
Customizable FPGA IP core implementation of a general-purpose genetic algorithm engine

International Global Navigation Satellite Systems Society IGNSS Symposium 2009
Holiday Inn Surfers Paradise, Qld, Australia
1 – 3 December, 2009
FPGA-based GNSS “Search Engine” using Parallel Techniques in the Time-Domain
Shahzad A Malik School of Surveying and Spatial Information Systems University of New South Wales, NSW 2052, Australia
Tel: +61 (2) 93854190, Fax: +61 (2) 93137493 [email protected]
Nagaraj C Shivaramaiah School of Surveying and Spatial Information Systems University of New South Wales, NSW 2052, Australia
Tel: +61 (2) 93854185, Fax: +61 (2) 93137493 [email protected]
Andrew G Dempster School of Surveying and Spatial Information Systems University of New South Wales, NSW 2052, Australia
Tel: +61 (2) 93856890, Fax: +61 (2) 93137493 [email protected]
ABSTRACT
This paper describes an FPGA-based GNSS “Search Engine” architecture
that is capable of acquiring both GPS and Galileo signals. The various GPS and Galileo signals have different frequencies and code structures which
requires a design that can incorporate all of these differences. The proposed
design consists of a number of multi-tap channels that are independently
configurable to be searching for any GNSS signal. It was tested with the GPS L1, Galileo E1 and GPS L2C signals to compare its performance with
different signals. The results showed that an increase in the number of
channels and/or taps decreases the acquisition time. The best acquisition times were achieved when the signals of more than one satellite were being
searched for simultaneously. On the other hand, the worst acquisition times
were observed when only one signal was being searched for. Furthermore, on a chip-by-chip basis, an architecture with less channels/taps benefits
shorter codes whereas an architecture with more channels/taps benefits
longer codes.
KEYWORDS: Search Engine, FPGA, GNSS, Acquisition.

1. INTRODUCTION
The word “navigate” is derived from the Latin "navigare", which means "to sail". But
navigation systems have come a long way since the days of the sailor with his trusty old
compass! Global Navigation Satellite Systems (GNSS) have totally changed the way we
move around today. The first GNSS was the Global Positioning System (GPS) which was
developed by the U.S. Department of Defence (DoD) during the Cold War. It consists of a
constellation of 24 to 32 satellites in one of six Medium Earth Orbits (MEO) providing
positioning information to military and civilian users worldwide. Towards the end of the Cold
War, the USSR (now Russia) launched its own GNSS known as GLONASS for military use.
But it soon became clear that a GNSS has many uses other than the original military purpose,
and so the Europeans proposed their own GNSS – Galileo. Then China launched Beidou,
which was the first Regional Navigation Satellite System (RNSS) and then announced a
GNSS which they named Compass. Japan and India also proposed their own RNSS; the
Quasi-Zenith Satellite System (QZSS) and the Indian RNSS (IRNSS) respectively.
To calculate a position, a GNSS receiver measures the time taken by a satellite signal to reach
the receiver. This is then used to calculate the distance between the satellite and the receiver.
If the receiver is able to find out the distance from at least three satellites, the two-
dimensional position of the receiver could be calculated by geometric trilateration. But this
process is very sensitive to the accuracy of the clock inside the receiver. So, when available,
receivers use positioning information from four or more satellites to adjust the clock errors.
The more satellites the receiver could find, the better the error correction. And that is exactly
what these new systems provide – more satellites. So, a receiver that could find and process
signals from different satellite systems at the same time would provide a more accurate
position as compared to a GPS-only receiver (Dempster and Hewitson, 2007).
Finding the signal from a satellite can be considered to be a three-dimensional search in the
Doppler, code-delay and PRN (pseudorandom noise) spaces. If this search is performed in a
sequential manner, this can take several minutes with the newer satellite signals such as GPS
L2C and Galileo E1 due to their longer code lengths (Dempster 2006). Apart from the
conventional method of sequentially searching this three-dimensional search space, a number
of methods exist that either eliminate one of the two parameters from the search procedure or
implement it in parallel to reduce the signal acquisition time. Software receivers often use
frequency-domain techniques that require both forward and inverse FFTs (Borre et al. 2007),
but such methods can be computationally expensive, particularly for longer codes. On the
other hand, parallel techniques in the time-domain generally consist of a large number of
dedicated correlator “channels” placed in parallel; 16000 in the case of (van Diggelen et al.
2001). Furthermore, the use of Field Programmable Gate Arrays (FPGA) has also been
studied for rapid acquisition of the GPS L1 signal using parallel techniques in the time-
domain (Malik et al. 2009 and Malik et al. 2007).
The aim of the work presented here is to extend the work done by Malik et al. (2009) by
proposing a search engine architecture that is capable of acquiring both GPS and Galileo
signals. The paper is organized as follows; Section 2 describes some characteristics of GPS
and Galileo signals and Section 3 describes the process of acquiring these signals. Section 4
describes the proposed changes to the design proposed by Malik et al. (2009) and Section 5
describes the challenges involved in acquiring the newer GPS and Galileo signals. Section 6
describes the methodology of testing the proposed architecture and Section 7 describes the
results of the tests. Section 8 concludes the paper.

2. GNSS Signals 2.1 GPS
GPS uses Direct-Sequence Spread Spectrum (DSSS) to achieve immunity to fading, cross
correlation and interference. In the transmitter the navigation bit-stream is multiplied by a
unique orthogonal code, thereby spreading the energy of the original signal into a much wider
band. These codes are deterministic sequences of pseudorandom bits with noise-like
properties and are hence called pseudorandom noise (PRN) codes. The bits of the code are
called “chips” because they carry no information. Longer codes provide better immunity to
fading, cross-correlation and interference at the expense of added complexity of the receiver.
After spreading the navigation bit-stream, the resultant signal is modulated and then
transmitted. Currently there are two GPS signals being transmitted in the UHF band; one is at
1575.42MHz (L1) and the other is at 1227.60MHz (L2C). Soon GPS will provide a new
signal on 1176.45MHz (L5).
The L1 signal uses Binary Phase Shift Keying (BPSK) modulation. A 1,023 chip long PRN
code called the coarse acquisition (C/A) code is modulated on the in-phase (I) component of
the BPSK bit-stream. This code is repeated every millisecond giving a “chipping rate” of
1.023M chips per second (cps). The code-delay is typically searched for in ½ chip steps which
means that 2046 half-chips need to be searched for during acquisition.
L2C is a “Modernized GPS” signal broadcasted by the new generation of satellites designated
Block IIR-M. It consists of two codes; the L2 CM (civil moderate) which is 20 milliseconds
long and has 10230 chips, and the L2 CL (civil long) which is 1.5 seconds long and has
767250 chips. The two codes are multiplexed together on a chip-by-chip basis to form a code
running at a speed of 1.023 Mcps (Qaiser and Dempster, 2007).
L5 is a civilian safety-of-life (SoL) signal that is planned to be implemented with the first
GPS IIF launch expected in November 2009. It will have higher transmission power than L1
and L2C it will have a wider bandwidth, thereby yielding large processing gains. Two PRN
ranging codes are transmitted on L5: the in-phase code (denoted as the I5-code); and the
quadrature-phase code (denoted as the Q5-code). Both codes are 10,230 bits long and
transmitted at 10.23 MHz (1ms repetition). In addition, the I5 stream is modulated with a 10-
bit Neuman-Hofman code that is clocked at 1kHz and the Q5-code is modulated with a 20-bit
Neuman-Hofman code that is also clocked at 1kHz.
2.2 Galileo
Galileo is a GNSS currently under development by the European Union (EU) and the
European Space Agency (ESA). It is planned to have a total of 30 satellites in 3 orbit planes
out of which 27 would be active and 3 would be in-orbit spares. Galileo is planned to have
four navigation services; the Open Service (OS) which would be free for everyone to access,
the Commercial Service (CS) which would have an accuracy of more than 1m but would
incur a fee, the Public Regulated Service (PRS) and the Safety of Life service (SoL) which are
intended to be used by security authorities. The first GIOVE (Galileo In-Orbit Validation
Element) test satellite, GIOVE-A was successfully launched in 2005. It can transmit at two
frequency bands at one time i.e. either “E1+E5” or “E1+E6”, but not both. Another test

satellite, GIOVE-B was launched in April 2008.
The Galileo E1 signal has a code length of 4092 chips and the chipping rate is 1.023 Mcps, so
one code period is 4ms long. It employs Binary Offset Carrier (BOC) modulation which splits
the transmitted energy around the carrier allowing the coexistence of both GPS and Galileo,
and the future combined use of both systems.
The Galileo E5 signal is composed of two data components and two pilot components that are
multiplexed together using a complex sub-carrier modulation known as AltBOC(15,10). Each
component has its own code which is the product of the repetition of a primary code of 10230
chips at 10.23 Mcps, corresponding to 1 ms of signal. E5 has the largest bandwidth
(51.150MHz) of all GNSS signals. The transmitted signal consists of two bands; E5a and
E5b, each 20.46MHz wide.
3. GNSS Signal Acquisition
The purpose of acquisition is to find a satellite signals in the three-dimensional search space
by estimating the Doppler frequency and code-delay of each signal. Figure 1 shows the search
space for a GPS receiver. It consists of 10 visible satellites with uniformly distributed code-
delays and Doppler frequencies in the range of ±4kHz.
Figure 1. Three-dimensional search space for a GPS receiver
Finding a signal involves replicating its code and carrier in the GPS receiver to extract the
coded positional information in the signal. Figure 2 shows a high-level representation of a
typical acquisition stage in which the signal from the RF front-end is multiplied with a locally
generated carrier signal. The resultant carrier-free signal is then multiplied with a locally
generated pseudorandom noise (PRN) code with a certain delay. The result is then integrated
for a certain length of time depending on the type of signal and the signal-to-noise ratio.
Finally, the integrated result is compared with a threshold to determine whether the signal has
been found or not. If it is greater than the threshold, the frequency of the locally generated
carrier signal and the code-delay is handed over to the tracking loops for further processing.
On the other hand, if it is smaller than the threshold, this process is repeated by changing the
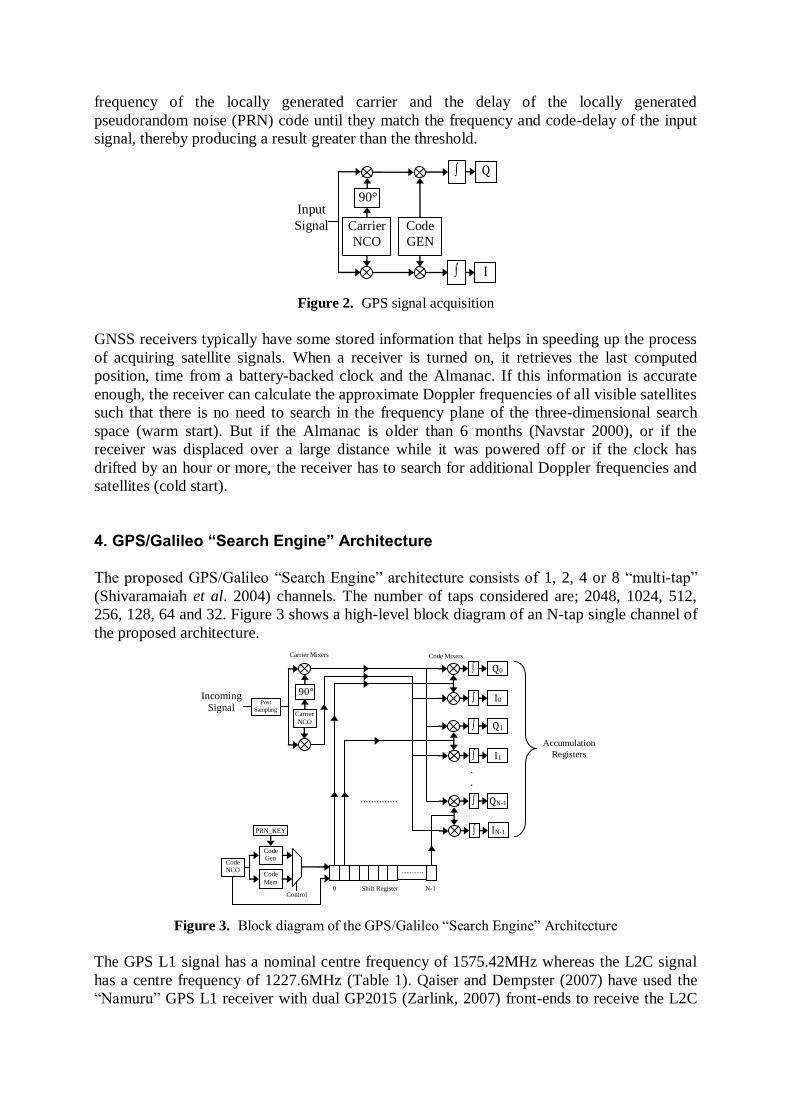
frequency of the locally generated carrier and the delay of the locally generated
pseudorandom noise (PRN) code until they match the frequency and code-delay of the input
signal, thereby producing a result greater than the threshold.
Figure 2. GPS signal acquisition
GNSS receivers typically have some stored information that helps in speeding up the process
of acquiring satellite signals. When a receiver is turned on, it retrieves the last computed
position, time from a battery-backed clock and the Almanac. If this information is accurate
enough, the receiver can calculate the approximate Doppler frequencies of all visible satellites
such that there is no need to search in the frequency plane of the three-dimensional search
space (warm start). But if the Almanac is older than 6 months (Navstar 2000), or if the
receiver was displaced over a large distance while it was powered off or if the clock has
drifted by an hour or more, the receiver has to search for additional Doppler frequencies and
satellites (cold start).
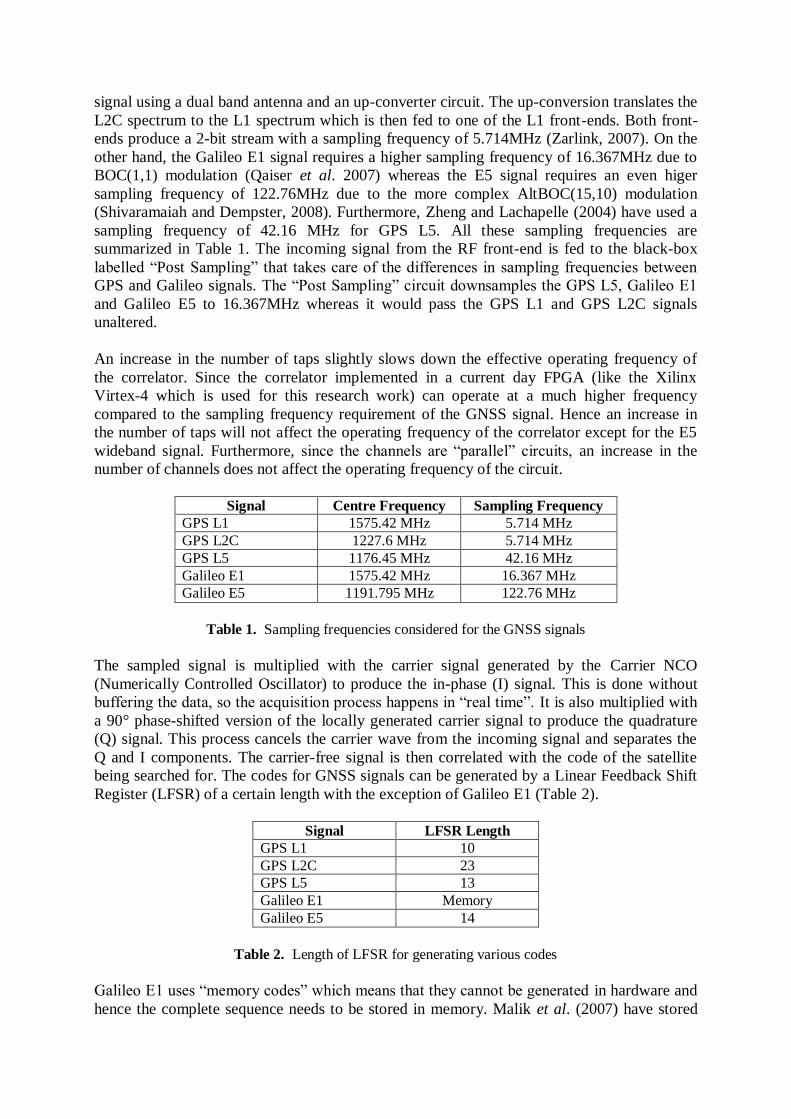
4. GPS/Galileo “Search Engine” Architecture
The proposed GPS/Galileo “Search Engine” architecture consists of 1, 2, 4 or 8 “multi-tap”
(Shivaramaiah et al. 2004) channels. The number of taps considered are; 2048, 1024, 512,
256, 128, 64 and 32. Figure 3 shows a high-level block diagram of an N-tap single channel of
the proposed architecture.
Figure 3. Block diagram of the GPS/Galileo “Search Engine” Architecture
The GPS L1 signal has a nominal centre frequency of 1575.42MHz whereas the L2C signal
has a centre frequency of 1227.6MHz (Table 1). Qaiser and Dempster (2007) have used the
“Namuru” GPS L1 receiver with dual GP2015 (Zarlink, 2007) front-ends to receive the L2C
Input
Signal
90°
Carrier
NCO
Q
Code
GEN
I
∫
∫
.............
..............
0 N-1 Shift Register Control
Incoming Signal
Carrier Mixers Code Mixers
90°
Carrier
NCO
.
.
∫ QN-1
∫ IN-1
∫
∫
∫
∫
I1
Q1
I0
Q0
Accumulation
Registers
Post
Sampling
Code Gen
Code
NCO
PRN_KEY
Code
Mem
signal using a dual band antenna and an up-converter circuit. The up-conversion translates the
L2C spectrum to the L1 spectrum which is then fed to one of the L1 front-ends. Both front-
ends produce a 2-bit stream with a sampling frequency of 5.714MHz (Zarlink, 2007). On the
other hand, the Galileo E1 signal requires a higher sampling frequency of 16.367MHz due to
BOC(1,1) modulation (Qaiser et al. 2007) whereas the E5 signal requires an even higer
sampling frequency of 122.76MHz due to the more complex AltBOC(15,10) modulation
(Shivaramaiah and Dempster, 2008). Furthermore, Zheng and Lachapelle (2004) have used a
sampling frequency of 42.16 MHz for GPS L5. All these sampling frequencies are
summarized in Table 1. The incoming signal from the RF front-end is fed to the black-box
labelled “Post Sampling” that takes care of the differences in sampling frequencies between
GPS and Galileo signals. The “Post Sampling” circuit downsamples the GPS L5, Galileo E1
and Galileo E5 to 16.367MHz whereas it would pass the GPS L1 and GPS L2C signals
unaltered.
An increase in the number of taps slightly slows down the effective operating frequency of
the correlator. Since the correlator implemented in a current day FPGA (like the Xilinx
Virtex-4 which is used for this research work) can operate at a much higher frequency
compared to the sampling frequency requirement of the GNSS signal. Hence an increase in
the number of taps will not affect the operating frequency of the correlator except for the E5
wideband signal. Furthermore, since the channels are “parallel” circuits, an increase in the
number of channels does not affect the operating frequency of the circuit.
Signal Centre Frequency Sampling Frequency
GPS L1 1575.42 MHz 5.714 MHz
GPS L2C 1227.6 MHz 5.714 MHz
GPS L5 1176.45 MHz 42.16 MHz
Galileo E1 1575.42 MHz 16.367 MHz
Galileo E5 1191.795 MHz 122.76 MHz
Table 1. Sampling frequencies considered for the GNSS signals
The sampled signal is multiplied with the carrier signal generated by the Carrier NCO
(Numerically Controlled Oscillator) to produce the in-phase (I) signal. This is done without
buffering the data, so the acquisition process happens in “real time”. It is also multiplied with
a 90° phase-shifted version of the locally generated carrier signal to produce the quadrature
(Q) signal. This process cancels the carrier wave from the incoming signal and separates the
Q and I components. The carrier-free signal is then correlated with the code of the satellite
being searched for. The codes for GNSS signals can be generated by a Linear Feedback Shift
Register (LFSR) of a certain length with the exception of Galileo E1 (Table 2).
Signal LFSR Length
GPS L1 10
GPS L2C 23
GPS L5 13
Galileo E1 Memory
Galileo E5 14
Table 2. Length of LFSR for generating various codes
Galileo E1 uses “memory codes” which means that they cannot be generated in hardware and
hence the complete sequence needs to be stored in memory. Malik et al. (2007) have stored

GPS L1 codes in dedicated on-chip memory blocks (BlockRAMs) of a Xilinx Virtex-4
FPGA. The proposed search engine uses a similar approach by storing the Galileo E1 codes in
on-chip memory blocks of an FPGA, indicated as “Code Mem” in Figure 3. The remaining
codes are generated by a variable length LFSR indicated as “Code Gen” in Figure 3. There are
two reasons why the remaining codes are “generated” instead of being stored in memory like
Galileo E1;
1. The amount of dedicated memory resources in an FPGA is limited. When the amount
of memory resources required by a design exceeds the number of dedicated memory
resources, the FPGA design tools construct memory elements out of distributed logic
resources which are also limited. It would be more sensible to use these logic
resources for correlators to decrease the acquisition time.
2. Even if the memory resources in an FPGA can store all codes for GPS and Galileo
signals (the latest Virtex-6 FPGAs from Xilinx offer up to 38Mbits of dedicated
memory resources), the power consumption of a code generator would be less than
that of a code memory.
The PRN sequence of the “Code Gen” is controlled by the value stored in the PRN_KEY
register shown in Figure 3. This is the initial value that is loaded into the LFSR of the “Code
Gen”. The outputs of the “Code Mem” and “Code Gen” are fed into a variable length shift
register through a multiplexer. The “Control” signal of the multiplexer controls whether the
Galileo E1 code from the “Code Mem” or one of the generated codes is fed to the shift
register. The length of the shift registers corresponds to the number of code-taps and it
depends on the available resources in the FPGA. Furthermore, the Code NCO controls the
chipping rate of the code and the clock of the shift register. It can generate a clock of
1.023MHz for GPS L1, L2C and Galileo E1 codes or 10.23MHz for GPS L5 and Galileo E5
codes.
The correlation results are integrated for a length depending upon the type of input signal and
its signal-to-noise ratio. The GPS L1 code is 1ms long, so it would be integrated for a period
of 1ms. Similarly, GPS L2C is 20ms long and Galileo E1 is 4ms long, so these signals would
be integrated for 20ms and 4ms respectively. Furthermore, a longer integration interval
accumulates more signal power but consumes more time for search in both code and Doppler
dimensions. So, if the signal is weak (receiver indoors etc.) the accumulation period has to be
increased at the expense of longer acquisition times. For example, in the case of GPS L1, if
the signal is not found with 1ms integration, the receiver would repeat acquisition with an
integration interval of 2ms. For the work presented here it is assumed that the antenna has a
clear view of the sky, so the received signal has a high signal-to-noise ratio. Finally, the
integrated results are stored in the accumulation registers from which they are read and
compared with the predefined threshold.
The GPS L1 search engine architecture designed by Malik et al. (2009) is based on the
Namuru GPS receiver (Mumford et al. 2006). It requires approximately 450 slices for a
single-channel-single-tap correlator and every additional tap requires 50 more slices on a
Xilinx Virtex-4 FPGA. So, the amount of logic resources utilized by a search engine with “X”
channels each with “Y” taps can be approximate by the formula;
Logic resources ≈ X * 450 + 50 * (Y-1)) (1)
The design proposed here is an extension of the search engine proposed by Malik et al.
(2009); however there are a number of differences between the two designs.
1. The design proposed here uses an additional memory resource for storing the Galileo
E1 codes. We assume that these codes are stored in the dedicated memory resources
and hence do not increase the number of slices.
2. The search engine designed by Malik et al. (2009) uses a 10-bit code generator to
generate GPS L1 codes. On the other hand, the design proposed here uses a 23-bit
code generator which is capable of generating all signals listed in Table 2. So, the shift
registers inside the code generator have 13 more bits, which does not significantly
increase the number of slices.
3. To generate a clock of 10.23MHz for the GPS L5 and Galileo E5 codes, an additional
2 bits would be required in the Code NCO, which does not significantly increase the
number of slices.
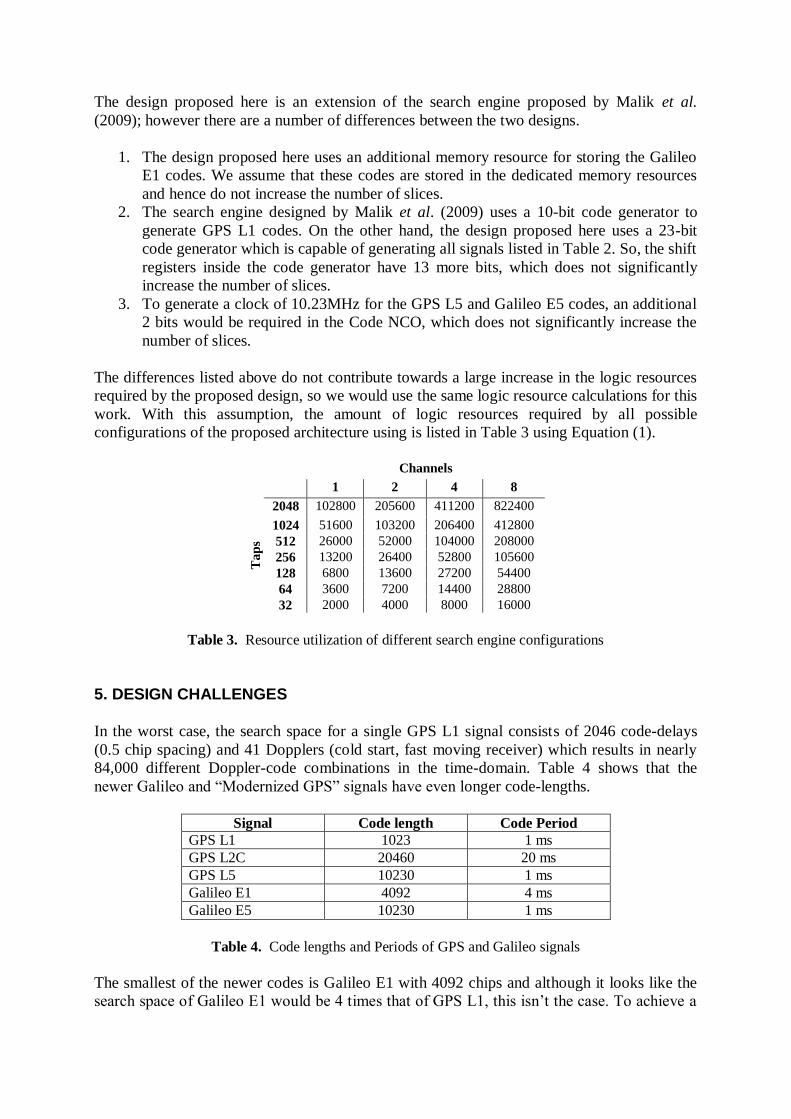
The differences listed above do not contribute towards a large increase in the logic resources
required by the proposed design, so we would use the same logic resource calculations for this
work. With this assumption, the amount of logic resources required by all possible
configurations of the proposed architecture using is listed in Table 3 using Equation (1).
Channels
1 2 4 8
Ta
ps
2048 102800 205600 411200 822400
1024 51600 103200 206400 412800
512 26000 52000 104000 208000
256 13200 26400 52800 105600
128 6800 13600 27200 54400
64 3600 7200 14400 28800
32 2000 4000 8000 16000
Table 3. Resource utilization of different search engine configurations
5. DESIGN CHALLENGES
In the worst case, the search space for a single GPS L1 signal consists of 2046 code-delays
(0.5 chip spacing) and 41 Dopplers (cold start, fast moving receiver) which results in nearly
84,000 different Doppler-code combinations in the time-domain. Table 4 shows that the
newer Galileo and “Modernized GPS” signals have even longer code-lengths.
Signal Code length Code Period
GPS L1 1023 1 ms
GPS L2C 20460 20 ms
GPS L5 10230 1 ms
Galileo E1 4092 4 ms
Galileo E5 10230 1 ms
Table 4. Code lengths and Periods of GPS and Galileo signals
The smallest of the newer codes is Galileo E1 with 4092 chips and although it looks like the
search space of Galileo E1 would be 4 times that of GPS L1, this isn’t the case. To achieve a

similar “average correlation loss” as that of GPS L1 (BPSK, 0.5 chip spacing), a chip spacing
of 0.16 must be used due to the BOC(1,1) modulation used in Galileo E1 (Wilde et al. 2006).
This is because of the narrower central peak and lower side peaks of the E1 autocorrelation
function. So, up to 4092*6 = 24552 code-delays needs to be searched, which results in a
search space of over a million Doppler-code combinations (cold start, fast moving receiver)
for one Galileo E1 satellite.
Therefore, a Galileo E1 search engine with 41 channels, each with 24552 taps could search a
signal in a million Doppler-code combinations within 4ms. But according to Equation (1),
such an architecture would require over 50 million Xilinx Virtex-4 slices. Furthermore, the
Galileo E5 signal requires a code search with an even finer granularity; 0.083 chips, which
results in a much larger search engine in terms of logic resource utilization. With the current
state of FPGA technology, this is not possible in single-chip designs, with the largest Virtex-4
FPGA being just over 50,000 slices.
A more realistic solution exists in implementing a search engine architecture that can easily fit
within the available resources in an FPGA. The two most important parameters of the
proposed design are; (a) the number of channels and (b) the number of taps in each channel.
So, the challenge addressed here is to find the optimum number of channels and taps in each
channel that efficiently utilizes the resources in an FPGA. More importantly, this work aims
to quantify what it means to implement a GPS L2C or a Galileo E1 search engine inside an
FPGA by discussing the trade-offs involved in using one architecture over the other.
6. METHODOLOGY
The methodology employed to find the best GPS/Galileo search engine architecture consists
of testing the design proposed in Section 4 to evaluate its performance. We assume a warm
start and that the receiver has an accurate on-board clock and a valid Almanac. Furthermore,
we assume that the receiver is powered on in a similar position to where it was powered off.
So, the estimated Doppler frequency is accurate enough not to require a search in the
frequency space and the receiver only needs to search in the code and PRN spaces. This can
be done in two ways;
1. del_sat – First exhaust code-delays and then satellite PRNs.
2. sat_del – First exhaust satellite PRNs and then code-delays.
For this work we compared the performance of GPS L1, GPS L2C and Galileo E1 signals.
We calculated the average number of accumulation periods required to find the first four
highest elevation satellites by all possible configurations of the proposed architecture. It is
assumed that once a code aligns with the locally generated code, the receiver will not loose
the signal. In other words, the effect of low SNR is not considered here and the probability of
detection, Pd is 1 and the probability of false-alarm Pfa is “zero”. For the sake of comparison,
the number of accumulation periods was calculated using an integration interval of 1ms for all
three signals considered. So, multiplying the average number of accumulation periods with
the code period (Table 4) would give the mean acquisition time for the particular signal
(Equation 2).
CPA TNT (2)
where; TA = mean acquisition time (ms)
NP = average number of accumulation periods
TC = code period (ms)
Furthermore, as discussed in Section 5, 2046 half-chips need to be searched for GPS L1
whereas 24552 1/6-chips need to be searched for Galileo E1 and similarly 40920 half-chips
need to be searched for GPS L2C. So, the average number of accumulation periods is divided
by the number of chips being searched for to obtain a normalised value given by Equation (3).
C
PP
N
NN ' (3)
where; NP’ = average number of accumulation periods (normalised)
NC = number of chips searched for
So, multiplying the normalised value of accumulation periods with the code period would
give the mean time required to search for one chip (Equation 4).
CPCHIP TNT ' (4)
where; TCHIP = mean time required for one chip
At the time of writing seven satellites are transmitting the L2C signal and only two are
transmitting the GIOVE-A signal. So, the tests for the Modernized GPS and Galileo signals
cannot be performed with real satellite data. Instead, we use uniformly distributed random
numbers for the code-delays of GPS L2C and Galileo E5. Furthermore, an FPGA designer
would be more interested in finding out the trade-offs between search engine configurations
with similar resource requirements. For that matter, we choose the following groups of
configurations with similar resource utilization from Table 3;
Group 1 (15k-slice receiver)
a. 1 Channel, 256 Taps (13200 slices) b. 2 Channels, 128 Taps (13600 slices)
c. 4 Channels, 64 Taps (14400 slices)
d. 8 Channels, 32 Taps (16000 slices)
Group 2 (30k-slice receiver)
a. 1 Channel, 512 Taps (26000 slices) b. 2 Channels, 256 Taps (26400 slices)
c. 4 Channels, 128 Taps (27200 slices)
d. 8 Channels, 64 Taps (28800) slices
Group 3 (50k-slice receiver)
a. 1 Channel, 1024 Taps (51600 slices)
b. 2 Channels, 512 Taps (52000 slices) c. 4 Channels, 256 Taps (52800 slices)
d. 8 Channels, 128 Taps (54400 slices)
Group 4 (100k-slice receiver)
a. 1 Channel, 2048 Taps (102800 slices)
b. 2 Channels, 1024 taps (103200 slices) c. 4 Channels, 512 Taps (104000 slices)
d. 8 Channels, 256 Taps (105600 slices)
The results for these groups would help in designing a search engine architecture on an FPGA
with a given number of available resources. For instance, if there are 50k slices available in a
Xilinx Virtex-4 FPGA, the configuration with the least acquisition time for the given signal
from within Group 3 would be implemented.
The tests performed in Malik et al. (2009) showed that a search engine with sat_del finds a
GPS L1 signal in lesser time when compared to del_sat. This is because del_sat checks for the

presence of a signal in all code-delays before moving on to the next signal in the list whereas
sat_del searches for more than one signal at a time. As the number of code-delays to search
for is always greater than the number of satellites in the case of a warm start, del_sat produces
more “wasted” searches because it searches for one signal at a time. We predict that this trend
would be the same for GPS L2C and Galileo E1.
7. RESULTS
The proposed GPS/Galileo search engine architecture was tested under the conditions
mentioned in Section 6. The average number of accumulation periods required for acquiring
the four highest elevation satellites in real time was calculated by a test-bench written in
MATLAB. This value was normalized according to the number of chips searched for and then
scaled by 10,000 to show on a graph. Figure 4 and Figure 5 shows a comparison of NP’ for
Galileo E1 and GPS L2C respectively.
Figure 4. Comparison of NP’ for Galileo E1
with del_sat and sat_del
Figure 5. Comparison of NP’ for GPS L2C
with del_sat and sat_del
The above figures show that, as in Malik et al. (2009), an increase in the number of channels
and/or taps decreases the acquisition time. Now we examine the performance of the proposed
search engine architecture with Galileo E1 and GPS L2C signals at a particular level of
resource allocation. Figures 6-9 (Galileo E1) and Figures 10-13 (GPS L2C) show a similar
comparison for Groups 1, 2, 3 and 4 respectively.
Figure 6. Comparison of NP’ for Galileo E1 with Group 1
Figure 7. Comparison of NP’ for Galileo E1 with Group 2

Figure 8. Comparison of NP’ for Galileo E1
with Group 3
Figure 9. Comparison of NP’ for Galileo E1
with Group 4
Figure 10. Comparison of NP’ for GPS L2C with Group 1
Figure 11. Comparison of NP’ for GPS L2C
with Group 2
Figure 12. Comparison of NP’ for GPS L2C with Group 3
Figure 13. Comparison of NP’ for GPS L2C with Group 4
Each of the points in the graphs represent a configuration in a particular group. These results
show that, as predicted earlier, sat_del is the best search strategy for Galileo E1 and GPS L2C.
This is due to the fact that, as the number of code-delays is larger than the number of satellites
to search for, del_sat produces more wasted searches.
Some interesting results are achieved if NP’ for GPS L1, Galileo E1 and GPS L2C is
compared simultaneously for one search strategy at a time. Figures 14 and Figure 15 shows a
comparison of NP’ for Galileo E1 and GPS L2C with del_sat and sat_del respectively.

Figure 14. Comparison of NP’ for del_sat
Figure 15. Comparison of NP’ for sat_del
A quick look at Figure 14 and 15 suggests that for smaller architectures the performance of
GPS L1 is better than Galileo E1 and GPS L2C. But for larger architectures the performance
of the longer codes is better than GPS L1. It is important to mention here that NP’ is a
normalized quantity, so in reality the values of NP’ shown here are 1/4th
for Galileo E1 and
1/20th
for GPS L2C. We now take a closer look at each level of resource allocation. Figures
16-19 show a comparison of NP’ for Groups 1, 2, 3 and 4 respectively using del_sat.
Figure 16. Comparison of NP’ for Group 1
with del_sat
Figure 17. Comparison of NP’ for Group 2
with del_sat
Figure 18. Comparison of NP’ for Group 3 with del_sat
Figure 19. Comparison of NP’ for Group 4 with del_sat
These results confirm that, for smaller designs (Group 1 and 2) the GPS L1 signal has the
smallest NP’, but as the size of the architecture increases, the longer codes are acquired
relatively more quickly than GPS L1. The curves in Figures 16-19 are flat; this corresponds to
the curves for del_sat obtained by Malik et al. (2009). This is a graphical representation of the
fact that exhausting code-delays before satellites produces wasted searches. No matter how
many channels and/or taps are available in the search engine, the signal would be found in the
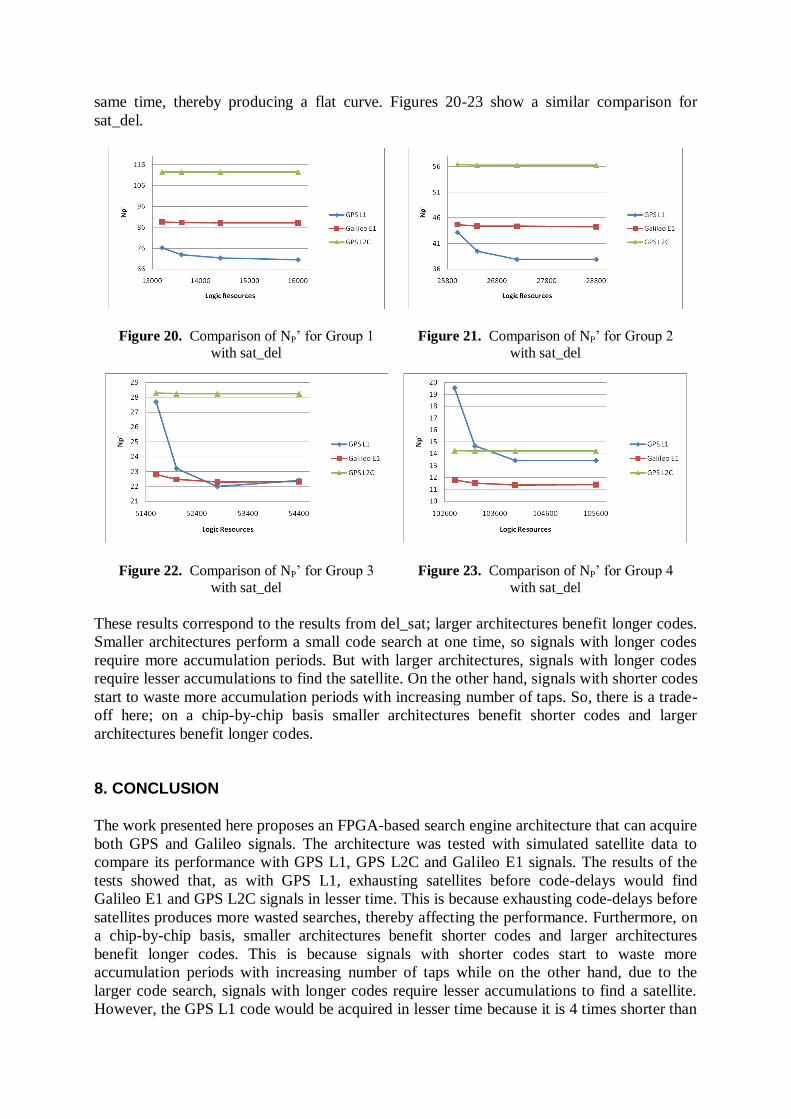
same time, thereby producing a flat curve. Figures 20-23 show a similar comparison for
sat_del.
Figure 20. Comparison of NP’ for Group 1
with sat_del
Figure 21. Comparison of NP’ for Group 2
with sat_del
Figure 22. Comparison of NP’ for Group 3
with sat_del
Figure 23. Comparison of NP’ for Group 4
with sat_del
These results correspond to the results from del_sat; larger architectures benefit longer codes.
Smaller architectures perform a small code search at one time, so signals with longer codes
require more accumulation periods. But with larger architectures, signals with longer codes
require lesser accumulations to find the satellite. On the other hand, signals with shorter codes
start to waste more accumulation periods with increasing number of taps. So, there is a trade-
off here; on a chip-by-chip basis smaller architectures benefit shorter codes and larger
architectures benefit longer codes.
8. CONCLUSION
The work presented here proposes an FPGA-based search engine architecture that can acquire
both GPS and Galileo signals. The architecture was tested with simulated satellite data to
compare its performance with GPS L1, GPS L2C and Galileo E1 signals. The results of the
tests showed that, as with GPS L1, exhausting satellites before code-delays would find
Galileo E1 and GPS L2C signals in lesser time. This is because exhausting code-delays before
satellites produces more wasted searches, thereby affecting the performance. Furthermore, on
a chip-by-chip basis, smaller architectures benefit shorter codes and larger architectures
benefit longer codes. This is because signals with shorter codes start to waste more
accumulation periods with increasing number of taps while on the other hand, due to the
larger code search, signals with longer codes require lesser accumulations to find a satellite.
However, the GPS L1 code would be acquired in lesser time because it is 4 times shorter than

the Galileo E1 code and 20 times shorter than the GPS L2C code.
Future work involves testing the architecture in a scenario where a warm start is required with
a large Doppler search and a scenario where a cold start is required. Also, the effect of low
signal-to-noise ratio could be taken into account, which would require longer integration
intervals and hence longer acquisition times. Furthermore, the use of multi-chip FPGA
designs could be studied for implementing even larger search engine architectures that could
possibly perform millions of searches for the newer GPS L5 and Galileo E5 codes.
REFERENCES
Borre K, Akos DM, Bertelsen N, Rinder P, Jensen SH (2007) A Software-Defined GPS and Galileo Receiver, Birkhäuser Boston,
Dempster AG (2006) Correlators for L2C: Some Considerations, Inside GNSS, October 2006, 32-37
Dempster AG, Hewitson S (2007) The “System of Systems” Receiver: an Australian Opportunity?,
International Global Navigation Satellite Systems Society (IGNSS) Symposium, 4-6 December
2007, The University of New South Wales, Sydney, Australia
Malik SA, Shivaramaiah NC, Dempster AG (2009) Search Engine Trade-offs in FPGA-based GNSS
Receiver Designs, European Navigation Conference ENC-GNSS 2009, CD-ROM proceedings,
3-6 May 2009, Naples, Italy
Malik U, Diessel O, Dempster AG (2007) Fast Code-Phase Alignment of GPS Signals Using Virtex-4
FPGAs, International Global Navigation Satellite Systems Society (IGNSS) Symposium, 4-6
December 2007, The University of New South Wales, Sydney, Australia
Mumford PJ, Parkinson K, Dempster AG (2006) An Open GNSS Receiver Research Platform,
International Global Navigation Satellite Systems Society (IGNSS) Symposium, 17-21 July
2006, Surfers Paradise, Australia
Navstar (2000) GPS Space Segment/Navigation User Interfaces, ICD200C-004, GPS Joint Program
Office, 12 April 2000
Qaiser S, Dempster AG (2007) Receiving the L2C Signal with “Namuru” GPS L1 Receiver,
International Global Navigation Satellite Systems Society (IGNSS) Symposium, 4-6 December
2007, The University of New South Wales, Sydney, Australia
Qaiser S, Wu J, Dempster AG (2007) Loud and Clear: Receiving the new GPS L2C and Galileo
Signals, UNSW Engineers, Issue 15, June 2007, p. 19
Shivaramaiah NC, Dempseter AG (2008) Galileo E5 Signal Acquisition Strategies, Coordinates, August 2008, pp. 12-16
Shivaramaiah NC, HS Jamadagn, Muralikrishna S, Vimala C (2004) Software-Aided Sequential Multi-Tap Correlator for Fast Acquisition, 17th International Technical Meeting of the Satellite
Division of the Institute of Navigation ION GNSS, 21-24 September 2004, Long Beach,
California
Wilde WD, Sleewaegen JM, Simsky A, Vandewiele C, Peeters E, Grauwen J, Boon F (2006) New
Fast Signal Acquisition Unit for GPS/Galileo Receivers, European Navigation Conference
ENC-GNSS 2006, 7-10 May 2006, Manchester
van Diggelen F, Abraham C (2001) Indoor GPS Technology, CTIA Wireless-Agenda, Dallas
Zarlink (2007) GPS Receiver RF Front End, http://www.zarlink.com/zarlink/gp2015-datasheet-sept2007.pdf
Zheng B, Lachapelle G (2004) Acquisition Schemes for a GPS L5 Software Receiver, 17th
International Technical Meeting of the Satellite Division of the Institute of Navigation ION
GNSS, 21-24 September 2004, Long Beach, California
Copyright © 2022 FDOKUMEN




















