Ejercicios Ing. Mecanica Mecatronica - 2011-2
96
EJERCICIOS DE APLICACIÓN DE LA ASIGNATURA 1000001, 1000003 y 1000004 (código de la asignatura) PARA EL(LOS) PROGRAMA(S) DE INGENIERÍA MECÁNICA Y MECATRÓNICA Realizados por: Santiago Echeverri González 285482 Wilmar Rodriguez Herrera 133180 Universidad Nacional de Colombia Sede Bogotá Segundo semestre de 2011 ASIGNATURA: MATEMÁTICAS BÁSICAS
Transcript of Ejercicios Ing. Mecanica Mecatronica - 2011-2

EJERCICIOS DE APLICACIÓN DE LA ASIGNATURA
1000001, 1000003 y 1000004 (código de la asignatura) PARA EL(LOS) PROGRAMA(S) DE INGENIERÍA MECÁNICA Y MECATRÓNICA
Realizados por: Santiago Echeverri González 285482 Wilmar Rodriguez Herrera 133180
Universidad Nacional de Colombia Sede Bogotá
Segundo semestre de 2011
ASIGNATURA: MATEMÁTICAS BÁSICAS

1. TEMA: Operaciones Trigonométricas, aplicación en Mecánica de Material Objetivos:
• Mostrar con un ejercicio sencillo de trigonometría al estudiante una aplicación avanzada de Mecánica de Materiales
• Introducir conceptos de resistencia de materiales para dar al estudiante una idea de cómo aplicar operaciones sencilla en trabajo de ingeniería
Aplicación o contextualización para el programa curricular: El cálculo de circulos de Mohr es una tarea común cuando se realizan trabajos de resistencia de materiales cuando se buscan los esfuerzos principales(de mayor y menos magnitud) sobre un elemento cualquiera. Para hallar estos valores se hace uso de una aplicación geométrica básica. Este proceso resulta de interés tanto para estudiantes de Ing. Mecánica como Ing. Mecatrónica
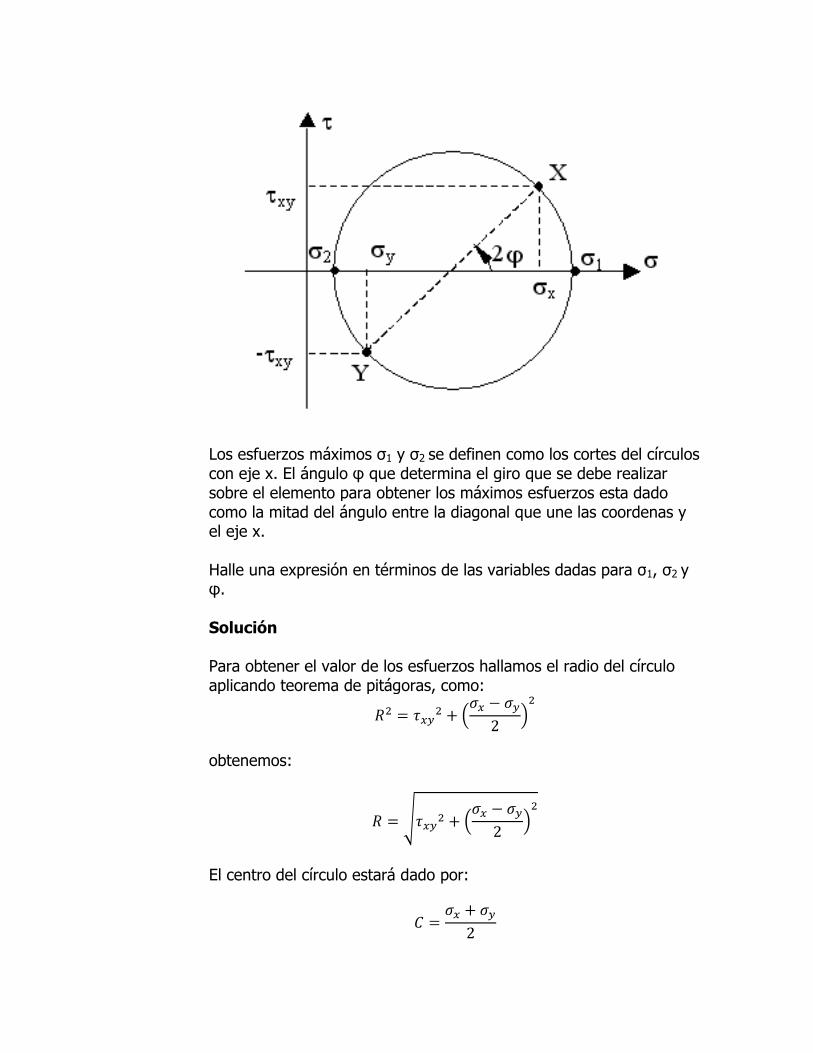
a. Nombre del problema 1 Representación del Circulo de Mohr Explicación del problema El circulo de Mohr consiste en una técnica para hallar los mayores esfuerzos normales y cortantes sobre un elemento mecánico que es sometido a fuerzas varias. Para el dibujo de este círculo se parte de los valores de esfuerzo en las direcciones σx y σy, y los efuerzos cortantes τxy. Se dibujan en un plano las coordenadas (σx, τxy) y (σy, -τxy) y se dibuja un círculo que pase por estos dos puntos con centro en el eje x. Como se muestra en la figura a continuación.
Los esfuerzos máximos con eje x. El ángulo sobre el elemento para obtener los máximos esfuerzos esta dado como la mitad del ángulo entre la diagonal que une las coordenas y el eje x. Halle una expresión en términos de las variables φ. Solución
Para obtener el valor de los esfuerzos hallamos el radio del círculo aplicando teorema de pitágoras, como:
obtenemos:
El centro del círculo estará dado por:
Los esfuerzos máximos σ1 y σ2 se definen como los cortes del círculos con eje x. El ángulo φ que determina el giro que se debe realizar sobre el elemento para obtener los máximos esfuerzos esta dado como la mitad del ángulo entre la diagonal que une las coordenas y
Halle una expresión en términos de las variables dadas para σ
Para obtener el valor de los esfuerzos hallamos el radio del círculo aplicando teorema de pitágoras, como:
El centro del círculo estará dado por:
se definen como los cortes del círculos que determina el giro que se debe realizar
sobre el elemento para obtener los máximos esfuerzos esta dado como la mitad del ángulo entre la diagonal que une las coordenas y
dadas para σ1, σ2 y
Para obtener el valor de los esfuerzos hallamos el radio del círculo

Los esfuerzos máximos estaran dados entonces por:
El ángulo φ lo podemos definir a partir de la tangente como:
b. Nombre del problema 2
Representación del Circulo de Mohr Explicación del problema De acuerdo a la explicación dada en el punto anterior determine los esfuerzos máximos y el ángulo de giro para σx=60Mpa, σy=20Mpa y τxy=30Mpa. Asegúrese de trazar el circulo de Mohr. Solución Trazamos el círculo de Mohr para los valores dados y obtenemos:
Reemplazando los valores en las expresiones tenemos:

Para el ángulo tenemos:

2. TEMA: Tipos de funciones y respuesta temporal de sistemas Objetivos:
• Favorecer al entendimiento de los estudiantes de cómo se debe esperar que resulte la gráfica de una función de acuerdo a las funciones que la componen
• Dar una idea inicial de los comportamientos comunes de sistemas de tipo mecánico, eléctrico entre otros.
Aplicación o contextualización para el programa curricular: La respuesta de sistemas en el dominio temporal esta asociado directamente a la representación de estos mismos como ecuaciones diferenciales. Este comportamiento resulta muy similar en sistemas de tipo mecánico y eléctrico en algunos casos. Por esto resulta interesante estudiar este comportamiento e invitar al estudiante a reflexionar sobre como los elementos del sistema modifican su comportamiento
a. Nombre del problema 1 Respuesta subamortiguada de un sistema de Segundo Orden Explicación del problema En la naturaleza son comunes sistemas cuyo comportamiento ante una determinada entrada es de una forma oscilatoria atenuada de manera exponencial. Este comportamiento es común en circuitos RLC, sistemas Masa-Resorte-Amortiguador entre otros. La forma general de este comportamiento es:
donde:
Suponga valores K, A y iguales a 1. Gráfique la ecuación para =0.2,0.5 y 0.8. Como altera este valor la respuesta del sistema, haga una hipótesis de que significa este valor para el mismo. Solución A continuación se presentan las diferentes gráficas, como se puede observar a medida que aumenta el valor de , la respuesta se ve más amortiguada, es decir que tiende a sobrepasar menos el valor final.


b. Nombre del problema 2
Respuesta subamortiguada de un sistema de Segundo Orden Explicación del problema Para el sistema presentado en el punto anterior ahora asuma un valor constante de =0.7 y gráfique para . Como altera este valor la respuesta del sistema, haga una hipótesis de que significa este valor para el mismo. Solución A continuación se presentan las diferentes gráficas, como se puede observar a medida que aumenta el valor de , la respuesta tiende a comprimirse en eje horizontal, de cierta forma se puede decir que aumental la frecuencia de la oscilación percibida.


ASIGNATURA: CÁLCULO DIFERENCIAL
3. TEMA: Límites y su aplicación en Sistemas de Control Objetivos:
• Dar al estudiante un vistazo del área de los sitemas de control y las funciones de transferencia como representaciones de los mismos
• Mostrar una aplicación sencilla pero importante del tema de límites como una operación matemática relevante para ciertos problemas en ingeniería
Aplicación o contextualización para el programa curricular: Los problemas a continuación se relacionan con el área de los sistemas de control y en general el análisis de sistemas dinámicos. Estas áreas son de vital importancia en el desarrollo de la carrera de Ing. Mecatrónica y resulta de interés también para ingenieros mecánicos que requieren una visión ampliada de su carrera a técnicas de control de sistemas y mecanismos.
a. Nombre del problema 1 Determinación de errores de estado estacionarios. Explicación del problema En el área de sistemas de control se utilizan las llamadas funciones de transferencia como una forma para representar un sistema de manera simplificada de modo que si definimos la función de tranferencia de un sistema como G(s), la salida de ese sistema ante una determinada señal de entrada R(s) estará dada por:
Para estas funciones se define el error de estado estacionario de posición (es decir la diferencia entre la salida esperada y salida obtenida) por la expresión:
donde:
determinar el para las funciones:

a) , b)
Solución a) Calculamos el limite para la función dada:
El error está entonces dado como:
b) Calculamos el limite para la función dada:
El error está entonces dado como:
b. Nombre del problema 2 Determinación de sistema prototipo para error 0 Explicación del problema Dada la definición dada en el problema anterior del error de estado estacionario de posición para un sistema determine para el sistema prototipo de la forma:

¿Qué características deben tener las constantes del sistema para que el error de estado estacionario sea igual a 0? Solución Para poder hacer que el error de estado estacionario sea cero, tiene que cumplirse en este caso que:
Es decir que Kp tienda a ser infinitamente grande. Para que esto se cumpla debe darse que
Para cumplir esta condición en particular existen dos posibilidades, la primera es que K tienda a o que el denominador se haga igual a cero una vez que se evalúa el limite. Ya que no se puede tomar la constante como infinita nos queda exclusivamente la segunda opción. Para que al calcular el límite en el denominador, se debe cumplir exclusivamente que a0 sea igual a cero, ya que todos los otras factores son multiplicados por una potencia de s diferente de cero, lo que hace que tiendan a cero al reemplazarse el límite. De esta manera vemos como es necesario que el termino a0 sea nulo para llegar a tener el resultado deseado. Esto en teoría de control se conoce como que el sistema tiene un integrador, es decir que esta multiplicado por un término del tipo 1/s el cual asegura que el error sea 0.

ASIGNATURA: ALGEBRA LINEAL
4. TEMA: Descripción y operaciones de vectores, aplicación en estática Objetivos:
• Dar una idea al estudiante de cómo aplicar los conocimientos obtenidos sobre la definición de los vectores y su uso en la solución de problemas de mecánica
• Romper la brecha entre el conocimiento teórico sobre los vectores dado en la asignatura de Algebra Lineal y aterrizarlo para una aplicación directa en el área de la ingeniería
Aplicación o contextualización para el programa curricular: En el área de estática la representación de diferentes elementos como vectores es imprecindible para el entendimiento y desarrollo de problemas del área. Sin embargo en el área de Algebra Lineal no se hace evidente la explicación de cómo se traducen las operaciones vectoriales en la práctica. Por esto es importante contextualizar el conocimiento y su aplicación
a. Nombre del problema 1 Representación de fuerzas en forma de vectores y componentes Explicación del problema En el desarrollo de problemas en el área de estática es común usar la representación de vectores en forma de cosenos directores y su magnitud. Esta representación de la forma:
donde F es la magnitud de la fuerza e i,j y k vectores unitarios en las direcciones x, y y z respectivamente. Los cosenos directores, que juntos representan un vector unitario en una dirección dada, se hallan dividiento la componente en cierto eje de un vector dado en esta dirección entre la magnitud del vector. Determine para los siguientes casos el vector unitario en la dirección dada: a) Vector que va de (0,2,-1) a (5,-4,0) b) Vector que va de (3,1,0) a (-1,2,8) Solución
a) Para halla las componentes del vector en cada caso hacemos la resta cartesiana de los vectores que van de 0 a los puntos determinados.
Para halla el vector unitario dividimos entre la norma del vector
b) Siguiendo el mismo procedimiento
Para halla el vector unitario dividimos entre la norma del vector
b. Nombre del problema 2 Sumatoria de fuerzas vectoriales Explicación del problema A partir de la estructura mostrada en la figura y usando la representación de vectores presentada en el punto anterior determine la sumatoria de fuerzas en el punto A.(La sumatoria de fuerzas se halla como la suma vectorial de todas las fuerzas aplicadas)

Solución La representación de los vectores en forma de cosenos directores se obtiene de la misma forma que en el punto anterior, tendremos entonces:
La suma vectorial de las fuerzas da como resultado:
c. Nombre del problema 3 Calculo vectorial de momentos Explicación del problema

El momento de una fuerzas con respecto a un punto (la tendencia a girar que la fuerza genera) se determina como el producto cruz entre el vector r de posición (que va de el punto de giro al punto de aplicación de la fuerza) y el vector F de la fuerza. De modo que:
Para la figura a continuación calcule el momento de F1con respecto al punto A.
Solución Para poder determinar estos momentos debemos hallar el vector de distancia y la dirección del vector de fuerza para poder realizar la operación. El vector de distancia partiendo de A y llendo al punto donde se aplica la fuerza es:
El vector de fuerza se puede representar como:
Ahora procedemos a realizar la operación de producto cruz como:

d. Nombre del problema 4 Calculo vectorial de momentos con respecto a un eje Explicación del problema El momento de una fuerzas con respecto a un eje (la tendencia a girar que la fuerza genera alredor del eje dado) se determina como la proyección de el momento generado sobre un punto de ese eje sobre el mismo. Esta operación se realiza como:
Donde es un vector unitario en la dirección del eje y el momento calculado como se presentó en el problema 3. Calcule el momento alrededor del eje cuyo vector unitario es Solución Ya que en el problema anterior se halló el momento alrededor de A que es un punto sobre el eje podemos hallar el momento alrededor del eje haciendo simplemente el producto punto.(Multiplicando los terminos de x, y y z respectivamente)
Bibliografía [1] Gere James M, Mecánica de Materiales, Editorial Thomson, 6ta Edición, México, 2006, Pág 483 - 394
[2] Beer, Ferdinand y Johnston, Rusell Mecánica Vectorial Para Ingenieros: Dinámica, Editorial Mc Graw Hill, México, 2007, Págs, 609-612 [3] Kuo, Benjamin, Sistemas de Control Automático, Editorial Prentice Hall, 7ª Edición, México, 1996 [4] Ogata, Katsuhiko, Ingeniería de Control Moderna, Editorial Pearson, 3ª Edición, México, 1998 [5] Beer, Ferdinand y Johnston, Statics and Mechanics of Materials, Editorial Mc Graw Hill, USA, 2011, Págs, 60-85

ALGEBRA LINEAL
Ejercicio 11 Suma de vectores
Aplicacion o contextualizacion en igenierıa mecanica y mecatronicaAplicar el concepto de vectores a problemas fısicos como este ayudara al estudiante a tener un mejor ren-dimiento en cursos posteriores de fısica que deben tomar los estudiantes de estas carreras, este problemamuestra el uso practico de la suma de vectores aplicados a los conceptos de fuerza y torque que todoestudiante de estas carreras debe aprender a manejar.
El problema
Sobre una placa de madera se clavan unas puntillas de las cuales tira una cuerda con fuerzas:
F1 = 15i Kgf, F2 = (10i+ 10j) Kgf, F3 = (−10i+ 10j) Kgf, F4 = (−10i+ 10j) Kgf, F5 = −10j Kgf
Como se muestra en la figura 1.
OF1
F1
F5
F5
F3
F2
FR
F3 F2
FR
F4
F4
45◦
45◦
45◦
Figura 1: Figura para el problema 1.
Halle la fuerza resultante que actua sobre la placa. Use para ello el hecho de que todas las fuerzas sonvectores y se pueden sumar usando las reglas que debio ver en clase.

Solucion
La solucion grafica a este problema se ilustra en la figura 1, el vector rojo es la fuerza resultante, unasolucion analitica pude tambien ser obtenida, escribiendo la suma como:
FR = (15, 0) + (10, 10) + (−10, 10) + (−10, 10) + (0,−10)
= (15 + 10− 10− 10 + 0, 0 + 10 + 10 + 10− 10) = (5, 20) ≡ (5i+ 20j) Kgf
Esto quiere decir que el bloque sera acelerado en una direccion de 45◦ y con una fuerza neta de kFRk =√25 + 400 Kgf =
√425 Kgf ≈ 20.6 Kgf
Ejercicio 12 Determinantes y producto vectorial
Aplicacion o contextualizacion en igenierıa mecanica y mecatronicaAplicar el concepto de determinantes y producto vectorial a problemas fısicos como este ayudara al estu-diante a tener un mejor rendimiento en cursos posteriores de fısica que deben tomar los estudiantes deestas carreras, este problema muestra el uso practico del concepto de determinantes y producto vectorialaplicado a los conceptos de fuerza y torque que todo estudiante de estas carreras debe aprender a manejar.
El problema
Halle el torque generado por las fuerzas aplicadas al bloque de la figura 1. y con este torque la fuerzaresultante hallada en el problema 1 halle el punto donde la fuerza resultante deberia ser aplicado paraobtener este torque (Cada cuadrito en la figura 1 representa 0.1m).
Solucion
Sabemos que la expresion para hallar el torque viene dada por el producto vectorial:
τ = r × F
Entonces como el torque es un vector se puede sumar como tal, es decir que podremos obtener el torquetotal como:
τT =∑i
τi
recordemos que el producto cruz se puede expresar como el dterminante de la matriz 3×3:
τ = r × F =
∣∣∣∣∣∣i j krx ry rzFx Fy Fz
∣∣∣∣∣∣ = (ryFz − rzFy )i+ (rzFx − rxFz)j + (rxFy − ryFx)k
2

En este caso bidimensional no tenemos componentes en z ni de la posicion ni de la fuerza entonces:
τ = r × F = (rxFy − ryFx)k
El resultado de cada torque para nuestro caso es:
τ1 = 0, τ2 = ((2 ∗ 0.1m)(10Kgf)− (2 ∗ 0.1m)(10Kgf))k = 0
τ3 = ((−2 ∗ 0.1m)(10Kgf)− (2 ∗ 0.1m)(−10Kgf))k = 0
τ4 = ((−1 ∗ 0.1m)(10Kgf)− 0)k = (−1Kgf ·m)k τ5 = 0
Entonces el torque total es:
τT = (−1Kgf ·m)k = (RxFy −RyFx)k = −1 = 20x− 5y
=⇒ y = 4x+1
5
Entonces si en un punto sobre esta recta se aplica una fuerza igual a la fuerza total, producira un torqueigual altoruqe total producido por todas las fuerzas.
Ejercicio 13 Generalizacion a 3 dimensiones de los problemas 1 y 2 (Determinantes y producto vectorial)
Suponga ahora que tiene el mismo bloque que en el problema 1, pero ahora suponga que se aplican lasfuerzas:
F1 = (1, 1, 1)Kgf, en la posicion r1 = (1, 1, 1) · 0.1m, F2 = (2, 1, 2)Kgf, en la posicion r1 = (−3, 1, 1) · 0.1m,
Realizar el grafico de la situacion eneste caso es mas difıcil y no serıa muy claro, sin embargo si entendieronlos problemas 1 y 2 entonces no debe ser dificil hallar la fuerza total:
FT = (1, 1, 1) + (2, 1, 2) = (3, 2, 3)Kgf
y el torque:
τ1 = (1 · 1− 1 · 1)i+ (1 · 1− 1 · 1)j + (1 · 1− 1 · 1)k = 0
τ2 = τT = (1 · 2− 1 · 1)i+ (1 · 2− (−3)2)j + (−3 · 1− 1 · 2)k= (1, 8,−5)
3

Ejercicio 14 Ecuacion parametrica de una recta y punto de aplicacion de la fuerza resultante
Aplicacion o contextualizacion en igenierıa mecanica y mecatronicaLa generacion de ecuaciones parametricas de una recta en tres dimensiones es uno de los temas tratadosen el curso de algebra lineal este problema muestra como este tema puede ser aplicado para hallar lapocision de la fuerza resultante que se debe aplicar a un sistema fısico para que el efecto sea el mismoque el producido por una serie de fuerzas individuales. Los estudiantes de ingenierıa deben ver cursos demecanica vectorial y fisica 1 en los que estos desarrollos les seran muy utiles.
El problema
Para el ejercicio 3 si se aplica una fuerza igual a la fuerza total, en que punto debe ser aplicada para quegenere un torque igual al torque total es decir como remplazarıamos las dos fuerzas en distintos puntospor una sola.
SolucionDebmos igualar el torque total a la expresion general esto es:
(1, 8,−5) = (ryFz − rzFy )i+ (rzFx − rxFz)j + (rxFy − ryFx)k
Donde las componentes de la fuerza son las halladas como fueza total (3,2,3)Kgf entonces igualandocomponente a componente tenemos:
1 = 3y − 2z, 8 = 3z − 3x − 5 = 2x− 3y
y =1
3− 2
3t, x = t− 8
3
En donde se ha escogido como parametro a z (z≡t). Esto puede escribirse como la ecuacion parametricade una recta:
(t− 8
3,1
3− 2
3t, t
)Entonces si ubicamos la fuerza total en algun punto a lo largo de esta recta el efecto producido sera elmismo que el efecto producido por las dos fuerzas individuales que teniamos al principio.
Ejercicio 15 Suma de vectores y sistema lineal de ecuaciones
Aplicacion o contextualizacion en igenierıa mecanica y mecatronicaAplicar el concepto de vectores a problemas fısicos como este ayudara al estudiante a tener un mejor ren-dimiento en cursos posteriores de fısica que deben tomar los estudiantes de estas carreras, este problema
4

muestra el uso practico de la suma de vectores aplicados a los conceptos de fuerza y torque que todoestudiante de estas carreras debe aprender a manejar.
El problema
En la figura cual es la fuerza que la bara aplica a los puntos A y B
x y
m1gm2g
FF’
A B
L
m1
m2
Figura 2: Figura para el problema 5.
Las fuerzas que actuan sobre la barra se muestran en la figura, entonces como sabemos que la barra estaen reposo, podemos escribir:
∑F = 0 =⇒ F + F ′ −m1g −m2g = 0∑τ = 0 =⇒ −m1gx−m2g(L− y) + F ′L = 0
En donde sumamos solo las magnitudes y el signo es puesto de acuerdo a los vectores mostrados en lafigura. Entonces tenemos un sistema lineal de ecuaciones donde las incognitas son F y F’ (recordemosque las correspondientes fuerzas de reaccion a estas fuerzas seran la que se aplica a los puntos A y B dela figura) se encuentra que:
5

F ′ =m1gx+m2g(L− y)
L
F =m1g(L− x)−m2gy
L
MATEMATICAS BASICAS Y CALCULO DIFERENCIAL
Ejercicio 16 Fncion inversa
Aplicacion o contextualizacion en igenierıa mecanica y mecatronicaEl concepto de funcion inversa es ensenado de forma muy abstracta en los cursos de matematicas, esteproblema ilustra de manera sencilla como esto puede ser aplicado a una simple conversion de escalas detemperatura que el estudiante de estas carreras debera aprender en cursos ulteriores de fısica
El problema
Si la temperatura en grados centigrados viene dada por:
TC =5
9(TF − 32◦F )
Entonces diga si esto es una funcion, si es uno a uno, si es sobreyectiva y si se puede halle su inversa yobtenga una expresion que le permita hallar la temperatura en grados farenheit si conoce la temperaturaen grados centigrados.
Solucion
La ecuacion es simplemente una recta ası que a cada valor de temperatura en ◦ F le asigna un valorde temperatura en ◦ C y viceversa lo primero quiere decir que la funcion es sobreyectiva y esto juntocon lo segundo asegura que la funcion es uno a uno y entonces podemos hallar su inversa, esto se logradespejando TF esto es:
TF =9
5TC + 32◦F
Y con esta expresion podemos hallar la temperatura en grados farenheit si conoce la temperatura engrados centigrados.
Ejercicio 17 Ecuacion de estado y funciones
6

Aplicacion o contextualizacion en igenierıa mecanica y mecatronicaEl concepto de funciones puede ser aplicado a gran cantidad de problemas fısicos los problemas 7 8 9 y10 ilustran esto
El problema
La ecuacion de estado para un gas ideal esta dada por:
PV = NKBT
En donde N es el numero de moleculas del gas y KB es la constante de Boltzman, P, V y T son la presionvolumen y temperatura del gas, describa como se comporta la temperatura y presion de un gas cuandoencerramos el gas en un contenedor de forma tal que su volumen sea siempre el mismo.
Solucion
Como el gas esta encerrado el numero de moleculas no cambia y ademas el volumen es constante entoncesla relacion es:
P = AT Con A una constante
Que no es mas que la ecuacion de una recta que como dijmos en el ejercicio anterior es una funcion unoa uno.
Ejercicio 18 Ecuacion de estado y funciones
El problema
Describa como se comporta la presion y el volumen de un gas cuando es encerrado en un recipiente hechocon paredes adiabaticas.
Solucion
Una pared adiabaticas no permitira que la temperatura del gas cambie, ası las cosas la relacion entre lapresion y el volumen sera:
P =A
V
La grafica de una ecuacion como esta se muestra en la Figura 3.
7

0
1
2
3
4
5
0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
Pre
sion
(U
.A.)
Volumen (U.A.)
P = A/V
Figura 3: Figura para el problema 8.
De esta ecuacion cabe destacar valores que aunque tienen un sentido unicamente matematico, bien sonla base de muchos ejercicios y estos valores son:
lımV→∞
P = 0, lımV→0
P → ∞
Ejercicio 19 Funcion exponencial y circuitos RC
Aplicacion o contextualizacion en igenierıa mecanica y mecatronicaLa funcion exponencial tiene propiedades matematicas interesantes que se ilustran en este caso con ladescarga de un cirucito RC, tema que es de interes y utilidad para estudiantes de ingenierıa mecatronica,los ejercicios 9 y 10 ilustran tratan esto.
El problema
Teniendo en cuenta que en el proceso de descarga, la carga en un condensador como funcion del tiempopara un circuito RC viene dada por:
Q(t) = Q0 exp(−t/τ) con τ = RC
Cuanto tiempo ha de transcurrir para que la carga se reduzca a la mitad?
Solucion
8

Basta igualar la expresion al valor deseado y despejar el tiempo que llamaremos T1/2:
1
2Q0 = Q0 exp(−t/τ) =⇒ 2 = exp(T1/2/τ) =⇒ ln(2) =
t1/2τ
=⇒ t1/2 = τ ln(2)
t = τ ln(2) =⇒ Q = Q0/2
Ejercicio 20 Funcion exponencial y circuitos RC
El problema
Tiene el mismo problema del ejercicio 9. Despues de transcurrir un tiempo t = τ cuanto vale la cargade un condensador? compare ahora con una grafica de la funcion exponencial los tiempos y las cargashalladas en los problemas 9 y 10.
Solucion
Primero hallamos el valor pedido para esto simplemente reemplazamos en la ecuacion para la carga enfuncion del tiempo:
Q = Q0 exp(−τ/τ) =⇒ Q = Q0/e
t = τ =⇒ Q = Q0/e ≈ 0.37Q0
El hecho que la carga tenga un valor de 0.37Q0 quiere decir que la carga ha disminuido a un 63% de suvalor inicial de forma tal que ahora solo queda el 37%. En la figura se muestran los valores hallados enlos problemas 9 y 10.
9
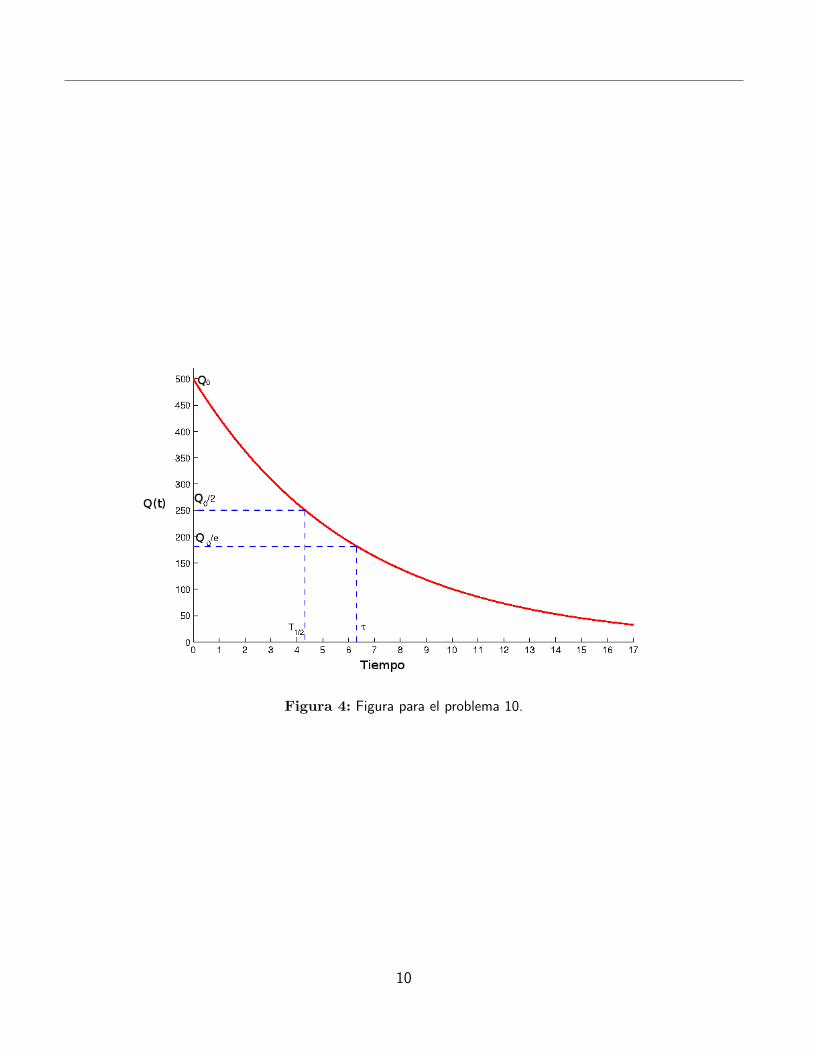
Figura 4: Figura para el problema 10.
10

EJERCICIOS DE APLICACIÓN DE LAS ASIGNATURAS 1000001, 1000003 y 1000004 PARA LOS PROGRAMAS DE
INGENIERÍA MECÁNICA Y MECATRÓNICA
Realizados por: Santiago Echeverri González 285482 Wilmar Rodriguez Herrera 133180
Universidad Nacional de Colombia Sede Bogotá
Segundo semestre de 2011
ASIGNATURA: MATEMÁTICAS BÁSICAS

1. TEMA: Criterio de Estabilidad de Sistemas Routh-Hurwitz Objetivos:
• Hacer uso de temáticas de asignaturas avanzadas para mostrar la aplicación y la importancia del trabajo con polinomios y sus raíces
• Introducir conceptos de ténicas usadas en las asignaturas de control y sistemas dinámicos que requieren de trabajo matemático básico
Aplicación o contextualización para el programa curricular: En la teoría de control y en si de sistemas dinámicos el criterio de Routh Hurwitz se utiliza como una herramienta clave para la determinación de la estabilidad de sistemas a partir de un sencillo procedimiento. Es así como esta técnica ampliamente usada por los estudiantes de Ing. Mecatrónica y los estudiantes de Ing. Mecánica interesados en el área de control puede ser presentada en un ejercicio sencillo de aplicación donde también se evidencia el trabajo con polinomios y sus raíces.
a. Nombre del problema 1 Criterio de Routh-Hurwitz, raíces de polinomios Explicación del problema En el área de sistemas de control se utilizan las llamadas funciones de transferencia como una forma para representar un sistema de manera simplificada de modo que si definimos la función de tranferencia de un sistema como G(s), la salida de ese sistema ante una determinada señal de entrada R(s) estará dada por:
Y(s)=G(s)R(s) El criterio de Routh Hurwitz permite determinar si un sistema es estable de acuerdo al denominador de la función G(s). Se dice que la función será estable si el polinomio del denominador no tiene ninguna raíz en el semiplano derecho (positiva, mayor o igual a cero). El polinomio será de la forma:[7]
El criterio de Routh Hurwitz parte de un arreglo particular en el cual se presentan los coeficientes del polinomio del denominador de modo:

donde
Se dice que el sistema es estable si no hay cambios de signos en la primera columna. Supóngase que el polinomio característica de un sistema es de la forma:
Determine los valores de k para los cuales el sistema sería estable de acuerdo al criterio de Rout Hurwitz Solución
Para poder solucionar el problema partimos de la definición del arreglo de Routh-Hurwitz:
Cálculamos los elementos faltantes:

Partiendo de lo obtenido podemos aplicar la ley de estabilidad definida en el criterio. Se dice que el sistema será estable solo si no hay cambios de signo en la primera columna. Ya que el primer valor es 1 positivo entonces tendremos que asumir que todo los valores de la primera columna tendrán que ser mayores a 0 para que se cumplan todas las condiciones. Hallamos entonces el rango de k válido para cada elemento. 1)
2)
3) Si hacemos la intersección de los conjuntos obtenidos obtenemos que el rango válido para k será:
2. TEMA: Definición Matemática de Recorridos de Máquinas
Objetivos: • Presentar un problema avanzado de diseño en ingeniería en el cuál se hace
necesario remontarse a conocimiento de matemáticas básicas. • Aplicar las funciones trigonométricas y buscar en el estudiante una mirada
analítica y propositiva frente a un problema de ingeniería.
Aplicación o contextualización para el programa curricular: En el ejercicio de la ingeniería moderna tanto Mecánica como Mecatrónica, es común encontrar maquinaria la cual debe realizar recorridos previamente definidos en un ordenador. Es importante para el ingeniero poder saber claramente como programar esta maquinaria para la realización de esto mismo teniendo en cuenta las limitaciones y posibilidades que presenta las interfaces computacionales. De acuerdo a esto se plantea

este problema donde se busca que el estudiante asimile los procesos de definición de estos trazados a partir de una definición matemática clara.
a. Nombre del problema 1Definición del recorrido de un sistema de Control Númerico Controlado Explicación del problema En el trabajo con una ruteadora CNC se desea que está pueda dibujar el círculo de la figura a continuación. El círculo, está descrito por una serie de puntos loscuales la máquina debe alcanzar progresivamente una tras otro. Se requiere encontrar una forma general para hallar el ángulo de desplazamiento para cada movimiento, teniendo en cuenta que este proceso se realiza en un computador el cuál maneja datos de matrigonométricas y analice que dificultades podría tener la máquina en su ejecución de acuerdo a la función dada.
Solución En cada caso la dirección del movimiento depende del punto en el que se encuentre la máquina y el punto al cuál ira exclusivamente y estará dada por la relación de dirección entre los puntos como se ve en la figura.
este problema donde se busca que el estudiante asimile los procesos de definición de estos trazados a partir de una definición matemática clara.
Nombre del problema 1 inición del recorrido de un sistema de Control Númerico Controlado
Explicación del problema
En el trabajo con una ruteadora CNC se desea que está pueda dibujar el círculo de la figura a continuación. El círculo, está descrito por una serie de puntos loscuales la máquina debe alcanzar progresivamente una tras otro. Se requiere encontrar una forma general para hallar el ángulo de desplazamiento para cada movimiento, teniendo en cuenta que este proceso se realiza en un computador el cuál maneja datos de manera discreta. Halle este ángulo a partir de funciones trigonométricas y analice que dificultades podría tener la máquina en su ejecución de acuerdo a la función dada.
En cada caso la dirección del movimiento depende del punto en el que se encuentre la máquina y el punto al cuál ira exclusivamente y estará dada por la relación de dirección entre los puntos como se ve en la figura.
este problema donde se busca que el estudiante asimile los procesos de definición de
inición del recorrido de un sistema de Control Númerico Controlado
En el trabajo con una ruteadora CNC se desea que está pueda dibujar el círculo de la figura a continuación. El círculo, está descrito por una serie de puntos los cuales la máquina debe alcanzar progresivamente una tras otro. Se requiere encontrar una forma general para hallar el ángulo de desplazamiento para cada movimiento, teniendo en cuenta que este proceso se realiza en un computador
Halle este ángulo a partir de funciones trigonométricas y analice que dificultades podría tener la máquina en su
En cada caso la dirección del movimiento depende del punto en el que se encuentre la máquina y el punto al cuál ira exclusivamente y estará dada por la

Se puede definir entonces el ángulo de desplazamiento de la máquina como:
Se podría hacer la
Es preciso entonces revisar la función arcotangente y su continuidad para evaluar la validez de la misma.
En la gráfica observamos como la función arcotangente tiene dominio de todos los reales sin embvalores extremos no se encontrarán y por lo tanto si la máquina fuera a hacer un movimiento en dirección vertical tanto hacia arriba como hacia abajo el programa computacional fallaría al no poder calcentonces otra función arcotangente la cual tenga en cuenta estas discontinuidades. Si proponemos que la función sea en función de cuenta que: cuando x es cero, es decir el movimiento es vertical por lo tanto la función no esta definida, el ángulo en este caso será
hacia arriba y
Se puede definir entonces el ángulo de desplazamiento de la máquina como:
Se podría hacer la relación con la función inversa:
Es preciso entonces revisar la función arcotangente y su continuidad para evaluar la validez de la misma.
gráfica observamos como la función arcotangente tiene dominio de todos los reales sin embargo su rango es , esto quiere decir que estos valores extremos no se encontrarán y por lo tanto si la máquina fuera a hacer un movimiento en dirección vertical tanto hacia arriba como hacia abajo el programa computacional fallaría al no poder calcula este ángulo. Se propone entonces otra función arcotangente la cual tenga en cuenta estas discontinuidades.
Si proponemos que la función sea en función de x y y tendremos que tener en cuenta que: cuando x es cero, es decir el movimiento es vertical por lo tanto la función no esta definida, el ángulo en este caso será para movimiento
hacia abajo. Definimos la nueva función como:
Se puede definir entonces el ángulo de desplazamiento de la máquina como:
Es preciso entonces revisar la función arcotangente y su continuidad para
gráfica observamos como la función arcotangente tiene dominio de todos , esto quiere decir que estos
valores extremos no se encontrarán y por lo tanto si la máquina fuera a hacer un movimiento en dirección vertical tanto hacia arriba como hacia abajo el
ula este ángulo. Se propone entonces otra función arcotangente la cual tenga en cuenta estas
tendremos que tener en cuenta que: cuando x es cero, es decir el movimiento es vertical por lo tanto la
para movimiento
hacia abajo. Definimos la nueva función como:

ASIGNATURA: CÁLCULO DIFERENCIAL
3. TEMA: Diagramas de Momento y Cortante en Vigas Objetivos:
• Introducir al estudiante en temáticas muy relevantes de la carrera en el área de estática mediante un ejercicio sencillo de aplicación
• Generar en el estudiante una capacidad deductiva e intuitiva que le permita al estudiante interpretar los problemas y extraer información adicional de manera ágil.
Aplicación o contextualización para el programa curricular: Los diagramas de momento y cortante para vigas consisten una de las bases de formación tanto del Ing. Mecánica como Mecatrónico. Estos componen una parte importante y exigente de los programas curriculares por lo tanto es importante generar en el estudiante una aproximación a los problemas propios. En este ejercicio se realiza una aplicación de la derivada y así mismo se empieza a generar en el estudiante una idea a futuro de lo que es la integración para el desarrollo de una capacidad analítica.
a. Nombre del problema 1 Obtención de Diagramas de Momento y Cortante en Vigas por método gráfico Explicación del problema En el área de Estática es un ejercicio común el estudio de Vigas y los esfuerzos que los conforman. Estos esfuerzos constituyen principalmente el esfuerzo cortante y el momento flector a lo largo del elemento, los cuales son causados por la aplicación de cargas puntuales, cargas distribuidas y pares que lo afectan. En la práctica se utilizan normalmente los diagramas de esfuerzo cortante y momentos flector los cuales hacen referencia a la distribución de esfuerzos a lo largo de la viga. Estos diagramas cumplen una condición particular:
Donde M es el momento flector y V el esfuerzo constante. Esto implica que el segundo equivale a la derivada del primero con respecto a la distancia. De acuerdo a esto se busca que a partir del siguiente diagrama de momento se obtenga una aproximación gráfica del cortante. (Asuma el último tramo como una función parabólica)[5]

Solución Para poder obtener la gráfica de esfuerzo cortante, correspondiente a la derivada del momento podemos estudiar la gráfica por trozos. Como podemos observar los primeros tres tramos son funciones de primer orden cuya derivada o pendiente es una constante la cual se puede obtener como:
El último tramo al ser una función parabólica tiene como deriviada una recta la cual comienza con una derivada positiva y termina con dervada 0 (horizontal). La gráfica a continuación muestra la gráfica generada:
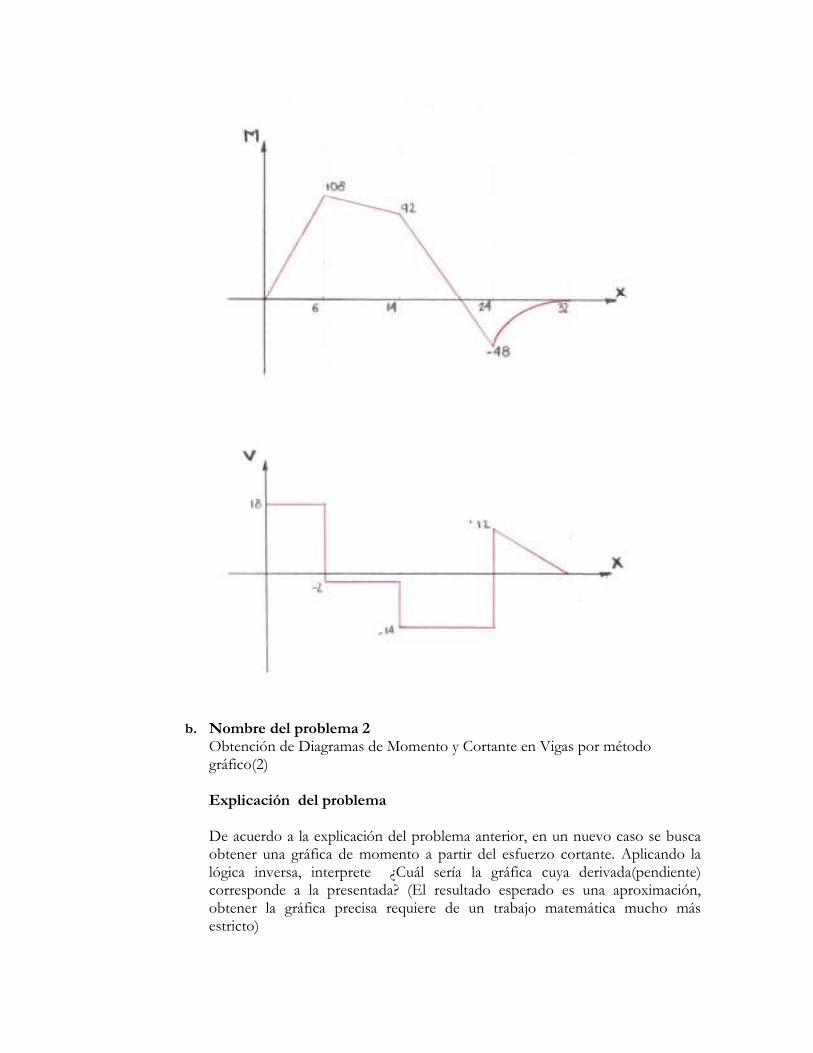
b. Nombre del problema 2 Obtención de Diagramas de Momento y Cortante en Vigas por método gráfico(2) Explicación del problema De acuerdo a la explicación del problema anterior, en un nuevo caso se busca obtener una gráfica de momento a partir del esfuerzo cortante. Aplicando la lógica inversa, interprete ¿Cuál sería la gráfica cuya derivada(pendiente) corresponde a la presentada? (El resultado esperado es una aproximación, obtener la gráfica precisa requiere de un trabajo matemática mucho más estricto)

Solución En este caso se debe realizar el proceso inverso, la gráfica nos indica de alguna manera la pendiente de la gráfica que se busca obtener en cada momento. De modo que se parte de una pendiente positiva relativamente grande la cual se reduce progresivamente hasta llegar al valor de 0 en x=4. En este punto la gráfica alcanza un máximo después del cuál la pendiente empieza a decrecer creciendo la pendiente negativamente. En x=6 la pendiente se mantiene negativa pero se hace cnstante haciendo esto que la gráfica de momento baje en línea recta.
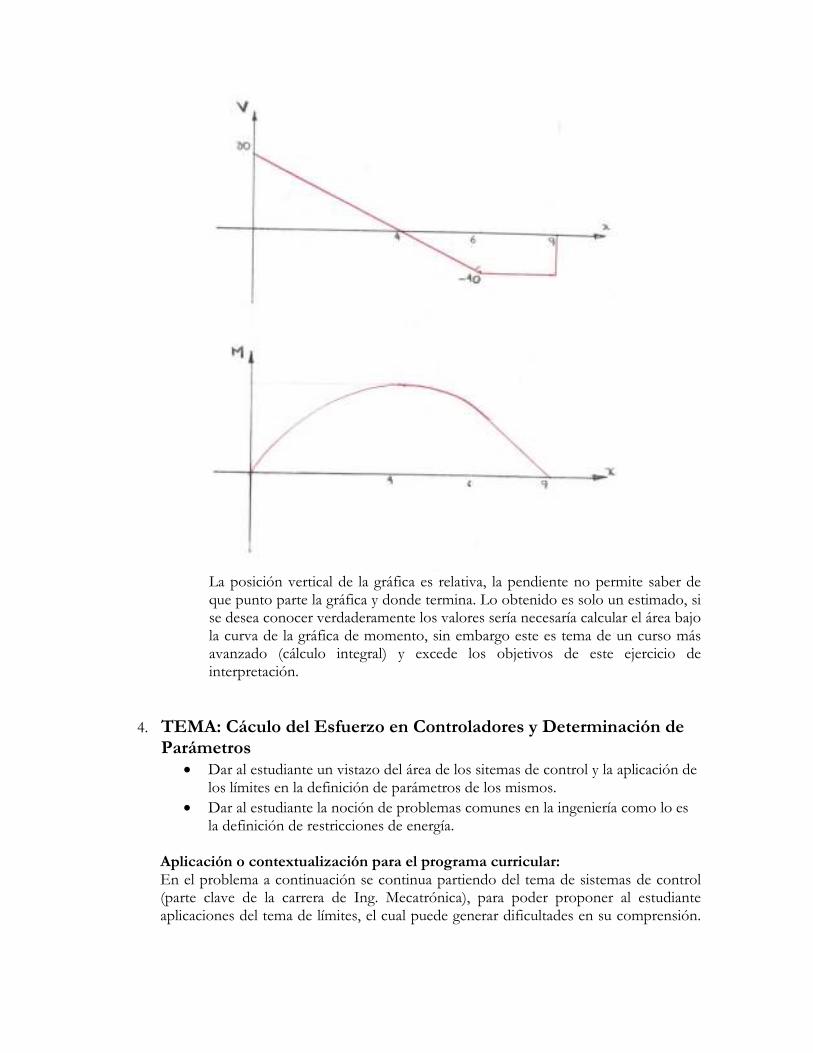
La posición vertical de la gráfica es relativa, la pendiente no permite saber de que punto parte la gráfica y donde termina. Lo obtenido es solo un estimado, si se desea conocer verdaderamente los valores sería necesaría calcular el área bajo la curva de la gráfica de momento, sin embargo este es tema de un curso más avanzado (cálculo integral) y excede los objetivos de este ejercicio de interpretación.
4. TEMA: Cáculo del Esfuerzo en Controladores y Determinación de Parámetros
• Dar al estudiante un vistazo del área de los sitemas de control y la aplicación de los límites en la definición de parámetros de los mismos.
• Dar al estudiante la noción de problemas comunes en la ingeniería como lo es la definición de restricciones de energía.
Aplicación o contextualización para el programa curricular: En el problema a continuación se continua partiendo del tema de sistemas de control (parte clave de la carrera de Ing. Mecatrónica), para poder proponer al estudiante aplicaciones del tema de límites, el cual puede generar dificultades en su comprensión.

El problema busca no solo aplicar los límites sino también introducir conceptos y conocimientos básicos de los sistemas para aproximar al estudiante a la materia.
a. Nombre del problema 1 Cálculo del Esfuerzo de un Controlador, teorema del valor inicial Explicación del problema En el área del control es común la representación de sistemas mediante funciones de transferencia y la interrelación de los mismos por medio de diagramas de bloques los cuales indican el flujo de una señal. En la figura a continuación se muestra un sistema básico realimentado el cual cuenta de una planta y un controlador. El objetivo del controlador es lograr que la señal de salida Y(s) sea lo más cercana a la señal de referencia R(s).
Sin embargo la señal del controlador y su efecto sobre el sistema se encuentran limitados por la energía que este requiere para su acción. Por lo tanto este solo logrará acerca la señal de salida en una medida antes de saturarse. La expresión para la salida del controlador esta dada por:[4]
Donde R(s) es la entrada al sistema de la forma paso:
El máximo esfuerzo del controlador se da normalmente en el instante 0, por lo tanto para hallar este valor se usa el llamado teorema del valor inicial:
Suponga parámetros del problema � =0.5, K=2, A=5 y una salida máxima del controlador de 10. Determine el máximo valor de Kc posible para no saturar el controlador Solución

Calculamos entonces la forma de U(s):
La salida máxima del controlador está dada por:
Reemplazando los valores obtendremos:
Podemos corroborar los resultados de manera gráfica:
5. TEMA: Descripción de Sistemas Mecánicos por el Método del Lagrangiano.
• Introducir al estudiante en técnicas de análisis de sistemas mecánicos más avanzadas que aquellas conocidas comúnmente en asignaturas de física
• Partir de un problema de ingeniería en apariencia complejo para exigir al estudiante en sus conocimientos de derivación y regla de la cadena.
• Introducir ideas más avanzadas de matemáticas de manera sencilla como lo es la derivada parcial.
Aplicación o contextualización para el programa curricular: En el análisis de mecanismos, tanto en la Ing. Mecánica como Mecatrónica, en ocasiones los métodos comunes de estudio mediante leyes de Newton no resultan suficientes para describir sistemas más complejos. Es ahí donde se hace necesario la aplicación de métodos avanzados como el Lagrangiano. Este parte de ecuaciones que implican derivadas parciales para describir el movimiento de los cuerpos. El ejercicio entonces propone mostrar al estudiante como aplicar sus conceptos de derivación adquiridos en la asignatura de Cálculo Diferencial para resolver estos problemas de manera sencilla.
a. Nombre del problema 1 Obtención de la forma general del Lagrangiano para un Sistema de Doble Péndulo

Explicación del problemaEl Lagrangiano es una técnica avanzada utilizada en el análisis de sistemas mecánicos a base del cálculo de la energía cinética y potencialel sistema del doble péndulo mostrado en la iamgen, el Lagrangiano nos permite hallar el Torque necesario para generar un cambio en cualquiera de los dos ángulos claves que definen el sistema como:
donde está dado por:
siendo K y U, las energías cinética y potencial del sistema respectivamente.
Dado que K y U están dados como:
Obtenga la expresión para Notas:
• c1, c2 y cde robótica y corresponden a misma forma para el seno(s
• La expresión
respecto a de variables como constante, incluyendo
Explicación del problema El Lagrangiano es una técnica avanzada utilizada en el análisis de sistemas mecánicos a base del cálculo de la energía cinética y potencial del mismo. Para el sistema del doble péndulo mostrado en la iamgen, el Lagrangiano nos permite hallar el Torque necesario para generar un cambio en cualquiera de los dos ángulos claves que definen el sistema como:
á dado por:
siendo K y U, las energías cinética y potencial del sistema respectivamente.
Dado que K y U están dados como:
Obtenga la expresión para .
y c12 hacen referencia a una nomenclatura común usada en el área de robótica y corresponden a , y misma forma para el seno(s1, s2 y s12)
La expresión hace referencia a la derivada parcial del laplaciano con
respecto a , esto implica derivar con respecto a tomando el resto de variables como constante, incluyendo y viceversa.
El Lagrangiano es una técnica avanzada utilizada en el análisis de sistemas del mismo. Para
el sistema del doble péndulo mostrado en la iamgen, el Lagrangiano nos permite hallar el Torque necesario para generar un cambio en cualquiera de los
siendo K y U, las energías cinética y potencial del sistema respectivamente.
hacen referencia a una nomenclatura común usada en el área . De la
hace referencia a la derivada parcial del laplaciano con
tomando el resto

Solución
Para obtener la expresión podemos realizarla por partes, partiendo de ,
podemos observar que para U no tenemos ningún termino que incluya a , solo tenemos terminos de , por lo que U se ve como una constante en general cuya derivada es 0. Obtenemos:
Derivando ahora con respecto al tiempo:
Ahora obtenemos teniendo en cuenta que en este caso es en K donde no
encontrarmos terminos que incluyan a , solo términos de por lo que la derivada se hace 0. Obtenemos entonces:
Obtendremos como resultado final:
Observaciones: La escencia del problema están en que el estudiante pueda aplicar correctamente la ley de la cadena y que además tenga total entendimiento de cómo aplicar las leyes de la derivación. Es además interesante el ejercicio en cuanto a que le ayuda al estudiante a tener una noción de cómo la derivación esta relacionada con una variable en particular y como se deben manejar funciones dentro de otras funciones a la hora de derivar.

ASIGNATURA: ALGEBRA LINEAL 6. TEMA: Descripción del Comportamiento de Sistemas Mecánicos, Cálculo de MovimientoObjetivos:
• Mostrar al estudiante como a partir del conocimiento obtenido en la asignatura de Algebra Lineal se puede lograr trabajar un problema en apariencia muy complejo.
• Introducir ideas para el análisis de sistemas mecánicos que serán aplicadas madelante en la carrera.
Aplicación o contextualización para el programa curricular:El análisis de sistemas mecánicos suele ser una materia que se empieza a estudiar desde el colegio en asignatura de física, sin embargo, el trabajo del mismo en el universitario implica retos muchos más grandes. De acuerdo a esto, se hace necesario que el estudiante adquiera y aplique nuevas herramientas como lo es la resolución de sistemas de ecuaciones mediante matrices la cuál será trabajada en él problemsiguiente.
a. Nombre del problema 1Doble Péndulo, Explicación del problema Considere el sistema de doble péndulo presenta
El sistema es liberado en un estado 0 partiendo del resposo. dinámico se obtienen las siguientes expresiones:
ALGEBRA LINEAL
TEMA: Descripción del Comportamiento de Sistemas Mecánicos, iento
Mostrar al estudiante como a partir del conocimiento obtenido en la asignatura de Algebra Lineal se puede lograr trabajar un problema en apariencia muy
Introducir ideas para el análisis de sistemas mecánicos que serán aplicadas madelante en la carrera.
Aplicación o contextualización para el programa curricular: El análisis de sistemas mecánicos suele ser una materia que se empieza a estudiar desde el colegio en asignatura de física, sin embargo, el trabajo del mismo en el universitario implica retos muchos más grandes. De acuerdo a esto, se hace necesario que el estudiante adquiera y aplique nuevas herramientas como lo es la resolución de sistemas de ecuaciones mediante matrices la cuál será trabajada en él problem
Nombre del problema 1 Doble Péndulo, Expresiones de velocidad y aceleración
Explicación del problema
l sistema de doble péndulo presentado en la figura a continuación:
El sistema es liberado en un estado 0 partiendo del resposo. Del análisis dinámico se obtienen las siguientes expresiones:
TEMA: Descripción del Comportamiento de Sistemas Mecánicos,
Mostrar al estudiante como a partir del conocimiento obtenido en la asignatura de Algebra Lineal se puede lograr trabajar un problema en apariencia muy
Introducir ideas para el análisis de sistemas mecánicos que serán aplicadas más
El análisis de sistemas mecánicos suele ser una materia que se empieza a estudiar desde el colegio en asignatura de física, sin embargo, el trabajo del mismo en el ambiente universitario implica retos muchos más grandes. De acuerdo a esto, se hace necesario que el estudiante adquiera y aplique nuevas herramientas como lo es la resolución de sistemas de ecuaciones mediante matrices la cuál será trabajada en él problema
do en la figura a continuación:
Del análisis

Obtenga las expresiones para las componentes de velocidad y aceleración de para los dos elementos del sistema.
Notas:
• c1, c2 y c12 hacen referencia a una nomenclatura común usada en el área de robótica y corresponden a , y . De la misma forma para el seno(s1, s2 y s12)
Solución Partiendo de las ecuaciones dadas tenemos un sistema de 8 incógnitas, podemos empezar a simplificar el sistema. Como primera medida debemos poder reemplazar los valores de las aceleraciones en las ecuaciones de fuerza para lo que derivamos dos veces las ecuaciones de posición: Primera derivación:
Segunda derivación:
b. Nombre del problema 2 Doble Péndulo, Resolución de problema de movimiento. Explicación del problema Del estudio de diagrama de cuerpo libre del doble péndulo del problema anterior se obtienen las siguientes ecuaciones:

Se requiere conocer el valor de las tensiones y del sistema. Obtengalas aplicando las derivadas halladas en el punto anteriory resolviendo el sistema de ecuación por método matricial. ¿A cuántas incógnitas se puede reducir el sistema? Los valores de y son iguales a 30º y 60º respectivamente. Las masas del sistema son =2Kg y =1Kg y las longitudes =0.5m y m (g equivale a la aceración de la gravedad, apróx 10m/s2) Solución
Nuestras ecuaciones de aceleración pueden reducirse si tenemos en cuenta que
y equivalen a cero para t=0 ya que el sistema parte del reposo.
Ahora podemos proceder a reemplazar estas ecuaciones simplificadas en las ecuaciones de fuerzas:
Se puede observar entonces que ahora tenemos un sistema de 4 ecuaciones como 4 incógnitas el cuál nos permite una solución a partir de métodos matriciales. Organizamos las 4 ecuaciones de modo que sea posible representarlas matricialmente:
Ahora en representación matricial:

Reemplazando los valores obtenemos:
Aplicamos Gauss Jordan para simplificar la matriz:
1) y
2) , y
3) , y

4) , y
Si pasamos esto a datos númericos obtendremos:
7. TEMA: Sistemas de Coordenadas en Dinámica Objetivos:
• Introducir metodologías utilizadas en Ing. Mecánica para el análisis de diversos problemas dinámicos.
• Romper la brecha entre el conocimiento teórico sobre los vectores dado en la asignatura de Algebra Lineal y aterrizarlo para una aplicación directa en el área de la ingeniería
Aplicación o contextualización para el programa curricular: En el área de dinámica la representación de diferentes elementos como vectores es imprecindible para el entendimiento y desarrollo de problemas del área. De la misma forma, la disciplina implica el trabajo con sistemas coordenados diferentes que pueden permitir resolver problemas complejos de manera más sencilla. Sin embargo en el área

de Algebra Lineal no se hace evidente la explicación de cómo se traducen las operaciones vectoriales en la práctica. Por esto es importante contextualizar el conocimiento y su aplicación con un ejemplo claro en el area donde se aplican estos conocimientos.
a. Nombre del problema 1 Cambio de sistemas coordenados, coordenadas cilíndricas. Explicación del problema El movimiento de una partícula en el espacio en algunas ocasiones se define mediante sus coordenadas cílindicas R, y z. En función de está el movimietno se da en función de 3 componentes en las dirección (Normal), (Tangencial) y (Vertical).Como se puede ver en la gráfica a continuación:
Supongase que una partícula pasando por el punto (-2,2,3) con un vector de velocidad -3i-4j+2k. Determinar las componentes de velocidad en coordenadas cilíndricas para un eje que va del origen al punto (-1,1-4) Nota: Tener en cuenta para la resolución de este problema: La componente de un vector con en una dirección de otro se calculacomo la proyección del vector original sobre el segundo. Esta operación se realiza como:
v = Donde la operación es el producto punto del vector v con el vector unitario de la dirección sobre la cuál se quiere proyectar. El vector unitario es una representación de la forma
cos cos cos con magnitud uno e i,j y k vectores unitarios en las direcciones x, y y z respectivamente. Los cosenos directores, que juntos representan el vector

unitario en una dirección dada, se hallan dividiento la componente en cierto eje de un vector dado en esta dirección entre la magnitud del vector. [2]
Solución Partimos por hallar el vector unitario en la dirección del eje del cilindro:
i j ki j k
A partir de este vector ya podemos halla la comoponente k de la velocidad la cuál llamaremos h para evitar confusiones con el vector unitario en la dirección z
i j k i j k i j k
Si definimos un punto de corte al eje cilíndrico por la componente este puede ser hallado como la proyección del vector que posiciona la velocidad en el eje cilíndrico:
i j k i j k i j k
Podemos hallar entonces el vector que conecta el vector de posición con este vector obteniendo así un vector en la dirección de como:
i j k i j k i j k
El vector unitario en esta dirección es:
i j ki j k
La componente de la velocidad en esta dirección será:
i j k i j k i j k
Ya que las dos componentes obtenidas son perpendiculares, si restamos estas componentes del vector original obtendremos la última componente que en si misma será perpendicular a las dos anteriores:
i j k i j k ij k

i j
8. TEMA: Movimiento en el Espacio de Vectores, Principio de Robótica Objetivos:
• Generar en el estudiante una visión de los métodos matemáticos utilizados en el ejercicio de la ingeniería para la resolución de problemas de ingeniería.
• Proponer al estudiante un ejercicio donde aplique sus conocimientos de vectores y lo relacione directamente con un aplicación de movimiento.
Aplicación o contextualización para el programa curricular: En el área de robótica (parte clave de la Ing. Mecatrónica) y en sí en el área de dinámica, el uso y manipulación de los vectores como indicadores de posición en el espacio tridimensional es clave. De esta forma es relevante que el estudiante entienda esta aplicación y la pueda apropiar desde una étapa temprana de su formación, en cuanto a esto, se propone aquí un ejercicio sencillo que cuestiona al estudiante en cuanto a la aplicación de sus conocimientos de Algebra Lineal y como estos le permiten entender un problema espacial de movimiento.
a. Nombre del problema 1 Rotación de un vector, movimiento de un robot. Explicación del problema Se tiene un elemento de un brazo robótico con una extremida conectada a una junta esferécia ubicada en (0,0,0) la cuál permite el giro del mismo en todos los ejes. El brazo esta originalmente posicionado en el punto (1,4,3). A través del mecanismo de control se hace que este gire 30º en el plano xz y posteriormente 45º en el plano yz. ¿Cuál es la posición final del extremo del brazo robótico?[6]

Nota: Para hallar la posición de un vector determinado posterior a un giro se multiplica el vector por las matrices:
para giros alrededor del eje x
para giros alrededor del eje y
para giros alrededor del eje z:
Solución Aplicamos la primera rotación:
Aplicamos la segunda rotación
El resultado se puede ver en la gráfica a continuación:
Bibliografía [1] Gere James M, Mecánica de Materiales, Editorial Thomson, 6ta Edición, México, 2006, Pág 483-394 [2] Beer, Ferdinand y Johnston, Rusell Mecánica Vectorial Para Ingenieros: Dinámica, Editorial Mc Graw Hill, México, 2007, Págs, 609-612, 667 [3] Kuo, Benjamin, Sistemas de Control Automático, Editorial Prentice Hall, 7ª Edición, México, 1996 [4] Ogata, Katsuhiko, Ingeniería de Control Moderna, Editorial Pearson, 3ª Edición, México, 1998, Pág 737-742 [5] Beer, Ferdinand y Johnston, Statics and Mechanics of Materials, Editorial Mc Graw Hill, USA, 2011, Págs, 60-85, 518-519 [6] Appin Knowledge Solutions, Robotics, Infinity Science Press, 1ª Edición, USA, 2007, Pág 213–219 [7] Distefano, Joseph, Feedback and Control Systemas, Schaum’s Outline Series, Mc Graw Hill, 2ª Edición, USA, 1995, Pág 115-117

CALCULO DIFERENCIAL, ALGEBRA LINEAL Y MATEMATICAS BASICAS
Ejercicio 31 Energıa potencial de un pendulo simple
Aplicacion o contextualizacion en ingenierıa mecanica y mecatronicaAplicar el concepto de primera y segunda derivada de una funcion a problemas tipicos de mecanica esbastante util para obtener informacion sobre la estabilidad de un sistema mecanico, entender esto sera degran ayuda para el estudiante de ingenierıa mecanica y mecatronica no solo en el desarrollo de cursosposteriores de fısica si no tambien en su vida laboral.
El problema
Para ilustrar el concepto consideremos un sistema mecanico sencillo como es el pendulo simple figura 1.
θ
ℓ(1− cos θ)
Figura 1: Figura para el problema 1.
Si tomamos como cero de energıa potencial el punto mas bajo en altura que puede alcanzar el pendulo,la energıa potencial estara dada por la expresion:
U = mgℓ(1− cos θ)
Realice una grafica de esta funcion en el intervalo θ ∈ [0 : 2π] e identifique en ella los valores maximos ymınimos
Solucion
La figura 2 muestra esta energıa potencial como funcion del angulo θ. Esta funcion tiene un maximo enθ = π ≈ 3.1416 y dos mınimos en en θ = 0, 2π ≈ 6.28
Ejercicio 32 Equilibrio en un pendulo simple

0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
0 1 2 3 4 5 6
U
Angulo
Figura 2: Figura para el problema 1.
Como veran en cursos posteriores la fuerza debida a esta energıa que se ejerce sobre el pendulo es:
F = −∇U Que en este caso equivale a: F =∂U
∂rr +
1
r
∂U
∂θθ ≡ 1
r
∂U
∂θθ (1)
Y entonces en los puntos donde la derivada con respecto a la coordenada sea cero, la fuerza aplicadasobre el pendulo sera igual a cero y el pendulo estara en equilibrio. Halle los valores de θ para los que elpendulo estarıa en equilibrio
Solucion
De la ecuacion (1) vemos que basta con que ∂U∂θ
= 0 para que la fuerza sea cero y el pendulo pueda estaren equilibrio entonces los valores que cumplen esta condicion se encuentran como:
∂
∂θmgℓ(1− cos θ) = 0 =⇒ mgℓ sin θ = 0
=⇒ sin θ = 0 =⇒ θ = 0, π, 2π ≡ 0, π
Ejercicio 33 Equilibrio estable e inestable
En el problema anterior encontramos dos valores de θ para los que el pendulo se puede encontrar en equi-librio. Ahora este equilibrio puede ser “Equilibiro estable” y en este caso al hacer un pequeno corrimientoen θ el sistema tendera de nuevo a alcanzar la posicion de equilibrio inicial, si el equilibrio en cambio esun “Equilibiro inestable” al hacer un pequeno corrimiento en θ el sistema tendera a alejarse de la pocisioninicial de equilibrio. Las condiciones para que se de cada uno de estos casos son:
2

∂2U
∂θ2> 0 =⇒ Equilibiro estable
∂2U
∂θ2< 0 =⇒ Equilibiro inestable
De los puntos de equilibrio que ya hallo determine que tipo de equlibrio se presenta en cada caso
Solucion
Para esto realizamos la segunda derivda de la energıa potencial y evaluando en cada punto sabremos sinos da un valor positivo o negativo, esto es:
∂2
∂θ2mgℓ(1− cos θ) =
∂
∂θmgℓ sin θ = mgℓ cos θ
mgℓ cos θ|θ=0 = mgℓ > 0 =⇒ Equilibiro estable
mgℓ cos θ|θ=π = −mgℓ < 0 =⇒ Equilibiro inestable
CALCULO DIFERENCIAL Y ALGEBRA LINEAL
Ejercicio 34 Velocidad en coordenadas polares
Aplicacion o contextualizacion en ingenierıa mecanica y mecatronicaEl concepto de vector se ensena en el curso de algebra lineal, sin embargo las aplicaciones practicas deellos es muy poco ensenada en estos cursos, un ejemplo de la aplicacion del concepto de vector y quetiene aplicacion directa en problemas de mecanica es el uso de los vectores r y θ y sus propiedades, lasderivadas de estos vectores son de utilidad para entender conceptos de mecanica newtoniana como son lafuerza de coriolis y la aceleracion centrıpeta el planteamiento de los siguientes problemas busca aplicar losconceptos de vector y derivada al entendimiento de conceptos de mecanica newtoniana utiles para el in-geniero mecanico y mecatronico en cursos posteriores de fısica y en el desempeno mismo de su vida laboral.
Problema
Los vectores r y θ se definen como muestra la figura 4 y las ecuaciones (4)Segun la figura 4. las expresiones para los vectores r y θ en funcion de los vectores i y j son:
r = cos θi+ sin θj (2)
θ = − sin θi+ cos θj (3)
Halle una expresion para la velocidad de una partıcula esto es hallar:
3

y
x
i
θ
sin θr
cos θ
j
sin θ
θ
cos θ
θ
R
Figura 3: Figura para el problema x.
V =dR
dtcon R = Rr
Debera usar el concepto de derivada implıcita.
Solucion
V =dR
dtr +R
dr
dtDefiniendo
dR
dt≡ R
Debemos entonces hallar el valor de drdt
a partir de las expresiones (5) y (6) esto es
dr
dt=
d
dt[cos θi+ sin θj]
= id
dtcos θ + j
d
dtsin θ
= id cos θ
dt
dθ
dt+ j
d sin θ
dt
dθ
dtDerivacon implıcita
= −θ sin θi+ θ cos θj Definiendodθ
dt≡ θ
= [− sin θi+ cos θj]θ
Recuerde que: θ = − sin θi+ cos θj
= θθ
4

Entonces la expresion para la velocidad es:
V = Rr +Rθθ usualmente se usa la notacion: θ ≡ ω la velocidad angular
Ejercicio 35 La derivada de un vector y el uso de los vectores r y θ
muestre que:
dθ
dt= −θr
Solucion
dθ
dt=
d
dt[− sin θi+ cos θj]
= −id
dtsin θ + j
d
dtcos θ
= −id sin θ
dt
dθ
dt+ j
d cos θ
dt
dθ
dtDerivacon implıcita
= −θ cos θi− θ sin θj
= −[cos θi+ sin θj]θ
Recuerde que: r = cos θi+ sin θj
= −θr
Ejercicio 36 La aceleracion de coriolis
Halle una expresion para la aceleracion en coordenadas polares, y de una interpretacion a cada uno de losterminos que obtiene
Solucion
5

a =dv
dt=
d
dt[Rr +Rθθ]
=dR
dtr + R
dr
dt+
dR
dtθθ +R
dθ
dtθ +Rθ
dθ
dt
Recuerde que:dr
dt= θθ y que:
dθ
dt= −θr
= Rr + Rθθ + Rθθ +Rθθ −Rθθr
= Rr + 2Rθθ +Rθθ −Rθ2r
= (R−Rθ2)r + (2Rθ +Rθ)θ
El termino R es una aceleracion debida a un cambio en la velocidad radial, Rθ es una aceleracion en ladireccion angular debida a un cambio en la velocidad angular, el tremino −Rθ2 es la aceleracion centrıpeta,y finalmente el termino 2Rθ es la aceleracion de coriolis.
CALCULO DIFERENCIAL Y ALGEBRA LINEAL
Ejercicio 37 El pendulo conico (Calculo del torque a partir del moemnto angular)
Aplicacion o contextualizacion en ingenierıa mecanica y mecatronicaLos conceptos de producto cruz de algebra lineal y el concepto de derivada pueden ser aplicados a pro-blemas de mecanica newtoniana, el pendulo conico es un ejemplo que ilustra como estas herramientasmatematicas son de gran utilidad a la hora de calcular momentos angulares y torques en sistemas mecani-cos. El saber calcular torques es de gran importancia para el ingeniero mecanico y mecatronico por esoencontrara util el desarrollo de estos ejercicios con los que entendera estos conceptos haciendo uso de lasherramientas matematicas que le han ensenado.
El pendulo conico es un sistema mecanico que se ilustra en la figura 3.
El problema
Halle primero momento angular alrededor del punto A en la figura 3 use para ello la definicion:
L = r × P con P = mv = mrωθ (4)
Deduzca de ahı que el torque sobre el sistema calculado para el punto A es cero, para esto use el hechode que:
dL
dt= τ (5)
6

B
T
A
α
mg
ω
r
ℓ
Figura 4: Figura para el problema 1.
Solucion
El momento angular viene dado por:
L = r × P = rr ×mrωθ
Para calcular la direccion resultante de un producto cruz de una forma mas practica que la que usualmenteensenan en los cursos de algebra lineal (determinante) podemos hacer uso de la regla de la mano derechaque nos dice que ubiquemos los vectores con un origen comun y una vez hehcho esto abramos nuestramano sobre el primer vector y la cerremos para alcanzar el segundo vector de esta forma el pulgar indicarala direccion del vector resultante (intentenlo!), ademas si los vectores son ortogonales la norma de unproducto cruz es:
|r × P | = |r||P | sin θ si los vectores son ortogonales ⇒ |r × P | = |r||P |
El momento angular en este caso es:
LA = r × P = mr2ωk
7

Con este resultado podemos calcular el torque alrededor del punto A esto es:
d
dtmr2ωk = 0
El torque es cero debido a que el momento angular con respecto al punto A es constante, tenemos unamasa constante que se mueve en un circulo de radio constante y con velocidad angular ω constante tam-bien.
Ejercicio 38 El pendulo conico (Calculo del momento angular a partir del torque)
Para el pendulo conico de la figura 3 calcule primero el torque alrededor del punto A y de ahı deduzcaque el momento angular es una constante de movimiento, use para ello los conceptos de producto cruz yderivada, debe tener en cuenta tambien las ecuaciones (2) y (3) y la definicion de torque:
τ = r × F con F = −T sinαr (6)
Solucion
Primero observamos que los vectores r y F son paralelos esto es:
r = rr y F = −T sinαr =⇒ los dos vectores van a lo largo de la direccion de r
El producto cruz de dos vectores paralelos es cero!!! de donde deducimos que:
τ = 0 =⇒ de la ecuacion (3)dL
dt= 0
Para que la derivada sea cero se debe cumplir que la funcion en este caso el momento angular no dependade la variable con respecto a la que se deriva, en este caso el tiempo, si el momento angular no dependedel tiempo decimos que este es una constante de movimiento.
Ejercicio 39 El pendulo conico (Un punto diferente)
Para el pendulo conico de la figura 3 calcule primero el momento angular alrededor del punto B, para ellonecesita hacer un analisi detallado de los vectores implicados en el calculo y escoger un metodo que lepermita hacer el calculo de la manera mas sencilla para esto tenga en cuenta las consideraciones hehcas enel ejercicio anterior, con el valor del momento angular deduzca el torque alrededor de este mismo punto,
8

use para ello sus conocimientos de derivadas.
Solucion
Como ahora se quiere calcular el momento angular alrededor de un punto diferente, entonces el vectorr de la ecuacion (2) es diferente en este caso, dicho vector va desde el punto B hasta la partıcula, paracalcular el producto cruz una forma util es escoger antes del calculo la componente de r perpendicular aP para poder ası calcular el producto cruz con el metodo que se describio en el ejercicio anterior, antesde empezar el calculo note que:
rT = ℓ cosαk + ℓ sinαr ≡ r1 + r2
Entonces el momento angular sera:
LT = rT × P = r1 × P + r2 × P ≡ LB1 + LB2
note que los vectores
r1 = ℓ cosαk y P = mrωθ
Son perpendiculares con lo que el producto cruz LB1 se puede calcular como:
LB1 = r1 × P = ℓ cosαk ×mrωθ = mlrω cosαr
Sin embargo el vector r en este caso tiene otra componente que resulta ser tambien perpendicular a Pesto quiere decir que los vectores:
r2 = ℓ sinαk y P = mrωθ
Tambien son perpendiculares y entonces el producto cruz de ellos tambien genera una contribucion almomento angular del sistema alrededor del punto B y esta contribucion tiene un valor de:
LB2 = r2 × P = ℓ sinαr ×mrωθ = mlrω cosαk
Tenemos finalmente que el momento angular alrededor del punto B es:
LT = mlrω cosαk +mlrω cosαr
Ahora para calcular el torque alrededor del punto B debemos hacer uso de la expresion (3) esto es:
9

d
dtLT =
d
dtmlrω cosαk +mlrω cosαr =
d
dtmlrω cosαk +
d
dtmlrω cosαr =
kd
dtmlrω cosα +mlrω cosα
d
dtk + r
d
dtmlrω cosα +mlrω cosα
d
dtr =
mlrω cosαd
dtr = mlrω2 cosαθ
CALCULO DIFERENCIAL
Ejercicio 40Cinematica de una partıcula en una dimensionAplicacion o contextualizacion en ingenierıa mecanica y mecatronicaUn ejemplo tıpico de la aplicacion de las derivadas en cinematica, es el movimiento de una partıcula enuna dimension en este ejercicio se ilustra de manera sencilla como la velocidad y la aceleracion se puedenobtener de manera sencilla cuando se conoce la pocision de la partıcula en funcion del tiempo. Aca sehara un analisis de la expresion general que permitira entender todos los problemas de este tipo.
El problema
una partıcula se mueve a lo largo de una recta de acuerdo a la ley:
v = t3 + 4t2 + 2
Encuentre el valor de la aceleracion de la partıcula cuando t = 3s
Solucion
Para resolver el problema, basta con recordar que:
dv
dt= a
En este caso unidimensional la derivada resulta facil de calcular:
a =d
dt[t3 + 4t2 + 2] =
d
dtt3 +
d
dt4t2 +
d
dt2
= 3t2 + 8t2 =⇒ a|t=3s = 27 + 72 = 99
10

EJERCICIOS DE APLICACIÓN DE LAS
ASIGNATURAS1000001, 1000003 y 1000004 PARA LOS PROGRAMAS DE INGENIERÍA MECÁNICA Y
MECATRÓNICA
Realizados por:
Santiago Echeverri González 285482 Wilmar Rodriguez Herrera 133180
Revisados por:
Universidad Nacional de Colombia Sede Bogotá

Segundo semestre de 2011
ASIGNATURA: MATEMÁTICAS BÁSICAS 1. TEMA: Descripción de señales y funciones de salida
Objetivos:
Relacionar la interpretación de gráficas con el ejercicio de la práctica de la ingeniería
Desarrollar capacidades analíticas y deductivas en el estudiante al plantear un ejercicio de interpretación de un modelo gráfico
Aplicación o contextualización para el programa curricular: En el ejercicio de las ingenierías Mecánica y Mecatrónica el análisis de señales y curvas que representan las salidas o entradas de un sistema consiste en un punto escencial del trabajo del ingenierio. Esta habilidad debe partir del estudiante con su conocimiento de funciones propio del curso de matemáticas básicas. El ejercicio propone un ejercicio donde este análisis permita entender el comportamiento de un sistema físico y obtener de una información gráfica datos relevantes del sistema.
a. Nombre del problema 1
Caracterización de un motor de Corriente Continua. Explicación del problema La gráfica a continuación representa la posición (o avance lineal) en el tiempo de un motor de corriente continua el cual está conectado a un mecanismo de control.

El análisis del funcionamiento físico del motor y de su conexión nos indica que la posición del mismo está dada por una función de la forma:
Donde y representan dos constantes importantes del motor. A partir de la gráfica y la forma de la ecuación obtenga estos dos parámetros del motor. Sugerencia: Divida la respuesta del motor en dos compontentes: una transitoria, es decir que tiende a hacer cero con el tiempo y otra cuyo comportamiento permanece constante en el tiempo. Solución Primero procedemos a dividir la respuesta del sistema en sus componentes transitoria y su componente no transitoria. Podemos observar que la parte que compone la exponencial tiende a hacerse cero cuando t tiende a infinito mientras que el resto corresponde al de una recta cuya ecuación no cambia con el tiempo. Reescribimos la ecuación como:
Si observamos igualmente la gráfica dada podemos notar como su comportamiento también presenta estas dos partes. Por un lado a medida que avanza el tiempo, la gráfica tiende a aproximarse a la de una recta, mientras que en un primer instante la gráfica tiene una curvatura dada que la diferencia de una recta siendo está su componente exponencial. Sin embargo si proyectamos la recta que se empieza a generar para tiempos mayores observaremos como esta corresponde exactamente a la parte de la recta de la ecuación pero su diferencia con la función verdadera es la parte exponencial.

Podemos asumir en primer lugar que la pendiente de esta recta se corresponde con el término en la ecuación que multiplica a t. Es decir la pendiente
corresponderá a Si calculamos la pendiente obtendremos:
Si igualamos podemos obtener el valor de :
Ahora el parámetro podríamos intuir que es un factor que está asociado con el tiempo que se demora en desaparecer la parte exponencial, pero de la misma manera observamos como en la parte de la ecuación que corresponde a una recta, este factor se relaciona con un corrimiento vertical de la línea sin el cual, la línea pasaría por el punto (0,0). Podríamos también plantear las relaciones de la línea para el punto por el que cruza el eje x cuyo valor conocemos de la gráfica por lo que tendremos:
Y de esta manera tenemos todos los parámetros del motor.
2. TEMA: Definición por medio de algoritmos de funciones matemáticas Objetivos:
Presentar un problema de análisis que contextualice al ingenierio en las aplicaciones computacionales como medio de resolución de problemas de ingeniería
Estudiar la aplicación de las series como un método para la resolución de problemas de ingeniería.
Aplicación o contextualización para el programa curricular: En el ejercicio de la ingeniería moderna tanto Mecánica como Mecatrónica, es común encontrar maquinaria la cual debe realizar recorridos previamente definidos en un ordenador. Es importante para el ingeniero poder saber claramente como programar esta maquinaria para la realización de esto mismo teniendo en cuenta las limitaciones y posibilidades que presenta las interfaces computacionales. De acuerdo a esto se presenta un problema donde se busca cuestionar las habilidades del ingenierio reinterpretando operaciones básicas para expresarlas en una forma que el computador pueda manipular.

a. Nombre del problema 1
Definición de operaciones matemáticas para aplicación en ordenadores. Explicación del problema Cuando se desea realizar la programación de algunas funciones por medio de un ordenador, es común que se tenga que recorrer a otro tipo de operaciones para poder lograrla. Esto se debe a que, siendo el computador un sistema que funciona a base de sistemas binarios, las operaciones que este puede realizar por sí mismo pueden reducirse a las más básicas. Muchas de estas operaciones se realizan entonces por medio de operaciones iterativas, es decir que para una operación compleja se realiza varias veces una operación más sencilla. Esto se puede relacionar a cuando se representa una operación por medio de una serie utilizando el símbolo sigma, de modo que una operación puede definirse como:
donde cada elemente puede ser hallado por medio de una operación más sencilla. En función de esto, genere representaciones de esta forma para representar las siguientes operaciones a partir de operaciones más sencillas:
a)
b) Siendo una suma la operación más sencilla seguida en orden de una resta, una múltiplicación, una división y un exponente. Solución Si se quisiera presentar estas funciones en forma de series es importante analizar en primer lugar de donde vienen las operaciones indicadas:
a) La multiplicación implica puede ser vista desde una perspectiva básico como el sumar una cantidad dada un número de veces. Es decir tomar el mismo valor y adicionarlo n veces. Esto se puede traducir entonces
muy fácilmente al dominio de la sumatoria en cuanto a qué, el valor correspondería al número que se quisiera multiplicar y lo que debemos hacer es sumarlo consigo mismo n veces. Esto se ve en forma de sumatoria como:
Esta ecuación ya es una expresión de la suma que se puede implementar en una máquina cuya única operación matemática sea la suma. Es de notar que debido a las propiedades de la multiplicación, sería posible

alterar el orden de esta ecuación de modo que corresponda n y este se sume consigo mismo b veces de modo que:
Esto nos generaría el mismo resultado. Si esto se fuera a implementar en un ordenador resultaría muy sencillo ya que se podría establecer una rutina de acumulación en la cual a una variable cualquiera se va
sumando en cada iteración el valor de y se trabaja con n iteraciones.
b) Ahora cuando se quiera hacer la elevación de un número a un exponente lo que se tiene en vez de una sucesión de sumas, es una
sucesión de multiplicaciones. En este caso el valor se está multiplicando por sí mismo n veces. Si se trabajara con una máquina que puede realizar la operación de productoria el resultado sería muy similar al obtenido en el caso anterior de la multiplicación de modo que:
Es importante anotar que esta función no resultar igual si se invierte lo factores debido a las propiedades de los exponentes. Ahora, si se quisiera implementar la función para una máquina cuya única función es la suma, la operación resulta algo más compleja. Esto en la medida que obtener la multiplicación de dos números requiere de una secuencia iterativa como vimos anteriormente y multiplicar esto por otro número así sea igual no resulta trivial ampliando las iteraciones. Es necesario en cambio trabajar con iteraciones dentro de iteraciones, esto se podría ver en la expresión siguiente.
En esta expresión vemos como se anida una sumatoria con otra para realizar multiplicaciones sucesivas de los resultados nuevamente por medio del producto. Esta resultaría entonces una opción que posiblemente pueda ser aplicada en un ordenador para obtener una exponencial.
3. TEMA: Procesamiento de Señales Objetivos:
Presentar un problema de análisis que introduzca al ingenierio al concepto de las señales como funciones y las posibilidades que esto les da para su manejo
Aplicar los conceptos de función utilizados para una aplicación en ingeniería.
Aplicación o contextualización para el programa curricular:

En el ejercicio de la ingeniería es común la representación de señales (variaciones de una magnitud física que cargan consigo una cierta información) como funciones matemáticas. Esto permite al ingenierio el pensar en la manipulación de ellas a través de sistemas que actuen como funciones matemáticas también. El ejercicios propuesto busca mostrar una aplicación de este tipo para además recordar conceptos importantes de las funciones a los estudiantes.
a. Nombre del problema 1
Operaciones matemáticas en señales. Explicación del problema En el desarrollo de una aplicación es necesario manipular una señal x de modo que: en una primera instancia se obtenga el resultado de la misma señal al operarla de modo:
Después se desea obtener a partir de está señal procesada la señal original elevada al cuadrado. Si se tiene un bloque intermedio entre la señal procesada en primera instancia y la salida del sistema, ¿cuál debe ser la función que debe realizar esté bloque para obtener en la salida el resultado deseado? Solución En este caso podemos partir de definir los diferentes procesos aplicados al sistema como diferentes funciones y entender su relación. La primera
operación aplicada a la señal consiste en la función , a continuación se
podría pensar que se aplica una nueva función la cuál genera a la salida de la primera lo operación para obtener el resultado esperado. Sin embargo también se podría ver que está salida es una función de la señal original a través
de una función digamos . Esta última la podemos expresar como:
Sin embargo si observamos la relación de las funciones podemos observar que el objetivo, es que está última equivalga a pasar la señal original x por las dos funciones anterior la una después de la otra (esto se conoce como una proceso en serie). De este modo podemos representar el resultado como:
En donde no conocemos la función , sin embargo despejando la anterior ecuación podríamos expresar esto como:

Debemos entonces en primer lugar obtener la función inversa de y
obtener su compuesta con . Obtenemos:
Ahora si componemos:
Esta será entonces la función esperada, podemos comprobar componiendo
y asegurándonos que el resultado será igual a .
4. TEMA: Rango de Señales Objetivos:
Presentar un problema de análisis que introduzca al problemas de manejos del rango de señales y su aplicación
Reforzar el manejo de funciones lineales y la definición de las mismas.
Aplicación o contextualización para el programa curricular: En el ejercicio de la ingeniería es común la representación de señales (variaciones de una magnitud física que cargan consigo una cierta información) como funciones matemáticas. En muchos casos estas señales manejan rangos diferentes en las diferentes fases de los procesos de trabajo con ellas lo cual se hace con el fin de buscar la mayor precisión posible en la medición. El problema plantea afianzar el manejo de esta funciones lineales con el objetivo de establecer las relaciones entre fases.
a. Nombre del problema 1
Ajuste de rangos en el trabajo con señales Explicación del problema Una termocupla mide la temperatura de un horno que varía entre 200 y 2000ºC. En función de esta temperatura envía una señal eléctrica que varía entre 25 y 100mV. Esta señal se debe pasar a un microcontrolador que recibe voltajes entre 1 y 5 V. Determine la función que relaciona la temperatura del horno con el voltaje recibido en la entrada del microcontrolador si el rango se aprovecha en su totalidad en cada caso.
Solución

Para establecer adecuadamente los rangos, lo más útil resulta generar ecuaciones de rectas que representan como se modifica el rango en cada etapa. Esto, haciendo en cada fase la variable independiente la entrada de salida y la variable dependiente la misma variable en el rango esperado de salida. De modo que en la primera instancia tenemos: Tenemos una temperatura que varía entre 400 y 2000°C que corresponde a un voltaje entre 20 y 100mV. Haciendo la equivalencia de rectas obtenemos primero una pendiente:
Ahora obtenemos un desplazamiento de recta para una forma paramétrica reemplazando un punto que conocemos hace parte de la recta:
Observamos a continuación la gráfica de esta recta:
Ahora pasamos a la segunda etapa donde debemos pasar este voltaje el cual se encuentra en un rango muy pequeño (de mili voltios) a un rango más común de trabajo, realizamos un procedimiento muy similar:

Si calculamos nuevamente el parámetro b podemos observar que esté será cero nuevamente ya que el producto de los x por la pendiente nos da inmediatamente los y. La gráfica de esta nueva recta se presenta a continuación:
Ahora si queremos obtener una relación directa entre la temperatura y el voltaje en el microcontrolador solo debemos ver a las dos rectas como funciones aplicadas a la señal en serie (pasa por una y su resultado se pasa como la señal de la segunda). De esta forma si vemos la primera recta de transformación
como una función y la segunda , definimos la función general como:
De forma que:

ASIGNATURA: CÁLCULO DIFERENCIAL
5. TEMA: Expansión de Funciones de Trasnferencia en Fracciones Parciales Objetivos:
Introducir al estudiante en técnicas relevantes en el área de control como una aproximación a los temas avanzados de su carrera
Mostrar una aplicación práctica y sencilla pero ampliamente usada de las técnicas de derivación en el ejercicio y estudio de la ingeniería
Aplicación o contextualización para el programa curricular: La técnica de expansión de funciones de transferencia en forma de fracciones parciales es ua técnica altamente utilizada en el área de control y análisis de sistemas dinámicos para la obtención de la respuesta de sistemas físicos. Estos temas relevantes principalmente para el Ing. Mecatrónico pero que también pueden resultar de utilidad para el Ing. Mecánico presentan una aplicación sencilla de las leyes de derivación que evidencia la utilidad de las mismas y la necesidad de un manejo adecuado de estas.
a. Nombre del problema 1
Expansión de una Función de Trasnferencia en forma de fracciones parciales Explicación del problema En el área de control es de común uso la ténica de expansión de una función de transferencia en forma de fracciones parciales con el fin de poder obtener la respuesta en el tiempo de un sistema dado. Esta función de transferencia normalmente se presenta como la división de dos polinomios. De la forma:

Las raíces del polinomio del denomidor son denominadas polos del mismo y a cada polo corresponde una forma de la respuesta del sistema. Cuando se tienen todos los polos reales y diferentes, se busca expresar la función de la forma:
Donde cada si corresponde a un polo del sistema. En este caso el valor de cada K está dado por:
Por otro lado si se tiene un polo de orden múltiple, es decir que se repite más de una vez, se define la función objetivo como:
donde las componentes Ai se calculan de la forma:
Suponga una función de transferencia de la forma:

Expanda esta función en fracciones parciales Solución Podemos decir que la función se va a separar en factores de la forma:
Podemos aplicar las fórmulas para obtener estas constantes de la forma:
Obtenemos entonces la expansión en fracciones parciales como:
6. TEMA: Obtención de gráficas de derivadas y análisis del comportamiento de la derivada
Aplicar los conocimientos de las técnicas de la derivación y su comprensión de manera gráfica en el estudio de un problema propio de la ingeniería
Dar al estudiante la noción de problemas comunes en la ingeniería como lo es la definición de restricciones de energía.
Aplicación o contextualización para el programa curricular: En el ejercicio de las ingenierías Mecánica y Mecatrónica el análisis de señales y curvas que representan las salidas o entradas de un sistema consiste en un punto escencial del trabajo del ingenierio. A esto mismo se agrega la necesidad de poder establecer la

relación de las señales con su derivada, la cual representa la razón de cambio de la misma tanto de manera gráfica intuitiva como matemática.
a. Nombre del problema 1
Cálculo del Esfuerzo de un Controlador, teorema del valor inicial Explicación del problema La gráfica a continuación representa la posición (o avance lineal) en el tiempo de un motor de corriente continua el cual está conectado a un mecanismo de control.
El análisis del funcionamiento físico del motor y de su conexión nos indica que la posición del mismo está dada por una función de la forma:
Donde y representan dos constantes importantes del motor. Suponga valores para estas corrientes de 10 y 0.02 respectivamente.
a) Describa la forma esperada de las curvas de velocidad y aceleración de acuerdo a un análisis de la gráfica y su pendiente.
b) Calcula las expresiones para la velocidad y la aceleración del motor como la primera y segunda derivada de la función de posición respectivamente, dibuje sus gráficas y compare con los resultados obtenidos en el punto anterior.
Solución

a) A partir de la curva de posición podríamos esperar una curva de velocidad (derivada) la cuál parta de una velocidad inicial cero, debido a que la curva parte “acostada”. Posteriormente la pendiente de la curva va aumentando progresivamente hasta el punto en que se convierte en una recta con una pendiente definida por lo que la derivada sigue constante hasta infinito.
La gráfica de aceleración derivada de la velocidad correspondería entonces a: primero la pendiente parte de un punto positivo ya que empieza de cero y va decreciendo debido a que el aumento en la pendiente de velocidad va siendo cada vez menor hasta que cuando llega a la parte recta donde la pendiente no varía por lo que se hace igual a cero.
b) Derivamos al expresión de la posición para hallar la velocidad:
De esta ecuación vemos que se confirma lo que planteamos como análisis gráfico, en t=0 el termino exponencial es igual a 1 por lo que la gráfica parte de cero y este término exponencial se va reduciendo con el tiempo hasta que para un tiempo grande tiene a cero por lo que la
velocidad se acerca a un valor constante dado por .

Ahora calculamos la aceleración:
Esto nuevamente está de acuerdo con lo planteado en el análisis gráfico en la medida que la función exponencial parte de una valor positivo diferente de cero y progresivamente el exponencial va decreciendo hasta acercarse a un valor igual a cero para tiempos grandes. Las gráficas se presentan a continuación:
7. TEMA: Desarrollo de Redes Neuronales Objetivos:
Mostrar al estudiante como una aplicación de ingeniería relativamente avanzada parte del conocimiento básico matemático obtenido en los primeros cursos de cálculo.
Aplicar los conocimientos de derivación y ver la relevancia de la regla de la cadena en el desarrollo de operaciones.
Aplicación o contextualización para el programa curricular: Las aplicaciones de redes neuronales consisten en una aplicación con mucho futuro para el desarrollo de aplicaciones cada vez más inteligente. Bajo el principio de partir de algo sencillo para desarrollar un elemento poderoso estas redes parten de la aplicación sencilla de principios matemáticos para progresivamente generar una complejidad de cálculo que le da posibilidades más amplias. El problema busca aplicar en el desarrollo de estas redes la regla de la cadena haciendo enfásis en las dificultades que presenta esta cuando se realiza en étapas consecutivas.

a. Nombre del problema 1
Redes Neuronales, obtención de función de pesos. Explicación del problema
Las redes neuronales son una técnica avanzada para el desarrollo de sistemas avanzados donde la interconexión de elementos de cálculo independiente permite el desarrollo de un sistema inteligente con una capacidad de cálculo que puede resolver problemas incluso de tipo no lineal. El funcionamiento de la red presentada en la imagen es así. Se tienen n entradas las cuales sopesadas por unos “pesos” entran a cada neurona de la capa oculta de modo que la salida de esta capa oculta es de la forma:
Donde corresponde a los valores de las entradas y el valor de los pesos. La salida de la red neuronal está dada por una función de activación de la forma:
Para el funcionamiento de la red es necesario ir cálculando el valor de e ir comparandolo con un valor esperado de salida para definir un error con el cual
se actualizan los valores de para así ir acercandose cada vez más a una respuesta adecuada. Para el cálculo de estos nuevos pesos es necesario cálcular
un factor de la forma
donde E corresponde al error dado por:

Donde es una constante. Cálcule la expresión para
Nota: La expresión a buscar es una derivada parcial que implica que se deriva la
función E solamente con respecto a la variable tomando las otras variables como constantes. Tenga en cuenta la relación entre las funciones y como la una se compone de la otra. Es muy importante la correcta aplicación de la regla de la cadena. Además ya que la operación del error se cálcula para cada m por aparte no es necesario tener en cuenta la sumatoria. Solución Para poder hallar la derivada en cuestión, debemos partir de analizar la relación directa que hay entre las variables implicadas. Entendemos que E es la variable dependiente la cual es producto de las operaciones que implica todo el sistema
y es en cierta medida una variable independiente de la cual se parte desde la base para obtener la expresión de E. Esto en la medida que se genera una
cadena de relaciones en la cuál net depende de , y depende de net y E
depende de y. Esto implica entonces que E es una función de a través de la composición de las diferentes funciones. Definimos entonces la sucesión de derivadas necesarias para definir la derivada que se quiere hallar (ignoraremos por ahora el que sea una derivada parcial asumiendo todos los otros valores como constantes para mantener el problema un poco más dentro de los límites del curso de cálculo diferencial)
Realizando la derivación por pasos:
En este punto podríamos pensar en reducir un poco la expresión dejándola en una menor cantidad de variables por lo que podríamos expresar el segundo término a partir de la variable y:
Reemplazando en la expresión que teníamos de la derivada:

Esta sería la expresión para la derivada general dada en términos solamente de
y, la salida y la entrada. Aunque puede resultar extraño una expresión en estos términos, esto se debe a que en las redes neuronales se calculan para toda una étapa los valores de salida con unos valores de entrada y luego se toman estos valores para calcular un error que va a modificar el sistema para una siguiente étapa.
ASIGNATURA: ALGEBRA LINEAL
8. TEMA: Descripción Vectoria de un Sistema Mecánico Objetivos:
Introducir el uso de los vectores en las áreas de mecánica particularmente en dinámica como representación de fuerzas y velocidades.
Aplicar las operaciones de vectores y entender como la operación de la derivada aplica de la misma medida al trabajo con vectores
Aplicación o contextualización para el programa curricular: En el área de dinámica la representación de diferentes elementos como vectores es imprecindible para el entendimiento y desarrollo de problemas del área. Sin embargo en el área de Algebra Lineal no se hace evidente la explicación de cómo se traducen las operaciones vectoriales en la práctica. Por esto es importante contextualizar el conocimiento y su aplicación con un ejemplo claro en el area donde se aplican estos conocimientos.
a. Nombre del problema 1
Determinación de las aceleraciones de un sistema en rotación Explicación del problema Supóngase una partícula que rota alrededor de un eje y cuya posición está dada por un vector r. Si la velocidad de la partícula está dada por:
Cálcule la expresión para la aceleración de la partícula dada por:
Índique la dirección esperada para el vector resultante.

Nota: El vector representa la velocidad ángular de la partícula y va a lo largo de la dirección del eje de giro, está es la misma dirección para el desplazamiento
ángular y la aceleración ángular Solución Partimos del planteamiento de la derivada en cuestión:
Tenemos entonces la derivada de un producto:
La primera expresión es la deriada de la velocidad ángular que corresponde a la
aceleración ángular , el segundo término de derivada lo podemos reemplazar igualmente:
Está sería en sí la expresión para la aceleración, podemos intuir de está ecuación entonces que tendrá dos componentes, la primera corresponde al producto cruz entre la aceleración angular que va en la dirección del eje y el radio. Si realizamos esté producto cruz notaremos que el vector resultante es tangente al círculo de giro de la partícula, por eso se le llama aceleración tangencial. El segundo término es un producto triple vectorial, en el cuál en primera instancia tenemos como resultado la velocidad de la partícula que al igual que la otra componente de aceleración hallada es tangencial al círculo de giro de la partícula. Ahora cuando está se opera nuevamente con la velocidad ángular que va en la dirección del eje obtenemos que esta comoponente esta dirigida hacía el centro del círculo por lo que se conoce como una componente normal.
9. TEMA: Controlabilidad de Sistemas en Representación en Variables de Estado Objetivos:
Introducir conceptos avanzados de Sistemas Dinámicos los cuales parten de conocimientos de Algebra Lineal para su solución.
Romper la brecha entre el conocimiento teórico dado en la asignatura de Algebra Lineal y aterrizarlo para una aplicación directa en el área de la ingeniería
Aplicación o contextualización para el programa curricular: Una de las representaciones utilizadas cuando se trabajan con sistemas dinámicos es la de variables de estado. En está, se utiliza las matrices como medio de simplificar y

consolidar un número determinado de ecuaciones. El trabajo en este estado implica para el estudiante el conocimiento de ciertos conocimientos de álgebra lineal los cuales suelen perderse en el tiempo debido a la poca aplicación que se suele ver de los mismos. Por esto resulta interesante plantear este ejercicio para mostrar al estudiante la aplicación directa de los conocimientos que está adquiriendo.
a. Nombre del problema 1
Controlabilidad de un Sistema en Representación de Variables de Estado Explicación del problema En el área de control y análisis de sistemas dinámicos es común la descripcción de sistemas por medio de variables de estados de modo que el sistema se representa de modo:
Donde A, B, C y D son matriz que representan reales de dimensiones específicadas. Uno de los factores que se evaluan en un sistema bajo está representación es la
controlabilidad de un sistema. Se dice que un sistema es totalmente controlable
sí la matriz de controlabilidad dada por:
Es de rango n donde Ay B son de dimensiones nxn y nxr respectivamente. Considere el sistema dado por las matrices:
, , ,
Determine si el sistema es controlable. Solución Calculamos la matriz de controlabilidad, con n=2, r=1:

Observamos que esta matriz es de rango uno ya que por lo menos uno de sus elementos es diferente de cero, sin embargo el sistema solo es completamente controlable si la matriz tuviera rango 2, por lo tanto el sistema no es controlable.
b. Nombre del problema 1
Observabilidad de un Sistema en Representación de Variables de Estado Explicación del problema Partiendo del mismo sistema en representación de variables de estado del punto anterior, otro de los factores que se evaluan en un sistema bajo está representación es la observabilidad del sistema. Se dice que un sistema es totalmente observable sí la matriz de observabilidad dada por:
Es de rango n donde Ay C son de dimensiones nxn y mxn respectivamente. Considere el sistema dado por las matrices:
, , ,
Determine si el sistema es completamente observable. Solución Calculamos la matriz de observabilidad, con n=2, r=1:

Observamos que esta matriz es de rango uno ya que por lo menos uno de sus elementos es diferente de cero, sin embargo el sistema solo es completamente observable si la matriz tuviera rango 2, por lo tanto el sistema no es obsrevable.
Bibliografía [1] Gere James M, Mecánica de Materiales, Editorial Thomson, 6ta Edición, México, 2006, Pág 483-394 [2] Beer, Ferdinand y Johnston, Rusell Mecánica Vectorial Para Ingenieros: Dinámica, Editorial Mc Graw Hill, México, 2007, Págs, 609-612, 667 [3] Kuo, Benjamin, Sistemas de Control Automático, Editorial Prentice Hall, 7ª Edición, México, 1996 [4] Ogata, Katsuhiko, Ingeniería de Control Moderna, Editorial Pearson, 3ª Edición, México, 1998, Pág 737-742 [5] Beer, Ferdinand y Johnston, Statics and Mechanics of Materials, Editorial Mc Graw Hill, USA, 2011, Págs, 60-85, 518-519 [6] Appin Knowledge Solutions, Robotics, Infinity Science Press, 1ª Edición, USA, 2007, Pág 213–219 [7] Distefano, Joseph, Feedback and Control Systemas, Schaum’s Outline Series, Mc Graw Hill, 2ª Edición, USA, 1995, Pág 115-117
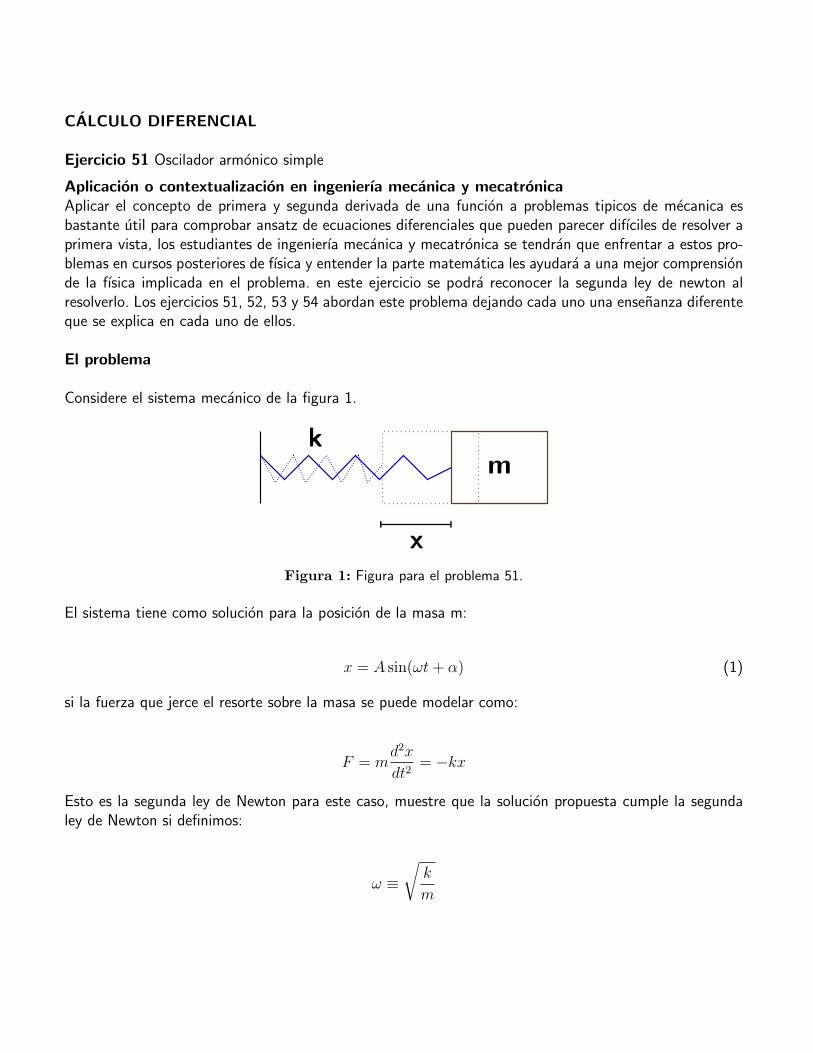
CALCULO DIFERENCIAL
Ejercicio 51 Oscilador armonico simple
Aplicacion o contextualizacion en ingenierıa mecanica y mecatronicaAplicar el concepto de primera y segunda derivada de una funcion a problemas tipicos de mecanica esbastante util para comprobar ansatz de ecuaciones diferenciales que pueden parecer difıciles de resolver aprimera vista, los estudiantes de ingenierıa mecanica y mecatronica se tendran que enfrentar a estos pro-blemas en cursos posteriores de fısica y entender la parte matematica les ayudara a una mejor comprensionde la fısica implicada en el problema. en este ejercicio se podra reconocer la segunda ley de newton alresolverlo. Los ejercicios 51, 52, 53 y 54 abordan este problema dejando cada uno una ensenanza diferenteque se explica en cada uno de ellos.
El problema
Considere el sistema mecanico de la figura 1.
mk
xFigura 1: Figura para el problema 51.
El sistema tiene como solucion para la posicion de la masa m:
x = A sin(ωt+ α) (1)
si la fuerza que jerce el resorte sobre la masa se puede modelar como:
F = md2x
dt2= −kx
Esto es la segunda ley de Newton para este caso, muestre que la solucion propuesta cumple la segundaley de Newton si definimos:
ω ≡√
k
m

Solucion
Para comprobar esto debemos entonces derivar la solucion a fin de verificar que la segunda derivadacumple la ecuacion pedida:
dx
dt= Aω cos(ωt+ α) =⇒ d2x
dt2= −ω2
x︷ ︸︸ ︷A sin(ωt+ α)
=⇒ d2x
dt2= −ω2xcon ω =
√k
m=⇒ ω2 =
k
m
=⇒ d2x
dt2= − k
mx =⇒ m
d2x
dt2= −kx
Y se comoprobo entonces que la solucion propuesta cumple la segunda ley de Newton para el caso de laFigura 1. donde se ha modela do la fuerza como F = −kx.
CALCULO DIFERENCIAL Y MATEMATICAS BASICAS
Ejercicio 53 Otra solucion para el oscilador armonico simple
Una solucion bastante parecida a la del problema 52 puede proponerse para el sistema de la Figura 1.
x = A cos(ωt+ β)
La segunda ley de Newton para este caso es:
F = md2x
dt2= −kx
Muestre que la solucion propuesta cumple la segunda ley de Newton
Solucion
Para comprobar esto debemos entonces derivar la solucion a fin de verificar que la segunda derivadacumple la ecuacion pedida:
dx
dt= Aω sin(ωt+ α) =⇒ d2x
dt2= −ω2
x︷ ︸︸ ︷A cos(ωt+ α)
=⇒ d2x
dt2= −ω2xcon ω =
√k
m=⇒ ω2 =
k
m
=⇒ d2x
dt2= − k
mx =⇒ m
d2x
dt2= −kx
2

Y se comoprobo entonces que la solucion propuesta cumple la segunda ley de Newton para el caso de laFigura 1. donde se ha modela do la fuerza como F = −kx.Ahora veamos que existe una equivalencia entre la solucion propuesta en el problema 52 y la solucion deeste problema, esto es:
A′ cos(ωt+ β) = A sin(ωt+ α)
Esta relacion se satisface si A′ = A y si α + π = βEntonces podemos escribir la solucion para el oscilador armonico simple de cualquiera de las dos formasya que estas son equivalentes.
CALCULO DIFERENCIAL
Ejercicio 54 Otra solucion para el oscilador armonico simple
Si para el sistema mostrado en la Figura 1 proponemos una solucion de la forma:
x = B sin(ωt) + C cos(ωt) con ω =
√k
m(2)
Muestre que esta solucion satisface la segunda ley de Newton si se modela la fuerza del resorte comoF = −kx. Esto es muestre que la solucion propuesta cumple:
F = md2x
dt2= −kx
Solucion
Debemos derivar nuestra solucion a fin de comprobar el resultado
dx
dt= Bω cos(ωt)−Bω sin(ωt)
=⇒ d2x
dt2= −ω2
x︷ ︸︸ ︷[B sin(ωt) + C cos(ωt)]
=⇒ d2x
dt2= −ω2x =⇒ ω2 =
k
m
=⇒ d2x
dt2= − k
mx =⇒ m
d2x
dt2= −kx
3

MATEMATICAS BASICAS
Ejercicio 55 Equivalencia entre dos soluciones para el oscilador armonico simple
Muestre que las soluciones para el oscilador armonico simple, ecuaciones (1) y (2), son equivalentes cuandolos parametros A, B, C y α cumplen las relaciones:
A2 = B2 + C2 yB
C= tan(α)
Esto significa que la relacion entre dichas constantes puede ser representada por el triangulo de la Figura2.
α
A
C
B
Figura 2: Figura para el problema 53.
Solucion
Si asumimos que las soluciones son equivalentes la igualdad:
B sin(ωt) + C cos(ωt) = A sin(ωt+ α) (3)
No deberıa llevarnos a ninguna contradiccion o a ningun error matematico, y de allı podremos deducir lasrelaciones pedidas. Si desarollamos mas esta expresion podemos escribir:
B sin(ωt) + C cos(ωt) = A sin(ωt) cos(α) + A cos(ωt) sin(α) (4)
Ahora como esta relacion debe cumplirse para cualquier valor de t y como las funciones sin y cos sonlinealmente independientes, entonces la unica forma de cumplir la igualdad es:
4

B = A cos(α) y C = A sin(α) (5)
=⇒ B2 + C2 = A2 cos2(α) + A2 sin2(α) = A2(cos2(α) + sin2(α)) = A2 (6)
C
B=
A sin(α)
A cos(α)= tan(α) (7)
CALCULO DIFERENCIAL
Ejercicio 56 Osciladores acoplados
Aplicacion o contextualizacion en ingenierıa mecanica y mecatronicaAplicar el concepto de primera y segunda derivada de una funcion a problemas tipicos de mecanica esbastante util para comprobar ansatz de ecuaciones diferenciales que pueden parecer difıciles de resolver aprimera vista, el problema de osciladores acoplados sera ampliamente tratado en cursos de mecanica paraingenierıa mecanica y mecatronica el desarrollo de los problemas 54 y 55 permitra a los estudiantes tenerun primer acercamiento a problemas de este tipo y que sulen causar problemas de interpretacion, tener laparte matematica clara les ayudara a enfrentar estos problemas con mayor confianza.
El problema
Considere el sistema ilustrado en la Figura 3.
x2x1
k
m m
kkc
Figura 3: Figura para el problema 1.
Si proponemos un ansatz de solucion para las posiciones x1 y x2 de cada una de las masas, dado por:
x1 = A sin(ω1t+ α1) +B cos(ω2t+ α2) (8)
x2 = A sin(ω1t+ α1)−B cos(ω2t+ α2) con ω1 =
√k
my ω2 =
√k + 2kcm1
(9)
Estas soluciones que parecen difıciles de proponer a primera vista, tienen su justificacion en la superposicionde los dos modos normales posibles para el sistema, y que veran los estudiantes en sus cursos de mecanica.El problema consiste en verificar que la segunda ley de Newton para la masa 1 se cumple, esto es verificarque:
5

F = md2x1
dt2= −kx1 + kc(x2 − x1)
Solucion
Debemos entonces derivar la solucion propuesta para x1 esto es:
dx1
dt= Aω1 cos(ω1t+ α1)−Bω2 sin(ω2t+ α2)
d2x1
dt2= −Aω2
1 sin(ω1t+ α1)−Bω22 cos(ω2t+ α2)
d2x1
dt2= − k
mA sin(ω1t+ α1)−
k + 2kcm
B cos(ω2t+ α2)
d2x1
dt2= − k
m
x1︷ ︸︸ ︷[A sin(ω1t+ α1) + B cos(ω2t+ α2)]−
kcm2B cos(ω2t+ α2)
Ahora si calculamos x2 − x1 esto es:
x2 − x1 = A sin(ω1t+ α1)−B cos(ω2t+ α2)− A sin(ω1t+ α1)−B cos(ω2t+ α2)
= −2B cos(ω2t+ α2)
De esta forma tenemos que:
d2x1
dt2= −k1
mx1 +
kcm(x2 − x1)
Y obtenemos el resultado deseado.
CALCULO DIFERENCIAL
Ejercicio 55 Osciladores acoplados parte 2
Compruebe que la solucion propuesta cumple con la segunda ley de Newton para la masa m2 esto escompruebe que dicha solucion cumple:
F = md2x2
dt2= −kx2 − kc(x2 − x1)
Solucion
Debemos entonces derivar la solucion propuesta para x2 esto es:
6

dx2
dt= Aω1 cos(ω1t+ α1) +Bω2 sin(ω2t+ α2)
d2x2
dt2= −Aω2
1 sin(ω1t+ α1) +Bω22 cos(ω2t+ α2)
d2x2
dt2= − k
mA sin(ω1t+ α1) +
k + 2kcm
B cos(ω2t+ α2)
d2x2
dt2= − k
m
x2︷ ︸︸ ︷[A sin(ω1t+ α1)−B cos(ω2t+ α2)] +
kcm2B cos(ω2t+ α2)
Usando el resultado hallado en el ejercicio 54 para x2 − x1 tenemos que:
F = md2x2
dt2= −kx2 − kc(x2 − x1)
Que era el resultado pedido.
7

EJERCICIOS CON SU RESPECTIVA SOLUCION PROPUESTOS PARA EL SIMULACRODEL EXAMEN FINAL DEL CURSO DE MATEMATICAS BASICAS
pregunta 1
Si tan(θ) = 3/4 y si 0 ≤ θ ≤ π/2 entonces sin(θ) + sec(θ) =
a)35
12b)
37
15
c)7
5e)
37
20
Solucion
Partiendo de la definicion de tangente de un angulo en un triangulo rectangulo podemos obtener el dibujode la Figura 1.
35
4
θ
Figura 4: Figura para el problema 1.
El valor de la longitud del lado opuesto al angulo en la figura es de 3 y la longitud del lado adyacentees de 4, de esta forma por el teorema de pitagoras la hipotenusa sera 5 y del dibujo el seno coseno y lasecante seran:
sin(θ) =3
5cos(θ) =
4
5sec(θ) =
5
4=⇒ sin(θ) + sec(θ) =
37
20
pregunta 2
Si en la figura los segmentos AB = 3, aC = 4, AC = 5 entonces la longitud del segmento ab es de:
a)15
4b)
4
15
c)20
3e)
12
5
8

C
A
B
a
b
Figura 5: Figura para el problema 2.
Solucion
Los triangulos ABC y abc son semejantes por lo que podemos escribir:
aC
AC=
AB
ab=⇒ ab = AC
AB
aC=
15
4
pregunta 3
El tiempo de semivida del 54Mn es de 216 dıas esto significa que cada 216 dıas la cantidad de 54Mn enuna muestra se reduce a la mitad. Si se tiene inicialmente una muestra de 32 gramos de 54Mn en cuantotiempo esta cantidad se reducira a 2 gramos
a) 432 dıas b) 648 dıas
c) 864 dıas e) 1080 dıas
Solucion
Este tipo de comportamiento en donde una cantidad decrece de esta forma, se expresa matematicamentecon la ecuacion:
C(t) = C02−t/216
Donde C(t) es la cantidad de elemento despues de un tiempo t y C0 es la cantidad inicial de dichoelemento, y el tiempo t se cuenta en dıas. De esta forma reemplazando los valores dados por el problematenemos:
2 = 32 · 2−t/216 =⇒ 16 = 2t/216 =⇒ log2(16) = log2(2t/216
)log2
(24)= log2
(2t/216
)=⇒ 4 =
t
216=⇒ t = 864
9

pregunta 4
El conjunto solucion de:
10
4x− 2≤ 5
es:
a) [1,∞) b) (−∞, 1/2] ∪ [1,∞)
c) (−∞, 1/2) ∪ [1,∞) e) (−∞, 1/2]
Solucion
La solucion se obtiene de la siguiente forma:
10
4x− 2≤ 5 =⇒ 10
4x− 2− 5 ≤ 0 =⇒ 10− 20x+ 10
4x− 2≤ 0
20− 20x
4x− 2≤ 0 =⇒ 20(1− x)
4(x− 1/2)≤ 0 =⇒ 20(x− 1)
4(x− 1/2)≥ 0
Entonces usando la tecnica conocida como cementerio que muestra en la figura 3
112
Figura 6: Figura para el la solucion al problema 4.
Concluimos que el conjunto solucion es (−∞, 1/2)∪ [1,∞) adicionalmente el valor x = 1/2 no es validoya que desde que se escribe la ecuacion este valor de x genera una division por cero.
10