ENCORE: Enhanced code Galileo receiver for land management applications in Brazil
11
ENCORE: ENHANCED CODE GALILEO RECEIVER FOR LAND MANAGEMENT APPLICATIONS IN BRAZIL Pedro F. Silva, João S. Silva, and Tiago Peres Aerospace Business Unit DEIMOS Engenharia SA Lisbon, Portugal [email protected] José Diez and José Palomo Aerospace Business Unit DEIMOS Space SLU Tres Cantos (Madrid), Spain Ismael Colomina, Eulàlia Pares Institut of Geomatics Castelldefels (Barcelona), Spain Terry Moore and Chris Hill University of Nottingham Nottingham, United Kingdom João Moreira Orbisat da Amazônia Indústria e Aerolevantamento S.A. São José dos Campos, Brazil Silvio E. Barbin Universidade de São Paulo São Paulo, Brazil João F. Galera Monico and Paulo O. Camargo Universidade Estadual Paulista Presidente Prudente, Brazil Emerson Z. Granemann and Eduardo Freitas Editora Mundo GEO Curitiba , Paraná, Brazil Gustavo Streiff Santiago & Cintra Importação e Exportação LTDA São Paulo, Brazil Carmen Aguilera European GNSS Supervisory Authority (GSA) Brussels, Belgium Keywords: GNSS; Galileo; AltBOC; Land Management Abstract Taking benefit of the new Galileo ranging signals, the ENCORE (Enhanced Code Galileo Receiver) project aims to develop a low-cost Land Management Application to cover needs of the Brazilian market in terms of geo- referencing and rural/urban cadastre, using a low-cost Enhanced Galileo Code Receiver as baseline. Land management applications require precision and accuracy levels from a few to several decimetres that are under- met with current pseudorange-based receiver and over-met with phase observations. This situation leads either to a waste of resources, or to lack of accuracy. In this project, it is proposed to fill this gap using the new
-
Upload
independent -
Category
Documents
-
view
0 -
download
0
Transcript of ENCORE: Enhanced code Galileo receiver for land management applications in Brazil
ENCORE:
ENHANCED CODE GALILEO RECEIVER FOR LAND MANAGEMENT APPLICATIONS IN BRAZIL
Pedro F. Silva, João S. Silva, and Tiago Peres Aerospace Business Unit DEIMOS Engenharia SA Lisbon, Portugal [email protected]
José Diez and José Palomo Aerospace Business Unit DEIMOS Space SLU Tres Cantos (Madrid), Spain
Ismael Colomina, Eulàlia Pares Institut of Geomatics Castelldefels (Barcelona), Spain
Terry Moore and Chris Hill University of Nottingham Nottingham, United Kingdom
João Moreira Orbisat da Amazônia Indústria e Aerolevantamento S.A. São José dos Campos, Brazil
Silvio E. Barbin Universidade de São Paulo São Paulo, Brazil
João F. Galera Monico and Paulo O. Camargo Universidade Estadual Paulista Presidente Prudente, Brazil
Emerson Z. Granemann and Eduardo Freitas Editora Mundo GEO Curitiba , Paraná, Brazil
Gustavo Streiff Santiago & Cintra Importação e Exportação LTDA São Paulo, Brazil
Carmen Aguilera European GNSS Supervisory Authority (GSA) Brussels, Belgium
Keywords: GNSS; Galileo; AltBOC; Land Management
Abstract
Taking benefit of the new Galileo ranging signals, the ENCORE (Enhanced Code Galileo Receiver) project aims to develop a low-cost Land Management Application to cover needs of the Brazilian market in terms of geo-referencing and rural/urban cadastre, using a low-cost Enhanced Galileo Code Receiver as baseline. Land management applications require precision and accuracy levels from a few to several decimetres that are under-met with current pseudorange-based receiver and over-met with phase observations. This situation leads either to a waste of resources, or to lack of accuracy. In this project, it is proposed to fill this gap using the new

possibilities of the Galileo ranging signals, in particular E5 AltBOC and E1 CBOC. This approach reduces the cost of the end-user solution, helping the rapid penetration of Galileo technology outside Europe.
The research leading to these results has received funding from the European Union's Seventh Framework Programme (FP7/2007-2013) under the Galileo Supervisory Authority grant agreement FP7-GALILEO-2008-GSA-1 Proj. 247939. The GNSS receiver platform used in this project has been based in the work developed in Methods and Algorithm Analysis for High Precision and Integrity GNSS Receivers (PLAREN), project reference SAE-1087 partially funded by the Spanish Centre for Technological Industrial Development (CDTI)
1. Introduction In the frame of the 7th Framework Programme under European GNSS Supervisory Authority (GSA) co-funding, DEIMOS Engenharia is leading ENCORE (Enhanced Code Galileo Receiver). The project is framed in application developments for international activities, aiming to penetrate the European GNSS (EGNOS, Galileo) in South America. Taking benefit of the new Galileo ranging signals, ENCORE is building a low-cost Land Management Application to cover the following needs of the Brazilian market:
• Geo-referencing: due to 10267/2001 Federal Law, all the 5 billions properties in Brazil must be linked to the Geocentric Reference System for the Americas whose objective is the standardisation of South America geodetic systems. All these properties are subject to surveying, which actually do not exist.
• Urban/rural cadastre: An important percentage of land in Brazil is not properly identified (such as in farming and private lands). This is an important drawback to allow an efficient use of the farmland, an optimised urban planning, and to perform tax collection.
The proposed land management application will address these Brazilian needs in terms of geo-referencing and cadastre planning, using a low-cost Enhanced Galileo Code Receiver as baseline. As an example, it will address the problem of land regularization at the Legal Amazon area of Brazil, enabling a large scale surveying service.
In current GNSS terminals, there is a gap in terms of performances, receiver complexity and price between mass-market and professional devices. Accuracies up to 5-meter are achieved in mass-market GNSS terminals using pseudorange observables. In professional receivers, with high precision requirements, carrier phase measurements are also processed to output the user position with errors below one decimetre, at a cost of higher complexity, price and operational requirements.
Land management applications require precision and accuracy levels from a few to several decimetres that are under-met with current pseudorange-based receiver and over-met with phase observations. This situation leads either to a waste of resources, or to lack of accuracy. In this work, it is proposed to fill this gap using the new possibilities of the Galileo ranging signals, in particular E5 AltBOC and E1 CBOC. This approach reduces the cost of the end-user device and required infrastructure, helping the rapid penetration of Galileo technology outside Europe.
In this paper, the current regional context in Brazil is described followed by an introduction to the ENCORE system architecture. A description of the ongoing design of a Galileo code-only solution is then given, providing a low-cost high-accuracy GNSS terminal. The design includes a dual-frequency Galileo E5/E1 front-end, the signal processing stage of a Galileo E5 AltBOC and E1 CBOC receiver, to be implemented in an FPGA prototype, as well as the land management application and positioning algorithms for on-site demonstrations.
2. REGIONAL CONTEXT
2.1. The Law 10.267/01 The Brazilian system of property registration, which is based in the German model, establishes that only those who register a property are entitled to its ownership. In such system, each property has a record comprising its history, which guarantees safer estate transactions. With the introduction of Law 10.267/01 [1], the register includes a technical record in a single database. Information such as coordinate of the vertices defining the property, georeferenced to Brazilian Geodetic Frame (BGF) is included in the record.
Not only does the Law 10.267/01 fights land-grabbing operations and the illegal formation of latifúndios (large portions of land belonging to a single land owner), but it also creates a rural technical record, which is a great advance in the Brazilian record cartography, because it generates a geo-referenced territorial database, a tool of key importance for the country’s territorial management, planning and development.
The Decree Law no. 4449 of the 30th of October of 2002 [2] regulates Law 10.267/01 and establishes the Institute of Colonization and Agrarian Reform (INCRA) the Federal Revenue Department as responsible for the establishment of technical criteria for the implementation, management and input of the technical record named Cadastro Nacional De Imóveis Rurais (CNIR), and establishes the time for identifying the area of the rural property. According to INCRA ordinance no.954 [3], the required positioning accuracy is 0,50 m (1σ). Recently, the second version of the Technical Norm for Rural Properties Geo-referencing has been published by INCRA [4], providing the necessary norms for GPS surveying.
According to Decree no. 5570/05 [5] which presents a new wording for the norms of Decree no. 4449/02, a timeline for property registration according to its area has been defined, starting on the 20th of November of 2003, ending in 2012 for properties with an area smaller than five hundred hectares and more stringent dates for even smaller properties.
Other laws and programs have been approved to promote land registration process (Brazilian Forest Code) and also to promote environmental regularization (i.e. the demarcation of Permanent Preservation Areas and Legal Reserve in rural properties).

2.2. Current Situation In early 2010, only 0,2% of the total number of Brazilian properties have been geo-referenced and certified by INCRA. [6]. It can be verified that the period of time established for geo-referencing is unlikely to be met.
The cost of equipment and difficulties faced by landowners and the delay of INCRA in the certification of properties are the main causes that prevent professionals to perform the work at accessible prices to the owners. It also reduces the number of professionals acting in geo-referencing.
Taking benefit of Galileo signal characteristics (e.g. low multipath effects and AltBOC low noise code observables), the production of robust GNSS receivers at a low cost will allow more professionals to act in the geo-referencing of rural properties, surveillance and demarcation of permanent reservation areas and legal reserve (see Fig. 1). This will also allow that the geo-referencing of rural properties and the environmental legalization be carried out in a shorter time. In the current situation, and based on the figures presented, the deadlines are unlikely to be met.
Figure 1. Dual frequency receiver data collection examples in Brazil
3. ENCORE SYSTEM ARCHITECTURE The ENCORE system architecture can be divided in two main components: the ENCORE Application and the ENCORE Code Receiver. The first operates on a Portable or Desktop Computer while the second consists of dedicated Hardware (HW) Field-Programmable Gate Array (FGPA) platform, which in the ENCORE prototype shall be enclosed in a host computer platform, also shared by the ENCORE Application as depicted in Fig. 2. Each of the components is characterized as follows:
• Code Receiver: consists of a dedicated HW FPGA board (Xilinx Virtex-6 on the ML605 evaluation board) connected to the RF Front-End and the respective antenna. The FGPA will host the baseband processing (GNSS signal processing) and other receiver cores elements (e.g. micro-processor).
• Application software: responsible for data processing and visualisation to the end-user as well as execution of the positioning algorithms to support the data processing. The application is envisaged to run on a portable or Desktop Computer and shall interface the receiver for the retrieval of necessary data.
Figure 2. ENCORE host computer platform with FGPA board
3.1. Code Receiver The Code Receiver builds upon existing receiver core modules available from past projects and within ENCORE the following updates shall be performed:
• Software (Firmware) updates, performed in C/C++ language;
• Hardware updates (such as signal processing functions, interface), performed using Xilinx proprietary SW tools, where a bit-stream is loaded for HW programming of the FGPA.
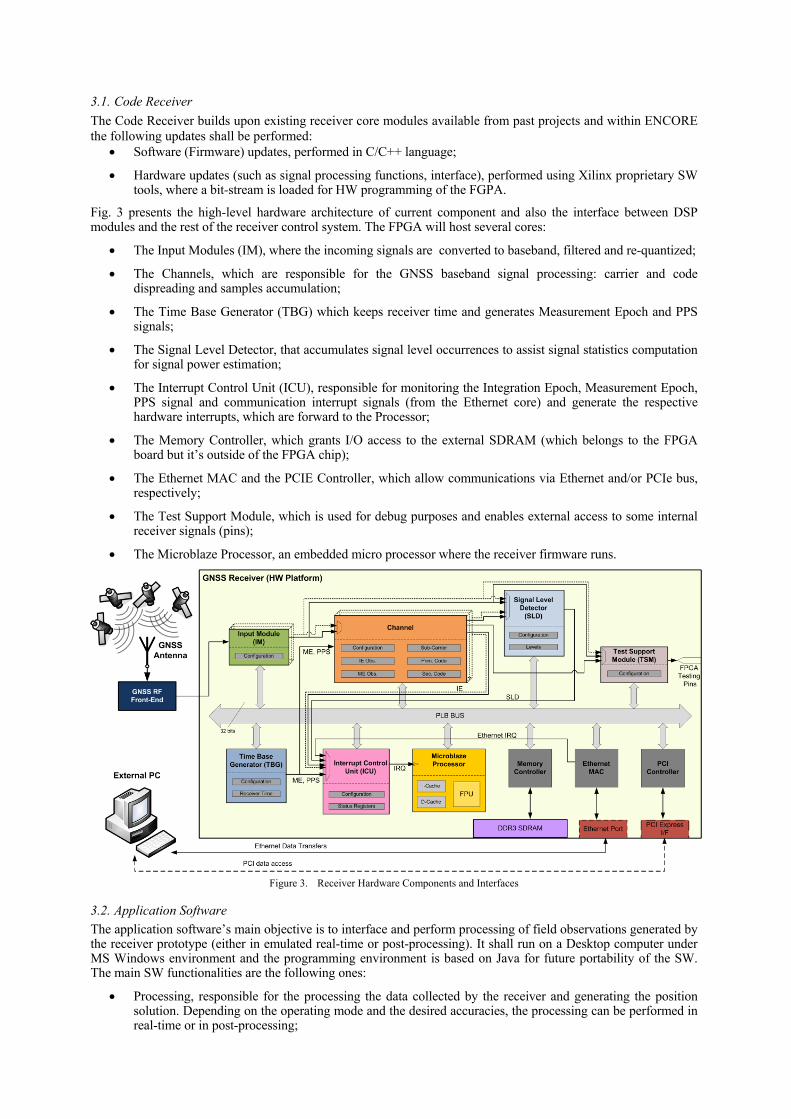
Fig. 3 presents the high-level hardware architecture of current component and also the interface between DSP modules and the rest of the receiver control system. The FPGA will host several cores:
• The Input Modules (IM), where the incoming signals are converted to baseband, filtered and re-quantized;
• The Channels, which are responsible for the GNSS baseband signal processing: carrier and code dispreading and samples accumulation;
• The Time Base Generator (TBG) which keeps receiver time and generates Measurement Epoch and PPS signals;
• The Signal Level Detector, that accumulates signal level occurrences to assist signal statistics computation for signal power estimation;
• The Interrupt Control Unit (ICU), responsible for monitoring the Integration Epoch, Measurement Epoch, PPS signal and communication interrupt signals (from the Ethernet core) and generate the respective hardware interrupts, which are forward to the Processor;
• The Memory Controller, which grants I/O access to the external SDRAM (which belongs to the FPGA board but it’s outside of the FPGA chip);
• The Ethernet MAC and the PCIE Controller, which allow communications via Ethernet and/or PCIe bus, respectively;
• The Test Support Module, which is used for debug purposes and enables external access to some internal receiver signals (pins);
• The Microblaze Processor, an embedded micro processor where the receiver firmware runs.
Figure 3. Receiver Hardware Components and Interfaces
3.2. Application Software The application software’s main objective is to interface and perform processing of field observations generated by the receiver prototype (either in emulated real-time or post-processing). It shall run on a Desktop computer under MS Windows environment and the programming environment is based on Java for future portability of the SW. The main SW functionalities are the following ones:
• Processing, responsible for the processing the data collected by the receiver and generating the position solution. Depending on the operating mode and the desired accuracies, the processing can be performed in real-time or in post-processing;
• Importing and storing files, where data from the receiver or other sources is imported for subsequent processing.
• Results Visualisation and Report generation, where the navigation solutions are displayed and the formatted into the appropriate output structure for later access.
Accuracies of at least 0,50 m (1σ) are targeted for Real Time although higher accuracies shall be achieved in post-processing, addressing the widest possible number of receiver surveying classes described in [4].
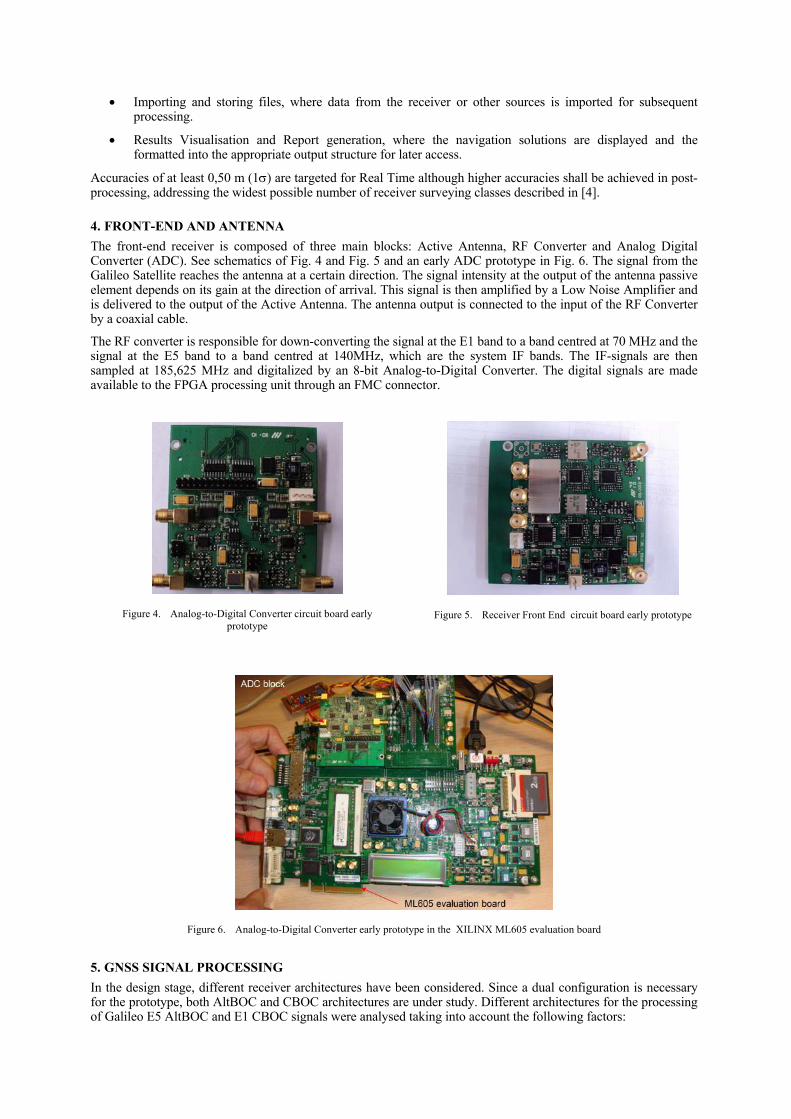
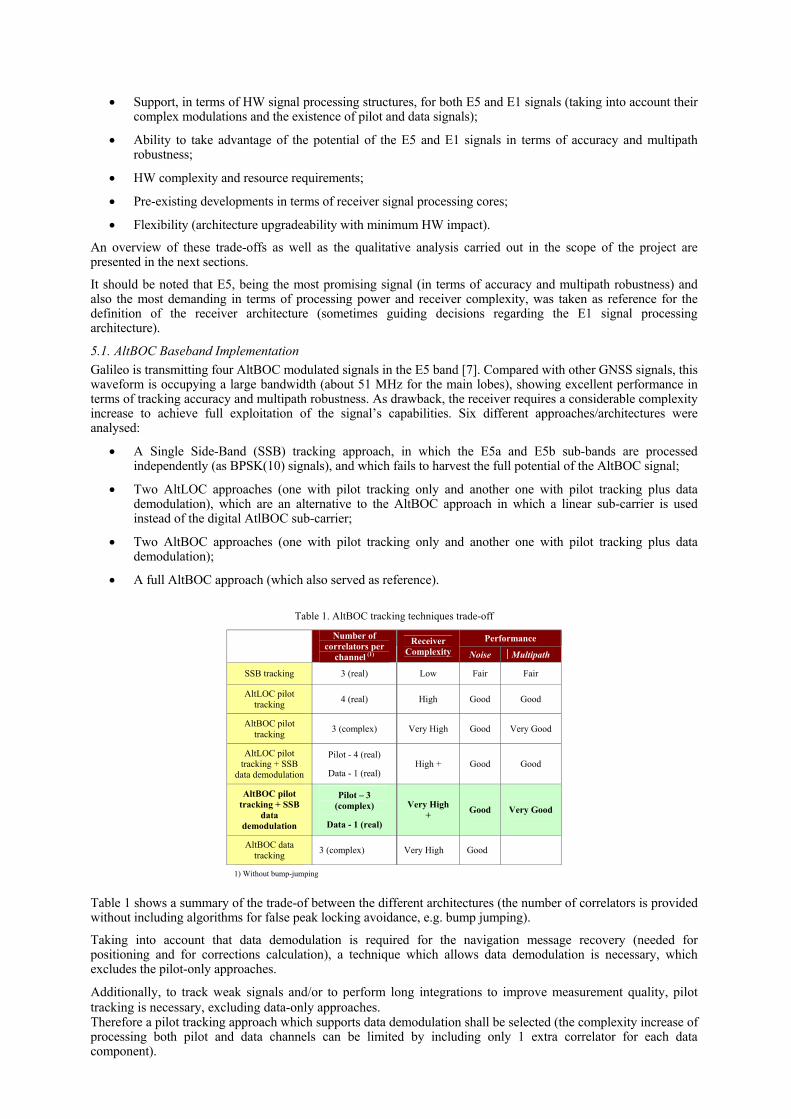
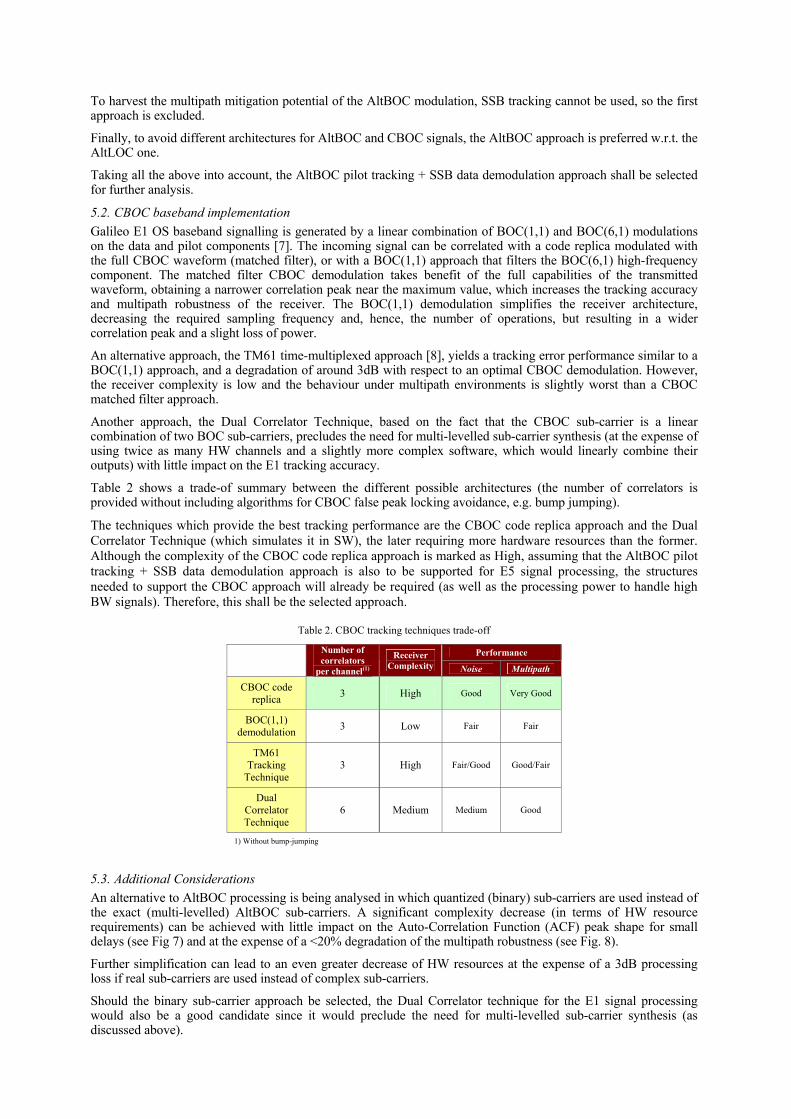
4. FRONT-END AND ANTENNA The front-end receiver is composed of three main blocks: Active Antenna, RF Converter and Analog Digital Converter (ADC). See schematics of Fig. 4 and Fig. 5 and an early ADC prototype in Fig. 6. The signal from the Galileo Satellite reaches the antenna at a certain direction. The signal intensity at the output of the antenna passive element depends on its gain at the direction of arrival. This signal is then amplified by a Low Noise Amplifier and is delivered to the output of the Active Antenna. The antenna output is connected to the input of the RF Converter by a coaxial cable.
The RF converter is responsible for down-converting the signal at the E1 band to a band centred at 70 MHz and the signal at the E5 band to a band centred at 140MHz, which are the system IF bands. The IF-signals are then sampled at 185,625 MHz and digitalized by an 8-bit Analog-to-Digital Converter. The digital signals are made available to the FPGA processing unit through an FMC connector.
Figure 4. Analog-to-Digital Converter circuit board early prototype
Figure 5. Receiver Front End circuit board early prototype
Figure 6. Analog-to-Digital Converter early prototype in the XILINX ML605 evaluation board
5. GNSS SIGNAL PROCESSING In the design stage, different receiver architectures have been considered. Since a dual configuration is necessary for the prototype, both AltBOC and CBOC architectures are under study. Different architectures for the processing of Galileo E5 AltBOC and E1 CBOC signals were analysed taking into account the following factors:
• Support, in terms of HW signal processing structures, for both E5 and E1 signals (taking into account their complex modulations and the existence of pilot and data signals);
• Ability to take advantage of the potential of the E5 and E1 signals in terms of accuracy and multipath robustness;
• HW complexity and resource requirements;
• Pre-existing developments in terms of receiver signal processing cores;
• Flexibility (architecture upgradeability with minimum HW impact).
An overview of these trade-offs as well as the qualitative analysis carried out in the scope of the project are presented in the next sections.
It should be noted that E5, being the most promising signal (in terms of accuracy and multipath robustness) and also the most demanding in terms of processing power and receiver complexity, was taken as reference for the definition of the receiver architecture (sometimes guiding decisions regarding the E1 signal processing architecture).
5.1. AltBOC Baseband Implementation Galileo is transmitting four AltBOC modulated signals in the E5 band [7]. Compared with other GNSS signals, this waveform is occupying a large bandwidth (about 51 MHz for the main lobes), showing excellent performance in terms of tracking accuracy and multipath robustness. As drawback, the receiver requires a considerable complexity increase to achieve full exploitation of the signal’s capabilities. Six different approaches/architectures were analysed:
• A Single Side-Band (SSB) tracking approach, in which the E5a and E5b sub-bands are processed independently (as BPSK(10) signals), and which fails to harvest the full potential of the AltBOC signal;
• Two AltLOC approaches (one with pilot tracking only and another one with pilot tracking plus data demodulation), which are an alternative to the AltBOC approach in which a linear sub-carrier is used instead of the digital AtlBOC sub-carrier;
• Two AltBOC approaches (one with pilot tracking only and another one with pilot tracking plus data demodulation);
• A full AltBOC approach (which also served as reference).
Table 1. AltBOC tracking techniques trade-off
Performance
Number of correlators per
channel (1)
Receiver Complexity Noise Multipath
SSB tracking 3 (real) Low Fair Fair
AltLOC pilot tracking 4 (real) High Good Good
AltBOC pilot tracking 3 (complex) Very High Good Very Good
AltLOC pilot tracking + SSB
data demodulation
Pilot - 4 (real)
Data - 1 (real) High + Good Good
AltBOC pilot tracking + SSB
data demodulation
Pilot – 3 (complex)
Data - 1 (real)
Very High + Good Very Good
AltBOC data tracking 3 (complex) Very High Good
1) Without bump-jumping
Table 1 shows a summary of the trade-of between the different architectures (the number of correlators is provided without including algorithms for false peak locking avoidance, e.g. bump jumping).
Taking into account that data demodulation is required for the navigation message recovery (needed for positioning and for corrections calculation), a technique which allows data demodulation is necessary, which excludes the pilot-only approaches.
Additionally, to track weak signals and/or to perform long integrations to improve measurement quality, pilot tracking is necessary, excluding data-only approaches. Therefore a pilot tracking approach which supports data demodulation shall be selected (the complexity increase of processing both pilot and data channels can be limited by including only 1 extra correlator for each data component).
To harvest the multipath mitigation potential of the AltBOC modulation, SSB tracking cannot be used, so the first approach is excluded.
Finally, to avoid different architectures for AltBOC and CBOC signals, the AltBOC approach is preferred w.r.t. the AltLOC one.
Taking all the above into account, the AltBOC pilot tracking + SSB data demodulation approach shall be selected for further analysis.
5.2. CBOC baseband implementation Galileo E1 OS baseband signalling is generated by a linear combination of BOC(1,1) and BOC(6,1) modulations on the data and pilot components [7]. The incoming signal can be correlated with a code replica modulated with the full CBOC waveform (matched filter), or with a BOC(1,1) approach that filters the BOC(6,1) high-frequency component. The matched filter CBOC demodulation takes benefit of the full capabilities of the transmitted waveform, obtaining a narrower correlation peak near the maximum value, which increases the tracking accuracy and multipath robustness of the receiver. The BOC(1,1) demodulation simplifies the receiver architecture, decreasing the required sampling frequency and, hence, the number of operations, but resulting in a wider correlation peak and a slight loss of power.
An alternative approach, the TM61 time-multiplexed approach [8], yields a tracking error performance similar to a BOC(1,1) approach, and a degradation of around 3dB with respect to an optimal CBOC demodulation. However, the receiver complexity is low and the behaviour under multipath environments is slightly worst than a CBOC matched filter approach.
Another approach, the Dual Correlator Technique, based on the fact that the CBOC sub-carrier is a linear combination of two BOC sub-carriers, precludes the need for multi-levelled sub-carrier synthesis (at the expense of using twice as many HW channels and a slightly more complex software, which would linearly combine their outputs) with little impact on the E1 tracking accuracy.
Table 2 shows a trade-of summary between the different possible architectures (the number of correlators is provided without including algorithms for CBOC false peak locking avoidance, e.g. bump jumping).
The techniques which provide the best tracking performance are the CBOC code replica approach and the Dual Correlator Technique (which simulates it in SW), the later requiring more hardware resources than the former. Although the complexity of the CBOC code replica approach is marked as High, assuming that the AltBOC pilot tracking + SSB data demodulation approach is also to be supported for E5 signal processing, the structures needed to support the CBOC approach will already be required (as well as the processing power to handle high BW signals). Therefore, this shall be the selected approach.
Table 2. CBOC tracking techniques trade-off
Performance
Number of correlators
per channel(1)
Receiver Complexity Noise Multipath
CBOC code replica 3 High Good Very Good
BOC(1,1) demodulation 3 Low Fair Fair
TM61 Tracking
Technique 3 High Fair/Good Good/Fair
Dual Correlator Technique
6 Medium Medium Good
1) Without bump-jumping
5.3. Additional Considerations An alternative to AltBOC processing is being analysed in which quantized (binary) sub-carriers are used instead of the exact (multi-levelled) AltBOC sub-carriers. A significant complexity decrease (in terms of HW resource requirements) can be achieved with little impact on the Auto-Correlation Function (ACF) peak shape for small delays (see Fig 7) and at the expense of a <20% degradation of the multipath robustness (see Fig. 8).
Further simplification can lead to an even greater decrease of HW resources at the expense of a 3dB processing loss if real sub-carriers are used instead of complex sub-carriers.
Should the binary sub-carrier approach be selected, the Dual Correlator technique for the E1 signal processing would also be a good candidate since it would preclude the need for multi-levelled sub-carrier synthesis (as discussed above).
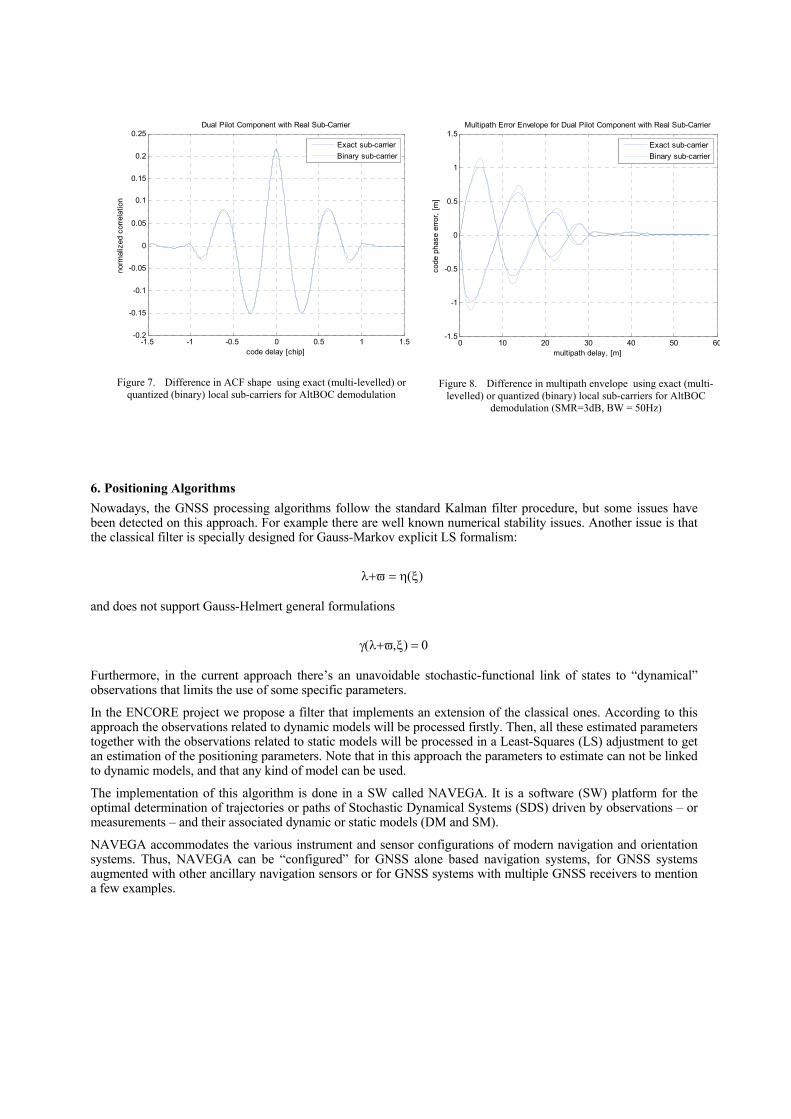
Figure 7. Difference in ACF shape using exact (multi-levelled) or quantized (binary) local sub-carriers for AltBOC demodulation
Figure 8. Difference in multipath envelope using exact (multi-levelled) or quantized (binary) local sub-carriers for AltBOC
demodulation (SMR=3dB, BW = 50Hz)
6. Positioning Algorithms Nowadays, the GNSS processing algorithms follow the standard Kalman filter procedure, but some issues have been detected on this approach. For example there are well known numerical stability issues. Another issue is that the classical filter is specially designed for Gauss-Markov explicit LS formalism:
λ+ϖ = η(ξ)
and does not support Gauss-Helmert general formulations
γ(λ+ϖ,ξ) = 0
Furthermore, in the current approach there’s an unavoidable stochastic-functional link of states to “dynamical” observations that limits the use of some specific parameters.
In the ENCORE project we propose a filter that implements an extension of the classical ones. According to this approach the observations related to dynamic models will be processed firstly. Then, all these estimated parameters together with the observations related to static models will be processed in a Least-Squares (LS) adjustment to get an estimation of the positioning parameters. Note that in this approach the parameters to estimate can not be linked to dynamic models, and that any kind of model can be used.
The implementation of this algorithm is done in a SW called NAVEGA. It is a software (SW) platform for the optimal determination of trajectories or paths of Stochastic Dynamical Systems (SDS) driven by observations – or measurements – and their associated dynamic or static models (DM and SM).
NAVEGA accommodates the various instrument and sensor configurations of modern navigation and orientation systems. Thus, NAVEGA can be “configured” for GNSS alone based navigation systems, for GNSS systems augmented with other ancillary navigation sensors or for GNSS systems with multiple GNSS receivers to mention a few examples.
-1.5 -1 -0.5 0 0.5 1 1.5-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
norm
aliz
ed c
orre
latio
n
code delay [chip]
Dual Pilot Component with Real Sub-Carrier
Exact sub-carrierBinary sub-carrier
0 10 20 30 40 50 60-1.5
-1
-0.5
0
0.5
1
1.5Multipath Error Envelope for Dual Pilot Component with Real Sub-Carrier
multipath delay, [m]
code
pha
se e
rror,
[m]
Exact sub-carrierBinary sub-carrier
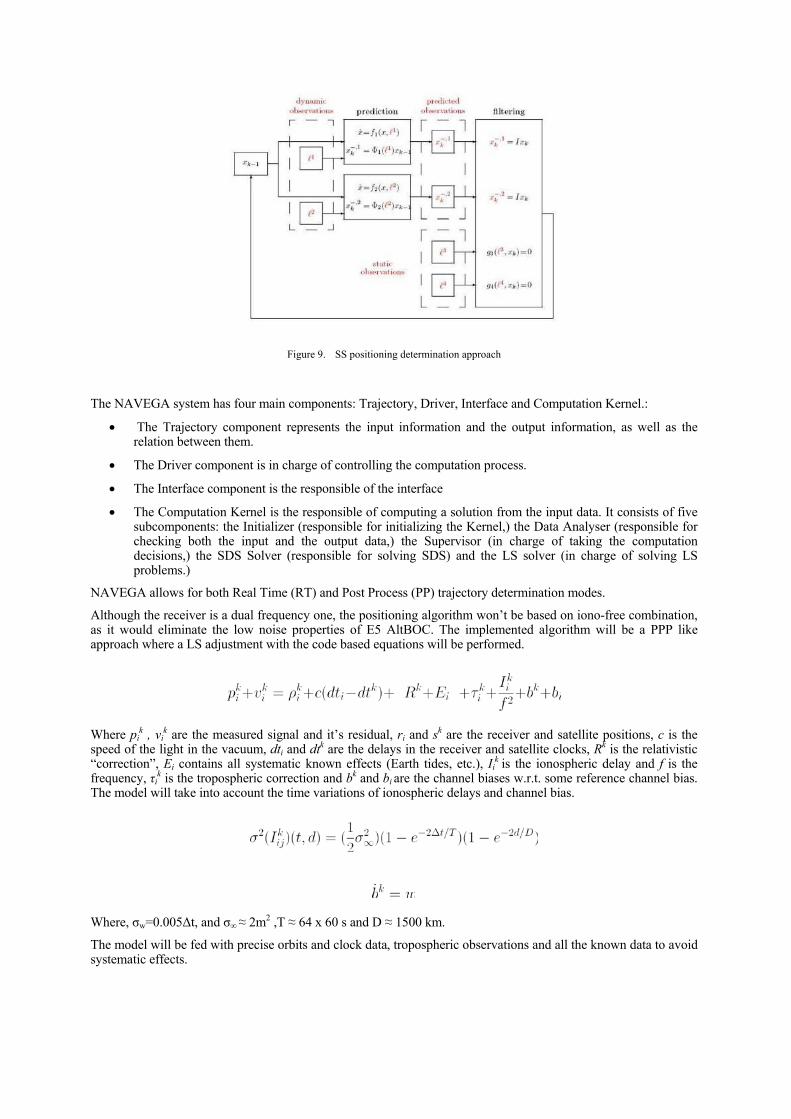
Figure 9. SS positioning determination approach
The NAVEGA system has four main components: Trajectory, Driver, Interface and Computation Kernel.:
• The Trajectory component represents the input information and the output information, as well as the relation between them.
• The Driver component is in charge of controlling the computation process.
• The Interface component is the responsible of the interface
• The Computation Kernel is the responsible of computing a solution from the input data. It consists of five subcomponents: the Initializer (responsible for initializing the Kernel,) the Data Analyser (responsible for checking both the input and the output data,) the Supervisor (in charge of taking the computation decisions,) the SDS Solver (responsible for solving SDS) and the LS solver (in charge of solving LS problems.)
NAVEGA allows for both Real Time (RT) and Post Process (PP) trajectory determination modes.
Although the receiver is a dual frequency one, the positioning algorithm won’t be based on iono-free combination, as it would eliminate the low noise properties of E5 AltBOC. The implemented algorithm will be a PPP like approach where a LS adjustment with the code based equations will be performed.
Where pik , vi
k are the measured signal and it’s residual, ri and sk are the receiver and satellite positions, c is the speed of the light in the vacuum, dti and dtk are the delays in the receiver and satellite clocks, Rk is the relativistic “correction”, Ei contains all systematic known effects (Earth tides, etc.), Ii
k is the ionospheric delay and f is the frequency, τik is the tropospheric correction and bk and bi are the channel biases w.r.t. some reference channel bias. The model will take into account the time variations of ionospheric delays and channel bias.
Where, σw=0.005∆t, and σ∞ ≈ 2m2 ,T ≈ 64 x 60 s and D ≈ 1500 km.
The model will be fed with precise orbits and clock data, tropospheric observations and all the known data to avoid systematic effects.

7. Conclusions As summary, ENCORE is developing an application for land management in the Brazilian context; a receiver prototype implemented on a FGPA based on the novel Galileo signal characteristics; a dedicated RF Front-end and antenna; and innovative signal processing; and positioning algorithms for surveying applications in Brazil.
Acknowledgment The ENCORE project is lead by DEIMOS Engenharia (Portugal) in partnership with: Institute of Geomatics (Spain), DEIMOS Space (Spain), University of Nottingham (UK), Universidade Estadual Paulista (Brazil), Orbisat da Amazônia Indústria e Aerolevantamento (Brazil) with support from Prof. Dr. Silvio Barbin, Santiago & Cintra Importaçäo e Exportaçao Ltda (Brazil) and Editora Mundo GEO ltda (Brazil).
References [1] Brazilian Law no. 10.267, of the 28th of August of 2001. Changes provisions of Laws 4.947, of the 6th of April 1966, 5.868, of the 12th
of December of 1972, 6.015, of the 31st of December of 1973, 6.739, of the 5th of December of 1979, 9.393, of the 19th of December of 1996, and addresses other provisions. Available at http://www.planalto.gov.br
[2] Brazilian Law Decree no. 4.449, of the 31st of October of 2005. Provides new wording for the provisions of Decree no. 4.449, of the 30th of October of 2002, and addresses other provisions. Available at http://www.planalto.gov.br
[3] Brazilian Ordinance/INCRA/P/N°/ 954, of 13th November 2002. Published : D. O. 222, 18 of November 2002, section 1 and BS no. 46 of 18 of November 2002. Available at www.incra.gov.br
[4] INCRA Technical Norm for Geo-referencing of Rural Property, 2nd edition, February 2010, Available at http://www.incra.gov.br/portal/images/arquivos/norma_tecnica_georreferenciamento.pdf
[5] Brazilian Law Decree nº 5.570/05, 31st of October 2005. Gives a new redaction to Decree n°4.449, de 30th October 2002. Available at http://www.planalto.gov.br
[6] INCRA. http://200.252.80.40/credencia/Lista2.asp, 2010 [7] Galileo Open Service Signal-in-Space ICD (SISICD), Draft 1, February 2008 [8] O Julien, C. Macabiau, “1-Bit Processing of Composite BOC (CBOC) Signals and Extension to Time-Multiplexed BOC (TMBOC)
Signals, ION NTM 2007, San Diego, CA.