Dynamic user equilibrium in public transport networks with passenger congestion and hyperpaths
20
Dynamic user equilibrium in public transport networks with passenger congestion and hyperpaths q Valentina Trozzi a,⇑ , Guido Gentile b , Michael G.H. Bell c , Ioannis Kaparias d a Centre for Transport Studies, Imperial College London, Skempton Building, South Kensington Campus, London SW7 2BU, UK b Dipartimento di Ingegneria Civile, Edile e Ambientale, Universitá La Spaienza, Via Eudossiana, 18, 00184 Rome, Italy c Institute of Transport and Logistics Studies, University of Sydney, Newtown Campus C3, NSW 2006, Australia d City Collaborative Transport Hub, City University London, Northampton Square, London EC1V 0HB, UK article info Article history: Received 2 June 2013 Received in revised form 16 June 2013 Accepted 17 June 2013 Available online xxxx Keywords: Dynamic transit assignment Dynamic shortest hyperpaths FIFO queues for attractive sets Erlang pdf abstract This paper presents a dynamic user equilibrium for bus networks where recurrent over- crowding results in queues at stops. The route-choice model embedded in the dynamic assignment explicitly considers common lines and strategies with alternative routes. As such, the shortest hyperpath problem is extended to a dynamic scenario with capacity con- straints where the diversion probabilities depend on the time at which the stop is reached and on the expected congestion level at that time. In order to reproduce congestion for all the lines sharing a stop, the Bottleneck Queue Model with time-varying exit capacity, intro- duced in Meschini et al. (2007), is extended. The above is applied to separate queues for each line in order to satisfy the First-In-First-Out principle within every attractive set, while allowing overtaking among passengers with different attractive sets but queuing single file. The application of the proposed model to a small example network clearly reproduces the formation and dispersion of passenger queues due to capacity constraints and thus moti- vates the implementation of the methodology on a real-size network case as the next step for future research. Ó 2013 Elsevier Ltd. All rights reserved. 1. Introduction Transit assignment models describe and predict the patterns of network usage by passengers and are seen as fundamental inputs for justifying resource allocation in transport planning. Available models differ on the assumptions made about trav- eller behaviour and congestion effects. To simulate high-frequency or low-reliability services, frequency-based (FB) models are usually preferred, because it is plausible to assume that passengers do not choose a particular run and do not time their arrival at a stop to coincide with vehicle arrivals. Furthermore, these models are capable of easily handling the common lines dilemma (Chriqui and Robillard, 1975) faced by passengers, who do not know if it is better to board the first vehicle approaching a bus stop or to keep waiting for a vehicle of another line with a more convenient service. Indeed, since the seminal works of Nguyen and Pallottino (1988) and Spiess and Florian (1989), travel strategies (or, equivalently, hyperpaths) have been successfully exploited in FB models to represent passenger travel choice in public transport networks. 0191-2615/$ - see front matter Ó 2013 Elsevier Ltd. All rights reserved. http://dx.doi.org/10.1016/j.trb.2013.06.011 q This paper was presented at the 20th International Symposium on Transportation & Traffic Theory. It therefore also appears in the complete proceedings of the 20th ISTTT in [Procedia - Social and Behavioral Sciences, vol 80C (2013), pp. aaa–bbb]. ⇑ Corresponding author. Present address: Transport Planning – London Underground, 55 Broadway (100 Petty France), London SW1H 0BD, UK. Tel.: +44 (0)207 918 4699. E-mail addresses: ValentinaTrozzi@tfl.gov.uk, [email protected] (V. Trozzi), [email protected] (G. Gentile), [email protected] (M.G.H. Bell), [email protected] (I. Kaparias). Transportation Research Part B xxx (2013) xxx–xxx Contents lists available at ScienceDirect Transportation Research Part B journal homepage: www.elsevier.com/locate/trb Please cite this article in press as: Trozzi, V., et al. Dynamic user equilibrium in public transport networks with passenger congestion and hyperpaths. Transportation Research Part B (2013), http://dx.doi.org/10.1016/j.trb.2013.06.011
Transcript of Dynamic user equilibrium in public transport networks with passenger congestion and hyperpaths

Transportation Research Part B xxx (2013) xxx–xxx
Contents lists available at ScienceDirect
Transportation Research Part B
journal homepage: www.elsevier .com/ locate/ t rb
Dynamic user equilibrium in public transport networkswith passenger congestion and hyperpaths q
0191-2615/$ - see front matter � 2013 Elsevier Ltd. All rights reserved.http://dx.doi.org/10.1016/j.trb.2013.06.011
q This paper was presented at the 20th International Symposium on Transportation & Traffic Theory. It therefore also appears in the complete proof the 20th ISTTT in [Procedia - Social and Behavioral Sciences, vol 80C (2013), pp. aaa–bbb].⇑ Corresponding author. Present address: Transport Planning – London Underground, 55 Broadway (100 Petty France), London SW1H 0BD, UK.
(0)207 918 4699.E-mail addresses: [email protected], [email protected] (V. Trozzi), [email protected] (G. Gentile), michael.bell@sydne
(M.G.H. Bell), [email protected] (I. Kaparias).
Please cite this article in press as: Trozzi, V., et al. Dynamic user equilibrium in public transport networks with passenger congesthyperpaths. Transportation Research Part B (2013), http://dx.doi.org/10.1016/j.trb.2013.06.011
Valentina Trozzi a,⇑, Guido Gentile b, Michael G.H. Bell c, Ioannis Kaparias d
a Centre for Transport Studies, Imperial College London, Skempton Building, South Kensington Campus, London SW7 2BU, UKb Dipartimento di Ingegneria Civile, Edile e Ambientale, Universitá La Spaienza, Via Eudossiana, 18, 00184 Rome, Italyc Institute of Transport and Logistics Studies, University of Sydney, Newtown Campus C3, NSW 2006, Australiad City Collaborative Transport Hub, City University London, Northampton Square, London EC1V 0HB, UK
a r t i c l e i n f o
Article history:Received 2 June 2013Received in revised form 16 June 2013Accepted 17 June 2013Available online xxxx
Keywords:Dynamic transit assignmentDynamic shortest hyperpathsFIFO queues for attractive setsErlang pdf
a b s t r a c t
This paper presents a dynamic user equilibrium for bus networks where recurrent over-crowding results in queues at stops. The route-choice model embedded in the dynamicassignment explicitly considers common lines and strategies with alternative routes. Assuch, the shortest hyperpath problem is extended to a dynamic scenario with capacity con-straints where the diversion probabilities depend on the time at which the stop is reachedand on the expected congestion level at that time. In order to reproduce congestion for allthe lines sharing a stop, the Bottleneck Queue Model with time-varying exit capacity, intro-duced in Meschini et al. (2007), is extended. The above is applied to separate queues foreach line in order to satisfy the First-In-First-Out principle within every attractive set, whileallowing overtaking among passengers with different attractive sets but queuing single file.The application of the proposed model to a small example network clearly reproduces theformation and dispersion of passenger queues due to capacity constraints and thus moti-vates the implementation of the methodology on a real-size network case as the next stepfor future research.
� 2013 Elsevier Ltd. All rights reserved.
1. Introduction
Transit assignment models describe and predict the patterns of network usage by passengers and are seen as fundamentalinputs for justifying resource allocation in transport planning. Available models differ on the assumptions made about trav-eller behaviour and congestion effects. To simulate high-frequency or low-reliability services, frequency-based (FB) modelsare usually preferred, because it is plausible to assume that passengers do not choose a particular run and do not time theirarrival at a stop to coincide with vehicle arrivals. Furthermore, these models are capable of easily handling the common linesdilemma (Chriqui and Robillard, 1975) faced by passengers, who do not know if it is better to board the first vehicleapproaching a bus stop or to keep waiting for a vehicle of another line with a more convenient service. Indeed, since theseminal works of Nguyen and Pallottino (1988) and Spiess and Florian (1989), travel strategies (or, equivalently, hyperpaths)have been successfully exploited in FB models to represent passenger travel choice in public transport networks.
ceedings
Tel.: +44
y.edu.au
ion and

2 V. Trozzi et al. / Transportation Research Part B xxx (2013) xxx–xxx
In the traditional formulation of the hyperpath concept (Nguyen and Pallottino, 1988; Spiess, 1983, 1984; Spiess andFlorian, 1989), it is assumed that the strategy is chosen before the trip begins and, starting from the origin, involves the iter-ative sequence of: walking to a public transport stop or to the destination; then selecting the potentially optimal lines toboard (formally defined as attractive lines – Nguyen and Pallottino, 1988) together with, for each of them, the stop at whichto alight. If two or more attractive lines are available and the only information provided to passengers waiting at a stop is theline of the next-arriving bus, the best option is to board the next-arriving bus, provided it is attractive (Spiess, 1983, 1984). Asclarified by Bouzaïene-Ayari et al. (2001), ‘‘[t]he outcome of such a choice is a set of simple itineraries that can diverge, onlyat bus stops, along the attractive lines’’ and the realisation of a particular travel strategy may change, from day to day, due toevents at the stop, such as which attractive line becomes available first.
In the context of strategy-based assignment, passenger congestion has increasingly received attention in the literature(Cepeda et al., 2006; Cominetti and Correa, 2001; Cortés et al., 2013; De Cea and Fernandez, 1993; Schmöcker et al.,2008) because recurrent queuing and overcrowding have developed into a major problem affecting the high-frequency tran-sit systems of large cities. For example, during peak hours, passengers often experience an over-saturation waiting time atstops because they are unable to board the first-arriving vehicle of their choice set. The queue of those who are thus forced toremain at a stop may also increase passenger congestion for subsequent vehicle arrivals, thus leading to great variations inthe level of service (LOS) that cannot be properly captured by static models, even when capacity constraints are considered.
On the other hand, despite the increasing interest in overcrowding, strategy-based transit assignment with capacity con-straints has mainly been considered in a static setting (Cepeda et al., 2006; Cominetti and Correa, 2001; Cortés et al., 2013;De Cea and Fernandez, 1993; Gendreau, 1984; Kurauchi et al., 2003) and, consequently, only a few dynamic models exist(Schmöcker et al., 2008, 2011).
Moreover, the majority of previous work has dealt with capacity constraints in FB transit assignment with hyperpaths onthe assumption that queuing takes the form of passengers mingling at the stop, without respecting any boarding priority.Thus, it is hypothesised either that the extra waiting may affect the users’ perception of service frequency or that crowdingmay increase the perceived cost of travelling through the fail-to-board probability. The first method, formally known aseffective frequency, has been developed only in a static framework, either considering the ‘‘practical capacity’’ of the transitlines (De Cea and Fernandez, 1993) or strict capacity constraints (Cepeda et al., 2006; Cominetti and Correa, 2001), and hasalso been further refined to consider stochasticity in the passengers’ decision process (Cortés et al., 2013); on the other hand,the method of fail-to-board probability (Kurauchi et al., 2003; Schmöcker et al., 2008, 2011) has also been developed in aquasi-dynamic framework, dividing the analysis period into time intervals (of 15 min, for the proposed application) withinwhich the problem is treated statically.
Consequently, this paper fills in the gap existing in the literature of strategy-based transit assignment and proposes a fullydynamic user equilibrium model, where overcrowding may lead to the progressive formation and dispersion of First-In-First-Out (FIFO) queues of passengers at transit stops.
In order to reproduce this phenomenon, it is assumed, as in Meschini et al. (2007), that flows are macroscopic time-continuous functions, formally known as temporal profiles (Bellei et al., 2005); and transit services are conceived as acontinuous flow of supply with ‘‘instantaneous capacity’’ (this implies that the supplied capacity is expressed in terms ofpassengers per hour and not passengers per vehicle), which allows the effect of time-discrete services to be representedthrough the temporal profile of the average waiting time.
Fig. 1. Dynamic user equilibrium: model structure.
Please cite this article in press as: Trozzi, V., et al. Dynamic user equilibrium in public transport networks with passenger congestion andhyperpaths. Transportation Research Part B (2013), http://dx.doi.org/10.1016/j.trb.2013.06.011

V. Trozzi et al. / Transportation Research Part B xxx (2013) xxx–xxx 3
Fig. 1 schematically presents the structure of the user equilibrium model described in this work. The main inputs are: onthe demand side, the time-varying origin–destination (OD) matrix; on the supply side, the network topology and the char-acteristics of the transit lines in terms of vehicle capacities, time-dependent service frequency and in-vehicle travel time.
The user equilibrium can generally be regarded as a system comprising a demand model and a supply model. The formerconsists of:
� The Stop Model (SM), which, for any given set of attractive lines, yields the distribution of passengers among the linesincluded in the set (conditional probability, Nguyen and Pallottino, 1988), as well as the expected (Erlang-distributed)waiting time, depending on the transit lines’ characteristics and passenger congestion.� The Route Choice Model (RCM), which reflects the behaviour of a rational passenger travelling from an origin to a desti-
nation on the transit network for given arc performances (i.e. time-varying travel times and costs). It is assumed in thispaper that route choice is deterministic and thus is modelled through a dynamic shortest hyperpath search.
On the other hand, the components of the supply model for dynamic assignment (Cascetta, 2009, p. 425) are:
� The Network Flow Propagation Model (NFPM), which aims at finding time-varying arc flows that are consistent with the arctravel times for given route choices (but not consistent with line capacities – this is the main difference between theNFPM and the Dynamic Network Loading Problem where, instead, mutual consistency of flows and times through theAPF is sought for given route choices).� The Arc Performance Functions (APF), which, given any entry time, yield the exit time for each arc, depending on the transit
lines’ characteristics and the passenger flows over the network.
Building on the work of Meschini et al. (2007), the present study extends the concept of hyperpaths to transit networkswith passenger congestion, where the traditional assumption that passengers always board the first line of their choice set toarrive at their stop does not hold because of the formation and dispersion of FIFO passenger queues. More specifically, it isassumed that, in cases where congestion occurs, passengers join a single ‘mixed’ queue regardless of the specific line(s) thatthey intend to board. Thus, in order to reproduce overcrowding effects for all the lines sharing a stop, the Bottleneck QueueModel with time-varying exit capacity, introduced by Meschini et al. (2007), is extended and applied to separate queues (onefor each line of the stop) in order to satisfy FIFO within every attractive set, allowing overtaking among passengers with dif-ferent attractive sets.
The rest of the paper is organised as follows. In the next section, the background research is presented, while the notationand formulation is explained in Section 3. After detailing the methodology in Section 4, model implementation is presentedin Section 5. Finally, Section 6 draws conclusions and identifies areas for future research.
2. Background research on transit congestion
Although recurrent passenger congestion is one of the major problems faced by public transport networks in large cities,it is only very recently that attempts have been made to model this phenomenon in a dynamic setting and it does not seemthat a full agreement has been achieved about which methodology is most appropriate. Some authors (Hamdouch et al.,2011; Nuzzolo et al., 2003; Papola et al., 2009; Sumalee et al., 2009) have used the diachronic graph because it has the advan-tage of being inherently dynamic, in the sense that travel times and passenger flows on transit lines are always referred to aspecific run and thus to a certain time of the day. Moreover, this method has the additional benefit that the dynamic equi-librium reduces to a static assignment on the time-expanded network since the time dimension is explicitly reproduced bythe graph topology. However, these models present a shortcoming on the demand side because it is assumed that userswould choose specific runs, rather than lines, and try to synchronise their arrival at stops with the scheduled passages ofcarriers. While this assumption is acceptable for services with low frequency and high regularity, it is questionable in den-sely connected urban networks because, when using such networks, passengers perceive runs of the same transit line as aunitary supply facility with high frequency or low regularity of service, since they do not consider timetables, even if avail-able, when making their travel choices.
Alternatively, assignment models for congested transit networks can be developed using a frequency-based (FB) approach,which has the main advantage of requiring less-detailed input data, on the supply side, and of representing more easily thestrategic behaviour of passengers, on the demand side. In fact, FB models assume that passengers do not consider the servicetimetable explicitly but make their travel choice on the basis of line average frequencies, while implicitly handling the uncer-tainty of the common lines dilemma.
Most of the research carried out in the realm of FB transit assignment with strategies (or, equivalently, hyperpaths) hasdealt with overcrowding by making the assumption that passengers mingle at stops (Cepeda et al., 2006; Cominetti andCorrea, 2001; De Cea and Fernandez, 1993; Kurauchi et al., 2003; Leurent et al., 2011; Schmöcker et al., 2008, 2011). Thisimplies that no priority is respected in the waiting process and, in cases of over-saturation, all passengers have the sameprobability of boarding the next-arriving carrier, provided it is attractive. Under this hypothesis, a possible simple solutionwould consider the effective frequency (De Cea and Fernandez, 1993) – that is, a line’s frequency as perceived by waiting
Please cite this article in press as: Trozzi, V., et al. Dynamic user equilibrium in public transport networks with passenger congestion andhyperpaths. Transportation Research Part B (2013), http://dx.doi.org/10.1016/j.trb.2013.06.011

4 V. Trozzi et al. / Transportation Research Part B xxx (2013) xxx–xxx
passengers, which decreases as the probability of not boarding its first-arriving carrier increases – or the fail-to-boardprobability (Kurauchi et al., 2003).
In general, when passenger congestion occurs, the queuing protocol followed by travellers is determined by the stop lay-out. For example, for stations and stops with large platforms, it is correct to assume that passengers will mingle and so ex-pected waiting time, as well as passenger distribution among the attractive lines, can be calculated according to the methodspresented in the aforementioned studies. However, in urban bus networks, the stop layout is usually such that, when pas-senger congestion occurs, users arriving at a stop tend to respect the boarding priority of those who have arrived beforethem. Models based on the mingling queuing protocol are clearly not applicable to the latter scenario.
The problem of modelling congestion in the form of passenger FIFO queues has proven to be even more challenging thanthe case of mingling. The vast majority of models developed so far for FIFO queuing (Bouzaïene-Ayari, 1988; Bouzaïene-Ayariet al., 2001; Gendreau, 1984; Leurent and Benezech, 2011) make use of the following stability condition (Bouzaïene-Ayariet al., 2001): passengers waiting at a stop would consider an attractive set that is never completely saturated, in the sensethat, at least for one of the attractive lines, passengers can board the first vehicle coming. This rather strong assumption hastwo crucial shortcomings:
� As congestion increases, more (and hence ‘worse’) lines are included in the attractive set.� If all lines are congested, the model’s passengers would rather walk than keep waiting (even if frequencies are high, so
that the extra waiting time due to congestion is, anyhow, short, while walking to destination has a higher travel time).
A schedule-based approach has also been used (Hamdouch and Lawphongpanich, 2008; Hamdouch et al., 2011; Sumaleeet al., 2009) to represent the behaviour of passengers who choose a ranked set of runs (i.e. have an ordered set of ‘back-uptravel plans’) and know that, at each intermediate stop, they may not be able to board the best option, or that they may notbe able to sit, because of capacity constraints. Thus, in this case, the concept of the hyperpath is applied to a different sce-nario: passengers know and trust the service timetable (this is one of the basic assumptions of schedule-based models) andcan precisely select their best travel option; however, it is uncertain if they will be able to board/sit when congestion occurs.By contrast, the model presented here considers the case in which passengers have a good estimate of congestion levels butdo not know the exact arrival time of the vehicles.
Beyond the realm of hyperpaths in transit assignment, a different approach for dealing with formation and dispersion ofpassengers’ FIFO queues is presented by Meschini et al. (2007), which is based on the formulation of a FB multimodal assign-ment by extending an existing approach for Dynamic Traffic Assignment (DTA) (Bellei et al., 2005). This considers flows asmacroscopic time-continuous functions, and hence transit services are conceived as a continuous flow of supply with‘‘instantaneous capacity’’ (e.g. 1000 passengers per hour and not 100 passengers per vehicle), which allows the effect oftime-discrete services to be represented through their average waiting time. The limitation of that study, though, is that pas-senger strategies are not considered in the RCM. It is thus unclear how the additional waiting time due to overcrowdingshould be accounted for when passengers in a queue are willing to board a set of lines (formally known as an attractiveset – Nguyen and Pallottino, 1988) and passengers in the same queue have different attractive sets (for example, becausethey are bound for different destinations).
As in Trozzi (2013), in this work the additional queuing time at stops due to passenger flows exceeding line capacities iscalculated by means of a Bottleneck Queue Model (BQM). Also, addressing the limitation of Meschini et al. (2007), it is as-sumed that, in the context of commuting passengers who know by previous experience the number of carrier passages theymust let go before being able to board, the route choice can still be represented as the selection of an optimal strategy. There-fore, expected waiting times and passenger distribution among attractive lines may be calculated by extending the formulaspresented by Nguyen and Pallottino (1988), Billi et al. (2004) and Gentile et al. (2005a).
For clarity and simplicity, the current study concentrates solely on the transit assignment model and only delays due toqueuing are considered. The extension to a multimodal assignment, as well as to other forms of transit congestion (where,for example, dwelling times depend on boarding and alighting flows, or on-board discomfort depends on in-vehicle over-crowding), can be easily carried out as in Meschini et al. (2007). The next two sections give detailed insight into the proposedmethodology, including network representation, mathematical notation and problem formulation.
3. Network representation
3.1. The transit network
The topology of the transit network, including the line routes and the pedestrian network, is described through a directedbase graph B = (V, E), where V � @ is the set of vertices (@ is the set of positive integer numbers) and E # V � V is the set ofedges (Fig. 2). The generic edge e 2 E is univocally identified by its initial vertex TLe 2 V, or tail, and its final vertex HDe 2 V, orhead. The generic vertex v 2 V is associated with a location in space and thus is characterised by geographic coordinates;while the generic edge e 2 E is characterised by ke and qe. The topology of each line ‘ 2 L is defined by its route R‘. The genericsection is referred to as (R‘,i�1, R‘,i) 2 E, with i 2 [2, r‘], and corresponds to an edge of the base graph. For any given vertexv 2 V and line ‘ 2 L, the function s(v, ‘) 2 [0, r‘] yields, if it exists, the index such that R‘, s(v, ‘) = v, and 0 otherwise.
Please cite this article in press as: Trozzi, V., et al. Dynamic user equilibrium in public transport networks with passenger congestion andhyperpaths. Transportation Research Part B (2013), http://dx.doi.org/10.1016/j.trb.2013.06.011

Fig. 2. Base graph representation of a small network.
V. Trozzi et al. / Transportation Research Part B xxx (2013) xxx–xxx 5
Plh
Transit network notation:
ke 2 Rþease cite this ayperpaths. Tran
length of edge e (Rþ is the set of non-negative real numbers);
qe 2 Rþ speed on edge e (if qe = 0, this means that a connection is not available); L � @ set of lines included in the transit network; ‘ 2 L generic transit line; R‘ # V route of line ‘, an ordered sequence of r‘ 2 @ (not repeated) vertices, each of which is denoted R‘,i 2 V withi 2 [1, r‘];
v‘ 2 Rþ the vehicle capacity of its carrier; u‘ðsÞ 2 Rþ base frequency, the instantaneous flow of departures from the origin terminal R‘,1 at time s 2 R; h‘;iðsÞ 2 Rþ line time, the time when a carrier of line ‘ 2 L, departed from R‘,1 at time s 2 R, reaches the ith vertex alongits route, with i 2 [1, r‘];
l‘,i 2 {0,1} whether a stop is made or not at the ith vertex along the route of line ‘ 2 L, with i 2 [1, r‘].3.2. From the base graph to the model graph
The physical topology of the transit network represented by B is insufficiently detailed for modelling purposes. As such, amodel graph G = (N, A) is introduced, where N is the set of nodes and A # N � N is the set of arcs; the generic arc a 2 A is univ-ocally identified by its initial node TLa 2 N, or tail, and its final node HDa 2 N, or head, that is: a = (TLa, HDa). The model graph isbuilt on the grounds of the base graph, which is usually organised in a GIS database, considering the transit line routes andthe transit and pedestrian speeds. Each node i 2 N is indeed the triplet of: a vertex Vi 2 V, a type Ti 2 {P, C, S, B, A, Q}, and a lineLi 2 L [ 0. N � (V � {P, S, B, A, Q} � L [ 0).
Specifically, the node set and arc set are constructed as the union of the following subsets, detailed in the box below:
N ¼ NP [ NC [ NS [ NB [ NA [ NQ ;
A ¼ AP [ AL [ AD [ AZ [ AA [ AW [ AQ:
Model graph notation:
NP pedestrian nodes, NP = {(v, P, 0): v 2 V}; NC centroid nodes, NC = {(v, C, 0): v 2 V}; NS stop nodes, NS = {(R‘,i, S, 0): ‘ 2 L, i 2 [1, r‘ � 1], l‘,i > 0}; NB boarding nodes, NB = {(R‘,i, B, ‘): ‘ 2 L, i 2 [1, r‘ � 1]}; NA alighting nodes, NA = {(R‘,i, A, ‘): ‘ 2 L, i 2 [2, r‘]}; NQ queuing nodes, NQ = {(R‘,i, Q, ‘): ‘ 2 L, i 2 [1, r‘ � 1], l‘,i > 0}; AP pedestrian arcs – representing walking time: AP = {(i, j): i 2 NP, j 2 NP, e = (Vi, Vj) 2 E, qe > 0}; AL line arcs – representing in-vehicle travel time: AL = {(i, j) 2 A: i 2 NB, j 2 NA, Vi � R‘,k, Vj � R‘,k+1, ‘ 2 L, i 2 [1, r‘ � 1]}; AD dwelling arcs – representing the time spent by the bus at a stop while passengers alight/board: AD = {(i, j) 2 A: i 2 NA,j 2 NB, Vi � R‘,k, Vj � R‘,k+1, ‘ 2 L, i 2 [2, r‘ � 1])};
AZ dummy arcs – introduced for algorithmic purposes to identify more easily arcs representing the waiting process;they connect the line stops and the pedestrian network: AZ = {(i, j) 2 A: i 2 NP, j 2 NS, Vi � Vj};
AA alighting arcs – representing the time at which passengers need to disembark: AA = {(i, j) 2 A: i 2 NA, j 2 NP, Vi � Vj}; AQ queuing arcs – representing the over-saturation waiting time, i.e. the ‘‘time spent by users queuing at the stop andwaiting [until] the next service becomes actually available to them’’ (Meschini et al., 2007): AQ = {(i, j) 2 A: i 2 NS,j 2 NQ, Vi � Vj};
AW
waiting arcs – representing the under-saturation waiting time, i.e. the average delay due to the fact that the transitservice is not continuously available over time: AW = {(i, j) 2 A: i 2 NQ, j 2 NB, Vi � Vj};FSi
forward star of node i 2 N – i.e. the set of arcs sharing the same tail i: FSi = {a 2 A: TLa = i}; BSj backward star of node j 2 N – i.e. the set of arcs sharing the same head j: BSj = {a 2 A: HDa = j}.rticle in press as: Trozzi, V., et al. Dynamic user equilibrium in public transport networks with passenger congestion andsportation Research Part B (2013), http://dx.doi.org/10.1016/j.trb.2013.06.011

6 V. Trozzi et al. / Transportation Research Part B xxx (2013) xxx–xxx
3.3. Hypergraph and hyperpaths
The Network Flow Propagation Model, which yields the inflow temporal profile of each arc, exploits the above graphic rep-resentation of the transit network as a directed graph G. On the other hand, the Stop Model, which yields the arc conditionalprobabilities at each stop node for every possible attractive set, and the Route Choice Model relate to a different graphic struc-ture, namely a directed hypergraph HG = (N, F) built on the graph G. Let F be the set of forward hyperarcs (Gallo et al., 1993),henceforth simply referred to as hyperarcs, included in hypergraph H. We assume: F = An{AW [ AQ} [ AH, such that:
� AH: is the set of waiting hyperarcs (Gentile et al., 2005b) – these represent the total expected waiting time (i.e. under-sat-uration plus over-saturation delay) for the considered set of attractive lines serving a stop: AH # {(i, j) 2 F: i 2 NS, J # NB,j 2 J, Vi � Vj};� HFSi: the hyper-forward star of node i 2 N, i.e. the set of hyperarcs h sharing the same stop tail i: HFSi = {h 2 AH: TLh = i}.
Because a waiting hyperarc h 2 AH is univocally identified by a singleton tail TLh 2 NS and by a set head HDh # NB, thehyperarc may be conceived as made up of ‘branches’, each of which represents the total waiting and queuing timebefore boarding one specific line of the attractive set. (More rigorously, a branch of the hyperarc represents the totalwaiting time conditional to boarding that specific line as the first available at the stop among all the lines in the consideredattractive set.) In the remainder of the paper, the following notation will be used to identify the branch of a hyperarc: a 2 h,h 2 AH.
The alternatives considered in the RCM are hyperpaths and are defined as follows: a hyperpath k connecting origin o 2 NC
to destination d 2 NC is a sub-hypergraph Hk,o,d = (Nk, Fk) of HG, where Nk � N, Fk � F, such that:
� Hk,o,d is acyclic;� o has no predecessors and one successor hyperarc;� d has no successors and at least one predecessor hyperarc;� Each of the other nodes has one successor hyperarc and at least one predecessor hyperarc.
It should be noted here that, in contrast to what is assumed in Meschini et al. (2007) and Trozzi (2013), the supply anddemand models are represented by means of different graphic structures. This theoretical complication has importantadvantages from the algorithmic side, as it allows great flexibility in representing different phenomena that are only relevantin the demand or the supply model.
For example, it is assumed that when travellers make their travel choices (demand model), they do not distinguish be-tween the under-saturation waiting and the over-saturation queuing times. Moreover, they tend to group together lines withpartially overlapping itineraries (common lines) that share the same stop and consider them as a unique travel alternative,with its own total waiting (plus queuing) time and travel time upon boarding. The hyperarcs of the hypergraph HG are cru-cial to represent this combined waiting-plus-queuing time for a set of attractive lines considered together as a unique travelalternative.
On the other hand, when passenger flows are propagated across the network by the NFPM (supply model), it is veryimportant to separate the waiting from the queuing time in order to ensure consistency between the flow that leaves a queu-ing arc and the capacity available on the vehicle; consequently, in the model graph G it is chosen to distinguish waiting andqueuing arcs. Moreover, because in the NFPM it is necessary to build a model with separate queues, combining the totalwaiting times of several lines through a hyperarc is not effective, as the following example helps to clarify.
If overcrowding occurs at a bus stop, the layout is usually such that all passengers wait in a single ‘mixed’ queue, regard-less of the specific line(s) they may prefer to board. Assume the first passenger in the queue does not board the first busarriving at the stop because it is not attractive for him/her. Then, if there is available capacity on board, the first passengercan be overtaken by the second, third, etc. in the queue, if the service is in their attractive set. This overtaking among pas-sengers with different attractive sets of lines would violate the FIFO discipline of the ‘mixed’ queue, but can be disregardedby developing a model with separate queues.
If the same graphic structure (hypergraph) is to be used to model the supply and demand when hyperpaths areconsidered in the RCM for dynamic assignment, then a model with separate queues can be obtained only representingthe under-saturation waiting and over-saturation queuing times in the inverse order, as in Trozzi (2013). Although thisallows for the representation of separate queues even when passengers queue in single file, the modelling assumption isquestionable from a phenomenal point of view, since exactly the opposite occurs in reality, and it does not guarantee theflexibility provided by two separate models (supply and demand) that are referred to different graphic structures (modelgraph and hypergraph).
In order to clarify the difference between G and HG, Fig. 3 shows two representations of Stop 2 in Fig. 2, one using thehypergraph (a) and the other using the model graph (b). It is important to notice here that each branch of the hyperarc(a⁄ 2 h 2 AH) in the hypergraph HG is associated with a line and corresponds to a queuing arc (a0 2 AQ) and the followingwaiting arc (a00 2 AW) in the model graph G, such that VTLa� ¼ VTLa0 and VHDa� ¼ VHDa00 .
Please cite this article in press as: Trozzi, V., et al. Dynamic user equilibrium in public transport networks with passenger congestion andhyperpaths. Transportation Research Part B (2013), http://dx.doi.org/10.1016/j.trb.2013.06.011

Fig. 3. Hypergraph (a) and model graph (b) representations of the network of Stop 2 of Fig. 2.
V. Trozzi et al. / Transportation Research Part B xxx (2013) xxx–xxx 7
4. Methodology
4.1. Problem definition
The extension of the first principle of Wardrop to a dynamic scenario allows the strategy-based dynamic transit assign-ment model studied here to be formulated as a dynamic Deterministic User Equilibrium (DUE) that represents configurationsin which no user can improve his/her travel cost at the time he/she is travelling by unilaterally changing hyperpath. The userequilibrium can be specified as a fixed-point problem (Cascetta, 2009: 305, 464–467) by combining the supply and demandmodels or, equivalently, by combining the APF and the Network Loading Map (Bellei et al., 2005; Gentile et al., 2007), whichmerges the RCM and NFPM, as done here.
The following sub-components therefore need to be specified and will be examined in the remainder of this section:
� Arc Performance Functions, which yield, for given passenger flows and transit supply, the temporal profiles of exit times foreach arc.� Stop Model, which yields, for each set of attractive lines, the temporal profiles of conditional probabilities pajh(s), when
passenger flows and transit supply are known.� Route Choice Model, which reflects the behaviour of a rational passenger travelling from an origin to a destination for given
profiles of: generalised costs, travel times and conditional probabilities; for each destination, it yields the (hyper)arc diver-sion probability, i.e. the probability that the considered (hyper)arc is included in the minimal hyperpath.� Network Flow Propagation Model, which calculates temporal profiles of link flows that are consistent with line capacities
for given (hyper)arc diversion probabilities.
Please cite this article in press as: Trozzi, V., et al. Dynamic user equilibrium in public transport networks with passenger congestion andhyperpaths. Transportation Research Part B (2013), http://dx.doi.org/10.1016/j.trb.2013.06.011

8 V. Trozzi et al. / Transportation Research Part B xxx (2013) xxx–xxx
Ph
User equilibrium notation:
ua(s)lease cite thiyperpaths. T
instantaneous frequency (instantaneous flow of carriers) of the line corresponding to a, if a is entered at timesua(s) –1 "a 2 AW 2 A, or a 2 h 2 AH 2 F;
ta(s)
exit time from arc a for users entering it at time s; t�1a (s)
entry time to the arc a for users exiting it at time s; ja(s) congestion parameter, expressed as the number of vehicle arrivals that passengers, reaching the stopcorresponding to the vertex VTLa at time s, have to wait before boarding the line associated with a; ja(s) > 0"a 2 AQ 2 A, or a 2 h 2 AH 2 F;
wh(s)
expected waiting time for passengers reaching the stop of vertex VTLh at time s and considering the attractiveline set represented by hyperarc h 2 AH;ca(s)
travel cost on arc a for users entering it at time s: a 2 AP [ AL [ AD [ AZ [ AA 2 F; ch(s) travel cost of the waiting hyperarc h for passengers reaching the stop of vertex VTLh at time s and consideringthe attractive line set represented by hyperarc h 2 AH 2 F
ga(ja(s)) value of time on a for users entering it at time s, a 2 AP [ AL [ AD [ AZ [ AA 2 F or it may be a branch of anhyperarc h 2 AH; ga is a function of the congestion at time s;
tajh(s) conditional exit time for passengers reaching the stop of vertex VTLa at time s and considering the attractiveline set represented by waiting hyperarc h 2 AH, relative to the event of boarding the line LHDa associated withthe branch a 2 h;
pajh(s)
conditional probability for passengers reaching the stop of vertex VTLa at time s and considering the attractiveline set represented by waiting hyperarc h 2 AH, relative to the event of boarding the line LHDa associated withthe branch a 2 h;gi,d(s)
total travel cost from node i to destination d 2 NC at time s; rh,d(s) diversion probability of using hyperarc h 2 F, for users entering it at time s and directed to destination d 2 NC,among all hyperarcs of its tail’s hyper-forward star;
ra,d(s) diversion probability of using arc a 2 A, for users entering it at time s and directed to destination d 2 NC, amongall arcs of its tail’s forward star;
qdemTLa ;dðsÞ
instantaneous demand flow from TLa to d 2 NC at time s; it is –0 only if TLa 2 NC;qina ðsÞ
instantaneous inflow of passengers entering arc a 2 A at time s;qina;dðsÞ
instantaneous inflow of passengers entering arc a 2 A at time s and directed to destination d 2 NC;qINa ðsÞ
cumulative inflow of arc a 2 A at time s, resulting from the network loading;qouta ðsÞ
instantaneous outflow of passengers leaving arc a 2 A at time s;qouta;d ðsÞ
instantaneous outflow of passengers leaving arc a 2 A at time s and directed to destination d 2 NC;qOUTa ðsÞ
cumulative outflow of arc a 2 A at time s, resulting from the network loading;ea(s)
instantaneous exit capacity of arc a 2 A at time s; eCUMa ðsÞ
cumulative exit capacity of arc a 2 A at time s; qdem vector of demand flows; q vector of instantaneous arc (in/out) flows; g vector of travel cost to destinations; r vector of diversion probabilities.4.2. Arc Performance Functions
4.2.1. Flow-independent performancesThe APF of each arc a 2 A determines the temporal profile of the exit time for a given entry time s depending on the in-
flows of the arc itself and of its adjacent arcs at previous instants resulting from the network loading. Thus, in general, thetravel costs are not separable in either time or space.
In this particular formulation, except for the queuing arcs, all other arcs have a flow-independent exit time provided bythe following equations, based on the exogenous inputs:
taðsÞ ¼ ðkij=qijÞ þ s; 8a 2 AP; ð1Þ
taðsÞ ¼ h‘;s h�1‘;s�1ðsÞ
� �; 8a 2 A; L ð2Þ
uaðsÞ ¼ u‘ h�1‘;s ðsÞ
� �� @h�1
‘;s ðsÞ=@s� �
; 8a 2 AW; ð3aÞ
taðsÞ ¼ da þ ð1=uaðsÞÞ þ s; 8a 2 AW; ð3bÞ
taðsÞ ¼ da þ s; 8a 2 AZ [ AD [ AA; ð4Þ
s article in press as: Trozzi, V., et al. Dynamic user equilibrium in public transport networks with passenger congestion andransportation Research Part B (2013), http://dx.doi.org/10.1016/j.trb.2013.06.011

V. Trozzi et al. / Transportation Research Part B xxx (2013) xxx–xxx 9
where ij ¼ ðVTLa ;VHDa Þ; ‘ = LHDa = LTLa is the line corresponding to HDa and TLa; s = s(LHDa, VHDa); s � 1 = s(LTLa, VTLa); da is a con-stant representing alighting, boarding, dwelling time and, for algorithmic purposes, also the travel time on dummy arcs.
4.2.2. Bottleneck Queue Model with variable exit capacityThe queuing process can be seen as a ‘gate system’. As soon as passengers reach a stop, they join a queue that can be
thought of as being behind a gate: whoever is at the front of the queue passes through the gate (so the queuing time dueto congestion is over) and starts waiting for the next arrival (this is the under-saturation delay due to the discontinuityof the service).
Eq. (3b) only considers the latter contribution, while the contribution due to overcrowding is considered in the perfor-mance function of queuing arcs, which in turn depends on the current length of the queue at the stop by means of a Bottle-neck Queue Model with time-varying exit capacity (Eqs. (5)–(10)).
Although these equations may appear somewhat complicated, their algorithmic implementation (Bellei et al., 2005; Tro-zzi, 2013) is fairly straightforward and so only a conceptual explanation is given here.
With reference to Fig. 3b, consider the waiting arc a00. Its exit capacity at s may be calculated as in Eq. (5), where b 2 AD isthe dwelling arc that enters the same boarding node of the waiting arc a00 and the outflow is defined as in Eq. (6) by applyingthe FIFO and flow conservation rules (Cascetta, 2001).
Pleasehyper
ea00 ðsÞ ¼ v‘ �ua00 ðsÞ � qoutb ðsÞ ð5Þ
qoutb ðsÞ ¼ qin
b t�1b ðsÞ
� �� @t�1
b ðsÞ=@s� �
ð6Þea0 t�1
a00 ðsÞ� �
¼ ea00 ðsÞ= @t�1a00 ðsÞ=@s
� �ð7Þ
The exit capacity of a00 2 AW coincides with the instantaneous capacity available on board (5) at the same time s. On the otherhand, for those who leave a0 2 AQ at t�1
a00 ðsÞ and leave a00 2 AW at s, the exit capacity ea0 t�1a00 ðsÞ
� �does not coincide with the
instantaneous capacity available on board at the same time ea00 t�1a00 ðsÞ
� �, but the exit capacity ea00 ðsÞ needs to be propagated
backwards in time (6).The temporal profiles of the exit capacity and inflows of the queuing arc a0 2 AQ are then used to obtain the cumulative
values of exit capacity and inflows (8).
qINa0 ðsÞ ¼
Z s
0qin
a0 ð#Þd#; eCUMa0 ðsÞ ¼
Z s
0ea0 ð#Þd# ð8Þ
qOUTa0 ðsÞ ¼min qIN
a0 ð#Þ þ eCUMa0 ðsÞ � eCUM
a0 ð#Þ : # 6 s� �
ð9Þ
qINa0 ðsÞ � qOUT
a0 ðsÞ ¼Z ta0 ðsÞ
sea0 ð#Þd# ð10Þ
At this point, the cumulative flow leaving arc a0 2 AQ is calculated in the spirit of the BQM, Bottleneck Queue Model (9). If it isassumed that the queue at time s began at a previous instant # 6 s, then qOUT
a0 ð#Þ ¼ qINa0 ð#Þ, and from # to s the cumulative flow
of passengers that leave the arc a0 2 AQ is eCUMa0 ðsÞ � eCUM
a0 ð#Þ, then Eq. (9) yields the cumulative number of passengers thathave left the queue at time s as the minimum among each cumulative outflow that would occur if the queue began at a pre-vious instant # 6 s.
On the other hand, the number of passengers queuing on arc a0 2 AQ at time s, which is qINa0 ðsÞ � qOUT
a0 ðsÞ, based on Eq. (10)can be expressed also as the integral of the exit capacity from s to the exit time ta0 ðsÞ. The latter is consistent with the tem-poral profile of the variable exit capacity of the queuing arc and is the output of the above BQM.
During this period of time ½s; ta0 ðsÞ, some buses of the line associated with a0 2 AQ approach the stop but queuing passen-gers cannot board them because of capacity constraints. Therefore, the number of bus passages that the passengers must letgo before boarding is given by Eq. (11), where bxc indicates the floor function of x.
ja0 ðsÞ ¼ 1þZ ta0 ðsÞ
sua00 ð#Þd#
� ð11Þ
This result will then be used as an input of the SM. Considering Fig. 3, if a⁄ is a branch of h 2 AH such that VTLa� ¼ VTLa0 andVHDa� ¼ VHDa00 , then ja� ðsÞ ¼ ja0 ðsÞ.
4.3. Stop Model
Once congestion is known for each line, the Stop Model yields: the conditional probabilities pajh,(s); the total (waiting plusqueuing) time spent at the stop wh(s) for users that have selected the hyperarc h at time s; and the exit time from a 2 h tajh(s),conditional on the event of boarding the line corresponding to a if users have selected the attractive set corresponding to h.
When making their choice, passengers do not distinguish between under-saturation and over-saturation waiting time.Moreover, they tend to group together partially overlapping lines that share the same stop and consider them as a uniquetravel alternative, with its own total waiting (plus queuing) time and travel time upon boarding. wh is this combined waiting(plus queuing) time for the set of attractive lines represented by the hyperarc h.
cite this article in press as: Trozzi, V., et al. Dynamic user equilibrium in public transport networks with passenger congestion andpaths. Transportation Research Part B (2013), http://dx.doi.org/10.1016/j.trb.2013.06.011

10 V. Trozzi et al. / Transportation Research Part B xxx (2013) xxx–xxx
The model is formally described by Eqs. (12)–(14) (Trozzi et al., 2013):
Pleasehyper
pajhðsÞ ¼R þ1
0 caðsÞdw; a 2 h0; a R h
(ð12Þ
tajhðsÞ ¼ sþ 1pajhðsÞ
�Z þ1
0w � caðsÞdw ð13Þ
whðsÞ ¼Xa2h
pajhðsÞ � ðtajhðsÞ � sÞ ð14Þ
where ca(s) is the probability of boarding the line associated with a at time s and is defined as:
caðsÞ ¼ faðw; sÞ �Yb2hb–a
Fbðw; sÞ; a 2 h ð15Þ
and fa(w, s) and Faðw; sÞ are respectively the Probability Density Function (PDF) and the survival function at time s of thetotal time w before boarding the line associated with branch a of the hyperarc h.
Given the conventional assumptions about passenger and carrier arrivals (Nguyen and Pallottino, 1988; Spiess andFlorian, 1989), the total waiting time w before boarding the jth carrier of the line associated with a may be described asa time-dependent stochastic variable with Erlang distribution of parameters ja(s) and ua(s). Eq. (16) shows the ErlangPDF of w, where, in order to improve readability, ja(s) and ua(s) are expressed as ja and ua.
faðw; sÞ ¼uja
a �expð�ua �wÞ�wja�1
ðja�1Þ! ; if w P 0
0; otherwise
(ð16Þ
It should be noted here that the results of the SM are not destination specific and are used as an input by the Route ChoiceModel.
4.4. Route Choice Model
The Route Choice Model calculates (hyper)arc diversion probabilities on the grounds of: travel costs, travel times, conditionalprobabilities and total waiting costs. As for the SM, the total waiting time wh is associated with the hyperarc h.
Travel costs are assumed to be dependent on travel times through the value of time (VOT) function ga, as in Eqs. (17)–(19).The VOT is the sum of a constant parameter aa and an increasing function of the congestion ba(ja(s)), which is non-null onlyif a 2 h 2 AH.
gaðjaðsÞÞ ¼ aa þ baðjaðsÞÞ 8a 2 F ð17ÞchðsÞ ¼
Xa2h
pajhðsÞ � ðtajhðsÞ � sÞ � gaðjaðsÞÞ; h 2 AH ð18Þ
caðsÞ ¼ ðtaðsÞ � sÞ � aa 8a 2 AP [ AL [ AD [ AZ [ AA ð19Þ
In order to avoid explicit hyperpath enumeration, the formulation of the RCM can be seen as a recursive local choice thatstarts from the destination d 2 NC and proceeds backwards to the origin(s). At each intermediate node i 2 N, passengers selectthe arc/hyperarc of its (hyper) forward star that minimises the total travel cost to d, as in Eq. (20).
gi;dðsÞ ¼ min
0; if i ¼ d
caðsÞ þ gHDa ;dðtaðsÞÞ : a 2 FSi; if i R NS
chðsÞ þXa2h
pajhðsÞ � ðgHDa ;dðtajhðsÞÞÞ : h 2 HFSi; if i 2 NS
8>>><>>>:
ð20Þ
As said, passengers do not distinguish between the under-saturation delay and the over-saturation queuing time but con-sider the total waiting time at the stop. Nonetheless, one would expect that the additional queuing time due to denied board-ing will be perceived more negatively than the normal waiting time. Consequently, when calculating the cost of waiting ch,the contribution of ‘total waiting time’ brought by each line is weighted by the value of time, which is an increasing functionof the congestion parameter ja.
The deterministic RCM can also be formulated as the following complementarity problem, formally known asWardrop inequalities, referred to the decision of passengers leaving node i 2 N at time s and directed toward destinationd 2 NC:
cite this article in press as: Trozzi, V., et al. Dynamic user equilibrium in public transport networks with passenger congestion andpaths. Transportation Research Part B (2013), http://dx.doi.org/10.1016/j.trb.2013.06.011

V. Trozzi et al. / Transportation Research Part B xxx (2013) xxx–xxx 11
Pleasehyper
ra;dðsÞ � ðcaðsÞ þ gHDa ;dðtaðsÞÞ � gTLa ;dðsÞÞ ¼ 0; 8a 2 FSi
ra;dðsÞP 0; 8a 2 FSiXa2FSi
ra;dðsÞ ¼ 1
8>>><>>>:
; if i R NS ð21aÞ
rh;dðsÞ � ðchðsÞ þXa2h
ðpajhðsÞ � gHDa ;dðtajhðsÞÞÞ � gTLa ;dðsÞÞ ¼ 0; 8h 2 HFSi
rh;dðsÞP 0; 8h 2 HFSiXh2HFSi
rh;dðsÞ ¼ 1
8>>>>><>>>>>:
; if i 2 NS ð21bÞ
ra0 ;dðsÞ ¼X
h2HFSi
ðrh;dðsÞ � pa�jhðsÞÞ; 8a0 2 FSi \ AQ; if i 2 NS ð21cÞ
Eq. (21c) transforms the output of the RCM (hyperarc diversion probabilities, referred to elements of the hypergraph HG) inthe input of the NFPM (arc diversion probabilities, referred to elements of the model graph G). Thus, with reference to Fig. 3,the diversion probability of h 2 AH 2 F and the conditional probability of its branch a⁄ are transformed into the diversionprobability of the arc a0 2 AQ 2 A.
4.5. Network Flow Propagation Model
This model gives the temporal profile of inflow and outflow on the grounds of the time-dependent travel demand and theresults of the RCM.
The flow is propagated forward across the network, starting from the origin node(s). Once the intermediate node i isreached, the flow propagates along its forward star, according to Eq. (22). The inflow qin
a;dðsÞ on arc a 2 A at time s directedto destination d 2 NC is given by the arc diversion probability ra,d(s) multiplied by the flow on node i (i.e. TLa) at time s. Thelatter is given, in turn, by the sum of: the flows qout
b;d ðsÞ that leave each arc b 2 BSi at time s; and the demand flow qdemi;d ðsÞ at the
same time. qoutb;d ðsÞ is calculated as in Eq. (6) by applying the FIFO and flow conservation rules (Cascetta, 2001).
The arc flows directed towards different destinations are, then, combined together as in Eq. (23).
qina;dðsÞ ¼ ra;dðsÞ � qdem
i;d ðsÞ þXb2BSi
qoutb;d ðsÞ
!; a 2 FSi ð22Þ
qina ðsÞ ¼
Xd2NC
qina;dðsÞ ð23Þ
4.6. Formulation of the dynamic user equilibrium as a fixed-point problem
In order to formulate the dynamic user equilibrium as a Fixed-Point Problem (FPP) with implicit path enumeration, theRCM (20) and the NFPM (22) are expressed in compact form respectively by Eqs. (24) and (25) (RCM), and (26) and (27)(NFPM).
g ¼ gðc; t;pÞ ð24Þr 2 rðg; c; t;pÞ ð25Þq ¼ qðr; t;qdemÞ ð26Þe ¼ eðq; tÞ ð27Þ
It should be noted here that, as in Meschini et al. (2007), because the RCM considered is deterministic, when more than onearc in the forward star of a node minimises the total travel time from the node to the destination, than the set of arc con-ditional probabilities solving Eq. (21) is not unique. Consequently, in Eq. (25), the symbol ‘‘=’’ is replaced by ‘‘2’’. On the otherhand, unlike Meschini et al. (2007), the compact formulation of the RCM clearly shows that the vector of conditional prob-abilities (r) also depends on the vector of conditional probabilities (p).
Combining the RCM ((24) and (25)) with the NFPM (26) and (27), the following Network Loading Map is obtained
½q; e 2 nðt; c;p;qdemÞ ð28Þ
On the other hand, the APFs also imply Eqs. (29) and (30), while the conditional probabilities calculated by the SM may beexpressed in compact form as in (31). Thus, if the generalised arc cost functions (18) and (19) are consolidated as in Eq. (32),then exit times, arc costs and conditional probabilities, which represent the supply, are expressed as in (33)
cite this article in press as: Trozzi, V., et al. Dynamic user equilibrium in public transport networks with passenger congestion andpaths. Transportation Research Part B (2013), http://dx.doi.org/10.1016/j.trb.2013.06.011

12 V. Trozzi et al. / Transportation Research Part B xxx (2013) xxx–xxx
Pleasehyper
t ¼ tðq; eÞ ð29Þj ¼ jðtÞ ð30Þp ¼ pðjÞ ð31Þc ¼ cðp;j; tÞ ð32Þ½t; c;p ¼ tðq; eÞ ð33Þ
In conclusion, the dynamic user equilibrium is obtained as an FPP combining Eqs. (28) and (33):
½q; e 2 1ðq; e;qdemÞ ð34Þ
Fig. 4 summarises the FPP and shows the inputs and outputs of the sub-models included in the user equilibrium representedin Fig. 1.
Following Cascetta (2009, p. 378), it is possible to prove the existence of the network equilibrium because all the mapsand functions, defined over the nonempty, compact and convex set of arc flows, are upper semi-continuous. Conversely, it isnot possible to prove the uniqueness of the equilibrium mathematically because the problem does not have separable APFs,as in Cantarella et al. (2010), but the generalised travel cost for queuing arcs depends on the link flow on the queuing arcconsidered, as well as on adjacent dwelling arcs (Eqs. (5)–(7)).
Finally, it is important to note that the formulation of a deterministic user equilibrium, as in this case, implies theassumption that users have a full and correct perception of generalised travel costs and choose travel alternatives with min-imum cost. Thus, at the equilibrium, the same origin–destination pair may be connected by several minimal hyperpaths orthe total generalised travel cost may be minimised through a split of the demand flows among different strategies, as shownby Cominetti and Correa (2001) and Schmöcker (2006).
5. Model implementation and numerical examples
In order to implement the strategy-based dynamic assignment procedure detailed in Section 4, a solution procedure isdeveloped, which extends to the dynamic setting the original formulation given by Nguyen and Pallottino (1988) and Spiessand Florian (1989) in their seminal works on static strategy-based transit assignment.
Obviously, in the case of interest, the algorithm structure is more complicated because the presence of congestion re-quires an additional feedback loop expressing the dependency of generalised travel times on flows. This loop, formalisedwith the FPP illustrated in Section 4.6, can be solved, as usual, by means of the MSA. Thus, the algorithm includes three parts:
� Part 0: Initialisation of equilibrium arc flows to zero.� Part 1: Hyperpath search – for every possible destination, shortest all-to-one hyperpaths (or hypertrees) are found, scan-
ning the network in reverse topological order.� Part 2: Assignment of demand according to shortest hyperpaths – for every possible origin, the travel demand is loaded,
scanning the network in topological order; loading flows are obtained.� Part 3: MSA – if the difference between equilibrium and loading flows is greater than a fixed quantity, apply the MSA.
Because the proposed model requires explicit consideration of the time dimension, a solution algorithm can be devised byextending to the problem of strategy-based dynamic transit assignment the Decreasing Order of Time (DOT) method, whichwas proposed by Chabini (1998) solely for the Dynamic Shortest Path Problem (DSPP).
Therefore, although the proposed model has a continuous time representation, a discrete-time representation for itsnumerical solution has been adopted. The main idea is to divide the analysis period AP = [0, H] into T time intervals, such
Fig. 4. Variables and models of the fixed-point problem formulation for the strategy-based dynamic user equilibrium of Fig. 1.
cite this article in press as: Trozzi, V., et al. Dynamic user equilibrium in public transport networks with passenger congestion andpaths. Transportation Research Part B (2013), http://dx.doi.org/10.1016/j.trb.2013.06.011

Fig. 5. Model graph representation of the example network.
Table 1Frequencies, in-vehicle travel times and vehicle capacity of the lines associated with line arcs of the network.
Line Route section Frequency(vehicles/min)
In-vehicletravel time (min)
Vehicle capacity(passengers)
2 Stop 1–Stop 4 1/6 25 501 Stop 1–Stop 2 1/6 7 501 Stop 2–Stop 3 1/6 6 503 Stop 2–Stop 3 1/15 4 503 Stop 3–Stop 4 1/15 4 504 Stop 3–Stop 4 1/3 10 25
Table 2Time-dependent OD matrix during the analysis period for the first example considered.
Origin centroid Destination centroid Travel demand (passengers/min)
17 16 518 16 719 16 716 16 0
V. Trozzi et al. / Transportation Research Part B xxx (2013) xxx–xxx 13
that AP = {n0,n1, . . . ,ns, . . . ,nT�1}, with n0 = 0 and nT�1 = H, and to replicate the network along the time dimension, forming atime-expanded hypergraph HGT containing vertices in the form (i, n) and edges in the form ((i, n), (j, tij(n))).
If time intervals are short enough to ensure that the exit time of a generic edge tij(ns) is not earlier than the next intervalns+1, for s 6 T � 2, it is ensured that the network is cycle-free and the vertex chronological order is equivalent to the topo-logical one.
Thus, in Part 1 of the algorithm, HGT is scanned starting from the last temporal layer to the value assumed for n = n0 and,within the generic layer, no topological order is respected. When a generic vertex (i, ns) is visited, its forward star is scannedin order to set the minimal travel cost to the destination and the successive edge by means of Eq. (20). On the other hand, inParts 2 and 3, HGT is scanned in chronological order without respecting any topological order within the same time layer.Firstly (Part 2), when a generic vertex (i, ns) is visited, the flow is loaded along its forward star by means of Eq. (22), then(Part 3) if the convergence criterion is not met, the MSA is applied. Finally the APF and congestion parameters are updatedfor every edge according to Eqs. (1)–(11).
The proposed methodology and solution algorithm have been applied to solve dynamic assignment problems for thesmall example network depicted in Fig. 2, whose model graph is shown in Fig. 5. Nodes 1, 2, 3, 4 2 NS and represent, respec-tively, Stop 1, Stop 2, Stop 3 and Stop 4 of Fig. 2, while nodes 17, 18, 19, 16 2 NC and represent centroids connected, respec-tively, to Stops 1, 2, 3 and 4. Also, the two different route sections connecting Stop 2 and Stop 3 are represented by thedistinct line arcs (7, 9) and (8, 10), and similarly the two route sections connecting Stop 3 and Stop 4 are represented bythe distinct line arcs (11, 14) and (12, 15).
Please cite this article in press as: Trozzi, V., et al. Dynamic user equilibrium in public transport networks with passenger congestion andhyperpaths. Transportation Research Part B (2013), http://dx.doi.org/10.1016/j.trb.2013.06.011

Fig. 6. All-to-one shortest hyperpaths in uncongested conditions. (The figure also depicts diversion probabilities and travel times to destination when thenetwork is not congested. For clarity, the diversion probability is here indicated as pi�j, where i is the stop node at which passengers are waiting and j is theboarding node corresponding to the attractive line considered.)
0,0
1,0
2,0
3,0
4,0
5,0
Line 3 Line 4
0
0,2
0,4
0,6
0,8
1
p a*|
h
0,0
2,0
4,0
6,0
8,0
10,0
07:3
0
07:4
0
07:5
0
08:0
0
08:1
0
08:2
0
08:3
0
08:4
0
08:5
0
09:0
0
e a
Time of the day
(a)
(b)
(c)
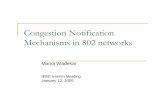
Fig. 7. Variation of congestion parameter ja (a), boarding probability pa� jh (b) and exit capacity ea (c) at Stop 3 during the analysis period [07:30–09:00] (arepresents respectively queuing arc (3, 25), corresponding to Line 3, and queuing arc (3, 26), corresponding to Line 4. On the other hand, a⁄ represents abranch of the waiting hyperarc in the hypergraph H, and corresponds, respectively, to Line 3 and Line 4).
14 V. Trozzi et al. / Transportation Research Part B xxx (2013) xxx–xxx
Please cite this article in press as: Trozzi, V., et al. Dynamic user equilibrium in public transport networks with passenger congestion andhyperpaths. Transportation Research Part B (2013), http://dx.doi.org/10.1016/j.trb.2013.06.011

0,0
1,0
2,0
3,0
4,0
5,0
Line 1 Line 2
0
0,2
0,4
0,6
0,8
1
p a*|
h
0,0
2,0
4,0
6,0
8,0
10,0
07:3
0
07:4
0
07:5
0
08:0
0
08:1
0
08:2
0
08:3
0
08:4
0
08:5
0
09:0
0
e a
Time of the day
(a)
(b)
(c)
Fig. 8. Variation of congestion parameter ja (a), boarding probability pa� jh (b) and exit capacity ea (c) at Stop 1 during the analysis period [07:30–09:00] (arepresents respectively queuing arc (1, 5), corresponding to Line 1, and queuing arc (1, 20), corresponding to Line 2. On the other hand, a⁄ represents abranch of the waiting hyperarc in the hypergraph H, and corresponds, respectively, to Line 1 and Line 2).
V. Trozzi et al. / Transportation Research Part B xxx (2013) xxx–xxx 15
In order to highlight the different hyperpath selection that occurs when passenger queues arise, it is assumed that traveltimes and frequencies remain constant during the analysis period [07:30–09:00]. These are displayed in Table 1, togetherwith the vehicle capacity. The analysis period is divided into one-minute intervals and the travel time on alighting, dwellingand dummy arcs is assumed to be of one minute. Finally, for every arc and/or branch of a hyperarc, ga is assumed to be con-stant and equal to 1.
In the first example studied, the only destination considered is node 16 and it is assumed that the origin–destination (OD)matrix is in the form given by Table 2. In this setting, at the beginning of the analysis period [07:30–07:55] no congestionoccurs in the network and the model yields the same results that could be obtained by applying static models as in Nguyenand Pallottino (1988) and Spiess and Florian (1989). Fig. 6 shows the hypergraph representation of the all-to-one shortesthyperpaths in uncongested conditions.
When congestion occurs, static models (with and without capacity constraints) are unable to reproduce the dynamic phe-nomenon of the formation and dispersion of FIFO queues or the effect of this on route choice, both of which can be repro-duced by the model proposed in this paper, as this example illustrates. With reference to the model graph of Fig. 5, apassenger who is at origin node 17 and boards Line 1 at 07:30 reaches node 7 at 07:46 and is joined by other passengerswho, from stop node 2, board the same line. These travellers have to disembark through arc (9, 19) and reach Stop 3 at07:54. Therefore, from this moment onwards, the total flow from Stop 3 to the destination exceeds the total available capac-ity and, when the next vehicle arrives, Line 3 and Line 4 become heavily congested (Fig. 7a and c). The decreased availablecapacity of Line 3, combined with a lower frequency of the service, results in a fall of its diversion probability, while thediversion probability of Line 4 increases (Fig. 7b).
It is important to note here that the value of the diversion probability solely depends on the frequency of the line and onits congestion level at the considered stop. On the other hand, the inclusion of a line in the attractive set depends on its totaltravel time upon boarding.
The analysis of congestion patterns at Stop 3 suggests that the model is able to simulate ‘forward effects’, namely effectsproduced by what happened upstream in the network at an earlier time of the day (in this case, passengers boarding Line 1 at
Please cite this article in press as: Trozzi, V., et al. Dynamic user equilibrium in public transport networks with passenger congestion andhyperpaths. Transportation Research Part B (2013), http://dx.doi.org/10.1016/j.trb.2013.06.011

0,0
1,0
2,0
3,0
4,0
5,0
Line 1 Line 3
0
0,2
0,4
0,6
0,8
1
p a*|
h
0,0
2,0
4,0
6,0
8,0
10,0
07:3
0
07:4
0
07:5
0
08:0
0
08:1
0
08:2
0
08:3
0
08:4
0
08:5
0
09:0
0
e a
Time of the day
(a)
(b)
(c)
Fig. 9. Variation of congestion parameter ja (a), boarding probability pa� jh (b) and exit capacity ea (c) at Stop 2 during the analysis period [07:30–09:00] (arepresents respectively queuing arc (2, 23), corresponding to Line 1, and queuing arc (2, 24), corresponding to Line 3. On the other hand, a⁄ represents abranch of the waiting hyperarc in the hypergraph H, and corresponds, respectively, to Line 1 and Line 3).
0,0
5,0
10,0
15,0
20,0
25,0
30,0
35,0
40,0
07:3
0
07:4
0
07:5
0
08:0
0
08:1
0
08:2
0
08:3
0
08:4
0
08:5
0
09:0
0
g i,d
Time of the day
Line 1 Line 2
Fig. 10. Travel time to destination (gi,d) upon boarding Line 1 or Line 2 from Stop 1 during the analysis period.
16 V. Trozzi et al. / Transportation Research Part B xxx (2013) xxx–xxx
07:30) on what happens downstream at a later time (the queue of passengers, wishing to board Line 3, that occurs at Stop 3at 07:55).
Additionally, the model also simulates ‘backward effects’, namely effects produced by what is expected to happen down-stream in the network at a later time on what happens upstream at an earlier time. The analysis of Line 1 helps to clarify thisconcept.
Line 1 never becomes congested at Stop 1 or 2 (Figs. 8a and 9a). However, because at 08:12 a long queue forms at Stop 3for Line 3, then, since 07:53, the travel time upon boarding Line 1 from Stop 1 increases to 35 min (Fig. 10) and therefore this
Please cite this article in press as: Trozzi, V., et al. Dynamic user equilibrium in public transport networks with passenger congestion andhyperpaths. Transportation Research Part B (2013), http://dx.doi.org/10.1016/j.trb.2013.06.011

0
0,002
0,004
0,006
0,008
0,01
1 6 11 16 21 26 31 36 41 46 51 56 61 66
Iteration
ε
Fig. 11. Algorithm convergence.
0,0
1,0
2,0
3,0
4,0
5,0
0,0
2,0
4,0
6,0
8,0
10,0
07:3
0
07:4
0
07:5
0
08:0
0
08:1
0
08:2
0
08:3
0
08:4
0
08:5
0
09:0
0
qin
a
Line 3 Line 4
Time of the day
(a)
(b)
Fig. 12. Variation of congestion parameter ja (a) and inflow qina (b) at Stop 3 during the analysis period [07:30–09:00] (a represents respectively queuing arc
(3, 25), corresponding to Line 3, and (3, 26), corresponding to Line 4).
Table 3Time-dependent OD matrix during the analysis period for the second example considered (traveldemand is expressed in passengers per minute).
Origin centroid Destination centroid
16 17 18
17 5 5 118 4 0 319 6 0 016 5 5 1
V. Trozzi et al. / Transportation Research Part B xxx (2013) xxx–xxx 17
line is excluded from the attractive set of Stop 1 (Fig. 8b). Line 1 is included again from 08:25 onwards, when the travel timeupon boarding decreases again because, by the time Stop 3 will be reached (08:44), congestion on Line 3 will have dissipated.
Similarly, starting from 08:00, passengers at Stop 2 (Fig. 9b) would board only Line 3. Should they board Line 1, theywould reach Stop 3 at 08:09, when a queue for boarding Line 4 arises and, consequently, the travel time upon boarding Line
Please cite this article in press as: Trozzi, V., et al. Dynamic user equilibrium in public transport networks with passenger congestion andhyperpaths. Transportation Research Part B (2013), http://dx.doi.org/10.1016/j.trb.2013.06.011

0,0
1,0
2,0
3,0
4,0
5,0
0,0
2,0
4,0
6,0
8,0
10,007:3
0
07:4
0
07:5
0
08:0
0
08:1
0
08:2
0
08:3
0
08:4
0
08:5
0
09:0
0
Time of the day
Line 1 Line 2
qin
aκ a
(a)
(b)
Fig. 13. Variation of congestion parameter ja (a) and inflow qina (b) at Stop 1 during the analysis period [07:30–09:00] (a represents respectively queuing
arcs (1, 22), corresponding to Line 1, and (1, 21), corresponding to Line 2).
0,0
1,0
2,0
3,0
4,0
5,0
0,0
2,0
4,0
6,0
8,0
10,0
07:3
0
07:4
0
07:5
0
08:0
0
08:1
0
08:2
0
08:3
0
08:4
0
08:5
0
09:0
0
Line 1Line 3
Time of the day
(a)
(b)
Fig. 14. Variation of congestion parameter ja (a) and inflow qina (b) at Stop 2 during the analysis period [07:30–09:00] (a represents respectively queuing
arcs (2, 23), corresponding to Line 1, and (2, 24), corresponding to Line 3).
18 V. Trozzi et al. / Transportation Research Part B xxx (2013) xxx–xxx
Please cite this article in press as: Trozzi, V., et al. Dynamic user equilibrium in public transport networks with passenger congestion andhyperpaths. Transportation Research Part B (2013), http://dx.doi.org/10.1016/j.trb.2013.06.011

V. Trozzi et al. / Transportation Research Part B xxx (2013) xxx–xxx 19
1 increases to 23.4 min. Afterwards (at 08:33, Fig. 10a), because Line 3 becomes congested at Stop 2, Line 1 is reincluded inthe attractive set of Stop 2 (Fig. 9b).
Figs. 8c and 9c complete the example and respectively depict the available capacity of Line 1 and Line 2 at Stop 1 and Line1 and Line 3 at Stop 2.
In the second example studied, the OD travel demand matrix is given by Table 3. In this case, the travel demand is notonly directed to node 16 (centroid connected to Stop 4) but also to nodes 18 and 19 of Fig. 5 and is assumed to be constantduring the analysis period [07:30–09:00]. The solution algorithm (Fig. 11) converges to e = 0.001 in 30 iterations and toe = 0.0001 in 67 iterations.
The results show that the only queue in the network occurs at Stop 3, where between 08:25 and 08:55 passengers have towait for the second passage of Line 4 if they want to board this service. Therefore, the diversion probabilities and, thus, theinflow on waiting arcs at Stop 3 are greatly affected by congestion, as depicted in Fig. 12, and the inflow on arc (3, 13) in-creases [08:20–08:50] when passengers know that, by the time the next carrier of Line 4 arrives, it will be full.
Notwithstanding the queue at Stop 3, the increase in total travel time from node 20 and node 7 to node 16 is not remark-able and, as opposed to the first example, Line 1 is always kept in the attractive sets of Stop 1 and Stop 2, whichever node isthe final destination. As a consequence (Figs. 13 and 14), the inflow on queuing arcs (1, 21) and (1, 22) at Stop 1 and (2, 23)and (2, 24) at Stop 2 stays constant throughout the analysis period.
6. Conclusion
A vast literature, produced since the late 1980s, has demonstrated that in FB networks with partially overlapping services,route choice can be best modelled as a shortest hyperpath problem rather than as a single path. However, a broad agreementon how most appropriately to represent dynamic congestion phenomena and their impacts on travel choices has not yetbeen attained. Therefore, the major contribution of this work is its consideration of the effects of the formation and disper-sion of FIFO queues at transit stops in networks where users have no explicit information about the service schedule, shouldany schedule exist, and minimise their travel time to destination by selecting the dynamic shortest hyperpath.
An FB approach has been chosen to build the model because it handles more suitably the inherent uncertainty faced bypassengers who travel in densely connected transit networks, in which several alternatives may be available from the samestop or station. While FB models have been exploited so far to reproduce, mainly, the effect of mingling queuing on travelstrategies, the concept of travel strategies has been extended here in order to address the case where passenger congestionresults in FIFO queues at transit stops. Consequently, a Bottleneck Queue Model with time-varying exit capacity is adopted toevaluate the queuing time at transit stops. On the other hand, the route choice needs to be modelled in the form of an all-to-one dynamic hyperpath search.
To this end, four main theoretical implications have been addressed:
� From a graph-theory point of view, the hypergraph HG, which is built on the model graph G, is introduced. HG = (N, F),where the set of forward hyperarcs is formally defined as F = An{AW [ AQ} [ AH. This is a substantial innovation with respectto Trozzi (2013), where a first hypothesis of dynamic assignment with hyperpaths is developed. In this works, the use ofthe same graphic structure for the demand and supply models leads to a representation of the waiting/queuing processwhich is questionable from the phenomenal point of view and does not allow the great flexibility that can be attained bycompletely separating the supply and demand models, as done here.� The Stop Model and Route Choice Model refer to the hypergraph HG, whose waiting hyperarcs graphically represent the pro-
cess of waiting for the set of attractive lines. When making their travel choices, passengers do not distinguish between theunder-saturation delay, due to the inherent transit service discontinuity, and over-saturation queuing time. Thus the totalwaiting cost wh for a waiting hyperarc h includes both components and depends on the lines that are included in theattractive set. In order to account for the increased perceived cost of waiting when boarding is denied because of capacityconstraints, it is assumed the VOT for hyperarcs is an increasing function of congestion by means of the parameter ja.� The Network Flow Propagation Model and Arc Performance Functionsrefer to the model graph G. In order to ensure that
inflows/outflows are consistent with arc exit times, in the NFPM and APF the waiting arcs a 2 AW only represent theunder-saturation delay, while the cost of queuing, as it results from the Bottleneck Queue Model, is represented by queuingarcs a 2 AQ. The queuing time calculated in the APF is used to calculate congestion parameters ja(s), which are used, inturn, in the SM to derive specific conditional probabilities and waiting times.� The stop layout considered is such that passengers wait in a unique ‘mixed’ FIFO queue, regardless of the specific line(s)
they may intend to board. Thus, while passengers with the same attractive set respect a FIFO rule, there can be overtakingbetween those who consider different sets of attractive lines.
The resulting dynamic user equilibrium is capable of reproducing the results from the static model by Spiess and Florian(1989) in the uncongested scenario with time-independent (constant) travel variables, whilst clearly demonstrating the dy-namic changes in the hyperpath, total travel cost and flow pattern when these vary with the time of the day.
The application of the proposed model to the small example network presented here motivates the implementation of themethodology on a real-size network case as the next step for future research, in order to verify the value of heuristics solu-
Please cite this article in press as: Trozzi, V., et al. Dynamic user equilibrium in public transport networks with passenger congestion andhyperpaths. Transportation Research Part B (2013), http://dx.doi.org/10.1016/j.trb.2013.06.011

20 V. Trozzi et al. / Transportation Research Part B xxx (2013) xxx–xxx
tion methods (for example, when selecting the set of attractive lines at each intermediate stop) and algorithm speed-uptechniques. Moreover, future work will concentrate on extending this approach to other transport modes, where the usualassumption of Poisson-distributed carrier arrivals is not applicable. Moreover, the new model will also be tested on largetransit networks.
References
Bellei, G., Papola, N., Gentile, G., 2005. A within-day dynamic traffic assignment model for urban road networks. Transportation Research Part B 39 (1), 1–29.Billi, C., Gentile, G., Nguyen, S., Pallottino, S., 2004. Rethinking the wait model at transit stops. Presented at TRISTAN V: The Fifth Triennial Symposium on
Transportation Analysis, Le Gosier, Guadeloupe.Bouzaïene-Ayari, B., 1988. Modélisation des arrêts multiples d’autobus pour les réseaux de transport en commun. MSc thesis, Département de Génie
Industriel, École Polytechnique de Montréal.Bouzaïene-Ayari, B., Gendreau, M., Nguyen, S., 2001. Modeling bus stops in transit networks: a survey and new formulations. Transportation Science 35 (3),
304–321.Cantarella, G.E., Gentile, G., Veloná, P., 2010. Uniqueness of stochastic user equilibrium. Presented at 5th IMA Conference on Mathematics in Transportation,
London, UK.Cascetta, E., 2001. Transportation Systems Engineering: Theory and Methods, Vol. 49. Kluwer Academic Publishers, Dordrecht.Cascetta, E., 2009. Transportation Systems Analysis – Models and Applications, vol. 29. Springer, New York.Cepeda, M., Cominetti, R., Florian, M., 2006. A frequency-based assignment model for congested transit networks with strict capacity constraints:
characterization and computation of equilibria. Transportation Research Part B 40 (6), 437–459.Chabini, I., 1998. Discrete dynamic shortest path problems in transportation applications: complexity and algorithms with optimal running time.
Transportation Research Record 1645, 170–175.Chriqui, C., Robillard, P., 1975. Common bus lines. Transportation Science 9 (2), 115–121.Cominetti, R., Correa, J., 2001. Common-lines and passenger assignment in congested transit networks. Transportation Science 35 (3), 250–267.Cortés, C.E., Jara-Moroni, P., Moreno, E., Pineda, C., 2013. Stochastic transit equilibrium. Transportation Research Part B 51 (C), 29–44.De Cea, J., Fernandez, E., 1993. Transit assignment for congested public transport systems: an equilibrium model. Transportation Science 27 (2), 133–147.Gallo, G., Longo, P., Pallottino, S., Nguyen, S., 1993. Directed hypergraphs and applications. Discrete Applied Mathematics 42 (2–3), 177–201.Gendreau, M., 1984. Étude approfondie d’un modéle d’équilibre pour l’affectation des passangers dans les réseaux de transport en commun. PhD thesis,
Départment d’Informatique et de Recherche Opérationnelle, Université de Montréal.Gentile, G., Nguyen, S., Pallottino, S., 2005a. Route choice on transit networks with online information at stops. Transportation Science 39 (3), 289–297.Gentile, G., Papola, N., Persia, L., 2005b. Advanced pricing and rationing policies for large scale multimodal networks. Transportation Research Part A 39 (7–
9), 612–631.Gentile, G., Meschini, L., Papola, N., 2007. Spillback congestion in dynamic traffic assignment: a macroscopic flow model with time-varying bottlenecks.
Transportation Research Part B 41 (10), 1114–1138.Hamdouch, Y., Lawphongpanich, S., 2008. Schedule-based transit assignment model with travel strategies and capacity constraints. Transportation Research
Part B 42 (7–8), 663–684.Hamdouch, Y., Ho, H.W., Sumalee, A., Wang, G., 2011. Schedule-based transit assignment model with vehicle capacity and seat availability. Transportation
Research Part B 45 (10), 1805–1830.Kurauchi, F., Bell, M.G.H., Schmöcker, J.-D., 2003. Capacity constrained transit assignment with common lines. Journal of Mathematical Modelling and
Algorithms 2 (4), 309–327.Leurent, F., Benezech, V., 2011. The passenger stock and attractivity threshold model for traffic assignment on a transit network with capacity constraint. In:
Transportation Research Board 90th Annual Meeting, the 2011 TRB Annual Meeting Compendium of Papers DVD, paper number 11-2382.Leurent, F., Chandakas, E., Poulhès, A., 2011. User and service equilibrium in a structural model of traffic assignment to a transit network. Procedia Social and
Behavioral Sciences 20, 495–505.Meschini, L., Gentile, G., Papola, N., 2007. A frequency based transit model for dynamic traffic assignment to multimodal networks. In: Allsop, R., Bell,
M.G.H., Heydecker, B.G. (Eds.), 17th International Symposium on Transportation and Traffic Theory. Elsevier, London, pp. 407–436.Nguyen, S., Pallottino, S., 1988. Equilibrium traffic assignment for large scale transit networks. European Journal of Operational Research 37 (2), 176–186.Nuzzolo, A., Russo, F., Crisalli, U., 2003. Transit Network Modelling: The Schedule-based Dynamic Approach. Franco Angeli – Collana Trasporti.Papola, N., Filippi, F., Gentile, G., Meschini, L., 2009. Schedule-based transit assignment: a new dynamic equilibrium model with vehicle capacity constraints.
In: Wilson, N.H.M., Nuzzolo, A. (Eds.), Schedule-Based Modeling of Transportation Networks. Springer, New York, pp. 145–170.Schmöcker, J.-D., 2006. Dynamic Capacity Constrained Transit Assignment. PhD Thesis, Department for Civil and Environmental Engineering, Imperial
College London.Schmöcker, J.-D., Bell, M.G.H., Kurauchi, F., 2008. A quasi-dynamic capacity constrained frequency-based transit assignment model. Transportation Research
Part B 42 (10), 925–945.Schmöcker, J.-D., Fonzone, A., Shimamoto, H., Kurauchi, F., Bell, M.G.H., 2011. Frequency-based transit assignment considering seat capacities.
Transportation Research Part B 45 (2), 392–408.Spiess, H., 1983. On Optimal Route Choice Strategies in Transit Networks, Publication 286. Centre de recherche sur les transports, Université de Montréal.Spiess, H., 1984. Contributions á la Téorie at aux Outils de Planification des Résaux de Transport Urbain. PhD thesis, Department d’Informatique et de
Recherche Opérationelle, Université de Montréal.Spiess, H., Florian, M., 1989. Optimal strategies: a new assignment model for transit networks. Transportation Research Part B 23b (2), 83–102.Sumalee, A., Tan, Z., Lam, W.H.K., 2009. Dynamic stochastic transit assignment with explicit seat allocation model. Transportation Research Part B 43 (8–9),
895–912.Trozzi, V., 2013. Strategy-based Dynamic Assignment in Transit Networks with Passenger Queues. PhD Thesis, Department for Civil and Environmental
Engineering, Imperial College London.Trozzi, V., Kaparias, I., Bell, M.G.H., Gentile, G., 2013. A dynamic route choice model for public transport networks with boarding queues. Transportation
Planning and Technology 36 (1), 44–61.
Please cite this article in press as: Trozzi, V., et al. Dynamic user equilibrium in public transport networks with passenger congestion andhyperpaths. Transportation Research Part B (2013), http://dx.doi.org/10.1016/j.trb.2013.06.011