound and Vibration 67
(1979) 179–186
R. Wilson, J. N. Fawcett, Dynamics of the slider-crank mechanism with clearance in the
sliding bearing. Mechanism and Machine Theory 9 (1974) 61–80
K. Worden, C.X. Wong, U. Parlitz, A. Hornstein, D. Engster, T. Tjahjowidodo, F. Al-
Bender, D.D. Rizos, S.D. Fassois, Identification of pre-sliding and sliding friction
dynamics: Grey box and black-box models, Mechanical Systems and Signal Processing
21 (1) (2007) 514–534.
H. Xu, A. Kahraman, N.E. Anderson, D.G. Maddock, Prediction of mechanical
efficiency of parallel-axis gear pairs, Journal of Mechanical Design 129 (1) (2007) 58
H. S. Yan, M. C. Tsai, M. H. Hsu, An experimental study of the effects of cam speeds on
cam-follower systems. Mechanism and Machine Theory 31 (4) (1996) 397–412.
D. Zhang, W.J. Whiten, The calculation of contact forces between particles using spring
and damping models. Powder Technology 88 (1996) 59–64.




















