DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA PROTECCIÓN DE TRANSFORMADORES DE POTENCIA MEDIANTE...
112
DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA DEPARTAMENTO DE ENERGÍA LICENCIATURA EN INGENIERÍA ELÉCTRICA PROTECCIÓN DE TRANSFORMADORES DE POTENCIA MEDIANTE RELEVADORES NUMÉRICOS MULTIFUNCIÓN PROYECTO TERMINAL PARA OBTENER EL TÍTULO DE INGENIERO ELECTRICISTA QUE PRESENTAN: ALUMNO: MARTÍN GARCÍA LEOCADIO MATRICULA: 98304042 ALUMNO: RAÚL TLACOMULCO TEODORO MATRICULA: 98306819 ASESOR: Dr. VICENTE AYALA AHUMADA Septiembre del 2007
-
Upload
it-acapulco -
Category
Documents
-
view
0 -
download
0
Transcript of DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA PROTECCIÓN DE TRANSFORMADORES DE POTENCIA MEDIANTE...

DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA
DEPARTAMENTO DE ENERGÍA
LICENCIATURA EN INGENIERÍA ELÉCTRICA
PROTECCIÓN DE TRANSFORMADORES DE POTENCIA MEDIANTE RELEVADORES NUMÉRICOS MULTIFUNCIÓN PROYECTO TERMINAL PARA OBTENER EL TÍTULO DE INGENIERO ELECTRICISTA QUE PRESENTAN: ALUMNO: MARTÍN GARCÍA LEOCADIO MATRICULA: 98304042 ALUMNO: RAÚL TLACOMULCO TEODORO MATRICULA: 98306819 ASESOR: Dr. VICENTE AYALA AHUMADA
Septiembre del 2007

Propuesta de actualización con relevadores microprocesados
ii
Índice Página Resumen vIntroducción viRelación de Figuras viiiRelación de Tablas x
Capítulo 1.-Reglamentación y prácticas generales para la protección transformadores de potencia.
1
1.1.- El Transformador 1.2.- Filosofía y consideraciones económicas 1.3.- Esquemas básicos De protección en transformadores 2 1.3.1.- Tipos de fallas en transformadores 3 1.3.2.- Tipos de esquemas básicos 3 1.3.2.1.- Fusible-interruptor 3 1.3.2.2.- Fusible-relevador 5 1.3.2.3.- Sistema relevador-relevador 61.4.- Límites de protección en transformadores 7 1.4.1.- Capacidad de sobrecarga 7 1.4.2.- Punto de magnetización (punto “inrush”) 8 1.4.3.- Curva de daño o curva ANSI 9 1.4.4.- Límites del NEC 11 Capítulo 2.- Relevadores 12
2.1.- Introducción 122.2.- Características funcionales de la protección por relevadores 132.3.- Principio de funcionamiento de los relevadores 132.4.- Relevadores de principio electromagnético 13 2.4.1.- Definición de funcionamiento 14 2.4.2.- Indicadores de funcionamiento 14 2.4.3.- Bobinas de sello y de retención y relevadores de contactos de
sello 15
2.4.4.- Ajuste de puesta en trabajo o de reposición 16 2.4.5.- Acción retardada 162.5.- Relevadores de Atracción electromagnética 19 2.5.1.- Relevador de una sola magnitud 19 2.5.1.1.- Principio de funcionamiento 19 2.5.1.2.- Relación de reposición a puesta en trabajo 20 2.5.1.3.- Efectos de los transitorios 20 2.5.2.- Relevadores direccionales del tipo de atracción electromagnética 21 2.5.2.1.- Principio de funcionamiento 212.6.- Relevadores del tipo de inducción 23 2.6.1.- Principio de funcionamiento 23 2.6.1.1.- La producción de la fuerza actuante 23 2.6.1.2.- Tipos de estructura actuante 24 2.6.2.- Relevadores de inducción de una sola magnitud 27 2.6.2.1.- Control del par 27 2.6.3.- Relevadores de inducción direccionales 28 2.6.3.1.- Relaciones del par en función de las magnitudes
de influencia 28
2.6.3.2.- La característica de funcionamiento de un relevador 31

Propuesta de actualización con relevadores microprocesados
iii
direccional
2.7.- Relevadores Microprocesador 32 2.7.1.- Problemas de muestreo 34 2.7.1.1.- Aliasing 35 2.7.2.- Técnicas de anti-aliasing 36 |2.7.2.1.- Muestras no sincronas 36 2.7.3.- Principio de medición 37 2.7.3.1.- Cálculo del rms 37 2.7.3.2.- Filtros digitales 38 2.7.3.3.- Filtro Fourier-Notch 38 2.7.3.4.- Otros filtros digitales 39 2.7.3.5.- Compensación de la componente de cd offset 40 Capítulo 3.-Diseño y Construcción de equipos tridimensionales,
habilitados con relevadores numéricos multifunción marca Ziv. 413.1.- Introducción 413.2.- Descripción del relevador microprocesador 8IVD-KZN-2D200FPA
(Protección Diferencial de Maquina) 41
3.2.1.- Especificaciones técnicas 413.3.- Descripción del relevador microprocesador
8MXI-A2B-2C2000DAC (Protección Multifunción de Motores) 44
3.3.1.- Especificaciones técnicas 44 3.3.2.- Diagramas de diseño 46 a) Diagramas de alambrado del relevador microprocesado
b) Esquema de distribución de salidas y entradas del equipo c) Isométrico del equipo tridimensional
3.4.- Descripción del relevador microprocesador 8WDI-A2B-2D2000DAC (Protección inversión de potencia)
47
3.4.1.- Especificaciones técnicas 47 3.4.2.- Diagramas de diseño 49 a) Diagramas de alambrado del relevador microprocesado
b) Esquema de distribución de salidas y entradas del equipo c) Isométrico del equipo tridimensional
Capítulo 4.- Análisis técnico del transformador de instrumento 504.1.- Introducción 504.2.- Principios físicos 50 4.2.1.- Sensor de corriente 50 4.2.1.1.- Transmisión entre el sensor y los medios electrónicos 53 4.2.1.2.- Procesamiento electrónico 54 4.2.1.3.- Procesamiento de la señal 54 4.2.1.4.- Construcción 55 4.2.2.- Sensor de efecto pockels 56 4.2.2.1- Principio físico básico 56 4.2.2.2- Principio del sensor 57 4.2.2.3- Sistema de detección 58 4.2.2.4- Descripción del sensor 59 4.2.2.5- Construcción 594.3.- Comparación entre el transformador óptico “tio” con los transformadores de
corriente y transformadores de potencial 60
4.3.1.- Análisis técnico del transformador de instrumento óptico 60 4.3.2.- La nueva tecnología de aislamiento 60 4.3.3.- Ventajas 61

Propuesta de actualización con relevadores microprocesados
iv
4.3.4.- Aplicaciones 61 4.3.5.- Selección y aplicación del relevador óptico 624.4.- Análisis técnico económico entre los transformadores convencionales y la
nueva tecnología de los transformadores ópticos 62
Capítulo 5.-Propuesta de actualización tecnológica para proteger mediante relevadores numéricos multifunción los transformadores de potencia instalados en la subestación de 85 kV de la unidad administrativa de PEMEX en la ciudad de México
. 63
5.1.- Introducción 635.2.- Dispositivos de protección actuales 635.3.- Propuesta de actualización tecnológica para la protección con relevadores
numéricos multifunción 69
5.3.1.- Valores nominales y parámetros calculados para el Transformador [TR-1]
69
5.4.- Especificaciones y ajustes de los dispositivos de primario del transformador 725.5.- Especificaciones y ajustes de los dispositivos del secundario del
transformador 73
Capitulo 6.- Conclusiones y recomendaciones 836.1.- Conclusiones 836.2.- Recomendaciones 84 Bibliografía
85 APÉNDICE 1
Glosario de términos 87 APÉNDICE 2 Diagramas de diseño 95

Propuesta de actualización con relevadores microprocesados
v
RESUMEN El presente proyecto Terminal esta dirigido a una investigación que permite describir la metodología utilizada para la protección de transformadores mediante relevadores numéricos multifunción, su desarrollo consistió en las siguientes etapas: Reglamentación y prácticas generales para la protección de transformadores de potencia. Principio de funcionamiento y características de los relevadores tipo electromagnético y microprocesado. Diseño y Construcción de equipos tridimensionales, habilitados con relevadores numéricos multifunción marca Ziv. Análisis técnico del transformador óptico, características y principio de funcionamiento. Propuesta de actualización tecnológica para proteger mediante relevadores numéricos multifunción los transformadores de potencia instalados en la Subestación de 85 kV de la Unidad Administrativa de PEMEX en la Ciudad de México. Y protegidos actualmente por relavadores electromagnéticos. Las conclusiones y recomendaciones que se desprenden del desarrollo del presente proyecto terminal.

Propuesta de actualización con relevadores microprocesados
vi
INTRODUCCIÓN El presente trabajo describe la metodología utilizada para la protección de transformadores mediante relevadores numéricos multifunción, que involucra funciones tales como protección, control, medición, supervisión y registro de fallas. Su desarrollo incluyo las siguientes etapas: A) investigación sobre la reglamentación y prácticas generales para la protección de transformadores de potencia (esquemas básicos de protección); B) principio de funcionamiento de los relevadores electromagnéticos y algoritmos utilizados en el funcionamiento de los relevadores microprocesador; C) diseño y construcción de un equipo tridimensional habilitado con relevadores numéricos multifunción para protección de transformadores; D) comparación teórica de la respuesta de sistemas de protección habilitados con relevadores numéricos multifunción con transformadores de corriente convencionales y con transformadores ópticos; E) formulación teorica de una propuesta de actualización tecnológica para proteger mediante relevadores numéricos multifunción los transformadores de potencia instalados en la Subestación de 85 kV de la Unidad Administrativa de PEMEX en la Ciudad de México; F) conclusiones y recomendaciones. En este trabajo la metodología empleada en el desarrollo del proyecto terminal incluyó una parte documental, la cual se llevó a cabo mediante la consulta de libros de texto propios de la Ingeniería Eléctrica, normas nacionales e internacionales, artículos y publicaciones especializadas, informes escritos de proyectos terminales y tesis de licenciatura, manuales técnicos diversos publicados por fabricantes de equipos. Consultas a páginas web, entre otras fuentes documentales. Además, de realizar un levantamiento técnico en la S.E. 85 kV de la Unidad Administrativa de PEMEX para adaptar los nuevos relevadores microprocesados requiriéndose del uso de su hardware y software. El motivo de este trabajo es el análisis que se realiza a la protección de transformadores, debido a la llegada de los modernos relevadores numéricos multifunción. Estos basan su funcionamiento en potentes microprocesadores, que involucran diferentes funciones de protección Ya que tradicionalmente la protección contra fallas en transformadores, ha estado limitada a la aplicación de relevadores diferenciales y relevadores de sobrecorriente electromagnéticos. En la actualidad, muchas de esas funciones son desempeñadas en forma separada por relevadores convencionales (discretos, estáticos y electromagnéticos), y en ocasiones, no se aplican por el alto costo que representan. Los relevadores numéricos suelen incorporar todos estos dispositivos de manera simultánea. Como los requisitos para la protección de transformadores varían de acuerdo a la aplicación, los usuarios generalmente sólo usan aquellas funciones requeridas para su caso específico. Para lograr esta funcionalidad adecuada, es recomendable que la selección de las funciones de protección de transformadores se determine en de manera flexible por los

Propuesta de actualización con relevadores microprocesados
vii
usuarios, y no necesariamente por los fabricantes de los equipos de protección. Así, las funciones seleccionadas permitirán configurar a los relevadores para cumplir con requisitos específicos de la aplicación de las protecciones, tal y como se hace con los relevadores convencionales. Por otro lado, el uso de la lógica programable permite ampliar los beneficios que de por si ofrece la protección mediante relevadores numéricos tipo multifunción. En cuanto al contenido del informe del presente proyecto terminal, en el capítulo 1 se da la metodología a realizar para la protección de transformadores de acuerdo a las normas IEEE y NEC; en ella se considera su tipo y esquemas básicos de protección, tomando en cuenta sus límites de protección de acuerdo a capacidad de sobrecarga, punto de magnetización, curva de daño (curva ANSI) y límites NEC. En el capítulo 2 se aborda el principio de funcionamiento de los relevadores tipo electromagnético y de los relevadores microprocesados. El capítulo 3 contiene el desarrollo del diseño y la construcción de los equipos tridimensionales, habilitados con relevadores numéricos multifunción marca Ziv. El capítulo 4 comprende el análisis técnico del transformador óptico, de manera particular se aborda el principio funcionamiento, así como una comparación teórica entre este tipo de transformador y los transformadores de corriente y de potencial convencionales. En el capítulo 5 se presenta la propuesta de actualización tecnológica para proteger mediante relevadores numéricos multifunción los transformadores de potencia instalados en la subestación de 85 kV de la unidad Administrativa de PEMEX en la ciudad de México. Finalmente, el capítulo 6 describe de manera particular las conclusiones y recomendaciones que se desprenden del desarrollo del presente proyecto terminal.

Propuesta de actualización con relevadores microprocesados
viii
Relación de figuras. No. De figura Descripción Figura 1 Esquema básico de protecciones para un transfor- 4 mador instalado en una subestación industrial típica Figura 2 Esquema básico de protecciones para transforma- 6 dores de potencia con menos de 12 MVA (sistema fusible-relevador) Figura 3 Esquema básico de protecciones para transformadores 7 de potencia con más de 12 MVA (sistema relevador-relevador) Figura 4 Curva ANSI para transformadores 11 4A) Categoría I 4B) Categorías II, III, IV Figura 5 Indicadores de funcionamiento 15 Figura 6 Bobinas de sello 16 Figura 7 Relevador de acción retardada 17 Figura 8 Curvas de tiempo de funcionamiento contra el valor de la magnitud de la corriente de influencia 18 Figura 9 Tipos de curvas en los relevadores 19 Figura 10 Relevador direccional del tipo de atracción Electromag- 21 nética Figura 11 Producción del par en un relevador de inducción. 23 Figura 12 Estructura de polo sombreado 25 Figura 13 Estructura de watthorímetro 25 Figura 14 Estructura de tambor de inducción 26 Figura 15 Estructura de anillo de doble acción 26 Figura 16 Estructura de anillo sencillo de doble de inducción 26 Figura 17 Efecto de la frecuencia, en la puesta de trabajo 27 de un relevador de inducción de una sola magnitud Figura 18 Diagrama vectorial para par máximo en un 27 relevador direccional, corriente-corriente del tipo de inducción. Figura 19 Diagrama vectorial para par máximo en un relevador 30 direccional corriente-tensión de tiempo de inducción. Figura 20 Característica de funcionamiento en un relevador 30 direccional en coordenadas polares. Figura 21 Circuito típico Sample and hold 33 Figura 22 Microprocesador individual “Sample and hold” 33

Propuesta de actualización con relevadores microprocesados
ix
Figura 23 Hardware básico para un relevador microprocesado 34 Figura 24. Generación de una onda senoidal a un fasor. 35 Figura 25. Representación de un fasor para la fundamental y quinta 35 harmónica Figura 26. Efecto aliasing de la séptima harmónica 36 Figura 27. Muestras de formas de onda tomadas de una onda 37 senoidal Figura 28. Protección diferencial de maquina 44 Figura 29. Protección multifuncional de motores 47 Figura 30. Protección multifuncional para inversión de potencia 50 Figura 31. Polarización lineal de un rayo de luz atravesando 52 un medio isotrópico transparente de altura L, afectado por un campo magnético de H Figura 32. Corte transversal de una fibra óptica 53 Figura 33. Procesamiento de una señal óptica para determinar el 55 ángulo de incidencia θ Figura 34. El radio S es independiente de las fluctuaciones 55 de la intensidad de entrada Po Figura 35. Analizador Wollaston 58 Figura 36. Curva de tiempo inverso 77 Figura 37. Curvas tiempo-corriente de operación de los relevadores 79
Propuesta de actualización con relevadores microprocesados
x
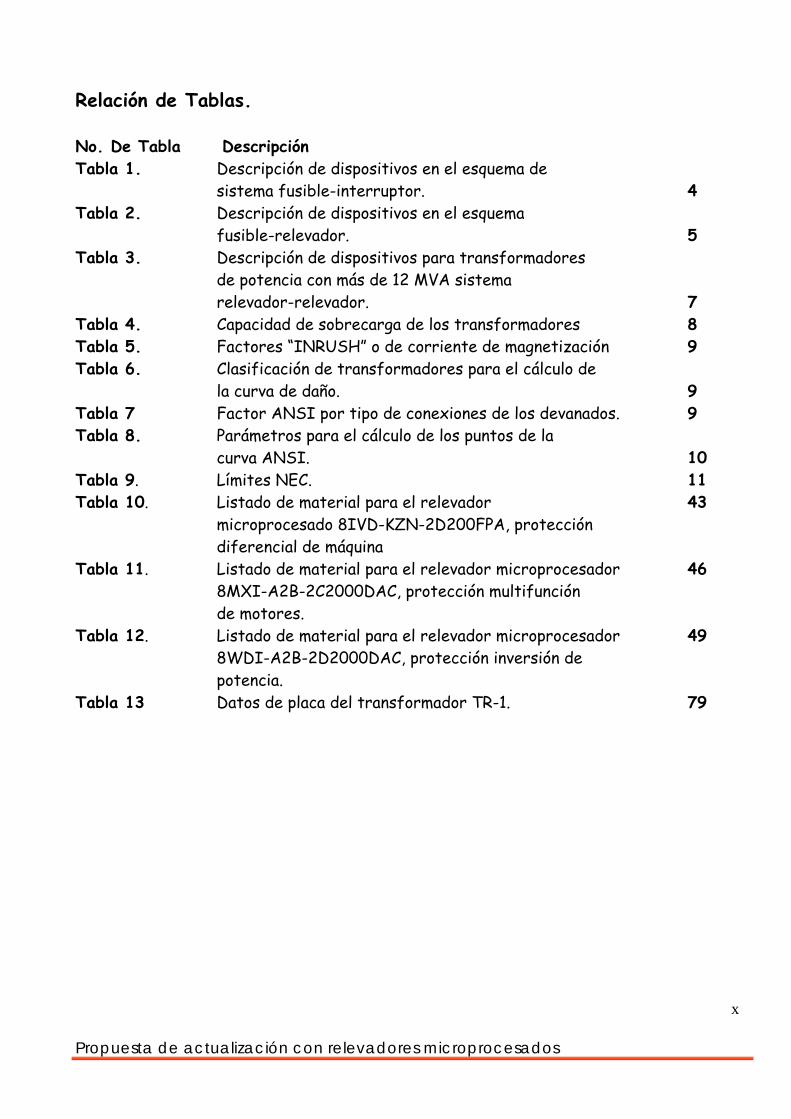
Relación de Tablas. No. De Tabla Descripción Tabla 1. Descripción de dispositivos en el esquema de sistema fusible-interruptor. 4 Tabla 2. Descripción de dispositivos en el esquema fusible-relevador. 5 Tabla 3. Descripción de dispositivos para transformadores de potencia con más de 12 MVA sistema relevador-relevador. 7 Tabla 4. Capacidad de sobrecarga de los transformadores 8 Tabla 5. Factores “INRUSH” o de corriente de magnetización 9 Tabla 6. Clasificación de transformadores para el cálculo de la curva de daño. 9 Tabla 7 Factor ANSI por tipo de conexiones de los devanados. 9 Tabla 8. Parámetros para el cálculo de los puntos de la curva ANSI. 10 Tabla 9. Límites NEC. 11 Tabla 10. Listado de material para el relevador 43 microprocesado 8IVD-KZN-2D200FPA, protección diferencial de máquina Tabla 11. Listado de material para el relevador microprocesador 46 8MXI-A2B-2C2000DAC, protección multifunción de motores. Tabla 12. Listado de material para el relevador microprocesador 49 8WDI-A2B-2D2000DAC, protección inversión de potencia. Tabla 13 Datos de placa del transformador TR-1. 79

Propuesta de actualización con relevadores microprocesados
1
CAPÍTULO 1
REGLAMENTACIÓN Y PRÁCTICAS GENERALES PARA LA PROTECCIÓN DE TRANSFORMADORES DE POTENCIA
1.1.- El Transformador Un transformador es un dispositivo que cambia potencia eléctrica alterna de un nivel de voltaje a otro nivel de voltaje mediante la acción de un campo magnético. Consta de dos o más bobinas de alambre conductor enrolladas alrededor de un núcleo ferromagnético común. Estas bobinas no están usualmente conectadas en forma directa. La conexión entre las bobinas es el flujo magnético común que se encuentra dentro del núcleo. Uno de los dos devanados del transformador se conecta a una fuente de energía eléctrica alterna y el segundo (y quizás tercero) suministra energía eléctrica a las cargas. El devanado del transformador que se conecta a la fuente de potencia se llama devanado primario o de vanado de entrada, y el devanado que se conecta a la fuente de potencia se llama devanado primario o devanado de entrada, y el devanado que se conecta a la carga se llama devanado secundario o devanado de salida. Si hay un tercer devanado en el transformador, este se llama devanado terciario. Los primeros sistemas de distribución, transmitían potencia a tan bajos voltajes que se requerían muy altas corrientes para suministrar cantidades significativas de potencia. Estas corrientes ocasionaban enormes caídas de voltaje y pérdidas de potencia en las líneas de transmisión, restringiendo bastante el área de servicio de las estaciones de generación, el hecho de no poder transmitir potencias a sitios lejanos a bajos voltajes significo que las estaciones generadoras fueran de baja capacidad, locales y por tanto, relativamente ineficientes. La invención del transformador y el desarrollo simultáneo de las fuentes de potencia alterna eliminaron para siempre las restricciones referentes al rango y el nivel de los sistemas de potencia. Un transformador cambia idealmente, un nivel de voltaje alterno a otro nivel de voltaje sin afectar la potencia que está suministrándose. Si un transformador eleva el nivel de voltaje de un circuito, debe disminuir la corriente para mantener igual la potencia que sale de él. De esta manera la potencia eléctrica alterna puede ser generada en determinado sitio, se eleva su voltaje para transmitirla a largas distancias con muy bajas pérdidas y luego se reduce para dejarlo nuevamente en el nivel de utilización final. En un sistema moderno de potencia se genera potencia eléctrica a voltajes de 12 a 25 kv y cerca de 1000 kv para transmisión a grandes con pocas perdidas y nuevamente, los transformadores bajan el voltaje a entre 12 kv y 34.5 kv para distribución local y para permitir que la potencia eléctrica sea utilizada con seguridad en los hogares, oficinas y fabricas a voltajes tan bajos como 120 kv.

Propuesta de actualización con relevadores microprocesados
2
Los transformadores de potencia se construyen de dos maneras. Un tipo de transformador consta de una pieza de acero rectangular laminada, con los devanados enrollados sobre dos de los lados del rectángulo. Este tipo de construcción conocido como transformador tipo núcleo. El otro consta de un núcleo laminado de tres columnas, cuyas bobinas están enrolladas en la columna central, este tipo de contracción se conoce como transformador tipo acorazado. En todo caso, el núcleo se construye con delgadas láminas aisladas eléctricamente unas de otras para minimizar las corrientes parásitas. En un transformador, las bobinas del primario y del secundario están físicamente enrolladas una sobre la otra; la bobina de menor voltaje está situada en la parte interna (más cerca del núcleo). Esta disposición cumple dos objetivos: 1.- Simplifica el problema del aislamiento del devanado de alta tensión desde el núcleo. 2.- Resulta menor flujo disperso que en caso de disponer los dos devanados en el núcleo, separado. Los transformadores de potencia reciben variedad de nombres, dependiendo de su utilización en los sistemas de potencia. Un transformador conectado a la salida de un generador utilizado para elevar el voltaje hasta niveles de transmisión (110 kv y mayores) a veces se denomina transformador de unidad. El transformador situado en el otro extremo de la línea de transmisión, que reduce el voltaje de los niveles de transmisión a los niveles de distribución (desde 2.3 a 34.5 kv), se denomina transformador de subestación. Por último, el transformador que reduce el voltaje de distribución al voltaje final a que se utiliza la potencia (110, 208, 220V, etc.) es llamado transformador de distribución. 1.2.- Filosofía y consideraciones económicas
La protección aplicada a los componentes de los sistemas de potencia en la cual
involucra al transformador es por las razones siguientes. a) Separar al equipo fallado del resto del sistema así como el sistema pueda
continuar en función. b) Limitar el daño del equipo fallado. c) Minimizar la posibilidad de fuego d) Minimizar el riesgo del personal e) Minimizar el riesgo de daño adyacente a los aparatos de alto voltaje.
No hay un camino estándar para la protección de todos los transformadores. Así entonces mas instalaciones requieren de un análisis de ingeniería en la cual se tenga de un esquema efectivo en costo. El plan o esquema a seleccionar debe de ofrecer varias alternativas de sensibilidad, velocidad y selectividad. Balanceando la mejor combinación de estos factores. 1.3.- Esquemas básicos de protección en transformadores
Cuando se habla de un esquema básico de protecciones, se debe entender éste como la recomendación de un conjunto de dispositivos, para cumplir con los requisitos

Propuesta de actualización con relevadores microprocesados
3
mínimos que establecen las normas y reglamentos en sus artículos referentes a la protección contra fallas eléctricas típicas en transformadores. 1.3.1.- Tipos de fallas en transformadores.
a) Fallas internas 1.- Incipientes. Este tipo de fallas en su etapa inicial no representa peligro. Pero pueden degenerarse y traer repercusiones graves si no se desconecta rápidamente. Como algunos ejemplos son conexiones defectuosas en los devanados que producen arqueos o calentamientos localizados, deterioró del aislamiento por fallas en el sistema de enfriamiento, etc. 2.- Severas. A este grupo pertenece la falla de cortocircuito, pudiendo ser franco (impedancia cero) o por arqueo. Las fallas típicas por arqueo frecuentemente se establecen entre: - Un devanado y el núcleo o el tanque. - Devanados de diferentes fases o espiras contiguas de capas diferentes. - En los contactos de los cambiadores de derivaciones generando calentamientos localizados o cortocircuito entre derivaciones.
b) Sobrecalentamiento excesivo por sobrecargas sostenidas. Esta condición es mas o menos común en transformadores de distribución tipo poste y pedestal, donde la demanda suele rebasar la capacidad del transformador, pero también en algunos casos de industrias en las que ha crecido su carga y no ha sido actualizada la capacidad de la subestación. Tales condiciones resultan por de más indeseables.
c) Sobrecalentamiento excesivo y esfuerzos mecánicos por fallas externas. Por ejemplo: cortocircuitos en el sistema que alimenta el transformador, y que son observados por éste como una condición de sobrecarga severa. Sobretensiones, siendo las de origen atmosférico la mas peligrosas por su magnitud. Las estadísticas de incidencia de fallas típicas, así como las consecuencias que en el equipo y otro servicio provocan, han planteado la necesidad de establecer esquemas básicos para su aplicación. Ahora se representan algunos de los mas utilizados en transformadores conectados directamente a líneas o a barras que alimentan sistemas de distribución o más utilizados en transformadores conectados directamente a líneas o a barras que alimentan sistemas de distribución o cargas.
1.3.2.-Tipos de esquemas básicos 1.3.2.1.- Sistema fusible-interruptor Transformador instalado en un subestación industrial típica
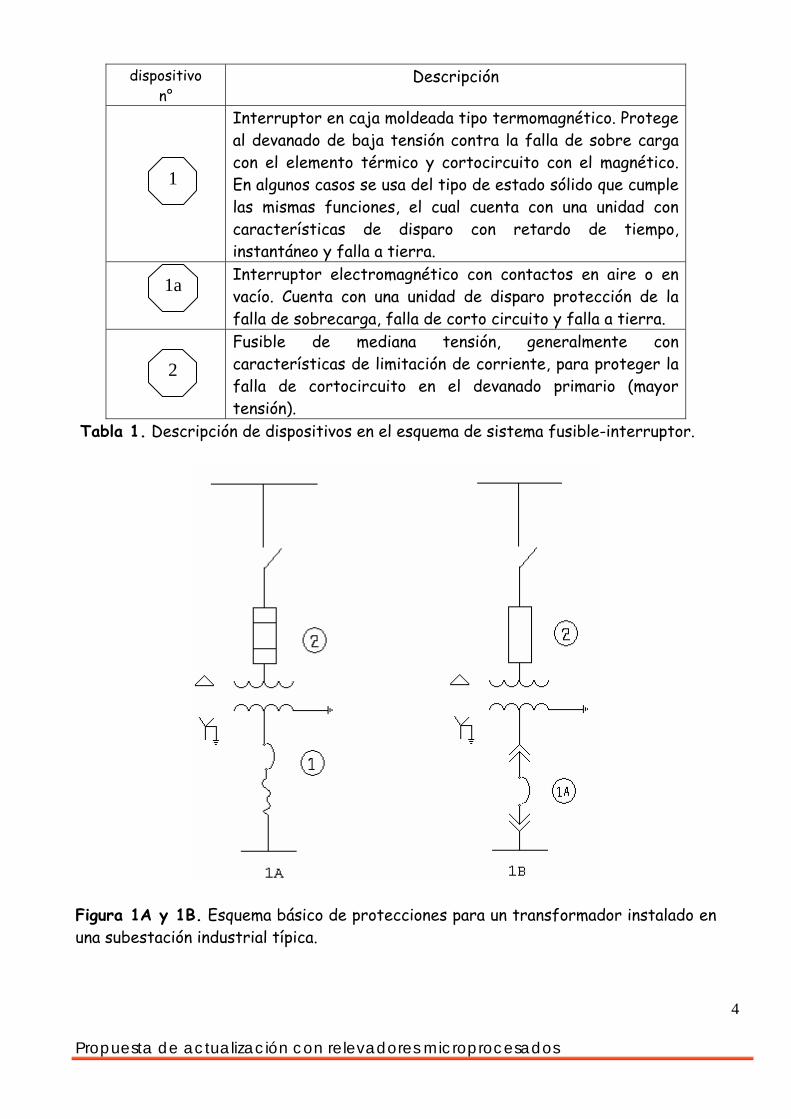
En este caso frecuentemente se utiliza el esquema básico de protecciones llamado sistema “fusible-interruptor”. Las figuras 1a y 1b indican los dispositivos que integran este tipo de esquema (hasta 34.5 kv en el devanado primario y 480 ó 220 volts en el secundario). Las características de los dispositivos empleados son las que se indican en la siguiente tabla:
Propuesta de actualización con relevadores microprocesados
4
dispositivo
n° Descripción
Interruptor en caja moldeada tipo termomagnético. Protege al devanado de baja tensión contra la falla de sobre carga con el elemento térmico y cortocircuito con el magnético. En algunos casos se usa del tipo de estado sólido que cumple las mismas funciones, el cual cuenta con una unidad con características de disparo con retardo de tiempo, instantáneo y falla a tierra.
Interruptor electromagnético con contactos en aire o en vacío. Cuenta con una unidad de disparo protección de la falla de sobrecarga, falla de corto circuito y falla a tierra.
Fusible de mediana tensión, generalmente con características de limitación de corriente, para proteger la falla de cortocircuito en el devanado primario (mayor tensión).
Tabla 1. Descripción de dispositivos en el esquema de sistema fusible-interruptor.
Figura 1A y 1B. Esquema básico de protecciones para un transformador instalado en una subestación industrial típica.
1
1a
2

Propuesta de actualización con relevadores microprocesados
5
1.3.2.2.- Sistema Fusible-Relevador La figura 2 indica los dispositivos que integran el esquema “fusible-relevador”.
Las subestaciones que emplean este sistema de protección son aquellas en las cuales el transformador de potencia tiene una capacidad menor de 12000 KVA y no se justifica económicamente el empleo de un interruptor de potencia en el lado de más alta tensión.
Dispositivo Número
Descripción
Relevador de sobrecorriente con retardo de tiempo para proteger al transformador de sobrecargas sostenidas evitando que operen los fusibles de potencia de la protección del primario (fusibles) y respaldo a la operación de los relevadores de sobrecorrientes de fase (51) del alimentador primario que alimenta el propio transformador.
Relevador de sobrecorriente con retardo intencional de tiempo, dispositivo para la protección de fallas a tierra instalado en el neutro del devanado de menor tensión.
Relevador de nivel de líquido refrigerante, dispositivo que indica la falta de aceite en el tanque.
Relevador de presión. (*)
Relevador térmico de líquido. (*)
Relevador térmico de devanado. (*)
Fusibles para protección contra la falla de cortocircuito instalados en el devanado de mayor tensión.
Tabla 2. Descripción de dispositivos en el esquema fusible-relevador (*) En algunos casos los dispositivos 49 y 63P se sustituye por un dispositivo desfoge tipo “Cuello de ganso” obturado por un vidrio que se rompe a una presión crítica, permitiendo la salida de gases producidos por falta interna. Ocasionalmente se tienen transformadores de potencia que cuentan con tanque conservador y tienen instalado también el relevador de flujo y de presencia de gases llamado Buchholz.
51
51N
71Q
63P
26Q
49
3

Propuesta de actualización con relevadores microprocesados
6
FIGURA 2 Esquema básico de protecciones para transformadores de potencia con menos de 12 MVA (sistema fusible-relevador).
1.3.2.3.- Sistema Relevador-Relevador Este esquema se emplea en transformadores de potencia con más de12 MVA,
aunque suele aplicarse en transformadores con 7.5 MVA. La figura 3 indica los componentes que lo integran.
Dispositivo Número
Descripción
Relevador de sobrecorriente con retardo de tiempo para proteger al transformador de sobrecargas sostenidas, como respaldo al dispositivo 87 en la protección de cortocircuito y al sistema de protección contra sobrecorriente de alimentadores enlazados al secundario del transformador.
Relevador de sobrecorriente con retardo de tiempo, dispositivo para la protección de fallas a tierra en el devanado de menor voltaje conectado en el neutro de la estrella aterrizada.
Relevador diferencial de porcentaje variable, con unidad de restricción de armónicas, dispositivo para la protección primaria contra fallas “internas” de cortocircuito.
Relevador de nivel de líquido refrigerante, dispositivo que indica la falta de aceite en el tanque.
Relevador térmico de presión. (*)
Relevador Buchholz de flujo y presencia de gases. (*)
Relevador térmico de líquido. (*)
Relevador auxiliar, disparo para secuencia de disparo de los interruptores de potencia y señales de alarma.
51
51N
87
71Q
63T
86
63P
26Q

Propuesta de actualización con relevadores microprocesados
7
Tabla 3. Descripción de dispositivos para transformadores de potencia con más de 12 MVA (sistema relevador-relevador). (*) Estos dispositivos disparan el interruptor de más alta tensión para desenergizar al transformador. Además, los dispositivos 63T y 71Q suelen tener un arreglo de detección de condiciones anormales leves o severas. El primer paso se utiliza para enviar una señal de alarma y el segundo como se mencionó, para iniciar una desconexión. (**) Estos dispositivos disparan una señal de alarma para que se tomen medidas colectivas. El relevador 49 también se utiliza para controlar en forma automática la operación por pasos del sistema de ventilación forzada.
FIGURA 3. Esquema básico de protecciones para transformadores de potencia con
más de 12 MVA (sistema relevador-relevador).
1.4.- Límites de protección en transformadores Los límites de protección de los diversos dispositivos de protección, permiten
aprovechar la capacidad de sobrecarga de transformadores, sin que se tenga la posibilidad del daño por el paso de la corriente de corto circuito. Cuando se realiza la selección del equipo eléctrico debe comprobarse la estabilidad térmica y dinámica del mismo en condiciones de corto circuito durante el tiempo máximo de duración de la falla, o sea cuando operan las protecciones lentas o con retardo. En la mayoría de los casos el corto circuito se eliminan por protecciones rápidas, sin embargo se debe considerar el caso más difícil cuando se falla se prolonga. 1.4.1.- Capacidad de sobrecarga Los transformadores en general tienen una gran capacidad de sobrecarga que depende de varios factores como son: el tipo de enfriamiento, la temperatura de diseño, la temperatura media anual, la gráfica de carga, la temperatura del punto más

Propuesta de actualización con relevadores microprocesados
8
caliente, etc. La sobrecarga se puede determinar por la norma NOM-J-409 (Guía de carga para transformadores de distribución y de potencia), para todos los tipos de enfriamiento y diversas condiciones de operación. La selección de los transformadores en todos los casos debe realizarse considerando su capacidad de sobrecarga. La tabla 4 proporciona los factores de enfriamiento y de elevación de temperatura, los cuales al multiplicarse por la corriente a plena carga dan la corriente de sobrecarga permitida por el transformador o por subestación.
ISC = FSC × IPC
Siendo: FSC = Factor de sobrecarga máxima total.
FENF = Factor de sobrecarga por tipo de enfriamiento. FTEMP = Factor de sobrecarga por elevación de temperatura máxima por aislamiento.
ENFRIAMIENTO TIPO DE TRANSFORMADOR
CAPACIDAD KVA TIPO FACTOR
(FENF)
TEMPERATURA
AA 1.0 SECO ≤ 2500 FA 1.3
150° 100
≤ 2500
OA 1.0 55/65° 65°
1.12 1.0
> 500 FA 1.0 55/65° 65°
1.12 1.0
> 500 ≤ 2000
FA 1.15 55/65° 65°
1.12 1.0
CENTRO
DE CARGA
> 2000 ≤ 2500
FA 1.25 55/65° 65°
1.12 1.0
OA 1.0 55/65° 55°
1.12 1.0
FA 1.33 55/65° 55°
1.12 1.0
SUBESTACION
PRIMARIA
FOA 1.67 55/65° 55°
1.12 1.0
Tabla 4. Capacidad de sobrecarga de los transformadores. 1.4.2.- Punto de magnetización (Punto “INRUSH”) Este punto representa la etapa de magnetización de la máquina la cual se produce al energizar el transformador, cuando la corriente de magnetización es muy grande debido a que aún no se establece el flujo opuesto en el núcleo. El punto de magnetización es variable por que depende del magnetismo residual en el transformador y del punto en la onda de voltaje al instante en que ocurre la energización. La corriente de magnetización se expresa como un múltiplo de la

Propuesta de actualización con relevadores microprocesados
9
corriente nominal del transformador y varía en función de la potencia de este así como lo indica la tabla 5. La expresión para la corriente inrush es la siguiente: tinrush = 0.1 para cualquier capacidad Iinrush = Ipc × FINRUSH
POTENCIA (kva) FINRUSH Menos de 1500 8.0 1500 a 3750 10.0
Mayor a 3750 12.0 Tabla 5. Factores “INRUSH” o de corriente de magnetización 1.4.3.- Curva de daño o curva ANSI Esta curva representa la máxima capacidad del transformador para soportar esfuerzos dinámicos y térmicos ocasionados por la corriente de corto circuito sin sufrir daño. Para calcular la curva ANSI los transformadores se clasifican en cuatro categorías de acuerdo a la tabla 6.
CATEGORIA CAPACIDAD EN KVA Monofásico Trifásico I 5 a 500 15 a 500 II 501 a 1667 501 a 5000 III 1668 a 10000 5001 a 30000 IV Más de 10000 Mas de 30000
Tabla 6. Clasificación de transformadores para el cálculo de la curva de daño. Como la forma de aterrizamiento del transformador influye notoriamente en la estabilidad térmica y dinámica del mismo, es necesario considerarla en el cálculo de la curva ANSI, afectándola por el factor de la tabla 7.
ALTA
BAJA FACTOR ANSI
DELTA DELTA 0.87 DELTA ESTRELLA-A(*) 0.58
ESTRELLA-A(*) ESTRELLA 1.0 ESTRELLA-A(*) ESTRELLA 1.0
ESTRELLA ESTRELLA-A(*) 1.0 ESTRELLA ESTRELLA-A núcleo 0.57 ESTRELLA ESTRELLA 1.0
ESTRELLA-A(*) DELTA 1.0 ESTRELLA DELTA 1.0
Tabla 7 Factor ANSI por tipo de conexiones de los devanados.

Propuesta de actualización con relevadores microprocesados
10
Para calcular la curva ANSI de los transformadores de las categorías anteriores se utilizan las curvas de la figura 4 y los datos de la tabla 8.
Punto categoría transformador
tiempo, S corriente, A
1 I II III, IV
1250 (ZT)2 2 2
FANSI×IPC/ZT
FANSI×IPC/ZT
FANSI×IPC/(ZT+ZS) 2 II
III, IV 4.08 8.0
0.7×FANSI×IPC/ZT
0.5×FANSI×IPC/ZT
3 II III Y IV
2551×(ZT)2
5000×(ZT+Zs)2 0.7×FANSI×IPC/ZT
0.5×FANSI×IPC/ZT
4 I, II, III, IV 50 5×FANSI×IPC/ZT Tabla 8. Parámetros para el cálculo de los puntos de la curva ANSI. DONDE: Ipc: Corriente de plena carga expresada en amperes y calculadas a partir de los KVA mínimos del transformador. ZT: Impedancia del transformador expresada en p.u. (Valor por unidad) referido a los KVA mínimos del propio transformador. ZS: Impedancia equivalente de Thevenin del sistema expresada en p.u. referida a los KVA mínimos del transformador y calculada a partir de la siguiente expresión.
ZS = ZS2×KVAT/KVAS
Siendo: ZS2= Impedancia del sistema referida a sus propias bases y expresado en p.u. KVAT = KVA mínimos del transformador. K VAS = KVA del sistema.
t, seg t, seg 4 4 3 2 1 1
I, [A] I, [A] Categoría I Categoría II, III Y IV
Figura 4. Curva ANSI para transformadores
4A) Categoría I. 4B) Categorías II, III, IV.

Propuesta de actualización con relevadores microprocesados
11
1.4.4.- Límites del NEC El NEC establece los límites máximos permisibles para los tiempos en que debe actuar la protección de sobrecorriente de los devanados primario y secundario de los transformadores. Se les conoce con el nombre de “límites NEC” por estar rígidos por el Nacional Electric Code (NEC) de los Estados Unidos del Norte América. Están contenidas en la tabla 9, se expresan en porcentaje de la corriente de plena carga a los KVA máximos de la máquina y se definen a partir de los siguientes parámetros del transformador por proteger:
- Impedancia expresada en porcentaje. - Voltaje nominal de los devanados primario y secundario. - Tipo de dispositivo de protección de sobrecorriente a usar en cada uno de los
devanados.
SECUNDARIO PRIMARIO Arriba de 600 V 600 V ó <
Impedancia del Transformador
( %Z )
Voltaje (Volts)
Ajuste del Interruptor
% (1)
Capacidad Del
fusible
Ajuste del Interruptor
% (1)
Capacidad Del fusible
Ajuste del Interruptor
% (1) Todas Z%≤6
6≤Z%≤10
Arriba De
600 V.
300 600 400
250 300 300
Ninguna 300 250
Ninguna 250 225
Ninguna 125 125
Todas Z%≤6
6≤Z%≤10
600 V. ó
menos
125 250 600 400
125 250 600 400
Ninguna 125 (2)+ (2)+
Tabla 9. Límites NEC Notas: a) % Ipc de máxima capacidad. b) + protección térmica de sobrecarga coordinada. c) El límite NEC para el primario (INEC PRIMARIO; 1000 seg). d) El límite NEC para el secundario (INEC SECUNDARIO; 1000 seg).

Propuesta de actualización con relevadores microprocesados
12
CAPÍTULO II RELEVADORES
2.1.- Introducción
Un relevador de protección es un dispositivo que se puede energizar por una señal de voltaje, una de corriente o por ambas. Cuando es energizado, opera para indicar o aislar las condiciones anormales de operación. Básicamente un relevador de protección consiste de un elemento de operación y de un conjunto de contactos; el elemento de operación toma la señal de dispositivos sensores en el sistema, tales como los transformadores de potencial o de corriente, o de ambas en algunos casos. Cuando el relevador opera, puede actuar sobre una señal, o bien completar un circuito para disparar un interruptor, el cual a su vez aísla la sección del sistema que tiene problema. Función de la protección de relevadores
La función de la protección por relevadores es originar el retiro rápido del servicio de cualquier elemento de un sistema de un sistema de potencia, cuando este sufre un cortocircuito o cuando empieza a funcionar en cualquier forma anormal que pueda originar daño o interfiera de otra manera con el funcionamiento eficaz del resto del sistema. El equipo de protección es ayudado, en esta tarea, por interruptores que son capaces de desconectarse por completo del resto del sistema. Estos interruptores deben tener la capacidad suficiente para que puedan conducir momentáneamente la corriente máxima de corto circuito que pueda fluir a través de ellos, e interrumpir entonces esta corriente deben soportar también el cierre de un cortocircuito semejante e interrumpirlo de acuerdo con ciertas normas prescritas. Si se considera solo por el momento el equipo de protección contra corto circuitos, Se tienen dos grupos de equipo: uno lo llamaremos de protección primaria, y otro de protección de respaldo. La protección primaria es la primera línea de defensa, mientras que las funciones de respaldo sólo se dan cuando falla la protección primaria. En la protección primaria, los interruptores se localizan, en las conexiones de cada elemento de un sistema de potencia, lo que hace posible desconectar sólo el elemento defectuoso, estableciendo una zona de protección separada alrededor de cada elemento del sistema, el significado de esto es que cualquier falla que ocurra dentro de una zona dada originará el disparo, es decir abertura de los interruptores dentro de esa zona y de sólo esos interruptores en la zona seleccionada. La protección de respaldo se emplea sólo para protección de cortocircuitos ya que son del tipo preponderante de falla en un sistema de potencia, hay mas posibilidades de que falle la protección primaria en caso de corto circuitos, la experiencia ha mostrado que la protección de respaldo no es justificable económicamente para casos distintos de cortocircuitos. Es muy deseable que la protección de respaldo esté dispuesta de tal manera que cualquier cosa que pueda originar la falla de la protección primaria no origine también la falla de la protección de respaldo. Por lo tanto este requisito se satisface si los relevadores de respaldo se localizan de tal manera que no empleen o

Propuesta de actualización con relevadores microprocesados
13
controlen cualquier cosa en común con los relevadores primarios que vayan a ser respaldados. 2.2.- Características funcionales de la protección por relevadores
Los siguientes términos deben estar incluidos en cualquier equipo de protección por relevadores considerados tanto en una protección primaria y de respaldo. a) Sensibilidad: cualquier equipo de protección debe ser suficientemente sensible para que funcione en forma segura cuando sea necesario, con la condición real de que produzca la tendencia de funcionamiento mínimo (disparo mínimo). b) Selectividad: capaz de seleccionar entre aquellas condiciones en las que se requiere un funcionamiento rápido y aquellas en las que se requiere de funcionamiento retardado. c) Velocidad: cada relevador debe de funcionar ala velocidad que es requerida debido a su utilización. d) Confiabilidad: requisito básico es que el equipo de protección por relevadores debe ser confiable, ante alguna falla. La aplicación adecuada del equipo de protección por relevadores involucra una selección adecuada no sólo del equipo de relevadores si no también de los aparatos asociados. 2.3.- Principio de funcionamiento de los relevadores
Todos los relevadores utilizados para protección de cortocircuitos y muchos otros tipos, funcionan en virtud de la corriente y la tensión, proporcionada a estos por los transformadores de corriente y tensión, conectada en diversas combinaciones al elemento del sistema que va a protegerse. Por cambios individuales o relativos en estas dos magnitudes las fallas señalan su presencia, tipo y localización de falla, hay alguna diferencia característica en estas magnitudes así como varios tipos de equipos de protección por relevadores disponibles cada uno de los cuales esta diseñado para reconocer una diferencia particular y funcionan en respuesta a esta. Existen, más diferencias posibles en estas magnitudes de las que uno pueda sospechar. Las diferencias en cada magnitud son posibles en una o más como las que se mencionan a continuación: magnitud, frecuencia, ángulo de fase, dirección, razón de cambio, dirección u orden de cambio, armónicas o forma de onda. Así pues los relevadores de protección son las herramientas del ingeniero de protección. Hoy en día existen actualmente diferentes tipos de relevadores. Los primeros que aparecieron fueron los de principio electromagnético, seguidos de los relevadores estáticos, y finalmente los de última generación los multifuncionales que funcionan a base de microprocesadores. En este presente trabajo omitiremos la descripción y funcionamiento de los relevadores estáticos. 2.4.- Relevadores de principio electromagnético
En este tipo de relevadores existen fundamentalmente dos. A) Atracción Electromagnética. Funcionan en virtud de un émbolo que es atraído
dentro de un solenoide, o una armadura que es atraída por los polos de un

Propuesta de actualización con relevadores microprocesados
14
electroimán. Estos relevadores pueden ser accionados por magnitudes de corriente directa y corriente alterna.
B) Inducción Electromagnética. Estas utilizan el principio del motor de inducción en un rotor; este principio de funcionamiento se aplica sólo a relevadores accionados por corriente alterna, y al referirnos a ellos los llamaremos simplemente relevadores del tipo de inducción.
2.4.1.- Definición de funcionamiento Todos los relevadores funcionan en respuesta a una o más magnitudes eléctricas, ya sea para cerrar o para abrir contactos. El movimiento mecánico de accionamiento es impartido a una estructura de contacto para cerrar y abrir contactos así pues cuando decimos que funciona un relevador decimos que cierra y abre contactos. La mayoría de los relevadores tienen un resorte de control o están restringidos por gravedad, de tal manera que estos asumen una posición dada cuando esta completamente sin alimentación, un contacto que se cierra bajo esta condición es conocido como que un contacto cerrado y uno que se abre se conocido como contacto abierto. Cuando un relevador funciona para abrir un contacto cerrado o cerrar un contacto abierto, decimos que se pone en trabajo, y al valor mínimo de la magnitud de influencia que originará tal funcionamiento a medida que esta se incrementa lentamente desde cero, se le conoce como valor de puesta de trabajo. Cuando un relevador funciona para cerrar un contacto cerrado, o para mover hacia un tope en lugar de hacia un contacto cerrado, decimos que se repone y el valor máximo de la magnitud de influencia a las que esto ocurre, y a medida que esta disminuye lentamente desde arriba del valor de puesta en trabajo, se le conoce como valor de reposición. Cuando un relevador opera para abrir su contacto abierto, pero no se repone, decimos que éste pasa al reposo y el valor máximo de la magnitud de influencia a la que esto ocurre es conocido como valor de paso al reposo. 2.4.2.- Indicadores de funcionamiento En general, un relevador de protección está provisto con un indicador que muestra cuándo ha funcionado el relevador para disparar un interruptor. Dichos indicadores de funcionamiento o indicadores son elementos coloreados de un modo característico y son accionados ya sea mecánicamente por el movimiento del mecanismo del relevador. O eléctricamente por el flujo de la corriente de contacto, y sale a la vista cuando funciona el relevador. Después de su operación se reponen manualmente y están listos para el siguiente funcionamiento. Los indicadores accionados eléctricamente se prefieren, por lo común por que dan una seguridad definida de que hubo un flujo de corriente en el circuito de contacto. Los indicadores accionados mecánicamente pueden utilizarse cuando el contacto de cierre del relevador completa siempre el circuito de disparo donde dicho disparo no depende del cierre de algún otro contacto en serie.

Propuesta de actualización con relevadores microprocesados
15
Figura 5.- Indicadores de funcionamiento
2.4.3 Bobinas de sello y de retención y relevadores de contactos de sello Para proteger los contactos contra el deterioró que resulta de un posible intento inadvertido para interrumpir el flujo de la corriente de la bobina de disparo del interruptor, algunos relevadores están provistos de un mecanismo de retención que comprende una pequeña bobina en serie con los contactos; esta bobina esta sobre un pequeño electroimán que actúa sobre una pequeña armadura en el conjunto móvil del contacto, para retener los contactos herméticamente sellados una vez que se haya establecido el flujo de corriente de la bobina de disparo. Esta bobina se le conoce como una bobina de sello o bobina de retención. Otros relevadores utilizan un relevador auxiliar pequeño cuyos contactos ponen en derivación los contactos del relevador de protección y sellan el circuito cerrado mientras que fluye la corriente de disparo, En cualquier caso, el circuito esta dispuesto de tal manera, que una vez que empieza a fluir la corriente de la bobina de disparo puede interrumpirse sólo por un contacto auxiliar del interruptor que está conectado en serie con el circuito de la bobina de disparo y que abre al mismo tiempo que el interruptor. Este contacto auxiliar se define como un contacto abierto o cerrado según sea el caso.

Propuesta de actualización con relevadores microprocesados
16
Figura 6.- Bobinas de sello.
2.4.4 Ajuste de puesta en trabajo o de reposición El ajuste de puesta en trabajo o de reposición está previsto eléctricamente por
bobinas con tomas de corriente o por transformadores de potencial auxiliares con tomas o resistencias, o el ajuste está provisto mecánicamente de un resorte de tensión ajustable o por variación del entrehierro inicial del elemento de maniobra con respecto a su solenoide o electroimán. 2.4.5 Acción retardada Algunos relevadores tienen acción retardada ajustable, y otros son instantáneos o de alta velocidad. El término instantáneo significa que no tiene acción retardada intencional y se aplica a relevadores que funciona en un tiempo mínimo de aproximadamente 0.1 seg. El termino de alta velocidad indica funcionamiento en menos de 0.1 seg y por lo general, en 0.05 seg o menos. El tiempo de funcionamiento para relevadores de alta velocidad está expresado de ordinario en ciclos y se basa en la frecuencia del sistema de potencia, por ejemplo, un ciclo sería 1/60 seg en un sistema de 60 hertz. Originalmente, se utilizo sólo el término instantáneo pero, medida que se incrementó la velocidad del relevador, se encontró necesario el término alta velocidad para diferenciar dichos relevadores de los primeros tipos más lentos. En ocasiones se puede utilizar un relevador auxiliar suplementario que tiene acción retardada fija cuando se requiere un cierto retardo que es completamente independiente del valor de la magnitud de influencia en el relevador de protección. La acción retardada se obtiene en relevadores del tipo de inducción por un imán de arrastre, que es un imán permanente dispuesto de tal manera que el rotor del relevador corta el flujo entre los polos del mismo imán.

Propuesta de actualización con relevadores microprocesados
17
Figura 7.- Relevador de acción retardada.
Esto produce un efecto retardante en el movimiento del rotor en cualquier dirección. En otros relevadores, se han utilizado diversos dispositivos mecánicos que incluyen émbolos amortiguadores, fuelles y mecanismos de escape. La terminología para expresar la forma de la curva del tiempo de funcionamiento contra la magnitud de influencia del valor de la corriente, ha sido afectada por el desarrollo a través de los años. Originalmente sólo fueron utilizados los términos de tiempo definido y tiempo inverso. Una curva de tiempo inverso es aquella en la cual el tiempo de funcionamiento viene a ser menor a medida que el valor de la magnitud de influencia de corriente se incrementa. Como se muestra la figura 8

Propuesta de actualización con relevadores microprocesados
18
Figura 8.- Curvas de tiempo de funcionamiento contra el valor de la magnitud de la
corriente de influencia. Cuánto más pronunciado es el efecto, más inversa se dice que es la curva. En realidad todas las curvas de tiempo son inversas en mayor o menor grado. Estas son más inversas cerca del valor de puesta en trabajo o vienen a ser menos inversas a medida que se aumenta la magnitud de influencia de corriente. Así pues una curva de tiempo definido sería estrictamente aquella en la cual el tiempo de funcionamiento no fuese afectado por el valor de la magnitud de influencia de corriente, pero en realidad la terminología se aplica a una curva que viene a ser sustancialmente definida un poco arriba del valor de puesta en trabajo del relevador como se muestra en la figura 8. Así entonces bajo esto se trata de dar nombres a las curvas de diferentes grados de inversidad, teniendo tiempo corto, medio, largo, inverso, muy inverso y extremadamente inverso. Las curvas correspondientes a cada una de estas clasificaciones, difieren por el rango en el cual el tiempo de operación decrece al aumentar el valor de la corriente. Cada una de estas curvas, en el diagrama tiempo-corriente, tendrían una representación como la que se muestra en la figura 9.

Propuesta de actualización con relevadores microprocesados
19
Figura 9. Tipos de curvas en los relevadores
2.5.- Relevadores de Atracción electromagnética Estos trabajan bajo el principio de atracción magnética ya sea del tipo solenoide y del tipo de armadura atraída de c-a o c-d que están accionados por una sola fuente de corriente o de tensión. 2.5.1.- Relevador de una sola magnitud 2.5.1.1.- Principio de funcionamiento La fuerza electromagnética ejercida en el elemento móvil es proporcional al cuadrado del flujo en el entrehierro. Si despreciamos el efecto de saturación, la fuerza actuante total puede expresarse.
22
1 KIKF −= Donde: F = Fuerza neta 1K = Una constante de conversión de la fuerza I = La magnitud eficaz de la corriente en la bobina actuante 2K = La fuerza de retención (que incluye la fricción) Cuando el relevador está en el límite de la puesta en trabajo, la fuerza neta es cero y la característica de funcionamiento es: 2
21 KIK =

Propuesta de actualización con relevadores microprocesados
20
O bien; 1
2K
KI = = constante
2.5.1.2.- Relación de reposición a puesta en trabajo Una característica que afecta la aplicación de algunos de estos relevadores es la diferencia relativamente grande entre sus valores de puesta en trabajo y de reposición. A medida que se pone en trabajo un relevador semejante, este acorta su entrehierro, lo que permite mantenerlo puesto en trabajo a una magnitud menor de la corriente de la bobina que la requerida para oponerlo en trabajo. Este efecto es menos pronunciado en relevadores de c-a que de c-d. por diseño especial, la reposición puede hacerse tan elevada como 90% a 95% de la puesta en trabajo para relevadores de c-d, Donde se arregla la puesta en trabajo ajustando el entrehierro inicial, una calibración mayor de la puesta en trabajo tendrá una menor relación de la reposición a la puesta en trabajo . Para aplicaciones de sobrecorriente donde se utilizan dichos relevadores con frecuencia, el relevador dispara un interruptor que reduce la corriente a cero, y por este valor de reposición no es de consecuencia. Si se utiliza un relevador de baja reposición junto con otros relevadores en una forma tal que no se dispara siempre un interruptor cuando funciona el relevador de baja reposición es un porcentaje bajo del valor de puesta en trabajo, existe la posibilidad de que una condición a normal origine que el relevador se ponga en trabajo (o se reponga), pero que un regreso alas condiciones normales no pueda hacer volver al relevador a su posición normal de funcionamiento, lo que podría dar un funcionamiento indeseado. A menos que las piezas polares de dichos relevadores tengan anillos de sombra para dividir el flujo del entrehierro en dos componentes fuera de fase, dichos relevadores no son adecuados para funcionamiento continuo en corriente alterna en la posición de puesta en trabajo. Debido a se originaria demasiada vibración que produciría ruido inconveniente y originaria uso excesivo. Esta tendencia a vibrar se encuentra relacionada con el hecho de que los relevadores de c-a tienen en su reposición mayor que los de c-d; un relevador de c-a sin anillos de sombra tiene una tendencia de reponer cada medio ciclo, cuando el flujo pasa por cero. Por tal motivo este tipo de relevadores de solenoide o de armadura atraída no son utilizados en el control direccional como los relevadores de tipo de inducción. 2.5.1.3.- Efectos de los transitorios Debido a que estos relevadores funcionan tan rápidamente ya se en c-a o c-d se ven afectados por los transitorios y, particularmente por la c-d descentrada en ondas de c-a. Esta tendencia debe tomarse en consideración cuando va a determinarse el ajuste apropiado para cualquier aplicación. Aunque el valor de estado estable de una onda descentrada es menor que el valor de puesta en trabajo del relevador, este puede ponerse en trabajo durante un transitorio semejante, que depende de la cantidad de descentrado, su constante de tiempo, y de la velocidad de funcionamiento del mismo. Este tipo de relevador es inherentemente rápido y se utiliza de ordinario donde no se requiere acción retardada. Esta puede obtenerse, como se estableció

Propuesta de actualización con relevadores microprocesados
21
antes, por mecanismos retardantes como fuelles, émbolos amortiguadores, o escapes. Las acciones retardadas muy cortas se obtienen con relevadores de c-d rodeando el circuito magnético con un anillo de baja resistencia o slug. Este anillo retarda los cambios en el flujo y puede colocarse para tener mayor efecto en el aumento del entrehierro del flujo, si se desea una acción retardada en la puesta en trabajo, o para tener mayor efecto en la disminución del entrehierro del flujo, si se requiere una acción retardada en la reposición. 2.5.2.- Relevadores direccionales del tipo de atracción electromagnética Los relevadores direccionales del tipo de atracción electromagnética están accionados por magnitudes de c-d o por las de c-a rectificadas. El uso más común de dichos relevadores es para la protección de circuitos de c-d donde la magnitud de influencia se obtiene de una resistencia de derivación o directamente del circuito. 2.5.2.1.- Principio de funcionamiento La siguiente figura 10 muestra en esquema el principio de funcionamiento de este tipo de relevador. Se ve una armadura móvil magnetizada por la corriente que fluye en la bobina actuante que rodea la armadura.
Figura 10.- Relevador direccional del tipo de atracción electromagnética
Y con tal polaridad como para cerrar los contactos. Una inversión de la polaridad de la magnitud de influencia invertirá las polaridades magnéticas de los extremos de la armadura y ocasionará que los contactos permanezcan abiertos. Aunque se muestra

Propuesta de actualización con relevadores microprocesados
22
una bobina de polarización o de campo para la magnetización del imán de polarización. Puede reemplazarse esta bobina por un imán permanente en la sección entre x e y. Hay muchas variaciones físicas posibles para llevar a cabo este principio, siendo una de éstas una construcción similar a la de un motor de c-d. La fuerza que tienda a mover la armadura puede expresarse como sigue. Si se desprecia la saturación tenemos:
;21 KIIKF aP −= F = fuerza neta Donde: 1K = una constante de conversión de la fuerza. PI = la magnitud de la corriente en la bobina de polarización. aI = la magnitud de la corriente en la bobina de la armadura. 2K = la fuerza de retención ( que fluye la fricción). En el punto de equilibrio cuando F=0, el relevador está en el límite del funcionamiento y la característica de funcionamiento es:
==1
2
KK
II aP Constante
Ip e Ia se supone que fluyen a través de las bobinas en direcciones tales que la fuerza de puesta en trabajo es producida como en la figura 6. Es evidente que si se invierte la dirección de Ip e Ia (pero no ambas), se invertirá la dirección de la fuerza. Así este relevador toma su nombre de su capacidad para distinguir entre direcciones opuestas del flujo de la corriente de la bobina actuante o entre polaridades opuestas. Si las direcciones relativas son correctas para el funcionamiento, el relevador se pondrá en trabajo a una magnitud constante del producto de las corrientes. Si se utiliza el imán permanente de polarización, o si se conecta la bobina de polarización a la fuente que ocasionará que fluya una magnitud constante de la corriente, la característica de funcionamiento viene ser:
==1
2
KIK
IP
P Constante
Sin embargo Ia debe tener la polaridad correcta, lo mismo que la magnitud debida. Para la puesta en trabajo del relevador. Este tipo de relevador es mucho más eficiente que los relevadores de armadura articulada o solenoide, desde el punto de vista de la energía requerida del circuito de la bobina actuante. Por esta razón, dichos relevadores direccionales son utilizados cuando la fuente actuantes es una resistencia en derivación de c-d, ya sea que se necesite o no la direccional. A veces un relevador semejante puede ser accionado por una magnitud de c-a por medio de un rectificador de onda completa, cuando se requiere un relevador de c-a de baja energía. Como una consecuencia de su mayor eficiencia, la bobina actuante de este tipo de relevador tiene una elevada relación de corriente continua o capacidad de tensión al valor de puesta en trabajo. Este tipo de relevadores son instantáneos en funcionamiento, aunque puede colocarse un slug alrededor de la armadura para dar un retardo corto.

Propuesta de actualización con relevadores microprocesados
23
2.6.- Relevadores del tipo de inducción 2.6.1.- Principio de funcionamiento Los relevadores del tipo de inducción son los más ampliamente utilizados para propósitos de protección por relevadores que incluyen magnitudes de c-a. Estos no son utilizables con magnitudes de c-d, debido al principio de funcionamiento. Un relevador del tipo de inducción es un motor de inducción de fase auxiliar con contactos. La fuerza actuante se desarrolla en un elemento móvil, que puede ser un disco o bien otra forma de rotor de material no magnético conductor de la corriente, por la interacción de los flujos electromagnéticos con las corrientes parásitas (de foucault) que se inducen en el rotor por estos flujos. 2.6.1.1.- La producción de la fuerza actuante La figura 11 muestra cómo se produce la fuerza en una sección de un rotor que esta atravesada por los flujos de c-a adyacentes. Se muestran diversas magnitudes en un instante cuando ambos flujos están dirigidos hacia abajo y son incrementados en una magnitud. Cada flujo induce tensión alrededor del mismo en ele rotor, y las corrientes fluyen en rotor bajo la influencia de las dos tensiones.
Figura 11.- Producción del par en un relevador de inducción.
La corriente producida por un flujo reacciona con el otro, y viceversa, para producir las fuerzas actuantes sobre el rotor. Las magnitudes incluidas en la figura 7 pueden expresarse como sigue:
),(22
11
θωϕφωϕφ
+==
tsentsen
Donde, θ es el ángulo de fase por el que ø2 adelanta a ø1. Puede suponerse con error despreciable que las trayectorias en las que fluyen las corrientes del rotor tienen autoinducción que no merece considerarse; por esto las corrientes del rotor están en fase con sus tensiones:
tdt
di ωϕ
φφ cos1
11 ∝∝

Propuesta de actualización con relevadores microprocesados
24
)cos(22
2 θωϕφ
φ +∝∝ tdt
di
Notamos que la figura 7 muestra las dos fuerzas en oposición y, por lo tanto, podemos escribir la ecuación para la fuerza neta (F) como sigue:
)( 12 FFF −= ∝ )( 2112 φφ φφ ii − (1) Sustituyendo los valores de las magnitudes en la ecuación 1, obtenemos:
F ∝ 21ϕϕ )]cos(cos)([ θωωωθω +−+ ttsenttsen (2) Que se reduce a: F ∝ θϕϕ sen21 (3) Ya que fueron supuestas ondas de flujo senoidales, podemos sustituir los valores eficaces de los flujos por los valores cresta en la ecuación 3. Aparte de la relación fundamental expresada por la ecuación 3, es más significativo que la fuerza neta es la misma en cada instante. La acción de un relevador bajo la influencia de una fuerza semejante es positiva y libre de vibración. También, aunque no pude ser inmediatamente aparente. La fuerza neta esta dirigida desde el punto donde el flujo adelantado atraviesa el rotor hacia el punto donde el flujo atrasado atraviesa el rotarlo arrastrase hacia delante. Es decir la fuerza actuante es producida en la presencia de los flujos fuera de fase. Un flujo solo no podría producir fuerza neta. Debe haber como mínimo dos flujos fuera de fase para producir cualquier fuerza neta, y la fuerza máxima es producida cuando los flujos están 90° fuera de fase. También, la dirección de la fuerza, y de aquí la dirección del movimiento del miembro móvil del relevador, depende del flujo que esté más adelante del otro. 2.6.1.2.- Tipos de estructura actuante Los diferentes tipos de estructura que han sido utilizados se conocen comúnmente por: a) La estructura de polo sombreado. b) La estructura de watthorímetro. c) Las estructuras de tambor o copa de inducción y la de anillo de doble de inducción. d) La estructura de anillo de inducción. a) La estructura de polo sombreado. Este tipo de relevador se muestra en la figura 12, esta accionada en general por corriente que fluye en una sola bobina en una estructura magnética que contiene un entrehierro. El flujo del entrehierro producido por esta corriente se encuentra dividido en dos componentes fuera de fase por el llamado anillo de sombra, por lo común de cobre, que rodea parte de la cara polar de cada polo en el entrehierro. El rotor mostrado en la figura 8 es un disco de cobre o aluminio, fijado por un pivote para girar en el entrehierro entre los polos. El ángulo de fase entre los flujos que atraviesa el disco esta fijado por diseño y, por lo tanto, no entra en las consideraciones de aplicación. Los anillos de sombra pueden ser remplazados por bobinas, si se desea el control del funcionamiento de un relevador de polo sombreado. Si las bobinas de sombra están en cortocircuito por el contacto de algún otro relevador, se producirá el par; pero si las bobinas están en circuito abierto, no se

Propuesta de actualización con relevadores microprocesados
25
producirá par debido a que no habrá división de fase del flujo. Un control semejante del par se emplea donde se desea el control direccional.
Figura 12.- Estructura de polo sombreado
b) La estructura de watthorímetro Esta estructura toma su nombre del hecho de que es la utilizada para los watthorímetros. Como se muestra en la figura 13, esta estructura contiene dos bobinas separadas en dos circuitos magnéticos diferentes, cada una de las cuales produce uno de los flujos necesarios para mantener el rotor, que también es un disco. c) Estructura de tambor o copa de inducción y de anillo doble de inducción. Estas dos estructuras se muestran en las figuras 14 y 15. Se parecen muchísimo a un
Figura 13.- Estructura de watthorímetro

Propuesta de actualización con relevadores microprocesados
26
motor de inducción, excepto que el hierro del rotor está estacionario y sólo la parte conductora del rotor está libre para girar. La estructura de tambor emplea un rotor cilíndrico hueco, mientras que la estructura de anillo doble emplea dos anillos en ángulos rectos entre sí. La estructura de tambor puede tener polos adicionales entre los mostrados en la figura 14. Funcionalmente, ambas estructuras son prácticamente idénticas. Estas estructuras son producidas de un par más eficiente que cualquiera de las estructuras de polo sombreado o de watthorímetro, y son del tipo utilizado en relevadores de alta velocidad.
Figura 14.- Estructura de tambor de inducción.
Figura 15.- Estructura de anillo de Figura 16.- Estructura de anillo doble inducción sencillo de inducción. d) Estructura de anillo sencillo de inducción. Esta estructura. Mostrada en la figura 16, es la que produce el par más eficiente de todos los tipos de inducción que han sido descritos. Sin embrago, ésta tiene más bien la seria desventaja de que su rotor tiende a vibrar, como se describió

Propuesta de actualización con relevadores microprocesados
27
antes, para un relevador en el que la fuerza actuante está expresada sólo por un componente dentro del paréntesis de la ecuación 2. También el par varía con la posición del rotor. 2.6.2.- Relevadores de inducción de una sola magnitud Un relevador de una sola magnitud esta accionada por una sola fuente de corriente o tensión. Cualquiera de las estructuras actuantes de relevadores de inducción, puede ser utilizada. La estructura de polo sombreado se utiliza sólo para relevadores de una sola magnitud. Cuando se utiliza cualquiera de las otras estructuras, se conectan sus dos circuitos actuantes en serie o en paralelo; y el ángulo de fase requerido entre los dos flujos se obtienen haciendo que los dos circuitos tengan relaciones X/R diferentes (reactancia a resistencia al usar resistencia auxiliar y/o capacitancia en combinación con uno de los circuitos. Despreciando el efecto de la saturación, el para de todos estos relevadores puede expresarse como:
22
1 KIKT −= Donde I es la magnitud eficaz de la corriente total de los dos circuitos. El ángulo de fase entre las corrientes individuales es una constante de diseño y no debe entrar en la aplicación de estos relevadores. Si el relevador está accionado de una fuente de tensión, su para puede expresarse como:
22
1 KVKT −= Donde V es la magnitud eficaz de la tensión aplicada al relevador. 2.6.2.1.- Control de par El control del par con las estructuras de las figuras 13, 14, 15 ó 16 se obtiene simplemente por un contacto en serie con uno de los circuitos si estos están en paralelo, o en serie con una parte del circuito si éstos están en serie.
Figura 17.- Efecto de la frecuen- Figura 18 .-Diagrama vectorial pa- cia, en la puesta en trabajo de un ra par máximo en un relevador di- relevador de inducción de una sola reccional, corriente-corriente del magnitud. tipo de inducción.

Propuesta de actualización con relevadores microprocesados
28
El efecto de la frecuencia en la puesta en trabajo de un relevador de una sola magnitud se muestra cualitativamente por la figura 17. En la medida que es posible, un relevador se diseña para tener la puesta en trabajo más baja a su frecuencia nominal. El efecto de ligeros cambios en la frecuencia, encontrados por lo general en el funcionamiento de sistemas de potencia, puede despreciarse. Sin embargo, una forma distorsionada de la onda puede producir cambios significativos en las características de puesta en trabajo y tiempo. La relación de reposición a puesta en trabajo es inherentemente elevada en relevadores de inducción, debido a que su funcionamiento no incluye ningún cambio en el entrehierro del circuito magnético. Esta relación está entre 95% y 100% y son la fricción y la compensación imperfecta del resorte de control del par las únicas cosas que hacen que la relación sea 100%. Además, esta relación no es afectada por el ajuste de la puesta en trabajo, donde las bobinas de corriente con tomas proporcionan el ajuste de la puesta en trabajo. Las curvas de tiempo inverso se obtienen con relevadores cuyo rotor es un disco y cuya estructura actuante es del tipo de polo sombreado o del tipo watthorímetro. El funcionamiento de alta velocidad se obtiene con las estructuras de tambor de inducción o de anillo de inducción. 2.6.3.- Relevadores de inducción direccionales En lo que es opuesto con los relevadores de una sola magnitud, los relevadores direccionales están accionados por dos fuentes diferentes independientes; de aquí que el ángulo θ de la ecuación 3 esté expuesto a cambiar, y debe considerarse en aplicación de estos relevadores. Dichos relevadores utilizan las estructuras actuantes de las figuras 13, 14, 15 ó 16. 2.6.3.1.- Relaciones del par en función de las magnitudes de influencia Relevador corriente-corriente: Esta accionado por dos fuentes de diferentes transformadores de corriente. Suponiendo que no haya saturación, podemos sustituir las corrientes actuantes por los flujos de la ecuación 3, y la expresión para el par viene a ser:
2211 KsenIIKT −= θ (4)
Donde: I1 e I2 = valores eficaces de las corrientes actuantes. Θ= el ángulo de fase entre los flujos que atraviesan el rotor producido por I1 e I2.
Una corriente actuante no se encuentra en fase con el flujo que atraviesa el rotor que ésta produce, por la misma razón que la corriente primaria de un transformador no está en fase con el flujo mutuo. (De hecho puede utilizarse el circuito equivalente de un transformador, para representar cada circuito actuante de un relevador de inducción.) Pero algunos relevadores como los tipos de cilindro de inducción y de anillo doble de inducción, los flujos (mutuos) que atraviesan el rotor están en el mismo ángulo de fase con respecto a sus corrientes actuantes. Para dichas estructuras llamadas simétricas de la ecuación 4 puede definirse también como el ángulo de fase entre las corrientes actuantes. Para la estructura del tipo watthorímetro, el ángulo de

Propuesta de actualización con relevadores microprocesados
29
fase entre las corrientes actuantes puede ser significativamente diferente del ángulo de fase entre los flujos. Por el momento supondremos que estamos tratando con estructuras simétricas y que θ puede definirse como el ángulo de fase entre I1 e I2 de la ecuación 4. Si se desea que el par máximo ocurra en algún valor de θ diferente de 90°. Para este fin, una de las bobinas actuantes debe ponerse en derivación por una resistencia o condensador. El par máximo ocurrirá aun cuando las corrientes de las bobinas estén 90° fuera de fase; pero en función de las corrientes proporcionadas por las fuentes actuantes, el par máximo se dará en algún ángulo diferente de 90°. La figura 18 muestra las relaciones vectoriales para un relevador con una resistencia en derivación con la bobina I1. I1 será definida ahora como la resistencia en paralelo. Si el ángulo θ por medio del cual I2 se adelanta a I1 se define como positivo, el ángulo φ por medio del cual la componente de la bobina I1 se atrasa de I1 será negativo, y la expresión para el par será:
2211 )( KsenIIKT −−= ϕθ (5) Si θ=45° y φ=-30, el par para las relaciones de la figura 15 será:
2211 )75( KsenIIKT −°= El ángulo τ de la figura 19 es conocido por el ángulo de par máximo ya que éste es el valor de θ en el que se da el par máximo positivo. Se acostumbra más bien especificar este ángulo que φ cuando se describe esta característica de los relevadores direccionales. Los dos ángulos están relacionados directamente por el hecho de que éstos se suman numéricamente a 90° en estructuras simétricas, tal como se supuso hasta aquí. Pero si utilizamos más bien τ como la constante de diseño de un relevador direccional en lugar de φ, podemos escribir la expresión del par de tal manera que se aplique a todos los relevadores, sean simétricos o no, como sigue:
2211 )cos( KIIKT −−= τθ Donde τ es positivo cuando se da el par máximo positivo a I2 que esta adelante de I1
como de la figura 19. O bien el par puede expresarse también como: 2211 )cos( KIIKT −= β Donde β es el ángulo entre I2 y la posición de par máximo de I2. o bien )( τθβ −= . Estas dos ecuaciones se utilizaran de aquí en adelante, por que son estrictamente ciertas para cualquier estructura. Si se utiliza un condensador en lugar de una resistencia para ajustar el ángulo del par máximo, éste puede conectarse al secundario de un transformador cuyo primario se conecta a través de la bobina y cuya relación es tal que la tensión secundaria es mucho más elevada que la tensión primaria. El propósito de esto es permitir el uso de un condensador pequeño. O bien, para llevar a cabo el mismo propósito, puede colocarse otro arrollamiento con muchas más vueltas que la bobina de corriente en el mismo circuito magnético, con la bobina de corriente y con un condensador conectado a través de este arrollamiento. Relevadores Corriente-Tensión: Un relevador corriente-tensión recibe una magnitud de influencia de un transformador de corriente y la otra magnitud de influencia de un transformador de tensión. La ecuación 5 se aplica aproximadamente para las corrientes en las dos bobinas. Sin embargo, en función de las magnitudes de influencia, el par es estrictamente:

Propuesta de actualización con relevadores microprocesados
30
21 )cos( KVIKT −−= τθ (6) Donde V= la magnitud eficaz de la tensión aplicada ala bobina de tensión del circuito. I= La magnitud eficaz de la corriente de la bobina de corriente. Θ = El ángulo entre I y V. τ = El ángulo del par máximo.
Figura 19 Figura 20 Diagrama Vectorial para, par Característica de funcionamiento en máximo en un relevador dire- un relevador direccional en cordena- ccional corriente-tensión de res polares. tiempo de inducción Para cualquier relación entre I y V que llamaremos θ positivo, deberíamos llamar también τ positivo para esa misma relación. Estas magnitudes se muestran en la figura 19, junto con la corriente IV de la bobina de tensión y el ángulo φ aproximado por medio del cual IV se adelanta de V. El valor de φ es del orden de 60 a 70° de atraso para la mayoría de las bobinas de tensión y, por lo tanto, τ será del orden de 30 a 20° de adelanto si no hay impedancia en serie con la bobina de tensión. Por la inserción de una combinación de resistencia y capacitancia en serie con la bobina de tensión, podemos cambiar el ángulo entre la tensión aplicada e Iv a casi cualquier valor, ya sea atrasando o adelantado V sin cambiar la magnitud de Iv. Un cambio limitado en φ puede hacerse sólo con resistencia, pero la magnitud de Iv. se disminuirá; de aquí que la puesta en trabajo se aumentará. Por lo mismo, el ángulo del par máximo puede hacerse casi a cualquier valor deseado. Si se enfatiza que V de la ecuación 6 es la tensión aplicada al circuito de la bobina de tensión, esta es realmente la tensión aplicada de la bobina de tensión, ésta es realmente la tensión de la bobina si no se inserta impudencia en serie.
Propuesta de actualización con relevadores microprocesados
31
Significado del término direccional Los relevadores direccionales de c-a se utilizan muy extensamente para reconocer la diferencia entre la corriente que es proporcionalmente en una dirección o la otra en un circuito de c-a, y el término direccional se deriva de este uso. Básicamente un relevador direccional de c-a puede reconocer ciertas diferencias en ángulo de fase entre dos magnitudes, como un relevador direccional de c-d reconoce las diferencias de polaridad. Este reconocimiento, como se refleja en la acción de contacto, esta limitado a diferencias en ángulo de fase que pasan de 90° del ángulo de fase al que se desarrolla al par máximo. La magnitud que produce uno de los flujos es conocida como la magnitud polarizante. Esta es la regencia contra la que se compara el ángulo de fase de la otra magnitud. En consecuencia, el ángulo de fase de la magnitud polarizante debe permanecer más o menos fijo cuando la otra magnitud sufre amplios cambios en el ángulo de fase. 2.6.3.2.- La característica de funcionamiento de un relevador direccional Considérese, por ejemplo, la relación expresada de por la ecuación 6 para un relevador direccional de corriente-tensión. En el punto de equilibrio, cuando el relevador está en el límite del funcionamiento, el par neto es cero, y tenemos:
teconsKK
VI tan)cos(1
2 ==−τθ
Esta característica de funcionamiento puede mostrarse en un diagrama de coordenadas polares. Como la figura 20, la magnitud polarizante, que es la tensión para este tipo de relevador, es la referencia y su magnitud se supone que es constante. La característica de funcionamiento se ve que es una línea descentrada del origen y perpendicular ala posición del par máximo positivo de la corriente. Esta línea es el trazo de la relación
teconsI tan)cos( =−τθ que se obtiene cuando la magnitud de V se supone que es constante, y ésta es la línea que divide entre el desarrollo del par neto positivo o negativo en el relevador. Cualquier vector de corriente cuya punta esté situada en el área del par positivo originará la puesta en trabajo; el relevador no se pondrá en trabajo, o se repondrá, para cualquier vector de corriente cuya punta esta situada en el área del par negativo. Para una magnitud diferente de la tensión de referencia, la característica de funcionamiento será otra línea paralela ala mostrada y relacionada a está por la expresión. VImin = constante Donde Imin , como se muestra en la figura 20, es la magnitud mínima de todos los vectores de corrientes cuyas puntas finalizan en la característica de funcionamiento. Imin es conocida por la corriente mínima de puesta en trabajo aunque, una corriente ligeramente mayor puede ocasionar la puesta en trabajo La característica de funcionamiento partirá de una línea recta a medida que el ángulo de fase se aproxima a 90° del ángulo de fase del par máximo. Para tales grandes salidas angulares, la corriente de puesta en trabajo viene a ser muy grande y la saturación magnética del elemento de corriente requiere una magnitud diferente de la

Propuesta de actualización con relevadores microprocesados
32
corriente, para originar la puesta en trabajo de la que indicaría la relación de la línea recta. La relación VImin= constante para el relevador corriente-tensión y expresiones similares para los otros es conocida por la característica producto constante. Esta corresponde de cerca de la corriente o tensión de puesta en trabajo de un relevador de una sola magnitud y se utiliza como base para el trazo de las características de tiempo. Esta relación sólo se mantiene en tanto no ocurre la saturación en cualquiera de los dos circuitos magnéticos. Cuando una de las dos magnitudes empieza a exceder cierta cantidad, debe incrementarse la magnitud que proporciona la saturación más allá del valor indicado por la relación de producto constante para producir el par neto positivo. El efecto de los transitorios puede despreciarse con relevadores de tiempo inverso; pero con relevadores de alta velocidad pueden tener que ser vigilados ciertos transitorios ya sea contra el diseño del relevador o en su aplicación. En general un aumento de la puesta en trabajo o la adición de uno o dos ciclos (60 hertz como base) de acción retardada evitarán el funcionamiento indeseado. Los relevadores direccionales están afectados de igual manera que los relevadores de una sola magnitud por cambios en la frecuencia de ambas magnitudes. El ángulo del par máximo es afectado, debido a cambios en la relación X/R en circuitos que contienen inductancia o capacitancia. El efecto de ligeros cambios en la frecuencia como los encontrados normalmente, puede no obstante, despreciarse. Si las frecuencias de las dos magnitudes proporcionadas al relevador son diferentes, se producirá un par senoidal alterno entre positivo y negativo; el par neto para cada ciclo del par será; pero si las diferencias son casi iguales y si está incluido un relevador de alta velocidad, el relevador puede responder alas inversiones en el par. Los relevadores del tipo de disco se utilizan donde se desean las características de tiempo inverso, y los relevadores de tambor o de anillo se utilizan para el funcionamiento de alta velocidad. Cuando se desea acción retardada, ésta se encuentra provista a menudo por otro relevador asociado con el relevador direccional. 2.7.- Relevadores Microprocesados Los relevadores electromecánicos cumplen con todas las necesidades de protección de, sin embargo tienen grandes desventajas como mayor costo, necesidad de mantenimiento, consumo alto de energía, espacios considerables, entre otras. En cambio, los relevadores digitales multifunción pueden tener todas las funciones requeridas por un en un solo dispositivo. Un microprocesador puede ocuparse de sólo una tarea en un momento. Multiplexores pueden muestrear una cantidad en un momento como voltajes y corrientes. La tarea imponente del programar es acomodar estas peculiaridades e idear el camino para que el microprocesador pueda lograr las tareas en el orden correcto y causar comparaciones basado en las corrientes y voltajes correctos sin el error asociado de dichos datos. Datos sesgados son introducidos por la comparación de cantidades tomadas no simultáneamente. Para permitir el muestreo de una cantidad fija mas rápida que en lugar de una cantidad

Propuesta de actualización con relevadores microprocesados
33
cambiante. El circuito “sample-and-hold” “muestrea y retiene”, es usualmente usado en relevadores numéricos. Un ejemplo de este circuito es la siguiente figura 21.
Figura 21.- Circuito típico Sample and hold.
El microprocesador requiere la información presentada en forma digital,
usualmente en 8 o 16 bits. El proceso de conversión de señales analógicas a señales digitales es logrado con un convertidor A/D, “Convertidor analógico a digital”. El rango y datos muestreados requeridos son escogidos dependiendo al diseño particular de relevador de protección. El microprocesador acepta los datos muestreados y son guardados para un futuro usando el tipo de memoria RAM (memoria de acceso aleatorio). Los datos son representados por algoritmos o comparaciones definidas por el programa de memoria la cual es almacenada en ROM (Memoria de lectura-únicamente), o mas mejor la EPROM (memoria de lectura únicamente programable borrable), el programa es guardado en ROM o EPROM siendo no volátil. Otro vital elemento en la arquitectura requerida para aplicaciones en relevadores microprocesadores es el NO-VRAM (RAM no volátil) o EEPROM (Memoria de lectura únicamente programable borrable eléctricamente). Estos datos son almacenados en este tipo de memoria no perdiéndose al apagar el relevador. Los microprocesadores basan sus algoritmos en muestrear en tiempo concidente las cantidades de entrada, direccionando dichas cantidades, particularmente en aplicaciones de relevadores donde es dependiente la relación de tiempo entre cantidades. Hay dos métodos de muestreo de datos entre la cual ambos utilizan el circuito “sample-and-hold”. En un ejemplo de de uno de estos métodos se muestrea en la siguiente figura 22.
Figura 22. Microprocesador individual “Sample and hold”
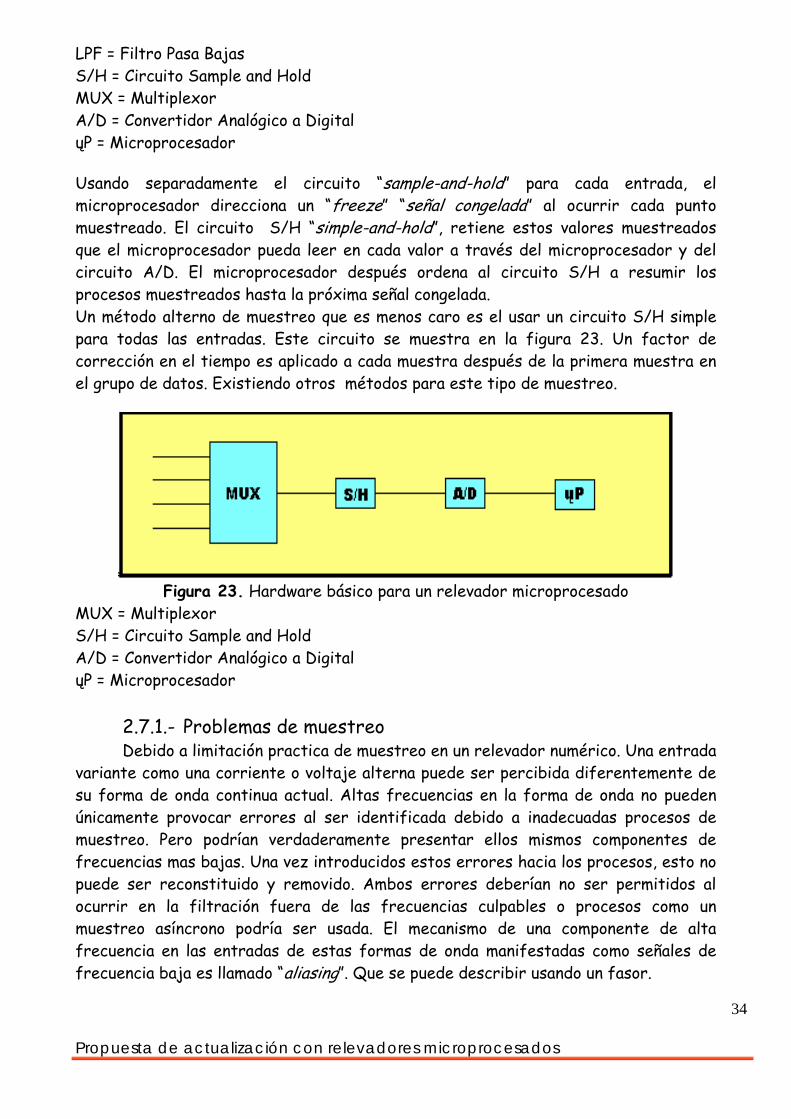
Propuesta de actualización con relevadores microprocesados
34
LPF = Filtro Pasa Bajas S/H = Circuito Sample and Hold MUX = Multiplexor A/D = Convertidor Analógico a Digital ųP = Microprocesador Usando separadamente el circuito “sample-and-hold” para cada entrada, el microprocesador direcciona un “freeze” “señal congelada” al ocurrir cada punto muestreado. El circuito S/H “simple-and-hold”, retiene estos valores muestreados que el microprocesador pueda leer en cada valor a través del microprocesador y del circuito A/D. El microprocesador después ordena al circuito S/H a resumir los procesos muestreados hasta la próxima señal congelada. Un método alterno de muestreo que es menos caro es el usar un circuito S/H simple para todas las entradas. Este circuito se muestra en la figura 23. Un factor de corrección en el tiempo es aplicado a cada muestra después de la primera muestra en el grupo de datos. Existiendo otros métodos para este tipo de muestreo.
Figura 23. Hardware básico para un relevador microprocesado
MUX = Multiplexor S/H = Circuito Sample and Hold A/D = Convertidor Analógico a Digital ųP = Microprocesador 2.7.1.- Problemas de muestreo
Debido a limitación practica de muestreo en un relevador numérico. Una entrada variante como una corriente o voltaje alterna puede ser percibida diferentemente de su forma de onda continua actual. Altas frecuencias en la forma de onda no pueden únicamente provocar errores al ser identificada debido a inadecuadas procesos de muestreo. Pero podrían verdaderamente presentar ellos mismos componentes de frecuencias mas bajas. Una vez introducidos estos errores hacia los procesos, esto no puede ser reconstituido y removido. Ambos errores deberían no ser permitidos al ocurrir en la filtración fuera de las frecuencias culpables o procesos como un muestreo asíncrono podría ser usada. El mecanismo de una componente de alta frecuencia en las entradas de estas formas de onda manifestadas como señales de frecuencia baja es llamado “aliasing”. Que se puede describir usando un fasor.

Propuesta de actualización con relevadores microprocesados
35
2.7.1.1.- Aliasing
La figura 24 describe la representación de una onda senoidal, por un fasor que gira. La proyección del fasor en un eje vertical en un tiempo dado, representa la magnitud de la onda senoidal en el tiempo. Note que para hacer esto el fasor debería ser representado por sus valores pico, no sus valores RMS. Estos generalmente se muestran por una frecuencia simple. La figura 25 se muestra una quinta armónica fasorial sobrepuesta en la fundamental y la distorsión senoidal que se genera. El fasor de quinta armónica gira por medio de 450 grados en el tiempo requerido por los 60 hertz del fasor fundamental, al rotar por encima de 90 grados. Así el efecto de distorsión de alta frecuencia de la forma de onda en el proceso del muestreo puede ser examinado. La figura 26 usa un ejemplo de una séptima harmónica donde son utilizados 8 muestreos por ciclo. El círculo normal para
Figura 24. Generación de una onda senoidal a un fasor
Figura 25. Representación de un fasor para la fundamental y quinta harmónica

Propuesta de actualización con relevadores microprocesados
36
Figura 26. Efecto Aliasing de la séptima harmónica. la fundamental es distorsionado en una elipse por la presencia de la harmónica. Así cuando la forma de onda total es hecha por la proyección en la vertical esta puede ser vista a ser deficiente en magnitud. Este el fenómeno conocido como aliasing. Esto así es la apariencia de la señal de alta frecuencia como una señal que distorsiona la señal deseada. 2.7.2.- Técnicas de anti-aliasing Este efecto puede ser removido por la filtración de las componentes de la alta frecuencia. Los empleos utilizados son los llamados filtros antialiasing. El criterio “Nyquist” la cual evitan los errores aliasing, frecuencias por encima de la mitad de la de muestras que deberían ser removidas. 2.7.2.1.- Muestras no sincronas Un filtro antialiasing alterno puede ser usado. En el cambio de puntos muestreados para la componente de la frecuencia fundamental de la cantidad a ser medida. Por ejemplo en la figura 27 no es crítico que las primeras muestras sean tomadas a la intersección del cero. Esto podía ser tomado en algún punto arbitrario. Después de colectar 8 muestras un salto es introducido a dicho retraso, para así nuevamente volver a empezar la colección de las próximas ocho muestras, por un tiempo correspondiente a 180 grados de una particular cantidad de alta frecuencia, (25.71° en base a 60 hz para la séptima harmónica). Un efecto interesante toma lugar. Si la cantidad medida aparece a ser bastante baja, como resultado de la presencia de la harmónica, para el ciclo de la primera fundamental, ver figura 2. Para el segundo ciclo (el siguiente salto) aparecerá ser demasiado alto por el mismo valor. De esta manera una comparación de información en los ciclos adyacentes permite el efecto de la séptima armónica a ser removida. Si la velocidad de requerimiento del dispositivo permiten, que sea posible eliminar el error asociado con una harmónica particular en un filtro aliasing. Note como, otras componentes de frecuencias de los harmónicas en la señal de entrada son atenuadas por este procedimiento de muestreo asíncrono, así el efecto de sólo una frecuencia se elimina.

Propuesta de actualización con relevadores microprocesados
37
Figura 27. Muestras de formas de onda tomadas de una onda senoidal 2.7.3.- Principio de medición Con los relevadores electromecánicos, el diseñador tiene la opción pequeña con respecto a si las cantidades eléctricas serán interpretadas por lo que se refiere al valor máximo, valor promedio, valor rms, o valor de la frecuencia fundamental. Con la potencia de los microprocesadores, el diseño puede aplicarse cualquiera de estas técnicas de medición. 2.7.3.1.- Cálculo del rms La determinación digital (de la raíz media cuadrada o valor medio), y de las formas de ondas es similar a los métodos analíticos convencionales. Ecuaciones 6.1 y 6.2 ilustran esto.
Rms análogo = ∫π
ωπ
2
0
22Im21 tdtsen (7)
Rms Digital = ∑=
8
1
2
81
n
In (8)
De esta forma así con estas ecuaciones puede ser extraída de una forma de onda compleja el valor rms. Dispositivos de tiempo de sobrecorriente que serán coordinados con otros aparatos tomando en cuenta de los efectos de calentamiento I2R (como fusibles, conductores, y transformadores) tienen a ser desarrollados con una respuesta en rms. Para aplicaciones en que los efectos de las harmónicas son generados por aparatos como los rectificadores de 6 pulsos, pueden ser ignorados. Ya que se han diseñado relevadores usando técnicas en los microprocesadores que sólo son sensible ala componente de la frecuencia fundamental de las entradas en las formas de onda.

Propuesta de actualización con relevadores microprocesados
38
2.7.3.2.- Filtros digitales Una forma de onda puedes ser representada por una fundamental y series de frecuencias de las harmónicas. Una frecuencia particular puede ser extraída utilizando las ecuaciones de la 9 ala 11.
∫−
=2
0
02
cos)(2T
Ton tdttf
Ta ω (9)
∫−
=2
0
02
)(2T
Ton tdtsentf
Tb ω (10)
tsenbtatf nbnnn ωω += cos)( (11) La suma de los productos de la función y del seno de la frecuencia que será extraída tomada sobre el periodo de la fundamental produce un total que solo contiene la frecuencia deseada. Este análisis de fourier acoplado con uno similar usando una función del coseno en lugar de un seno permite la magnitud completa y posición de fase de la frecuencia deseada. Con esta integración alguna frecuencia deseada como una fundamental a 60 Hz, puede ser extraída de una forma de onda periódica distorsionada. 2.7.3.3.- Filtro Fourier-Notch Los procesos digitales comparables involucran la multiplicación de muestras individuales por los valores guardados de la referencia de una onda senoidal y sumando los productos durante un ciclo completo. Donde:
AK
N
Kkc CtfA ∑
−
=
=1
0)( ; ∑
−
=
1
0)(
N
KBKks CtfA
Donde:
)2cos(2NK
NC AK π= ; )2(2
NKsen
NCBK π=
K = Número de muestra N = Muestras por ciclo F(t) = Función original T0 = El periodo de la forma de onda n = el orden de las harmónicas Considerando por ejemplo en aplicaciones en la cual hay ocho muestras por ciclo (fundamental de 60 hz). Las muestras correspondientes de una forma de onda senoidal podrían ser escogidas como 0, 0.707, 1.0, 0.707, 0, -0.707, -1.0, y -0.707. Estos son valores fijos, mientras que sen K(2π/8), donde K son los valores de cero a siete y 2π/8 corresponden a 45°. Estos valores entonces multiplicados por 2/N para obtener las constantes que son usados. Entonces los valores muestreados de las cantidades medidas de los ciclos completos son multiplicados por estas constantes en

Propuesta de actualización con relevadores microprocesados
39
el orden correcto y sumando los procesos de las ecuaciones 9 y 10. Esta información proporcionada que deja fuera todas las frecuencias excepto la fundamental. Por este proceso cualquier componente de la frecuencia puede ser separada y utilizando la función deseada, As = Ksin(ധt). Similarmente, usando un juego de constantes de la función del coseno, la multiplicación de las muestra y de la suma pueden generar una función. Ac = Kcos (ധt). Ya que sin2 ധ + cos2 ധ = 1, As
2 + Ac
2 = K2, de esta manera el
valor pico de una particular componente de la frecuencia puede ser encontrada obteniendo la raíz cuadrada de As
2 + Ac
2. Si el sen(ധt)/cos(ധt) = tan(ധt), As/Ac = (K
sen(ധt))/K cos(ധt) = tan(ധt). El ángulo de la función puede ser encontrada por Ø = tan1 As/Ac. Así este algoritmo es llamado Filtro Fourier-Notch. 2.7.3.4.- Otros filtros digitales Otras formas de filtros digitales son usadas para aplicaciones específicas. En las series IMPRS de los relevadores, cuatro muestras por ciclo son usadas. Estas muestras podrían empezar en algún punto del ciclo, como en el ángulo Ø en la figura 27. Los valores de las muestras individuales pueden ser descritas como: S1 = sen(ധt + Φ ) S2 = sen(ധt + Φ + 90°) S3 = sen(ധt + Φ + 180°) S4 = sen(ധt + Φ + 270°) S5 = sen(ധt + Φ) La filtración digital puede lograrse con el procedimiento siguiente. Ss = S1 - S2 - S3 + S4 = 2 2 sen (ധt + Φ - 45°) Similarmente Sc = S2 – S3 – S4 + S5 = 2 2 cos (ധt + Φ - 45°) Estos valores se relacionaron ala forma de onda simple de la figura 27 con un valor pico de 1.0 para una onda senoidal, Im sen(ധt + Ø), el valor de Im, el valor pico, puede ser obtenida por. Estos filtros digitales tienen otras cualidades útiles. Si nosotros consideramos una corriente dc, esto es obvio ya que S1 + S2 + S3 + S4 = 0 porque cada muestra es de la misma magnitud. Similarmente una onda linealmente de forma de rampa decadente producirá una suma igual a cero. Ya que la componente de cd de la corriente de falla tiene un decaimiento exponencial, que esta entre la señal de entrada cd y la señal de entrada linealmente decadente, además es severamente atenuada por estos procesos de suma. Usando cuatro muestras por ciclo, estos filtros digitales removerán todas las harmónicas de misma magnitud. Con muestras de formas de ondas tomadas a intervalos de 90°, las muestras de de 120 hz, ocurrirán en intervalos de 180°. Cada otra muestra será igual, para que S1-S3 = 0 y S2-S4 = 0. La segunda harmónica es eliminada, por la suma Ss = S1 – S2 –S3 + S4. Con la cuarta harmónica, las muestras son tomadas en intervalos de 360° y siendo Ss = 0 .Así todas las harmónicas de misma magnitud serán eliminadas.

Propuesta de actualización con relevadores microprocesados
40
2.7.3.5.- Compensación de la componente de cd offset La componente de cd offset en las corrientes de falla ocurren como resultado de dos leyes naturales: (1) La corriente no puede cambiar instantáneamente en una inductancia y (2) la corriente debería estar desfasada al voltaje aplicado por lo natural del ángulo del factor de potencia del sistema. La componente de cd offset produce efectos no deseables en relevadores de sobrecorriente o de distancia. Para sólo hacer estos dispositivos sensibles alas componente de la ca de la corriente de la falla, es necesario remover la componente de dc. La componente máxima de corriente de falla es Im(1-e1-t/T), donde Im es el valor pico de la corriente de falla ac simétrica, t el tiempo en ciclos y T la constante de tiempo dc del circuito que limita las corrientes de falla. En algunas ocasiones la constante T es conocido, desgraciadamente para un sistema dado es probable que varíe considerablemente. Muchos algoritmos han usado, unos usando el concepto de una muestra de la componente fundamental de corriente, teniendo la misma magnitud y de signo opuesto a una muestra tomada 180° después. La componente de dc para cada de estás muestras son la mismas (si nosotros asumimos esta componente como una verdadera componente de dc). De esta manera para una muestra a 480 Hz. es la siguiente formula:
Offset= 24−+ KK II
Donde IK es el valor de una corriente muestreada y IK-4 es el valor tomado cuatro muestras previamente. Con ocho muestras por ciclo, estas muestras deberían estar 180° separadas y el efecto de la componente senoidal, debería ser nula en la suma. La componente offset podría entonces ser usada como un factor de corrección para las muestras tomadas en este intervalo, algún error se presenta en este proceso, dependiendo de la constante de tiempo dc. Filtros de componentes simétricas Otro filtro digital interesante, utilizando tres muestras por ciclo es incluido en el relevador MPR. Utilizando la definición de componentes simétricas si se sugiere que las cantidades están 120° o 240° desplazadas en el tiempo. IA1= 1/3(IA+aIB+a2Ic) ; IA2= 1/3(IA+a2IB+aIc) ; IA0= 1/3(IA+IB+Ic) ;
Donde: El proceso análogo normal para la extracción de IA2, por ejemplo, de la corriente trifásica es desfasada Ic por 120° y IB por 240° y sumando a ambos a IA. Con técnicas digitales, un procedimiento alterno puede ser usado. Una muestra de IA es sumada a la muestra de Ic que es tomada 120° después, entonces la suma es agregada a IB tomando 240° después dado el valor instantáneo de 3IA2. Un procedimiento similar es usado a la extracción de 3IA1 de las muestras individuales de IA, IB, y IC. Este algoritmo es usado para efectos como calentamiento de motor, pero para la detección de fallas es insatisfactorio. La exactitud de este método es dependiente de la naturaleza de los harmónicos.

Propuesta de actualización con relevadores microprocesados
41
Capítulo III DISEÑO Y CONSTRUCCIÓN DE EQUIPOS TRIDIMENSIONALES, HABILITADOS CON RELEVADORES NUMÉRICOS MULTIFUNCIÓN
MARCA ZIV.
3.1.- INTRODUCCIÓN Los relevadores microprocesador son equipos digitales basados en un potente microprocesador, que incorpora varias funciones de protección dentro de un mismo modulo. Este tipo de relevadores en la actualidad tienen un enorme campo de aplicaciones, ya que por sus características son ideales para aquellas instalaciones en las que se precisa una protección precisa y fiable de los equipos e instalación. Las posibilidades y la facilidad de la puesta en operación de los relevadores microprocesador, hacen que sean muy valiosos por sus notables cualidades pedagógicas en aplicaciones potenciales a la enseñanza de la Ingeniería Eléctrica; requiriéndose para ello, el diseño y construcción de los módulos para entrenamiento en el uso de relevadores microprocesador, para apoyar las actividades de docencia en el Área Eléctrica y de manera particular al programa de la UEA 113150 Laboratorio de Sistemas de Potencia III. 3.2.-Descripción del relevador microprocesador 8IVD-KZN-2D200FPA Protección Diferencial de Maquina El equipo denominado 8IVD-KZN-2D200FPA constituye una familia de sistemas formados por equipos digitales basados en potentes microprocesadores, que incorporan funciones de protección diferencial. La protección diferencial se utiliza en la protección de todo tipo de maquinas ( transformadores, generadores, motores o reactancias ), de 2 o 3 devanados, así como en la protección denominada de “bloque”, ( transformador-generador ), proporcionando una protección primaria segura y selectiva frente a cortocircuitos en la zona comprendida entre el transformador y generador. Por lo que este equipo tiene gran eficacia en la protección de equipos contra: * Saturación y errores de los transformadores de corriente * Maniobras de energización * fallas internas y externas * Variaciones de voltaje 3.2.1.- Especificaciones técnicas. Sistema integrado con equipos digitales basados en un microprocesador por módulo para comunicación “Relevador-PC” con interfase vía puerto local (RS232C) y remoto (FOC, POP). Transmisión remota por fibra óptica de cristal o plástico, o cable de

Propuesta de actualización con relevadores microprocesados
42
comunicación blindado para RS232C o RS485, con las siguientes funciones incorporadas:
• Protección diferencial trifásica; detecta fallas internas de la maquina protegida, como aquellas protegidas dentro de la zona de influencia de los transformadores de corriente.
• Unidad de protección de sobrecargas térmicas; protege al transformador contra sobrecargas durante periodos relativamente cortos, con el fin de controlar estas sobrecargas evitando su salida y su posible daño y envejecimiento prematuro del equipo.
• Unidad de protección de sobreintensidad de falla a tierra; a través de 4 curvas seleccionables, inversa, muy inversa, extremadamente inversa, tiempo fijo y la de usuario.
• Unidad de fallas a tierra; protege al transformador a través de una mayor sensibilidad y rapidez.
• Filtro de secuencia cero; compensa las corrientes de diferentes magnitudes que circulan en determinadas circunstancias.
• Adaptación y ajuste del defasamiento causado en las corrientes primarias y secundarias de la maquina a proteger.
• Compensación de corrientes; los transformadores de corriente al utilizar relaciones de transformación diferentes no compensa la diferencia, el equipo por medio de un ajuste compensa esta diferencia.
• Unidad contra fallas instantáneas; protege a la maquina contra fallas internas de gran magnitud.
• Filtro de armónicos; 2da y 5 armónica. • Unidad de bloqueo o cierre por la activación de alguna señal, debido a un
disparo de interruptores por alguna falla., permaneciendo activa hasta la reposición del comando.
• Señalización óptica a través de 5 leds, 4 de ellos configurables, y el 5 para indicación de que el equipo esta disponible.
• Ocho entradas digitales, ambas configurables. • Salidas auxiliares, formada por 8 contactos, 7 de ellas configurables. • Autodiagnóstico y vigilancia, dispone de un programa de vigilancia para
comprobación del correcto funcionamiento de todos los componentes del sistema.
• Acceso a información local mediante “display” y teclado, y remota vía MODEM apoyada con una PC.
• Software de comunicación “relevador-PC” con licencia marca ZIV serie ZIVERCOM, para relevadores numéricos multifunción de la familia IDN-IVD-K [13].
Lista de Material La siguiente lista de material es la usada y recomendada para sustituir cualquier parte de los módulos para entrenamiento en el uso de los relevadores microprocesador.

Propuesta de actualización con relevadores microprocesados
43
CLAVE DESCRIPCIÓN CANTIDAD MARCA MODELO
F Portafusible y Fusible de 1.5
A, 120v.
1pza Steren -----------
LP1 Lámpara Piloto 110VCA
10mm diam.
1pza Steren Tipo Bel
Ver/Rojo
E Etiquetas de identificación 100 pzas ---------- -----------
Cableado Cable Vianel , # 18 negro 25 m Condumex Monofasico
Cableado Cable Vianel , # 14 rojo 10 m Condumex Monofasico
Interruptor Interruptor selector de llave
de 2 posiciones sostenidas,
con un contacto abierto, 240
V, 3 A.
1 pza Telemecanique --------------
Relevador
Microprocesado
Relevador microprocesado,
para protección multifunción
de motores, 110-125 Vcc, 60
Hz, 5ª.
1 pza ZIV 8MXI-A2B-
2C2000DAC
J Plugs hembra tipo JAKS de
fase activa
7 pzas ------------------ ---------------
N plugo hembra tipo JAKS para
neutro activo
22 pzas ------------------ ---------------
Tabla 10. Listado de material para el relevador microprocesado 8IVD-KZN- 2D200FPA Protección Diferencial de Máquina En las siguientes partes se muestran los diagramas utilizados para la elaboración de los módulos de entrenamiento en el uso de relevadores

Propuesta de actualización con relevadores microprocesados
44
microprocesador, en ellos se especifican los materiales y elementos utilizados para su construcción.
Figura 28. Protección diferencial de maquina. 3.3.- Descripción del relevador microprocesador
8MXI-A2B-2C2000DA (Protección Multifunción de Motores) El equipo de protección de motores/generadores, denominado, 8MXI-A2B-2C2000DAC forma parte de una familia de sistemas o de unidades simples, para posiciones de maquinas rotativas. Son equipos digitales basados en un potente microprocesador, incorporando la protección de mínima intensidad, desbalanceo de corrientes, sobrecarga térmica, cortocircuitos, fallas a tierra, rotor bloqueado, excesivo número de arranques, control y medición. Los sistemas 3MXI son de aplicación en aquellas instalaciones en las que se precisa una protección fiable de motores de media y alta tensión, así como de generadores de pequeña y mediana potencia. 3.3.1.- Especificaciones técnicas. Sistema integrado con equipos digitales basados en un microprocesador por módulo para comunicación “Relevador-PC” con interfase vía puerto local (RS232C) y remoto (FOC, POP). Transmisión remota por fibra óptica de cristal o plástico, o cable de comunicación blindado para RS232C o RS485, con las siguientes funciones incorporadas:
• Unidad térmica (49). • Unidad de mínima intensidad (37), detecta cuando el motor esta funcionando
con poca carga.

Propuesta de actualización con relevadores microprocesados
45
• Unidad de secuencia homopolar (protección de sobreintensidad instantánea de neutro) (50N).
• Unidad de control del número de arranques (66), limita el número de arranques consecutivos que se producen en el motor.
• Unidad de secuencia inversa (protección contra desequilibrio de intensidades) (46).
• Unidad de secuencia directa (protección de sobreintensidad instantánea de fase) (50).
• Unidad de detección de rotor bloqueado (51RB), detecta un posible bloqueo del rotor del motor.
• Bloqueo de cierre, activa una señal cuando se produce un disparo, permaneciendo activa hasta la reposición del comando.
• Señalización óptica a través de 8 leds, 7 de ellos configurables, y el 8 para indicación de que el equipo esta disponible.
• Dos entradas digitales, ambas configurables. • Salidas auxiliares, formada por tres contactos, 2 de ellas configurables
(AUX-1 y AUX-2), una fija para indicar que el equipo esta en servicio (AX-3). • Salida de disparo. • Selección de fases. • Autodiagnóstico y vigilancia, dispone de un programa de vigilancia para
comprobación del correcto funcionamiento de todos los componentes del sistema.
• Acceso a información local mediante “display” y teclado, y remota vía MODEM apoyada con una PC.
• Software de comunicación “relevador-PC” con licencia marca ZIV serie ZIVERCOM, para relevadores numéricos multifunción de la familia IDN-IVD-K [13].
Lista de Material La siguiente lista de material es la usada y recomendada para sustituir cualquier parte de los módulos para entrenamiento en el uso de los relevadores microprocesador.
CLAVE DESCRIPCIÓN CANTIDAD MARCA MODELO
F Portafusible y Fusible de 1.5
A, 120v.
1pza Steren -----------
LP1 Lámpara Piloto 110VCA
10mm diam.
1pza Steren Tipo Bel
Ver/Roj
E Etiquetas de identificación 100 pzas ---------- -----------

Propuesta de actualización con relevadores microprocesados
46
Cableado Cable Vianel , # 18 negro 25 m Condumex Monofasico
Cableado Cable Vianel , # 14 rojo 10 m Condumex Monofasico
Interruptor Interruptor selector de llave
de 2 posiciones sostenidas,
con un contacto abierto, 240
V, 3 A.
1 pza Telemecanique --------------
Relevador
Microprocesado
Relevador microprocesado,
para protección multifunción
de motores, 110-125 Vcc, 60
Hz, 5ª.
1 pza ZIV 8MXI-A2B-
2C2000DAC
J Plugs hembra tipo JAKS de
fase activa
7 pzas ------------------ ---------------
N plugo hembra tipo JAKS para
neutro activo
22 pzas ------------------ ---------------
Tabla 11. Listado de material para el relevador microprocesador 8MXI- A2B-2C2000DAC Protección Multifunción de Motores En las siguientes partes se muestran los diagramas utilizados para la elaboración de los módulos de entrenamiento en el uso de relevadores microprocesador, en ellos se especifican los materiales y elementos utilizados para su construcción. 3.3.2.- Diagramas de diseño. a) Diagramas de alambrado del Relevador microprocesado. (VEASE APÉNDICE 2, PAG.
A5) b) Esquema de distribución de salidas y entradas del equipo. (VEASE APÉNDICE,
PAG. A3) c) Isométrico del equipo tridimensional. (VEASE APÉNDICE 2, PAG. A2)

Propuesta de actualización con relevadores microprocesados
47
Figura 29. Protección multifuncional de motores.
3.4.-Descripción del relevador microprocesador 8WDI-A2B-2D2000DAC Protección inversión de potencia
El equipo denominado 8WDI-A2B-2D2000DAC forma parte de una familia de sistemas digitales que incorpora funciones de protección contra inversión de potencia (activa o reactiva, dependiendo del modelo), constituyendo una solución eficaz para diversos problemas de supervisión y control del flujo de potencia en redes equilibradas, redes que requieran una medida real de la potencia así como la supervisión de la dirección del flujo de dicha potencia. De modo general esta protección es aplicable a todos aquellos equipos (generadores, maquinas etc.), donde se requiera una protección contra la monitorización del generador y perdida de excitación. 3.4.1.- Especificaciones técnicas. Sistema integrado con equipos digitales basados en un microprocesador por módulo para comunicación “Relevador-PC” con interfase vía puerto local (RS232C) y remoto (FOC, POP). Transmisión remota por fibra óptica de cristal o plástico, o cable de comunicación blindado para RS232C o RS485, con las siguientes funciones incorporadas:
• Unidad contra inversión de potencia #WDI-A; actúa en función del nivel y dirección de la potencia de la potencia activa que circula, esta unidad dispone de dos elementos, uno instantáneo y otro temporizado, con posibilidad de una temporización ajustable, a través de dos curvas de actuación; inversa y de tiempo fijo.

Propuesta de actualización con relevadores microprocesados
48
• Unidad para limitación de potencia #WDI-A; se puede realizar la limitación de potencia adecuando las conexiones de entradas analógicas de corriente.
• Unidad de contra inversión de potencia reactiva; actúa en función el nivel y dirección de la potencia reactiva que circula, esta unidad dispone de dos elementos de instantáneo, cada uno de ellos con un umbral de arranque, y una temporización, ambos ajustables.
• Señalización óptica a través de 8 leds, 7 de ellos configurables, y el 8 para indicación de que el equipo esta disponible.
• Dos entradas digitales, ambas configurables. • Salidas auxiliares, formada por tres contactos, 2 de ellas configurables
(AUX-1 y AUX-2), una fija para indicar que el equipo esta en servicio (AX-3). • Salida de disparo. • Selección de fases. • Autodiagnóstico y vigilancia, dispone de un programa de vigilancia para
comprobación del correcto funcionamiento de todos los componentes del sistema.
• Acceso a información local mediante “display” y teclado, y remota vía MODEM apoyada con una PC.
• Software de comunicación “relevador-PC” con licencia marca ZIV serie ZIVERCOM, para relevadores numéricos multifunción de la familia IDN-IVD-K [13].
Lista de Material La siguiente lista de material es la usada y recomendada para sustituir cualquier parte de los módulos para entrenamiento en el uso de los relevadores microprocesador.
CLAVE DESCRIPCIÓN CANTIDAD MARCA MODELO
F Portafusible y Fusible de 1.5
A, 120v.
1pza Steren -----------
LP1 Lámpara Piloto 110VCA
10mm diam.
1pza Steren Tipo Bel
Ver/Roj
E Etiquetas de identificación 100 pzas ---------- -----------
Cableado Cable Vianel , # 18 negro 25 m Condumex Monofasico
Cableado Cable Vianel , # 14 rojo 10 m Condumex Monofasico
Interruptor Interruptor selector de llave
de 2 posiciones sostenidas,
con un contacto abierto, 240
V, 3 A.
1 pza Telemecanique --------------

Propuesta de actualización con relevadores microprocesados
49
Relevador
Microprocesado
Relevador microprocesado,
para protección multifunción
de motores, 110-125 Vcc, 60
Hz, 5ª.
1 pza ZIV 8MXI-A2B-
2C2000DAC
J Plugs hembra tipo JAKS de
fase activa
7 pzas ------------------ ---------------
N plugo hembra tipo JAKS para
neutro activo
22 pzas ------------------ ---------------
Tabla 12. Listado de material para el relevador microprocesador 8WDI-A2B-2D2000DAC, protección inversión de potencia. En las siguientes partes se muestran los diagramas utilizados para la elaboración de los módulos de entrenamiento en el uso de relevadores microprocesador, en ellos se especifican los materiales y elementos utilizados para su construcción. 3.4.2.- Diagramas de diseño. a) Diagramas de alambrado del Relevador microprocesado. (VEASE APÉNDICE 2,
PAG. A6) b) Esquema de distribución de salidas y entradas del equipo. (VEASE APÉNDICE 2,
PAG. A4) c) Isométrico del equipo tridimensional. (VEASE APÉNDICE 2, PAG A2)
Figura 30. Protección multifuncional para inversión de potencia.

Propuesta de actualización con relevadores microprocesados
50
Capítulo IV
ANÁLISIS TECNICO DEL TRANSFORMADOR DE INSTRUMENTO OPTICO.
4.1 INTRODUCCION.
Existen muchas, compañías que usan transformadores de instrumento construidos con técnicas convencionales para obtener bajo voltaje, compatible con equipos de medición y protección. Nuevas tecnologías, las cuales parecen ser muy prometedoras muestran un gran número de ventajas, reduciendo la dificultad de aislamiento, confiabilidad y seguridad; por lo cual estas serán usadas en un futuro cercano. Dentro de estas tecnologías, la óptica tiene un sitio privilegiado; ya que las fibras ópticas presentan un. Aislamiento intrínseco y aseguran naturalmente la separación galvánica entre piezas de equipo de alto voltaje y ofrece un alto nivel de seguridad. Existen dos principios físicos relevantes: El efecto Faraday descubierto en 1845, para medición de corriente y el efecto Pockels que es más reciente para medición de voltaje. El intento de desarrollar equipos de medición óptica ya es viejo. En 1884 el científico francés H. Becquerel fue el primero en proponer el uso de un principio óptico para medir la corriente eléctrica. Mas recientemente en los 60's se realizó la primera experimentación de reductores ópticos fuera de laboratorios. Pero las técnicas usadas en aquel entonces no fueron formales hasta mediados de los de los 70's que ocurrió el extraordinario desarrollo tecnológico de la fibra óptica que se tomo este concepto. Sin embargo, la construcción de aparatos industriales se hizo realmente a mediados de la década de los 80's. Estos resultados fueron posibles usando la más avanzada tecnología, permitiéndoles así ser mejores que otras soluciones. Después se detalló la presentación del sensor combinado óptico especificado solo en documentos (arquitectura y especificaciones). Una aplicación concreta fue desarrollada con Electricité de France, pasando exitosamente y siendo calificado por el Renaidiéres de febrero a septiembre de 1988. Este instrumento cumple con las especificaciones requeridas por los transformadores de instrumento de potencial y corriente convencionales. Este sistema, que es el primero en su tipo, incluye tres sensores ópticos pasivos en la cabeza del instrumento de altos voltajes, para corriente combinada y mediciones de voltaje. Toda la electrónica (diodos láser, detectores y procesadores de señales) son colocados en una área remota (cuarto de control), y se unen por un cable de fibra óptica.
4.2.- PRINCIPIOS FISICOS. 4.2.1.- SENSOR DE CORRIENTE.
Recordando los principios físicos básicos del efecto Faraday. En el caso de una polarización lineal de un rayo de luz atravesando un medio isotrópico transparente de altura L, afectado por un campo magnético de H, al centro de este medio, la luz será siempre polarizada linealmente, pero la dirección de polarización girará un ángulo θ.

Propuesta de actualización con relevadores microprocesados
51
donde: θ = V HZ L EC-4.1
Hz; Componente longitudinal del campo aplicado; por ejemplo, la proyección de H en la dirección del viaje de la luz. V; Constante de VERDET; para un cuerpo diamagnético como un fusible de sílice V = 2.7 rd/A; Ves independiente de la temperatura, diferente para cada medio, generalmente muy pequeño y depende de la longitud de onda de la luz (=λ-2). Considerando el caso en donde el rayo de luz describe un ciclo cerrado (C) comprendiendo N vueltas alrededor de una línea de alto voltaje la cual es atravesada por una corriente 1. Esta situación se logra cuando el rayo es guiado a través de una fibra óptica describiendo una curva C, como en la figura 5.1. Siendo di un elemento del viaje de la luz, de acuerdo con el Teorema de Ampere:
θ = V ∫©H d L= V NI EC-4.2
En este caso, V es asumido como una constante a través de C, justificado en el caso de una fibra cuyos parámetros son constantes de un punto a otro. La medición que se obtiene es la de l. Dicha medición debe ser objeto de importantes y variadas recomendaciones: *Este es proporcional a I con un factor de escala que puede ser ajustado por el cambio del número de vueltas N dentro de un rango amplio; *Este es insensible a los campos radiados por líneas vecinas porque su circulación a lo largo de ( C ) es cero.
Figura 31. Polarización lineal de un rayo de luz atravesando un medio isotrópico
transparente de altura L, afectado por un campo magnético de H.
Ecuaciones como (4.1) Y. (4.2) fueron escritas en el caso de una onda plana

Propuesta de actualización con relevadores microprocesados
52
propagándose a través de un medio isotrópico. Cuando la propagación es en una fibra, deben considerarse dos nuevos fenómenos. Primero, la propagación de la luz es en forma de series de modos guiados, cada una teniendo su propia velocidad de fase, amplitud de distribución y polarización eléctrica del campo en la fibra. Consecuentemente, la luz polarizada linealmente es transformada, por propagación el una fibra altamente multimodal, donde la luz es esencialmente despolarizada después de varias decenas de metros de propagación. Sin embargo debe usarse la fibra multimodal. Subsecuentemente, el medio de propagación en una fibra monomodal, no es isotrópico pero tiene birrefringencias (doble refracción) lineales (diferentes índices que siguen un eje lento y un eje rápido) de origen geométrico, pero las cuales son sobre todo elasto-ópticas. Estas birrefringencias son intrínsecas (los esfuerzos internos que I aparecen durante la extrusión de la fibra, no circulares de centro) o extrínsecos (restricciones debidas al recubrimiento, ángulos de curvatura y I todos los esfuerzos mecánicos que pueden ser aplicados a la fibra). Como éste se propaga mediante la fibra monomodal birrefringente, la polarización de la luz se vuelve elíptica a medida que la polarización de estado a lo largo de la fibra es altamente inestable térmicamente. Para solucionar estos problemas ha aparecido recientemente una fibra hilar en el mercado. Esto implica una birrefringencia intrínseca muy baja. Sin entrar en detalles, se debe notar que esta es más exactamente la fibra para la que la dirección de ambos ejes rápidos y lentos sigan una elipse Las birrefringencias intrínsecas quedan canceladas. También hay birrefringencias extrínsecas. La solución adoptada consiste en enrollar la fibra en sus ejes (10 vueltas/m) en orden para inducir una actividad torsional óptica más alta que las birrefringencias lineales que pueden existir a lo largo de la fibra entera. Puede ser demostrado que la fibra es equivalente a un medio donde solamente hay actividad óptica. La actividad óptica induce la rotación de polarización de la luz (4.2 rad/m). Ventajas e inconvenientes de la fibra óptica utilizada como material magneto-óptico Al ser la fibra óptica un dieléctrico, puede estar en contacto con el conductor sin exista ningún problema de aislamiento. Sin embargo, presenta ciertas desventajas que hay que superar para poder diseñar un sensor magnetó-optico con garantías de funcionamiento satisfactorio. A saber, la constante de Verdet del SiO2 es muy pequeña, del orden de 2.6 grados/(T·cm), es necesario, entonces, que el número de vueltas alrededor del conductor sea grande para que se aprecie un giro en el ángulo de polarización. Por otra parte, la fibra óptica tiene una birrefringencia intrínseca debida a la elipticidad de su núcleo y a tensiones asimétricas y una birrefringencia inducida al ser doblada alrededor del conductor. Recordemos que la birrefringencia es un doble índice de refracción en los dos ejes de un corte transversal del material, figura 7. Estas birrefringencias afectan a la medida y modifican el ángulo de polarización. Es posible disminuir o incluso eliminar este error de la medida con diferentes técnicas. Las más utilizadas son las dos siguientes:

Propuesta de actualización con relevadores microprocesados
53
• Si se retuerce la fibra óptica, se induce una birrefringencia circular conocida y dependiente de la tensión a la que se somete a la fibra. Al ser mucho mayor que la birrefringencia lineal ésta termina por desaparecer y el sensor solo está afectado por la circular. El efecto Faraday es una birrefrigencia circular por lo que se superpone a la que se ha creado dando una medida válida. • Si la fibra se calienta a una temperatura de entre 800-900 ºC durante 24h y se enfría lentamente la birrefringencia también desaparece. Este procedimiento puede debilitar la fibra y eliminar la capa de material que protege el núcleo y el recubrimiento de la fibra.
Figura 32.Corte transversal de una fibra óptica.
4.2.1.1.-Transmisión entre el sensor y los medios electrónicos El sensor combinado esta conectado a los electrónicos por medio de cable óptico. Hay dos tipos de fibras. El primer tipo se refiere a la fibra que trae la luz emitida por el diodo láser. Para asegurar que el balance de energía no esta muy afectado por su conexión, se usa una fibra monomodal de conservación de polarización plana (una fibra de alta birrefringencia, muy usada en las conexiones de comunicación). De esta manera, hay muy pocas pérdidas de extinción durante el paso a través del polarizador y durante la unión con la fibra sensible al efecto Faraday. De cualquier manera, dicha conexión puede ser prácticamente imposible con una fibra multimodal (centros de dimensiones muy diferentes). Para asegurar el fácil ensamble y desensamble en el lugar de la conexión, se desarrolló un nuevo tipo de conector de conservación de polarización óptica plana que permite a las fibras monomodales estar conectadas con una relativa precisión de posición angular. El segundo tipo se refiere. a otras fibras las cuales devuelven la luz que viene del analizador de polarización. Desde am ya no hay más fases de información transmitidas a ese tablero, éste es más fácil de construir, esas conexiones usan fibras multimodales. Sin embargo se pueden evitar mas pérdidas durante el paso a través de los conectores, de otro modo, podrá tomarse

Propuesta de actualización con relevadores microprocesados
54
un error en la medición. Para más seguridad las fibras que se usan tienen cada vez más largos diámetros de centro cuando pasan a través de sucesivos conectores. Estas medidas resultan de una conexión que es fácil de implementar en el lugar y que no altera la medida cuando está sujeta a un esfuerzo mecánico. Obviamente, estos esfuerzos no deben generar ninguna micro-curva hacia pérdidas de refracción en la envoltura óptica. Esto está garantizado al jalar hacia afuera una estructura apretada de la instalación de fibras. Finalmente una envoltura de metal anti-roedor es usada para proteger este cable que puede ser fácilmente instalado en los ductos de las subestaciones de extra alto voltaje. 4.2.1.2 PROCESAMIENTO ELECTRONICO. Las cantidades de I1 e I2 son detectadas por fotodiodos seguidas por amplificadores de transimpedancia. Dos amplificadores operacionales aseguran las operaciones de adición y sustracción. Dos servo-dispositivos electrónicos, uno rápido para compensar las fluctuaciones de energía láser y otro lento para compensar la dirección de sensibilidad del fotodiodo en el largo plazo; nos permiten obtener el seno del ángulo de Faraday de una manera más precisa que por la división directa de las cantidades relativas a los amplificadores operacionales. Esta configuración también permite compensar uniones de coeficientes de fluctuación en fibras de retorno para eliminar desviaciones de precisión que pueden ser inducidas por la variación de absorción en las fibras y, finalmente, para hacer el aparato insensible a todas las variaciones de la intensidad de luz debidas a vibraciones mecánicas. Esto es seguido por una tarjeta que asegura la función Arco seno dentro del Intervalo (-70°, + 70°). El principio es usar la señal a la cual la corrección digitalizada es sumada en 8 bits, preprogramada dentro de un ROM. La corrección de la temperatura es necesaria para compensar las variaciones de longitud de onda en la transmisión láser, porque la constante de VERDET depende de ello. Los electrónicos permiten. el procesamiento de las mediciones procedentes de los sensores de protección y medición. Para asegurar redundancia completa en ambos canales, es necesario realmacenar alta dinámica para el sensor de canal de medición de acuerdo a esto un sistema electrónico se usa para contar las revoluciones del ángulo de Faraday. Un canal óptico adicional es necesario para conocer el dato de coseno el cual se obtiene colocando un espejo semirreflejante ente el polarizador. . 4.2.1.3 PROCESAMIENTO DE LA SEÑAL. Con el sensor óptico no se puede determinar directamente θ, pero si sen (2θ). El analizador que mejor se ajusta es un prisma WOLLASTON, que separa el campo luminoso incidente Eo en dos campos de polarización lineal y perpendicular E1 y E2 (Fig. 29).La intensidad luminosa de estos campos esta dada por: P1 = (E1)2 = Po cos 2 (θ + π/4) EC-4.3
P2 = (E2)2 = Po cos 2 (θ + π/4) La rotación adicional π /4 es obtenida colocando los ejes del analizador en π /4 con

Propuesta de actualización con relevadores microprocesados
55
respecto a los del polarizador. La información de la rotación θ radica en la intensidad relativa de modulación S dada por:
S = (P1-P2) / (P1 + P2) = sen 2 θ EC-4.4
Figura 33. Procesamiento de una señal óptica para determinar el ángulo de incidencia θ.
Figura 34. El radio S es independiente de las fluctuaciones de la intensidad de
entrada Po. 4.2.1.4.- CONSTRUCCIÓN La ecuación 4.2, es válida para un plano de onda propagándose en un medio isotrópico. Para no maltratar la fibra que va alrededor de la barra de bus (lineal), se

Propuesta de actualización con relevadores microprocesados
56
toman las siguientes precauciones: a) Usar una fibra de Ultra Baja Birrefringencia para tener un material isotrópico, libre de birrefringencia intrínseca. b) Enrollar esta fibra (10 vueltas por metro) para que quede libre de birrefringencia inducida por doblar la fibra alrededor de la barra de bus. c) Pegar un espejo al final de la fibra. El efecto Faraday se duplica mientras el efecto de torsión se suprime.
4.2.2 SENSOR DE EFECTO POCKELS.
Como el principio físico básico ha sido establecido, el sensor Pockels será descrito rápidamente, pues su implementación es más sencilla que la del sensor Faraday y principios idénticos son usados en muchos puntos. El sensor combinado tiene una buena uniformidad, la cual es un beneficio mayor para asegurar alta eficiencia.
4.2.2.1 PRINCIPIO FISICO BASICO. El efecto POCKELS, o efecto electro-óptico, describe la dependencia del índice refractivo del cristal en función del campo eléctrico aplicado Г el cual tiene une frecuencia despreciable con respecto al campo eléctrico en el cual ocurre este efecto; ver ecuación 4.5. Este efecto tiene dos orígenes: *Deformación por nubes electrónicas radiadas por átomos y, *Posiblemente, deformación de la red cristalina iónica. Las modificaciones proporcionales de los índices refractivos inducidos son proporcionales a Г. Las simetrías de este efecto resultan en ambas simetrías del monocristal en cuestión y en dirección del campo aplicado. Generalmente, se modifica la simetría del elipsoide de los índices del cristal y los valores de estos índices. Por ejemplo un cristal cúbico con Г = 0 se convierte en uní axial en la presencia de Г, dependiente de la dirección con respecto a los ejes cristalinos. La influencia de la birrefringencia inducida por los efectos electro ópticos en un rayo de luz pasando a través del cristal depende de las direcciones de propagación y polarización del campo, como en cualquier medio anisótropo, e independiente del origen de ésta birrefringencia (natural, debida a esfuerzos mecánicos). Los modos normales de propagación de luz en un cristal son definidos por su elipsoide para los índices o por su tensor de impermeabilidad (B), (Los componentes de (B) son el opuesto de los del tensor de permitividad de las constantes dieléctricas; ecuaciones 5 y 6. Las componentes de éste sensor deben ser expresadas en referencias ortogonales (X1,X2,X3) de los' ejes enlazados con el cristal (idénticamente equivalentes a los ejes principales). Cuando no hay campo ( o cualquier otra acción externa como esfuerzos que modifiquen las propiedades ópticas del cristal), los índices de la elipsoide quedan expresados como:
B 1 0 X 1 2+ B 20 X 2 2 + B 30 X 3 2 = 1 EC-4.5 donde:
BI0 1/ni
2 para i= 1,2,3

Propuesta de actualización con relevadores microprocesados
57
ni= Índice de refracción para una polarización paralela a ni. Después de la aplicación del campo eléctrico Г, ésta elipsoide regresa deformada V, de manera general, puede ser expresada matemáticamente como:
B 1X 1 2+ B 2X 2 2 + B 3X 3 2 + 2 B 4X 2 X3 + 2 B 5X 3 X1 + 2 B 6X 1 X2 = 1 EC- 4.6
Si B4, B5, B6 no son cero, los ejes principales de éste sensor no serán más grandes que (X1 X2, X3). El tensor (B) puede ser expresado como una matriz o en notación contraída: Bm = Bm0 + ФBm EC-4.7 Entonces:
ФBm = rm,n гn para n = 1,2,3 EC-4.8 y m = 1,2,3,4,5,6 El rm,n representa los coeficientes electro-ópticos en la notación contraída. Algunos de estos coeficientes son cero dependiendo del grupo cristalino que sea usado. Generalmente, la birrefringencia eléctro-óptica es expresada:
dβ = (2π/λ) n0 3 rij Гi dLj EC-4.9
donde: dLj = tamaño del cristal. (ij)= componentes en el caso en cuestión. Para una elección factible de la cristalografía del cristal, y la disposición óptica (en configuración longitudinal), para integrar la ecuación previa, obtenemos la diferencia de potencial entre la cara de entrada y de salida del cristal, aun si r¡ no es uniforme.
β = (2π/λ) n0 3 r41 UHT EC-4.10 donde:
UHT= voltaje entre las caras del cristal. Esta es la propiedad usada en la concepción del sensor de voltaje. Obviamente, la elección del cristal depende de sus características físicas, pero también de su disponibilidad y. su precio. Por éstas razones, un cristal. BGO ha sido seleccionado; que también es usado en otras aplicaciones industriales. 4.2.2.2.- PRINCIPIO DEL SENSOR. La figura 28 nos muestra el diagrama óptico del sensor POCKELS (Ecs. 4.10, 4.11, 4.12). El sistema óptico incluye un láser gas colimador (que da a la vista una dirección determinada), el cual detrás de un polarizador, sirve para inyectar una onda monocromática polarizada linealmente dentro del cristal. Dos electrodos transparentes son usados para aplicar alto voltaje entre las dos caras opuestas del cristal. Cuando el cristal es expuesto a alto voltaje, los ejes de birrefringencia están a 45º de la luz inicial de polarización. Es conveniente provocar un cuarto de onda en el plato dentro del ensamble; esto será justificado. Los ejes de este cuarto de onda en el plato están también a 45 o de la polarización inicial. Finalmente, un analizador WOLLASTON cuyos ejes de polarización son paralelos al polarizador de entrada y los fotodiodos seguidos por los electrónicos, forman un diseño convencional de análisis polarimétrico. Para presentar la fase alterna se deberán incluir los componentes de

Propuesta de actualización con relevadores microprocesados
58
luz del campo eléctrico de vector E, después de cruzar la birrefringencia media, usamos componentes normalizadas con una notación tipo matriz.
Figura 35. Analizador Wollaston.
El polarizador de entrada establece los ejes del sistema; los cuales se refieren como: (x,y); Asumiendo que la luz de polarización de entrada al ensamble es paralela al eje x. Dentro de las referencias:
Ei = (1,0) EC 4.11 Siguiendo el cuarto de onda en el plato V el cristal birrefringente tenemos:
Es = 1/2 ( e-∫(β/2-π/4) + e-∫(β/2-π/4) , e-∫(β/2-π/4) - e-∫(β/2-π/4)) EC-4.12
Si nos referimos a (R,S) como las componentes del vector de luz entrando al analizador, obtenemos finalmente.
( R = cos ( π/4 – β/2) ) EC-4.13 ( S = sen ( π/4 – β/2) )
Este sistema de ecuaciones representa una elipse cuyos ejes son (x, y). La figura 29 muestra la evolución de la polarización de la luz durante su progresión a lo largo de el sistema óptico.
4.2.2.3.- SISTEMA DE DETECCION. Como en el caso de sensor Faraday, el sistema de detección aplicado es el analizador WOLLASTON. Las cantidades detectadas por los fotodiodos siguiendo sus dos ejes son las intensidades de luz I1, e I2;
I1 = I0 R2 = I0 cos 2 ( β/2 –π/4) EC-4.14
I2 = I0 S2 = I0 sen 2 ( β/2 –π/4)
El término lo de la intensidad total de luz aparece ahora en la expresión porque hasta aquí las componentes normalizadas del campo luminoso fueron utilizadas. Como

Propuesta de actualización con relevadores microprocesados
59
este término puede- fluctuar de una extensión mayor a una menor es necesario usar un procesamiento electrónico similar al de la detección Faraday.
S = (I1-I2) / (I1+I2) = sen (β) EC-4.15
Esta expresión es idéntica a aquella obtenida para la detección del efecto Faraday (Ec. 5.4). Por lo tanto se puede usar un procesamiento electrónico idéntico. La fase alterna de π/2 impuesta por el cuarto de onda en el plato queda ahora justificada. Se basa en una señal dada en forma senosoidal (y no en forma de un coseno). Además este plato puede ser situado delante o detrás del cristal electro-óptico.
4.2.2.4.- DESCRIPCION DEL SENSOR. En el estado actual de la técnica sólo se pueden usar ópticos discretos; recordando que ésta es una tecnología adoptada para el sensor Faraday. La misma habilidad es por lo tanto necesaria para construir este sensor. La base del plato del sensor óptico Pockels no está hecha de acero, sino de vidrio cuyo coeficiente de expansión es lo más cercano posible al del cristal electro-óptico. Esta medida previene birrefringencias indeseadas generadas en el cristal a causa del efecto de expansión diferencial. Este vidrio también nos permite ubicamos en las impedancias acústicas del cristal y de su soporte con el objetivo de disminuir las resonancias piezoeléctricas posibles de ocurrir con el campo eléctrico y que pueden interferir con las mediciones. Finalmente, es necesario asegurar una ecualización de la temperatura en el efecto Pockels. La dependencia tiene dos partes: * Como función de la amplitud de onda de la luz. Esta dependencia también se presenta para el efecto Faraday. La corrección se hace por la medición de la temperatura del diodo láser cuya longitud de onda de la luz emitida depende de lo último. * Fluctuación del índice de refracción n0 y del coeficiente r41 como función de la temperatura para una longitud de onda constante. Por lo tanto, el plato Pockels debe ser equipado con un termómetro óptico. Notando simplemente que usa como su principio físico la variación de birrefringencia de un cristal con temperatura. El efecto de interferencia ocurre en el cristal de Pockels se usa en otro cristal (hoja de cuarzo) para hacer un termómetro. La medición también se da por un análisis polarimétrico.
4.2.2.5 CONSTRUCCIÓN El cristal tiene un largo de.4 cm. y sus caras son cubiertas con óxido indio que provee electrodos transparentes. El voltaje aplicado, es una fracción del voltaje del divisor capacitivo seco (papel – SF6 -aislador). Un termómetro óptico alrededor del cristal establece una información para -la corrección de la sensibilidad de la dirección.

Propuesta de actualización con relevadores microprocesados
60
4.3.- ANÁLISIS TÉCNICO DEL TRANSFORMADOR DE INSTRUMENTO ÓPTICO
COMPARACION ENTRE EL TRANSFORMADOR ÓPTICO “TIO”, CON LOS TRANSFORMADORES DE CORRIENTE Y LOS TRANSFORMADORES DE POTENCIAL. 4.3.1.- Introducción Un transformador convencional de instrumento va necesariamente acompañado de dispositivos que llevan a cabo procesos electrónicos. Los cuales hasta hoy, han sido colocados cerca del sensor de medida (en la línea de potencial) o en la parte mas baja del mismo; pero en el primer caso, debe utilizarse un enlace especial para transportar la información. La mayor desventaja de semejar un arreglo son en particular las condiciones ambientales de una estación de extra alto voltaje (perturbaciones climáticas y electromagnéticas) por un lado y la necesidad de los elementos electrónicos para la energía eléctrica por el otro. En la fase de semejar la perturbación, parece interesante promover un nuevo principio, el de un reductor óptico pasivo; para el cual los procesos electrónicos, podrían ser localizados en un lugar más favorable simplemente conectándolos al reductor por un cable de fibras ópticas. Esta solución ha sido adoptada por el sensor combinado. La conexión permitiría la instalación en una clásica subestación de extra alta voltaje a unos cuantos cientos de metros.
4.3.2.- LA NUEVA TECNOLOGÍA DE AISLAMIENTO Aunque se han encontrado equipos de medición óptica desarrollados con materiales dieléctricos, es esencial asegurar las condiciones de operación de estos materiales y distribuir mejor el campo eléctrico a tierra. Es también necesario atenuar el voltaje aplicado al sensor Pockels, ya que en el presente estado de la tecnología respecto a cristales ópticos todavía no se tienen aquellos que puedan resistir el voltaje completo, por eso es indispensable el uso de un divisor capacitivo el cual tiene las siguientes funciones:
* Reducir el voltaje a KV. * Distribuir El campo eléctrico sobre la altura total del aparato. * Servir como una conexión capacitiva para llevar las emisiones de corriente.
Si el uso del alto voltaje capacitivo es de gran ayuda en muchos aspectos, seria desafortunado tener los mismos problemas de chisporroteo interno como en los aparatos convencionales. Como el producto de la descomposición de SF6 es muy agresivo para los componentes ópticos, el uso de este gas esta limitado al aislamiento capacitivo. Para los sensores ópticos, un medio de nitrógeno seco evita las condiciones de vapor de agua durante las fluctuaciones térmicas y previene de cualquier estado crítico químico.

Propuesta de actualización con relevadores microprocesados
61
4.3.3.- VENTAJAS Las principales ventajas de este instrumento son: * La pasividad total de los sensores ópticos, los cuales no tienen contacto con el alto voltaje y esto incrementa su confianza. * No hay distorsión en la medición (saturaciones o histéresis de magnetización) en ambos sensores, corriente y voltaje. * Amplio ancho de banda intrínseco (voluntariamente limitado a 2 Khz). * Total inmunidad a corrientes parásitas de toda clase. * Reducción del tamaño del instrumento el cual es incluido sobre un mismo aislador (voltaje, corriente). * Seguridad total del aparato lo cual puede entenderse como: * Ausencia de una explosión peligrosa. * Permanente monitoreo. El sistema es montado con las técnicas mecánicas de transformadores convencionales, lo cual permite su uso inmediato. En la cabeza de este sistema hay tres sensores ópticos independientes: * Medición de corriente. * Protección de corriente. * Medición de voltaje. 4.3.4.- APLICACIONES La tecnología puede ser adoptada a cualquier red de voltaje, lo cual puede ser aplicable a redes de muy alto voltaje a 230, 345, 420, 500, 800 KV. Aun se debe definir las internas con los equipos existentes los cuales procesan mediciones (relevadores). Además de la tecnología óptica también se han estudiado los relevadores digitales con entradas convencionales. Ambos equipos fueron validados separadamente y ahora trabajan en interfaz. Se tienen muchas ideas a corto y largo plazo: * Desde la introducción de los sensores ópticos en las redes, tomara tiempo para definir los estándares para proveer sistemas completos de medición y protección; lo cual no se debe hacer esperar. Pronto se podrán ensamblar tales sistemas usando el bajo nivel de entrada de los relevadores presentes. Sin embargo, el sistema ciertamente no esta optimado en precio y procesamiento de datos. * Por otra parte la integración de la electrónica en los sensores ópticos dentro del sistema de protección del mismo, reducirá el tamaño del sistema por completo. Esto significara el fin de los conceptos de separar transformadores de instrumento de sus estándares. * El futuro se basa en el enlace de los sensores ópticos (con salidas digitales) a equipos digitales (relevadores y medidores) con conexiones ópticas creando así una red de medición.

Propuesta de actualización con relevadores microprocesados
62
4.3.5.- SELECCIÓN Y APLICACIÓN DEL RELEVADOR OPTICO Esta nueve generación de sensores ha sido diseñada para reemplazar los transformadores de instrumento convencionales (transformadores magnéticos o transformadores de potencial capacitivos). Las fibras ópticas aseguran naturalmente una separación galvánica del alto voltaje, lo cual permite trabajar con un alto nivel de seguridad. Las señales de salida de los sensores pueden ser analógicas o digitales, lo cual los hace compatibles entonces con el bajo nivel de entrada de los relevadores, medidores o a futuro comunicaciones de alcance óptico de subestaciones de extra alto voltaje. Para poder seleccionar o especificar un transformador de instrumento óptico, se tomara como base los datos necesarios utilizados para especificar un aparato convencional; en base a una tabla u hoja de datos técnicos.
4.4.- ANALISIS TÉCNICO ECONÓMICO ENTRE LOS TRANSFORMADORES CONVENCIONALES Y LA NUEVA TECNOLOGÍA DE LOS TRANSFORMADORES ÓPTICOS.
Para poder hablar de costos debemos considerar, que los transformadores ópticos aun no están disponibles en el mercado, ya que no se dispone totalmente de la tecnología para fabricarlos en masa, y por otra parte no es común disponer de los elementos para adaptarlos directamente a las conexiones de los transformadores convencionales (que es uno de los principales problemas); pero al cabo de algunos años estos serán mas comunes y por lo tanto su costo se vera disminuido. Uno de los problemas es que aun no existen normas definidas para la fabricación de protecciones de los transformadores ópticos, y las que se fabrican son especiales (ALSTHOM, ABB). Para el caso de funciones de medición si se dispone de normas establecidas como la (SCIENTIFIC COLUMBUS). Los transformadores convencionales manejan las tensiones y corrientes de las líneas en las cuales son instalados y por lo tanto también altos rangos de potencia (volts, amperes), que difícilmente podrían manejar los transformadores ópticos ya que el rango de voltaje que utilizan es de 0 a 10 Volts, y de 5 a 10 Volts-Amperes, y para poder adaptarlos necesitarían de un amplificador de potencia alimentado por una fuente externa, lo cual desde luego va en contra de los principios. Además de esto el mercado aun no esta listo para adaptarse y convertirse a los rangos que manejan los transformadores ópticos y necesitan de otros equipos y dispositivos especiales para poder utilizarlos. Para tratar los costos respecto a transformadores ópticos, se necesita referir al equipo y partes que lo forman, ya que actualmente cuesta prácticamente lo mismo fabricar un transformador óptico que un convencional, exclusivamente por la tecnología óptica, ya que estos aparatos son de laboratorio, y su proceso de fabricación es lento y costoso. Para un uso común de medición y protección con transformadores de instrumento; un transformador de instrumento óptico (modulo), sustituye a un transformador de potencial inductivo, un capacitor de acoplamiento y un transformador de corriente; o similarmente, un transformador de potencial capacitivo y un transformador de corriente.

Propuesta de actualización con relevadores microprocesados
63
CAPÍTULO 5 PROPUESTA DE ACTUALIZACIÓN TECNOLÓGICA PARA LA PROTECCIÓN CON RELEVADORES NUMÉRICOS MULTIFUNCIÓN EN LOS TRANSFORMADORES DE POTENCIA INSTALADOS EN LA SUBESTACIÓN DE 85 KV, DE LA UNIDAD ADMINISTRATIVA DE PEMEX EN LA CIUDAD DE MÉXICO. 5.1.- Introducción
Actualmente se tienen protegidos los transformadores de potencia por relevadores electromecánicos en la Subestación de 85 kV de la Unidad Administrativa de PEMEX en la Ciudad de México (diagrama 1). El presente capítulo hace mención de los equipos actuales de protección en los transformadores ya mencionados así como una propuesta de actualización tecnológica para proteger mediante relevadores numéricos multifunción estos transformadores, así como la actualización del Estudio de coordinación de protecciones de la red enlazada a dicha subestación. 5.2.- DISPOSITIVOS DE PROTECCIÓN ACTUALES A continuación se enlistan los equipos de protección para los transformadores TR-1 y TR-2, instalados, los cuales aparecen en el plano unifilar de protecciones electromecánicos IE-01, así mismo se en listan características, valores ajustados actuales de estos últimos, en la siguiente página.

Propuesta de actualización con relevadores microprocesados
64
Dispositivo *
Unidad de sobrecorriente 51
Rango de “Tap” 1 a 12 A Valores de “Tap” 1; 1.2; 1.5; 2; 2.5; 3; 4; 5; 6; 7; 8; 10;12 amp. Valor de “Tap” 3 A, O-L Posición de “dial” 6 Tipo de curva Inversa
Unidad instantánea 50
Rango de “Tap” 6-150 A Valores de “Tap” L 6-30 A
H 30 a 150 A Valor de “Tap” H Derivación del contactor del sello
0.2 A
Marca General Electric Modelo 12IFC51BD1A
*El dispositivo y los valores de ajuste son los mismos para las tres fases del TR-1
Dispositivo * Unidad de sobrecorriente
51 Rango de “Tap” 1 a 12 A Valores de “Tap” 1; 1.2; 1.5; 2; 2.5; 3; 4; 5; 6; 7; 8; 10;12 amp. Valor de “Tap” 3 A, O-L Posición de “dial” 6 Tipo de curva Inversa
Unidad instantánea 50
Rango de “Tap” 6-150 A Valores de “Tap” L 6-30 A
H 30 a 150 A Valor de “Tap” H Derivación del contactor del sello
0.2 A
Marca General Electric Modelo 12IFC51BD1A
*El dispositivo y los valores de ajuste son los mismos para las tres fases del TR-2
1
2

Propuesta de actualización con relevadores microprocesados
65
Dispositivo
Unidad de sobrecorriente falla a tierra 51N [Fuera de servicio]
Rango de “Tap” 0.5 a 4 A Valores de “Tap” 0.5; 0.6; 0.7; 0.8; 1.0;1.2;1.5; 2.0; 2.5; 3.0; 4.0 amp. Valor de “Tap” 1 A, A-E Posición de “dial” 6 Tipo de curva Inversa
Unidad instantánea falla a tierra 50N [Fuera de servicio]
Rango de “Tap” 2-50 A Valores de “Tap” L 6-30 A
H 30 a 150 A Valor de “Tap” L Derivación del contactor del sello
0.2 A
Marca General Electric Modelo 12IFC53BD2A
Dispositivo
Unidad de sobrecorriente falla a tierra 51N [Fuera de servicio]
Rango de “Tap” 1 a 12 A Valores de “Tap” 1; 1.2; 1.5; 2; 2.5; 3; 4; 5; 6; 7; 8; 10;12 amp. Valor de “Tap” 1 A, A-E Posición de “dial” 6 Tipo de curva Inversa
Unidad instantánea falla a tierra 50N [Fuera de servicio]
Rango de “Tap” 2-50 A Valores de “Tap” L 6-30 A
H 30 a 150 A Valor de “Tap” L Derivación del contactor del sello
0.2 A
Marca General Electric Modelo 12IFC53BD2A
3
4

Propuesta de actualización con relevadores microprocesados
66
Dispositivo
Unidad de bajo voltaje 27
Rango de Ajuste (DROPOUT)
70-100 V
Valores de “Tap” ? Valor de “Tap” ? Posición de “dial” ? Tipo de curva ? Target 2.0 A Burden Máximo 4.2Watts Marca General Electric Modelo 12NGV12BI5A
Dispositivo Unidad de bajo voltaje
27 Rango de Ajuste (DROPOUT)
70-100 V
Valores de “Tap” ? Valor de “Tap” ? Posición de “dial” ? Tipo de curva ? Target 2.0 A Burden Máximo 4.2Watts Marca General Electric Modelo 12NGV12BI5A Dispositivo *
Unidad de sobrecorriente 51
Rango de “Tap” 1 a 12 A Valores de “Tap” 1; 1.2; 1.5; 2; 2.5; 3; 4; 5; 6; 7; 8; 10;12 amp. Valor de “Tap” 5 A, E-K Posición de “dial” 5 Tipo de curva Inversa Derivación del contactor del sello
0.2 A
Marca General Electric Modelo 12IFC51AD1A
*El dispositivo y los valores de ajuste son los mismos para las tres fases del TR-1
5
6
7

Propuesta de actualización con relevadores microprocesados
67
Dispositivo * Unidad de sobrecorriente
51 Rango de “Tap” 1 a 12 A Valores de “Tap” 1; 1.2; 1.5; 2; 2.5; 3; 4; 5; 6; 7; 8; 10;12 amp. Valor de “Tap” 5 A, E-K Posición de “dial” 5 Tipo de curva Inversa Derivación del contactor del sello
0.2 A
Marca General Electric Modelo 12IFC51AD1A
*El dispositivo y los valores de ajuste son los mismos para las tres fases del TR-1
Dispositivo Unidad de sobrecorriente falla a tierra
51N Rango de “Tap” 0.5 a 4.0 A Valores de “Tap” 0.5; 0.6; 0.7; 0.8; 1.0; 1.2; 1.5; 2.0; 2.5; 3.0; 4.0 A. Valor de “Tap” 1 A, A-E Posición de “dial” 1 Tipo de curva Muy Inversa Derivación del contactor del sello
0.2 A
Marca General Electric Modelo 12IFC53BD2A
Dispositivo Unidad de sobrecorriente falla a tierra
51N Rango de “Tap” 0.5 a 4.0 A Valores de “Tap” 0.5; 0.6; 0.7; 0.8; 1.0; 1.2; 1.5; 2.0; 2.5; 3.0; 4.0 A. Valor de “Tap” 1 A, A-E Posición de “dial” 1 Tipo de curva Muy Inversa Derivación del contactor del sello
0.2 A
Marca General Electric Modelo 12IFC53BD2A
8
9
10

Propuesta de actualización con relevadores microprocesados
68
Dispositivo Unidad de sobrecorriente falla a tierra
51G Rango de “Tap” 0.5 a 4.0 A Valores de “Tap” 0.5; 0.6; 0.7; 0.8; 1.0; 1.2; 1.5; 2.0; 2.5; 3.0; 4.0 A. Valor de “Tap” 3 A, A-B Posición de “dial” 4 Tipo de curva Muy Inversa Derivación del contactor del sello
0.2 A
Marca General Electric Modelo 12IFC53AD2A
Dispositivo Unidad de sobrecorriente falla a tierra
51G Rango de “Tap” 0.5 a 4.0 A Valores de “Tap” 0.5; 0.6; 0.7; 0.8; 1.0; 1.2; 1.5; 2.0; 2.5; 3.0; 4.0 A. Valor de “Tap” 3 A, A-B Posición de “dial” 4 Tipo de curva Muy Inversa Derivación del contactor del sello
0.2 A
Marca General Electric Modelo 12IFC53AD2A
Dispositivo * Unidad diferencial
87 Slope Percent Disponible 15; 25; 40 Slope Percent Ajustado 25 Voltaje DC Ajustado 125 Rango de “Tap” 2.9; 3.2; 3.5; 3.8; 4.2; 4.6; 5.0; 8.7 A. Valor de Tap 2.9 Marca General Electric Modelo 12BDD15B11A
*El dispositivo y los valores de ajuste son los mismos para las tres fases del TR-1
11
12
13

Propuesta de actualización con relevadores microprocesados
69
Dispositivo *
Unidad diferencial 87
Slope Percent Disponible 15; 25; 40 Slope Percent Ajustado 25 Voltaje DC Ajustado 125 Rango de “Tap” 2.9; 3.2; 3.5; 3.8; 4.2; 4.6; 5.0; 8.7 A. Valor de Tap 2.9 Marca General Electric Modelo 12BDD15B11A
*El dispositivo y los valores de ajuste son los mismos para las tres fases del TR-2 5.3.- Propuesta de actualización tecnológica para la protección con relevadores numéricos multifunción A continuación se presenta el estudio y actualización de la coordinación de protecciones para los transformadores de 20/25 MVA; 85 Kv instalados en la S.E. (diagrama 7), esto incluye el cálculo de los parámetros. Valores de “Tap”, Posición de “dial”, tipo de curva, tiempos de respuestas, con la finalidad de lograr en los dispositivos de protección una correcta sensibilidad y selectividad en su funcionamiento. Estos cálculos se hicieron en base a los valores nominales de los transformadores antes mencionados y a los relevadores microprocesador propuestos que continuación se describen.
- 8WDI-A2B-2D200DAC8WDI-A2B-2D200DAC - 8IVD-K2N-2D200FPA
5.3.1.- Valores nominales y parámetros calculados para el Transformador [TR-1].
Transformador TR-1 Transformador TR-2
S [MVA] 20/25 OA-FA S [MVA] 20/25 OA-FA
V [Kv] 85/23 V [Kv] 85/23 Z 0.1168 /0.1488 Z 0.1204/0.15
X/R 22 X/R 22 Zona de operación normal del transformador corriente a plena carga Debido a que el transformador estará operando siempre a su carga mínima
de 20 MVA y con un tipo de enfriamiento, aceite-aire [OA]. Se tiene a una corriente a plena carga la cual se calcula a partir de la siguiente expresión. Para el lado del primario:
14

Propuesta de actualización con relevadores microprocesados
70
kvkVAIpc p ×
=3
; ][85.135][853][20000 A
kVkVAIpc p =
×=
Para el lado del secundario:
][05.502][853][20000;
3A
kVkVAIpc
kVkVAIpc ss =
×=
×=
CAPACIDAD O CORRIENTE MÁXIMA DE SOBRE CARGA
Siendo un transformador tipo SE. Y de acuerdo a sus características se clasifica de la categoría 4, con las siguientes expresiones.
Factor de enfriamiento [fenf] 1 Factor de temperatura [Ftem] 1.12
Por lo cual se determina el Factor de Sobrecarga [Fsc] Fsc = Fenf * Ftem = 1.12
Con ello se determina las corrientes de sobre carga máxima en el transformador [Iscm]
Iscmp= Ipcp x Fsc = 152.149 [A]; Iscms= Ipcs x Fsc = 562.289 [A]
Se obtiene el punto IInrush o corriente IInrush, la cual de acuerdo a sus características se tiene las siguientes constantes y expresiones.
IInrush = Ipcp x FInrush = 1630.165 [A] ; t = 0.1 [Seg]
ZONA DE DAÑO DEL TR-1 Para motivo del presente proyecto se supondrá el valor de la potencia de corto circuito e impedancia del sistema, como se menciono anteriormente siendo un transformador tipo SE. y de acuerdo a sus características se clasifica de la categoría 4.
MVA'S= 1200 Zs'= 0.01
Factor ANSI [FANSI]
0.58
Zs+Zt 0.11697
Para la impedancia equivalente de thevenin, Zs se tiene la siguiente expresión
0.0001671200
2001.0'
' =×=×=S
TR
MVAMVA
ZsZs
De acuerdo a las siguientes expresiones se calculan los puntos de la curva de daño del transformador.
FINRUSH 12 tInrush 0.1 [Seg]

Propuesta de actualización con relevadores microprocesados
71
Punto 1 [I(A),t(seg)]: ] 2 , 673.623[]2,[ =+
×ZtZs
IpcFansi p
Punto 2 [I(A),t(seg)]: 337.292,8][]8,5.0[ =××Zt
IpcFansi p
Punto 3 [I(A),t(seg)]: ]406.68,292.337[])(5000,5.0[ 2 =+××× ZsZtZt
IpcFansi p
Punto 4 [I(A),t(seg)]: ]406.68,393.956[]50,5[ =×× pIpcFansi Estos puntos se grafican en la figura número 37 Se calculan las corrientes Nec
Factor Necp 3 Factor Necs 4
De acuerdo a la siguiente expresión se tiene: INECp = Fnec x Ipcp = 4 x 135.85 = 543.3885 [A], t [1000 Seg] INECs = Fnec x Ipcs = 3 x 502.05 = 1506.13 [A], t [1000 Seg] Elección del voltaje base Teniendo las siguientes corrientes de corto circuito las cuales fueron calculadas en base al estudio de corto circuito elaborado por el profesor Vicente Ayala.
IccP[A] 8165.6[A] IccS[A] 4336.2[A]
Las corrientes se referenciarán de acuerdo al voltaje base teniendo un límite inferior y superior kV base
23 [kV] ; ][3017785236.8165];[043.502
2323043.502 A
kVkVA
kVkV
=×=×
85 [kV] ; ][6.816523236.8165];[847.135
8523043.502 A
kVkVA
kVkV
=×=×
Se selecciona el bus de 85Kv como voltaje base. De acuerdo al levantamiento efectuado en la S.E. de PEMEX se tiene los siguientes TC´s VALOR DEL TC KTC
LÍMITE INFERIOR
LÍMITE SUPERIOR
Ipcs 502.043 [A] Iccp 8165.6 [A]
S
p

Propuesta de actualización con relevadores microprocesados
72
Primario 400:5 80 Secundario 400/800/1200:5 80/160/240
5.4.- Especificaciones y ajustes de los dispositivos de primario del transformador Relevador 8 IVD-K2N-2D200FFA Para este relevador multifuncional se tiene integrados los equipos 1[unidad 50/51], equipo 3[unidad 51N] y equipo 5[unidad 27] Equipo 1[unidad 50/51] Unidad 50 De acuerdo a las especificaciones se tiene que la unidad instantánea de fase el arranque de la unidad o valor de disparo mínimo se encuentra en el rango de [0.1-30] en pasos de 0.01 A y el tiempo de [0-100s] en pasos de 0.01 seg. Se elige un valor de disparo mínimo de 1.5, teniendo este valor y el valor de corto circuito en el bus del primario, se calcula el valor del tap
VDM 1.5 Icc3øp 8166
047.6850 =×
=VDMKTC
IccTap
p
p
Se selecciona un valor de tap de 68 8160505050 =××= TAPKTCVDMIDM P [A]
Se cumple que IDM ≤ Icc3øp ; 8160[A] ≤ 8166 [A] Se calculan los puntos para graficar la curva de la unidad 50 debido a que el relevador permite ajustar el valor de disparo mínimo, rango de curva y el tiempo de este se tiene.
PKTCTapIvecesIamp ××= 50 Unidad 51
Se debe de cumplir la siguiente expresión IPCp ≤IDM ≤ ISCMAX TR Ó INEC
De acuerdo a las especificaciones y graficas para la unidad de retardo de tiempo 51, con un valor de disparo mínimo de 1.2 y el valor de corriente Nec en lado primario se procede a calcular el valor de tap para el 51.
VDM 1.2 KTCP 80
t[seg] 0.1 0.1 Iveces 1.3 9 Iamp 7800 46800

Propuesta de actualización con relevadores microprocesados
73
66.551
51 =×
=VDMKTC
ITAP
P
NECP
Se selecciona un valor de tap de 3, para el cálculo de l corriente de disparo mínimo [IDM]
28866.5802.1515151 =××=××= TAPKTCVDMIDM P [A] por lo que se cumple la desigualdad
135.847 [A] ≤ 288 [A] ≤ 543.388 [A] Determinación del dial de ajuste Para la corriente a plena carga del primario referido en veces
VECESKTCTap
IpcpIpcpp
veces 566.051
=×
=
Se calcula la IInrush Y Icc3ø en veces
S]16.98[VECE380
1630.165][51
=×
=×
=PKTCTAP
IInrushvecesIInrush
t = 0.1 Seg
][06.85380
8165][51
33 VECES
KTCTAPIcc
VECESIccP
=×
=×
= φφ
t =1000 Seg Para los cuatro puntos de la curva del daño referido en veces se tiene la siguiente expresión.
Pn KTCTAP
InI
×=
51
])[2],[807.2(]);[2],[380
673.622(]);[],[( 1 SegVECESSegVECESSegtVECESI×
])[8],[405.1(]);[8],[380
337.292(]);[],[( 2 SegVECESSegVECESSegtVECESI×
])[68.406],[1.405(]);[68.406],[380
337.292(]);[],[( 3 SegVECESSegVECESSegtVECESI×
])[50],[641.1(]);[50],[380
393.956(]);[],[( 4 SegVECESSegVECESSegtVECESI×
Para la gráfica de curva inversa [figura 36] se selecciona un valor de dial 0.2, y se referencia los valores de la curva en Amperes
PKTCTapIvecesIamp ××= 51
A partir de estos datos se proceden a graficar de acuerdo a la gráfica
5.5. Especificaciones y ajustes de los dispositivos del secundario del transformador
t(s) 15 8 5 3 2 1 0.7 0.6 Iveces 1.2 1.3 1.4 1.72 2 4 7 10 Iamp 288 312 336 412.8 480 960 1680 2400

Propuesta de actualización con relevadores microprocesados
74
Se proceden a calcular los ajustes del lado del secundario con un Relevador 8 IVD-K2N-2D200FFA marca ZIV, para este relevador multifuncional se tienen integrados los equipos 3[unidad 50/51], equipo 5[unidad 27] y equipo 7 [unidad 51N] Equipo 3 [Unidad 50/51] Unidad 50 [Fuera de servicio] Unidad 51 Se debe de cumplir la siguiente expresión
IPCs ≤ IDM51 ≤ ISCMAX TR Ó INEC De acuerdo a las especificaciones y graficas para la unidad de retardo de tiempo 51, con un valor de disparo mínimo de 1.2, teniendo este valor y el valor de corriente Nec en lado primario se procede a calcular el valor de tap para el 51
VDM 1.2 KTCP 160
84.751
51 =×
=VDMKTC
ITAP
S
NECS
Se selecciona un valor de tap de 5.5, para el cálculo de la corriente de disparo mínimo [IDM51]
10565.51602.1515151 =××=××= TAPKTCsVDMIDM [A] por lo que se cumple la desigualdad
502.043 [A] ≤ 1056 [A] ≤ 1506.13 [A] Determinación del dial de ajuste Para la corriente a plena carga del secundario referido en veces
][571.01605.5043.502
51
VECESKTCTap
IpcsIpcss
veces ×=
×=
Se calcula la Icc3ø en veces referido al dispositivo de la unidad 51.
][22.581605.5
4336.2][51
33 VECES
KTCTAPIcc
VECESIccP
=×
=×
= φφ
t =1000 Seg Para los cuatro puntos de la curva del daño referido en veces del dispositivo 51 del lado del secundario se multiplica por el factor [kVp/kVs], nótese que solo se cambio los KvBASE, se tiene la siguiente expresión.
S
P
Pn kV
kVKTCTAP
InI ××
=51
])[2],[2.829(]);[2],[2385
1605.5673.622(]);[],[( 1 SegVECESSegVECES
kVkVSegtVECESI ×
×
])[8],[1.416(]);[8],[2385
1605.5337.292(]);[],[( 2 SegVECESSegVECES
kVkVSegtVECESI ×
×

Propuesta de actualización con relevadores microprocesados
75
])[68.406],[1.416(]);[68.406],[2385
1605.5337.292(]);[],[( 3 SegVECESSegVECES
kVkVSegtVECESI ×
×
])[50],[1.654(]);[50],[2385
1605.5393.956(]);[],[( 4 SegVECESSegVECES
kVkVSegtVECESI ×
×
Para la gráfica de curva inversa se selecciona un valor de dial 0.1 y se referencia los valores de la curva en Amperes referidas al valor base, nótese que se multiplica por el factor (kVS/kVp)
P
SS kV
kVKTCTapIvecesIamp ×××= 51
t(s) 7.5 4 2 1 0.5 0.35 0.32 0.23 Iveces 1.2 1.35 1.5 2 4 7 9 20 Iamp 285.74 321.5 357.17 476.2 952.471 1666.8 2143.1 4762.35
Se refiere el valor de la corriente NEC del secundario al primario para graficar el punto al igual del valor de la corriente de corto circuito trifásica.
1000[Seg] t407.5[A];1506.138523
KVkV
P
S ==×==kVKVINECINEC Ssreferida
1000[Seg] t1173[A];4336.28523
KVkV
3P
S3 ==×==
kVKVIccIcc
sreferida φφ
Se proceden a graficar estas últimas corrientes en la figura 37 Equipo 9[Unidad 51N] Se habilita este dispositivo del relevador 8IVD-K2N-2D200FFA Para el ajuste del dispositivo 51N, la corriente de corto circuito monofásico se supondrá del 20 por ciento del valor de la corriente trifásica. Teniendo los valores del KTCS y el valor de disparo mínimo de acuerdo ala gráfica de la curva inversa del dispositivo figura 36. Se debe de cumplir la siguiente expresión.
IDM51N<IccФs
Se calcula el valor de tap de ajuste mediante la siguiente expresión
][516.42.1160
24.867
5151 A
VDMKTCIcc
TAPNS
=×
=×
= φ
Se toma el valor de TAP51N=3.5, se sustituye en la expresión siguiente: 672515151 =××= NNSN TAPVDMKTCIDM
Por lo que se cumple la igualdad
Icc3Фs 4.3362 [A]; t=1000[Seg] IccФS 867.24[A]; t=1000[Seg] VDM51N 1.2 KTCS 160

Propuesta de actualización con relevadores microprocesados
76
24.867672 ≤ Se referencia el valor de corriente de corto circuito con el valor de tap de 3.5 a un tiempo de 0.09 [Seg]
][09.0];[5486.11605.324.867
5151 SEGVECES
KTCTAPIccIcc
SN =
×=
×=
φφ
Se toma el valor de dial de 0.1 de la grafica de la curva inversa, figura 31. Equipo 11[Unidad 51G] Se habilita este dispositivo del relevador 8IDN-F2N-2C200FBA Para el ajuste del dispositivo 51G, la corriente de corto circuito monofásico se supondrá del 20 por ciento del valor de la corriente trifásica. Teniendo los valores del KTCS y el valor de disparo mínimo de acuerdo ala gráfica del dispositivo de la curva inversa figura 36. Se debe de cumplir la siguiente expresión.
IDM51G<IccФs
Se calcula el valor de tap de ajuste mediante la siguiente expresión
][516.42.1160
24.867
5151 A
VDMKTCIcc
TAPGS
G =×
=×
= φ
Se toma el valor de TAP51N=4, se sustituye en la expresión siguiente: 76842.1160515151 =××=××= GGSG TAPVDMKTCIDM
Por lo que se cumple la igualdad 24.867768 ≤
Se referencia el valor de corriente de corto circuito con el valor de tap de 4 a un tiempo de 0.01 seg
][01.0];[1.355160424.867
5151 SegVECES
KTCTAPIccIcc
SGG =
×=
×=
φφ .
Se toma el valor de dial de 0.4 de la curva inversa, figura 36.
Icc3Фs 4.3362 [A]; t=1000[Seg] IccФS 867.24[A]; t=1000[Seg] VDM51G 1.2 KTCS 160

Propuesta de actualización con relevadores microprocesados
77
CURVA DE INTENSIDAD/TIEMPO
Figura 36. Curva de tiempo inverso.
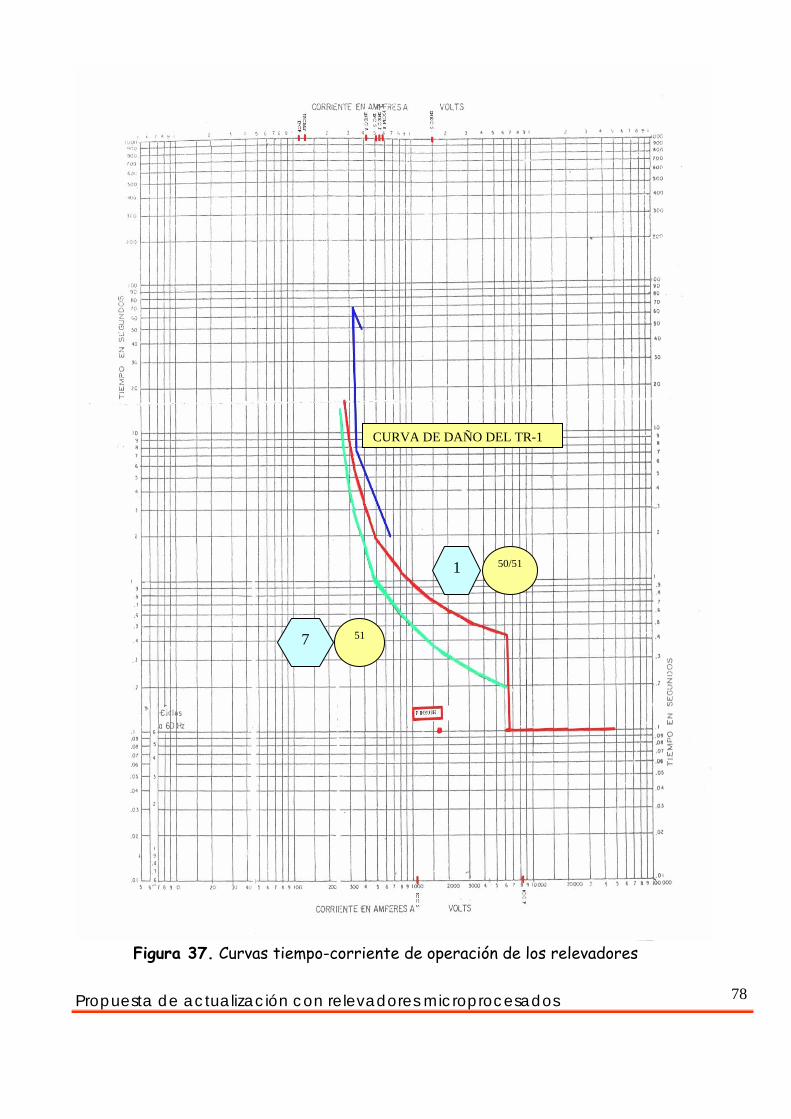
Propuesta de actualización con relevadores microprocesados
78
Figura 37. Curvas tiempo-corriente de operación de los relevadores
1
7
50/51
51
CURVA DE DAÑO DEL TR-1

Propuesta de actualización con relevadores microprocesados
79
Ajustes de la protección diferencial 87 Para este equipo se habilitara el dispositivo 87 del relevador multifuncional 8IDN-F2N-2C200FBA Equipo 13[Unidad 87]
DATOS DE PLACA
Tabla 13.Datos de placa del transformador TR-1. Transformador de potencia de dos devanados 20MVA, 85:23 kV ± 5%, delta-estrella aterrizada-, KTCP=400:5 A = 63, KTCS=800:5 A = 160. Corrientes de línea:

Propuesta de actualización con relevadores microprocesados
80
kVkVAI
3=
32 0 * 1 0 1 3 5 . 8 43 * 8 5
I p = =[A];
3
1.025%20 *10 489.793 * 23.575SI = = [A]
3
1.05%20 *10 478.133 * 24.15SI = =
[A];
32 0 * 1 0 5 0 2 .0 43 * 2 3SI = =
[A] Corrientes de línea referidas:
KTCII REF =
Devanado primario en delta del transformador:
135.85 1.69880REF
PP
P
IIKTC
= = =
Devanado secundario en estrella del transformador: 502.04 3.137
3* 3*160REF
SS
S
IIKTC
= = = [A]
1.025%1.025%
489.79 3.06160REF
SS
S
IIKTC
= = = [A]
1.05%1.05%
478.13 2.985160REF
SS
S
IIKTC
= = = [A]
Ajuste de valores de “tap” del relevador: TAPP= 1.70 A; TAPS=1.025% = 3.14 [A]; TAPP1.05% = 3.14 [A] TAPS = 3.14 [A] Corrientes diferenciales: Idif =TAP-IREF IdifP = 1.70 – 1.698 = 0.002 [A] IdifS1.025% = 3.14–3.06 = 0.06[A] IdifS1.5% = 3.14 – 2.98 = 0.16 [A] IdifS = 3.14 – 3.137 = 0.003 [A]
Corriente de frenado porcentual o de paso (Ipaso)
IpasoS = 3.137 [A]

Propuesta de actualización con relevadores microprocesados
81
IpasoS1.025 = 3.06 [A] IpasoS1.05 = 2.985 [A] Error de ajuste:
100*fren
dif
II
E =
0.003*100 *100 0.095 %3.137
difSP
pasoS
IE
I= = =
1.0251.025
1.025
0.08*100 *100 2.614 %3.06
difSP
pasoS
IE
I= = =
1.51.05
1.05
0.16*100 *100 5. 360%2.985
difSP
pasoS
IE
I= = =
Ajuste del % de Pendiente (M): M = E + ETC’s + IV (12)
Donde: E = Error máximo de ajuste en %. ETC’s = % de error que introducen los TC’s. IV= Corriente de vacío del transformador en %. M = 5.36 + 5 + 2 = 12.1% M = 20% Ajuste de Sensibildad (S): Se sugiere S = 0.3*TAP Sp(delta) = 0.3*TAPp* 3 = 0.3*1.70* 3 = 0.883 [A] Ss(estrella) = 0.3*TAPP = 0.3*3.14 = 0.942 [A]
Ajuste de la Unidad Instantánea
Se recomienda Idisparo mínimo= 5 a 10 veces el TAP con un tiempo de respuesta de 20ms. Para este caso: IDM p(delta) = 5*TAPP* 3 = 5*1.70* 3 = 14.72 [A] IDM s(estrella) = 5*TAPs = 5*3.14 = 15.7 [A] Ajuste de frenado por 2a y 5a armónica Se sugiere 20% Filtro de I0: habilitado en ambos devanados Grupo de conexión: Devanado primario: delta Devanado secundario: estrella

Propuesta de actualización con relevadores microprocesados
82
Ajustes del relevador de bajo voltaje 27, para protección del secundario del transformador Para este equipo se habilitara el dispositivo 27 del relevador multifuncional 8IVD-K2N-2D200FFA Equipo 13[Unidad 87] De acuerdo a las especificaciones del relevador la unidad 27 se tiene un arranque de la unidad o valores de disparo mínimo del rango de [50-140 V].
VP > Vnt
Selección del KTP: VAT = 23 KV 25 > 23 KV KTP = 24000 V: 120 V KTP = 208 2.- Selección del TAP de ajuste; VA ref = 0.8 * VAT 0.85 * 23000 = 93.99 Volts KTP 208 En el relevador se selecciona un valor de disparo mínimo de 1.0 VDM27 = 1.0 VDM = TAP27 * KTP * VDM27
Con valor de tap seleccionable de 105 VDM = 105 * 208 * 1.0 = 21840 [V] VA = 0.85* 23000 = 19550 [V] Se procede a obtener el porcentaje con el valor de tap de 105 FCR = 19550 * 100 = 89.51% 208*105 Por lo que 89.51% es menor de 90% se selecciona el valor de tap de 105

Propuesta de actualización con relevadores microprocesados
83
CAPÍTULO 6 CONCLUSIONES Y RECOMENDACIONES
6.1 Conclusiones Las modernas instalaciones eléctricas que incorporan sistemas de protección y control integrados aportan una serie de ventajas en la operación de la propia instalación. Con la llegada de los relevadores digitales más avanzados para transformadores, basados en microprocesadores, es posible integrar en estos conjuntos otras funciones además de las protecciones de sobrecorriente y diferencial. Funciones como las de sobreexcitación, sobre voltaje del neutro, diferencial de tierra y separación de cargas por baja frecuencia, bajo voltaje, estas añaden características de protección mejoradas para la zona de protección de los transformadores. Las funciones seleccionables por el usuario permiten configurar estos relevadores para cumplir con requisitos específicos de aplicación de protecciones, favoreciendo de manera particular la característica de discriminación entre condiciones que ameritan una rápida desconexión del transformador fallado y aquéllas en las que se debe evitar disparos en falso.
• Donde se emplean este tipo de relevadores ocupan un espacio más
reducido en las instalaciones, solucionando los problemas de escasez de espacio que en la actualidad sufre cualquier tipo de industria a si mismo economizando la renta del lugar donde se instale estos.
• Todos los elementos necesarios para el mando y motorización de la instalación se encuentran en el mismo lugar, y de ello resulta que la operación de la instalación sea sencilla y segura, pudiendo ser observada y accesible para toda maniobra por el operador, desde su puesto frente a la consola de operación.
• La respuesta ante cualquier incidente ocurrido en la instalación es mucho más rápida, al tener concentrada en la misma pantalla la información del estado de los interruptores, y los parámetros eléctricos.
• El estudio de cualquier incidente se facilita en gran medida al disponer de los sucesos (disparo de protecciones, apertura de interruptores, etc.) ocurridos en la subestación, junto con el dato de la hora (con resolución de milisegundos) en que ha ocurrido, pudiéndose de este modo tomar las decisiones oportunas con una gran fiabilidad.
• Se ha presentado un resumen de los métodos de medida magneto ópticos “transformadores de corriente ópticos”. Las ventajas e inconvenientes del uso de este tipo de sensores, su base teórica, los materiales magneto-ópticos más utilizados y las configuraciones de medida más utilizados.

Propuesta de actualización con relevadores microprocesados
84
Grandes fabricantes de equipos de medida de alta tensión como sonSiemens, ABB y Alstom en el mercado internacional y Arteche en el mercado nacional, han desarrollado prototipos e incluso poseen equipos terminados y homologados, basados en este tipo de sensores. Los errores debidos a la variación de la medida con la temperatura y los problemas de vibraciones que pueden distorsionar la señal óptica, están ampliamente superados. El gran interés que despierta un sensor que permite medir grandes magnitudes eléctricas sin problemas de aislamiento y con un ancho de banda limitado exclusivamente por la electrónica del sensor, está haciendo que las grandes multinacionales empleen parte de su capacidad investigadora y desarrolladora para abrir un mercado completamente nuevo en el campo de la instrumentación. 6.2 Recomendaciones
• El personal involucrado en las labores de operación de este tipo de equipos, debe estar familiarizado, entrenado y capacitado para desarrollar correctamente cada una de las actividades de manejo y supervisión.
• Es aconsejable siempre guiarse por el manual o instructivos de los equipos para desarrollar labores y asesorarse con las compañías especializadas en servicio y mantenimiento. Ya que la manipulación de estos equipos eléctricos cuando no se realiza adecuadamente, puede presentar riesgos graves o daños para las personas o materiales.
• Siempre es aconsejable que cada grupo de trabajo sea conducido por un personal técnico con la suficiente experiencia para asesorar al grupo lo que garantiza seguridad y calidad en las labores ejecutadas.
• Es recomendable que se realice un nuevo estudio de coordinación de protecciones, así como la actualización del estudio de corto circuito, para ajustarlas de tal manera que todas sean sensibles en un tiempo determinado y operen correctamente ante cualquier disturbio, ya que dentro de las protecciones que se tienen existen dispositivos fuera de servicio por estarse disparando continuamente.
• Para esta Subestación no se recomienda hacer un cambio de las protecciones existentes, debido a que esto implica poner en consideración muchos factores técnicos, económicos y sociales, los cuales deben ser analizados y evaluados de manera tal que permitan tener un máximo de confiabilidad en la operación del sistema.

Propuesta de actualización con relevadores microprocesados
85
BIBLIOGRAFÍA A.G. Phadke and J.S. Thorp (1998). “Computer Relaying for Power Systems”. USA.
Research Studies Press”. LTD- John Willy.
CFE (2002). “Listado de Relevadores de Protección Aprobados”. LAPEM 05L No. 6/2002,
México.
Elmore, Walter A. (1999). “Protective Relaying Theory and Applications”. ABB. USA.
Especificaciones CFE G0000-G2 (2002). “Esquemas Normalizados de Protecciones para
Transformadores de Potencia”. México. CFE.
IEEE STD 142-1999. “Recommend Practice For Protection And Coordination of Industrial
and Commercial Power Systems”. USA. IEEE.
Kajztenny Bogdan and Kezunovic, Miaden. (2001). “Improved Power Transformer
Protection Using Numerical Relays”. USA Texas A. and M. University.
Kenneth C. Behhrendt, P.E. (2000) “Relay to Relay Digital Logic Communication For Line
Protection, Monitoring And Control”. Pullman, USA. Schweitzer Engineering
Laboratories, Inc.
Mason Russell C. “El arte y la ciencia de la protección por relevadores”. CIA. EDITORIAL
CONTINENTAL S.A DE CV. MEXICO
Mozina, C. & Yalla, M.V.V.S. (1996). “Protección digital de transformadores, desde plantas
eléctricas a subestaciones de distribución”.IEEE Sección México Julio 1998.
Mozina, C. & Yalla, M.V.V.S. (1996). “Fundamental Reliability Considerations In The
Design, Manufacturing and application o Multifunction Digital Relays For Generator
Protection”. Canada. Canadian Electrical Association.

Propuesta de actualización con relevadores microprocesados
86
S. Vasilic, M. Kezunovic. “Fuzzy Art Neuronal Network Algorithm for Classifying the Power
system Faults”. IEEE Transactions on Power Delivery. (Accepted, in Press).
Yalla, M.V.V.S. “A Digital Multifunction Protection Relay”. IEEE Trans. On PD, Vol. 7,
Nº1, January 1992.
ZIV (2000). “Manual de protecciones: Terminal de Protección Diferencial”. LIDN804AV05.
España. ZIV Aplicaciones y Tecnología, S.A.
ZIV (2000). “Manual de protecciones: Protección de sobreintensidad y Tensión”.
LIV002Kv01. España. ZIV Aplicaciones y Tecnología, S.A.
ZIV (2000). “Manual de usuario: Software de comunicación “relevador-PC” con licencia
marca ZIV serie ZIVERCOM, para relevadores numéricos multifunción de la familia IDN-IVD-
K”. LCOMM602Av02. España. ZIV Aplicaciones y Tecnología, S.A.

Propuesta de actualización con relevadores microprocesados
87
APÉNDICE 1 GLOSARIO DE TERMINOS Aliasing: Son las componentes de las altas frecuencias en las formas de ondas, manifestándose como señales de frecuencia baja, llamados aliasing. Armónico: Son corriente o tensiones que se generan de la corriente o tensión fundamental, la tensión fundamental en México normalmente es de 60 Hz. Por lo que las armónicas derivadas de esta son múltiplos de 60 o sea que la tercera armónica corresponde a 180 hz., la quinta armónica corresponde a 300 Hz. Armónico fundamental: Se dice de la figura senoidal que nos da la fase y que se puede observar por medio de un osciloscopio, corresponde a un giro completo del generador que la proporciona, mientras mas pura sea la senoide se puede decir que tenemos mejor calidad de energía eléctrica. Autodiagnóstico: Sistema que permite detectar a través de un conjunto de cuestionarios las áreas que pueden mejorarse para incrementar la productividad y competitividad. Algoritmos: Se aplica a muchos de los métodos de resolución de problemas que emplean una secuencia mecánica de pasos, como en el diseño de un programa de ordenador o computadora. Esta secuencia se puede representar en forma de un diagrama de flujo para que sea más fácil de entender.
Birreficencia: Este fenómeno se produce en el interior de ciertos cristales transparentes, cuando la onda luminosa se descompone en dos partes, las que son refractadas con distinta intensidad y en direcciones diferentes, duplicando la imagen de los objetos observados a través de ellos.
Circuito Sample and hold: En relevadores numéricos es el circuito usado usualmente para permitir el muestreo de una cantidad fija más rápida en el orden correcto y causar comparaciones basado en las corrientes y voltajes correctos sin el error asociado de dichos datos. Convertidores Analógicos: Dispositivo que traduce señales analógicas continúas en señales digitales discretas proporcionales. Convertidor digital: Dispositivo que transforma las tensiones a forma dígital.

Propuesta de actualización con relevadores microprocesados
88
Cortocircuito: Se originan por la unión fortuita de dos líneas eléctricas, entre las que existe una diferencia de potencial eléctrico (fase-neutro, fase-fase). Durante un cortocircuito el valor de la intensidad de corriente se eleva de tal manera, que los conductores eléctricos pueden llegar a fundirse en los puntos de falla, generando excesivo calor, chispas e incluso flamas, con el respectivo riesgo de incendio. Corriente INRUSH: Este punto representa la etapa de magnetización de la máquina la cual se produce al energizar el transformador, cuando la corriente de magnetización es muy grande debido a que aún no se establece el flujo opuesto en el núcleo. Este punto de magnetización es variable por que depende del magnetismo residual en el transformador y del punto en la onda de voltaje al instante en que ocurre la energización. La corriente de magnetización se expresa como un múltiplo de la corriente nominal del transformador y varía en función de la potencia. Confiabilidad: Se puede definir también como la probabilidad en que un producto realizará su función prevista sin incidentes por un período de tiempo especificado y bajo condiciones indicada. Un requisito básico es que el equipo de protección por relevadores debe ser digno de confianza. Cuando la protección por relevadores no funciona adecuadamente, las características de reducción implicadas son muy inefectivas. Por lo tanto, es esencial que el equipo de protección por relevadores sea de suyo confiable y que su aplicación, instalación y mantenimiento aseguren que se aprovecharán al máximo.
Curva ANSI: Esta curva representa la máxima capacidad del transformador para soportar esfuerzos dinámicos y térmicos ocasionados por la corriente de corto circuito sin sufrir daño.
Desbalanceo: Se dice que un sistema eléctrico trifásico esta desbalanceado cuando las tres fases que lo componen no tienen la misma cantidad de corriente en cada una de ellas, no es absolutamente necesario que estén exactamente igual cada fase, pero es conveniente repartir las cargas entre cada una de las tres fases de manera que se logre un acercamiento en este equilibrio.
Defasamiento: La fase de una señal senoidal es la medida angular que especifica la posición de la onda relativa a referencia. Si el cruce por cero cuando la señal va subiendo ocurre en 0°, decimos que la señal no está desfasada. Si la señal está corrida hacia la izquierda o la derecha con respecto a referencia, entonces la

Propuesta de actualización con relevadores microprocesados
89
señal tiene un defasamiento que puede ser medido en ángulos o radianes. Dependiendo hacia qué lado esté corrida, ese defasamiento es negativo o positivo.
DIAL: Termino empleado en aquellos relevadores con características de operación con retardo intencional de tiempo, y que define el intervalo de tiempo en el que se da el “pick-up” del relevador. Esquema Básico De Protecciones: Recomendación de un conjunto de dispositivos, para cumplir con los requisitos mínimos que establecen las normas y reglamentos en sus artículos referentes a la protección contra fallas eléctricas típicas en transformadores u equipo a proteger. Error: Se define el error absoluto; Ea, como la diferencia entre el resultado de la medida M y el verdadero valor m de la magnitud a medir Ea = M - m
Fallas eléctricas: El evento de cortocircuito es una falla eléctrica que se produce en un equipo, aparato, o línea de energía. Durante la falla la corriente pasa de un conductor a otro conductor, creciendo a valores muy altos. Pueden ocurrir incendios con consecuencias fatales, tanto para la vida humana como para la instalación.
Falla de aislamiento: Estas se originan por el envejecimiento de las aislamiento, los cortes de algún conductor, uniones mal aisladas, etc. Estas fallas no siempre originan cortocircuitos, sino en muchas ocasiones se traduce en que superficies metálicas de aparatos eléctricos queden energizadas (con tensiones peligrosas), con el consiguiente peligro de shock eléctrico para los usuarios de aquellos artefactos.
Fibra óptica: La fibra óptica es un conductor de ondas en forma de filamento, generalmente de vidrio, aunque también puede ser de materiales plásticos. La fibra óptica es capaz de dirigir la luz a lo largo de su longitud usando la reflexión total interna. Normalmente la luz es emitida por un láser o un LED. Las fibras son ampliamente utilizadas en telecomunicaciones a largas distancias, ya que permiten enviar gran cantidad de datos a una gran velocidad, mayores que las comunicaciones de radio y de cable. Igualmente son usadas para redes locales.
Filtro: Circuito electrónico o eléctrico usado para limitar ciertas frecuencias en una señal. Filtro paso-bajo (Low-Pass) deja pasar las bajas y atenúa las altas frecuencias, el inverso en el filtro paso-alto (High-Pass) que deja pasar las altas y atenúa las bajas.

Propuesta de actualización con relevadores microprocesados
90
Filtros de rechazo (BT/AT): Están formados por baterías de condensadores con reactancias de rechazo. Este conjunto forma un circuito serie resonante sintonizado a una frecuencia inferior a la del armónico más común (5º). A frecuencias armónicas el valor de la reactancia es dominante y el escalón es, por tanto, inductivo. No hay amplificación armónica, ya que no existe circuito resonante paralelo entre el circuito serie condensador-reactancia y la red exterior. La batería actúa también como filtro de absorción, eliminando parcialmente (15 a 20%) las corrientes armónicas de menor frecuencia del sistema.
Filtros de absorción (BT/AT): Están formados por tantas ramas L-C como armónicos se desee filtrar. El valor de la inductancia de la reactancia (L) es aquel que asegura un bajo valor de impedancia para el circuito resonante serie a la frecuencia armónica. De esta forma la mayor parte de la intensidad armónica se dirige hacia el filtro (80 a 90%).
Filtros Activos: Los filtros activos eliminan los armónicos (desde el 2º hasta el 50), tanto en las fases como en el neutro en tiempo real (tiempo de respuesta inferior a 1 ms), pudiendo compensar también la potencia reactiva.
Fotodiodo: Un fotodiodo es un semiconductor construido con una unión PN, sensible a la incidencia de la luz visible o infrarroja. Para que su funcionamiento sea correcto se polariza inversamente, con lo que se producirá una cierta circulación de corriente cuando sea excitado por la luz. Debido a su construcción, los fotodiodos se comportan como células fotovoltaicas, es decir, en ausencia de luz exterior generan una tensión muy pequeña con el positivo en el ánodo y el negativo en el cátodo.
Freeze: Señal que ocurre en un circuito sample and hold y que el microprocesador, direcciona la señal, llamada señal congelada al ocurrir cada punto muestreado.
Homopolar: La inducción homopolar es intrigante en el sentido de que el flujo que atraviesa el circuito no cambia con el tiempo y sin embargo, se produce una fem. El término inducción homopolar fue acuñado por Weber, quién pensó que solamente uno de los polos estaba involucrado en el fenómeno.
Impedancia: La impedancia eléctrica mide la oposición de un circuito o de un componente eléctrico al paso de una corriente eléctrica alterna sinusoidal. El concepto de impedancia generaliza la ley de Ohm en el estudio de circuitos en corriente alterna (AC).

Propuesta de actualización con relevadores microprocesados
91
Interfase RS-232: (también conocido como Electronic Industries Alliance RS-232C) es una interfaz que designa una norma para el intercambio serie de datos binarios entre un DTE (Equipo terminal de datos) y un DCE (Data Communication Equipment, Equipo de terminación del circuito de datos), aunque existen otras situaciones en las que también se utiliza la interfaz RS-232.
Isotropico: En física, la isotropía se refiere al hecho de que ciertas magnitudes vectoriales medibles dan resultados idénticos con independencia de la dirección escogida para la medida. Cuando una determinada magnitud no presenta isotropía decimos que presenta anisotropía.
Inversión de Potencia: La inversión e potencia esta basada en la utilización de las magnitudes de corriente de fase Ia, Ib, Ic, y el voltaje de línea, para el calculo de la potencia activa, con magnitud y sentido. La magnitud y el sentido de la potencia activa, determina la salida de la unidad de inversión de la potencia. Limitación de potencia: Se puede limitar la potencia activa, conociendo su magnitud, sentido y la zona en que la protección operara, limitando las magnitudes de las corrientes de fase y tensión. Límites NEC: Establece los límites máximos permisibles para los tiempos en que debe actuar la protección de sobrecorriente de los devanados primario y secundario de los transformadores. Se les conoce con el nombre de “límites NEC” por estar rígidos por el National Electric Code (NEC) de los Estados Unidos del Norte América. Maniobra: Se denomina maniobra eléctrica a las funciones que se pueden realizar combinando diferentes elementos eléctricos como interruptores relevadores etc., por consiguiente el cambio de sentido del motor es una maniobra eléctrica
Monomodal: El diámetro del núcleo de la fibra es muy pequeño y sólo permite la propagación de un único modo o rayo (fundamental), el cual se propaga directamente sin reflexión. Este efecto causa que su ancho de banda sea muy elevado, por lo que su utilización se suele reservar a grandes distancias, superiores a 10 Km., junto con dispositivos de elevado costo (LASER).
Multiplexor: Dispositivo para combinar dos o más señales.
Multimodal: El término multimodo indica que pueden ser guiados muchos rayos luminosos, cada uno de los cuales sigue un camino diferente dentro de la fibra óptica. Este efecto hace que su ancho de banda sea inferior al de las fibras

Propuesta de actualización con relevadores microprocesados
92
monomodo. Este tipo de fibras son las preferidas para comunicaciones en pequeñas distancias, hasta 10 Km.
Polaridad: La polaridad de un transformador de instrumento, es la dirección instantánea relativa entre las corrientes que circulan por las terminales primaria y secundaria.
Protección diferencial: Un interruptor diferencial es un dispositivo electromecánico que se coloca en las instalaciones eléctricas con el fin de proteger a las personas de las derivaciones causadas por fallas de aislamiento entre los conductores activos y tierra o de los aparatos. En esencia, el interruptor diferencial consta de dos bobinas, colocadas en serie con los conductores de alimentación de corriente y que producen campos magnéticos opuestos y un núcleo o armadura que mediante un dispositivo mecánico adecuado puede accionar unos contactos.
Protección primaria: Se le denomina así al tipo de protección que se localizan en cada elemento del sistema. El significado de esto es que cualquier falla que ocurra dentro de una zona dada originará el disparo esto es la apertura de todos los interruptores dentro de esa zona, y de sólo esos interruptores.
Protección respaldo: La protección de respaldo se emplea sólo para protección de cortocircuitos. Debido a que éstos son el tipo preponderante de falla del sistema de potencia, hay más posibilidades de que falle la protección primaria en caso de cortocircuitos. La experiencia ha mostrado que la protección de respaldo no es justificable económicamente para casos distintos de los cortacircuitos. Relevador auxiliar: se denominan así a los relevadores cuya función es la de complementar los esquemas de protección, permitiendo diferir la función principal de un relevador. Relevadores electromagnético; Los relevadores, también conocidos como relés o relays, son dispositivos electromecánicos que funcionan utilizando un electroimán que acciona un juego de uno varios contactos metálicos, permitiendo abrir o cerrar circuitos eléctricos. Relevadores multifuncionales: Instrumento de protección, multimedición con capacidad de realizar adicionalmente cualesquiera de las siguientes tareas: protección, Comunicación local y/o remota, Control de entradas y/o salidas, Almacenamiento y transferencia de datos.

Propuesta de actualización con relevadores microprocesados
93
Relevador de protección: Es un dispositivo que se puede energizar por una señal de voltaje, una señal de corriente o por ambas. Cuando es energizado, opera para indicar o aislar las condiciones anormales de operación. Saturación: Condición por la cual se alcanza el límite máximo de magnetización permitida en el material. Sensor Pockel: En el efecto, el sensor modula algún rasgo de la onda de luz en una fibra óptica como la intensidad o fase. Normalmente la modulación de la fase debe convertirse a una modulación de intensidad al descubrimiento. Señal eléctrica: Señal eléctrica es aquella en la que los valores de la tensión o voltaje varían constantemente en forma de corriente alterna, incrementando su valor con signo eléctrico positivo (+) durante medio ciclo y disminuyéndolo a continuación con signo eléctrico negativo (–) en el medio ciclo siguiente.
Sensibilidad: En una protección deberá ser lo suficientemente sensible para operar en forma segura cuando sea necesario aún bajo condiciones mínimas de falla dentro de su zona de protección, y permanecer estable bajo fallas fuera de su zona de protección.
Selectividad: La protección por relevadores debe ser capaz de seleccionar aquellas condiciones en que debe de operar y en las que no debe de hacerlo, así como las condiciones de operación rápida o retardada, de manera que no exista la desconexión innecesaria de los elementos del sistema.
Sistema de potencia: Un Sistema Eléctrico de Potencia (SEP), es el conjunto de centrales generadoras, de líneas de transmisión interconectadas entre sí y de sistemas de distribución esenciales para el consumo de energía eléctrica.
Sobrecarga: Las Sobrecargas se definen como corrientes que son mayores que el flujo de corriente normal, están confinadas a la trayectoria normal de circulación de corriente y pueden causar sobrecalentamiento del conductor si se permite que continué circulando. TAP: Rango de valores, dentro del cual es posible ajustar la respuesta del relevador. Tiempo de respuesta: Se refiere a la característica de tiempo a la cual responde el relevador, ya sea de retardo de tiempo, tiempo definido, operación instantánea o de alta velocidad.

Propuesta de actualización con relevadores microprocesados
94
Transformador de potencial: Es un transformador de tensión en el que el circuito primario se conecta en derivación con el circuito con el cual se desea conocer el voltaje. En el secundario, se conectan en paralelo los instrumentos correspondientes a utilizar. Transformador de corriente: Es aquel en el cual el devanado primario se encuentra en serie con el circuito al cual se quiere medir la corriente, sobre el devanado secundario se conectan en serie los instrumentos relativos a utilizar. Transmisión remota: La transmisión remota consiste en enviar desde una computadora la señal a transmitir hacia el servidor. Valor de puesta en operación (pick-up o disparo mínimo): Valor de ajuste al cual responde el relevador, iniciando una secuencia de disparo. Velocidad: En un relevador debe operar la protección rápidamente de acuerdo al ajuste.

Propuesta de actualización con relevadores microprocesados
95
APÉNDICE 2 DIAGRAMAS DE DISEÑO PÁGINA Diagrama 1. Diagrama Unifilar de la subestación actual de A1
| PEMEX en 85KV. Diagrama 2. Isométrico de equipos tridimensional de los A2 relevadores multifuncionales (motor, direccional).
Diagrama 3. Esquemático frontal de distribución de salidas y A3
entradas del relevador multifuncional para protección del motor.
Diagrama 4. Esquemático frontal de distribución de salidas A4
y entradas del relevador para protección direccional. Diagrama 5. Diagramas de alambrado del Relevador para A5
protección del motor.
Diagrama 6. Diagrama de alambrado del Relevador A6 para protección direccional.
Diagrama 7. Diagrama Unifilar de la subestación de PEMEX A7
en 85KV, con relevadores microprocesados.

A1
Diagrama 1. Diagrama Unifilar de la subestación actual de PEMEX en 85KV.

A2
Diagrama 2. Isométrico de equipos tridimensional de los relevadores multifuncionales (motor, direccional).
A3
Diagrama 3. Esquemático frontal de distribución de salidas y entradas del relevador multifuncional para protección del motor.

A4
Diagrama 4. Esquemático frontal de distribución de salidas y entradas del relevador para protección direccional.

A5
Diagrama 5. Diagrama de alambrado del Relevador para protección del motor.

A6
Diagrama 6. Diagrama de alambrado del Relevador para protección direccional.

A7
Diagrama 7. Diagrama Unifilar de la subestación de PEMEX en 85KV, con relevadores microprocesados.