
DSP فرمولهای پردازش سیگنال دیجیتال
19
Transcript of DSP فرمولهای پردازش سیگنال دیجیتال


Signals & Systems Processing By: Ali.Alijani
2
جداولفهرست
شماره صفحهجدولعنوان
3ضرايب سري فوريه برخي سيگنال هاي مهم پيوسته در زمان
4- 5خواص سري فوريه پيوسته در زمان
6سيگنال هاي مهم پيوسته در زمانتبديل فوريه برخي
7- 8 خواص تبديل فوريه پيوسته در زمان
9 ضرايب سري فوريه برخي سيگنال هاي مهم گسسته در زمان
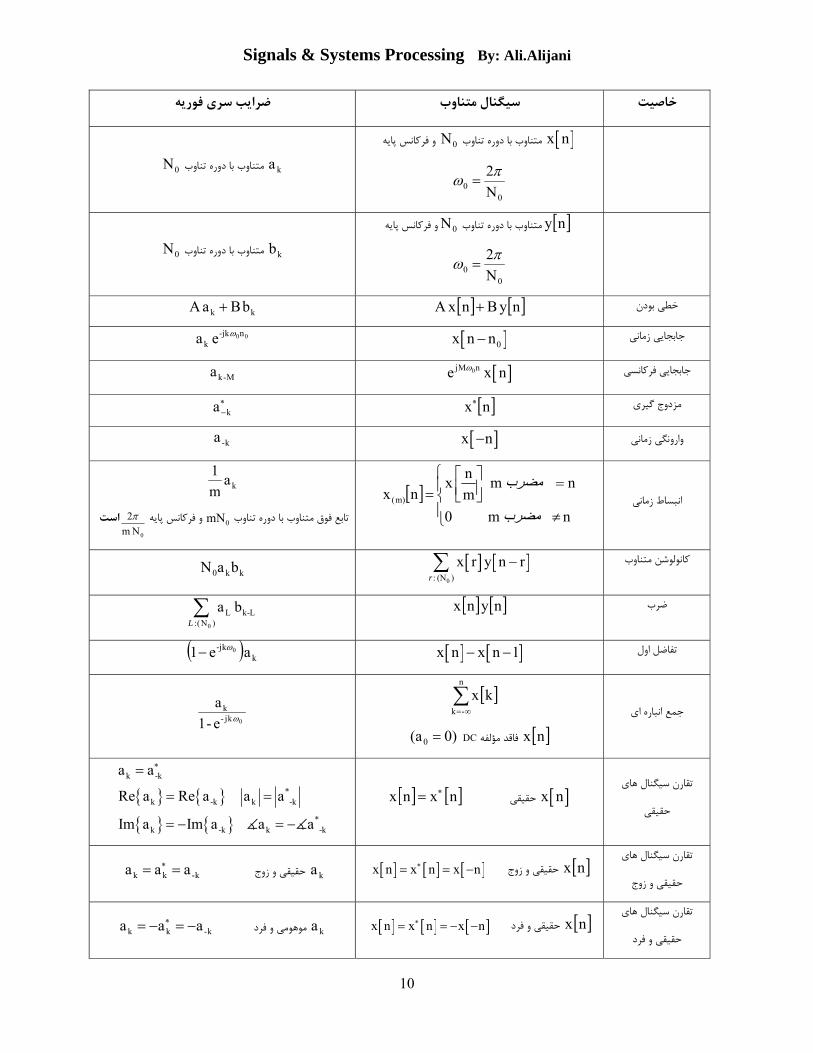
10- 11خواص سري فوريه گسسته در زمان
12 تبديل فوريه برخي سيگنال هاي مهم گسسته در زمان
13- 14 خواص تبديل فوريه گسسته در زمان
15معادالت سري و تبديل فوريه پيوسته و گسسته در زمانخالصه
16تبديل الپالس برخي سيگنال هاي مهم پيوسته در زمان
17خواص تبديل الپالس
18 برخي سيگنال هاي مهم گسسته در زمان Zتبديل
Z 19خواص تبديل

Signals & Systems Processing By: Ali.Alijani
3
ضرايب سري فوريه سيگنال
0jx (t) e tω= k
1 k 1a
0 k 1=⎧
= ⎨ ≠⎩
0x(t) cos ( t)ω= k
1 k = 1a 2
0 k 1
⎧ ±⎪= ⎨⎪ ≠ ±⎩
0x(t) sin ( t)ω= k
1 k 12j
1a k 12j
0 k 1
⎧ =⎪⎪⎪= − = −⎨⎪⎪ ≠ ±⎪⎩
x (t) 1= k
1 k 0a
0 k 0=⎧
= ⎨ ≠⎩
nx (t) (t n )δ
+∞
=−∞
= − Τ∑ T1ak =
1
1
1 t Tx (t) T0 T t
2x (t) x (t-T)
⎧ <⎪= ⎨
≤ <⎪⎩=
0 1 0 1 0 1k
T k T sin (k T )a sinck
ω ω ωπ π π
⎛ ⎞= =⎜ ⎟⎝ ⎠
ضرايب سري فوريه برخي سيگنال هاي مهم پيوسته در زمان - 1جدول

Signals & Systems Processing By: Ali.Alijani
4
ضرايب سري فوريه سيگنال متناوب خاصيت
x (t) 0متناوب با دوره تناوبT و فركانس پايه
00 T
2πω = ka
y(t) 0متناوب با دوره تناوبT و فركانس پايه
00 T
2πω = kb
Ax(t) By خطي بودن (t)+ kk BbAa +
جابجايي زماني 0x (t t )− 0 0-jk
ka e tω
0e جابجايي فركانسي x(t)jM tω M-ka
∗ ∗x(t) مزدوج گيري k-a
)x وارونگي زماني t)− k-a
زماني تغيير مقياس
x( t) 0α α >
0T متناوب با دوره تناوب اصلي α
ka
كانولوشن متناوب0T
x ( ) y (t ) dτ τ τ−∫ kk0 baT
y(t)x L(t) ضرب در حوزه زمان k-LL
a b+∞
=−∞∑
حوزه زمانمشتق در td(t)xd
k0 akj ω
x انتگرال در حوزه زمان (t) فاقد مؤلفه DC ∫∞
t
-
d)(x ττ 0kkja
0
k ≠ω
x (t)x)(t حقيقي x) t( تقارن سيگنال هاي حقيقي ∗=
{ } { }{ } { }
k -k
k -k
k -k
k -k
k -k
a aRe a Re a
Im a Im a
a a
a a
∗
∗
∗
=
=
= −
=
= −
x حقيقي و زوج t (x( تقارن سيگنال هاي حقيقي و زوج (t) x (t) x ( t)∗= = − kaحقيقي و زوج k-kk aaa == ∗
x فرد حقيقي و t (x( تقارن سيگنال هاي حقيقي و فرد (t) x (t) x ( t)∗= = − − kaموهومي و فرد k-kk aaa −=−= ∗
x(t)x)(xt(t) حقيقي x) t( تجزيه زوج و فرد سيگنال هاي حقيقي 0e +=
{ } { } { } { }kkkkk aoddaveaImjaRea +=+=
} برابر است با t)(Xeضرايب فوريه } { }kk aveaRe =
oXفوريهضرايب (t) برابر است با{ } { }kk aoddaImj =

Signals & Systems Processing By: Ali.Alijani
5
رابطه پارسوال براي سيگنال هاي
متناوب ∫ ∑
+∞
∞=
==0T -k
2k
2
0x atd(t)x
T1P
خواص سري فوريه پيوسته در زمان - 2جدول

Signals & Systems Processing By: Ali.Alijani
6
تبديل فوريه سيگنال
0j tx (t) e ω= 0X(j ) 2 ( )ω πδ ω ω= −
t)(cos(t)x 0ω= [ ])()-()(jX 00 ωωδωωδπω ++=
t)(sin(t)x 0ω= ( ) ( )[ ]00j)(jX ωωδωωδπω +−−=
1(t)x = ( ) )(2jX ωπδω =
t)((t)x δ= ( ) 1jX =ω
0x (t) (t t )δ= − ( ) 0t-jejX ωω =
t)(u(t)x = ( ) )(j1jX ωπδω
ω +=
{ }-ax (t) e u(t) , Re a 0t= > ( )ω
ωja
1jX+
=
{ }n -a tx (t) t e u (t) , Re a 0= > 1n)j(a
!n)(jX ++=
ωω
n -
x (t) (t n T)δ+∞
= ∞
= −∑ ( ) ∑+∞
∞=⎟⎠⎞
⎜⎝⎛ −=
-k Tk2
T2jX πωδπω
⎪⎩
⎪⎨⎧
>
<=⎟⎟
⎠
⎞⎜⎜⎝
⎛Π=
Tt0
Tt1T2t(t)x ( ) ( )
⎟⎠⎞
⎜⎝⎛==πω
ωωω TcsinT2Tsin2jX
tt)(Wsin(t)x
π=
⎪⎩
⎪⎨⎧
>
<=⎟
⎠⎞
⎜⎝⎛Π=
W0
W12W
)(jXω
ωωω
⎪⎩
⎪⎨
⎧
>
<=⎟
⎠⎞
⎜⎝⎛Λ=
Tt0
TtTt
-1Tt(t)x ⎟
⎠⎞
⎜⎝⎛=π
ωω2
TcsinT)(jX 2
⎟⎠⎞
⎜⎝⎛=ππ 2
Wtcsin2W(t)x 2 ( )
⎪⎩
⎪⎨
⎧
>
<=⎟
⎠⎞
⎜⎝⎛Λ=
W0
WW
-1W
jXω
ωω
ωω
0e(t)x t- >= αα ( ) 222jXωααω+
=
تبديل فوريه برخي سيگنال هاي مهم پيوسته در زمان -3جدول

Signals & Systems Processing By: Ali.Alijani
7
تبديل فوريه سيگنال نامتناوب خاصيت
(t)x )(jX ω
(t)y )(jY ω
Ax خطي بودن (t) By (t)+ A ( ) ( )X j BY jω ω+
جابجايي زمان 0x (t t )− 0-j te X (j )ω ω
0je فركانسيجابجايي x(t)tω 0X (j( ))ω ω−
∗x(t) مزدوج گيري X ( j )ω∗ −
x وارونگي زماني ( t)− X ( j )ω−
x(t)*y كانولوشن در حوزه زمان (t)
)(jY)(jX ωω
y(t)x(t) ضرب در حوزه زمان 1 X (j )*Y (j )
2ω ω
π
تغيير مقياس زماني و
فركانسي t)(ax ⎟
⎠⎞
⎜⎝⎛
aX
a1 ω
X 2(t) دوگاني ( )xπ ω−
مشتق در حوزه زمانtd(t)xd
)(jXj ωω
∫ انتگرال در حوزه زمان∞
t
-
d)(x ττ )((0)Xj
)(jX ωδπωω
+
−xtj(t) مشتق در حوزه فركانس
ωω
d)(jXd
x انتگرال در حوزه فركانس (t) x (0) (t)j t
π δ− + ∫+∞
ωud(u)X
تقارن سيگنال هاي
حقيقي )t (x حقيقي x (t) x (t)∗= { } { }
{ } { }
*
*
X (j ) X ( j )
Re X (j ) Re X( j ) X (j ) X ( j )
Im X (j ) Im X ( j ) X (j ) X ( j )
ω ω
ω ω ω ω
ω ω ω ω
∗= −
= − = −
= − − = − −
تقارن سيگنال هاي
حقيقي و زوج
)t (x و زوج حقيقي
x (t) x ( t) x ( t)∗= = −
)(jX ω حقيقي و زوج X (j ) X ( j ) X ( j )ω ω ω∗= = −
تقارن سيگنال هاي
حقيقي و فرد
)t (x و فرد حقيقي
x (t) x (t) x ( t)∗= = − −
)(jX ωموهومي و فرد X (j ) X ( j ) X( j )ω ω ω∗= − = − −

Signals & Systems Processing By: Ali.Alijani
8
تجزيه زوج و فرد سيگنال
هاي حقيقي
)t(xحقيقي
t)(xt)(x(t)x 0e +=
{ } { } )j(X)j(X)(jXImj)(jXRe)(jX 0e ωωωωω +=+=
برابر است با t)(Xeتبديل فوريه
{ } )j(X)(jXRe e ωω =
برابر است با t)(X0تبديل فوريه
{ } )j(X)(jXImj 0 ωω =
سطح زيرمنحني سيگنال ∫+∞
∞=
-td(t)x(0)X
سطح زير منحني تبديل
فوريه ∫+∞
∞=
-d)(jX(0)x2 ωωπ
رابطه پارسوال براي
سيگنال هاي نامتناوب∫ ∫+∞
∞−
+∞
∞−== ωω
πd)(jX
21td(t)xE 22
x
خواص تبديل فوريه پيوسته در زمان - 4جدول

Signals & Systems Processing By: Ali.Alijani
9
ضرايب سري فوريه گسسته سيگنال
[ ] nj 0enx ω=
πمضرب گويا از 0ω: فرض k 0
1 k m,m N, m 2N,...2ma
N0 other k
πω
= ± ±⎧⎪⎪= =⎨⎪⎪⎩
[ ] ( )ncosnx 0ω=
πمضرب گويا از 0ω: فرض k 0
1 k m, m N, m 2N,...2
2maN
0 other k
πω
⎧ = ± ± ± ± ±⎪⎪⎪= =⎨⎪⎪⎪⎩
[ ] ( )nsinnx 0ω=
πمضرب گويا از 0ω: فرض k 0
1 k m,m N,m 2N,...2
1 2ma k m, m N, m 2N,...2 j N
0 other k
πω
⎧ = ± ±⎪⎪⎪= − =− − ± − ± =⎨⎪⎪⎪⎩
[ ] 1nx = k
1 k 0, N, 2N,...a
0 other k
= ± ±⎧⎪= ⎨⎪⎩
موج مربعي متناوب
[ ]
[ ] [ ]nxNnx2NnN0
Nn1nx
1
1
=+
⎪⎩
⎪⎨⎧
≤<
≤=
1
k
1k
12k N2sin
N
a k 0, N, 2 N,....2kNsin2 N
2 N 1a k 0, N, 2 N,....N
π
π
⎡ ⎤⎛ ⎞+⎜ ⎟⎢ ⎥⎝ ⎠⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦= ≠ ± ±
⎡ ⎤⎢ ⎥⎣ ⎦
+= = ± ±
[ ]k -
n k Nδ+∞
= ∞
−∑ k1aN
for all k=
ضرايب سري فوريه برخي سيگنال هاي مهم گسسته در زمان -5جدول
Signals & Systems Processing By: Ali.Alijani
10
ضرايب سري فوريه سيگنال متناوب خاصيت
[ ]x n 0 متناوب با دوره تناوبN و فركانس پايه
00 N
2πω = ka 0 متناوب با دوره تناوبN
[ ]ny و فركانس پايه0N متناوب با دوره تناوب
00 N
2πω = kb 0 متناوب با دوره تناوبN
] خطي بودن ] [ ]nyBnxA + kk bBaA +
] جابجايي زماني ]0x n n− 00nk-jk ea ω
] جابجايي فركانسي ]0jM ne x nω M-ka
] مزدوج گيري ]nx∗ ∗−ka
] وارونگي زماني ]x n− k-a
] انبساط زماني ]⎪⎩
⎪⎨
⎧
≠
=⎥⎦⎤
⎢⎣⎡
=nm0
nmmnx
nx m)(
مضرب
مضرب
kam1
و فركانس پايه 0mN تابع فوق متناوب با دوره تناوب0Nm
2πاست
] كانولوشن متناوب ] [ ]0: (N )
x r y n rr
−∑ kk0 baN
] ضرب ] [ ]nynx 0
L k-L:(N )
a bL∑
] تفاضل اول ] [ ]x n x n 1− − ( ) kk-j ae1 0ω−
جمع انباره اي[ ]∑
∞=
n
-kkx
[ ]nx فاقد مؤلفهDC )0a( 0 = 0kj-
k
e-1a
ω
تقارن سيگنال هاي
حقيقي[ ]x n حقيقي [ ] [ ]nxnx ∗= { } { }
{ } { }
k -k
*k -k k -k
*k -k k -k
a a
Re a Re a a a
Im a Im a a a
∗=
= =
= − = −
تقارن سيگنال هاي
حقيقي و زوج [ ]nx حقيقي و زوج [ ] [ ] [ ]x n x n x n∗= = − ka حقيقي و زوج k-kk aaa == ∗
تقارن سيگنال هاي
حقيقي و فرد [ ]nx فردحقيقي و [ ] [ ] [ ]x n x n x n∗= = − − ka موهومي و فرد k-kk aaa −=−= ∗

Signals & Systems Processing By: Ali.Alijani
11
تجزيه زوج و فرد
سيگنال هاي حقيقي
رابطه پارسوال براي
سيگنال هاي متناوب
[ ]x n حقيقي
[ ] [ ] [ ]e ox n x n x n= +
{ } { } { } { }kkkkk aoddaevaImjaRea +=+=
] ضرايب سري فوريه ]nXe برابر است با:
{ } { }kk aevaRe =
] ضرايب سري فوريه ]oX n برابر است با:
{ } { }kk a oddajIm =
مجموع ضرايب سري
فوريه
[ ] ∑=)(N:k
k0
a0x
مجموع نمونه هاي سيگنال
[ ]∑=)(N:n0
00
nxN1a
ضريب 2
N0 0به ازاءN زوج
( ) [ ]∑ −=)(N:n
n
02N
0
0nx1
N1a
] رابطه پارسوال براي سيگنال هاي متناوب ]∑ ∑=)(N:n )(N:k
2k
2
0 0 0
anxN
1
خواص سري فوريه گسسته در زمان -6جدول

Signals & Systems Processing By: Ali.Alijani
12
تبديل فوريه سيگنال
[ ] nj 0enx ω= ( ) ∑+∞
∞=
−−=-k
0j )k2(2eX πωωδπω
[ ] n)(cosnx 0ω= ( ) ( ) ( ){ }∑+∞
∞=
−++−−=-k
00j k2k2eX πωωδπωωδπω
[ ] n)(sinnx 0ω= ( ) ( ) ( ){ }∑+∞
∞=
−+−−−=-k
00j k2k2
jeX πωωδπωωδπω
[ ] 1nx = ( ) ( )j
k -X e 2 2kω π δ ω π
+∞
= ∞
= −∑
موج مربعي متناوب
[ ]
[ ] [ ]nxNnx2NnN0
Nn1nx
1
1
=+
⎪⎩
⎪⎨⎧
≤≤
≤=
( ) ∑
+∞
∞=⎟⎠⎞
⎜⎝⎛ −=
-kk
j
Nk2a2eX πωδπω
[ ] [ ]k -
x n n k Nδ+∞
= ∞
= −∑ ( )j
k -
2 2 kX eN N
ω π πδ ω+∞
= ∞
⎛ ⎞= −⎜ ⎟⎝ ⎠
∑
[ ]⎪⎩
⎪⎨⎧
>
≤=
1
1
Nn0
Nn1nx
( )⎟⎠⎞
⎜⎝⎛
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ +
=
2sin
21Nsin
eX1
j
ω
ωω
[ ]
ππππ
<<
⎟⎠⎞
⎜⎝⎛==
W0
nWcsinWn
(Wn)sinnx ( )ωjeX متناوب با دوره تناوب π2 ( )
⎪⎩
⎪⎨⎧
≤<
≤≤=
πω
ωω
W0
W01eX j
[ ] [ ]nnx δ= ( ) 1eX j =ω
[ ] [ ]nunx = ( )j-j
k -n
1X e ( 2 k )1 e
ωω π δ ω π
+∞
=
= + −− ∑
[ ] [ ]0x n n nδ= − ( ) 0n-jj eeX ωω =
[ ] [ ]nx n u n 1α α= < ( ) ωω
α j-j
e11eX
−=
[ ] [ ]n(n r l)!x n u n 1n!(r l)!
α α+ −= <
− ( )
( )j
-j
1 X e1 e
rω
ωα=
−
تبديل فوريه برخي سيگنال هاي مهم گسسته در زمان - 7جدول

Signals & Systems Processing By: Ali.Alijani
13
تبديل فوريه سيگنال نامتناوب خاصيت
[ ]nx )(eX jω متناوب با دوره تناوب π2
[ ]ny ( )ωjeY متناوب با دوره تناوب π2
] خطي بودن ] [ ]Ax n By n+ ( ) ( )j jAX e BY eω ω+
] جابجايي زماني ]0x n n− ( )ωω jn-j eXe 0
] جابجايي فركانسي ]nxe nj 0ω ( ))-(j 0eX ωω
] مزدوج گيري ]nx∗ ( )ω-jeX∗
] وارونگي زماني ]x n− ( )ω-jeX
] انبساط زماني ]⎪⎩
⎪⎨
⎧
≠
=⎥⎦⎤
⎢⎣⎡
=nk0
nkknx
nx k)(
مضرب
مضرب
( )ωkjeX
] انقباض زماني ]nMx ( )j 2kM-1M
k 0
1 X eM
ω π+
=
⎛ ⎞⎜ ⎟⎜ ⎟⎝ ⎠
∑
كانولوشن در حوزه
زمان
[ ] [ ]x n *y n ( ) ( )ωω jj eYeX
ضرب در حوزه
زمان
[ ] [ ]nynx ( ) ( )( )∫π
θωθ θπ 2
-jj deYeX21
تفاضل گيري زماني [ ] [ ]x n x n 1− −
( ) ( )-j j1 e X eω ω−
] جمع انباره اي ]kxn
-k∑
∞=
( ) ( ) ( )∑
∞+
∞=
−+− -k
jj-
j
k2eXe1eX
0 πωδπω
ω
مشتق گيري
فركانسي[ ]nxn
( )ω
ω
deXdj
j
تقارن سيگنال هاي
حقيقي
[ ]x n حقيقي
[ ] [ ]nxnx ∗=
( ) ( )( ){ } ( ){ } ( ) ( )( ){ } ( ){ } ( ) ( )
j -j
j -j j * -j
j -j j * -j
X e X e
Re X e Re X e X e X e
Im X e Im X e X e X e
ω ω
ω ω ω ω
ω ω ω ω
∗=
= =
= − = −
تقارن سيگنال هاي
حقيقي و زوج
[ ]x n وزوج حقيقي
[ ] [ ] [ ]*x n x n x n= = − ( )ωjeX زوج حقيقي و ( ) ( ) ( )ωωω -jjj eXeXeX == ∗

Signals & Systems Processing By: Ali.Alijani
14
تقارن سيگنال هاي
حقيقي و فرد
[ ]nx حقيقي و فرد
[ ] [ ] [ ]*x n x n x n= = − − ( )ωjeX موهومي و فرد ( ) ( ) ( )ωωω -jjj eXeXeX −=−= ∗
سيگنال هاي تجزيه زوج و فرد
حقيقي
[ ]nx حقيقي
[ ] [ ] [ ]e ox n x n x n= +
( ) ( ){ } ( ){ } ( ) ( )j j j j je oX e Re X e jIm X e X e X eω ω ω ω ω= + = +
) :برابر است با t)(Xeتبديل فوريه ){ } ( )ωω je
j eXeXRe =
oXتبديل فوريه (t) است با برابر: ( ){ } ( )j jojIm X e X eω ω=
رابطه پارسوال براي سيگنال هاي
نامتناوب
[ ] ( )∑ ∫+∞
∞=
=-n 2
2j2 deX21nx
π
ω ωπ
جمع نمونه هاي يك سيگنال
( ) [ ]∑+∞
∞=
=-n
0j nxeX
πω درمقدار تبديل فوريه =
( ) ( ) [ ]∑+∞
∞=
=-n
nj nx1-eX π
سطح زير منحني تبديل فوريه
[ ] ( )∫=π
ω ωπ 2
j deX210x
خواص تبديل فوريه گسسته در زمان - 8جدول

Signals & Systems Processing By: Ali.Alijani
15
گسسته در زمان پيوسته در زمان
ركانسفحوزه حوزه زمان ركانسفحوزه حوزه زمان
سري
فوريه0jk
kk -
x (t) a e tω+∞
= ∞
= ∑
پيوسته در زمان
متناوب در زمان
0
0
-jk tk
0 T
1a x (t)e d tT
ω= ∫
گسسته در فركانس
نامتناوب در فركانس
[ ] 0jk nk
k:(N)x n a e ω= ∑
گسسته در زمان
متناوب در زمان
[ ] 0-jk nk
n:(N)
1a x n eN
ω= ∑
گسسته در فركانس
متناوب در فركانس تبديل
فوريه
j t1x(t) X(j )e d2
ωω ωπ
+∞
−∞= ∫
پيوسته در زمان
نامتناوب در زمان
-j t
-X (j ) x (t) e d tωω
+∞
∞= ∫
پيوسته در فركانس
نامتناوب در فركانس
[ ] j j n
2
1x n X(e )e d2
ω ω
π
ωπ
= ∫
گسسته در زمان
نامتناوب در زمان
( ) [ ]j -j n
n -
e X n eX ω ω+∞
= ∞
= ∑
پيوسته در فركانس
متناوب در فركانس
خالصه معادالت سري و تبديل فوريه پيوسته و گسسته در زمان -9جدول
.عالمت پيكان در جدول به معناي دوگاني مي باشد: توجه

Signals & Systems Processing By: Ali.Alijani
16
ROC تبديل الپالس سيگنال
(t)(t)x δ= 1(s)X sتمام صفحه =
(t)u(t)x = s1(s)X = { } 0sRe >
x (t) u ( t)= − − s1(s)X = { } 0sRe <
(t)ut(t)x n= 1nsn!(s)X += { } 0sRe >
nx (t) t u ( t)= − − 1nsn!(s)X += { } 0sRe <
- tx (t) e u (t)α= α+
=s
1(s)X { } α−>sRe
- t x (t) e u ( t)α= − − α+
=s
1(s)X { } α−<sRe
- tx (t) e u(t)nt α= 1n)(sn!(s)X ++
=α
{ } α−>sRe
- tx (t) e u( t)nt α= − − 1n)(sn!(s)X ++
=α
{ } α−<sRe
x (t) (t T)δ= − T-se(s)X sتمام صفحه =
( )[ ] (t)utcos(t)x 0ω= 20
2ss(s)Xω+
= { } 0sRe >
[ ] (t)ut)(sin(t)x 0ω= 20
20
s(s)X
ωω+
= { } 0sRe >
- t0x (t) e cos ( t) u (t)α ω⎡ ⎤= ⎣ ⎦ 2
02)(s
s(s)Xωα
α++
+= { } α−>sRe
( )[ ] (t)utsine(t)x 0t- ωα= 2
020
)(s(s)X
ωαω
++= { } α−>sRe
n
n
tdt)(d(t)x δ
= ns(s)X sتمام صفحه =
-nx (t) u (t) u (t)* *u (t)ار nب
= = … ns
1(s)X = { } 0sRe >
تبديل الپالس برخي سيگنال هاي مهم پيوسته در زمان -10جدول

Signals & Systems Processing By: Ali.Alijani
17
ROC تبديل الپالس سيگنال خاصيت
(t)x (s)X { } βα << sRe:R
(t)x1 s)(X1 1R
(t)x2 s)(X2 2R
t)(bxt)(ax خطي بودن 21 + s)(bXs)(aX 21 21 حداقل + RR ∩
0x جابجائي زماني (t t )− (s)Xe 0-st R
s (t)xeجابجايي در حوزه ts0 )s-(sX 0 { } { } { }00 sResResRe +<<+ βα
⎟ x(at) تغيير مقياس زماني⎠⎞
⎜⎝⎛
asX
a1
{ }{ }
a Re s a a 0
a Re s a a 0
α β
β α
< < >
< < <
t)(x∗ )s(X مزدوج گيري ∗∗ R
1 كانولوشن 2x (t)*x (t) s)(Xs)(X 21 حداقل 21 RR ∩
مشتق گيري زمانيdt
(t)dx (s)Xs حداقل R
−s (t)txمشتق گيري در حوزه ds
(s)dX R
∞∫ انتگرال گيري زمانيt
-d)(x ττ
s(s)X
} حداقل } 0)s(ReR >∩
0tاگر در : قضاياي مقدار اوليه و مقدار نهايي x(t)0داشته باشيم > 0tدر x(t)و = ضربه و توابع تكين مرتبه باالتر نداشته =
:آنگاه باشد،
0lim ( ) lim ( )t s
x t sX s→ →∞
=
0lim ( ) lim ( )t s
x t sX s→∞ →
=
.شودچون ناپايدار مي يا سمت راست آن قطب داشته باشد ωjنبايد روي محور s(sx(در قضيه مقدار نهايي
خواص تبديل الپالس -11جدول

Signals & Systems Processing By: Ali.Alijani
18
z ROCتبديل سيگنال
[ ] [ ]nnx δ= 1(z)X تمام صفحه مختلط =
[ ] [ ]nunx = -1
1X (z)1 z
=−
1z >
[ ] [ ]x n u n 1= − − − -1
1X (z)1 z
=−
1z <
[ ] [ ]x n n mδ= − -mz(z)X =
تمام صفحه مختلط
<0mغير از صفر اگر
>0m اگر ∞غير از
[ ] [ ]nunx nα= -11X (z)
1 zα=
− α>z
[ ] [ ]nx n u n 1α= − − − 1-z11(z)Xα−
= α<z
[ ] [ ]nunnx nα= 21-
-1
)z1(z(z)Xαα−
= α>z
[ ] [ ]nx n n u n 1α= − − − 21-
-1
)z1(z(z)Xαα−
= α<z
[ ] ( )[ ] [ ]nuncosnx 0ω= ( )[ ]( )[ ] 2-1-
0
-10
zzcos21zcos1(z)X+−
−=
ωω 1z >
[ ] ( )[ ] [ ]nunsinnx 0ω= ( )[ ]( )[ ] 2-1-
0
-10
zzcos21zsin(z)X
+−=
ωω 1z >
[ ] ( )[ ] [ ]nuncosrnx 0n ω= ( )[ ]
( )[ ] 2-21-0
-10
zrzcosr21zcosr1(z)X+−
−=
ωω rz >
[ ] ( )[ ] [ ]nunsinrnx 0n ω= ( )[ ]
( )[ ] 2-20
-10
zrcosr21zsinr(z)X+−
=ωω rz >
برخي سيگنال هاي مهم گسسته در زمان zتبديل - 12جدول

Signals & Systems Processing By: Ali.Alijani
19
z ROCتبديل سيگنال گسسته خاصيت
[ ]nx ( )zX R : zα β≺ ≺
[ ]nx1 z)(X1 1R
[ ]nx2 z)(X2 2R
] خطي بودن ] [ ]nxbnxa 21 + z)(Xbz)(Xa 21 21حداقل + RR ∩
] جابجايي زماني ]0x n n− (z)Xz 0-n z 0
Rz=⎧ ⎫
± ⎨ ⎬= ∞⎩ ⎭
تغيير مقياس در حوزه
z
[ ]nxe nj 0ω z)(eX 0-jω R
[ ]nxzn0 ⎟⎟
⎠
⎞⎜⎜⎝
⎛
0zzX 0 0z z zα β< <
[ ]nxan ⎟
⎠⎞
⎜⎝⎛
azX a z aα β< <
] زمانيوارونگي ]x n− ( )-1zX 1 1zβ α< <
] انبساط زماني ] [ ]⎭⎬⎫
⎩⎨⎧
≠=
=krn0
krnrxnx k)( ( )kzX
kzα β< <
] انقباض زماني ]nMx
( )
1 2kM-1 jM M
k 0
jc
1 X zM
X e 0
eπ
ω ω ω π
−
=
⎛ ⎞⎜ ⎟⎝ ⎠
= < <
∑ Mzα β< <
] مزدوج گيري ]nx∗ ( )∗∗ zX R
كانولوشن در حوزه
زمان
[ ] [ ]1 2x n *x n z)(Xz)(X 21 21R حداقل R∩
] تفاضل اول ] [ ]x n x n 1− − -1(1 z ) X (z)− حداقل { }R 0z >∩
] جمع انباره اي ]∑∞=
n
-kkx -1
X (z)1 z−
} حداقل }R 1z >∩
] zمشتق در حوزه ]nxn zd(z)Xdz− R
] اگر: قضاياي مقدار اوليه ] 0nx :آنگاه n>0به ازاء، =
2 1[0] lim ( ) , [1] lim ( ( ) [0]) , [2] lim ( ( ) [0] [1]) , ...z z z
x X z x z X z x x z X z x z x−
→ ∞ → ∞ → ∞= = − = − −
]: مجموع نمونه هاي سيگنال ]1
)(=
+∞
−∞=
=∑zn
zXnx
zخواص تبديل - 13جدول




















