eSafety Compendium - ETSI docbox
658
eSafety Compendium May 2006
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of eSafety Compendium - ETSI docbox

eSafety CompendiumMay 2006
eSafety Compendium
May 2006
Produced by
eSafety Support

Page 2 of 490
TTaabbllee ooff CCoonntteennttss INTRODUCTION .............................................................................................. 6
CHAPTER I - THE 28 ESAFETY RECOMMENDATIONS ........................... 12
1.1 Final Report of the eSafety Working Group on Road Safety, Annex 1: 28 Recommendations, November 2002 .........................................................................14
1.2 Progress of the 28 recommendations..................................................................59
CHAPTER II - EUROPEAN COMMISSION ESAFETY COMMUNICATIONS...................................................................................................................... 109
CHAPTER III - ESAFETY FORUM HIGH LEVEL AND PLENARY MEETINGS CONCLUSIONS ....................................................................... 111
3.1 First eSafety High Level Meeting, Brussels, 25 April 2002............................113
3.2 Second eSafety High Level Meeting, Brussels, 14 November 2002 ...............116
3.3 First eSafety Forum Plenary Meeting, Brussels, 22 April 2003 ....................119
3.4 Second eSafety Forum Plenary Meeting, Madrid, 17 November 2003.........123
3.5 eSafety Forum Summary Report 2003, Madrid, 17 November 2003............125
3.6 Third eSafety Forum Plenary Meeting, Brussels, 25 March 2004 ................158
3.7 eSafety High-Level Meeting with Public Authorities, Brussels, 27 September 2004............................................................................................................................162
3.8 eSafety High Level Meeting with Industry, Brussels, 3 February 2005 .......168
3.9 Fourth eSafety Forum Plenary Meeting, Hanover, 2 June 2005...................173
3.10 The Second eSafety High Level Meeting with Member States, Brussels, 18 October 2005.............................................................................................................175
CHAPTER IV - ESAFETY WORKING GROUPS HISTORY AND FINAL RECOMMENDATIONS ................................................................................ 177
4.1 Accident Causation Analysis Working Group................................................179
Page 3 of 490
4.1.1 Final Report and Recommendations of the Accident Causation Analysis Working Group, December 2004............................................................................180
4.2 Communications Working Group....................................................................196
4.3 Digital Maps Working Group.................................................................198
4.3.1 Digital Maps Working Group Final Report Recommendation, November 2005............................................................................................................................200
4.4 eCall Driving Group ..........................................................................................220
4.4.1 Memorandum of Understanding for Realisation of Interoperable In-Vehicle eCall .............................................................................................................222
4.4.2 eCall Memorandum of Understanding: Status of Signatures.....................228
4.5 Heavy Duty Vehicles Working Group .............................................................229
4.5.1 Final Report of Heavy Duty Vehicles Working Groups - Activity report for the year 2004, October, 2005...................................................................................231
4.6 Human-Machine Interaction Working Group................................................272
4.6.1 Recommendations from the eSafety-HMI Working Group, February 2005....................................................................................................................................274
4.7 Implementation Road Maps Working Group.................................................334
4.7.1 Final Report and Recommendations of the Implementation Road Map Working Group, 8 September 2005 .......................................................................336
4.8 International Cooperation Working Group....................................................423
4.9 Real-time Traffic and Travel Information Working Group..........................424
4.10 Research and Development Working Group ................................................436
4.10.1 Progress Report of the eSafety Working Group RTD, June 2005 ...........437
4.11 User Outreach Working Group......................................................................444
CHAPTER V - OTHER ESAFETY RELATED TOPICS.............................. 445
5.1 E112.....................................................................................................................446
5.2 Intelligent Cooperative Systems and Radio Spectrum...................................447
5.2.1 Working Paper on Intelligent Co-operative Systems based on V2V and V2I Communications, January 2006 .............................................................................449
CHAPTER VI - APPENDIXES..................................................................... 463

Page 4 of 490
6.1 Acronym list .......................................................................................................464
6.2 eSafety Glossary .................................................................................................474
CHAPTER VII - ANNEXES ......................................................................... 489
ANNEX I – 1st eSafety Communication: Information and Communication Technologies for Safe and Intelligent Vehicles
ANNEX II – 2nd eSafety Communication: Bringing eCall to Citizens.
ANNEX III – 3rd eSafety Communication: On the Intelligent Car Initiative, “Raising awareness of ICT for Smarter, Safer and Cleaner Vehicles”.
ANNEX IV – Radio Spectrum Policy Fact Sheet
ANNEX V – Decision on a regulatory framework for radio spectrum policy in the European Community (Radio Spectrum Decision)
ANNEX VI – Commission Decision on the harmonisation of the 24 GHz range radio spectrum band for the time-limited use by automotive short-range radar equipment in the Community
ANNEX VII – Mandate to CEPT to harmonise Radio Spectrum to facilitate a coordinated EU Introduction of Automotive Short-Range Radar (SRR) Systems.
ANNEX VIII – CEPT Report to the EC under Mandate to CEPT to harmonise radio spectrum to facilitate a coordinated EU introduction of Automotive SRR systems
ANNEX IX – Explanatory Memorandum to the Draft Commission Decision on the harmonisation of the 24 GHz band for the time-limited use by automotive SRR equipment in the Community
ANNEX X – Commission Recommendation on the processing of caller location information in electronic communication networks for the purpose of location-enhanced emergency call services

Page 5 of 490

Page 6 of 490
INTRODUCTION
Page 7 of 490
Modern society depends heavily on mobility. From the society’s point of view, an efficient transport system is the engine of our economy. But there are also serious problems associated with transport, such as congestion of road network and urban areas, harmful effects on the environment and public health, waste of energy and, above all, accidents. The high cost of fatalities, injuries and material damage caused by road accidents remains one of the major societal challenges in Europe, further increased by the EU enlargement which brought the number of Member States to 25 and increased demand for transport services.
Of all transport problems, safety is the one with the most serious impact on the daily lives of citizens. It also has a high impact on most socio-economic indicators. With its “White Paper”1 of September 2001, the European Commission set the target to half road fatalities by 2010. In the EU25, more than 40 000 people die every year and many more are injured. In total, there are approximately 1.4 million accidents on European roads annually, entailing a €200 billion cost to the EU – 2% of EU GDP.
The achievement of this urgent target requires a rapid increase in the efforts of all safety stakeholders. To support these actions, in April 2002 the European Commission officially launched a joint industry-public sector initiative: eSafety.
The eSafety initiative aims to reduce the number of accidents on Europe’s roads by using Advanced Information and Communication Technologies (ICTs). Such technologies can contribute significantly to improving road safety, enabling the development of sophisticated safety systems that improve road users’ chances of avoiding and surviving accidents.
In 2002 the Commission established an eSafety Working Group bringing together the all key stakeholders, to agree on the actions needed for accelerating the research, development, deployment and use of ICT for improving road safety. On the basis of this Working Group’s report (included in Chapter 1) and other consultations, the Commission adopted, in September 2003, a Communication on eSafety2. The Communication presents the Commission’s recommendations to accelerate the development and deployment of ICT in road safety, in particular the wider, accelerated use of active safety systems, so-called Intelligent Vehicle Safety Systems.
The establishment of the eSafety Forum in 2003 was one of the priority actions set out in the Commission Communication. The eSafety Forum, typically meeting twice per year, is a joint platform involving all road safety stakeholders. The general objective of the Forum is to promote and monitor the implementation of the eSafety Working Group’s recommendations and to support the development, deployment and use of Intelligent Vehicle Safety Systems.
1 COM(2001) 370 final “WHITE PAPER: European transport policy for 2010: time to decide” 2 Commission Communication Information and Communications Technologies for Safe and Intelligent
Vehicles, COM(2003) 542 Final, 15.9. 2003

Page 8 of 490
The eSafety Forum created several Working Groups, each of which focuses on a priority topic for implementing the eSafety Working Group’s recommendations. These recommendations correspond to the priority actions set out in the Commission Communication.
The Commission has also taken a number of other important measures to improve road safety, based on the above-mentioned Communication and the Road Safety Action Programme. Since the adoption of the Communication in September 2003, the Commission has followed this action plan, and considerable progress has already been achieved. The automotive industry has also successfully continued to introduce intelligent vehicle safety systems in their new vehicle models.
In September 2005 the Commission adopted a 2nd eSafety Communication3 to the Council and the European Parliament: “Bringing eCall to Citizens”. This Communication proposes a road map for a full-scale rollout of eCall, the pan-European in-vehicle emergency call service, by 2009.
On 1 June 2005 the Commission adopted the initiative “i2010: European Information Society 2010 for growth and employment” as a comprehensive strategy for modernising and deploying all EU policy instruments to encourage the development of the digital economy. i2010 consists of three pillars: a Single European Information Space, Innovation and Investment, and an Inclusive European Information Society. The “Intelligent Car” is one of the 3 Flagship initiatives proposed within the third pillar. The initiatives grouped together under this pillar aim to raise the visibility of ICT’s vital contribution to quality of life. The “Intelligent Car Initiative” on smart, safe and clean transport, focuses on road vehicles and addresses safety and environmental challenges caused by increased road use.
In February 2006 the Commission adopted the Communication on the Intelligent Car Initiative “Raising Awareness of ICT for Smarter, Safer and Cleaner Vehicles”4, presenting the Intelligent Car Initiative as the policy framework that will guide stakeholders’ efforts in their drive to accelerate the deployment of intelligent vehicle systems on European and international markets. This will be achieved through clearly defined actions that encompass the use of policy, research and communications instruments.
The three Communications to the Council and the European Parliament on eSafety can be found in annex.
3 Commission Communication The 2nd eSafety Communication “Bringing eCall to Citizens”, COM(2005)
431 Final, 14.9. 2005 4 Commission Communication: On the Intelligent Car Initiative “Raising Awareness of ICT for Smarter,
Safer and Cleaner Vehicles”, COM(2006) 59 Final, 15.2. 2006
Page 9 of 490
This eSafety Compendium aims to summarise all the work that has been done so far in the field of eSafety, from the publication of the Commission’s 2002 White Paper on European transport policy and up until now. It contains details of the work carried out in the eSafety Forum, its High-Level and Plenary Sessions and the Working Groups.
eSafety: Structure and Organisation
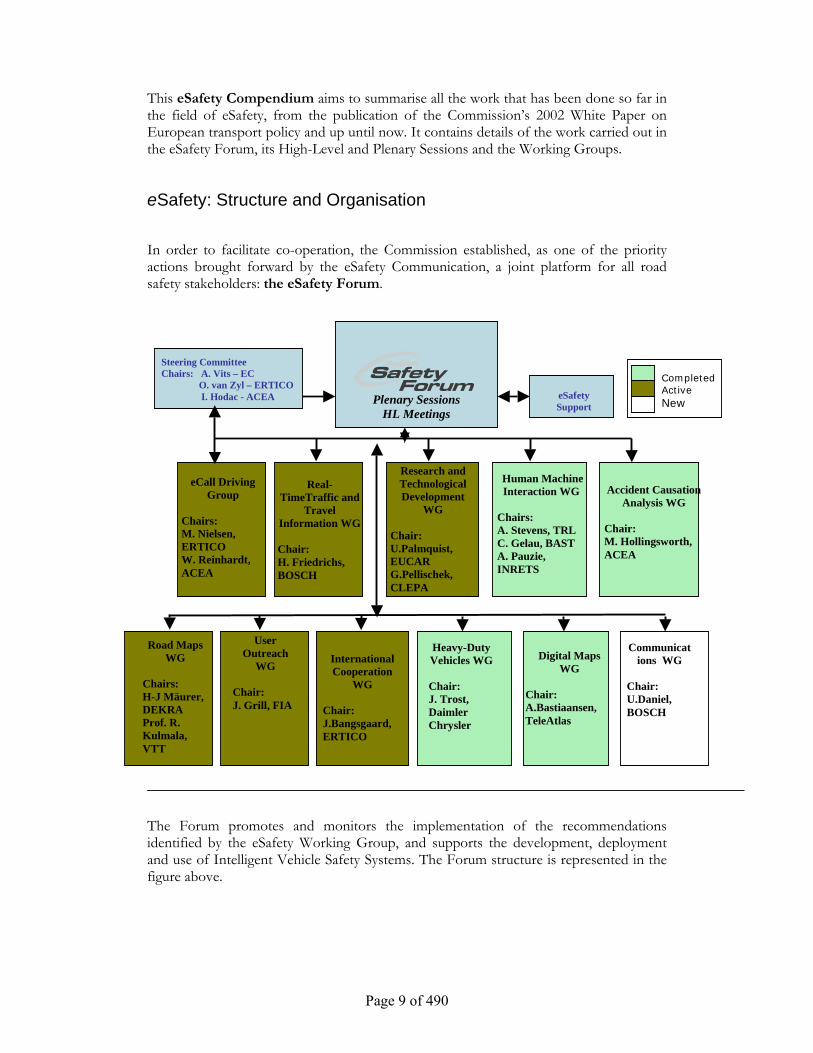
In order to facilitate co-operation, the Commission established, as one of the priority actions brought forward by the eSafety Communication, a joint platform for all road safety stakeholders: the eSafety Forum.
The Forum promotes and monitors the implementation of the recommendations identified by the eSafety Working Group, and supports the development, deployment and use of Intelligent Vehicle Safety Systems. The Forum structure is represented in the figure above.
Plenary Sessions HL Meetings
Steering Committee Chairs: A. Vits – EC O. van Zyl – ERTICO I. Hodac - ACEA eSafety
Support
eCall Driving
Group
Chairs: M. Nielsen, ERTICO W. Reinhardt, ACEA
Real-
TimeTraffic and Travel
Information WG Chair: H. Friedrichs, BOSCH
Research and Technological Development
WG Chair: U.Palmquist, EUCAR G.Pellischek, CLEPA
Human Machine Interaction WG
Chairs: A. Stevens, TRL C. Gelau, BAST A. Pauzie, INRETS
Accident Causation Analysis WG
Chair: M. Hollingsworth, ACEA
Road Maps WG
Chairs: H-J Mäurer, DEKRA Prof. R. Kulmala, VTT
Heavy-Duty Vehicles WG Chair: J. Trost, Daimler Chrysler
International Cooperation
WG
Chair: J.Bangsgaard, ERTICO
User Outreach
WG Chair: J. Grill, FIA
Digital Maps WG
Chair: A.Bastiaansen, TeleAtlas
CompletedActive New
Communications WG
Chair: U.Daniel, BOSCH

Page 10 of 490
The Forum now has more than 150 active members, representing all road safety stakeholders, the European Commission, automotive and telecommunications industry and operators, equipment and service suppliers, motorway operators, road authorities, insurance companies, road safety and user organisations and others. The Forum has established ten industry-led Working Groups that work on priority topics (seven are currently active, and four have completed their work). The Forum holds regular High-Level Plenary Meetings, and has been instrumental in producing the recommendations on which the 2nd eSafety Communication was based. The Forum is managed by the Steering Group, which meets approximately once a month, and has representatives from all the above-mentioned sectors.
The eSafety Forum Working Groups are focusing on domain-specific priority areas that are important for the stakeholders and for the implementation of the actions identified in the Commission Communication. There are currently seven active Working Groups, chaired by industry, and four that have completed their work. An exhaustive description of the Working Group and the reports produced can be found in Chapter 4.
The eSafety Forum Working Groups
Accident Causation Analysis - COMPLETED Real-Time Traffic and Travel Information – ACTIVE
eCall Driving Group – ACTIVE
Implementation Road Maps - ACTIVE
Human-Machine Interaction - COMPLETED Heavy Duty Vehicles - COMPLETED International Co-operation – ACTIVE
User Outreach – ACTIVE
Research and Development - ACTIVE Digital Maps – COMPLETED
Communications – ACTIVE
Type of meeting Description Date
1st Plenary Session Discussions on eCall, Accident Causation, HMI; establishment of four new WGs
April 22, 2003
2nd Plenary Session Discussions on eCall, RTTI, HMI; approval of the 1st Summary Report
November 17, 2003, Madrid
3rd Plenary Session Finalisation of eSafety Forum Recommendations on the basis of the 2003 Summary Report; Decision on next steps
March 25, 2004
4th Plenary Session Towards the full deployment of eSafety 2 June, 2005 Hannover
5th Plenary Session 4 years of the eSafety Initaitive eSafety and the Intelligent Car Initiative
2-3 May 2006, Brussels
Page 11 of 490
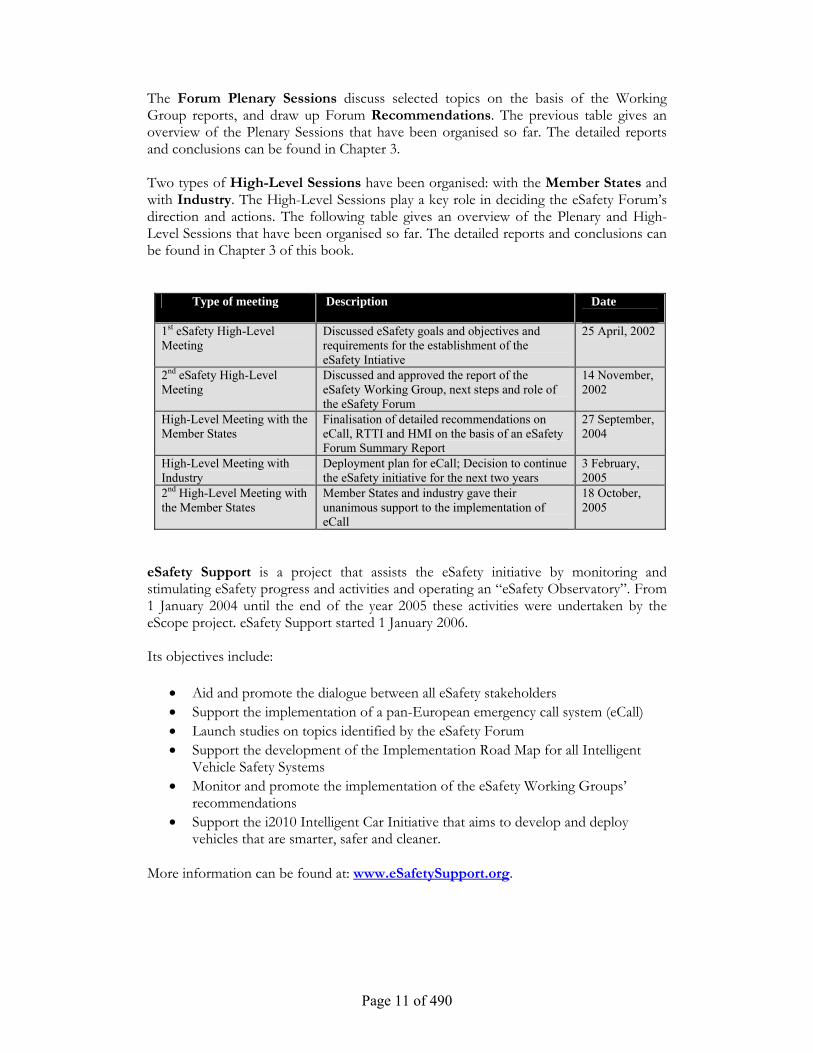
The Forum Plenary Sessions discuss selected topics on the basis of the Working Group reports, and draw up Forum Recommendations. The previous table gives an overview of the Plenary Sessions that have been organised so far. The detailed reports and conclusions can be found in Chapter 3. Two types of High-Level Sessions have been organised: with the Member States and with Industry. The High-Level Sessions play a key role in deciding the eSafety Forum’s direction and actions. The following table gives an overview of the Plenary and High-Level Sessions that have been organised so far. The detailed reports and conclusions can be found in Chapter 3 of this book.
Type of meeting Description Date
1st eSafety High-Level Meeting
Discussed eSafety goals and objectives and requirements for the establishment of the eSafety Intiative
25 April, 2002
2nd eSafety High-Level Meeting
Discussed and approved the report of the eSafety Working Group, next steps and role of the eSafety Forum
14 November, 2002
High-Level Meeting with the Member States
Finalisation of detailed recommendations on eCall, RTTI and HMI on the basis of an eSafety Forum Summary Report
27 September, 2004
High-Level Meeting with Industry
Deployment plan for eCall; Decision to continue the eSafety initiative for the next two years
3 February, 2005
2nd High-Level Meeting with the Member States
Member States and industry gave their unanimous support to the implementation of eCall
18 October, 2005
eSafety Support is a project that assists the eSafety initiative by monitoring and stimulating eSafety progress and activities and operating an “eSafety Observatory”. From 1 January 2004 until the end of the year 2005 these activities were undertaken by the eScope project. eSafety Support started 1 January 2006. Its objectives include:
• Aid and promote the dialogue between all eSafety stakeholders • Support the implementation of a pan-European emergency call system (eCall) • Launch studies on topics identified by the eSafety Forum • Support the development of the Implementation Road Map for all Intelligent
Vehicle Safety Systems • Monitor and promote the implementation of the eSafety Working Groups’
recommendations • Support the i2010 Intelligent Car Initiative that aims to develop and deploy
vehicles that are smarter, safer and cleaner.
More information can be found at: www.eSafetySupport.org.
Page 12 of 490
CHAPTER I - THE 28 ESAFETY
RECOMMENDATIONS
Page 13 of 490
Introduction The eSafety High-Level meeting on 25 April 2002 called for the establishment of a Working Group, to be tasked to further elaborate the European strategy, to recommend actions and to prepare for the next High-Level Meeting. The Commission services established this Working Group, which met four times in 2002 on 7 June, 8 July, 9 September and 8 November. The final report of the eSafety Working Group from November 2002 lists 28 recommendations for further actions within the following eSafety related topics:
Accident Causation Data
Impact assessment of safety systems
Human-Machine Interaction
Road Map for Intelligent Integrated Safety
Intelligent Passive Safety Systems
Intelligent Integrated Road Safety Systems including ADAS
The European Safety Map database
Emergency Calls (e-Calls) and E-112
Real-time Traffic and Traveller Information (RTTI) for road safety
Motor vehicle type-approval legislation
Safety systems standards and regulation in the EU: State of the art
Legal issues of market introduction of Intelligent Integrated Road Safety Systems
Ultra wide-band 24 GHz short range radar
Societal aspects
The different business cases
User Outreach
The eSafety Forum
Page 14 of 490
1.1 Final Report of the eSafety Working Group on Road Safety, Annex 1: 28 Recommendations, November 2002
Legal notice by the Commission of the European Communities.
This report was produced by the eSafety Working Group for the Information Society DG and represents the view of the experts on improving Road Safety in Europe with the use of Information Communications Technologies (ICT). These views have not been adopted or in any way approved by the European Commission and should not be relied upon as a statement of the European Commission’s or the Information Society DG’s views. The European Commission does not guarantee the accuracy of the data included in this report, nor does it accept responsibility for any use made thereof.
Members of the eSafety Working Group
Chair: André VITS – European Commission
Co-Chairs: Ivan HODAC –ACEA, Olivier MOSSÉ – ERTICO
Rapporteur: Juhani JAASKELAINEN – European Commission
· ADAC e.V.–Automobile Club Germany, Bernhard LABUDEK
· ASECAP – European Association of Paying Motorways, Kallistratos DIONELIS · COFIROUTE, Bertrand DE CHANGY
· DaimlerChrysler, Berthold ULMER
· DHV Environment &Infrastructure, F.J.OP DE BEEK
· Dutch National Police Agency (KLPD), Jan MALENSTEIN
· ERTICO – ITS Europe, Ghassan FREIJ
· European Commission (DG ENTR), Neil BOWERMAN
· European Commission (DG INFSO), Antonios BARBAS, David CALLAHAN, Juhani JAASKELAINEN, Fabrizio MINARINI
· European Commission (DG TREN), Keith KEEN, Willy MAES
· FIA – Fondation Fédération Internationale de l’Automobile, David WARD
· Fiat Auto S.P.A. Giorgio AUDISIO, Cesare RAVIGLIONE
· Ford John ARCHER
· IMPACTS – Forum International des Grandes Métropoles pour l’évaluation et le Développement des Systèmes de Transport Intelligent, Hughes DUCHATEAU
· Ministry of Transport &Communications Czech, Republic, Martin PICHL
· Navigation Technologies Europe J.M.ROWELL
Page 15 of 490
· NL – Ministry of Transport, Public Works and Water Management Western European Road Directors (WERD), Paul VAN DER KROON
· Nokia GmbH, Razvan OLOSU
· Orange World, Michel FOND
· POLIS – European Cities and Regions Networking for New Transport Solutions, Jerôme POURBAIX, Maurizio TOMASSINI
· PSA Peugeot Citroën, Bernard COUSYN
· RACC – Real Automobil Club de Catalunya Nuria ALBERTI, Pere SAURET
· Renault, Daniel AUGELLO
· Scania Infotronics AB, Peter GILLBRAND
· Siemens VDO Automotive, Theo KAMALSKI
· Società Autostrade, Sandro TOMASSINI
· Tele Atlas Data Gent NV, Ad BASTIAANSEN
· Vodafone, Passo Stefan VIEWEG
· Volkswagen, Tycho VON JAN
PREFACE
About eSafety
eSafety is a joint industry – public sector initiative for improving road safety by using new Information and Communications technologies5. The overall objective is to join forces and to build up a European strategy to accelerate the research and development, deployment and use of Intelligent Integrated Road Safety Systems including Advanced Driver Assistance Systems (ADAS) for increasing road safety in Europe.
About this report
This is the final report of the eSafety Working Group. The eSafety High-Level meeting on 25 April 2002 called for establishing of such a Working Group, to be tasked to further elaborate the above-mentioned European strategy, to recommend actions and to prepare for the next High-Level Meeting. The
Commission services established this Working Group, which has met four times on 7 June, 8 July, 9 September and 8 November. This report represents the result of the work in the Working Group.
5 For more information, refer to www.eu.int/information_society/programmes/esafety/index_en.htm
Page 16 of 490
1. INTRODUCTION 1.1. Towards a safe and efficient transport system for the enlarging European Union Mobility: a key factor in the enlarging European Union
Transport is a key factor in modern economies: the sector corresponds to more than 10% of gross domestic product and employs more than 10 million people.
Motor vehicles are the biggest contributor to mobility, we estimate that some
80% of travel calculated in passenger – km is currently by car.
The enlarging European Union with increasing demand for transport services needs an efficient transport system, and has to tackle the problems caused by transport: congestion, harmful effects to the environment and public health, and the heavy toll of road accidents.
Reaping the benefits of Information and Communications technologies for safer and more efficient mobility
More and more of the added value – and also manufacturing cost - of vehicles comes from more sophisticated electronic systems which can replace entire mechanical and hydraulic subsystems. An increasing number of vehicle control, safety and comfort functions are controlled by processors and software.
In Europe, we have invested heavily in research and technological development (RTD) for the use of Information and Communications Technologies (ICT) in transport. The EU’s Research Programmes have contributed in realising leading edge technologies, systems and applications for safer, cleaner and more efficient transport. The development of appropriate sensors, actuators and processors has already permitted wide spread implementation of autonomous in-vehicle systems with potential safety effect, such as Anti-lock Braking Systems (ABS) and Electronic Stability Programme (ESP).
It is time now to reap the industrial, economic and societal benefits of these new systems which we call Intelligent Integrated Road Safety Systems. European industry should be able to position itself as a leader the in the world, and at the same time contribute to the reduction of road accidents.
The number of road victims is still unacceptably high
During the last decade, the European Union, Member States and the automotive industry have been actively involved in improving road safety through both accident prevention and injury reduction. Most of the accident prevention measures have focused on the driver, while the measures to reduce the consequences of an accident have primarily focused on the vehicle, through improved passive safety such as crashworthiness, seatbelts, airbags and conventional active safety systems such as braking and lighting.
These combined actions have contributed to the continuous reduction of the number of fatalities on European roads6. Nevertheless, the number of road accidents and the number of road victims are still unacceptably high in the European Union. And even though the number of fatalities on EU roads is decreasing, the number of accidents with injuries is still increasing. Moreover, the contribution of some conventional safety measures is reaching its limits.
6 http://europa.eu.int/comm/transport/home/care/index_en.htm

Page 17 of 490
Further improvements in safety by these measures are becoming more and more difficult to achieve at a reasonable cost.
The goal of the White Paper: 50% reduction of road fatalities
The price paid for mobility in Europe is too high. In 2000, road accidents killed over 40 000 people in the European Union and injured more than 1.7 million.
The directly measurable cost of road accidents is of the order of 45 billion €.
Indirect costs are three to four times higher. The annual figure is put at 160 billion €, equivalent to 2% of the EU’s GNP.
In September 2001 the European Commission presented the White Paper on European Transport policy for 20107. In this paper the Commission set a very ambitious target for road safety: a 50% reduction of road fatalities by 2010, which should bring the number of deaths per year down to 20 000, and simultaneously bring down the number of accidents and injuries.
The use of new technologies cannot achieve this target alone, although it can make an important contribution. Other measures such as infrastructure improvements and enforcement of compliance with current safety measures make an extremely important contribution to overall road safety and must be implemented without delay. The penetration of new technologies to all vehicles will also take a long time, and even in the best of cases will be incomplete by 2010.
Acting at EU, national and local level
The EU has a broad scope to act on road safety and has been active in the following ways since the late 1980s:
• · Legislating where it has exclusive and shared responsibilities
• · Promoting the use of financial instruments and support to create a market for safety
• · Encouraging best practice and information exchange
• · Accident and injury data gathering and analysis
• · Research and development towards future solutions
In the light of subsidiarity and the responsibilities for different aspects of road safety, achieving the targets set in the White Paper cannot be the sole responsibility of the European Union. Shared action encompassing all types of safety measures and all players at the EU, national and regional level is needed. The European Strategy for a partnership approach and proposed measures for improving road safety are brought forward in the Road Safety Action Plan 2002-20108.
7 White Paper European Transport Policy for 2010: time to decide, COM(2001) 370, 12.9.2001 8 Currently under preparation (DG Transport and Energy)

Page 18 of 490
Increasing co-operation between the public and private sectors
The road authorities and the industries have to work closely together on strategic, tactic and operational levels. The WERD9 Subgroup on Telematics is generating strategic recommendations on ITS Deployment for Road Authorities, based on practical experience and analysis. For advancing the deployment of Intelligent Integrated Safety Systems, the public and private sectors should collaborate on fitting together their
• · Strategy goals: Policy objectives and network performance requirements with business goals translated to marketing strategies
• · Tactical goals: Network functions and facilitating services with product portfolios
• · Operational goals: Network operations with services and products
Creating demand for safety
The public perception, expectancy and understanding of in-vehicle safety systems and interaction with infrastructure does not completely align with reality.
Nevertheless, a policy to introduce such systems can be based only on a public demand for safety. If public demand for such systems is to be generated and satisfied, there needs to be a co-ordinated effort by the EU, Member States, automotive industry, Car Clubs, standardisation bodies, insurance industry, and trade associations, and more involvement of police and law enforcement agencies to promote public demand, understanding and acceptance of safety systems. Incentives need to be discussed by industry and presented to e.g. the EU Council of Ministers of Transport and other bodies.
1.2. Using Information and Communications technologies for safer and more efficient mobility Vision for the Intelligent Vehicle
The driver is sitting behind the steering wheel and is driving at 70 km/h. He steers the vehicle into a corner. To do so he uses information acquired by looking at the total road picture, the surroundings and his in-car instruments. The in-car applications continuously receive information from cameras (visible light and infrared), in-vehicle radar systems, digital maps, GNSS satellites for location information, vehicle-infrastructure communication, information from other vehicles and the like. The information collected by these sensors is verified by the in-vehicle control unit, integrated, analysed and processed, and presented to the driver. In this case, there has been an accident on the road, around the corner and not visible to the driver. The Advanced Driver Assistance Systems (ADAS), part of the on-board intelligent integrated safety system intervenes by giving an audible warning (a spoken message), based on information received from vehicles ahead. The driver knows that he remains in control of the vehicle and can always ignore signals or override active assistance. He reduces speed, and is able to stop safely before the accident site. His car starts immediately to broadcast warnings to the vehicles following behind.
9 WERD is the association of managing directors of West European Road Administrations

Page 19 of 490
The driver is also aware that his car is equipped with a sophisticated safety system which can do even more in hazardous situations. Depending on the degree and timing of the danger the system would inform him, warn him, actively assist him or ultimately actively intervene to avoid the danger. If the intervention cannot avoid the crash completely, intelligent passive safety applications will be deployed in an optimal way to protect the vehicle occupants and possibly other parties involved in the accident (vulnerable road users). The system will also automatically contact the emergency services indicating the severity and location of the accident. Improved road safety through the use of new technologies
New systems which use advanced information and communication technologies in new intelligent solutions for improved road safety can reduce the number of accidents on our roads, in particular when the accident can still be avoided or at least its severity significantly reduced. We know that almost 95% of the accidents are partly due to the human factor. In almost three-quarters of the cases the human behaviour is solely to blame. This apparent mismatch between driver skills and situation complexity can be addressed by improvements in three factors: the driver (education and training); the environment (intelligent infrastructure) and the vehicle (vehicle safety systems). This is the area where Intelligent Integrated Road Safety Systems, including Advanced Driver Assistance Systems, offer their greatest potential.
The development of appropriate sensors, actuators and processors, has already permitted wide spread implementation of ABS and stability systems, which help the driver to maintain control of the vehicle even when he has exceeded its ‘normal’ limits of handling. We are now looking towards a new generation of active safety systems and Advanced Driver-Assistance Systems. These systems will take into account not just the driver and the vehicle, but also the environment around the vehicle. Co-operative systems will enable essential safety information to be exchanged between the vehicle and other vehicles, and the infrastructure.
By receiving information from outside of the vehicle, the systems will be able to assess the risk of an accident happening. They can then warn the driver so that he can take appropriate action, or they can even initiate appropriate action. If an accident becomes unavoidable the systems could use that same information to optimise the passive safety systems. Other safety systems can also automatically summon assistance following an accident.
In this approach to safety using new technologies, the European Commission,
Member States, public authorities and industry all have an important role to play.
The necessary actions, which include investments in safety-related information and road infrastructure, have to be clearly identified at an early stage. A European and integrating strategy is required for increasing road safety in Europe.
Community Research: Foundation for safety technologies and applications systems
In the transport sector, the EU has played a leading role in research in Road
Transport Telematics and Intelligent Transport Systems (ITS) since 1988. Under the EU’s Fourth Framework Programme for Research, Technological
Development and Demonstration (1994 -1998), the Telematics Applications

Page 20 of 490
Programme, administered by Directorate-General for Information Society of the European Commission, has realised leading-edge systems and applications.
The current Information Society Technologies (IST) programme10 builds on the success and results of the Telematics programme, continuing research in technologies and applications systems aiming at safer, cleaner and more efficient transport, with research focused on intelligent safety and Advanced Driver Assistance Systems and supporting technologies11. The Intelligent Vehicle cluster of the IST Programme has over 40 projects, with total budget of over 150 million € and Community contribution of over 80 million €. Research into safer vehicles and infrastructures as well as accident databases and human behaviour in road transport is also undertaken in the Sustainable Growth programme12.
The forthcoming Sixth Framework Programme for 2002-200613 will offer new funding opportunities for RTD in Intelligent Integrated Safety including Advanced Driver Assistance Systems and technologies. The new instrument, Integrated Project, which is designed to generate the knowledge required to address major societal challenges, will be especially suitable for research in this area.
Integrated Projects are intended to build a critical mass of activities and resources needed for achieving ambitious, clearly defined scientific and technological objectives. They are co-financed up to several tens of millions €, with the duration of typically three to five years. Towards large-scale deployment of Intelligent Integrated Road Safety Systems
The potential contribution of the introduction of Intelligent Integrated Road
Safety Systems including Advanced Driver-Assistance Systems for enhancing road safety and security has already been demonstrated by the industry in a number of European RTD projects. However, to realise the potential benefits, the new systems have to be widely deployed in the marketplace.
The technology is in some cases already fully developed. Unfortunately in most cases there is still an important gap between technology development and its deployment at a reasonable cost and in sufficient quantity. These technologies have to be assessed in co-operation with the industry in terms of their impact on accident reduction and their cost, so that priorities can be set for their introduction. Liability, standardisation, certification, and financial incentives need to be considered.
New technologies for more sustainable transport
The environment has become a major influencing factor on the motor industry.
Environmental legislation affects both the design and performance of motor vehicles and the ways in which they are manufactured. In addition environmental considerations have also become an argument for sales of vehicles.
10 The Information Society Technologies Programme is part of the European Union’s Fifth Framework Programme for research and technological development (RTD), covering the period 1998-2002 11 www.europa.eu.int/information_society/programmes/esafety/index_en.htm 12 See www.europa.eu.int/comm/research/growth/gcc/menu-researchthemes.html 13 Council decision 3 June 2002 concerning the specific programmes implementing the Sixth Framework Programme 2002-2006 of the European Community for research, technological development and demonstration activities (2002-2006)

Page 21 of 490
For both cars and commercial vehicles, great progress has been made in reducing the levels of pollutant emissions from the tailpipe and by evaporation.
Emissions of noise have also been reduced. Further actions, though, might be necessary to ensure sustainable mobility.
These actions include measures to make the road transport less energy consuming and polluting; to address the full life cycle of vehicles, including recycling; to improve safety and reduce accidents, injuries and fatalities, and measures to make the transport system more efficient. The best tools available for us today for achieving sustainable mobility are those offered by new technologies. The way forward is the approach of the intelligent vehicles and intelligent transport systems. The technologies improving safety have the potential to contribute also towards more sustainable transport.
2. INTELLIGENT INTEGRATED ROAD SAFETY SYSTEMS 2.1. The problem: Human errors in road traffic Research has shown that 90-95% of road accidents are partly caused by human errors. In order to identify relevant errors a behavioural study/model is necessary. In the most quoted models distinction is normally made between the strategic level, tactical level and operational level.
Literature shows that the probability of human errors depends on certain error shaping conditions:
– External conditions e.g., limitations of vision by obstruction or blinding
– Errors caused by distraction (e.g., phone, conversation)
– Overload
– Underload, caused by extended absence of sufficient stimuli (highway hypnosis)
– Physical condition of the driver: fatigue, alcohol and drug abuse.
– Insufficient interaction time (high speed differences)
– Unfamiliarity with location and/or local driving behaviour
– Ignorance
– Lack of adequate skills or training
Furthermore, an important general error shaping condition is the available time (hurry). Aside from this list, errors in judgement of own capabilities, vehicle capabilities and assessing the state of the environment are of importance. It is obvious that active safety systems and applications which support the driver’s perception can help the driver to perform his or her complex driving task, if the design of the system is according to the important human-machine interaction principles.

Page 22 of 490
2.2. Taking an integrated approach to road safety
Integrated Intelligent Road Safety Systems will use information society technologies and intelligent transport systems in vehicles and the infrastructure for improving the safety of the vehicle, taking an integrated and global approach to safety, where the involvement of and interaction between the driver, the vehicle and the road environment are addressed together. Integrated Safety Systems will help the driver in vehicle control and use new sensors for collision warning and mitigation, lane keeping, vulnerable road user detection, driver condition monitoring and improved vision. Other technologies will provide for automatic emergency calls, adaptive speed limitation, traffic management and parking aids.
All safety systems which are introduced into the vehicles should be designed to meet certain basic requirements: reliability over time and with regard to external influences, robustness in case of a system malfunction or misuse, perceptibility of the human machine interface, comprehensibility and predictability of system functionality, controllability in every situation and consideration of foreseeable misuse.
As the life-time of the in-vehicle telematics products is substantially shorter than that of the automobile, open systems architecture, standards and interchangeability are key issues, offering also the industry the possibility to develop components and software for use in a variety of in-vehicle and portable platforms, with multiple types and multi-sensorial interfaces (visible, audible, tactile etc.). For the industry at large, the challenge is to develop new, dependable open software and applications, aiming at offering the consumers a wide choice of competitive, interchangeable, upgradeable, personalised, and seamlessly networked products and applications. The vehicles have to remain safe and in compliance with the legal requirements, also if these new systems are fitted in the after-market.
2.3. Extending autonomous on-board functions with interactive and co-operative systems
Most of the existing safety systems and those under development operate autonomously on-board the vehicles.
Autonomous systems have their limitations. Enabling the vehicle to communicate with other vehicles or with an intelligent infrastructure could bring further benefits, including the extension of the functionality for preventive safety.
Today, initial or experimental implementation of these systems already exists, e.g. e-Call, speed warning systems on specific stretches of road; traffic information and hazard-warning. In the longer term, co-operative traffic control and management will become a possibility when vehicle on-board systems can interpret data from sensors embedded in infrastructure, supplementing or replacing conventional visual signals and enhancing safety. Infrastructure-to vehicle communication can be used to realise traffic sign recognition and to transmit speed limit information. Furthermore, information about critical road conditions (e.g. stationary vehicle or icy road ahead) can be transmitted, if suitable sensors are located at the road side.

Page 23 of 490
It can be expected that in the near future, many of the onboard safety functions will be complemented by co-operative technologies, while further advances in road safety are brought by co-operative functions. Therefore, in this report the safety systems are addressed by safety function. Some of these functions are based completely on autonomous in-vehicle technologies while some others use also complementary, interactive technologies.
2.4. The most effective safety function Most of the accident databases relate the accident to a small set of accident
manoeuvres. However, the distribution of the registered accident causes varies per country, and the data collection methods in the different countries vary also.
Most accidents are also a consequence of multiple problems.
For these reasons, it is not possible to determine today what might be the most effective safety function and which function would save most lives. Therefore, the industry is engaged in the development and deployment of a relatively large number of Intelligent Integrated Road Safety Systems, like safe speed and speed warning, vehicle collision alert system, lane support, safe following, pedestrian protection, intersection safety, vehicle dynamics, driver monitoring and improved vision and perception systems. These systems, their potential impact and the complementing co-operative systems such as Emergency Call and Traffic and Travel Information are discussed in detail in the next Chapter.
3. THE BUILDING BLOCKS FOR INTEGRATED SAFETY 3.1. The need for Accident Causation Data One of the most important building blocks in setting up a strategy for the deployment of intelligent integrated road safety systems into the vehicles is the availability of a European wide database of accident causation data. Only on the basis of clear statistics on the causes of accidents can the impact of new safety systems be evaluated and the real potential of these systems highlighted.
Targeted actions can then be formulated, and the deployment accelerated.
Accident statistics for all Member States exist (e.g. the EU CARE database14), but consolidated data on accident causation does not. However, in some countries comprehensive data sets are available and automotive manufacturers and insurance companies have also substantial data sets (e.g. GEDAS, LAB, DEKRA and Volvo databases). A European Accident Causation Database is needed. Such a database might be built on the same foundations as the current EACS database15. EACS is not sufficiently large nor is its coverage enough to guarantee the kind of reliable picture of accident causation required.
14 CARE database: http://europa.eu.int/comm/transport/home/care/index_en.htm 15 European Accident Causation Survey (EACS) Methodology, ACEA with the support of the European Commission and European Road Safety Federation (ERSF)

Page 24 of 490
Nevertheless, it could form the basis of a suitable database. Another important aspect that should be taken into consideration when building this database is the homogeneity of the data collected in the different European countries. This could be ensured through the development of a European system based on an easy to use advanced IT software for homogeneous data collection and processing.
Recommendations:
(1) Consolidate analyses from the existing EU, Member State and industry road accident data which give information on the cause and circumstances of the accidents, for allowing the determination of the most efficient countermeasures, starting from the most frequent accident types.
(2) Define a common format and structure for recording accident data in the EU countries. Develop jointly an European Accident Causation Database covering all EU and enlargement countries, and provide open access to industry and public agencies.
3.2. About the impact assessment of safety systems Before the market introduction of any safety-related new functions on the vehicles, their potential impact on road safety, and possible negative side effects have to be analysed. This is imperative from the point of view of the liability of manufacturers, estimation of socio-economic cost-benefit, and consumer awareness and protection.
Unfortunately a systematic assessment of the impact of intelligent safety
systems on road safety for Europe does not yet exist. Some preliminary data has been obtained in studies performed by individual automotive manufacturers and in EU funded RTD Projects. Additional data is available from U.S. studies, and those undertaken by some Member States. This data is not, however, sufficient due to the fact that most of the systems are at prototype level and the existing impact assessments in real environments are done on too small samples or through simulation.
In the view of European vehicle manufacturers there is no completely certain ex ante way of assessing the impact of the introduction of technologies or functions on accident or casualty rates, especially for active safety devices.
Nevertheless, the potential impact of safety systems including ADAS can be derived from the analysis of accident causation data. Here also a European database for accident causation data is urgently required.
Once a database of accident causation has been established, scenarios for the most common accidents can be drawn up. By studying the most frequent accident scenarios and their associated causes, it is possible to determine a priori which technologies/functions might have avoided the accidents or mitigated their severity, and to assess the relevance/potential of given technologies in these scenarios. Also, the evaluation of the possible side-effects has to be performed.
Recommendations:
(3) Develop methodology to assess the potential impact of intelligent integrated safety technologies in Europe based on the accident causation data. This work should carry out analysis of combined systems (fusion of sensors, integration and use of multiple active safety systems together).
Page 25 of 490
Develop validation methodology and procedures for vehicles equipped with Intelligent Integrated Road Safety Systems.
(4) Set up a coordinated validation framework for operational tests for active safety systems in the Member States.
3.3. Human-Machine Interaction Information transmitted to the driver might distract him or her from the current task. This might be dangerous if the driver is performing a difficult manoeuvre.
Systems of prioritisation and management of information can be implemented.
Human-Machine Interaction with increasingly more complex in-vehicle systems is a major concern. To tackle this other important issue, the Commission published in 2000 a Recommendation on Safe and Efficient In-vehicle Information and Communication Systems16. This Recommendation requests the industry to take account of guidelines contained in the recommendation, and the Member States to follow-up their implementation and to report to the European Commission within a period of one year. Some Member States have answered, but the picture is still incomplete.
Recommendations:
(5) Assess the reports by the Member States on the Commission Recommendation
“Statement of Principles on safe and efficient in-vehicle information and communications systems”, and decide on further actions as necessary taking into account the rapid development in this area.
The use of portable (nomadic) devices requires urgent assessment of risks.
(6) Develop workload assessment, testing and certification methodology and procedures for complex in-vehicle working environments involving interfacing with in-vehicle devices for vehicle control, driver assistance, intelligent integrated safety, including Multi-Media systems.
3.4. Road Map for Intelligent Integrated Safety Why a Road Map?
The Intelligent Integrated Road Safety Systems hold a huge promise of a safer future for all road users. Some of these systems are already on the market, and more will follow. Gradually, these systems will assist the driver in maintaining safe speed, following other vehicles safely, avoiding un-intentional lane departure and accidents at intersections, detecting in time the vulnerable road users, and help him in all emergency situations.
16 Commission Recommendation of 21 December 1999 on safe and efficient in-vehicle information and communication systems: A European statement of principles on human machine interface Text with EEA relevance (notified under document number C(1999) 4786) , published in the OJ 25 01 2000 L19

Page 26 of 490
Their market introduction is, however, a highly complex issue, involving policy, technological, societal, business, legal and consumer aspects. In the market introductions, we have to carefully balance the following perspectives:
• The automotive industry has to be allowed to undertake market introductions freely, based on their own assessment of the technological readiness and safety (functionality, reliability, robustness), the market situation and competition, availability of supporting infrastructure and incentives, etc.
• The consumer demand, and willingness to pay for Intelligent Integrated Road Safety Systems depends on public perception of potential usefulness and benefits. It is clear that public perception cannot be based on individual safety technologies, because this is far too complex. The use of relatively simple, universal concepts for vehicles equipped with (the same) set of safety features would be clearly beneficial.
• The safety functions should be standardised at functional and operational level,
so that they operate in a similar, predictable way in all vehicles.
• From the societal point of view, it has to be possible to estimate the potential impact of the Intelligent Integrated Road Safety Systems on road accidents and fatalities, and to use this information to determine if further measures are required. For example, financial or tax incentives, directives and regulation can be used for harmonising the market and enabling take-up.
• The industry is mainly targeting the introduction of the new systems in new vehicles. However, considering the replenishment rate of the existing vehicle fleet, additional measures may be required for removing older vehicles from the fleet, and/or equipping vehicles in circulation with more efficient safety systems.
A Road Map that balances the above-mentioned views, and introduces clear
milestones for Intelligent Integrated Road Safety Systems is therefore seen as a key element for their successful take-up. This Road Map should indicate the
technical and economic capability of the automotive industry to deploy intelligent integrated safety solutions, and, for the public sector, the time-table for infrastructure investments and other support measures.
Intelligent Integrated Safety: Technical maturity
The following is a summary of the potential maturity of the various Intelligent
Integrated Road Safety Systems, based on the analysis later in this Chapter and the results from EU supported RTD:
Safe speed
Systems that warn the driver of excessive speed or assist him or her to keep to the speed limit could be put in vehicles using on-board digital maps (EU RTD Projects ACTMAP and NEXTMAP), using infrastructure-based systems, or their combination. These systems are not yet fully mature for the market introduction, mainly because of unavailability of speed data attributes for the digital maps.
The work done by National governments such as the Netherlands, the UK,
Sweden and Belgium should be followed closely and a benchmark or best practice exercise could be launched.

Page 27 of 490
Lane support
Lane keeping, lane departure warning and blind spot detection could have a large impact on road safety. A system performing these functions is commercially available for trucks. These systems were also developed and tested in FP4 projects (IN-ARTE and LACOS) they exist as prototypes for cars.
Safe following
ACC is already in the market, although only in top-of-the-range cars. It is expected that ACC will be made available in more and more of the new cars, when the manufacturing costs, especially the sensor technology gets cheaper.
Pedestrian protection
Technologies for pedestrian protection, like PROTECTOR or SAVE-U are not mature yet. Follow-up of the progress in developing and deploying measures to improve pedestrian protection included in the indicative list in the industry commitment on pedestrian protection17 is required.
Improved vision
Systems for artificial vision or improved vision already exist but they are expensive. Implementation of intelligent lighting systems should be supported, although they are anyway coming into the market little by little (always in the top-of-the-range vehicles first).
Driver monitoring
RTD projects are working on it and first results are promising but technologies and systems are not mature for the moment.
Intersection safety
Very little exists for in-vehicle systems, the problem could be better and faster solved with systems based on the infrastructure. A great deal could be done by improving infrastructure: intersection design and construction. These improvements are essential for achieving benefits from intelligent integrated road safety systems.
Vehicle dynamics
Electronic Stability Programme (ESP) is in the market and has a significant impact on better vehicle stability especially in avoiding skidding and while breaking. The implementation of ESP in all cars could be promoted.
Work on vehicle dynamics through the x-by-wire is very interesting and looks very promising but solutions are not yet available for full drive-by-wire.
Vehicle-to-vehicle and vehicle-to-infrastructure communication
17COM(2001) 389 final, 11.07.2001 – Communication from the Commission to the Council and European Parliament – Pedestrian protection: Commitment by the European automobile industry
Page 28 of 490
Ongoing activities aimed at providing drivers with on-line information e.g. by road operators using DSRC link show promising developments. However, in the specific case of co-operative safety systems, these by definition pre-suppose that other vehicles and/or infrastructure are also be equipped with the system, in order to become effective. However, in the market introduction phase this precondition cannot be expected to be easily met. Thus, an early buyer of the intervehicle or infrastructure-based hazard warning system is unlikely to perceive immediate benefits and consequently, he/she may not be willing to pay for the system before a significant percentage of other equipped vehicles are already on the roads and the infrastructure are equipped.
Short and medium-to-long term time to market
The analysis above indicates that there are a number of systems that still need to complete the basic RTD phase and are therefore not yet ready to be considered for commercialisation.
Other systems are being considered for commercialisation but are still dependent on market demand and a valid set of business conditions. These could be considered for early launch but only when all supporting factors are in place.
Recommendations:
(7) a) Develop regularly reviewed Road Maps with technical steps and economic implications for the introduction of Intelligent Integrated Road Safety Systems.
These Road Maps should indicate the technical and economic capability of the stakeholder industries to deploy intelligent integrated safety solutions. b) The public sector Road Maps should indicate the investments required for improvements in the road networks and information infrastructure based on the industrial Road Maps, and identify the steps needed for removing regulatory barriers.
3.5. Intelligent Passive Safety Systems Intelligent passive safety technologies encompass the sensing technologies that enhance the passive safety systems and reduce the seriousness of unavoidable crashes. Examples of the technologies include pre-crash sensing, activation of passive safety systems adapted to optimise protection (including systems for the protection of vulnerable road users) and anticipated alerting.
The passive safety systems will keep on contributing to the reduction of the number of road fatalities. Intelligent passive safety systems, which use information from active safety systems for adapting to the parameters of the unavoidable collision, are expected, to be more efficient.
3.6. Intelligent Integrated Road Safety Systems including ADAS Safe Architecture
Vehicle Electronics Safe Architecture is the basic building block on the way towards the development of cost-effective in-vehicle safety technologies, starting from active chassis control. Significant effort has to be put into the development of fail-safe technologies, on-board communications, sensors and actuators with a particular emphasis on sensor fusion.

Page 29 of 490
Safe speed and speed warning
These systems relate to keeping a safe speed for instance related to the road and environment or when approaching curves, congestion or adverse road conditions. Examples of these systems include curve speed prediction, traffic sign recognition, speed advice, road status, and intersection support using vehicle - infrastructure communication. It is possible to develop systems linked to intelligent speed adaptation, based on GNSS positioning or vehicle-to infrastructure communications e.g. using DSRC or a combination of the two, that will alert drivers to the speed limit according to the current traffic situation. A link with traffic models could allow better short term forecast of traffic conditions.
Excessive speed is one of the major causes of accidents on European roads.
Speed is intimately related to the risk and severity of a crash. The UK
Department of Transport18 states that research has shown that speed is a factor in about one-third of all road accidents. The report says that excessive and inappropriate speed is a contributing factor to the death of around 1200 people each year and to injure 100,000 more. The German Federal Statistic Office19 identifies 88,770 accidents, or 25%, in 2001 in which “unadapted speed” is a factor. An ADAS function for safe speed, safe following and improved vision and stability could be beneficial in reducing frontal and rear end collisions. Speed warnings could reduce the seriousness of perhaps 500,000 accidents and reduce fatalities by 10-12,000 per annum.
The safe speed systems have a potential for both increasing safety and improving traffic flow. On motorways, for example, vehicles moving much slower or much faster than the median speed are over-involved in accidents. In 30 km/h zones it is shown that traffic-calming measures have good potential to reduce accidents. It is widely recognised by the stakeholders (industry, road authority) that these applications should be assisting the driver in keeping a safe speed , i.e. that the driver should remain attentive to the driving task and responsible for the vehicle’s actions (driver in the loop).
Vehicle Collision Alert System
On European roads, many accidents occur due to poor visibility. Especially in the case of fog, the number of severe traffic accidents is significantly above average.
Rear fog-lights and hazard flashing lights as well as the vehicle´s optical warning devices, are in many cases not sufficient for timely and effective alerting of drivers of following vehicles. Hazard warning systems based on sensors as well as direct vehicle-to-vehicle communication link can improve traffic safety significantly in such situations.
Possible technical options are currently being investigated, e.g., in the German- French research project DEUFRAKO-IVHW, a low cost system for inter-vehicle hazard warning on roads has been specified and has been demonstrated. The system is designed to create perceivable benefits at an expected penetration rate of 10-15 %.
18Tomorrow’s Roads: Safer for Everyone, http://www.roads.dft.gov.uk/roadsafety/strategy/tomorrow/ 19See website www.destatis.de/basis/e/verk/trafttab9 (also time series data available from the same source)
Page 30 of 490
Lane support
These systems decrease unintentional lane departure, leading to a decrease of collisions with other vehicles and single vehicle accidents usually associated with road departure. Lane support currently exists as an autonomous in-vehicle system. The possibility exists to extend this by vehicle-to-vehicle communication to a system which alerts road users to unexpected changes of lane. Examples of these systems include Lane keeping, Blind spot warning, Lane Change
Assistant, Driver Drowsiness Detection and warning. Lane support systems may require complementary/support infrastructure investments (e.g. better lane markings).
The German Federal Statistical Office20 estimates that of 466,863 road accidents in 2001, 54,908 were attributable to overtaking errors, or mistakes while turning off. Unfortunately the number of fatalities is not reported.
Preventing steering errors in heavy traffic will lead to fewer serious accidents and associated consequences for infrastructure use. Active heading control systems will also strongly contribute to the user comfort. Deployment is slowly taking up, but only in the freight sector (trucks). Nevertheless in Japan some cars equipped with lane keeping and lane departure warning systems are already in the market.
Safe following
These systems will automatically maintain distance and optionally adapt the speed. This function could be implemented through a class of collision mitigation systems, building on today’s cruise control systems, with added sensors, warning systems and communications. Most of the proposed systems require a well-controlled traffic situation, such as found on motorways. Examples of these systems include Collision warning, Collision mitigation, ACC, Platooning, Stop & Go, and Vehicle-vehicle communication.
The avoidance of the primary instance of collision can be successfully repeated by passing warning data, and possibly causing a partial activation of braking systems, through a chain of following vehicles. This should lead to a reduction of multiple vehicle crashes.
The German Federal Statistic Office estimates that 55,740 accidents, or 15%, involved insufficient distance between vehicles. In a study done at Volkswagen, an analysis of the pre-crash braking behavior shows that in severe accidents about 85% of drivers either did not brake at all or not to the full possible deceleration. While the human factors behind this are still not perfectly understood, this finding is the rationale for Assistant systems that maintain a safe distance between vehicles (ACC, Stop&Go) or that assist the driver in emergency breaking maneuvers.
Pedestrian protection
The voluntary commitment by the European automotive manufacturers covers a set of measures for the protection of pedestrians. This commitment covers testing of the fronts of the vehicles, support for ICT in improving active safety (as suggested in Annex IV of the Commitment) and the progressive installation of additional active safety measures.
2016 http://www.destatis.de/e_home.htm

Page 31 of 490
Active pedestrian protection systems can warn when the risk of an accident with a pedestrian or a vulnerable road user is high, and significant safety improvements can be expected in urban and rural areas. There is a strong link to (intelligent) passive safety systems. Examples of these systems include: Vulnerable road user protection, Pedestrian awareness.
15% of the total number of people killed on European roads are pedestrians, and 28% are vulnerable road users21. Although the relevant technologies are not mature today, it is important to continue research into ADAS functions for the protection of vulnerable road users.
Intersection safety
Evidence suggests that intersections are particularly dangerous. They are also a particularly challenging problem for collision mitigation systems. Alongside the conventional vehicle-related collision warning systems, there are also systems in development (particularly in Japan and the USA) that monitor dangerous intersections and warn or inform drivers of vehicles entering or approaching the hazardous zone. These systems employ detection functions and road-side vehicle or even vehicle-vehicle communication. Due to the high complexity of these situations, the requirements for reliability and accuracy are high. Strong potential is expected in complex urban and rural intersections.
UK statistics22 indicate that 61% of personal injury accidents happen within 20 meters of a junction. NHTSA23 claims that 30% of all crashes occur at intersections, causing 6700 fatalities per year. The German Federal Statistical
Office identifies 86,497 accidents involving failure to observe priority or on entering the road (overall 34% of the accidents happens at intersections, with failure to observe priority 19%, turning off mistakes 10%, entering or starting off the road 5%). This suggests that feasible technical solutions reducing this type of accident by 50% would save 6000 - 7000 lives per year in Europe.
Vehicle dynamics
These systems combine vehicle dynamics and speed assistance and support in managing the vehicle when for example to reduce the braking distance or to prevent it from skidding or rolling over. These systems may lead to a decrease in serious accidents, especially in freight transport, as these systems are especially attractive for heavy road users. Examples of these systems include roll-over warning systems and roll stability control, road surface monitoring (loss of traction alarms)
21See the CARE database, http://europa.eu.int/comm/transport/home/care/index_en.htm 22Department of the Environment, Transport and the Regions. Personal Injury Road Accidents: Great Britain 1998. 23 National Highway Traffic Safety Organisation (U.S. Department of Transport), http://wwwnrd. nhtsa.dot.gov/departments/nrd-30/ncsa/index.html

Page 32 of 490
Most promising for the mitigation of lateral impacts is a system that maintains stability (i.e., reduces side-slip angle). It will be beneficial even under the most pessimistic assumption that it does not avoid any accidents but simply transforms them from lateral to frontal, which are generally more survivable. This change alone would already reduce the fatality rate in this type of accidents from about 18% to less than 7%24. Such a system, known as ESP, is now optional or even standard on many current passenger cars. Preliminary findings on accident causation analysis seem to confirm a very high efficiency of today’s ESP systems in terms of reducing skidding. This observation is also in line with an a priori estimation of ESP efficiency published by the German Insurance Association. Future automobiles may provide an even better platform for stability control. Steer-by-wire systems will enable ESP not only to apply the brake on selected wheels but also directly to influence steer angle. Precision navigation systems and digital maps will provide accurate information on the vehicle’s position with respect to the environment. Thus ESP will no longer solely depend on steer angle information to determine the desired vehicle trajectory.
Driver monitoring
Driver monitoring systems which are currently in the research phase can non intrusively detect driver drowsiness and/or degraded driver performance, and provide in-vehicle warnings. In the future it will be possible for such warnings to be sent to a traffic control centre to enable appropriate measures to be taken.
Warnings could also be sent to adjacent vehicles.
The previously cited UK report states that between 10 pm and 4 am 672 people were killed with a further 5363 seriously injured in 2000. NHTSA claims that drowsiness was a factor in crashes in which over 1400 fatalities occurred.
Overall in the UK, 1926 deaths occurred at night or in wet conditions on roads in 2000, or some 56% of total deaths. A UK Department of Transport publication states that over 16,000 accidents in 1998, including 460 deaths were caused by accidents where at least one driver was over the legal alcohol limit. The same source states that fatigue may be the principal factor in around 10% of all road accidents.
Although it is difficult to draw a firm conclusion, systems to warn of fatigue and reduced driver performance, especially if integrated with enhanced vision and road-state data, might save a large number of lives.
Improved vision systems
Improved vision systems help the driver in his task to perceive the environment, especially when in difficult conditions, like night and bad weather. Examples of these systems include improved infra-red vision systems and adaptive lighting systems for different driving conditions.
24 Based on data in the GIDAS Database

Page 33 of 490
Need for further RTD in technologies for safety systems
The future development of the above-mentioned safety functions requires RTD in a number of technologies. This RTD should cover, as relevant, improvements in sensors and sensor data fusion, situation capture in complex environments, improvement of vision during night or detrimental meteorological conditions, failsafe systems, advanced adaptive restraint and safety systems, vehicle electronic safety architecture, vehicle-to-vehicle and vehicle-to-infrastructure communications technologies, accurate and reliable location technologies, safety uses of DSRC and pedestrian detection and protection technologies.
Recommendations:
(8) Analyse existing accident causation data and possible countermeasures, and determine clear goals and priorities for further RTD in Intelligent Integrated Road Safety Systems in industrial research, Community Research (Integrated Projects in the 6th FP) and national research programmes.
(9) Identify existing specifications, and where necessary develop new specifications for pan-European, standardised interoperable interfaces and communications protocols for vehicle-vehicle and vehicle-infrastructure communications which will support interactive, co-operative safety systems and services, including Traffic and Travel Information.
(10) Pursue international co-operation in the development of intelligent integrated safety technologies.
The co-operation should cover especially Human-Machine Interaction, certification and testing methodology and procedures, harmonisation and standardisation, legal issues, impact and socio-economic benefit analysis, and benchmarking/best practice.
3.7. The European Safety Map database General principles
Navigation systems are increasingly becoming standard equipment in European cars. Based on the positioning capability of the vehicle, location-aware driver information systems can be built, that increase road safety by informing the driver in advance of safety issues related to the road section ahead.
Implementing map based safety systems that provide on-the-spot as well as predictive road information e.g. speed alert, curve warning, slope warning, require an appropriate digital map which contains the respective road safety related data attributes.
It is evident, that these safety related data must be of particularly high quality and reliability and that a permanent up-date process will be required to ensure the data quality also over the life time of the vehicle.
Market forces that drive the navigation market push currently for additional trip/travel related content (e.g. points of interest, tour information, service related data), and not for safety relevant road network data (e.g. speed limits, road bend shapes, slope gradients, road danger warnings).
Page 34 of 490
Considering these current market signals, it is evident that due to commercial constraints a European Road Safety (ADAS) Map Data base, a key enabler for autonomous applications, is not likely to appear on the market as a sufficiently low-cost product which would enable large scale take-up of safety applications.
This finding is in line with the experiences of traffic information services, which have shown that the citizen is not willing to pay additionally for traffic congestion or traffic safety related information, as it is clearly seen as one of the tasks of public authorities in ensuring safe and efficient mobility.
Actions required
Thus, the lack of a digital map containing safety related road data of high quality, turns out to be a major barrier for the introduction of autonomous and interactive safety systems.
European road map data bases containing additional agreed attributes for driver-support and advisory purposes should be produced, maintained and certified under the responsibility of a public-private partnership and made available at acceptable prices for end users (possibly free of charge) and in an open format to all parties interested in implementing Intelligent Integrated Road Safety Systems and services. This partnership should among other tasks, define which data, attributes, functions and services will be required from both the mapping industry and the public sector road authorities, and determine how they will be compiled and certified. An important additional application will be the production of a specific database for commercial vehicles including data on weight, height and width restrictions on the road network.
The mapping suppliers already have an extensive road map data base to which must be added agreed road safety attributes. These should be provided in digital form to industry standards by the public sector authorities.
As a consequence, suitable business models need first to be established by all parties concerned, with the goal of ensuring delivery of digital road safety map data bases by the mapping industry, ensuring appropriate revenue generation for the private mapping suppliers involved.
Recommendations:
(11) Based on existing research results, define requirements for a European digital road map database. This database should contain in addition to road map data agreed road safety attributes for driver-support for information and warning purposes, such as speed information and road configuration data.
Create a public-private partnership to produce, maintain certify and distribute this digital road map data base. It should be made available for all users at affordable prices (possibly free of charge). National, local and regional authorities and operators should provide safety-related data on road configurations within their networks, with target dates for implementation.
Page 35 of 490
3.8. Emergency Calls (e-Calls) and E-112 E-112 regulation and implementation in the EU
The response time of emergency services attending the scene of accidents varies greatly across different regions of the Union. Infrastructure operators and authorities currently depend on notification of accidents and incidents through telephone calls (fixed, and increasingly mobile), or through data provided by video, radar or other sensing equipment. Especially in the case of mobile calls, the location of the accident or incident cannot be accurately determined in 40% of the cases.
Providing accurate positioning information will reduce response time, reduce trauma in victims, increase survivability and provides the opportunity for enhancing the complete incident and road emergency management chain. A study conducted by the European Commission indicates that a 10% reduction of fatalities can be achieved by improvements in the response time, due to better location information25.
Therefore, the Commission launched an initiative for making it mandatory for telephone network operators to provide the best possible caller location information available to emergency authorities. This provision is contained on the new electronic communications package26 (Universal Service Directive, Data Protection and User Rights Directive, which regulates access to location data and privacy), and will become mandatory in all Member States from July 2003.
Privacy is a major concern in the provision of location information. The majority of the users agree that in case of a life-threatening emergency, privacy and the authorities should overrule data protection rights. 64% of the users even go so far to accept recording of the call, in order to be able to reconstruct the process later if needed.
Besides the provisions mentioned above, implementation guidelines are required. These will be published by the European Commission by the end of
2002 in a Commission Recommendation on the processing of caller location information for the purpose of location-enhanced emergency call services.
These implementation guidelines are based on the deliberations of the
CGALIES27 group and a recent study on caller location in telecommunications networks28.
25IST-1999-14093 LOCUS Location of Cellular Users for Emergency Services, http://www.telematica.de/locus 26Directive 2002/21/EC of the European Parliament and of the Council of 7 March 2002 on a common regulatory framework for electronic communications networks and services (Framework Directive) Directive 2002/22/EC of the European Parliament and of the Council of 7 March 2002 on universal service and users' rights relating to electronic communications networks and services (Universal Service Directive) Directive 2002/58/EC of the European Parliament and of the Council of 12 July 2002 concerning the processing of personal data and the protection of privacy in the electronic communications sector (Directive on privacy and electronic communications) 27Final Report of CGALIES (Co-ordination Group for Access to Location Information by Emergency Services), http://www.telematica.de/cgalies/ 28Caller Location in Telecommunication Networks in View of Enhancing 112 Emergency Services, 30
Page 36 of 490
Commercial in-vehicle e-Call systems
In cases where a vehicle is involved in an accident, an emergency call with location information can be initiated automatically. This basic function which should be implemented immediately can be in the future complemented with additional safety-related information, which can be passed to the call center via a commercial Service Center.
From project surveys carried out by the EC-funded project E-MERGE in the partner countries, users clearly preferred an automatic call (in the case of Airbag release) and manual call (via SOS button) system. Exact location information is seen as the most important feature of an in-vehicle emergency-call system. The majority of people have no objections to their telephone number being displayed at the call centre to facilitate a call back if needed.
The Public Service Answering Points (PSAPs) are normally not yet equipped to handle the location information or the above-mentioned additional information for the provision of location-enhanced emergency services. The automotive industry together with service providers is currently developing data requirements and interface specifications for vehicle-originated emergency calls, or the so called e-Calls29. The aim is to establish specifications and call routing and handling procedures which would allow for pan-European interoperability.
To reach economies of scale and to drive adoption rates that allow for Community-wide benefits to be realised, an integrated strategy for pan-
European emergency services needs to be driven from the European institutions. The successful co-existence of commercial Service Centers and publicly operated PSAPs requires defining the interface between them and solving the related liability and responsibility issues.
Public sector involvement
The infrastructure will have to handle manual and in the future also automatic emergency calls from vehicles and mobile devices. The actual location information is either generated by the on-board system (normally based on
GNSS), or determined by the public telephone network operator using either handset-based or network-based methods. This location information is then passed to the PSAP.
The PSAPs, as well as the emergency response vehicles, must be equipped with equivalent map databases with Graphical User Interfaces to handle the emergency call location. This requires large-scale investments by especially the civil protection authorities (PSAPs, ambulances, fire trucks etc). Standards are required for the location information (vehicle or mobile to infrastructure) and for the interface between the communication network and PSAPs, and for the additional information between PSAPs and commercial Service Centers.
The Commission is proposing, for the follow-up of the implementation of E-112; to establish an European Emergency Communications Forum (EECF).
April 2002 by Helios Technology Ltd 29 IST-2001-34061 E-MERGE Pan-European harmonisation of vehicle eMERGEncy call service chain http://www.ertico.com/activiti/projects/e_merge/e_merge.htm
Page 37 of 490
Recommendations:
(12) After consultations (telecommunications authorities, civil protection authorities, industry through CGALIES) adopt a Commission Recommendation on the introduction and implementation of E-112 in Europe.
(13) Establish a European Emergency Communications Forum to continue the CGALIES work and to monitor the implementation of E-112 in the Member States.
Establish national liaison groups to co-ordinate the implementation and building up of the E-112 service chain. (14) For in-vehicle emergency calls (e-calls), establish data requirements and data transfer protocol for e-Calls originating from vehicles. Establish an interface specification and routing and handling procedures for e-Calls with location and other accident-related information.
3.9. Traffic and Travel Information Real-time TTI for road safety
Accurate, reliable and on-time Traffic and Travel Information has the potential to increase the safety and efficiency of the transport system in many ways. With real-time traffic information, the road users can avoid congestion and bottlenecks, select alternative routes and avoid secondary accidents and incidents in urban areas and the motorway network.
Multiple services are in use in Europe, with various technologies. RDS-TMC is the only available pan-European service, supported by the TMC Forum. The cooperation between the car industry and service providers has produced many commercial services for multiple platforms (in-vehicle platform, internet and mobile phones). On the side of data collection, so called Floating-Vehicle Data (FVD) is emerging as a new method for real-time traffic information.
Essential requirements for the establishment of TTI services are access to the public sector data, and capability of the private and public sectors to co-operate in service provision at local, regional, national and EU levels. In order to facilitate this, the Commission published in 2001 a Recommendation on the deployment of Traffic and Travel services in Europe30. This recommendations asks the Member States to report in 2002. Also, a Commission proposal for a Directive on ”Exploitation of Public Sector Information” has been recently published31, and is expected to become mandatory in 2005.
The commercial sector appears to be well placed to provide services in large conglomerations like London, Paris and Berlin. However, the realisation of pan- European TTI services and especially services providing all the necessary safety-related information cannot be expected from the private sector only.
30Commission Recommendation on the development of a legal and business framework for participation of the private sector in deploying telematics-based Traffic and Travel Information (TTI) services in Europe, OJ L 199/20 24.7.2001 31 COM (2002) 207 final dated 5.6.2002. “Proposal for a Directive of the European Parliament and of the Council on the re-use and commercial exploitation of public sector documents”

Page 38 of 490
Public-private partnerships would be required for supporting European level services, and for supporting the business case for safety-related information.
Standardisation
Standardisation is guided by the Telematics Forum work program, which is being migrated to GST (Global Standard for Telematics) CEN and ISO have produced protocols and message sets standards RDS-TMC. They are in the process of developing a standard for RTTI via Digital Broadcast. CEN has also developed a standard for DATEX, (DATa EXchange between Traffic Control Centres), which is already in use.
Recommendations:
(15) Analyse the Member States’ responses to the TTI Recommendation, draw up further actions if necessary, and make a progress report to the Council and the European Parliament.
(16) Create public-private partnerships to capture, process and provide real-time traffic, travel and road condition data from a variety of sources, including Floating Vehicle Data.
(17) Support the wider use of the pan-European RDS/TMC network for safety-related traffic information.
Provide a report with required actions to the European Commission on the status of RDS/TMC implementation and the remaining bottlenecks.
4. ADAPTING REGULATIONS AND STANDARDIZATION 4.1. Motor vehicle type-approval legislation Within Europe there is an established type approval regime for motor vehicles and their components/systems. Under this regime, once a vehicle or component has been type approved against a set of technical provisions, it must be permitted to be marketed in every country that applies those provisions, without any further testing being required. In the EU, those technical provisions are contained in Directives, which are applicable to every Member State.
Before new passenger cars and motorcycles can be placed on the market within the European Union they must have obtained whole vehicle type approval against a specified set of directives. Those directives cover both safety and environmental aspects of the vehicle (e.g. braking systems, emissions, etc.).
The EU legislation is regularly up-dated to take account of technical progress, and wherever possible to remove requirements that would prevent new technologies being applied in vehicles. For example, steps are now being taken to amend the relevant legislative acts to enable the use of "steering-by-wire" and new types of adaptive headlamps that can direct the light into a corner.
Generally new solutions are coming forward in all areas of motor vehicle design based on new technologies including information and communication technology (ICT), and the electronic content in motor vehicles is increasing dramatically. It has been possible to integrate these new technologies without major legislative obstacles.
Page 39 of 490
There is also the forum of the United Nations Economic Commission for Europe (UN/ECE), which prepares regulations which contracting parties to either the 195832 or 199833 agreements may apply. The European Community is a Contracting Party to these agreements and many of the regulations prepared under the 1958 agreement are accepted as alternatives to the directives prescribed for WVTA.
The European Commission also acknowledges that non-legislative market initiatives must be pursued in order to bring forward improvements in vehicles.
As a supplement to the EU legislative acts the European, Japanese and Korean car manufacturers have, for example, committed themselves to further reduce the level of CO2 emissions from vehicles and to introduce measures to reduce the fatalities and injuries of pedestrians. It can be foreseen that similar approaches could be used in the case of Intelligent Integrated Road Safety Systems.
Recommendations:
(18) Determine what actions may be required for rapidly bringing forward road safety improvements obtainable with Intelligent Integrated Road Safety Systems in vehicles.
4.2. Standardisation An increasing number of vehicle control, safety and comfort functions are controlled by processors and software and sophisticated telematics services are becoming available on embedded in-vehicle platforms or portable terminals. The need for responsive standardisation process becomes extremely important. Standardised solutions guarantee wide market acceptance, higher volumes and lower costs, benefiting all consumers. Within Europe there are three formal European Standards Organisation, CEN, CENELEC and ETSI.
CEN and CENELEC are the European Standardisation Committee and the European Committee for Electrotechnical Standardisation, respectively. They
have the responsibility of promoting voluntary technical harmonisation in Europe in conjunction with world-wide bodies, and other standardisation partners in Europe. They have technical committees (TC) and working groups (WG) covering the full range of standards work. CEN is primarily responsible for the work on road transport, and within the ITS sector the relevant technical committee is TC 278 – ‘Road Transport and Traffic Telematics’. Under TC 278 there are currently 13 WGs. Voting on draft standards within CEN is weighted according to the GDP- of the countries.
The global equivalent of CEN is the International Organisation for Standardisation (ISO) which promotes the development of voluntary standards to facilitate the international exchange of goods and services. Within the field of ITS, the lead technical committee is TC 204 (Intelligent Transport Systems), which has 7 active WGs and 23 sub-committees. TC 204 liases closely with TC 22 (Road Vehicles) and with CEN TC 278. ISO voting is vote per country.
32 E/ECE/324-E/ECE/TRANS/505 Rev.2 Agreement Concerning the Adoption of Uniform Technical Prescriptions for Wheeled Vehicles, Equipment and Parts which can be Fitted and/or be used on Wheeled Vehicles and the Conditions for Reciprocal Recognition of Approvals Granted on the Basis of these Prescriptions. 33 ECE/TRANS/132 - Agreement Concerning the Establishing of Global Technical Regulations for Wheeled Vehicles, Equipment and Parts which can be Fitted and/or be Used on Wheeled Vehicles.

Page 40 of 490
ETSI, the European Telecommunications Standards Institute, develops standards for the needs of the telecommunication/electronic communication community. The telecommunications as well as radar standards are under the responsibility of ETSI ERM (EMC and Radio Spectrum matters). While ETSI develops radio standards, the allocation of frequencies are under the responsibility of the CEPT/ECC. Its global equivalent is the International Telecommunications Union (ITU-R). Both CEPT/ECC and ITU-R deal with radio frequency Spectrum allocation issues. ETSI co-operates with CEPT/ECC under a MoU.
In 1999, the Commission issued a mandate to the three European standardisation organisations (CEN, CENELEC and ETSI) to prepare a draft programme for European standardisation in the ITS area. The report and recommendations have now been published34. International collaboration and strengthening liaisons between CEN and ISO are required especially with respect to vehicle standards, architecture, wide-area communication systems and traveller information systems.
4.3. Safety systems standards and regulation in the EU: State of the art In-vehicle functions
A number of systems that affect the longitudinal control of vehicles are already in production, i.e. anti-lock braking systems (ABS), traction control systems, electronic stability control systems, brake assistant systems, throttle-by-wire, and adaptive cruise control (ACC). Others are under development, i.e. brake-bywire, ACC with stop and go, collision warning/mitigation, and speed warning/adaptation.
In addition systems are being developed that influence the lateral control of vehicles, e.g. steer-by-wire, lane support, automatic lane keeping, advanced stability control systems using automatic corrective steering.
Other safety systems are available, or under development which do not directly affect the control of the vehicle, e.g. parking aids, tyre pressure monitoring systems (TPMS), enhanced brake lamps, and adaptive headlamps.
The type approval of braking systems has been in operation for many years based on EC Directive 71/320/EC and UN/ECE Regulation No. 13. Braking standards are also addressed in ISO TC 22. Emergency Braking is being discussed in Working Party 29 of the UN/ECE and ISO TC 22. Test procedures & standards for ACC have been developed in ISO TC 204, while “Adjustable Speed Limiters” are covered in UN/ECE Regulation No. 89.
All X-by-wire standards, (including steering) are being addressed by an expert Working Party of the UN/ECE, ISO TC 204, and the FlexRay Industry Consortium. Steering equipment is regulated by UN/ECE Regulation No. 79 and EC Directive 70/311/EEC. Installation of lighting devices is regulated by UN/ECE Regulation No. 48 and EC Directive 76/756/EEC, whilst the performance of particular devices are regulated by a number of separate Regulations and Directives. Standards for tyre pressure monitoring systems are under preparation in the US.
34 http://www.cenorm.be/standardization/tech_bodies/cen_bp/workpro/tc278.htm

Page 41 of 490
Vehicle-to-infrastructure communications
The available and emerging technologies include RDS-TMC, DAB, DSRC, GSM, GPRS, 3G, Bluetooth and others.
Standardisation is underway in CEN concerning GNSS and 3G wireless. Continuous Air Long & Medium Range Communications (CALM) and six new work items are making progress in ISO TC204, whilst CEN 278 with ISO TC204 is in charge of standards for RDS-TMC and derivatives. ETSI-IEC liaison stresses EU bandwidth availability issues.
No pan-European specification or standards exist currently for applications using communication to/from vehicles. This has lead to different systems in different countries, even if they are used for the same purpose, e.g. Electronic
Fee Collection.
Vehicle-to-vehicle communications
The available and emerging technologies include Broad Band High Speed and 3G.
Continuous Air Medium and Long Range Communication (CALM) standards are being rapidly developed under ISO TC204. Bandwidth and spectrum allocation are being co-developed on the European level through the CEPT/ECC with the support of ETSI and ITU. CEN TC 278 is developing Traffic and Travel Information services via Digital Broadcast bearers.
Sensors
Many different sensor technologies are already available on vehicles, ranging from simple temperature sensors, through to advanced radar systems. It is in the field of spatial sensor that the greatest road safety benefits are likely to be achieved. Ultra-sonic and infra-red sensors are in limited production for use with systems such as reversing aids or interior monitoring for security systems. The 77 GHz radar for applications that need to ‘see’ long way ahead is in production and used in ACC systems. These sensors, though, are very expensive. The 24 GHz ultra-wide band radar for shorter range applications is in development with a view for production in 2005. These sensors are a fraction of the cost of the 77 GHz radars, but their use is not currently permitted as this frequency is currently restricted in the EU (US released 24 GHz SRR frequency allocation April 2002). See section 4.5 for more information.
Vision-based sensors using camera technology are under development for number of application, such as road sign recognition and driver alertness monitoring (e.g. monitoring of eye movement).
77 GHz is approved for use in vehicle system. For the 24 GHz the Harmonised ETSI Standard “EN 301 091” is in process with strong support from manufacturers & suppliers, ACEA, & CLEPA, (release due 1st quarter 2003).
Completion of the ETSI Standard work depends on the CEPT/ECC frequency regulation process. 24 GHz SRR sharing studies with other services are progressing but need support from national administrations.
Page 42 of 490
Multi-Media products
The available and emerging technologies include voice recognition, ‘Hands-free’ use, standardised docking ports for mobile (nomad) after market accessories, and standardised in-vehicle data buses.
AMI-C (Automotive Multi-Media Interface – Consortium) is progressing on three localisation API specifications for safe use of Multi-Media and nomad products.
A MOST Databus Standard is in production, while MOST and AMI-C have put into operation an MoU on co-operation. Many Nomad devices / PDA’s are in production and are being introduced in the vehicles.
Recommendations:
(19) Analyse the specific needs and priorities of the intelligent integrated road safety systems for standardisation in ISO, CEN and ETSI.
For vehicle-vehicle and vehicle-infrastructure communications, promote the accelerated standardisation of emerging communications protocols. For CEN, based on the recently published report of the M270 mandate, choose the appropriate mechanisms (Committee Working Agreements, full EN standards), and establish the necessary working groups.
4.4. Legal issues of market introduction of Intelligent Integrated Road Safety Systems Legal issues in the market introduction
Information/warning systems
These are systems which only provide information to the driver, for example, by warning that the vehicle is too close to another, but do not physically take over the driver's role in any way. The driver remains fully in control of the vehicle at all times, with no physical driving functions being assumed by the system. Instead, information is provided for the driver to listen to or see, in order to assist in careful and proper driving. Therefore, where an accident or collision occurs after a warning has been given, and the driver fails to take the appropriate action, he is likely to have breached his duty of care to other roadusers.
Accordingly, it seems that the existence of such a system means the driver may have a higher standard of care, because a reasonable driver would not only take into account the usual factors when driving, but would also take heed of any information or warning, and take the appropriate action to avoid damage. Responsibility is therefore focused on the driver’s care as to his driving behaviour. However, there remains a possibility that the information provided by the system may be incorrect or inaccurate. If this is the case, the manufacturer or distributor’s liability should also be taken into account.
It should be noted, however, that in most cases, it could be difficult for the concerned parties to provide evidence of the malfunctioning of the system and then to determine the correct allocation of responsibility between the driver and the manufacturer.
Page 43 of 490
Overridable intervention systems
The potential liability of the driver in negligence where the system is overridable will very much depend on the facts of each case. Important factors will include whether or not the system has inherent limitations, whether the driver takes note of and acts appropriately in relation to any warnings about the consequences of such limitations, and whether in the circumstances a reasonable person in the same situation could have overridden the system to avoid a collision. If a driver chooses to buy a vehicle with overridable functions, he may be exposing himself to a new degree of risk. By buying such an advanced feature, the driver takes on the responsibility of using the function in the appropriate manner.
Certain factors need to be considered such as the correct level of information and warnings released by the manufacturer about the functioning of the system.
Indeed, the care of the driver in his driving behaviour may be classified on the basis of his capability to correctly utilise the system, taking into account the information and instructions made available to him.
Also, malfunctioning of the system may imply a manufacturer’s liability, the possibility depending on whether it is possible to determine that the malfunctioning of the system caused the damaging event.
Non-overridable intervention systems
If the driver is not able to override the system, no liability for a breach of rules on behaviour in road traffic caused by the system arises, because such liability, as a pre-condition, requires that the driver is able to influence his driving. If there is no alternative conduct available to a driver, there is no fault-based liability.
If the driving support system is not overridable by the driver, the area of the manufacturer’s liability in case of accident in traffic situations is likely to be broadened.
Given the importance of a driver being able to avoid accidents to the general safety of the public, a system which renders the driver powerless in certain foreseeable and likely situations should be considered as a defective and unsafe design.
Therefore, where damage ensues as a result of the intervention of a system which cannot be overridden by the driver, the manufacturer will be considered liable.
Such liability may fall under the general rules of tort law (general liability) or
Defective Product Law (strict liability, which in EU countries is generally governed by the EU Directive 85/374).
However, notwithstanding that the likelihood of liability being imposed on the driver is strongly reduced in cases where damage is caused by the malfunctioning of vehicles equipped with non-overridable systems, it cannot be totally excluded.
There will always be other issues to consider, such as whether or not the driver of another vehicle has been negligent. Also, if a collision occurs where the functioning of the non-overridable system has no bearing (for example, it occurs as a result of the driver's failure to slow down, yet the system permits him to slow down), the driver of the vehicle may be liable in negligence.
Page 44 of 490
Towards a European Code of Practise
The discussion above indicates the complexity of the legal side of the market
introduction of Intelligent Integrated Road Safety Systems. A project supported by the IST Programme, called Response 235 is developing a basis for a Code of Practice by undertaking risk/benefit analysis for market introduction scenarios, and converting this to possible strategies for managing risks in the market introduction of safety systems.
The definition of a full Code of Practice for the legal considerations in the market introduction of Intelligent Integrated Safety Systems requires an overall industrial and societal consensus, especially for the “reasonably safe” products and the definition of “duty of care” process.
Recommendations:
(20) Develop a methodology for risk benefit assessment, achieve an industrial and societal consensus on a European Code of Practice, and establish guidelines for facilitating the market introduction of Intelligent Integrated Road Safety Systems.
4.5. Ultra wide-band 24 GHz short range radar
Ultra wide band (UWB) 24 GHz radar is considered by many to be a key technology to realise the introduction of many Intelligent Integrated Road Safety Systems. Such radar enhances road safety by collision warning and mitigation through active safety devices. The radar components are ready for operation in the 24 GHz band. Nevertheless, there remain regulatory barriers that will affect timely achievement of Community goals if not solved co-operatively with the pan-European Electronic Communication Committee (ECC) of CEPT. UWB short range radar technology represents a cost-effective technology by taking advantage of an existing frequency band for unlicensed low power devices in the 24 GHz range and combined with off-the-shelf radar sensor technology. In contrast, higher frequency UWB radar - as suggested by the ECC - do not offer the same advantages. For example, 77 GHz technology is not mature for volume production, and is significantly more expensive than 24 GHz technology, which would significantly delay its implementation.
ETSI and ECC have been looking at the issue of the use of 24 GHz for
automotive application and is seeking to resolve concerns that UWB technology in this frequency range could cause harmful interference to other applications.
The U.S. Federal Communications Commission (FCC), in an order released on 22 April 2002, already has authorised UWB short range vehicular radar in the 24 GHz band. The FCC assessed comments from over 400 commenting parties, and concluded that the risk of interference from automotive 24 GHz UWB short range radar could be managed with technical standards consistent with ITU-R rules.
35RESPONSE II IST-2001-37528: Advanced Driver Assistance Systems: From introduction Scenarios towards a Code of Practice for Development and Testing

Page 45 of 490
The Short Range Automotive Radar Frequency Allocation (SARA) group represents the international automotive industry with the goal to implement UWB radar at 24 GHz world-wide.
Recommendations:
(21) Take the necessary actions for removing regulatory barriers to the use of the 24 GHz spectrum for short-range radar in Europe. This will include issuing an EU liaison statement to ECC and to national administrations requesting international regulations through the ITU-R concerning UWB Radar Sensors.
(22) Undertake the standardisation in ETSI for the 24GHz UWB Radar by implementing the EU Mandate for ETSI and completing and publishing the relevant standard.
5. REMOVING THE SOCIETAL AND BUSINESS OBSTACLES 5.1. Societal aspects Estimates of societal benefits and costs
The costs of accidents and fatalities in the European Union are estimated to be 160 billion € per year, or 2% of the Community’s Gross National Product. The new Intelligent Integrated Road Safety Systems thus carry a promise of huge potential savings on societal costs, if the number of accidents and severe injuries decreases.
Societal benefits of specific safety applications/functions have been estimated in a number of comprehensive reviews of the potential benefits36. Revenues, rates of return and benefit/cost ratios of autonomous intelligent cruise control, anticollision systems, driver and vehicle monitoring and lane keeping, were estimated for prospective deployment. However, the data on societal benefits and cost/benefit ratio are incomplete and not kept up-to-date with latest technological developments.
Therefore, the societal benefits because of reduction in fatalities and serious injuries should be estimated, followed by a cost analysis regarding reduction of medical and other expenses in Member States.
Societal Support for market take-up
Member States could stimulate road users to buy vehicles with intelligent safety functions, and to use safety-related services. Possible support could include financial incentives (tax reduction, lower insurance premium) and/or other means of preferential treatment, such as granting access to dedicated lanes, in order to facilitate market take-up and promote user acceptance.
This support should target especially the car buyers who choose to equip their vehicles with co-operative e-safety systems, thus helping also to create an initial market demand for advanced safety systems.
36TRL Study 1996, DIATS funded by DG TREN 1999
Page 46 of 490
Recommendations:
(23) Estimate the socio-economic benefits which can be obtained through the reduction of fatalities, injuries and material damage by the introduction of Intelligent Integrated Road Safety Systems. This should include an analysis of the reduction in medical care and other expenses in the Member States and enlargement states, and benefits like improved journey times and reduced congestion and environmental impact.
(24) Stimulate and support road users and fleet owners to buy vehicles with intelligent safety functions and to use safety-related services by incentives such as tax reductions, lowering insurance premiums, and preferential treatment.
This support should target especially the buyers who choose to equip their vehicles with co-operative safety systems, thus helping to create an initial market demand for advanced safety systems.
5.2. The business case The different business cases
Business models for safety functions based on autonomous technologies correspond mainly to the automobile manufacturers' business models. Most of these applications are at or near market stage. No formal public sector cooperation is required, though a support in the form of policies, funding for RTD and awareness actions is seen as highly beneficial.
Business models for safety functions which also use interactive and co-operative technologies are not so clear. Many of these applications are today still at an R&D stage. Public/private sectors must co-operate to agree final solutions, and to decide on the role and responsibilities of the partners.
The automobile industry is not likely to take the lead at the present time as it is under severe pressure from market/financial conditions. Telematics and safety functions do not represent a competitive advantage for most manufacturers at the present time. Unfortunately the industry innovators are also relatively small scale manufacturers and are also able to command a premium price for so called "exotic options" (which is how the market perceives these systems right now).
Without full support from the public sector it will take a great number of years before a safety-system enabled vehicle park is realised. Industry/consumer business cases should be developed jointly with all other actors involved (motorway operators, service providers, public sector)
The “start-up” dilemma exists for all safety systems based on direct vehicle-to-vehicle communication. The minimum penetration level of equipped vehicles in the traffic system, which is required for the safety systems to become effective, and which are needed to unfold markets, is unlikely to be created by market mechanisms alone. The market forces are, however, expected to produce higher system penetration rates later-on.
Page 47 of 490
Towards a positive business case
There are different business models used by automobile manufacturers. Most common are break-even models or buyer-based pricing models. These two models take into consideration development costs, part price etc. But they stem mainly from a manufacturing point of view.
New technology is usually implemented at a higher cost due to higher development cost which makes it more likely to be sold first in high end cars.
Examples of these systems are ABS, ESP etc. This early entry in high end cars will most likely be the case for the near future since for the moment no considerations are made of possible cost savings from a total society perspective.
• Discussions about business/revenue models often involve considerations of issues such as:
• How to package safety services (for instance, essential information and communication functions or lane control offered together with collision mitigation systems, etc.)
• Priorities in terms of time scale for market introduction (i.e. early autonomous technologies and e-Call versus longer-term systems for impaired driver monitoring, etc.)
• Experimentation with a tailored pricing scheme dependent on the nature of application/service (for instance, 'free of charge' for safety warning information and emergency calls; increased vehicle price for active safety technologies; 'pay per use' for personalised, location-based services);
• Co-funding investments and support (automotive industry supported by service providers, and facilitated by policy makers and user associations)
• Work agreements between involved actors (automotive industry; service and content providers; motorway operators; city authorities; user associations, insurance companies).
Strategy for a public/private partnership
Public goods are characterised by non-depletion and non-excludability. Safety technologies demonstrate the characteristics of public goods to a high degree.
This is true for autonomous in-vehicle functions like collision warning as well as interactive services like e-Call. This has implications for the business models through which some of these systems may be supplied. Public goods can be and are supplied by private firms. Even when supplied by private firms, public good status may justify some kind of public intervention to 'incentives' the system development and deployment of these systems.
Page 48 of 490
Special case: The e-Call business model
Taking into consideration the experience of various stakeholders, there is
currently no clear business case for commercial e-Call service. Furthermore, the public authorities may not be prepared to invest in the requirede-Call centre equipment or operations.
The societal benefits and savings must be looked upon first, and then balanced against the cost of hardware in every vehicle and the costs associated with running the services. An ongoing RTD Project EMERGE is developing a business model for a pan-European harmonised e-Call servivr. A clear prerequisite for e-Call is that the public service PSAPs are equipped to handle at least the location information of the data calls, and that the interfaces are clearly specified.
Each Member State could launch a call for tender for the investment and the operation of an Emergency Centre able to manage and route to the appropriate rescue service the localised emergency call.
Recommendations:
(25) Identify best practices for positive business cases to promote the introduction of Intelligent Integrated Road Safety Systems, including analysis of the required bundling of the functions, priorities for market introduction, co-funding schemes, and public private partnership.
(26) Support the e-Call business model by implementing the full service chain and ensuring inter-operability, compatibility with E-112 systems and direct links to infrastructure operators and vehicle breakdown services. Training of personnel has to be provided for.
5.3. User Outreach Awareness
Awareness of the new safety systems available for consumers with clear explanations of their functioning and benefits will be a key issue, determining to a large degree the rate of uptake. The EuroNCAP vehicle crash worthiness test offers an example in this respect.
The European Commission, Member States and other stakeholders should promote the awareness amongst the consumers, with campaigns that explain
the benefits of safety systems and the available subsidies and other incentives, and aim to accelerate the equipping of the vehicles with the approved systems.
Information
Adequate information of the new systems introduced with new vehicle models is essential for their safe and efficient use, and for liability reasons. The drivers cannot be expected to master these new systems on the basis of conventional driving school practices and instructions received years, or decades ago.
The automotive industries, safety organisation, driving schools and other road federations should launch a pro-active information campaigns on safety concepts at the time of issuing driver licences, when selling a car and in conjunction with campaigns on code of practice, for raising awareness on the new safety systems and stimulating user acceptance.

Page 49 of 490
User Perception of Costs and Benefits
It is important to assess all costs and benefits of the safety systems, for the society as well as for the individual users, and to know how they will be financed. The user acceptance and willingness of to pay must be assessed. A wide acceptance ratio requires that the perceived benefits outweigh the cost.
The benefits could include issues such as smaller risk of accidents, lower insurance premiums, access to dedicated infrastructure, improved comfort, and fewer fatal accidents. Some of these benefits are also material. The willingness to pay for such benefits must be studied with specific techniques such as stated preference surveys.
Recommendations:
(27) Design and execute awareness campaigns which explain the benefits, functioning and use of the Intelligent Integrated Road Safety Systems to the consumers
.
5.4. The eSafety Forum A continuous dialogue between the safety stakeholders is required, and the partners have to define together further actions for promoting intelligent integrated safety. It is therefore proposed that an eSafety Forum is established.
The eSafety Forum is a partnership open for all contributing parties. Its purpose is to monitor and promote the implementation of the recommendations of this report, and to promote the development of open platforms, open system architecture and standard software, communications, service and human machine interfaces for accelerating the development, deployment, use and user awareness of Intelligent Integrated Road Safety Systems. The Forum should take up and continue the work of the eSafety Working Group.
Recommendations:
(28) Create a eSafety Forum with the objective to monitor and promote the implementation of these recommendations, and to support the development, deployment and use of intelligent integrated road safety systems. Determine its objectives, Terms of Reference, draft a Memorandum of Understanding and organisation. Establish membership and work programme.
Page 50 of 490
Glossary of Abbreviations and Acronyms
3G Mobile Third generation mobile phone
ABS Anti-locking Braking System
ACC Adaptive Cruise Control
ACEA Association des Constructeurs Européen d’Automobiles
ADAS Advanced Driver Assistance Systems
AMI-C Automotive Multi-media Interface Consortium
CALM Continuous-Air Long and Medium range
CARE Community Road Accident Database
CEPT Conference Européenne des Administrations des postes et des
télécommunications
CGALIES Co-ordinating Group on Access to Location information by
Emergency Services
CEN Comité Européen de Normalisation
(European Standardisation Committee)
CLEPA European Association of Automobile Suppliers
DAB Digital Audio Broadcast
DATEX DATa EXchange (between traffic control centres)
DSRC Dedicated Short Range Communication
E-112 Location-enhanced emergency (112) call
EACS European Accident Causation Survey
EC European Commission
ECC European Electronic Communications Committee
EECF European Emergency Communications Forum
ERSF European Road Safety Federation
ETSI European Telecommunications Standards Institute
EU European Union
EuroNCAP European New Car Assessment Programme
FCC Federal Communications Commission
FCD Floating Car Data
GIDAS German in-depth accident study
GNSS Global Navigation Standard System
GPS Global Positioning System
Page 51 of 490
GSM Global System for Mobile Communications
Final Report of the eSafety Working Group Page 47
GST Global Standard for Telematics
GNP Gross National Product
HMI Human Machine Interface
ICT Information and Communications Technologies
ISO International Organisation for Standardisation
IST Information Society Technologies
ITS Intelligent Transport Systems
ITU International Telecommunications Union
IVHW Inter-Vehicle Hazard Warning
LAB Laboratory of Accidentology and Biomechanic, PSA Peugeot
Citroën - Renault
MMM Mobile Multi-Media
MOST The MOST Cooperation is based on a partnership of carmakers, set makers, system architects and key component suppliers.
Together they define and adopt a common multimedia network protocol and application object model.
PDA Personal Digital Assistant
PSAP Public Service Answering Point
RDS-TMC Radio Data System – Traffic Message Channel
RTD Research and Technological Development
RTTI Real-Time Traffic Information
SRR Short Range Radar
TC Technical Committee
TCC Traffic Control Centre
TMC Traffic Message Channel
TTI Traffic and Travel Information
UN/ECE United Nations Economic Commission for Europe
UWB Ultra Wide Band
WERD Western European Road Directors
WG Working Group
WVTA Whole Vehicle Type Approval
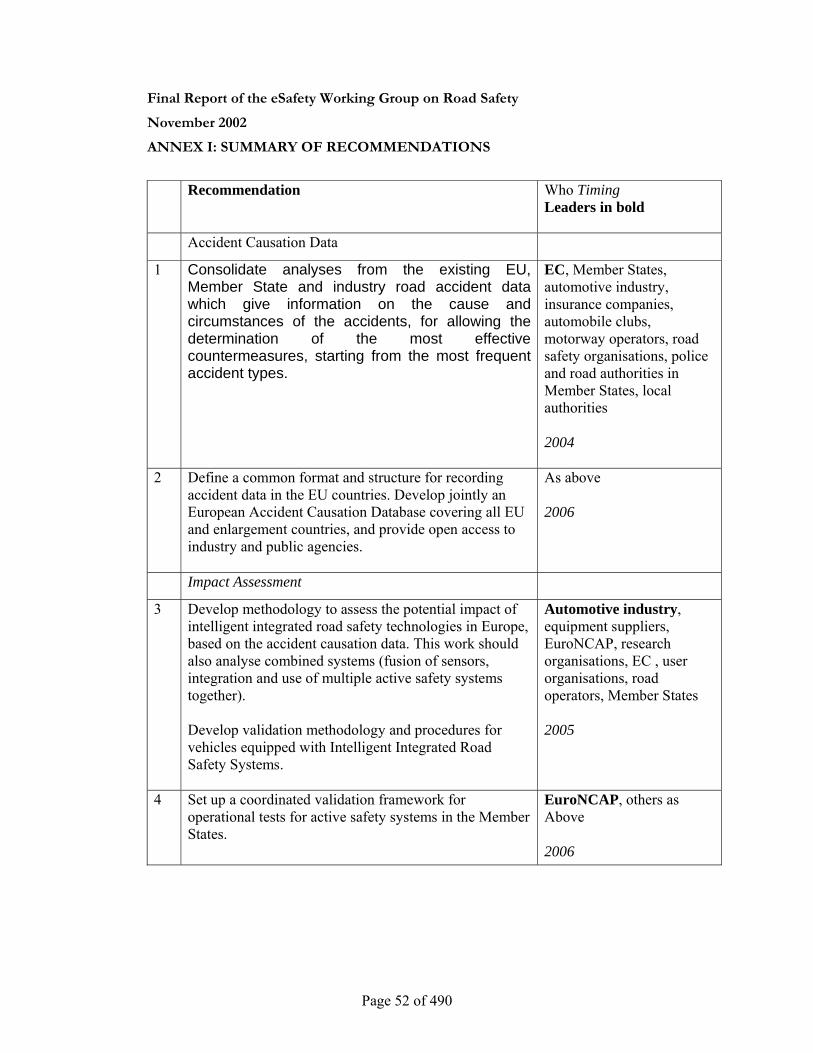
Page 52 of 490
Final Report of the eSafety Working Group on Road Safety
November 2002
ANNEX I: SUMMARY OF RECOMMENDATIONS
Recommendation Who Timing Leaders in bold
Accident Causation Data
1 Consolidate analyses from the existing EU, Member State and industry road accident data which give information on the cause and circumstances of the accidents, for allowing the determination of the most effective countermeasures, starting from the most frequent accident types.
EC, Member States, automotive industry, insurance companies, automobile clubs, motorway operators, road safety organisations, police and road authorities in Member States, local authorities 2004
2 Define a common format and structure for recording accident data in the EU countries. Develop jointly an European Accident Causation Database covering all EU and enlargement countries, and provide open access to industry and public agencies.
As above 2006
Impact Assessment
3 Develop methodology to assess the potential impact of intelligent integrated road safety technologies in Europe, based on the accident causation data. This work should also analyse combined systems (fusion of sensors, integration and use of multiple active safety systems together). Develop validation methodology and procedures for vehicles equipped with Intelligent Integrated Road Safety Systems.
Automotive industry, equipment suppliers, EuroNCAP, research organisations, EC , user organisations, road operators, Member States 2005
4 Set up a coordinated validation framework for operational tests for active safety systems in the Member States.
EuroNCAP, others as Above 2006
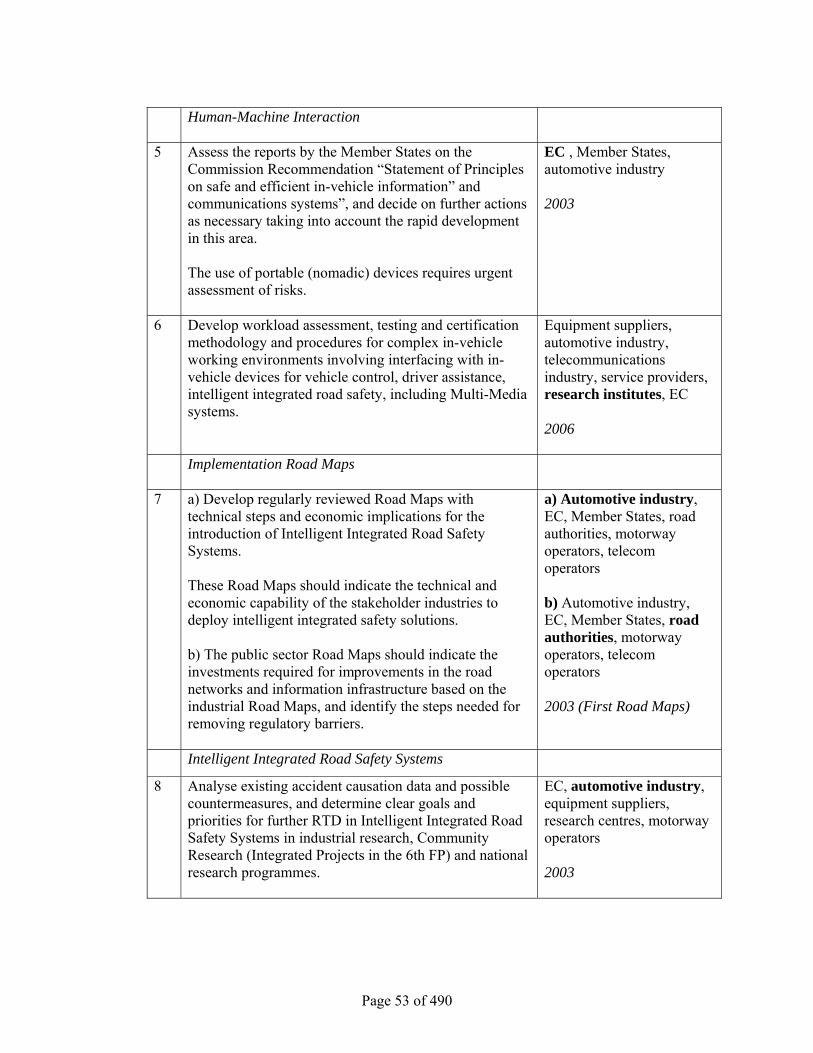
Page 53 of 490
Human-Machine Interaction
5 Assess the reports by the Member States on the Commission Recommendation “Statement of Principles on safe and efficient in-vehicle information” and communications systems”, and decide on further actions as necessary taking into account the rapid development in this area. The use of portable (nomadic) devices requires urgent assessment of risks.
EC , Member States, automotive industry 2003
6 Develop workload assessment, testing and certification methodology and procedures for complex in-vehicle working environments involving interfacing with in-vehicle devices for vehicle control, driver assistance, intelligent integrated road safety, including Multi-Media systems.
Equipment suppliers, automotive industry, telecommunications industry, service providers, research institutes, EC 2006
Implementation Road Maps
7 a) Develop regularly reviewed Road Maps with technical steps and economic implications for the introduction of Intelligent Integrated Road Safety Systems. These Road Maps should indicate the technical and economic capability of the stakeholder industries to deploy intelligent integrated safety solutions. b) The public sector Road Maps should indicate the investments required for improvements in the road networks and information infrastructure based on the industrial Road Maps, and identify the steps needed for removing regulatory barriers.
a) Automotive industry, EC, Member States, road authorities, motorway operators, telecom operators b) Automotive industry, EC, Member States, road authorities, motorway operators, telecom operators 2003 (First Road Maps)
Intelligent Integrated Road Safety Systems
8 Analyse existing accident causation data and possible countermeasures, and determine clear goals and priorities for further RTD in Intelligent Integrated Road Safety Systems in industrial research, Community Research (Integrated Projects in the 6th FP) and national research programmes.
EC, automotive industry, equipment suppliers, research centres, motorway operators 2003

Page 54 of 490
9 Identify existing specifications, and where necessary
develop new specifications for pan-European, standardised interoperable interfaces and communications protocols for vehicle-vehicle and vehicle-infrastructure communications which will support interactive, co-operative safety systems and services, including Traffic and Travel Information.
EC, multi-sector organisation involving automotive industry, Telematics Forum, Telecommunications industry, equipment suppliers, information and content providers, with Member States, road authorities, motorway infrastructure operators and standardisation bodies 2004
10 Pursue international co-operation in the development of intelligent integrated road safety technologies. The co-operation should cover especially Human-Machine Interaction, certification and testing methodology and procedures, harmonisation and standardisation, legal issues, impact and socio-economic benefit analysis, and benchmarking/best practise.
In Europe: automotive industry, equipment suppliers, EC, telecom operators, motorway operators, road authorities 2003 onwards
Digital Map Database
11 Based on existing research results, define requirements for a European digital road map database. This database should contain in addition to road map data agreed road safety attributes for driver-support for information and warning purposes, such as speed information and road configuration data. Create a public-private partnership to produce, maintain certify and distribute this digital road map data base. It should be made available for all users at affordable prices (possibly free of charge). National, local and regional authorities and operators should provide safety-related data on road configurations within their networks, with target dates for implementation.
EC, mapping industry, automobile industry, and telecomm operators, service providers, motorway operators, road authorities (national, regional and local level) 2004
Emergency calls and E-112
12 After consultations (telecommunications authorities, civil protection authorities, industry through CGALIES) adopt a Commission Recommendation on the introduction and implementation of E-112 service in Europe.
EC 2002
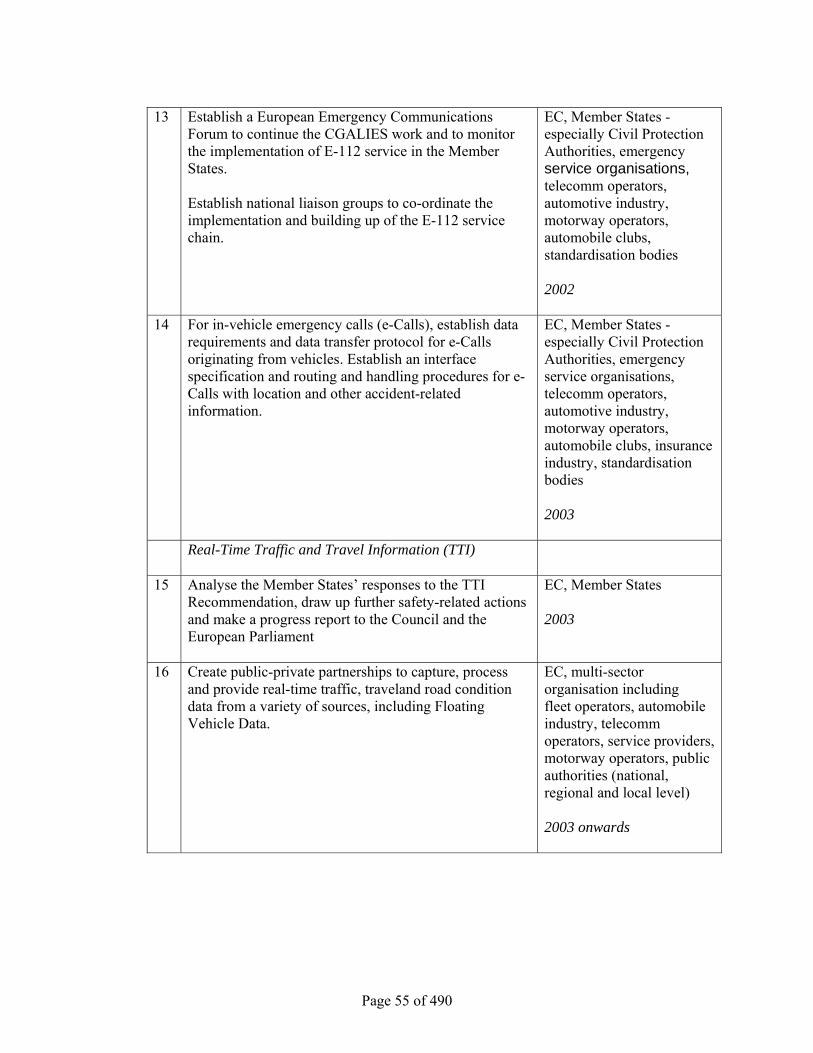
Page 55 of 490
13 Establish a European Emergency Communications
Forum to continue the CGALIES work and to monitor the implementation of E-112 service in the Member States. Establish national liaison groups to co-ordinate the implementation and building up of the E-112 service chain.
EC, Member States - especially Civil Protection Authorities, emergency service organisations, telecomm operators, automotive industry, motorway operators, automobile clubs, standardisation bodies 2002
14 For in-vehicle emergency calls (e-Calls), establish data requirements and data transfer protocol for e-Calls originating from vehicles. Establish an interface specification and routing and handling procedures for e- Calls with location and other accident-related information.
EC, Member States - especially Civil Protection Authorities, emergency service organisations, telecomm operators, automotive industry, motorway operators, automobile clubs, insurance industry, standardisation bodies 2003
Real-Time Traffic and Travel Information (TTI)
15 Analyse the Member States’ responses to the TTI Recommendation, draw up further safety-related actions and make a progress report to the Council and the European Parliament
EC, Member States 2003
16 Create public-private partnerships to capture, process and provide real-time traffic, traveland road condition data from a variety of sources, including Floating Vehicle Data.
EC, multi-sector organisation including fleet operators, automobile industry, telecomm operators, service providers, motorway operators, public authorities (national, regional and local level) 2003 onwards
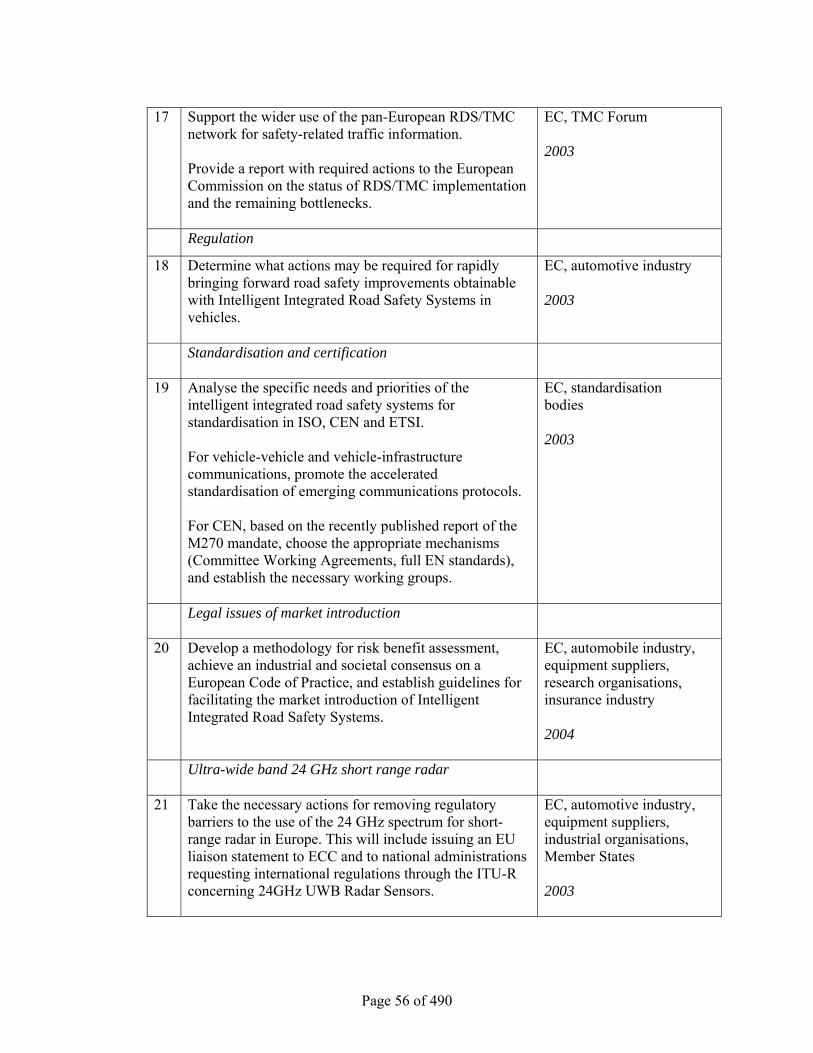
Page 56 of 490
17 Support the wider use of the pan-European RDS/TMC
network for safety-related traffic information. Provide a report with required actions to the European Commission on the status of RDS/TMC implementation and the remaining bottlenecks.
EC, TMC Forum 2003
Regulation
18 Determine what actions may be required for rapidly bringing forward road safety improvements obtainable with Intelligent Integrated Road Safety Systems in vehicles.
EC, automotive industry 2003
Standardisation and certification
19 Analyse the specific needs and priorities of the intelligent integrated road safety systems for standardisation in ISO, CEN and ETSI. For vehicle-vehicle and vehicle-infrastructure communications, promote the accelerated standardisation of emerging communications protocols. For CEN, based on the recently published report of the M270 mandate, choose the appropriate mechanisms (Committee Working Agreements, full EN standards), and establish the necessary working groups.
EC, standardisation bodies 2003
Legal issues of market introduction
20 Develop a methodology for risk benefit assessment, achieve an industrial and societal consensus on a European Code of Practice, and establish guidelines for facilitating the market introduction of Intelligent Integrated Road Safety Systems.
EC, automobile industry, equipment suppliers, research organisations, insurance industry 2004
Ultra-wide band 24 GHz short range radar
21 Take the necessary actions for removing regulatory barriers to the use of the 24 GHz spectrum for short-range radar in Europe. This will include issuing an EU liaison statement to ECC and to national administrations requesting international regulations through the ITU-R concerning 24GHz UWB Radar Sensors.
EC, automotive industry, equipment suppliers, industrial organisations, Member States 2003
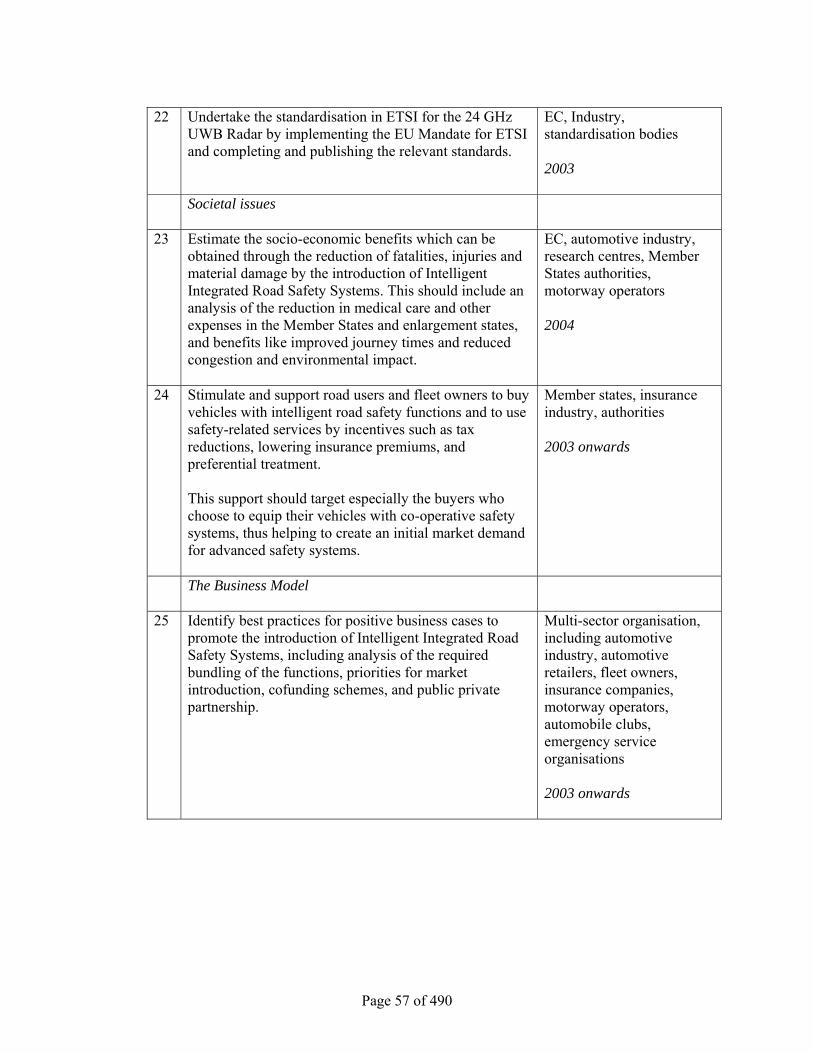
Page 57 of 490
22 Undertake the standardisation in ETSI for the 24 GHz
UWB Radar by implementing the EU Mandate for ETSI and completing and publishing the relevant standards.
EC, Industry, standardisation bodies 2003
Societal issues
23 Estimate the socio-economic benefits which can be obtained through the reduction of fatalities, injuries and material damage by the introduction of Intelligent Integrated Road Safety Systems. This should include an analysis of the reduction in medical care and other expenses in the Member States and enlargement states, and benefits like improved journey times and reduced congestion and environmental impact.
EC, automotive industry, research centres, Member States authorities, motorway operators 2004
24 Stimulate and support road users and fleet owners to buy vehicles with intelligent road safety functions and to use safety-related services by incentives such as tax reductions, lowering insurance premiums, and preferential treatment. This support should target especially the buyers who choose to equip their vehicles with co-operative safety systems, thus helping to create an initial market demand for advanced safety systems.
Member states, insurance industry, authorities 2003 onwards
The Business Model
25 Identify best practices for positive business cases to promote the introduction of Intelligent Integrated Road Safety Systems, including analysis of the required bundling of the functions, priorities for market introduction, cofunding schemes, and public private partnership.
Multi-sector organisation, including automotive industry, automotive retailers, fleet owners, insurance companies, motorway operators, automobile clubs, emergency service organisations 2003 onwards
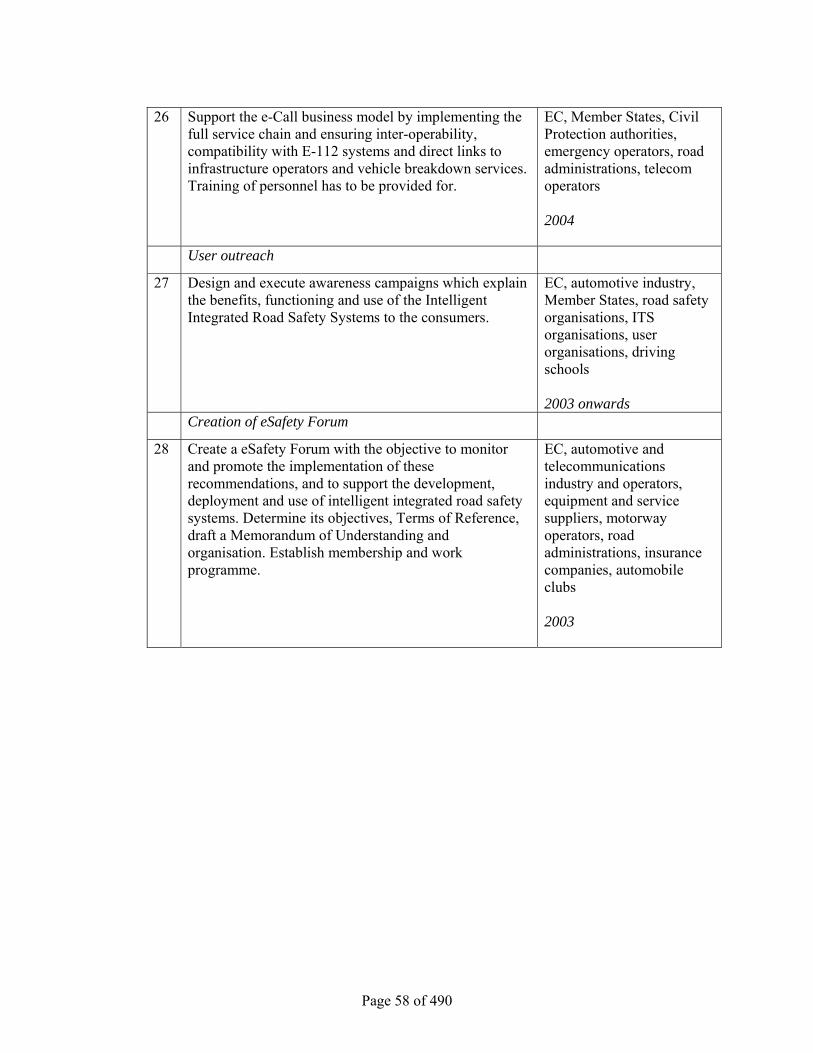
Page 58 of 490
26 Support the e-Call business model by implementing the
full service chain and ensuring inter-operability, compatibility with E-112 systems and direct links to infrastructure operators and vehicle breakdown services. Training of personnel has to be provided for.
EC, Member States, Civil Protection authorities, emergency operators, road administrations, telecom operators 2004
User outreach
27 Design and execute awareness campaigns which explain the benefits, functioning and use of the Intelligent Integrated Road Safety Systems to the consumers.
EC, automotive industry, Member States, road safety organisations, ITS organisations, user organisations, driving schools 2003 onwards
Creation of eSafety Forum
28 Create a eSafety Forum with the objective to monitor and promote the implementation of these recommendations, and to support the development, deployment and use of intelligent integrated road safety systems. Determine its objectives, Terms of Reference, draft a Memorandum of Understanding and organisation. Establish membership and work programme.
EC, automotive and telecommunications industry and operators, equipment and service suppliers, motorway operators, road administrations, insurance companies, automobile clubs 2003

Page 59 of 490
1.2 Progress of the 28 recommendations
The document consists of an executive summary followed by chapters describing the status of the 28 eSafety Recommendations.
The document provides an overview of the background and progress of the 28 eSafety Recommendations. This document will be updated throughout 2005 and the latest version is available on the eScope website (www.escope.info).
Executive summary
The eSafety Initiative was launched in April 2002. In November 2002 the eSafety Working Group published its final report, listing 28 recommendations for further actions for several eSafety-related topics. For the past three years, these further actions have been worked on in 11 different Working Groups that were created by the eSafety Forum. These include: Accident Causation Data, Emergency Call (eCall), Human-Machine Interaction (HMI), International Cooperation, Research and Development, Real-time Traffic and Travel Information (RTTI), Implementation Road Maps, Heavy Duty Vehicles, User Outreach, Digital Maps and Communications.
Activities till now
The following was achieved in 2003, 2004, and 2005:
Four Plenary Sessions for the eSafety Forum were organised over the past three years. The third Plenary Session finalised the 2003 eSafety Forum Summary Report, and issued the first set of Forum Recommendations. In September 2004 and February 2005, the Forum organised High Level meetings for the public authorities and private sector respectively. In June 2005 the Commission organised a Plenary Session in connection to the European ITS Congress and Exhibition in Hannover, Germany. A High Level meeting for the Member States was organised in October 2005.
The Working Group on Accident Causation organised a workshop on 30 June 2004 as part of the effort to formulate a methodology and framework to allow a more effective use of existing accident causation databases. The final report from the WG was released in January 2005.
The Working Group on HMI has identified and listed HMI-related problems from available Member State reports and other relevant sources and clustered these around six thematic areas. A new draft version of the ESoP has been produced and is planned to be adopted at the end of 2005.
The Implementation Road Maps Working Group has created tables for autonomous vehicle-based systems as well as the vehicle and infrastructure based systems of e-Call, extended environmental information, RTTI, dynamic traffic management (VMS), local danger warning, and Speed Alert. A table has been drafted showing the eSafety functions against their technical prerequisites. The work will continue in 2006 to expand on the existing work performed.
Page 60 of 490
The Working Group on Research and Development has established mechanisms for monitoring, aligning and steering projects related to eSafety so as to maximize synergies and disseminate results.
Priority-defining work has been performed to focus international cooperation on eSafety issues of international importance. This work is done in close cooperation with key stakeholders from the USA, Japan, and Europe. Japan has also recently set up an international Vehicle Safety Committee to achieve global standards of vehicle safety, in co-operation with Europe and the USA. The next International Cooperation Working Group meeting will take place in London 8-12 October 2006.
A Working Group on Digital Maps was created in the beginning of 2005 and in November 2005 it finalized its Final Report - Recommendations.
The eCall DG released an MoU which was signed in August 2004 by the European Commission, ERTICO, and ACEA. This MoU sets the objectives and outlines the route to complete the launch phase of a European wide eCall by 2009. Several Members States have now signed the MoU. A specific eCall Toolbox is available on the eScope website to support the implementation process. The 2nd eSafety Communication was published and focuses on the strategies for the implementation of eCall towards 2009.
The RTTI Working Group has produced a technical and economical model for implementing the RTTI services. The RTTI Working Group of the eSafety Forum submitted its final report in September 2004.
The Working Group on User Outreach is currently defining strategies for dissemination of eSafety research to the end user and eSafety campaigns to promote the eSafety systems available on the market. The main conclusion from the Working Group till now is that there is a need to increase the effort on user outreach to support the deployment of eSafety. One proposal from the group has been to create a communication platform for eSafety outreach.
A new working group has been created for vehicle to vehicle and vehicle to infrastructure communications. The terms of reference from this working group is under preparation.
Proposals to amend the UN-ECE Regulation on steering systems to remove the requirements for a mechanical link and to specifically permit certain steer-by-wire functions have been agreed and can be expected to enter into force during the first half of 2005 from when it could be used for the purposes of obtaining EC Whole Vehicle Type Approval.
The Commission decision on short-range radar taken 18 January 2005 allocates a specific radio frequency band to short-range radar devices. The new decision is the result of a two-year drive by the Commission and EU radio spectrum and road safety experts.
Planned activities
The 4th call of the IST Programme with the deadline 22 March 2005 invited stakeholders to submit proposals related to eSafety where the main focus areas for this call are cooperative systems. One result from this call has been the strengthening of eSafety dissemination through the launching of the eSafety Support project that will build on the findings of eScope and expand the eSafety support activities throughout three years (2006-2009). A special effort will be made in eSafety Support to sustain the process towards the deployment of a European wide eCall solution.
Page 61 of 490
Progress of the 28 Recommendations
List of recommendations
The eSafety High-Level meeting on 25 April 2002 called for the establishment of a Working Group, to be tasked to further elaborate the European strategy, to recommend actions and to prepare for the next High-Level Meeting. The Commission services established this Working Group, which met four times in 2002 on 7 June, 8 July, 9 September and 8 November. The final report of the eSafety Working Group from November 2002 lists 28 recommendations for further actions within the following eSafety related topics:
• Accident Causation Data
• Impact assessment of safety systems
• Human-Machine Interaction
• Road Map for Intelligent Integrated Safety
• Intelligent Passive Safety Systems
• Intelligent Integrated Road Safety Systems including ADAS
• The European Safety Map database
• Emergency Calls (e-Calls) and E-112
• Real-time Traffic and Traveller Information (RTTI) for road safety
• Motor vehicle type-approval legislation
• Safety systems standards and regulation in the EU: State of the art
• Legal issues of market introduction of Intelligent Integrated Road Safety Systems
• Ultra wide-band 24 GHz short range radar
• Societal aspects
• The different business cases
• User Outreach
• The eSafety Forum
This report describes for each of the 28 recommendations, the progress status, links to ongoing national and European eSafety activities, and the planned activities for the area.

Page 62 of 490
Accident Causation Data
Recommendation number and title:
1) Consolidate analyses from existing EU, Member State and industry road accident data.
2) Develop jointly a European Accident Causation Database covering all EU countries, and facilitate access to it.
Activity leader:
European Commission
Start of activities:
1) 2004
2) 2006
Background:
Although today there are different sources of accident statistics from the Member States, no single consolidated accident causation database exists. In the US, the NHTSA spends approximately $28 million annually on accident data. The European Union spends considerably less, often in a fragmented way. Europe can, within two years, use existing data sources to obtain a much clearer understanding of accident causation than exists today. The aim is to:
- Establish a European network for accident analysis;
- Provide input for the European Road Safety Observatory;
- Provide a more scientific basis for the identification and evaluation of effective safety functions;
- Enable the confirmation of the relevant best tests and test procedures for safety, performance, and ease of use;
- Enable the evaluation of effective countermeasures.
Status:
Information on national and international data has been disseminated to the different eSafety Working Groups. However, the comparison of data is difficult and several of the WGs are investigating how to best make use of this data. The WG on Implementation Road Maps has compiled some of the results in order to list technologies according to the impact on road safety in Europe. The Final Report and Recommendations of the Implementation Road Maps WG is available on www.escope.info
Page 63 of 490
European R&D:
APROSYS (www.aprosys.com)
MAIDS (www.bmf.co.uk/maids/report.pdf)
PENDANT (www.mechanik.tu-graz.ac.at/pendant/)
CARE (europa.eu.int/comm/transport/care/index_en.htm)
IRTAD (www.bast.de/htdocs/fachthemen/irtad/index.htm)
HUMANIST (www.noehumanist.org)
SAFETYNET (http://safetynet.swov.nl/)
ETAC
RISER ( http://www.erf.be/section/ep/riser)
National activities:
A number of data collection activities exist in the Member States or internationally. The goal is to consolidate and align this data on a European level. Examples of data sources are:
National: FARS, GDV, ITARDA, DEKRA, NASS, GIDAS, INRETS, INSIA, ELASIS, MICKEY, VALT, LAB
International: WHO, RIDER, OTS, CCIS, STAIRS, VOLVO, BMW, VW, DC, EACS
eSafety Working Groups:
The Accident Causation Working Group carried out a detailed analysis of existing data sources.
• The data sources were assessed on three criteria, which yielded a mixed picture.
• The task to interrogate these data sources was defined. One element of this is the development of the research questions that need to be answered. To help in this and to enhance transparency, a multi-stakeholder workshop was held on 30 June 2004. The questions that need to be answered during the interrogation of existing data sources have been developed in a report, available on www.escope.info.
• A strong recommendation was made that the task of interrogation of the existing data sources be included in a project call in the near future.
The working group also tried to ensure that duplication of effort was avoided by forging good links with other projects and initiatives. This includes :
MAIDS, ETAC, SafetyNet, APROSYS, and a number of national initiatives.
The above analysis resulted in the clear identification of the need for resources to carry out this interrogation. It is now anticipated that this will be done following an appropriate call.
Using the results of Accident Causation Data WG is also a key area for the Road Map WG.
Page 64 of 490
Future actions:
The Working Group on R&D has defined the following research need for this area:
Greater emphasis and funding of accident causation R&D including the analysis of present data and demographic aspects.
The Working Group on Accident Causation has used the above to outline specific tasks related to accident causation:
The Implementation Road Maps working group recommends that funding be put in place to have the task carried out urgently so that final results can be expected within 2 years. This may cost around €1.5 million. This work is an essential prerequisite measure for other eSafety work or initiatives outside eSafety that are already underway.
The work to carry out the interrogation should now be handed on to the successful project consortium.
There is a need to maintain some continuity between the work that has been done by the working group and that which will be carried out by the project group.
In the future it would also be useful to maintain a bridge between the e-Safety initiative and other activities in accident analysis.
The longer term recommendation of the e-Safety Forum to define a common format and structure for future accident data is being led by SafetyNet and accident causation analysis working group members are in touch with this work and would wish to remain so.
In view of the above, the e-Safety accident causation analysis group recommends that it disseminates the work and reports produced so far and then invoke a temporary moratorium until results from these other initiatives begin to appear or are available for discussion. The work of the group could then recommence to maintain contact and continuity. The IST 4th call provided an opportunity to address accident causation needs and new activities might be launched within this area in the beginning of 2006.
Contacts:
Mr Michael Hollingsworth, ACEA, [email protected]
Page 65 of 490
Impact assessment of safety systems
Recommendation number and title:
3) Develop a methodology to assess the potential impact of intelligent integrated road safety technologies in Europe. Develop a validation methodology and procedures for vehicles equipped with intelligent integrated road safety systems.
Activity leader:
Automotive industry
Start of activities:
2005
Background:
For each relevant eSafety system the following facts are to be considered:
- Accident fatalities to be affected (Accident causation data);
- Expected change in fatalities;
- Other benefit / side effects;
- Approximation for In Vehicle cost average;
- Approximation for cost of road and information / Infrastructure;
- Technical capability;
- Regulatory issues (obstacles and updated regulations needed);
- Estimation for implementation issues / different classes of vehicles;
- Fleet composition in market up to 2010.
These items are combined into an eSafety MATRIX, which combines all relevant information to enable evaluation of the realistic impact of eSafety systems. This work is undertaken by the Road Map Working Group.
Status:
The ongoing work aims in the short term, to analyse accident causation data using the existing European databases. This analysis can then be used for defining the most effective countermeasures. In the long term, the group is expected to make recommendations for further actions that are required for effective, homogeneous accident causation data collection and analysis, liaising with the Integrated Project SafetyNet.
An exploratory study on the potential socio-economic impact of the introduction of Intelligent Safety Systems in Road Vehicles (SEISS) was completed in January 2005. The socio-economic impact was preliminarily estimated for a certain number of cases showing a positive Benefit-Cost ratio in the long term.
Page 66 of 490
A survey on “Incentives schemes applied by the Member States in the Transportation Sector” was also conducted in 2005 so as to design a strategy to support the adoption of eSafety. This survey collected experiences from the Member States in the application of financial or fiscal control incentives in the transportations field as an instrument to speed up the introduction of improved or new technologies, especially in conjunction with regulatory requirements.
European R&D:
SafetyNet (http://safetynet.swov.nl/)
PReVENT (www.prevent-ip.org)
National activities:
(not available)
eSafety Working Groups:
The Working Group on Accident Causation collected information on the existing EU, Member State and industry road accident databases. A multi-stakeholder workshop was held on 30 June 2004 to understand how a more effective use can be made of existing accident causation databases.
The working group also tried to ensure that duplication of effort was avoided by forging good links with other projects and initiatives. This includes:
MAIDS, ETAC, SafetyNet, APROSYS, and a number of national initiatives.
Future actions:
On the basis of the recommendations of the Working Group, the Commission intends to include a study of impact assessment and accident causation analysis using existing data sources in the FP6 IST, Call 4.
Contacts:
Mr Michael Hollingsworth, ACEA, [email protected]
Mr Michael Nielsen, ERTICO, [email protected]
Mr Risto Kulmala, VTT, [email protected]
Page 67 of 490
Recommendation number and title:
4) Set up a coordinated validation framework for operational tests in the Member States.
Activity leader:
EuroNCAP
Start of activities:
2006
Background:
The validation methodology and procedures are part of the Code of Practice (CoP) that is being developed in Response 3, (see Recommendation 20). The CoP will contain descriptions of validation procedures for intelligent vehicle safety systems. Response 3 will also contribute towards standardisation. The effect of a Code of Practice is comparable to standardisation, as the industry makes a self commitment to the application of the CoP as the current state of the art. This work will influence the future standardisation activities within the field of ADAS once the technologies get more mature.
Status:
Some concrete testing has been performed for example, for ESP systems. The automotive press has published the results and the plan is to broaden tests to include more eSafety technologies in the future.
European R&D:
(not available)
National activities:
(not available)
eSafety Working Groups:
The User Outreach Working Group is looking into this area and has suggested preparing a pilot project based on the promotion of ESP.
Future actions:
The User Outreach Working Group has discussed how methods from traditional car testing could be transferred to testing of eSafety technologies.
Contacts:
Mr Johann Grill, AIT – FIA, [email protected]

Page 68 of 490
Human-Machine Interaction
Recommendation number and title:
5) Assess the reports by the Member States on the Commission recommendation, and decide on further actions. Urgent action is needed to assess the risk of portable (nomadic) devices.
6) Develop workload assessment, testing and certification methodology for complex in-vehicle working environments.
Activity leader:
5) European Commission
6) Research institutes
Start of activities:
5) 2003
6) 2006
Background:
The majority of road accidents (90-95%) are caused by human errors. More recent data has identified inattention (including distraction, "looked but did not see", and falling asleep at the wheel) as the primary cause of accidents, accounting for at least 25% of the crashes. Today, a wide range of Advanced Driver Assistance Systems (ADAS) is being developed for enhancing the driver's perception of the hazards, and/or partly automating the driving task. The safety impact of these systems is to a great extent determined by their interaction with the driver. For example, in order to efficiently support the driver in avoiding crashing into a front obstacle, it is crucial that the warning/feedback given by the system intuitively generates the appropriate response (e.g. a safe avoidance manoeuvre). The introduction of new safety functions may induce longer-term changes in driver behaviour. This type of behavioural change, often referred to as behavioural adaptation, may significantly affect the actual (as compared to the expected) safety benefits of a safety measure, both in positive and negative directions.
Status:
The Working Group on HMI has identified and listed HMI-related problems from available Member State reports and other relevant sources independently from the state of the art of present technologies. This list of HMI-related problems has been clustered around the following six thematic areas:
1. Risks and benefits
2. Users
3. Markets/Implementation
4. Research
Page 69 of 490
5. Nomadic devices
6. Criteria and Verification Procedures on HMI
European R&D:
AIDE (www.aide-eu.org)
COMUNICAR (www.comunicar-eu.org)
EUCLIDE (www.euclide-eu.org)
SAVE (http://www.iao.fraunhofer.de/Projects/SAVE/save/saveinit.htm)
HUMANIST (www.noehumanist.org)
COST 352 (www.cost.cordis.lu)
National activities:
(not available)
eSafety Working Groups:
To reduce the risks associated with the new in-car information, entertainment and safety systems, the EU published in 1999 a European Statement of Principles (ESoP )for Information and Communication Systems. The eSafety Working Group on HMI was established in February 2003 within the eSafety initiative. Following the recommendations of the eSafety Report, the Working Group on HMI considered amendment and development of the existing EU Statement of Principles (ESoP), taking account of views expressed by Member States and including issues of HMI safety assessment and nomadic and after-market devices.
The Human-Machine Interaction Working Group assessed the technical progress in collaboration with the industry and the Member States, and has proposed a series of further measures on HMI in their final report of 2005. The EC has acted swiftly on one of the recommendations and formed an Expert Group to update the European Statement of Principles (ESoP) on HMI. A new version of the ESop was drafted and reviewed prior to being sent to the EU Member States, the European Parliament and the European Council.
HMI recommendations from the final report include:
Producers should:
• Apply good design principles
• Supply a secure fitting kit (if not built-in)
• Provide clear instructions for product use
• Disable functions not intended to be accessed while driving
Vehicle manufacturers, device manufacturers and service providers should:
• Co-operate to develop smart interfaces
Page 70 of 490
Member States should:
• Take measures to ensure secure fixing of devices
• Take actions on the misuse of visual entertainment systems (e.g. TV, video, games)
European Commission should:
• Further develop and promote the European Statement of Principles on HMI
Further developments are also tackled being by the group and will be addressed, taking into account national experiences or industry best practices. This includes the Nomadic Device Forum launched in June 2005 by the AIDE project. The Forum will address the safety threat Nomadic devices could pose if they are not adequately designed, controlled and installed. In addition, there were calls for more research to understand their risks, the need to extend existing guidelines to include nomadic devices, and for a wide-ranging safety charter to include the full range of stakeholders.
Future actions:
The Working Group on R&D has defined the following research needs for this area:
• Investigate aspects of collective/interactive road use
• Improve common understanding of road traffic
• Improve understanding of error compensation mechanisms
• Investigate adaptation of driver behaviour to new technological systems
• Investigate acceptability of technologies (definition of acceptability/criteria of acceptance)
Contacts:
Mrs Annie Pauzie, INRETS, [email protected]
Mr Alan Stevens, TRL, [email protected]
Mr Christhard Gelau, BASt, [email protected]
Page 71 of 490
Road Map for Intelligent Integrated Safety
Recommendation number and title:
7a) Develop Road Maps with technical steps and economic implications for the introduction of intelligent integrated road safety systems in Europe.
7b) The public sector Road Maps should indicate the investments required for improvements in the road networks and information infrastructure.
Activity leader:
7a) Automotive industry
7b) Road authorities
Start of activities:
7a) 2003
7b) 2003
Background:
The market introduction of Intelligent Vehicle Safety Systems involves policy, technological, societal, business, legal and consumer aspects. From the public sector point of view it has to be possible to estimate the market introduction timetable and to use this information to plan for investments and to determine what other measures are required for enabling take-up. Therefore, there is a need to produce road maps for eSafety technologies to support the development of activities in other eSafety Working Groups. Its aim is to draft some simplified implementation road maps, and details such as essential implementation issues for the systems selected were submitted in 2004. Based on the results of the Working Group on Implementation Road Maps, all parties can think about the business case as well as the public sector budget implications for implementing different eSafety systems. Chances and obstacles will be clearly identified for all involved parties and options for enhancement of the process can be found.
Status:
Tables have been produced for autonomous vehicle-based systems as well as the vehicle and infrastructure based systems of E-call, extended environmental information, RTTI, dynamic traffic management (VMS), local danger warning, and Speed Alert. The tables will be validated in consultation with the key stakeholders. A table has also been drafted showing the eSafety functions against their technical prerequisites.
European R&D:
(not available)
National activities:
(not available)
Page 72 of 490
eSafety Working Groups:
The Road Map Working Group of the eSafety Forum commenced its activities in July 2003. The objectives of the Road Map Working Group were:
1. To identify the technical and economical potentials of the industry as well as the topics and time table for infrastructure improvements by the public sector with regard to eSafety systems capable of affecting road fatalities in Europe by 2010;
2. To develop regularly reviewed road map, which focuses technological steps and economic implication models for introduction of intelligent integrated road safety systems as well as the required improvements in road and information infrastructure
After a collection period for all available information and sources concerning eSafety relevant systems, a suitable structure was found in defining vehicle based systems as well as infrastructure based systems and combined solutions like eCall. The evaluation of these different systems has reflected the following aspects:
• Accidents/fatalities to be affected
• % change in accidents expected
• other side effects/comfort functions
• cost of in–vehicle systems
• cost for infrastructure systems (investment/maintenance)
• cost for information infrastructure (investment/maintenance)
• year of technical readiness
• year of implementation readiness
• user acceptance and willingness to pay
• year of implementation by regulation
• specific implementation issues
• estimation of cars equipped with at 2010 / 2020
• other actors involved for implementation
Not all questions could be appropriately answered but it was possible to create a table of generally prioritized systems, which will have a reasonable impact of the number of fatalities and with a reasonable deployment for the timeframe, which is on focus.
The priority vehicle based systems are:
• ESP (Electronic Stability Program)
• Blind spot monitoring
• Adaptive head lights
• Obstacle & collision warning
• Lane departure warning

Page 73 of 490
The priority infrastructure-related systems are:
• eCall
• Extended environmental information (Extended FCD)
• RTTI (Real-time Travel and Traffic Information)
• Dynamic traffic management
• Local danger warning
• Speed Alert
One key question is how to promote the deployment rate of these systems in future. There are also differences in feasibility between vehicle-based systems and more infrastructure / or mixed systems within the business case. Different incentives are likely to enhance the customer awareness for eSafety features. For each priority system, two market penetration forecasts were estimated, one based on “business as usual” conditions and the other based on incentives and other measures to promote the deployment of the system.
The potential safety effects of the systems were estimated based on research as well as expert assessments using German accident statistics and the European CARE accident data base.
Future actions:
The following recommendations were given for in-vehicle systems:
a. The automobile industry, the EC, the Member States and other stakeholders should enhance the customer awareness of the safety benefits of such systems in vehicles through well structured and harmonized European campaigns;
b. The Member States and insurance companies should give financial/fiscal incentives to customers to buy vehicles equipped with such systems. For this purpose, the discussion should start without further delay to clarify the possibility for incentives given by insurance companies or public agencies;
c. All stakeholders should develop feasible sustainable business models for each application on the principle that those who benefit from the introduction in the form of reduced accident-related costs should share these benefits with those who have to carry the investments and costs. These should also cover nomadic devices.
The following recommendations were given for autonomous vehicle systems:
To increase and accelerate the market penetration of eSafety systems with highest safety benefits, such as ESP:
Page 74 of 490
d. EuroNCAP should incorporate such systems into their rating as soon as proven technology and safety benefit data becomes available, and the functionality of the systems can be adequately tested. ESP and Speed Limiter are on the list today;
e. The European Commission and the Member States should consider regulatory actions (such as making a system mandatory equipment in new vehicles) only as a last option, when such action is judged as essential and beneficial for both industrial and public stakeholders. Socio-economic reasons and respecting the principle of subsidiarity are other important decision criteria. Voluntary solutions should be favored;
f. The Member States and the industry should follow the recommendations of the HMI (Human Machine Interaction) working group to ensure future user acceptance and a safe application and function of the systems during their whole life cycle;
g. The automobile industry, the EC, the Member States and other stakeholders should continue the R&D effort to develop new technologies and solutions for in-vehicle safety systems as well as to evaluate the effects of eSafety system on safety, economy and employment.
The following recommendations are given for infrastructure-related systems:
In order to increase and accelerate the deployment of safety beneficial infrastructure-related eSafety systems:
h. The Member States should ensure the deployment of socio-economically feasible systems and services according to their responsibility and in line with the requirements accepted on the European level.
i. The European Commission should support the deployment of infrastructure related systems on the TERN as well as other key parts of the road networks with the instruments at their disposal (e.g. TEN-T programme).
j. The industry, European Commission and the Member States should together take actions to ensure that digital maps with the information required by the eSafety systems would be developed for all roads in the Member States.
k. The European Commission and the Member States should agree on actions and instruments to increase the willingness of countries and regions to take on the role as “early adopters” for eSafety systems.
l. The European Commission and the Member States should continue R&D efforts to develop new technologies and solutions for infrastructure-related safety systems as well as to evaluate the effects of such systems on safety and other socio-economic factors.
m. Concerning eCall, the European Commission, the Member States and the industry should follow the recommendations of the eCall Driving Group.
n. Concerning RTTI, the European Commission, the Member States and the industry should follow the recommendations of the RTTI Working Group.
Page 75 of 490
o. Concerning dynamic traffic management and local danger warnings, the road authorities and operators should develop together a European vision and strategy for the deployment and operation of dynamic traffic management and local danger warning systems in co-operation with vehicle and telecommunications industry.
p. Concerning speed alert, the European Commission and the other stakeholders should solve the currently open issues and utilise the implementation roadmap produced by the SpeedAlert project.
Contacts:
Mr Risto Kulmala, VTT, [email protected]
Mr Hans-Jürgen Mäurer, DEKRA, [email protected]

Page 76 of 490
Intelligent Integrated Road Safety Systems including ADAS
Recommendation number and title:
8) Analyse existing accident causation data and possible countermeasures and determine clear goals and priorities for further RTD.
Activity leader:
Automotive industry
Start of activities:
2003
Background:
More than half of the R&D efforts analysed focus on electronic systems and enabling technologies for accident prevention and protection systems within vehicles. From the analyses it emerges clearly that the present European “eSafety research activities” do not reflect the necessary systems approach. Research activities in accident causation, road and telecommunications infrastructures; post accident call and issues around cost benefit analysis and efficacy of safety measures need more R&D investment. European research activities should be structured to be complementary to activities in other regions (USA and Japan).
Status:
(See Recommendation 1 & 2)
European R&D:
(See Recommendation 1 & 2)
National activities:
(See Recommendation 1 & 2)
eSafety Working Groups:
The Working Group on Research and Development has the goal to identify and map the Regional, National and European research, technology and demonstration projects that may contribute to addressing the recommendations of the High Level Group on eSafety. The Working Group has established mechanisms for monitoring, aligning and steering such projects so as to maximize synergies and disseminate results. It also identifies the priorities for research areas for integrated European research, technology and demonstration projects in the field of eSafety.

Page 77 of 490
The group presented its final results and recommendations of the RTD Working Group at the eSafety Forum Plenary Session held in June 2005. The group concluded that more work is needed in accidentology, human factors, interoperable co-operative systems, ITS services and also some non-technical issues. The group stresses the importance of an integrated approach, and proposes the setting up of a Joint Technology Initiative on Co-operative eSafety Systems as a vehicle for pushing the frontiers of the research forward.
RTD Working Group
The final results and recommendations of the Group were presented at the 2 June 2005 eSafety Forum Plenary Session in Hannover. The Group concluded that more work is needed in accidentology, human factors, interoperable cooperative systems, ITS services and some non-technical issues. It stressed the importance of an integrated approach, and proposed the establishment of a Joint Technology Initiative on Co-operative eSafety Systems as a vehicle for pushing forward the boundaries of the research. This proposal is in line with the current preparations of FP7 and could eventually evolve into the “Intelligent Car” flagship project of the Commission’s i2010 strategy.
Future actions:
The Working Group on R&D has defined the further research effort needed within the following areas:
- Accident Causation
- eCall
- Cost Benefit Analysis - Quantification of Impacts
- Road and Telecommunications Infrastructure and Architecture
- Human Factors
- Vehicle - Preventive and Protective Systems
The recommendations from the Group have already been directing the funding in FP6. The Commission published in December 2002 the first FP6 call for proposals, on the basis of which, six new projects in the area of eSafety for Intelligent Vehicles Safety Systems have been launched. The IST Call 4 aimed to start research and development activities in the area of co-operative vehicle to vehicle and vehicle to infrastructure systems, and specific actions supporting eSafety. This call observes the recommendations of the RTD Working Group, as well as other stakeholder consultations.
Contacts:
Mr Ulf Palmquist ([email protected]).
Mr Michael Hollingsworth, ACEA, [email protected]

Page 78 of 490
Recommendation number and title:
9) Where necessary, develop specifications for interfaces and communications protocols for vehicle-to-vehicle and vehicle-to-infrastructure communications.
Activity leader:
Multi-sector organisation
Start of activities:
2004
Background:
Co-operative systems are based on two-way communications, with interaction in real time. Thus vehicles may communicate directly with one another, so that a driver knows for example if another vehicle is on a conflicting course, or vehicles may provide data directly to a traffic management centre and receive individual guidance and support in return. These systems can greatly extend the driver’s range of perception, providing relevant information on the behaviour of traffic in general and neighbouring vehicles in particular beyond the range of vision. Cooperative Systems (as an extension to autonomous or stand-alone systems), in which the vehicles communicate with each other and the infrastructure, have the potential to greatly increase the quality and reliability of information available about the vehicles, their location and the road environment, enabling improved and new services for the road users.
Status:
Both Japan and the USA have invested heavily in R&D programmes for intelligent road infrastructure and integrated vehicle-infrastructure systems. In Japan, the Advanced Safety Vehicle (ASV) programme addresses vehicle-to-vehicle communication to avoid crossing and right-turn collisions and accidents with pedestrians, while the new Advanced Cruise-Assist Highway Systems (AHS) programme is looking at infrastructure-supported safety systems using DSRC and digital roadmaps. Japan has recently set up an international Vehicle Safety Committee to achieve global standards of vehicle safety, in co-operation with Europe and the USA.
In the USA, the Intelligent Vehicle Initiative (IVI) is aimed at encouraging driver-assistance technologies, such as collision avoidance systems and diagnostics systems, and the recently-announced VII (Vehicle-Infrastructure Integration) programme is aimed at vehicle-infrastructure communication, e.g. for intersection control. The US DSRC vehicle-road communication system is intended to link vehicles with the Internet.
Page 79 of 490
European R&D:
- ADASE II (http://www.crfproject-eu.org/menu.asp?ind=adasefolder&nome= ADASE%20II)
- GST (http://www.gstproject.org/)
- CarTalk2000 project (www.cartalk2000.net)
- PReVENT project (WILLWARN, INTERSAFE subprojects) (http://www.prevent-ip.org/)
- Car-to-Car Communications Consortium (German industry group)
- ROADSENSE project (http://www.cranfield.ac.uk/sme/amac/c2vip/roadsense/)
National activities:
- INVENT programme (Germany)
- PREDIT programme, ARCOS project (France)
- FleetNet project (DaimlerChrysler)
- SUMMITS project (NL, TNO)
- Roads for the Future (NL, RWS)
- Traffimatics project - CVHS (UK)
eSafety Working Groups:
The Working Group on R&D has defined the following research needs for this area:
- Study possibilities of infrastructure to vehicle communication
- Investigate how new vehicle technologies could influence design of roads (or could even be used for road infrastructure)
- Develop HMI standards for information on road infrastructure
- Stronger involvement of road authorities and road operators in R&D project
- Assessment of how Galileo, UMTS and other electronics systems could improve preventive safety technologies
Future actions:
The IST 4th Call included eSafety Co-operative Systems on Road Transport with the objective to develop and demonstrate Co-operative systems for road transport that will make transport more efficient and effective, safer and more environmentally friendly.
Contacts:
Mr Juhani Jaaskelainen, European Commission, [email protected]
http://www.europa.eu.int/information_society/programmes/esafety/index_en.htm

Page 80 of 490
Recommendation number and title:
10) Pursue international cooperation.
Activity leader:
European Commission
Start of activities:
2003
Background:
International collaboration is seen as an important and essential part of the eSafety initiative. It is needed to strengthen the synergies and to avoid duplication with work that is taking place in other regions, in particular the regions playing a leading role in automotive technology (North America and Japan). The problems associated with the development and market introduction of active safety systems are quite similar in the different regions. International Cooperation has the potential of avoiding the duplication of efforts of both the industry and the public sectors, and avoiding fragmentation of markets through different technical or regulatory approaches. International collaboration should also lead to the proliferation of functionally compatible systems through standardisation, harmonisation and open platforms, thus benefiting the automotive industry, its suppliers and the travelling public at large.
Status:
Priority-defining work has been performed to focus international cooperation on eSafety issues of international importance. This work is done in close cooperation with key stakeholders from the USA, Japan, and Europe. The next step is to involve emerging markets where road safety has been a key issue for long and where eSafety now has become a major priority. These are countries like China, India, Brazil, South Africa, etc.
European R&D:
EU-India – cooperation on eSafety (FP6-Call4)
National activities:
(not available)
Page 81 of 490
eSafety Working Groups:
The International Cooperation Working Group supports the dialogue at the international level, coordinates the international aspects of the work of the other eSafety Forum Working Groups and identifies topics/issues where this cooperation is lacking or should be strengthened. The International Cooperation Working Group will make the necessary recommendations to accelerate the exchange of information on priority topics and suggest the way forward. The working group expects to cover especially Human-Machine Interaction, certification and testing methodology and procedures, harmonisation and standardisation, legal issues, impact and socio-economic benefit analysis and benchmarking/best practise. The Working Group met in 2004 in Parma. Participants from Europe, US and Japan discussed the international aspects of the eSafety initiative and defined a number of priority fields to be discussed within the eSafety Forum, namely:
• Consolidation of accident data
• Global impact assessment of technologies
• Global principles for HMI
• Vehicle-Vehicle and Vehicle-Infrastructure specifications
• Standardisation and certification
• Legal issues
• Socio economic benefits
• Exchange of “Best Practice” and outreach
A Working Group meeting was held in 2004 in Nagoya during the ITS World Congress. The topics discussed were:
• Review of Global eSafety Recommendations
• Summary of eSafety activities in Europe
• Outcome of the 25 September 2004 High Level Plenary Meeting in Brussels
• Update on eScope and eSafety meeting calendar, and relevant events in 2005
• eSafety update from Japan and the US
• Progress on International Cooperation
During the ITS World Congress in San Francisco the International Cooperation Working Group held its 6th meeting. The agenda included an update on the eSafety Progress in Europe, information on global activities (USA, Japan, China and Australia) and HMI activities and incentives to support deployment of eSafety. The discussion centred on regional eSafety developments and on improving eSafety systems.
Future actions:
The next meeting of this Group is scheduled to take place during the ITS World Congress in London, 8-12 October 2007.
Contacts:
Mr Jacob Bangsgaard, [email protected]

Page 82 of 490
The European Safety Map database
Recommendation number and title:
11) Define requirements for a European digital road map database, with agreed road safety attributes. Create a public-private partnership to produce, maintain certify and distribute this database.
Activity leader:
Mapping industry
Start of activities:
2004
Background:
The digital road map database should be made available for all users at affordable prices (possibly free of charge). National, local and regional authorities and operators should provide safety-related data on road configurations within their networks, with target dates for implementation. This recommendation can be split into a few milestones:
Definition of a safety-enabled map format;
Definition of an updating mechanism to increase the map updating frequency;
Definition of map database interface with standardized architecture in the vehicle;
Definition of public-private automatic information mechanisms;
Definition of new map collection mechanisms.
Status:
The NextMAP project (2001-2002 - www.ertico.com/nextmap) identified requirements for the future digital map, based on functional requirements of anticipated ADAS and telematics applications, tested and evaluated the technical and economical feasibility of a digital map based on this enhanced specification. One of the major outputs of NextMAP is the contribution to the GDF standard by formulating a change request to the ISO standard 14825-GDF. This proposal has been submitted to ISO/TC204/SWG3.1 in 2002 resulting in a new GDF 4.0 standard accepted in January 2004.
At its 24 June 2005 meeting, The European Council’s Environment Committee reached a unanimous policy agreement on the adoption of a draft of the INSPIRE (Infrastructure for Spatial Information in Europe) Directive, which creates a legal framework for the establishment and operation of a geographical information infrastructure in Europe. Its purpose is twofold: First, to make top-quality geographical data available at all levels across the European Union, in order to better implement community policies; and, second, to give the public access to the information.
Page 83 of 490
European R&D:
ActMAP (www.ertico.com/activiti/projects/actmap/home.htm) investigated and developed dynamic incremental actualisation of digital map databases and has developed a concept of delivery chain for map updates using a standard map update exchange format. This work will result in a standardization proposal to ISO TC204/WG3.
MAPS&ADAS (www.ip-prevent.com) develops, tests and validates a standard method for the collection, maintenance, certification and provision of safety related content for in-vehicle map databases. Additionally, it will develop, test and validate a standard interface to provide different ADAS applications access to map and vehicle positioning data provided by one central unit (either stand-alone or part of a navigation system). The results of the MAPS&ADAS already have proven to be important for the Digital Map Working Group. It supplied the list of safety attributes and determined priorities. The survey currently conducted within the MAPS&ADAS will be important for the implementation of phase 1.
EuroRoadS (eContent programme) (www.euroroads.org) is developing a common data model and exchange format and online delivery tools for digital road databases. Focus is on easing access to national survey and road administration data, to support pan-European applications and products such as speed information, tolling, telematics, ADAS and road management. When successful, EuroRoadS will facilitate the standardised availability of road data. Safety attributes are part of it. EuroRoadS therefore can facilitate the standardised availability of safety attributes.
The SpeedAlert (www.speedalert.org) project's main objectives are to harmonise the in-vehicle speed alert concept definition and to identify and investigate the first priority issues to be addressed at the European level, such as the collection, maintenance and certification of speed limit information. One of the most important recommendations defined by SpeedAlert address the crucial need to ensure procurement of European-wide and up-to-date speed limit information.
HIGHWAY (www.ist-highway.org) is working on the architecture and specifications to offer integrated safety and added-value services for both embedded in-vehicle and mobile personal navigation systems. The work includes a user requirement analysis and the design of the global system architecture. After finalisation of the detailed specifications the implementation of prototypes will start followed by an extensive validation in 2007.
SafeMAP focuses on analysis of societal benefits of safety-related map data (in terms of improvement of road traffic safety) and the feasibility and cost of inclusion of such data in in-vehicle map databases.
National activities:
(not available)

Page 84 of 490
eSafety Working Groups:
The Digital Maps Working Group kicked off its activities on 18 April 2005. The Working Group’s objectives include:
• Defining a business model for Public-Private cooperation, to ensure availability of attributes relevant to road safety utilising digital maps; This model aims to support the creation, maintenance, quality assurance and distribution of safety attributes that can be integrated into the digital roadmap databases.
• Defining the requirements for digital map databases which contains road safety-related attributes in addition to normal road map data.
The Working Group concluded its “Final Report-Recommendation “ in November 2005. The report outlines three phases that need to be implemented if safety attributes are to become available to the mapping industry and are to be integrated into their digital map databases to be utilised in all kinds of road safety applications. They are:
• Phase 1 – "COOPERATION": Supply of safety attributes in the form that they are currently available at Public Authorities.
• Phase 2 – "QUALITY ASSURANCE: Standardisation of information provision and output quality testing.
• Phase 3 – "OPTIMISATION": Standardisation of transfer format and transfer media and optimisation of the transfer process.
Future actions:
The Working Group recommended, that it continues to act on behalf of the Steering Committee of the eSafety Forum, undertaking on-going monitoring of the implementation of all three workplan phases.
Further research can be done on automatic collection of data using map data in the cars. Further business scenarios should be investigated especially for the implementation of ADAS-enabled maps on the market. Collaboration between public authorities and private location-based content providers should be actively supported.
Contacts:
Mr Ad Bastiaansen, TeleAtlas, [email protected]
Mr Yiannis Moissidis, Navteq, [email protected]
Mr Maxime Flament, ERTICO, [email protected]
Mr Vincent Blervaque, ERTICO, [email protected]

Page 85 of 490
Emergency Calls (e-Calls) and E-112
Recommendation number and title:
12) Adopt the Commission Recommendation on the introduction and implementation of E-112 in Europe.
13) Establish a European Emergency Communications Forum to continue the CGALIES work.
14) For in-vehicle emergency calls (e-Calls), establish data requirements and data transfer protocols. Establish interfaces and e-Call routing and handling.
Activity leader:
European Commission
Start of activities:
2002
Background:
Deployment of the in vehicle emergency call (e-Call) is a priority both for the industry and the public sector. In cases where a vehicle is involved in an accident, an emergency Call, or e-Call can be initiated automatically, and accurate vehicle location and additional safety-related information can be passed to the Public Service Answering Point (PSAP). Such information cuts dramatically the emergency response times, saving lives and reducing the consequences of serious injuries. eCall will use the single European emergency call number E112. In order to facilitate the processing of location-enhanced emergency calls, the Commission adopted a Recommendation that further emphasises the need to take into account the in-vehicle emergency calls.
Status:
Having recognised the absolute necessity that all eCall players agree on a common functional objective and a common project timing, the eCall DG has drafted an MoU which is now open for signature and has been signed by some of the main stakeholders. This MoU sets the objectives and outlines the route to complete the launch phase of the eCall project by 2009. The MoU was signed in August 2004 by the European Commission, ERTICO, and ACEA.. Since then, Finland, Sweden, Greece, Italy, Lithuania and Slovenia have also signed the MoU. Five further Member States (Cyprus, Czech Republic, Denmark, Germany and The Netherlands) have indicated that they would be ready to sign in the near future. A "toolbox" for eCall, including the list of organisations that have signed the MoU can be found on www.escope.info.
European R&D:
eScope – eCall toolbox (www.escope.info)
eSafety Support – eCall Support (www.esafetysupport.org)
eMerge (www.e-merge.org/)
CGALIES (www.telematica.de/cgalies/index.html)
GST RESCUE (http://www.gstrescue.org)
Page 86 of 490
One of the tasks within the GST Rescue project is to investigate the implementations status of E112 in the Member States. This was done through a questionnaire sent out to the 25 Member States and the study was finalised in November 2004. GST Rescue aims to optimise the use of data from in-vehicle emergency call systems. Not only will in-vehicle emergency calls deliver to the dispatch centre such critical additional information as location and accident severity data as agreed by the DG eCall, but the emergency vehicles themselves will employ a navigation solution and warning system permitting them to arrive safely on the scene as quickly as possible.
National activities:
A consortium commissioned by the Finnish Ministry of Transport and Communications has produced a plan for a national eCall pilot. The plan concludes that aftermarket devices will enable more forceful and cost-efficient car fleet penetration than OEM eCall devices. The plan also includes an analysis of user requirements based on an interview study. The authorities will provide the system for the device manufacturers and vendors in order to already ensure the operation of the devices.
The German Federal Ministry of the Interior is planning the implementation of E112. The plan is to visualise the location of the incident both at the PSAP and in the emergency vehicles.
The Ministry of Internal Affairs and Kingdom Relations in the Netherlands has made a plan for the implementation of E112 taking place in 2006. The implementation contains visualisation of incident location both at the PSAP and in the emergency vehicles.
eScope supports the organisation of national workshops where implementation of eCall will be the key subject. These workshops will be organised throughout Europe in 2005. The first Expert workshops were held in Finland, Portugal and Switzerland in 2005.
eSafety Working Groups:
The eCall Working Group was established at the end of 2002. By mid 2003, the eCall Working Group (at that point transformed into the eCall Driving Group) had identified the key players involved in the eCall process and outlined the functionalities of the interfaces to be established between the players. These players are members of four large “constituencies”: The eCall Driving Group has developed an Action Plan for Pan-European emergency services. These services will build on the location-enhanced emergency services being implemented in the Member States on the basis of the recently adopted recommendation on the implementation of E-112. Furthermore, these services will include provisions for more accurate location information and additional safety information.
Future actions:
The Working Group on R&D has defined the following research needs for this area:
- Further R&D into the required technical architecture and structure of eCall systems
- Study aspects of civil protection and emergency management
In order to further advance the provision of E112 the Commission has established a European Forum for officials responsible for the delivery of public safety and emergency services in Europe. The first meeting was held in Brussels on 11 October 2005. Further meetings will be held in 2006.

Page 87 of 490
The Commission also supports the work of ETSI in defining the necessary standards, as well as the work of the ETSI OCG ad-hoc group on emergency telecommunications (OCG EMTEL).
Contacts:
Mr Michael Nielsen, ERTICO, [email protected]
Mr Wolfgang Reinhardt, ACEA, [email protected]

Page 88 of 490
Real-time Traffic and Traveller Information (RTTI) for road safety
Recommendation number and title:
15) Analyse the Member States’ responses to the RTTI Recommendation and draw up further actions.
16) Create public-private partnerships to capture, process and provide real-time traffic, travel and road condition data including Floating Vehicle Data.
17) Support the wider use of the pan-European RDS/TMC network for safety-related traffic information. Provide a report with required actions to the European Commission on the status of RDS/TMC implementation and the remaining bottlenecks.
Activity leader:
15) European Commission
16) Multi-sector organisation
17) TMC Forum
Start of activities:
2003
Background:
Real-time traffic and travel information (RTTI) can contribute greatly to safety. In order to facilitate access to public sector data, and to enable the private and public sectors to co-operate in the service provision, the Commission published in 2001 a Recommendation on the deployment of Traffic and Travel services in Europe. RTTI is the first area of a new generation of telematics services for drivers and other travellers to achieve appreciable success. Currently, this is due to the fast-growing implementation of services and products based primarily on existing RDS-TMC broadcast technology. In the future, supplementary technologies such as digital bearers will enhance the service possibilities. By delivering traffic data messages promptly to a suitable in-vehicle terminal, TMC upgrades static navigation to real-time, i.e. dynamic route guidance, or “electronic traffic avoidance” while giving safety benefits by alerting drivers to accidents, congestion and hazardous driving conditions.
Status:
Floating Vehicle Data and other advanced data collection techniques are now being used to support high quality TMC services. Public private partnerships could help increase the usage of these techniques.

Page 89 of 490
RDS-TMC receiver deployment is gradually reaching mass market status thanks to its relationship with navigation systems. A number of limitations are however appearing. Examples are its fixed location coding with limited capacity (causing cumbersome updates of location tables and making extensions to urban networks difficult), limited bandwidth, a limited message set and a lack of prioritisation mechanisms. The use of more recent communication media (such as terrestrial or satellite DAB) and the results of research initiatives such as AGORA (pioneering on-the-fly location referencing) and TPEG (extending the message set and supported applications) can help overcome these limitations. How to do so in a way that is backward compatible with RDS-TMC (because its large installed base) remains a topic of discussion. The TMC Forum continues to support wider use of RDS-TMC through assistance for new and existing EU member states and organisations:
- Advice on all aspects of setting up TMC services
- Harmonisation, standardisation and quality assurance, e.g. certification of Location Tables
- Development work to implement new features to improve services.
European R&D:
(not available)
National activities:
The UK is very active both at a national and international level in relation to RTTI, also in the standardisation arena on this subject. Activities within the following areas/programmes have been launched:
In-Vehicle Driver Information Systems
Radio Data System - Traffic Message Channel (RDS-TMC)
Transport Direct
National Traffic Control Centre (NTCC)
Travel Information Highway (TIH)
MATTISSE (Midlands Regions)
ROMANSE (Southampton)
Star Trak (Leicester)
TravelBristol Info Centre (Bristol)
Kizoom
Nomadic Devices: PDAs, Mobile telephones, Tablet PCs, Mobile Data Terminals; etc
STREETWISE & CENTRICO
UTMC29, TTI Standards, ITS-Assist, ITS Cost-Benefits
Page 90 of 490
eSafety Working Groups:
The RTTI Working Group of the eSafety Forum aims to identify the obstacles to more and Europe-wide RTTI implementation and to identify concrete actions that could remove these obstacles in the specific countries and accelerate deployment. The group has produced a technical and economical model for implementing the RTTI services. The group recognises that the only viable short-term solution is RDS/TMC, while other technologies will offer higher quality services in the future.
The RTTI Working Group has formally ended its work. The final results were made public at the 2nd eSafety High Level Meeting with the EU Member States on 18 October 2005 where recommendations to Member States were presented. Among these were:
• The need to agree on an implementation strategy for the extension of RTTI services working to European Standards,
• Support the TMC Forum,
• Agreement on a minimum quality for public services,
• Publish clear guidelines for the private sector on the conditions for establishing private data collection networks for commercial vehicles, and
• Ensure that frequency spectrum and broadcast capacity will be made available in the near future and support the development of future advanced digital services.
The final report has been written is available on www.eScope.info.
Future actions:
- Work to take advantage of the RTTI possibilities offered by the availability of new broadcast data bearers such as digital radio.
- Work to improve quality of service in urban areas.
- Continuing work to optimise and manage the quality of existing services.
- Support in introduction of TMC services to new markets (e.g. Eastern Europe and China).
Contacts:
RTTI WG: Mr Gert Siegle, Robert Bosch, [email protected]
TMC Forum: Mr James Burgess, ERTICO, [email protected]
Page 91 of 490
Motor vehicle type-approval legislation
Recommendation number and title:
18) Determine what actions may be required for bringing rapidly forward road safety improvements obtainable with intelligent integrated road safety systems in vehicles.
Activity leader:
European Commission
Start of activities:
2003
Background:
As the legislation is primarily performance based, it tends not to be design restrictive. One area that will need revision is that of the provisions on the steering system, which currently requires a mechanical link and monotonic action (i.e. the same amount of input at the wheel always provides the same amount of output). This effectively prevents steer-by-wire systems being brought to the market.
Status:
Proposals to amend the UN-ECE Regulation on steering systems to remove the requirements for a mechanical link and to specifically permit certain steer-by-wire functions have been agreed and entered into force in 2005 from when it can be used for the purposes of obtaining EC Whole Vehicle Type Approval.
European R&D:
(not available)
National activities:
(not available)
eSafety Working Groups:
(not available)
Contacts:
Mr Juhani Jaaskelainen, European Commission, [email protected]
http://www.europa.eu.int/information_society/programmes/esafety/index_en.htm

Page 92 of 490
Safety systems standards and regulation in the EU: State of the art
Recommendation number and title:
19) Analyse specific needs and priorities of intelligent integrated safety systems for standardisation in ISO, CEN and ETSI. Promote accelerated standardisation.
Activity leader:
Standardisation bodies
Start of activities:
2003
Background:
The Commission is supporting both the work of the standardisation bodies and fostering industry’s collaborative groups and open platforms. The standardisation bodies active in ICT and ITS are ISO, IEC and ITU at international level, and CEN, CENELEC and ETSI at European level. The most relevant technical committees are ISO-TC 204, and CEN TC 278. The three European standards organisations have also formed a collaborative body called The ICT Standards Board (ICTBS), and the public and private organisations dealing with road transport have formed ISTSG, the Intelligent Transport Systems Steering Group. The Commission is observer in ICTBS, and a member of ISTSG. The Commission has also issued the following standardisation mandates to the European Standardisation Organisations:·M329 – standardisation of the 24 GHz UWB SRR· M338 – drawing up a work programme to support the EFC Directive· M270 – calling for work programme for standardisation for ITS in road transport.
Status:
The ITSSG Strategic Framework document was finalized in November 2004 Specifically for eSafety, the EC is responsible for mapping eSafety areas onto standardisation requirements; this work is in progress. The document is available for download a: www.itcsb.org
European R&D:
The new Integrated Projects, especially GST and PREVENT have substantial work packages in standardisation. The projects also foster the development of open platforms and system architecture. The best example is the 3GT project, aiming at an open telematics platform and collaborating with such industrial groups like OSGi Alliance, AMI-C, Open GIS and MOSTCo.
Contacts:
Ms Cathy Jenkins, DfT (UK), [email protected]
Mr Paul Kompfner, ERTICO, [email protected]

Page 93 of 490
Legal issues of market introduction of Intelligent Integrated Road
Recommendation number and title:
20) Develop a methodology for risk-benefit analysis, achieve a consensus on a European Code of Practice, and establish guidelines for facilitating market introduction of intelligent integrated safety systems.
Activity leader:
Automotive industry
Start of activities:
2004
Background:
This Code of Practice (CoP) will contain descriptions of procedures and processes for analysis of user requirements, definition of systems according to these requirements, and validation procedures showing that safety related customer requirements are fulfilled. This CoP will have a special focus on an integrated “system safety - human factors” approach and will be a basis for future standardisation efforts. It will also give advice on the legal questions regarding product liability, driver’s responsibility – manufacturer’s liability, etc.
Status:
The basic research work in this area was done by the projects Response 1 and Response 2 (FP4 & 5). Response 1 carried out a detailed analysis of “non-technical” questions regarding market introduction. Response 2 established a deeper understanding of possible future market introduction scenarios for active safety systems, including risk-benefit-analysis. This analysis includes an evaluation of possible methods to identify and quantify the risks and benefits of ADAS.
European R&D:
Response 2 (http://response.adase2.net/)
PREVENT (http://www.prevent-ip.org/)
National activities:
(not available)
eSafety Working Groups:
(not available)
Future actions:
The project Response 3 which is a sub-project of the Integrated Project PREVENT will translate these results into a CoP for development and testing of ADAS. This will address two major issues and the results will be available at the end of 2006:
• A definition of "safe" ADAS development and testing.

Page 94 of 490
• An agreement on these development guidelines between all stakeholders as a basis for the company internal translation and/or optimisation of system design specifications and complementary verification methods.
Contacts:
Mr Maxime Flament, ERTICO, [email protected]
Mr Peter van der Perre, ERTICO, [email protected]

Page 95 of 490
Ultra wide-band 24 GHz short range radar
Recommendation number and title:
21) Take the necessary actions for removing regulatory barriers to the use of the 24 GHz band for short-range radar in Europe.
22) Undertake the standardisation in ETSI for the 24 GHz UWB radar.
Activity leader:
21) European Commission
22) Standardisation bodies
Start of activities:
2003
Background:
Short-range radars that can detect collision dangers and automatically apply a car’s brakes should be available by mid-2005, further to a Decision adopted 17 January 2005 by the European Commission. In Europe, CEPT ECC/DEC/(02) 01 designates the band 76-77 GHz for vehicular or infrastructure radar systems. However, SRR systems require a wider bandwidth than currently available to obtain the required resolution. Furthermore, the automotive industry holds that the immediate implementation of SRR systems in or around this frequency range would not be feasible at the present time, given the stated relative lack of maturity and cost-effectiveness of the available technology for this band. The automotive industry believes that in the short term, operation around the 24 GHz band is the only commercially viable solution, with a subsequent migration to the 77 GHz or to another band after some years, by which time appropriate technology solutions are expected to have become cost-effective and the SRR concept validated in the market.
Status:
The Commission decision, which allocates a specific radio frequency band to short-range radar devices, is the result of a two-year drive by the Commission and EU radio spectrum and road safety experts. According to the European Road Safety Action Programme, the number of road accident victims is to be halved in the EU by 2010. All new SRR devices would have to use the 77 GHz band (or any other designated permanent band) while the operation of existing SRR systems would remain authorised in the temporary band to the end of their operational lifetime. The Radio Spectrum Decision of 2002 allows the Commission, with the assistance of the Radio Spectrum Committee (RSC), to adopt decisions on EC radio harmonisation measures, based on CEPT reports. The Commission issued in August 2003 a mandate to CEPT for the harmonisation of radio spectrum in both 79 and 24 GHz ranges. On the basis of the CEPT report, the Commission will bring a decision concerning this spectrum range to the RSC in 2004. The 79 GHz range band has been identified by CEPT as the most suitable band for long term development and deployment of SRR.

Page 96 of 490
European R&D:
(not available)
National activities:
(not available)
eSafety Working Groups:
(not available)
Future actions:
A new harmonised standard for the permanent frequency band would need to be developed as early as possible and with the highest priority. Furthermore, a harmonised standard from ETSI for SRR devices at 24 GHz produced in the context of the R&TTE Directive will only be accepted by the Commission provided it is in line with the various elements of the overall approach agreed to in the Radio Spectrum Committee. To enable the operation of SRR devices in new vehicles sold on the European market, radio spectrum needs to be rapidly identified and harmonised at Community level.
Contacts:
Mr Juhani Jaaskelainen, European Commission, [email protected]
http://www.europa.eu.int/information_society/programmes/esafety/index_en.htm
Page 97 of 490
Societal aspects
Recommendation number and title:
23) Estimate the socio-economic benefits, which can be obtained through the reduction of fatalities, injuries and material damage.
Activity leader:
European Commission
Start of activities:
2004
Background:
The impact of intelligent vehicle safety systems goes beyond mere improvements in road safety. Other effects, such as greater reliability of arrival times, environmental benefits or increased driver convenience are also benefits of using IVSS. An assessment of the socio-economic impact of safety systems also face the possibility of reverse effects, for example a reduction in traffic flow or even an increase in the number of accidents due to inappropriate human-machine interfaces. Investigations of the socio-economic impact of intelligent safety systems began in the late 1980s. Since then, the benefits of IVSS and services have been assessed on the basis of more than 200 operational tests and early deployment experiences in North America, Europe, Japan, and Australia (PIARC 2000). Three broad-based categories of evaluation approach are currently being used (OECD 2003):
Empirical data from laboratory measurements and real-world tests;
Simulation;
Statistical analysis.
Status:
The Commission launched in July 2004 an exploratory study on the potential socio-economic impact of the introduction of Intelligent Safety Systems in road vehicles (SEiSS). The lead contractor of the SEiSS study was VDI/VDE Innovation + Technik, Germany, and the work ended in January 2005. The Commission initiated this exploratory study in order to:
Provide a survey of current approaches to assess the impact of new IVSS;
Develop a methodology for assessing the potential impact of IVSS in Europe;
Provide factors for estimating the socio-economic benefits resulting from the introduction of Intelligent Vehicle Safety Systems;
Identify the major indicators influencing market deployment and develop deployment scenarios for selected technologies/regions.

Page 98 of 490
The socio-economic impact was preliminarily estimated for a certain number of cases showing a positive Benefit-Cost ratio in the long term. The report can be found on www.escope.info.
A survey on “Incentives schemes applied by the Member States in the Transportation Sector” was also conducted in 2005 so as to design a strategy to support the adoption of eSafety. This survey collected experiences from the Member States in the application of financial or fiscal control incentives in the transportations field as an instrument to speed up the introduction of improved or new technologies, especially in conjunction with regulatory requirements.
European R&D:
Several projects funded by EU member states or the European Commission as well as studies carried out by the automotive industry and equipment suppliers have already provided some data on IVSS impact. A number of projects deal with technological R&D and provide a good basis for further progress. These projects include AIDE, ARCOS, CarTALK 2000, CHAMELEON, EDEL, E-Merge, GST, HUMANIST, INVENT, PReVENT, PROTECTOR, RADARNET and SAFE-U. Several projects (such as ADASE II, GST, HUMANIST) are focused on accompanying measures to develop the sectoral innovation system and strengthen networks and co-operation. Some projects (such as ADVISORS and RESPONSE) deal with the implementation of safety systems and measures to support the application of new technologies. Finally, a number of projects discuss the costs and benefits of the technologies. These include ADVISORS, CHAUFFEUR, DIATS, E-Merge, STARDUST, and the TRL Report.
National activities:
The UK Department of Transport has contracted a consortium to evaluate the quantifiable cost and benefits of ITS deployment. The project is considering a wide range of ITS applications, of which Travel and Traffic Information systems form an important element. Particular attention is being paid to the benefits accruing from both technological and institutional integration in the deployment of ITS. The end product of this study will be a comprehensive Guidance, a methodology that can be applied, taking into account local circumstances, in terms of:
- The nature of the benefits that might realistically be anticipated, according to a range of policy goals;
- The factors, which determine the outturn costs and benefits of ITS deployment;
- The variables, which the end user is most able to influence in order to maximise benefits;
- What needs to be monitored and controlled to ensure that benefits are realised; and
- What needs to be measured and evaluated in the future, to ensure that the benefits anticipated are being achieved.

Page 99 of 490
eSafety Working Groups:
The Working Group on R&D has defined the following research need for this area:
- EU wide assessment and verification (with international comparison) of efficacy of safety measures and systems – including the establishment of methodologies for a comprehensive cost benefit analysis.
Future actions:
There is, as yet, no systematic assessment and coherent analysis of the socio-economic impact of Intelligent Vehicle Safety Systems. In addition, the compilation of such an analysis is further complicated by the fact that many systems have not yet been widely deployed. The Commission invited proposals for a Europe-wide study in the IST 4th call.
Contacts:
Mr Juhani Jaaskelainen, European Commission, [email protected]
http://www.europa.eu.int/information_society/programmes/esafety/index_en.htm
Page 100 of 490
Recommendation number and title:
24) Stimulate and support road users and fleet owners to buy vehicles equipped with intelligent road safety systems.
Activity leader:
Member States
Start of activities:
2003
Background:
The aim is to create more awareness among the road users of the benefits that eSafety systems offer.
Status:
The User Outreach Working Group currently undertakes this task. Through the eSafety Communication Platform, the User Outreach Working Group plans to provide marketing support to vehicle manufacturers in the pre-competitive area.
European R&D:
(not available)
National activities:
(not available)
eSafety Working Groups:
The User Outreach Working Group has analysed some consumer campaigns and experiences from suppliers, communications models and penetration patterns of some earlier technologies like ESP. The group recommends the establishment of a common Media Platform for eSafety. This platform of all interested stakeholders would co-ordinate the media work, marketing issues and political work. A pilot campaign could be organised as soon as end of this year. Later, eSafety should look into a common Label for eSafety. The pilot campaign could also benefit from user surveys such as the Eurobarometer.
Future actions:
Organising campaigns and information material/articles.
Contacts:
Mr Johann Grill, AIT – FIA, [email protected]

Page 101 of 490
The different business cases
Recommendation number and title:
25) Identify best practices for positive business cases to promote the introduction of intelligent integrated road safety systems.
Activity leader:
Multi-sector organisation
Start of activities:
2003
Background:
For both public and commercial services there needs to be a successful business model. As in the past, the public model rests on securing safety benefits judged to outweigh the costs of providing the service. For any commercial provider, the challenge is to collect sufficient revenue from customers while minimising the cost of data collection and service provision. Individual drivers are reluctant to pay directly for services like traffic information, especially safety messages, that is commonly understood to be provided free of charge as a public service.
Status:
An exploratory study on the potential socio-economic impact of the introduction of Intelligent Safety Systems in Road Vehicles (SEISS) was completed in January 2005. The socio-economic impact was preliminarily estimated for a certain number of cases showing a positive Benefit-Cost ratio in the long term.
A survey on “Incentives schemes applied by the Member States in the Transportation Sector” was also conducted in 2005 so as to design a strategy to support the adoption of eSafety. This survey collected experiences from the Member States in the application of financial or fiscal control incentives in the transportations field as an instrument to speed up the introduction of improved or new technologies, especially in conjunction with regulatory requirements.
eSafety Working Groups:
The RTTI WG has identified that, other than free services such as those offered by TMC in many countries today, annual or monthly fees such as a radio tax or a once-per-life down payment added to the purchase price of the receivers could be more easily accepted by the customers than a pay-per-use service.
Contacts:
Mr Juhani Jaaskelainen, European Commission, [email protected]
http://www.europa.eu.int/information_society/programmes/esafety/index_en.htm
Page 102 of 490
Recommendation number and title:
26) Support the eCall business model by implementing the full service chain and ensuring interoperability and compatibility with E-112.
Activity leader:
Member States
Start of activities:
2004
Background:
The economics of the eCall model have been investigated and found genuinely problematic in the sense that:
- Significant up front investments must be made by the automotive industry, the telecom industry and the emergency Authorities.
- When in service, eCall is expected to reduce the costs of social security and of the insurance companies while neither of these two constituencies would have contributed to the investments.
- The upfront investments of the automotive and telecom industries would be largely pointless unless the emergency authorities, as an initial step, have also invested to make their operational processes compatible with eCall.
The eCall Driving Group has developed several original ideas on how to solve this.
Status:
The need for a positive business case for eCall has been identified at the high-level meeting 3 February 2005 and should be elaborated through a private-public partnership. Also the European Commission has been requested to make an in-depth analysis on the possible use of fiscal incentives (reduction of vehicle taxes).
European R&D:
(not available)
National activities:
(not available)
eSafety Working Groups:
Initially a Working Group was established to look at the Business Case for Intelligent Vehicle Safety Systems. Due to very close synergies with the eCall Working Group, and the largely overlapping list of members, this group was merged into the Working Group, which is now called the eCall Driving Group.

Page 103 of 490
Future actions:
To support the business model it will be necessary for the main stakeholders to sign the agreed MoU. The MoU is ready for signature and has already been signed by a number of stakeholders. The MoU was signed in August 2004 by the European Commission, ERTICO, and ACEA. Since then, Finland, Sweden, Greece, Italy, Lithuania and Slovenia have also signed the MoU. Five further Member States (Cyprus, Czech Republic, Denmark, Germany and The Netherlands) have indicated that they would be ready to sign in the near future.
The complete list of MoU signees can be found on the eCall toolbox on www.escope.info.
Contacts:
Mr Michael Nielsen, ERTICO, [email protected]
Mr Wolfgang Reinhardt, ACEA, [email protected]

Page 104 of 490
User Outreach
Recommendation number and title:
27) Design and execute awareness campaigns that explain the benefits, functioning and use of the intelligent integrated road safety systems to the consumers.
Activity leader:
User organisations
Start of activities:
2003
Background:
A close link between the development of eSafety technologies and the end users is missing today. The benefits of these advanced technologies are difficult to disseminate to a broad public and more engagement of the user might bring the technologies closer to a market introduction. Human behaviour is an important aspect and the work of the HMI Working Group is therefore essential in the user involvement phase. All key stakeholders are interested in the user acceptance of eSafety technologies and this needs to be supported by a broader dissemination of eSafety functionalities and benefits.
Status:
The Working Group on User Outreach is currently defining strategies for dissemination of eSafety research to the end user and eSafety campaigns to promote the eSafety systems available on the market.
European R&D:
eScope (www.escope.info) is disseminating European R&D and policy results for eSafety systems and services.
eSafety Support will continue the work of eScope and has a dedicated work package on user outreach. (www.eSafetysupport.org).
National activities:
(not available)
eSafety Working Groups:
The User Outreach Working Group has been formed to increase the awareness among the general public of the existence of eSafety systems, their contribution to road safety in general, and their potential for reducing individual risk is essential. Besides the awareness on new eSafety systems there are further influences defining the acceptance by the user and forming the basis for real demand. The working group will concentrate on aspects of communication and consumer behaviour. Therefore communication and campaign managers, media and marketing experts and representatives of user groups will be particularly invited to contribute to the working group.

Page 105 of 490
The group has analysed some consumer campaigns and experiences from suppliers, communications models and penetration patterns of some earlier technologies like ESP. The group recommends the establishment of a Communications Platform for eSafety outreach activities in. This platform will invite of all interested stakeholders to coordinate media work, marketing issues, campaigns, and political work. A pilot campaign could be organised in 2006 in cooperation with eSafety Support. Later, eSafety should look into a common Label for eSafety. The pilot campaign could also benefit from user surveys such as the Eurobarometer.
Future actions:
Organising campaigns and information material/articles.
Contacts:
Mr Johann Grill, AIT – FIA, [email protected]

Page 106 of 490
The eSafety Forum
Recommendation number and title:
28) Create an eSafety Forum with the objective to monitor and promote the implementation of these recommendations, and support the development, deployment and use of intelligent integrated road safety systems.
Activity leader:
European Commission
Start of activities:
2003
Background:
The eSafety Forum was established in early 2003 by the Commission in close co-operation with the industry, industrial associations and public sector stakeholders. Its organisation is managed by the Steering Group, which meets about once a month. The Steering Group is co-chaired by European Commission, ERTICO, and ACEA and has representatives from all sectors. In 2003, the Steering Group defined the work programme of the Forum as well as membership issues and the Working Groups. The Commission adopted in September 2003 a Communication on Information and Communications Technologies for Safe and Intelligent Vehicles, based on the results from the eSafety Working Group and other consultations. The Communication brings forward the actions the Commission intends to take in order to accelerate the development, large-scale deployment, and use of eSafety systems.
Status:
Four Plenary Sessions have been organised, on 22 April 2003, 17 November 2003 (Madrid), 25 March 2004 and 2 June 2005 (Hannover). The third Plenary Session (March 2004) finalised the 2003 eSafety Forum Summary Report, and issued the first set of Forum Recommendations. The fourth Plenary session focussed on “Deploying eSafety”. In September 2004 the Forum organised a High Level meeting for the public authorities, another High Level meeting took place on 3 February 2005 focusing on the private sector and the last High Level meeting was organised for the Member States on 18 October 2005. The European Commission organises Steering Group meetings, High Level meetings, and Plenary Meetings, participates in the Working Groups and offers the secretarial support to eSafety activities.
European R&D:
A number of R&D projects have been launched by the Commission under FP5 and FP6:
ADVISORS, AIDE, APROSYS, APSN, AWAKE, COMUNICAR, eSCOPE, EUCLIDE, EuroRoads, GST, HUMANIST, IN-ARTE, PEIT, PReVENT, SAVE, TRAVEL-GUIDE, SpeedAlert, etc. More information on these projects can be found on www.escope.info.

Page 107 of 490
National activities:
(not available)
eSafety Working Groups:
The Forum has created 11 Working Groups in the following areas:
- Accident Causation Data
- Emergency Call (eCall)
- Human-Machine Interaction (HMI)
- International Cooperation
- Research and Development
- Real-time Traffic and Travel Information (RTTI)
- Implementation Road Maps
- Heavy Duty Vehicles
- User Outreach
- Digital Maps
- Communications
The working groups might dissolve when their role has been finalised and new working groups can be created.
Future actions:
The Public Authority High Level meeting organised to discuss the work of the Forum took place in Brussels 27 September 2004. The objective of the meeting was to get the support from the Member States for the implementation of three priority topics: eCall, RTTI and HMI, and for the continuation of the eSafety initiative. The progress in the eSafety initiative was presented jointly by the eSafety partners, and the Commission presented their proposal for next steps and the planned actions. At the High Level meeting for the private sector 3 February 2005 further commitment was given to eCall implementation in Europe. The last Plenary Meeting took place in Hannover 2-3 June 2005. All eSafety Forum activities can be found on www.escope.info. eSafety Support will further strengthen the support to the eSafety Forum activities.
Contacts:
Mr Juhani Jaaskelainen, European Commission, [email protected]
http://www.europa.eu.int/information_society/programmes/esafety/index_en.htm
Mr Jacob Bangsgaard, eSafety Support, [email protected]

Page 108 of 490
Conclusion
Since the launch of the eSafety activities in April 2002, the European Commission has initiated 11 working groups that, with strong support from different European stakeholders, has undertaken very significant work and made valuable contributions towards making vehicles and the infrastructure safer for the citizens.
The European Commission’s initial commitment to eSafety was of two years. Although important strides have been made during this period, this was but the beginning of the endeavour to make eSafety mainstream in road safety. The Future Actions described for the 28 Recommendations in the previous section evidence that there is still a lot of work ahead that will need the continued commitment of both the European Commission and all the key stakeholders on national and European level. This will enable the implementation of a number of eSafety technologies and end-user education that have already been identified, through European research, as mature enough for introduction to the marketplace.
The IST 4th Call programme shows the commitment from the European Commission and the proposals for new projects related to eSafety shows the commitment from the European stakeholder’s side to act on these issues. This, coupled with the continued work of the eSafety Forum and its Working Groups is thus of crucial importance to creating safer roads in an enlarged European Union with ever increasing demands for mobility and transport services.

Page 109 of 490
CHAPTER II - EUROPEAN COMMISSION
ESAFETY COMMUNICATIONS
Page 110 of 490
On the basis of the report of the eSafety Working Group and other consultations, the Commission adopted in September 2003 a Communication on eSafety37. The Communication presents the Commission’s recommendations to accelerate the development and deployment of ICT in road safety, in particular the wider, accelerated use of active safety systems called Intelligent Vehicle Safety Systems.
In September 2005 the Commission adopted 2nd eSafety Communication38 “Bringing eCall to Citizens”. This Communication proposes a road map for a full-scale roll-out of eCall, the pan-European in-vehicle emergency call service, by 2009.
In February 2006 the Commission adopted the Communication on the Intelligent Car Initiative “Raising Awareness of ICT for Smarter, Safer and Cleaner Vehicles”39, presenting the Intelligent Car Initiative as the policy framework that will guide the stakeholder’s efforts, aiming at accelerating the deployment of intelligent vehicle systems on the European and other markets through clearly defined actions that encompass the use of policy, research and communications instruments.
The three Communications to the Council and the European Parliament on eSafety can be found as annexes to this Compendium.
37 Commission Communication Information and Communications Technologies for Safe and Intelligent
Vehicles, COM(2003) 542 Final, 15.9. 2003 38 Commission Communication The 2nd eSafety Communication “Bringing eCall to Citizens”, COM(2005)
431 Final, 14.9. 2005 39 Commission Communication: On the Intelligent Car Initiative “Raising Awareness of ICT for Smarter,
Safer and Cleaner Vehicles”, COM(2006) 59 Final, 15.2. 2006

Page 111 of 490
CHAPTER III - ESAFETY FORUM HIGH LEVEL AND PLENARY
MEETINGS CONCLUSIONS
Page 112 of 490
Introduction
Several eSafety High Level Meetings have been held since April 2002. In 2002, before the eSafety Forum was set up, the objective of the High Level Meetings was to launch the eSafety initiative. Commissioners and Director Generals from the European Commission, MEPs, Chairpersons from Associations and CEOs from industry met in order to develop the eSafety Action Plan, agree on the strategy and priorities for its implementation and steer the way forward. Since the Forum was established in early 2003 – bringing together all road safety stakeholders - three High Level Meetings have been held to address specific issues with selected stakeholders. In that respect, these meetings differ from the eSafety Forum Plenary Meetings, which gather all stakeholders involved in eSafety. The main objectives of the Plenary meetings are to discuss the eSafety Forum Working Group reports, and to try to reach Forum Recommendations, representing consensual views on the implementation of the actions in question. Additionally, the European Commission normally reports on the progress of their eSafety Communications, as well as progress on other related activities. This chapter presents the minutes of all eSafety High Level Meetings and Plenary Meeting conclusions. The chronological order of the meetings has been respected in order to show how the eSafety initiative has progressed over time.
Page 113 of 490
3.1 First eSafety High Level Meeting, Brussels, 25 April 2002
3.1.1 Introduction The first eSafety High Level meeting was attended by 60 participants from the European Commission, European Parliament, other public authorities and key representatives from the industry. The meeting set out to discuss eSafety goals and objectives. The meeting explored key issues related to eSafety and in particular examined the requirements for putting the initiative into place. This helped in creating an overall strategy for eSafety and defining the priorities for implementation of the strategy. Key follow up actions to carry out the strategy were also set and distributed amongst partners.
3.1.2 General Conclusions Overall the meeting established that eSafety is an opportunity to further improve road safety and the comfort of vehicles and decrease the harmful effects of transport. This in turn creates business opportunities for the automotive, telecommunication and service industries as well as infrastructure operators.
eSafety Requirements
Whilst examining eSafety requirements one clear point arose; that eSafety could only move forward so long as it had full commitment from each of the sectors involved.
A mixture of relevant stakeholders forming a public-private partnership was necessary. A combination of policy makers, technological know-how, industrial expertise and operators needed to form an alliance and establish a common strategy for actions in road safety. This strategy was to adopt an integrated approach to safety including the interaction between the vehicle, the driver and the infrastructure.
Obstacles
Several barriers were identified which would need to be removed in order to progress within eSafety. These included:
A lack of open standards
The fragmentation of markets
A lack of financing available for information infrastructure
Insufficient education and awareness amongst drivers
Risks (e.g. liability issues)
Page 114 of 490
Creating a positive business case and business opportunities was a key element in developing eSafety. This would help in obtaining the necessary support from the industry.
Consideration of Human Factors
As the majority of road accidents are caused by human factors or weaknesses this is clearly one of the more difficult factors to control. Therefore, human factors need to be taken into account by the eSafety Forum. Ways and means to not only educate the driver, change driver behaviour and assist the driver would all need to be explored.
Standardisation
As standardisation is still an issue to be tackled in integrated vehicle systems, the eSafety Forum needs to develop a clear understanding of the specific standardisation needs and determine where further actions are required.
Classification of technologies
eSafety technologies would need to be classified into ‘families’ or groups. This would avoid adopting a global approach when important differences would need to be considered. The groups would have common features, which would help particularly when creating customer awareness and demand comparable to the approach adopted by EuroNCAP.
Stakeholder Cooperation
As the eSafety initiative is Europe-wide, it has to coordinate the interests of all Member States and existing safety advisory bodies, some of which are operating on a national level. However, in an evolving and growing Europe, it also has to take into consideration the impact of EU enlargement on its activities and compare safety issues in candidate countries. It is also extremely valuable to lean upon and share experience with non-European countries, particularly USA and Japan who have made significant contributions to road safety in recent years.
Key Actions
There were 10 key actions, which were identified at this meeting. These included:
1. Establishment of a public-private partnership working together on eSafety targets
2. Finalising targets of the eSafety Action Plan
3. Elaboration of the eSafety Road Map & finding consensus
4. Continuation of the process with High-Level Meetings
5. A Working Group, established for 6 months, to assist in the preparation of the eSafety Action Plan and in the follow-up of its implementation
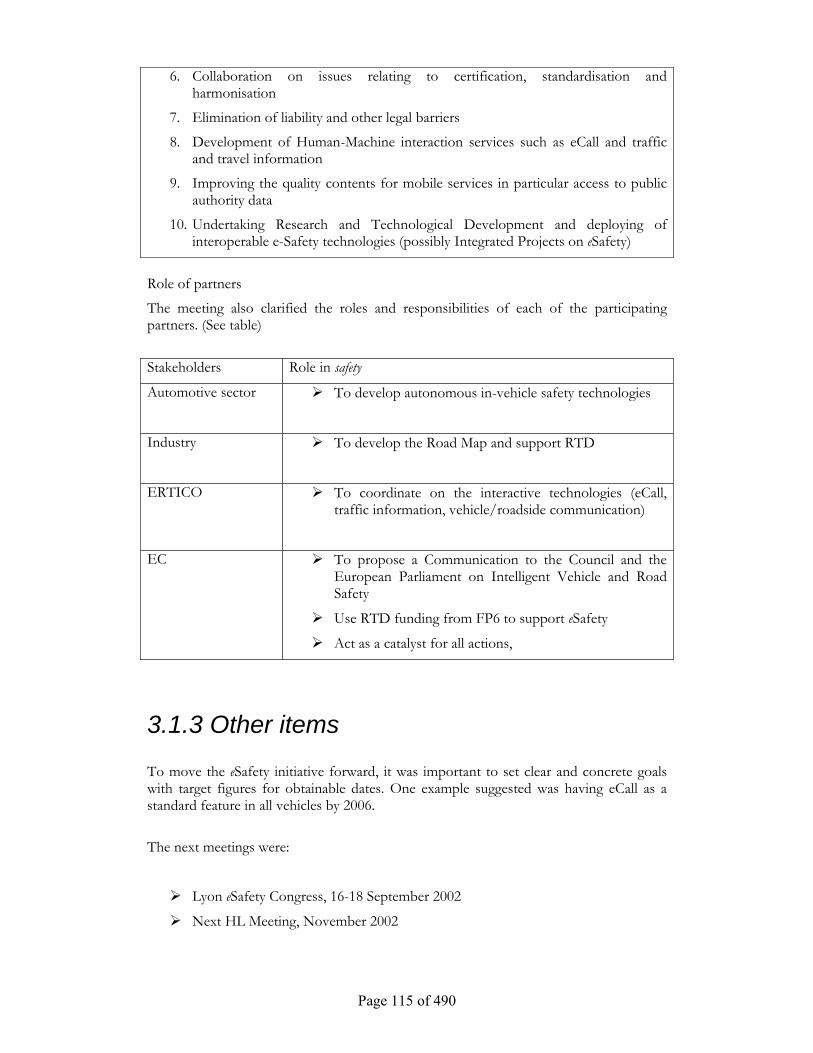
Page 115 of 490
6. Collaboration on issues relating to certification, standardisation and harmonisation
7. Elimination of liability and other legal barriers
8. Development of Human-Machine interaction services such as eCall and traffic and travel information
9. Improving the quality contents for mobile services in particular access to public authority data
10. Undertaking Research and Technological Development and deploying of interoperable e-Safety technologies (possibly Integrated Projects on eSafety)
Role of partners
The meeting also clarified the roles and responsibilities of each of the participating partners. (See table)
Stakeholders Role in safety
Automotive sector To develop autonomous in-vehicle safety technologies
Industry To develop the Road Map and support RTD
ERTICO To coordinate on the interactive technologies (eCall, traffic information, vehicle/roadside communication)
EC To propose a Communication to the Council and the European Parliament on Intelligent Vehicle and Road Safety
Use RTD funding from FP6 to support eSafety
Act as a catalyst for all actions,
3.1.3 Other items To move the eSafety initiative forward, it was important to set clear and concrete goals with target figures for obtainable dates. One example suggested was having eCall as a standard feature in all vehicles by 2006.
The next meetings were:
Lyon eSafety Congress, 16-18 September 2002
Next HL Meeting, November 2002
Page 116 of 490
3.2 Second eSafety High Level Meeting, Brussels, 14 November 2002
3.2.1 Introduction
The second High-Level meeting gathered some 60 representatives from the European Commission, other public authorities and industries to discuss the Final Report of the eSafety Working Group and to approve this Report as a basis for the steps forward in the public-private eSafety initiative.
Participants also discussed issues such as acting together on eSafety, the role of Member States, eCall, Human-Machine Interaction and eSafety user demand. It also defined the next steps for eSafety and determined the role of the eSafety Forum.
3.2.2 General Conclusions Acting together on eSafety
In order for eSafety to make progress it cannot function in isolation. The Forum should work and cooperate with other stakeholders involved in road safety. It would be beneficial to collaborate with other existing as well as new road safety measures. Therefore, developing eSafety would require all stakeholders acting together in a coherent manner and integrating eSafety with other safety measures. For example, a pre-requisite for road safety is good road infrastructure, this requires support and investment by Member States and road operators.
Final Report of the eSafety WG
The Final report was acknowledged by all participants as comprehensive, detailed and above all an important step forward in the eSafety initiative. All participants present at the meeting approved the Final report indicating it would be the basis of future work and actions on eSafety. The Commission and industry declared their commitment to the actions recommended in the report. Nevertheless, it was clear that other stakeholders also needed to demonstrate their commitment.
Role of the Member States
The role and contribution of the Member States in eSafety needed to be clarified further by eSafety partners. The contribution and involvement of the Member States to eSafety initiatives was almost always essential for example with eCall, all Member States would need to sign agreements to introduce the pan-European emergency number.

Page 117 of 490
eCall
eCall is a major priority for industry and can essentially be used as a ‘selling’ point for eSafety as a concept. eCall requires an integrated approach with investments made in the location-enhanced emergency service chain in Member States. Despite being a priority for industry, eCall should not be a privatised business case. In order to achieve the best possible results the public-private partnership is the ideal set up. This is where it can look to the work of ETSI and CGALIES.
Human-Machine Interaction
Human-Machine Interaction was defined as an issue requiring urgent attention. In particular, a priority area is introducing nomadic systems in vehicles. In fact, the Commission included this topic on its Communication on “Safe and Efficient In-Vehicle Information and Communications Systems” which it claims received a mixed response. Some Member States have considered passing Directives on this topic.
eSafety User Demand
As the end user should be a focal point in eSafety development, it is essential to create awareness campaigns and disseminate specialised information targeted at drivers.
Incentives to incite drivers, for example innovative insurance schemes, such as “Pay as You Drive” could be further investigated. Existing regulation leans towards public interest. However, there could be a clearer balance between innovation and regulation.
Key Actions
The following key actions were identified:
In order for work to progress it is beneficial for eSafety work programme to have
clear set deliverables to work towards
The positive business case needed to be further developed as this will facilitate adoption
Further analysis of human behaviour and interactions with technology needed to be undertaken
Trucks, buses and train crossings also had to be considered as potential areas for action
Greater emphasis on vulnerable road users such as children and the elderly was required
eCall was to be made the first industrial priority in eSafety
The Commission was bringing forward a Communication with Community actions on the 1st quarter of 2003
Page 118 of 490
Role of the eSafety Forum
The eSafety Forum was regarded by eSafety stakeholders as the next major step in the eSafety initiative. It is to serve as a more permanent body for promoting eSafety and monitoring its progress. The Commission was to take the lead and run the secretariat for the Forum.
The Forum’s activities should be based on a few but very concrete objectives. Its modalities, membership and workprogramme should be defined in collaboration with industry.
3.2.3 Other Items Road Maps on infrastructure investments and other actions were required for supporting the actions of the industry.
Dates for the eSafety Forum Plenary Sessions were suggested:
March 2003, Brussels
November 2003 (ITS World Congress, Madrid)
Page 119 of 490
3.3 First eSafety Forum Plenary Meeting, Brussels, 22 April 2003
3.3.1 Introduction
The Commission organised the first eSafety Forum Plenary Session in Brussels on 22 April 2003, bringing together 150 representatives of the European automotive and telecommunication industries, providers of intelligent transport systems, infrastructure operators and public authorities.
The main objectives of the eSafety Plenary Meetings are to the eSafety Forum Working Group reports, and to try to reach Forum Recommendations, representing consensual views on the implementation of the actions in question. Additionally, the European Commission normally reports on the progress on their eSafety Communications, as well as progress on other related activities.
The first eSafety Forum Plenary Meeting discussed eCall, Accident Causation Data, Business Case and Human-Machine Interface. Participants were also reminded of the objectives, organisation and processes of the Forum.
eSafety Forum objectives
The general objective of the Forum is to promote and support the development, deployment and use of Intelligent Integrated Road Safety Systems and to monitor the implementation of the 28 recommendations identified by the eSafety Working Group.
eSafety Forum organisation
The Forum is led by the European Commission (DG INFSO) and managed by the Steering Group, which also organises the meetings. Plenary Sessions are chaired by the Commission and gather all stakeholders, while Working Groups are chaired by industry and focus on specific topics. At that time, four Working Groups had been set up: Emergency Call (chair: ERTICO/Belgacom), Accident causation data (chair: ACEA), Business Case (chair: Norwich Union) and Human-Machine Interaction (chair: INRETS).
eSafety Forum process
In order to reach the general objectives of the Forum, the Working Groups, with the collaboration of all stakeholders, find consensus views. On the basis of their reports, recommendations are formulated during the Plenary sessions. All stakeholders are then responsible for the implementation of these recommendations. The Commission monitors and reports on the stakeholders’ progress in this respect, presenting its findings during the Plenary sessions.
Page 120 of 490
3.3.2 General Conclusions
The first eSafety Forum Plenary Meeting
1) Re-confirmed the need for the eSafety Forum, and the high level of interest and continuous commitment of all stakeholders to the initiative
2) Confirmed the structure of the Forum, and the Commission’s leadership
3) Firmly established the Forum as the platform preferred by all stakeholders for continuing eSafety efforts.
4) Took note of the excellent work and progress achieved in the first four Working Groups
5) Demonstrated clearly the potential of improving road safety with new ICT technologies, when deployed broadly
6) Established four new Working Groups: Implementation Road Maps (DEKRA), Real-time Traffic and Travel Information (Bosch), Research and Development (EUCAR) and International co-operation (FIA Foundation) 7) Highlighted the crucial importance of moving the initiative ahead rapidly.
The High Level Session
1) Highlighted the role of the Commission as the facilitator of the eSafety Process, acting within its areas of competence, such as RTD and regulation
2) Confirmed the commitment of the automotive industry to work with the Commission and other players in finding solutions for its customers
3) Emphasised the need to consider the driver, the vehicle and the environment in an integrated way
4) Highlighted the importance of the participation of the Member States at all levels in the eSafety Forum
5) Highlighted the need to invest in Intelligent Roads, and to analyse the benefits of eSafety to society
6) Emphasised the crucial importance of getting eSafety into the “mainstream” political programme on Road Safety
7) Emphasised the need to get eSafety to users as quickly as possible.
Accident Causation Data
At that time, data existed but clear definitions were missing. The knowledge available was not considered sufficient. One of the reasons for this was that barriers existed on access, methodologies, funding, etc.
Quick information collection was identified as a priority for the future. Stakeholders would therefore have to be prepared to work on incomplete data. A second priority was to follow-up the work undertaken to validate the impact of eSafety technologies.

Page 121 of 490
The next steps identified for the members of the Accident Causation Data WG was to collect examples of as many databases as possible, to consider which databases could be consolidated and to define interrogation models for the consolidated data. Members noted that data would be incomplete, but emphasised that this did not rule out an analysis of the impact of possible counter measures.
eCall
eCall was reconfirmed as the number one priority for eSafety. Preceding the meeting, eCall and Business Rationale Working Groups had been working closely together, focusing on the eCall functional model and on the role of the partners (automotive industry, PSAPs, telecom operators and service providers). Reference was made to existing eCall systems (public, private) and on-going work (E-112, EMERGE).
The next steps identified for the eCall stakeholders were to define/agree on a eCall functional model (“toolkit”, investments, political framework), to define data protocols and processing (TELCOS), to clarify the current and planned commitments of the PSAPs and the emergency authorities in the Member States and to clarify the position and roles of the automotive industry and the service providers.
At last, specific issues needed to be addressed, including:
• How to deal with false alarms?
• How to best use existing infrastructure?
• How to deal with liability, privacy?
• How to bundle eCall with value-added services?
Business Rationale
Members of the Business Rationale Working Group assessed that public/private partnerships was the best way ahead, considering the need to implement both autonomous systems (e.g. ABS) and infrastructure-based systems (e.g. eCall).
Preceding the meeting, members of the Business Rational WG and the eCall WG had jointly considered an implementation model (PPP), and initial work had been undertaken on autonomous eSafety functions.
The WG’s next steps were identified, namely to determine the nature of the public/private partnership (benefits for each stakeholder), to define an eCall implementation model, to further investigate autonomous eSafety systems and to cooperate with EuroNCAP.
Participants also identified a number of additional issues that demanded attention, including:
• How to avoid the chicken and egg situation?
• What would be the appropriate timeline for the take-up of eSafety technologies (e.g. ABS)?

Page 122 of 490
HMI
The scope of the work of the HMI Working Group was defined. The HMI WG was mandated to study methods to evaluate the cognitive, visual and manual workload associated with the operation of in-vehicle information and communication systems - including nomadic devices - and recommend good practices. The working group’s remit of study excludes two-wheelers.
The WG’s next steps were identified, namely: to formulate detailed terms of reference, to ask Member States for the missing responses to the Statement of Principles (Commission), to analyse the Member States responses (Commission) and to analyse the activities of ISO as well as activities in the U.S. and Japan in order to harmonize recommendations.
3.3.3 Other items
The Commission reported that it would adopt a Communication on “Information and Communications technologies for Intelligent Vehicles” during the first half of 2003, aimed at accelerating the development, deployment and use of new technologies for improving road safety.

Page 123 of 490
3.4 Second eSafety Forum Plenary Meeting, Madrid, 17 November 2003
3.4.1 Introduction
Over 100 members of the eSafety Forum met on 17 November 2003. The meeting was held to monitor the progress of the eSafety Forum Working Groups and discuss current and future activities in eCall, Accident Causation Analysis, Real-Time Traffic and Travel Information, HMI, Implementation Road Maps, ongoing RTD projects and International Cooperation.
3.4.2 General Conclusions
eCall
In-vehicle Emergency Call (eCall) remains the number one priority for both industry and the public sector. An agreement was made to use E-112 as per Commission recommendations. Work was performed to define the architecture, messages and routing. The Working Group was continuing work on an economic model and to obtain signatures for the MoU.
Accident Causation Analysis
Accident Causation Analysis requires both short-term actions and a long-term strategy. In the short-term, some useful databases existed but an additional funding of 1.5 million euros was needed. In the long-term, there needed to be more work done to define the long-term data needs and formulate an appropriate strategy.
Real-Time Traffic and Travel Information
Real-Time Traffic and Travel Information needs to be developed both at a European level as well as within individual cities. In the short-term, the focus is on building the RDS/TMC services. This is where an innovative public-private business model is required. A European project is needed to secure access to public data and to develop European-wide services.

Page 124 of 490
HMI
Human-Machine Interaction presented challenges for the introduction of in-vehicle systems, including nomadic devices. HMI-related problems were defined on the basis of the Member States’ reports. A key action was to amend the European Statement of Principles and introduce other measures if necessary to help solve some of the identified problems.
Implementation Road Maps
An agreement on implementation Road Maps was seen as an essential element for public sector investments and for user awareness. An inventory of eSafety systems will be created and reach the market by 2010 (see eSafety Matrix). The work of the Implementation Road Maps Working Group was recognised as being closely linked to other Working Groups (e.g. RTD, eCall, RTTI). An important next step was to perform a cost/benefit analysis to determine realistic implementation scenarios for eSafety Systems.
Ongoing RTD
A survey of ongoing RTD projects revealed a lack of systems approach and also highlighted areas for further work to be carried out. Some disparities became apparent from this survey, for example more than half of RTD efforts focus on the vehicle, with substantial gaps in funding of other areas. Further analysis was required into the existing 70 projects. The eSafety Forum wishes to make recommendations for the focus of further RTD and analysis of impacts/benefits.
International Cooperation
International Cooperation is seen as an essential part of the eSafety initiative. This is because knowledge and experience can be shared and opportunities to collaborate are beneficial. A first analysis showed that EU, USA and Japan already have some common interests. The next step was to move towards concrete co-operation in the selected priority topics.
3.4.3 Other items
Good progress was noted in all the seven industry-led eSafety Forum Working Groups, with the first concrete results emerging for eCall.
The Commission Communication “ICT for Safe and Intelligent Vehicles” which was adopted on 15 September 2003 was seen as an important milestone
The industry emphasised the need for integrated approach, affordability, standardisation and harmonizing of legal requirements.

Page 125 of 490
3.5 eSafety Forum Summary Report 2003, Madrid, 17 November 2003
Legal notice by the Commission of the European Communities:
This report was produced by the eSafety Forum Working Groups for the Information Society DG and represents the view of the experts on improving Road Safety in Europe with the use of Information Communications Technologies (ICT). These views have not been adopted or in any way approved by the European Commission and should not be relied upon as a statement of the European Commission ’ s or the Information Society DG’s views. The European Commission does not guarantee the accuracy of the data included in this report, nor does it accept responsibility for any use made thereof. In addition, the European Commission is not responsible for the external web sites referred to in this publication.
1. INTRODUCTION 1.1 About the eSafety Initiative Every year 40,000 people die on Europe’s roads. During the last decade numerous measures were taken to reduce the number of fatalities on European roads. Nevertheless, from society’s point of view the accident costs of road transport are too high with 1.300.000 accidents per year in Europe causing 40.000 fatalities and 1.700.000 injuries, at an estimated cost of 160 Billion €.
The European Road Safety Action Programme published by the Commission provides a general strategy and framework for road safety to reach the ambitious target of halving road fatalities by 2010.
Within this general framework, eSafety is a joint industry-public sector initiative aiming to cut the number of accident by using new Information and Communication Technologies. Advanced Information and Communication Technologies (ICTs) can contribute significantly to road safety, enabling sophisticated safety systems which improve road users’ chances of avoiding and surviving accidents.
In November 2002 an eSafety Working Group, established by the Commission, automotive industry and other stakeholders, proposed 28 recommendations to accelerate the research, development and use of these safety systems in its Final Report. These recommendations are aimed at the European Commission, the Member States, road and safety authorities, the automotive industry, service providers, user clubs, the insurance industry and other stakeholders. They address the improvement of road safety by integrated safety systems that use advanced ICT for providing new, intelligent solutions which address together the involvement of and interaction between the driver, the vehicle and the road environment.
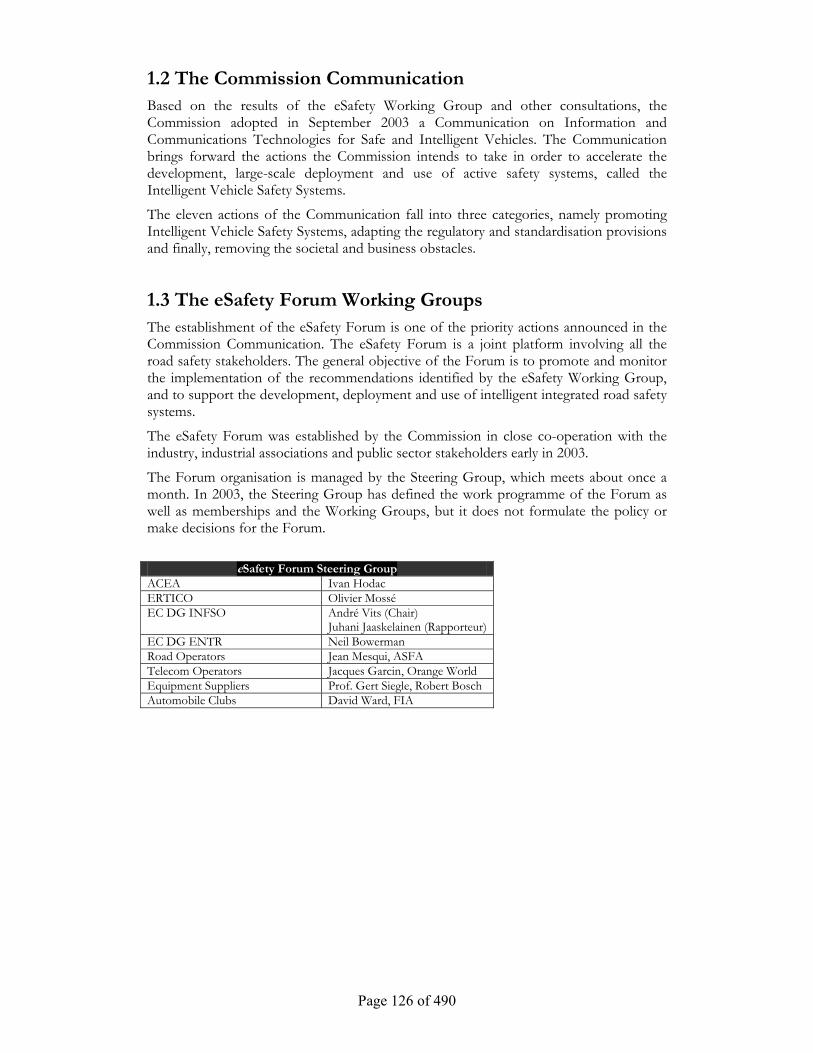
Page 126 of 490
1.2 The Commission Communication Based on the results of the eSafety Working Group and other consultations, the Commission adopted in September 2003 a Communication on Information and Communications Technologies for Safe and Intelligent Vehicles. The Communication brings forward the actions the Commission intends to take in order to accelerate the development, large-scale deployment and use of active safety systems, called the Intelligent Vehicle Safety Systems.
The eleven actions of the Communication fall into three categories, namely promoting Intelligent Vehicle Safety Systems, adapting the regulatory and standardisation provisions and finally, removing the societal and business obstacles.
1.3 The eSafety Forum Working Groups The establishment of the eSafety Forum is one of the priority actions announced in the Commission Communication. The eSafety Forum is a joint platform involving all the road safety stakeholders. The general objective of the Forum is to promote and monitor the implementation of the recommendations identified by the eSafety Working Group, and to support the development, deployment and use of intelligent integrated road safety systems.
The eSafety Forum was established by the Commission in close co-operation with the industry, industrial associations and public sector stakeholders early in 2003.
The Forum organisation is managed by the Steering Group, which meets about once a month. In 2003, the Steering Group has defined the work programme of the Forum as well as memberships and the Working Groups, but it does not formulate the policy or make decisions for the Forum.
eSafety Forum Steering Group
ACEA Ivan Hodac ERTICO Olivier Mossé EC DG INFSO André Vits (Chair)
Juhani Jaaskelainen (Rapporteur)EC DG ENTR Neil Bowerman Road Operators Jean Mesqui, ASFA Telecom Operators Jacques Garcin, Orange World Equipment Suppliers Prof. Gert Siegle, Robert Bosch Automobile Clubs David Ward, FIA
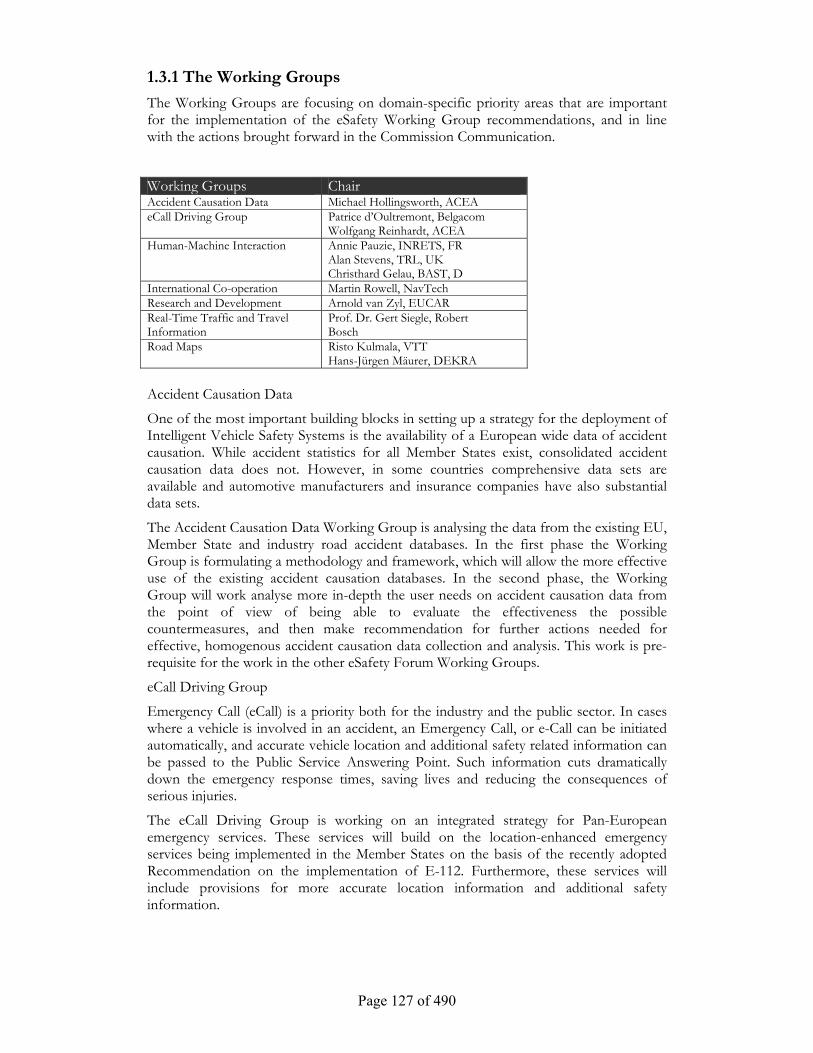
Page 127 of 490
1.3.1 The Working Groups
The Working Groups are focusing on domain-specific priority areas that are important for the implementation of the eSafety Working Group recommendations, and in line with the actions brought forward in the Commission Communication.
Working Groups Chair Accident Causation Data Michael Hollingsworth, ACEA eCall Driving Group Patrice d’Oultremont, Belgacom
Wolfgang Reinhardt, ACEA Human-Machine Interaction Annie Pauzie, INRETS, FR
Alan Stevens, TRL, UK Christhard Gelau, BAST, D
International Co-operation Martin Rowell, NavTech Research and Development Arnold van Zyl, EUCAR Real-Time Traffic and Travel Information
Prof. Dr. Gert Siegle, Robert Bosch
Road Maps Risto Kulmala, VTT Hans-Jürgen Mäurer, DEKRA
Accident Causation Data
One of the most important building blocks in setting up a strategy for the deployment of Intelligent Vehicle Safety Systems is the availability of a European wide data of accident causation. While accident statistics for all Member States exist, consolidated accident causation data does not. However, in some countries comprehensive data sets are available and automotive manufacturers and insurance companies have also substantial data sets.
The Accident Causation Data Working Group is analysing the data from the existing EU, Member State and industry road accident databases. In the first phase the Working Group is formulating a methodology and framework, which will allow the more effective use of the existing accident causation databases. In the second phase, the Working Group will work analyse more in-depth the user needs on accident causation data from the point of view of being able to evaluate the effectiveness the possible countermeasures, and then make recommendation for further actions needed for effective, homogenous accident causation data collection and analysis. This work is pre-requisite for the work in the other eSafety Forum Working Groups.
eCall Driving Group
Emergency Call (eCall) is a priority both for the industry and the public sector. In cases where a vehicle is involved in an accident, an Emergency Call, or e-Call can be initiated automatically, and accurate vehicle location and additional safety related information can be passed to the Public Service Answering Point. Such information cuts dramatically down the emergency response times, saving lives and reducing the consequences of serious injuries.
The eCall Driving Group is working on an integrated strategy for Pan-European emergency services. These services will build on the location-enhanced emergency services being implemented in the Member States on the basis of the recently adopted Recommendation on the implementation of E-112. Furthermore, these services will include provisions for more accurate location information and additional safety information.

Page 128 of 490
Human-Machine Interaction
Human-Machine Interaction with increasingly more complex in-vehicle systems is a major concern. To tackle this important issue, the Commission published in year 2000 a Recommendation on Safe and Efficient In-vehicle Information and Communication Systems, which has been welcomed by the industry. The Human- Machine Interaction Working Group is assessing the situation in the light of technical progress in collaboration with the industry and the Member States, and will propose further measures on HMI if necessary.
International Co-operation International collaboration is seen as an important and essential part of the eSafety initiative and eSafety Forum. It is needed to strengthen the synergies and to avoid duplication with the work which is taking place in other regions, in particular the regions playing a leading role in automotive technology i.e. the North America and Japan.
The International Co-ordination Working Group supports dialogue at the international level, co-ordinates the international aspects of the work of the other eSafety Forum Working Groups and identifies topics/issues where this cooperation is lacking or should be strengthened. The International Co-operation Working Group will make the necessary recommendations to accelerate the exchange of information on priority topics and suggest the way forward. The international co-operation is expected to cover especially Human-Machine Interaction, certification and testing methodology and procedures, harmonisation and standardisation, legal issues, impact and socio-economic benefit analysis and benchmarking/best practise.
Research and Development
The EU’s Research Programmes, especially the Telematics Application Programme under the EU’s Fourth Framework Programme, and the Information Society Technologies (IST) programme which is part of the Fifth Framework Programme have contributed in realising the leading edge technologies, systems and applications which form the basis for many of the active safety systems which are finding their way to the vehicles today.
The development of the Intelligent Vehicle Safety Systems requires still further RTD in a number of technologies. The critical task is determining the priorities for further research based on analysis of accident causes and the impact of potential countermeasures. Therefore, the focus of the Research and Development Working Group is in actions for determining the priorities for further research. Co-ordinating with the national research programmes and promoting the European Research Area (ERA) is a must, as well as reinforcing the international co-operation.
Real-time Traffic and Travel Information (RTTI)
Real-time traffic and travel information (RTTI) can contribute greatly to safety. In order to facilitate the access to the public sector data, and to enable the private and public sectors to co-operate in the service provision, the Commission published in 2001 a Recommendation on the deployment of Traffic and Travel services in Europe. The Real-time Traffic and Travel Information (RTTI) Working Group provides further analysis and recommendations for accelerating the take-up of the measures for accessing the public sector data, enabling the establishment of public-private partnerships, and the provision of reliable, high-quality RTTI services in Europe.
Page 129 of 490
Road Maps
The market introduction of Intelligent Vehicle Safety Systems involves policy, technological, societal, business, legal and consumer aspects. From the public sector point of view it has to be possible to estimate the market introduction timetable and to use this information to plan for investments and to determine what other measures are required for enabling take-up. The Road Maps Working Group promotes the development of Industry Road Maps, and based on them, elaborates in collaboration with experts from the Member States corresponding Public Sector Road Maps, which predict product development and deployment, and indicate the eSafety Forum investments required for improvements in the road networks and in the information infrastructure.
Business Case
Initially, an eighth Working Group was set up as well, working on the Business Case for Intelligent Vehicle Safety Systems. Due to very close synergies with the eCall Working Group, and the largely overlapping list of members, this group was merged into the Working Group, which is now called the eCall Driving Group.
1.3.2 The Plenary Sessions
Two eSafety Forum Plenary Sessions, chaired by the Commission (DG INFSO), were organised in 2003. The main tasks of the eSafety Plenary Sessions are to discuss the selected topics on the basis of the Working Group reports, and to try to conclude with Forum Recommendations, which present consensus views on the implementation of the action in question.
The Commission organised the first plenary meeting of the eSafety Forum in Brussels on April 22, 2003. The Forum brought together 150 representatives of the European automotive and telecommunication industries, providers of intelligent transport systems, infrastructure operators, public authorities and the Commission.
Following the lines set out by its four preparatory working groups, the forum adopted recommendations on how to implement eCall (in-vehicle emergency calls), Accident Causation Data, a better Human-Machine Interaction and a stimulating Business rationale. Four new Working Groups were also set up covering International Co-operation, Real-time Traffic and Travel Information,
Research and Development priorities and Road Maps.
The 2nd Plenary Session of the eSafety Forum took place in Madrid on
November 17, 2003 on the occasion of the 10th Intelligent Transport Systems and Services World Congress. The Forum which featured high-level plenary speakers and a panel discussion discussed the Draft of this Summary Report, and made the Conclusions which are presented in Annex III.
Page 130 of 490
1.4 eScope: The eSafety Observatory The eScope project is a Specific Support Action that supports the eSafety initiative directly by establishing an “eSafety Observatory”. eScope will monitor and stimulate eSafety initiative progress and activities, and will become an easily accessible and up-to-date resource for information on the priority eSafety topics.
eScope comprises three main activities aimed at mobilising the commitment of the eSafety community:
1. Monitoring progress on implementation of the 28 eSafety priority recommendations and of the eSafety “Road Maps” to be agreed
2. Overview of European emerging results on eSafety priority topics 3. Awareness and dissemination.
eScope started 1 January 2004 and will continue to the end of the year 2005. For more information, see www.escope.info
2. Progress Reports of the Working Groups 2.1 Accident Causation Data WG Chair
Michael Hollingsworth, Director-Transport Policy, ACEA
Objectives
At the first plenary meeting of the eSafety Forum the accident causation analysis working group reported that it had identified four questions. These need answers or recommendations of how the answers can be provided to achieve the consistent accident causation analysis that Europe needs.
What information currently exists?
What can be done with this information in the short term?
What information do we really need?
What can be done in the longer term?
The Working Group has so far concentrated on the first two of these questions and intends to complete answers to all four questions by the end of 2004. The group intends to undertake some basic analysis but considers its primary function is best served by making recommendations about how the necessary work can most effectively be done.
Description
The working group believes that accident causation analysis requires:
- diagnosis of the safety issues and identification of the nature and magnitude of the problems at an EU level
- evaluation of the expected effectiveness of countermeasures - evaluation of the observed effectiveness of the countermeasures.
The contribution of the Working Group to the above three requirements is to provide a way to answer the four questions in the objectives. This should address most of the first requirement and a proportion of the second. It is an essential enabler for the third requirement.
Page 131 of 490
a) Existing Data Sources
The working group has collected information about a sample of twelve databases that already exist in Europe40.
Many of these data sources are either private or commercial with significant access restrictions brought about by Intellectual Property Right issues. The group sees no prospect of overcoming these restrictions to make disaggregate data publicly available.
Nevertheless, real possibilities exist to share some aggregated data and
analyses. This conclusion has been reached as a result of the following qualitative analysis in which.
i) Aims and objectives have been developed for what available data might provide and what was being sought from them.
ii) Each database has been assessed, on the basis of four criteria to see what are their essential characteristics and to what extent, on a scale of 1 to 5, they have potential to be used in conjunction with other sources. (The results of this analysis are all given in an annex which will be available on the eSafety website).
The analysis confirms the hypothesis reported to the first eSafety Forum that although many information sources already exist they are not enough to provide Europe with the analysis that it needs.
The picture obtained is a mixed one. Some databases are not appropriate for coordinated analysis because they deal mainly with passive safety issues; they were never designed for the purpose of coordinated analysis. Some others show a degree of potential for cooperative analysis and others show good potential.
This mixed canvass indicates to the working group that there is potential for gathering together the various stakeholders who have access to these various databases to seek to share analysis to answer, on a wider basis than is currently possible, a series of agreed questions. Despite some attempts in the past, unfortunately no formal EU multi-stakeholder mechanism currently exists to allow these discussions to take place between the database holders.
To see if an existing activity could be used for this purpose, the working group has invited presentations from groups either running or proposing to run projects in this area. The project presentations were informative and the work being undertaken in the projects is undoubtedly worthwhile. Despite some known proposals, the group does not currently feel that these existing or agreed EU projects will be able to undertake the work being proposed here.
b) Definition of the task
To achieve the task the following steps will be necessary
• Stakeholders need to be clearly identified and brought together;
• Data user requirements need to be identified (governments, road users, manufacturers, suppliers, insurance companies etc);
• Common definitions of accident causation among the stakeholders are required;
• Unambiguous common questions need to be developed (on accident causation);
• the interrogation of data sources can then be undertaken;
40 Data exist outside Europe too but this has not yet been looked at in detail since it is not always completely relevant for European experience.
Page 132 of 490
• stakeholders can then share and compare analytical results (data and interpretation) and report findings;
• Intellectual Property Right issues will need to be dealt with;
c) Shared Analysis Mechanisms
The variation in the potential of the sample databases for cooperative analysis indicated that the derivation of a more consistent and wider interpretation of the data is not easy. As a result work needs to be done to formulate the appropriate questions, allow the database holders to interrogate their sources and share the results of their analysis. This will take resources and time. In the opinion of the working group the task is such that it cannot be done on a voluntary basis since the necessary time and resources do not exist.
The working group is therefore seeking a way to enable this work to be carried out.
Possibilities include: Network of Excellence, Integrated Project, SSA (Specific Support Action),CA (Coordination Action) and STREP (Specific Targeted Research Project)
Discussion in the group indicates that funding may not be available for such work in the near future. This would constitute a major obstacle.
Recommendations – for short term actions
It is the firm belief of the working group that existing data sources can help to give better EU information on accident causation. This is not a small task and cannot be done on a voluntary basis.
The group recommends:
1. That the definition of the task in section 2b be adopted as a basis for the necessary work.
2. That the task be carried out in the shortest time possible as a matter of urgency
3. That funding be put in place to have the task carried urgently so that final results can be expected within 2 years. This may cost around €1.5 million.
This work is an essential prerequisite measure for other eSafety work or initiatives outside eSafety that are already underway. It has also been identified as a key area of work by the eSafety R and D Working Group.
In the US, NHTSA spends approx. $28 million annually on accident data (this is ongoing work). The European Union is considerably larger and spend considerably less, often in a fragmentary way.
Impacts
If the above recommendations are acted upon, Europe can within two years use existing data sources to obtain a much clearer understanding of accident causation than exists today. It will - Establish a European network for accident analysis
- Be complementary to the proposed European Road safety Observatory
- Provide a more scientific basis for the identification and evaluation of effective safety functions
- Enable the confirmation of the relevant best tests and test procedures for safety, performance and ease of use
- Enable the evaluation of effective countermeasures.

Page 133 of 490
Workplan and Longer term initiatives
The work plan of the accident causation analysis working group proposed to concentrate, within the long term context, on the short term priority to make better use of existing data sources in its first year. The Working Group will turn its attention to the longer term actions and needs in early 2004 so that work on these can begin in 2005. These include recommendations for a common European methodology and accident causation information system.
2.2 eCall Driving Group Co-chairs
Patrice d’Oultremont (Belgacom) and Wolfgang Reinhardt (ACEA)
Objectives
The eCall Driving Group is the successor of the eCall Working Group. The objective of the DG is to enable the complex eCall service chain by removing existing road blocks and coordinating the many action areas. The priority goals are:
• Produce and maintain a stable definition of the eCall concept and a corresponding functional model
• Outline the respective roles of the various constituencies (public services and industries) within that model and ensure that the interfaces between such roles are clearly defined
• Coordinate the outputs of related EU-wide supporting technical activities
• (e.g. E- MERGE model and ETSI standards)
• Promote a balanced economical model supporting the entire eCall life cycle
• Progress report
• The eCall DG has defined the eCall functional model and identify the role of the four main constituencies of potential players, that is
o The car manufacturing industries
o The mobile telephony industry
o The public emergency services
o The private driver assistance and insurance industries
This has been progressed (but not completed yet) through the writing of position papers by the various sector actors. These papers have made it possible to identify –sector by sector - the stable or still-to-be-developed elements of the eCall model.
The eCall DG has addressed the following key issues:
o The considerable diversity of the legal and operational conditions of the public emergency services across the EU. As the central goal of eCall is to reduce the time for these services to reach the site of the crash irrespective of the specifics of the eCalling vehicle and its passengers, it is concluded that a significant degree of harmonisation of these services is required, a very tall order indeed.

Page 134 of 490
o Transporting the eCall data and voice signals from the vehicle to the emergency services requires full interoperability of the three technical platforms involved (in-vehicle, telecom networks, emergency operation rooms). Although the E 112 EU Directive provides a generic framework for such interoperability, a significant standardisation work still needs to be executed to adapt the terms of the Directive to the specificities of an in-vehicle automated call.
o As time for the emergency services to reach to the crash site is the determining factor in eCall, a precise positioning of the vehicle and the availability of data describing the pre-crash motion of the vehicle are essential. It is accepted by eCall that the positioning technologies currently (and probably in the future) exploitable by the mobile telephony networks can meet only part of the requirements and that satellite based positioning systems (SBPS) offer significantly better performances. This, in turn raises questions concerning mass access to SBPS and the corresponding in-vehicle equipments. All this parameters will need detailed analysis.
o The economics of the eCall model have been investigated and found genuinely problematic in the sense that :
o Significant up front investments must be made by the automotive industry, the telecom industry and the emergency
Authorities
o When in service, eCall is expected to reduce the costs of the
Social Security and the of the insurance Companies while neither of these two constituencies would have contributed to the investments
o The upfront investments of the automotive and telecom
Industries would be largely pointless unless the emergency
Authorities, as an initial step, have also invested to make their operational processes compatible with eCall.
The eCall Driving Group has developed several original ideas on how to crack that hard nut. Yet more work is obviously necessary in this essential area.
o A number of private operators have launched commercial eCall-like services that now extend beyond the borders of a single Member State. This eCall DG has therefore identified the possibility that scenarios where private companies would operate the services in partnership with public emergency Authorities could form the initial kernels of a pan-European eCall service. This possibility needs to be investigated further. o A number of legal issues have been identified but not treated in any depth yet. Key points are obviously related to privacy, the liability of various players, etc.
• The eCall DG has reviewed and endorsed as compatible with the general
eCall functional model two major outputs of the E-MERGE project :
• The minimum set of data to be provided directly from the vehicle to the relevant emergency Authority
• The recommended architecture for pan-European in-vehicle eCalls.
Page 135 of 490
• Having recognised the absolute necessity that all eCall players agree on a common functional objective and a common project timing, the eCall DG, in collaboration with ERTICO, has drafted an MoU to be shortly open for signature. This MoU sets the objectives an outlines the route to complete the launch phase of the eCall project by 2009. It is intended to be the “seed” of a collaborative framework without which the eCall project will be difficult to progress.
Recommendations
As stated here above, and as expressed in the proposed MoU, the possibility to develop eCall hinges around two sine qua non key factors:
• Willingness of all parties to synchronise their respective efforts
• Agreement on an economic model and the corresponding financial mechanisms.
• To achieve this, it is recommended that the following actions (ranked by their respective priority level) be executed:
• The Member States agree to rationalise and align their respective road emergency capabilities
• The European Commission takes an active role in encouraging the harmonisation of the operations of the emergency Authorities
• The vehicle manufacturing Industry and the mobile telecom Industry agree on the necessary standards both in their own area and at the interfaces between their respective areas
• The role of the public and private insurance services in the eCall economics are further investigated by the eCall DG
• The eCall economic scenarios are further elaborated by the eCall DG and discussed with the European Commission and the Member States.
These tasks should be accomplished by the end of Q2 2004. The current participants to the eCall DG are conscious that their efforts cannot be extended further unless they are backed by the appropriate political will and consensus.

Page 136 of 490
2.3 Human-Machine Interaction WG Co-chairs
Annie Pauzie (INRETS, F)
Alan Stevens (TRL, UK)
Christhard Gelau (BASt, D)
Background and Objectives
The number and quality of in-car electronic systems / functionality is permanently increasing. This is true for driver infotainment (e.g. Navigation) and driver assistance systems (e.g. ACC). Such systems may provide an increase in traffic safety but also may imply certain risks while driving. This is influenced by good or sub-optimal Human Machine Interface or Human Machine Interaction solutions (HMI). To improve the benefit/risk -ratio the EU has launched in 1999 the so called Statement of Principles for Information and Communication Systems describing basic requirements for in-car infotainment systems. On this background and recent developments within the global discussion the WG HMI was established in February 2003 within the e-safety initiative. This WG will meet at least four times a year.
Following the recommendations of the e Safety Report the WG-HMI will consider amendment and development of the existing EU Statement of Principles (ESoP) taking account of views expressed by Member States and including issues of HMI safety assessment and nomadic devices. Further developments are also tackled by the group and will be addressed during the second working year, taking into account national experiences or company best practices.
Description
The importance of a safe HMI for in-vehicle systems has been stressed many times in resolutions, opinions and conclusions of several European institutions.
This was acknowledged by the European Commission (EC) who issued the ESoP on the 21st of December 1999. A voluntary agreement from European car manufacturers to fully respect the ESoP (letter from ACEA), was issued in 2001.
This document presents very basic principles for the design of HMI. The ESoP was planned to be a first document to be followed by a more detailed one based on the comments of the Member States. Member States were required to inform the EC, within a period of 12 months from publication of the ESoP of the steps taken by them and by their industries, and should have provided within a period of 24 months evaluation results about the adherence to these principles by industry. Up to now, Germany, Denmark, Great Britain, France and Sweden have sent their reports to the EC. More answers would be welcome.
The comments given in these reports are quite varied. All of them recognise interest in the ESoP but also its lack of details.
Page 137 of 490
The approach taken by the WG-HMI can be described as problem-oriented risk/benefit approach to implementation. This approach focuses on assessment methods rather than simplistic ”pass/fail” criteria, which are outside the scope of the Working Group. More specifically the WG-HMI will:
1. identify HMI-related matters likely to negatively impact on safety or markets for In-vehicle driver information and assistance systems,
2. explain each problem and reach consensus on the problem definition,
3. identify where there is a consensus over an approach to a solution and where the issue is still ”open”,
4. develop a focused workplan to resolve issues and solve problems.
Recommendations
Presently specific recommendations must be considered as premature, at least because reports from several Member States are still outstanding and because research is still running. However, what has been done so far by the WG-HMI was to identify and list HMI-related problems from the available Member States reports and other relevant sources independently from the state of the art of present technologies.
This list of HMI-related problems has been clustered around the following six thematic areas:
1. Risks and benefits
2. Users
3. Markets/Implementation
4. Research
5. Nomadic devices
6. Criteria and Verification Procedures on HMI
At the present state-of-affairs these clusters can be considered to be of equal importance. For each of these clusters a ”problem statement” has been elaborated, i.e. a general description and discussion of the problem cluster followed by suggestions for routes to solutions. These ”problem statements” will be made available as a working document on the WEB site When a general consensus on the ”problem statements” has been reached the WG-HMI will continue with further developing the workplan and proposing in particular amendments and extensions of the ESoP.
Impact
Within the eSafety initiative HMI-related themes have to be considered as crosssectional issues which tackle all types of in-vehicle systems in a different manner.
Generally, the risk/benefit approach to implementation adopted by the Working Group implies the assumption that the provision of more information not necessarily decreases road safety but also has the potential to contribute to increases in road safety mainly depending on how issues of HMI have been resolved. More is not worse.
This supports the eSafety approach that has both safety and market aspirations.
Workplan for next year
December 2003 - January 2004:

Page 138 of 490
Development of a detailed workplan
February 2004 - January 2005:
Activities contingent on the progress made
Issues of nomadic devices will be tackled
HMI issues related to some ADAS may be addressed if timescale and WG-HMI resources sufficient
Propose amendments and extensions of the ESoP
2.4 International Co-operation WG Chair
Martin Rowell, NavTeq
Objectives
The main objective of this Working Group is to co-ordinate the international aspects of the eSafety Forum and its Working Groups.
To this effect, the International Co-operation Working Group will support the dialogue at the international level between all road safety stakeholders and identify topics/issues where this co-operation is needed or should be strengthened. The International Co-operation Working Group will make the necessary recommendations to accelerate the exchange of information on priority topics and suggest the way forward. The international co-operation is expected to cover especially Accidentology, aspects of Human-Machine Interaction, certification and testing methodology and procedures, harmonisation and standardisation requirements, legal issues and socio-economic benefit analysis and benchmarking/best practise.
Description
International collaboration is seen as an important and essential part of the eSafety initiative and the eSafety Forum. It is needed to strengthen the synergies and to avoid duplication with the work which is taking place in other regions, in particular the regions playing a leading role in automotive technology i.e. North America and Japan.
The first meeting of the eSafety Forum International Co-operation Working Group took place on 17 July 2003 in Paris, under the chairmanship of David Ward (FIA Foundation). Representatives from EU, USA, Japan and Canada were present in this meeting. The main conclusions of this meeting were the following:
1.) There is a need for global co-ordination of the activities in the area of eSafety The global co-ordination of eSafety, or Global eSafety could be best organised under the umbrella of the regional –operating ITS organisations of the three continents. This co-ordination should be based on the MoUs which exist between the three organisations, and could use the ITS World Congresses as a venue to hold their typically twice-annual meetings.
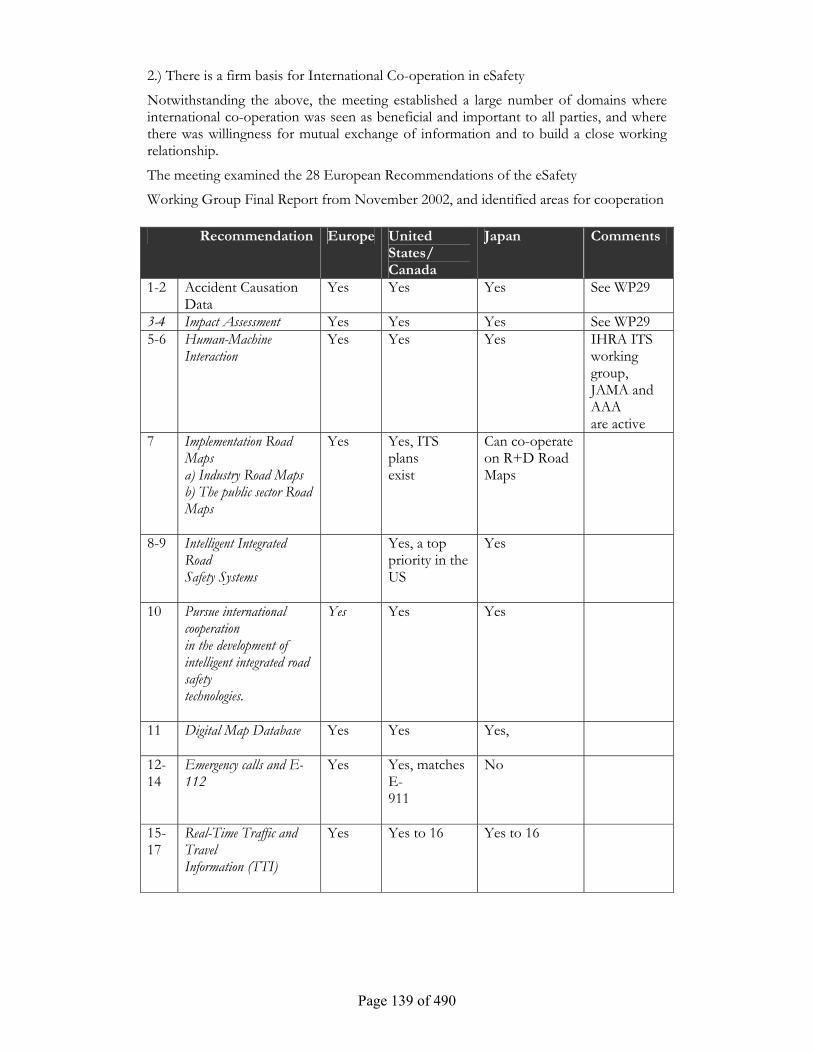
Page 139 of 490
2.) There is a firm basis for International Co-operation in eSafety
Notwithstanding the above, the meeting established a large number of domains where international co-operation was seen as beneficial and important to all parties, and where there was willingness for mutual exchange of information and to build a close working relationship.
The meeting examined the 28 European Recommendations of the eSafety
Working Group Final Report from November 2002, and identified areas for cooperation Recommendation Europe United
States/ Canada
Japan Comments
1-2 Accident Causation Data
Yes Yes Yes See WP29
3-4 Impact Assessment Yes Yes Yes See WP29 5-6
Human-Machine Interaction
Yes Yes Yes IHRA ITS working group, JAMA and AAA are active
7
Implementation Road Maps a) Industry Road Maps b) The public sector Road Maps
Yes Yes, ITS plans exist
Can co-operate on R+D Road Maps
8-9
Intelligent Integrated Road Safety Systems
Yes, a top priority in the US
Yes
10
Pursue international cooperation in the development of intelligent integrated road safety technologies.
Yes Yes Yes
11
Digital Map Database Yes Yes Yes,
12-14
Emergency calls and E-112
Yes Yes, matches E- 911
No
15-17
Real-Time Traffic and Travel Information (TTI)
Yes Yes to 16 Yes to 16
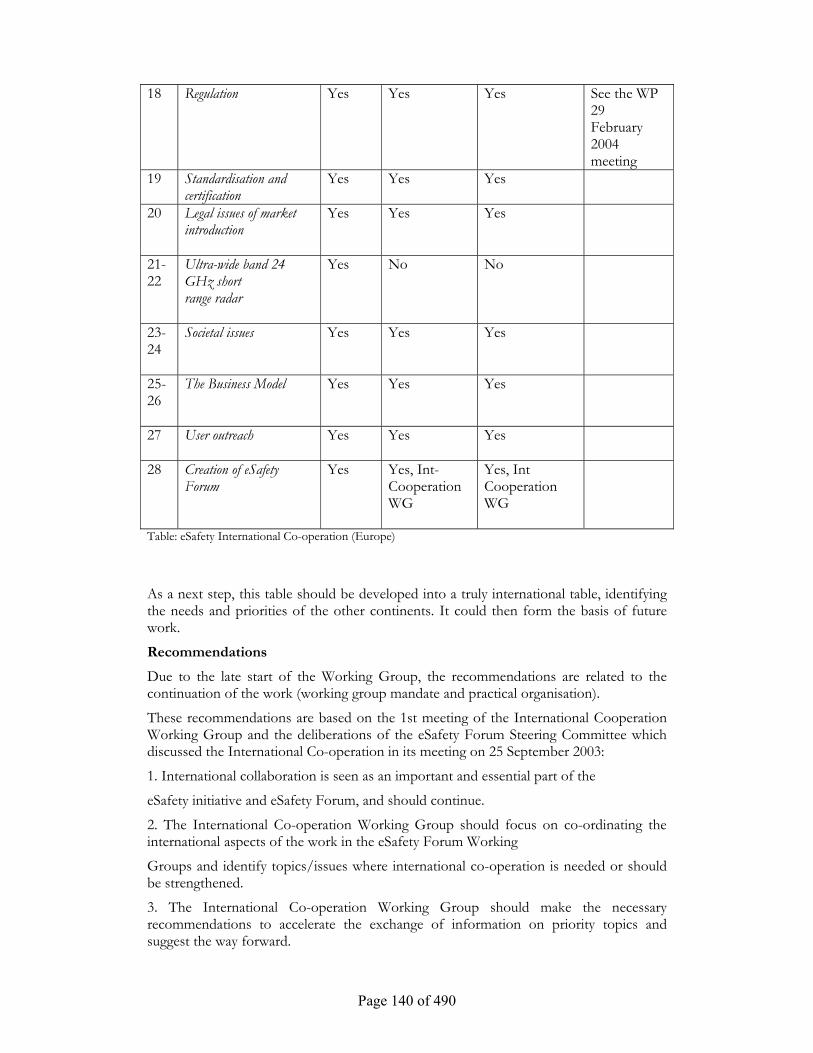
Page 140 of 490
18
Regulation Yes Yes Yes See the WP 29 February 2004 meeting
19
Standardisation and certification
Yes Yes Yes
20
Legal issues of market introduction
Yes Yes Yes
21-22
Ultra-wide band 24 GHz short range radar
Yes No No
23-24
Societal issues Yes Yes Yes
25-26
The Business Model Yes Yes Yes
27
User outreach Yes Yes Yes
28
Creation of eSafety Forum
Yes Yes, Int-Cooperation WG
Yes, Int Cooperation WG
Table: eSafety International Co-operation (Europe)i /
As a next step, this table should be developed into a truly international table, identifying the needs and priorities of the other continents. It could then form the basis of future work.
Recommendations
Due to the late start of the Working Group, the recommendations are related to the continuation of the work (working group mandate and practical organisation).
These recommendations are based on the 1st meeting of the International Cooperation Working Group and the deliberations of the eSafety Forum Steering Committee which discussed the International Co-operation in its meeting on 25 September 2003:
1. International collaboration is seen as an important and essential part of the
eSafety initiative and eSafety Forum, and should continue.
2. The International Co-operation Working Group should focus on co-ordinating the international aspects of the work in the eSafety Forum Working
Groups and identify topics/issues where international co-operation is needed or should be strengthened.
3. The International Co-operation Working Group should make the necessary recommendations to accelerate the exchange of information on priority topics and suggest the way forward.
Page 141 of 490
4. The International Working Group should organise typically 2 meetings per year, each one concentrating on a small number of topics. The topics are selected on the basis of the priorities identified in the first meeting (see table) and further deliberations.
5. Representatives of the eSafety Working Groups on the topics to be discussed are invited to the meetings, together with the international experts (EU-USAJapan- Canada).
Impact
The problems related to Road Safety are quite similar on all three continents, although some differences are also evident. The problems associated with the development and market introduction of active safety systems are also quite alike.
This creates a good basis for international collaboration.
International Co-operation has the potential of avoiding the multiplication of the efforts of both the industry and the public sectors, and avoiding fragmentation of markets through different technical or regulatory approaches. International collaboration should also lead to the proliferation of functionally compatible systems through standardisation, harmonisation and open platforms, thus benefiting the automotive industry, its suppliers and the travelling public at large.
Workplan
The workplan and the dates and venues of the future meetings will be decided in a “Working Meeting” which will be organised in Madrid on 18 November 2003.
2.5 Real-Time Traffic and Traveller Information WG Chair
Gert Siegle, Prof. Dr., Bosch
RTTI: An important ingredient of eSafety
RTTI (= “Real-time Traffic and Traveller Information”) is the first of a new generation of telematic services for drivers and other travellers to achieve appreciable success. At the time being this is due to the fast-growing implementation of services and products based firstly on existing RDS-TMC broadcast technology. In future supplementary technologies will become applicable, too. By delivering digital traffic messages in real time to a suitable invehicle terminal, TMC upgrades static navigation to real-time, i.e. dynamic route guidance, or “electronic traffic avoidance”.
The need now is to bring important safety benefits by alerting drivers to accidents, congestion and hazardous driving conditions. This demands the installation of dynamic traffic information services, extended to urban areas.
Objective of the RTTI Working Group: Make RTTI happen
The RTTI Working Group of the eSafety Forum aims to identify the obstacles to more and Europe-wide RTTI implementation and to identify concrete actions that could remove these obstacles in the specific countries and accelerate deployment.
Challenges
Despite this success, some factors are holding back RTTI from achieving its full market and safety potential:
• In some countries very limited availability of traffic information content

Page 142 of 490
• Limited motivation of some broadcasters to introduce RDS/TMC as programme associated service
• Restricted availability of FM radio broadcast capacity
• Scarce willingness of customers for pay-per-use- service with consequence:
Difficulty to achieve successful business model for commercial services
• Need to organise commitment of all links in the service chain
• Technical limitations of TMC technology, need for future standards
• Clear road map for evolution and future development of RTTI products agreed by all partners in the service chain in all European countries.
The mass deployment of RTTI services and products throughout Europe awaits a new level of co-operation between public and private sectors. Traffic data collected by public authorities (e.g. police, highway agencies) in some countries is still not fully available to commercial service providers; and it is not always “fresh” and sufficiently reliable. While public broadcasters provide full coverage of free TMC broadcasts in some countries, in other countries TMC is not carried on any public network.
Where public services are limited, private businesses may have an incentive to set up commercial services. But building a viable business model is not easy when the service chain has many actors, and end users have a low willingness to pay.
TMC technology today means RTTI is largely limited to inter-urban coverage. But important safety benefits could be realised if urban traffic information services were available, allowing drivers to avoid hazards, incidents and congestion, while the road authority could use RTTI messages to manage traffic flows more safely. Ecfunded projects are under way to define adequate protocols to distribute safetyrelated messages suitable for both urban and inter-urban areas.
Steps towards further RTTI implementation
The RTTI Working Group has identified a number of positive steps to accelerate deployment of RTTI across Europe:
Information content: The fundamental basis for European RTTI services is the collection and processing of real-time traffic data over the entire network, interurban and urban. The road authorities and police collect much of this information already for traffic management purposes. An Europe-wide consensus should allow open access to these data, subject to conditions on how it is used at what cost.
Traffic data are also collected by non-public bodies, such as by motoring clubs, broadcasters and service providers. There is a need to explore how to bring this information together into a “data pool” so as to improve both data quality and coverage.
Service coverage and interoperability: RTTI via RDS/TMC in Europe is standardised since years and has a vast coverage and very good acceptance where introduced. But in some countries no broadcasting service or only a patchwork of public and commercial services is available, yet. Up to now, RTTI Services are limited to regional or national coverage, and roaming across RTTI commercial services is very limited. In some countries, providers even implement services differently, which may then result in proprietary solutions for terminal/car combination.
Page 143 of 490
Broadcast frequencies and capacity: Availability of frequencies and broadcast capacity for digital RTTI services varies strongly across Europe. There is a need for more broadcast capability in some countries (FM or digital (DAB, DRM, or eventually DVB-T, satellite)) to carry more RTTI information destined for in-vehicle receivers. As per today, this could be brought about by public broadcasters, by commercial broadcasters or by a combination of the two.
Technology evolution: Extending RTTI to allow full coverage in urban areas requires new technology, as TMC is limited by its reliance on a defined table of location reference points. This would need to be extended to an on-the-fly method – but that will require substantially more bandwidth to allow adequate location resolution as available e.g. by DigitalRadio (DAB). By consequence, an innovative dynamic navigation even in urban areas will then become possible.
Business models: For both public and commercial services there needs to be a successful business model. As in the past, the public model rests on securing safety benefits judged to outweigh the costs of providing the RTTI service. For any commercial provider, the challenge is to collect sufficient revenue from customers while minimising the cost of data collection and service provision. Individual drivers are reluctant to pay directly for traffic information, especially safety messages that is commonly understood to be provided free of charge as a public service.
The RTTI WG has identified that - beside free services as is TMC in many countries today – annual or monthly fees such as a radio tax or a once-per-life down-payment added to the purchase price of the receivers could be more easily accepted by the customers than a pay-per-use service.
Implementation: There is currently a need to agree within every European country to a strategy and a time schedule for RTTI implementation for urban and interurban services. The TMC Forum fulfils well this need for TMC services and products, but lacks a focus on both safety-related RTTI and urban services. The European assembly of the national transport ministers, the national ministers for transport and their regional counterparts have to take over their role to trigger and to speedup the installation of the mentioned RTTI services in Europe
A European project can be a good means for bringing stakeholders together in a common endeavour and for finding consensus on a technical solution, but should be complemented by a process to secure high-level backing and commitment for implementation across Europe.
Recommendations for action
To advance the resolution of these issues and the implementation of RTTI across Europe, the Working Group recommends the following steps:
• Secure a Europe-wide agreement on access to traffic information content
• Identify and begin steps towards the organisation and execution of the pooling of diverse sources of real-time traffic information
• Identify the obstacles to pan-European service coverage, roaming and interoperability and establish a process to work to a solution
• Analyse status of RTTI and digital broadcast implementation across Europe and develop options for achieving a dedicated RTTI broadcast capability
• Identify and support standardisation needed for delivery of enhanced safety related RTTI services

Page 144 of 490
• If possible, find some viable o business models for commercial and mixed service provision
• Develop medium and long-term strategy and road-map for RTTI deployment and secure high-level commitment to its realisation
The RTTI Working Group proposes to start implementing these recommendations through a European project involving the participation of key stakeholders.
2.6 Research and Technology Development WG Chair
Chair: Arnold van Zyl – European Council for Automotive R&D
Objectives
To identify and map the Regional, National and European research, technology and demonstration projects that may contribute to addressing the recommendations of the High Level Group on eSafety.
To establish mechanisms for monitoring, aligning and steering such projects so as to maximize synergies and disseminate results.
To identify the priorities for research areas for integrative European research, technology and demonstration projects in the field of eSafety.
Description
Approach:
• In an intensive consultation process the members contributed to mapping of current RTD activities41 at the Regional, National and European level. A matrix was generated in which the content of the known projects were projected onto the following categories:
Enablers
Accident Causation
Road Infrastructure and Architecture
Telecommunications Infrastructure
Vehicle Architecture
Human Factors
Safety Functions
Preventive and Protective Systems
Post Accident Call
Cost Benefit Analysis
• On the basis of this analysis, the RTD gaps were identified and recommendations for future research priorities were derived.
41Information on the projects analysed were contributed by the WG members and by a literature survey.
No claims are made with respect to the completeness of the analysis and the results represent a first qualitative indication of the distribution and focus of R&D activities in Europe.
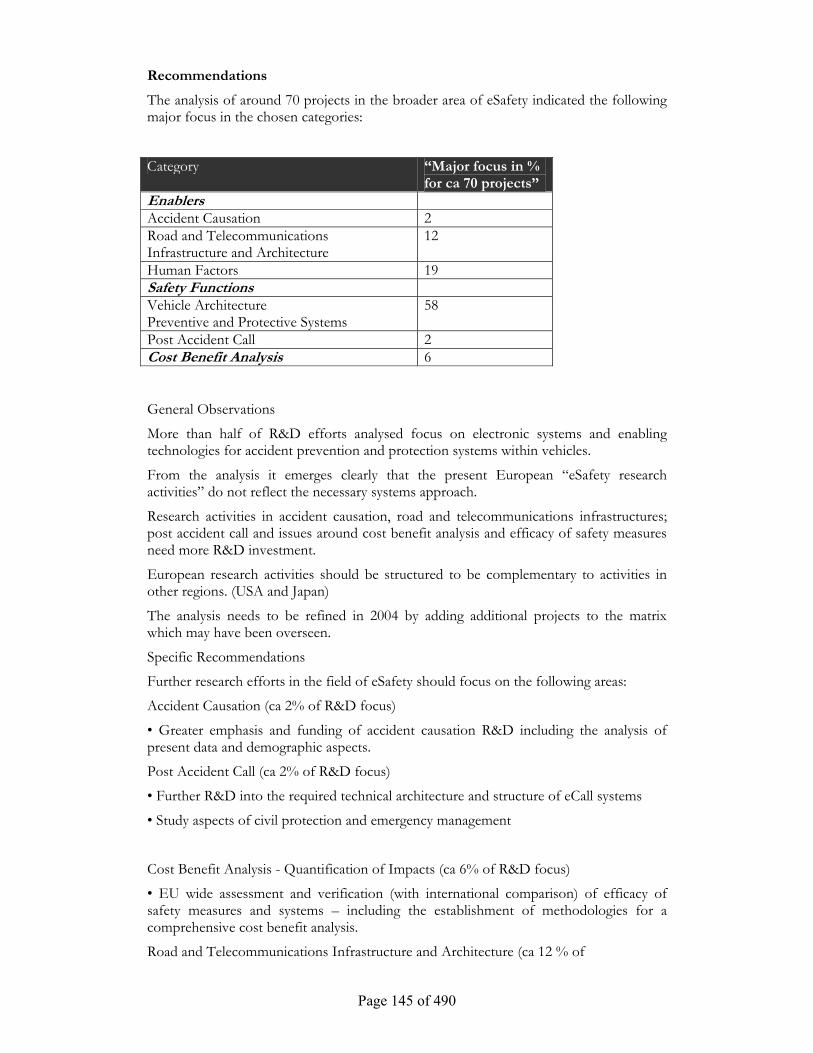
Page 145 of 490
Recommendations
The analysis of around 70 projects in the broader area of eSafety indicated the following major focus in the chosen categories:
Category “Major focus in % for ca 70 projects”
Enablers Accident Causation 2 Road and Telecommunications Infrastructure and Architecture
12
Human Factors 19 Safety Functions Vehicle Architecture Preventive and Protective Systems
58
Post Accident Call 2 Cost Benefit Analysis 6 General Observations
More than half of R&D efforts analysed focus on electronic systems and enabling technologies for accident prevention and protection systems within vehicles.
From the analysis it emerges clearly that the present European “eSafety research activities” do not reflect the necessary systems approach.
Research activities in accident causation, road and telecommunications infrastructures; post accident call and issues around cost benefit analysis and efficacy of safety measures need more R&D investment.
European research activities should be structured to be complementary to activities in other regions. (USA and Japan)
The analysis needs to be refined in 2004 by adding additional projects to the matrix which may have been overseen.
Specific Recommendations
Further research efforts in the field of eSafety should focus on the following areas:
Accident Causation (ca 2% of R&D focus)
• Greater emphasis and funding of accident causation R&D including the analysis of present data and demographic aspects.
Post Accident Call (ca 2% of R&D focus)
• Further R&D into the required technical architecture and structure of eCall systems
• Study aspects of civil protection and emergency management
Cost Benefit Analysis - Quantification of Impacts (ca 6% of R&D focus)
• EU wide assessment and verification (with international comparison) of efficacy of safety measures and systems – including the establishment of methodologies for a comprehensive cost benefit analysis.
Road and Telecommunications Infrastructure and Architecture (ca 12 % of

Page 146 of 490
R&D focus)
Road Infrastructure:
• Study possibilities of infrastructure to vehicle communication
• Investigate how new vehicle technologies could influence design of roads
(or could even be used for road infrastructure)
• Develop HMI standards for information on road infrastructure
• Stronger involvement of road authorities and road operators in R&D project
Telecommunication Infrastructure:
• Assessment of how Galileo, UMTS and other electronics systems could improve preventive safety technologies
Human Factors (ca 19 % of R&D focus)
Normal driving:
• Investigate aspects of collective/interactive road use
• Improve common understanding of road traffic
• Improve understanding of error compensation mechanisms
HMI:
• Investigate adaptation of driver behaviour to new technological systems
• Investigate acceptability of technologies (definition of acceptability / criteria of acceptance)
Vehicle - Preventive and Protective Systems (ca 58 % of R&D focus)
Vehicle Architecture:
• Investigate and suggest appropriate protocols for vehicle to vehicle & vehicle to infrastructure. Ensure EMC compatibility of communication components.
• Investigate structure of a common vehicle architecture that would allow the implementation of vehicle and infrastructure specific safety features.
Vehicle Technology:
• Investigate interaction of vehicle infrastructure systems
• Investigate efficacy vs. market penetration and life cycle aspects
• Continual improvements on component level – reliability and cost
Impact
The RTD WG could provide the stimulus for the enhancement of a systems approach in safety RTD though continued analysis and monitoring of the of the international R&D landscape.

Page 147 of 490
2.7 Road Maps WG Co-chairs
Risto Kulmala, VTT and Hans Jürgen Mäurer, DEKRA
Objectives
The main objective of the working group is to develop regularly reviewed road maps with technical steps and socio-economic implications for the introduction of Intelligent Integrated Road Safety Systems as well as to develop public sector road maps indicating the required improvements and related potential of public and private investments in the road and information infrastructures.
The working group started on 16 June 2003
The work schedule is projected to the 1st QR 2005.
Description
There is a high potential for safer road traffic in future, supported by intelligent integrated vehicle systems and appropriate infrastructure improvements. The whole market deployment is affected by different high complex aspects like technological, social, business, financial, legal and consumer aspects. A balance between the automotive industry, the consumer demand, standardisation and road authorities is needed.
Within the first 3 meetings the WG found the following approach feasible for solving the target :
• Create Inventory of relevant eSafety systems taken into account new systems and projects (RTD)
• Analyses of vehicle fleet changes over the years up to 2010
• Analyses of current safety situation an prognosis (Accident causation data)
• Estimate safety benefits of different systems
• Point requirement of systems to road and information infrastructure
• Identify realistic Scenarios for Implementation models
• Agree on the systems as well as the related road and information infrastructure to be implemented by 2010
• Develop roadmaps to be reviewed periodically
The first steps are in progress.
For each relevant eSafety system the following facts are to be considered:
• Accident fatalities to be affected (Accident causation data)
• Expected change in fatalities
• Other benefit / side effects
• Approximation for In Vehicle cost average
• Approximation for cost of road and information / Infrastructure
• Technical capability
• Regulatory issues (obstacles and updated regulations needed)
• Estimation for implementation issues / different classes of vehicles
• Fleet composition in market up to 2010

Page 148 of 490
These items are combined into a eSafety MATRIX, which combines all relevant information to enable evaluation of the realistic impact of eSafety systems. The group is working in close liaison with the car industry through ACEA and with the road authorities through CEDR (Conference of European Road Directors) Telematic group.
After the first discussions within two meetings, the following structure for those systems was found:
The list below is so far not finalised and will be the basis for the ongoing process of further work:
Recommendations
Due to the late start of Road Map working group, there are no agreed recommendations available, but the approach for solving the main objectives are clear. One of the most important issue is data gathering from other working groups for solving most of the questions which come up very soon.
Autonomous vehicle systems with safety implications
Autonomous vehicle systems with network potential
Driver information systems based on v2v or v2i/ i2v communications
Systems with support /communication from/to infrastructure
Dynamic control systems Run flat Indicator Tire Pressure Monitoring System Vision enhancement Blind spot monitoring Adaptive Head Lights Automatic Headlight Activation Driver Condition Monitoring (Alcohol lock, etc.) Traffic Sign Recognition and alert /Event data recorder/
Obstacle & Collision Warning Local Danger Warning Adaptive Brake Lights Urban Drive Assistant Extended environmental information
High quality Congestion / Traffic Information Inter vehicle hazard warning
e-call Speed Alert Variable Message / Traffic Signs Infrastructure Based Warning Systems Lane Keeping Assistant Lane Departure Warning
Page 149 of 490
Impact
Based on results of Road Maps, all parties can think about the business case as well as the public sector budget implications for implementing different eSafety systems.
Chances and obstacles will be clearly identified for all involved parties and options for enhancement of the process can be found.
It is recognisable that some new technology, like 24GHz Sensors, are getting in conflict with existing and regulated frameworks. So such conflicts will be pointed out and considered and action plans established.
ACEA, private agencies and Road Authorities are the key actors for convincing the customer with added values.
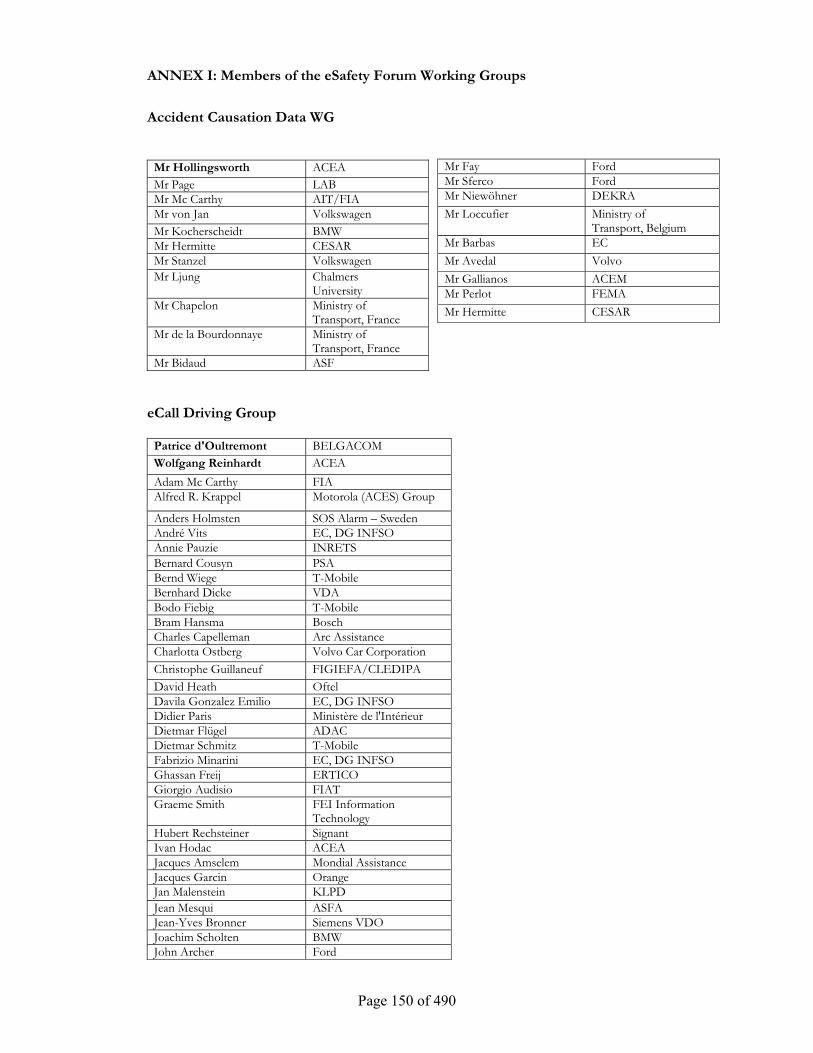
Page 150 of 490
ANNEX I: Members of the eSafety Forum Working Groups
Accident Causation Data WG
Mr Hollingsworth ACEA Mr Page LAB Mr Mc Carthy AIT/FIA Mr von Jan Volkswagen Mr Kocherscheidt BMW Mr Hermitte CESAR Mr Stanzel Volkswagen Mr Ljung Chalmers
University Mr Chapelon Ministry of
Transport, France Mr de la Bourdonnaye Ministry of
Transport, France Mr Bidaud ASF
eCall Driving Group
Patrice d'Oultremont BELGACOM Wolfgang Reinhardt ACEA Adam Mc Carthy FIA Alfred R. Krappel Motorola (ACES) Group
Anders Holmsten SOS Alarm – Sweden André Vits EC, DG INFSO Annie Pauzie INRETS Bernard Cousyn PSA Bernd Wiege T-Mobile Bernhard Dicke VDA Bodo Fiebig T-Mobile Bram Hansma Bosch Charles Capelleman Arc Assistance Charlotta Ostberg Volvo Car Corporation Christophe Guillaneuf FIGIEFA/CLEDIPA David Heath Oftel Davila Gonzalez Emilio EC, DG INFSO Didier Paris Ministère de l'Intérieur Dietmar Flügel ADAC Dietmar Schmitz T-Mobile Fabrizio Minarini EC, DG INFSO Ghassan Freij ERTICO Giorgio Audisio FIAT Graeme Smith FEI Information
Technology Hubert Rechsteiner Signant Ivan Hodac ACEA Jacques Amselem Mondial Assistance Jacques Garcin Orange Jan Malenstein KLPD Jean Mesqui ASFA Jean-Yves Bronner Siemens VDO Joachim Scholten BMW John Archer Ford
Mr Fay Ford Mr Sferco Ford Mr Niewöhner DEKRA Mr Loccufier Ministry of
Transport, Belgium Mr Barbas EC Mr Avedal Volvo Mr Gallianos ACEM Mr Perlot FEMA Mr Hermitte CESAR
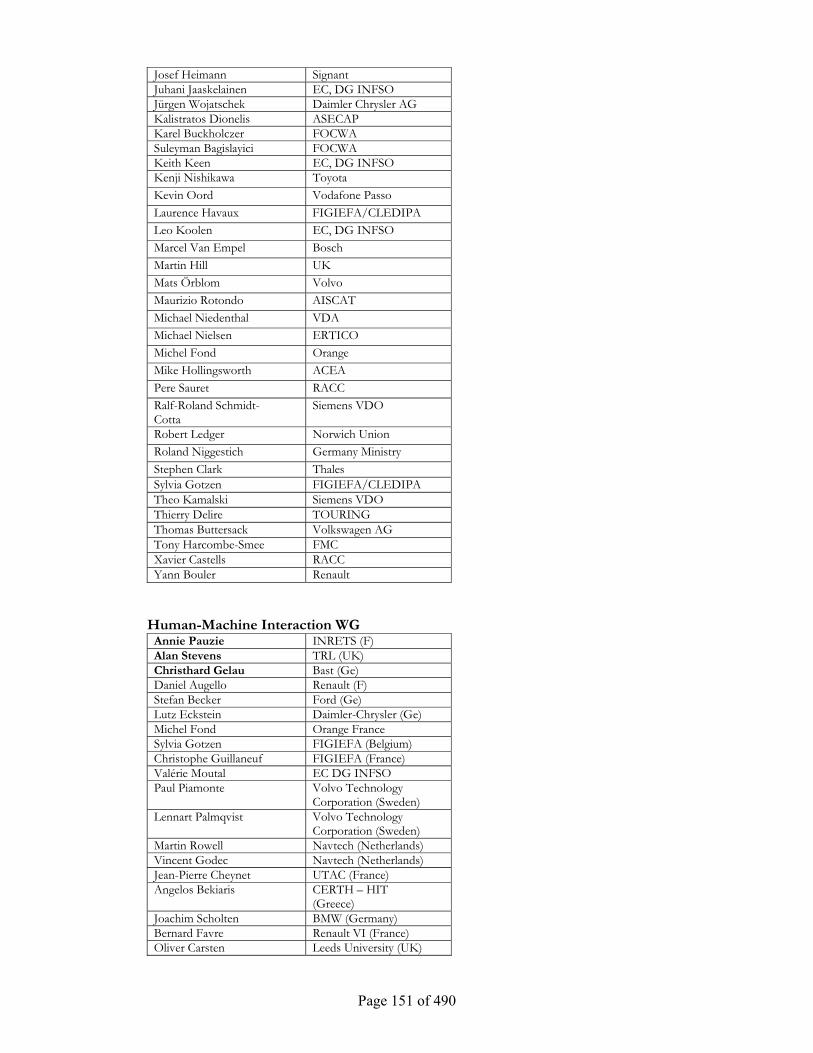
Page 151 of 490
Josef Heimann Signant Juhani Jaaskelainen EC, DG INFSO Jürgen Wojatschek Daimler Chrysler AG Kalistratos Dionelis ASECAP Karel Buckholczer FOCWA Suleyman Bagislayici FOCWA Keith Keen EC, DG INFSO Kenji Nishikawa Toyota Kevin Oord Vodafone Passo Laurence Havaux FIGIEFA/CLEDIPA Leo Koolen EC, DG INFSO Marcel Van Empel Bosch Martin Hill UK Mats Örblom Volvo Maurizio Rotondo AISCAT Michael Niedenthal VDA Michael Nielsen ERTICO Michel Fond Orange Mike Hollingsworth ACEA Pere Sauret RACC Ralf-Roland Schmidt- Cotta
Siemens VDO
Robert Ledger Norwich Union Roland Niggestich Germany Ministry Stephen Clark Thales Sylvia Gotzen FIGIEFA/CLEDIPA Theo Kamalski Siemens VDO Thierry Delire TOURING Thomas Buttersack Volkswagen AG Tony Harcombe-Smee FMC Xavier Castells RACC Yann Bouler Renault
Human-Machine Interaction WG
Annie Pauzie INRETS (F) Alan Stevens TRL (UK) Christhard Gelau Bast (Ge) Daniel Augello Renault (F) Stefan Becker Ford (Ge) Lutz Eckstein Daimler-Chrysler (Ge) Michel Fond Orange France Sylvia Gotzen FIGIEFA (Belgium) Christophe Guillaneuf FIGIEFA (France) Valérie Moutal EC DG INFSO Paul Piamonte Volvo Technology
Corporation (Sweden) Lennart Palmqvist
Volvo Technology Corporation (Sweden)
Martin Rowell Navtech (Netherlands) Vincent Godec Navtech (Netherlands) Jean-Pierre Cheynet UTAC (France) Angelos Bekiaris
CERTH – HIT (Greece)
Joachim Scholten BMW (Germany) Bernard Favre Renault VI (France) Oliver Carsten Leeds University (UK)
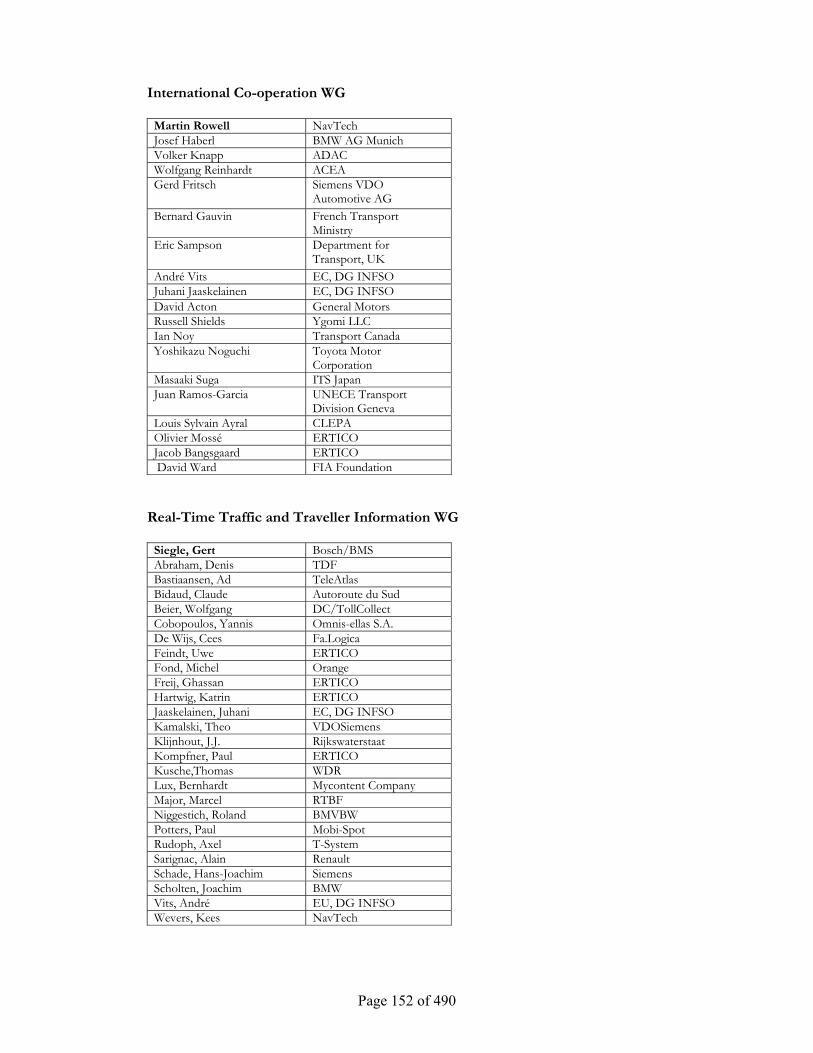
Page 152 of 490
International Co-operation WG
Martin Rowell NavTech Josef Haberl BMW AG Munich Volker Knapp ADAC Wolfgang Reinhardt ACEA Gerd Fritsch
Siemens VDO Automotive AG
Bernard Gauvin French Transport Ministry
Eric Sampson
Department for Transport, UK
André Vits EC, DG INFSO Juhani Jaaskelainen EC, DG INFSO David Acton General Motors Russell Shields Ygomi LLC Ian Noy Transport Canada Yoshikazu Noguchi
Toyota Motor Corporation
Masaaki Suga ITS Japan Juan Ramos-Garcia UNECE Transport
Division Geneva Louis Sylvain Ayral CLEPA Olivier Mossé ERTICO Jacob Bangsgaard ERTICO David Ward FIA Foundation
Real-Time Traffic and Traveller Information WG
Siegle, Gert Bosch/BMS Abraham, Denis TDF Bastiaansen, Ad TeleAtlas Bidaud, Claude Autoroute du Sud Beier, Wolfgang DC/TollCollect Cobopoulos, Yannis Omnis-ellas S.A. De Wijs, Cees Fa.Logica Feindt, Uwe ERTICO Fond, Michel Orange Freij, Ghassan ERTICO Hartwig, Katrin ERTICO Jaaskelainen, Juhani EC, DG INFSO Kamalski, Theo VDOSiemens Klijnhout, J.J. Rijkswaterstaat Kompfner, Paul ERTICO Kusche,Thomas WDR Lux, Bernhardt Mycontent Company Major, Marcel RTBF Niggestich, Roland BMVBW Potters, Paul Mobi-Spot Rudoph, Axel T-System Sarignac, Alain Renault Schade, Hans-Joachim Siemens Scholten, Joachim BMW Vits, André EU, DG INFSO Wevers, Kees NavTech
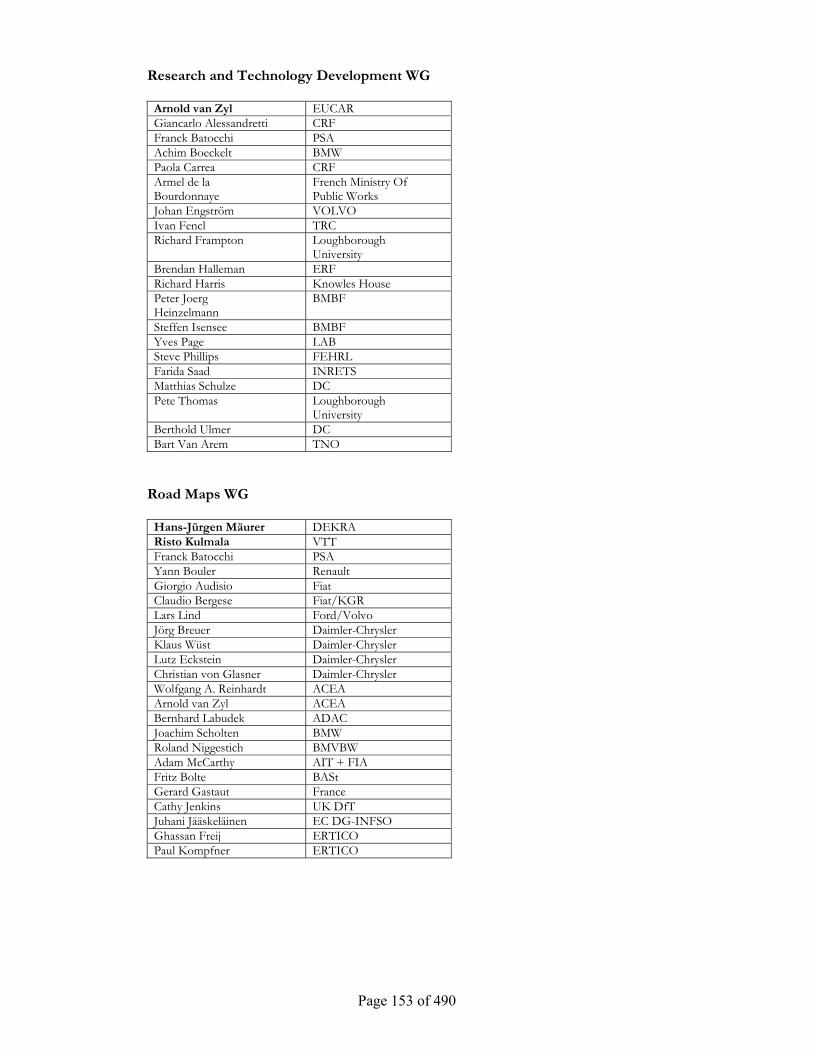
Page 153 of 490
Research and Technology Development WG
Arnold van Zyl EUCAR Giancarlo Alessandretti CRF Franck Batocchi PSA Achim Boeckelt BMW Paola Carrea CRF Armel de la Bourdonnaye
French Ministry Of Public Works
Johan Engström VOLVO Ivan Fencl TRC Richard Frampton Loughborough
University Brendan Halleman ERF Richard Harris Knowles House Peter Joerg Heinzelmann
BMBF
Steffen Isensee BMBF Yves Page LAB Steve Phillips FEHRL Farida Saad INRETS Matthias Schulze DC Pete Thomas
Loughborough University
Berthold Ulmer DC Bart Van Arem TNO
Road Maps WG
Hans-Jürgen Mäurer DEKRA Risto Kulmala VTT Franck Batocchi PSA Yann Bouler Renault Giorgio Audisio Fiat Claudio Bergese Fiat/KGR Lars Lind Ford/Volvo Jörg Breuer Daimler-Chrysler Klaus Wüst Daimler-Chrysler Lutz Eckstein Daimler-Chrysler Christian von Glasner Daimler-Chrysler Wolfgang A. Reinhardt ACEA Arnold van Zyl ACEA Bernhard Labudek ADAC Joachim Scholten BMW Roland Niggestich BMVBW Adam McCarthy AIT + FIA Fritz Bolte BASt Gerard Gastaut France Cathy Jenkins UK DfT Juhani Jääskeläinen EC DG-INFSO Ghassan Freij ERTICO Paul Kompfner ERTICO
Page 154 of 490
ANNEX II: Terms of Reference of the Working Groups
1. Context 1.1 In 2001, the European Commission together with the automotive industry and other stakeholders established an eSafety Working Group consisting of some 40 experts, and mandated it to propose a European strategy for accelerating the research and development, deployment and use of Intelligent Integrated Road Safety Systems including Advanced Driver Assistance Systems (ADAS). In November 2001, the Working Group published its Final Report, which was later approved in a High-Level Meeting by all stakeholders to be the basis for further actions in advancing the use of ICT for improving road safety in Europe. The report gives 28 detailed recommendations for action, directed to the European Commission, the Member States, road and safety authorities, automotive industry, service providers, user clubs, insurance industry and other stakeholders.
1.2 One of the key recommendations in the report is the proposal to establish an eSafety Forum to act as a joint platform for all road safety stakeholders. The objective of the Forum is to promote and monitor the implementation of the recommendations identified by the eSafety Working Group, and to support the development, deployment and use of Intelligent Integrated Road Safety Systems.
The Forum is expected to provide for a platform to encourage and monitor the actions of all stakeholders, including the Commission, industry and the Member States.
1.3 The eSafety Forum was established by the Commission (DG Information Society) in close collaboration with the industry, industrial associations and public sector stakeholders. A Steering Group has been set up, and it has defined the Forum Workprogramme for 2003, as well as the membership and Working Group structure. Furthermore, the Commission Communication on eSafety includes, as one of its priority measures, continuing support for the Forum42.
2. Constitution 2.1 In the context of the setting-up of the Forum, four Working Groups will be set up immediately, and four others later in 2003.
2.2 Depending on the Forum progress and priorities, the Steering Group may propose to the eSafety Forum plenary the establishment of additional Working
Groups, which can be also ad-hoc groups with a specific objective and limited duration.
2.3 The Working Groups will be established initially for the period of 2 years
(2003-2004). The Working Groups are expected to meet at least four times per year.
2.4 The Working Groups will be chaired by industrial partners or industry associations. The chairs are expected to set up the meetings and provide for their secretariat. The Commission will provide help if so requested by the chairs (providing meeting facilities, mailings, copying etc).
42 Commission Communication: Information and Communications technologies for Safe and
Intelligent Vehicles, COM 2003(542) Final, 15.9.2003

Page 155 of 490
2.5 The following Working Groups will be constituted in 2003:
Working groups Working Group Topic Chair
Emergency call (e-Call)4 ERTICO/Belgacom
Accident Causation Data ACEA
Human-Machine Interaction INRETS/TRL/BAST
1st half 2003
Business Rationale5 Norwich Union
Working groups Working Group Topic Chair
Road Maps DEKRA/VTT International co-operation NavTech
Traffic and Travel Information (TTI) Bosch
2nd half 2003
Research and Development (RTD) EUCAR
3. Membership 3.1 The Working Groups will be set up by the selected chairs, who will invite at their discretion the relevant experts to participate in the groups. The number of participants will be kept relatively low, to allow for efficient working in the group.
3.2 The Working Groups will, however, assure that all relevant players are represented. In this respect, the Working Group participation should reflect that of the eSafety Forum.
3.3 All Working Group participants are expected to share the general objectives of the eSafety Forum, and to be willing to actively contribute to its work.
3.4 Participation from Member States will be encouraged. These members (from Road and Highway authorities, transport ministries, safety organisations) will be invited as individual experts and not as formal representatives of their countries.
4. Objectives and Scope 4.1 The Working Groups will contribute to the general objectives of the eSafety Forum in their domain, and base their work on the Recommendations of the eSafety
Working Group.
4.2 The Working Groups will identify and focus on the issues which are important for the implementation of the Working Group recommendations (including technical and market issues, regulation, standardisation, societal issues etc). If necessary, they will address also issues not covered by the eSafety Working Group recommendations, if deemed necessary for the work.
4.3. The Working Groups will aim at reaching consensus amongst the players on the critical issues, and to conclude in specific, detailed recommendations on the implementation steps which lead into the accelerated development, deployment and use of Intelligent Integrated Road Safety Systems.
4 This working group has changed its name to eCall Driving Group 5 This working group was merged into the eCall Driving Group

Page 156 of 490
4.4 The Working Groups will also provide recommendations on setting up of the monitoring mechanisms for the progress in their domain.
5. Reporting 5.1 The Working Groups will provide regular reports on their progress and present results at the eSafety Forum Plenary Meetings43. All reports are considered to be public, if not explicitly stated otherwise by the Group chairman.
5.2 The Working Group Chair and its members may be invited to present the Group’s progress, reports and recommendations in other public meetings, workshops and conferences.
5.3 The Commission may use the Working Group results in its internal reporting and the eventual reports to the Council and the Parliament.
6. Costs 6.1 Working Group chairs and members are responsible for their own costs including travel costs and meeting expenses.
6.2 On the specific request of the chairs, meetings can be organised in Brussels in the Commission premises, without charge. The travel costs for a small number of experts (non-industrial partners) per meeting can be reimbursed on request.
6 Meetings 2003: 7 April and 17 November
43 Focus in the Real-Time Traffic and Travel Information is in making it happen at the European level -
also in the cities
Page 157 of 490
ANNEX III: Conclusions of the 2nd eSafety Forum Plenary Session
Madrid, 17 November 2003
1. Good progress in all the seven industry-led eSafety Forum Working Groups, with the first concrete results emerging (eCall)
2. Commission Communication “ICT for Safe and Intelligent Vehicles” adopted on 15 September 2003 seen as an important milestone
3. Industry emphasizing the need for integrated approach, affordability, standardization and harmonizing of legal requirements
4. In-vehicle Emergency Call (eCall) remains number one priority for both industry and the public sector
• Agreement to use E-112 as per Commission recommendations
• Architecture, messages and routing defined
• Working on an economic model and a MoU
5. Accident Causation Analysis needs urgent short-term actions and a longterm strategy
• On short-term, useful databases exists but additional funding needed (1,5 M€)
• Work to be continued for defining long-term data needs and strategy
• On a short-term, building on the RDS/TMC services
• Innovative public-private business model required
• An European project is needed to secure access to public data and to develop European-wide services
7. Human-Machine Interaction presents a very complex problem for the introduction of in-vehicle systems, including nomadic devices
• HMI-related problems defined on the basis of the Member States’ reports
• Targeting amendment of the European Statement of Principles, and other measures if necessary
8. Survey of ongoing RTD projects reveals lack of systems approach and confirms need for further work
• More than half of RTD efforts focus on the vehicle, with substantial gaps in funding of other areas
• Further analysis of the around 70 projects required
• Moving towards recommendations for the focus of further RTD and analysis of impacts/benefits
9. International Co-operation seen as an essential part of the eSafety initiative
• Moving towards concrete co-operation in the selected priority topics
10. Agreement on implementation Road Maps seen essential for the public sector investments and for user awareness
• Inventory of relevant eSafety systems which will reach the market by 2010 created (eSafety Matrix)
• Closely linked to other Working Groups (e.g. RTD, eCall, RTTI)
• Next: Analyzing the cost/benefit and to work out realistic implementation scenarios for eSafety Systems

Page 158 of 490
3.6 Third eSafety Forum Plenary Meeting, Brussels, 25 March 2004
3.6.1 Introduction Over 120 members attended, confirming the continuous commitment by all stakeholders to the eSafety initiative. An increasing participation from the Member States and the public authorities was noted. The meeting demonstrated that eSafety is gaining international recognition and is moving towards “Global eSafety”
eSafety is increasingly regarded as part of the integrated road safety concept. This helps generate interest from all road safety stakeholders.
The meeting aimed to examine the 2003 Summary Report and finalise the draft Recommendations. It also looked at the progress Working Groups had made in each of the priority areas.
3.6.2 General Conclusions Working Groups
• During this meeting two new Working Groups were established in the areas of:Heavy Duty Vehicles
• User Outreach
With regard to existing Working Groups, it was recommended that the Road Maps and RTD Working Groups work even more closely with the other Working Groups. The Commission was invited to play more active part in the Working Groups.
eCall
The eCall Driving Group believes a necessary measure is to develop an implementation and business plan for eCall, involving both the Member States and industry. Other eSafety stakeholders supported this proposal.
The eCall Driving Group intends to reinforce its membership by inviting new members from public authorities, insurance industry, mobile telecommunications, navigation and aftermarket equipment and system suppliers. This would contribute to a new strengthened structure in place under the current chairmanship for its next meeting in April 2004.
The eCall Driving Group continued to seek signatures to the eCall Memorandum of Understanding, to secure the commitment of all stakeholders to create a concrete roll-out plan.
Page 159 of 490
ERTICO invited its Public Authorities Platform to review progress made in eSafety and especially in eCall from the perspective of the Member States and to agree upon national eCall implementation strategies. The FP6 Integrated Project GST undertakes a study on the status of the implementation of E-112 in the 25 Member States.
The Commission organised a High-Level meeting with the Member States, inviting both transport and interior ministries, to discuss the eCall implementation road map.
The Member States, the automotive industry and other key stakeholders committed to the development of the eCall rollout plan by signing the Memorandum of Understanding upon its release for signature. Finally, the Commission set up the Public Safety Officers Communication Forum who’s priority will be to discuss the actions for implementing E-112 and eCall.
Impact Assessment
The framework for impact assessment of eSafety systems was still missing and the Commission’s plans to initiate a study on this topic was welcomed.
Accident Causation Analysis
The Working Group had a short-term task to provide better accident causation analysis from existing sources, by the end of 2005. In order for this task to be carried out in the shortest possible time, it needed access to EU funding. The Working Group stated it would continue its work to prepare for the defined task to be carried out and that a stakeholder workshop be held to prepare answers to questions from analysis users. This work relied on support from Member States, industry, user groups and other stakeholders.
Work will continue on the development of the longer term needs to prepare for at European level, improved accident analysis methodologies and build a road safety information system.
RTTI
A proposal had to be submitted to the Council of the Transport Ministers of the European Union to endorse that all countries within the EU should be advised to enable and extend the installation of the chain of information needed to establish Real-Time Traffic Information Services in their countries. The objective was to have 80% of all population in Europe be served with adequate, standardised services by the year 2010.
R&D
Further EU wide R&D programs with a focus on an integrated approach involving vehicles, the infrastructure as well as the driver are necessary. In particular, the focus should be in the following areas:
• Accident causation R&D including the development of an EU wide methodology for the analysis of present data and demographic aspects
• R&D into the required technical architecture and structure for post accident incidents, civil protection and emergency management
Page 160 of 490
• EU wide assessment and verification (with international comparison) of effectiveness of safety measures and systems implemented in vehicles and infrastructure. This included the establishment of methodologies for a comprehensive cost benefit analysis including models, simulation and pilot studies to assess the impact of new technologies
• Human Factors- an analysis of collective interactive road use, collective understanding of road traffic and error compensating mechanisms as input for technology development
• Systematic assessment of the impact of intelligent road and information infrastructure on safety for all road use. In particular in the area of cooperative infrastructure to vehicle communication and the inter-vehicle communication systems.
ESP
Vehicle manufacturers stated they would continue to significantly increase the availability of ESP systems on the market within the next two years. The relevant stakeholders were to launch a consumer awareness campaign on ESP. In particular a main focus of the campaign should be on surroundings perception sensors for enhanced driver assistance system applications, as these are a key technology for the next breakthrough in primary and secondary (active and passive) vehicle safety.
The stakeholders have to remove the remaining obstructions in areas such as risk assessment, liability and legal issues, which delay the market introduction of these systems. Industrial partners should work and agree on uniform telematics platforms on-board vehicles.
International Cooperation
The new International Cooperation Working Group acts to co-ordinate actions that aim at deployment of larger volume eSafety technologies in 2005 and beyond.
A broader international presence was acknowledged at the 2004 IC-WG meetings in Parma on June 17, and in Nagoya in October during the ITS World Congress. International co-operation is pursued with reciprocity, so that the European experts are invited to meetings and seminars organised by the US and Japanese parties and can follow the ongoing activities and vice versa. A global list of proven near-term-applicable accident-reducing techniques / policies was required. eSafety demonstrations had to be identified and publicised, during the 2004 and 2005 World and European ITS Congresses, as well as those in USA, Japan and other nations.
Standardisation
The Commission proceeded with the imperative legal initiatives. The automotive industry endorsed the solution for the use of the 79 GHz band and the limited use of the 24 GHz band. The Commission and industry wanted to ensure that adequate effort is put on the development of the SRR 79 GHz technology, in order to make it available on a cost effective basis within the required time schedule.
Page 161 of 490
The automotive industry is to co-operate with the Commission and the Member States by taking the necessary control measures resulting from the limitations imposed by the restricted use of the 24 GHz band: including to cease to register, put into service and put on the market the equipment, when the time limit or the limit of penetration rate is reached. Member States will have to take all necessary legislative, regulatory or administrative measures for the implementation of the above solution.
3.6.3 Other items Participants agreed it was important to take an integrated approach to vehicles and the infrastructure, and welcomed the Commission’s plans to publish a call on Co-operative systems under the IST priority.
The European Economic and Social Council gave a positive Opinion on eSafety and participants were still awaiting positive conclusions or a resolution from the Council.
The Commission was to organise two High-Level meetings with the public sector and industrial leaders for committing to eSafety deployment and deciding on the next steps in the eSafety initiative.
Page 162 of 490
3.7 eSafety High-Level Meeting with Public Authorities, Brussels, 27 September 2004
3.7.1 Introduction
The eSafety Forum organised a High-Level Meeting with the Public Authorities of the Member States on 27 September 2004. The meeting was attended by over 80 persons representing 18 Member States, one Associated State, industry associations, the eSafety Forum Working Groups and the European Commission. The goal of the meeting was to further integrate the Member States into the eSafety initiative and to discuss and seek support for continuing the work of the eSafety Forum and its Working Groups. In particular, the meeting aimed to discuss actions and formulate the way forward for three priority topics; eCall, RTTI and HMI, on the basis of the detailed recommendations proposed by the Working Groups.
Taking reference to the general eSafety Summary Report and the recommendations for the Member States’s actions (See Tables in following pages), the Member States agreed the following conclusions:
3.7.2 General Conclusions Role of the Member States
In many Member States eSafety was already recognised as a national priority and other Member States had already initiated national activities in this domain as a part of the their general road safety strategy or a more specific ITS Strategy. The Commission called to the Member States to support eSafety activities including the publication of the first eSafety Communication in 2003 and the establishment of the eSafety Forum. The Commission sought the involvement of all stakeholders in the eSafety initiative and this also went for all levels of public authorities. Member States were essential not only to manage and increase national efforts in eSafety but also to lend their expertise to the eSafety Forum and its Working Groups.
Member states were asked to enhance eSafety action plans with their input on intermediate goals and clear milestones. The implementation of the recommendations proposed by the eSafety Forum requires co-ordination between different ministries, which can sometimes prove to be a challenging and time-consuming task. Member States were empowered to organising expert meetings for the three priority areas: eCall, RTTI and HMI, with a view to speeding up their implementation. Their contribution towards work on Accident Causation Analysis, Road Maps and Public Outreach Working Groups was indispensable. Finally, the Commission asked Member States for support on its second Communication on eSafety, which reports the progress, made and proposes further actions.
Page 163 of 490
The In-Vehicle Emergency Call (eCall)
Support from the Member States was required in making eCall a priority item for eSafety. Their assistance was necessary in creating the general architecture for the implementation of eCall, based on the location-enhanced E112 pan-European emergency number and the Minimum Data Set, which had been proposed by the eCall Driving Group.
Given that emergency services are operated at a regional and/or local level in many Member States, their coordination support was necessary to ensure smoother implementation of the actions.
The Commission was asked to conduct an analysis of the socio-economic benefits of eCall and especially to produce reliable cost figures. In addition an expert meeting on eCall was required.
In the Tour de Table, one Member State (Finland) announced it had already signed the MoU, was advancing with implementation and planned to start the service in the beginning of 2005. The Netherlands, Germany, Sweden, France, Spain, Belgium, Czech Republic, U.K, Hungary and Norway all gave their support to the MoU, and stated that they would sign as soon as their internal processes were completed.

Page 164 of 490
Recommended Actions for the Member States
In-vehicle Emergency Call (eCall)
With the aim of offering to all road users a harmonised, pan-European, interoperable eCall service, the Member States should provide the necessary infrastructure to start the pan-European eCall service from 2006 onwards. To do so the Member States should:
1. immediately sign the eCall Memorandum of Understanding at an appropriate level, and commit to the creation of a concrete implementation plan for eCall as soon as possible
2. send representatives to and support the work of the Public Safety Officers Communication Forum and urge it, as a priority, to prepare for implementing E-112 and eCall
3. set up, as appropriate, national platforms for the implementation of E112 and eCall, urge participation from relevant ministries (e.g. transport, telecommunications and interior) and especially from the authorities responsible for the emergency services, as well as private industry and service providers
4. use the appropriate European platforms, such as the eSafety Forum and the ERTICO Public Authorities Platform to review progress in eSafety and to agree on national eCall implementation strategies and plans, harmonised at a European level
5. undertake to assure, by the end of 2006, that adequate infrastructure will exist in the Public Service Answering Points (PSAPs) for the processing of eCalls originating from vehicles, and increase their efforts to the use of location and other relevant information into the whole emergency service chain
6. support in ETSI the standardisation of interfaces between the telecommunications networks and the PSAPs, and of the data transfer protocols for simultaneous voice-data link between the vehicle and the PSAP
7. undertake the necessary training of emergency service personnel, and organise public awareness campaigns to increase the visibility of E112 and eCall
8. develop, together with the other stakeholders, a model of how to provide financial incentives to the users of eCall to accelerate the take up
9. report by the end of 2004 on the status of their E112 implementation and by the end of 2005 on the status of the readiness of their PSAPs to process eCalls
Page 165 of 490
Real-Time Traffic And Travel Information (RTTI)
The support of Member States was required in making RTTI a priority item. The ambitious aim of the RTTI Working Group was that 80% of journeys in Europe should be covered by RTTI services. In order to achieve this goal, Member States needed to contribute to RDS and TMC services in their networks and help improve data availability. They also needed to assist the Working Group with the development of new technologies. The Commission was asked to organise an expert meeting on this topic. In the Tour de Table, some Member States stated there were problems in establishing and maintaining the RDS/TMC service, due to the lack of commercial interest.
Recommended Actions for the Member States
Real-Time Traffic and Travel Information (RTTI)
With the aim of having by 2010, 80% of journeys throughout Europe served with adequate, standardized RTTI services, using initially RDS/TMC, the Member States should – if they have not already
1. agree by the end of 2005 at the national level on a strategy and time schedule for the implementation of RTTI services, starting with RDS/TMC, covering as much as possible both inter-urban and urban areas
2. support the TMC-Forum to continuously promote the safety-related service features of TMC, building on the already existing, standardised European format for the data, and European messaging and transmission standards
3. take steps to ensure roaming and interoperability across the RTTI-services
4. require their authorities to make available existing public data for the provision of RTTI-services and to establish additional collection of real-time traffic information when necessary
5. agree to create national RTTI strategies aligned with the Commission Recommendation on TTI services; use these strategies to create agreement between the public and private service providers on the extent of the public (free of charge) services and the conditions for commercial services; establish public-private partnerships wherever these will support the public or private services
6. ensure the correct implementation of the standard by service providers
7. publish, following the guidance of the Commission RTTI recommendation, clear guidelines for the private sector, regarding the conditions for establishing private data collection networks for commercial purposes
8. require broadcasters, especially those operating under public licence, to carry the RDS/TMC traffic information for public or private providers so that for a minimum of 80% of journeys the driver has access to a relevant service
9. require authorities to ensure through the appropriate standardisation and regulation bodies that frequency spectrum and broadcast capacity will be made available for more advanced digital broadcast services such as DAB, DRM, DVB-T and eventually satellite DAB
10. support the development of more advanced services, made possible by 3G Mobile Communications, DAB and DVB-T and satellite broadcasting, wireless LANs and others

Page 166 of 490
Human-Machine Interaction (HMI)
With HMI as the third priority item, Member States were needed to help solve the issue of nomadic systems, as well as address the issue of introducing ADAS in vehicles. Their assistance would also be required to implement and monitor the Recommendations made by the HMI Working Group. Their support was called for by the Commission’s proposal to produce a new version of the European Statement of Principles in early 2005. The Commission was asked to organise another expert meeting, this time on HMI.
In the Tour de Table, many Member States (including Finland, Spain, Belgium, and Austria) referred to existing legislation prohibiting the use of Mobile Phones while driving.
Recommended Actions for the Member States
Human-Machine Interaction (HMI)
. Recommendations in terms of Communication
Member States should:
1. Actively ensure ESoP is effectively disseminated, known and used by designers, manufacturers, installers and fleet managers44
2. Provide general information to drivers on the safe use of in-vehicle information and communication systems e.g. by means of safety campaigns and mass media
3. Promote self-commitment of ESoP compliance for after-market systems and nomadic devices and support provision of consumer information concerning the safety implications and usability of in-vehicle devices (via consumer organisations, EURO-NCAP etc.)
4. Report to the European Commission about their studies regarding the ESoP if they have not already done so
Recommendations in terms of Monitoring and Enforcement45
Member States should:
1. Ensure that regularly updated information is available on the definition and dynamics of the market for aftermarket and nomadic devices, in order to know about the evolution of the market and of the techniques
2. Continue evaluation and monitoring of the impact of the ESoP and report to the European Commission about the results.
3. Ensure that data collection is sufficiently detailed in order to perform further evaluation and monitoring of the safety-impact of in-vehicle information and communication systems, and especially of aftermarket systems and nomadic devices
44 The language used should be chosen according to the addressee (designer/manufacturers/installer/fleet
managers) 45 Enforcement on Driver Behaviour is a matter of Member States, not the EC. Therefore the EC should
recommend taking appropriate measures; the choice of measure is up to the individual Member State.

Page 167 of 490
4. Take measures (for example legislation) to ensure secure fixing of aftermarket systems and nomadic devices according to ECE R21, or equivalent
5. Continue to actively enforce existing Health and Safety legislation concerning at-work driving practices
6. Take measures to ensure no hand-held use of nomadic devices by drivers while driving
7. Identify and take the necessary actions on the unintended use or misuse46 of visual entertainment systems by drivers while driving (e.g. movies, TV, video games)
46 Since the TV/DVD lock can be defeated (information on internet), it may be necessary to carry out regular
inspections or to take actions against the information providers
Page 168 of 490
3.8 eSafety High Level Meeting with Industry, Brussels, 3 February 2005
3.8.1 Introduction The eSafety Forum organised a High-Level Meeting with the main European industry representatives on 3rd February 2005. The meeting was chaired by the Director General of Information Society and Media, Mr. Fabio Colasanti and was attended by over 70 persons representing the main automotive, telecommunications, insurance and telematics industries, industry associations, user organisations representatives as well as representatives of the Member States, European Parliament and the European Commission. Mrs Viviane Reding, European Commissioner for Information Society and Media opened the meeting. The chairs of the ten eSafety Forum Working Groups were also present in the meeting.
The goal of the meeting was to discuss progress and the next steps in the priority topic, a pan-European in-vehicle emergency call, eCall, on the basis of the detailed recommendations and an action plan proposed by the eCall Driving Group. Furthermore, the meeting discussed and drew conclusions on the continuation of the work of the eSafety Forum and its Working Groups on the basis of a Commission’s proposal.
The participants of the High-Level meeting received a summary report on the progress of the eSafety Forum and its ten Working Groups. The eCall Driving Group submitted a proposal detailing actions for the roll-out of the pan-European eCall. The Commission wrote a proposal on the next steps to be included in the eSafety initiative.
3.8.2 General Conclusions
eSafety is regarded as a crucially important element in the general framework of improving road and vehicle safety in Europe and the quality of life of its citizens. The participants of the High Level meeting were satisfied with the progress in the eSafety Forum and its Working Groups and the chairs and members were congratulated for their work.
The participants declared their support for the Commission’s activities in eSafety, providing foresight, acting as a catalyst, supporting its work in the eSafety Forum and funding RTD in eSafety systems and technologies.
Page 169 of 490
Progress in eSafety
As many eSafety systems were already entering the market this would facilitate the change in the focus of the eSafety initiative from technology development to deployment. An example of such a system is ESP that already has proven its efficiency and anti-collision radars, which led to the Commission Decision on the use of the 24 GHz frequency band for automotive use.
A commitment was made by participants to increase efforts in eSafety and to extend the active participation of the industry experts into the Working Groups. There was an agreement to avoid unnecessary regulation and to proceed with voluntary measures and negotiated agreements
It was noted that despite the positive results emanating from the High-Level Meeting with the Member States on September 2004, progress had been slow in some cases and the Commission was invited to accelerate its efforts for getting the Member States fully inline with industry’s actions especially as regards eCall. The role of standardisation, harmonisation, international co-operation and open in-vehicle platforms needs to be emphasised in accelerating the take-up of in-vehicle systems and services.
The idea of creating a positive business case in the introduction of Intelligent Vehicle Safety Systems was still important and the Commission were invited to investigate possible fiscal incentives, based on the model used for environmental goals.
The In-Vehicle Emergency Call (eCall)
Studies previously made including the Commission’s Socio-Economic Study indicated huge potential socio-economic benefits for the pan-European deployment of eCall. The eCall Driving Group had made good progress in the eCall architecture based on the pan-European E-112 Emergency Number, the Minimum Set of Data (MSD) and the signatures for the Memorandum of Understanding (MoU).
The eCall Driving Group drafted an action plan and Recommendations which were approved by participants. The main milestones for the eCall roll-out were defined as:
Obtaining signatures on the eCall MoU by all key stakeholders by June 2005
Agreeing on the business model, roll-out plan and standards by end of 2005
Full specification of in-vehicle and PSAP systems by June 2006
Roll-out of infrastructure and full scale field tests in 2006 and 2007
eCall as a standard equipment in all new vehicles starting from models introduced after September 2009
The action plan and Recommendations can only be achieved as long as it has the commitment of all stakeholders. The Commission was therefore asked to increase its efforts to obtain the support of the insurance and telecommunications industries and the Member States.
The Commission produced a report on the status of the pan-European emergency number 112, its location enhancement (E-112) and eCall in the Member States. The report identified that emergency services are operated at a regional and/or local level in many Member States which makes the situation more complex. This is an issue the Commission planned to address.
Page 170 of 490
A positive business case for eCall, based on private-public partnership still needed to be found and the Commission was asked to make an in-depth analysis on the possible use of fiscal incentives (reduction of vehicle taxes).
The eCall Driving Group’s proposal to establish eCall-NET as a platform for all eCall stakeholders was generally supported and the Commission was asked to create it. The Commission was to support the eCall Driving Group in promoting and obtaining signatures of the MoU by all stakeholders particularly the Member States. This could be done by organising bilateral meetings, meetings between eCall experts and other relevant measures.
Finland, the first Member State to proceed with nation-wide implementation of eCall by 2006, suggested all European stakeholders test their systems in their open test environment. Representatives from Finland said they were keen to organise an Expert Meeting on eCall in Helsinki on 15 April.
The Commission’s initiative for promoting standardisation of the eCall protocols and interfaces by ETSI was welcomed. The participation of relevant experts in this work was encouraged.
Key Actions
The Commission’s proposal for the next steps in the eSafety initiative included
Organising Expert Meetings with the Member States on eCall, RTTI, HMI
Adoption the 2nd eSafety Communication in March 2005, in view of having it on the agenda of the June 2005 meeting of the Telecommunications, Transport and Energy Council under the Luxembourg Presidency
Producing an updated version of the European Statement of Principles (ESoP), and bringing it to the Council under the U.K. Presidency by the end of 2005
Monitoring the introduction of 24 GHz Short-Range Radars on the markets
Establishing a support function for the eSafety Forum through the currently open call in the IST Programme, for continuing the promotion and dissemination of eSafety and
Providing further funding for RTD in eSafety technologies and systems through the IST Programme Call 4
Role of the Commission
The Commission was invited to increase efforts to communicate the results of eSafety. This could involve the Commission’s Vice-President in charge of communications, to increase the co-operation between the different Commissioners dealing with transport and road safety. The Commission could attempt to establish some link between eSafety and CARS-21.

Page 171 of 490
It was also suggested that the Commission could play an important role in increasing the visibility of eSafety on a political level, especially in the European Council and the European Parliament. The Commission was asked to examine the possible inclusion of eSafety as a priority in the re-launch of the Lisbon strategy for 2005-2010. The Commission was also to explore the possibility to use fiscal incentives for accelerating the take-up of eSafety systems and to produce a report for the next meeting. As the European Parliament was to hold discussions on car taxation in 2005, the Commission could use this opportunity to inform the Parliament about the ideas on eSafety tax incentives.
3.8.3 Other items An idea was put forward to nominate European and national eSafety champions as a mechanism to promote eSafety and to increase its visibility.
Efforts needed to be made to promote road safety the developing countries and make the eSafety initiative known in the international arena.
The next meetings scheduled were:
• Plenary Session in Hannover on 2 June
• High-Level Meeting with the Member States in Brussels on 18 October
Page 172 of 490
Recommendations of the eCall Driving Group
With the aim of offering to all road users a harmonised, pan-European, interoperable eCall service as a standard equipment in all new European vehicle models introduced after September 2009, the eCall Driving Group recommends the following actions:
1. To fix the starting point of the action plan on June 2005
2. To establish an “eCallNet” consortium with financial support by June 2005, including Member States, European Commission and key industry stakeholders, committed to progress on the eCall implementation plan
3. The Commission to promote the signature of the MoU by all key stakeholders of the eCall service chain (including the Member States) before June 2005
4. The Commission to adopt a 2nd Communication on eSafety proposing specific actions for Member States and industry by June 2005, including actions on eCall
5. All key stakeholders including insurance industries to prepare a feasible Business Model for eCall to be adopted by December 2005
6. ETSI to produce relevant eCall standards (protocols, interfaces) by December 2005
7. All stakeholders to prepare a final implementation and rollout plan to be agreed by December 2005
8. Key stakeholders to commit with a Letter of Intent (LoI) to start the project implementation in December 2005
9. ACEA to finalize the in-vehicle eCall functionality system architecture and launch the system development by June 06
10. Key Member States to upgrade their infrastructures of Public Safety Answering Points (PSAPs) to allow the receiving and processing eCalls by June 2007
11. “Early Adopter” Member States in collaboration with the Commission and the industry to perform full-scale field tests of the eCall system until December 2007
12. All Member States to complete the upgrading of their PSAPs infrastructure and ACEA to start the introduction of eCall as standard option in all new vehicles by September 2009
Page 173 of 490
3.9 Fourth eSafety Forum Plenary Meeting, Hanover, 2 June 2005
3.9.1 Introduction The Fourth Plenary Meeting was one of the largest so far with over 120 members attending. There was a strong participation from the Member States and the insurance industry was also present for the first time.
The goal of the meeting was to discuss issues related to deployment of eSafety systems and an number of reports including the Working Group report on ‘Towards pan-European Deployment of eSafety’. The focus was on how to accelerate the deployment of eSafety.
3.9.2 General Conclusions eSafety Deployment
In order to achieve large-scale deployment of eSafety systems, it was necessary to conceive more concrete plans.
Reports
Several reports by the different Working Groups and stakeholders were proposed at the time of the meeting:
1. Reports by the User Outreach and Implementation Road Maps WGs were welcomed and the concept of a joint platform obtained support from other stakeholders.
2. The Implementation Road Maps WG submitted an interim report. It also drafted its approach on assessing the merits of various eSafety systems, which it would complete by the end of the year.
3. Reports from the Heavy Duty Vehicles and Digital Maps Working Groups were also welcomed.
4. The Commission asked to distribute its Draft Working Paper on incentives to all members to enable further discussions on this topic.
Page 174 of 490
User Outreach
The User Outreach WG stressed the importance of the user outreach actions and proposed to establish a joint platform for user outreach actions. There was an agreement to create an eSafety label to improve the concepts branding and increase awareness on eSafety systems.
eCall
The need for urgent actions by the Member States on eCall implementation was stressed. Germany announced that it would be ready to sign on 18 October 2005.
It was also still important to work on the business case for eCall. The insurance industry stated it would investigate the use of incentives for eCall. Finland announced it was to conduct a detailed study on eCall benefits. Finally, the work of eScope in monitoring progress and disseminating eSafety results was acknowledged. With regard to RTTI, the Commission was asked to investigate the use of an MoU as a means to accelerate deployment of RDS/TMC.
3.9.3 Other items The meeting agreed on the RTD Working Group’s proposal to set up a Joint European Technology Initiative for eSafety Co-operative Systems.
Participants acknowledged the importance of ITS standards in the deployment of eSafety and invited ITSSG to its coordination and strategy work.
Commissioner Reding’s support for the eSafety initiative was appreciated along with her initiative to propose the i2010 a new flagship initiative “intelligent car”. The Commission was asked to further investigate tax incentives for safety issues, following the schemes used for environmental aims.
Page 175 of 490
3.10 The Second eSafety High Level Meeting with Member States, Brussels, 18 October 2005
3.10.1 Introduction The Commission organised the 2nd High-Level Meeting with the Member States on 18 October 2005. The meeting was attended by over 60 persons representing 21 Member States, Norway, industry associations, the eSafety Forum Working Groups and the European Commission. The goal of the meeting was to discuss progress and obtain further commitment from the Member States on the road map plan agreed by the Commission and the industry on the priority topic, the pan-European in vehicle emergency call, eCall.
Furthermore, the results achieved on three of the eSafety Working Groups
(Implementation Road Maps, Human Machine Interaction and Real Time Travel and Traffic Information) as well as the i2010 information society strategy were presented.
The participants of this 2nd eSafety High Level meeting, discussed the Commission’s 2nd Communication on eSafety and in particular recommendations to the Member States. Participants also received progress reports on the eCall initiative the Implementation Road Map and the User Outreach Working Groups.
3.10.2 General Conclusions Road Safety
An introductory point made at the meeting was that road safety was to be regarded as an utmost priority for improving the quality of life of citizens. A great achievement would be to have the following EU presidency (Austria) to include it as a priority.
eSafety
eSafety is a crucially important element in the general framework of improving road and vehicle safety in Europe. A public-private partnership approach is the most effective way for achieving eSafety goals. The Commission intends to avoid unnecessary regulation and to proceed with voluntary measures and negotiated agreements.
There was overall satisfaction with the progress achieved in the eSafety Forum and its Working Groups. Chairs and members of the Working Groups were congratulated for their work. However, in order to accelerate the take-up of in-vehicle systems and services greater emphasis needed to be on standardisation, harmonisation, and open in-vehicle platforms.

Page 176 of 490
The In-Vehicle Emergency Call (eCall)
There was unanimous support for the implementation of a pan-European in-vehicle emergency call service. This is an important contribution to reduce the number of fatalities and the severity of injuries caused by road accidents. However, in order to maximise benefits for all European citizens, the service needs to be implemented in all vehicles in all Member States. This highlights the importance of the signatures for the eCall Memorandum of Understanding (MoU). The aim was to have all Member States sign the eCall MoU by 2005. Finland and Sweden had already signed the MoU and Greece, Italy, Lithuania and Slovenia joined them. Other countries, which had initiated the signature procedure of the eCall MoU were the Czech Republic, Cyprus, Denmark, The Netherlands and Germany. In addition, progress needs to be monitored on the implementation and handling of the pan-European emergency number 112, its location enhancement (E112) and eCall in the Member States.
Requirements for eCall:
• The Commission stated it would increase its support to the Member States, in particular by creating a Sub-Group under the Civil Protection Committee specialised in emergency calls and by monitoring its progress
• National level and interdepartmental Working Groups had to be established to support the deployment of eCall
• ETSI was to develop pan-European standards for E112 and eCall
• The use of eCall in-vehicle open platform was to be extended to other public service applications in the future
• Commission had to find a positive business case with a detailed cost-benefit analysis
• Potential data privacy issues needed to be addressed
3.10.3 Other items The Commission’s proposal for the i2010 initiative and its Intelligent Car Flagship initiative was welcomed. This is deemed to create positive social and economic impacts.
The Commission was asked to:
• address the need for radio-spectrum allocation for future eSafety applications
• endorse the Final Report on the Implementation Road Map Working Group
eSafety stakeholders were asked to refer to the results of the Implementation Road Map Working Group as a basis for future initiatives to accelerate the implementation of eSafety systems.
The promotion of private-public partnerships is a way to create positive business cases. It is important to introduce appropriate the necessary incentives to accelerate the introduction of eSafety systems.

Page 177 of 490
CHAPTER IV - ESAFETY WORKING
GROUPS HISTORY AND FINAL RECOMMENDATIONS
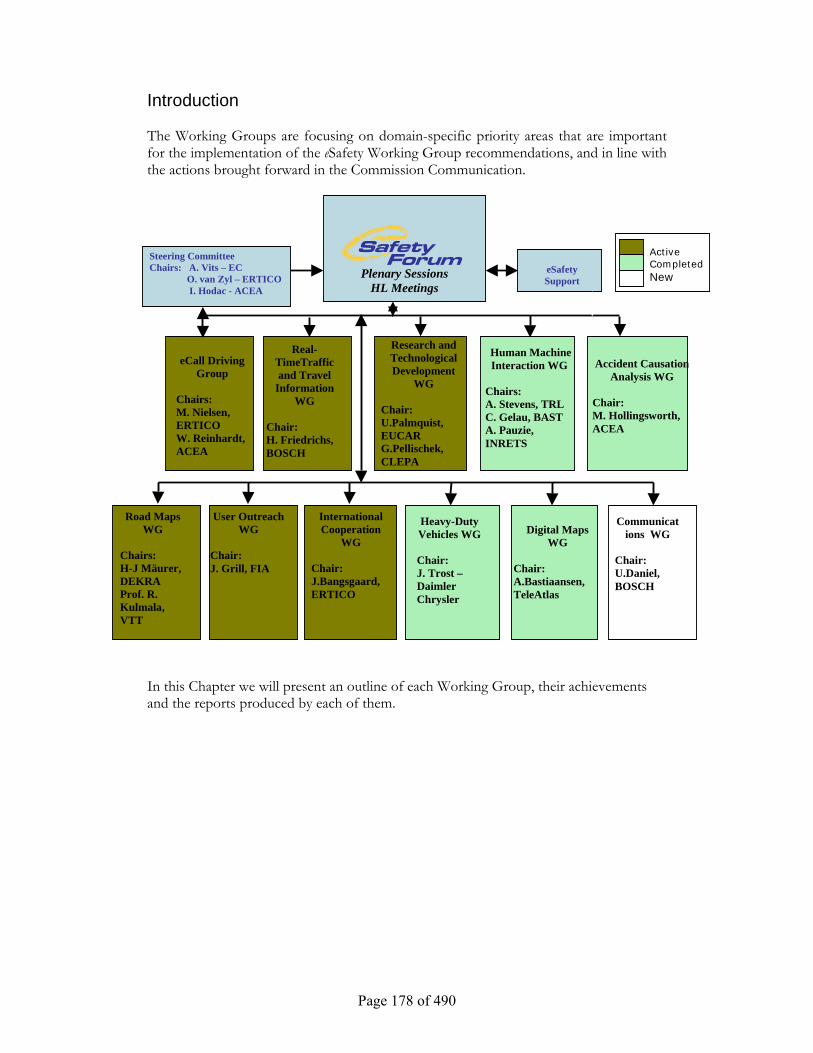
Page 178 of 490
Introduction
The Working Groups are focusing on domain-specific priority areas that are important for the implementation of the eSafety Working Group recommendations, and in line with the actions brought forward in the Commission Communication.
In this Chapter we will present an outline of each Working Group, their achievements and the reports produced by each of them.
Plenary Sessions HL Meetings
Steering Committee Chairs: A. Vits – EC O. van Zyl – ERTICO I. Hodac - ACEA
eSafety Support
eCall Driving
Group
Chairs: M. Nielsen, ERTICO W. Reinhardt, ACEA
Real-
TimeTraffic and Travel
Information WG
Chair: H. Friedrichs, BOSCH
Research and Technological Development
WG Chair: U.Palmquist, EUCAR G.Pellischek, CLEPA
Human Machine Interaction WG
Chairs: A. Stevens, TRL C. Gelau, BAST A. Pauzie, INRETS
Accident Causation Analysis WG
Chair: M. Hollingsworth, ACEA
Road Maps WG
Chairs: H-J Mäurer, DEKRA Prof. R. Kulmala, VTT
Heavy-Duty Vehicles WG Chair: J. Trost – Daimler Chrysler
International Cooperation
WG
Chair: J.Bangsgaard, ERTICO
User Outreach WG
Chair: J. Grill, FIA
Digital Maps WG
Chair: A.Bastiaansen, TeleAtlas
Active CompletedNew
Communications WG
Chair: U.Daniel, BOSCH
Page 179 of 490
4.1 Accident Causation Analysis Working Group
Despite the existence of a multitude of accident statistics sources in all Member States, no single consolidated pan-European accident causation data exists. The role of the Accident Causation Analysis Working Group was therefore to:
• Analyse data from existing databases • Define the most effective measures to reduce accidents • Make recommendations for homogeneous accident causation data collection and
analysis
The Working Group analysed data from existing EU, Member State and industry road accident databases. In the first phase, the Working Group formulated a methodology and framework for a more effective use of existing accident causation databases. In the second phase, the Working Group analysed the user needs for accident causation data, focusing on determining the effectiveness of possible countermeasures. Recommendations for further actions required for effective, homogenous accident causation data collection and analysis were subsequently formulated.
The sectors represented are:
• Automotive industry • Universities • Research institutes • National authorities • User organisations • Insurance companies • Safety authorities • Road operators
Page 180 of 490
4.1.1 Final Report and Recommendations of the Accident Causation Analysis Working Group, December 200447
Legal notice by the European Communities, Information Society Directorate-General
This report was produced by the eSafety Forum Working Group for Directorate-General Information Society of the European Commission. It represents the view of the experts on improving Road Safety in Europe with the use of Information Communication Technologies (ICT). These views have not been adopted or in any way approved by the European Commission and should not be relied upon as a statement of the European Commission’s or its Information Society Directorate-General’s view. The European Commission does not guarantee the accuracy of the data included in this report, nor does it accept responsibility for any use made thereof. In addition, the European Commission is not responsible for the external web sites referred to in this publication.
Introduction
The Accident Causation Analysis working group of the e-Safety Forum has been in existence for almost two years, which was the original period for the mandate of the group when it was established. The working group was asked to undertake the work to carry out the relevant recommendations that were agreed at the first Forum meeting in November 2002. The recommendations were:
Status
The activity of the working group to meet the requirement of these two recommendations has been under five main headings.
1. Analysis of existing data
The working group carried out a detailed analysis of existing data sources (Annex 1).
• The data sources were assessed on three criteria, which yielded a mixed picture.
• The task to interrogate these data sources was defined.
• A strong recommendation was made that the task of interrogation of the existing data sources be included in a project call in the near future.
47The document is officially named “Interim Report” but now that the work of the group is over, it
became the final report.
Page 181 of 490
2. Links with other connected initiatives and projects The working group has tried to ensure that duplication of effort was avoided by forging good links with other projects and initiatives. This includes:
MAIDS, ETAC, SafetyNet, APROSYS, and a number of national initiatives.
3. Stakeholder Workshop One element of the task to interrogate existing data sources was the development of the research questions that need to be answered. To help in this and to enhance transparency, a multi-stakeholder workshop was held on 30 June 2004.
4. Development of the short-term research questions The questions that need to be answered during the interrogation of existing data sources have been developed in a report (Annex 2). The questions consist of:
a) Diagnostic questions relating to:
- Infrastructure - Human factors - Accident types - Vehicle safety - Specific users - Risk factors - Discrepancies
b) Evaluation questions relating to the physical benefits from saved lives, reduced
injuries and number of accidents from clearly defined safety systems
- Methods - Results - Side effects
c) Transversal questions
- European perspective - Prospective angle - User acceptance
5. Execution The above analysis resulted in the clear identification of the need for resources to carry out this interrogation. It is now anticipated that this will be done following an appropriate call. This work should ensure that e-Safety recommendation 1 is fulfilled.
Page 182 of 490
Next steps
The work to carry out the interrogation should now be handed on to the successful project consortium. There is a need to maintain some continuity between the work that has been done by the working group and that which will be carried out by the project group. In the future it would also be useful to maintain a bridge between the e-Safety initiative and other activities in accident analysis. The longer term recommendation of the e-Safety Forum to define a common format and structure for future accident data is being led by SafetyNet and accident causation analysis working group members are in touch with this work and would wish to remain so. This SafetyNet work should fulfil the requirement for e-Safety recommendation 2.
In view of the above, the e-Safety accident causation analysis group recommends that it disseminates the work and reports produced so far and then invoke a temporary moratorium until results from these other initiatives begin to appear or are available for discussion. The work of the group could then recommence to maintain contact and continuity.
Page 183 of 490
Annex 1 - ANALYSIS OF EXISTING DATA SOURCES
AIMS
a) To evaluate the essential characteristics and use potential of a sample of European
accident causation databases.
b) To assess the extent to which the sampled databases would fulfil the objectivesnecessary to develop a better understanding of accident causation using existing datasources.
OBJECTIVES FOR USE OF DATA SOURCES
- Description of accident (qualitative) – combination of factors - Statistical overview of descriptions - Evaluation of effectiveness of safety “function” (vehicle, driver, infrastructure,
environment) • Potential for non-existent measures • Observed effect
- Case studies
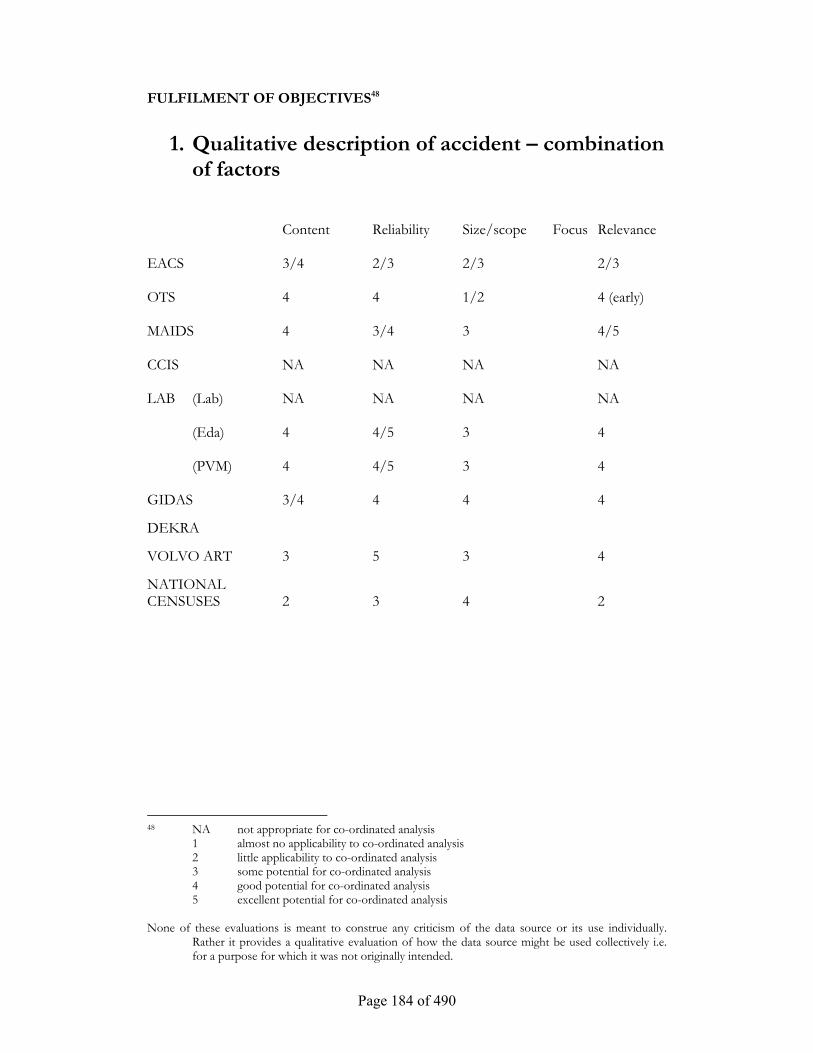
Page 184 of 490
FULFILMENT OF OBJECTIVES48
1. Qualitative description of accident – combination
of factors
Content Reliability Size/scope Focus Relevance
EACS 3/4 2/3 2/3 2/3 OTS 4 4 1/2 4 (early) MAIDS 4 3/4 3 4/5 CCIS NA NA NA NA LAB (Lab) NA NA NA NA (Eda) 4 4/5 3 4 (PVM) 4 4/5 3 4 GIDAS 3/4 4 4 4 DEKRA VOLVO ART 3 5 3 4 NATIONAL CENSUSES 2 3 4 2
48 NA not appropriate for co-ordinated analysis
1 almost no applicability to co-ordinated analysis 2 little applicability to co-ordinated analysis 3 some potential for co-ordinated analysis 4 good potential for co-ordinated analysis 5 excellent potential for co-ordinated analysis
None of these evaluations is meant to construe any criticism of the data source or its use individually.
Rather it provides a qualitative evaluation of how the data source might be used collectively i.e. for a purpose for which it was not originally intended.
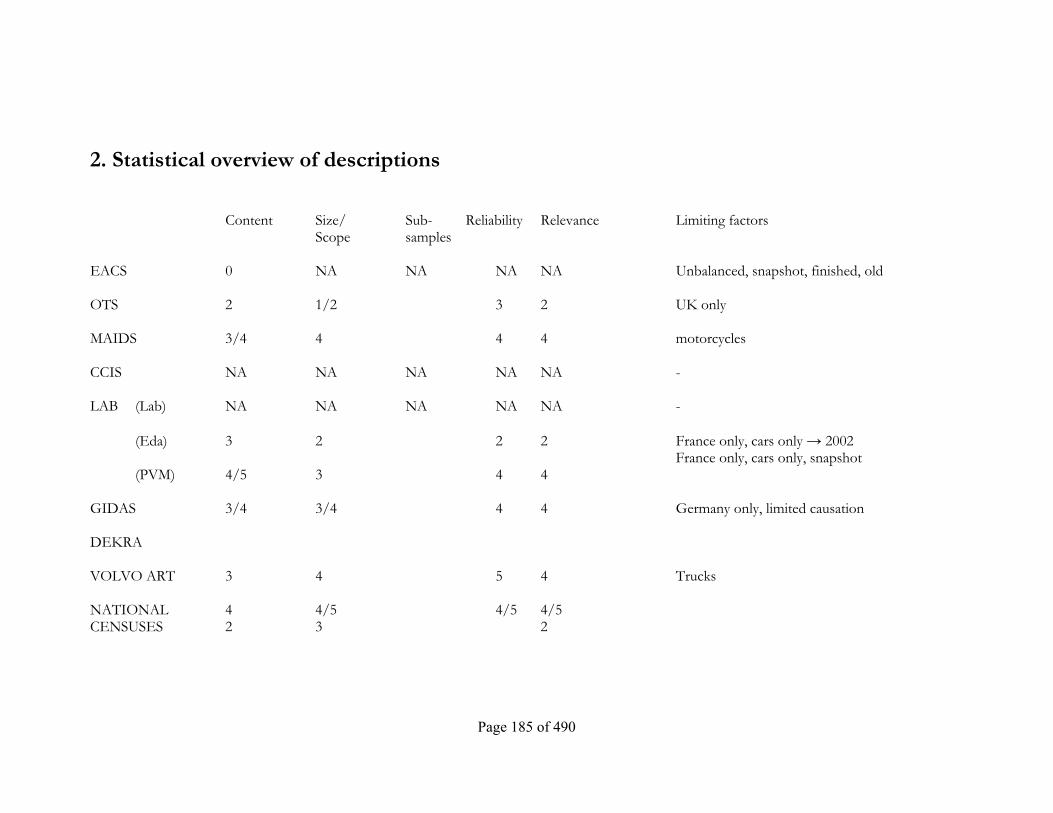
Page 185 of 490
2. Statistical overview of descriptions
Content Size/ Sub- Reliability Relevance Limiting factors
Scope samples EACS 0 NA NA NA NA Unbalanced, snapshot, finished, old OTS 2 1/2 3 2 UK only MAIDS 3/4 4 4 4 motorcycles CCIS NA NA NA NA NA - LAB (Lab) NA NA NA NA NA - (Eda) 3 2 2 2 France only, cars only → 2002 France only, cars only, snapshot (PVM) 4/5 3 4 4 GIDAS 3/4 3/4 4 4 Germany only, limited causation DEKRA VOLVO ART 3 4 5 4 Trucks NATIONAL 4 4/5 4/5 4/5 CENSUSES 2 3 2
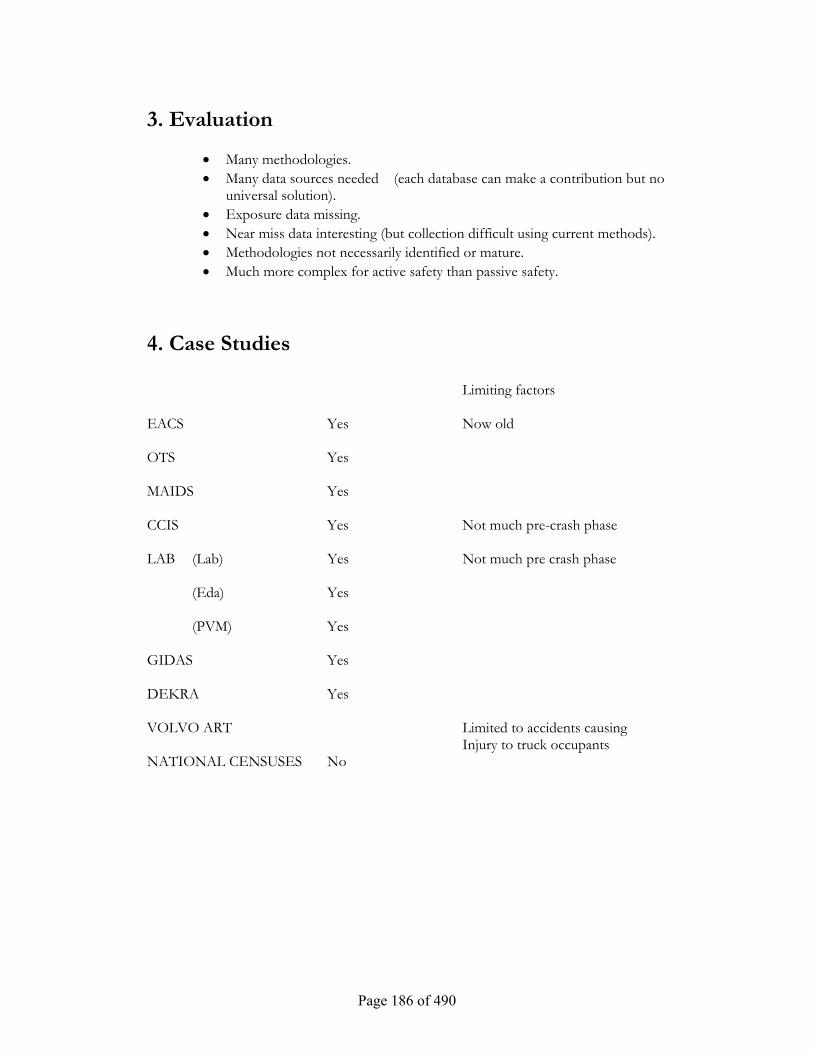
Page 186 of 490
3. Evaluation
• Many methodologies. • Many data sources needed (each database can make a contribution but no
universal solution). • Exposure data missing. • Near miss data interesting (but collection difficult using current methods). • Methodologies not necessarily identified or mature. • Much more complex for active safety than passive safety.
4. Case Studies
Limiting factors EACS Yes Now old OTS Yes MAIDS Yes CCIS Yes Not much pre-crash phase LAB (Lab) Yes Not much pre crash phase (Eda) Yes (PVM) Yes GIDAS Yes DEKRA Yes VOLVO ART Limited to accidents causing Injury to truck occupants NATIONAL CENSUSES No
Page 187 of 490
Annex 2: Questions to be Answered During the Interrogation of Existing Data Sources
1. Background and Needs The e-Safety Forum adopted a recommendation to consolidate analyses from existing data sources for a better understanding of the causes and circumstances of road accidents and to determine the most affective counter measures. The Accident Causation Analysis working group of the e-Safety Forum has in response to this recommendation set itself the task to identify the remaining needs for a diagnosis of safety issues and for an evaluation of the expected and observed effectiveness of the counter measures. A stakeholder workshop was organised on 30 June 2004, which was followed up by further work by the working group. The following report synthesises the discussions at the workshop and the working groups efforts to try to provide the most important questions for the necessary diagnosis and evaluation

Page 188 of 490
2. The needs 2.1 Diagnosis
Parameter Generic Question Detailed Questions Road
Infrastructure How does road infrastructure design and maintenance cause or contribute to accidents?
• Road furniture (including speed bumps, etc.) • Road architecture (including visibility) • Road surface questions • Road edges and barriers • Road markings and signs • Road maintenance and repair • Traffic engineering • Changing conditions (surface, illumination, etc.)
Human Factors How would our improved understanding of human factors help in obtaining better information on accidents?
• Physical attributes (eyesight, etc.) • Road user status (biorhythmic, fatigue, vigilance, alcohol, drugs, etc.) • Attention • Perception • Cognition (e.g., knowledge of other road users) • Failure and violation • Emotions • Ergonomics • Experience • Attitude towards risk • Capacities • Age, gender • Road user workload • Training and licensing • Social and cultural differences (e.g., lifestyle) • Distraction (e.g., use of cellular phone)
./.
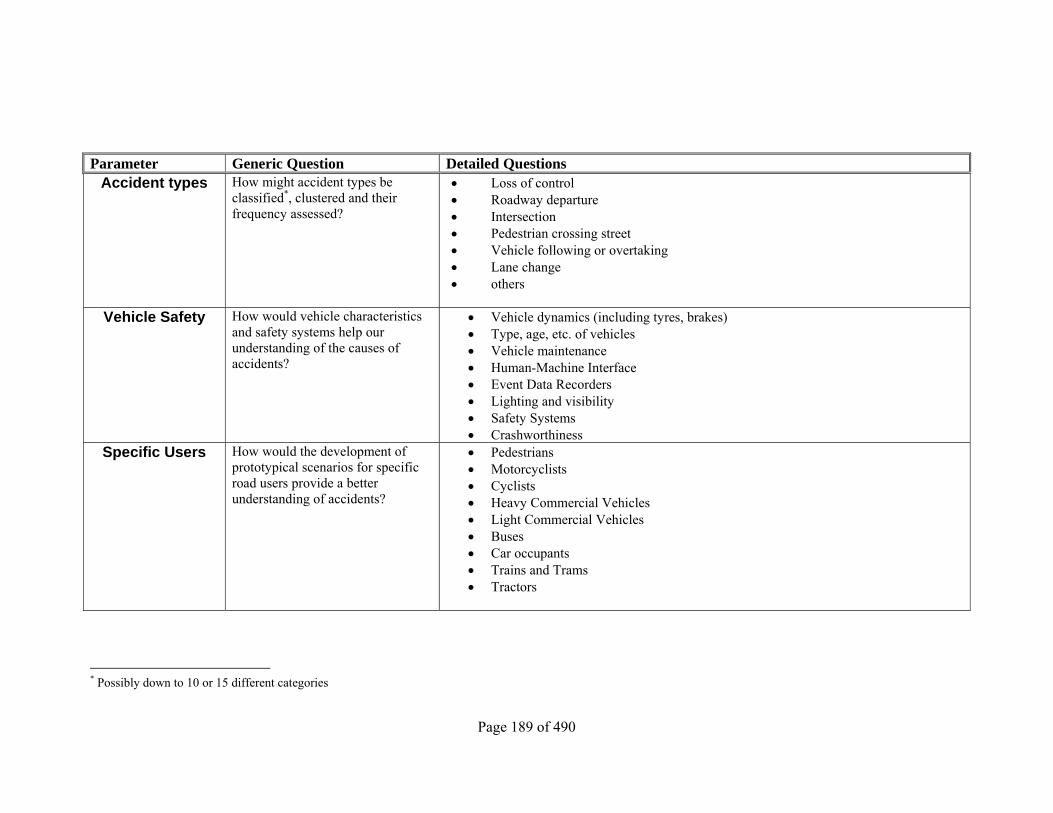
Page 189 of 490
Parameter Generic Question Detailed Questions
Accident types How might accident types be classified*, clustered and their frequency assessed?
• Loss of control • Roadway departure • Intersection • Pedestrian crossing street • Vehicle following or overtaking • Lane change • others
Vehicle Safety How would vehicle characteristics and safety systems help our understanding of the causes of accidents?
• Vehicle dynamics (including tyres, brakes) • Type, age, etc. of vehicles • Vehicle maintenance • Human-Machine Interface • Event Data Recorders • Lighting and visibility • Safety Systems • Crashworthiness
Specific Users How would the development of prototypical scenarios for specific road users provide a better understanding of accidents?
• Pedestrians • Motorcyclists • Cyclists • Heavy Commercial Vehicles • Light Commercial Vehicles • Buses • Car occupants • Trains and Trams • Tractors
* Possibly down to 10 or 15 different categories
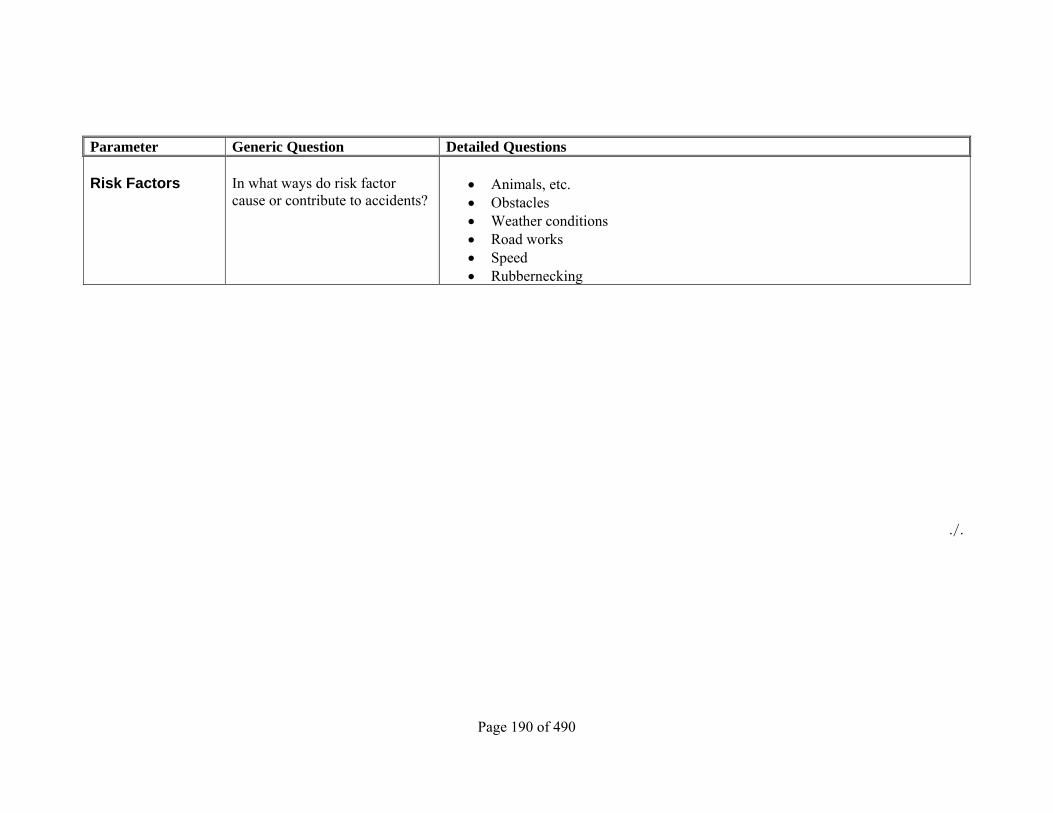
Page 190 of 490
Parameter Generic Question Detailed Questions Risk Factors
In what ways do risk factor cause or contribute to accidents?
• Animals, etc. • Obstacles • Weather conditions • Road works • Speed • Rubbernecking
./.
Page 191 of 490
2.2 Evaluation Evaluation in this context means an assessment of the physical benefits from saved lives and reduced injuries and accidents. It does not include an monetary estimation of either the costs or the benefits of those physical benefits and therefore is only part of an impact assessment.
2.2.1 Expected Try to foresee the expected benefit/side effects of safety functions in terms of saved lives or avoided casualties.
2.2.1.1. Methods Clear description of systems (e.g. in terms of reaction time).
Identify existing methods to achieve the prediction stated in 2.2.1 (methods may not only include data analysis but also experiments, simulator studies, etc.)
2.2.2.2 Results Confirmation/validation of the effect of safety features 2.2.2.3 Side effects Side effects within the same user group as well as across user groups. 3. Transversal questions Descriptive methods for diagnosis: • Statistics (distributions, risk analyses). • In-Depth scenarios • Single case studies 3.1 European perspective Provide as wide Member State analyses as possible and / or state the limitations.
Page 192 of 490
3.2 Prospective angle
• Predict traffic accident scenarios • Predict safety functions and systems (including deployment, development of fleet
penetration). • Predict legislative requirements (either by making certain functions mandatory or by
removing type approval barriers). • User adaptation / risk compensation effects
3.3 User acceptance
• Incentives • Education, training, campaigns • Realistic description and marketing of safety systems • Enforcement
3.3.1 Individual and Societal Accident causation analysis has application outside the immediate road safety sphere and should also inform this research (e.g., medical, biomechanical, psychological, sociological, etc.. Development of test procedures (regulation as well as consumer testing) will also need accidentology. 4. Links to other projects A number of other projects and working groups have close correspondence with the work proposed by the e-Safety Accident Causation Analysis working group. Some of these projects are currently working in similar complementary analysis, for example: PENDANT, APROSYS, SAFETYNET. Others will have questions to which the Accident Causation Analysis working group activity may help to find answers, for example: HMI, Heavy Duty Vehicles, PREVENT. The links with these other projects and activities will need to be strengthened to obtain the maximum synergies.
Page 193 of 490
Annex 3: Accident Causation Analysis Working Group: Terms of Reference Chairman: Michael Hollingsworth, Director – Transport Policy, ACEA 1. The context The accident causation data working group was one of the first four groups established to prepare activity for the e-Safety Forum. The Forum is a joint platform for all road safety stakeholders to promote and monitor the implementation of the recommendations identified and presented to the 2002 High Level Group. e-Safety is a complex issue and it was quickly established that a clearer picture of accident causation was needed on a pan-European basis to enable effective safety investment decisions to be made on a sound scientific foundation. To this end two recommendations were drafted:
1. Consolidate analyses from the existing EU, Member State and industry road accident data which give information on the cause and circumstances of the accidents, for allowing the determination of the most effective countermeasures, starting from the most frequent accident types.
2. Define a common format and structure for recording accident data in the EU countries. Develop jointly a European Accident Causation Database covering all EU and enlargement countries, and provide open access to industry and public agencies.
2. Constitution The accident causation data group was established in February 2003, for a period of two years. The group is chaired by ACEA and is open to any stakeholder with an interest and expertise to contribute to the work of the group. The work is on a voluntary basis and does not commit group members to any particular view or course of action. Decisions and recommendation will be arrived at by consensus. 3. Objectives and Scope The accident causation data working group has decided to focus on four key questions. • What can be done in the short term to understand better accident causation in Europe? • What is already known and how can it be used more imaginatively to increase our
understanding? • What might be done in the longer term to create a more rigorous understanding of
accident causation? • How might such an accident information system be established? By answering these questions it aims to fulfil its responsibility to contribute to the HLG recommendations. It has already been established that a database alone is not the solution and that enhanced information will be needed.
Page 194 of 490
The working group currently has members from industry, national authorities, research institutions, the Commission and user groups. It aims to reach consensus amongst these stakeholders on the critical questions. The group aims to reach specific detailed recommendations on the implementation steps within a two year period. The group cannot undertake the detailed research and analytical work necessary but it will monitor progress in the development of accident causation data provision at a EU level.
4. Reporting The accident causation data group reported progress of its initial work at the first e-Safety Forum plenary meeting on 22 April 2003, and organised a workshop session. It will continue to report progress at future e-Safety Forum and Steering Group meetings. Members of the working group will also report to other meetings.
Page 195 of 490
Annex 4: Accident Causation Analysis WG - List of members
Active members: Mike Hollingsworth ACEA (Chair) Yves Page LAB Peter Frank DAIMLERCHRYSLER Axel Mitterer BMW Michael Stanzel VW Paul Fay FORD Walter Niewöhner DEKRA Antonio Perlot FEMA Michel Loccufier Belgian Ministry of Transport Armel de la Bourdonnaye French Ministry of Transport Hans Van Driessche ACEM Thierrry Hermitte CESAR Claes Avedal VOLVO Jacques Compagne ACEM Jean-Paul Repussard DG TREN Jesus Monclus FITSA Francisco Ferreira DG INFSOC Laurence Chauveau MAAF Erich Bittner BOSCH Wolfram Hell UNI München

Page 196 of 490
4.2 Communications Working Group During its meeting on 14 March 2005, the eSafety Forum Steering Group decided to establish a Communications Working Group. The Working Group aims to cover all communication technologies and modes relevant for the successful deployment of eSafety. Special attention is devoted to:
• Spectrum issues, helping the European Commission with CEPT (European Conference of Postal and Telecommunications Administrations) and RSC (Radio Spectrum Committee)
• Standardisation, working with the Intelligent Transportation Systems Steering Group (ITSSG) in its dealings with ETSI, CEN and ISO
• International cooperation, i.e. establishing contacts to similar groups in the US and Japan to coordinate international issues in the communications
The biggest obstacle to the successful introduction of most vehicle based communication systems is that network effects are needed to cause significant results on road safety, fuel economy, congestion avoidance etc. Often a minimum percentage of vehicles equipped with communication based electronic control units (ECUs) is needed to enable features like cooperative traffic, accident warning or traffic management. This threshold is much more difficult to overcome if different standards and systems are used within the Member States. Therefore a key mission of the Communications Working Group is to provide the eSafety Steering Group with all information needed to give recommendations to the European Commission on how a harmonised EU wide communication system for vehicle-to-vehicle (V2V) and Vehicle to Infrastructure (V2I) could be established. This will enable all stakeholders to develop business models based on common standards in a common market. A subsequent goal could be to promote this EU based system worldwide so that the European industry will be able to gain economies of scale for the components developed.
The Communications Working Group was established in fall 2005 and includes all stakeholders in the road and traffic field that could be positively influenced by communication technologies. Its stakeholders/participants are representatives of:
• Automotive industry and its suppliers of ECUs
• Car-to-Car Communication Consortium (C2C-CC) of the automotive industry
• Current and future EU projects in this context like GST, CVIS etc.
• Digital map producers
• Providers/operators of communication infrastructure
• Research institutes
• Road authorities/operators
• Safety authorities
• Service providers for traffic information and location based services
• Universities
• User organisations

Page 197 of 490
The Communications Working Group is chaired by Uwe Daniel (Bosch) and it plans to finalise its work within two years. A final report is expected in the fall 2007. Two parallel Task Forces have been created to deal with Standardisation and Spectrum requirements.
Former work on V2V (Vehicle-to-Vehicle), V2I (Vehicle-to-Infrastructure) and V2X (Vehicle-to-Vehicle and Vehicle-to-Infrastructure) has shown that there is a strong demand for a single standard and system specification as well as the allocation of exclusive spectrum. Recognition of these needs has lead the Communications Working Group to focus on the following work areas to support these requirements at EU level:
• Highlight the contribution of V2X to road safety, environmental and economic effects
• Identify optimum standards and spectrum requirements and promote these via the eSafety Forum Steering Group towards the relevant bodies
• Evaluate use cases for traffic management, driver assistance etc, using V2X
• Maintain links to other eSafety Working Groups and the i2010 Initiative in related areas
Page 198 of 490
4.3 Digital Maps Working Group
Discussions related to eCall deployment are carried out in the eSafety Forum Driving Group on eCall. The eCall Driving Group, which is co-chaired by Michael Nielsen (ERTICO – ITS EUROPE) and Wolfgang Reinhardt (ACEA) was established by the European Commission at the end of 2002.
The key players involved in the eCall Driving Group’s activities are members of four large “constituencies”:
• Automotive industry
• Mobile telecommunication industry
• Public emergency authorities and associated or cooperating service organisations
• Public social security organisations and private insurance companies
The eCall Driving Group is developing an integrated strategy for pan-European emergency services. These services will build on the location-enhanced emergency services being implemented in the Member States on the basis of the recently adopted Recommendation on the implementation of the E-112 emergency number.
“eCall” stands for “In-vehicle Pan-European automatic emergency call system”. Generated either manually by vehicle occupants or automatically via activation of in-vehicle sensors, eCall gives the precise coordinates of an accident’s location to the emergency services that are responsible for the follow-up assistance.
The eCall Driving Group was established to produce a framework architecture and a business model for eCall, and to define the roles of both the public and private stakeholders. These include the Member States, the Commission, telecom operators, PSAP operators, vehicle manufacturers, equipment suppliers, motorway operators, automobile clubs, insurance industry, service providers.
The Driving Group produced a Memorandum of Understanding on the implementation of eCall. The aim of the MoU is to ensure that eCall will work in any EU Member State. The MoU commits the stakeholders to implementing eCall on the basis of a common approved architecture and interface specifications, including the Minimum Set of Data (MSD). The European Commission, the automotive industry – represented by ACEA - and the multi-sector partnership ERTICO signed the MoU in August 2004. The MoU now has around 60 signatures. Seven Member States are now among the signatories. Greece, Italy, Lithuania and Slovenia signed it on 18 October 2005 and Cyprus on 8 December 2005. Five additional Member States have announced that they will sign in the near future.

Page 199 of 490
The eSafety partners have also agreed on a Road Map for the roll-out of eCall. The main milestones are the following:
• Agree on an eCall roll-out plan, business model and standards by the end of 2005
• Full specification of the in-vehicle eCall system and start of development by mid-2006
• Full-scale field tests with early adopters in 2007
• Introduction of eCall as standard equipment in all new vehicles after September 2009
To make eCall technology work, the emergency services in the EU Member States will need to equip or upgrade their PSAPs to process eCall location reports by the end of 2007 at the latest.
The remaining issues related to the roll-out of pan-European eCall by 2009 include:
• Speeding up Member State signatories
• Agreeing on the specifications of the in-vehicle system
• Agreeing on the eCall business model
• Organizing the field tests
Page 200 of 490
4.3.1 Digital Maps Working Group Final Report Recommendation, November 2005
Legal Notice
Legal notice by the European Communities, Information Society Directorate-General This report was produced by the eSafety Forum Working Group on Digital Maps for Directorate-General Information Society of the European Commission. It represents the view of the experts on improving Road Safety in Europe with eSafety systems. These views have not been adopted or in any way approved by the European Commission and should not be relied upon as a statement of the European Commission’s or its Information Society Directorate-General’s view. The European Commission does not guarantee the accuracy of the data included in this report, nor does it accept responsibility for any use made thereof. In addition, the European Commission is not responsible for the external web sites referred to in this publication.
Executive Summary
The eSafety Forum is a joint platform involving key road traffic safety stakeholders. As part of the eSafety Forum initiatives, the Digital Maps Working Group seeks (1) to coordinate activities concerning road traffic safety-related elements of digital map databases, and (2) to bring together relevant stakeholders such as digital map producers, mapping agencies, automotive industry, public authorities, user organisations, safety authorities, road operators, universities and research institutes.
The Digital Maps Working Group is chaired jointly by Tele Atlas and NAVTEQ. This document provides (1) background, scope, objectives and organisation of the Working Group, (2) a description of the benefits for industry, public authorities and user groups, (3) an overview of related European projects and initiatives with which the Working Group seeks on-going co-operation, (4) a description of the working approach for building a public/private cooperation, and (5) the work plan consisting of three phases.
1. Introduction 1.1 Background At the 20 October 2004 Nagoya meeting of the eSafety International Coordination Working Group, the private mapping industry requested inclusion of the Digital Maps in the eSafety list of related and important building blocks towards improved road safety. This was accepted and resulted in a new working group "Digital Maps" for eSafety, co-chaired by NAVTEQ and Tele Atlas. The Digital Maps Working Group (WG) main objective is to define a business model for public-private cooperation in this area, to promote the availability of safety-related attributes in digital maps. The mapping industry was asked to take the lead and suggest actions.
Page 201 of 490
In addition, the Final Report of the eSafety Working Group on Road Safety from November 2002 provides a set of recommendations for the Ditigal Maps WG. Recommendation 11 is categorised as "Digital Map Database", and reads as follows:
“Based on existing research results, define requirements for a European digital road map database. This database should contain in addition to road map data, agreed road safety attributes49 for the driver-support for information and warning purposes, such as speed information and road configuration data.
Create a public-private partnership to produce, maintain, certify and distribute this digital road map database. It should be made available for all users at affordable prices (possibly free of charge). National, local and regional authorities and operators should provide safety-related data on road configurations within their networks, with target dates for implementation.
The idea behind the concept of a "digital road map database" containing "agreed safety attributes" becomes clearer from the last sentence of the recommendation indicating that: "Public authorities should provide safety related information for the digital map database". NAVTEQ and Tele Atlas initiated the Digital Maps Working Group to address this issue.
With this cooperation in place, safety attributes become available to the mapping industry and will be integrated into their digital map databases to be made available to be utilised in all kinds of road safety applications.
1.2 Objectives, organisation and approach of the Working Group
The objectives of the Digital Maps Working Group include:
• defining a business model for public-private cooperation, to ensure availability of attributes
relevant to road safety utilising digital maps; This model aims to support the creation, maintenance, quality assurance and distribution of safety attributes that can be integrated into the digital roadmap database.
• defining the requirements for a digital map database that contains road safety-related attributes in addition to normal road map data.
The Working Group recommends that it continues to act on behalf of the Steering Committee of the eSafety Forum, undertaking on-going monitoring of the implementation of all three workplan phases.
49 In this document, the safety attributes refer to the “ADAS” attributes that are defined in MAPS&ADAS project.
Page 202 of 490
The organisation of the Working Group:
• The Working Group (WG) is co-chaired by Tele Atlas (Ad Bastiaansen) and NAVTEQ (Yiannis Moissidis);
• The WG contains public sector representation; • The WG’s drafting group develops a working document regarding requirements and a
framework of cooperation; • The WG’s co-chairs initiate plenary meetings for interested parties who are directly involved
in the collection, production, maintenance and ownership of safety attributes. Plenary meetings facilitate discussion and finalisation of the working document;
• the final version of the working document – this document – the final recommendation of the WG to be presented to the High Level Steering Committee of the eSafety Forum by the end of 2005.
The WG includes organisations from both the private and public sector. In this working group, mapping companies can be private and public. The WG agreed on the following approach:
• Phase 1 – "COOPERATION": Supply of safety attributes in the form that they are currently available at public authorities.
• Phase 2 – "QUALITY ASSURANCE: Standardisation of information provision and output quality testing.
• Phase 3 – "OPTIMISATION": Standardisation of transfer format and transfer media and optimisation of the transfer process.
Details about the approach will be discussed in part 5.
2. Benefits to stakeholders 2.1 How can safety attributes contribute to traffic safety? Advanced Driver Assistance System (ADAS) applications are in-vehicle applications focussed on increasing safety and comfort of cars on the roads. A distinction can be made between control and advice applications. While “control” applications generally control certain in-car components, “advice” applications provide input to the car driver who then can act according using his/her own judgement. Examples of control applications include speed and curve control systems. Here the applications actively reduce the speed of the vehicle based on the legal speed limit at the location of the vehicle (speed control) or on the sharpness of the curve ahead (curve control). Corresponding examples of advice applications are speed limit assistant and curve warning applications. These warn the driver that he/she is driving too fast for the legal speed limit at the location of the vehicle (speed warning) or faster than is safe for the curve ahead (curve warning).

Page 203 of 490
Advice applications do not change the traditional driving model, as the driver remains fully in control of the vehicle, assisted by advice or warnings from the application. With control applications the role of the driver is changed in the sense that in certain situations he/she is no longer in direct and full control of the vehicle. At least for some aspects of control, the application can operate without the driver’s involvement. From a liability point of view this may be considered undesirable. Developments therefore focus on hybrid systems in which the driver is stimulated by certain physical stimuli (e.g. pressure on the accelerator or steering wheel) to perform a controlling action. From this one could envisage an evolutionary path from advice systems via hybrid systems towards control systems with an increasing level of autonomy.
ADAS applications work on the basis of a view of a vehicle’s surroundings. This view is generated through sensor information. Examples of sensors include radar to track obstacles or other vehicles in front of the vehicle, vision systems that track pavement markings or road signs. An on-board map can also be considered as a sensor. It allows the system to look ahead, i.e. where the car will be in couple of seconds. A map can act both as a primary sensor and as a secondary sensor. When the map is used as a primary sensor, the information derived from the map is of highest importance, and it may be the only information supplied to the application. When data from the map is used as a secondary sensor, other sensors supply more important information to the system and the map information is used to validate other sensor data or to enable more efficient detection by the primary sensor.
Table 1 gives an overview of some safety applications divided according to the role of the map as a sensor.
Role of the map as sensor for safety systems
Primary sensor Secondary sensor
Speed Limit Assistance (e.g. Speed Alert): Informs the driver of the legal speed limit at the location of the vehicle and/or warns the driver when exceeding the legal speed limit.
Advanced front-lighting system: Directs the front light beam in the direction of the turn a car intends to take, or adapts beam width and reach on basis of the vehicle’s speed and the road lay out.
Curve Warning: Warns the driver when his/her current speed exceeds the safe speed for the curve ahead, and possibly the distance to the curve and the required brake force.
Adaptive cruise control: Adapts a vehicle’s desired speed to the speed of preceding vehicles or road geometry ahead. Adaptive cruise control typically works at higher speeds only.
Predictive Powertrain Control: Informs the system of upcoming slopes thus enabling gear shifts to avoid inefficient speed reduction.
Lane keeping assistance: Informs the driver when the vehicle is likely to leave the current lane unintentionally.
Weather Dependent
Weather Dependent
Speed Limit (I )
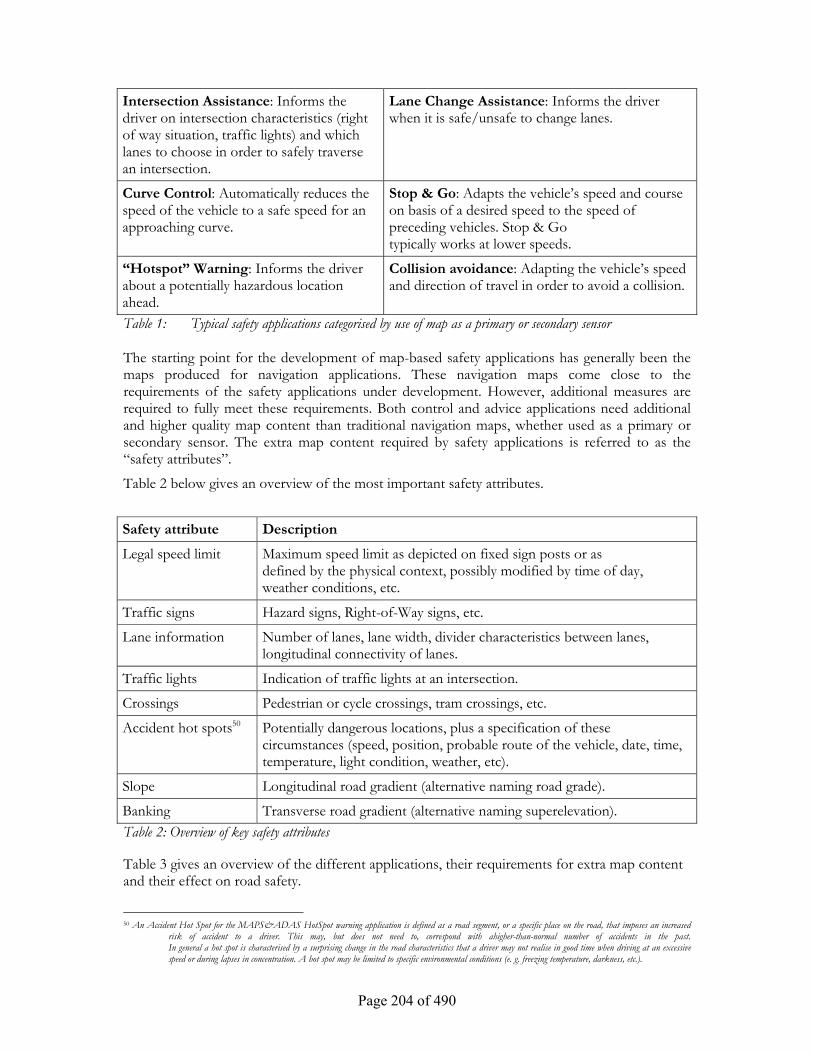
Page 204 of 490
Intersection Assistance: Informs the driver on intersection characteristics (right of way situation, traffic lights) and which lanes to choose in order to safely traverse an intersection.
Lane Change Assistance: Informs the driver when it is safe/unsafe to change lanes.
Curve Control: Automatically reduces the speed of the vehicle to a safe speed for an approaching curve.
Stop & Go: Adapts the vehicle’s speed and course on basis of a desired speed to the speed of preceding vehicles. Stop & Go typically works at lower speeds.
“Hotspot” Warning: Informs the driver about a potentially hazardous location ahead.
Collision avoidance: Adapting the vehicle’s speed and direction of travel in order to avoid a collision.
Table 1: Typical safety applications categorised by use of map as a primary or secondary sensor
The starting point for the development of map-based safety applications has generally been the maps produced for navigation applications. These navigation maps come close to the requirements of the safety applications under development. However, additional measures are required to fully meet these requirements. Both control and advice applications need additional and higher quality map content than traditional navigation maps, whether used as a primary or secondary sensor. The extra map content required by safety applications is referred to as the “safety attributes”.
Table 2 below gives an overview of the most important safety attributes.
Safety attribute Description
Legal speed limit Maximum speed limit as depicted on fixed sign posts or as defined by the physical context, possibly modified by time of day, weather conditions, etc.
Traffic signs Hazard signs, Right-of-Way signs, etc.
Lane information Number of lanes, lane width, divider characteristics between lanes, longitudinal connectivity of lanes.
Traffic lights Indication of traffic lights at an intersection.
Crossings Pedestrian or cycle crossings, tram crossings, etc.
Accident hot spots50 Potentially dangerous locations, plus a specification of these circumstances (speed, position, probable route of the vehicle, date, time, temperature, light condition, weather, etc).
Slope Longitudinal road gradient (alternative naming road grade).
Banking Transverse road gradient (alternative naming superelevation). Table 2: Overview of key safety attributes Table 3 gives an overview of the different applications, their requirements for extra map content and their effect on road safety.
50 An Accident Hot Spot for the MAPS&ADAS HotSpot warning application is defined as a road segment, or a specific place on the road, that imposes an increased
risk of accident to a driver. This may, but does not need to, correspond with ahigher-than-normal number of accidents in the past. In general a hot spot is characterised by a surprising change in the road characteristics that a driver may not realise in good time when driving at an excessive speed or during lapses in concentration. A hot spot may be limited to specific environmental conditions (e. g. freezing temperature, darkness, etc.).
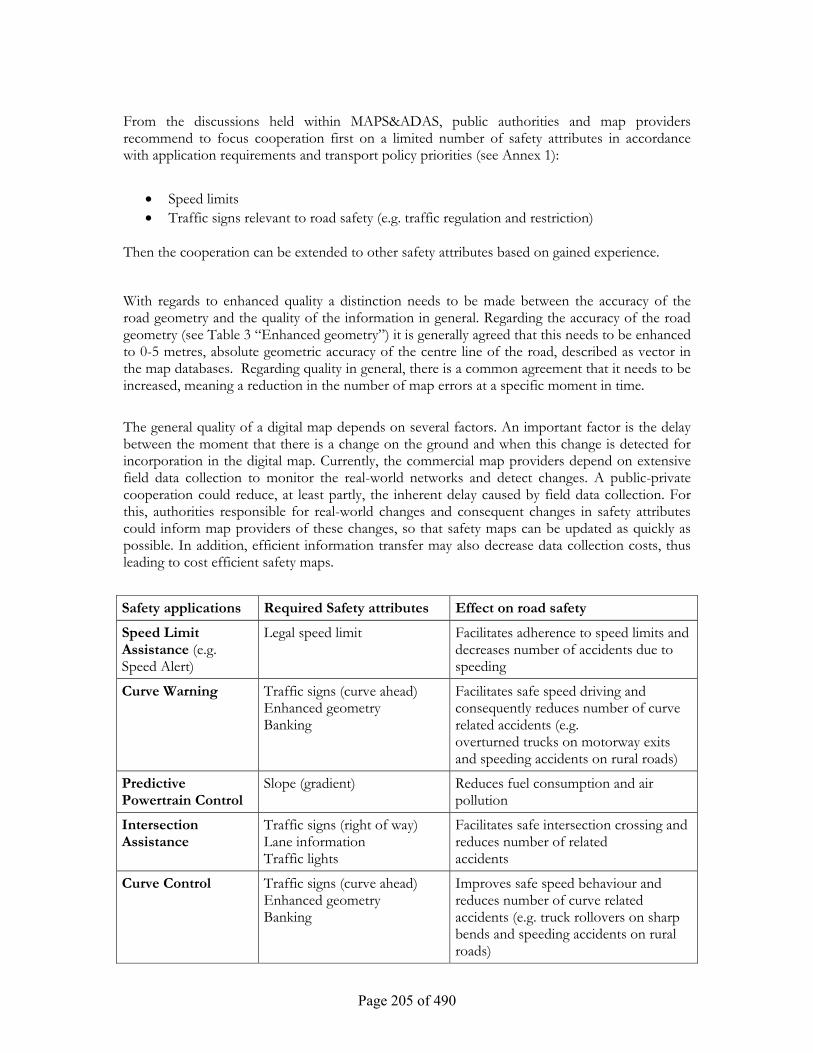
Page 205 of 490
From the discussions held within MAPS&ADAS, public authorities and map providers recommend to focus cooperation first on a limited number of safety attributes in accordance with application requirements and transport policy priorities (see Annex 1):
• Speed limits • Traffic signs relevant to road safety (e.g. traffic regulation and restriction)
Then the cooperation can be extended to other safety attributes based on gained experience.
With regards to enhanced quality a distinction needs to be made between the accuracy of the road geometry and the quality of the information in general. Regarding the accuracy of the road geometry (see Table 3 “Enhanced geometry”) it is generally agreed that this needs to be enhanced to 0-5 metres, absolute geometric accuracy of the centre line of the road, described as vector in the map databases. Regarding quality in general, there is a common agreement that it needs to be increased, meaning a reduction in the number of map errors at a specific moment in time.
The general quality of a digital map depends on several factors. An important factor is the delay between the moment that there is a change on the ground and when this change is detected for incorporation in the digital map. Currently, the commercial map providers depend on extensive field data collection to monitor the real-world networks and detect changes. A public-private cooperation could reduce, at least partly, the inherent delay caused by field data collection. For this, authorities responsible for real-world changes and consequent changes in safety attributes could inform map providers of these changes, so that safety maps can be updated as quickly as possible. In addition, efficient information transfer may also decrease data collection costs, thus leading to cost efficient safety maps.
Safety applications Required Safety attributes Effect on road safety
Speed Limit Assistance (e.g. Speed Alert)
Legal speed limit Facilitates adherence to speed limits and decreases number of accidents due to speeding
Curve Warning Traffic signs (curve ahead) Enhanced geometry Banking
Facilitates safe speed driving and consequently reduces number of curve related accidents (e.g. overturned trucks on motorway exits and speeding accidents on rural roads)
Predictive Powertrain Control
Slope (gradient) Reduces fuel consumption and air pollution
Intersection Assistance
Traffic signs (right of way) Lane information Traffic lights
Facilitates safe intersection crossing and reduces number of related accidents
Curve Control Traffic signs (curve ahead) Enhanced geometry Banking
Improves safe speed behaviour and reduces number of curve related accidents (e.g. truck rollovers on sharp bends and speeding accidents on rural roads)
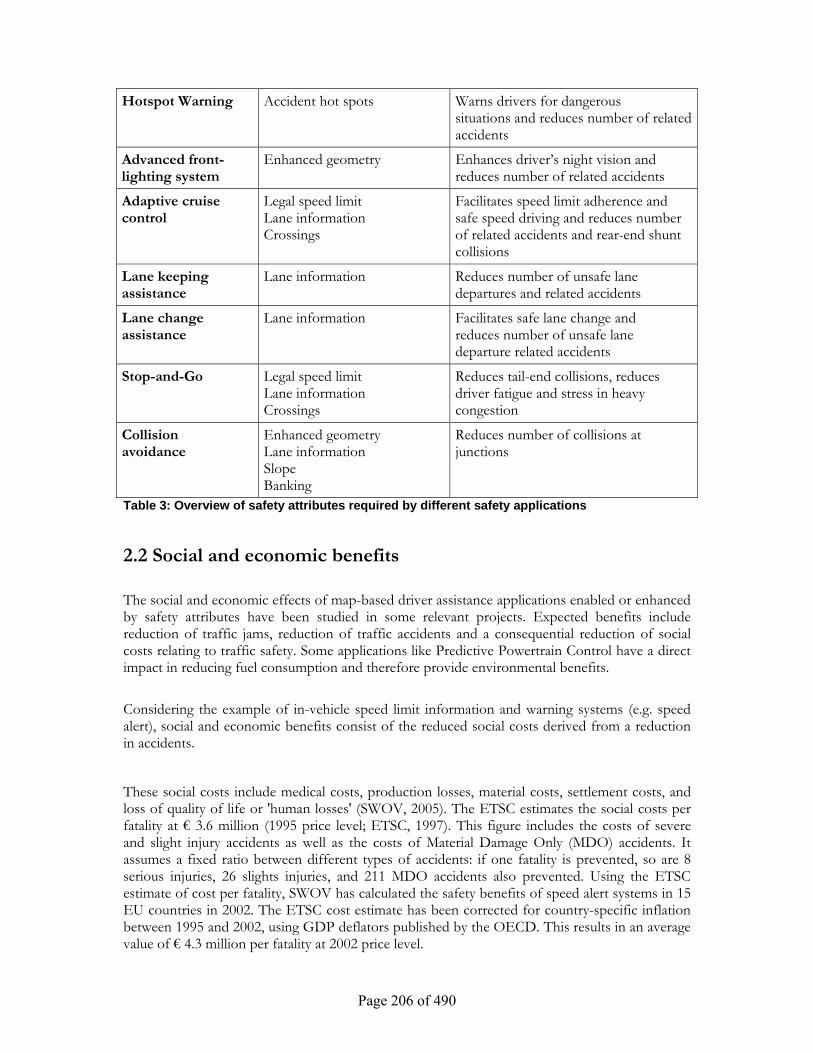
Page 206 of 490
Hotspot Warning Accident hot spots Warns drivers for dangerous situations and reduces number of related accidents
Advanced front-lighting system
Enhanced geometry Enhances driver’s night vision and reduces number of related accidents
Adaptive cruise control
Legal speed limit Lane information Crossings
Facilitates speed limit adherence and safe speed driving and reduces number of related accidents and rear-end shunt collisions
Lane keeping assistance
Lane information Reduces number of unsafe lane departures and related accidents
Lane change assistance
Lane information Facilitates safe lane change and reduces number of unsafe lane departure related accidents
Stop-and-Go Legal speed limit Lane information Crossings
Reduces tail-end collisions, reduces driver fatigue and stress in heavy congestion
Collision avoidance
Enhanced geometry Lane information Slope Banking
Reduces number of collisions at junctions
Table 3: Overview of safety attributes required by different safety applications 2.2 Social and economic benefits The social and economic effects of map-based driver assistance applications enabled or enhanced by safety attributes have been studied in some relevant projects. Expected benefits include reduction of traffic jams, reduction of traffic accidents and a consequential reduction of social costs relating to traffic safety. Some applications like Predictive Powertrain Control have a direct impact in reducing fuel consumption and therefore provide environmental benefits.
Considering the example of in-vehicle speed limit information and warning systems (e.g. speed alert), social and economic benefits consist of the reduced social costs derived from a reduction in accidents.
These social costs include medical costs, production losses, material costs, settlement costs, and loss of quality of life or 'human losses' (SWOV, 2005). The ETSC estimates the social costs per fatality at € 3.6 million (1995 price level; ETSC, 1997). This figure includes the costs of severe and slight injury accidents as well as the costs of Material Damage Only (MDO) accidents. It assumes a fixed ratio between different types of accidents: if one fatality is prevented, so are 8 serious injuries, 26 slights injuries, and 211 MDO accidents also prevented. Using the ETSC estimate of cost per fatality, SWOV has calculated the safety benefits of speed alert systems in 15 EU countries in 2002. The ETSC cost estimate has been corrected for country-specific inflation between 1995 and 2002, using GDP deflators published by the OECD. This results in an average value of € 4.3 million per fatality at 2002 price level.

Page 207 of 490
The expected fatality reduction is based on the percentage reduction of fatal and serious accidents as estimated by Carsten & Tate (2004).
Table 4 shows the total safety benefits of Speed Alert per system type. Based on full coverage of data availability and implementation, the benefits range from € 23 billion for the system with the lowest reduction percentage (14%), to € 30 billion for the system with the highest reduction percentage (18%).
Speed limit type Best estimate of fatal
and serious accident reduction (%)
Number of fatal accidents saved
Benefits (billion euro 2002)
Fixed 14 5,460 23Variable 14 5,460 23Dynamic 18 7,020 30Table 4: Safety benefits of speed alert systems. Source: SWOV (2005). Road safety costs. Factsheet. SWOV, Leidschendam. 2.3 Benefits for public authorities As much as benefiting from traffic safety and consequential improvement in mobility, and reduced social costs, public authorities should also benefit from proposed public-private cooperation. Much of the information on safety map attributes is available at the respective public authorities, however it is held in a non-standardised form and often on limited accessibility media (e.g. on paper). The chosen approach of the three stages (Phase 1: "COOPERATION", Phase 2: "QUALITY ASSURANCE", Phase 3: "OPTIMISATION") means that public authorities can start the cooperation without specific additional investment. Safety attributes can be delivered in their current form as held by the public authority, no additional processing is required and the costs associated with delivery will be borne by the requesting map suppliers. The map providers will convert the safety attributes and in a second stage integrate them into the digital road maps. This integration is referred to on the agreed list of safety attributes (see Annex I).
The map providers will make these maps available to the market. The maps comply with international standards. The safety attributes will thus be available to the authorities in a consistent way, which may help them optimise their internal processes. These data can be loaded into geographical information systems (GIS) and serve as an efficient supporting tool to manage the processes associated with real-world changes undertaken by the authorities. Public authorities at different levels (national, regional, local) benefit from having access to European-wide homogeneous maps covering the area under their responsibility.

Page 208 of 490
In the second phase the necessary investments will be closely associated with the implementation of systems to assure safety attribute quality within the public authorities. Where such a quality system already exists the necessary effort and investments will be minimal. This may not be the case if such a system does not exist. However, implementation of such a system will show immediate pay back in the form of more efficient processes and less waste. Additionally, the map providers, each of which has implemented advanced quality systems, will offer their expertise in map related quality systems free of charge, thus contributing to a cost efficient implementation of such a quality system. If correctly implemented, safety attributes in maps will be homogeneous in content and quality across a road network owned by many public authorities. 3. Description of the current situation at public authorities In general, public authorities are the originators of real-world changes in safety-related attributes. Therefore they are the preferred source of information regarding such changes. This will be especially important when mechanisms for incremental updating of in-vehicle map data are in common implementation, which is expected by some experts to become reality in three to five years from now. It will allow instantaneous updating of the in-vehicle map with changes that are recorded in the real world. For this future scenario, systems are needed where changes are systematically recorded by authorities and disseminated with minimal delay to the map providers. Current practices and procedures for registration of status of, changes in road geometry and road attributes differ widely across Europe. In some parts of Europe national road databases are in development, which may serve as the mechanism for immediate registration and regular export of changes, if suitable processes are in place, whilst in some other parts an accessible registration system hardly exists. Even the national road databases are not necessarily geared to instantaneous provision of updates, within a very short time, after a real-world change has been effected. This requires that responsible authorities are obliged to maintain safety attributes in a timely manner, be it in their own local database or in a national road database, and provide incremental updates at short regular intervals. To get this organised in all of Western and Central Europe, within a certain period of time, a step by step roll-out plan at European level would be required. The eSafety Forum, and especially the eSafety Forum Digital Maps Working Group, could play a role in further investigating the requirements, and in drafting such a plan, including guidelines for implementation. The time horizon for this should be in the timeframe of five years. The EU funded MAPS&ADAS project will soon investigate current data storage practices for relevant road traffic safety related attributes at authorities across Europe (see below, section 4.3).
4. Relationships with other initiatives The eSafety Forum Digital Maps Working Group recommends that it acts on behalf of the High Level Steering Committee of the eSafety Forum as a Steering Committee to monitor the implementation of all 3 phases. This Working Group will create synergies with other related EU funded programmes, projects and initiatives such as EuroRoadS, SpeedAlert, Highway and INSPIRE. The WG will investigate potential conflicts with the activities and recommendations of the WG. The WG will also support the business model coordination of ongoing activities on EC funded projects such as SpeedAlert, MAPS&ADAS, EuroRoadS, to name a few, and future follow-up projects, particularly to utilise the technical expertise of those activities in phase 3.
Page 209 of 490
4.1 EuroRoadS
4.1.1 Description
EuroRoadS will lay the ground for the creation of a pan-European standardised, seamless, updated and quality assured digital road data infrastructure built on identified user requirements.
As a result of 'EuroRoadS' activities, by the end of the project, public and private road data key actors in Europe will have:
• exchanged experiences about - and raised awareness of today's problematic situation; • created networks and build the basis for further cooperation; • a common view on how to create a harmonised European road data solution; • agreed on a specification framework built on user requirements (standard); • tested and verified the framework (technique, process and organisation); • agreed on an implementation and exploitation plan to be executed after the project has
finished. 4.1.2 Relationship
When successful, EuroRoadS will facilitate the standardised availability of road data. Safety attributes are part of it. EuroRoadS therefore can facilitate the standardised availability of safety attributes.
4.2 INSPIRE
4.2.1 Description
At its 24 June 2005 meeting, the European Council’s Environment Committee reached a unanimous policy agreement on the adoption of a draft of the INSPIRE (Infrastructure for Spatial Information in Europe) Directive, which creates a legal framework for the establishment and operation of a geographical information infrastructure in Europe. Its purpose is twofold: First, to make top-quality geographical data available at all levels across the European Union, in order to better implement community policies; and, second, to give public access to the information.
INSPIRE is completely in line with other laws in this area, and in particular with the Directive of public access to information on the environment. INSPIRE, although born within the environmental arena, would provide a technical framework that could be extended to many other geo-referenced data sets – explicit mention is made of transport networks or forests with the intention that INSPIRE would provide the technological basis to enable multi-disciplinary data sets to be brought together. Similar initiatives can be found in the USA (The Geographic Information Framework) and national initiatives within Europe such as the Digital National Framework in the UK.
Page 210 of 490
Visualisation of the ADAS Horizon
ADAS Horizon – How digital maps can contribute to road safety
4.2.2 Relationship
The INSPIRE Directive, if enacted, will demand the provision of geo-referenced data from public administrations. Although initially the primary focus is upon environmental data, the concepts underpinning INSPIRE are broadly applicable across a number of application areas. The target application areas include transportation, which draws it to a role equivalent to the intentions behind the Digital Maps WG and the work being undertaken within the EuroRoadS project. Steps need to be taken to ensure harmonisation.
4.3 MAPS&ADAS
4.3.1 Description
MAPS&ADAS is a three-year sub-project of the EU funded PReVENT Integrated Project (IP) that focuses on research and development of different kinds of preventive safety applications. MAPS&ADAS has two major parts: (1) the ADAS Interface Specification, and (2) the data sourcing of safety-related map data. The first part concerns the finalisation and testing of the ADAS Interface Specification, the development of which was initiated in the ADASIS Forum. This specification intends to enable and harmonise the use of in-vehicle map data by different ADAS applications to provide a preview of the road ahead of the vehicle. This so-called ADAS horizon includes the geometry of the most likely path and of side-roads, as well as relevant attributes, and is constantly refreshed as the car moves along. The testing includes the development of ADAS Horizon Providers by Blaupunkt, Navigon, NAVTEQ, and Siemens VDO.
The other part of the MAPS&ADAS project concerns the provision of safety-related attributes. Based on driver assistance application requirements (see Table 3), MAPS&ADAS has identified a priority list of road attributes. As stated above (section 3), public authorities are the preferred source for such information, but current
practices and procedures for registration of status of and changes in road geometry and road attributes
differ widely across Europe. To get a better insight in the current situation in different countries, the MAPS&ADAS project will carry out a survey, in all or most of the 15 "old" member states, Switzerland and Norway, and possibly in some of the "new" member states. Final

Page 211 of 490
results of this survey have to be made available by MAPS&ADAS working group. MAPS&ADAS has also set up a Public Authorities Consultation Platform, which is playing an active role in data sourcing activities by means of dedicated meetings. In addition the project is studying certification issues related to the data flow of safety related ADAS attributes from public authorities to the digital map providers. It intends to establish cross-sector agreed models and methods for certification of safety-related content for digital maps, to define the necessary data flows for up-to-date map provision, to analyse the risks for sub-standard content, and to explore organisational and business models for long-term provision of safety content for digital map databases. These issues are especially relevant for phase 2 (see section 6.2). 4.3.2 Relationship
The results of the MAPS&ADAS work may provide an important input for the work and the recommendations of the Digital Maps WG.
The results of MAPS&ADAS already have proven to be important for the Working Group. It supplied the list of safety attributes and determined priorities. The survey currently conducted within MAPS&ADAS will be important for the implementation of Phase 1.
4.4 SpeedAlert
4.4.1 Description Intelligent speed management has been identified as one of the priority areas for road safety improvement. In-vehicle speed alert systems can contribute to increased driver awareness of road speed limits. The SpeedAlert initiative has brought key actors across Europe together with a common objective to support and coordinate the implementation of in-vehicle speed alert systems in Europe.
The SpeedAlert project's main objectives are to harmonise the in-vehicle speed alert concept definition and to identify and investigate the first priority issues to be addressed at the European level, such as the collection, maintenance and certification of speed limit information. The specific objectives are:
• establish a common classification of speed limits in Europe relevant to speed alert systems; • define the system and service requirements of in-vehicle speed alert systems; • define functional architecture and analyse technical building blocks; • harmonise definition of speed alert concepts; • identify requirement for standardisation. To fulfil these objectives, SpeedAlert has produced a list of recommendations and an associated deployment roadmap in cooperation with key stakeholders from public and private sectors, to support successful European-wide implementation of speed alert applications.

Page 212 of 490
4.4.2 Relationship
Speed limit information and warning will be one of the applications in eSafety. Synergies should be made between SpeedAlert results and the digital maps safety attributes.
One of the most important recommendations defined by SpeedAlert addresses the crucial need to ensure procurement of European-wide and up-to-date speed limit information.
4.5 HIGHWAY
4.5.1 Description
The HIGHWAY project is funded under the 6th Framework Programme of the European Commission. The project started in April 2004 and will last until December 2006. The HIGHWAY consortium is working on the architecture and specifications to offer integrated safety and added-value services for both embedded in-vehicle and mobile personal navigation systems. The work includes a user requirement analysis and the design of the global system architecture. After finalisation of the detailed specifications the implementation of prototypes will start, followed by an extensive validation in 2007.
Within the HIGHWAY project, the role of digital maps is central: Smart dynamic maps provide up-to-date information enriched with safety attributes for car drivers and mobile users. This may include, for example, speed limit data from speed limit units or other dynamic data like relevant traffic or weather information for human and non-human consumption. Such enhanced maps may help drivers facing critical driving situations, e.g. by delaying incoming phone calls or triggering safety mechanisms based on the radius of the curve ahead, by notifying speed limits or an accident ahead. In addition to decreasing the probability for accidents and minimising potential damage to drivers and property, the services populated by HIGHWAY will be cost-effective and efficient (e.g. saving time of users) as well as informative (e.g. provide travellers with information for the area within which they are currently travelling or they will arrive soon).
4.5.2 Relationship
The HIGHWAY project might come up with requirements for additional safety attributes. This Working Group will then take these into account when they are available.
Another issue where the work of HIGHWAY might be relevant for this WG is in the field of exchange mechanisms of data. The commercial map providers have developed GDF as the means to exchange road related map information. On the other hand GML is surfacing more and more as an exchange format in an internet-based working environment. The need for coordination already has been identified and work is being undertaken to develop a GDF profile for GML. The HIGHWAY project is contributing to this profiling work and will implement the results, which will be very important for the later work of the Working Group.
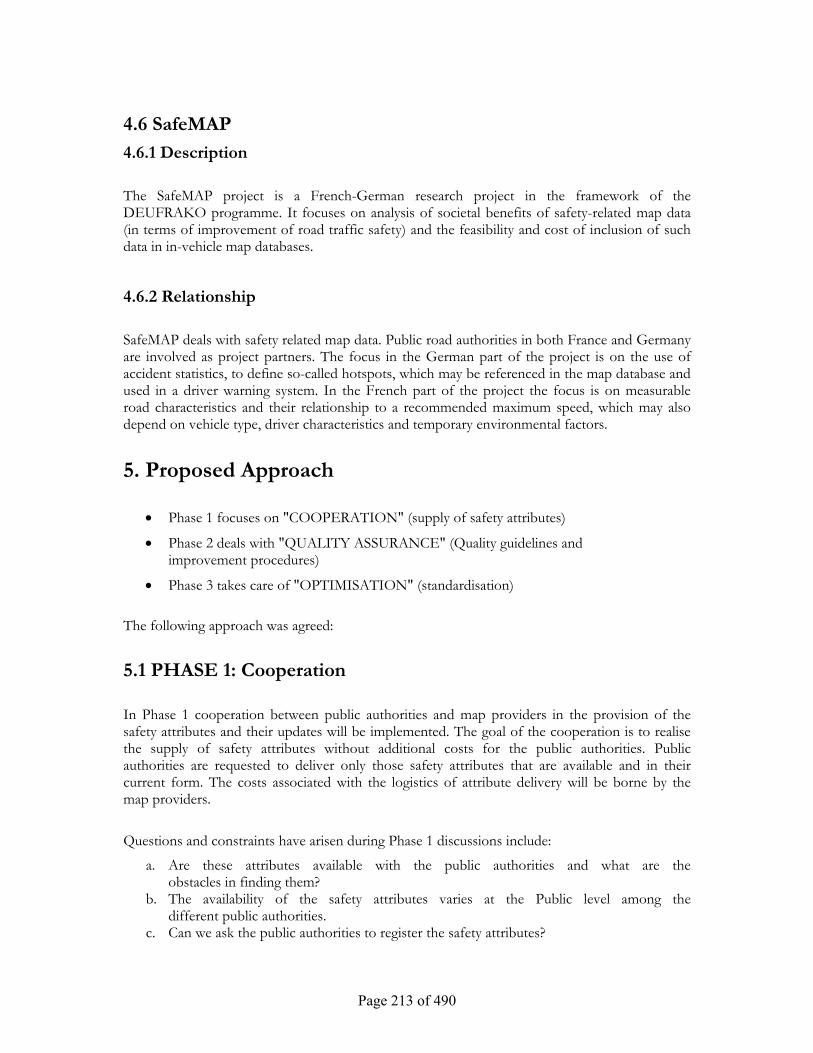
Page 213 of 490
4.6 SafeMAP
4.6.1 Description The SafeMAP project is a French-German research project in the framework of the DEUFRAKO programme. It focuses on analysis of societal benefits of safety-related map data (in terms of improvement of road traffic safety) and the feasibility and cost of inclusion of such data in in-vehicle map databases.
4.6.2 Relationship
SafeMAP deals with safety related map data. Public road authorities in both France and Germany are involved as project partners. The focus in the German part of the project is on the use of accident statistics, to define so-called hotspots, which may be referenced in the map database and used in a driver warning system. In the French part of the project the focus is on measurable road characteristics and their relationship to a recommended maximum speed, which may also depend on vehicle type, driver characteristics and temporary environmental factors.
5. Proposed Approach
• Phase 1 focuses on "COOPERATION" (supply of safety attributes)
• Phase 2 deals with "QUALITY ASSURANCE" (Quality guidelines and improvement procedures)
• Phase 3 takes care of "OPTIMISATION" (standardisation) The following approach was agreed:
5.1 PHASE 1: Cooperation In Phase 1 cooperation between public authorities and map providers in the provision of the safety attributes and their updates will be implemented. The goal of the cooperation is to realise the supply of safety attributes without additional costs for the public authorities. Public authorities are requested to deliver only those safety attributes that are available and in their current form. The costs associated with the logistics of attribute delivery will be borne by the map providers.
Questions and constraints have arisen during Phase 1 discussions include:
a. Are these attributes available with the public authorities and what are the obstacles in finding them?
b. The availability of the safety attributes varies at the Public level among the different public authorities.
c. Can we ask the public authorities to register the safety attributes?
Page 214 of 490
Conclusions: It was agreed by the Working Group that:
• The list of the safety attributes that has been agreed in the EU funded project “MAPS&ADAS” will form the basis of safety attributes considered by this WG.
• MAPS&ADAS will provide definitions of the individual safety attributes according to European Standards. This output will be provided to the European Commission as the reference document for safety attributes towards the public authorities. The acceptability of output will be “market tested” by the WG in order to ensure its suitability.
• The WG will strive to create synergies with the other related EU funded projects like EuroRoadS, SpeedAlert, Highway and INSPIRE and examine conflicts.
The draft of the INSPIRE directive is available from http://eu-geoportal.jrc.it/
“Article 29” of this draft directive says: Member States shall report to the Commission on the implementation of this Directive and on the experience gained in applying it. The report shall include: (a) a description of how public sector providers and users of spatial data sets and services and intermediary bodies are coordinated, and of the relationship with the third parties and of the organisation of quality assurance;”
Deliverables - Proposed Recommendation for Phase 1:
1. The safety attributes list will be made available to the member states by the European
Commission. They will be categorised as high, medium or low priority. 2. Upon receipt of a request by a mapping company/organisation, public authorities will
indicate what data they have from that list to the mapping companies and make the safety-related data available (as far as it is reasonably possible and at their own convenience). Alternatively, they will place the information (the names of the datasets and/or the information within that dataset) on a publicly accessible website. If they do not have responsibility for a particular dataset (within their own geographic area) they may suggest the name of the public (or other) authority that does.
3. Public authorities will fill in and maintain the list of the attributes that they own, to be made available either upon request or on their website. For data that is presently categorised as high priority, where they have incomplete datasets they will endeavour - as far as is reasonable - to collect and maintain the complete set of information.
4. For datasets with high priority safety attributes, public authorities will make updates available to the mapping companies when they become available.
5. For datasets with high priority safety attributes, the safety attributes will, as far as possible, be made available to the mapping companies at cost of their compilation and delivery.
6. If the national government wishes, it may compile a register of the available safety attributes data. Reference to this register should be made on the public authorities’ websites.
7. None of the above (items 1-6 as they apply to a particular dataset) applies where a national government (Ministry of Transport) deems that a database containing the relevant dataset already exists (e.g. one prepared by a mapping agency) and is available at reasonable cost.
8. Private and public sectors will seek to work together to improve the accuracy of routing information, so that navigation systems do not route vehicles illegally (banned turns) and that public authorities can fulfil their road safety and congestion reduction objectives.
Page 215 of 490
9. When public authorities introduce new database or asset management systems, consideration should be given to the introduction of new fields for the safety attributes, even if there is currently no intention to collect that data. This WG will maintain and actively provide to public authorities a current list of safety attributes – this list must be maintained and agreed with in an appropriate manner through consultation with the public authorities.
5.2 Phase 2: Quality assurance Phase 2 is to define and implement guidelines and procedures to qualify the safety attributes. Focus will be on testing the output of the public authorities. These tests will be specified jointly by public authorities and map providers in Phase 2. In Phase 2 it will also be determined whether these tests will be performed by a third party, through self certification or by the map providers.
Quality assurance of the information delivered will:
• lead to an increased quality improvement of eSafety maps and cost reduction of map
production; • help public authorities improve their data output quality and their methods related to the
safety attributes collection, registration, maintenance, etc • with regard to liability issues, we refer to the Response 3 project Deliverables - Proposed Recommendation for Phase 2:
1. The issue of quality assurance of data will be studied in more detail based on experience and the outputs from other programmes, projects and initiatives.
2. The WG will evaluate the quality of data supplied and where it is not adequate will suggest ways of improving the quality.
3. The public and private actors will evaluate how well this Recommendation is working one year after full operation and make recommendations for improvements, if needed, to the European Commission and then initiate Phase 3.
In order to be able to perform proper quality assurance through output testing a certain degree of standardisation is necessary. This degree needs to be restricted to the minimum in order to limit undesirable cost consequences for the public authorities. It is therefore recommended to restrict standardisation to the information that is transferred. Standardisation of the medium or the format with which the information is transferred is left outside the scope of Phase 2 and will be subject of Phase 3. Cost consequences of the chosen solution need to be considered in Phase 2 which might lead to the installation of funding mechanisms for the public authorities.
An example to elucidate this aspect is the following. (Note: This is a hypothetical example to be improved in Phase 2). Within Phase 3, speed limit information will be delivered containing the following (standard) components:
1. A value representing the speed limit 2. A unit in which the speed limit is expressed (e.g. km/h, mph) 3. A specification on which section of the road the speed limit applies 4. The type of speed limit (e.g. advisory speed, legal speed limit)

Page 216 of 490
5. A specification of the following additional constraints: a. Only valid in wet/rainy conditions b. Time constrains. Please specify the constraint in free text c. Because of specific reasons. Please specify in free text (e.g. noise
pollution)
Officially the WG will comply with the SpeedAlert specifications.
It will not be specified whether these information have to be delivered in an Excel sheet on a CD, on a paper map or in any other format or on any other medium. The public authority is free to make its own choice in this respect.
5.3 Phase 3: Optimisation Phase 3 will optimise the data transfer process based on the experience from Phase 1 & 2.
5.4 Ownership The transfer of information does not include the transfer of the object(s) referred to in the information. In other words, the transfer of information of a speed limit at a certain location does not imply that the map provider now owns this information. With the inclusion of the information in the commercial database added value and intellectual property are created. This means that the information included in the database, represents a certain value which is owned by the map provider and which can be capitalized by selling the database. This does not mean that the supplier of the information no longer has ownership of the information it supplied. The supplier continues to have full freedom in exploiting the information in any way.
Safety attributes data, as described in this document provided by public authorities and derived from a third-party map used by that authority, can be subject to Intellectual Property Rights (IPR) related to that map. This is a complex issue, currently subject to bilateral agreements between the map owner and the public authorities.
As it is described in the benefits “section 2.3”, if the public authority is willing to utilise the map data for the purpose of delivering safety attributes, the IPR issue should be addressed in a bilateral agreement between the map owner and the public authorities. As such, the solution is not within the scope of this working group. However, efforts need to be undertaken towards a framework solution facilitating a more efficient approach.

Page 217 of 490
Time planning, meetings and activities
Preparation Working Group Plenary Working Group
Kick off meeting – 18 April 2005
Prepare Final Document – 30 May in Hanover
Invitation First Plenary – May 2005
Collect feedback – June/July 2005 First Plenary meeting – 1 July 2005
Discuss feedback and prepare Second Plenary document – 9 September 2005
Invitation Second Plenary meeting Second Plenary meeting – 30 September 2005
Discuss feedback and prepare final recommendations document for High Level Steering Committee meeting – 11 October 2005
Third Plenary meeting- 18 November 2005
High Level Steering Committee meeting, in 2006
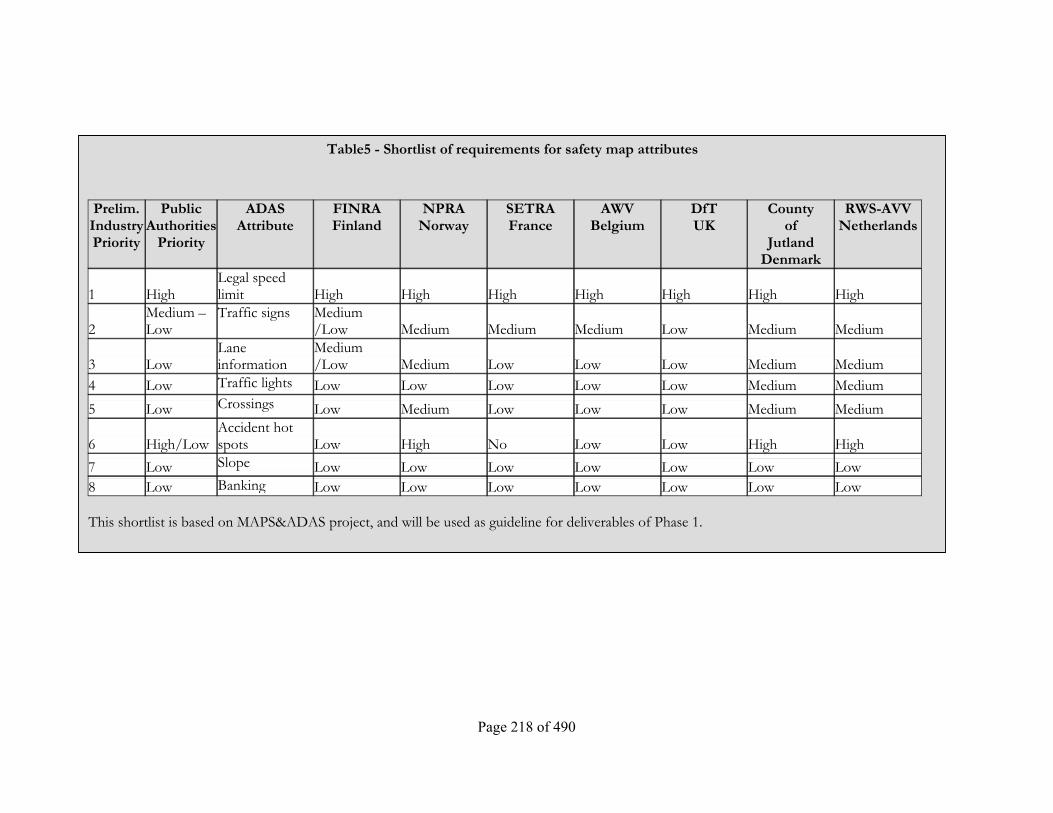
Page 218 of 490
Table5 - Shortlist of requirements for safety map attributes
Prelim.
Industry Priority
Public Authorities
Priority
ADAS Attribute
FINRA Finland
NPRA Norway
SETRA France
AWV Belgium
DfT UK
County of
Jutland Denmark
RWS-AVV Netherlands
1 High Legal speed limit High High High High High High High
2 Medium – Low
Traffic signs Medium /Low Medium Medium Medium Low Medium Medium
3 Low Lane information
Medium /Low Medium Low Low Low Medium Medium
4 Low Traffic lights Low Low Low Low Low Medium Medium 5 Low Crossings Low Medium Low Low Low Medium Medium
6 High/Low Accident hot spots Low High No Low Low High High
7 Low Slope Low Low Low Low Low Low Low 8 Low Banking Low Low Low Low Low Low Low This shortlist is based on MAPS&ADAS project, and will be used as guideline for deliverables of Phase 1.

Page 219 of 490
List of Participants who contributed to the creation of this document
Name Organisation
Juhani Jaaskelainen European Commission, DG Infso
Elina Holmberg European Commission, DG Infso
Emilio Davila-Gonzalez European Commission, DG Infso
Bipin Radia European Commission, DG TREN
Ad Bastiaansen TeleAtlas
Rob Van Essen TeleAtlas
Stephen T’Siobbel TeleAtlas
Linda Zhu TeleAtlas
Yiannis Moissidis NAVTEQ
Kees Wevers NAVTEQ
Vincent Blervaque ERTICO
Paul Kompfner ERTICO
Maxime Flament ERTICO
Jonathan Harrod Booth CEDR
Eva Boëthius Swedish Road Administration
Bengt Hallström Swedish Road Administration
Vera Siegler Top-Map Ltd./ ITS Hungary
Jan Odenmo Autoliv Electronics Europe
Jonas Bargman Autoliv Electronics Europe
David Lewis Ordnance Survey
Dave Russell Ordnance Survey
Loïc BLAIVE French ministry of Transport (DSCR and Sétra)
Svend Tøfting Nordjyllands Amt,Denmark
Nik Widmann PRISMA solutions/ Arsenal Research, Austria
José Achaerandio Trabajos Catastrales S.A. in Navarra, Spain
Ms Lotz German Federal Ministry of Transport
Patrick Mottet AREA (on behalf of ASFA)
Franziska Achterberg European Transport Safety Council
Goodwin Frazer European Transport Safety Council
Istvan SZARKA AKMI, Hungary Jan Juslén Finnish Road Administration
Wethal Harald Vegvesen Norway Csaba Csapodi First Counsellor
Telecommunications and Information Society Attaché Permanent Representation of the Republic of Hungary to the European
Union Keresztes Miklos Hungarian National Road Administration
Mike Lowe DfT UK Luc Heres RWS AVV
* We apologise, if we have missed any of the participants.
Page 220 of 490
4.4 eCall Driving Group Discussions related to eCall deployment are carried out in the eSafety Forum Driving Group on eCall. The eCall Driving Group, which is co-chaired by Michael Nielsen (ERTICO – ITS EUROPE) and Wolfgang Reinhardt (ACEA) was established by the European Commission at the end of 2002.
The key players involved in the Driving Group eCall activities are members of four large “constituencies”:
• Automotive industry
• Mobile telecommunication industry
• Public emergency authorities and associated or cooperating service organisations
• Public social security organisations and private insurance companies
The eCall Driving Group is working on an integrated strategy for pan-European emergency services. These services will build on the location-enhanced emergency services being implemented in the Member States on the basis of the recently adopted Recommendation on the implementation of E-112 emergency number.
“eCall” stands for “In-vehicle Pan-European automatic emergency call system”. Generated either manually by vehicle occupants or automatically via activation of in-vehicle sensors, eCall gives the precise coordinates of an accident’s location to the emergency services which are responsible for the follow-up assistance.
The eCall Driving Group was established to produce a framework architecture and a business model for eCall, and to define the roles for both the public and private stakeholders. These include the Member States, the Commission, telecom operators, PSAP operators, vehicle manufacturers, equipment suppliers, motorway operators, automobile clubs, insurance industry, service providers.
The Driving Group produced a Memorandum of Understanding on the implementation of eCall. The aim of the MoU is to ensure that eCall will work in any EU Member State. The MoU binds the stakeholders in implementing the eCall together on the basis of common approved architecture and interface specifications, including the Minimum Set of Data (MSD). The MoU was signed by the European Commission, ACEA on behalf of the automotive industry and the multi-sector partnership ERTICO in August 2004. The MoU has now around 60 signatures. Since Greece, Italy, Lithuania and Slovenia signed it on 18 October 2005 and Cyprus on 8 December 2005, seven Member States are now among the signatories. Five additional Member States have announced that they will sign in the near future.
Page 221 of 490
The eSafety partners have also agreed on a Road Map for eCall roll-out. The main milestones are the following:
• Agreeing on eCall roll-out plan, business model and standards by the end of 2005
• Full specification of the in-vehicle eCall system and start of development by mid-2006
• Full-scale field tests with early adopters in 2007
• Introduction of eCall as standard equipment in all vehicles entering the market after September 2009
To enable eCall technology to work, the emergency services in the EU Member States will need to equip or upgrade their PSAPs to process eCall location reports at the latest by the end of 2007.
The remaining issues related to the roll-out of pan-European eCall by 2009 include:
• Speeding up Member State signatories
• Equipping or upgrading the PSAPs to process eCall location reports (at the latest by the end of 2007)
• Agreeing on the specifications of the in-vehicle system
• Agreeing on the eCall business model
• Organizing the field tests
Page 222 of 490
4.4.1 Memorandum of Understanding for Realisation of Interoperable In-Vehicle eCall
The purpose of this European Memorandum of Understanding (MoU) is to secure the realisation of an interoperable in-vehicle emergency call service (eCall) supplied, introduced and operated across Europe. This MoU does not represent a legally binding agreement; rather, it is an expression of the individual and collective commitment of the signatories to work in partnership in order to realise a shared objective to the benefit of everyone.
1. Preamble
1.1 Rationale The introduction and use of in-vehicle eCall for deployment of emergency assistance will save lives and reduce social burden by improving the notification of road accidents and speeding up emergency service response. There is an urgent need for a European solution in order to contribute to a reduction of the 39,20051 people killed, 3.3 million casualties and annual costs in relation to traffic accidents of more than 180 billion Euro. This is why the European Commission-led eSafety Forum adopted eCall as the highest priority amongst the eSafety measures contained in the recent eSafety Communication52.
1.2 Definition of In-vehicle eCall The in-vehicle eCall is an emergency call generated either manually by vehicle occupants or automatically via activation of in-vehicle sensors. When activated, the in-vehicle eCall system will establish a voice connection directly with the relevant PSAP (Public Safety Answering Point), this being either a public or a private eCall centre operating under the regulation and/or authorisation of a public body. At the same time, a minimum set of incident data (MDS)53 will be sent to the eCall operator receiving the voice call.
1.3 Framework This MoU creates a framework for the introduction of in-vehicle emergency call at all levels in the emergency call chain – including the public sector, the private sector and/or through public-private partnerships. The aim of this MoU is to encourage co-operation between the vehicle makers, Telecom Operators, the EC and the Member States (in particular the emergency agencies, the public PSAPs and the private PSAPs operating under the regulation of a public body) together with other relevant parties such as the insurance industry, automobile clubs and other relevant industrial partners.
51 ETSC report on Transport Safety Performance in the EU – A statistical overview 2003 (2001 statistics) 52COM(2003) 542 final: COMMUNICATION FROM THE COMMISSION TO THE COUNCIL AND THE
EUROPEAN PARLIAMENT “Information and Communications Technologies for Safe and Intelligent Vehicles” 53 See Annex B

Page 223 of 490
2. Involved Parties Moving forward with implementation of in-vehicle eCall requires parallel commitment and joint effort to work on common, co-ordinated implementation and supporting business plans from all Parties constituting the basic eCall service and value chain.
Such co-ordinated roll-out and business plans need to include optimised technical solutions, quality standards, co-ordinated target dates when emergency calls from in-vehicle systems can be handled by the infrastructure, the incremental investments needed to develop, produce and operate such systems and infrastructure adaptations, a financial model how investments and service costs could be financed and by whom, the possibility of fiscal and financial incentives, the benefits and savings by stakeholder group, etc.
The relevant stakeholder groups with the highest impact on the realisation of a European solution can be divided into two major groups: The Parties directly forming the eCall service chain (2.1 – 2.4) and the other Parties (2.5 – 2.8), which are essential contributors and accelerators of the process. Both groups need to work together to achieve the overall objectives and should be represented in the European Coordination Platform.
2.1 Member States Member States signing this MoU and in particular those authorities in charge of emergency call services and related finance - e.g. civil protection authorities, Ministry of Interior and Ministry of Finance - agree to contribute to the development and agreement of country specific implementation plans conforming to the principles for pan-European eCall as defined in 1.2 and Annex B. For Member States having one or more Service Providers acting as PSAPs for the 112 services, this MoU requires a special handling. The Member State should, after signing this MoU, ensure that the Service Providers who are operating as PSAPs under their regulation gets a commission to handle in-vehicle eCall services. The agreement between the Member State and the Service Provider should include specification, financing and time plan of the in-vehicle eCall service implementation and operations.
2.3 Telecom operators Telecom Operators signing this MoU agree to contribute to the development and agreement of feasible implementation and business plans conforming to the principles for pan-European eCall as defined in 1.2 and Annex B.
Page 224 of 490
2.4 Vehicle Manufacturers Vehicle Manufacturers signing this MoU agree to contribute to the development and agreement of feasible implementation and business plans conforming to the principles for pan-European eCall as defined in 1.2 and Annex B.
2.5 Service Providers operating as PSAPs under the regulation of a public body Private Service Providers who are operating as PSAPs under the regulation of a public body signing this MoU agree to contribute to the development and agreement of implementation and business plans conforming to the principles for pan-European eCall as defined in Para 1.2 and Annex B.
In addition to the essential Parties constituting the eCall service chain, other players are an important part of the value chain and have an important role in supporting and accelerating market take up e.g. through specific support in the business and implementation planning phase and/or contributing to the overall business and outreach plan. These players have been identified as follows:
2.6 Insurance companies
2.7 Automobile clubs, service providers and other end user focused entities
2.8 European Commission DG Information Society, DG Transport, DG Environment
2.9 Related Industrial partners (equipment manufactures, location technology providers, repair industry etc.)
3. Act The Parties signing this MoU will actively contribute to the development and agreement of feasible implementation and business plans conforming to the principles for pan-European eCall as defined in 1.2 and Annex B.
The Parties signing this MoU will – within the first 12 months following the signature of this MoU, which is targeted to take place within the first half of 2004 - define an overall European work plan and present their recommendation for decision.

Page 225 of 490
To achieve the objectives each party signing the MoU will delegate minimum one expert as a member to the Driving Group on eCall. The representative should be empowered to take necessary decisions.
4. Process
4.1 European Co-ordination The Parties signing this MoU will interact through a European Co-ordination Platform to co-ordinate their activities by bringing together all relevant stakeholders. Provided sufficient funds can be made available, the co-ordination platform will include studies on the economics underlying the introduction and the drafting of a road map at European level.
The European Commission is the appropriate body to determine the platform to be used for this European Co-ordination. Currently the Driving Group on eCall within the eSafety Forum is the appropriate platform, but the co-ordination may take another form in subsequent years to support implementers and monitor progress of implementation across Europe. However, such co-ordination should continue to be under the auspices of the eSafety Forum.
4.2 Status of the Memorandum of Understanding This MoU summarises the current intentions of the different Parties signing this MoU. It will form the basis for action by each of the Parties according to their respective roles. However, nothing in this MoU legally obliges any Party to any other Party. Also, this MoU does not affect the rights (including intellectual property rights) of any Party to material or services supplied by them as part of the in-vehicle eCall chain. This MoU recognises that all Parties carry their own risks and costs in providing, carrying and handling the in-vehicle eCall initiative.
4.3 Review of this MoU For this MoU to provide an effective framework for co-operation active participation of all sectors concerned is required. Progress on implementation and business planning by all Parties concerned will be reviewed when appropriate. However, first review should take place not later than after 12 months following the signature of the MoU. When appropriate the Parties, will consider the need for improvements in their co-operation and make and introduce suitable proposals for modification or termination to this MoU.
European Memorandum of Understanding
for in-vehicle e-call

Page 226 of 490
SIGNATURE PAGES
Representative from (Please tick) Member
State Telecom Operator
Vehicle manufacturer
Service Provider
operating as PSAP under
the regulation of a public body
Insurance Company/
Organisation
Automobile Club
Service Provider
Related Industrial
Party
Other Name
Status
Organisation
Contact Address
Signature
Date
Page 227 of 490
Annex A - Relevant European Resolutions, Conclusions and Decisions C(2003) 2657 final COMMISSION RECOMMENDATION of 25/07/2003 on the processing of caller location information in electronic communication networks for the purpose of location-enhanced emergency call services COM(2003) 542 final: COMMUNICATION FROM THE COMMISSION TO THE COUNCIL AND THE EUROPEAN PARLIAMENT “Information and Communications Technologies for Safe and Intelligent Vehicles” Universal Service Directive (http://europa.eu.int/eur-lex/en/archive/2002/l_10820020424en.html) Final CGALIES report (http://europa.eu.int/comm/environment/civil/index.htm) ETSC report Transport Safety Performance in the EU – A statistical overview 2003 (2001 statistics) ISBN: 90-76024-154 Annex B - The in-vehicle e-call minimum data set Minimum Data Set The parties agree to the following minimum data set that have to be sent directly from the vehicle to the public PSAPs or the private service providers operating as PSAPs under the regulation of a public body, in case of a manual or automatic emergency call initiated from the in-vehicle system. Mandatory to be included:
• Time stamp • Precise Location • Vehicle identification • Service Provider Identifier • E-call qualifier (as a minimum a indication stating if the eCall has been manually or
automatically initiated)
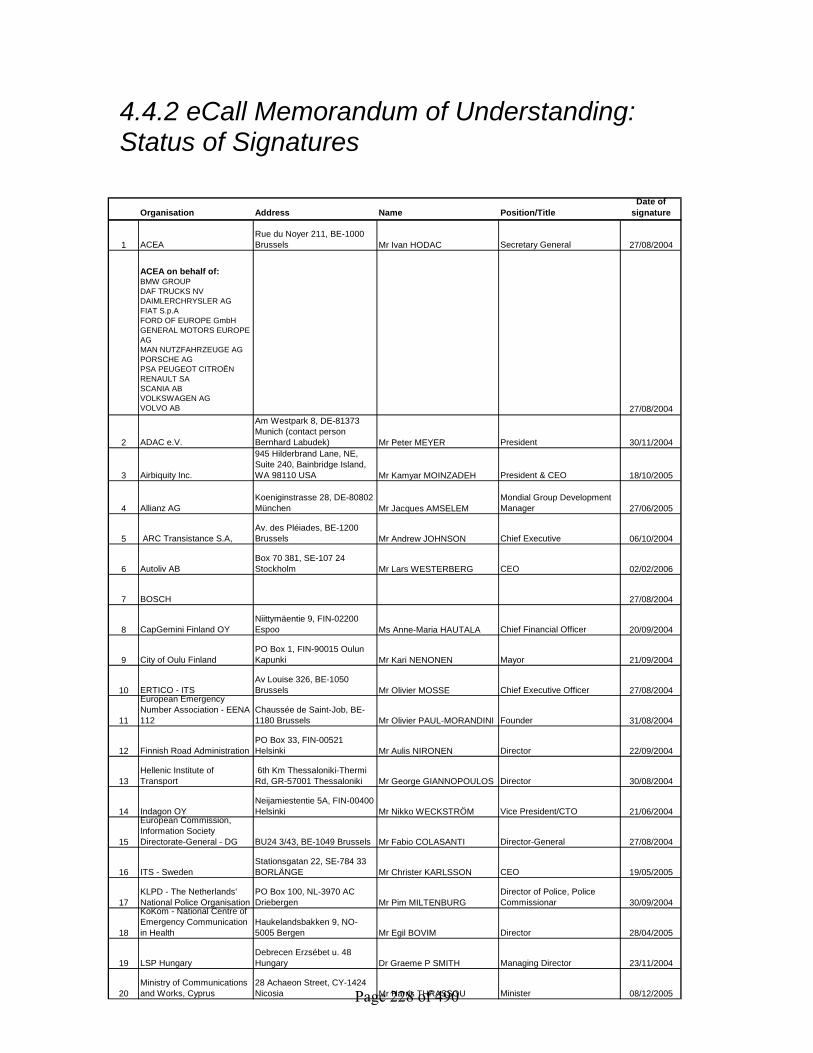
Page 228 of 490
4.4.2 eCall Memorandum of Understanding: Status of Signatures
Organisation Address Name Position/TitleDate of
signature
1 ACEARue du Noyer 211, BE-1000 Brussels Mr Ivan HODAC Secretary General 27/08/2004
ACEA on behalf of:BMW GROUPDAF TRUCKS NVDAIMLERCHRYSLER AGFIAT S.p.A FORD OF EUROPE GmbH GENERAL MOTORS EUROPE AG MAN NUTZFAHRZEUGE AG PORSCHE AG PSA PEUGEOT CITROËNRENAULT SASCANIA ABVOLKSWAGEN AGVOLVO AB 27/08/2004
2 ADAC e.V.
Am Westpark 8, DE-81373 Munich (contact person Bernhard Labudek) Mr Peter MEYER President 30/11/2004
3 Airbiquity Inc.
945 Hilderbrand Lane, NE, Suite 240, Bainbridge Island, WA 98110 USA Mr Kamyar MOINZADEH President & CEO 18/10/2005
4 Allianz AGKoeniginstrasse 28, DE-80802 München Mr Jacques AMSELEM
Mondial Group Development Manager 27/06/2005
5 ARC Transistance S.A,Av. des Pléiades, BE-1200 Brussels Mr Andrew JOHNSON Chief Executive 06/10/2004
6 Autoliv ABBox 70 381, SE-107 24 Stockholm Mr Lars WESTERBERG CEO 02/02/2006
7 BOSCH 27/08/2004
8 CapGemini Finland OYNiittymäentie 9, FIN-02200 Espoo Ms Anne-Maria HAUTALA Chief Financial Officer 20/09/2004
9 City of Oulu FinlandPO Box 1, FIN-90015 Oulun Kapunki Mr Kari NENONEN Mayor 21/09/2004
10 ERTICO - ITSAv Louise 326, BE-1050 Brussels Mr Olivier MOSSE Chief Executive Officer 27/08/2004
11
European Emergency Number Association - EENA 112
Chaussée de Saint-Job, BE-1180 Brussels Mr Olivier PAUL-MORANDINI Founder 31/08/2004
12 Finnish Road AdministrationPO Box 33, FIN-00521 Helsinki Mr Aulis NIRONEN Director 22/09/2004
13Hellenic Institute of Transport
6th Km Thessaloniki-Thermi Rd, GR-57001 Thessaloniki Mr George GIANNOPOULOS Director 30/08/2004
14 Indagon OYNeijamiestentie 5A, FIN-00400 Helsinki Mr Nikko WECKSTRÖM Vice President/CTO 21/06/2004
15
European Commission, Information Society Directorate-General - DG BU24 3/43, BE-1049 Brussels Mr Fabio COLASANTI Director-General 27/08/2004
16 ITS - SwedenStationsgatan 22, SE-784 33 BORLÄNGE Mr Christer KARLSSON CEO 19/05/2005
17KLPD - The Netherlands' National Police Organisation
PO Box 100, NL-3970 AC Driebergen Mr Pim MILTENBURG
Director of Police, Police Commissionar 30/09/2004
18
KoKom - National Centre of Emergency Communication in Health
Haukelandsbakken 9, NO-5005 Bergen Mr Egil BOVIM Director 28/04/2005
19 LSP HungaryDebrecen Erzsébet u. 48Hungary Dr Graeme P SMITH Managing Director 23/11/2004
20Ministry of Communications and Works, Cyprus
28 Achaeon Street, CY-1424 Nicosia Mr Harris THRASSOU Minister 08/12/2005
Page 229 of 490
4.5 Heavy Duty Vehicles Working Group The Heavy Duty Vehicles Working Group was set up to review known road safety enhancement measures and approaches specific to heavy duty vehicles, to evaluate the measures according to the accident figures for heavy duty vehicles and to formulate recommendations for Member States and the EC on how to improve road safety.
Chaired by Jurgen Trost (DaimlerChrysler), the Working Group began its activities in March 2004. Representatives from the following sectors were invited to participate:
• Heavy duty vehicle manufacturers (OEMs)
• European Commission
• Insurance companies
• Road accident investigation experts
• Haulage contractors
• Road operators
• Associations
The Working Group’s main task was to investigate how the road safety performance of heavy-duty vehicles could be improved. The detailed task list for the Working Groups was as follows:
• To review known road safety enhancement measures and approaches specific to heavy-duty vehicles. This review was to be carried out from a holistic perspective, also including non-electronic approaches, such as passive safety measures and driver training issues.
• To evaluate the measures according to the accident figures for heavy-duty vehicles. The evaluation of the various approaches was to be carried out with respect to their potential for reducing the number of accidents and fatalities, technical availability, and cost.
• To formulate recommendations for Member States and the EC on enhanced road safety performance. Experience indicates that in the heavy-duty vehicles sector, the market penetration for safety systems is slow. The task was to formulate measures to improve the situation on the basis of the preceding terms of reference for the Working Group.
Page 230 of 490
The Heavy Duty Vehicles Working Group recognised from the start that it would be unable to provide a comprehensive view of the issue of “road safety of heavy duty vehicles” because of the lack of clear information on the accidents that occur and the wide variety of developments and initiatives throughout the world for improved road safety. To avoid getting bogged down in detail, the Working Group also consistently restricted its focus to the main points, without trying to provide a comprehensive coverage of the topic. By adopting this approach, the Working Group was able to agree on significant findings within a short time, and to keep costs down to a moderate level. A summary of the significant accident types across all sub-categories of accidents was subsequently developed. These scenarios represent more than 40% of the accidents analysed in Europe.
The second step was to evaluate about fifty safety measures, estimating how efficient they were in reducing accidents. The Working Group also analysed the obstacles to market introduction of safety measures. In every case, the cost was one of the obstacles to implementation, if not the critical obstacle. This is the reason why a number of safety systems already available in the marketplace (e.g. ESC) are not penetrating the heavy-duty vehicles market. In some cases regulations were also identified as obstacles to market introduction. Define
On the basis of the identified obstacles to market introduction, the Working Group developed recommendations for a business case and an appropriate regulatory framework. The Working Group also formulated recommendations for how research can contribute to road safety. The recommendations are available in the Final Report from the Heavy Duty Vehicles Working Group, made public in October 2005.
Page 231 of 490
4.5.1 Final Report of Heavy Duty Vehicles Working Groups - Activity report for the year 2004, October, 2005
1. Preamble This report is the result of the Heavy Duty Vehicles Working Group’s activities over a period of almost a year, as part of the EC eSafety project. The Working Group has been a purely voluntary initiative, with no contractual arrangements of any kind. The results of the Group’s endeavors as presented in this report are now in the public domain, and may be quoted, subject to specification of the source.
As Chairman of the Working Group, I want to thank all members for their open, cooperative, and highly effective contributions. It has been a real pleasure to coordinate the inputs from my colleagues in a range of companies and institutions, all of whom are top people in their field. In spite of the diverse individual interests involved, the Working Group has consistently provided an excellent example of our ability to work together to make a difference in enhancing road safety.
The Working Group is most grateful for the European Commission’s initiative that led to the establishment of the Group, thereby creating a forum that could focus on the specific issues of heavy duty vehicles with a view to improving road safety. We hope that our recommendations will produce some tangible results.
2. Executive Summary The e-Safety Working Group Heavy Duty Vehicles has been set up to review known road safety enhancement measures and approaches specific to heavy duty vehicles, to evaluate the measures according to the accident figures for heavy duty vehicles and to formulate recommendations for Member States and the EC on enhanced road safety performance.
The Working Group realized from the outset that it would be unable to provide a comprehensive view of the issue of “road safety of heavy duty vehicles,” because of the lack of clear information on the accidents that occur and the wide variety of developments and initiatives throughout the world for improved road safety. To avoid getting bogged down in detail, the Group also consistently restricted its focus to the main points, without trying to provide a comprehensive coverage of the topic. By adopting this approach, we were able to agree on significant findings within a short time, and to keep costs down to a moderate level.
So the group provided a summary of the significant accident types across all sub-categories of accidents. These scenarios represent more then 40% of the accidents analyzed in Europe.
With a second step the Group evaluated about fifty safety measures regarding there efficiency to reduce accidents of the significant accident types. The available and the most efficient measures are reported within this paper.
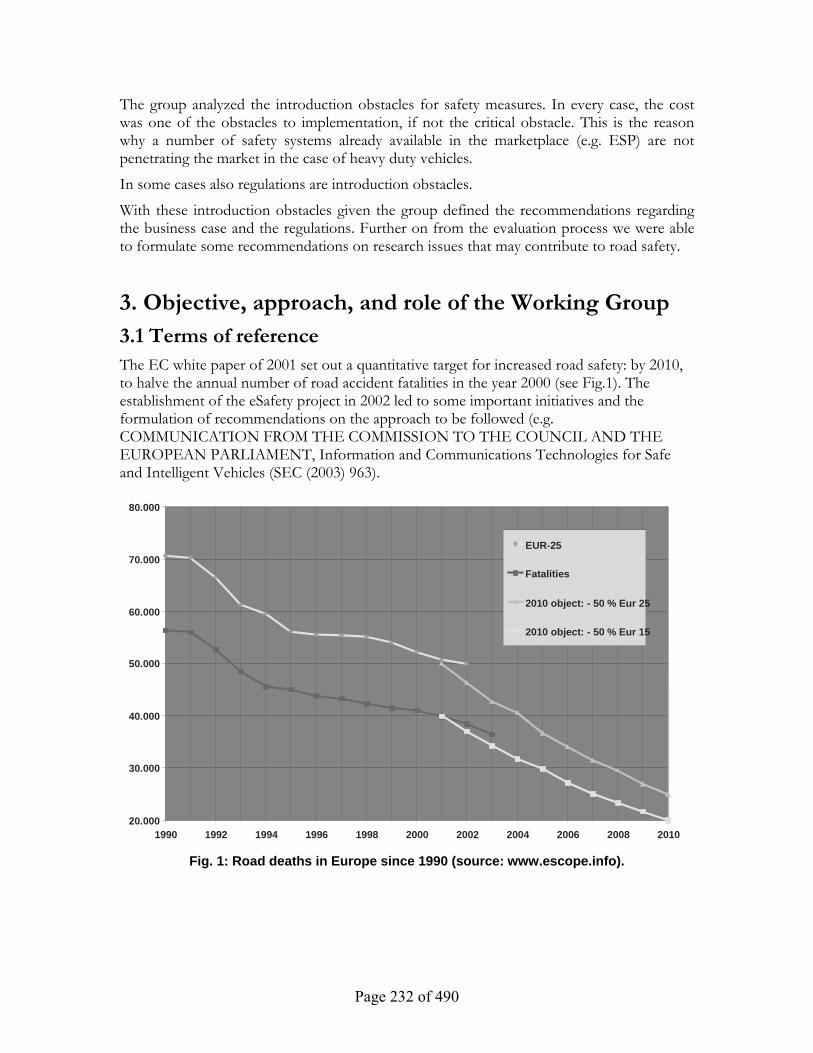
Page 232 of 490
The group analyzed the introduction obstacles for safety measures. In every case, the cost was one of the obstacles to implementation, if not the critical obstacle. This is the reason why a number of safety systems already available in the marketplace (e.g. ESP) are not penetrating the market in the case of heavy duty vehicles.
In some cases also regulations are introduction obstacles.
With these introduction obstacles given the group defined the recommendations regarding the business case and the regulations. Further on from the evaluation process we were able to formulate some recommendations on research issues that may contribute to road safety.
3. Objective, approach, and role of the Working Group 3.1 Terms of reference The EC white paper of 2001 set out a quantitative target for increased road safety: by 2010, to halve the annual number of road accident fatalities in the year 2000 (see Fig.1). The establishment of the eSafety project in 2002 led to some important initiatives and the formulation of recommendations on the approach to be followed (e.g. COMMUNICATION FROM THE COMMISSION TO THE COUNCIL AND THE EUROPEAN PARLIAMENT, Information and Communications Technologies for Safe and Intelligent Vehicles (SEC (2003) 963).
20.000
30.000
40.000
50.000
60.000
70.000
80.000
1990 1992 1994 1996 1998 2000 2002 2004 2006 2008 2010
EUR-25
Fatalities
2010 object: - 50 % Eur 25
2010 object: - 50 % Eur 15
Fig. 1: Road deaths in Europe since 1990 (source: www.escope.info).
Page 233 of 490
It was not the role of the Working Group to duplicate those outcomes, much less to question them. Our task was rather to investigate the extent to which enhanced road safety performance could be achieved in the context of the specific conditions of the market for heavy duty vehicles. Technology-based, infrastructure, and social blueprints for improving road safety do not operate in the market for heavy duty vehicles in the same way as in the mass market for passenger cars. The clear differences in the vehicles themselves (mass, handling characteristics, etc.), in the reason for the vehicles being on the road, in driver training and skills, and in particular the very different economic factors involved, along with many other aspects, make it impossible to apply the same approaches to heavy duty vehicles as those adopted for passenger cars. And of course, the same applies to the extrapolation of concepts or technical solutions for heavy duty vehicles to passenger cars.
The task list for the Working Group was as follows:
• To review known road safety enhancement measures and approaches specific to heavy duty vehicles. (The review of approaches was to be carried out from a holistic perspective, which would also include non-electronic approaches, such as passive safety measures and driver training issues.) • To evaluate the measures according to the accident figures for heavy duty vehicles. (The evaluation of the various approaches was to be carried out with respect to their potential for reducing the number of accidents and fatalities, technical availability, and cost.) • To formulate recommendations for Member States and the EC on enhanced road safety performance. (Experience indicates that safety systems take a long time to become established in practice in the heavy duty vehicles sector. The task was to formulate measures to improve the situation on the basis of the preceding terms of reference for the Working Group.)
3.2 Membership of the Working Group In order to ensure a genuinely holistic approach for the Working Group’s activities, it was clearly desirable to seek participation from the widest possible circle of actors involved in this issue; another primary concern was to create a Working Group that could operate effectively, in accordance with the “Terms of Reference for the (eSafety) Working Groups.” Representatives from the following sectors were therefore actively invited to participate:
• Heavy duty vehicle manufacturers (OEMs) • European Commission • Insurance companies • Road accident investigation experts • Haulage contractors • Road operators • Associations
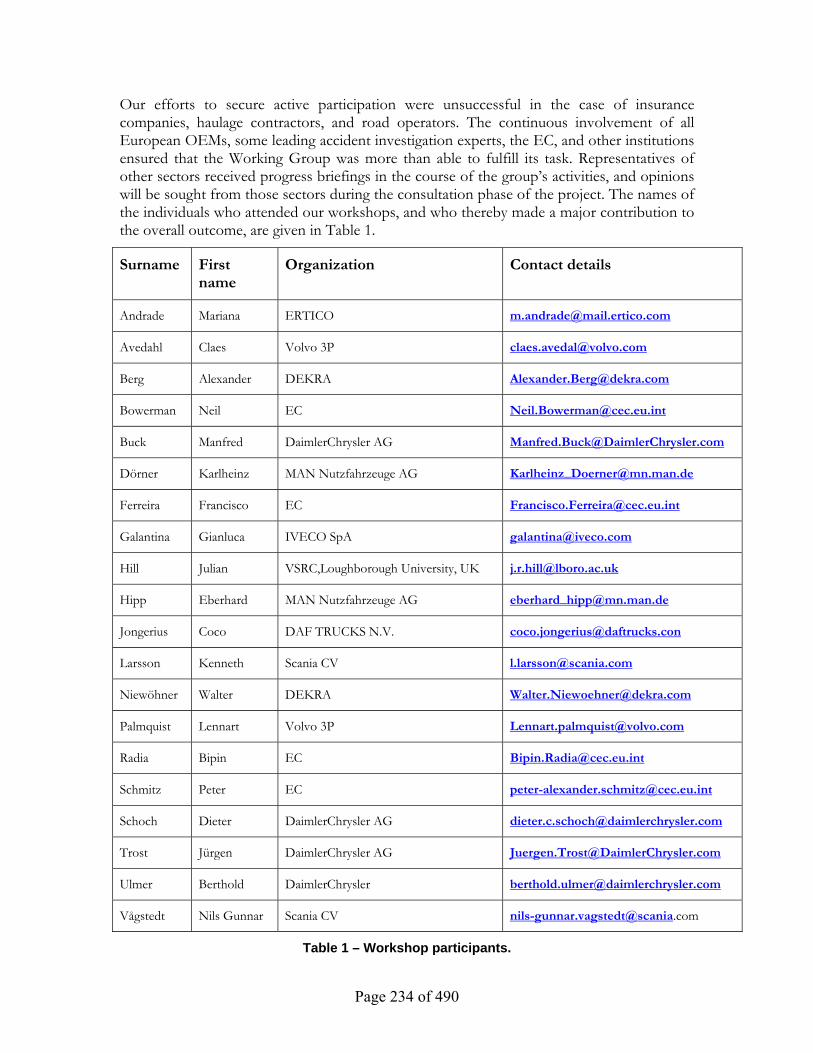
Page 234 of 490
Our efforts to secure active participation were unsuccessful in the case of insurance companies, haulage contractors, and road operators. The continuous involvement of all European OEMs, some leading accident investigation experts, the EC, and other institutions ensured that the Working Group was more than able to fulfill its task. Representatives of other sectors received progress briefings in the course of the group’s activities, and opinions will be sought from those sectors during the consultation phase of the project. The names of the individuals who attended our workshops, and who thereby made a major contribution to the overall outcome, are given in Table 1.
Surname First name
Organization Contact details
Andrade Mariana ERTICO [email protected]
Avedahl Claes Volvo 3P [email protected]
Berg Alexander DEKRA [email protected]
Bowerman Neil EC [email protected]
Buck Manfred DaimlerChrysler AG [email protected]
Dörner Karlheinz MAN Nutzfahrzeuge AG [email protected]
Ferreira Francisco EC [email protected]
Galantina Gianluca IVECO SpA [email protected]
Hill Julian VSRC,Loughborough University, UK [email protected]
Hipp Eberhard MAN Nutzfahrzeuge AG [email protected]
Jongerius Coco DAF TRUCKS N.V. [email protected]
Larsson Kenneth Scania CV [email protected]
Niewöhner Walter DEKRA [email protected]
Palmquist Lennart Volvo 3P [email protected]
Radia Bipin EC [email protected]
Schmitz Peter EC [email protected]
Schoch Dieter DaimlerChrysler AG [email protected]
Trost Jürgen DaimlerChrysler AG [email protected]
Ulmer Berthold DaimlerChrysler [email protected]
Vågstedt Nils Gunnar Scania CV [email protected]
Table 1 – Workshop participants.

Page 235 of 490
Not all participants were able to attend all the workshops. We were, however, able to set up the required proxy arrangements, or conference calls where necessary, to ensure that all members who were interested in the issues could be involved in drawing up the results of our investigations. It was partly for this reason that we were able to agree on the text of the “Recommendations” (see Appendix 1) within a relatively short time. The task list, approach, and results were drawn up by consensus, following discussions that were sometimes intense, but always constructive.
3.3 Methods and approach
3.3.1 Focus of the Working Group
The Working Group defines “Heavy Duty Vehicles” as referring to trucks (chassis vehicles) with a permissible total weight exceeding 12 t. All our proposed measures, recommendations, assessments, etc. are based on this category of vehicle, and would in some cases be different for other vehicle categories.
Buses with a permissible total weight exceeding 12 t were not specifically considered, but may be regarded as included, given that they are largely equipped with the same technology as the trucks of the kind referred to.
3.3.2 Methodology
The Working Group realized from the outset that it would be unable to provide a comprehensive view of the issue of “road safety of heavy duty vehicles,” because of the lack of clear information on the accidents that occur and the wide variety of developments and initiatives throughout the world for improved road safety. It was also clear, however, that if major European experts on commercial vehicle safety issues were able to collaborate effectively, it would be possible to describe the prominent accident scenarios, to specify measures seen as critical for improving road safety, and to clearly identify the main obstacles to the implementation of these critical measures. To avoid getting bogged down in detail, the Group also consistently restricted its focus to the main points, without trying to provide a comprehensive coverage of the topic. By adopting this approach, we were able to agree on significant findings within a short time, and to keep costs down to a moderate level.
At the kick-off meeting on March 16, 2004, the Group adopted the above task list and approach for formulating its results. It was decided to conduct a further four workshops, focusing on the following issues:
• The incidence of accidents
• Measures to improve road safety
• Evaluation of the proposed measures
• Action priorities and recommendations
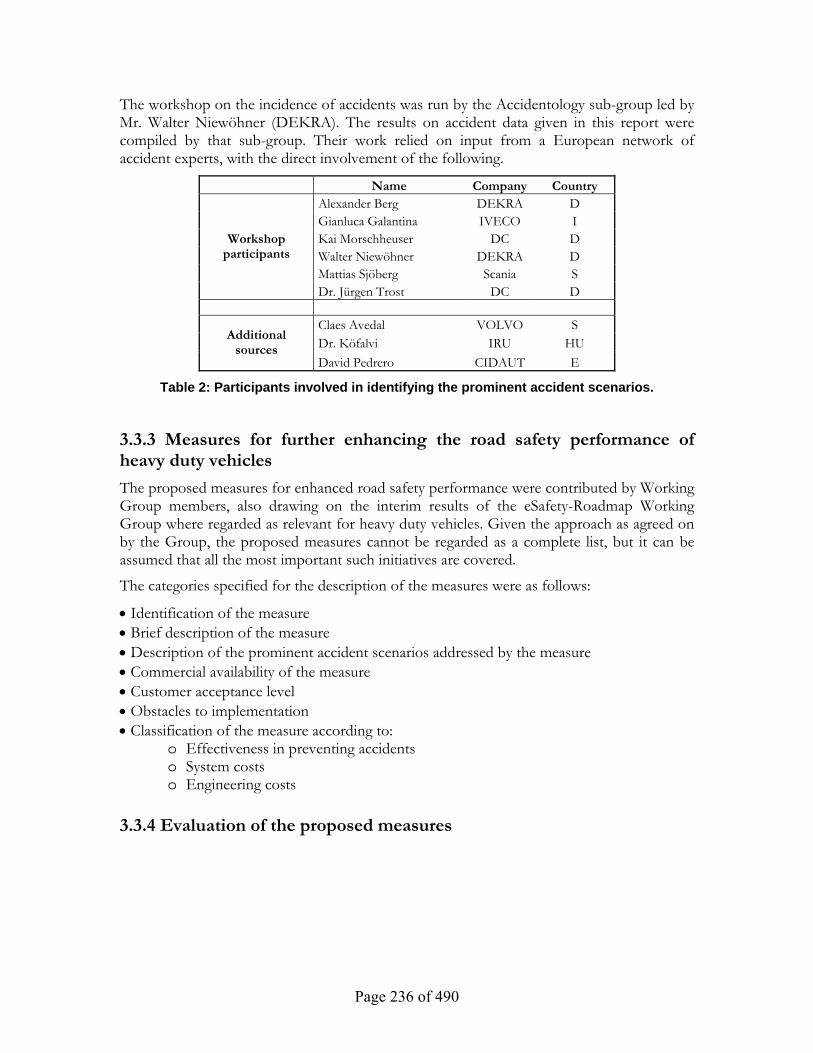
Page 236 of 490
The workshop on the incidence of accidents was run by the Accidentology sub-group led by Mr. Walter Niewöhner (DEKRA). The results on accident data given in this report were compiled by that sub-group. Their work relied on input from a European network of accident experts, with the direct involvement of the following.
Name Company Country Alexander Berg DEKRA D Gianluca Galantina IVECO I Kai Morschheuser DC D Walter Niewöhner DEKRA D Mattias Sjöberg Scania S
Workshop participants
Dr. Jürgen Trost DC D
Claes Avedal VOLVO S Dr. Köfalvi IRU HU Additional
sources David Pedrero CIDAUT E
Table 2: Participants involved in identifying the prominent accident scenarios.
3.3.3 Measures for further enhancing the road safety performance of heavy duty vehicles
The proposed measures for enhanced road safety performance were contributed by Working Group members, also drawing on the interim results of the eSafety-Roadmap Working Group where regarded as relevant for heavy duty vehicles. Given the approach as agreed on by the Group, the proposed measures cannot be regarded as a complete list, but it can be assumed that all the most important such initiatives are covered.
The categories specified for the description of the measures were as follows:
• Identification of the measure • Brief description of the measure • Description of the prominent accident scenarios addressed by the measure • Commercial availability of the measure • Customer acceptance level • Obstacles to implementation • Classification of the measure according to:
o Effectiveness in preventing accidents o System costs o Engineering costs
3.3.4 Evaluation of the proposed measures
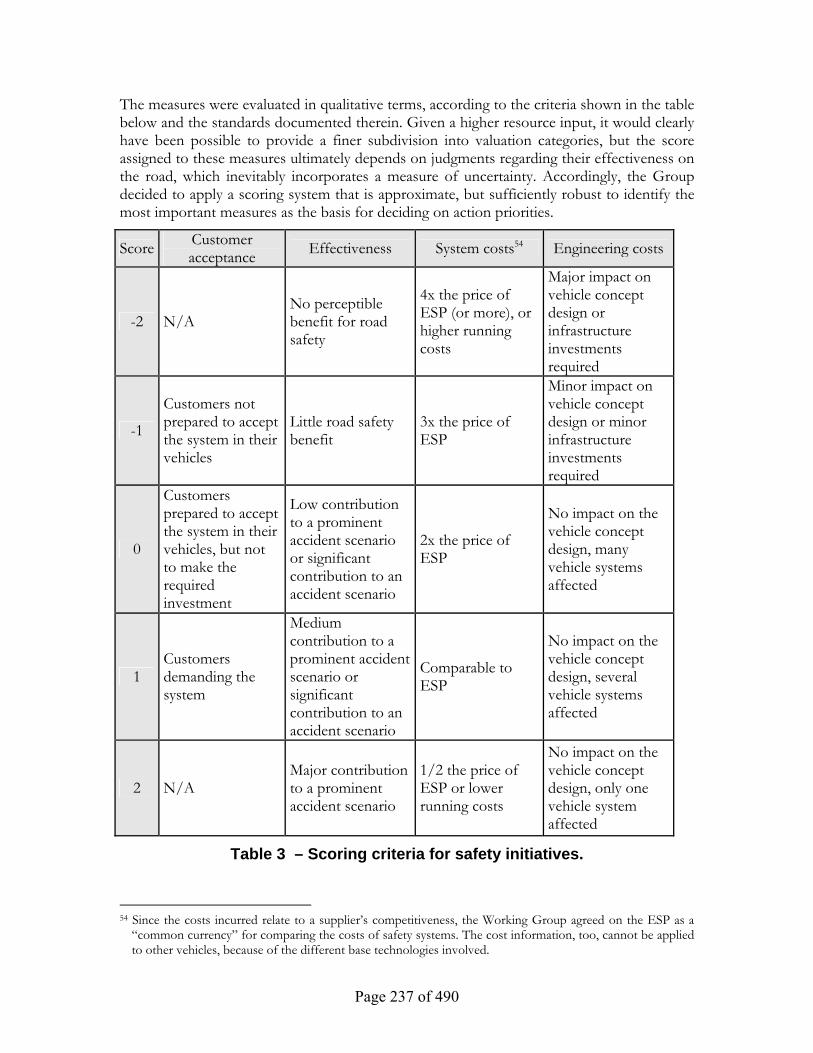
Page 237 of 490
The measures were evaluated in qualitative terms, according to the criteria shown in the table below and the standards documented therein. Given a higher resource input, it would clearly have been possible to provide a finer subdivision into valuation categories, but the score assigned to these measures ultimately depends on judgments regarding their effectiveness on the road, which inevitably incorporates a measure of uncertainty. Accordingly, the Group decided to apply a scoring system that is approximate, but sufficiently robust to identify the most important measures as the basis for deciding on action priorities.
Score Customer acceptance Effectiveness System costs54 Engineering costs
-2 N/A No perceptible benefit for road safety
4x the price of ESP (or more), or higher running costs
Major impact on vehicle concept design or infrastructure investments required
-1
Customers not prepared to accept the system in their vehicles
Little road safety benefit
3x the price of ESP
Minor impact on vehicle concept design or minor infrastructure investments required
0
Customers prepared to accept the system in their vehicles, but not to make the required investment
Low contribution to a prominent accident scenario or significant contribution to an accident scenario
2x the price of ESP
No impact on the vehicle concept design, many vehicle systems affected
1 Customers demanding the system
Medium contribution to a prominent accident scenario or significant contribution to an accident scenario
Comparable to ESP
No impact on the vehicle concept design, several vehicle systems affected
2 N/A Major contribution to a prominent accident scenario
1/2 the price of ESP or lower running costs
No impact on the vehicle concept design, only one vehicle system affected
Table 3 – Scoring criteria for safety initiatives. 54 Since the costs incurred relate to a supplier’s competitiveness, the Working Group agreed on the ESP as a
“common currency” for comparing the costs of safety systems. The cost information, too, cannot be applied to other vehicles, because of the different base technologies involved.
Page 238 of 490
All scores are to be taken as estimates by specialists who work with safety systems on a daily basis. Particularly in the case of systems whose implementation still lies far in the future, the scores are not accurate in the scientific sense. In order to document the uncertainties involved in the estimates of effectiveness, the Group has provided lower and upper limit values for effectiveness (see Appendix 2, columns headed “Effectiveness – low” and “Effectiveness – high”). 1 Since the costs incurred relate to a supplier’s competitiveness, the Working Group agreed on the ESP as a “common currency” for comparing the costs of safety systems. The cost information, too, cannot be applied to other vehicles, because of the different base technologies involved. 3.3.5 Formulation of action priorities and recommendations
Since the obstacles to implementation were identified along with the measures for further improvements to road safety, we were able to formulate action recommendations on the basis of this data. The discussion of these recommendations is here restricted to the systems that scored the highest, but in principle they can be extrapolated to all systems for heavy duty vehicles.
3.4 Reports, cooperation with other eSafety Working Groups The Working Group’s task list, membership, and approach, particularly the workshop dates, were presented and agreed in the eSafety Forum and eSafety Steering Group.
To reduce efforts, the Working Group decided not to publish progress reports. Our results are documented in the recommendations for the next EC communication to the Council (to be handed to Mr. Jääskeläinen, EC, in 10/04) and in this report. The Group decided to treat their working minutes, presentations, and documentation of interim results as confidential. This approach has proved its value, since this enabled participants to crosscheck with their organizations between workshops, so that the Group’s activities were not held up by harmonization problems. In isolated cases where legitimate reasons were given for seeking access to interim records, the Chairman cleared this with the Group.
The work being done by the “Accident Research” and “Roadmap” working groups had many points of contact with this Working Group. The arrangements to avoid duplication of effort and inconsistencies were as follows: Mr. Walter Niewöhner, DEKRA, who played a major role in coordinating the accident research for this Working Group, is also a member of the “Accident Research” working group, which ensured a smooth flow of information between the two groups.
The “Roadmap” working group mainly comprises experts on passenger car safety. It was therefore agreed with that group that issues relating to heavy duty vehicles would be addressed in the “Heavy Duty Vehicles” Working Group, and that the results would be provided to consolidate the findings of the “Roadmap” working group. That policy is implemented in this report and in a report presentation that was to be given by the Chairman of the “Heavy Duty Vehicles” Working Group in the “Roadmap” Working Group in early 2005.

Page 239 of 490
4. Results of the “Accident Research” sub-group 4.1 Available accident data In accordance with the focus for the Working Group, the work of the “Accident Research” sub-group began with a review of the available accident statistics. This showed that there are no reliable EU-wide statistics on accidents involving heavy duty vehicles (chassis vehicles with permissible total mass exceeding 12 t). This represents a major gap in European statistics, since information that is important as the basis for political decisions on vehicle and road safety is simply not available. This means that the priority scenarios in the area of heavy duty vehicle accidents cannot be adequately described at present. This makes it difficult to make any rapid progress with the development and implementation of measures likely to achieve the maximum benefit with the limited resources available. And following the implementation of measures, it is virtually impossible to monitor their impact on the incidence of accidents over time, and hence to provide a statistically based description of the effectiveness of specific measures.
One of the recommendations from the Working Group is therefore for the Europe-wide provision of accident statistics based on the vehicle definitions according to the type approval of vehicles and their trailers under Directive 70/156/EEC. Among other classes, the Directive defines the class of motor vehicles for goods transport (Class N), which is further subdivided into classes N1 (permissible total mass up to 3.5 t), N2 (permissible total mass over 3.5 t and up to 12 t), and N3 (permissible total mass exceeding 12 t). And for accidents involving trailer units or semitrailer rigs, the trailer vehicle also has to be taken into account. Directive 70/156/EEC provides Class O for this purpose. Here again, the class is subdivided into class O1 (permissible total mass up to 0.75 t), O2 (permissible total mass over 0.75 and up to 3.5 t), O3 (permissible total mass over 3.5 and up to 10 t), and O4 (permissible total mass exceeding 10 t). If required, a restructuring of European accident statistics could even include a more finely divided classification system, on the basis of the national standard DIN 70 010, for example. That standard provides a classification for road vehicles, with definitions for motor vehicles, motor vehicle combinations, and trailer vehicles.
An appropriate basis for an initial overview of accidents involving heavy duty vehicles, notwithstanding the unsatisfactory data situation, is the OECD International Road Traffic and Accident Database IRTAD. IRTAD currently covers the following countries: Australia, Austria, Belgium, Canada, the Czech Republic, Denmark, Finland, France, Germany, Greece, Hungary, Iceland, Ireland, Italy, Japan, Luxembourg, the Republic of Korea, the Netherlands, New Zealand, Norway, Poland, Portugal, Slovakia, Slovenia, Spain, Sweden, Switzerland, Turkey, the UK, and the USA.
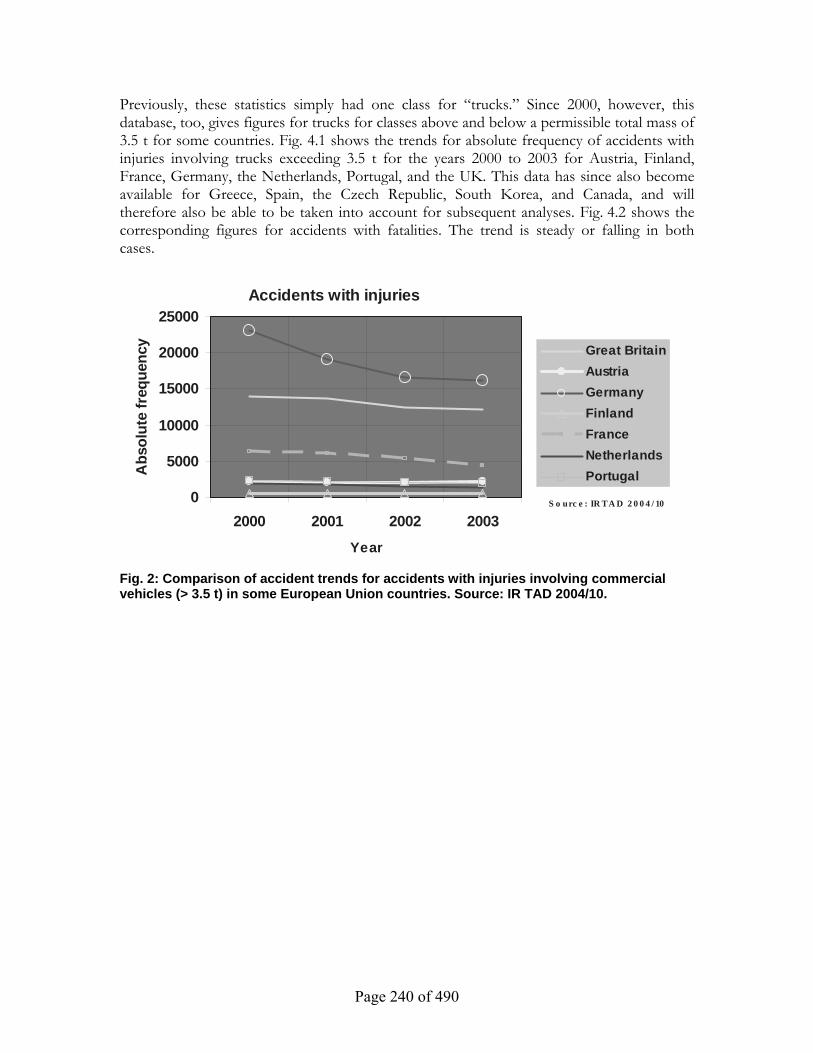
Page 240 of 490
Accidents with injuries
0
5000
10000
15000
20000
25000
2000 2001 2002 2003
Year
Abs
olut
e fr
eque
ncy Great Britain
AustriaGermanyFinlandFranceNetherlandsPortugal
S o urc e : IR TA D 2 0 0 4 / 10
Previously, these statistics simply had one class for “trucks.” Since 2000, however, this database, too, gives figures for trucks for classes above and below a permissible total mass of 3.5 t for some countries. Fig. 4.1 shows the trends for absolute frequency of accidents with injuries involving trucks exceeding 3.5 t for the years 2000 to 2003 for Austria, Finland, France, Germany, the Netherlands, Portugal, and the UK. This data has since also become available for Greece, Spain, the Czech Republic, South Korea, and Canada, and will therefore also be able to be taken into account for subsequent analyses. Fig. 4.2 shows the corresponding figures for accidents with fatalities. The trend is steady or falling in both cases.
Fig. 2: Comparison of accident trends for accidents with injuries involving commercial vehicles (> 3.5 t) in some European Union countries. Source: IR TAD 2004/10.
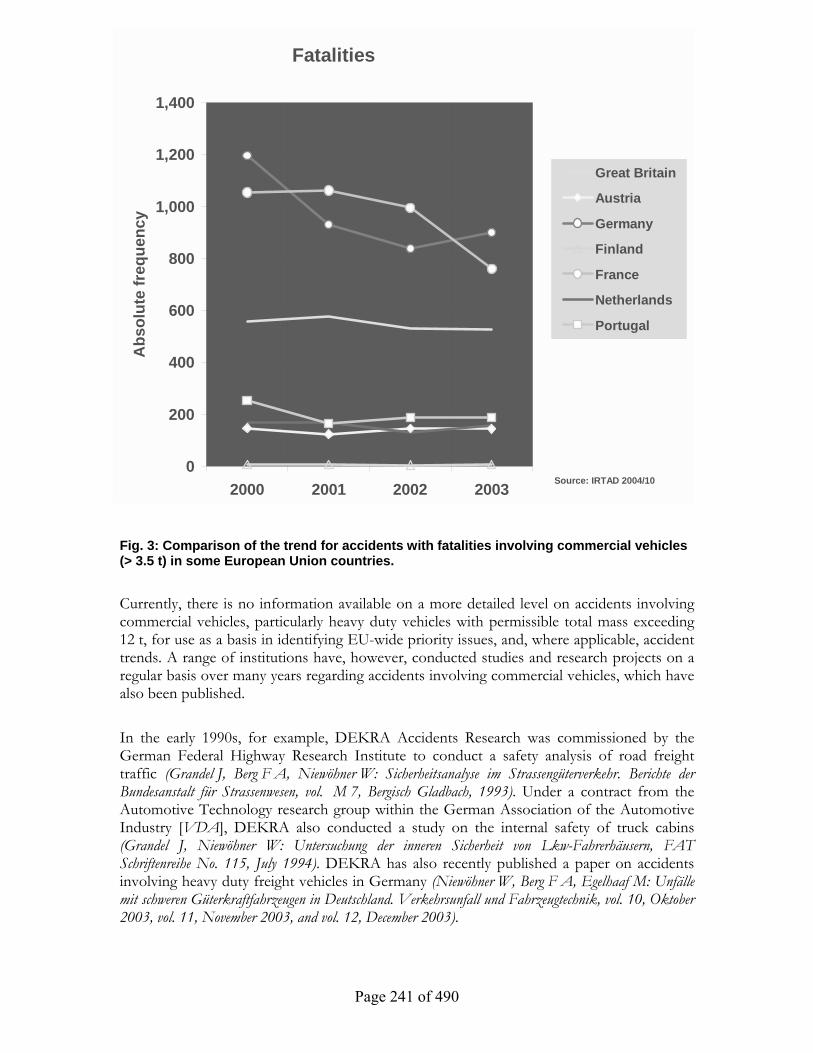
Page 241 of 490
Fatalities
0
200
400
600
800
1,000
1,200
1,400
2000 2001 2002 2003
Abs
olut
e fr
eque
ncy
Great Britain
Austria
Germany
Finland
France
Netherlands
Portugal
Source: IRTAD 2004/10
Fig. 3: Comparison of the trend for accidents with fatalities involving commercial vehicles (> 3.5 t) in some European Union countries.
Currently, there is no information available on a more detailed level on accidents involving commercial vehicles, particularly heavy duty vehicles with permissible total mass exceeding 12 t, for use as a basis in identifying EU-wide priority issues, and, where applicable, accident trends. A range of institutions have, however, conducted studies and research projects on a regular basis over many years regarding accidents involving commercial vehicles, which have also been published.
In the early 1990s, for example, DEKRA Accidents Research was commissioned by the German Federal Highway Research Institute to conduct a safety analysis of road freight traffic (Grandel J, Berg F A, Niewöhner W: Sicherheitsanalyse im Strassengüterverkehr. Berichte der Bundesanstalt für Strassenwesen, vol. M 7, Bergisch Gladbach, 1993). Under a contract from the Automotive Technology research group within the German Association of the Automotive Industry [VDA], DEKRA also conducted a study on the internal safety of truck cabins (Grandel J, Niewöhner W: Untersuchung der inneren Sicherheit von Lkw-Fahrerhäusern, FAT Schriftenreihe No. 115, July 1994). DEKRA has also recently published a paper on accidents involving heavy duty freight vehicles in Germany (Niewöhner W, Berg F A, Egelhaaf M: Unfälle mit schweren Güterkraftfahrzeugen in Deutschland. Verkehrsunfall und Fahrzeugtechnik, vol. 10, Oktober 2003, vol. 11, November 2003, and vol. 12, December 2003).

Page 242 of 490
Examples of published results from accidents research on trucks by OEMs include the Volvo Reports (Svenso L, Viden S: Accidents involving Volvo trucks resulting in driver injury and the estimated effect of the SRS Airbag. Volvo Report 4, Gothenburg, May 1994. Högström K, Svenson L: Accidents involving Volvo trucks resulting in personal injury. Volvo Report 3, Gothenburg, May 1980. Högström K, Svenson L, Weimar, L: Heavy Commercial Vehicles/vulnerable road users. Volvo Accident Investigation, Report 1, Gothenburg 1973.). The current EU research program is addressing the issue of commercial vehicle safety in the APROSYS (Advanced PROtection SYStems) integrated project. Within that project, the AP2 Truck Accidents work package is examining possibilities for reducing the number of serious injuries and fatalities in accidents involving heavy duty vehicles in Europe (see also www.aprosys.com).
In view of the inadequate availability of data in official statistics, the members of the Working Group decided on a best-practice approach, based on using the analysis, using a standard template, of case record compilations and data on accidents involving trucks, including some in-house data, and the compilation of the results. The task of compiling accident statistics at the European level for heavy trucks is made more difficult by vehicle classification systems based on different weight limits, company-specific procedures for recording truck accidents, and different focuses in terms of the research priorities in each case.
In fact, we found that a template originally developed from the accident research carried out by Volvo provided a suitable basis for identifying the main issues for this accident category. The template was used to analyze the data from Volvo case records (mainly accidents in Sweden), from DEKRA accidents research (accidents in Germany), data from CIDAUT (accidents in Spain), and IVECO records (accidents in Italy). CIDAUT was able to draw on the available figures from official accident statistics on all Spanish accidents. For systemrelated reasons, IVECO had to run analyses on two sets of Italian statistics, recorded in different ways, without always being able to apply a precise demarcation between mass classes (up to and exceeding 3.5 t, respectively).
4.2 Prominent accident scenarios involving trucks The situation regarding truck accidents in individual countries of the EU is partly dependent on the types of vehicles mainly used by private motorists. Two-wheeled motor-driven vehicles are more widely used in southern Europe than in central and northern Europe. This is reflected in the “other party involved” data for accidents involving trucks in the accident databases of DEKRA (for Germany) and IVECO (for Italy), see Fig. 4.3. The Scandinavian countries are characterized by the more frequent use of trucks on rural roads. Because of its central location, Germany has a higher proportion of transit traffic. There are significantly more bicycles on the roads in the Netherlands and Denmark. These are just some of the reasons for the differences between European countries in terms of frequent accident scenarios.
The reporting template used for the analyses from this point comprises three categories of accidents involving heavy trucks: accidents killing or severely injuring truck occupants, occupants of another passenger vehicle involved, and vulnerable road users (pedestrians and drivers of two-wheeled vehicles, including motorcycles).
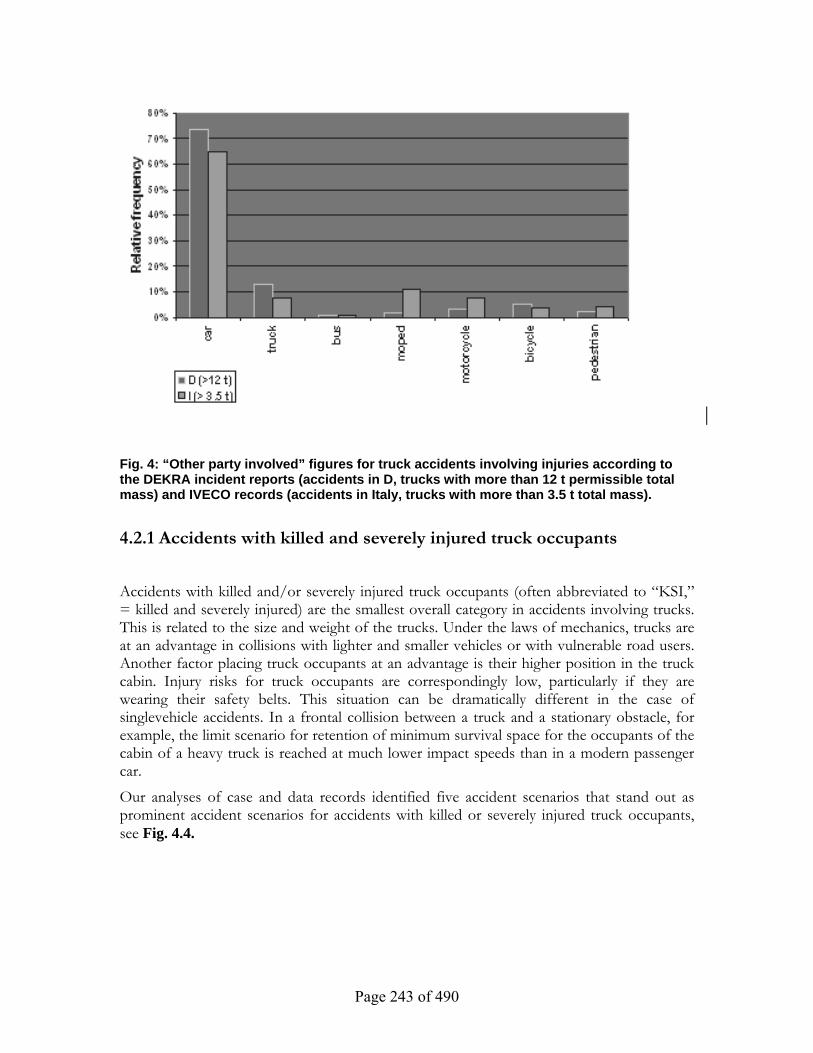
Page 243 of 490
Fig. 4: “Other party involved” figures for truck accidents involving injuries according to the DEKRA incident reports (accidents in D, trucks with more than 12 t permissible total mass) and IVECO records (accidents in Italy, trucks with more than 3.5 t total mass).
4.2.1 Accidents with killed and severely injured truck occupants
Accidents with killed and/or severely injured truck occupants (often abbreviated to “KSI,” = killed and severely injured) are the smallest overall category in accidents involving trucks. This is related to the size and weight of the trucks. Under the laws of mechanics, trucks are at an advantage in collisions with lighter and smaller vehicles or with vulnerable road users. Another factor placing truck occupants at an advantage is their higher position in the truck cabin. Injury risks for truck occupants are correspondingly low, particularly if they are wearing their safety belts. This situation can be dramatically different in the case of singlevehicle accidents. In a frontal collision between a truck and a stationary obstacle, for example, the limit scenario for retention of minimum survival space for the occupants of the cabin of a heavy truck is reached at much lower impact speeds than in a modern passenger car.
Our analyses of case and data records identified five accident scenarios that stand out as prominent accident scenarios for accidents with killed or severely injured truck occupants, see Fig. 4.4.

Page 244 of 490
S E D IVolvo Cidaut DEKRA IVECO
1
Truck single Driving off road
35% 52% 21% 30%
2
Truck single Rollover on road
12% 8% 0% 11%
3
Truck- truck collision, oncoming traffic Front vs. front 10% 2% 0% 13%
4
Truck- truck collision, traffic ahead in same direction Front vs. rear 20% 6% 79% 25%
5
Truck-car collision, oncoming traffic Truck front vs. car 10% 2% 0% 2%
A1
other
24% 19%
A.Truck Occupants
Fig. 4.4: Prominent scenarios for accidents will killed or severely injured truck occupants.
In the databases of Volvo (35%), Cidaut (52%), and IVECO (30%), single-vehicle accidents with the truck leaving the road represent the highest proportion of accidents. Such accidents often occur in curves. It is also frequent in this type of accident for the vehicle to tip onto its side or overturn during the accident.
In the corresponding case records of DEKRA, this type of accident, at 21%, is only the second-most frequent category, behind front-rear collisions between two trucks traveling in the same direction, at 79%. Such accidents often occur on motorways. These accident frequency differences could be due to differences in the infrastructure, and also to the density of traffic, which clearly plays a role in this context.
Further accident scenario categories involving killed or severely injured occupants can be identified on the basis of the case records and accident analyses of Volvo, CIDAUT, and IVECO: single-vehicle truck accidents, where the truck skids and possibly also rolls on the carriageway; front/front collisions between two trucks traveling in opposite directions; and front/front collisions between a truck and a car traveling in opposite directions. Similar accidents involving car-truck collisions can also be found in the DEKRA case records, but in this case they do not stand out as a prominent accident scenario. In such cases, the cause of truck occupant injuries or fatalities is generally loss of control of the truck after an initial collision with a car, followed by a second collision with more severe consequences for the truck occupants, e.g. with a stationary obstacle. There are also cases where a truck occupant not wearing a safety belt has been thrown out of the truck cabin after an initial, less serious collision, and has then been severely injured or killed, e.g. by being run over.

Page 245 of 490
4.2.2 Truck accidents with killed or severely injured occupants in the passenger car involved
Truck-car accidents in which occupants of the car are killed or severely injured form the largest category overall. This is related to the fact that, in all European countries, by far most of the vehicles on the roads are passenger cars, with a correspondingly high probability of accidents involving passenger cars, of all levels of severity. Along with the large mass of the truck, other factors involved include the geometrical incompatibility between these vehicles in terms of their ladder-type frame structures. If the car passes underneath the truck at the time of the collision, the passenger car safety design feature to maintain a survival space for the occupants, e.g. the crash zone or mechanical side protection, is not able to perform its function. In accidents of this type, the impacting parts of the truck are forced downwards through the windshield into the inside of the car. In such cases, fatal consequences for the occupants can occur even at relatively low collision speeds.
Our analyses of the case records and accident data identified seven accident scenarios as the main situations leading to killed or severely injured car occupants, see Fig. 4.5.
S E D IVolvo Cidaut DEKRA IVECO
6
Truck- car collision, oncoming traffic Truck front vs. car front,
30% 19% 19% 21%
7
Truck- car collision, oncoming traffic Truck front vs. car side
5% 27% 19% 11%
8
Truck- car collision, traffic ahead in same direction Truck front vs. car rear
15% 16% 11%
10
Truck- car collision, traffic ahead in same direction Car front vs. truck rear
12% 6% 10%
9
Truck- car collision, intersection Truck front vs. car side
15% 6% 18%
11
Truck- car collision, intersection Car front vs. truck side
12% 13% 9%
12
Truck- car collision, lane change accident Truck side vs. car side
10% 7% 6% 9%
B1Other 32% 15% 11%
15%
1%
B.Car Occupants
Fig. 4.5 Prominent scenarios for car-truck accidents with killed or severely injured car
occupants.

Page 246 of 490
In the analyses of Volvo and IVECO case records and data, the highest frequency figures here are for front/front collisions with the vehicles traveling in opposite directions (30% and 21%, respectively). For the DEKRA case records, this is one of the two most frequent scenarios, alongside accidents in which the front of the truck collides with the side of a skidding car (19% in each case). In the Spanish accident data analyzed by CIDAUT, the latter constellation is the most frequent, at 27%, followed by front/front collisions, at 19%. The third most frequent scenario was a frontal impact of the truck on the rear of a car traveling in the same direction, e.g. when driving up behind a traffic jam. The front of the truck is also involved in the fifth most frequent scenario, in which the truck drives into the side of a car driving across its path.
The fourth-ranked scenario is the frontal impact of the car on the rear of a truck traveling in the same direction. These accidents have appalling consequences for the car occupants, and are frequently reported in the media. They generally occur at high initial speeds on motorways, when the truck is standing at the end of a traffic jam. There are also isolated cases of such accidents in rest and parking areas, when trucks are parked in the access way in the absence of any dedicated parking places.
This is followed in sixth place by the frontal impact of the car on the side of a truck driving across its path. If the collision is with the tires of the truck, the front of the car may take the impact, allowing the crash zone to perform its function. Given a very robust passenger cabin design and an effective retention system, the car occupants then have a real chance of surviving such an accident with slight or severe injuries, provided that the equivalent impact speeds do not significantly exceed the range of the relevant crash tests. The worst case for this impact constellation is where the front of the car passes laterally between the truck tires, and under the truck chassis.
Equally frequent, in seventh place, is an accident scenario in which a truck and a car are initially traveling in the same direction alongside one another, and one of them then changes lanes. This kind of accident is generally caused by impeded visibility or lack of attention, or the driver becoming distracted at the time of the lane change. Car drivers are usually not aware of the specific visibility problems truck drivers have to deal with, and are therefore not conscious of the risk they face.
4.2.3 Truck accidents with killed and severely injured vulnerable road users
The term “vulnerable road users” generally refers primarily to pedestrians and cyclists. After a thorough discussion of the matter, the Working Group decided to include motorcyclists in this group as well. While motorcyclists and their pillion passengers generally wear protective clothing, comprising a suit, boots, gloves, and a helmet, their risk of injury in traffic accident is significantly higher than that of car occupants, who are surrounded by the vehicle body as a protective structure.
Two truck/pedestrian collision scenarios were identified as prominent in this category, along with another three truck/cyclist scenarios, see Fig. 4.6.
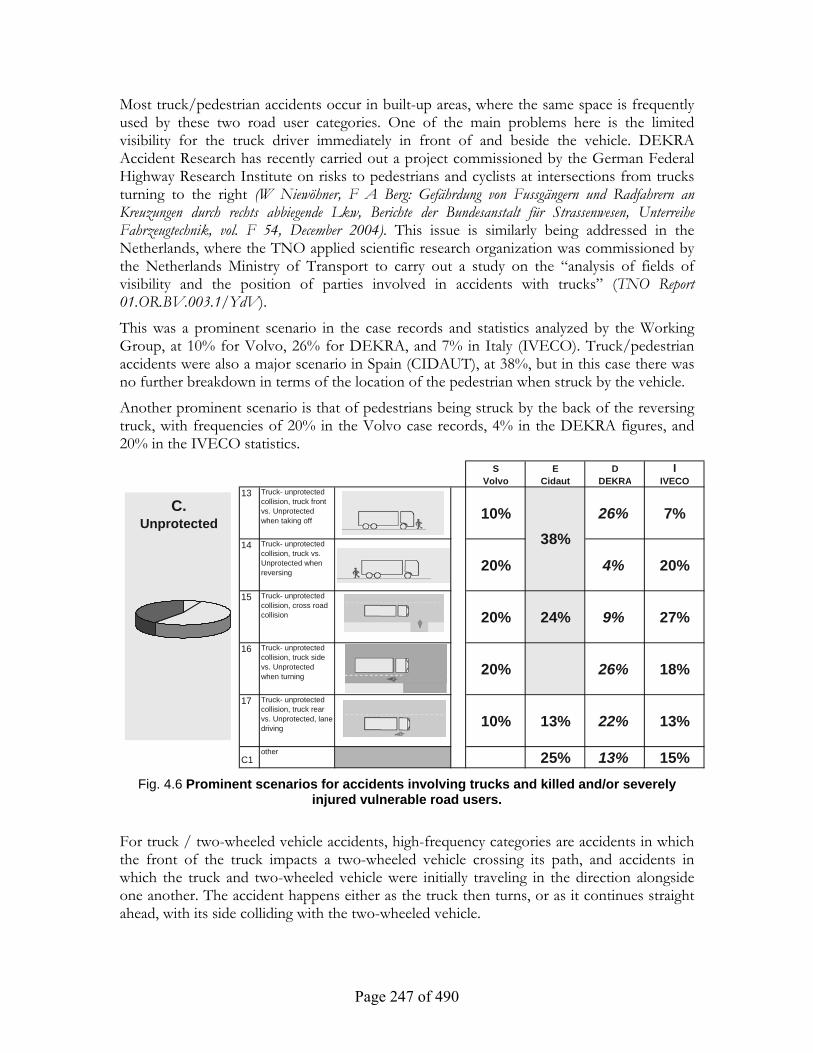
Page 247 of 490
Most truck/pedestrian accidents occur in built-up areas, where the same space is frequently used by these two road user categories. One of the main problems here is the limited visibility for the truck driver immediately in front of and beside the vehicle. DEKRA Accident Research has recently carried out a project commissioned by the German Federal Highway Research Institute on risks to pedestrians and cyclists at intersections from trucks turning to the right (W Niewöhner, F A Berg: Gefährdung von Fussgängern und Radfahrern an Kreuzungen durch rechts abbiegende Lkw, Berichte der Bundesanstalt für Strassenwesen, Unterreihe Fahrzeugtechnik, vol. F 54, December 2004). This issue is similarly being addressed in the Netherlands, where the TNO applied scientific research organization was commissioned by the Netherlands Ministry of Transport to carry out a study on the “analysis of fields of visibility and the position of parties involved in accidents with trucks” (TNO Report 01.OR.BV.003.1/YdV).
This was a prominent scenario in the case records and statistics analyzed by the Working Group, at 10% for Volvo, 26% for DEKRA, and 7% in Italy (IVECO). Truck/pedestrian accidents were also a major scenario in Spain (CIDAUT), at 38%, but in this case there was no further breakdown in terms of the location of the pedestrian when struck by the vehicle.
Another prominent scenario is that of pedestrians being struck by the back of the reversing truck, with frequencies of 20% in the Volvo case records, 4% in the DEKRA figures, and 20% in the IVECO statistics.
S E D IVolvo Cidaut DEKRA IVECO
13 Truck- unprotected collision, truck front vs. Unprotected when taking off 10% 26% 7%
14 Truck- unprotected collision, truck vs. Unprotected when reversing 20% 4% 20%
15 Truck- unprotected collision, cross road collision 20% 24% 9% 27%
16 Truck- unprotected collision, truck side vs. Unprotected when turning 20% 26% 18%
17 Truck- unprotected collision, truck rear vs. Unprotected, lane driving 10% 13% 22% 13%
C1other 25% 13% 15%
38%
C.Unprotected
Fig. 4.6 Prominent scenarios for accidents involving trucks and killed and/or severely
injured vulnerable road users.
For truck / two-wheeled vehicle accidents, high-frequency categories are accidents in which the front of the truck impacts a two-wheeled vehicle crossing its path, and accidents in which the truck and two-wheeled vehicle were initially traveling in the direction alongside one another. The accident happens either as the truck then turns, or as it continues straight ahead, with its side colliding with the two-wheeled vehicle.

Page 248 of 490
There are also some significant levels of “other” truck / two-wheeled vehicle accident scenarios, particularly in the DEKRA accident material.
Fig. 4.7 Prominent accident scenarios involving trucks, overall summary.
4.2.4 Prominent accident scenarios overall
A summary of the significant accident types across all sub-categories as prominent accident scenarios is provided in Fig. 4.2.4. These scenarios represent 49% of all Volvo accidents, 40% of the accidents analyzed by CIDAUT in Spain, 62% of the DEKRA accidents, and 42% of the accidents analyzed by IVECO in Italy.
Page 249 of 490
4.2.5 Basic concept of an EU-wide core accident database on accidents involving heavy trucks
In formulating the best-practice approach for the identification and description of prominent accident scenarios involving heavy trucks, the members have demonstrated how a useful overview can be arrived at in spite of the inadequacies in official statistics, through effective cooperation between the stakeholders. If further information on the scenarios described is required, for research projects, for example, the institutions involved may be approached with an application for assistance or provision of the case material. The Group remains open to the idea of further examination and analysis of accident data with other partners. In this way, it would be possible to go beyond the compilation of prominent scenarios for this type of accident to create an EU-side core database. The small number of details recorded in the database would cover the essential features required for the description and identification of accident scenarios. If required, the more extensive data held by the various partners and information on individual accidents could then be accessed through the appropriate query and release procedures.
5. Technical approaches to reducing road deaths
The Working Group discussed a list of around 50 technical and non-technical approaches for enhancing the road safety performance of heavy duty vehicles. The systems already available are now described, followed in the next section by a discussion of the most effective approaches.
5.1 Current state of the art in commercial vehicles In view of the target date of 2010 for decreasing the number of road deaths, the systems already in the marketplace are obviously of great importance, even where they are regarded as less effective than future systems are expected to be. The systems for heavy duty vehicles presented and assessed in this section are already commercially available.
5.1.1 ESP for semitrailer rigs (including rollover protection)
There are two main reasons for heavy duty vehicles leaving the road. The first is the vehicle getting out of control because of an incorrect appreciation of the driving situation by the driver. In this event, the ESP helps the driver to slow down the vehicle and bring it back under control.

Page 250 of 490
The operating principle of ESP is now well known, following the large-scale series production of the system, particularly in Germany. The system assesses the dynamic driving situation of the vehicle by monitoring the yaw rate, wheel revolutions, and steering angles. If the vehicle behavior becomes unstable or the driving situation becomes critical, i.e. the vehicle may be about to roll, the driving situation is automatically stabilized by independent wheel braking interventions, and the vehicle is simultaneously slowed down by automatic braking. The braking intervention takes place on the tractor vehicle, and also on the trailer as an independent trailer braking operation.
The positive impact of ESP shows up quickly in the accident statistics for passenger cars because of the rapid introduction of the system onto the market. The market introduction of the system for trucks is going to be a very slow process (see also under 6). No technical solution for trailer units is yet available.
5.1.2 Lane departure warning
The second reason for a truck leaving the road is loss of concentration by the driver, which can be for any of a number of reasons: loss of alertness, becoming distracted, or stress. This then leads to the driver unintentionally leaving the lane, or even the road.
The lane departure warning system uses video-based sensors to monitor the position of the vehicle in the lane, and activates a (generally acoustic) alarm when there is a risk of the vehicle leaving its lane.
Since trucks are often forced to drive over lane markings because of the dimensions of heavy duty vehicles, the activation of a warning is usually restricted by certain limit settings, e.g. at low speeds, or it can even be switched off by the driver. Recent variants that automatically switch the system back on after it has been switched off by the driver are now in use, in the NAFTA market and elsewhere.
5.1.3 Flexible underrun protection
As shown in 4.2, a car/truck collision is one of the prominent accident scenarios, and, accordingly, legislation now requires the use of a rigid front underrun protection system. The rigid front underrun protection system operates by activating the crash zone of the car when it collides with the truck, before the structural parts of the truck have penetrated into the survival space of the car. The crash zone of the car then performs the function of absorbing the energy of the accident.
Some OEMs have now enhanced the rigid front underrun protection system by providing this protection with a flexible structure. That structure is able to absorb the energy created by the accident in the same way as the car’s crash zone. This increases the collision speeds at which the car occupants may be able to survive a crash with a heavy duty vehicle. It has been demonstrated by measurements (indicative figures only, since the characteristics of the car itself have a significant impact on the results) (quotation), that flexible front underrun protection increases the survivable collision speed by 60 km/h.
Page 251 of 490
5.1.4 Seat-belt warning
In spite of campaigns including the active involvement of OEMs, the belt-wearing rate for heavy duty vehicles lags far behind that for passenger cars, which continually results in fatalities among truck drivers. A technical method for increasing the belt-wearing rate could be the introduction of systems to warn drivers before they can start a journey without fastening their seat belt. The acceptance level for such systems is low, and they would therefore have to be imposed by regulation or a joint campaign by all OEMs.
5.1.5 Driver alertness monitoring system
Lack of attention is a frequent cause for a range of accident scenarios, such as leaving the lane, or the standard rear-end collision. In the Japanese market for heavy duty vehicles, a system is available that assesses the alertness of the driver by monitoring the driving situation and the driver’s behavior. The assessment is then displayed to the driver. When the situation is critical, a driver alarm is activated, and in some cases invigorating fragrances are released.
Because of the range of driver responses to the onset of tiredness, and the limited personalization capacity of the system (although the personalization process proceeds quite rapidly), the alertness monitor will sometimes make mistakes, including both false alarms and failures to issue warnings at the right time.
Here again, because of the limited market penetration to date, we do not have any information on the effectiveness of the system in the field.
5.1.6 Adaptive cruise control
The adaptive cruise control system was introduced as a luxury feature, particularly for bumper-to-bumper driving. There are a range of such systems in the market. The approach shown in this diagram seems to be gaining dominance, because of its better performance in Europe (Fig 5).
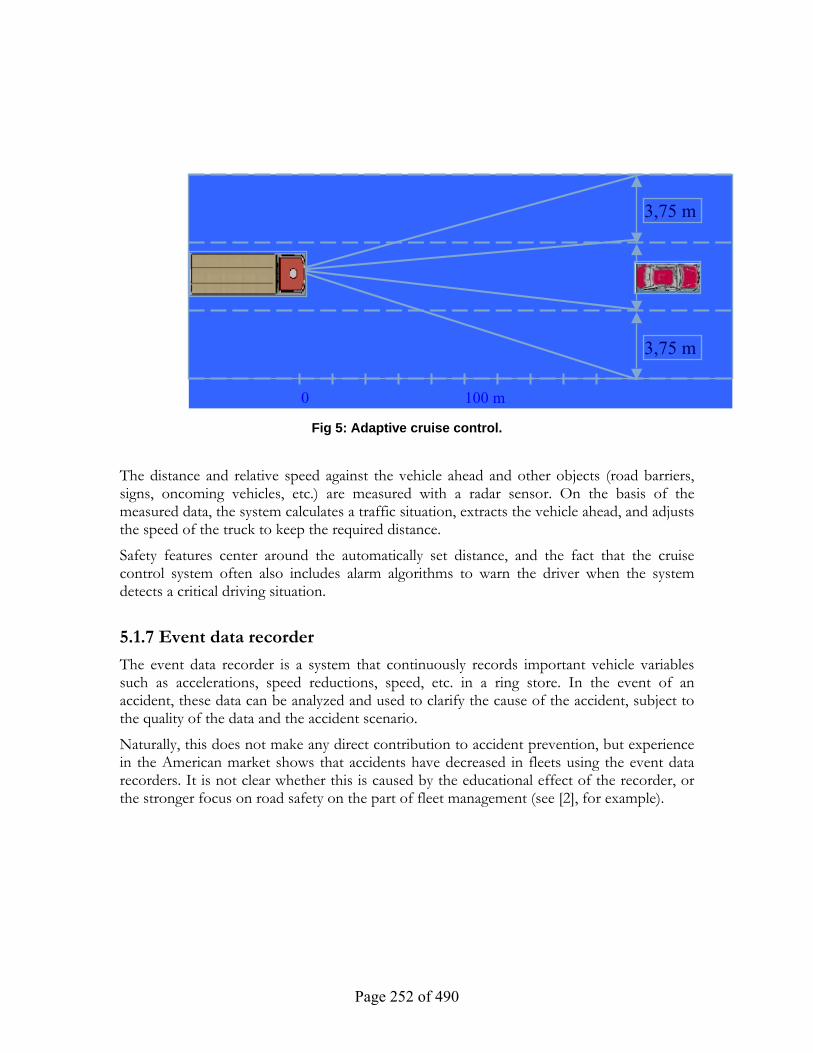
Page 252 of 490
Fig 5: Adaptive cruise control.
The distance and relative speed against the vehicle ahead and other objects (road barriers, signs, oncoming vehicles, etc.) are measured with a radar sensor. On the basis of the measured data, the system calculates a traffic situation, extracts the vehicle ahead, and adjusts the speed of the truck to keep the required distance.
Safety features center around the automatically set distance, and the fact that the cruise control system often also includes alarm algorithms to warn the driver when the system detects a critical driving situation.
5.1.7 Event data recorder
The event data recorder is a system that continuously records important vehicle variables such as accelerations, speed reductions, speed, etc. in a ring store. In the event of an accident, these data can be analyzed and used to clarify the cause of the accident, subject to the quality of the data and the accident scenario.
Naturally, this does not make any direct contribution to accident prevention, but experience in the American market shows that accidents have decreased in fleets using the event data recorders. It is not clear whether this is caused by the educational effect of the recorder, or the stronger focus on road safety on the part of fleet management (see [2], for example).
3,75 m
3,75 m
0 100 m

Page 253 of 490
5.2 Evaluation of the available systems The results of the evaluation are documented in Fig 6.
Fig. 5: System costs of implemented safety systems.
5.3 List of highly effective approaches from various initiatives The Working Group discussed a list of around 50 technical and non-technical approaches for enhancing the road safety performance of heavy duty vehicles. This section discusses only those systems that the Working Group expects to make the highest contribution to increased road safety. This does not mean that other systems will not be able to assist in improving road safety. However, any measures to promote the use of these systems will also help to boost the market penetration of systems not examined here, apart from measures specifically designed to change the provisions for the official approval of a particular system.
Effectiveness

Page 254 of 490
The Working Group decided against the use of quantitative indicators of reductions in road deaths in its evaluation of the systems for enhanced road safety performance, for two reasons. First, the data on accidents, as discussed in section 4, does not provide a sufficient basis for any such assessment. Secondly, it is not possible to assess the effectiveness of any particular system, particularly in comparison with other solutions or in an environment changed by the implementation of other systems. The Group has therefore made a qualitative assessment of the impact of each proposed system on a prominent accident scenario (see also 3.3.4). Effectiveness 5.3.1 Improving the frictional properties of commercial vehicle tires
There are significant performance differences between brake systems in heavy duty vehicles and passenger cars. Whereas cars achieve braking performance in the order of 10 m/s², a good figure for truck braking performance is around 6.5 m/s². Increased braking capacity has a direct positive impact on accident statistics.
The data of both the German Federal Statistics Office and insurance companies shows a marked decline (of around 10%) in the accident frequency of heavy Mercedes-Benz trucks against the market average following the implementation of an improved braking system as standard on those trucks. The potential for any further increase in braking performance is limited by the characteristics of commercial vehicle tires, as optimized for mileage and low rolling friction losses. On the basis of the physics involved, any optimization of tire characteristics requires either poorer mileage performance and rolling friction losses – which the market will not accept for financial reasons – or significant expenditure on tire research.
5.3.2 Emergency braking system
The high volumes of road traffic in central Europe make bumper-to-bumper driving a normal driving situation for heavy duty vehicles. Rear-end collisions are therefore one of the main accident scenarios, normally assumed to represent around 30% of all accidents involving heavy trucks on central European roads. In around 60% of such accidents, there was no reaction or an inadequate reaction from the driver.
The emergency braking system was developed to ameliorate this accident scenario. On the basis of the adaptive cruise control systems already on the market, the emergency braking system detects the risk of a rear-end collision and warns the driver. If the driver fails to respond, the system activates an emergency braking operation to prevent the accident or mitigate the consequences.
The Working Group discussed three development stages for emergency braking systems. The first technology to become commercially available will be a system that responds to traffic in front of the vehicle traveling in the same direction. The next development stage will also cope with stationary traffic, which accounts for a further approx. 10% of heavy truck accidents. The final stage will also respond to oncoming traffic. In a head-on collision scenario, applying the truck brakes just 1 s earlier dissipates as much energy as the flexible underrun protection system referred to below.

Page 255 of 490
5.3.3 Pedestrian protection system
In contrast with the situation for accidents involving passenger cars, passive measures designed to diminish the impact of the person against the vehicle structure are not among the viable strategies to reduce pedestrian fatalities in accidents involving heavy duty vehicles. Many injuries to vulnerable road users in accidents involving trucks take place when the person is thrown out onto the road after the collision with the vehicle, or when people are run over by the truck. As also in other contexts, the priority is to prevent accidents rather than mitigating their consequences.
Particularly in inner-city traffic, accidents involving pedestrians and cyclists are caused by the poor visibility for the driver in the immediate vicinity of the truck. The Working Group discussed an electronic system to detect the presence of vulnerable road users in the danger area around the truck, and to warn the driver or actively intervene if the driver fails to take action.
Technical solutions based on short-range radar, video systems, or laser scanners are currently at the research stage. The Working Group did not evaluate the differences between these technologies in terms of effectiveness, but did look at the legal constraints applicable to the use of short-range radar technology as part of the availability estimation process.
5.3.4 Extended flexible front underrun protection
In a front/front collision between a car and a truck, there are often fatalities in the car because of the very different masses of the vehicles and the geometrical incompatibility of the frontal structures. The legislative authorities have reacted to this situation by requiring a (rigid) front underrun protection system. Some truck manufacturers ( i.e. MAN, Volvo) offer enhanced flexible front underrun protection systems that can be provided within the existing legal constraints (dimensions and weight).
The Working Group evaluated a system based on a proposal from Scania. If the front of the truck could be made approx. 300 mm longer than the legally permitted maximum length, the survivable differential speed for a frontal collision between a passenger car and a truck would rise from approx. 60 km/h to approx. 90 km/h (60 km/h for the car, 30 km/h for the truck).
This system and its effectiveness were intensively debated in the Working Group, particularly since the latest results from the VC–Compat project showed that, in addition to the optimization of the truck front structure, it would also be necessary to make improvements in the car (retention system activation conditions). The evaluation provided below was the agreed Group consensus from that debate.
5.3.5 Inter-vehicle communication systems
Accident prevention systems based on inter-vehicle communication technology are currently at the initial research stage. The Working Group assessed a system that is able to communicate the vehicle’s planned trajectories to other vehicles in the vicinity. Such a system would clearly make a significant contribution to accident-free traffic, since this would create an environment requiring traffic participants to cooperate and think ahead.

Page 256 of 490
5.3.6 Infrastructure-supported intersection assistant
Accident statistics show that intersection accidents represent a major accident scenario. Preliminary studies by DaimlerChrysler research specialists and DEKRA have shown that purely vehicle-based systems are not able to make any significant contribution to reducing accidents, because the accidents in this situation are so diverse. The Working Group assessed a system in which infrastructure facilities – traffic sign systems, for example – can forward information on traffic approaching the intersection to intersecting traffic.
5.3.7 Interactive driver training
Some 85% to 95% of all road accidents, according to the statistics used, involve human error as a causal element. All the above suggested road safety enhancements are designed to compensate for human failure. It is well known that intensive driver training can make a significant contribution to traffic safety. For example, Shell AG [1] has demonstrated how road safety can be improved by identifying this as a priority for the actors involved. A number of techniques using driver training and awareness-raising to achieve enhanced road safety performance have been designed and implemented in practice. It is particularly interesting to note that some of these initiatives have been implemented in so-called third-world countries. The basic idea behind these campaigns is that road fatalities can be avoided by reducing the number of critical situations arising, through training and awareness-raising measures (including incentives). And the prevention of critical situations will inevitably diminish the probability of all kinds of accidents, whether minor, severe, or even fatal.
One approach to integrate driver training and awareness-raising is that of telematics-supported interactive driver training, which is already being provided by the industry. The driver’s onthe- job driving behavior is recorded, assessed according to various criteria (e.g. safety and economic use of resources), and reflected back to the driver in a feedback interview. This form of training has been shown to have a marked impact on fuel consumption. The Working Group believes that a similar impact on safety can be achieved, even through this cannot be demonstrated statistically because of the small number of drivers that have undergone this training to date.
5.4 Evaluation of future systems Since there are always restrictions of one sort or another on the availability of resources for the enhancement and implementation of new technologies or measures, it is necessary to focus in the first instance on those measures that can achieve maximum impacts with limited resources in terms of time, budget, or professional expertise. Such assessments are never onedimensional, and, accordingly, the Working Group assessed the approaches that are likely to have the highest impact on reducing road deaths (see also 5.3) in terms of the associated issues, mainly regarding resources, and placed them in portfolios.

Page 257 of 490
5.4.1 Availability
Given the product development lead times required for heavy duty vehicles, measures that have not yet been developed (i.e. by 2005) will not be able to play any significant part in reducing road deaths in 2010. The first priority, therefore, is to support the market penetration of those measures that are already available or are about to become so, in order that positive impacts can be achieved even in the short term.
Fig. 6: Availability of effective approaches towards enhanced road safety
performance for heavy duty vehicles. Interactive driver training is already offered by the industry, even if on only a small scale to date. This form of training could be provided on a larger scale to meet the demand through the more widespread installation of telematics platforms in heavy duty vehicles. The industry has announced the impending arrival of the various forms of emergency braking systems on several occasions. The market launch of the first system is imminent, and further stages are in preparation.
Person detection processes based on short-range radar technology are already available. Since current legislation does not allow the widespread implementation of these systems, and the other technologies have not reached the required level of maturity, the Working Group has assessed systems for preventing the accidents involving vulnerable road users as becoming available only in the medium term.

Page 258 of 490
The Group has also assessed the availability of an extended flexible front underrun system as medium-term at best, since the relevant legal requirements would not allow its implementation at present. Even if the required legal changes were made, there would still be a considerable period of development time, in view of the significant impact of this solution on the vehicle design concept.
Infrastructure-based measures could make a major contribution towards reducing road deaths. The Working Group’s assessment of availability only in the long term is based on the lack of business models for the implementation of this kind of technology and the inadequate resources available in the area of traffic infrastructure systems.
At present, there is no prospect of the introduction of commercial vehicle tires with similar friction values to those of passenger car tires, since the friction value is directly related to the rolling friction losses of the tires. As a result, any improvement in the friction characteristics would lead directly to increased fuel consumption, and therefore to an increased environmental burden. In this case, we have a conflict between two social values. The Working Group believes that achieving technological improvements that bring advances in both directions will be a slow process.
5.4.2 System costs
For systems not required by law, their success in the marketplace will be defined by their acceptance by the end customer. An important aspect of building acceptance is the price. The price factor for safety systems is much more prominent for trucks than it is for passenger cars, because of the extremely difficult economic situation facing truck drivers for some years. It can therefore be assumed that the lower the cost of a safety system to the end customer, the more likely it is to gain the required level of acceptance.
In its estimates of the costs for interactive driver training, the Working Group has assumed that the vehicle is fitted with a telematics platform that is economically viable through its use for fleet management purposes. If such a platform had to be purchased solely for training purposes, the system cost score would be between -1 and -2.
Extended flexible front underrun protection could be offered at low cost if it can be incorporated into the overall vehicle design concept, which impacts on availability, as shown above, and the associated engineering costs.
An infrastructure-based alarm system to provide warnings of potential intersection accidents could be implemented in the vehicle very economically, since today’s vehicles are essentially already fitted with all the operating and display components required for such a system.
The approaches requiring the use of an additional mechatronic system (emergency braking system, pedestrian protection system) have comparable cost ranges.

Page 259 of 490
Fig. 7: System costs of effective approaches towards
enhanced road safety performance for heavy duty vehicles. Systems designed to communicate their trajectory to other vehicles and respond reliably to information received from other vehicles are assessed as significantly more resource-intensive, and therefore more expensive. In addition to the communications facilities, this would require intensive networking of the system with other vehicle systems, leading to significant additional costs in comparison with other solutions.
The Working Group believes that any significant enhancements to the friction characteristics of commercial vehicle tires would lead to increased operating costs, even in the long term, hence the low score assigned for system costs.
5.4.3 Development costs
Another success criterion for the implementation of new road safety improvement systems is the risk carried by the industry for their development. Experience shows that safety systems are generally not profitable, because of the constraints associated with heavy duty vehicles. Accordingly, the higher the resource input required for a given approach, the less likely it is to be successful.
This is particularly evident in the case of infrastructure-supported systems, for which there are development and implementation costs to be borne by public authorities.
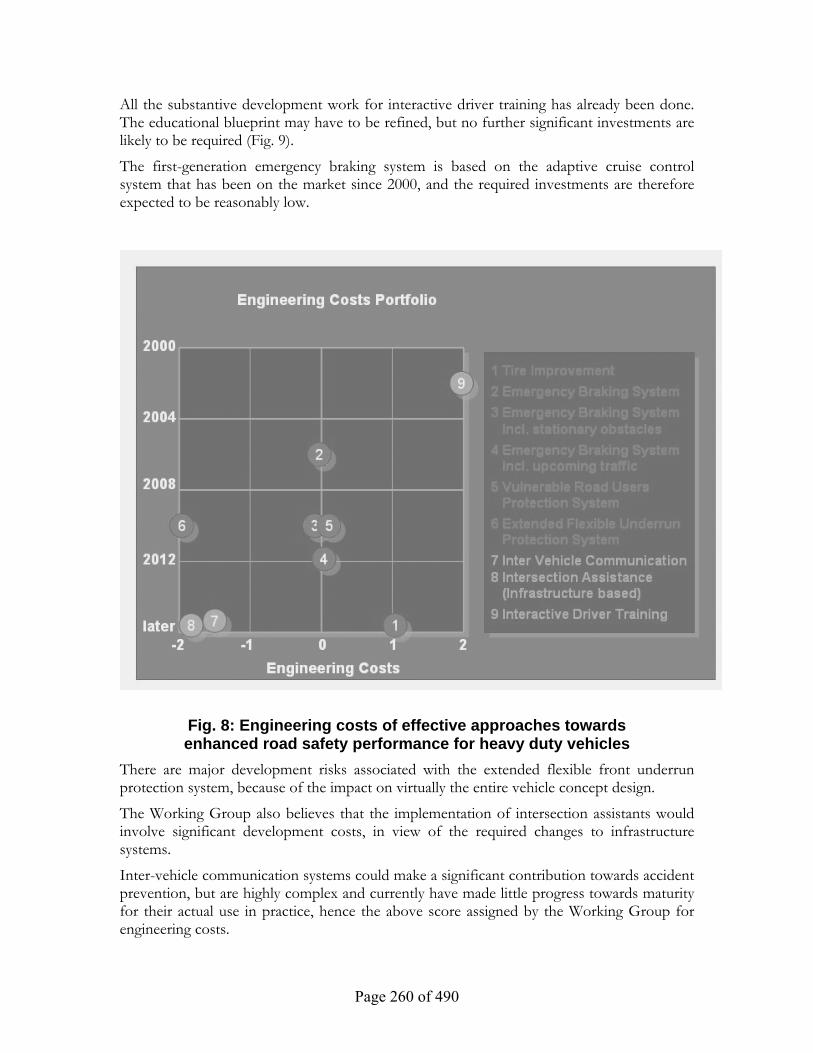
Page 260 of 490
All the substantive development work for interactive driver training has already been done. The educational blueprint may have to be refined, but no further significant investments are likely to be required (Fig. 9).
The first-generation emergency braking system is based on the adaptive cruise control system that has been on the market since 2000, and the required investments are therefore expected to be reasonably low.
Fig. 8: Engineering costs of effective approaches towards enhanced road safety performance for heavy duty vehicles
There are major development risks associated with the extended flexible front underrun protection system, because of the impact on virtually the entire vehicle concept design.
The Working Group also believes that the implementation of intersection assistants would involve significant development costs, in view of the required changes to infrastructure systems.
Inter-vehicle communication systems could make a significant contribution towards accident prevention, but are highly complex and currently have made little progress towards maturity for their actual use in practice, hence the above score assigned by the Working Group for engineering costs.
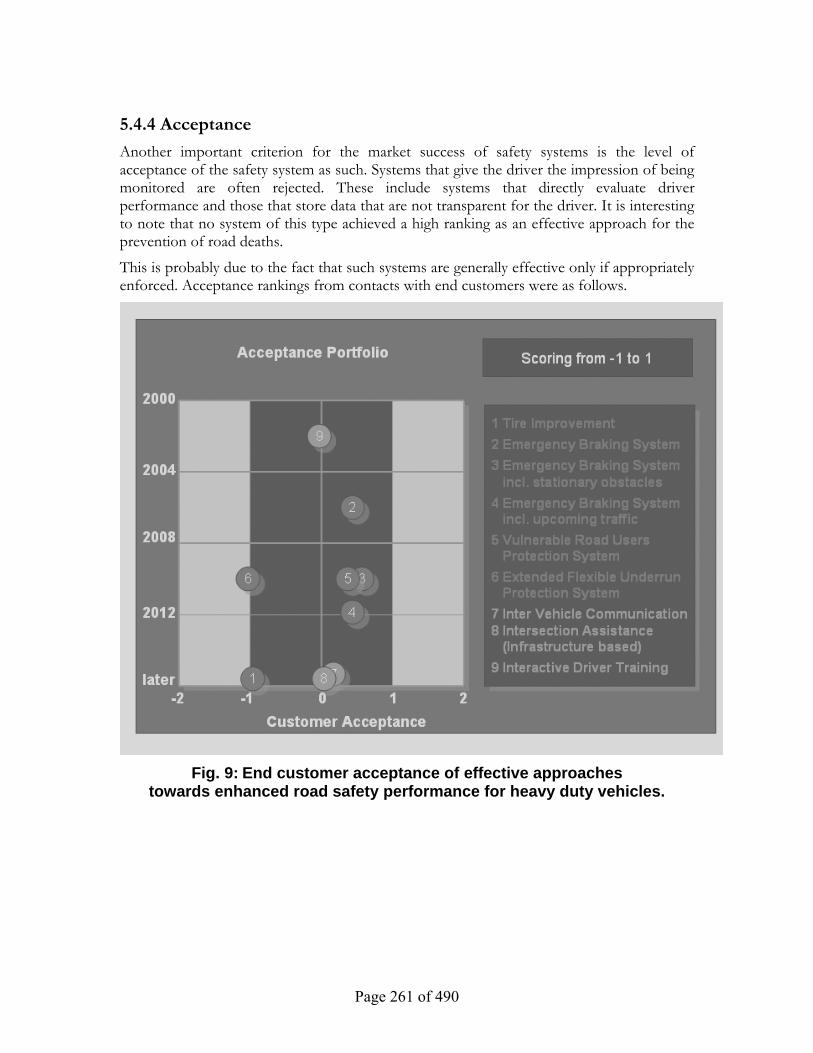
Page 261 of 490
5.4.4 Acceptance
Another important criterion for the market success of safety systems is the level of acceptance of the safety system as such. Systems that give the driver the impression of being monitored are often rejected. These include systems that directly evaluate driver performance and those that store data that are not transparent for the driver. It is interesting to note that no system of this type achieved a high ranking as an effective approach for the prevention of road deaths.
This is probably due to the fact that such systems are generally effective only if appropriately enforced. Acceptance rankings from contacts with end customers were as follows.
Fig. 9: End customer acceptance of effective approaches
towards enhanced road safety performance for heavy duty vehicles.

Page 262 of 490
Most of the systems examined here would be accepted by the customer provided that no additional cost was incurred. One requirement for customer acceptance would be met if there was another customer benefit in addition to increased safety. This kind of benefit is seen as being provided in the case of the emergency braking system, through the offer of adaptive cruise control functionality. For the system for preventing accidents involving vulnerable road users, greater ease of parking maneuvers or the prevention of minor damage could be seen as ancillary benefits of this kind. Experience shows that, in these conditions, a small proportion of customers are prepared to bear the additional costs for such a system.
The Working Group assessed improvements in tire performance as not acceptable to haulage operators, because of the higher operating costs involved. The extended flexible front underrun system is also considered to be unlikely to gain acceptance if it involves economic disadvantages through load volume and weight constraints.
6. Implementation obstacles and action priorities
6.1 Economic constraints
6.1.1 Business model
The Working Group evaluated approximately fifty suggestions for the enhanced road safety performance of heavy duty vehicles. In every case, the cost was one of the obstacles to implementation, if not the critical obstacle.
The heavy duty vehicles market differs significantly from the passenger car market on this point. Short-term economic considerations dominate all others in the commercial vehicle market. This explains the completely different penetration rates and speeds for safety systems in the two markets. Indeed, that difference was one of the reasons for setting up this Working Group.
Relevant publications (e.g. www.iru.org) indicate that road freight traffic in Europe is subject to very high underlying costs, even in terms of an international comparison, and also that haulage business operators are working in an extraordinarily tough competitive environment.
It is therefore understandable that economic survival is the first consideration for haulage companies when making decisions on vehicle equipment. Any investments required to meet social goals must take second place in this competitive environment.
This is the reason why a number of safety systems already available in the marketplace (e.g. ESP) are not penetrating the market in the case of heavy duty vehicles. In turn, the lack of market acceptance means that it is difficult for the manufacturers to continue work on the further development of these systems, since they are neither profitable, nor capable of achieving an adequate impact on reducing the occurrence of accidents. The technology leadership in driver assistance systems built up by the European industry over the last decade now seems to have been all for naught, judging by recent products coming onto the market in Asia.
Many sources (including eSafety) indicate that improved road safety includes economic aspects as well as the ethical issues involved.

Page 263 of 490
6.1.2 Action priorities
Given that the need for an appropriate business model for safety systems in heavy duty vehicles (and other road safety initiatives) has long been clearly identified, and since road safety is both a social goal of the European Union and an economic goal, ignoring this issue is simply not an option. The Working Group concludes that there are basically two approaches towards actively encouraging the implementation of safety systems.
6.1.2.1 Implementation by regulation
There have been a few examples of the successful introduction of safety systems onto the market, including in the heavy duty vehicle sector. However, these examples also demonstrate that this is an extremely slow process, and essentially applies to situations where the technologies are already standard, and it is a matter of bringing them into more widespread use. The creation of an “eSafety Project” designed to bring about the use of new technologies to increase road safety is not, therefore, a viable option in the view of the Working Group. This view is clearly supported by the latest examples of safety systems introduced by regulation: the special rear-view mirror or the rigid front underrun protection system.
6.1.2.2 Creation of attractive financial conditions
It has long been established practice in Europe to provide incentives for new systems as an effective way of supporting their introduction prior to the entry into force of the relevant regulations. The Group believes this approach would be more productive in both the long and short term.
In the short-term perspective, this view is based on the period of time required to implement regulations on the one hand, and incentives on the other. Experience shows that the pace of the implementation of regulations is dictated by the slowest member states. Incentives can also be introduced in individual member states. If incentives came into force in a few key states, they would then effectively apply Europe-wide, given the high volume of long-distance traffic movements.
In the long-term perspective, the Group’s thinking is based on the business model used by OEMs. Systems introduced by regulation do not provide the basis for any differentiation from the competition, or any advantage for individual OEMs. And particularly for highly complex safety systems, regulation can require only the implementation of systems that already exist. If safety systems were to be implemented essentially by regulation, there would be no economic stimuli for OEMs to develop the systems in the first place, since a business model could not be achieved either by a market pull or technology push. The result would be to make the introduction of new systems a much slower process.
To speed up the introduction onto the market of systems that are already developed or about to be launched on the market, the Working Group strongly advises using the tried and proven method of incentives. The low market penetration of safety systems at this stage in the heavy duty vehicle sector means that there is potential for achieving enhanced road safety performance, even within the short term.

Page 264 of 490
6.2 Legal constraints In an age in which electronics and software systems are playing a crucial role in the operation of motor vehicles, it is probably inevitable that legislative and regulatory provisions are unable to keep up with the latest technical advances. This means there is a danger that obsolete laws and regulations could jeopardize any form of technical enhancements. Conversely, legislation can play a valuable role in laying down a solid, enduring framework for ongoing technical advances. Setting the right balance between flexible legislation that can keep abreast of the latest technology on the one hand, and provide robust ground rules on the other is a major part of creating an attractive business environment. Particular concerns of the Working Group were the authorization of new electronics systems and the drafting of regulations on the dimensions and weight of heavy duty vehicles.
6.2.1 Authorization of new electronic systems
The recent authorization of electronic braking systems, ESP, steer-by-wire, and other comparable systems demonstrates that if public authorities are involved in the process at the appropriate time, the process of implementing such products – while not without its problems – is not actually impeded. A particularly positive feature is the fact that certifying bodies have significantly improved their expertise over the last few years, and are therefore in a position to assess state-of-the-art electronic safety systems.
A further improvement in the authorization process will come with the introduction of the “horizontal approach.” At present, different provisions apply for specific vehicle systems, under a “vertical approach”: brake systems regulations, steering systems regulations, etc. Today’s electronic safety systems can no longer be classified in the traditional sense, however, so that several sets of regulations may apply in a given case. This means that the vertical approach is reaching its limits, making it difficult to obtain the required permits. The competent committees are currently working on drafting a generally applicable (horizontal) directive for the authorization of complex systems, which will simplify the permit process for modern systems.
6.2.2 Dimensions and weights
The situation regarding adaptations to the regulations on dimensions and weights appears to be less flexible. These regulations significantly affect vehicle design concepts, and it is important for any changes in these regulations to be announced well in advance, because of the major impact at the capital investment level.
The extended flexible front underrun protection system is discussed above under 5.3.4. This approach towards enhanced road safety performance could make a real contribution to reducing the number of fatalities in passenger car / truck collisions. The implementation of the system requires a longer vehicle front structure. The total length of a truck is laid down by law, i.e. the introduction of this protection system would be at the expense of cargo length, which would make trucks fitted with this safety system less profitable to operate. As pointed out several times in this report, the economic situation of haulage companies does not allow any increase in operating costs at present, and, accordingly, this safety measure would achieve only very low market penetration rates.
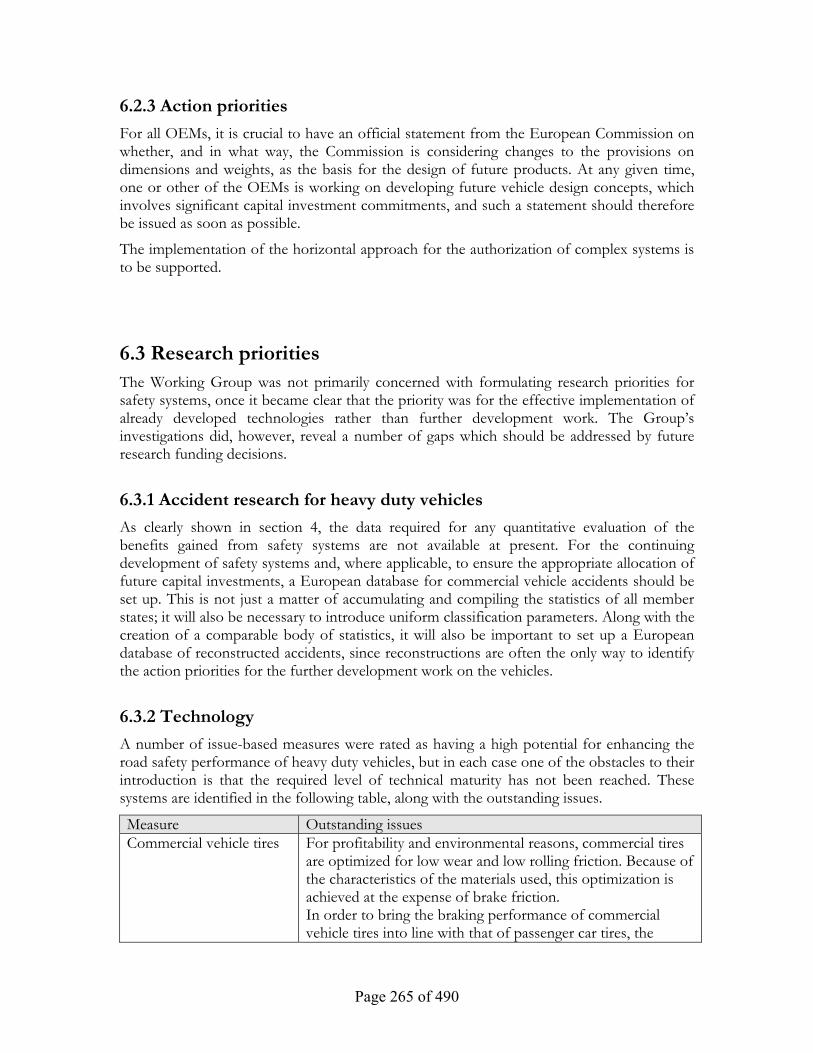
Page 265 of 490
6.2.3 Action priorities
For all OEMs, it is crucial to have an official statement from the European Commission on whether, and in what way, the Commission is considering changes to the provisions on dimensions and weights, as the basis for the design of future products. At any given time, one or other of the OEMs is working on developing future vehicle design concepts, which involves significant capital investment commitments, and such a statement should therefore be issued as soon as possible.
The implementation of the horizontal approach for the authorization of complex systems is to be supported.
6.3 Research priorities The Working Group was not primarily concerned with formulating research priorities for safety systems, once it became clear that the priority was for the effective implementation of already developed technologies rather than further development work. The Group’s investigations did, however, reveal a number of gaps which should be addressed by future research funding decisions.
6.3.1 Accident research for heavy duty vehicles
As clearly shown in section 4, the data required for any quantitative evaluation of the benefits gained from safety systems are not available at present. For the continuing development of safety systems and, where applicable, to ensure the appropriate allocation of future capital investments, a European database for commercial vehicle accidents should be set up. This is not just a matter of accumulating and compiling the statistics of all member states; it will also be necessary to introduce uniform classification parameters. Along with the creation of a comparable body of statistics, it will also be important to set up a European database of reconstructed accidents, since reconstructions are often the only way to identify the action priorities for the further development work on the vehicles.
6.3.2 Technology
A number of issue-based measures were rated as having a high potential for enhancing the road safety performance of heavy duty vehicles, but in each case one of the obstacles to their introduction is that the required level of technical maturity has not been reached. These systems are identified in the following table, along with the outstanding issues.
Measure Outstanding issues Commercial vehicle tires For profitability and environmental reasons, commercial tires
are optimized for low wear and low rolling friction. Because of the characteristics of the materials used, this optimization is achieved at the expense of brake friction. In order to bring the braking performance of commercial vehicle tires into line with that of passenger car tires, the
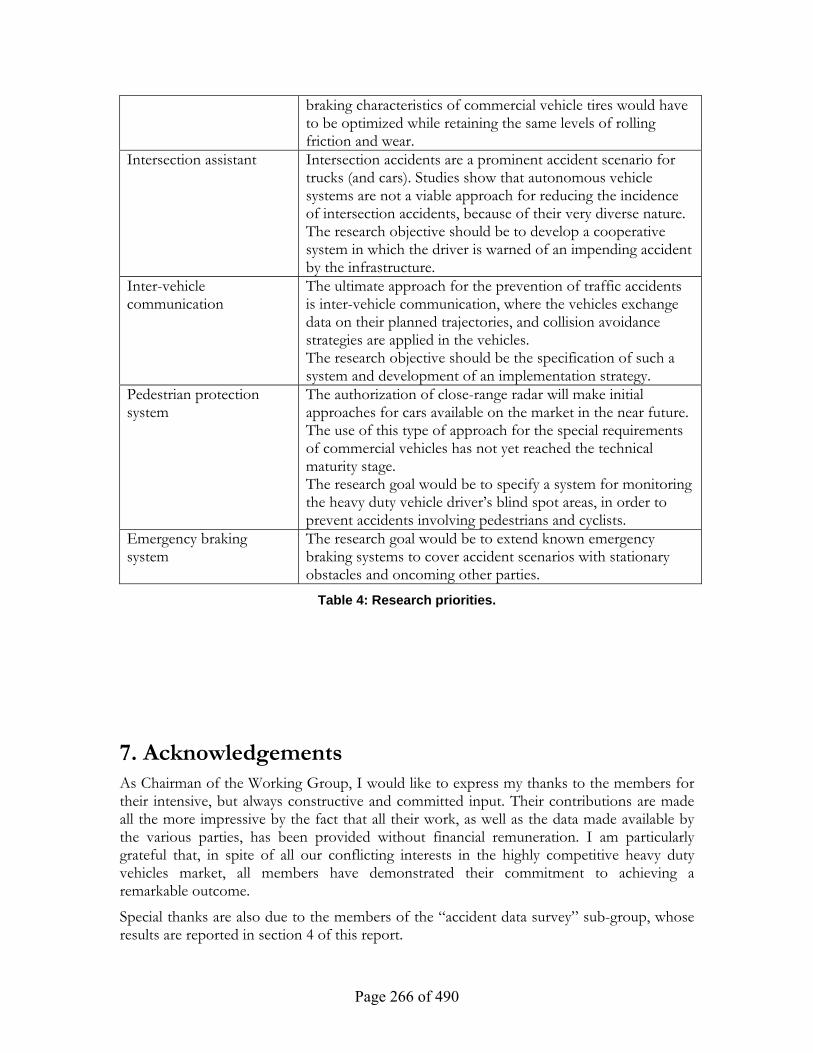
Page 266 of 490
braking characteristics of commercial vehicle tires would have to be optimized while retaining the same levels of rolling friction and wear.
Intersection assistant Intersection accidents are a prominent accident scenario for trucks (and cars). Studies show that autonomous vehicle systems are not a viable approach for reducing the incidence of intersection accidents, because of their very diverse nature. The research objective should be to develop a cooperative system in which the driver is warned of an impending accident by the infrastructure.
Inter-vehicle communication
The ultimate approach for the prevention of traffic accidents is inter-vehicle communication, where the vehicles exchange data on their planned trajectories, and collision avoidance strategies are applied in the vehicles. The research objective should be the specification of such a system and development of an implementation strategy.
Pedestrian protection system
The authorization of close-range radar will make initial approaches for cars available on the market in the near future. The use of this type of approach for the special requirements of commercial vehicles has not yet reached the technical maturity stage. The research goal would be to specify a system for monitoring the heavy duty vehicle driver’s blind spot areas, in order to prevent accidents involving pedestrians and cyclists.
Emergency braking system
The research goal would be to extend known emergency braking systems to cover accident scenarios with stationary obstacles and oncoming other parties.
Table 4: Research priorities.
7. Acknowledgements As Chairman of the Working Group, I would like to express my thanks to the members for their intensive, but always constructive and committed input. Their contributions are made all the more impressive by the fact that all their work, as well as the data made available by the various parties, has been provided without financial remuneration. I am particularly grateful that, in spite of all our conflicting interests in the highly competitive heavy duty vehicles market, all members have demonstrated their commitment to achieving a remarkable outcome.
Special thanks are also due to the members of the “accident data survey” sub-group, whose results are reported in section 4 of this report.

Page 267 of 490
We are grateful for the constant support for the Working Group from representatives of the European Commission. I would specifically like to mention Mr. André Vits and Mr. Juhani Jääskeläinen by name in this regard.
Valuable input was received from our colleagues in the “Implementation Roadmap” and “Accidentology” working groups, and we would like to express our gratitude to them, and also to acknowledge their results.
The actors and institutions involved have long been aware of the issue of providing appropriate incentives for safety systems, and the Working Group is extremely pleased to note that this is to be addressed as a priority matter in the near future. In particular, we welcome the work done by the eSafety project on the implementation of an incentives scheme. Especially worthy of attention is the document entitled “Incentives Schemes applied by the Member States in the Transportation Sector: Towards the Design of a Strategy to Support the Adoption of Safety,” archived under www.escope.info. The statement includes the following statement from FIA President Max Mosley, which is the perfect way to end this report:
“As yet there have been no fiscal incentives for safety related products. This is a serious omission that is unnecessarily delaying the introduction of vehicles that can save lives on our roads today. If consumers can have tax breaks for cleaner cars, why not safer cars too? After all, safety should really be considered as another aspect of a healthy and sustainable environment.”
Sources
1] www. Shell-international.com
[2] www.ntsb.gov/events/symp_rec/proceedings/authors/kowalick.htm
[3] www.iru.org
Appendix [1] Recommendations
Appendix [2] Extract from scoring table

Page 268 of 490
Appendix [1] - Recommendations
Recommendation Part
3.4 Heavy Duty Vehicles
The differences between passenger cars, vans and heavy duty vehicles give a need for a special treatment to ensure a further increase of vehicle safety of heavy duty vehicles.
Due to the high mass of heavy duty vehicles the avoiding of accidents (primary safety) should have a higher priority than the reduction of accident consequences (secondary safety). Surely the combination of both measures will have the highest impact in reducing fatalities.
The broad market penetration of available or ready to market vehicle safety systems is hindered by a missing business case.
The current regulations for masses and dimensions hinder, if the load length should be kept, the introduction of an advanced passive safety system.
The member states therefore should
(1) promote the market penetration of safety systems by granting incentives,
(2) agree in a harmonized approach for additional length and weight for a passive
safety system.

Page 269 of 490
Action Items for the EC
Commission Action Explanation / Progress 12 The Commission will actively
promote the introduction of incentives for Safety Systems in Heavy Duty Vehicles (HDV).
The main obstacle for the introduction of safety systems in the market for HDV is the cost aspect. The Commission will promote the introduction of incentives for Safety Systems that affect main accident fields. Incentives may be the adoption of taxes and tolls or other non financial advantages.
13 The EC will urgently clarify whether or not it will adopt legislation on mass and dimensions for a time frame of 2008 to 2012 to support an advanced passive safety system.
A Safety System that may have significant impact on fatalities is the Extended Flexible Underrun Protection Device. The Extended Flexible Underrun Protection Device needs an extension of 300mm of the vehicle length and an additional weight of 100-150 kg. The extension of the length and the additional weight need a change of the legislation (mass and dimensions) to be successful in the market. This change of legislation should allow additional length and weight as long as particular crash compatibility is achieved.
14 The Commission will investigate the socio economic impact of high rated Safety Systems for Heavy Duty Vehicles.
Taking main accident fields for HDV into account the following Safety Systems may contribute significantly in the reduction of fatalities: Primary Safety: High Performance Braking Systems, Emergency Braking System, Vulnerable Road User Detection, Warning and Braking system, Intersection Assistance, Inter Vehicle Communication Secondary Safety: Extended Flexible Underrun Protection Device
15 The EC will promote further investigations on heavy duty vehicle accidentology in order to achieve comparable data bases.

Page 270 of 490
Appendix [2] – Extract from scoring table
Safety Measures Working List - eSafety Working Group Heavy Duty Vehicles Market Introduction 2004 or earlier
Portfolio
Safety Measure Short description Accident Type (primary) / normal driving
Introduction Obstacle
Cus
tom
er A
ccep
tanc
e
Eff
ecti
ven
ess-
low
Eff
ecti
vene
ss-
hig
h
Syst
em C
osts
En
gin
eeri
ng
Cos
ts
1 ESP for semi trailer trucks, slippery conditions
Stabilize vehicle by single wheel braking when yaw-rate does not reflect the steering angle
single truck accidents costs 0 0,5 1 1 1
2 Rollover Protection for single trucks and semi trailer trucks
Stabilize vehicle by single wheel braking when speed and steering angel causes threat of roll over
single truck accidents costs 0 0,5 1 1 1
3 Lane departure warning system
Driver warning if vehicle is likely to leave the lane
single truck accidents costs 0 0 1 2 2
4 Adaptive Cruise Controll Controls distance to vehicle in front normal driving /
rear end collisions costs 0,5 -1 0 0 0
6 Flexible Front Underride Protection
Activates car crumble zone in case of a front crash Car/Truck accident costs -1 0,5 1 2 2
8 Lane Change Assistant Driver warning if vehicle is likely to hit other vehicle in case of a lane change Car/Truck accident costs 0 0 0,5 1,5 1
9 Backing assistance /video or ultra sonic based
Alert if obstacle occurs while backing general approach/normal driving
costs, responsibilities, harmonization of interface
0,5 -1 -1 1,5 1
10 Seat Belt Warning Warning to driver, if vehicle is starting and belt is not properly fixed general approach user acceptance -1 1 1 2 2
11
Driver Alertness Monitoring, Driver Drowsiness Monitoring, Health monitoring
Monitor drivers behaviour to gain information about their alertness normal driving
Maturity, liability, customer acceptance
-1 -1 0,5 0 0
12 Event data recorder Store vehicle data in case of an accident general approach user acceptance, cost
-1 -1 0 1,5 2
13 On Board Diagnostics Measure the vehicle health status general approach 1 -2 -2 2 2
14 Runflat Indicator / Tire Pressure Monitoring System
Driver warning if tyre runs flat general approach/normal driving
costs 1 -2 -1 1 1
15 Service-/Assistance Call
Service provided by OEMs and third parties
general approach/normal driving
costs 0,5 -2 -2 1 1
16 interactive driver training give feedback to driver about his behaviour
general approach/normal driving
costs 1 1 2 0 2
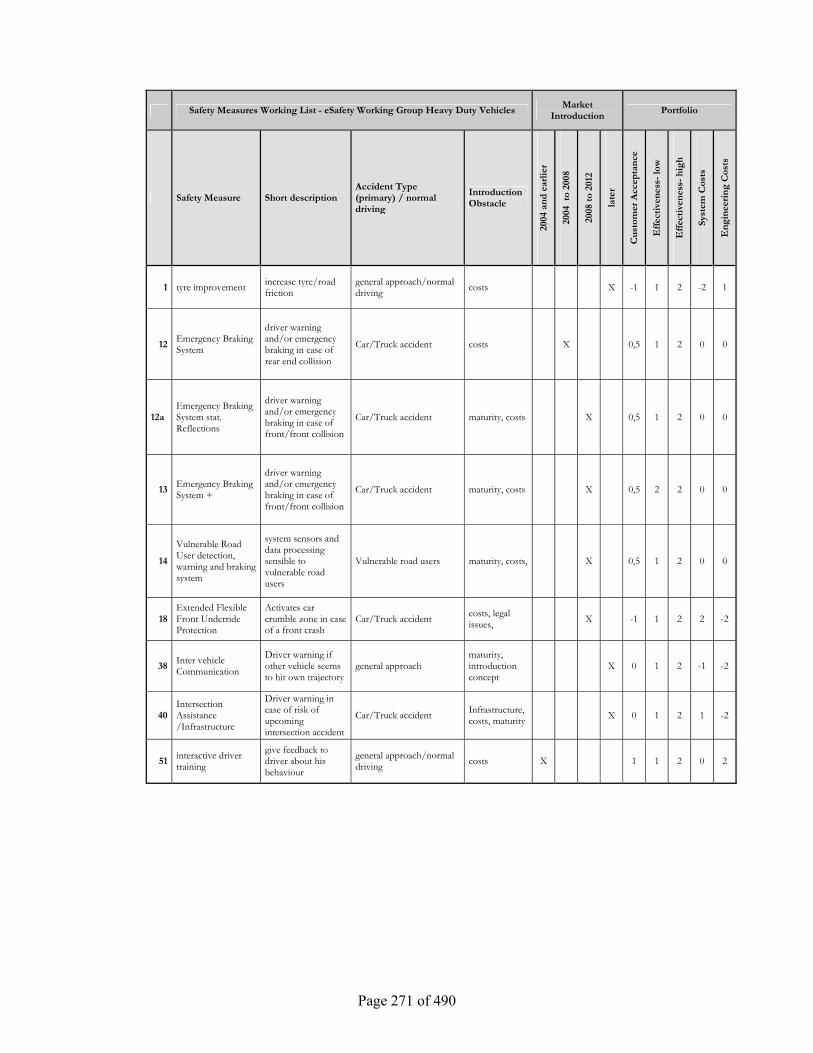
Page 271 of 490
Safety Measures Working List - eSafety Working Group Heavy Duty Vehicles Market
Introduction Portfolio
Safety Measure Short description Accident Type (primary) / normal driving
Introduction Obstacle
2004
and
ear
lier
2004
to
2008
2008
to
2012
late
r
Cu
stom
er A
ccep
tan
ce
Eff
ecti
vene
ss-
low
Eff
ecti
ven
ess-
hig
h
Syst
em C
osts
Eng
inee
rin
g C
osts
1 tyre improvement increase tyre/road friction
general approach/normal driving costs X -1 1 2 -2 1
12 Emergency Braking System
driver warning and/or emergency braking in case of rear end collision
Car/Truck accident costs X 0,5 1 2 0 0
12a Emergency Braking System stat. Reflections
driver warning and/or emergency braking in case of front/front collision
Car/Truck accident maturity, costs X 0,5 1 2 0 0
13 Emergency Braking System +
driver warning and/or emergency braking in case of front/front collision
Car/Truck accident maturity, costs X 0,5 2 2 0 0
14
Vulnerable Road User detection, warning and braking system
system sensors and data processing sensible to vulnerable road users
Vulnerable road users maturity, costs, X 0,5 1 2 0 0
18 Extended Flexible Front Underride Protection
Activates car crumble zone in case of a front crash
Car/Truck accident costs, legal issues, X -1 1 2 2 -2
38 Inter vehicle Communication
Driver warning if other vehicle seems to hit own trajectory
general approach maturity, introduction concept
X 0 1 2 -1 -2
40 Intersection Assistance /Infrastructure
Driver warning in case of risk of upcoming intersection accident
Car/Truck accident Infrastructure, costs, maturity X 0 1 2 1 -2
51 interactive driver training
give feedback to driver about his behaviour
general approach/normal driving costs X 1 1 2 0 2

Page 272 of 490
4.6 Human-Machine Interaction Working Group The Working Group was established in February 2003 and published its final report in February 2005. Participants were divided into two groups, with the Commission participating in both:
• An Expert Group, consisting of a small number of participants to promote efficient group-work: Daniel Augello, Renault (F) Stefan Becker, Ford (DE) Lutz Eckstein, DaimlerChrysler (DE), Annie Pauzie, INRETS (F) Christhard Gelau, Bast (DE) Alan Stevens, TRL (UK)
• A Ring Group, consisting of a wider group of interested experts. This
group was kept fully informed of the Expert Group’s work, receiving all papers and materials as well as invitations to provide comments and input. Michel Fond, Orange France (F); Sylvia Gotzen, FIGIEFA (B); Christophe Guillaneuf, FIGIEFA (F) ; Paul Piamonte, Volvo Technology Corporation (SE) ; Lennart Palmqvist, Volvo Technology Corporation (SE) ; Martin Rowell, Navteq (NL) ; Vincent Godec, Navteq (NL) ; Jean-Pierre Cheynet, UTAC (F) ; Angelos Bekiaris CERTH – HIT (GR); Joachim Scholten BMW (DE); Bernard Favre, Renault VI (F); Oliver Carsten, Leeds University (UK); Jan Paul Peters, European Association of Motorcycles Manufacturers (B); Christopher Patten Vägvert, Swedish Road Administration (SE); Cathy Jenkins, UK Department for Transport (UK); Andrea Pinkerton, Speciality Equipment Market Association; Alex Schirmer, Homologation consultants; Patrice Reihac, Valeo.
The Working Group was co-chaired by Annie Pauzie, Christhard Gelau and Alan Stevens. The specific objectives were:
1. Identify HMI-related problems likely to impact negatively on safety or market penetration of in-vehicle driver information and assistance systems
2. Explain all relevant problems and reach consensus on the problem definition 3. To identify where there is consensus on a solution approach and where the issue
is still “open” 4. To develop a work plan to resolve issues and solve problems.
The principal scope of the Expert Group was “M1” vehicles (basically passenger cars). The initial focus was in-vehicle information and communication systems (IVIS). The Working Group considered amendment and development of the existing EU Statement of Principles for HMI, taking account of views expressed by Member States and including issues of HMI safety assessment and nomadic devices. The approach focussed on assessment methods rather than simplistic “pass/fail” criteria
Page 273 of 490
The Working Group took a balanced risk/benefit approach to implementation rather than assuming that provision of more information always decreases safety. This supports the eSafety approach that has both safety and market aspirations. Important workshops took place in 2003, 2004 and 2005 with industry and with Member states to collect their comments and to inform them about the progress of the working group. The final report was presented in February 2005 and contained numerous recommendations, including the urgent revision of the European Statement of Principles on HMI.
Page 274 of 490
4.6.1 Recommendations from the eSafety-HMI Working Group, February 2005
Foreword
The importance of a safe Human Machine Interaction (HMI) for in-vehicle information and communication systems has been stressed many times in resolutions, opinions and conclusions of several European institutions. In January 2000, the Commission adopted a first “Recommendation on safe and efficient in-vehicle information and communication systems: a European Statement of Principles on human machine interface” (ESoP)(OJ L19, 25.1.2000, p.64), which was voluntarily adopted and followed by car manufacturers in Europe.
In 2002, the Commission, together with Industry launched a large initiative aiming at promoting active road safety: the eSafety initiative.
Taking into account the evolution of technologies, and the increasing development of nomadic devices in cars (Mobile telephone, personal digital assistants, laptop), it was necessary to establish the state-of-the-art with respect to HMI and to re-define responsibilities among the different stakeholders.
This report is the result of 2 years of work, within the framework of the eSafety working group on HMI. It was written on a voluntary basis by a group of experts issued from major laboratories and institutes in Europe and from key industrial companies. A large group of specialists were kept informed and their comments were taken into account. Consensus and balance are key words for this report. Consensus between scientists and industrialists to take into account financial constraints and user interests; consensus among industrialists to respect the spirit of competitiveness. Balance among the authors of this report (50% from industry and 50% from labs/public institutes) and balance in terms of responsibilities among the stakeholders.
I am pleased to present this report and I would like to thank the authors for the huge amount of work they have put into it.
Executive Summary
One major goal of the eSafety Initiative is to promote the introduction of information and communication systems as well as of Advanced Driver Assistance Systems (ADAS) in order to contribute to the goal of reducing the number of traffic deaths in the EU by fifty percent in the year 2010. It is acknowledged that a specific system which is expected to provide a safety benefit may also introduce a certain risk – the balance of risks and benefits needs to be acceptable in order to gain a contribution to the ultimate goal of reducing the number of traffic fatalities.

Page 275 of 490
The importance of a safe human machine interface (HMI) for in-vehicle information and communication systems has been stressed many times in resolutions, opinions and conclusions of several European institutions. Finally, in December 1999, the Commission adopted a “Recommendation on safe and efficient in-vehicle information and communication systems: a European Statement of Principles on human machine interface” (OJ L19, 25.1.2000, p.64). In addition, the EC published an expansion of these Principles (hereafter called ESoP) by its expert group (dated July 2001). Member States were asked to inform the EC about the knowledge and adherence to the Principles and their impact in the Member States within 2 years after its publication.
In order to identify possible needs for revision of the ESoP and accompanying measures to promote its application and responsible use of information and communication systems by drivers the eSafety Working Group on HMI analysed the above mentioned Member State responses, reviewed research results and expanded on specific problem areas. The identified problems and possible solutions were structured using the three dimensions ‘HMI aspect’, ‘system type’ and ‘stakeholder’ resulting in a three-dimensional HMI-solultion-matrix. By this approach, not only the technical solution but also other important aspects like driver/consumer behaviour can be taken into account.
As a result of this process, the WG HMI makes on the one hand specific recommendations on the revision of the European Statement of Principles, on the other hand recommendations for actions on focus areas and of defined stakeholders. The EC will be writing a Communication to the Parliament and Council during 2005, which contains specific recommendations on HMI based on expert consensus within the WG-HMI.
First of all a revised European Statement of Principles should promote the goal of the eSafety Initiative by supporting the introduction of well designed systems into the market and by taking into account both risks and benefits of these systems, thus not impeding innovation.
Secondly, the revised principles should take into account the capabilities and constraints of all stakeholders and the market by being applicable during the development process in terms of complexity, costs and time also by small system manufacturers. Since it is the driver, who finally decides whether he buys and uses e.g. a fully integrated navigation system or a nomadic device or a paper map, the intention should be to promote good HMI and less to exclude certain functionalities by simplistic pass/fail criteria.
Thirdly it is important to keep up the clear distinction between principles on installation, principles on information presentation, principles on design of interaction and principles on system behaviour, which has been introduced by the ESoP. The HMI-solution-matrix clearly shows that the distribution of responsibility and solutions varies according to these aspects. Moreover this precise distinction is important to maintain a logical structure of the principles and it helps to avoid cross references and redundancies, thus making them easy to understand and to work with.
In general the current version of the ESoP lacks a clear allocation of relevant standards, rules and directives to the individual principles. This causes the impression that the principles contained in the guideline are very general and not applicable in detailed design. Looking at the “Expansion of Principles” issued in June 2001 reveals that, in many cases, the application of a specific principle requires compliance with well defined ISO-standards, rules and directives. Therefore the Expansion of Principles should be used as a basis for a revised European Statement of Principles.
Page 276 of 490
More specifically the WG recommends amending the scope of the ESoP by a clear distribution of responsibilities including post-manufacture issues, Fleet Managers and Employers. In addition the responsibility of service providers and manufacturers of specialized systems (e.g. express delivery systems) should be stated more clearly. The principles on system installation should be amended by a specific criterion and a simple verification procedure, e.g. by adopting the 30 degree-rule from the current version 2.1 of the American AAM-guideline. Moreover the aspect of Passive Safety should be explicitly addressed. Regarding information presentation a validated procedure for the evaluation of information on a single screen should be provided, for example by referring to the expected ISO-standard on the occlusion method. Criteria addressing task duration like total glance time are judged misleading since the duration of secondary task operation is primarily determined by the driver and moreover “task” cannot be precisely defined. In general the degree of attentional shift away from the driving task is regarded as decisive, not its integral or duration. Analysing the principles on system interaction the WG HMI sees the need to define more precisely, how many inputs a short sequence of interactions may require before it has to be interruptible. Finally also the principles on system information should be revised in order to address important aspects of system use more clearly.
Concerning the Focus of Nomadic Devices (NDs) the working group recommends that the product-responsible organisations make sure, that specific functions not compatible with the driving task are inaccessible for the driver while the vehicle is in motion. The product-responsible organisation should also provide an installation kit according to ESoP and appropriate consumer information. The responsibility for the installation itself will rest on the driver or his employer in case of non-private use. Authorities should ensure secure fixing by appropriate means, e.g. performance tests on installation, and should inform the relevant stakeholders and drivers about their responsibilities not only concerning manipulation or misuse.
In order to address the Focus of Service Providers - which is closely linked to the issue of nomadic devices - the Working Group recommends development of a Safety Agreement starting with a workshop planned by ERTICO within the AIDE framework. In order to enable the “adaptation” of ND-use to the specific automotive environment, one solution could be a standard for interfacing between the vehicle and the ND, giving the plugged ND access to an integrated HMI (complying with ESoP) with the capability of applying filtering criteria for access to functions depending on the driving context and the possible impact on traffic safety.
The third Focus area addresses Fleet Managers/Owners and Employers. Their responsibility should be clarified in respect of existing Health and Safety Directives and they should be adequately informed by the EC and Member states.
From the Working Group’s perspective Authorities play a decisive role in actively ensuring that the ESoP is effectively disseminated, known and used by all responsible stakeholders. They should also provide general information to drivers on safe use of in-vehicle information and communications systems and promote self-commitment of ESoP compliance for manufacturers of after-market systems and nomadic devices which are intended to be used by the driver while driving. Authorities should also monitor the impact of the ESoP on the market for aftermarket and nomadic devices, and evaluate the safety impact of in-vehicle information and communication systems by collecting and analyzing accident data. Moreover they should take measures to ensure secure fixing of devices according to ESoP, hands-free use of nomadic devices and the inaccessibility of movies, TV and video games by the driver while driving.

Page 277 of 490
Finally the Working Group identifies specific research needs on the phenomenon of driver distraction itself as well as on assessment methods which help to quantify contributing factors and the overall effect on driving performance. Standardization of scientifically well founded and understood methods is an important contribution to harmonization by making the evaluation of different system designs comparable. Introduction
Following the publication of the European Statement of Principles for in-vehicle information and communication systems, responses from the Member States concerning application of the Principles have been studied by the eSafety Working Group55 on HMI (Chapter 1).
On this basis Chapter 2 analysis the situation concerning HMI and defines specific focus areas. One addresses the increasing availability of “nomad devices” and, to a lesser extent after-market systems, which gives particular cause for concern as their lack of integration within the vehicle may cause additional driver workload. Another important issue is due to the fact, that multiple Stakeholders contribute to delivering information services. Chapter 2 also discusses scientific evidence on the safety impact of HMI and the potential and limitations of HMI evaluation.
Chapter 3 explains the tool/framework which is used in order to structure these current HMI issues and relates them to the European Statement of Principles. The basis is a three-dimensional Matrix, called “HMI Solution Matrix”, which consists of the dimensions “HMI-aspect”, “system type” and “stakeholder”.
In Chapter 4 the HMI Solution Matrix is completed resulting in specific proposals for the amendment of the current ESoP.
On this basis the goals and recommendations for a revised ESoP are derived in Chapter 5 and compared to similar efforts in the United States and Japan.
Chapter 6 provides, in addition, specific recommendations for specific focus areas:
• Nomadic devices • Service Providers • Fleet Operators and Employers • Authorities • Research
Finally Chapter 7 summarizes the recommendations on a revised ESoP as well as on accompanying measures like driver information, ESoP dissemination and enforcement of specific aspects structured by stakeholder.
55 Annex A describes the composition of the eSafety Working Group (WG) on HMI (Human Machine Interaction).
Page 278 of 490
The recommendations were presented during an open forum on HMI in June 2004 and subsequently refined with other stakeholders and discussed during a high-level meeting with authorities on 27th of September 2004 in Brussels. They form the basis for a revision of the current ESoP announced by the EC for the first trimester of 2005.
The WG HMI has principally concentrated on driver information and communication systems. Advanced Driver Assistance Systems56 (ADAS) are fundamentally different and therefore require a different approach in terms of Human Machine Interaction (HMI). Information and communication systems can be approached in terms of installation, information presentation, interaction and use, always aiming at minimizing the attentional demand. Advanced Driver Assistance System address the primary task of driving, which means, that its HMI needs to attract sufficient driver attention, e.g. when providing warnings. Other additional issues involve the co-operation with the driver in execution of the driving task.
Compared with information and communication systems, Advanced Driver Assistance Systems are relative novel. There is still a need to clearly define what constitutes an ADAS. In contrast with information and communication systems, Advanced Driver Assistance Systems are so closely integrated with vehicle controls that there is very limited scope for after-market systems: ADAS are principally within the domain of mainstream vehicle manufacturers, who are very aware of safety and liability issues.
Basically it is possible to define relatively high-level human factors principles for ADAS (Lansdown and Stevens, 200357; RESPONSE 2-Checklist); descriptions at such a general level are, however, of limited use to practising designers. Clearly, some information and communication system design principles, as distilled in the ESoP, do apply to assistance systems but the principles would need to be re-visited and extended for assistance systems because they actively assist the driver in performing the primary driving task by information (e.g. “vehicle ahead”), warning (e.g. “high closing velocity”) and/or assistance (e.g. applying the brakes). Depending on the level of detail it is anticipated that different principles would be applicable to different ADAS functions.
Design principles for ADAS are currently being addressed in a number of EC FP6 research projects: for example, AIDE is considering systems that co-operate with the driver; and in RESPONSE3 (part of the PReVENT project) a Code of Practice for the design, development and testing of ADAS will be developed.
The WG-HMI, being aware of the current state-of-the-art and ongoing work, consider that it would be premature to undertake additional work on the HMI of Advanced Driver Assistance Systems at this time. It is recommended that HMI issues associated with the safety of ADAS are re-visited and addressed when the current FP6 project have generated substantial results, which are expected during 2006.
56 While conventional Driver Assistance Systems (DAS), e.g.Anti-Lock-Brake (ABS) or Electronic Stability Program
(ESP), assist the driver in vehicle stabilization, Advanced Driver Assistance Systems assist the driver on the higher level of vehicle guidance by informing, warning or actively assisting the driver on the basis of information on the vehicle surroundings/environment.
57 Lansdown TC and A Stevens. Driver assistance systems: guidance for designers regarding human capabilities. Proceedings International Ergonomics Association 15th Triennial Congress. 24-29 August 2003, Seoul, Korea.
Page 279 of 490
1. Background
The importance of a safe human machine interface (HMI) for in-vehicle information and communication systems has been stressed many times in resolutions, opinions and conclusions of several European institutions. These include
the Council conclusions of 17 June 1997;
the European Parliament resolution of 8 October 1998;
the Opinion of the Committee of the Regions of 14 May 1998;
the Commission Communication COM (97) 223 of 20 May 1997 (related to a Community strategy and framework for the deployment of road transport telematics in Europe);
the Council Resolution of 17 June 1997 on the development of telematics in road transport.
Finally, in December 1999, the Commission adopted a “Recommendation on safe and efficient in-vehicle information and communication systems: a European Statement of Principles on human machine interface” (OJ L19, 25.1.2000, p.64). The purpose of this last recommendation was to widely disseminate these principles, through the Member States, to the main actors in the field with the objective, that the relevant European industry would take them into account in the design of new systems. In addition, the EC published an expansion of the Principles by its expert group (dated July 2001). A voluntary agreement from European car manufacturers to fully respect the ESoP (letter from ACEA) was issued in 2001.
1.1 European Statement of Principles on HMI (ESoP) The Commission Recommendation of 21 December 1999 on safe and efficient in-vehicle information and communication systems contains three overall design principles and 32 principles on the topics system installation, information presentation, interaction with displays and controls, system behaviour and information about the system. It is concerned with all information and communication systems intended for use by the driver while driving. The statement of principles is not a substitute for regulations and standards explicitly mentioned under “existing provisions”.
In order to apply the ESoP it is helpful to use the expansions of the principles mentioned above. This document shows, which standards/rules etc. are linked to a specific ESoP-principle.
Today, compliance with the recommendations contained in the ESoP is ensured by integrating the principles in the quality management systems/process of the vehicle manufacturers (see Member State Response of Germany). Aspects of system installation, information presentation, interaction and system behaviour are also addressed by e.g. ISO standards and rules relevant for certification of a vehicle. Annex B lists in detail which ISO standards and rules are implicitly linked to which ESoP principle and suggests through which questions a consumer could check whether a system was designed according to the ESoP.

Page 280 of 490
1.2 Member States´ responses58 Following the above publications, Member States were asked to inform the EC about the knowledge and adherence to the Principles and their impact in the Member States. Up to now, Denmark, France, Germany, Great Britain and Sweden have sent their reports to the EC. The comments given in these reports are quite varied; they address different areas which can be seen from table 1:
Table 1: systematic analysis of member states responses
Attitude Scope Content Application Remark Denmark positive, but
does not apply to Danish industry
- - - -
France Valuable very general; generally well followed by manufacturers; problem are nomadic devices
suggests license for nomadic device manu-facturer.
Germany positive should include service providers;
Add precise criteria on combination of several systems during retrofit
Is applied by manufacturers
Need of research on methods and misuse potential of systems; prefers recommendation
Great Britain
UK is more focussed on sales and service provision than on design of these systems
Include use of mobile data terminals by fleets of vehicles; responsibilities should be clarified (after market devices...)
add assessment criteria for context specific applications;
Knowledge varies,
Application was checked with checklist; prefers guideline
Sweden prefers directive
58 Received until December 2004 upon request by EC
Page 281 of 490
The attitude of those member states who answered is in general positive. The scope should be extended to all responsible stakeholders, e.g. to service providers. According to the answers of Germany and Great Britain the content should be extended by precise criteria on the combination of several systems during retrofit and for context specific applications. The application by car manufacturers and suppliers of original equipment is judged positive but should be improved for other stakeholders, e.g. nomadic device manufacturers and service providers. A brief summary of Member State responses can be found in Annex C.
2. HMI – Situation Analysis 2.1 Risk / Benefit Considerations in the context of eSafety One of the goals of the eSafety initiative is to promote the introduction of information and communication systems as well as of Advanced Driver Assistance Systems (ADAS) in order to contribute to the goal of reducing the number of road traffic fatalities in the EU by fifty percent in the year 2010. It is acknowledged that a specific system which is expected to provide a safety benefit may also introduce a certain risk – the balance of risks and benefits needs to be acceptable in order to gain a contribution to the ultimate goal of reducing the number of fatalities.
Advanced Driver Assistance Systems, in particular, are likely to change to some extent the existing dynamic relationship between drivers, their vehicles and the road environment and, at a detailed and statistical level, changes may be expected in the nature of accidents. It should be noted that safety-enhancing features such as airbags and ABS are not without their problems in specific situations. So, although an overall improvement in safety can be expected, research may reveal subtle changes in contributory factors and the nature of accidents.
Driver information, communication and assistance functions will vary in their safety potential. It is important, that the system benefit is not overcompensated by a poorly designed HMI, introducing driver distraction or inappropriate driver behaviour. Thus, the way the function is implemented is an important factor which has already lead to the existing version of the ESoP. On the other hand the implementation and HMI-solution also depends on the system type (e.g. nomadic versus OEM installed) and is also used by manufacturers for brand differentiation. Clearly, functionalities not directly related to driving should not introduce additional risks.
Consequently, new concepts and systems should be designed according to the principles in the ESoP and relevant ISO standards and ECE-rules. Appropriate testing needs to be carried out before market introduction in order to optimize the HMI and eliminate aspects which could compromise safety. However, it may be impossible in terms of time and costs, to undertake sufficiently large field trials to identify the full impact of every system feature/function. To illustrate this, there are few studies which directly link aspects of HMI design or driver behaviour with safety related outcomes like accidents. Such accident data usually covers a broad range of distraction-related categories and the data integrity and relative contribution of distraction to the accident makes definitive conclusions very problematic. Regarding the possible safety benefit of a system, it is often also quite difficult or even impossible to quantify this effect in advance.

Page 282 of 490
Thus, it can be regarded as hardly feasible to “prove” enhanced safety before market introduction. Consequently in practice system and policy development cannot be entirely evidence-based but must draw e.g. on expert knowledge and consensus. Nevertheless, research on topics such as driver workload and behaviour should be increased.
Development in technology, design and understanding of driver behaviour and needs also contribute to more mature products. For example, route guidance systems are today much easier to use than earlier versions and, on balance, may offer safety advantages59. If initial implementations had been excluded from the market, the current advantages offered by the systems may not have materialized. Therefore, the assumption that more information and functionality is automatically “worse” than less cannot be accepted.
From the perspective of eSafety it is not sufficient to evaluate specific solutions or systems. If the driver wants to achieve a certain goal, e.g. obtaining information on how to get from point A to point B, he will decide how to achieve this goal. Restricting functionality e.g. of an integrated OEM system may result in an increased use of nomadic devices or conventional means like a paper map - which does not mean that there is no potential for optimization of factory installed systems. Therefore the aim must be, to promote good HMI solutions by offering principles which can be easily understood and applied. In addition, driver education is certainly an important approach to this concern, since it addresses driver behaviour as a whole, not only specific functionalities.
2.2 Scientific Evidence – ongoing research Distraction can be defined as follows (STUTTS et al. 2001): „Distraction occurs when a driver is delayed in the recognition of information needed to safely accomplish the driving task because some event, activity, object, or person within or outside the vehicle compels or induces the driver ’s shifting attention away from the driving task.” The presence of a triggering event distinguishes a distracted driver from one who is simply inattentive or “lost in thought.”
In general there are different approaches to scientifically evaluate the risks and benefits of driver assistance or information & communication systems.
Analysing accident data has been useful in quantifying the safety benefit of Driver Assistance Systems, e.g. of ESP60. On the other hand, high quality accident data are needed especially if the expected risks and benefits are not very large. STEVENS61 et al. analysed fatal accidents in England and Wales (years 1985 to 1995). In less than 0.15% of fatal accidents evidence was found that "new-technology" distraction has been a contributory factor during that time.
59 T. Luke and N. Reed (2004) Visual Distraction of Paper Map and Electronic System Based Navigation. Human
Factors and Ergonomic Society (HFES) Europe Chapter- Annual Meeting 2004
60 UNSELT, T.; BREUER, J.; ECKSTEIN, L.; FRANK, P.: Avoidance of “Loss of control accidents” through the benefit of ESP; FISITA 2004
61 STEVENS A and R MINTON. In-vehicle distraction and fatal accidents in England and Wales. Accident Analysis and Prevention. Elsevier . 33 pp 539-545 2001.
Page 283 of 490
The U.S. National Highway Traffic Safety Administration estimates that at least 25% of police-reported crashes involve some form of driver inattention - driver distraction is one form of inattention (STUTTS et al. 2001)62. The analysis of five years (1995-1999) of the National Accident Sampling System (NASS) Crashworthiness Data System (CDS) data identified 8.3% of the drivers as distracted. Looking at the specific sources of distraction, 15.8% of the total 8.3% can be attributed to adjusting radio, cassette, CD or an other device/object brought into the vehicle resulting in a total percentage of 1,3% of all analysed accidents, which also includes using/dialling a cell phone.
A field data study published by STUTTS et al. in 200363 analysed driver behaviour of 70 subjects under everyday driving conditions. It also demonstrates that many driver distractions are neither new nor technological in nature, while recent research has primarily been focused on the safety implications of wireless communications and other in-vehicle technologies. The authors conclude, that the challenge for the highway safety community is to develop effective strategies for modifying people’s driving behaviour, so that they do not engage in these potentially dangerous activities at inappropriate times while driving.
Since the evaluation of future systems on the basis of accident data is naturally not possible, various methods have been developed, which all have individual advantages and disadvantages. Evaluating a system in an instrumented vehicle by analysing driver behaviour as well as the system’s influence on driving performance yields results with high validity but is neither time- nor cost-efficient. At the other end of the spectrum quite simple methods like the occlusion technique are developed which reduce the driving task to a condition, where the participant can not look at the secondary task under test by occluding his view using special shutter glasses64. Between these two extremes we find moving or fixed based driving simulators, where the driving task is presented in a more or less realistic way by providing visual, acoustic and in some cases haptic cues to the driver.
Finally it is not only important to evaluate the potential effect of an isolated system on driving performance but to take into account the reality of human behaviour. It is well known that drivers engage in all kinds of activities while driving that may satisfy immediate needs but which can also be considered risky (e.g. smoking, reading maps, texting on a hand-held mobile phone). Driver education is one approach to this problem. Another approach is to provide appropriately optimized solutions to support the driver’s needs. As consumer products are a reality restricting the functionality of integrated driver interfaces may result in an increased use of portable devices which today are usually not designed in accordance with the ESoP.
Currently a number of European and International projects and activities are dealing with the issue of HMI (in alphabetic order):
62 STUTTS, J. et al.: The role of driver distraction in traffic crashes; report prepared by the Highway Safety Research
Center at the University of North Carolina for AAA Foundation for Traffic Safety in 2001 63 STUTTS, J. et al.: Distractions in everyday driving; report prepared by the Highway Safety Research Centre at
the University of North Carolina for AAA Foundation for Traffic Safety in 2003
64 The occlusion technique allows for the experimental control of the time a visually presented stimulus can be viewed or is occluded. The method simulates an on-road situation where the occluded phase simulates that the subject looks on the road and the open phase allows the subjects to look at the in-vehicle system. There is an ongoing ISO process of standardization of the occlusion technique as a method to assess driver distraction (ISO TC22/SC13/WG8).
Page 284 of 490
ADAM – Advanced Driver Attention Metrics (Peer-reviewed Project funded by BMW and DaimlerChrysler): evaluates existing and develops and validates a new method, called Lane-Change-Test (LCT) in order to describe the effect of secondary task performance on the primary driving task (Contact: Dr. Christian Heinrich - DC; Dr. Klaus-Josef Bengler – BMW))
AIDE – adaptive integrated driver-vehicle interface: plans to design, develop and validate a generic Adaptive Integrated Driver-vehicle Interface (AIDE) that maximises the efficiency of individual and combined Advanced Driver Assistance Systems, reduces the level of workload and distraction and enables the potential benefits of new in-vehicle technologies and nomad devices (Contact: Jan Arfwidsson – Volvo Technology)
CAMP Driver Workload Metrics Project – U.S.A. (Ford, GM, NHTSA, Nissan, Toyota): one of three projects of the Crash Avoidance Metrics Partnership (CAMP) developing performance metrics and test procedures for assessing the visual, manual and cognitive aspects of driver workload from telematics systems (Contact: Richard Deering, General Motors)
HASTE – Human machine interface And Traffic Safety in Europe: develops an expermental design in order to evaluate the effect of various types of load caused by in-vehicle information systems on driving performance (Contact: O. Carsten, University of Leeds, U.K.)
HUMANIST – (Human centered Design for information society technologies) EC-funded Network of excellence: development of knowledge management database, methodology for safety evaluation and design criteria for ITS based upon user’s needs, functional abilities (coordinator ERT-SAS INRETS, contact Jean-Pierre Medevielle)
RESPONSE 3 – EC-funded Sub-project within PREVENT: develop code-of-practice for the design, development and testing of Driver Assistance Systems taking into account of driver responsibility and provider liability (contact: Dr. Jürgen Schwarz, DaimlerChrysler)
2.3 Market Development – system types During the last few years a new category of systems has become relevant providing information and communication functionality to the driver: the so-called nomadic devices, which can be used inside as well as outside the vehicle. In addition, after-market systems are developing very fast, turning from pure audio systems into multi-functional devices with integrated HMI. This section focuses on after-market and nomadic devices (NDs) since European car manufactures have self-committed to design their factory-installed systems according to the ESoP (through ACEA). At this stage, no official voluntary agreement about respecting the ESoP has been made by the stakeholders concerned with after-market and nomadic devices. These groups may be less aware about road safety issues and may not be organised into easily identified networks.
With the increase in system variety and functionality the issue of multiple in-vehicle devices and integration becomes more and more relevant. Independent of system type the responsibility for use of these systems while driving always rests on the driver (Vienna Convention dated 1968).

Page 285 of 490
2.3.1 After-Market Systems
Definition: After-market information and communication systems are designed for use while
driving and are permanently installed in the vehicle but not by the vehicle manufacturer. They usually have standardized mechanical and electrical interfaces so they can be installed in a variety of models from different manufacturers. Some after-market systems are custom designed for specific functions/employers e.g. for taxis, delivery fleets and emergency vehicles.
After-market systems range from conventional radios to in-vehicle devices with multiple functions like navigation, CD, radio, mp3. Since they are often neither designed nor installed by the vehicle manufacturers, the responsibility for HMI issues is usually distributed between several parties. However, some after-market systems are “approved” by an OEM. Organisations involved in the design of after-market systems range from large multi-national groups to small independent producers. Many after-market systems available today are obviously not designed in accordance with the current ESoP.
2.3.2 Nomadic Devices Definition65: A nomadic device is a device for information, including entertainment, and/or communication
that can be used outside of the vehicle and inside the vehicle by the driver while driving. It is not supplied or installed by the vehicle manufacturer.
The ESoP applies as soon as the nomadic device is intended (explicitly or implied by the product responsible organization66) to be used by the driver while driving (by design of hard- and/or software).
Nomadic devices include all types of information and communication devices that can be brought into the vehicle by the driver to be used while driving. Current examples are mobile phones, portable computers, pocket PCs, and DVD players. With technological improvements and decreasing prices, these devices are expected to be widespread, offering a diversity of functions to the user, which were not specifically designed for use while driving. These systems are able to provide useful information to the driver (navigation and guidance with GPS, traffic information) and information that is likely to require a high and potentially unsafe amount of driver attention (e.g. movies on DVD, direct access to web sites). Consequently, nomadic device use inside the vehicle should not be considered as unsafe per se: the potential risk depends on the type of function that the driver has decided to access using the nomadic system, the HMI-design including the position and, of course, the traffic situation.
65 alternative definition for portable system (nomadic device) used in ISO TC22 SC13 WG8 LCT-draft:
device, which provides information to, and/or receives output from the driver of a motor vehicle, that can be rapidly and easily installed into and removed from a vehicle (i.e., not integrated) and which is not permanently affixed to the vehicle and integrated into the overall vehicle system.
66 May be the nomadic device manufacturer but also a software or service provider. Definition: organization with authority to establish a new, or change an existing, product specification This responsibility includes testing and verification of design performance within the customer’s specified
application.
Page 286 of 490
The ESoP on HMI clearly covers all types of information and communication systems used in the vehicle, including nomadic devices. In the case of a nomadic device, many actors along the value chain contribute to the availability of a specific functionality:
System hardware manufacturers (ND makers), e.g. producing smart phones, PDAs, DVD players, laptops
Software providers, e.g. providing navigation software for mobile phones and PDAs
Content Providers, e.g. proving navigation map data, which is used by the software.
Telecom Operators provide “air time” and subscriptions for services that are not necessarily produced by them (e.g. contents of i-mode)
Distribution channels, on which the products are sold: these include e.g. accessory shops, car rental agencies, car clubs
Installation service / customer: installation of system hardware but also of additional software/ software updates providing additional functionality
In order to identify and implement possible solutions, the distribution of responsibility needs to be analyzed and communicated.
An additional problem is the physical risk linked to the device itself in case of a crash in terms of the way it could injure the driver and other passengers. These devices are frequently not securely fixed to the vehicle. Another aspect which may influence the location of installation is the risk of theft.
2.3.3 Multiple Devices and Integration
The existing ESoP does not specify principles for the combination or integration of in-vehicle systems. Today integrated systems, that means systems with multiple functionality like radio, CD, Navigation, Telephone, are not only offered by OEMs but also by after-market suppliers. In general, a high level of integration offers the opportunity to prioritize visual and acoustic information. In contrast, this is not possible if there is a low level of integration of multiple functions (e.g. radio&CD via OEM-system, PDA for navigation and cellular phone for communication).
Of course integration of multiple systems with respect to HMI is at least as important for after-market and nomadic systems as for OEM systems but even more difficult to achieve since several stakeholders are involved. With the expected growth in after-market and, particularly, nomadic devices, the issue of multiple but independent systems within one vehicle is becoming more and more important.

Page 287 of 490
2.4 Multiple Actors – a shared responsibility
In general several parties contribute to the availability and presentation of information and communication functionalities while driving. It is important to note, that the distribution of responsibility differs depending on system type as well as on the specific HMI aspect:
• the installation of the system may be undertaken by the OEM (integrated system), a dealer/supplier (after-market system) or a private person/driver (nomadic device);
• the information presentation is not only defined by the system manufacturer but is also influenced by service providers offering information/content (e.g. running text) and which may also influence system performance (response times);
• the interaction is partly defined by the system hardware, partly by system software. System hard- and software may be provided by one party (e.g. OEM) but may also come from different parties, e.g. in case of nomadic devices;
• last but not least the driver or passenger, who activates a certain functionality while driving in a more or less suitable driving situation, is responsible for system use.
When systems contain components from different sources (e.g. hardware, software, mapping, communications, dynamic traffic information) the individual suppliers have very limited possibilities to influence all relevant HMI issues like system installation, information presentation, system interaction or how the system is used, even if they are aware of these HMI issues. Nevertheless for each functionality the product-responsible organisation67 needs to be identified, which should ensure e.g. by contracts that the ESoP is applied by the various actors along the value chain. The term "product" (as typically used e.g. in ISO 9000) can mean a product, service and ancillary material, instructions etc. - in this case, it stands for a piece of functionality, which is provided to the driver with or without a specific system, service etc.
If a nomadic system is not correctly installed in a vehicle but used while resting on the front passenger seat, a good design of information presentation and interaction is not effective. Therefore the existence of the ESoP may not be sufficient – it may be necessary to identify accompanying measures e.g. in order to inform drivers about their responsibility in using theses systems.
The question of responsibility becomes even more complex if the driver is required (as part of his job) to use one or more in-vehicle systems. Already today professional vehicles like taxis or emergency vehicles are equipped with multiple systems including navigation systems, specific communication systems, telephone and audio systems. Similarly, rental vehicles may be amongst the first to support new features. In both cases, the drivers may be insufficiently informed or trained to use the in-vehicle system safely.
67 Product responsible organisation = organisation bringing a new or modified product to the market Note 1 the term product also covers services Note 2 the product means that product used and experienced by the driver Note 3 this responsibility includes compliance with all applicable regulations

Page 288 of 490
The driver may have limited knowledge concerning in-vehicle systems available within a vehicle, e.g. if he has recently purchased or hired the vehicle. The driver may use an existing in-vehicle system in a way or manner that could not reasonably have been foreseen by the manufacturer. Also the driver may be unaware of a potential hazard involved in using e.g. a nomadic system while driving, believing it to be sufficiently safe to use, whereas wider experience suggests that there are safety problems (for example, using mobile phones while driving).
A number of wider market issues also need to be noted: traffic conditions and the legal requirements differ among the member states in the EU – e.g. the use of hand held phones is legal while driving in Sweden whereas it is not in France, Germany, U.K. and some other member states. But there may also be differences on a more international level like between Japan, the U.S. an Europe regarding systems and functionalities due to differences regarding the alphabet, the regular driving situation but also driver education. These differences may result in HMI-principles which are not fully harmonized on a global level but are most suitable for the situation in the EC.
2.5 HMI Evaluation – potential and limitations
There is no such thing as a “safe” system. Visual, cognitive and manual demand caused by the driving task greatly varies depending on many factors like speed, road parameters and the traffic situation. On the one hand the traffic situation can be extremely demanding, e.g. when making a turn across oncoming traffic and pedestrians crossing the road, making it difficult/risky to read the speedometer. On the other hand there are low-demanding traffic situations like driving down a long, empty road at limited speed, where the driver has sufficient resources for secondary task operation, e.g. consulting a map or tuning the radio.
Therefore HMI-principles cannot guarantee safe systems but systems which require a predictable amount of attention. If the driver can anticipate the demand associated with a certain secondary task he is able to decide whether to start secondary task operation in a specific traffic situation or not. If the secondary task requires more attention than he anticipated, his resources for monitoring the traffic situation and deciding to interrupt the secondary task may be compromised. For example, it is impossible to anticipate how much attention a movie will require in the next moment. Consequently the existing ESoP contains a principle stating that functions like TV or movies should be inaccessible to the driver while driving. Selecting a pre-set radio station or adjusting the sound level has a very predictable demand.
Consequently the goal of the eSafety Initiative in respect of HMI should be to promote well designed systems and services, ensure appropriate installation and encourage responsible use of these systems by drivers.
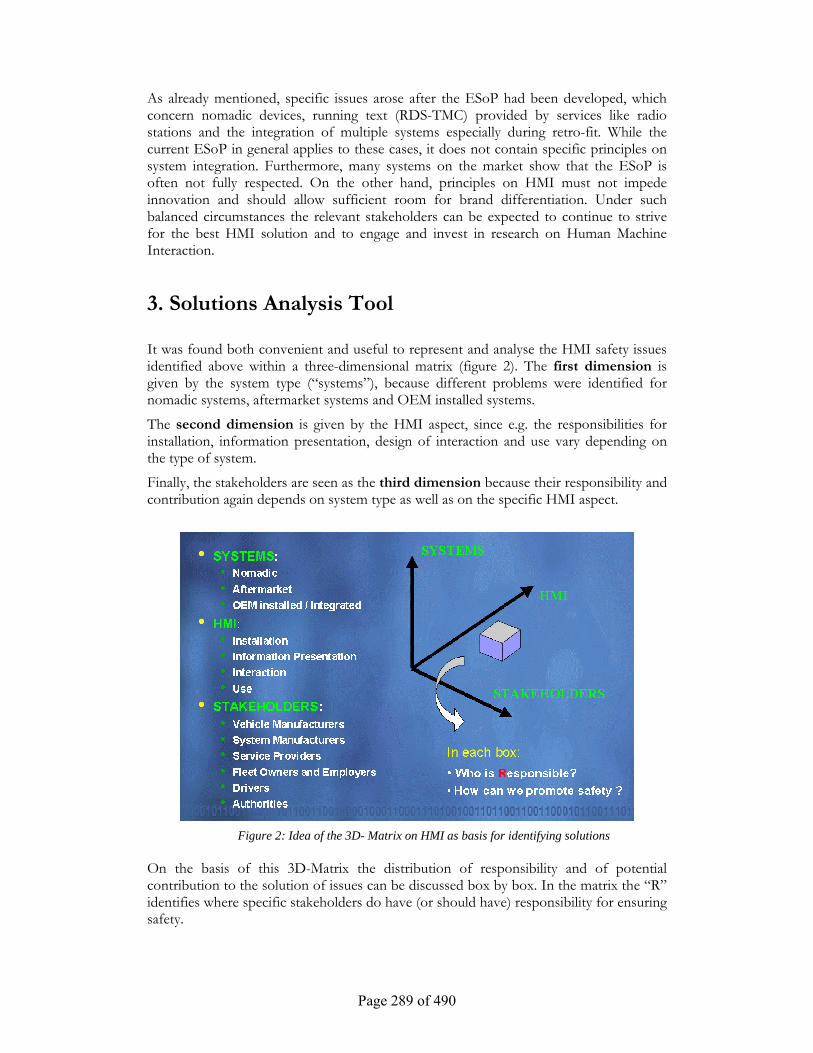
Page 289 of 490
As already mentioned, specific issues arose after the ESoP had been developed, which concern nomadic devices, running text (RDS-TMC) provided by services like radio stations and the integration of multiple systems especially during retro-fit. While the current ESoP in general applies to these cases, it does not contain specific principles on system integration. Furthermore, many systems on the market show that the ESoP is often not fully respected. On the other hand, principles on HMI must not impede innovation and should allow sufficient room for brand differentiation. Under such balanced circumstances the relevant stakeholders can be expected to continue to strive for the best HMI solution and to engage and invest in research on Human Machine Interaction.
3. Solutions Analysis Tool It was found both convenient and useful to represent and analyse the HMI safety issues identified above within a three-dimensional matrix (figure 2). The first dimension is given by the system type (“systems”), because different problems were identified for nomadic systems, aftermarket systems and OEM installed systems.
The second dimension is given by the HMI aspect, since e.g. the responsibilities for installation, information presentation, design of interaction and use vary depending on the type of system.
Finally, the stakeholders are seen as the third dimension because their responsibility and contribution again depends on system type as well as on the specific HMI aspect.
Figure 2: Idea of the 3D- Matrix on HMI as basis for identifying solutions
On the basis of this 3D-Matrix the distribution of responsibility and of potential contribution to the solution of issues can be discussed box by box. In the matrix the “R” identifies where specific stakeholders do have (or should have) responsibility for ensuring safety.
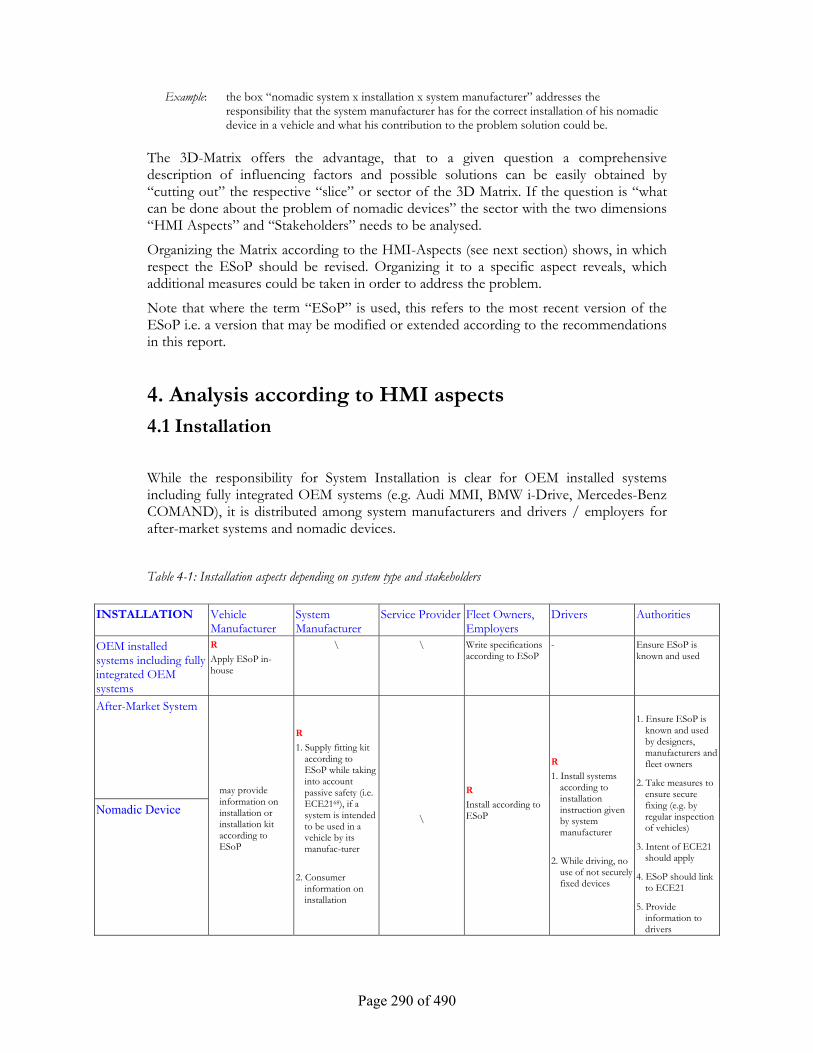
Page 290 of 490
Example: the box “nomadic system x installation x system manufacturer” addresses the responsibility that the system manufacturer has for the correct installation of his nomadic device in a vehicle and what his contribution to the problem solution could be.
The 3D-Matrix offers the advantage, that to a given question a comprehensive description of influencing factors and possible solutions can be easily obtained by “cutting out” the respective “slice” or sector of the 3D Matrix. If the question is “what can be done about the problem of nomadic devices” the sector with the two dimensions “HMI Aspects” and “Stakeholders” needs to be analysed.
Organizing the Matrix according to the HMI-Aspects (see next section) shows, in which respect the ESoP should be revised. Organizing it to a specific aspect reveals, which additional measures could be taken in order to address the problem.
Note that where the term “ESoP” is used, this refers to the most recent version of the ESoP i.e. a version that may be modified or extended according to the recommendations in this report.
4. Analysis according to HMI aspects
4.1 Installation
While the responsibility for System Installation is clear for OEM installed systems including fully integrated OEM systems (e.g. Audi MMI, BMW i-Drive, Mercedes-Benz COMAND), it is distributed among system manufacturers and drivers / employers for after-market systems and nomadic devices.
Table 4-1: Installation aspects depending on system type and stakeholders
INSTALLATION Vehicle Manufacturer
System Manufacturer
Service Provider Fleet Owners, Employers
Drivers Authorities
OEM installed systems including fully integrated OEM systems
R
Apply ESoP in-house
\ \ Write specifications according to ESoP
- Ensure ESoP is known and used
After-Market System Nomadic Device
may provide
information on installation or installation kit according to ESoP
R
1. Supply fitting kit according to ESoP while taking into account passive safety (i.e. ECE2168), if a system is intended to be used in a vehicle by its manufac-turer
2. Consumer
information on installation
\
R
Install according to ESoP
R
1. Install systems according to installation instruction given by system manufacturer
2. While driving, no use of not securely fixed devices
1. Ensure ESoP is
known and used by designers, manufacturers and fleet owners
2. Take measures to ensure secure fixing (e.g. by regular inspection of vehicles)
3. Intent of ECE21 should apply
4. ESoP should link to ECE21
5. Provide information to drivers
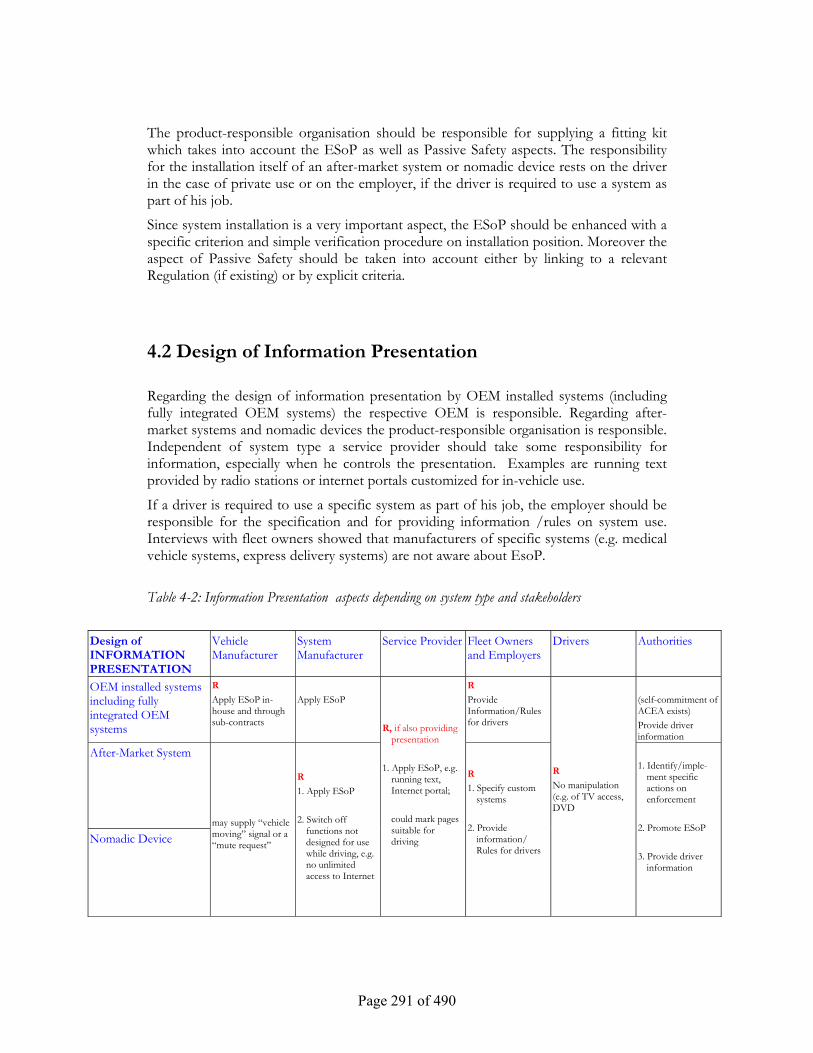
Page 291 of 490
The product-responsible organisation should be responsible for supplying a fitting kit which takes into account the ESoP as well as Passive Safety aspects. The responsibility for the installation itself of an after-market system or nomadic device rests on the driver in the case of private use or on the employer, if the driver is required to use a system as part of his job.
Since system installation is a very important aspect, the ESoP should be enhanced with a specific criterion and simple verification procedure on installation position. Moreover the aspect of Passive Safety should be taken into account either by linking to a relevant Regulation (if existing) or by explicit criteria.
4.2 Design of Information Presentation Regarding the design of information presentation by OEM installed systems (including fully integrated OEM systems) the respective OEM is responsible. Regarding after-market systems and nomadic devices the product-responsible organisation is responsible. Independent of system type a service provider should take some responsibility for information, especially when he controls the presentation. Examples are running text provided by radio stations or internet portals customized for in-vehicle use.
If a driver is required to use a specific system as part of his job, the employer should be responsible for the specification and for providing information /rules on system use. Interviews with fleet owners showed that manufacturers of specific systems (e.g. medical vehicle systems, express delivery systems) are not aware about EsoP.
Table 4-2: Information Presentation aspects depending on system type and stakeholders
Design of INFORMATION PRESENTATION
Vehicle Manufacturer
System Manufacturer
Service Provider Fleet Owners and Employers
Drivers Authorities
OEM installed systems including fully integrated OEM systems
R
Apply ESoP in-house and through sub-contracts
Apply ESoP
R
Provide Information/Rules for drivers
(self-commitment of ACEA exists) Provide driver information
After-Market System Nomadic Device
may supply “vehicle moving” signal or a “mute request”
R
1. Apply ESoP 2. Switch off
functions not designed for use while driving, e.g. no unlimited access to Internet
R, if also providing
presentation 1. Apply ESoP, e.g.
running text, Internet portal;
could mark pages
suitable for driving
R
1. Specify custom systems
2. Provide
information/ Rules for drivers
R
No manipulation (e.g. of TV access, DVD
1. Identify/imple-
ment specific actions on enforcement
2. Promote ESoP 3. Provide driver
information
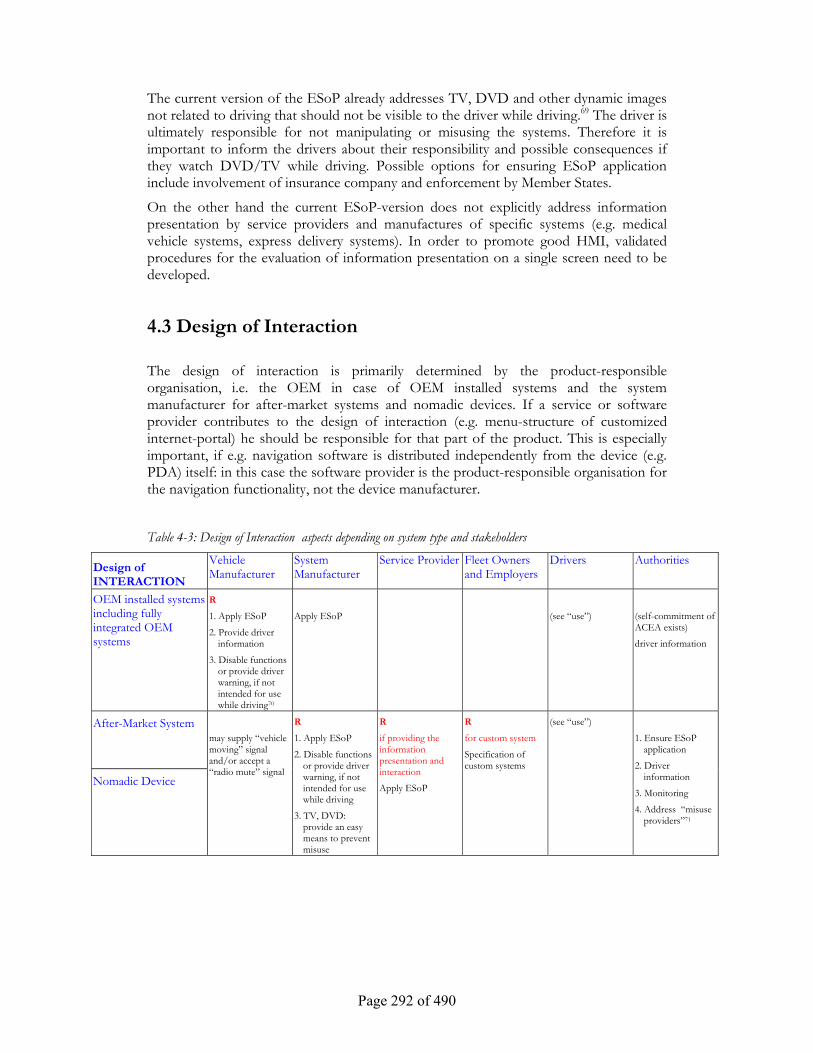
Page 292 of 490
The current version of the ESoP already addresses TV, DVD and other dynamic images not related to driving that should not be visible to the driver while driving.69 The driver is ultimately responsible for not manipulating or misusing the systems. Therefore it is important to inform the drivers about their responsibility and possible consequences if they watch DVD/TV while driving. Possible options for ensuring ESoP application include involvement of insurance company and enforcement by Member States.
On the other hand the current ESoP-version does not explicitly address information presentation by service providers and manufactures of specific systems (e.g. medical vehicle systems, express delivery systems). In order to promote good HMI, validated procedures for the evaluation of information presentation on a single screen need to be developed.
4.3 Design of Interaction The design of interaction is primarily determined by the product-responsible organisation, i.e. the OEM in case of OEM installed systems and the system manufacturer for after-market systems and nomadic devices. If a service or software provider contributes to the design of interaction (e.g. menu-structure of customized internet-portal) he should be responsible for that part of the product. This is especially important, if e.g. navigation software is distributed independently from the device (e.g. PDA) itself: in this case the software provider is the product-responsible organisation for the navigation functionality, not the device manufacturer.
Table 4-3: Design of Interaction aspects depending on system type and stakeholders
Design of INTERACTION
Vehicle Manufacturer
System Manufacturer
Service Provider Fleet Owners and Employers
Drivers Authorities
OEM installed systems including fully integrated OEM systems
R
1. Apply ESoP
2. Provide driver information
3. Disable functions or provide driver warning, if not intended for use while driving70
Apply ESoP
(see “use”)
(self-commitment of ACEA exists)
driver information
After-Market System Nomadic Device
may supply “vehicle moving” signal and/or accept a “radio mute” signal
R
1. Apply ESoP
2. Disable functions or provide driver warning, if not intended for use while driving
3. TV, DVD: provide an easy means to prevent misuse
R
if providing the information presentation and interaction
Apply ESoP
R
for custom system
Specification of custom systems
(see “use”)
1. Ensure ESoP application
2. Driver information
3. Monitoring
4. Address “misuse providers”71
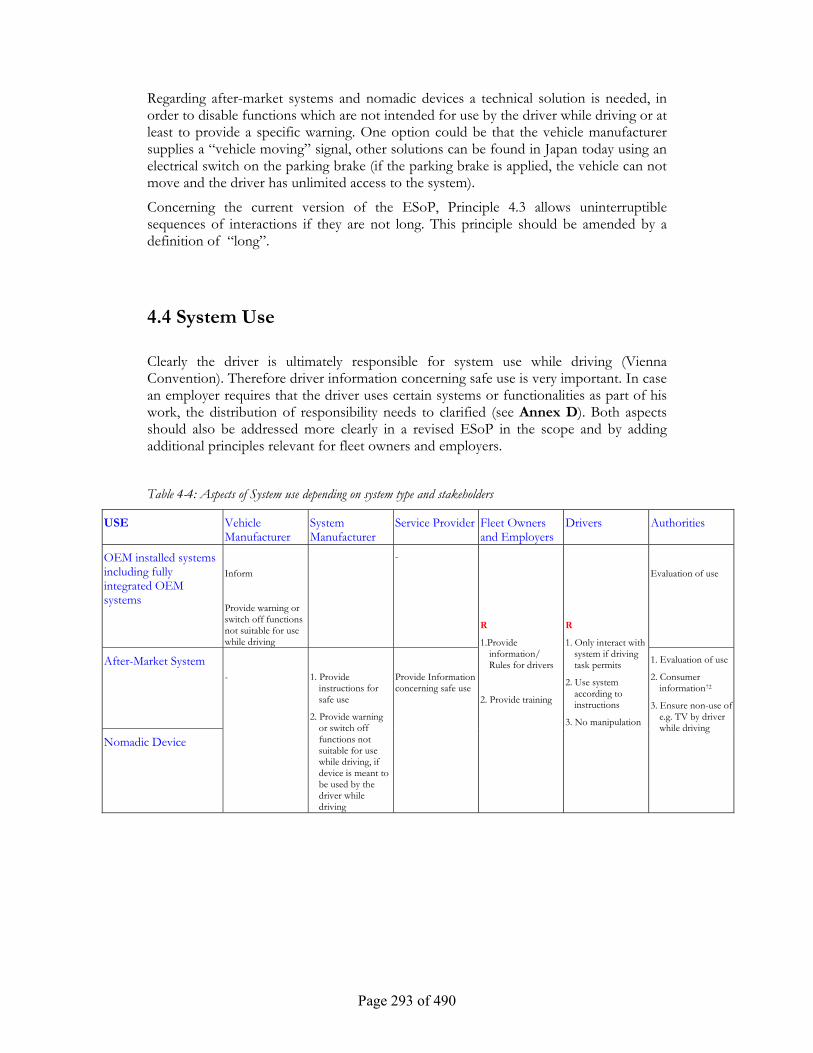
Page 293 of 490
Regarding after-market systems and nomadic devices a technical solution is needed, in order to disable functions which are not intended for use by the driver while driving or at least to provide a specific warning. One option could be that the vehicle manufacturer supplies a “vehicle moving” signal, other solutions can be found in Japan today using an electrical switch on the parking brake (if the parking brake is applied, the vehicle can not move and the driver has unlimited access to the system).
Concerning the current version of the ESoP, Principle 4.3 allows uninterruptible sequences of interactions if they are not long. This principle should be amended by a definition of “long”.
4.4 System Use Clearly the driver is ultimately responsible for system use while driving (Vienna Convention). Therefore driver information concerning safe use is very important. In case an employer requires that the driver uses certain systems or functionalities as part of his work, the distribution of responsibility needs to clarified (see Annex D). Both aspects should also be addressed more clearly in a revised ESoP in the scope and by adding additional principles relevant for fleet owners and employers.
Table 4-4: Aspects of System use depending on system type and stakeholders
USE Vehicle Manufacturer
System Manufacturer
Service Provider Fleet Owners and Employers
Drivers Authorities
OEM installed systems including fully integrated OEM systems
Inform
Provide warning or switch off functions not suitable for use while driving
-
Evaluation of use
After-Market System
Nomadic Device
-
1. Provide instructions for safe use
2. Provide warning or switch off functions not suitable for use while driving, if device is meant to be used by the driver while driving
Provide Information concerning safe use
R
1.Provide information/ Rules for drivers
2. Provide training
R
1. Only interact with system if driving task permits
2. Use system according to instructions
3. No manipulation
1. Evaluation of use
2. Consumer information72
3. Ensure non-use of e.g. TV by driver while driving

Page 294 of 490
5. Recommendations on a revised European Statement of Principles 5.1 Goals of a revised ESoP
First of all a revised European Statement of Principles should promote the goal of the eSafety Initiative by supporting the introduction of well designed Systems into the market and by taking into account both risks and benefits of these systems, thus not impeding innovation.
Secondly it should take into account the capabilities and constraints of all stakeholders and the market by being applicable during the development process in terms of complexity, costs and time even by small system manufacturers. Since it is the driver, who finally decides whether he buys and uses e.g. a fully integrated navigation system or a nomadic device or a paper map the intention should be to promote good HMI and less to exclude certain functionalities by simplistic pass/fail criteria.
Thirdly it is important to keep up the clear distinction between principles on installation, information presentation, design of interaction, system behaviour etc. introduced by the ESoP, since the HMI-solution-matrix shows, that the distribution of responsibility and solutions varies according to these aspects. Moreover this clear distinction is important to maintain a logical structure easy to understand and to work with, and it helps to avoid cross references and redundancies.
5.2 Recommendations on the Scope R-ESoP-1 Clarify and adequately incorporate the distribution of responsibilities into
the scope
R-ESoP-2 Expand the scope of the principles to include “post-manufacture” issues including service providers and Fleet Managers and Employers as described above – see Annex D for an initial draft.
R-ESoP-3 Explicitly address information presentation by service providers (e.g. running text) in the Scope.
R-ESoP-4 Explicitly address manufactures of specific systems in the Scope (e.g. medical vehicle systems, express delivery systems)
5.3 Recommendations on Principles In general, the current version of the ESoP lacks a clear allocation of relevant standards, rules and directives to the individual principles. This causes the impression that the principles contained in the guideline are very general and not applicable in detailed design. Looking at the “Expansion of Principles” issued in June 2001 reveals that in many cases the application of a specific principle requires compliance with well defined ISO-standards, rules and directives. Therefore this Expansion of Principles should be used as a basis for a revised European Statement of Principles.
More specifically, the analysis using the “HMI solution matrix” identified some cases, where existing HMI principles should be revised or amended by specific criteria.

Page 295 of 490
R-ESoP-5 Add specific criterion to Principle 2.4 (“visual displays should be positioned as close as practicable to the driver's normal line of sight”). Possible solution: adopt the 30°-rule from the current version 2.1 of the American AAM-guideline for visually intensive displays and add a precise definition of “visually intensive displays”.
R-ESoP-6 Add definition of “long” in Principle 4.3 (“The system should not require long and uninterruptible sequences of interactions”). Since a time-based criteria would only be valid under defined and repeatable conditions, it appears to be reasonable to define a minimum number of interactions in order to call it “long”. The ESoP expansions published in 2001 contain some proposals about how this issue could be resolved.
R-ESoP-7 Revise principles on information about the system including instructions on system use, since the driver is ultimately responsible for system use while driving (Vienna Convention)
In addition, it may help to minimize the need of expert knowledge by linking available, scientifically well founded and accepted assessment methods to specific principles, like e.g. the occlusion technique for evaluating the complexity of visually displayed information on a single screen. More sophisticated measurements (e.g. driving simulator experiments, field trials) take more account of the complexity of human machine interaction, including manual, visual and cognitive demand, but are clearly very demanding in terms of resources.
Introducing additional pass/fail criteria especially on information presentation and interaction principles is regarded as problematic for several reasons: First of all these criteria do not take into account the benefit of a system or function, since they only describe a potential risk. Specifically, pass/fail criteria that are too simplistic (e.g. total task time) may be spurious i.e. they may exclude good HMI solutions and may not exclude bad HMI solutions73. Simplistic Criteria also tend to exclude certain tasks in general and this eliminates the challenge for researchers and industry to strive for a HMI solution which permits the performance of these tasks while the vehicle is in motion – also avoiding the driver using “conventional means” like a paper map.
From a liability perspective simplistic pass/fail-criteria for HMI may imply that it is safe to undertake those tasks while driving which comply with the criteria. However, no matter how restrictively the pass/fail-criteria on HMI are chosen, there will always be traffic situations in which the operation of these tasks may cause critical situations.
Overall, therefore, the WG-HMI is cautions about accepting or defining specific criteria (beyond those already available or linked to in the Expansion of the Principles) as they may be spurious and may impede innovation – an effect contrary to the goal of the eSafety initiative.
5.4 Comparison with US- and Japanese guidelines On July 18, 2000 the National Highway Traffic Safety Administration held a public meeting to address growing concern over motor vehicle crashes and driver use of cellular telephones and other electronic distractions present in the vehicle and challenged industry to respond to the rising concern in this area.

Page 296 of 490
As a result of this challenge, the Alliance of Automobile Manufacturers agreed to develop a “best practices” document to address essential safety aspects of driver interactions with future in-vehicle information and communications systems. These systems, also known as “telematic” devices, include such items as cellular telephones, navigation systems and Internet links. In December 2000 the Alliance submitted to NHTSA a comprehensive list of draft principles related to the design, installation and use of future telematic devices which was based, in large part, on the European Commission recommendations of December 21, 1999, on safe and efficient in-vehicle information and communication systems (2000/53/EC0). At that time, the Alliance agreed to seek input from experts and interested parties to develop the principles into a more comprehensive document including more fully define performance criteria and verification procedures during 2001.
These design guidelines focus on light vehicles and are intended to be used by both original equipment manufacturers and the aftermarket. These guidelines are limited to safety aspects of human machine interface (HMI) for:
• “new” information and communication technology and devices with visual and manual/visual interfaces (a precise definition is not given)
• features and functions designed to be used by a driver while driving (vehicle speed above 5 mph) under “routine driving conditions”
At this time the guidelines are not intended to apply to:
• head-up displays • voice-activated devices • haptic displays and cues • purely cognitive distraction (e.g., conversation) • driver assistance systems
Comparing the Expansion of the ESoP to the current version 2.1 of the AAM-guideline (Alliance of Automobile Manufacturers, U.S.A.) reveals more or less substantial differences in spite of the fact that the ESoP and the Expansions of the ESoP clearly formed the basis for the work on the AAM Guidelines.
This is to some degree due to some generic differences with respect to the aim, actors, approach and envisaged actions. The aim of the WG on HMI is to promote good HMI solutions contributing to the goal of the eSafety initiative, which is to enhance traffic safety by promoting the introduction e.g. of information-, communication and driver assistance systems. Consequently, the European approach takes into account risks and benefits striving for a positive overall effect on traffic safety. The result of the European multiple-actor approach is not restricted to the formulation of a revised ESoP but is going to be a concerted action also addressing driver behaviour, market issues and the responsibility of the various stakeholders involved.
On the other hand the approach by the Alliance of Automobile Manufacturers (AAM) aims at limiting the distraction potential of advanced information and communication systems by a guideline without taking into account possible system benefits or consumer behaviour (e.g. risk of increased use of nomadic devices).

Page 297 of 490
As shown in Annex E some principles substantially differ as the result of small wording changes. For example, the first ESoP Principle on Information Presentation (3.1) originally addressed the visual demand associated with the information presentation on a single screen. In the AAM guideline the seemingly corresponding principle (2.1) addresses the complete interaction needed to complete a desired task. Thus it is not a pure principle on information presentation any more but primarily one on interaction.
Moreover the concept of task adopted by the AAM guideline appears to be a problematic one, since the same task may substantially vary in its duration in terms of the associated number of interactions (e.g. entering a long vs. a short town name). Much more important is that it is the driver who decides which tasks he is going to (repeatedly) perform in which order depending on the traffic situation and other factors. If he is driving for one hour from point A to point B, he may engage – dependent on the traffic situation, his motivation and condition - in secondary task performance for ten minutes. He may use the time for one phone call, four times changing the radio station and finally searching for one title on a CD. Consequently the effective duration of secondary task performance cannot be influenced by the system designer – but only the intensity of interaction.
On the other hand the AAM-Guideline contains some helpful additions and changes which could be included in a revised ESoP. The comparison of the ESoP and AAM Guidelines in Annex E also summarises the WG-HMI’s recommendations for changes to the existing ESoP taking into account the AAM Guideline.
In October 1990, Japan Automobile Manufacturers Association, Inc. (JAMA) drew up Safety Guidelines for In-vehicle Monitor Systems that were targeted primarily at car navigation systems. The first report on JAMA’s activity regarding the safety of in-vehicle information systems explained the basic sections of the guidelines [1]. In February 2000 the guidelines were revised and a new criterion concerning the monitor location of image display devices was included (30-degree criterion).
Currently there are two activities pending in Japan regarding this issue of HMI which are completely separate and have not been finalized:
1. National Public Safety Commission (NPSC): notification Nr. 12 dated 26th May 2002 on guidelines for providing traffic information (distributed as ISO TC22 SC13 WG8 N 365).
2. MLIT: Their working group wrote a technical report for the target performance of image display devices. This document (WG8 N366) includes the previous JAMA guideline. Today there is no decision, when and which parts of this report become relevant e.g. in form of a regulation.
Comparing the ESoP expansions to the JAMA guidelines reveals two different appoaches: while the ESoP describes generic HMI principles, the JAMA guidelines consist of quite specific recommendations for certain applications or functions like ‘map display’, ‘dynamic traffic information’ and ‘FM multiplex broadcast’.

Page 298 of 490
Annex F tabulates a comparison of the ESoP expansions with the two documents mentioned above. Please note that these draft documents have no official status compared to the ESoP. The NPSC notification focuses specific issues related to the provision of traffic information but is not limited to HMI. Consequently it covers only a small part of the scope of the ESoP. The MLIT document is obviously an extension of the JAMA guideline published in the year 2000 by adding a number of principles similar to the ESoP. The scope was extended from navigation systems to image display systems.
5.5 Summary of Development proposals Based on the analysis of the HMI-solution matrix and the comparison with other HMI-guidelines, the following recommendations are made by the WG-HMI in order to revise the European Statement of Principles on HMI based on their Expansions issued in June 2001:
R-ESoP-8 Reword ESoP carefully for clarity but with no fundamental change to the
structure and to the existing principles
R-ESoP-9 Enhance applicability of the ESoP by explicitly naming what needs to be done to apply a principle. Precisely link standards, rules and directives to the specific principle. In general, exercise caution over additional, not sufficiently validated, verification procedures – Annex B
R-ESoP-10 Continue to monitor standardization activities, EC-funded projects, AAM developments, Japanese activities etc. and evaluate opportunities for collaboration – see Annex E, F
R-ESoP-11 In order to ensure an efficient process of revising the ESoP it is recommended that this work should be carried out by a small group of well-informed and well-motivated persons covering vehicle manufacturers, suppliers and research institutions/Government representatives.
Please refer to Chapters 5.2 and 5.3 for specific recommendations on the revision of the Scope and the Principles themself.
5.6 Research and Standardization Needs To assess if some of the goals which are formulated in the ESoP are met by a certain HMI solution requires the availability of scientifically well founded and accepted assessment methods, which may also be efficiently used during the design process. Whereas for a number of areas covered by the ESoP a good deal of work has been done by international standardisation, the definition of criteria and methods to assess aspects of drivers’ interaction with the system may be regarded as incomplete. Driver workload and the various facets of this concept have turned out to be key variables for this assessment because they define the “linkage” between HMI design and safety-related aspects of driving behaviour. For this reason there is an urgent need of research for a workload assessment and testing methodology, which provides valid and reliable results and is economically applicable already in early phases of the HMI design process. Since some functions may also provide a benefit and moreover a “critical” workload depends very much on the driving task, these methods are especially valuable for relatively comparing and selecting the best from different HMI solutions.

Page 299 of 490
A certain level of driver workload can be induced by numerous sources inside and outside the vehicle and depends, finally, on drivers’ behavioural responses and individual performance limitations. On the other hand the acceptable workload is largely defined by the driving task. For this reason the suggested development of an assessment and testing methodology has to be accompanied by further research on correlations with safe driving behaviour and human performance limitations in dependence of the driving task to complete the picture.
In terms of standards, the Occlusion method to evaluate visual demand needs to be completed. Also the Lane Change Test (LCT) method to estimate the effect of secondary task operation on driving performance needs to be standardised. Issues of driver characteristics need to be better standardised in terms of definitions and some recommendations made about driver characteristics for specific performance measurements.
6. Recommendations for Specific Actions by Focus Area 6.1 Nomadic Devices
6.1.1 Situation Analysis
The ESoP for HMI clearly covers any type of information and communication system used in the vehicle, including nomadic devices and after-market systems. However, a nomadic device can e.g. display a movie DVD without any restrictions, while the European Statement of Principles clearly covers this situation.
Because of the diversity of functions provided by nomadic devices, it is not possible to consider their use inside the vehicle per se unsafe: the level of criticality is directly related to the type of function that the driver decides to access and to the driving task (speed, road type, traffic situation etc.). A general ban of nomadic device use inside a vehicle seems unjustified. On the other hand suitable measures need to be defined in order to address nomadic device use by the driver while driving. In general, it would be difficult to control which function is currently used by the driver, if this function is or is not related to the driving task, and if this function is critical in terms of distraction.
Development of nomadic devices involves many types of widespread stakeholders who are not organised into easily identified networks and may not necessarily be aware about road safety issues.
The advertisement of these products often shows that safety aspects are not taken sufficiently taken into account. Furthermore, there are no regulations applicable to nomadic devices in terms of installation and services (compared with more than 200 European Directives applicable to vehicles and vehicle equipments). In some European countries there are regulations on the use of ND – e.g. on the use of hand-held phones while driving.
Nomadic devices can also present a physical risk in case of crashes. Indeed, these devices are often not securely implemented in the vehicle.
Page 300 of 490
6.1.2 Recommendations
R-SyM-1 If a nomadic device or a specific function is meant to be used by the driver while driving, system manufacturers (SyM) and system providers74 should be responsible for applying the ESoP for nomadic devices and for providing clear instructions of use to the driver.
R-SyM-2 If a nomadic device or a specific function is meant to be used while the vehicle is in motion the system manufacturers (SyM) should be responsible for supplying fitting kit according to ESoP for installation (complying with the intent of ECE21) and for ensuring consumer information.
R-SyM-3 For functions not intended to be accessible to the driver while the vehicle is in motion, the system manufacturer should ensure that these functions are disabled when the vehicle is moving75
R-D/E-1 Drivers (D), as well as any fleet owners and the employers (E), should be responsible for installing nomadic systems and after-market systems according to the installation instructions.
R-MS-8 Member States (MS) should take measures (for example legislation) to ensure secure fixing of aftermarket systems and nomadic devices according to ECE R21, or equivalent (for details please see Annex G)
R-MS-10 Member States should take measures to ensure that use of nomadic devices by the driver while driving is hands-free.
R-MS-11 Member States should identify and take necessary actions on the unintended use or misuse of visual entertainment systems by drivers while driving (e.g. movies, TV, video games).
6.2 Service Providers
6.2.1 Situation Analysis
In the list of Actors involved in the issue of nomadic devices (NDs) no one can be clearly identified as solely responsible for road safety involving their use by drivers. In the contrary case of integrated systems or OEM installed systems, it is clear that car manufacturers are identified by users and public authorities as the responsible actor; very often they act like an “active filter”, allowing (or not) access, and integrating (or not) dedicated functions depending on their potential impact on road safety. A good, but not unique, example is the integrated smart hand free kit developed by a French car manufacturer where there is no possibility to read or write SMS while driving; this was a clear decision of the car manufacturer after evaluation of the safety impact.

Page 301 of 490
Apart from the nomadic device manufacturer, the software providers and the content providers can also play an active role to improve the situation in the short-term. A service or software provider can present information on various types of systems (e.g. running text) or sell new functionality for an existing system directly to the customer, also contributing to the design of interaction (e.g. navigation software, or customized internet-portal). Consequently he should be responsible for this functionality. For example, if navigation software is distributed independently from the device (e.g. PDA) itself, the software provider is the product-responsible organisation for the navigation functionality, not the device manufacturer.
For ND based on communication (and this is more and more the case) telecom operators can also play an important role, perhaps more efficiently than other actors. According to French statistics, more than 50% of mobile phone use originates from within a vehicle by drivers or passengers. Some telecommunication companies are well aware of their responsibility, others obviously try to shift the full responsibility to the user. These differences can easily be identified by analysis of advertisement for certain products.
6.2.2 Recommendations
Action plan for short-term result:
R-SP-1 Service providers (SP) should develop and comply with a “Safety Agreement”, compatible with ESoP, together with hardware platform providers, e.g. after-market and nomadic system manufacturer, vehicle manufacturers. This initiative can be discussed and launched during the planned ERTICO workshop within the AIDE framework on ND-issues.
R-SP-2 If a specific function or service, which was designed and marketed e.g. for a nomadic device, is intended by the product-responsible organisation to be used by the driver while driving, this organisation should be responsible for ensuring the availability of a fitting kit for the respective device in accordance with ESoP and compliant with ECE21 or equivalent and for providing clear instructions of use to drivers.
For medium term result (in parallel with above):
R-SyM-4 Nomadic device manufacturers should cooperate with the automotive industry aiming at accessing the integrated HMI of the vehicle, e.g. by providing smart, standardized interfaces between NDs and the vehicle.
6.3 Fleet Owners and Employers76
6.3.1 Situation Analysis
For certain ITS services, the first vehicles equipped will be commercial ones driven by professional drivers. Some systems may be OEM supplied, but the diversity and specialist nature of the requirements involve an increasing number of after-market and custom-designed systems being used by drivers during their working day. A particular issue concerns pre-existing in-vehicle ITS systems and the compatibility, from the driver’s point of view, of the different systems [Matrix: Information Presentation and Interaction].
Page 302 of 490
European Health and Safety Directives apply to any employer, manager, or supervisor with staff who drive or ride a motorcycle at work, and particularly those responsible for fleet management. They include people whose main job is driving and those who drive or ride occasionally or for short distances. (However, if drivers wilfully ignore instructions given to them or misuse equipment in a way that could not be foreseen by their employer, then the driver becomes fully responsible for the consequences of their misuse.)
So, the Fleet Manager/Employer has a responsibility under existing Health and Safety legislation for safety at work to ensure the safe operation of their fleet in terms of risk to drivers and other road users. Key issues are the extent to which Fleet Owners and Employers are responsible for HMI aspects of systems used by their employees and whether they are aware of these responsibilities. In outline, these are expected to cover:
1. Specification of any hardware or software purchased and their testing and
acceptance – Note that ESoP already applies to their systems. 2. Installation and maintenance in accordance with the manufacturer’s
instructions - This may involve periodic updating of hardware and software and system re-testing.
3. Provision of both general and specific safety information in relation to the use of the in-vehicle ITS equipment provided – This could include instructions to drivers that additional in-vehicle systems should only be installed and used by agreement with the Employer.
4. Ensuring that safety is not compromised by drivers’ use of any in-vehicle systems as part of their work – This implies that training and assessment of the training are involved.
6.3.2 Recommendations
R-ESoP-2 Expand the scope of the principles to include “post-manufacture” issues including service providers and Fleet Managers and Employers as described above – see Annex D for an initial draft. [Action by: EC]
R-EC-1 The EC should clarify the extent to which existing Health and Safety Directives include all drivers who drive as part of their work activities and include in-vehicle ergonomic safety considerations. [Action by: EC Legal experts].
R-EC-2 Undertake Europe-wide information dissemination to Fleet Managers and Employees. As a first step, this can be undertaken through European and National Member representative bodies. [Action by: EC and Member States, eSafety WG-Outreach and Industry]

Page 303 of 490
6.4 Authorities
6.4.1 Situation Analysis
Authorities have been identified as a key actor in the implementation of eSafety systems. Authorities include both the EC and Member States and the role that each will play will depend on existing Directives and laws in specific areas.
There appears to be a lack of knowledge concerning the ESoP, and HMI principles, more generally, in some sections of the industry. Therefore, wider dissemination and use of the ESoP could be beneficial along with continued monitoring of its impact.
To encourage more responsible use of in-vehicle information and communications devices, the provision of consumer information concerning the safety and usability of in-vehicle devices may be helpful [Matrix: use / after-market and nomadic devices].
Manufacturers of integrated and OEM-installed systems are well informed concerning HMI, so the existing ACEA-self-commitment for ESoP compliance is an efficient route [Matrix: information presentation, design of interaction]. For after-market and nomadic device manufacturers, however, there are examples of systems that appear less well designed. Consequently there should also be a self-commitment of these design responsible organisations covering systems and functionalities which they intend for in-vehicle use while driving. Moreover these systems are sometimes poorly secured within the vehicle, which may pose a safety threat in case of an accident. For such devices, it also appears necessary to take measures to ensure secure fixing. One possibility is to adapt ECE R21 which is required to apply to OEM fitments. [Matrix: installation/after-market and nomadic devices]
Specific current areas of concern for HMI include the use of hand-held devices and visual entertainment systems (e.g. TV, DVD) by drivers while driving. [Martix: installation/nomadic devices and information presentation/after-market and nomadic devices and interaction/nomadic devices]. This is an area of driver behaviour that could be addressed by Member States e.g. by means of suitable legal measures and enforcement actions to improve safety.
6.4.2 Recommendations
Communication
R-MS-1 Member States should actively ensure ESoP is effectively disseminated, known and used by designers, installers, manufacturers, employers and fleet managers77
R-MS-2 Member States should provide general information to drivers on safe use of in-vehicle information and communication systems e.g. by means of safety campaigns, mass media etc.
R-MS-3 Member States should promote self-commitment of ESoP compliance for after-market systems and nomadic devices and support provision of consumer information concerning the safety implication and usability of in-vehicle information and communication devices (via consumer organisations, EURO-NCAP etc.)
R-MS-4 Member States should report to the European Commission about their studies regarding the ESoP if not done yet.
Page 304 of 490
Monitoring and Enforcement78
R-MS-5 Member States should ensure that regularly updated information is available on the definition and dynamics of the market for after-market and nomadic devices to be informed about the evolution of the market and of the techniques.
R-MS-6 Member States continue evaluation and monitoring of the impact of the ESoP and report to the European Commission about the results.
R-MS-7 Member States should ensure that data collection is sufficiently detailed in order to perform further evaluation and monitoring the safety-impact of in-vehicle information and communication systems especially of aftermarket systems and nomadic devices.
R-MS-8 Member States should take measures (for example legislation) to ensure secure fixing of aftermarket systems and nomadic devices according to ECE R21, or equivalent (for details please see Annex G).
R-MS-9 Member States should continue to actively enforce existing Health and Safety legislation concerning at-work driving practices.
R-MS-10 Member States should take measures to ensure that use of nomadic devices by the driver while driving is hands-free.
R-MS-11 Member States should identify and take necessary actions on the unintended use or misuse79 of visual entertainment systems by drivers while driving (e.g. movies, TV, video games).
7. Summary of Recommendations 7.1 Concerning ESoP
R-ESoP-1 Clarify and adequately incorporate the distribution of responsibilities into the scope.
R-ESoP-2 Expand the scope of the principles to include “post-manufacture” issues including service providers and Fleet Managers and Employers as described above – see Annex D for an initial draft.
R-ESoP-3 Explicitly address information presentation by service providers (e.g. running text) in the scope.
R-ESoP-4 Explicitly address manufactures of specific systems in the Scope (e.g. medical vehicle systems, express delivery systems).
R-ESoP-5 Add specific criterion to Principle 2.4 (“visual displays should be positioned as close as practicable to the driver's normal line of sight”). Possible solution: adopt the 30°-rule from the current version 2.1 of the American AAM-guideline for visually intensive displays and add a precise definition on “visually intensive displays”.
R-ESoP-6 Add definition of “long” in Principle 4.3 (“The system should not require long and uninterruptible sequences of interactions”). Since a time-based
Page 305 of 490
criteria would only be valid under defined and repeatable conditions, it appears to be reasonable to define a minimum number of interactions in order to call it “long”. The ESoP expansions published in 2001 contain some proposals about how this issue could be resolved.
R-ESoP-7 Revise principles on information about the system including instructions on system use, since the driver is ultimately responsible for system use while driving (Vienna Convention).
R-ESoP-8 Reword ESoP carefully for clarity but with no fundamental change to the structure and to the existing principles
R-ESoP-9 Enhance applicability of the ESoP by explicitly naming what needs to be done to apply a principle. Precisely link standards, rules and directives to the specific principle. In general, exercise caution over additional, not sufficiently validated, verification procedures – Annex B
R-ESoP-10 Continue to monitor standardization activities, EC-funded projects, AAM developments, Japanese activities etc. and evaluate opportunities for collaboration – see Annex E, F
R-ESoP-11 In order to ensure an efficient process of revising the ESoP it is recommended that this work should be carried out by a small group of well-informed and well-motivated persons covering vehicle manufacturers, suppliers and research institutions/Government representatives.
7.2 Concerning Additional Actions Manufacturers of Nomadic Devices and After-market Systems (SyM)
R-SyM-1 If a nomadic device or a specific function is meant to be used by the driver while driving, system manufacturers (SyM) and system providers80 should be responsible for applying the ESoP for nomadic devices and for providing clear instructions of use to the driver.
R-SyM-2 If a nomadic device or a specific function is meant to be used while the vehicle is in motion the system manufacturers (SyM) should be responsible for supplying fitting kit according to ESoP for installation (comply with intent of ECE21) and to ensure consumer information.
R-SyM-3 For functions not intended to be accessible to the driver while the vehicle is in motion, the system manufacturer should ensure that these functions are disabled when the vehicle is moving81
R-SyM-4 Nomadic device manufacturers should cooperate with the automotive industry aiming at accessing the integrated HMI of the vehicle, e.g. by providing smart, standardized interfaces between NDs and the vehicle.
.

Page 306 of 490
Service Providers
R-SP-1 Service providers (SP) should develop and comply with a “Safety Agreement”, compatible with ESoP, together with hardware platform providers, e.g. after-market and nomadic system manufacturer, vehicle manufacturers. This initiative can be discussed and launched during the planned ERTICO workshop within the AIDE framework on ND-issues.
R-SP-2 If a specific function or service, which was designed and marketed e.g. for a nomadic device, is intended by the product-responsible organisation to be used by the driver while driving, this organisation should be responsible for ensuring the availability of a fitting kit for the respective device in accordance with ESoP and compliant with ECE21 or equivalent and for providing clear instructions of use to drivers.
Drivers / Employers
R-D/E-1 Drivers (D), as well as any fleet owners and the employers (E), should be responsible for installing nomadic systems and after-market systems according to the installation instructions.
Authorities: EC
R-EC-1 The EC should clarify the extent to which existing Health and Safety Directives include all drivers who drive as part of their work activities and include in-vehicle ergonomic safety considerations. [Action by: EC Legal experts].
R-EC-2 Undertake Europe-wide information dissemination to Fleet Managers and Employees. As a first step, this can be undertaken through European and National Member representative bodies. [Action by: EC and Member States, eSafety WG-Outreach and Industry]
R-EC-3 The EC should promote continued research on quantitative measures of driver behaviour and on the evidential basis for safety impacts of in-vehicle information and communication systems as well as on Advanced Driver Assistance Systems82 as a function of the driving task
Authorities: Member States
R-MS-1 Member States should actively ensure, ESoP is effectively disseminated, known and used by designers, installers, manufacturers, installers and fleet managers83
R-MS-2 Member States should provide general information to drivers on safe use of in-vehicle information and communication systems e.g. by means of safety campaigns, mass media etc.
R-MS-3 Member States should promote self-commitment of ESoP compliance for after-market systems and nomadic devices and support provision of consumer information concerning the safety implication and usability of in-vehicle information and communication devices (via consumer organisations, EURO-NCAP etc.)
R-MS-4 Member States should report to the European Commission about their studies regarding the ESoP if not done yet.
R-MS-5 Member States should ensure that regularly updated information is available on the definition and dynamics of the market for after-market
Page 307 of 490
and nomadic devices to be informed about the evolution of the market and of the techniques.
R-MS-6 Member States continue evaluation and monitoring of the impact of the ESoP and report to the European Commission about the results.
R-MS-7 Member States should ensure that data collection is sufficiently detailed in order to perform further evaluation and monitoring the safety-impact of in-vehicle information and communication systems especially of aftermarket systems and nomadic devices
R-MS-8 Member States should take measures (for example legislation) to ensure secure fixing of aftermarket systems and nomadic devices according to ECE R21, or equivalent (for details please see Annex G)
R-MS-9 Member States should continue to actively enforce existing Health and Safety legislation concerning at-work driving practices.
R-MS-10 Member States should take measures to ensure that use of nomadic devices by the driver while driving is hands-free.
R-MS-11 Member States should identify and take necessary actions on the unintended use or misuse84 of visual entertainment systems by drivers while driving (e.g. movies, TV, video games)
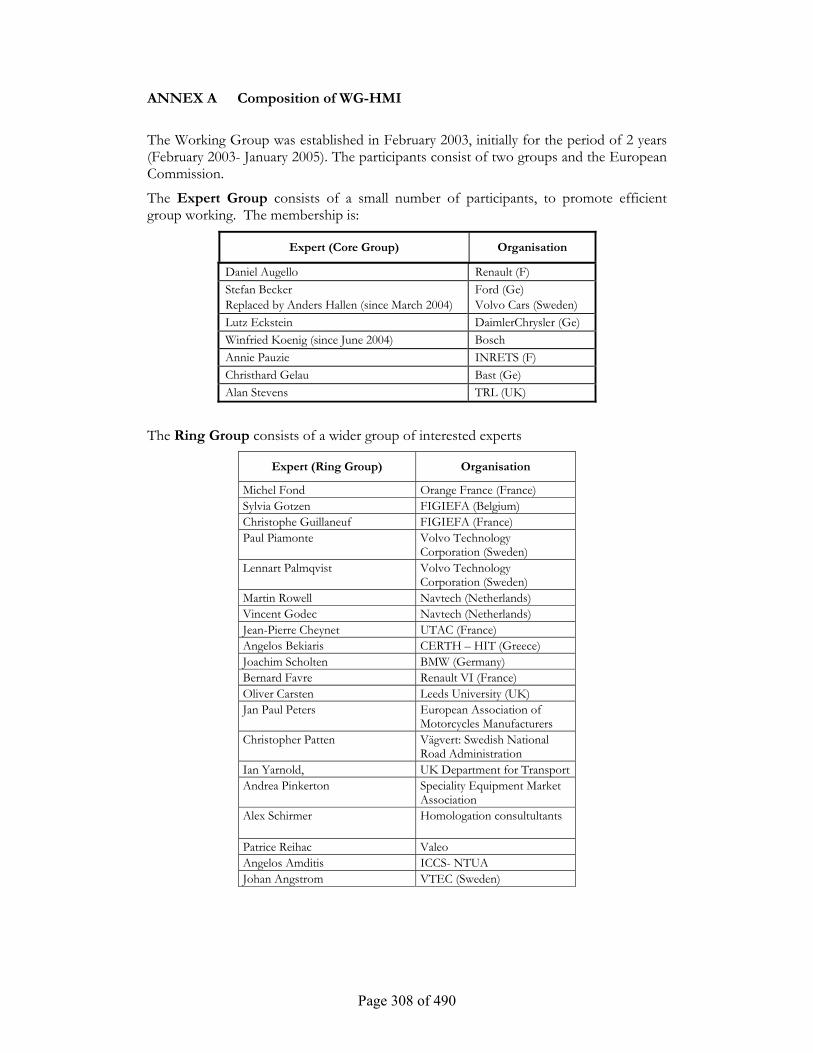
Page 308 of 490
ANNEX A Composition of WG-HMI
The Working Group was established in February 2003, initially for the period of 2 years (February 2003- January 2005). The participants consist of two groups and the European Commission.
The Expert Group consists of a small number of participants, to promote efficient group working. The membership is:
Expert (Core Group) Organisation
Daniel Augello Renault (F) Stefan Becker Replaced by Anders Hallen (since March 2004)
Ford (Ge) Volvo Cars (Sweden)
Lutz Eckstein DaimlerChrysler (Ge) Winfried Koenig (since June 2004) Bosch Annie Pauzie INRETS (F) Christhard Gelau Bast (Ge) Alan Stevens TRL (UK)
The Ring Group consists of a wider group of interested experts
Expert (Ring Group) Organisation
Michel Fond Orange France (France) Sylvia Gotzen FIGIEFA (Belgium) Christophe Guillaneuf FIGIEFA (France) Paul Piamonte Volvo Technology
Corporation (Sweden) Lennart Palmqvist Volvo Technology
Corporation (Sweden) Martin Rowell Navtech (Netherlands) Vincent Godec Navtech (Netherlands) Jean-Pierre Cheynet UTAC (France) Angelos Bekiaris CERTH – HIT (Greece) Joachim Scholten BMW (Germany) Bernard Favre Renault VI (France) Oliver Carsten Leeds University (UK) Jan Paul Peters European Association of
Motorcycles Manufacturers Christopher Patten Vägvert: Swedish National
Road Administration Ian Yarnold, UK Department for TransportAndrea Pinkerton Speciality Equipment Market
Association Alex Schirmer
Homologation consultultants
Patrice Reihac Valeo Angelos Amditis ICCS- NTUA Johan Angstrom VTEC (Sweden)
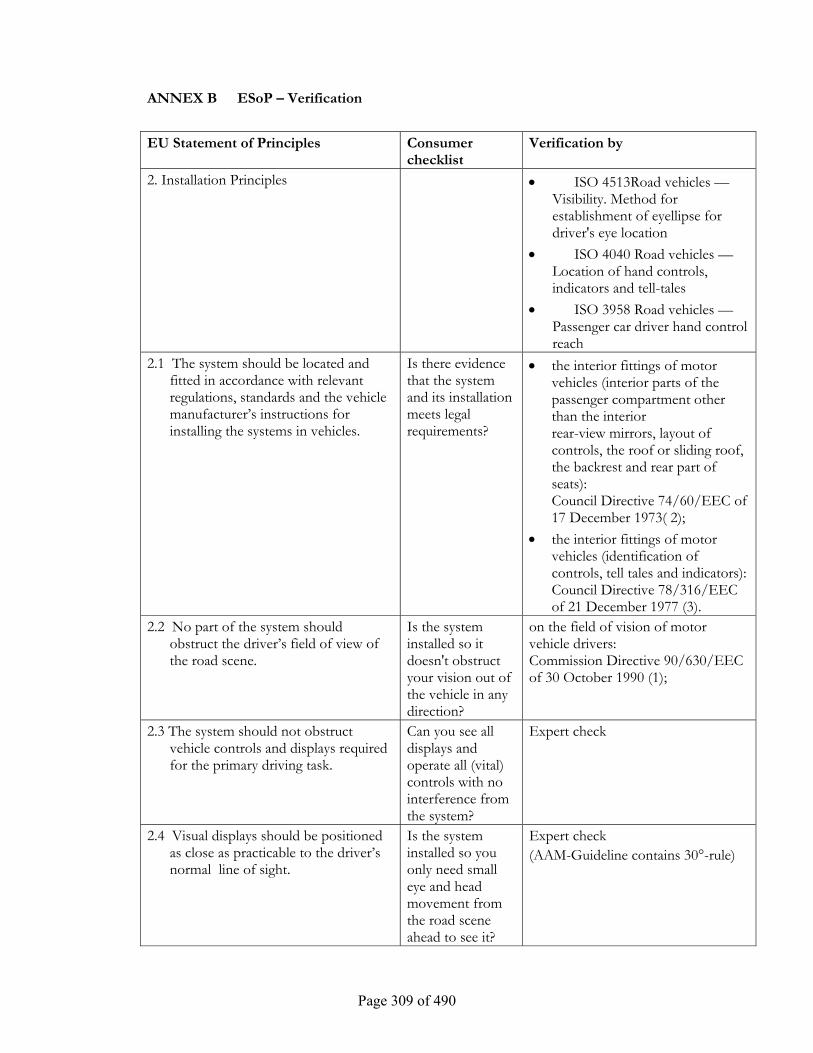
Page 309 of 490
ANNEX B ESoP – Verification
EU Statement of Principles Consumer
checklist Verification by
2. Installation Principles • ISO 4513Road vehicles — Visibility. Method for establishment of eyellipse for driver's eye location
• ISO 4040 Road vehicles — Location of hand controls, indicators and tell-tales
• ISO 3958 Road vehicles — Passenger car driver hand control reach
2.1 The system should be located and fitted in accordance with relevant regulations, standards and the vehicle manufacturer’s instructions for installing the systems in vehicles.
Is there evidence that the system and its installation meets legal requirements?
• the interior fittings of motor vehicles (interior parts of the passenger compartment other than the interior rear-view mirrors, layout of controls, the roof or sliding roof, the backrest and rear part of seats): Council Directive 74/60/EEC of 17 December 1973( 2);
• the interior fittings of motor vehicles (identification of controls, tell tales and indicators):Council Directive 78/316/EEC of 21 December 1977 (3).
2.2 No part of the system should obstruct the driver’s field of view of the road scene.
Is the system installed so it doesn't obstruct your vision out of the vehicle in any direction?
on the field of vision of motor vehicle drivers: Commission Directive 90/630/EEC of 30 October 1990 (1);
2.3 The system should not obstruct vehicle controls and displays required for the primary driving task.
Can you see all displays and operate all (vital) controls with no interference from the system?
Expert check
2.4 Visual displays should be positioned as close as practicable to the driver’s normal line of sight.
Is the system installed so you only need small eye and head movement from the road scene ahead to see it?
Expert check (AAM-Guideline contains 30°-rule)
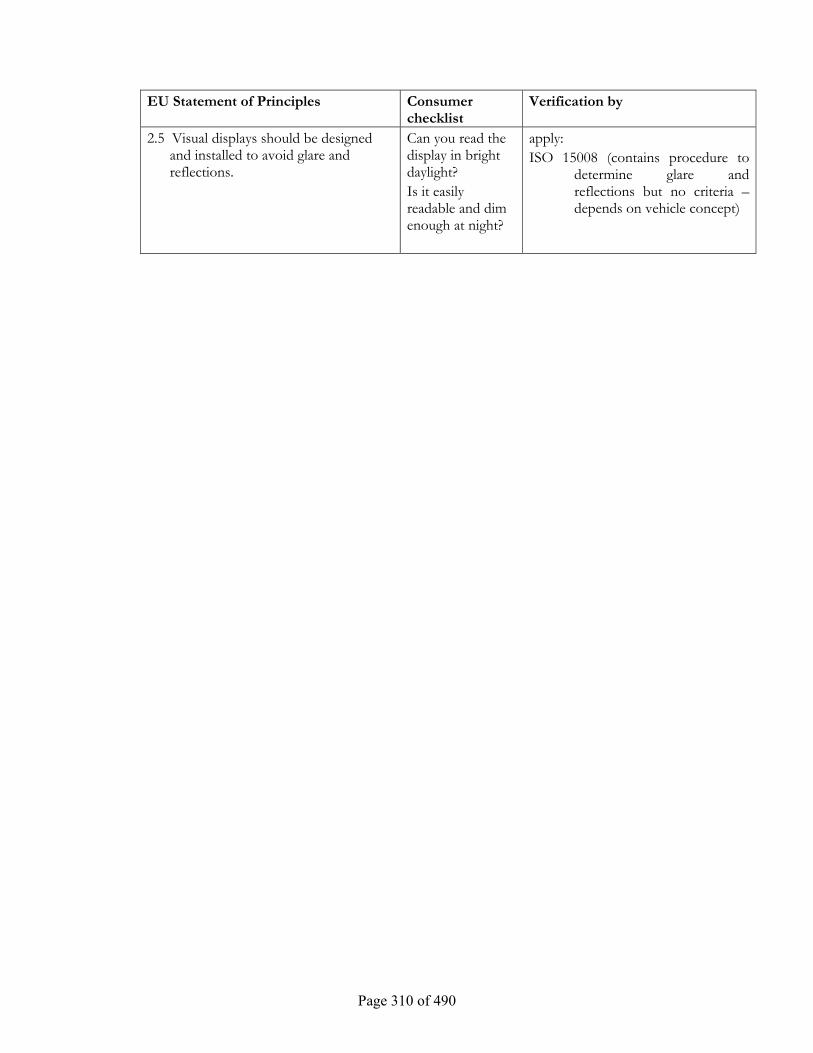
Page 310 of 490
EU Statement of Principles Consumer checklist
Verification by
2.5 Visual displays should be designed and installed to avoid glare and reflections.
Can you read the display in bright daylight? Is it easily readable and dim enough at night?
apply: ISO 15008 (contains procedure to
determine glare and reflections but no criteria – depends on vehicle concept)

Page 311 of 490
3. Information Presentation Principles
3.1 Visually displayed information should be such that the driver can assimilate it with sequential glances that are brief enough not to adversely affect driving.
Can you read displayed information quickly and easily?
Expert check
Work under way ISO TC22/SC13/WG8
3.2 Where available, internationally agreed upon standards relating to legibility, audibility, icons, symbols, words, acronyms or abbreviations, should be used.
Do you understand the symbols and graphics used?
ISO 15008 (procedures and criteria)
ISO 2575 (symbols to be used)
ISO 15006 (audible icons)
3.3 Information relevant to the driving task should be timely and accurate.
Does the system provide information when you expect it to?
Expert check
3.4 The system should not present information which may result in potentially hazardous behaviour by the driver or other road users
Is information presented in a way that does not invite you to drive risky?
Expert evaluation (example: presentation of lateral acceleration could be critical – “scoring”)
3.5 The system should not produce uncontrollable sound levels liable to mask warnings from within the vehicle or outside.
If the system produces uncontrollable sound levels, are warnings still clearly perceptible?
Maximum defined by ISO15006 (criteria in [dbA])
4. Principles on Interaction with Displays and Controls
4.1 The driver should always be able to keep at least one hand on the steering wheel while interacting with the system.
Can you operate the system with only one hand?
Yes/No by expert check
4.2 Speech-based communication systems should include provision for hands-free speaking and listening.
Can you speak and listen hands-free?
Yes/No by expert check
(in some countries supported by laws)
4.3 The system should not require long and uninterruptible sequences of interactions.
Are uninterruptible sequences of interactions short?
expert check, if system state remains unchanged after interrupting a long sequences of interactions
(In discussion in ISO/TC22/SC13/WG8)
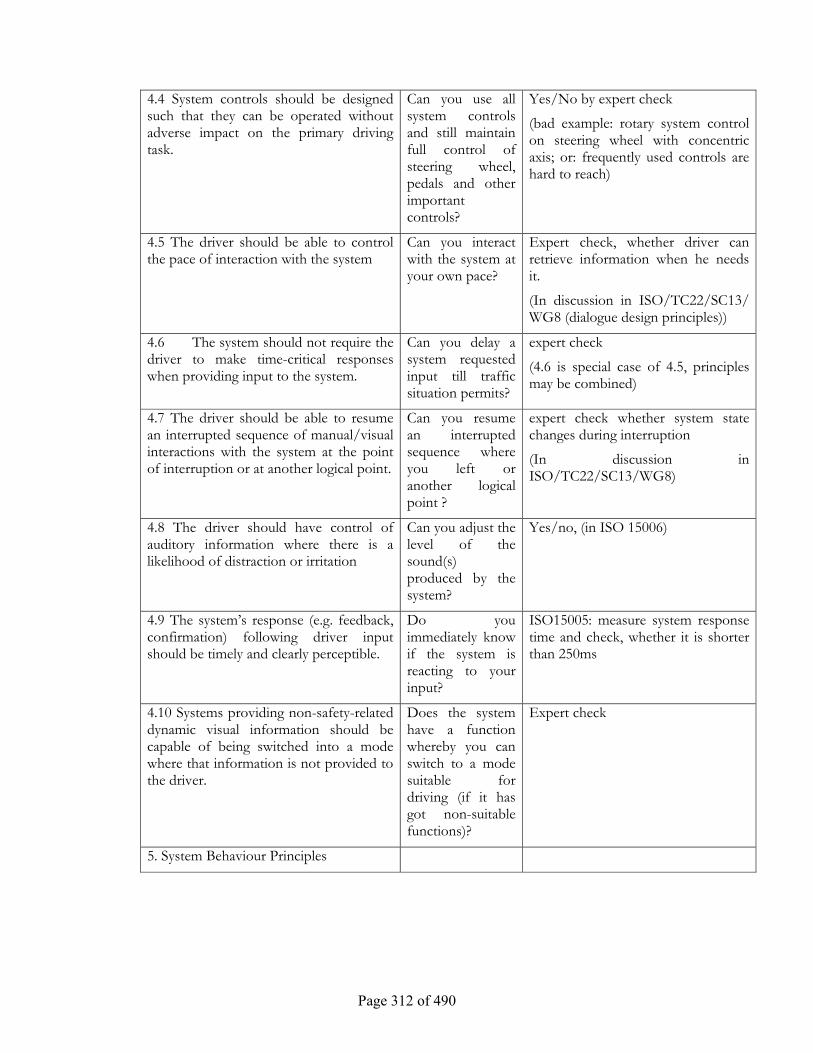
Page 312 of 490
4.4 System controls should be designed such that they can be operated without adverse impact on the primary driving task.
Can you use all system controls and still maintain full control of steering wheel, pedals and other important controls?
Yes/No by expert check
(bad example: rotary system control on steering wheel with concentric axis; or: frequently used controls are hard to reach)
4.5 The driver should be able to control the pace of interaction with the system
Can you interact with the system at your own pace?
Expert check, whether driver can retrieve information when he needs it.
(In discussion in ISO/TC22/SC13/ WG8 (dialogue design principles))
4.6 The system should not require the driver to make time-critical responses when providing input to the system.
Can you delay a system requested input till traffic situation permits?
expert check
(4.6 is special case of 4.5, principles may be combined)
4.7 The driver should be able to resume an interrupted sequence of manual/visual interactions with the system at the point of interruption or at another logical point.
Can you resume an interrupted sequence where you left or another logical point ?
expert check whether system state changes during interruption
(In discussion in ISO/TC22/SC13/WG8)
4.8 The driver should have control of auditory information where there is a likelihood of distraction or irritation
Can you adjust the level of the sound(s) produced by the system?
Yes/no, (in ISO 15006)
4.9 The system’s response (e.g. feedback, confirmation) following driver input should be timely and clearly perceptible.
Do you immediately know if the system is reacting to your input?
ISO15005: measure system response time and check, whether it is shorter than 250ms
4.10 Systems providing non-safety-related dynamic visual information should be capable of being switched into a mode where that information is not provided to the driver.
Does the system have a function whereby you can switch to a mode suitable for driving (if it has got non-suitable functions)?
Expert check
5. System Behaviour Principles
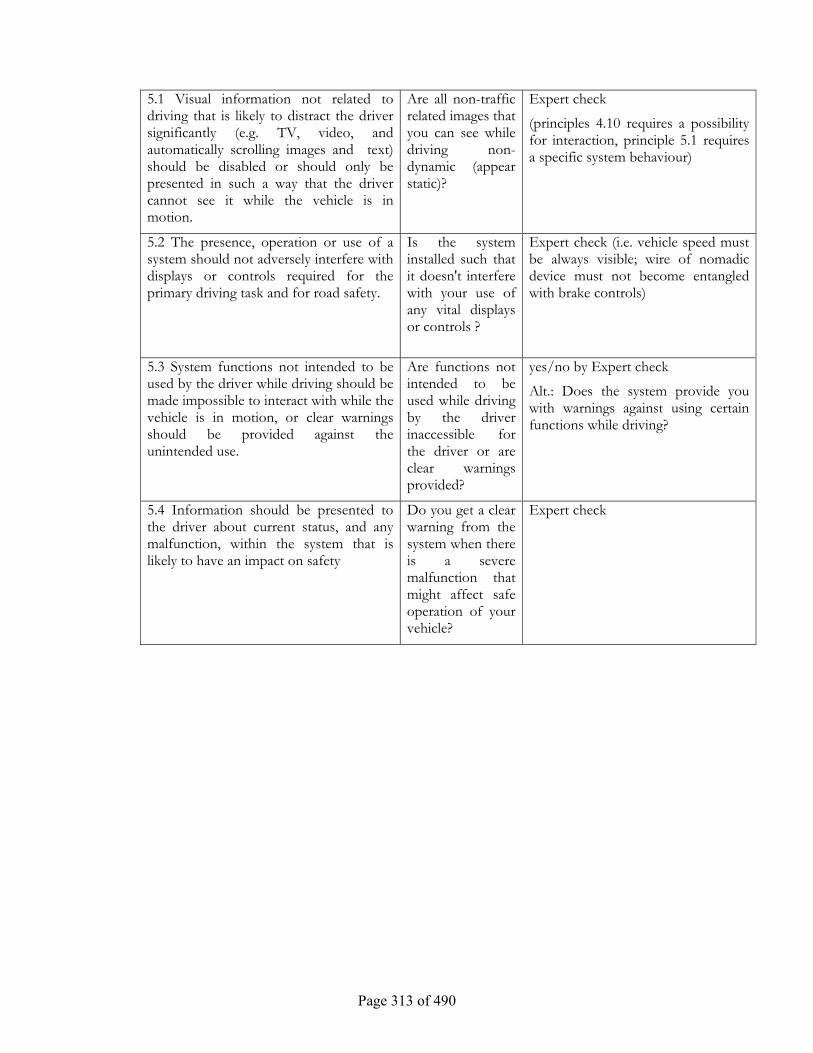
Page 313 of 490
5.1 Visual information not related to driving that is likely to distract the driver significantly (e.g. TV, video, and automatically scrolling images and text) should be disabled or should only be presented in such a way that the driver cannot see it while the vehicle is in motion.
Are all non-traffic related images that you can see while driving non-dynamic (appear static)?
Expert check
(principles 4.10 requires a possibility for interaction, principle 5.1 requires a specific system behaviour)
5.2 The presence, operation or use of a system should not adversely interfere with displays or controls required for the primary driving task and for road safety.
Is the system installed such that it doesn't interfere with your use of any vital displays or controls ?
Expert check (i.e. vehicle speed must be always visible; wire of nomadic device must not become entangled with brake controls)
5.3 System functions not intended to be used by the driver while driving should be made impossible to interact with while the vehicle is in motion, or clear warnings should be provided against the unintended use.
Are functions not intended to be used while driving by the driver inaccessible for the driver or are clear warnings provided?
yes/no by Expert check
Alt.: Does the system provide you with warnings against using certain functions while driving?
5.4 Information should be presented to the driver about current status, and any malfunction, within the system that is likely to have an impact on safety
Do you get a clear warning from the system when there is a severe malfunction that might affect safe operation of your vehicle?
Expert check
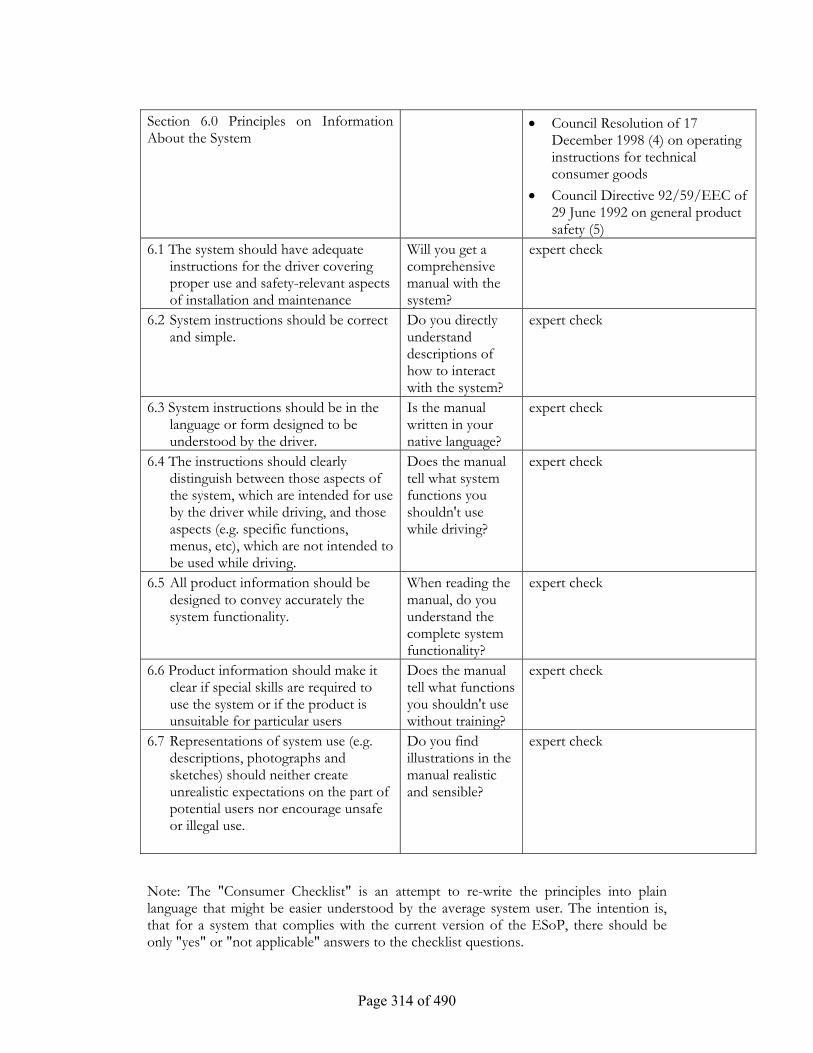
Page 314 of 490
Section 6.0 Principles on Information About the System
• Council Resolution of 17 December 1998 (4) on operating instructions for technical consumer goods
• Council Directive 92/59/EEC of 29 June 1992 on general product safety (5)
6.1 The system should have adequate instructions for the driver covering proper use and safety-relevant aspects of installation and maintenance
Will you get a comprehensive manual with the system?
expert check
6.2 System instructions should be correct and simple.
Do you directly understand descriptions of how to interact with the system?
expert check
6.3 System instructions should be in the language or form designed to be understood by the driver.
Is the manual written in your native language?
expert check
6.4 The instructions should clearly distinguish between those aspects of the system, which are intended for use by the driver while driving, and those aspects (e.g. specific functions, menus, etc), which are not intended to be used while driving.
Does the manual tell what system functions you shouldn't use while driving?
expert check
6.5 All product information should be designed to convey accurately the system functionality.
When reading the manual, do you understand the complete system functionality?
expert check
6.6 Product information should make it clear if special skills are required to use the system or if the product is unsuitable for particular users
Does the manual tell what functions you shouldn't use without training?
expert check
6.7 Representations of system use (e.g. descriptions, photographs and sketches) should neither create unrealistic expectations on the part of potential users nor encourage unsafe or illegal use.
Do you find illustrations in the manual realistic and sensible?
expert check
Note: The "Consumer Checklist" is an attempt to re-write the principles into plain language that might be easier understood by the average system user. The intention is, that for a system that complies with the current version of the ESoP, there should be only "yes" or "not applicable" answers to the checklist questions.

Page 315 of 490
ANNEX C Summary of Member State Responses
The comments received from the Member States are quite varied. All of them recognise interest in the principles but also its lack of details. They are waiting for a more elaborated document, stating that the subject is of importance. As for industry, it is quite favourable to the principles in order to stabilise the market. Nevertheless, it is also sceptical about rules which constrain too much that might affect competition between the brands.
Position of Denmark: Such a recommendation is welcome but as there are practically no car manufacturers or equipment suppliers in Denmark, The European Statement of Principle does not really apply to Danish industry. Position of Great Britain: A large number of organisations were contacted and where appropriate, provided information about the recommendation. Moreover, in-depth interviews were held with individuals involved in the design or manufacture of in-vehicle information systems. The feedback received suggests that only a relatively small number of in-vehicle information communication and entertainment systems are designed and manufactured in the UK. The UK indeed is more focused on distribution sales and service provision. Knowledge about the recommendation among those who do the design and manufacture these systems in the UK varied considerably. The motor manufacturing companies appeared well informed and stated that they apply the principles during the design process. Others (e.g. aftermarket and nomadic device manufacturers) have little or no knowledge of the recommendation, relying instead on input from academic institutions, ergonomic literature and consultant ergonomists, or simply trial and error, for their design information. 23 systems have been evaluated to assess the extent of their compliance with the European principles. A national safety checklist was utilised to provide an initial assessment of whether or not a system complies with the principles. The UK approach of checklist assessment has proved extremely valuable as a method of providing a consistent and swift account of compliance with the European Commission.
The survey has identified a number of areas where the recommendation could be strengthened. These include the use of mobile data terminals by fleets of vehicles, the responsibilities of individuals involved with after market devices and multiple component systems, and assessment criteria for context specific applications.
To conclude, the results of the survey and evaluation show that the future Statement of Principles should be an important issue within Europe and internationally. The format of the future document remains open but there is no explicit willingness for a directive. European guidelines seem preferable. Position of Germany: A survey was driven with a questionnaire directed at the German car industry and component supply industry, and completed with on site visits to important international manufacturers. In parallel, an investigation was conducted into the criteria applied for the safety assessment of HMI. The conclusions were:
Page 316 of 490
German car manufacturers and suppliers of original equipment use the following procedures for ensuring that use of the HMI of information and communication systems remain compatible with the driver’s task of driving the vehicle.
Compliance with the recommendation is ensured by integrating the principles in the quality management systems of the relevant manufacturers.
Even prior to publication of the principles, national guidelines and company internal design criteria for HMI were being applied as precursors to the European statement of principles.
The market must be considered as a controlling factor.
There is still a substantial need for research on the methods available and their scientific foundation.
There is a need for research and action on the misuse potentials of information and communication systems.
It is proposed to include service providers on a EU wide basis as a target group in the Recommendation of the European Commission
There is a need for more precise details in the statement of principles about the combination of several systems during a retrofit
Finally, the principles should retain their character of recommendation. It is not considered as necessary to take legislative measures with the exception of a regulation dealing with the installation of retrofit equipment. Position of Sweden: The progress made in respect of the EC requirement is as follows:
A memorandum of understanding has been drafted, involving all of the major car manufacturers in Sweden, but remains unsigned up to now. This is because the Swedish manufacturers seek a European–wide solution to the HMI European Statement of principles rather than purely national agreements. The main reason for not signing the MoU is a matter of fair play and equal competition between European Union members. The Swedish authorities support this view and are favourable to a European directive uniformly applicable to all Member States. Position of France: A large survey has been completed and a second one which especially concerns especially professional drivers is in progress. The results of the first survey were: The recommendation is valuable but very general. The principles are generally well followed by the actors but a problem remains unsolved for nomadic devices; From the point of view of the French authorities, one of the potential solutions is to create a licence for authorising the implementation in the market of on board devices. Any product that has not received this agreement could be taken out of the market by the authorities. In that context the Statement of principles would be a basis both for the designers of the tools and for the evaluators. No position regarding the European format of the next document to be issued is given, neither willingness nor reluctance.
Page 317 of 490
ANNEX D Employers Responsibilities and Relevant Legislation
• Guidelines for Employers (Draft)
Employers requiring or expecting their staff to use in-vehicle systems should ensure that the safe operation of the vehicle is not compromised by the system and that the driver or other road users are not put at risk.
Employer should ensure that the system is maintained in accordance with the manufacturer’s instructions.
Adequate training should be given on all systems that drivers are required to use. There should be a clear distinction between systems or functions that are intended (by the employer) to be used while driving and those that are not. Training should be recorded and its effectiveness assessed.
Employers should ensure that anyone required to use an in-vehicle system whilst driving is capable of doing so without endangering themselves or other road users.
A copy of the manufacturer’s user instructions should be provided (and remain) in every equipped vehicle.
Company procedures should not cause or encourage the driver to misuse any system (such as listening to, or reading, complex. information while driving, or even being required to make difficult business decisions ‘live’ on the phone etc). Similarly, company reward (incentive) or punishment schemes should not encourage system misuse.
Legislation
Many aspects of vehicle design, especially those related to safety, are highly regulated. In addition, there are industry Codes and design recommendations, including the European Statement of Principles (ESoP) relating to the design and use of in-vehicle information and communication systems.
The EC Road Safety Charter has been introduced to provide a framework for specific and voluntary undertakings in support of the eSafety goals. Many of the general provisions are relevant to Fleet Managers and Employers including, for example:
Safety performance measurement … in the …organisation of professional
activities
Initial and continuous driving training and information…
High quality actions in motor-vehicle equipment and ergonomics
Technologies for reducing the consequences of road traffic accidents
Monitoring … compliance with traffic rules by persons acting in my name
Page 318 of 490
European Health and Safety Directives apply to any employer, manager, or supervisor with staff who drive or ride a motorcycle at work, and particularly those responsible for fleet management. They include people whose main job is driving and those who drive or ride occasionally or for short distances.
Legislation and its application varies throughout the EU but basically makes employers responsible for managing health and safety effectively and for assessing the risks to health and safety of their employees. For example, UK guidance makes it clear that this includes ergonomic considerations and use of mobile telephones. So, by extension each person or organisation involved in supplying or using electronic systems within a vehicle has responsibilities to ensure that systems do not compromise either the safety of the users themselves - or of other road users.
A number of Directives have been established to protect the health and safety of workers at work. First there was a Framework Directive and then a series of individual Directives on different topics, including, for example transport activities. The essence of these Directives are then enacted within National legislation.
Framework Directive:
Council Directive 89/391 of 12 June 1989 on the introduction of measures to encourage improvements in the safety and health of workers at work, Official Journal n° L 183, 29.06.1989, p. 1.
URL: http://europe.osha.eu.int/legislation/directives/a1.php3 Individual Directive:
Amended proposal for a Council Decision concerning the minimum safety and health requirements for transport activities and workplaces on means of transport - Individual Directive within the meaning of Article 16 of Directive 89/391/EEC /* COM/93/421FINAL - SYN 420 */, Official Journal C 294 , 30/10/1993 p. 0004
Specific National Legislation and Guidance (UK):
Health and Safety at Work etc Act 1974 Ch 37 (ISBN 0 10 543774 3)
The Management of Health and Safety at Work Regulations 1999 SI 1999/3242 (ISBN 0 11 085625 2)
Driving at Work - Managing work-related Road Safety. UK Health and Safety Executive September 2003 (ISBN 0 7176 2740 3)

Page 319 of 490
ANNEX E ESoP – AAM-Guideline Comparison
1. Overall Design Principles EU Statement of Principles AAM-guideline comment 1.1 The system should be designed to
support the driver and should not give rise to potentially hazardous behaviour by the driver or other road users
states that risk-benefit balance should be positive or at least not negative – difficult to prove since hard to quantify
1.2 The system should be designed in such a way so that the allocation of driver attention to the system displays or controls remains compatible with the attentional demands of the driving situation
If a system is not in accordance with this principle it will compromise driving performance. Consequently the overall HMI design can be evaluated by analysing its effect on driving performance e.g. in a field test or driving simulator study. Carrying out such a test may be an alternative to checking every single principle
1.3 The system should not be designed to distract or visually entertain the driver
addresses games, TV, video, automatically scrolling images or text
2. Installation Principles EU Statement of Principles AAM-guideline comment 2.1 The system should be located and fitted
in accordance with relevant regulations, standards and the vehicle manufacturer’s instructions for installing the systems in vehicles.
1.1 The system should be located and fitted in accordance with relevant regulations, standards and the vehicle and components manufacturer’s instructions for installing the systems in vehicles.
agree, since wording change clarifies the relevance of ESoP for after-market and nomadic devices
2.2 No part of the system should obstruct the driver’s field of view of the road scene.
1.2 No part of the system should obstruct the driver’s field of view as defined by applicable regulations.
needs clarification which regulations are relevant in U.S. compared to EC and Japan
2.3 The system should not obstruct vehicle controls and displays required for the primary driving task.
1.3 No part of the physical system should obstruct vehicle controls and displays required for the primary driving task.
agree, minor clarification
2.4 Visual displays should be positioned as close as practicable to the driver’s normal line of sight.
1.4 Visual displays that carry information relevant to the driving task and visually intensive information should be positioned as close as practicable to the driver’s normal line of sight.
Criterion: If head-down, the display shall be mounted in a position where the 2-D downward viewing angle is less than or equal to 30 degree at the geometric centre of the display
agree, 30-degree rule should be adopted since display position is highly relevant (even if scientific basis for this value is rather weak)“visually intensive information” needs to be defined
2.5 Visual displays should be designed and installed to avoid glare and reflections.
1.5 Visual displays should be designed and installed to reduce or minimize glare and reflections.
needs discussion wording change respects that glare and reflections can not be completely avoided in all vehicle types and conditions
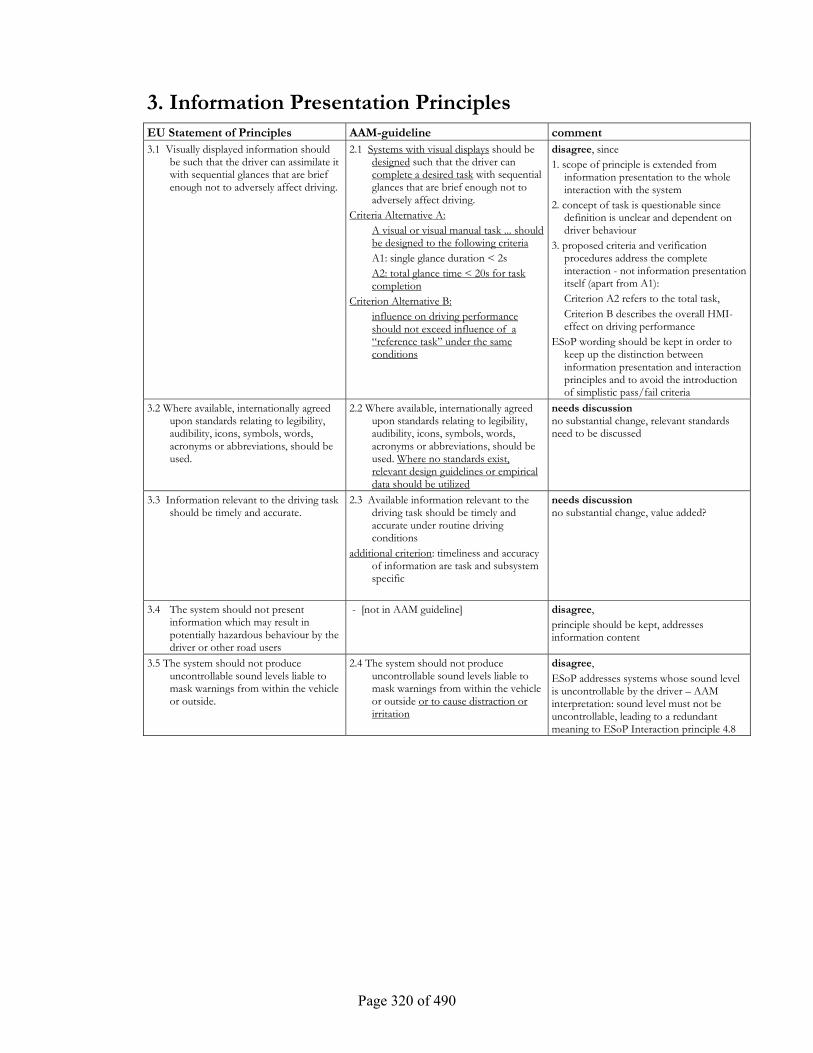
Page 320 of 490
3. Information Presentation Principles EU Statement of Principles AAM-guideline comment 3.1 Visually displayed information should
be such that the driver can assimilate it with sequential glances that are brief enough not to adversely affect driving.
2.1 Systems with visual displays should be designed such that the driver can complete a desired task with sequential glances that are brief enough not to adversely affect driving.
Criteria Alternative A: A visual or visual manual task ... should
be designed to the following criteria A1: single glance duration < 2s A2: total glance time < 20s for task
completion Criterion Alternative B: influence on driving performance
should not exceed influence of a “reference task” under the same conditions
disagree, since 1. scope of principle is extended from
information presentation to the whole interaction with the system
2. concept of task is questionable since definition is unclear and dependent on driver behaviour
3. proposed criteria and verification procedures address the complete interaction - not information presentation itself (apart from A1):
Criterion A2 refers to the total task, Criterion B describes the overall HMI-
effect on driving performance ESoP wording should be kept in order to
keep up the distinction between information presentation and interaction principles and to avoid the introduction of simplistic pass/fail criteria
3.2 Where available, internationally agreed upon standards relating to legibility, audibility, icons, symbols, words, acronyms or abbreviations, should be used.
2.2 Where available, internationally agreed upon standards relating to legibility, audibility, icons, symbols, words, acronyms or abbreviations, should be used. Where no standards exist, relevant design guidelines or empirical data should be utilized
needs discussion no substantial change, relevant standards need to be discussed
3.3 Information relevant to the driving task should be timely and accurate.
2.3 Available information relevant to the driving task should be timely and accurate under routine driving conditions
additional criterion: timeliness and accuracy of information are task and subsystem specific
needs discussion no substantial change, value added?
3.4 The system should not present information which may result in potentially hazardous behaviour by the driver or other road users
- [not in AAM guideline] disagree, principle should be kept, addresses information content
3.5 The system should not produce uncontrollable sound levels liable to mask warnings from within the vehicle or outside.
2.4 The system should not produce uncontrollable sound levels liable to mask warnings from within the vehicle or outside or to cause distraction or irritation
disagree, ESoP addresses systems whose sound level is uncontrollable by the driver – AAM interpretation: sound level must not be uncontrollable, leading to a redundant meaning to ESoP Interaction principle 4.8

Page 321 of 490
4. Principles on Interaction with Displays and Controls EU Statement of Principles AAM-guideline comment 4.1 The driver should always be able to keep
at least one hand on the steering wheel while interacting with the system.
3.1 The system should allow the driver to leave at least one hand on the steering control
needs discussion no substantial wording change, criteria added by AAM need to be discussed
4.2 Speech-based communication systems should include provision for hands-free speaking and listening.
3.2 Speech-based communication systems should include provision for hands-free speaking and listening. Starting, ending, or interrupting a dialog may, however, be done manually. A hands-free provision should not require preparation by the driver that violates any other principle while the vehicle is in motion
could agree, but disagree but no significant change, too much detail on of principle wording
4.3 The system should not require long and uninterruptible sequences of interactions.
3.3 The system should not require long and uninterruptible sequences of manual/visual interactions. The driver should be able to resume an operator-interrupted sequence of manual/visual interactions with the system at the point of interruption or at another logical point in the sequence
disagree, since 1. AAM omitted words “long and” making
this principle redundant to 4.7, so they were combined in the AAM-guideline
2. ESoP principle states that uninterruptible sequences are permitted as long as they are short
3. instead, definition of term “long” should be added to revised ESoP
4.4 System controls should be designed such that they can be operated without adverse impact on the primary driving task.
- [not in AAM-guideline] disagree, should be retained in revised ESoP
4.5 The driver should be able to control the pace of interaction with the system
3.4 In general (but with specific exceptions) the driver should be able to control the pace of interaction with the system. The system should not require the driver to make time-critical responses providing input to the system.
needs discussion additional words “in general” make sense; integration of principle 4.6 needs to be discussed
4.6 The system should not require the driver to make time-critical responses when providing input to the system.
- [integrated in preceding principle] needs discussion
4.7 The driver should be able to resume an interrupted sequence of manual/visual interactions with the system at the point of interruption or at another logical point.
- [integrated in AAM principle 3.3] disagree, should be kept separately, since ESoP 4.7 addresses a different issue than 4.3
4.8 The driver should have control of auditory information where there is a likelihood of distraction or irritation
- [integrated in AAM principle 2.4] disagree, should be kept separately, because otherwise principles on information presentation and system interaction are mixed up
4.9 The system’s response (e.g. feedback, confirmation) following driver input should be timely and clearly perceptible.
3.5 The system’s response (e.g. feedback, confirmation) following driver input should be timely and clearly perceptible.
agree, virtually the same, some minor additions by AAM need to be discussed
4.10 Systems providing non-safety-related dynamic visual information should be capable of being switched into a mode where that information is not provided to the driver.
4.10 Systems providing non-safety-related dynamic visual information should be capable of a means by which being switched into a mode where that information is not provided to the driver.
agree, on wording change in principle disagree with cross reference of criterion to AAM principle 2.1, which is due to mix of information presentation and interaction
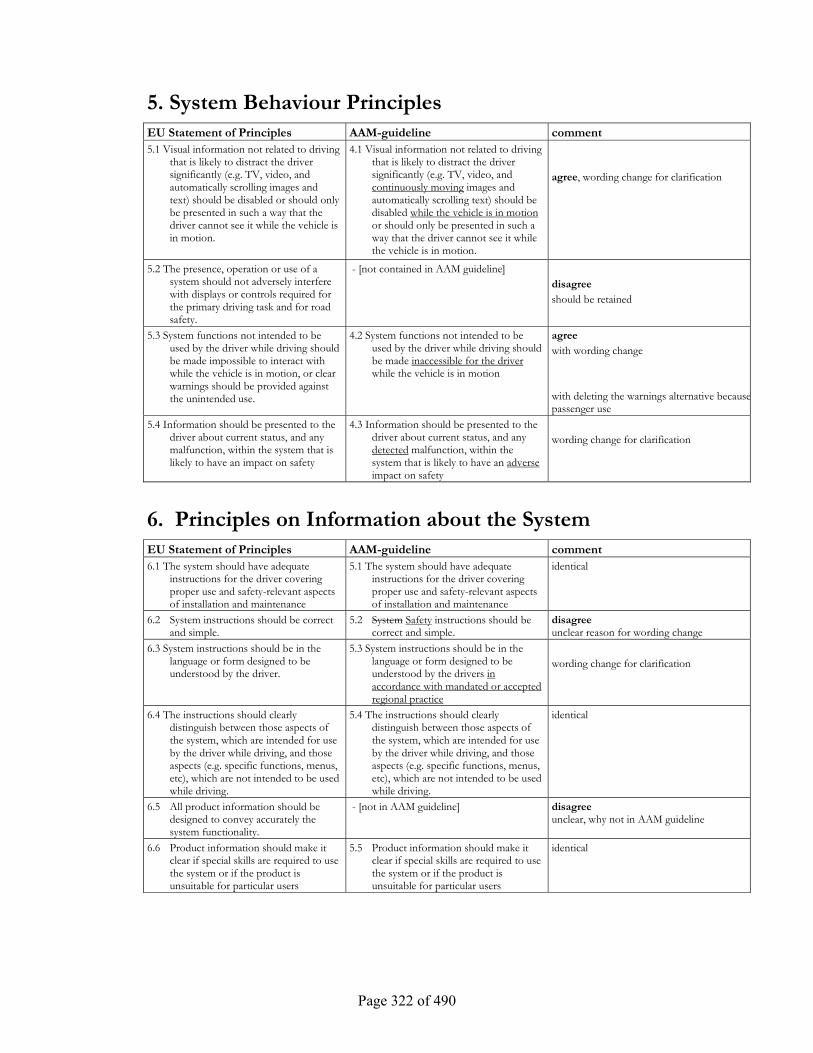
Page 322 of 490
5. System Behaviour Principles EU Statement of Principles AAM-guideline comment 5.1 Visual information not related to driving
that is likely to distract the driver significantly (e.g. TV, video, and automatically scrolling images and text) should be disabled or should only be presented in such a way that the driver cannot see it while the vehicle is in motion.
4.1 Visual information not related to driving that is likely to distract the driver significantly (e.g. TV, video, and continuously moving images and automatically scrolling text) should be disabled while the vehicle is in motion or should only be presented in such a way that the driver cannot see it while the vehicle is in motion.
agree, wording change for clarification
5.2 The presence, operation or use of a system should not adversely interfere with displays or controls required for the primary driving task and for road safety.
- [not contained in AAM guideline] disagree should be retained
5.3 System functions not intended to be used by the driver while driving should be made impossible to interact with while the vehicle is in motion, or clear warnings should be provided against the unintended use.
4.2 System functions not intended to be used by the driver while driving should be made inaccessible for the driver while the vehicle is in motion
agree with wording change
with deleting the warnings alternative becausepassenger use
5.4 Information should be presented to the driver about current status, and any malfunction, within the system that is likely to have an impact on safety
4.3 Information should be presented to the driver about current status, and any detected malfunction, within the system that is likely to have an adverse impact on safety
wording change for clarification
6. Principles on Information about the System EU Statement of Principles AAM-guideline comment 6.1 The system should have adequate
instructions for the driver covering proper use and safety-relevant aspects of installation and maintenance
5.1 The system should have adequate instructions for the driver covering proper use and safety-relevant aspects of installation and maintenance
identical
6.2 System instructions should be correct and simple.
5.2 System Safety instructions should be correct and simple.
disagree unclear reason for wording change
6.3 System instructions should be in the language or form designed to be understood by the driver.
5.3 System instructions should be in the language or form designed to be understood by the drivers in accordance with mandated or accepted regional practice
wording change for clarification
6.4 The instructions should clearly distinguish between those aspects of the system, which are intended for use by the driver while driving, and those aspects (e.g. specific functions, menus, etc), which are not intended to be used while driving.
5.4 The instructions should clearly distinguish between those aspects of the system, which are intended for use by the driver while driving, and those aspects (e.g. specific functions, menus, etc), which are not intended to be used while driving.
identical
6.5 All product information should be designed to convey accurately the system functionality.
- [not in AAM guideline] disagree unclear, why not in AAM guideline
6.6 Product information should make it clear if special skills are required to use the system or if the product is unsuitable for particular users
5.5 Product information should make it clear if special skills are required to use the system or if the product is unsuitable for particular users
identical
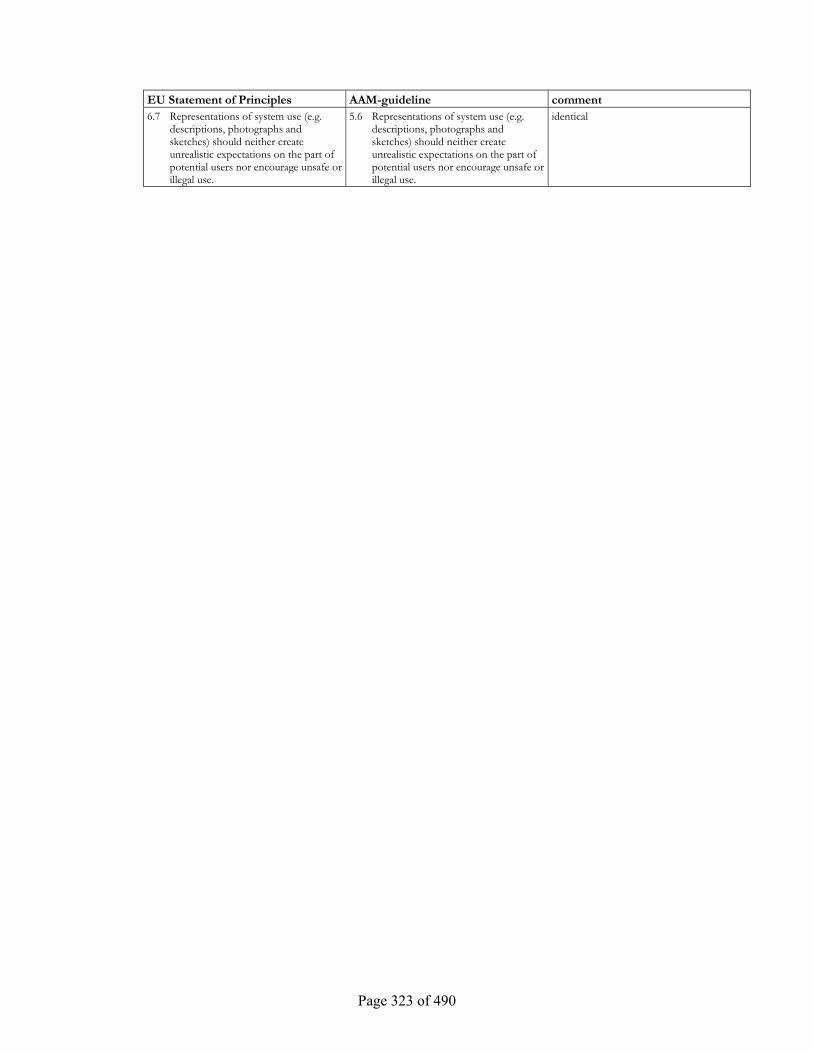
Page 323 of 490
EU Statement of Principles AAM-guideline comment 6.7 Representations of system use (e.g.
descriptions, photographs and sketches) should neither create unrealistic expectations on the part of potential users nor encourage unsafe or illegal use.
5.6 Representations of system use (e.g. descriptions, photographs and sketches) should neither create unrealistic expectations on the part of potential users nor encourage unsafe or illegal use.
identical
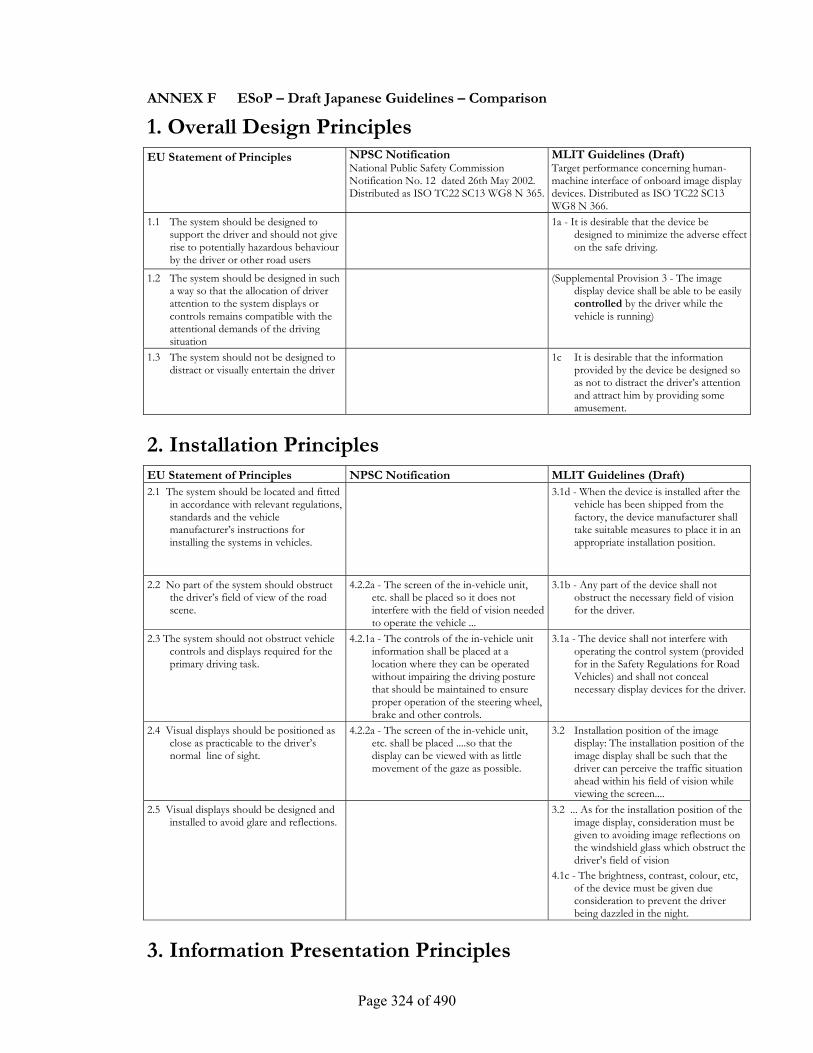
Page 324 of 490
ANNEX F ESoP – Draft Japanese Guidelines – Comparison
1. Overall Design Principles EU Statement of Principles NPSC Notification
National Public Safety Commission Notification No. 12 dated 26th May 2002. Distributed as ISO TC22 SC13 WG8 N 365.
MLIT Guidelines (Draft) Target performance concerning human-machine interface of onboard image display devices. Distributed as ISO TC22 SC13 WG8 N 366.
1.1 The system should be designed to support the driver and should not give rise to potentially hazardous behaviour by the driver or other road users
1a - It is desirable that the device be designed to minimize the adverse effect on the safe driving.
1.2 The system should be designed in such
a way so that the allocation of driver attention to the system displays or controls remains compatible with the attentional demands of the driving situation
(Supplemental Provision 3 - The image display device shall be able to be easily controlled by the driver while the vehicle is running)
1.3 The system should not be designed to distract or visually entertain the driver
1c It is desirable that the information provided by the device be designed so as not to distract the driver’s attention and attract him by providing some amusement.
2. Installation Principles EU Statement of Principles NPSC Notification MLIT Guidelines (Draft) 2.1 The system should be located and fitted
in accordance with relevant regulations, standards and the vehicle manufacturer’s instructions for installing the systems in vehicles.
3.1d - When the device is installed after the vehicle has been shipped from the factory, the device manufacturer shall take suitable measures to place it in an appropriate installation position.
2.2 No part of the system should obstruct the driver’s field of view of the road scene.
4.2.2a - The screen of the in-vehicle unit, etc. shall be placed so it does not interfere with the field of vision needed to operate the vehicle ...
3.1b - Any part of the device shall not obstruct the necessary field of vision for the driver.
2.3 The system should not obstruct vehicle controls and displays required for the primary driving task.
4.2.1a - The controls of the in-vehicle unit information shall be placed at a location where they can be operated without impairing the driving posture that should be maintained to ensure proper operation of the steering wheel, brake and other controls.
3.1a - The device shall not interfere with operating the control system (provided for in the Safety Regulations for Road Vehicles) and shall not conceal necessary display devices for the driver.
2.4 Visual displays should be positioned as close as practicable to the driver’s normal line of sight.
4.2.2a - The screen of the in-vehicle unit, etc. shall be placed ....so that the display can be viewed with as little movement of the gaze as possible.
3.2 Installation position of the image display: The installation position of the image display shall be such that the driver can perceive the traffic situation ahead within his field of vision while viewing the screen....
2.5 Visual displays should be designed and installed to avoid glare and reflections.
3.2 ... As for the installation position of the image display, consideration must be given to avoiding image reflections on the windshield glass which obstruct the driver’s field of vision
4.1c - The brightness, contrast, colour, etc, of the device must be given due consideration to prevent the driver being dazzled in the night.
3. Information Presentation Principles
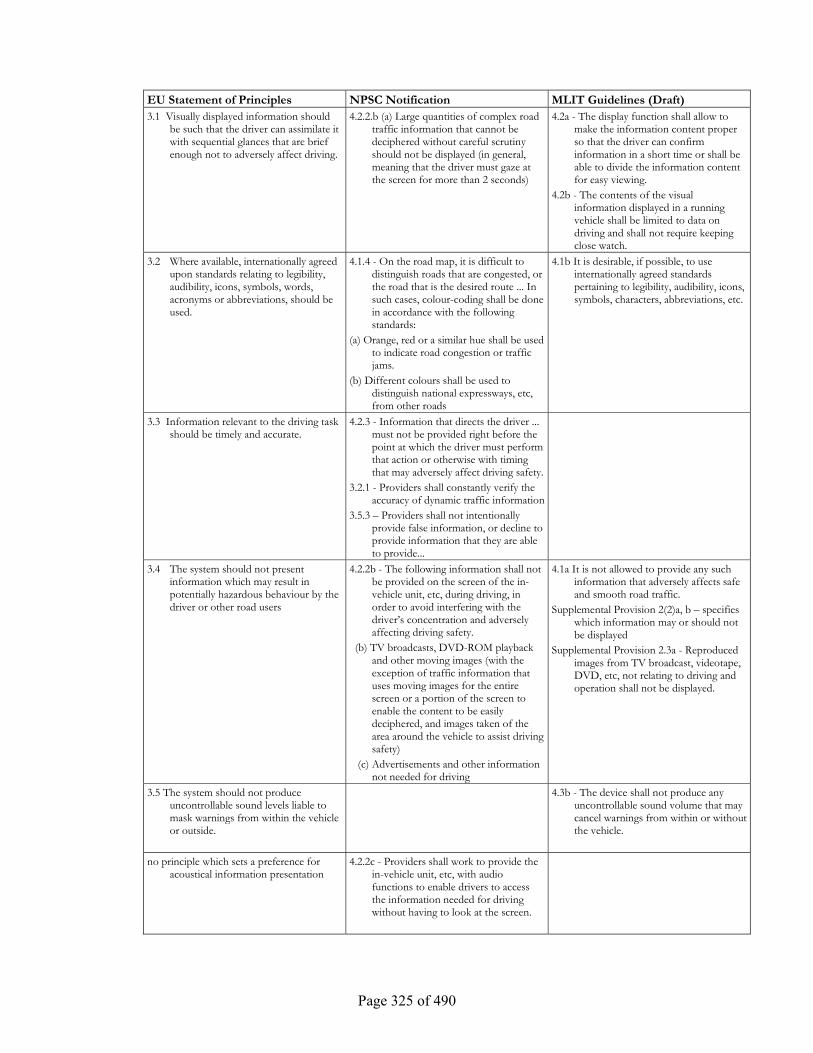
Page 325 of 490
EU Statement of Principles NPSC Notification MLIT Guidelines (Draft) 3.1 Visually displayed information should
be such that the driver can assimilate it with sequential glances that are brief enough not to adversely affect driving.
4.2.2.b (a) Large quantities of complex road traffic information that cannot be deciphered without careful scrutiny should not be displayed (in general, meaning that the driver must gaze at the screen for more than 2 seconds)
4.2a - The display function shall allow to make the information content proper so that the driver can confirm information in a short time or shall be able to divide the information content for easy viewing.
4.2b - The contents of the visual information displayed in a running vehicle shall be limited to data on driving and shall not require keeping close watch.
3.2 Where available, internationally agreed upon standards relating to legibility, audibility, icons, symbols, words, acronyms or abbreviations, should be used.
4.1.4 - On the road map, it is difficult to distinguish roads that are congested, or the road that is the desired route ... In such cases, colour-coding shall be done in accordance with the following standards:
(a) Orange, red or a similar hue shall be used to indicate road congestion or traffic jams.
(b) Different colours shall be used to distinguish national expressways, etc, from other roads
4.1b It is desirable, if possible, to use internationally agreed standards pertaining to legibility, audibility, icons, symbols, characters, abbreviations, etc.
3.3 Information relevant to the driving task should be timely and accurate.
4.2.3 - Information that directs the driver ... must not be provided right before the point at which the driver must perform that action or otherwise with timing that may adversely affect driving safety.
3.2.1 - Providers shall constantly verify the accuracy of dynamic traffic information
3.5.3 – Providers shall not intentionally provide false information, or decline to provide information that they are able to provide...
3.4 The system should not present information which may result in potentially hazardous behaviour by the driver or other road users
4.2.2b - The following information shall not be provided on the screen of the in-vehicle unit, etc, during driving, in order to avoid interfering with the driver’s concentration and adversely affecting driving safety.
(b) TV broadcasts, DVD-ROM playback and other moving images (with the exception of traffic information that uses moving images for the entire screen or a portion of the screen to enable the content to be easily deciphered, and images taken of the area around the vehicle to assist driving safety)
(c) Advertisements and other information not needed for driving
4.1a It is not allowed to provide any such information that adversely affects safe and smooth road traffic.
Supplemental Provision 2(2)a, b – specifies which information may or should not be displayed
Supplemental Provision 2.3a - Reproduced images from TV broadcast, videotape, DVD, etc, not relating to driving and operation shall not be displayed.
3.5 The system should not produce uncontrollable sound levels liable to mask warnings from within the vehicle or outside.
4.3b - The device shall not produce any uncontrollable sound volume that may cancel warnings from within or without the vehicle.
no principle which sets a preference for acoustical information presentation
4.2.2c - Providers shall work to provide the in-vehicle unit, etc, with audio functions to enable drivers to access the information needed for driving without having to look at the screen.
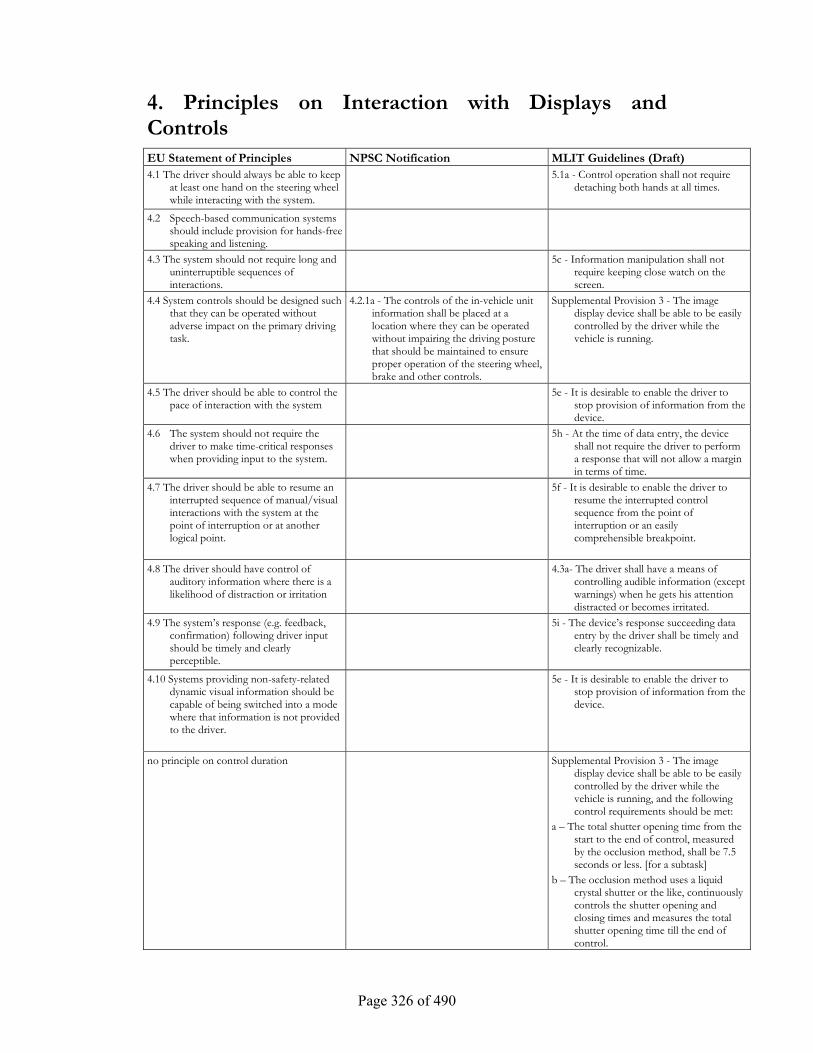
Page 326 of 490
4. Principles on Interaction with Displays and Controls EU Statement of Principles NPSC Notification MLIT Guidelines (Draft) 4.1 The driver should always be able to keep
at least one hand on the steering wheel while interacting with the system.
5.1a - Control operation shall not require detaching both hands at all times.
4.2 Speech-based communication systems
should include provision for hands-free speaking and listening.
4.3 The system should not require long and uninterruptible sequences of interactions.
5c - Information manipulation shall not require keeping close watch on the screen.
4.4 System controls should be designed such that they can be operated without adverse impact on the primary driving task.
4.2.1a - The controls of the in-vehicle unit information shall be placed at a location where they can be operated without impairing the driving posture that should be maintained to ensure proper operation of the steering wheel, brake and other controls.
Supplemental Provision 3 - The image display device shall be able to be easily controlled by the driver while the vehicle is running.
4.5 The driver should be able to control the pace of interaction with the system
5e - It is desirable to enable the driver to stop provision of information from the device.
4.6 The system should not require the driver to make time-critical responses when providing input to the system.
5h - At the time of data entry, the device shall not require the driver to perform a response that will not allow a margin in terms of time.
4.7 The driver should be able to resume an interrupted sequence of manual/visual interactions with the system at the point of interruption or at another logical point.
5f - It is desirable to enable the driver to resume the interrupted control sequence from the point of interruption or an easily comprehensible breakpoint.
4.8 The driver should have control of
auditory information where there is a likelihood of distraction or irritation
4.3a- The driver shall have a means of controlling audible information (except warnings) when he gets his attention distracted or becomes irritated.
4.9 The system’s response (e.g. feedback, confirmation) following driver input should be timely and clearly perceptible.
5i - The device’s response succeeding data entry by the driver shall be timely and clearly recognizable.
4.10 Systems providing non-safety-related
dynamic visual information should be capable of being switched into a mode where that information is not provided to the driver.
5e - It is desirable to enable the driver to stop provision of information from the device.
no principle on control duration Supplemental Provision 3 - The image display device shall be able to be easily controlled by the driver while the vehicle is running, and the following control requirements should be met:
a – The total shutter opening time from the start to the end of control, measured by the occlusion method, shall be 7.5 seconds or less. [for a subtask]
b – The occlusion method uses a liquid crystal shutter or the like, continuously controls the shutter opening and closing times and measures the total shutter opening time till the end of control.
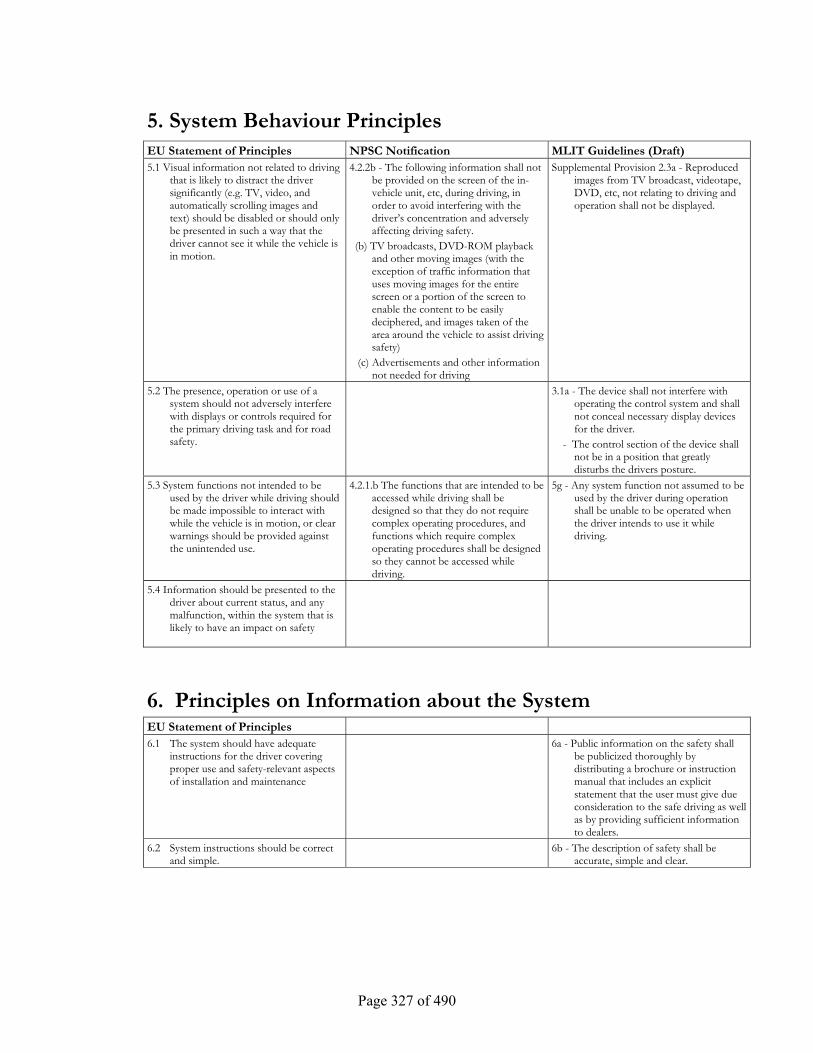
Page 327 of 490
5. System Behaviour Principles EU Statement of Principles NPSC Notification MLIT Guidelines (Draft) 5.1 Visual information not related to driving
that is likely to distract the driver significantly (e.g. TV, video, and automatically scrolling images and text) should be disabled or should only be presented in such a way that the driver cannot see it while the vehicle is in motion.
4.2.2b - The following information shall not be provided on the screen of the in-vehicle unit, etc, during driving, in order to avoid interfering with the driver’s concentration and adversely affecting driving safety.
(b) TV broadcasts, DVD-ROM playback and other moving images (with the exception of traffic information that uses moving images for the entire screen or a portion of the screen to enable the content to be easily deciphered, and images taken of the area around the vehicle to assist driving safety)
(c) Advertisements and other information not needed for driving
Supplemental Provision 2.3a - Reproduced images from TV broadcast, videotape, DVD, etc, not relating to driving and operation shall not be displayed.
5.2 The presence, operation or use of a system should not adversely interfere with displays or controls required for the primary driving task and for road safety.
3.1a - The device shall not interfere with operating the control system and shall not conceal necessary display devices for the driver.
- The control section of the device shall not be in a position that greatly disturbs the drivers posture.
5.3 System functions not intended to be used by the driver while driving should be made impossible to interact with while the vehicle is in motion, or clear warnings should be provided against the unintended use.
4.2.1.b The functions that are intended to be accessed while driving shall be designed so that they do not require complex operating procedures, and functions which require complex operating procedures shall be designed so they cannot be accessed while driving.
5g - Any system function not assumed to be used by the driver during operation shall be unable to be operated when the driver intends to use it while driving.
5.4 Information should be presented to the driver about current status, and any malfunction, within the system that is likely to have an impact on safety
6. Principles on Information about the System EU Statement of Principles 6.1 The system should have adequate
instructions for the driver covering proper use and safety-relevant aspects of installation and maintenance
6a - Public information on the safety shall be publicized thoroughly by distributing a brochure or instruction manual that includes an explicit statement that the user must give due consideration to the safe driving as well as by providing sufficient information to dealers.
6.2 System instructions should be correct and simple.
6b - The description of safety shall be accurate, simple and clear.
Page 328 of 490
6.3 System instructions should be in the
language or form designed to be understood by the driver.
6c - The instruction manual for the device shall be written and formatted so as to be readily understandable by the user.
6.4 The instructions should clearly distinguish between those aspects of the system, which are intended for use by the driver while driving, and those aspects (e.g. specific functions, menus, etc), which are not intended to be used while driving.
6.5 All product information should be designed to convey accurately the system functionality.
6.6 Product information should make it clear if special skills are required to use the system or if the product is unsuitable for particular users
6.7 Representations of system use (e.g. descriptions, photographs and sketches) should neither create unrealistic expectations on the part of potential users nor encourage unsafe or illegal use.
Page 329 of 490
ANNEX G Installation Recommendation and Test Procedure for After-market In-Vehicle Information Systems
Recommendation 1:
Aftermarket IVIS should not endanger the driver or passenger on impact. a) The IVIS should not contain any dangerous roughness, sharp or protruding edges or
dangerous projections likely to increase the risk of serious injury to the occupants b) The IVIS should terminate in round edges c) The IVIS should detach, break up, be distorted or retract under force without
producing any dangerous features or projections d) The IVIS should be energy dissipating
Elaboration:
Aftermarket IVIS in this context is any in-vehicle information or communication system fitted within the vehicle by persons other than the manufacturer, after the vehicle has received Type Approval.
Round edges are defined as having a radii of curvature not less than 3.2 mm (as prescribed in annex 4 of Regulation 21).
Force is defined as the effect of a forward-acting horizontal longitudinal force of 37.8 daN exerted by a cylinder of 110mm diameter with its axis vertical. The force must be directed at the strongest part of the system (as prescribed in annex 4 of Regulation 21).
Energy dissipating means that the deceleration of the head form shall not exceed 80 g continuously for more than 3 milliseconds (as prescribed in annex 4 of Regulation 21).
Dangerous projection is defined as 9.5mm or greater (as prescribed in annex 4 of Regulation 21).
Relevant Regulation:
Regulation 21: Agreement concerning the adoption of uniform conditions of approval and reciprocal recognition of approval for motor vehicle equipment and parts (Section 5.1).
Rationale:
To ensure that the vehicle occupants are not physically endangered by the presence of any components of the system on impact
Recommendation 2:
Aftermarket IVIS should be securely fitted/mounted so that no components of the system detach either partially or fully from their fitting when the vehicle is in motion during the whole life of the product
Page 330 of 490
Elaboration:
Aftermarket IVIS in this context is any in-vehicle information or communication system fitted within the vehicle by persons other than the manufacturer (e.g. drivers), after the vehicle has received Type Approval.
Detach is defined as to separate from intended fitting or to separate fitting/holder from the vehicle.
Vehicle in motion in this context is measured by 1g braking deceleration, 0.5g acceleration or a 1g cornering force (based on an extension of the requirements in the DfT CoP Safety of loads on vehicles, 2002). Simple braking and cornering test procedures are provided in Annex 1 and 2.
Relevant Code of Practice:
UK Department for Transport’s Code of practice: The safety of loads on vehicles, third addition, 2002.
This is intended to apply to loads carried by vehicles such as HGVs but is based on the principle that the method of securing a load in place must be sufficient such that it will not move when subjected to a 1g braking deceleration, a 0.5g acceleration or a 0.5g cornering force. The limit values are based on the performance of goods vehicles but since cars are capable of a greater dynamic performance than most goods vehicles cornering accelerations of up to 1g are used when applying the principle to passenger cars.
Rationale:
To ensure that the driver is not distracted by the system, or any components of the system, becoming partially or fully detached. This ensures that the driver’s ability to be in full control of the vehicle is not affected by any sudden movements of the system components or any physical obstructions if components fall on the driver, the vehicle controls or in the vehicle foot well.
Test procedure 1: Brake Test (DRAFT)
Test vehicle
The IVIS must be fitted to the vehicle as it would be in normal service. It is preferable if the vehicle is fitted with an anti-lock brake system (ABS) to avoid excess tyre wear.
The test vehicle should be either the actual vehicle the system will be fitted to or have comparable interior structure in the area the candidate system is mounted and a brake system capable of generating a Mean Fully Developed Deceleration (MFDD, defined in UNECE R13) of at least 8 m/s2.
Test conditions
The test should be carried out on a flat smooth asphalt area in good condition away from the public road and other personnel or vehicles. The test must be carried out in dry conditions in order to maximise the level of deceleration achieved. Adequate safety precautions must be taken at all times.
Page 331 of 490
Test procedure
The vehicle must be accelerated to a speed of 30 mile/h. The test area will be approached in a straight line and all vehicle inputs (steering, throttle, speed) should be maintained at a constant level for at least one second.
The accelerator must then be released, the vehicle put into neutral gear and the brake pedal activated in as short a time as possible.
The brake pedal must be depressed as hard and as fast as possible such that ABS activation of locked wheel braking is achieved within 0.5 seconds of first touching the brake pedal.
A high pedal force must be maintained until the vehicle comes to rest such that ABS is active or wheels are locked throughout the test. (Note that ABS systems will allow some wheel lock at low speeds of approximately 10 mile/h or less).
The procedure should be repeated five times.
Evaluation of results
The system in question must remain rigidly secure at all times. Any evidence of movement should be noted in a test report.
Test Procedure 2: Cornering Test (DRAFT)
Test vehicle
The IVIS must be fitted to the vehicle as it would be in normal service. It is preferable if the vehicle is fitted with an electronic stability program (ESP) to avoid excess tyre wear.
The test vehicle should be either the actual vehicle the system will be fitted to or have comparable interior structure in the area the candidate system is mounted.
Test conditions
The test should be carried out on a flat smooth asphalt area in good condition away from the public road and other personnel or vehicles. There must be sufficient flat smooth asphalt surrounding the test area that no collision would occur even if the test caused the vehicle to lose control and spin.
The test must be carried out in dry conditions in order to maximise the level of lateral acceleration achieved.
A skilled and experienced test driver should be used and adequate safety precautions must be taken at all times
Test procedure
A course must be marked out using small cones to the specification contained in ISO 3888 (test track for a lane change manoeuvre).
The vehicle should approach the test course at a constant speed. The throttle should be released immediately on entry into the lane and steering should be applied in order to guide the car through the course without colliding with any of the cones.

Page 332 of 490
The first test should be carried out at 10 m/s. The test should then be repeated at progressively higher speeds (increments of 2 m/s) until it is no longer possible to guide the vehicle successfully through the cones.
Tests should be halted if the driver is concerned about instability or loss of control of any sort.
Evaluation of results
The system in question must remain rigidly secure at all times. Any evidence of movement should be noted in a test report.
Page 333 of 490
ANNEX H Definitions
after-market system: After-market information and communication systems are designed for
use while driving and are permanently installed in the vehicle but not by the vehicle manufacturer. They usually have standardized mechanical and electrical interfaces so they can be installed in a variety of models of different manufacturers. Some after-market systems are custom designed for specific functions/employers e.g. for taxis, delivery fleets and emergency vehicles.
Authorities: used as synonym for the European Commission as well as for the Member
States Fleet Owners and Employers: fleet owners in general include Car rental Companies, Taxi
Companies, delivery service companies etc. The fleet owner ca also be the employer of the driver, which affects the distribution of responsibility.
Integrated System: system which integrates various functions into one system, e.g. Radio,
CD/DVD/MP3, navigation. Can be an after-market system, nomadic device or an OEM installed system.
nomadic system: Device, which provides information to, and/or receives output from the
driver of a motor vehicle, that can be rapidly and easily installed into and removed from a vehicle (i.e., not integrated) and which is not permanently affixed to the vehicle and integrated into the overall vehicle system
OEM installed system: System which can be ordered with the vehicle from its manufacturer
and is factory installed (from classic radio to MB COMAND, BMW i-Drive …)
Product responsible organisation
Organisation bringing a new or modified product to the market Note 1 the term product also covers services; Note 2 the product means that product used and experienced by the driver; Note 3 this responsibility includes compliance with all applicable regulations;
Service Provider: Service Provider is a person or organisation supplying information e.g.
geographical or congestion information but may also provide the information presentation (running text, web portals)
Page 334 of 490
4.7 Implementation Road Maps Working Group The Implementation Road Maps Working Group was established in July 2003, for a period of approximately two years. The objectives of the Working Group were originally determined by the eSafety Forum Steering Group and further detailed by the Working Group members at the Group’s first meeting on 18 July 2003. The objectives were the following:
• To identify eSafety systems’ technical and economical potential for the industry as
well as the topics and time table for eSafety infrastructure improvements by the public sector.
• To develop a regularly reviewed road map, focusing on the technology, the economic models and the infrastructure improvements needed for the efficient introduction of intelligent integrated road safety systems.
Representatives from VTT (Risto Kulmala) and DEKRA (Hans-Jürgen Mäurer) chair the Working Group, and it is open to any stakeholder with interest or experience in the issues under discussion in the Working Group. The following stakeholders are represented:
• Car manufacturers
• European Commission
• Industry
• OEM industry
• National authorities
• Research institutions
• Road authorities
• User groups
• Vehicle inspection
The Group’s general approach was defined as follows:
A. Survey of existing and upcoming eSafety systems and available data sources
B. Qualified ranking for identification of priority systems:
Relevant factors are: availability and capability
estimated impact on road safety
general user intentions
cost/efficiency and business models/cases

Page 335 of 490
C. Evaluation of findings and best/worst case figures under certain circumstances
D. Implementation issues
E. Recommendations for actions to promote roll-out and deployment of priority systems
F. Method for regular updating of the implementation road map
A comprehensive assessment was carried out to study the maturity and potential of all eSafety systems. Eleven priority systems were subsequently identified. Five of these were autonomous vehicle-based systems:
• ESC (Electronic Stability Control)
• Blind spot monitoring
• Adaptive headlights
• Obstacle & collision warning
• Lane departure warning
The priority infrastructure-related systems were:
• eCall
• Extended environmental information (Extended FCD)
• RTTI (Real-time Travel and Traffic Information)
• Dynamic traffic management
• Local danger warning
• Speed Alert
A key issue identified by the Working Group is how to promote the deployment and market penetration of these systems in future. The Group noted that the business cases for vehicle-based systems and more infrastructure or mixed systems differ. Additionally, incentives are likely to enhance customer awareness of eSafety features. For each priority system, two market penetration forecasts were made, one based on “business as usual” conditions and the other based on incentives and other measures to promote the deployment of the system.
After two years of work the Implementation Road Maps Working Group produced a number of general recommendations to promote the deployment of priority eSafety systems and a number of system specific recommendations and conclusions. The recommendations are available in the final report, which was presented at the Second eSafety Forum Meeting with the Member States on 18 October 2005.
The Implementation Road Maps Working Group will continue its activities, possibly updating the implementation road map with new priority systems and accelerating the roll-out of eSafety systems.
Page 336 of 490
4.7.1 Final Report and Recommendations of the Implementation Road Map Working Group, 8 September 2005
Legal notice
Legal notice by the European Communities, Information Society Directorate-General
This report was produced by the eSafety Forum Working Group for Directorate-General Information Society of the European Commission. It represents the view of the experts on improving Road Safety in Europe with eSafety systems. These views have not been adopted or in any way approved by the European Commission and should not be relied upon as a statement of the European Commission’s or its Information Society Directorate-General’s view. The European Commission does not guarantee the accuracy of the data included in this report, nor does it accept responsibility for any use made thereof. In addition, the European Commission is not responsible for the external web sites referred to in this publication.
Executive summary
The Road Map Working Group of the eSafety Forum commenced its activities in July 2003. The objectives of the Road Map Working Group were originally set by the steering group and further detailed at the first meeting of the Working Group on 18th of July 2003 by the working group members. The objectives were the following:
1. To identify the technical and economical potentials of the industry as well as the topics and
time table for infrastructure improvements by the public sector with regard to eSafety systems capable of affecting road fatalities in Europe by 2010
2. To develop regularly reviewed road map which focuses technological steps and economic implication models for introduction of intelligent integrated road safety systems as well as the required improvements in road and information infrastructure
After a collection period for all available information and sources concerning eSafety relevant systems, a suitable structure was found in defining vehicle based systems as well as infrastructure based systems and combined solutions like eCall.
The evaluation of these different systems has reflected the following aspects:
• Accidents / fatalities to be affected • % change in accidents expected • other side effects / comfort functions • cost of in–vehicle systems • cost for infrastructure systems (investment / maintenance)
Page 337 of 490
• cost for information infrastructure (investment / maintenance) • year of technical readiness • year of implementation readiness • user acceptance and willingness to pay for • year of implementation by regulation • specific implementation issues • estimation of cars equipped with at 2010 / 2020 • other actors involved for implementation
Not all questions could be appropriately answered but it was possible to create a table of generally prioritized systems which will have a reasonable impact of the number of fatalities and with a reasonable deployment for the timeframe which is on focus.
The priority vehicle based systems are :
ESP (Electronic Stability Program) Blind spot monitoring Adaptive head lights Obstacle & collision warning Lane departure warning
The priority infrastructure-related systems are:
Extended environmental information (Extended FCD) RTTI (Real-time Travel and Traffic Information) Dynamic traffic management Local danger warning Speed Alert
One key question is how to promote the deployment rate of these systems in future. There are also differences in feasibility between vehicle-based systems and more infrastructure / or mixed systems within the business case. Different incentives are likely to enhance the customer awareness for eSafety features. For each priority system, two market penetration forecasts were estimated, one based on “business as usual” conditions and the other based on incentives and other measures to promote the deployment of the system.
The potential safety effects of the systems were estimated based on research as well as expert assessments using German accident statistics and the European CARE accident data base.
Page 338 of 490
The following recommendations were given for in-vehicle systems:
a. The automobile industry, European Commission, the Member States and other stakeholders should enhance the customer awareness of the safety benefits of such systems in vehicles through well structured and harmonized European campaigns
b. The Member States and insurance companies should give financial/fiscal incentives to customers to buy vehicles equipped with such systems. For this purpose, the discussion should start without further delay to clarify the possibility for incentives given by insurance companies or public agencies.
c. All stakeholders should develop feasible sustainable business models for each application on the principle that those who benefit from the introduction should share their benefits with those who have to carry the investments and costs. These should also cover nomadic devices.
The following recommendations were given for autonomous vehicle systems:
In order to increase and accelerate the market penetration of eSafety systems with highest safety benefits, such as ESP,
d. EuroNCAP should incorporate such systems into their rating as soon as proven technology and safety benefit data becomes available, and the functionality of the systems can be adequately tested. ESP and Speed Limiter are on the list today.
e. The European Commission and the Member States should consider regulatory actions (such as making a system mandatory equipment in new vehicles) only as a last option, when such action is judged as essential and beneficial for both industrial and public stakeholders. Socio-economic reasons and respecting the principle of subsidiarity are other important decision criteria. Voluntary solutions should be favoured.
f. The Member States and the industry should follow the recommendations of the HMI (Human Machine Interaction) working group to ensure future user acceptance and a safe application and function of the systems during their whole life cycle
g. The automobile industry, European Commission, the Member States and other stakeholders should continue R&D efforts to develop new technologies and solutions for in-vehicle safety systems as well as to evaluate the effects of eSafety system on safety, economy and employment.
The following recommendations are given for infrastructure-related systems: In order to increase and accelerate the deployment of safety beneficial infrastructure-related eSafety systems,
h. The Member States should ensure the deployment of socio-economically feasible systems and services according to their responsibility and in line with the requirements accepted on the European level.
i. The European Commission should support the deployment of infrastructure-related systems on the TERN as well as other key parts of the road networks with the instruments at their disposal (e.g. TEN-T programme).
Page 339 of 490
j. The industry, European Commission and the Member States should together take actions to ensure that digital maps with the information required by the eSafety systems would be developed for all roads in the Member States.
k. The European Commission and the Member States should agree on actions and instruments to increase the willingness of countries and regions to take on the role as “early adopters” for eSafety systems.
l. The European Commission and the Member States should continue R&D efforts to develop new technologies and solutions for infrastructure-related safety systems as well as to evaluate the effects of such systems on safety and other socio-economic factors.
m. Concerning eCall, the European Commission, the Member States and the industry should follow the recommendations of the eCall Driving Group.
n. Concerning RTTI, the European Commission, the Member States and the industry should follow the recommendations of the RTTI Working Group.
o. Concerning dynamic traffic management and local danger warnings, the road authorities and operators should develop together a European vision and strategy for the deployment and operation of dynamic traffic management and local danger warning systems in co-operation with vehicle and telecommunications industry.
p. Concerning speed alert, the European Commission and the other stakeholders should solve the currently open issues and utilise the implementation roadmap produced by the SpeedAlert project.
1. Introduction eSafety is a joint industry-public sector initiative aiming to reduce the number of accidents by using new intelligent vehicle safety systems and related infrastructure utilising ICT. The eSafety Forum established in 2003 is a joint platform of the road safety stakeholders promoting the implementation of the recommendations of the eSafety Working Group on Road Safety. The Forum has created several Working Groups focusing on priority topics in the action plan. One of these is the Implementation Road Map Working Group (WG), which started its work in July 2003 and had a target for finishing its work by mid-2005, e.g. within approximately 24 months.
Page 340 of 490
The Implementation Road Map WG was given the task of investigating how to promote the roll-out and deployment of vehicle- and infrastructure-based as well as co-operative systems in order to contribute to the overall goals of reducing road accident fatalities by 50% systems by 2010. The inclusion of both vehicle- and infrastructure-based systems caused special problems as there are the strong differences between both actors involved and the timelines for development and financial issues. Also the decision processes are quite different and especially problematic for truly co-operative systems. This meant that the WG had to involve actors from wide range of domains. Especially the car manufacturers and road authorities would have to be well represented. In addition to this, the WG needed members from user or customer related organizations, implementation road map experts, vehicle inspection, OEM industry etc. A close link was established to the Telematics Sub-Group of the Conference of European Directors of Road (CEDR). The chairing of the WG was also arranged in a manner reflecting the orientation of both the road authority and the vehicle industry.
It became also at an early stage quite clear that within the time frame and funding available, no highly sophisticated evaluation could be carried out for the key questions. Having in mind a close correlation to other working groups under the umbrella of the eSafety Forum, especially the output from Accident Causation, eCall, RTTI and Heavy Duty Vehicles WGs, at least one Implementation Road Map WG member was a member or at least had close links to the other eSafety Forum WGs.
2. Objectives The Road Map Working Group of the eSafety Forum commenced its activities in July 2003. The objectives of the Road Map Working Group were originally set by the steering group and further detailed at the first meeting of the Working Group on 18th of July 2003 by the working group members. The objectives were the following:
1. To identify the technical and economical potentials of the industry and issues of existing and
new systems as well as the topics and time table for infrastructure improvements by the public sector with regard to eSafety systems capable of affecting road fatalities in Europe by 2010 2. To develop regularly reviewed road map which focuses technological steps and
economic implication models for introduction of intelligent integrated road safety systems as well as the required improvements in road and information infrastructure
3. Approach The agreed generally approach was defined as follows:
A Survey of existing and feasible upcoming eSafety systems and available data sources

Page 341 of 490
B Qualified ranking for identification of priority systems: Relevant factors are: availability and capability estimated impact on road safety generally user intentions cost / efficiency business models /cases C Evaluation of findings and best / worst case figures under certain circumstances D Implementation issues E Recommendations for actions to promote roll-out and deployment of priority systems F Method for regular updating of the implementation road map The results of the activities of the Working Group are described in this report. 4. Identification of relevant systems
The Working Group dealt with a number of systems, which were first classified according to the timing of their operation with regard to the accident or crash: 1) normal driving, 2) danger phase, 3) crash unavoidable, 4) in-crash, and 5) post-crash. The primary systems (1 and 2) reduce accident risk whereas the secondary ones reduce the consequences of accidents. The functions can be autonomous, co-operative or infrastructure based and hence, also the following classification was tried: 1) Vehicle autonomous systems, 2) Vehicle autonomous systems with network potential, 3) Aggregate information in the vehicle with vehicle to vehicle or vehicle to infrastructure/infrastructure to vehicle (v2v or v2i/i2v) communication, and 4) Functions with support/communication from/to infrastructure.
After clarification of tasks and available options, it was possible to identify the relevant systems. It should be pointed out that the WG only included systems, where the market introduction would be possible in the very near future i.e. by 2010. A number of systems are still under research and hence, out of the time frame of this report. The list of systems needs to be adapted when emerging technologies appear on the market. The systems were first classed according to the following categories:
A vehicle based autonomous systems B systems which are infrastructure & vehicle based
C infrastructure based systems Also systems, which are already or will, according to the working group’s judgement, certainly be in the next generation of vehicles such as ABS were also left out. Later, these were reclassified into two categories of vehicle based (A) and infrastructure related systems (B and C). The systems are described in Table 1.
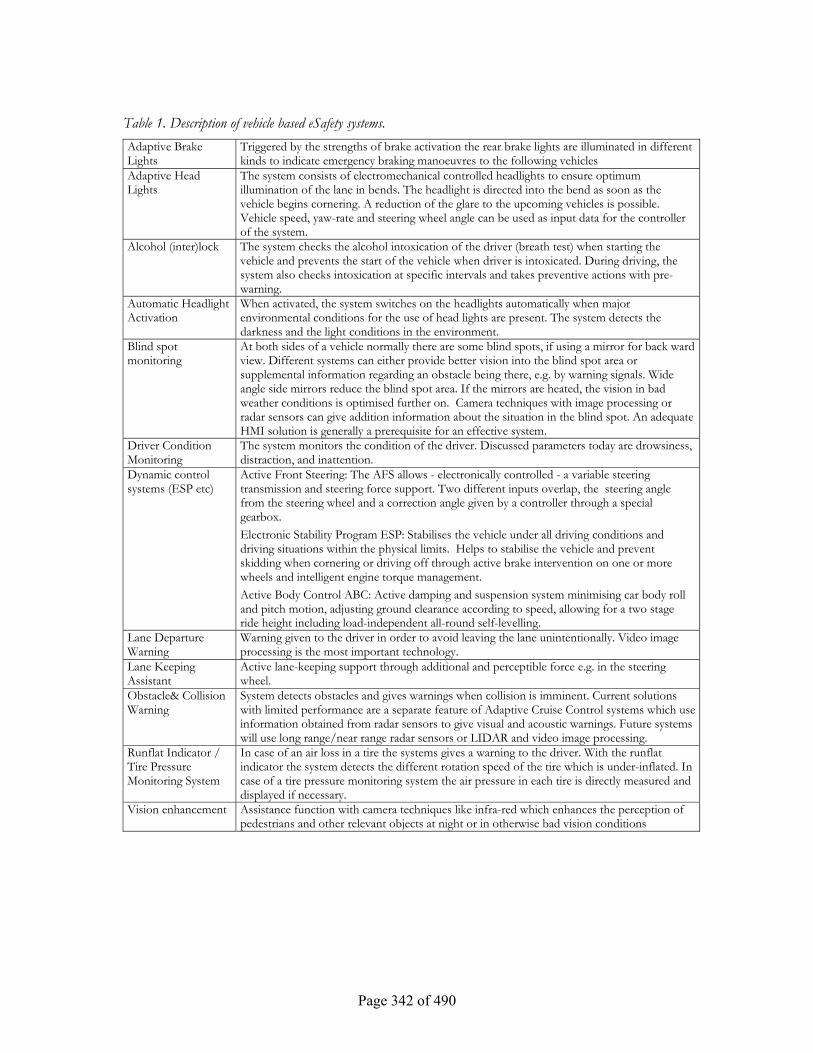
Page 342 of 490
Table 1. Description of vehicle based eSafety systems. Adaptive Brake Lights
Triggered by the strengths of brake activation the rear brake lights are illuminated in different kinds to indicate emergency braking manoeuvres to the following vehicles
Adaptive Head Lights
The system consists of electromechanical controlled headlights to ensure optimum illumination of the lane in bends. The headlight is directed into the bend as soon as the vehicle begins cornering. A reduction of the glare to the upcoming vehicles is possible. Vehicle speed, yaw-rate and steering wheel angle can be used as input data for the controller of the system.
Alcohol (inter)lock The system checks the alcohol intoxication of the driver (breath test) when starting the vehicle and prevents the start of the vehicle when driver is intoxicated. During driving, the system also checks intoxication at specific intervals and takes preventive actions with pre-warning.
Automatic Headlight Activation
When activated, the system switches on the headlights automatically when major environmental conditions for the use of head lights are present. The system detects the darkness and the light conditions in the environment.
Blind spot monitoring
At both sides of a vehicle normally there are some blind spots, if using a mirror for back ward view. Different systems can either provide better vision into the blind spot area or supplemental information regarding an obstacle being there, e.g. by warning signals. Wide angle side mirrors reduce the blind spot area. If the mirrors are heated, the vision in bad weather conditions is optimised further on. Camera techniques with image processing or radar sensors can give addition information about the situation in the blind spot. An adequate HMI solution is generally a prerequisite for an effective system.
Driver Condition Monitoring
The system monitors the condition of the driver. Discussed parameters today are drowsiness, distraction, and inattention.
Dynamic control systems (ESP etc)
Active Front Steering: The AFS allows - electronically controlled - a variable steering transmission and steering force support. Two different inputs overlap, the steering angle from the steering wheel and a correction angle given by a controller through a special gearbox. Electronic Stability Program ESP: Stabilises the vehicle under all driving conditions and driving situations within the physical limits. Helps to stabilise the vehicle and prevent skidding when cornering or driving off through active brake intervention on one or more wheels and intelligent engine torque management. Active Body Control ABC: Active damping and suspension system minimising car body roll and pitch motion, adjusting ground clearance according to speed, allowing for a two stage ride height including load-independent all-round self-levelling.
Lane Departure Warning
Warning given to the driver in order to avoid leaving the lane unintentionally. Video image processing is the most important technology.
Lane Keeping Assistant
Active lane-keeping support through additional and perceptible force e.g. in the steering wheel.
Obstacle& Collision Warning
System detects obstacles and gives warnings when collision is imminent. Current solutions with limited performance are a separate feature of Adaptive Cruise Control systems which use information obtained from radar sensors to give visual and acoustic warnings. Future systems will use long range/near range radar sensors or LIDAR and video image processing.
Runflat Indicator / Tire Pressure Monitoring System
In case of an air loss in a tire the systems gives a warning to the driver. With the runflat indicator the system detects the different rotation speed of the tire which is under-inflated. In case of a tire pressure monitoring system the air pressure in each tire is directly measured and displayed if necessary.
Vision enhancement Assistance function with camera techniques like infra-red which enhances the perception of pedestrians and other relevant objects at night or in otherwise bad vision conditions
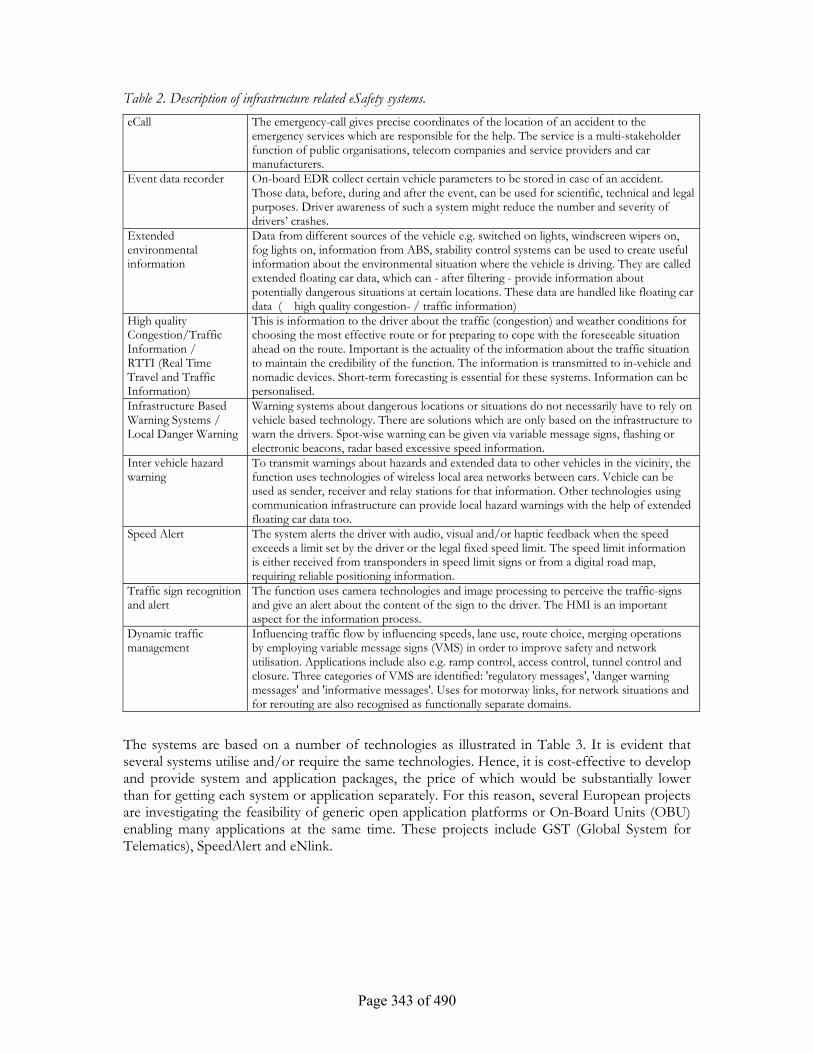
Page 343 of 490
Table 2. Description of infrastructure related eSafety systems. eCall The emergency-call gives precise coordinates of the location of an accident to the
emergency services which are responsible for the help. The service is a multi-stakeholder function of public organisations, telecom companies and service providers and car manufacturers.
Event data recorder On-board EDR collect certain vehicle parameters to be stored in case of an accident. Those data, before, during and after the event, can be used for scientific, technical and legal purposes. Driver awareness of such a system might reduce the number and severity of drivers’ crashes.
Extended environmental information
Data from different sources of the vehicle e.g. switched on lights, windscreen wipers on, fog lights on, information from ABS, stability control systems can be used to create useful information about the environmental situation where the vehicle is driving. They are called extended floating car data, which can - after filtering - provide information about potentially dangerous situations at certain locations. These data are handled like floating car data (� high quality congestion- / traffic information)
High quality Congestion/Traffic Information / RTTI (Real Time Travel and Traffic Information)
This is information to the driver about the traffic (congestion) and weather conditions for choosing the most effective route or for preparing to cope with the foreseeable situation ahead on the route. Important is the actuality of the information about the traffic situation to maintain the credibility of the function. The information is transmitted to in-vehicle and nomadic devices. Short-term forecasting is essential for these systems. Information can be personalised.
Infrastructure Based Warning Systems / Local Danger Warning
Warning systems about dangerous locations or situations do not necessarily have to rely on vehicle based technology. There are solutions which are only based on the infrastructure to warn the drivers. Spot-wise warning can be given via variable message signs, flashing or electronic beacons, radar based excessive speed information.
Inter vehicle hazard warning
To transmit warnings about hazards and extended data to other vehicles in the vicinity, the function uses technologies of wireless local area networks between cars. Vehicle can be used as sender, receiver and relay stations for that information. Other technologies using communication infrastructure can provide local hazard warnings with the help of extended floating car data too.
Speed Alert The system alerts the driver with audio, visual and/or haptic feedback when the speed exceeds a limit set by the driver or the legal fixed speed limit. The speed limit information is either received from transponders in speed limit signs or from a digital road map, requiring reliable positioning information.
Traffic sign recognition and alert
The function uses camera technologies and image processing to perceive the traffic-signs and give an alert about the content of the sign to the driver. The HMI is an important aspect for the information process.
Dynamic traffic management
Influencing traffic flow by influencing speeds, lane use, route choice, merging operations by employing variable message signs (VMS) in order to improve safety and network utilisation. Applications include also e.g. ramp control, access control, tunnel control and closure. Three categories of VMS are identified: 'regulatory messages', 'danger warning messages' and 'informative messages'. Uses for motorway links, for network situations and for rerouting are also recognised as functionally separate domains.
The systems are based on a number of technologies as illustrated in Table 3. It is evident that several systems utilise and/or require the same technologies. Hence, it is cost-effective to develop and provide system and application packages, the price of which would be substantially lower than for getting each system or application separately. For this reason, several European projects are investigating the feasibility of generic open application platforms or On-Board Units (OBU) enabling many applications at the same time. These projects include GST (Global System for Telematics), SpeedAlert and eNlink.

Page 344 of 490
Table 3. Technology prerequisites for the eSafety systems. Green colour means that technologies are alternatives.
IR /
LIDARCam-era
Short range radar
Veh 2 Veh com-muni-cation
other vehicle/driver data Airbag/ CPU
Wheel speed sens-ors
Steer-ing
SensorGPS GSM Digital
Map PSAP DAB/ TMC VMS
Traffic detect-
ion
Road wea-ther
detect-ion
Incident detect-
ion
ESP yaw rate, deceleration, brake actuation X X
Blind Spot Monitoring X X turn indicator signal X X
Vision Enhancement
X (+ IR) X
Lane Keeping Assistance X X X
Lane Departure warning X X X
Driver Monitoring X eye movements, …Speed Alert X X X
Local Danger Warning X X X X X X X X
eCall X X X X XAdaptive
Headlights turn indicator signal X X
Obstacle Collision Warning X X X X X X X
Run Flat Indicator XTire Pressure
Monitoring tire pressure sensors
Autom. Headlight activation light conditions
Event Data recorder
driver input data, status of safety/assistance systems,
decelerationX X X
Adaptive Brake Lights deceleration X
Ext. Environmental Information X X X X X X
Dynamic Traffic Management X X X X X X X X X
Infra-based Warning System X X X X
Intervehicle hazard warning X
RTTI (High quality congestion inf.) X X X X X X X X
The following aspects were considered for each system:
• Accidents / fatalities to be affected • % change in accidents expected • other side effects / comfort functions • cost of in – vehicle systems • cost for infrastructure systems (investments / maintenance) • cost for information infrastructure (investment / maintenance ) • year of technical readiness • year of implementation readiness • user acceptance and willingness to pay for • year of implementation by regulation • specific implementation issues • estimation of cars equipped with at 2010 / 2020 • other actors involved for implementation
It was found out that all of questions raised were not likely to be answered within the work of the group. The competition situation does not allow industrial players to unveil sensitive information before the market implementation of new functions and features. Some other questions are only to be answered by dedicated studies and sophisticated research programs. Hence, not all fields in the table could be filled with appropriate data. But a more suitable option was found for getting an idea of the ongoing process of market deployment of those systems by looking at the systems in a more general way.
Page 345 of 490
5. Assessment of safety impacts Individual members of the Working Group collected information about the safety impacts of ITS systems from various sources. Information of the safety impacts of eSafety systems was gathered from literature by VTT. In addition, DEKRA and ADAC produced some assessments of the impacts of eSafety systems on the basis of German accident causation data and Swedish researchers also produced such an overview on the basis of Swedish accident causation data. The results of these overviews are presented in Annex 1.
Furthermore, a data analysis of the European CARE accident data base was initiated to identify the accident patterns also on the European level, in addition to the afore-mentioned data from Germany and Sweden.
A comprehensive overview of the safety impacts of eSafety systems is expected to be produced by 2007 as a result of the European Commission’s 6th Framework R&D Programme.
In order to facilitate more qualified assessments of the safety potential of eSafety systems, the European data bases for accidents have to be improved according to the recommendation of the Accident Causation Data Working Group.
6. Priority systems After a ranking based on safety impacts, availability and possible market deployment, the Working Group selected a number of systems as priority systems. The priority systems are systems, which are expected to be able to reduce road fatalities in Europe already in the short- and medium-term. The priority systems are the following:
Vehicle-based systems
- ESP (Electronic Stability Programme) - Blind spot monitoring - Adaptive head lights - Obstacle and collision warning - Lane departure warning
Infrastructure-related / based systems
- eCall - Extended environmental information / Extended Floating Car Data - RTTI (Real Time Traffic and Travel Information) - Dynamic traffic management (VMS) - Local danger warning - Speed Alert
A summary of the expected safety benefits of the priority systems according to research results is given in Table 4.
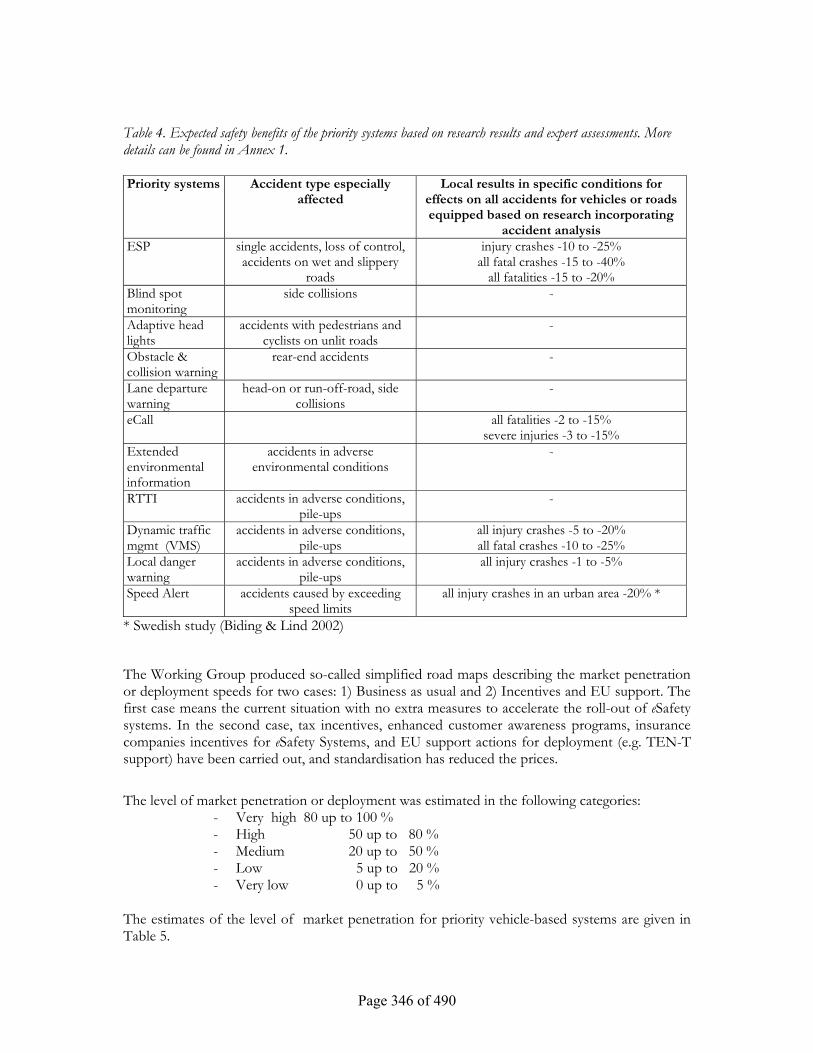
Page 346 of 490
Table 4. Expected safety benefits of the priority systems based on research results and expert assessments. More details can be found in Annex 1. Priority systems
Accident type especially affected
Local results in specific conditions for effects on all accidents for vehicles or roads equipped based on research incorporating
accident analysis ESP single accidents, loss of control,
accidents on wet and slippery roads
injury crashes -10 to -25% all fatal crashes -15 to -40%
all fatalities -15 to -20% Blind spot monitoring
side collisions -
Adaptive head lights
accidents with pedestrians and cyclists on unlit roads
-
Obstacle & collision warning
rear-end accidents -
Lane departure warning
head-on or run-off-road, side collisions
-
eCall all fatalities -2 to -15% severe injuries -3 to -15%
Extended environmental information
accidents in adverse environmental conditions
-
RTTI accidents in adverse conditions, pile-ups
-
Dynamic traffic mgmt (VMS)
accidents in adverse conditions, pile-ups
all injury crashes -5 to -20% all fatal crashes -10 to -25%
Local danger warning
accidents in adverse conditions, pile-ups
all injury crashes -1 to -5%
Speed Alert accidents caused by exceeding speed limits
all injury crashes in an urban area -20% *
* Swedish study (Biding & Lind 2002)
The Working Group produced so-called simplified road maps describing the market penetration or deployment speeds for two cases: 1) Business as usual and 2) Incentives and EU support. The first case means the current situation with no extra measures to accelerate the roll-out of eSafety systems. In the second case, tax incentives, enhanced customer awareness programs, insurance companies incentives for eSafety Systems, and EU support actions for deployment (e.g. TEN-T support) have been carried out, and standardisation has reduced the prices.
The level of market penetration or deployment was estimated in the following categories:
- Very high 80 up to 100 % - High 50 up to 80 % - Medium 20 up to 50 % - Low 5 up to 20 % - Very low 0 up to 5 %
The estimates of the level of market penetration for priority vehicle-based systems are given in Table 5.

Page 347 of 490
Table 5. Estimates of new car market penetration of priority vehicle-based systems in the “business as usual” and “implementation support” scenarios.
% new cars equipped Business as usual 2005 2010 2020
ESP medium high high Blind spot monitoring very low low high Adaptive head lights very low medium high Obstacle & collision warning very low low medium Lane departure warning very low low medium
% new cars equipped Implementation support 2005 2010 2020
ESP medium high very high Blind spot monitoring very low medium high Adaptive head lights very low medium high Obstacle & coll.warning very low medium high Lane departure warning very low medium high
The market penetration varies a lot between different car segments, being highest in the top-end models and lowest for smallest cars, for which the price of any system forms a much larger proportion of the car price than for larger cars. The market penetration also varies between countries
The estimates of the level of market penetration for priority infrastructure-related systems are given in Table 5 for cars and in Table 6 for the road network. It should be noted that the only reason for giving the estimates for the TERN is that currently European data on current and planned deployment only exists for the TERN. It is likely that the estimates correspond well to the situation on other major roads as well. More detailed information on the level of system deployment on the TERN is given in Annex 2.
Concerning the network equipped (Table 7), it should be noted that the most problematic and important parts are equipped first.
Table 6. Estimates of new car market penetration of priority infrastructure-related systems in the “business as usual” and “implementation support” scenarios.
% new cars equipped Business as usual 2005 2010 2020
eCall* very low very low medium Extended environmental info* very low low medium RTTI* Low medium high Dynamic traffic mgmt (VMS) not applicable not applicable not applicable Local danger warning not applicable not applicable not applicable Speed Alert very low low medium
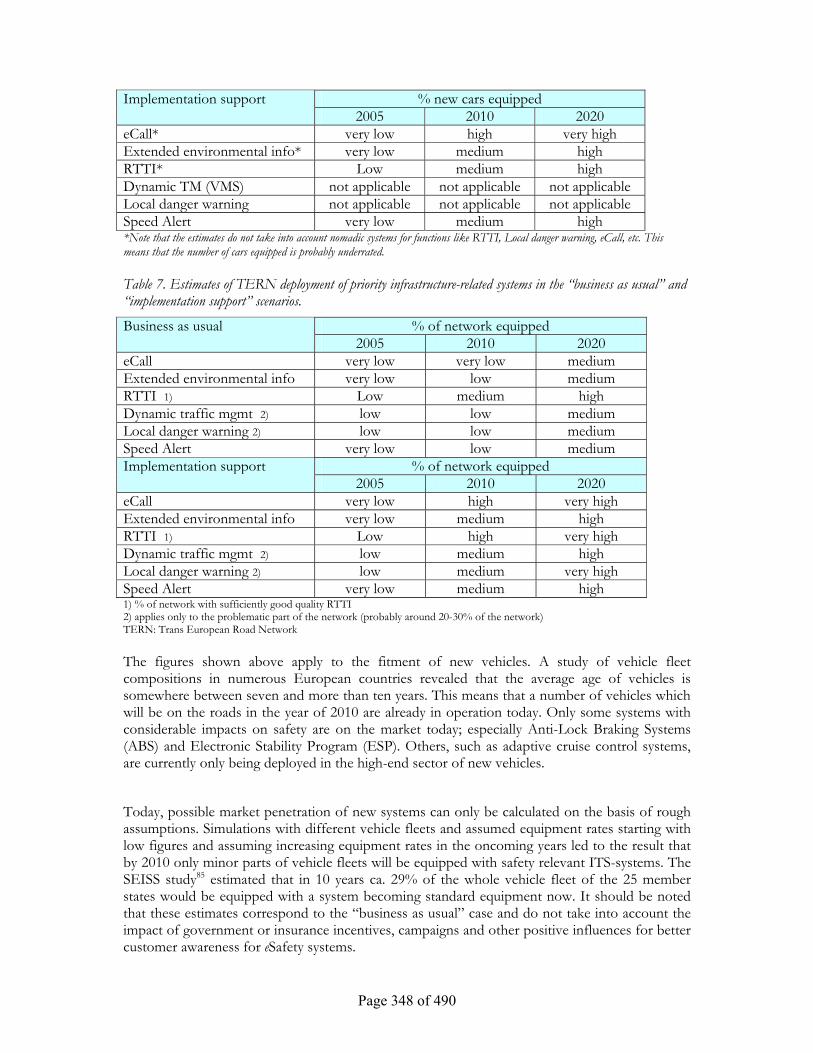
Page 348 of 490
% new cars equipped Implementation support 2005 2010 2020
eCall* very low high very high Extended environmental info* very low medium high RTTI* Low medium high Dynamic TM (VMS) not applicable not applicable not applicable Local danger warning not applicable not applicable not applicable Speed Alert very low medium high *Note that the estimates do not take into account nomadic systems for functions like RTTI, Local danger warning, eCall, etc. This means that the number of cars equipped is probably underrated. Table 7. Estimates of TERN deployment of priority infrastructure-related systems in the “business as usual” and “implementation support” scenarios.
% of network equipped Business as usual 2005 2010 2020
eCall very low very low medium Extended environmental info very low low medium RTTI 1) Low medium high Dynamic traffic mgmt 2) low low medium Local danger warning 2) low low medium Speed Alert very low low medium
% of network equipped Implementation support 2005 2010 2020
eCall very low high very high Extended environmental info very low medium high RTTI 1) Low high very high Dynamic traffic mgmt 2) low medium high Local danger warning 2) low medium very high Speed Alert very low medium high 1) % of network with sufficiently good quality RTTI 2) applies only to the problematic part of the network (probably around 20-30% of the network) TERN: Trans European Road Network The figures shown above apply to the fitment of new vehicles. A study of vehicle fleet compositions in numerous European countries revealed that the average age of vehicles is somewhere between seven and more than ten years. This means that a number of vehicles which will be on the roads in the year of 2010 are already in operation today. Only some systems with considerable impacts on safety are on the market today; especially Anti-Lock Braking Systems (ABS) and Electronic Stability Program (ESP). Others, such as adaptive cruise control systems, are currently only being deployed in the high-end sector of new vehicles.
Today, possible market penetration of new systems can only be calculated on the basis of rough assumptions. Simulations with different vehicle fleets and assumed equipment rates starting with low figures and assuming increasing equipment rates in the oncoming years led to the result that by 2010 only minor parts of vehicle fleets will be equipped with safety relevant ITS-systems. The SEISS study85 estimated that in 10 years ca. 29% of the whole vehicle fleet of the 25 member states would be equipped with a system becoming standard equipment now. It should be noted that these estimates correspond to the “business as usual” case and do not take into account the impact of government or insurance incentives, campaigns and other positive influences for better customer awareness for eSafety systems.

Page 349 of 490
7. Implementation issues The implementation issues relevant for each priority systems were identified and reported applying a common template with the following headings:
- System description - Technology availability - Road and information infrastructure need and availability - Organisation requirements - Regulatory requirements / barriers - Business case / customer awareness and acceptance - Key success factors - Feasible deployment strategies
These implementation issue summaries are presented in Annex 3, and the main issues are discussed below.
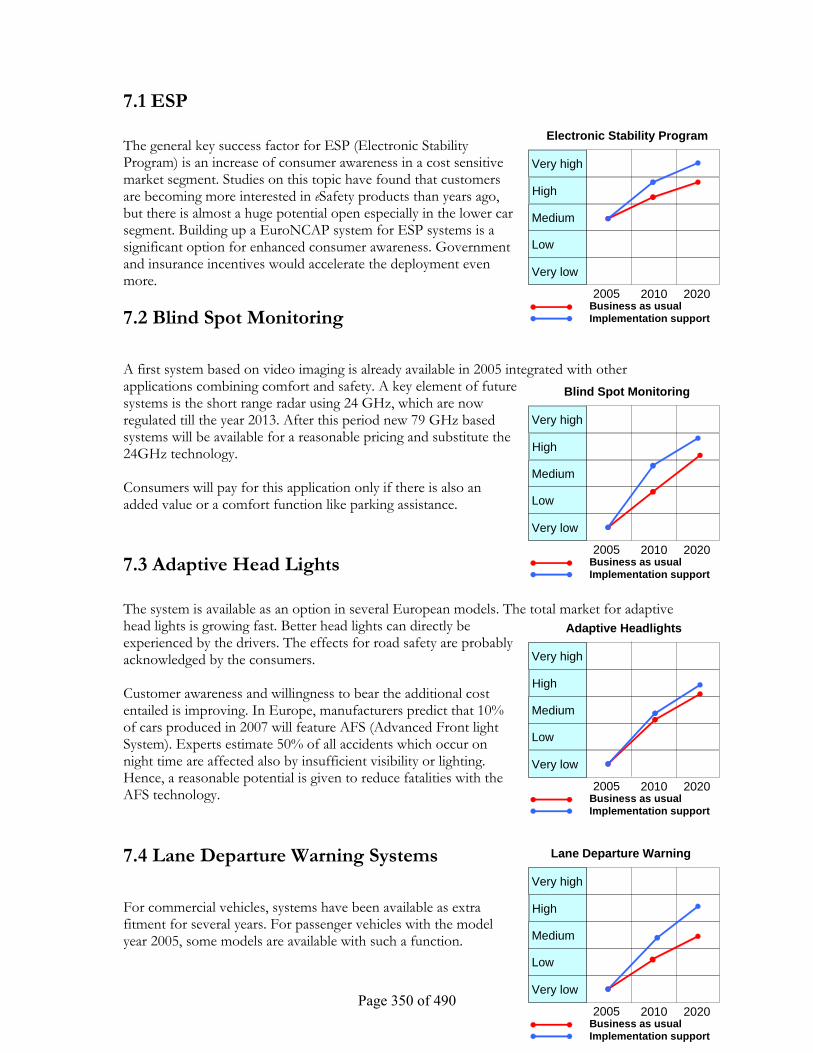
Page 350 of 490
Very low
Low
Medium
High
Very high
2005 2010 2020Business as usualImplementation support
Electronic Stability Program
7.1 ESP The general key success factor for ESP (Electronic Stability Program) is an increase of consumer awareness in a cost sensitive market segment. Studies on this topic have found that customers are becoming more interested in eSafety products than years ago, but there is almost a huge potential open especially in the lower car segment. Building up a EuroNCAP system for ESP systems is a significant option for enhanced consumer awareness. Government and insurance incentives would accelerate the deployment even more. 7.2 Blind Spot Monitoring
A first system based on video imaging is already available in 2005 integrated with other applications combining comfort and safety. A key element of future systems is the short range radar using 24 GHz, which are now regulated till the year 2013. After this period new 79 GHz based systems will be available for a reasonable pricing and substitute the 24GHz technology. Consumers will pay for this application only if there is also an added value or a comfort function like parking assistance. 7.3 Adaptive Head Lights The system is available as an option in several European models. The total market for adaptive head lights is growing fast. Better head lights can directly be experienced by the drivers. The effects for road safety are probably acknowledged by the consumers. Customer awareness and willingness to bear the additional cost entailed is improving. In Europe, manufacturers predict that 10% of cars produced in 2007 will feature AFS (Advanced Front light System). Experts estimate 50% of all accidents which occur on night time are affected also by insufficient visibility or lighting. Hence, a reasonable potential is given to reduce fatalities with the AFS technology.
7.4 Lane Departure Warning Systems
For commercial vehicles, systems have been available as extra fitment for several years. For passenger vehicles with the model year 2005, some models are available with such a function.
Very low
Low
Medium
High
Very high
2005 2010 2020Business as usualImplementation support
Blind Spot Monitoring
Very low
Low
Medium
High
Very high
2005 2010 2020Business as usualImplementation support
Adaptive Headlights
Very low
Low
Medium
High
Very high
2005 2010 2020Business as usualImplementation support
Lane Departure Warning
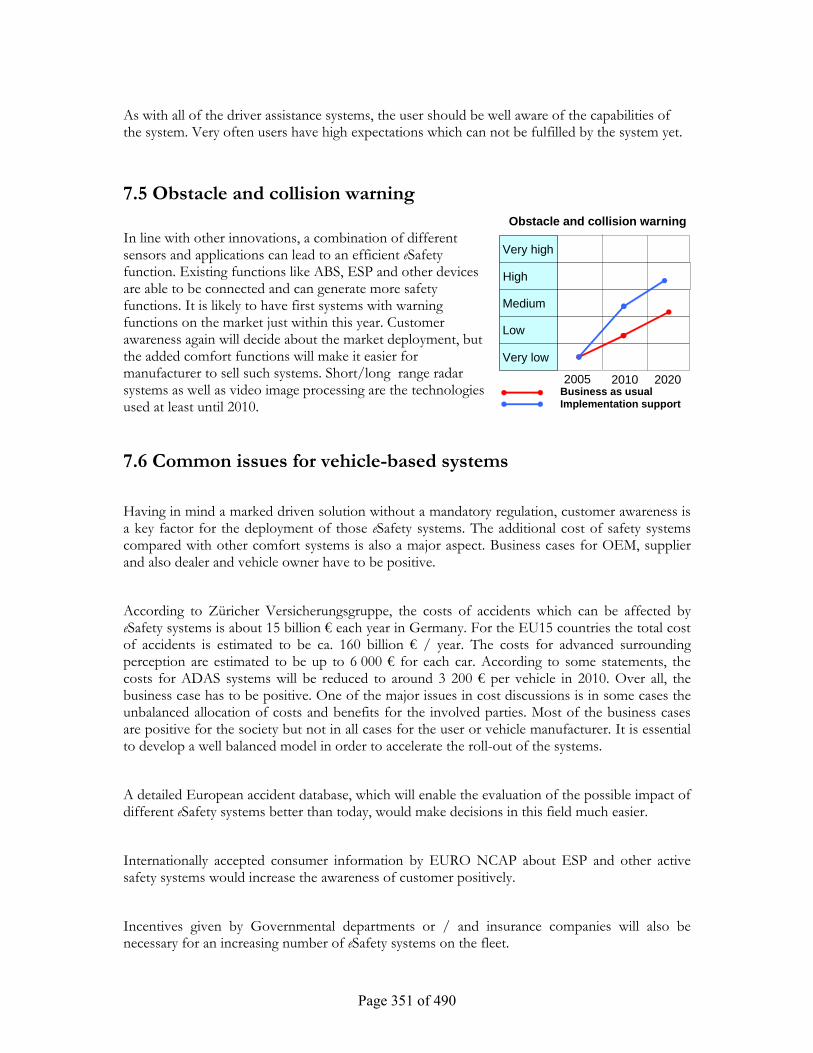
Page 351 of 490
As with all of the driver assistance systems, the user should be well aware of the capabilities of the system. Very often users have high expectations which can not be fulfilled by the system yet.
7.5 Obstacle and collision warning In line with other innovations, a combination of different sensors and applications can lead to an efficient eSafety function. Existing functions like ABS, ESP and other devices are able to be connected and can generate more safety functions. It is likely to have first systems with warning functions on the market just within this year. Customer awareness again will decide about the market deployment, but the added comfort functions will make it easier for manufacturer to sell such systems. Short/long range radar systems as well as video image processing are the technologies used at least until 2010. 7.6 Common issues for vehicle-based systems
Having in mind a marked driven solution without a mandatory regulation, customer awareness is a key factor for the deployment of those eSafety systems. The additional cost of safety systems compared with other comfort systems is also a major aspect. Business cases for OEM, supplier and also dealer and vehicle owner have to be positive.
According to Züricher Versicherungsgruppe, the costs of accidents which can be affected by eSafety systems is about 15 billion € each year in Germany. For the EU15 countries the total cost of accidents is estimated to be ca. 160 billion € / year. The costs for advanced surrounding perception are estimated to be up to 6 000 € for each car. According to some statements, the costs for ADAS systems will be reduced to around 3 200 € per vehicle in 2010. Over all, the business case has to be positive. One of the major issues in cost discussions is in some cases the unbalanced allocation of costs and benefits for the involved parties. Most of the business cases are positive for the society but not in all cases for the user or vehicle manufacturer. It is essential to develop a well balanced model in order to accelerate the roll-out of the systems.
A detailed European accident database, which will enable the evaluation of the possible impact of different eSafety systems better than today, would make decisions in this field much easier.
Internationally accepted consumer information by EURO NCAP about ESP and other active safety systems would increase the awareness of customer positively.
Incentives given by Governmental departments or / and insurance companies will also be necessary for an increasing number of eSafety systems on the fleet.
Very low
Low
Medium
High
Very high
2005 2010 2020Business as usualImplementation support
Obstacle and collision warning
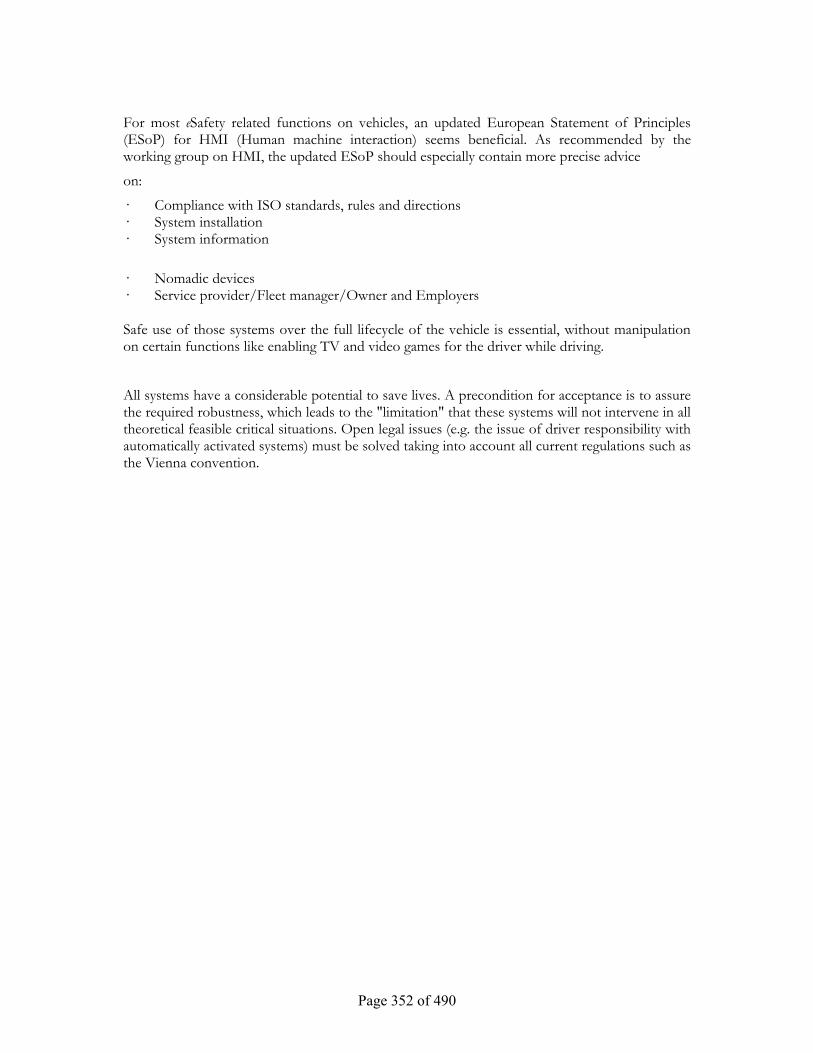
Page 352 of 490
For most eSafety related functions on vehicles, an updated European Statement of Principles (ESoP) for HMI (Human machine interaction) seems beneficial. As recommended by the working group on HMI, the updated ESoP should especially contain more precise advice
on:
· Compliance with ISO standards, rules and directions · System installation · System information
· Nomadic devices · Service provider/Fleet manager/Owner and Employers Safe use of those systems over the full lifecycle of the vehicle is essential, without manipulation on certain functions like enabling TV and video games for the driver while driving.
All systems have a considerable potential to save lives. A precondition for acceptance is to assure the required robustness, which leads to the "limitation" that these systems will not intervene in all theoretical feasible critical situations. Open legal issues (e.g. the issue of driver responsibility with automatically activated systems) must be solved taking into account all current regulations such as the Vienna convention.
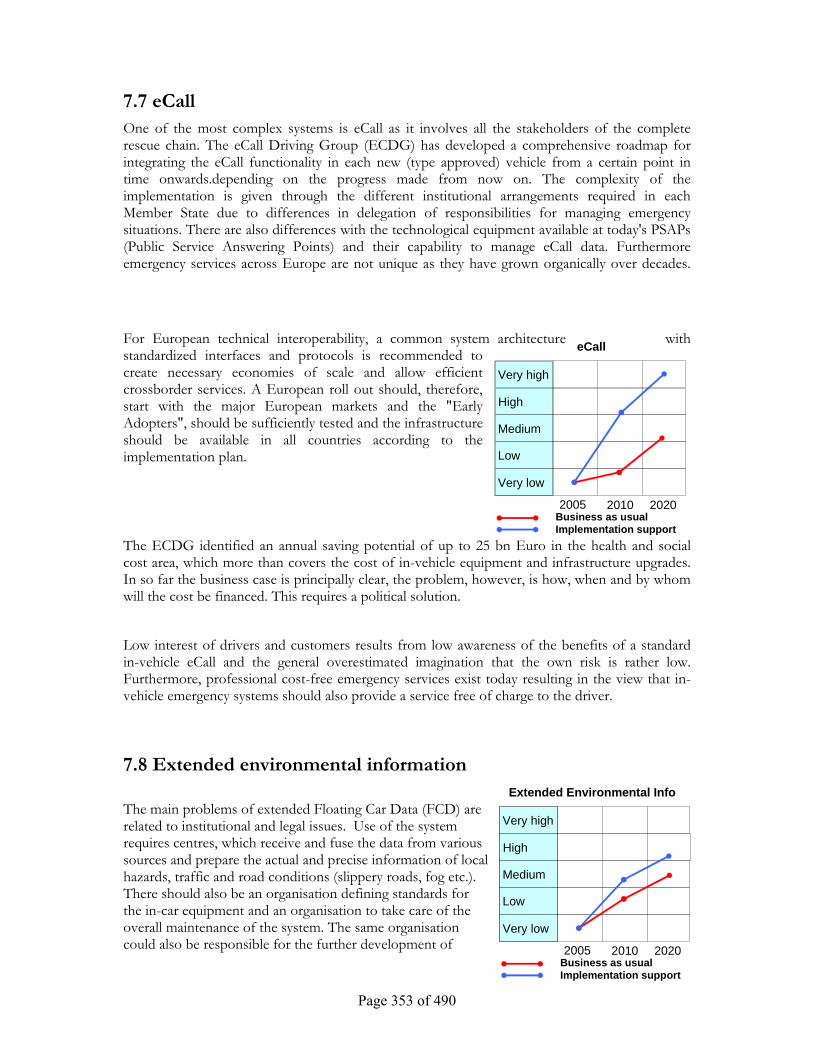
Page 353 of 490
Very low
Low
Medium
High
Very high
2005 2010 2020Business as usualImplementation support
eCall
7.7 eCall One of the most complex systems is eCall as it involves all the stakeholders of the complete rescue chain. The eCall Driving Group (ECDG) has developed a comprehensive roadmap for integrating the eCall functionality in each new (type approved) vehicle from a certain point in time onwards.depending on the progress made from now on. The complexity of the implementation is given through the different institutional arrangements required in each Member State due to differences in delegation of responsibilities for managing emergency situations. There are also differences with the technological equipment available at today's PSAPs (Public Service Answering Points) and their capability to manage eCall data. Furthermore emergency services across Europe are not unique as they have grown organically over decades.
For European technical interoperability, a common system architecture with standardized interfaces and protocols is recommended to create necessary economies of scale and allow efficient crossborder services. A European roll out should, therefore, start with the major European markets and the "Early Adopters", should be sufficiently tested and the infrastructure should be available in all countries according to the implementation plan.
The ECDG identified an annual saving potential of up to 25 bn Euro in the health and social cost area, which more than covers the cost of in-vehicle equipment and infrastructure upgrades. In so far the business case is principally clear, the problem, however, is how, when and by whom will the cost be financed. This requires a political solution.
Low interest of drivers and customers results from low awareness of the benefits of a standard in-vehicle eCall and the general overestimated imagination that the own risk is rather low. Furthermore, professional cost-free emergency services exist today resulting in the view that in-vehicle emergency systems should also provide a service free of charge to the driver.
7.8 Extended environmental information The main problems of extended Floating Car Data (FCD) are related to institutional and legal issues. Use of the system requires centres, which receive and fuse the data from various sources and prepare the actual and precise information of local hazards, traffic and road conditions (slippery roads, fog etc.). There should also be an organisation defining standards for the in-car equipment and an organisation to take care of the overall maintenance of the system. The same organisation could also be responsible for the further development of
Very low
Low
Medium
High
Very high
2005 2010 2020Business as usualImplementation support
Extended Environmental Info
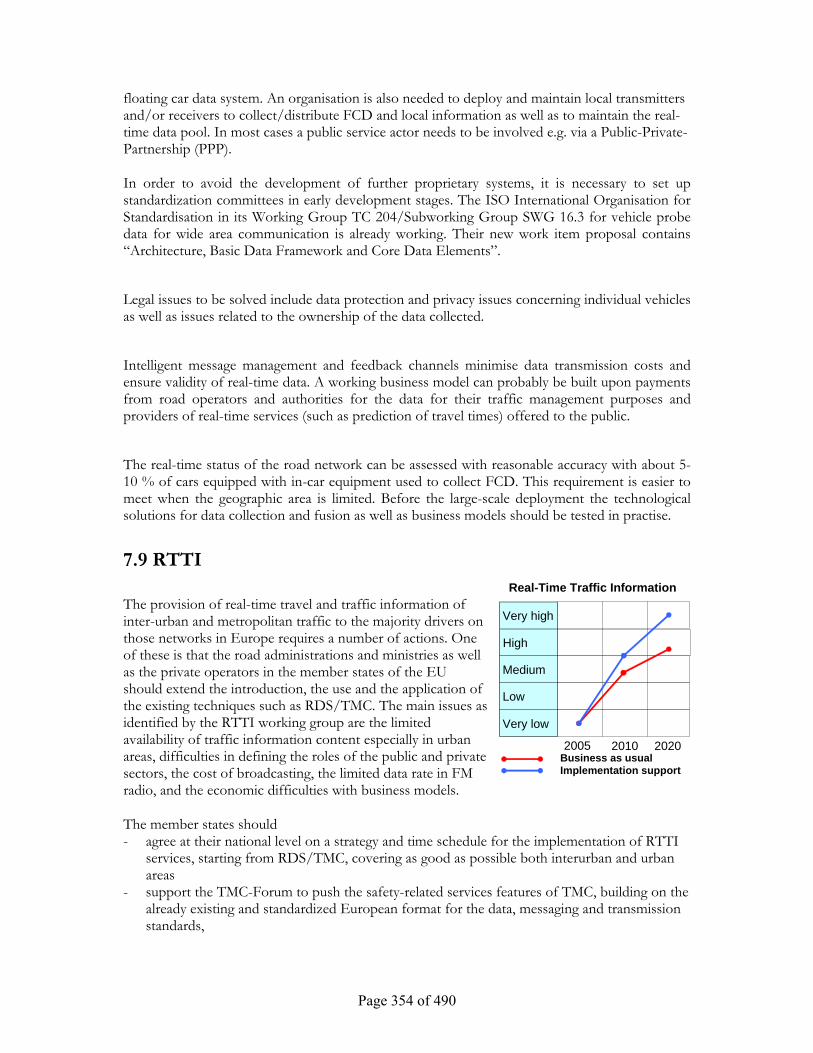
Page 354 of 490
floating car data system. An organisation is also needed to deploy and maintain local transmitters and/or receivers to collect/distribute FCD and local information as well as to maintain the real-time data pool. In most cases a public service actor needs to be involved e.g. via a Public-Private-Partnership (PPP). In order to avoid the development of further proprietary systems, it is necessary to set up standardization committees in early development stages. The ISO International Organisation for Standardisation in its Working Group TC 204/Subworking Group SWG 16.3 for vehicle probe data for wide area communication is already working. Their new work item proposal contains “Architecture, Basic Data Framework and Core Data Elements”.
Legal issues to be solved include data protection and privacy issues concerning individual vehicles as well as issues related to the ownership of the data collected.
Intelligent message management and feedback channels minimise data transmission costs and ensure validity of real-time data. A working business model can probably be built upon payments from road operators and authorities for the data for their traffic management purposes and providers of real-time services (such as prediction of travel times) offered to the public.
The real-time status of the road network can be assessed with reasonable accuracy with about 5-10 % of cars equipped with in-car equipment used to collect FCD. This requirement is easier to meet when the geographic area is limited. Before the large-scale deployment the technological solutions for data collection and fusion as well as business models should be tested in practise.
7.9 RTTI The provision of real-time travel and traffic information of inter-urban and metropolitan traffic to the majority drivers on those networks in Europe requires a number of actions. One of these is that the road administrations and ministries as well as the private operators in the member states of the EU should extend the introduction, the use and the application of the existing techniques such as RDS/TMC. The main issues as identified by the RTTI working group are the limited availability of traffic information content especially in urban areas, difficulties in defining the roles of the public and private sectors, the cost of broadcasting, the limited data rate in FM radio, and the economic difficulties with business models. The member states should - agree at their national level on a strategy and time schedule for the implementation of RTTI
services, starting from RDS/TMC, covering as good as possible both interurban and urban areas
- support the TMC-Forum to push the safety-related services features of TMC, building on the already existing and standardized European format for the data, messaging and transmission standards,
Very low
Low
Medium
High
Very high
2005 2010 2020Business as usualImplementation support
Real-Time Traffic Information
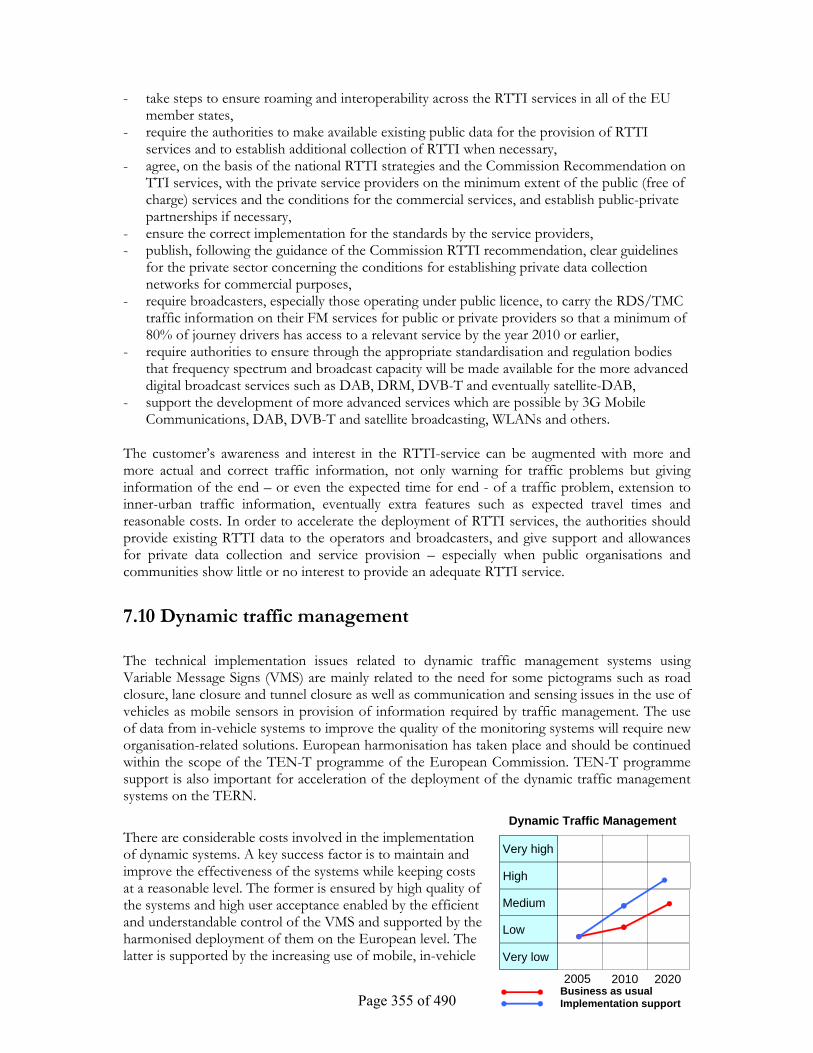
Page 355 of 490
- take steps to ensure roaming and interoperability across the RTTI services in all of the EU member states,
- require the authorities to make available existing public data for the provision of RTTI services and to establish additional collection of RTTI when necessary,
- agree, on the basis of the national RTTI strategies and the Commission Recommendation on TTI services, with the private service providers on the minimum extent of the public (free of charge) services and the conditions for the commercial services, and establish public-private partnerships if necessary,
- ensure the correct implementation for the standards by the service providers, - publish, following the guidance of the Commission RTTI recommendation, clear guidelines
for the private sector concerning the conditions for establishing private data collection networks for commercial purposes,
- require broadcasters, especially those operating under public licence, to carry the RDS/TMC traffic information on their FM services for public or private providers so that a minimum of 80% of journey drivers has access to a relevant service by the year 2010 or earlier,
- require authorities to ensure through the appropriate standardisation and regulation bodies that frequency spectrum and broadcast capacity will be made available for the more advanced digital broadcast services such as DAB, DRM, DVB-T and eventually satellite-DAB,
- support the development of more advanced services which are possible by 3G Mobile Communications, DAB, DVB-T and satellite broadcasting, WLANs and others.
The customer’s awareness and interest in the RTTI-service can be augmented with more and more actual and correct traffic information, not only warning for traffic problems but giving information of the end – or even the expected time for end - of a traffic problem, extension to inner-urban traffic information, eventually extra features such as expected travel times and reasonable costs. In order to accelerate the deployment of RTTI services, the authorities should provide existing RTTI data to the operators and broadcasters, and give support and allowances for private data collection and service provision – especially when public organisations and communities show little or no interest to provide an adequate RTTI service.
7.10 Dynamic traffic management The technical implementation issues related to dynamic traffic management systems using Variable Message Signs (VMS) are mainly related to the need for some pictograms such as road closure, lane closure and tunnel closure as well as communication and sensing issues in the use of vehicles as mobile sensors in provision of information required by traffic management. The use of data from in-vehicle systems to improve the quality of the monitoring systems will require new organisation-related solutions. European harmonisation has taken place and should be continued within the scope of the TEN-T programme of the European Commission. TEN-T programme support is also important for acceleration of the deployment of the dynamic traffic management systems on the TERN.
There are considerable costs involved in the implementation of dynamic systems. A key success factor is to maintain and improve the effectiveness of the systems while keeping costs at a reasonable level. The former is ensured by high quality of the systems and high user acceptance enabled by the efficient and understandable control of the VMS and supported by the harmonised deployment of them on the European level. The latter is supported by the increasing use of mobile, in-vehicle Very low
Low
Medium
High
Very high
2005 2010 2020Business as usualImplementation support
Dynamic Traffic Management

Page 356 of 490
based systems for producing the necessary traffic and environmental information required.
The road authorities and operators should develop together a European vision and strategy for the deployment and operation of dynamic traffic management and local danger warning systems in co-operation with the vehicle and telecommunications industry and other involved parties, possibly on the basis of new PPP models. In the development the central organisations CEDR (Conference of European Directors of Road) and ASECAP ( = European Association of toll road operators) play an important role 7.11 Local danger warnings The technical implementation issues related to local danger warnings using Variable Message Signs (VMS) are mainly related to need for some pictograms such as fog, rain, snow, unauthorised person on road, on-coming vehicle as well as communication and sensing issues in the use of vehicles as mobile sensors in provision of hazard information. The same issues and solutions for harmonisation, costs, need for TEN-T programme involvement and common European strategy as with dynamic traffic management systems also apply to local danger warnings. The co-operation with the vehicle and telecommunication industry are, however, even more central with local danger warning systems due to the presentation of warnings via in-vehicle systems and the need for quick transmission of hazard warnings. 7.12 Speed alert A number of open questions exist related to speed alert such as voluntary or mandatory equipment of vehicles, type of speed limits, road categories or road sections to be included, types of vehicles to be equipped and categories of road users to use speed alert. Suitable solutions need to be achieved on e.g. how to convey speed limit modifications to the data bases of on board units (OBUs), e.g. electronic Map on CD-ROMS, local short range communication, wide range communication (DAB). The basic information infrastructure required by the system, i.e. up-to-date fixed speed limit information in digital road map, needs to be made available in Europe, but is currently only available for all roads in Norway, Finland and Sweden, and limited to motorways and main roads for a large part of Europe. The fixed speed limit information should be complemented with dynamic and temporary speed limit information. The institutional and legal issues related to data quality requirements, questions of responsibility, liability, updating, timing of the updating, legal relevance of speed alert systems and speed limit signs as well as their possible contradictions and necessary business cases are among issues, which need to be solved.
Very low
Low
Medium
High
Very high
2005 2010 2020Business as usualImplementation support
Local danger warnings
Very low
Low
Medium
High
Very high
2005 2010 2020Business as usualImplementation support
Speed Alert

Page 357 of 490
The demand for speed alert is expected to increase among authorities and transport operators due to safety concerns and among drivers due to increased automated enforcement of legal speed limits. The large-scale implementation in the short-term will depend on European and national regulations aiming at mandatory or voluntary deployment of the system. European and national decision making will, however, require that the open questions will be settled. The most urgent factor is the need for an accurate, up-to-date speed limit database that is readily accessible to all potential service providers.
The SpeedAlert project developed the European wide deployment strategy for voluntary in-vehicle speed alert systems by establishing a common classification of speed limits in Europe, defining the system and service requirements of in-vehicle speed alert system, defining the functional architecture of speed alert, harmonising the definition of speed alert concepts and identifying the requirements for standardisation. The project defined recommendations and an associated deployment roadmap for a successful European-wide implementation.
It is quite likely, that deployment has to build on voluntary systems. In a longer perspective mandatory systems could be deployed for certain customer groups, such as learning drivers, frequently caught speeders, drivers wishing for insurance bonus etc., if this is regarded as feasible and beneficial.
7.13 Systems for heavy duty vehicles Because of special implementation issues, different system solutions and also different accident analysis, the working group for Heavy Duty Vehicles was established. This working group identified the following priority systems, after ranking and evaluation of effectiveness, costs, availability and customer acceptance:
1. Tire Improvement 2. Emergency Braking Systems 3. Emergency Braking System incl. Stationary obstacles 4. Emergency Braking Systems incl. Upcoming traffic 5. Vulnerable Road User Protection System 6. Extended Flexible Under run Protection Systems 7. Inter Vehicle communication 8. Intersection Assistance (infrastructure based) 9. Interactive Driver Training
More detailed results can be found in the final report of the Heady Duty Vehicles working group.
Page 358 of 490
8. Updating of implementation road map The Implementation Road Map Working Group has produced a first version of the simplified Road Map for the implementation and roll-out of eSafety systems. The Implementation Road Map working group has adopted a pragmatic approach and concentrated not only on such systems, which will be available in new cars in the market at the latest by 2010, because the major impact of these new systems will occur in 2008 and later, so the timeframe up to 2015 and 2020 is also very important.
The working group has analysed all possible systems according to their safety effectiveness and implementation maturity among other things, and selected priority systems to be promoted for larger scale roll-out and implementation.
It is, however, desirable to continue to update the Road Map due to several reasons such as: • advances in technology enabling new and more inexpensive solutions • advances in standardisation and harmonisation • changes in transport policy and investment programs • changes in industrial and manufacturing policies due to global competition and other
reasons • accumulated knowledge about the safety impacts of the systems
In order to be meaningful, the updating process has to involve all key stakeholders in the domain, i.e. the automobile industry (OEMs and other system manufacturers), road authorities, transport ministries, the European Commission, ERTICO, insurance companies, automobile clubs or other user representatives, as well as academia and research institutes. We recommend that the following procedure is to be used in the updating of the road Map: 1) The present Implementation Road Map Working Group is the platform used for the updating, pending that the members are available to continue their participation 2) Preparatory work for the annual updating of the simplified road map is carried out by designated Working Group members responsible for monitoring the implementation issues concerning specific systems and/or parts of the eSafety matrix 3) The actual updating should be carried out annually in two meetings or rather workshops. In the first, each responsible person will present the needs for updates and these will be discussed with the aim of having a common view. After the first workshop, the proposal for an updated road map will be discussed within various actors' organisations and umbrella organisations such as (eSafety Office) ACEA, CEDR, FIA etc. At the second meeting, the updates are agreed upon on the basis of feedback received. 4) The updated version should preferably include information from other than European Automotive manufactures like U.S., Japanese and Korean. This requires an extension of the monitoring scope to other markets and the involvement of experts from such manufacturers. 5) The updated road map will be made public in such a manner that those utilising the road map will be informed about the update. This will elaborated upon after the publication of the first road map.
Page 359 of 490
9. Conclusions and recommendations The whole challenge to fulfil the major road safety target for 2010, ie to reduce traffic fatalities by 50% cannot be solved by eSafety systems alone although a positive impact is possible and realistic. Equally though, driver education and law enforcement as well as infrastructure development will also have their own powerful impacts on fatalities. Especially for the new Member States, road safety targets and measures are getting very high priority.
The Implementation Road Map Working Group of the eSafety Forum focused their work on vehicle- and infrastructure-based eSafety systems. New eSafety systems are likely to come faster into the market than in the past. For instance, the 50% market penetration of ABS in Germany took about 20 years starting in1978, whereas the same level of penetration was reached for ESP in just 10 years, starting in 1995. Based on already existing basic technologies and sensors, new functions can faster become standard equipment in new vehicles. Agreements on open application development platforms in vehicles can also increase the speed of eSafety system rollout.
The use of sensors for surrounding recognition like Radar, Lidar (LIght Detection And Ranging), ultrasonic and video camera systems can enable warning systems (first step), enhance both active and passive safety systems (second step) and finally activate collision avoidance/mitigation actions like autonomous braking.
A combination with enhanced traffic and travel information (RTTI) based on TMC and DAB, digital maps and on-board GPS / Galileo (satellite positioning) services can lead to a comfortable and safe way of travelling. GPS based eCall systems can bring those basic technical features into the vehicles, and the sensor signals could also be shared for other use than eCall.
Technological development is on a high level, but there has to be a stronger customer demand, a higher awareness for safety functions and also a positive business case. Combining comfort functions with safety functions can lead to a high market demand.
Regulatory prerequisites mostly exist; just some conditions for type approving complex and safety related systems are still not defined. Concerns regarding product liability still need to be addressed in some cases.
The working group identified, after an assessment of the safety potential and implementation readiness of the various eSafety systems, eleven priority systems for the eSafety deployment up to 2010. To see the full effect of these new technologies on the road, however, the timeframe has to be expanded to 2020
Page 360 of 490
In addition to the Implementation Road Map working group, other working groups have also investigated the implementation of eSafety systems. The RTTI and Heavy Duty Vehicles working groups and the eCall Driving Group have produced detailed recommendations and road maps for their respective implementations.
It is interesting to note that the list of priority systems as identified by the Implementation Road Map working group has its focus on autonomous in-vehicle systems on one hand and road infrastructure systems on the other hand. Co-operative (vehicle and infrastructure) systems, on the other side, are still mostly in the development stage. The situation is partly due to the diverging fundamental objectives of private and public stakeholders
The descriptions of the implementation issues are much more detailed for the infrastructure related systems than for autonomous vehicle-based system. It is obvious that all solutions, which more or less need a PPP (Public-Private Partnership) arrangement between public authorities and private companies, are more complicated and also become very complex within the European context for standardisation and harmonisation. Setting up agreements between all Member States and a number of industrial consortia is time consuming and also affected by different national or single company interests. Vehicle-based systems have an advantage in this comparison; only the manufacturer and the customer have to agree on new systems (partly some homologation issues are to be solved).
Nevertheless, in order to reduce road fatalities in Europe, infrastructure-based, vehicle-based and co-operative solutions are required. Improvements in the infrastructure affect directly each vehicle/driver, which uses the roads, whereas the effects of improvements in the vehicles depend on the fleet penetration of these improvements.
The costs for the eSafety systems are not always allocated to all of those getting the benefits from the systems. In many cases, the society and insurance companies are getting a positive business case in the form of reduction of accidents, fatalities and their costs while only the user/customer has to pay for the systems. When both savings and cost are put in the same equation, a positive business model could be developed leading to positive business cases for each stakeholder group.
The systems investigated in the Implementation Road Map working group do not cover all technology solutions, affecting the safety of road traffic. For instance, nomadic devices have not been discussed in detail, except as alternative solutions to vehicle-based systems. Also systems, which are already or will, according to the working group’s judgement, certainly be as a standard in the next generation of vehicles, such as e.g. ABS, were also left out.
The recommendations for the priority systems as identified in the Implementation Road Map working group are given below:
Page 361 of 490
The following recommendations were given for in-vehicle systems: a. The automobile industry, European Commission, the Member States and other
stakeholders should enhance the customer awareness of the safety benefits of such systems in vehicles through well structured and harmonized European campaigns
b. The Member States and insurance companies should give financial/fiscal incentives to customers to buy vehicles equipped with such systems. For this purpose, the discussion should start without further delay to clarify the possibility for incentives given by insurance companies or public agencies.
c. All stakeholders should develop feasible sustainable business models for each
application on the principle that those who benefit from the introduction should share their benefits with those who have to carry the investments and costs. These should also cover nomadic devices.
Recommendations for autonomous vehicle systems: In order to increase and accelerate the market penetration of eSafety systems with highest safety benefits, such as ESP,
d. EuroNCAP should incorporate such systems into their rating as soon as proven technology and safety benefit data becomes available, and the functionality of the systems can be adequately tested. ESP and Speed Limiter are on the list today.
e. The European Commission and the Member States should consider regulatory actions (such as making a system mandatory equipment in new vehicles) only as a last option, when such action is judged as essential and beneficial for both industrial and public stakeholders. Socio-economic reasons and respecting the principle of subsidiarity are other important decision criteria. Voluntary solutions should be favoured.
f. The Member States and the industry should follow the recommendations of the
HMI (Human Machine Interaction) working group to ensure future user acceptance and a safe application and function of the systems during their whole life cycle
g. The automobile industry, European Commission, the Member States and other stakeholders should continue R&D efforts to develop new technologies and solutions for in-vehicle safety systems as well as to evaluate the effects of eSafety system on safety, economy and employment.
Recommendations for infrastructure-related systems: In order to increase and accelerate the deployment of safety beneficial infrastructure-related eSafety systems,
h. The Member States should ensure the deployment of socio-economically feasible systems and services according to their responsibility and in line with the requirements accepted on the European level.
Page 362 of 490
i. The European Commission should support the deployment of infrastructure-related systems on the TERN as well as other key parts of the road networks with the instruments at their disposal (e.g. TEN-T programme)
j. The industry, European Commission and the Member States should together take
actions to ensure that digital maps with the information required by the eSafety systems would be developed for all roads in the Member States
k. The European Commission and the Member States should agree on actions and instruments to increase the willingness of countries and regions to take on the role as “early adopters” for eSafety systems
l. The European Commission and the Member States should continue R&D efforts to develop new technologies and solutions for infrastructure-related safety systems as well as to evaluate the effects of such systems on safety and other socio-economic factors
Concerning eCall,
m. The European Commission, the Member States and the industry should follow the recommendations of the eCall Driving Group
Concerning RTTI,
n. The European Commission, the Member States and the industry should follow the recommendations of the RTTI Working Group
Concerning dynamic traffic management and local danger warnings,
o. The road authorities and operators should develop together a European vision and strategy for the deployment and operation of dynamic traffic management and local danger warning systems in co-operation with vehicle and telecommunications industry.
Concerning speed alert,
p. Concerning speed alert, the European Commission and the other stakeholders should solve the currently open issues and utilise the implementation roadmap produced by the SpeedAlert project.

Page 363 of 490
Annex 1: Safety effect overviews
Priority eSafety systems and safety
The following gives a summary of the research results on the safety impacts of the priority systems as recommended by the Implementation Road Map Working Group.
Electronic Stability Programme
A study of accidents in Sweden shows that there are positive effects of ESP or ESC (Electronic Stability Control) overall and in circumstances where the road has low friction. The overall effectiveness on all injury crashes except for rear end crashes was 16.7 +/- 9.3 %, while for serious and fatal crashes the effectiveness was 21.6 +/- 12.8%. The effectiveness for serious and fatal crashes on wet roads was 56.2 +/- 23.5 %. On roads covered with ice and snow, the corresponding effectiveness was 49.2 +/- 30.2 %. The estimates are based on the assumption that rear end crashes on dry road surfaces are not affected at all by ESC. (Lie et al 2005)
A study by DaimlerChrysler investigated the impacts of ESP with the help of German accident statistics. ESP was made available for Mercedes-Benz passenger cars starting in 1995. Between 1997 and 1999 the equipment level of Mercedes-Benz passenger cars with ESP increased rapidly up to 100%. The over-all-penetration of ESP for firstly registered passenger cars in Germany was 20% in 1999 compared to 100% for Mercedes-Benz (MB). The percentage of “loss of control accidents” decreased by about 30% for MB vehicles (accident years 2000/2001) whereas the percentage of the other vehicles is decreasing at a lower rate. Only about 10 percent of all accidents with MB cars were loss of control accidents, for the competitors the rate remained at a level of about 15 percent, which was also the level for MB before ESP became standard in all vehicles. The accident rate (accidents per newly registered vehicles) decreased by about 15% for Mercedes-Benz passenger cars, compared to a drop of 11% for the competitors. The percentage of accidents outside urban roads decreased for MB vehicles from about 35 % for model year 1996 down to about 30% for model years 2000 and 2001. No significant reduction was identified for the competitors. The percentage of accidents on icy roads dropped from about 5% for model years 1996 down to 2% for model year 2001. The reduction for the competitors is much lower. The percentage of fatal and injury crashes for MB dropped from about 13% for model year 1996 down to 11% for model years 1999 and 2000. No significant reduction was found for the competitors. (Breuer 2003)
A study from United States (Dang 2004) analysed crash data from 1997-2003 from 5 US-states by comparing specific make/models of passenger cars and SUVs with ESC (Electronic Stability Control) as standard equipment versus earlier versions of the same make/models, using multi-vehicle crash involvements as a control group. The study found that single vehicle crashes were reduced by 35 % in passenger cars and by 67 % in SUV crashes. The study also showed significant or borderline-significant reductions in the multi-vehicle crash rates per 100,000 vehicle years with ESC. As multi-vehicle crashes we used as the control group and it is possible that multi-vehicle crashes are being reduced by ESC, this actually means that the true effectiveness of ESC could even be higher than we estimated for single vehicle crashes. (Dang 2004)

Page 364 of 490
Another U.S. study (Farmer 2004) compared crash involvement rates for otherwise identical vehicle models with and without ESC systems. ESC was found to affect single-vehicle crashes to a greater extent than multiple-vehicle crashes, and crashes with fatal injuries to a greater extent than less severe crashes. Based on all police-reported crashes in 7 states over 2 years, ESC reduced single-vehicle crash involvement risk by approximately 41 % and single-vehicle injury crash involvement risk by 41 %. This translates to an estimated 7 % reduction in overall crash involvement risk and a 9 % reduction in overall injury crash involvement risk. Based on all fatal crashes in the United States over 3 years, ESC was found to have reduced single-vehicle fatal crash involvement risk by 56 percent. This translates to an estimated 34 percent reduction in overall fatal crash involvement risk. (Farmer 2004)
A recent German overview (Langwieder 2005) has summarised all available scientific studies on the impacts of ESP. The overview states that independently of the examination methods and the selection criteria in the different international studies, all studies resulted in quite similar estimates of ESP efficiency. In Germany, 100 per cent equipment of all cars with ESP is estimated to reduce the number of accidents with car occupant injuries by about 7 -11 %. The reduction in the car occupant fatalities would be approximately 15 -20 % (Langwieder 2005).
Blind spot monitoring
Due to the early stage of deployment no scientific evaluation for blind spot monitoring systems is available, but given by accident situation analysis (see Annex) lane changing accidents are calculated with about 3.500 fatalities /major injuries each year. Such systems are since 2004 available on several new vehicles. It has to be monitored what deployment rate will occur.
Adaptive headlights
Rumar (1997) has studied the feasibility of a unified, adaptive vehicle illumination system, including direct and indirect illumination systems, systems for adverse weather and street lighting conditions and daytime running lights. The extent of road safety impact of such a system will rely on how drivers will adapt their behaviour to the increased visibility conditions. Drivers have been found to compensate for the improved vision by increasing their speeds as demonstrated, for example, by Kallberg (1991).
Obstacle & collision warning
Concerning obstacle warning systems, simulator studies indicate safety benefits (Yamada, 2002). Hoetink A. (2003)

Page 365 of 490
Collision warnings systems are currently being developed as part of or complement to Adaptive Cruise Control (ACC) system. Also a system predicting driver’s braking beforehand has been found as having safety potential as a collision warning system (Sakabe et al 2002). In a study compiling information from ACC systems it was found that the possibilities of current ACC systems in improving traffic safety and reducing congestion seem limited: although positive effects on driver safety and traffic safety were found, some negative effects are a cause for concern. Improving ACC systems with a Stop-and-Go functionality, and preferably also with collision warning or even collision avoidance capabilities, might improve traffic safety and at the same time reduce congestion (Hoetink 2003).
Wakasugi and Yamada (2000) show that with a Forward Vehicle Collision Warning System (FVCWS) the average reaction time from the warning output to braking is 0.73 s and 95% of the drivers can react in 1.0 s or less. The results indicate that the warning system compensates for a decline in driver perceptual ability caused by sleepiness.
Lane Departure Warning
According to Abele et al (2004), lane departure warning systems can prevent or reduce the severity of the accidents in which two vehicles collide frontally (head-on collision), accidents in which a vehicle leaves the road without colliding with another vehicle (“left roadway” accidents), and accidents in which two or more vehicles collide laterally (side-collision accidents. Abele et al (2004) concluded the following estimates of the impacts of lane departure warning systems:
- Head-on collisions: lane departure warning enables a driver to react, on average, 0.5 seconds earlier than he or she would without the system. This effects a collision reduction of 25 % for all relevant accidents. Furthermore, in 25 % of the accidents, a reduction in accident severity can be assumed.
- “Left roadway” accidents: Time gains of 0.5 seconds can also be assumed for this type of accident using a lane departure warning system. This translates into 25 % accident avoidance and 15 % accident severity reduction.
- Side-collision accidents: It is assumed that the aggregate time gain is composed of 0.5 s for the warning phase (lane departure warning and lane change assistant affect different accident causes and therefore the time gains are not combined) and 0.2 s for the assistance phase (lane change assistant with haptic feedback). The cumulated time gain is 0.7 s. This leads us to an expected 60 % reduction in the number of accidents and a 10 % reduction in accident severity.
A Dutch study on the impact of lane departure warning systems installed in heavy goods vehicles concluded that the system would decrease the number of accidents involving heavy goods vehicles by 10% (Korse 2003).
Page 366 of 490
eCall
Considering the safety benefits the eCall system leads to a higher efficiency of the rescue chain. When medical care for critically (and severely) injured people is available at an earlier time after the accident, the death rate can be significantly lowered. This is known as the Golden Hour Principle of accident medicine. It expresses that in general, the earlier the medical help can reach the injured, the higher is the likelihood to avoid fatalities and long-term or permanent disability. One hour after the accident, the death rate of people with heart or respiratory failure or massive bleeding approaches 100 %. This is why the rapid reaction of rescue services is very important. (Abele et al 2004)
Recently, the E-Merge project approached the issue of decreasing rescue times and resulting safety benefits based on surveys conducted in different Western European countries. According to E-Merge and the eSafety Forum’s eCall Driving Group, 5 % to 15 % of road fatalities can be reduced to severe injuries and 10 % to 15 % of severe injuries can be reduced to slight injuries. For slight injuries, no positive effect of eCall was foreseen. (E-Merge 2004, eSafety 2004, Abele et al 2004). In Sweden, the full implementation of eCall has been estimated to reduce the number of road accident fatalities by 2-4 % and the number of severely injured by 3-5% (Lind et al 2003).
Extended environmental information (extended FCD)
The safety benefits from extended environmental information follow from the user services utilising the information collected. These effects are described in more detail under real-time traffic information, dynamic traffic management and local danger warnings.
Real-time traffic information
Real-time traffic information about problems and hazards on the road network to drivers before the trip and during the trip to in-vehicle receivers enable the drivers either to avoid the problem by e.g. changing their route or to be better prepared for the problem by increasing their awareness and alertness. Real-time information on slipperiness and other road weather related problems has been estimated to reduce the risk of injury accidents in adverse conditions by 8 % on main roads and 5 % on minor roads in Nordic conditions (Rämä et al 2003).
Several studies have been carried out on the RDS-TMC (Radio Data System – Traffic Message Channel) service providing event information to drivers with specific RDS-TMC receivers. While there exists little explicit evidence of safety impacts, studies indicate that the service is affecting driver behaviour in the assumed direction. A study in UK showed that 45 % of drivers with an RDS-TMC receiver had changed route due to on-trip RDS-TMC messages at least once. On the basis of information received before the trip, 23 % of the drivers had changed their plans (Tarry & Pyne 2003).
Page 367 of 490
Dynamic traffic management and local danger warnings
Incident warnings are provided by roadside VMS or beacons, and via radio and cellular information services. Studies usually show accident reductions on the IWS (Incident Warning System) equipped motor way sections. The whole range of the effect on the total number of injury accidents is from –35 per cent to + 9 per cent, where the largest reductions may include bias caused by the regression-to-the-mean effect. The effects are more beneficial on secondary accidents (Kulmala, Fránzen & Dryselius, 1995). According to Elvik et al. (1997), rear-end injury accidents have decreased as a result of queue warning systems on motorways whereas the number of rear-end accidents resulting in property damage only have increased. Japanese field tests (Makino 2004) of a local obstacle and congestion warning VMS system on a motorway indicated a 45% reduction in accidents after the VMS was installed, but the effect is probably biased due to the regression-to-the-mean effect.
Safety can be improved not only by just reacting swiftly to incidents but also by preventing them through harmonisation of the traffic flow. This can be accomplished by ramp control (or ramp metering), lane control, route diversion schemes, and in general traffic management. Safety is also expected to be improved as a result of replacement of manual toll collection with automatic tolling on motorways due to the elimination of traffic channelling at toll plazas as well as of the possible queues and unnecessary stops (Bandmann & Finsterer, 1997).
Lane control has little effect on injury accidents (Perrett & Stevens, 1996 and Elvik et al., 1997). Ramp control is considerably more beneficial to safety, the accident reduction on equipped motorways being up to 10 % as such, and more than 15 % as a part of an integrated motorway management system (Federal Highway Administration, 1997a; Perrett & Stevens, 1996).
Route diversion schemes are beneficial to safety only when the diversion does not increase exposure (driving distance) too much and does not divert traffic to roads with higher accident risk. Unfortunately, this is very seldom the case. The opposite case is shown by for example Lashermes and Zerguini (1997).
Route information and management systems employing VMS in Germany decreased the risk of road accidents by 15% and the risk of severe injury accidents by somewhat more, between 9 and 36 %. The impacts of the system depend on the quality of the traffic management system and the level of traffic volumes. On roads with high traffic volumes, the numbers of accidents were 22 – 64 % lower than before the implementation of the system. On roads with low or moderate volumes, the changes in accident numbers were statistically insignificant. (Siegener et al 2000)
Page 368 of 490
Influencing vehicle speeds with the help of variable speed limits has been tried especially in connection with weather-related traffic management systems by lowering speed limits in adverse conditions. A variable speed limit system integrated with a fog warning system reduced the number of injury accidents on a German motorway by around 20 % (Balz & Zhu, 1994), and a variable speed limit system integrated with a slippery road warning system on a Finnish motorway by around 10 % (Rämä, 2001). Both studies reported significant reductions in mean speeds (3 to 9 km/h) in adverse weather conditions, and the latter also a significant decrease in speed variation. An accident study showed that weather-related speed control reduced injury accidents by 13 % in winter and 2 % in summer on sections, where the control system was automatic and of good quality. Manually operated systems, however, were estimated to result in increased accident risks (Rämä & Schirokoff 2004).
A Dutch fog warning system including a text warning (“fog”) and dynamic speed limit VMS signs on a motorway, reduced speeds in fog by 8 to 10 km/h, although in extremely dense fog, the system had an adverse effect on speed. This was due to the too high “lowest possible speed limit” display in the VMS (60 km/h). A more uniform speed behaviour was obtained due to the introduction of the system (Hogema, van der Horst & van Nifterick, 1996). Variable speed limits have also been applied by schools, resulting in a 20 per cent accident reduction (Elvik et al., 1997).
In addition to speed control, the high accident risks caused by adverse weather conditions can be decreased by providing information, warnings and support to road users, but also by combating weather problems with the help of winter maintenance. A Finnish study (Rämä et al., 1996) showed that slippery road warning VMS decreased mean speeds by around 1–2 km/h when the signs were lit. The system was also shown to affect the direction of attention to find cues showing potential hazards, and to make passing behaviour more careful indicating an even larger positive impact on safety than that due to lower speeds (Luoma, Rämä, Penttinen & Harjula, 1997).
The automatic fog-warning system on the M25 motorway in England displays the “Fog” legend on roadside matrix signals. The assessment of this system showed that the net mean vehicle speed reduction was around 3 km/h, when the signals were switched on as a result of the formation of fog (Cooper & Sawyer, 1993). Collision warning systems are probably beneficial to road safety in the fog (Saroldi, Bertolino & Sidoti, 1997).
Speed Alert
The largest study so far on Intelligent Speed Adaptation (ISA) systems have been carried out in Sweden (Biding & Lind 2002). These studies involved 5000 equipped vehicles driven by over 10000 drivers (from different age groups) in urban areas as well as an accident study. Speed alert was one of the systems studied. The studies found out that all ISA systems result in better road safety without increasing travel time, and that there were quite minor differences between the impacts of speed alert and those of other types of ISA. The estimate was that if everyone had ISA, there could be 20% fewer road injuries in urban areas.

Page 369 of 490
Speed alert systems signalling with light and sound if the driver exceeds the speed limit are expected to reduce the number of injury accidents by ca. 10% and fatalities by ca. 18%. A voluntary system, where the driver can enable or disable control by the vehicle of the maximum speed has been estimated to affect safety in a similar fashion (Carsten & Fowkes 2000). Várhelyi (1997) has estimated that automatic speed limiting on rural roads would reduce the total number of injury accidents in Sweden by about 10%.
Speed alert and ISA can also be implemented as a dynamic version, where in addition to fixed speed limits the system applies temporary limitations to maximum speed due to congestion, fog, slippery road surfaces, major incidents, outside schools at drop-off or pick-up times, etc. Dynamic ISA in conditions of low friction would decrease the total number of injury accidents by ca. 12% and ISA in darkness by 12% (Várhelyi 1997). Carsten and Fowkes (2000) estimate that the dynamic version of the compulsory ISA reduces injury accidents by 36% and fatal accidents by 59%.
References
Abele, J., Kerlen, C., Krueger, S., Baum, H., Geißler, T., Grawenhoff, S., Schneider, J. & Schulz, W.H. (2004). Exploratory Study on the potential socio-economic impact of the introduction of Intelligent Safety Systems in Road Vehicles. SEiSS. VDI/VDE Innovation + Technik GmbH and Institute for Transport Economics at the University of Cologne. Balz, W. & Zhu, J. (1994). Nebelwarnsystem A8 Hohenstadt–Riedheim. Wirkungsanalyse. Landesamt für Strassenwesen, Baden-Württenberg & PTV Consult GmbH. Bandmann, M. & Finsterer, H. (1997). Safety aspects of traffic management systems. Proceedings, 4th World Congress on Intelligent Transport Systems, 21-24 October, Berlin, Germany. ITS America, ERTICO & VERTIS. Biding, T. & Lind, G. (2002). Intelligent speed adaptation (ISA), Results of large-scale trials in Borlänge, Lidköping, Lund and Umeå during 1999-2002. Swedish National Road Administration, Publication 1002:89E. Breuer, J. (2003). Safety Benefits of ESP. DaimlerChrysler. Carsten, O. & Fowkes, M. (1998). External Vehicle Speed Control, Phase I results: Executive summary. University of Leeds and the Motor Industry Research Association. Carsten, O. & Fowkes, M. 2000. External Vehicle Speed Control, Executive summary of Project Results. University of Leeds and the Motor Industry Research Asociation. Cooper, B. R. & Sawyer, H. E. (1993). Assessment of M25 automatic fog-warning system: Final report. TRL Project report 16. Crowthorne. 11 p. Dang, J. (2004). Preliminary results analyzing the effectiveness of electronic stability control (ESC) systems. National Highway Traffic Safety Agency, USA. Elvik, R., Borger Mysen, A. & Vaa, T. (1997). Trafikksikkerhetshåndbok (Traffic Safety Manual). Transportøkonomisk Institutt, Oslo. 704 p. ISBN 82-480-0027-3. ISSN 0802-0175.
Page 370 of 490
E-MERGE (2004). E-MERGE Compiled Evaluation Results, Deliverable 6.3. Cap Gemini Ernst & Young. eSafety (2004). eSafety Forum, Summary Report, The eSafety High-Level Meeting with Public Authorities, Brussels, 27 September 2004, Annex 1: eCall. European Commission, Directorate General for Information Society Technologies. Farmer C. (2004). Effect of electronic stability control on automobile crash risk. Insurance Institute for Highway Safety, Arlington, Virginia, USA. Hoetink, A. (2003). Advanced Cruise Control in the Netherlands: a critical review. 10th World Congress and Exhibition on Intelligent Transport Systems and Services, Madrid 16-20 November 2003. Proceedings, CD-ROM. ERTICO, ITS Europe. Hogema, J. H., van der Horst, R. & van Nifterick, W. (1996). Evaluation of an automatic fog-warning system. Traffic Engineering + Control, November 1996. pp. 629–632. Kallberg, V-P. (1991). Reunapaalujen vaikutus ajokäyttäytymiseen ja liikenneonnetto-muuksiin (Effects of reflector posts on driver behaviour and accidents). Helsinki. Tiehallitus, kehittämiskeskus. Tielaitoksen selvityksiä (Finnra reports) 5/1991. Korse, M. (2003). Results of the trial with the Lane Departure Warning Assistant-system. Rijkswaterstaat 11 September 2003. Kulmala, R., Fránzen, S. & Dryselius, B. (1995). Safety Evaluation of Incident Warning Systems -Integration of Results. HOPES Deliverable 35. Langwieder, K. (2005). Wissenschaftlicher Erkenntnisstand zu ESP. 10 Jahre ESP, Berlin, 23. Februar 2005. Lashermes, C. & Zerguini, S. (1997). Socio-Economic Evaluation Of Traffic Operation Example Of Toll Charge Adjustments On A6- A5 Motorways. Proceedings, 4th World Congress on Intelligent Transport Systems, 21-24 October, Berlin, Germany. ITS America, ERTICO & VERTIS. Lie, A., Tingvall, C., Krafft, M. & Kullgren, A. (2005). The effectivess of ESC (Electronic Stability Control) in reducing real life crashes and injuries. 19th International Technical Conference on the Enhanced Safety of Vehicles Conference (ESV), June 2005. Lind, G., Lindqvist, E. & Persson, S. (2003). Short descriptions of ITS safety applications and their potential safety benefits. Stratega and Transek. Appendix version 1.0 2003-12-31. Luoma, J., Rämä, P., Penttinen, M. & Harjula, V. (1997). Driver responses to variable road condition signs. Proceedings of the Conference on International Cupertino on Theories and Concepts in Traffic Safety, Lund, Sweden, November 5-7, 1997. Makino, H. (2004). Verification of traffic accident reduction effect of AHS. Presentation at the ITS World Congress in Nagoya, Japan.
Page 371 of 490
Nishimura, Y. AND Nagaya, R. (1997) Road pattern visibility system in wintertime. Proceedings, 4th World Congress on Intelligent Transport Systems, 21-24 October, Berlin, Germany. ITS America, ERTICO & VERTIS. Perrett, K. E. & Stevens, A. (1996). Review of the potential benefits of Road Transport Telematics. Transport Research Laboratory, TRL Report 220. Rämä, P. (2001). Effects of weather-controlled variable message signing on driver behaviour Technical Research Centre of Finland. VTT Publications 447. Rämä, P., Kulmala, R. & Heinonen, M. (1996). Muuttuvien kelivaroitusmerkkien vaikutus ajonopeuksiin, aikaväleihin ja kuljettajien käsityksiin (The effect of variable road condition warning signs). Helsinki. Finnish National Road Administration. Finnra reports 1/1996. Rämä, P., Kummala, J., Schirokoff, A. & Hiljanen, H. (2003). Road traffic information. Preliminary study. Ministry of Transport and Communications Finland. FITS Publications 21/2003. Rämä, P. & Schirokoff, A. (2004). Effects of weather-controlled variable speed limits on injury accidents. 11th World Congress and Exhibition on Intelligent Transport Systems and Services, Budapest 24-26 May 2004. Proceedings, CD-ROM. ERTICO, ITS Europe. Rumar, K. (1997). Adaptive illumination systems for motor vehicles: towards a more intelligent headlighting system. The University of Michigan, Transportation Research Institute. UMTRI-97-7. Sakabe M., Watanabe K. & Ohno H. (2002). Development of a collision warning system based on the prediction of driver’s braking action. 9th World congress on intelligent transport systems, Chicago October 14-17 2002 Saroldi, A., Bertolino, D. & Sidoti, C. (1997). Driving in the fog with a collision warning system: A driving simulator experiment. Proceedings, 4th World Congress on Intelligent Transport Systems, 21-24 October, Berlin, Germany. ITS America, ERTICO & VERTIS. Siegener, W., Träger, K., Martin, K. & Beck, T. (2000). Accident occurrence in the area of route information and management systems, allowing particularly for traffic load. IVT Ingenieurbüro für Verkehrstechnik GmbH. BAST. Federal Highway Administration (1997a). Review of ITS Benefits: Emerging Successes. FHWA-JPO-97-001. Tarry, S. & Pyne, M. 2003. UK – TMC Service evaluation 1998-2001. The European Commission, Directorate General Energy and Transport, TEMPO Programme. Tingvall, C., Krafft, M., Kullgren, A. & Lie, A. (2003) The effectiveness of ESP (Electronic Stability Programme) in reducing real life accidents. www.vv.se/aktuellt/ pressmed/pdfdokument/ESPFinal.pdf Várhelyi, A. (1997). Dynamic speed adaptation in adverse conditions. Proceedings, 4th World Congress on Intelligent Transport Systems, 21-24 October, Berlin, Germany. ITS America, ERTICO & VERTIS.

Page 372 of 490
Wakasugi, T. &Yamada, K. (2000). Driver reaction time to forward vehicle collision warning - effectiveness of warning system under low awareness level. 7th World Congress on Intelligent Transport Systems, Turin 6-9 November 2000. Proceedings, CD-ROM. ERTICO, ITS Europe Yamada, K. (2002). Evaluation of forward obstacles collision avoidance support system using driving simulator 9th World congress on intelligent transport systems, Chicago October 14-17 2002. Proceedings, CD-ROM.
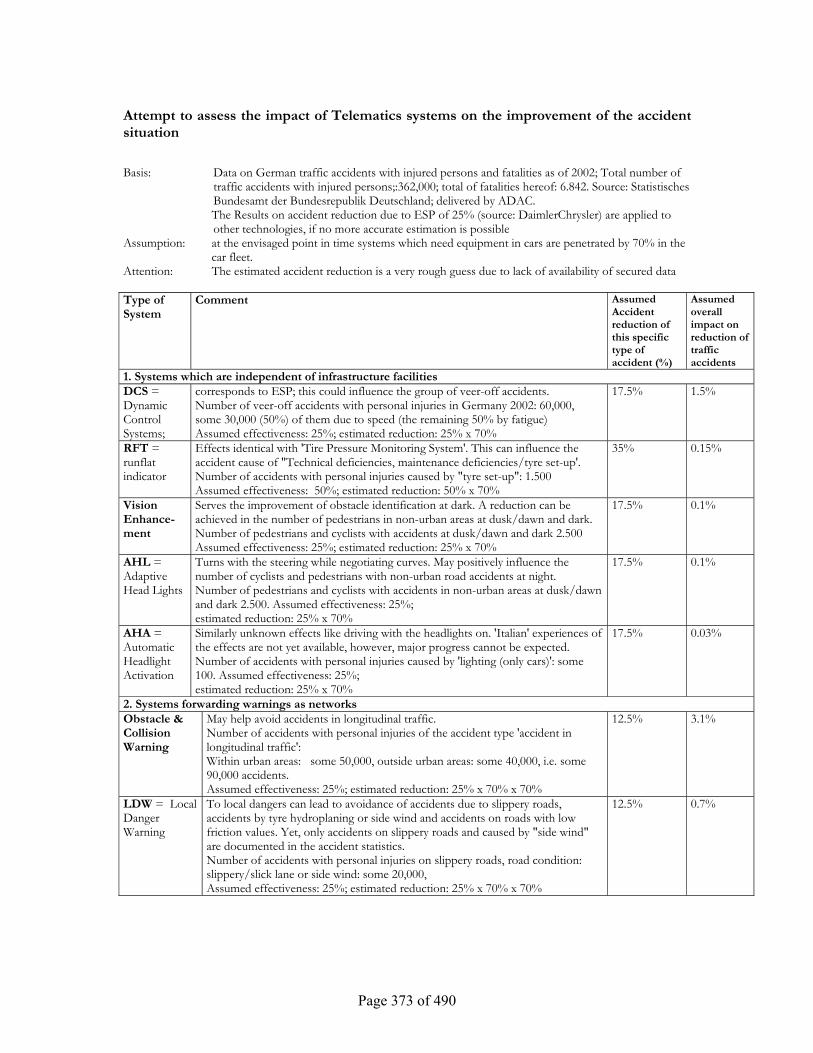
Page 373 of 490
Attempt to assess the impact of Telematics systems on the improvement of the accident situation
Basis: Data on German traffic accidents with injured persons and fatalities as of 2002; Total number of
traffic accidents with injured persons;:362,000; total of fatalities hereof: 6.842. Source: Statistisches Bundesamt der Bundesrepublik Deutschland; delivered by ADAC. The Results on accident reduction due to ESP of 25% (source: DaimlerChrysler) are applied to other technologies, if no more accurate estimation is possible
Assumption: at the envisaged point in time systems which need equipment in cars are penetrated by 70% in the car fleet.
Attention: The estimated accident reduction is a very rough guess due to lack of availability of secured data Type of System
Comment Assumed Accident reduction of this specific type of accident (%)
Assumed overall impact on reduction of traffic accidents
1. Systems which are independent of infrastructure facilities DCS = Dynamic Control Systems;
corresponds to ESP; this could influence the group of veer-off accidents. Number of veer-off accidents with personal injuries in Germany 2002: 60,000, some 30,000 (50%) of them due to speed (the remaining 50% by fatigue) Assumed effectiveness: 25%; estimated reduction: 25% x 70%
17.5% 1.5%
RFT = runflat indicator
Effects identical with 'Tire Pressure Monitoring System'. This can influence the accident cause of "Technical deficiencies, maintenance deficiencies/tyre set-up'. Number of accidents with personal injuries caused by "tyre set-up": 1.500 Assumed effectiveness: 50%; estimated reduction: 50% x 70%
35% 0.15%
Vision Enhance-ment
Serves the improvement of obstacle identification at dark. A reduction can be achieved in the number of pedestrians in non-urban areas at dusk/dawn and dark. Number of pedestrians and cyclists with accidents at dusk/dawn and dark 2.500 Assumed effectiveness: 25%; estimated reduction: 25% x 70%
17.5% 0.1%
AHL = Adaptive Head Lights
Turns with the steering while negotiating curves. May positively influence the number of cyclists and pedestrians with non-urban road accidents at night. Number of pedestrians and cyclists with accidents in non-urban areas at dusk/dawn and dark 2.500. Assumed effectiveness: 25%; estimated reduction: 25% x 70%
17.5% 0.1%
AHA = Automatic Headlight Activation
Similarly unknown effects like driving with the headlights on. 'Italian' experiences of the effects are not yet available, however, major progress cannot be expected. Number of accidents with personal injuries caused by 'lighting (only cars)': some 100. Assumed effectiveness: 25%; estimated reduction: 25% x 70%
17.5% 0.03%
2. Systems forwarding warnings as networks Obstacle & Collision Warning
May help avoid accidents in longitudinal traffic. Number of accidents with personal injuries of the accident type 'accident in longitudinal traffic': Within urban areas: some 50,000, outside urban areas: some 40,000, i.e. some 90,000 accidents. Assumed effectiveness: 25%; estimated reduction: 25% x 70% x 70%
12.5% 3.1%
LDW = Local Danger Warning
To local dangers can lead to avoidance of accidents due to slippery roads, accidents by tyre hydroplaning or side wind and accidents on roads with low friction values. Yet, only accidents on slippery roads and caused by "side wind" are documented in the accident statistics. Number of accidents with personal injuries on slippery roads, road condition: slippery/slick lane or side wind: some 20,000, Assumed effectiveness: 25%; estimated reduction: 25% x 70% x 70%
12.5% 0.7%
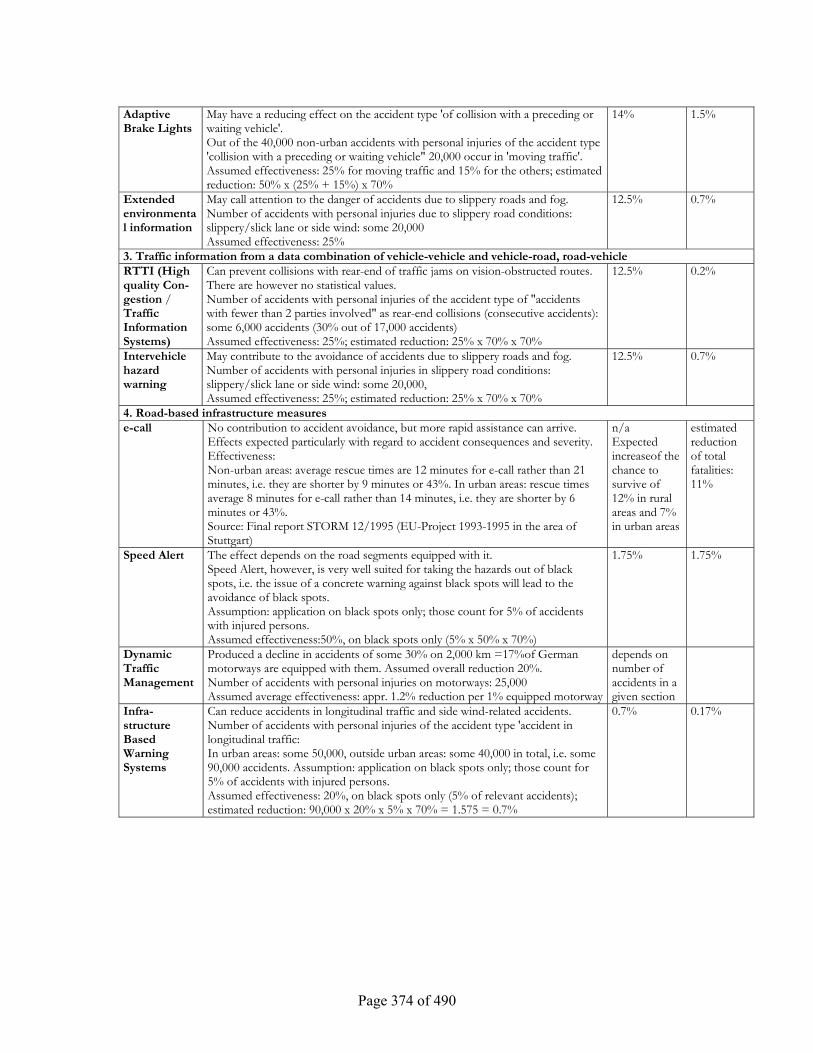
Page 374 of 490
Adaptive Brake Lights
May have a reducing effect on the accident type 'of collision with a preceding or waiting vehicle'. Out of the 40,000 non-urban accidents with personal injuries of the accident type 'collision with a preceding or waiting vehicle" 20,000 occur in 'moving traffic'. Assumed effectiveness: 25% for moving traffic and 15% for the others; estimated reduction: 50% x (25% + 15%) x 70%
14% 1.5%
Extended environmental information
May call attention to the danger of accidents due to slippery roads and fog. Number of accidents with personal injuries due to slippery road conditions: slippery/slick lane or side wind: some 20,000 Assumed effectiveness: 25%
12.5% 0.7%
3. Traffic information from a data combination of vehicle-vehicle and vehicle-road, road-vehicle RTTI (High quality Con-gestion / Traffic Information Systems)
Can prevent collisions with rear-end of traffic jams on vision-obstructed routes. There are however no statistical values. Number of accidents with personal injuries of the accident type of "accidents with fewer than 2 parties involved" as rear-end collisions (consecutive accidents): some 6,000 accidents (30% out of 17,000 accidents) Assumed effectiveness: 25%; estimated reduction: 25% x 70% x 70%
12.5% 0.2%
Intervehicle hazard warning
May contribute to the avoidance of accidents due to slippery roads and fog. Number of accidents with personal injuries in slippery road conditions: slippery/slick lane or side wind: some 20,000, Assumed effectiveness: 25%; estimated reduction: 25% x 70% x 70%
12.5% 0.7%
4. Road-based infrastructure measures e-call No contribution to accident avoidance, but more rapid assistance can arrive.
Effects expected particularly with regard to accident consequences and severity. Effectiveness: Non-urban areas: average rescue times are 12 minutes for e-call rather than 21 minutes, i.e. they are shorter by 9 minutes or 43%. In urban areas: rescue times average 8 minutes for e-call rather than 14 minutes, i.e. they are shorter by 6 minutes or 43%. Source: Final report STORM 12/1995 (EU-Project 1993-1995 in the area of Stuttgart)
n/a Expected increaseof the chance to survive of 12% in rural areas and 7% in urban areas
estimated reduction of total fatalities: 11%
Speed Alert The effect depends on the road segments equipped with it. Speed Alert, however, is very well suited for taking the hazards out of black spots, i.e. the issue of a concrete warning against black spots will lead to the avoidance of black spots. Assumption: application on black spots only; those count for 5% of accidents with injured persons. Assumed effectiveness:50%, on black spots only (5% x 50% x 70%)
1.75% 1.75%
Dynamic Traffic Management
Produced a decline in accidents of some 30% on 2,000 km =17%of German motorways are equipped with them. Assumed overall reduction 20%. Number of accidents with personal injuries on motorways: 25,000 Assumed average effectiveness: appr. 1.2% reduction per 1% equipped motorway
depends on number of accidents in a given section
Infra-structure Based Warning Systems
Can reduce accidents in longitudinal traffic and side wind-related accidents. Number of accidents with personal injuries of the accident type 'accident in longitudinal traffic: In urban areas: some 50,000, outside urban areas: some 40,000 in total, i.e. some 90,000 accidents. Assumption: application on black spots only; those count for 5% of accidents with injured persons. Assumed effectiveness: 20%, on black spots only (5% of relevant accidents); estimated reduction: 90,000 x 20% x 5% x 70% = 1.575 = 0.7%
0.7% 0.17%

Page 375 of 490
Lane Keeping Assistant and Lane Departure Warning
Can contribute to a reduction in veer-off accidents. Number of veer-off accidents with personal injuries in Germany 2002: 60,000 Assumed effectiveness: 25% estimated reduction: 25% x 70% = 17.5%
17.5% 2.9%
5. Autonomous vehicle systems Driver Condition Monitoring
It tracks fatigue, disturbances like distractions and lack of attention. Number of accidents with the accident cause of "fatigue": some 2,000, estimated number of unknown cases (50% of all accidents involving road veer-off) = some 30,000 accidents Assumed effectiveness: 50%; estimated reduction: 50% x 70%
35% 2.9%
Alcohol Interlock
as an indirect blood alcohol analysis prevents vehicle start, if BAC is excessive. Number of accidents involving at least one intoxicated person: some 23,000 Assumed effectiveness 25 % (50% technical tolerance, 50% bypassing); estimated reduction 25% x 70%
17.5% 1.1%
Traffic Sign Recognition and Alert
points out traffic signs and warns against violations. Number of accidents with the accident cause of 'non-compliance of priority-controlling traffic signs': some 47,000 Assumed effectiveness: 50%, on black spots only (5% of relevant accidents) 50% x 5% x 70%
1.75% 0.2%
Event Data Recorder or Black Box
is not directly suited for accident prevention. Knowing of the existence of this piece of equipment may have a disciplining influence on driver behaviour. expect no significant influence on accident figures
n/a n/a
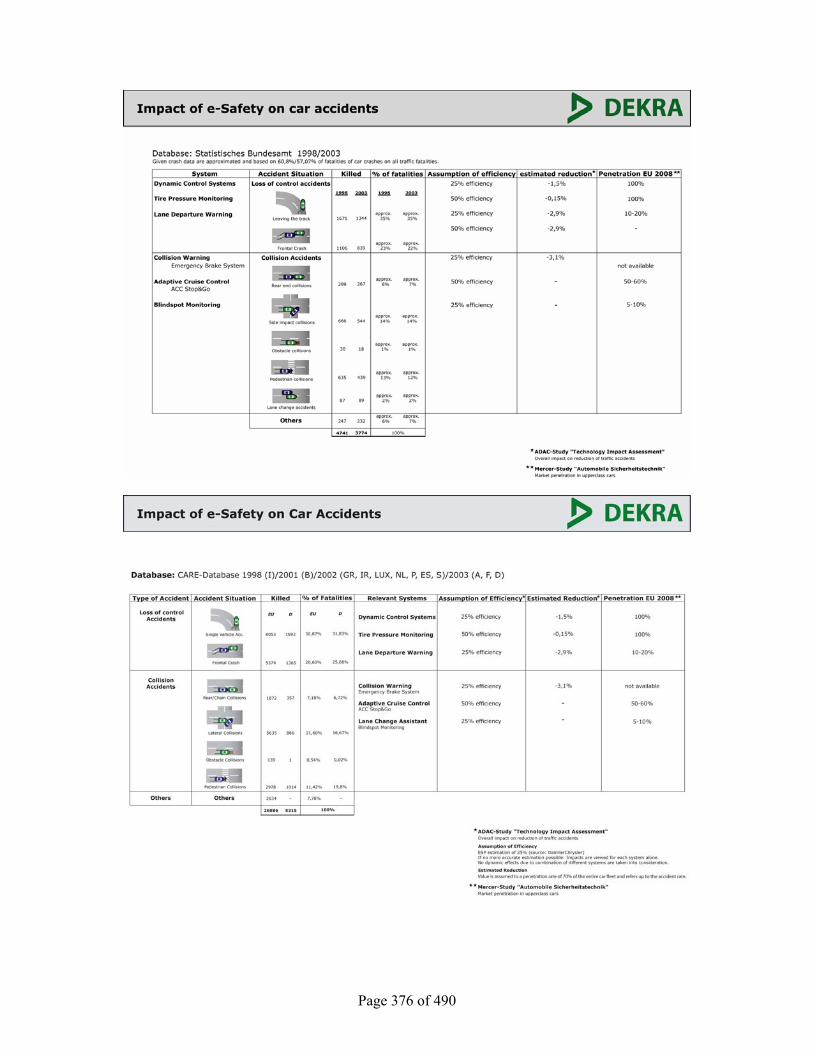
Page 376 of 490
Page 377 of 490
Comparing the different values for accident situations it is obvious that no bigger difference between those data bases exists. The Accident Causation Analysis WG, is promoting the development towards common and improved data bases for accidents analysis in Europe.
A major share of accidents with fatalities is accounted for by single vehicle accidents / loss of control accidents. Generally spoken, for this accident category the priority systems are likely to have a reasonable impact.
The existing figures on vehicles on the road in different European member states and the current vehicle fleet renewal rate in each MS indicate that the time needed to have a market penetration of more than 50% over all vehicle categories is more than 10 years for a system introduced in all vehicles today.
Remark: In Germany the average age of the vehicle fleet is 7.8 years. Ca. 3.2 million new registered vehicles/year leads to approximately 21 million new vehicles equipped with eSafety systems (ca. 50% of the fleet) after 8 years if all new vehicles are from this year on equipped with the systems. An open question is the fitment rate per vehicle; optional solutions, hence only driven by customer demand, are likely to have a slower gradient in deployment than standard fitment or mandatory regulations.
Safety benefits of selected ITS applications
Lind, G., Lindqvist, E. & Persson, S. 2003. Potentialen hos ITS att öka trafiksäkerheten på kort och lång sikt (The potential of ITS to increase safety in the short and long run). Stratega and Transek.
Assumptions - Vehicle functions that not are introduced already today, need at least a couple of years before
implementation in new cars - It will take a number of years before the entire vehicle fleet will be renewed - It will take a couple of years for planning, decision making and construction of Infrastructure
measures - The assessment for year 2015 is based on the assumption that vehicle measures influence
50 % of the total traffic volume and that infrastructure measures influence 70 % of total traffic volume (percent of vehicle-kilometres).
The assumptions above are relatively optimistic concerning the rapidity in implementation. The reason for the optimistic view is the objective to show the potential, not a forecast of the future development. If the traffic safety applications are viewed by all major players as a great opportunity, then it is reasonable to assume a corresponding big effort in resources from the Government, the Road Administration and from the Car industry.
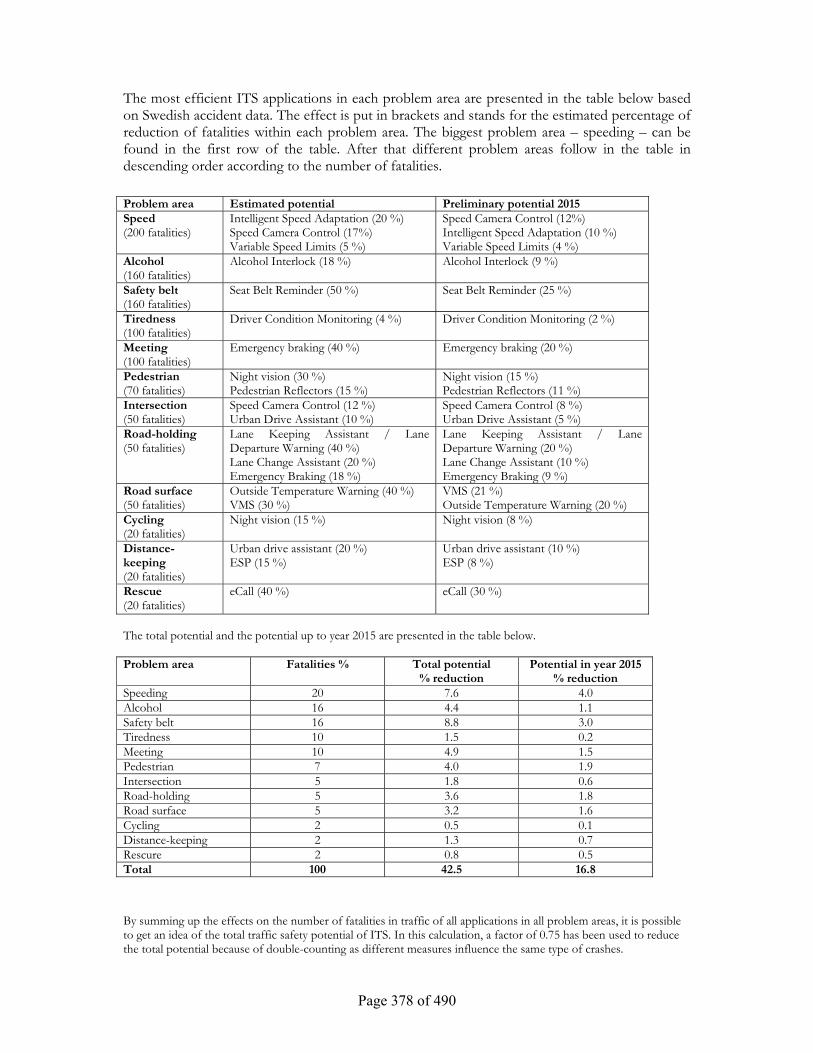
Page 378 of 490
The most efficient ITS applications in each problem area are presented in the table below based on Swedish accident data. The effect is put in brackets and stands for the estimated percentage of reduction of fatalities within each problem area. The biggest problem area – speeding – can be found in the first row of the table. After that different problem areas follow in the table in descending order according to the number of fatalities. Problem area Estimated potential Preliminary potential 2015 Speed (200 fatalities)
Intelligent Speed Adaptation (20 %) Speed Camera Control (17%) Variable Speed Limits (5 %)
Speed Camera Control (12%) Intelligent Speed Adaptation (10 %) Variable Speed Limits (4 %)
Alcohol (160 fatalities)
Alcohol Interlock (18 %) Alcohol Interlock (9 %)
Safety belt (160 fatalities)
Seat Belt Reminder (50 %) Seat Belt Reminder (25 %)
Tiredness (100 fatalities)
Driver Condition Monitoring (4 %) Driver Condition Monitoring (2 %)
Meeting (100 fatalities)
Emergency braking (40 %) Emergency braking (20 %)
Pedestrian (70 fatalities)
Night vision (30 %) Pedestrian Reflectors (15 %)
Night vision (15 %) Pedestrian Reflectors (11 %)
Intersection (50 fatalities)
Speed Camera Control (12 %) Urban Drive Assistant (10 %)
Speed Camera Control (8 %) Urban Drive Assistant (5 %)
Road-holding (50 fatalities)
Lane Keeping Assistant / Lane Departure Warning (40 %) Lane Change Assistant (20 %) Emergency Braking (18 %)
Lane Keeping Assistant / Lane Departure Warning (20 %) Lane Change Assistant (10 %) Emergency Braking (9 %)
Road surface (50 fatalities)
Outside Temperature Warning (40 %) VMS (30 %)
VMS (21 %) Outside Temperature Warning (20 %)
Cycling (20 fatalities)
Night vision (15 %) Night vision (8 %)
Distance-keeping (20 fatalities)
Urban drive assistant (20 %) ESP (15 %)
Urban drive assistant (10 %) ESP (8 %)
Rescue (20 fatalities)
eCall (40 %) eCall (30 %)
The total potential and the potential up to year 2015 are presented in the table below. Problem area Fatalities % Total potential
% reduction Potential in year 2015
% reduction Speeding 20 7.6 4.0 Alcohol 16 4.4 1.1 Safety belt 16 8.8 3.0 Tiredness 10 1.5 0.2 Meeting 10 4.9 1.5 Pedestrian 7 4.0 1.9 Intersection 5 1.8 0.6 Road-holding 5 3.6 1.8 Road surface 5 3.2 1.6 Cycling 2 0.5 0.1 Distance-keeping 2 1.3 0.7 Rescure 2 0.8 0.5 Total 100 42.5 16.8
By summing up the effects on the number of fatalities in traffic of all applications in all problem areas, it is possible to get an idea of the total traffic safety potential of ITS. In this calculation, a factor of 0.75 has been used to reduce the total potential because of double-counting as different measures influence the same type of crashes.
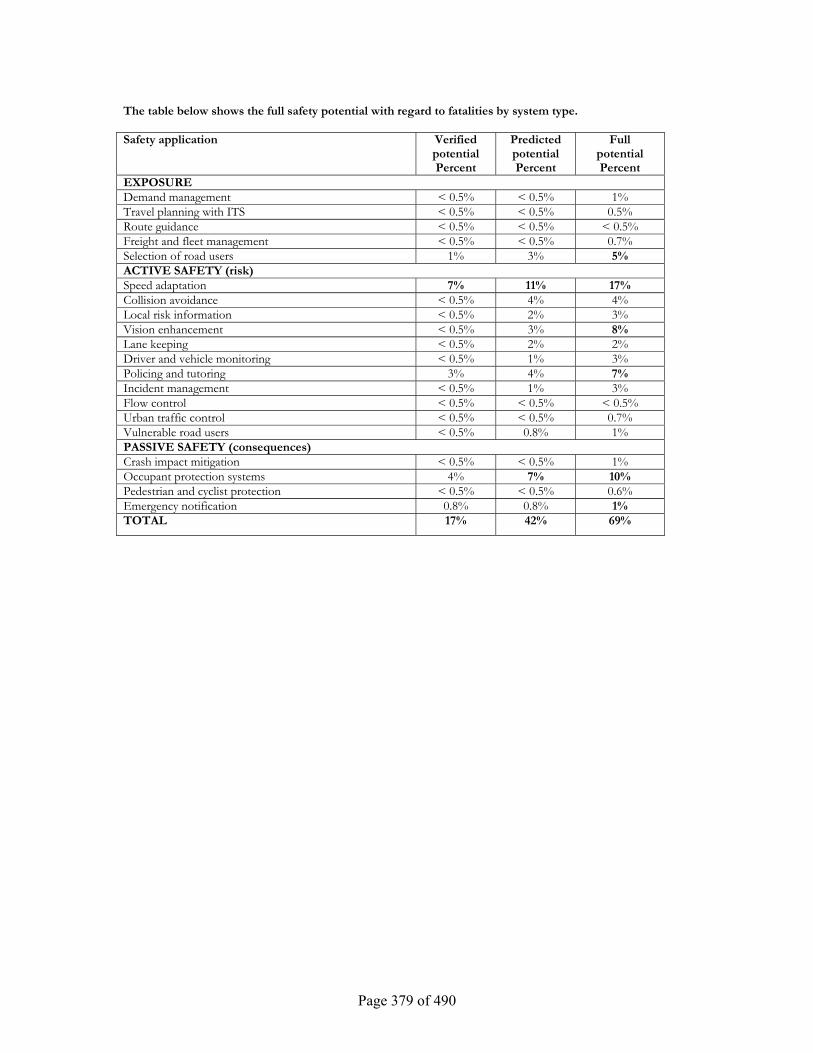
Page 379 of 490
The table below shows the full safety potential with regard to fatalities by system type. Safety application Verified
potential Percent
Predicted potential Percent
Full potential Percent
EXPOSURE Demand management < 0.5% < 0.5% 1% Travel planning with ITS < 0.5% < 0.5% 0.5% Route guidance < 0.5% < 0.5% < 0.5% Freight and fleet management < 0.5% < 0.5% 0.7% Selection of road users 1% 3% 5% ACTIVE SAFETY (risk) Speed adaptation 7% 11% 17% Collision avoidance < 0.5% 4% 4% Local risk information < 0.5% 2% 3% Vision enhancement < 0.5% 3% 8% Lane keeping < 0.5% 2% 2% Driver and vehicle monitoring < 0.5% 1% 3% Policing and tutoring 3% 4% 7% Incident management < 0.5% 1% 3% Flow control < 0.5% < 0.5% < 0.5% Urban traffic control < 0.5% < 0.5% 0.7% Vulnerable road users < 0.5% 0.8% 1% PASSIVE SAFETY (consequences) Crash impact mitigation < 0.5% < 0.5% 1% Occupant protection systems 4% 7% 10% Pedestrian and cyclist protection < 0.5% < 0.5% 0.6% Emergency notification 0.8% 0.8% 1% TOTAL 17% 42% 69%
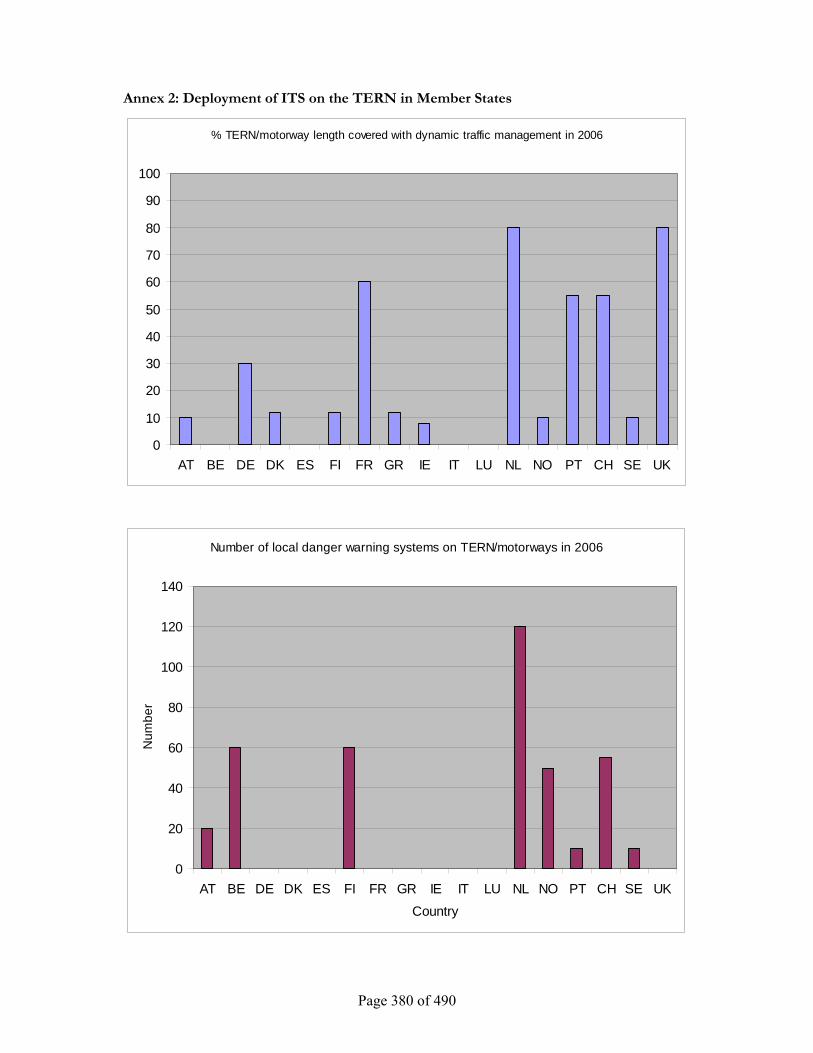
Page 380 of 490
Annex 2: Deployment of ITS on the TERN in Member States
% TERN/motorway length covered with dynamic traffic management in 2006
0
10
20
30
40
50
60
70
80
90
100
AT BE DE DK ES FI FR GR IE IT LU NL NO PT CH SE UK
Number of local danger warning systems on TERN/motorways in 2006
0
20
40
60
80
100
120
140
AT BE DE DK ES FI FR GR IE IT LU NL NO PT CH SE UK
Country
Num
ber
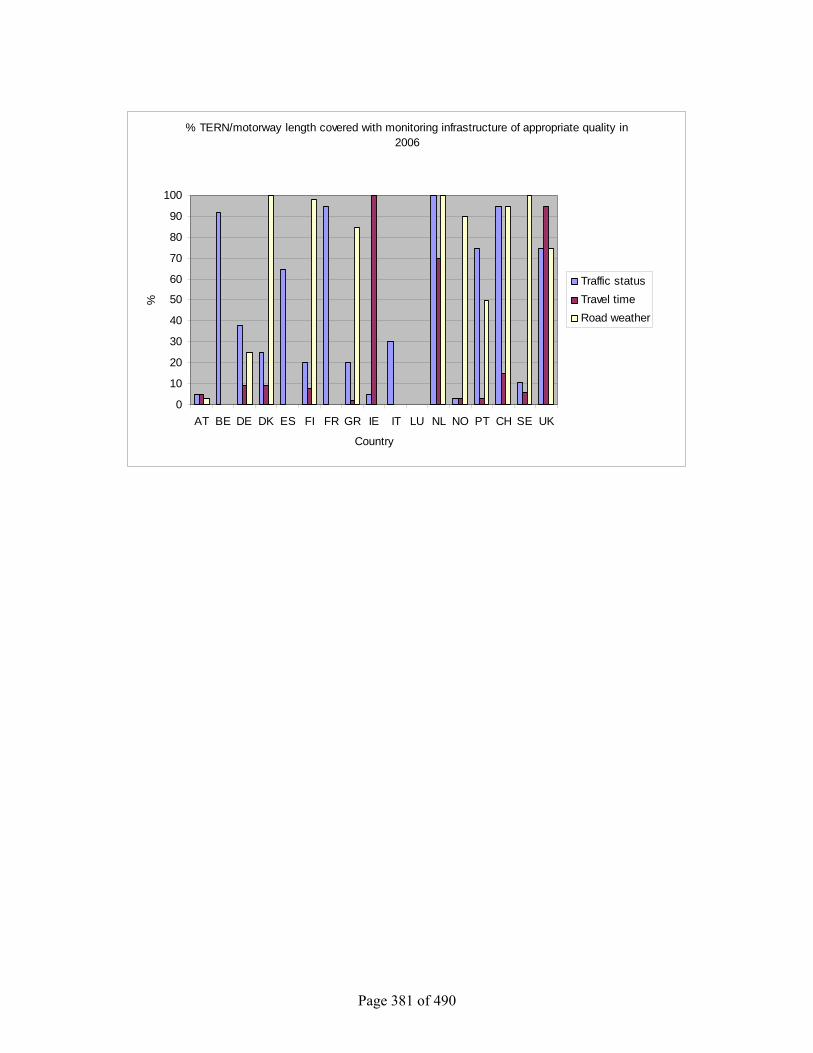
Page 381 of 490
% TERN/motorway length covered with monitoring infrastructure of appropriate quality in 2006
0
10
20
30
40
50
60
70
80
90
100
AT BE DE DK ES FI FR GR IE IT LU NL NO PT CH SE UK
Country
%
Traffic statusTravel timeRoad weather

Page 382 of 490
Annex 3: Descriptions of implementation issues for the priority systems
Implementation Issues for ESP (Electronic Stability Program)
A System description
ESP stabilises the vehicle and prevent skidding under all driving conditions and driving situation within the physical limits by active brake intervention on one ore more wheels and by intelligent engine torque management.
As soon as ESP identifies a critical driving situation it intervenes by applying specific brake pressure to one or more wheels, as required. If necessary, the engine torque is also adjusted automatically. In this way, ESP helps the driver stabilise the vehicle – although the extent to which it can do so is of course limited by the physical laws governing the dynamic behaviour of the vehicle.
A yaw-rate sensor and a lateral acceleration sensor continuously monitor the movement of the vehicle about its vertical axis and compare the actual value with the target value calculated on the basis of the driver's steering input and the vehicle speed. The moment the car deviates from this ideal line, ESP intervenes to counteract any incipient tendency to skid by applying a precisely metered braking force to one or more wheels. ESP systems combine the functions of ABS and TCS traction control and complement them with directional stability assistance.
B Technology Availability
ESP is in serial production since 10 years. During this time the cost have been reduced from 100% in 1995 to less than 25 % in 2005.
ESP is based on ABS, which is standard in 15 EU Countries thanks to the ACEA self-commitment.
That’s why the additional cost on TOP of ABS are relatively low ((ABS plus Yaw Rate Sensor with lateral acceleration Sensor, Steering Angle Sensor (Standard in vehicles with Electronic Powered Steering EPS, ), Pressure Sensor, enhanced ECU and enhanced hydraulic Unit)).
C Road and Information Infrastructure Need and Availability
none
D Organisation requirements
none
E Regulatory Requirements / Barriers
none
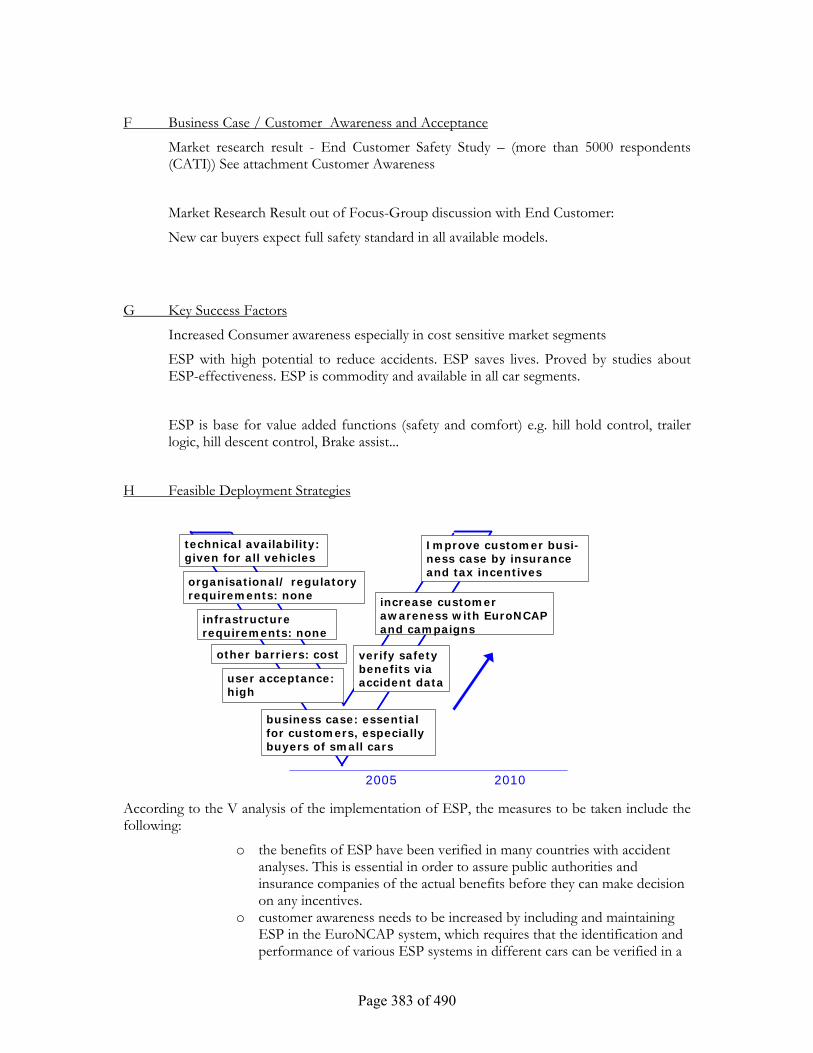
Page 383 of 490
F Business Case / Customer Awareness and Acceptance
Market research result - End Customer Safety Study – (more than 5000 respondents (CATI)) See attachment Customer Awareness
Market Research Result out of Focus-Group discussion with End Customer:
New car buyers expect full safety standard in all available models.
G Key Success Factors
Increased Consumer awareness especially in cost sensitive market segments
ESP with high potential to reduce accidents. ESP saves lives. Proved by studies about ESP-effectiveness. ESP is commodity and available in all car segments.
ESP is base for value added functions (safety and comfort) e.g. hill hold control, trailer logic, hill descent control, Brake assist...
H Feasible Deployment Strategies
According to the V analysis of the implementation of ESP, the measures to be taken include the following:
o the benefits of ESP have been verified in many countries with accident analyses. This is essential in order to assure public authorities and insurance companies of the actual benefits before they can make decision on any incentives.
o customer awareness needs to be increased by including and maintaining ESP in the EuroNCAP system, which requires that the identification and performance of various ESP systems in different cars can be verified in a
technical availability: given for all vehicles
organisational/ regulatoryrequirements: none
other barriers: cost
user acceptance: high
business case: essentialfor customers, especiallybuyers of small cars
Improve customer busi-ness case by insuranceand tax incentives
increase customerawareness with EuroNCAPand campaigns
infrastructurerequirements: none
verify safetybenefits via accident data
2005 2010
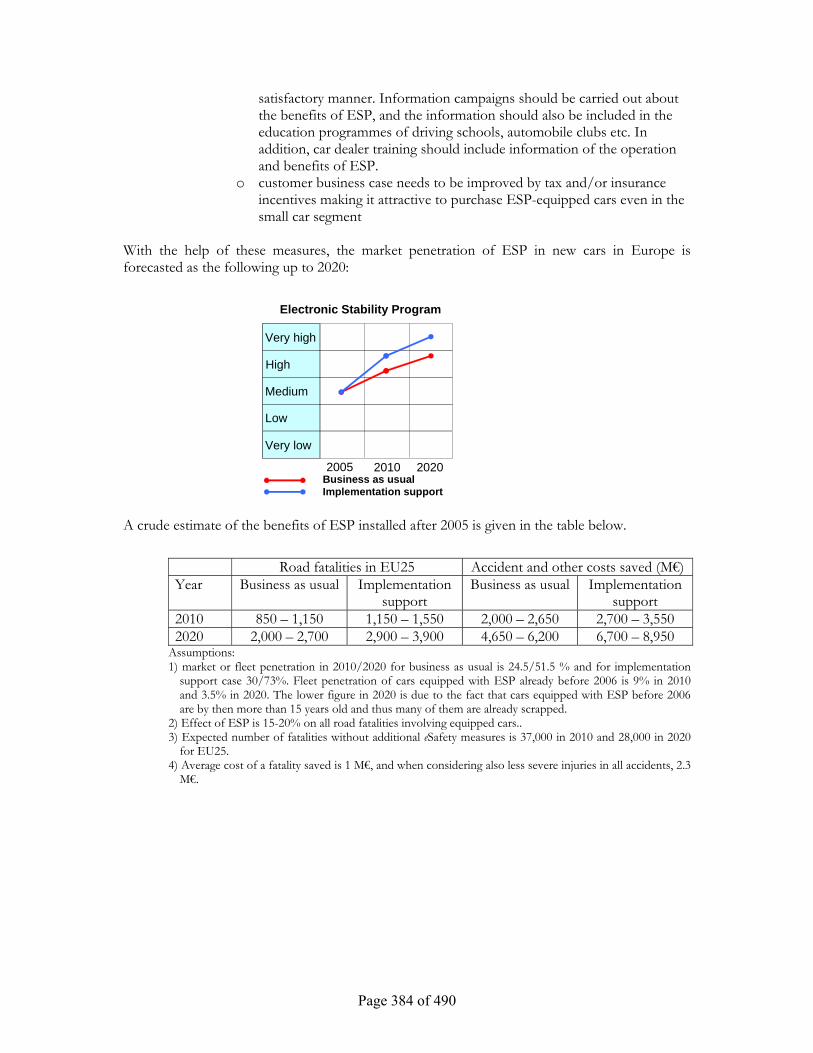
Page 384 of 490
satisfactory manner. Information campaigns should be carried out about the benefits of ESP, and the information should also be included in the education programmes of driving schools, automobile clubs etc. In addition, car dealer training should include information of the operation and benefits of ESP.
o customer business case needs to be improved by tax and/or insurance incentives making it attractive to purchase ESP-equipped cars even in the small car segment
With the help of these measures, the market penetration of ESP in new cars in Europe is forecasted as the following up to 2020:
Very low
Low
Medium
High
Very high
2005 2010 2020Business as usualImplementation support
Electronic Stability Program
A crude estimate of the benefits of ESP installed after 2005 is given in the table below.
Road fatalities in EU25 Accident and other costs saved (M€)Year Business as usual Implementation
support Business as usual Implementation
support 2010 850 – 1,150 1,150 – 1,550 2,000 – 2,650 2,700 – 3,550 2020 2,000 – 2,700 2,900 – 3,900 4,650 – 6,200 6,700 – 8,950
Assumptions: 1) market or fleet penetration in 2010/2020 for business as usual is 24.5/51.5 % and for implementation
support case 30/73%. Fleet penetration of cars equipped with ESP already before 2006 is 9% in 2010 and 3.5% in 2020. The lower figure in 2020 is due to the fact that cars equipped with ESP before 2006 are by then more than 15 years old and thus many of them are already scrapped.
2) Effect of ESP is 15-20% on all road fatalities involving equipped cars.. 3) Expected number of fatalities without additional eSafety measures is 37,000 in 2010 and 28,000 in 2020
for EU25. 4) Average cost of a fatality saved is 1 M€, and when considering also less severe injuries in all accidents, 2.3
M€.
Page 385 of 490
Implementation Issues for Blind Spot Monitoring Systems
A System description
Systems, which give information/warnings to the driver about relevant obstacles in the blind spot around the vehicle, when the driver intends to change the lane. Systems can use cameras or radar sensors to detect relevant objects.
B Technology Availability
Available as an option in a few models since 2005 in production.
C Road and Information Infrastructure Need and Availability
none
D Organisation requirements
none
E Regulatory Requirements / Barriers
For the systems based on 24 GHz short-range radar, the market penetration must not exceed 7%, automatic deactivation in exclusion zones and no new systems after 2013 due to risk of interference with other systems using the same frequency band. Liability problems need to be solved.
F Business Case / Customer Awareness and Acceptance
G Key Success Factors
Consumer information, customer awareness and willingness to bear additional cost, driver acceptance (false/missing alarms, HMI), liability.
H Feasible Deployment Strategies
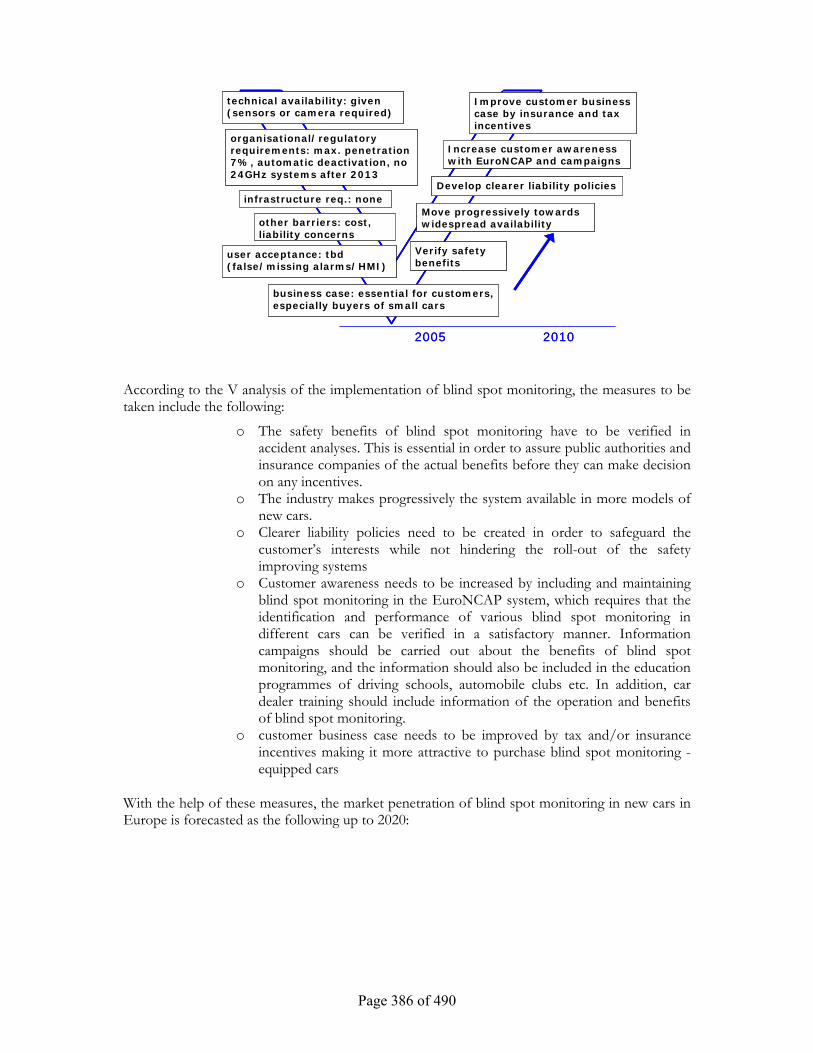
Page 386 of 490
technical availability: given(sensors or camera required)
organisational/regulatoryrequirements: max. penetration7%, automatic deactivation, no 24GHz systems after 2013
other barriers: cost, liability concerns
user acceptance: tbd(false/missing alarms/HMI)
business case: essential for customers, especially buyers of small cars
Improve customer business case by insurance and taxincentives
Increase customer awarenesswith EuroNCAP and campaigns
infrastructure req.: none
Verify safetybenefits
2005 2010
Develop clearer liability policies
Move progressively towardswidespread availability
technical availability: given(sensors or camera required)
organisational/regulatoryrequirements: max. penetration7%, automatic deactivation, no 24GHz systems after 2013
other barriers: cost, liability concerns
user acceptance: tbd(false/missing alarms/HMI)
business case: essential for customers, especially buyers of small cars
Improve customer business case by insurance and taxincentives
Increase customer awarenesswith EuroNCAP and campaigns
infrastructure req.: none
Verify safetybenefits
2005 2010
Develop clearer liability policies
Move progressively towardswidespread availability
According to the V analysis of the implementation of blind spot monitoring, the measures to be taken include the following:
o The safety benefits of blind spot monitoring have to be verified in accident analyses. This is essential in order to assure public authorities and insurance companies of the actual benefits before they can make decision on any incentives.
o The industry makes progressively the system available in more models of new cars.
o Clearer liability policies need to be created in order to safeguard the customer’s interests while not hindering the roll-out of the safety improving systems
o Customer awareness needs to be increased by including and maintaining blind spot monitoring in the EuroNCAP system, which requires that the identification and performance of various blind spot monitoring in different cars can be verified in a satisfactory manner. Information campaigns should be carried out about the benefits of blind spot monitoring, and the information should also be included in the education programmes of driving schools, automobile clubs etc. In addition, car dealer training should include information of the operation and benefits of blind spot monitoring.
o customer business case needs to be improved by tax and/or insurance incentives making it more attractive to purchase blind spot monitoring -equipped cars
With the help of these measures, the market penetration of blind spot monitoring in new cars in Europe is forecasted as the following up to 2020:

Page 387 of 490
Very low
Low
Medium
High
Very high
2005 2010 2020Business as usualImplementation support
Blind Spot Monitoring
As there is very little knowledge about the benefits of blind spot monitoring, the estimates for fatalities and costs saved through the deployment of these systems were not calculated.

Page 388 of 490
Implementation Issues for Adaptive Head Lights
A System description
Adaptive Head Lights improve night-time driving safety on twisty roads: the headlamps follow the direction in which the driver is steering, thus extending the illumination range in the relevant areas. In this way it is possible to spot pedestrians, cyclists and animals much sooner.
Conventional headlamps have a range of about 30 metres when entering a corner with a 190-metre centre-line radius. With the Active Light System however, this is extended by a further 25 metres. The Active Light System is based on bi-xenon headlamps with dynamic range adjustment. A microprocessor integrated in the vehicle's electronic data network controls the system on the basis of real-time information supplied by the steering angle and speed sensors. Other possible functions include bending lights.
B Technology Availability
Available as an option in several European models.
C Road and Information Infrastructure Need and Availability
none
D Organisation requirements
none
E Regulatory Requirements / Barriers
Liability problems need to be solved..
F Business Case / Customer Awareness and Acceptance
G Key Success Factors
Customer awareness and willingness to bear additional cost, liability.
H Feasible Deployment Strategies
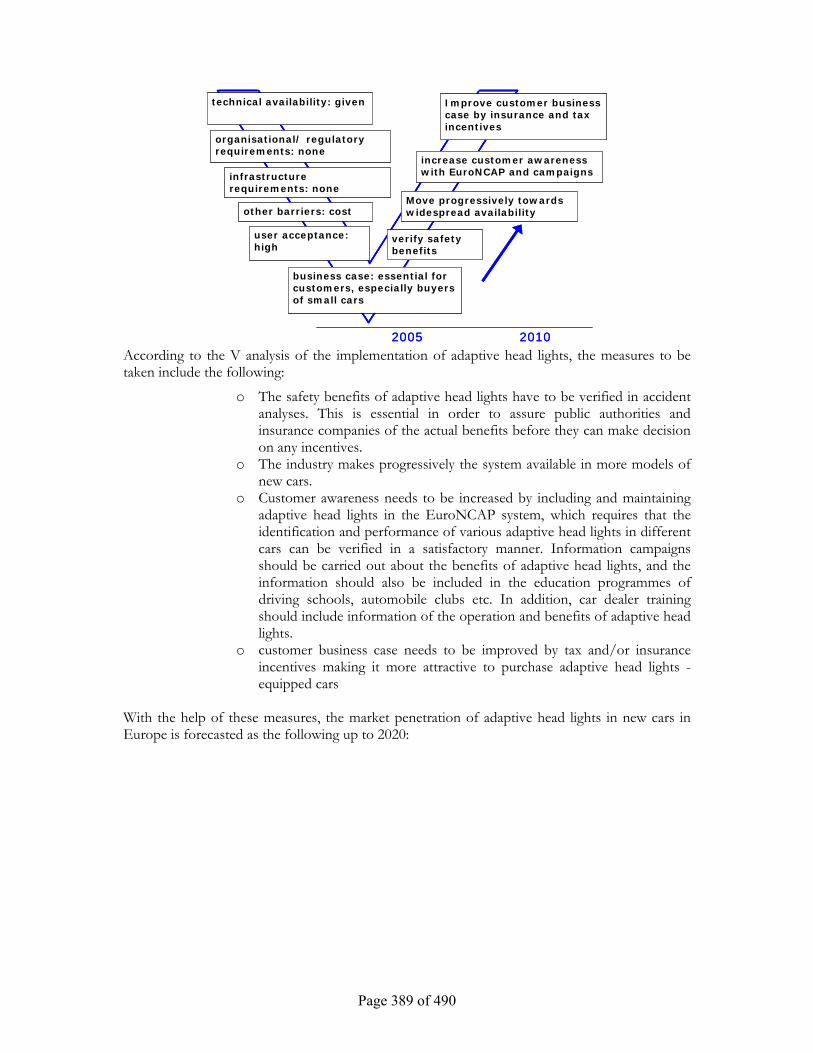
Page 389 of 490
technical availability: given
organisational/ regulatoryrequirements: none
other barriers: cost
user acceptance: high
business case: essential for customers, especially buyersof small cars
Improve customer business case by insurance and taxincentives
increase customer awarenesswith EuroNCAP and campaignsinfrastructure
requirements: none
verify safetybenefits
2005 2010
Move progressively towardswidespread availability
technical availability: given
organisational/ regulatoryrequirements: none
other barriers: cost
user acceptance: high
business case: essential for customers, especially buyersof small cars
Improve customer business case by insurance and taxincentives
increase customer awarenesswith EuroNCAP and campaignsinfrastructure
requirements: none
verify safetybenefits
2005 2010
Move progressively towardswidespread availability
According to the V analysis of the implementation of adaptive head lights, the measures to be taken include the following:
o The safety benefits of adaptive head lights have to be verified in accident analyses. This is essential in order to assure public authorities and insurance companies of the actual benefits before they can make decision on any incentives.
o The industry makes progressively the system available in more models of new cars.
o Customer awareness needs to be increased by including and maintaining adaptive head lights in the EuroNCAP system, which requires that the identification and performance of various adaptive head lights in different cars can be verified in a satisfactory manner. Information campaigns should be carried out about the benefits of adaptive head lights, and the information should also be included in the education programmes of driving schools, automobile clubs etc. In addition, car dealer training should include information of the operation and benefits of adaptive head lights.
o customer business case needs to be improved by tax and/or insurance incentives making it more attractive to purchase adaptive head lights -equipped cars
With the help of these measures, the market penetration of adaptive head lights in new cars in Europe is forecasted as the following up to 2020:

Page 390 of 490
Very low
Low
Medium
High
Very high
2005 2010 2020Business as usualImplementation support
Adaptive Headlights
As there is very little knowledge about the benefits of adaptive head lights, the estimates for fatalities and costs saved through the deployment of these systems were not calculated.

Page 391 of 490
Implementation Issues for Obstacle and Collision Warning
A System description
Systems detect obstacles and give warnings when collision is imminent. Current solutions with limited performance are a separate feature of Adaptive Cruise Control systems which use information obtained from radar sensors to give visual and acoustic warnings. Future systems will optionally use near range radar sensors or LIDAR in addition to the long range radar. The evolution of the function has been the following: 1) ACC without braking capability, 2) ACC including braking capability but without taking care of fixed obstacles, 3) taking care of some category of fixed obstacles i.e. those with a big equivalent surface to detection.
B Technology Availability
Available as ACC feature as an option in several European models. Safety systems based on long rage radar and additional near range radar sensors or LIDAR to be introduced in 2005.
C Road and Information Infrastructure Need and Availability
none
D Organisation requirements
none
E Regulatory Requirements / Barriers
For the systems based on 24 GHz short-range radar, the market penetration must not exceed 7%, automatic deactivation in exclusion zones and no new systems after 2013 due to risk of interference with other systems using the same frequency band. Liability problems need to be solved.
F Business Case / Customer Awareness and Acceptance
G Key Success Factors
Consumer awareness, willingness to bear additional cost, liability.
H Feasible Deployment Strategies
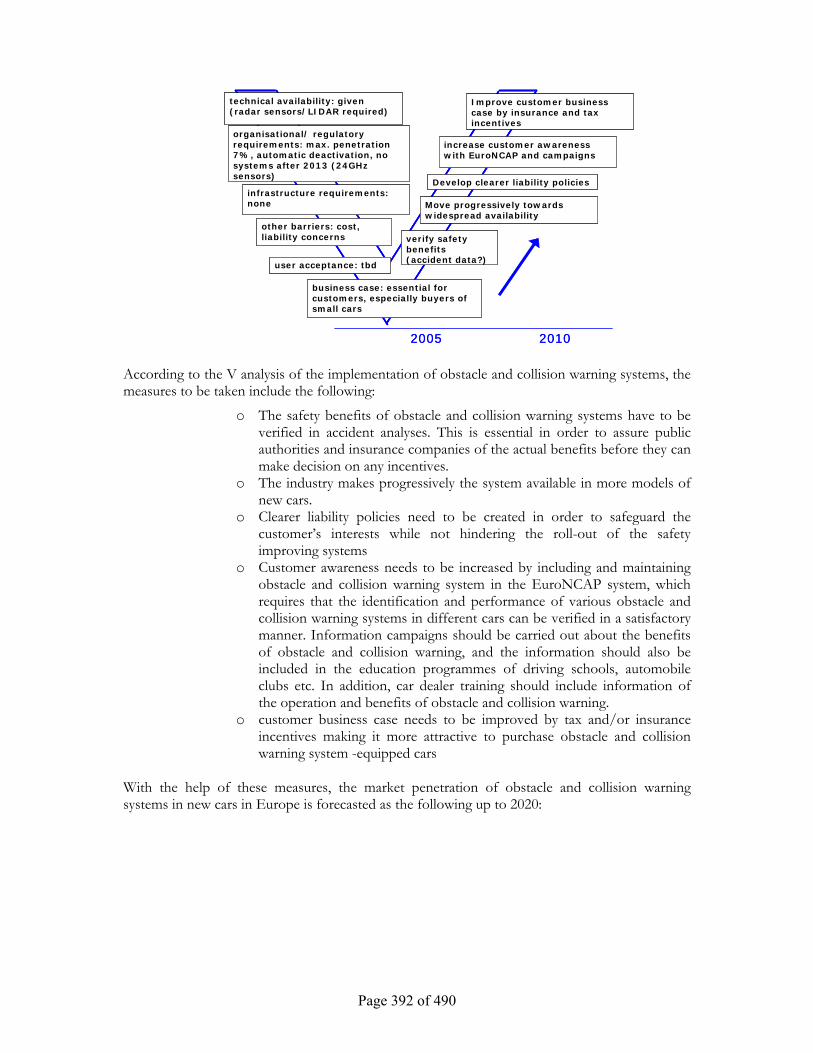
Page 392 of 490
technical availability: given(radar sensors/LIDAR required)
organisational/ regulatoryrequirements: max. penetration7%, automatic deactivation, no systems after 2013 (24GHz sensors)
other barriers: cost, liability concerns
user acceptance: tbd
business case: essential for customers, especially buyers of small cars
Improve customer business case by insurance and taxincentives
increase customer awarenesswith EuroNCAP and campaigns
infrastructure requirements: none
verify safetybenefits(accident data?)
2005 2010
Develop clearer liability policies
Move progressively towardswidespread availability
technical availability: given(radar sensors/LIDAR required)
organisational/ regulatoryrequirements: max. penetration7%, automatic deactivation, no systems after 2013 (24GHz sensors)
other barriers: cost, liability concerns
user acceptance: tbd
business case: essential for customers, especially buyers of small cars
Improve customer business case by insurance and taxincentives
increase customer awarenesswith EuroNCAP and campaigns
infrastructure requirements: none
verify safetybenefits(accident data?)
2005 2010
Develop clearer liability policies
Move progressively towardswidespread availability
According to the V analysis of the implementation of obstacle and collision warning systems, the measures to be taken include the following:
o The safety benefits of obstacle and collision warning systems have to be verified in accident analyses. This is essential in order to assure public authorities and insurance companies of the actual benefits before they can make decision on any incentives.
o The industry makes progressively the system available in more models of new cars.
o Clearer liability policies need to be created in order to safeguard the customer’s interests while not hindering the roll-out of the safety improving systems
o Customer awareness needs to be increased by including and maintaining obstacle and collision warning system in the EuroNCAP system, which requires that the identification and performance of various obstacle and collision warning systems in different cars can be verified in a satisfactory manner. Information campaigns should be carried out about the benefits of obstacle and collision warning, and the information should also be included in the education programmes of driving schools, automobile clubs etc. In addition, car dealer training should include information of the operation and benefits of obstacle and collision warning.
o customer business case needs to be improved by tax and/or insurance incentives making it more attractive to purchase obstacle and collision warning system -equipped cars
With the help of these measures, the market penetration of obstacle and collision warning systems in new cars in Europe is forecasted as the following up to 2020:

Page 393 of 490
Very low
Low
Medium
High
Very high
2005 2010 2020Business as usualImplementation support
Obstacle and collision warning
A crude estimate of the benefits of obstacle and collision warning systems installed after 2005 is given in the table below.
Road fatalities in EU25 Accident and other costs saved (M€)Year Business as usual Implementation
support Business as usual Implementation
support 2010 30 – 70 50 – 110 80 – 150 120 – 250 2020 150 – 300 300 – 550 300 – 650 650 – 1,250
Assumptions: 1) market or fleet penetration in 2010/2020 for business as usual is 3.6/17.5 % and for implementation
support case 5.4/33.2%. Fleet penetration of cars equipped with obstacle and collision warning already before 2006 is 0.6% in 2010 and 0.3% in 2020. The lower figure in 2020 is due to the fact that cars equipped with obstacle and collision warning before 2006 are by then more than 15 years old and thus many of them are already scrapped.
2) Effect of obstacle and collision warning is 3-6% on all road fatalities involving equipped cars.. 3) Expected number of fatalities without additional eSafety measures is 37,000 in 2010 and 28,000 in 2020
for EU25. 4) Average cost of a fatality saved is 1 M€, and when considering also less severe injuries in all accidents, 2.3
M€.
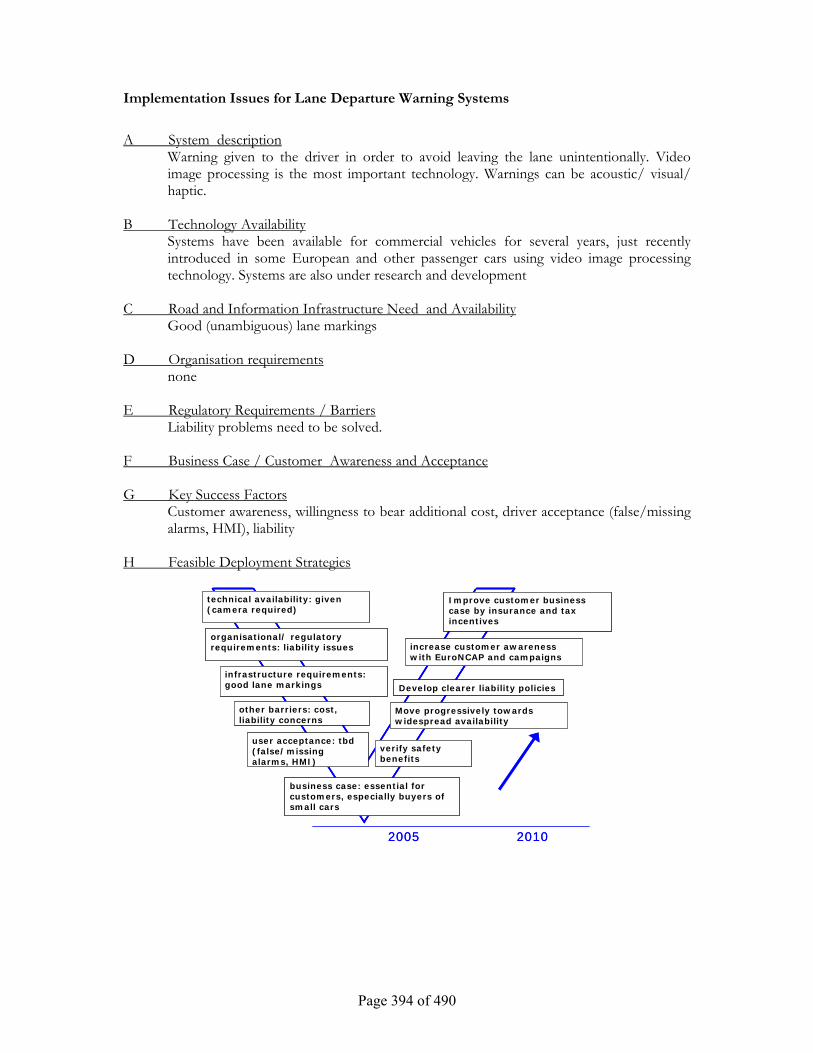
Page 394 of 490
Implementation Issues for Lane Departure Warning Systems
A System description
Warning given to the driver in order to avoid leaving the lane unintentionally. Video image processing is the most important technology. Warnings can be acoustic/ visual/ haptic.
B Technology Availability
Systems have been available for commercial vehicles for several years, just recently introduced in some European and other passenger cars using video image processing technology. Systems are also under research and development
C Road and Information Infrastructure Need and Availability
Good (unambiguous) lane markings D Organisation requirements
none
E Regulatory Requirements / Barriers Liability problems need to be solved.
F Business Case / Customer Awareness and Acceptance G Key Success Factors
Customer awareness, willingness to bear additional cost, driver acceptance (false/missing alarms, HMI), liability
H Feasible Deployment Strategies
technical availability: given(camera required)
organisational/ regulatoryrequirements: liability issues
other barriers: cost, liability concerns
user acceptance: tbd(false/missingalarms, HMI)
business case: essential for customers, especially buyers of small cars
Improve customer business case by insurance and taxincentives
increase customer awarenesswith EuroNCAP and campaigns
infrastructure requirements: good lane markings
verify safetybenefits
2005 2010
Move progressively towardswidespread availability
Develop clearer liability policies
technical availability: given(camera required)
organisational/ regulatoryrequirements: liability issues
other barriers: cost, liability concerns
user acceptance: tbd(false/missingalarms, HMI)
business case: essential for customers, especially buyers of small cars
Improve customer business case by insurance and taxincentives
increase customer awarenesswith EuroNCAP and campaigns
infrastructure requirements: good lane markings
verify safetybenefits
2005 2010
Move progressively towardswidespread availability
Develop clearer liability policies
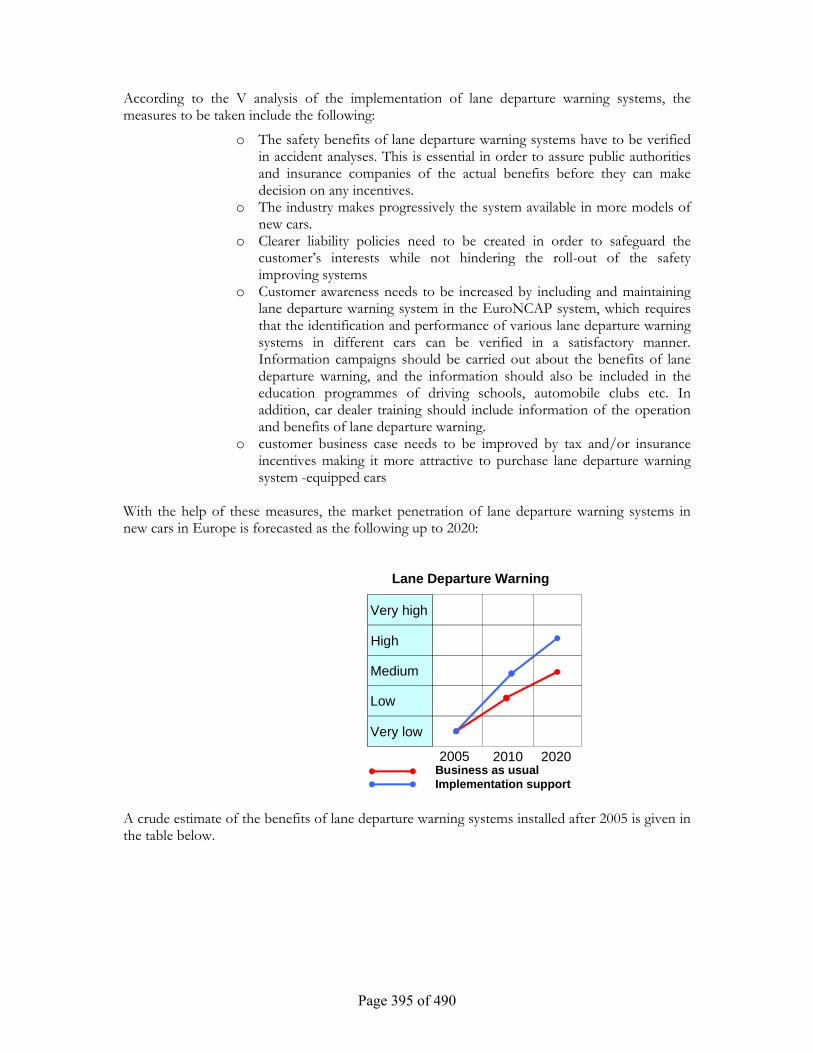
Page 395 of 490
According to the V analysis of the implementation of lane departure warning systems, the measures to be taken include the following:
o The safety benefits of lane departure warning systems have to be verified in accident analyses. This is essential in order to assure public authorities and insurance companies of the actual benefits before they can make decision on any incentives.
o The industry makes progressively the system available in more models of new cars.
o Clearer liability policies need to be created in order to safeguard the customer’s interests while not hindering the roll-out of the safety improving systems
o Customer awareness needs to be increased by including and maintaining lane departure warning system in the EuroNCAP system, which requires that the identification and performance of various lane departure warning systems in different cars can be verified in a satisfactory manner. Information campaigns should be carried out about the benefits of lane departure warning, and the information should also be included in the education programmes of driving schools, automobile clubs etc. In addition, car dealer training should include information of the operation and benefits of lane departure warning.
o customer business case needs to be improved by tax and/or insurance incentives making it more attractive to purchase lane departure warning system -equipped cars
With the help of these measures, the market penetration of lane departure warning systems in new cars in Europe is forecasted as the following up to 2020:
Very low
Low
Medium
High
Very high
2005 2010 2020Business as usualImplementation support
Lane Departure Warning
A crude estimate of the benefits of lane departure warning systems installed after 2005 is given in the table below.

Page 396 of 490
Road fatalities in EU25 Accident and other costs saved (M€)Year Business as usual Implementation
support Business as usual Implementation
support 2010 40 – 130 60 – 200 90 – 300 140 – 450 2020 170 – 550 300 – 1,000 400 – 1,250 700 – 2,300
Assumptions: 1) market or fleet penetration in 2010/2020 for business as usual is 4.1/19.9 % and for implementation
support case 5.9/36.3%. Fleet penetration of cars equipped with lane departure warning already before 2006 is 0.6% in 2010 and 0.2% in 2020. The lower figure in 2020 is due to the fact that cars equipped with lane departure warning before 2006 are by then more than 15 years old and thus many of them are already scrapped.
2) Effect of lane departure warning is 3-10% on all road fatalities involving equipped cars.. 3) Expected number of fatalities without additional eSafety measures is 37,000 in 2010 and 28,000 in 2020
for EU25. 4) Average cost of a fatality saved is 1 M€, and when considering also less severe injuries in all accidents, 2.3
M€.
Page 397 of 490
Implementation Issues for eCall
A System description
eCall is targeted by the European Commission to become a harmonized European emergency service, which is based on precise satellite positioning and additional information of vehicles involved in a severe accident (vehicle identification, time of incident, eCall qualifier, identification of service provider as described in a minimum set of data or MSD). Severity will be defined from a personal injury point of view. The generated information will then be sent to a Public Service Answering Point (PSAP) or another type of certified first level emergency centre via a mobile phone connection. It is the intention that the eCall is triggered off by dialling the European emergency number 112 either automatically (deployment of airbag or crash sensors) or manually (press of a dedicated button). When a voice connection to the next PSAP is set up, accident and vehicle related data (MSD) are transferred through GSM/GPRS communication, using the same channel. In a second phase, it might be possible that when the customer has a contract with a private emergency service provider, additional information (full set of data) could be sent to this service provider. As the contractual optional connection to a private service provider is flagged on the operator screen at the PSAP the operator might pull down these additional information via the Internet. A possible valuable service might be language/translation service in case the accident happens in a different country and the accident victim has no knowledge of the local language. The PSAP, the emergency centre or service provider has to be able to receive and process the voice call and data set. The information is then sent to the local emergency authorities in order to dispatch the necessary emergency vehicles. The service should work in principle all over Europe.
B Technology Availability Vehicle integrated GSM/GPRS communications only available in part of the vehicle park,
but the percentage is slowly increasing Roaming to overcome language difficulties conference call via private service provider
or local language. Only very large PSAPs able to serve many languages
Low cost in-vehicle communication system not available yet in Europe to create volume market
Emergency call routing all over Europe European call and SMS routing through private network only. Not available in all member states. No public crossover systems exist
PSAP receiving technology theoretically available, however, implementation depending on E-112 roll-out
Vehicle sensors Airbag deployment and crash sensors used in existing applications.
Page 398 of 490
C Road and Information Infrastructure Need and Availability GPS Information available in small part of the fleet; in most
HGVs (Heavy Goods Vehicles) Road infrastructure not necessary but traffic accident
information could be displayed on variable message signs to avoid rear-end collisions
GSM Communication Technology all over Europe future of GSM in Europe unclear Receiving technology in PSAP’s and others theoretically available, implementation
depending on E-112 roll-out map D Organisation requirements
Collaboration with and between all EU Member States (EU-25) and other key stakeholders of the emergency value chain in Europe
All stakeholder representatives have to get involved in detailed discussions to work out necessary plans and solve open questions, in particular solve the commercial aspects, regulatory and data protection issues
Development of and agreement on a business plan before starting the system development and implementation
Development of and agreement on an implementation (roll-out) plan before starting the system development and implementation
Receiving PSAP infrastructure needs to be specified, tested and in place
eCall system architecture, standards, protocols and interfaces need to be agreed in advance before volume production and service can start. Simultaneously the necessary receiving infrastructure needs to be prepared.
Vehicle model cycles and starting dates for vehicle production must be considered, taking into account vehicle type-approval.
Matching of voice calls and data sets (technology).
Roaming requirements must be solved. E Regulatory Requirements / Barriers
Data protection and privacy issues have been solved but liability issues still open. Legislation not harmonized across Europe.
F Business Case / Customer Awareness and Acceptance
The interest of drivers and customers to pay for emergency call activities is rather low. As long as the customer is not made aware about the benefits of a harmonized European emergency call service he/she is reluctant to pay for this service. The current situation of different state of deployment of rescue services and gaps in rescue chains in different European countries is making it difficult to find common solutions.
Today there is no business model discussed and accepted among the different stakeholders. The ECDG (eCall Driving Group) has identified significant savings in the health and social cost side outnumbering the investment needs in in-vehicle systems and infrastructure. Models of tax and financial incentives have been presented and discussed. So far no agreement is reached.
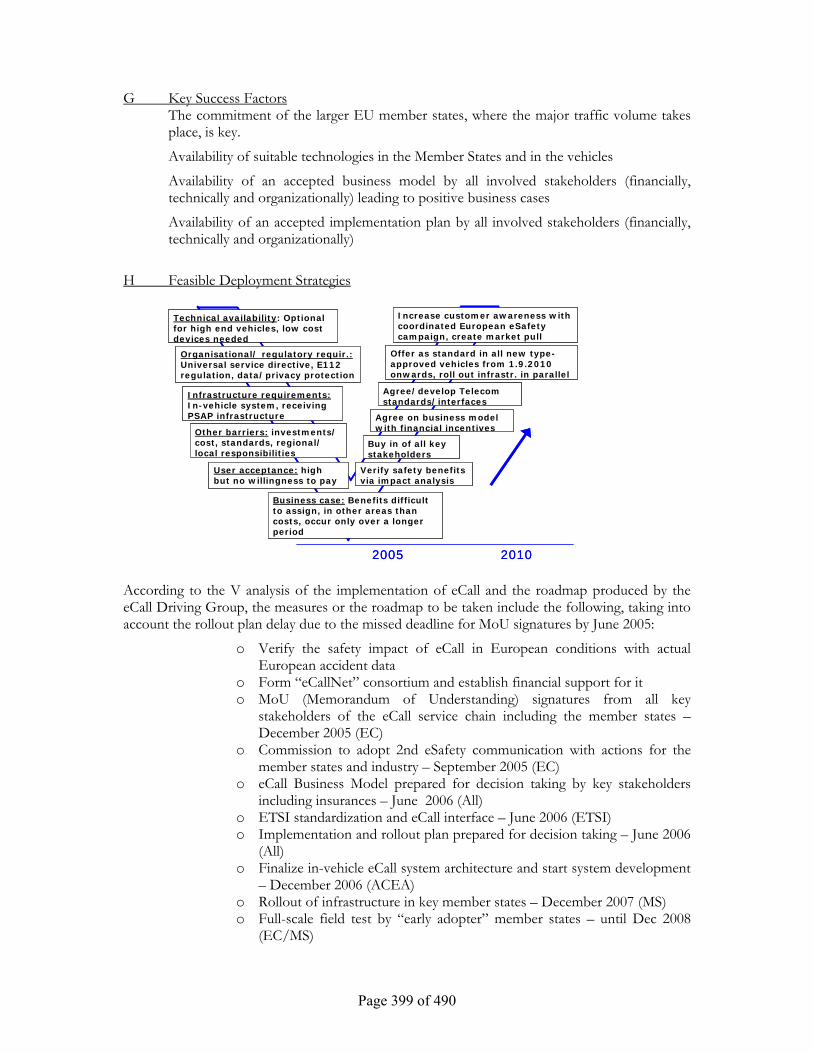
Page 399 of 490
G Key Success Factors The commitment of the larger EU member states, where the major traffic volume takes place, is key.
Availability of suitable technologies in the Member States and in the vehicles
Availability of an accepted business model by all involved stakeholders (financially, technically and organizationally) leading to positive business cases
Availability of an accepted implementation plan by all involved stakeholders (financially, technically and organizationally)
H Feasible Deployment Strategies
Technical availability: Optionalfor high end vehicles, low costdevices needed
Organisational/ regulatory requir.:Universal service directive, E112 regulation, data/privacy protection
Other barriers: investments/ cost, standards, regional/local responsibilities
User acceptance: highbut no willingness to pay
Business case: Benefits difficult to assign, in other areas than costs, occur only over a longer period
Increase customer awareness with coordinated European eSafety campaign, create market pull
Infrastructure requirements:In-vehicle system, receivingPSAP infrastructure
Verify safety benefits via impact analysis
2005 2010
Buy in of all keystakeholders
Agree on business model with financial incentives
Offer as standard in all new type-approved vehicles from 1.9.2010 onwards, roll out infrastr. in parallel
Agree/develop Telecom standards/interfaces
Technical availability: Optionalfor high end vehicles, low costdevices needed
Organisational/ regulatory requir.:Universal service directive, E112 regulation, data/privacy protection
Other barriers: investments/ cost, standards, regional/local responsibilities
User acceptance: highbut no willingness to pay
Business case: Benefits difficult to assign, in other areas than costs, occur only over a longer period
Increase customer awareness with coordinated European eSafety campaign, create market pull
Infrastructure requirements:In-vehicle system, receivingPSAP infrastructure
Verify safety benefits via impact analysis
2005 2010
Buy in of all keystakeholders
Agree on business model with financial incentives
Offer as standard in all new type-approved vehicles from 1.9.2010 onwards, roll out infrastr. in parallel
Agree/develop Telecom standards/interfaces
According to the V analysis of the implementation of eCall and the roadmap produced by the eCall Driving Group, the measures or the roadmap to be taken include the following, taking into account the rollout plan delay due to the missed deadline for MoU signatures by June 2005:
o Verify the safety impact of eCall in European conditions with actual European accident data
o Form “eCallNet” consortium and establish financial support for it o MoU (Memorandum of Understanding) signatures from all key
stakeholders of the eCall service chain including the member states – December 2005 (EC)
o Commission to adopt 2nd eSafety communication with actions for the member states and industry – September 2005 (EC)
o eCall Business Model prepared for decision taking by key stakeholders including insurances – June 2006 (All)
o ETSI standardization and eCall interface – June 2006 (ETSI) o Implementation and rollout plan prepared for decision taking – June 2006
(All) o Finalize in-vehicle eCall system architecture and start system development
– December 2006 (ACEA) o Rollout of infrastructure in key member states – December 2007 (MS) o Full-scale field test by “early adopter” member states – until Dec 2008
(EC/MS)
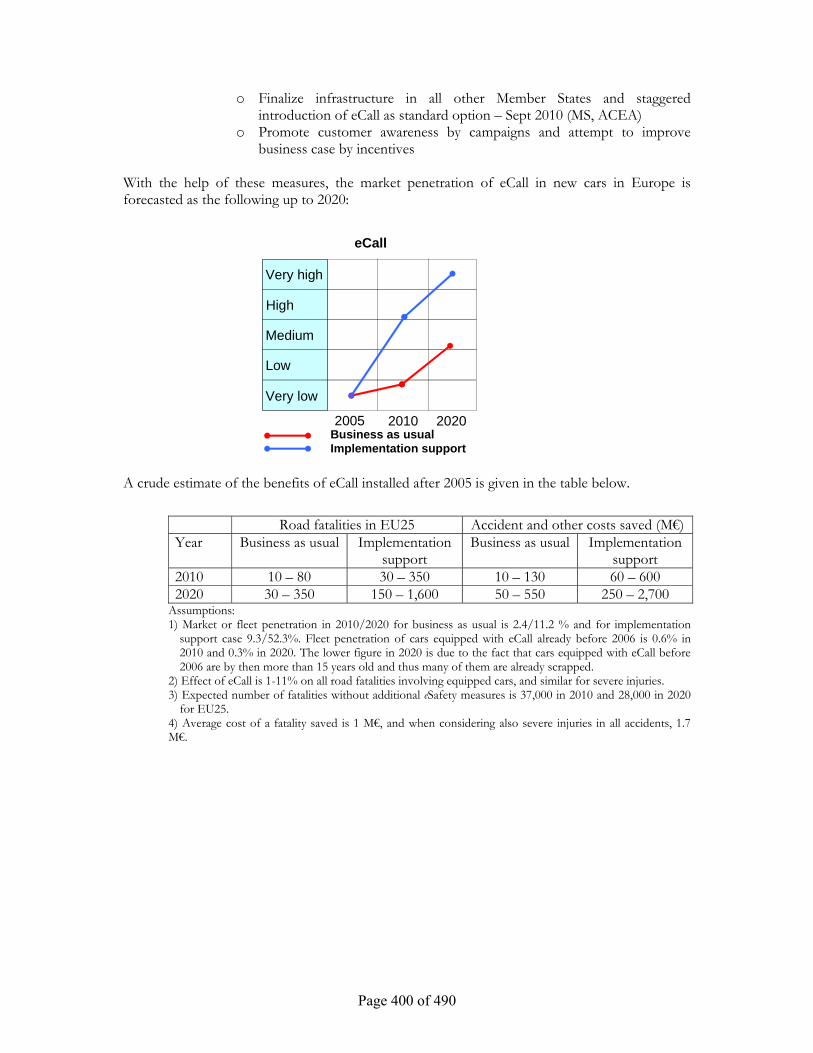
Page 400 of 490
o Finalize infrastructure in all other Member States and staggered introduction of eCall as standard option – Sept 2010 (MS, ACEA)
o Promote customer awareness by campaigns and attempt to improve business case by incentives
With the help of these measures, the market penetration of eCall in new cars in Europe is forecasted as the following up to 2020:
Very low
Low
Medium
High
Very high
2005 2010 2020Business as usualImplementation support
eCall
A crude estimate of the benefits of eCall installed after 2005 is given in the table below.
Road fatalities in EU25 Accident and other costs saved (M€)Year Business as usual Implementation
support Business as usual Implementation
support 2010 10 – 80 30 – 350 10 – 130 60 – 600 2020 30 – 350 150 – 1,600 50 – 550 250 – 2,700
Assumptions: 1) Market or fleet penetration in 2010/2020 for business as usual is 2.4/11.2 % and for implementation
support case 9.3/52.3%. Fleet penetration of cars equipped with eCall already before 2006 is 0.6% in 2010 and 0.3% in 2020. The lower figure in 2020 is due to the fact that cars equipped with eCall before 2006 are by then more than 15 years old and thus many of them are already scrapped.
2) Effect of eCall is 1-11% on all road fatalities involving equipped cars, and similar for severe injuries. 3) Expected number of fatalities without additional eSafety measures is 37,000 in 2010 and 28,000 in 2020
for EU25. 4) Average cost of a fatality saved is 1 M€, and when considering also severe injuries in all accidents, 1.7 M€.
Page 401 of 490
Implementation Issues for Extended Environmental Information A System description
The idea of Floating Car Data (FCD) is to monitor individual vehicles to gather data concerning the traffic situation on the whole road network. The in-vehicle equipment records the location of the car, speed and possibly other information such as acceleration or deceleration, and sends the recorded information to the central system or to other cars. The central collected data can be used as content for different applications and services. Floating car data can also be implemented as a decentralised system as in the German FleetNet project.
B Technology Availability
The technology needed to implement FCD systems exists. There have been several implementations with varying features. Trials have been carried out and actual FCD deployments exist in Europe (e.g. France, Germany and UK), USA and Japan. Technological solutions such as the wireless communication and location systems used vary from one case to the other. In addition to speed and location, many other kinds of information can be collected. First FCD systems transmitted travel times and locations out of range-outs or time-outs. Enhanced methods compare the onboard travel times with expected travel times to transmit only travel times which exceed a certain threshold value. Different kind of sensors can be mounted in the car and the results of measurements transferred. In modern vehicles numerous control devices and subsystems generates data which can be used by intelligent algorithms to detect traffic situation and safety relevant events and situations (Extended Floating Car Data – XFCD). For example, the operation of ABS brakes can be used to detect slippery road conditions.
C Road and Information Infrastructure Need and Availability
In case of floating car data no roadside equipment is needed. Satellite location systems and means of communication between cars and central system exist. Usually, the location data is produced by a GPS receiver. In future, the corresponding European system called GALILEO together with GPS offers complementary added value compared with either on their own. GPRS, GSM, UMTS, WLAN can be used for wireless communication. At present, GPRS is widely available and offers packet switched data connection which is cheaper to use than circuit switched GSM data. Methods for the data fusion of the data from different sources (stationary detectors, floating cars, manual reports) are needed and are already used for travel time and traffic status FCD by e.g. ITIS in the UK. The system also requires centres, which receive the various data and where very actual and precise information of local hazards, traffic and road conditions (slippery roads, fog etc.) will be prepared.
D Organisation requirements
The floating car data are collected from individual cars. At least, there should be an organisation which defines standards for the in-car equipment and an organisation to take care of the overall maintenance of the system. The same organisation could also be responsible for the further development of floating car data system. An organisation is also needed to deploy and maintain local transmitters and/or receivers to collect/distribute FCD and local information as well as to maintain the real-time data pool. It is likely that in most cases a public service actor needs to be involved e.g. via a Public-Private-Partnership (PPP). In order to avoid the development of further proprietary systems, it is necessary to set up standardization committees in early development stages. The ISO International
Page 402 of 490
Organisation for Standardisation in its Working Group TC 204/Subworking Group SWG 16.3 for vehicle probe data for wide area communication is already working. Their new work item proposal contains “Architecture, Basic Data Framework and Core Data Elements”
E Regulatory Requirements / Barriers
Data protection and privacy issues should be dealt with when the system gathers data on the movement of individual vehicles. Questions related to the ownership of the data collected must be answered before starting the implementation.
F Business Case / Customer awareness and Acceptance
Monitoring traffic with conventional roadside equipment is costly. FCD could be one way to produce real-time data for traffic control purposes. A part of the cost could be paid by the authorities paying for the data while the other part can be recovered by the value of real-time services (such as prediction of travel times) offered to the public. In addition, the business model chosen should be feasible with the technology used. New generation of extended floating cars will transmit only data which are relevant to know in the centre: e.g. detected slippery conditions on the road, congested traffic with precise located congestion fronts and weather related visibility obstructions (fog, snowfall). To avoid unnecessary repetition of in-vehicle message feedback-channel-referencing has to be implemented. Every message sent over the air (digital audio broadcast-DAB, traffic message channel-TMC) into the vehicles contains what the centre already knows and does not need to get informed. An intelligent message management in the vehicles with feedback channel referencing will keep the number of send messages explicitly low. Special attention needs to be given to deletion of outdated messages.
G Key Success Factors
One of the most crucial issues is, who will pay the costs and why. There should be a valid business model or a way to share the costs between different parties concerned e.g. in a PPP. Data protection and privacy issues should be taken account when designing the system to minimize the potential for abuse the data collected and to ensure the user acceptance. Important is to send all Floating Car Data of a geographical area into one single data pool in order to get the highest quality of content for the services. It doesn’t make sense to have numbers of data pools, each with some data.

Page 403 of 490
H Feasible Deployment Strategies
technical availability: given
organ./ regulatory requirem.: org. for standard./ distribution
other barriers: Privacy
user acceptancedepending on cost
business case: essentialfor customers, PPP
use data fusion withroadside sensors for starting the deployment
create a sufficient size of vehicle fleet by incentives
infrastructure requirem.: localtransmitters/receivers
clarify flow of information
2005 2010
verify safety and other benefits
create good business models
technical availability: given
organ./ regulatory requirem.: org. for standard./ distribution
other barriers: Privacy
user acceptancedepending on cost
business case: essentialfor customers, PPP
use data fusion withroadside sensors for starting the deployment
create a sufficient size of vehicle fleet by incentives
infrastructure requirem.: localtransmitters/receivers
clarify flow of information
2005 2010
verify safety and other benefits
create good business models
According to the V analysis, the measures to be taken include the following:
o Verify the safety and other benefits as well as the benefit/cost ratios in different conditions and test the technical performance of the system in large scale demonstrators
o Clarify the flow of information between the vehicles and the FCD servers as well as between FCD servers and traffic information or management centres (both public and private) while maintaining privacy of equipped vehicles
o Develop good business models for European conditions in the context of large demonstrators so that all stakeholders including the drivers have a sufficient business case
o Create a sufficient size of vehicle fleet, usually 5-10% of vehicles on a network is sufficient. In order to quickly reach the required critical mass, the deployment is perhaps best to do one area at a time
o Improve and maintain data quality by co-operating and carrying out data fusion with the owners of roadside monitoring infrastructure
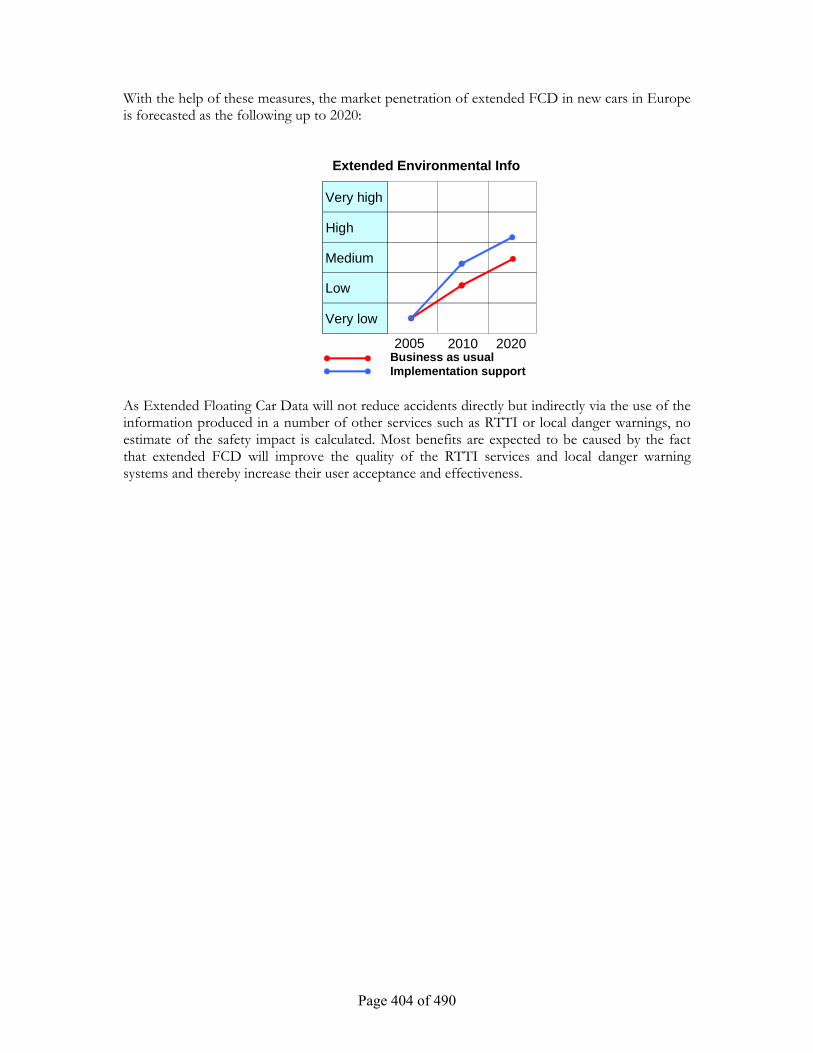
Page 404 of 490
With the help of these measures, the market penetration of extended FCD in new cars in Europe is forecasted as the following up to 2020:
Very low
Low
Medium
High
Very high
2005 2010 2020Business as usualImplementation support
Extended Environmental Info
As Extended Floating Car Data will not reduce accidents directly but indirectly via the use of the information produced in a number of other services such as RTTI or local danger warnings, no estimate of the safety impact is calculated. Most benefits are expected to be caused by the fact that extended FCD will improve the quality of the RTTI services and local danger warning systems and thereby increase their user acceptance and effectiveness.

Page 405 of 490
Implementation Issues for RTTI A System description
“Real-time Traffic and Travel Information” includes all information which is relevant to organize and to optimize traffic flow and which can give advice to the mobile user, usually the driver, and to contribute to road safety and efficiency. The eSafety goal is to provide the majority of drivers with actual intra-urban traffic information and to get adequate urban traffic information in 50% of all major metropolitan areas in the EU. RTTI contains * the collection of relevant traffic data, * the interpretation of that information and prepare it for further use and distribution, * the application of that information to operate infrastructural installations such as traffic lights or moving traffic signals, * the wireless transmission of the RTTI to the mobile user by public or private broadcast and/or two-way systems such as GSM, GPRS, UMTS, WLAN, Satellite transmission.
B Technology Availability
Beside verbal radio announcements which interrupt the regular audio program, the most commonly used service is RDS/TMC, which is in operation in quite some European countries, already. It offers digitally coded traffic information which can then be electronically selected and interpreted. Very often this is then used to adjust the routing of electronic navigation systems in vehicles to the actual traffic situation (-> “dynamic navigation”). RDS/TMC has a significant user base – about 3 million users - and is growing currently by about 1 million users p.a. A growing number of terminals such as in-car navigation sets, PDAs and mobile radios with built-in navigation capability are on the market. In many European countries, RDS-TMC services are available free of charge for the users. The highest penetration can be seen in Germany, where RDS-TMC messages are transmitted by 10 public broadcasters and 8 private broadcasters within 53 regional or local programs. This means, that full coverage in Germany has been reached and RDS-TMC messages can be received at any place from several programs. During the last years in some countries commercial services have taken up – mainly in France and the UK. These private companies normally operate their own data collection system, but use public data, too, where available. RDS/TMC services are already installed in some of the new Member Countries of the EU, too.
C Road and Information Infrastructure Need and Availability
The systems require monitoring systems of sufficient quality in order to serve the user and have a positive effect on safety and efficiency. The proliferation of RTTI services into further European countries and/or the extension of services in the countries already equipped is however sometimes hindered by a number of factors, such as * limited availability of traffic information content, * difficulties in defining the roles of the public and private sectors, * cost of broadcasting, * limited data rate in FM radio, * and economic difficulties with business models. The RTTI Working Group group has analysed some of the issues mentioned as being caused by
Page 406 of 490
- the limited capacity in FM which may be removed by using DigitalRadio (DAB) - the lack of data in most urban areas - and the lack of some push for starting-up in some European countries. The RTTI Working Group has proposed to the eSafety Forum that all EU-countries should agree or should be advised to enable and to extend the installation of the chain of information needed to establish RTTI services, so to have about 80% of all journeys served with adequate, standardized services by the year 2010.
D Organisation requirements
To reach the target mentioned above, the RTTI WG has recommended to the Member States * agree at their national level on a strategy and time schedule for the implementation of RTTI services, starting from RDS/TMC, covering as good as possible both interurban and urban areas * support the TMC Forum to push the safety-related services features of TMC, building on the already existing and standardized European format for the data, messaging and transmission standards, * take steps to ensure roaming and interoperability across the RTTI services in all of the EU, * require the authorities to make available existing public data for the provision of RTTI services and to establish additional collection of RTTI when necessary, * agree, on the basis of the national RTTI strategies and the Commission Recommendation on TTI services, with the private service providers on the extent of the public (free of charge) services and the conditions for the commercial services, and establish public-private partnerships if necessary, * ensure the correct implementation for the standards by the service providers, * publish, following the guidance of the Commission RTTI recommendation clear guidelines for the private sector the conditions for establishing private data collection networks for commercial purposes, * require broadcasters, especially those operating under public licence, to carry the RDS/TMC traffic information on their FM services for public or private providers so that a minimum of 80% of journey drivers has access to a relevant service by the year 2010 or earlier, * require authorities to ensure through the appropriate standardisation and regulation bodies that frequency spectrum and broadcast capacity will be made available for the more advanced digital broadcast services such as DAB, DRM, DVB-T and eventually satellite-DAB, * support the development of more advanced services which are possible by 3G Mobile Communications, DAB, DVB-T and satellite broadcasting, WLANs and others.
E Regulatory Requirements / Barriers See D and the proposals made there to get the necessary regulatory requirements installed and the existing barriers removed.
Page 407 of 490
F Business Case / Customer Awareness and Acceptance In many European countries, RTTI is run in coordination between the authorities or operators of the main roads, the public and private broadcasters and some automobile clubs. The cost of the RTTI services are then covered by these groups, and no extra charge has to be born by the users. They deliver the traffic information normally free of charge to the broadcasters. These distribute that part of the information to their audience which they feel will be relevant to the road users. Very often they add some more and extra information which they may get from other sources such as the automobile clubs, from local police or organisations. In case of private broadcasters and Public Private Partnerships some other business cases are applied. The most common one is: Encryption of the TMC-service and a once-per-life down-payment for the car-radio installed into the vehicle. The existing RTTI-service via RDS/TMC is widely accepted – especially when the service is free of an extra monthly or annual charge. In countries with that service about all navigation systems installed by the car manufacturers have the RDS/TMC-feature installed, already. Due to this the strong expansion by about 1 million customers p.a. in the Member Countries of the European Union is understandable. The next step expected by the users is a more detailed digital information on the urban traffic situation and so to allow a dynamic navigation in towns.
G Key Success Factors
There are many factors for success, the two most important ones may be: a. Customer’s awareness and interest in the RTTI-service, augmented with: * more and more actual and correct traffic information * not only warning for traffic problems but giving information of the end – or even the expected time for end - of a traffic problem * extension to inner-urban traffic information * eventually extra features such as expected travel times * reasonable costs b. enabling of the installation of RTTI-services by the authorities, * providing existing RTTI-data to the operators and broadcasters, *and giving support and allowances for private installations – mainly then, when public organisations and communities show no or only small interest to install an adequate RTTI service.
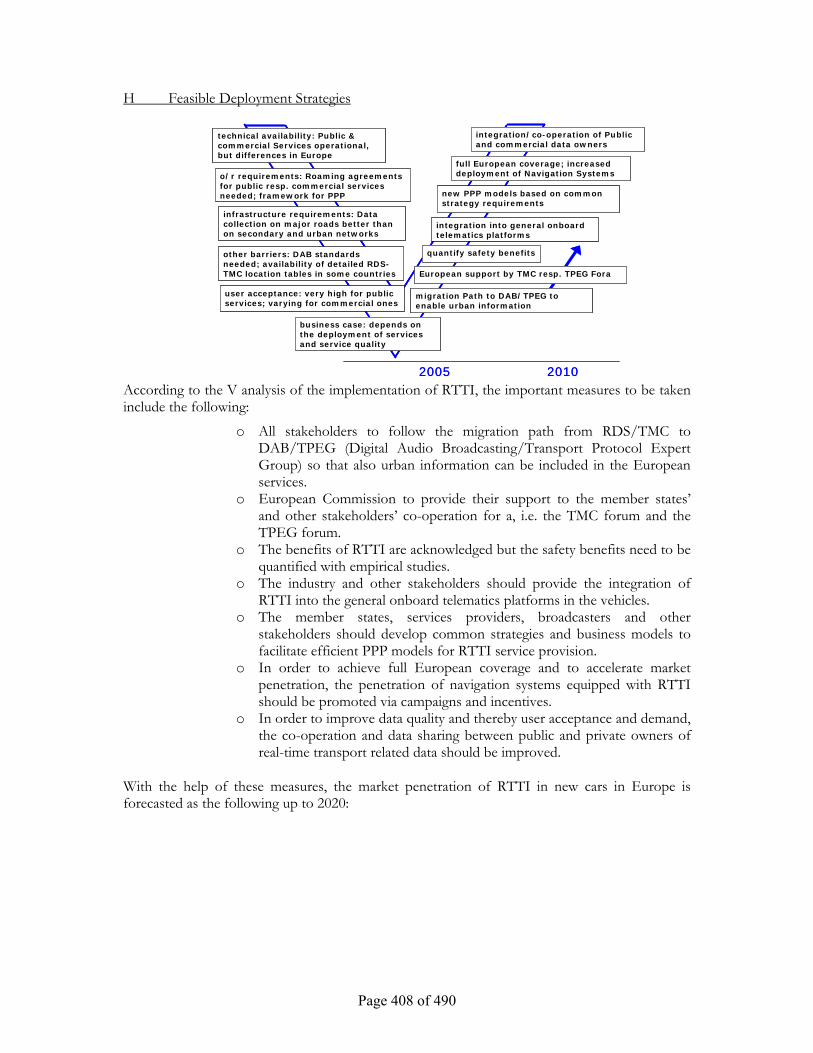
Page 408 of 490
H Feasible Deployment Strategies
2005 2010
technical availability: Public & commercial Services operational, but differences in Europe
o/r requirements: Roaming agreements for public resp. commercial services needed; framework for PPP
other barriers: DAB standardsneeded; availability of detailed RDS-TMC location tables in some countries
user acceptance: very high for publicservices; varying for commercial ones
business case: depends on the deployment of servicesand service quality
integration into general onboardtelematics platforms
new PPP models based on common strategy requirements
infrastructure requirements: Data collection on major roads better thanon secondary and urban networks
full European coverage; increaseddeployment of Navigation Systems
European support by TMC resp. TPEG Fora
integration/co-operation of Publicand commercial data owners
quantify safety benefits
migration Path to DAB/TPEG to enable urban information
2005 2010
technical availability: Public & commercial Services operational, but differences in Europe
o/r requirements: Roaming agreements for public resp. commercial services needed; framework for PPP
other barriers: DAB standardsneeded; availability of detailed RDS-TMC location tables in some countries
user acceptance: very high for publicservices; varying for commercial ones
business case: depends on the deployment of servicesand service quality
integration into general onboardtelematics platforms
new PPP models based on common strategy requirements
infrastructure requirements: Data collection on major roads better thanon secondary and urban networks
full European coverage; increaseddeployment of Navigation Systems
European support by TMC resp. TPEG Fora
integration/co-operation of Publicand commercial data owners
quantify safety benefits
migration Path to DAB/TPEG to enable urban information
According to the V analysis of the implementation of RTTI, the important measures to be taken include the following:
o All stakeholders to follow the migration path from RDS/TMC to DAB/TPEG (Digital Audio Broadcasting/Transport Protocol Expert Group) so that also urban information can be included in the European services.
o European Commission to provide their support to the member states’ and other stakeholders’ co-operation for a, i.e. the TMC forum and the TPEG forum.
o The benefits of RTTI are acknowledged but the safety benefits need to be quantified with empirical studies.
o The industry and other stakeholders should provide the integration of RTTI into the general onboard telematics platforms in the vehicles.
o The member states, services providers, broadcasters and other stakeholders should develop common strategies and business models to facilitate efficient PPP models for RTTI service provision.
o In order to achieve full European coverage and to accelerate market penetration, the penetration of navigation systems equipped with RTTI should be promoted via campaigns and incentives.
o In order to improve data quality and thereby user acceptance and demand, the co-operation and data sharing between public and private owners of real-time transport related data should be improved.
With the help of these measures, the market penetration of RTTI in new cars in Europe is forecasted as the following up to 2020:
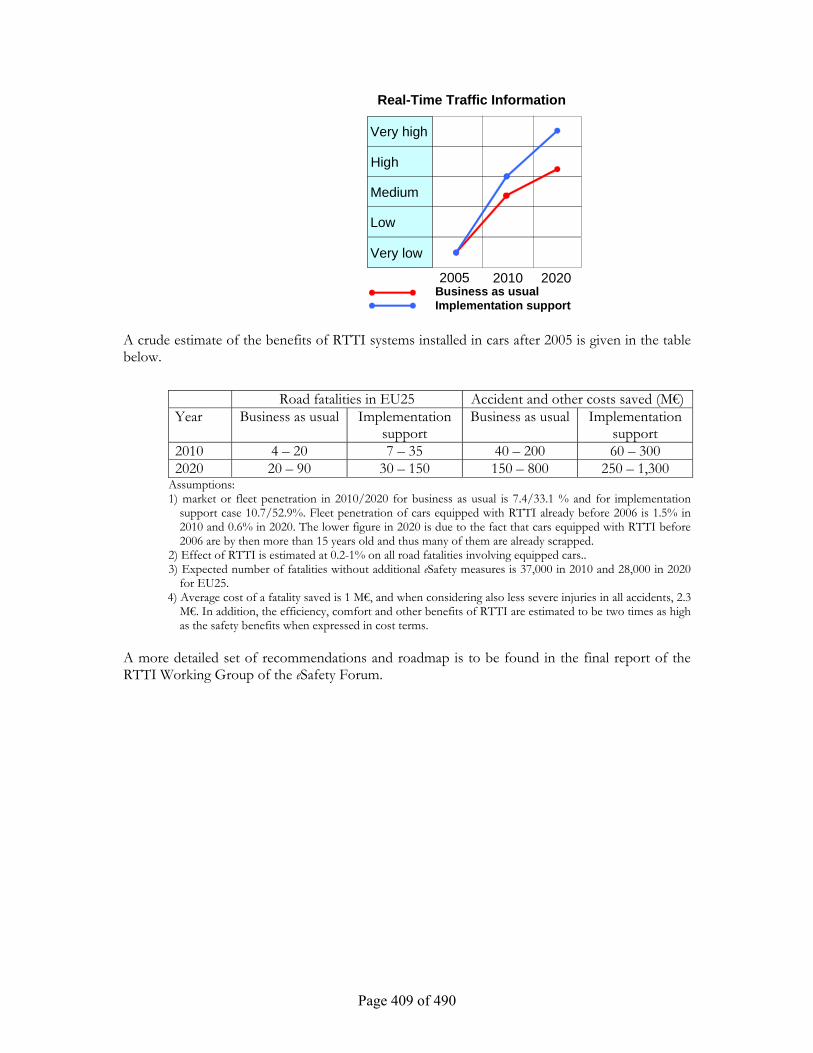
Page 409 of 490
Very low
Low
Medium
High
Very high
2005 2010 2020Business as usualImplementation support
Real-Time Traffic Information
A crude estimate of the benefits of RTTI systems installed in cars after 2005 is given in the table below.
Road fatalities in EU25 Accident and other costs saved (M€)Year Business as usual Implementation
support Business as usual Implementation
support 2010 4 – 20 7 – 35 40 – 200 60 – 300 2020 20 – 90 30 – 150 150 – 800 250 – 1,300
Assumptions: 1) market or fleet penetration in 2010/2020 for business as usual is 7.4/33.1 % and for implementation
support case 10.7/52.9%. Fleet penetration of cars equipped with RTTI already before 2006 is 1.5% in 2010 and 0.6% in 2020. The lower figure in 2020 is due to the fact that cars equipped with RTTI before 2006 are by then more than 15 years old and thus many of them are already scrapped.
2) Effect of RTTI is estimated at 0.2-1% on all road fatalities involving equipped cars.. 3) Expected number of fatalities without additional eSafety measures is 37,000 in 2010 and 28,000 in 2020
for EU25. 4) Average cost of a fatality saved is 1 M€, and when considering also less severe injuries in all accidents, 2.3
M€. In addition, the efficiency, comfort and other benefits of RTTI are estimated to be two times as high as the safety benefits when expressed in cost terms.
A more detailed set of recommendations and roadmap is to be found in the final report of the RTTI Working Group of the eSafety Forum.
Page 410 of 490
Implementation Issues for Dynamic Traffic Management and Local Danger Warnings
A System description
Dynamic traffic management systems and local danger warnings are used to increase the safety and flow of traffic in cases of disturbance caused by incidents, congestion and adverse weather. The systems are operated automatically, semi-automatically or manually from traffic control centres based on fixed monitoring systems or mobile sensors (FCD etc.) on location. The systems employ Variable Message Signs or VMS to give the information to the drivers. Three categories of VMS exist based on the types of messages given: 'regulatory messages', 'danger warning messages' and 'informative messages'. The dynamic traffic management systems usually use regulatory messages, sometimes accompanied by danger warning and informative messages, and local warning systems use danger warning messages.
B Technology Availability
The technologies needed to implement the systems exist. The VMS signs vary from single matrix devices which can display just one sign/symbol (in on/off mode) via line matrix displays which can display any text or which can display a varying combination of pictograms and text to graphical panels which can display anything. Also combinations of signs/symbols and texts are in use (Multi-purpose VMS). Various technologies are used in the signs, e.g. fiber optics, leds, prisms. The telecommunications between the VMS, monitoring systems and traffic control centres utilise various wire and wireless technologies. The traffic or environmental monitoring systems required by the systems are primarily based on fixed road infrastructure based monitoring stations utilising e.g. inductive loops, microwave detectors, video detectors, infrared detectors, etc. Specific systems are used for monitoring weather conditions. There are situations for which no pictogram or no satisfactory pictogram exists. New or adequate pictograms may be needed for the following regulatory pictograms: 1) Switch off the engine if congestion persists, 2) Switch on hazard warning lights and 3) Vehicle broken down; Danger warning pictograms: 1) Unauthorised person(s) on the road, 2) On-coming vehicle and 3) Weather conditions such as fog, rain, snow; Informative pictograms: 1) Road closure, 2) Lane closure and 3) Tunnel closure. Major technical issues relate to the future developments in technology and vehicle equipments enabling the use of cars and other motor vehicles as mobile sensors. This means that we need to solve the in-vehicle sensing issues as well as the communication issues, which mainly relate to vehicle-to-infrastructure and roadside-to-control centre communications, but also vehicle-to-vehicle communications. In-vehicle technologies for producing monitoring information required by the systems exist (travel time and traffic status, accidents) or are under development (road surface friction, incidents, pedestrian and animal detection).
C Road and Information Infrastructure Need and Availability
The systems require monitoring systems of sufficient quality. The high quality of the monitoring information input is essential to the high quality operation of the dynamic traffic management and local warning systems, which in turn is directly linked to the effectiveness of the systems. The type and quality of the monitoring system are dependent on the aim of the traffic management and local warning system as listed below.
Page 411 of 490
- Speed management /speed harmonisation (traffic-related): Cross-section traffic parameters (traffic flow by vehicle class; spot speed – average and standard deviation; occupancy) and/or queue length and/or camera output
- Speed management (weather-related): Cross-section road weather information (temperature - air, road, ground, dew point; precipitation; visibility; wind - speed, direction, gusts) and cross-section or continuous road surface condition information (water/snow existence; black ice existence; friction); additionally camera output
- Ramp control/metering: Cross-section traffic parameters and queue length on motorway and ramp
- Network traffic control: From main parts of network cross-section traffic parameters and/or link travel times and/or queue lengths; camera output
- Lane control: cross-section traffic parameters lane by lane; camera output (geographical position of stationary objects , e.g. vehicles); automatic incident detection
- Tunnel control: cross-section traffic parameters; queue length, camera output; automatic incident detection; automatic fire detection, stopped vehicle detection
- Bridge control: cross-section road weather information (especially wind - speed, direction, gusts and black ice); cross-section traffic parameters
- Incident warning: Output from Automatic Incident Detection (AID) systems or cross-section traffic parameters; queue length; camera output;
- Local warnings (school children): Output from pedestrian detection system, or manual or clock-based trigger system
- Local warnings (large animals): Output from animal detection system - Local warnings (slipperiness): Cross section road surface information - Local warnings (queue): Cross-section traffic parameters; queue length; camera output
D Organisation requirements
The systems are currently usually fully operated by traffic control centres under the jurisdiction of the road operator/authority or the police. The use of data from in-vehicle systems to improve the quality of the monitoring systems will require new organisation-related solutions.
E Regulatory Requirements / Barriers
Both regulatory rules and warning messages shall be indicated on VMS’s with symbols as prescribed by the Vienna Convention (1968), and texts shall be minimised. Supplementary brief texts according to the Vienna Convention can be used. This could also be extended to informative and advisory messages on VMS’s. This is especially recommended where these messages along the Trans European Road Network (TERN) are meant for all drivers, thus including a growing percentage of foreign drivers, avoiding language confusion. (CEDR 2003). The current representation of regulatory rules on the European VMS’s almost completely conforms the signs of the Vienna Convention. This seems to be rather evident as they have the same legal status/value everywhere in Europe. Regarding danger warnings, the different approaches of the European states already appear, ranging from warning signs conform the Vienna Convention to entirely textual descriptions which may vary per region. The differences between the European states are most apparent with informative signs. Where the Vienna Convention gives some recommendations for informative signs like (non-variable) directional signs, it does not contain prescriptions nor recommendations for pure textual messages on VMS’s. This lack probably is the cause of the variety of the national and local guidelines which describe these panels in more detail. Besides the fact that each county/region currently uses its own language, they also apply
Page 412 of 490
different national and even local approaches to the use of VMS. The common practice of VMS in the CEDR member states shows a mixture of different languages and, in some cases, 'invented' pictograms which are not being used all over Europe or which are an interpretation of the Vienna Convention. The most harmonised areas are the colours and the use of symbols and pictograms in regulatory and danger warning message signs. In some cases the harmonisation is based on practices and the development should be followed and kept consistent. Examples of already harmonised objects are light emitting (e.g. LED or fibre optic) signs with inverted colours in speed limit systems and in danger warning signs on main roads; a red circle indicating a mandatory speed limit; avoidance of text messages in lane control; small amount of information; no unnecessary information; pictograms instead of text messages and, combined messages; no flashing warning signs; and approval procedures for new pictograms. The accident pictogram (suggested by FIVE) should be confirmed at national level if an overall consensus will be reached (e.g. on UNECE-level). An alternative is to show the consequences of the accident i.e. to just show the congestion pictogram. The current definitions for the maximal length of text messages are not equal, except for the definition for number of lines, and they should be made more uniform. If a text message is shown, it should be as short as possible and have minimal amount of the words. Internationally understood expressions or symbols (e.g. ←,→,↑,↓,‹,›,+,-,=) should be preferred. The liability issue has delayed the deployment of VMS in some cases. The problem is due to cases where a danger warning message is not displayed, although the danger (about which the system should warn) is present at the location, and the driver interprets the absence of warning as an indication of no danger and then is involved in an accident or a near-accident due to the danger event. Liability is very much connected to the reliability of the system and its control algorithms and monitoring infrastructure. The final responsibility lies in any case with the driver. For all deployments the reliability of the systems is important. Information on the qualities of VMS is occasional or does not even exist, but the quality should be controlled. Siting criteria should be specified in national guidelines. There is a substantial variation in the control principles both nationally and between countries. A more harmonised use of variable warning signs would be beneficial to the drivers. For this purpose the documented principles should be collected for the common use and analysis. In long term, the differences in the use of pictograms should be minimised. For text messages, the approval procedures should be developed. The existing message prioritisation practices should be discussed and evaluated.
F Business Case / Customer Awareness and Acceptance
Road users find the systems useful, and usually comply well with the regulatory messages and danger warning messages. For these reasons, the systems have been also found to be very effective for reducing the risk of accidents and their consequences. The systems are, however, quite costly to implement. The systems are usually only installed if the expected benefit-to-cost ratio is high enough.
G Key Success Factors
There are considerable costs involved in the implementation of VMS systems. The extent of the costs are naturally linked to the location, the objectives of the system, the VMS signs, control system, monitoring infrastructure required, communication systems etc. The costs of route and network control systems on motorways are in the range of 0.15-0.2 M€/motorway-km, and of a line control (speed management) system on a motorway

Page 413 of 490
can be estimated to be in the range of 0.05-0.1 M€/motorway-km and the investment cost for one VMS in a larger system to be 15 000 – 30 000 €. The annual maintenance and operation of the systems can be 5...10% of the investment costs. For most road authorities, the decision to implement the system will be based on the benefits of the system in comparison to its costs. The main benefits of the systems come from improved safety and efficiency. Evidence exists of an accident reduction of 25% from motorway traffic management systems, a 13% reduction in wintertime injury accidents due to dynamic weather related speed management systems. The benefit/cost ratio of the system will depend much on the location, accident situation and traffic volumes, e.g. the benefit/cost ratio for a motorway control system on a motorway with average daily traffic volume of 95 000 vehicles was estimated as 5.6. Concerning local danger warnings, studies indicate injury accident reductions of 5-15%. A key success factor is to maintain and improve the effectiveness of the systems while keeping costs at a reasonable level. The former is ensured by high quality of the systems and high user acceptance enabled by the efficient and understandable control of the VMS and supported by the harmonised deployment of them on the European level. The latter is supported by the increasing use of mobile, in-vehicle based systems for producing the necessary monitoring information required.
H Feasible Deployment Strategies
CEDR (Conference of European Directors of Road) has worked for many years toward the implementation of harmonised VMS based traffic management and danger warning systems in Europe. The last efforts have been the FIVE action as well as the VMS Platform funded by the UK but terminated in the spring of 2004. A successful implementation of the harmonisation of VMS around Europe - and setting up a Platform to coordinate that work - depends first and for all on the willingness of the NRA’s to implement the FIVE Framework. A CEDR Sub-Group on Telematics has been asked to present a TERN deployment strategy for VMS (Implement FIVE) and to seek a structure to implement this strategy.
technical availability: exists; lack of some pictograms
organisational/ regulatoryrequirements: PPP models(monitoring) ; Europeanharmonisation
other barriers: cost
user acceptance: high
business case: benefit/ cost ratio has to be highenough
accelerate deploymentby EU support (TEN-T)
promote harmonisationby implementing FIVE
infra requirements: quality monitoring
verify safetybenefits via accident data
2005 2010
co-ordinate deployment bycommon strategy of roadauthorities and operators
technical availability: exists; lack of some pictograms
organisational/ regulatoryrequirements: PPP models(monitoring) ; Europeanharmonisation
other barriers: cost
user acceptance: high
business case: benefit/ cost ratio has to be highenough
accelerate deploymentby EU support (TEN-T)
promote harmonisationby implementing FIVE
infra requirements: quality monitoring
verify safetybenefits via accident data
2005 2010
co-ordinate deployment bycommon strategy of roadauthorities and operators
According to the V analysis of the implementation of dynamic traffic management as well as mainly infrastructure based local danger warnings, the measures to be taken include the following:
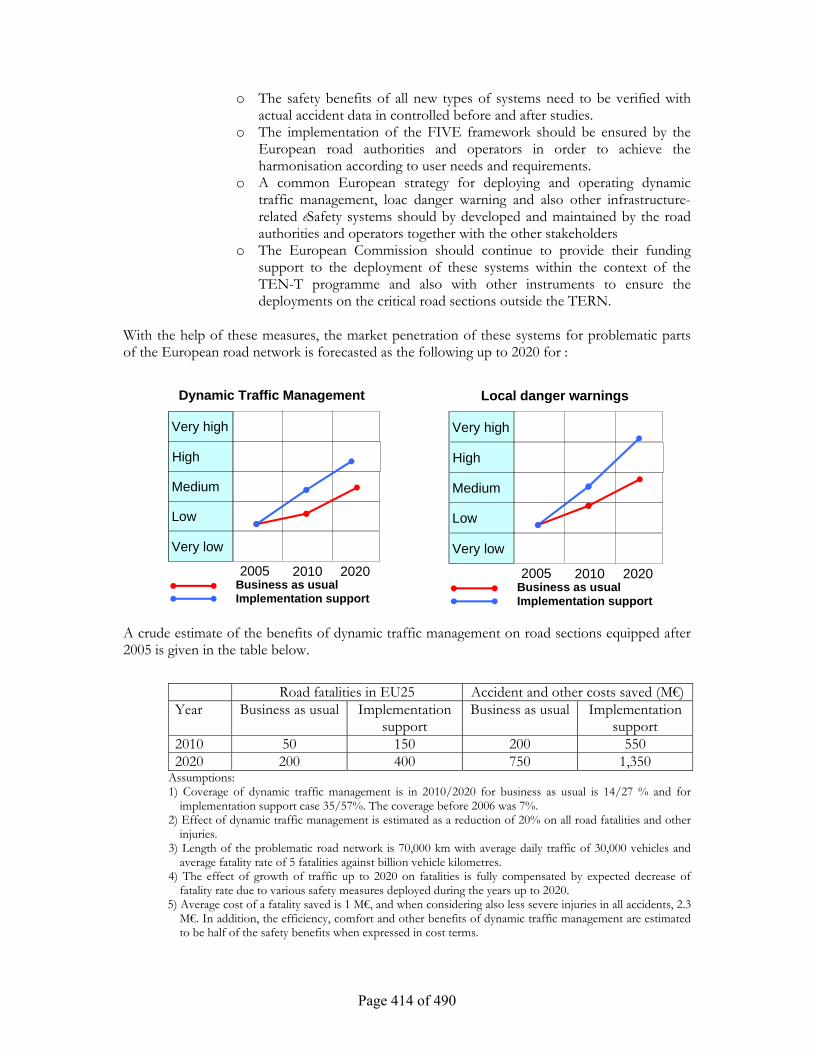
Page 414 of 490
o The safety benefits of all new types of systems need to be verified with actual accident data in controlled before and after studies.
o The implementation of the FIVE framework should be ensured by the European road authorities and operators in order to achieve the harmonisation according to user needs and requirements.
o A common European strategy for deploying and operating dynamic traffic management, loac danger warning and also other infrastructure-related eSafety systems should by developed and maintained by the road authorities and operators together with the other stakeholders
o The European Commission should continue to provide their funding support to the deployment of these systems within the context of the TEN-T programme and also with other instruments to ensure the deployments on the critical road sections outside the TERN.
With the help of these measures, the market penetration of these systems for problematic parts of the European road network is forecasted as the following up to 2020 for :
Very low
Low
Medium
High
Very high
2005 2010 2020Business as usualImplementation support
Dynamic Traffic Management
A crude estimate of the benefits of dynamic traffic management on road sections equipped after 2005 is given in the table below.
Road fatalities in EU25 Accident and other costs saved (M€)Year Business as usual Implementation
support Business as usual Implementation
support 2010 50 150 200 550 2020 200 400 750 1,350
Assumptions: 1) Coverage of dynamic traffic management is in 2010/2020 for business as usual is 14/27 % and for
implementation support case 35/57%. The coverage before 2006 was 7%. 2) Effect of dynamic traffic management is estimated as a reduction of 20% on all road fatalities and other
injuries. 3) Length of the problematic road network is 70,000 km with average daily traffic of 30,000 vehicles and
average fatality rate of 5 fatalities against billion vehicle kilometres. 4) The effect of growth of traffic up to 2020 on fatalities is fully compensated by expected decrease of
fatality rate due to various safety measures deployed during the years up to 2020. 5) Average cost of a fatality saved is 1 M€, and when considering also less severe injuries in all accidents, 2.3
M€. In addition, the efficiency, comfort and other benefits of dynamic traffic management are estimated to be half of the safety benefits when expressed in cost terms.
Very low
Low
Medium
High
Very high
2005 2010 2020Business as usualImplementation support
Local danger warnings

Page 415 of 490
A crude estimate of the benefits of local danger warning systems on road sections equipped after 2005 is given in the table below.
Road fatalities in EU25 Accident and other costs saved (M€)Year Business as usual Implementation
support Business as usual Implementation
support 2010 2 4 4 8 2020 5 9 12 21
Assumptions: 1) The number of local danger warning systems is in 2010/2020 for business as usual is 1,500/2,500 and
for implementation support case 2100/3,700. The number before 2006 was 1,000. 2) Effect of local danger warnings is estimated as a reduction of 20% on all road fatalities and other injuries. 3) Length of the impact area of each system is 3 km with average daily traffic of 30,000 vehicles and average
fatality rate of 10 fatalities against billion vehicle kilometres. 4) The effect of growth of traffic up to 2020 on fatalities is fully compensated by expected decrease of
fatality rate due to various safety measures deployed during the years up to 2020. 5) Average cost of a fatality saved is 1 M€, and when considering also less severe injuries in all accidents, 2.3
M€. In addition, the efficiency, comfort and other benefits of dynamic traffic management are estimated to be half of the safety benefits when expressed in cost terms.
Page 416 of 490
Implementation Issues for Speed Alert
A System description The system alerts the driver with audio, visual and/or haptic feedback when the speed exceeds the locally valid legal speed limit. The speed limit information is either received from transponders in speed limit signs or from a digital road map, requiring reliable positioning information. Some open questions exist such as: • Voluntary or mandatory equipment of vehicles • Type of speed limits to be included: General regulations, local speed signs,
temporary speed limits (e.g. “70” between 07.00 – 10.00h), dynamic speed limits depending on traffic and other conditions
• Road categories to be included: motorways, rural highways, urban roads • General deployment for selected road categories or equipment of specific parts of
road networks, such as accident black spots, tunnels, bridges • Types of vehicles to be equipped: all vehicles, passenger cars, lorries, hazardous
goods transports, buses, • Categories of road users to use speed alert: all drivers, young/aged drivers, drivers
under rehabilitation, commercial companies/drivers, other specific groups B Technology Availability
The basic technology needed to implement speed alert systems exists. There have been several successful large-scale tests with varying speeding feedback solutions, and voluntary speed alert or limiter systems are on the market. However, suitable solutions need to be achieved on how to convey speed limit modifications to on board units (OBUs), e.g. electronic Map on CD-ROMS, local short range communication, wide range communication (DAB).
C Road and Information Infrastructure Need and Availability
The basic information infrastructure required by the system, i.e. up-to-date fixed speed limit information in digital road Map, is only partly available in Europe for all roads in Finland and Norway, and in the near future Sweden, and limited coverage (motorways and main roads) for a large part of Europe.
D Organisation requirements
There has to be an organisation responsible and liable for updating the speed limit data banks in regular time cycles, as soon as speed limits are changed, and for the actual update reporting procedures. The organisation responsible for conveying temporary and variable speed limit information is required, if they are included in the system.
E Regulatory Requirements / Barriers
In order to have a nation- or European-wide implementation of the system, the following aspects have to be solved: data quality requirements, questions of responsibility, liability, updating, timing of the updating, legal relevance of speed alert systems and speed limit signs as well as their possible contradictions.
F Business Case / Customer awareness and Acceptance
So far, there has not been substantial market (car buyer) demand for the system. The market demand for speed alert will probably be increasing in the future with the expected increase of automated speed enforcement throughout the EU. The growing awareness for traffic safety issues among organisations and the use of speed alert as a tool to ensure

Page 417 of 490
delivery of safety quality-assured transport services for a company might also increase market demand. It is also obvious from the pilots that user acceptance for speed alert will increase with increasing familiarity with the system.
G Key Success Factors
Many road and other authorities are regarding speed alert as a key system for improving road safety, and the large-scale implementation in the short-term will depend on European and national regulations aiming at mandatory or voluntary deployment of the system. European and national decision making will, however, require that the open questions as listed above will be settled. The most urgent factor is the need for an accurate and up-to-date speed limit database that is readily accessible to all potential service providers.
H Feasible Deployment Strategies
Together with another EU project PROSPER, SpeedAlert has developed the European wide deployment strategy for informative and voluntary-based speed alert. The SpeedAlert project has established a common classification of speed limits in Europe, defined the system and service requirements of in-vehicle speed alert system, defined the functional architecture of speed alert, harmonised the definition of speed alert concepts and identified the requirements for standardisation. The project has built consensus with all key stakeholders leading to the definition of recommendations and associated deployment roadmap for successful European-wide implementation. It is quite likely that deployment has to build on voluntary systems. In a longer perspective mandatory systems could be deployed for certain customer groups, such as learning drivers, frequently caught speeders, drivers wishing for insurance bonus etc.
technical availability: exists for the first generation systems with limitedcoverage of static speed limit.
o/r requirements: organisation to collect speed limits and to updatechanges; regulations
Other barriers: Incremental updateof in-vehicle speed limit data
user acceptance: small, butincreasing; higher in transport industry and public transport than among car drivers
business case: depends on the functionality and customer profile
Improve business case byinsurance and tax incentives
Increase customer awarenesswith EuroNCAP and campaigns
Infrastructure requirements: digitalroad maps with speed limitinformation
Full European map coverage of staticspeed limits
2005 2010
European roll-out plan
Establishing PP-partnership for collection and update of speed limit data
Verify safety benefits
EU-wide solution for incremental updateof in-vehicle speed limit data.
technical availability: exists for the first generation systems with limitedcoverage of static speed limit.
o/r requirements: organisation to collect speed limits and to updatechanges; regulations
Other barriers: Incremental updateof in-vehicle speed limit data
user acceptance: small, butincreasing; higher in transport industry and public transport than among car drivers
business case: depends on the functionality and customer profile
Improve business case byinsurance and tax incentives
Increase customer awarenesswith EuroNCAP and campaigns
Infrastructure requirements: digitalroad maps with speed limitinformation
Full European map coverage of staticspeed limits
2005 2010
European roll-out plan
Establishing PP-partnership for collection and update of speed limit data
Verify safety benefits
EU-wide solution for incremental updateof in-vehicle speed limit data.
The V model is also based on the work of the SpeedAlert project. According to the roadmap produced by the SpeedAlert project (www.speedalert.org), the following measures need to be taken to promote the deployment of informative and voluntary speed alert systems:
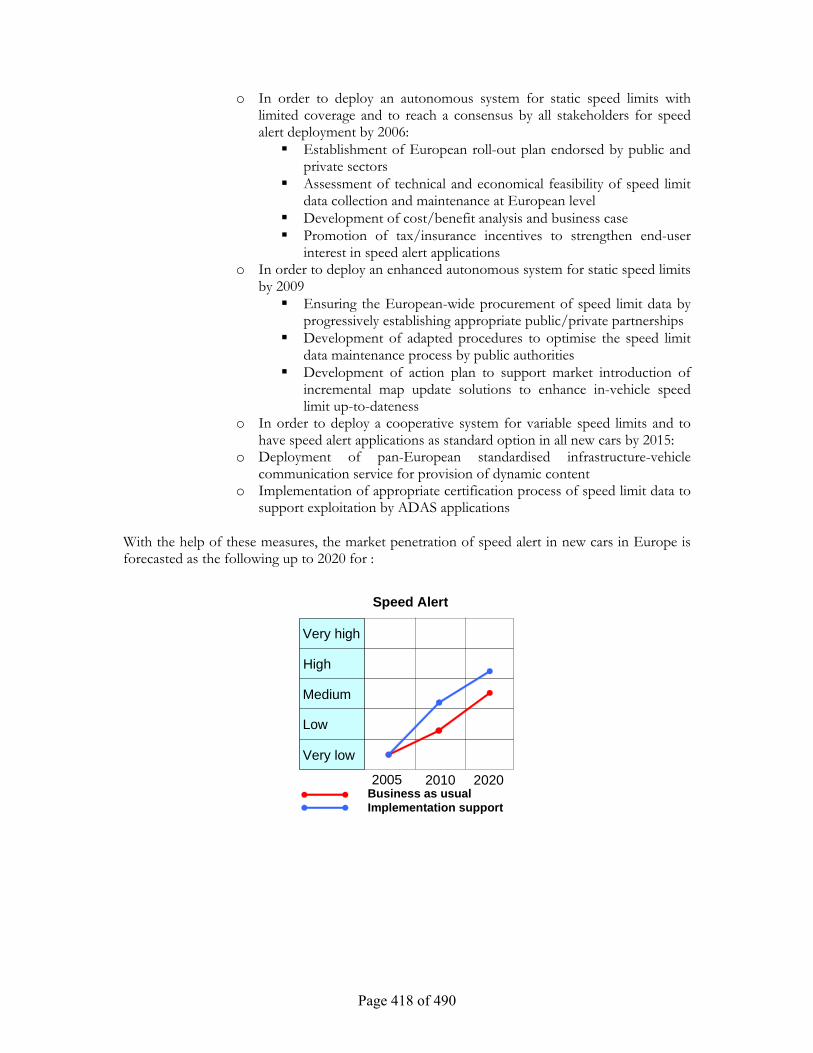
Page 418 of 490
o In order to deploy an autonomous system for static speed limits with limited coverage and to reach a consensus by all stakeholders for speed alert deployment by 2006: Establishment of European roll-out plan endorsed by public and
private sectors Assessment of technical and economical feasibility of speed limit
data collection and maintenance at European level Development of cost/benefit analysis and business case Promotion of tax/insurance incentives to strengthen end-user
interest in speed alert applications o In order to deploy an enhanced autonomous system for static speed limits
by 2009 Ensuring the European-wide procurement of speed limit data by
progressively establishing appropriate public/private partnerships Development of adapted procedures to optimise the speed limit
data maintenance process by public authorities Development of action plan to support market introduction of
incremental map update solutions to enhance in-vehicle speed limit up-to-dateness
o In order to deploy a cooperative system for variable speed limits and to have speed alert applications as standard option in all new cars by 2015:
o Deployment of pan-European standardised infrastructure-vehicle communication service for provision of dynamic content
o Implementation of appropriate certification process of speed limit data to support exploitation by ADAS applications
With the help of these measures, the market penetration of speed alert in new cars in Europe is forecasted as the following up to 2020 for :
Very low
Low
Medium
High
Very high
2005 2010 2020Business as usualImplementation support
Speed Alert
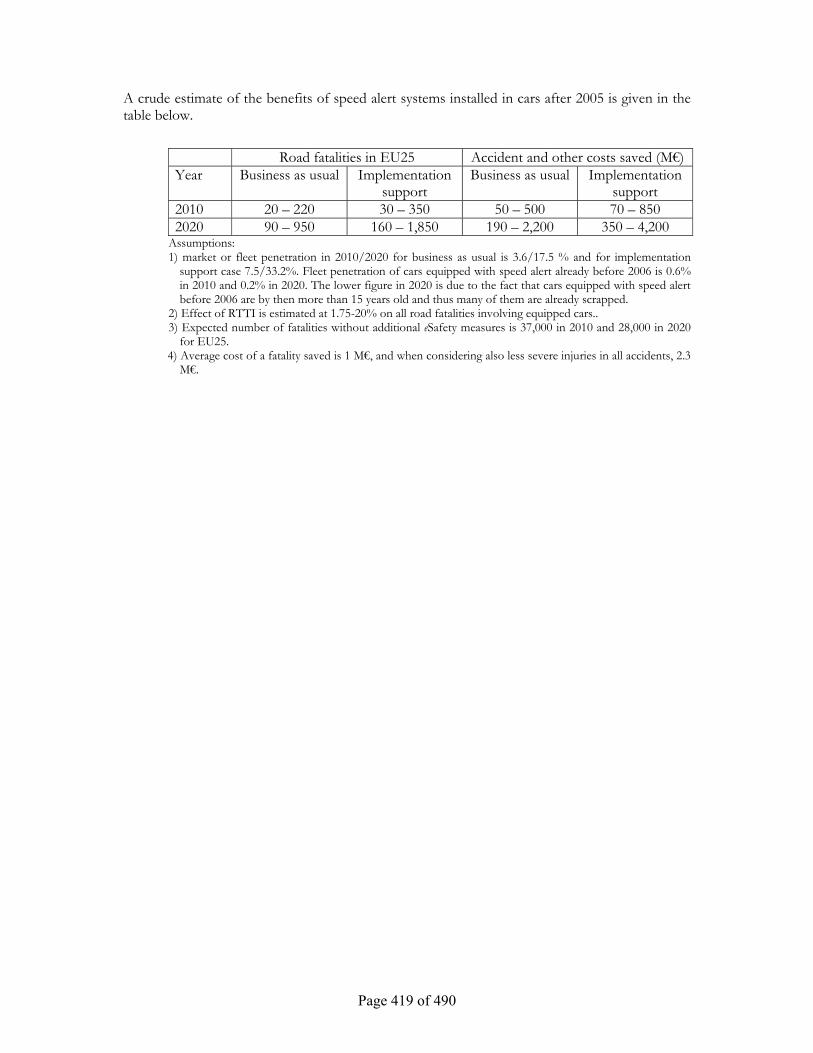
Page 419 of 490
A crude estimate of the benefits of speed alert systems installed in cars after 2005 is given in the table below.
Road fatalities in EU25 Accident and other costs saved (M€)Year Business as usual Implementation
support Business as usual Implementation
support 2010 20 – 220 30 – 350 50 – 500 70 – 850 2020 90 – 950 160 – 1,850 190 – 2,200 350 – 4,200
Assumptions: 1) market or fleet penetration in 2010/2020 for business as usual is 3.6/17.5 % and for implementation
support case 7.5/33.2%. Fleet penetration of cars equipped with speed alert already before 2006 is 0.6% in 2010 and 0.2% in 2020. The lower figure in 2020 is due to the fact that cars equipped with speed alert before 2006 are by then more than 15 years old and thus many of them are already scrapped.
2) Effect of RTTI is estimated at 1.75-20% on all road fatalities involving equipped cars.. 3) Expected number of fatalities without additional eSafety measures is 37,000 in 2010 and 28,000 in 2020
for EU25. 4) Average cost of a fatality saved is 1 M€, and when considering also less severe injuries in all accidents, 2.3
M€.
Page 420 of 490
Annex 4: Terms of Reference for the Implementation Roads Map Working Group
Implementation Road Map Working Group: Terms of Reference
Chairmen: Risto Kulmala, VTT and Hans Jürgen Mäurer, DEKRA 1. The context
The Road Map working group was one of the later established groups to provide a combined strategic approach for the eSafety Forum. The Forum is a joint platform for all road safety stakeholders to promote and monitor the implementation of the recommendations identified and presented to the High Level Group.
2. Constitution
The Road Map working group was established in July 2003, for a period of approximately two years.
The group is chaired by representatives from VTT and DEKRA, and it is open to any stakeholder with an interest and expertise to contribute to the work of the group.
The work is on a voluntary basis and does not commit group members to any particular view or course of action. Decisions and recommendation will be arrived at by consensus.
3. Objectives and Scope
The Road Map working group has decided to focus on
• Global Matrix of eSafety Systems
• Technical availability
• HLG recommendations.
The working group has members from industry, national authorities, research institutions, the Commission and user groups. It aims to reach consensus amongst these stakeholders on the critical questions. The group aims to reach specific detailed recommendations on the implementation steps within a two year period. The group cannot undertake the detailed research and analytical work necessary but it will monitor progress in the development / fulfilment of Road Map at a EU level.

Page 421 of 490
4. Reporting
The Road Map group reported progress of its initial work at the first eSafety Forum plenary meeting and will continue to report progress at future eSafety Forum and Steering Group meetings.
Members of the working group will also report to other meetings deemed as relevant for the group.

Page 422 of 490
Annex 5: Members of the Implementation Road Map Working Group
Implementation Road Map WG - List of members
Name Organisation Hans-Jürgen Mäurer DEKRA Risto Kulmala VTT Franck Batocchi PSA Didier Wautier Renault Giorgio Audisio Fiat Alessandro Coda Fiat Auto Lars Lind / Mats Rosenquist Ford/Volvo Jörg Breuer Daimler-Chrysler Jürgen Trost Daimler-Chrysler Wolfgang A. Reinhardt ACEA Arnold van Zyl ACEA Bernhard Labudek ADAC Joachim Scholten BMW Roland Niggestich BMVBW Adam McCarthy AIT + FIA Fritz Bolte BASt Gerard Gastaut / Patrick Mallejacq France Cathy Jenkins UK DfT Juhani Jääskeläinen EC DG-INFSO Ghassan Freij / Paul Kompfner ERTICO Brian Knibb KGP Vera Siegler / Agnes Lindenbach Topolisz Martin Rowell NavTech Erich Bittner Bosch Eva Boethius/Bengt Hallström SRA

Page 423 of 490
4.8 International Cooperation Working Group International collaboration is seen as an essential part of the eSafety initiative. Cooperation between regions will strengthen R&D efforts and create new possibilities for industry cooperation. The International Cooperation Working Group was created to exchange information on research activities between Europe, North America, and Japan. Finding solutions to mobility problems through the implementation of ITS is high on the agenda in many regions. The International Cooperation Working group has therefore been extended to include members from Australia, China, Korea, and India.
The Working Group has looked through the 28 eSafety recommendations to priorities the recommendations in terms of relevance for international cooperation. These priorities cover areas like Human-Machine Interaction, certification and testing methodology and procedures, harmonisation and standardisation, legal issues, impact and socio-economic benefit analysis and benchmarking/best practise. Working Group meetings are organised on a yearly basis parallel to the ITS World Congress.
Page 424 of 490
4.9 Real-time Traffic and Travel Information Working Group Real-time traffic and travel information (RTTI) can contribute greatly to safety, by warning drivers of accidents, dangerous situations and stress-causing traffic congestion. In order to facilitate access to public sector data and enable the private and public sectors to co-operate in service provision, in 2001, the Commission published a Recommendation on the deployment of Traffic and Travel services in Europe. The RTTI Working Group, chaired by Prof. Dr. Gert Siegle (Robert Bosch), started in July 2003. Interested parties were invited to join. The RTTI WG provides further analysis and recommendations for accelerating the take-up of the measures for accessing public sector data, enabling the establishment of public-private partnerships, and the provision of reliable, high-quality RTTI services in Europe. The objectives of the RTTI WG were set by the eSafety Working Group in November 2002. They are, in short:
1. Concentration on Road Traffic. 2. Support for the wider use of pan-European RDS/TMC (Traffic Message Channel) network for safety-related traffic information and provision of a report with the recommended actions to the European Commission on the status for RDS/TMC implementation and the remaining bottlenecks. 3. By 2010, RTTI services should be available in 50% of all the important metropolitan areas in Europe. 4. Analyzing the Member States’ responses and checking some possible business models.
The key players involved in the RTTI Working Group are members of different sectors, including:
• Automotive industry • Universities • Research institutes • National and local authorities • User organisations • Safety authorities • Road operators.
The RTTI Working Group produced a Final Report in October 2005. As a key RTTI technology already widely deployed in Europe, the Working Group recommendations support increase in availability of TMC to new countries, across national borders and with increased coverage of national and urban road networks. National authorities are urged to support and provide freely accessible information and services to the widest possible audience. They are also asked to support, together with all interested parties, the TMC Forum to promote the safety-related features of TMC, building on the already existing and standardized formats for data, messaging and transmission.

Page 425 of 490
4.9.1 Final Report and Recommendations of the Working Group for Real-time Traffic and Traveller Information (RTTI), August 2005 Legal Notice Legal Notice by the European Communities, Information Society Directorate-General
This report was produced by the eSafety Working Group for Directorate-General Information Society of the European Commission. It represents the – not always uniform – views of the experts in the field of Real-time Traffic and Traveller Information which is part of the eSafety System Approach. These views have not been adopted or in any way approved by the European Commission and should not be relied upon as a statement of the European Commission’s or its Information Society Directorate-General’s view. The experts and the European Commission do not guarantee the accuracy of the data included in this report nor do they accept responsibility for any use made thereof. In addition, the experts and the European Commission cannot be held liable for the external web sites referred to in this publication. The use of abbreviations, standards and/or trademarks and product names in this publication does not mean that they can be used freely.
Executive Summary
The Real-time Traffic and Traveller Information Working Group (RTTI WG) started in July 2003. Interested parties were invited to join. The objectives of the RTTI WG were set by the eSafety Working Group in November 2002. They were adopted and extended by the eSafety Steering Group. The objectives are in short:
1. Concentration on Road Traffic. 2. Support for the wider use of pan-European RDS/TMC network for safety-related traffic information and provision of a report with the recommended actions to the European Commission on the status for RDS/TMC implementation and the remaining bottlenecks.
3. By 2010, RTTI services should be available in 50% of all the important metropolitan areas in Europe. 4. Analysing the Member States’ responses and checking some possible business models.
During the working time, the wish and the activities within many Member Countries grew considerably to establish - or when already started or when already in operation then to extend – RTTI-services via RDS/TMC and to install more of the necessary infrastructure for the collection of relevant traffic data.
Page 426 of 490
So, RDS/TMC offers at the time being the best platform for a fast growth of RTTI services: Actually, more than 3,5 Mio. RDS/TMC-receivers are used by European customers – and this figure grows by at least 1,5 Mio. additional sets per year – mostly vehicle navigation systems.
As requested from eSafety Working Group, more and more traffic information will be required in metropolitan areas in the near future. Then RDS/TMC will reach inherent limitations when very many more detailed geographic locations than useable with RDS/TMC are wanted. So, the European Broadcasting Union and the TMC Forum started some years ago their evaluation for a RTTI-service via digital transmission broadcast schemes – using preferably TMC but with the option to extend it by a so called TPEG-system when and where necessary, eventually. A final standard for TPEG has not been settled, yet. It may be expected for 2006. So a final conclusion or recommendation of the WG for RTTI via digital broadcast could not be given.
The basic recommendations and conclusions of the WG are as already presented at some High Level Meetings and the European ITS conference in Hanover June 1, 2005:
The Member States should
1. – if not already done - agree at their national level on a strategy, a time schedule and possible business models for the implementation or the extension of RTTI services working to European Norms – starting from RDS/TMC and covering as good as possible both interurban and urban areas,
2. support together with all interested parties the TMC-Forum to promote the safety-related service features of TMC, building on the already existing and standardized formats for the data, messaging and transmission standards,
3. take steps to ensure roaming and interoperability across the RTTI-services in all of the EU,
4. require reluctant authorities to make available existing public data for the provision of RTTI services and to establish additional collection of data for RTTI when and where necessary, in any case should safety relevant data be freely available,
5. request that Traffic Management Centres operate to European Standards such as TMC-encoding of the data. It is recommended that tenders for new or for the extension of existing Traffic Management Centres should ask for a mandatory use of these standards,
6. agree, on the basis of the national RTTI strategies and the Commission’s Recommendation on TTI services, with the private service providers on the minimum extent of the public (free of extra charge) services and the conditions for the commercial services, and establish public- private-partnerships if necessary and economically reasonable,
7. publish – following the guidance of the Commission’s RTTI recommendation, clear guidelines for the private sector of the conditions for establishing private data collection networks for commercial services,
8. require reluctant FM-Broadcasters – especially those operating under public license - to carry the RDS/TMC-service for public or private users so that 80% or more of all journey drivers can have access to a relevant RTTI service by the year 2010 or earlier,
9. require the authorities to ensure through the appropriate standardisation and regulation bodies that frequency spectrum and broadcast capacity will be made available in the near future for advanced broadcast services via DAB, DRM, DVB-T and eventually satellite DAB,
10. support the development of future advanced services which become possible by DAB, DVB-T, satellite broadcasting, 3G, WLANs and others.
11. The RTTI-WG should make a proposal for a letter to the European Transport Ministries to ask for their position against these recommendations of the RTTI-WG.
Page 427 of 490
12. The Council of the Transport Ministers of the European Union should decide at one of their next reunions that
“All countries within the European Union should agree or should be advised to enable and to extend the installation of the chain of road information and to establish Real-Time Traffic and Traveller Information Services in their countries. By the year 2010 more than 80% of all population should be served with adequate, standardized services.”
1. Introduction Real-time Traffic and Traveller Information (RTTI) offers a very significant method to improve safety on roads: Early warning and most actual information result in more careful and more relaxed driving which will lead then to fewer accidents.
Consequently most of all traffic information can be regarded as safety relevant.
In all countries of the European Union some RTTI systems have been installed for decades: They are well known for the real-time control of traffic lights or of green waves or of moving traffic signs. In parallel, verbal – i.e. analogue - traffic announcements via radio are broadcasted since decades, too.
These types of RTTI-information are well established and will not be regarded any further in this report.
But RTTI services via RDS/TMC which inform the drivers with digitally coded messages via broadcast or via mobile radio services have been installed just some years before (earliest regular service 1997, tests started as soon as 1991) in some – but by far not in all - Member Countries of the European Union, yet (see Annex 1).
So, in Nov. 2002, the eSafety Working Group published its famous 28 Recommendations which showed possibilities and chances to improve safety on roads – proposing to use more extensively electronical means in the vehicle or at the road side.
The recommendations 15 to 17 referred already to “Real-time Traffic and Traveller Information”, and the eSafety Forum and its Steering Committee decided to establish a Working Group (WG) to deal with this topic and to make recommendations for realization (see Annex 2).
The interested organisations, companies, governmental bodies, operators were invited to participate and to contribute with their views and specific proposals. So many persons joined the Working Group and its many meetings regularly or on a temporary basis. Participants are named in Annex 3.
The wording of the Recommendation 17 “Support the wider use of pan-European RDS/TMC network for safety-related traffic information” reminded already that the status of RTTI-services at the start of the eSafety-Programme was – and still is - in fact very different in Europe. The differences became even more visible after the entry of the 10 new members into the European Union in 2004.
So it was obvious from the very beginning that the WG has to have a differentiated view as to the different countries and to the speed necessary or possible for the introduction or extension of RTTI-services.
Page 428 of 490
Additionally, the eSafety Forum had added a very specific task to the Recommendations mentioned above: “By 2010, RTTI services should be available in 50% of all the important metropolitan areas in Europe”. This formulated a strong task, because until now most Traffic Information dealt with highways and main inter-urban routes, only.
With this summarizing report the RTTI Working Group presents its results in a paper which gives its recommendations and proposals how to realize and to improve RTTI-services in the next years. The document will be passed to the DG INFSO for its evaluation. Finally the report will be sent to the European Commission and to the European Parliament.
2. Objectives of the RTTI WG
As intended by the Recommendations, the WG dealt with
• the collection of relevant traffic information,
• the transformation into traffic messages,
• the use and distribution of these messages,
• the business models.
It was agreed within the WG that is not the task of the WG to define or to evaluate specific products for infrastructural/roadside installation or for the in-vehicle use.
3. RTTI Status at the Start of the WG RTTI services have been introduced in Europe since very many years in different versions, but in all systems the traffic information passes 4 steps as shown in Annex 4:
• Generation of Traffic Data with all types of sensors
• Data collection and processing – e.g. in Traffic Management Centres
• Data distribution (via service and network operators)
• Use of the traffic data – i.e. especially in vehicles.
It is important to recognize that these 4 steps can be realized independently from each other. This enables regionally different speeds of introduction – which consequently happened in the past: Countries or areas with heavy traffic were keen to introduce earlier than areas with low traffic density.
The major issue to be covered here is the wireless information of the drivers which can be realized cheapest by broadcasting.

Page 429 of 490
Broadcasted traffic Information to the drivers started with verbal announcements – and this is maintained by some broadcasting stations until now. But the number of different messages per hour obviously is very limited and the messages relevant for a specific route can neither be selected electronically nor fed into a navigation systems so to adopt the route to the actual traffic situation.
Some countries preferred to introduce a separate FM-radio channel dedicated mainly to traffic announcements (F, UK, I), others used to have the information on many different and mostly regional FM-stations (some Central European countries such as CH, A, D, NL, B).
In the mean time very many FM-stations added a 57 kHz pilot carrier to their transmission scheme which can be digitally modulated with a data rate of about 1 kbit/s. Part of this data rate has been agreed and standardized to be dedicated to digitally encoded traffic information. This whole approach is called Radio Data system with Traffic Message Channel (= RDS/TMC).
So, RDS/TMC has been developed in Europe, was then standardized internationally (see Ref. 1) and in the mean time became operational in some European countries (Annex 1) and abroad.
Within RDS/TMC, every specific traffic information consists from two components – the location code and the event code. The total sets of those codes are stored within the FM radio (or the navigation system which may be combined with the radio) so that a decoding becomes possible indicating then the location and the event of the specific traffic situation.
When received, the traffic information can then be transformed into a speech output, but this is done very rarely because the many traffic announcements may disturb the driver. Most RDS/TMC-systems just update the navigation system and optimize the route indicated to the drivers considering the actual traffic situation transmitted.
Two business models are in operation:
• In most countries with a monthly radio fee, the RDS/TMC-service of public radio stations is included at no extra charge (A, CH, NL, D etc.).
• In France, in the UK and by many private radio stations in some other countries (e.g. Germany) the RDS/TMC service is encrypted. With a one-time down-payment of about 60 € per set, the radio will be enabled to decode these messages, too.
Vehicles equipped with this type of radio can then drive through Europe and receive everywhere the RDS/TMC messages as long as there is a roaming agreement between the private operators in three different countries which provide encrypted services.
Besides FM-broadcasting, traffic information naturally can be asked from Call Centers via all two-way communications links - wired or wirelessly (via mobile radio of all kinds).
A TMC-Forum organized by ERTICO cares for the updating and extensions of the RDS/TMC- system which may be wanted from time to time. Beside this, the TMC-Forum cares that all manufacturers using the TMC-logo stick exactly to that norm so that basically compatibility and correct operation for RDS/TMC-services in all areas is assured. Update of location codes in a specific country or new sets of location codes in countries which start RDS/TMC services require an input to the radio memory – mostly done by getting the new codes together with an update of the digital maps in the navigation system which may be connected to the FM-radio.
The RTTI via RDS/TMC allows the navigation system to adjust the proposed route to the actual traffic situation – to “dynamize” the selected route. Almost all modern navigation systems – as vehicle-installed or as nomadic device - provide this feature and contribute to the ever increasing number of receivers with RDS/TMC-functionality.
Page 430 of 490
4. Running Activities and the International Situation
4.1 TMC-Forum
Coordinated by ERTICO, the European multi-sector, public-private partnership organisation based in Brussels and pursuing the development and deployment of intelligent transport systems and services, the Forum works very effectively on the spreading of TMC-services and on the further development and extension of TMC-services.
The activities are organized in some Working groups and Task Forces.
The Forum grants the use of the TMC-logo to those companies which agree to maintain and to stick to the TMC-standardisation so to enable compatibility.
It cares to reach an improved coverage of TMC-services in Europe, participates e.g. within the European project CONNECT in the development of RDS/TMC-services in the new European Member States and organises together with its industrial and public partners demonstration projects whenever necessary - e.g. in China (project DYNASTY).
A very comprehensive survey can be found under J.Burgess, “TMC-Forum – Results, Activities, Developments”, presented May 11, 2005 at a RTTI-meeting in Berlin and published in www.eScope.info.
4.2 TPEG – a scheme for the transmission of encoded traffic information via digital broadcasting
This topic is beyond the original scope of the RTTI WG. A standard has not been fixed, yet, drafts refer to Ref. 2. So no formal agreements or recommendations have been made in the WG.
But because broadcasters and industry discuss this topic since long, a summary of the reasoning for this potential extension of RDS/TMC is given here:
A strong demand can be expected in future to provide urban traffic information so to allow a very detailed dynamic navigation in towns.
RDS/TMC is applied in more and more big cities to allow this service – starting with the main roads. Positive examples are Paris, London and many cities in e.g. the Netherlands or Germany.
But when to be extended to every small street, the European Broadcasting Union (EBU) feared that RDS/TMC alone may not satisfy such an increased demand. So, the EBU decided for the future Digital Audio Broadcasting (DAB)
- to make continuous use of the advantageous features of RDS/TMC and to take the standardized digital event codes and the location codes wherever applicable,
- but to apply additionally georeferenced location codes.
- In a joint effort a “Road Traffic Information Group” (RTIG) from members of the EBU and the TMC-Forum are actively working for a joint solution which then will be standardized in ISO TC 204. Two solutions for location referencing are under discussion, IPR-agreements will be settled in the near future. The parties are optimistic that a final test can be made during the Soccer World Championship 2006 already (project Mobil-Info).
Page 431 of 490
This work is still under way. Therefore the RTTI WG registered these activities but could not make concrete recommendations, yet.
Further details refer to the presentations of Bev Marks, “TPEG – a Status Report” and H.-W. Pfeiffer et al. „Demonstration of the TMC and Dynamic Navigation” all presented at the eSafety Expert Meeting on RTTI, May 11,2005 in Berlin and published under www.eScope.info.
4.3 Minimum quality requirements for traffic information
ERIC - the “European Road Information Center”, a federation of the automobile clubs in Europe, which organizes the internal distribution of traffic information which is relevant to the main roads and thru-traffic - has defined for this purpose a minimum set of requirements which may be used to have a minimum level.
The Bundesamt für Straßenwesen (BASt) in Germany developed an even more detailed proposal which is – between others – under the joint evaluation by the European Highway authorities.
The Swiss authorities have specified their requirements for traffic information in the Swiss Standard SN 671 921 and specified additionally the future wishes for border-crossing traffic information.
Similar attempt have been made in many European Member Countries.
The agreement on a the RDS/TMC-norm, its coding structure and the look-up tables involved led already in the field of RDS/TMC-messages to a RTTI-information which then fulfils automatically such a set of requirements – so to guarantee that the RDS/TMC-receivers can be used in all the many countries with a RDS/TMC broadcast service.
The RTTI WG appreciated these efforts because they enable a basically seamless service (encryption see 3.3.)
4.4 Statements of the European Member States
At the High Level Meeting Sept. 27, 2004 in Brussels, the representatives of some Member States presented their view as to the extension of RTTI services in their countries.
The efforts and the recommendations of the RTTI WG have been presented at that meeting (see ref. 3). They were unanimously supported by the representatives of the Member States. But not all of the representatives gave a detailed programme how to expand the RTTI services and specifically the RDS/TMC based services in their individual countries.
So, from obvious reasons some countries did not see at that time a necessity for a country- wide RDS/TMC-service if some areas are scarcely populated (Finland, Norway): It became clear that because of the different traffic densities and the investments required eventually, the speed for the introduction and of the extension of RTTI may be quite different in the Member States.
Some countries have published the basics of their RTTI strategies, already. But to generate a detailed survey it was decided within the RTTI WG to contact the responsible Transport Ministries in the Member Countries to get their most actual views.
Page 432 of 490
The expected answers may not be very detailed at the time being but the actual RTTI strategy of the different countries may be seen.
Within these answers, it is expected to get an very actual view of the monitoring infrastructure installed on the highways of the member countries as a prerequisite to collect traffic data of appropriate completeness and reliability for a RTTI-service covering the highways. Annex 5 shows that not in all countries installations exist – and only a few countries can claim to have sufficient traffic detectors installed to get enough data for a RTTI service.
As another example Annex 6 presents the German view as given by the State Secretary Dr. Nagel of the Ministry of Traffic, Construction and Housing (BMVBW) May 11, 2005:
The major points regarding RTTI are:
- RDS/TMC is in operation in Germany since many years, its further speading is supported - Digital broadcasting and its options should be used as soon as standardisation has been realized - Safety relevant information should be provided at lowest possible costs to the drivers.
His statement as to the business model reads: ”It should to be possible continuously to access basic safety-related traffic information free of charge throughout Europe. This does not rule out the incorporation of private-sector commercial information service providers, who can target specific market segments and provide customized information services – services that cannot be provided in this form by the public sector. I can imagine that roaming agreements will be concluded – like those between mobile phone operators – which give seamless cross-border access to traffic information.”
4.5 International Developments
• Japan VICS shows no alternative which may be directly applicable in Europe. The basic functionalities have been realized similarly in earlier European developments (IR-Beacon, Mikrowave Beacon, RDS/TMC, tests with Digital Radio)
• China RDS/TMC is demonstrated there by European companies (see 4.1. Project DYNASTY).
• USA The two Satellite Digital Automobile Radio Systems (SDARS = Sirius and XM Radio) use or will use a RDS/TMC-comparable transmission scheme for RTTI-services. No direct application to Europe.

Page 433 of 490
5. Results and Recommendations
1. The WG agreed that “All traffic information is potentially safety relevant and an important tool for traffic management. The more “real-time” the information is, the better.”
2. Customer’s awareness and interest in RTTI-services is augmented with more and more actual and correct traffic information. This includes not only warning for traffic problems but in addition to this information of the end of that problem - or even the expected end – and an extension to e.g. detailed inner-urban traffic information and even to expected travel times, eventually.
3. Regional differences from the geographical situation and/or the traffic density will result in a different speed and different schedules for the realisation or the extension of RTTI in the different countries.
4. The business models remain different – depending upon the operator of the traffic services. There was consensus that any information should be freely available to all drivers which may safe lives and avoids accidents. On the other side it was expressively stated that a service “Expected Travel Times” could be a typical service which may be offered only against a fee to be paid by the user.
5. All interested parties should support the TMC-Forum to promote the safety-related service features of TMC.
6. The operators of RDS/TMC-services should take steps to ensure roaming and interoperability across Europe for the RTTI-services.
7. In many countries the public authorities such as the governmental highway operators provide already some existing RTTI data to operators and broadcasters. Whenever this is not the case, the authorities should be requested to do so to accelerate the deployment of RTTI services. When public organisations and communities show little or no interest to provide an adequate RTTI service, support and start-up allowances for private data collection and service provision should be given.
8. Traffic Management Centres should be requested to operate to European Standards such as TMC-encoding of the date. It is recommended that tenders for new or for the extension of existing Traffic Management Centres should ask for a mandatory use of these standards. Services should be offered according to these Standards. Clear guidelines ought to be published for the private sector for the conditions of private data collection networks.
9. Broadcasters should be requested to carry the RDS/TMC-service.
10. Frequency spectrum and broadcast capacity should be made available for advanced broadcast services such as DAB, DRM, DVB-T and eventually satellite DAB as soon as they have been standardized. Some support ought then to be given to install those services using these broadcast schemes and mobile radio (e.g. 3G).
11. RTTI-WG should make a proposal for a letter to the European Transport Ministries to ask for their position against these recommendations of the RTTI-WG.
12. The Council of the Transport Ministers of the European Union should decide at one of their next reunions that “All countries within the European Union should agree or should be advised to enable and to extend the installation of the chain of road information and to establish Real-Time Traffic and Traveller Information Services in their countries. By the year 2010 more than 80% of all population should be served with adequate, standardized services.”

Page 434 of 490
6. Steps ahead in the very near Future
• From the answers to the letter to the national ministries an actual survey is to be expected of the strategies of the Member States.
• The new member states will install rather rapidly RTTI-services.
• Standardisation of TPEG should become true within short allowing first trials and evaluations with RTTI-services in 2006, eventually.
• Agreements with as many Urban Traffic Centres as possible should be made so that traffic information which is readily available there may be used for RTTI-services.
• To avoid expensive installation of new sensors for traffic data collection, it has been proposed e.g. by the company Logica CMG to use the location information of mobile phones to measure traffic density and average speed. First installations for RTTI services may be realized in the near future, eventually. This may be most valuable in towns, suburban areas and on roads without sensors to monitor the actual traffic flow.
Page 435 of 490
Annex 1 European RDS/TMC-Services in operation. Source: ERTICO
Annex 2 Recommendation 15 – 17 of the “Final Report of the eSafety Working Group
(Road Safety), published Nov. 2002, (see www.eScope.info)
Annex 3 List of temporary and regular Participants to the WG
Annex 4 RTTI-process overview
Annex 5 Provision of European Highways with traffic monitoring systems
Source: R. Kulmala, Report to the Safety Forum, June 2005
Annex 6 State Secretary Nagel at RTTI-conference May 11, 2005 in Berlin
(see www.eScope.info, reference eSafety Expert Meeting on RTTI May 11, 2005)
Ref. 1 TMC-Standard EN ISO 14819, parts 1 -3 and 6 (2002)
RDS-Standard IEC 62106:2000
Ref. 2 TPEC-Loc CEN/ISO TS 18234-6
AGORA-C specification version 1.0, April 06, 2005
Ref. 3 RTTI-Report to the eSafety High-Level Meeting, Sept. 27, 2004
(see www.eScope.info)
Page 436 of 490
4.10 Research and Development Working Group The EU’s Research Programmes - especially the Telematics Application Programme under the EU’s Fourth Framework Programme and the Information Society Technologies (IST) programme within the Fifth Framework Programme - have contributed to realising the leading edge technologies, systems and applications which form the basis for many of the active safety systems being implemented in vehicles today.
The continued development of Intelligent Vehicle Safety Systems requires further RTD on a number of technologies. The critical task is to determine the priorities for further research, based on an analysis of accident causes and the impact of potential countermeasures. Therefore, the Research and Development Working Group focuses on determining the priorities for further research. Co-ordinating with the national research programmes and promoting the European Research Area (ERA) is a must, as well as reinforcing international co-operation.
Page 437 of 490
4.10.1 Progress Report of the eSafety Working Group RTD, June 2005
Working Group Title and Chair
eSafety Working Group RTD
Chair: Arnold van Zyl – Director – EUCAR (European Council for Automotive R&D)
The members of the working group were recruited from a broad range of stakeholders representing the automobile and parts manufacturers, telecommunications operators, road infrastructure builders, the academic community, member state representations as well as civil society. A list of the WG members is attached in Appendix 1.
Objectives and Methodology
To identify and map the Regional, National and European research, technology and demonstration projects that may contribute to addressing the recommendations of the High Level Group on eSafety.
To identify the priorities for research areas for integrative European research, technology and demonstration projects in the field of eSafety.
On the basis of these priorities, a set of recommendations were developed to act as the basis for future European collaborative research programmes supporting the eSafety initiatives
Approach: In an intensive consultation process the members contributed to mapping of current RTD activities at the Regional, National and European level. A matrix (Appendix 2) was generated in which the content of 77 projects and initiatives in the broader area of eSafety were analysed. The content of the projects and initiatives were analysed with respect to their main focus – The following categories were considered: (share of total R&D effort indicated as an approximate % in brackets)
• Accident Causation (2%) • Road Infrastructure and Architecture (14%) • Telecommunications (7%) • In Vehicle systems and electronics (12%) • Human factors (17%) • On Board accident prevention systems (35%) • On Board systems for occupant protection in the case of an accident* (6%) • Post Accident emergency and rescue systems (2%) • Cost Benefit Analyses (2%)
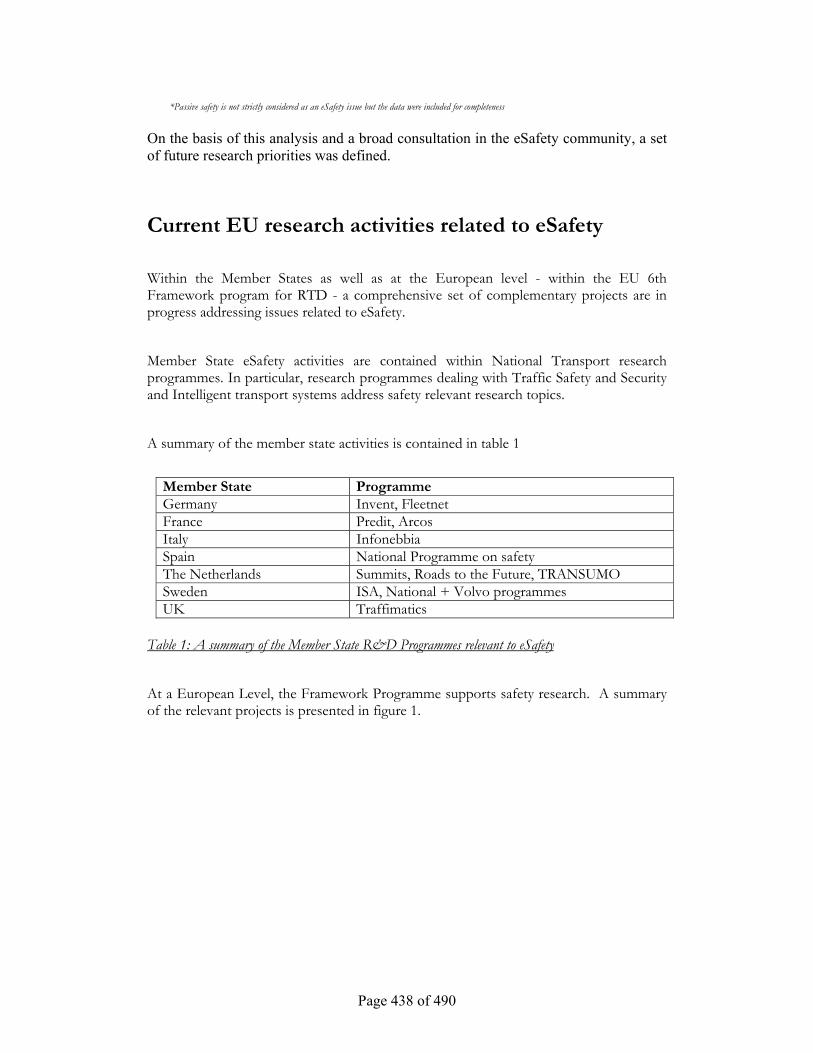
Page 438 of 490
*Passive safety is not strictly considered as an eSafety issue but the data were included for completeness
On the basis of this analysis and a broad consultation in the eSafety community, a set of future research priorities was defined.
Current EU research activities related to eSafety
Within the Member States as well as at the European level - within the EU 6th Framework program for RTD - a comprehensive set of complementary projects are in progress addressing issues related to eSafety.
Member State eSafety activities are contained within National Transport research programmes. In particular, research programmes dealing with Traffic Safety and Security and Intelligent transport systems address safety relevant research topics.
A summary of the member state activities is contained in table 1
Member State Programme Germany Invent, Fleetnet France Predit, Arcos Italy Infonebbia Spain National Programme on safety The Netherlands Summits, Roads to the Future, TRANSUMO Sweden ISA, National + Volvo programmes UK Traffimatics
Table 1: A summary of the Member State R&D Programmes relevant to eSafety
At a European Level, the Framework Programme supports safety research. A summary of the relevant projects is presented in figure 1.
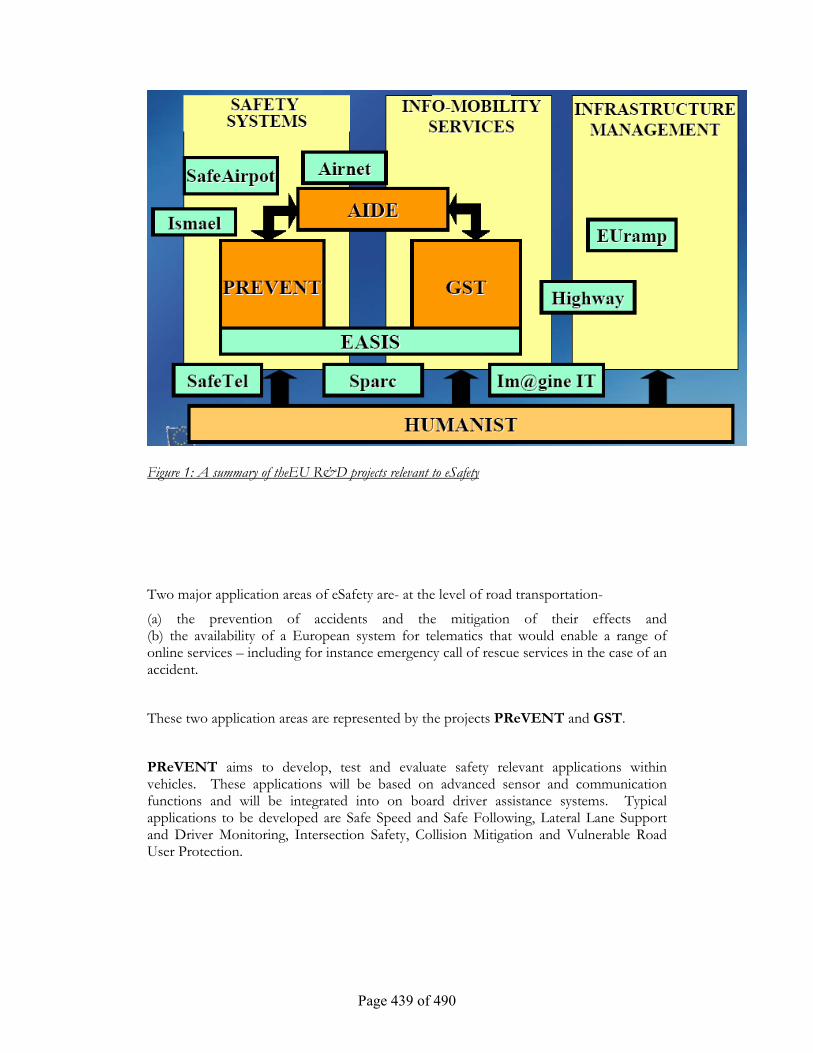
Page 439 of 490
Figure 1: A summary of theEU R&D projects relevant to eSafety
Two major application areas of eSafety are- at the level of road transportation-
(a) the prevention of accidents and the mitigation of their effects and (b) the availability of a European system for telematics that would enable a range of online services – including for instance emergency call of rescue services in the case of an accident.
These two application areas are represented by the projects PReVENT and GST.
PReVENT aims to develop, test and evaluate safety relevant applications within vehicles. These applications will be based on advanced sensor and communication functions and will be integrated into on board driver assistance systems. Typical applications to be developed are Safe Speed and Safe Following, Lateral Lane Support and Driver Monitoring, Intersection Safety, Collision Mitigation and Vulnerable Road User Protection.
Page 440 of 490
The project GST aims at creating a standardized framework for end-to-end, in-vehicle telematics. The following specific areas of online service provision will be developed: Rescue – ensuring automatic emergency call in the case of an accident. Enhanced floating car data – uses vehicles as sensors for real time traffic data and Safety channel – allows for the broadcast and download of safety relevant information.
The application focussed projects such as PReVENT and GST require a common basis to ensure a seamless deployment of their respective functions. A set of transversal projects and networks are underway which all contribute to the common foundation required for the deployment of eSafety relevant applications:
• an agreed, adaptive and intuitive human machine interface (AIDE and HUMANIST)
• a common, scaleable and robust vehicle architecture (EASIS) not susceptible to electromagnetic interference (SafeTel)
• X by wire systems and architectures supporting accident avoidance algorithms and mitigating measures – especially focussed on heavy duty commercial vehicles (SPARC)
• standardized location based access points for transportation information (Imagine IT) supported by intelligent maps and geographical tools (Highway) as well as information relating to infrastructure aspects (EURAMP)
In addition, to the R&D projects dealing with road transportation, Airport and Airspace safety issues are addressed in the projects ISMAEL (Surveillance and Management of Airport functions), SafeAirport (Acoustic systems for Air traffic management) and AIRNET (Runway safety, congestion control and emergency management).
General observations
The analysis of the projects at National and European level result in the following observations:
• The majority of the activities are strongly focussed on in-vehicle technologies and systems for accident prevention and mitigation.
• No systems approach to safety with an inclusion of the essential non automotive
aspects is recognizable.
• Protective safety features should be linked to the in-vehicle and environmental safety relevant sensors
• No apparent coordination the Member State and EU activities in the area of
eSafety R&D are evident.
• Deployment projects in the area of eSafety are strongly atomized and provide local, solutions that are not, in general, transferable to other regions.

Page 441 of 490
• A European/Global market for safety applications will require much more coherent R&D inputs to standardization of safety systems.
Major areas of future eSafety R&D focus in Future R&D On the basis of the analysis op the set of projects the following specific recommendations for future R&D topics in the area of eSafety are put forward:
1. Accidentology and Impact Assessment
• R&D to establishment harmonized European accident databases capturing information relating to the vehicle, driver and infrastructure associated with the accident.
• R&D to develop predictive and statistical methodologies to support the impact assessment and effectiveness of measures that support road safety should be started. The methodologies should encompass safety measures relating to the vehicle, driver and infrastructure.
• An improved understanding of behavioural adaptation is of great importance for more accurate safety benefit estimation.
• Comparative analysis of the effectiveness of safety measures and technologies should be carried out.
2. Human factors
• Investigation of human behavioural adaptations to the introduction of novel
technological cooperative systems. Investigation of the influence of such behavioural changes on the overall safety system.
• The development of adaptive HMI principles and systems that would allow the road user to interact optimally with the vehicle and infrastructure.
• HMI integration - The investigation of how different applications (including nomad devices, remote services and cooperative systems in general) could share a common in-vehicle HMI in a safe and efficient way.
3. Vehicle systems
• Decreasing the cost and increasing the reliability and redundancy of sensor and
recognition technology. • Ensuring appropriate, hierarchical fusing of sensor data. • Development of robust actuation devices supported by an open, scaleable safety
critical electronic architecture. • Integration of such sensors and actuators into systems that interoperable between
all vehicle platforms. The information should feed protective safety systems and features.
• Novel, intuitive in-vehicle information and input systems (eg virtual reality projections) resulting from the synergy effects of vehicle to vehicle and vehicle to infrastructure communication.
Page 442 of 490
• Use of potential opportunities provided by co processing
4. Infrastructure systems
• Investigate how new vehicle technologies could influence design of roads (or could even be used for road infrastructure) with stronger involvement of road authorities and road operators in R&D project.
• Develop HMI standards for information on road infrastructure. • Develop models for the integration of the technologies and management of
information at a pan-European level. • Assessment of how for example Galileo, UMTS, WiFi Lan and other electronics
systems (such as TETRA) could contribute to the goals of eSafety and support cooperative systems.
5. Autonomous, cooperative systems for efficiency, safety
and mobility.
• Development of a functional, open, scaleable architecture allowing seamless communication between vehicles as well as between vehicles and infrastructure. In addition this architecture should provide the possibility for seamless data exchange between road data capturing and processing centres.
• The development of value added services enabled by cooperative systems – navigation, safety and power-train and energy management.
• The development of systems to support safety of vulnerable road users, safety and efficiency of goods distribution and encourage intermodality.
• Large scale demonstration/field tests for deployment of cooperative systems. • The development of standards for cooperative systems and interoperability to
favour compatibility and diffusion.
6. Post accident & emergency management
• Further R&D into the required technical architecture, structure and interoperability of eCall and emergency management systems in general.
• Investigate aspects of synergy between eCall , civil protection and emergency management
7. Non technical aspects
• Investigation of organisational aspects of involving the stakeholders (Telecom,
road builders and OEM’s) in the planning, deployment and upgrading of “intelligent” infrastructure.
• Investigation of all aspects of liability and privacy related to cooperative systems. • Investigation of business cases based on cooperative systems also investigating
the potential synergy with technologies for Automatic Debiting Systems.
Page 443 of 490
Concluding remarks To reach the ambitious target of the road safety charter - halving the number of road deaths by 2010 – an integrated R&D approach in eSafety is needed complemented by R&D activities in the area of protective safety. Such an approach should extend the focus of the work beyond the vehicle to include the driver as well as the road and communication infrastructure.
In addition to the specific recommendations in the above the need is recognized to establish a mechanism to coordinate the European R&D efforts and to deploy the results in a large scale, generic deployment and demonstration project. In this light the WG RTD eSafety recommends investigating the establishment of a large scale demonstration initiative on Cooperative Systems for eSafety.
Arnold van Zyl
Brussels, 22 April 05

Page 444 of 490
4.11 User Outreach Working Group
The User Outreach Working Group was created as a response to the growing need to involve stakeholders outside the eSafety community in the effort to support eSafety deployment. Involving the end user is essential for the development of a positive business case. Including policy makers and opinion leaders has also been seen as a key driver for increasing awareness of the benefits of ITS.
Public awareness of the development and existence of eSafety Systems, their contribution to road safety in general and their potential to reduce individual risk is essential. ITS stakeholders has defined this as one of the key missing enblers on the road to deployment.
The User Outreach Working Group has investigated methodologies and studied good practice for improving the take up of eSafety systems amongst the general public. Recommendations have been made to increase user awareness through the creation of an eSafety Communication Platform, where stakeholders can launch awareness campaigns and gather information so as to spread awareness of eSafety’s benefits.
The Working Group has concentrated on aspects of communication and consumer behaviour in the context of eSafety and a strong link has been established to communication managers, media and marketing experts and representatives of the users. Actions to increase user awareness will in the future also be launched through the eSafety Support project.
The Final Report of this Working Group is not ready yet, and will be available after May 2006 on the eSaftey Support website.

Page 445 of 490
CHAPTER V - OTHER ESAFETY RELATED
TOPICS

Page 446 of 490
5.1 E112 112 is the single emergency telephone number for the European Union. European citizens in distress situations are able to call the 112 and get through to the emergency services in all Member States. Thus, anyone travelling within the Union has to remember only one number and this guarantees a quicker and more efficient intervention. The relevant legal provisions at European Union level are now incorporated in article 26 of Directive 2002/22/EC of the Universal Service Directive on universal service and users' rights relating to electronic communications networks and services.
Enhanced 112 (E112) is an emergency communications service using the single European emergency call number, 112, which is enhanced with location information of the calling user. Today 50% of emergency calls are made from mobile networks and the number is bound to rise because of the increase in use of cellular phones. It is also estimated that approximately 1 million emergency calls every year are unable to indicate their location. This is the reason why the European Commission in July 2003 adopted the Communication on E112 (on the processing of caller location information in electronic communication networks for the purpose of location-enhanced emergency call services). The reader can find it in Annex X.
Page 447 of 490
5.2 Intelligent Cooperative Systems and Radio Spectrum
Intelligent Co-operative Systems that are based on vehicle-to-vehicle and vehicle (V2V) and Vehicle to Infrastructure (V2I) communications hold the promise of great improvements both in the efficiency of the transport systems and in the safety of all road users. Intelligent Co-operative Systems increase the “time horizon”, the quality and the reliability of information the available to the driver about his/her driving environment, the other vehicles and all other road users, enabling improved driving conditions leading to better safety and more efficient and comfortable mobility. Similarly, Intelligent Co-Operative Systems offer increased information about the vehicles, their location and the road conditions in the whole road network to the road operators and infrastructure owners, allowing optimized and safer use of the capacity of the available road network, and better response to incidents and hazards. The architecture and technical choices are done now, and in section 5.2.1 the reader can find the Commission Working Paper on Intelligent Co-operative Systems. This section comes as an effort to provide the reader with a picture of the work undergoing at policy level, the state of the art in standardization. All the supporting documents can be found in Annex to this Compendium. Radio Spectrum Policy
Wireless communications is one of Europe’s most dynamic technology sectors and underpins European society in areas as diverse as transport, security and environmental protection. The entire industry relies on radio spectrum – a ‘raw material’ in short supply.
The development of radio spectrum policy in the Community is based on the Radio Spectrum Decision 676/2002/EC and contributes to the implementation of the eCommunications regulatory framework. It includes co-ordinating and supporting the radio spectrum needs of EU policies and initiatives in such sectors as communications, R&D and broadcasting.
In Annex IV the reader can find the fact sheet to introduce the matter, while the Communication cited above is contained in Annex V.
Automotive short-range radars (SRRs) at 24 GHz and 79 GHz
SRR are radar systems operating around a car when in motion to detect possible impacts with obstacles, such as other cars, walls, etc. so that safety measures may be triggered automatically, such as pre-tensioning of seat belts and inflating airbags. Ultimately, this could include automated braking to avoid or to mitigate collisions.

Page 448 of 490
The introduction of such active safety systems in cars supports the EU's road safety policy goal of halving the number of deaths on the road. Automotive short-range radars are permitted to use two harmonised frequency bands in the European Union: 24 GHz and 79 GHz. Since technology for the latter is not considered mature for commercial implementation as yet, the former will be used in a first stage with some detailed regulatory measures to avoid interference with existing users in the 24 GHz range, such as radio astronomy stations.
Two Commission Decisions were adopted in the framework of the Radio Spectrum Decision to harmonise the use of SRR in the European Union: Commission Decision 2005/50/EC of 17 January 2005 on the harmonisation of the 24 GHz range radio spectrum band for the time-limited use by automotive short-range radar equipment in the Community and press release, and Commission Decision 2004/545/EC of 8 July 2004 on the harmonisation of radio spectrum in the 79 GHz range for the use of automotive short-range radar equipment in the Community. (see Annex VI).
In Annex the reader will also find the Mandate (Annex VII), the CEPT Report (Annex VIII), and the Explanatory Memorandum (Annex IX). Intelligent Transport System in 5.9 GHz
ITS communication equipment intended for critical road safety applications need an effective protection to avoid delays. Sufficient protection cannot be found in the 5 GHz RLAN bands nor in the 5.8 GHz ISM frequency band, which have been regarded as viable for non-critical road safety and traffic management applications and communications purposes. Thus it has been proposed to designate 2*10 MHz in the 5.9 GHz band (5885-5905 MHz) for the critical road safety application purposes.
Commercial ITS products based on this technology are planned to be placed on the market (i.e. built in cars) starting from 2008. The safety applications like inter-vehicle hazard warning, work zone safety warning, intersection collision avoidance and emergency vehicle signal pre-emption are expected to take longer, starting to enter the market from 2010 onwards.
Page 449 of 490
5.2.1 Working Paper on Intelligent Co-operative Systems based on V2V and V2I Communications, January 2006
1. Introduction Intelligent Co-operative Systems that are based on vehicle-to-vehicle and vehicle (V2V) and Vehicle to Infrastructure (V2I) communications hold the promise of great improvements both in the efficiency of the transport systems and in the safety of all road users.
Intelligent Co-operative Systems increase the “time horizon”, the quality and the reliability of information the available to the driver about his/her driving environment, the other vehicles and all other road users, enabling improved driving conditions leading to better safety and more efficient and comfortable mobility.
Similarly, Intelligent Co-Operative Systems offer increased information about the vehicles, their location and the road conditions in the whole road network to the road operators and infrastructure owners, allowing optimized and safer use of the capacity of the available road network, and better response to incidents and hazards.
Intelligent Co-operative systems are the next big challenge in automotive electronics and ITS. Activities have been started in USA, Japan and Europe. Europe is well placed in the research on autonomous and stand-alone systems that have been researched in EU funded programmes for over a decade, and have benefited from the support of political initiatives such as eSafety. Now, Europe has to build on this expertise and take a lead in the research, standardisation and market introduction of Intelligent Co-operative Systems. The architecture and technical choices are done now, and concentrated efforts are required for Europe for becoming a leader and not adopter of U.S. or Japanese technologies.
2. What are the benefits of Intelligent Co-Operative Systems? Intelligent Co-operative Systems will build and expand on the functionality of the autonomous and stand-alone in-vehicle and infrastructure-based systems, such as Intelligent Vehicle Safety Systems (eSafety systems), including Advanced Driver Assistance Systems (ADAS), traffic control and management systems and motorway management systems. The benefits of he Intelligent Co-operative Systems stem from the increased information that is available of the vehicle and its environment. The same set of information can be used for extending the functionality of the in-vehicle safety systems, and through vehicle-to-infrastructure communications for more efficient traffic control and management. The benefits include - increased road network capacity
- reduced congestion and pollution
- shorter and more predictable journey times
- improved traffic safety for all road users
Page 450 of 490
- lower vehicle operating costs
- more efficient logistics
- improved management and control of the road network (both urban and inter-urban)
- increased efficiency of the public transport systems
- better and more efficient response to hazards, incidents and accidents
It should be noted, however, that on the contrary to the stand-alone and autonomous systems, many of these benefits require a minimum level of penetration (see chapter 8). The initial deployment of the Co-operative Systems is a huge challenge, and the business model may be even more difficult issue to solve than the development of the required technologies.
3. The Communications Technologies Intelligent Co-operative Systems are based on vehicle-to-vehicle (V2V) and vehicle-to infrastructure (V2I) Communications. A large number of technologies are available and potentially needed. In U.S. a dedicated frequency band has been made available for the safety critical applications at 5.9 GHz band, while Europe is currently looking into the feasibility of various frequencies and technologies for this purpose. In Japan the situation is more unclear.
3.1 Standardisation A significant effort in the standardisation of these communications technologies is going on. The most significant effort globally is ISO TC204 WG 16 (Chair: Michael Noblett) for a series of standards under the acronym CALM (Continuous Air Interface for Long and Medium range). A complete set of standards is expected in 2006. The scope of CALM is to provide a standardised set of air interface protocols and parameters for medium and long range, high-speed ITS communication using one or more of several media, with multi-point and networking protocols and upper layer protocols. The media defined in the current phase of CALM are
• Cellular Systems: GSM/HSCSD/GPRS (2/2.5G) and UMTS (3G)
• Infrared Communication
• Wireless LAN (WLAN) in 5 GHz, IEEE 802.11p (a draft standard for ‘Wireless Access for Vehicular Environments’, WAVE)
• Wireless systems in 60 GHz range Besides the standardisation of the media layers, CALM is also looking into the standardisation of the protocols, network layer and the management services, for creating efficient set of communication standards.
In Europe, the standardisation of the Communications of air interfaces and protocols is the competence of ETSI. The most active Working Group is ETSI ERM TG 37 (Chair: Bob Williams), which is in charge of the European side of CALM work. It has prepared, on the request of Car2Car CC, a System Reference Document on the primary use of 5.9 GHz band for Cooperative Systems, based on WLAN technology. A set of standards already exists for 5.8 GHz DSRC that is used primarily for Electronic Fee Collection (EFC).

Page 451 of 490
The Intelligent Transport Standards Steering Group (ITSSG, Chair: Cathy Jenkins) is coordinating ITS standardisation in Europe liaising with ETSI, CEN and CENELEC, and will play a role in the standardisation as well. Furthermore, the Commission has recently written to the European Standardisation Organisations, inviting them to initiate standardisation work on a given list of priorities. The priority list contains, under eSafety, standardisation work for Co-operative Systems. As a response, CEN TC 278 is considering to establish a new Working Group (WG 15), which would work on eSafety.
3.2 Core Technologies Cellular technologies
Cellular 2/2.5G networks have a good coverage in Europe, and 3G is starting to take over. These networks are used by all the existing telematics services, due to their wide coverage. The main disadvantage is the relatively high cost of communications, as well as lengthy response times making V2V communication for safety applications impractical at the moment. Some applications, like eCall will, however, remain to be based on cellular communications. Cellular communications is also part of the CALM framework, and this functionality is standardised by ISO TC 204 WG16.
Within the life-time of the Co-operative Systems (over 20 years), there will also be ‘beyond 3G’ wireless networks evolving. They will offer bandwidth-on-demand with IP transport for all media, and potentially a business model with only contents being charged. Within about 10 years, these networks may offer the best communications technology for Co-operative Systems.
WLAN/CALM M5/IEEE 802.11p
The technology promoted by the car industry both in the U.S. (VSC Consortium, VII Initiative) and Europe (Car2Car CC) is a mobile version of the WLAN (IEEE 802.11) technology. This technology was initially developed for the use of laptops and PDAs for hot-spots, and it is also called Wi-Fi. A new version called IEEE 802.11p (WAVE) is developed for mobile use, supporting omni-directional communication and localized broadcast up to 500m distance. The main benefit of this technology is that it would be cheaper, due to large volumes. Under the CALM umbrella, a set of standards is being developed by ISO TC 204 WG 16, called CALM M5. CALM M5 builds on 802.11p WAVE, but adds global elements and for example GPRS/UMTS network interconnectivity.
Broadcasting Technologies
Intelligent Co-operative Systems are expected to make use of broadcasting technologies as well. A wide range of broadcasting technologies is available, starting from FM radio (used for RDS/TMC) and moving to wider bandwidth digital services such as DAB, DVB, DVB-H, S-DMB, T-DMB and DDB. Satellite broadcasting is rapidly gaining customers in the U.S., and the services available now include real-time traffic information. The main advantages of broadcasting are its low cost and large potential volumes of data.
Page 452 of 490
Services already exist in Europe based on DAB broadcast and TPEG protocol. Further development in this area is expected, but the main problem is the availability of contents that would make high-quality services possible. The eSafety RTTI Working Group has looked into this issue, and published recommendations. In Europe regulatory barriers prevent cross-border satellite services, and this is why they have not taken up.
WiMAX
Compared to Wi-Fi, WiMAX (World Interoperability for Microwave Access, based on IEEE standard 802.16) offers longer distance and higher bandwidth. WiMAX is rapidly gaining ground in the consumer markets.
Short-range
Intelligent Co-operative Systems will also use short-range communications technologies such as Bluetooth and Zigbee for communication inside vehicles between different devices.
3.3 Spectrum issues - 5.9 GHz The automotive industry in both U.S. and Europe is strongly arguing in favour of primary use of a frequency band for the Intelligent Co-operative Systems. This need is justified due to the great potential for socio-economic benefits, the need to have a secure communications channel and the need to control it for a long period of time, at least for 20 years.
In the U.S. the FCC has already allocated 75 MHz of spectrum at 5.9 GHz (from 5.850 to 5,925 GHz) for car-to-car and car-to-infrastructure communications. The subsequent investigations by the U.S. stakeholders, mainly the VSC consortium and the VII Consortium, have led to the conclusion that the best technology available for the communications systems using this spectrum would be a derivative of IEEE 802.11. This has led to standardisation activities in IEEE and ISO TC204. The technology is then named IEEE 802.11p (WAVE), and referred to as WLAN or CALM M5 in the subsequent documents.
In Europe, the Car2Car consortium has proposed a derivative of the U.S. approach for the European market. As continuous spectrum of 75 MHz is not available, the Car2Car consortium has proposed the allocation of primary use of 2 x 10 MHz for safetycritical applications at 5.9 GHz range (5.875 – 5.925 GHz). This is used as control channel in the U.S., and allocation of this band in Europe would allow for worldwide harmonisation. The same technology would then allow using additional spectrum at either in the 5 GHz RLAN band or in the 5.8 GHz IRM band, non-protected for nonsafety critical and commercial applications. The proposal has also been submitted to the European Commission, which has introduced the topic at the Radio Spectrum Committee (RSC) meeting of October 2005.

Page 453 of 490
If frequencies in the 5.9 GHz band will be allocated for safety-critical automotive use, the co-existence issues will have to be solved. This band is currently allocated for military radar systems and fixed satellite services. Recently, the CEPT/ECC Short Range Device Maintenance Group (SRD/MG) has recommended placing the 10 MHz control channel in 5885 – 5895 MHz, to align with the US approach, and the second 10 MHz channel in the upper part of the ISM band (5865 – 5875 MHz) to take also into account Radiolocation services below 5850 MHz. It is noteworthy that some frequencies below 5875 MHz are also being considered as candidate bands for use by Broadband Wireless Access and Broadband Disaster Relief (BBDR) systems.
4. Potential Applications
4.1 Applications for Improved Safety
The Intelligent Co-operative Systems improve the functionality of the in-vehicle active and integrated safety systems by exchanging sensor data between the vehicles, and with the roadside equipment. This information can be displayed to the driver, or used by the in-vehicle systems directly. There are three basic classes of co-operative safety applications:
- Co-operative Awareness Systems extend the horizon of the in-vehicle systems by data exchange between a net of vehicles and infrastructure. The information typically includes dangerous road conditions, adverse weather conditions, obstacles, complex road situations like tunnels etc. Typical applications are such as extended blind spot applications, enhanced ACC with Stop and Go, weather and obstacle warnings etc.
- Cooperative Assistance Systems will rely mainly on the data from the infrastructure to the vehicle. The possible applications include management of traffic in safety critical situations (e.g. accident on a highway or in a tunnel), and local vehicle redistribution for improved safety. Typical applications include intelligent speed advisory, individualized traffic rerouting, co-operative intersections and co-operative longitudinal control with braking assistance.
- Co-operative manoeuvring is the most difficult set of applications. It will rely on vehicle-to-vehicle and vehicle-to-infrastructure communications. The manoeuvring strategies will be based on information exchange of the relative position and dynamics between the vehicles. Typical applications are negotiated entry to the motorway, negotiated lane change, safe overtaking and safe urban intersections.
4.2 Applications for improved efficiency The applications that aim at improved traffic efficiency will rely on the information collected from two sources:
- The infrastructure component of the Co-operative Systems is expected to collect information on the local conditions, e.g. on weather, road conditions, traffic congestion etc, besides relaying the vehicle data
Page 454 of 490
- The vehicles in the Co-Operative Systems continuously collect information about their vicinity, and are able to pass this in real-time to the traffic control and management systems (as well as to other vehicles). This is the Co-operative monitoring concept.
Today’s traffic data acquisition is based on local sensors. Ongoing research is looking into so called Floating Car Data (e.g. X-FCD in GST). Intelligent Co-operative systems aim at joined monitoring concepts that complement the local sensor data with networkwide data from the vehicles. This higher-quality information can include location-based road and weather data, information about traffic (from travel times to whole time/position stamped travel profiles), information about accidents and incidents etc.
Furthermore, information about start and destination and desired travel time allows both network efficiency optimising and assisted individualised driving and guidance for individual passenger cars, and co-operative freight and fleet operations.
Typical applications in urban environments include Co-operative Network Management – optimising area traffic management using vehicle/driver destination information, co-operative area routing and rerouting aiming at optimised use of the network, and co-operative local traffic control that enhances the operation with information about approaching vehicles.
The Co-operative Inter-urban applications aim at offering all travellers a safe, efficient, comfortable and predictable journey. This area has not been much developed yet, but the applications could include co-operative highway management systems with entry/exit control, co-operative park and ride with information about arrival times and time-tables of public transport, co-operative rescue operations and co-operative work zone management.
4.3 Commercial applications The establishment of Intelligent Co-Operative Systems, with continuous communication to the vehicles would allow a myriad of commercial applications as well. These would typically have been introduced as stand-alone, but would benefit of additional functionality of Co-operative Systems (more information, wider bandwidth, increased user base). Examples of such services are Co-operative Dynamic Route Guidance, Enhanced Traffic and Travel Information, Fleet management, Infotainment, Mobile Internet etc.
It should be noted, however, that the introduction of commercial services may introduce legal problems (e.g. if the infrastructure is publicly funded), as well as competition issues with other providers of communications services.
Page 455 of 490
5. Intelligent Cooperative Systems in Europe 5.1 The eSafety Forum Communications Working Group The eSafety Forum was establishes in 2002 to promote and accelerate the development, deployment and use of Intelligent Vehicle Safety Systems. In March 2005, the Forum established a new Working Group on Communications (Chair: Uwe Daniel, Bosch). The group will play a crucial role in defining the European approach to the communications aspects of the Intelligent Vehicle Safety Systems.
The group had its first meeting in October 2005, and has already managed to include representatives of all stakeholders, including the public sector (road authorities, road operators etc) in its work. The group will focus especially on spectrum issues and standardisation, helping the Commission in informing the CEPT and Radio Spectrum Committee (RSC) and in defining the needs for the European standardisation work at ETSI, CEN and ISO (working together with ITSSG), and it will also follow the international developments in the U.S. and Japan. Its work will encompass all communications technologies (not only WLAN or WAVE based).
5.2 The i2010 Intelligent Car Initiative In June 2005, the Commission adopted the i2010 initiative: European Information Society 2010 for growth and employment. As one of the three flagship projects proposed by the i2010 initiative, the Commission is finalising a new Communication: Intelligent Car Initiative, "Raising Awareness of ICT for Smarter, Safer and Cleaner Vehicles". The Communication will be adopted in mid-March 2006.
The Intelligent Car Initiative, presented in the Communication, has three objectives: (1) to co-ordinate and support the work of stakeholders through the eSafety Forum, to support research and technological development for smarter, cleaner and safer vehicles, and to create awareness of ICT-based solution for safer and more efficient transport.
Within the first objective, the work will address the issues of spectrum needs for cooperative systems. The i2010 Intelligent Car Initiative will offer the highest level political support and a coordination mechanism for the discussions on spectrum implications.
5.3 Car2Car Communications Consortia Car2Car Communication Consortium is an industrial non-profit organisation initiated by European vehicle manufacturers, open for suppliers, research organisations and other partners. The members include Audi, BMW, DaimlerChrysler, Fiat, Renault and Volkswagen. The primary goal of the consortium is to establish an open European industry standard for Car2car communications systems based on WLAN components, and to guarantee European-wide inter-vehicle operability. The consortium has strongly promoted the allocation of the frequency band at 5.9 GHz range for safety-critical automotive use. From European perspective, it should be noted that the Car2Car consortium is not open for the public sector partners and that it promotes mainly car-to-car communication. Its technology choices have so far followed the U.S. choices. This is

Page 456 of 490
why the eSafety Forum Communications Working Group may present a better platform for all stakeholders in Europe to come together and debate the future directions of the Co-operative Systems. 5.4 RTD Activities – FP5 and FP6 Call 1 Work has been going on the development of pre-cursor technologies for Intelligent Cooperative Systems for quite some time. Projects were launched already under the IST Programme of FP5, and this work has continued under the IST priority of FP6. The most important projects are the following: CarTalk2000 was a European funded project in the 5th framework which ended in July 2004. The objectives were the development of a self-organising radio system for intervehicle and vehicle-infrastructure communication considering the extremely high dynamic changes of the network topologies. The results had been tested and demonstrated in probe vehicles in real traffic scenarios.
GST, Global systems for Telematics, is a European funded Integrated Project (IP) in the 6th framework. The main GST objectives are the development of an overall system architecture for end-to-end telematics, including the use of the car itself as a floating traffic sensor where vehicles monitor and report the road network status situation in their vicinity. GST goals also include the development and validation of cost-effective broadcast mechanisms to communicate safety-relevant information to drivers, and ensuring a fast, reliable and safe pan-European response to vehicle incidents (based on eCall)..
EASIS – Electronic architecture and system engineering for integrated safety systems, is a project in the 6th framework, developing vehicle on-board electronic hardware infrastructure which supports the requirements of integrated safety stand-alone and cooperative systems.
PReVENT – Preventive and active safety applications, is an Integrated Project (IP) in the 6th framework. Two project objectives are relevant for Co-Operative Systems. One is the development of a system for on-board hazard detection, in-car warning management and decentralised warning distribution by communication between moving vehicles on a road network. The other one is the improvement of safety in intersections based on sensor systems and communications.
5.5 RTD Activities – FP6 Call 4 In 2004, the Commission published the 4th call of the IST Programme, which focused on Co-operative eSafety Systems. The proposals have been evaluated and the resulting projects will all start in early 2006. The most relevant projects are the following:
Page 457 of 490
CVIS is a 48-month Integrated Project with 67 partners (Coordinator: ERTICO) aiming at developing and integrating the essential basic and enabling technologies such as multichannel communications, highly accurate positioning and local map module, plus open software for a common platform unit, adaptable for vehicle or roadside unit. The project’s budget is about 45 million € and community contribution 21.9 million €. CVIS will develop a set of basic technologies and applications for urban, inter-urban, fleet&freight management, monitoring and public transport, and test these at six test sites. The CVIS architecture is based on a common in-vehicle platform that implements the full CALM router in the car.
SAFESPOT is a 48-month Integrated Project with 49 partners (Coordinator: CRF), aiming at developing “Safety margin assistant” which will extend in space and time the information available to the driver by using both the infrastructure and other vehicles as sources. SAFESPOT uses flexible and modular communications architecture and accurate relative positioning, and will develop key enabling technologies and test them in real conditions. The total budget of SAFESPOT is 44.5 million €, with 20,6 million € Community funding.
COOPERS is a 48-month Integrated Project with 39 partners (Coordinator: via Donau), targeting better use of the available infrastructure capacity. The project focuses more on the infrastructure and the role of the road operators in providing efficient and environmentally sustainable transport to increasing number of vehicles. It will deploy convergent communications networks (I2V) to exchange safety relevant data and build the necessary in-vehicle communications unit. The total budget of COOPERS is 18.5 million €, with 9.8 million € Community funding.
COMeSafety is a 48-month Specific Support Action with 7 partners (Coordinator: BMW). COMeSafety will support the eSafety Forum with respect to all issues related to car-to-car and car-to-infrastructure communications, as the basis for co-operative road transport systems. The project aims at aiding in the allocation of dedicated frequency band for automotive use, prepares the standardisation work, and will also promote harmonised approach with U.S. and Japan. It will work closely with the eSafety Forum Communications WG. The total budget of COMeSafety is 1.8 million €, with1.1 million € Community funding.
eSafetySupport is a 36-month Specific Support Action, 100% funded by the Community (Coordinator: ERTICO). It will continue the activities of eScope, but with wider agenda supporting the eSafety Forum, disseminating information on eSafety, and with specific support actions for eCall, User Outreach and Implementation Road Maps. (see www.eSafetySupport.org)

Page 458 of 490
5.6 National Activities
FleetNet – Internet on the road, granted by the German Federal Ministry of Education and Research, ended in December 2003. The main objective of this project was the development of a communication platform for inter-vehicle communications in order to improve drivers’ and passengers’ safety and comfort. Emphasis had been put on the specification of protocols for vehicle ad hoc networks, the geo-based routing and the internet integration. The communication protocols and applications developed in FleetNet were implemented in a demonstrator using WLAN-technology/ Network on wheels, is the successor of FleetNet started in June 2004 and again funded by the German Federal Ministry of Education and Research. In this project emphasis is put on verifiable specifications, the implementation of a reference system and standardization via the C2C-CC. INFONEBBIA, a project promoted by the Italian Ministry of Transport, funded by the major Italian road operator, ANAS S.p.A. Ente Nazionale per le Strade. The project objectives include the cooperation of vehicles and infrastructure for the preventive provision of information about the presence of dense fog on the highways. Already one test site on the A4 highway has been installed and started its testing, the test site includes the installation of visibility sensors and communication systems on the road.
Invent – intelligent traffic and user friendly technology, is a frame for several projects running from 2001 until 2005 funded by the German Federal Ministry of Education and Research. Related to Co-operative systems is the project “Traffic Performance Assistance”. The goal of this project is to increase the traffic flow by self-organisation of traffic through information distribution in the traffic network. This includes the detection and interpretation of the driving environment.
6. International Initiatives Cooperative System technology developments are moving fast in both U.S. and in Japan, with large-scale national programmes supported by substantial budgets and enjoying the support of industrial players.
6.1 USA: VSC and VII The Vehicle Safety Communications project (VSC) was a 2.5-year program that started in 2002. Its members were BMW, DaimlerChrysler, Ford, GM, Nissan, Toyota and VW. The project aimed to identify and evaluate the safety benefits of Cooperative Systems, to assess their communications requirements and to develop next generation DSRC system also contributing to standards. The project has published its final report. One of the main conclusions was that 5.9 GHz DSRC is potentially the best technology for Co-operative applications.
The Vehicle-Infrastructure Integration (VII) initiative is the main programme in the area of Cooperative Systems in U.S. It is a cooperative effort between federal and state departments of transportation (DOTs) and vehicle manufacturers, including FHWA, NHTSA and FMCSA from U.S. DOT, 10 state DOTs, BMW, DaimlerChrysler, Ford, GM, Nissan, Toyota and Volkswagen.
Page 459 of 490
The goal of VII is to evaluate the technical, economic and social/political feasibility of deploying a communications system, based on WLAN – IEEE 802.11 p technology in 5.9 GHz, to be used primarily for improving the safety and efficiency of nation’s road transportation system. Also commercial use is planned. Field operational tests are planned for 2007, and a major go/no go decision in the VII deployment is expected in 2008.
The automotive industry has proposed as the share of responsibilities that the government deploys the nationwide network of roadside units (vehicle manufacturers deploy the in-vehicle units). The initial network would be some 300.000 roadside units, and would cost 2.5 – 3.0 Billion USD to deploy and 100 Million USD per year to operate.
6.2 Japan: ASV, AHS and Smartway The situation in Japan regarding the development and deployment of Co-operative Systems is more complex. This is because two main initiatives exist, namely vehicle (ASV) and infrastructure (AHS). These were initially under two ministries, but belong now both of them to Ministry of Land, Infrastructure and Transportation (MLIT).
The initiative aiming at combining both of these is called Smartway. Smartway is a road or highway which enables a wide range of information to be exchanged amongs all its users, creating a platform for ITS services. Smartway consists of systems communicating between the road and the cars, and a variety of sensors.
ASV stands for an Advanced Safety Vehicle. The current generation is ASV-3. ASV builds on C2C communications, and field tests are taking place in 2005. AHS stands for Advanced Highway Systems, and is promoted by Advanced cruise assist Highway System Research Association (ASHRA). AHS is based on similar technologies than ASV, but obviously with V2I communications. Several AHS technologies have been field-tested in Japan in 2003 and 2004. In 2005, Japan organised a large showcase of AHS and ASV technologies in Hokkaido.
The level of co-operation between ASV and AHS programmes is not known. Neither is it clear if the components will be promoted individually, or under the Smartway concept.
The two other factors that are important re the Japanese situation are the following:
-There is a huge number of government bodies involved, including MLIT, Ministry of Internal Affairs and Communications, Ministry of Economy, Trade and Industry, National Police Agency, as well as various fora and research institutes: ITS Forum, Association of Radio Industries and Businesses, National Institute of Advance Industrial Science and Technology and Japan Automobile Research Institute.
- There is a very large installed base of in-vehicle systems in Japan, for example about 15 million navigation units out of which close to 10 million are equipped with VICS, real-time traffic and travel information service. The number of Electronic Toll Collection (ETC) on-board units is growing rapidly and is now over 4 million.
The large number of installed vehicles explains the thrust in Japan to go towards DSRC technologies as well. The Japanese approach is that the public sector builds the basic services for information and safety, which makes buying the on-board unit more attractive. The announced plan for the 2nd Stage of ITS Deployment (2007) is based on the concept of Universal On- Board Unit, on which all the services are based.
Page 460 of 490
6.3 International Workshop on Vehicle Communications In November 2005, the US DoT, MLIT from Japan and DG Information Society and Media from EC organised jointly with industry's support a Workshop on Vehicle Communications in San Francisco, USA. This workshop, following the San Francisco ITS Congress, was very successful, joining over 70 experts from the three regions. Four expert panels were organised, addressing applications, technologies, business case and deployment models, and privacy and standardisation. The conclusions of the Workshop are available at eSafety websites.
7. Deployment Strategies Deployment is a critical issue for Co-Operative Systems. Several deployment strategies and associated business models can be envisaged. The general understanding is that the deployment needs some type of public-private partnership for financing and risk-sharing. In U.S., the VII initiative has come up with a list of 10 "Day 1" applications. Although a "killer application" may not exist, the initial set of applications should be such that it provides value for all stakeholders, including the user/consumer.
Applications vs. market penetration
The available functionality of the applications will depend on the market penetration, and for some applications there may not be immediate benefit for the car driver who buys such a system:
• For infrastructure-based systems, there is no market penetration based threshold. If the public sector invests in the infrastructure (e.g. local hazard or weather warnings), an equipped vehicle gets immediately the benefit.
• For de-centralised traffic information (vehicles as probes), the required level of market penetration is very low, between 2% and 5%.
• For co-operative assistance systems such as road congestion and condition warnings based on communicating vehicles, penetration of over 10% is needed.
• Finally, for co-operative manoeuvring such as intersection collision avoidance, assisted lane change etc, penetration of over 95% is needed.
Equipment rates vs. market penetration
The renewal rate of the car fleets in Europe varies greatly depending on the market. The general conclusion, however, that achieving reasonable penetration values will take a long time. For example, for the German market:
• If all new cars are equipped, reaching 10% will take a bit less than 2 years, and 50% takes over 7 years
• If 25% of cars are equipped (this represents currently all cars with navigation system), reaching 10% will take 6 years and full 25% 13 years.
Page 461 of 490
Deployment strategies
From the above, it can be concluded that
• The public sector and the private sector have to work together and analyse different cost-benefit scenarios in order to come up with optimal deployment scenarios
• Equipping the vehicles in market-led way will not achieve the desired result (e.g. upper and middle class are less than 8% of the market, not sufficient for the applications) or will take by far too long
It is probable that sufficient market penetration can be achieved only by public sector intervention, either in the form of investment in the infrastructure (immediate benefit to equipped users) or making Intelligent Co-operative Systems mandatory.
Security and Privacy
Security and Privacy are issues that have to be carefully assessed and addressed in the design of the Co-operative Systems. Several threats potentially exist: fake messages causing disruption of traffic or even danger, compromising drivers' private information etc. The issues to be addressed include:
Trust - vehicles should be able to trust the messages they receive
Anonymity - the communications should not make the vehicle tracking or identification possible for non-trusted parties
Resiliency - the system must be resilient for interference, allow for easy maintenance etc
Efficiency - possibility to authenticate messages in real-time
8. Conclusions and Next Steps What is at stake?
The automotive industry is a major contributor to EU growth, employment and health. The car production in Europe was in 2004 19.9 million units (out of which 18 million passenger cars), corresponding to 31.6% of the total production worldwide. Europe is also the largest world market for automobiles, with 19.7 million new registrations in 2004 (out of which 14.9 passenger cars), corresponding to 42% of the worldwide total.
The automotive industry with its suppliers employs directly 2 million people in Europe, offering indirect employment to 12 million – about 10% of the total in Europe. ACEA members world-wide invest about 5% of their global turnover to RTD, in 2003 this figure was 19 billion euro. The automotive industry operates globally, and over the last years the efforts for getting economies of scale and synergies by streamlining car models and production facilities world-wide have intensified. More and more the companies are turning to common components and car platforms.
From this background it is understandable that the automotive industry favours the same global solutions for Intelligent Co-operative Systems. This would minimise the RTD costs, and allow larger production series.
Page 462 of 490
What should be done?
Europe, as the largest producer and largest market should take a leading position in the development, standardisation and market introduction of Intelligent Co-operative Systems, in order to:
• Ensure the competitiveness and technological leadership of our automotive industry on the world markets
• Assure that the developed solutions fulfil the European needs as comes to our transport policies, safety, efficiency of transport services and sustainability
• Assure that the developed systems take into account Europe’s existing and future physical and information infrastructures such as TEN and EGNOS/Galileo, the characteristics of our road networks and special characteristics of our urban conglomerations
• To assure that the developed applications and services are economically viable and fulfil the needs of our citizens
Next Steps
• Workshop on Spectrum Requirements, Brussels on 28 February 2006 (for RSC, ETSI and CEPT experts, industry, eSafety Forum)
• Discussions on the spectrum requirements continued in the Radio Spectrum Committee in June 2006
• eSafety Forum Communications WG working on standardisation and spectrum needs (next meeting: Munich, 7 April, 2006)
• Work continues in the RTD and support projects CVIS, SAFESPOT, CVIS, COOPERS, COMeSafety, eSafetySupport
• Work continues in ISO, ETSI and CEN on standardization
• 2nd International Workshop on Communications, organised by COMeSafety, London 13 October 2006
• Architecture Workshop on Co-Operative Systems, Brussels, July 2006
• eSafety Forum Plenary discusses communications issues (Brussels, November 2006)

Page 463 of 490
CHAPTER VI - APPENDIXES
Page 464 of 490
6.1 Acronym list 3GT: 3rd Generation Telematics
ABS: Anti-lock Braking System
ACC: Adaptive Cruise Control
ACEA: Association of European Automobile Manufacturers
ACNS: Automatic Crash Notification System
ACP: Applications Communications Protocol
ACU: Antenna Control Unit
ADAS: Advanced Driver Assistance Systems
ADC: Automatic Distance Control
ADS: Automatic Dependent Surveillance
ADS-B: Automatic Dependent Surveillance Broadcast
AECU: Airbag Electronic Control Unit
AEI: Automatic Equipment Identification
AF: Alternative Frequency
AFC: Automated Fare Collection
AFS: Advanced Frontline System
AGVs: Automatically Guided Vehicles
AHS: Automated Highway System
AHSRA: Advanced Cruise-assist Highway Systems Research Association, Japan
AID: Automatic Incident Detection
AIS: Automatic Identification System
ALERT: Advice and problem Location for European Road Traffic
AMI-C: Automotive Multimedia Interface Consortium
Page 465 of 490
ANB: Automatic emergency brake assist
ANPR: Automatic Number Plate Recognition (see also ANI)
API: Application Programming Interfaces
APTS: Advanced Public Transport Systems
ASIC: Application Specific Integrated Circuit
ASV: Advanced Safety Vehicle
ATCS: Advanced Traffic Control Centres
ATIS: Advanced Traveller Information System
ATMS: Advanced Transportation Management Systems
ATT: Advanced Transport Telematics
AVC: Automated Vehicle Classification
AVCS: Advanced Vehicle Control Systems
AVI: Automated Vehicle Identification
AVL: Automated Vehicle Location
AVNI: Automatic Vehicle Number Identification (see also ANPR)
BAS: Brake Assist System
BSM: Blind Spot Monitor
C2CC: Car-to-Car Communication Consortium
CAG: Core Architecture Group
CALM: Continuous Air interface for Local and Medium range communications
CAN: Controlled Area Network
CCS: Collision Countermeasure System
CCTV: Close Circuit Television
CEN: Comité Européen de Normalisation
CGALIES: Coordination Group on Access to Location Information by Emergency Services
Page 466 of 490
CLI: Caller Line Identification
CMV: Commercial Motor Vehicle
CNS: Communication, Navigation and Surveillance
CRD: Child Restraint Device
CVHS: Co-operative Vehicle Highway System
CVIS: Cooperative Vehicle-Infrastructure Systems
CVO: Commercial Vehicle Operation
CWS: Collision Warning System
DAB: Digital Audio Broadcasting
DARC: Data Radio Channel
DAS: Driver Assistance System
DATEX: Data Exchange Network
DDB: Digital Data Broadcasting
DFD: Data Flow Diagram
DG eCall: Driving Group on eCall
DGPS: Differential global positioning systems
DIS: Driver Information System
DMS: Dynamic Message Sign
DOA: Direction Of Arrival
DRM: Digital Rights Management
DSRC: Dedicated Short Range Communication
DTA: Dynamic Traffic Assignment
DTMF: Dual Tone Multiple Frequency
DVSMS: Dynamic Vehicle Safety Management System
EC: European Commission
Page 467 of 490
ECDIS: Electronic Chart Display and Information Systems
ECU: Electronic Control Unit
EDI: Electronic Data Interchange
EFC: Electronic Fee Collection
EG: eCall Generater
EGNOS: European Geostationary Navigation Overlay Service
EMC: ElectroMagnetic Compatibility
ENC: Electronic Navigational Charts
EOS: End Of Service
EP: Electronic Payment
EPS: Electronic Payment System
ESC: Electronic Stability Control
ESP: Electronic Stability Program
ETA: Estimated Time of Arrival
ETC: Electronic Toll Collection
ETSI: European Telecommunications Standardisation Institute
EUCAR: European Council for Automotive Research
Euro NCAP: European New Car Assessment Programme
EV: Emergency Vehicle
FCD: Floating Car Data
FCW: Front-end Collision Warning
FET: Future and Emerging Technologies
FLIR: Forward Looking Infrared Radar
FOAM: Framework for Open Application Management
FSD: Full Set of Data
Page 468 of 490
FVD: Floating Vehicle data (see also FCD)
GATS: Global Automotive Telematics Standard
GDF: Geographical Data Files
GE: Ground Equipment
GIS: Geographic Information Systems
GNP: Growth National Product
GNSS: Global Navigation Satellite System
GPRS: General Packet Radio Service
GPS: Global Positioning System
GRD: Geographical Road Database
GSM: Global System for Mobile Communications
GST: Global System for Telematics Integrated Project
GTP: Global Telematics Protocol
HGV: Heavy Goods Vehicle
HMI: Human Machine Interface
HOV: High–Occupancy Vehicle
HTML: Hyper Text Markup Language
HTTP: HyperText Transfer Protocol
I2I: Infrastructure-to-Infrastructure
IC: Integrated Circuit
ICC : Intelligent Cruise Control
ICN: Integration Information, Communication and Navigation
ICT: Information and Communication Technologies
ID: Identification
IENC: Inland Electronic Navigational Charts
Page 469 of 490
IETF: Internet Engineering Task Force
IIMS: Integrated Incident Management Systems
INTI: Integrated Network of Transportation Information
IP: Integrated Project, Internet Protocol
IPR: Intellectual Property Rights
IR: Infrared
ISA: Intelligent Speed Adaptation
ISC: Integrated Ship Control
ISO: International Standards Organisation
ISP: Information Service Provider (see also VASP)
ISRN: International Standard Road Number
ITS: Intelligent Transport Systems and Services
ITSSG: Intelligent Transport Standards Steering Group
IVHS: Intelligent Vehicle–Highway Systems
IVI: Intelligent Vehicle Initiative
IVS: In-Vehicle System
IVSS: Intelligent Vehicle Safety Systems
IVU: In-Vehicle Unit
LBS: Location-Based Services
LDW: Lane Departure Warning system
LIDAR: Light Detection And Ranging
MAGIC: Mobile Automotive Geographic Information Core
MID: Moulded Interconnect Device
MM: Millimetre-wave Microwave communications
MMI: Man-Machine Interaction
Page 470 of 490
MoU: Memorandum of Understanding
MSC: Mobile Switching Centre
MSD: Minimum Set of Data
MSG: Mobile Standardisation Group
NEMO: NEtwork MObility standard
NGSS: Next Generation Satellite System
NIC: New Information and Communications
OBC: On-Board Computer
OBE: On-Board Equipment
OBU: On-Board Unit
OCC: Operational Control Centre
OEM: Original Equipment Manufacturer
OIS: On-board Information System
OESGi: Open Service Gateway Initiative
P2P: Point-to-Point
PC: Personal Computer
PCS: Personal Communication Systems
PDA: Personal Digital Assistant
POI: Point Of Interest
PPP: Public/Private Partnership
PSAP: Public Safety Access Point
PT: Public Transport
PTT: Predictive Travel Times
RDS: Radio Data System
RDS-TMC: Radio Data Systems incorporating a Traffic Message Channel
Page 471 of 490
RDWS: Road Departure Warning System
RF: Radio Frequency
RFID: Radio Frequency Identification
RNP: Required Navigation Performance
RSC: Roll Stability Control system
RSC: Radio Spectrum Committee
RTA: Requested Time of Arrival
RTD: Research and Technical Development
RTI: Road Traffic Informatics
RTM: Road Traffic Management
RTPI: Real-Time Passenger Information
RTTI: Real-Time Traffic and Travel Information
Satnev: Satellite navigation
SDK: Service/Software Development Kit
SDS: Spatial Distributed Sources
SG: Steering Group
SMS: Short Message Service
SP: Service Provider, Sub-project
SP ID: Service Provider Identification
SPV: Special Purpose Vehicle
SRR: Short Range Radars
SRS: Systems Requirement Specifications
TA: Traffic Announcement
TCC: Traffic Control Centre
TCP/IP: Transmission Control Protocol / Internet Protocol
Page 472 of 490
TEN: Trans-European Network
TEN-T: Trans-European Network – Transport
TERN: Trans-European Road Network
TI: Traffic Information service
TIC: Traffic Information Centre
TICS: Transport Information and Control Systems
TM: Traffic Management
TMC: Traffic Message Channel
TP: Traffic Programme
TSI: Technical Specifications for Interoperability
TSS: Track-Side System
TTI: Traffic and Travel Information
UCC: Unified Chassis Control
UDP: User Datagram Protocol
UMTS: Universal Mobile Telecommunication System
USIM: Universal Subscriber Identity Module
USSD: Unstructured Supplementary Service Data
UUS.1: User to User Signalling
V2I: Vehicle-to-Infrastructure
V2V: Vehicle-to-Vehicle
V2X: Vehicle-to-Vehicle and Vehicle-to-Infrastructure
VAS: Value-Added Services
VASP: Value-Added Service Provider (see also ISP)
VDS: Variable Direction Sign
VDU: Vehicle Display Unit
Page 473 of 490
VII: Vehicle-Infrastructure Integration
VIN: Vehicle Identification Number
VMS: Variable Message Signs
VoIP: Voice-over-IP
VRM: Vehicle Relationship Management
VRP: Vehicle Routing Problems
VRU: Vulnerable Road User
VSI: Vehicle System Interface
VTMIS: Vessel Traffic Management and Information System
W3C: World-Wide Web Consortium
WAP: Wireless Application Protocol
WG: Working Group
WIFI: Wireless Fidelity
WIM: Weigh In Motion
WLAN: Wireless Local-Area Network
XFCD: Extended Floating Car Data
Page 474 of 490
6.2 eSafety Glossary 112:
The Pan-European emergency call number
3GPP:
The 3rd Generation Partnership Project (3GPP) is a collaboration agreement that was established in December 1998. The collaboration agreement brings together a number of telecommunications standards bodies, which are known as “Organisational Partners”. The current Organisational Partners are ARIB, CCSA, ETSI, ATIS, TTA, and TTC.
ABS (Anti-lock Braking System):
Originally developed for aircraft braking systems, uses computer-controlled valves to limit the pressure delivered to each slave cylinder. If a wheel locks up, steering input cannot affect the car's direction. With ABS, no matter how hard the pedal is pressed, each wheel is prevented from locking up and skidding is prevented. Since ABS pumps the brakes, a driver can apply constant pressure on the brake pedal and concentrate on steering the car. This allows the driver to regain control during inclement weather or quickly avoid a collision. ABS is available for nearly all new cars and trucks and is standard equipment on many.
ACC (Adaptive Cruise Control):
Cruise control system that uses sensors to automatically maintain a safe distance from the vehicle ahead, adapting to speed changes, etc
Adaptive Brake Lights
Triggered by the strengths of brake activation the rear brake lights are iluminated in different kinds to indicate emergency braking manoeuvres to the following vehicles.
Adaptive Head Lights
The system consists of electromechanical controlled headlights to ensure optimum illumination of the lane in bends. The headlight is directed into the bend as soon as the vehicle begins cornering. A reduction of the glare to the upcoming vehicles is possible. Vehicle speed, yaw-rate and steering wheel angel can be used as input data for the controller of the system.
ADAS (Advanced Driver Assistance Systems):
In-vehicle technologies designed to improve vehicle safety by aiding the driver, such as collision avoidance, curve warning, distance control, etc
Page 475 of 490
ADC (Automatic Distance Control):
The system is already available on the marked and is activated when the speed control system determines the need for driver response. The next-generation ADC+F2S (F2S = follow to stop) system will be able to automatically bring the vehicle to a full stop behind the car ahead if necessary. It will also be possible to generate a collision warning, to brake ahead of a stationary obstacle, to identify bends in the road ahead and to perform light braking manoeuvres ahead of curves.
AFS (Advanced Frontline System):
Concept of intelligent lighting, according to curves, weather and speed
AHS (Automated Highway System):
Research initiative aimed at developing automatic guidance on motorways for vehicles using cruise control
AID (Automatic Incident Detection):
Radar- or video-controlled system enabling rapid location of an incident or accident on tunnels and motorways
Airbiquity:
Digital modem over voice channel
Alcolocks:
Alcohol interlocks (also termed ‘alcolocks’) are devices that require the driver to take a breath test before starting the car.
ALERT (Advice and problem Location for European Road Traffic):
Protocol used for traffic messages by RDS-TMC
AMI-C (Automotive Multimedia Interface Consortium):
Non-profit corporation of worldwide vehicle manufacturers which aims to develop a set of common specifications for a multimedia interface to motor vehicle electronic systems to accommodate a variety of computer-based electronic devices in the vehicle.
ANB (Automatic emergency brake assist):
Page 476 of 490
Work is ongoing to refine the ANB developed on the basis of engineering solutions already being applied in series production. Vehicles featuring this system will be equipped with the radar sensor used in automatic distance control systems. This sensor provides information on the distance to the vehicle ahead or to any obstructions. Hence, if the ANB should conclude that a braking manoeuvre could reduce the impact of an impending accident, it will initiate a hard stop in order to keep the severity of the accident to a minimum.
Assisted or automatic parking:
As the vehicle passes a parking spot, the system ascertains the dimensions of the available space and of any obstacles. Once it has evaluated this sensory data, it automatically calculates the ideal parking manoeuvre. The driver then presses the button which activates the parking assistant, and the car steers itself into the space in reverse gear.
Attention control system:
A camera installed in the cockpit to monitor the driver’s blinking movements will eventually help to save lives, given that 25 percent of all road deaths are attributable to the sleepiness of drivers. The development of the attention control system is aimed at eliminating the risk of driver inattentiveness. The camera keeps a constant track of the frequency and duration of eyelid movement. If it perceives the driver to be at risk of sleepiness, the system will warn the driver ahead of time to take a break from driving and recover to a state of full attention.
Automatic Headlight Activation
When activated, the system switches on the headlights automatically when major environmental conditions for the use of headlights are present. The system detects the darkness and the light conditions in the environment.
AVI (Automated Vehicle Identification):
A system which transmits signals from an on-board tag or transponder to roadside receivers for uses such as electronic toll collection (ETC) and stolen vehicle recovery
AVL (Automated Vehicle Location):
Location system, in particular for buses and heavy-goods vehicles, used widely in fleet management utilising technologies such as GSM, GPS and Internet
BAS (Brake Assist System):
Safety system amplifying the brake force in case of emergency
BIVAS:
Inland navigation intelligent demand and supply system
Page 477 of 490
BSM (Blind Spot Monitor):
Vehicle-based sensor system that detects other vehicles located to the host’s side and rear, warnings (visual/audible) are given to the host driver, increased warnings indicate potentially hazardous lane changes. BT (Bluetooth): Bluetooth is a computing and telecommunications industry specification that describes how mobile phones, computers and PDAs can easily interconnect with each other and with home and business phones and computers using a short wireless connection.
CAN (Controlled Area Network):
Data bus which enables computerised exchanges in a high bandwidth
CCS (Collision Countermeasure System):
Infrastructure-based system using fixed roadside sensors to monitor the presence and speed of vehicles approaching critical road points (intersections, blind curves, gradients etc); dynamic signs warn approaching drivers of a potential collision in real-time.
CEN (Comité Européen de Normalisation):
European Standardisation Committee
Collision Avoidance:
The automatic control of longitudinal and/or lateral movement of the vehicle in order to avoid potential collisions.
Commercial vehicle administrative processes:
A service which allows trucks and bus companies to electronically pay for vehicle registration and other motor carrier taxes and licences.
CVIS (Cooperative Vehicle-Infrastructure Systems):
R&D project under the 6th Framework Programme
CWS (Collision Warning System):
Infrastructure- or vehicle-based radar technology that senses the presence and motion of two or more vehicles and provides warning (external or internal) to host (or both vehicles) of imminent collision.
DAB (Digital Audio Broadcasting):
Standard which enables the high-quality transmission of text, data and sound at a higher data rate

Page 478 of 490
DARC (Data Radio Channel):
A digital data transmission method using FM radio that is compatible with RDS and offers a higher bit rate (10 kbits/s)
DATEX (Data Exchange Network):
Agreement between European traffic centres to exchange traffic and travel information
Dead reckoning:
A technique that calculates the current location of a vehicle by measuring the distance and direction that the vehicle has travelled since leaving a known starting point
DG eCall:
Driving Group on eCall under the eSafety Forum
DGPS: Differential global positioning systems, a means of improving GPS auccuracy by using a signal from a fixed reference location.
Digital Tachograph:
An electronic system fitted to commercial vehicles to record driver information and details about driving time and distance
Driver monitoring:
Observation of the driver’s condition and way of controlling the vehicle and the evaluation of possible deviation from the driver’s normal behaviour
DSRC (Dedicated Short Range Communication):
Standard enabling data transmission at a frequency of 5.8 GHz
DVSMS (Dynamic Vehicle Safety Management System):
By helping drivers avoid accidents, these systems help reduce fatigue and stress, allowing the driver to feel more confident and in control. So, by integrating or enhancing existing active steering, braking and suspension systems, DVSMS performs at a higher level than today’s brake-based stability systems. The future vision of DVSMS includes vehicle dynamics sensor integration with active chassis controls. When coupled with our Driver State
Page 479 of 490
Dynamic control systems
Active Front Steering, Electronic Stability Program, Active Body Control - several applications belong to this group
Dynamic route guidance:
A navigation system which uses real time traffic information to plot optimal routes based on current conditions.
Dynamic traffic management
Influencing traffic flow by influencing speeds, lane use, route choice, merging operations by employing variable message sings (VMS) in order to improve safety and network utilisation.
E112: Location-enhanced Pan-European emergency call number
eCall: An emergency call either generated manually by vehicle occupants or automatically via activation of in-vehicle sensors when an accident occurs
Edge Detection:
Image-processing technique to identify object outline, usually the road ahead.
EDI (Electronic Data Interchange):
A standard form of electronic communication used mainly for electronic commerce and document interchange
EFC (Electronic Fee Collection):
A system that enables automatic debiting/payment for a transport service without any action from the user at the moment of use - example: automatic toll collection
EGNOS (European Geostationary Navigation Overlay Service):
A positioning system designed to augment satellite navigation systems and which will ultimately form part of the Galileo satellite navigation system; typically used for air applications
Electronic clearance:
A process that allows commercial vehicles to pass a checkpoint at normal highway speeds without stopping to be checked for hard copy credentials, weight and safety status.
Page 480 of 490
EMC (ElectroMagnetic Compatibility):
Is concerned with the prevention of interference that can occur between electrical and electronic products or systems. Any electrical apparatus has the ability to generate interference or be affected by interference.
E-MERGE project:
Pan-European Harmonisation of Vehicle Emergency call Service Chain
Enhanced night vision:
This system uses an infrared unit to identify pedestrians or any possible sources of hazard. After identifying pedestrians and their position or distance from the vehicle, the system informs the driver of the potential risk they pose.
eSafety:
The objective of eSafety is to accelerate the development, roll-out and use of vehicle safety systems through research, co-ordination and information. There are two possible kinds of systems and both are included: stand-alone devices like the Electronic Stability Control (ESC), which helps control the vehicle in critical situations, and the more advanced so-called Driver Assistance Systems.
ESP (Electronic Stability Program):
Safety function linked to brake sensors and traction control which enables cars to correct their trajectory on slippery roads and curves
Event data recorder
On-board EDR collect certain vehcile parameters to be stored in case of an accident. Those data, before, during and after the event, can be used for scientific, technical and legal purposes. Driver awareness of such a system might reduce the number and severity of drivers' crashes.
Extended environmental information
Data from different sources of the vehicle e.g. switched on lights, windscreen wipers on, fog lights on, informatin from ABS, stability control systems, can be used to create useful information about the environmental situation where the vehicle is driving.
FCD (Floating Car Data):
Floating car data are gathered from vehicles equipped with appropriate sensors (such as whether windscreen wipers are activated or the vehicle's location and speed) and then passed to traffic management centres that can evaluate this information for general traffic trends (see also FVD)
Page 481 of 490
FCW (Front-end Collision Warning):
Applied to vehicle front to prevent rear-end collisions with vehicles ahead.
FLIR (Forward Looking Infrared Radar):
Aerospace and defence industry technology, now automotive, that senses object motion relative to sensing platform in forward fields of view.
Galileo:
The European contribution to the Global Navigation Satellite System; full operational capability planned for 2008
GATS (Global Automotive Telematics Standard):
Open standard to enable a full range of traffic information and other telematics services
GDF (Geographical Data Files):
Map data exchange format
GIS (Geographic Information Systems):
Data management system designed to collect, analyse and report geographic and demographic information
GLONASS:
Russian Satellite Navigation system
GNSS (Global Navigation Satellite System):
The combined total of all satellite navigation and positioning systems operating around the world and offering signal reception worldwide
GPRS (General Packet Radio Service):
Standard for data transmission by packet, with a speed of 64 Kbits/s
GPS (Global Positioning System):
US satellite positioning system used to pinpoint geographic locations worldwide
GSM (Global System for Mobile Communications):
Digital cellular telephony system used in ITS services such as traffic information, emergency call and fleet management
Page 482 of 490
GST (Global System for Telematics Integrated Project):
R&D Project under the 6th Framework Programme
High quality traffic information
This is information to the driver about the traffic (congestion) and weather conditions for choosing the most effective route or for preparing to cope with the foreseeable situation ahead on the route.
HMI (Human Machine Interface):
Previously know as man-machine interface (MMI); means by which a user interacts with a machine and includes simple and advanced functions such as voice recognition, speech synthesis and touch screens
Incident detection:
Detection and identification of an abnormal traffic situation on the road, including a possible accident.
Incident management:
Detection and identification of a traffic incident, implementation of appropriate responsive actions and handling of the traffic until normal traffic conditions have been restored.
Info-structure: The databases, data capture equipment, communications systems and data processing procedures available to feed the information supply chain in ITS.
Infrastructure Based Warning Systems/Local Danger Warning
Warning systems about dangerous locations or situations do not necessarily ave to rely on vehicle-based technology. There are solutions, which are only based on the infrastructure to warn the drivers. Spot-wise warning can be given via variable message signs, flashing or electronic beacons, radar based excessive speed information.
Infrastructure maintenance management:
A service which covers the application of ITS to the management and upkeep of a road, communications and computer infrastructure.
Page 483 of 490
Integral handling control:
The system integrally regulates all active components (drive, brakes, steering, running gear) in any given situation. What makes this system so revolutionary in comparison to the active vehicle stability control systems used today – primarily in borderline situations – is the continued optimisation of vehicle handling and the fact that such handling can be easily individualised, meaning software is used which enables a vehicle’s running gear to be variously set from sporty to comfort handling at the mere push of a button.
Intermodality:
The ability to move freight or passengers between two or more modes of transport
Interoperability:
The ability of ITS systems to provide services to and accept services from other systems and to use these services to enable the systems to operate effectively together.
Inter-vehicle Hazard Warning
To transmit warnings about hazards and extended data to other vehicles in the vicinity, the function uses technologies of wireless local area networks between cars. Vehicle can be used as sender, receiver and relay stations for that information. Other technologies using communication infrastructure can provide local hazard warnings with the help of extended floating car data too.
In-vehicle signing:
On board display of roadside sign information. The information can be obtained either by short-range transmission from roadside beacons or from on-board data storage.
ISA (Intelligent Speed Adaptation):
Systems designed to alert drivers when they exceed the speed limit or are travelling dangerously slow, with some systems also offering dynamic correction capabilities
ITS (Intelligent Transport Systems and Services):
Any system or service that makes the movement of people or goods more efficient and economical, thus more "intelligent"
JAVA:
Device-independent programming language
Lane Keeping Assistant
Active lane-keeping support through additional and perceptible force e.g. in the steering wheel.
Page 484 of 490
LBS (Location-Based Services):
Services that depend on knowing the user's location to deliver user-specific information, such as real-time traffic updates or point-of-interest data
LDW (Lane Departure Warning system):
According to an analysis undertaken by the Volkswagen accident research unit, 18 percent of all accidents are attributable to drivers veering off the road. Volkswagen accident research has now come up with a system to counteract this phenomenon, which is already close to reaching series maturity. This assistance feature can identify a vehicle’s position in relation to lane boundary markings by way of cameras integrated into the vehicle. If the vehicle should deviate too strongly from its ideal course of travel, the system will send out a warning to the driver before he potentially goes off the road.
MAGIC (Mobile Automotive Geographic Information Core):
An industry consortium established to develop and promote an open industry specification for delivering navigation, telematics and related geographic information services across multiple networks, platforms, and devices
Map matching:
A technique to enhance and correct in-vehicle dead reckoning. Computer software follows the progress of the vehicle through an on-board digital map and matches the dead reckoned estimate of the current position to the closest point on the map in order to correct for accumulated sensor errors.
MID (Moulded Interconnect Device):
A mould-injected shell with the electric circuits integrated into the structure.
MOST Cooperation:
Cooperation between car manufacturers and OEM suppliers to develop a low cost, high bandwidth solution for data and multimedia in-vehicle applications
Obstacle & Collision Warning
System detects obstacles and gives warning when collision is imminent. Current solutions with limited performance are a separate feature of Adaptive Cruise Control systems, which use information obtained from radar sensors to give visual and acoustic warnings. Future systems wil use long/near range radar sensors or LIDAR and video image processing.
Obstacle Detection:
Vehicle systems that senses an obstacle in the planned path. Feedback-control loop to process sensors determines whether avoidance is necessary.
Page 485 of 490
On-Board Safety Monitoring:
Management systems that sense the safety status of a vehicle, cargo and/or driver at highway speeds.
PDA (Personal Digital Assistant):
Small, hand-held devices offering functions similar to a personal computer (though limited); also now offering access to some ITS services
Perceiving vehicle surroundings:
System which involves recording a complete take of all surroundings (360 degrees) using all available sensory data and combining this data to create a holistic model of the vehicle environment. The data generated provides a picture of the ambient setting and the given situation in such a way that the driver assistance systems will be able to identify any risks (e.g. blind spots before a lane change).
Precision Docking:
Automatic vehicle guidance systems for accurate and safe parking.
PSAP 1:
The Public Safety Access Point 1 is a physical location where emergency calls are first received.
PSAP 2:
The Public Safety Access Point 2 is a physical location where emergency calls are received from PSAP 1 and Emergency Vehicles are dispatched and incidents controlled.
RDS (Radio Data System):
Digital channel transmitted within the FM radio wavelength used to relay traffic messages
RDWS (Road Departure Warning System):
Warns of unintentional vehicle exiting of the roadside.
Road pricing:
Use of smart card technology or simple tags to charge road users based on criteria such as demand, congestion, time, or distance.

Page 486 of 490
Roll Stability Control system (RSC):
By continuously monitoring the vehicle’s movement and its relationship to the road surface, the RSC system automatically applies brakes and/or reduces engine power when a potential rollover situation is identified.
Runflat Indicator/ Tire Pressure Monitoring System:
In case of an air loss in a tire the system gives a warning to the driver. With the runflat indicator the system detects the different rotation speed of the tire, which is under-inflated. In case of a tire pressure-monitoring system the air presssure in each tire is directly measured and displayed if necessary.
SIM card:
A subscriber identity module (SIM) is a logical application running on a UICC smartcard. Although the terms UICC and SIM are often interchanged, UICC refers to the physical card, whereas SIM refers to a single application residing in the UICC that collects GSM user subscription information. The SIM provides secure storing of the key identifying a mobile phone service subscriber but also subscription information, preferences and storage of text messages. The equivalence of a SIM in UMTS is a Universal Subscriber Identity Module (USIM).
Smart card:
An electronic information carrier system that uses plastic cards - about the size of a credit card - with an imbedded integrated circuit that stores and processes information.
Speed Alert Forum:
Objective of the Forum is to be the reference of all stakeholders to support and promote European-wide implementation of in-vehicle speed alert applications
Telematics:
Combination of telecommunications and informatics
TMC (Traffic Message Channel):
Digital channel used to provide silent, coded messages to in-vehicle applications in order to display route and traffic information in a user's native language.
Traffic control:
The use of hardware software and actual humans to manage traffic. ITS brings additional computer power and advanced sensing technologies to this traditional transportation engineering field.
Page 487 of 490
Traffic information:
The provision of dynamic traffic and traffic-related information to drivers via either “collective” means (e.g. VMS) or individual in-vehicle terminals. In contrast to travel information, traffic information is generally characterised by shorter temporal and geographical spans, provided to drivers in the course of a trip.
Traffic management:
The combination of semi-automated control of traffic signs and signals, application of demand management techniques, and traffic information and advisories to achieve an optimal traffic flow throughout a defined management area (both urban and inter-urban).
Traffic monitoring:
Observation of traffic conditions on the road network by Closed Circuit Television (CCTV), or by automatic means.
Traffic signs recognition:
Prescribed speed limits can often change during the course of travel along a road, and the road signs are not always easy to follow. The system will offer a new quality of comfort and safety in this area. The system incorporates a digital display, which informs the driver of all the respectively applicable road signs along the motorway.
UCC (Unified Chassis Control):
Through software enhancements or by integrating two or more of these active chassis subsystems, the vehicle is able to respond better and more predictably to emergency situations. This is all achieved through communication. The subsystems “talk” to each other electronically — sharing real-time information. They then work together to maintain vehicle control, reacting instantly, before the driver is even aware of trouble.
UDP (User Datagram Protocol):
Internet Transport Protocol
UMTS (Universal Mobile Telecommunication System):
Standard for third-generation digital cellular telephony which enables users to receive video and audio on mobile phones
USIM (Universal Subscriber Identity Module):
Equivalence of SIM in UMTS
Vision enhancement:
Improves the visibility of the driving scene by autonomous and non-cooperative means, in sub-normal visibility conditions by providing direct visual information to the driver.

Page 488 of 490
VMS (Variable Message Signs):
Roadside message displays used for traffic control and information
VoIP:
Voice-over-IP Protocols used to carry voice signals over the IP network are commonly referred to as Voice over IP or VoIP protocols. They may be viewed as commercial realisations of the experimental Network Voice Protocol (1973) invented for the ARPANET
WAP (Wireless Application Protocol):
Standard which brings Internet content to mobile phones
WIM (Weigh In Motion):
A technology for determining the weight of a commercial vehicle without requiring it to stop on a scale, using AVI to identify the vehicles and other technologies to measure the dynamic tire forces of a moving vehicle and then estimate the corresponding static weight
WLAN (Wireless Local-Area Network):
Also referred to as LAWN. A type of local-area network that uses high-frequency radio waves rather than wires to communicate between nodes.

Page 489 of 490
CHAPTER VII - ANNEXES

ANNEX I – 1ST ESAFETY COMMUNICATION: INFORMATION AND COMMUNICATION
TECHNOLOGIES FOR SAFE AND INTELLIGENT
VEHICLES

COMMISSION OF THE EUROPEAN COMMUNITIES
Brussels, 15.9.2003COM(2003) 542 final
COMMUNICATION FROM THE COMMISSIONTO THE COUNCIL AND THE EUROPEAN PARLIAMENT
Information and Communications Technologies for Safe and Intelligent Vehicles
(SEC(2003) 963)
2
COMMUNICATION FROM THE COMMISSIONTO THE COUNCIL AND THE EUROPEAN PARLIAMENT
Information and Communications Technologies for Safe and Intelligent Vehicles
PREFACE
Modern society depends on mobility, which provides personal freedom and access to servicesfor business and leisure. From society’s point of view, an efficient transport system is theengine of our economy, and the transport sector is of huge economic importance employingmore than 10 million people and with expenditure of more than 10% of the Gross DomesticProduct (GDP) in Europe.
For a long time, the demand for transport services has grown steadily for both passengersand goods. The continuing growth of the economic activity and the Union’s enlargement willincrease needs for mobility and transport services. Most of this growth is expected to be takenup by the road sector at a time when tight public budgets restrict investments in theinfrastructure. The rising volumes of traffic further deteriorate the situation regarding theproblems caused by the road transport, which include congestion of the main roadsnetwork and in urban areas, harmful effects on the environment and public health, and aboveall, accidents which cause fatalities, injuries and material damage.
In the forefront in the drive for safer and more efficient transport is the automotive industry,together with its suppliers and the emerging telematics sector, which build on the strengths oftwo other industrial sectors, namely the Mobile Telecommunications and InformationTechnology sectors. As a result of the efforts of the industry, vehicles today are inherentlysafer, cleaner and more recyclable than before. But the societal costs of road transport arestill by far too high. The 1.300.000 accidents per year in Europe cause 40.000 fatalities and1.700.000 injuries, at an estimated cost of 160 Billion €, or 2 % of the GDP in Europe. Roadtransport is a necessity for our mobility, but new measures are required to tackle thisincreasing problem. The automotive industry is facing an increasing challenge to tackle thisissue and to contribute to the main transport policy goal of the EC, which is to reduce by halfthe number of road fatalities by 2010.
Road safety cannot, however, be sufficiently improved by concentrating on the industry andthe vehicles only. The public sector has to work together with the private sector both byinvesting in the required infrastructure and in taking measures, which enable the marketintroduction of new solutions. A lot can be achieved by simple measures like educating thedrivers to be more responsible, enforcing the existing road safety rules e.g. related to safetybelt use, drinking and driving and speed limits, and by improving the physical roadinfrastructure. The safety and efficiency of roads can be also substantially improved by thedeployment of Intelligent Transport Systems (ITS) for Intelligent Infrastructure, such asadaptive traffic control and management systems in cities, and traffic control and incidentdetection systems on the motorways, the deployment of which is financially supported by theTrans-European Networks for Transport.
Information and Communications Technologies (ICT) are already widely in use in allareas of mobility, most notably in vehicles, which are becoming more and more intelligent.With the development of the more powerful processors, communication technologies, sensors

3
and actuators, more and more of the vehicle control, monitoring and comfort functions arebased on ICT. Information and Communications Technologies (ICT) are also seen as themost important set of tools enabling the industrial players to meet the above-mentionedchallenge on road safety and contributing to Europe’s expectations for safer and moreefficient mobility.
Recognising this potential, the European Commission in 2002, together with the automotiveindustry and other stakeholders established an eSafety Working Group consisting of some40 experts, and mandated it to propose a strategy for accelerating the research, development,deployment and use of ICT-based intelligent safety systems for improving road safety inEurope. In November 2002, the Working Group published its Final Report, which a High-Level meeting of all stakeholders later endorsed as the basis for further actions in advancingthe use of ICT for improving road safety in Europe.
The eSafety Working Group Final Report gives 28 detailed recommendations for action,directed to the European Commission, the Member States, road and safety authorities,automotive industry, service providers, user clubs, insurance industry and otherstakeholders. These recommendations fall into three main categories: actions for thedevelopment of the building blocks for integrated safety, actions for adapting regulationand standardisation, and actions for removing the societal and business obstacles.
The report concludes that the greatest potential in the application of ICT in solving roadtransport safety problems is offered by the Intelligent Vehicle Safety Systems, which useadvanced ICT for providing new, intelligent solutions which address together the involvementof and interaction between the driver, the vehicle and the road environment. In this integratedand global approach to safety, the autonomous on-board safety systems are complementedwith co-operative technologies, which use vehicle-to vehicle and vehicle-to infrastructurecommunication to get information of the road environment for assessing the potential hazardsand optimising the functioning of the on-board safety systems.
This Communication brings forward the actions the Commission intends to take in orderto accelerate the development, large-scale deployment and use of Intelligent VehicleSafety Systems in Europe, with the emphasis on the Intelligent Vehicle part of thesesystems. These actions are intended to facilitate the industry to develop these systems, toenable their rapid market introduction by removing the regulatory and standardisationobstacles, and to contribute to a joint public-private business case which is seen as aprerequisite for their large-scale take-up.
These actions, when complemented in a co-ordinated way with shared actions by the MemberStates on national, regional and local level, and by the industry itself, are expected to make amajor contribution to reducing the fatalities on European roads, and provide for the basicneed for Europe’s citizens: safe mobility.
4
TABLE OF CONTENTS
PREFACE..............................................................................................................................2
TABLE OF CONTENTS .......................................................................................................4
1. INTRODUCTION..........................................................................................................5
1.1. THE TRANSPORT SECTOR: A KEY ECONOMIC SECTOR FULFILLING A BASIC NEED ............5
1.2. GROWTH IN DEMAND OF TRANSPORT SERVICES CAUSING INCREASING PROBLEMS ..........5
1.3. URGENT ACTIONS REQUIRED IN MEETING THE SOCIETAL CHALLENGES...........................6
1.4. TOWARDS INTELLIGENT VEHICLES AND SAFER, MORE EFFICIENT MOBILITY...................6
1.5. TOWARDS MORE INTELLIGENT INFRASTRUCTURE..........................................................8
2. REAPING THE BENEFITS OF INFORMATION AND COMMUNICATIONSTECHNOLOGIES FOR ROAD SAFETY................................................................9
2.1. FROM PASSIVE SAFETY TO ACTIVE SAFETY AND ACCIDENT PREVENTION ........................9
2.2. TOWARDS A NEW GENERATION OF INTELLIGENT SAFETY SYSTEMS THROUGH RESEARCH 9
2.3. INTELLIGENT VEHICLE SAFETY SYSTEMS ................................................................. 11
2.4. A PREREQUISITE: A POSITIVE BUSINESS CASE..............................................................12
2.5. CONTRIBUTING TO PEDESTRIAN SAFETY .....................................................................13
3. RATIONALE FOR COMMUNITY ACTIONS............................................................14
3.1. INTRODUCTION..........................................................................................................14
3.2. EUROPEAN COMMISSION TAKING THE RESPONSIBILITY FOR EUROPEAN LEVEL PUBLICSECTOR ACTIONS .....................................................................................................14
3.3. ACTING TOGETHER AT EU, NATIONAL AND REGIONAL LEVEL......................................15
4. EUROPEAN COMMISSION ACTIONS .....................................................................16
4.1. PROMOTING INTELLIGENT VEHICLE SAFETY SYSTEMS................................................16
4.2. ADAPTING THE REGULATORY AND STANDARDISATION PROVISIONS .............................20
4.3. REMOVING THE SOCIETAL AND BUSINESS OBSTACLES .................................................22
4.4. OTHER ACTIONS ........................................................................................................23
5. REPORTING ...............................................................................................................24
ANNEX 1: GLOSSARY OF TERMS ..................................................................................25
ANNEX 2: SUMMARY OF CONSULTATIONS................................................................27
5
1. INTRODUCTION
1.1. The transport sector: A key economic sector fulfilling a basic need
Mobility and transport is a concern for citizens throughout Europe: there are 375 million roadusers in the EU. Modern society depends on mobility, which provides personal freedom andaccess to services for business and leisure. From society’s point of view, an efficient transportsystem is the engine of our economy, and the transport sector is of huge economic importanceemploying more than 10 million people and with expenditure of more than 10% of the GrossDomestic Product (GDP) in Europe.
A key industry in the transport sectors is the automotive sector, which manufactures about 17million vehicles per year and employs with its suppliers close to 2 million people in Europe,with a turnover of 452 billion € world-wide1. The automotive telematics market, comprisingof sales of telematics platforms and services is experiencing rapid growth in marketpenetration, and according to some market studies will reach an annual revenue as high as 8,5billion € in Europe in 2007, up from 1 billion € in 2000. As the car parc of vehicles withtelematics grows, the market will shift towards services2, further integrating the automotivemarket with two other key industrial sectors in Europe: Mobile Communications andInformation Technology. As a whole, Information and Communications Technologies(ICT) play a key role in the convergence of these sectors towards the Intelligent Vehicles ofthe future. The coming generation of mobile communication technology will further reinforcethis trend.
1.2. Growth in demand of transport services causing increasing problems
For a long time, the demand for transport services has grown steadily for both passengers andgoods. Most of this growth has taken place in road transport, which has been able to increasecapacity and offer competitive services. It is estimated that some 80% of travel calculated inpassenger-km is currently by car, and road makes up 44% of the goods transport market.Between 1970 and 2001, the number of vehicles in the Community grew from 62.5 million toover 205 million3, and the vehicle parc is now increasing by more that 3 million every year.
The continuing growth of the economic activity in the Union, and its enlargement willincrease needs for mobility and transport services, with estimated increase in demand of 38%for goods services and 24% for passengers by 2010 in the EU of 15. Most of this growth isexpected to be taken up by the road sector, which further deteriorates the situation regardingthe problems caused by the road transport, which include congestion at more points of themain roads network and in urban areas, harmful effects on the environment and public health,and above all accidents, causing fatalities, injuries and material damage.
At the same time, tight public budgets restrict investments in the infrastructure. Theseproblems are not only socio-economic ones, but concern each and every citizen in their dailylives. The 1.300.000 accidents per year in Europe cause 40.000 fatalities and 1.700.000injuries, at an estimated cost of 160 Billion €, or 2 % of the GDP. On a personal level, theseaccident figures translate to one third of us being injured in an accident at some point of theirlives. The psychological damage to the victims and their families cannot even be estimated.
1 Sources: ACEA and Eurostat, 20012 Source: European Automotive Telematics Market, Frost&Sullivan 20013 Source: ACEA, 2001. The total number of motor vehicles in use was 205,8 million, out of which 180,3
million were passenger cars.
6
1.3. Urgent actions required in meeting the societal challenges
Road transport is a necessity for our mobility, but new measures are required to tackle theincreasing problems associated with it. In the forefront in the drive for safer and moreefficient transport is the automotive industry, together with its suppliers and the emergingtelematics sector. Both of these largely depending on the strengths of two other industrialsectors, namely the Mobile Communications and the Information Technology sectors.
Thanks largely to the efforts of the industry, vehicles today are inherently safer, cleaner andmore recyclable than before. Thanks to improvements in the crash-worthiness of the vehicles,safety belts, ABS and other inventions, the vehicles are now four times safer than in 1970;this has largely contributed to the reducing by 50% of the number of deaths in EU 15 from1970, while the traffic volumes have tripled during the same period.
But the societal costs of road transport are still far too high, and new goals have been set. Theautomotive industry, with its suppliers and the related industrial sectors, are facing anincreased challenge to comply with both tighter environmental controls expected by both thesociety and citizens, aiming at more sustainable transport4, and demands to contribute to themain transport policy goal of the EC, which is to reduce by half the number of road fatalitiesby 20105. Regarding road safety, the effect of the current measures appears to be reaching itslimits, and new measures are urgently required.
In order to tackle the whole issue of road safety, including enforcement of current safetymeasures to be undertaken at Member State and regional level, the Commission hasintroduced an European Road Safety Action Programme6.
1.4. Towards Intelligent Vehicles and safer, more efficient mobility
ICT holding the promise of safer and more efficient mobility
Looking forward, Information and Communications Technologies (ICT) should guaranteemobility and secure economic growth. The primary effects of ICT in transport and mobilityare in enabling the development of more Intelligent Vehicles, more sophisticated telematicsservices, and for advanced Intelligent Transport Systems (ITS) to be applied to traffic controland management systems providing the intelligent road infrastructure. Telematics andinnovative logistics based on ICT can help to make traffic flows more efficient and to avoidcongestion, even on the existing road infrastructure.
Towards more intelligent vehicles
Increasingly, the competitiveness of the automotive sector depends on its ability to use andadopt the latest Information and Communications Technologies. An increasing number ofvehicle functions are controlled by processors and software, and more and more of the addedvalue of the vehicle comes from sophisticated electronic systems which can replace entiremechanical and hydraulic subsystems. Today, the electronics sensors, actuators andsubsystems for vehicle control, monitoring, safety and comfort comprise some 30% of thevehicles’ added value; this is expected to rise to some 40% in 2005.
4 Gothenburg European Council, 20015 White Paper on European Transport Policy for 2010, adopted by the Commission in September 20016 European Road Safety Action Programme : Halving the number of road accident victims in the
European Union by 2010 : A shared responsibility, COM 2003(311) final 2.6.2003
7
During the last decade, we have made in Europe a major investment in the use of ICT in in-vehicle safety technologies like Advanced Driver Assistance Systems (ADAS). While thesetechnologies are introduced on the markets, there is a need to continue investment in future,advanced technologies. While these technologies have a wide scope of applications inIntelligent Vehicles, including on-board diagnostic systems7, this Communication deals onlywith the application of these technologies for road safety. The EU’s 6th FrameworkProgramme for Research and Technological Development offers further possibilities forapplying for funding in this area8.
Towards more sophisticated telematics services
The automotive telematics industry is driven by Information and CommunicationsTechnologies. The key ICT technologies include mobile telecommunications,location/positioning technologies, intelligent sensors, actuators and interfaces, automotive-grade high-performance processors and high-performance in-vehicle communicationsnetworks. A key role in this rapidly growing sector is also played by services/contentsindustry, which drive towards higher quality personalised services and sustainable businessmodels. The four principal markets for telematics services today are safety and security(including e-Call, vehicle tracking), vehicle oriented telematics (including remote diagnosticsand proactive maintenance), navigation and routing (including dynamic navigation, Point ofInterest, traffic and travel information), fleet management and infotainment (entertainment,internet access, information services, email).
Mobile Communications: a future pillar for telematics
With general packet radio service (GPRS) and universal mobile telecommunications system(UMTS) advancing into the automotive markets, the outlook for mobile, location relatedservices is brightening up significantly. Thanks to the option of being permanently on-lineand by offering much higher bandwidths, the scope of affordable services increases rapidly.In the future, the existing telematics services based on SMS or WAP messaging over GSMwill be replaced by location-enhanced services using GPRS/UMTS and DAB/DVB, whileRDS-TMC services using FM radio will be enhanced and are expected to co-exist on themarkets. eEurope 20059, with its focus on providing mobile and broadband connectivity andmobile services will further facilitate this development.
Logistics depending on ICT
The combination of logistics and telematics based on Information and CommunicationsTechnologies is gaining importance in the whole transport sector, and especially in roadhaulage. ICT is increasingly used in route planning, tracking and tracing and usage-relatedinvoicing. Road hauliers depend today on ICT for fleet management, with promises of greater
7 Directive 2001/1/EC of the European Parliament and of the Council of 22 January 2001 amending
Council Directive 70/220/EEC concerning measures to be taken against air pollution by emissions frommotor vehicles; published in OJ L 035 of 6.2.2001
8 Decision No 1513/2002/EC of the European Parliament and of the Council of 27 June concerning thesixth framework programme of the European Community for research, technological development anddemonstration activities, contributing to the creation of the European Research Area and to innovation(2002-2006); published in OJ L 232 of 29.8.2002; and 2002/834/EC: Council Decision of 30 September2002 adopting a specific programme for research, technological development and demonstration:"Integrating and strengthening the European Research Area" (2002-2006); published in OJ L 294 of29.10.2002.
9 eEurope 2005:An information society for all, COM(2002) 263 final, 28.5.2002

8
efficiency and reduction of equipment costs. The role of ICT in logistics will increase with e-Commerce and the trend towards just-on-time deliveries.
1.5. Towards more intelligent infrastructure
Intelligent infrastructure and co-operative systems
Many of our large and medium-sized cities are equipped with advanced computer-controlled,adaptive traffic control and information systems. More and more of the European motorwaynetwork is being equipped with traffic control, incident detection and traveller informationsystems, which increase safety and user comfort, e.g. by informing about traffic conditionsand alternative routes in case of an accident.
The basis for an effective traffic management is the availability of real-time trafficinformation. Traffic data has been conventionally collected by sensors embedded in thepavement, installed at critical sections of the road network. Video-based sensors areincreasingly being installed and their data analysed via image processing technologies. Nextgeneration systems which use Floating Vehicle Data (FVD), for example based onanonymous polling of vehicle position and speed information, hold the promise of providingmore complete traffic information for a fraction of the cost. Further advances in mobilecommunications technology, traffic control, information and location technologies will enableavoiding bottlenecks and offer new innovative ways for traffic management.
Co-operation between the intelligent infrastructure and the intelligent vehicle is valuable forboth. Information on the network condition is necessary for the best performance of thesystems included in the vehicle, and feedback information is of primary importance toimprove the knowledge of the situation for operators. Intelligent Transport Systems (ITS)projects on the trans-European Transport Network are leading the way in introducing theseservices.
Galileo: Core positioning technology for telematics services
Location information, together with mobile communications, enables a large number oftelematics services like location-enhanced emergency call (e-Call), in-vehicle navigation,Points of Interest (POI) services, vehicle tracking, stolen vehicle location etc. The current in-vehicle systems are based on satellite navigation (GPS), due to the need to operate also inrural areas where the alternative location technology (based on mobile communicationnetwork) does not offer sufficient performance.
The European satellite navigation infrastructure Galileo10 will provide a set of navigation andpositioning services that allow a wide range of innovative applications to be developed.Galileo together with the advent of new regulations in the mobile phone domain (E-112legislation), in the road sector and others, will create new business opportunities and opendoors for new applications. The enhanced accuracy and the guaranteed service provided byGalileo will improve the performance of the ITS services. Galileo will start operations in2008, and in the meantime the European Geostationary Navigation Overlay Systems(EGNOS11) will provide similar enhanced services from 2004 onwards.
10 Council Conclusions on GALILEO, 25/25 March 2002,
europa.eu.int/comm/dgs/energy_transport/galileo/index_en.htm11 Communication from the Commission to the European Parliament and the Council “Integration of the
EGNOS programme in the GALILEO Programme”, COM(2003) 123 final, 19.3. 2003

9
2. REAPING THE BENEFITS OF INFORMATION AND COMMUNICATIONS TECHNOLOGIESFOR ROAD SAFETY
2.1. From passive safety to active safety and accident prevention
The 1.300.000 road accidents per year in Europe cause 40.000 fatalities and 1.700.000injuries. During the last decade, the European Union, Member States and the automotiveindustry have been actively involved in improving road safety through both accidentprevention and injury reduction. Most of the accident prevention measures have focused onthe driver, while the measures to reduce the consequences of an accident have primarilyfocused on the vehicle, through improved passive safety such as crashworthiness, seatbeltsairbags and conventional active safety systems such as braking and lighting.
Passive Safety measures have been proven to be a very effective method for thereduction of the car accident trauma. This can be illustrated with German accident data,for instance. In the period from 1970-1987 the number of accidents on German roadsincreased by about 40 %, as the traffic measured as kilometres travelled increased by72%. In this same period however the number or traffic injuries decreased by 20% andthe number of fatalities even by about 50%. It was concluded that this decrease to a largeextent was due to injury prevention measures like significant improvements of thevehicle crashworthiness and the introduction of the seat belt12.
These combined actions have contributed to the continuous reduction of the number offatalities on European roads. The number of deaths in EU 15 has halved from 1970, while thetraffic volumes have tripled during the same period13. Nevertheless, the number of roadaccidents and the number of road victims are still unacceptably high in the European Union.Furthermore, the contribution of many of these “conventional” safety measures is reaching itslimits, and further improvements in safety by these measures are becoming more and moredifficult to achieve at a reasonable cost. This is why the in-vehicle passive safety has to becomplemented by introducing on the markets more advanced in-vehicle and co-operativeactive safety systems.
2.2. Towards a new generation of intelligent safety systems through research
During the last decade in Europe both the industry and the public sector have invested heavilyin Research and Development (RTD) in the use of Information and CommunicationsTechnologies (ICT) in in-vehicle safety technologies and subsystems. While the bulk of thework has been done by the industry, the EU’s Research Programmes have contributed inrealising leading edge technologies, systems and applications.
12 Verletzungsfolgekosten nach Strassenverkehrsunfallen". Schriftenreihe des Hauptverbandes der
gewerblichen Berufsgenossenschaften e.V. A. Sutter Druckerei GmbH, Essen13 http://europa.eu.int/comm/transport/home/care/index_en.htm

10
The EU has played a role in this research since the DRIVE Programme in 1988. Underthe EU’s Fourth Framework Programme for Research, Technological Development andDemonstration (1994 -1998), the Telematics Applications Programme, helped inrealising leading-edge systems and applications. The Information Society Technologies(IST) programme14 continues research in technologies and applications systems aiming atsafer, cleaner and more efficient transport, with specific focus on intelligent safety andAdvanced Driver Assistance Systems and supporting technologies. The IntelligentVehicle cluster of the IST Programme has over 40 projects, with total budget of over 150million € and Community contribution of over 80 million €. Research into safer vehiclesand infrastructures as well as accident databases and human behaviour in road transportis also undertaken in the Competitive and Sustainable Growth programme (5th
Framework Programme)15.
The development of appropriate sensors, actuators and processors, has already permitted widespread implementation of systems, which help the driver to maintain control of the vehicleeven when he has exceeded its ‘normal’ limits of handling. Examples of such systems areAnti-lock Braking Systems (ABS) and Electronic Stability Programme (ESP). These systemsare already making a major contribution to road safety. Together with improvements inpassive safety, the vehicles are now four times safer than in 1970.
Many accidents are avoidable if the driver was to take evasive action. This is possibleprovided that the driver has retained directional control of the vehicle. However, if thewheels lock-up under braking the driver no longer has that directional control. Anti-lockBraking Systems (ABS) detect when any of the wheels of a vehicle are about to lock-up,and release the brakes slightly on that wheel, ensuring that it maintains its grip on theroad. Therefore, in emergency braking situations or in slippery conditions, it is possiblefor the driver of a vehicle equipped with ABS to avoid an accident by steering round itand to retain control of the vehicle.
It is far more difficult to offer protection to the occupants from lateral impacts thanfrontal impacts, especially if the struck object is narrow like a pole or tree, which is atypical scenario when a vehicle slides or spins off the road. Therefore, vehicle andbraking system manufacturers have developed systems commonly known as ElectronicStability Programmes (ESP) which detect the onset of a slide and automatically applythe brakes to individual wheels to correct the slide and prevent spinning. ESP will bebeneficial even under the most pessimistic assumption that it does not avoid anyaccidents but simply transforms them from lateral to frontal. ESP is now optional or evenstandard on many current passenger cars. Statistics from one car manufacturer shows thatin 2001 there was a 4% reduction of accidents, compared to the year before, that could bedirectly attributed to ESP. The reduction of roll-over accidents thanks to ESP have alsobeen estimated to be 12%.
The further development of intelligent active safety systems will require substantial RTDefforts. The current Sixth Framework Programme for Research and TechnologicalDevelopment (2002-2006)8 will offer new funding opportunities for RTD in intelligentintegrated safety systems including accidentology and Advanced Driver Assistance Systemsand technologies. The new instrument, Integrated Project, which is designed to generate the
14 The Information Society Technologies Programme is part of the European Union’s Fifth Framework
Programme for research and technological development (RTD), covering the period 1998-200215 See www.europa.eu.int/comm/research/growth/gcc/menu-researchthemes.html

11
knowledge required to address major societal challenges, will be especially suitable forresearch in this area. Integrated Projects are intended to build a critical mass of activities andresources needed for achieving ambitious, clearly defined scientific and technologicalobjectives. These projects are of substantial size, with the duration of typically three to fiveyears.
2.3. Intelligent Vehicle Safety Systems
We know that almost 95% of the accidents are at least partly due to the human factor. Inalmost three-quarters of the cases the human behaviour is solely to blame. This apparentmismatch between driver skills and situation complexity can be addressed by improvementsin three factors: the driver (education and training); the environment (intelligentinfrastructure) and the vehicle (in-vehicle safety systems).
Intelligent Vehicle Safety Systems use Information and Communications Technologies forproviding solutions for improving road safety in particular in the pre-crash phase when theaccident can still be avoided or at least its severity significantly reduced. With these systems,which can operate either autonomously on-board the vehicle, or be based on vehicle-to-vehicle or vehicle-to-infrastructure communication (co-operative systems), the number ofaccidents and their severity can be reduced, leading equally to a reduction of the number offatalities and injuries.
Collisions during lane changes and involuntary lane departure are two of the mostimportant causes of accidents. This problem requires in-vehicle technology to help detectand warn drivers of vehicles in adjacent lanes or when the vehicle is about tounintentionally depart from the lane. According to the National Highway Traffic SafetyAgency (NHTSA) in the US, lane change and merge collisions could be cut in half bynew technologies. In Europe, a Dutch study expects a reduction of 37% in all side impactcollisions and a reduction of 24% of the single vehicle accidents due to lane departurecrash avoidance.
Location-enhanced emergency calls like in-vehicle e-Call have their primary benefit tosociety of saving lives and in offering an increased sense of security. This is achieved byimproved call routing obtaining faster and improved information for dispatching relevantresources, and most importantly improved information to locate the caller. What is ofparamount importance here is that the relevant resources are delivered to the person inneed as soon as possible, this can save up to 10% of the fatalities. An increased sense ofsecurity is particularly relevant for European citizens travelling abroad. The secondarybenefits may be varied and include increased confidence in emergency service provision,reduced stress, decreased reliance on verbal communication and reduced trafficcongestion16.
In the development and deployment of Intelligent Vehicle Safety Systems, priority should begiven to the systems with the best prospects. The eSafety Working Group17 identified anumber of such systems, e.g. safe speed, lane support, safe following, pedestrian protection,
16 Caller Location in Telecommunication Networks in view of enhancing 112 Emergency Services:
Recommendations towards a European policy and implementation plan. 30 April 2002, HeliosTechnology Ltd
17 The Final Report of the eSafety Working Group on Road Safety, November 2002
12
improved vision, driver monitoring and intersection safety systems. Each one of these systemsdepend on a number of sensors, subsystems and technologies with varying degree of maturity,some being still in the RTD phase and some already partially introduced to the market.
The potential contribution of the introduction of Intelligent Vehicle Safety Systems forenhancing road safety and security has already been demonstrated by the industry in a numberof European research and technological development (RTD) projects. However, to realise thepotential benefits, the new systems have to be widely deployed in the marketplace. It istherefore of paramount importance that the public and private sectors work together inaccelerating the development and deployment of these Intelligent Vehicle Safety Systems inEurope. This collaborative approach is expected to result the quickest market penetration ofthese systems. In compliance with the data protection legislation and the right to mobility,other technologies such as increased monitoring of the driver condition and performance,accident data recorders and electronic vehicle identification should also be examined, asdescribed in the European Road Safety Action Programme.
2.4. A prerequisite: a positive business case
From the manufacturers’ point of view, the introduction of Intelligent Vehicle Safety Systemsbased on costly sensors, actuators, electronic components and subsystems increases themanufacturing cost, power consumption and weight, making it also more difficult to meet theenvironmental requirements imposed to new vehicle production. Furthermore, problemsassociated with the reliability of embedded electronics and especially of the software have tobe solved. Market introduction of new functionality requires tackling liability, type-approvaland Human-Machine Interaction (HMI) issues as well as investments to the infrastructure.
The industry has demonstrated its capability to innovate and bring active safety systems to themarkets, as has been the case with ABS and ESP. The introduction of these technologies is avery good example of the two main problems the industry is facing in bringing new systemson the market.
First, if the pace of market introduction is dictated solely by the market economies andcompetition, it can take a very long time. ABS was first introduced in the 1970’s, and now 30years later still only 91% of new vehicles are equipped with ABS, with a 66% penetration onthe whole vehicle parc in Europe. The introduction of ESP has advanced a bit faster,achieving 38% penetration of new vehicles sold and 16% of the whole vehicle parc in fiveyears after its introduction18.
Secondly, relying solely on the automotive manufacturers’ business case leads to introductionof the new safety features in the high-end range of vehicles first, then into the mid-rangevehicles and finally to the small and compact cars. This can be easily understood bycomparing the price of the advanced safety systems, for example 2000 € for a collisionmitigation or adaptive cruise control system, with the selling price of the vehicles. As aconsequence the drivers most at risk, i.e. the young, are the last to benefit, as they tend todrive the older and smaller cars.
Furthermore, more sophisticated software and electronic assistance systems tends to lead tomore complexity in repairing and maintaining the vehicles. As the cost of repair and
18 Source: Volkswagen Group research, 2001, German market
13
maintenance typically accounts for 40% of the total life-time cost of the vehicle, equalling thepurchase price, this is an important issue for the consumers.
Based on the above, it is clear that the wide-spread take-up of Intelligent Vehicle SafetySystems cannot depend on the private business case only, and needs the full support of thepublic sector, contributing to a positive public/private business case. This business case has tobe developed jointly with all actors involved, the automobile manufacturers, equipmentsuppliers, motorway operators, telecommunication operators, service providers, automotiveafter-sales players, insurance industry, road safety and user organisations, road authorities,emergency service providers, Member States and the European Commission. The public andprivate sectors must agree to co-operate, to decide on the role and responsibilities of eachpartner, and take the appropriate actions.
The main mechanisms for the public sector intervention, in contributing to this business case,are: promoting standardisation - leading to market harmonisation, larger volumes and lowermanufacturing costs; promoting awareness and information - leading to an increased demandof safety systems and consumers’ willingness to pay for advanced safety features; andworking together with appropriate partners (public and private sectors) in introducingfinancial incentives for the buyers of vehicles equipped with advanced safety systems. Thevehicle type approval legislation should be adapted, when necessary, to permit these systems,or even mandate them, if appropriate.
Introduction of Intelligent Vehicle Safety Systems requires a well-functioning, competitivemaintenance and repair system that guarantees their good functionality over time. Theconsumers should be able to choose between alternative providers of repair and maintenanceservices. To this effect, the automotive industry and equipment suppliers should respect theCommission Regulation with provisions for independent operators to have access to technicalinformation, training, tools and equipment19.
Finally, in addition to standardisation public authorities have a particular role in steering theimplementation of the appropriate infrastructures, including intelligent features, and puttingforward legislation enabling the wider deployment of ITS.
2.5. Contributing to pedestrian safety
In 2001 the European automotive industry (represented by ACEA) committed itself toreducing the risk of pedestrians being killed and injured when struck by a vehicle. TheCommitment was an innovative approach to road safety, as it contained both passive andactive safety elements, as well as a commitment by the industry to progressively installadditional active safety devices, including ICT elements. Even though it has subsequentlybeen agreed that the passive safety elements should be supported by a directive20, theadditional active safety devices and ICT elements remain subject to the industryCommitment.
19 Commission Regulation EC 1400/2002 of 31 July 200220 Proposal for a Directive of the European Parliament and of the Council relating to the protection of
pedestrians and other vulnerable road users in the event of a collision with a motor vehicle andamending Directive 70/156/EEC, COM(2003) 67 final, 19.02.2003
14
3. RATIONALE FOR COMMUNITY ACTIONS
3.1. Introduction
Information and Communications Technologies (ICT) which enable the building of IntelligentVehicles for intelligent roads will help Europe to meet its expectations for mobility andeconomic growth. ICT offer a set of tools which gives the industrial players an opportunity tomeet the challenges related to road safety. First generation Intelligent Vehicle Safety Systems,such as ABS (Anti-lock Braking System) and ESP (Electronic Stability Programme) arealready contributing to reducing the number of accidents and fatalities.
A major responsibility for introducing new generation Intelligent Vehicle Safety Systems invehicles remains with the automotive industry, which is developing them in collaborationwith its suppliers, the telematics industry and supported by two other main industrial sectors,the telecommunications and IT industries.
However, the industry cannot act on its own. The public sector has to work together with theprivate sector in a concerted way. The European Commission has to act especially in relationto its competencies such as Community RTD, vehicle type-approval procedures,telecommunications and transport regulation, and in solving liability, standardisation andother obstacles in the introduction of Intelligent Vehicle Safety Systems.
Europe’s citizens should be able to expect the same level of safety and support from the roadinfrastructure for their mobility all over Europe, just as they can with regard to the safetyfeatures of the vehicles. Further European level actions are required for defining andharmonising the Member States’ technical requirements and investments to road andcommunications infrastructure, especially those required by the future collaborative roadsafety systems.
In many cases a positive private business case for the introduction of safety systems does notexist, and further public sector intervention in the form of tax and insurance incentives isrequired for speeding up the deployment of these systems.
3.2. European Commission taking the responsibility for European level publicsector actions
This Commission Communication brings forward the measures the Commission is proposingto undertake to promote the development and deployment of Intelligent Vehicle SafetySystems, and to remove barriers which prevent their large-scale introduction and take-up inEurope.
The proposed Community actions fall into the following three categories:
(1) Promoting Intelligent Vehicle Safety Systems
(2) Adapting the regulatory and standardisation provisions
(3) Removing the societal and business obstacles
With these actions, the Commission intends to facilitate the development and large-scaledeployment of Intelligent Vehicle Safety Systems in Europe, in a way which allows theEuropean automotive industry to maintain and even increase its world-wide competitiveness,at the same time benefiting society by reducing the number of road accidents and fatalities.
15
These systems, when deployed in sufficiently large scale, are expected to make a majorcontribution to reducing the fatalities on European roads, and provide for the basic need forEurope’s citizens: safe mobility.
Concerted efforts using techniques noted in this Communication will also help in gaining thebest value for Europe from the deployment of infrastructure management to achieve the threegoals of the White Paper on European Transport Policy of sustainable development, reducingcongestion and ensuring a more efficient use of the available modes of transport andespecially facilitating greater intermodality between transport modes.
3.3. Acting together at EU, national and regional level
Although the EU has a broad scope to act on road safety, achieving the targets set in theWhite Paper on European Transport Policy cannot be the sole responsibility of the EuropeanUnion. Shared action encompassing all types of safety measures and all players at the EU,national and regional level is needed. The European Strategy for a partnership approach andproposed measures for improving road safety are brought forward in the European RoadSafety Action Programme: Halving the number of road accident victims in the EuropeanUnion by 2010: A shared responsibility.
A number of measures introduced in this plan contribute also to the goals of thisCommunication. Examples of such measures are support to EuroNCAP in progressingtowards new methods and information to the consumers, further development of the CAREaccident database and complementing it with Accident Causation Data, elaboration ofcommon specifications for accident registration and improving methods for collectingaccident statistics in the Member States, and the study with the Member States on the need toinclude new electronic systems in the framework of technical vehicle inspection and controls.
Shared action of the European Commission, Member States, industry and other public andprivate stakeholders is also a pre-requisite in promoting the development, deployment and useof Intelligent Vehicle Safety Systems. The Final Report of the eSafety Working Groupidentified in all 28 actions, on most of which the Member States are expected to contribute.Further to the actions that constitute this Communication, these include the following:
• Consolidate analyses from the existing EU, Member State and industry road accidentdata which give information on the cause and circumstances of the accidents.
• Define a common format and structure for recording accident data in the EUcountries. Develop jointly an European Accident Causation Database.
• Set up a coordinated validation framework for operational tests for active safetysystems in the Member States.
• Develop public sector Road Maps which indicate the investments required forimprovements in the road networks and information infrastructure based on theindustrial Road Maps, and identify the steps needed for removing regulatory barriers.
• Identify existing specifications, and where necessary develop new specifications forpan-European, standardised interoperable interfaces and communications protocols forvehicle-vehicle and vehicle-infrastructure communications which will supportinteractive, co-operative safety systems and services.
16
• Establish national liaison groups to co-ordinate the implementation and building up ofthe E-112 service chain.
• Stimulate and support road users and fleet owners to buy vehicles with intelligent roadsafety functions and to use safety-related services by incentives such as tax reductions,lowering insurance premiums, and preferential treatment.
• Design and execute awareness campaigns that explain the benefits, functioning anduse of the Intelligent Vehicle Safety Systems to the consumers.
4. EUROPEAN COMMISSION ACTIONS
The Commission, in close collaboration with other stakeholders is proposing to undertake thefollowing actions to promote the development, deployment and use of Intelligent IntegratedSafety Systems in Europe, and to remove barriers which prevent their large-scale introductionand take-up.
4.1. Promoting Intelligent Vehicle Safety Systems
Road safety requires concerted actions by all the safety stakeholders: the EuropeanCommission, automotive and telecommunications industry and operators, equipment andservice suppliers, motorway operators, road authorities, insurance companies, road safety anduser organisations and others. In order to facilitate co-operation, the Commission willcontinue to support a joint platform for all the road safety stakeholders, the eSafety Forum.The objective of the Forum is to promote and monitor the implementation of therecommendations identified by the eSafety Working Group, and to support the development,deployment and use of Intelligent Vehicle Safety Systems. The Forum will provide for aplatform to encourage and review progress of the actions of all stakeholders, includingindustry and the Member States, reporting to the Commission.
The future development of the above-mentioned safety functions requires further RTD in anumber of technologies. The overall target of Europe, as agreed by the Research CouncilBarcelona in 2002 is to invest 3% of GDP on research by the year 2010. These increasedefforts with two thirds of the funding coming from the private sector should cover IntelligentVehicle Safety Systems as one of the priority areas. The Commission intends to use its 6th
Framework Programme for Research and Technological Development (2002-2006) forsupporting research in this area, co-ordinated with national research programmes andbenefiting from the European Research Area (ERA) and international collaboration. Thecritical task, in which the eSafety Forum can play a role, is determining the priorities forfurther research based on analysis of accident causation data and the impact of potentialcountermeasures. The international co-operation is expected to cover especially Human-Machine Interaction, certification and testing methodology and procedures, harmonisationand standardisation, legal issues, impact and socio-economic benefit analysis andbenchmarking/best practise.
Human-Machine Interaction with increasingly more complex in-vehicle systems is a majorconcern. To tackle this important issue, the Commission published in 2000 aRecommendation on Safe and Efficient In-vehicle Information and Communication
17
Systems21, which has been largely adopted by the industry. The Commission proposes now toassess the situation in the light of technical progress, including the effects of the introductionof nomadic devices in the vehicles, in collaboration with the industry and the Member States.Further measures will be then proposed if deemed necessary. An important part of this workis the development of workload assessment, testing and certification methodology andprocedures for complex in-vehicle working environments that involve interfacing with in-vehicle devices for vehicle control, driver assistance and infotainment.
In cases where a vehicle is involved in an accident, an Emergency Call (e-Call) can beinitiated automatically, and accurate vehicle location and additional safety-related informationcan be passed to the Public Service Answering Point (PSAP). Such information cutsdramatically down the emergency response times, saving lives and reducing the consequencesof serious injuries, and also has the potential to allow correct response in case of accidentsinvolving hazardous goods. Building on the provision of the so-called E-112 legislation,which is contained in the new electronic communications directive22, the Commission isproposing an integrated strategy for Pan-European emergency services. These services willbuild on the location-enhanced emergency services being implemented in the Member Stateson the basis of deliberations in the joint industry–public sector CGALIES23 group, and therecently adopted Recommendation on the implementation of E-11224, but will includeprovisions for more accurate location information and additional safety information. Thisrequires defining the interfaces between the vehicles and the telecommunications network,and between the telecommunications network and the PSAPs, and solving the related liabilityand responsibility issues.
Real-time traffic and travel information (RTTI) contributes greatly to safety. In order tofacilitate the access to the public sector data, and to enable the private and public sectors toco-operate in the service provision, the Commission published in 2001 a Recommendation onthe deployment of Traffic and Travel services in Europe25. The Commission proposes nowfurther analysis and recommendations for accelerating the take-up of the measures foraccessing the public sector data, enabling the establishment of public-private partnerships,and the provision of reliable, high-quality RTTI services in Europe. Furthermore, theCommission may draw up in its TENs ITS Working Group recommendations or legislation
21 Commission Recommendation of 21 December 1999 on safe and efficient in-vehicle information and
communication systems: A European statement of principles on human machine interface Text withEEA relevance (notified under document number C(1999) 4786) , published in the OJ L 19 of25.1.2000
22 Directive 2002/21/EC of the European Parliament and of the Council of 7 March 2002 on a commonregulatory framework for electronic communications networks and services (Framework Directive) ;published in OJ L 108 of 24.4.2002; Directive 2002/22/EC of the European Parliament and of theCouncil of 7 March 2002 on universal service and users' rights relating to electronic communicationsnetworks and services (Universal Service Directive); published in OJ L 108 of 24.4.2002; Directive2002/58/EC of the European Parliament and of the Council of 12 July 2002 concerning the processingof personal data and the protection of privacy in the electronic communications sector (Directive onprivacy and electronic communications); published in OJ L 201of 31.7.2002.
23 See the Final Report of CGALIES (Co-ordination Group for Access to Location Information byEmergency Services), http://www.telematica.de/cgalies/
24 Commission Recommendation of 25/07/03 on the processing of caller location information in electroniccommunication networks for the purpose of location-enhanced emergency call services, C(2003) 2657final
25 Commission Recommendation on the development of a legal and business framework for participationof the private sector in deploying telematics-based Traffic and Travel Information (TTI) services inEurope, OJ L 199/20 24.7.2001

18
aimed at accelerating the deployment of Real-time Traffic and Travel Information services inEurope.
19
Commission actions:
• To facilitate co-operation of all stakeholders, the Commission will continue tosupport the eSafety Forum, aiming at a self-sustained platform.
The eSafety Forum will promote and review progress of the implementation of therecommendations of the eSafety Working Group, and support the development,deployment and use of Intelligent Vehicle Safety Systems. The Forum will alsopromote the development of open platforms, open system architecture and userawareness of Intelligent Vehicle Safety Systems. Where appropriate the Forum willset up specific Working Groups26.
During an initial period of two years, the Commission will provide the necessarysupport for the Forum. During this period the model for a self-sustained platform willbe established by the industry and the Member States, with the aim to shift theresponsibility to industrial partners at the end of 2004.
• The Commission will determine clear goals and priorities for further RTD under its6th Framework Programme, and pursue co-ordination with national programmes.
The Commission will invite the Forum to analyse existing accident causation dataand to identify clear goals and priorities for further RTD in Intelligent Vehicle SafetySystems in industrial research, Community Research (Integrated Projects in the 6th
FP) and national research programmes.
Furthermore, the Commission will pursue international co-operation in thedevelopment of intelligent integrated road safety technologies.
• The Commission will determine what further actions are required on HumanMachine Interaction.
The Commission will invite the eSafety Forum to create a Working Group that will,taking into account the reports by the Member States and the rapid development inthis area, develop further recommendations on HMI. The Commission will, on thebasis of these recommendations, examine if further actions are deemed necessary.
Furthermore, the Commission will promote through its RTD funding and co-operation the development of workload assessment, testing and certificationmethodology and procedures for complex in-vehicle working environments.
• The Commission will promote harmonised, pan-European in-vehicle emergency call(e-Call) service that builds on the location-enhanced emergency call E-112.
For this purpose the eSafety Forum is invited to set up a Working Group to establishconsensus on the implementation of the pan-European in-vehicle emergency call (e-Call), based on the recently published Recommendation and the results of ongoingRTD actions.
26 These are new eSafety Forum Working Groups, operating under the Forum. They should not to be
mixed up with the eSafety Working Group which was established in April 2002 and published its FinalReport with 28 Recommendations in November 2002.
20
Furthermore, the Commission encourages the industry in establishing datarequirements, data transfer protocols, interface specifications and routing andhandling procedures for the enhanced in-vehicle e-Calls, and standardisation in ETSIand CEN.
• The Commission will analyse the progress on the provision of Real-Time Traffic andTravel Information (RTTI) in Europe, and propose further actions.
The Commission will invite the eSafety Forumto analyse the implications of theRTTI services in road safety including emerging new services based on broadcastingand mobile communications, taking into account the Member States’ responses to theTTI Recommendation. Special attention is given to pan-European services andsustainable business models.
On the basis of this analysis and the recommendations, the Commissionmay consider theneed presenting a progress report to the Council and the European Parliament in view ofkeeping focus on the issues and proposing further measures when necessary.
4.2. Adapting the regulatory and standardisation provisions
Ultra wide band (UWB) automotive radar (SRR) operating at 24 GHz is considered to be akey technology for the rapid and cost-effective introduction of many Intelligent VehicleSafety Systems. SRR systems of this type could validate relatively quickly active safetyconcepts, while giving other technologies the time to mature. However, regulatory barriers tothe market-led introduction of this technology remain, in particular concerning access toappropriate harmonised radio spectrum in the EU. Such obstacles will affect timelyachievement of Community road safety goals if not solved co-operatively with the EUMember States within the pan-European Electronic Communication Committee (ECC) ofCEPT27. The Commission now proposes to take the necessary actions to support the removalof regulatory barriers to a time-limited legal use of the 24 GHz spectrum for automotiveshort-range radar, and to support the standardisation of SRR systems in ETSI.
Before new passenger cars and motorcycles can be placed on the market within the EuropeanUnion they must have obtained EC Whole Vehicle Type–Approval, indicating compliancewith the requirements of a number of separate EC Directives. Other types of vehicles, e.g.trucks and buses, etc. may also use these Directives as the basis for gaining access to theEuropean market. Nonetheless, the Commission also acknowledges that non-legislativemarket initiatives should be pursued in order to bring forward improvements in vehicles. TheCommission intends to review the existing situation regarding the introduction of IntelligentVehicle Safety Systems, determine what legislative and non-legislative actions may berequired, and wherever necessary adjust requirements to accommodate new technologies.
While the vehicles are equipped with an increasing number of electronic subsystems,telematics platforms and/or portable terminals, the need for a responsive standardisationprocess becomes extremely important. Standardised solutions guarantee wide marketacceptance, higher volumes and lower costs, benefiting both the manufacturers and theconsumers. The Commission proposes further measures, through a standardisation mandateand in collaboration with industry, to initiate a process in the European StandardisationOrganisations to analyse the specific needs and priorities of the Intelligent Vehicle Safety
27 Conference Européenne des Administrations des postes et des télécommunications

21
Systems for accelerated standardisation in ISO, CEN and ETSI of emerging communicationsprotocols for the vehicle-vehicle and vehicle-infrastructure communications, and forpromotion of the development of open platforms, open system architecture, and standardsoftware, communication protocols, services and human-machine interactions.
Commission Actions:
• The Commission will take the necessary steps to support the removal of legal barriersto a time-limited use of 24 GHz UWB short-range radar, in particular concerningharmonised access to the radio spectrum in the EU.
The Commission will co-ordinate, via the appropriate Community mechanisms (RadioSpectrum Committee and Telecommunications Conformity Assessment Mechanism28)and with the CEPT, the investigation of possible regulatory solutions which willenable short-range radars to be rapidly implemented at 24 GHz for an initial period,while providing adequate protection to other potentially affected radio services. Along-term transition of radar operation to 77 GHz is expected.
Furthermore, the Commission has recently addressed a standardisation mandate(M329) to the European Standardisation Organisations inviting them to prepareharmonised standards to be recognised under Directive 1999/5/EC (the R&TTEDirective). ETSI will execute the mandated work.
The mandate foresees, in a first phase, the development of a work programme to befurther discussed with Member States in the standing committee established by theDirective. Subsequently the European standardisation organisations will developstandards in accordance with priorities identified by the Member States.
• The Commission will review the existing EC vehicle type-approval legislation.
The Commission will determine what actions (legislative and non-legislative) may berequired to bring forward road safety improvements obtainable with IntelligentVehicle Safety Systems in vehicles.
• The Commission will invite the European Standardisation Organisations to identifypriorities and prepare a standardisation programme.
The Commission will invite the European Standardisation Organisations, through astandardisation mandate, to identify the actual status of standardisation work atEuropean and international level in support of Intelligent Vehicle Safety Systems, toidentify specific additional needs and priorities for standardisation and subsequentlyto prepare for a common standardisation work programme, taking into account theneed to maintain coherence with activities such as standardisation in support ofeEurope and standardisation in support of the technologies proposed Directive oninteroperability for Electronic Fee Collection on European roads.
28 Respectively the standing regulatory committee for the Radio Spectrum Decision (676/2002/EC) and
for the RTT&E Directive (1999/5/EC)

22
4.3. Removing the societal and business obstacles
The costs of road fatalities, injuries and accidents have been estimated in the CommissionWhite paper. Also, the societal benefits of specific safety applications/functions have beenestimated in a number of reviews, but not recently in a comprehensive manner. The data onsocietal benefits and cost/benefit ratio are incomplete and not kept up-to-date with latesttechnological developments. Therefore, the Commission proposes measures to estimatesocietal benefits obtainable through the reduction in accidents, serious injuries and materialdamage, including an analysis of the reduction in medical care and other expenses in theMember States and enlargement states, and benefits like improved journey times, reducedcongestion and environmental impact.
The legal and liability issues of the market introduction of Intelligent Vehicle SafetySystems are very complex, involving new risks to the customers, the society and above all themanufacturers in the terms of product liability and increased financial risks such as call-backcampaigns. The risks regarding product liability are not only technological, but also includehuman factors such as dependability, controllability, comprehensibility, predictability andmisuse robustness. The Commission proposes measures for developing a methodology forrisk benefit assessment, achieving an industrial and societal consensus on a European Code ofPractice, and for establishing guidelines for the market introduction of Intelligent VehicleSafety Systems.
The market introduction of Intelligent Vehicle Safety Systems involves policy, technological,societal, business, legal and consumer aspects. The automotive industry undertakes marketintroductions based on their own assessment of the technological readiness, the marketsituation and competition and the availability of supporting infrastructure and incentives.From the public sector point of view, it has to be possible to estimate the market introductiontime-table and to use this information to plan for investments and to determine what othermeasures (incentives, removing regulatory barriers) are required for enabling take-up.Furthermore, these measures have to guarantee the same level of safety and support from theroad infrastructure in all European countries. The Commission proposes to promote thedevelopment of Industry Road Maps, and based on them, elaborate with the Member StatesPublic Sector Road Maps, which predict product development and deployment, and indicatethe investments required for improvements in the road networks and informationinfrastructure base, and identify the steps needed for removing regulatory barriers.
Commission Actions:
• The Commission will estimate the socio-economic benefits.
The Commission will undertake a study to estimate the socio-economic benefitswhich can be obtained through the introduction of Intelligent Vehicle Safety Systems.This study will involve all mobility actors.
• The Commission will support the development of an European Code of Practice.
The Commission will promote through its RTD funding and co-operation thedevelopment of a methodology for risk benefit assessment of Intelligent VehicleSafety Systems.
Furthermore, the Commission will invite an eSafety Forum Working Group to pursuean industrial and societal consensus on a European Code of Practice, applicable to
23
both system design specifications and validation procedures, and to formulatepractical guidelines which facilitate the market introduction of Intelligent VehicleSafety Systems.
• The Commission will promote the elaboration of Industrial Road Maps and thecorresponding Public Sector Road Maps.
The Commission will invite the eSafety Forum to elaborate Road Maps for thedevelopment and deployment of Intelligent Vehicle Safety Systems. Furthermore, theCommission will launch consultations of Member States and all other public sectoractors on these Industry Road Maps, and based on the results of these consultations,elaborates with the Member States regularly updated Public Sector Road Maps whichdefine and indicate the time-table for the required investments and other public sectormeasures.
Furthermore, the Commission will review the progress regularly, and propose furthermeasures when necessary, in particular in cases where the market take-up is reluctant..
4.4. Other actions
The European Commission will also contribute towards the following actionsundertaken by the industry.
• The industry will develop a methodology to assess the potential impact of theintroduction of the Intelligent Vehicle Safety Systems and technologies in Europe,based on the accident causation data and including the analysis of combined systems(fusion of sensors, integration and use of multiple active safety systems together).
The Commission will support this development through RTD funding, and byencouraging the establishment of a Working Group on impact assessment.
• The industry will develop a validation methodology and procedures for vehiclesequipped with Intelligent Vehicle Safety Systems.
First steps towards the development of validation methodology has been taken in theongoing RTD projects. The Commission will support the further development ofvalidation methodology and standards of the design and use of Intelligent VehicleSafety Systems, based on the Code of Practice (see 4.3) through follow-up actions.
• The industry will define, produce, maintain and certify a European digital mapdatabase with road safety attributes.
The Commission offers for use by industry the results of existing Communitysupported research, which define preliminary requirements for a European digital roadmap database. Based on these results, the public sector and industry will jointly decideon the needs for additional road safety attributes for driver-support for informationand warning purposes, such as speed limits information and road configuration data.
The Commission will also support, through the eSafety Forum, the industry-led effortsfor the creation of a public-private partnership to produce, maintain, certify anddistribute this digital road map data base.

24
5. REPORTING
Monitoring of the progress of the recommendations of the eSafety Working Group will be animportant part of the activity. The eSafety Forum with its wide membership will be bestplaced to perform this important function.
• The eSafety Forum will, as an important part of its activity, monitor and report to theCommission on the implementation of the actions and recommendations of theeSafety Working Group.
• The Commission will support this activity through RTD funding (Specific SupportActions).
The Commission will examine the recommendations of the eSafety Forum and, if needed,report to Council and European Parliament on the progress achieved and further actionsneeded to support the development and deployment of Intelligent Vehicle Safety Systems.
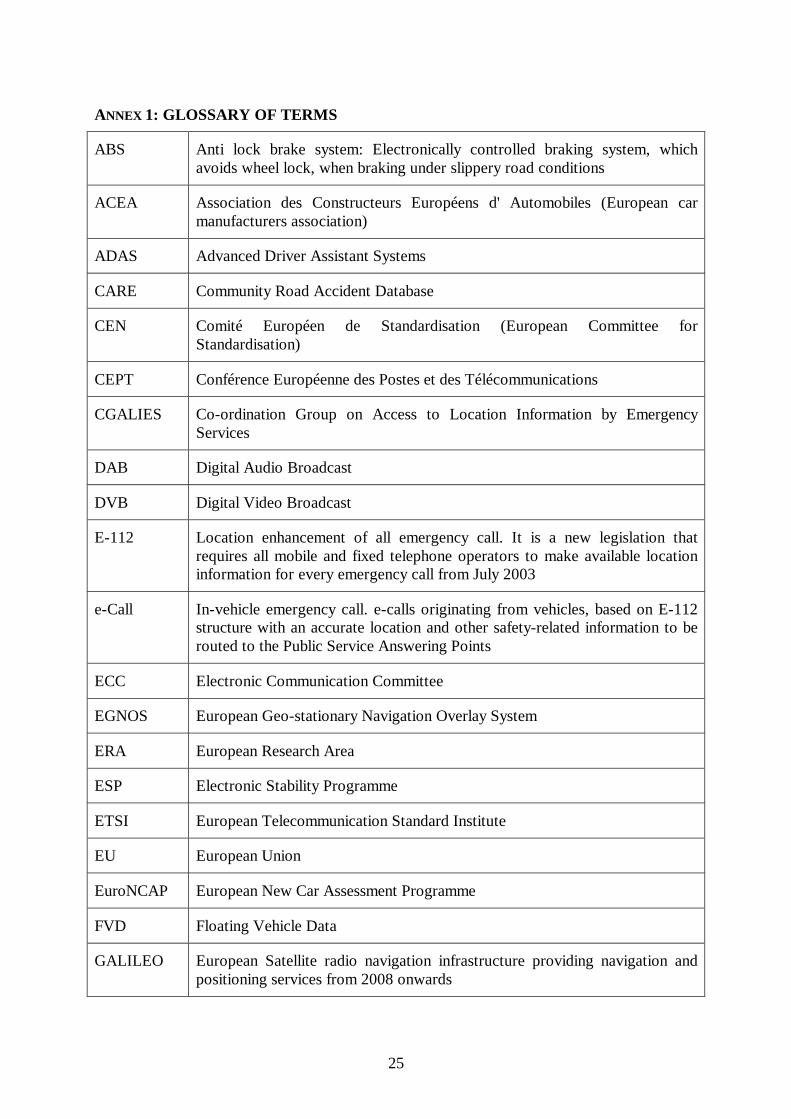
25
ANNEX 1: GLOSSARY OF TERMS
ABS Anti lock brake system: Electronically controlled braking system, whichavoids wheel lock, when braking under slippery road conditions
ACEA Association des Constructeurs Européens d' Automobiles (European carmanufacturers association)
ADAS Advanced Driver Assistant Systems
CARE Community Road Accident Database
CEN Comité Européen de Standardisation (European Committee forStandardisation)
CEPT Conférence Européenne des Postes et des Télécommunications
CGALIES Co-ordination Group on Access to Location Information by EmergencyServices
DAB Digital Audio Broadcast
DVB Digital Video Broadcast
E-112 Location enhancement of all emergency call. It is a new legislation thatrequires all mobile and fixed telephone operators to make available locationinformation for every emergency call from July 2003
e-Call In-vehicle emergency call. e-calls originating from vehicles, based on E-112structure with an accurate location and other safety-related information to berouted to the Public Service Answering Points
ECC Electronic Communication Committee
EGNOS European Geo-stationary Navigation Overlay System
ERA European Research Area
ESP Electronic Stability Programme
ETSI European Telecommunication Standard Institute
EU European Union
EuroNCAP European New Car Assessment Programme
FVD Floating Vehicle Data
GALILEO European Satellite radio navigation infrastructure providing navigation andpositioning services from 2008 onwards
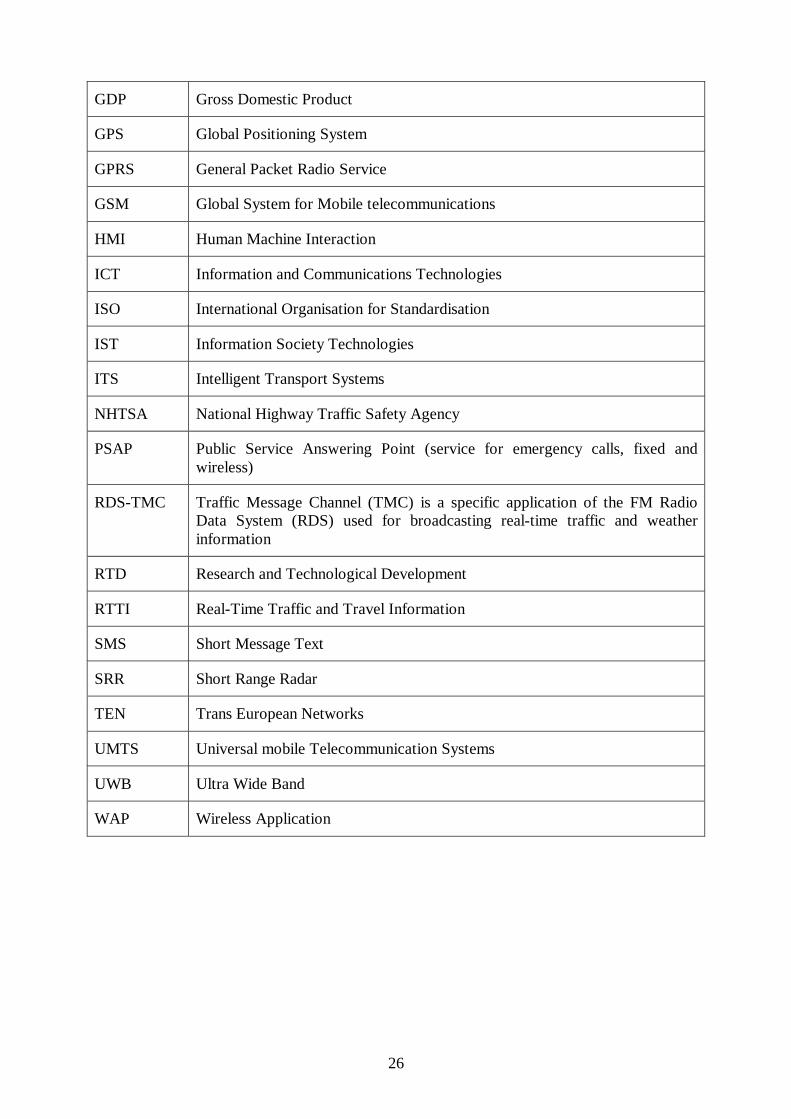
26
GDP Gross Domestic Product
GPS Global Positioning System
GPRS General Packet Radio Service
GSM Global System for Mobile telecommunications
HMI Human Machine Interaction
ICT Information and Communications Technologies
ISO International Organisation for Standardisation
IST Information Society Technologies
ITS Intelligent Transport Systems
NHTSA National Highway Traffic Safety Agency
PSAP Public Service Answering Point (service for emergency calls, fixed andwireless)
RDS-TMC Traffic Message Channel (TMC) is a specific application of the FM RadioData System (RDS) used for broadcasting real-time traffic and weatherinformation
RTD Research and Technological Development
RTTI Real-Time Traffic and Travel Information
SMS Short Message Text
SRR Short Range Radar
TEN Trans European Networks
UMTS Universal mobile Telecommunication Systems
UWB Ultra Wide Band
WAP Wireless Application
27
ANNEX 2: SUMMARY OF CONSULTATIONS
All major road safety stakeholders have been consulted. The consultation process, with anemphasis on industrial issues, consisted of two eSafety High-Level Meetings and an eSafetyWorking Group of some 40 experts. The Member States were consulted through the High-Level Group on Road Safety, in collaboration with DG TREN.
The eSafety High-Level Meetings and the eSafety Working Group
In April 2002, the Commission organised, together with the automotive industry and otherstakeholders, a High-Level Meeting on eSafety.
The HL Meeting had representatives from the following stakeholders: automobilemanufacturers, equipment suppliers, motorway operators, telecommunication operators,service providers, insurance industry, road safety and user organisations, road authorities,emergency service providers, Member States and the European Commission.
As a result of this meeting, the partners decided to establish an eSafety Working Groupconsisting of some 40 experts, and mandated it to propose a strategy for accelerating theresearch, development, deployment and use of ICT-based intelligent active safety systems forimproving road safety in Europe. This Working Group had a limited membership, butnevertheless had participants from all important stakeholders.
The eSafety Working Group concluded its work in November 2002 and published its FinalReport, with 28 Recommendations. This Final Report was discussed by the Second eSafetyHigh-Level Group in November 2002, with the following conclusions:
This 2nd High-Level meeting, gathering some 60 representatives from industries, EuropeanCommission and other public authorities discussed the Final Report of the eSafety WorkingGroup made the following conclusions:
(1) Approved the Final Report as a basis for the next steps in the public-private eSafetyinitiative
(2) Decided to establish an eSafety Forum as a more permanent body for promotingeSafety and monitoring progress
(3) Made the e-Call the 1st priority in eSafety
(4) Acknowledged the Commission’s plans to bring forward a Communication withcommunity actions in 2003
(5) The 2nd High-Level Meeting made also conclusions related to acting together oneSafety, role of the Member States, the e-Call, Human-Machine Interaction, eSafetyuser Demand, the eSafety Forum and the next steps
The High-Level Group on Road Safety
The High-Level Group on Road Safety, consisting of representatives from the Member States,was given a full briefing on the eSafety initiative in November 2002. Furthermore, the RoadPlatform Meeting, consisting mainly of Member States road authorities and motorwayoperators, were briefed of the initiative in March 2003. In both meetings the Member States
28
have welcomed the eSafety Initiative, and expressed the wish for the Commission to come upwith further policy measures regarding eSafety (the Commission Communication).
SUMMARY OF THE RESULTS OF THE CONSULTATION
• The second eSafety High-Level Meeting endorsed the Final Report as the basis for furtheractions in advancing the use of ICT for improving road safety in Europe and welcomed theCommission’s plan to draft a further policy measures.
• The Member States welcomed the eSafety Initiative, and expressed the wish for theCommission to come up with further policy measures regarding eSafety.

ANNEX II – 2ND ESAFETY COMMUNICATION:
BRINGING ECALL TO CITIZENS

EN EN
COMMISSION OF THE EUROPEAN COMMUNITIES
Brussels, 14.9.2005 COM(2005) 431 final
COMMUNICATION FROM THE COMMISSION TO THE COUNCIL, THE EUROPEAN PARLIAMENT, THE EUROPEAN ECONOMIC AND SOCIAL
COMMITTEE AND THE COMMITTEE OF THE REGIONS
The 2nd eSafety Communication BRINGING ECALL TO CITIZENS

EN 2 EN
COMMUNICATION FROM THE COMMISSION TO THE COUNCIL, THE EUROPEAN PARLIAMENT, THE EUROPEAN ECONOMIC AND SOCIAL
COMMITTEE AND THE COMMITTEE OF THE REGIONS
The 2nd eSafety Communication BRINGING ECALL TO CITIZENS
1. INTRODUCTION In the Communication i2010 – A European Information Society for Growth and Employment the Commission presents its strategy for the information society up to 2010. The i2010 initiative recognizes the importance of the transport sector, accounting for 10% of Europe’s GDP and employment, and the significance of the sector for ICT research and development. Indeed safe and efficient transport and mobility services are essential for the achieving the Lisbon goals of growth and jobs.
To help to make progress towards these goals, the Commission will use all its instruments -regulatory tools in the area of telecommunications, research funds, and political initiatives. To this end, the Commission will launch a Flagship Initiative “The Intelligent Car” as part of the i2010 strategy1.
The present Communication, dealing with the urgent and practical actions needed to roll-out eCall, the pan-European in-vehicle emergency call, is the first building block of the Intelligent Car2 initiative.
Increasing road safety is a human and economic necessity. In 2004, the number of road fatalities in the 25 Member States of the European Union was 43.000. Without urgent measures, the ambitious target of reducing this to 25.000 road deaths by the year 20103 will not be met. The carnage on European roads will continue, creating immeasurable human suffering. The costs to our health care system will remain huge, and our economies will be burdened by loss of productivity and large-scale material damage.
Technologies that can save lives and reduce the severity of injuries exist today. In the first eSafety Communication4 the Commission proposed actions to develop and deploy Intelligent Vehicle Safety Systems that are based on advanced Information and Communication Technologies (ICT). These systems can prevent accidents from happening, mitigate their consequences and aid in rescue if accidents do take place.
Since the adoption of the first eSafety Communication, considerable progress has been made, and many eSafety technologies, systems and services are ready for deployment. One such system is the pan-European in-vehicle emergency call, eCall.
1 Communication from the Commission: i2010 – A European Information Society for growth and
employment, COM(2005) 229 Final, 1.6.2005 2 In the context of the i2010 Communication, “Car” includes cars, trucks, buses and motorbikes 3 European Road Safety Action Programme : Halving the number of road accident victims in the
European Union by 2010 : A shared responsibility, COM 2003(311) final 2.6.2003 4 Information and Communications Technologies for Safe and Intelligent Vehicles, COM(2003) 542
Final, 15.9.2003
EN 3 EN
In case of an accident, the eCall device in the car will transmit an emergency call that automatically goes to the nearest emergency service. eCall can be triggered manually, but in case of a severe accident the car will send it automatically. The life-saving feature of eCall is the accurate information it provides on the location of the accident site: the emergency services are notified immediately, and they know exactly where to go. This results in a drastic reduction in the rescue time.
The large-scale roll-out of eCall is a priority goal of the eSafety initiative. Since 2002, the stakeholders have worked together and developed an implementation plan for eCall. However, without urgent actions from the side of the Member States the deployment of eCall could be substantially delayed.
2. TOWARDS THE PAN-EUROPEAN IN-VEHICLE EMERGENCY CALL (ECALL) SERVICE
A key recommendation of the first eSafety Communication was the establishment of a harmonised, pan-European in-vehicle emergency call (eCall) service that builds on the single European emergency number 112.
There are over 1.7 million accidents that require medical help in Europe per year, and many more that need other types of assistance. After the accident the people in the car may be in shock, not know their location, be unable to communicate it or unable to use a mobile phone. In all these cases eCall helps: it can drastically cut the emergency response times, save lives and reduce the severity of injuries. When implemented, the socio-economic benefits of eCall will be huge.
Significant progress towards the full-scale roll-out of eCall has been achieved. The eCall Driving Group that was established to foresee the implementation has set 2009 as a target year for full roll-out.
However, the setting-up of a full emergency chain for eCall needs the co-operation of many authorities. This co-operation has been slow to materialize and in many Member States it is completely absent. The need to modernize the emergency services is recognized, but is not carried out as a result of lack of funding or organisational complexities.
The Commission strongly urges the national and regional governments to act and to invest in the necessary emergency care infrastructure for eCall, with the view to launch the full pan-European service in 2009.
2.1 eCall: How does it work? The in-vehicle eCall is an emergency call generated either manually by the vehicle occupants or automatically via activation of in-vehicle sensors after an accident. When activated, the in-vehicle eCall device will establish an emergency call carrying both voice and data directly to the nearest emergency services (normally the nearest 112 Public Safety Answering Point, PSAP), see Figure 1. The voice call enables the vehicle occupants to communicate with the trained eCall operator. At the same time, a minimum set of data will be sent to the eCall operator receiving the voice call.
The minimum set of data contains information about the incident including time, precise location, vehicle identification, eCall status (as a minimum, indication if eCall has been manually or automatically triggered) and information about a possible service provider.

EN 4 EN
2.2 Why do we need eCall ?
According to the results of an analysis conducted by the E-MERGE5 project funded by the European Commission, an eCall system that relays the accurate location of the accident to the PSAP and the emergency services will allow a reduction of response time to the accident of about 50% in rural areas and up to 40% in urban areas. When medical care for severely injured people is available at an earlier time after the accident, the death rate and severity of trauma resulting from the injuries can be significantly reduced. This is known as the Golden Hour Principle of accident medicine.
Figure 1: eCall operating principle
Cost-benefit estimations for eCall carried within the E-MERGE project and the SEiSS study6 indicate that in EU-25 up to 2.500 lives can be saved per year, with up to 15 % reduction in the severity of injuries. These estimates were based on the CARE accident data base7 from 2002.
Road accidents also lead to congestion and possibly secondary accidents. As a result of shorter rescue time, eCall can reduce congestion. The above-mentioned studies indicate that this reduction may be up to 20%. Additionally, other road users can be more quickly informed about the accident.
Considering the total impact of eCall estimated by the SEiSS study, the annual accident cost savings are estimated to be up to 22 billion € and the annual congestion cost savings up to 4 billion €, which brings the total annual benefits up to 26 billion €. Compared to these benefits, the investments needed are relatively small, 150 € per vehicle and up to 50,000 € to upgrade a Public Safety Answering Point (PSAP)8. On the basis of this initial investment per
5 See http://www.gstforum.org/en/subprojects/rescue/ 6 Exploratory Study on the potential socio-economic impact of the introduction of Intelligent Safety
Systems in Road Vehicles, see http://europa.eu.int/information_society/activities/esafety/call_4/index_en.htm.
7 http://europa.eu.int/comm/transport/care/index_en.htm 8 Estimates of the SEiSS study: Based on volume production of the in-vehicle unit and upgrade of PSAPs
that already are able to process location information of E112 calls.
EN 5 EN
PSAP, and adding the costs for training their staff and to ensure adequate language support, it brings the annual total costs up to 4,550 million € in EU 25, including the in-vehicle systems. To calculate this amount, the number of necessary PSAPs in EU 25 has been estimated in average to be one PSAP per every 31,000 inhabitants, with 60 staff members per PSAP.
The above-mentioned figures indicate a substantial benefit-cost ratio for eCall. Even with a lower estimated success rate and higher costs the benefit-cost ratio stays positive, confirming the soundness of the investment into the eCall service.
2.3 Why does eCall use 112?
The aim of the eCall project is to implement a pan-European emergency service that can be used by all vehicles in Europe, regardless of their make, country of registration and their location. Europeans travel abroad in their cars more and more frequently, and therefore a pan-European interoperable service is a prerequisite for eCall.
The single European emergency number 112 was introduced to offer this type of service for emergency calls by a Council Decision in 19919. Calls to this number are routed to the nearest Public Safety Answering Point (PSAP) in the different European countries. Calls can be made from any phone without charge, and they normally receive priority routing.
More and more of the 180 million calls to the emergency services per year originate from mobile phones (currently 60-70%). For about 15% of these calls, the location cannot be accurately determined, leading to a significant delay in dispatching help and even inability to send it.
The Universal Service Directive adopted in 200210 stipulates the obligation that the public network operators make the caller location of all calls to the extent technically feasible available to the emergency services11. The 112 calls with location information are known as E112 calls.
Implementation of the location capability for processing the E112 calls in the PSAPs also benefits eCall. After this investment, the cost of upgrading the PSAPs up to eCall level is considered to be relatively small. Using 112 enables building of an eCall service that is truly pan-European, based on approved Directives, with a relatively small investment.
9 Council Decision of 29 July 1991on the introduction of a single European emergency call number
(91/396/EEC), Published in the Official Journal L 217, 6.8.1991, p. 31 10 Directive 2002/22/EC of the European Parliament and of the Council of 7 March 2002 on universal
service and users' rights relating to electronic communications networks and services (Universal Service Directive); published in OJ L 108, 24.4.2002
11 For all calls to the 112 number, the network operator either sends the location information (push) or makes it available on request (pull). This function that is now being implemented in about 50% of the Member States is called the enhanced 112 or E112. The location information is in most cases the location of the wireless cell (so called Cell-ID)

EN 6 EN
The Directive on Privacy and Electronics Communications12 contains provisions for safeguarding the personal data and protecting the privacy in electronic communications. However, in the case of a real emergency, it is considered that need for assistance overrides the need for privacy. The directive therefore allows the processing of location information and other personal data for organisations dealing with emergency calls.
2.4 Road Map for a full-scale roll-out by 2009
The eCall Driving Group was established to produce a framework architecture and a business model for eCall, and to define the roles for both the public and private stakeholders. These include the Member States, the Commission, telecom operators, PSAP operators, vehicle manufacturers, equipment suppliers, motorway operators, automobile clubs, insurance industry and service providers.
The Driving Group produced a Memorandum of Understanding13 on implementing eCall. The aim of the MoU is to ensure that eCall will work in any EU Member State. The MoU binds the stakeholders in implementing the eCall together on the basis of common approved architecture and interface specifications, including the Minimum Set of Data (MSD). The MoU was signed by the European Commission, ACEA on behalf of the automotive industry and the multi-sector partnership ERTICO on behalf of its partners in August 2004. The MoU has now over 50 signatures.
The eSafety partners have agreed on a Road Map for eCall roll-out, presented in Figure 2. The main milestones are the following:
a) Agreeing on eCall roll-out plan, business model and standards by the end of 2005
b) Full specification of the in-vehicle eCall system and start of development by mid-2006
c) Full-scale field tests with early adopters in 2007
d) Introduction of eCall as standard equipment in all vehicles entering the market after September 2009
To enable eCall technology to work, the emergency services in the EU Member States will need to equip or upgrade their PSAPs to process eCall location reports at the latest by the end of 2007.
12 Directive 2002/58/EC of the European Parliament and of the Council of 12 July 2002 concerning the
processing of personal data and the protection of privacy in the electronic communications sector 13 Memorandum of Understanding for Realisation of Interoperable In-Vehicle eCall, see
www.eScope.info

EN 7 EN
Figure 2: Road Map for eCall roll-out
3. ACTIONS FOR BRINGING ECALL TO THE CITIZENS BY 2009
With the commitment of the industry and public sector stakeholders, eCall can become a reality. Industry is ready to equip all new vehicles with the eCall devices starting from models entering the market after September 2009. However, without the full commitment of the Member States there will be no investment from the automotive industry. All stakeholders must act together to promote eCall at national and international fora, most notably the eSafety Forum.
3.1 Actions for the Member States
1. The Member States should sign the eCall MoU
The Member States should immediately sign the eCall Memorandum of Understanding at an appropriate level, and commit to the implementation of the pan-European eCall. The MoU has now over 50 stakeholders’ signatures, but only two Member States (Finland and Sweden) and Switzerland have signed. Lack of signatures, especially from the Member States threatens to delay the eCall implementation and weakens the commitment of industry.
2. The Member States should promote 112 and E112
The single European emergency number 112 is in use in 24 Member States14. It is, however, used in parallel with national numbers, and only in Denmark and Netherlands is it the single number. The majority of Member States have also been slow in encouraging their public wireless network operators to provide location information (E112). As eCall is based on 112 and E112, the Member States should promote the use of 112 and take steps for accelerating the introduction of location information in their public wireless networks.
14 Infringement procedure against Poland was started in March 2005.
EN 8 EN
3. The Member States should upgrade their PSAPs to handle location-enhanced E112 calls and eCalls
The Member States should undertake to ensure, at the latest by the end of 2007, that adequate schemes are put in place to upgrade the infrastructure in the Public Service Answering Points (PSAPs) for the processing of location and other information of eCalls originating from vehicles. In order to comply also with the E112 regulation, the Member States should upgrade their PSAPs first to handle the location information of E112 calls, and then do the incremental upgrade that enables the handling of eCalls, following standards being developed by ETSI.
4. The Member States should provide adequate location-enhanced emergency services and language support.
The Member States should ensure that their PSAPs are capable of adequately handling the eCalls originating from vehicles, that the personnel are trained to do so, and that language support is provided. They should also upgrade their whole emergency service chain (PSAPs, dispatching, emergency vehicles, and hospital emergency rooms) with adequate ICT based tools that will ensure fast and reliable response to vehicle accidents and take full benefit of the information provided by the in-vehicle eCalls. A service concept for the full emergency chain is being developed by the project RESCUE15.
3.2 Promoting eCall at National and International Fora
The Commission strongly recommends that the Member States set up national platforms for promoting eCall. They should have participation from relevant ministries (transport, telecommunications and interior) including the authorities responsible for emergency services, as well as private industry and service providers. The Commission will launch a promotion campaign of 112, E112 and eCall, and will organise Conferences for best practice exchanges, in support of the national activities.
The Commission will propose to the Civil Protection Committee the creation of a sub-group dealing with Emergency Communications, 112, E112 and eCall. The Member States should support the work of this sub-group to solve the remaining issues related to the investments in the interoperable pan-European E112 and eCall service in their respective countries.
All eSafety stakeholders should support the work of the eCall Driving Group and use this forum for solving the remaining issues related to the roll-out of pan-European eCall by 2009. This includes agreeing on the specifications of the in-vehicle system, agreeing on the eCall business model, and organising the field tests.
The eSafety Forum is an important European platform to continue the dialogue on accelerating the development, deployment and use of intelligent vehicle safety systems in Europe. The Commission will organise regular High-Level and Plenary meetings of the Forum. These will allow all stakeholders to monitor the progress of the eCall roll-out and to take further actions if needed.
15 RESCUE is a part of the Integrated Project GST, see http://www.gstforum.org/en/7_sub-
projects/rescue_rsq/
EN 9 EN
eCall has to operate in all GSM and 3G networks in Europe. Standardisation of the eCall transaction and data transfer protocols between the in-vehicle eCall terminal and the PSAPs is therefore crucial. The Commission has asked ETSI to accelerate the standardisation of eCall and to work with CEN as necessary. ETSI should produce draft standards for eCall by the end of 2005.
4. BUILDING A SAFER FUTURE WITH ESAFETY AND OTHER COMMISSION ACTIONS
The eSafety initiative is part of the Commission comprehensive strategy for improving road safety and transport efficiency in Europe, at the same time maintaining and improving the competitiveness of the industries involved, most notably the automotive sector.
In Road Safety, the eSafety initiative is recognized world-wide. The eCall is a priority item under eSafety, which has reached maturity. Under the eSafety Forum, eleven Working Groups have been established and results, not only eCall, are emerging. The Commission is also active on the regulatory side and in promoting road safety in joint initiatives.
As a result of the eSafety initiative and Community supported research programmes, Active Safety and Advanced Driver Assistance Systems like ESP, ACC, lane departure warning and collision mitigation are ready for a wider market introduction. The Commission will strengthen the efforts to promote the voluntary implementation of these systems.
4.1 eSafety
Human Machine Interaction (HMI) is a priority topic in eSafety. The HMI Working Group was established in 2003 to analyse the situation in the implementation of the so called European Statement of Principles16 for Human-Machine Interaction. This analysis was done on the basis of the Member State’s reports. The group focused on problem areas in HMI, such as the introduction of nomadic devices and the rapidly increasing complexity of new in-vehicle systems. The Working Group published its Final Report in February 2005. On the basis of this report the Commission intends to provide a Recommendation on HMI with a renewed European Statement of Principles (ESoP).
The Real-Time Traffic and Travel Information (RTTI) is another priority. The RTTI Working Group of the eSafety Forum aims to identify and remove the obstacles for Europe-wide implementation of RTTI services, such as limited availability of traffic information content, difficulties in defining the roles of the public and private sectors, availability of broadcast capacity and difficulties with business models. The work takes into account the Commission Recommendation on TTI services in Europe17. The target set by the RTTI Working Group is that all countries within the European Union agree to extend the installation of the chain of information needed for Real-Time Traffic Information Services in order to cover 80% of the EU population with standardized services by 2010. The group will publish its Final Report by the end of 2005.
16 Commission Recommendation of 21 December 1999 on safe and efficient in-vehicle information and
communication systems: A European statement of principles on human machine interface OJ L 19 of 25.1.2000
17 Commission Recommendation, OJ L 199, 24.7.2001, p. 20

EN 10 EN
The eSafety Forum User Outreach Working Group is investigating actions for communicating to users the benefits of eSafety systems in order to increase user awareness. This is essential to increase user demand for such systems and to improve the business case. The group has analyzed best practices and “lessons learned” from earlier campaigns and user outreach actions, as well as the penetration patterns of some earlier systems. The group proposes to create a “communications platform” of all stakeholders and the creation of an eSafety label. This proposal was included in its first interim report in May 2005 and is currently under discussion in the other eSafety groups, including the group on Implementation Road Maps.
4.2 Other Commission actions
The Commission established a High-Level Group in 2005 for a competitive EU Car Industry. This group, called CARS 21, brings together the European Commission, leaders of the automotive industry, the European Parliament, Trade Unions NGOs and Users, and will develop an integrated strategy for sustainable development of the industry, define the best possible regulatory approaches and set the necessary conditions for innovation.
The Commission will also produce in 2005 a Mid-Term Review of the Road Safety Action Programme. This review will evaluate the overall progress towards the objective to reduce the number of fatalities on European roads by half by 2010.
5. CONCLUSIONS
Technologies and systems that can save lives and reduce the severity of injuries caused by road accidents exist today. The eSafety initiative is bringing such systems that are based on the use of advanced ICTs within the reach of road users. eCall is the first: when fully deployed, it could save up to 2500 lives per year and will have substantial socio-economic benefits. It directly improves the quality of life of all our 454 million citizens.
Our challenge is to ensure the large-scale deployment of eCall in Europe. The technology is ready and the industry is committed. Member States must now commit to it and to invest in the necessary infrastructure in their emergency services.
Upgrading of the emergency services comes with a cost, but the estimated benefit-cost ratio is good. Once the investment is done, there will be also additional benefits. The Commission urges the Member States to act immediately on the recommendations of this Communication. The Commission will follow the progress closely and in case the eCall roll-out fails to progress according to the presented Road Map it will consider further measures.

ANNEX III – 3RD ESAFETY COMMUNICATION: ON THE
INTELLIGENT CAR INITIATIVE, “RAISING
AWARENESS OF ICT FOR SMARTER, SAFER AND CLEANER VEHICLES”

EN EN
COMMISSION OF THE EUROPEAN COMMUNITIES
Brussels, 15.2.2006 COM(2006) 59 final
COMMUNICATION FROM THE COMMISSION TO THE COUNCIL, THE EUROPEAN PARLIAMENT, THE EUROPEAN ECONOMIC AND SOCIAL
COMMITTEE AND THE COMMITTEE OF THE REGIONS
On the Intelligent Car Initiative "Raising Awareness of ICT for Smarter, Safer and Cleaner Vehicles"
EN 2 EN
1. PURPOSE AND SCOPE OF THIS COMMUNICATION
The present Communication is an answer to the need of the citizen, the industry and the Member States to solve transport related societal problems and improve Information and Communication Technologies (ICT) take up. The Communication presents the Intelligent Car Initiative as a policy framework for actions in this area. The Intelligent car initiative is composed of 3 pillars: the eSafety Forum, the ICT research programme and the awareness raising actions.
2. INTRODUCTION
On 1 June 2005 the Commission adopted the initiative “i20101: European Information Society 2010 for growth and employment” as a comprehensive strategy for modernising and deploying all EU policy instruments to encourage the development of the digital economy. i2010 consists of three pillars: a Single European Information Space, Innovation and Investment, and an Inclusive European Information Society. The “Intelligent Car” is one of the 3 Flagship initiatives proposed within the third pillar with the objective to raise the visibility of the vital contribution of ICT to the quality of life. The “Intelligent Car Initiative” on smart, safe and clean transport, focuses on road vehicles and addresses safety and environmental challenges caused by increased road use.
3. RATIONALE: WHY A EUROPEAN INITIATIVE ON THE INTELLIGENT CAR?
There are an estimated 300 million drivers in the EU Member States, who wish their driving to be easier with less trouble, less delay, and less chance of getting injured. Of all daily activities, driving is crucial as our entire life could change in an instant or even end because of a road accident. The present activity responds to the need to move towards a new situation, where cars don’t crash anymore, and traffic congestion is reduced. The pollution of the environment, traffic safety and congestion are truly European problems affecting all 25 Member States and therefore, European solutions need to be found.
3.1. Description of the Problem
Modern societies depend heavily on mobility, but transport entails severe problems, such as congestion of road networks and urban areas, harmful effects on the environment and public health, waste of energy and, above all, accidents which cause fatalities, injuries and material damage.
In the EU, Congestion costs amount to 50 billion € per year or 0.5 % of Community GDP, and by 2010 this figure could go up to 1% of EU GDP. The number of cars per thousand persons has increased from 232 in 1975 to 460 in 2002. The overall distance travelled by road vehicles has tripled in the last 30 years and, in the last decade, the volume of road freight grew by 35% contributing to 7 500 km or 10 % of the network being affected daily by traffic jams2.
1 COM(2005) 229 final: “i2010 – A European Information Society for growth and employment” 2 source DG TREN.

EN 3 EN
Concerning energy efficiency and emissions, in 2002 the transport sector consumed 338 million tonnes oil equivalent (MToe) representing 31% of the total energy consumption in the EU. Road transport consumed 281 MToe, or 83% of the energy consumed by the whole transport sector. Road transport CO2 emissions account for 835 million tonnes per year representing 85% of the total transport emissions3. Investigations show that up to 50% of fuel consumption is caused by congested traffic situations and non optimal driving behaviour.
Of all transport problems, Safety is the one with the most serious impact on the daily lives of citizens. It also has a high impact on most of the socio-economic indicators. With its “White Paper”4of September 2001, the European Commission set the target to half road fatalities by 2010. Although the situation has improved thanks to the road safety action programmes5, there are still over 40.000 fatalities on the Euro 25 roads every year, with 1.4 million accidents with a cost of around 200 billion €/year representing 2% of the EU GDP6. Concerning the causes of accidents, current research7 indicates that human error is involved in almost 93% of accidents and that, in almost three-quarters of the cases, the human mistake is solely to blame. As an example, a recent study8 concluded that if we have an accident when driving at a speed of 50 km/h and we could brake half a second earlier, we could reduce the crash energy by 50%, but an analysis of German accidents showed that 39% of passenger vehicles and 26% of trucks do not activate brakes before a collision and some 40% more do not brake effectively, underlying our limits as drivers.
3.2. The potential of intelligent cars
Information and Communication Technologies (ICT), which enable building Intelligent Cars, provide new intelligent solutions that contribute to solving the key societal challenges described above by increasing road safety, the overall efficiency of the transport systems and by contributing to a more efficient use of fuel. These intelligent systems can assist the driver in the driving functions preventing or avoiding accidents, they can provide drivers with real time information about the road network avoiding congestion, and they can optimise a journey or the engine performance improving overall energy efficiency. These intelligent systems address the interaction between the driver, the vehicle and the road environment, in an integrated approach where the autonomous on-board systems are complemented with vehicle-to-vehicle and vehicle-to-infrastructure co-operative technologies and improved traffic network management.
3 source EUROSTAT 4 COM(2001) 370 final “WHITE PAPER: European transport policy for 2010: time to decide” 5 COM(2003) 311 final: European Road Safety Action Programme Halving the number of road accident
victims in the European Union by 2010: A shared responsibility COM(2003) 542 Final: Information and Communications Technologies for Safe and Intelligent Vehicles
6 source EUROSTAT 7 GIDAS database 8 source HELLA presentation AMAA 2004

EN 4 EN
What is the potential of these intelligent systems?
Why should the EU propose a plan to raise their awareness?
• The SeiSS study9, estimated that if all vehicles were equipped with eCall (emergency call automatically triggered by the vehicle in case of an accident) by 2010 a reduction in fatalities between 5% and 15% could be achieved in the EU saving up to a maximum of 22 billion €. Moreover, eCall could reduce congestion times between 10% and 20% with additional cost savings of between 2 to 4 billion €.
• The same study estimated that Adaptive Cruise Control (ACC) that performs longitudinal control (thus avoiding rear-end collisions) could save up to 4.000 accidents in 2010 if only 3% of the vehicles were equipped.
• In the case of Lateral Support (lane departure warning and lane change assistant) 1.500 accidents could be saved in 2010 given a penetration rate of only 0.6%, while a penetration rate of 7% in 2020 would lead to 14.000 fewer accidents.
• AWAKE, a project that developed a Driver hypovigilance system, estimated that a warning to the driver in case of drowsiness could play an important role in avoiding 30% of fatal crashes on motorways and 9% of all fatal accidents.
• The SMART NETS project demonstrated that improved software and real-time traffic data in urban traffic control centres could lead to better traffic management and achieve a reduction of up to 40% in traffic standstill and congestion, thus resulting in considerable energy savings.
• Other systems like “speed alert”, “alcohol-lock” and “charging systems” can have also, under certain circumstances, an important impact on cleaner, safer and more efficient transport.
3.3. Need for action at European Level
Considering the problems described, it appears that intelligent car systems could contribute substantially to overcome some of the current transport problems. Unfortunately, despite their potential, most of these intelligent systems are not yet on the market and the vehicles that are fitted with telematics or with new generation active safety features are mainly luxury cars representing a small percentage of the market. For some successful active safety systems, for example, large-scale deployment faced several problems and took very long periods of time. This has been the case with the introduction of the ABS10 (20 years); the ESP (10 years to reach 40% of market penetration) and ACC (more than 25 years since the start of the development phase and yet a very low penetration rate). The main reasons are legal barriers, the extremely competitive situation of the automotive sector with narrow margins and low return on investment, the high cost of intelligent systems and the consequent lack of customer demand, the lack of information, throughout society, about the potential benefits of these systems and a clear business case.
9 Exploratory Study on the potential socio-economic impact of the introduction of Intelligent Safety
Systems in Road Vehicles: SeiSS final report. 10 ABS: Antilock Braking System; ESP: Electronic Stability Programme; ACC: Adaptive Cruise Control
EN 5 EN
A survey done by EUROTEST11 on a representative sample of almost 2800 drivers showed that only half the drivers surveyed were familiar with existing basic in-vehicle technologies providing active and passive safety (only 50% of them, for example, knew what an antilock braking system (ABS) does,). The same survey also concluded that “more needs to be done, on both the European and national level, to raise the awareness about safer, cleaner and more economical driving”. Citizens and policy makers cannot be expected to invest or promote technology unless its benefits and usefulness are clear. In order to stimulate the users’ demand for intelligent car systems, it is therefore important to establish a consistent awareness raising programme being careful not to create distortion of competition in the after-market or false expectations on systems capabilities
Moreover, European transport problems need harmonised solutions at European level. Bottlenecks to market implementation need to be removed, product demand needs to be stimulated and consensus needs to be built among key players. The eSafety Forum underlines that the wide-spread take-up of Intelligent Car Systems cannot depend on the private business case only. This take-up needs the full support of the public sector especially in the initial phase of market penetration of mature technologies, if they contribute to solving European societal problems and represent excellence in innovation. The Cars2112 initiative that focuses on a competitive automotive regulatory system for the 21st Century also identifies eSafety as a key initiative to reach the objective of reducing fatalities on European roads. The Intelligent Car links to Cars21 and complements it through a number of awareness raising actions and research. The actions proposed in the present Communication will also contribute significantly to the overall reduction in the emission of pollutants and would help industry to fulfil its commitment to reduce average new car CO2 emissions to 140 g/km in 2008.
To ensure interoperability and the harmonisation of technical solutions throughout the Union, a comprehensive European approach is needed. In addition to standardisation and in line with the ongoing work on co-operative systems, public authorities have a particular role in the implementation of the appropriate infrastructures, including intelligent features, and putting forward targeted actions enabling the wider deployment of ITS.
Further action is needed in research and development. During the last decades, major investments have been made in Europe in the use of ICT for intelligent vehicle technologies, also thanks to the European Framework Programmes. Several technologies contributing to higher road and vehicle safety, less congestion and more rational energy consumption were developed and tested in these programmes. Additional efforts are needed to follow up the appropriate research priorities activities developed so far by focusing on assessment programmes and refinement of technologies and systems to make them smarter, cheaper and more reliable. It is also important to maintain European industry competitiveness towards Japan and the US where similar research programmes exists.
4. OBJECTIVES
The three needs for action at European level in the area of intelligent cars as identified above, define the following objectives of the Intelligent Car Initiative:
11 http://www.eurotestmobility.net/eurotest.php?itemno=86&lang=EN 12 For more on the CARS 21 initiative and to download the final report, see
http://europa.eu.int/comm/enterprise/automotive/pagesbackground/competitiveness/cars21.htm
EN 6 EN
(1) Coordinate and support the work of relevant stakeholders, citizens, Member States and the Industry, in the Intelligent Car Initiative.
(2) Support research and development in the area of smarter, cleaner and safer vehicles and facilitate the take-up and use of research results.
(3) Create awareness of ICT-based solutions to stimulate users’ demand for these systems and create socio-economic acceptance.
5. ACTIONS PROPOSED
5.1. Support and co-ordinate the work of the Member States and of the other relevant stakeholders.
The first objective of the Intelligent Car Initiative is implemented with the support of the eSafety Forum. The eSafety Forum activities are described in two Commission Communications on eSafety13. The Forum aims at removing the bottlenecks that prevent Intelligent Vehicle Systems entering the market, through consensus building among stakeholders and recommendations to the Member States and the EU. It was established in 2003 and has now over 150 members representing all road safety stakeholders. It has established so far eleven industry-led Working Groups that work on priority topics. The Forum has produced a consistent number of valuable reports that constitutes an important input for industrial initiatives and policy activities. The Forum will ensure the links with parallel and complementary activities in the domain of intelligent transport systems like Cars21, the European Road Safety Action Programme in particular the European Road Safety Charter14, the “Intelligent Transport Systems for logistics and intermodality” initiative announced in the Community Lisbon Programme and, in the field of the environment, the European Climate Change Programme working group on light vehicles15. As the Intelligent Car Initiative develops, the Commission will consider extending the activities of the eSafety Forum to cover ICT for cleaner as well as safer transport.
The Forum becomes one of the pillars of the Intelligent Car Initiative and it will be the essential link to decision makers.
Within the first objective of the Intelligent Car Initiative, the eSafety Forum will continue to support the Commission through its working groups. In addition, the following specific actions are proposed:
(1) Follow up and report on the specific actions proposed in the 2nd eSafety Communication “Bringing eCall to Citizens” mainly in relation to the signature of the eCall Memorandum of Understanding by the Member States, the state of implementation of the single emergency number 112 and E112, the status of the PSAPs (Public Service Answering Points) upgrading for the handling of location-enhanced E112 calls and eCalls and on the provision of adequate location-enhanced emergency services and language support.
13 COM(2003) 542 Final: Information and Communications Technologies for Safe and Intelligent
Vehicles and COM/2005/0431 final The 2nd eSafety Communication - Bringing eCall to Citizens 14 http://europa.eu.int/comm/transport/road/roadsafety/rsap/charter.htm 15 http://forum.europa.eu.int/Public/irc/env/eccp_2/library

EN 7 EN
(2) Produce Commission Recommendation on the design and safe use of Human Machine Interfaces (HMI) for intelligent vehicles systems. The recommendation updates the Commission Recommendation of 21 December 1999 on safe and efficient in vehicle information and communication systems, taking also into account the evolution of technology during the past 5 years.
(3) Investigate the possibility to use appropriate incentives schemes at national level in order to support the purchase of vehicles equipped with advanced safety functions and after-market installations. Fiscal Incentive schemes should be introduced by Member States in a coordinated manner across the EU to avoid fragmentation of the internal market, and mainly take the form of tax differentiation, aimed at influencing consumer’s behaviour towards a well defined category of vehicles, which will be equipped with the preferred advanced safety functions and after-market installation. Any incentive plan including national support to Intelligent Car technologies will be carefully elaborated in conformity with State aid rules.
(4) To address the issues of spectrum needs in the context of vehicle-to-vehicle communication and to organise a workshop to discuss spectrum implications16 of the Intelligent Car Initiative. The spectrum needs require coordination with the proper bodies at an early stage of technical development to ensure the necessary frequency band availability.
(5) To follow up the recommendation on the establishment of a European Code of Practice for the development and testing of Advanced Driver Assistance Systems17.
5.2. Research and development in the area of smarter, cleaner and safer vehicles
The Intelligent Car Initiative activities build upon the achievements and results of EU Framework Programmes on research and technological development18.
The long-term objectives of the Intelligent Car Initiative can only be achieved through co-operative research and will be part of the ICT priority in FP7: ICT meeting societal challenges, contributing to the development of ICT-based transportation systems and services enabling people and goods to move safely, ecologically, comfortably and efficiently. The research priorities of the Intelligent Car fully support the ERTRAC19 (European Road Transport Research Advisory Council) strategic research agenda. Within the second objective of the Intelligent Car the following actions are proposed:
(6) Co-operative Research in Europe has allowed system suppliers and car manufacturers to develop active safety systems to mitigate or avoid accidents. Future research in this area should continue the work done so far and look at the needs for the next generation of driver assistance systems, such as enhanced performance, reliability, security and reduced fuel consumption, including potential risks of Electromagnetic compatibility failure, based on cheaper, smarter and faster components.
16 Pursuant to Decision 676/2002/EC of the European Parliament and of the Council on a regulatory
framework for radio spectrum policy in the European Community (Radio Spectrum Decision) 17 results of RESPONSE 3 part of the PREVENT integrated project http://www.prevent-ip.org/ 18 http://www.cordis.lu/ist/so/esafety-road/home.html 19 http://www.ertrac.org/

EN 8 EN
Under FP6 a first group of projects looking at the potential of vehicle-to-vehicle and vehicle-to-infrastructure communication have been launched. Further research on co-operative systems is needed to evolve from basic conceptual models towards integrated systems enabling functional testing and validation to take place. Traveller and traffic information have become key services for improving access to transport services. Open platforms are under development enabling travellers to access information in a seamless way. Market uptake is slow and further RTD is needed to overcome issues linked to business cases and user acceptability. ICT research should also help to achieve transport across transport modes, in particular in the case of freight transport where increased capacity management has a direct impact on fuel consumption. ICT should also help to overcome the economical barriers of multi-modal transport by improving the overall information flow. The research mentioned above, needs to be complemented with actions demonstrating the benefits and use of intelligent vehicle systems.
(7) Establishment through FP7 of a comprehensive, technical and socio/economic assessment program, based on Field Operational Tests (FOT) to assess in real environments the impact of ICT-based Intelligent Car systems on driver behaviour and on driving dynamics. The FOT will also serve as the basis for a cost-benefit analysis of advanced, intelligent systems and for an overall assessment of their impact on traffic safety and on the efficiency of the transport system. The deployment of these systems requires the commitment of the automotive industry and investments in the infrastructure that is under the responsibility of public authorities. Any engagement from their side will be based on impact assessment studies, where costs/benefits play an important role. The FOT will provide real operational data to carry out this analysis. The programme should target close-to-the-market systems that can rapidly be made available in a sufficiently large fleet of vehicles. The results of the Assessment programme will strongly depend on the commitment, involvement and participation of the Member States in the identification, setting-up and follow-up of the tests. The same applies for the work on co-operative systems, where the road operators, both urban and inter-urban, play a key role in achieving the expected benefits.
(8) Support and promote the setting up of an independent conformance testing and performance assessment programme in the EU, by using the existing means and capacity available in major European research centres. Whereas in the field of passive safety and emissions there are clear testing methods to verify design performance (i.e. crash worthiness), harmonised performance testing methods of ICT based systems do not exist. It is therefore urgent to start the reflection on criteria and methods to measure their performance. A number of European test centres have gained a lot of experience on performance testing of ICT based traffic safety and efficiency systems, and a comprehensive initiative can be started in close co-operation with the automotive industry, its suppliers, European Standards Organisations, Member States and EuroNCAP20. The initiative will include the launching of a feasibility study which
20 European New Car Assessment Programme: www.euroncap.com
EN 9 EN
will investigate the most appropriate methodology for testing and the organisational structure of the programme. In the second phase, a project could be started in FP7 for the proper application of the methodology, to carry out preliminary performance tests and to link with the standardisation bodies.
5.3. Create awareness of ICT based solutions for intelligent Cars
The awareness pillar of the Intelligent Car Initiative will promote, active information dissemination to a wide audience to raise drivers and policy maker’s knowledge about the potential of intelligent vehicle systems, stimulate user’s demand and create socio-economic acceptance. The following specific actions under the third objective of the Intelligent Car Initiative are proposed:
(9) Hold appropriate and regular “Intelligent Car Initiative Events”. These events aim at maximising media attention through result-oriented activities e.g. demonstration days, Integrated Projects road shows, showcases, workshops.
(10) Support and launch targeted activities to raise intelligent car systems awareness including the production of short, well targeted TV series or documentaries on specific ICT based systems, and the launching of a comprehensive benchmarking study on ongoing activities in promoting and deploying intelligent vehicle systems in the Member States and in the industry.
(11) Promote the establishment of an “eSafety Communication Platform” with the aim to improve, coordinate and harmonise the end-user communication of the different stakeholders. This platform has been proposed by the User Outreach Working Group of the eSafety Forum. In this working group a number of industrial partners identified the need to establish a formal organisation as a prerequisite for raising user awareness at EU level. This work will make use of best practise toolbox and pilots for user campaigns to be tested in several Member States.
(12) Support and promote with the i2010 branding and other targeted actions, stakeholders’ initiatives which pursue the objectives of the Intelligent Car Initiative
5.4. Monitoring of the Intelligent Car Initiative
In order to measure the progresses of the Intelligent Car Initiative a monitoring exercise will be put in place at European, national and industrial level, focusing on specific indicators to regularly assess the progress on the proposed actions.

EN 10 EN
6. CONCLUSIONS
The present Communication focuses on the third pillar of the i2010 initiative, the building of an inclusive European Information Society that offers better quality of life and improved public services. It proposes an Intelligent Car Initiative with three specific objectives: Coordination of the work of stakeholders through the eSafety Forum, supporting research and development and raising the user's awareness about intelligent vehicle systems and their potential benefits, and to accelerate their deployment in the market.
The Communication emphasises the strategic importance of Information and Communication Technologies, which enable building of smarter, safer and cleaner vehicles that help to solve the road transport related societal problems. It presents the Intelligent Car Initiative as the policy framework that will guide the stakeholder’s efforts in this area, aiming at accelerating the deployment of intelligent vehicle systems on the European and other markets through clearly defined actions that encompass the use of policy, research and communications instruments.
The Member States are key stakeholders of the Intelligent Car Initiative. The Commission invites the Member States to support the objectives expressed in this Communication, and stresses the need to act together at the European level. To this effect, the Member States are invited to play an active role in the execution of the proposed actions, together with the Commission, industry and other stakeholders.

ANNEX IV – RADIO SPECTRUM POLICY FACT
SHEET
What is the “market-based approach”? The Commission has proposed that specific bands - spectrum used for “electronic communications services”- should be subject to tradability throughout the EU. Spectrum trading means buying or selling the right to use a frequency band. The introduction of trading has been a recent trend in spectrum management and is mainly regulated at national level. Trading can help to determine the “market value” of spectrum, so the introduction of this approach would help reconcile demand and supply. In order to also drive innovation and the development of new wireless technologies, trading would be supported by limited regulatory restrictions on its use, permitting any technology that would not cause interference and allowing the provision of any communications service.
Unleashing Europe’s Wireless Potential Wireless communications is one of Europe’s most dynamic technology sectors and underpins European society in areas as diverse as transport, security and environmental protection. The entire industry relies on radio spectrum – a ‘raw material’ in short supply.Every time you turn on your radio, use your mobile or cordless telephone, lock your car by remote control or use a satellite navigation system, you are using radio spectrum. All wireless equipment receives information transmitted in a different part of the radio spectrum – your favourite radio station is probably on the ‘FM band’ (around 100 MHz), for example, while your GSM phone operates at either 900 or 1800 MHz. If they did use the same frequency, they could interfere with each other, so regulating the use of radio spectrum is essential. And in a European single market, rules on spectrum use need to be coordinated across frontiers. The Radio Spectrum Decision (RSD, 676/2002/EC, March 2002), the EU - with the expert assistance of the European Conference of Postal and Telecommunications Administrations (CEPT) – aims to make the use of radio spectrum more flexible and ensure the development of a European single market for equipment and services, stimulating growth in this vital sector.
Radio spectrum policy: achievements and next steps
In its second annual progress report on the RSD, (COM(2005)411) the Commission outlined a forward looking strategy for Radio spectrum policy in Europe. It proposes a mix of models, combining the use of spectrum markets, unlicensed spectrum and traditional management. Specific policy issues that have reached the first concrete results include:
• a proposal for a market-based approach to spectrum management in Europe (see box). Legislative proposals for the
coordinated introduction of spectrum markets in Europe will be included in the review of the Regulatory Framework for Electronic Communication Services that is scheduled to begin in 2006 and
• The implications for spectrum use of the switchover from analogue to digital broadcasting.
Technical harmonisation has also delivered its first results in:
• spectrum harmonisation for next-generation Radio Local Area Networks (RLANs) providing wireless broadband access for computers and portable devices, and
• spectrum harmonisation for automotive short-range radars, to increase road safety.
Work is still at the development stage on:
• use of spectrum for current and future wireless platforms, such as GSM, third-generation mobile communications, etc,
• EU policy links with international spectrum fora, such as the International Telecommunication Union (ITU) World Radio Conference, where global rules for sharing spectrum are set,
• the role of unlicensed spectrum in flexible spectrum use,
• new uses, e.g. for hearing aids, of spectrum that is currently under-used by the European Radio Messaging System (ERMES),
• harmonised regulation of high speed short-range communications and imaging applications that use Ultra-Wide Band (UWB) technology,
• harmonising and prioritising frequency bands for Short-Range Devices (low-power, low-cost
Radio Spectrum Policy22
equipment, typically operated without licence,
• more efficient use of spectrum bands that are under-used for the Terrestrial Flight Telecommunications System (TFTS), and
• additional spectrum for third-generation mobile communications (by 2008).
The Commission has also launched a review of the available information on spectrum usage to see whether it is sufficient for informed public and private decision-making, notably in the light of new mechanisms such as spectrum trading.
New potential, New Challenges Many of today’s cutting-edge wireless technologies play an essential role in Europe’s continuous modernisation – from health to social inclusion, from regional development to the protection of our environment and promotion of cultural diversity. The potential and the challenge are illustrated by Europe’s GSM standard. EU regulation of the radio spectrum was essential in launching GSM, ensuring that the standard worked across the EU and placing European industry at the forefront of a global sector. And yet GSM is just one wireless application. A similar European standard was developed for paging (ERMES), a system that never took off as GSM displaced it. The management of radio spectrum in Europe has clearly not always kept pace with the potential. Until the RSD, radio spectrum management could not effectively, systematically and consistently take into account the needs of Community policies, including the completion of the single market (the GSM Directive was a piece of ad hoc EU legislation). This led to a paradox – while many of today’s most dynamic and useful technologies are radio-based, their use is still tightly constrained by national rules and inflexible procedures. As a result, some organizations under-use the radio spectrum they have rights to, while new sectors are constrained by ‘spectrum scarcity’. Organisations with ‘legacy spectrum’ also have a clear market advantage over new entrants, further limiting innovation and efficient spectrum use. Despite voluntary coordination among Member States, moreover, national rules now effectively fragment the EU single market. Radio spectrum regulation must therefore be brought up to date in a coordinated way across Europe if further fragmentation is to be avoided and more success stories such as GSM are to be achieved.
• Hence the Radio Spectrum Decision aims to ensure sufficient harmonisation to support the single market and promote innovation and
competitiveness, while making the use of spectrum more flexible.
What does radio spectrum policy at the European level mean?
The Radio Spectrum Decision also covers spectrum use outside communications and empowers the European Commission to mandate the European Conference of Postal and Telecommunications Administrations (CEPT) to develop technical solutions for harmonizing spectrum use to give effect to EU policies. These solutions can be made legally binding by Commission decisions via technical implementation measures. Further the RSD, the following entities have been established:
• Radio Spectrum Committee (RSC) chaired by the Commission and composed of representatives of the Member States, the RSC assists the Commission in developing decisions regarding technical implementation Measures;
• Radio Spectrum Policy Group (RSPG) - composed of high-level representatives from EU Member States and the Director General of DG Information Society, the RSPG advises the Commission on issues of a broader policy scope than the technical measures covered by the RSC.
Under the RSD, the Commission can also act to ensure the co-ordinated and timely provision of information concerning the allocation, availability and use of radio spectrum in the EU. Finally, appropriate coordination by the Commission has enabled the promotion of Community policy objectives in international spectrum negotiations.
While many of today’s most
dynamic and useful technologies are radio-based, their use is still tightly constrained by
national rules and procedures
Factsheet 22 (January 2006)
Further Information • Radio Spectrum Policy:
http://europa.eu.int/information_society/topics/ radio_spectrum/index_en.htm
• Europe’s Information Society: Thematic Portal http://europa.eu.int/information_society/
• Information Society Directorate-General: Av. de Beaulieu 24, 1160 Brussels [email protected]
See Also: • FactSheets 13 & 14: eCommunications
Regulation
• Factsheet 23: Mobile Communications All Factsheets and more can be downloaded from “Europe’s Information Society: Thematic Portal”.

ANNEX V – DECISION ON A REGULATORY
FRAMEWORK FOR RADIO SPECTRUM POLICY IN THE EUROPEAN COMMUNITY
(RADIO SPECTRUM DECISION)

I
(Acts whose publication is obligatory)
DECISION No 676/2002/EC OF THE EUROPEAN PARLIAMENT AND OF THE COUNCIL
of 7 March 2002
on a regulatory framework for radio spectrum policy in the European Community (RadioSpectrum Decision)
THE EUROPEAN PARLIAMENT AND THECOUNCIL OF THE EUROPEAN UNION,
Having regard to the Treaty establishing the EuropeanCommunity, and in particular Article 95 thereof,
Having regard to the proposal from the Commission (1),
Having regard to the opinion of the Economic and SocialCommittee (2),
Acting in accordance with the procedure laid down in Article251 of the Treaty (3).
Whereas:
(1) On 10 November 1999 the Commission presented acommunication to the European Parliament, theCouncil, the Economic and Social Committee and theCommittee of the Regions proposing the next steps inradio spectrum policy on the basis of the results of thepublic consultation on the Green Paper on radiospectrum policy in the context of European Communitypolicies such as telecommunications, broadcasting,transport and research and development (R & D). ThisCommunication was welcomed by the EuropeanParliament in a Resolution of 18 May 2000 (4). Itshould be emphasised that a certain degree of furtherharmonisation of Community policy on the radiospectrum is desirable for services and applications, inparticular for services and applications with Communityor European coverage, and that it is necessary to ensurethat the Member States make applicable in the requiredmanner certain decisions of the European Conference ofPostal and Telecommunications Administrations (CEPT).
(2) A policy and legal framework therefore needs to becreated in the Community in order to ensurecoordination of policy approaches and, whereappropriate, harmonised conditions with regard to theavailability and efficient use of radio spectrum necessaryfor the establishment and functioning of the internalmarket in Community policy areas, such as electronic
communications, transport and R & D. The policyapproach with regard to the use of radio spectrumshould be coordinated and, where appropriate,harmonised at Community level, in order to fulfilCommunity policy objectives efficiently. Communitycoordination and harmonisation may also helpachieving harmonisation and coordination of the use ofthe radio spectrum at global level in certain cases. Atthe same time, appropriate technical support can beprovided at national level.
(3) Radio spectrum policy in the Community shouldcontribute to freedom of expression, including freedomof opinion and freedom to receive and disseminateinformation and ideas, irrespective of borders, as well asfreedom and plurality of the media.
(4) This Decision is based on the principle that, where theEuropean Parliament and the Council have agreed on aCommunity policy which depends on radio spectrum,committee procedures should be used for the adoptionof accompanying technical implementing measures.Technical implementing measures should specificallyaddress harmonised conditions with regard to theavailability and efficient use of radio spectrum, as wellas the availability of information related to the use ofradio spectrum. The measures necessary for theimplementation of this Decision should be adopted inaccordance with Council Decision 1999/468/EC of 28June 1999 laying down the procedures for the exerciseof implementing powers conferred on theCommission (5).
(5) Any new Community policy initiative depending onradio spectrum should be agreed by the EuropeanParliament and the Council as appropriate, on the basisof a proposal from the Commission. Without prejudiceto the right of initiative of the Commission, thisproposal should include, inter alia, information on theimpact of the envisaged policy on existing spectrumuser communities as well as indications regarding anygeneral radio frequency reallocation that this new policywould require.
(6) For the development and adoption of technicalimplementing measures and with a view to contributingto the formulation, preparation and implementation of
(1) OJ C 365 E, 19.12.2000, p. 256 and OJ C 25 E, 29.1.2002,p. 468.
(2) OJ C 123, 25.4.2001, p. 61.(3) Opinion of the European Parliament of 5 July 2001 (not yet
published in the Official Journal), Council Common Position of16 October 2001 (OJ C 9, 11.1.2002, p. 7) and Decision of theEuropean Parliament of 12 December 2001 (not yet published inthe Official Journal). Council Decision of 14 February 2002.
(4) OJ C 59, 23.2.2001, p. 245. (5) OJ L 184, 17.7.1999, p. 23.
24.4.2002 L 108/1Official Journal of the European CommunitiesEN

Community radio spectrum policy, the Commissionshould be assisted by a committee, to be called theRadio Spectrum Committee, composed ofrepresentatives of the Member States and chaired by arepresentative of the Commission. The Committeeshould consider proposals for technical implementingmeasures related to radio spectrum. These may bedrafted on the basis of discussions in the Committeeand may in specific cases require technical preparatorywork by national authorities responsible for radiospectrum management. Where committee proceduresare used for the adoption of technical implementingmeasures, the Committee should also take into accountthe views of the industry and of all users involved, bothcommercial and non-commercial, as well as of otherinterested parties, on technological, market andregulatory developments which may affect the use ofradio spectrum. Radio spectrum users should be free toprovide all input they believe is necessary. TheCommittee may decide to hear representatives of radiospectrum user communities at its meetings wherenecessary to illustrate the situation in a particular sector.
(7) Where it is necessary to adopt harmonisation measuresfor the implementation of Community policies whichgo beyond technical implementing measures, theCommission may submit to the European Parliamentand to the Council a proposal on the basis of theTreaty.
(8) Radio spectrum policy cannot be based only ontechnical parameters but also needs to take into accounteconomic, political, cultural, health and socialconsiderations. Moreover, the ever increasing demandfor the finite supply of available radio spectrum willlead to conflicting pressures to accommodate thevarious groups of radio spectrum users in sectors suchas telecommunications, broadcasting, transport, lawenforcement, military and the scientific community.Therefore, radio spectrum policy should take intoaccount all sectors and balance the respective needs.
(9) This Decision should not affect the right of MemberStates to impose restrictions necessary for public orderand public security purposes and defence. Where atechnical implementing measure would affect inter aliaradio frequency bands used by a Member Stateexclusively and directly for its public security anddefence purposes, the Commission may, if the MemberState requests it on the basis of justified reasons, agreeto transitional periods and/or sharing mechanisms, inorder to facilitate the full implementation of thatmeasure. In this regard, Member States may also notifythe Commission of their national radio frequency bandsused exclusively and directly to pursue public securityand defence purposes.
(10) In order to take into account the views of MemberStates, Community institutions, industry and of all usersinvolved, both commercial and non-commercial, as wellas of other interested parties on technological, marketand regulatory developments which may affect the useof radio spectrum, the Commission may organiseconsultations outside the framework of this Decision.
(11) Radio spectrum technical management includes theharmonisation and allocation of radio spectrum. Suchharmonisation should reflect the requirements ofgeneral policy principles identified at Community level.However, radio spectrum technical management doesnot cover assignment and licensing procedures, nor thedecision whether to use competitive selectionprocedures for the assignment of radio frequencies.
(12) With a view to the adoption of technical implementingmeasures addressing the harmonisation of radiofrequency allocation and of information availability, theCommittee should cooperate with radio spectrumexperts from national authorities responsible for radiospectrum management. Building on the experience ofmandating procedures gained in specific sectors, forexample as a result of the application of Decision No710/97/EC of the European Parliament and of theCouncil of 24 March 1997 on a coordinatedauthorisation approach in the field of satellitepersonal-communication services in the Community (1)and Decision No 128/1999/EC of the EuropeanParliament and of the Council of 14 December 1998 onthe coordinated introduction of a third generationmobile and wireless communications system (UMTS) inthe Community (2), technical implementing measuresshould be adopted as a result of mandates to the CEPT.Where it is necessary to adopt harmonised measures forthe implementation of Community policies which donot fall within the remit of CEPT, the Commission couldadopt implementation measures with the assistance ofthe Radio Spectrum Committee.
(13) The CEPT comprises 44 European countries. It draftstechnical harmonisation measures with the objective ofharmonising the use of radio spectrum beyond theCommunity borders, which is particularly important forthose Member States where the use of radio spectrummay be affected by that of the non-EU members ofCEPT. Decisions and measures taken in accordance withthis Decision should take account of the specificsituation of Member States with external frontiers.Where necessary, the Commission should be able tomake the results of mandates issued to CEPTcompulsory for Member States, and where the results ofsuch mandates are not available or deemed not
(1) OJ L 105, 23.4.1997, p. 4. Decision as amended by DecisionNo 1215/2000/EC (OJ L 139, 10.6.2000, p. 1).
(2) OJ L 17, 22.1.1999, p. 1.
L 108/2 24.4.2002Official Journal of the European CommunitiesEN
acceptable, to take appropriate alternative action. Thiswill in particular provide for the harmonisation of useof radio frequencies across the Community, in line withDirective 2002/21/EC of the European Parliament andof the Council of 7 March 2002 on a commonregulatory framework for electronic communicationsnetworks and services (Framework Directive) (1) andtaking into account the provisions of Directive2002/20/EC of the European Parliament and theCouncil of 7 March 2002 on the authorisation ofelectronic communications networks and services(Authorisation Directive) (2).
(14) The coordinated and timely provision to the public ofappropriate information concerning the allocation,availability and use of radio spectrum in the Communityis an essential element for investments and policymaking. So are technological developments which willgive rise to new radio spectrum allocation andmanagement techniques and radio frequency assignmentmethods. Development of long-term strategic aspectsrequire proper understanding of the implications of howtechnology evolves. Such information should thereforebe made accessible in the Community, withoutprejudice to confidential business and personalinformation protection under Directive 97/66/EC of theEuropean Parliament and of the Council of 15December 1997 concerning the processing of personaldata and the protection of privacy in thetelecommunications sector (3). The implementation of across-sectoral radio spectrum policy makes theavailability of information on the whole radio spectrumnecessary. In view of the general purpose ofharmonising radio spectrum use in the Community andelsewhere in Europe, the availability of such informationneeds to be harmonised at European level in auser-friendly manner.
(15) It is therefore necessary to complement existingCommunity and international requirements forpublication of information on use of radio spectrum. Atinternational level, the reference paper on regulatoryprinciples negotiated in the context of the World TradeOrganisation by the Group on BasicTelecommunications also requires that the existing stateof allocated radio frequency bands be made publiclyavailable. Commission Directive 96/2/EC of 16 January1996 amending Directive 90/388/EEC with regard tomobile and personal communications (4) requiredMember States to publish every year or make availableon request the allocation scheme of radio frequencies,including plans for future extension of such frequencies,but covered only mobile and personal communicationsservices. Moreover, Directive 1999/5/EC of the
European Parliament and of the Council of 9 March1999 on radio equipment and telecommunicationsterminal equipment and the mutual recognition of theirconformity (5), as well as Directive 98/34/EC of theEuropean Parliament and of the Council of 22 June1998 laying down a procedure for the provision ofinformation in the field of technical standards andregulations and of rules on information societyservices (6), require Member States to notify theCommission of the interfaces which they have regulatedso as to assess their compatibility with Community law.
(16) Directive 96/2/EC was at the origin of the adoption of afirst set of measures by CEPT such as EuropeanRadiocommunications Committee Decision(ERC/DEC/(97)01) on the publication of national tablesof radio spectrum allocations. It is necessary to ensurethat CEPT solutions reflect the needs of Communitypolicy and are given the appropriate legal basis so as tobe implemented in the Community. For that purpose,specific measures have to be adopted in the Communityboth on procedure and substance.
(17) Community undertakings should obtain fair andnon-discriminatory treatment on access to radiospectrum in third countries. As access to radio spectrumis a key factor for business development and publicinterest activities, it is also necessary to ensure thatCommunity requirements for radio spectrum arereflected in international planning.
(18) Implementation of Community policies may requirecoordination of radio spectrum use, in particular withregard to the provision of communications servicesincluding Community-wide roaming facilities. Moreover,certain types of radio spectrum use entail a geographicalcoverage which goes beyond the borders of a MemberState and allow for transborder services withoutrequiring the movement of persons, such as satellitecommunications services. The Community shouldtherefore be adequately represented in the activities ofall relevant international organisations and conferencesrelated to radio spectrum management matters, such aswithin the International Telecommunication Union (ITU)and its World Radiocommunications Conferences.
(19) The existing preparation and negotiation mechanismsfor ITU World Radiocommunication Conferences havegenerated excellent results due to willing cooperationwithin the CEPT, and the Community's interests have
(1) See page 33 of this Official Journal.(2) See page 21 of this Official Journal.(3) OJ L 24, 30.1.1998, p. 1.(4) OJ L 20, 26.1.1996, p. 59.
(5) OJ L 91, 7.4.1999, p. 10.(6) OJ L 204, 21.7.1998, p. 37. Directive as amended by Directive
98/48/EC (OJ L 217, 5.8.1998, p. 18).
24.4.2002 L 108/3Official Journal of the European CommunitiesEN
been taken into account in the preparations. Ininternational negotiations, Member States and theCommunity should develop a common action andclosely cooperate during the whole negotiations processso as to safeguard the unity of the internationalrepresentation of the Community in line with theprocedures which had been agreed in the Councilconclusions of 3 February 1992 for the WorldAdministrative Radio Conference and as confirmed bythe Council conclusions of 22 September 1997 and 2May 2000. For such international negotiations, theCommission should inform the European Parliamentand the Council whether Community policies areaffected, with a view to obtaining endorsement by theCouncil on the Community policy objectives to beachieved and on the positions to be taken by MemberStates at international level. In order to ensure that suchpositions also appropriately address the technicaldimension related to radio spectrum management, theCommission may issue mandates to the CEPT for thispurpose. Member States should accompany any act ofacceptance of any agreement or regulation withininternational fora in charge of, or concerned with, radiospectrum management by a joint declaration stating thatthey will apply such agreement or regulation inaccordance with their obligations under the Treaty.
(20) In addition to international negotiations specificallyaddressing radio spectrum, there are other internationalagreements involving the Community and thirdcountries which may affect radio frequency bands usageand sharing plans and which may address issues such astrade and market access, including in the World TradeOrganisation framework, free circulation and use ofequipment, communications systems of regional orglobal coverage such as satellites, safety and distressoperations, transportation systems, broadcastingtechnologies, and research applications such as radioastronomy and earth observation. It is thereforeimportant to ensure compatibility between theCommunity's arrangements for negotiating trade andmarket access issues with the radio spectrum policyobjectives to be pursued under this Decision.
(21) It is necessary, due to the potential commercialsensitivity of information which may be obtained bynational authorities in the course of their action relatingto radio spectrum policy and management, that thenational authorities apply common principles in thefield of confidentiality laid down in this Decision.
(22) Since the objective of the proposed action, namely toestablish a common framework for radio spectrumpolicy, cannot be sufficiently achieved by the MemberStates and can therefore, by reason of the scale andeffects of the action, be better achieved at Communitylevel, the Community may adopt measures, inaccordance with the principle of subsidiarity as set out
in Article 5 of the Treaty. In accordance with theprinciple of proportionality as set out in that Article,this Decision does not go beyond what is necessary inorder to achieve that objective.
(23) Member States should implement this commonframework for radio spectrum policy in particularthrough their national authorities and provide theCommission with the relevant information required toassess its proper implementation throughout theCommunity, taking into account international tradeobligations of the Community and its Member States.
(24) Decisions No 710/97/EC and No 128/1999/EC remainin force.
(25) The Commission should report annually to theEuropean Parliament and the Council on the resultsachieved under this Decision, as well as on plannedfuture actions. This may allow the European Parliamentand the Council to express their political support, whereappropriate,
HAVE ADOPTED THIS DECISION:
Article 1
Aim and scope
1. The aim of this Decision is to establish a policy and legalframework in the Community in order to ensure thecoordination of policy approaches and, where appropriate,harmonised conditions with regard to the availability andefficient use of the radio spectrum necessary for theestablishment and functioning of the internal market inCommunity policy areas such as electronic communications,transport and research and development (R & D).
2. In order to meet this aim, this Decision establishesprocedures in order to:
(a) facilitate policy making with regard to the strategicplanning and harmonisation of the use of radio spectrumin the Community taking into consideration inter aliaeconomic, safety, health, public interest, freedom ofexpression, cultural, scientific, social and technical aspectsof Community policies as well as the various interests ofradio spectrum user communities with the aim ofoptimising the use of radio spectrum and of avoidingharmful interference;
(b) ensure the effective implementation of radio spectrumpolicy in the Community, and in particular establish a
L 108/4 24.4.2002Official Journal of the European CommunitiesEN
general methodology to ensure harmonised conditions forthe availability and efficient use of radio spectrum;
(c) ensure the coordinated and timely provision ofinformation concerning the allocation, availability and useof radio spectrum in the Community;
(d) ensure the effective coordination of Community interestsin international negotiations where radio spectrum useaffects Community policies.
3. Activities pursued under this Decision shall take dueaccount of the work of international organisations related toradio spectrum management, e.g. the InternationalTelecommunication Union (ITU) and the European Conferenceof Postal and Telecommunications Administrations (CEPT).
4. This Decision is without prejudice to measures taken atCommunity or national level, in compliance with Communitylaw, to pursue general interest objectives, in particular relatingto content regulation and audio-visual policy, to the provisionsof Directive 1999/5/EC and to the right of Member States toorganise and use their radio spectrum for public order andpublic security purposes and defence.
Article 2
Definition
For the purposes of this Decision, �radio spectrum� includesradio waves in frequencies between 9 kHz and 3 000 GHz;radio waves are electromagnetic waves propagated in spacewithout artificial guide.
Article 3
Committee procedure
1. The Commission shall be assisted by a committee (�theRadio Spectrum Committee�).
2. Where reference is made to this paragraph, Articles 3and 7 of Decision 1999/468/EC shall apply, having regard tothe provisions of Article 8 thereof.
3. Where reference is made to this paragraph, Articles 5and 7 of Decision 1999/468/EC shall apply, having regard tothe provisions of Article 8 thereof.
The period provided for in Article 5(6) of Decision1999/468/EC shall be set at three months.
4. The Committee shall adopt its rules of procedure.
Article 4
Function of the Radio Spectrum Committee
1. In order to meet the aim set out in Article 1, theCommission shall submit to the Radio Spectrum Committee,in accordance with the procedures set out in this Article,appropriate technical implementing measures with a view toensuring harmonised conditions for the availability andefficient use of radio spectrum, as well as the availability ofinformation related to the use of radio spectrum, as referred toin Article 5.
2. For the development of technical implementing measuresreferred to in paragraph 1 which fall within the remit of theCEPT, such as the harmonisation of radio frequency allocationand of information availability, the Commission shall issuemandates to the CEPT, setting out the tasks to be performedand the timetable therefor. The Commission shall act inaccordance with the procedure referred to in Article 3(2).
3. On the basis of the work completed pursuant toparagraph 2, the Commission shall decide whether the resultsof the work carried out pursuant to the mandates shall applyin the Community and on the deadline for theirimplementation by the Member States. These decisions shall bepublished in the Official Journal of the European Communities. Forthe purpose of this paragraph, the Commission shall act inaccordance with the procedure referred to in Article 3(3).
4. Notwithstanding paragraph 3, if the Commission or anyMember State considers that the work carried out on the basisof a mandate issued pursuant to paragraph 2 is notprogressing satisfactorily having regard to the set timetable orif the results of the mandate are not acceptable, theCommission may adopt, acting in accordance with theprocedure referred to in Article 3(3), measures to achieve theobjectives of the mandate.
5. The measures referred to in paragraphs 3 and 4 may,where appropriate, provide the possibility for transitionalperiods and/or radio spectrum sharing arrangements in aMember State to be approved by the Commission, wherejustified, taking into account the specific situation in theMember State, on the basis of a reasoned request by theMember State concerned and provided such exception wouldnot unduly defer implementation or create undue differencesin the competitive or regulatory situations between MemberStates.
6. To achieve the aim set out in Article 1, the Commissionmay also adopt technical implementing measures referred to inparagraph 1 which are not covered by paragraph 2, acting inaccordance with the procedure referred to in Article 3(3).
24.4.2002 L 108/5Official Journal of the European CommunitiesEN
7. With a view to contributing to the formulation,preparation and implementation of Community radiospectrum policy, and without prejudice to the procedures setout in this Article, the Commission shall consult the RadioSpectrum Committee periodically on the matters covered byArticle 1.
Article 5
Availability of information
Member States shall ensure that their national radio frequencyallocation table and information on rights, conditions,procedures, charges and fees concerning the use of radiospectrum, shall be published if relevant in order to meet theaim set out in Article 1. They shall keep this information up todate and shall take measures to develop appropriate databasesin order to make such information available to the public,where applicable in accordance with the relevantharmonisation measures taken under Article 4.
Article 6
Relations with third countries and internationalorganisations
1. The Commission shall monitor developments regardingradio spectrum in third countries and in internationalorganisations, which may have implications for theimplementation of this Decision.
2. Member States shall inform the Commission of anydifficulties created, de jure or de facto, by third countries orinternational organisations for the implementation of thisDecision.
3. The Commission shall report regularly on the results ofthe application of paragraphs 1 and 2 to the EuropeanParliament and the Council and may propose measures withthe aim of securing the implementation of the principles andobjectives of this Decision, where appropriate. When necessaryto meet the aim set out in Article 1, common policy objectivesshall be agreed to ensure Community coordination amongMember States.
4. Measures taken pursuant to this Article shall be withoutprejudice to the Community's and Member States' rights andobligations under relevant international agreements.
Article 7
Notification
Member States shall give the Commission all informationnecessary for the purpose of verifying the implementation ofthis Decision. In particular, Member States shall immediatelyinform the Commission of the implementation of the results ofthe mandates pursuant to Article 4(3).
Article 8
Confidentiality
1. Member States shall not disclose information covered bythe obligation of business confidentiality, in particularinformation about undertakings, their business relations ortheir cost components.
2. Paragraph 1 shall be without prejudice to the right ofrelevant authorities to undertake disclosure where it is essentialfor the purposes of fulfilling their duties, in which case suchdisclosure shall be proportionate and shall have regard to thelegitimate interests of undertakings in the protection of theirbusiness secrets.
3. Paragraph 1 shall not preclude publication ofinformation on conditions linked to the granting of rights touse radio spectrum which does not include information of aconfidential nature.
Article 9
Report
The Commission shall report on an annual basis to theEuropean Parliament and the Council on the activitiesdeveloped and the measures adopted pursuant to this Decision,as well as on future actions envisaged pursuant to thisDecision.
Article 10
Implementation
Member States shall take all measures necessary, by laws,regulations and administrative provisions, for theimplementation of this Decision and all resulting measures.
Article 11
Entry into force
This Decision shall enter into force on the day of itspublication in the Official Journal of the European Communities.
Article 12
Addressees
This Decision is addressed to the Member States.
Done at Brussels, 7 March 2002.
For the European Parliament
The PresidentP. COX
For the Council
The PresidentJ. C. APARICIO
L 108/6 24.4.2002Official Journal of the European CommunitiesEN
ANNEX VI – COMMISSION DECISION ON THE
HARMONISATION OF THE 24 GHZ RANGE RADIO
SPECTRUM BAND FOR THE TIME-LIMITED USE BY AUTOMOTIVE SHORT-
RANGE RADAR EQUIPMENT IN THE
EUROPEAN COMMUNITY

COMMISSION
COMMISSION DECISION
of 17 January 2005
on the harmonisation of the 24 GHz range radio spectrum band for the time-limited use byautomotive short-range radar equipment in the Community
(notified under document number C(2005) 34)
(Text with EEA relevance)
(2005/50/EC)
THE COMMISSION OF THE EUROPEAN COMMUNITIES,
Having regard to the Treaty establishing the EuropeanCommunity,
Having regard to Decision No 676/2002/EC of the EuropeanParliament and of the Council of 7 March 2002 on a regulatoryframework for radio spectrum policy in the EuropeanCommunity (Radio Spectrum Decision) (1), and in particularArticle 4(3) thereof,
Whereas:
(1) The Commission communication to the Council and theEuropean Parliament of 2 June 2003 on ‘European RoadSafety Action Programme — Halving the number of roadaccident victims in the European Union by 2010: ashared responsibility’ (2) sets out a coherent approach toroad safety in the European Union. Furthermore, in itscommunication to the Council and the EuropeanParliament of 15 September 2003, entitled ‘Informationand communications technologies for safe and intelligentvehicles’ (3), the Commission announced its intention toimprove road safety in Europe, to be known as theeSafety initiative, by using new information and commu-nications technologies and intelligent road safety systems,such as automotive short-range radar equipment. On5 December 2003 in its conclusions on road safety (4)the Council also called for the improvement of vehiclesafety by the promotion of new technologies such aselectronic safety.
(2) The rapid and coordinated development and deploymentof automotive short-range radar within the Communityrequire a harmonised radio frequency band to beavailable for this application in the Community withoutdelay and on a stable basis, in order to provide thenecessary confidence for industry to make thenecessary investments.
(3) On 5 August 2003, with a view to such harmonisation,the Commission issued a mandate, pursuant to Article4(2) of Decision No 676/2002/EC, to the EuropeanConference of Postal and Telecommunications Adminis-trations (CEPT), to harmonise the radio spectrum and tofacilitate a coordinated introduction of automotive short-range radar.
(4) As a result of that mandate, the 79 GHz range band hasbeen identified by CEPT as the most suitable band forlong term development and deployment of automotiveshort-range radar, with the introduction of this measureby January 2005 at the latest. The Commission thereforeadopted Decision 2004/545/EC of 8 July 2004 on theharmonisation of the radio spectrum in the 79 GHzrange for the use of automotive short-range radarequipment in the Community (5).
(5) However, automotive short-range radar technology in the79 GHz range band is still under development and is notimmediately available on a cost-effective basis, althoughit is understood that the industry will promote the devel-opment of such a technology in order to make itavailable at the earliest possible date.
EN25.1.2005 Official Journal of the European Union L 21/15
(1) OJ L 108, 24.4.2002, p. 1.(2) COM(2003) 311.(3) COM(2003) 542.(4) Conclusions of the Council of the European Union on road safety,
15058/03 TRANS 307. (5) OJ L 241, 13.7.2004, p. 66.

(6) In its report of 9 July 2004 to the European Commissionunder the mandate of 5 August 2003, CEPT identifiedthe 24 GHz range radio spectrum band as being atemporary solution which would enable the early intro-duction of automotive short-range radar in theCommunity to meet the objectives of the e-Safetyinitiative, since technology is considered sufficientlymature for operation in that band. Therefore, MemberStates should take the appropriate measures based ontheir particular national radio spectrum situation tomake sufficient radio spectrum available on a harmonisedbasis in the 24 GHz range radio spectrum band (21,65to 26,65 GHz), while protecting existing servicesoperating in that band from harmful interference.
(7) According to footnote 5.340 of the Radio Regulations ofthe ITU, all emissions are prohibited in the band 23,6 to24,0 GHz, in order to protect the use on a primary basisof this band by the radio astronomy, earth explorationsatellite and space research passive services. This prohi-bition is justified by the fact that harmful interference tothese services by emissions in the band cannot betolerated.
(8) Footnote 5.340 is subject to national implementationand may be applied in conjunction with Article 4.4 ofthe Radio Regulations, pursuant to which no frequencymay be assigned to a station in derogation of the RadioRegulations, except on the express condition that such astation, when using such a frequency assignment, shallnot cause harmful interference to a station operating inaccordance with the provision of the ITU rules.Therefore, in its report to the Commission, CEPTpointed out that footnote 5.340 does not strictlyprevent administrations from using bands falling underthe footnote, provided that they are neither impactingservices of other administrations nor trying to have inter-national recognition under the ITU of such use.
(9) The 23,6 to 24,0 GHz frequency band is of primaryinterest for the scientific and meteorological communitiesto measure water vapour content essential fortemperature measurements for the earth explorationsatellite service. In particular, this frequency plays animportant role in the Global Monitoring for Environmentand Security initiative (GMES) aiming at an operationalEuropean warning system. The 22,21 to 24,00 GHzfrequency range is also needed to measure spectrallines of ammonia and water as well as continuum obser-vations for the radio astronomy service.
(10) The bands 21,2 to 23,6 GHz and 24,5 to 26,5 GHz areallocated to the fixed service on a primary basis in theITU Radio Regulations and are extensively used by fixedlinks to meet the infrastructure requirement for existing2G and 3G mobile networks and to develop broadbandfixed wireless networks.
(11) Based on studies of compatibility between automotiveshort-range radar and fixed services, earth explorationsatellite services and radio astronomy services, CEPThas concluded that an unlimited deployment of auto-motive short-range radar systems in the 24 GHz rangeradio spectrum band will create unacceptable harmfulinterference to existing radio applications operating inthis band. Considering ITU Radio Regulations and theimportance of these services, any introduction of auto-motive short-range radar at 24 GHz could be made onlyon condition that these services in the band are suffi-ciently protected. In this respect, while the signalemanating from automotive short-range radarequipment is extremely low in most of the 24 GHzfrequency range, it is important to take into accountthe cumulative effect of the use of many devices, whichindividually might not cause harmful interference.
(12) According to CEPT, existing applications operating in oraround the 24 GHz band would increasingly suffersignificant levels of harmful interference if a certainlevel of penetration of vehicles using the 24 GHzrange radio spectrum band for automotive short-rangeradars were to be exceeded. CEPT concluded in particularthat sharing between earth exploration satellite servicesand automotive short-range radar could only be feasibleon a temporary basis if the percentage of vehiclesequipped with 24 GHz automotive short-range radarwas limited to 7,0 % in each national market. Whilethis percentage has been calculated on the basis ofearth exploration satellite pixels, national markets areused as the reference against which to calculate thethreshold, as this represents the most effective meansof carrying out this monitoring.
(13) Furthermore, the CEPT report concluded that to maintainthe protection requirements of the fixed service, sharingwith automotive short-range radar could only be feasibleon a temporary basis if the percentage of vehiclesequipped with automotive short-range radar withinsight of a fixed service receiver was limited to less than10%.
(14) It is therefore presumed on the basis of the work carriedout by CEPT that harmful interference should not becaused to other users of the band where the totalnumber of vehicles registered, placed on the market orput into service equipped with 24 GHz automotiveshort-range radar does not exceed the level of 7 % ofthe total number of vehicles in circulation in eachMember State.
(15) It is not presently anticipated that this threshold will bereached before the reference date of 30 June 2013.
ENL 21/16 Official Journal of the European Union 25.1.2005

(16) Several Member States also use the 24 GHz range radiospectrum band for radar speed meter control whichcontributes to traffic safety. Following compatibilitystudies with automotive short-range radar of a numberof these devices operating in Europe, CEPT has concludedthat compatibility is possible under certain conditions,principally by decoupling the centre frequencies of thetwo systems by at least 25 MHz, and that the risk ofharmful interference is low and will not create false speedmeasurements. Manufacturers of vehicles using auto-motive short-range radar systems have also committedthemselves to continue taking appropriate steps toensure that the risk of interference to radar speedmeters is minimal. The reliability of radar speed meterequipment will therefore not be affected by the operationof automotive short-range radar to any significant extent.
(17) Some Member States will in the future use the band 21,4to 22,0 GHz for broadcast satellite services in thedirection space-to-earth. Following compatibility studies,relevant national administrations have concluded that nocompatibility problems exist if the emissions of auto-motive short-range radar are limited to no more than– 61,3 dBm/MHz for frequencies below 22 GHz.
(18) The above presumptions and precautions need to be keptunder ongoing objective and proportionate review by theCommission assisted by the Member States, in order toassess on the basis of concrete evidence whether thethreshold of 7% will be breached in any nationalmarket before the reference date, whether harmful inter-ference has been or is likely to be caused within a shortperiod of time to other users of the band by the breachof the threshold of 7% in any national market, orwhether harmful interference has been caused to otherusers of the band even below the threshold.
(19) Therefore, as a result of information that becomesavailable as part of the review process, modifications tothe present Decision may turn out to be necessary, inparticular to ensure that there is no harmful interferencecaused to other users of the band.
(20) Accordingly, there can be no expectation that the bandof 24 GHz will continue to be available for automotiveshort-range radar until the reference date, if any of theabovementioned presumptions prove not to be valid atany time.
(21) In order to facilitate and render more effective the moni-toring of the use of the 24 GHz band and the reviewprocess, Member States may decide to draw more directlyupon manufacturers and importers for informationrequired in relation to the review process.
(22) As reported by CEPT, sharing between automotive short-range radar and the radio astronomy service within the22,21 to 24,00 GHz band could lead to harmful inter-ference for the latter if short-range radar-equipped
vehicles were allowed to operate unhindered within acertain distance from each radio astronomy station.Therefore, and bearing in mind that Directive1999/5/EC of the European Parliament and of theCouncil of 9 March 1999 on radio equipment and tele-communications terminal equipment and the mutualrecognition of their conformity (1) requires that radioequipment must be constructed so as to avoid harmfulinterference, automotive short-range radar systemsoperating in bands used by radio astronomy in the22,21 to 24,00 GHz range should be deactivated whenmoving within these areas. The relevant radio astronomystations and their associated exclusion zones should bedefined and justified by national administrations.
(23) In order to be effective and reliable, such deactivation isbest done automatically. However, to allow an earlyimplementation of automotive short-range radar in24 GHz, a limited amount of transmitters with manualdeactivation can be allowed as, with such a limiteddeployment, the probability of causing harmful inter-ference to the radio astronomy service is expected toremain low.
(24) The temporary introduction of automotive short-rangeradar in the 24 GHz range radio spectrum band hasan exceptional character and must not be considered asa precedent for the possible introduction of other appli-cations in the bands where ITU Radio Regulationsfootnote 5.340 applies, be it for temporary orpermanent use. Moreover, automotive short-range radarmust not be considered as a safety-of-life service withinthe meaning of the ITU Radio Regulations and mustoperate on a non-interference and non-protected basis.Furthermore, automotive short-range radar should notconstrain the future development in the use of the24 GHz band of applications which are protected byfootnote 5.340.
(25) The placing on the market and operation of 24 GHzautomotive short-range radar equipment in a stand-alone mode or retrofitted in vehicles already on themarket would not be compatible with the objective ofavoiding harmful interference to existing radio appli-cations operating in this band, since it could lead to anuncontrolled proliferation of such equipment. In contrast,it should be easier to control the use of automotiveshort-range radar systems in the 24 GHz band solelyas part of a complex integration of the electricalharness, automotive design and software package of avehicle and originally installed in the new vehicle, or asreplacement of original vehicle-mounted automotiveshort-range radar equipment.
EN25.1.2005 Official Journal of the European Union L 21/17
(1) OJ L 91, 7.4.1999, p. 10. Directive as last amended by Regulation(EC) No 1882/2003 (OJ L 284, 31.10.2003, p. 1).
(26) This Decision will apply taking into account and withoutprejudice to Council Directive 70/156/EEC of 6 February1970 on the approximation of the laws of the MemberStates relating to the type-approval of motor vehicles andtheir trailers (1) and to Directive 1999/5/EC.
(27) The measures provided for in this Decision are inaccordance with the opinion of the Radio SpectrumCommittee,
HAS ADOPTED THIS DECISION:
Article 1
The purpose of this Decision is to harmonise the conditions forthe availability and efficient use of the 24 GHz range radiospectrum band for automotive short-range radar equipment.
Article 2
For the purposes of this Decision, the following definitions shallapply:
1. ‘24 GHz range radio spectrum band’ means the 24,15+/– 2,50 GHz frequency band;
2. ‘automotive short-range radar equipment’ means equipmentproviding road vehicle-based radar functions for collisionmitigation and traffic safety applications;
3. ‘automotive short-range radar equipment put into service inthe Community’ means automotive short-range radarequipment originally installed or replacing one soinstalled in a vehicle which will be or which has beenregistered, placed on the market or put into service inthe Community;
4. ‘on non-interference and non-protected basis’ means thatno harmful interference may be caused to other users ofthe band and that no claim may be made for protectionfrom harmful interference received from other systems orservices operating in that band;
5. ‘reference date’ means 30 June 2013;
6. ‘transition date’ means 30 June 2007;
7. ‘vehicle’ means any vehicle as defined by Article 2 ofDirective 70/156/EEC;
8. ‘deactivation’ means the termination of emissions by auto-motive short-range radar equipment;
9. ‘exclusion zone’ means the area around a radio astronomystation defined by a radius equivalent to a specific distancefrom the station;
10. ‘duty cycle’ means the ratio of time during any one-hourperiod when equipment is actively transmitting.
Article 3
The 24 GHz range radio spectrum band shall be designated andmade available as soon as possible and no later than 1 July2005, on a non-interference and non-protected basis, for auto-motive short-range radar equipment put into service in theCommunity which complies with the conditions laid down inArticles 4 and 6.
The 24 GHz range radio spectrum band shall remain soavailable until the reference date, subject to the provisions ofArticle 5.
After that date, the 24 GHz range radio spectrum band shallcease to be available for automotive short-range radarequipment mounted on any vehicle except where thatequipment was originally installed, or is replacing equipmentso installed, in a vehicle registered, placed on the market orput into service before that date in the Community.
Article 4
The 24 GHz range radio spectrum band shall be availablefor the ultra-wide band part of automotive short-rangeradar equipment with a maximum mean power density of– 41,3 dBm/MHz effective isotropic radiated power (e.i.r.p.)and peak power density of 0 dBm/50MHz e.i.r.p., except forfrequencies below 22 GHz, where the maximum mean powerdensity shall be limited to -61,3 dBm/MHz e.i.r.p.
The 24,05 to 24,25 GHz radio spectrum band is designated forthe narrow-band emission mode/component, which may consistof an unmodulated carrier, with a maximum peak power of20 dBm e.i.r.p. and a duty cycle limited to 10% for peakemissions higher than – 10 dBm e.i.r.p.
Emissions within the 23,6-24,0 GHz band that appear 30o orgreater above the horizontal plane shall be attenuated by at least25 dB for automotive short-range radar equipment placed onthe market before 2010 and thereafter by at least 30 dB.
Article 5
1. The continued availability of the 24 GHz range radiospectrum band for automotive short-range radar applicationsshall be kept under active scrutiny to ensure that the mainpremise of opening this band to such systems remains valid,which is that no harmful interference is caused to other users ofthe band, in particular through the timely verification of:
ENL 21/18 Official Journal of the European Union 25.1.2005
(1) OJ L 42, 23.2.1970, p. 1. Directive as last amended by CommissionDirective 2004/104/EC (OJ L 337, 13.11.2004, p. 13).
(a) the total number of vehicles registered, placed on themarket or put into service equipped with 24 GHz auto-motive short-range radar in each Member State, to verifythat this number does not exceed the level of 7 % of thetotal number of vehicles in circulation in each MemberState;
(b) whether adequate information has been made available byMember States or by manufacturers and importers regardingthe number of 24 GHz short-range radar-equipped vehiclesfor the purpose of monitoring effectively the use of the24 GHz band by automotive short-range radar equipment;
(c) whether the individual or cumulative use of 24 GHz auto-motive short-range radar is causing or is likely to causewithin a short period of time harmful interference toother users in the 24 GHz band or in adjacent bands inat least one Member State, whether or not the thresholdreferred to in (a) has been reached;
(d) the continuing appropriateness of the reference date.
2. In addition to the review process in paragraph 1, a funda-mental review shall be carried out by 31 December 2009 at thelatest to verify the continuing relevance of the initialassumptions concerning the operation of automotive short-range radar in the 24 GHz range radio spectrum band, aswell as to verify whether the development of automotiveshort-range radar technology in the 79 GHz range isprogressing in such a way as to ensure that automotive short-range radar applications operating in this radio spectrum bandwill be readily available by 1 July 2013.
3. The fundamental review may be triggered by a reasonedrequest by a member of the Radio Spectrum Committee, or atthe Commission’s own initiative.
4. The Member States shall assist the Commission to carryout the reviews referred to in paragraphs 1 and 2 by ensuringthat the necessary information is collected and provided to theCommission in a timely manner, in particular the informationset out in the Annex.
Article 6
1. Automotive short-range radar equipment mounted onvehicles shall only operate when the vehicle is active.
2. Automotive short-range radar equipment put into servicein the Community shall ensure protection of the radioastronomy stations operating in the radio spectrum band22,21 to 24,00 GHz defined in Article 7 through automaticdeactivation in a defined exclusion zone or via another methodproviding equivalent protection for these stations without driverintervention.
3. By way of derogation to paragraph 2, manual deactivationwill be accepted for automotive short-range radar equipmentput into service in the Community operating in the 24 GHzrange radio spectrum band before the transition date.
Article 7
Each Member State shall determine the relevant national radioastronomy stations to be protected pursuant to Article 6(2) inits territory and the characteristics of the exclusion zonespertaining to each station. This information, supported byappropriate justification, shall be notified to the Commissionwithin six months of adoption of this Decision, and publishedin the Official Journal of the European Union.
Article 8
This Decision is addressed to the Member States.
Done at Brussels, 17 January 2005.
For the CommissionViviane REDING
Member of the Commission
EN25.1.2005 Official Journal of the European Union L 21/19
ANNEX
Information required for monitoring the use of the 24 GHz range radio spectrum band by automotiveshort-range radar
This Annex establishes the data required to verify the penetration rate of automotive vehicles equipped with short-rangeradar in each Member State of the European Union in accordance with Article 5. This data shall be used to calculate theproportion of vehicles equipped with short-range radar using the 24 GHz range radio spectrum compared to the totalnumber of vehicles in circulation in each Member State.
The following data shall be collected on a yearly basis:
(1) the number of vehicles equipped with short-range radar using the 24 GHz range radio spectrum band producedand/or placed on the market and/or registered for the first time during the reference year in the Community;
(2) the number of vehicles equipped with short-range radar using the 24 GHz range radio spectrum band imported fromoutside the Community during the reference year;
(3) the total number of vehicles in circulation during the reference year.
All data shall be accompanied by an evaluation of the uncertainty related to the information.
In addition to the above data, any other relevant information which would assist the Commission in maintaining anadequate overview on the continued use of the 24 GHz range radio spectrum band by automotive short-range radardevices shall be made available in a timely fashion, including information on:
— current and future market trends, both within and outside the Community,
— after-market sales and retrofitting of equipment,
— the state of progress of alternative technologies and applications, notably automotive short-range radar operating inthe 79 GHz range radio spectrum band according to Decision 2004/545/EC.
ENL 21/20 Official Journal of the European Union 25.1.2005

ANNEX VII – MANDATE TO CEPT TO HARMONISE
RADIO SPECTRUM TO FACILITATE A
COORDINATED EU INTRODUCTION OF
AUTOMOTIVE SHORT-RANGE RADAR (SRR)
SYSTEMS
Rue de la Loi 200, B-1049 Bruxelles/Wetstraat 200, B-1049 Brussel - Belgium - Office: BU33 6/15. Telephone: direct line (+32-2)299.01.82., switchboard 299.11.11. Fax: +32.2.296.88.75. e-mail : [email protected]
EUROPEAN COMMISSION Directorate-General Information Society Communications Services Implementation/Committees
Brussels, 10 June 2003 DG INFSO/B2
RSCOM03-15
FOR INTERNAL USE ONLY
RADIO SPECTRUM COMMITTEE
Working Document
Subject: Mandate to CEPT to harmonise Radio Spectrum to facilitate a coordinated EU Introduction of Automotive Short-Range Radar (SRR) Systems.
This is a Committee working document which does not necessarily reflect the official position of the Commission. No inferences should be drawn from this document as to the
precise form or content of future measures to be submitted by the Commission. The Commission accepts no responsibility or liability whatsoever with regard to any
information or data referred to in this document.

2
MANDATE TO CEPT TO HARMONISE RADIO SPECTRUM TO FACILITATE A COORDINATED EU INTRODUCTION OF AUTOMOTIVE SHORT-RANGE RADAR SYSTEMS
Title
A mandate to CEPT to identify radio spectrum for the introduction of automotive short-range radar devices (SRR) in the European Union.
Purpose
Pursuant to art. 4 of the Radio Spectrum Decision, CEPT is mandated to undertake all necessary work to ensure the availability of harmonised radio spectrum in the European Union for the deployment of automotive short-range radar systems to be used for improving road safety. In order to expedite the introduction of this type of radio application in the EU, additional appropriate frequency bands ought to be considered for a limited temporary introduction of SRR systems, besides the identification of permanent SRR spectrum bands for the long term. The protection of other services operating in or near the temporary band(s) must be ensured by introducing specific operating limits for such SRR systems and by moving their operation to the permanent band by a fixed transition date.
Justification
Automotive SRR systems have been identified by the EU policy eSafety initiative1 as a significant technology for the improvement of road safety in Europe by active means, and as one of a number of active and passive measures that could be introduced together to address the overall transport policy goal of cutting road fatalities in Europe by half by 20102. In this context, the achievement of this policy goal would be supported by enabling the operation of SRR devices in new vehicles sold on the European market at the earliest. For this to happen, radio spectrum needs to be rapidly identified and harmonised at Community level. Background
In Europe, CEPT ECC/DEC/(02) 01 designates the band 76-77 GHz for vehicular or infrastructure radar systems. However, SRR systems require a wider bandwidth than currently available to obtain the required resolution Furthermore, the automotive industry3 holds that the immediate implementation of SRR systems in or around this
1see http://europa.eu.int/information_society/programmes/esafety/index_en.htm
2 Commission Communication on a European Road Safety Action Programme, COM(2003)311, June 2nd, 2003 at http://europa.eu.int/comm/transport/road/library/rsap/com_2003_0311_en.pdf , and Council Conclusions on the European Road Safety Action Programme, June 5th, 2003.
3 SARA (Short Range Automotive Radar Frequency Allocation group) representing 16 car manufacturers and 11 automotive components companies.

3
frequency range would not be feasible at the present time, given the stated relative lack of maturity and cost-effectiveness of the available technology for this band. The automotive industry believes that in the short term operation around the 24 GHz band is the only commercially-viable solution, with a subsequent migration to the 77 GHz or to another band after some years, by which time appropriate technology solutions are expected to have become cost-effective and the SRR concept validated in the market.
The SRR systems proposed by the automotive industry4 for the initial market introduction of SRR devices use ultra-wide band transmission principles and emit with a bandwidth of 5 GHz around a carrier, potentially affecting the operation of several existing and important radio applications operating in or near the 24 GHz band, such as passive Earth Observation services, wireless telecommunications fixed links, the Radio Astronomy Service (RAS), and various short-range device applications (SRDs)5. It should be underlined that some of these services also play a major role in the security and well-being of European citizens, in particular space-borne passive sensing for meteorological applications. Based on studies on compatibility between SRR systems and the Fixed Service, the Earth Exploration Satellite Service and the Radio Astronomy Service, CEPT studies6 indicate that an unlimited deployment of SRR systems at 24 GHz will create unacceptable harmful interference to important existing radio applications operating in or close to this band. The protection of all concerned services7 must be taken into account and safeguarded in the designation of spectrum for automotive SRR systems. Technical or regulatory solutions to protect other radio services must therefore be considered, while avoiding undue delays in the introduction of this technology. In this context, some proposals about a programmed phased approach have been discussed in the Electronic Communications Committee (ECC) of CEPT, with SRR systems initially deployed in or near the 24 GHz band for a limited period of time during which their numbers would be expected to remain below a level where interference could become harmful to other existing users. The second part of this phased approach would consist in a proposed migration of the operation of automotive SRR devices to a permanent band.
The compatibility studies carried out by CEPT so far conclude that harmful interference to the FS and EESS services from SRR devices operating in the 24 GHz band according to agreed industry specifications will not be significant as long as the maximum density of cars and other vehicles equipped with SRR systems remains limited and in any case below 10% of all vehicles within visibility of victim radio services.
4 Such as defined by draft ETSI Harmonised Standard EN 301 091
5 The band 24-24.25 GHz is designated for ISM applications.
6 ECC Report 23 on the compatibility of automotive collision warning short range radars operating at 24 GHz with FS, EESS and Radio Astronomy.
7 May also include radars used for road speed limit control, the Amateur Radio Service and the Broadcasting Satellite Service (BSS).
4
Given the mobility within and across EU borders of automotive equipment, a harmonised withdrawal of designation for SRR systems of the 24 GHz band across the EU is essential for this approach to be feasible. A reference date for the termination of placing on the market of SRR devices operating in the temporary band therefore ought to be defined at EU level in the context of their expected market penetration in this band. From this reference date, all new SRRs devices would have to use the 77 GHz band (or any other designated permanent band) while the operation of existing SRR systems would remain authorised in the temporary band to the end of their operational lifetime.
In order to ensure that this withdrawal will be effective from the set date referred above, and to provide a strong incentive for the automotive sector to develop viable technologies for the permanent frequency range, this band should be available as soon as possible. CEPT is invited therefore to specify the conditions for use of the 77 GHz band (or any other designated band) as soon as possible, but at the latest in parallel with any interim approach.
While any agreed solution must aim to minimise the necessity to refarm other services already operating in the SRR-designated bands, the proposed time schedule on the introduction of SRR should take into account the needs of Administrations possibly concerned by such refarming activities.
Regulatory Context
This mandate is one element of an integrated action aiming at promoting the timely introduction of SRR systems in the European Union in the context of the eSafety initiative. If it is decided to designate temporarily the 24 GHz band for SRR systems, other elements that will need to be considered by the European Commission are the following:
a) Regulatory EU and national measures. Any possible operation of SRR systems at 24 GHz must be linked to halting the introduction on the market of any additional equipment operating in this band by a specific date related to an expected penetration threshold. Consideration on how this can be achieved across the EU will include (but not necessarily be limited to) the possibility of a harmonised prohibition of the placing on the market of new SRR systems in the temporary band under the RTT&E Directive.
b) Harmonised standards. A new harmonised standard for the permanent frequency band would need to be developed as early as possible and with the highest priority. Furthermore, a harmonised standard from ETSI for SRR devices at 24 GHz produced in the context of the R&TTE Directive will only be accepted by the Commission provided it is in line with the various elements of the overall approach agreed to in the Radio Spectrum Committee.
c) A collective commitment by the automotive industry. The commitment would include monitoring of the market penetration of SRR devices in the provisional band. The gathering of monitoring information according to an agreed format would be carried out by ACEA (European Automobile Manufacturers Association) in coordination with other automotive associations and presented to the Radio Spectrum Committee annually, or as often as needed. Issues related to the after-sales market may also need to be considered.
5
d) A review mechanism. The RSC to undertake a full review of the adopted regulatory approach at some set date, well before the reference date for withdrawal of placing on the market of SRR systems in the temporary band. The RSC may decide to hold such a review at an earlier date, due for instance to a faster-than-expected penetration of SRR systems in the 24 GHz band, or harmful interference that may arise into other services operating in or near the 24 GHz band due to SRR systems.
The above mentioned elements should be prepared in parallel with the execution of this mandate and considered by CEPT when providing its deliverables under this mandate.
Order and Schedule
1. The CEPT is hereby mandated to undertake all relevant work to identify harmonised radio spectrum for the deployment of automotive short-range radar in the EU without undue delay. The radio frequency bands should therefore be chosen according to criteria of equipment cost and of technological maturity. At the same time, a high degree of consideration must be given to the protection of existing radio services in or near the bands to be designated for such short-range radar systems.
Work on the identification of a permanent appropriate band for SRR devices, possibly around 77 GHz, should be undertaken as soon as possible, but at the latest in parallel with any interim approach.
The viability of a time-limited introduction of SRR systems in or near the 24 GHz band should be explored in detail, as this frequency range is considered by the automotive industry as being currently the most appropriate in terms of equipment cost and of technological maturity.
2. More specifically, CEPT is mandated to:
- undertake all necessary technical compatibility studies between automotive SRR systems and other radio services for possible SRR bands;
- designate as a matter of urgency a permanent frequency band(s) for automotive SRR systems, and specify the conditions required for the use of this band;
- consider the designation of a temporary frequency band to enable SRR systems to be introduced in a timely and cost-effective fashion, and specify the conditions required for the use of this band;
- consider the implications of encouraging emissions on a licence-exempt basis in the 23.6-24.0 GHz band, in view of the protection provided by ITU footnote 5.340 to passive services;
- define the threshold market penetration of vehicles equipped with SRR systems operating at or near 24 GHz where interference would be harmful to other existing radio services, and the way this level should be evaluated; - propose technical and regulatory measures to protect the EESS and FS services from harmful interference by limiting the deployment of automotive SRR systems in the 24 GHz band, and notably by defining a reference date for a programmed mandatory transition of SRR operation to the permanent frequency band in relation to the expected
6
market penetration of SRR systems at European, national and local level. Other potentially affected services ought also to be considered, in particular Radio Astronomy. - define the information required to ensure the continued relevance of the technical compatibility identified between SRR systems and other services over the period of operation in the temporary frequency band; CEPT is expected to summarise the results on the above-mentioned tasks in a report to the Commission.
3. The CEPT is mandated to provide Mandate deliverables according to the following schedule:
Delivery date Deliverable Subject
October 2003 First Report from CEPT to the Commission
Description of work undertaken under this Mandate and orientation for future work.
January/March 2004 Draft ECC Decisions on a possible interim and a permanent harmonised frequency band
Validation of draft ECC Decisions for public consultation.
March/July 2004 ECC Decisions Adoption of the ECC Decisions on the interim solution, if any, and on the permanent harmonised frequency band.
March/July 2004 Final Report from CEPT to the Commission
Description of work undertaken and results achieved under this Mandate
4. The result of this Mandate can be made applicable in the European Community pursuant to Article 4 of the Radio Spectrum Decision8.
In implementing this Mandate, the CEPT shall, where relevant, take the utmost account of Community law applicable.
***
8 Decision 676/2002/EC of the European Parliament and of the Council of 7 March 2002 on a regulatory framework for radio spectrum policy in the European Community, OJ L 108 of 24.4.2002, p.1.

ANNEX VIII – CEPT REPORT TO THE EC UNDER MANDATE TO
CEPT TO HARMONISE RADIO SPECTRUM TO
FACILITATE A COORDINATED EU INTRODUCTION OF AUTOMOTIVE SRR
SYSTEMS
Rue de la Loi 200, B-1049 Bruxelles/Wetstraat 200, B-1049 Brussel - Belgium - Office: BU33 7/09. Telephone: direct line (+32-2)295 94 66., switchboard 299.11.11. Fax: +32.2.296.83.95. e-mail : [email protected]
EUROPEAN COMMISSION Information Society Directorate-General Communication Services: Policy and Regulatory Framework Radio Spectrum Policy
Brussels, 15 September 2004 DG INFSO/B4
RSCOM04-41
RADIO SPECTRUM COMMITTEE
Subject: CEPT Report to the EC under Mandate to CEPT to harmonise radio spectrum to facilitate a coordinated EU introduction of Automotive SRR systems
This is a Committee working document, which does not necessarily reflect the official position of the Commission. No inferences should be drawn from this document as to the
precise form or content of future measures to be submitted by the Commission. The Commission accepts no responsibility or liability whatsoever with regard to any
information or data referred to in this document.
Rue de la Loi 200, B-1049 Bruxelles/Wetstraat 200, B-1049 Brussel - Belgium - Office: BU33 7/09. Telephone: direct line (+32-2)295 94 66., switchboard 299.11.11. Fax: +32.2.296.83.95. e-mail : [email protected]
1.1.1.1. ECC
Electronic Communications Committee
CE
PT
Annex 5
to Doc. ECC(04)053Rev1
8th meeting
Gothenburg, 5-9 July 2004
Report from CEPT to
the European Commission under
Mandate to CEPT to harmonise radio spectrum
to facilitate a coordinated EU introduction of
Automotive Short Range Radar systems
3
Table of contents
EXECUTIVE SUMMARY................................................................................................. 5
CONCLUSIONS ................................................................................................................. 6
0 INTRODUCTION..................................................................................................... 10
1 STATUS OF OTHER REGIONS ............................................................................. 11
1.1 FCC Regulations ............................................................................................... 11
1.2 Developments in Japan...................................................................................... 12
2 PERMANENT FREQUENCY BAND FOR SRR SYSTEMS IN EUROPE ........... 13
2.1 Designation of the permanent frequency band.................................................. 13
2.2 Protection of Radiocommunication Services in the 79 GHz range................... 14
3 CONSIDERATION OF A TEMPORARY FREQUENCY BAND FOR SRR SYSTEMS ................................................................................................................. 15
3.1 General description of the temporary solution .................................................. 15
3.2 Possible implementation of the temporary solution .......................................... 16
3.2.1 Reference date ................................................................................... 17
3.2.2 National market penetration threshold .............................................. 18
3.2.3 Reporting process .............................................................................. 18
3.2.4 Deactivation mechanism ................................................................... 19
3.2.5 Review process.................................................................................. 20
3.3 Compatibility studies in the 24 GHz range ....................................................... 21
3.3.1 Radio Astronomy Service.................................................................. 22
3.3.2 Earth Exploration Satellite Service ................................................... 22
3.3.3 Fixed Service ..................................................................................... 23
3.3.4 Radiolocation Service........................................................................ 24
3.3.5 Services not covered by ECC Report 23 ........................................... 25
3.3.5.1 Radio Amateur Service...................................................................... 25
3.3.5.2 Short Range Devices. ........................................................................ 25
3.3.5.3 Broadcasting Satellite Service........................................................... 25
4 PROTECTION OF PASSIVE SERVICES ............................................................... 25
4.1 ITU-R footnote 5.340 ........................................................................................ 25
4.2 Protection of the Radio Astronomy Service (RAS) .......................................... 27
4.3 Protection of the Earth Exploration Satellite Service (EESS)........................... 28
5 SHORT RANGE RADAR IMMUNITY .................................................................. 29
4
6 AFTERMARKET FITMENT ................................................................................... 30
7 NEED FOR FREQUENCY REGULATION AND LEGAL CERTAINTY............. 30
7.1 Need for frequency regulation: timescales and responsibilities........................ 30
7.2 Requirement for legal certainty......................................................................... 31
8 CONCLUSIONS ....................................................................................................... 32
Annexes
Annex 1 ……Mandate issued by the European Commission on SRR
Annex 2 ……Draft ECC Decision on frequency bands for the permanent use of SRRs
5
2. EXECUTIVE SUMMARY
This report is developed in response of a mandate pursuant to art 4 of the Radio Spectrum Decision. The report provides a detailed description of the spectrum management issues including required protection of other services associated with the two frequency bands given in the Mandate and a possible ‘package solution’ for implementation. The elements of this are:
− A permanent frequency band at 77-81 GHz range (79 GHz) for Short Range Radar (SRR) applications in Europe. An ECC Decision has been developed and adopted by the ECC in March 2004 (ECC/DEC(04)03. The 79 GHz band should be made available within EU member states and other CEPT countries by January 2005 in order to encourage industry development of components and technology for this frequency band
− A possible temporary use of 21.625-26.625 GHz (24 GHz) frequency band with limited number of equipment in the market place in Europe and only applicable for a limited time frame. Technical conditions on SRR implementation should be established in order to ensure protection of the existing services in the 21.625-26.625 GHz band. The report suggests a power level limited to -41.3 dBm/MHz with attenuation for 23.6-24 GHz 30° above the horizontal plane as already included in the FCC Regulations. Furthermore regulatory means should be found to limit the placing on the market of 24 GHz equipment to a defined period in time in accordance with the results of the sharing studies as agreed by the SE WG (ECC Report 23). It has been suggested in the current report to limit the percentage of vehicles equipped with SRR devices to 7.0% on each national market. Not all manufacturing groups will implement 24 GHz SRR from the outset or at all so there is confidence that the absolute 7.0% limit would not be exceeded. To provide certainty of the applicability of the possible temporary solution a reporting programme for 24 GHz equipment placed on the market in Europe must be arranged together with a commitment from car manufacturers to publish market figures and to accept the maximum penetration limits required by the Administrations.
An ECC Decision on the temporary use of the 24 GHz band has been developed and has been adopted for public consultation by the ECC. Furthermore provisions for legal certainty need to be agreed by the Radio Spectrum Committee and the TCAM as appropriate.
6
− A review process would allow all parties involved to consider the results of the reporting programme and to agree on necessary action as required to ensure adequate protection of other services. This process would however not review the possible ‘package solution’ as such.
The designation of frequency bands for SRR equipment is developed under the explicit condition that SRR equipment is not considered as safety of life applications in accordance with the Radio Regulations and must operate on a non-interference and non-protected basis.
In considering the Short Range Radar issues, it was recognised that a stable and permanent frequency band for SRR equipment is essential for the automotive industry to make the substantial investments necessary for deployment of the 79 GHz frequency band. It was also recognised that the 24 GHz band contains an extensive number of existing users who have all expressed considerable concern about the future of their very substantial existing long-term investments.
The acceptance of the temporary solution at 24 GHz is conditional on a number of agreed elements including protection of the existing services in the 21.625 - 26.625 GHz band and the legal certainty from the Radio Spectrum Committee and TCAM of stopping the placement on the market of 24 GHz equipment at an agreed date.
Additionally particular regulation and legal certainty should be provided on the reporting arrangement including the reporting on vehicles imported to national market from outside EU.
3. CONCLUSIONS
The European Commission has determined that short range radar is a key component of the Community’s e-safety initiative. Text from the mandate Introduction of Short Range Radars based on Ultra Wide Band technology in Europe should be based on the following frequency management considerations in full respect of the long-term protection of the existing services:
1. A permanent frequency band at 77-81 GHz (the ‘79 GHz range’) should be made available as soon as possible for Short Range Radars. ECC/DEC/(04)03 has been finally adopted by the ECC at its March 2004 meeting. The frequency band should be made available by January 2005 in order to encourage industry development of components and technology for this band.
7
2. In order to allow early introduction of SRR applications in Europe the frequency band the ‘24 GHz range’ may be used on a temporary basis with limited number of equipment in the market place in Europe for a limited time frame. The implementation of such temporary solution requires agreement and commitment in some cases with legal certainty from CEPT Administrations, the European Commission (Radio Spectrum Committee and the TCAM) and the automotive industry. It shall be taken as a clear incitement for manufacturers to develop SRR in the 79 GHz range.
3. The temporary solution must be limited in time and scope as follows:
a. The characteristics of SRR systems shall be limited to an e.i.r.p. mean power density of –41.3 dBm/MHz, an e.i.r.p. peak limit of 0 dBm/50 MHz, with a vertical attenuation of 25 dB from 2005 and 30dB from 2010 for any emissions within the 23.6-24 GHz band that appear 30° or greater above the horizontal plane, and a narrow-band emission mode limited to an unmodulated carrier within frequency band 24.05 -24.25 GHz with a maximum peak power of 20 dBm e.i.r.p.
b. Vehicles fitted with 24 GHz SRR equipment must contain an automatic deactivation mechanism to ensure protection of Radio Astronomy stations in Europe as well as a manual deactivation to allow cross border enforcement if some CEPT countries not being member of the European Union do not implement the interim solution. In order to allow an early implementation of 24 SRR Systems the automatic deactivation should only be made mandatory after a transitional period of 24 months. During the transition period manual deactivation is required.
c. The temporary solution is limited in time until the reference date that is set to 1st January, 2013. After this reference date all new SRR equipment placed on the market shall use the 79 GHz band only, but the installed 24 GHz SRR equipment may still be used until the end of the lifetime of the vehicles.
d. In order to protect other existing services within the frequency band including in particular the Fixed Service and the Earth Exploration Satellite Service (EESS) the percentage of vehicles equipped with SRR devices must be limited to less than 7.0 percent in each national market.
e. The reference date may be set earlier, in case the 7% national market penetration threshold would be exceeded in one EU country or associated European country where R&TTE Directive is applicable. The Radio Spectrum Committee and the European Commission should consider
8
whether the area of such country is significant and decide whether the ‘reference date’ shall be brought forward (i.e. set earlier).
f. In order to ensure that the actual penetration level does not exceed the limit mentioned above a reporting process should be established where information about the number of vehicles equipped with 24 GHz SRR and intended for the European or national markets is provided and made available to administrations and parties involved. The Radio Spectrum Committee should establish the necessary legal means to collect and publish the information received.
g. A review should take place during 2009 in order for the Radio Spectrum Committee and the parties involved to consider and confirm that the number of equipment in use on a national basis is still consistent with the agreed solution.
h. Development of 79 GHz equipment should be monitored by the Radio Spectrum Committee and the committee should take action should as appropriate.
4. An ECC Decision designating the 24 GHz frequency band has been developed by the ECC and is adopted for public consultation in parallel with the other elements of the “package solution”. The ECC Decision includes the designated frequency bands, the maximum power levels allowed and associated regulatory provisions.
5. CEPT administrations and the European Commission shall make sure that any such temporary authorization of 24 GHz SRR systems is exceptional and can not be used as a precedent for possible introduction of other transmitter devices in bands where RR footnote 5.340 is applicable, for temporary or permanent use.
6. The designation of frequency bands for SRR equipment is developed under the explicit condition that SRR equipment is not considered as safety of life applications in accordance with the Radio Regulations. No mandatory measures shall therefore be envisaged for the protection of SRR applications from existing services.
7. To manage a temporary use of the 24 GHz frequency band a number of agreements between parties involved need to be in place and legal as well as regulatory certainties need to be provided by the TCAM/Radio Spectrum Committee and the European Commission before any introduction of SRR equipment operating in the 24 GHz band can be permitted. In particular the following issues need detailed regulation and legal certainty:
a. Stop placing on the market of 24 GHz SRR
9
b. forbidding of after-market sales c. Legal certainty of the availability of the 79 GHz band d. Legal certainty of the temporary availability of the 24 GHz band for SRR e. Legal certainty on the reporting arrangement including participation of
automotive manufacturers from outside the European Union. f. Certainty about harmonised standard for the 24 GHz equipment and the
79 GHz equipment
10
4. 0 INTRODUCTION
This draft report has been developed by the European Conference of Postal and Telecommunications Administrations (CEPT) to the European Commission (EC) under a mandate pursuant to article 4 of the Radio Spectrum Decision to harmonise radio spectrum to facilitate a coordinated EU introduction of automotive Short Range Radar systems. (See Annex 1).
The mandate was issued to CEPT on 5 August 2003. The draft outline of the Report was presented to the RSC meeting 1st October 2003 and the first interim report was provided to the European Commission 30 October 2003. Furthermore a status report regarding the most recent developments within the SRD/MG was provided to the RSC meeting 10 December 2003. The final report with the requested deliverables is expected from the ECC by July 2004.
The report was developed by the Short Range Device Maintenance Group (SRD/MG) of the FM WG. Special meetings have been arranged and participation was open for industry representatives from SARA1 and recognised observers as well as CEPT administration representatives and representatives from the EC (Counsellor) and the European Radiocommunications Office (ERO).
For the purpose of this Report, the following definitions shall apply:
(1) The ‘24 GHz range’ or ‘24 GHz SRR band’ shall mean a 5 GHz wide band centred on the frequency 24.125 GHz, which is frequency band 21.625 – 26.625 GHz.
(2) The ‘79 GHz range’ or ‘79 GHz SRR band’ shall mean a 4 GHz wide band centred on the frequency 79 GHz, which is frequency band 77 – 81 GHz.
(3) SARA shall mean an ad hoc grouping of manufacturers and suppliers from the European automotive industry1.
1 SARA is currently made up of the following automobile manufacturers and suppliers: Audi, Autocruise, Autoliv, BMW, Bosch, CEL, Continental Termic, DaimlerChrysler, Delphi, Denso Europe, Fiat, Ford, Hella, InnoSenT, Jaguar, MAN Nutzfahrzeuge, Opel/GM, Porsche, Saab, Seat, Siemens VDO Automotive, Skoda, sms, TDK, TRW, Tyco Electronics, ValeoRaytheon Systems, Visteon, Volkswagen, and Volvo
11
It shall be further noted that, for the purpose of this Report, SRR systems refer to vehicular radar systems operating in the 24 GHz and 79 GHz frequency ranges as given above but exclude narrow-band vehicular radar systems that operate as per the conditions given in Annex 6 of ERC/Rec.70-03. Specific measures that could be developed in relation to the temporary designation of the 24 GHz SRR band are therefore not applicable to such narrow-band systems.
5. 1 STATUS OF OTHER REGIONS
1.1 FCC Regulations
The Federal Communications Commission (FCC) issued the First Report and Order for revision of Part 15 of the Commission’s Rules Regarding Ultra-Wideband Transmission Systems, 22 April 2002. The Report and Order provides regulations for Vehicular Radar Systems in the 24 GHz range as follows:
“Vehicular Radar Systems: Provides for the operation of vehicular radar systems using directional antennas on terrestrial transportation vehicles provided the center frequency of the emission and the frequency at which the highest radiated emission occurs are greater than 24.075 GHz. The -10 dB bandwidth must be between 22 and 29 GHz. These devices are able to detect the location and movement of objects near a vehicle, enabling features such as near collision avoidance, improved airbag activation, and suspension systems that better respond to road conditions. Attenuation of the emissions below 24 GHz is required above the horizontal plane in order to protect space borne passive sensors operating in the 23.6-24.0 GHz band.”
The vertical attenuation limit for emissions within the 23.6-24.0 GHz band that appears 30 degrees or greater above the horizontal plane is set by FCC at different values with time; -25 dB by 2005, -30 dB by 2010 and -35 dB by 2014. It is also indicated that vehicular radar systems should employ directional antennas or other methods that will attenuate the emissions 38 degrees or higher above the horizontal plane in the 23.6-24.0 GHz band by at least 25 dB below the Part 15 general emission limits.
Apart from the vertical attenuation limits, the FCC Regulations contain provisions for the operation of vehicular radar systems. The provisions specify that “These devices shall operate only when the vehicle is operating, e.g., the engine is running. Operation shall occur only upon specific activation, such as upon starting the vehicle, changing gears, or engaging a turn signal.”
In the USA the FCC has considered footnote 5.340 as subject to national implementation and has accepted the development and use of the 24 GHz Short Range Radars.

12
The FCC Regulation was a controversial proceeding and was based on extensive public consultation and sharing studies carried out within the National Telecommunication and Information Administration (NTIA) in order to ensure protection of certain services within the frequency range suggested. However, it is understood that detailed sharing studies were not carried out with respect to the Fixed Service where density of the fixed links in USA is much lower than in Europe. The USA is currently the only country known to have specifically authorised the use of UWB Short Range Radars at 24 GHz, although it is believed that no vehicles containing these devices have yet been marketed.
Following the WRC-2000 results the FCC has initiated a proposed rule making on the future frequency allocations within the band 76-81 GHz. The bands 76-77.5 GHz and 78-81 GHz are allocated to the Radio Astronomy service and Radiolocation Service on an equal primary basis.
In the United States, the FCC reviewed a proposal from the automotive industry to use 24 GHz short range automotive radar. After a public consultation on this and other proposals, including direct input from the government agencies responsible for operation of EESS, the FCC adopted technical emission levels that permit implementation of SRR to serve the public interest.
Further details may be found on the FCC web site.
1.2 Developments in Japan
In Japan automotive long range radar systems are available in the 77 GHz range but limited to narrow-band design (below 500 MHz).
Japanese vehicle industries as well as microelectronic manufacturers are seeking to establish a narrow band 77 GHz technology Mitsubishi Electronics announced recently a MMIC chipset for 77 GHz automotive radars. Toyota and Honda began the implementation of ACC radars on some of their vehicles for limited pre-crash applications.
These applications do not provide, however, the same functionalities as SRRs and are not yet available at affordable prices.
13
6. 2 PERMANENT FREQUENCY BAND FOR SRR SYSTEMS IN EUROPE
2.1 Designation of the permanent frequency band
Based on the technical requirements on frequency range and power levels described in the System Reference document from ETSI (ETSI TR 102 263), the frequency band 77-81 GHz has been identified by the FM WG as the permanent frequency band for Short Range Radars (SRR).
It was noted that the 76-77 GHz band, which is harmonised on a worldwide basis for the Radiolocation Service, is designated in ECC/DEC/(02)01 for Road Transports and Traffic Telematics, more specifically for infrastructure and vehicular radar systems. The 76-77 GHz band is commonly used by Automotive Long Range Radars which are commercially available since 1999 from European vehicle manufacturers. However, it has been indicated by the automotive industry that Short Range Radar systems based on Ultra Wide Band technology are not compatible with Long Range Radars if operating within the same frequency band. Consequently, SRR requires the designation of a new band allowing a 4 GHz bandwidth operation in the 79 GHz range (77-81 GHz).
The European Research project Radarnet (IST 14031) started in 2000 and had as objective to study and develop on a pre-competitive basis the realization of a synchronized 77 GHz radar network with improved performance by multilateration techniques between 4 short and one long range radar. Both a new MMIC chipset and advanced signal processing techniques were intended to improve advanced driver assistance functions. A new chipset was not realized due to Infineons leaving of the project.
SARA however indicated that 79 GHz technology is not yet available for mass production.
The adoption and early implementation of the ECC Decision for the 79 GHz band was seen as critical to provide a clear indication to the automotive industry as well as the component industry that the required frequency bands will be made available on time and on a Europe-wide and permanent basis. A stable and permanent frequency band for SRR equipment is important for the automotive components industry to make the substantial investments necessary for deployment of the 79 GHz frequency band.
The FM WG agreed that the frequency band 77-81 GHz should be made available throughout Europe as soon as possible and not later than January 2005. This is included in Decides 4 of the ECC Decision and thus administrations committing to the ECC Decision also commit to an early implementation.
The 79 GHz frequency designation should be harmonised within EU member states and other CEPT countries applying the R&TTE Directive and the equipment operating in the 79 GHz band should be agreed as ‘class 1’ equipment in accordance with the R&TTE Directive and the Commission Decision 2000/299/EC (6.4.2000). It is envisaged that the Radio Spectrum Committee provides the necessary legal certainty to the implementation

14
of the ECC Decision in order to ensure a permanent harmonised solution within EU member states.
An ECC Decision designating the 79 GHz range for Automotive Short Range Radars was developed by SRD/MG based on preliminary conclusions from Project Team SE24 of SE WG. Decision ECC/DEC/(04)03 was finally adopted by the ECC at its meeting 15-19 March 2004. See ERO web site www.ero.dk
2.2 Protection of Radiocommunication Services in the 79 GHz range
Based on the technical requirements on frequency range and power levels from the industry and described in the initial System Reference document from ETSI (ETSI TR 102 263), Project Team SE24 of WGSE had carried out in 2003 initial compatibility studies on SRR operating at 79 GHz with radiocommunication services. For the purpose of these studies, only radiocommunication services with a primary allocation status within frequency band 77 – 81 GHz were considered i.e. the Amateur and Amateur Satellite, the Radio Astronomy and the Radiolocation Services.
NATO informed the CEPT that there are no radiolocation systems operational in the 79 GHz frequency range and that there are currently no plans to introduce such systems. No compatibility studies were therefore conducted with radiolocation systems in this frequency range.
Preliminary conclusion for the Radio Astronomy Service was that regulatory measures could be identified enabling the coexistence between SRR within the band 77-81 GHz and the Radio Astronomy Service.
As for the Amateur and Amateur Satellite Services, it was concluded that the use of 79 GHz SRR systems might be incompatible. WGFM agreed consequently to extend the timescales given in footnote 5.559A, which permits Radio Amateur Service on a primary basis within band 75.5-76 GHz beyond 2006. This change was included in the update of the European Common Allocation Table, January 2004. This Frequency Management solution compensates for potential incompatibility problems with the Amateur (Satellite) Service that operates with a primary status in the 77.5-78 GHz band.
A specific ECC Report is expected to present the final compatibility studies for 79 GHz SRR systems. This Report should consider the effects of SRR systems on allocated Radiocommunication Services operating in the frequency range 77 to 81 GHz but not interference from radiocommunication services into SRR or automotive EMC issues.
15
7. 3 CONSIDERATION OF A TEMPORARY FREQUENCY BAND FOR SRR SYSTEMS
3.1 General description of the temporary solution
SARA has indicated that all components for a 79 GHz SRR technology are not yet available for mass production. Early implementation and legal certainty on the harmonised availability of the frequency band is intended, however, to support this development. The Automotive Components Industry would hence need to be encouraged to work towards an early introduction of equipment operating in the 79 GHz band by means of intensive research and development programmes in complement to what is done in the 76-77 GHz range.
It was reported that 79 GHz components developed in relation with European Union Research programs are expected to be available by 2008.
In order to allow an early introduction of the SRR applications in Europe and meet some of the requirements of the e-safety initiative, a temporary solution should be considered with possible introduction of 24 GHz equipment up to year 2013 acknowledging that the related technology is now available for deployment.
The date until when placing on the market of 24 GHz SRR equipment would be allowed in Europe is referred to as the ‘reference date’. After the reference date, all new SRR equipment placed on the market shall use the 79 GHz SRR band, but the installed 24 GHz SRR equipment may still be used until the end of the lifetime of the vehicles.
The power level shall be limited to -41.3 dBm/MHz with vertical attenuation for any emissions within the 23.6-24 GHz band that appear 30° or greater above the horizontal plane as already included in the FCC regulations.
In addition to the limitation set by the reference date that applies on a European wide basis, the percentage of vehicles equipped with SRR devices must be less than 7.0 percent in each national car fleet, which may be referred to as the ‘national market penetration threshold’.
Not all manufacturing groups will implement 24 GHz SRR from the outset or at all. This increases the probability that the limit of 7.0% would not be exceeded.
Finally, vehicles fitted with 24 GHz SRR systems must contain an automatic deactivation mechanism to ensure protection of Radio Astronomy Service. In order to allow an early implementation of 24 GHz SRR Systems the automatic deactivation should only be made
16
mandatory after a transitional period of 24 months. During this transition period, manual deactivation is required.
3.2 Possible implementation of the temporary solution
The 24 GHz range is already heavily used across Europe by a range of services including the Fixed Service, Radio Astronomy Service, Earth Exploration Satellite Service and Radiolocation Service. Existing users of these services in Europe have expressed significant concern about the effect that SRR would have on their activities. All these services represent critical national or European services and/or wide economical interest and for which very substantial existing long-term investments have been and are to be made.
The scientific and meteorological communities and a number of administrations have expressed their concern about the implications for the passive Services of encouraging emissions on a license exempt basis in the 23.6-24 GHz band despite the obligations placed on Administrations by RR 5.340.
In addition, many Administrations have extensively licensed a large number of fixed links (more than 40000 links as given in ECC report 3 “Fixed Service in Europe, Current Use and Future Trends Post 2002”) in this frequency range. These not only support existing second generation cellular networks but also the developing third generation mobile networks. The rollout of third generation mobile networks requires a high level of start-up investment and there is concern that the loss of confidence that would be caused by SRR could affect 3G rollout with consequent knock-on effects on the Community’s e-information initiatives.
Possible interference from cars equipped with SRR into fixed service equipment would be very difficult to identify. Due to the moving nature of the cars, the interferer will be undetectable at the moment when the interference occurs and the network operator would have no means to complain about harmful interference from the SRR. Such kind of interference would affect the proper performance of fixed radio telecommunications networks established around 24 GHz and lead to possible security impairment due to the disruption of communications. The bands used by operators are subject to authorisation and to the payment of fees for their use. Precise specifications are established concerning the quality of service to be provided to the public.
It is essential that any temporary introduction of SRR systems at 24 GHz in Europe shall only be on a basis that ensures full protection of other services in the band from harmful interference. Resolution of these issues is an essential pre-requisite.
Any interim solution shall be based on the following principles for the use of SRR vis-à-vis the Fixed Service:
17
No compulsory refarming, even limited, of Fixed Service links that could potentially be affected by 24 GHz SRR systems can be envisaged;
Restrictions for future deployment of Fixed Service links as well as harmful interference to existing and future systems in the fixed service are not acceptable.
3.2.1 Reference date If the proposed temporary use of the 24 GHz band is approved, a firm reference date for stopping the placement of 24 GHz SRR equipment on the market must be agreed. After this date only 79 GHz SRR equipment should be permitted to be placed on the market in Europe but the 24 GHz equipment may still be used in existing vehicles preferably without any further restriction of use within EU countries and other CEPT countries until the end of the lifetime of the vehicle.
The reference date is considered in connection with the envisaged vehicle parc penetration of SRR equipment as well as industry requirements for introduction of the equipment in a complete line of production while also taking into account the requirement for protection of the existing services in the 24 GHz range in accordance with the ECC Report 23. In addition, the reference date should be defined such as encouraging SRR manufacturers to start at the earliest possible development of SRR at 79 GHz.
As stated previously, the reference date implies that 24 GHz equipment installed in vehicles before this date continue to be in operation and used until the end of lifetime of the vehicles. Given the average vehicle lifetime the aggregate emission level at the end of the interim period will decrease slowly for a considerable number of years after the reference date..
The most sensitive service to aggregate interference from SRR is the Earth Exploration Satellite Service for which a maximum of 5.9% of SRR penetration can be accepted in each EESS pixel. This criteria should be considered in connection with the fact that the SRR will not to be uniformly deployed all over Europe but is likely to be more concentrated in geographic areas with high levels of economic activity or urban areas. However, based on further consideration, the ECC agreed on a compromise 7% penetration rate per country.
Limiting the average penetration of SRR to 7.0% all over Europe will not ensure that several EESS pixels would not be polluted, hence jeopardising the whole measurements in the band. In order to avoid such a concentration effect, it is therefore felt necessary to determine the reference date in a way that would limit the average 24 GHz SRR penetration ratio to only a few percents in the original European market forecast.
18
In addition, the so-called “2 phases approach” or “package solution” shall clearly represent an incitement for manufacturers to develop the 79 GHz SRR technologies for which a 5 years delay was reported.
On this basis, should associated regulatory and legal certainty issues be adopted, it is recognised that a 2013 reference date would be consistent with the spirit and the general principle of the two phase approach in that it will:
- allow an early introduction of SRR applications in Europe,
- encourage and incite manufacturers to start at the earliest the development of 79 GHz SRR systems,
- ensure the protection for the existing services.
3.2.2 National market penetration threshold The reporting process as described in section 3.2.3 may however result in bringing forward the reference date, in case the 7.0% national market penetration threshold would be exceeded in one EU country or associated European country where R&TTE Directive is applicable.
The Radio Spectrum Committee and the European Commission should consider whether the area of such country is significant with regards to a typical EESS pixel size which is assumed to be 200 km² and decide whether the ‘reference date’ shall be brought forward (i.e. set earlier).
As stated above in the section dealing with the final date, the 7.0% criteria should be considered in connection with the fact that the SRR will not be uniformly deployed all over Europe but will likely be more concentrated in geographic areas with high economical level or urban areas.
In this case also, limiting the average penetration of SRR to 7.0% in each national market will not ensure that existing services would not be interfered, in particular with regard to the fact that cars equipped with SRR 24 GHz would be free to circulate all around Europe.
Therefore, in order to ensure the protection of existing services all around Europe, the 7.0% threshold to stop placing 24 GHz SRR on the market in Europe shall apply to the first national market in which this threshold will be exceeded.
3.2.3 Reporting process To ensure that the actual penetration level does not exceed the agreed maximum national market penetration threshold in any European country, a reporting process should be established where information about the number of vehicles equipped with SRR and intended for the various European national markets is provided and made available to administrations and parties involved.

19
The Radio Spectrum Committee and national administrations shall provide the necessary legal means to collect and publish the information received.
To achieve accurate figures for the introduction of 24 GHz SRR equipment in Europe in the interim solution, it is further noted that no after-market for SRR equipment should be allowed.
3.2.4 Deactivation mechanism A possible temporary solution in the 24 GHz range needs to provide provisions for cross border enforcement if some CEPT countries not being members of the EU do not implement the interim solution in particular as a consequence of footnote 5.340 from the Radio Regulations. Vehicles fitted with 24 GHz SRR equipment must contain a manual deactivation mechanism to ensure that the use of this equipment is limited to those countries that have implemented the temporary solution
Based on consideration of protection of Radio Astronomy stations as detailed in section 4.2 an SRR system must also be able to be automatically deactivated in case its emissions could interfere with the Radio Astronomy Service (i.e. in geographic areas that would be defined by national Administrations). In order to allow an early implementation of 24 GHz SRR Systems the automatic deactivation should only be made mandatory after a transitional period of 24 months.
Geographical coordinates of Radio Astronomy stations that operate in the 24 GHz range and related protection area for publication before July 2004 are the following:
Country Name of the
station Geographic
Latitude Geographic Longitude
France Plateau de Bure 44°38’01’’ N 05°54’26’’ E Floirac 44°50’10’’ N 00°31’37’’ W Germany Effelsberg 50°31’32’’ N 06°53’00’’ E Spain Yebes 40°31’27’’ N 03°05’22’’ W Robledo 40o25’38” N 04°14’57” W Finland Metsähovi 60°13’04’’ N 24°23’17’’ E Italy Medicina 44°31’14’’ N 11°38’49’’ E Noto 36°52’34’’ N 14°59’21’’ E Sardinia 39o 29’50” N 09°14’40’’ E UK Cambridge 52°09’59’’ N 00°02’20’’ E
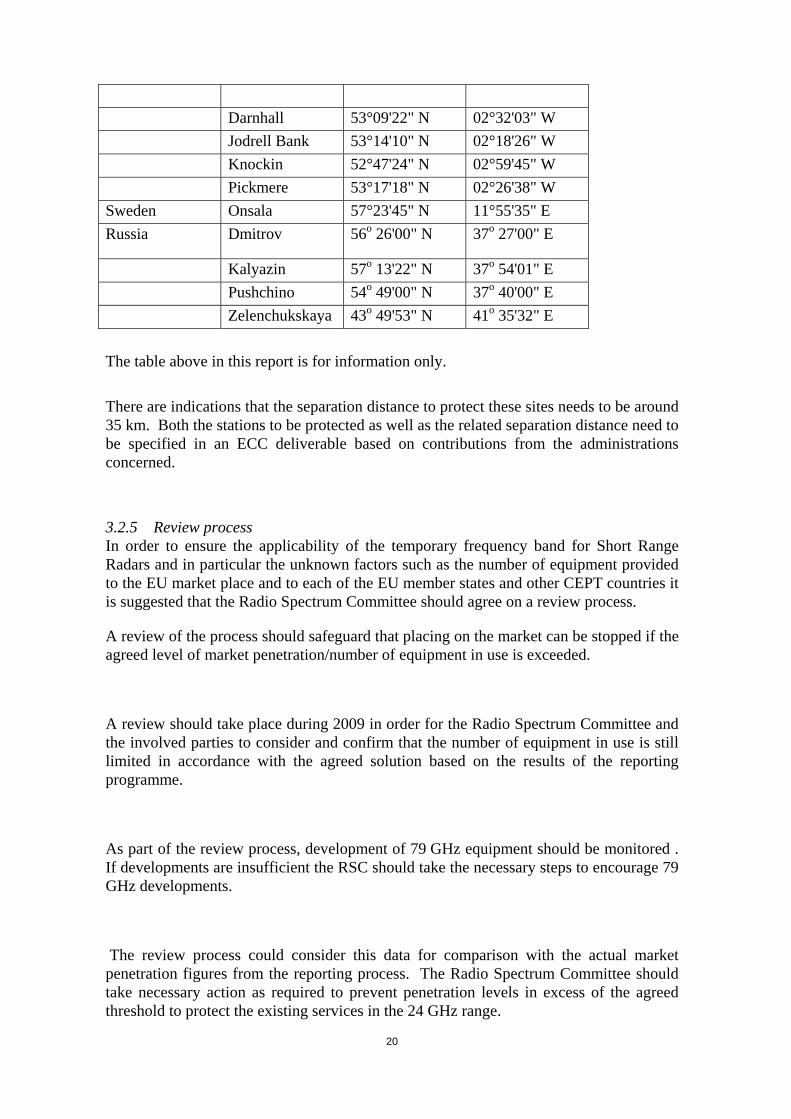
20
Darnhall 53°09'22" N 02°32'03" W Jodrell Bank 53°14'10" N 02°18'26" W Knockin 52°47'24" N 02°59'45" W Pickmere 53°17'18" N 02°26'38" W Sweden Onsala 57°23'45" N 11°55'35" E Russia Dmitrov 56o 26'00" N 37o 27'00" E
Kalyazin 57o 13'22" N 37o 54'01" E Pushchino 54o 49'00" N 37o 40'00" E Zelenchukskaya 43o 49'53" N 41o 35'32" E The table above in this report is for information only. There are indications that the separation distance to protect these sites needs to be around 35 km. Both the stations to be protected as well as the related separation distance need to be specified in an ECC deliverable based on contributions from the administrations concerned.
3.2.5 Review process In order to ensure the applicability of the temporary frequency band for Short Range Radars and in particular the unknown factors such as the number of equipment provided to the EU market place and to each of the EU member states and other CEPT countries it is suggested that the Radio Spectrum Committee should agree on a review process.
A review of the process should safeguard that placing on the market can be stopped if the agreed level of market penetration/number of equipment in use is exceeded.
A review should take place during 2009 in order for the Radio Spectrum Committee and the involved parties to consider and confirm that the number of equipment in use is still limited in accordance with the agreed solution based on the results of the reporting programme.
As part of the review process, development of 79 GHz equipment should be monitored . If developments are insufficient the RSC should take the necessary steps to encourage 79 GHz developments.
The review process could consider this data for comparison with the actual market penetration figures from the reporting process. The Radio Spectrum Committee should take necessary action as required to prevent penetration levels in excess of the agreed threshold to protect the existing services in the 24 GHz range.
21
In any case the review is not intended to relax the maximum penetration rate or extend the reference date.
3.3 Compatibility studies in the 24 GHz range
ECC Report 23 has been developed by Project Team SE24 of SE WG to clarify the compatibility issues and impact on Radiocommunication Services within the 24 GHz range. The study does not consider the impact of radio communication services on SRR or automotive EMC issues. 3 administrations expressed difficulties with the outcome of this work and reservations were entered into the minutes of the May 2003 meeting of SE WG. No assessment has yet been made on the possibility of interference into the Amateur and Amateur-satellite service, both of which have primary allocation in this range.
It is agreed that the SRR-equipment can not be considered as a safety of life service in accordance with the Radio Regulations, therefore SRR must operate on a non-interference and non-protected basis in accordance with the Radio Regulations. It has however to be ensured that the high power environment in which 24 GHz SRR systems may operate cannot lead to misinterpretation of received signal and potentially affect the vehicle’s drive in case of automotive active safety application.
The general study has focused on the following 3 specific primary services to which SRR at 24 GHz is considered likely to present a high interference potential
− Fixed Service (FS) − Earth Exploration Satellite Service (EESS) − Radio Astronomy Service (RAS)
Complementary to ECC Report 23, a study on the compatibility between 24 GHz SRR systems and the Radiolocation Service has been developed on a national basis and was considered by the SE WG at its October 2003 meeting.

22
3.3.1 Radio Astronomy Service The sharing study shows that compatibility is not feasible with a calculated negative margin in the order for 70 dB for spectral line observations and 90 dB for continuum observations with a device density of 100 devices per km2 that transmit in the direction of the radio astronomy station.
It is further indicated in the report that if all of the possible mitigation factors such as local terrain, clutter loss, vehicle density are applicable and if this leads to sufficient reduction in interference level, then sharing between the SRR at 24 GHz and Radio Astronomy could be possible in some cases.
See also section 5 relating to the protection of passive services.
3.3.2 Earth Exploration Satellite Service For the specific types of EESS satellites studied and currently operating, the results showed that the margins were all negative i.e. that the SRR devices would cause unacceptable interference at 100 % penetration to all EESS satellites.
Projecting the scenario forward to 2020, when the new generation of more sensitive EESS satellites are expected to be operating, the negative impact of the interference is expected to be an order of magnitude more severe.
The sharing study shows that the protection criteria for 100% penetration would be exceeded by 10.8 dB. However, this analysis has been made with the final set of SRR systems characteristics, proposed to be applied from 2014 by FCC (i.e vertical attenuation of 35 dB).
It also assumed traffic densities of 330 vehicles per square kilometre and EESS sensitivity levels of 50 mK.
The translation of the 10.8 dB negative margin into a market penetration limit did not take into account that, in the case of an interim solution up to 2013, the SRR systems would present, before these dates, lower vertical attenuation (and hence higher interference potential) namely 10 dB up to 2010 and 5 dB between 2010 and 2013.
Additional calculations by the EESS Service concluded that 5.9% maximum SRR penetration per EESS pixel should be the right value to be used as market penetration
23
limit for SRR's. However, based on further consideration, the ECC agreed on a compromise of 7% penetration rate per country.
See also section 4 relating to the protection of passive services.
3.3.3 Fixed Service Project Team SE24 of SE WG considered the impact of automotive Short Range Radars at 24 GHz operating at a mean e.i.r.p power density of -41.3 dBm/MHz associated with an e.i.r.p peak limit of 0dBm/50MHz on the Fixed Service in 23 GHz (21.2-23.6) and 26 GHz (24.25-26.5) bands Even though the studies have been limited to the 23-26 GHz Fixed Service band, the calculation results and conclusions are still valid in the 28 GHz band and the 32 GHz band.
The 23 and 26 GHz bands are extensively used by Telecommunications Operators, mainly to provide second and third generation mobile network infrastructure. The 23 GHz band is the fastest growing among all the bands used by Telecommunications Operators. The 26 GHz band has also been identified by several CEPT Administrations for the development of Broadband Fixed Wireless Access Networks. Many of fixed service point to point links are associated with busy roads and could be subject to interference from the 24 GHz SRRs. Most of the fixed links in the 23 and 26 GHz bands have a minimum availability objective of 99.99 %.
The main conclusions of ECC Report 23 were the following:
• If a protection criteria of –20 dB I/N is to be met in all cases, sharing is not feasible with Fixed Service.
• However, sharing is considered to be feasible if an excess of the protection criteria by 10 dB (up to –10 dB I/N) in worst case scenarios can be accepted, as far as the percentage of cars equipped with SRR devices in visibility of the FS receiver is limited to 10% or less.
Some administrations are of the opinion that is it necessary that SRR meets the –20 dB I/N protection criteria in all cases. Some other administrations are of the opinion that an excess of the protection criteria by 10 dB, which still corresponds to an I/N of –10 dB, is acceptable.
Consequently, reservations were entered into the minutes of both SE24 and WGSE.
The debate was brought to the ITU level. working party 9A and 9D confirmed the adequacy of the method used for calculation, and the protection criteria for the Fixed Service to be -20 dB I/N taking into account the regulatory status of wide band SRR. On

24
this basis, it is understood that the notion of harmful interference is qualified by a maximum I/N of -20 dB.
For further details about the compatibility studies see ECC Report 23.
SRR would operate on a non-protected/non-interference basis. The issue of SRR immunity is developed in section 5 of this Report.
3.3.4 Radiolocation Service The services mentioned above do not represent the complete picture. In a number of administrations there are speed radars operated by police forces. These make a major contribution to road safety and there are concerns that the legal basis on which they operate could be undermined if unlicensed emitters were allowed into the same environment.
Some administrations have currently restrictions for the use of short range devices in the 24 GHz band designated in ERC REC 70-03 in order to protect speed meter radars operating as a Radiolocation Service.
Compatibility tests have been carried out on a number of Radar Speed Meter equipment operated in Europe.
The effects of the UWB emission component of SRR to RSMs were investigated in a first series of test carried out in 2003 and no interference to the RSM could be found.
In further tests carried out March 2nd, 2004, the interference potential of the narrow-band component (i.e. residual carrier or optional Doppler radar signal) was investigated on one RSM equipment.
The test results show that there will be no wrong or false speed reading at the RSM due to the SRR residual/Doppler mode emission. However, the probability of suppressed speed readings due to residual carriers or Doppler mode signals emitted by UWB-SRR sensors that fall within the RSM receiver bandwidth is as a first assessment below 10-4.
This low probability of interference is directly related to the type of narrow-band emission component of 24 GHz SRR, which shall therefore be limited to an unmodulated carrier (e.g. residual carrier or optional Doppler radar signal).
25
In order to avoid blocking of the RSM (i.e. suppressed speed readings), the police speed meter radars might require a frequency decoupling of carriers of both SRR and police radars. The need to limit the narrow-band emission component of 24 GHz SRR within the band 24.18 – 24.25 GHz – and to have consequently the centre frequency of a SRR shifted at 24.215 GHz - is under discussion. Compatibility studies are ongoing on a national basis.
It should however be noted that ISM radio equipment are already allowed in this band with higher power levels. Use of narrow band automotive radar limited to this ISM band is also under study on a national basis.
7.1.1. 3.3.5 Services not covered by ECC Report 23
3.3.5.1 Radio Amateur Service. The Radio Amateurs have a primary Amateur and primary Amateur-Satellite allocation in this frequency range. Growth in the use of this band is anticipated and although current use is estimated as light, The International Amateur Radio Union has identified an interference issue.
3.3.5.2 Short Range Devices. Recommendation 70-03 lists allocations for SRDs in this band and ECC Decisions have been proposed for such Short Range Devices. However, these operate on a non-interference basis and claim no protection from SRR.
7.1.2.
3.3.5.3 Broadcasting Satellite Service BSS in the band 21.4-22.0 GHz may be affected by both in band and out of band emissions of the SRR. Studies performed by SARA indicate that a compatibility problem exists unless the emissions limits of SRR are lowered to -61.3 dBm/MHz below 22 GHz, i.e. to the same value as adopted by the FCC in the US.
8. 4 PROTECTION OF PASSIVE SERVICES
4.1 ITU-R footnote 5.340
Footnote 5.340 from the Radio Regulation (RR) prohibits all emissions within the band 23.6-24 GHz. CEPT administrations agreed during their SE WG meeting in Yalta (October 2003) on the following general principles:
26
• It is not possible to record in the Master Register any stations in the 5.340 bands, even for information purpose under No. 4.4.
• Administrations are discouraged to introduce stations in these bands. • But this does not strictly prevent administrations from the use of such bands
providing that there are neither impacting services of other administrations nor trying to have international recognition of such use.
Additionally it should be noted that article 0.4 of the Preamble of the Radio Regulations applies:
0.4 All stations, whatever their purpose, must be established and operated in such a manner as not to cause harmful interference to the radio services or communications of other Members or of recognized operating agencies, or of other duly authorized operating agencies which carry on a radio service, and which operate in accordance with the provisions of these Regulations (No. 197 of the Constitution).
CEPT administrations, as well as, the European Commission should make sure that any such temporary authorization of 24 GHz SRR systems must not be used as a precedent for possible introduction of other transmitter devices in bands where RR footnote 5.340 is applicable, for temporary or permanent use.
The scientific and meteorological communities fear that an interim solution for the deployment of SRR in the 24 GHz band will create damaging side effects. The validity of the footnote 5.340 will be weakened and development of future sensitive radiometers may be delayed. Furthermore arguments to limit the unwanted emissions in purely passive bands could be affected.
It has to be emphasized that any misapplication of the interim use of the 21.5-26.5 GHz band by SRR or any lack of certainty of the abovementioned regulation and legal elements will lead to tremendous negative consequences for the existing services, and in particular to passive services for which the 23.6-24 GHz is a unique natural resource:
- the EESS measurements will be jeopardized hence severely endangering safety of life related warnings and procedures, meteorological forecasts as well as scientific programs that are being developed in the field of weather and climate;
- the Radio Astronomy Service will not be protected in this part of the radio spectrum due to complex physical and regulatory conditions.
27
4.2 Protection of the Radio Astronomy Service (RAS)
In the following countries Radio Astronomy stations are using or planning to use the frequency range 22.21-24 GHz including the band 23.6-24 GHz:
Finland (1)
France (2), Germany (1) Italy (3)
Russian Federation (4) Spain (2) Sweden (1) United Kingdom (5).
Using the protection criteria contained in Recommendation ITU-R RA.769 (Protection Criteria Used for Radio astronomical Measurements) for the band 22.21–24 GHz, the compatibility study found that sharing between SRR and RAS is not feasible.
If all of the possible mitigation factors such as local terrain, clutter loss, vehicle density are applicable and if this leads to sufficient reduction in interference level, then sharing between the SRR at 24 GHz and Radio Astronomy could be possible in some cases.
However, conditional to the deployment of SRR in the band 21.625 - 26.625 GHz is the use of an automatic deactivation mechanism of the SRR device within the protection area around the RAS stations. This protection area is to be determined by each national concerned administration, if necessary in cooperation with neighbouring administrations in case of stations located close to country borders. In order to allow an early implementation of 24 GHz SRR Systems the automatic deactivation should only be made mandatory after a transitional period of 24 months.
It is uncertain whether such a protection area can be determined to ensure the protection of Radio Astronomy Stations in Europe for SRR operating in the 21.625 - 26.625 GHz, since in this part of the radio spectrum the physical and regulatory conditions are complex.
The physical conditions are highly variable with frequency since the band includes spectral lines of H2O at ~22 GHz and NH3 (ammonia) at ~23 GHz. At these frequencies calculations indicate that separation distances could be estimated as several tens km from a Radio Astronomy Station, taking into account that these estimates for frequency bands that include these spectral lines cannot be taken elsewhere within the 22.21-24 GHz frequency band since the effect of these lines on separation distances is unknown. As a function of frequency these distances can increase with at least a factor of 3 w.r.t. the values just mentioned.
28
Another difficulty is that no generally accepted method exists on how to calculate separation distances for a frequency band to which ITU Radio Regulations footnote 5.340 applies. Therefore, the separation distance necessary to protect Radio Astronomy Stations operating in the band 23.6-24.0 GHz is currently undetermined.
Further consideration on the deactivation mechanism is given in section 4.2.4.
4.3 Protection of the Earth Exploration Satellite Service (EESS)
Out of the 447 MHz bandwidth allocated for purely passive applications in the first 30 GHz of the spectrum, the 400 MHz in the band 23.6-24 GHz represents by far the largest share. This in itself indicates the importance of this band for the passive services. This band covers the flank of the water vapour spectral line.
The measurements made at 24 GHz directly lead to the total column water vapour content in the atmosphere. This is crucial for weather forecasting at local and global level. The potential loss of these data that are assimilated in Numerical Weather Prediction (NWP) models will affect the quality of weather forecasting. National meteorological offices and international weather centres are increasingly relying on satellite data. Compared to traditional measuring networks (e.g. radiosondes), satellite remote sensing is a unique and crucial method of achieving global geographical and time coverage.
Also, this band is used for correcting temperature measurements (made between 50-60 GHz) for attenuation due to water vapour. Without correct measurements at 24 GHz, temperature measurements at 50-60 GHz cannot be corrected for attenuation due to water vapour content in the atmosphere and thus have larger errors that again feed in the NWP models and potentially result in wrong interpretation and weather forecasts.
It should also be highlighted that information from measurements in this band is not only used for weather forecasts, but also for climate research. Especially for this application, continuity of these measurements over a long period (i.e. many years) is crucial to the understanding of the climate, its related changes and its variability on all timescales.
In particular, EESS observations in the 24 GHz band play an important role in the GMES (Global Monitoring for Environment and Security) initiative promoted and coordinated in Europe by the European Commission and ESA, aiming at an operational European warning system.
One of the objectives of GMES is to improve traffic safety by improving severe weather forecasting. Moreover, these observations are needed to develop scenarios for climate change, which, among others, contribute substantially to governmental policy making on traffic safety. Such a policy requires the development of scenarios to cope with climate developments. GMES is the European contribution to the Global Earth Observations (GEO) and warning system which development was triggered as an immediate consequence of the Earth Observation Summit held in Washington in 2003.
29
The protection of this fundamental band implies limitations on the vertical antenna pattern of 24 GHz SRR. Such limitations shall be detailed in the relevant Harmonised standard. For equipment authorized, manufactured or imported from January 1st, 2005 to December 31st, 2009, this level of attenuation shall be 25 dB and 30 dB from 2010 for any emissions within the 23.6-24.0 GHz band that appear 30 degrees or greater above the horizontal plane.
9. 5 SHORT RANGE RADAR IMMUNITY
The SE WG of the Electronic Communications Committee (ECC) has conducted an analysis on the immunity of 24 GHz automotive SRRs.
This analysis is presented in ECC Report 046 on ‘Immunity of 24 GHz automotive SRRs operating on a non interference and non protected basis from emissions of the primary fixed service operating in the 23 GHz and 26 GHz frequency bands’.
ECC Report 046 considers the impact of FS systems in the 23 and 26 GHz bands into the 24 GHz Short Range Radars (SRRs).
It gives the interference situations in which 24 GHz SRR would be likely to operate in the vicinity of FS systems (P-P and P-MP) and elaborates on the means that such SRR are expected to implement in order to overpass these situations.
The analysis has been done following different scenarios, recognising that while FS systems can coexist in a close environment due to a high level of discrimination, due to frequency separation and/or angular separation, all FS systems operating in the 23 and 26 GHz bands fall into the SRR receiver bandwidth.
The calculations of interference from FS to SRR operating at 24 GHz show that SRR will have to operate in a high level of interference in the vicinity of FS transmitters, presenting in particular I/N levels above +20 dB along the FS path.
The ability of SRR to operate in such an environment mainly depends on the design of the SRR and the resulting processing gain (see section 2.1 of ECC Report 46 that estimates a minimum processing gain of 67 dB).
30
As SRR will operate on non-interference and non protected basis, it is therefore the responsibility of the SRR manufacturers to carefully design their systems to minimize the effect of interference from radiocommunication services (in particular Fixed Service) as well as other SRR devices by implementing adequate mitigation techniques such as spread spectrum technique that can provide processing gain above 50dB and further interference suppression techniques (see section 2.2 of ECC Report 46).
Based on the information provided by industry (see section 2.2 of ECC Report 46), acknowledging however the lack of details, it can be assumed that adequately designed SRR would be able to restore to a high degree signals distorted by strong interference. Where the level of interference would be detrimental to the 24 GHz SRR operation as could occur from the operation of FS, it can be assumed that the SRR devices would be temporarily disabled. This report shows that the protection of 24 GHz SRR cannot be guaranteed.
10. 6 AFTERMARKET FITMENT
It is noted that a fully operational SRR system requires a complex integration with several functional units within the vehicle. Nevertheless, two types of aftermarket fitment are possible:
1) A partial fit, offering limited functionality to a vehicle not designed for SRR. This may be attractive to some owners, but is unlikely to offer many of the benefits of an SRR system integrated by a manufacturer, or qualify for insurance discounts.
2) A full fit, to a vehicle not designed for SRR. This is viewed by the automotive industry as too difficult to affect market penetration.
Manufacturers must take measures to prevent SRR being added retrospectively to vehicles designed with SRR as an option, and it is recommended that manufacturers also report the level of sales of SRR sensors as spare parts.
11. 7 NEED FOR FREQUENCY REGULATION AND LEGAL CERTAINTY
7.1 Need for frequency regulation: timescales and responsibilities
CEPT administrations consider that an interim solution at 24 GHz could only be accepted “if and when all the conditions for the package solution are sufficiently clear, accepted and guaranteed” (ECC meeting, Luxembourg 11-15 November 2002).

31
The timescales for the designation of a frequency band for the temporary solution as well as for the permanent solution should therefore be linked to the legal certainty to be provided by the TCAM/Radio Spectrum Committee and the European Commission.
The intention with this CEPT Report to the Commission is twofold:
- to clarify the frequency management issues regarding the designation of frequency bands for SRR equipment;
- to provide requirements for necessary legal certainty to the Radio Spectrum Committee and the European Commission.
Some of the legal initiatives may be taken after the delivery of the final CEPT Report and after final adoption of the ECC Decision.
Availability of frequency bands for SRR systems within all EU member states is expected as a consequence of the relevant EC Decision together with the required legal certainty.
It was however questioned whether the R&TTE Directive would be the appropriate tool for such a regulation. The possible use of the Automotive Directive was suggested as this Directive is still based on the concept of type approval.
7.2 Requirement for legal certainty
In particular the following issues need detailed regulation and legal certainty:
a) Stop placing on the market of radio equipment after the reference date but continued use for vehicles already equipped.
b) Forbidding of after-market sales should be defined and legal certainty provided by the European Commission.
c) Legal certainty of the availability of the 79 GHz range band within all EU member states. ECC/DEC/(04)03 has been finally adopted by the ECC at its March 2004 meeting.
d) Legal certainty of the availability of the 24 GHz range within all EU member states.
32
The ECC Decision at 24 GHz is adopted for public consultation in July 2004 Final adoption by the ECC is foreseen in November 2004.
e) Legal certainty on the reporting arrangement including participation by automotive manufacturers from outside the European Union. The European Manufacturers Association ACEA has initiated consideration of a commitment for manufacturers intending to provide 24 GHz equipment under a temporary solution. Other vehicle manufacturers must also be included in such an agreement in order to cover vehicles imported into the EU market.
f) Certainty about the harmonised standard for the 24 GHz equipment and the 79 GHz equipment and in particular the possible relation needed between the harmonised standard and provisions to stop placing on the market of 24 GHz equipment. Limitations of vertical antenna pattern for the vehicle radars and automatic deactivation mechanism based on geographical location should clearly appear in the Harmonised standard.
g) The designation of frequency bands for SRR equipment is developed under the explicit condition that SRR equipment is not considered as a safety of life applications in accordance with the Radio Regulations. No mandatory measures shall therefore be envisaged for the protection of SRR applications from existing services.
12. 8 CONCLUSIONS
The European Commission has determined that short range radar is a key component of the Community’s e-safety initiative. Text from the mandate Introduction of Short Range Radars based on Ultra Wide Band technology in Europe should be based on the following frequency management considerations in full respect of the long-term protection of the existing services:
1. A permanent frequency band at 77-81 GHz (the ‘79 GHz range’) should be made available as soon as possible for Short Range Radars. ECC/DEC/(04)03 has been finally adopted by the ECC at its March 2004 meeting. The frequency band should be made available by January 2005 in order to encourage industry development of components and technology for this band.
2. In order to allow early introduction of SRR applications in Europe the frequency band the ‘24 GHz range’ may be used on a temporary basis with limited number of equipment in the market place in Europe for a limited time frame. The implementation of such temporary solution requires agreement and commitment in some cases with legal certainty from CEPT Administrations, the European Commission (Radio Spectrum Committee and the TCAM) and the automotive
33
industry. It shall be taken as a clear incitement for manufacturers to develop SRR in the 79 GHz range.
3. The temporary solution must be limited in time and scope as follows:
a. The characteristics of SRR systems shall be limited to an e.i.r.p. mean power density of –41.3 dBm/MHz, an e.i.r.p. peak limit of 0 dBm/50 MHz, with a vertical attenuation of 25 dB from 2005 and 30dB from 2010 for any emissions within the 23.6-24 GHz band that appear 30° or greater above the horizontal plane, and a narrow-band emission mode limited to an unmodulated carrier within frequency band 24.05 -24.25 GHz with a maximum peak power of 20 dBm e.i.r.p.
b. Vehicles fitted with 24 GHz SRR equipment must contain an automatic deactivation mechanism to ensure protection of Radio Astronomy stations in Europe as well as a manual deactivation to allow cross border enforcement if some CEPT countries not being member of the European Union do not implement the interim solution. In order to allow an early implementation of 24 GHz SRR Systems the automatic deactivation should only be made mandatory after a transitional period of 24 months. During the transitional period manual deactivation is required.
c. The temporary solution is limited in time until the reference date that is set to 1st January, 2013. After this reference date all new SRR equipment placed on the market shall use the 79 GHz band only, but the installed 24 GHz SRR equipment may still be used until the end of the lifetime of the vehicles.
d. In order to protect other existing services within the frequency band including in particular the Fixed Service and the Earth Exploration Satellite Service (EESS) the percentage of vehicles equipped with SRR devices must be limited to less than 7.0 percent in each national market.
e. The reference date may be set earlier, in case the 7.0% national market penetration threshold would be exceeded in one EU country or associated European country where R&TTE Directive is applicable. The Radio Spectrum Committee and the European Commission should consider whether the area of such country is significant and decide whether the ‘reference date’ shall be brought forward (i.e. set earlier).
f. In order to ensure that the actual penetration level does not exceed the limit mentioned above a reporting process should be established where information about the number of vehicles equipped with 24 GHz SRR and intended for the European or national markets is provided and made available to administrations and parties involved. The Radio Spectrum
34
Committee should establish the necessary legal means to collect and publish the information received.
g. A review should take place during 2009 in order for the Radio Spectrum Committee and the parties involved to consider and confirm that the number of equipment in use on a national basis is still consistent with the agreed solution.
h. Development of 79 GHz equipment should be monitored by the Radio Spectrum Committee and the committee should take action should as appropriate.
4. An ECC Decision on the temporary use of the 24 GHz frequency band has been developed and has been adopted for public consultation by the ECC. It is expected to be finally adopted in parallel with finalising the other elements of the “package solution”. The ECC Decision includes the designated frequency bands, the maximum power levels allowed and associated regulatory provisions.
5. CEPT administrations and the European Commission shall make sure that any such temporary authorization of 24 GHz SRR systems is exceptional and can not be used as a precedent for possible introduction of other transmitter devices in bands where RR footnote 5.340 is applicable, for temporary or permanent use.
6. The designation of frequency bands for SRR equipment is developed under the explicit condition that SRR equipment is not considered as a safety of life application in accordance with the Radio Regulations. No mandatory measures shall therefore be envisaged for the protection of SRR applications from existing services.
7. To manage a temporary use of the 24 GHz frequency band a number of agreements between parties involved need to be in place and legal as well as regulatory certainties need to be provided by the TCAM/Radio Spectrum Committee and the European Commission before any introduction of SRR equipment operating in the 24 GHz band can be permitted. In particular the following issues need detailed regulation and legal certainty:
a. Stop placing on the market of 24 GHz SRR b. forbidding of after-market sales c. Legal certainty of the availability of the 79 GHz band d. Legal certainty of the temporary availability of the 24 GHz band for SRR e. Legal certainty on the reporting arrangement including participation of
automotive manufacturers from outside the European Union. f. Certainty about harmonised standard for the 24 GHz equipment and the
79 GHz equipment

35

Rue de la Loi 200, B-1049 Bruxelles/Wetstraat 200, B-1049 Brussel - Belgium - Office: BU33 6/15. Telephone: direct line (+32-2)299.01.82., switchboard 299.11.11. Fax: +32.2.296.88.75. e-mail : [email protected]
ANNEX 1
MANDATE TO CEPT TO HARMONISE RADIO SPECTRUM TO FACILITATE A COORDINATED EU INTRODUCTION OF AUTOMOTIVE SHORT-RANGE RADAR SYSTEMS
Title
A mandate to CEPT to identify radio spectrum for the introduction of automotive short-range radar devices (SRR) in the European Union.
Purpose
Pursuant to art. 4 of the Radio Spectrum Decision, CEPT is mandated to undertake all necessary work to ensure the availability of harmonised radio spectrum in the European Union for the deployment of automotive short-range radar systems to be used for improving road safety. In order to expedite the introduction of this type of radio application in the EU, additional appropriate frequency bands ought to be considered for a limited temporary introduction of SRR systems, besides the identification of permanent SRR spectrum bands for the long term. The protection of other services operating in or near the temporary band(s) must be ensured by introducing specific operating limits for such SRR systems and by moving their operation to the permanent band by a fixed transition date.
Justification
Automotive SRR systems have been identified by the EU policy eSafety initiative2 as a significant technology for the improvement of road safety in Europe by active means, and as one of a number of active and passive measures that could be introduced together to address the overall transport policy goal of cutting road fatalities in Europe by half by 20103.
In this context, the achievement of this policy goal would be supported by enabling the operation of SRR devices in new vehicles sold on the European market at the earliest.
2see http://europa.eu.int/information_society/programmes/esafety/index_en.htm
3 Commission Communication on a European Road Safety Action Programme, COM(2003)311, June 2nd, 2003 at http://europa.eu.int/comm/transport/road/library/rsap/com_2003_0311_en.pdf , and Council Conclusions on the European Road Safety Action Programme, June 5th, 2003.
37
For this to happen, radio spectrum needs to be rapidly identified and harmonised at Community level.
Background
In Europe, CEPT ECC/DEC/(02) 01 designates the band 76-77 GHz for vehicular or infrastructure radar systems. However, SRR systems require a wider bandwidth than currently available to obtain the required resolution. Furthermore, the automotive industry4 holds that the immediate implementation of SRR systems in or around this frequency range would not be feasible at the present time, given the stated relative lack of maturity and cost-effectiveness of the available technology for this band. The automotive industry believes that in the short term operation around the 24 GHz band is the only commercially-viable solution, with a subsequent migration to the 77 GHz or to another band after some years, by which time appropriate technology solutions are expected to have become cost-effective and the SRR concept validated in the market.
The SRR systems proposed by the automotive industry5 for the initial market introduction of SRR devices use ultra-wide band transmission principles and emit with a bandwidth of 5 GHz around a carrier, potentially affecting the operation of several existing and important radio applications operating in or near the 24 GHz band, such as passive Earth Observation services, wireless telecommunications fixed links, the Radio Astronomy Service (RAS), and various short-range device applications (SRDs)6. It should be underlined that some of these services also play a major role in the security and well-being of European citizens, in particular space-borne passive sensing for meteorological applications.
Based on studies on compatibility between SRR systems and the Fixed Service, the Earth Exploration Satellite Service and the Radio Astronomy Service, CEPT studies7 indicate that an unlimited deployment of SRR systems at 24 GHz will create unacceptable harmful interference to important existing radio applications operating in or close to this band. The protection of all concerned services8 must be taken into account and safeguarded in the designation of spectrum for automotive SRR systems. Technical or regulatory solutions to protect other radio services must therefore be considered, while avoiding undue delays in the introduction of this technology. In this context, some proposals
4 SARA (Short Range Automotive Radar Frequency Allocation group) representing 16 car manufacturers and 11 automotive components companies.
5 Such as defined by draft ETSI Harmonised Standard EN 301 091
6 The band 24-24.25 GHz is designated for ISM applications.
7 ECC Report 23 on the compatibility of automotive collision warning short range radars operating at 24 GHz with FS, EESS and Radio Astronomy.
8 May also include radars used for road speed limit control, the Amateur Radio Service and the Broadcasting Satellite Service (BSS).
38
about a programmed phased approach have been discussed in the Electronic Communications Committee (ECC) of CEPT, with SRR systems initially deployed in or near the 24 GHz band for a limited period of time during which their numbers would be expected to remain below a level where interference could become harmful to other existing users. The second part of this phased approach would consist in a proposed migration of the operation of automotive SRR devices to a permanent band.
The compatibility studies carried out by CEPT so far conclude that harmful interference to the FS and EESS services from SRR devices operating in the 24 GHz band according to agreed industry specifications will not be significant as long as the maximum density of vehicles and other vehicles equipped with SRR systems remains limited and in any case below 10% of all vehicles within visibility of victim radio services.
Given the mobility within and across EU borders of automotive equipment, a harmonised withdrawal of designation for SRR systems of the 24 GHz band across the EU is essential for this approach to be feasible. A reference date for the termination of placing on the market of SRR devices operating in the temporary band therefore ought to be defined at EU level in the context of their expected market penetration in this band. From this reference date, all new SRRs devices would have to use the 77 GHz band (or any other designated permanent band) while the operation of existing SRR systems would remain authorised in the temporary band to the end of their operational lifetime.
In order to ensure that this withdrawal will be effective from the set date referred above, and to provide a strong incentive for the automotive sector to develop viable technologies for the permanent frequency range, this band should be available as soon as possible. CEPT is invited therefore to specify the conditions for use of the 77 GHz band (or any other designated band) as soon as possible, but at the latest in parallel with any interim approach.
While any agreed solution must aim to minimise the necessity to refarm other services already operating in the SRR-designated bands, the proposed time schedule on the introduction of SRR should take into account the needs of Administrations possibly concerned by such refarming activities.
Regulatory Context
This mandate is one element of an integrated action aiming at promoting the timely introduction of SRR systems in the European Union in the context of the eSafety initiative. If it is decided to designate temporarily the 24 GHz band for SRR systems, other elements that will need to be considered by the European Commission are the following:
a) Regulatory EU and national measures. Any possible operation of SRR systems at 24 GHz must be linked to halting the introduction on the market of any additional equipment operating in this band by a specific date related to an expected penetration threshold. Consideration on how this can be achieved across the EU will include (but not necessarily be limited to) the possibility of a harmonised prohibition of the placing on the market of new SRR systems in the temporary band under the RTT&E Directive.
39
b) Harmonised standards. A new harmonised standard for the permanent frequency band would need to be developed as early as possible and with the highest priority. Furthermore, a harmonised standard from ETSI for SRR devices at 24 GHz produced in the context of the R&TTE Directive will only be accepted by the Commission provided it is in line with the various elements of the overall approach agreed to in the Radio Spectrum Committee.
c) A collective commitment by the automotive industry. The commitment would include monitoring of the market penetration of SRR devices in the provisional band. The gathering of monitoring information according to an agreed format would be carried out by ACEA (European Automobile Manufacturers Association) in coordination with other automotive associations and presented to the Radio Spectrum Committee annually, or as often as needed. Issues related to the after-sales market may also need to be considered.
d) A review mechanism. The RSC to undertake a full review of the adopted regulatory approach at some set date, well before the reference date for withdrawal of placing on the market of SRR systems in the temporary band. The RSC may decide to hold such a review at an earlier date, due for instance to a faster-than-expected penetration of SRR systems in the 24 GHz band, or harmful interference that may arise into other services operating in or near the 24 GHz band due to SRR systems.
The above mentioned elements should be prepared in parallel with the execution of this mandate and considered by CEPT when providing its deliverables under this mandate.
Order and Schedule
1. The CEPT is hereby mandated to undertake all relevant work to identify harmonised radio spectrum for the deployment of automotive short-range radar in the EU without undue delay. The radio frequency bands should therefore be chosen according to criteria of equipment cost and of technological maturity. At the same time, a high degree of consideration must be given to the protection of existing radio services in or near the bands to be designated for such short-range radar systems.
Work on the identification of a permanent appropriate band for SRR devices, possibly around 77 GHz, should be undertaken as soon as possible, but at the latest in parallel with any interim approach.
The viability of a time-limited introduction of SRR systems in or near the 24 GHz band should be explored in detail, as this frequency range is considered by the automotive industry as being currently the most appropriate in terms of equipment cost and of technological maturity.
2. More specifically, CEPT is mandated to:
40
- undertake all necessary technical compatibility studies between automotive SRR systems and other radio services for possible SRR bands;
- designate as a matter of urgency a permanent frequency band(s) for automotive SRR systems, and specify the conditions required for the use of this band;
- consider the designation of a temporary frequency band to enable SRR systems to be introduced in a timely and cost-effective fashion, and specify the conditions required for the use of this band;
- consider the implications of encouraging emissions on a licence-exempt basis in the 23.6-24.0 GHz band, in view of the protection provided by ITU footnote 5.340 to passive services;
- define the threshold market penetration of vehicles equipped with SRR systems operating at or near 24 GHz where interference would be harmful to other existing radio services, and the way this level should be evaluated; - propose technical and regulatory measures to protect the EESS and FS services from harmful interference by limiting the deployment of automotive SRR systems in the 24 GHz band, and notably by defining a reference date for a programmed mandatory transition of SRR operation to the permanent frequency band in relation to the expected market penetration of SRR systems at European, national and local level. Other potentially affected services ought also to be considered, in particular Radio Astronomy. - define the information required to ensure the continued relevance of the technical compatibility identified between SRR systems and other services over the period of operation in the temporary frequency band; CEPT is expected to summarise the results on the above-mentioned tasks in a report to the Commission.
3. The CEPT is mandated to provide Mandate deliverables according to the following schedule:
Delivery date Deliverable Subject
October 2003 First Report from CEPT to the Commission
Description of work undertaken under this Mandate and orientation for future work.
January/March 2004 Draft ECC Decisions on a possible interim and a permanent harmonised frequency band
Validation of draft ECC Decisions for public consultation.
41
March/July 2004 ECC Decisions Adoption of the ECC Decisions on the interim solution, if any, and on the permanent harmonised frequency band.
March/July 2004 Final Report from CEPT to the Commission
Description of work undertaken and results achieved under this Mandate
4. The result of this Mandate can be made applicable in the European Community pursuant to Article 4 of the Radio Spectrum Decision9.
In implementing this Mandate, the CEPT shall, where relevant, take the utmost account of Community law applicable.
***
9 Decision 676/2002/EC of the European Parliament and of the Council of 7 March 2002 on a regulatory framework for radio spectrum policy in the European Community, OJ L 108 of 24.4.2002, p.1.
Annex 2
ECC/DEC/(04)03
ELECTRONIC COMMUNICATIONS COMMITTEE
ECC Decision
of 19 March 2004
on the frequency band 77 – 81 GHz to be designated for the use of Automotive Short Range Radars
(ECC/DEC/(04)03)
43

ECC/DEC/(04)03
44
EXPLANATORY MEMORANDUM
1 Introduction
Within Europe, there are proposals to improve road safety by using new information communications technologies, including building a European strategy to accelerate the research and development, deployment and use of intelligent road safety systems such as Automotive Short Range Radars (SRR).
SRR systems will be a significant element of a future transport infrastructure for Europe and in particular contribute to the long term goal of the European Commission e-safety initiative.
To support a quick development and deployment of SRR systems within a trans-European road network, it is essential that common frequency bands and associated harmonised equipment standards be available throughout Europe. A stable and permanent solution needs to be made available as soon as possible in order to support the European industry developments in this area.
2 Background
To meet the requirement for a permanent, long term solution for short range radars the frequency band
77-81 GHz has been identified. Compatibility issues within this band have been successfully studied and a system reference document with market information as well as technical information has been agreed within ETSI as the basis for a frequency designation within the ECC.
The 76-77 GHz frequency band was designated for vehicular and infrastructure radar systems in ERC Recommendation 70-03 and in ECC Decision (02)01. This frequency band is used by long range radar systems which are not compatible with Ultra Wide Band (UWB) SRR systems. Thus a new frequency band of 4 GHz for Automotive (UWB) Short Range Radars is needed within the 79 GHz range 77-81 GHz.
ECC/DEC/(04)03
45
In order to support industry developments of the general and specific SRR technology within the 79 GHz range the frequency band 77-81 GHz should be made available throughout Europe as soon as possible.
3 Requirement for an ECC Decision
The allocation of radio frequencies in CEPT member countries is laid down by law, regulation or administrative action. The ECC recognizes that for SRR systems to be introduced successfully throughout Europe, manufacturers and operators must be given the confidence to make the necessary investment in the new pan-European radiocommunications systems and services. A commitment by CEPT member countries to implement an ECC Decision will provide a clear indication that the required frequency bands will be made available on time and on a Europe-wide basis.

ECC Decision
of 19 March 2004
on the frequency band 77 – 81 GHz to be designated for the use of Automotive Short Range Radars
(ECC/DEC/(04)03)
“The European Conference of Postal and Telecommunications Administrations,
considering
a) that within Europe, there are proposals to improve road safety by using new information communications technologies, including building a European strategy to accelerate the research and development, deployment and use of intelligent road safety systems such as Automotive Short Range Radars (SRR);
b) that the availability of spectrum for SRR equipment in Europe would contribute to the long term goal of the European Commission e-Safety-initiative;
c) that in order to give the automotive industry as well as the components industry the confidence to make substantial investment in Short Range Radar technology, they need a clear indication that the required frequency bands will be made available on time, and on a Europe-wide and permanent basis;
d) that in order to address these goals the EC issued a mandate to CEPT 31 July 2003 under the Spectrum Decision 676/2002/EC ‘Mandate to CEPT to harmonise radio spectrum to facilitate a coordinated EU introduction of Automotive Short Range Radar systems’
e) that the use of the 79 GHz frequency range (77-81 GHz) has been considered as the most suitable band for Short Range Radars;
f) that the development and use of the 79 GHz technology will have a beneficial effect to European industry;
g) that the sharing with Radio Astronomy Service has been studied concluding that regulatory measures could be identified enabling the coexistence between SRR in the frequency band 77-81 GHz and the Radio Astronomy Service, which is dependent on the aggregated impact of SRR devices transmitting in the direction of a radio astronomy station;
h) that the use of SRR within the band 77-81 may be incompatible with the Radio Amateur Service which has been resolved by allowing the Amateur Service to remain in the 75.5-76 GHz band after 2006 (see footnote 5.559A);
i) that information has been received from NATO that there are currently no radiolocation systems operational in the band and there are no plans to introduce such systems;
j) that the frequency band 76-77 GHz is already designated for long range automotive radars (vehicular and infrastructure radar systems) (ECC DEC(02)01 on Road Transport and Traffic Telematic Systems. Sharing
ECC/DEC/(04)03
47
studies conducted by the automotive industry have concluded that sharing is not achievable between Ultra Wide Band Short Range and Long Range Automotive Radars;
k) that the 79 GHz band should be made available on a European basis for SRR equipment as soon as possible and not later than January 2005 in order to provide an incentive for industry to place SRR products on the market using this frequency range;
l) that SRR-equipment is not considered as a safety of life service in accordance with the Radio Regulations, therefore SRR must operate on a non-interference and non-protected basis in accordance with the Radio Regulations;

ECC/DEC/(04)03
48
DECIDES
1. that for the purpose of this Decision, SRR equipment are defined as applications providing road vehicle based radar functions for collision mitigation and traffic safety applications;
2. that the 79 GHz frequency range 77-81 GHz is designated for Short Range Radar (SRR) equipment on a non-interference and non-protected basis with a maximum mean power density of -3 dBm/MHz e.i.r.p. associated with an peak limit of 55 dBm e.i.r.p.;
3. that the maximum mean power density outside a vehicle resulting from the operation of one SRR equipment shall not exceed -9 dBm/MHz e.i.r.p.;
4. that the 79 GHz frequency range (77-81 GHz) should be made available as soon as possible and not later than January 2005;
5. that this Decision will enter into force on 19 March 2004;
6. that CEPT administrations shall communicate the national measures implementing this Decision to the ECC Chairman and the Office when the Decision is nationally implemented.”
Note:
Please check the ERO web site (http://www.ero.dk) for the up to date position on the implementation of this and other ERC/ECC decisions.
EUROPEAN CONFERENCE OF POSTAL AND TELECOMMUNICATIONS ADMINISTRATION
Annex 3
ELECTRONIC COMMUNICATIONS COMMITTEE
ECC Decision
of day/month/200[4]
on the frequency bands to be designated
for the temporary introduction of
Automotive Short Range Radars
(ECC/DEC/(0a)xx)
ANNEX 6
to Doc ECC(04)53 Rev1

ECC/DEC/(0a)xx
EUROPEAN CONFERENCE OF POSTAL AND TELECOMMUNICATIONS ADMINISTRATIONS

EXPLANATORY MEMORANDUM
13. INTRODUCTION
Within Europe, there are proposals to improve road safety by using new information communications technologies, including building a European strategy to accelerate the research and development, deployment and use of intelligent road safety systems such as Automotive Short Range Radars (SRR).
SRR systems will be an essential element of a future transport infrastructure for Europe and in particular contribute to the long term goal of the European Commission e-safety initiative.
To support a quick development and deployment of SRR systems within a trans-European road network, it is essential that common frequency bands and associated harmonised equipment standards be available throughout Europe as soon as possible.
It has to be noted that this ECC decision is part of a "package solution" implying regulatory and legal provisions to be adopted by both CEPT and the European Commission.
14. BACKGROUND
To meet the requirement for a permanent, long term solution for SRR equipment the frequency band 77-81 GHz has been designated (ECC/DEC/(04)03). The 79 GHz SRR technology is however not yet available at affordable prices for mass production. Therefore, in order to meet an early introduction of SRR applications in Europe, the temporary use of a 5 GHz wide band centred around 24 GHz, hereinafter referred to as the ‘24 GHz range’, has been considered as this particular frequency range provides for immediate cost effective solutions.
However, the 24 GHz frequency range is already heavily used in Europe for a wide range of applications that all represent, at different levels, critical national or European services and/or wide economical interests and for which very substantial existing long-term investments have been and are to be made.
Compatibility studies with these services (mainly Fixed Service, Radio Astronomy Service and Earth Exploration Satellite Service) conducted within CEPT and described in ECC Report 23 concluded that the deployment 24 GHz SRR is not feasible in the long term.
With regard to Fixed Service, although sharing is not feasible if a protection criteria of –20 dB I/N is to be met in all cases, Sharing is considered to be feasible if an excess of the protection criteria by 10 dB (up to –10 dB I/N) in worst case scenarios can be accepted, as far as the percentage of cars equipped with SRR devices in visibility of the FS receiver is limited to less than 10%.
Compatibility with the Radio Astronomy Service within the frequency band 22.21-24 GHz has been shown as not being possible and thus specific measures to protect Radio Astronomy stations in Europe have to be implemented by SRR, in particular an automatic deactivation of the SRR in the protection zones to be defined by national administrations. In order to allow an early implementation of 24 GHz SRR Systems the automatic deactivation should only be made mandatory after a transitional period of 24 months. During the transition period, manual deactivation is required.
Concerning Earth Exploration Satellite Service (EESS), sharing studies show that the protection criteria for 100% penetration would be exceeded by 10.8 dB which leads to a maximum SRR penetration level of 8.3% per EESS pixel. However, this analysis has been made with the final set of SRR systems characteristics, proposed to be applied from 2014 by FCC (i.e vertical attenuation of 35 dB).
The translation of the 10.8 dB negative margin into a market penetration limit did not take into account that, in the case of an interim solution up to 2013, the SRR systems would present, before these dates, lower vertical attenuation (and hence higher interference potential), namely 10 dB up to 2010 and 5 dB between 2010 and 2013. Additional considerations indicate that it is necessary to limit at 7% the maximum SRR penetration per EESS pixel.
Allowing 24 GHz equipment on the European market until 2013 would hence allow the first product lines of vehicles in Europe equipped with SRR and thus introduce the SRR solutions on the market while developing the 79 GHz technology to provide the final solution. The 24 GHz frequency band shall therefore only be made available for installation of SRR systems in Europe until 2013 and after this date all new SRR equipment shall use the 79 GHz band.
As the penetration levels are important to avoid interference to other services a monitoring process shall be established by the Radio Spectrum Committee providing collective commitment from the automotive manufacturers to comply with the regulatory conditions in this ECC Decision and to provide monitoring information about vehicles equipped with SRR systems on a European and on national markets.
15. REQUIREMENT FOR AN ECC DECISION
The allocation of radio frequencies in CEPT member countries is laid down by law, regulation or administrative action. The ECC recognizes that for SRR systems to be introduced successfully throughout Europe, confidence must be given on the one hand to manufacturers to make the necessary investment in the new pan European radiocommunications systems and services and on the other hand to users of existing services in the 21.625-26.625 GHz band that their protection will be ensured. A commitment by CEPT member countries to implement an ECC Decision will provide a clear indication that the required frequency bands will be made available on time and on a Europe-wide basis and that the means to ensure protection of existing services will be applied.
EUROPEAN CONFERENCE OF POSTAL AND TELECOMMUNICATIONS ADMINISTRATION
ECC Decision
of DD/MM/YY
on the frequency bands to be designated for the temporary introduction of
Automotive Short Range Radars (SRR)
(ECC/DEC/(0a)xx)
“The European Conference of Postal and Telecommunications Administrations,
considering
a) that within Europe, there are proposals to improve road safety by using new information communications technologies, including building a European strategy to accelerate the research and development, deployment and use of intelligent road safety systems such as Automotive Short Range Radars (SRR);
b) that the availability of spectrum for SRR equipment in Europe would contribute to the long term goal of the European Commission e-Safety-initiative;
c) that the 79 GHz frequency band (77-81 GHz) has been designated as the permanent band for SRR equipment (ECC/DEC/(04)03);
d) that 79 GHz SRR technology is not yet commercially available at the time of adoption of this ECC Decision;
e) that in order to allow an early introduction of SRR applications in Europe the use of the 24 GHz frequency range (24.05-24.25 GHz for the carrier and 24 GHz +/- 2.5 GHz for the Ultra Wide Band component) has been requested by the automotive industry as this particular frequency range provides for immediate cost effective solutions;
f) that narrow-band vehicular radar systems operating at 24 GHz in accordance with the conditions currently given in Annex 6 of ERC/Rec.70-03 are not under the scope of this ECC Decision;
g) that the 24 GHz frequency band is heavily used in Europe for a wide range of applications that all represent, at different levels, critical national or European
5
services and/or wide economical interests and for which very substantial existing long-term investments have been and are to be made;
h) that in a number of Administrations there are speed radars operated by police forces at 24 GHz and these contributes to road safety;
i) that the bands 21.2-23.6 GHz and 24.5-26.5 GHz are allocated to the Fixed Service on a primary basis in the Radio Regulations. These bands are extensively used by fixed links and expanding across Europe to meet, among others, the infrastructure requirement for existing 2G and 3G mobile networks or to develop broadband fixed wireless networks;
j) that the band 23.6-24 GHz is allocated to passive services including the Radio Astronomy and Earth Exploration Satellite Services on a primary basis in the Radio Regulations and is covered by footnote 5.340 which prohibits all emissions into the band;
k) that the 23.6-24 GHz frequency band is a unique natural resource of primary interest for the scientific and meteorological communities to measure water vapour content which is essential for temperature measurements (for EESS) and within the 22.21-24 GHz frequency range to measure spectral lines of ammonia and water as well as continuum observations for Radio Astronomy Service;
l) that interference to any EESS pixel in the 23.6-24 GHz band would jeopardise the global measurements performed in this frequency band and could affect the overall passive measurements;
m) that the compatibility studies given in ECC Report 23 have been performed within CEPT between existing services and 24 GHz SRR-equipment with an e.i.r.p. mean power density of –41.3 dBm/MHz, an e.i.r.p. peak limit of 0 dBm/50 MHz;
n) that the vertical attenuation of 24 GHz SRR for emissions within the 23.6-24 GHz band that appear 30° or greater above the horizontal plane as included in the FCC regulations and used in ECC Report 23, is the one assumed for dates after 2014 (35 dB), whereas this value will be 25 dB up to 2010 and 30 dB between 2010 and 2014;
o) that ECC Report 23 concludes that sharing between 24 GHz SRR with a 100% market penetration and the Earth Exploration Satellite Service (EESS) within the 23.6-24 GHz band as well as with the Fixed Service within the 24 GHz range is not possible;
p) that ECC Report 23 concludes that to maintain the protection requirements of the Fixed Service, sharing with SRRs is only be feasible on a temporary basis if the
6
percentage of vehicles equipped with SRR devices in the visibility of the fixed service receiver is limited to less than 10% considering an excess by -10 dB can be accepted;
q) that, taking into account ECC Report 23 and the gradual values of vertical attenuation of SRR as described in considering n), sharing between Earth Exploration Satellite Service (EESS) and SRRs can only be feasible on a temporary basis if the percentage of vehicles equipped with 24 GHz SRR devices in any EESS pixel is limited to 7.0%;
r) that ECC report 23 also indicates that sharing between 24 GHz SRR and the Radio Astronomy Service within the band 22.21-24 GHz would in general not be feasible. A number of mitigation factors might locally lead to reduction of the interference level to allow sharing with low penetration of SRR equipment, provided that SRR devices would be equipped with an automatic deactivation system for when the vehicle is within the agreed protection range of Radio Astronomy stations. In order to allow an early implementation of 24 GHz SRR Systems the automatic deactivation should only be made mandatory after a transitional period of 24 month. During the transition period, manual deactivation is required.;
s) that a manual deactivation mechanism would ensure that emissions are restricted only to those countries that have implemented the temporary solution;
t) that there is a world wide primary amateur and amateur satellite service allocation at 24.00-24.05 GHz and stations within this service can radiate a significant power;
u) that the period before the reference date of 2013 would allow the first product lines of vehicles on the European market to be equipped with 24 GHz SRR systems while ensuring protection of other services. After this reference date all new SRR equipment placed on the market in Europe must use the 79 GHz band (see ECC Decision (04)03) or alternative permitted technical solution while existing 24 GHz equipment may still operate in the 24 GHz to the end of lifetime of the vehicles;
v) that in order to place 24 GHz SRR-equipment on the market in Europe for a limited period of time specific measures would have to be taken on a harmonised European basis, in particular in accordance with the Directive 1999/5/EC (the R&TTE Directive);
w) that SRR-equipment is not considered as a safety of life applications in accordance with the Radio Regulations. SRR in the 24 GHz band must operate on a non-interference and non-protected basis in accordance with the Radio Regulations;
7
x) that ECC Report 046 shows that SRR will have to operate in a high level of interference in the vicinity of FS transmitters and stipulates that it is the responsibility of the SRR manufacturers to carefully design their systems to minimize the effect of interference from radiocommunication services (in particular Fixed Service) as well as other SRR devices by implementing adequate mitigation techniques;
y) that the most sensitive service to aggregate interference from SRR is the Earth Exploration Satellite Service for which a maximum of 5.9% of SRR penetration can be accepted in each EESS pixel. However, based on further consideration,. ECC agreed on a compromise of 7% penetration rate per country;
z) that in order to ensure protection of other services and thus that vehicles equipped with 24 GHz SRR is limited to a penetration level not exceeding 7.0% on each European national market, an arrangement is required which commits automobile manufacturers to reporting on sales of SRR-equipment vehicles;
aa) that a general review of the actual market penetration situation and availability of 79 GHz technology is needed during the period until 2013. Such a review should take place during 2009 and shall include participation of all interested parties;
bb) that administrations and the European Commission should be invited to ensure commitment from automotive industry on limited placing on the market and reporting of the market penetration of vehicles with 24 GHz SRR equipment during the period until 2013;
8
DECIDES
1. that for the purpose of this Decision, a SRR is defined as a radio communication equipment that falls in the general category of vehicular radar systems and provides collision mitigation and traffic safety applications;
2. that in order to allow early introduction of SRR applications in Europe the 24 GHz frequency range is designated for SRR systems on a temporary basis as follows:
a. 24.125 GHz ± 2.5 GHz for the Ultra Wideband component, with a maximum mean power density of -41.3 dBm/MHz e.i.r.p. and peak power density of 0 dBm/50MHz e.i.r.p.;
b. 24.05-24.25 GHz for the narrow-band emission mode/component, which may consist of an unmodulated carrier, with a peak power of 20 dBm e.i.r.p.;
3. that the temporary frequency designation for SRR equipment in the 24 GHz range is on a non-interference and non-protected basis;
4. that emissions within the 23.6-24 GHz band that appear 30° or greater above the horizontal plane shall be attenuated by at least 25 dB up to 2010 and 30 dB up to 2013 for SRR systems operating in the 24 GHz range as defined in Decide 2;
5. that 24 GHz SRR systems shall be fitted with an automatic deactivation mechanism to ensure protection of Radio Astronomy sites as well as manual deactivation to ensure that emissions are restricted only to those countries that have implemented the temporary solution. In order to allow an early implementation of 24 SRR Systems the automatic deactivation should only be made mandatory after a transitional period of 24 months. This period starting at the date of entry into force of this Decision. During the transition period, manual deactivation is required.;
6. that the 24 GHz frequency range may only be used within CEPT for new SRR systems until the reference date, that is set to January 1st, 2013. After this reference date, the 79 GHz range for new SRR systems, or alternative permitted technical solutions, must be used for road vehicle collision mitigation and traffic safety applications;
9
7. that the percentage of vehicles equipped with 24 GHz SRR devices must not exceed 7.0% in each European national market;
8. that the reference date may be set earlier, in case the agreed national market penetration threshold would be exceeded in one EU country subject to decision by the Radio Spectrum Committee and the European Commission;
9. to invite the European Commission to encourage the Automotive Components Industry to work towards an early introduction of equipment operating in the 79 GHz band by means of research and development programmes;
10. that a CEPT country not being a member of the EU can take its own national measures to stop placing on the market if the penetration threshold is exceeded
11. to invite administrations and the European Commission to ensure commitment from automotive industry on limited placing on the market and reporting of the market penetration of vehicles with 24 GHz SRR equipment during the period until 2013;
12. that the 24 GHz frequency band should be made available as soon as possible and not later than January 2005;
13. that this Decision will enter into force on DD/MM/YY
14. that CEPT Administrations shall communicate the national measures implementing this Decision to the ECC Chairman and the Office when the Decision is nationally implemented.”
Note:
Please check the ERO web site(http//:www.ERO.dk) for the up to date position on the implementation of this and other ECC Decisions

10

ANNEX IX – EXPLANATORY
MEMORANDUM TO THE DRAFT COMMISSION
DECISION ON THE HARMONISATION OF THE 24 GHZ BAND FOR THE
TIME-LIMITED USE BY AUTOMOTIVE SRR EQUIPMENT IN THE
EUROPEAN COMMUNITY
Commission Européenne, B-1049 Bruxelles/Europese Commissie, B-1049 Brussel - Belgium - Office: BU33 7/09. Telephone: direct line +32.2.296.12.67, switchboard +32.2.299.11.11, Fax: +32.2.296.83.95. e-mail : [email protected]
EUROPEAN COMMISSION Information Society and Media Directorate-General Electronic Communications Policy Radio Spectrum Policy
Brussels, 10 March 2005 DG INFSO/B4
RSCOM04-80 final
PUBLIC DOCUMENT
RADIO SPECTRUM COMMITTEE
Working Document
Subject: Explanatory Memorandum to the Draft Commission Decision on the harmonisation of the 24 GHz band for the time-limited use by automotive SRR equipment in the Community
This is a Committee working document which does not necessarily reflect the official position of the Commission. No inferences should be drawn from this document as to the
precise form or content of future measures to be submitted by the Commission. The Commission accepts no responsibility or liability whatsoever with regard to any
information or data referred to in this document.

10 March 2005
Explanatory Memorandum
to COMMISSION DECISION No 2005/50/EC (OJ L 21, 25.01.2005)
of 17 January 2005
on the harmonisation of the 24 GHz radio spectrum range for the time-limited use by automotive short-range radar equipment in the Community
(1) Introduction
This memorandum, addressed by the services of the Commission to the Member States via the Radio Spectrum Committee, aims to present and to explain the views of the Commission services involved in preparing this Decision, in order to clarify and provide guidance on a number of issues related to the implementation of this Decision. In particular, it recalls the technical and regulatory context and objectives underpinning this Decision, addresses the applicability of relevant EC legal instruments, the monitoring procedures related to the use of automotive short range radars in 24 GHz in the Community, and the modalities and premises of the reviewing process established under the Decision in order to adequately protect radio services in the 24 GHz band.
(2) Context
This regulatory action is part of the larger program of improving road safety in the European Union. Under the eSafety initiative, “the Commission will take the necessary steps to support the removal of legal barriers to a time-limited use of 24 GHz UWB short-range radar, in particular concerning harmonised access to the radio spectrum in the EU”. Since technology in the 79 GHz band is still under development and is not currently available on a cost-effective basis, the CEPT identified under mandate from the Commission the 24 GHz frequency range as a temporary solution to enable early introduction of SRR in the Community to meet the aim of increasing road safety. Implementing the temporary solution will give enough time to the permanently allocated 79 GHz band or other alternative technologies to become commercially available for the continued use of SRR-based applications providing active road safety systems.
The purpose of the Commission’s regulatory action on SRR has been to ensure the following measures are implemented in the Community:
A. the permanent designation of a spectrum band for SRR at 79 GHz. This has been achieved by the earlier Commission Decision 2004/545/EC. The Commission Decision (hereinafter the 79 GHz Decision) is based on work carried out by CEPT for the Commission pursuant to the mandate (see ECC/DEC/(04)01 on the ERO web site: www.ero.dk). .
3
B. the temporary designation of 24 GHz for immediate introduction of SRR. The current Commission Decision developed for this purpose (hereinafter the 24 GHz Decision) is based on work carried out by CEPT for the Commission pursuant to the mandate, with as final delivery a CEPT report providing the means of achieving technical compatibility of UWB automotive SRR with radio services in the 24 GHz range. The CEPT report can be obtained from the Commission’s spectrum policy web site 1 and from the ERO web site2. A further output of the CEPT work has been an ECC Decision on the same issue (see ECC/DEC/(04)10 on the ERO web site). While this document is not identical to the Commission Decision in its scope and legal applicability in the EU, the two instruments ought to have matching elements, where relevant, in order to avoid any misunderstandings by administrations or spectrum users.
(3) Legal and Regulatory Principles
The 24 GHz Decision has been developed in the context of a number of Community legal principles:
1. The prescriptive elements of the Decision can concentrate solely on obligations for the Member States, which are the legal addressees of this technical implementing measure under Article 4.3 of the Radio Spectrum Decision 676/2002/EC.
2. Like any other EC legal instrument, the Decision cannot be used to constrain or mandate future legislative revision the Commission may wish to propose.
3. The Decision must be consistent with the application of other existing EC legal instruments, notably provisions pertaining to the R&TTE Directive, and to Directive 1999/37/EC and Directive 70/156/EEC.
The underlying regulatory principle in making available harmonised radio spectrum in the 24 GHz band (24.15 +/- 2.50 GHz) on a temporary basis to automotive SRR is to ensure sufficient protection to radio stations operating in accordance with the provisions of the ITU Constitution, Convention and Radio Regulations. Stations of existing radio services to which the 24 GHz band is allocated, notably the Radio Astronomy, Earth Exploration Satellite, Fixed, Radiolocation and Broadcasting Satellite services must be protected from harmful interference caused by automotive SRR; this is a sine qua non requisite for the temporary opening of the band for SRR.
If, at any time, this requirement proves not to be met, the Commission shall take the necessary remedial action, in collaboration with the Radio Spectrum Committee (and TCAM, where it concerns aspects covered by the R&TTE Directive), to ensure that such protection to stations of existing radio services is maintained. Subject to the principle of proportionality, such action could encompass taking certain types of automotive SRR from the market, strengthening requirements on emissions in harmonised standards, and the closing of the 24 GHz band before the deadline fixed in the Decision for automotive SRR.
1 http://europa.eu.int/information_society/policy/radio_spectrum/index_en.htm
2 http://www.ero.dk
4
The 24 GHz range radio spectrum band is made available for automotive short-range radar equipment on a non-protected basis. This means that no claim may be made for protection from harmful interference received from other systems or services operating in that band.
(4) Elements of the Commission Decision
Based on the technical conditions recommended by CEPT in its report of 9 July 2004 to the European Commission under the mandate of 5 August 2003, the Decision, intends to:
• harmonise conditions for temporary usage of 24 GHz for SRR and for co-existence between SRR and other 24 GHz users;
• set a Reference Date by which time the harmonised use of 24 GHz would no longer be allowed for new SRR devices to be put on the market- while leaving the existing 24 GHz equipment unaffected. This gives the relevant target date for the development of the 79 GHz long term solution;
• define the modalities required to monitor penetration of 24 GHz SRR in the EU; the Commission and RSC are to undertake a reviewing process, notably to ensure that the evolution of the SRR market will not or will most likely not cause harmful interference.
At any moment, where justified to avoid harmful interference to protected radio services, the Commission may propose a new Decision to the Radio Spectrum Committee to anticipate the Reference Date and thus to terminate putting on the market 24 GHz SRR.
(5) Closure of the 24 GHz band to automotive SRR from the Reference Date
Closing the 24 GHz band from the Reference Date will be legally ensured in three ways:
From the radio spectrum point of view: article 3 of the Commission Decision stipulates:
“The 24 GHz range radio spectrum band shall remain so available until the Reference Date, subject to the provisions of Article 5. After that date, the 24 GHz range radio spectrum band shall cease to be available for automotive short-range radar equipment mounted on any vehicle except where that equipment was originally installed, or is replacing equipment so installed, in a vehicle registered, placed on the market or put into service before that date in the Community.”
Therefore, once the period defined by the Reference Date is concluded, Member States will be required to take all necessary actions to ensure the band is closed for the operation of new automotive SRR systems anywhere in the EU. Failure to do so would be an infringement of the Commission Decision. The Commission will encourage exchange of information on the procedures implemented in Members States in order to ensure that the necessary measures will be adopted on time.
While the Reference Date is specified in Art.3 of the 24 GHz Decision to be subject to provisions of Art. 5 of the 24 GHz Decision, this is not to be interpreted as a means for the date to be postponed, as well as being brought forward, but rather to emphasise that the use of SRR in the 24 GHz band is predicated on the continued absence of harmful interference.
From the equipment point of view: SRR systems that are placed on the market integrated within vehicles are radio equipment in the sense of the R&TTE Directive. The avoidance of
5
harmful interference is an essential requirement under this Directive (Article 3.2). Furthermore, Article 7.1 R&TTED allows the putting into service only of apparatus for its intended purpose and provided it complies with the essential requirements. The Reference Date is justified by CEPT compatibility studies showing that introduction of new SRR beyond this date would lead to harmful interference due to aggregate effects. Therefore, Member States will be obliged to prevent new 24 GHz SRR equipment from being placed on the market (i.e. made available for the first time on the EC market with a view to distribution or use in the Community) beyond this point, since any additional SRR system would not further comply with Art. 3.2 R&TTED.
Should 24 GHz SRR be placed on the market after the Reference Date, Member States, subject to the Community control procedure contained in the R&TTE Directive, can apply safeguards mechanisms pursuant to article 9 R&TTED so as to withdraw the SRR from the market or from service, prohibit its placing on the market or putting into service or restrict its free movement.
Radio equipment is classified in two classes under Commission Decision 2000/299/EC: Class 1 equipment can be placed on the market anywhere in the EC and used without restrictions and Class 2 equipment the operation of which is restricted by some Member States with regard to effective and appropriate use of radio spectrum, protection of public health or avoidance of harmful interference (Art. 7.2 R&TTE). Legally, once the 24 GHz band is harmonised for SRR at EU level, this equipment shall be considered as Class 1 until the Reference date. Beyond this point, manufacturers still willing to sell their product will be obliged to notify ex ante their intention to place such products on the market to national spectrum authorities, but also to inform users (Art. 6.3. R&TTE) that this equipment cannot be put into use anywhere in the Community, other than to replace defective existing equipment, thereby de facto closing this band to new SRR.
Related to the above, the use of the harmonised standard adopted under the R&TTE Directive to demonstrate compliance with it and to place on the market new equipment is in practice only applicable in the context of the spectrum regulation and is therefore subject to its provisions. Therefore, after the Reference Date, only new equipment as replacement to existing equipment would be allowed, according to the relevant modalities stipulated in the 24 GHz Decision.
From the automotive point of view: in order to guarantee from a legal point of view that no new SRR 24 GHz will be put on the European market after the Reference Date the automotive committee (CATP-MV) will be asked to define the appropriate harmonised measures to be taken (i.e. Council Directive 70/156/EEC and/or Commission Directive 2004/1004) so that new vehicles equipped with such SRR will be clearly identified and will not get the authorisation necessary in all the Members States to be placed on the market after the reference date. A revision clause will also probably need to be introduced in order to allow such provisions to apply prior to the Reference Date if required.
It is to be noted that terms used in the Commission Decision on 24 GHz SRR which make reference to concepts relating to the R&TTE Directive, such as “placing on the market”, “putting into service”, etc., are not defined in the Decision itself, but can be understood by reference to the “Guide to the implementation of directives based on the New Approach and the Global Approach” (edition 2000).
(6) Appropriate Methods to protect Radio Astronomy Stations
6
CEPT has concluded that protection of the radio astronomy service in the 24 GHz band is best achieved using automatic deactivation techniques that switch off the SRR when in the vicinity of a radio astronomy site. Even though for an initial period, manual deactivation can be accepted when penetration of SRRs is still low, the risk of interference would however become too high should this method be allowed beyond a certain date (the “Transition Date”).
Pursuant to a Commission mandate, an ETSI harmonised standard for SRR incorporating automatic deactivation is to be finalised by 30 June 2006, including a list of radio astronomy sites which would be protected by automatic SRR switch off.
In line with the New Approach principles which apply to the R&TTE Directive, the application of harmonised standards that gives presumption of conformity remains voluntary. The manufacturer may choose whether or not to refer to the harmonised standard. However, if the manufacturer chooses not to follow the harmonised standard, he has the obligation to prove that his product is in conformity with essential requirements, including the avoidance of harmful interference, by the use of other means of his own choice. Therefore, the automatic deactivation could be replaced by another method if it demonstrably provides equivalent protection for radio astronomy stations without driver intervention, in accordance with the provision of the ECC decision ECC/DEC/(04)10 and notably its “decides 5”. Should such a technology emerge, ETSI should, under an EC mandate, embed it in a revision of the harmonised standard in close cooperation with CEPT, thereby giving legal certainty to manufacturers, but also to regulators.
By mandating ETSI to introduce advanced protection mechanisms to protect radio astronomy sites after the Transition Date it has been established that manufacturers will not be able to claim compliance with the R&TTE Directive for SRR equipment with manual deactivation after this date. Vehicles which comply with the harmonised standard will however be presumed to comply with the R&TTE Directive.
In conclusion, the combined effect of the Commission Decision and the application of the R&TTE Directive will ensure that automatic deactivation will be introduced in vehicles in line with the conclusions of CEPT.
(7) Reporting and Monitoring of the use of the 24 GHz band by automotive SRR
The work carried out by the CEPT has demonstrated that no harmful interference will likely be caused to stations of existing radio services in the 24 GHz band as long as the total number of vehicles equipped with 24 GHz Short-Range Radar registered, placed on the market or put into service does not exceed the level of 7% of the total number of vehicles in circulation in each Member State. In this context, objective and proportionate reporting and monitoring are necessary to ensure, on the basis of concrete evidence, that no harmful interference has been caused to other stations of existing radio services using the 24GHz band below the threshold of 7% and that the threshold has not been reached before the Reference Date of 30 June 2013.
Data gathered by the Member States and/or the industry shall be used to calculate in a consolidated report the proportion of vehicles equipped with Short-Range Radar using the 24 GHz band compared to the total number of vehicles in circulation in each Member State. For the first three years, such report shall be computed on a European Union basis. An acceptable approximation of this proportion in the above-mentioned report can be provided with the counting of vehicles equipped with SRR at 24 GHz when they are submitted to the acceptance procedure. This counting will not take into account neither the resale of a vehicle from one country to another nor the circulation of vehicles through the Member States.
7
For that purpose, several actions will need to be undertaken by the Member States and/or the vehicle manufacturing industry in relation to monitoring and reporting at least until the reference date. The modalities of industry data collection, as well as the commitment of all car manufacturing industry signatories to the overall approach concerning the use of the 24 GHz band for SRR applications, are included in the voluntary and publicly-available Memorandum of Understanding which needs to be signed by manufacturers implementing 24 GHz Short-Range Radar systems in the EU before the Decision is adopted by the Commission.
Through this MoU, the vehicle manufacturing industry shall publicly commit to provide sufficient information to the Member States and to the Commission so as to ensure appropriate monitoring of the implementation of this decision. In order to improve the reliability of data on the use of 24 GHz SRR manufacturers shall also commit to provide Vehicle Identification Numbers upon request by Member States or the Commission, to trace single vehicles equipped with SRR and to count these vehicles when they are accepted. Where possible, manufacturers shall also provide appropriate model code information in a format requested by or on behalf of, Member States to allow the easy identification of 24GHz SRR equipped vehicles. The sanction of non-compliance with such undertaking could be the closing of the 24 GHz band for new SRR. This would be justified by the need to take anticipatory protective measure for radio services which are entitled to protection against harmful interference.
According to the MoU, its signatories shall select an independent data monitoring and reporting entity (“Reporting Entity”) with the advice of the European Commission, similarly with the procedure implemented for the monitoring of CO2 emission. This entity will present an annual report to the Commission which, without prejudice to the commercial sensitivity of proprietary information, shall include all the elements specified in the Annex to the Decision and any other duly-justified information required by the Commission to maintain an adequate overview on this issue. The Commission will review this report every year, starting with the situation as at 30 June 2006, and discuss it with the Radio Spectrum Committee.
Member States may also decide to quantify and report on the take-up of Short-Range Radar equipment operating in the 24 GHz range on their territory. Possible modalities for such monitoring are presented in the next section. If they decide to do so, this data gathering ought to be carried out on an annual calendar basis and transmitted to the Reporting Entity, together with the total cumulated number of vehicles in circulation on their territory.
(8) Possible Modalities to Assist Member States in Direct Monitoring of 24 GHz SRR Penetration
Besides the voluntary approach proposed by industry, monitoring of the number of 24 GHz SRR equipment installed in vehicles in the Community could rely on two Community directives applicable to road vehicles, i.e. Directive 1999/37/EC and Directive 70/156/EEC.
Pursuant to Directive of the Council 1999/37/EC on the registration documents for vehicles, Member States may include additional information in Parts I and II of the registration certificate to cover SRR equipment. This could in principle be done on a voluntary basis to monitor the number of registered vehicles with Short-Range Radars operating in the 24 GHz band. Where possible and necessary, the Commission will also consider proposing mandatory monitoring of 24 GHz SRRs by all Member States through modifications of the relevant annexes of Directive 1999/37/EC. However, mandating the recording of this information on the registration documents across the EC requires an amendment to Directive 70/156/EEC
8
(see below) for the vehicle’s Certificate of Conformity to include this data. Furthermore, until now harmonised extensions to the annexes have been resisted by the Member States.
As to Council Directive 70/156/EC, the Commission intends to discuss an amendment to the Directive in the Committee for the Adaptation to Technical Progress – Motor Vehicle (CATP-MV) when appropriate, to require manufacturers to include the presence of 24GHz SRR in their application for EC whole vehicle type approval. In addition, Directive 70/156 could be amended to include the mention of 24GHz SRR in the Certificate of Conformity. Although these provisions could presently only apply to passenger cars (M1 category vehicles), their extension is envisaged to cover larger passenger vehicles and commercial vehicles.
(9) The Review Process
The temporary availability of the 24 GHz band for SRR shall be kept under active scrutiny. A review process to verify the continued compatibility of Short-Range Radar systems in the 24 GHz band with stations of existing radio services shall be conducted on a regular basis by the Commission with the assistance of the Radio Spectrum Committee, including a Fundamental Review by 31 December 2009 at the latest.
The 24 GHz Commission Decision may be replaced by a new Decision after consideration of the consequences of the use by SRR of the 24 GHz range radio spectrum for existing radio services. Without prejudice to the application of Article 9 of the R&TTE Directive which allows Member States to take immediate safeguards against automotive SRR, the Commission retains the right to bring forward the Reference Date defined in Article 3, acting pursuant to article 3.3 of the Radio Spectrum Decision, and to close the 24 GHz band to Short-Range Radar applications earlier than 30 June 2013.
The Commission may close the 24 GHz band for use by SRR in particular where:
- the Commission finds that the information made available by Member States, manufacturers and/or importers regarding the number of 24 GHz Short-Range Radar-equipped vehicles as covered by Article 5 and the annex to the Decision is inadequate to monitor effectively the use of the 24 GHz band by Short-Range Radar equipment, and that there is a reasonable probability that the threshold of 7% is already or will soon be exceeded in one or more Member States;
- the Commission finds that the individual or cumulative use of 24 GHz automotive Short-Range Radar is causing or is likely to cause within a short period of time harmful interference to stations of existing radio communications services in the 24 GHz band or in adjacent bands at national level in at least one Member State, although the level of 7% of the total number of vehicles in circulation in that Member State has not been reached;
- the Commission concludes by 31 December 2009 at the earliest that the development of Short-Range Radar technology in the 79 GHz range or of alternative technologies is not progressing in such a way as to ensure that applications of this type could be readily available commercially by the Reference Date.
- after consideration of the information collected in the monitoring process, the Commission finds that in one or more Member States the total number of vehicles registered, placed on the market or put into service equipped with 24 GHz automotive Short-Range Radar exceeds the level of 7% of the total number of vehicles in circulation in that Member State.
9
On this final point, where the maximum threshold level in any Member State is reached, the Commission, assisted by the Radio Spectrum Committee and after requesting an opinion of CEPT, will examine whether it is justified to close down the 24 GHz band to SRR before the Reference Date across the European Union by assessing the impact thereof on existing radio services taking into account all pertinent elements, including the size and location of the Member State, the penetration situation in other countries, industry trends, and the latest technical information on potential harmful interference between SRR and existing radio services in the 24 GHz band
The above review mechanisms will be applied without prejudice to the general Commission’s right of initiative in radio spectrum policy and other policy areas under the EC Treaty.
(10) Amendment to the 24 GHz SRR Decision
Any amendment to the substantive elements of the 24 GHz Decision, such as the Reference Date, will apply the mechanisms described in Council and European Parliament 1999/468/EC (the “Comitology Decision”) which underpin the work on technical implementing measures developed under the Spectrum Decision. Therefore, such modifications will require adoption of a new Decision by the Commission assisted by the Radio Spectrum Committee.
The list and characteristics of radio astronomy stations to be protected will, according to Art. 7 of the Decision, be provided by the Member States within six months after adoption of the Decision. This list will be published in the Official Journal of the EU, with a reference to the Decision.
(11) Conclusion
The Commission is determined to take any appropriate action to ensure adequate protection and avoid harmful interference to existing radio services against SRR in the 24 GHz band. This will need an active collaboration between the Commission, Member States and industry as explained in this Memorandum and shall benefit from the implementation of various Community regulatory instruments.
_____________

ANNEX X – COMMISSION RECOMMENDATION ON
THE PROCESSING OF CALLER LOCATION
INFORMATION IN ELECTRONIC
COMMUNICATION NETWORKS FOR THE
PURPOSE OF LOCATION-ENHANCED EMERGENCY
CALL SERVICES
COMMISSION RECOMMENDATIONof 25 July 2003
on the processing of caller location information in electronic communication networks for thepurpose of location-enhanced emergency call services
(notified under document number C(2003) 2657)
(Text with EEA relevance)
(2003/558/EC)
THE COMMISSION OF THE EUROPEAN COMMUNITIES,
Having regard to the Directive 2002/21/EC on a commonregulatory framework for electronic communications andservices (the ‘Framework Directive’) (1), and in particular Article19 thereof,
Whereas:
(1) Decision 91/396/EEC on the introduction of a singleEuropean emergency call number (2) required MemberStates to ensure that the number 112 was introduced inpublic telephone networks as the single European emer-gency call number by 31 December 1992, with undercertain conditions, a possibility for derogation until 31December 1996.
(2) Directive 2002/22/EC on universal service and users'rights relating to electronic communications networksand services (the ‘Universal Service Directive’) (3), requirespublic telephone network operators (hereafter ‘opera-tors’) to make caller location information available toauthorities handling emergencies, to the extent techni-cally feasible, for all calls made to the single Europeanemergency call number 112. Directive 2002/58/ECconcerning the processing of personal data and theprotection of privacy in the electronic communicationssector (the ‘Directive on privacy and electronic commu-nications’) (4) establishes that providers of publiccommunications networks and services may override theelimination of the presentation of calling line identifica-tion and the temporary denial or absence of consent of asubscriber or user for the processing of location data, ona per-line basis for organisations dealing with emergencycalls and recognised as such by a Member State,including law enforcement agencies, ambulance servicesand fire brigades, for the purpose of responding to suchcalls.
(3) Although this Recommendation is concerned with loca-tion-enhanced 112, it is understood that parallel nationalemergency call numbers will be enhanced with the same
functionality and following the same principles. Organi-sations operating private telecommunication installationsare not affected by this Recommendation.
(4) For the successful implementation of E112 servicesthroughout the Community, implementation issues mustbe addressed and timescales for the introduction of newsystems coordinated. The Coordination Group on Accessto Location Information by Emergency Services(CGALIES) established by the Commission in May 2000as a partnership of public service and private sectorplayers has allowed players of different sectors to discussand find agreement on the principles for harmonisedand timely implementation.
(5) Following on from the recommendation by CGALIES,providers of the public telephone network or serviceshould use their best effort to determine and forward themost reliable caller location information available for allcalls to the single European emergency call number 112.
(6) During the introductory phase of E112 services, applica-tion of the best efforts principle is considered preferableto mandating specific performance characteristics forlocation determination. However, as public safetyanswering points and emergency services gain practicalexperiences with location information, their require-ments will become more defined. Moreover, locationtechnology will continue to evolve, both within mobilecellular networks and satellite location systems. There-fore, the best effort approach will need to be reviewedafter the initial phase.
(7) It is important for all Member States to develop commontechnical solutions and practices for the provision ofE112. The elaboration of common technical solutionsshould be pursued through the European standardisationorganisations, in order to facilitate the introduction ofE112, create interoperable solutions and decrease thecosts of implementation to the European Union.
29.7.2003 L 189/49Official Journal of the European UnionEN
(1) OJ L 108, 24.4.2002, p. 33.(2) OJ L 217, 6.8.1991, p. 31.(3) OJ L 108, 24.4.2002, p. 31.(4) OJ L 201, 31.7.2002, p. 37.
(8) A harmonised solution across Europe would serve inter-operability for advanced safety applications, such as callswhich can be originated manually or automatically byan in-vehicle telematics terminal. These calls can provideadditional information, for instance on the number ofpassengers in a car or bus, on compass-direction, oncrash-sensor indicators, on the type of load of dangerousgoods or on health records of drivers and passengers.With the high volume of cross-border traffic in Europe,there is a growing need for a common data transferprotocol for passing such information to public safetyanswering points and emergency services in order toavoid the risk of confusion or a wrong interpretation ofdata passed.
(9) The arrangements for forwarding location informationby operators to public safety answering points should beestablished in a transparent and non-discriminatory wayincluding, where appropriate, any cost aspects.
(10) The effective implementation of location-enhanced emer-gency call services requires that the caller's location asdetermined by the provider of the public telephonenetwork or service is transmitted automatically to anyappropriate public safety answering point that canreceive and use the location data provided.
(11) Directive 2002/58/EC concerning the processing ofpersonal data and the protection of privacy in the elec-tronic communications sector (the ‘Directive on privacyand electronic communications’) generally requires thatprivacy and data protection rights of individuals shouldbe fully respected and adequate technical and organisa-tional security measures should be implemented for thatpurpose. However, it allows the use of location data byemergency services without consent of the userconcerned. In particular, Member States should ensurethat there are transparent procedures governing the wayin which a provider of a public telecommunicationsnetwork and/or service may override the temporarydenial or absence of consent of a user for the processingof location data, on a per-line basis for organisationsdealing with emergency calls and that are recognised assuch by a Member State.
(12) Actions conducted in the context of the Communityaction programme in the field of Civil Protection (herein-after ‘Civil Protection Action Programme’) (1) should aimto contribute to the integration of civil protection objec-tives in other Community policies and actions as well asto the consistency of the programme with otherCommunity actions. This entitles the Commission toimplement actions aiming at increasing the degree ofpreparedness of organisations involved in civil protec-
tion in the Member States, by enhancing their ability torespond to emergencies and improving the techniquesand methods of response and immediate aftercare. Thismay include the handling and use of location informa-tion associated to E112 emergency calls by public safetyanswering points and emergency services.
(13) To achieve the objectives of this Recommendation, theneed for a continued dialogue between public networkoperators and service providers and public authoritiesincluding emergency services becomes even stronger.
(14) When reporting on the situation of E112 implementa-tion, national authorities should address any relevanttechnical feasibility issue that hinders the introduction ofE112 for specific categories of end-users, as well as thetechnical requirements for handling emergency calls thatmay originate from SMS and telematic data services.
(15) The measures set out in this Recommendation are inaccordance with the advisory opinion of the Communi-cations Committee set up by Article 22 of Directive2002/21/EC,
HEREBY RECOMMENDS THAT:
1. Member States should apply the following harmonisedconditions and principles to the provision of caller locationinformation to emergency services for all calls to the singleEuropean emergency call number 112.
2. For the purposes of this Recommendation, the followingdefinitions should apply:
(a) ‘emergency service’ means a service, recognised as suchby the Member State, that provides immediate andrapid assistance in situations where there is a directrisk to life or limb, individual or public health orsafety, to private or public property, or the environ-ment but not necessarily limited to these situations.
(b) ‘location information’ means in a public mobilenetwork the data processed indicating the geographicposition of a user's mobile terminal and in a publicfixed network the data about the physical address ofthe termination point.
(c) ‘E112’ means an emergency communications serviceusing the single European emergency call number,112, which is enhanced with location information ofthe calling user.
(d) ‘public safety answering point’ means a physical loca-tion where emergency calls are received under theresponsibility of a public authority.
29.7.2003L 189/50 Official Journal of the European UnionEN
(1) OJ L 327, 21.12.1999, p. 53.
3. Member States should draw up detailed rules for publicnetwork operators, to include, inter alia, the provisions inpoints 4 to 9 below.
4. For every emergency call made to the European emergencycall number 112, public telephone network operatorsshould, initiated by the network, forward (push) to publicsafety answering points the best information available as tothe location of the caller, to the extent technically feasible.For the intermediate period up to the conclusion of thereview as referred to in point 13 below, it is acceptablethat operators make available location information onrequest only (pull).
5. Fixed public telephone network operators should makeavailable the installation address of the line from which theemergency call is made.
6. Public telephone network operators should provide loca-tion information in a non-discriminatory way, and in parti-cular should not discriminate between the quality of infor-mation provided concerning their own subscribers andother users. In the case of the fixed networks, other usersinclude users of public pay phones; in the case of mobilenetworks or mobility applications, other users includeroamers or visiting users, or, where appropriate, users ofmobile terminals which can not be identified by thesubscriber or user number.
7. All location information provided should be accompaniedby an identification of the network on which the call origi-nates.
8. Public telephone network operators should keep sources oflocation information, including address information, accu-rate and up-to-date.
9. For each emergency call for which the subscriber or usernumber has been identified, public telephone networkoperators should provide the capability to public safetyanswering points and emergency services of renewing thelocation information through a call back functionality(pulling) for the purpose of handling the emergency.
10. In order to facilitate data transfer between operators andpublic safety answering points, Member States shouldencourage the use of a common open interface standard,and in particular for a common data transfer protocol,adopted by the European Telecommunications StandardsInstitute (ETSI), where available. Such a standard shouldinclude the necessary flexibility to accommodate future
requirements as they may arise, for instance from in-vehicle telematics terminals. Member States should ensurethat the interface is best suited to the effective handling ofemergencies.
11. In the context of the obligation for E112 servicesprescribed by the Universal Service Directive, MemberStates should provide adequate information to their citi-zens about the existence, use and benefits of E112 services.Citizens should be informed that 112 connects them toemergency services all across the European Union and thattheir location will be forwarded. They should also beinformed about the identity of the emergency services thatwill receive their location information and of other neces-sary details to guarantee fair processing of their personaldata.
12. In the context of the continuous evolution of concepts andtechnologies, Member States are encouraged to foster andsupport the development of services for emergency assis-tance, for instance to tourists and travellers and for thetransport of dangerous goods by road or rail, includinghandling procedures for forwarding location and otheremergency or accident related information to public safetyanswering points; to support the development and imple-mentation of common interface specifications in ensuringEurope-wide interoperability of such services; and toencourage the use of location technologies with high preci-sion such as third generation cellular network locationtechnologies and Global Navigation Satellite Systems.
13. Member States should require their national authorities toreport to the Commission on the situation of E112 imple-mentation by the end of 2004 so that the Commission canundertake a review taking into account the emergingrequirements from public safety answering points andemergency services and the evolutions and availability oftechnological capabilities for location determination.
14. This Recommendation is addressed to the Member States.
Done at Brussels, 25 July 2003.
For the CommissionErkki LIIKANEN
Member of the Commission
29.7.2003 L 189/51Official Journal of the European UnionEN

The eSafety Initiative
eSafety website:
http://europa.eu.int/information_society/programmes/esafety/index_en.htm
email: [email protected]
eSafety Support is a European Commission funded project assisting the eSafety initiative in its goal of reducing the number of fatal road accidents in Europe.
The project’s main tasks are to stimulate and monitor the activities, progress and results generated by the eSafety initiative. It offers assistance to the eSafety Forum and its Working Groups, keeps all stakeholders up-to-date on eSafety progress and findings, and promotes the benefits of Intelligent Vehicle Safety Systems to the general public.
Its objectives include:• Aid and promote the dialogue between all eSafety stakeholders
• Support the implementation of a pan-European emergency call system (eCall)
• Launch studies on topics identified by the eSafety Forum
• Support the development of the Implementation Road Map for all Intelligent Vehicle Safety Systems
• Monitor and promote the implementation of the eSafety Working Groups’ recommendations
• Support the i2010 Intelligent Car Initiative that aims to develop and deploy vehicles that are smarter, safer and cleaner.
For more information, visit www.esafetysupport.org
© 2006 Produced by eSafety Support