Further extension of the Hougen-Bunker-Johns model
20
JOURNAL OF MOLECULAR SPECTROSCOPY 102, 13-32 (1983) Further Extension of the Hougen-Bunker-Johns Model VIKTOR SZALAY Research Laboratory for CrystalPhysics,Hungarian Academy ofsciences, P.O.B. 132, H-1502 Budapest, Hungary The method of Hougen, Bunker, and Johns is developed into a unified theory for molecules with one large amplitude internal motion. Examples show how the Nielsen and Hecht-Dennison transformation formulae and also the Hougen-Bunker-Johns formulae for rigid or semirigid large amplitude bending, inversion, and puckering motions follow as special cases from the theory outlined here. The author believes that this theory can also be useful for molecules with more than one large amplitude internal motion. Treating the trimethylene oxide molecule, an example is given for the calculation of effective mass function of small ring molecules. I. INTRODUCTION Since in all chemical reactions conformational changes in molecules take place with large displacements of the constituent atoms, the investigation of the dynamics of large amplitude motions is of special interest to chemists and biochemists. The key step in the understanding of such motions is the determination of potential surfaces over a wide range of internal coordinates. Vibrational-rotational spectroscopy is a possible and frequently used experimental technique to do this, particularly when combined with the results of other experiments and of quantum chemical calculations. Depending on the type of large amplitude motion there are different methods of constructing an approximate Hamiltonian. Among the well-established methods for internal rotation the principal axis method (PAM) and the internal axis method (IAM) can be mentioned (I). The theory of Hougen, Bunker, and Johns (2) (henceforth referred to as HBJ) formulated originally for the bending motion of linear and quasi- linear molecules has been extended to more complicated cases (Table I). For the puckering of small membered rings, T. B. Malloy developed another method to construct an approximate Hamiltonian (16). In this work a general method for constructing the HBJ Hamiltonian will be presented, without any restriction on the symmetry of the molecule or on the type of the large amplitude motion. After a brief summary of ideas of the HBJ method (Sect. II) we investigate how a molecule fixed axis system can be chosen to eliminate the rotation-vibration couplings’ in different orders of approximation (Sect. III). In Section IV relations between the kinetic energy matrices will be derived and their role in the HBJ Hamiltonian will be discussed. In Section V we show how the formulae of the zero-order block diagonal generalized tensor of inertia of molecules listed in Table I and the Nielsen and Hecht-Dennison transformation formulae result as ’ Throughout this paper, by rotation-vibration coupling we mean solely the Coriolis interaction. 13 0022-2852/83 $3.00 Copynghl 6 1983 by Academic Press, Inc. All rights of reproduction in any form reserved.
-
Upload
independent -
Category
Documents
-
view
0 -
download
0
Transcript of Further extension of the Hougen-Bunker-Johns model

JOURNAL OF MOLECULAR SPECTROSCOPY 102, 13-32 (1983)
Further Extension of the Hougen-Bunker-Johns Model
VIKTOR SZALAY
Research Laboratory for Crystal Physics, Hungarian Academy ofsciences, P.O.B. 132, H-1502 Budapest, Hungary
The method of Hougen, Bunker, and Johns is developed into a unified theory for molecules with one large amplitude internal motion. Examples show how the Nielsen and Hecht-Dennison transformation formulae and also the Hougen-Bunker-Johns formulae for rigid or semirigid large amplitude bending, inversion, and puckering motions follow as special cases from the theory outlined here. The author believes that this theory can also be useful for molecules with more than one large amplitude internal motion. Treating the trimethylene oxide molecule, an example is given for the calculation of effective mass function of small ring molecules.
I. INTRODUCTION
Since in all chemical reactions conformational changes in molecules take place with large displacements of the constituent atoms, the investigation of the dynamics of large amplitude motions is of special interest to chemists and biochemists. The key step in the understanding of such motions is the determination of potential surfaces over a wide range of internal coordinates. Vibrational-rotational spectroscopy is a possible and frequently used experimental technique to do this, particularly when combined with the results of other experiments and of quantum chemical calculations. Depending on the type of large amplitude motion there are different methods of constructing an approximate Hamiltonian. Among the well-established methods for internal rotation the principal axis method (PAM) and the internal axis method (IAM) can be mentioned (I). The theory of Hougen, Bunker, and Johns (2) (henceforth referred to as HBJ) formulated originally for the bending motion of linear and quasi- linear molecules has been extended to more complicated cases (Table I). For the puckering of small membered rings, T. B. Malloy developed another method to construct an approximate Hamiltonian (16).
In this work a general method for constructing the HBJ Hamiltonian will be presented, without any restriction on the symmetry of the molecule or on the type of the large amplitude motion. After a brief summary of ideas of the HBJ method (Sect. II) we investigate how a molecule fixed axis system can be chosen to eliminate the rotation-vibration couplings’ in different orders of approximation (Sect. III). In Section IV relations between the kinetic energy matrices will be derived and their role in the HBJ Hamiltonian will be discussed. In Section V we show how the formulae of the zero-order block diagonal generalized tensor of inertia of molecules listed in
Table I and the Nielsen and Hecht-Dennison transformation formulae result as
’ Throughout this paper, by rotation-vibration coupling we mean solely the Coriolis interaction.
13 0022-2852/83 $3.00 Copynghl 6 1983 by Academic Press, Inc.
All rights of reproduction in any form reserved.

14 VIKTOR SZALAY
TABLE I
Examples of Molecules Which Have Been Studied by the HBJ Method
HCN, DCN, CsOH (2) 1970
Hz0 (,I, 4. 9) 1974, 1977, 1981
HCNO (6) 1979
'3'2 (1. 8) 1976, 1980
HCN-HNC isomerization system (P) 1980
H2CO (lo. 11.12) 1973, 1980, 1982
NH3 (13) 1973
H30+ , CH - 3 (2.) 1982
C-H2 (2) 19.81
special cases from the method developed in Sections III and IV. The advantages of the method in calculating the effective mass functions of small ring molecules are numerically demonstrated in the case of trimethylene oxide and are included into Section VI. A discussion of the properties and significance of the extended HBJ theory is given in Section VII.
We shall use boldface letters for “abstract” vectors, as R r J The column vector *.),(I) ..* representations carried out by their coordinates derived in an analysis system “P will be denoted as R*, r$, J”. It denotes the inertia tensor of a molecule calculated in a coordinate system having its origin fixed in the center of mass and with its axes parallel to the axes of A. By the superscript + we denote the transpose of a coordinate vector or a matrix, e.g., (Ei)+ is a row vector.
II. RECAPITULATION OF THE IDEAS OF THE HBJ METHOD FOR MOLECULES WITH TWO OR MORE LARGE AMPLITUDE INTERNAL MOTIONS
To obtain a spectroscopically useful form for the energy operator of a freely moving molecule consisting of N atoms with one or more large amplitude internal motions, the Born-Oppenheimer (henceforth, BO) variables (17) are defined. These are the coordinates giving the position of the molecule fixed axis system MS0 (explained in detail in Sect. III) relative to a space fixed system of axes LS, i.e., the coordinates
x eMS
7 \ \
FIG. 1. The definition of the Euler angles.

EXTENDED HBJ THEORY 15
gLs of the origin of MS0 and the Euler angles 0, P, x defined in Wilson’s sense (Fig. l), the L G 3N-6 (or L G 3N-5 in the case of linear molecules) large amplitude coordinates collected in a column vecto? t, the suitable linear combinations of which are only approximately normal coordinates when L -c 3N-6 (or 3N-5), the 3N-6-L symmetry coordinates Q of the small amplitude vibrations, and finally the coordinates of electrons in MS’, fo; example, p,Mso for the pth electron.
The relations to transform the Hamiltonian written in the coordinates of nuclei &? and electrons E,” to BO variables are
rls = RLs + S’(8, ‘P, x)[&@(~) + @‘], .,a I
d Mso = C 4t’isok)Qs, “,.(I
f@ = p + s-ye, 56, x)p,Ms” (1)
(I 7). Since the values of BO variables should be calculable from the instantaneous coordinates of particles in the LS and from the instantaneous coordinates of the nuclei of the reference configuration in MS’, a!““, we need additional equations, e.g., the so-called Eckart and Sayvetz equations (18, 19)
2 m&Is0 = Q, @a) a
(2b)
C m,(8P"la+d, hIso = () 3
(I
C m,(aaf$So/a7L). t+iFso = 0, (I
(3)
where m, is the mass of the ath atom of the molecule. The set &, cx = 1, . . . , N of displacement vectors represents the small amplitude internal motions. The linear and angular momenta of a molecule originating from internal motions have to be zero. From these requirements for small amplitudes follow Eq. (2a) and the Eckart conditions (Eq. (2b)) and, for large amplitude motions, the equations
2: 2 m,(L$~so/d7i)~j = 0, (44 i 01
(4b)
Equation (4) represents restrictions on the reference configuration and Eq. (2) re- strictions on the d, displacements. The constraints expressed by Eqs. (2b) and (4b) minimize the couplings between the rotation of the molecule as a whole and the
* The elements of; may be not only the coordinates of large amplitude motions, but all coordinates of large amplitude motions should be included into L.

16 VIKTOR SZALAY
internal motions (for both large and small amplitudes). The demand of minimized large amplitude internal motion-small amplitude vibration couplings does not lead to additional constraints on the reference configuration, but it gives new ones on the displacement vectors; these are the Sayvetz conditions (Eq. (3)). The translation of the molecule as a whole is fully decoupled from the other motions by Eqs. (2a) and (4a).
The transformed Hamiltonian fi has constituents as
where f stands for the kinetic energy operators of nuclear motions (translation T, rotation R, large amplitude motion LAM, vibration V, and their couplings RV, LAMV, LAMR). c is a mass dependent so-called pseudopotential term (20), and fie is the electron energy operator. In zero-order approximation, when all a, are equal to zero, the coupling terms vanish. The average of fi over one of the eigenfunctions of & is the Hamiltonian for nuclear motions in a given electronic state of the molecule. Neglecting the translation kinetic energy term, which has a continuous spectrum,
k = ‘I’R + i+i_AM + &I + &I + Fi&+M” + Fr*Mn + 0 + P (6)
is obtained, with ti denoting the internal motion potential function resulted from tie. Before we use a Born-Oppenheimer like approximation to derive an effective rotation-large amplitude motion Hamiltonian, i.e., before we average over one of the eigenfunctions of pv + 0 + p, a number of alternative simplifications can be made. We may obtain alternative approximate effective Hamiltonians, for example, a nonrigid rotation-nonrigid large amplitude motion Hamiltonian, as derived for the HZ0 molecule (3) a rigid rotation-rigid large amplitude motion Hamiltonian (20, a semirigid rotation-semirigid large amplitude motion Hamiltonian (1 I), and a number of more or less improved variants (12). By rigid rotation-rigid large amplitude ap- proximation we mean that all couplings with small amplitude vibrations are neglected in the kinetic energy. The semirigid attribute indicates that the relaxation of some geometric parameters is taken into account.
The specification of each of these Hamiltonians demands the calculation of the atom position vectors gy”” of the reference o c nfi g uration satisfying Eq. (4). If we can do this generally, the derivation of the effective rotation-large amplitude motion Hamiltonian would be possible for any molecule in different orders of approximation.
III. HOW A MOLECULE FIXED AXIS SYSTEM CAN BE CHOSEN TO MINIMIZE THE ROTATION-VIBRATION COUPLINGS
Now the calculation of the vectors g?“” will be carried out in a completely general way. We are looking for the molecule fixed system MS, in which the linear and angular momenta
J=ZW&Xi, n
(7)

EXTENDED HBJ THEORY 17
or the linear and angular momenta due to one or more internal coordinates
J ,INT = 2 2 %L X (&x/aTi);i 03)
i LI
of a molecule vanish. Since the center of mass of a freely moving molecule moves along a straight line,
for any given time J and J rNT can be associated with rotations of the molecule as a whole about its center of mass, and p, p rNT can be associated with the translation of the molecule as a whole. So, the system sought has to be moved relatively to an arbitrarily chosen system A with linear velocity
-2% = &T/M, Pa)
where
M= Cma; CW a
furthermore it has to be rotated relative to A with angular velocity
-&* = (WIJ&T (10)
in order that the momenta defined in Eqs. (8) vanish. Indeed, the momenta of a molecule in such a moving system are
M-$k + ST ~0, (118
(lib)
because of the former equations. The first terms
M$?, , <a&~
are the apparent linear and angular momenta of a molecule due to the movement of the axis system.
In the case of the momenta the symbols J&r, em, etc. denote that the momenta were not only given by coordinates referring to the system A but were also defined and calculated in this system. Consequently, using the direction cosine matrix
/cosxcosBcos(P cos x cos B sin (P -cos x sin r9 - sin x sin Cp + sin x cos Cp
U= -sin x cos B cos P -sin x cos 0 sin Cp sin x sin 0 (12) - cos x sin P + cos x cos 56
sin B cos Cp sin e sin (0 cos e
connecting the systems A, MS the momentum &!$r may be unequal to lJ&,. At the same time, since the total angular momentum is conserved, JMS is equal to UJA.
To determine the matrix U, the relations

18 VIKTOR SZALAY
t9 = -sin XC&~, - cos x&sY
8 = cosec B cos x&s, - cosec 0 sin XC&“,
x = -cot 0 cos xwg”, + cot 19 sin
(22) between the vector -wz1 MS = -lJ&
and the time derivatives of the Euler angles can be used. Substituting lJ& for c&’ we have a system of differential equations to calculate the Euler angles for the rotation u:
8 = sin PC&,, - cos ‘Pw$,,~
+ = cot 8 cos %$,, + cot 0 sin R&Y - A,,
x = -(cot 0 cos e + sin e)(c0s 8&,, + sin R.&J. (14)
Summarizing, the MS, in which the momenta defined by Eq. (8) vanish, is given relative to A up to a constant translation and a constant rotation. Its origin is the point
s
tlJ+t WI” = t-BW + %%1, (15)
IO
while its unit vectors are
(gXMs, gyyMS, gzMs) = b, eya, thw+(e, p, x)u+va, qo, x0), (16)
where U(0, 8, x) is calculable through the integration of Eq. (14). The atom coordinates in this system are
930 = U(eo, qoY x,)U(e, 8, x)[c~) - WA]
= u(eo, vo, xo)u(e, ‘P, ~W(t)i = ~5; (17)
with e(t) denoting the coordinate vector of the ath atom in the system A. For applications the constant vector RA _ o,21 is chosen to be zero, and U(eo, ‘PO, x,)U(e, 9,
x) is taken as the unit matrix for special conformation of the molecule, e.g., for the planar conformation. The classical rotation-vibration kinetic energy, if all internal coordinates are included into t, will assume a simple form
= ((WY)‘, ,i)+)(ER ;;)(;‘“) = ((*YS>‘, (i)+)lMfy) (18)
with the angular velocity yr of the molecule defined as the angular velocity of the system MS relatively to the LS, with the zero matrices ORV, OVR, and with the matrices

EXTENDED HBJ THEORY 19
where j,k,I=x,y,z,
djk is the Kronecker delta,
(tR)RT, = c m,a,Ms x (aa,MS/ar;), a
where
(@X0 = C wA%Pld~i) - eP/a7h),
a
h,i=l,2 ,..., L = 3N - 6(or 3N-5),
(19)
because in our moving coordinate system
Jf”N”T = I# = 0 * _. (20)
The systems defined by the disappearance of the momenta in Eqs. (7) and (8), including all internal coordinates, will be identical if the starting system A is chosen as a molecule fixed system. Since in the applications A is always chosen as a molecule fixed system (see Sect. V) we do not treat other cases and do not have to distinguish the systems mentioned. Both systems denoted by MS may be called internal motion axis systems (23). The systems MS” for which J rNT, and therefore the rotation- vibration couplings (for both large and small amplitudes), vanish only to nth order may be practical for calculations (MS” = MS). Writing into Eqs. (8)-( 17) JINT only to nth order the system MS” and the ~2~” vectors can be derived. Clearly, we can assume block diagonal form for the kinetic energy matrix IMS” only to nth order.
IV. RELATIONS BETWEEN THE ELEMENTS OF THE KINETIC ENERGY MATRICES
For further developments we determine how the elements of the kinetic energy matrix
(21)
transform into the elements of the matrix IMS, and show the particular importance of known relations (formulae (28), (29) to come) between the elements of the kinetic energy matrices I*, lMS and GA, GMS referring to the velocities and the momenta, respectively, for the HBJ Hamiltonian. The matrix GA is defined as
(22)
and there is a similar equation for lMS, GMS. For calculating the matrices GA, GMS avoiding the inversion the “$’ vectors (20, 23) can be used.
The kinetic energy of a molecule can be written by the use of Eq. (11 b), i.e., by
If@, + I& = Q (23) as follows:

20 VIKTOR SZALAY
where ~2 is the angular velocity of the molecule defined as the angular velocity of the system A relative to the LS. Since wl equals to w2 - w21 and the total energy of a molecule calculated in the LS and the internal energy of a molecule should be independent of the choice of the moving coor.dinate system,
IFS = u#J+, (25)
IV” = I$ - (l&J)+(l”,)-‘l”, (26)
in agreement with the results of Pickett, who investigated the transformation properties of the kinetic energy matrix elements for the case of arbitrary rotations of atomic positions (24).
Since lAGA = E, (27)
i.e., the unit matrix, using a technique applied in Ref. (25), we obtain the relation
(G$)-1 zz 17” = (Gys)-‘. (28)
That is, the pure vibrational part of the energy of the molecule is independent of the orientation of the coordinate axes. The matrices Gv (due to Eq. (28) the superscript can be omitted) and Iv” have the structure
(Gv),, Gv),, (6% (It% G&r Gv)qq (V)q7 > (W, ’
respectively, where q stands for the small amplitude and 7 stands for the large amplitude internal motions. By the repeated use of the procedure of Ref. (25) for the matrices Gv, Iv”, the relation
[(It%-’ = (Gv),, - (Gv),st(Gv),l-‘(Gv)~, (29)
can be derived. Let us observe that the inverse of the effective mass tensor of large amplitude motions [(l~S),,]-’ is unequal to (Gv),,, unless (GV)rq is equal to zero.3 Generalizing Quade’s zero-order formulae (Eqs. (21) and (22) in Ref. (28)) and com- paring them with the formula (29) and using the block diagonal form of IMS, we can write the expression of the rotation-large amplitude motion-vibration matrix GMS as
(30)
One can see from Eq. (30) that introducing the block diagonal generalized tensor of inertia
JMS = (f: $,.j ) (31)
the rotation and large amplitude motions can be treated together, which is the basic feature of the HBJ method.
Clearly, the matrices G MS” JMS” are block diagonal only to nth order. For instance GMSo is block diagonal when all dol are equal to zero. The transformation into operator
3 The authors of paper (26) make a mistake on this point. The incompleteness of their effective mass formula was proved numerically (27), but without pointing out the mistake made in Ref. (26).
EXTENDED HBJ THEORY 21
form of the classical kinetic energy written in terms of the momenta and GM@ gives the kinetic part of the HBJ Hamiltonian (Eq. (28) in Ref. (2)).
V. MOLECULES WITH ONE LARGE AMPLITUDE INTERNAL MOTION
In this section we apply the method outlined in Sections III and IV to some important cases of molecules with one large amplitude internal motion.
Three simplifications are made. The first is the zero-order approximation of MS. Then the angular momenta of small and large amplitude internal motions should vanish in zero order. This is achieved by the use of the Eckart conditions (Eq. (2b)) and of Eq. (4b). One can show that the coordinate vectors a?““, &‘@, a$” are the same as they are in the system defined only by the disappearance of the momenta of the large amplitude motion; so the latter coordinates can be directly used in Eq. (1) to derive the rotation-internal motion Hamiltonian (Eq. (6)) written in MS’. Afterwards, and this is the second simplification, the nonrigid rotation-nonrigid large amplitude motion Hamiltonian is approximated by an effective rigid (or semirigid) rotation-rigid (or semirigid) large amplitude motion Hamiltonian referring to a given electronic and small amplitude vibrational state:
@%? = (~)+(Ps”)-‘~ + V,(r) + 92(7, n), (32)
where p is the column vector of the operators of angular and large amplitude motion momenta, n is the vector of the vibrational quantum numbers of small amplitude vibrations, gMso is the zero-order block diagonal generalized tensor of inertia, and 7 denotes the single large amplitude internal coordinate. In Eq. (32) the pseudopotential term is neglected (third simplification) for the reason given in Ref. (29).
The determination of YMso means the determination of the kinetic energy matrix IMS of a molecule in which all small amplitude internal motions are frozen. Such a molecule has been referred to as the reference configuration in Section II, but it may also be called the reference molecule. Let the starting system A be a moving system of axes fixed in a given way to a part of the reference molecule. This part of the reference molecule is called the frame part, and the other parts moving around the frame are called tops. (This concept of top and frame is used in the theory of internal rotations (I).) For example, in the case of the bending of triatomic molecules (Fig. 2), the bond 23 may be the frame while the bond % may be the top. For our present problem Eqs. (25) (26) (23) and (14) can be simplified as follows:
IV” = lJ@u+
1:” = 1: - &*)+(6-~~8,,
(33)
(34)
I$@ + !“R7 = 0 (n+ = &I), (35) dd - = sin 8Q, - cos (OQ, dr
av - = cot 0 cos (Ps2, + cot 6 sin ‘PQ, - 9; dr
dx - = -(cot 13 cos 0 + sin t?)(cos CPQ, + sin ‘PQ,). dr
(36)
The calculation of the atom coordinates a:” of the reference molecule can be done

22 VIKTOR SZALAY
easily by the use of Eq. (17). One should remember that the system MS and all quantities in this section relate to the reference molecule and so for example 1:” in Eq. (34) is unequal to (l~So),r, because in the latter the effect of all internal motions was taken into account.
If we are interested only in the large amplitude motion, Eq. (34) can then be used to obtain the corresponding effective mass. Considering the rotation or the rotation- large amplitude motions three cases may be distinguished according to the solution of Eq. (36). These are the cases
a, (?)’ = (0, 0, O),
b, (8)’ = (0, 0, QZ),
c, (?)+ = (0, QY, W or (QX, 4, %).
In the first trivial case U is the matrix of an arbitrary but constant angle rotation. In the second case we can choose the angles 8, x to be zero, and we have
where w, ‘p, 0) = w-+Y, (384
i
cos (Y -sin a 0 U(a) = sin a! cos (Y 0 . WW
0 0 1
This rotation is a function of the large amplitude coordinate.
Examples of Case b
First, we investigate molecules of the type shown in Table I. To find the elements of IMS, we should specify the position vectors I$~ (starting coordinates) as func- tions of the large amplitude coordinate 7. Let us choose the unit vectors gX, gY of A in the symmetry plane of the molecules as shown in Fig. 2. After some calculation, we obtain
,,iL,+ = (0, 0, L), (39)
and so
zMS = zt, - z,= 1
[ 1 - rT (IARLZ zTZP
(40)
(8)’ = to, 0, - Ld(G)*z), (41)
aI,, -= d7 (Ii&z ’ u = ux-(P(T)).
(42)
(43)
For the justification of the above formulae, for instance, we expand Eq. (42) in the case of bending of a triatomic molecule. Using Steiner’s theorem (30), Eq. (42) can be written as

EXTENDED HEiJ THEORY 23
with
(44)
where the superscript A was omitted for simplicity. Using the coordinates of Fig. 2 and Eq. (44) the same result can be obtained as that from the usual HBJ procedure (2) that is,
L&o ur + 2413 cos 7 -=_
dr u3 + uI + 2u13 cos 7 ’ (454
where
243 = mm312J23. (45b)
As a second example of case b, we treat the internal rotation in symmetric molecules like CH3SiH3. Let the axis of internal rotation be the z axis of A. r denotes the internal rotation angle. The coordinates of the top and frame atoms are lJX7)ga and I&. After some calculation
,,9+ = (0, 0, L), (46) where
Lz > 0, (47) and
I:‘, = I,,, (48) so that
(49)
. Y Joel = (-l,, cos Z , I,, sin r, Cl )+
1
\
A*=( 0 , 0 I 0 I'
'21 &=(h , 0 ,01+
‘23 3
Y
FIG. 2. The location of the starting molecule fixed axis system A for a triatomic molecule, and the starting atom coordinates as functions of the bending angle.

24 VIKTOR SZALAY
(51)
These are the same results, which can be obtained by the Nielsen transforma- tion (2):
The common feature of the former examples is that
(Q)’ = ((X0, 0,) (52)
and because of this it is very easy to solve Eq. (36). Generally this is not so. How can we find the rotation matrix U in the general case c?
The effect of the desired rotation U(8, q, x) on the molecule, where the Euler angles are the solutions of Eq. (36) is equivalent to the effect of subsequent rotations z?J and Ud-Cp), where ZD has to satisfy the equation
with
~(Q,, Qy, Qz)’ = (&(.I @)’ (53)
and
cp = - TO (9,I - s T Q, (~Q(~“%T + ‘PO. (55)
The matrix l&(-F’) is known, but 22 is still unknown, According to Eq. (53), one can say that we need an axis system, the axis z’ of which is parallel to the vector Q, and is directed as Q, i.e., it points into the same half space as the vector Q&. Of course, this choice of direction of z’ is arbitrary; only the form
Q* = (0, 0, fly>+ (56)
is important for us. The position of Q, and so the position of the axis z’, is given by the Euler angles
0 = arccos ( > j&y
YJ = arccos (@ J&)“2) (57)
’ Since the coordinate system A itself is a moving frame whose orientation relative to the LS is defined by the Euler angles &,Ls, VU, and XA,.U, and since in our examples the z axes of systems A and MS coincide, the orientation of the MS relatively to the LS is given by the Euler angles
s r
I9 A&i, ‘p‘%Ls, XAJS - f&d7 + Cpo, 70
where the angle P (which more precisely should be denoted by Cp MS,,,) is added to xa,*. Now one can see easily that in the two particular cases considered the angle -cP is identical with the HBJ angle c (see, for example, Ref. (2)) and with the angle x-x’ of the internal rotation theory of symmetric molecules (see Eqs. (2)-(15) in Ref. (I)), respectively.

EXTENDED HBJ THEORY 25
with respect to A (Fig. 1). Since there is no other restriction except Eq. (53), the Euler angle x can be arbitrarily chosen. Substituting in Eq. (12) the expressions derived from Eq. (57) for the trigonometric functions cos 8, sin 0, cos ‘P, sin sb and taking into account Eq. (53), we obtain
Although this matrix fulfills Eq. (53), there is still one ambiguous point in the de- termination of D. We can multiply its first and/or second row by an arbitrary number leaving Eq. (53) unchanged. But since YJ should be the matrix of a proper or improper rotation, this number may be only + 1 or - 1. The determinant of the above matrix is
det(bD)=$. (59)
So, in the general case, we obtain the MS from an initial set of axes by a translation described by Eq. (15) plus a subsequent proper or improper rotation depending on the sign of the z component of the internal motion angular velocity (5_2; = &).
Example of Case c
Let us consider the internal rotation of molecules with only a plane of symmetry, like CH&HO. Let the z axis of A be parallel to the internal rotation axis, and the axis y of A be in the symmetry plane of the frame (CHO group). Then
(G,)’ = (0, 0, L), (60)
(61)
(62)
VIKTOR SZALAY 26
so that
and
Choosing x = (3/4)7r, and multiplying the first row of D by Q~/IQ~I, we obtain
where WY *YY
IlQll 1’2)i-iy2yl = (rZy + r;y)l12 & ’ -lQyl _ -ILyl -- II?11 1’2 (ZZy f z&J”2 ’
1f-u - 4Y llQll”’ <z:, + z$p ’
IQz;i$ 112 = (zzy 5,, *
(63)
(64)
(65)
WW
In these equations we can recognize the transformation formulae developed by Hecht and Dennison (1).
VI. STARTING ATOM COORDINATE AND EFFECTIVE MASS FUNCTIONS FOR THE TRIMETHYLENE OXIDE MOLECULE
Up to now we have seen how the zero-order block diagonal generalized tensor of inertia can be calculated from the starting atom coordinates. One of the difficulties to be solved before using Z?’ (Eq. (32)) for calculations is the determination of the starting atom coordinates I& as functions of the large amplitude coordinate. The solution of this is easy for molecules such as H20, H2C0, but for small ring molecules it is complicated because of the combined motions of substituent atoms. As an example of the derivation of starting coordinates of small ring molecules, let us consider the case of the trimethylene oxide.
For the derivation of starting coordinates of methylene hydrogens, first we investigate the coordinates of H5, H6 hydrogens in the local system of axes XYZ, in which (Figs. 3, 4)

EXTENDED HJ3J THEORY 27
FIG. 3. The numbering of the atoms of the trimethylene oxide molecule.
(a) the origin is at the carbon atom C2; (b) the 2 axis bisects the C3C201 angle; (c) the Y axis is in the C3C201 plane; and (d) the X axis constitutes, together with the 2, Y, axes, a right-handed orthogonal
system of axes.
The coordinates in the XYZ system of the hydrogens in a general position are given by making the following subsequent transformations, taking the (0, 0, I,& position as starting point for the hydrogens, where 1,-n is the bond length of the C2H5 or C2H6 bonds:
s=* and
-c+*+S+# -7r
g+*=x/2
FIG. 4. The local axis system XYZ of HS, H6 hydrogens, and the starting molecule fixed system A(=xyz). For simplicity the hydrogens H7, H8, H9, HlO are not shown on the picture

28 VIKTOR SZALAY
(a) Rotation about the X axis by the angle w (wagging). The new system of axes in which the coordinates of the hydrogens are (0, 0, Icu) is denoted XY’Z’.
(b) Rotation about the Y’ axis by the angle 6 (rocking). The new system of axes is X’YZ”.
(c) Rotation about the Z” axis by the angle y (twisting). The new system of axes is X”Y”Z”.
(d) The coordinates of the H5 and H6 hydrogens in the X”Y”Z” system are
U:(+.4(0,0, &I)+, (67a) where
!
cos (Y 0 sin (Y U,(a) = 0 1 0
i ) W’b)
-sin a! 0 cos (Y
a2 = ; 0 H5C2H6,
and the minus sign refers to H6.
(67~)
The problem is thus the determination of the coordinates in the starting axis system A(=xyz), using the coordinates (Eq. (67)) given in the X”Y”Z” system. The unit vectors are connected by the relation
(k, SY”, ez4 = km e,, !&www,(wJAr). (68)
Here we assumed that the origins of xyz and X”Y”Z” had been brought into coincidence by a translation of xyz with the vector 102. A is the rotation matrix transforming the unit vectors of xyz into the unit vectors of XYZ. We can derive from Fig. 3 that
/’ I
+
\
K to1 - ro2 ro3 - Eo2
IkOI - ~0211”2 - lko3 - Eo2ll )I
A+(123) = II X01 - r_o2 Eo3 - co2 112 t
IIIO, - 202v* - III03 - Eo2P2 II 1 (69)
(For simplicity we omitted the A superscript in Eq. (69)). The starting coordinates for the H5 and H6 atoms will be
r& = 3(1(123)UX-~)U,(s)U~(y)U,(az)(O, 0, hd+ + ~b4
&6 = 34(123)u~(-w)u,(s)u~r)U,(-cY2)(o, 0, l26)+ + d2. (70)
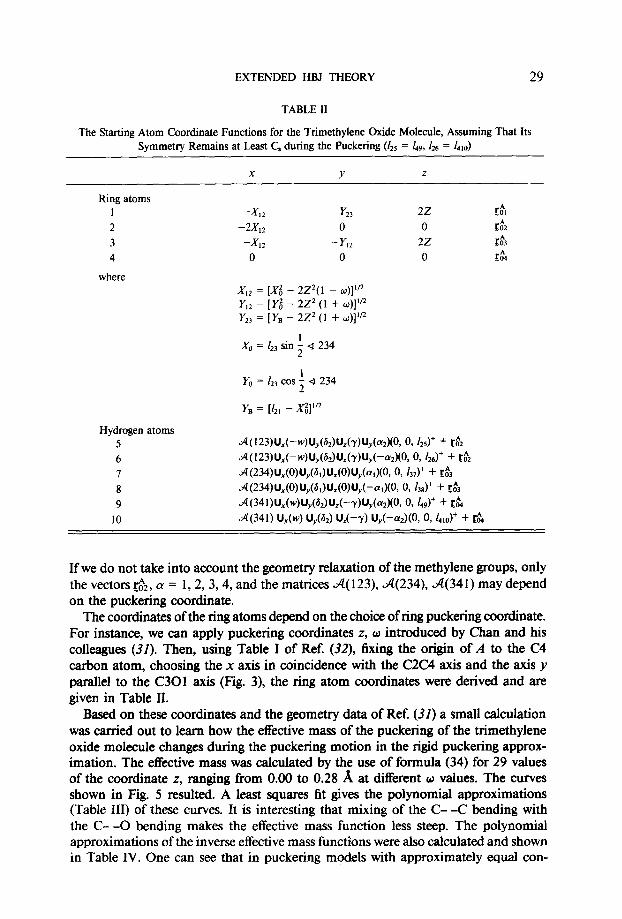
The coordinates for the other hydrogen atoms may be calculated similarly (Table II).
EXTENDED HBJ THEORY 29
TABLE II
The Starting Atom Coordinate Functions for the Trimethylene Oxide Molecule, Assuming That Its Symmetry Remains at Least C, during the Puckering (I,, = b, 126 = &)
Ring atoms 1
2
3
4
where
X Y z
-x12 y23 22 rC
4x12 0 0 rik
-X,2 -Y,z 22 Eo:
0 0 0 1;
x,, = [X6 - 2271 - ,)]“2 Y,, = [Y; - 2z2 (1 + ,)p Y,, = [ Yrc - 222 (1 + ul)]‘”
X0 = I,, sin i Q 234
Y, = I,, cos f Q 234
Y, = [I,, - X$]‘”
Hydrogen atoms 5
6
7
8
9
10
34(123)U,(-w)U,(62)U,(y)U,(azXO, 0, IS)+ + ro:
~(123)U,(-w)U,(62)U,(y)U,(-azXO, 0, /2d+ + ~$2
~(~~~)U,(O)U,(~,)U,(O)U,((Y,XO, 0, k,)+ + ~t3
~(234)U,(O)U,(WJz(O)U,(-wXO, 0, I,,)+ + r&
34(34l)U,(w)U,(62)U,(-y)U,(a,XO, 0, 49)+ + &
34(341) U,(w) q@2) Ud-7) uy(-Ly2)K4 0,41cJ+ + 4%
If we do not take into account the geometry relaxation of the methylene groups, only the vectors I&, (Y = 1,2, 3,4, and the matrices A( 123), &(234), A(341) may depend on the puckering coordinate.
The coordinates of the ring atoms depend on the choice of ring puckering coordinate. For instance, we can apply puckering coordinates z, w introduced by Chan and his colleagues (31). Then, using Table I of Ref. (32), fixing the origin of A to the C4 carbon atom, choosing the x axis in coincidence with the C2C4 axis and the axis y parallel to the C301 axis (Fig. 3), the ring atom coordinates were derived and are given in Table II.
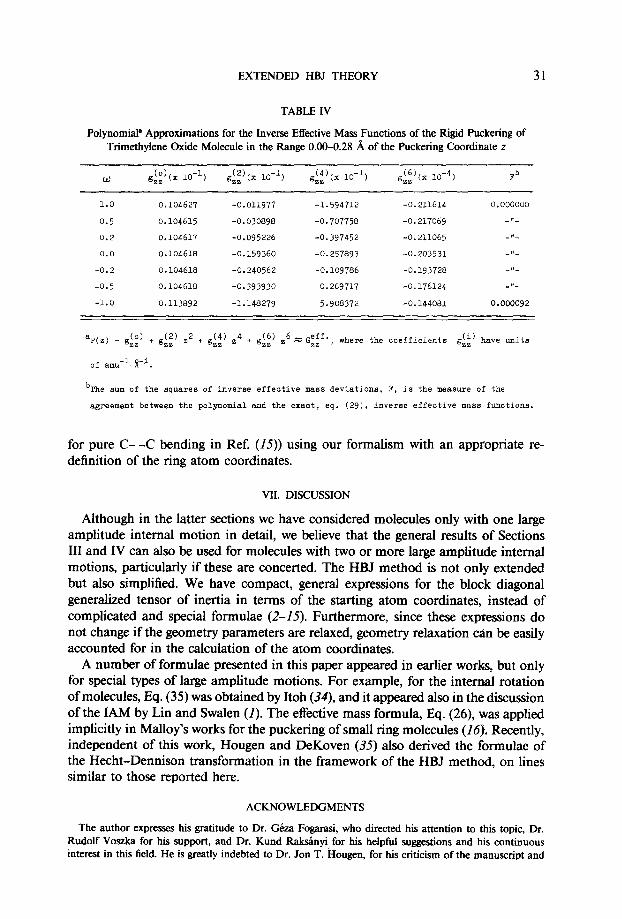
Based on these coordinates and the geometry data of Ref. (32) a small calculation was carried out to learn how the effective mass of the puckering of the trimethylene oxide molecule changes during the puckering motion in the rigid puckering approx- imation. The effective mass was calculated by the use of formula (34) for 29 values of the coordinate z, ranging from 0.00 to 0.28 A at different w values. The curves shown in Fig. 5 resulted. A least squares fit gives the polynomial approximations (Table III) of these curves. It is interesting that mixing of the C- -C bending with the C- -0 bending makes the effective mass function less steep. The polynomial approximations of the inverse effective mass funcdons were also calculated and shown in Table IV. One can see that in puckering models with approximately equal con-

30 VIKTOR SZALAY
FIG. 5. The effective mass of the puckering of the trimethylene oxide molecule as a function of the puckering coordinates z,w - Ig’(z = 0) = 95.6 amu (95.7 amu in Ref. (33)) is the effective mass at the planar conformation.
tributions of C- -C, C- -0 bendings, the use of the constant effective mass of the planar conformation is reasonable.
Puckering motions can be described also by curvilinear coordinates (this was done
TABLE III
Polynomial’ Approximations for the Effective Mass Functions of the Rigid Puckering of Trimethylene Oxide Molecule in the Range 0.00428 A of the Puckering Coordinate z
W I;$ 102) I g+x 103) 1;;’ (x 103) ,(6) zz Fb
1.0 0.956177 0.001214 1.736039 -0.224150 0.022214
0.5 0.955990 0.025387 0.745751 -0.218408 0.000561
0.2 0.955985 0.083970 0.548546 -0.224656 0.000249
0.0 0.956023 0.141426 0.604451 -0.233064 0.001194
-0.2 0.956109 0.213186 0.835778 -0.245044 0.006444
-0.5 0.956387 0.346115 1.581961 -0.270156 0.053936
-1.0 0.957660 0.624916 4.283116 -0.333324 0.890159
a P(z) = llz' + ILz'z' + lifz'z4 + I$' z6z1fz, where the coefficients 1::' have units of
amu 8-i and unite of 7, are in 8.
b The sum of the squares of effective !mss deviations, F, is the measure of the agreement
between the polynomial and the exact, eq.(34), effective mass functions.
EXTENDED HBJ THEORY 31
TABLE IV
Polynomial. Approximations for the Inverse Effective Mass Functions of the Rigid Puckering of Trimethylene Oxide Molecule in the Range 0.00428 A of the Puckering Coordinate z
1.0 0.104627 -0.011977 -1.594712 -0.211614 0.000000
0.5 0.104615 -0.030898 -0.707758 -0.217069 _v_
0.2 0.104617 -0.095226 -0.397452 -0.211065 _I?_
0.0 0.104618 -0.159360 -0.257893 -0.203531 -II_
-0.2 0.104618 -0.240562 -0.109786 -0.193728 -II_
-0.5 0.104618 -0.393930 0.269717 -0.176124 _!I_
-1.0 0.113892 -1.148279 5.908372 -0.144081 0.000092
of am-l. x-i.
bThe sum of the squares of inverse effective mass deviations, F, is the measure of the
agreement between the polynomial and the exact, eq. (29), inverse effective mass functions.
for pure C- -C bending in Ref. (15)) using our formalism with an appropriate re- definition of the ring atom coordinates.
VII. DISCUSSION
Although in the latter sections we have considered molecules only with one large amplitude internal motion in detail, we believe that the general results of Sections III and IV can also be used for molecules with two or more large amplitude internal motions, particularly if these are concerted. The HBJ method is not only extended but also simplified. We have compact, general expressions for the block diagonal generalized tensor of inertia in terms of the starting atom coordinates, instead of complicated and special formulae (2-25). Furthermore, since these expressions do not change if the geometry parameters are relaxed, geometry relaxation can be easily accounted for in the calculation of the atom coordinates.
A number of formulae presented in this paper appeared in earlier works, but only for special types of large amplitude motions. For example, for the internal rotation of molecules, Eq. (35) was obtained by Itoh (34), and it appeared also in the discussion of the IAM by Lin and Swalen (I). The effective mass formula, Eq. (26), was applied implicitly in Malloy’s works for the puckering of small ring molecules (16). Recently, independent of this work, Hougen and DeKoven (35) also derived the formulae of the Hecht-Dennison transformation in the framework of the HBJ method, on lines similar to those reported here.
ACKNOWLEDGMENTS
The author expresses his gratitude to Dr. Gkza Fogarasi, who directed his attention to this topic, Dr. Rudolf Voszka for his support, and Dr. Kund Raksanyi: for his helpful suggestions and his continuous interest in this field. He is greatly indebted to Dr. Jon T. Hougen, for his criticism of the manuscript and

32 VIKTOR SZALAY
for sending a copy of his paper before publication, Dr. Brenda P. Winnewisser and Dr. L&lb Nemes for their criticism and encouragement, and Dr. G&or Corradi for his help in the preparation of the manuscript.
RECEIVED: April 18, 1983
1. C. C. LIN AND J. D. SWALEN, Rev. Mod. Phys. 31,841-892 (1959). 2. J. T. HOUGEN, P. R. BUNKER, AND J. W. C. JOHNS, J. Mol. Spectrosc. 34, 136-172 (1970). 3. A. R. HOY AND P. R. BUNKER, J. Mol. Spectrosc. 52, 439-456 (1974). 4. P. R. BUNKER AND B. M. LANDSBERG, J. Mol. Spectrosc. 67, 374-385 (1977). 5. CH. V. S. R. RAO, J. Mol. Spectrosc. 89, 197-213 (1981). 6. P. R. BUNKER, B. M. LANDSBERG, AND B. P. WINNEWISSER, J. Mol. Spectrosc. 74,9-25 (1979). 7. W. H. WEBER AND G. W. FORD, J. Mol. Spectrosc. 63, 445-459 (1976). 8. P. R. BUNKER, J. Mol. Spectrosc. 84, 139-145 (1980). 9. P. R. BUNKER, AND D. J. HOWE, .T. Mol. Spectrosc. 83, 288-303 (1980).
10. D. C. MOULE AND CH. V. S. R. RAO, J. Mol. Spectrosc. 45, 120-141 (1973). Il. M. KREGLEWSKI, J. Mol. Struct. 60, 105-108 (1980). 12. P. JENSEN AND P. R. BUNKER, J. Mol. Spectrosc. 94, 114-125 (1982). 13. D. PAPOUSEK, J. M. R. STONE, AND V. SPIRKO, J. Mol. Spectrosc. 48, 17-37 (1973). 14. V. SPIRKO AND P. R. BUNKER, J. Mol. Spectrosc. 95, 226-235 (1982). 15. I. FOLTYNOWICZ, J. KONARSKI, AND M. KREGLEWSKI, J. Mol. Spectrosc. 87, 29-40 (1981). 16. T. B. MALL~Y, J. Mol. Spectrosc. 44, 504-535 (1972); T. B. MALLOY AND W. J. LAFFERTY, J. Mol.
Spectrosc. 54, 20-38 (1975). 17. J. T. HOUGEN, Canad. J. Phys. 42, 1920-1937 (1964). 18. C. ECKART, Phys. Rev. 47, 552-568 (1935). 19. A. SAWETZ, J. Chem. Phys. 7, 383-389 (1939). 20. G. 0. S~~NSEN, A New Approach to the Hamiltonian of Nonrigid Molecules, in “Topics in Current
21. 22.
Chemistry,” Vol. 82, pp. 97-175, Springer-Verlag, New York, Berlin, 1979. P. R. BUNKER AND J. M. R. STONE, J. Mol. Spectrosc. 41, 310-332 (1972). E. B. WILSON, JR., J. C. DECIUS, AND P. C. CROSS, “Molecular Vibrations,” p. 282, Eq. (4), McGraw-
Hill, New York, 1955. 23. 24. 25. 26. 27. 28. 29. 30. 31. 32.
R. MEYER AND Hs. H. GUNTHARD, J. Chem. Phys. 49, 1510-1520 (1968). H. M. PICKETT, J. Chem. Phys. 56, 1715-1723 (1972). See Ref. (22), p. 311. D. J. CLOUTHIER AND J. D. GODDARD, J. Chem. Phys. 76, 5034-5038 (1982). P. JENSEN AND P. R. BUNKER, J. Mol. Spectrosc. 95, 92-100 (1982). C. R. QUADE, J. Chem. Phys. 65, 700-705 (1976). M. A. HARTHC~~CK AND J. LAANE, J. Mol. Spectrosc. 94,461-462 (1982). L. D. LANDAU AND E. M. LIFSHITZ, “Mechanics” [in Hungarian], Tankijnyvkiad6, Budapest, 1974. S. I. CHAN, J. ZINN, AND W. D. GWINN, J. Chem. Phys. 34, 1319-1329 (1961). J. LAANE, M. A. HARTHCOOCK, P. M. KILLOUGH, L. E. BAUMAN, AND J. M. COOKE, J. Mol. Spectrosc.
91,286-299 (1982). 33. H. WIESER, M. DANYLUK, AND R. A. KYDD, J. Mol. Spectrosc. 43, 382-392 (1972). 34. T. ITOH, J. Phys. Sot. Japan 11, 264-271 (1956). 35. J. T. HOUGEN AND B. M. DEKOVEN, J. Mol. Spectrosc. 98, 375-391 (1983).
REFERENCES