Innovative strategies for seismic retrofitting of steel and composite structures

Engineering Structures 46 (2013) 77–86
Contents lists available at SciVerse ScienceDirect
Engineering Structures
journal homepage: www.elsevier .com/ locate /engstruct
Energy-based design method for seismic retrofitting with passive energydissipation systems
Ali Habibi a, Ricky W.K. Chan b, Faris Albermani a,⇑a School of Civil Engineering, The University of Queensland, Australiab School of Civil, Environmental and Chemical Engineering, RMIT University, Australia
a r t i c l e i n f o a b s t r a c t
Article history:Received 21 December 2011Revised 19 July 2012Accepted 19 July 2012Available online 8 September 2012
Keywords:Passive energy dissipationSeismic retrofittingEnergy-based design
0141-0296/$ - see front matter Crown Copyright � 2http://dx.doi.org/10.1016/j.engstruct.2012.07.011
⇑ Corresponding author.E-mail address: [email protected] (F. Alberm
In this paper a stepwise multi-mode energy-based design method for seismic retrofitting with passiveenergy dissipation systems is proposed as an alternative to strength and displacement-based methods.The method utilizes modal pushover analysis to determine modal yield force and ductility factor of anequivalent single-degree-of-freedom system. Two modes with the highest participation factors areaccounted for. The energy contribution of each mode is determined using energy spectra and the requiredamount of energy dissipation is estimated and used to retrofit the original structure with appropriateenergy dissipation system. The effectiveness of the proposed method is verified using nonlinear time-his-tory analysis. It is concluded that the proposed method is easy to implement and yields an effective ret-rofitting design in which damage is confined within the dissipative system.
Crown Copyright � 2012 Published by Elsevier Ltd. All rights reserved.
1. Introduction
The past three decades have witnessed significant progress inresearch and development of seismic structural response control[1]. Structural response control can be broadly classified into: pas-sive, active, and semi-active control. Among these, passive control(also known as passive energy dissipation system, PEDS) is aneffective, reliable and relatively inexpensive technique for mitigat-ing seismic risk. With designated supplementary energy dissipa-tive devices (EDDs) installed in a structure, a considerableportion of the input seismic energy can be dissipated and the dam-age to the parent structure is minimized. Energy dissipation can beachieved via a number of mechanisms such as yielding [2,3], fric-tion sliding [4], phase transformation of metals, fluid orificing [5]and viscoelastic deformation [6].
In spite of the steady development of EDDs, implementation ofEDDs as a retrofit strategy for mitigating seismic risk in existingstructures is still lacking. To facilitate the adoption and implemen-tation of EDDs, the development of suitable design methods is nec-essary. Aguirre [7] proposed an iterative design method based onlinear static analysis while Williams and Albermani [8] proposeda design method based on equivalent viscous damping. Theseforce-based methods rely on a force reduction factor that is contro-versial, does not directly address the inelastic nature of the struc-ture during the earthquake and the resulting displacement is onlychecked at the end of the design process to satisfy serviceability
012 Published by Elsevier Ltd. All r
ani).
criteria. Furthermore, structural (and nonstructural) damage expe-rienced during an earthquake is primarily due to lateral displace-ments. Therefore, a force-based design method may not providea reliable indication of damage potential.
To resolve these shortcomings, displacement-based seismic de-sign methods have been proposed such as FEMA-273 coefficientmethod [9], ATC-40 capacity-spectrum method [10] and the directdisplacement-based design method [11]. Chen et al. [12] proposeda seismic design approach for steel portal frame piers with buck-ling-restrained braces. They utilized displacement-based as wellas strain-based indices as pre-determined target performance atthe beginning of design.
The structural damage caused by earthquake ground motionresults not only from the maximum response but also from accu-mulated plastic deformations. However current seismic designpractice, which accounts only for the maximum earthquake loadand maximum lateral displacement, does not provide enough infor-mation on the inelastic response of the structure. In this regard en-ergy-based seismic design methods, which utilize hysteretic energyas the main design parameter and account for damage accumula-tion, have been considered as potential alternative to the conven-tional force or displacement-based seismic design methods.Associated with energy-based seismic design, Riddell and Garcia[13] presented a procedure for the construction of hystereticenergy demand spectrum. Uang and Bertero [14] and Estes andAnderson [15] obtained story-wise distribution of hysteretic energyin multi-story structures. Akbas et al. [16] suggested a design pro-cedure in which the seismic input energy demand is dissipated bythe accumulated plastic deformation at beam ends. Leelataviwat
ights reserved.

78 A. Habibi et al. / Engineering Structures 46 (2013) 77–86
et al. [17] proposed a seismic design method based on energy bal-ance and Chou and Uang [18] proposed a procedure to computetotal energy demand and to distribute it along the height of thestructure based on inelastic energy spectra. These studies havebeen conducted for conventional moment-resisting frame (MRF)structures without EDDs.
Kim and Choi [19] extended the energy balance concept ofLeelataviwat et al. [17] to develop a simplified seismic design pro-cedure for steel frames with buckling-restrained braces. In theirmethod they only accounted for the fundamental mode of thestructure and concluded that this assumption caused unreliableresults for frames which have more than three stories.
In this paper, a step-wise multi-mode energy-based designmethod for seismic retrofitting of frame structures with EDDs isproposed. Nonlinear time-history analysis is used as a baselinecase against which the proposed design method is validated. Themethod has been applied to frame structures with different heightsand number of stories and under different earthquake ground mo-tions. However, since the objective of this paper is the presentationof the proposed design method, only one frame structure (a 9-storyMRF) under one earthquake record (1940 Imperial Valley El CentroLA02) is presented.
2. Seismic Energy Demand (SED)
Chou and Uang [18] had outlined a procedure for determiningSED at each floor of a MDOF system. This procedure, which is sum-marized in the following section, forms the basis of the proposedstep-wise design method.
2.1. Constant-ductility response spectra for SDOF system
The energy equation for an inelastic SDOF system
Ek þ En þ Ea ¼ Ei ð1Þ
where
Ek ¼mð _utÞ2
2ð1aÞ
En ¼Z t
0ðc _uÞdu ð1bÞ
Ei ¼Z t
0ðm _utÞdug ð1cÞ
Ea ¼ Es þ Eh ¼Z t
0fdu ð1dÞ
In which Ek, En and Ei are the kinetic, viscous damping and input en-ergy, respectively, Ea is the absorbed energy that consists of recov-erable strain energy, Es, and the irrecoverable hysteretic energy, Eh.The other variables in Eq. (1) are; ground displacement, ug, relativedisplacement, u, total displacement, ut = u + ug, mass m, viscousdamping, c, restoring force, f, and superscript (�) indicates @/@t.
The equivalent velocity, Va, is used as a parameter for energydemand since it converges to pseudo-velocity in the elastic case(ie for ductility factor less than one).
Va ¼ffiffiffiffiffiffiffiffi2Ea
m
rð2Þ
For a given modal ductility factor, l, and damping ratio, n, nonlineardynamic analysis of the inelastic SDOF is conducted and the yieldforce, fy, and yield displacement, Dy, are evaluated. From these thenormalized yield strength coefficient, Cy, and maximum displace-ment, Ds, are obtained;
Cy ¼fy
mgð3aÞ
Ds ¼ lDy ð3bÞ
In this work, the 1940 Imperial Valley El Centro (LA02) earthquakeground motion is used to construct the constant-ductility responsespectra (Ds and Cy) for an elastic-perfectly plastic SDOF system with0–40% viscous damping. Fig. 1 shows sample Ds and Cy spectra forn = 5%, 10% and 15%. From nonlinear time-history analysis of theSDOF system with Cy values at different ductility levels, the maxi-mum value of Ea for different damping ratios is calculated and theVa spectra of the absorbed energy is constructed as shown inFig. 1. For any earthquake record, constant-ductility response spec-tra similar to those in Fig. 1 can be generated using a Matlab [20]code written for this purpose.
2.2. Equivalent SDOF systems
In this work the SED of the MDOF system is evaluated using twomodes which have the highest participation factors. These twomodes are determined first using elastic modal analysis of theMDOF. Using each of these two modes, modal pushover analysisof the MDOF is conducted and the response is converted to anequivalent SDOF (ESDOF) to determine Cy and hence l from Cyspectra (Fig. 1). Using l for each of these two modes, Ea is deter-mined from Va spectra and summed up to calculate the total ab-sorbed energy of the MDOF system.
2.3. Passive Energy Dissipation Systems (PEDS)
To allow for various PEDS to be incorporated in the proposeddesign method, the characteristics of any energy dissipative deviceis represented by an effective viscous damping ratio (nEDS) andeffective stiffness (KEDS) [11].
Fig. 2 shows the force-displacement relationship of a linear vis-cous damper under periodic excitation ðu ¼ u0 sin �xtÞ of amplitudeu0 and frequency �x. The enclosed elliptic area is the dissipated en-ergy per cycle, ED ¼ pc �xu2
0.For a nonlinear energy dissipative device, nEDS is obtained from
equating the energy dissipated per cycle of periodic excitation tothe related value of linear viscous damping [21];
nEDS ¼c
ccr¼ c
2mx¼ ED
2pmx �xu20
¼ ED
4pEs �x=xð4aÞ
where ccr, m, x and ES are the critical damping coefficient, mass,natural circular frequency and maximum strain energy of the sys-tem, respectively. Under earthquake loading, �x
x ¼ 1 and Eq. (4a) sim-plifies to
nEDS ¼ED
4pEsð4bÞ
Lin et al. [11] presented nEDS and KEDS for four types of EDDs; vis-cous, friction, metallic yielding and viscoelastic. These are listed inTable 1.
3. Stepwise energy-based design method
This section outlines the proposed stepwise energy-based de-sign method for seismic retrofitting of frame structures with PEDS.A flow-chart summarizing the proposed design method is shown inFig. 3.
Step 1: This step involves modal analysis (sub-step 1a), push-over analysis (sub-step 1b) and initialization (sub-step1c).

Cy
ξ = 5% ξ = 10% ξ = 15%
Ds(cm)
Va(cm/s)
µ = 1 µ = 2 µ = 4 µ = 6
Fig. 1. Generated response spectra for LA02.
Fig. 2. Viscous response periodic excitation.
Table 1Characteristics of various EDDs.
Name of device nEDS KEDS,j
Viscous deviceP
jpcj �xu2
0;j
4pEs
0
Friction deviceP
j4F0;j u0;j
4pEs
F0;ju0;j
Metallic yielding device 4P
jFy;j u0;jð1�ajÞ 1� 1
lj
� �4pEs
Fy;j ½1þajðlj�1Þ�u0;j
Viscoelastic deviceP
jpgk0ju
20;j
4pEs
k0j
cj: damping coefficient of the viscous device j; uo,j: relative axial displacementbetween the ends of device j; T: fundamental period of the damped structure;�x � 2p
T ; Fo,j: maximum static friction force of the friction device j; Fy,j: yield force; aj:strain hardening ratio; lj: ductility ratio of the metallic yielding device j; g: lossfactor; k0j: storage stiffness of the viscoelastic device j.
A. Habibi et al. / Engineering Structures 46 (2013) 77–86 79
1a- Performing elastic modal analysis of the original framestructure (ie before retrofitting) and determine the twomodes (i = 1 and 2) which have the highest participation
factor. For each of these two modes, the period is Ti, thenormalized modal shape vector is /i (Eq. (5a)) and the par-ticipation factor is Ci (Eq. (5b))
mi ¼ uTi Mui ¼ 1 ð5aÞ
Ci ¼ uTi M1=mi ð5bÞ
where M is the diagonal mass matrix and 1 is a unit vector.1b- For each mode, i, perform modal pushover analysis of the
original frame structure and calculate the yield force Fyi
then transform this to the corresponding force fyi in theESDOF
fyi ¼Fyi
Cið6aÞ
Using fyi to calculate the yield strength coefficient Cyi
Cyi ¼fyi
Cimigð6bÞ
1c- Assign a value for the damping ratio n to start design iter-ations. The starting value of n depends on the level ofacceptable plastic deformations (following an earthquake)in the original structure. In this work n = 5% is assumedwhich corresponds to nearly elastic response of the originalstructure under seismic action.
Step 2: For a damping ratio n with Ti and Cyi of each mode, deter-mine the ductility factor li from Cy spectra (Fig. 1).
Step 3: Using n, li and Ti, determine the equivalent velocity ofabsorbed energy Vai from Va spectra (Fig. 1).
Step 4: In this step the absorbed energy and the elastic strainenergy are calculated;
4a- Calculate the absorbed energy Eai and the total absorbedenergy EaT

Fig. 3. Flow-chart of the proposed design method.
80 A. Habibi et al. / Engineering Structures 46 (2013) 77–86
Eai¼ miðCiVaiÞ2
2ð7aÞ
EaT ¼X2
i¼1
Eaið7bÞ
4b- This step is performed once only at the first designiteration,
Eai¼ Eai
ð8aÞ
Using Ds spectra (Fig. 1) with n, l1 and T1, obtain Ds for i = 1 and cal-culate the elastic strain energy Es
Es ¼2p2
T21
m1C1Ds1
l1
� �2
ð8bÞ
It is assumed that Es is dominated by the 1st mode and it will notchange during design iterations since it represents the elastic capac-ity of the original structure.
Step 5: Calculate the plastic strain energy that need to be dissi-pated, ED
ED ¼ EaT � Es ð9Þ
For the 1st iteration, if Eq. (9) gives ED 6 0 then the structural re-sponse is elastic and no need for EDDs, the design method is termi-nated. Otherwise the damping demand nD is
nD ¼ED
4pEsð10Þ
update the damping ratio accordingly
n ¼ nþ nD ð11Þ
Step 6: Compare the dissipative plastic energy ED with the elasticstrain energy (Es)If ED
Es> e go back to step 2, otherwise
EDi ¼ Eai� Eai ð12Þ

m
A. Habibi et al. / Engineering Structures 46 (2013) 77–86 81
where e is a convergence tolerance that can be adjusted accordingto design requirements.Step 7: Distribute EDi over the height of the structure according to
the energy profile of the corresponding mode i to obtainthe absorbed energy at each story EDis (see Appendix). Cal-culate the total absorbed energy at each story from bothmodes EDTS
5 @
9.1
5
EDTs ¼X2
i¼1
EDisð13Þ
5 @ 9.15 m
Step 8: Using the Ds spectra (Fig. 1) with n, l1 and T1, obtain Ds1
(maximum displacement of ESDOF), convert to MDOFsystem (Ds1C1) and distribute over the height of the struc-ture according to the modal shape vector u1 then calcu-late the drift at each story, Ds.
Step 9: For each story, using EDTs (step 7) and Ds (step 8), deter-mine the required EDDs based on the device characteristicdisplacement uy and device strength Fyd (device stiffnessKd = Fyd/uy), Table 1.
Step 10: Design the bracing members according to the requiredaxial force in each brace, FBrace
6 m
FBrace >Fyd
cos afor metallic yielding devices ð14aÞ
FBrace > Fyd for other devices ð14bÞ
5 @ 9.15 m
5.5
m8
@ 3
.9
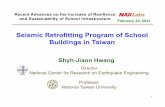
Fig. 4. 9-Story MRF.
where a is the brace angle with the horizontal axis. The brace is de-signed as a strut member with adequate capacity to precludebuckling.
4. Implementation
To demonstrate the implementation of the design method out-lined in Section 3, a 9 story moment resiting frame (MRF) is used inthis section. The original structure (Fig. 4 and Tables 2 and 3) hassteel MRF in both directions (shown as solid lines in Fig. 4) andwas designed by SAC-commissioned consulting firm, according to1994 UBC [22] and was used by many researchers as a benchmarkcase study [23,24]. The designed nominal yield strength of thebeams and columns were 248 (339) MPa and 345 (397) MPa,respectively (values in brackets are the expected yield strengthsand were used to compute the members’ capacity in dynamic anal-ysis [18,23]). The computer program SAP2000 [25] was used forthe analysis assuming a bi-linear moment-rotation relationshipwith 0% and 3% strain hardening to model the response of thebeams and columns, respectively, and 5% Rayleigh damping forthe first two modes. The steps outlined in Section 3 are followedhere to demonstrate the proposed design method.
Step 1:1a- Modal analysis is performed and the two modes which
have the highest participation factors (these correspondsto the first two modes in this example), have beenselected;
T1 ¼ 2:13 s T2 ¼ 0:8 sC1 ¼ 1931:6 C2 ¼ 709:82
The normalized modal shape vectors u1 and u2 are listed in Table 3.1b- From modal push-over analysis using modes 1 and 2
(Appendix Fig. A1) determine the yield force Fyi of theMDOF system
Fy1 ¼ 9291 kN and Fy2 ¼ 7226 kN
Calculate the corresponding yield forces, fyi, of the ESDOF systemand normalize to Cyi
fy1 ¼Fy1
C1¼ 4:81 kN
fy2 ¼Fy2
C2¼ 10:18 kN
Cy1 ¼fy1
C1m2g¼ 4:81� 103
1931:6� 1� 9:81¼ 0:25
Cy2 ¼fy2
C2m2g¼ 10:18� 103
709:82� 1� 9:81¼ 1:46
1c- Assuming n = 5%Step 2: Using Cy spectra (Fig. 1) determine the ductility factor l
for each mode;
Cy1 ¼ 0:25 and T1 ¼ 2:13 s! l1 ¼ 1:27Cy2 ¼ 1:46 and T2 ¼ 0:80 s! l2 < 1
Note that when the ductility factor (l) is less than 1 (from Cy-spec-tra), Cy value for l = 1 and T = 0.8 s is first determined (Cy = 1.0255in this case), then the ratio of this Cy to that from step 1b (i.e1.46) is the system ductility factor for the elastic response.
l2 ¼1:0255
1:46¼ 0:7

Table 2Summary of design parameters and beam-member sections for the 9-story frame.
Floor Weight (kN) Design load (kN) Drift (cm) Drift limit (cm) Beam members
2nd 5053 21.92 1.71 2.0 W36 � 1603rd 5053 58.85 1.34 1.44 W36 � 1604th 5053 111.24 1.41 1.44 W36 � 1355th 5053 178.14 1.49 1.44 W36 � 1356th 5053 258.87 1.47 1.44 W36 � 1357th 5053 352.94 1.41 1.44 W36 � 1358th 5053 459.95 1.43 1.44 W30 � 999th 5053 579.55 1.35 1.44 W27 � 84Roof 3790 533.6 0.94 1.44 W24 � 68
Table 3Column-member sections and normalized modal shape vectors for the 9-story frame.
Story Column members u1 (�10�3) u2 ð�10�3ÞInterior Exterior
1st W14 � 500 W14 � 370 0.11 �0.282nd W14 � 500 W14 � 370 0.20 �0.45
W14 � 4553rd W14 � 455 W14 � 370 0.28 �0.554th W14 � 455 W14 � 370 0.37 �0.57
W14 � 370 W14 � 2835th W14 � 370 W14 � 283 0.45 �0.476th W14 � 370 W14 � 283 0.53 �0.25
W14 � 283 W14 � 2577th W14 � 283 W14 � 257 0.60 0.098th W14 � 283 W14 � 257 0.67 0.49
W14 � 257 W14 � 2339th W14 � 257 W14 � 233 0.71 0.81
82 A. Habibi et al. / Engineering Structures 46 (2013) 77–86
Step 3: From Va spectrum (Fig. 1)
Va1 ¼ 105:79 cm=sVa2 ¼ 128:81 cm=s
Step 4:4a- Using C1 = 1931.6, C2 = 709.82, Va1 = 105.79 cm/s,
Va2 = 128.81 cm/s, calculate
Eai¼ miðCiVaiÞ2
2
EaT ¼X2
i¼1
Eai
Ea1 ¼ ð1=2Þ � 1� ð1931:6� 105:79� 10�2Þ2 � 10�3 ¼ 2087:82 kN m
Ea2 ¼ ð1=2Þ � 1� ð709:82� 128:81� 10�2Þ2 � 10�3 ¼ 417:99 kN mEaT ¼ Ea1 þ Ea2 ¼ 2505:81 kN m
4b-
Ea1 ¼ 2087:82 kN m
Ea2 ¼ 417:99 kN mDs1 ¼ 36:3 cm
Es ¼2p2
2:132 � 1� 1931:6� 36:3� 10�2
1:27
!2
� 10�3 ¼ 1326:205 kN m
Step 5
ED ¼ EaT � Es ¼ 2505:81� 1326:205 ¼ 1179:605 kN m
nD ¼ED
4pEs¼ 1179:605
4p� 1326:205¼ 0:07
n ¼ nþ nD ¼ 0:05þ 0:07 ¼ 0:12:
Step 6 Repeat step 2-6 as in Table 4 which shows that the designhas converged at the 4th design iteration (the convergencetolerance e is taken as 10% in this example) where
n ¼ 15%
and from Eq. (12) the plastic strain energy dissipated in each of thetwo modes are
ED1 ¼ 2087:82� 1233:97 ¼ 853:85 kN mED2 ¼ 417:99� 177:24 ¼ 240:75 kN m:
Step 7: Following the technique outlined in the Appendix, theenergy profile for each mode is determined based on thedrift of the first floor DR1(for mode 1) and kth floor DR2
(for mode 2). In this example the kth floor is floor 7. Foreach of the two modes (i = 1,2) the story drift at whichthe first plastic hinge forms in a beam member (DRibeam)and at the base of a column member (DRibase) are obtainedfrom the modal push-over analysis;
DR1beam ¼ 0:99%
DR1base ¼ 1:32%
DR2beam ¼ 1:1%
Ds1 ¼ 27:57 cm! DR1 ¼ 1:08%
ðAppendix eq A1Þ ! DR1beam < DR1 < DR1base ! Energy profile w12
Ds2 ¼ 10:68 cm! DR2 ¼ 0:18%
ðAppendix eq A2Þ ! DR2 < DR2beam ! Energy profile w21
Then EDis and EDTs are calculated as shown in Table 5.Step 8: Table 6 gives the drift Ds at each story.Step 9: Fig. 5 shows possible configurations of different EDDs that
can be implemented and Table 7 lists the required charac-teristics of different types of EDDs.
Step 10: Based on the use of metallic yielding devices, Table 8gives the axial force in each brace member (Eq. (14a))and the required cross-section of the brace.
5. Verification
Nonlinear time history analysis is used to verify the accuracy ofthe proposed design method. The 1940 Imperial Valley El Centro(LA02, PGA 662.88 cm/sec2) is used and the analysis is conductedusing SAP2000 [25] with implicit integration using Hilber-Hughes-Taylor method [26].
Four different analyses were conducted, these are;
a- Original structure with 5% Rayleigh dampingb- Original structure with amplified 15% Rayleigh dampingc- Dissipative structure: original structure retrofitted with
EDDs (metallic yielding) according to the proposed designmethod (Fig. 5a, Tables 7 and 8)
d- Stiffened structure: original structure retrofitted with bracesonly (no EDDs) according to Table 8.
The results of the nonlinear time history analysis are summa-rized in Table 9 and Figs. 6–8. Table 9 compares the maximum

Table 4Summary of design iterations of the proposed method.
Iteration no. n (%) Step 2 Step 3 Step 4 Step 5 Step 6
l1 l2 Va1 (cm/s) Va2 (cm/s) Ea1 (kN m) Ea2 (kN m) EaT (kN m) Es (kN m) ED (kN m) nD (%) e (%)
1 5 1.27 0.7 105.79 128.81 2087.82 417.99 2505.81 1326.21 1179.60 7 892 12 1.1 0.52 87.54 95.37 1429.61 229.13 1658.74 1326.21 332.54 2 253 14 1.02 0.48 83.45 87.72 1299.14 193.85 1492.99 1326.21 166.78 1 134 15 0.97 0.46 81.33 83.88 1233.97 177.24 1411.22 1326.21 85.02 – 6a
a Design iteration is terminated at n = 15% since e < 10%.
Table 5Amount of energy to be dissipated per story.
Story ED1s = ED1w12 (kN m) ED2s = Ea2w21 (kN m) EDTs = ED1s + ED2s (kN m)
1 227.81 58.85 286.662 133.08 17.71 150.793 139.06 5.65 144.714 111.27 0.92 112.195 92.79 11.64 104.426 66.50 28.19 94.697 51.90 59.57 111.478 24.95 41.95 66.909 6.49 16.27 22.76
Table 6First mode maximum displacement and drift per story.
Story Maximum displacement (cm) Ds1C1/1 Drift (cm)
1 5.93 5.932 10.50 4.583 15.11 4.614 19.81 4.705 24.22 4.416 28.23 4.017 32.05 3.828 35.47 3.429 37.74 2.27
A. Habibi et al. / Engineering Structures 46 (2013) 77–86 83
absorbed energy from time history analysis (Ea,max) with that fromthe design method, EaT (Eq. (7)) for case (a) and (b). Figs. 7 and 8compare the structural response in terms of the evolution of plastichinges.
From Table 9 it is clear that for different damping ratios (5% and15%), the amount of the absorbed energy predicted by the designmethod is very close to that obtained from nonlinear time history
((a) EDD
Fig. 5. Possible configurations of EDDs. (a) M
analysis. The design method over predicts the amount of the ab-sorbed energy by 3% and 6% for damping ratio of 15% and 5%respectively.
The evolution of plastic hinges in any member (beams, columnsand braces) is defined according to FEMA 356 (Tables 5–7) [27].Fig. 6 is schematic representation of plastic hinge status inSAP2000. In this figure the region between point A to B representsthe elastic range, from B to C is plastic range, which is followed by asudden drop in strength (C to D) then failure at point E. Within theplastic range (B to C) three different performance levels are de-fined. These are; immediate occupancy (IO), life safety (LS) and col-lapse prevention (CP). Different symbols are used to represent eachstatus level (IO, LS, CP and E) as shown in Fig. 6. These symbols areused to trace the evolution of plastic hinges in the nonlinear time-history analysis (case a-d) as shown in Figs. 7 and 8.
Fig. 7a shows the result at the end of the time-history analysisof the original structure with 5% Rayleigh damping (case a). As canbe seen in Fig. 7a, 42 LS and 11 IO plastic hinges have alreadyformed in the beam members in addition to 3 IO plastic hingesformed at the base of the column members at the ground floor (atotal of 56 plastic hinges). With 15% viscous damping (case b)the number of plastic hinges has reduced to 7 hinges in the beammembers only and out of these 7 hinges, 6 are at IO level and onlyone has reached the LS level (Fig. 7b).
The time history analysis of the dissipative structure (case c)indicates that the structure remain elastic (Fig. 8a) and the damag-ing part of the seismic energy is dissipated by the EDDs. The dissi-pative frame in case c (Fig. 8a) is designed based on 15% hystereticdamping (Table 4), however time history analysis shows that, un-like case b (15% viscous damping), the dissipative frame remainselastic (while case b has 7 hinges). The superior performance ofthe dissipative frame (case c) in comparison to case b is due toproper distribution of EDDs along the height of the frame according
b) EDD
etallic yielding device. (b) Other devices.

Table 7Design of energy dissipation devices for each story.
Story Metallic yielding device Viscous device Friction device Viscoelastic device
Fy (kN) KD (kN/m) c (kN s/m) KD (kN/m) F0 (kN) KD (kN/m) g KD = k0 (kN/m)
1 483.41 8151.88 7158.57 0.0 629.44 16585.04 1.0 21116.732–3 329.24 7188.55 4476.55 0.0 361.00 10371.30 1.0 13205.154–7 238.70 5078.77 3162.71 0.0 261.73 7327.40 1.0 9329.548 195.61 5719.71 3561.85 0.0 214.49 8252.12 1.0 10506.929 100.26 4416.93 2750.57 0.0 109.94 6372.53 1.0 8113.76
Table 8Design of bracing members.
Story FBrace (kN) Cross-section of brace members
1 755.33 219.1 � 6.4 CHS2–3 435.50 165.1 � 5.4 CHS4–7 315.74 165.1 � 5 CHS8 258.74 139.7 � 5 CHS9 132.62 139.7 � 3.5 CHS
Table 9Comparison of maximum absorbed energy from nonlinear time-history analysis andthe proposed design method.
Case n Ea,max (kN m) Ea1 (kN m) Ea2 (kN m) EaT (kN m) EaT�Ea;maxEa;max
a 5% 2356 2087.82 417.99 2505.81 0.06b 15% 1364.45 1233.97 177.24 1411.22 0.03
Fig. 6. Plastic hinge status according to FEMA-356.
84 A. Habibi et al. / Engineering Structures 46 (2013) 77–86
to energy demand at each story. Furthermore, the dissipatedenergy of the EDD is calculated based on the largest hysteretic cy-cle executed by the device (based on maximum story drift). Duringdesign earthquake excitation, the device may undergo some smal-ler cycles in addition to the largest design one. This makes thedesign method to be conservative.
In order to demonstrate the effectiveness of the EDDs designedaccording to the proposed retrofitting method, the original framewith added bracing system (stiffened frame without EDDs) is con-sidered in case d (Fig. 8b). The same bracing members used in casec are utilized in case d (Table 8). The results show that all bracingmembers would fail during the earthquake (hinge status E), this isfollowed by plastic hinge formation in the original frame structurewith 25 hinges forming at beam members and 2 hinges at the baseof the column members at the ground floor (Fig. 8b).
6. Conclusion and discussion
A stepwise multi-mode energy-based design method forseismic retrofitting with passive energy dissipation systems isproposed. The method incorporates two modes with the highestparticipation factors to conduct modal push-over analysis and
calculates modal yield forces and energy profiles. ESDOF is ob-tained and nonlinear response spectra are used to determine theductility factor for each mode. The energy contribution of eachmode is then determined and distributed over the height of thestructure based on energy profiles. The required amount of energydissipation and drift at each story are calculated and used to retro-fit the structure with EDDs.
The proposed method is verified using nonlinear time-historyanalysis which shows that the retrofitted structure remains intactwhile damage is confined to the added EDDs. Very good correlationis obtained between the proposed method and nonlinear time-his-tory analysis (Table 9). The effectiveness of the proposed retrofitdesign method can be seen by comparing the nonlinear time-his-tory response of the retrofitted dissipative structure with that ofthe stiffened structure (Fig. 8a and b). The effectiveness of the pro-posed method can be further seen by comparing the response ofthe resulting dissipative system (Fig. 8a) to that of the originalframe with amplified viscous damping (Fig. 7b).
Although two modes are used for the calculation and distribu-tion of the absorbed energy, only the 1st mode is used for estimat-ing the elastic strain energy and the drift at each story. Theproposed method can be easily extended to include additionalmodes, if required, and is applicable to any passive energy dissipa-tion system. Although the method is presented within a retrofittingcontext of existing structure, it can be used for new design of dis-sipative structures. The method allows the designer to specify anacceptable damage in the structure and to design the dissipativesystem accordingly. The proposed stepwise method lends itselfto spread-sheet type calculations and requires only static push-over analysis. The required response spectra (Fig. 1) can be gener-ated and tabulated for any seismic action using the developed Mat-lab code.
Appendix A. Energy distribution along the height of thestructure
Step 7 of the proposed design method requires the distributionof the energy along the height of the frame. The energy distributionprocedure proposed by Chou et al. [18] has been modified and ex-tended for retrofitting of frame structures with EDDs.
Based on the results from modal pushover analysis of the twomodes with the highest participation factors, pushover curves foreach of these two modes are constructed (Fig. A1). For each push-over curve, two points (A and B) are identified. Point A correspondsto the formation of the first plastic hinge in a beam member. PointB corresponds to the formation of the first plastic hinge in the baseof a column member. In addition, three zones are determined onthe pushover curve; from zero to A, from A to B and beyond B. InFig. A1, point 1 and 2 represent the midpoints of the first two zoneswhile point 3 coincides with point B and represents the third zone.The first zone corresponds to elastic response, the second zone cor-responds to the evolution of plastic hinges (at the lower floor levelsin mode 1 and upper levels in mode 2) and the third zone corre-sponds to the formation of plastic hinges at the column’s base at

(b)(a)
IO LS CP Failure
Fig. 7. Evolution of plastic hinges based on nonlinear time-history analysis. (a) Original structure with 5% viscous damping (case a). (b) Original structure with 15% viscousdamping (case b).
(b)(a)
IO LS CP Failure
Fig. 8. Evolution of plastic hinges based on nonlinear time-history analysis. (a) Dissipative structure with metallic yielding EDDs (case c). (b) Stiffened structure (case d).
A. Habibi et al. / Engineering Structures 46 (2013) 77–86 85
ground level in mode 1 and at the kth story in mode 2. The kthstory is usually where significant reversal of lateral forces occursand the first plastic hinge forms at a beam member in this story(Point A, mode 2).
For each of the three zones represented by points 1–3 on thepushover curve, the energy at each story is calculated based onthe moment-curvature response of all the members in that story.The total energy is obtained from the sum of the energy at eachstory over the height of the frame. Then the calculated energy ateach story is normalized by the total energy. For each mode(i = 1, 2), three energy profiles wij corresponding to each of thethree zones (j = 1, 2, 3) are obtained. For the 9-story building usedin Section 4, these energy profiles are shown in Fig. A2.
Determine the appropriate energy profile for each mode (1 and2) based on the drift of the first floor DR1(for mode 1) and kth floorDR2 (for mode 2). These are calculated from.
DR1 ¼Ds1C1u11
H1ðA1Þ
DR2 ¼Ds2C2ðu2k �u2ðk�1ÞÞ
HkðA2Þ
Ds1 and Ds2 are the maximum displacements (mode 1 and 2) of theESDOF (Fig. 1). /11 and /2k and /2(k�1) are the components of themodal vectors (mode 1 and 2) at story 1, k and k � 1 respectively.H1, Hk are the height of 1st and the kth story.
From the modal pushover analysis of each mode (i = 1 and 2)determine story drift at which the first plastic hinge form in abeam member (DRibeam) and at the base of a column member (DRi-
base). Select the appropriate energy profile according to
DRi < DRibeam ! Energy profile wi1
DRibeam 6 DRi < DRibase ! Energy profile wi2
DRi P DRibase ! Energy profile wi3

Fig. A1. Modal push-over curves. (a) Mode 1. (b) Mode 2.
Fig. A2. Energy profiles. (a) Mode 1. (b) Mode 2.
86 A. Habibi et al. / Engineering Structures 46 (2013) 77–86
References
[1] Soong TT, Spencer Jr BF. Supplemental energy dissipation: state-of-the-art andstate-of-the-practice. Eng Struct 2002;24:243–59.
[2] Chan RWK, Albermani F, Williams MS. Evaluation of yielding shear paneldevice for passive energy dissipation. J Construct Steel Res 2007.
[3] Ghabraie k, Chan R, Huang X, Xie Y. Shape optimization of metallic yieldingdevices for passive mitigation of seismic energy. Eng Struct 2010;32(8).
[4] Mualla IH, Belev B. Performance of steel frames with a new friction damperdevice under earthquake excitation. Eng Struct 2002;24(3).
[5] Soong TT, Dargush GF. Passive energy dissipation systems in structuralengineering. John Wiley & Sons; 1997.
[6] Guo AX, Xu YL, Wu B. Seismic reliability analysis of hysteretic structure withviscoelastic dampers. Eng Struct 2002;24(3).
[7] Aguirre M. Earthquake-resistant structure: structural frame damper system –an approach to design. In: Proc. instn civ. engrs structs & bldgs; 1997.
[8] Williams MS, Albermani F. Evaluation of displacement-based analysis anddesign methods for steel frames with passive energy dissipators. CivilEngineering Research Bulletin No. 24, Department of Civil Engineering,University of Queensland, Australia; 2003. <http://eprint.uq.edu.au/archive/00000899/>.
[9] FEMA 273. NEHRP guidelines for the seismic rehabilitation of buildings.Building Seismic Safety Council; October 1997.
[10] ATC-40. Seismic evaluation and retrofit of concrete building. Redwood City,CA: Applied Technology Council; 1996.
[11] Lin YY, Tsai MH, Hwang JS, Chang KC. Direct displacement-based design forbuilding with passive energy dissipation systems. Eng Struct 2002.
[12] Chen Z, Ge H, Kasai A, Usami T. Simplified seismic design approach for steelportal frame piers with hysteretic dampers. Earthquake Eng Struct Dyn 2007.
[13] Riddell R, Garcia JE. Hysteretic energy spectrum and damage control.Earthquake Eng Struct Dyn 2001;30(12):1791–816.
[14] Uang CM, Bertero VV. Use of energy as a design criterion in earthquake-resistant design. Report No. UCB/EERC-88/18, Earthquake EngineeringResearch Center, University of California at Berkeley; 1988.
[15] Estes KR, Anderson JC. Hysteretic energy demands in multistory buildings.Seventh US national conference on earthquake engineering, Boston,Massachusetts; 2002.
[16] Akbas B, Shen J, Hao H. Energy approach in performance-based seismic designof steel moment resisting frames for basic safety objective. Struct Des TallBuild 2001;10:193–217.
[17] Leelataviwat S, Goel SC, Stojadinovic B. Energy-based seismic design ofstructures using yield mechanism and target drift. J Struct Eng 2002;128(8):1046–54.
[18] Chou CC, Uang CM. A procedure for evaluating seismic energy demand offramed structures. Earthquake Eng Struct Dyn 2003;32:229–44.
[19] Kim J, Choi H. Energy-based seismic design of structures with buckling-restrained braces. Steel Compos Struct 2004;4(6):437–52.
[20] MATLAB online reference. The MathWorks; 2009b. <http://www.mathworks.com>.
[21] Chopra AK. Dynamics of structures: theory and applications to earthquakeengineering. second ed. Englewood Cliffs, New Jersey: Prentice Hall; 2001.
[22] ICBO. Uniform Building Code (UBC). Whittier, CA: international conference ofbuilding officials; 1994.
[23] Krawinkler H, Gupta A. Storey drift demands for steel moment framestructures in different seismic regions. In: Proceeding of the 6th US nationalconference on earthquake engineering, Oakland, CA; 1998.
[24] Yang C-S, Leon R, DesRoches R. Design and behavior of zipper-braced frames.Eng Struct 2008;30(4).
[25] CSI Sap2000. Version 14: integrated software for structural analysis anddesign. Computers and Structures Inc., Berkeley, CA; 2009.
[26] Hilber HM, Hughes TJR, Taylor RL. Improved numerical dissipation for timeintegration in structural dynamics. Earthquake Eng Struct Dyn 1977;5:283–92.
[27] FEMA 356. Prestandard and commentary for the seismic rehabilitation ofbuildings. American Society of Civil Engineers, Federal EmergencyManagement Agency, Washington, DC; November 2000.
Copyright © 2022 FDOKUMEN