
ĐỒ ÁN TỐT NGHIỆP ĐẠI HỌC - DSpace at UTE
89
ĐẠI HỌC ĐÀ NẴNG TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT KHOA ĐIỆN – ĐIỆN TỬ ĐỒ ÁN TỐT NGHIỆP ĐẠI HỌC CHUYÊN NGÀNH: CÔNG NGHỆ KỸ THUẬT ĐIỀU KHIỂN VÀ TỰ ĐỘNG HOÁ ĐỀ TÀI: THIẾT KẾ MÔ HÌNH HỆ THỐNG LƯU KHO TỰ ĐỘNG SỬ DỤNG PLC S7-1200 Người hướng dẫn: ThS. Dương Quang Thiện Sinh viên thực hiện: Hoàng Phúc Tài 1811505520246 Phạm Thanh Sang 1811505520244 Lớp: 18TDH2 Đà Nẵng, 5/2022 Họ và tên sinh viên: Hoàng Phúc Tài, Phạm Thanh Sang TÊN ĐỀ TÀI: Thiết kế mô hình Lưu kho tự động sử dụng PLC S7 -1200 …………………………………………………………………………………………………………
-
Upload
khangminh22 -
Category
Documents
-
view
7 -
download
0
Transcript of ĐỒ ÁN TỐT NGHIỆP ĐẠI HỌC - DSpace at UTE

ĐẠI HỌC ĐÀ NẴNG
TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT
KHOA ĐIỆN – ĐIỆN TỬ
ĐỒ ÁN TỐT NGHIỆP
ĐẠI HỌC
CHUYÊN NGÀNH: CÔNG NGHỆ KỸ THUẬT ĐIỀU
KHIỂN VÀ TỰ ĐỘNG HOÁ
ĐỀ TÀI:
THIẾT KẾ MÔ HÌNH HỆ THỐNG LƯU KHO
TỰ ĐỘNG SỬ DỤNG PLC S7-1200
Người hướng dẫn: ThS. Dương Quang Thiện
Sinh viên thực hiện: Hoàng Phúc Tài 1811505520246
Phạm Thanh Sang 1811505520244
Lớp: 18TDH2
Đà Nẵng, 5/2022
H
ọ v
à t
ên s
inh
viê
n:
Hoàn
g P
hú
c T
ài,
Ph
ạm
Th
an
h S
an
g T
ÊN
ĐỀ
TÀ
I: T
hiế
t k
ế m
ô h
ình
Lư
u k
ho t
ự đ
ộn
g s
ử d
ụn
g P
LC
S7 -
1200
……
……
……
……
……
……
……
……
……
……
……
……
……
……
……
……
……
……
……
……
ĐẠI HỌC ĐÀ NẴNG
TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT
KHOA ĐIỆN – ĐIỆN TỬ
ĐỒ ÁN TỐT NGHIỆP
ĐẠI HỌC CHUYÊN NGÀNH: CÔNG NGHỆ KỸ THUẬT ĐIỀU
KHIỂN VÀ TỰ ĐỘNG HOÁ
ĐỀ TÀI:
THIẾT KẾ MÔ HÌNH HỆ THỐNG LƯU KHO
TỰ ĐỘNG SỬ DỤNG PLC S7-1200
Người hướng dẫn: ThS. Dương Quang Thiện
Sinh viên thực hiện: Hoàng Phúc Tài 1811505520246
Phạm Thanh Sang 1811505520244
Lớp: 18TDH2
Đà Nẵng, 5/2022

Thiết kế Mô hình Lưu kho tự động sử dụng PLC S71200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện

Thiết kế Mô hình Lưu kho tự động sử dụng PLC S71200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện

Thiết kế Mô hình Lưu kho tự động sử dụng PLC S71200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện

Thiết kế Mô hình Lưu kho tự động sử dụng PLC S71200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
TÓM TẮT
Tên đề tài: Thiết kế mô hình hệ thống lưu kho tự động sử dụng PLC S7-1200
Sinh viên thực hiện: Hoàng Phúc Tài 1811505520246
Phạm Thanh Sang 1811505520244
Lớp: 18TDH2
Sau một thời gian nghiên cứu và tìm hiểu, chúng em đã quyết định chọn đề tài
“Thiết kế mô hình Lưu kho tự động”. Đây là một đề tài mà chúng em cảm thấy là khá
hay và thú vị, đáp ứng nhu cầu về kiến thức chuyên ngành Tự động hoá.
Bằng sự cố gắng nỗ lực của bản thân và đặc biệt là sự giúp đỡ tận tình, chu đáo
của thầy Dương Quang Thiện, em đã hoàn thành đồ án đúng thời hạn. Do thời gian làm
đồ án có hạn và trình độ còn nhiều hạn chế nên không thể tránh khỏi những thiếu sót.
Em rất mong nhận được ý kiến đóng góp của các thầy cô để đồ án này được hoàn thiện
hơn nữa.
Chúng em xin chân thành cảm ơn thầy Dương Quang Thiện, và các thầy cô giáo
trong bộ môn “Tự Động hóa” đã tạo điều kiện giúp đỡ chúng em trong thời gian qua.
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S71200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT
KHOA ĐIỆN - ĐIỆN TỬ
CỘNG HÒA XÃ HÔI CHỦ NGHĨA VIỆT NAM
Độc lập - Tự do - Hạnh phúc
NHIỆM VỤ ĐỒ ÁN TỐT NGHIỆP
Giảng viên hướng dẫn: ThS. Dương Quang Thiện
Sinh viên thực hiện: Phạm Thanh Sang Mã SV: 1811505520244
Hoàng Phúc Tài Mã SV: 1811505520246
1. Tên đề tài:
THIẾT KẾ MÔ HÌNH HỆ THỐNG LƯU KHO TỰ ĐỘNG SỬ DỤNG S7-1200
2. Các số liệu, tài liệu ban đầu:
Cấu trúc cơ bản của hệ thống lưa kho (sơ đồ công nghệ)
Sơ đồ quản lý kho (sơ đồ công nghệ)
Sách, báo, các website công nghệ, you tube
Tài liệu từ thầy cô, các anh chị khóa trước
3. Nội dung chính của đồ án:
Chương 1: Giới thiệu chung.
Chương 2: Tổng quan về hệ thống Simatic S7-1200 và HMI
Chương 3: Thiết kế mô hình Lưu kho tự động
Chương 4: Kết luận và hướng phát triển
4. Các sản phẩm dự kiến
Sản phẩm được lưu kho và xuất kho đã được tính toán và quản lý một cách thông
minh, và tiện lợi
5. Ngày giao đồ án: 14/2/2022
6. Ngày nộp đồ án: 30/5/2022
Đà Nẵng, ngày 22 tháng 02 năm 2022.
Trưởng Bộ môn Người hướng dẫn
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S71200
i
SVTH: Phạm Thanh Sang GVHD: ThS.Dương Quang Thiện
LỜI NÓI ĐẦU
Ngày nay, nền kinh tế nước ta đang phát triển mạnh mẽ, cuộc cách mạng
khoa học kỹ thuật cũng có những bước đột phá mới, đời sống nhân dân ngày
càng được nâng cao. Cùng với xu thế công nghiệp hóa, hiện đại hóa ở nước ta
cũng như các nước trên thế giới, các hệ thống tự động đã được đưa vào quá trình
lao động sản xuất. Tuy nhiên các hệ thống lưu kho ở nước ta vẫn chưa được áp
dụng tự động hóa, vẫn còn sử dụng lao động tay chân.
Với mục đích nghiên cứu có tính ứng dụng và ý nghĩa thực tiễn nên nhóm
đã chọn đề tài “Mô hình lưu kho tự động ứng dụng PLC S7-1200” để giải quyết
vấn đề lưu kho tự động ở nước ta. Qua đề tài nhóm đã thực hiện mong sẽ góp
phần nào cho sinh viên mới ra trường thích ứng nhanh với thực tế.
Đồ án tốt nghiệp này là kết quả của sự vận dụng các kiến thức đã học vào
thực tế để thiết kế lập trình cho hệ thống. Cũng nhờ đây mà người thực hiện có
thể hiểu rõ hơn được những gì đã học ở lý thuyết, mà chưa có dịp để ứng dụng
vào thực tiễn. Đề tài “Mô hình lưu kho tự động ứng dụng PLC S7-1200” là cơ
sở để người thực hiện thiết kế những hệ thống tự động thực tế sau này.
Trên tinh thần đó với sự hướng dẫn tận tình của thầy Dương Quang Thiện,
bọn em đã tiến hành làm đồ án thiết kế mô hình lưu kho tự động.
Trong quá trình thực hiện đề tài này, chắc chắn không tránh khỏi những
thiếu sót. Nếu có sơ suất kính mong đọc giả góp ý để người thực hiện có cơ hội
bổ sung vào vốn kiến thức của mình.
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S71200
ii
SVTH: Phạm Thanh Sang GVHD: ThS.Dương Quang Thiện
LỜI CẢM ƠN
Chúng tôi xin gửi lời cảm ơn đến giáo viên hướng dẫn là thầy Dương
Quang Thiện đã chỉ bảo và hướng dẫn tận tình cũng như hổ trợ các thiết bị
trong mô hình để chúng tôi có thể hoàn thành tốt đề tài “Mô hình hệ thống lưu
kho tự động ứng dụng PLC S7-1200”.
Đồng thời chúng tôi cũng xin cảm ơn Trường Đại Học SPKT Đà Nẵng,
các thầy cô trong Khoa Điện - Điện Tử đã tạo điều kiện, cung cấp cho chúng tôi
những kiến thức cơ bản rất cần thiết làm cơ sở cho chúng tôi thực hiện quá trình
nghiên cứu.
Cuối cùng nhóm thực hiện cũng gửi lời cảm ơn đến gia đình, bạn bè đã
luôn ủng hộ về mặt tinh thần cũng như kinh phí, tạo động lực mạnh mẽ để nhóm
nghiên cứu và làm việc tích cực, hoàn thành tốt những nội dung khoa học trong
đồ án.
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S71200
iii
SVTH: Phạm Thanh Sang GVHD: ThS.Dương Quang Thiện
CAM ĐOAN
Em xin cam đoan rằng đề tài “Thiết kế mô hình hệ thống lưu kho tự động” được
tiến hành một cách minh bạch, công khai.
Mọi thứ được dựa trên sự cố gắng cũng như sự nỗ lực của bản thân cùng với sự
giúp đỡ không nhỏ từ Ths.Dương Quang Thiện.
Các số liệu và kết quả nghiên cứu được đưa ra trong đồ án là trung thực và không
sao chép hay sử dụng kết quả của bất kỳ đề tài nghiên cứu nào tương tự.
Nếu như phát hiện rằng có sự sao chép kết quả nghiên cứu đề những đề tài khác
bản thân em xin chịu hoàn toàn trách nhiệm.
Sinh viên thực hiện
{Chữ ký, họ và tên sinh viên}

Thiết kế Mô hình Lưu kho tự động sử dụng PLC S71200
iv
SVTH: Phạm Thanh Sang GVHD: ThS.Dương Quang Thiện
MỤC LỤC
Nhận xét của người hướng dẫn
Nhận xét của người phản biện
Tóm tắt
Nhiệm vụ đồ án
Lời nói đầu .............................................................................................................. i
Lời cảm ơn ............................................................................................................. ii
Lời cam đoan ....................................................................................................... iii
Mục lục ................................................................................................................. iv
Danh sách các bảng, hình vẽ ................................................................................. vi
Danh sách các ký hiệu, chữ viết tắt ....................................................................... x
CHƯƠNG 1: GIỚI THIỆU CHUNG ................................................................. 1
1.1 Đặt vấn đề .................................................................................................... 1
1.2 Ý nghĩa khoa học và thực tiễn đề tài ......................................................... 2
1.3 Đối tượng nghiên cứu và phạm vi nghiên cứu ......................................... 2
1.4 Phương pháp nghiên cứu ........................................................................... 2
1.5 Kế hoạch nghiên cứu .................................................................................. 2
1.6 Nội dung đề tài ............................................................................................ 3
CHƯƠNG 2: TỔNG QUAN VỀ HỆ THỐNG SIMATIC S7-1200 VÀ HMI4
2.1 Giới thiệu về PLC S7-1200 ......................................................................... 4
2.1.1 Tổng quan về nguồn gốc PLC.................................................................. 4
2.1.2 Một số nhóm PLC phổ biến hiện nay....................................................... 4
2.1.3 Tổng quan về họ PLC S7-1200 ................................................................ 5
2.1.4 Các dòng CPU S7-1200 ........................................................................... 6
2.1.5 Lập trình ................................................................................................... 9
2.1.6 Cấu trúc phần cứng ................................................................................ 10
2.1.7 Các tập lệnh cơ bản trong S7-1200 ........................................................ 11
2.1.9 Kết nối I/O cho S7-1200 CPU1214C DC/DC/DC ................................. 20
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S71200
v
SVTH: Phạm Thanh Sang GVHD: ThS.Dương Quang Thiện
2.2 Phần mềm lập trình TIA PORTAL V15.1 .............................................. 22
2.3 Giao diện giám sát HMI ........................................................................... 23
CHƯƠNG 3 THIẾT KẾ MÔ HÌNH LƯU KHO TỰ ĐỘNG ..................... 26
3.1 Bài toán lưu kho ........................................................................................ 26
3.1.1 Quy trình công nghệ ............................................................................... 26
3.1.2 Sơ đồ khối .............................................................................................. 27
3.2 Giới thiệu từng thiết bị trong mô hình .................................................... 28
3.2.1 Khối PLC ............................................................................................... 28
3.2.2 Khối Nguồn ............................................................................................ 28
3.2.3 Khối cảm biến và công tắc hành trình.................................................... 29
3.2.4 Khối băng tải và sản phẩm ..................................................................... 31
3.2.5 Động cơ bước ......................................................................................... 32
3.2.6 Mô hình tổng thể .................................................................................... 40
3.2.7 Tủ điện ................................................................................................... 42
3.3 Sơ đồ nối dây ............................................................................................. 44
3.4 Nguyên lý hoạt động của hệ thống ......................................................... 45
3.5 Thiết kế giao diện HMI và lập trình hệ thống........................................ 51
3.5.1 Lưu đồ thuật toán ................................................................................... 51
3.5.2 Thiết lập địa chỉ IP ................................................................................. 53
3.5.3 Tạo Project mới ...................................................................................... 54
3.5.4 Thiết kế giao diện HMI .......................................................................... 55
3.5.5 Lập trình điều khiển hệ thống ................................................................ 61
CHƯƠNG 4 KẾT LUẬN VÀ HƯỚNG PHÁT TRIỂN .............................. 63
4.1 Kết luận ...................................................................................................... 63
4.2 Hướng phát triển ...................................................................................... 64
TÀI LIỆU THAM KHẢO ................................................................................. 65
PHỤ LỤC................................................................................................................
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S71200
vi
SVTH: Phạm Thanh Sang GVHD: ThS.Dương Quang Thiện
DANH SÁCH CÁC BẢNG, HÌNH VẼ
LIỆT KÊ HÌNH
Hình 2.1 PLC S7-224 ............................................................................................. 4
Hình 2. 2. PLC S7-1200 CPU 1212C AC/DC/RLY .............................................. 5
Hình 2. 3. Các cổng kết nối S7-1200 .................................................................... 6
Hình 2. 4. CPU 1214C ........................................................................................... 7
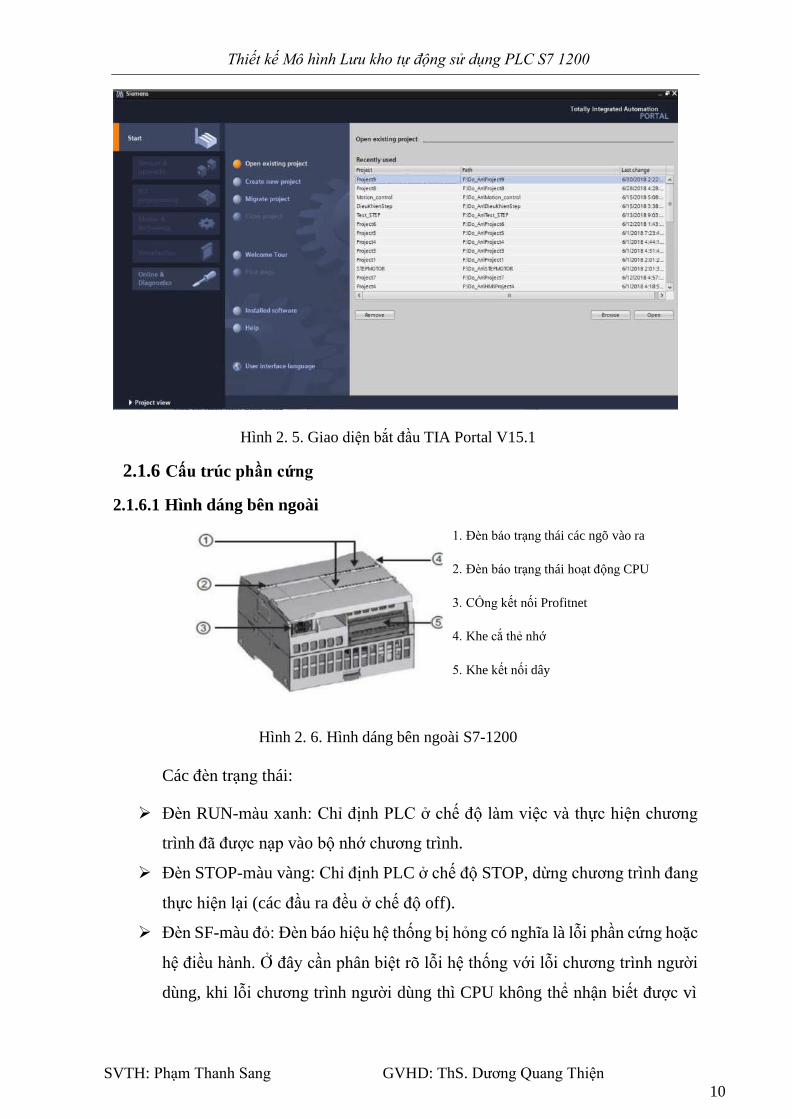
Hình 2. 5. Giao diện bắt đầu TIA Portal V15.1 ................................................... 10
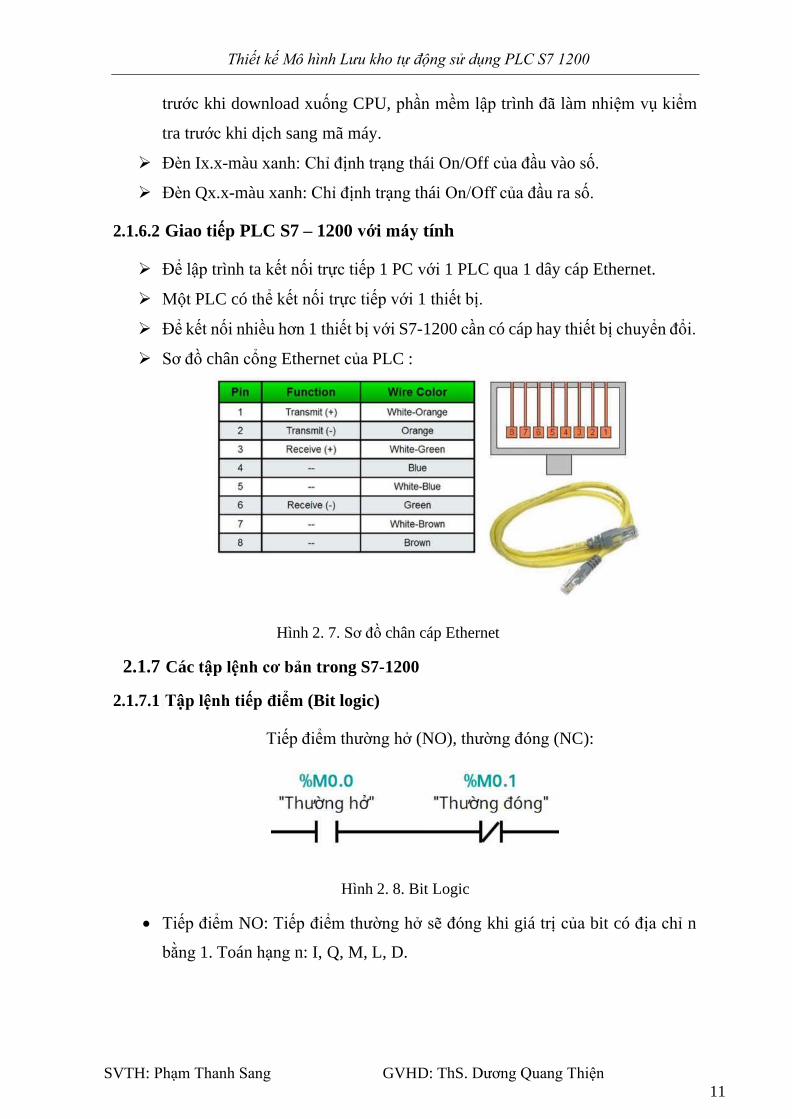
Hình 2. 6. Hình dáng bên ngoài S7-1200 ............................................................ 10
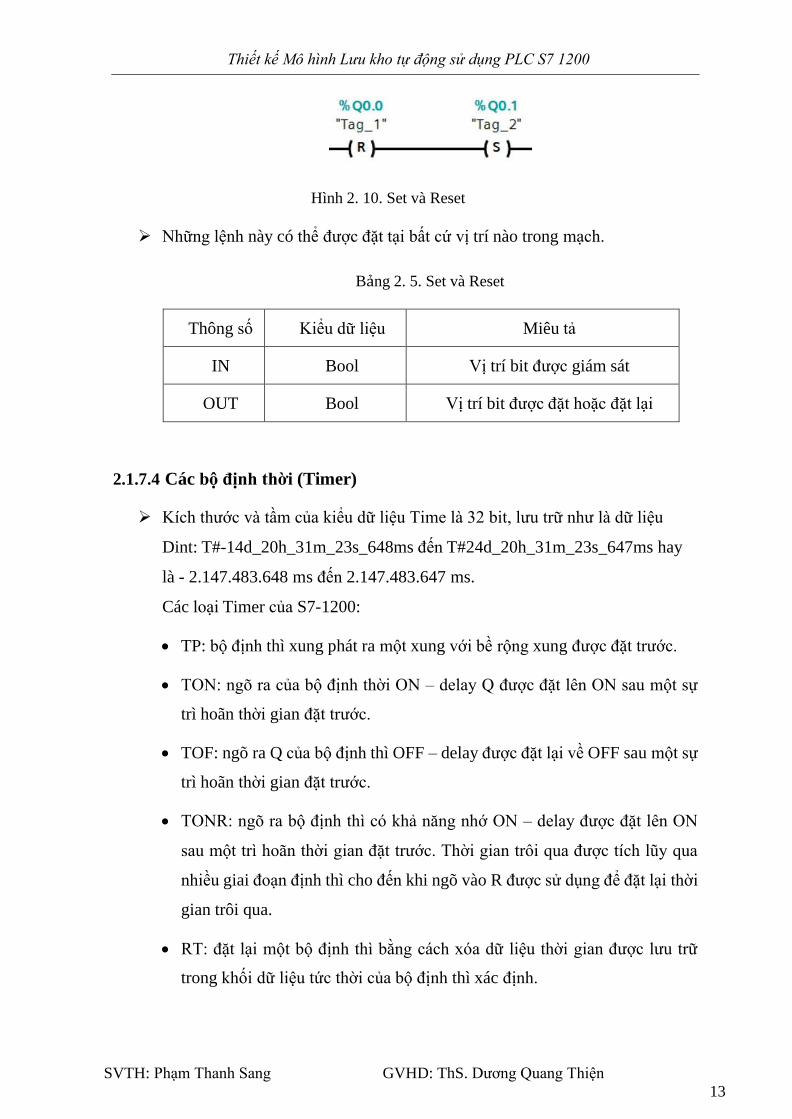
Hình 2. 7. Sơ đồ chân cáp Ethernet ..................................................................... 11
Hình 2. 9. Cuộn dây ngõ ra .................................................................................. 12
Hình 2. 10. Set và Reset ....................................................................................... 13
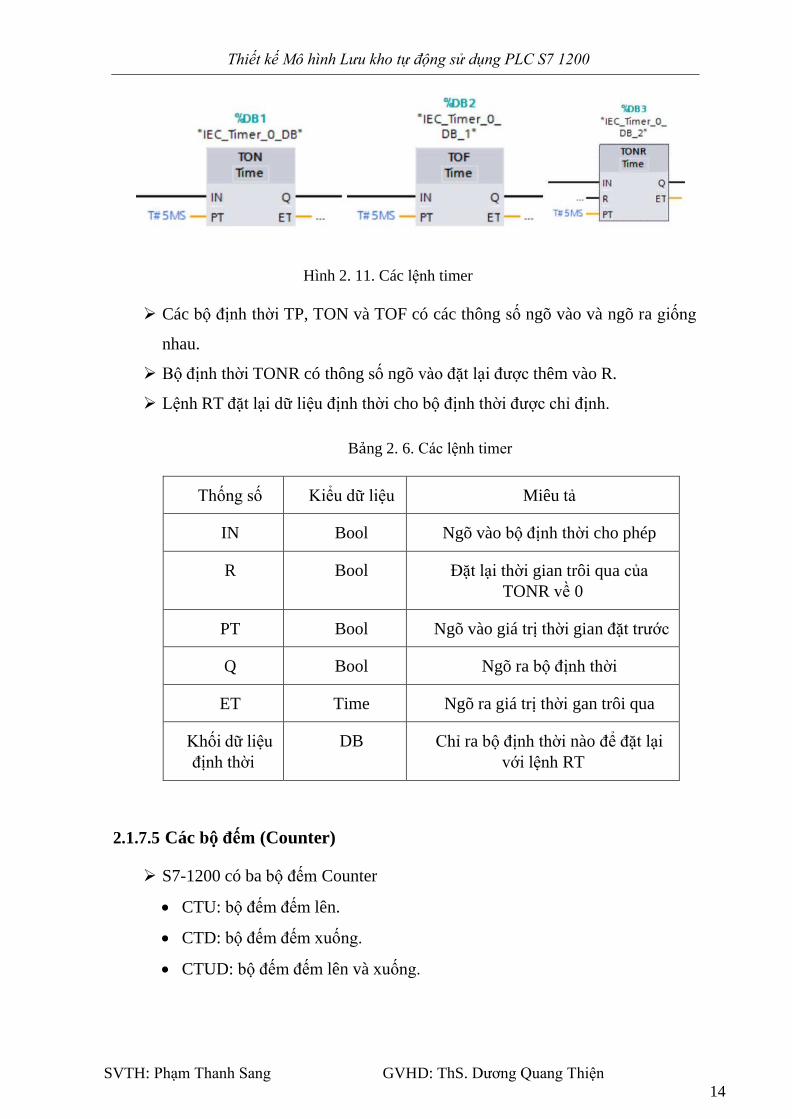
Hình 2. 11. Các lệnh timer ................................................................................... 14
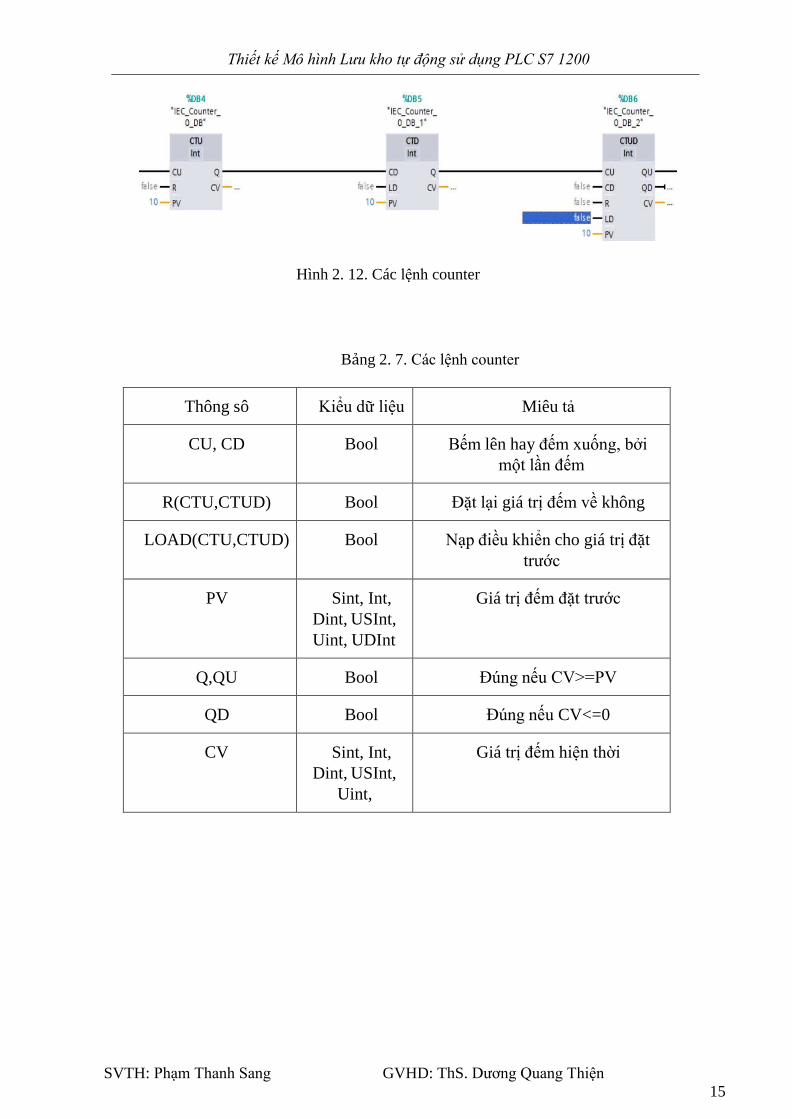
Hình 2. 12. Các lệnh counter ............................................................................... 15
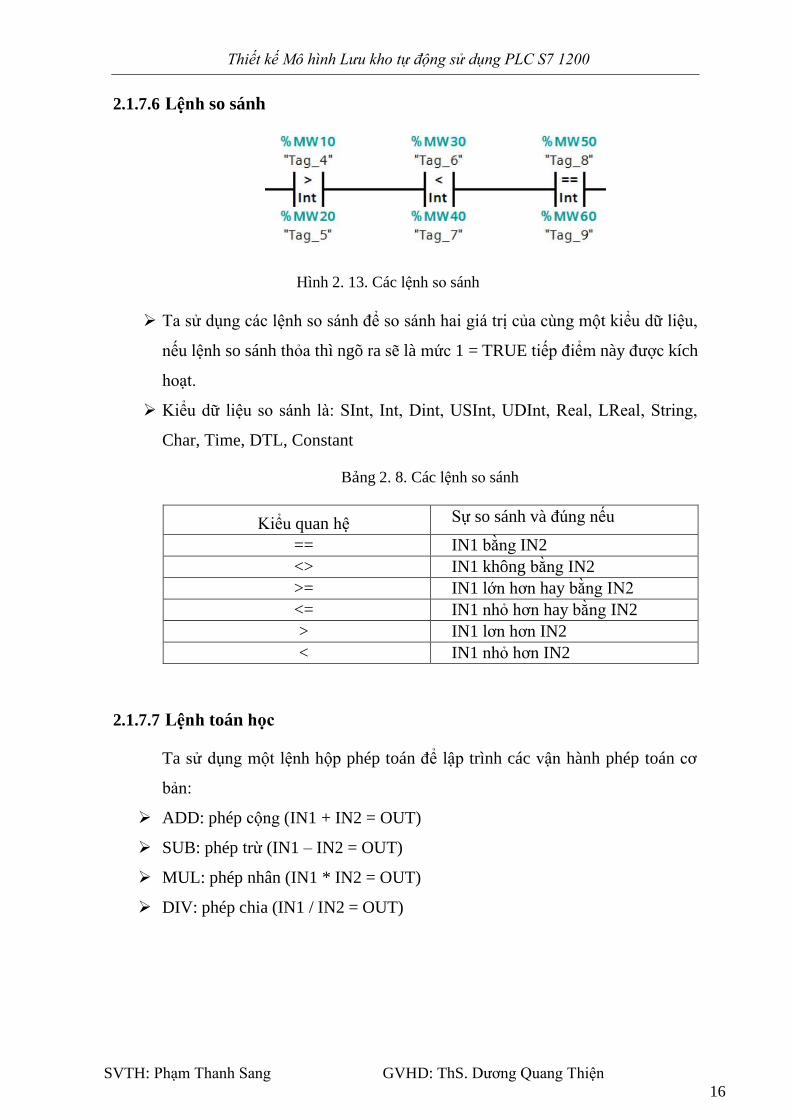
Hình 2. 13. Các lệnh so sánh ............................................................................... 16
Hình 2. 14. Các lệnh toán học .............................................................................. 17
Hình 2. 15. Các lệnh di chuyển ............................................................................ 17
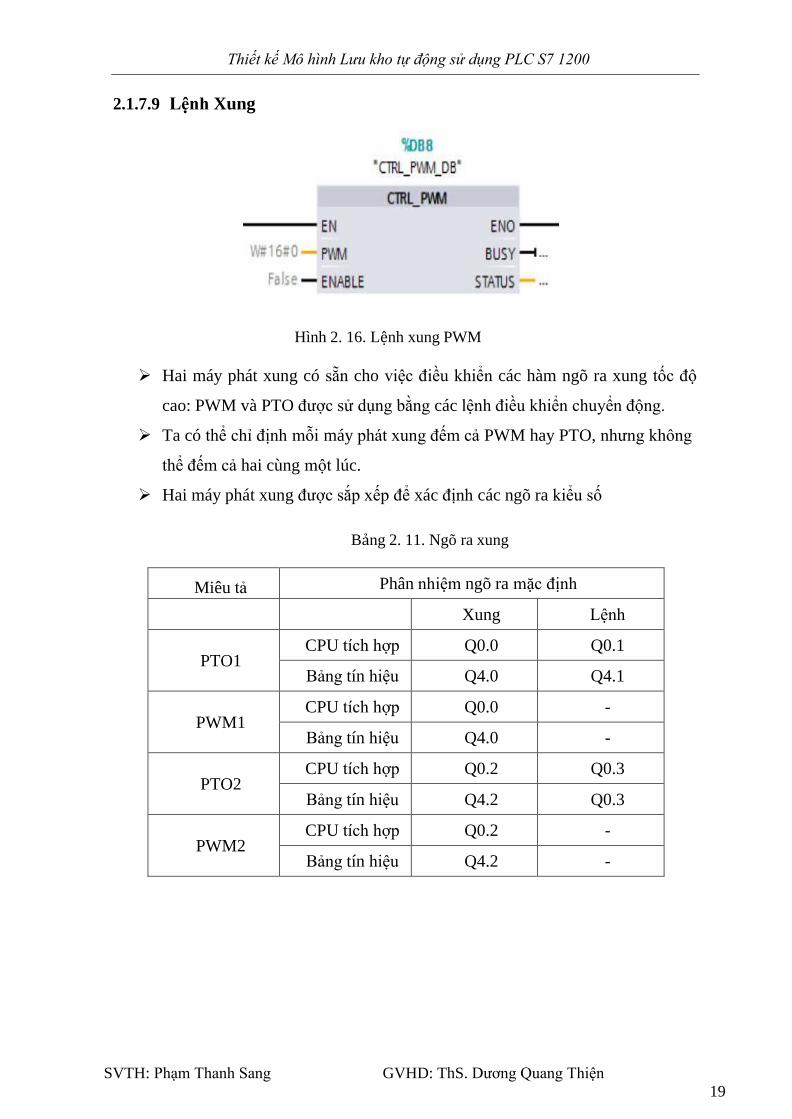
Hình 2. 16. Lệnh xung PWM .............................................................................. 19
Hình 2. 17. Các lệnh Motion Control .................................................................. 20
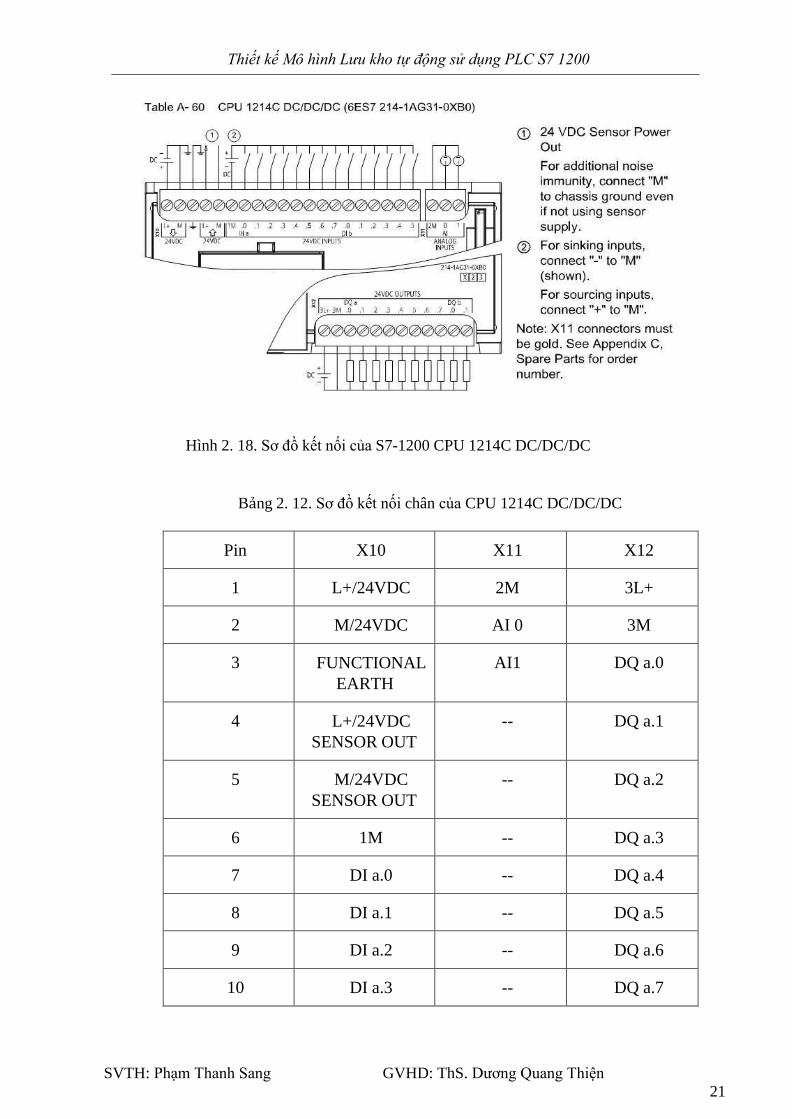
Hình 2. 18. Sơ đồ kết nối của S7-1200 CPU 1214C DC/DC/DC ........................ 21
Hình 2.19 Giao diện phần mềm Tia PorTal ......................................................... 22
Hình 2.20 Cấp điều khiển giám sát HMI ............................................................. 24
Hình 2.21 Màn hình giao diện WinCC tích hợp trong phần mềm Tia PorTal .... 25
Hình 3. 1 Quy trình công nghệ bài toán nhập kho ............................................... 26
Hình 3.2 Quy trình công nghệ bài toán xuất kho ................................................. 27

Thiết kế Mô hình Lưu kho tự động sử dụng PLC S71200
vii
SVTH: Phạm Thanh Sang GVHD: ThS.Dương Quang Thiện
Hình 3.3 Sơ đồ khối ........................................................................................... 27
Hình 3. 4. PLC S7-1200 1214C DC/DC/DC ....................................................... 28
Hình 3. 5. Nguồn tổ ong ...................................................................................... 29
Hình 3. 6 Cảm biến hồng ngoại ........................................................................... 30
Hình 3.7 Cảm biến tiệm cận ................................................................................ 31
Hình 3.8 Công tắc hành trình ............................................................................... 31
Hình 3.9 Băng tải ............................................................................................... 32
Hình 3.10 Sơ đồ khối động cơ bước .................................................................... 33
Hình 3.11 Cuộn dây động cơ bước ...................................................................... 34
Hình 3.12 Sơ đồ mạch điện động cơ bước ........................................................... 35
Hình 3.13 Sơ đồ cuộn dây của các loại động cơ bước ......................................... 36
Hình 3.14 Động cơ bước ..................................................................................... 37
Hình 3.15 Driver TB 6600 ................................................................................... 38
Hình 3.16 Đấu dây TB6600 ............................................................................... 39
Hình 3.17 Mô hình thiết kế ................................................................................ 41
Hình 3.18 Mô hình tổng thể ............................................................................... 42
Hình 3.19 Sơ đồ bố trí tủ điện ........................................................................... 43
Hình 3.20 Tủ điện ............................................................................................... 43
Hình 3. 21 Sơ đồ nối dây ................................................................................... 44
Hình 3.22 Hoạt động_B1 ................................................................................... 45
Hình 3. 23 Hoạt động_B2 .................................................................................. 46
Hình 3.24 Hoạt động_B3 ................................................................................... 47
Hình 3. 25 Hoạt động_B4 .................................................................................. 48
Hình 3. 26 Hoạt động_B5 .................................................................................. 49
Hình 3. 27 Hoạt động_B6 .................................................................................. 50
Hình 3. 28 Lưu đồ nhập kho .............................................................................. 51
Hình 3. 29 Lưu đồ xuất kho ............................................................................... 52

Thiết kế Mô hình Lưu kho tự động sử dụng PLC S71200
viii
SVTH: Phạm Thanh Sang GVHD: ThS.Dương Quang Thiện
Hình 3. 30 Thiết lập địa chỉ IP cho máy tính_1 ................................................... 53
Hình 3. 31 Thiết lập địa chỉ IP cho máy tính_2 ................................................. 53
Hình 3. 32 Thiết lập địa chỉ IP cho máy tính_3 ................................................. 54
Hình 3.33 Tạo Project mới_1 ............................................................................ 54
Hình 3. 34 Tạo Project mới_2 ........................................................................... 55
Hình 3. 35 Thiết kế HMI_1 ............................................................................... 55
Hình 3. 36 Thiết kế HMI_1 ............................................................................... 56
Hình 3. 37 Thiết kế HMI_3 ............................................................................... 56
Hình 3. 38 Kết nối giữa WinCC và PlC ............................................................ 57
Hình 3. 39 Màn hình thiết kế giao diện HMI trên WinC .................................. 57
Hình 3.40 Tạo Background ................................................................................ 58
Hình 3. 41 Tạo hiệu ứng cho vật di chuyển ....................................................... 58
Hình 3. 42 Setbit cho nút Start ........................................................................... 59
Hình 3. 43 Tạo hiệu ứng đổi màu cho nút Start ................................................. 59
Hình 3. 44 Giao diện HMI trên WinCC .............................................................. 60
Hình 3. 45 Giao diện viết chương trình ........................................................... 61
Hình 3.46 Chương trình điều khiển .................................................................. 62
Hình 3.47 Chương trình điều khiển ................................................................... 62

Thiết kế Mô hình Lưu kho tự động sử dụng PLC S71200
ix
SVTH: Phạm Thanh Sang GVHD: ThS.Dương Quang Thiện
LIỆT KÊ BẢNG
Bảng 2. 1. Các module mở rộng của S7-1200 ....................................................... 6
Bảng 2. 2. Đặc điểm các dòng CPU ...................................................................... 7
Bảng 2. 3. Bit Logic ............................................................................................. 12
Bảng 2. 4. Cuộn dây ngõ ra ................................................................................. 12
Bảng 2. 5. Set và Reset ........................................................................................ 13
Bảng 2. 6. Các lệnh timer .................................................................................... 14
Bảng 2. 7. Các lệnh counter ................................................................................. 15
Bảng 2. 8. Các lệnh so sánh ................................................................................. 16
Bảng 2. 9. Các lệnh toán học ............................................................................... 17
Bảng 2. 10. Các lệnh di chuyển ........................................................................... 18
Bảng 2. 11. Ngõ ra xung ...................................................................................... 19
Bảng 2. 12. Sơ đồ kết nối chân của CPU 1214C DC/DC/DC ............................. 21
Bảng 3. 1 Bảng Bước góc của động cơ bước ..................................................... 34
Bảng 3.2 Liệt kê các thiết bị .............................................................................. 40
Bảng 3. 3 Địa chỉ vào ra .................................................................................... 61
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S71200
x
SVTH: Phạm Thanh Sang GVHD: ThS.Dương Quang Thiện
CÁC THUẬT NGỮ
• PLC: Programmable Logic Controller
• CPU: Central Processing Unit
• PWM: Pulse Width Modulation
• TIA: Totally Integrated Automation
• Sensor: cảm biến
• PTO: Pulse Train Output
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện xi
MỞ ĐẦU
Ngày trước, sản phẩm được tạo ra một cách thủ công nên việc mang sản phẩm
ra vào kho chủ yếu được thực hiện bằng sức người, do đó không tận dụng hết được các
khoảng không gian, sức chứa của kho hàng, việc quản lý hàng hoá kém hiệu quả cũng
như tốn nhiều diện tích đất làm nhà kho chứa hàng.
Trong thời kỳ công nghiệp hoá, hiện đại hoá ngày nay sản xuất ngày càng
phát triển, hàng hóa làm ra càng nhiều đáp ứng nhu cầu tiêu dùng cho xã hội. Từ đó
đã nảy sinh cần có những kho hàng hiện đại đáp ứng yêu cầu của sản xuất và khắc
phục được những hạn chế của các kho hàng cũ.
Hiện tại, trên thế giới có nhiều hệ thống lưu trữ hàng hóa, các hệ thống này
rất đa dạng, phong phú về thiết bị cũng như cách thức thực hiện. Nhưng trong đó chủ
yếu là sử dụng nhân công để bốc dỡ hàng hóa, các thiết bị bốc dỡ hàng là các máy
nâng sử dụng người lái để sắp xếp hàng hóa vào kho.
Nhìn chung, các nhà kho hiện nay có các nhược điểm sau:
- Sử dụng nhiều diện tích để chứa hàng hóa.
- Không phân loại được các hàng hóa khác nhau (các hàng hóa thường để
chung với nhau trong 1 kho).
- Không bảo quản tốt hàng hóa khi số lượng nhiều (Chất hàng chồng lên nhau).
- Rất khó kiểm soát số lượng hàng hóa ra vào trong kho.
Với sự ra đời của các hệ thống xếp hàng hóa tự động, người ta có thể quản lý
tốt hàng hóa cũng như nhanh chóng trong việc lưu trữ và xuất hàng hóa ra khỏi kho,
các hệ thống kho tự động được sử dụng robot để vận chuyển hàng hóa, điều này
đồng nghĩa với việc đầu tư trang thiết bị hiện đại cho hệ thống kho tốn khá nhiều chi
phí cho việc vận chuyển hàng hóa nhưng bù lại là hàng hóa được bảo quản tốt, thuận
tiện cho việc quản lý và kiểm soát, tiết kiệm được nhân công …
Sau thời gian học tập tại trường, được sự chỉ bảo hướng dẫn nhiệt tình của thầy
cô giáo trong bộ môn Tự động hóa, em đã tích luỹ được vốn kiến thức nhất định. Được
sự đồng ý của nhà trường và thầy cô giáo, bọn em được giao đề tài tốt nghiệp: “Thiết
kế mô hình Lưu kho tự động”.
Đồ án tốt nghiệp của em gồm bốn chương:
Chương 1: Giới thiệu chung.
Chương 2: Tổng quan về hệ thống Simatic S7- 1200 và HMI
Chương 3: Thiết kế mô hình Lưu kho tự động
Chương 4: Kết luận và hướng phát triển
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
1
CHƯƠNG 1: GIỚI THIỆU CHUNG
1.1 Đặt vấn đề
Nền công nghiệp nước ta nói riêng và các nước trên thế giới nói chung đang
phát triển mạnh mẽ. Ngày trước, sản phẩm được tạo ra một cách thủ công nên việc
mang sản phẩm ra vào kho chủ yếu được thực hiện bằng sức người, do đó không tận
dụng hết được các khoảng không gian, sức chứa của kho hàng, việc quản lý hàng hoá
kém hiệu quả cũng như tốn nhiều diện tích đất làm nhà kho chứa hàng. Trong thời
kỳ công nghiệp hoá, hiện đại hoá ngày nay sản xuất ngày càng phát triển, hàng hóa
làm ra càng nhiều đáp ứng nhu cầu tiêu dùng cho xã hội. Từ đó đã nảy sinh cần có
những kho hàng hiện đại đáp ứng yêu cầu của sản xuất và khắc phục được những
hạn chế của các kho hàng cũ. Hiện tại, trên thế giới có nhiều hệ thống lưu trữ hàng
hóa, các hệ thống này rất đa dạng, phong phú về thiết bị cũng như cách thức thực
hiện. Nhưng trong đó chủ yếu là sử dụng nhân công để bốc dỡ hàng hóa, các thiết bị
bốc dỡ hàng là các máy nâng sử dụng người lái để sắp xếp hàng hóa vào kho. Nhìn
chung, các nhà kho hiện nay có các nhược điểm sau: - Sử dụng nhiều diện tích để
chứa hàng hóa. - Không phân loại được các hàng hóa khác nhau (các hàng hóa
thường để chung với nhau trong 1 kho). - Không bảo quản tốt hàng hóa khi số lượng
nhiều (Chất hàng chồng lên nhau). - Rất khó kiểm soát số lượng hàng hóa ra vào
trong kho. - Mất nhiều thời gian cho việc xuất nhập kho Với sự ra đời của các hệ
thống xếp hàng hóa tự động, người ta có thể quản lý tốt hàng hóa cũng như nhanh
chóng trong việc lưu trữ và xuất hàng hóa ra khỏi kho, các hệ thống kho tự động
được sử dụng robot để vận chuyển hàng hóa, điều này đồng nghĩa với việc đầu tư
trang thiết bị hiện đại cho hệ thống kho tốn khá nhiều chi phí cho việc vận chuyển
hàng hóa nhưng bù lại là hàng hóa được bảo quản tốt, thuận tiện cho việc quản lý và
kiểm soát, tiết kiệm thời gian, tiết kiệm được nhân công …
Chính nhu cầu và lý do đó mà chúng em tiến hành thiết kế, thi công hệ thống lưu kho
tự động với bộ điều khiển PLC, giám sát và điều khiển thông qua hệ thống SCADA.

Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
2
1.2 Ý nghĩa khoa học và thực tiễn đề tài
Đề tài giải quyết vấn thiết kế hệ thống giám sát, điều khiển việc nhập và xuất
kho một cách chính xác, nhanh gọn và tự động. Ngoài ra, đề tài còn hướng đến việc
phân loại hàng hóa để phân chia khu vực lưu trữ trong kho. Toàn bộ hệ thống lưu
kho sẽ được điều khiển và giám sát thông qua hệ thống SCADA. Bao gồm: giao diện
điều khiển từ máy tính (WinCC, HMI). Dự đoán, cảnh báo các lỗi trong xảy ra trong
quá trình hoạt động. Giải quyết vấn đề kiểm tra số lượng hàng hóa, rút ngắn thời
gian cũng như không can thiệp nhiều vào quá tình sản xuất, tăng hiệu quả của dây
chuyền lưu trữ hàng hóa lên cao
1.3 Đối tượng nghiên cứu và phạm vi nghiên cứu
➢ Đối tượng nghiên cứu
• PLC S7-1200 CPU 1214C DC/DC/DC
• Phần mềm Tia Portal V15.1, HMI
• Động cơ bước và Driver TP6600
➢ Phạm vi nghiên cứu:
Thiết kế phần cứng và lập trình trên PLC S7-1200 điều khiển giám sát “Mô
hình lưu kho tự động ứng dụng PLC S7-1200”.
1.4 Phương pháp nghiên cứu
➢ Tham khảo tài liệu trên trang chủ http://www.siemens.com kết hợp với thực
hành trực tiếp trên CPU 1214C của Siemens trên mô hình.
➢ Tham khảo một số tài liệu do GVHD cung cấp; tài liệu trên các diễn đàn liên
quan.
➢ Khảo sát một số mô hình thực tế và một số đề tài trước.
1.5 Kế hoạch nghiên cứu
➢ Thu thập và nghiên cứu tài liệu.
➢ Tìm hiểu PLC S7-1200, TIA Portal V15.1, Driver TP6600.
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
3
➢ Phác thảo mô hình, viết chương trình.
➢ Xây dựng mô hình, kiểm tra và sửa lỗi.
➢ Kiểm tra, hoàn thiện phần cứng và chương trình.
➢ Hoàn thành đồ án: đánh máy, in ấn, đóng bìa và nộp đề tài.
1.6 Nội dung đề tài
Đề tài được gồm 4 chương:
➢ Chương 1: Giới thiệu chung
Giới thiệu tổng quát về đề tài “Mô hình lưu kho tự động ứng dụng PLC S7-
1200”.
➢ Chương 2: Tổng quan về hệ thống Simatic S7-1200 và HMI
Giới thiệu về PLC S7-1200: các dòng CPU, cấu trúc phần cứng, I/O, các tập
lệnh, phần mềm Tia Portal V15.1.
➢ Chương 3: Thiết kế mô hình Lưu kho tự động
Thiết kế phần cứng, HMI và lập trình hệ thống.
➢ Chương 4: Kết luận và hướng phát triển
Kết luận những gì đã đạt được trong đề tài và đưa ra hướng phát triển cho đề
tài.
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
4
CHƯƠNG 2: TỔNG QUAN VỀ HỆ THỐNG SIMATIC S7-1200 VÀ HMI
2.1 Giới thiệu về PLC S7-1200
2.1.1 Tổng quan về nguồn gốc PLC
Hình 2.1 PLC S7-224
Năm 1968, công ty General của Mỹ đã cho ra đời thiết bị điều khiển lập
trình được. Tuy nhiên hệ thống còn khá cồng kềnh và đơn giản, người vận
hành gặp nhiều khó khăn và không đáp ứng đủ yêu cầu sử dụng.
Hiện nay có nhiều loại PLC của nhiều hãng sản xuất khác nhau như: Siemens,
Omron, Mitsubishi, Festo, Schneider, Hitachi, Koyo … trong một hãng lại có
nhiều thế hệ khác nhau. Ngoài ra các hãng còn sản xuất các thiết bị liên quan
phục vụ cho quá trình tự động hoá như các module, cảm biến…
2.1.2 Một số nhóm PLC phổ biến hiện nay
Siemens: Có các nhóm
➢ CPU S7 200:
• CPU 21x: 210; 212; 214; 215-2DP; 216.
• CPU 22x: 221; 222; 224; 224XP; 226; 226XM
➢ CPU S7 300: 312IFM; 312C; 313; 313C; 313C-2DP+P; 313C-2DP; 314;
314IFM; 314C-2DP+P; 314C-2DP; 315; 315-2DP; 315E-2DP; 316-2DP;
318-2
➢ CPU S7 400.
➢ CPU S7 1200: CPU 121xC: 1211C; 1212C; 1214C.1215C.

Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
5
Mitsubishi: Họ FX
Omron: Họ CMQ
Controtechnique: Họ Compact TWD LCAA 10DRP; TWD LCAA 16DRP;
TWD LCAA 24DRP...
ABB: Ba nhóm
➢ AC 100M
➢ AC 400M
➢ AC 800M, đây là loại có 2 module CPU làm việc song song theo chế độ
dự phòng nóng.
2.1.3 Tổng quan về họ PLC S7-1200
Hình 2. 2. PLC S7-1200 CPU 1212C AC/DC/RLY
➢ S7-1200 là một dòng của bộ điều khiển logic lập trình (PLC) có thể kiểm soát
nhiều ứng dụng tự động hóa. Thiết kế nhỏ gọn, chi phí thấp và có nhiều tập
lệnh mạnh làm cho bạn có những giải pháp hoàn hảo hơn cho ứng dụng của
mình với S7-1200.
➢ S7-1200 bao gồm một microprocessor, một nguồn cung cấp được tích hợp sẵn,
các đầu vào/ra (I/O).
➢ Một số tính năng bảo mật giúp bảo vệ quyền truy cập vào cả CPU và chương
trình điều khiển.
➢ Tất cả các CPU đều cung cấp bảo vệ bằng password chống truy cập vào PLC.
Bạn cũng có thể dùng chức năng “know-how protection” để bảo vệ các block
đặc biệt của mình.
➢ S7-1200 cung cấp một cổng Profinet, hỗ trợ chuẩn Ethernet và TCP/IP. Ngoài
ra bạn có thể dùng các module truyền thông mở rộng kết nối bằng RS485 hoặc
RS232.
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
6
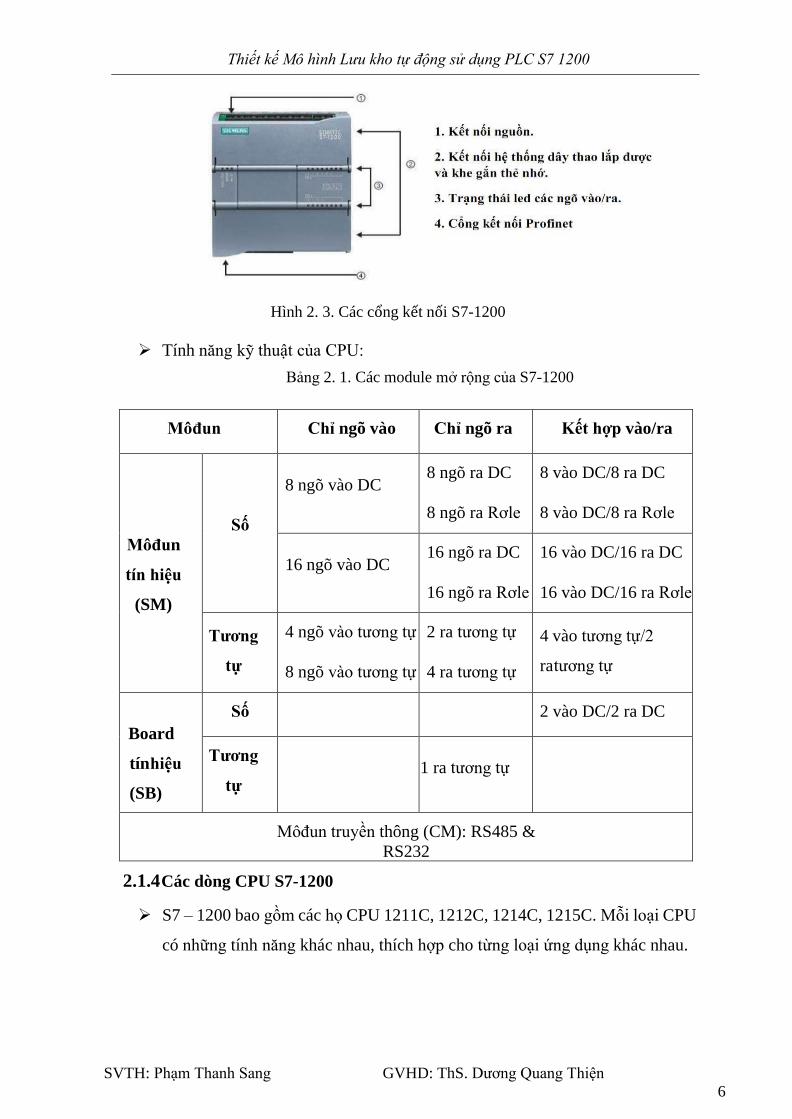
Hình 2. 3. Các cổng kết nối S7-1200
➢ Tính năng kỹ thuật của CPU:
Bảng 2. 1. Các module mở rộng của S7-1200
Môđun Chỉ ngõ vào Chỉ ngõ ra Kết hợp vào/ra
Môđun
tín hiệu
(SM)
Số
8 ngõ vào DC 8 ngõ ra DC
8 ngõ ra Rơle
8 vào DC/8 ra DC
8 vào DC/8 ra Rơle
16 ngõ vào DC 16 ngõ ra DC
16 ngõ ra Rơle
16 vào DC/16 ra DC
16 vào DC/16 ra Rơle
Tương
tự
4 ngõ vào tương tự
8 ngõ vào tương tự
2 ra tương tự
4 ra tương tự
4 vào tương tự/2
ra tương tự
Board
tín hiệu
(SB)
Số 2 vào DC/2 ra DC
Tương
tự
1 ra tương tự
Môđun truyền thông (CM): RS485 &
RS232
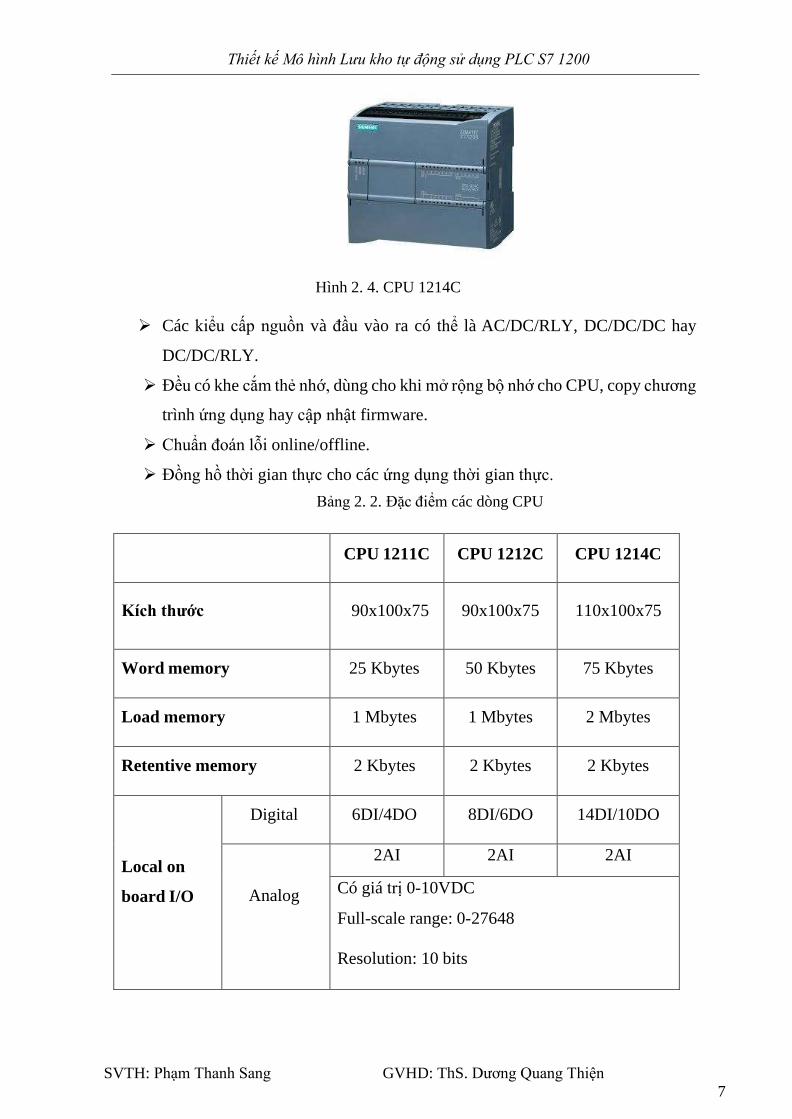
2.1.4 Các dòng CPU S7-1200
➢ S7 – 1200 bao gồm các họ CPU 1211C, 1212C, 1214C, 1215C. Mỗi loại CPU
có những tính năng khác nhau, thích hợp cho từng loại ứng dụng khác nhau.
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
7
Hình 2. 4. CPU 1214C
➢ Các kiểu cấp nguồn và đầu vào ra có thể là AC/DC/RLY, DC/DC/DC hay
DC/DC/RLY.
➢ Đều có khe cắm thẻ nhớ, dùng cho khi mở rộng bộ nhớ cho CPU, copy chương
trình ứng dụng hay cập nhật firmware.
➢ Chuẩn đoán lỗi online/offline.
➢ Đồng hồ thời gian thực cho các ứng dụng thời gian thực.
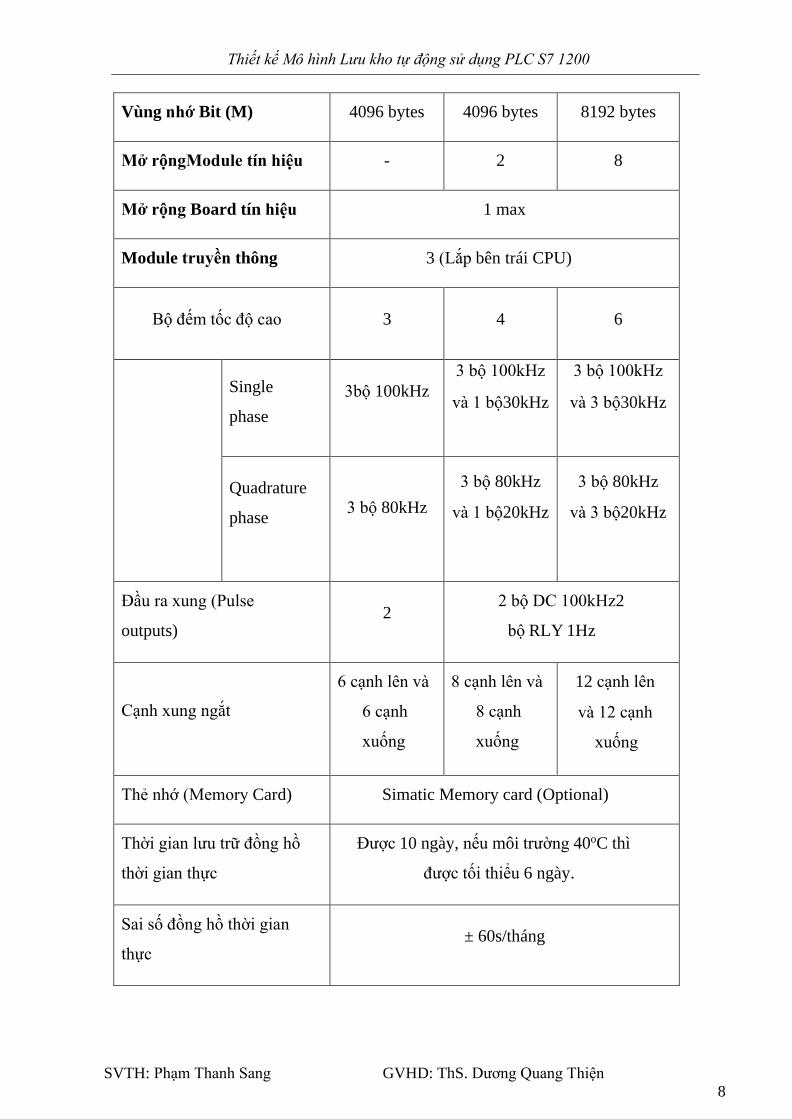
Bảng 2. 2. Đặc điểm các dòng CPU
CPU 1211C CPU 1212C CPU 1214C
Kích thước 90x100x75 90x100x75 110x100x75
Word memory 25 Kbytes 50 Kbytes 75 Kbytes
Load memory 1 Mbytes 1 Mbytes 2 Mbytes
Retentive memory 2 Kbytes 2 Kbytes 2 Kbytes
Local on
board I/O
Digital 6DI/4DO 8DI/6DO 14DI/10DO
Analog
2AI 2AI 2AI
Có giá trị 0-10VDC
Full-scale range: 0-27648
Resolution: 10 bits
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
8
Vùng nhớ Bit (M) 4096 bytes 4096 bytes 8192 bytes
Mở rộngModule tín hiệu - 2 8
Mở rộng Board tín hiệu 1 max
Module truyền thông 3 (Lắp bên trái CPU)
Bộ đếm tốc độ cao
3
4
6
Single
phase
3bộ 100kHz
3 bộ 100kHz
và 1 bộ 30kHz
3 bộ 100kHz
và 3 bộ 30kHz
Quadrature
phase
3 bộ 80kHz
3 bộ 80kHz
và 1 bộ 20kHz
3 bộ 80kHz
và 3 bộ 20kHz
Đầu ra xung (Pulse
outputs)
2 2 bộ DC 100kHz 2
bộ RLY 1Hz
Cạnh xung ngắt
6 cạnh lên và
6 cạnh
xuống
8 cạnh lên và
8 cạnh
xuống
12 cạnh lên
và 12 cạnh
xuống
Thẻ nhớ (Memory Card) Simatic Memory card (Optional)
Thời gian lưu trữ đồng hồ
thời gian thực
Được 10 ngày, nếu môi trường 40oC thì
được tối thiểu 6 ngày.
Sai số đồng hồ thời gian
thực
± 60s/tháng
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
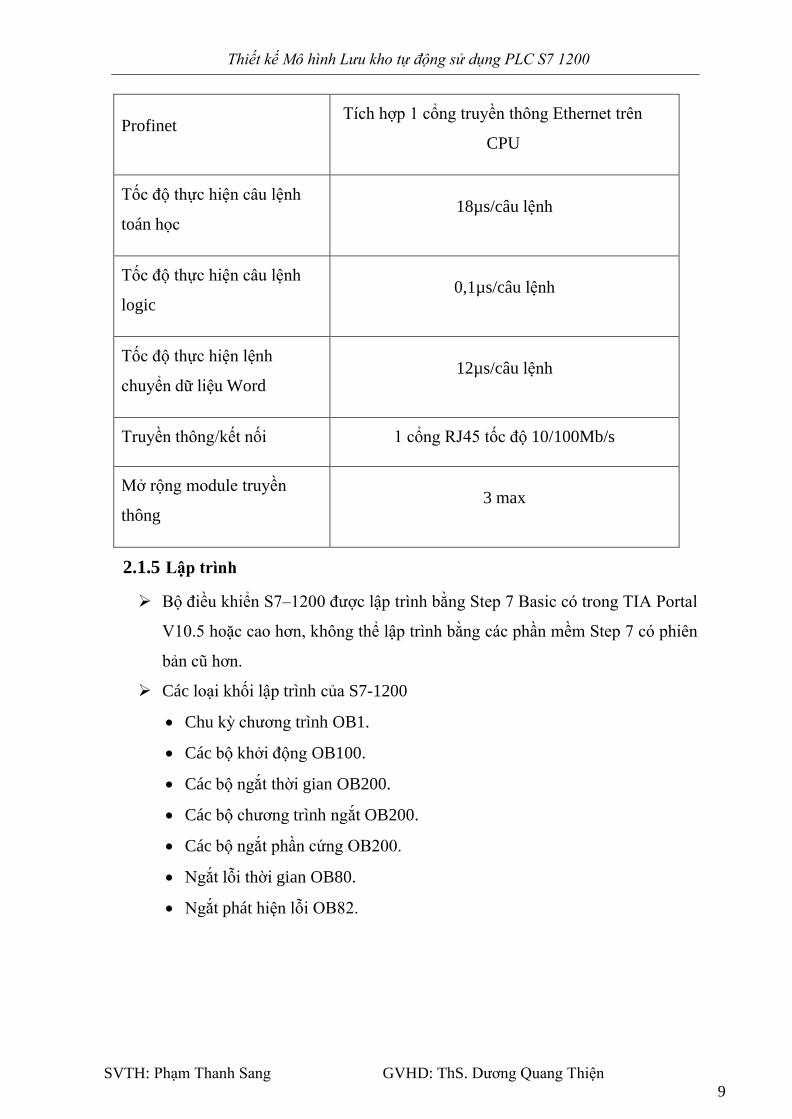
9
Profinet Tích hợp 1 cổng truyền thông Ethernet trên
CPU
Tốc độ thực hiện câu lệnh
toán học
18µs/câu lệnh
Tốc độ thực hiện câu lệnh
logic
0,1µs/câu lệnh
Tốc độ thực hiện lệnh
chuyển dữ liệu Word
12µs/câu lệnh
Truyền thông/kết nối 1 cổng RJ45 tốc độ 10/100Mb/s
Mở rộng module truyền
thông
3 max
2.1.5 Lập trình
➢ Bộ điều khiển S7–1200 được lập trình bằng Step 7 Basic có trong TIA Portal
V10.5 hoặc cao hơn, không thể lập trình bằng các phần mềm Step 7 có phiên
bản cũ hơn.
➢ Các loại khối lập trình của S7-1200
• Chu kỳ chương trình OB1.
• Các bộ khởi động OB100.
• Các bộ ngắt thời gian OB200.
• Các bộ chương trình ngắt OB200.
• Các bộ ngắt phần cứng OB200.
• Ngắt lỗi thời gian OB80.
• Ngắt phát hiện lỗi OB82.
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
10
Hình 2. 5. Giao diện bắt đầu TIA Portal V15.1
2.1.6 Cấu trúc phần cứng
2.1.6.1 Hình dáng bên ngoài
Hình 2. 6. Hình dáng bên ngoài S7-1200
Các đèn trạng thái:
➢ Đèn RUN-màu xanh: Chỉ định PLC ở chế độ làm việc và thực hiện chương
trình đã được nạp vào bộ nhớ chương trình.
➢ Đèn STOP-màu vàng: Chỉ định PLC ở chế độ STOP, dừng chương trình đang
thực hiện lại (các đầu ra đều ở chế độ off).
➢ Đèn SF-màu đỏ: Đèn báo hiệu hệ thống bị hỏng có nghĩa là lỗi phần cứng hoặc
hệ điều hành. Ở đây cần phân biệt rõ lỗi hệ thống với lỗi chương trình người
dùng, khi lỗi chương trình người dùng thì CPU không thể nhận biết được vì
Đèn báo trạng thái các ngõ vào ra
Đèn báo trạng thái hoạt động CPU
CỔng kết nối Profitnet
Khe cắ thẻ nhớ
Khe kết nối dây
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
11
trước khi download xuống CPU, phần mềm lập trình đã làm nhiệm vụ kiểm
tra trước khi dịch sang mã máy.
➢ Đèn Ix.x-màu xanh: Chỉ định trạng thái On/Off của đầu vào số.
➢ Đèn Qx.x-màu xanh: Chỉ định trạng thái On/Off của đầu ra số.
2.1.6.2 Giao tiếp PLC S7 – 1200 với máy tính
➢ Để lập trình ta kết nối trực tiếp 1 PC với 1 PLC qua 1 dây cáp Ethernet.
➢ Một PLC có thể kết nối trực tiếp với 1 thiết bị.
➢ Để kết nối nhiều hơn 1 thiết bị với S7-1200 cần có cáp hay thiết bị chuyển đổi.
➢ Sơ đồ chân cổng Ethernet của PLC :
Hình 2. 7. Sơ đồ chân cáp Ethernet
2.1.7 Các tập lệnh cơ bản trong S7-1200
2.1.7.1 Tập lệnh tiếp điểm (Bit logic)
Tiếp điểm thường hở (NO), thường đóng (NC):
Hình 2. 8. Bit Logic
• Tiếp điểm NO: Tiếp điểm thường hở sẽ đóng khi giá trị của bit có địa chỉ n
bằng 1. Toán hạng n: I, Q, M, L, D.

Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
12
• Tiếp điểm NC: Tiếp điểm thường đóng sẽ đóng khi giá trị của bit có địa chỉ n
bằng 0. Toán hạng n: I, Q, M, L, D.
Bảng 2. 3. Bit Logic
Thông số Kiểu dữ liệu Miêu tả
IN Bool Bit được gán giá trị
2.1.7.2 Cuộn dây ngõ ra (OUT)
Hình 2. 9. Cuộn dây ngõ ra
➢ Lệnh OUT: Giá trị của bit có địa chỉ là n sẽ bằng 1 khi đầu vào của lệnh này
bằng 1 và ngược lại. Toán hạng n: Q, M, L, D. Chỉ sử dụng một lệnh OUT cho
1 địa chỉ.
➢ Lệnh OUT NOT: Giá trị của bit có địa chỉ là n sẽ bằng 1 khi đầu vào của lệnh
này bằng 0 và ngược lại. Toán hạng n: Q, M, L, D. Chỉ sử dụng một lệnh OUT
NOT cho 1 địa chỉ.
Bảng 2. 4. Cuộn dây ngõ ra
Thông số Kiểu dữ liệu Miêu tả
OUT Bool Bit được gán giá trị
2.1.7.3 Các lệnh Set và Reset
➢ Khi lệnh S (Set) được kích hoạt, giá trị dữ liệu ở địa chỉ OUT được đặt lên 1.
Khi lệnh S không được kích hoạt, ngõ ra OUT không bị thay đổi.
➢ Khi lệnh R (Reset) được kích hoạt, giá trị dữ liệu ở địa chỉ OUT được đặt về
0. Khi lệnh R không được kích hoạt, ngõ ra OUT không bị thay đổi.
➢ Toán hạng n: Q, M, L, D.
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
13
Hình 2. 10. Set và Reset
➢ Những lệnh này có thể được đặt tại bất cứ vị trí nào trong mạch.
Bảng 2. 5. Set và Reset
Thông số Kiểu dữ liệu Miêu tả
IN Bool Vị trí bit được giám sát
OUT Bool Vị trí bit được đặt hoặc đặt lại
2.1.7.4 Các bộ định thời (Timer)
➢ Kích thước và tầm của kiểu dữ liệu Time là 32 bit, lưu trữ như là dữ liệu
Dint: T#-14d_20h_31m_23s_648ms đến T#24d_20h_31m_23s_647ms hay
là - 2.147.483.648 ms đến 2.147.483.647 ms.
Các loại Timer của S7-1200:
• TP: bộ định thì xung phát ra một xung với bề rộng xung được đặt trước.
• TON: ngõ ra của bộ định thời ON – delay Q được đặt lên ON sau một sự
trì hoãn thời gian đặt trước.
• TOF: ngõ ra Q của bộ định thì OFF – delay được đặt lại về OFF sau một sự
trì hoãn thời gian đặt trước.
• TONR: ngõ ra bộ định thì có khả năng nhớ ON – delay được đặt lên ON
sau một trì hoãn thời gian đặt trước. Thời gian trôi qua được tích lũy qua
nhiều giai đoạn định thì cho đến khi ngõ vào R được sử dụng để đặt lại thời
gian trôi qua.
• RT: đặt lại một bộ định thì bằng cách xóa dữ liệu thời gian được lưu trữ
trong khối dữ liệu tức thời của bộ định thì xác định.
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
14
Hình 2. 11. Các lệnh timer
➢ Các bộ định thời TP, TON và TOF có các thông số ngõ vào và ngõ ra giống
nhau.
➢ Bộ định thời TONR có thông số ngõ vào đặt lại được thêm vào R.
➢ Lệnh RT đặt lại dữ liệu định thời cho bộ định thời được chỉ định.
Bảng 2. 6. Các lệnh timer
Thống số Kiểu dữ liệu Miêu tả
IN Bool Ngõ vào bộ định thời cho phép
R Bool Đặt lại thời gian trôi qua của
TONR về 0
PT Bool Ngõ vào giá trị thời gian đặt trước
Q Bool Ngõ ra bộ định thời
ET Time Ngõ ra giá trị thời gan trôi qua
Khối dữ liệu
định thời
DB Chỉ ra bộ định thời nào để đặt lại
với lệnh RT
2.1.7.5 Các bộ đếm (Counter)
➢ S7-1200 có ba bộ đếm Counter
• CTU: bộ đếm đếm lên.
• CTD: bộ đếm đếm xuống.
• CTUD: bộ đếm đếm lên và xuống.
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
15
Hình 2. 12. Các lệnh counter
Bảng 2. 7. Các lệnh counter
Thông sô Kiểu dữ liệu Miêu tả
CU, CD Bool Bếm lên hay đếm xuống, bởi
một lần đếm
R(CTU,CTUD) Bool Đặt lại giá trị đếm về không
LOAD(CTU,CTUD) Bool Nạp điều khiển cho giá trị đặt
trước
PV Sint, Int,
Dint, USInt,
Uint, UDInt
Giá trị đếm đặt trước
Q,QU Bool Đúng nếu CV>=PV
QD Bool Đúng nếu CV<=0
CV Sint, Int,
Dint, USInt,
Uint,
Giá trị đếm hiện thời
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
16
2.1.7.6 Lệnh so sánh
Hình 2. 13. Các lệnh so sánh
➢ Ta sử dụng các lệnh so sánh để so sánh hai giá trị của cùng một kiểu dữ liệu,
nếu lệnh so sánh thỏa thì ngõ ra sẽ là mức 1 = TRUE tiếp điểm này được kích
hoạt.
➢ Kiểu dữ liệu so sánh là: SInt, Int, Dint, USInt, UDInt, Real, LReal, String,
Char, Time, DTL, Constant
Bảng 2. 8. Các lệnh so sánh
Kiểu quan hệ Sự so sánh và đúng nếu
== IN1 bằng IN2
<> IN1 không bằng IN2
>= IN1 lớn hơn hay bằng IN2
<= IN1 nhỏ hơn hay bằng IN2
> IN1 lơn hơn IN2
< IN1 nhỏ hơn IN2
2.1.7.7 Lệnh toán học
Ta sử dụng một lệnh hộp phép toán để lập trình các vận hành phép toán cơ
bản:
➢ ADD: phép cộng (IN1 + IN2 = OUT)
➢ SUB: phép trừ (IN1 – IN2 = OUT)
➢ MUL: phép nhân (IN1 * IN2 = OUT)
➢ DIV: phép chia (IN1 / IN2 = OUT)

Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
17
Hình 2. 14. Các lệnh toán học
Bảng 2. 9. Các lệnh toán học
Thông số Kiểu dữ liệu Miêu tả
IN1, IN2 Sint, Int, Dint, USInt, Uint,
UDInt, Real, Lreal, Constant Ngõ vào phép toán
OUT Sint, Int, Dint, USInt, Uint,
UDInt, Real, Lreal Ngõ ra phép toán
2.1.7.8 Lệnh di chuyển
➢ Các lệnh di chuyển và di chuyển khối
Hình 2. 15. Các lệnh di chuyển
➢ Ta sử dụng các lệnh di chuyển để sao chép các phần tử dữ liệu đến một địa
chỉ nhớ mới và chuyển đổi từ một kiểu dữ liệu này sang kiểu khác. Dữ liệu
nguồn không bị thay đổi trong quá trình di chuyển.
➢ MOVE: sao chép một phần tử dữ liệu được lưu trữ tại một địa chỉ xác định
đến một địa chỉ mới.

Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
18
➢ MOVE_BLK: di chuyển có thể ngắt mà sao chép một khối các phần tử dữ
liệu đến một địa chỉ mới.
➢ UMOVE_BLK: di chuyển không ngắt được mà sao chép một khối các phần
tử dữ liệu đến một địa chỉ mới.
Bảng 2. 10. Các lệnh di chuyển
MOVE
Thông số Kiểu dữ liệu Miêu tả
IN Sint, Int, Dint,
USInt, Uint, UDInt,
Real, Lreal, Byte,
Word, Dword, Char,
Array, Struct, DTL,
Time
Địa chỉ nguồn
OUT
Đại chỉ đích
MOVE_BLK, UMOVE_BLK
Thông số
Kiểu dữ liệu
Miêu tả
IN
Sint, Int, Dint,
USInt, Uint, UDInt,
Real, Lreal, Byte,
Word, Dword
Địa chỉ bắt đầu
nguồn
COUNT
Uint Số lượng phần tử dữ
liệu để sao chép
OUT
Sint, Int, Dint,
USInt, Uint, UDInt,
Real, Lreal, Byte,
Word, Dword
Địa chỉ bắt đầu đích
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
19
2.1.7.9 Lệnh Xung
Hình 2. 16. Lệnh xung PWM
➢ Hai máy phát xung có sẵn cho việc điều khiển các hàm ngõ ra xung tốc độ
cao: PWM và PTO được sử dụng bằng các lệnh điều khiển chuyển động.
➢ Ta có thể chỉ định mỗi máy phát xung đếm cả PWM hay PTO, nhưng không
thể đếm cả hai cùng một lúc.
➢ Hai máy phát xung được sắp xếp để xác định các ngõ ra kiểu số
Bảng 2. 11. Ngõ ra xung
Miêu tả Phân nhiệm ngõ ra mặc định
Xung Lệnh
PTO1 CPU tích hợp Q0.0 Q0.1
Bảng tín hiệu Q4.0 Q4.1
PWM1 CPU tích hợp Q0.0 -
Bảng tín hiệu Q4.0 -
PTO2 CPU tích hợp Q0.2 Q0.3
Bảng tín hiệu Q4.2 Q0.3
PWM2 CPU tích hợp Q0.2 -
Bảng tín hiệu Q4.2 -

Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
20
2.1.7.10 Lệnh điều khiển chuyển động
Hình 2. 17. Các lệnh Motion Control
➢ MC_Power cho phép và vô hiệu một trục điều khiển chuyển động.
➢ MC_MoveVelocity làm cho trục di chuyển với tốc độ xác định.
2.1.8 Ngôn ngữ lập trình S7-1200
Bộ điều khiển PLC S7 – 1200 ứng dụng cho hệ thống nhỏ và vừa, Siemens phát
triển và ưu tiên hỗ trợ cho 3 ngôn ngữ lập trình sau:
LADER (LAD): Ngôn ngữ lập trình theo sơ đồ mạch. Đơn giản, dễ hiểu, dễ
chỉnh sửa và tiện lợi.
Function Block Diagram (FBD): Ngôn ngữ lập trình theo đại số Boolean.
Structure Language Control (SCL): Ngôn ngữ lập trình theo dạng Text, đây là
ngôn ngữ lập trình cấp cao sử dụng nền tảng Pascal phát triển.
2.1.9 Kết nối I/O cho S7-1200 CPU1214C DC/DC/DC
Kết nối tín hiệu ra cho PLC: S7-1200 CPU 1214C DC/DC/DC có mạch
điện đầu ra tương đối hoàn thiện, có thể kết nối trực tiếp tới các tải công suất
nhỏ. Để mạch điện đầu ra hoạt động được, ta cần phải cấp nguồn cho nó.
Nguồn này là một nguồn 24VDC bất kì bên ngoài phải bảo đảm giá trị dòng
điện định mức (tùy vào lượng tải) và dãy điện áp trong khoảng 20.4VDC tới
28.8VDC. Cực nguồn dương (24VDC) nối tới chân 3L+ và GND(24VDC) nối
tới 3M. Theo tài liệu của hãng thì ở trạng thái tác động của một ngõ ra, tại
dòng điện định mức 0.5 A thì đầu ra sẽ có mức điện áp cao 20VDC, nó cho
phép kết nối trực tiếp với các cảm biến. Xem chi tiết Bảng 2.13
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
21
Hình 2. 18. Sơ đồ kết nối của S7-1200 CPU 1214C DC/DC/DC
Bảng 2. 12. Sơ đồ kết nối chân của CPU 1214C DC/DC/DC
Pin X10 X11 X12
1 L+/24VDC 2M 3L+
2 M/24VDC AI 0 3M
3 FUNCTIONAL
EARTH
AI1 DQ a.0
4 L+/24VDC
SENSOR OUT
-- DQ a.1
5 M/24VDC
SENSOR OUT
-- DQ a.2
6 1M -- DQ a.3
7 DI a.0 -- DQ a.4
8 DI a.1 -- DQ a.5
9 DI a.2 -- DQ a.6
10 DI a.3 -- DQ a.7

Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
22
11 DI a.4 -- DQ b.0
12 DI a.5 -- DQ b.1
13 DI a.6 -- ---
14 DI a.7 -- --
15 DI b.0 -- --
16 DI b.1 -- --
17 DI b.2 -- ---
18 DI b.3 -- --
2.2 Phần mềm lập trình TIA PORTAL V15.1
Năm 2009, Siemens giới thiệu phần mềm TIA Portal V10.5 tích hợp STEP 7
Basic để lập trình PLC S7 – 1200 và WinCC Basic để thiết kế màn hình giám sát.
Từ năm 2010 đến nay, Siemens không ngừng cải thiện và nâng cấp phần mềm TIA
Portal. Hiện nay, phần mềm TIA Portal lên tới Version 16, không chỉ lập trình cho
các bộ điều khiển PLC mà còn thiết kế giao diện màn hình HMI/SCADA và cấu
hình biến tần của Siemens.
Hình 2.19 Giao diện phần mềm Tia PorTal

Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
23
(1) Tên của chương trình lưu ban đầu
(2) Device configuration: Cấu hình thêm phần cứng
(3) Main [OB1]: Nơi viết chương trình OB1
(4) Download tất cả cấu hình phần cứng và phần mềm cho PLC S7-1200
(5) Upload tất cả cấu hình phần cứng và phần mềm cho PLC S7-1200
(6) Điều khiển PLC Run
(7) Điều khiển PLC Stop
(8) Chức năng cài đặt các thông số của cổng mạng
(9) Cài đặt địa chỉ ngõ vào ra số, tương tự, bộ đếm tốc độ cao…
2.3 Giao diện giám sát HMI
Là thiết bị giao tiếp giữa người điều hành và máy móc thiết bị, khi con người “giao
tiếp” với một máy móc qua 1 màn hình giao diện thì đó là một HMI
2.1.10 Ưu Điểm và ứng dụng của HMI
➢ Ưu điểm
• Tính đầy đủ kịp thời và chính xác của thông tin.
• Tính mềm dẻo, dễ thay đổi bổ xung thông tin cần thiết.
• Tính đơn giản của hệ thống, dễ mở rộng, dễ vận hành
và sửa chữa.
• Tính “Mở”: có khả năng kết nối mạnh, kết nối nhiều loại
thiết bị và nhiều loại giao thức.
• Khả năng lưu trữ cao.
➢ Ứng dụng thực thế của HMI
HMI luôn có trong các hệ SCADA hiện đại, vị trí của HMI ở cấp điều
khiển và giám sát

Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
24
Hình 2.20 Cấp điều khiển giám sát HMI
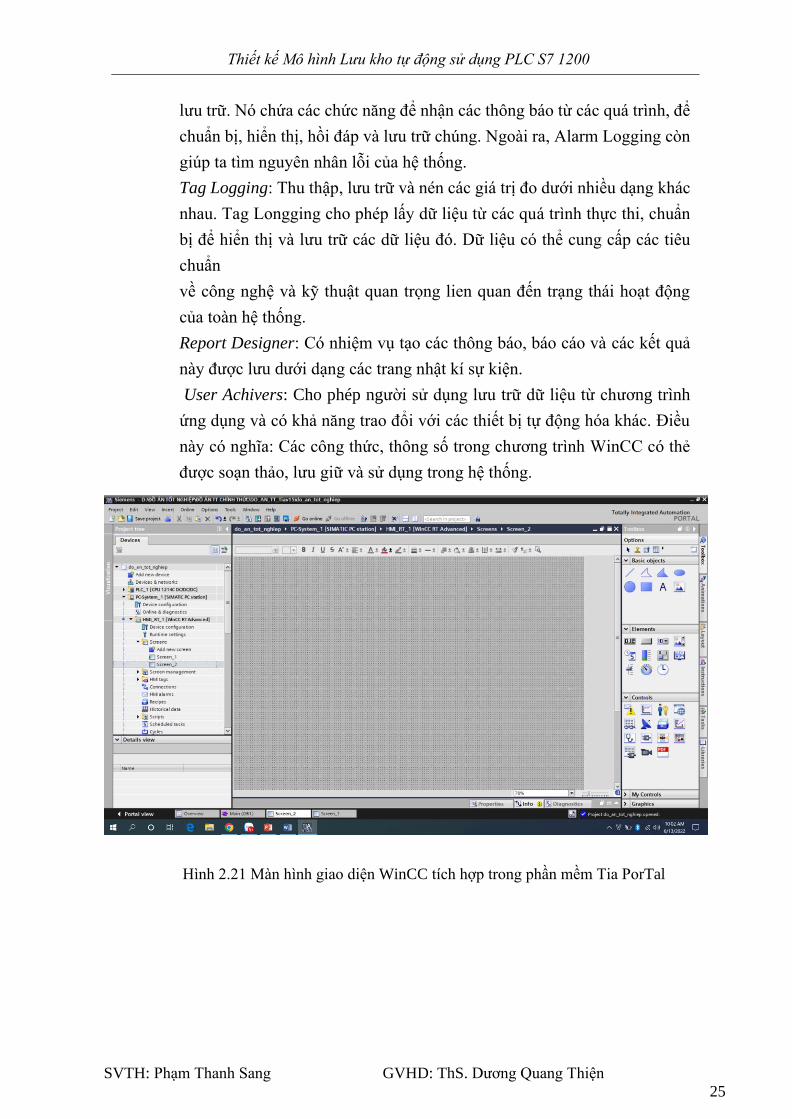
2.1.11 Phần mềm thiết kế giao diện WinCC tích hợp trong Tia PorTal
WinCC viết tắt của Windows Control Center, là một phần mềm của hãng
Siemens dùng để giám sát, điều khiển và thu thập dữ liệu trong quá trình sản
xuất. Ngoài ra WinCC còn cung cấp các module chức năng thường dùng trong
công nghiệp như: hiển thị hình ảnh, tạo thông điệp, lưu trữ và báo cáo. Giao
diện điều khiển mạnh, việc truy cập hình ảnh nhanh chóng và chức năng lưu
trữ an toàn (bảo mật) của nó đảm bảo tính hữu dụng cao.
➢ Ứng dụng của WinCC trong công nghiệp tự động hóa:
Khi sử dụng WinCC để thiết kế giao diện HMI và mạng SCADA, WinCC
sử dụng các chức năng sau:
Graphics Designer: Thực hiện dễ dàng các chức năng mô phỏng và hoạt
động của các đối tượng đồ họa của chương trình WinCC. OLE, I/O, với
thuộc tính động (Dynamic).
Alarm Logging: Thực hiện việc hiển thị các thông báo hay các báo cáo
trong khi hệ thống vận hành. Đảm trách về các thông báo nhận được và
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
25
lưu trữ. Nó chứa các chức năng để nhận các thông báo từ các quá trình, để
chuẩn bị, hiển thị, hồi đáp và lưu trữ chúng. Ngoài ra, Alarm Logging còn
giúp ta tìm nguyên nhân lỗi của hệ thống.
Tag Logging: Thu thập, lưu trữ và nén các giá trị đo dưới nhiều dạng khác
nhau. Tag Longging cho phép lấy dữ liệu từ các quá trình thực thi, chuẩn
bị để hiển thị và lưu trữ các dữ liệu đó. Dữ liệu có thể cung cấp các tiêu
chuẩn
về công nghệ và kỹ thuật quan trọng lien quan đến trạng thái hoạt động
của toàn hệ thống.
Report Designer: Có nhiệm vụ tạo các thông báo, báo cáo và các kết quả
này được lưu dưới dạng các trang nhật kí sự kiện.
User Achivers: Cho phép người sử dụng lưu trữ dữ liệu từ chương trình
ứng dụng và có khả năng trao đổi với các thiết bị tự động hóa khác. Điều
này có nghĩa: Các công thức, thông số trong chương trình WinCC có thẻ
được soạn thảo, lưu giữ và sử dụng trong hệ thống.
Hình 2.21 Màn hình giao diện WinCC tích hợp trong phần mềm Tia PorTal

Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
26
CHƯƠNG 3 THIẾT KẾ MÔ HÌNH LƯU KHO TỰ ĐỘNG
3.1 Bài toán lưu kho
3.1.1 Quy trình công nghệ
Quy trình công nghệ là một phần (hoặc một công đoạn) của quá trình sản
xuất có tác dụng làm thay đổi trực tiếp trạng thái của sản phẩm (dịch vụ) theo
phương thức bắt buộc nào đó. Trong quá trình diễn ra sự thay đổi này, bắt buộc phải
sử dụng đến yếu tố kỹ thuật công nghệ để tác động vào hình thức, chất lượng của
sản phẩm (dịch vụ) theo một quy tắc nhất định.
➢ Thông qua yêu cầu, mục tiêu đã đặt ra, hướng giải quyết vấn đề chúng ta có hai
bài toán cần giải quyết:
Bài toán nhập kho: Hàng được đưa vào thông qua băng tải dưới sự tác động của
các cảm biến, sau đó cánh tay Robot sẽ hoạt động đưa hàng vào kho theo đúng vị
trí yêu cầu.
Hình 3. 1 Quy trình công nghệ bài toán nhập kho
Bài toán xuất kho: Chuyển từ nhập kho sang xuất kho, lúc này Robot sẽ quay
về phía kho hàng để chuẩn bị lấy hàng, cánh tay Robot sẽ lấy hàng sau đó đưa
ra vị trí băng tải, các cảm biến khi nhận biết có hàng sẽ kích hoạt băng tải và
đưa hàng ra bên ngoài.

Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
27
Hình 3.2 Quy trình công nghệ bài toán xuất kho
3.1.2 Sơ đồ khối
Hệ thống chia làm 6 khối:
• Khối cảm biến: nhận biết sản phẩm
• Khối HMI: hiển thị
• Khối Driver step: điều khiển động cơ bước
• Khối nguồn: cấp nguồn cho hệ thống
• Khối cơ cấu chấp hành: nhận tín hiệu và xử lý
• Khối PLC: điều khiển toàn hệ thống
Hình 3.3 Sơ đồ khối
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
28
3.2 Giới thiệu từng thiết bị trong mô hình
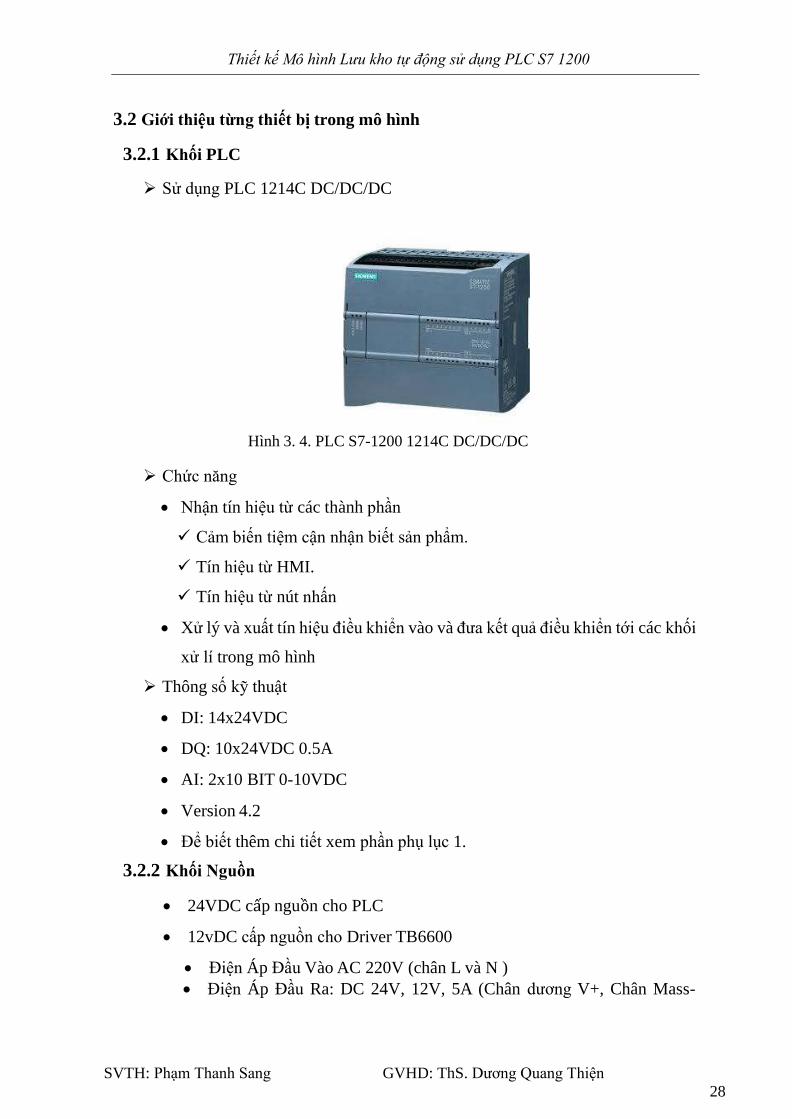
3.2.1 Khối PLC
➢ Sử dụng PLC 1214C DC/DC/DC
Hình 3. 4. PLC S7-1200 1214C DC/DC/DC
➢ Chức năng
• Nhận tín hiệu từ các thành phần
✓ Cảm biến tiệm cận nhận biết sản phẩm.
✓ Tín hiệu từ HMI.
✓ Tín hiệu từ nút nhấn
• Xử lý và xuất tín hiệu điều khiển vào và đưa kết quả điều khiển tới các khối
xử lí trong mô hình
➢ Thông số kỹ thuật
• DI: 14x24VDC
• DQ: 10x24VDC 0.5A
• AI: 2x10 BIT 0-10VDC
• Version 4.2
• Để biết thêm chi tiết xem phần phụ lục 1.
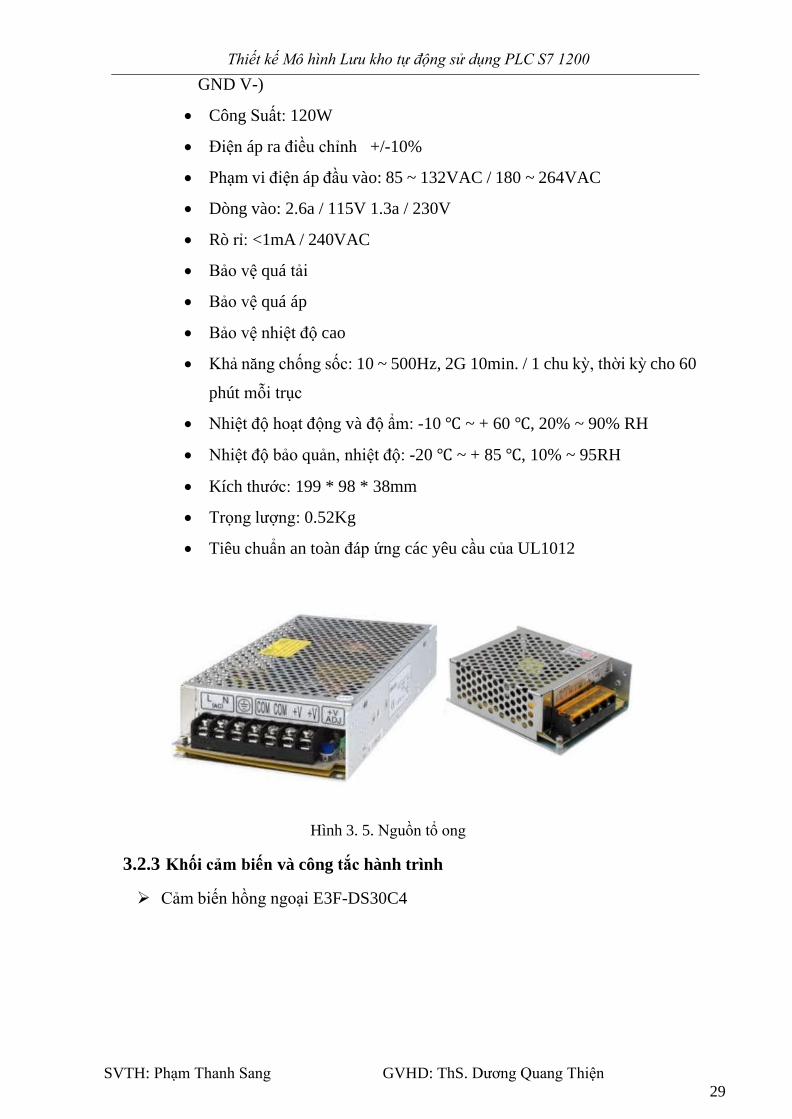
3.2.2 Khối Nguồn
• 24VDC cấp nguồn cho PLC
• 12vDC cấp nguồn cho Driver TB6600
• Điện Áp Đầu Vào AC 220V (chân L và N )
• Điện Áp Đầu Ra: DC 24V, 12V, 5A (Chân dương V+, Chân Mass-
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
29
GND V-)
• Công Suất: 120W
• Điện áp ra điều chỉnh +/-10%
• Phạm vi điện áp đầu vào: 85 ~ 132VAC / 180 ~ 264VAC
• Dòng vào: 2.6a / 115V 1.3a / 230V
• Rò rỉ: <1mA / 240VAC
• Bảo vệ quá tải
• Bảo vệ quá áp
• Bảo vệ nhiệt độ cao
• Khả năng chống sốc: 10 ~ 500Hz, 2G 10min. / 1 chu kỳ, thời kỳ cho 60
phút mỗi trục
• Nhiệt độ hoạt động và độ ẩm: -10 ℃ ~ + 60 ℃, 20% ~ 90% RH
• Nhiệt độ bảo quản, nhiệt độ: -20 ℃ ~ + 85 ℃, 10% ~ 95RH
• Kích thước: 199 * 98 * 38mm
• Trọng lượng: 0.52Kg
• Tiêu chuẩn an toàn đáp ứng các yêu cầu của UL1012
Hình 3. 5. Nguồn tổ ong
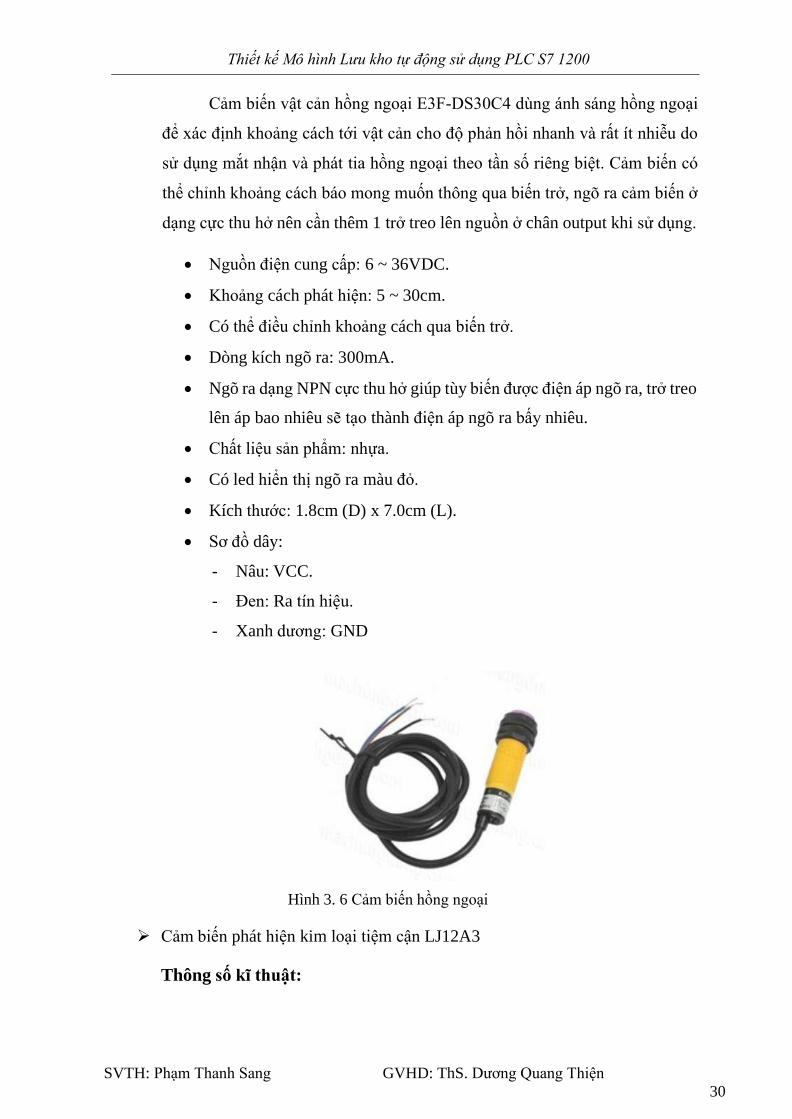
3.2.3 Khối cảm biến và công tắc hành trình
➢ Cảm biến hồng ngoại E3F-DS30C4
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
30
Cảm biến vật cản hồng ngoại E3F-DS30C4 dùng ánh sáng hồng ngoại
để xác định khoảng cách tới vật cản cho độ phản hồi nhanh và rất ít nhiễu do
sử dụng mắt nhận và phát tia hồng ngoại theo tần số riêng biệt. Cảm biến có
thể chỉnh khoảng cách báo mong muốn thông qua biến trở, ngõ ra cảm biến ở
dạng cực thu hở nên cần thêm 1 trở treo lên nguồn ở chân output khi sử dụng.
• Nguồn điện cung cấp: 6 ~ 36VDC.
• Khoảng cách phát hiện: 5 ~ 30cm.
• Có thể điều chỉnh khoảng cách qua biến trở.
• Dòng kích ngõ ra: 300mA.
• Ngõ ra dạng NPN cực thu hở giúp tùy biến được điện áp ngõ ra, trở treo
lên áp bao nhiêu sẽ tạo thành điện áp ngõ ra bấy nhiêu.
• Chất liệu sản phẩm: nhựa.
• Có led hiển thị ngõ ra màu đỏ.
• Kích thước: 1.8cm (D) x 7.0cm (L).
• Sơ đồ dây:
- Nâu: VCC.
- Đen: Ra tín hiệu.
- Xanh dương: GND
Hình 3. 6 Cảm biến hồng ngoại
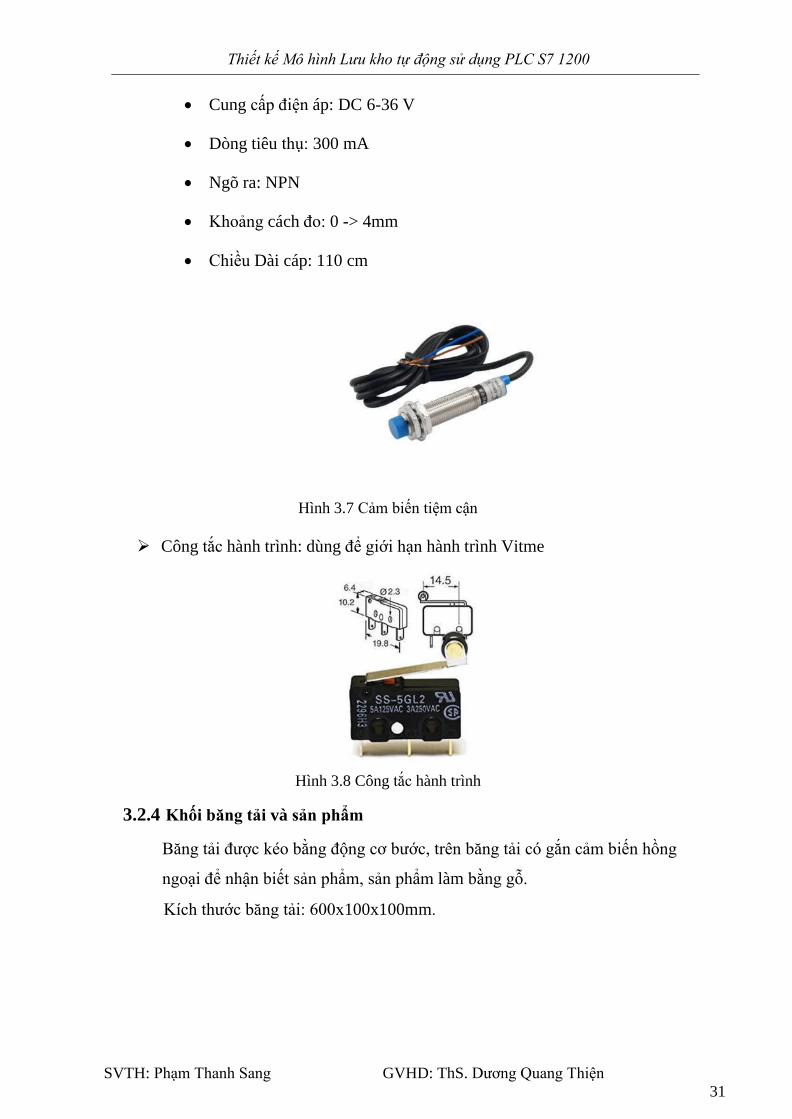
➢ Cảm biến phát hiện kim loại tiệm cận LJ12A3
Thông số kĩ thuật:
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
31
• Cung cấp điện áp: DC 6-36 V
• Dòng tiêu thụ: 300 mA
• Ngõ ra: NPN
• Khoảng cách đo: 0 -> 4mm
• Chiều Dài cáp: 110 cm
Hình 3.7 Cảm biến tiệm cận
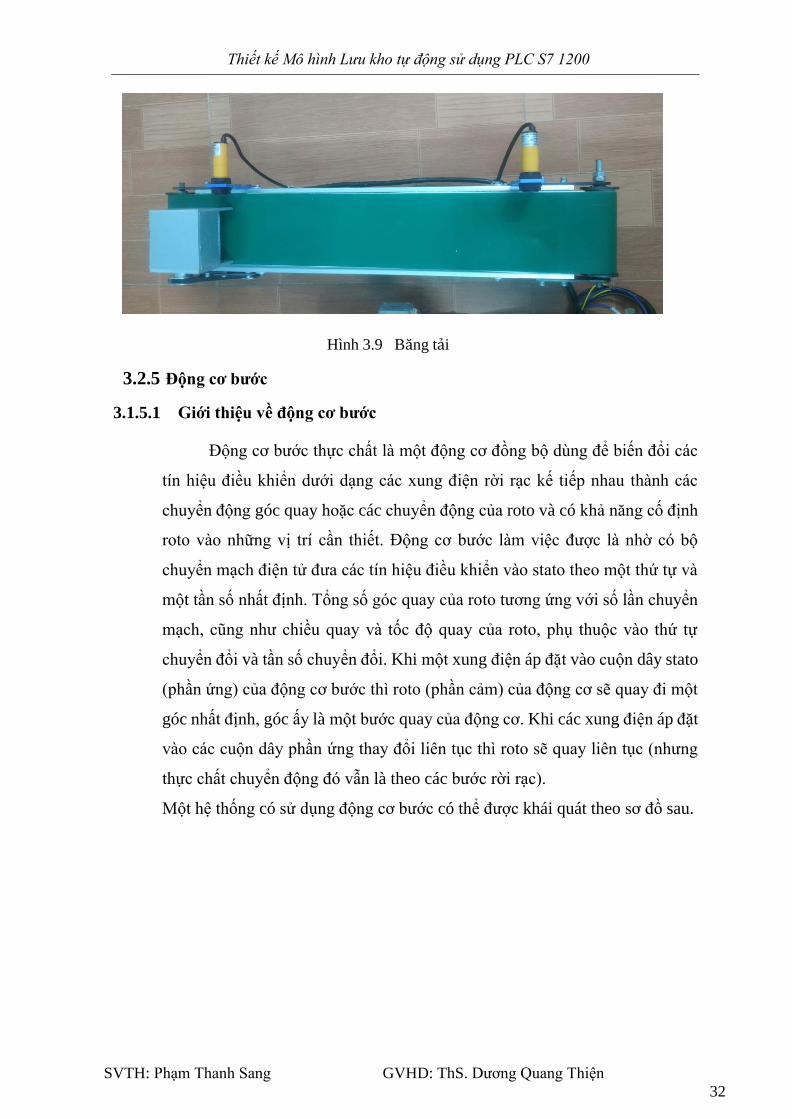
➢ Công tắc hành trình: dùng để giới hạn hành trình Vitme
Hình 3.8 Công tắc hành trình
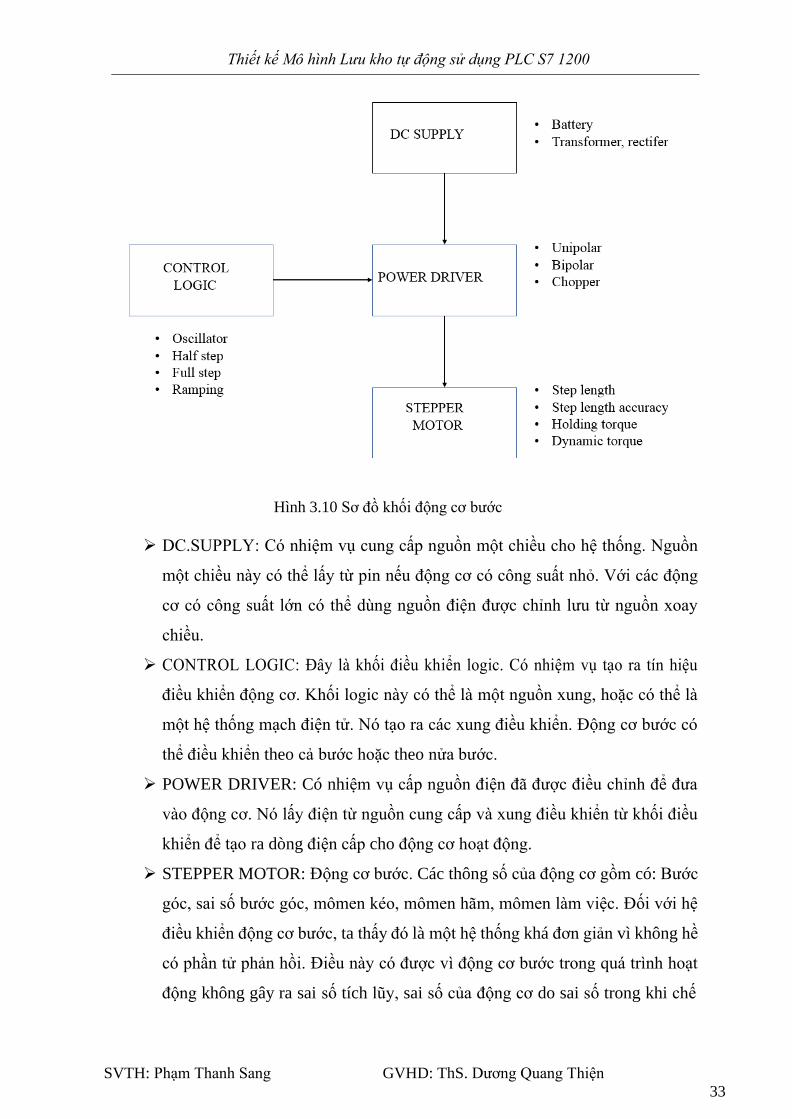
3.2.4 Khối băng tải và sản phẩm
Băng tải được kéo bằng động cơ bước, trên băng tải có gắn cảm biến hồng
ngoại để nhận biết sản phẩm, sản phẩm làm bằng gỗ.
Kích thước băng tải: 600x100x100mm.
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
32
Hình 3.9 Băng tải
3.2.5 Động cơ bước
3.1.5.1 Giới thiệu về động cơ bước
Động cơ bước thực chất là một động cơ đồng bộ dùng để biến đổi các
tín hiệu điều khiển dưới dạng các xung điện rời rạc kế tiếp nhau thành các
chuyển động góc quay hoặc các chuyển động của roto và có khả năng cố định
roto vào những vị trí cần thiết. Động cơ bước làm việc được là nhờ có bộ
chuyển mạch điện tử đưa các tín hiệu điều khiển vào stato theo một thứ tự và
một tần số nhất định. Tổng số góc quay của roto tương ứng với số lần chuyển
mạch, cũng như chiều quay và tốc độ quay của roto, phụ thuộc vào thứ tự
chuyển đổi và tần số chuyển đổi. Khi một xung điện áp đặt vào cuộn dây stato
(phần ứng) của động cơ bước thì roto (phần cảm) của động cơ sẽ quay đi một
góc nhất định, góc ấy là một bước quay của động cơ. Khi các xung điện áp đặt
vào các cuộn dây phần ứng thay đổi liên tục thì roto sẽ quay liên tục (nhưng
thực chất chuyển động đó vẫn là theo các bước rời rạc).
Một hệ thống có sử dụng động cơ bước có thể được khái quát theo sơ đồ sau.
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
33
Hình 3.10 Sơ đồ khối động cơ bước
➢ DC.SUPPLY: Có nhiệm vụ cung cấp nguồn một chiều cho hệ thống. Nguồn
một chiều này có thể lấy từ pin nếu động cơ có công suất nhỏ. Với các động
cơ có công suất lớn có thể dùng nguồn điện được chỉnh lưu từ nguồn xoay
chiều.
➢ CONTROL LOGIC: Đây là khối điều khiển logic. Có nhiệm vụ tạo ra tín hiệu
điều khiển động cơ. Khối logic này có thể là một nguồn xung, hoặc có thể là
một hệ thống mạch điện tử. Nó tạo ra các xung điều khiển. Động cơ bước có
thể điều khiển theo cả bước hoặc theo nửa bước.
➢ POWER DRIVER: Có nhiệm vụ cấp nguồn điện đã được điều chỉnh để đưa
vào động cơ. Nó lấy điện từ nguồn cung cấp và xung điều khiển từ khối điều
khiển để tạo ra dòng điện cấp cho động cơ hoạt động.
➢ STEPPER MOTOR: Động cơ bước. Các thông số của động cơ gồm có: Bước
góc, sai số bước góc, mômen kéo, mômen hãm, mômen làm việc. Đối với hệ
điều khiển động cơ bước, ta thấy đó là một hệ thống khá đơn giản vì không hề
có phần tử phản hồi. Điều này có được vì động cơ bước trong quá trình hoạt
động không gây ra sai số tích lũy, sai số của động cơ do sai số trong khi chế

Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
34
tạo. Việc sử dụng động cơ bước tuy đem lai độ chính xác chưa cao nhưng ngày
càng được sử dụng phổ biến. Vì công suất và độ chính xác của bước góc đang
ngày càng được cải thiện.
➢ Bảng tiêu chuẩn về Bước Góc của động cơ bước:
Bảng 3. 1 Bảng Bước góc của động cơ bước
Step angle Steps per revolution
0.9 400
1.8 200
3.6 100
3.75 96
7.5 48
15 24
➢ Nguyên tắc điều khiển động cơ bước đơn cực:
Động cơ bước đơn cực, (có thể là động cơ vĩnh cửu hoặc động cơ hỗn hợp) có
5,6 hoặc 8 dây ra thường được quấn như sơ đồ dưới. Khi dùng, các đầu nối
trung tâm thường được nối vào cực dương nguồn cấp, và hai đầu còn lại của
mỗi mấu lần lượt nối đất để đảo chiều từ trường tạo bởi quận đó.
Hình 3.11 Cuộn dây động cơ bước
➢ Mạch điều khiển động cơ bước bao gồm một số chức năng sau đây:
Tạo các xung với những tần số khác nhau.
Chuyển đổi các phần cho phù hợp với thứ tự kích từ.
Làm giảm các dao động cơ học.
Đầu vào của mạch điều khiển là các xung. Thành phần của mạch là các bán
dẫn, vi mạch. Kích thích các phần của động cơ bước theo thứ tự 1-2-3-4 do

Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
35
các transistor công suất T1 đến T4 thực hiện.Với việc thay đổi vị trí bộ
chuyển mạch, động cơ có thể quay theo chiều kim đồng hồ hoặc ngược lại.
Điện áp được cấp qua các khoá chuyển để nuôi các cuộn dây, tạo ra từ trường
làm quay rotor. Các khoá ở đây không cụ thể, có thể là bất cứ thiết bị đóng cắt
nào điều khiển được như rơle, transitor công suất… Tín hiệu điều khiển có thể
được đưa ra từ bộ điều khiển như vi mạch chuyên dụng, máy tính.
Hình 3.12 Sơ đồ mạch điện động cơ bước
Các loại động cơ bước thông dụng và các cách điều khiển động cơ bước.
• Động cơ bước có nhiều loại như động cơ biến trở từ, động cơ đơn cực, động
cơ lưỡng cực.
• Về step thì có loại là 0.36 độ/ 1step, loại 0.72/1step. Và thông dụng nhất là
loại 1.8 độ/ 1 step. Tức là 200 step sẽ được 1 vòng
• Trên thị trường chúng ta hay gặp nhất là động cơ đơn cực và lưỡng cực. Khi
đi mua thì hay gặp động cơ 4 dây, 5 dây, 6 dây, 8 dây. Trong đó 4 dây là 6
dây là gặp thường xuyên nhất. Dưới đây là sơ đồ dây của hãng Oriental
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
36
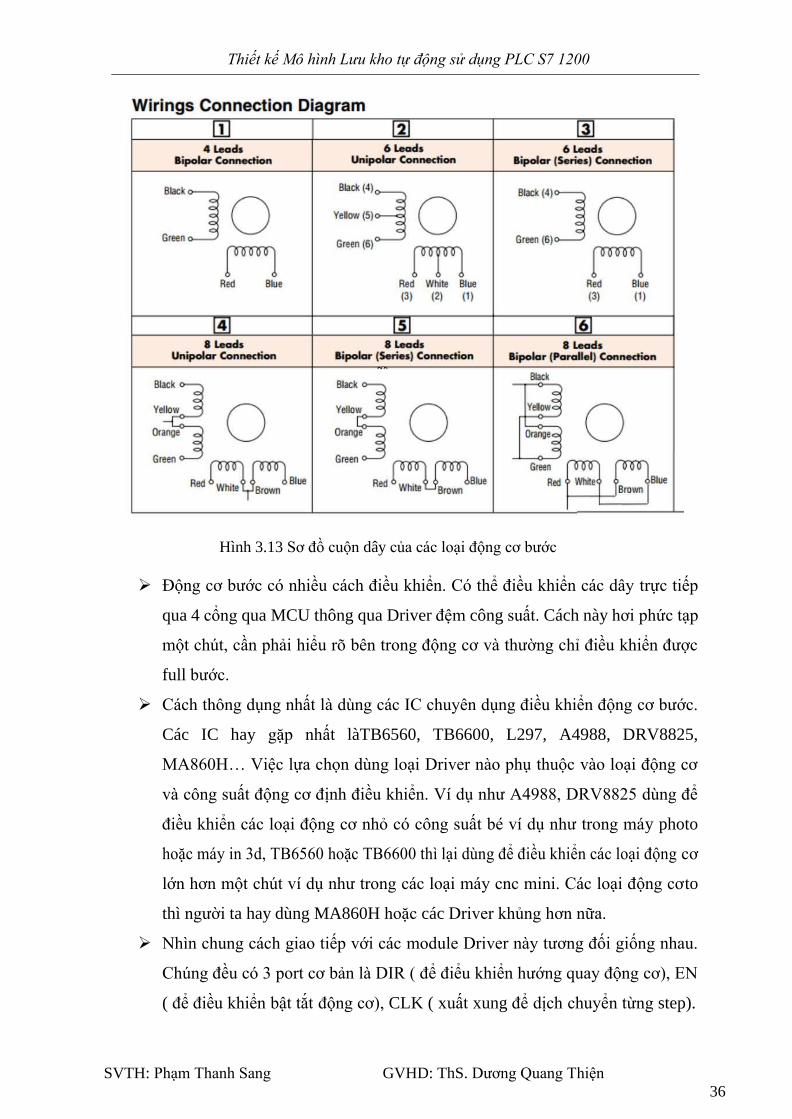
Hình 3.13 Sơ đồ cuộn dây của các loại động cơ bước
➢ Động cơ bước có nhiều cách điều khiển. Có thể điều khiển các dây trực tiếp
qua 4 cổng qua MCU thông qua Driver đệm công suất. Cách này hơi phức tạp
một chút, cần phải hiểu rõ bên trong động cơ và thường chỉ điều khiển được
full bước.
➢ Cách thông dụng nhất là dùng các IC chuyên dụng điều khiển động cơ bước.
Các IC hay gặp nhất làTB6560, TB6600, L297, A4988, DRV8825,
MA860H… Việc lựa chọn dùng loại Driver nào phụ thuộc vào loại động cơ
và công suất động cơ định điều khiển. Ví dụ như A4988, DRV8825 dùng để
điều khiển các loại động cơ nhỏ có công suất bé ví dụ như trong máy photo
hoặc máy in 3d, TB6560 hoặc TB6600 thì lại dùng để điều khiển các loại động cơ
lớn hơn một chút ví dụ như trong các loại máy cnc mini. Các loại động cơ to
thì người ta hay dùng MA860H hoặc các Driver khủng hơn nữa.
➢ Nhìn chung cách giao tiếp với các module Driver này tương đối giống nhau.
Chúng đều có 3 port cơ bản là DIR ( để điểu khiển hướng quay động cơ), EN
( để điều khiển bật tắt động cơ), CLK ( xuất xung để dịch chuyển từng step).

Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
37
Một số loại module như tb6560 tb6600 hoặc MA860H thì mỗi port đều có 2
pin. Ví dụ như EN+ EN- CW+ CW- CLK+ CLK-. vì thế người dùng có thể
tùy chọn điều khiển theo mức 0 hoặc mức 1.
➢ Điều quan trọng nhất là các module này là chúng có thể điều khiển được vi
bước như 1/16 step, 1/8 step, 1/2 step và full step. Nếu full step thì cần 200
step để quay hết 1 vòng đối với loại 1.8 độ 1step. Còn nếu dùng chế độ vi bước
1/16 step thì một xung động cơ chỉ dịch chuyển 1,8/16 độ. Tức là phải cần
200*16=3200 xung để quay hết một vòng, điều này làm tăng độ phân giải và
tăng độ chính xác cho step.
➢ Cách kết nối: với động cơ 4 dây thì tìm các dây xem dây nào là kênh A- A+
B- B+ và nối vào Driver. với động cơ 5 dây 6 dây hoặc 8 dây thì cắt bỏ hết
những dây chung đi và chỉ sử dụng 4 dây ở 2 đầu cuộn dây để điều khiển.
3.1.5.2 Động cơ bước và mạch điều khiển được sử dụng trong mô hình
Thông số kỹ thuật động cơ bước được sử dụng trong hệ thống:
• Loại động cơ bước: 2 pha
• Điện áp định mức: 4.5-5VDC
• Độ phân giải: 1.8 độ/bước
• Số dây: 6 dây
• Kích thước: 42x42x50
Hình 3.14 Động cơ bước

Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
38
Mạch điều khiển là Driver TB6600:
Hình 3.15 Driver TB 6600
Driver Điều Khiển Động Cơ Bước TB6600 sử dụng IC TB6600HQ/HG, dùng
cho các loại động cơ bước: 42/57/86 2 pha hoặc 4 dây có dòng tải là 4A/42VDC.
Ứng dụng của mạch điều khiển động cơ bước TB6600 trong làm máy như CNC,
Laser hay các máy tự động khác.
Thông số kỹ thuật:
+ Nguồn đầu vào là 9V – 42V.
+ Dòng cấp tối đa là 4A.
+ Ngõ vào có cách ly quang, tốc độ cao.
+ Có tích hợp đo quá dòng quá áp.
+ Cân nặng: 200G.
+ Kích thước: 96 * 71 * 37mm.
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
39
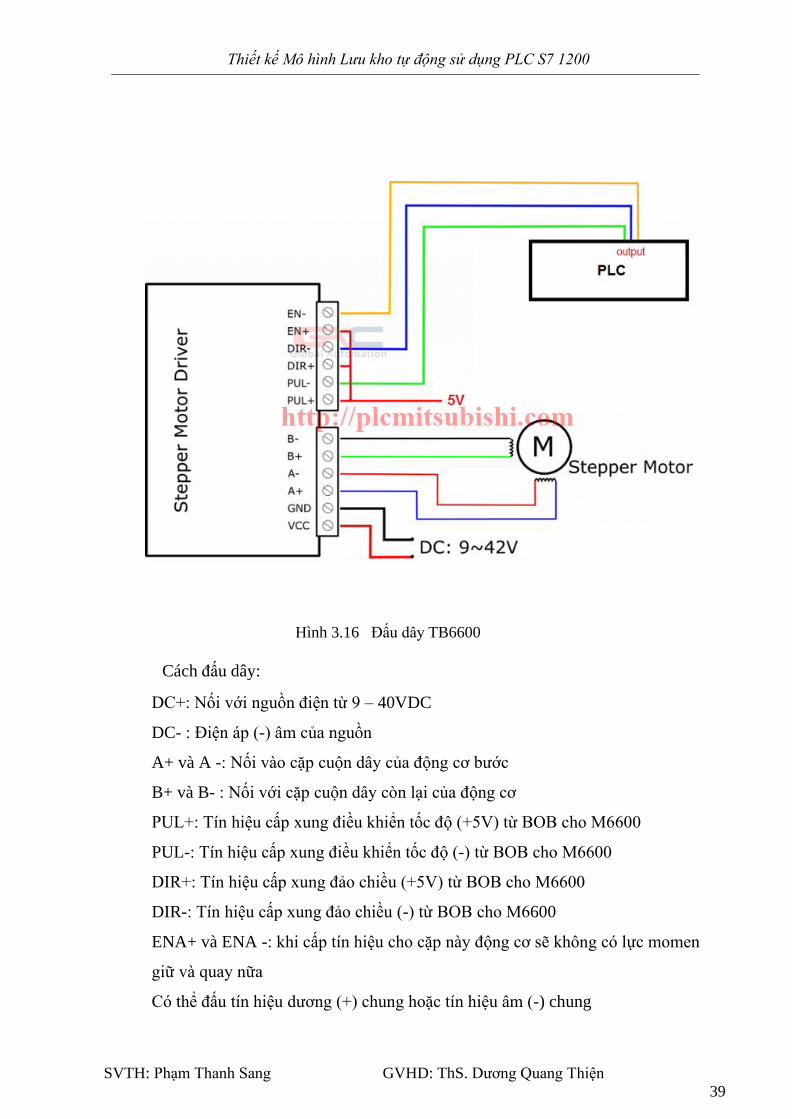
Hình 3.16 Đấu dây TB6600
Cách đấu dây:
DC+: Nối với nguồn điện từ 9 – 40VDC
DC- : Điện áp (-) âm của nguồn
A+ và A -: Nối vào cặp cuộn dây của động cơ bước
B+ và B- : Nối với cặp cuộn dây còn lại của động cơ
PUL+: Tín hiệu cấp xung điều khiển tốc độ (+5V) từ BOB cho M6600
PUL-: Tín hiệu cấp xung điều khiển tốc độ (-) từ BOB cho M6600
DIR+: Tín hiệu cấp xung đảo chiều (+5V) từ BOB cho M6600
DIR-: Tín hiệu cấp xung đảo chiều (-) từ BOB cho M6600
ENA+ và ENA -: khi cấp tín hiệu cho cặp này động cơ sẽ không có lực momen
giữ và quay nữa
Có thể đấu tín hiệu dương (+) chung hoặc tín hiệu âm (-) chung

Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
40
3.2.6 Mô hình tổng thể
➢ Dưới đây là bảng liệt kê các thiết bị phần cứng được sử dụng trong mô hình:
Bảng 3.2 Liệt kê các thiết bị
Thiết bị Ký hiệu trên mô hình
Động cơ bước 1
Băng tải 2
Cảm biến hồng ngoại 3
Công tắc hành trình 4
Khung kệ và sản phẩm 5
Vitme 6
Tay nâng 7
CB nguồn 8
Nguồn 9
PLC S7-1200 10
Driver TB6600 11
Đèn nguồn 12
Nút khẩn cấp 13
➢ Chức năng của các bộ phận:
• Băng tải đưa sản phẩm đến vị trí trục nâng
• Cảm biến xác định vị trí của sản phẩm trên băng tải
• Động cơ bước dùng kéo băng tải và các trục Vitme

Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
41
• Các Vitme tạo thành 3 trục XYZ đưa sản phẩm đến vị trí cần đặt
• Công tắc hành trình giới hạn hành trình trục Vitme đề phòng sự cố hư hỏng
• PLC lập trình điều khiển hệ thống
• Driver TB 6600 cấp xung điều khiển động cơ bước
• Nguồn tổ ong cấp nguồn cho hệ thống
Dưới đây là hình ảnh chụp từ mô hình đã hoàn thành:
Hình 3.17 Mô hình thiết kế
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
42
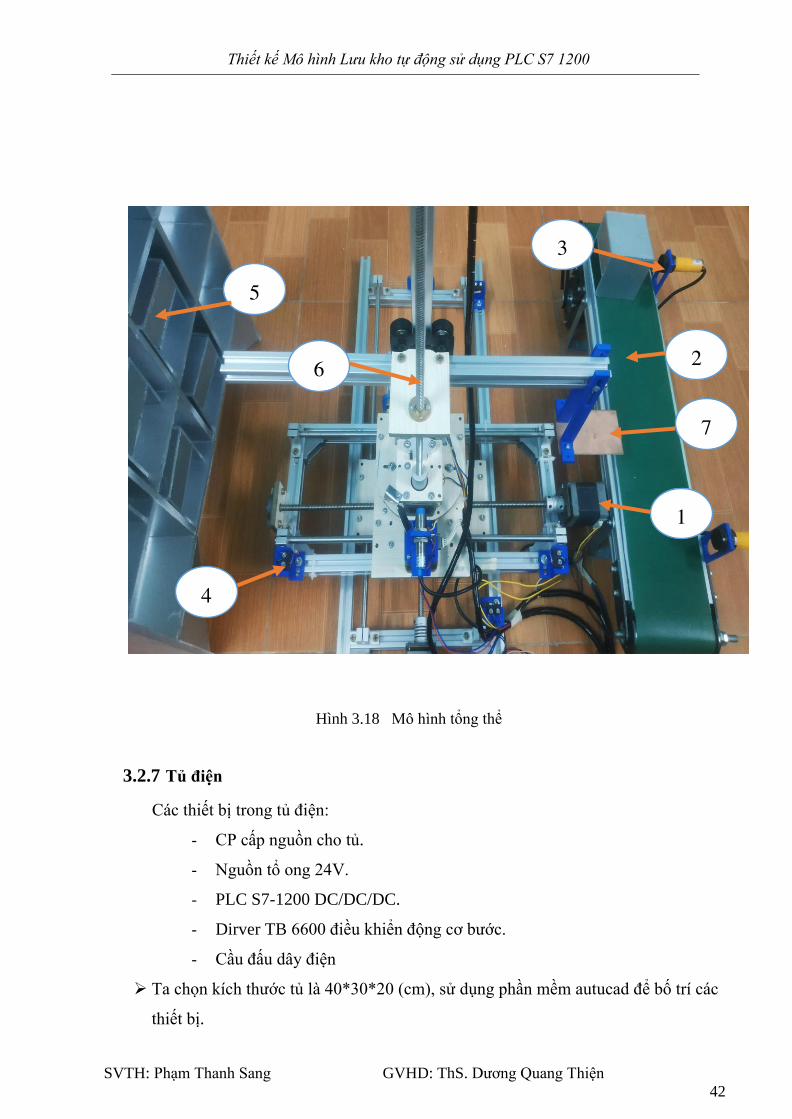
Hình 3.18 Mô hình tổng thể
3.2.7 Tủ điện
Các thiết bị trong tủ điện:
- CP cấp nguồn cho tủ.
- Nguồn tổ ong 24V.
- PLC S7-1200 DC/DC/DC.
- Dirver TB 6600 điều khiển động cơ bước.
- Cầu đấu dây điện
➢ Ta chọn kích thước tủ là 40*30*20 (cm), sử dụng phần mềm autucad để bố trí các
thiết bị.
3
1
6
5
7
4
2

Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
43
Hình 3.19 Sơ đồ bố trí tủ điện
Hình 3.20 Tủ điện
12
8 11
10
0
9
13

Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
44
3.3 Sơ đồ nối dây
Hình 3. 21 Sơ đồ nối dây
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
45
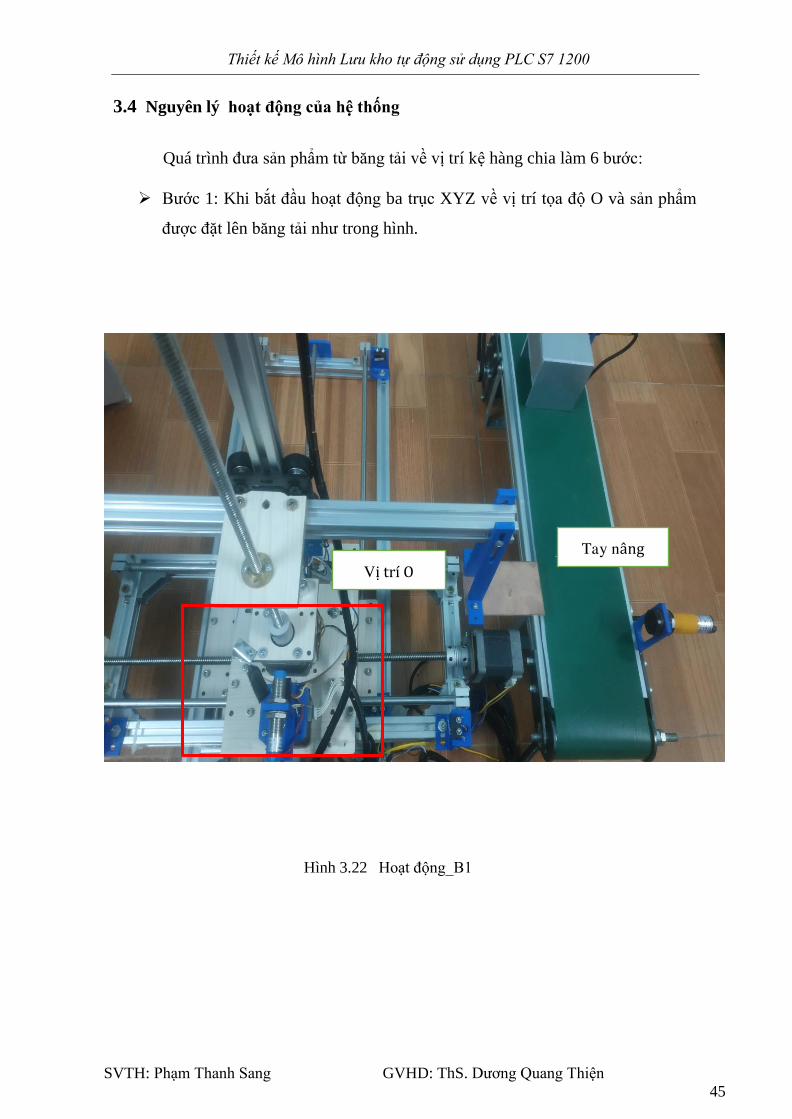
3.4 Nguyên lý hoạt động của hệ thống
Quá trình đưa sản phẩm từ băng tải về vị trí kệ hàng chia làm 6 bước:
➢ Bước 1: Khi bắt đầu hoạt động ba trục XYZ về vị trí tọa độ O và sản phẩm
được đặt lên băng tải như trong hình.
Hình 3.22 Hoạt động_B1
Vị trí O
Tay nâng
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
46
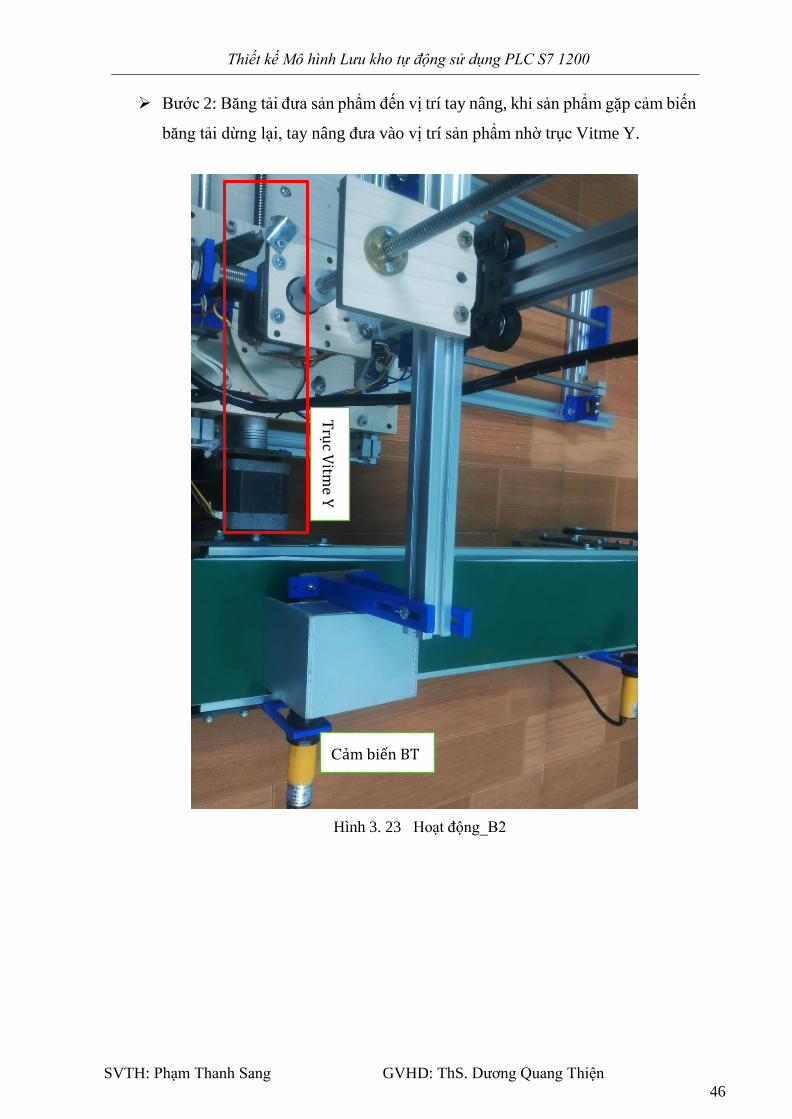
➢ Bước 2: Băng tải đưa sản phẩm đến vị trí tay nâng, khi sản phẩm gặp cảm biến
băng tải dừng lại, tay nâng đưa vào vị trí sản phẩm nhờ trục Vitme Y.
Hình 3. 23 Hoạt động_B2
Trụ
c Vitm
e Y
Cảm biến BT

Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
47
➢ Bước 3: Tay nâng nâng sản phẩm lên nhờ chuyển động của trục Vitme Z.
Hình 3.24 Hoạt động_B3

Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
48
➢ Bước 4: Tay nâng quay đưa sản phẩm sang vị trí kệ để hàng nhờ cơ cấu trục
quay được kéo bởi động cơ bước.
Hình 3. 25 Hoạt động_B4
Trục Xoay
Kệ hàng

Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
49
➢ Bước 5: Sản phẩm được đặt vào đúng vị trí mong muốn nhờ sự kết hợp của 3
trục Vitme XYZ.
Hình 3. 26 Hoạt động_B5
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
50
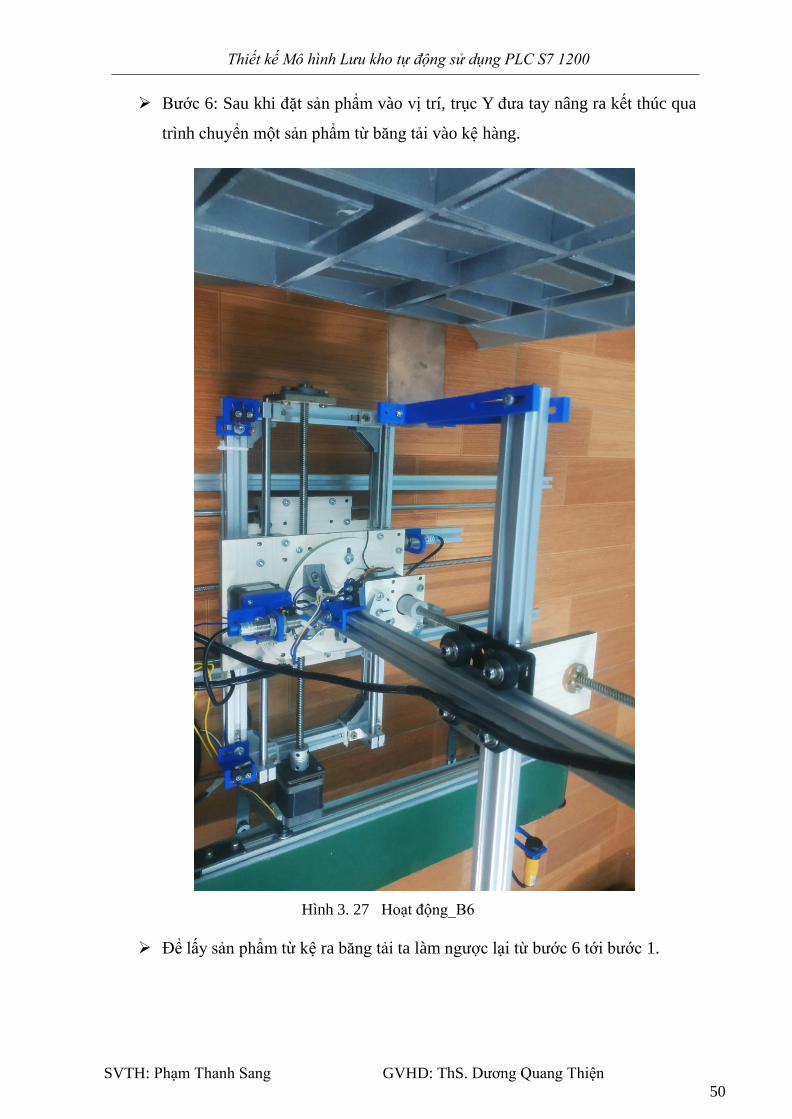
➢ Bước 6: Sau khi đặt sản phẩm vào vị trí, trục Y đưa tay nâng ra kết thúc qua
trình chuyển một sản phẩm từ băng tải vào kệ hàng.
Hình 3. 27 Hoạt động_B6
➢ Để lấy sản phẩm từ kệ ra băng tải ta làm ngược lại từ bước 6 tới bước 1.
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
51
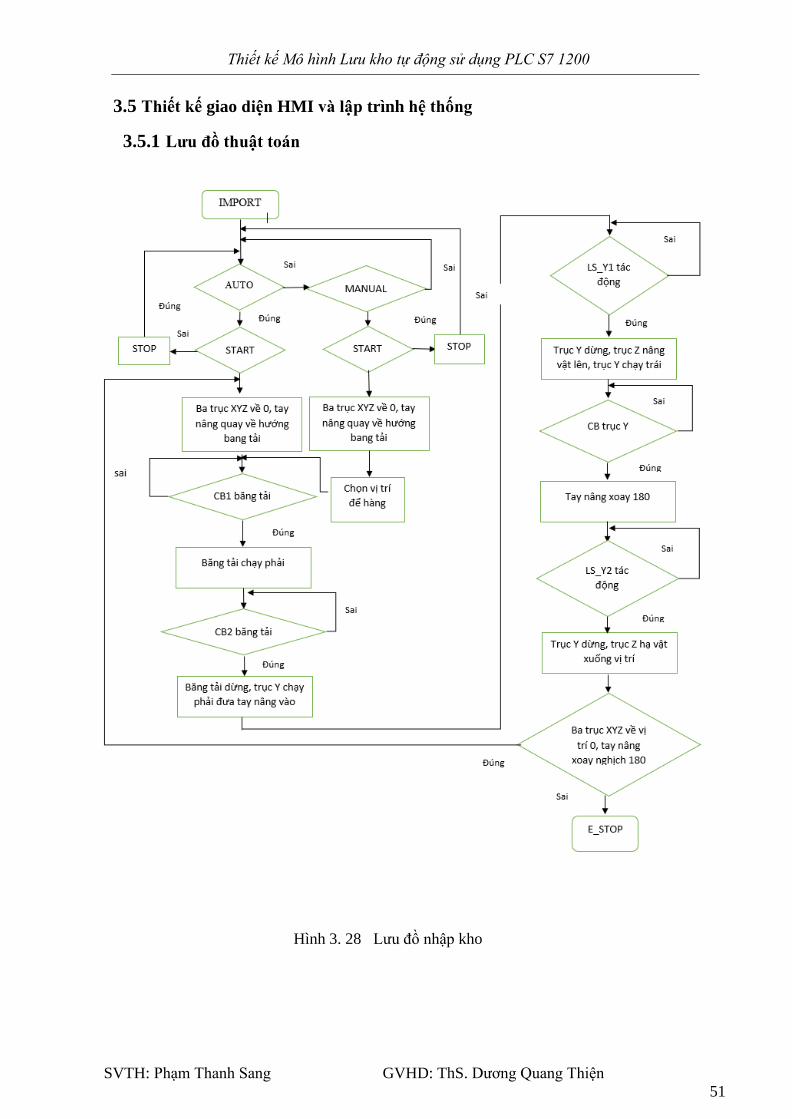
3.5 Thiết kế giao diện HMI và lập trình hệ thống
3.5.1 Lưu đồ thuật toán
Hình 3. 28 Lưu đồ nhập kho
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
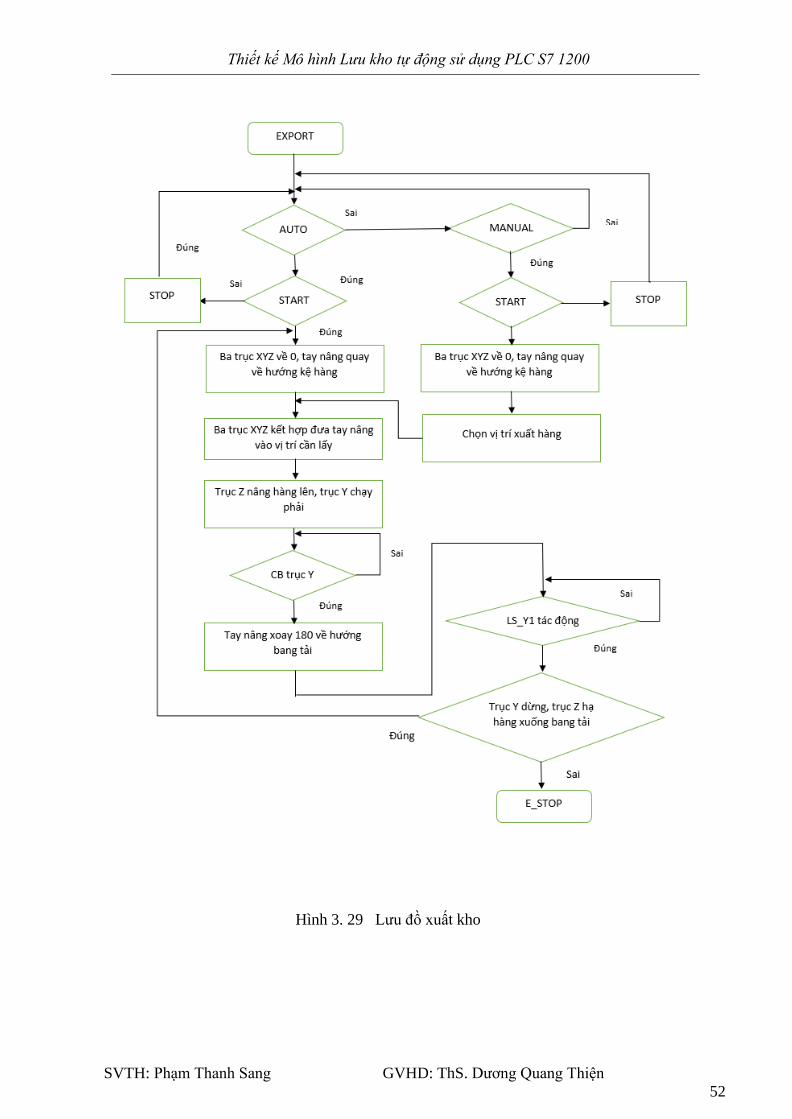
52
Hình 3. 29 Lưu đồ xuất kho
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
53
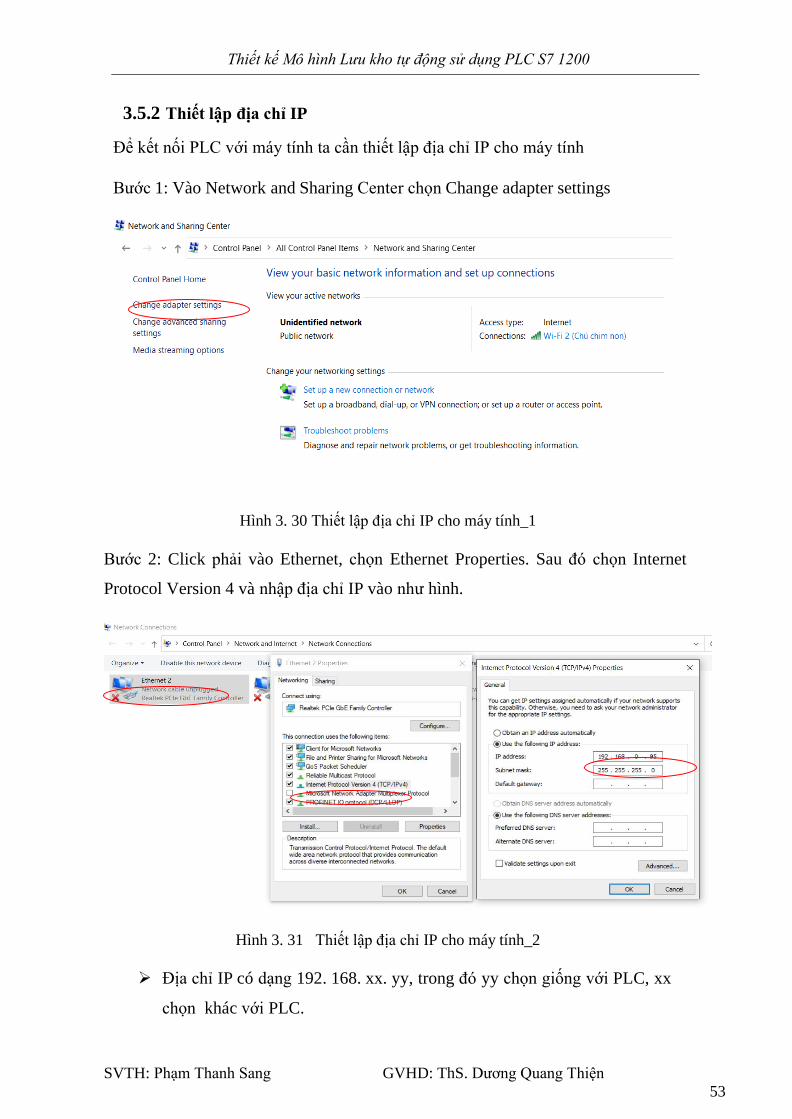
3.5.2 Thiết lập địa chỉ IP
Để kết nối PLC với máy tính ta cần thiết lập địa chỉ IP cho máy tính
Bước 1: Vào Network and Sharing Center chọn Change adapter settings
Hình 3. 30 Thiết lập địa chỉ IP cho máy tính_1
Bước 2: Click phải vào Ethernet, chọn Ethernet Properties. Sau đó chọn Internet
Protocol Version 4 và nhập địa chỉ IP vào như hình.
Hình 3. 31 Thiết lập địa chỉ IP cho máy tính_2
➢ Địa chỉ IP có dạng 192. 168. xx. yy, trong đó yy chọn giống với PLC, xx
chọn khác với PLC.

Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
54
➢ Để xem địa chỉ IP của PLC, trong giao diện chính click chuột phải vào PLC
chọn Properties, xem trong phần Ethernet addresses.
Hình 3. 32 Thiết lập địa chỉ IP cho máy tính_3
3.5.3 Tạo Project mới
Bước 1: Từ màn hình chính máy tính chọn vào biểu tượng TIA Portal V15.1
Hình 3.33 Tạo Project mới_1
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
55
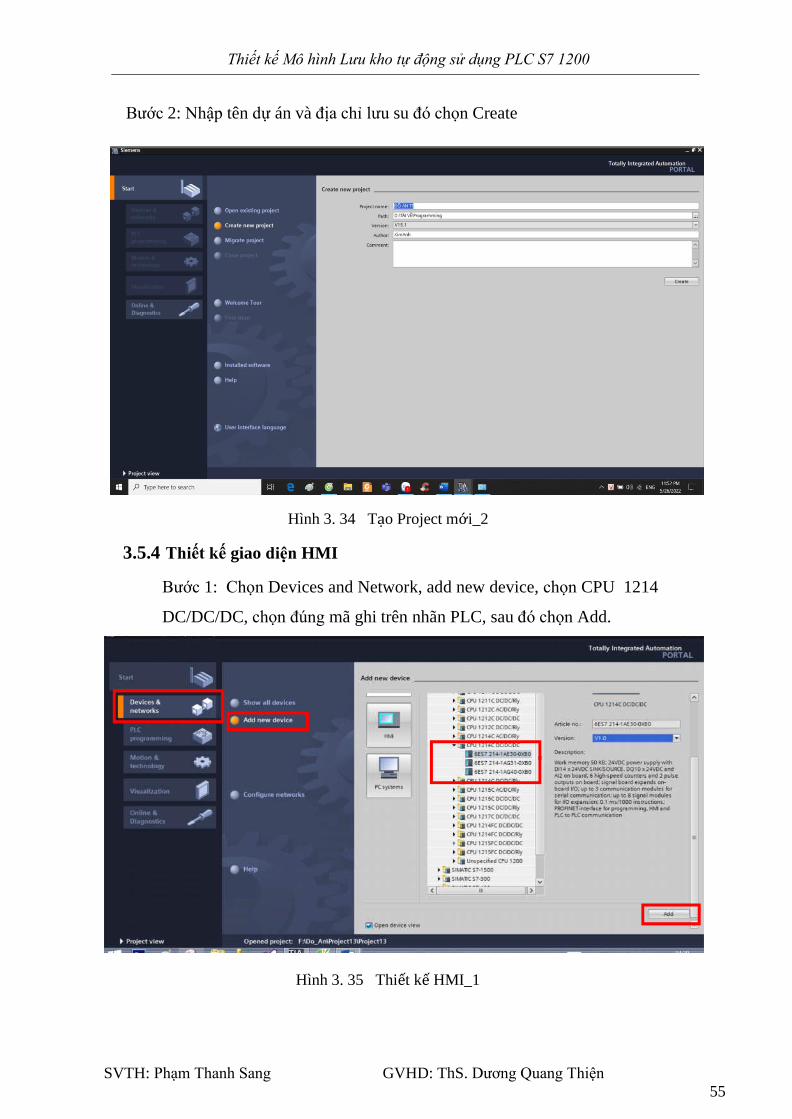
Bước 2: Nhập tên dự án và địa chỉ lưu su đó chọn Create
Hình 3. 34 Tạo Project mới_2
3.5.4 Thiết kế giao diện HMI
Bước 1: Chọn Devices and Network, add new device, chọn CPU 1214
DC/DC/DC, chọn đúng mã ghi trên nhãn PLC, sau đó chọn Add.
Hình 3. 35 Thiết kế HMI_1
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
56
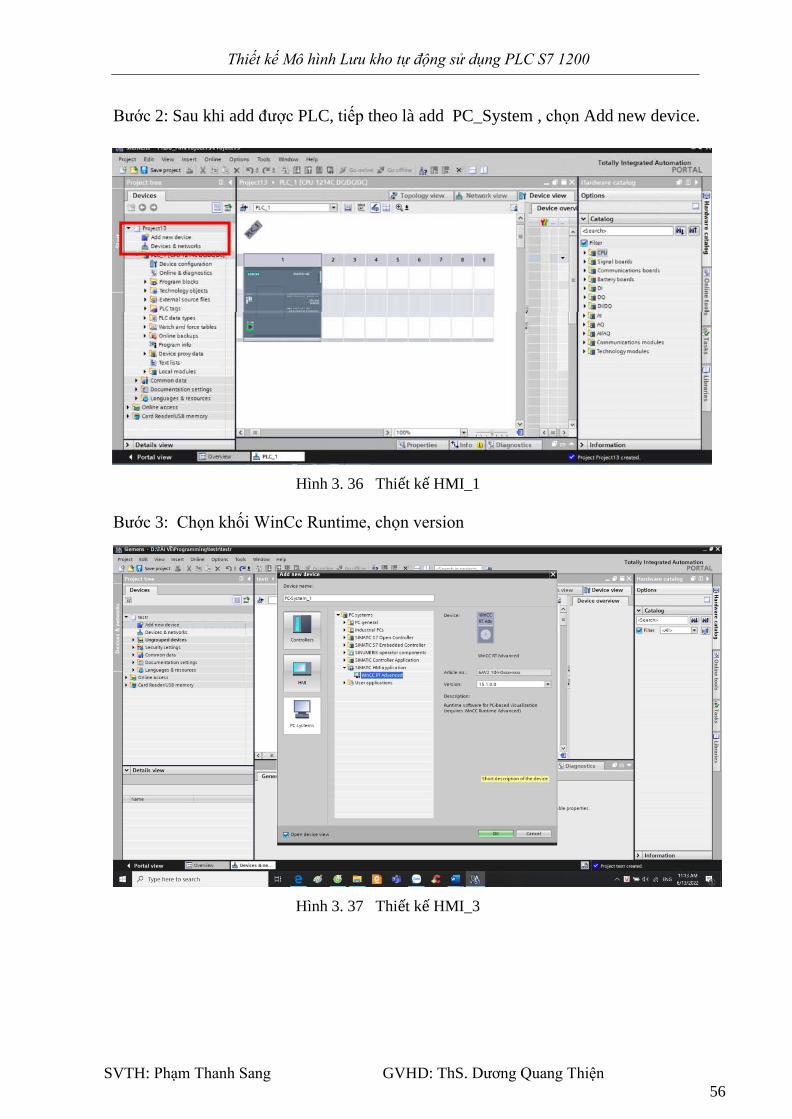
Bước 2: Sau khi add được PLC, tiếp theo là add PC_System , chọn Add new device.
Hình 3. 36 Thiết kế HMI_1
Bước 3: Chọn khối WinCc Runtime, chọn version
Hình 3. 37 Thiết kế HMI_3
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
57
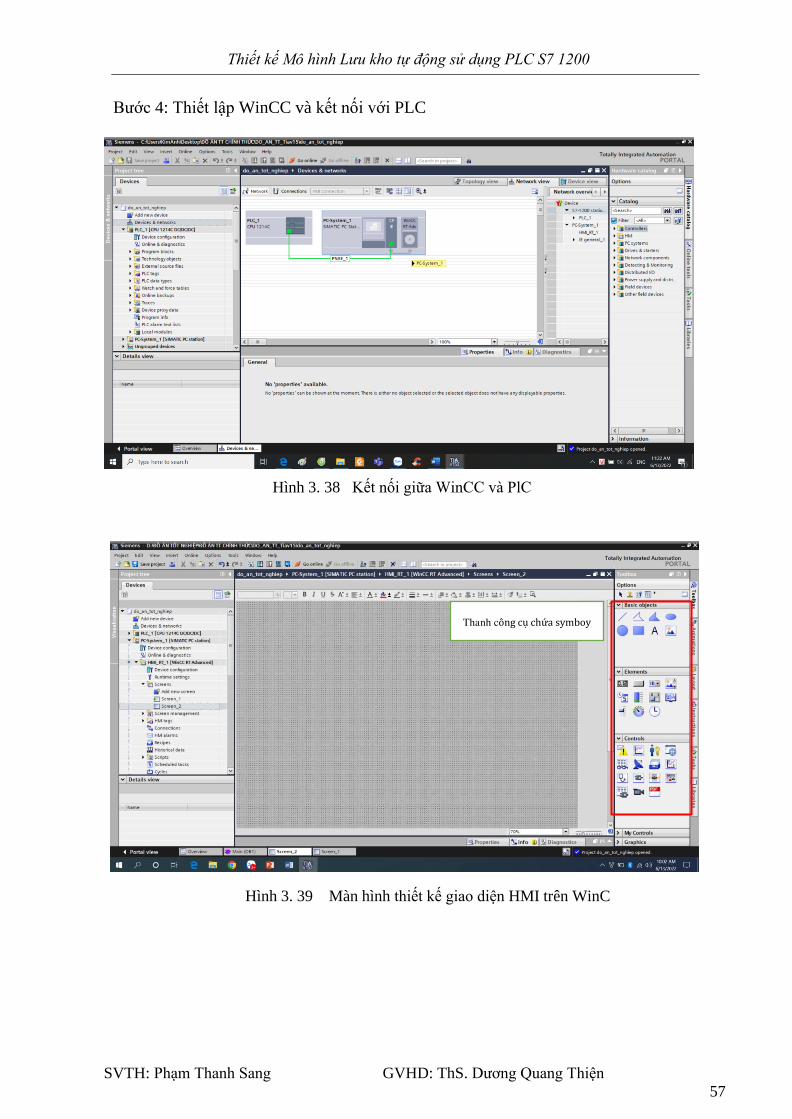
Bước 4: Thiết lập WinCC và kết nối với PLC
Hình 3. 38 Kết nối giữa WinCC và PlC
Hình 3. 39 Màn hình thiết kế giao diện HMI trên WinC
Thanh công cụ chứa symboy

Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
58
Hình 3.40 Tạo Background
Hình 3. 41 Tạo hiệu ứng cho vật di chuyển
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
59
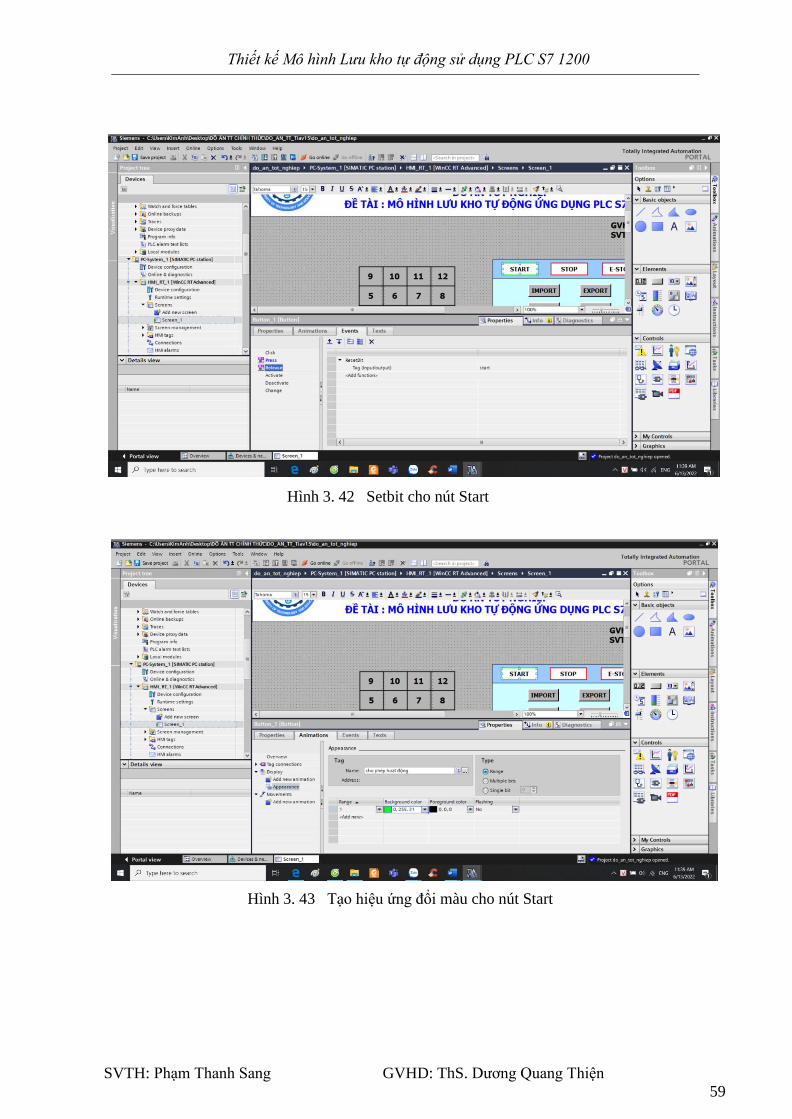
Hình 3. 42 Setbit cho nút Start
Hình 3. 43 Tạo hiệu ứng đổi màu cho nút Start
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
60
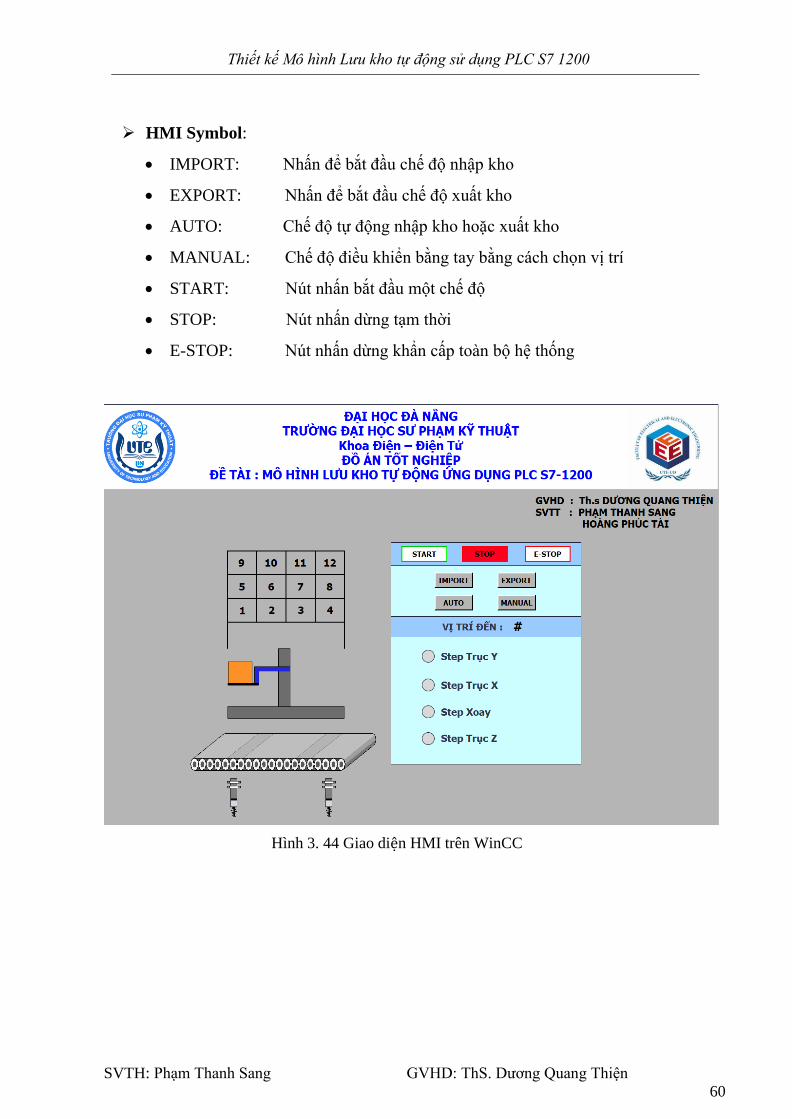
➢ HMI Symbol:
• IMPORT: Nhấn để bắt đầu chế độ nhập kho
• EXPORT: Nhấn để bắt đầu chế độ xuất kho
• AUTO: Chế độ tự động nhập kho hoặc xuất kho
• MANUAL: Chế độ điều khiển bằng tay bằng cách chọn vị trí
• START: Nút nhấn bắt đầu một chế độ
• STOP: Nút nhấn dừng tạm thời
• E-STOP: Nút nhấn dừng khẩn cấp toàn bộ hệ thống
Hình 3. 44 Giao diện HMI trên WinCC

Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
61
3.5.5 Lập trình điều khiển hệ thống
Trước khi bắt đầu lập trình ta cần kí hiệu các địa chỉ đầu vào ra cho PLC:
Bảng 3. 3 Địa chỉ vào ra
Input Output
I0.0 EMERGENCY Q0.0 PUL_X
I0.1 LS_X1 Q0.1 DIR_X
I0.2 LS_X2 Q0.2 PUL_Z
I0.3 LS_Y1 Q0.3 DIR_Z
I0.4 LS_Y2 Q0.4 PUL_Y
I0.5 LS_Z1 Q0.5 DIR_Y
I0.6 LS_Z2 Q0.6 PUL_XOAY
I0.7 CB_Y Q0.7 DIR_XOAY
I1.0 LS_XOAY 1 Q1.0 PUL_BT
I1.1 LS_XOAY 2 Q1.1 DIR_BT
I1.2 CB_BT1
I1.3 CB_BT2
➢ Chương trình được viết trên ngôn ngữ Ladder (các hàm chức năng và các
lệnh cơ bản đã được giới thiệu ở chương 2)
Hình 3. 45 Giao diện viết chương trình
Các lệnh nâng cao
Các lệnh cơ bản
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
62
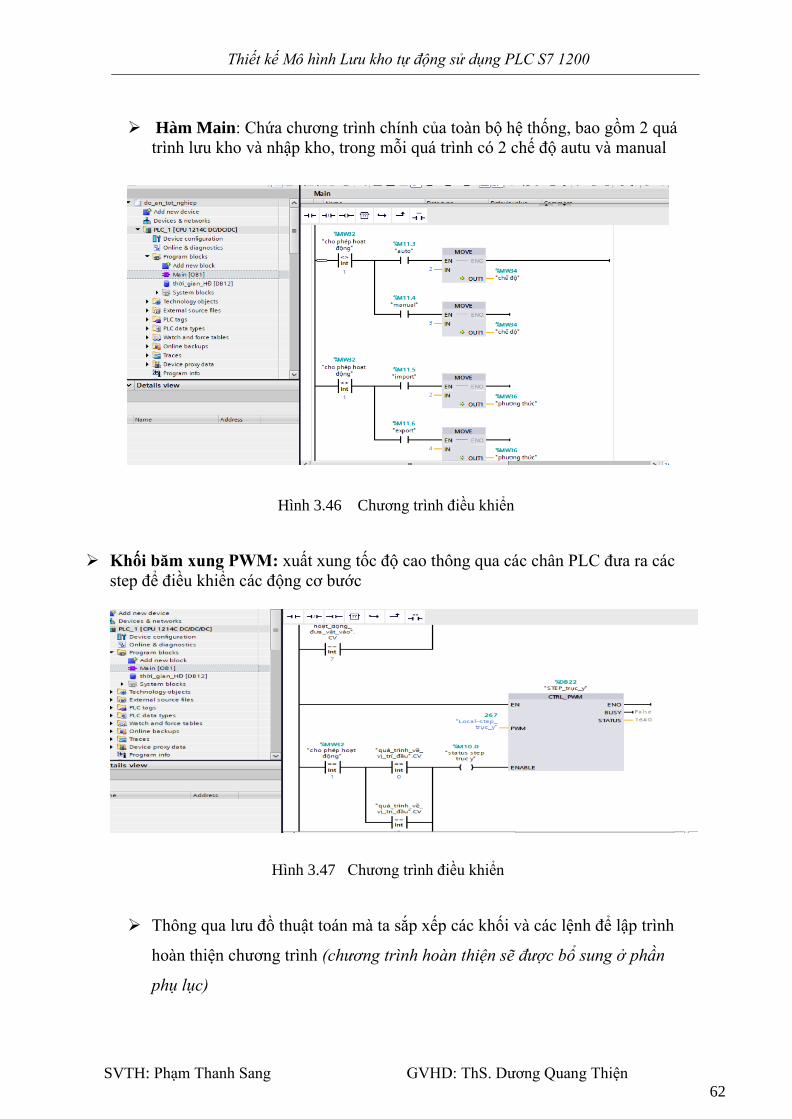
➢ Hàm Main: Chứa chương trình chính của toàn bộ hệ thống, bao gồm 2 quá
trình lưu kho và nhập kho, trong mỗi quá trình có 2 chế độ autu và manual
Hình 3.46 Chương trình điều khiển
➢ Khối băm xung PWM: xuất xung tốc độ cao thông qua các chân PLC đưa ra các
step để điều khiển các động cơ bước
Hình 3.47 Chương trình điều khiển
➢ Thông qua lưu đồ thuật toán mà ta sắp xếp các khối và các lệnh để lập trình
hoàn thiện chương trình (chương trình hoàn thiện sẽ được bổ sung ở phần
phụ lục)
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
63
CHƯƠNG 4 KẾT LUẬN VÀ HƯỚNG PHÁT TRIỂN
4.1 Kết luận
❖ Kết quả đạt được:
Sau quá trình nghiên cứu và hoàn thành đề tài, nhóm đã thiết kế và thi công “Mô
hình lưu kho tự động ứng dụng PLC S7-1200”; đã đạt được những mục tiêu lúc đầu
đề ra:
➢ Sử dụng phần mềm TIA Portal V15.1 để lập trình điều khiển hệ thống cũng như
mô phỏng giám sát trên giao diện màn hình HMI.
➢ Hiểu được cấu tạo, các ngõ vào ra, nguyên lý hoạt động cũng như các modun,
các thiết bị phần cứng liên quan đến PLC S7-1200.
➢ Tìm được các giải thuật giúp việc lập trình PLC S7-1200 trở nên dễ dàng và
logic hơn.
➢ Biết được các loại động cơ bước, nguyên lý hoạt động của động cơ bước, cách sử
dụng động cơ bước, cách đấu dây cũng như cách điều khiển động cơ bước.
➢ Biết được Driver TB6600 điều khiển động cơ bước, đặc biệt là cấu tạo, nguyên lý
hoạt động, thiết lập các thông số, cách đấu dây giữa Driver với PLC và động cơ
bước.
➢ Có thể thiết kế được các kết cấu cơ khí nhỏ mang tính chính xác tương đối trong
mô hình, làm tiền đề cho các hệ thống lớn sau này.
➢ Thiết kế và thi công tủ điện với tính thẩm mỹ và kỹ thuật cao phù hợp với các
tiêu chuẩn tủ điện thực tế.
❖ Đánh giá:
- Mô hình hoạt hoạt động ổn định và chính xác, đúng yêu cầu công nghệ đã đề
ra.
- Toàn bộ quá trình từ khâu lên bản vẽ, tính toán cho đến khi hoàn thiện mô hình
mô phỏng 3D sát với thực tế nhất nhóm đã mất khoảng 1,5 tháng và kinh phí
chế tạo dự kiến dưới 6 triệu đồng cho toàn bộ trang thiết bị. Nhìn chung nhóm
chúng em hoàn toàn hài lòng với mô hình mô phỏng tạo ra.
- Ngoài ra cả nhóm đã rèn luyện thêm được kĩ năng làm việc nhóm với nhau,
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
64
đây là một kĩ năng vô cùng quan trọng cho chúng em trong thời gian sắp tới.
- Đây cũng là nguồn tài liệu cho sinh viên nghiên cứu, cho các kỹ sư điện tham
khảo để thiết kế hệ thống lưu kho tiết kiệm chi phí.
❖ Hạn chế: Vì không hiểu biết nhiều trong phần cơ khí và kinh phí còn hạn
chế nên chúng em còn những vấn đề như sau:
- Chưa phát huy tối đa được việc giám sát.
- Mô hình chỉ có một loại sản phẩm nhất định.
- Phần cơ khí chưa được chỉnh chu và chắc chắn do gia công chưa đúng cách.
- Khi chạy mô hình lâu dài động cơ nóng và vẫn xảy ra một số lỗi.
4.2 Hướng phát triển
Mô hình có thể cái tiến theo nhiều hướng như: phân loại sản phẩm bằng công
nghệ xử lý ảnh sau đó đưa vào đúng vị trí mong muốn, sử dụng quét mã QR hoặc mã
vạch tăng độ chính xác và dễ dàng giám sát củng như quản lý kho hàng.
Có thể thay thế tay nâng bằng tay gắp để tăng độ chính xác, thay thế động cơ bước
bằng động cơ servo có bộ hồi tiếp encoder tăng độ chính xác cho hệ thống.

Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
SVTH: Phạm Thanh Sang GVHD: ThS. Dương Quang Thiện
65
TÀI LIỆU THAM KHẢO
[1] SIMATIC S7-1200 System Manual, Update to edition 05/2009
[2] Nguyễn Thị Phương Hà, Huỳnh Thái Hoàng (2003), Lý Thuyết Điều Khiển Tự
Động, Nhà Xuất Bản Đại Học Quốc Gia Tp.HCM.
[3] Phạm Quang Huy, Ngô Văn Thuyên (2017), Lập Trình Với PLC S7-1200 Và S7-
1500, Nhà Xuất Bản Thanh Niên, STK.
[4] Một số trang web:
– https://tuhocplc.com/
– https://plctech.com.vn/lo-trinh-tu-hoc-lap-trinh-plc/
– https://www.docmienphi365.com/
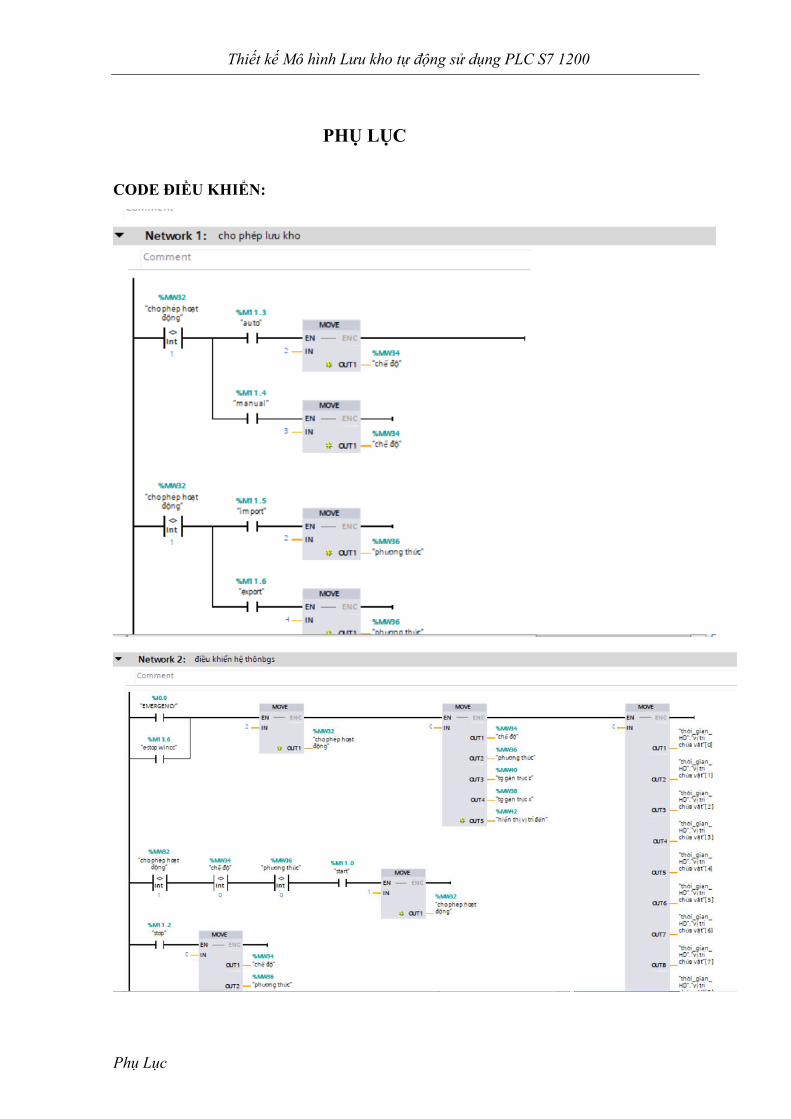
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
Phụ Lục
PHỤ LỤC
CODE ĐIỀU KHIỂN:
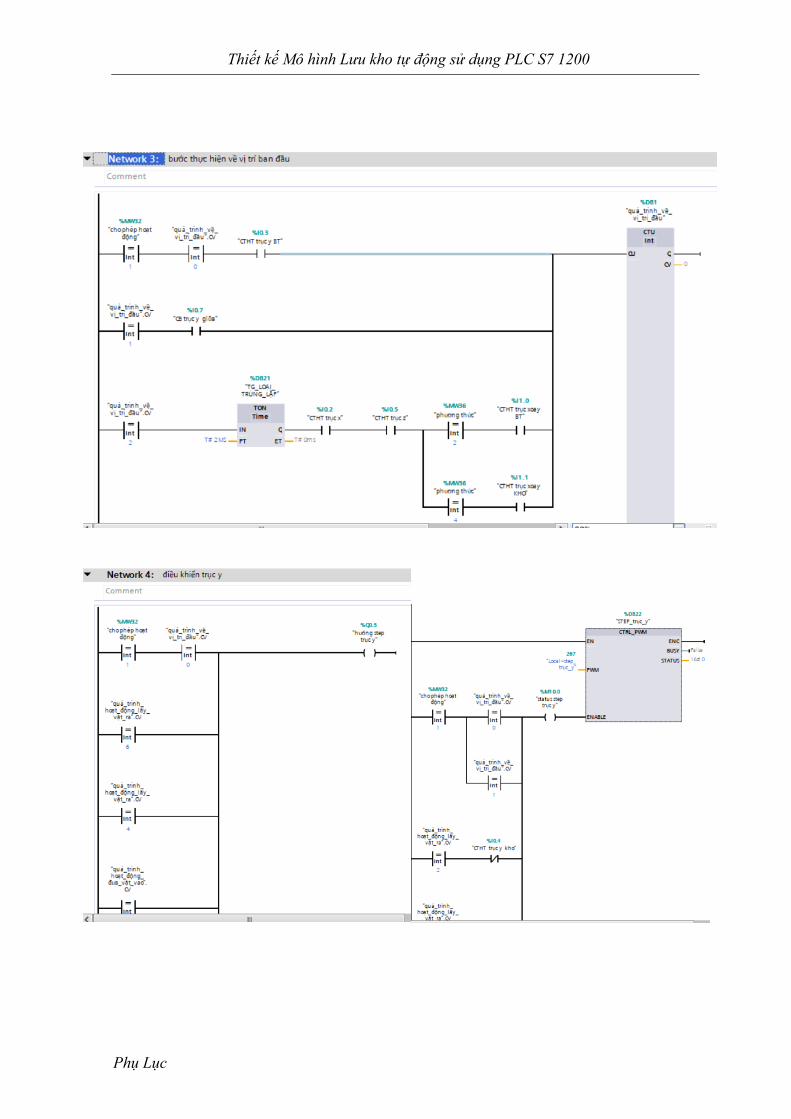
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
Phụ Lục

Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
Phụ Lục

Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
Phụ Lục
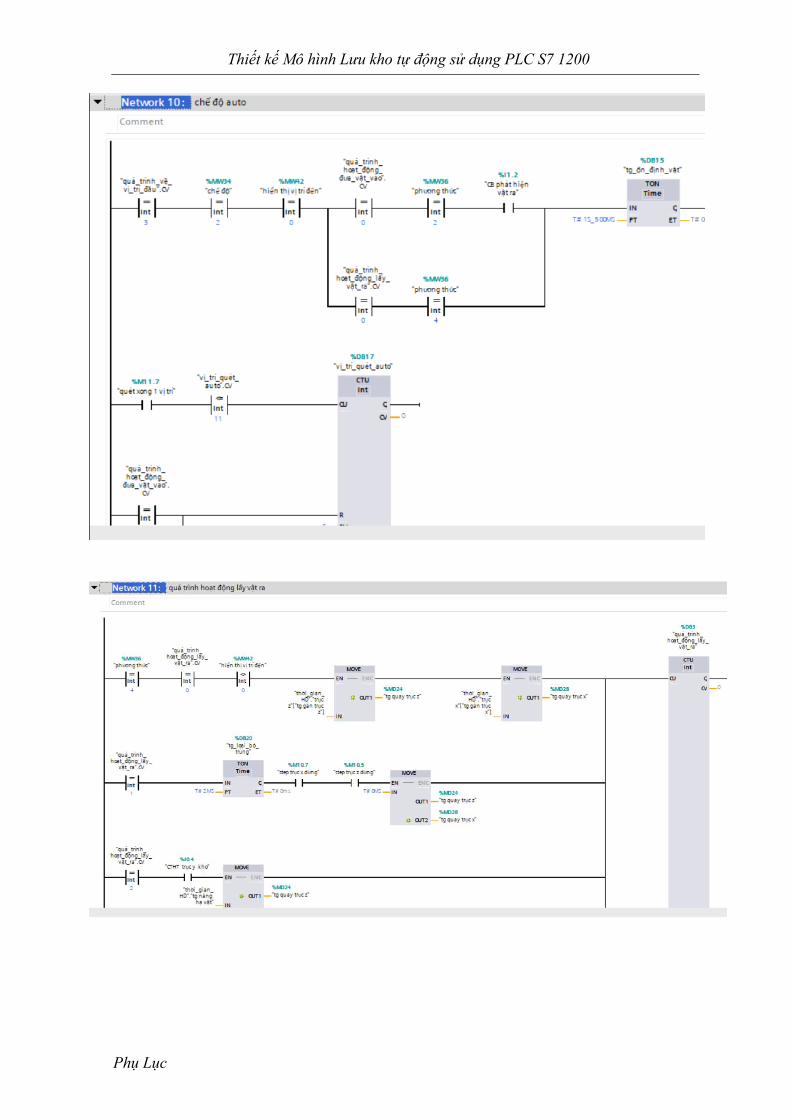
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
Phụ Lục
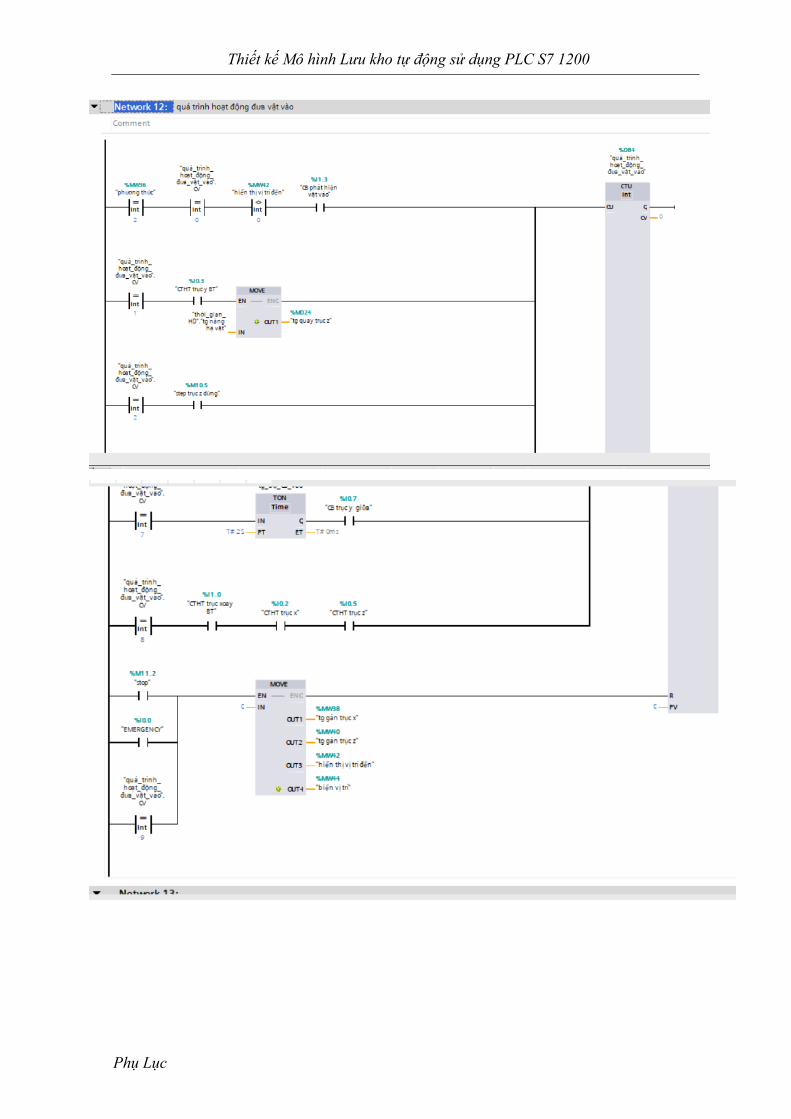
Thiết kế Mô hình Lưu kho tự động sử dụng PLC S7 1200
Phụ Lục




















