Ordering Conference Proceedings - National Sea Grant Library
Upload
khangminh22Category
view
4download
0
DYNAMICS OF LONG WATER WAVES:
WAVE-SEAFLOOR INTERACTIONS, WAVES
THROUGH A COASTAL FOREST, AND WAVE
RUNUP
A Dissertation
Presented to the Faculty of the Graduate School
of Cornell University
in Partial Fulfillment of the Requirements for the Degree of
Doctor of Philosophy
by
I-Chi Chan
August 2011

c© 2011 I-Chi Chan
ALL RIGHTS RESERVED

DYNAMICS OF LONG WATER WAVES: WAVE-SEAFLOOR INTERACTIONS,
WAVES THROUGH A COASTAL FOREST, AND WAVE RUNUP
I-Chi Chan, Ph.D.
Cornell University 2011
This dissertation studies three applied topics concerning long-wave dynamics.
Interactions between surface waves and a muddy seabed are first investigated.
Under the assumption that a seafloor can be modeled as a layer of viscoelastic
sediments, a set of depth-integrated equations is derived to describe the propa-
gation of long waves under the effects of seabed conditions. Dynamic responses
of a viscoplastic mud bed subject to a surface solitary wave are also studied.
Surface waves can be attenuated considerably due to the presence of a muddy
seabed. Features of wave-induced mud motions depend largely on the rheol-
ogy of bottom sediments. Theoretical predictions are tested against available
experimental data. A good agreement is observed.
Next, a theory is developed to study the effects of emergent coastal forests on
the propagation of long surface waves of small amplitudes. The forest is ideal-
ized by a periodic array of rigid cylinders. Parameterized models are employed
to simulate turbulence and to represent bed friction. A multi-scale analysis is
carried out to deduce the averaged equations on the wavelength-scale, with the
effective coefficients calculated by numerically solving the flow problem in a
unit cell surrounding one or several cylinders. Analytical and numerical solu-
tions for the wave attenuation are presented. Comparisons with laboratory data
show very good agreements for both periodic and transient incident waves.
Finally, the last topic concerns mainly the runup of leading tsunami waves.

Lagrangian long-wave equations are derived to help accurately track the mov-
ing shoreline. A series of numerical experiments reveals that the front-profiles
of leading tsunami waves dominate the runup processes while the back-profiles
are influential for the rundown flows. For a leading elevation wave, stronger ac-
celeration of the wave front results in higher maximum runup height. As far as
the maximum runup height is concerned, it is sufficient to consider only the ac-
celerating phase of the main tsunami wave. It is concluded that solitary wave is
not a perfect modeling wave for tsunami research. Directly applying the runup
rule of solitary wave to tsunami runup can lead to a very inaccurate estimation.

BIOGRAPHICAL SKETCH
I was born and raised in Taipei, Taiwan. Before being awarded this Doctor of
Philosophy degree, I earned my Bachelor of Engineering degree in Water Re-
sources and Environmental Engineering from Tamkang University, my Master
of Science degree in Civil Engineering from National Taiwan University, and
another Master of Science degree in Civil and Environmental Engineering from
University of Illinois at Urbana-Champaign.
iii

Dedicated to my parents, my wife, and my two sisters.
iv

TABLE OF CONTENTS
Biographical Sketch . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iiiDedication . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ivAcknowledgements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vTable of Contents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . viList of Tables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ixList of Figures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . x
1 Introduction 1
2 Long water waves over a thin muddy seabed 92.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.1.1 A simplified two-layer model and assumptions . . . . . . 122.1.2 An overview of the mud rheology . . . . . . . . . . . . . . 14
2.2 A generalized model for surface waves interaction with a linearviscoelastic muddy seabed . . . . . . . . . . . . . . . . . . . . . . . 162.2.1 Depth-integrated model for weakly nonlinear and weakly
dispersive water waves . . . . . . . . . . . . . . . . . . . . 202.2.2 Model equations for mud flow motions . . . . . . . . . . . 252.2.3 Rheology model for a linear viscoelastic mud . . . . . . . . 292.2.4 Solution forms inside the muddy seabed . . . . . . . . . . 332.2.5 1HD application: evolution of wave height of a surface
solitary wave . . . . . . . . . . . . . . . . . . . . . . . . . . 442.2.6 1HD application: amplitude variation of a linear progres-
sive wave . . . . . . . . . . . . . . . . . . . . . . . . . . . . 512.2.7 Explicit solutions for 1HD periodic waves . . . . . . . . . . 552.2.8 Comparison with laboratory experiments . . . . . . . . . . 582.2.9 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
2.3 Response of a Bingham-plastic muddy seabed to a surface soli-tary wave . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 652.3.1 Formulation for wave-induced mud motions inside a thin
Bingham-plastic seabed . . . . . . . . . . . . . . . . . . . . 682.3.2 Review of Mei & Liu (1987) . . . . . . . . . . . . . . . . . . 692.3.3 Solutions inside a Bingham-plastic mud . . . . . . . . . . . 732.3.4 Extension of the solution technique . . . . . . . . . . . . . 832.3.5 Numerical examples . . . . . . . . . . . . . . . . . . . . . . 842.3.6 Wave attenuation caused by a thin layer of mud . . . . . . 982.3.7 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
2.4 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
3 Long water waves through emergent coastal forests 1063.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1063.2 Theoretical formulation . . . . . . . . . . . . . . . . . . . . . . . . 110
vi

3.2.1 Governing equations and boundary conditions . . . . . . 1103.2.2 The linearized problem . . . . . . . . . . . . . . . . . . . . 1123.2.3 Depth-integrated equations for the constant eddy viscos-
ity model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1123.2.4 Estimation of controlling parameters . . . . . . . . . . . . 115
3.3 Method of homogenization . . . . . . . . . . . . . . . . . . . . . . 1183.4 Macro theory for linear progressive waves . . . . . . . . . . . . . . 120
3.4.1 Homogenization . . . . . . . . . . . . . . . . . . . . . . . . 1213.4.2 Numerical solution of the micro-scale cell problem . . . . 1243.4.3 1HD application: constant water depth . . . . . . . . . . . 1253.4.4 1HD application: variable water depth . . . . . . . . . . . 1303.4.5 Experiments and numerical simulation for periodic waves 135
3.5 Macro theory for transient waves . . . . . . . . . . . . . . . . . . . 1393.5.1 Homogenization . . . . . . . . . . . . . . . . . . . . . . . . 1393.5.2 Numerical solution for the transient cell problem . . . . . 1433.5.3 Numerical model for the macro-scale solutions . . . . . . . 1463.5.4 1HD application: tsunami waves through a thick forest . . 1463.5.5 Comparison with laboratory experiments . . . . . . . . . . 154
3.6 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 160
4 Long-wave modeling in the Lagrangian description 1634.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1634.2 On the solitary wave paradigm for tsunami waves . . . . . . . . . 1654.3 Characteristics of leading tsunamis and solitary waves . . . . . . 167
4.3.1 Leading waves of the 2004 Indian Ocean tsunamis . . . . . 1674.3.2 Leading waves of the 2011 Tohoku tsunamis . . . . . . . . 171
4.4 Lagrangian long-wave equations . . . . . . . . . . . . . . . . . . . 1744.5 Numerical model and its validation . . . . . . . . . . . . . . . . . 1754.6 The role of surface profile on the tsunami runup . . . . . . . . . . 1814.7 The role of beach slope on the tsunami runup . . . . . . . . . . . . 1894.8 Discussions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 189
5 Concluding remarks and suggestions for future work 194
A Motions of a bi-viscous muddy seabed under a surface solitary wave 198A.1 Solutions of mud flows inside a bi-viscous seabed . . . . . . . . . 198A.2 Approximate bi-viscous model . . . . . . . . . . . . . . . . . . . . 202
B The Lagrangian long-wave equations 204B.1 Shallow water equations . . . . . . . . . . . . . . . . . . . . . . . . 204B.2 Boussinesq equations . . . . . . . . . . . . . . . . . . . . . . . . . . 207B.3 A stratified multi-layer model . . . . . . . . . . . . . . . . . . . . . 218B.4 Solid slide on a plane beach . . . . . . . . . . . . . . . . . . . . . . 219
vii

Bibliography 222
viii

LIST OF TABLES
2.1 Laboratory conditions of periodic waves over a viscoelastic mudbed by Maa & Mehta (1987, 1990). . . . . . . . . . . . . . . . . . . 63
3.1 Controlling parameters in the proposed wave-forest model: Val-ues of σ and α under different wave conditions. . . . . . . . . . . 117
3.2 Positions of wave gauges in the experiments at NTU, Singapore. 1353.3 Laboratory conditions of periodic waves experiments at NTU:
Wave periods range from 0.8 to 3.0 seconds. . . . . . . . . . . . . 1373.4 Experimental conditions of NTU study: Periodic waves with a
wide range of wave amplitudes. . . . . . . . . . . . . . . . . . . . 1393.5 Experimental conditions of NTU study: Solitary waves cases. . . 157
4.1 Solitary wave characteristics for two different scenarios. . . . . . 1714.2 Ocean bottom tsunami meters (TM1, TM2) and the GPS gauge
station (Iwate South) off the northeastern coast of Japan. . . . . . 173
ix

LIST OF FIGURES
2.1 Surface waves over a muddy seabed. . . . . . . . . . . . . . . . . 142.2 Rheology curves for viscous, elastic, and plastic behaviors. . . . . 152.3 Schematic sketch of a Maxwell element and a Kelvin-Voigt ele-
ment. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.4 Rheology curves for a Maxwell element and a Kelvin-Voigt ele-
ment. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.5 Rheology curve for a viscoplastic mud. . . . . . . . . . . . . . . . 182.6 A surface solitary wave over a viscoelastic mud: Time histories
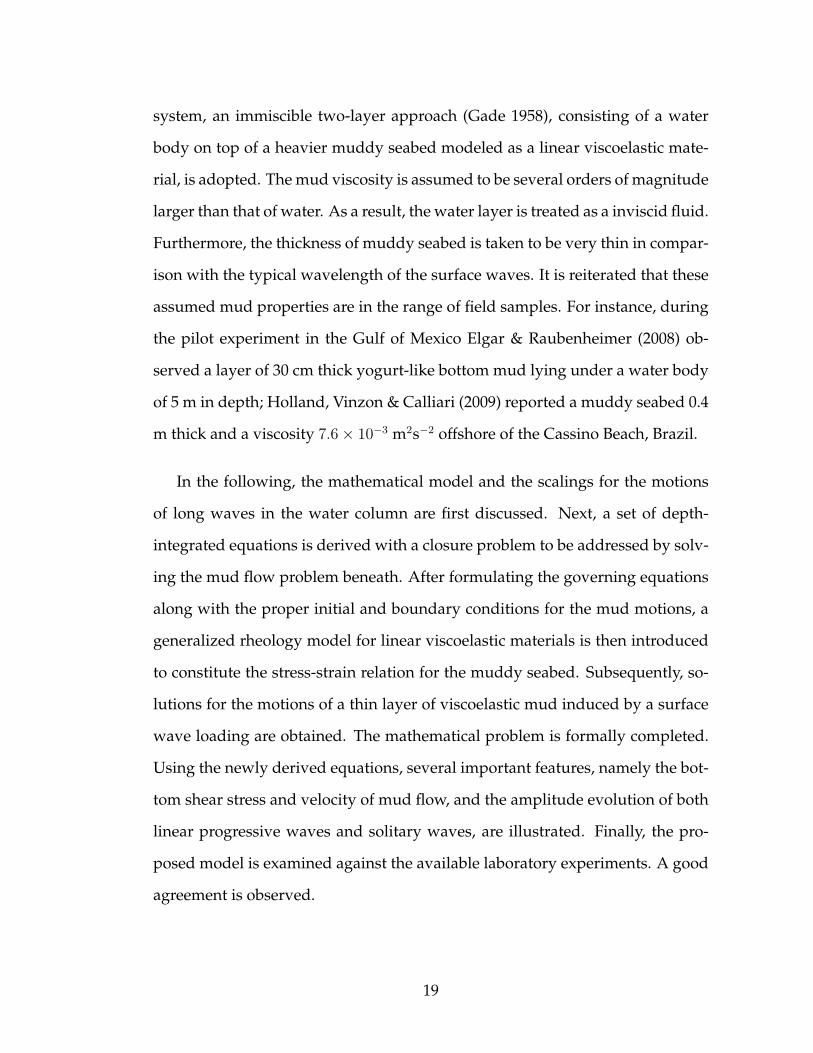
of horizontal mud flow velocity at the water-mud interface, umi. 412.7 A surface solitary wave over a viscoelastic mud: Time histories
of bottom shear stress, τmb. . . . . . . . . . . . . . . . . . . . . . . 422.8 A surface solitary wave over a viscoelastic mud: Profiles of hor-
izontal velocity, um, inside the mud column at different phases. . 432.9 Evolution of a surface solitary wave propagating over a vis-
coelastic mud: Wave height as a function of time. . . . . . . . . . 502.10 Surface solitary wave propagates over a viscoelastic mud: Effect
of mud layer thickness on the evolution of wave height. . . . . . 512.11 A linear progressive wave over a viscoelastic mud: βi as a func-
tion of d. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 562.12 Periodic wave over a viscous mud: Comparison with Gade (1958). 602.13 Solitary wave over a viscous mud: Comparison of horizontal ve-
locity component. . . . . . . . . . . . . . . . . . . . . . . . . . . . 612.14 Viscous mud flow induced by a solitary wave: Comparison with
Park, Liu & Clark (2008). . . . . . . . . . . . . . . . . . . . . . . . 622.15 Solitary wave over a viscous mud: Interfacial displacement and
bottom shear stress . . . . . . . . . . . . . . . . . . . . . . . . . . . 632.16 Periodic waves over a viscoelastic mud: Velocity profiles. . . . . 642.17 Sketches of solitary wave induced Bingham-plastic mud flow ve-
locity: Two-layer scenario. . . . . . . . . . . . . . . . . . . . . . . . 712.18 Sketches of solitary wave induced Bingham-plastic mud flow ve-
locity: Four-layer scenario. . . . . . . . . . . . . . . . . . . . . . . 742.19 Sketches of solitary wave induced Bingham-plastic mud flow ve-
locity: Three-layer scenario. . . . . . . . . . . . . . . . . . . . . . . 772.20 Bingham-plastic mud flow solutions of 4-layer scenario (1): Yield
surfaces and interfacial velocity. . . . . . . . . . . . . . . . . . . . 852.21 Sample solutions of 4-layer scenario (2): Vertical profiles of mud
flow velocity. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 862.22 Bingham-plastic mud flow solutions of 3-layer scenario (1): Yield
surfaces and interfacial velocity. . . . . . . . . . . . . . . . . . . . 902.23 Sample solutions of 3-layer scenario (2): Vertical profiles of mud
flow velocity. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
x

2.24 Bingham-plastic mud flow solutions of 2-layer scenario (1): Yieldsurfaces and interfacial velocity. . . . . . . . . . . . . . . . . . . . 93
2.25 Sample solutions of 2-layer scenario (2): Vertical profiles of mudflow velocity. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
2.26 Bingham-plastic mud problem: Comparison with the theory ofMei & Liu (1987). . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
2.27 Strain rate of at the bottom of a Bingham-plastic muddy seabed. 962.28 Effects of viscosity on the flow motion inside a Bingham-plastic,
τ0/d = 0.02. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 972.29 Effects of viscosity on the flow motion inside a Bingham-plastic,
τ0/d = 0.2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 982.30 Effects of physical mud layer thickness on the flow motion inside
a Bingham-plastic mud. . . . . . . . . . . . . . . . . . . . . . . . . 992.31 Energy dissipation of a surface solitary wave over a thin layer of
Bingham-plastic mud. . . . . . . . . . . . . . . . . . . . . . . . . . 102
3.1 Sketch of the wave-forest problem. . . . . . . . . . . . . . . . . . . 1103.2 Discretization of a typical unit cell and the spatial distributions
of K11(x). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1253.3 Hydraulic conductivity as a function of depth-to-wavelength ra-
tio, k0h0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1263.4 Periodic waves through a semi-infinite forest in a constant water
depth region: Reflection coefficient and snapshots of free-surfaceelevation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
3.5 Periodic waves propagating through a finite patch of forest ina constant water depth: Reflection coefficient and snapshots offree-surface elevation. . . . . . . . . . . . . . . . . . . . . . . . . . 130
3.6 Snapshots of periodic waves propagating through a forest on aplane beach. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
3.7 Periodic waves through a finite forest belt: Reflection coefficient. 1343.8 Sketch of experimental setup at NTU, Singapore. . . . . . . . . . 1363.9 Comparison between theory and experimental data: Reflection
coefficient for periodic waves. . . . . . . . . . . . . . . . . . . . . 1383.10 Reflection and transmission coefficients against amplitude-to-
depth ratio: Comparison between theory and measurements. . . 1403.11 Sample solutions of dynamic permeability, K(t). . . . . . . . . . . 1443.12 Effects of the cell geometry on the dynamic permeability. . . . . . 1453.13 Leading waves of a tsunami entering a deep forest in a constant
water depth: Theoretical and numerical solutions. . . . . . . . . . 1553.14 A transient wave packet crossing a forest: Comparison between
theory and measurements. . . . . . . . . . . . . . . . . . . . . . . 1563.15 Sample record of incident wave for solitary wave experiments at
NTU, Singapore. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
xi

3.16 Solitary waves through a model forest of finite length (H/h0 =0.04, 0.0775): Comparison between theory and measurements. . . 159
3.17 Solitary waves through a model forest of finite length (H/h0 =0.1117, 0.1483): Comparison between theory and measurements. 160
3.18 Solitary waves through a model forest of finite width (H/h0 =0.1883): Comparison between theory and measurements. . . . . . 161
4.1 2004 Indian Ocean tsunamis: Satellite images. . . . . . . . . . . . 1694.2 2004 Indian Ocean tsunamis: Numerical simulations. . . . . . . . 1704.3 2011 Tohoku tsunamis: Locations of the gauge stations and the
epicenter of the earthquake. . . . . . . . . . . . . . . . . . . . . . . 1724.4 2011 Tohuku tsunamis: Gauge records. . . . . . . . . . . . . . . . 1734.5 Runup of surface waves on an infinite sloping beach. . . . . . . . 1784.6 Runup of a non-breaking solitary wave on a one-slope beach. . . 1794.7 Runup of a non-breaking solitary wave on a three-slope beach. . 1804.8 Effects of the horizontal length scale of the initial wave condition
on the runup and rundown. . . . . . . . . . . . . . . . . . . . . . . 1844.9 Effects of the back profile of the initial wave condition on the
runup and rundown. . . . . . . . . . . . . . . . . . . . . . . . . . . 1864.10 Effects of the preceding waves on the runup processes. . . . . . . 1884.11 Runup and drawdown of model waves on a one-slope beach. . . 1904.12 Effects of the bottom slope on the wave runup over a one-slope
beach . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191
A.1 Sketches of solitary wave induced bi-viscous mud flow velocity. 200A.2 Rheology curve of a bi-viscous mud. . . . . . . . . . . . . . . . . 203
xii

CHAPTER 1
INTRODUCTION
Ocean surface waves, among the best-known oceanic phenomena, perform an
essential role in sustaining life on our planet; in part these wave motions trans-
port energy across the continents and shape the coastlines. Ocean waves occur
over a tremendously broad range of wavelengths, from a few centimeters capil-
lary ripple to a tsunami spanning hundreds of kilometers. In particular, surface
gravity waves are of the greatest importance since gravity is the main restoring
force for wave motions associated with most human activities in the seas. In
the well-established linear water wave theory, to specify the wave motions one
needs to know the water depth h, wave height H , and wavelength L. While
the last two describe the physical dimensions of the wave, the first, from a cer-
tain perspective, states the property of the medium a wave travels through. As
for the seemingly undetermined wave period T , it can be calculated theoreti-
cally from the dispersion relationship, ω2 = gk tanh kh, where ω = 2π/T is the
wave frequency, g the gravitational acceleration, and k = 2π/L the wavenum-
ber. Through the theoretical analysis, it is interesting to see that as a surface
wave propagates, the active water particles pass along the wave energy by mov-
ing in circular orbits. What is more intriguing is that these circular orbital mo-
tions are only considerable within the depth no more than half the wavelength.
This influential depth, of course, can be smaller the total water depth.
Based on the relative magnitudes of water depth and wavelength, surface
waves are classified as long waves if h/L is less than 0.05. On the other hand,
for waves of h/L greater than 0.5 they are called short waves. Of course, waves
outside these two categories are given the name intermediate waves. To be more
1

precise, long waves are of large wavelengths, long periods, and low frequencies
while short waves are just the opposite. Long waves, inherently, have several
special features. For instance, the water particle trajectories of a long wave are
ellipse-like with the horizontal excursion more or less a constant throughout the
depth-wise extent, and a comparably negligible vertical component increases
linearly from the bottom to the free surface. In other words, the wave-induced
pressure is hydrostatic and the horizontal motions have only a weak depen-
dence on elevation. In addition, long waves are nondispersive, i.e. the wave
speed c is solely a function of the water depth, c =√gh. All leads to a com-
mon ground that the three-dimensional long-wave hydrodynamics can be legit-
imately approximated by some simplified models involving only two horizontal
dimensions. Let us also discuss some properties regarding short waves. Quite
differently, motions associated with short waves are strongly three-dimensional
as the trajectories of active water particles are circles with the orbital diameters
decreasing exponentially with depth. Also, the speed of short waves depends
on the wavelength, c =√gL/(2π), i.e. the so-called frequency dispersion.
Tremendous efforts have been made by scientists and engineers to study
long-wave mechanisms as these waves are more prominent in association with
many human activities in coastal marine environments. The importance of long
waves in the complex web of natural waters can be appreciated from several
perspectives. A rather intuitive explanation is that long waves travel faster than
short waves, and consequently would reach the beaches much earlier. This cor-
responds to the fact that for short waves c =√gL/(2π) <
√gh/(4π). One shall
also realize that long waves interact strongly with the seabed while the bottom
conditions have less impact on short waves. This can be understood by con-
sidering the previously discussed influential depth of the wave-induced water
2

particle motion, along with the underlying assumption on the limits of h/L that
distinguish the long and short waves. The presence of ocean floor makes the
physical process involving long waves more complicated. In part, bottom sed-
iments can be eroded and transported by wave motions while wave climates
can as well be changed simultaneously. One may also argue the significance
of long waves from the viewpoint of the amount of collective energy. As the
wavelength of a long wave is usually considerable and the corresponding wa-
ter particle motions are uniform throughout the entire water column, the energy
carried by a long wave is substantial. A good example is to consider tsunamis,
the extreme long waves which can have a wavelength of several hundred kilo-
meters in an open sea with a water depth of a few kilometers. Furthermore, long
waves lose less energy than short waves as they propagate. First, the frictional
energy loss is mainly attributed to the oscillations of water particles. Secondly,
water particles under short waves move upwards and downwards much more
rapidly as can be seen from the previously discussed particle trajectories. Com-
bining these two facts, the conclusion is drawn. Another point to argue the
importance of long waves in consideration of wave energy is that the velocity
of energy transport is the same as the wave speed of long waves. Consequently,
short waves die out fast as surface waves are sustained by energy.
The above arguments, although solely based on the linear wave theory along
with ideal conditions, support the significance of long waves in understanding
the mechanisms of ocean surface waves. Therefore, the objective of this dis-
sertation is to study the dynamics of long water waves. In particular, three
specific topics are investigated: Long water waves over a thin muddy seabed
(Chapter 2); Long water waves through emergent coastal forests (Chapter 3);
Long-wave modeling in the Lagrangian description (Chapter 4). The first topic
3

addresses the significance of seabed conditions on the long-wave propagation;
the second one investigates wave dynamics in a wave-forest system; finally, the
last essentially studies the runup of tsunami waves. Therefore, this dissertation
shall cover some fundamental, yet important, features of long water waves in
coastal marine environments. To introduce these three problems, which are to
be studied specifically in Chapter 2 to Chapter 4, an overview is provided in the
following.
Long water waves over a thin muddy seabed
Most studies of wave-seabed interactions have focused on the wave propaga-
tion over non-cohesive sediments, i.e. a sandy bed (see e.g. Liu 1973). Wave
attenuation due to percolation1 in a sandy bed tends to be relatively minor in
comparison with other dissipative mechanisms, such as bottom roughness and
wave breaking. On the other hand, it is well known that damping of ocean
waves can be considerable, if the seabed consists of cohesive sediments. Gade
(1958) reported that there is a location in the Gulf of Mexico, nicknamed the
Mud Hole, where the attenuation of surface waves due to the mud bed is so
great that fishing boats use it as an emergency harbour during severe storms.
Similar muddy seafloors have been reported in many coasts, rivers and estuar-
ies around the world (Healy, Wang & Healy 2002). Cohesive sediments, com-
monly characterized as mixtures of water and clays, are transported as aggre-
gates. In general, mud in different locales can exhibit diverse rheological prop-
erties, partly as a consequence of distinct physico-chemical compositions. Fac-
ing the rather complex dynamic behaviour of cohesive sediments, many sim-
plified constitutive models have been suggested, including the viscous fluid
1This can be observed when ocean waves propagate over a permeable seabed. Wave energyis dissipated by the porous bed due to the friction between water and solid skeleton (see Liu &Dalrymple 1984).
4

(Dalrymple & Liu 1978), viscoelastic (MacPherson 1980), viscoplastic (Mei &
Liu 1987), and poroelastic models (Yamamoto et al. 1978). Clearly, no single
model can describe the entire spectrum of the seabed responses because of the
great complexity and variety of mud rheology. Nevertheless, it is worthwhile
pursuing a deeper understanding of every model as each has its own range of
validity2, and it is the hope that one could build up a complex model closer
to the reality with the knowledge gained from this base. In the present study,
the emphasis is on muddy seafloors that can be modeled as either viscoplas-
tic or viscoelastic matter. The proposed models shall cover the basic material
behaviour of viscosity, elasticity, and plasticity. It is remarked that all these
rheological laws have been employed in the context of wave-seafloor interac-
tions (see e.g., Gade 1958; Mallard & Dalrymple 1977; Hsiao & Shemdin 1980;
Mei & Liu 1987). However, most of the past studies considered only waves of
small amplitudes, i.e. within the framework of linear periodic wave theory. It
is known that in shallow waters, where the seabed effects are expected to be
more significant, the wave nonlinearity can be considerable; a nonlinear theory
of long waves is therefore needed. In what follows, the immediate objective is
to develop a general model describing the interactions between long waves and
muddy seafloors. This problem is investigated and presented in Chapter 2.
Long water waves through emergent coastal forests
It is not surprising that coastal forests could serve as natural barriers to pro-
tect coastlines from tides, storm surges and tsunamis. Indeed, the field survey
conducted by Danielsen et al. (2005) has shown that vegetated coastal areas suf-
fered less damage from the 2004 Indian Ocean tsunamis. In the event of the 1999
Orissa Super Cyclone that struck the eastern coast of India, it was also seen that
2Wen & Liu (1998) classified the applicability of these models based on soil properties.
5

mangroves shielded the coastline and reduced the death toll (Dasa & Vincent
2009). It is indubitably comprehended that surface waves could lose a substan-
tial amount of energy when propagating through coastal forests. Based on the
field observations collected at Cocoa Creek in Australia, Massel, Furukawa &
Binkman (1999) were able to demonstrate that at low tides nearly 75% of inci-
dent wave enery, with a peak period of rougly 2 seconds, was dissipated when
waves propagated through a coastal forest of approximate 100 m in length. Of
course, a rough seabed can cause certain frictional loss. However, in a wave-
forest system the energy dissipation, as can be expected, is mainly due to the
turbulence generated through the multiple interactions between waves and the
vegetation; this most likely occurs throughout the entire water column. Labo-
ratory studies have been designed to build quantitative understanding of en-
ergy dissipation process in wetlands, and to evaluate the efficiency of coastal
trees in protecting the shore against tsunami attacks. For instance, Nepf (1999)
proposed a parameterized model to describe the turbulence for flow through
emergent vegetation. Modeling a coastal forest by an array of rigid cylinders,
Irtem et al. (2009) have demonstrated that trees planted on the sloping beach
can reduce the runup height of a model tsunami approximately by half. Built
on the established knowledge, the goal of this study is to develop a sound, yet
simple, theory describing the dynamics of long waves through coastal forests.
To make the analysis more tractable, a major simplification is adopted to model
tree trunks by a periodic array of rigid cylinders but to neglect the effects of
tree roots, branches, and leaves. Note that the typical diameter of tree trunks
is of O(0.5) m, while the characteristic wavelength of long waves can easily
reach O(100) m. The existence of these two distinct scales grants the use of the
homogenization technique, which can be viewed as a rigorous two-scale anal-
6

ysis, in developing the theoretical model for the present wave-forest problem.
The new theory is capable of dealing with both periodic waves and transient
waves, and will be tested against the available experimental data. Several nu-
merical examples are also given to illustrate some important features regarding
the wave-forest dynamics. This topic will be discussed in Chapter 3.
Long-wave modeling in the Lagrangian description
A tsunami, which is usually generated by a submarine earthquake, landslide,
or volcanic eruption, is an extremely long wave with a wavelength easily up
to several hundred kilometers. The science of tsunami waves has been studied
systematically for many decades. It is fair to say that a tremendous advance
has been achieved after the devastating 2004 Indian Ocean tsunamis shocked
the world. Nevertheless, our knowledge is still quite limited. This is evident af-
ter another earthquake-triggered destructive tsunami struck the northeastern
coast of Japan in March, 2011 and claimed thousands of lives. In studying
water wave theory, contributions can be made towards the understanding of
tsunami mechanisms by improving the prediction on the generation, propaga-
tion, and runup of tsunamis. Of course, the study of wave-structure interactions
is also important. In this study, the particular focus is on the terminal effect of
tsunami waves running up shoreline3. The capability of accurately estimating
the maximum runup height, i.e. the largest landward excursion of the waves
along the shoreline, is crucial in developing a tsunami evacuation plan. How-
ever, the problem is challenging as the moving shoreline makes the problem
domain time-varying. It is worth remembering that most of the wave-related
studies employ the Eulerian approach, which concentrates on the fluid motions
3A good reference on the modeling of tsunami generation and propagation is that of Wang(2008). For the study of wave-structure interactions, one can refer to, for example, the three-dimensional numerical model developed by Mo (2010).
7

at specific spatial locations. Several approximation techniques have been ap-
plied to address this well-known moving-boundary issue with various degrees
of success. An increasingly popular treatment is the higher order interpolation
method developed by Lynett (2002). The present study, on the other hand, ap-
proaches the problem by the use of the Lagrangian specification. The moving
shoreline becomes a fixed point as in the Lagrangian coordinates one essen-
tially follows the history of each individual particle. Thus, with no additional
numerical approximation required one can accurately and directly calculate the
time history of the shoreline movement, including the position and the velocity.
In many cases, it is desirable to have a quick assessment of tsunami inunda-
tion with only limited information. It is because of this engineering interest that
many runup formulae have been established by assuming certain idealized con-
ditions. For instance, the best-known work is that of Synolakis (1987), relating
the maximum runup height to the incident solitary wave height and the beach
slope. The performance of this so-called runup rule is very good, if indeed the
tsunamis can be scaled by solitary waves. However, Madsen, Fuhrman & Schaf-
fer (2008) cautioned that solitary waves can not be used to model tsunamis due
to the limitation of relevant geophysical scales. It is therefore important to un-
derstand the consequence if a solitary wave is still in use to model a tsunami.
In all, Chapter 4 will start from the introduction of long-wave equations in the
Lagrangian description. A Lagrangian numerical model is then developed to
study the runup of tsunami waves.
8

CHAPTER 2
LONG WATER WAVES OVER A THIN MUDDY SEABED
In this chapter, interactions between surface waves and a thin muddy seabed
made of cohesive sediments are studied by the use of a immiscible two-layer
water-mud system. Modeling the seafloor as a linear viscoelastic body, a set of
Boussinesq-type equations for long waves over a thin layer of mud is derived,
as presented in section 2.2. Wave damping rates for both periodic waves and
solitary waves are calculated using the newly developed model. In section 2.3,
the seabed is assumed to be made of Bingham-plastic mud. The dynamics of
mud flow induced by a surface solitary wave are investigated. To examine the
performance of the proposed model, theoretical predictions of mud flow veloc-
ity, bottom shear stress, vertical displacement at wave-mud interface, amplitude
attenuation, and wavenumber shift are all compared with available laboratory
measurements for the case of viscoelastic mud. As for the study of a surface
solitary wave propagating over a layer of Bingham-plastic mud, comparison
is made between the model results and field observations. Good agreements
are evident in all examples. It is concluded that a muddy seabed can attenuate
surface waves considerably.
2.1 Introduction
Understanding the interactive processes between surface water waves and
muddy seabeds is one of the intriguing research topics in the fields of coastal en-
gineering and ocean science. On one hand, as waves propagate over a seafloor
work is done by the wave-induced pressure force to excite the motion of fluid
9

mud. The associated wave energy loss can be considerable. Indeed, signifi-
cant damping of surface waves caused by a mud bottom has been reported by
numerous field observations (see e.g., Gade 1958; Wells & Coleman 1981; For-
ristall & Reece 1985; Elgar & Raubenheimer 2008). On the other hand, the wave-
induced mud motions not only affect the wave climate but also have great im-
pacts on the seabed morphology and biological activities in the benthic bound-
ary layer (Foda 1995). For instance, through the resuspension and deposition
processes transport of nutrients is enhanced as well as the remobilization of the
buried pollutants. In the long run, coastline change can also be expected (Mei
et al. 2010).
Muddy seabeds are essential cohesive sediments made up of fine particles
with a characteristic size less than 2 µm (Chou, Foda & Hunt 1991). In con-
trast to the non-cohesive deposits where particles move individually, the cohe-
sive sediments flow as aggregates. In general, mud in different locales can ex-
hibit diverse rheological properties, partly as a consequence of distinct physico-
chemical compositions (Balmforth & Craster 2001). Moreover, the rheology of
muddy seabed depends also on the wave climate and sediment concentration
(see e.g. Krone 1963; Chou, Foda & Hunt 1991). As a result, the rheology of
bottom mud could change dynamically. Owing to the difficulty in modeling
the complexity of nature, researchers have approached the problem, as the first
step, with different simplified rheology models to examine the wave-mud in-
teractions, namely the response of cohesive sediments to surface waves and the
impact of seabeds on wave propagation. The hope is that with the knowledge
gained from these basic studies, one could build up a complex model closer to
the reality. Some representative rheology models employed in the past studies
of wave-seafloor problem are: viscous fluid mud (Gade 1958; Dalrymple & Liu
10

1978), elastic bed (Mallard & Dalrymple 1977), viscoelastic model (MacPherson
1980; Piedra-Cueva 1993), and viscoplastic seabed (Mei & Liu 1987; Sakakiyama
& Bijker 1989). In fact, these simplified rheology models have been shown to fit
fairly well with specified field observations (Krone 1963; Maa & Mehta 1987;
Mei et al. 2010). Reviews on the early studies of wave-mud interactions have
been well documents by Mehta, Lee & Li (1994), Foda (1995) and Wen & Liu
(1998).
It is noted that almost all of the above mentioned studies have considered
only progressive waves of infinitesimal amplitudes. However, seabed effects
become more significant as surface waves propagate into shallow waters where
the wave nonlinearity is expected to be important as well. It is then the objective
of the present study to investigate the problem in a more general context, i.e. re-
lax the time periodicity assumption on the wave motions, and consider also the
effects of wave nonlinearity. Since it is well known that the wave system is bet-
ter described by Boussinesq equations in a shallow sea (see e.g. Peregrine 1972),
waves that are both weakly nonlinear and weakly dispersive shall be of partic-
ular interest. For the purpose of better understanding the fundamental physics
of wave-seafloor interactions, the following mud rheology models shall be con-
sidered: viscous, elastic, viscoelastic, and viscoplastic. In section 2.2, a single
model is proposed to describe the interactions between surface waves and a
muddy seabed made of Newtonian fluid, elastic mud, or linear viscoelastic ma-
terials, as it will be shown later in section 2.2.3 that these three can actually be
incorporated into a generalized viscoelastic model. In section 2.3, the dynamic
response of a viscoplastic seabed to a surface wave is discussed.
Before proceeding to the detailed analysis, an overview is first given in sec-
11

tions 2.1.1 and 2.1.2 to clarify the theoretical aspect of the present problem along
with several important assumptions.
2.1.1 A simplified two-layer model and assumptions
Inspired by the strong field evidence that surface waves can be damped out sig-
nificantly at certain locales, a phenomena which can not be explained by the
classical water wave theory where a rigid bottom is often assumed, Gade (1958)
was perhaps the first to investigate the wave-seafloor interactions both theoret-
ically and experimentally. In his study, a immiscible two-layer model, which
consists of a layer of water and a relative heavier seabed lying on a flat solid
bottom, was employed. In addition, the mud properties were assumed to be
homogeneous. Since then, this two-layer approach has been widely adopted by
other researchers (see e.g. Dalrymple & Liu 1978; Hsiao & Shemdin 1980; Mei &
Liu 1987; Piedra-Cueva 1993; Ng 2000; Mei et al. 2010 among others) due to its
simplicity and good performance when validating with laboratory experiments
and field observations.
Without any surprise, the simple two-layer approach has been challenged.
For instance, Maa & Mehta (1987, 1990) proposed a multi-layer stratified model
since the properties of mud, such as viscosity and elasticity, can also depend
on the concentration, which is essentially the mud density. To simulate nu-
merically several laboratory-scale examples, they divided the mud beds into
four distinct homogeneous viscoelastic layers, each of which has different val-
ues of viscosity and elasticity, according to the measured concentration profiles.
It is remarked that in the situation where mud density varies considerably, i.e.
12

mud properties are not vertically uniform, the multi-layer stratified model cer-
tainly outperforms the two-layer approach. However, as the vertical variation
becomes important one may also need to consider the time-varying layer thick-
ness, which is not incorporated in this stratified model. To improve the two-
layer treatment, Chou, Foda & Hunt (1991) also suggested another approach: a
multi-phase layered model. For example, the entire mud column can be dived
into three different layer (from top to bottom): viscous fluid, elastic mud, and
a solid bottom. The layer thicknesses, which are determined as part of the so-
lution, are no longer fixed. One can argue that this approach seems to be more
realistic for the field applications as the moving interfaces have been consid-
ered. Nevertheless, one can also question the appropriateness of the viscous-
elastic-solid configuration for a muddy seabed. How to assign the properties
to each sublayer, namely determine the proper rheology of each layer, remains
an issue. In addition, while locations of interfaces between different materials
change in time, whether mixing starts to play a role needs to be examined more
carefully. From another perspective, Shibayama & An (1993) have proposed to
consider the mud rheology as a function of wave forcing. More precisely, they
suggested that the fluid mud act as either viscoelastic or viscoplastic material
depending on the magnitude of the driven pressure force induced by the sur-
face waves. Their model intends to replicate the complex properties of natural
mud, although more field evidence is required to confirm the assumption that
the rheology of mud is indeed switching between viscoelasticity and viscoplas-
ticity.
As a first step to carefully examine the wave-mud interactions under a gen-
eral surface wave loading, the two-layer model will be adopted in the present
study: we shall consider an inviscid water body on top of a layer of heavier
13

mud. Schematic sketch of the wave-seafloor system is given in figure 2.1.
∇
Water
Mud
d′
h0
x′
y′
z′
ζ ′
ξ′
Figure 2.1: Surface waves over a layer of mud. h0 and d′ are the water
depth and the mud thickness, respectively. ζ ′ and ξ′ denote the
displacements at the free-surface and the water-mud interface.
x′ and y′ are the horizontal coordinates, and z′ is the vertical
axis. The mud layer is sitting on top of a solid bed.
2.1.2 An overview of the mud rheology
In addition to the two-layer assumption, the seabed will be modeled as either
a generalized linear viscoelastic material or a viscoplastic mud. To help under-
stand the complex mud rheology, figure 2.2 gives the schematic sketch of rhe-
ology curves for purely viscous, elastic, and plastic behaviors. Basically, stress
is proportional to strain rate for viscous fluid; elastic behavior shows the linear
relation between the stress and the strain; plastic material displays continuous
14

deformation after certain value of critical stress (yield stress) is achieved.
High viscous
Low viscous
Strain rate
Str
ess
(a)
More stiff
Less stiff
Strain
Str
ess
(b)
Strain rate
Str
ess
(c)
Yield stress
Figure 2.2: Schematic diagram of rheology curves for: (a) Viscous mud; (b)
Elastic mud; (c) Plastic mud.
It can be expected that a viscoelastic material exhibits both viscous and elas-
tic behaviors. Two conceptual rheology models are the Maxwell element and
the Kelvin-Voigt element, both consisting of a linear combination of an elastic
spring and a viscous damper (dashpot), as have been sketched in figure 2.3 (see
e.g., Malvern 1969). Using the information given in figures 2.2 and 2.3, the re-
sponses of these two elements under a constant stress or a fixed deformation
are illustrated in figure 2.4. This provides a qualitatively understanding of lin-
ear viscoelastic media. It is noted that the detailed constitutive equation of a
viscoelastic mud is to be discussed in section 2.2.3.
For an ideal viscoplastic mud, namely a Bingham-plastic material, the rheol-
ogy curve is demonstrated in figure 2.5. A Bingham-plastic mud behaves like a
rigid body when the magnitude of the stress is less than the yield stress (see also
figure 2.2), and flows pretty much as a viscous fluid at high stress. The detailed
analysis of waves over a viscoplastic seabed is presented in section 2.3.
15

(a) (b)
Figure 2.3: Schematic diagram of linear viscoelastic media: (a) Maxwell
element; (b) Kelvin-Voigt element. The stress is the same in
the spring and the dashpot for a Maxwell element. The spring
and the dashpot exhibit the same amount of deformation for a
Kelvin-Voigt element.
2.2 A generalized model for surface waves interaction with a
linear viscoelastic muddy seabed
Early studies on the interactions between a layer of viscoelastic mud and surface
waves relied on the introduction of a complex viscosity (see e.g., Tchen 1956;
Hsiao & Shemdin 1980; MacPherson 1980; Maa & Mehta 1990; Piedra-Cueva
1993; Zhang &Ng 2006),
νe = νm
(1 + i
Emρmω0νm
), (2.2.1)
where νm is the kinematic viscosity of mud,Em the shear modulus of elasticity of
mud, ρm the mud density, and ω0 the wave frequency. In terms of this complex
viscosity νe, the viscoelastic model shares the same governing equations with
those of Newtonian fluid-mud case and, of course, the solution forms (Tchen
1956). It is remarked that the problem of surface waves over a viscous fluid-mud
seabed has been studied extensively. Some representative references are Gade
(1958), Dalrymple & Liu (1978), and Ng (2000). Despite the breakthrough of the
complex viscosity concept, Ng & Zhang (2007) reiterated that this approach is
16

Time
Str
ess
(a)
Time
Str
ain
Maxwell
Time
Str
ain
K-V
Time
Str
ain
(b)
Time
Str
ess
Maxwell
Time
Str
ess
K-V
Figure 2.4: Viscoelastic behaviors of a Maxwell element and a Kelvin-Voigt
element: (a) Under a constant load; (b) Apply a fixed deforma-
tion.
valid only for the wave system of simple harmonic motions. By examining the
field samples taken from the eastern coast of China, Mei et al. (2010) have shown
that νm and Em in (2.2.1) are actually functions of ω0. This further confirms the
limited applicability of the complex viscosity model.
To investigate the higher harmonic components of wave motions which re-
late to the mass transport due to the muddy seabed, Ng & Zhang (2007) for-
mulated the problem in the Lagrangian coordinates without using the complex
viscosity approach commonly adopted in the Eulerian description. In fact, the
work by Ng & Zhang (2007) can be viewed as the extension of Piedra-Cueva
(1995) who has developed a Lagrangian model describing how surface waves
interact with a layer of viscous fluid mud. The conservation laws presented
by these two studies are, of course, general and valid for any surface wave
17

Yield stress
Bingham-plastic
Strain rate
Stress
Viscous
Figure 2.5: Rheology curves for viscous and viscoplastic (Bingham-plastic)
materials. The constitutive equation for a Bingham-plastic
mud is given in 2.3.164.
loadings. However, when deducing the analytical solutions both Piedra-Cueva
(1995) and Ng & Zhang (2007) considered only small amplitude waves. There-
fore, up to now analytical solution for the viscoelastic or viscous mud flow mo-
tions driven by a transient long-wave loading is still not available. This moti-
vates the present study.
The effects of a muddy seafloor on surface wave propagation become more
significant as waves enter shallow waters where the wave system is better de-
scribed by Boussinesq equations (see e.g. Peregrine 1972). It is, therefore, the
objective of this study to derive a set of Boussinesq-type depth-integrated equa-
tions for weakly nonlinear and weakly dispersive waves with the effects of a vis-
coelastic muddy seabed considered. It follows that the perturbation technique
outlined in Mei, Stiassnie & Yue (2005) for deriving common Boussinesq equa-
tions, and also in Liu & Orfila (2007) for studying the effects of water viscosity
on the evolution of shallow-water waves shall be applied. In the water-mud
18
system, an immiscible two-layer approach (Gade 1958), consisting of a water
body on top of a heavier muddy seabed modeled as a linear viscoelastic mate-
rial, is adopted. The mud viscosity is assumed to be several orders of magnitude
larger than that of water. As a result, the water layer is treated as a inviscid fluid.
Furthermore, the thickness of muddy seabed is taken to be very thin in compar-
ison with the typical wavelength of the surface waves. It is reiterated that these
assumed mud properties are in the range of field samples. For instance, during
the pilot experiment in the Gulf of Mexico Elgar & Raubenheimer (2008) ob-
served a layer of 30 cm thick yogurt-like bottom mud lying under a water body
of 5 m in depth; Holland, Vinzon & Calliari (2009) reported a muddy seabed 0.4
m thick and a viscosity 7.6× 10−3 m2s−2 offshore of the Cassino Beach, Brazil.
In the following, the mathematical model and the scalings for the motions
of long waves in the water column are first discussed. Next, a set of depth-
integrated equations is derived with a closure problem to be addressed by solv-
ing the mud flow problem beneath. After formulating the governing equations
along with the proper initial and boundary conditions for the mud motions, a
generalized rheology model for linear viscoelastic materials is then introduced
to constitute the stress-strain relation for the muddy seabed. Subsequently, so-
lutions for the motions of a thin layer of viscoelastic mud induced by a surface
wave loading are obtained. The mathematical problem is formally completed.
Using the newly derived equations, several important features, namely the bot-
tom shear stress and velocity of mud flow, and the amplitude evolution of both
linear progressive waves and solitary waves, are illustrated. Finally, the pro-
posed model is examined against the available laboratory experiments. A good
agreement is observed.
19

2.2.1 Depth-integrated model for weakly nonlinear and weakly
dispersive water waves
Consider a train of surface water waves with a characteristic wavelength L0
and wave amplitude a0 propagates in a uniform depth h0 overlying a thin layer
of bottom mud of thickness d′. The wave-seafloor system is sketched in figure
2.1. In contrast to the mud column which is made of cohesive sediments, the
water body of a constant density ρw is treated as an inviscid fluid following
the usual assumption of classical water wave theory. To ease the mathematical
manipulation, the following dimensionless variables are introduced:
(x, y) =x′
L0
, z =z′
h0
, t =t′
L0/√gh0
p =p′
ρga0
, ζ =ζ ′
a0
, u = (u, v) =(u′, v′)
ǫ√gh0
, w =w′
(ǫ/µ)√gh0
, (2.2.2)
where (x′, y′) and z′ denotes the horizontal and vertical references, respectively,
t′ the time coordinate, g the gravitational acceleration, p′ the total pressure, ζ ′
the free-surface displacement, and (u′, v′, w′) the velocity components of water
particles in (x′, y′, z′)-directions. In addition, two dimensionless parameters
ǫ =a0
h0
and µ =h0
L0
(2.2.3)
measure the relative importance of the wave nonlinearity and the frequency
dispersion, respectively, and both are considered to be small.
Consequently, the dimensionless continuity equation in the water body can
be expressed in terms of the velocity potential, Φ = Φ(x, y, z, t), as
µ2∇2Φ +∂2Φ
∂z2= 0, −1 ≤ z ≤ ǫζ, (2.2.4)
20

and the kinematic and dynamic free-surface boundary conditions are
µ2
(∂ζ
∂t+ ǫ∇Φ · ∇ζ
)=∂Φ
∂z, z = ǫζ, (2.2.5)
µ2
(∂Φ
∂t+ ζ
)+ǫ
2
[µ2 (∇Φ)2 +
(∂Φ
∂z
)2]
= 0, z = ǫζ, (2.2.6)
where ∇ ≡(∂∂x, ∂∂y
)denotes the horizontal gradients. In addition, the pressure
field can be evaluated from the Bernoulli’s equation as
p = −zǫ− 1
µ2
µ2∂Φ
∂t+ǫ
2
[µ2 (∇Φ)2 +
(∂Φ
∂z
)2]
, (2.2.7)
where the first term is the hydrostatic pressure and the rest the hydrodynamic
pressure.
The velocity potential Φ may be expended in terms of a power series in the
vertical coordinate z as (see Chapter 12.1 in Mei, Stiassnie & Yue 2005)
Φ(x, y, z, t) =∞∑
n=0
(z + 1)nφn(x, y, t). (2.2.8)
Therefore, the direct substitution of (2.2.8) into the Laplace equation, i.e. the
conservation law of mass (2.2.4), leads to a recursive relation
φn+2 = − µ2
(n+ 1)(n+ 2)∇2φn, n = 0, 1, 2, · · · . (2.2.9)
Note that
∇φ0 = ∇Φ|z=−1 = u(x, y, z = −1, t) ≡ ub (2.2.10)
and
φ1 =∂Φ
∂z
∣∣∣∣z=−1
= w(x, y,−1, t) ≡ wb (2.2.11)
represent the horizontal and vertical velocity components at the water-mud in-
terface z = −1, which are now defied as ub and wb, respectively. In the case of
a horizontal solid sea bottom, the no flux condition requires wb = 0 suggest-
ing that each φn with odd n vanishes. For the present wave-seabed problem,
21

the wave-driven mud motion leads to a non-zero wb. It is necessary to estimate
the order of magnitude of this quantity. Since in coastal waters the thickness of
mud bed, d′, is usually very small and the mud viscosity, νm, is relatively strong,
under long water waves the laminar boundary-layer thickness of mud, δ′m, can
be comparable to d′. Therefore, in this study the focus will be on the following
scenario:
d′ ∼ δ′m ∼√
νm√gh0/L0
= αL0, (2.2.12)
where
α2 =νm
L0
√gh0
(2.2.13)
is a dimensionless parameter. To give a quantitative example, let us consider a
typical case:
O(ǫ) ∼ O(µ2) ∼ 0.1, h0 ∼ 5 m, d′ ∼ 0.25 m, νm ∼ 0.01 m2 s−1, (2.2.14)
where both νm and d′ are in the range of field data reported by Mei et al. (2010).
It follows that the value of α is roughly 0.01, i.e.
O(α) ∼ O(µ4). (2.2.15)
Note that the condition (2.2.15) has also been assumed by Ng (2000), Ng &
Zhang (2007) and Mei et al. (2010) to study periodic waves over a viscous or
viscoelastic muddy seabed. Furthermore, many field observations (see e.g.,
Sheremet & Stone 2003; Winterwerp et al. 2007; Holland, Vinzon & Calliari 2009)
have supported this argument. In this study, the assumption (2.2.15) will be
adopted throughout.
It also deserves emphasis that the mud motion considered is in the laminar
flow regime. A Reynolds number can be introduced as
Rem =
(ǫ√gh0
)d′
νm=
ǫ
α2
d′
L0
, (2.2.16)
22

where α has been defined in (2.2.13). By the use of (2.2.12) and (2.2.15), we
obtain
O (Rem) = O(µ−2), (2.2.17)
which is a moderate value for the weakly dispersive waves to be discussed
herein. In fact, this statement complies with the immersible assumption: a sharp
density interface is persistent in the two-layer model, which surpasses the pos-
sible turbulence.
Through the above argument, the horizontal and vertical components of
mud flow velocity are estimated to be
O (u′m) ∼ O
(ǫ√gh0
)and O (w′
m) ∼ O(αǫ√gh0
), (2.2.18)
respectively. By virtue of matching the vertical velocity across the water-mud
interface, we obtain
O(wb) ∼ O(αµ) ∼ O(µ5). (2.2.19)
Consequently, from (2.2.8) to (2.2.11) the truncated velocity potential with an
error of O(µ6) is
Φ = (z + 1)wb + ub −µ2
2(z + 1)2∇2
ub +µ4
24(z + 1)4∇2∇2
ub +O(µ6), (2.2.20)
where (2.2.19) has been evoked as well. Under the Boussinesq assumption, i.e.
O(ǫ) ∼ O(µ2), the use of (2.2.20) into the free-surface conditions, (2.2.5) and
(2.2.6), yields
1
ǫ
∂H
∂t+∇ · (Hub)−
µ2
6∇2∇ · ub −
wbµ2
= O(µ4), (2.2.21)
and
∂ub
∂t+ ǫub · ∇ub +
1
ǫ∇H − µ2
2
∂
∂t∇∇ · ub = O(µ4), (2.2.22)
23

where
H = 1 + ǫζ (2.2.23)
denotes the total water depth. Equations (2.2.21) and (2.2.22) are the approx-
imate continuity and momentum equations in terms of H and the velocity at
the bottom of water body, (ub, wb). These vertical independent Boussinesq-type
equations can also be expressed in the form of the depth-averaged horizontal
velocity defined by
u =1
H
ǫζ∫
−1
∇Φdz = ub −µ2
6H2∇2
ub +O(µ4). (2.2.24)
Substituting the above definition into (2.2.21) and (2.2.22), we obtain
1
ǫ
∂H
∂t+∇ · (Hu)− wb
µ2= O(µ4), (2.2.25)
and
∂u
∂t+ ǫu · ∇u +
1
ǫ∇H − µ2
3∇∇ · ∂u
∂t= O(µ4). (2.2.26)
Equations (2.2.25) and (2.2.26) constitute the Boussinesq-type depth-averaged
equations in terms of the total depth, H , and the depth-averaged horizontal
velocity, u. The effects of the underlaid thin mud layer appear in the continuity
equation through a nonzero wb term and are of O(µ3). In the absence of the
muddy sea bed where the solid bottom is also frictionless, wb = 0 and the above
equations reduce to the conventional Boussinesq equations.
It is remarked that (2.2.25) and (2.2.26) are underdetermined, as three un-
knowns (ζ,u, wb) are involved. Ideally, if wb can be expressed in terms of u
and/or ζ the mathematical problem is then complete (of course, proper initial
and boundary conditions for both ζ and u are still required). Owing to the con-
tinuity of vertical velocity at the water-mud interface, wb essentially describes
24

the vertical motion of mud flow at z = −1 as well. Therefore, it sheds some in-
sight on this closure issue that the solution form of wb may be obtained from the
flow problem inside the mud layer. Details will be elaborated in the following
sections, 2.2.2 to 2.2.4.
It is beneficial to point out that actual velocity components, (u, v, w), and
pressure field, p, are realized once ζ and u are solved. The approximate velocity
is obtained, by definition, as
(u, v) = ∇Φ = u− µ2
2(z + 1)2∇∇ · u +O(µ4), (2.2.27)
and
w =∂Φ
∂z= −µ2(z + 1)2∇ · u +O(µ4). (2.2.28)
From (2.2.7), the total pressure becomes
p = −zǫ
+ ζ +µ2
2
(z2 + 2z
)+O(µ4). (2.2.29)
2.2.2 Model equations for mud flow motions
Since viscous shearing is one of the key factors affecting the mud flow motions,
we shall introduce new scalings to describe dynamics inside the muddy seabed.
For the mud flow velocity components, (u′m, v′m, w
′m), pressure, p′m, and the shear
stress tensor, τ′
m, the normalizations are as follow:
um = (um, vm) =(u′m, v
′m)
ǫ√gh0
, wm =w′m
αǫ√gh0
pm =p′m
ρmga0
, τm =τ
′
m
αǫρmgh0
, (2.2.30)
25

where ρm is the mud density and recall α defined by (2.2.13). Note that
τm =
τm,xx τm,xy τm,xz
τm, yx τm, yy τm, yz
τm, zx τm, zy τm, zz
. (2.2.31)
Recalling (2.2.12) that the mud depth d′ is assumed to be comparable to the
laminar boundary-layer thickness δ′m ∼ αL0, a new dimensionless vertical coor-
dinate is introduced:
η =z′ + d′ + h0
αL0
. (2.2.32)
The mud then occupies 0 ≤ η ≤ d in the stretched coordinate where
d =d′
αL0
+ǫµ
α
ζ ′ma0
(2.2.33)
with ζ ′m denoting the vertical displacement of the water-mud interface. By the
order of magnitude analysis on the mass conservation of both water body and
mud column, it can be shown that ζ ′m is much smaller than the free-surface
displacement, ζ ′,
O (ζ ′m/ζ′) ≈ O (d′/(d′ + h0)) ≈ O(d′/h0) ∼ O(µ3)≪ 1. (2.2.34)
The above statement has been verified by laboratory study of solitary waves
propagate over a viscous fluid-mud bed (Park, Liu & Clark 2008) and the exam-
ination of field samples of viscoelastic mud subject to a surface periodic wave
forcing (Mei et al. 2010). Following (2.2.34),
d =d′
αL0
+O(µ2). (2.2.35)
In terms of the above dimensionless variables, we can now formulate the
conservation law of mass for mud flow as
∇um +∂wm∂η
= 0, (2.2.36)
26

and the momentum equations:
∂um∂t
+ ǫ
(um · ∇um + wm
∂um∂η
)=−∇pm +
(α∇τ
HHm +
∂τHVm∂η
),
(2.2.37)
α2
[∂wm∂t
+ ǫ
(um · ∇wm + wm
∂wm∂η
)]=− ∂pm
∂η+ α
(α∇τ
V Hm +
∂τ V Vm∂η
)− α
ǫµ,
(2.2.38)
where
τHHm =
τm,xx τm,xy
τm, yx τm, yy
, τ
HVm = (τm,xz, τm, yz) , (2.2.39)
and
τV Hm = (τm, zx, τm, zy) , τ
V Vm = τm, zz. (2.2.40)
Referring again to (2.2.25) and (2.2.26), the long-wave equations that describe
the motions of water particles, leading-order solutions of (um, wm) and pm are
sufficient to satisfy the overall truncation error of O(µ4) as
wb = αµwm(x, y, η = d, t). (2.2.41)
Therefore, it is reasonable to neglect the displacement of water-mud interface in
the present study, i.e., (2.2.35) reduces to
d ≈ d′
αL0
. (2.2.42)
The significance of the above assumption is that d becomes a constant parameter
of O(1).
All in all, we shall now work on the linearization of (2.2.37),
∂um∂t
= −∇pm +∂τHVm∂η
, 0 ≤ η ≤ d. (2.2.43)
As for the vertical equation, (2.2.38), it suggests that at the leading-order pres-
sure is vertically uniform inside the mud layer, i.e.
pm = pm(x, y, t), 0 ≤ η ≤ d. (2.2.44)
27

In addition, the continuity of normal stress along the water-mud interface re-
duces to
pm(x, y, t) = γp(x, y, z = −1, t), (2.2.45)
where
γ =ρwρm
(2.2.46)
is the ratio of water density to mud density. Furthermore, the use of (2.2.26) into
(2.2.29) leads to
∇p ≈ −∂ub∂t
, z = −1 (2.2.47)
at the leading-order. The approximate problem, (2.2.43) to (2.2.47), is similar to
that of classic laminar boundary-layer theory, which is expected since d′ ∼ δ′m.
Evoking (2.2.45) and (2.2.47) into the horizontal momentum equation (2.2.43),
we obtain
∂um∂t
= γ∂ub∂t
+∂τHVm∂η
. (2.2.48)
The associated boundary conditions in the vertical coordinate are
um = 0, η = 0, (2.2.49)
τHVm = 0, η = d, (2.2.50)
which satisfy the no-slip condition and the inviscid water assumption, respec-
tively. In addition,
um = 0, t = 0 (2.2.51)
is imposed as the initial condition.
Reviewing (2.2.48) to (2.2.51), the solution of um can be obtained in terms of
ub under the circumstances that shear stress is a linear function of um, ∂um
∂ηand
their time operations. The understanding of mud rheology is therefore essential,
and will be discussed next.
28

2.2.3 Rheology model for a linear viscoelastic mud
The muddy seabed, made of cohesive sediments, is modeled as a general linear
viscoelastic body. Here, the term general signifies the fact that Newtonian flu-
ids and purely elastic media shall be recovered from the proposed viscoelastic
model as two limiting cases. In addition, the linearity refers to the direct pro-
portionality between the shear stress τ ’ and shear strain ε’ at all time (Barnes,
Hutton & Walters 1991). In other words, the effects of successive changes in
shear strain are additive. Following the study of Boltzmann (see e.g., Fabrizio
& Morro 1992; Lakes 2009), the three-dimensional constitutive equation for a
linear viscoelastic material can be expressed in a general form as
τ ′ij(x′i, t
′) =
t∫
0
Rijkl(x′i, t
′ − t′′)∂ε′kl(x
′i, t
′′)
∂t′′dt′′, i, j, k, l = 1, 2, 3, (2.2.52)
where R is the relaxation function, which describes over time under a fixed level
of strain the decreasing of stress from its peak value. Note that both ε’ and τ ’
are zero at t′ = 0. The shear-strain relation (2.2.52) can be inverted to obtain ε’
as a similar time convolution integral of C and the rate of change of τ ’, where
C denotes the creep function describing the change of strain in time subject to a
constant stress.
In practice, the rheology model (2.2.52) is difficult to apply due to the com-
plexity of R. We shall limit ourselves to a special case of homogeneous materi-
als such that the relaxation function is only a function of time. Now, recall the
common strain-displacement relationship (see e.g. Kundu & Cohen 2002),
ε′kl =1
2
(∂X ′
k
∂x′l+∂X ′
l
∂x′k
), (2.2.53)
where X’ is the displacement vector. Evoking the assumption of homogeneous
material properties and (2.2.53), the constitutive equation (2.2.52) can be recast
29

into a differential equation (Malvern 1969; Barnes, Hutton & Walters 1991),
P∑
p=0
T ′p
∂pτ ′ij∂t′p
=
Q∑
q=0
D′q
∂q
∂t′q
(∂X ′
i
∂x′j+∂X ′
j
∂x′i
), (2.2.54)
where P , T ′p , Q(= P or P + 1), and D′
q are constant coefficients to be determined
experimentally. Note that the finite order of (2.2.54) is equivalent to the lim-
ited discrete record of continuous relaxation function, R. Note also that (2.2.54)
reduces to the constitutive relation of Newtonian fluids if:
P = 0, T ′0 = 1, Q = 1, D′
0 = 0, D′1 = µv, (2.2.55)
where µv is the dynamic viscosity. Similarly, for
P = 0, T ′0 = 1, Q = 0, D′
0 = Ee, (2.2.56)
(2.2.54) recovers the case of purely elastic mediums in which Ee denotes the
shear modulus of elasticity. Therefore, both the viscous and elastic cases can be
viewed as special scenarios of the generalized linear viscoelastic problem.
Before applying the generalized viscoelastic rheology model, (2.2.54), to our
mud flow problem, we shall discuss two elementary cases, namely Maxwell’s
model and Kelvin-Voigt’s model (see e.g., Malvern 1969), for a better under-
standing of material behaviors and the associated relevance to the wave-mud
studies. Both under a phenomenological concept of a two-component Hookean
spring-and-Newtonian dashpot system, Maxwell element has a spring and a
dashpot in series whereas the Kelvin-Voigt element consists of a spring and a
dashpot in parallel (see figure 2.3). It is obviously that in Kelvin-Voigt’s model
both spring and dashpot are constrained to deform the same amount, and the
total stress is the sum of the stresses from these two parts. Alternatively, in
the design of the Maxwell element, the spring and dashpot are subjected to the
30

same stress while the total strain being the summation from both parts. There-
fore, cast in the generalized formulation, (2.2.54), these two conceptual models
are associated with the following constant coefficients:
Maxwell: P,Q = 1, T ′0 = 1, T ′
1 = µv/Ee, D′0 = 0, D′
1 = µv,
Kelvin-Voigt: P = 0, Q = 1, T ′0 = 1, D′
0 = Ee, D′1 = µv.
(2.2.57)
Recall that Ee is the elastic modulus of the Hookean spring and µv the dynamic
viscosity of the Newtonian dashpot. It is known that Maxwell’s model does
not predict creep in material accurately, and the Kelvin-Voigt element shows a
retarded elastic behavior (Malvern 1969). Despite their utility, quantitative rep-
resentation of real viscoelastic materials is not always guaranteed by these two
simple models. Through laboratory rheology tests on the estuarial mud sam-
ples1, exhibiting both viscous and elastic behaviors, Maa & Mehta (1988) have
suggested that Kelvin-Voigt element is a better selection for modeling the mud
responses. In fact, the two-parameter Kelvin-Voigt’s model has been adopted
by many researchers (see e.g., Hsiao & Shemdin 1980; MacPherson 1980; Maa
& Mehta 1990; Piedra-Cueva 1993 and others) to study the interactions between
small-amplitude surface waves and a viscoelastic seabed. A remarkable obser-
vation, first revealed by Tchen (1956), is that a mathematical problem encoun-
tered in the study of periodic waves interacting with a Kelvin-Voigt viscoelastic
medium is essentially identical to that of viscous fluid-mud case. The reasoning
is as follows. By the use of complex variables, the periodicity of wave motions
permits a new expression of a constitutive relation from (2.2.54) and (2.2.57):
τ ′ij =
(µ+ i
Ee
ω′
)(∂u′i∂x′j
+∂u′j∂x′i
), (2.2.58)
where ω′ is the wave frequency and u′i =∂X′
i
∂t′the velocity field of mud flow.
1Mud samples were taken from Cedar Key, Florida. See Maa & Mehta (1988).
31

Consequently, the introduction of a complex viscosity,
µkv = µv + iEe
ω′ , (2.2.59)
into (2.2.58) draws the conclusion suggested by Tchen (1956).
Regardless of a great appreciation for the complex viscosity approach, Ng &
Zhang (2007) have re-emphasized that this concept can only be applied to prob-
lems involving simple harmonic waves. Furthermore, examining the field mud
samples from sites along the eastern coast of China, Mei et al. (2010) reported
that, under periodic motions, the values of µv and Ee are actually functions of
ω′ when fitting the results of rheology tests to (2.2.59). Similar time-dependent
behavior of presumed constant coefficients was also observed by Jiang & Mehta
(1995) who studied the properties of viscoelastic mud samples taken from the
southwest coast of India. The above two laboratory tests both support the fact
that Kelvin-Voigt element is only an approximate rheology model for viscoelas-
tic materials, as has been mentioned. Reviewing (2.2.54) and (2.2.57), findings of
Mei et al. (2010) and Jiang & Mehta (1995) can be interpreted as the insufficient
order of the truncated constitutive equation, i.e. P and Q are not large enough
to provide the desired accuracy.
The present study does not intend to suggest a better rheology model. In-
stead, the research focuses on the interactions between long waves and a vis-
coelastic seabed where the constitutive relationship is known a priori. There-
fore, the solution methodology of mud flow motions shall be developed based
on the generalized shear stress formulation for a linear viscoelastic medium,
(2.2.54), where the problem of a Newtonian or elastic mud is also a special case
(see the discussion in (2.2.55)).
32

2.2.4 Solution forms inside the muddy seabed
We shall now discuss the solutions of the mud motions. From (2.2.39), (2.2.48)
and (2.2.54), let us first formulate the necessary components of shear stress gra-
dient in the normalized form as
N∑
p=0
Tp∂p
∂tp∂τHVm∂η
=M∑
q=0
Dq∂q
∂tq
(∂2
Xm
∂η2+ α2 ∂
∂η∇Zm
)
≈M∑
q=0
Dq∂q
∂tq
(∂2
Xm
∂η2
), (2.2.60)
where Xm = (Xm, Ym) and Zm are the horizontal and vertical displacements
of mud, respectively, and (Tp,Dq) the dimensionless coefficients. Note that the
following new normalizations have been introduced:
(Xm, Ym) =(X ′
m, Y′m)
ǫL0
, Zm =Z ′m
αǫL0
Tp =T ′p(
L0/√gh0
)p , Dq =Dq
ρmνm(L0/√gh0
)q−1
. (2.2.61)
Clearly, the relationship between τHVm and Xm is implicitly defined through
(2.2.60). By taking the Laplace transform of (2.2.60), however, an explicit expres-
sion can be deduced in terms of transformed variables, provided the necessary
initial conditions are accessible. In other words,
∂τHVm∂η
= S(s)∂2
Xm
∂η2, (2.2.62)
where () denotes the transformed function in s−domain as defined by
F(s) =
∞∫
0
e−stF(t)dt, (2.2.63)
and S = S(s) is a function of s only. Note that the actual function of S is deter-
mined by the coefficients pn and qm. For instance, as the two simplest models
33

are associated with the following dimensionless coefficients (see (2.2.57) and
(2.2.61)):
Maxwell: P,Q = 1, T0 = 1, T1 = Wi, D0 = 0, D1 = 1,
Kelvin-Voigt: P = 0, Q = 1, T0 = 1, D0 = 1/Wi, D1 = 1,(2.2.64)
we obtain
Maxwell: S =s
1 + sWi, Kelvin-Voigt: S = s+
1
Wi, (2.2.65)
where
Wi =µm/Em
L0/√gh0
(2.2.66)
is the Weissenberg number defining the ratio of the relaxation time to the pro-
cess time. It is reiterated that Em and µm are the elastic modulus and dynamic
viscosity of the viscoelastic mud, respectively.
The above discussion suggests the use of the Laplace transform to solve the
initial-boundary-value problem, (2.2.48) to (2.2.51) along with (2.2.61). As a
result, in the transformed domain the counterpart of the original problem be-
comes an ordinary differential equation:
s2Xm = γs2
Xb + S(s)∂2
Xm
∂η2, (2.2.67)
Xm = 0, η = 0, (2.2.68)
∂Xm
∂η= 0, η = d, (2.2.69)
where Xb = Xb(x, y, t) denotes the horizontal displacements of water particles
at the water-mud interface, z = −1 or η = d. By further introducing a new
variable,
X = Xm − γXb, (2.2.70)
34

the problem is now:
s2X = S(s)
∂2X
∂η2, (2.2.71)
X = −γXb, η = 0, (2.2.72)
∂X
∂η= 0, η = d. (2.2.73)
Solution can then be obtained as
X = −γXb
cosh(s (d− η) /
√S)
cosh(sd/√S) ≡ −γXbR(η, s), (2.2.74)
where the inverse Laplace transform of R can be viewed as a response function
describing the mud motions induced by the surface wave loadings. Applying
the convolution theorem, the inversion of X is
X(x, y, η, t) =
t∫
0
−γXb(x, y, t− τ)R(η, τ)dτ. (2.2.75)
The functionR(η, t), by definition, is
R(η, t) =1
2πi
c+i∞∫
c−i∞
estcosh
(s(d− η)/
√S)
cosh(sd/√S) ds, (2.2.76)
where the path of integration with respect to s is a vertical line parallel to and on
the right of the imaginary axis in the complex s-domain. In practice, the com-
plex integral in (2.2.76) can be evaluated using the Cauchy’s residue theorem2.
Afterwards, Xm = X + γXb and
um =∂Xm
∂t=∂X
∂t+ γub, ub =
∂Xb
∂t, (2.2.77)
are finally deduced in the form of ub. Subsequently, the vertical displacement is
calculated from (2.2.36) as
Zm(x, y, η, t) =
η∫
0
−∇ ·Xm(x, y, η′, t)dη′, (2.2.78)
2An example based on the two-component Kelvin-Voigt element is demonstrated shortly.
35

where the bottom boundary condition,
Zm = 0, η = 0, (2.2.79)
has been evoked. Recalling the condition (2.2.41) which states the matching of
vertical velocity at the water-mud interface, we then obtain the vertical compo-
nent of water particle velocity at the bottom of water body as
wb(x, y, t) = αµ
d∫
0
−∇ · um(x, y, η′, t)dη′. (2.2.80)
Reviewing the newly derived Boussinesq-type wave equations, (2.2.21) and
(2.2.22), the problem is now officially complete as wb has been indirectly ex-
pressed in terms of ub, i.e.
wb(x, y, t) = αµI(γ, d,ub), (2.2.81)
where the detail of function I is determined by the actual mud rheology. It is
clear from (2.2.75), (2.2.77), and (2.2.81) that derivatives involved in I are ∇ · uband ∂
∂t(∇ · ub). The same is also true for model equations (2.2.25) and (2.2.26)
since u ≈ ub at the leading-order.
Special cases: Kelvin-Voigt element, viscous fluid mud, and elastic mud
Solution technique for the mud flow problem of a generalized linear viscoelas-
tic seabed has been presented in the above. However, detailed expression of the
mud response function R(η, t), i.e. (2.2.76), still needs to be worked out once
the rheology model is specified. Without loss of generality, let us consider the
two-component Kelvin-Voigt element for the demonstration. Two representa-
tive limiting cases, namely Newtonian fluid-mud and purely elastic mud, will
also be discussed.
36

(1) Simple model for a viscoelastic mud: Kelvin-Voigt element
For the two-component Kelvin-Voigt’s model, S(s) = s+ 1/Wi as has been dis-
cussed in (2.2.65). Since the viscoelastic mud is of interest, we shall consider a
case where O (1/Wi) = O(1), which can be interpreted as both the viscous and
elastic effects are considered equally important in our analysis.
Now, substitute the expression of S into (2.2.76). Since cosh (i(n+ 1/2) π) = 0
for any given integer n, there are poles at
sn = −1
2
[(2n+ 1)π
2d
]2
1±
√
1− 4
Wi
[2d
(2n+ 1)π
]2
, n = 0, 1, 2, · · · .
(2.2.82)
By the Cauchy’s residue theorem, the inversion of R can be evaluated as
R(η, t) =∞∑
n=0
cosh(s(d− η)/
√S)
∂∂s
cosh(sd/√S) est
∣∣∣∣∣∣s=sn
=2
d
∞∑
n=0
s2n
κn (2sn − κ2n)
cosh (κn(d− η))sinh (κnd)
esnt, (2.2.83)
where
κn =sn√
sn + 1/Wi. (2.2.84)
Finally,
Xm = γXb − 2γ
d
∞∑
n=0
s2n/κn
2sn − κ2n
cosh (κn(d− η))sinh (κnd)
t∫
0
Xb(x, y, t− τ)esnτdτ . (2.2.85)
The corresponding horizontal velocity component is
um = γub + 2γ
d
∞∑
n=0
sn/κn2sn − κ2
n
cosh (κn(d− η))sinh (κnd)
t∫
0
∂ub(x, y, τ)
∂τ
[1− esn(t−τ)] dτ .
(2.2.86)
37

Recalling (2.2.78), the vertical velocity component becomes
wm = −γη∇ · ub − 2γ
d
∞∑
n=0
sn/κ2n
2sn − κ2n
1− sinh (κn(d− η))
sinh (κnd)
t∫
0
∂∇ · ub(x, y, τ)∂τ
[1− esn(t−τ)] dτ . (2.2.87)
(2) Newtonian fluid mud
If the muddy seabed is made of a viscous fluid, i.e. Em = 0 or Wi→∞, solutions
of mud flow velocity, (2.2.86) and (2.2.87), are reduced to
um = γub − 2γ
d
∞∑
n=0
sinh(√
snη)
√sn
t∫
0
∂ub(x, y, τ)
∂τ
[1− esn(t−τ)] dτ , (2.2.88)
and
wm =− γη∇ · ub
− 2γ
d
∞∑
n=0
1− cosh(√
snη)
sn
t∫
0
∂∇ · ub(x, y, τ)∂τ
[1− esn(t−τ)] dτ , (2.2.89)
where sn = − [(2n+ 1)π/ (2d)]2 is also obtained from (2.2.82). Of course, these
new solutions can also be obtained following the same procedure introduced
above with S(s) = s.
Note that solutions (2.2.88) and (2.2.89) are, in fact, identical to the results
reported by Liu & Chan (2007a) who studied only waves over a layer of vis-
cous mud and expressed the solutions in terms of complementary error func-
tion. Taking (2.2.88) for example, one can follow Tikhonov & Samarskii (1963)
to show that the series is formally interchangeable with
um = γub −γ
2√π
∞∑
n=−∞(−1)n (η + 2nd)
t∫
0
ub(x, y, τ)
(t− τ)3/2exp
[−(η + 2nd)2
4(t− τ)
]dτ.
(2.2.90)
38

Employing integration by parts, the integral in (2.2.90) becomes
2√π
η + 2nd
t∫
0
∂ub(x, y, τ)
∂τerfc
(η + 2nd√4(t− τ)
)dτ. (2.2.91)
Therefore,
um = γub − γ∞∑
n=−∞(−1)n
t∫
0
∂ub(x, y, τ)
∂τerfc
(η + 2nd√4(t− τ)
)dτ, (2.2.92)
which is exact the same as that of Liu & Chan (2007a)3.
(3) Purely elastic mud
Solutions for the case of a elastic mud can be obtained by taking proper limits
of (2.2.86) and (2.2.87) at Wi → 0. Whereas the stretched vertical coordinate η
breakdowns at α = 0 (i.e., νm = 0), we shall set an artificial viscosity as ρmνm =
EmL0/√gh0 for the sake of keeping the same vertical coordinate. Therefore, at
the elastic limit (2.2.86) reduces to
um = γub − 2γ
d
∞∑
n=0
sin (snη)
sn
t∫
0
∂ub(x, y, τ)
∂τ[1− cos (sn(t− τ))] dτ , (2.2.93)
where sn = (2n+ 1)π/(2d). Similarly, (2.2.87) becomes
wm = −γ∇ · ubη + 2γ
d
∞∑
n=0
1− cos(snη)
s2n
t∫
0
∂∇ · ub(x, τ)∂τ
[1− cos (sn(t− τ))] dτ .
(2.2.94)
Note that the above results can also be obtained by solving the elastic limit of
(2.2.67) to (2.2.69) with S = 1 directly, where the reduced equation is identical to
the wave equation and the solution is known in the literatures (see e.g. Tikhonov
& Samarskii 1963).
3See Eq. (2.2.1) in Liu & Chan (2007a). Note that in their study −d < η < 0, while in thepresent formulation 0 < η < d.
39

1HD example: a surface solitary wave loading
To illustrate the mud motions excited by surface waves, let us consider a case
of a solitary wave loading in one horizontal dimension (1HD). This example
shall also show that the current study outperforms the early studies (Gade 1958;
MacPherson 1980; Ng 2000 and others) as they considered only periodic waves.
The horizontal velocity of a water particle at the water-mud interface is assumed
to be described by the canonical solitary wave solution,
ub = sech2
(√3ǫ
2µ(x− x0 − c t)
), (2.2.95)
where c =√
1 + ǫ is the dimensionless wave celerity and x0 denotes the initial
location of the wave crest. In this section, ǫ = µ2 = 0.1 and x0 = −50 are
employed.
In order to gain some insights on the effects of both elasticity and viscos-
ity, let us examine the responses of three different types of viscoelastic mud
(Wi = 0.5, 1, 2) along with a purely elastic mud (Wi = 0) and a viscous fluid-
mud (Wi = ∞)4. Note that the two-component Kelvin-Voigt element has been
adopted as the rheology model for the viscoelastic mud. In all cases, γ = 0.85
and d = 5 are fixed. Figure 2.6 shows the time histories of horizontal veloc-
ity at the water-mud interface, umi = um|η=d. The corresponding bottom shear
stress, τmb = τm,xz|η=d, is plotted in figure 2.7. It is not surprising to observe that
both umi and τmb oscillate for the cases of elastic and viscoelastic mud. Further-
more, as the relative elasticity becomes stronger, i.e. smaller Wi, the oscillation
becomes more violent. For both viscous and viscoelastic mud, i.e. Wi > 0,
mud motions eventually vanish due to the viscous damping, although it takes
a longer time to settle down for more elastic mud. As for the case of a purely
4It is reminded that Wi, the Weissenberg number, has been defined in (2.2.66).
40

elastic mud (Wi = 0), however, it is evident that the excited mud motions do
not attenuate. Through this example, effects of both viscosity and elasticity on
the mud responses are clearly illustrated.
−5 0 5 10 15 20 25 30 35 40 45 50
−1.60
−1.20
−0.80
−0.40
0.00
0.40
0.80
1.20
1.60
umi
−(x− x0 − ct)
Wi = 0.0Wi = 0.5Wi = 1.0Wi = 2.0Wi =∞
−1 −0.5 0 0.5 10.0
0.5
1.0ub
Figure 2.6: A surface solitary wave over a viscoelastic mud: Time histo-
ries of horizontal mud flow velocity at the water-mud interface,
umi. Lower corner plots the horizontal velocity of imposed soli-
tary wave, ub. While dashed, solid and dashed-dotted lines de-
note the cases of different viscoelastic mud with Wi = 0.5, 1, 2
respectively, the gray line plots the result of a purely elastic
muddy bed (i.e. Wi = 0) and bold line represents the case
of viscous fluid-mud (Wi = ∞). In this example, x0 = −50,
ǫ = µ2 = 0.1, γ = 0.85 and d = 5.
Figure 2.8 further plots the vertical profiles of horizontal velocity inside the
mud column corresponding to the cases shown in figures 2.6 and 2.7. During the
acceleration phase of imposed solitary wave (i.e. ∂ub
∂t> 0), the velocity profiles
for different mud samples are very similar. However, as the solitary wave starts
to decelerate, these velocity profiles behave very differently depending on the
41
−5 0 5 10 15 20 25 30 35 40 45 50
−1.60
−1.20
−0.80
−0.40
0.00
0.40
0.80
1.20
1.60
τmb
−(x− x0 − ct)
Wi = 0.0Wi = 0.5Wi = 1.0Wi = 2.0Wi =∞
−2 0 2 4 6−0.5
0.0
0.5
1.0
Figure 2.7: A surface solitary wave over a viscoelastic mud: Time histories
of bottom shear stress, τmb, with the insert highlights the de-
tails. Dashed, solid and dashed-dotted lines plot the results of
different viscoelastic mud with Wi = 0.5, 1, 2 respectively, gray
line represents the elastic mud (Wi = 0) and the bold line plots
the case of viscous fluid-mud (i.e. Wi = ∞). In this example,
x0 = −50, ǫ = µ2 = 0.1, γ = 0.85 and d = 5.
mud elasticity. The oscillation and attenuation are of course observed. Note that
features of mud responses shown in figures 2.6 to 2.8 are similar to the findings
of Park & Liu (2010) who studied experimentally pipe flow motions of a visco-
elastic-plastic fluid driven by oscillatory pressure gradients.
42

0.000 0.125 0.2500.0
0.2
0.4
0.6
0.8
1.0θ = -1.521
η
d
um
Wi = 0.0; Wi = 0.5; Wi = 1.0; Wi = 2.0; Wi =∞
0.00 0.25 0.50 0.750.0
0.2
0.4
0.6
0.8
1.0θ = -0.634
um
−0.8 −0.4 0.0 0.30.0
0.2
0.4
0.6
0.8
1.0
θ = 1.521
um
−1.0 −0.5 0.00.0
0.2
0.4
0.6
0.8
1.0
θ = 3.456
um
−1.8 −1.2 −0.6 0.00.0
0.2
0.4
0.6
0.8
1.0
θ = 5
η
d
um
0.0 0.4 0.8 1.20.0
0.2
0.4
0.6
0.8
1.0
θ = 15
um
−0.9 −0.6 −0.3 0.0 0.30.0
0.2
0.4
0.6
0.8
1.0
θ = 25
um
−0.3 0.0 0.3 0.6 0.90.0
0.2
0.4
0.6
0.8
1.0
θ = 35
um
Figure 2.8: A surface solitary wave over a viscoelastic mud: Profiles of
horizontal velocity component, um, inside the entire mud col-
umn at several different phases, θ = −(x − x0 − ct). The up-
per four panels (θ = −1.521,−0.634, 1.521, 3.456) correspond to
ub = (+)0.25, (+)0.75, (−)0.25, (−)0.01 where (+) and (−) rep-
resent the accelerating and decelerating phases of the imposed
solitary wave, respectively. For the remaining phases, ub → 0.
All parameters are same as those in figures 2.6 and 2.7.
43

2.2.5 1HD application: evolution of wave height of a surface
solitary wave
We shall now examine the effects of muddy seabed on the surface water waves.
For simplicity, let us consider again a solitary wave in one horizontal dimension
(1HD). The solution procedure presented here follows closely the approach out-
lined in Mei, Stiassnie & Yue (2005) for studying viscous damping of solitary
waves (see also Liu & Orfila 2007).
For the 1HD problem, the conservation laws of mass and momentum can be
reduced from (2.2.25) and (2.2.26) as
∂ζ
∂t+
∂
∂x[(1 + ǫζ)u]− α
µI = O(µ4), (2.2.96)
and
∂u
∂t+ ǫu
∂u
∂x+∂ζ
∂x− µ2
3
∂3u
∂x2∂t= O(µ4), (2.2.97)
respectively. Recall the function I is defined by (2.2.81), and in this case
I = I(γ, d, u). (2.2.98)
As suggested by Mei, Stiassnie & Yue (2005), let us first introduce a moving
coordinate,
σ = x− t, (2.2.99)
and also a slow time variable,
ϕ = ǫt. (2.2.100)
The temporal and spatial derivatives then become:
∂
∂t→ − ∂
∂σ+ ǫ
∂
∂ϕ,
∂
∂x→ ∂
∂σ. (2.2.101)
44

Folding (2.2.101) into the summation of (2.2.96) and (2.2.97), we obtain
ǫ∂
∂ϕ(ζ + u) + ǫ
∂
∂σ(ζu) + ǫu
∂u
∂σ+µ2
3
∂3u
∂σ3− α
µI = O(µ4). (2.2.102)
Recall that O(α) ∼ O(µ4). Therefore, with an error of O(µ2) only the leading-
order solutions of ζ and u are required in (2.2.102).
The leading-order solution of an undisturbed solitary wave can be expressed
in terms of the newly defined coordinates as
ζ = a sech2
(√3a
2
(σ − a
2ϕ))
, (2.2.103)
where a = a(ϕ) is the dimensionless wave height. Moreover,
u = ζ (2.2.104)
is the leading-order approximation. Using (2.2.104), we obtain from (2.2.102) a
partial differential equation for ζ,
∂ζ
∂ϕ+
3
2ζ∂ζ
∂σ+
1
6
µ2
ǫ
∂3ζ
∂σ3− 1
2
α
ǫµI = O(µ2), (2.2.105)
where
I = I(γ, d, u)→ I(γ, d, ζ) (2.2.106)
is also evident.
Under the effect of a muddy seabed, the surface solitary wave is expected
to be perturbed from its original solution, i.e. (2.2.103). Let us introduce the
perturbation solution as follows (see Mei, Stiassnie & Yue 2005):
ζ =∞∑
n=0
δnζn, ζn = ζn(ρ, ξ), (2.2.107)
where
δ =α
ǫµ, ξ = δϕ =
α
µt, ρ = σ− 1
2
∫ ϕ
a(ϕ′)dϕ′ = σ− 1
2δ
∫ ξ
a(ξ′)dξ′. (2.2.108)
45

Notice that
∂
∂σ→ ∂
∂ρ,
∂
∂ϕ→ δ
∂
∂ξ− a
2
∂
∂ρ. (2.2.109)
Substituting (2.2.107) into (2.2.105) and then collecting terms at different orders,
we obtain at O(δ0):
−a2
∂ζ0∂ρ
+3
2ζ0∂ζ0∂ρ
+1
6
µ2
ǫ
∂3ζ0∂ζ3
0
= 0, (2.2.110)
and at O(δ):
∂ζ0∂ξ− a
2
∂ζ1∂ρ
+3
2
∂
∂ρ(ζ0ζ1) +
1
6
µ2
ǫ
∂3ζ1∂ζ3
0
− 1
2I0 = 0, (2.2.111)
where I0 is the leading-order of I and is a function of ζ0. Following Ott & Sudan
(1970) (see also Mei, Stiassnie & Yue 2005), (2.2.110) and (2.2.111) can be recast
as
L0ζ0 ≡∂
∂ρ
[−a
2+
3
4ζ0 +
1
6
µ2
ǫ
∂2
∂ρ2
]ζ0 = 0, (2.2.112)
and
L1ζ1 ≡∂
∂ρ
[−a
2+
3
2ζ0 +
1
6
µ2
ǫ
∂2
∂ρ2
]ζ1 = −∂ζ0
∂ξ+
1
2I0, (2.2.113)
respectively. The operators L0 and L1 satisfy
∞∫
−∞
(ζ0L1ζ1 − ζ1L0ζ0) dρ = 0, (2.2.114)
as they are adjoint operators of each other (Mei, Stiassnie & Yue 2005). There-
fore, (2.2.114) provides a solvability condition for ζ1,
∞∫
−∞
ζ0
(−∂ζ0∂ξ
+1
2I0)dρ = 0. (2.2.115)
It is remarked that this condition is actually valid for any weakly nonlinear and
weak dispersive wave loadings, as long as ζ ≈ u is legit at the leading-order.
46

Apparently, the leading-order solution, ζ0, is just the solitary wave solution
which can be re-expressed from (2.2.104) as
ζ0 = a sech2
(√3a
2ρ
), a = a(ξ). (2.2.116)
Substituting (2.2.116) into (2.2.115), we then obtain an integral equation for the
wave height, a(ξ),
∞∫
−∞
a sech2
(√3a
2ρ
)(∂ζ0∂ξ− 1
2I0)dρ = 0, (2.2.117)
where
∂ζ0∂ξ
=da
dξsech2
(√3a
2ρ
)[1−√
3a
2ρ tanh
(√3a
2ρ
)]. (2.2.118)
Since ∞∫
−∞
sech4(k) [1− k tanh(k)] dk = 1, (2.2.119)
the integral equation (2.2.117) becomes
da
dξ=
√3a
4
∞∫
−∞
sech2
(√3a
2ρ
)I0dρ. (2.2.120)
It is now necessary to discuss the detailed function of I0, which depends
on the actual mud rheology. Let us again use the two-component Kelvin-Voigt
element as an example. It is reiterated that both viscous fluid-mud and purely
elastic mud are just special cases of Kelvin-Voigt’s model (see the discussion in
section 2.2.4). Recall (2.2.41), (2.2.87) and (2.2.81), we obtain
wb = −αµγd∂u
∂x+
2
d
∞∑
n=0
sn/κ2n
2sn − κ2n
∫ t
0
∂2u(x, τ)
∂x∂τ
[1− esn(t−τ)] dτ
, (2.2.121)
and
I = −γd ∂ζ∂x− γ 2
d
∞∑
n=0
sn/κ2n
2sn − κ2n
t∫
0
∂2ζ(x, τ)
∂x∂τ
[1− esn(t−τ)] dτ , (2.2.122)
47

where the leading-order approximation of (2.2.24), (2.2.104) and (2.2.106) are
evoked. To satisfy the order of accuracy as stated in (2.2.105), (2.2.122) shall be
rewritten as
I = −γd ∂ζ∂σ
+ γ2
d
∞∑
n=0
sn/κ2n
2sn − κ2n
t∫
0
∂2ζ(x, τ)
∂σ2
[1− esn(t−τ)] dτ . (2.2.123)
It is then straightforward to obtain the leading-order term as
I0 = −γd ∂ζ0∂ρ
+ γ2
d
∞∑
n=0
sn/κ2n
2sn − κ2n
t∫
0
∂2ζ0∂ρ2
[1− esn(t−τ)] dτ . (2.2.124)
Derivatives in the above equation can be expressed explicitly as:
∂ζ0∂ρ
= −a√
3a sech2 (R) tanh (R) , (2.2.125)
∂2ζ0∂ρ2
= −3
2a2 sech4 (R) [2− cosh(2R)] , (2.2.126)
where
R =
√3a
2ρ. (2.2.127)
The substitution of the above expressions back into (2.2.124) gives
I0 = a√
3a[γd sech2(R) tanh(R)
]
+ a√
3a
t∫
0
sech4(ρ+ S) [2− cosh(ρ+ S)]M(
2S√3a
)dS, (2.2.128)
where
M(τ) = −2γ
d
∞∑
n=0
sn/κ2n
2sn − κ2n
[1− esnτ ] . (2.2.129)
Since ∞∫
−∞
sech4(k) tanh(k)dk = 0, (2.2.130)
we finally obtain from (2.2.120) and (2.2.128) an evolution equation for the wave
height of a surface solitary wave propagating over a thin layer of viscoelastic
48

mud modeled by the two-component Kelvin-Voigt element:
da
dξ=a√
3a
2
∫ ∞
−∞
∫ ∞
0
sech2(R)sech4(R + S) [2− cosh 2(R + S)]M(
2S√3a
)dSdR.
(2.2.131)
The above equation can be integrated numerically to find the time variation of
solitary wave heights for a prescribed set of wave data and mud properties.
Numerical examples
As an example, figures 2.9 and 2.10 plot a(ξ) under different values of Wi and d.
The effect of relative elasticity is first discussed by fixing γ and d while varying
Wi, as shown in figure 2.9-(a) and (b). In subplot (a) (i.e. d = 5), the wave height
tends to decay faster for the case of smaller Wi (i.e. the mud is more elastic).
However, as solitary wave propagates further (i.e. at large ξ) the attenuation
caused by mud with bigger Wi can be larger. This behavior is more obvious
if we decrease the mud layer thickness to d = 2, as shown in figure 2.9-(b).
Again, more elastic mud causes a stronger attenuation only at the beginning
stage. The complexity can be attributed to the fact that part of surface wave
energy is transfered into the mud layer as elastic energy to sustain the oscillation
motion (see figures 2.6 to 2.8 for reference). Since elastic energy is proportional
to the square of mud displacement, during the oscillation process the stored
elastic energy can be released in which a portion of energy is damped out by
the viscous mechanism while the rest recharges the surface wave motion.
In figure 2.10, the effect of mud thickness is discussed by fixing Wi but vary-
ing d. It is observed that for the case of Wi = 1 and moderate mud layer thick-
ness, the increase of d leads to remarkably faster and stronger attenuation of
solitary wave height as shown in subplot (a). However, if the mud layer thick-
49

0 2 4 6 8 100.01
0.05
0.10
0.25
0.50
0.751.00
ξ
a
(a) d = 5; Wi = 0.5, 1, 2,∞
Wi = 0.5Wi = 1.0Wi = 2.0Wi =∞
0 2 4 6 8 100.10
0.25
0.50
0.75
1.00
ξ
a
(b) d = 2; Wi = 0.5, 1, 2,∞
Wi = 0.5Wi = 1.0Wi = 2.0Wi =∞
Figure 2.9: Evolution of a surface solitary wave propagates over a vis-
coelastic mud: Wave height, a, as a function of time, ξ = (α/µ)t.
Effect of relative importance of elasticity are shown by fixing d
((a): d = 5; (b): d = 2) and varying Wi as Wi = 0.5, 1, 2,∞. In
all calculations, γ = 0.85.
ness keeps increasing, the attenuation of wave height becomes less sensitive to
d and a complex behavior, similar to that shown in figure 2.9, is displayed. Note
that, viscous damping does not grow unbounded with d as the viscous effect is
mostly contributed by the so-called boundary layer. Regarding the wave varia-
tion caused by the elastic mechanism, as discussed above the releasing of elastic
energy plays the role where the oscillation frequency of elastic motion is also a
function of d.
50

0 2 4 6 8 100.0
0.2
0.4
0.6
0.8
1.0
ξ
a
(a) Wi = 1; d = 0.5, 1, 1.5, 2
d = 0.5d = 1.0d = 1.5d = 2.0
0 2 4 6 8 100.0
0.2
0.4
0.6
0.8
1.0
ξ
a
(b) Wi = 1; d = 2.5, 5, 7.5, 10
d = 2.5d = 5.0d = 7.5d = 10
Figure 2.10: Wave height, a, as a function of time, ξ = (α/µ)t, for a surface
solitary wave propagates over a viscoelastic mud: Effect of
mud layer thickness, d. While γ = 0.85 and Wi = 1 are fixed,
d = 0.5, 1, 1.5, 2 in subplot (a) and d = 2.5, 5, 7.5, 10 in (b).
2.2.6 1HD application: amplitude variation of a linear progres-
sive wave
We can also examine the effects of bottom mud on a simple harmonic wave as
the present theory considers a general surface wave loading.
For a linear nondispersive progressive wave, the 1HD equations can be re-
duced from (2.2.96) and (2.2.97) as
∂ζ
∂t+∂u
∂x=α
µI, (2.2.132)
∂u
∂t+∂ζ
∂x= 0, (2.2.133)
which are just the linear shallow water equations with the effects of muddy
51

seabed as a forcing. Recall the moving coordinate, σ = x− t, and the slow time
variable, ξ = (α/µ)t, by evoking the leading-order approximation,
∂u
∂ξ≈ ∂ζ
∂ξ, (2.2.134)
into the summation of (2.2.132) and (2.2.133) we obtain an evolution equation
for the free-surface displacement
∂ζ
∂ξ=
1
2I. (2.2.135)
Note that in function I the spatial and temporal derivative operators should be
replaced by:
∂
∂x→ ∂
∂σ,
∂
∂t→ − ∂
∂σ. (2.2.136)
For a linear progressive wave, the displacement can be formally expressed
as
ζ = a(ξ)eiσ = [a(0)exp (iβrξ) exp (−βiξ)] eiσ, (2.2.137)
where a(ξ) is the wave amplitude. Also, βr and βi account for the wavenumber
shift and change in magnitude due to the presence of a muddy seabed, respec-
tively. In the case of a frictionless solid bottom, βr = βi = 0 and a(ξ) = a(0)
remains as a constant. For convenience, in the dimensionless manner one can
further take a(0) = 1.
Due to the periodicity of wave loadings, we can express
I(ξ, σ) = I∗(ξ)ζ. (2.2.138)
Therefore, the direct substitution of (2.2.137) and (2.2.138) into (2.2.135) leads to
βr + iβi = − i
2I∗. (2.2.139)
52

For the numerical demonstration, let us consider again the two-component
Kelvin-Voigt’s model. Following (2.2.123),
I =− γd∂ζ∂σ−
t∫
0
∂2ζ(x, τ)
∂σ2M(t− τ)dτ
= −iγd ζ + ζ
t∫
0
ei(t−τ)M(t− τ)dτ
=
−iγd+
∞∫
0
eiSM(S)dS
ζ, (2.2.140)
where the functionM has been defined in (2.2.129). Substituting (2.2.140) into
(2.2.139), we finally obtain
βr = −1
2γd+
1
2
∞∫
0
sin(S)M(S)dS, (2.2.141)
and
βi = −1
2
∞∫
0
cos(S)M(S)dS. (2.2.142)
For a purely elastic mud,M reduces to
M(τ) = −2γ
d
∞∑
n=0
[2d
(2n+ 1)π
]2 [1− cos
((2n+ 1)π
2dτ
)]. (2.2.143)
Therefore, (2.2.142) has the asymptotic result
βi = 0, (2.2.144)
while βr can be approximated as
βr = −γd2− γd
d2 − [(n+ 1/2)π]2
[2d
(2n+ 1)π
]2 [1− cos
((2n+ 1)π2
d
)]. (2.2.145)
Clearly, (2.2.144) suggests that there is zero decay for periodic waves propagat-
ing over a elastic seabed, which bas been shown by MacPherson (1980) and Mei
et al. (2010). It is reiterated that both past theories are limited to small-amplitude
53
waves only, which can be viewed as a special case of the present model. It is also
noted that the denominator of (2.2.145) vanishes at
d =
(n+
1
2
)π, n = 0, 1, 2, · · · , (2.2.146)
signifying the resonance due to the elasticity of mud. The above criterion is the
same as that given by Mei et al. (2010). It is noted that only the first three peaks,
i.e. n ≤ 3, are physically significant as d is of O(1).
If the seabed is made of viscoelastic mud, we can also obtain the similar
condition at which the magnitude of βi will be significantly enhanced. For a
non-zero Wi, the asymptotic expression of (2.2.142) is
βi =γ
d
∞∑
n=0
sn/k2n
2sn − k2n
sn1 + s2
n
. (2.2.147)
By requiring ∂βi
∂d= 0, one gets
d =
(n+
1
2
)π√Wi
√√4 + 3Wi2 − 1, n = 0, 1, 2, · · · . (2.2.148)
The above condition reduces to (2.2.146) as Wi→ 0.
Regrading the case of a Newtonian muddy seabed, i.e. Wi → ∞, the rate of
amplitude attenuation can be further deduced from (2.2.147) as
βi =γ
d
∞∑
n=0
1
1 + [(2n+ 1)π/(2d)]4, (2.2.149)
and the criterion (2.2.148) becomes
d = 31/4
(n+
1
2
)π ≈ 2.067(2n+ 1). (2.2.150)
Again, only n = 0 and n = 1 are meaningful in (2.2.150). To determine the peak
wave damping, it is sufficient to consider n ≤ 1 in (2.2.149) alone. Therefore,
it is found that a maximum βi occurs at d ≈ 2.186, or d′ ≈ 1.55√
2νm
ω0
where ω0
is the angular frequency of the surface progressive wave. This agrees with the
result of Ng (2000).
54

Numerical examples
In figure 2.11, βi is plotted against d under various values of Wi and γ. Both
solutions calculated by (2.2.142) and results from MacPherson (1980) are pre-
sented. The occurrence of resonance is also compared with the prediction by
(2.2.148). As can be seen, a good agreement is evident. The oscillating feature
of βi, due largely to the presence of elasticity, is same as that demonstrated by
Mei et al. (2010). However, it is remarked that viscous damping is not responsi-
ble for the amplitude attenuation (non-zero βi) caused by a purely elastic mud
bed. Instead, wave energy transfered into the mud layer through pressure work
at the water-mud interface is stored by the muddy seabed to sustain the mud
flow motions. Furthermore, supported by the observation from figure 2.11-(b)
and the mathematical argument by Mei et al. (2010), it is realized that local max-
ima of βi, which correspond to m = 0, 1, 2, · · · in (2.2.148), decrease sequentially
as a mud layer becomes thicker (i.e. larger m). We may expect for the case of
purely elastic mud βi → 0 as d→∞, which is consistent with the conclusion by
Mallard & Dalrymple (1977).
Given that the problem of linear waves interacting with a muddy seabed has
been studied extensively, comprehensive discussions are available in the liter-
ature. Some important references are MacPherson (1980), Piedra-Cueva (1995),
Ng & Zhang (2007), and Mei et al. (2010).
2.2.7 Explicit solutions for 1HD periodic waves
For a linear progressive wave propagating over a viscoelastic seabed modeled
by a two-component Kelvin-Voigt element, explicit solution forms can actually
55

0 2 4 6 8 100.0
0.5
1.0
1.5
2.0
βi
(a) γ = 0.85 Wi = 0.5
Wi = 1.0Wi = 2.0Wi =∞Present model
0.0 0.5 1.0 1.5 2.0 2.50.00
0.25
0.50Wi =∞
0 2 4 6 8 100.0
0.5
1.0
1.5
2.0
d
βi
(b) Wi = 0.5 γ = 0.85
γ = 0.75γ = 0.65Present model
Figure 2.11: Amplitude attenuation rate (βi) for a linear progressive wave
over a viscoelastic mud: (a) Effect of relative importance of
elasticity: Wi = 0.5, 1, 2,∞; (b) Effect of mud density, γ. Sym-
bols are the solutions of present model while lines plot the
damping rate of MacPherson (1980). The insert in subplot (a)
shows the details of viscous case with the dashed line indi-
cates the value of d corresponds to the maximum βi as given
by (2.2.150). In addition, the vertical bars in (b) show the theo-
retical prediction of d values correspond to the first two peaks
of βi by (2.2.148).
56

be deduced.
Consider the free-surface displacement in the following form:
ζ(x, t) = ei(kx−t), (2.2.151)
where k is the dimensionless wavenumber. Substitute the above expression
into the momentum equation, (2.2.133), the horizontal velocity component is
obtained
u(x, t) = kei(kx−t). (2.2.152)
Furthermore, the vertical component is
w(x, z, t) = −ik2µ2zei(kx−t) + wb. (2.2.153)
Regarding the mud flow solutions, from the initial-boundary-value problem,
(2.2.48) to (2.2.50), the horizontal velocity is
um(x, η, t) = γ
[1− cosh ((d− η))
cosh (d)
]u(x, t), (2.2.154)
where
=1− i√
2
√Wi
i + Wi(2.2.155)
is a complex parameter. Accordingly,
wm(x, η, t) = −ikγ
[η − 1
sinh (d)− sinh ((d− η))cosh (d)
]u(x, t), (2.2.156)
which suggests that
I = −ik2γd
[1− tanh (d)
d
]. (2.2.157)
The dimensionless wavenumber, k, is still an unknown. By evoking the conser-
vation of mass, (2.2.132), the dispersion relation is obtained
1 = k2
1 +
α
µγd
[1− tanh (d)
d
]. (2.2.158)
57

In fact, we can further take into account the wave dispersion. Following the
continuity equation, (2.2.4), the water particle velocity components are formu-
lated as
u = [k cosh (kµ(z + 1)) +D sinh (kµ(z + 1))] ei(kx−t), (2.2.159)
w = −iµ [k sinh (kµ(z + 1)) +D cosh (kµ(z + 1))] ei(kx−t), (2.2.160)
where D is an unknown to be determined. Note that the mud flow velocity re-
mains the same, as given in (2.2.155) and (2.2.156). The continuity of the vertical
velocity at the water-mud interface yields
D = k2αγd
[1− tanh (d)
d
]. (2.2.161)
Therefore, combing the free-surface conditions, (2.2.5) and (2.2.6), we obtain the
dispersion relation
1 =k
µtanh (kµ)
1 + kαγd[1− tanh(d)
d
]coth(kµ)
1 + kαγd[1− tanh(d)
d
]tanh(kµ)
. (2.2.162)
The above solution forms agree with the results reported by Ng (2000) if the
water viscosity is ignored5. In addition, at the nondispersive limit, i.e. µ → 0,
(2.2.159), (2.2.160) and (2.2.162) reduce to (2.2.152), (2.2.153) and (2.2.158), re-
spectively.
2.2.8 Comparison with laboratory experiments
To examine the performance of the present theory, model predictions are now
compared with available laboratory measurements. In this section, three exam-
ples will be discussed: linear progressive waves over a layer of either viscous
5The water viscosity is also considered by Ng (2000), while the water body is treated as ainviscid fluid in the current study.
58

mud (Gade 1958) or viscoelastic mud (Maa & Mehta 1987, 1990), and a solitary
wave interacting with a viscous fluid-mud seabed (Park, Liu & Clark 2008). All
experiments were carried out in flat wave flumes.
The pioneering work of Gade (1958) modeled the bottom mud using sugar
water, considered as a Newtonian fluid. Experimental conditions were:
2π
ω0
= 8 s, h0 = 4 ft, νm = 5 ft2s−1, γ = 0.487,
d′√2νm/ω0
= 0, 0.28, 0.56, 0.84, 1.12, 1.40, 1.68.
Figure 2.12 plots βr and βi calculated by (2.2.141) and (2.2.141), along with the
laboratory results. A reasonable quantitative agreement is observed. Due to the
presence of the viscous mud, the amplitude of the surface wave is attenuated
while the wavelength increases. As a reminder, βr and βi represent the rates
of change of wavenumber and amplitude, respectively. It should be noted that
in the experiments, even without the mud, a remarkable wave damping is still
evident, i.e., value of βi is significant at d ≈ 0. Note that this cannot be solely
accounted for by the effect of water viscosity, as a considerable discrepancy is
also reported by Dalrymple & Liu (1978)6 whose theoretical model also includes
the water viscosity.
Park, Liu & Clark (2008) also studied the interaction between surface waves
and a viscous mud, but considered solitary waves of weak to moderate nonlin-
earity instead. In their experiments, a commercial Newtonian silicone fluid was
used as the bottom mud. Employing the particle image velocimetry (PIV), Park,
Liu & Clark (2008) reported the velocity measurements in both water body and
mud column. Experimental conditions of a specific case to be discussed are:
h0 = 10 cm, a0 = 1.9 cm, d′ = 1.7 cm, νm = 5.24× 10−3 m2s−1, γ = 0.667.
6See FIG. 2 in Dalrymple & Liu (1978).
59

0.0 0.5 1.0 1.5 2.0 2.5 3.0−0.80
−0.60
−0.40
−0.20
0.00
βr
d0.0 0.5 1.0 1.5 2.0 2.5 3.0
0.00
0.05
0.10
0.15
0.20
βi
d
Figure 2.12: Periodic wave over a viscous mud: Rates of change of dimen-
sionless wavenumber, βr, and wave amplitude, βi, as func-
tions of dimensionless mud layer thickness, d. Dots are the
laboratory measurements of Gade (1958) and lines plot the re-
sults calculated by (2.2.141) and (2.2.141), respectively.
Figure 2.13 shows the time histories of horizontal mud flow velocity, um, at
three fixed vertical levels: η/d = 0.25, 0.5, 0.75. The theoretical predictions agree
very well with the measurements. The vertical profiles of um at several different
phases are further illustrated in figure 2.14. Again, the agreement is also reason-
able. Note that panel (c) demonstrates the transition of flow reversal predicted
by the current theory. Unfortunately, the experiment did not capture this fea-
ture due to the limited sampling rate at 100 HZ, which corresponds to a phase
difference of ∆θ ≈ 0.04 with θ = −(x− x0 − ct).
In figure 2.15, records of both bottom shear stress, τmb, and the vertical dis-
placement at water-mud interface, ζm, are shown. Note that the model predicted
interfacial displacement is recovered by numerically integrating the linear ap-
proximation
∂ζm∂t
= wm, η = d. (2.2.163)
60

−1.00 −0.75 −0.50 −0.25 0.00 0.25 0.50 0.75 1.00−0.06
−0.04
−0.02
0.00
0.02
0.04
0.06
−(x− x0 − ct)
um
η
d= 0.75
η
d= 0.50
η
d= 0.25
Measurements
Figure 2.13: Solitary wave over a viscous mud: Records of horizontal mud
flow velocity, um, at three vertical levels, η/d = 0.25, 0.5, 0.75.
Lines plot the theoretical results and dots are the experimental
data of Park, Liu & Clark (2008).
The measurements are actually those of PIV products. As can be seen, theoret-
ical results agree well with the experimental data. It should be noted that ζm
is at least two orders of magnitude smaller than the free-surface displacement,
which is of O(1) in the dimensionless manner. This justifies the assumption of
negligible interfacial displacement (see the discussion in (2.2.34)).
The model validation is completed by considering a final example of peri-
odic waves over a viscoelastic muddy seabed. Here, the present solutions are
compared with the laboratory tests of Maa & Mehta (1987, 1990). It is noted
that actual estuarial mud taken from Cedar Key, Florida was used in the experi-
ments. Rheology tests have shown that the mud samples exhibited both viscous
and elastic properties. Figure 2.16 shows the comparison of horizontal velocity
component across the entire extent of water body and mud column. The cor-
61

−0.08 −0.06 −0.04 −0.02 0.00 0.02 0.04 0.06 0.080.000.250.500.751.00
(a) θ = −0.33η
d
−0.08 −0.06 −0.04 −0.02 0.00 0.02 0.04 0.06 0.080.000.250.500.751.00
(b) θ = −0.12η
d
−0.008 −0.006 −0.004 −0.002 0.000 0.002 0.004 0.006 0.0080.000.250.500.751.00
(c) θ = 0.012, 0.014, 0.016η
d
−0.08 −0.06 −0.04 −0.02 0.00 0.02 0.04 0.06 0.080.000.250.500.751.00
(d) θ = 0.09η
d
−0.08 −0.06 −0.04 −0.02 0.00 0.02 0.04 0.06 0.080.000.250.500.751.00
(e) θ = 0.33
um(x, η, t)
η
d
Figure 2.14: Mud flow induced by a surface solitary wave: Profiles of hor-
izontal velocity component, um, at several different phases,
θ = −(x − x0 − xt). Dots are the PIV products of Park,
Liu & Clark (2008) and lines show the theoretical predictions.
In panel (c), the transition of flow reversal is demonstrated,
which was not captured by the experiment due to the limited
sampling rate.
62

−1.00 −0.75 −0.50 −0.25 0.00 0.25 0.50 0.75 1.00−0.010
−0.005
0.000
0.005
0.010
ζm
−1.00 −0.75 −0.50 −0.25 0.00 0.25 0.50 0.75 1.00−1.0
−0.5
0.0
0.5
1.0
τmb
−(x− x0 − ct)
Figure 2.15: Solitary wave over a viscous mud: Time histories of interfacial
displacement, ζm, and bottom shear stress, τmb. Lines plot the
theoretical predictions and dots show the laboratory results of
Park, Liu & Clark (2008).
responding parameters are listed in Table 2.1. Notice that in both experiments,
the properties of mud, namely ρm, νm, and Em, are vertically stratified. To adopt
their data to our theory, these parameters have been depth-averaged. As can
be seen, the agreement is generally acceptable. It is clear that a sharp velocity
gradient is shown at the water-mud interface, due largely to the huge difference
in viscosities of water and mud.
Table 2.1: Experimental conditions of Maa & Mehta (1987, 1990) for periodic
waves over a viscoelastic muddy seabed.
2πω0
h0 a0 d′ ρm νm Em
(s) (cm) (cm) (cm) (g cm−3) (m2s−1) (N m2)
M&M87 1.6 19.7 1.6 16.0 2.475 0.0400 18.0
M&M90 1.2 21.1 3.4 14.6 2.400 0.0945 38.3
63

0 5 10 150
5
10
15
20
25
30
35
40
∇
(a)
Dis
tance
tobott
om
(cm
)
Horizontal velocity (cm/s)0 10 20 30
0
5
10
15
20
25
30
35
40
∇
Dis
tance
tobott
om
(cm
)
Horizontal velocity (cm/s)
(b)
Figure 2.16: Periodic waves over a viscoelastic mud: Profiles of horizontal
velocity components. Lines plot the theoretical results while
dots are experimental data of Maa & Mehta (1987) (subplot
(a)) and Maa & Mehta (1990) (subplot (b)). In addition, dashed
lines denote the free surfaces. The corresponding parameters
are given in Table 2.1.
2.2.9 Summary
A set of depth-averaged continuity and momentum equations, describing mo-
tions of surface long waves over a thin viscoelastic muddy seabed, has been
derived. The new theory is capable of modeling weakly nonlinear and weakly
dispersive waves. A generalized rheology model for a linear viscoelastic ma-
terial is adopted with both Newtonian fluid and purely elastic mud being the
limiting cases. To demonstrate, amplitude evolution of a solitary wave is in-
vestigated which shows a significant attenuation caused by the mud. The case
of linear progressive waves is also studied. It is found that the wave attenua-
tion can be enhanced remarkably by the elasticity of mud. The performance of
64

the proposed model is examined by comparing the results with the available
laboratory measurements. The overall agreement is encouraging.
2.3 Response of a Bingham-plastic muddy seabed to a surface
solitary wave
Mud in different locales can have different rheological behavior, partly as a con-
sequence of diverse chemical composition (Balmforth & Craster 2001). Examin-
ing the mud samples taken from the eastern coast of China, Mei et al. (2010) have
shown that these cohesive sediments can be modeled as a viscoelastic material.
Krone (1963) performed the viscosimetric tests on field mud samples collected
along the coasts of the United States. He reported that mud with a concentration
roughly lying between 10 to 100 g L−1 displayed both plastic and viscous-like
behavior, depending on the external forcing. This observation suggests that the
muddy seafloor can sometimes be referred as a Bingham-plastic material, in
which the constitutive equation in a simple two-dimensional case is expressed
as
µm∂u′m∂z′
=
0, |τ ′m| ≤ τ ′o
τ ′m − τ ′o sgn
(∂u′m∂z′
), |τ ′m| > τ ′o
, (2.3.164)
where τ ′o > 0 is the yield stress, and µm is the Bingham-plastic viscosity. It is
remarked that the above rheology model is the leading-order approximation as
the contribution from ∂u′m∂x′
has been ignored (see section 2.2.2 for the justifica-
tion). Detailed discussion on the validation of (2.3.164) has been documented in
Balmforth & Craster (1999). It is noted that typical values of the physical param-
eters for different Bingham-plastic muds can be found in Mei & Liu (1987). A
65
useful summary on the relationships among yield stress, Bingham-plastic vis-
cosity, and the concentration for various types of mud is also provided by Mei,
Liu & Yuhi (2001).
The immense challenge of the Bingham-plastic mud problem is posed by
the existence of the yield stress. Yet, Mei & Liu (1987) still managed to investi-
gate the effects of a Bingham-plastic muddy seabed on long-wave propagation
and shoaling. Neglecting the water viscosity and assuming a thin mud layer,
they illustrated elegantly that the motions of a Bingham-plastic muddy seafloor
can be approximately divided into two distinct regions: a plug flow layer mov-
ing above a shear flow zone. The plug flow velocity and the thickness of the
shear flow zone, or equivalently the location of the yield surface, change in time
depending on the magnitude of the pressure gradient imposed by the surface
wave, and the properties of the Bingham-plastic mud. Solutions have to be ob-
tained numerically by solving two coupled partial differential equations which
govern motions in two regions, respectively. In analyzing the shear flow, Mei
& Liu (1987) applied the Karman momentum integral method and adopted the
parabolic profile to describe the vertical distribution of horizontal velocity com-
ponent inside the shear flow region. They further assumed that the plug flow
layer is always much thicker than the shear flow zone. With these two addi-
tional simplifications, the plug flow velocity can be obtained explicitly without
knowing the shear zone thickness, which has to be solved numerically from
the deduced ordinary differential equation. Clearly, their analysis does not al-
low the flow reversal inside the shear flow region as illustrated by figure 2.8
for the case of surface waves over a viscoelastic mud. Although the finding
of viscoelastic problem presented in section 2.2 does not necessarily guarantee
the same behavior to be observed in the Bingham-plastic fluid, it is desirable
66

to analyze the shear flow region more carefully. In addition, it is anticipated
that under certain combinations of yield stress, viscosity and pressure gradient,
multiple shear flow layers (or plug flow regions) can develop.
Therefore, this section is devoted to studying the response of a Bingham-
plastic muddy seafloor subject to long water wave loadings without some of
the constrains imposed in Mei & Liu (1987). In particular, we shall relax the
following two assumptions: the parabolic shear flow velocity profile and the
negligible shear layer thickness in computing the plug flow velocity. This will
allow us to investigate the evolution of yield surfaces, and the associated ve-
locity profiles throughout the entire mud column. Since analytical solutions
are impossible for general wave loadings, we shall focus only on the free sur-
face solitary wave loading. The initial-boundary-value problem governing the
wave-induced motions inside the thin layer of Bingham-plastic mud shall be
first discussed. A brief review of the approach and assumptions of Mei & Liu
(1987) follows. Possible scenarios of mud motions, which could have up to four
layers of alternating plug flow and shear flow under a surface solitary wave,
are then illustrated. Subsequently, semi-analytical/numerical solutions are pre-
sented for the velocities inside the mud column, along with detailed discussion
on the mud flow dynamics under different physical parameters. The damping
rate for a surface solitary wave is calculated using the energy conservation law.
Using some estimated but realistic physical parameters, the predicted damp-
ing rate is compared with the field observations. Good qualitative agreement is
shown.
67

2.3.1 Formulation for wave-induced mud motions inside a thin
Bingham-plastic seabed
A thin layer of Bingham-plastic mud subject to a transient surface long-wave
loading is now studied. For simplicity, let us consider only two-dimensional
problem where the x-axis coincides with the direction of wave propagation and
the η-axis points upwards, denoting the vertical coordinate. As has been dis-
cussed comprehensively in section 2.2.2, the mud flow motions can be described
by the following linearized boundary-layer equations (see (2.2.36) and (2.2.48)):
∂um∂x
+∂wm∂η
= 0, 0 ≤ η ≤ d, (2.3.165)
∂um∂t
= γ∂ub∂t
+∂τm∂η
, 0 ≤ η ≤ d, (2.3.166)
where
−∂pm∂x
=∂ub∂t
, η = d (2.3.167)
has been evoked. In addition, from (2.2.49) and (2.2.50) the corresponding
boundary conditions in the vertical direction are
τm = 0, η = d, (2.3.168)
and
um = 0, η = 0. (2.3.169)
The idea is again to first express um in terms of ub by solving the above initial-
boundary-value problem. Afterwards,
wm(x, η, t) =
η∫
0
−∂um∂x
dη (2.3.170)
is calculated from (2.3.165) (see also (2.2.78)).
68
2.3.2 Review of Mei & Liu (1987)
Fundamental characteristics of Bingham-plastic mud motion is the existence of
plug flow and shear flow: when the magnitude of shear stress is larger than
the yield stress the mud will move like a viscous fluid (shear flow), otherwise it
behaves as a solid (plug flow). The crucial assumption embedded in the analysis
by Mei & Liu (1987) is that under wave loadings the shear stress in the mud
column decreases monotonically in the vertical direction with the maximum
magnitude at the solid bottom, η = 0. Accordingly, inside the Bingham-plastic
mud bed there exists only one shear flow zone (0 < η < η0) with a thickness
of η0(x, t), if the magnitude of bottom frictional stress, |τmb|, is greater than the
yield stress, i.e., |τmb| > τo. Above the shear flow layer, there is a plug flow
region (η0 < η < d) of thickness κ0 = d − η0. Mei & Liu (1987) have pointed
out that in the plug flow region the horizontal mud velocity, um = up(x, t), is
vertically uniform7. It follows from (2.3.166) that ∂τm∂η
must also be independent
of η. Therefore, balancing the forces in the plug flow region one obtains
∂up∂t
= γ∂ub∂t
+−τosgn(up)
d− η0
, η0 ≤ η ≤ d. (2.3.171)
By further assuming that the plug flow region occupies most of the mud col-
umn, i.e., O(η0) = 1 and κ0 ≫ η0, or equivalently d≫ 1, the equation above can
be approximated as
∂up∂t≈ γ
∂ub∂t
+−τosgn(up)
d, η0 ≤ η ≤ d. (2.3.172)
Clearly, the plug flow velocity can now be determined without knowing the
shear flow layer thickness. Within the shear flow region, um = us(x, η, t), Mei
7In this study, the terminology plug flow is actually referred to the flow region where the hor-izontal velocity component is uniform in the vertical extent, but not necessarily being invariantlaterally.
69
& Liu (1987) employed the Karman momentum integral method by assuming a
parabolic velocity profile
usup
= −(η
η0
)2
+ 2η
η0
, 0 ≤ η ≤ η0, (2.3.173)
in which the no-slip condition on the solid bottom and two matching conditions
along the interface between plug flow and shear flow regions,
up = us,∂us∂η
= 0, η = η0, (2.3.174)
have been applied. Consequently, the momentum equation inside the shear
flow zone becomes
up∂η2
0
∂t+
(6γ∂ub∂t− 4
∂up∂t
)η2
0 − 12up = 0, (2.3.175)
which is an ordinary differential equation for η0, as up can be obtained by
(2.3.172) beforehand. Note that the assumed parabolic shear flow velocity pro-
file, along with the negligible water viscosity, (2.3.168), implies that the shear
flow layer must vanish at zero plug flow velocity.
Based on the model of Mei & Liu (1987), the anticipated Bingham-plastic
mud motions under a surface solitary wave loading are sketched in figure 2.17.
Notice that in this figure the yield surface location, η = η0, is designated as η1
when the mud flow moves in the direction of wave propagation (from the left to
the right) and η0 = η3 when it moves in the opposite direction. Before the arrival
of the solitary wave, the entire extent of mud column behaves like a solid and is
at rest. As shown in phase (1) of figure 2.17, a shear flow layer begins to develop
from the solid bottom at t = ts when τmb = τo. Clearly, this incipient moment
can be calculated as
γ∂ub∂t− τod
= 0, t = ts, (2.3.176)
70

η = η1
(1)
t = ts
η
d
(2)
η1
(3)
η1
η1
(4)
t = t0
η3
(5)
t = t1
(6)
η3
(7)
η3
η3
(8)
t = te
Figure 2.17: Sketches of vertical profiles of horizontal velocity, um, inside
the mud bed under a surface solitary wave loading based on
the model proposed by Mei & Liu (1987) (two-layer scenario).
All dots represent the locations of yield surface (η0 = η1 for the
positive mud motion and η0 = η3 for the backward mud mo-
tion), dashed-dotted lines denote the water-mud interface and
dotted vertical lines are the zero velocity reference. A shear
flow layer develops when the bottom shear stress reaches the
yield stress at t = ts (cf. phase (1)). Both mud velocity and the
thickness of shear flow region first grow and then decrease as
shown in phases (2) to (4). The mud motion pauses at t = t0
and restarts to move backwards at t = t1 (see phases (4) and
(5)). If t1 > t0, the mud flow is intermittent (i.e., the mud is at
rest for a finite time interval t0 < t < t1), otherwise it moves
continuously. Eventually, the mud motion stops at t = te and
a cycle of mud motion under a solitary wave loading is com-
pleted. In this example, the velocity profile is always mono-
tonically increasing from zero at the bottom to the plug flow
velocity at the mud-water interface.
71

representing the balance between the driving pressure gradient, which is also
proportional to acceleration of wave motions at the water-mud interface, and
the bottom friction that is the same as the yield stress at this moment. Phases (2)
to (4) in figure 2.17 suggest that both the mud velocity and the thickness of shear
flow layer first grow and then diminish as the magnitude of the driving pressure
gradient (or acceleration of wave motions) first increases and then decreases.
Eventually, the entire mud column pauses and returns to the solid state at t = t0
(i.e., phase (4) in figure 2.17). The shear flow starts to move in the opposite
direction of the wave propagation when the reversed driving pressure gradient
yields the bottom mud again at t = t1 (see phase (5)). During the backward
mud flow motion phases, the characteristics of mud velocity and shear flow
layer thickness behave very much like those at the forward mud motion phases.
Finally, the mud flow ends at t = te as shown in phase (8). The transition times
t0, t1, and t = te are yet to be determined. Mei & Liu (1987) have suggested that
when t1 = t0 the mud flows continuously while the mud motion is intermittent
if t1 > t0 (cf. figure 2.17). For the intermittent mud flow, t1 can be calculated by
γ∂ub∂t
+τod
= 0, t = t1. (2.3.177)
The physical representation of the above equation is similar to that of (2.3.176)
except the directions of mud flow and driving pressure gradient reverse.
Although the analysis of Mei & Liu (1987) is ground breaking, the simplifica-
tions employed prevent it from being applied to more complex flow conditions.
For instance, the assumption that shear flow layer thickness is much smaller
than the total mud bed thickness, d ≫ 1, is not always applicable. Consider
a solitary wave propagating over a depth h0 = 10 m with ǫ = µ2 = 0.1. The
Bingham-plastic mud has a thickness of d′ = 0.5 m and a viscosity three orders
of magnitude greater than that of water (i.e., αL0 = 0.05 m); the dimensionless
72

mud thickness is only about d = 10. Moreover, it is well-known that for a New-
tonian boundary-layer flow under unfavorable pressure gradient, the strain rate
at the bottom can become zero and eventually a flow reversal occurs, implying
that the vertical variation of the strain rate is no longer monotonic. This fea-
ture has been demonstrated in figure 2.8 for the case of a viscoelastic mud. The
parabolic velocity profile is adequate when the driving force is always favor-
able, e.g., in gravity current or debris flow problems (Liu & Mei 1989; Huang
& Garcıa 1997). Under a transient wave loading, because of the occurrence of
unfavorable pressure gradients a multi-layer flow structure inside the Bingham-
plastic mud, i.e., alternating layers of plug and shear flow regions, can exist. Dif-
fering from the approach of Mei & Liu (1987), it is the objective of the present
study to provide a general investigation of the response of a Bingham-plastic
muddy sea bed to the surface solitary wave propagation.
2.3.3 Solutions inside a Bingham-plastic mud
Figure 2.18 illustrates the complete mud responses under a surface solitary
wave loading. During the accelerating phases of solitary wave, (1) and (2) in fig-
ure 2.18, a shear flow region develops from the solid bottom when the pressure
gradient generated bottom friction overcomes the yield stress. The correspond-
ing yield surface between the plug flow and the shear flow region is designated
as η1(x, t). As the solitary wave starts to decelerate, the unfavorable pressure
gradient creates zero strain rate at the bottom, which implies that the lower por-
tion of mud is solidified (plug flow) and a second yield surface, η2(x, t), appears;
e.g., panel (4) in figure 2.18. The corresponding time instant is denoted as t = t1.
In terms of the constitutive curve, (2.3.164), the development of the bottom plug
73

η = η1
(1)
t = ts
η
d
(2)
η1
(3)
η1
(4)
t = t0
η1
η2
(5)
η1
η2
(6)
t = ty
η1
η2 η3
(7)
η1
η2
η3
(8)
t = t1
η1 = η2
η3
(9)
η3
η3
(10)
t = te
Figure 2.18: Sketches of vertical profiles of horizontal velocity, um, inside
the mud bed under a surface solitary wave loading: Four-
layer scenario. All dots represent the locations of yield sur-
faces (η1,2,3), dashed-dotted lines denote the water-mud inter-
face and dotted lines are the zero velocity reference. The mud
is yielded at t = ts when the bottom shear stress reaches the
yield stress. During the beginning phases (1) to (3), there is
only one yield surface. In panel (4), a second plug flow region
develops from the solid bottom in response to the unfavor-
able pressure gradient and the mud plasticity at t = t0 and
the new plug flow layer grows as the strength of the unfavor-
able pressure gradient increases (cf. phase (5)). As the driving
unfavorable pressure gradient becomes stronger, the mud in
the lower plug flow region is yielded again at t = ty in (6).
The upper shear layer eventually vanishes, i.e., η1 and η2 are
merged at t = t1, and the mud motion returns to a single yield
surface (η3) structure. The whole process of mud flows ends
at t = te.
74

flow layer represents the transition during which the bottom shear stress de-
creases from the positive yield stress to the negative yield stress, τmb = −τo. As
the solitary wave keeps propagating forward, the newly developed lower plug
flow region grows and the positive (unfavorable) pressure gradient can liquefy
the bottom solid mud again when the pressure gradient overcomes the yield
stress; i.e., panels (5) and (6) in figure 2.18. The third interface between plug
flow and shear flow region is denoted as η3(x, t) and the time of its occurrence
is marked as t = ty. Consequently, a four-layer structure inside the mud column
is formed and a flow reversal occurs as shown in panel (7). The subsequent
phases show that the sandwiched shear layer vanishes, i.e., the upper two yield
surfaces, η1 and η2, merge at t = t1 in panel (8) of figure 2.18, since the driving
(positive) pressure gradient becomes fully favorable again. The sea bed con-
tinues to flow with a single yield surface structure (panel (9), figure 2.18) and
eventually the whole mud column returns to its initial resting state at t = te.
In addition to the four-layer and two-layer (also the model of Mei & Liu
1987) scenarios, a three-layer scenario is also possible and is sketched in figure
2.19. This scenario occurs only if the driving pressure gradient is not strong
enough so that the second shear flow region does not develop and the second
plug flow region builds up only until the whole mud column is solidified be-
fore the backward mud motions take place (cf. (4) to (6) in figure 2.19). With
this exception, the three-layer scenario is very similar to the four-layer scenario:
the mud is first liquefied at t = ts, a bottom plug flow region begins to develop
at t = t0, the sandwiched shear layer vanishes at t = t1 and the whole mud
motion ends at t = te. Clearly, the flow reversal does not occur in either the
three-layer or two-layer scenarios. We reiterate that the two-layer scenario, as
shown in figure 2.17, can only occur when the yield stress is so strong that dur-
75

ing the middle phases the entire mud column comes to rest without any bottom
plug flow zone develops (cf. (4) to (5) in figure 2.17). In addition, there is no
presumed shear flow velocity profile in our two-layer scenario and mud flow
has to be intermittent (i.e., no mud flow motion during t0 ≤ t ≤ t1). This is very
different from the proposal of Mei & Liu (1987).
Based on the above physical pictures, we can now formulate the mathemat-
ical model describing Bingham-plastic mud motions under a surface solitary
wave loading within the following framework:
(I) ts ≤ t ≤ t0 : A plug flow region is on top of a shear flow region with the
single yield surface, η1 (cf: (1)-(4) in figure 2.17; (1)-(3) in figures 2.18 and
2.19);
(II) t0 ≤ t ≤ t1 : There are multiple yield surfaces with alternating plug-
−shear−plug−shear flow structure (four-layer scenario: figure 2.18, (4)-
(8); three-layer scenario: figure 2.19, (4)-(6)) or no mud motion at all (two-
layer scenario: figure 2.17, (4)-(5));
(III) t1 ≤ t ≤ te : Flows return to the plug−shear flow structure with a single
yield surface, η3 (cf: (5)-(8) in figure 2.17; (8)-(10) in figure 2.18; (7)-(9) in
figure 2.19).
Notice that all the time stamps, ts, te, t0, and t1, have been illustrated and
described in figures 2.17 to 2.19. In addition, while for all scenarios ts has
a common definition (see (2.3.176)), t0 and t1 are different for two-layer or
three/four-layer scenarios. Both t0 and t1 are still parts of the solutions to be
determined with the exception that for the two-layer scenario t1 has been de-
fined in (2.3.177).
76

η = η1
(1)
t = ts
η
d
(2)
η1
(3)
η1
(4)
t = t0
η1
η2
(5)
η1
η2
(6)
t = t1
η1 = η2
(7)
η3
(8)
η3
η3
(9)
t = te
Figure 2.19: Sketches of vertical profiles of horizontal velocity, um, inside
the mud bed under a surface solitary wave loading: Three-
layer scenario. All dots represent the yield surfaces (η1,2,3),
dashed-dotted lines denote the water-mud interface and dot-
ted lines are the zero velocity reference. The mud motion is
initiated at t = ts and a second plug flow region develops
from the solid bottom when t = t0. At t = t1 the whole mud
column is solidified as the transition between positive plug
flow velocity and the backward movement (cf. phase (6)).
Thereafter, the mud bed moves backwards with a single yield
surface (η3) structure towards the ending instant, t = te. To
be consistent with the definition in section 2.3.3, here the no-
tation η3 denotes the lowest yield surface after η1 and η2 have
merged. In this example, there is no second shear flow layer
and flow reversal does not occur.
77

Despite the possibility of having different multi-layer structures, the mo-
mentum equation remains the same in each shear flow region,
∂us∂t
= γ∂ub∂t
+∂2us∂η2
, (2.3.178)
while within the plug flow layer the momentum equation becomes
∂up∂t
= γ∂ub∂t
+τpt − τpbκp
, (2.3.179)
where τpt and τpb are the shear stresses along the top and bottom of a plug flow
region, respectively and κp is the thickness of this specified layer. However, the
boundary and interfacial conditions are not the same for different flow scenar-
ios, which will be described in the following sections.
Stage (I): Initial single yield surface (η1) structure
During this initial stage (ts ≤ t ≤ t0), there is only one yield surface, η1(x, t),
and the vertical velocity gradient inside the shear flow layer is always positive,
which indicates that plug flow velocity, up1(x, t), is non-negative. Therefore, by
integrating (2.3.179) in time we obtain
up1(x, t) = γ[ub(x, t)− ub(x, ts)
]+
t∫
ts
−τo−η1
dt, η1 ≤ η ≤ d. (2.3.180)
As for the shear flow velocity, let us follow the approach presented in section
2.2 (see the mathematical treatment in (2.2.70)) to introduce a new variable
vs1 = us1 − γub. (2.3.181)
Thus, the two-point boundary-value problem (BVP) in this region can be ex-
pressed in terms of vs1 as
∂vs1∂t
=∂2vs1∂η2
, 0 ≤ η ≤ η1, (2.3.182)
78

with the initial condition
vs1 = −γub, t = ts, (2.3.183)
and the following boundary conditions
∂vs1∂η
= 0, η = η1, (2.3.184)
and
vs1 = −γub, η = 0. (2.3.185)
In addition, the continuity of mud flow velocity along the yield surface, η = η1,
needs to be satisfied. Hence, from (2.3.180) and (2.3.181) it is required that
vs1(x, η1, t) = −γub(x, ts)−t∫
ts
τod− η1
dt. (2.3.186)
The BVP, (2.3.182) to (2.3.185), is similar to that presented in section 2.2 for a
linear viscoelastic muddy seabed problem. However, the present problem has
a moving boundary, i.e., η1 = η1(x, t), which posts a mathematical difficulty
in finding an analytical solution. Nevertheless, by adopting the assumption
that the thickness of shear flow layer is slowly varying in time, η1(x, t) can be
approximated as a constant within a small time interval, ∆t. Therefore, using
the Green’s function method (Mei 1995) the solution form can be obtained as
vs1(x, η, t) =
η1∫
0
vs1(x, ξ, t∗)G(η, ξ,∆t)dξ − γ
∆t∫
0
ub(x, t∗ + t)
∂G
∂ξ(η, 0,∆t− t)dt,
(2.3.187)
where
G(η, ξ, t) =∞∑
n=−∞
(−1)n
2√πt
exp
[−(η − ξ + 2nη1)
2
4t
]− exp
[−(η + ξ + 2nη1)
2
4t
],
(2.3.188)
79

and 0 < ∆t = t − t∗ ≪ 1 in order to satisfy the slowly varying assumption,
η1 = η1(x, t) from t∗ to t. When t∗ = ts, the solution becomes
vs1(x, η, t) = γub(x, ts)∞∑
n=0
1∑
m=−1
(−1)n+m
(1− |m|
2
)erfc
[η + (2n+m)η1√
4∆t
]
− γ
2√π
∞∑
n=−∞(−1)n(η + 2nη1)
∆t∫
0
ub(x, ts + t)√(∆t− t)3
exp
[−(η + 2nη1)
2
4(∆t− t)
]dt, (2.3.189)
with η1 = η1(x, ts+∆t). Based on (2.3.189), it is possible to formulate the general
expression for vs1(x, ξ, t∗) in (2.3.187), which involves a multiple series. How-
ever, there is no obvious computational benefit for doing so since the integrals
in (2.3.187) still have to be evaluated numerically. In summary, when the proper-
ties of the Bingham-plastic mud and the velocity of water along the water-mud
interface, ub, are given, the thickness of the shear flow layer, η1, can be calcu-
lated numerically from (2.3.186). Once η1 is known, the velocities of the plug
flow and shear flow can be obtained by (2.3.180) and (2.3.187), respectively. It
is remarked that the current stage ends at t = t0. For a two-layer scenario, t0
indicates the moment that mud motion pauses from the forward motion while
in the three/four-layer scenario it represents the instant that zero shear strain
rate appears at the solid bottom (see figures 2.17 to 2.19).
Stage (II): Multiple yield surfaces structure for three/four-layer scenario
During the unfavorable pressure gradient phase, multiple yield surface struc-
ture is formed when t0 ≤ t ≤ t1. As mentioned earlier, the mud bed is stationary
during this time interval in the two-layer scenario. Referring to figure 2.18, the
maximum possible number of yield surfaces is three, therefore, the momentum
80

equations for these four layers can be formulated as
∂up1∂t
= γ∂ub∂t
+−τod− η1
, η1 ≤ η ≤ d, (2.3.190)
∂us1∂t
= γ∂ub∂t
+∂2us1∂η2
, η2 ≤ η ≤ η1, (2.3.191)
∂up2∂t
= γ∂ub∂t
+2τo
η2 − η3
, η3 ≤ η ≤ η2, (2.3.192)
∂us2∂t
= γ∂ub∂t
+∂2us2∂η2
, 0 ≤ η ≤ η3, (2.3.193)
where η1, η2 and η3 denote the yield surfaces. The associated interfacial and
boundary conditions are
up1 = us1, η = η1, (2.3.194)
∂us1∂η
= 0, η = η1 or η = η2, (2.3.195)
us1 = up2, η = η2, (2.3.196)
up2 = us2, η = η3, (2.3.197)
∂us2∂η
= 0, η = η3 and us2 = 0, η = 0. (2.3.198)
An additional yielding criterion for the second shear flow zone, 0 ≤ η ≤ η3, is
η3 = us2 = up2 = 0, t < ty, (2.3.199)
where ty is illustrated in phase (6) of figure 2.18 and can be determined by
γ∂ub∂t
+2τoη2
= 0, t = ty. (2.3.200)
It is reiterated that since η2 is still part of the unknown solutions, the above
criterion has to be checked at every time step. For the three-layer scenario, η3 is
always zero in this stage. As for the four-layer scenario, η3 > 0 when t ≥ ty. In
both scenarios, the mud motion returns to a single yield surface setup at t = t1
with η1 = η2 when the wave-induced pressure gradient becomes truly favorable
again (see (8) of figure 2.18 and (6) of figure 2.19).
81

Following the same solution method as shown in the previous section, the
plug flow velocities can be obtained as
up1(x, t) = up1(x, t0) + γ[ub(x, t)− ub(x, t0)
]+
t∫
t0
−τod− η1
dt, (2.3.201)
and
up2(x, t) = γ[ub(x, t)− ub(x, ty)
]+
t∫
ty
2τoη2 − η3
dt, t > ty. (2.3.202)
For the upper shear flow zone, solution form of BVP, (2.3.191)) with (2.3.195),
is
vs1(x, η, t) =1
2√π∆t
η1−η2∫
0
vs1(x, ξ + η2, t−∆t)G1(η, ξ)dξ, t > t0, (2.3.203)
where
G1(η, ξ) =∞∑
n=−∞
2∑
m=1
exp
[−(η + (−1)mξ + 2n(η1 − η2)
2√
∆t
)2], (2.3.204)
and vs1 = us1 − γub. Note that ∆t should be small in order to satisfy the as-
sumption of slowly varying yield surfaces. In addition, the initial condition,
vs1 = vs1(x, η, t0), has to be computed from (2.3.187). Similarly, for the second
shear flow layer, i.e., (2.3.193) with (2.3.198), we obtain
vs2(x, η, t = t∗ + ∆t) =
η3∫
0
vs2(x, ξ, t∗)G2(η, ξ,∆t)dξ
−γ∆t∫
0
ub(x, t∗ + t)
∂G2
∂ξ(η, 0,∆t− t)dt, t∗ ≥ ty, (2.3.205)
where G2(η, ξ, t) is same as G given in (2.3.188), except η1 being replaced by η3.
Recall the initial condition for this region should be
us2 = γub + vs2 = 0, t = ty. (2.3.206)
82

So far, the thicknesses of each layer remain unknown. Three interfacial con-
ditions, (2.3.194), (2.3.196) and (2.3.197), are applied to obtain these variables.
Therefore, at every instant we need to solve numerically a nonlinear system
that involves three unknowns.
Stage (III): Single yield surface (η3) structure with a negative value of plug
flow velocity
During this final period (t1 ≤ t ≤ te), the solutions are very similar to those in
stage (I). Therefore, we can easily obtain
up1(x, t) = up1(x, t1) + γ[ub(x, t)− ub(x, t1)
]+
t∫
t1
τod− η3
dt, (2.3.207)
and
vs2(x, η, t = t∗ + ∆t) =
η3∫
0
vs2(x, ξ, t∗)G2(η, ξ,∆t)dξ
−γ∫ ∆t
0
ub(x, t∗ + t)
∂G2
∂ξ(η, 0,∆t− t)dt, t∗ ≥ t1. (2.3.208)
Reminded that t1 is part of the solutions from the previous stages and the loca-
tion of yield surface, η3, can be obtained by requiring
vs2(x, η3, t) = up1(x, t1)− γub(x, t1) +
t∫
t1
τod− η3
dt. (2.3.209)
All solutions need to be carried out until up1 vanishing at t = te, which com-
pletes the process of Bingham-plastic mud response under a surface solitary
wave loading.
2.3.4 Extension of the solution technique
The above solution technique can be extended to study surface waves over an-
other yield-stress fluid-mud, namely the bi-viscous mud: a material tends to
83

resist motion at low stress, but flows readily when the yield stress is exceeded.
In other words, a bis-viscous mud has two distinct viscosities of finite values
and the viscosity is much higher when the magnitude of the applied stress is
less than the yield stress. As the solution approach for the bi-viscous problem
follows closely the methodology presented in section 2.3.3, the detailed analysis
is documented in appendix A instead.
2.3.5 Numerical examples
For illustration, numerical solutions of Bingham-plastic mud motion subject to
a surface solitary wave shall be presented. Several different scenarios will be
considered. The prescribed water velocity along the water-mud interface is as-
sumed to be the undisturbed solitary wave given as
ub(x, t) = sech2
(√3ǫ
2µ(x− x0 − c t)
). (2.3.210)
It is reiterated that x0 is the initial position of the wave crest, and c =√
1 + ǫ the
dimensionless celerity. In addition, ǫ and µ measure the wave nonlinearity and
frequency dispersion, respectively. For all cases presented here, the following
wave parameters are used
x = 0, x0 = −50, ǫ = µ2 = 0.1.
As for other physical parameters, let us consider
d = 10, γ = 0.7, α = 3× 10−3, τo = 0.2.
In terms of dimensional values:
h0 = 10 m, a0 = 1 m, λ0 = 200 m,
84

−3 −2 −1 0 1 2 3 4 5 6 7 8−1.0
−0.5
0.0
0.5
1.0
∂pm
∂x
γ = 0.7, τo = 0.2, d = 10
(1) (a) θ = -0.032(b) θ = 0.629(c) θ = 0.760(d) θ = 1.019(e) θ = 1.511(f) θ = 1.851(g) θ = 4.284
−3 −2 −1 0 1 2 3 4 5 6 7 80.00
0.25
0.50
ηj
d
(2) η1
η2
η3
−3 −2 −1 0 1 2 3 4 5 6 7 8−0.2
0.0
0.4
0.8
1.0
θ = −(x− x0 − ct)
Hori
zonta
lvel
oci
ty
(3) ub
up1
Figure 2.20: Muddy sea bed responses under a surface solitary wave load-
ing (4-layer scenario) at different phases: ⊳ (a) θ = −(x−x0−ct) = -0.032; ♦ (b) 0.629; (c) 0.760; (d) 1.019; ⊲ (e) 1.511;©(f) 1.851; (g) 4.284. (1) The pressure gradient (dashed-dotted
line indicates the yield stress, τo/(γd)); (2) Locations of yield
surfaces, ηj , j = 1, 2, 3; (3) Water-mud interfacial plug flow ve-
locity, up1 (dashed-dotted line is the water particle velocity at
the water-mud interface, ub). The corresponding velocity pro-
files are illustrated in figure 2.21. A second plug flow region
develops after phase (b) which is yielded again at (d). The
mud flow motion returns to a single yield surface (η3) struc-
ture as η1 and η2 are merged at phase (f).
85

−0.2 0.0 0.2 0.4 0.6 0.80.0
0.5
1.0(a)η
d
−1.0 −0.5 0.0 0.5 1.00.0
0.5
1.0
(a′)
η
η1
−0.2 0.0 0.2 0.4 0.6 0.80.0
0.5
1.0(b)η
d
−1.0 −0.5 0.0 0.5 1.00.0
0.5
1.0
(b′)
η
η1
−0.2 0.0 0.2 0.4 0.6 0.80.0
0.5
1.0(c)η
d
−1.0 −0.5 0.0 0.5 1.00.0
0.5
1.0
(c′)
η
η1
−0.2 0.0 0.2 0.4 0.6 0.80.0
0.5
1.0(d)η
d
−1.0 −0.5 0.0 0.5 1.00.0
0.5
1.0
(d′)
η
η1
−0.2 0.0 0.2 0.4 0.6 0.80.0
0.5
1.0(e)η
d
−1.0 −0.5 0.0 0.5 1.00.0
0.5
1.0
(e′)
η
η1
−0.2 0.0 0.2 0.4 0.6 0.80.0
0.5
1.0(f)η
d
−1.0 −0.5 0.0 0.5 1.00.0
0.5
1.0
(f′)
η
η1
−0.2 0.0 0.2 0.4 0.6 0.80.0
0.5
1.0(g)η
d
um
−1.0 −0.5 0.0 0.5 1.00.0
0.5
1.0
(g′)
η
η3
um
max|um|
Figure 2.21: Muddy sea bed responses under a surface solitary wave load-
ing (4-layer scenario) — vertical profiles of horizontal velocity
component, um, at different phases: (a) θ = −(x − x0 − ct) =
-0.032; (b) 0.629; (c) 0.760; (d) 1.019; (e) 1.511; (f) 1.851; (g)
4.284. Left panels, (a)−(g), show the velocities throughout the
entire mud column while the right panels, (a′)−(g′), are ex-
panded for 0 < η < η1 or 0 < η < η3 at the same phases. In
each plot, the dotted line represents the zero velocity reference
line. Clearly, a second plug−shear flow pair is formed from
the solid bottom during the deceleration phase of the surface
solitary wave and the flow reversal occurs (cf. phase (e)).
86

d′ = 0.95 m, ρm = 1.43 g cm−3, νm = 3× 10−3 m2 s−1, τ ′o = 8.67 N m−2,
where λ0 = 2πL0 has been defined as the effective wavelength. As mentioned
in Mei, Liu & Yuhi (2001), the properties of mud vary widely, depending on the
chemical composition, sediment concentration, salinity and other factors. For
instance, the mud found in Yunan Province, China has a viscosity three orders of
magnitude greater than that of water and the yield stress reachesO(100) N m−2.
On the other hand, Krone (1963) reported that the mud in San Francisco Bay,
USA has a viscosity which is in the same order of magnitude as the water and
the yield stress is much smaller compared to the mud observed in China. The
parameter set employed here is within the range of Provins clay data collected
by Mei & Liu (1987).
In figures 2.20-2.21 (four-layer scenario), 2.22-2.23 (three-layer scenario),
and 2.24-2.25 (two-layer scenario), the effects of the yield stress on the result-
ing mud motions are demonstrated. Three different values of yield stress,
τo = 0.2, 2.0, 4.0, are used while all other parameters remain the same. In the case
of a relatively small yield stress (τo = 0.2), i.e., figures 2.20 and 2.21, the four-
layer scenario inside the mud column results. From (2.3.167) and (2.3.176), it is
clear that the dimensionless parameter τoγd
measures the relative ease of the mud
to be mobilized under a given incident wave. As the yield stress is weak rela-
tive to the wave loading ( τoγd
= 0.029, see plate (1) in figure 2.20), the Bingham-
plastic mud is quickly liquefied and a shear flow layer starts to develop from the
solid bottom when the friction due to the yield stress is balanced by the pres-
sure force. Note that because of the viscous shear, the plug flow velocity at the
water-mud interface, up1, is not in phase with the velocity of the solitary wave
and the mud flow can move in the opposite direction of wave propagation (see
(3) in figure 2.20). During the initial period (θ < −0.032, phase (a)) both the plug
87

flow velocity, up1, and thickness of the viscous shear layer, η1/d, grow in time.
The velocity profile at the phase (θ = −0.032) of maximum plug flow velocity
is illustrated in panel (a) of figure 2.21. As the crest of solitary wave passes,
the unfavorable pressure gradient eventually slows down the forward motion
in the mud column as shown in (3) of figure 2.20. However, the corresponding
shear layer thickness, η1/d, is still increasing until the phase θ = 1.658 (see (2) in
figure 2.20). At the phase θ = 0.629 (t = t0), i.e., plate (b) of figure 2.21, the shear
strain rate vanishes at the bottom of muddy bed and the lowermost Bingham-
plastic mud returns to its plastic state (plug flow). Once the mud is solidified,
the friction between the bottom of the mud layer and solid bed prevents this
portion of mud from moving. The material plasticity resists the viscous force.
As the unfavorable pressure gradient continues to push the mud column back-
wards, the thickness of the second plug flow region (with zero velocity), η2/d,
increases and the shear flow layer thickness, (η1 − η2)/d, shrinks (cf. phases (c)
to (d) in figures 2.20 and 2.21). Since the yield stress is relatively small in this
case, as the unfavorable pressure gradient persists, the bottom plug flow region
is eventually yielded again. A new shear layer is formed at θ = 1.019 (i.e., phase
(d), t = ty) and continues to grow (see (d) to (e) in figures 2.20 and 2.21). At
this point, there are two plug flow regions (η1 < η < d; η3 < η < η2) and two
shear flow layers (η2 < η < η1; η < η3); the two plug flow regions move in the
opposite direction and flow reversal occurs (cf. (e), figure 2.21). The process
continues as the lower shear flow layer grows and the middle shear flow layer
shrinks. Finally, the sandwiched shear layer vanishes at θ = 1.851 (i.e., phase (f),
t = t1) and the mud motion returns to a single yield surface structure moving
towards the end of the event at θ = 7.833 (t = te). Notice that when the wave
crest already propagated far away, i.e., ub ≈ 0 or pressure gradient vanishes (see
88

(3) in figure 2.20), it is actually the inertia of mud drives its motion .
For the case with a larger yield stress (τo = 2.0, figures 2.22 and 2.23), it re-
quires a stronger driving pressure gradient to yield the mud and to create the
first shear flow layer (cf. plate (1) in figure 2.22). The shear flow layer thickness
is also relatively thinner than that in the previous case. During the unfavorable
(positive) pressure gradient period, for instance, phase (c), the strong plasticity
suppresses the viscous force and the pressure gradient. As a result, the bottom
solid layer (plug flow) builds up and eventually the mud motion pauses (cf.
phase (d), figure 2.23). From phase (b) to (d), i.e., stage (II): t0 ≤ t ≤ t1, there is
only one shear flow layer being sandwiched by two plug flow regions. Imme-
diately after the zero motion moment, a new shear flow layer develops from the
solid bottom and continues to grow as the positive pressure gradient increases,
see phases (e) and (f) in figures 2.22-2.23. The mud flow structure now returns
to a single yield surface structure progressing towards the end of the whole pro-
cess. We reiterate that there is no flow reversal in this case and mud flow motion
is continuous.
Figure 2.24 and 2.25 show a case where the mud has an even stronger yield
stress, i.e., τo = 4.0. The sea bed is barely liquefied and the mud flow motion
is relatively small with a single yield surface structure throughout the entire
process. Obviously, a flow reversal is impossible in this case. The mud flow
moves intermittently with no motion during −0.149 ≤ θ ≤ 0.438 (t0 ≤ t ≤ t1,
t1 given in (2.3.177)). While it has been demonstrated that the present results
can have very different features from the approach of Mei & Liu (1987) for low
yield stress situations (cf. figures 2.20-2.21 and 2.22-2.23), the solutions of this
high yield stress case (τo = 4.0) are indeed similar to those presented in Mei
89

−2.0 −1.5 −1.0 −0.5 0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5−1.0
−0.5
0.0
0.5
1.0
∂pm
∂x
γ = 0.7, τo = 2, d = 10
(1)
(a) θ = -0.218(b) θ = 0.363(c) θ = 0.430
(d) θ = 0.479(e) θ = 0.594(f) θ = 1.664
−2.0 −1.5 −1.0 −0.5 0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.50.00
0.05
0.10
0.15
ηj
d
(2) η1
η2
η3
−2.0 −1.5 −1.0 −0.5 0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5−0.30
−0.15
0.00
0.15
0.30
θ = −(x− x0 − ct)
up1
(3)
Figure 2.22: Muddy sea bed responses under a surface solitary wave load-
ing (3-layer scenario) at different phases: ⊳ (a) θ = −(x−x0−ct) = -0.218; ♦ (b) 0.363; (c) 0.430; (d) 0.479; ⊲ (e) 0.594;©(f) 1.664. (1) The pressure gradient (dashed-dotted line indi-
cates the yield stress, τo/(γd)); (2) Locations of yield surfaces,
ηj , j = 1, 2, 3 ; (3) Water-mud interfacial plug flow velocity,
up1. The corresponding velocity profiles are illustrated in fig-
ure 2.23. A second plug flow region develops at phase (b) but
no flow reversal appears (i.e., at each instant the maximum
possible number of yield surface(s) is two). The entire mud
column pauses at phase (d) and immediately continues the
backward motion as a single yield surface structure.
90

−0.25 −0.15 0.00 0.15 0.250.0
0.1
0.2(a)
η
d
−1.0 −0.5 0.0 0.5 1.00.0
0.5
1.0
(a′)
η
η1
−0.25 −0.15 0.00 0.15 0.250.0
0.1
0.2(b)
η
d
−1.0 −0.5 0.0 0.5 1.00.0
0.5
1.0
(b′)
η
η1
−0.25 −0.15 0.00 0.15 0.250.0
0.1
0.2(c)
η
d
−1.0 −0.5 0.0 0.5 1.00.0
0.5
1.0
(c′)
η
η1
−0.25 −0.15 0.00 0.15 0.250.0
0.1
0.2(d)
η
d
−1.0 −0.5 0.0 0.5 1.00.0
0.5
1.0
(d′)
η
η1
−0.25 −0.15 0.00 0.15 0.250.0
0.1
0.2(e)
η
d
−1.0 −0.5 0.0 0.5 1.00.0
0.5
1.0
(e′)
η
η1
−0.25 −0.15 0.00 0.15 0.250.0
0.1
0.2(f)
η
d
um
−1.0 −0.5 0.0 0.5 1.00.0
0.5
1.0
(f′)
η
η3
um
max|um|
Figure 2.23: Muddy sea bed responses under a surface solitary wave load-
ing (3-layer scenario) — profiles of horizontal velocity compo-
nent, um, at phases: (a) θ = −(x − x0 − ct) = -0.218; (b) 0.363;
(c) 0.430; (d) 0.479; (e) 0.594; (f) 1.664. Left panels show the
velocities throughout the entire mud column while the right
ones give the corresponding details. Dotted lines indicate the
zero velocity reference. Due to a large yield stress, a plug
flow region builds up from the solid bottom and eventually
pauses the mud at the transition between forward and back-
ward mud motion (see (b) to (d)). As a result, it is impossible
for the flow reversal to develop. When the sea bed begins to
move in the opposite direction to the solitary wave propaga-
tion direction, the mud column can be described again by a
single yield surface structure.
91

& Liu (1987). Figure 2.26 shows the locations of yield surfaces and the plug
flow velocity from both studies. Two models give similar results with some
differences. The discrepancy can be mainly attributed to one of assumptions by
Mei & Liu (1987) that the shear flow layer thickness is small and negligible when
computing the plug flow velocity (see (2.3.172)). Apparently, this assumption
becomes invalid as d decreases.
Figure 2.27 shows the shear strain rate along the bottom of muddy bed (η =
0), ∂um
∂η
∣∣∣mb
, which is proportional to the bottom shear stress, τmb. In all three cases
there exists a time interval where zero velocity gradient appears along the solid
bottom, i.e., |τmb| ≤ τo. As has been discussed previously, for the large yield
stress case, τo = 4.0 (figures 2.24 and 2.25), within this period the entire mud
column is solidified and stays at rest, while for other two cases the upper portion
of mud column keeps moving. Therefore, there is no clear trend describing the
length of the zero strain rate interval as the physical processes are quite different
for the examples shown in figure 2.27. The mud movement appears to start and
end more gradually for the case of smaller yield stress, i.e., τo = 0.2. When the
yield stress is very low, the mud behaves closely to a viscous fluid. However,
it is remarked that for a purely viscous fluid mud, the zero bottom strain rate
occurs only at one moment.
The effect of Bingham-plastic viscosity on the mud flow motion has also been
investigated. Figures 2.28 and 2.29 demonstrate the plug flow velocity and lo-
cations of yield surfaces for various dimensionless mud layer thickness, d = 1,
5 and 10, with the same initiation parameter: τo/γd = 0.029, 0.29 in figures 2.28
and 2.29, respectively. Since
τoγd
=τ ′od′
1
ǫµρwg, (2.3.211)
92

−1.5 −1.0 −0.5 0.0 0.5 1.0 1.5 2.0−1.0
−0.5
0.0
0.5
1.0
∂pm
∂x
γ = 0.7, τo = 4, d = 10
(1)
(a) θ = -0.818(b) θ = -0.471(c) θ = -0.188
(d) θ = 0.784(e) θ = 1.141(f) θ = 1.413
−1.5 −1.0 −0.5 0.0 0.5 1.0 1.5 2.00.00
0.02
0.04
0.06
ηj
d
(2) η1
η3
−1.5 −1.0 −0.5 0.0 0.5 1.0 1.5 2.0−0.04
−0.02
0.00
0.02
0.04
θ = −(x− x0 − ct)
up1
(3)
Figure 2.24: Muddy sea bed responses under a surface solitary wave load-
ing (2-layer scenario) at different phases: ⊳ (a) θ = −(x−x0−ct) = -0.818; ♦ (b) -0.471; (c) -0.188; (d) 0.784; ⊲ (e) 1.141;
© (f) 1.413. (1) The pressure gradient (dashed-dotted line in-
dicates the yield stress, τo/(γd)); (2) Locations of yield sur-
faces, ηj , j = 1, 3; (3) Water-mud interfacial plug flow velocity,
up1. The corresponding velocity profiles are illustrated in fig-
ure 2.25. In this case, the shear flow region is relatively small
due to the large yield stress. The mud flow motion pauses
for a long interval before it starts to move backwards. Only
a single yield surface structure appears throughout the whole
process.
93

−0.04 −0.02 0.00 0.02 0.040.00
0.05
0.10(a)
η
d
−1.0 −0.5 0.0 0.5 1.00.0
0.5
1.0
(a′)
η
η1
−0.04 −0.02 0.00 0.02 0.040.00
0.05
0.10(b)
η
d
−1.0 −0.5 0.0 0.5 1.00.0
0.5
1.0
(b′)
η
η1
−0.04 −0.02 0.00 0.02 0.040.00
0.05
0.10(c)
η
d
−1.0 −0.5 0.0 0.5 1.00.0
0.5
1.0
(c′)
η
η1
−0.04 −0.02 0.00 0.02 0.040.00
0.05
0.10(d)
η
d
−1.0 −0.5 0.0 0.5 1.00.0
0.5
1.0
(d′)
η
η3
−0.04 −0.02 0.00 0.02 0.040.00
0.05
0.10(e)
η
d
−1.0 −0.5 0.0 0.5 1.00.0
0.5
1.0
(e′)
η
η3
−0.04 −0.02 0.00 0.02 0.040.00
0.05
0.10(f)
η
d
um
−1.0 −0.5 0.0 0.5 1.00.0
0.5
1.0
(f′)
η
η3
um
max|um|
Figure 2.25: Muddy sea bed responses under a surface solitary wave load-
ing (2-layer scenario) — profiles of horizontal velocity compo-
nent, um, at different phases: (a) θ = −(x−x0−ct) = -0.818; (b)
-0.471; (c) -0.188; (d) 0.784; (e) 1.141; (f) 1.413. Left panels, (a)-
−(f), show the velocities throughout the entire mud column
while the right panels, (a′)−(f′), are the detailed features at the
same instants. In each plot, the dotted line indicates the zero
velocity reference. The velocity profiles vary monotonically
in all phases, which is similar to those presented in Mei & Liu
(1987).
94

−1.5 −1.0 −0.5 0.0 0.5 1.0 1.5 2.00.00
0.02
0.04
0.06γ = 0.7, τo = 4, d = 10
ηj
d
M&Lη1η3
−1.5 −1.0 −0.5 0.0 0.5 1.0 1.5 2.0−0.050
−0.025
0.000
0.025
0.050
−(x− x0 − ct)
up1
Figure 2.26: Comparison of results from Mei & Liu (1987) and current
study for the case of large yield stress, τo = 4.0. The upper
panel displays the locations of yield surfaces (M&L: solid line;
Current study: dashed-dotted line = η1, dashed line = η3) and
the lower panel is the water-mud interfacial plug flow veloc-
ity.
in each figure a different value of d (= d′/(αL0), α2 ∼ νm) can be interpreted as
the results of changing viscosity (i.e., treat τ ′o, ρm and d′ as constants). Despite
the fact that the mud flow motion is initiated at the same instant with a fixed
τo(γd), it does not guarantee that the subsequent mud flow motions will be the
same. For instance, all three cases display a four-layer scenario when τo/d = 0.02
(figure 2.28) but behave differently for τo/d = 0.2 (figure 2.29). As can be seen,
low viscosity mud (bigger d) can move faster in the forward direction and the
duration of mud flow motion lasts longer. In addition, the time interval within
which the multiple yield surfaces appear tends to shorten as the viscosity in-
creases (d decreases). However, this does not imply that the single yield surface
95

−4 −2 0 2 4 6 8−0.4
−0.2
0.0
0.2
0.4
0.6γ = 0.7, d = 10
∂um
∂η
∣∣∣∣mb
−(x− x0 − ct)
τo = 0.2τo = 2.0τo = 4.0
Figure 2.27: The strain rate of various types of mud bed at the bottom. The
mud is assumed to have different yield stresses with dashed
line: τo = 0.2, solid line: τo = 2.0 and dashed-dotted line:
τo = 4.0. In all cases, γ = 0.7 and d = 10.
model of Mei & Liu (1987) is adequate when the multi-layer interval becomes
small (e.g., d = 1 in figure 2.28) as the mud flow behaves very differently, i.e.,
flow reversal occurs, within this period.
Next, the effects of actual mud layer thickness, d′, is examined. In figure
2.30, the mud column is thicker for bigger d since all other physical parameters
are kept the same (constant τo and γ are equivalent to fix τ ′o and νm). It is seen
that the thin mud layer case, d = 1, has much smaller plug flow velocity as the
relative yield stress, τo/d, is stronger. Referring to figures 2.20 to 2.25 (various
yield stress, τo), we can conclude that the mud bed thickness and strength of
yield stress show similar effects on the mud flow motion: low τo/d cases are
easier to be initiated and tend to have multi-layer mud structure, stronger plug
flow velocity and thicker shear flow region.
96

−4 −2 0 2 40.0
0.5
1.0
ηj
d
d = 1 (τo = 0.02, 4L)
−4 −2 0 4 6 80.0
0.5
1.0
−(x− x0 − ct)
d = 5 (τo = 0.1, 4L)
−4 −2 0 4 6 80.0
0.5
1.0d = 10 (τo = 0.2, 4L)
−4 −2 0 2 4 6 8
−0.2
0.0
0.2
0.4
0.6
up1
γ = 0.7, τo/d = 0.02
d = 1d = 5d = 10
Figure 2.28: Effects of viscosity on the mud flow motion with τ0/d = 0.02:
fixed τ0/d represents same τ ′o and d′; small d stands for high
viscosity mud. The upper panel shows the water-mud inter-
facial plug flow velocity, up1, with dashed line: d = 10, solid
line: 5, dashed-dotted line: 1 and dotted line the zero velocity
reference. Lower plates are the the locations of the yield sur-
faces, ηj/d, j = 1, 2, 3, with dotted line: η1, solid line: η2 and
dashed line: η3. All three cases display a four-layer scenario
and the mud is initiated at the same instant. Low viscosity
mud (bigger d) tends to have faster forward plug flow veloc-
ity and the overall mud flow duration last longer.
97

−2 0 20.0
0.3
0.6
d = 1
ηj
d
d = 1 (τo = 0.2, 2L)
−2 0 2 40.0
0.2
0.4
−(x− x0 − ct)
d = 5 (τo = 1, 3L)
−2 0 2 40.0
0.1
0.2d = 10 (τo = 2, 3L)
−2 −1 0 1 2 3 4
−0.2
−0.1
0
0.1
0.2
up1
γ = 0.7, τo/d = 0.2
d = 1d = 5d = 10
Figure 2.29: Effects of viscosity on the mud flow motion with τ0/d = 0.2: τ ′oand d′ are fixed while a small d corresponds to a high viscos-
ity mud. The upper panel shows the water-mud interfacial
plug flow velocity, up1, with dashed line: d = 10, solid line:
d = 5, dashed-dotted line: d = 1. Lower panels are the the
locations of the yield surfaces, ηj/d, j = 1, 2, 3, with dotted
line: η1, solid line: η2 and dashed line: η3. While d = 1 (high
viscosity mud) shows a two-layer scenario, the other two are
three-layer scenario.
2.3.6 Wave attenuation caused by a thin layer of mud
Estimating wave energy dissipation in the muddy seabed and the correspond-
ing wave damping rate is one of the key objectives in studying the interaction
between waves and seafloor. Referring to Dalrymple & Liu (1978) and Mei &
Liu (1987), in a moving coordinate following the wave propagation the balance
98

−2 0 20.0
0.2
0.4
0.6
d = 1
ηj
d
d = 1 (τo/d = 0.2, 2L)
−4 −2 0 2 4 60.0
0.2
0.4
0.6
−(x− x0 − ct)
d = 5 (τo/d = 0.04, 4L)
−4 −2 0 2 4 6 80.0
0.2
0.4
0.6d = 10 (τo/d = 0.02, 4L)
−4 −2 0 2 4 6 8
−0.2
0.0
0.2
0.4
0.6
up1
γ = 0.7, τo = 0.2
d = 1d = 5d = 10
Figure 2.30: Effects of physical mud layer thickness, d′, on the mud flow
motion: A fixed value of τo represents the same viscosity and
yield stress (see the normalization introduced in (2.2.30)). The
upper panel shows the water-mud interfacial plug flow ve-
locity, up1, with dashed line: d = 10, solid line: d = 5, dashed-
dotted line: d = 1 and dotted line the zero velocity reference.
Lower plates are the the locations of the yield surfaces, ηj/d,
j = 1, 2, 3, with dotted line: η1, solid line: η2 and dashed line:
η3. For a thinner sea bed, d = 1, the mud flow motion shows
a two-layer scenario while thicker mud cases are four-layer
scenario.
99

of wave energy requires
dE ′dt′
= −D′m, (2.3.212)
where E ′ and D′m represent the wave energy and the energy dissipation in the
muddy seabed, respectively. The dissipation in (2.3.212) can be calculated by
D′m =
∞∫
−∞
0∫
−d′
τ ′m∂u′m∂z′
dz′dx′. (2.3.213)
For a solitary wave, the dimensionless free-surface profile, ζ(x, t), can be ex-
pressed in the form
ζ =ζ ′
a0
= a sech2
[√3ǫa
2µ
(x− x0 −
√1 + ǫa t
)]. (2.3.214)
It is reminded that a = a′/a0 ≤ 1 is the dimensionless wave height. Therefore,
the total wave energy for a solitary wave is obtained as
E ′ = E ′p + E ′k, (2.3.215)
where
E ′p =
∞∫
−∞
1
2ρwgζ
′2dx′ =4
3√
3ρwg (a′h0)
3/2(2.3.216)
and
E ′k =
∞∫
−∞
1
2ρw(h0 + ζ ′)u′b
2dx′ = (1 + 0.8ǫa)E ′p (2.3.217)
are the potential and kinetic energies, respectively. If the wave nonlinearity is
weak, i.e., ǫ is small, we can assume E ′k ≈ E ′p. In addition, for long waves the
celerity is roughly equal to the group velocity, c′ ≈ c′g. These two approxima-
tions lead to
dE ′dt′
= c′gdE ′dx′≈ c′
dE ′dx′
. (2.3.218)
Substituting (2.3.213) and (2.3.215) to (2.3.218) into (2.3.212), we derive the evo-
lution equation of the dimensionless wave height
da
dx= −
(α√ǫ
γµ2
√3
4
)1√a
∞∫
−∞
d∫
0
τm∂um∂η
dηdx = −(α√ǫ
γµ2
√3
4
)FD√a, (2.3.219)
100

where FD, the dissipation function, represents the double-integral term and has
to be calculated numerically.
As an example, figure 2.31 plots the dissipation function FD for several dif-
ferent scenarios calculated by the current model and the theory of Mei & Liu
(1987). The parameter sets being used are same as those in figures 2.20-2.21
(four-layer scenario), 2.22-2.23 (three-layer scenario), and 2.24-2.25 (two-layer
scenario), respectively. The corresponding evolution of surface wave height is
also shown in panel (II) of the same figure. For the case of larger yield stress
(τo = 4.0, two-layer scenario), the present results fit well with those of Mei &
Liu (1987) as expected. However, the discrepancy becomes obvious as strength
of yield stress decreases. Note that it is not possible to compare the results for
τo = 0.2 (four-layer scenario) since an unbounded shear layer thickness occurs in
Mei & Liu (1987) (see their Fig. 4 for more details). In addition, in panel (I) we
observe that there is no clear relationship between the values of FD and strength
of yield stress. For a larger τo, the corresponding strain rate is weaker. However,
the product of strain rate and shear stress, which actually accounts for the en-
ergy dissipation, is not necessary smaller (i.e., FD can be larger). Referring to
panel (II), we find that the wave height can be damped out severely by the pres-
ence of Bingham-plastic mud. For instance, the case of τo = 0.2 shows that wave
height could be reduced by 50% after propagates over x′/h0 ∼ 600. Moreover, as
can be seen in panel (II) both the present solutions and those of Mei & Liu (1987)
approach asymptotic values (or equivalent to FD approaches zero in panel (I)),
which means that the attenuated surface solitary wave can no longer move the
Bingham-plastic mud for the diminished wave pressure gradient becomes too
weak to yield the mud, i.e.,∣∣∂ub
∂t
∣∣ < τoγd
. Since mud with weaker yield stress has
less ability to resist the viscous shearing than that with stronger yield stress, it
101
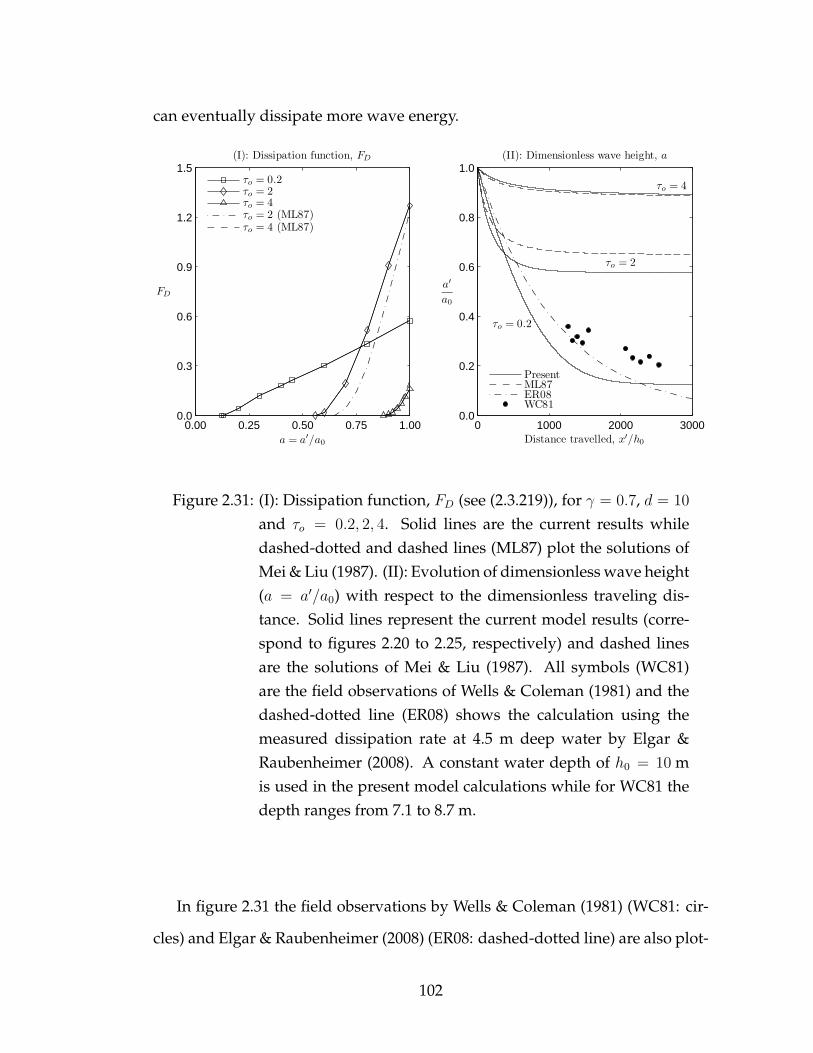
can eventually dissipate more wave energy.
0.00 0.25 0.50 0.75 1.000.0
0.3
0.6
0.9
1.2
1.5
a = a′/a0
FD
(I): Dissipation function, FD
τo = 0.2τo = 2τo = 4τo = 2 (ML87)τo = 4 (ML87)
0 1000 2000 30000.0
0.2
0.4
0.6
0.8
1.0(II): Dimensionless wave height, a
Distance travelled, x′/h0
a′
a0
τo = 0.2
τo = 2
τo = 4
PresentML87ER08WC81
Figure 2.31: (I): Dissipation function, FD (see (2.3.219)), for γ = 0.7, d = 10
and τo = 0.2, 2, 4. Solid lines are the current results while
dashed-dotted and dashed lines (ML87) plot the solutions of
Mei & Liu (1987). (II): Evolution of dimensionless wave height
(a = a′/a0) with respect to the dimensionless traveling dis-
tance. Solid lines represent the current model results (corre-
spond to figures 2.20 to 2.25, respectively) and dashed lines
are the solutions of Mei & Liu (1987). All symbols (WC81)
are the field observations of Wells & Coleman (1981) and the
dashed-dotted line (ER08) shows the calculation using the
measured dissipation rate at 4.5 m deep water by Elgar &
Raubenheimer (2008). A constant water depth of h0 = 10 m
is used in the present model calculations while for WC81 the
depth ranges from 7.1 to 8.7 m.
In figure 2.31 the field observations by Wells & Coleman (1981) (WC81: cir-
cles) and Elgar & Raubenheimer (2008) (ER08: dashed-dotted line) are also plot-
102

ted in panel (II). To present the data collected by Wells & Coleman (1981), the
water depth at the first station in the field experiment has been used (i.e., h1 in
their TABLE 1; h1 = 7.1− 8.7 m). As for the damping curve of Elgar & Rauben-
heimer (2008), a constant depth of 4.5 m is adopted (see their Figure 2). It is re-
minded that in the model calculations x′/ h0 = x/µ with µ =√
0.1 and h0 = 10
m. As shown in panel (II), one of model predicted wave height curves (τo = 0.2)
is close to WC81 and ER08. In fact if we increase the value of τo slightly, the
results will fit WC81 very well. However, the present model is not expected to
fully explain the field observations as the wave conditions and mud properties
in both WC81 and ER08 are incomplete. For instance, the mud in WC81 is inho-
mogeneous with density, ρm = 1.03−1.24 g cm−3, and viscosity, µm = 0.002−20
kg m−1s−1. In addition, the mud layer thickness is about half meter. Although
no yield stress data is available in Wells & Coleman (1981), it has been men-
tioned that the mud exhibited very low strength. For the mud property in Elgar
& Raubenheimer (2008), the seabed has been described as a layer of 0.3 m thick
yogurt-like mud above a harder clay bottom. The mud has a density, ρm = 1.3
g cm−3, and can resist shear. Despite the fact that the physical parameters in the
field studies and the current numerical examples are not perfectly matched, the
comparison of wave height attenuation does suggest that the muddy seabeds
mentioned in these two sites behave more closely to Bingham-plastic mud with
weaker yield stress where the model of Mei & Liu (1987) is not adequate to
describe the mud flow motion as the multi-layer scenario occurs.
103

2.3.7 Summary
Response of Bingham-plastic muddy seafloor under a surface solitary wave
loading has been investigated. A semi-analytical/numerical approach is used
to obtain solutions inside the mud bed. The present analyses suggest that lay-
ered flow structures can occur, depending on the magnitudes of yield stress and
the viscosity of the mud, the thickness of the mud bed, and the strength of the
solitary wave. Four alternating plug flow and shear flow layers are possible.
Detailed mud motions driven by a surface solitary wave have been successfully
demonstrated for the possible scenarios. Wave damping rate for the solitary
wave is also estimated and there are indications that they agree qualitatively
with available field data.
2.4 Conclusions
Considering the water-mud system as a two-layer setting, a depth-integrated
model has been developed to describe the dynamic interaction between weakly
nonlinear and weakly dispersive surface waves and a thin layer of viscoelastic
mud. Response of a Bingham-plastic seabed to a surface solitary wave is also
studied. Model predictions are examined against the available laboratory mea-
surements and field observations. The overall agreement is reasonably well.
In the present study, water viscosity is neglected. This can be improved by
installing a viscous boundary layer right above the water-mud interface. How-
ever, the correction is expected to be small due to the fact that the water viscos-
ity is much smaller than the typical viscosity of mud, as has been suggested by
104

field samples. The assumption of a flat solid bottom beneath the mud layer has
also been made in the current analysis. This certainly limits the application of
the proposed theory only to the case where bottom slope is negligible. Further
investigation is required to examine the wave-mud interaction on an inclined
beach. Finally, a true challenge comes from the assumption that thickness of
the muddy seabed is fixed in our consideration, i.e. vertical displacement at
the water-mud interface is neglected. Although this has been justified both the-
oretically and experimentally, it is still not satisfactory. Significant interfacial
movement can be expected, in particular, when a sloping bottom is considered.
For instance, Traykovski et al. (2000) reported a strong field evidence showing a
considerable interfacial waves in the wave-mud system on a roughly 1-on-150
slope. As has been pointed out by Mei et al. (2010), predicting the depth is an
immense challenge.
Of course, in the fluid dynamics problem of wave-mud interactions there
are still many physical processes being neglected in the present study, such as
resuspension and deposition of cohesive sediments. Nevertheless, supported
by the good performance of the theoretical predictions, it is fair to say that the
present model provides a better understanding on the change of wave climate
caused by the muddy seabed, and the dynamics of wave-induced mud flow.
Some of the results presented in this chapter have been published in Liu &
Chan (2007a,b) and Chan & Liu (2009).
105
CHAPTER 3
LONG WATER WAVES THROUGH EMERGENT COASTAL FORESTS
This chapter discuss the effects of emergent coastal forests on the propagation
of long surface waves of small amplitudes. While the forest is idealized by a pe-
riodic array of vertical cylinders, a two-parameter model is employed to repre-
sent bed friction and to simulate turbulence generated by flow through the tree
trunks. A multi-scale (homogenization) analysis is carried out to deduce the
effective equation on the wavelength-scale with the effective coefficients calcu-
lated by numerically solving the flow problem in a unit cell surrounding one or
several cylinders. Analytical and numerical solutions for amplitude attenuation
of periodic waves for different bathymetries are presented. In addition, results
for the damping of a leading tsunami wave are discussed to demonstrate the
effects of forests on transient waves. It is seen that strong reflection and energy
dissipation can occur when surface waves propagate through a coastal forest.
The proposed theory is compared with a series of laboratory data for periodic
and transient incident waves. Good agreement is observed.
3.1 Introduction
The hydrodynamics of tidal flows through mangrove swamps have been widely
studied for understanding the health of coastal ecosystems (see e.g., Wolanski,
Jones & Bunt 1980; Wolanski 1992; Mazda, Kobashi & Okada 2005). For inland
waters, Nepf (1999) has investigated flow and diffusion of nutrients and sol-
vents in a steady current. It has also been noted that coastal forests can serve
as barriers against tides, storm surges and tsunami waves (Kerr & Baird 2007).
106

Historical evidence suggests that mangroves shielded the eastern coast of India
and reduced the number of deaths in the 1999 cyclone attack (Dasa & Vincent
2009). Records of the 2004 Indian Ocean tsunamis have given strong support
to the hypothesis of shore protection by mangroves and trees (Danielsen et al.
2005; Tanaka et al. 2007). Field experiments conducted in Australia and Japan
also demonstrated that during high tides only 50% of incident wave energy
is transmitted through forests over a distance of 200 m (Massel, Furukawa &
Binkman 1999). Indeed, this evidence has motivated suggestions and labora-
tory studies for planting a strip of trees along the shores. For instance, Hiraishi
& Harada (2003) have proposed the Green Belt with trees planted in water to
guard against tusnami attacks. Through a seires of experimental studies, Irtem
et al. (2009) demonstrated that trees planted on the landward side of the shore
can reduce the maximum run-up of a model tsunami by as much as 45%. Au-
gustin, Irish & Lynett (2009) and Thuy et al. (2009) have both reported laboratory
studies of wave damping by emergent cylinders along with numerical simula-
tions employing parameterized drag models.
In tidal swamps, part or most of the vegetation can be constantly immersed
in water. For effective protection against tsunamis, the needed thickness of the
green forest can be hundreds of meters. Hence an emerging plantation would
likely be a preferred option along well populated shores. It follows that the
understanding of the dissipation process of long waves through emergent veg-
etation is then essential. As can be expected, the dissipation of wave energy
is dominated by turbulence generated between the tree trunks, branches and
leaves throughout the entire sea depth, and by bed friction (Massel, Furukawa
& Binkman 1999). In general, numerical simulations shall provide the most
detailed and accurate predictions. Mo & Liu (2009), for instance, developed a
107

three-dimensional numerical model to study a solitary wave interacting with
a group of cylinders. Similarly, the large eddy simulation for open channel
flows through submerged vegetations has also been performed by Stoesser et al.
(2009). Both studies showed very good agreements when compared with lab-
oratory measurements. However, it is noted that in Stoesser et al. (2009) the
largest dimension in the computational domain is only about forty times of the
cylinder diameter. For the study by Mo & Liu (2009), about one and a half mil-
lion numerical cells are already required for the case of three cylinders. The
application to real problems can be computationally expensive. In practice, sev-
eral simplified mathematical models, all based on the common parameterized
drag force concept (e.g. Massel, Furukawa & Binkman 1999; Mazda, Kobashi &
Okada 2005; Teh et al. 2009), have been proposed to describe the most important
impact of coastal forests on surface wave propagation, namely the wave damp-
ing, without the demand of massive computation. In other words, instead of
resolving the detailed flow, effects of individual tree trunks are represented by
a bulk drag force term. The required model coefficient, i.e. the so-called drag
coefficient, is usually obtained by fitting the simulated free-surface profiles with
either laboratory measurements (e.g. Thuy et al. 2009) or field observations (e.g.
Mazda, Kobashi & Okada 2005). Although easy to implement, this kind of em-
pirical drag force model does not explain well how the detailed structure (i.e.
flow problem around tree trunks) affects the global behavior (i.e. the surface
wave transformation). One important goal of the present study is to systemati-
cally develop a theoretical model for describing the propagation and dissipation
process of long waves through emergent coastal forests. Through the substan-
tive effort of mathematical work, it is the hope to better address the effective
impact of the tree trunks than the existing drag force approach.
108

For the wave-forest problem being considered, the typical wavelength can
be of O(100) m while the diameter of tree trunks is O(0.5) m. Therefore, the
physical problem can be viewed as a micro-scale structure, i.e. the coastal trees,
subjected to a macro-scale forcing, i.e. the surface waves. The goal is then to
obtain a macro equation associated with the effective property of micro-scale
material in question. In other words, it is to find the representative macroscopic
property through multiple-scale analysis. To enable an analysis of the macro-
scale phenomenon from the micro-scale upwards, a number of simplifications
are made. The first is to consider only long waves of small amplitude so that
linearized approximation applies. The second is to model tree trunks by rigid
cylinders in a periodic array but neglect the effects of tree branches, roots, and
leaves. Turbulence generated between tree trunks is then described by the con-
stant eddy viscosity model. Finally, bottom friction is represented by a linear
law. With these simplifications, the two-scale method of homogenization is car-
ried out to derive the mean-field equations on the macro-scale. The effect of tree
trunks on the mean flows appears in macro equations through an effective hy-
draulic conductivity, which needs to be calculated from the solution of certain
initial-boundary-value problem on the micro-scale.
Several macro-scale problems will be discussed, both analytically and nu-
merically. For possible application to wind waves, the marco theory for lin-
ear progressive waves is first presented. Of interest to the protection against
tsunamis, the transient problem is then considered. Numerical examples will
be demonstrated under different incident wave conditions and coastal forest
configurations. The present theory is also examined by comparing with a se-
ries of laboratory experiments for both periodic and transient incident waves.
Comparison shows a very encouraging agreement.
109

3.2 Theoretical formulation
Consider a train of long water waves entering a thick coastal forest from the
open sea. Spanning a large horizontal area, vertical cylinders are erected in a
periodic array of uniform spacing to simulate emergent and rigid tree trunks.
An illustration of a coastal forest is provided in figure 3.1. The tree spacing ℓ
and the typical water depth h0 are assumed to be comparable. Since long waves
are considered, both ℓ and h0 are much smaller than the typical wavelength L0,
i.e., O(ℓ/L0) = O(h0/L0) ≪ 1. The variation of water depth is assumed to be
appreciable only over a distance scale comparable to a wavelength.
(a)ℓ
(b)
Figure 3.1: Problem sketch. (a) Illustration of a coastal forest. (b) Proposed
model: trees are modeled by emergent cylinders of a uniform
spacing ℓ. Only tree trunks are considered.
3.2.1 Governing equations and boundary conditions
For clarity, the horizontal and vertical quantities are separated: u = (u1, u2) and
w denote the horizontal and vertical velocity components in x = (x1, x2) and z
coordinates, respectively.
110

By the use of the eddy viscosity concept, the three-dimensional flow problem
is governed by the averaged Reynolds equations:
∂ui∂xi
+∂w
∂z= 0, i = 1, 2, (3.2.1)
∂ui∂t
+ uj∂ui∂xj
+ w∂ui∂z
= −1
ρ
∂p
∂xi+ νe
(∂2ui∂xj∂xj
+∂2ui∂z2
), i, j = 1, 2, (3.2.2)
and
∂w
∂t+ uj
∂w
∂xj+ w
∂w
∂z= −g − 1
ρ
∂p
∂z+ νe
(∂2w
∂xj∂xj+∂2w
∂z2
), j = 1, 2, (3.2.3)
where t denotes the temporal coordinate, g the gravitational acceleration, ρ the
water density, p the total pressure, and finally νe the eddy viscosity.
Several boundary conditions need to be satisfied. Along the slowly varying
seabed, z = −h(x), the no-slip condition is
ui = w = 0, z = −h(x). (3.2.4)
On the air-water interface, the kinematic boundary condition states
∂η
∂t+ ui
∂η
∂xi= w, z = η, (3.2.5)
where η depicts the free-surface displacement. The dynamic free-surface
boundary condition requires the vanishing of the normal stress
gη − p
ρ+ 2νe
∂w
∂z= 0, z = η, (3.2.6)
and of the tangential components
∂ui∂z
+∂w
∂xi= 0, z = 0. (3.2.7)
Note that the air is assumed to be free of stress and that zero atmospheric pres-
sure is also assumed. Finally, the kinematic boundary condition on the cylinder
walls, (x, z) ∈ SB , is satisfied by requiring
ui = w = 0, (x, z) ∈ SB. (3.2.8)
111

3.2.2 The linearized problem
Considering only infinitesimal waves, the above governing equations and
boundary conditions can be simplified. While the continuity equation remains
unchanged, the linearized momentum equations are obtained straightforwardly
from (3.2.2) and (3.2.3) as
∂ui∂t
= −1
ρ
∂p
∂xi+ νe
(∂2ui∂xj∂xj
+∂2ui∂z2
), i, j = 1, 2, (3.2.9)
and
∂w
∂t= −g − 1
ρ
∂p
∂z+ νe
(∂2w
∂xj∂xj+∂2w
∂z2
), j = 1, 2. (3.2.10)
Likewise, the kinematic condition on the free surface becomes
∂η
∂t= w, z = 0, (3.2.11)
and the requirements of the dynamic free-surface boundary condition reduce to
gη − p
ρ+ 2νe
∂w
∂z= 0, z = 0, (3.2.12)
∂ui∂z
+∂w
∂xi= 0, z = 0. (3.2.13)
The no-slip conditions on both the seabed and the cylinders stay the same.
3.2.3 Depth-integrated equations for the constant eddy viscos-
ity model
Let us further assume a constant eddy viscosity for the current consideration of
linear long waves through a coastal forest.
The typical tree spacing ℓ and the characteristic water depth h0 are used to
normalize the horizontal and vertical coordinates, respectively. Regarding the
112

time scale, the inverse of characteristic frequency, 1/ω, is adopted. For incom-
ing waves of a typical wave amplitude A, the scale of the dynamic pressure is
dictated as [p] = ρgA. In addition, two distinct length scales are presented as
ℓ is much smaller than the typical wavelength of long water waves, L0. As a
result, ℓ is regarded as the micro-length scale while L0 is the macro-length scale.
Employing also the common normalization for the water particle velocity, the
following dimensionless variables are introduced:
x∗i =xiℓ, z∗ =
z
h0
, t∗ = tω, h∗ =h
h0
η∗ =η
A, p∗ =
p
ρgA, ui
∗ =ui√
gh0A/h0
, w∗ =w
Aω
. (3.2.14)
The normalized conservation equations are then obtained from (3.2.1), (3.2.9)
and (3.2.10) as
∂u∗i∂x∗i
+ ǫ∂w∗
∂z∗= 0, (3.2.15)
and
ǫ∂u∗i∂t∗
= −∂p∗
∂x∗i+ ǫσ
[∂2u∗i∂x∗j∂x
∗j
+
(ℓ
h0
)2∂2u∗i∂z∗∂z∗
], (3.2.16)
∂w∗
∂t∗= −
(L0
h0
)2 [h0
A+∂p∗
∂z∗
]+ σ
[∂2w∗
∂x∗j∂x∗j
+
(ℓ
h0
)2∂2w∗
∂z∗∂z∗
]. (3.2.17)
In the above,
ǫ ≡ ℓ
L0
=ωℓ√gh0
≪ 1 (3.2.18)
defines the ratio of micro-to-macro length scales in which the characteristic
wavenumber is calculated as k0 = 1/L0. As for the turbulence parameter,
σ ≡ νe/ω
ℓ2, (3.2.19)
which can be interpreted as the square of ratio of turbulent diffusion length-
scale to tree spacing. Note that σ can take a wide range of values including
O(1) and is larger for longer waves or denser forests. It is also reminded that
ℓ/h0 = O(1).
113

From (3.2.11) to (3.2.13), the dimensionless boundary conditions on the free
surface are now
∂η∗
∂t∗= w∗, z∗ = 0, (3.2.20)
and
η∗ − p∗ + 2ǫ2σ∂w∗
∂z∗= 0, z∗ = 0, (3.2.21)
∂u∗i∂z∗
+ ǫ
(h0
ℓ
)2∂w∗
∂x∗i= 0, z∗ = 0. (3.2.22)
Denoting by a tilde the depth-averaged quantity,
F =1
h∗(x∗)
∫ 0
−h∗F dz∗, (3.2.23)
the depth-integrated continuity equation is deduced from (3.2.15) as
∂(h∗u∗i )
∂x∗i+ ǫ
∂η∗
∂t∗= 0, (3.2.24)
where the conditions (3.2.4) and (3.2.11) have been evoked. Also, it is assumed
that h = h(x) varies appreciably only over a distance of O(L0), but not over
O(ℓ).
Regarding the momentum equations, by similar depth-averaging of (3.2.16)
the vertical independent equation is
ǫ∂u∗i∂t∗
= −∂η∗
∂x∗i+ ǫσ
∂2u∗i∂x∗j∂x
∗j
+ ǫσ
h∗
(ℓ
h0
)2 [∂u∗i∂z∗
]0
−h∗. (3.2.25)
Note that the hydrostatic pressure is obtained from (3.2.17) by the use of the
long-wave assumption, i.e. h0/L0 ≪ 1. If the bottom shear is further repre-
sented by a linear term,
σ
h∗
(ℓ
h0
)2 [∂u∗i∂z∗
]
−h∗≡ αu∗i , (3.2.26)
114

we obtain from (3.2.25)
ǫ∂u∗i∂t∗
= −∂η∗
∂x∗i+ ǫσ
∂2u∗i∂x∗j∂x
∗j
− ǫαu∗i , (3.2.27)
where α can be viewed as a bottom friction parameter.
In physical units, (3.2.24) and (3.2.27) read
∂(hui)
∂xi+∂η
∂t= 0, (3.2.28)
∂ui∂t
= −g ∂η∂xi
+ νe∂2ui∂xj∂xj
− fui, (3.2.29)
where f is the common bed friction coefficient and α = f/ω. In addition, the
bottom shear stress, (3.2.26), becomes
νe
[∂ui∂z
]
−h= fhui. (3.2.30)
Both parameters νe and f (or σ and α in the dimensionless form) are given by
empirical formulae to be discussed shortly.
3.2.4 Estimation of controlling parameters
In the absence of direct measurements of turbulent momentum diffusivity in
water waves interacting with coastal forests, a reasonable compromise is to use
the empirical diffusivity for steady flows through emergent vegetation obtained
from extensive laboratory studies and field observations by Nepf and her col-
leagues (see e.g., Nepf, Sullivan & Zavistoski 1997; Nepf 1999; Tanino & Nepf
2008). In particular, results in the representative work, Nepf (1999), will be
adopted by the present study.
The collected data of Nepf (1999) are in a moderate range of Reynolds num-
ber, Red = U0d/ν = 400 − 2000, where ν is the molecular kinematic viscosity of
115

water, U0 the characteristic velocity, and d the diameter of rigid cylinders which
were used in the experiments to model stems of vegetations. Based on Fig. 10
in Nepf (1999), the turbulent diffusivity, νe, can be roughly fitted by the formula
νeU0ℓ≈ 1.86(1− n)2.06, (3.2.31)
where the range of porosity, n = 1 − π(d/2ℓ)2, of the available data is 0.945 ≤
n ≤ 0.994. Estimating U0 by the orbital velocity in open water, U0 =√gh0A/h0,
we obtain
σ ≈ 1.86(1− n)2.06 1
k0ℓ
A
h0
. (3.2.32)
It is remarked that the experimental data in Nepf (1999) are for randomly dis-
tributed cylinders arranged by using a random number generator with a dis-
placement of 0.1d. In the absence of empirical data from wave experiments for
a periodic array of cylinders, the preceding empirical relation will be adopted
even beyond the data range.
Bed friction in waves is often modeled by a formula quadratic in the local ve-
locity, but can be replaced by a linear law with the equivalent friction coefficient
(Mei 1983; Nielsen 1992),
f = fw4
3π
U0
h0
, (3.2.33)
where fw is a dimensionless friction factor in the quadratic law. Values of fw can
be estimated by an empirical formula of Swart (1974)
fw = exp[5.213κ0.194 − 5.977
], (3.2.34)
where κ = r/A with r being the bed roughness (see Nielsen 1992). Conse-
quently, by assuming U0 =√gh0A/h0 we obtain
α ≈ 0.424fw1
k0h0
A
h0
. (3.2.35)
116

It is known that fw = O(10−2) for 0 ≤ κ ≤ 0.1. For instance, fw = 0.045 corre-
sponds to a relative roughness of κ = 0.05.
Note that both σ and α depend on the wave amplitude, indicating the fact
that turbulence and bed friction are inherently nonlinear, here represented by
linear formulas. It is also obvious that effects of coastal vegetation are more sig-
nificant in stronger and longer waves as can be seen from (3.2.32) and (3.2.35).
To have some quantitative ideas, σ and α are estimated in Table 3.1 for several
different incident wave conditions and micro-scale geometry (i.e. various cylin-
der spacing ℓ and porosity n). Values of σ and α are larger for waves typical of
storm surges and tsunamis. It is remarked here that the Reynolds numbers for
these field examples are two orders of magnitude larger than those appearing
in the steady flow experiments of Nepf (1999). Despite the fact that turbulence
in steady flows interacting with cylinders is only a weak function of Reynolds
number for Red > 200 (Nepf 1999), new in-situ observations and laboratory tests
are desired to examine the applicability of (3.2.32) for oscillatory flows in field
conditions.
Table 3.1: Estimations of sample parameters. Values of σ and α are estimated
according to (3.2.32) and (3.2.35), respectively, with a constant friction
factor fw = 0.045.
h0 ℓ n 2π/ω A/h0 k0ℓ k0h0 Red σ α
2.5 (m) 1 (m) 0.80 10 (sec) 0.05 0.1269 0.317 1.25×105 0.027 0.003
2.5 (m) 1 (m) 0.85 1 (min) 0.05 0.0211 0.053 1.08×105 0.088 0.018
5.0 (m) 1 (m) 0.90 2 (min) 0.10 0.0075 0.037 2.50×105 0.217 0.051
5.0 (m) 2 (m) 0.90 10 (min) 0.05 0.0030 0.007 2.50×105 0.271 0.128
7.5 (m) 2 (m) 0.92 0.5 (hr) 0.05 0.0008 0.003 2.74×105 0.628 0.313
117

3.3 Method of homogenization
For the current problem, the primary interest is of predicting the global fea-
tures of wave propagation and dissipation through coastal forest. Therefore, it
is desirable to derive the equivalent macro-scale equations with the upscaling of
micro-scale effects. As there exists two vastly different length scales and the tree
trunks, which signifies the microstructure, are modeled by a periodic array of
cylinders, the method of homogenization based on the rigorous two-scale anal-
ysis applies (Mei 1992). The homogenization technique is a powerful mathemat-
ical tool for problems with well-separated scales to obtain macroscopic model
with effective homogenized coefficients determined by solving the associated
boundary-value problems, or initial-boundary-value problem for the unsteady
consideration, at successive smaller scales. In other words, this method serves
as a passage from microscopic description to macroscopic behavior of the sys-
tem (Bensoussan, Lions & Papanicolaou 1978) which enhances, without labori-
ous computations, the understanding of macro-scale quantities in the presence
of micro-scale variations.
The intention of this section is to give a brief introduction of the homogeniza-
tion technique, to the extent that it applies to the problem considered herein.
For the rigorous mathematical aspect of the homogenization theory and its ap-
plications, some main references are those of Bensoussan, Lions & Papanicolaou
(1978), Lions (1981), Sanchez-Palencia (1980), and Mei & Vernescu (2010).
A simple mathematical description of the homogenization method is first
118

provided. Consider a boundary-value problem in a domain Ω,
Au = f in Ω
u subject to proper conditions on boundary ∂Ω
,
where A is a linear operator. Assuming Ω is divided into equal cells of a order
of ǫ > 0 in size and the unknown solution u can be expressed by a multi-scale
series expansion
u = u0 + ǫu1 + ǫ2u2 + · · · ,
the homogenization process is to obtain and to prove that by certain averaging
limǫ→0
u = u0
A0u0 = f in Ω
u0 subject to proper conditions on boundary ∂Ω
.
In general, A is a linear partial differential operator while A0 is a integro-
differential operator.
For the current two-scale problem, the homogenization procedure can be
outlined as follows (Auriault 1991):
• Identifying the macro and micro scales. In this case, they are the wave-
length and tree spacing, respectively.
• Expressing the model equations in the dimensionless manner.
• Performing the perturbation analysis by expanding each unknown into an
infinite series in powers of the length-scale ratio, ǫ.
• Solving the resulting boundary-value or initial-boundary-value problems
at successive orders in ǫ.
• Obtaining the equivalent equations in macroscopic scale by averaging
over the microscopic scale.
119

In our analysis, microstructure is assumed to be periodic, i.e. trees are mod-
eled by a periodic array of cylinders. This strong assumption, although it can
not perfectly represent the situation in nature, provides an unique opportunity
to study the wave-forest problem more rigorously as it enables a mathematical
analysis for which the homogenization theory for periodic models has been well
established (see e.g. Bensoussan, Lions & Papanicolaou 1978). Furthermore, at
present no class of models is free of assumptions to describe the distribution
of coastal tress. The assumption of periodicity is therefore reasonable as a first
attempt to develop the theory model for the wave-forest problem. However, it
should be noted that the homogenization can actually be applied to any kind of
disordered medium. The mathematical justification involves theG-convergence
or H-convergence1. There is also a stochastic theory of homogenization (Allaire
2001). An introductory discussion is documented by Hornung (1996).
In the following sections, the macro theory for both linear progressive waves
and transient waves are developed based on the homogenization method.
3.4 Macro theory for linear progressive waves
For possible application to wind waves, let us first investigate sinusoidal waves
propagating through an emergent coastal forest. We shall work with dimen-
sionless depth-averaged quantities and equations as presented in section 3.2.3.
For brevity, tildes and asterisks, which represent depth-averaging and nondi-
mensionalization, will be omitted herein.
1G-convergence (Gamma-convergence), a notation of convergence for functionals, is used inthe proof of homogenization theory. H-convergence is the extension of G-convergence to thenon-periodic cases. Both are beyond the scope of this study and are not discussed here. For areference, see Tartar (2009).
120

For a linear progressive wave, the depth-averaged horizontal velocity and
the free-surface displacement can be expressed as
ui = ℜui(x)e−it
, η = ℜ
η(x)e−it
. (3.4.36)
Accordingly, conservation of mass, (3.2.24), can be rewritten as
−ǫηi +∂
∂xi(uih) = 0, i = 1, 2 (3.4.37)
while the momentum equation, (3.2.27), becomes
−ǫuii = − ∂η∂xi
+ ǫ
(σ
∂2ui∂xj∂xj
− αui), i, j = 1, 2. (3.4.38)
3.4.1 Homogenization
The forest region is modeled by periodic cells surrounding one or more surface-
piercing rigid cylinders. While the micro-scale motions between cylinders occur
in x coordinate, an additional macro-scale coordinate x′ = ǫx is introduced to
describe the wave motions. It is also reminded that the sea depth is assumed to
depend on x′ only, i.e., h = h(x′). Two-scale expansions are then assumed for
the dynamic unknowns:
ui = u(0)i + ǫu
(1)i + ǫ2u
(2)i + · · · , η = η(0) + ǫη(1) + ǫ2η(2) + · · · , (3.4.39)
where u(n)i = u
(n)i (x,x′) and η(n) = η(n)(x,x′) for n = 0, 1, 2, · · · . Consequently,
the perturbation problems of (3.4.37) and (3.4.38) can be organized as follows.
At O(ǫ0),
∂u(0)i
∂xi= 0, (3.4.40)
∂η(0)
∂xi= 0, (3.4.41)
121

and, at O(ǫ),
−iη(0) +∂(u
(0)i h)
∂x′i+ h
∂u(1)i
∂xi= 0, (3.4.42)
−iu(0)i = −∂η
(0)
∂x′i− ∂η(1)
∂xi+ σ
∂2u(0)i
∂xj∂xj− αu(0)
i . (3.4.43)
From (3.4.41), η(0) = η(0)(x′) is independent of x. Through the linearities of
(3.4.40) and (3.4.43), u(0)i and η(1) can be represented by
u(0)i (xk, x
′k) = −Kij(xk)
∂η(0)(x′k)
∂x′j, (3.4.44)
and
η(1) = −Aj(xk)∂η(0)(x′k)
∂x′j+ 〈η(1)〉, (3.4.45)
where coefficients Kij and Aj are periodic from cell to cell, and 〈·〉 denotes the
averaged quantity over the cell area Ω,
〈Q〉 =1
Ω
∫∫
Ωf
QdΩ (3.4.46)
with Ωf being the fluid part in the unit cell. Immediately, the cell average of A
is zero,
〈Aj〉 = 0. (3.4.47)
Note that both K and A are invariant in x′ as the local sea depth is a constant,
i.e, h = h(x′). Now, referring back to the continuity equation (3.4.40) and the
momentum equation (3.4.43), K and A must satisfy
∂Kij
∂xi= 0, x ∈ Ωf , (3.4.48)
and
σ∂2Kij
∂xk∂xk+ (i− α)K ij =
∂Aj∂xi− δij, x ∈ Ωf , (3.4.49)
where δij is the Kronecker delta. In addition, the no-slip condition on the cylin-
der walls requires
Kij = 0, x ∈ SB. (3.4.50)
122

Since η(0) is independent of micro-scale coordinates, the cell-averaged lead-
ing order velocity, 〈u(0)〉, is also of interest. Follow (3.4.44), we obtain
〈u(0)i 〉 = −〈Kij〉
∂η(0)(x′k)
∂x′j(3.4.51)
which is an extension of Darcy’s law with 〈Kij〉 denoting the spatial average
of the hydraulic conductivity tensor, Kij , over the unit cell. Both η(0) and 〈u(0)〉
describe the macro-scale wave motions with the micro-scale effects through 〈K〉.
Since 〈K〉 is the same for all x′, we shall first solve the tensorKij from the micro-
scale boundary-value-problem, (3.4.48) to (3.4.50). Afterwards, by taking the
cell average of mass conservation law at O(ǫ) and invoking the Gauss’ theorem
and periodicity, we obtain
−iη(0) +∂(〈u(0)
j 〉h)∂x′j
= 0. (3.4.52)
By further combining (3.4.51) with (3.4.52), we derive an equation for the cell-
averaged amplitude of the free-surface displacement,
iη(0) + 〈Kij〉∂
∂x′i
(h∂η(0)
∂x′j
)= 0. (3.4.53)
It is noted that the dimensionless hydraulic conductivity tensor Kij is normal-
ized by g/ω and it depends on the wave frequency through σ and α. In the
absence of forests and bottom friction, (3.4.49) gives Kij → iδij and accordingly
(3.4.51) and (3.4.53) reduce to the standard linearized equations governing in-
viscid shallow water waves.
The above perturbation analysis is very similar to that for steady flows (Ene
& Sanchez-Palencia 1975; Keller 1980) and monochromatic sound waves (Auri-
ault 1991; Mei & Vernescu 2010) through a periodic porous medium.
In the following sections, we shall first discuss the solution procedure of the
123

cell problem and then turn to the macro-scale application of linear progressive
waves propagating through a coastal forest.
3.4.2 Numerical solution of the micro-scale cell problem
The micro-scale problem, (3.4.47) to (3.4.50), is similar to that for sound waves
through a periodic porous medium (Sheng & Zhou 1988; Zhou & Sheng 1989;
Auriault 1991) and shall be solved numerically, here by the finite element
method. For this purpose the governing equations, (3.4.48) and (3.4.49), are
first rewritten in the weak form as
∫∫
Ω
∂Kij
∂xiψj dΩ = 0, (3.4.54)
and
∫∫
Ω
[(α− i)Kij +
∂Aj∂xi− δij
]φij+σ∇Kij ·∇φij dΩ = σ
∫
∂Ω
∂Kij
∂nφij ds, (3.4.55)
where ∂Ω denotes the boundary with n being its outward normal. The above
integral equations are then discretized by linear triangular elements. As an ex-
ample of a circular cylinder inside a unit square cell, figure 3.2 shows the dis-
cretization and the spatial variation of K11 for n = 0.85, σ = 0.088 and α = 0.018
which correspond to the second parameter set listed in Table 3.1. Due to cellular
symmetry, 〈Kij〉 = Kδij = (KR + iKI)δij is isotropic.
Figure 3.3 shows the normalized hydraulic conductivity,K, against the wave
frequency parameter, k0h0, for n = 0.8, 0.85, 0.9 and the following parameters:
h0 = 2.5 m, ℓ = 1 m, A/h0 = 0.05 and fw = 0.045. The imaginary part of K
vanishes as k0h0 → 0 because in a steady stream the averaged and local flows
are always in phase. While KI (the imaginary part) increases monotonically
124

n = 0.92, σ = 0.036, α = 0.020
−0.50.0
0.5−0.5 0.0 0.5
0.0
0.5
1.0
x1
Real part
x2
K11
−0.50.0
0.5−0.5 0.0 0.5
0.0
0.5
1.0
x1
Imaginary part
x2
Figure 3.2: Top: Discretization of a typical unit cell with a circular cylinder
inside a square. Bottom: Spatial distributions, K11(x). Due to
isotropy, only K11 is needed. The input parameters are listed
in the second row of Table 3.1.
with both k0h0 and n, at a fixed porosity KR (the real part) first grows then
decreases with increasing wave frequency. In physical dimensions, the real part
of the conductivity is expected to decrease monotonically from a finite value as
k0h0 increases. Since K is normalized by g/ω, value of KR approaches zero for
very long waves. It is also noted thatKR is bigger for larger n at very small k0h0.
However, the opposite is true for relatively shorter waves.
3.4.3 1HD application: constant water depth
Applications to one horizontal dimension (1HD) problems are demonstrated.
In fact, the consideration is of normal incident waves propagating into the
forest characteristized by a symmetric cellular configuration. If the bottom
125

0.0 0.1 0.2 0.30.0
0.2
0.4
0.6
0.8
1.0
k0h0
KR
n = 0.90n = 0.92n = 0.94
0.0 0.1 0.2 0.30.0
0.2
0.4
0.6
0.8
1.0
k0h0
KI
n = 0.90n = 0.92n = 0.94
Figure 3.3: Hydraulic conductivity K as a function of k0h0 for the case of
periodic waves. Left: real part, KR; Right: imaginary part, KI .The cell geometry is a circular cylinder inside a square with
n = 0.8, 0.85, 0.9, respectively. In all cases, h0 = 2.5 m, ℓ = 1 m,
A/h0 = 0.05 and fw = 0.045 are fixed. The values of σ and α are
calculated from (3.2.32) and (3.2.35) for any given n and k0h0.
bathymetry is also simple, analytical solutions are then possible which can pro-
vide useful insights on the wave-forest problem. For simplicity, uniform water
depth everywhere, i.e. h = 1, is concerned. Several different scenarios are to be
discussed.
(1) Very thick forest
Let the forest occupies the semi-infinite domain, 0 < x′ < ∞. Inside the forest,
the governing equation for η(0) can be deduced from (3.4.53) as
∂2η(0)
∂x′2+
i
Kη(0) = 0, x′ > 0. (3.4.56)
It is reminded that K = KR + iKI is the hydraulic conductivity. The solution is
η(0) = Be−x′/a (3.4.57)
126

with
a =√iK = aR + iaI =
√|K|ei( θ
2+π
4), θ = tan−1 KI
KR <π
2, (3.4.58)
and B the coefficient to be determined. From (3.4.51) and (3.4.57), the corre-
sponding velocity is also obtained:
〈u(0)〉 =1
aKBe−x′/a. (3.4.59)
Solutions (3.4.57) and (3.4.59) represent a propagating wave with decreasing
amplitude.
Regarding the open water region, x′ < 0, solutions can be expressed as
η = eix′
+Re−ix′ , (3.4.60)
u = eix′ −Re−ix′ . (3.4.61)
It is noted that in this region both the turbulence and bottom friction are ne-
glected.
Matching at x′ = 0 of the surface displacement and horizontal velocity yields
two algebraic equations for R and B, with the solutions
R =a−Ka+K , (3.4.62)
and
B =2a
a+K . (3.4.63)
Notice that |R| and |B| denote the reflection and transmitted coefficients, respec-
tively. From (3.4.58), (3.4.62), and (3.4.63), it can be readily shown that
|R|2 =
(aR −KR
)2+(aI −KI
)2
(aR +KR)2 + (aI +KI)2 ≤ 1, (3.4.64)
127

and
|B|2 =4|a|2
(aR +KR)2 + (aI +KI)2 ≥ 0. (3.4.65)
Clearly waves are damped out after a distance of x′ = O(√|K|).
For possible relevance to weak wind waves, in figure 3.4 the computed K
values shown in figure 3.3 are used to demonstrate the square of the reflection
coefficient, |R|2, and the free-surface elevations inside the forest for different
porosities and dimensionless frequency. It is evident that reflection increases
with the wave period (or wavelength) and decreases with larger porosity. The
wave amplitude is more rapidly damped for longer waves as shown in figure
3.4-(b).
0.0 0.1 0.2 0.310
−5
10−4
10−3
10−2
10−1
100
k0h0
|R|2
(a) n = 0.90
n = 0.92n = 0.94
0 2 4 6 8 10−1.0
−0.5
0.0
0.5
1.0
1.5
x′
η(0)
(b) n = 0.92 k0h0 = 0.05
k0h0 = 0.10k0h0 = 0.20
Figure 3.4: Periodic waves propagating through a semi-infinite forest in a
constant water depth region: (a) The square of the reflection
coefficient, |R|2, against the wave frequency parameter, k0h0,
for n = 0.8, 0.85, 0.9; (b) Snapshots of free-surface elevation at
the phase t = 0 for the case of n = 0.85. As can be seen, |R|2grows with increasing wavelength (i.e. smaller k0h0). In all
calculations, the input parameters are same as those used in
figure 3.3.
128

(2) A finite forest belt
Consider next a finite forest belt, 0 < x′ < L′B , where L′
B = k0LB is the ratio
of forest thickness (LB) to typical wavelength (1/k0). In the region of incidence,
x′ < 0, solutions (3.4.60) and (3.4.61) still hold. Behind the forest, x′ > L′B , the
solutions can be expressed as
η = u = Teix′
, x′ > L′B. (3.4.66)
Inside the forests, 0 < x′ < L′B, the solution of free-surface elevation is now of
the form
η(0) = Be−x′/a +Dex
′/a. (3.4.67)
Matching the displacement and velocity at both x′ = 0 and x′ = L′B, the coeffi-
cients are found to be
R =(a2 −K2)(−1 + e2L
′
B/a)
(a+K)2e2L′
B/a − (a−K)2
,
B =2a(a+K)e2L′
B/a
(a+K)2e2L′
B/a − (a−K)2
,
D =−2a(a−K)
(a+K)2e2L′
B/a − (a−K)2
,
T =4aKeL′
B(1/a−i)
(a+K)2e2L′
B/a − (a−K)2
.
(3.4.68)
Taking L′B →∞, R and B reduce to those shown in (3.4.62) and (3.4.63), respec-
tively. Consider again the cell with a single cylinder at the center, the effects of
different forest thickness and porosity are shown in figure 3.5. Values of σ and
α are calculated from (3.2.32) and (3.2.35) respectively for n = 0.8, 0.85, 0.9 with
all other parameters listed in the second row of Table 3.1. As can be seen, the
reflection coefficient, |R|, does not vary monotonically with respect to the di-
mensionless forest thickness, L′B, due to interference among multiply reflected
and transmitted waves. In addition, as L′B →∞ the values of |R| reach asymp-
totically to those for the semi-infinite forest given in (3.4.62) and are indicated
129

by triangles in figure 3.5-(a). In subplot (b), it is seen that spatial decay of the
surface waves is more rapid for greater L′B = k0LB , i.e., thicker forest relative to
the wavelength.
0 2 4 6 80.00
0.03
0.06
0.09
0.12
0.15
L′
B
|R|2
(a) α = 0.02
n = 0.90, σ = 0.057n = 0.92, σ = 0.036n = 0.94, σ = 0.020
L′
B →∞
0 2 4 6 8 10−1.0
−0.5
0.0
0.5
1.0
1.5
x′
η(0)
(b) n = 0.92 LB = 0.85
LB = 1.25LB = 4.00
Figure 3.5: Periodic waves propagating through a finite patch of forest in
a constant water depth. (a): The square of reflection coeffi-
cient, |R|2, against the dimensionless thickness of forest, L′B ;
(b): Snapshots of free-surface elevation at t = 0 for n = 0.85 and
L′B = 0.85, 1.25, 4. Lines are the results from (3.4.67) and (3.4.68)
while triangles give |R|2 of L′B → ∞ predicted by (3.4.64). In
all calculations, k0ℓ0 = 0.0211 and k0h0 = 0.053, corresponding
to the second row of Table 3.1.
3.4.4 1HD application: variable water depth
In this section, let us consider again one horizontal dimension (1HD) problems
but now with the effects of varying water depth. To seek analytical solutions,
we limit ourselves to the case where h = h(x′) varies linearly in x′ over some dis-
tance. For a general bathymetry, numerical computations of macro-scale equa-
130

tions are required.
(1) Forest on a plane beach
Consider a flat open water region connects to a beach of constant slope s covered
entirely by a forest. Accordingly, the sea depth is
h =
1, x′ < 0
1− sx′, 0 < x′ < 1/s. (3.4.69)
Over the sloping bottom, the mean wave equation, (3.4.53), becomes
iη(0) − sK∂η(0)
∂x′+ (1− sx′)K∂
2η(0)
∂x′2= 0. (3.4.70)
Assuming perfect reflection at the shore, the solution on the beach can be ex-
pressed as
η(0) =B√sJ0
(2i
sa
√1− sx′
), 0 < x′ < 1/s, (3.4.71)
where Jn(z) is the Bessel function of the first kind and B the undetermined
coefficient. Note that the parameter a is defined in (3.4.58) while the solutions
in the incidence region are given in (3.4.60) and (3.4.61). Again, the matching
conditions at x′ = 0 require
1 +R =B√sJ0
(2i
sa
)
1−R = − B√s
√aJ1
(2i
sa
) . (3.4.72)
Solving the above algebraic equations, we obtain
R =J0
(2isa
)+ aJ1
(2isa
)
J0
(2isa
)− aJ1
(2isa
) , (3.4.73)
and
B =2√s
J0
(2isa
)− aJ1
(2isa
) . (3.4.74)
131

As a check, let us consider the limiting case of no forest. Then, K → i and the
reflection coefficient becomes
R→ J0(2/s) + iJ1(2/s)
J0(2/s)− iJ1(2/s). (3.4.75)
Similarly, the coefficient B reduces to
B → 2√s
J0(2/s)− iJ1(2/s). (3.4.76)
For very small bottom slope s≪ 1, (3.4.75) and (3.4.76) recover the solutions of
Keller & Keller (1964). Figure 3.6 plots the free-surface elevation inside forests
for different n. Behaviors of these examples are similar to those of constant
water depth cases.
0 2 4 6 8 10−1.0
−0.5
0.0
0.5
1.0
1.5
x′
η(0)
n = 0.90, σ = 0.057, α = 0.02n = 0.92, σ = 0.036, α = 0.02n = 0.94, σ = 0.020, α = 0.02
Figure 3.6: Snapshots at t = 0 of periodic waves propagating through
a forest on a plane beach of slope s = 1/20. Porosities are:
n = 0.8, 0.85, 0.9 and k0h0 = 0.053. Other inputs are shown
in the second row of Table 3.1). The corresponding hydraulic
conductivity, K, is shown in figure 3.3.
132

(2): A finite forest belt on a sloping step
Now, consider the sea bed to be a plane slope in the middle region and horizon-
tal on both sides, i.e.,
h =
1, x′ < 0
1− sx′, 0 < x′ < L′B
1− sL′B, x′ > L′
B
. (3.4.77)
The forest covers the sloping part only. From (3.4.70), the solution on the slope
becomes
η(0) =1√s
BI0
(2a
s
√1− sx′
)+DK0
(2a
s
√1− sx′
), (3.4.78)
where In(z) and Kn(z) are the modified Bessel function of the first kind and
second kind, respectively. Coefficients B and D are yet to be determined. Re-
garding solutions in both open water regions, the transmitted wave in x′ > L′B
is
η = Teimx′
, u = mTeimx′
with m =1√h′B
=1√
1− sL′B
, (3.4.79)
while the free-surface elevation and horizontal velocity in the incident wave
region, x′ < 0, are again given in (3.4.60) and (3.4.61).
Matching at both x′ = 0 and x′ = L′B, the unknown coefficients can be found
as
R =c34 [(c13 − c23)c42 − (c12 − c22)c43]− c44 [(c13 − c23)c32 − (c12 − c22)c33]c34 [(c13 + c23)c42 − (c12 + c22)c43]− c44 [(c13 + c23)c32 − (c12 + c22)c33]
,
B =2(c33c44 − c34c43)
c34 [(c13 + c23)c42 − (c12 + c22)c43]− c44 [(c13 + c23)c32 − (c12 + c22)c33],
D =2(c32c44 − c34c42)
(c12 + c22)(c33c44 − c34c43)− (c13 + c23)(c32c44 − c34c42),
T =−2(c32c43 − c33c42)
c34 [(c13 + c23)c42 − (c12 + c22)c43]− c44 [(c13 + c23)c32 − (c12 + c22)c33],
(3.4.80)
133

where
c12 =1√sI0 (Z) , c13 =
1√sK0 (Z) ,
c22 = − 2i
s√s
1
ZI1 (Z) , c23 =
2i
s√s
1
ZK1 (Z) ,
c32 =1√sI0
(Z√h′B
), c33 =
1√sK0
(Z√h′B
),
c42 = − 2i
s√s
1
Z√h′B
I1
(Z√hB
), c43 =
2i
s√s
1
Z√h′B
K1
(Z√h′B
),
c34 = exp (imL′B) , c44 = m exp (imL′
B) ,
(3.4.81)
with Z = 2/(sa). Recall a and m are defined in (3.4.58) and (3.4.79), respectively.
For the case of L′B → 1/s, it can be shown that the above solutions for R and B
recover to those presented in (3.4.73) and (3.4.74).
In figure 3.7, the square of reflection coefficient, |R|2, is displayed against the
dimensionless thickness of forests, L′B . Again, |R|2 does not vary monotonically
with L′B as discussed in section 3.4.3-(2). The features are qualitatively similar
to those for a horizontal seabed.
0 2 4 6 8 100.00
0.03
0.06
0.09
0.12
0.15
|R|2
L′
B
α = 0.02
n = 0.90, σ = 0.057n = 0.92, σ = 0.036n = 0.94, σ = 0.020
L′
B →∞
Figure 3.7: Square of the reflection coefficient, |R|2, for waves through a fi-
nite forest belt of dimensionless thickness L′B on a sloping step
with a constant slope s = 1/20. Parameters used in all calcula-
tions are same as those shown in figure 3.6.
134

3.4.5 Experiments and numerical simulation for periodic waves
Mei et al. (2011) reported a laboratory study on surface waves propagating
through a model forest, which provides a great opportunity to examine the per-
formance of the present theory. For completeness, the experiments are first in-
troduced followed by the corresponding comparisons between the theoretical
predictions and measurements.
A series of laboratory experiments has been conducted in the glass-walled
wave flume (32 m long, 0.54 m wide, and 0.6 m deep) in the Hydraulics Labo-
ratory at the Nanyang Technological University, Singapore (Mei et al. 2011). At
one end, the flume is equipped with a piston-type wave maker (Wallingford,
UK) which has active wave absorbing capability. At the other end, there is an
energy absorbing beach of 1-to-7 slope to minimize the reflection. In the center
region of constant water depth, perspex cylinders of 1 cm diameter were in-
stalled as a periodic array spanning the entire width of the flume. The model
forest has a total thickness of 1.08 m and a porosity n = 0.913. Several resistance-
type wave gauges (Wallingford, UK) were employed to record time histories of
free-surface elevation. The experimental setup is sketched in figure 3.8 with the
exact positions of wave gauges listed in Table 3.2. Overall, three types of inci-
Table 3.2: Positions of wave gauges (in meters) (see figure 3.8). The origin is set at
the front edge of the model forest. In some tests records were not taken
from all gauges.
Wave type G1 G2 G3 G4 G5 G6 G7 G8
Periodic waves −3.085 −2.935 −2.685 −0.005 0.540 1.085 2.025 2.275
Transient packets — — −3.025 −0.100 0.715 — 2.260 2.660
Solitary waves — −3.205 −3.005 −0.005 0.540 1.085 1.385 —
135

≈ ≈ ≈
∇ ≈ ≈ ≈
G1 G2 G3 G4 G5 G6 G7 G8
Figure 3.8: Sketch of experimental setup at NTU (Mei et al. 2011) with sam-
ple arrangement of wave gauges (not to scale). The model for-
est has a width of 0.54 m and a thickness of 1.08 m. Wave flume
is 0.54 m wide and 0.6 m deep. The length of constant depth
part is 25 m. Gauge locations for different incident waves are
listed in Table 3.2.
dent waves were studied: periodic waves, transient wave packets and solitary
waves. Data of surface displacement were collected at a sampling rate of 100 Hz
for periodic waves and at 50 Hz for transient cases. In addition, the Reynolds
numbers in the experiments were in a moderate range of 200 to 2500 which is
close to that of Nepf (1999) (i.e. 400 < Red < 2000).
In this section, we shall only examine the periodic waves in three different
water depths: 12, 15 and 20 cm. Since long waves of accurately measurable am-
plitude are easily nonlinear in a small depth, data for relatively shorter waves
were also taken. Conditions for the first set of tests are listed in Table 3.3. Figure
3.9 compares the reflection coefficient (|R|) and transmission coefficient (|T |) ex-
tracted from the experimental data with predictions according to (3.4.68). The
quantity 1− |R|2 − |T |2 which measures the amount of wave energy dissipated
by the model forest is also shown. It is reiterated that in the present theory the
required controlling parameter σ is estimated by (3.2.32). Also, α = 0 is taken to
account for the smooth tank bottom. Despite the appearance of nonlinear sig-
nature of higher harmonics in waves of shorter periods, the agreement between
136

theoretical predictions and the measured data is generally well. Note that for
longer waves, although the parameters σ and α are larger, the ratio L′B = k0LB
is smaller since LB = 1.08 m is fixed, resulting in less attenuation hence higher
transmission. Discrepancy between theory and observation is evident for longer
waves (i.e. small k0LB) where the predicted |R| and |T | are underestimated and
overestimated, respectively. This remarkable difference is possibly attributable
to the reflection of very long waves from the sloping beach measured at roughly
9%. As |T | is around 0.8, contribution of the reflected wave off the beach can be
significant.
Table 3.3: Experimental conditions for periodic waves through a coastal forest at
NTU (Mei et al. 2011). In all cases, the forest thickness is LB = 1.08
m and porosity n = 0.913. Controlling parameter σ is estimated by
(3.2.32). See figure 3.9 for corresponding reflection and transmission
coefficients.
Period (s) h0 (m) 2A (m) 1/k0 (m) k0h0 k0LB Red σ
0.8 0.12 0.0232 0.1207 0.9940 8.9464 1049 0.0047
1.0 0.12 0.0253 0.1587 0.7560 6.8044 1144 0.0068
1.2 0.12 0.0272 0.1956 0.6135 5.5218 1230 0.0090
1.4 0.12 0.0246 0.2318 0.5177 4.6593 1112 0.0096
1.6 0.12 0.0239 0.2676 0.4485 4.0362 1081 0.0108
1.8 0.12 0.0243 0.3031 0.3959 3.5633 1099 0.0124
1.9 0.12 0.0243 0.3208 0.3741 3.3670 1099 0.0132
2.0 0.12 0.0068 0.3384 0.3546 3.1915 307 0.0039
2.5 0.12 0.0065 0.4261 0.2816 2.5344 294 0.0047
3.0 0.12 0.0050 0.5134 0.2337 2.1036 226 0.0043
To test the robustness of the present theory, the predictions of |R| and |T |
are examined against additional data for a wide range of wave amplitudes in
137

1 2 3 4 5 6 7 8 9 100.0
0.2
0.4
0.6
0.8
1.0
k0LB
|T |
|R|
1 2 3 4 5 6 7 8 9 100.0
0.2
0.4
0.6
0.8
1.0
k0LB
1−|R|2−|T|2
Figure 3.9: Left: Reflection coefficient (|R|) and transmission coefficient
(|T |) as functions of k0LB ; Right: 1− |R|2 − |T |2 vs. k0LB . Hol-
low symbols: measured data; solid symbols: predictions by
(3.4.68).
deeper water depths as detailed conditions listed in Table 3.4. For a total of 70
cases, three wave periods (Set A, B, C: 0.8, 1, 1.2 s), two water depths (0.15, 0.2
m), and wave amplitudes ranged from 1 to 4 cm are considered. Figure 3.10
shows the corresponding predictions of reflection and transmission coefficients
and the degree of dissipation, 1 − |R|2 − |T |2, by (3.4.68) along with measured
data. Again, the quantitative agreement is quite reasonable even for weakly
nonlinear waves of intermediate length.
138

Table 3.4: Experimental conditions for a wide range of wave amplitudes shown
in figure 3.10. Controlling parameter σ is estimated by (3.2.32). In all
cases, the forest thickness is LB = 1.08 m and porosity n = 0.913. The
corresponding Reynolds numbers are in the range of 490 < Red < 2520.
Set Period (s) h0 (m) 1/k0 (m) k0h0 k0LB σ/(A/h0)
0.15 0.130 1.152 8.297 0.0528A 0.8
0.20 0.141 1.415 7.642 0.0573
0.15 0.174 0.864 6.223 0.0703B 1.0
0.20 0.193 1.037 5.597 0.0782
0.15 0.215 0.696 5.014 0.0873C 1.2
0.20 0.243 0.825 4.454 0.0983
3.5 Macro theory for transient waves
Of interest to the protection against distant tsunamis, a transient wave invading
a coastal forest is now considered. Working equations are the dimensionless
depth-integrated conservation equations, (3.2.24) and (3.2.27). Again, tildes and
asterisks will be omitted for brevity.
3.5.1 Homogenization
Similar to the analysis for the periodic waves (see section 3.4.1), the dimension-
less horizontal velocity and the free-surface elevation are expressed by the two-
scale expansions as
ui = u(0)i + ǫu
(1)i + ǫ2u
(2)i + · · · , η = η(0) + ǫη(1) + ǫ2η(2) + · · · , (3.5.82)
where u(n) = u(n)(x,x′, t) and η(n) = η(n)(x,x′, t) for n = 0, 1, 2, · · · . Conse-
quently, perturbation equations can be deduced from the conservation laws of
139

0.04 0.08 0.12 0.16 0.200.00
0.25
0.50
0.75
1.00|T |
|R|
Set A
0.04 0.08 0.12 0.16 0.200.00
0.25
0.50
0.75
1.00
1−|R|2−|T|2
Set A
0.04 0.08 0.12 0.16 0.200.00
0.25
0.50
0.75
1.00|T |
|R|
Set B
0.04 0.08 0.12 0.16 0.200.00
0.25
0.50
0.75
1.00
1−|R|2−|T|2
Set B
0.04 0.08 0.12 0.16 0.200.00
0.25
0.50
0.75
1.00
A
h0
|T |
|R|
Set C
0.04 0.08 0.12 0.16 0.200.00
0.25
0.50
0.75
1.00
A
h0
1−|R|2−|T|2
Set C
Figure 3.10: Reflection (|R|) and transmission (|T |) coefficients of periodic
waves crossing a finite patch of forest in constant water depth,
as functions of amplitude-to-depth ratio (A/h0). Symbols
show the measured data while lines show the predictions by
(3.4.68). Triangles and solid lines are for h0 = 0.15 m, while
circles and dashed lines are for depth h0 = 0.2 m. See Table
3.4 for experimental conditions.
mass and momentum. At O(ǫ0),
∂u(0)i
∂xi= 0, (3.5.83)
∂η(0)
∂xi= 0, (3.5.84)
140

where the free-surface height varies only over the macro scale, η(0) = η(0)(x′, t).
At O(ǫ),
∂η(0)
∂t+∂(u
(0)i h)
∂x′i+ h
∂u(1)i
∂xi= 0, (3.5.85)
∂u(0)i
∂t= −∂η
(0)
∂x′i− ∂η(1)
∂xi+ σ
∂2u(0)i
∂xj∂xj− αu(0)
i . (3.5.86)
Due to the dynamic signature and the linearity of the above equations, the un-
knowns u(0) and η(1) can be formally represented by convolution integrals as
u(0)i (xk, x
′k, t) = −
∫ t
0
Kij(xk, t− τ)∂η(0)(x′k, τ)
∂x′jdτ, (3.5.87)
and
η(1) = −∫ t
0
Aj(xk, t− τ)∂η(0)(x′k, τ)
∂x′jdτ + 〈η(1)〉, (3.5.88)
where 〈·〉 denotes the cell average defined by (3.4.46). We shall now derive the
governing equations for K and A, i.e., construct the micro-scale cell problem. It
follows from (3.5.83) that
∂Kij
∂xi= 0, ∀x ∈ Ω. (3.5.89)
Utilizing the expressions of (3.5.87) and (3.5.88) and evoking the Leibniz rule,
the left-hand-side and the right-hand-side of (3.5.86) become
−∫ t
0
∂Kij(xk, t− τ)∂t
∂η(0)(x′k, τ)
∂x′jdτ −Kij(xk, 0+)
∂η(0)(x′k, t)
∂x′j(3.5.90)
and
−∂η(0)
∂x′i−∫ t
0
dτ∂η(0)
∂x′j
−∂Aj(xk, t− τ)
∂xi+ σ
∂2Kij(xk, t− τ)∂xk∂xk
− αKij
, (3.5.91)
respectively. Imposing the initial condition,
Kij(xk, 0+) = δij, (3.5.92)
the last term in (3.5.90) can be rewritten as
−Kij(xk, 0+)∂η(0)(x′k, t)
∂x′j= −∂η
(0)(x′k, t)
∂x′i(3.5.93)
141

which clearly cancels the first term in (3.5.91). Finally, (3.5.86) becomes∫ t
0
∂Kij
∂t
∣∣∣∣t−τ
∂η(0)
∂x′j
∣∣∣∣τ
dτ =
∫ t
0
−∂Aj∂xi
+ σ∂2Kij
∂xk∂xk− αKij
t−τ
∂η(0)
∂x′j
∣∣∣∣τ
dτ.
(3.5.94)
Hence, we obtain
∂Kij
∂t= −∂Aj
∂xi+ σ
∂2Kij
∂xk∂xk− αKij, ∀x ∈ Ω, t > 0. (3.5.95)
In addition, Kij and Aj must be Ω−periodic and satisfy
Kij = 0, x ∈ SB, (3.5.96)
and
〈Aj〉 = 0. (3.5.97)
Defined by (3.5.89), (3.5.92) and (3.5.95) to (3.5.97), the initial-boundary-value
problem in the unit cell can be solved numerically. Note that these equations,
hence their solution, are independent of the macro coordinates. Afterwards, the
cell-averaged horizontal velocity can be obtained as
〈u(0)i (xk, x
′k, t)〉 = −
∫ t
0
〈Kij(xk, t− τ)〉∂η(0)(x′k, τ)
∂x′jdτ, (3.5.98)
which is the transient Darcy’s law. By taking the cell average of (3.5.85) and
invoking Gauss’ theorem and Ω−periodicity, we obtain
∂η(0)
∂t+
∂
∂x′i
(〈u(0)
i 〉h)
= 0. (3.5.99)
Combination of (3.5.99) with (3.5.98) leads to the mean-field equation for the
free-surface displacement,
∂η(0)
∂t=
∂
∂x′i
[h(xk
′)
∫ t
0
〈Kij(xk, t− τ)〉∂η(0)(x′k, τ)
∂x′jdτ
], (3.5.100)
which can also be expressed as
∂2η(0)
∂t2=
∂
∂x′i
[h(xk
′)〈Kij(xk, 0)〉∂η(0)(x′k, t)
∂x′j
]
+∂
∂x′i
[h(xk
′)
∫ t
0
∂〈Kij(xk, t− τ)〉∂τ
∂η(0)(x′k, τ)
∂x′jdτ
],
(3.5.101)
142

displaying the dual effect of wave propagation and diffusion. Similarly, (3.5.98)
can be rewritten as
∂〈u(0)(xk, x′k, t)〉
∂t= −〈Kij(xk, 0)〉∂η
(0)(x′k, t)
∂x′j−∫ t
0
∂〈Kij(xk, t− τ)〉∂τ
∂η(0)(x′k, τ)
∂x′jdτ.
(3.5.102)
Clearly, these equations reduce to the familiar shallow water equations in the
absence of forest.
3.5.2 Numerical solution for the transient cell problem
The micro-scale cell problem forKij andAj needs be solved numerically. Again,
the finite element method is used. The initial-boundary-value problem shall be
first rewritten in the weak form. Thus, from (3.5.89),
∫∫
Ω
∂Knij
∂xiψj dΩ = 0, (3.5.103)
and from (3.5.95),
∫∫
Ω
[Knij −Kn−1
ij
∆t+∂Anj∂xi
+ αKnij
]φij + σ∇Kn
ij · ∇φij dΩ = σ
∫
∂Ω
∂Knij
∂nφij dγ,
(3.5.104)
where the superscript n denotes the n-th time step and the time derivative is
discretized by the two-point backward difference. These two integral equations
are then discretized spatially by linear triangular elements. Recall the initial and
boundary conditions are given in (3.5.92) and (3.5.96), respectively. In addition,
(3.5.97) is imposed.
As an example, a micro-scale geometry consisting of a circular cylinder in-
side a unit square is considered. A sketch of the cell configuration is shown in
the top panel of figure 3.2. Again due to micro-scale symmetry, 〈Kij〉 = Kδij is
143

isotropic. For this sample cell setting, the numerical results, as shown in figure
3.11, suggest that K can be approximated by
K(t) = K0e−bt, (3.5.105)
where K0 and b depend on the geometry of the micro-scale problem and the
controlling parameters σ and α. In particular, K0 decreases while b increases
with decreasing porosity n, hence dissipation is stronger for a denser forest.
0.0 0.1 0.2 0.3 0.4 0.5−6
−5
−4
−3
−2
−1
0
t
lnK
n = 0.85n = 0.90n = 0.95
Figure 3.11: Sample solutions of lnK(t) for a symmetric microscale config-
uration (see the top panel in figure 3.2). The corresponding
controlling parameters σ and α are calculated by (3.2.32) and
(3.2.35) respectively using n = 0.85, 0.9, 0.95 and all other pa-
rameters are listed in the third row in Table 3.1.
To examine the role of the cell geometry, in figure 3.12 the conductivities
of two different micro-scale configurations, i.e., one cylinder per cell versus
five per cell, are compared. Other parameters such as n, α, σ, and cell size
are kept the same. Note that for the same porosity, the cell with multiple
cylinders has a smaller permeability. This is qualitatively consistent with the
empirical formula of Carmen-Kozeny for steady seepage flow (Carmen 1937),
where the permeability is not only a function of porosity but also propor-
144

tional to the square of the ratio L = (total volume)/(total surface area) of a
grain. For the current circular cylindrical grains, we shall redefine it as L =
(total sectional area)/(total circumference). The ratio for the single-cylinder cell
is then L1 = d/4 with d denoting the cylinder diameter. For the five-cylinder cell,
the diameter of the four small cylinders is d/2√
2 and that of the larger cylinder
is d/√
2. Therefore, L5 = d/6√
2 = L1/3. This explains the large difference of
conductivities.
It is remarked that the use of a constant σ in figure 3.12 implies that we have
extended the empirical formula (3.2.32), which is designed for estimating σ of
single-cylinder cellular configuration, to a more general case. This of course is
not necessary true. Careful examination on the capability of (3.2.32) by future
laboratory and field studies is essential.
(C) (Cs)
0.0 0.1 0.2 0.3 0.4 0.5−10
−8
−6
−4
−2
0
t
lnK
(C)(Cs)
Figure 3.12: Effects of the cell geometry on the dynamic permeability, K:
the first two panels show two different cell configurations
while the last one compares the results of lnK. In both exam-
ples, n = 0.9, σ = 0.217 and α = 0.0051, which corresponds to
the third row in Table 3.1.
145

3.5.3 Numerical model for the macro-scale solutions
Once the dynamic conductivity 〈Kij〉 is obtained from the cell problem, the pre-
ceding macro initial-boundary-value problem (i.e., (3.5.100) along with proper
initial and boundary conditions) can be solved numerically in general. For this
purpose, an implicit finite-difference numerical model is developed. The spa-
tial derivatives are discretized by second-order difference and the time deriva-
tive approximated by the first-order backward difference, with uniform grids
being used in both temporal and spatial domains. In addition, the convolution
time integral is calculated by simple trapezoidal rule. As the model equation,
(3.5.100), is practically similar to the common linear shallow water equations
and the proposed numerical scheme is rather ordinary, the discrete differencing
equation is not presented here.
It shall be noted that hampered by the convolution integral, especially be-
ing evaluated by the low-order trapezoidal rule, the numerical calculation can
be very time consuming. Furthermore, the size of time stepping can not be
too large for the accuracy consideration. A practical approach to estimate the
required grid resolution is to perform the similar problem in the absence of for-
est and then compare the results with the existing exact solutions or numerical
simulations.
3.5.4 1HD application: tsunami waves through a thick forest
In this section, a train of leading tsunami waves entering a coastal forest is dis-
cussed. While in general the numerical results are accomplishable as described
in section 3.5.3, analytical solution of certain simplified case is valuable for pro-
146

viding useful physical understanding and validating discrete computations. To
make the problem analytically tractable, let us consider waves attack a semi-
infinite forest normally in a constant depth region. More precisely, we study
only one horizontal dimension (1HD) case with a uniform sea depth every-
where. Note that the micro-scale symmetry has also been assumed.
(1) Boundary conditions for 1HD constant depth problem
We shall first discuss the associated boundary conditions for the complete for-
mulation of the macro-scale problem.
Inside the forest, the governing equations for η(0) and 〈u(0)〉 are (3.5.100) and
(3.5.98), respectively. The initial condition in the forest is assumed to be
η(0)(x′, 0) = 0. (3.5.106)
In the open water, x′ < 0, waves can be described by
η−(x′, t) = I(t− x′) +R(t+ x′), u−(x′, t) = I(t− x′)−R(t+ x′), (3.5.107)
where I stands for incident waves and R for reflected waves. Matching the
free-surface elevation and velocity at the edge, x′ = 0, we obtain
I(t) =1
2
(η(0)(0, t)−
∫ t
0
〈Kij(x, t− τ)〉∂η(0)(x′, τ)
∂x′
∣∣∣∣x′=0
dτ
), (3.5.108)
and
R(t) =1
2
(η(0)(0, t) +
∫ t
0
〈Kij(x, t− τ)〉∂η(0)(x′, τ)
∂x′
∣∣∣∣x′=0
dτ
). (3.5.109)
Therefore, the boundary condition for η(0) at the incident edge, x′ = 0, is
η(0)(0, t)−∫ t
0
〈Kij(x, t− τ)〉∂η(0)(x′, τ)
∂x′
∣∣∣∣x′=0
dτ = 2I(t). (3.5.110)
147
If the forest is of finite extent L′B , the solution in the open water on the trans-
mission side is of the form
η+(x′, t) = u+(x′, t) = T (t− x′), L′B < x′ <∞, (3.5.111)
where T denotes the transmitted waves. Continuity of both the surface height
and horizontal velocity at x′ = L′B requires
η(0)(L′B, t) = T (t− L′
B)
−∫ t
0
〈K(x, t− τ) 〉∂η(0)(x′, τ)
∂x′
∣∣∣∣x′=L′
B
dτ = T (t− L′B)
, (3.5.112)
which implies the boundary condition
η(0)(L′B, t) +
∫ t
0
〈K(x, t− τ) 〉∂η(0)(x′, τ)
∂x′
∣∣∣∣x′=L′
B
dτ = 0. (3.5.113)
For a semi-infinite forest, i.e. L′B → ∞, the condition (3.5.113) should be re-
placed by
η(0) → 0, x′ ∼ ∞. (3.5.114)
(2) Analytical solutions
Solutions for L′B ∼ ∞ are now to be obtained by the use of Laplace transform.
For brevity, the superscripts (.)(0) and (.)′ will be omitted. Taking the Laplace
transform and applying the convolution theorem, an ordinary differential equa-
tion for the transformed free-surface displacement can be deduce from (3.5.100),
sη = K∂2η
∂x2, x > 0, (3.5.115)
where s is the transform variable and () denotes the transformed functions in
s−domain. The solution satisfying the boundary condition (3.5.110) is
η =
(2
1 +√sK
)I(s) exp
(−x√
s
K(s)
), x > 0. (3.5.116)
148

From the Laplace transforms of (3.5.108) and (3.5.109), we also obtain
R =
(1−
√sK
1 +√sK
)I. (3.5.117)
It has been shown by Kajiura (1963) (see also Mei 1983 p. 31, Eq. (1.42))
that the leading tsunami from a distant and long fault line is a propagating one-
dimensional wave train approximately expressed by Airy function with am-
plitude decaying in time as tµ−1, where µ = 2/3 if the seafloor rises or falls
vertically (line source) and µ = 1/3 if the seafloor tilts along the fault line (line
dipole). For analytical convenience, let us take
I(t) = Atµ−1 sinωt, t > 0 (3.5.118)
to model roughly the leading tsunami approaching the edge of the forest. The
Laplace transform of (3.5.118) is obtained as (see Bateman 1954 p. 152, Eq. (15))
I(s) =iA
2Γ (µ)
[1
(s+ iω)µ− 1
(s− iω)µ
], (3.5.119)
in which Γ(·) denotes the Gamma function.
Assuming (3.5.105) for K, the Laplace transform of K is then
K =
∫ ∞
0
e−stK0e−b tdt =
K0
s+ b. (3.5.120)
Consequently, the Laplace transform of the free-surface displacement in the for-
est becomes
η =iAΓ (µ)
1 +√sK0/(s+ b)
[1
(s+ iω)µ− 1
(s− iω)µ
]e−x√s(s+b)/K0 . (3.5.121)
The free-surface elevation can be obtained by inverse Laplace transform,
η =1
2πi
∫
γ
estηds, (3.5.122)
149

where γ is the path parallel to the imaginary axis in the s plane and to the right of
all singularities. It is generally difficult to obtain the inversion, (3.5.122). How-
ever, expressions at small and large time can be easily achieved, and will be
presented in the following. While the small time solution describes the onset
of tsunami waves, the large time behavior is useful for evaluating the tsunami
inundation.
(2)-I: Solution at small time
Regarding the solution at small time, the asymptotic behavior is dominated by
the inverse Laplace transform at large s (see §124, Carslaw & Jaeger 1963). For
large s, (3.5.121) becomes
η(s) ≈ CSA
2Γ (µ)
i
sµ
[(1 + i
ω
s
)−µ−(1− i
ω
s
)−µ]e−sx/
√K0
= CSA
2Γ (µ)
i
sµ
[(1− i
µω
s
)−(1 + i
µω
s
)+H.O.T .
]e−sx/
√K0
= CSA
2Γ (µ)
[2µω
sµ+1+H.O.T .
]e−sx/
√K0 , (3.5.123)
where
CS = lims→∞
2
1 +√sK0/(s+ b)
=2
1 +√K0
(3.5.124)
andH.O.T . denotes the truncated higher-order terms. Hence
η(s) ≈ CSAΓ (µ)µω
e−sx/
√K0
sµ+1
. (3.5.125)
Now, consider
G(s) =e−sx/
√K0
sµ+1, (3.5.126)
the inverse Laplace transform is
G(t) =1
2πi
∫
γ
e−s(x/√K0−t)
sµ+1ds. (3.5.127)
For x/√K0 − t > 0, a large semicircle in the right half plane is chosen as the
integration path. By Cauchy’s theorem and Jordan’s lemma, the inverse Laplace
150

transform is zero. Therefore, there is no disturbance if x/√K0 > t. For ξ =
t− x/√K0 > 0, the inverse Laplace transform is
G(t) =1
2πi
∫
Γ
esξ
sµ+1ds, (3.5.128)
which can be evaluated as (see Bateman 1954 p. 238, Eq. (1))
G(t) =ξµ
Γ(1 + µ)=
(t− x/
√K0
)µ
Γ(1 + µ). (3.5.129)
Finally, at small t we obtain
η(x, t) ≈
0, if x/√K0 > t
2
1 +√K0
Aω(t− x/
√K0
)µ, if x/
√K0 < t
, (3.5.130)
where the property Γ(1 + µ) = µΓ(µ) has been evoked. The solution suggests
that the head of tsunami enters the forest with the dimensionless speed of√K0.
SinceK0 is small when the porosity, n, is small, a dense forest slows the invasion
of an incoming tsunami.
(2)-II: Solution at large time
It is known (§126, Carslaw & Jaeger 1963) that the asymptotic behavior of η(x, t)
at large t can be found from its Laplace transform near the singular points with
the largest real part in the complex plane of s. For (3.5.121) we shall only look
at three singularities,
s = 0, s = ±iω, (3.5.131)
all of which have the same real part, 0, and neglect the contribution from the
pole at
1 +
√sK0
s+ b= 0, i.e., s = − b
1−K0
< 0 (3.5.132)
since K0 < 1. The final solution is the sum from three singularities in (3.5.131).
151

Near s = 0, the leading term of (3.5.121) is
η(x, s ≈ 0) ≈ iAΓ(µ)
[1
(iω)µ− 1
(−iω)µ
]e−x√sb/K0
= 2AΓ(µ)ω−µ sinµπ
2e−x√sb/K0 , (3.5.133)
From Bateman (1954) (see p. 245, Eq. (1)), the inverse Laplace transform for
e−√λs is
1
2√π
√λ
t3/2exp
(− λ
4t
). (3.5.134)
Thus,
[η(x, t)]0 ≈2
t3/2x√b/K0
2√π
AΓ(µ)
ωµsin
µπ
2exp
(− bx2
4K0t
), (3.5.135)
which dies out with t rapidly.
Next, consider the singularity at s = iω. Notice first that
exp(−x√s(s+ b)/K0
)≈ exp
(−x√
(iω)(iω + b)/K0
), (3.5.136)
and√
(iω)(iω + b)/K0 = ei(π/4+ψ/2)√√
ω2 + b2ω/K0, (3.5.137)
where
tanψ =ω
b. (3.5.138)
From Carslaw & Jaeger (1963) (see p. 280), the leading term of the inverse
Laplace transform is
[η(x, t)]iω ≈ −CL+
i
2
A
t1−µexp
(−xei(π/4+ψ/2)
√√ω2 + b2ω/K0
)eiωt, (3.5.139)
where
CL+ =2
1 +√sK0/(s+ b)
∣∣∣∣∣s= iω
=
(1 +
√ωK0/
√ω2 + b2ei(π/4−ψ/2)
)−1
. (3.5.140)
152

For the singularity at s = −iω, the approximate inverse Laplace transform is the
complex conjugate of (3.5.139),
[η(x, t)]−iω ≈ CL−i
2
A
t1−µexp
(−xe−i(π/4+ψ/2)
√√ω2 + b2ω/K0
)e−iωt, (3.5.141)
where
CL− =
(1 +
√ωK0/
√ω2 + b2e−i(π/4−ψ/2)
)−1
. (3.5.142)
Since contribution from s = 0 is relatively small at large time, we obtain
η ≈ [η(x, t)]iω + [η(x, t)]−iω
=2A
t1−µ(1 + δ cosψ′′) sin (ωt− ξ cosψ′)− δ sinψ′′ cos (ωt− ξ sinψ′)
1 + 2δ cosψ′′ + δ2e−ξ cosψ′
,
(3.5.143)
where
ξ = x
√√ω2 + b2
ω
K0
, δ =
√ωK0√ω2 + b2
, ψ′ =π + 2ψ
4, ψ′′ =
π − 2ψ
4
(3.5.144)
and ψ = tan−1 (ω/b) defined in (3.5.138). Solution (3.5.143) represents a spatially
damped progressive wave. The temporal attenuation follows the pattern of the
leading wave before entering the forest. For good protection, the thickness of
the forest should be greater than
O
1√√
ω2 + b2 ωK0
, (3.5.145)
which suggests that the thickness must be large for long tsunamis.
(2)-III: Comparison with numerical results
In figure 3.13, the above asymptotic solutions are compared with numerical re-
sults obtained by the method described in section 3.5.3. For illustration, the
incident wave of the form (3.5.118) with A = ω = 1 and µ = 2/3 (vertical rise
153

or fall of the seafloor) is used. The cell geometry and controlling parameters are
the same as the case of n = 0.9 displayed in figure 3.11, which correspond to the
third parameter set listed in Table 3.1. While numerical results are carried out
using (∆x,∆t) = (10−3, 10−4) for all time, analytical solutions are only given at
small and large time by (3.5.130) and (3.5.143), respectively. Figures 3.13-(a) and
-(b) show good agreement in the two limiting ranges of time. In subplot (c), the
approximation for large time according to (3.5.143) is seen to agree well with the
discrete computations at all stations, for nearly all time beyond t ≈ 5.
3.5.5 Comparison with laboratory experiments
Laboratory studies of both transient wave packets and long pulses entering a
coastal forest have also been conducted by Mei et al. (2011). The experiment
details have been described in section 3.4.5. In particular, sketch of the setup
and positions of wave gauges are displayed in figure 3.8 and Table 3.2, respec-
tively. Corresponding numerical simulations by the same algorithm described
in section 3.5.4 are performed for comparison.
Experimental data of two transient wave packets each of which consists of
a few oscillatory waves are first presented, as shown in figure 3.14. The first
packet (set I) is led by a prominent crest (elevation) and the second (set II) by
a trough (depression). In both tests, time histories of surface elevation were
recorded by five wave gauges where stations G3 and G4 were located in the re-
gion of incidence, G5 inside the forest, and two additional, G7 and G8, available
far behind the model forest (see Table 3.2 for the exact positions). Bottom fric-
tion is ignored (α = 0) in our numerical simulations. The parameter σ = 0.0085
154

0 0.001 0.002 0.003 0.004 0.005
0
0.01
0.02
0.03
0.04
η
x
(a) Snapshots of η at small time
t = 0.0025t = 0.0050
0 0.5 1 1.5−0.6
−0.3
0
0.3
0.6
η
x
(b) Snapshots of η at large time
t = 20t = 30
0 5 10 15 20 25 30−1
−0.5
0
0.5
1
1.5
η
t
(c) Histories of η at fixed locations
x = 0.1x = 0.5x = 1.0
Figure 3.13: Leading waves of a tsunami entering a deep forest in a con-
stant water depth. Snapshots of free-surface elevation are
shown in (a) for small time, and in (b) for large time. Dots are
the numerical results. Lines represent the respective asymp-
totic solutions. Time histories at different stations are com-
pared in (c) where dots are the numerical results for all time
and lines are the asymptotic solution for large time.
is again calculated from (3.2.32) by using h0 = 0.12 m, estimating the charac-
teristic wave period to be 3 seconds and taking the mean of the maximum crest
height and trough depth to be A. While (3.5.113) is imposed as the boundary
condition at the exit of the forest, records of free-surface elevation at G4 (0.1 m
from the leading edge of the forest) are used directly as the boundary value at
the incident edge. The reason for replacing the condition (3.5.110) is that inci-
dent and reflected waves cannot be easily separated as stations G3 and G4 are
155

close to the entrance of the forest. Comparison between predictions and mea-
surements at station G5 which is to the right of the forest center is shown in
figure 3.14. Spatial attenuation can be easily seen and the theory fits reasonably
well with the data for roughly the first 15 seconds of both records. After that,
reflection from the sloping beach arrived at station G5 but is not accounted for
in our simulations.
0 3 6 9 12 15 18 21 24 27−0.50
−0.25
0.00
0.25
0.50
0.75
Time (sec)
Fre
e-su
rface
elev
ati
on
(cm
)
Set I
G4 (Exp)G5 (Exp)G5 (Num)
0 3 6 9 12 15 18 21 24 27−0.50
−0.25
0.00
0.25
0.50
0.75
Time (sec)
Fre
e-su
rface
elev
ati
on
(cm
)
Set II
G4 (Exp)G5 (Exp)G5 (Num)
Figure 3.14: A transient wave packet crossing a forest. Solid and dashed
lines: experimental data at G4 and G5, respectively. Bold line:
numerical prediction at G5.
In the next set of experiments, long pulses with the profile of a soliton were
156

generated by displacing the piston wave maker as a hyperbolic tangent function
of time. Five incident waves of increasing amplitudes were tested in a constant
depth of h0 = 0.12 m, with all detailed conditions listed in Table 3.5. It is re-
marked that some cases were for moderately nonlinear waves, which does not
correspond well to the applicability of the present linear theory, due to the dif-
ficulty of accurately measuring small-amplitude long waves in a shallow depth
of 0.12 m. For each test, records of surface height were collected at six wave
Table 3.5: Experimental conditions for solitary waves crossing a 1.08 m
thick model forest with porosity n = 0.913. Records of corre-
sponding free-surface elevation are shown in figures 3.16 to 3.18.
Set h0 (m) H (cm) 1/k0 (m) k0LB Red σ
1 0.12 0.48 0.693 1.573 217 0.0056
2 0.12 0.93 0.498 2.190 420 0.0078
3 0.12 1.34 0.415 2.629 606 0.0094
4 0.12 1.78 0.360 3.030 850 0.0108
5 0.12 2.26 0.319 3.414 1022 0.0122
gauges. In reference to figure 3.8, the gauge locations are listed in Table 3.2. In
figure 3.15, the record at G2, the closest gauge station to the wave marker, is first
checked with the classical solitary wave,
η(x, t) = Hsech2[k0(x−
√g(h0 +H) t)
], k0 =
√3H
4h30
, (3.5.146)
where H is the maximum wave height and k0 the characteristic wave number
of the soliton. The agreement is essentially good, although some waviness was
found at the tail due to the finite increments of the paddle displacement driven
by a step motor. In numerical simulations, (3.5.146) is used as the incident wave
I(t) in the boundary condition (3.5.110) at G4 while (3.5.113) is imposed at the
157

exit of the forest. Also, σ is calculated by (3.2.32) and α = 0 is employed to
represent the frictionless smooth laboratory flume.
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0−0.5
0.0
0.5
1.0
1.5
2.0
2.5
Time (sec)
Fre
e-su
rface
elev
ati
on
(cm
)
Measurementssech2()
Figure 3.15: Sample record of incident wave at station G2. In this case,
the water depth is 12 cm and wave height is 2.26 cm. The
classical solitary wave solution, (3.5.146), is also shown for
comparison.
Figures 3.16 and 3.17 compare the measured and predicted free-surface ele-
vations of two almost linear waves of solitons with H/h0 = 0.04, 0.0775 at sta-
tions G4, G5, and G6. Amplitude attenuation is evident at G5 and G6 located
at the center of the forest and near the exit edge, respectively. For larger am-
plitudes (H/h0 = 0.1117, 0.1483), the agreement is still quite good despite the
linearized theory, as seen in figure 3.17. Expectedly, the measured data show
slightly higher phase speed than the prediction and the discrepancy becomes
more significant as the wave height of incident solitary waves increases. This is
of course the effect of nonlinearity in the experiment.
Finally, records of a relatively large solitary wave of finite length (H/h0 =
158

0 1 2 3 4 5
0.0
0.5
1.0G4
Set 1: H/h0 = 0.0400
ExpNum
0 1 2 3 4 5
0.0
0.5
1.0G5
Fre
e-su
rface
elev
ati
on
(cm
)
ExpNum
0 1 2 3 4 5
0.0
0.5
1.0G6
Time (sec)
ExpNum
0 1 2 3 4 5
0.0
0.5
1.0
1.5G4
Set 2: H/h0 = 0.0775
ExpNum
0 1 2 3 4 5
0.0
0.5
1.0
1.5G5
ExpNum
0 1 2 3 4 5
0.0
0.5
1.0
1.5G6
Time (sec)
ExpNum
Figure 3.16: Comparison between model predictions (dashed lines) and
laboratory measurements (solid lines) at stations: G4, G5 and
G6. Wave heights (H) of the incident solitary waves are 0.48
cm for Set 1 and 0.93 cm for Set 2, respectively. See figure 3.8
and Table 3.2 for the positions of wave gauges.
0.1883) are shown in figure 3.18. In this test, noise from the step motor was
harder to eliminate. We use the record for 0 < t < 7.18 second at G2 as the
incident wave in (3.5.110) for simulations. This duration corresponds to the
time needed for reflection from the forest to be felt at G2, as estimated by using
the wave speed of the linearized theory. Strong spatial attenuation of the main
crest is evident. The small reflected wave is also reasonably well predicted.
159

0 1 2 3 4 5
0.0
0.5
1.0
1.5
2.0G4
Set 3: H/h0 = 0.1117
ExpNum
0 1 2 3 4 5
0.0
0.5
1.0
1.5
2.0G5
Fre
e-su
rface
elev
ati
on
(cm
)
ExpNum
0 1 2 3 4 5
0.0
0.5
1.0
1.5
2.0G6
Time (sec)
ExpNum
0 1 2 3 4 5
0.00.51.01.52.02.5
G4
Set 4: H/h0 = 0.1483
ExpNum
0 1 2 3 4 5
0.00.51.01.52.02.5
G5
ExpNum
0 1 2 3 4 5
0.00.51.01.52.02.5
G6
Time (sec)
ExpNum
Figure 3.17: Comparison of model predictions (dashed lines) with mea-
surements (solid lines) at stations G4, G5 and G6 for Set 3
(H = 1.34 cm) and Set 4 (H = 1.78 cm). The water depth
is h0 = 12 cm.
3.6 Conclusions
Starting from a set of linearized conservation equations, a micro-mechanical the-
ory of the damping of long waves by coastal forests has been developed. Mod-
eling turbulence by assuming a constant eddy viscosity and bottom friction by
a linear formula, with coefficients taken from experiments for steady flows, the
asymptotic method of homogenization (multiple scales) is employed to derive
the mean-field equations for the macro-scale motion. The effective conductivity
for the mean-field equation is obtained by numerically solving certain canoni-
cal problems in a micro-scale cell. Analytical solutions of the macro-scale prob-
160

0 2 4 6 8 10 12
0
1
2
3
Set 5: H/h0 = 0.1883
Incidnet ←−
−→ Reflected
G2
Fre
e-su
rface
elev
ati
on
(cm
)
ExpNum
0 2 4 6 8 10 12
0
1
2
3G4
Time (sec)
ExpNum
0 2 4 6 8 10 12
0
1
2
3G5
ExpNum
0 2 4 6 8 10 12
0
1
2
3G6
Time (sec)
ExpNum
Figure 3.18: Comparison between theory (dashed lines) and measure-
ments (solid lines) at selected stations: G2, G4, G5 and G6.
Wave height of the incident solitary wave is H = 2.26 cm and
the water depth is h0 = 12 cm.
lems are discussed for sinusoidal waves, which are relevant to wind waves.
Solution of the transient problem simulating the head of a tsunami is also dis-
cussed. Comparison of theoretical predictions with laboratory records of linear
and moderately nonlinear waves shows surprisingly good agreement, suggest-
ing the robustness of the current approximate theory.
In nature, the nearshore dynamics of tsunami can be highly nonlinear. The
averaging method of homogenization which enables a micro-mechanical theory
can in principle be extended for weakly nonlinear waves. The present study,
however, shows that even for moderately nonlinear waves the linearized the-
161

ory presented herein is not far off the mark, due likely to strong dissipation in
the forest. Extension to account for weak nonlinearity is worthwhile for predict-
ing mass transport and convective diffusion of particulates in coastal seas with
vegetation.
In the present theory, the controlling parameters σ and α are crucial in deter-
mining the hydraulic conductivity. The parameter σ, which is calculated based
on the experimental results of steady flow study by Nepf (1999) and models the
turbulences between tree trunks, is particularly important. Due to the lack of
reliable data and information, it is not easy to address the criticism of the di-
rect application to wave-driven turbulence. Although the comparisons of free-
surface elevation between theoretical predictions and laboratory measurements
have shown good agreements, more fundamental studies on determining σ un-
der a variety of wave conditions are needed to provide firmer basis. Two possi-
ble approaches are the direct laboratory measurements of turbulent diffusivity
and the direct numerical simulation of wave-cylinder interactions calibrated by
measured free-surface profiles and velocity data. For the later, the existing nu-
merical models, for instance the three-dimensional model of Mo & Liu (2009),
can be adopted while for the former one may extend the methodology of Nepf
(1999) to estimate the turbulent diffusivity in a wave-forest system.
Some results presented in this chapter have been documented in Mei et al.
(2011).
162

CHAPTER 4
LONG-WAVE MODELING IN THE LAGRANGIAN DESCRIPTION
This chapter essentially studies the runup and drawdown of leading tsunami
waves by the use of Lagrangian long-wave equations. The runup rule, based on
the assumption that solitary wave is the paradigm for leading tsunami waves,
has particular engineering interest as it is convenient to use. However, it has
been cautioned that solitary waves are not good representatives for tsunamis.
This issue will be investigated by carefully examining the roles of incident wave
surface profiles and beach slope on the processes of wave runup and draw-
down.
4.1 Introduction
The runup of long water waves has been investigated extensively by tsunami
research community as the reliable prediction of the wave runup is crucial to the
prevention and mitigation of tsunami hazard. Some benchmark studies are the
work of Carrier & Greenspan (1958) who solved analytical the nonlinear shal-
low water equations, and the laboratory experiment on the runup of solitary
waves by Synolakis (1987). Many numerical models, including Lynett (2002)
and Zelt (1991), have also been proven to simulate the runup process fairly
well. However, some fundamental problems still require more careful consider-
ation. For instance, solitary waves have long been used to simulate the leading
tsunami waves as they are theoretically well-understood and easy to control in
the laboratory experiments. Several runup rules have been derived based on the
solitary wave paradigm (see e.g. Synolakis 1987). Recently, Madsen, Fuhrman &
163

Schaffer (2008) raised a concern that the application of the solitary wave theory
to the runup of leading tsunami waves is incorrect since the length of solitary
wave is constrained by the wave nonlinearity and it is not the case for leading
tsunami waves. Several field observations have been found to support their
argument (see section 4.3 for more details). A brief discussion using the 2004
Indian Ocean tsunamis as an example can also be found in Segur (2007).
This chapter will discuss whether the use of solitary wave leads to any sig-
nificant effects on the prediction of tsunami runup. As the process of tsunami
runup and rundown is of particular interest, a well-known numerical challenge
is the treatment of the moving shoreline. This issue has been addressed by sev-
eral approximation techniques with various degrees of success. For instance,
the higher order interpolation method suggested by Lynett (2002) has gained
increasing popularity. An alternative to the common Eulerian approach is to
adopt the Lagrangian description, in which the moving shoreline becomes a
fixed point. Thus, no additional numerical approximation is necessary for com-
puting the runup and drawdown of the shoreline. This motivates the choice of
the Lagrangian approach in the present study.
In the following, more detailed discussions on scaling leading tsunami
waves by solitary waves are first presented. The direct evidence, based on
the field observations of the 2004 Indian Ocean tsunamis and the 2011 Tohoku
tsunamis, is provided to confirm that the leading tsunami waves can not be
characterized as solitary waves. The Lagrangian long-wave equations, i.e. the
depth-integrated equations, are introduced. A numerical method, validated by
comparing the model results with both existing analytical solutions (Carrier &
Greenspan 1958) and experimental data (Synolakis 1987; Kanoglu & Synolakis
164

1998), is then developed to study runup processes of different kinds of incident
long waves. The simulations are compared with solutions associated with soli-
tary waves in order to discuss the effects of incoming wave characteristics and
bottom topography on the runups of leading tsunami waves.
4.2 On the solitary wave paradigm for tsunami waves
Since the 1970s, most of experimental and analytical investigations on tsunami
runup and inundation processes have inherited the assumption that the leading
tsunami waves can be scaled by solitary waves (for reviews, see e.g. Madsen,
Fuhrman & Schaffer 2008; Synolakis & Kanoglu 2009). It is fair to say that this is
mainly motivated by a series of laboratory experiments by J. L. Hammack in the
1970s, as it has been demonstrated that the leading wave evolving from a sur-
face disturbance could develop into a solitary wave (see Segur 2007 for a brief
discussion). In a constant water depth, a solitary wave, which is the solution
of the Korteweg-DeVries (KdV) equation, remains a permanent waveform both
spatially and temporally. Naturally, this feature is very attractive in performing
experimental studies and in deriving theoretical solutions for tsunami research.
Indeed, several formulae have been established relating the maximum runup
height to the incident solitary wave height and the beach slope (e.g., Pedersen
& Gjevik 1983; Synolakis 1987). Although these studies provide a quick assess-
ment of tsunami inundation, the legitimacy of using solitary waves to model
leading tsunami waves has been challenged. For instant, the numerical sim-
ulation by Madsen, Fuhrman & Schaffer (2008) showed that the leading wave
evolving from an initial rectangular-shaped free-surface hump becomes a soli-
tary wave only after propagates over a very long distance. In other words, the
165

required distance to form a solitary wave is much greater than the relevant geo-
physical scale of possible tsunami propagation. This point, in fact, has been
long aware of even by the early work of J. L. Hammack (see Segur 2007). Note
also that in the classical reference of Mei, Stiassnie & Yue (2005), the range of
validity of KdV equation has been discussed which essentially addressed the
same issue.
It is clear that the direct application of the runup formulae based on soli-
tary wave to tsunami runup needs to be re-examined. As an attempt, Mad-
sen & Schaffer (2010), by adopting the solution procedure outlined in Syno-
lakis (1987)1, obtained approximate explicit solutions describing the elevations
and velocities at maximum runup and drawdown for sinusoidal waves, single
sech2-shape waves, and N -waves. A swift numerical (or semi-analytical) solu-
tion for transient waves evolving from initially static rectangular disturbances
was also demonstrated. Madsen & Schaffer (2010) greatly advanced the work
by Synolakis (1987). However, their explicit solutions are limited to waves of
symmetric surface shape propagating over a two-section bathymetry consists
of an offshore constant water depth region attached to a uniform sloping beach.
It is also worth to mention that although the analytical approach of Madsen &
Schaffer (2010), which is based on the hodograph transformation method advo-
cated by Carrier & Greenspan (1958), is very eloquent, it requires several simpli-
fications and approximations in order to carry out the explicit runup solutions.
To address issues of the so-called solitary wave paradigm for tsunami research,
the present study takes another perspectives. With no intention to develop new
runup formulae, efforts are made to investigate the effects of important param-
eters on the runup process, such as the acceleration and deceleration of inci-
1Synolakis (1987) elegantly combined the two well-known solutions of Carrier & Greenspan(1958) and Keller & Keller (1964) to study the runup of a solitary wave on a plane beach.
166

dent waves, and beach configuration. To analyze the inundation process, direct
numerical solutions are seek by solving the nonlinear shallow water (NLSW)
equations in the Lagrangian description, as have been derived in appendix B.1.
Using the Lagrangian approach, one can accurately and directly calculate the
time history of the shoreline movement, including the position and the velocity
(Shuto 1967). Furthermore, the numerical algorithm is straightforward and has
the potential in dealing with more general wave forms and beach bathymetry.
4.3 Characteristics of leading tsunamis and solitary waves
4.3.1 Leading waves of the 2004 Indian Ocean tsunamis
The 2004 Sumartra-Andaman earthquake triggered one of the most devastat-
ing natural disasters in the last few decades. The impacts of the tsunami have
been thoroughly surveyed and well documented. During the tsunami, many
dynamic features were revealed by satellite images, tourists videos, and eye-
witnessess reports (see e.g., Liu et al. 2005). One of the most important scien-
tific records during the event is the satellite altimeter data taken by TOPEX and
Jason-1 over the Bay of Bengal, providing, for the first time, snapshots of the sea
surface profiles associated with tsunami waves in an open ocean (Smith et al.
2005). In figure 4.1, the ocean surface elevations along the tracks of TOPEX and
Jason-1 are plotted. The corresponding numerical simulation obtained from a
linear shallow water equations (LSW) model by Wang & Liu (2006) is also im-
posed and agrees reasonably well with the observation. The data suggests that
the west-bound leading tsunami wave was an elevation (positive); the wave-
167

length (the horizontal distance from two adjacent crests) was in the order of
magnitude of L ∼ 250 km and the wave height (the vertical distance from crest
to trough) was around H ∼ 1 m. In addition, the initial free surface profile
across 6.63N in the Bay of Bengal (Wang & Liu 2007), as illustrated in figure
4.2, clearly indicated that H ∼ 2 m. It is remarked that in this source region
the water depth is about h ∼ 1 km. Also in figure 4.2, in the deep ocean (h ∼ 3
km) the LSW calculation showed an elevated leading wave moving towards the
west (Sri Lanka and India). Roughly speaking, the nonlinearity (H/h = 0.00067)
and frequency dispersion (h/L = 0.01) were all small. Both the satellite data and
the numerical simulation confirmed that the leading tsunami waves were small
amplitude long waves; the nonlinearity and frequency dispersion were not im-
portant as far as the leading tsunami wave propagation is concerned. Indeed,
most of the important tsunami characteristics, such as the speed and the direc-
tion of propagation as well as the leading wave height and wave period, can
be predicted reasonably well by the linear shallow water wave theory once the
earthquake source region parameters are defined. Following the initial leading
tsunami waves as shown in figure 4.2, Wang & Liu (2007) (see Fig. 9 in their pa-
per for more details) demonstrated that the wave height of the leading tsunami
waves remains low (< 1 m) in the deep water basin, while the wavelength (or
the width of the leading elevated wave form) varies between 200 km and 300
km. The evolution of the wave forms is primarily caused by the spreading of
the wave energy and the large features of bathymetry in the Bay of Bengal. As
the leading wave reaches the continental shelf adjacent to Sri Lanka, the shoal-
ing effects took place. The wave front becomes relatively steep, although the
absolute values are still rather small (∼ 1/4000). The wavelength decreases as
the leading wave approaches the shoreline. Very close to the shoreline (h ∼ 10
168

TO
PEX
Jaso
n-1
80° E 90° E 100° E 110° E
10° S
0°
10° N
20° N
−5 0 5 10 15−100
−50
0
50
100
Latitude (degree)
Rel
ati
vese
ale
vel
(cm
)
TOPEXWang & Liu
−5 0 5 10 15−100
−50
0
50
100
Latitude (degree)
Rel
ati
ve
sea
level
(cm
)
Jason-1Wang & Liu
Figure 4.1: Tsunami wave height derived from the satellite images of
TOPEX and Jason-1 by Smith et al. (2005). The left depicts the
satellite tracks while the right panels show the the relative sea
level about two hours after the earthquake. The corresponding
numerical simulation by Wang & Liu (2006) is also imposed.
m), the wave height is about 1.5 m and the wavelength is about 10 km with a
wave period of 15.69 min. Note that the typical reported wave period of the
leading waves along the eastern coast of Sri Lanka is about 15 min.
We shall now compare the time scale (wave period) and length scale (wave-
length) associated with the solitary wave2 to those of the leading waves of the
2004 Indian Ocean tsunamis. Let us consider two scenarios as illustrated in Ta-
2The characteristic wavelength is Lo = 2π/Ko and wave period To = 2π/(Koc), where Ko =√3H/(4h3) and c =
√g(h + H).
169

←−A
BCt = 0
80° E 90° E 100° E 110° E
10° S
0°
10° N
20° N
92 93 94 95 96−1
0
1
2
3
Latitude (degree)
Rel
ati
vese
ale
vel
(m)
t = 0
Cross-sectional profile along 6.63N
0 1 2 3 4 5−0.5
0
0.5
1
Rel
ati
vese
ale
vel
(m)
Location A
0 1 2 3 4 5−0.5
0
0.5
1
Rel
ati
vese
ale
vel
(m)
Location B
0 1 2 3 4 5−0.5
0
0.5
1
Time (hour)
Rel
ati
ve
sea
level
(m)
Location C
Figure 4.2: Initial leading tsunami waves (t = 0) and the time histories
of free surface elevation at three selected locations (A, B and
C). Markers in the upper left panel represent the correspond-
ing positions and the arrow denotes the west-bound propagat-
ing direction along 6.63N. Numerical calculations are those of
Wang & Liu (2007).
ble 4.1. The first scenario typifies the deep water condition, while the second
one represents a nearshore condition. The wave height and water depth in the
scenario #1 shown in Table 4.1 are in the same range as those of the leading
tsunami waves in the deep water basin of Bay of Bengal. The wavelength for
the solitary wave is about L ∼ 800 km, i.e. three times larger than those ob-
served by the satellites as shown in figure 4.1. Nevertheless, they are in the
same order of magnitude. The matching of this scenario is only a coincidence.
170

Table 4.1: Solitary wave characteristics for two different scenarios.
Scenario h (m) H (m) H/h Lo (m) h/Lo To (min)
#1 3,000 2.0 0.00067 842,978 0.0036 81.870
#2 10 1.5 0.15000 187 0.0534 0.294
Since in this deep water region both nonlinearity and frequency dispersion are
very weak, the shape of the leading wave is primarily determined by the ini-
tial free surface displacement in the source region. In the shallower water near
the coastline, the wavelength suggested by the solitary wave as shown in the
scenario #2, Lo = 187 m, is two orders of magnitude smaller than the simu-
lated and observed data (L ∼ 10 km). The corresponding wave period for the
solitary wave also under-estimates the observed value by two orders of mag-
nitude. Based on the above argument, it is clear that the runup formulae for
solitary wave can not directly be used for estimating the runup heights for a
given leading tsunami wave height.
4.3.2 Leading waves of the 2011 Tohoku tsunamis
A deadly earthquake-triggered tsunami struck Japan’s northeastern coast on
March 11, 2011. Tsunami waves were recorded by ocean bottom pressure sen-
sors (tsunami meters, TM1 and TM2) and offshore GPS buoy wave gauges (Fujii
et al. 2011). Locations of these stations as well as the epicenter of the main earth-
quake are plotted in figure 4.3. We shall examine the records at TM1, TM2,
and the closest GPS station, Iwate South, to gain some insights on the leading
tsunami waves of this particular event. These three stations are more or less
171

positioned in a line. Their locations, depths, and the distances to the shore are
listed in Table 4.2.
⋆
Tokyo
132° E 135° E 138° E 141° E 144° E
32° N
34° N
36° N
38° N
40° N
42° N
Figure 4.3: 2011 Tohoku tsunamis: Epicenter of the earthquake (marked
by the star), ocean bottom pressure sensors (tsunami meters)
(marked by the triangles: TM1 (sea-side) and TM2 (land-side)),
and the offshore GPS wave stations (circles). Information is
collected from Kanazawa & Hasegawa (1997) and Fujii et al.
(2011). The closest GPS station to the tsunami meters is Iwate
South (marked by the hollow circle).
In figure 4.4-(a), records at TM1, TM2, and Iwate South are plotted. Clearly,
the wave group was led by a small depression wave followed by a main el-
evation peak. It is interesting to see that the depression wave became more
significant at TM2. In addition, the wave form did not evolve too much over
the traveling distance of TM1 to Iwate South (around 2/3 of the wavelength).
Despite the maximum wave heights at TM1 and TM2 were both over 5 m, the
wave nonlinearities were small: H/h =0.003, 0.005 at TM1 and TM2, respec-
tively. However, at Iwate South H/h = 0.0325 which is an order of magnitude
172

Table 4.2: Ocean bottom tsunami meters (TM1, TM2) and the GPS gauge
station (Iwate South). The distances are estimated from the sta-
tions to the closest shoreline.
Station Longitude (N) Latitude (N) Depth (m) Distance (km)
TM1 142.78 39.23 1563 78.4
TM2 142.45 39.25 990 49.9
Iwate South 142.10 39.26 204 19.6
larger. In subplot (b), a solitary wave, with the same wave height as measured
at Iwate South, is imposed to compare with the observations. It is clear to see
that the solitary wave has a much smaller wave period (or wavelength) than
the leading tsunami wave. This again confirms that solitary wave paradigm for
tsunami research is questionable.
14:40 14:50 15:00 15:10 15:20 15:30−1
0
1
2
3
4
5
6
7
March 11, 2011
Surf
ace
elev
ati
on
(m)
Iwate South
TM2
TM1
(a)
14:40 14:50 15:00 15:10 15:20 15:30−1
0
1
2
3
4
5
6
7
March 11, 2011
Surf
ace
elev
ati
on
(m)
(b)Iwate South
Solitary wave
Figure 4.4: Records of surface elevations at ocean bottom sensors (TM1,
TM2) and GPS buoy gauge (Iwate South). (a) Observations;
(b) Gauge data vs. imposed solitary wave with the same wave
height.
173

4.4 Lagrangian long-wave equations
In the Lagrangian description, we essentially follow the motion of each individ-
ual fluid particle. The flow variables can be expressed as functions of the time
coordinate t′ and the independent spatial reference (a′, b′, c′), which denotes the
initial particle position in the Cartesian coordinates (x′, y′, z′).
Consider an inviscid and incompressible fluid, the continuity equation for
the three-dimensional flow can be formulated as (see e.g., Lamb 1932)
∂(x′, y′, z′)
∂(a′, b′, c′)=
∣∣∣∣∣∣∣∣∣∣
∂x′
∂a′∂x′
∂b′∂x′
∂c′
∂y′
∂a′∂y′
∂b′∂y′
∂c′
∂z′
∂a′∂z′
∂b′∂z′
∂c′
∣∣∣∣∣∣∣∣∣∣
=
∣∣∣∣∣∣∣∣∣∣
x′a′ x′b′ x′c′
y′a′ y′b′ y′c′
z′a′ z′b′ z′c′
∣∣∣∣∣∣∣∣∣∣
= 1, (4.4.1)
and the equations of motion are
∂2x′
∂t′2= −1
ρ
∂(p′, y′, z′)
∂(a′, b′, c′), (4.4.2)
∂2y′
∂t′2= −1
ρ
∂(x′, p′, z′)
∂(a′, b′, c′), (4.4.3)
∂2z′
∂t′2+ g = −1
ρ
∂(x′, y′, p′)
∂(a′, b′, c′), (4.4.4)
where g is the gravitational acceleration, ρ the fluid density, and p′ the pressure.
The above three momentum equations can also be recast as
x′a′x′t′t′ + y′a′y
′t′t′ + z′a′ (z
′t′t′ + g) = −p
′a′
ρ, (4.4.5)
x′b′x′t′t′ + y′b′y
′t′t′ + z′b′ (z
′t′t′ + g) = −p
′b′
ρ, (4.4.6)
x′c′x′t′t′ + y′c′y
′t′t′ + z′c′ (z
′t′t′ + g) = −p
′c′
ρ. (4.4.7)
It is reminded that the subscripts denote the corresponding derivatives.
Regarding the boundary conditions, the common kinematic condition sim-
ply states that the flow boundary is occupied by the same fluid particles at all
174

time. In other words, c′ = 0 always refers to the free surface while at the bottom
z′ = −h′(x′, y′, t′), c′ = −h′(a′, b′, t′ = 0), (4.4.8)
where h′ is the water depth. In addition, the dynamic free-surface condition
requires
p′ = p′air, c′ = 0 (4.4.9)
with p′air being the atmospheric pressure.
For the discussion of water waves, it is also useful to address the vorticity
field in which all three components are calculated, by definition, as
∂(x′, z′t′ , z′)
∂(a′, b′, c′)− ∂(x′, y′, y′t′)
∂(a′, b′, c′), (4.4.10)
∂(x′, y′, x′t′)
∂(a′, b′, c′)− ∂(z′t′ , y
′, z′)
∂(a′, b′, c′), (4.4.11)
∂(y′t′ , y′, z′)
∂(a′, b′, c′)− ∂(x′, x′t′ , z
′)
∂(a′, b′, c′). (4.4.12)
Since the long waves are of main concern, the goal is to derive the approx-
imate equations by vertically integrating the above conservation laws. The
derivation, which is straightforward but tedious, is documented in appendix
B.
4.5 Numerical model and its validation
Citing the long-wave equations derived in appendix B.1, the Lagrangian non-
linear shallow water (NLSW) equations in the physical variables are
[ζ + h(a+X)]
(1 +
∂X
∂a
)= h(a), (4.5.13)
175

and (1 +
∂X
∂a
)∂2X
∂t2= −g∂ζ
∂a. (4.5.14)
In the above, ζ = ζ(a, t) and X = X(a, t) are the vertical and horizontal dis-
placements of particles initially occupying the undisturbed free surface. The re-
lationship between the Lagrangian coordinate, a, and the horizontal Cartesian
coordinate, x, is
x = a+X(a, t). (4.5.15)
As a reference, the Eulerian counterpart of the NLSW equations is
∂ζ
∂t+∂ [u(h+ ζ)]
∂x= 0, (4.5.16)
∂u
∂t+ u
∂u
∂x= −g ∂ζ
∂x, (4.5.17)
where u = u(x, t) denote the horizontal velocity component.
Equations (4.5.13) and (4.5.14) are solved numerically using a second-order
finite-difference scheme, both spatially and temporally, with staggered grids. In
this study, three canonical topography configurations will be considered:
(1) Infinite uniform slope model: an infinitely long uniform sloping beach
(Carrier & Greenspan 1958).
(2) One-slope model: a slope being connected to a constant water depth region
(Synolakis 1987).
(3) Three-slope model: composite piecewise linear slopes (Kanoglu & Syno-
lakis 1998).
Despite these simplified models are far from the realistic bathymetry, they rep-
resent some important characteristics influencing the evolution of tsunamis.
For instance, the infinite uniform slope model can be used to investigate the
tsunamis generated by an initial free surface disturbance on a wide continen-
tal shelf. On the other hand, the one-slope model represents on the climbing
176

of a leading tsunami wave on beach. Therefore the incident waves are sent in
from the constant depth region. The three-slope model can be used to study
the runups of a distant tsunami where three sloping segments model the conti-
nental slope, continental shelf and the coastline, respectively. To validate the
numerical codes, simulations are tested against both analytical solutions and
experimental data. For the case of the infinite uniform slope model, numeri-
cal solutions are compared with the classical solutions of Carrier & Greenspan
(1958) and those of Carrier, Wu & Yeh (2003). Figure 4.5 shows the free sur-
face profiles at several phases and the time history of the shoreline locations
of a periodic wave. Also in the same figure, evolution of an initially static N -
shaped disturbance is illustrated. Mathematically, the first example represents a
boundary-value problem while the second case is an initial-value problem. The
present numerical results for both cases agree well with analytical solutions.
Next, numerical simulations for the case of a non-breaking solitary wave are
checked with the experimental data obtained by Synolakis (1987). A solitary
wave with wave height H first propagates on a constant water depth, h, and
then climbs on a sloping beach of hx = s = 1/19.85. The wave nonlinearity is
H/h = 0.0185. Figure 4.6 plots both the snapshots of free surface profiles and the
time histories of free surface elevation at selected locations, which demonstrates
that our numerical algorithms produce accurate solutions that agree well with
the experimental data by Synolakis (1987). In addition, the calculated shore-
line locations (the bottom panel of figure 4.6-(b)) fit reasonably with the analyti-
cally predicted elevations of maximum runup (Synolakis 1987) and drawdown
(Madsen & Schaffer 2010). Finally, the numerical model is applied to the case
where a non-breaking solitary wave propagates over bathymetry of a compos-
ite slope that was investigated experimentally by Kanoglu & Synolakis (1998).
177

0.0 0.2 0.4 0.6 0.8 1.0
−1.0
−0.5
0.0
0.5
1.0
x/L
ζ
2A
(a) Runup of a periodic wave
Free surface profiles
0 1 2 3 4
−2
−1
0
1
2
x 10−4
t/T
xs
L
Evolution of the shoreline
1 2 3 4 5
−0.04
−0.02
0.00
0.02
0.04
t/√
L/(sg)
xs
L
Evolution of the shoreline
−0.05 0.00 0.05 0.10 0.15 0.20
−0.04
−0.02
0.00
0.02
0.04
x/L
ζ
sL
(b) Evolution of a N-shpae disturbance
Free surface profiles
Figure 4.5: Validation of the numerical results (solid lines) against the an-
alytical solutions (dashed lines) for the cases of an infinite
uniform slope. (a) Runup of a periodic wave on a slope of
s = 1/10: the upper shows the snapshots of the normalized free
surface profiles, ζ/2A, with A = 0.0015 m being the incident
wave amplitude, and, the lower is the normalized inundation
depth, xs/L, where L represents the wavelength and T = 10
s is the wave period. Analytical solutions are those of Carrier
& Greenspan (1958). (b) Evolution of an initial N -shaped dis-
turbance: numerical results are compared with the analytical
solutions of Carrier, Wu & Yeh (2003) (see their equation (30)).
The present solutions agree reasonably well with the analytical
ones.
178

0 60 120 180 240−0.02
0.00
0.02
0.04(b) Time histories of free surface elevation
x/h = 19.85ζ
h
0 60 120 180 240−0.02
0.00
0.02
0.04x/h = 9.95
ζ
h
0 60 120 180 240−0.02
0.00
0.02
0.04x/h = 5.10
ζ
h
0 60 120 180 240−0.02
0.000.020.040.06
x/h = 0.25ζ
h
0 60 120 180 240−0.05
0.00
0.05
0.10Shoreline
ζ
h
t√
g/h
0 5 10 15 20−0.04
0.00
0.04
0.08(a) Snapshots of free surface profile
ζ
h
t√
g/h = 30
0 5 10 15 20−0.04
0.00
0.04
0.08
ζ
h
t√
g/h = 40
0 5 10 15 20−0.04
0.00
0.04
0.08
ζ
h
t√
g/h = 50
0 5 10 15 20−0.04
0.00
0.04
0.08
ζ
h
t√
g/h = 60
0 5 10 15 20−0.04
0.00
0.04
0.08
x/h
ζ
h
t√
g/h = 70
Figure 4.6: Runup of a non-breaking solitary wave on a one-slope beach.
Left and right panels show the the dimensionless free surface,
ζ/h, at different time instants and selected locations respec-
tively. Solid lines are the numerical solutions while dots and
the dashed lines are the experimental data of Synolakis (1987)
(except in the lowest panel the dashed lines indicate the an-
alytical prediction of maximum runup (Synolakis 1987) and
minimum drawdown (Madsen & Schaffer 2010)). In this ex-
ample, the slope is s = 1/19.85 and the wave nonlinearity is
H/h = 0.0185 with h denoting the constant water depth and H
the wave height.
179

x = 0 (wall)
x = 43.50hx = 20.32h
s1
s2
s3
∇
0 25 50 75 100 125 1500.000.020.04
ζ
h
x/h = 43.50
0 25 50 75 100 125 1500.000.020.04
ζ
h
x/h = 31.91
0 25 50 75 100 125 1500.000.020.04
ζ
h
x/h = 20.32
0 25 50 75 100 125 1500.000.020.04
ζ
h
x/h = 12.55
0 25 50 75 100 125 1500.000.020.04
ζ
h
x/h = 4.77
0 25 50 75 100 125 1500.000.020.04
ζ
h
x/h = 2.27
t/√
h/g
Figure 4.7: Comparison between the numerical solutions and the exper-
imental data for the solitary wave runup on a three-slope
beach. The uppermost panel denotes the locations of the se-
lected gauges and three linear slopes are s3 = 1/53, s2 = 1/150,
and s1 = 1/13. All dots are the data of Kanoglu & Synolakis
(1998) while the lines are the numerical results (solid lines:
with the vertical wall at the shoreline, same as the laboratory
setup; dashed lines: extended beach). The wave nonlinearity is
H/h = 0.015 and the constant water depth is h = 0.188 m.
180
The bathymetry can be described as follow: the offshore constant water depth
region is connected to three successive linear slopes, s3 = 1/53, s2 = 1/150, and
s1 = 1/13. The corresponding horizontal dimensions of each sloping segment,
from offshore edge to the shoreline are: 4.4 m, 2.9 m and 0.9 m, respectively.
A sketch of the configuration is shown in figure 4.7. While a vertical wall was
installed at the coastline in the original levee overtopping experiment (Ward
1995), an additional set of simulation is performed in which the vertical wall
was removed and the beach slope was extended so that the maximum runup
height on a composite sloping beach can be examined. The comparison be-
tween experimental data and numerical solutions at selected gauges are given
in figure 4.7. In this example, the wave nonlinearity is H/h = 0.015 and the con-
stant water depth is h = 0.188 m. The runup process is accurately simulated by
the Lagrangian model. However, the simulated reflected wave tends to move
faster than the measurements. In the same figure the numerical results for the
situation where the vertical wall at the shoreline was removed are also plotted.
Clearly because the runup onto the sloping beach, the reflected wave takes on a
different form and the arrival time of the reflected wave at an offshore station is
also significantly lagging.
4.6 The role of surface profile on the tsunami runup
In this section, the role of the surface profile of leading tsunami wave in deter-
mining the runup process is examined specifically. For a beach with an infinite
uniform slope so, three initial free surface profiles that have the same maximum
vertical displacement (wave height) but with different width are considered. All
181

of them are set to have the sech2-shape surface profiles,
ζ(x, t = 0) = Hsech2
[2π
L(x− xo)
], (4.6.18)
where H is the wave height, xo the location of the initial wave crest, and L can
be viewed as the characteristic wavelength. Note that these proposed profiles
are symmetric with respect to the crest. The reference shape is chosen as the
solitary wave whose wavelength is
L = Lo = h
√4
3
h
H. (4.6.19)
An important feature of a solitary wave is that the wave height and the wave-
length are tied. As for the other two cases, the wavelength is a free choice
which is specified as L = 2Lo and L = 3Lo, respectively. Clearly these two
non-solitary wave initial free surface disturbances spread out much wider. The
first panel in figure 4.8 plots these three sech2-shape disturbances in the dimen-
sionless form with all of them peaking at the same xo. Here, the value of xo
is selected such that these profiles are fully described inside the computational
domain. Obviously, a different choice of xo value will change the correspond-
ing runup height. However, the important information concerning the relative
runup heights among these three cases would not be affected. Finally, the pa-
rameters selected in simulations can be scaled up to geophysical scales such as:
so = 1/500, ho = 300 m, Ho = 0.02 m (Ho/ho = 6.67 × 10−5), Lo = 42.4 km
(ho/Lo = 7.08 × 10−3) and xo = 150 km. Employing our Lagrangian numeri-
cal model, the time evolution of the shoreline elevation, ζs, and the horizontal
water particle velocity at the shoreline, us, are also shown in figure 4.8. As ex-
pected, the widest initial disturbance (i.e. L = 3Lo with Lo being the character-
istic wavelength associated with a solitary wave as defined in (4.6.19)) reaches
the shoreline sooner than the other two initial disturbances. However, the nar-
rowest initial disturbance yields the largest maximum runup and drawdown
182

elevations even though it carries the least amount of water mass. By referring
to the momentum equation, (4.5.17), and the shape of the initial disturbance
profiles, it is clear that the narrower the initial disturbance (i.e. larger |ζx|) is, the
stronger the acceleration/deceleration of the runup/drawdown flows becomes.
Consequently, a higher maximum runup height results from the narrower initial
disturbance. The water particle velocities at the shoreline (the bottom panel in
4.8) also indicate that the on-offshore momentums are stronger for the narrower
initial free surface disturbance. It is also noticeable that although the initial free
surface disturbance is symmetric with respect to the crest, the runup elevations
tend to be larger than the drawdown elevations. The shoreline velocities are
stronger in the offshore direction.
Results shown in figure 4.8 strongly suggest that for an initial free surface
disturbance with a simple form like sech2-profile, the accelerating phase, ζx > 0,
is responsible for the runup process and the maximum runup elevation, and
the deceleration phase, ζx < 0, for the drawdown process and the associated
minimum drawdown elevation. Let us test further this idea by introducing the
initial disturbances that have identical wave front (i.e. acceleration phase) but
different back-profiles (deceleration phase). As illustrated in the top panel of fig-
ure 4.9, three sech2-shape initial disturbances that share a same wave front but
have different back-profiles evolve on the infinite uniform slope are discussed.
More precisely, while all three wave fronts have the same wavelength, Lf = Lo,
each initial disturbance employs different wavelength for its own back-profile:
Lb = nLo. It is reminded that Lo is defined in (4.6.19). Accordingly, the middle
and lower panels in figure 4.9 present the time history of shoreline elevation and
the water particle velocities at the shoreline. It is observed that the back-profiles
play no role in the runup process, and the maximum runup elevation remains
183

0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.50
0.4
0.8
1.2x 10
−3
sox/ho
ζ0
ho
Topography configuration: infinite uniform slope
(a) t = 0, ζ0
L = Lo
2Lo
3Lo
1.5 2.0 2.5 3.0 3.5 4.0−4
0
4
8x 10
−3
sot/√
ho/g
ζs
ho
(b) shoreline, ζs
1.5 2.0 2.5 3.0 3.5 4.0−0.05
0.00
0.05
0.10
sot/√
ho/g
us√gho
(c) shoreline, us
Figure 4.8: Horizontal length scale of the initial wave condition on the
runup and rundown: the infinite uniform slope beach. (a)
Initial free surface elevation (ζ0) of three sech2-shaped distur-
bances that have different length scales, L = Lo, 2Lo, 3Lo, with
Lo being defined in (4.6.19). (b) and (c): The corresponding
shoreline elevations (ζs) and shoreline (water particle) veloci-
ties (us). In the above, so is the beach slope and ho = sLo repre-
sents the characteristic water depth.
184

the same. The deceleration history, however, determines the drawdown pro-
cess. In addition, the wider back profile (i.e., with smaller deceleration) yields
smaller maximum drawdown elevation. This is in consistent with those shown
in figure 4.8. Since the current results are obtained by solving the nonlinear shal-
low water equations, which do not include frequency dispersion, the backside
(deceleration phase) of an incoming wave can never catch up with the wave
crest due to the effects of amplitude dispersion as long as the waves do not
break, i.e., the wave speed is
c =√g(h+ ζ). (4.6.20)
It is reiterated that the leading tsunami waves are extremely long waves where
the frequency dispersion is indeed negligible and the NLSW equations are the
adequate model equations (see e.g. Wang 2008).
In short, for a given wave height the horizontal length scale of the incident
wave does have significant impacts on the runup and rundown. More specif-
ically, the wave front dominates the maximum runup height while the back-
profile plays the main role in the process of drawdown. It is remarked that the
conclusion has been drawn based on the analysis on the runup of a single wave.
However, it is well recognized that leading tsunami waves usually consist of
several waves where the first wave is not necessary the biggest (Liu et al. 2005).
This matter is now addressed by considering the following initial free surface
elevation:
ζ(x, t = 0) =3∑
i=1
Hi exp[−Ki(x− xi)2
]. (4.6.21)
Setting H1 = 0.3H3, H2 = −0.5H3, K1 = K2 = K3, x1/x3 ≈ 0.5 and x2/x3 ≈ 0.75,
a M -shaped disturbance propagating on the infinite uniform slope is demon-
strated in figure 4.10. It can be seen that the second crest is now the biggest in
185

1.0 1.5 2.0 2.5 3.0 3.5 4.00
0.4
0.8
1.2x 10
−3
sox/ho
ζ0
ho
Topography configuration: infinite uniform slope
(a) t = 0, ζ0
Lb = Lo
2Lo
3Lo
2.25 2.50 2.75 3.00 3.25 3.50 3.75−4
0
4
8x 10
−3
sot/√
ho/g
ζs
ho
(b) shoreline, ζs
2.25 2.50 2.75 3.00 3.25 3.50 3.75−0.05
0.00
0.05
0.10
sot/√
ho/g
us√gho
(c) shoreline, us
Figure 4.9: Back profile of the initial wave condition on the runup and
rundown: the infinite uniform slope beach. (a) Initial free sur-
face elevation (ζ0) of three sech2-shaped disturbances that have
the same wave front but carry the different horizontal scales,
Lb = Lo, 2Lo, 3Lo, for the back profiles. (b) and (c): The corre-
sponding shoreline elevations (ζs) and shoreline (water parti-
cle) velocities (us). Here, so is the beach slope and ho = soLo
represents the characteristic water depth.
186

the designed model input. A static soliton disturbance is also imposed in the
same plot to fit the second crests of the M -shaped disturbance. Figure 4.10 also
presents the resulting shoreline location and water particle velocity, as shown
in the middle and bottom panels. The simulations suggest that the preceding
waves have little impact on the maximum runup height and even the draw-
down process. This implies that the maximum runup height (or equivalently
the inundation depth) can be well predicted as long as the biggest incident wave
is correctly described.
Along the same line, let us now consider a leading tsunami wave, not as the
initial free surface disturbance, but as an incident wave propagating first on a
constant water depth and then climbing on a sloping beach (i.e. the one-slope
model as described in section 4.5). A scenario with a constant water depth ho =
200 m and a slope of so = 1/20 is discussed. In addition, the wave nonlinearly
of ǫ = H/h = 0.02 is chosen. This value is reasonable if one considers the
linear wave shoaling for the 2004 Indian Ocean tsunamis that had a condition
of ǫ = 0.66× 10−3 in the deep ocean of a water depth 3 ∼ 4 km (see e.g. Wang &
Liu 2006). It is noted that unlike the cases discussed previously where the initial
velocity is zero everywhere, in the present examples the initial water particle
velocity, u(x, t), is also specified in numerical simulations by adopting the long
wave theory,
u ≈ −∣∣∣∣
ζ
ζ + h
∣∣∣∣√g(h+H), (4.6.22)
where the negative sign indicates that the incoming waves travel towards
the shoreline. Considering three different initial wave forms, effects of the
length scale of the incoming waves are examined: a reference solitary wave
(L = Lo as defined in (4.6.18) and (4.6.19)); two sech2-shape profiles that have
the same wave height as the solitary wave, but with the different wavelengths
187

0.0 0.5 1.0 1.5 2.0 2.5−6
0
6
12x 10
−4
sox/ho
ζ0
ho
Topography configuration: infinite uniform slope
(a) t = 0, ζ0 Combined
Soliton
1.25 1.75 2.25 2.75 3.25 3.75−4
0
4
8x 10
−3
sot/√
ho/g
ζs
ho
(b) shoreline, ζs
1.25 1.75 2.25 2.75 3.25 3.75−0.05
0.00
0.05
0.10
sot/√
ho/g
us√gho
(c) shoreline, us
Figure 4.10: Effects of the preceding waves on the runup processes. (a) Ini-
tially static disturbances on the infinite uniform slope beach:
solid line plots the M -shaped profile given in (4.6.21); dashed
line depicts a soliton-shaped disturbance. (b) and (c): The cor-
responding shoreline elevations (ζs) and shoreline (water par-
ticle) velocities (us).
(L = 1.75Lo and 2.5Lo). The initial wave crests of these waves are all located
at xo = 100ho offshore ensuring the incoming waves are fully described in the
computational domain. The designed incident wave profiles and the result-
ing shoreline locations are shown in figure 4.11-(a). Effects of the back profile
and the preceding waves are again examined with the model inputs and result-
ing simulations shown in the cases (b) and (c) of figure 4.11. Not surprisingly,
the same behaviors are observed as those demonstrated for the infinite uniform
188

beach. It is to point out that here an additional example of Lb ≈ ∞ is discussed,
which represents an extreme case of uniform bore. As can be seen in figure 4.11-
(b), the water level eventually settles at the level that is twice the initial wave
height as the results of superposition of two opposing bores.
4.7 The role of beach slope on the tsunami runup
The above examples for the one-slope model are all limited to a specific beach
slope, i.e., hx = s = so = 1/20. We shall now examine whether the same be-
havior holds at a different bottom slope. Figure 4.12 repeats the same simu-
lations as in figure 4.11-(a) except the beach slope is now s = 1/10. Not only
does it show that the horizontal length scale effect is independent of the bot-
tom slope, a similarity also exists regarding the maximum runup height and its
occurrence time. However, the retrieving flows appear to behave differently as
the drawdown process can not be scaled in the same manner. Note that Madsen
& Schaffer (2010) derived the formulae for the maximum runup and drawdown
elevations of a single sech2-shaped wave suggesting that both elevations are in-
versely proportional to√s. It is interesting to see that in the present solutions
only the runup part shows this feature.
4.8 Discussions
The so-called runup rule, based on the study of solitary waves (e.g. Synolakis
1987), is practically used to estimate the runup of a leading tsunami wave after
the nearshore conditions, say solutions of wave heights at water depth of 50 m,
189

0 40 80 120 160 2000.000
0.005
0.010
0.015
0.020
ζ0
ho
Initial profiles: ζ0(x) = ζ(x, t = 0)
(a)
30 70 110 150 190 230−0.04
0.00
0.04
0.08
0.12
ζs
ho
Shoreline locations: ζs(t)
45 75 105 135 1650.000
0.005
0.010
0.015
0.020
ζ0
ho
(b)
75 105 135 165 195 225−0.04
0.00
0.04
0.08
0.12
ζs
ho
20 50 80 110 140−0.012
0.000
0.012
0.024
x/ho
ζ0
ho
(c)
40 70 100 130 160−0.06
0.00
0.06
0.12
t/√
ho/g
ζs
ho
L = Lo
1.75Lo
2.50Lo
Lb = Lo
1.75Lo
2.50Lo≈∞
Combined waveSolitary wave
Figure 4.11: Runup and drawdown of model waves on a one-slope beach:
(a) Effects of horizontal length scale; (b) Effects of the back
profile; (c) Effects of the preceding waves. Left panels plot
the initial free surface profiles (ζ0) while on the right are the
corresponding shoreline elevations (ζs). In (a), all three incom-
ing waves have a sech2-shaped profiles. Incident waves in (b)
share the same wave font (solitary wave) but each has a dif-
ferent backside with Lb = Lo denoting the canonical solitary
wave and Lb ≈ ∞ illustrating a uniform bore. Finally, case (c)
shows a M -shaped wave (see (4.6.21)) versus a solitary wave.
A constant slope of s = 1/20 is used for all the examples.
190

50 75 100 125 150 175−0.03
0.00
0.03
0.06
0.09
t/√
ho/g
ζs
ho
s = 1/10 L = Lo
L = 1.5Lo
L = 2.0Lo
50 100 150−0.010
−0.005
0.000
0.005
0.010
0.015
0.020
0.025
0.030
t/√
ho/g − 1/s
√s
ζs
ho
L = Lo
s = 1/10s = 1/20
50 100 150−0.010
−0.005
0.000
0.005
0.010
0.015
0.020
0.025
0.030
t/√
ho/g − 1/s
L = 1.5Lo
s = 1/10s = 1/20
50 100 150−0.010
−0.005
0.000
0.005
0.010
0.015
0.020
0.025
0.030
t/√
ho/g − 1/s
L = 2.0Lo
s = 1/10s = 1/20
Figure 4.12: Effects of the bottom slope on the wave runup over a one-
slope beach. The upper panel shows the shoreline locations
(ζs) for three different incident waves, which repeats the same
exercise as that in figure 4.11-(a) except the beach slope is now
twice steeper, s = 1/10. In the lower subplots, results from
both s = 1/20 and s = 1/10 are re-scaled with respect to√s
so as to demonstrate the effects of beach slope on the runup
heights.
191

have been calculated from a large scale numerical simulation. However, as has
been discussed previously it is now well accepted that on the geophysical scales
solitary wave is not a realistic model for leading tsunami wave. Regardless,
those laboratory and analytical studies based on the solitary paradigm are still
valuable as they not only validate the numerical models but also provide us a
clear picture of some important physics.
In this study, a Lagrangian NLSW model is established to investigate the im-
pacts of different incident wave forms and the bathymetry on the runup heights.
It is observed that the wave front profile of leading tsunami wave dominates the
runup process, while the back-profile is influential for the rundown flows and
has little impact on wave runup. This suggests that as far as the maximum
runup height is concerned, one should focus on better describing the front pro-
file of the leading tsunami waves. This, of course, involves the study on the
evolution of initial free surface disturbances, which usually caused by the earth-
quakes, into the tsunamis. Unfortunately, there exists no simple wave form as
that of solitary waves can be used to describe the leading tsunami waves. Al-
though the formation of leading waves can be formulated in terms of an inte-
gral, the numerical integration is required and the detailed information on the
initial disturbance is needed.
It is noted that the present study considered only non-breaking waves. In
many cases, leading tsunami waves indeed break in the shallow waters. It is
desirable to incorporate the wave breaking mechanism in the numerical model
proposed in section 4.5 in order to examine whether the runup features of break-
ing waves are the same as those of non-breaking waves reported in this chapter.
A natural choice for the future study would be the widely used parameterized
192

breaking scheme. This kind of wave breaking models can not perfectly describe
the breaking process but has been proven to simulate the free-surface profiles
fairly well (see e.g., Zelt 1991; Lynett 2002).
193

CHAPTER 5
CONCLUDING REMARKS AND SUGGESTIONS FOR FUTURE WORK
This dissertation is devoted to studying some important dynamics of long wa-
ter waves in coastal marine environments. Three special topics are discussed:
wave-seafloor interactions; waves through a coastal forest; runup of leading
tsunami waves.
Long water waves over a thin muddy seabed
In Chapter 2, a two-layer model is employed to study the interactions between
long waves and a muddy seabed. The mud is considered as either viscoelastic
or viscoplastic materials. A depth-integrated model is developed to describe
weakly nonlinear, and moderately dispersive long waves propagating over a
thin layer of viscoelastic mud. For the Bingham-plastic problem, responses of
seabed to a surface solitary wave are studied. It is observed that surface waves
can be attenuated considerably when propagating over a muddy seafloor. At
the same time, the structure of wave-induced mud flow can be rather com-
plicated. Theoretical predictions are examined against the available labora-
tory measurements and field observations. The overall agreement is reasonably
good.
Effects of the the water viscosity are neglected in the present study. This as-
sumption can be relaxed by installing a viscous boundary layer right above the
water-mud interface. The viscous correction, however, is expected to be small
since the water viscosity is much smaller than the typical viscosity of mud. It
is important to note that further investigation is required to examine the wave-
mud interactions on an inclined beach as currently a flat bottom is assumed.
Significant interfacial movements can be expected when a sloping bottom is
194

considered: the prediction of the time-varying mud depth is an immense chal-
lenge.
Long water waves through emergent coastal forests
In Chapter 3, a micro-mechanical theory of the damping of long waves by
coastal forests is developed. A constant eddy viscosity model and a linear bot-
tom friction formula are employed. Utilizing the homogenization technique,
the mean-field equations for the macro-scale motion is derived. The effective
conductivity for the mean-field equations is obtained by numerically solving
certain canonical problems in a micro-scale unit cell. Analytical solutions of
the macro-scale problems are discussed for long monochromatic waves. Solu-
tion of the transient problem simulating the head of a tsunami is also discussed.
Comparisons of theoretical predictions with laboratory records of linear and
moderately nonlinear waves show surprisingly good agreements, suggesting
the robustness of the current approximate theory. Through this study, it is evi-
dent that coastal forests can cause strong wave damping. Considerable reflected
waves by the trees can also be expected. The newly developed theory is capa-
ble of serving as a design guideline for planting trees to guard the shorelines
against tsunami waves.
The proposed model is, unfortunately, limited to small-amplitude waves. In
nature, the nearshore dynamics of tsunamis can be highly nonlinear. For waves
of finite amplitudes, i.e. a fully nonlinear system, the problem can be very chal-
lenging. However, the averaging method of homogenization which enables
a micro-mechanical theory can in principle be extended for weakly nonlinear
waves. Extension to account for weak nonlinearity is worthwhile for predict-
ing mass transport and convective diffusion of particulates in coastal seas with
vegetation.
195

Long-wave modeling in the Lagrangian description
In Chapter 4, Lagrangian long-wave equations are introduced to study the
runup and drawdown of water waves, with an application to examine the soli-
tary wave paradigm for leading tsunami waves. The runup rule, based on the
study of solitary waves, is practically used to estimate the runup of a leading
tsunami wave after the nearshore conditions have been calculated from a large
scale numerical simulation. However, it is now widely accepted that on the geo-
physical scales solitary wave is not a realistic model to scale leading tsunami
waves. In spite of this, the past laboratory and analytical studies based on the
solitary paradigm are still valuable as they not only provide us a clear picture of
some important physics of tsunamis but also can be used to test the robustness
of numerical models. In this study, the impacts of different incident wave forms
and the bathymetry on the processes of runup and drawdown are investigated.
Through a series of numerical experiments on the benchmark bathymetry con-
figurations, it is concluded that the front-profiles of leading tsunami waves
dominate the runup processes. On the other hand, the back-profiles have lit-
tle impact on wave runup but are influential for the drawdown flows. This
suggests that as far as the maximum runup height is concerned, it is more cru-
cial to better describe the front-profile of a leading tsunami wave. Although the
formation of leading waves can be, in theory, formulated by the integral expres-
sion, it seems that no simple wave form, as that of solitary waves, can be used
as the model tsunami wave. More careful study on the formation and evolution
of initial free-surface disturbance is therefore needed.
The Lagrangian approach is used as the toll for this study since it is a natural
way of tacking the moving shoreline without introducing additional numerical
error. Indeed, the proposed numerical model has been tested against existing
196

analytical solutions and experimental data. A satisfactory performance is ob-
served. However, the current model is only capable of simulating non-breaking
waves. It is known that leading tsunami waves often break in the shallow water
regions. Therefore, it is desirable to incorporate the wave breaking process in
order to enhance the understanding of runup and drawdown of tsunami waves.
The common parameterized wave breaking model is a good starting point for
the future study.
197

APPENDIX A
MOTIONS OF A BI-VISCOUS MUDDY SEABED UNDER A SURFACE
SOLITARY WAVE
In this appendix, the problem of a surface solitary wave over a layer of bi-
viscous mud is discussed1. The analysis is the extension of the solution tech-
nique presented in section 2.3.3 for the Bingham-plastic mud problem.
A.1 Solutions of mud flows inside a bi-viscous seabed
Let us consider again the two-dimensional problem as described in section 2.3.
The non-Newtonian rheology of a bi-viscous mud can be described by the con-
stitutive equation
τ ′m =
µm∂u′m∂z′
, |τ ′m| ≤ τ ′o
µmy∂u′m∂z′
+ τ ′o
(1− µmy
µm
)sgn
(∂u′m∂z′
), |τ ′m| > τ ′o
, (A.1.1)
where µm and µmy are two viscosities while all other parameters have been de-
fined in (2.3.164). Using the normalization suggested in section 2.3, the dimen-
sionless form of (A.1.1) is
τm =
∂um∂z
, |τm| ≤ τo
µ∂um∂z
+ τo (1− µ) sgn
(∂um∂z
), |τm| > τo
, (A.1.2)
where µ = µmy/µm is the viscosity ratio and µ < 1, i.e. the shear thinning, is
considered.
1The bi-viscous problem has been studied by Becker & Bercovici (2000) and Ng, Fu & Bai(2002). However, both studies are limited to periodic waves only.
198

Based on the concept introduced in section 2.3.3, figure A.1 illustrates the
possible mud motions excited by a surface solitary wave. As the bi-viscous
rheology responds to the unfavorable pressure induced by the surface wave,
multiple sublayers can be developed inside the mud column. In fact, figure
A.1 shows the most complicated scenario that can be expected under a solitary
wave. For the bi-viscous mud with a large yield stress, it essentially flows as
a viscous material. Therefore, we shall consider only the situation as shown in
figure A.1.
From (2.3.166) and (A.1.1), the mud motion inside each sublayer is described
by the diffusion-type equation,
∂um
∂t= γ
∂ub∂t
+ µ∂2um∂η2
, LB ≤ η ≤ LT , (A.1.3)
where µ = 1 or µ, and LB,T define the thickness of each sublayer, i.e. LT − LB .
Subject to different sublayers shown in figure A.1, the corresponding boundary
conditions are either
um = 0, η = LB = 0
∂um∂η
= A, η = LT
, (A.1.4)
or∂um∂η
= B1, η = LB
∂um∂η
= B2, η = LT
. (A.1.5)
Values of the above constants are: A = 0 or ±τo/µ; B1 = τo/µ; B2 can be either 0
or ±τo/µ. It is difficult to obtain the general solution form for the above system
as µ and LB,T all vary in time. Nevertheless, by the use of the solution tech-
nique suggested in section 2.3.3, the semi-analytical solution form for (A.1.3)
199

→
(1)
η
d
µ = 1
µ = µ
→
(2)
µ = µ
←
(3) µ = 1
µ = 1
←
(4)
µ = µ
µ = 1
←(5)
µ = µ
µ = 1
←(6)
→(7)
µ = 1
Figure A.1: Sketch of mud motions (profile of horizontal velocity compo-
nent, um) in response to a surface wave loading. Arrows in-
dicate the direction of acceleration at the topmost portion of
mud and markers are the yielding locations with dots: τm = τo
and open circle: τm = −τo. Phases (1) and (2): mud first flows
like a viscous material and then develops a two-layer struc-
ture after the bottom shear stress exceeds the yield stress. (3)
and (4): the bottom part responds to the unfavorable pressure
first, the flow reversal occurs and three sublayers are formed.
(5) and (6): as the magnitude of unfavorable pressure becomes
stronger, the bottom mud can be yield again which develops
alternating sublayers. Meanwhile, the sandwiched yielding
mud vanishes and returns to two-layer structure. (7): mud
again flows like a viscous material.
200

and (A.1.4) is
um(x, η, t) =
∫ L
0
um(x, ξ + LB, t∗)G1(η − LB, ξ,∆t)dξ
+
∫ ∆t
0
µAG1(η − LB, L,∆t− τ)dτ
+
∫ ∆t
0
γ∂ub∂τ
(x, t∗ + τ)G2(η − LB,∆t− τ)dτ, (A.1.6)
where
G1(η, ξ, t) =∞∑
n=−∞
(−1)n
2√πµt
exp
[−(η − ξ + 2nL)2
4µt
]− exp
[−(η + ξ + 2nL)2
4µt
],
(A.1.7)
and
G2(η, t) =1
2
∞∑
n=−∞
1∑
m=−1
(−1)n+m (2− |m|) erf
[η + (2n+m)L
2õt
]. (A.1.8)
For (A.1.3) and (A.1.5), the solution is
um(x, η, t) =
∫ L
0
um(x, ξ + LB, t∗)H1(η − LB, ξ,∆t)dξ
−∫ ∆t
0
µB1H1(η − LB, 0,∆t− τ)dτ
+
∫ ∆t
0
µB2H1(η − LB, L,∆t− τ)dτ
+
∫ ∆t
0
γ∂ub∂τ
(x, t∗ + τ)H2(η − LB,∆t− τ)dτ, (A.1.9)
where
H1(η, ξ, t) =∞∑
n=−∞
1
2√πµt
exp
[−(η − ξ + 2nL)2
4µt
]+ exp
[−(η + ξ + 2nL)2
4γt
],
(A.1.10)
and
H2(η, t) =1
2
∞∑
n=−∞
1∑
m=0
(−1)1+merf
[η + (2(n+m)− 1)L
2õt
]. (A.1.11)
Note that um(x, η, t∗ = 0) is the initial condition.
201

Equations (A.1.6) and (A.1.9) provide the solution form for every sublayer.
By requiring the continuation of um across two successive sublayers, a system
of nonlinear algebraic equations is obtained for solving LB,T of each sublayer.
It is reminded that the overall mud thickness is d. In addition, Lb = 0 for the
lowest sublayer and LT = d for the uppermost layer.
A.2 Approximate bi-viscous model
The main difficulty of bi-viscous problem is attributed to the nonlinear nature
of the mud rheology (see (A.1.1)). In addition to the above solution method, one
can adopt the regularized rheology approach suggested by Papanastasiou (1987).
For instance, a simple model
τm = µ∂um∂z
+ τo (1− µ) tanh
(1
τ ∗o
∂um∂z
), (A.2.12)
is proposed to approximate the rheology curve of the bi-viscous mud. In the
above, τ ∗o , the designed yield stress, is a free parameter. Comparison between
the exact constitutive equation, (A.1.1), and the regularized model with τ ∗o = τo is
demonstrated in figure A.2. As can be seen, the approximation is acceptable and
it reserves the shear thinning behavior. Although the analytical solution is still
not granted, (A.2.12) promotes a fast numerical simulation since the two-stage
constitutive equation of bi-viscous mud can now be well described by a single
smooth curve.
202

−5 −4 −3 −2 −1 1 2 3 4 5
−1.5
−1
−0.5
0.5
1
1.5
1
τ∗
o
∂um
∂z
τm
τo
Figure A.2: Solid line plots the exact rheology curve of bi-viscous mud,
(A.1.1). Dashed line is the approximate rheology model give
in (A.2.12) with τ ∗o = τo. In this example, µ = 0.1 is used.
203

APPENDIX B
THE LAGRANGIAN LONG-WAVE EQUATIONS
In this appendix, approximate long-wave equations are derived by vertically
integrating the three-dimensional conservation equations in the Lagrangian de-
scription. The nondispersive, fully nonlinear shallow water equations are first
presented, followed by the derivation of Boussinesq equations describing the
weakly nonlinear and moderately dispersive long water waves. The shallow
water equations are also extended to account for the density stratification. Fi-
nally, the application of long wave equations to study the landslide problem is
discussed.
B.1 Shallow water equations
Suggested by the studies of linear long waves in the Eulerian specification, the
following normalizations are introduced:
(x, y, a, b) =(x′, y′, a′, b′)
Lo, (z, c) =
(z′, c′)
ho, t =
t′
Lo/√gho
h =h′
ho, p =
p′
ρogho
, (B.1.1)
where ρo is the reference density, Lo and ho are the characteristic length scales in
the horizontal and vertical directions, respectively.
Consequently, the dimensionless continuity equation is deduced from (4.4.1)
as
∂(x, y, z)
∂(a, b, c)= 1, (B.1.2)
204

and the momentum equations, (4.4.5) to (4.4.7), become
xaxtt + yaytt + za(µ2ztt + 1
)= −γpa, (B.1.3)
xbxtt + ybytt + zb(µ2ztt + 1
)= −γpb, (B.1.4)
xcxtt + ycytt + zc(µ2ztt + 1
)= −γpc, (B.1.5)
where
µ =hoLo
(B.1.6)
describing the shallowness, and
γ =ρoρ. (B.1.7)
Regarding the boundary conditions, (4.4.8) and (4.4.9) are recast as
z = zdn, c = cdn, (B.1.8)
p = pup, c = cup, (B.1.9)
where
zdn = −h(x, y, t), cdn = −h(a, b, 0)
pup = pair, cup = 0. (B.1.10)
Likewise, the dimensionless vorticity components are
µ2∂(x, zt, z)
∂(a, b, c)− ∂(x, y, yt)
∂(a, b, c), (B.1.11)
∂(x, y, xt)
∂(a, b, c)− µ2∂(zt, y, z)
∂(a, b, c), (B.1.12)
∂(yt, y, z)
∂(a, b, c)− ∂(x, xt, z)
∂(a, b, c). (B.1.13)
Since µ2 ≪ 1 for long water waves, the following expansions may be em-
ployed for the flow variables:
[ · ] =∞∑
n=0
µ2n[ · ](n), [ · ] = x, y, z, and p. (B.1.14)
205

Let us now discuss the leading-order problem. At O(µ0), terms in (B.1.10) are
z(0)dn = −h(x(0), y(0), t), cdn = −h(a, b, 0)
p(0)up = p
(0)air, cup = 0
, (B.1.15)
where the assumption that ha, hb, haa, hbb, and hab are all ofO(1) has been made.
From (B.1.11) and (B.1.12), the vanish of horizontal vorticity components yields∣∣∣∣∣∣∣∣∣∣
x(0)a x
(0)b x
(0)c
y(0)a y
(0)b y
(0)c
y(0)ta y
(0)tb y
(0)tc
∣∣∣∣∣∣∣∣∣∣
=
∣∣∣∣∣∣∣∣∣∣
x(0)a x
(0)b x
(0)c
y(0)a y
(0)b y
(0)c
x(0)ta x
(0)tb x
(0)tc
∣∣∣∣∣∣∣∣∣∣
= 0, (B.1.16)
which leads to
x(0)c = y(0)
c = 0 (B.1.17)
provided
∆(0) =
∣∣∣∣∣∣∣
x(0)a x
(0)b
y(0)a y
(0)b
∣∣∣∣∣∣∣6= 0. (B.1.18)
Note that the condition (B.1.18) is automatically satisfied as physically it states
the restriction on the overlapping of fluid particles along the bottom boundary,
c = −h(a, b, 0).
By the use of (B.1.17), the continuity equation (B.1.2) becomes∣∣∣∣∣∣∣∣∣∣
x(0)a x
(0)b 0
y(0)a y
(0)b 0
z(0)a z
(0)b z
(0)c
∣∣∣∣∣∣∣∣∣∣
= 1, (B.1.19)
which gives
z(0)c =
1
∆(0). (B.1.20)
Integrating (B.1.20) and employing the bottom boundary condition stated in
(B.1.15), we obtain
z(0) =c− cdn∆(0)
+ z(0)dn . (B.1.21)
206

Substituting (B.1.17) and (B.1.20) into the c-component momentum equation
(B.1.5), the pressure field is obtained as
p(0) =cup − cγ∆(0)
+ p(0)up , (B.1.22)
where the free-surface boundary condition in (B.1.15) has been evoked.
Combining (B.1.21) and (B.1.22), we get
z(0) + γp(0) =cup − cdnγ∆(0)
+ γp(0)up + z
(0)dn . (B.1.23)
Therefore, the horizontal momentum equations, (B.1.3) and (B.1.4), become
x(0)a y
(0)a
x(0)b y
(0)b
x(0)tt
y(0)tt
= −go
ζ(0)a
ζ(0)b
, (B.1.24)
where go = 1 and
ζ(0)(a, b, t) =cup − cdn
∆(0)+ γp(0)
up + z(0)dn
=h(a, b, 0)
∆(0)− h
(x(0), y(0), t
)(B.1.25)
describing the vertical displacements of fluid particles on the free surface as
the usual zero atmospheric pressure is taken. It is remarked that (B.1.24) and
(B.1.25) are the shallow water equations in the Lagrangian description. Note
also that the model equations in the physical variables can be retrieved by set-
ting go = g.
B.2 Boussinesq equations
The previous section presented the approximate equations for very long waves
of large amplitudes. Ideally, one may extend the formulation to higher orders
207

in µ2 to include the effects of frequency dispersion. From the past experience
on the derivation of long-wave equations in the Eulerian description, this relies
on the use of the irrotationality1. Unfortunately, at higher orders, say O(µ2),
it is unclear how would the irrotational condition help understand the vertical
structure of the horizontal flow variables due to the nonlinear nature of the vor-
ticity vector in the Lagrangian expression (see (B.1.11) to (B.1.13)). Alternatively,
the weakly nonlinear and moderately dispersive long waves are considered. By
limiting the magnitude of the wave amplitude, it is observed that the irrotation-
ality leads to the relation similar to (B.1.17) at both O(µ0) and O(µ2) (the details
are to be shown shortly). This makes the derivation of the depth-integrated
approximate equations possible.
Hence, the objective is to derive the Boussinesq-type equations in the La-
grangian description, as have been well studied in the Euler specification. For
this purpose, the following normalizations are introduced:
(a, b) =(a′, b′)
Lo, c =
c′
ho, t =
t′
Lo/√gho
h =h′
ho, P =
P ′
ρogho, (X,Y ) =
(X ′, Y ′)
LoAo/ho, Z =
Z ′
Ao
. (B.2.26)
In the above, the new variables Ao and P ′ denote the characteristic wave am-
plitude and the dynamic pressure, respectively, and (X ′, Y ′, Z ′) are the corre-
sponding displacement components satisfying
(x′, y′, z′) = (a′ +X ′, b+ Y ′, c+ Z ′). (B.2.27)
As for all other notations, they have been explained in (B.1.1). The common
Boussinesq approximation is also reminded, i.e.
O(ǫ) = O(µ2)≪ 1, (B.2.28)
1One can deduce the relation between the horizontal velocity components and the verticalvelocity by requiring the irrotational condition (see e.g., Lynett 2002), or, start directly with theuse of the velocity potential as the primitive variable (see e.g., Mei, Stiassnie & Yue 2005).
208

where ǫ = Ao/ho and again µ = ho/Lo.
Following section 4.4, the dimensionless continuity equation becomes
Xa + Yb + Zc + ǫ
∂(Y, Z)
∂(b, c)+∂(Z,X)
∂(c, a)+∂(X,Y )
∂(a, b)
+ ǫ2
∂(X,Y, Z)
∂(a, b, c)= 0, (B.2.29)
while the conservation of momentum states
Xtt + (P + Z)a + ǫ
∂(P + Z, Y )
∂(a, b)+∂(P,Z)
∂(a, c)
+ ǫ2
∂(P, Y, Z)
∂(a, b, c)= 0, (B.2.30)
Ytt + (P + Z)b + ǫ
∂(X,P + Z)
∂(a, b)+∂(P,Z)
∂(b, c)
+ ǫ2
∂(X,P, Z)
∂(a, b, c)= 0, (B.2.31)
µ2Ztt + Pc −Xa − Yb + ǫ
∂(Y, P )
∂(b, c)+∂(P,X)
∂(c, a)− ∂(X,Y )
∂(a, b)
+ ǫ2
∂(X,Y, P )
∂(a, b, c)= 0.
(B.2.32)
Similarly, the dimensionless vorticity components are
µ2
(Zbt + ǫ
∂(X,Zt)
∂(a, b)+∂(Zt, Z)
∂(b, c)
+ ǫ2
∂(X,Zt, Z)
∂(a, b, c)
)
−(Yct + ǫ
∂(X,Yt)
∂(a, c)+∂(Y, Yt)
∂(b, c)
+ ǫ2
∂(X,Y, Yt)
∂(a, b, c)
),
(B.2.33)
Xct + ǫ
∂(X,Xt)
∂(a, c)+∂(Y,Xt)
∂(b, c)
+ ǫ2
∂(X,Y,Xt)
∂(a, b, c)
−µ2
(Zat + ǫ
∂(Zt, Y )
∂(a, b)+∂(Zt, Z)
∂(a, c)
+ ǫ2
∂(Zt, Y, Z)
∂(a, b, c)
),
(B.2.34)
Yat + ǫ
∂(Yt, Y )
∂(a, b)+∂(Yt, Z)
∂(a, c)
+ ǫ2
∂(Yt, Y, Z)
∂(a, b, c)
−(Xbt + ǫ
∂(X,Xt)
∂(a, b)+∂(Xt, Z)
∂(b, c)
+ ǫ2
∂(X,Xt, Z)
∂(a, b, c)
).
(B.2.35)
As for the boundary conditions, both
P = Pair, c = 0, (B.2.36)
and
ǫZ(a, b, c, t) = h(a, b, 0)− h(a+ ǫX, b+ ǫY, t), c = −h(a, b, 0) (B.2.37)
209

need to be satisfied.
For the current study, flow variables are expanded in different orders of µ as
[ · ] =∞∑
n=0
µ2n[ · ](n), [ · ] = X,Y, Z, and P. (B.2.38)
Therefore, at O(µ0) the governing equations are
X(0)a + Y
(0)b + Z(0)
c = 0, (B.2.39)
X(0)tt +
(P (0) + Z(0)
)a
= 0, (B.2.40)
Y(0)tt +
(P (0) + Z(0)
)b= 0, (B.2.41)
P (0)c −X(0)
a − Y(0)b = 0. (B.2.42)
Regarding the vorticity field, the vanish of the horizontal components leads to
(see (B.2.33) and (B.2.34))
X(0)c = Y (0)
c = 0. (B.2.43)
Likewise, the dimensionless bottom boundary condition becomes
Z(0) = −h− hincǫ
−X(0)ha − Y (0)hb, c = −hinc, (B.2.44)
where the shorthand notations h = h(a, b, t) and hinc = h(a, b, 0) have been used.
Note that ha and hb are assumed to be of O(1).
At O(µ2), the continuity equation is
X(1)a + Y
(1)b + Z(1)
c +ǫ
µ2
∂(Y (0), Z(0))
∂(b, c)+∂(Z(0), X(0))
∂(c, a)+∂(X(0), Y (0))
∂(a, b)
= 0,
(B.2.45)
and the momentum equations are
X(1)tt +
(P (1) + Z(1)
)a+
ǫ
µ2
∂(P (0) + Z(0), Y (0))
∂(a, b)+∂(P (0), Z(0))
∂(a, c)
= 0, (B.2.46)
Y(1)tt +
(P (1) + Z(1)
)b+
ǫ
µ2
∂(X(0), P (0) + Z(0))
∂(a, b)+∂(P (0), Z(0))
∂(b, c)
= 0, (B.2.47)
210

Z(0)tt +P (1)
c −X(1)a −Y
(1)b +
ǫ
µ2
∂(Y (0), P (0))
∂(b, c)+∂(P (0), X(0))
∂(c, a)− ∂(X(0), Y (0))
∂(a, b)
= 0.
(B.2.48)
From (B.2.33) and (B.2.34), the O(µ2) horizontal vorticity components yield
Z(0)bt − Y
(1)ct −
ǫ
µ2
∂(X(0), Y
(0)t )
∂(a, c)+∂(Y (0), Y
(0)t )
∂(b, c)
= 0, (B.2.49)
X(1)ct +
ǫ
µ2
∂(X(0), X
(0)t )
∂(a, c)+∂(Y (0), X
(0)t )
∂(b, c)
− Z(0)
at = 0, (B.2.50)
or by further evoking (B.2.43),
X(1)c = Z(0)
a , Y (1)c = Z
(0)b . (B.2.51)
By the use of (B.2.43), the leading-order continuity equation (B.2.39) suggests
that
Z(0)c = −
(X(0)a + Y
(0)b
)(B.2.52)
is independent of c-coordinate. Therefore,
Z(0) = −cS − T −R, (B.2.53)
where
S ≡ X(0)a + Y
(0)b
T ≡[X(0)h(a, b, t)
]a+[Y (0)h(a, b, t)
]b
R ≡(
1
ǫ− S
)h(a, b, t)− h(a, b, 0)
(B.2.54)
as the bottom condition (B.2.44) has been evoked. Note that S, T , and R are all
independent of c.
Similarly, by integrating (B.2.51) we obtain
X(1) = −c2
2Sa − c (T +R)a + F1(a, b, t), (B.2.55)
Y (1) = −c2
2Sb − c (T +R)b + F2(a, b, t), (B.2.56)
211

where both F1 and F2 are yet to be determined.
With an error of O(µ4), the horizontal displacements can be expressed as
X = X(0) + µ2X(1) +O(ǫµ2, µ4), (B.2.57)
Y = Y (0) + µ2Y (1) +O(ǫµ2, µ4). (B.2.58)
Accordingly, the displacements at an arbitrary level c = k(a, b, t) can be defined
as
X = X(0) − µ2
k2
2Sa + k(T +R)a
+ µ2F1(a, b, t) +O(ǫµ2, µ4), (B.2.59)
Y = Y (0) − µ2
k2
2Sb + k(T +R)b
+ µ2F2(a, b, t) +O(ǫµ2, µ4). (B.2.60)
Subtracting (B.2.59) from (B.2.57) and (B.2.60) from (B.2.58), (X,Y ) can be re-
expressed in terms of (X, Y ) as
X = X − µ2
c2 − k2
2Sa + (c− k)(T +R)a
+O(ǫµ2, µ4), (B.2.61)
Y = Y − µ2
c2 − k2
2Sb + (c− k)(T +R)b
+O(ǫµ2, µ4). (B.2.62)
We shall next discuss both the pressure field and the vertical displacement,
or P + Z, as they appear repeatedly in the momentum equations. Adding the
continuity equation, (B.2.29), to the c-component momentum equation, (B.2.32),
we have
µ2Ztt + (P + Z)c + ǫ
∂(Y, P + Z)
∂(b, c)+∂(P + Z,X)
∂(c, a)
+ ǫ2
∂(X,Y, P + Z)
∂(a, b, c)= 0.
(B.2.63)
At O(µ0),(P (0) + Z(0)
)c= 0, (B.2.64)
and at O(µ2),(P (1) + Z(1)
)c= −Z(0)
tt . (B.2.65)
212

Therefore, (B.2.63) reduces to
(P + Z)c = −µ2Z(0)tt +O(µ4). (B.2.66)
Since Z(0) has been given in (B.2.53), by integrating (B.2.66) with respect to c and
evoking the free-surface dynamic boundary condition, (B.2.36), we obtain
P + Z = ζ + µ2
[c2
2S + c(T +R)
]
tt
+O(µ4), (B.2.67)
where
ζ(a, b, t) ≡ Pair + Z(a, b, 0, t) (B.2.68)
with the detailed expression to be addressed in the following. Clearly, ζ is the
vertical displacement at the free surface, c = 0, if the atmospheric pressure is
taken as zero.
Now, evoking the O(µ0) results, i.e. (B.2.39) and (B.2.43), the full continuity
equation (B.2.29) reduces to
Zc = −Xa − Yb − ǫ−S2 +Q
+O(µ4), (B.2.69)
where
Q ≡ ∂(X(0), Y (0))
∂(a, b). (B.2.70)
Substituting (B.2.61) and (B.2.62) into (B.2.69), the vertical displacement on the
free surface can be formulated as
Z(a, b, 0, t) =Zb.b.c. −Xa + Yb − ǫ
(S2 −Q
)h(a, b, 0)
+ µ2
∫ 0
−h(a,b,0)
[c2 − k2
2Sa + (c− k)(T +R)a
]
a
dc
+ µ2
∫ 0
−h(a,b,0)
[c2 − k2
2Sb + (c− k)(T +R)a
]
b
dc
+O(µ4), (B.2.71)
213

where
Zb.b.c. = −h(a+ ǫX, b+ ǫY, t) + h(a, b, 0)
ǫ
∣∣∣∣c=−h(a,b,0)
(B.2.72)
is the bottom boundary condition. Performing the Taylor series expansion and
utilizing the perturbation expression of (X,Y ), i.e. (B.2.61) and (B.2.62), we get
Zb.b.c. =−h(a, b, t)− h(a, b, 0)
ǫ−Xha(a, b, t) + Y hb(a, b, t)
+ µ2
h2(a, b, 0)− k2
2Sa − (h(a, b, 0) + k) (T +R)a
ha(a, b, t)
+ µ2
h2(a, b, 0)− k2
2Sb − (h(a, b, 0) + k) (T +R)b
hb(a, b, t)
− ǫ
2M+O(µ4), (B.2.73)
where
M≡ X(0)X(0)haa(a, b, t) + Y (0)Y (0)hbb(a, b, t) + 2X(0)Y (0)hab(a, b, t). (B.2.74)
Note that hab, haa, and hbb are all of O(1). Finally, by substituting (B.2.73) into
(B.2.71) and using the Leibniz integral rule to evaluate the integrals, we obtain
ζ =Pair −h− hinc
ǫ−(Xha + Y hb
)− ǫ
2M− hinc
Xa + Yb − ǫ
(S2 −Q
)
+ µ2
[hinc
(h2inc
6− k2
2
)Sa −
(hinc2
+ k
)(T +R)a
]
a
+ µ2
[hinc
(h2inc
6− k2
2
)Sb −
(hinc2
+ k
)(T +R)b
]
b
+O(µ4). (B.2.75)
In addition, from (B.2.69) it is rapidly shown that
Z =(ζ − pair)− cXa + Yb − ǫ
(S2 −Q
)
− µ2c
[k
(1
2Sa + (T +R)a
)]
a
+
[k
(1
2Sb + (T +R)b
)]
b
+ µ2 c2
2(T +R)aa + (T +R)bb+ µ2 c
3
6Saa + Sbb+O(µ4). (B.2.76)
214

Subsequently, the pressure field is found from (B.2.67) as
P =Pair + cXa + Yb − ǫ
(S2 −Q
)
+ µ2c
[k
(1
2Sa + (T +R)a
)]
a
+
[k
(1
2Sb + (T +R)b
)]
b
+ (T +R)tt
− µ2 c2
2(T +R)aa + (T +R)bb − Stt − µ2 c
3
6Saa + Sbb
+O(µ4). (B.2.77)
The simplified vertical-independent horizontal momentum equations can
now be formulated. Substituting both (B.2.52) and (B.2.64) into the momentum
equations, (B.2.30) and (B.2.31), we obtain
Xtt + (P + Z)a − ǫX(0)a
(P (0) + Z(0)
)a+ Y (0)
a
(P (0) + Z(0)
)b
= O(µ4), (B.2.78)
and
Ytt + (P + Z)b − ǫX
(0)b
(P (0) + Z(0)
)a+ Y
(0)b
(P (0) + Z(0)
)b
= O(µ4). (B.2.79)
By the use of (B.2.61), (B.2.62) and (B.2.67), the above equations become
Xtt+µ2
[k2
2Sa + k(T +R)a
]
tt
+ ζa − ǫXaζa + Yaζb
= O(µ4), (B.2.80)
Ytt+µ2
[k2
2Sb + k(T +R)b
]
tt
+ ζb − ǫXbζa + Ybζb
= O(µ4). (B.2.81)
Note that S, T , R, Q, and M are re-defined using (X, Y ) in replacement of
(X(0), Y (0)), i.e.
S ≡ Xa + Yb
T ≡[Xh(a, b, t)
]a+[Y h(a, b, t)
]b
R ≡(
1
ǫ− S
)h(a, b, t)− h(a, b, 0)
Q ≡ ∂(X, Y )
∂(a, b)
M≡ XXhaa(a, b, t) + Y Y hbb(a, b, t) + 2XY hab(a, b, t)
, (B.2.82)
215

and, accordingly, ζ is calculated by (B.2.75) using these new (S, T ,R,Q,M).
Equations (B.2.75), (B.2.80) and (B.2.81) are the Lagrangian Boussinesq equa-
tions in terms of the vertical free-surface displacement, ζ, and the horizontal
displacements2, (X, Y ), evaluated at an arbitrary level c = k(a, b, t). Once the
above equation set is solved numerically, the actual distributions of displace-
ments (X,Y, Z) can be retrieved from (B.2.61), (B.2.62) and (B.2.76). Likewise,
the pressure field is obtained through (B.2.77).
The above long-wave equations can also be expressed in terms of cer-
tain depth-averaged quantities. For instance, one can define an averaged a-
component displacement as
X ≡1
h
∫ 0
−hXdc
=1
h
∫ 0
−h
X − µ2
(c2 − k2
2Sa + (c− k)(T +R)a
)dc+O(µ4)
=X − µ2
(h2
6− k
2
)Sa −
(h
2+ k
)(T +R)a
+O(µ4), (B.2.83)
or
X = X0 − µ2
h2
6Sa −
h
2(T +R)a
+O(µ4). (B.2.84)
Similarly, another horizontal displacement component is calculated as
Y = Y0 − µ2
h2
6Sb −
h
2(T +R)b
+O(µ4). (B.2.85)
In (B.2.84) and (B.2.85), (X0, Y0) denotes the horizontal displacements at the free
surface, c = 0, and (S, T ,R) are evaluated using (X0, Y0).
Substituting (B.2.84) and (B.2.85) into (B.2.80) and (B.2.81), the momentum
2The atmospheric pressure is taken as zero, Pair = 0.
216

equations in terms of (X,Y ) are
X tt + µ2
[h2
6Sa −
h
2(T +R)a
]
tt
+ ζa − ǫXaζa + Y aζb
= O(µ4), (B.2.86)
Y tt + µ2
[h2
6Sb −
h
2(T +R)b
]
tt
+ ζb − ǫXbζa + Y bζb
= O(µ4). (B.2.87)
It is reiterated that (S, T ,R) are now evaluated using (X,Y ) and the vertical
displacement at the free surface is deduced from (B.2.75) as
ζ =Pair −h− hinc
ǫ−(Xha + Y hb
)− ǫ
2M− hinc
Xa + Y b − ǫ
(S2 −Q
)
+ µ2
[h2inc
2
hinc3Sa − (T +R)a
]
a
+ µ2
[h2inc
2
hinc3Sb − (T +R)b
]
b
− µ2
[h2
6Sa −
h
2(T +R)a
]ha +
[h2
6Sa −
h
2(T +R)a
]
a
hinc
− µ2
[h2
6Sb −
h
2(T +R)b
]hb +
[h2
6Sb −
h
2(T +R)b
]
b
hinc
+O(µ4) (B.2.88)
with again (S, T ,R,Q,M) evaluated using (X,Y ).
In many cases, the bottom is stationary, i.e., h = h(a, b). The model equations
can then be simplified as
ζ =Pair − T − ǫ
1
2M− h
(S2 −Q
)
+ µ2
[h3
6Sa −
h2
2Ta]
a
+ µ2
[h3
6Sb −
h2
2Tb]
b
+O(µ4), (B.2.89)
and
X0tt + ζa − ǫ X0aζa + Y0aζb = O(µ4), (B.2.90)
Y0tt + ζb − ǫ X0bζa + Y0bζb = O(µ4). (B.2.91)
Note that (S, T ,Q,M) in (B.2.89) are evaluated using (X0, Y0), i.e. the horizontal
displacements at the free surface. Again, the above model equations can be
217

recast in terms of the depth-averaged quantities as
ζ =− T − ǫ
1
2M− h
(S2 −Q
)+O(µ4), (B.2.92)
and
X tt + µ2
[h2
6Sa −
h
2Ta]
tt
+ ζa − ǫXaζa + Y aζb
= O(µ4), (B.2.93)
Y tt + µ2
[h2
6Sb −
h
2Tb]
tt
+ ζb − ǫXbζa + Y bζb
= O(µ4), (B.2.94)
where the calculations of (S, T ,Q,M) are based on (X,Y ).
It is remarked that the above two sets of approximate long-wave equations,
(B.2.89) to (B.2.91) and (B.2.92) to (B.2.94), agree with those derived by Zelt
(1986).
B.3 A stratified multi-layer model
The shallow water equations presented in section B.1 can be extended to ac-
count for the density stratification by dividing the vertical extent into discrete
sub-layers of constant properties. That is, the continuous stratification is ap-
proximated by the stairway profile.
Consider a N -layer system with the uppermost one attached to the free sur-
face and the N -th layer touched the solid bottom. Through the above single-
layer analysis, the approximate long-wave equations for the n-th layer can be
rapidly formulated as (see (B.1.24) and (B.1.25))
ζ [n](a, b, t) =h[n](a, b)
∆[n]+ γ[n]p[n]
up + z[n]dn , (B.3.95)
x[n]a y
[n]a
x[n]b y
[n]b
x[n]tt
y[n]tt
= −
ζ [n]a
ζ[n]b
, (B.3.96)
218

where the superscript [n] denotes the layer index, h[n](a, b) as the initial layer
thickness, and
∆[n] =
∣∣∣∣∣∣∣
x[n]a x
[n]b
y[n]a y
[n]b
∣∣∣∣∣∣∣6= 0, γ[n] =
ρoρ[n]
. (B.3.97)
Both p[n]up and z
[n]dn are yet to be elaborated. Note also that the superscript (·)(0) has
been omitted for simplicity.
Applying the kinematic boundary condition along c = c[n]dn and the dynamic
boundary condition on c = c[n]up , i.e. (B.1.15), we obtain
z[n]dn (x, y, t) =
γ[n+1]ζ [n](x, y, t)− γ[n]ζ [n+1](x, y, t)
γ[n+1] − γ[n], n < N
−h(x, y, t), n = N
, (B.3.98)
and
p[n]up(x, y, t) =
pair, n = 1
ζ [n](x, y, t)− ζ [n−1](x, y, t)
γ[n] − γ[n−1], 1 < n
, (B.3.99)
where
(x, y) = (x[n], y[n]) = (x[n−1], y[n−1]) = (x[n+1], y[n+1]). (B.3.100)
It is reminded that a mismatch in the horizontal velocity components at the
interface between two adjacent sub-layers is expected, due to the assumption of
inviscid fluid.
B.4 Solid slide on a plane beach
The inherent advantage of the Lagrangian method can be taken to study the
tsunamis generated by landslides as this problem usually involves multiple
moving boundaries, i.e. the moving shoreline and the ground movements.
219

In this section, an idealized two-dimensional case is discussed. Let us con-
sider a solid rock with a flat bottom sliding down a plane beach. The shape
of the rock, i.e. the rock height, is describe by a given function S(ξ), where
0 < ξ < Ls with Ls denoting the length of the rock.
Motions of the solid slide
We shall first formulate the model equation for the rock motion. Let ξ-axis be
the coordinate parallel to the plane beach, from the force balance we obtain
M∂2ξ0∂t2
= Mg sin θ + Ff + Fp, (B.4.101)
where
Ff = −fLs∂ξ0∂t
(B.4.102)
models the bottom friction, and
Fp =
∫ Ls
0
ps(ξ + ξ0 − Ls, t)∂S(ξ)
∂ξdξ (B.4.103)
is the contribution from the surrounding water pressure at the top of the rock,
ps. In the above, ξ0 denotes the tip of the rock, M is the mass per unit width
of the rock, g is the gravitational acceleration, tan θ is the beach slope, f is the
friction coefficient, and finally t denotes the time variable. The corresponding
initial conditions are
ξ0 = 0,∂ξ0∂t
= U0, at t = 0, (B.4.104)
where U0 is the initial speed of the rock. Note that U0 can be determined from
the free fall motion of the solid slide:
M∂2ξ∗0∂t′2
= Mg sin θ − fLs∂ξ∗0∂t′
(B.4.105)
220

with
ξ∗0 = ξ∗I < 0,∂ξ∗0∂t′
= 0, at t′ = 0. (B.4.106)
The corresponding solution is
ξ∗0(t′) = ξ∗I +
(M
fLs
)2
g sin θ
fLsM
t′ − 1 + exp
[−fLsM
t′]
. (B.4.107)
By solving t′0 from
ξ∗0(t′ = t0) = 0, (B.4.108)
we finally obtain
U0 =∂ξ∗0∂t′
∣∣∣∣t′=t′
0
. (B.4.109)
Equations for the wave motions
Let us adopt the Lagrangian shallow water equations from section B.1 (see also
(4.5.13) and (4.5.14)):
[ζ + h(a+X, t)] (1 +Xa) = h(a, t) (B.4.110)
and
(1 +Xa)∂2X
∂t2= −g∂ζ
∂a. (B.4.111)
Note that the water depth, h, is time-varying since the rock slides down the
sloping beach. The associated pressure field can be formulated as
p(a, c, t) = −ρg c
1 +Xa
. (B.4.112)
Thus, the expression for the pressure term in (B.4.103) is
ps(ξ, t) = ρgh(a, t)
1 +Xa
, (B.4.113)
where h(a, t) depends on the shape function of the rock, S. For any given ξ, the
corresponding Lagrangian coordinate, a, can be determined, by definition, from
a+X(a, t) = x = ξ cos θ.
221

Outline for the numerical solutions
Solutions for the wave field and the rock motion can be obtained by numerically
solving (B.4.101), (B.4.110) and (B.4.111). Numerical solutions are not trivial.
A simple two-step algorithm is proposed. The first step is to obtain the new
location of the rock tip using the old wave field information, i.e., when solving
(B.4.101) the pressure field in (B.4.103) is taken at previous time-step. Next, the
wave equations, (B.4.110) and (B.4.111), are advanced in time using the newly
obtained ξ0. This algorithm has not yet been tested. In addition, a more rigorous
iterative scheme shall also be considered for the future study.
222

BIBLIOGRAPHY
ALLAIRE, G. 2001 Shape Optimization By the Homogenization Method. Springer.
AUGUSTIN, L. N., IRISH, J. L. & LYNETT, P. 2009 Laboratory and numerical
studies of wave damping by emergent and near-emergent wetland vegeta-
tion. Coast. Eng. 56, 332–340.
AURIAULT, J.-L. 1991 Dynamic behaviour of porous materials. In Transport pro-
cesses in porous media (ed. J. Bear & M. Y. Corapcioglu). pp. 471–519. Hemi-
sphere Publishing, New York.
AURIAULT, J. L. 1991 Heterogeneous medium. Is an equivalent macroscopic
description possible? Int. J. Eng. Sci. 29, 785–795.
BALMFORTH, N. J. & CRASTER, R. V. 1999 A consistent thin-layer theory for
Bingham plastics. J. Non-Newtonian Fluid Mech. 84, 65–81.
BALMFORTH, N. J. & CRASTER, R. V. 2001 Geophysical aspects of non-
Newtonian fluid mechanics. In Geomorphological Fluid Dynamics (ed. Proven-
cale, A. & Balmforth, N.). Lecture Notes in Physics, vol. 582, pp. 34–51.
Springer.
BARNES, H. A., HUTTON, J. F. & WALTERS, K. 1991 An introduction to rheology.
Elsevier Science.
BATEMAN, H. 1954 Table of Integral Transforms, Vol. 1 (ed. A. Erdrelyi). McGraw-
Hill.
BECKER, J. M. & BERCOVICI, D. 2000 Permanent bedforms in a theoretical
model of wave-sea-bed interactions. Nonlin. Processes Geophys. 7, 31–35.
223

BENSOUSSAN, A., LIONS, J.-L. & PAPANICOLAOU, G. 1978 Asymptotic Analysis
for Periodic Structures. North-Holland.
BIESEL, F. 1952 Study of wave propagation in water of gradually varying depth.
Gravity Waves. U.S. Natl. Bureau of Standards 521, 243–253.
CARMEN, P. C. 1937 Fluid flow through granular beds. Trans. Inst. Chem. Eng.
15, 15–16.
CARSLAW, H. S. & JAEGER, J. C. 1963 Operational Methods in Applied Mathemat-
ics. Dover.
CARRIER, G. & GREENSPAN, H. P. 1958 Water waves of finite amplitude on a
sloping beach. J. Fluid Mech. 4, 97–109.
CARRIER, G., WU, T. T. & YEH, H. 2003 Tsunami runup and draw-down on a
plane beach. J. Fluid Mech. 475, 79–99.
CHAN, I-C. & LIU, P. L.-F. 2009 Responses of Bingham-plastic muddy seabed
to a surface solitary wave. J. Fluid Mech. 618, 155–180.
CHOU, H.-T., FODA, M. A. & HUNT, J. R. 1991 Rheological response of cohe-
sive sediments to oscillatory forcing. In Nearshore and Estuarine Cohesive Sedi-
ment Transport (ed. A. J. Mehta). pp. 126–147. American Geophysical Union.
DALRYMPLE, R. A. & LIU, P. L.-F. 1978 Waves over soft muds: a two layer
model. J. Phys. Oceanogr. 8, 1121–1131.
DANIELSEN, F. et al. 2005 The Asian Tsunami: A Protective Role for Coastal
Vegetation. Science 310, 643.
224

DASA, S. & VINCENT, J. R. 2009 Mangroves protected villages and reduced
death toll during Indian super cyclone. Proc. Natl. Acad. Sci. USA 106, 7357–
7360.
ELGAR, S. & RAUBENHEIMER, B. 2008 Wave dissipation by muddy seafloors.
Geophys. Res. Lett. 35, L07611, doi:10.1029/2008GL033245.
ENE, H. L. & SANCHEZ-PALENCIA, E. 1975 Equations et phenomenes de sur-
face pour l’ecoulement dans un modele de milieu poreux. J. Mecanique 14,
73–108.
FABRIZIO, M. & MORRO, A. 1992 Mathematical problems in linear viscoelasticity.
SIAM.
FERNANDO, H. J. S., SAMARAWICKRAMA, S. P., BALASUBRAMANIAN, S., HET-
TIARACHCHI, S. S. L. & VOROPAYEV, S. 2008 Effects of porous barriers such
as coral reefs on coastal wave propagation. J. Hydro-environ. Res. 1, 187–194.
FODA, M. A. 1995 Sea floor dynamics. In Advances in Coastal and Ocean Engi-
neering (ed. P. L.-F. Liu). pp. 77–123. World Scientific.
FODA, M. A., HUNT, J. R. & CHOU, H.-T. 1993 A nonlinear model for the
fluidization of marine mud by waves. J. Geophy. Res. 98, 7039–7047.
FORRISTALL, G.Z. & REECE, A.M. 1985 Measurements of wave attenuation due
to a soft bottom: the SWAMP experiment. J. Geophys. Res. 90, 3367-3380.
FUJII, Y., SATAKE, K., SAKAI, S.-I., SHINOHARA, M. & KANAZAWA, T. 2011
Tsunami source of the 2011 off the Pacific coast of Tohoku, Japan earthquake.
Earth Planets Space (in press).
225

FUJIMA, K. 2007 Tsunami runup in Lagrangian description. In Tsunami and Non-
linear Waves (ed. Kundu, A). pp. 191–207. Springer.
GADE, H. G. 1958 Effects of a non-rigid, impermeable bottom on plane surface
waves in shallow water. J. Mar. Res. 16, 61–82.
HEALY, T., WANG, Y., & HEALY, H.-J. 2002 Muddy Coasts of the World: Processes,
Deposits and Function. Elsevier.
HIRAISHI, T. & HARADA, K. 2003 Greenbelt Tsunami Prevention in South-
Pacific Region. Report of the Port and Airport Research Institute 43 (2), 1–23.
HOLLAND, K. T., VINZON, S. B. & CALLIARI, L. J. 2009 A field study of coastal
dynamics on a muddy coast offshore of Cassino beach, Brazil. Cont. Shelf Res.
29, 503–514.
HORNUNG, U. 1996 Homogenization and Porous Media. Springer.
HSIAO, S. V. & SHEMDIN, O. H. 1980 Interaction of ocean waves with a soft
bottom. J. Phys. Oceanogr. 10, 605–610.
HUANG, X. & GARCIA, M. H. 1997 A perturbation solution for Bingham-plastic
mudflows. J. Hydraul. Eng. 123, 986–994.
IRTEM, E., GEDIK, N., KABDASLI, M. S. & YASA, N. E. 2009 Coastal forest
effects on tsunami run-up heights. Ocean Eng. 36, 313–320.
JIANG, F. & MEHTA, A. J. 1995 Mudbanks of the southwest coast of India. Part
IV. Mud viscoelastic priperties. J. Coast. Res. 11, 918–926.
JOHNSGARD, H. & G. PEDERSEN 1997 A numerical model for three-
dimensional run-up. Int. J. Numer. Methods Fluids 24, 913–931.
226

KAJIURA, K. 1963 The leading wave of a tsunami. Bull. Earthq. Res. 41, 525–571.
KANOGLU, U. & SYNOLAKIS, C. M. 1998 Long wave runup on piecewise linear
topographies. J. Fluid Mech. 374, 1–28.
KAPINSKI, J. 2006 On modelling of long waves in the Lagrangian and Eulerian
description. Coast. Eng. 53, 759–765.
KANAZAWA, T. & HASEGAWA, A. 1997 Ocean-bottom observatory for earth-
quakes and tsunami off Sanriku, north-east Japan using submarine cable.
Proc. Int. Works. Sci. Use Submar. Cables. 208–209.
KELLER, J. B. 1980 Darcy’s law for flow in porous media and the two-space
method. In Nonlinear Partial Differential Equations in Engineering and Applied
Science (ed. R. L. Sternberg et al.). Lecture Notes in Pure and Applied Mathe-
matics, vol. 54, pp. 429–443. Dekker, New York.
KELLER, J. B. & KELLER, H. B. 1964 Water wave run-up on a beach. ONR. Res.
Rep. Contract No. NONNR-3828(00), Department of the Navy. Washington,
D.C..
KERR, A. M. & BAIRD, A. H. 2007 Natural barriers to natural disasters. Bio-
Science 57, 102–103.
KRONE, R. B. 1963 A study of rheologic properties of estuarial sediments. Tech.
Bull. No. 7, Committee on Tidal Hydraulics, U S Army Corps of Engineers.
KUNDU, P. K. & COHEN, I. M. 2002 Fluid Mechanics. Academic Press.
LAKES, R. S. 2009 Viscoelastic materials. Cambridge University Press.
LAMB, H. 1932 Hydrodynamics. Dover.
227

LIONS, J. L. 1981 Some Methods in the Mathematical Analysis of Systems and Their
Control. Science Press.
LIU, P. L.-F. 1973 Damping of water waves over porous bed. J. Hydraul. Div.,
ASCE 99, 2263–2271.
LIU, P. L.-F. et al. 2005 Observations by the International Tsunami Survey Team
in Sri Lanka. Science 308, 1595.
LIU, P. L.-F. & CHAN, I-C. 2007a On long-wave propagation over a fluid-mud
seabed. J. Fluid Mech. 579, 467–480.
LIU, P. L.-F. & CHAN, I-C. 2007b A note on the effects of a thin visco-elastic
mud layer on small amplitude water-wave propagation. Coast. Eng. 54, 233–
247.
LIU, P. L.-F. & DALRYMPLE, R. A. 1984 The damping of gravity water-waves
due to percolation. Coast. Eng. 8, 33–49.
LIU, P. L.-F. & ORFILA, A. 2007 Viscous effects on transient long-wave propa-
gation. J. Fluid Mech. 520, 83–92 (and corrigendum 537, 2005, 443).
LIU, K.-F. & MEI, C. C. 1989 Effects of wave-induced friction on a muddy
seabed modelled as a Bingham-plastic fluid. J. Coast. Res. 5, 777–789.
LYNETT, P. J. 2002 A multi-layer approach to modeling generation, propagation,
and interaction of water waves. Ph.D. dissertation, Cornell University.
MAA, J. P.-Y. & MEHTA, A. J. 1987 Mud erosion by waves: a laboratory study.
Cont. Shelf Res. 7, 1269–1284.
MAA, J. P.-Y. & MEHTA, A. J. 1988 Soft mud properties: Voigt model. J. Waterw.
Port Coast. Ocean Eng. 114, 765–770.
228

MAA, J. P.-Y. & MEHTA, A. J. 1990 Soft mud response to water waves. J. Waterw.
Port Coast. Ocean Eng. 116, 634–650.
MACPHERSON, H. 1980 The attenuation of water waves over a non-rigid bed.
J. Fluid Mech. 97, 721–742.
MADSEN, P. A., FUHRMAN, D. R. & SCHAFFER, H. A. 2008 On the
solitary wave paradigm for tsunamis. J. Geophys. Res. 113, C12012,
doi:10.1029/2008JC004932.
MADSEN, P. A. & SCHAFFER, H. A. 2010 Analytical solutions for tsunami
runup on a plane beach: single waves, N -waves and transient waves. J. Fluid
Mech. 645, 27–57.
MALLARD, W. W. & DALRYMPLE, R. A. 1977 Water waves propagating over a
deformable bottom. Proc. Offshore Tech. Conf. OTC 2895, 141–146.
MALVERN, L. E. 1969 Introduction to the Mechanics of a Continuous Medium. Pren-
tice Hall.
MASSEL, S. R., FURUKAWA, K. & BINKMAN, R. M. 1999 Surface wave propa-
gation in mangrove forests. Fluid Dynamics Res. 24, 219–249.
MAZDA, Y., KOBASHI, D. & OKADA, S. 2005 Tidal-scale hydrodynamics within
mangrove swamps. Wetlands Ecol. Manage. 13, 647–655.
MEI, C. C. 1983 The Applied Dynamics of Ocean Surface Waves. Wiley.
MEI, C. C. 1992 Method of homogenization applied to dispersion in porous
media. Transp. Porous Med. 9, 261–274.
MEI, C. C. 1995 Mathematical Analysis in Engineering. Cambridge University
Press.
229

MEI, C. C., CHAN, I-C., LIU, P. L.-F., HUANG, Z. & ZHANG, W. 2011 Long
waves through emergent coastal vegetation. (Submitted).
MEI, C. C., KROTOV, M., HUANG, Z. & HUHE, A. 2010 Short and long waves
over a muddy seabed. J. Fluid Mech. 643, 33–58.
MEHTA, A. J., LEE, S.-C. & LI, Y. 1994 Fluid mud and water waves: a brief
review of interactive processes and simple modeling approaches. Contract
Report DRP-94-4, U.S. Army Corps of Engineers.
MEI, C. C. & LIU, K.-F. 1987 A Bingham-plastic model for a muddy seabed
under long waves. J. Geophys. Res. 92, 14581–14594.
MEI, C. C., LIU, K.-F. & YUHI, M. 2001 Mud flows - slow and fast. In Geomor-
phological Fluid Dynamics (ed. Provencale, A. & Balmforth, N.). Lecture Notes
in Physics, vol. 582, pp. 548–578. Springer.
MEI C. C., STIASSNIE, M. & YUE, D. K.-P. 2005 Theory and Applications of Ocean
Surface Waves. World Scientific.
MEI, C. C. & VERNESCU, B. 2010 Homogenization Methods for Multiscale Mechan-
ics. World Scientific.
MO, W. 2010 Numerical investigation of solitary wave interaction with group
of cylinders. Ph.D. dissertation, Cornell University.
MO, W. & LIU, P. L.-F. 2009 Three dimensional numerical simulations for non-
breaking solitary wave interacting with a group of slender vertical cylinders.
Inter. J. Nav. Archit. Oc. Engng. 57, 102–103.
NEPF, H. M. 1999 Drag, turbulence, and diffusion in flow through emergent
vegetation. Water Resour. Res. 35, 479–489.
230

NEPF, H. M., SULLIVAN, J. A. & ZAVISTOSKI, R. A. 1997 A model for diffusion
within emergent vegetation. Limnol. Oceanogr. 42, 1735–1745.
NG, C.-O. 2000 Water waves over a muddy bed: a two-layer Stokes’ boundary
layer model. Coast. Eng. 40, 221–242.
NG, C.-O., FU, S. C. & BAI, Y. C. 2002 Mass transport in a thin layer of bi-
viscous mud under surface waves. China Ocean Eng. 16, 423–436.
NG, C.-O. & ZHANG, X. 2007 Mass transport in water waves over a thin layer
of soft viscoelastic mud. J. Fluid Mech. 573, 105–130.
NIELSEN, P. 1992 Coastal Bottom Boundary Layers and Sediment Transport. World
Scientific.
OTT, E. & SUDAN, R. N. 1970 Damping of solitary waves. Phys. Fluids 13, 1432–
1434.
PAPANASTASIOU, T. C. 1987 Flows of materials with yield. J. Rheol. 31, 385–404.
PARK, Y. S., LIU, P. L.-F. & CLARK, S. J. 2008 Viscous flows in a muddy seabed
induced by a solitary wave. J. Fluid Mech. 598, 383–392.
PARK, Y. S. & LIU, P. L.-F. 2010 Oscillatory pipe flows of a yield-stress fluid. J.
Fluid Mech. 658, 211–228.
PEDERSEN, G. & GJEVIK, B. 1983 Runup of solitary waves. J. Fluid Mech. 135,
283–299.
PEREGRINE, D. H. 1972 Equations for water waves and the approximations be-
hind them. In Waves on Beaches and the Resulting Sediment Transport (ed. R. E.
Meyer). pp. 95–121. Academic.
231

PHILLIPS, O. M. 1977 Dynamics of the Upper Ocean. Cambridge University Press.
PIEDRA-CUEVA, I. 1993 On the response of a muddy bottom to surface water
waves. J. Hydraul. Eng. 31, 681–696.
PIEDRA-CUEVA, I. 1995 Drift velocity of spatially decaying waves in a two-layer
viscous system. J. Fluid Mech. 299, 217–239.
SAKAKIYAMA, T. & BIJKER, E. W. 1989 Mass transport velocity in mud layer
due to progressive waves. J. Waterw. Port Coast. Ocean Eng. 115, 614-633.
SANCHEZ-PALENCIA, E. 1980 Non-Homogeneous Media and Vibration Theory.
Springer.
SEGUR, H. 2007 Waves in shallow water, with emphasis on the tsunami of 2004.
In Tsunami and Nonlinear Waves (ed. A. Kundu). pp. 3–29. Springer.
SHENG, P. & ZHOU, M. Y. 1988 Dynamic permeability of porous media. Phy.
Rev. Lett. 61, 1951–1954.
SHEREMET, A. & STONE, G. W. 2003 Observations of nearshore wave dissipa-
tion over muddy sea beds. J. Geophys. Res. 108, 3357.
SHIBAYAMA, T. & AN, N. N. 1993 A visco-elastic-plastic model for wave-mud
interaction. Coast. Eng. Japan 36, 67-89.
SHUTO, N. 1967 Run-up of long waves on a sloping Beach. Coast. Eng. Japan 10,
23–38.
SMITH, W. H. F., SCHARROO, R., TITOV, V. V., ARCAS, D. & ARBIC, B. K. 2005
Satellite altimeters measure tsunami. Oceanography 18, 10–12.
232

STOESSER, T., SALVADOR, G. P., RODI, W. & DIPLAS. P. 2007 Large eddy sim-
ulation of turbulent flow through submerged vegetation. Transp. Porous Med.
78, 347–365.
SWART, D. H. 1974 Offshore sediment transport and equilibrium beach profiles.
Delft Hydr. Lab. Publ. No. 131.
SYNOLAKIS, C. M. 1987 The runup of solitary waves. J. Fluid Mech. 185, 523–545.
SYNOLAKIS, C. M. & KANOGLU, U. 2009 Tsunami Modeling: Development of
Benchmarked Models. In The Sea (ed. E. N. Bernard & A. R. Robinson). The
Sea: Ideas and Observations on Progress in the Study of the Seas, vol. 15,
pp. 237–294. Harvard University Press.
TANAKA, N., SASAKI, Y., MOWJOOD, M.I. M., JINADASA, K. B. S. N. & HOM-
CHUEN, S., 2007, Coastal vegetation structures and their function in tsunami
protection: experience of the recent Indian Ocean tsunami. Landscape Ecol.
Eng. 3, 33-45.
TANINO, Y. & NEPF, H. M. 2008 Lateral dispersion in random cylinder arrays
at high Reynolds number. J. Fluid Mech. 600, 339–371.
TARTAR, L. 2009 The General Theory of Homogenization: A Personalized Introduc-
tion. Springer.
TCHEN, C.-M. 1956 Interfacial waves in viscoelastic media. J. Appl. Phys. 27,
431–434.
TEH, S. Y. et al. 2009 Analytical and numerical simulation of tsunami mitigation
by mangroves in Penang, Malaysia. J. Asian Earth Sci. 36, 38–46.
233

THUY, N., TANIMOTO, K., TANAKA, N., HARADA, K. & IIMURA, K. 2009 Ef-
fect of open gap in coastal forest on tsunami run-up—investigations by ex-
periment and numerical simulation. Ocean Eng. 36, 1258–1269.
TIKHONOV, A. N. & SAMARSKII, A. A. 1963 Equations of Mathematical Physics.
Dover Publications.
TRAYKOVSKI, P., GEYER, W. R., IRISH, J. D. & LYNCH, J. F. 2000 The role of
wave-induced density-driven fluid mud flows for cross-shelf transport on the
Eel River continental shelf. Cont. Shelf Res. 20, 2113-2140.
WANG, X. 2008 Numerical modelling of surface and internal waves over shal-
low and intermediate water. Ph.D. dissertation, Cornell University.
WANG, X. & LIU, P. L.-F. 2006 An analysis of 2004 Sumatra earthquake fault
plane mechanisms and Indian Ocean tsunami. J. Hydraul. Res. 44, 147–154.
WANG, X. & LIU, P. L.-F. 2007 Numerical simulations of the 2004 Indian Ocean
Tsunamis - Coastal Effects. J. Earthq. Tsunami 1, 273–297.
WARD, D. 1995 Physical model study of Revere Beach, Massachusetts. US Army
Corps of Engineers, Waterways Experiment Station Technical Rep. CERC-95-2.
WELLS, J. T. & COLEMAN, J. M. 1981 Physical processes and fine-grained sedi-
ment dynamics, coast of Surinam, South America. J. Sed. Pet. 51, 1053–1068.
WEN, J. & LIU, P. L.-F. 1998 Effects of seafloor conditions on water wave damp-
ing. In Free Surface Flows with Viscosity (ed. P. A. Tyvand). pp. 145–178. Com-
putational Mechanics Publications.
WINTERWERP, J. C., DE GRAAFF, R. F., GROENEWEG, J. & LUIJENDIJK, A. P.
234

2007 Modelling of wave damping at Guyana mud coast. Coast. Eng. 54, 249–
261.
WOLANSKI, E., JONES, M. & BUNT, J. S. 1980 Hydrodynamics of a tidal creek-
mangrove swamp system. Aust. J. Mar. Freshwat. Res. 31, 431–450.
WOLANSKI, E. 1992 Hydrodynamics of mangrove swamps and their coastal
waters. Hydrobiologia. 247, 141–161.
YAMAMOTO, T., KONING, H. L., SELLMEIGHER, H. & HIJUM, E. V. 1978 On
the response of poro-elastic bed to water waves. J. Fluid Mech. 87, 193–206.
ZELT, J. A. 1986 Tsunamis: the response of harbours with sloping boundaries to
long wave radiation. Ph.D. thesis, California Institute of Technology.
ZELT, J. A. 1991 The run-up of nonbreaking and breaking solitary waves. Coast.
Eng. 14, 205–246.
ZHANG, X. Y. & NG, C.-O. 2006 Mud0wave interaction: a viscoelastic model.
China Ocean Eng. 20, 15–26.
ZHOU, M. Y. & SHENG, P. 1989 First-principle calculation of dynamic perme-
ability of porous media. Phy. Rev. B. 39, 12027–12039.
235
Copyright © 2022 FDOKUMEN