Diplomarbeit - TU Graz
87
Diplomarbeit Ein auf WWAN basierendes Telemetriesystem für Rennsportanwendungen Christoph Adelmann Institut für Elektronik Technische Universität Graz A-8010 Graz Betreuer: Ass. Prof. Dipl.-Ing. Dr. Bernd Eichberger Graz, 19.10.2011
-
Upload
khangminh22 -
Category
Documents
-
view
1 -
download
0
Transcript of Diplomarbeit - TU Graz
Diplomarbeit
Ein auf WWAN basierendes Telemetriesystem
für Rennsportanwendungen
Christoph Adelmann
Institut für Elektronik
Technische Universität Graz
A-8010 Graz
Betreuer: Ass. Prof. Dipl.-Ing. Dr. Bernd Eichberger
Graz, 19.10.2011

Diplomarbeit
Seite 1
Zusammenfassung
Diese Arbeit dokumentiert die Entstehung eines Telemetriesystems für Rennsport-
Anwendungen. Um den Zustand eines Rennwagens und die Fahrlinie während eines Ren-
nens oder Trainings in Echtzeit zu bewerten, ist es notwendig Positions- und
Telemetriedaten (Geschwindigkeit, Drehzahl, Gang, Drücke, Temperaturen usw.) zu erfas-
sen und so rasch wie möglich dem Technikteam bereitzustellen.
Für die Ermittlung der Fahrlinie wird ein GPS-System verwendet, welches in der Lage ist,
die Position mit hinreichender Genauigkeit und zeitlicher Auflösung zu erfassen. Die Mo-
tordaten werden über ein CAN-Interface eingelesen, welches sich durch eine hohe Zuver-
lässigkeit auszeichnet. Übertragen werden die gesammelten Daten mittels eines WWAN-
Modules (Wireless Wide Area Network), basierend auf GPRS/UMTS, zu einem Server.
Durch die Verwendung eines WWAN-Modules wird eine flexible Nutzung des Systems
gewährleistet, da kein zusätzlicher Aufwand an Equipment für die Datenübertragung am
Einsatzort notwendig ist. Auf dem Server werden die Daten gespeichert und stehen dem
Anwender zur Ansicht in Echtzeit mit entsprechender Software bereit.

Diplomarbeit
Seite 2
Abstract
This work describes the development of a telemetry system for racing applications. To
evaluate the state and the trajectory of a racing car during race or practice in real time, it is
necessary to capture position and telemetry data (speed, rpm, gear, pressure, temperature,
etc.) and provide it to the team as quickly as possible.
To determine the trajectory of the car, a GPS system is used which is able to detect the
position with reasonable accuracy and sufficient temporal resolution. The engine data is
acquired via a CAN interface. The collected data is then transferred to a server on the In-
ternet using a WWAN module (Wireless Wide Area Network) based on GPRS/UMTS.
This communication technology provides a flexible application of the system, because no
additional equipment is necessary for data transmission in the field.
On the server the information is finally stored and additionally, if appropriate software is
installed, made available to the user in form of a real-time visualization.

Diplomarbeit
Seite 3
Danksagung
Diese Diplomarbeit widme ich meinen Eltern, Geschwistern und Freunden, die durch ihre
Unterstützung und unerschöpfliche Geduld mir die Vollendung dieser Arbeit und des Stu-
diums ermöglichten.
Besonders danke ich Dr. Bernd Eichberger für die ausgezeichnete und freundschaftliche
Betreuung während der Diplomarbeit.
Weiteres möchte ich mich bei allen Kolleginnen und Kollegen am Institut für Elektronik
für ihre Unterstützung bedanken. Spezieller Dank gilt DI Harald Axmann, Reinhard
Klambauer, BSc, Dr. Michael Hinterberger und Dipl.-Ing. Stefan Nöhammer für ihre Rat-
schläge und moralische Unterstützung.
Diplomarbeit
Seite 4
Inhaltsverzeichnis
Zusammenfassung 1
Abstract 2
Danksagung 3
Abkürzungsverzeichnis 6
1 Einleitung 9
2 Systemdefinition 11
2.1 Anforderungen 11
2.2 Komponentenauswahl 12
3 Grundlagen 14
3.1 GPS-Empfänger 14
3.2 CAN-Bus 18
3.3 WWAN-Modul 20
4 Entwicklung und Realisierung 23
4.1 Hardware 23
4.1.1 Spannungsversorgung 25
4.1.2 Überspannungsschutz und Strombegrenzung 26
4.1.3 RS232-Interface 30
4.1.4 CAN-Interface 32
4.1.5 Eingänge und Ausgang 32
4.1.6 Konfigurationsspeicher 34
4.1.7 Speicherkarten-Interface 34
4.1.8 WWAN - Modul 36
4.1.9 GPS und Statuslampen 38
4.2 Firmware 40
4.2.1 Gliederung der Firmware 40
Diplomarbeit
Seite 5
4.2.2 Applikation 41
4.2.3 DAQ-Task 43
4.2.4 Main-Task 44
4.2.5 Verbindungssteuerung 45
4.2.6 Übertragungsrahmen 47
4.3 PC-Softwares 50
4.3.1 Konfigurationssoftware 50
4.3.2 Upgrade-Software 51
5 Messungen 53
5.1 GPS-Vergleichsmessungen 55
5.2 Feldtests 58
Abbildungsverzeichnis 66
Tabellenverzeichnis 69
Literaturverzeichnis 70
Anhang I - Schaltpläne 72
Anhang II - Bestückungspläne 82
Diplomarbeit
Seite 6
Abkürzungsverzeichnis
ADC Analog to Digital Converter
APN Access Point Name
ARM Advanced RISC Machine
ASCII American Standard Code for Information Interchange
APOS Austrian Positioning Service
CAN Controller Area Network
CDGPS Canada-Wide DGPS Correction Service
CMOS Complementary Metal Oxide Semiconductor
CRC Cyclic Redundancy Check
CSMA/CA Carrier Sense Multiple Access/Collision Avoidance
DAC Digital to Analog Converter
DAQ Data Acquisition
DGPS Differential Global Positioning System
EDGE Enhanced Data Rates for GSM Evolution
EGNOS European Geostationary Navigation Overlay Service
EOBD European On Board Diagnostics
ESD Electrostatic Discharge
FDD Frequency Division Duplex
FDMA Frequency Division Multiple Access
FIFO First In First Out
FTP File Transfer Protocol
GMSK Gaussian Minimum Shift Keying
GNSS Global Navigation Satellite System
GPRS General Packet Radio Service
GPS Global Positioning System

Diplomarbeit
Seite 7
HAL Hardware Abstraction Layer
HSDPA High Speed Downlink Packet Access
IIC Inter-Integrated Circuit
IIS Inter-IC Sound, Integrated Interchip Sound
IP Internet Protocol
IP Ingress Protection
ISO International Organization for Standardization
LED Light Emitting Diode
MD5 Message Digest Algorithm 5
MMC Multimedia Card
MOSFET Metal Oxide Semiconductor Field-Effect Transistor
OBD On Board Diagnostics
OTG On-The-Go
PSK Phase Shift Keying
PWM Pulse Width Modulation
QAM Quadrature Amplitude Modulation
QPSK Quadrature Phase-Shift Keying
RMS Root Mean Square
RS232 Recommended Standard 232
RTK Real Time Kinematic
RTOS Real Time Operating System
SBAS Satellite Based Augmentation System
SD Secure Digital
SD Standard Deviation
SDHC Secure Digital High Capacity
SFTP Secure Shell File Transfer Protocol
SIM Subscriber Identity Module
Diplomarbeit
Seite 8
SMD Surface Mounted Device
SMTP Simple Mail Transfer Protocol
SPI Serial Peripheral Interface
SRAM Static Random Access Memory
SSP Synchronous Serial Port
TCP Transmission Control Protocol
TDMA Time Division Multiple Access
TTL Transistor Transistor Logic
UART Universal Asynchronous Receiver/Transmitter
UDP User Datagram Protocol
UMTS Universal Mobile Telecommunications System
USB Universal Serial Bus
WCDMA Wideband Code Division Multiple Access
WWAN Wireless Wide Area Network
Diplomarbeit
Seite 9
Kapitel 1
Einleitung
Die Ursprünge des Motorsports liegen in Rennfahrten zwischen den ersten Besitzern von
Automobilen im 19. Jahrhundert. Aufgrund des großen öffentlichen Interesses hat sich
diese Sportart immer weiter entwickelt. Die Grundzüge, ein Auto zu bauen und das Ren-
nen zu gewinnen, sind gleich geblieben, der Weg dorthin ist mit der Zeit immer komplexer
geworden. Heutzutage wird ein immenser technischer Aufwand betrieben um das Ziel zu
erreichen, den obersten Platz am Podest. Dabei spielt die Überwachung des Rennwagens
und des Fahrers in Aktion eine sehr große Rolle, in allen Stadien der Entwicklung und dem
Rennen.
So liefern technische Daten des Rennautos im Einsatz viele Informationen über das Ver-
halten und den Zustand des Fahrzeuges. Dadurch ist es den Konstrukteuren und der Bo-
xencrew möglich Verbesserungen am Fahrzeug vorzunehmen oder Einstellungen zu än-
dern um sich einer Situation anzupassen. Während des eigentlichen Rennens wird durch
eine Überwachung die Möglichkeit geschaffen, das Auftreten eines Fehlers im Vorfeld zu
erkennen und darauf zu reagieren um einen Ausfall zu vermeiden.
Wie in jeder Sportart ist auch im Motorsport das Training ein entscheidender Faktor über
Sieg oder Niederlage. So sind neben den reinen Fahrzeugdaten auch die fahrtechnischen
Fähigkeiten des Fahrers von hohem Interesse. Wie und ob er eine Kurve richtig anfährt, die
Abweichung von der Ideallinie, Sektorzeiten usw. Um eine solche Auswertung zu ermög-
lichen, ist eine Bestimmung der Position des Rennwagens auf der Strecke notwendig. Mit
solchen Daten lässt sich ein Training oder die Ausbildung sehr effizient gestalten. So kann
der Trainer den Fahrer auf der gesamten Strecke viel genauer verfolgen und entsprechende
Anweisungen geben. Danach kann der Lenker des Rennautos sich seine Fahrlinie ansehen
oder mit anderen vergleichen.
Um die gewünschten Daten von einem Fahrzeug während des Einsatzes zu bekommen
bedient man sich der Hilfe von Telemetriesystemen. Dabei handelt es sich im Allgemeinen
um Vorrichtungen zur Entgegennahme von Messdaten und deren Weiterleitung zu einer
räumlich getrennten Stelle über eine Datenverbindung. Die Wandlung der physikalischen
Messgröße in eine elektrische Größe ist nicht Aufgabe der Telemetrie sondern der Mess-
technik. Weiters ist eine Auswertung der übertragenen Daten ebenfalls nicht Teil der Te-
lemetrie.

Diplomarbeit
Seite 10
Erreicht wird die Überwachung des Autos und des Fahrers mit drei Komponenten: Der
Datenerfassung (Sensoren und Anpassung), der Datenübertragung (Telemetrie) und der
Anzeige bzw. Auswertung der Informationen.
Die Hersteller von solchen Systemen bieten heutzutage fast immer Lösungen zu allen drei
Bereichen an. Dabei reicht das Spektrum von professionellen Systemen für große Teams
bis hin zu semiprofessionellen Lösungen für kleinere Teams. Vorteil einer Komplettlösung
ist ein kompakter Aufbau des Gesamtsystems, Wartung und Support von einem Anbieter.
Für ein kleines Team entsteht dadurch eventuell der Nachteil, dass es mehr Funktionalität
kaufen muss als es benötigt, da das System für einen universellen Einsatz gedacht ist und
für diesen Verwendungszweck überdimensioniert ist.
Ziel dieser Arbeit war es, ein kompaktes, maßgeschneidertes System für die Übertragung
der Fahrzeugdaten und der Position auf der Strecke zu entwickeln. Der Umfang dieses Sys-
tems beschränkt sich auf die Entgegennahme der Daten vom Rennwagen, die Bestimmung
der Position und die Weiterleitung der gesammelten Daten an einen Server im Internet.
Dabei soll der Einsatz auf der Rennstrecke so einfach wie möglich gehalten werden. Der
Nutzer dieses Systems benötigt neben der eigentlichen Einheit, welche im Auto verbaut ist,
nur noch einen Laptop mit Internetverbindung um auf die Daten zuzugreifen. Im optimals-
ten Fall kommt der Anwender mit dem installierten System zur Rennstrecke, startet eine
Analysesoftware am Rechner und kann beginnen die Telemetriedaten zu empfangen.
Diplomarbeit
Seite 11
Kapitel 2
Systemdefinition
In diesem Kapitel werden die grundsätzlichen Anforderungen definiert und die Hauptkom-
ponenten ausgewählt, welche für die Realisierung des Systems notwendig sind.
Anforderungen 2.1
Bei dieser Arbeit soll ein Prototyp für ein kompaktes Telemetriesystem entstehen, mit wel-
chem Motor- und Positionsdaten von Fahrzeugen erfasst werden können. Diese Daten sol-
len anschließend zu einem Server im Internet gesendet werden. Dabei muss immer darauf
geachtet werden, dass das System so einfach wie möglich gehalten wird, um eine leichte
Handhabung zu garantieren.
Für die Erfassung der Motordaten ist ein Interface zu wählen, das in den meisten Fahrzeu-
gen vorhanden ist und eine robuste Datenübertragung gewährleistet. Um auch schnellere
Vorgänge im Auto darstellen zu können, sollen die Motordaten mindestens 20 mal pro Se-
kunde übertragen werden.
Die Bestimmung der Position auf der Stecke muss im Submeterbereich und mit mindestens
zehn Punkten pro Sekunde erfolgen, um einen Vergleich der Fahrlinien in Bezug auf Ort
und Zeit zu ermöglichen.
Für die Übertragung der gesammelten Daten soll kein zusätzlicher Empfänger auf der Stre-
cke notwendig sein. Die Daten müssen direkt zum Server übermittelt werden. Sicherge-
stellt soll auch sein, dass die Daten von keinem Dritten mit einfachen Mitteln eingesehen
werden können, während sie auf den Server übertragen werden.
Da es nicht auszuschließen ist, dass das Gerät während des Einbaues bzw. im Einsatz mit
Flüssigkeiten in Berührung kommt, sollen das Gehäuse und die Steckverbindungen min-
destens der Schutzklasse IP55 (Ingress Protection) genügen.

Diplomarbeit
Seite 12
Komponentenauswahl 2.2
Als nächster Schritt mussten die Hauptkomponenten gewählt werden, mit welchen die An-
forderungen erfüllt werden.
Bei dem GPS-Empfänger für die Positionsbestimmung fiel die Wahl auf eine kompakte
Platine der Firma NovAtel [NET1] aus Kanada. Es handelt sich dabei um einen Empfänger
mit der Bezeichnung OEMV-1, sie ist für das Amerikanische GPS - System [WIKI3] (of-
fiziell NAVSTAR GPS) ausgelegt. Mit diesem Produkt ist es möglich, die Position im
Submeterbereich und 20mal pro Sekunde zu erfassen. Dies wird durch einen speziellen
Betriebsmodus erreicht, welcher in Kapitel 3.1 beschrieben wird. Als weiterer Pluspunkt
sei zu erwähnen, dass dieser Empfänger ein Modell aus einer Produktgruppe ist, welche
alle die gleiche Baugröße und Steckerposition haben. Hiermit wird ein Austausch gegen
andere oder zukünftige Versionen erleichtert und man kann die Positionsbestimmung im-
mer aktuell halten (Stichwort GALILEO-Navigationssystem [WIKI4]).
Für die Erfassung der Motordaten wurde der CAN-Bus [3,4] gewählt. CAN steht für „Con-
troller Area Network“ und ist ein Zweidrahtinterface für die serielle Datenübertragung mit
einem sehr hohen Grad an Sicherheit. Entwickelt hat dieses BUS-System die Firma Bosch.
Durch die ISO (International Standardisation Organisation) wurde dieses Interface stan-
dardisiert (ISO 11898 [15,16,17]). Fast alle Automobilhersteller verwenden dieses System
für die Verbindung von Steuergeräten, Sensoren und Aktoren innerhalb ihres Fahrzeuges.
Mit der Einführung der On-Board-Diagnose (OBD) und deren Vorschreibung in Europa
(EOBD) für zugelassene Fahrzeuge steht ein einheitliches Steckersystem zur Verfügung,
an welchem ein CAN-Interface zugänglich ist. Damit können eine Vielzahl an Informatio-
nen während des Betriebs des Autos ermittelt werden. In Rennautos wird der CAN-Bus
ebenfalls verwendet, es gibt jedoch meist keinen einheitlichen Zugang zum Bus, sodass
eventuell ein Eingriff in den Kabelbaum des Fahrzeuges notwendig ist.
Nachdem die Komponenten für die Bestimmung der Position und der Motordaten ausge-
wählt wurden, musste eine Möglichkeit für die Übertragung der Daten gefunden werden.
Da die Informationen direkt an einen Server gesendet werden sollen kam nur ein WWAN -
Modul infrage. Mit WWAN werden Funknetzwerke für die Übertragung von Daten über
weite Strecken bezeichnet. Zu dieser Kategorie zählen z. B. Mobilfunknetze (GPRS,
UMTS) oder Satellitenverbindungen. Die Wahl eines Modules für das Mobilfunknetz er-
schien logisch, da GPRS- bzw. UMTS-Netze in sehr vielen Ländern zur Verfügung stehen
und der Anwender lediglich eine gültige SIM-Karte braucht, um die Datenübertragung zu
ermöglichen. Das Modell UC864-E der Firma Telit [NET2] erschien passend, da es fast
alle Übertragungsstandards (GSM, GPRS, EDGE, UMTS und HSDPA) unterstützt. Für die

Diplomarbeit
Seite 13
Anbindung an das restliche System steht eine serielle Schnittstelle zur Verfügung, weiters
hat es einen TCP/IP-Stack integriert, was den Aufbau der Kommunikation zum Server
erleichtert. Ähnlich dem GPS-Empfänger hat dieses Modem einen definierten Formfaktor,
was ein Austauschen gegen andere Modelle der Fa. Telit erleichtert.
Gesteuert wird das gesamte System von einem Mikrocontroller der Firma NXP. Dieser
Controller (LPC2387 [5,6]) basiert auf einem ARM7-Kern und zeichnet sich durch eine
reichhaltige Anzahl von Schnittstellen und Speicher aus. Mit einer Taktfrequenz von
72MHz ist die Rechengeschwindigkeit mehr als ausreichend für die Realisierung des Sys-
tems.
Alle Komponenten werden in ein ALUBOS-Gehäuse der Firma ROSE+BOPLA eingebaut
und mit Steckverbindungen der Serie 712-M9 von Binder versehen. Die Stecker und das
Gehäuse erfüllen bei sachgerechtem Einbau mindestens die Schutzklasse IP65.
Diplomarbeit
Seite 14
Kapitel 3
Grundlagen
In diesem Kapitel werden die Grundlagen zu den wichtigsten Komponenten des Systems,
deren Eigenschaften und spezielle Betriebsmodi beschrieben.
GPS-Empfänger 3.1
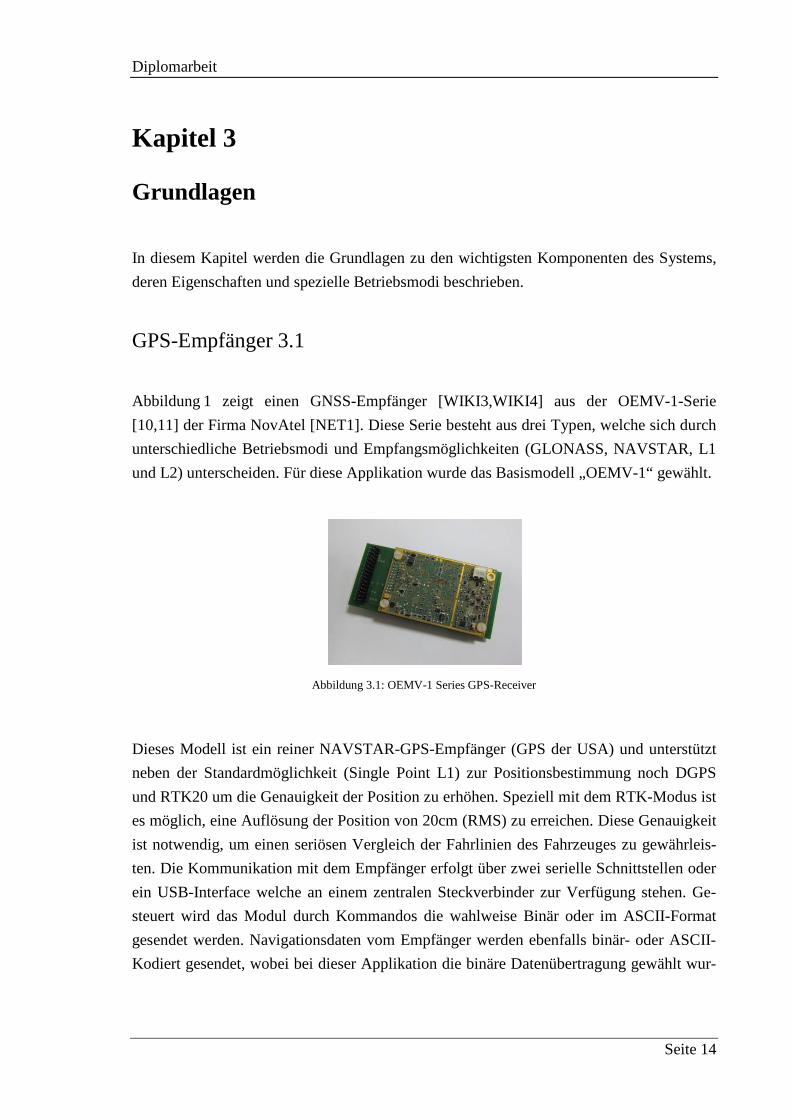
Abbildung 1 zeigt einen GNSS-Empfänger [WIKI3,WIKI4] aus der OEMV-1-Serie
[10,11] der Firma NovAtel [NET1]. Diese Serie besteht aus drei Typen, welche sich durch
unterschiedliche Betriebsmodi und Empfangsmöglichkeiten (GLONASS, NAVSTAR, L1
und L2) unterscheiden. Für diese Applikation wurde das Basismodell „OEMV-1“ gewählt.
Abbildung 3.1: OEMV-1 Series GPS-Receiver
Dieses Modell ist ein reiner NAVSTAR-GPS-Empfänger (GPS der USA) und unterstützt
neben der Standardmöglichkeit (Single Point L1) zur Positionsbestimmung noch DGPS
und RTK20 um die Genauigkeit der Position zu erhöhen. Speziell mit dem RTK-Modus ist
es möglich, eine Auflösung der Position von 20cm (RMS) zu erreichen. Diese Genauigkeit
ist notwendig, um einen seriösen Vergleich der Fahrlinien des Fahrzeuges zu gewährleis-
ten. Die Kommunikation mit dem Empfänger erfolgt über zwei serielle Schnittstellen oder
ein USB-Interface welche an einem zentralen Steckverbinder zur Verfügung stehen. Ge-
steuert wird das Modul durch Kommandos die wahlweise Binär oder im ASCII-Format
gesendet werden. Navigationsdaten vom Empfänger werden ebenfalls binär- oder ASCII-
Kodiert gesendet, wobei bei dieser Applikation die binäre Datenübertragung gewählt wur-

Diplomarbeit
Seite 15
de. Diese ist kompakter und es ist keine weitere Konvertierung, in ein für den Controller
verständlicheres Format, notwendig. Eine Trennung zwischen Datenkanal und Steuerkanal
ist durch die zwei Schnittstellen besonders elegant, sodass eine Überwachung der Emp-
fangsqualität währen der Datenverarbeitung möglich ist.
Im Weiteren werden die drei Betriebsmodi kurz beschrieben, welche bei der Telemetrie
zum Einsatz kommen. In Tabelle 3.1 sind diese Modi und ihre Genauigkeiten aufgelistet.
Modus Genauigkeit (RMS)
Single Point L1 1.8m
SBAS 0.6m
CDGPS 0.6m
DGPS 0.45m
OmniSTAR VBS 0.7m
RTK20 0.2m
Tabelle 3.1: OEMV-1 Genauigkeiten [11]
Positionsbestimmung ohne Korrekturdaten (Single Point L1)
Dies ist die grundsätzliche Methode zur Ermittlung der Position auf der Erde. Durch Mes-
sung der Abstände zwischen den Satelliten und dem Empfänger und dem Wissen um die
absolute Lage der Satelliten innerhalb eines Koordinatensystem ist es dem Empfänger
möglich seine Position durch Berechnung des gemeinsamen Schnittpunktes der Kugelober-
flächen zu berechnen (Abbildung 3.2).

Diplomarbeit
Seite 16
Abbildung 3.2: Positionsbestimmung mit drei Satelliten
Der Abstand zwischen Satellit und Empfänger wird durch die Laufzeit des Signals gemes-
sen, die absolute Position der Satelliten ist in den Nutzdaten der ausgesendeten Information
enthalten.
Fehler in der Position entstehen durch Ungenauigkeiten in der Abstandsbestimmung, be-
dingt durch z.B. atmosphärische Effekte die die Laufzeit verändern oder durch Abwei-
chungen der Sollposition der Satelliten.
DGPS/RTK
Um die Genauigkeit der Positionsbestimmung zu erhöhen gibt es mehrere Möglichkeiten.
Zum einen können die Daten nach der Erfassung mittels Korrekturdaten verbessert werden
(Postprocessing), zum anderen können Echtzeitkorrekturdaten an den Empfänger gesendet
werden, um eine augenblickliche Erhöhung der Genauigkeit zu erzielen. Diese Echtzeitver-
fahren werden als DGPS (Differential GPS) und als RTK (Real-Time-Kinematic) be-
zeichnet. Dabei muss unter Umständen ein zusätzlicher Geräteaufwand betrieben werden.
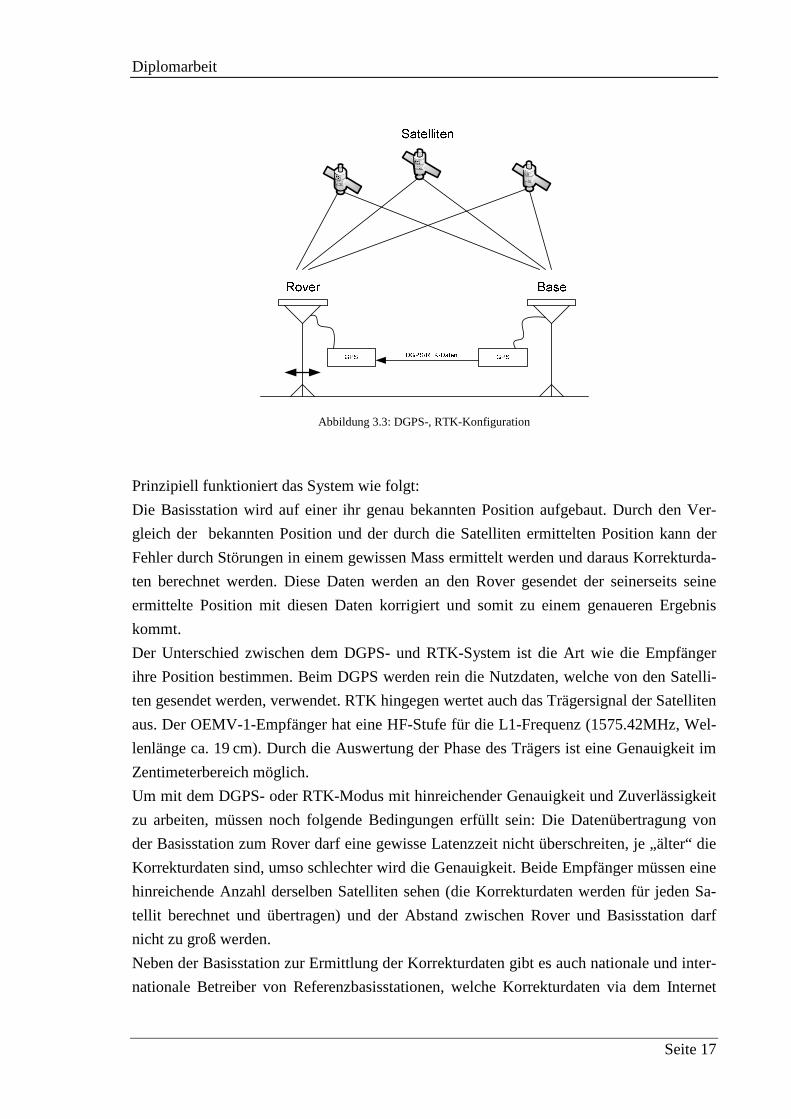
In Abbildung 3.3 ist ein prinzipieller DGPS-, RTK-Aufbau dargestellt. Das System besteht
jetzt aus zwei GPS-Empfängern: dem Rover, welcher dem Telemetriesystem entspricht
und sich bewegt und einer Basisstation. Eine Datenverbindung von der Basisstation um
Rover muss ebenfalls vorhanden sein, um die Korrekturdaten zu übertragen.
Diplomarbeit
Seite 17
Abbildung 3.3: DGPS-, RTK-Konfiguration
Prinzipiell funktioniert das System wie folgt:
Die Basisstation wird auf einer ihr genau bekannten Position aufgebaut. Durch den Ver-
gleich der bekannten Position und der durch die Satelliten ermittelten Position kann der
Fehler durch Störungen in einem gewissen Mass ermittelt werden und daraus Korrekturda-
ten berechnet werden. Diese Daten werden an den Rover gesendet der seinerseits seine
ermittelte Position mit diesen Daten korrigiert und somit zu einem genaueren Ergebnis
kommt.
Der Unterschied zwischen dem DGPS- und RTK-System ist die Art wie die Empfänger
ihre Position bestimmen. Beim DGPS werden rein die Nutzdaten, welche von den Satelli-
ten gesendet werden, verwendet. RTK hingegen wertet auch das Trägersignal der Satelliten
aus. Der OEMV-1-Empfänger hat eine HF-Stufe für die L1-Frequenz (1575.42MHz, Wel-
lenlänge ca. 19 cm). Durch die Auswertung der Phase des Trägers ist eine Genauigkeit im
Zentimeterbereich möglich.
Um mit dem DGPS- oder RTK-Modus mit hinreichender Genauigkeit und Zuverlässigkeit
zu arbeiten, müssen noch folgende Bedingungen erfüllt sein: Die Datenübertragung von
der Basisstation zum Rover darf eine gewisse Latenzzeit nicht überschreiten, je „älter“ die
Korrekturdaten sind, umso schlechter wird die Genauigkeit. Beide Empfänger müssen eine
hinreichende Anzahl derselben Satelliten sehen (die Korrekturdaten werden für jeden Sa-
tellit berechnet und übertragen) und der Abstand zwischen Rover und Basisstation darf
nicht zu groß werden.
Neben der Basisstation zur Ermittlung der Korrekturdaten gibt es auch nationale und inter-
nationale Betreiber von Referenzbasisstationen, welche Korrekturdaten via dem Internet

Diplomarbeit
Seite 18
oder Rundfunksender zur Verfügung stellen (Österreich APOS). Es gibt auch satellitenge-
stützte Systeme (SBAS, Satellite Based Augmentation System) die Korrekturdaten aussen-
den und somit zu einer Erhöhung der Genauigkeit führen.
CAN-Bus 3.2
Der CAN-Bus [3,4] wurde von der Firma Bosch entwickelt und im Jahr 1986 offiziell prä-
sentiert. Dieser Bus zählt zu den Feldbussen und wird in der Automobilbranche zur Ver-
netzung elektronischer Systeme innerhalb des Fahrzeuges verwendet. Von der ISO wurde
das Protokoll 1993 standardisiert und in der Norm ISO 11898 [15,16,17] festgehalten. Da-
bei wird zwischen zwei Varianten unterschieden: Den Highspeed-CAN mit einer maxima-
len Datenrate von 1 Mbit und einem Lowspeed-CAN mit maximal 125 kbit. Eingesetzt
wird der Highspeed-CAN-Bus meist im Motorbereich wie ABS, Airbag und Motorsteue-
rung. Der Lowspeed-CAN-Bus findet Verwendung im Komfortbereich, zur Steuerung von
Klimageräten, Zentralverriegelungen usw. Topologisch findet meist die Linienstruktur
Einsatz. In Abbildung 3.4 ist eine typische Konfiguration dargestellt.
Abbildung 3.4: Typische CAN-Bus Topologie
Wie aus dieser Abbildung ersichtlich handelt es sich um eine Multi-Master-Konfiguration.
Es können also mehrere Einheiten zur selben Zeit auf den Bus zugreifen. Um diesen Mehr-
fachzugriff zu verwalten und einen Verlust an Daten durch Kollision zu vermeiden wird
das CSMA/CA-Verfahren zur Arbitrierung (Zuteilung der Zugriffsberechtigung) des Bus-
ses verwendet. Die eigentliche Datenübertragung erfolgt in Datenrahmen.
Physikalisch gesehen ist es eine serielle Binärdatenübertragung auf einer verdrillten Zwei-
drahtleitung mit einem definierten Wellenwiderstand von 120 Ohm. Die Information wird
Diplomarbeit
Seite 19
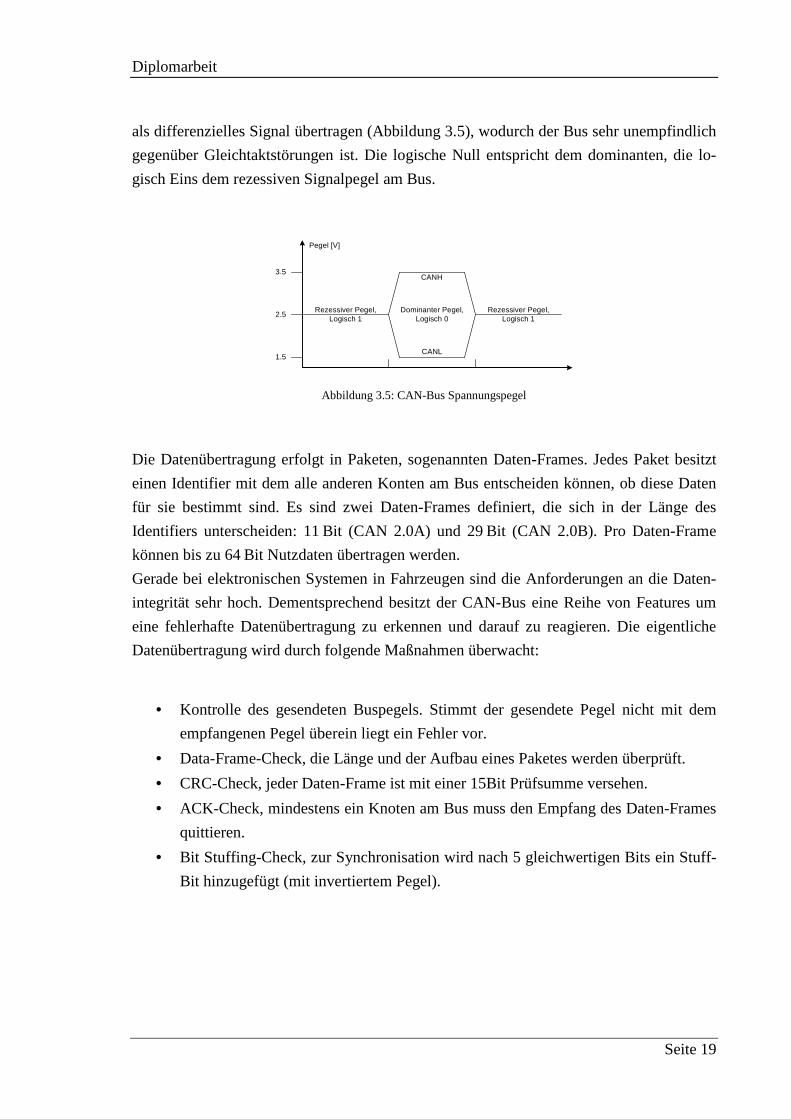
als differenzielles Signal übertragen (Abbildung 3.5), wodurch der Bus sehr unempfindlich
gegenüber Gleichtaktstörungen ist. Die logische Null entspricht dem dominanten, die lo-
gisch Eins dem rezessiven Signalpegel am Bus.
Pegel [V]
1.5
2.5
3.5
CANL
CANH
Rezessiver Pegel,Logisch 1
Dominanter Pegel,Logisch 0
Rezessiver Pegel,Logisch 1
Abbildung 3.5: CAN-Bus Spannungspegel
Die Datenübertragung erfolgt in Paketen, sogenannten Daten-Frames. Jedes Paket besitzt
einen Identifier mit dem alle anderen Konten am Bus entscheiden können, ob diese Daten
für sie bestimmt sind. Es sind zwei Daten-Frames definiert, die sich in der Länge des
Identifiers unterscheiden: 11 Bit (CAN 2.0A) und 29 Bit (CAN 2.0B). Pro Daten-Frame
können bis zu 64 Bit Nutzdaten übertragen werden.
Gerade bei elektronischen Systemen in Fahrzeugen sind die Anforderungen an die Daten-
integrität sehr hoch. Dementsprechend besitzt der CAN-Bus eine Reihe von Features um
eine fehlerhafte Datenübertragung zu erkennen und darauf zu reagieren. Die eigentliche
Datenübertragung wird durch folgende Maßnahmen überwacht:
• Kontrolle des gesendeten Buspegels. Stimmt der gesendete Pegel nicht mit dem
empfangenen Pegel überein liegt ein Fehler vor.
• Data-Frame-Check, die Länge und der Aufbau eines Paketes werden überprüft.
• CRC-Check, jeder Daten-Frame ist mit einer 15Bit Prüfsumme versehen.
• ACK-Check, mindestens ein Knoten am Bus muss den Empfang des Daten-Frames
quittieren.
• Bit Stuffing-Check, zur Synchronisation wird nach 5 gleichwertigen Bits ein Stuff-
Bit hinzugefügt (mit invertiertem Pegel).
Diplomarbeit
Seite 20
WWAN-Modul 3.3
Als WWAN-Modul wird das Modem UC864-E [7,8,9] der Firma Telit [NET2] verwendet.
Die Datenübertragung erfolgt über das Mobilfunknetz [1,2], wodurch ein flexibler Einsatz
gewährleistet ist. Das Modem beinhaltet alle Komponenten die für eine Kommunikation
mit einem Server im Internet benötigt werden. So ist ein kompletter TCP/IP-Stack inte-
griert der die Protokolle TCP, UDP, SMTP (Email) und FTP beherrscht. Elektrisch kann
über eine serielle Schnittstelle oder einen USB-Port mit dem Modem kommuniziert wer-
den.
Abbildung 3.6: UC864-E Modem der Firma Telit
Bei der Telemetrie wird über die serielle Schnittstelle kommuniziert. Gesteuert wird das
Modem mittels AT-Befehlen (ursprünglich von der Firma Hayes Communications entwi-
ckelt). Dies sind einfache ASCII-Kommandos. Durch die „Enhanced Easy GPRS Extensi-
on AT Commands“ (Telit spezifische Kommandos) werden ein Verbindungsaufbau und
eine Kommunikation mit dem Server via TCP besonders unterstützt. Nachdem man die
Verbindung konfiguriert hat (APN, Username, Password, IP und Port) öffnet man die Ver-
bindung und kann Daten ohne weitere Befehle an den Server senden oder empfangen. Das
Modem erscheint dem Controller gegenüber transparent und die Kommunikation mit dem
Server beschränkt sich auf das Schreiben und Lesen von der Schnittstelle.
Das UC864-E beherrscht unter anderem die in Tabelle 3.2 angegebenen Mobilfunkstan-
dards für die Datenübertragung im Europäischen Raum. Die Übertragungsraten sind die
maximal zu erreichenden Werte. In der Praxis hängt der tatsächliche Wert stark von der
Netzqualität und der Auslastung des Netzes ab.

Diplomarbeit
Seite 21
Standard Datenrate (Upload/Download) Frequenz
HSDPA 384 kbps / 7.2 Mbps 2100 MHz
UMTS/WCDMA 384 kbps / 384 kbps 2100 MHz
EDGE 236.8 kbps / 236.8 kbps 850/9001800/1900 MHz
GPRS 85.6 kbps / 85.6 kbps 850/9001800/1900 MHz
Tabelle 3.2: UC864-E Datenraten und Frequenzen
GSM
Die Datenübertragung im GSM-Netz erfolgt als Kombination aus Zeit- und Frequenz-
multiplexing (TDMA, FDMA). Für den Uplink und den Downlink gibt es zwei getrennte
Frequenzbänder. Dabei wird die Frequenzachse des jeweiligen Bandes in 200 kHz Kanäle
unterteilt und in jedem dieser Kanäle werden acht Subkanäle (GSM-Zeitschlitze) zeitver-
setzt übertragen. Als Modulationsverfahren wird das GMSK-Verfahren eingesetzt.
GPRS - General Packet Radio Service
GPRS baut auf GSM auf. Dabei werden mehrere GSM-Zeitschlitze gebündelt, um einen
höheren Datendurchsatz zu erzielen.
EDGE - Enhanced Data Rates for GSM Evolution
Bei EDGE wird statt der GSMK-Modulation das 8-PSK-Verfahren eingesetzt. Dadurch
wird eine Erhöhung der Datenübertragungsrate pro Zeitschlitz erreicht (3 Bit/Symbol an-
statt 1 Bit/Symbol).
UMTS – Universal Mobile Telecommunication System
Die Datenübertragung bei UMTS basiert auf CDMA, einem Codespreizverfahren bei dem
das Nutzsignal über die volle zur Verfügung stehende Bandbreite (5 MHz) eines Kanales
verteilt wird. Dieses Frequenzfenster wird dabei von mehreren Einheiten gleichzeitig ver-
wendet. Moduliert wird das Signal mittels QPSK. Beim WCDMA wird der Uplink (UL)
und Downlink (DL) auf zwei verschiedene Frequenzbänder aufgeteilt (FDD, Frequency
Division Duplex). Zusätzlich erfolgt die Datenübertragung in Rahmen von 10 ms Länge.
Diplomarbeit
Seite 22
HSDPA – High Speed Downlink Packet Access
Bei HSDPA handelt es sich um eine technische Weiterentwicklung von UMTS, die sich
aber nur auf den Downlink bezieht. So wurde die Paketverwaltung optimiert. Weiters wer-
den mehrere und neue Kanäle zur Datenübertragung verwendet und durch ein zusätzliches
Modulationsverfahren (16 QAM) können 4 Bits/Symbol statt 2 Bit/Symbol übertragen
werden.
Spannungsversorgung:
Spannungsversorgung: 3.4 Volt bis 4.2 Volt, Nominal 3.8 Volt
Stromaufnahme: Off: < 26 uA
Idle (GSM): <3.3 mA
Idle (UMTS): <4.1 mA
WCDMA (Data): <680 mA
HSDPA (Data): <730 mA
GPRS (Class 12): <790 mA
Bei der Datenübertragung mittels GSM, GPRS und EDGE sei darauf hingewiesen, dass für
das Senden in Abständen von 4.615 ms ein Strom bis zu 2 Ampere benötigt wird. Die Län-
ge der Strompulse richtet sich nach der Anzahl der eingestellten GSM-Zeitschlitzen
(577 us/Slot). Dies ist beim Design der Spannungsversorgung für das Modem zu berück-
sichtigen.
Diplomarbeit
Seite 23
Kapitel 4
Entwicklung und Realisierung
Die Entwicklung und Realisierung beinhalten den Bau der Hardware und die Programmie-
rung der Firmware für den Controller. Neben diesen Hauptaufgaben musste noch je eine
Software für die Konfiguration der Einheit und für das einspielen einer neuen Firmware
geschrieben werden.
Hardware 4.1
Herzstück des Systems bildet der LPC2387 [5,6] Mikrocontroller der Firma NXP. Es han-
delt sich dabei um einen 32 Bit General Purpose Controller mit ARM7-Kern. Dieser Chip
bietet genügend Rechenleistung und Speicher für die Anwendung.
Eckdaten des Mikrocontrollers:
• ARM7TDMI-S Kern mit einer Taktfrequenz bis zu 72 MHz
• 512 kByte Flash und 96 kByte SRAM
• 4x UART, 1x SPI, 2x SSP, 3x I2C, 1xI2S
• Ethernet Interface
• USB Device/Host/OTG 2.0 Full-Speed Interface
• CAN-Controller mit zwei Kanälen
• SD/MMC Interface
• 10 Bit ADC/DAC
• 4x 32 Bit Timer, PWM Unit, Watchdog Timer, Real-Time-Clock
Die Interfaces des Controllers wurden, wie in Abbildung 4.1 dargestellt, mit der restlichen
Hardware verbunden. Drei Kanäle des ADC-Konverters sowie ein SSP-Interface
(Synchronous Serial Port) sind auf Stecker innerhalb des Gehäuses ausgeführt, um eine
Erweiterung zu ermöglichen. Der GPS-Empfänger wird mit den RX- und TX-Leitungen
der UART2 und UART3 verbunden, da er kein Hardware-Handshakingn unterstützt.
UART2 dient als Datenschnittstelle und UART3 wird für die Konfiguration verwendet.

Diplomarbeit
Seite 24
Das Modem und der Controller kommunizieren über die voll ausgeführte UART1. Durch
die Verwendung aller Signalleitungen zum Modem sind ein Hardware-Handshaking sowie
eine Abfrage des Verbindungszustandes zum Server ohne Softwarebefehle möglich. Ein
Upgrade der Firmware ist durch den im Controller integrierten Bootloader über UART0
möglich. Deshalb war es zweckmäßig, dieses Interface nach außen zu führen. Mit den
Speicherelementen und den Status-Leds wird mit der SSP0- bzw. dem I2C0-Interface
kommuniziert.
Abbildung 4.1: Blockschaltbild der Hardware
Um die gesamte Hardware in das gewählte Gehäuse einbauen zu können, mussten die
Komponenten aufgeteilt werden. Der GPS-Empfänger mit den Status-Leds sowie das Mo-
dem wurden je auf einer eigenen Platine untergebracht, die auf der Basisplatine aufgesteckt
werden. Durch diese konstruktive Maßnahme ist es in der Zukunft ebenfalls ein leichtes,
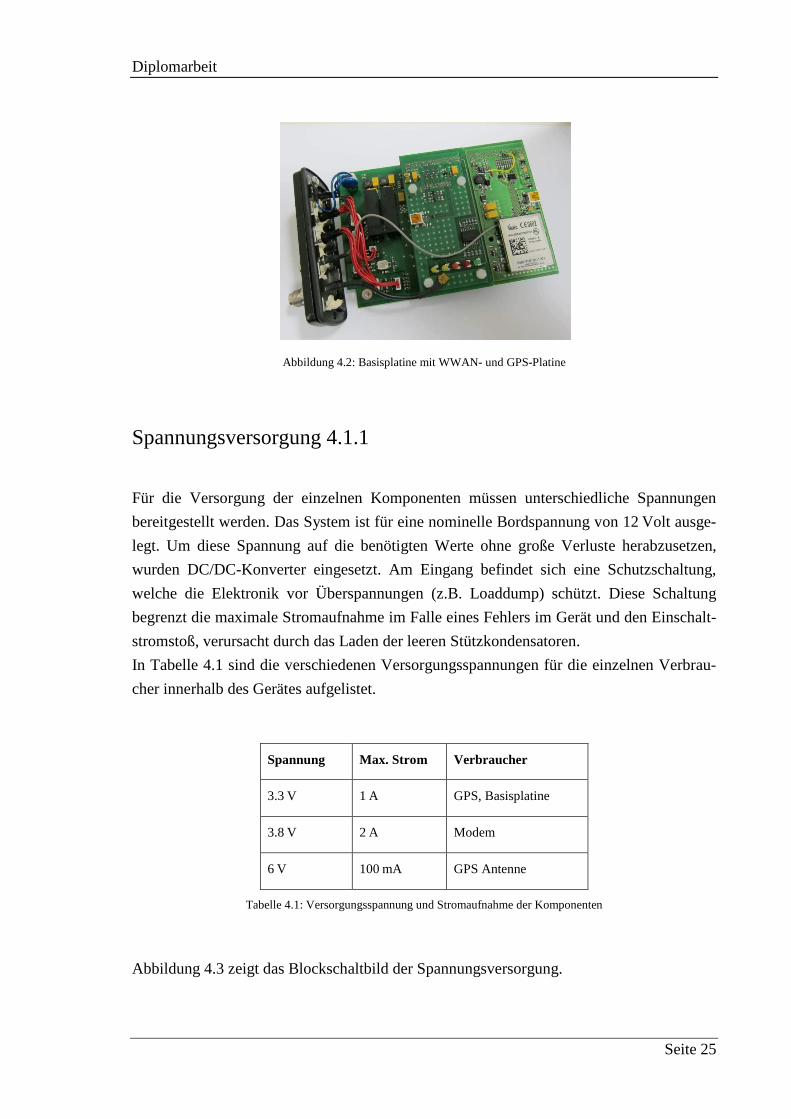
einen Wechsel von Modem oder GPS-Empfänger durchzuführen. Abbildung 4.2 zeigt die
Basisplatine mit aufgesteckter Modem- und GPS-Platine.
Diplomarbeit
Seite 25
Abbildung 4.2: Basisplatine mit WWAN- und GPS-Platine
Spannungsversorgung 4.1.1
Für die Versorgung der einzelnen Komponenten müssen unterschiedliche Spannungen
bereitgestellt werden. Das System ist für eine nominelle Bordspannung von 12 Volt ausge-
legt. Um diese Spannung auf die benötigten Werte ohne große Verluste herabzusetzen,
wurden DC/DC-Konverter eingesetzt. Am Eingang befindet sich eine Schutzschaltung,
welche die Elektronik vor Überspannungen (z.B. Loaddump) schützt. Diese Schaltung
begrenzt die maximale Stromaufnahme im Falle eines Fehlers im Gerät und den Einschalt-
stromstoß, verursacht durch das Laden der leeren Stützkondensatoren.
In Tabelle 4.1 sind die verschiedenen Versorgungsspannungen für die einzelnen Verbrau-
cher innerhalb des Gerätes aufgelistet.
Spannung Max. Strom Verbraucher
3.3 V 1 A GPS, Basisplatine
3.8 V 2 A Modem
6 V 100 mA GPS Antenne
Tabelle 4.1: Versorgungsspannung und Stromaufnahme der Komponenten
Abbildung 4.3 zeigt das Blockschaltbild der Spannungsversorgung.

Diplomarbeit
Seite 26
Abbildung 4.3: Konzept der Spannungsversorgung
Die DC/DC-Konverter 1 und 2 wurden mittels zweier Module der Firma RECOM reali-
siert, die eine kompakte Bauweise und einen hohen Wirkungsgrad aufweisen. Der DC/DC-
Konverter 3, welcher die Spannung für das Modem bereitstellt, wurde mittels des Bau-
steins LT1765 diskret realisiert. Durch die hohe Schaltfrequenz von 1,25 MHz reagiert der
Schaltregler sehr schnell auf die hohen Stromimpulse, die das Modem bei einer GSM- oder
GPRS-Datenübertragung benötigt.
Überspannungsschutz und Strombegrenzung 4.1.2
Abbildung 4.4: Schaltung für Überspannungsschutz und Strombegrenzung
Abbildung 4.4 zeigt die Schutzschaltung für die Spannungsversorgung. Am Eingang be-
findet sich ein Varistor (R22), welcher als Grobschutz fungiert. Dieser ist nominal für 12
Volt ausgelegt und begrenzt die Spannung auf maximal 43 Volt (@I=5 A). C3, C4 und L1
bilden einen Filter.
EN
AB
LE
+V_SYSTEM
+ C1330u/35V
+ C2330u/35V
C3100n/63V
C4100n/63V
C25100n/63V
C45
D1
MBRS360
D88V2
GND GND GND GNDGND GND GND GNDGND GNDGND GNDGND
#FLT7
#SHDN6
EN8
FB1
GA
TE
3
GN
D9
OU
T2
SN
S4
TM
R10
VC
C5
IC9LT4356HMS-1
L1
WE742792514
R12
0R02
R1610R
R1882k
R194k99
V R22S10K14
R584k7
R7710k
R7822k
T1IRLR3705Z
X11-1
POWER
X11-2X11-3X11-4
Diplomarbeit
Seite 27
Danach folgt mit LT4356 (IC9) [12] ein integrierter Schutzbaustein der Firma Linear
Technology, der die Spannung auf 20 Volt begrenzt und einen Überstromschutz bildet. Im
normalen Betriebszustand ist der N-Channel MOSFET (T1) vollständig leitend. Über-
schreitet die Spannung am Ausgang (+V_SYSTEM) einen Schwellwert, begrenzt der
Schutzbaustein diese durch Ansteuerung des Gates von T1. Gleichzeitig startet ein Timer.
Wenn nach Ablauf des Timers die Überspannung immer noch anliegt, wird der MOSFET
abgeschaltet um seine thermische Überlastung zu verhindern. Der Schwellwert der Span-
nung wird mit R18 und R19 eingestellt.
Mit R12 wird die Stromaufnahme gemessen. Überschreitet der Spannungsabfall an R12
50 mV, beginnt der Baustein ebenfalls durch Ansteuerung des Gates von T1 den Strom zu
begrenzen. Wie bei Überspannung wird auch bei Überstrom der Transistor T1 nach einer
gewissen Zeit abgeschaltet, wenn der Fehlerzustand nicht verlassen wird.
Die Telemetrie kann durch den Shutdown-Pin (Pin6, #SHDN) des LT4356 ein- oder aus-
geschaltet werden. Der Pin wird durch R77, R87 und D8 geschützt.
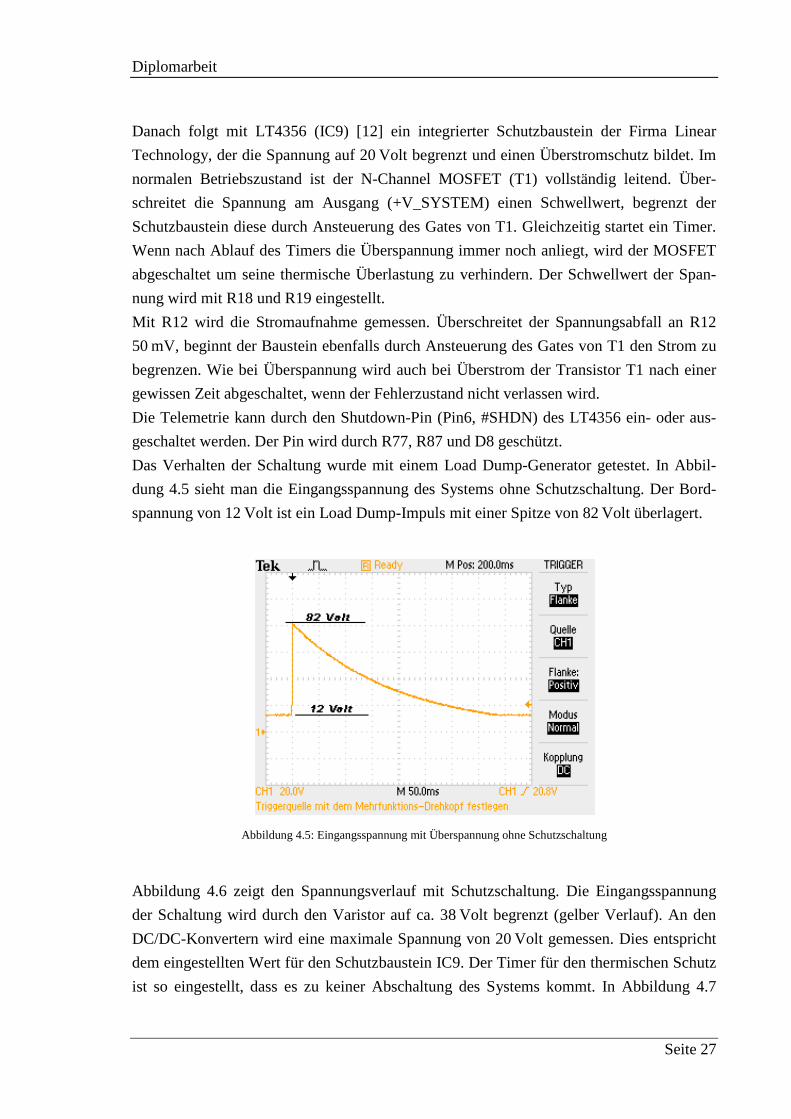
Das Verhalten der Schaltung wurde mit einem Load Dump-Generator getestet. In Abbil-
dung 4.5 sieht man die Eingangsspannung des Systems ohne Schutzschaltung. Der Bord-
spannung von 12 Volt ist ein Load Dump-Impuls mit einer Spitze von 82 Volt überlagert.
Abbildung 4.5: Eingangsspannung mit Überspannung ohne Schutzschaltung
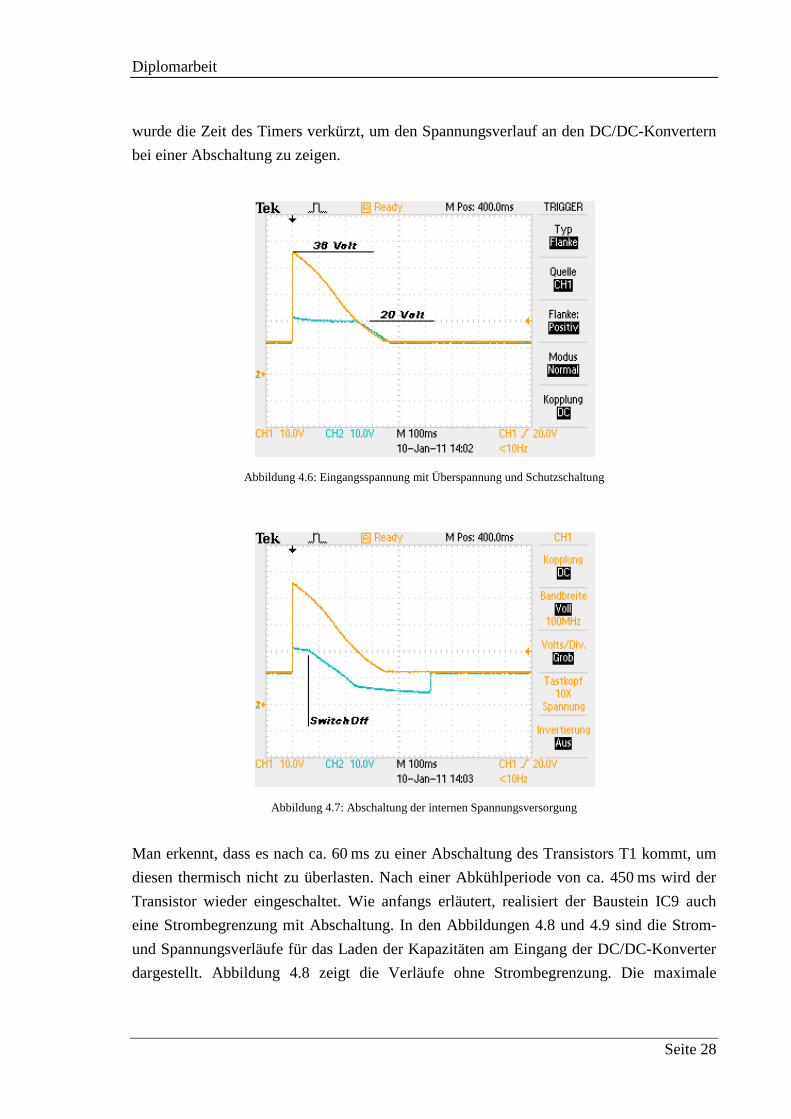
Abbildung 4.6 zeigt den Spannungsverlauf mit Schutzschaltung. Die Eingangsspannung
der Schaltung wird durch den Varistor auf ca. 38 Volt begrenzt (gelber Verlauf). An den
DC/DC-Konvertern wird eine maximale Spannung von 20 Volt gemessen. Dies entspricht
dem eingestellten Wert für den Schutzbaustein IC9. Der Timer für den thermischen Schutz
ist so eingestellt, dass es zu keiner Abschaltung des Systems kommt. In Abbildung 4.7
Diplomarbeit
Seite 28
wurde die Zeit des Timers verkürzt, um den Spannungsverlauf an den DC/DC-Konvertern
bei einer Abschaltung zu zeigen.
Abbildung 4.6: Eingangsspannung mit Überspannung und Schutzschaltung
Abbildung 4.7: Abschaltung der internen Spannungsversorgung
Man erkennt, dass es nach ca. 60 ms zu einer Abschaltung des Transistors T1 kommt, um
diesen thermisch nicht zu überlasten. Nach einer Abkühlperiode von ca. 450 ms wird der
Transistor wieder eingeschaltet. Wie anfangs erläutert, realisiert der Baustein IC9 auch
eine Strombegrenzung mit Abschaltung. In den Abbildungen 4.8 und 4.9 sind die Strom-
und Spannungsverläufe für das Laden der Kapazitäten am Eingang der DC/DC-Konverter
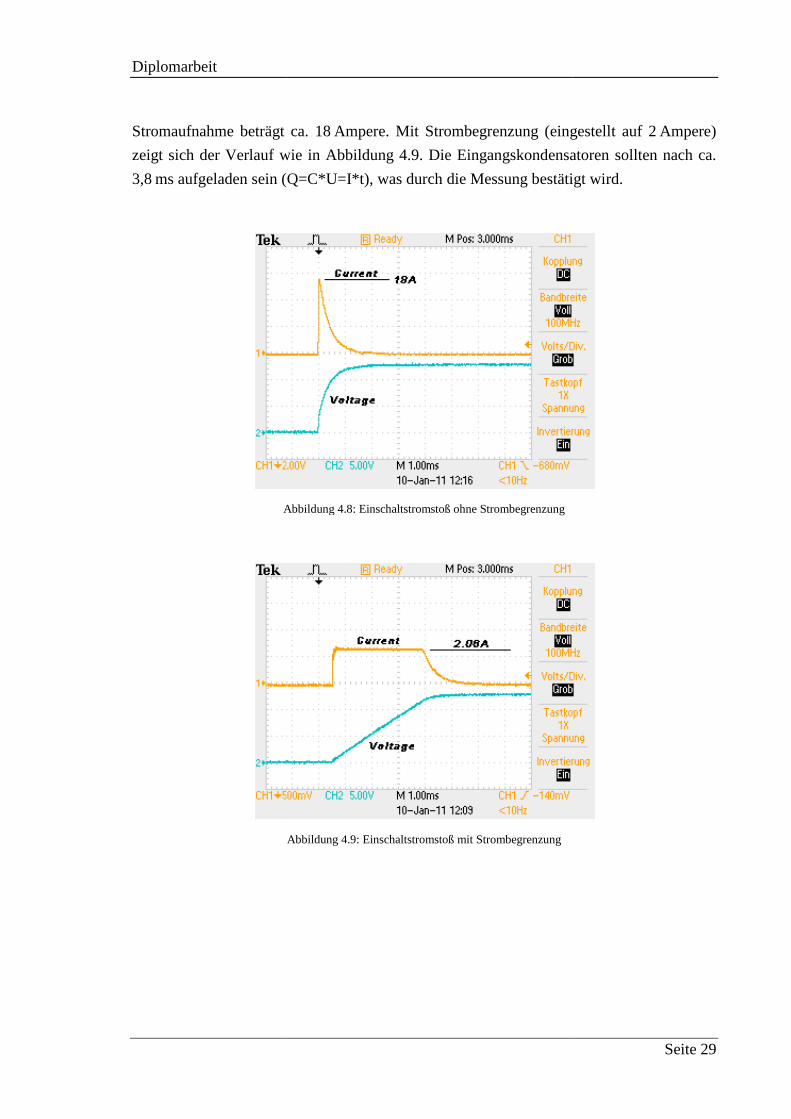
dargestellt. Abbildung 4.8 zeigt die Verläufe ohne Strombegrenzung. Die maximale
Diplomarbeit
Stromaufnahme beträgt ca. 18
zeigt sich der Verlauf wie in Abbildung
3,8 ms aufgeladen sein (Q=C*U=I*t)
Abbildung 4.8
Stromaufnahme beträgt ca. 18 Ampere. Mit Strombegrenzung (eingestellt auf 2
zeigt sich der Verlauf wie in Abbildung 4.9. Die Eingangskondensatoren sollten nach ca
ms aufgeladen sein (Q=C*U=I*t), was durch die Messung bestätigt
Abbildung 4.8: Einschaltstromstoß ohne Strombegrenzung
Abbildung 4.9: Einschaltstromstoß mit Strombegrenzung
Seite 29
(eingestellt auf 2 Ampere)
. Die Eingangskondensatoren sollten nach ca.
was durch die Messung bestätigt wird.
Diplomarbeit
Seite 30
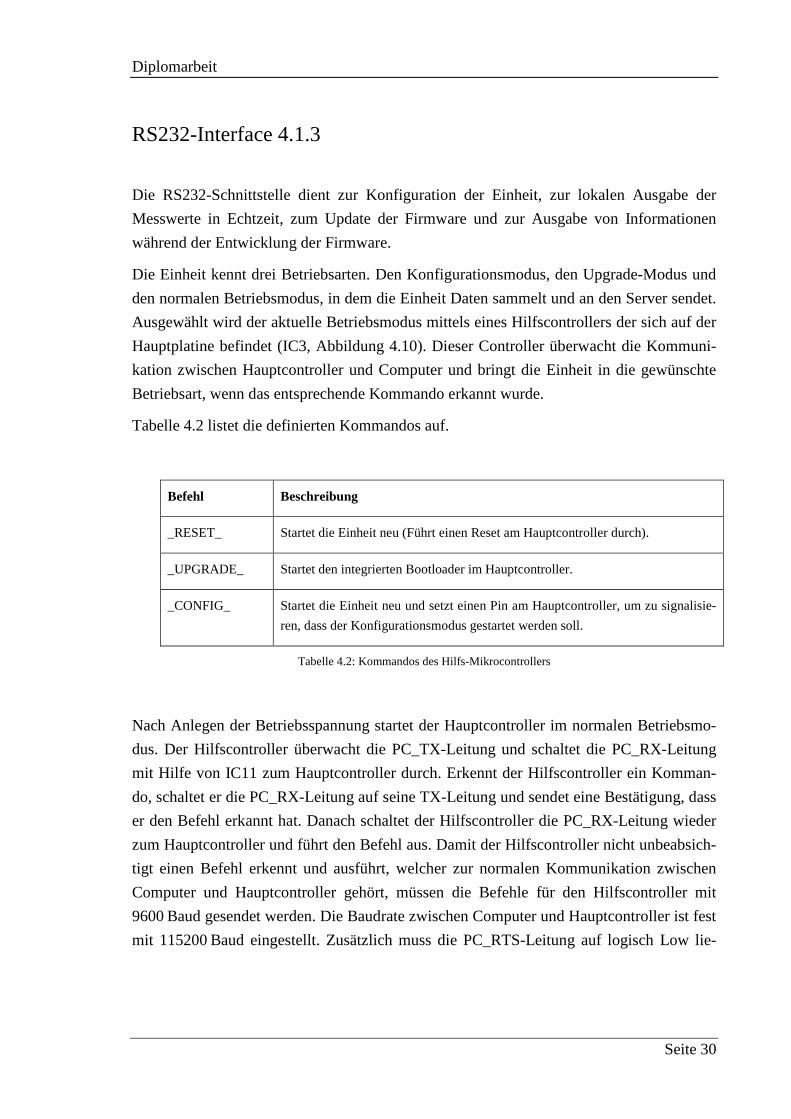
RS232-Interface 4.1.3
Die RS232-Schnittstelle dient zur Konfiguration der Einheit, zur lokalen Ausgabe der
Messwerte in Echtzeit, zum Update der Firmware und zur Ausgabe von Informationen
während der Entwicklung der Firmware.
Die Einheit kennt drei Betriebsarten. Den Konfigurationsmodus, den Upgrade-Modus und
den normalen Betriebsmodus, in dem die Einheit Daten sammelt und an den Server sendet.
Ausgewählt wird der aktuelle Betriebsmodus mittels eines Hilfscontrollers der sich auf der
Hauptplatine befindet (IC3, Abbildung 4.10). Dieser Controller überwacht die Kommuni-
kation zwischen Hauptcontroller und Computer und bringt die Einheit in die gewünschte
Betriebsart, wenn das entsprechende Kommando erkannt wurde.
Tabelle 4.2 listet die definierten Kommandos auf.
Befehl Beschreibung
_RESET_ Startet die Einheit neu (Führt einen Reset am Hauptcontroller durch).
_UPGRADE_ Startet den integrierten Bootloader im Hauptcontroller.
_CONFIG_ Startet die Einheit neu und setzt einen Pin am Hauptcontroller, um zu signalisie-
ren, dass der Konfigurationsmodus gestartet werden soll.
Tabelle 4.2: Kommandos des Hilfs-Mikrocontrollers
Nach Anlegen der Betriebsspannung startet der Hauptcontroller im normalen Betriebsmo-
dus. Der Hilfscontroller überwacht die PC_TX-Leitung und schaltet die PC_RX-Leitung
mit Hilfe von IC11 zum Hauptcontroller durch. Erkennt der Hilfscontroller ein Komman-
do, schaltet er die PC_RX-Leitung auf seine TX-Leitung und sendet eine Bestätigung, dass
er den Befehl erkannt hat. Danach schaltet der Hilfscontroller die PC_RX-Leitung wieder
zum Hauptcontroller und führt den Befehl aus. Damit der Hilfscontroller nicht unbeabsich-
tigt einen Befehl erkennt und ausführt, welcher zur normalen Kommunikation zwischen
Computer und Hauptcontroller gehört, müssen die Befehle für den Hilfscontroller mit
9600 Baud gesendet werden. Die Baudrate zwischen Computer und Hauptcontroller ist fest
mit 115200 Baud eingestellt. Zusätzlich muss die PC_RTS-Leitung auf logisch Low lie-
Diplomarbeit
Seite 31
gen, damit der Hilfscontroller den Befehl akzeptiert.
Abbildung 4.10: Schaltung des RS232-Interfaces
Elektrisch wird eine serielle Schnittstelle nach EIA232-Standard zur Verfügung gestellt.
Dies erfolgt mit den Schnittstellenwandler SN753232, der die TTL-Pegel in die entspre-
chenden Spannungspegel umsetzt.
CONFIGGP
ISPPC_RXDPC_TXD
RESET
+3V3
+3V3
+3V3 +3V3 +3V3
+3V3
+3V3
C34
100n
+ C37
10u
C38
100n
C48
100n
C641u
C651u
C661u
C671u
C68100n
GND
GND
GND
GND
GN
D
(AIN0/PCI0)PB012(AIN1/PCI1)PB113
(CKOUT/XCK/INT0)PD26
(ICP)PD611
(INT1)PD37
(MISO/DO/PCI6)PB618
(MOSI/DI/SDA/PCI5)PB517
(OC0A/PCI2)PB214
(OC0B/T1)PD59
(OC1A/PCI3)PB315(OC1B/PCI4)PB416
(RXD)PD02
(SCK/UCSK/PCI7)PB719
(T0)PD48
(TXD)PD13
GND10
RESET/DW/PA21
VCC20
XTAL1(PA0)5
XTAL2(PA1)4
IC3ATTINY2313V-10S
C1+ 1
C1- 3
C2+ 4
C2- 5GND
15
R1IN13 R1OUT 12
R2IN8 R2OUT 9
T1IN 11T1OUT
14
T2IN 10T2OUT
7
V+2
V-6
VCC16
IC10SN75C3232EDR
TTLRS232
A3
B1
C6
GND2
VCC5
Y4
IC11SN74AUP1G97_TSOP-6
/RESET2
GND 1
VCC 3
IC15MAX809
SGNDSGNDSGNDSGNDSGND
Q8BSS138
R533
VR6
V14
MLA
0805
R31
330
R6310k
R64 220R65 220
R69 220R70 220R71 220R72 220
R8010k
R8110k
R82 220R83 220
R84
100k
R852k2
R86 220R87 220
VR111
V14
MLA
0805
VR112
V14
MLA
0805
VR113
V14
MLA
0805
R11933R12033R12133
X5-1MO
LEX
-LP
-5-0
X5-2
X5-3
X5-4
X5-5
X12-1
MO
LEX
-LP
-3-0
X12-2X12-3
PC_RXPC_CTS
PC_TXPC_RTS
Diplomarbeit
Seite 32
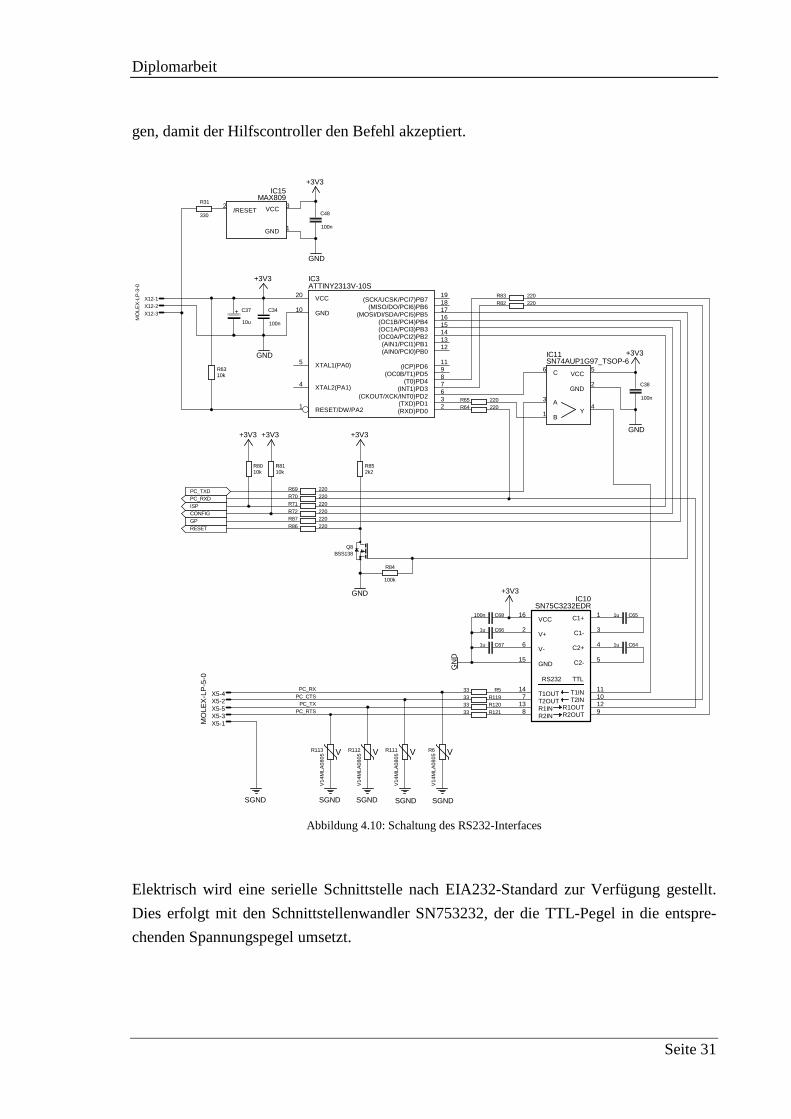
CAN-Interface 4.1.4
Da der Mikroprozessor bereits über einen eingebauten CAN-Controller verfügt, besteht die
Schaltung für das CAN-Interface lediglich aus einem CAN-Treiber mit entsprechender
Beschaltung.
Abbildung 4.11: Schaltung des CAN-Interfaces
Am Eingang befinden sich zwei Varistoren (R44, R45), welche die Schaltung vor Über-
spannungen schützen. R59, R60 und C51 bilden eine Split- Terminierung für Stub-Nodes.
Durch die Split-Terminierung wird eine bessere Störfestigkeit erzielt. Wird die Einheit an
den Anfang oder das Ende des CAN-Busses angeschlossen, kann mit Jumper 2 ein
130 Ohm Widerstand hinzu geschaltet werden, wodurch sich ein Abschlusswiderstand von
122 Ohm ergibt. Die Gleichtaktdrossel L3 dient zur Unterdrückung von Gleichtaktstörun-
gen. In Verbindung mit den Kondensatoren an der Drossel entstehen LC-Filter zur weite-
ren Unterdrückung von HF-Störungen.
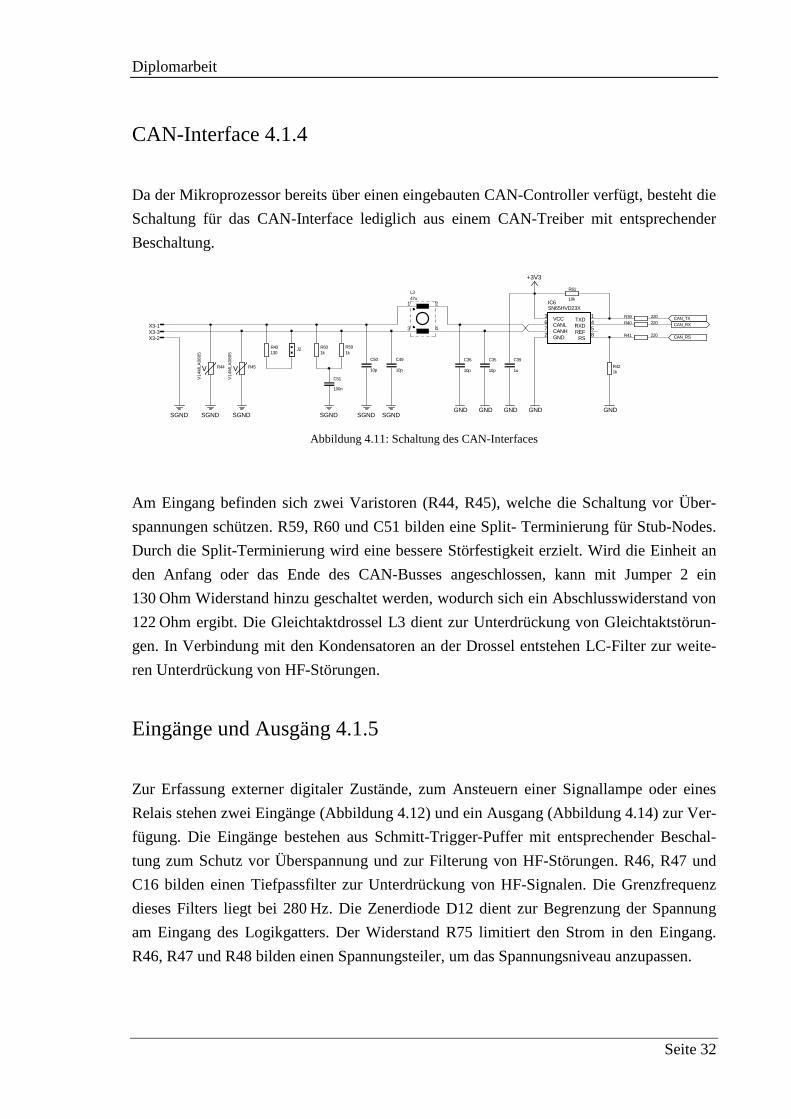
Eingänge und Ausgäng 4.1.5
Zur Erfassung externer digitaler Zustände, zum Ansteuern einer Signallampe oder eines
Relais stehen zwei Eingänge (Abbildung 4.12) und ein Ausgang (Abbildung 4.14) zur Ver-
fügung. Die Eingänge bestehen aus Schmitt-Trigger-Puffer mit entsprechender Beschal-
tung zum Schutz vor Überspannung und zur Filterung von HF-Störungen. R46, R47 und
C16 bilden einen Tiefpassfilter zur Unterdrückung von HF-Signalen. Die Grenzfrequenz
dieses Filters liegt bei 280 Hz. Die Zenerdiode D12 dient zur Begrenzung der Spannung
am Eingang des Logikgatters. Der Widerstand R75 limitiert den Strom in den Eingang.
R46, R47 und R48 bilden einen Spannungsteiler, um das Spannungsniveau anzupassen.
CAN_RS
CAN_RXCAN_TX
+3V3
C35
10p
C36
10p
C39
1u
C49
10p
C50
10p
C51
100n
GNDGNDGND GND GND
CANH7CANL6
GND2 REF5
RS8
RXD4TXD1VCC3
IC6SN65HVD23X
J2
1 2
3 4
L347u
SGNDSGNDSGND SGNDSGND SGND
R39 220R40 220
R41 220
R421k
R43130
V R44
V14
MLA
0805
V R45
V14
MLA
0805
R591k
R601k
R61
10k
X3-1
X3-2X3-3
Diplomarbeit
Seite 33
Abbildung 4.12: Schaltung einer Eingangsstufe
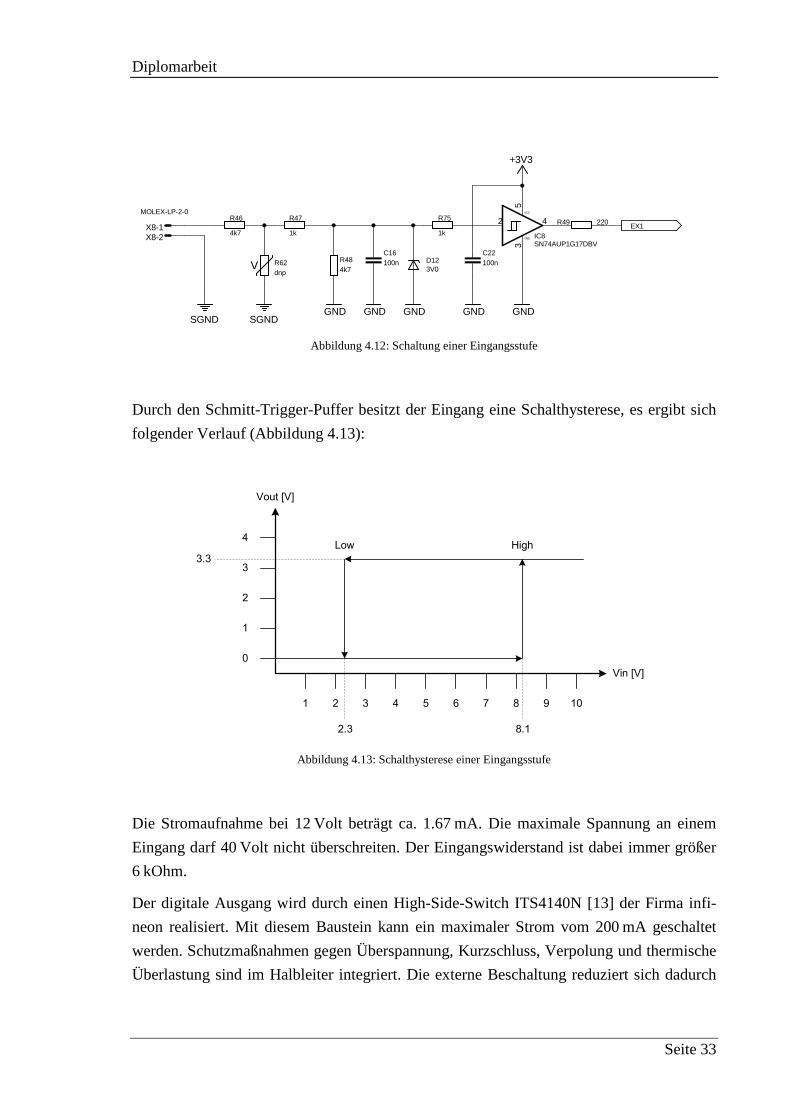
Durch den Schmitt-Trigger-Puffer besitzt der Eingang eine Schalthysterese, es ergibt sich
folgender Verlauf (Abbildung 4.13):
Vout [V]
1
2
3
Vin [V]
4
1 2 3 4 5 6 7 8 9 10
0
3.3
8.12.3
Low High
Abbildung 4.13: Schalthysterese einer Eingangsstufe
Die Stromaufnahme bei 12 Volt beträgt ca. 1.67 mA. Die maximale Spannung an einem
Eingang darf 40 Volt nicht überschreiten. Der Eingangswiderstand ist dabei immer größer
6 kOhm.
Der digitale Ausgang wird durch einen High-Side-Switch ITS4140N [13] der Firma infi-
neon realisiert. Mit diesem Baustein kann ein maximaler Strom vom 200 mA geschaltet
werden. Schutzmaßnahmen gegen Überspannung, Kurzschluss, Verpolung und thermische
Überlastung sind im Halbleiter integriert. Die externe Beschaltung reduziert sich dadurch
EX1
+3V3
C16100n
C22100nD12
3V0
GNDGNDGND GND GND
3
2 4
5
VCC
GND IC8SN74AUP1G17DBV
SGND SGND
R46
4k7
R47
1k
R484k7
R49 220
V R62dnp
R75
1kX8-1
MOLEX-LP-2-0
X8-2
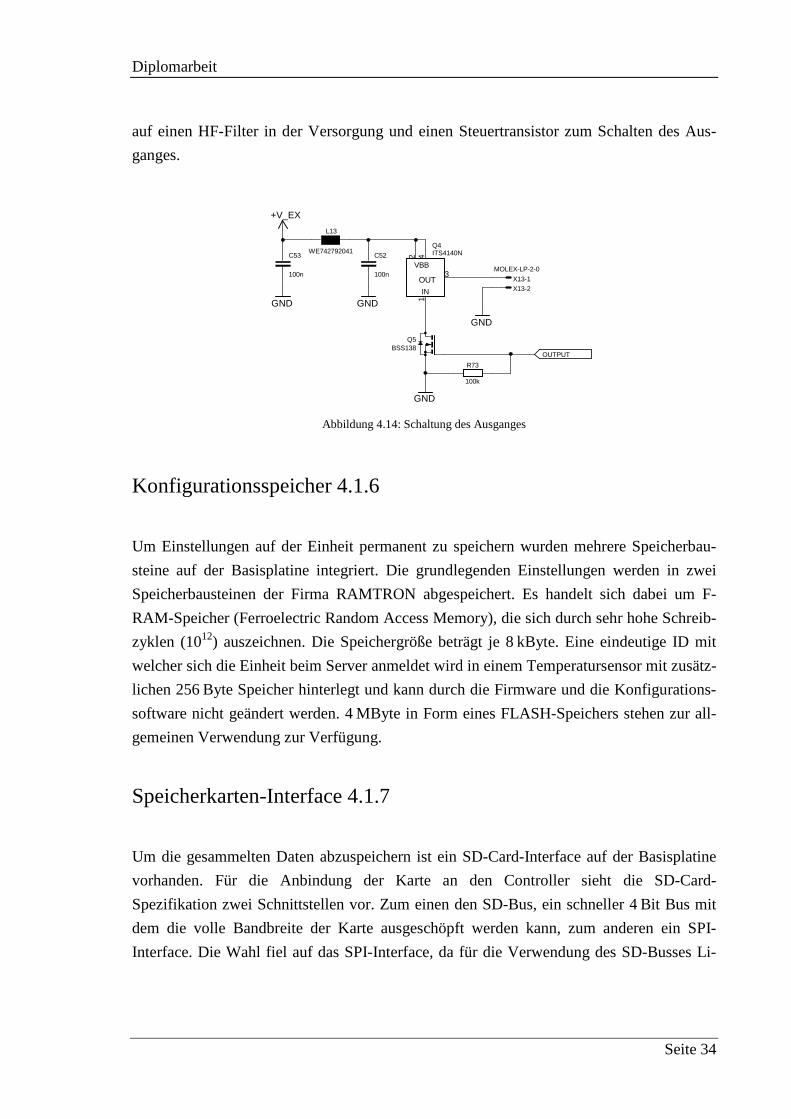
Diplomarbeit
Seite 34
auf einen HF-Filter in der Versorgung und einen Steuertransistor zum Schalten des Aus-
ganges.
Abbildung 4.14: Schaltung des Ausganges
Konfigurationsspeicher 4.1.6
Um Einstellungen auf der Einheit permanent zu speichern wurden mehrere Speicherbau-
steine auf der Basisplatine integriert. Die grundlegenden Einstellungen werden in zwei
Speicherbausteinen der Firma RAMTRON abgespeichert. Es handelt sich dabei um F-
RAM-Speicher (Ferroelectric Random Access Memory), die sich durch sehr hohe Schreib-
zyklen (1012) auszeichnen. Die Speichergröße beträgt je 8 kByte. Eine eindeutige ID mit
welcher sich die Einheit beim Server anmeldet wird in einem Temperatursensor mit zusätz-
lichen 256 Byte Speicher hinterlegt und kann durch die Firmware und die Konfigurations-
software nicht geändert werden. 4 MByte in Form eines FLASH-Speichers stehen zur all-
gemeinen Verwendung zur Verfügung.
Speicherkarten-Interface 4.1.7
Um die gesammelten Daten abzuspeichern ist ein SD-Card-Interface auf der Basisplatine
vorhanden. Für die Anbindung der Karte an den Controller sieht die SD-Card-
Spezifikation zwei Schnittstellen vor. Zum einen den SD-Bus, ein schneller 4 Bit Bus mit
dem die volle Bandbreite der Karte ausgeschöpft werden kann, zum anderen ein SPI-
Interface. Die Wahl fiel auf das SPI-Interface, da für die Verwendung des SD-Busses Li-
OUTPUT
+V_EX
C52
100n
C53
100n
GND
GND
GNDGND
L13
WE742792041
1
OUT3
2 4
VBB
IN
Q4ITS4140N
Q5BSS138
R73
100k
X13-1
MOLEX-LP-2-0
X13-2

Diplomarbeit
Seite 35
zenzgebühren zu zahlen sind. Unterstützt werden von der Firmware SD- und SDHC-
Karten.
Abbildung 4.15: Schaltung für die Speicherkarte
Die Hardwareausführung (Abbildung 4.15) sieht ESD-Schutzvaristoren (R33, R93-R96
und R98) an allen Leitungen zum SD-Kartensockel vor. Damit die Karte bei eingeschalte-
tem System gewechselt werden kann ist der Taster S2 vorgesehen. Durch Betätigung des
Tasters wird veranlasst, dass die Firmware die Datenaufzeichnung auf der Karte beendet
und die Spannungsversorgung abschaltet. Die Karte benötigt eine Spannungsversorgung
im Bereich von 2,7 Volt bis 3,6 Volt. Das Schalten der Versorgungsspannung erfolgt mit
Q1 und Q6. Nach Q6 folgt mit L4 und C30 bis C32 ein Filter. C32 dient zusätzlich als
Stützkondensator, da die Stromaufnahme mitunter bis zu 200 mA betragen kann. D2 dient
zur Betriebsanzeige der Versorgungsspannung. Diese Anzeige wurde für die
Firmwareentwicklung benötigt und ist von außen nicht sichtbar. Sollte die Initialisierung
der Karte fehlschlagen, wird die Spannungsversorgung deaktiviert und wieder aktiviert.
Der Treiberbaustein 74ALVC125 (IC12) dient als Puffer zwischen Mikrocontroller und
Speicherkarte.
SD_CD
SD_CS
SD
_EJE
CT
SD
_PW
R
SPI_CLK
SPI_MISO
SPI_MOSI
+3V3+3V3
+3V3
+3V3
C26
100n
C27
100n
C30
100n
C31
100n
+ C32
100u
C43100n
D2green
GND
GND GND GNDGNDGND
GND
GNDGND
GNDGNDGND
1/OE1
1A21Y3
2/OE4
2A52Y6
3/OE10
3A93Y8
4/OE13
4A124Y11
714
VCC
GND
IC12
SN
74A
LVC
125
3
2 4
5
VCC
GND
IC13SN74AUP1G17DBV
L4
CD CD
CD/DAT3 1
CLK 5CMD 2
COM COM
DAT0 7
DAT1 8
DAT2 9
SHD M1
SHD M2
SHD M3
SHD M4
VDD 4
VSS 3
VSS 6
LOCK
San
Dis
k
M3KYOCERA_MINI_SHIELD
SGND
SGND
SGND SGND
SGND
Q1BSS138
Q6IRLML6402
R810k
R17
10k
R2820k
R291k
R30
100k
V
R33
V3.
5MLA
0805
R3422k
R35 220R36 220R37 220
R38 220
R55
220
R56 1k
R66800
R91
0
R9210kV
R93
V3.
5MLA
0805 V
R94
V3.
5MLA
0805 V
R95
V3.
5MLA
0805 V
R96
V3.
5MLA
0805
R97 220
V
R98
V3.
5MLA
0805
R10410k
12
SH
D3
SH
D4
S2
31-X
X_S
HIE
LD

Diplomarbeit
Seite 36
WWAN-Modul 4.1.8
Das Modem befindet sich auf einer eigenen Platine und wird auf die Hauptplatine aufge-
steckt. In Abbildung 4.16 sind die Schaltungen für die Spannungsversorgungen des Mo-
dems dargestellt. Zum Betrieb des Modems wird eine Betriebsspannung im Bereich von
3,4 bis 4,2 Volt benötigt. Diese wird durch den Abwärtswandler IC9 mit entsprechender
Beschaltung aus 6 Volt, kommend von der Hauptplatine, erzeugt. Nach dem Schaltregler
kommt ein Filter mit C29, C36 und L6. Die Kondensatoren C29 und C36 dienen zusätzlich
als Energiespeicher für die hohen Strompulse (bis zu 2 Ampere), die beim Senden im
GSM- oder GPRS-Netz benötigt werden.
Abbildung 4.16: Spannungsversorgung für das Modem
Das Interface der seriellen Schnittstelle des Modems ist in CMOS-Technik ausgeführt mit
einer nominellen Spannung von 2,6 Volt. Für die Anpassung an die Pegel des Controllers
(3,3 Volt) wird der Puffer IC2 (SN74LVC3G3) und IC1 (SN74LV07A) verwendet (Abbil-
dung 4.17 Mitte). IC2 liefert als High-Ausgangspegel die Versorgungsspannung von
+2V6+3V3
+3V7+V_EX
C5100n
C6100n
+ C710u
+ C2010u
C2322u
C24220n
C252n2
C26
22u
C27100n
C28100n
+ C29470u
+ C36470u
C39100n
C40100n
D7
TMMBAT46
D8
MB
RS
240
GND
GND GNDGNDGND GND GNDGND GNDGND GNDGND GNDGND GND
EN3FB
4
2
IN1OUT
5
GND
IC6TPS76301
/SHDN5
1
FB6
48 7
VIN2VSW
3BOOST
SYNC GND VC
IC9LT1765ES8
L5
3u3
L6
3u3
R4947k
R5033k
R5822k
R5910k
R60180
Diplomarbeit
Seite 37
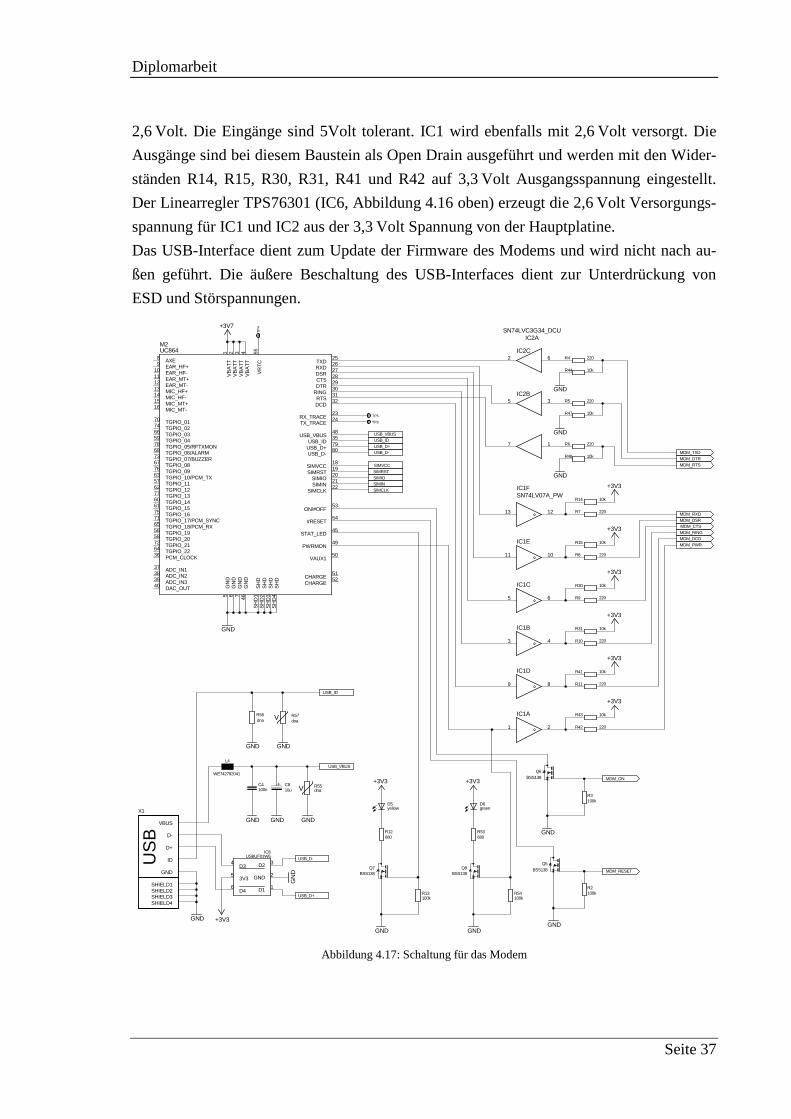
2,6 Volt. Die Eingänge sind 5Volt tolerant. IC1 wird ebenfalls mit 2,6 Volt versorgt. Die
Ausgänge sind bei diesem Baustein als Open Drain ausgeführt und werden mit den Wider-
ständen R14, R15, R30, R31, R41 und R42 auf 3,3 Volt Ausgangsspannung eingestellt.
Der Linearregler TPS76301 (IC6, Abbildung 4.16 oben) erzeugt die 2,6 Volt Versorgungs-
spannung für IC1 und IC2 aus der 3,3 Volt Spannung von der Hauptplatine.
Das USB-Interface dient zum Update der Firmware des Modems und wird nicht nach au-
ßen geführt. Die äußere Beschaltung des USB-Interfaces dient zur Unterdrückung von
ESD und Störspannungen.
Abbildung 4.17: Schaltung für das Modem
MDM_CTS
MDM_DCD
MDM_DSR
MDM_DTR
MDM_ON
MDM_PWR
MDM_RESET
MDM_RING
MDM_RTS
MDM_RXD
MDM_TXD
SIMCLKSIMINSIMIOSIMRSTSIMVCC
USB_D+
USB_D+
USB_D-
USB_D-
USB_ID
USB_ID
USB_VBUS
USB_VBUS
+3V7
+3V3
+3V3
+3V3
+3V3
+3V3
+3V3
+3V3
+3V3 +3V3C4100n
+ C810u
D5yellow
D6green
GND
GND
GND
GND
GND
GND
GND
GND
GN
D
GND
GND
GND
GND GND
GND
1 2
IC1A
3 4
IC1B
5 6
IC1C
9 8
IC1D
11 10
IC1E
13 12
IC1FSN74LV07A_PW
17
IC2ASN74LVC3G34_DCU
35IC2B
62IC2C
3V35
D1 1
D2 3D3
4
D46
GND 2
IC8USBUF01W6
L4
WE742792041
#RESET54
ADC_IN137
ADC_IN238
ADC_IN339
AXE8
CHARGE51
CHARGE52
CTS28
DAC_OUT40
DCD32
DSR27
DTR29
EAR_HF+9
EAR_HF-10
EAR_MT+11
EAR_MT-12
GN
D5
GN
D6
GN
D7
GN
D46
MIC_HF+13
MIC_HF-14
MIC_MT+15
MIC_MT-16
ON/#OFF53
PCM_CLOCK36
PWRMON49
RING30
RTS31
RXD26
RX_TRACE23
SH
DS
HD
1
SH
DS
HD
2
SH
DS
HD
3
SH
DS
HD
4
SIMCLK22SIMIN21SIMIO20SIMRST19SIMVCC18
STAT_LED45
TGPIO_0170
TGPIO_0274
TGPIO_0366
TGPIO_0459
TGPIO_05/RFTXMON78
TGPIO_06/ALARM68
TGPIO_07/BUZZER73
TGPIO_0867
TGPIO_0976
TGPIO_10/PCM_TX63
TGPIO_1157
TGPIO_1262
TGPIO_1377
TGPIO_1460
TGPIO_1561
TGPIO_1675
TGPIO_17/PCM_SYNC71
TGPIO_18/PCM_RX65
TGPIO_1956
TGPIO_2058
TGPIO_2172
TGPIO_2264
TXD25
TX_TRACE24
USB_D+79
USB_D-80
USB_ID35USB_VBUS48
VAUX150
VB
AT
T1
VB
AT
T2
VB
AT
T3
VB
AT
T4
VR
TC
55
M2UC864
Q5BSS138
Q6BSS138
Q7BSS138
Q8BSS138
R2100k
R3100k
R4 220
R5 220
R6 220
R7 220
R8 220
R9 220
R10 220
R11 220
R12680
R13100k
R14 10k
R15 10k
R30 10k
R31 10k
R41 10k
R42 220
R43 10k
R44 10k
R47 10k
R48 10k
R53680
R54100k
V R55dna
R56dna V R57
dna
TP
4
TP5
TP6
D+
D-
GND
ID
SHIELD1SHIELD2SHIELD3SHIELD4
VBUS
X1
US
B
Diplomarbeit
Seite 38
GPS und Statuslampen 4.1.9
Der GPS-Empfänger und die Status-LEDs befinden sich, gemeinsam mit dem Modem, auf
einer eigenen Platine und werden auf die Hauptplatine aufgesteckt.
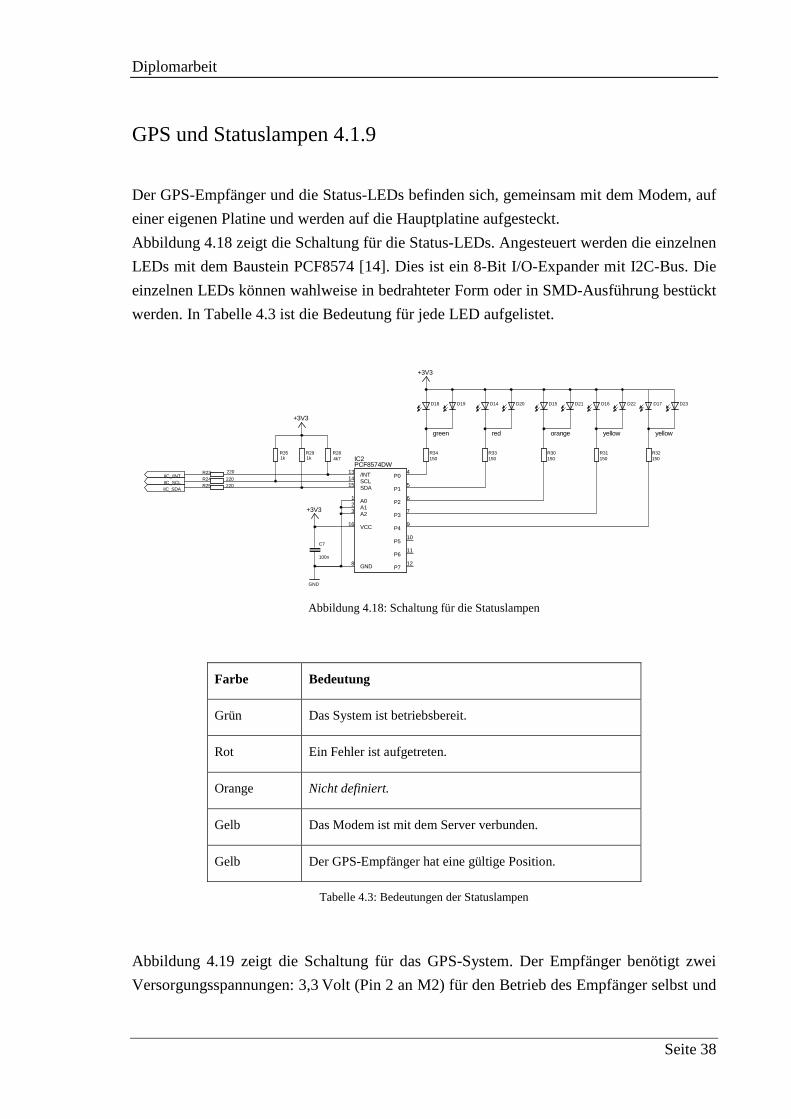
Abbildung 4.18 zeigt die Schaltung für die Status-LEDs. Angesteuert werden die einzelnen
LEDs mit dem Baustein PCF8574 [14]. Dies ist ein 8-Bit I/O-Expander mit I2C-Bus. Die
einzelnen LEDs können wahlweise in bedrahteter Form oder in SMD-Ausführung bestückt
werden. In Tabelle 4.3 ist die Bedeutung für jede LED aufgelistet.
Abbildung 4.18: Schaltung für die Statuslampen
Farbe Bedeutung
Grün Das System ist betriebsbereit.
Rot Ein Fehler ist aufgetreten.
Orange Nicht definiert.
Gelb Das Modem ist mit dem Server verbunden.
Gelb Der GPS-Empfänger hat eine gültige Position.
Tabelle 4.3: Bedeutungen der Statuslampen
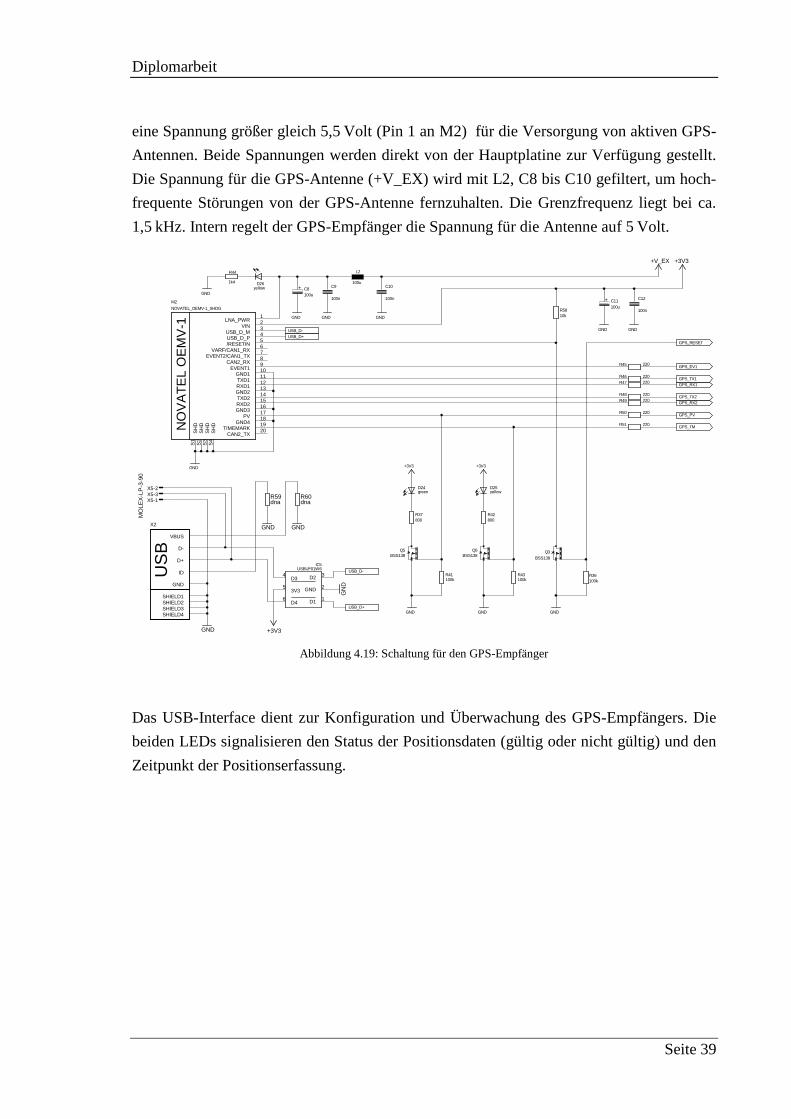
Abbildung 4.19 zeigt die Schaltung für das GPS-System. Der Empfänger benötigt zwei
Versorgungsspannungen: 3,3 Volt (Pin 2 an M2) für den Betrieb des Empfänger selbst und
IIC_/INTIIC_SCLIIC_SDA
+3V3
+3V3
+3V3
C7
100n
D14 D15 D16 D17D18 D19 D20 D21 D22 D23
GND
/INT13
A01
A12
A23
GND8
P04
P15
P26
P37
P49
P510
P611
P712
SCL14
SDA15
VCC16
IC2PCF8574DW
R23 220
R24 220R25 220
R284k7
R291k
R30150
R31150
R32150
R33150
R34150
R351k
green red orange yellow yellow
Diplomarbeit
Seite 39
eine Spannung größer gleich 5,5 Volt (Pin 1 an M2) für die Versorgung von aktiven GPS-
Antennen. Beide Spannungen werden direkt von der Hauptplatine zur Verfügung gestellt.
Die Spannung für die GPS-Antenne (+V_EX) wird mit L2, C8 bis C10 gefiltert, um hoch-
frequente Störungen von der GPS-Antenne fernzuhalten. Die Grenzfrequenz liegt bei ca.
1,5 kHz. Intern regelt der GPS-Empfänger die Spannung für die Antenne auf 5 Volt.
Abbildung 4.19: Schaltung für den GPS-Empfänger
Das USB-Interface dient zur Konfiguration und Überwachung des GPS-Empfängers. Die
beiden LEDs signalisieren den Status der Positionsdaten (gültig oder nicht gültig) und den
Zeitpunkt der Positionserfassung.
GPS_EV1
GPS_PV
GPS_RESET
GPS_RX1
GPS_RX2
GPS_TM
GPS_TX1
GPS_TX2
USB_D+
USB_D+
USB_D-
USB_D-
+3V3 +3V3
+3V3
+3V3
+V_EX
+ C8100u
C9
100n
C10
100n + C11100u
C12
100n
D24green
D25yellow
D26yellow
GND
GND GND GND
GNDGND GND
GND
GND GND
GND
GN
D
GND GND
3V35
D1 1
D2 3D3
4
D46
GND 2
IC5USBUF01W6
L2
100u
/RESETIN5
CAN2_RX8
CAN2_TX20
EVENT19
EVENT2/CAN1_TX7
GND110
GND213
GND316
GND418
LNA_PWR1
PV17
RXD112
RXD215
SH
DS
1
SH
DS
2
SH
DS
3
SH
DS
4
TIMEMARK19
TXD111
TXD214
USB_D_M3
USB_D_P4
VARF/CAN1_RX6
VIN2
NO
VA
TE
L O
EM
V-1
M2
NOVATEL_OEMV-1_SHDG
Q3BSS138
Q5BSS138
Q6BSS138
R36100k
R37800
R41100k
R42800
R43100k
R44
1k4
R45 220
R46 220R47 220
R48 220R49 220
R50 220
R51 220
R5810k
R59dna
R60dna
D+
D-
GND
ID
SHIELD1SHIELD2SHIELD3SHIELD4
VBUS
X2
US
B
X5-1
MO
LEX
-LP
-3-9
0
X5-2X5-3

Diplomarbeit
Seite 40
Firmware 4.2
Die Firmware für den Mikrocontroller wurde in C mit dem RealView-Compiler, der in der
µVision-Entwicklungsumgebung von der Firma KEIL integriert ist, entwickelt. Diese
Entwicklungsumgebung bietet einen sehr guten Hardware-Simulator für den Prozessor,
wodurch eine Vielzahl an Softwarekomponenten ohne das eigentliche System getestet
werden konnte.
Um die Firmware übersichtlich und wartbar zu halten wurden mehrere Ebenen definiert,
die aufeinander aufsetzen. Dabei wurde versucht, dass jede Ebene nur von der unteren ab-
hängig ist, um ihren Einsatz so universell wie möglich zu halten.
Gliederung der Firmware 4.2.1
Abbildung 4.20 zeigt das Konzept der Firmware. In der ersten Schicht sind die Treiber für
die einzelnen Peripheriekomponenten implementiert. Diese Schicht stellt den HAL (Hard-
ware Abstraction Layer) dar. Durch die HAL verlieren die nachfolgenden Layer den direk-
ten Bezug zur Hardware. Bei einem Wechsel des Controllers müsste nur diese Schicht neu
implementiert werden. Einzige Ausnahme stellt der Tasking-Block im System-Layer dar.
Bei dieser Komponente handelt es sich um ein Real-Time-Operating-System für Mikro-
controller, dass direkt auf die Hardware (einen Timer) zugreift. Es ist im Entwicklungssys-
tem der Firma KEIL enthalten.
Abbildung 4.20: Aufteilung der Firmware
Diplomarbeit
Seite 41
Da der größte Teil des Datentransfers über die seriellen Schnittstellen und den SPI-Bus
stattfindet, wurde versucht diese Treiber besonders effizient zu implementieren. Bei beiden
Schnittstellen werden mehrstufige Hardware-FIFOs verwendet, sowohl für das Senden als
auch das Empfangen. Weiteres erfolgt die Ereignissteuerung mittels Interrupts, um keine
Rechenzeit durch das Warten auf ein Ereignis zu verlieren. Die Datenübergabe erfolgt
blockweise (einen kompletten Puffer statt der einzelnen Bytes nacheinander), um den
Overhead durch mehrfache Funktionsaufrufe zu minimieren.
Nach der Treiber-Schicht folgt die System-Schicht. In ihr enthalten sind die High-Level-
Funktionen für die Kommunikation mit den einzelnen Komponenten im System. Zum Bei-
spiel wird mit dem Modem via AT-Kommandos [9] kommuniziert. Dementsprechend
werden Funktionen bereitgestellt, die ein Kommando ausführen, auf die Antwort warten
und das ausgewertete Ergebnis zurückliefern. Für den Zugriff auf die Speicher werden
allgemeine Lese- bzw. Schreibfunktionen zur Verfügung gestellt, unabhängig vom darun-
terliegenden Speichertyp.
Der Tool-Block ist eine Ansammlung von hardwareunabhängigen Funktionen, die von der
Applikation und der System-Schicht verwendet werden.
Applikation 4.2.2
Nach dem Programmstart wird die Hardware konfiguriert, beginnend mit einer Low-Level
Initialisierung. Bei dieser wird das Taktsystem innerhalb des Controllers eingestellt, damit
der ARM-Core und alle Peripheriekomponenten mit dem richtigen Takt versorgt werden.
Weiters werden die Port-Pins entsprechend ihres Verwendungszwecks eingestellt und in
einen definierten Zustand gebracht. Sind diese Schritte abgeschlossen wird die HAL für
die Verwendung vorbereitet. Für jeden Treiber innerhalb der HAL wird eine Initialisie-
rungs-Funktion aufgerufen, welche die entsprechenden Peripheriekomponenten aktiviert,
konfiguriert und interne Speicher für die Verwendung vorbereitet.
Nach diesen Schritten erfolgt eine High-Level Initialisierung der externen Hardwarekom-
ponenten. Das Modem, der GPS-Empfänger, der CAN-Bus und eine eventuell vorhandene
Speicherkarte werden entsprechend der abgespeicherten Einstellungen konfiguriert.
Konnte die Hardware erfolgreich aktiviert werden, wird die Ablaufsteuerung aufgerufen.
Diese Steuerung besteht aus zwei Tasks, siehe Abbildung 4.21. Der DAQ-Task erfasst die
Messwerte vom CAN-Bus und dem GPS-Empfänger und leitet diese weiter an den Main-
Task. Dieser Main-Task besteht intern aus zwei getrennten Ablaufsteuerungen. Die erste
Ablaufsteuerung ist verantwortlich für die Verbindung zum Server und für die Übertra-
Diplomarbeit
Seite 42
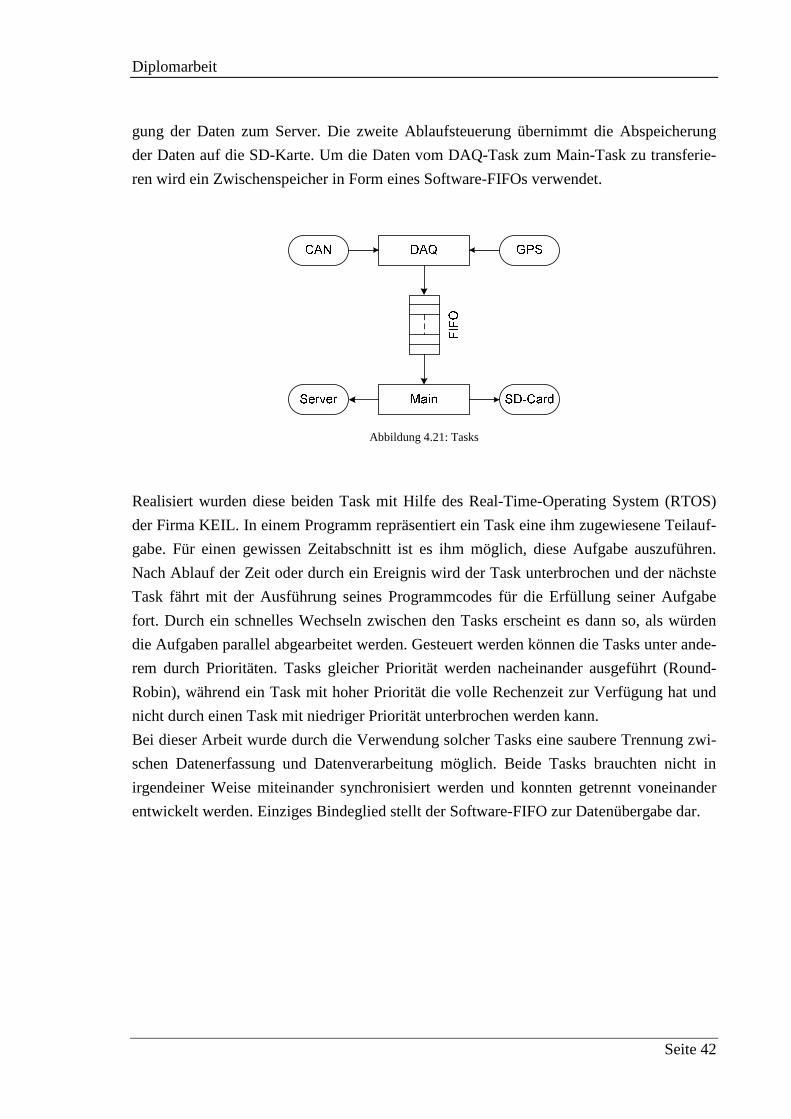
gung der Daten zum Server. Die zweite Ablaufsteuerung übernimmt die Abspeicherung
der Daten auf die SD-Karte. Um die Daten vom DAQ-Task zum Main-Task zu transferie-
ren wird ein Zwischenspeicher in Form eines Software-FIFOs verwendet.
Abbildung 4.21: Tasks
Realisiert wurden diese beiden Task mit Hilfe des Real-Time-Operating System (RTOS)
der Firma KEIL. In einem Programm repräsentiert ein Task eine ihm zugewiesene Teilauf-
gabe. Für einen gewissen Zeitabschnitt ist es ihm möglich, diese Aufgabe auszuführen.
Nach Ablauf der Zeit oder durch ein Ereignis wird der Task unterbrochen und der nächste
Task fährt mit der Ausführung seines Programmcodes für die Erfüllung seiner Aufgabe
fort. Durch ein schnelles Wechseln zwischen den Tasks erscheint es dann so, als würden
die Aufgaben parallel abgearbeitet werden. Gesteuert werden können die Tasks unter ande-
rem durch Prioritäten. Tasks gleicher Priorität werden nacheinander ausgeführt (Round-
Robin), während ein Task mit hoher Priorität die volle Rechenzeit zur Verfügung hat und
nicht durch einen Task mit niedriger Priorität unterbrochen werden kann.
Bei dieser Arbeit wurde durch die Verwendung solcher Tasks eine saubere Trennung zwi-
schen Datenerfassung und Datenverarbeitung möglich. Beide Tasks brauchten nicht in
irgendeiner Weise miteinander synchronisiert werden und konnten getrennt voneinander
entwickelt werden. Einziges Bindeglied stellt der Software-FIFO zur Datenübergabe dar.
Diplomarbeit
Seite 43
sw
itc
h
sw
itc
h
sw
itc
h
sw
itc
h
sw
itc
h
da
ta
da
ta
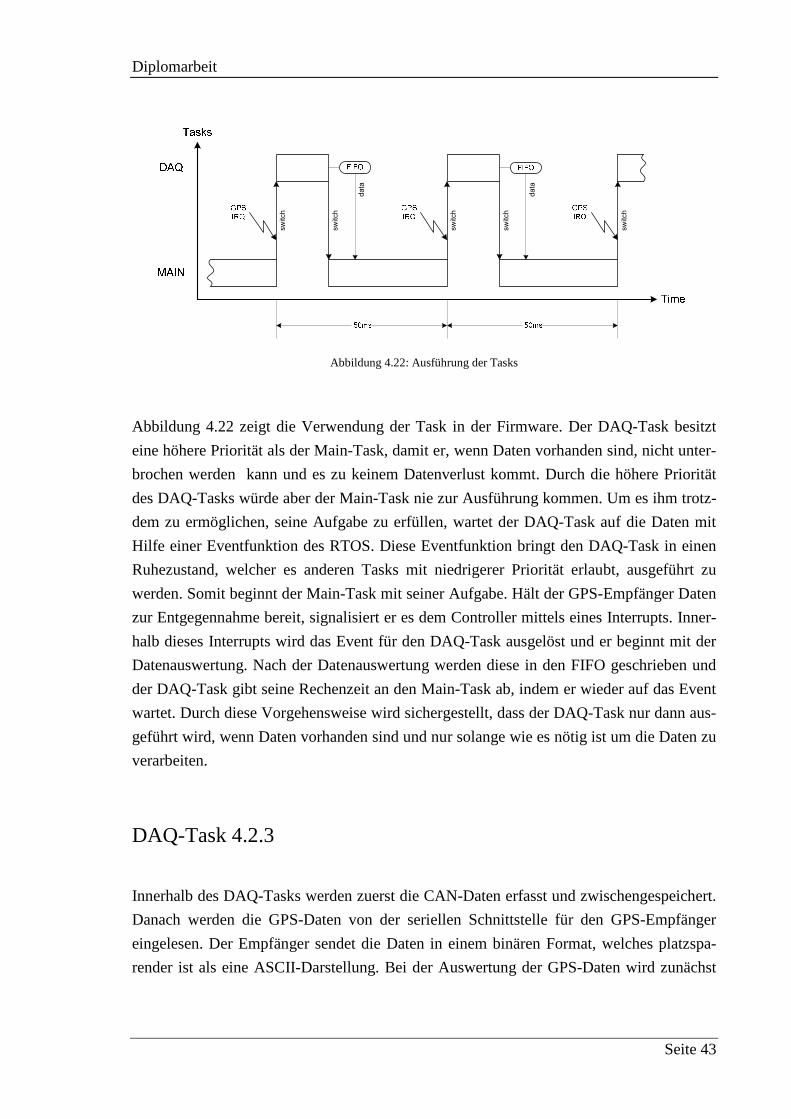
Abbildung 4.22: Ausführung der Tasks
Abbildung 4.22 zeigt die Verwendung der Task in der Firmware. Der DAQ-Task besitzt
eine höhere Priorität als der Main-Task, damit er, wenn Daten vorhanden sind, nicht unter-
brochen werden kann und es zu keinem Datenverlust kommt. Durch die höhere Priorität
des DAQ-Tasks würde aber der Main-Task nie zur Ausführung kommen. Um es ihm trotz-
dem zu ermöglichen, seine Aufgabe zu erfüllen, wartet der DAQ-Task auf die Daten mit
Hilfe einer Eventfunktion des RTOS. Diese Eventfunktion bringt den DAQ-Task in einen
Ruhezustand, welcher es anderen Tasks mit niedrigerer Priorität erlaubt, ausgeführt zu
werden. Somit beginnt der Main-Task mit seiner Aufgabe. Hält der GPS-Empfänger Daten
zur Entgegennahme bereit, signalisiert er es dem Controller mittels eines Interrupts. Inner-
halb dieses Interrupts wird das Event für den DAQ-Task ausgelöst und er beginnt mit der
Datenauswertung. Nach der Datenauswertung werden diese in den FIFO geschrieben und
der DAQ-Task gibt seine Rechenzeit an den Main-Task ab, indem er wieder auf das Event
wartet. Durch diese Vorgehensweise wird sichergestellt, dass der DAQ-Task nur dann aus-
geführt wird, wenn Daten vorhanden sind und nur solange wie es nötig ist um die Daten zu
verarbeiten.
DAQ-Task 4.2.3
Innerhalb des DAQ-Tasks werden zuerst die CAN-Daten erfasst und zwischengespeichert.
Danach werden die GPS-Daten von der seriellen Schnittstelle für den GPS-Empfänger
eingelesen. Der Empfänger sendet die Daten in einem binären Format, welches platzspa-
render ist als eine ASCII-Darstellung. Bei der Auswertung der GPS-Daten wird zunächst
Diplomarbeit
Seite 44
versucht, den Start der Daten zu finden. Dargestellt wird dieser durch die Sequenz der drei
Bytes 0xAA, 0x44 und 0x12. Konnte der Start gefunden werden, erfolgt eine Längenprü-
fung der Daten und ein Vergleich der übertragenen CRC mit der berechneten Prüfsumme.
Wenn alles in Ordnung ist, werden die benötigten Informationen aus den Daten extrahiert
und zusammen mit den CAN-Daten in den FIFO geschrieben. Danach gibt der DAQ-Task
die CPU wieder an den Main-Task ab.
Folgende Informationen werden dem GPS-Records entnommen und an den Server gesen-
det:
• Längengrad [°]
• Breitengrad [°]
• Höhe über Meeresspiegel [m]
• Horizontale Geschwindigkeit [m/s]
• Vertikale Geschwindigkeit [m/s]
• Kurs [°]
• Anzahl an GPS-Satelliten in Sicht
• Anzahl an GPS-Satelliten, welche für die Berechnung herangezogen wurden
• Typ der Positionsbestimmung [Single, DGPS oder RTK]
• Status der Positionsbestimmung [Position gültig oder ungültig]
• Standardabweichung für den Längengrad [m]
• Standardabweichung für den Breitengrad [m]
• Standardabweichung für die Höhe [m]
• Alter der differenziellen Daten, wenn vorhanden [s]
Main-Task 4.2.4
Dieser Task besteht, wie Anfangs erwähnt, aus zwei Ablaufsteuerungen. Die erste verwal-
tet die Verbindung zum Server und die Datenübertragung, die zweite ist zuständig für die
SD-Karte. Aufgerufen werden diese Steuerungen wiederholend in einer Endlosschleife.

Diplomarbeit
Seite 45
Verbindungssteuerung 4.2.5
Abbildung 4.23 zeigt die Ablaufsteuerung für die Verbindung. Nach dem Start wird ge-
prüft, ob eine Verbindung besteht. Falls dies zutrifft und Daten zum Senden vorhanden
sind, oder Daten vom Server zur Einheit gesendet wurden (z.B. GPS-Korrekturdaten),
werden diese übertragen oder entgegengenommen und verarbeitet. Die Nutzdaten werden
für den Transfer immer in Frames verpackt (siehe Punkt 4.2.6). Sollte keine Verbindung
bestehen wird eine TCP/IP-Verbindung zum Server aufgebaut. Dies geschieht durch die
TCP/IP-Unterstützung des Modems und wird mit einem Kommando initiiert.
Abbildung 4.23: Ablaufdiagramm für die Serververbindung
Wenn eine TCP/IP-Verbindung erfolgreich zum Server aufgebaut werden konnte, muss
sich die Einheit noch anmelden, um Daten senden und empfangen zu können. Erforderlich
ist dieser Schritt, um die Einheit einem Benutzer zuordnen zu können, was für die Verwal-
tung der Daten notwendig ist.
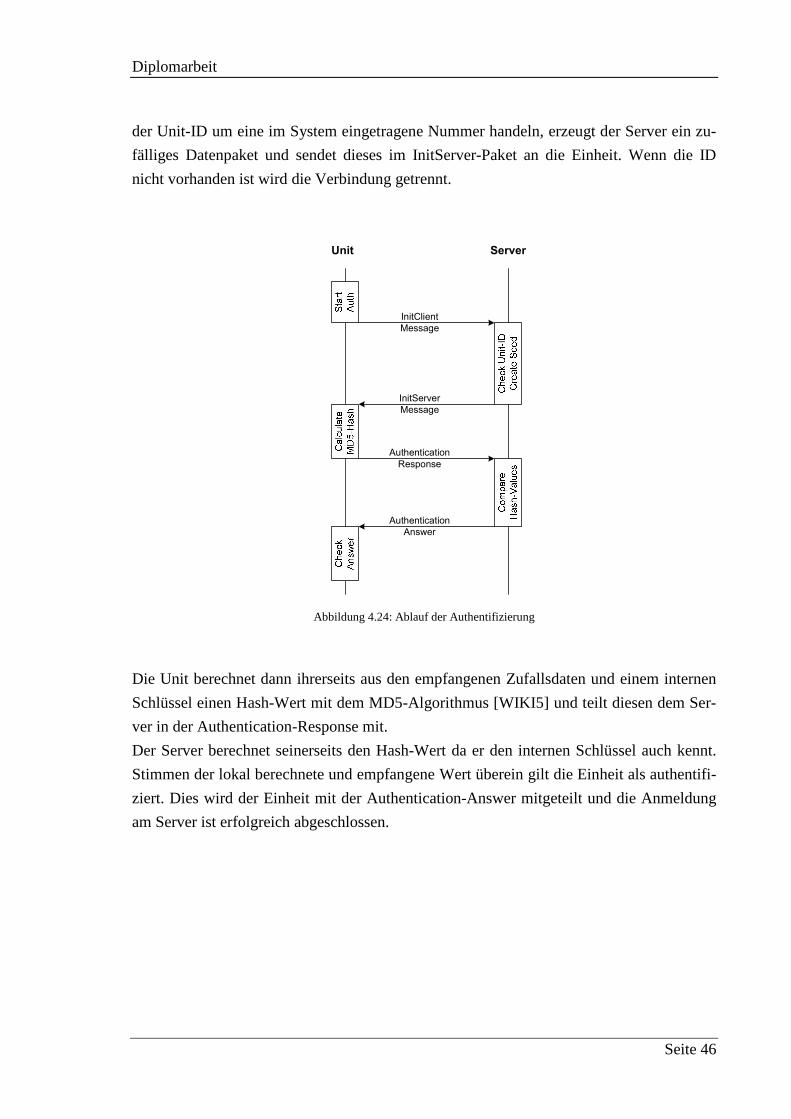
Der erste Schritt bei der Authentifizierung ist, dass die Einheit eine Anmeldungsanfrage,
mittels einer InitClient-Nachricht, an den Server sendet (Abbildung 4.24). In dieser Nach-
richt ist die Unit-ID und Protokoll- sowie Firmeware-Version enthalten. Sollte es sich bei
Diplomarbeit
Seite 46
der Unit-ID um eine im System eingetragene Nummer handeln, erzeugt der Server ein zu-
fälliges Datenpaket und sendet dieses im InitServer-Paket an die Einheit. Wenn die ID
nicht vorhanden ist wird die Verbindung getrennt.
InitClient
Message
InitServer
Message
Authentication
Response
Authentication
Answer
Unit Server
Abbildung 4.24: Ablauf der Authentifizierung
Die Unit berechnet dann ihrerseits aus den empfangenen Zufallsdaten und einem internen
Schlüssel einen Hash-Wert mit dem MD5-Algorithmus [WIKI5] und teilt diesen dem Ser-
ver in der Authentication-Response mit.
Der Server berechnet seinerseits den Hash-Wert da er den internen Schlüssel auch kennt.
Stimmen der lokal berechnete und empfangene Wert überein gilt die Einheit als authentifi-
ziert. Dies wird der Einheit mit der Authentication-Answer mitgeteilt und die Anmeldung
am Server ist erfolgreich abgeschlossen.

Diplomarbeit
Seite 47
Übertragungsrahmen 4.2.6
Alle Daten und Kommandos werden in einen Übertragungsrahmen verpackt. Dieser Rah-
men besteht aus zwei eindeutigen Steuerzeichen (dem Start- und End-Zeichen) sowie einer
Prüfsumme zur Fehlererkennung. Durch das eindeutige Start- und End-Zeichen ist es für
den Server oder eine Anwendung sehr einfach die Daten aus einem kontinuierlichen
Stream zu filtern. Abbildung 4.25 zeigt den Aufbau eines solchen Rahmens.
Abbildung 4.25: Aufbau eines Übertragungsrahmens
Elemente im Rahmen:
• SOF StartOfFrame: Zeigt den Start eines neuen Datenpaketes an • Payload Daten: 1 bis 128 Byte an Nutzdaten • CRC Prüfsumme: CRC über die Nutzdaten • EOF EndOfFrame: Zeigt das Ende des Datenpaketes an
Damit die Steuerzeichen eindeutig sind, dürfen diese Zeichen in den Nutzdaten nicht vor-
kommen. Erreicht wird dies durch das Ersetzen aller Steuerzeichen innerhalb der Nutzda-
ten durch ein Sonderzeichen. Dieses Sonderzeichen wird aus einer bitweisen Exklusive-
ODER Verknüpfung des originalen Zeichens mit 0x80 erzeugt. Um bei der Dekodierung
zu erkennen wo ein Steuerzeichen durch ein Sonderzeichen ersetzt wurde, wird dem Son-
derzeichen ein ESCAPE-Symbol vorangesetzt. Jedes Mal, wenn bei der Dekodierung ein
ESCAPE-Symbol gefunden wird, muss dieses dann entfernt werden und das nächste Zei-
chen durch das entsprechende Steuerzeichen ersetzt werden. Natürlich muss auch das
ESCAPE-Symbol, wenn es Teil der originalen Nutzdaten ist, ersetzt werden. Schlussend-
lich kann es ebenso passieren, dass der berechnete CRC-Wert einem Steuerzeichen ent-
spricht. Dann muss auch dieser entsprechend ausgetauscht werden.
In der Tabelle 4.4 sind die Steuerzeichen mit den definierten Werten sowie die Ersatzse-
quenzen für selbige angegeben.
Diplomarbeit
Seite 48
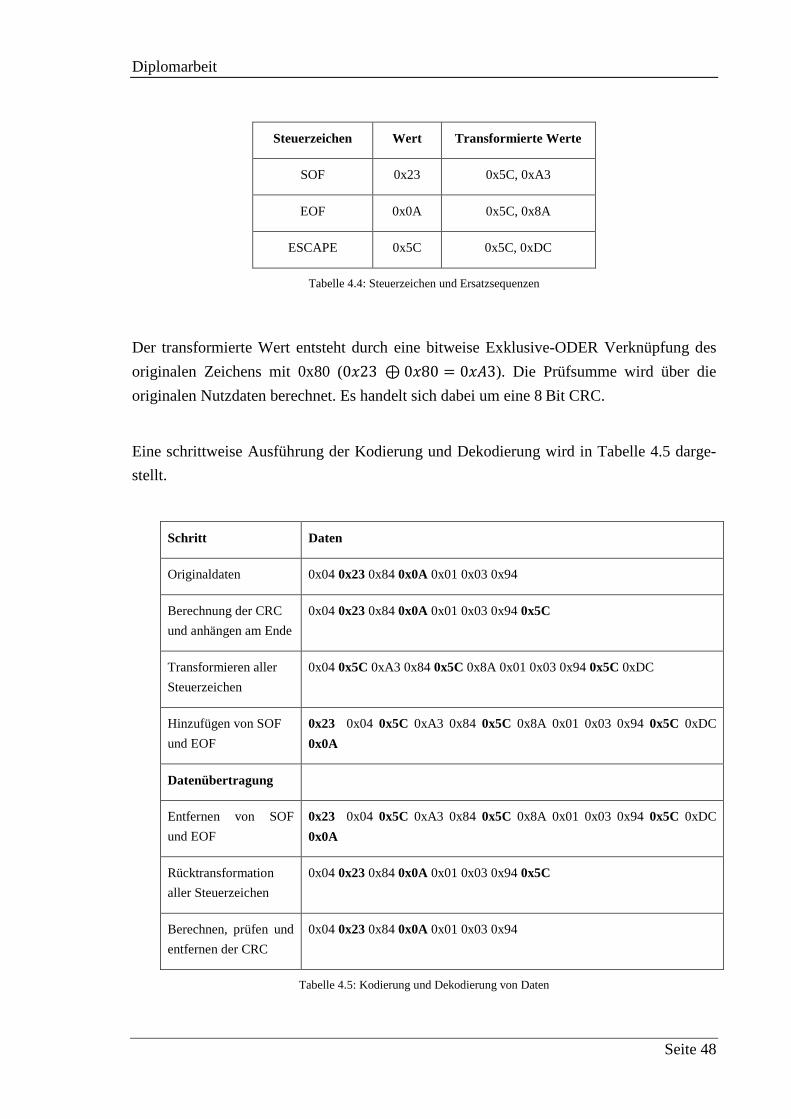
Steuerzeichen Wert Transformierte Werte
SOF 0x23 0x5C, 0xA3
EOF 0x0A 0x5C, 0x8A
ESCAPE 0x5C 0x5C, 0xDC
Tabelle 4.4: Steuerzeichen und Ersatzsequenzen
Der transformierte Wert entsteht durch eine bitweise Exklusive-ODER Verknüpfung des
originalen Zeichens mit 0x80 (0�23 ⊕ 0�80 = 0�3). Die Prüfsumme wird über die
originalen Nutzdaten berechnet. Es handelt sich dabei um eine 8 Bit CRC.
Eine schrittweise Ausführung der Kodierung und Dekodierung wird in Tabelle 4.5 darge-
stellt.
Schritt Daten
Originaldaten 0x04 0x23 0x84 0x0A 0x01 0x03 0x94
Berechnung der CRC
und anhängen am Ende
0x04 0x23 0x84 0x0A 0x01 0x03 0x94 0x5C
Transformieren aller
Steuerzeichen
0x04 0x5C 0xA3 0x84 0x5C 0x8A 0x01 0x03 0x94 0x5C 0xDC
Hinzufügen von SOF
und EOF
0x23 0x04 0x5C 0xA3 0x84 0x5C 0x8A 0x01 0x03 0x94 0x5C 0xDC
0x0A
Datenübertragung
Entfernen von SOF
und EOF
0x23 0x04 0x5C 0xA3 0x84 0x5C 0x8A 0x01 0x03 0x94 0x5C 0xDC
0x0A
Rücktransformation
aller Steuerzeichen
0x04 0x23 0x84 0x0A 0x01 0x03 0x94 0x5C
Berechnen, prüfen und
entfernen der CRC
0x04 0x23 0x84 0x0A 0x01 0x03 0x94
Tabelle 4.5: Kodierung und Dekodierung von Daten

Diplomarbeit
Seite 49
Ausgangspunkt sind die Originaldaten. Im ersten Schritt wird die Prüfsumme berechnet
und am Ende der Originaldaten angehängt. Danach erfolgt die Umwandlung aller Steuer-
zeichen in die transformierten Werte laut Tabelle 4.4. Abschließend werden Startzeichen
und Endzeichen am Anfang und Ende der Daten angefügt.
Nach der Übertragung erfolgen alle Schritte der Kodierung in umgekehrter Reihenfolge.
Erstens entfernen von Start- und Endzeichen, danach Rücktransformation der Daten in die
Originaldaten und als letzter Schritt die Berechnung, Prüfung und Verwerfung der Prüf-
summe.
Diplomarbeit
Seite 50
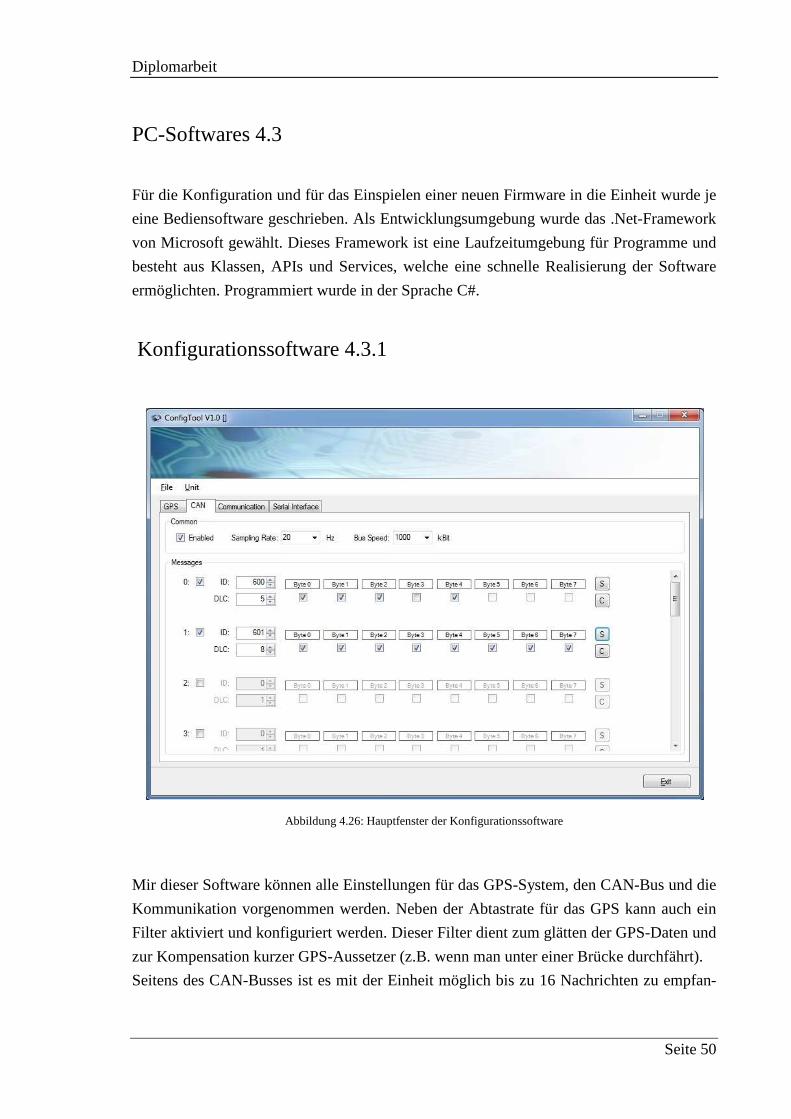
PC-Softwares 4.3
Für die Konfiguration und für das Einspielen einer neuen Firmware in die Einheit wurde je
eine Bediensoftware geschrieben. Als Entwicklungsumgebung wurde das .Net-Framework
von Microsoft gewählt. Dieses Framework ist eine Laufzeitumgebung für Programme und
besteht aus Klassen, APIs und Services, welche eine schnelle Realisierung der Software
ermöglichten. Programmiert wurde in der Sprache C#.
Konfigurationssoftware 4.3.1
Abbildung 4.26: Hauptfenster der Konfigurationssoftware
Mir dieser Software können alle Einstellungen für das GPS-System, den CAN-Bus und die
Kommunikation vorgenommen werden. Neben der Abtastrate für das GPS kann auch ein
Filter aktiviert und konfiguriert werden. Dieser Filter dient zum glätten der GPS-Daten und
zur Kompensation kurzer GPS-Aussetzer (z.B. wenn man unter einer Brücke durchfährt).
Seitens des CAN-Busses ist es mit der Einheit möglich bis zu 16 Nachrichten zu empfan-

Diplomarbeit
Seite 51
gen. Für jede aktivierte Nachricht kann man die ID, die Länge der Nutzdaten und welche
davon übertragen werden sollen getrennt einstellen. Die Umrechnung in eine physikalische
Größe erfolgt am Server oder durch den Anwender. Weiteres können Abtastrate und Bus-
geschwindigkeit eingestellt werden.
Um mit dem Modem eine Verbindung zum Server aufzubauen sind neben einer gültigen
SIM-Karte folgende Einstellungen notwendig: Die Zugangsdaten für das Mobilfunknetz,
bestehend aus dem APN (Access Point Name), Benutzername und Passwort sowie das
Funknetzwerk, GPRS oder UMTS. Für den Server benötigt man die IP-Adresse und einen
Port. APN, Benutzername und Passwort für das Mobilfunknetz sind innerhalb der Software
als Liste vorhanden. Man wählt den Betreiber und die entsprechenden Werte werden ge-
setzt. Diese Liste kann mittels eines Texteditors beliebig verändert werden. Für den Ver-
bindungsaufbau und die Datenübertragung können weitere Parameter wie Paketgröße,
Verbindungstimeout usw. eingestellt werden.
Upgrade-Software 4.3.2
Abbildung 4.27: Hauptfenster der Upgrade-Software
Abbildung 4.27 zeigt das FlashTool nach einem erfolgreichen Update der Firmware einer
Einheit. Das Einspielen einer neuen Software erfolgt über den im Prozessor integrierten
Bootloader. Nach dem Aktivieren des Bootloaders müssen die betroffenen Sektoren ge-
Diplomarbeit
Seite 52
löscht und einzeln programmiert werden. Wenn diese Schritte abgeschlossen sind erfolgt
eine Verifizierung, ob alle Sektoren den richtigen Inhalt haben. Da alle Prozessoren dieser
Serie den gleichen Bootloader enthalten, war es zweckmäßig eine eigene Komponente zu
entwickeln, die alle unterschiedlichen Typen programmieren kann. Weiters war es not-
wendig einen Konverter zu schreiben, der die Firmware in ein für den Prozessor verständ-
liches Format übersetzt, bevor diese übertragen wird.
Ebenso wichtig wie eine robuste Softwareimplementierung ist die einfache Handhabbar-
keit. Außer sich mit der Einheit zu verbinden, eine Firmware-Datei auszuwählen und den
Updatevorgang zu starten, soll der Anwender nicht mit technischen Details in Berührung
kommen. Damit immer die aktuellste Firmware zur Verfügung steht ist es möglich, sich
via SFTP aus dem FlashTool heraus mit einem Server zu verbinden und die neueste Soft-
wareversion herunterzuladen.
Diplomarbeit
Seite 53
Kapitel 5
Messungen
Abbildung 5.1: Testeinheit
Die grundsätzliche Funktionsfähigkeit der einzelnen Features der Einheit wurde während
des Aufbaus sowie der Erstellung der Firmware getestet. Um den vollen Funktionsumfang
des Systems für einen Einsatz zu ermitteln musste zusätzlich eine Infrastruktur geschaffen
werden. Diese besteht aus einem Server im Internet, einer Visualisierungssoftware, der
Einheit und einer DGPS/RTK-Basisstation. Der Server im Internet hat die Aufgabe, die
Daten von der Unit entgegenzunehmen, abzuspeichern und an die Visualisierungssoftware
weiterzuleiten, welche die Position und die Motordaten anzeigt. Die Korrekturdaten für
den GPS-Empfänger in der Einheit werden von der Basisstation über den Server an die
Unit weitergeleitet. Für die Tests im Labor wurde der CAN-Bus des Fahrzeuges mit einem
USB-CAN-Interface simuliert. Der Server und die Visualisierungssoftware wurden von der
Firma PJS-Systems GmbH zur Verfügung gestellt. In Abbildung 5.2 wird der Testaufbau
schematisch dargestellt.
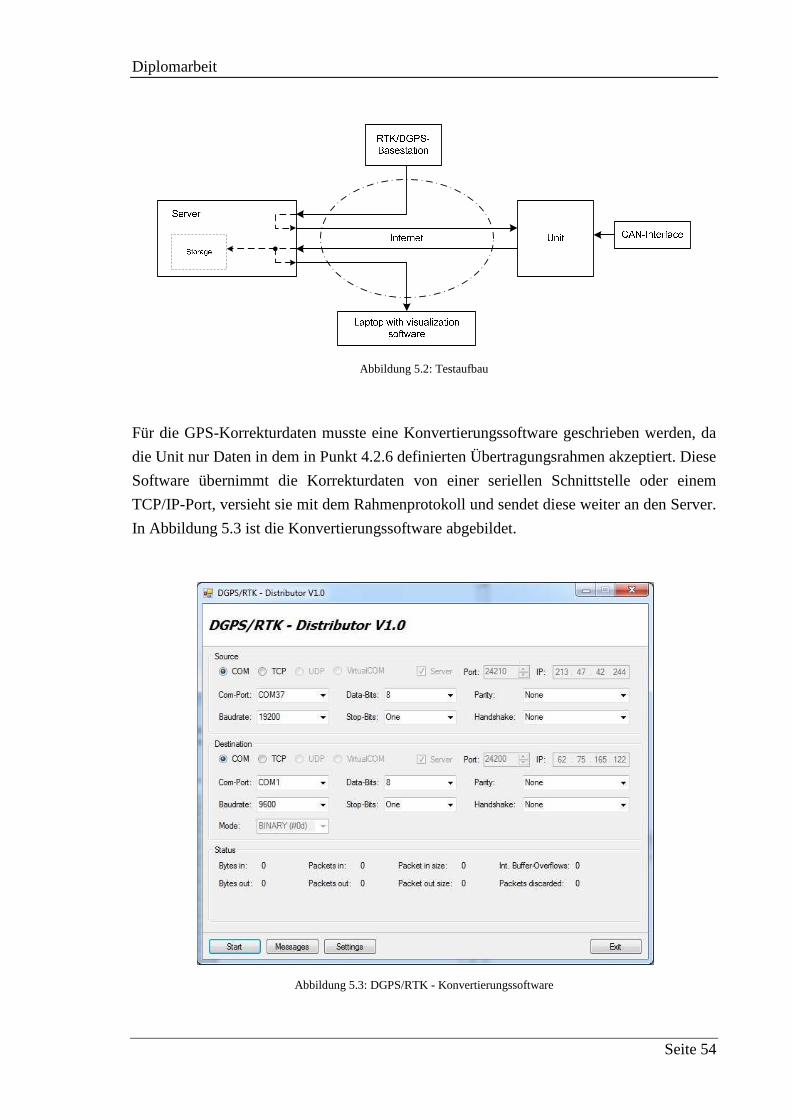
Diplomarbeit
Seite 54
Abbildung 5.2: Testaufbau
Für die GPS-Korrekturdaten musste eine Konvertierungssoftware geschrieben werden, da
die Unit nur Daten in dem in Punkt 4.2.6 definierten Übertragungsrahmen akzeptiert. Diese
Software übernimmt die Korrekturdaten von einer seriellen Schnittstelle oder einem
TCP/IP-Port, versieht sie mit dem Rahmenprotokoll und sendet diese weiter an den Server.
In Abbildung 5.3 ist die Konvertierungssoftware abgebildet.
Abbildung 5.3: DGPS/RTK - Konvertierungssoftware
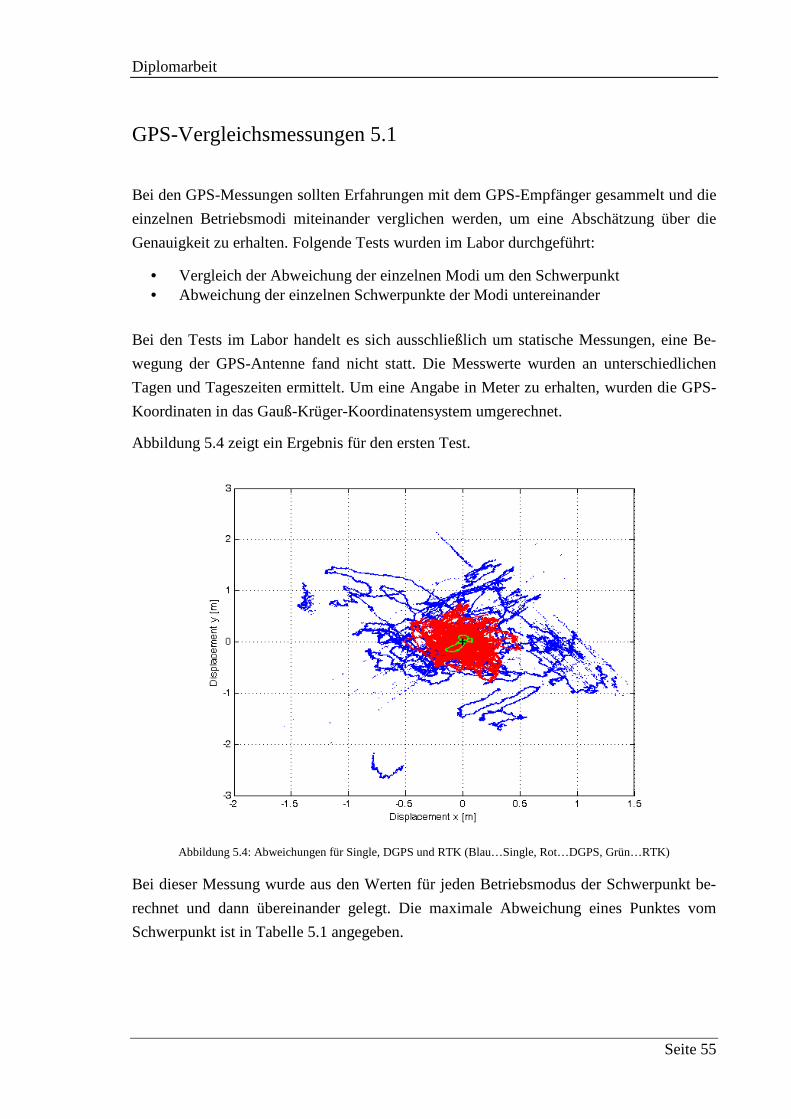
Diplomarbeit
Seite 55
GPS-Vergleichsmessungen 5.1
Bei den GPS-Messungen sollten Erfahrungen mit dem GPS-Empfänger gesammelt und die
einzelnen Betriebsmodi miteinander verglichen werden, um eine Abschätzung über die
Genauigkeit zu erhalten. Folgende Tests wurden im Labor durchgeführt:
• Vergleich der Abweichung der einzelnen Modi um den Schwerpunkt • Abweichung der einzelnen Schwerpunkte der Modi untereinander
Bei den Tests im Labor handelt es sich ausschließlich um statische Messungen, eine Be-
wegung der GPS-Antenne fand nicht statt. Die Messwerte wurden an unterschiedlichen
Tagen und Tageszeiten ermittelt. Um eine Angabe in Meter zu erhalten, wurden die GPS-
Koordinaten in das Gauß-Krüger-Koordinatensystem umgerechnet.
Abbildung 5.4 zeigt ein Ergebnis für den ersten Test.
Abbildung 5.4: Abweichungen für Single, DGPS und RTK (Blau…Single, Rot…DGPS, Grün…RTK)
Bei dieser Messung wurde aus den Werten für jeden Betriebsmodus der Schwerpunkt be-
rechnet und dann übereinander gelegt. Die maximale Abweichung eines Punktes vom
Schwerpunkt ist in Tabelle 5.1 angegeben.

Diplomarbeit
Seite 56
Betriebsmodus Abweichung
m
Single 2.75
DGPS 0.82
RTK20 0.22
Tabelle 5.1: Abweichungen vom Schwerpunkt
In Abbildung 5.5 wurden die Schwerpunkte der Messungen nicht übereinander gelegt.
Man erkennt einen deutlichen Offset zwischen den Schwerpunkten für Single und
DGPS/RTK.
Abbildung 5.5: Abweichungen der Schwerpunkte (Blau…Single, Rot…DGPS, Grün…RTK)
Da für einen Fahrlinienvergleich aber nur der RTK-Modus eingesetzt werden sollte, ist es
wichtig, dass der Abstand zwischen den Schwerpunkten für die Messungen dieser Be-
triebsart klein bleibt. Abbildung 5.6 zeigt die Messwerte und Schwerpunkte für drei RTK-
Messungen.
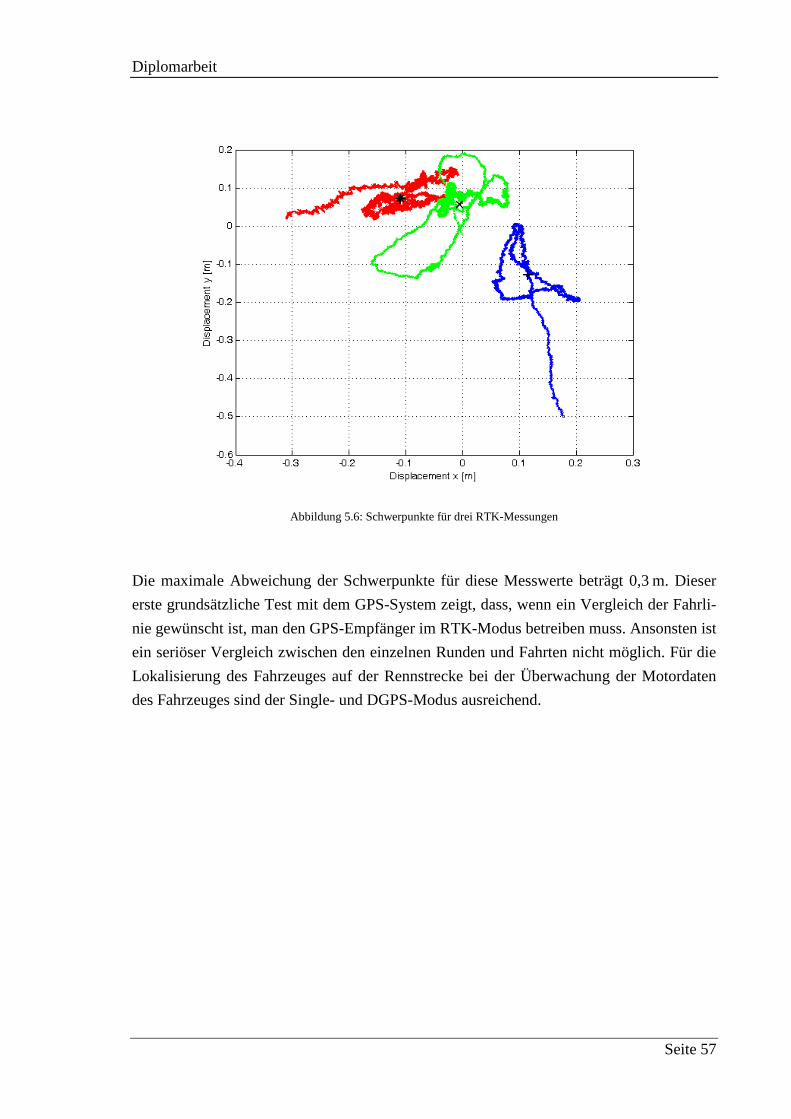
Diplomarbeit
Seite 57
Abbildung 5.6: Schwerpunkte für drei RTK-Messungen
Die maximale Abweichung der Schwerpunkte für diese Messwerte beträgt 0,3 m. Dieser
erste grundsätzliche Test mit dem GPS-System zeigt, dass, wenn ein Vergleich der Fahrli-
nie gewünscht ist, man den GPS-Empfänger im RTK-Modus betreiben muss. Ansonsten ist
ein seriöser Vergleich zwischen den einzelnen Runden und Fahrten nicht möglich. Für die
Lokalisierung des Fahrzeuges auf der Rennstrecke bei der Überwachung der Motordaten
des Fahrzeuges sind der Single- und DGPS-Modus ausreichend.
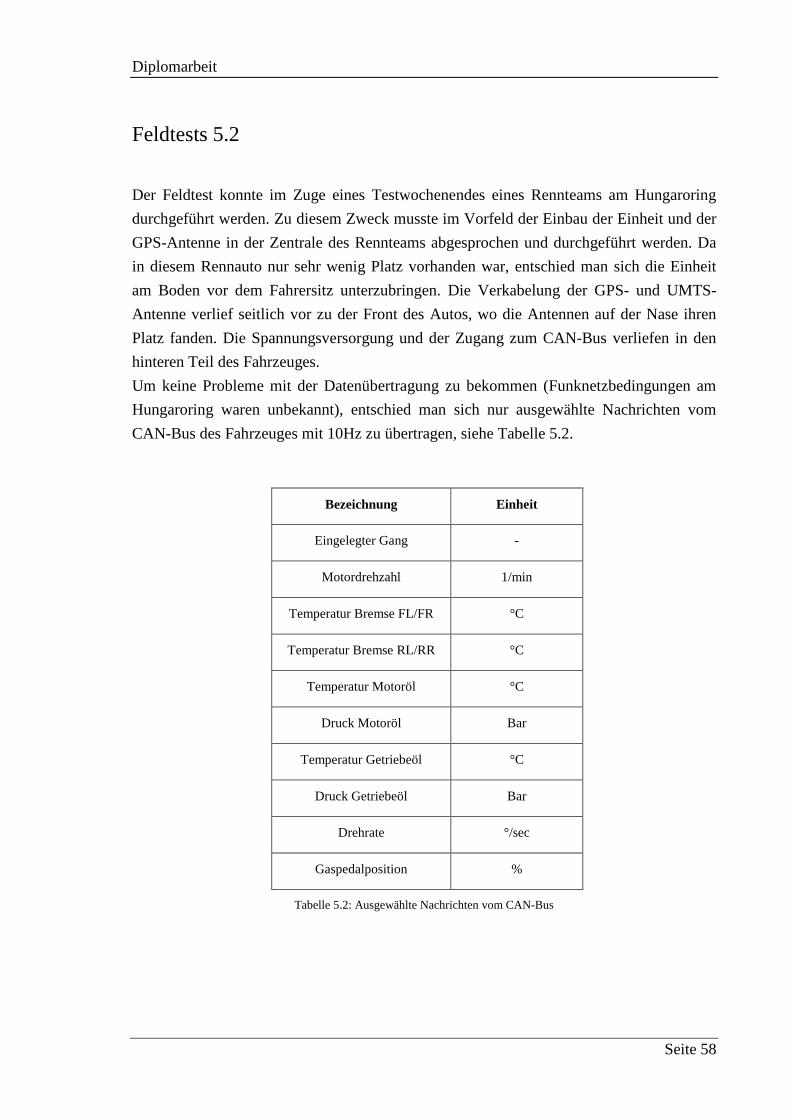
Diplomarbeit
Seite 58
Feldtests 5.2
Der Feldtest konnte im Zuge eines Testwochenendes eines Rennteams am Hungaroring
durchgeführt werden. Zu diesem Zweck musste im Vorfeld der Einbau der Einheit und der
GPS-Antenne in der Zentrale des Rennteams abgesprochen und durchgeführt werden. Da
in diesem Rennauto nur sehr wenig Platz vorhanden war, entschied man sich die Einheit
am Boden vor dem Fahrersitz unterzubringen. Die Verkabelung der GPS- und UMTS-
Antenne verlief seitlich vor zu der Front des Autos, wo die Antennen auf der Nase ihren
Platz fanden. Die Spannungsversorgung und der Zugang zum CAN-Bus verliefen in den
hinteren Teil des Fahrzeuges.
Um keine Probleme mit der Datenübertragung zu bekommen (Funknetzbedingungen am
Hungaroring waren unbekannt), entschied man sich nur ausgewählte Nachrichten vom
CAN-Bus des Fahrzeuges mit 10Hz zu übertragen, siehe Tabelle 5.2.
Bezeichnung Einheit
Eingelegter Gang -
Motordrehzahl 1/min
Temperatur Bremse FL/FR °C
Temperatur Bremse RL/RR °C
Temperatur Motoröl °C
Druck Motoröl Bar
Temperatur Getriebeöl °C
Druck Getriebeöl Bar
Drehrate °/sec
Gaspedalposition %
Tabelle 5.2: Ausgewählte Nachrichten vom CAN-Bus
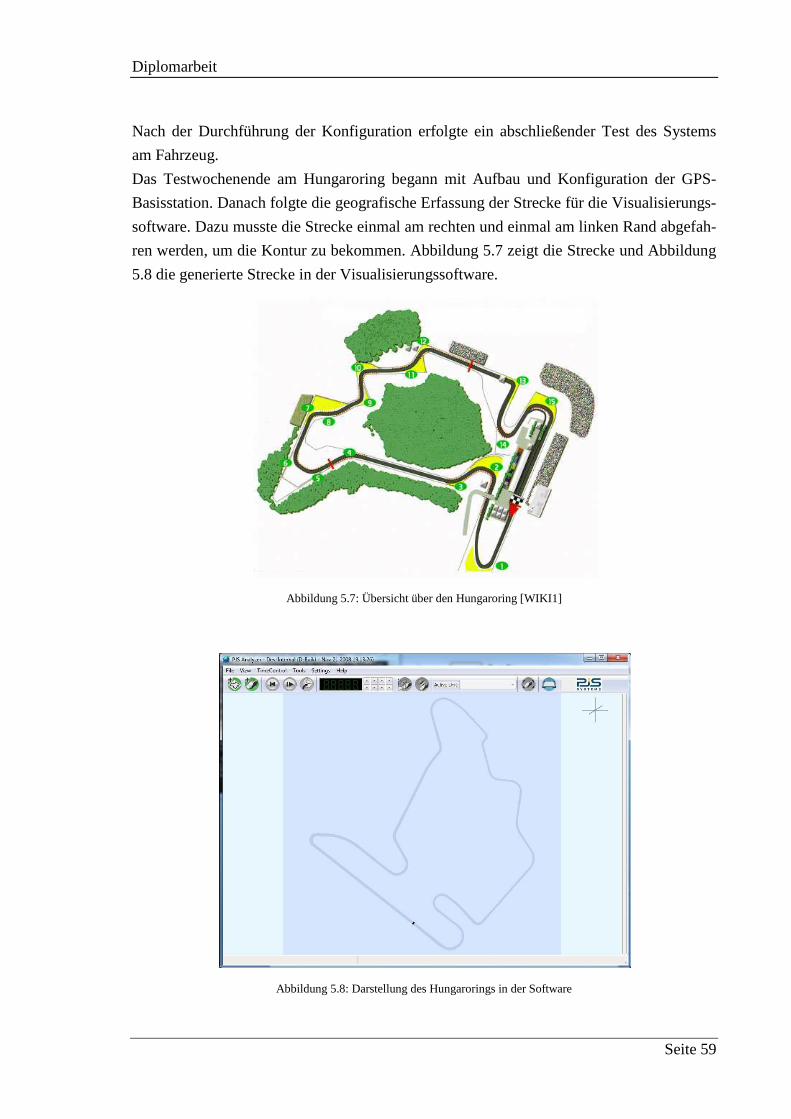
Diplomarbeit
Seite 59
Nach der Durchführung der Konfiguration erfolgte ein abschließender Test des Systems
am Fahrzeug.
Das Testwochenende am Hungaroring begann mit Aufbau und Konfiguration der GPS-
Basisstation. Danach folgte die geografische Erfassung der Strecke für die Visualisierungs-
software. Dazu musste die Strecke einmal am rechten und einmal am linken Rand abgefah-
ren werden, um die Kontur zu bekommen. Abbildung 5.7 zeigt die Strecke und Abbildung
5.8 die generierte Strecke in der Visualisierungssoftware.
Abbildung 5.7: Übersicht über den Hungaroring [WIKI1]
Abbildung 5.8: Darstellung des Hungarorings in der Software
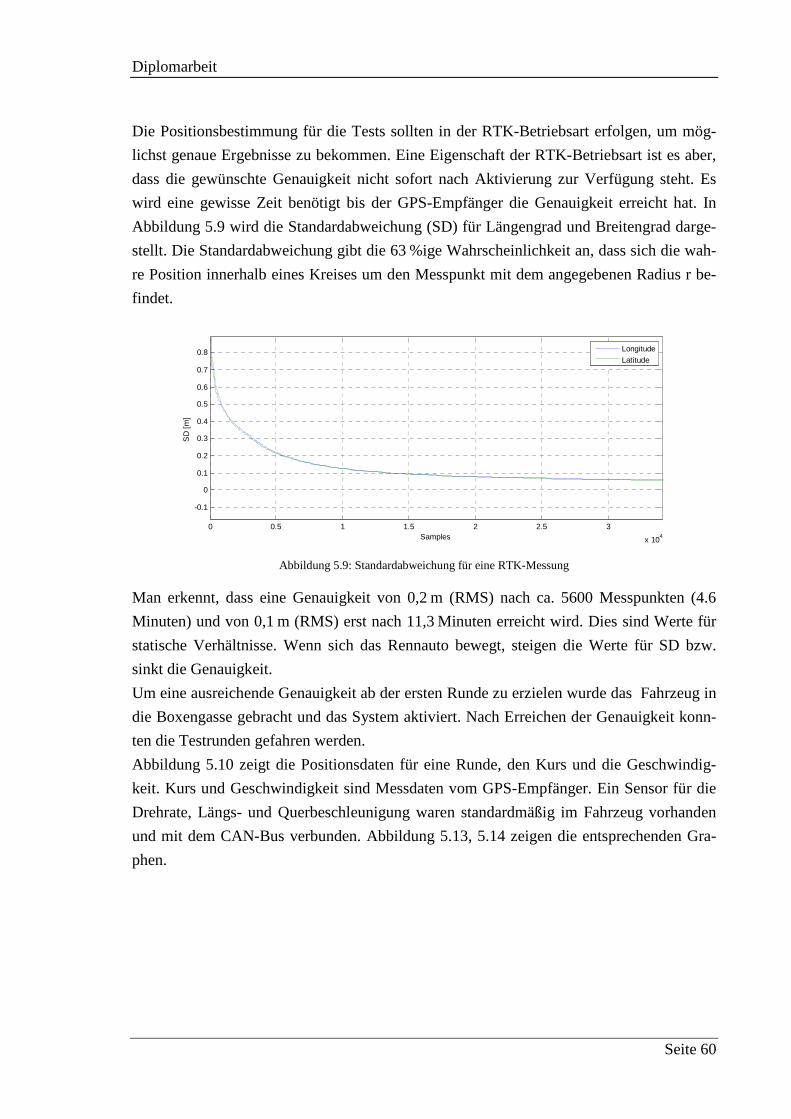
Diplomarbeit
Seite 60
Die Positionsbestimmung für die Tests sollten in der RTK-Betriebsart erfolgen, um mög-
lichst genaue Ergebnisse zu bekommen. Eine Eigenschaft der RTK-Betriebsart ist es aber,
dass die gewünschte Genauigkeit nicht sofort nach Aktivierung zur Verfügung steht. Es
wird eine gewisse Zeit benötigt bis der GPS-Empfänger die Genauigkeit erreicht hat. In
Abbildung 5.9 wird die Standardabweichung (SD) für Längengrad und Breitengrad darge-
stellt. Die Standardabweichung gibt die 63 %ige Wahrscheinlichkeit an, dass sich die wah-
re Position innerhalb eines Kreises um den Messpunkt mit dem angegebenen Radius r be-
findet.
Abbildung 5.9: Standardabweichung für eine RTK-Messung
Man erkennt, dass eine Genauigkeit von 0,2 m (RMS) nach ca. 5600 Messpunkten (4.6
Minuten) und von 0,1 m (RMS) erst nach 11,3 Minuten erreicht wird. Dies sind Werte für
statische Verhältnisse. Wenn sich das Rennauto bewegt, steigen die Werte für SD bzw.
sinkt die Genauigkeit.
Um eine ausreichende Genauigkeit ab der ersten Runde zu erzielen wurde das Fahrzeug in
die Boxengasse gebracht und das System aktiviert. Nach Erreichen der Genauigkeit konn-
ten die Testrunden gefahren werden.
Abbildung 5.10 zeigt die Positionsdaten für eine Runde, den Kurs und die Geschwindig-
keit. Kurs und Geschwindigkeit sind Messdaten vom GPS-Empfänger. Ein Sensor für die
Drehrate, Längs- und Querbeschleunigung waren standardmäßig im Fahrzeug vorhanden
und mit dem CAN-Bus verbunden. Abbildung 5.13, 5.14 zeigen die entsprechenden Gra-
phen.
0 0.5 1 1.5 2 2.5 3
x 104
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Samples
SD
[m
]
Longitude
Latitude
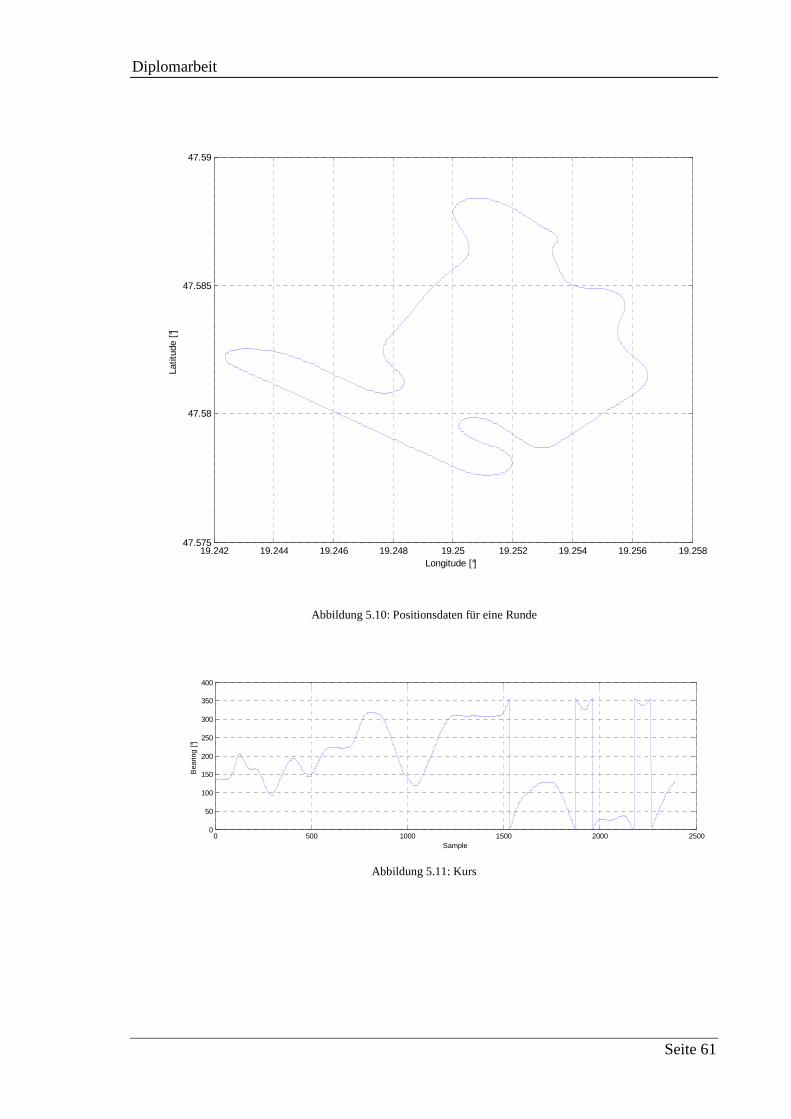
Diplomarbeit
Seite 61
Abbildung 5.10: Positionsdaten für eine Runde
Abbildung 5.11: Kurs
19.242 19.244 19.246 19.248 19.25 19.252 19.254 19.256 19.25847.575
47.58
47.585
47.59
Longitude [°]
Latit
ude
[°]
0 500 1000 1500 2000 25000
50
100
150
200
250
300
350
400
Sample
Bea
ring
[°]
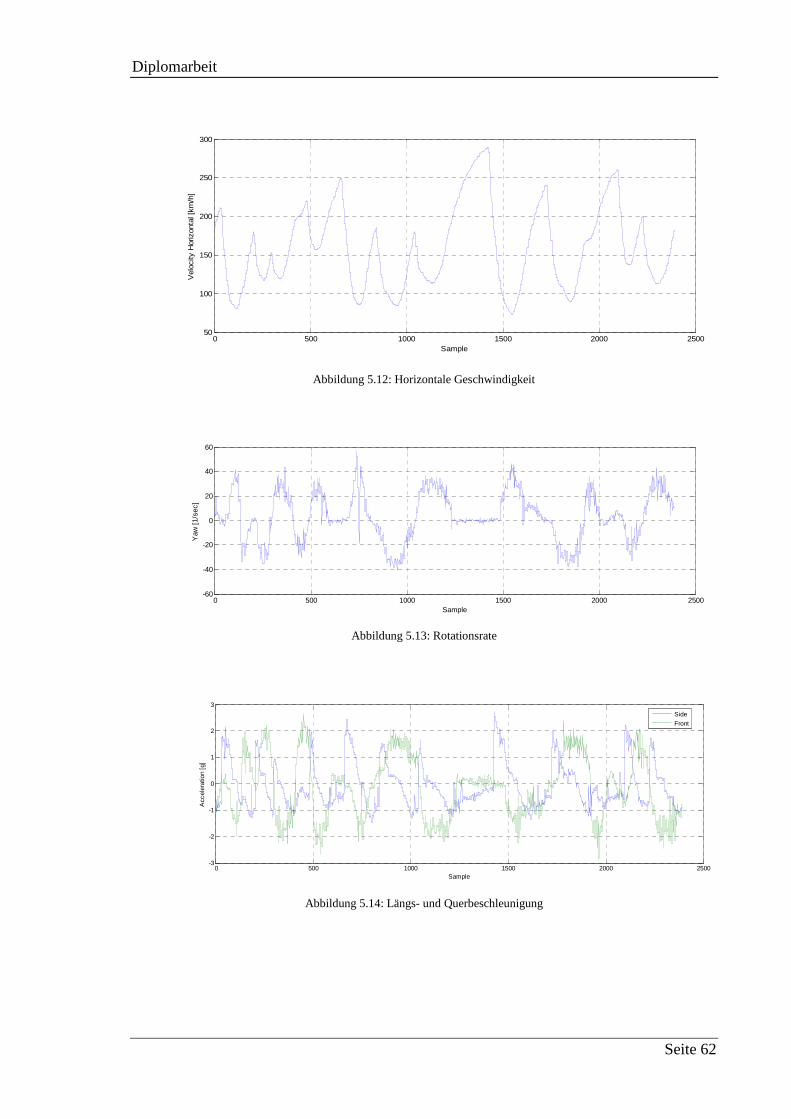
Diplomarbeit
Seite 62
Abbildung 5.12: Horizontale Geschwindigkeit
Abbildung 5.13: Rotationsrate
Abbildung 5.14: Längs- und Querbeschleunigung
0 500 1000 1500 2000 250050
100
150
200
250
300
Sample
Vel
ocity
Hor
izon
tal [
km/h
]
0 500 1000 1500 2000 2500-60
-40
-20
0
20
40
60
Sample
Yaw
[1/
sec]
0 500 1000 1500 2000 2500-3
-2
-1
0
1
2
3
Sample
Acc
eler
atio
n [g
]
Side
Front

Diplomarbeit
Seite 63
Die Abbildungen 5.15 bis 5.22 zeigen die restlichen Fahrzeugdaten mit 10 Hz. Diese Ab-
tastrate ist für eine Überwachung des Fahrzeuges während eines Tests oder Rennens aus-
reichend.
Abbildung 5.15: Motordrehzahl
Abbildung 5.16: Gaspedalstellung
Abbildung 5.17: Eingelegter Gang
0 500 1000 1500 2000 25005000
6000
7000
8000
9000
10000
11000
12000
Sample
Eng
ine
RP
M [
1/m
in]
0 500 1000 1500 2000 25000
20
40
60
80
100
Sample
Thr
ottle
Pos
ition
[%
]
0 500 1000 1500 2000 25001
2
3
4
5
6
7
Sample
Gea
r
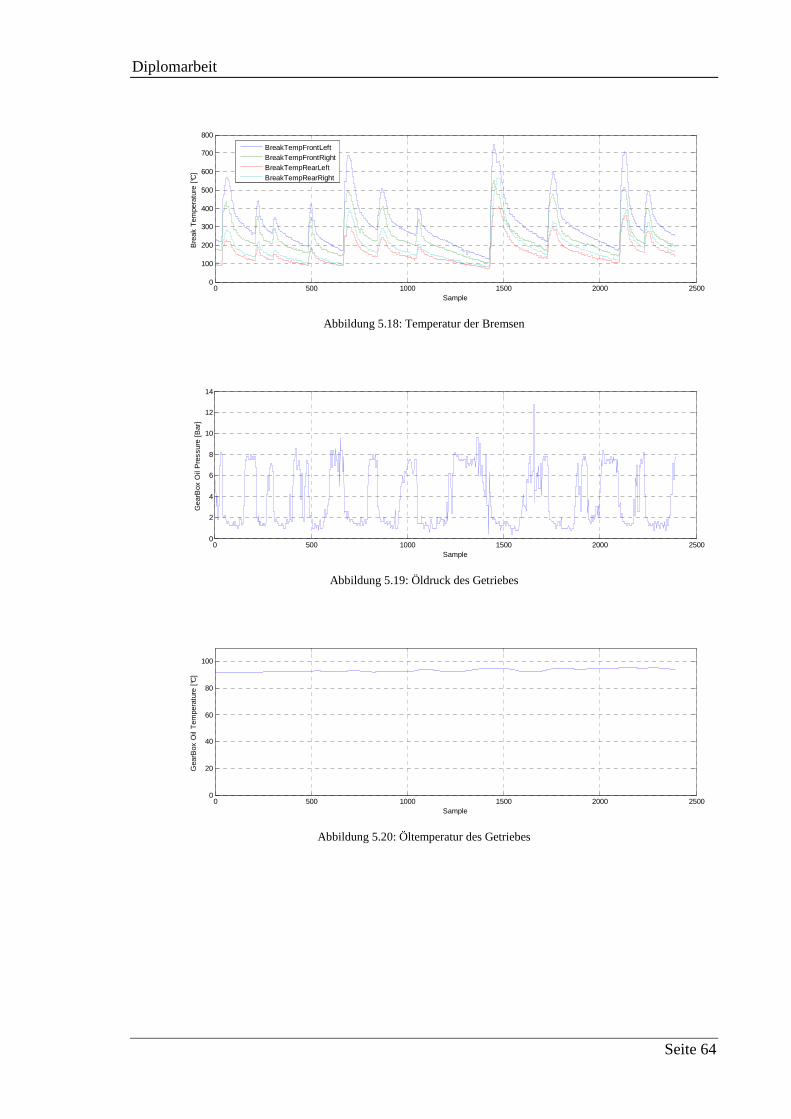
Diplomarbeit
Seite 64
Abbildung 5.18: Temperatur der Bremsen
Abbildung 5.19: Öldruck des Getriebes
Abbildung 5.20: Öltemperatur des Getriebes
0 500 1000 1500 2000 25000
100
200
300
400
500
600
700
800
Sample
Bre
ak T
empe
ratu
re [
°C]
BreakTempFrontLeftBreakTempFrontRightBreakTempRearLeftBreakTempRearRight
0 500 1000 1500 2000 25000
2
4
6
8
10
12
14
Sample
Gea
rBox
Oil
Pre
ssur
e [B
ar]
0 500 1000 1500 2000 25000
20
40
60
80
100
Sample
Gea
rBox
Oil
Tem
pera
ture
[°C
]
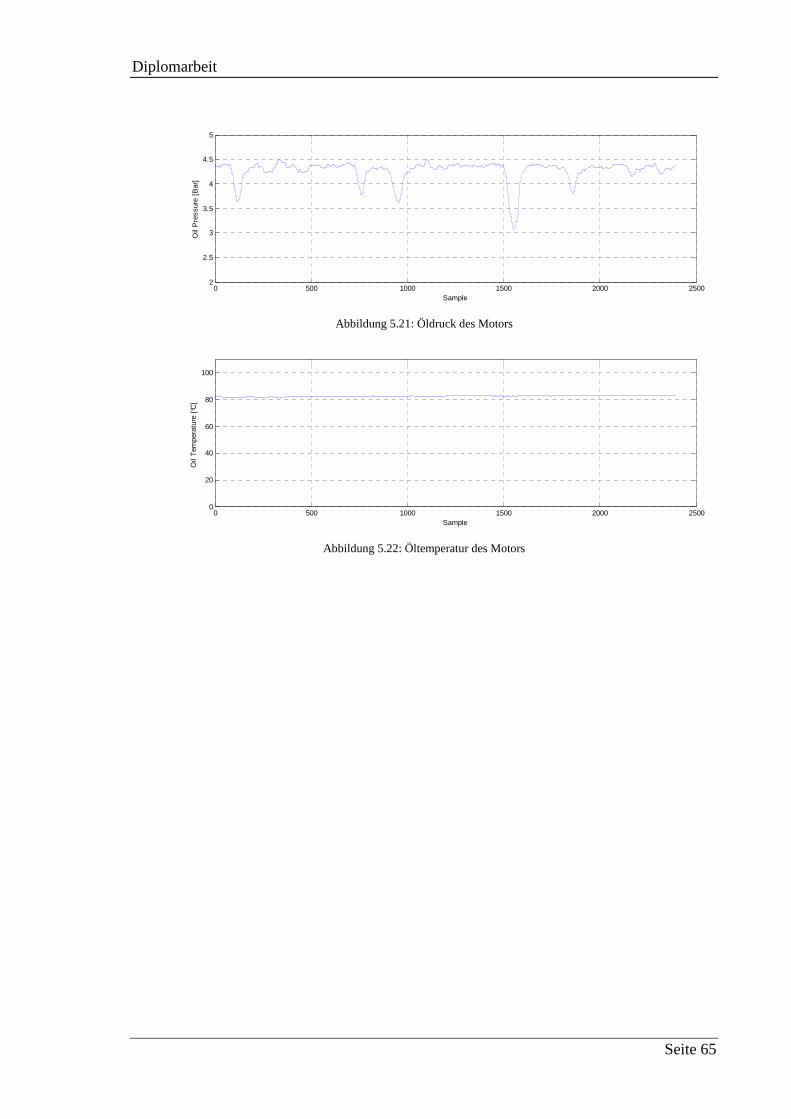
Diplomarbeit
Seite 65
Abbildung 5.21: Öldruck des Motors
Abbildung 5.22: Öltemperatur des Motors
0 500 1000 1500 2000 25002
2.5
3
3.5
4
4.5
5
Sample
Oil
Pre
ssur
e [B
ar]
0 500 1000 1500 2000 25000
20
40
60
80
100
Sample
Oil
Tem
pera
ture
[°C
]
Diplomarbeit
Seite 66
Abbildungsverzeichnis
3.1 OEMV-1 Series GPS-Receiver 14
3.2 Positionsbestimmung mit drei Satelliten 16
3.3 DGPS-, RTK-Konfiguration 17
3.4 Typische CAN-Bus Topologie 18
3.5 CAN-Bus Spannungspegel 19
3.6 UC864-E Modem der Firma Telit 20
4.1 Blockschaltbild der Hardware 24
4.2 Basisplatine mit WWAN- und GPS-Platine 25
4.3Konzept der Spannungsversorgung 26
4.4 Schaltung für Überspannungsschutz und Strombegrenzung 26
4.5 Eingangsspannung mit Überspannung ohne Schutzschaltung 27
4.6 Eingangsspannung mit Überspannung und Schutzschaltung 28
4.7 Abschaltung der internen Spannungsversorgung 28
4.8 Einschaltstromstoß ohne Strombegrenzung 29
4.9 Einschaltstromstoß mit Strombegrenzung 29
4.10 Schaltung des RS232-Interfaces 31
4.11 Schaltung des CAN-Interfaces 32
4.12 Schaltung einer Eingangsstufe 33
4.13 Schalthysterese einer Eingangsstufe 33
4.14 Schaltung des Ausganges 34
4.15 Schaltung für die Speicherkarte 35
4.16 Spannungsversorgung für das Modem 36
4.17 Schaltung für das Modem 37
4.18 Schaltung für die Statuslampen 38
Diplomarbeit
Seite 67
4.19 Schaltung für den GPS-Empfänger 39
4.20 Aufteilung der Firmware 40
4.21 Tasks 42
4.22 Ausführung der Tasks 43
4.23 Ablaufdiagramm für die Serververbindung 45
4.24 Ablauf der Authentifizierung 46
4.25 Aufbau eines Übertragungsrahmens 47
4.26 Hauptfenster der Konfigurationssoftware 50
4.27 Hauptfenster der Upgrade-Software 51
5.1 Testeinheit 53
5.2 Testaufbau 54
5.3 DGPS/RTK - Konvertierungssoftware 54
5.4 Abweichungen für Single, DGPS und RTK 55
5.5 Abweichungen der Schwerpunkte 56
5.6 Schwerpunkte für drei RTK-Messungen 57
5.7 Übersicht über den Hungaroring 59
5.8 Darstellung des Hungarorings in der Software 59
5.9 Standardabweichung für eine RTK-Messung 60
5.10 Positionsdaten für eine Runde 61
5.11 Kurs 61
5.12 Horizontale Geschwindigkeit 62
5.13 Rotationsrate 62
5.14 Längs- und Querbeschleunigung 62
5.15 Motordrehzahl 63
5.16 Gaspedalstellung 63
5.17 Eingelegter Gang 63
Diplomarbeit
Seite 68
5.18 Temperatur der Bremsen 64
5.19 Öldruck des Getriebes 64
5.20 Öltemperatur des Getriebes 64
5.21 Öldruck des Motors 65
5.22 Öltemperatur des Motors 65

Diplomarbeit
Seite 69
Tabellenverzeichnis
3.1 OEMV-1 Genauigkeiten 15
3.2 UC864-E Datenraten und Frequenzen 21
4.1 Versorgungsspannung und Stromaufnahme der Komponenten 25
4.2 Kommandos des Hilfs-Mikrocontrollers 30
4.3 Bedeutungen der Statuslampen 38
4.4 Steuerzeichen und Ersatzsequenzen 48
4.5 Kodierung und Dekodierung von Daten 48
5.1 Abweichungen vom Schwerpunkt 56
5.2 Ausgewählte Nachrichten vom CAN-Bus 58
Diplomarbeit
Seite 70
Literaturverzeichnis
[1] Martin Sauter (2011); Grundkurs Mobile Kommunikationssysteme
(4.Auflage); VIEWEG+TEUBNER
[2] John Dunlop, Demessie Girma, James Irvine (2000); Digital Mobile
Communications and the TETRA System; John Wiley & Sons, LTD
[3] Manfred Krüger (2008); Grundlagen der Kraftfahrzeugelektronik
(2.Auflage); HANSER
[4] Henning Wallentowitz, Konrad Reif (Hrsg.) (2006); Handbuch Kraft-
fahrzeugelektronik (1.Auflage); Vieweg
[5] NXP (2009); LPC23XX User manual; UM10211
[6] NXP (2008); LPC2387; Product data sheet
[7] Telit (2008); UC864 E/G Hardware User Guide
[8] Telit (2008); UC864-E/G Software User Guide
[9] Telit (2007); UC864-E/UC864-G AT Commands Reference Guide
[10] NovAtel Inc. (2009); OEMV Family Firmware Reference Manual
(Rev. 7); OM-20000094
[11] NovAtel Inc. (2009); OEMV Family Installation and Operation User
Manual (Rev. 10); OM-20000093
[12] Linear Technology; LT4356-1/LT4356-2 Surge Stopper; Datasheet
[13] infineon (2006); ITS4140N (Rev. 2.1); Datasheet
[14] NXP (2008); PCF8574 Remote 8-bit I/O expander for I2C-bus; Data
sheet
[15] ISO 11898-1:2003; Road vehicles -- Controller area network (CAN) --
Part 1: Data link layer and physical signalling; ISO Standard
[16] ISO 11898-2:2003; Road vehicles -- Controller area network (CAN) --
Part 2: High-speed medium access unit; ISO Standard
[17] ISO 11898-3:2006; Road vehicles -- Controller area network (CAN) --
Part 3: Low-speed, fault-tolerant, medium-dependent interface; ISO
Standard
Diplomarbeit
Seite 71
[NET1] NovAtel Inc.; http://www.novatel.com
[NET2] Telit Communications S.p.A.; http://www.telit.com
[NET3] APOS - Austrian Positioning Service (2011);
http://www.bev.gv.at/portal/page?_pageid=713,1571538&_dad=portal
&_schema=PORTAL
[WIKI1] WIKIPEDIA (2011); Hungaroring;
http://de.wikipedia.org/wiki/Hungaroring
[WIKI2] WIKIPEDIA (2011); Gauß-Krüger-Koordinatensystem;
http://de.wikipedia.org/wiki/Gauß-Krüger-Koordinatensystem
[WIKI3] WIKIPEDIA (2011); Global Positioning System;
http://de.wikipedia.org/wiki/Global_Positioning_System
[WIKI4] WIKIPEDIA (2011); Galileo (Satellitennavigation);
http://de.wikipedia.org/wiki/Galileo_(Satellitennavigation)
[WIKI5] WIKIPEDIA (2011); Message-Digest Algorithm 5;
http://de.wikipedia.org/wiki/Message-Digest_Algorithm_5
Diplomarbeit
Seite 72
Anhang I
Schaltpläne
Basisplatine 73
Schaltplan 1: Verbindung zur Modem- und GPS-Platine 73
Schaltplan 2: Spannungsversorgung 74
Schaltplan 3: CAN-Interface und Eingänge 75
Schaltplan 4: RS232-Interface und Speicherkarte 76
Schaltplan 5: Speicher und Ausgang 77
Schaltplan 6: Mikrocontroller Spannungsversorgung, Oszillator und JTAG 78
Schaltplan 7: Mikrocontroller GPIOs 79
WWAN-Platine 80
GPS-Platine 81
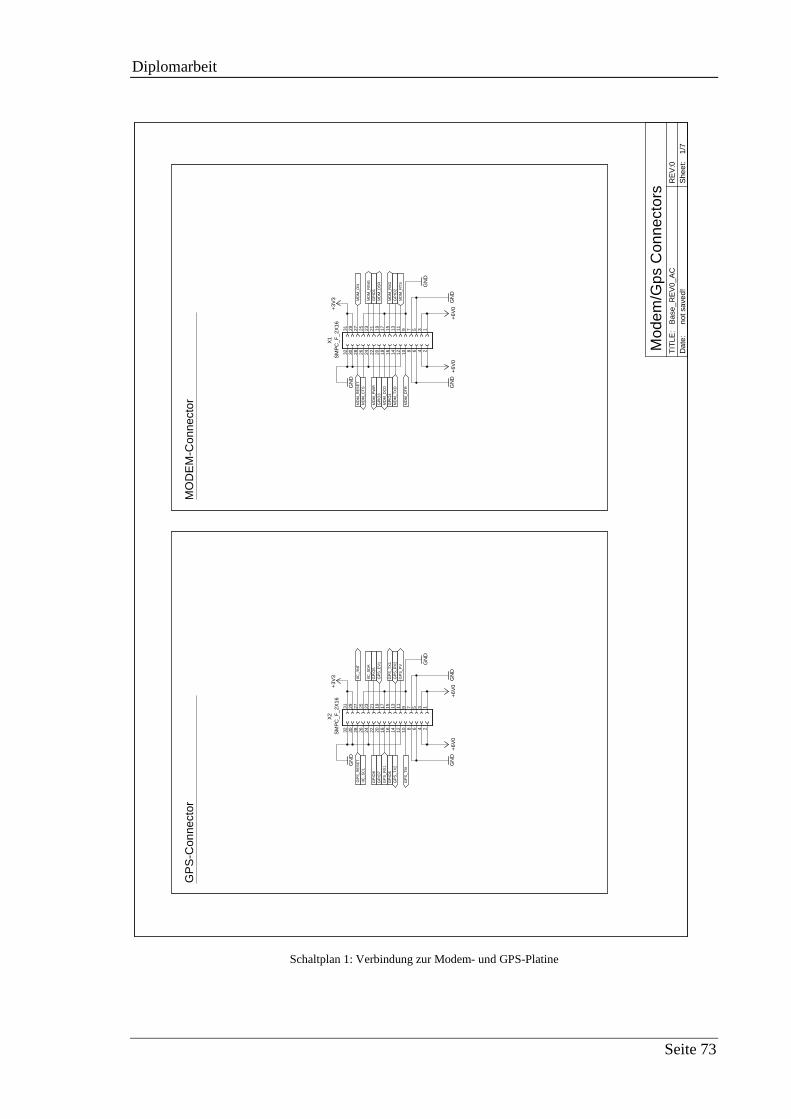
Diplomarbeit
Seite 73
Schaltplan 1: Verbindung zur Modem- und GPS-Platine
GP
IO1
GP
IO2
GP
IO3
GP
IO4
GP
IO5
GP
IO6
GP
IO7
GP
IO8
GP
S_E
V1
GP
S_P
V
GP
S_R
ES
ET
GP
S_R
X1
GP
S_R
X2
GP
S_T
M
GP
S_T
X1
GP
S_T
X2
IIC
_/IN
TII
C_S
CL
IIC
_SD
AM
DM
_CT
S
MD
M_D
CD
MD
M_D
SR
MD
M_D
TR
MD
M_O
N
MD
M_P
WR
MD
M_R
ES
ET
MD
M_R
ING
MD
M_R
TS
MD
M_R
XD
MD
M_T
XD
+3V
3+
3V3
+6V
0+
6V0
+6V
0+
6V0
Dat
e:no
t sav
ed!
She
et:
1/7
RE
V:
TIT
LE:
Bas
e_R
EV
0_A
C
GN
DG
ND
GN
DG
ND
GN
D
GN
DG
ND
GN
D
12
34
56
78
910
1112
1314
1516
1718
1920
2122
2324
2526
2728
2930
3132
X1
SM
PC
_F_2
X16
12
34
56
78
910
1112
1314
1516
1718
1920
2122
2324
2526
2728
2930
3132
X2
SM
PC
_F_2
X16
Mod
em/G
ps C
onne
ctor
s0
GP
S-C
onne
ctor
MO
DE
M-C
onne
ctor
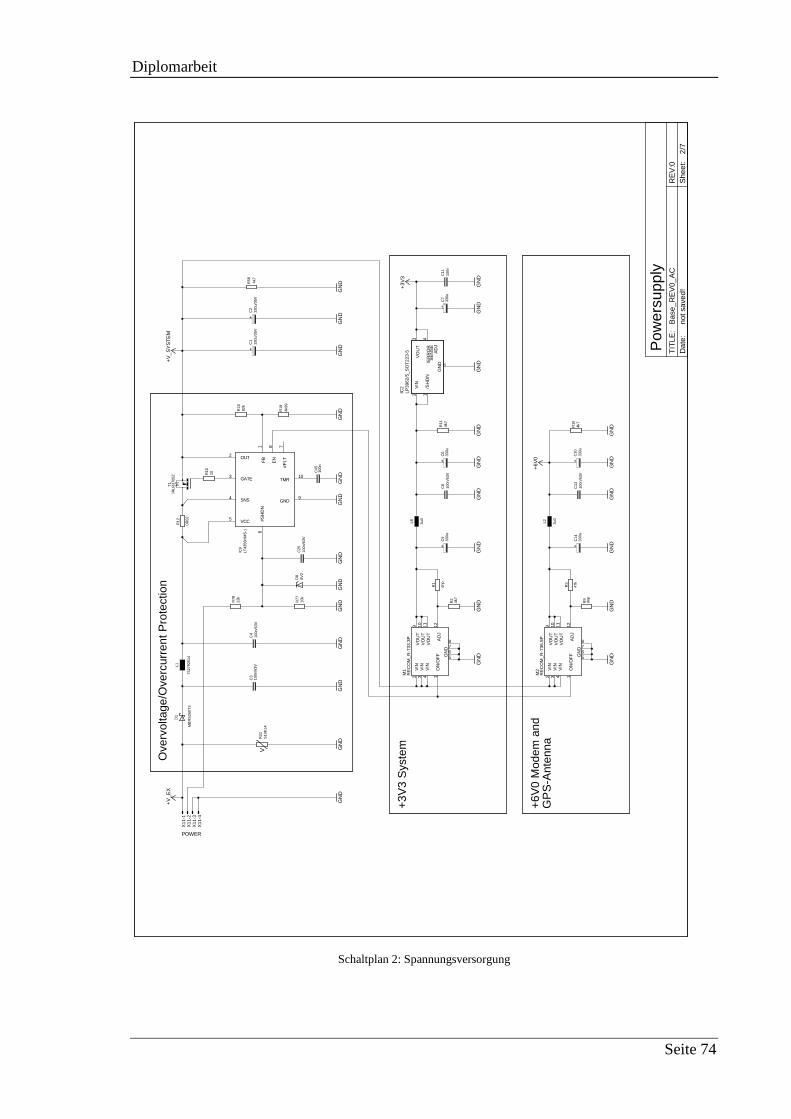
Diplomarbeit
Seite 74
Schaltplan 2: Spannungsversorgung
+3V
3
+6V
0
+V
_EX
+V
_SY
ST
EM
+C
133
0u/3
5V+
C2
330u
/35V
C3
100n
/63V
C4
100n
/63V
+C
633
0u+
C7
330u
C8
100n
/63V
+C
933
0u
+C
1033
0u
C11
100n
C13
100n
/63V
+C
1433
0u
C25
100n
/63V
C45
100n
D1
MB
RS
260T
3
D8
8V2
Dat
e:no
t sav
ed!
She
et:
2/7
RE
V:
TIT
LE:
Bas
e_R
EV
0_A
C
GN
DG
ND
GN
DG
ND
GN
DG
ND
GN
DG
ND
GN
DG
ND
GN
DG
ND
GN
D
GN
D
GN
DG
ND
GN
DG
ND
GN
D
GN
D
GN
D
GN
DG
ND
GN
DG
ND
GN
DG
ND
GN
D
/ER
RO
R4
/SH
DN
1
5
VIN
2V
OU
T3
GN
D
SE
NS
E
IC2
LP39
62/5
_SO
T22
3-5 AD
J
#FLT
7
#SH
DN
6
EN
8
FB
1
GATE3
GND9
OUT2
SNS4
TMR10
VCC5
IC9
LT43
56H
MS
-1
L1
7427
9251
4
L2 3u3
L8 3u3
AD
J12
5678
ON
/OF
F1
VIN
2
VIN
3
VIN
4
VO
UT
9
VO
UT
10
VO
UT
11
GN
D
M1
RE
CO
M_R
-733
.3P AD
J12
5678
ON
/OF
F1
VIN
2
VIN
3
VIN
4
VO
UT
9
VO
UT
10
VO
UT
11
GN
D
M2
RE
CO
M_R
-736
.5P
R1
dnp
R2
4k7
R3
47k
R9
dnp
R10
4k7
R11
4k7
R12
0R02
R16
10
R18
82k
R19
4k99
VR
22S
10K
14
R58 4k7
R77
10k
R78
22k
T1
IRLR
3705
Z
X11
-1
POWER
X11
-2X
11-3
X11
-4
Pow
ersu
pply
0
Ove
rvol
tage
/Ove
rcur
rent
Pro
tect
ion
+3V
3 S
yste
m
+6V
0 M
odem
and
GP
S-A
nten
na
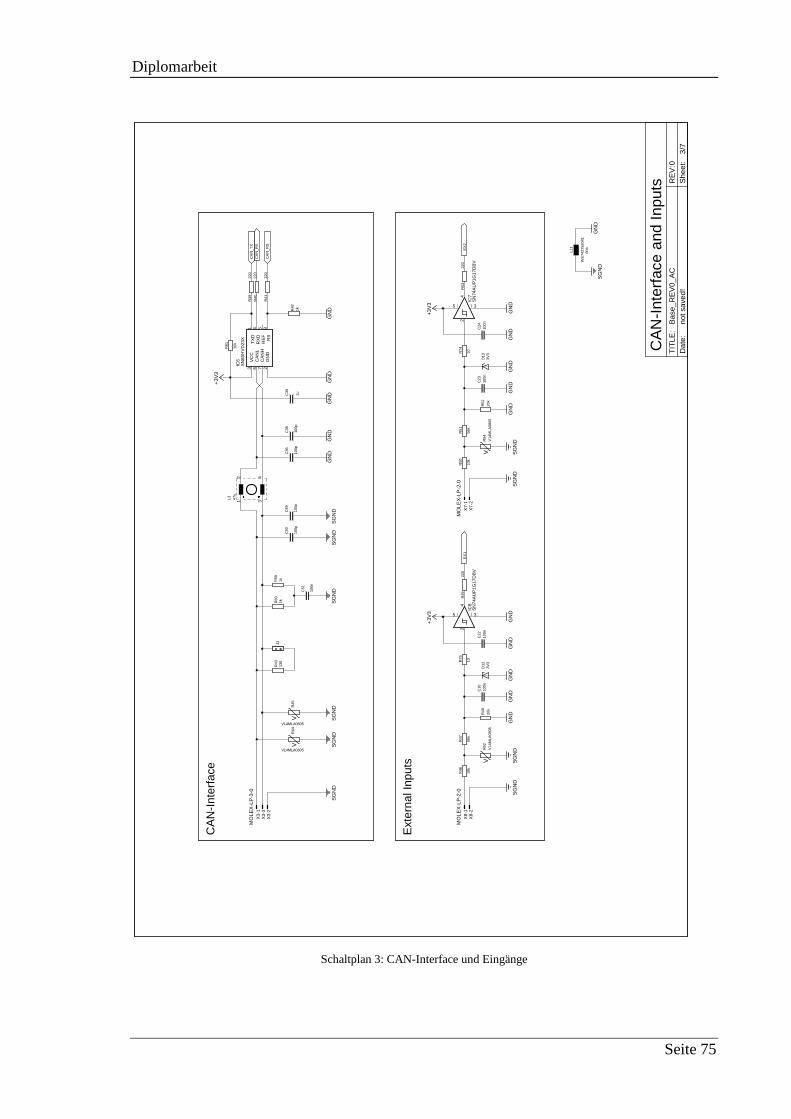
Diplomarbeit
Seite 75
Schaltplan 3: CAN-Interface und Eingänge
CA
N_R
S
CA
N_R
XC
AN
_TX
EX
1E
X2
+3V
3+
3V3
+3V
3
C16
100n
C22
100n
C23
100n
C24
100n
C35
100p
C36
100p
C39
1u
C49
100p
C50
100p
C51
100n
D12
3V3
D13
3V3 D
ate:
not s
aved
!S
heet
:3/
7R
EV
:T
ITLE
:B
ase_
RE
V0_
AC
GN
D
GN
DG
ND
GN
DG
ND
GN
DG
ND
GN
D
GN
DG
ND
GN
DG
ND
GN
DG
ND
GN
DG
NDC
AN
H7
CA
NL
6
GN
D2
RE
F5
RS
8
RX
D4
TX
D1
VC
C3
IC6
SN
65H
VD
23X
3
24
5
IC7
SN
74A
UP
1G17
DB
V
VC
C
GN
D
3
24
5
IC8
SN
74A
UP
1G17
DB
V
VC
C
GN
D
J2
12
34
L3 47u
L11
WE
7427
9204
1
SG
ND
SG
ND
SG
ND
SG
ND
SG
ND
SG
ND
SG
ND
SG
ND
SG
ND
SG
ND
SG
ND
R39
220
R40
220
R41
220
R42
1k
R43
130
VR
44
V14MLA0805
VR
45
V14MLA0805
R46
10k
R47
56k
R48
20k
R49
220
R50
10k
R51
56k
R52
20k
R53
220
VR
54V
14M
LA08
05
R59
1kR
601k
R61
10k
VR
62V
14M
LA08
05
R74
10
R75
10
X3-
1
MO
LEX
-LP
-3-0
X3-
2X
3-3
X7-
1
MO
LEX
-LP
-2-0
X7-
2X
8-1
MO
LEX
-LP
-2-0
X8-
2
CA
N-I
nter
face
and
Inpu
ts0
CA
N-I
nter
face
Ext
erna
l Inp
uts
dna
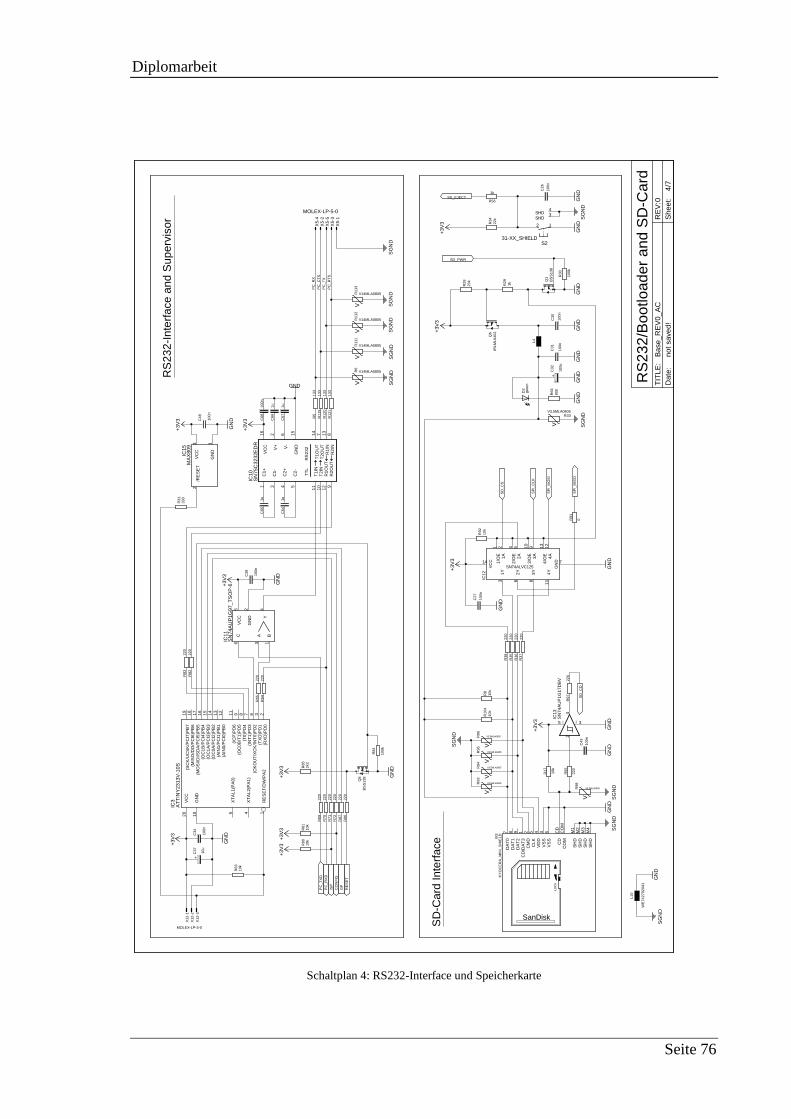
Diplomarbeit
Seite 76
Schaltplan 4: RS232-Interface und Speicherkarte
CO
NF
IGG
P
ISP
PC
_RX
DP
C_T
XD
RE
SE
T
SD
_CD
SD
_CS
SD_EJECT
SD_PWR
SP
I_C
LK
SP
I_M
ISO
SP
I_M
OS
I
+3V
3
+3V
3
+3V
3
+3V
3+
3V3
+3V
3
+3V
3
+3V
3
+3V
3
+3V
3
+3V
3
C26
100n
C27
100n
C30
100n
C31
100n
+C
32
100u
C34
100n
+C
37
10u
C38
100n
C43
100n
C48
100n
C64
1u
C65
1u
C66
1u
C67
1u
C68
100n
D2
gree
n Dat
e:no
t sav
ed!
She
et:
4/7
RE
V:
TIT
LE:
Bas
e_R
EV
0_A
C
GN
D
GN
D
GN
D
GN
DG
ND
GN
DG
ND
GN
D
GN
D
GN
DG
ND
GN
D
GN
D
GN
D
GN
DG
ND
GN
D
GND
(AIN
0/P
CI0
)PB
012
(AIN
1/P
CI1
)PB
113
(CK
OU
T/X
CK
/INT
0)P
D2
6
(IC
P)P
D6
11
(IN
T1)
PD
37
(MIS
O/D
O/P
CI6
)PB
618
(MO
SI/D
I/SD
A/P
CI5
)PB
517
(OC
0A/P
CI2
)PB
214
(OC
0B/T
1)P
D5
9
(OC
1A/P
CI3
)PB
315
(OC
1B/P
CI4
)PB
416
(RX
D)P
D0
2
(SC
K/U
CS
K/P
CI7
)PB
719
(T0)
PD
48
(TX
D)P
D1
3
GN
D10
RE
SE
T/D
W/P
A2
1
VC
C20
XT
AL1
(PA
0)5
XT
AL2
(PA
1)4
IC3
AT
TIN
Y23
13V
-10S
C1+
1
C1-
3
C2+
4
C2-
5G
ND
15
R1I
N13
R1O
UT
12
R2I
N8
R2O
UT
9
T1I
N11
T1O
UT
14
T2I
N10
T2O
UT
7
V+
2
V-
6
VC
C16
IC10
SN
75C
3232
ED
R
TT
LR
S23
2
A3
B1
C6
GN
D2
VC
C5
Y4
IC11
SN
74A
UP
1G97
_TS
OP
-6
1/O
E1
1A2
1Y3
2/O
E4
2A5
2Y6
3/O
E10
3A9
3Y8
4/O
E13
4A12
4Y11
714
VC
C
GN
D
IC12
SN74ALVC125
3
24
5 VC
C
GN
D
IC13
SN
74A
UP
1G17
DB
V
/RE
SE
T2
GN
D1
VC
C3
IC15
MA
X80
9
L4
L10
WE
7427
9204
1
CD
CD
CD
/DA
T3
1
CLK
5C
MD
2
CO
MC
OM
DA
T0
7
DA
T1
8
DA
T2
9
SH
DM
1
SH
DM
2
SH
DM
3
SH
DM
4
VD
D4
VS
S3
VS
S6
LOC
K
SanDisk
M3
KY
OC
ER
A_M
INI_
SH
IELD
SG
ND
SG
ND
SG
ND
SG
ND
SG
ND
SG
ND
SG
ND
SG
ND
SG
ND
SG
ND
SG
ND
Q1
BS
S13
8
Q6
IRLM
L640
2
Q8
BS
S13
8
R5
133
VR
6
V14MLA0805
R8
10k
R17
10k
R28
20k
R29
1k
R30
100k
R31
330
V
R33V3.5MLA0805
R34
22k
R35
220
R36
220
R37
220
R38
220
R55
220
R56
1k
R63
10k
R64
220
R65
220
R66
800
R69
220
R70
220
R71
220
R72
220
R80
10k
R81
10k
R82
220
R83
220
R84
100k
R85
2k2
R86
220
R87
220
R91
0
R92
10k
V
R93
V3.5MLA0805
V
R94
V3.5MLA0805
V
R95
V3.5MLA0805
V
R96
V3.5MLA0805
R97
220
V
R98
V3.5MLA0805
R10
410
k
VR
111
V14MLA0805
VR
112
V14MLA0805
VR
113
V14MLA0805
R11
913
3R
120
133
R12
113
3
12
SHD3SHD4
S231-XX_SHIELD
X5-
1
MOLEX-LP-5-0
X5-
2
X5-
3
X5-
4
X5-
5
X12
-1
MOLEX-LP-3-0
X12
-2X
12-3
RS
232/
Boo
tload
er a
nd S
D-C
ard
0
RS
232-
Inte
rfac
e an
d S
uper
viso
r
SD
-Car
d In
terf
ace
PC
_RX
PC
_CT
SP
C_T
XP
C_R
TS
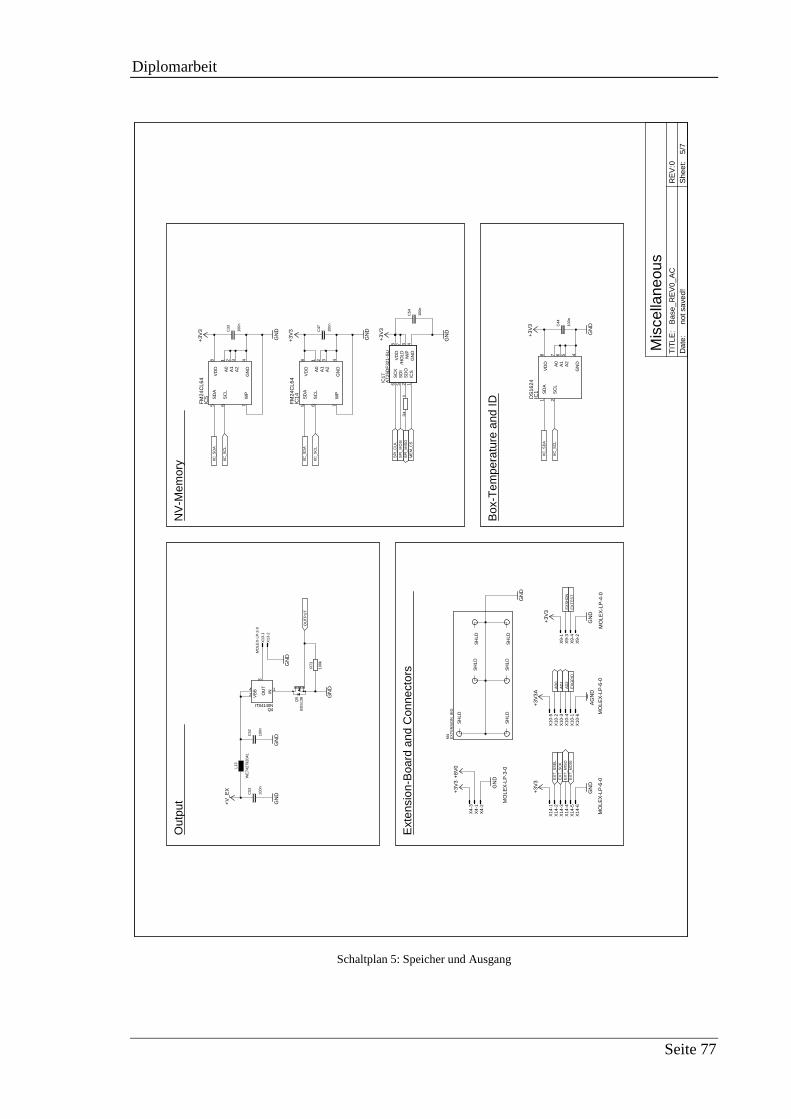
Diplomarbeit
Seite 77
Schaltplan 5: Speicher und Ausgang
AD
0A
D1
AD
2E
XG
PIO
EX
SH
DN
EX
TE
ST
EX
T_M
ISO
EX
T_M
OS
I
EX
T_S
CK
EX
T_S
SE
LII
C_S
CL
IIC
_SC
L
IIC
_SC
L
IIC
_SD
A
IIC
_SD
A
IIC
_SD
A
ME
M_C
S
OU
TP
UT
SP
I_C
LK
SP
I_M
ISO
SP
I_M
OS
I
+3V
3+
3V3A
+3V
3
+3V
3
+3V
3
+3V
3
+3V
3
+3V
3
+8V
0
+V
_EX
AG
ND
C33
100n C
44
100n
C47
100n
C52
100n
C53
100n
C54
100n
Dat
e:no
t sav
ed!
She
et:
5/7
RE
V:
TIT
LE:
Bas
e_R
EV
0_A
C
GN
D
GN
D
GN
D
GN
D
GN
D
GN
D
GN
D
GN
D
GN
DG
ND
GN
D
GN
D
A0
7
A1
6
A2
5
GN
D4
SC
L2
SD
A1
VD
D8
IC1
DS
1624
A0
1
A1
2
A2
3
GN
D4
SC
L6
SD
A5
VD
D8
WP
7IC5
FM
24C
L64
A0
1
A1
2
A2
3
GN
D4
SC
L6
SD
A5
VD
D8
WP
7IC14
FM
24C
L64 /C
S1
/HO
LD7
/WP
3
GN
D4
SC
K6
SD
I5
SD
O2
VD
D8
IC17
AT
25D
F32
1-S
U
L13
WE
7427
9204
1
SH
LD
SH
LDS
HLD
SH
LDS
HLD
SH
LD
M4
EX
TE
NS
ION
_BIG
1
OU
T3
24
VB
B IN
Q4ITS4140N
Q5
BS
S13
8
R4
0
R73
100k
X4-
1
MO
LEX
-LP
-3-0
X4-
2
X4-
3
X9-
1
MO
LEX
-LP
-4-0
X9-
2
X9-
3X
9-4
X10
-1
MO
LEX
-LP
-6-0
X10
-2X
10-3
X10
-4
X10
-5
X10
-6
X13
-1
MO
LEX
-LP
-2-0
X13
-2
X14
-1
MO
LEX
-LP
-6-0
X14
-2X
14-3
X14
-4X
14-5
X14
-6
Mis
cella
neou
s0
NV
-Mem
ory
Box
-Tem
pera
ture
and
ID
Ext
ensi
on-B
oard
and
Con
nect
ors
Out
put
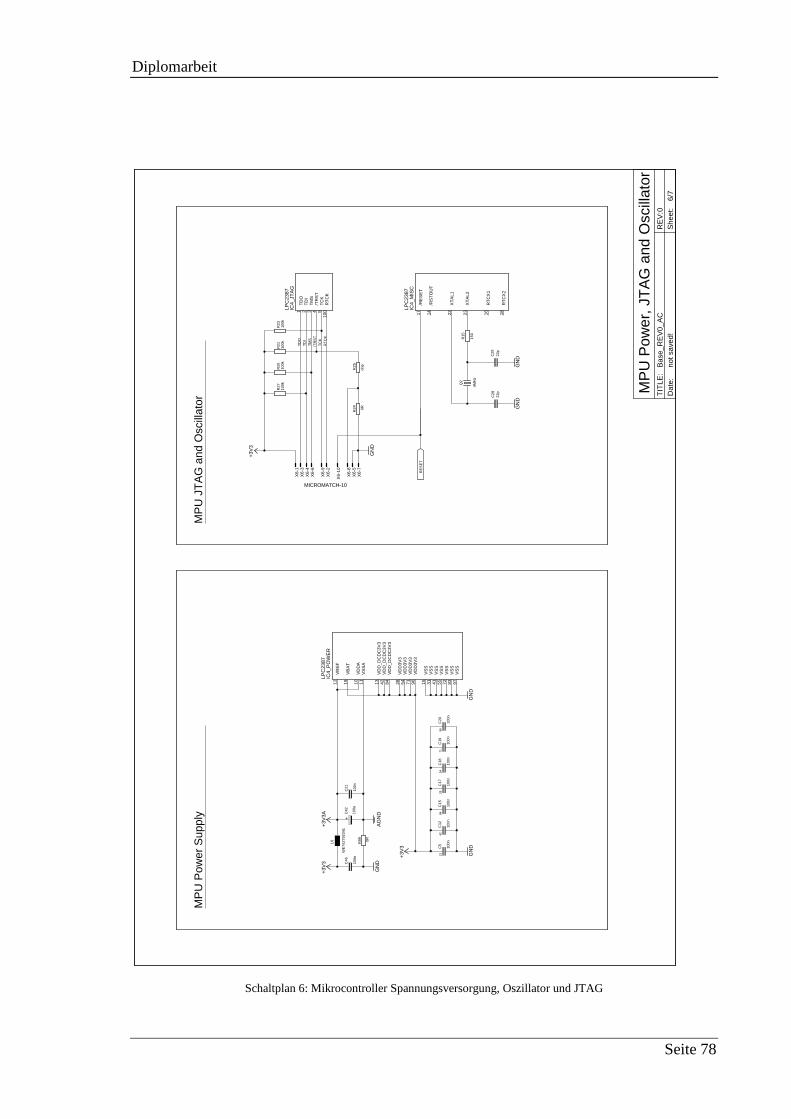
Diplomarbeit
Seite 78
Schaltplan 6: Mikrocontroller Spannungsversorgung, Oszillator und JTAG
/TR
ST
RE
SE
T
RT
CK
TC
K
TD
IT
DO
TM
S
+3V
3+
3V3A
+3V
3
+3V
3
AG
ND
C5
100n
C12
100n
C15
100n
C17
100n
C18
100n
C19
100n
C20
100n
C21
100n
C28
22p
C29
22p
+C
42
100u
C46
100n
Dat
e:no
t sav
ed!
She
et:
6/7
RE
V:
TIT
LE:
Bas
e_R
EV
0_A
C
GN
D
GN
D
GN
DG
ND
GN
D
GN
D
/TR
ST
4
RT
CK
100
TC
K5
TD
I2
TD
O1
TM
S3IC
4_JT
AG
LPC
2387
/RE
SE
T17
/RS
TO
UT
14
RT
CX
116
RT
CX
218
XT
AL1
22
XT
AL2
23
IC4_
MIS
CLP
C23
87
VB
AT
19
VD
D3V
328
VD
D3V
354
VD
D3V
371
VD
D3V
396
VD
DA
10
VD
D_D
CD
C3V
313
VD
D_D
CD
C3V
342
VD
D_D
CD
C3V
384
VR
EF
12
VS
S15
VS
S31
VS
S41
VS
S55
VS
S72
VS
S83
VS
S97
VS
SA
11
IC4_
PO
WE
RLP
C23
87
L6
WE
7427
9204
1
Q2
4MH
z
R15
150
R20
100k
R21
100k
R23
100k
R24 0R
R25
dnp
R27
100k
R99 0R
X6-
1
MICROMATCH-10
X6-
2
X6-
3X
6-4
X6-
5
X6-
6
X6-
7
X6-
8
X6-
9
X6-
10
MP
U P
ower
, JT
AG
and
Osc
illat
or0
MP
U J
TA
G a
nd O
scill
ator
MP
U P
ower
Sup
ply
1342
8428
5471
96
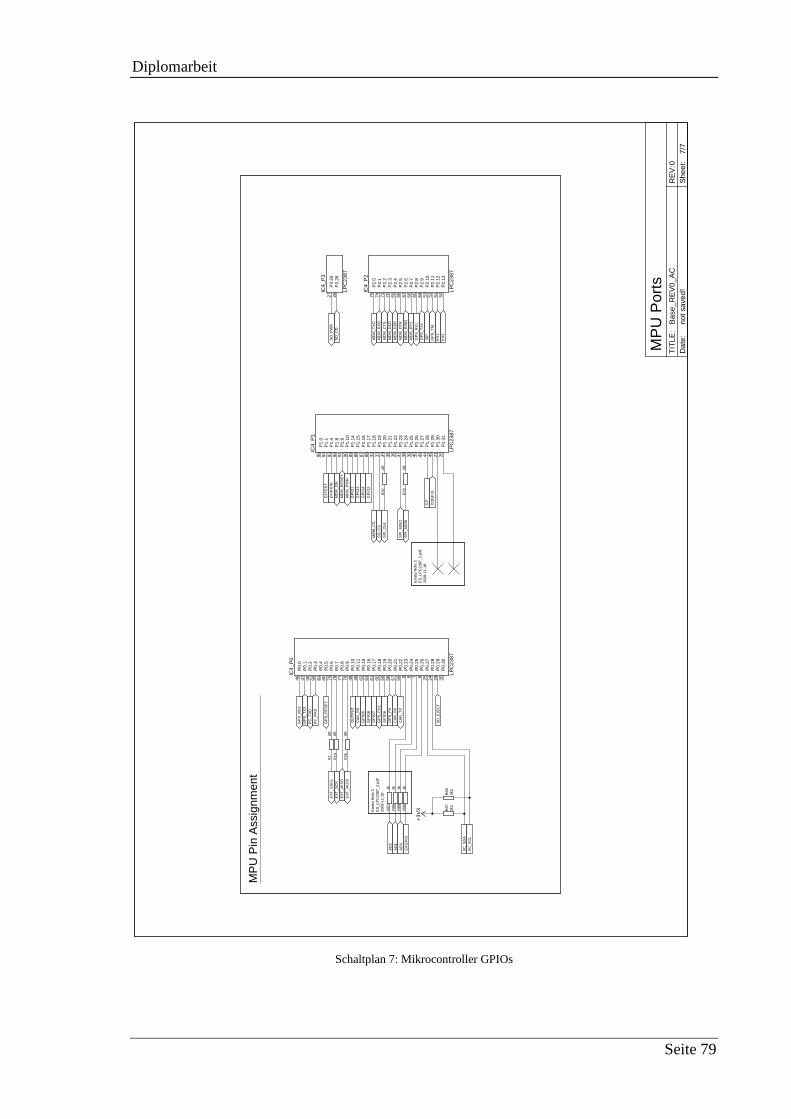
Diplomarbeit
Seite 79
Schaltplan 7: Mikrocontroller GPIOs
AD
0A
D1
AD
2
CA
N_R
S
CA
N_R
XC
AN
_TX
CO
NF
IGE
X1
EX
2
EX
GP
IO
EX
SH
DN
EX
TE
ST
EX
T_M
ISO
EX
T_M
OS
I
EX
T_S
CK
EX
T_S
SE
L
GP
GP
IO1
GP
IO2
GP
IO3
GP
IO4
GP
IO5
GP
IO6
GP
IO7
GP
IO8
GP
S_E
V1
GP
S_P
V
GP
S_R
ES
ET
GP
S_R
X1
GP
S_R
X2
GP
S_T
M
GP
S_T
X1
GP
S_T
X2
IIC
_SC
LII
C_S
DA
ISP
MD
M_C
TS
MD
M_D
CD
MD
M_D
SR
MD
M_D
TR
MD
M_O
N
MD
M_P
WR
MD
M_R
ES
ET
MD
M_R
ING
MD
M_R
TS
MD
M_R
XD
MD
M_T
XD
ME
M_C
S
OU
TP
UT
PC
_RX
DP
C_T
XD
SD
_CD
SD
_CS
SD
_EJE
CT
SD
_PW
R
SP
I_C
LK
SP
I_M
ISO
SP
I_M
OS
I
+3V
3
Dat
e:no
t sav
ed!
She
et:
7/7
RE
V:
TIT
LE:
Bas
e_R
EV
0_A
C
P0.
046
P0.
147
P0.
298
P0.
399
P0.
481
P0.
580
P0.
679
P0.
778
P0.
877
P0.
976
P0.
1048
P0.
1149
P0.
1562
P0.
1663
P0.
1761
P0.
1860
P0.
1959
P0.
2058
P0.
2157
P0.
2256
P0.
239
P0.
248
P0.
257
P0.
266
P0.
2725
P0.
2824
P0.
2929
P0.
3030
IC4_
P0
LPC
2387
P1.
095
P1.
194
P1.
493
P1.
892
P1.
991
P1.
1090
P1.
1489
P1.
1588
P1.
1687
P1.
1786
P1.
1832
P1.
1933
P1.
2034
P1.
2135
P1.
2236
P1.
2337
P1.
2438
P1.
2539
P1.
2640
P1.
2743
P1.
2844
P1.
2945
P1.
3021
P1.
3120
IC4_
P1
LPC
2387
P2.
075
P2.
174
P2.
273
P2.
370
P2.
469
P2.
568
P2.
667
P2.
766
P2.
865
P2.
964
P2.
1053
P2.
1152
P2.
1251
P2.
1350
IC4_
P2
LPC
2387
P3.
2527
P3.
2626
IC4_
P3
LPC
2387
R7
0RR
140R
R26
0R
R32
0RR
571k
R67
2k2
R68
2k2
R76
0R
R88
1kR
891k
R90
1k
MP
U P
orts
0
MP
U P
in A
ssig
nmen
t
Err
ata
Not
e 2
ES
_LP
C23
87_2
2008
-11-
18
Err
ata
Not
e 2
ES
_LP
C23
87_2
2008
-11-
18
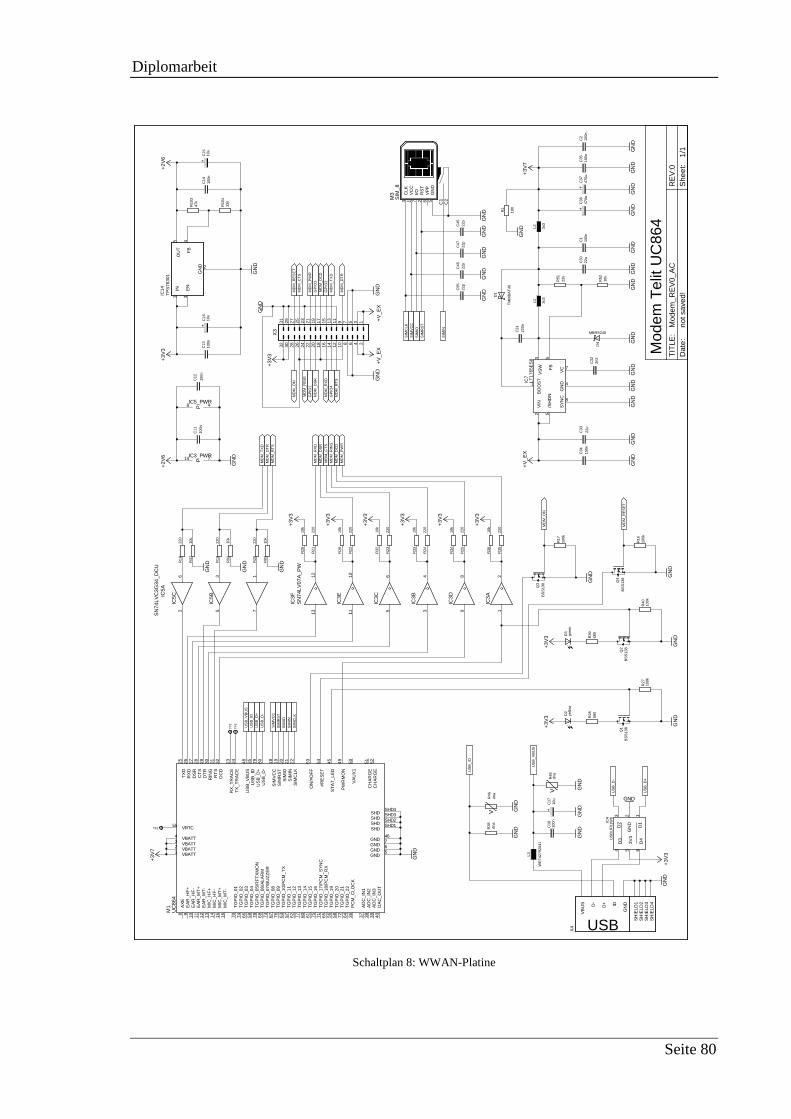
Diplomarbeit
Seite 80
Schaltplan 8: WWAN-Platine
GP
IO1
GP
IO2
GP
IO3
GP
IO4
MD
M_C
TS
MD
M_C
TS
MD
M_D
CD
MD
M_D
CD
MD
M_D
SR
MD
M_D
SR
MD
M_D
TR
MD
M_D
TR
MD
M_O
N
MD
M_O
N
MD
M_P
WR
MD
M_P
WR
MD
M_R
ES
ET
MD
M_R
ES
ET
MD
M_R
ING
MD
M_R
ING
MD
M_R
TS
MD
M_R
TS
MD
M_R
XD
MD
M_R
XD
MD
M_T
XD
MD
M_T
XD
SIM
CLK
SIM
CLK
SIM
IN
SIM
IN
SIM
IO
SIM
IO
SIM
RS
T
SIM
RS
T
SIM
VC
C
SIM
VC
C
US
B_D
+
US
B_D
+
US
B_D
-
US
B_D
-
US
B_I
D
US
B_I
D
US
B_V
BU
S
US
B_V
BU
S
+2V
6+
2V6
+3V
7
+3V
3
+3V
3
+3V
3+
3V3
+3V
3
+3V
7
+3V
3
+3V
3
+3V
3
+3V
3
+3V
3
+3V
3
+V
_EX
+V
_EX
+V
_EX
C1
100n
C2
100n
C11
100n
C12
100n
C13
100n
C14
100n
+C
1510
u+
C16
10u
+C
1710
uC
1810
0n
C30
22u
C31
220n
C32
2n2
C33
22u
C34
100n
C35
100n
+C
3747
0u+
C38
470u
C45
22p
C47
22p
C48
22p
C55
22p
D1
TM
MB
AT
46
D2
yello
wD
3gr
een
D4
MBRS240
Dat
e:no
t sav
ed!
She
et:
1/1
RE
V:
TIT
LE:
Mod
em_R
EV
0_A
C
GN
DG
ND
GN
D
GN
D
GN
D
GN
D
GN
D
GN
D
GN
D
GN
D
GN
D
GN
D
GN
D
GN
D
GN
DG
ND
GN
D
GND
GN
DG
ND
GN
D
GN
D
GN
D
GN
D
GN
DG
ND
GN
DG
ND
GN
DG
ND
GN
DG
ND
GN
DG
ND
GN
DG
ND
GN
DG
ND
GN
D
12
IC3A
34
IC3B
56
IC3C
98
IC3D
1110
IC3E
1312
IC3F
SN
74LV
07A
_PW
714 P
IC3_PWR
3V3
5
D1
1
D2
3D
34
D4
6
GN
D2
IC4
US
BU
F01
W6
17
IC5A
SN
74LV
C3G
34_D
CU
35
IC5B
62
IC5C
48 P
IC5_PWR
/SH
DN
5
1
FB
6
4
8
7
VIN
2V
SW
3B
OO
ST
SY
NC
GN
DV
C
IC7
LT17
65E
S8
EN
3F
B4
2
IN1
OU
T5
GN
D
IC14
TP
S76
301
L1 3u3
L2 3u3
L3
WE
7427
9204
1
#RE
SE
T54
AD
C_I
N1
37
AD
C_I
N2
38
AD
C_I
N3
39
AX
E8
CH
AR
GE
51
CH
AR
GE
52
CT
S28
DA
C_O
UT
40
DC
D32
DS
R27
DT
R29
EA
R_H
F+
9
EA
R_H
F-
10
EA
R_M
T+
11
EA
R_M
T-
12
GND5GND6GND7GND46
MIC
_HF
+13
MIC
_HF
-14
MIC
_MT
+15
MIC
_MT
-16
ON
/#O
FF
53
PC
M_C
LOC
K36
PW
RM
ON
49
RIN
G30
RT
S31
RX
D26
RX
_TR
AC
E23
SHDSHD1SHDSHD2SHDSHD3SHDSHD4
SIM
CLK
22S
IMIN
21S
IMIO
20S
IMR
ST
19S
IMV
CC
18
ST
AT
_LE
D45
TG
PIO
_01
70
TG
PIO
_02
74
TG
PIO
_03
66
TG
PIO
_04
59
TG
PIO
_05/
RF
TX
MO
N78
TG
PIO
_06/
ALA
RM
68
TG
PIO
_07/
BU
ZZ
ER
73
TG
PIO
_08
67
TG
PIO
_09
76
TG
PIO
_10/
PC
M_T
X63
TG
PIO
_11
57
TG
PIO
_12
62
TG
PIO
_13
77
TG
PIO
_14
60
TG
PIO
_15
61
TG
PIO
_16
75
TG
PIO
_17/
PC
M_S
YN
C71
TG
PIO
_18/
PC
M_R
X65
TG
PIO
_19
56
TG
PIO
_20
58
TG
PIO
_21
72
TG
PIO
_22
64
TX
D25
TX
_TR
AC
E24
US
B_D
+79
US
B_D
-80
US
B_I
D35
US
B_V
BU
S48
VA
UX
150
VBATT1VBATT2VBATT3VBATT4
VRTC55
M1
UC
864
C1
C2
CLK
3
GN
D5
I/O7
RS
T2
VC
C1
VP
P6S
IM_8
M3
Q1
BS
S13
8Q
2B
SS
138
Q3
BS
S13
8
Q4
BS
S13
8
R1
180
R16
100k
R17
100k
R18
220
R19
220
R20
220
R21
220
R22
220
R23
220
R24
220
R25
220
R26
680
R27
100k
R28
10k
R29
10k
R32
10k
R33
10k
R34
10k
R35
220
R36
10k
R37
10k
R38 dna
R39
680
R40
100k
VR
45dn
a
VR
46dn
a
R51
22k
R52
10k
R92
10k
R93
10k
R10
347
k
R10
433
k
TP1
TP
2
TP
3
12
34
56
78
910
1112
1314
1516
1718
1920
2122
2324
2526
2728
2930
3132
X3
D+D-
GN
DID
SH
IELD
1S
HIE
LD2
SH
IELD
3S
HIE
LD4
VB
US
X4 USB
Mod
em T
elit
UC
864
0
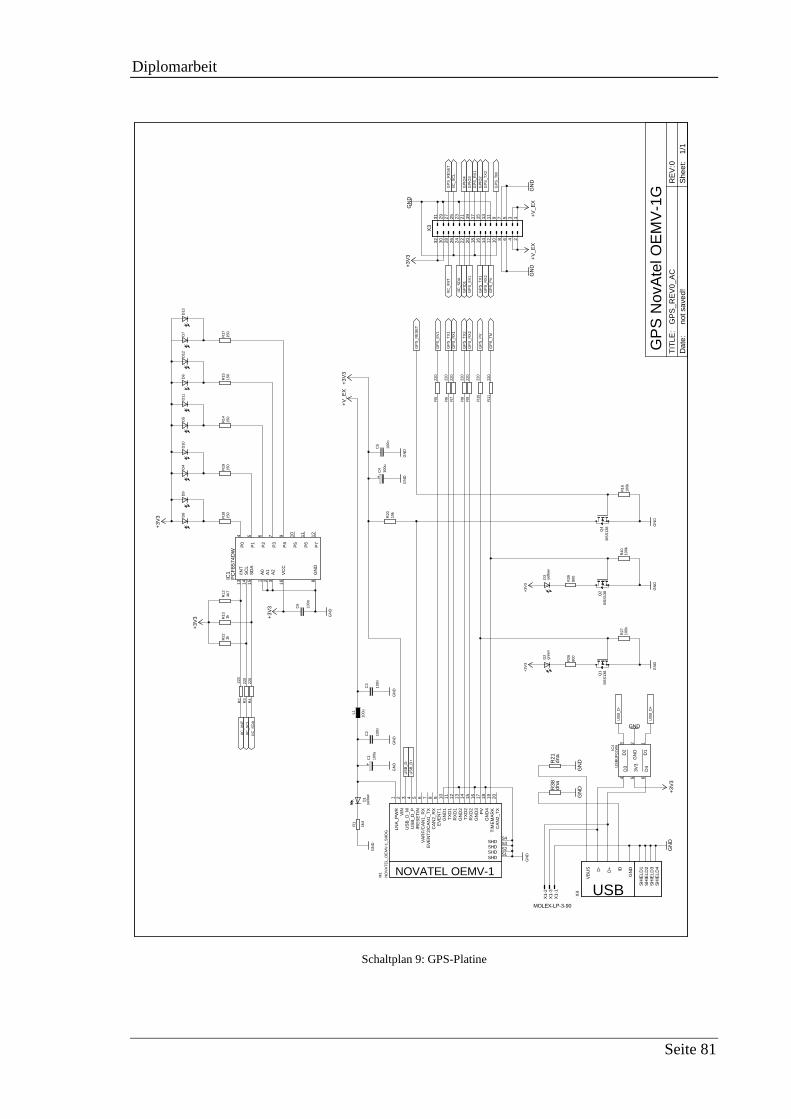
Diplomarbeit
Seite 81
Schaltplan 9: GPS-Platine
GP
IO1
GP
IO2
GP
IO3
GP
IO4
GP
S_E
V1
GP
S_E
V1
GP
S_P
V
GP
S_P
V
GP
S_R
ES
ET
GP
S_R
ES
ET
GP
S_R
X1
GP
S_R
X1
GP
S_R
X2
GP
S_R
X2
GP
S_T
MG
PS
_TM
GP
S_T
X1
GP
S_T
X1
GP
S_T
X2
GP
S_T
X2
IIC
_/IN
T
IIC
_/IN
T
IIC
_SC
L
IIC
_SC
L
IIC
_SD
A
IIC
_SD
A
US
B_D
+
US
B_D
+
US
B_D
-
US
B_D
-
+3V
3
+3V
3
+3V
3
+3V
3
+3V
3
+3V
3+
3V3
+3V
3 +V
_EX
+V
_EX
+V
_EX
+C
110
0u
C2
100n
C3
100n
+C
410
0u
C5
100n
C6
100n
D1
yello
w
D2
gree
nD
3ye
llow
D4
D5
D6
D7
D8
D9
D10
D11
D12
D13
Dat
e:no
t sav
ed!
She
et:
1/1
RE
V:
TIT
LE:
GP
S_R
EV
0_A
C
GN
D
GN
DG
ND
GN
D
GN
D
GN
DG
ND
GN
D
GN
D
GN
DG
ND
GN
D
GN
DG
ND
GN
D
GND
GN
D
GN
D
/INT
13
A0
1
A1
2
A2
3
GN
D8
P0
4
P1
5
P2
6
P3
7
P4
9
P5
10
P6
11
P7
12
SC
L14
SD
A15
VC
C16
IC1
PC
F85
74D
W
3V3
5
D1
1
D2
3D
34
D4
6
GN
D2
IC4
US
BU
F01
W6
L1
100u
/RE
SE
TIN
5
CA
N2_
RX
8
CA
N2_
TX
20
EV
EN
T1
9
EV
EN
T2/
CA
N1_
TX
7
GN
D1
10
GN
D2
13
GN
D3
16
GN
D4
18
LNA
_PW
R1
PV
17
RX
D1
12
RX
D2
15
SHDS1SHDS2SHDS3SHDS4
TIM
EM
AR
K19
TX
D1
11
TX
D2
14
US
B_D
_M3
US
B_D
_P4
VA
RF
/CA
N1_
RX
6
VIN
2
NOVATEL OEMV-1
M1
NO
VA
TE
L_O
EM
V-1
_SH
DG
Q1
BS
S13
8Q
2B
SS
138
Q4
BS
S13
8
R1
1k4
R2
220
R3
220
R4
220
R5
220
R6
220
R7
220
R8
220
R9
220
R10
220
R11
220
R12
4k7
R13
1kR
1415
0R
1515
0
R16
100k
R17
150
R18
150
R19
150
R20
10k
R21
dna
R22
1k
R26
800
R27
100k
R38
dna
R39
800
R40
100k
X1-
1
MOLEX-LP-3-90
X1-
2X
1-3
12
34
56
78
910
1112
1314
1516
1718
1920
2122
2324
2526
2728
2930
3132
X3
D+D-
GN
DID
SH
IELD
1S
HIE
LD2
SH
IELD
3S
HIE
LD4
VB
US
X4 USB
GP
S N
ovA
tel O
EM
V-1
G0

Diplomarbeit
Seite 82
Anhang II
Bestückungspläne
Basisplatine 83
WWAN-Platine 84
GPS-Platine 85

Diplomarbeit
Seite 83
Basisplatine - Top
Basisplatine - Bottom

Diplomarbeit
Seite 84
WWAN-Platine - Top
WWAN-Platine - Bottom
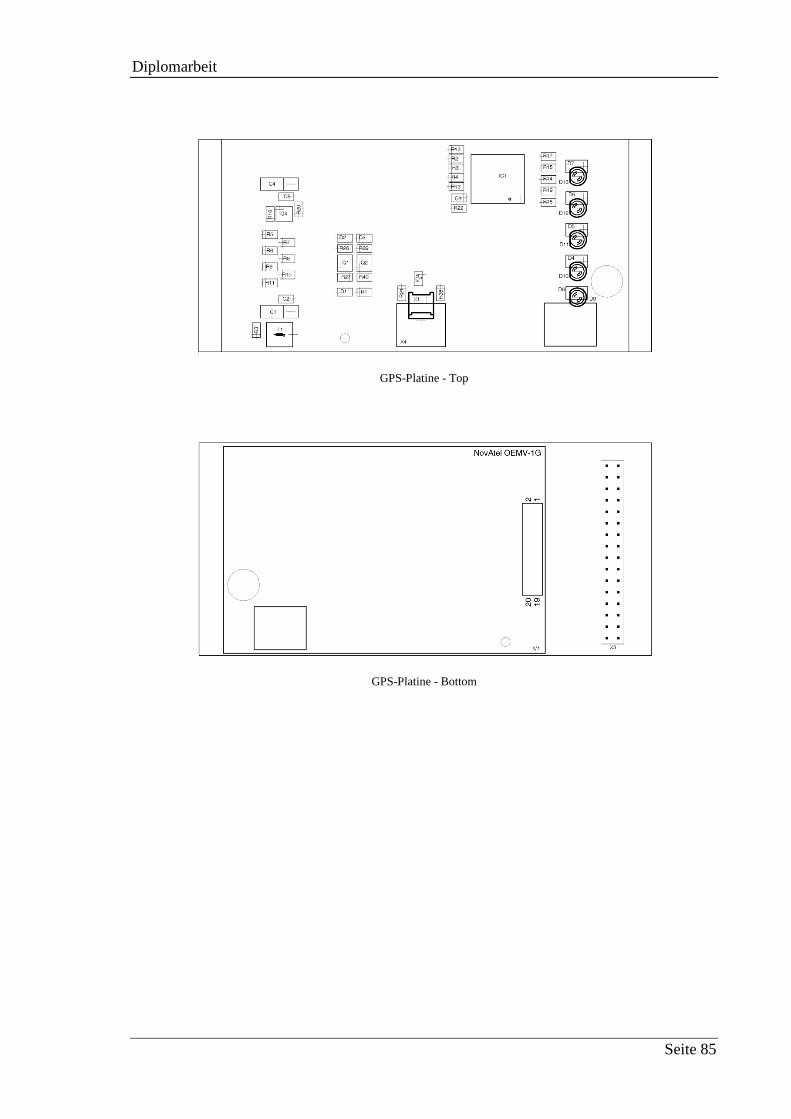
Diplomarbeit
Seite 85
GPS-Platine - Top
GPS-Platine - Bottom