
recueil des actes administratifs - Département des Bouches ...
Upload
u-picardieCategory
view
4download
0
1
Exploration et planification
EXPLORATION ET PLANIFICATIONDANS LE PROBLEME DES ANNEAUX CHINOIS :
LA DECOUVERTE DES REGLES A PARTIR DES PROPRIETES
Olga MEGALAKAKI1 et Charles TIJUS2
1 Laboratoire ECCHAT,Université de Picardie
2 Laboratoire Cognition & UsagesUniversité Paris 8 – St Denis
1 Olga Megalakaki, Laboratoire ECCHAT, Université de Picardie, Faculté Philosophie, Sciences Humaines et Sociales,Chemin du Thil, F80025 Amiens Cedex 1, France.2 Charles Tijus, Laboratoire Cognition & Usages, Université Paris 8, 2 rue de la Liberté, F93526 St Denis cedex 02.

2
SUMMARY: Exploration and planning with the Chinese rings puzzle, discovering object properties.
Solving the Chinese Rings Puzzle (ChRP, or baguenaudier) consists of removing tokens of their placeaccording to a recursive rule. Contrary to other puzzle problems, as the Tower of Hanoi, ChRPproblem space is linear and 21 states path leading from the initial to the final state: to reach thegoal, it is enough to never return behind. However, in practice, participants put until 300 moves toChRP. We show that the heuristic “ reduce the distance that separates the current state from the goalstate (hill climbing)” and states informativeness are some of the factors explaining ChRP difficulty.
Key words: problem solving, exploration, planning, rules discovery, Chinese Rings Puzzle.

3
Les études désormais classiques sur la résolution de problèmes de type puzzle (Newell et Simon,
1972 ; Simon, 1979 ; Ruiz et Newell, 1989 ; VanLehn, 1991 ; Anderson, Kushmerick et Lebiere,
1993 ; O’Hara et Payne, 1999 ; Davies, 2000 ; Del Missier et Fum, 2002 ; Altmann et Trafton, 2002 ;
Guimberteau, 2003) accordent une grande importance aux problèmes sémantiquement pauvres tels
que la Tour de Hanoi (TOH), les cannibales et missionnaires (C&M), les crapauds et grenouilles
(C&G), les anneaux chinois (PAC), etc. Le matériel de ces problèmes est simple et les instructions,
sous forme de règles données aux participants, sont également simples à comprendre. Utiliser des
problèmes sémantiquement pauvres, a longtemps été considéré comme une des possibilités de mettre
en évidence les processus de planification et les heuristiques de recherche du plus court chemin dans
l’espace des états du problème, sans l’intervention de connaissances.
Pour les théories de la résolution de problème basées sur la planification, la difficulté de
résolution est considérée comme relevant de la stratégie de recherche (Newell et Simon, 1972), elle-
même sous la dépendance de la capacité de la mémoire à court terme (Kotovsky, Hayes et Simon,
1985 ; Kotovsky et Fallside, 1989). Ainsi la plus ou moins grande difficulté à planifier de manière
rétroactive les coups à jouer, la plus ou moins grande difficulté à évaluer un coup selon le nombre de
comparaisons à faire, ou encore la quantité d’informations à mémoriser et le nombre d’opérations à
faire, sont autant de facteurs qui détermineraient la difficulté du problème.
Cette première approche classique de la résolution de problèmes, basée sur l’idée d’une
parfaite compréhension des instructions et sur la notion de charge mentale, a eu un indéniable succès,
mais elle se heurte à deux faits expérimentaux troublants.
Le premier fait expérimental concerne la difficulté qu’éprouvent les participants pour la
résolution du Problème des Anneaux Chinois (PAC). Le matériel de ce problème comporte cinq pions
qui doivent tous être ôtés selon une règle récursive donnée. L’espace problème est linéaire et
comporte 21 états différents. Selon la théorie de la planification, PAC devrait être le plus facile des
problèmes à résoudre puisque l’espace problème est linéaire et réduit à un seul chemin, le chemin de
la solution. Ainsi, un participant qui éviterait de défaire un coup joué (une des heuristiques majeures
des théories de la planification), mettrait 21 ou 41 coups pour résoudre ce problème, selon le premier
4
coup joué (voir l’espace problème donné dans le tableau 1). Pourtant, PAC se trouve être parmi les
problèmes les plus difficiles, car il nécessite parfois plus de 500 coups (Kotovsky et Simon, 1990).
Alors, comment expliquer la grande difficulté de PAC qu’on trouve, par exemple, auprès de
participants qui résolvent le problème en mettant jusqu’à 850 coups ?
Le second fait expérimental concerne les problèmes isomorphes qui ont le même espace
problème mais un habillage sémantique différent. Ces problèmes isomorphes, qui devraient être
d’égale difficulté, présentent de fait de grandes différences dans le nombre de coups mis par les sujets
pour les résoudre. C'est le cas avec le problème des Cannibales et Missionnaires (C&M) lorsqu'on les
remplace simplement par des jetons blancs et noirs, ou encore par des gendarmes et des voleurs. Ce
phénomène se retrouve avec des isomorphes de la Tour de Hanoi (TOH) qui consistent, par exemple,
à remplir trois récipients avec de l'eau en mettant l'accent, soit sur le contenu (variable continue), soit
sur le niveau (variable discrète). Bien que 7 suffisent, les plus difficiles des problèmes TOH sont
résolus avec plus de 60 coups et les plus simples en moins de 12 coups (Kotovsky, Hayes et Simon,
1985; Richard, Clément et Tijus, 2002). Pour étudier la difficulté de PAC, Kotovsky et Simon (1990)
ont comparé la résolution de deux versions isomorphes. Dans la première version, il faut dégager cinq
anneaux, alors que la deuxième est une version graphique où les cinq anneaux sont remplacés par cinq
pions disposés sur une suite de cinq cases alignées avec un pion par case. Aucun sujet n’arrive à
résoudre la première version dans un laps de temps inférieur à deux heures, alors que tous les sujets
résolvent l’isomorphe graphique en une demi-heure. Les approches en termes de charge cognitive
n'expliquent pas à elles seules ces différences de difficulté de résolution qu’on trouve pour tous les
types de problèmes isomorphes.
La différence de difficulté dans la résolution des problèmes isomorphes ne peut pas
s’expliquer par la complexité de l’espace problème, mais plutôt par la difficulté qu’il y a à
comprendre "comment réaliser un changement d’état” sur le matériel. Il est à signaler que
l’information sur "comment réaliser un changement d’état" est précisément celle qui est donnée dans
la consigne du problème et qui se révèle être ce que les participants découvrent en résolvant le
problème (Reber et Kotovsky, 1997 ; Zanga, Richard et Tijus, 2004).
5
Reber et Kotovsky, (1997) et Zanga, Richard et Tijus, (2004) ont ainsi mis en évidence deux
phases caractéristiques de la résolution de problèmes : une première phase exploratoire, souvent
longue, avec beaucoup de coups illégaux, - c’est-à-dire qui ne respectent pas les règles données dans
la consigne -, et une deuxième phase brève pratiquement sans erreurs où les participants vont
directement au but. Pour ces auteurs, cette première phase exploratoire permet l’apprentissage de
"comment réaliser un changement d’état". Cet apprentissage est implicite dans la mesure où les
participants ne peuvent généralement pas verbaliser ce qu’ils ont découvert. Pour expliquer la
difficulté de résolution et cet apprentissage implicite, Richard (1982) et Richard, Poitrenaud et Tijus
(1993) ont avancé que les participants se donnent souvent des contraintes supplémentaires, elles aussi
implicites, en considérant que certains mouvements ne sont pas autorisés bien qu’ils soient légaux.
Pour le problème M&C, - qui consiste à faire traverser une rivière à des cannibales et missionnaires -,
une contrainte implicite est par exemple celle de ne pas mettre d’abord les cannibales sur la rive
d’arrivée. L’apprentissage consiste alors à se découvrir que certains changements d’état qu’on
envisageait interdits ou peu profitables à la résolution sont en fait nécessaires. Ce sont ces contraintes
implicites, ajoutées aux contraintes explicites données dans les instructions, qui rendent le problème
difficile. Leur suppression, qui élargit l’espace de recherche, et favorise la résolution, est
accompagnée d’un changement d’interprétation de « comment réaliser un changement d’état » dans la
mesure où les actions qui étaient jugées illicites ne le sont plus. Cette compréhension va s'acquérir lors
de la phase d'exploration, principalement lors des situations d’impasse générées par des contraintes
implicites. Les participants qui se trouvent dans une situation d’impasse, ne sachant plus quoi faire,
font alors des actions qu’ils pensent illégales et découvrent qu’elles ne le sont pas. Ces nouvelles
possibilités d'action les conduisent à changer leur représentation sur la façon de jouer. Ainsi, même
sémantiquement pauvres, les problèmes de planification apparaissent aussi comme des problèmes de
découvertes de règles.
Les contraintes implicites relèvent souvent du but. Kotovsky et Simon (1990) et Jeffries,
Polson, Razran et Atwood (1977) signalent ainsi que les participants choisissent d’aller dans des états
qui sont perceptivement proches du but, alors qu'en termes d'espace problème, ils s’éloignent du but.

6
Cette contrainte du but sur la prise de décision, et qui va à l’encontre du détour caractéristique de la
résolution de problème, est aussi utilisée par Richard, Poitrenaud et Tijus, (1993) comme une des
contraintes implicites à éliminer pour apprendre à résoudre le problème. Elle correspond, dans
l'analyse "fins et moyens", à choisir parmi les coups possibles, celui qui rapproche du but. Les
participants auraient ainsi tendance à vouloir résoudre le problème en réduisant la distance qui sépare
l'état actuel de l'état but. Pour PAC, par exemple, une contrainte implicite majeure apportée par
l’atteinte du but est de ne pas ajouter de pions puisque le but est de les retirer. Pour résoudre le
problème PAC, les participants doivent découvrir une règle contre-intuitive : il faut parfois remettre
des pions pour pouvoir en ôter. Deux actions, mettre et ôter, sont alors requises pour se rapprocher du
but, la première qui peut sembler régressive et l’autre progressive.
Les contraintes liées au but pourraient aussi relever de la présence dans l’environnement
d’activateurs de sous-buts déduits de l ‘analyse « fins et moyens », - une proposition théorique
défendue par Mannes et Kintsch (1991) et Altmann et Trafton, (2002) -. Ainsi si au début de la
résolution, le but « enlever les cinq pions » se traduit par « enlever chacun des pions », la présence
d’un pion active par un effet d’amorçage le sous-but associé et déclenche sa réalisation. D’un autre
côté, l’état courant peut aussi être plus ou moins indicateur de la règle qui doit être découverte. Par
exemple, la règle de PAC est la suivante : « on peut ôter ou mettre un pion, s’il y a un pion à sa droite
et rien au-delà ». Cette règle ne peut pas être mise en correspondance avec l’état initial du problème
(tableau 1) qui comprend les cinq pions (OOOOO) puisqu’on ne peut pas dans cet état « mettre un
pion », ni « ôter un pion » de telle sorte qu’il y ait « un pion à sa droite et rien au-delà (tous les
emplacements plus à droite doivent être libres) ». En revanche, cette règle peut être facilement mise
en correspondance avec l’état 16 du tableau 1 (OOXXX) pour ôter le pion le plus à gauche et avec
l’état 15 (XOXXX) du même tableau pour mettre le pion le plus à gauche (O signifiant « présence du
pion à cet emplacement », X signifiant « absence du pion à cet emplacement »)
Notre point de vue sur la résolution des problèmes, de type puzzle, est que leur difficulté ne
provient pas que de la planification des actions à entreprendre pour atteindre le but, mais d’abord de la
compréhension du fonctionnement du matériel du problème qui est énoncé dans les règles de la

7
consigne. Ainsi, bien qu’étant sémantiquement pauvres, ces problèmes sont difficiles à résoudre parce
que les règles énoncées dans les instructions ne sont pas comprises par les participants. Les règles
pourraient toutefois être découvertes par exploration en testant ce qu’il est possible de faire et de ne
pas faire, mais la focalisation sur le but diminue la possibilité de découvrir par l’action le
fonctionnement du matériel exprimé verbalement dans les règles de la consigne.
Pourquoi des règles supposées être simples sont-elles difficiles à comprendre ? Notre
hypothèse est qu’il s’agit de règles générales valables pour tous les états du problème si bien que leur
mise en correspondance avec l’état courant est plus ou moins évidente. Parmi les états du problème,
certains apparaissent comme des meilleurs exemples en ce qu’ils permettent d’instancier les règles.
Dans cette étude, nous rapportons les résultats de l'expérience que nous avons menée en
utilisant le problème PAC pour observer la facilitation apportée lorsqu’on amoindrit la focalisation sur
le but et la facilitation apportée par l’adéquation entre l’état visité et les règles du problème.
EXPERIENCE
Pour étudier l'exploration et la planification en résolution de problème et montrer le rôle de la
compréhension des actions nécessaires pour réaliser un changement d’état, nous avons utilisé une
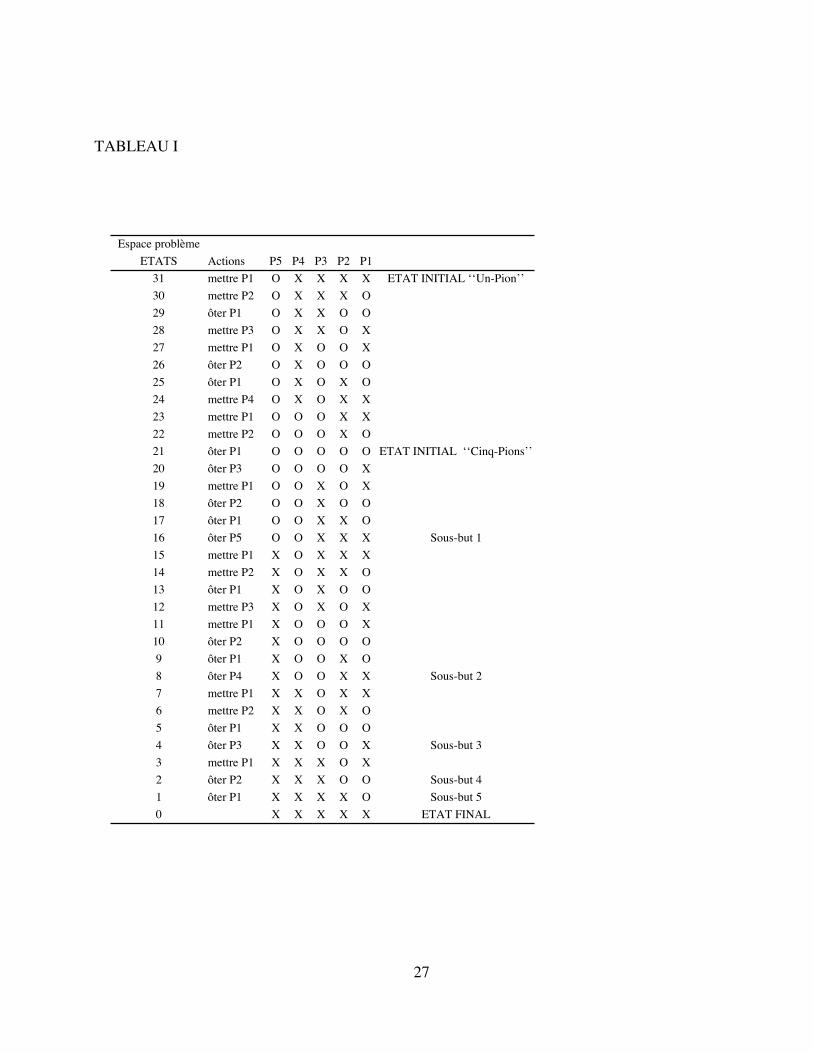
version informatisée du PAC (tableau I).
< INSERER TABLEAU I >
Résoudre PAC consiste à ôter tous les pions de leur emplacement selon une règle récursive qui
stipule qu’on peut ôter ou mettre un pion, s’il y a un pion à sa droite et rien au-delà. Pour réaliser un
changement d’état, en respectant la règle, il faut parfois mettre des pions pour créer les conditions
nécessaires afin de pouvoir en enlever par la suite. Selon cette règle, le pion P1 constitue une
exception dans la mesure où il peut être ôté et mis sans aucune condition, puisque la condition d’avoir
un pion à sa droite ne peut être satisfaite. Le pion P2 ne peut être ôté ou mis que si le P1 est présent.
Les autres pions P3, P4 et P5 ne peuvent être ôtés, ou mis, que s’il y a un seul autre pion juste à leur
droite, les autres pions plus à droite étant absents. Le problème est résolu quand tous les
8
emplacements sont vides. Dans PAC, à chaque état, il n’y a que deux coups possibles, sauf à l’état 31
(OXXXX ) et l’état final 0 (XXXXX) où un seul coup est possible (voir l’espace problème, tableau I).
Partant de l’état initial 21 (OOOOO), il y a 21 coups pour atteindre l’état final en prenant la bonne
direction et en ne revenant pas en arrière. En prenant la mauvaise direction, le nombre minimal de
coups s'accroît de 20 coups : 10 coups pour aller de l’état 21 à l’état 31, et 10 coups pour revenir à
l’état 21.
Nous avons programmé deux versions du problème PAC (une première version nommée un-
pion pour laquelle l’état initial est l’état 31 et une version nommée cinq-pion pour laquelle l’état
initial est l’état 31, tableau 1). Pour les deux versions, le problème est résolu lorsque tous les cinq
emplacements sont vides. L’expérience a été menée pour
(i) étudier la contrainte du but. Notre hypothèse est que la focalisation sur le but diminue la
performance parce que les participants essayent d’enlever des pions, avec une grande
réticence à en mettre pour en enlever. Si c’est le cas, alors les participants feront plus
d’erreurs lorsque le coup qui fait avancer vers le but est de mettre un pion que lorsqu’il
s’agit d’ôter un pion,
(ii) mettre à l'épreuve l'hypothèse que la contrainte du but est plus faible chez les participants
qui commencent la résolution du problème à l’état antérieur 31, parce qu’en allant de l’état
31 à l’état 21, ils devraient découvrir l’intérêt de mettre des pions pour en enlever. Notre
prédiction relative aux performances est que les participants qui débutent à l’état 31, alors
qu’ils ont un chemin plus long à parcourir, ne feront pas plus de coups pour résoudre le
problème que les participants qui débutent à l’état 21.
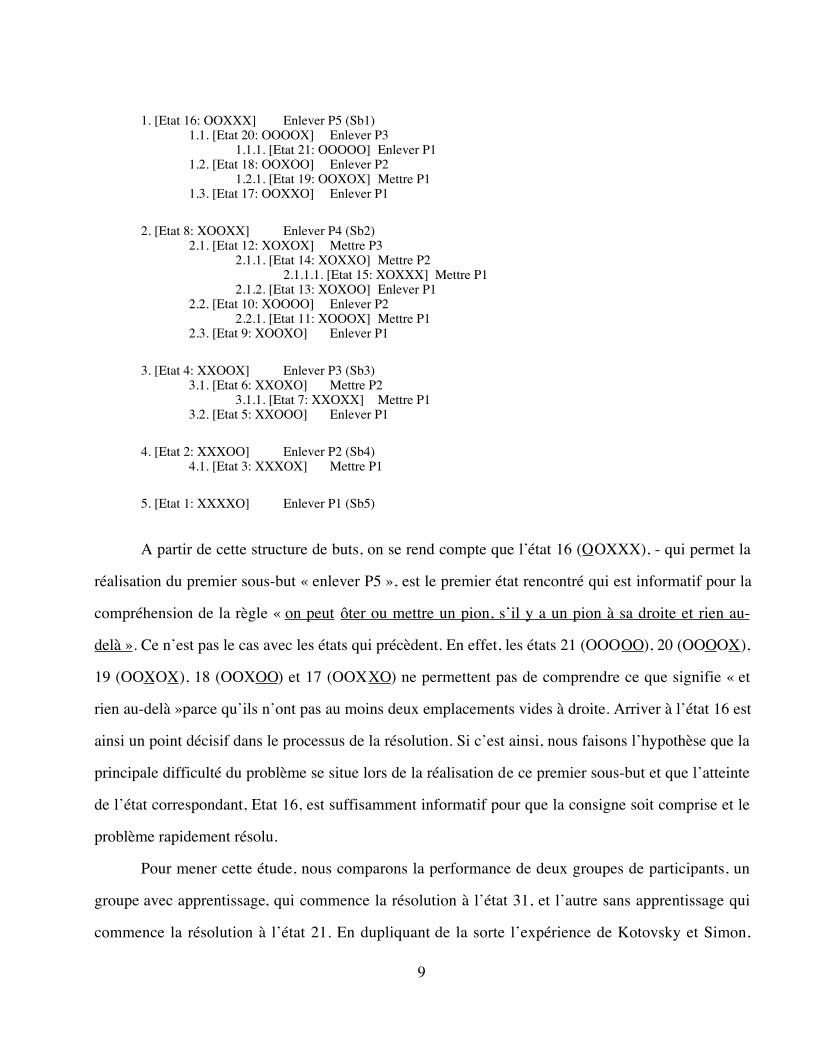
(iii) mettre en évidence le rôle du premier sous-but (état 16), ceci en menant une analyse fine
de la hiérarchie des sous-buts. Résoudre PAC consiste en effet à ôter le pion P5 (sous-but
1 ou Sb1), puis le pion P4 (Sb2), puis le pion P3 (Sb3), puis le pion P2 (Sb4), et enfin le
pion P1 (Sb5) selon la structure de sous-buts ci-dessous qui découle de la règle. Dans cette
structure, sont détaillés les coups préliminaires nécessaires pour réaliser chacun de ces
sous-buts, ainsi que les états correspondants.
9
1. [Etat 16: OOXXX] Enlever P5 (Sb1)1.1. [Etat 20: OOOOX] Enlever P3
1.1.1. [Etat 21: OOOOO] Enlever P1 1.2. [Etat 18: OOXOO] Enlever P2
1.2.1. [Etat 19: OOXOX] Mettre P1 1.3. [Etat 17: OOXXO] Enlever P1
2. [Etat 8: XOOXX] Enlever P4 (Sb2) 2.1. [Etat 12: XOXOX] Mettre P3
2.1.1. [Etat 14: XOXXO] Mettre P2 2.1.1.1. [Etat 15: XOXXX] Mettre P1
2.1.2. [Etat 13: XOXOO] Enlever P12.2. [Etat 10: XOOOO] Enlever P2
2.2.1. [Etat 11: XOOOX] Mettre P1 2.3. [Etat 9: XOOXO] Enlever P1
3. [Etat 4: XXOOX] Enlever P3 (Sb3) 3.1. [Etat 6: XXOXO] Mettre P2
3.1.1. [Etat 7: XXOXX] Mettre P1 3.2. [Etat 5: XXOOO] Enlever P1
4. [Etat 2: XXXOO] Enlever P2 (Sb4) 4.1. [Etat 3: XXXOX] Mettre P1
5. [Etat 1: XXXXO] Enlever P1 (Sb5)
A partir de cette structure de buts, on se rend compte que l’état 16 (OOXXX), - qui permet la
réalisation du premier sous-but « enlever P5 », est le premier état rencontré qui est informatif pour la
compréhension de la règle « on peut ôter ou mettre un pion, s’il y a un pion à sa droite et rien au-
delà ». Ce n’est pas le cas avec les états qui précèdent. En effet, les états 21 (OOOOO), 20 (OOOOX),
19 (OOXOX), 18 (OOXOO) et 17 (OOXXO) ne permettent pas de comprendre ce que signifie « et
rien au-delà »parce qu’ils n’ont pas au moins deux emplacements vides à droite. Arriver à l’état 16 est
ainsi un point décisif dans le processus de la résolution. Si c’est ainsi, nous faisons l’hypothèse que la
principale difficulté du problème se situe lors de la réalisation de ce premier sous-but et que l’atteinte
de l’état correspondant, Etat 16, est suffisamment informatif pour que la consigne soit comprise et le
problème rapidement résolu.
Pour mener cette étude, nous comparons la performance de deux groupes de participants, un
groupe avec apprentissage, qui commence la résolution à l’état 31, et l’autre sans apprentissage qui
commence la résolution à l’état 21. En dupliquant de la sorte l’expérience de Kotovsky et Simon,
10
(1990), nous analysons les données pour les deux groupes à partir de l'état 21 jusqu’à l’état final. La
principale différence entre notre travail et celui de Kotovsky et Simon est que nous analysons aussi
bien les mouvements légaux qui permettent de s’approcher au but ou de s’éloigner du but, que les
mouvements illégaux qui, par définition, n’aboutissent pas à un changement d’état.
METHODE
Participants
Quarante étudiants en deuxième année de psychologie de l'université d'Amiens, répartis en
deux groupes, ont participé à l’expérience. Le premier groupe, nommé un-Pion, a débuté avec un seul
pion (état 31) et le deuxième groupe, nommé cinq-Pions, a débuté avec cinq pions (état 21).
Matériel
Le matériel utilisé est une version informatisée du problème des Anneaux Chinois, dans un
environnement Macintosh (Frida II; Poitrenaud, 1991). Le logiciel de passation comprend à la fois
une interface interactive et des outils automatisés de création d'un fichier de recueil des données
répertoriées par action : le numéro de chaque action, le temps de réponse en 60ème de secondes, le
numéro du pion joué, le nouvel état obtenu lorsque l'action est légale, sinon l'indication que l'action
est illégale.
Procédure
Selon la condition expérimentale, sur l’écran de l’ordinateur apparaissent, soit cinq cases avec
un pion placé au 5ème emplacement et les quatre autres cases sont vides (condition un-Pion), soit cinq
cases remplies chacune par un pion (condition cinq-Pions). Les participants sont informés que le but
est d’ôter tous les pions de leur emplacement, mais qu’il n’est possible d’ôter ou de mettre un pion
que s’il y a un seul pion à sa droite et rien au-delà.
Pour mesurer les performances, nous avons considéré les coups illégaux, qui ne respectent pas
la consigne, ainsi que les coups légaux progressifs qui rapprochent du but (par exemple, aller de l'état
27 à l'état 26) et les coups légaux régressifs qui éloignent du but (par exemple, aller de l'état 27 à l'état
28). Lorsqu’un coup est légal progressif ou régressif, la transformation d’état est réalisée par le
11
programme: les pions disparaissent ou apparaissent lorsque les participants cliquent avec la souris sur
l’un des cinq emplacements et que les conditions requises par la consigne sont remplies. Dans le cas
d’un coup illégal, lorsque les conditions requises par la consigne ne sont pas satisfaites,
l’emplacement joué se met en inverse vidéo pendant 1 seconde pour indiquer la prise en compte de
l’action et l'état reste inchangé.
RESULTATS
Pour résoudre le problème, le groupe un-Pion (de l’état 31 à l’état 0) a réalisé en moyenne 231 coups
(écart-type = 177.7) tandis que le groupe cinq-Pions (de l’état 21 à l’état 0) a réalisé en moyenne 297
coups (écart-type = 180.2). Cette différence n’est pas significative ; F (1, 38) = 1.34, ns. Rapporté au
nombre d’états à parcourir, le groupe un-Pion met en moyenne 7.5 coups (écart-type = 5.7) pour un
état à parcourir et le groupe cinq-Pions 14 coups (écart-type = 8.6). Cette différence est significative ;
F (1, 38) = 8.37, p = .006.
Pour les analyses qui suivent, les performances des deux groupes sont comparées de l’état 21 à
l’état 0, qui constitue la partie commune de la résolution pour les deux groupes. Pour le groupe cinq-
Pions, il s’agit de la totalité des données. Pour le groupe un-Pion, il s’agit de la partie finale du
protocole qui débute lorsque l’état 21 est atteint. Nous avons comptabilisé séparément le nombre de
coups pour réaliser successivement chacun des cinq buts d’ôter les pions 5, 4, 3, 2 et 1. Si un
participant réalise plusieurs fois un même sous-but, seule la première réalisation est comptabilisée.
Pour les cinq sous-buts, le groupe un-Pion a mis 149.7 coups (écart-type = 102.7) tandis que le groupe
cinq-Pions a réalisé en moyenne 235 coups (écart-type = 123). Cette différence est significative ; F (1,
38) = 5.69, p = .02.
Décomposition du problème en sous-buts
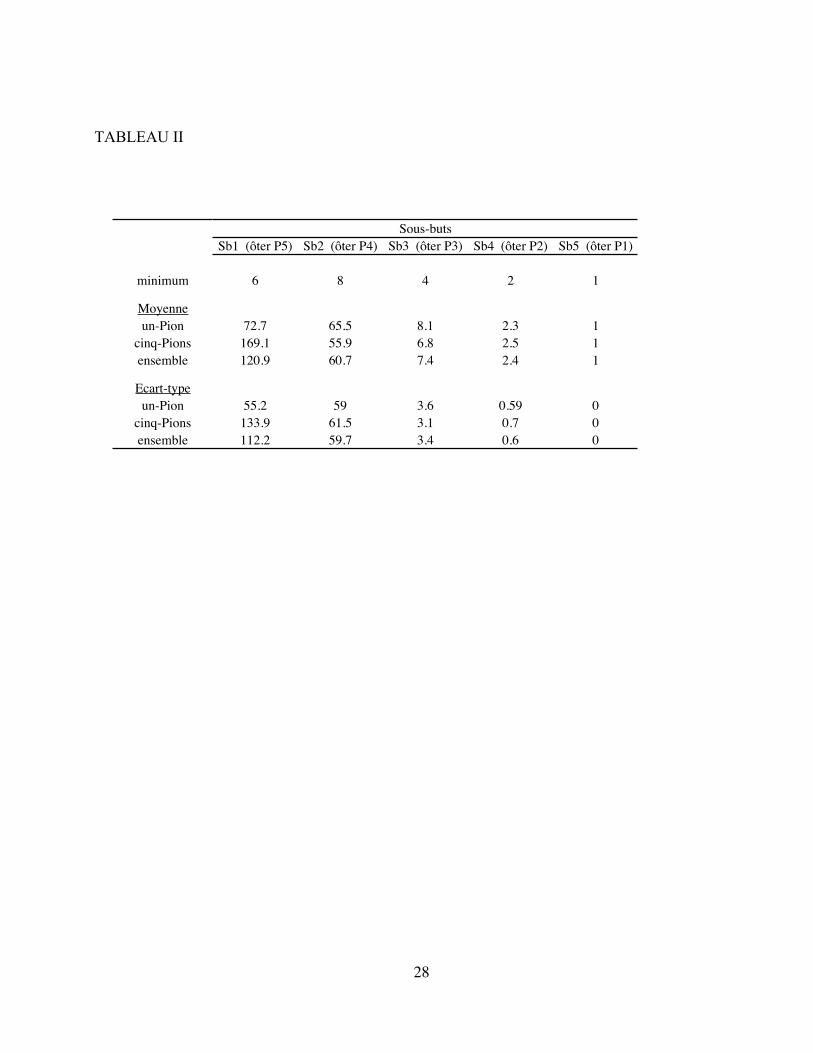
Le tableau II donne le nombre minimum de coups pour atteindre chacun de ces cinq sous-buts
et le nombre de coups mis par les participants des deux groupes.
<INSERER TABLEAU II>
12
Un premier constat est que la difficulté de résolution, pour les groupes cinq-Pions et un-Pion,
ne concerne ni le sous-but Sb3 (respectivement, 6.8 et 8.1 coups au lieu de 4), ni le sous-but Sb4 (2.5
et 2.3 coups au lieu de 2), ni le sous-but Sb5 (1 coup). La difficulté provient de la réalisation du Sb2
(56 et 65 coups au lieu de 8 pour le groupe cinq-Pions et un-Pion) et surtout du Sb1 (169 et 73 coups
au lieu de 6). Cette constatation reste également valable pour les deux groupes réunis, puisque les
participants mettent globalement 121 coups pour réaliser le Sb1 (écart-type =112.2) et 61 coups pour
réaliser le Sb2 (écart-type = 59.7). Pourtant, au regard de l'espace problème, le Sb2, qui requiert 8
transformations d'état contre 6 pour le Sb1, devrait être le plus difficile à réaliser. C'est le contraire qui
est constaté et la différence est significative ; F(1, 38) = 9.42, p = .004.
Il y a également un effet d’interaction entre "groupes" (un-Pion, cinq-Pions) et "sous-buts"
(Sb1 et Sb2 ); F(1,38) = 7.29, p = .01. Alors que le groupe un-Pion ne met pas significativement plus
de coups pour arriver à Sb1 (73 coups) que pour arriver à Sb2 (65 coups) (F(1,19) = .40, ns), le
groupe cinq-Pions met respectivement 169 contre 56 coups, ; F(1,19) = 9.08, p = .007. Ainsi, le
groupe cinq-Pions met 7 fois plus de coups que le nombre minimal pour atteindre le Sb2 et 28 fois
plus de coups que le nombre minimal pour atteindre le Sb1. Le groupe un-Pion ne met que 12 fois
plus de coups que le nombre minimal requis pour atteindre Sb1.
La difficulté du problème réside dans la résolution du Sb1
Le nombre de coups pour le passage d’un sous-but à l’autre, - qui montre la capacité des
participants à décomposer le problème - , présente des différences de difficulté significatives selon le
groupe (fig. 1). Cette différence réside principalement dans la résolution du Sb1 : le nombre moyen de
coups est respectivement de 72.7 (écart-type = 55.2) et de 169 (écart-type = 133.9) pour le groupe un-
Pion et cinq-Pions, F (1, 38) = 8.85, p = .005.
< INSERER FIGURE 1 >
Cette différence de difficulté pour résoudre le Sb1 provient à son tour de la difficulté qu’il y a
à résoudre les sous-sous-buts préalables à sa propre réalisation (Sb1.1 : ôter P3, état 19 ; Sb1.2 : ôter
P2, état 17 ; Sb1.3 : ôter P1, état 16. Voir tableau III). La différence de résolution des sous-sous-buts
13
pour les deux groupes confondus (M Sb1.1 = 50.6 ; M Sb 1.2 = 57.7 ; MSb 1.3 = 9.5) est significative :
F(2,38) = 6.33, p = .003. Le tableau III montre que Sb1.1 et Sb1.2 sont les plus difficiles à réaliser (51
coups et 58 coups respectivement pour les deux groupes confondus au lieu des 2 coups théoriques).
Le groupe un-Pion réussit ainsi mieux que le groupe cinq-Pions les Sb1.1 et Sb1.2, puisque le groupe
un-Pion fait 54 coups de moins pour le Sb1.1 et 48 coups de moins pour le Sb1.2 par rapport au
groupe cinq-Pions ; F(1,38) = 10.4, p = .002. L’interaction entre groupes et sous-buts n’est pas
significative ; F(2,38) = 2.42, ns.
<INSERER TABLEAU III>
La principale difficulté est celle de mettre des pions
La proportion d'erreurs commises sur les actions "mettre" et "ôter" sert à évaluer la prise en
compte par les participants de l'heuristique "ne pas s'éloigner du but" qui consiste à éviter de mettre
des pions. Cette proportion montre que pour passer d’un état à un autre, les participants des deux
groupes confondus ont plus de difficulté lorsqu’il faut mettre un pion que lorsqu’il s’agit d’enlever un
pion. A titre d’exemple, pour les deux groupes confondus, la différence de résolution entre enlever P1
(en moyenne 7,3 coups) et mettre P1 (en moyenne 38,3 coups) est significative ; F (1, 38) =11.5, p =
.002.
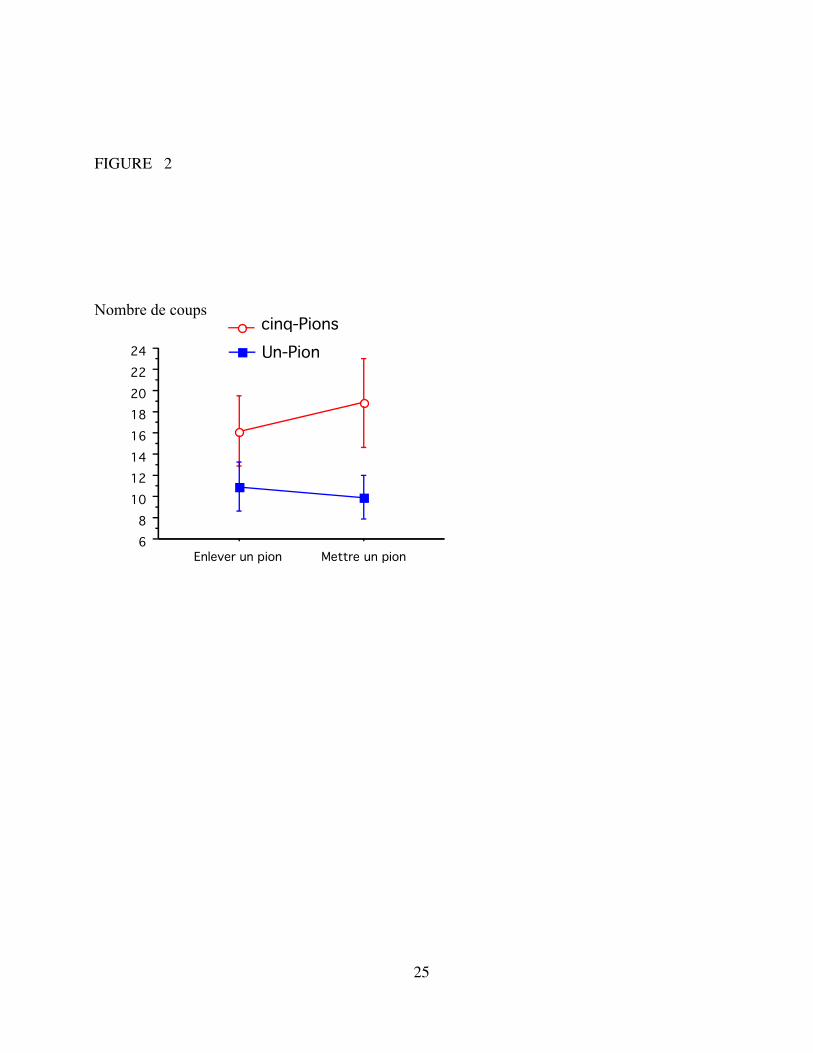
Globalement, qu'il s'agisse d'ôter ou mettre un pion pour passer d’un état à l’autre, le groupe
un-Pion met significativement moins de coups que le groupe cinq-Pions, respectivement 10.4 et 17.5
coups en moyenne, F (1, 38) = 6.66, p =.01.
Lorsqu’il s’agit d’enlever un pion, le groupe un-Pion met moins de coups que le groupe cinq-
Pions, respectivement 11 et 16 coups en moyenne, différence qui se relève non significative (fig. 2) ;
F(1, 38) = 1.6, ns. En revanche, lorsqu'il s’agit de mettre un pion, le groupe un-Pion met
significativement moins de coups que le groupe cinq-Pions, respectivement 10 et 19 coups en
moyenne, F (1, 38) = 3.67, p = .06 (fig. 2).
<INSERER FIGURE 2>
14
La compréhension du problème
Pour évaluer la compréhension du problème, nous avons pris en compte le nombre de coups
légaux progressifs et le nombre de coups légaux régressifs.
L’analyse montre que le groupe un-Pion a fait proportionnellement plus de coups légaux
progressifs que le groupe cinq-Pions (moyenne un-Pion :.33 % (.1), cinq-Pions :.30% (.09)) et moins
de coups légaux régressifs que le groupe cinq-Pions (moyenne un-Pion : 15.6 % (.05), cinq-Pions :
19.4 % (.09)). Cette différence est significative, F (1, 26) = 4.82, p =.03.
Une analyse supplémentaire a été réalisée pour le groupe un-Pion en considérant l'espace des
états pour aller de l’état 31 (OXXXX), où seul le pion P5 est présent, jusqu'à l’état 21 (OOOOO) où
les cinq pions sont présents. Pour cette partie des protocoles, le nombre de coups varie de 39 à 220.
Cette partie de la résolution informe sur l’apprentissage du groupe un-Pion qui y découvre les
propriétés des états qui conditionnent l'action. Bien que pour cette partie de la résolution (aller de
l’état 31 à l’état 21), il faille "mettre" six fois et "enlever" seulement trois fois, on observe que les
participants mettent plus de coups pour réaliser les états où il faut "mettre" que pour les états où il faut
"enlever"; ce qui correspond ici encore à l’heuristique de "ne pas s'éloigner du but".
Enfin, nous avons comptabilisé le nombre de coups joués dans chaque état pour chacun des
deux groupes (fig. 3). La distribution du nombre de coups montre que, après la réalisation du Sb1 à
l’état 16, le nombre de coups diminue jusqu’à l’état final, prouvant ainsi qu’aucun des états compris
entre 16 et 0 ne constitue une situation d’impasse. Ceci provient selon nous de l’informativité de
l’état 16 qui est un état crucial dans l’espace problème en ce qu’il figure toutes les conditions de la
règle sans ambiguïté.
<INSERER FIGURE 3>
DISCUSSION ET CONCLUSION
Résoudre un problème consiste à atteindre un but mais d’abord, lorsqu'elles ne sont pas acquises, à
découvrir par exploration ses règles et ses contraintes. Exploration et planification bien que
complémentaires, peuvent difficilement être conduites simultanément dans la mesure où la

15
planification de l'atteinte du but peut bloquer le processus de découverte des règles. Et ceci parce que
se donner un but induit la planification d'actions qui visent à s'approcher à l'état final et de ne pas s'en
éloigner. De tels détours caractérisent la plupart de problèmes de type puzzle dont les règles
conduisent à des résolutions récursives qui nécessitent de s’écarter du but pour l’atteindre. Par
exemple, pour résoudre le problème des missionnaires et des cannibales, il faut d’abord mettre les
cannibales sur la rive où les missionnaires devront ensuite les rejoindre avec le risque de se faire
manger. Avec la tour d’Hanoi, également, afin de libérer un grand disque, il faut mettre le plus petit
disque à l’emplacement où il faudra mettre ce grand disque.
La nature récursive du problème, en obligeant à ajouter des pions pour en retirer, et en cela
conduisant à ce qu’on s'éloigne apparemment du but, fait de PAC un problème difficile. Il s’agit
toutefois d’un problème très difficile. Parmi les problèmes de type puzzle à résolution récursive, PAC
est l’un des plus difficiles: nos participants font jusqu'à 300 à 400 coups avant d'arriver à l'état final,
alors que 21 coups suffisent (ou 41 selon la condition expérimentale de départ). A cet égard, les
données que nous avons rapportées dans cette étude correspondent à celles qu'on trouve dans la
littérature (Kotovsky et Simon, 1990 ; Reber et Kotovsky, 1997 ; Zanga, 2001 ; Zanga, Richard et
Tijus, 2004) . Cette grande difficulté fournit aussi un grand nombre de données pour étudier
l’apprentissage de la résolution.
L’analyse des comportements de résolution montre que, globalement, nous pouvons
décomposer la résolution du problème PAC en deux phases distinctes. La première phase correspond
au chemin parcouru pour arriver à l’état 16 qui correspond à la réalisation du premier sous-but.
Pendant cette phase, les participants ont un comportement apparemment erratique au bout duquel ils
semblent finalement avoir compris « comment réaliser un changement d’état ». La deuxième phase
correspond au chemin parcouru à partir de l’état 16 jusqu'à l’état final et se caractérise par une
résolution rapide, avec peu de retours en arrière, qui mène les sujets directement au but. Sur ce point,
nous partageons les conclusions de Kotovsky et Simon (1990) et de Zanga, Richard et Tijus (2004)
selon lesquelles la première phase n’est pas une phase de planification (sinon il serait impossible
d’expliquer le grand nombre de coups pour arriver au premier sous-but et la résolution rapide). Elle
16
correspondrait plutôt à une phase d’exploration, les tentatives d’action échouant ou réussissant sans en
connaître les motifs. Cette phase aboutit à la compréhension des règles qui justifient les actions
nécessaires pour réaliser un changement d’état. Dans la deuxième phase, nous observons alors un
comportement de planification.
Le comportement erratique observé lors de la première phase d’exploration est manifestement
guidé par des contraintes additionnelles que se donnent les participants en considérant comme
interdites, ou sans intérêt, des actions qui sont légales et profitables.Se donner de telles contraintes
supplémentaires est un comportement qui a été observé par Richard (1982) et Richard, Poitrenaud et
Tijus (1993) pour le problème TDH. Ces contraintes implicites génèrent très souvent des situations
jugées par les participants comme étant des situations d’impasses. Ces situations sont toutefois utiles
pour la découverte de règles. Arriver à une situation d’impasse implicite signifie penser ne plus avoir
la possibilité de changer d’état. Ne sachant quoi faire, les participants réalisent alors des actions qu’ils
jugeaient jusque-là interdites, ou sans intérêt, et découvrent ainsi ce qu’il est possible de faire.
Une contrainte additionnelle est celle d’éviter de mettre des pions: la proportion d'erreurs
commises sur les actions "mettre" et "ôter" montre que les participants qui résolvent le PAC sont plus
réticents à mettre qu’à ôter. Ce que nous interprétons comme relevant de l'application de l'heuristique
"ne pas s'éloigner du but" qui est opérationnalisée par les participants en évitant de mettre des pions.
Les participants ont aussi tendance à vouloir ôter des pions pour obtenir des états perceptiblement plus
proches du but . Ce résultat, trouvé aussi par Zanga, Richard et Tijus (2004), montre que les
participants tentent d’abord de réduire l’écart au but et négligent ainsi l’exploration qui favorise la
compréhension des règles du problème. Dans une situation expérimentale où les sujets doivent prédire
le coup joué par l’ordinateur, la performance des sujets s’améliore, alors qu’elle s’amoindrit dans une
situation où ce sont les participants qui réalisent eux-mêmes les actions. Dans cette dernière situation,
les participants tentent de réduire l’écart apparent au but en enlevant des pions. Lorsque l’ordinateur
joue, les participants prédisent moins ce type de coups, en notant que l’ordinateur met souvent des
pions.
17
Une autre source de difficulté de la résolution du PAC est liée à la fonction de la contrainte du
but selon la situation expérimentale. Notre hypothèse était que la contrainte du but serait plus faible
chez les participants qui commencent la résolution du problème à l’état 31, parce qu’en allant de l’état
31 à l’état 21, ils découvrent l’intérêt de placer des pions pour en enlever. Comme Kotovsky et
Simon, (1990), nous avons trouvé une meilleure réussite pour le groupe un-Pion débutant à l'état 31
que pour le groupe cinq-Pions débutant à l’état 21. Les participants du groupe un-Pion, partant de
l’état 31, ne peuvent que mettre des pions et cela facilite la découverte et la compréhension de la
consigne. Le groupe un-Pion, étant de la sorte obligé à ne pas tenir compte de l'heuristique "ne pas
s'éloigner du but", et bien qu’ayant un chemin 50% plus long à parcourir pour atteindre l’état-but que
le groupe cinq-Pions, il ne fait pas 50% de coups de plus que le groupe cinq-Pions. Bien au contraire,
le nombre de coups réalisés globalement par le groupe un-Pion est légèrement inférieur au nombre de
coups réalisés par le groupe cinq-Pions (231 et 263 coups, respectivement).
Voyons comment de telles performances sont obtenues. Les participants du groupe un-Pion
ont eu beaucoup de difficulté à ajouter P1 à l'état OXOOX (rappelons que « O » correspond à la
présence du pion et « X » à son absence ). Partant de OXXXX, un comportement typique est d'essayer
d'ôter P5, le seul pion présent, puis de cliquer à l'emplacement de P4, de P3, de P2 et enfin de P1 qui
apparaît. Certains participants l'enlèvent et essayent à nouveau d'ôter P5. Mettre P1 étant la seule
action possible, ils se retrouvent dans l'état OXXOO où ils ont mis P2. Certains enlèvent P2, puis P1
puis essayent d'ôter P5 et recommencent, tandis que d'autres enlèvent seulement P1. Ceux-là sont
alors dans l'état OXXOX. Ils essayent d'ôter P2 et P5, cliquent sur P4 et P3 et mettent ainsi P3 et se
retrouvent dans l'état OXOOX. Dans cet état, ils évitent de remettre P1 parce que, pensons-nous, c'est
un pion qu'ils ont mis (s'éloignant apparemment du but) et qui a causé l'apparition de P2 (s'éloignant
encore plus du but), puis a causé celle de P3. Ajouter P1 ferait avoir 4 pions présents, alors qu'il faut
tous les ôter. De l'état 31 à l’état 21, l’état OXOOO est l'état qui apparaît le plus distant du but qui est
d’avoir ôté tous les pions. C’est aussi l’état le plus difficile à franchir. Ce faisant, c'est un état obligé
pour les participants du groupe un-Pion qui apprennent ainsi que mettre des pions permet d'en enlever.
18
Nous avons vu que la configuration d’un état, son apparence, est une source de difficulté. Une
dernière raison de la grande difficulté de résolution de PAC est la réalisation hiérarchique des sous-
buts. Nos analyses montrent que PAC est difficile à résoudre parce qu'il faut le décomposer en cinq
sous-buts hiérarchiques qui ne sont pas équivalents du point de vue de leur importance dans le
processus de résolution de ce problème. Pour résoudre PAC, il faut ôter chaque pion. Lorsque le pion
est le seul à être présent, le chemin le plus long est celui qui doit être parcouru pour ôter le pion P5, le
plus à gauche (OXXXX). Il faut, entre autres, pour cela repasser par l’état OOOOO, avec l’impression
d’être à nouveau à l’état initial, alors qu’on a progressé.
D’un autre côté, c’est aussi la configuration de certains états qui facilite l’apprentissage. Plus
précisément, l’état 16 (OOXXX) où le premier sous-but (ôter le pion P5) peut être réalisé, représente
un point clé dans le processus de la résolution pour PAC. Le plus souvent, c’est à cet état précis que
débute la seconde phase de résolution caractérisée par un cheminement rapide et quasiment optimal
vers le but. Ceci parce que la disposition des pions placés à l’état 16 est la première configuration qui
permette d’instancier et de comprendre la règle : "vous pouvez ôter ou mettre un pion" (P5), "s’il y a
un pion à sa droite" (P4), "et rien au-delà" (aucun pion aux positions 3, 2 et 1). C’est à partir de ce
moment-là que la majorité des sujets semblent découvrir la règle et passent à la deuxième phase de
résolution en ayant une planification adéquate.
On notera que ce résultat conforte l’idée d’action située défendue par Norman, (1993) dans la
mesure où c’est un état du dispositif externe, - un état « smart » -, qui semble favoriser la
compréhension du fonctionnement en fournissant une représentation externe adéquate de la consigne.
Il apparaît ainsi que la configuration des états, leur apparence, jouent un rôle dans la difficulté
du problème. Nous pensons que ce résultat est généralisable, tout d’abord aux effets de l’habillage
qu’on trouve lorsqu’on donne à résoudre des problèmes isomorphes : on observe de grandes
différences de difficulté Certains habillages sont probablement, plus que d’autres, des supports
externes à la compréhension des règles du problème lorsque le contenu des énoncés verbaux peut être
mis en correspondance avec ce qu’on perçoit du matériel. Pour le problème de la tour de Hanoi,
l’énoncé « ne pas mettre un disque sur un plus petit » dans une version où les disques ont des tailles
19
fixes et des emplacements variables, trouve une meilleure correspondance dans les propriétés visibles
du matériel que l’énoncé « ne pas donner à un disque la taille d’un disque plus à gauche » dans une
version où les disques ont des emplacements fixes et des tailles variables. Dans le premier cas, on
perçoit l’emplacement attribuable au disque alors que dans le second cas, on ne perçoit pas la taille
attribuable au disque.
Ce résultat de recherche est probablement généralisable à la résolution de problèmes
sémantiquement riches. Réservés à l’étude de la planification, les problèmes sémantiquement pauvres
ont parfois été jugés peu utiles pour l’étude des problèmes sémantiquement riches, à cause justement
de la nature sémantique de leurs différences. Dans la mesure où nous montrons que la résolution des
problèmes sémantiquement pauvres nécessite préalablement la découverte des relations de nature
sémantique entre les objets du problème, et qui sont exprimées dans les règles, nous avons alors un
terrain propice à l’étude des caractéristiques sémantiques de la résolution de problème.
En conclusion, notre approche est dans la lignée de celle qui a été défendue par Kotovsky et
Fallside (1989), dans une évolution dans l’explication des différences de la difficulté en résolution de
problème, depuis une explication en termes de charge mentale, vers une explication plutôt sémantique
de la construction de la représentation des prérequis au changement d’état. Ces prérequis sont les
propriétés des objets qui caractérisent les états à partir desquels on peut réaliser l’action. Autrement
dit, comprendre l’action, c’est comprendre d’abord les propriétés d'objets pertinentes pour l'action.
BIBLIOGRAPHIEAltmann E.M., Trafton J.G. - (2002) Memory for goals : an activation-based model, Cognitive science
26, 39-83.Anderson J.R., Kushmerick N., Lebiere C. - (1993) The tower of Hanoi and goal structures. In J.R.
Anderson (Ed.), Rules of the mind. Hillsdale, NJ: Erlbaum.Davies S.P. - (2000) Memory and planning processes in solutions to well-structured problems. The
Quarterly Journal of Experimental Psychology, 53A, 896-927.Del Missier F., Fum D. - (2002) Declarative and procedural strategies in problem solving: Evidence
from the toads and frogs puzzle. In W. D. Gray & C. D. Schunn (Eds.), Proceedings of theTwenty-Fourth Annual Conference of the Cognitive Science Society. Mahwah, NJ: LawrenceErlbaum Associates, 262-267
20
Guimberteau B. - (2003) Developing problem-solving competence: A new model and a new classstrategies with the Tower of Hanoi task. Proceedings of the Twenty-Fifth Annual Conferenceof the Cognitive Science Society. Boston, MA.
Jeffries R., Polson P. G., Razran L., Atwood M. E. - (1977) A process model for missionaries-cannibals and other river-crossing problems, Cognitive Psychology, 9, 412-440.
Kotovsky K., Fallside D. - (1989) Representation and transfer in problem solving, in K. Kotovsky(Edit), Complex information processing, What as Simon brought ? 21th Symposium of theCarnegie Mellon Institute, Hillsdale (NJ), Erlbaum, 69-108.
Kotovsky K., Hayes J.R., Simon H.A. - (1985) Why are some problems hard ? Evidence from Towerof Hanoi, Cognitive psychology, 17, 248-294.
Kotovsky K., Simon H.A. - (1990) What makes some problems really hard : explorations in theproblem space of difficulty, Cognitive Psychology, 22, 143-183.
Mannes, S. M. & Kintsch, W. - (1991) Routine computing tasks: Planning as understanding,Cognitive Science, 15, 305-342.
Newell A., Simon H.A. - (1972) Human Problem Solving, Englewood Cliffs, PrenticeHall.Norman D. - (1993) Things That Make Us Smart. Reading, MA : Addison-Wesley.
O’Hara K.P., Payne S.J. - (1999) Planning and the user interface: the effects of lockout time and errorrecovery cost, International Journal Human Computers Interaction, 50 (1), 41-59.
Poitrenaud S. - (1991) Conception du logiciel Frida II. Université Paris VIII, laboratoire Cognition &Usages, Document interne.
Reber P.J., Kotovsky, K. - (1997) Implicit Learning in Problem Solving : The Role of WorkingMemory Capacity, Journal of Experimental Psychology: General, 126, 178-203.
Richard J.F. - (1982) Planification et organisation des actions dans la résolution de problème de latour de Hanoi par des enfants de 7 ans, L’Année Psychologique, 82, 307-336.
Richard J.F. - (1995) Les activités mentales. Comprendre, raisonner, trouver des solutions. ArmandColin. Paris.
Richard J.F., Clément E., Tijus C.A. - (2002) Les différences de difficulté dans la résolution desproblèmes isomorphes comme révélatrices des composantes sémantiques dans la constructionde la représentation du problème. In J. Pitrat (Ed.), hommage à H. Simon. Revue d'IntelligenceArtificielle, 16, 1-2, 191-219
Richard J.F., Poitrenaud S., Tijus C.A. - (1993) Problem-Solving Restructuration : Elimination ofImplicit Constrains, Cognitive Science, 17, 497-529.
Ruiz D., Newell A. - (1989) Tower-noticing triggers strategy-change in the Tower of Hanoi: a Soarmodel. Proceedings of the Eleventh Annual Conference of the Cognitive Science Society.Hillsdale, NJ: Arlbaum 522-529.
Simon H.A. - (1979) Models of thought. New Haven, CT: Yale University Press.
21
VanLehn K. - (1991) Rule acquisition events in the discovery of problem solving strategies. Cognitivescience, 15, 1-47.
Zanga A. - (2001) Apprentissage Implicite en Situation de Découverte de Règle et de Résolution deProblème, Bulletin de Psychologie, Tome 54 (4), 389-399.
Zanga A., Richard J.F., Tijus C.A. - (2004) Implicit Learning in Rule Induction and Problem Solving,,Thinking and reasoning, 10, 55-83.
Zhang J. - (1997) The nature of external representation in problem solving. Cognitive Science, 21,179-217.
Zhang J. Norman D. A. - (1994) Representations in distributed cognitive tasks, Cognitive Science, 18,87-122.
RESUME
Contrairement aux autres problèmes récursifs de type puzzle, comme la Tour d'Hanoi, l’espace derecherche du problème des Anneaux Chinois (PAC ou baguenaudier) est linéaire : il n'y a qu'un seulchemin de 21 états qui mène de l'état initial à l'état final, si bien que pour atteindre le but, il suffit dene pas revenir en arrière. Or en pratique, PAC se révèle être un problème très difficile : lesparticipants mettent jusqu’à plus de 300 coups pour le résoudre. Nous montrons qu’une part de cettedifficulté provient de l’heuristique « ne pas s’éloigner du but » appliquée à la configuration des étatsmais que, d’autre part, la correspondance entre les règles du problème et la configuration des étatsfavorise l’apprentissage à partir de la découverte des propriétés pertinentes.
Mots clés : résolution de problème, exploration, planification, découverte de règles, problème desanneaux chinois.
22
LEGENDES DE FIGURES
Fig. 1 - Le nombre de coups pour réaliser chacun des sous-buts selon l’état initial (Un-pion ou Cinq-pions).
The number of moves to reach each of the sub-goals according to the initial state of the problem (One-token or Five-tokens).
Fig. 2 - Le nombre de coups pour ôter ou mettre un pion selon l’état initial (Un-pion ou Cinq-pions).
Number of moves for removing or adding a token according to the initial state of the problem (One-token or Five-tokens).
Fig. 3 - Nombre de coups pour chaque état du problème selon l’état initial (Un-pion ou Cinq-pions).
Number of moves for each state according to the initial state of the problem (One-token or Five-tokens).
23
LEGENDES DE TABLEAUX
TABLEAU I : L’espace problème des Anneaux Chinois ("O" correspond à la présence d’un pion,“X” à son absence). Tous les pions sont enlevés à l'état final (état 0).
The problem space for the Chinese Ring Puzzle. ("O" means that the token is present and "X" that itis absent). To reach the final state (state 0), the five token have to be removed.
TABLEAU II: Pour réaliser chaque sous-but, le nombre minimum de coups et le nombre de coupsselon l’état initial (Un-pion ou Cinq-pions).
For each of the sub-goals, the minimum number of moves and the average number of movesaccording to the initial state of the problem (One-token or Five-tokens).
TABLEAU III: Pour atteindre chaque sous-but du premier sous-but, le nombre minimum de coups etle nombre de coups selon l’état initial (Un-pion ou Cinq-pions)..
For each each of the sub-goals of the first subgoal, the minimum number of moves and number ofmoves according to the initial state of the problem (One-token or Five-tokens).

24
FIGURE 1
Nombre de coups
0
25
50 75
100125150
175
200
225
Sb1 Sb2 Sb3 Sb4 Sb5
Un-PionCinq-Pions
Sous-buts
25
FIGURE 2
Nombre de coups
68
1012141618202224
Enlever un pion Mettre un pion
Un-Pioncinq-Pions

26
Figure 3
27
TABLEAU I
Espace problèmeETATS Actions P5 P4 P3 P2 P1
31 mettre P1 O X X X X ETAT INITIAL ‘‘Un-Pion’’ 30 mettre P2 O X X X O29 ôter P1 O X X O O28 mettre P3 O X X O X27 mettre P1 O X O O X26 ôter P2 O X O O O25 ôter P1 O X O X O24 mettre P4 O X O X X23 mettre P1 O O O X X22 mettre P2 O O O X O21 ôter P1 O O O O O ETAT INITIAL ‘‘Cinq-Pions’’20 ôter P3 O O O O X19 mettre P1 O O X O X18 ôter P2 O O X O O17 ôter P1 O O X X O16 ôter P5 O O X X X Sous-but 115 mettre P1 X O X X X14 mettre P2 X O X X O13 ôter P1 X O X O O12 mettre P3 X O X O X11 mettre P1 X O O O X10 ôter P2 X O O O O9 ôter P1 X O O X O8 ôter P4 X O O X X Sous-but 27 mettre P1 X X O X X6 mettre P2 X X O X O5 ôter P1 X X O O O4 ôter P3 X X O O X Sous-but 33 mettre P1 X X X O X2 ôter P2 X X X O O Sous-but 41 ôter P1 X X X X O Sous-but 50 X X X X X ETAT FINAL
28
TABLEAU II
Sous-butsSb1 (ôter P5) Sb2 (ôter P4) Sb3 (ôter P3) Sb4 (ôter P2) Sb5 (ôter P1)
minimum 6 8 4 2 1
Moyenneun-Pion 72.7 65.5 8.1 2.3 1
cinq-Pions 169.1 55.9 6.8 2.5 1ensemble 120.9 60.7 7.4 2.4 1
Ecart-typeun-Pion 55.2 59 3.6 0.59 0
cinq-Pions 133.9 61.5 3.1 0.7 0ensemble 112.2 59.7 3.4 0.6 0

29
TABLEAU III
Sous-butsSb1.1 (ôter P3) Sb1.2 (ôter P2) Sb1.3 (ôter P1)
Minimum 2 2 1
Moyenneun-Pion 23.4 33.7 11.7cinq-Pions 77.7 81.7 7.3ensemble 50.6 57.7 9.5
Ecart-typeun-Pion 25.8 45.2 25.7cinq-Pions 106.4 95.2 17.7ensemble 81.2 77.5 21.9
Copyright © 2022 FDOKUMEN




![[con Daniel Sáez Rivera] L’espagnol des immigrants chinois et l’espagnol américain dans le Paysage linguistique de Madrid. (Emprunt et empreintes d’une perspective de la Linguistique](https://static.fdokumen.com/doc/165x107/6331f1c483bb92fe98042b66/con-daniel-saez-rivera-lespagnol-des-immigrants-chinois-et-lespagnol-americain.jpg)















