
Capteurs et algorithmes pour la localisation autonome en mode pédestre
Upload
inpl-nancyCategory
view
2download
0
.
Diagnostic de fonctionnement de capteurs
d’un réseau de surveillance de la qualité de
l’air par analyse en composantes principales
Mohamed-Faouzi Harkat* — Gilles Mourot** — José Ragot**
* Université Badji Mokhtar AnnabaFaculté des sciences de l’ingénieur, Département d’électroniqueBP. 12, Sidi Amar, 23000 Annaba, Algérie
** Centre de Recherche en Automatique de NancyInstitut National Polytechnique de Lorraine2, avenue de la Forêt de Haye, 54516 Vandoeuvre-lès-Nancy, France
{mohamed-faouzi.harkat, gilles.mourot, jose.ragot}@ensem.inpl-nancy.fr
RÉSUMÉ. Nous proposons une méthode basée sur l’analyse en composantes principales pour ladétection et la localisation de défauts de capteurs d’un réseau de surveillance de la qualité del’air. Le modèle ACP du réseau de mesures est optimal au sens d’un critère basé sur l’erreurde reconstruction des différentes variables. La détection des défauts de capteurs est réaliséedans différents sous-espaces résiduels à l’aide d’un nouvel indicateur de détection. Enfin, lareconstruction des variables permet, d’une part, en la combinant avec l’indicateur de détection,de localiser les capteurs défaillants et, d’autre part, d’estimer l’amplitude des défauts.
ABSTRACT. In this paper a sensor fault detection and isolation procedure based on principalcomponent analysis is proposed to monitor an air quality monitoring network. The PCA modelof the network is optimal with respect to a reconstruction error criterion. The sensor faultdetection is carried out in various residual subspaces using a new detection index. The recon-struction approach allows, on one hand, by combining it with the detection index, to isolate thefaulty sensors and, on the other hand, to estimate the fault amplitudes.
MOTS-CLÉS : diagnostic, analyse en composantes principales, détection et localisation de défautsde capteurs, reconstruction de variables, réseau de mesures, qualité de l’air.
KEYWORDS: Diagnosis, principal component analysis, sensor failure detection and isolation,reconstruction approach, air quality monitoring network.
RS - JESA – 39/2005. Information et pollution atmosphérique, pages 417 à 436
418 RS - JESA – 39/2005. Information et pollution atmosphérique
1. Introduction
Beaucoup d’activités humaines produisent des polluants primaires comme les oxy-
des d’azote (NO2 et NO) et les composés organiques volatiles (COV) qui forment dans
la basse atmosphère, par des réactions chimiques ou photochimiques, des polluants
secondaires comme l’ozone. Les concentrations admissibles de ces polluants, nocifs
pour la santé humaine et l’environnement, sont définies par des normes européennes.
Les missions principales des organismes chargés de la surveillance de la qualité de
l’air sont la gestion des réseaux de mesures (mesures de concentration de polluants
et d’un ensemble de paramètres météorologiques) et la diffusion des données pour
l’information permanente de la population et des autorités publiques.
Pour assurer ces missions, la mise en œuvre d’une procédure de diagnostic de
fonctionnement de capteurs est indispensable avant toute utilisation des mesures pour
déceler d’éventuelles anomalies de fonctionnement des capteurs, principalement ceux
mesurant les concentrations des polluants. De plus, si on considère l’étendue géo-
graphique de la zone surveillée par un réseau, on constate immédiatement l’intérêt de
cette procédure qui va également permettre d’optimiser les opérations de maintenance.
Jusqu’à présent, la validation des données de pollution est réalisée soit manuellement
ce qui est très subjectif et difficilement praticable en ligne à cause de la quantité de
mesures à valider, soit à l’aide de méthodes de détection de valeurs aberrantes qui ne
permettent de détecter que des valeurs en dehors des échelles de mesure.
Cependant, pour résoudre ce problème, il existe une approche basée sur le concept
de redondance analytique existant entre les différentes variables du processus. Un test
de cohérence vérifiant l’adéquation entre les mesures et les estimations fournies par
ces relations permet de déterminer et éventuellement d’isoler les capteurs défaillants.
Les performances de la procédure de diagnostic en termes de détection et localisa-
tion de défauts dépendent donc directement de la qualité de ces relations mais aussi
de leur structure. Ces relations mathématiques entre les différentes variables du sys-
tème prennent généralement deux formes. La première est un ensemble de relations
explicites de type entrée/sortie entre les variables de ce système. Elles sont extraites
du modèle du système qui est lui-même souvent issu d’une étape antérieure d’iden-
tification du système dans laquelle sont pris uniquement en compte des critères de
performances liés à la capacité du modèle à reproduire la sortie du système. Pour des
systèmes de grande dimension dont les composants peuvent être fortement liés (degré
de redondance élevé), l’élaboration de cette formulation explicite des relations de re-
dondance n’est pas immédiate car elle doit être guidée principalement par des critères
de performances du système de diagnostic. L’alternative consiste à ne pas formuler ex-
plicitement ces relations. Les méthodes alors utilisées sont basées uniquement sur les
signaux entrées/sorties du système (analyse en composantes principales, par exemple)
et sont particulièrement bien adaptées à la mise en évidence de toutes les relations
linéaires entre les variables du système sans les formuler explicitement. Cette repré-
sentation permet la prise en compte d’un critère propre au diagnostic lors sa synthèse
(Dunia et Qin, 1998). L’analyse en composantes principales (ACP) est ainsi utilisée
pour modéliser le fonctionnement normal du système et les défauts sont alors détectés

Diagnostic de fonctionnement par ACP 419
en comparant le comportement observé et celui donné par le modèle ACP (Wise et
Gallagher, 1996).
En collaboration avec AIRLOR, réseau lorrain de surveillance de la qualité de l’air,
le but de ce travail est de développer une méthode pour la détection et localisation
de défauts de capteurs de ce réseau. Dans la suite, nous nous intéressons uniquement
aux capteurs mesurant les concentrations d’ozone et d’oxydes d’azote. D’une part, la
complexité du phénomène et l’absence de mesures de certaines grandeurs et, d’autre
part, la dimension élevée du processus (le réseau de mesures) ainsi que le fort degré
de redondance entre les variables du réseau nous ont incité à utiliser l’analyse en
composantes principales pour extraire les relations existant entre ces grandeurs.
Cet article est organisé comme suit. La deuxième section présentera la méthode
proposée de détection et localisation de défauts de capteurs basée sur l’analyse en
composantes principales. Dans un premier temps, nous présentons le principe de
l’ACP et montrons comment élaborer le modèle ACP d’un système. Ensuite, après
avoir rappelé le principe de la détection et localisation de défauts de capteurs par
ACP, nous proposons un nouvel indicateur de détection de défauts de capteurs qui est
calculé à partir des dernières composantes principales. Pour la localisation des cap-
teurs défaillants, nous combinons l’indicateur de détection proposé et le principe de
reconstruction des variables. Enfin, la reconstruction des mesures aberrantes permet
d’estimer l’amplitude des défauts. Dans la section 3, nous présentons l’application de
la méthode proposée à la détection et la localisation de défauts de capteurs d’ozone
et d’oxydes d’azote d’un réseau de surveillance de la qualité de l’air en Lorraine. Des
conclusions ainsi que des perspectives sont finalement présentées dans la dernière sec-
tion.
2. Détection et localisation de défauts par ACP
2.1. Modélisation par ACP
Dans cette partie, nous allons rappeler le principe de l’analyse en composantes
principales. L’analyse en composantes principales permet de mettre en évidence des
relations linéaires statiques entre les variables du processus. Cependant, son applica-
tion directe à des données issues d’un système dynamique ne révélera pas les relations
exactes existant entre les variables. Ku et al. (1995) ont proposé une extension, appe-
lée analyse en composantes principales dynamiques, qui consiste à appliquer l’ACP
à une matrice de données augmentées contenant les différentes variables du système
décalées dans le temps. Récemment, Li et Qin (2001), puis Wang et Qin (2002) ont
proposé des extensions de l’ACP dynamique proches des méthodes d’identification
des sous-espaces pour éliminer un biais éventuel sur les paramètres du modèle.
2.1.1. ACP standard
Soit x(k) = [x1(k) x2(k) . . . xm(k)]T
le vecteur contenant les m variables ob-
servées du système (mesures ou commandes) à l’instant k. Considérons la matrice

420 RS - JESA – 39/2005. Information et pollution atmosphérique
de données X = [x(1) x(2) . . . x(N)]T
∈ ℜN×m comprenant N observations
x(k)(k = 1, . . . , N) recueillies sur ce processus en fonctionnement normal.
L’ACP détermine une transformation optimale (vis-à-vis d’un critère de variance)
de la matrice de données X :
T = XP et X = TPT [1]
avec T = [t1 t2 . . . tm] ∈ ℜN×m, où les ti sont les composantes principales et
la matrice P = [p1 p2 . . . pm] ∈ ℜm×m, où les vecteurs orthogonaux pi sont les
vecteurs propres correspondant aux valeurs propres λi de la décomposition en valeurs
et vecteurs propres de la matrice de covariance (ou de corrélation) Σ de X :
Σ = PΛPT avec PPT = PT P = Im [2]
avec Λ = diag(λ1 . . . λm) une matrice diagonale où les termes diagonaux sont or-
donnés dans l’ordre décroissant : λ1 ≥ λ2 ≥ . . . ≥ λm.
Partitionnons les matrices des valeurs propres, des vecteurs propres et des compo-
santes principales :
Λ =
[Λℓ 0
0 Λm−ℓ
]
, P =[
Pℓ Pm−ℓ
], T =
[
Tℓ Tm−ℓ
][3]
où l’indice ℓ sera défini ultérieurement.
L’équation [1] s’écrit alors :
X = TℓPTℓ + Tm−ℓP
Tm−ℓ = X + E [4]
avec :
X = XCℓ [5]
et
E = XCm−ℓ [6]
où Cℓ = PℓPTℓ et Cm−ℓ = Im − Cℓ constituent le modèle ACP du système.
Les matrices X et E représentent, respectivement, les variations modélisées et les
variations non modélisées de X à partir de ℓ composantes (ℓ < m). Les ℓ premiers
vecteurs propres Pℓ ∈ ℜm×ℓ constituent l’espace de représentation alors que les (m−
ℓ) derniers vecteurs propres Pm−ℓ ∈ ℜm×m−ℓ constituent l’espace résiduel.
L’identification du modèle ACP consiste donc à estimer ses paramètres par une
décomposition en valeurs et vecteurs propres de la matrice Σ et à déterminer le nombre
ℓ de composantes principales à retenir. En absence de bruit sur les mesures, les valeurs
propres nulles de Σ indiquent l’existence de relations linéaires entre les composantes
de x. En présence de bruit sur les mesures, les valeurs propres les plus petites par
rapport aux autres indiquent l’existence de relations linéaires ou quasi-linéaires entre
les différentes composantes de x. On entrevoit ici le rôle-clé joué par le nombre ℓ de
composantes dans la détermination des relations de redondance entre variables mais
aussi la difficulté de déterminer ce paramètre structurel.

Diagnostic de fonctionnement par ACP 421
2.1.2. Détermination du nombre de composantes ℓ
Pour la détermination de ce nombre, de nombreuses règles ont été proposées dans
la littérature (Valle et al., 1999). La plupart sont issues de méthodes heuristiques par-
fois subjectives ou de critères utilisés en identification de système qui privilégient
l’approximation de la matrice de données. Toutefois, dans le cadre de l’application
de l’ACP au diagnostic, le nombre de composantes a un impact significatif sur chaque
étape de la procédure de détection et de localisation de défauts. Si peu de composantes
sont utilisées, certaines variables peuvent être projetées dans le sous-espace résiduel
et ainsi entraîner des erreurs de modélisation qui entachent les résidus, ce qui compro-
met la détection des défauts de petite amplitude. Si, par contre, un nombre élevé de
composantes est choisi, la dimension de l’espace résiduel étant réduite, certains dé-
fauts seront projetés dans l’espace de représentation et ne pourront pas être détectés,
d’autres ne pourront pas être localisés.
Qin et Dunia (2000) ont proposé de déterminer la valeur de ℓ par minimisation
de la variance de l’erreur de reconstruction. La reconstruction consiste à estimer une
variable à l’aide du modèle ACP et des autres variables, i.e. à partir des relations de
redondance existant entre cette variable et les autres. La qualité de la reconstruction
est donc liée à la capacité du modèle ACP à modéliser les relations de redondance
existantes entre les variables, i.e. au choix du nombre de composantes. En effet, si on
choisit un nombre de composantes trop élevé, la matrice Cℓ tendant vers la matrice
identité, les variables seront mal reconstruites. Par contre, si on choisit un nombre
de composantes trop faible, le modèle ACP sera imprécis et la reconstruction des
variables sera mauvaise.
Dans un premier temps, nous montrons comment reconstruire une variable. Soit
xj(k) = [x1(k) . . . xj−1(k) zj(k) xj+1(k) . . . xm(k)]T
le vecteur de mesure x(k)à l’instant k dont la jème composante a été reconstruite par (Wise et Gallagher, 1996) :
zj(k) =
[cT−j 0 cT
+j
]
1 − cjj
x(k) avec cjj < 1 [7]
où Cℓ = [c1 c2 . . . cm] , cTj =
[cT−j cjj cT
+j
]. cj est la jème colonne de Cℓ et les in-
dices +j et −j désignent, respectivement, les vecteurs formés par les (j−1) premiers
et les (m − j) derniers éléments du vecteur cj .
La condition nécessaire de reconstruction d’une variable par le modèle est :
cjj 6= 1 ou encore ξj 6= 0 [8]
où ξj =(
I − Cℓ
)
ξj et ξj = [0 . . . 1 . . . 0]T
.
Si cjj = 1 alors la jème variable n’est pas corrélée avec les autres et elle ne peut
donc pas être reconstruite à partir des autres variables.

422 RS - JESA – 39/2005. Information et pollution atmosphérique
La variance de l’erreur de reconstruction de la jème composante de x(k) est donnée
par :
ρj(ℓ) = var{ξTj (x(k) − xj(k))
}=
ξTj Σξj
(
ξTj ξj
)2 [9]
Le nombre de composantes principales à retenir s’obtient en minimisant par rap-
port à ℓ le critère :
J(ℓ) =
m∑
j=1
ρj(ℓ)
ξTj Σξj
ℓ = 1, . . . ,m − 1 [10]
les contributions des variables au critère étant pondérées par leurs variances.
Qin et Dunia (2000) ont montré que ce critère peut présenter un minimum dans
l’intervalle [1, m]. De plus, ces auteurs proposent d’écarter de l’ensemble des va-
riables utilisées pour la surveillance, celles pour lesquelles la variance d’erreur de
reconstruction est supérieure à la variance d’erreur de reconstruction obtenue en uti-
lisant la valeur moyenne comme meilleure reconstruction. En effet, les variables peu
corrélées avec les autres ne peuvent pas être reconstruites avec une bonne précision.
2.2. Détection de défauts de capteurs
Ayant défini le modèle ACP à partir de données réputées saines, nous examinons
maintenant son utilisation pour la détection de défauts de capteur.
2.2.1. Génération de résidus
Pour un nouveau vecteur de mesure x(k), l’équation [4] s’écrit :
x(k) = x(k) + e(k) [11]
où x(k) = Cℓ x(k) représente le vecteur des estimations et e(k) = (I − Cℓ)x(k)représente le vecteur des erreurs d’estimation.
Le vecteur des composantes principales est donné par :
t(k) = PTx(k) =
[tℓ(k) tm−ℓ(k)
][12]
où :
tℓ(k) = PTℓ x(k), tm−ℓ(k) = PT
m−ℓ x(k) [13]
Il y a équivalence entre le vecteur des résidus e et le vecteur des dernières compo-
santes principales tm−ℓ :
e(k) = Pm−ℓ tm−ℓ(k) [14]
Par conséquent, il est plus simple de travailler directement avec le vecteur tm−ℓ
de dimension (m − ℓ).

Diagnostic de fonctionnement par ACP 423
Observons maintenant l’influence d’un défaut sur le vecteur résiduel tm−ℓ. Soient
xo(k) le vecteur des valeurs vraies, ǫ(k) le vecteur des bruits de mesure supposé blanc
et ξj la direction du défaut (le défaut affecte la jème composante de x(k)). En présence
d’un défaut d’amplitude d(k) quelconque, on peut écrire :
x(k) = xo(k) + ǫ(k) + ξjd(k) [15]
A partir de cette équation, le vecteur des résidus (voir [13]) s’écrit sous la forme :
tm−ℓ(k) = PTm−ℓ x
o(k)︸ ︷︷ ︸
=0
+PTm−ℓ ǫ(k) + PT
m−ℓ ξjd(k)[16]
En absence de défauts et ǫ étant à valeur moyenne nulle, l’espérance mathématique
du résidu est nulle. Par contre, en présence de défauts, l’espérance mathématique du
résidu n’est plus nulle et le défaut affecte toutes les composantes du vecteur des rési-
dus, le vecteur traduisant cette influence étant la jème colonne de PTm−ℓ.
2.2.2. Indicateur de détection de défauts proposé
Classiquement, plusieurs indicateurs de détection sont utilisés pour la détection
d’un fonctionnement anormal par ACP.
La statistique T 2 est calculée à partir des ℓ premières composantes principales :
T 2(k) = tℓ(k)T Λ−1ℓ tℓ(k) [17]
Dans le cas de défauts de capteurs, cet indicateur n’est pas très performant car
les variations dues au défaut peuvent être masquées par les variations normales des
variables dans l’espace des premières composantes principales.
Contrairement à la statistique T 2, l’indicateur SPE (Squared Prediction Error)
réalise la détection dans l’espace résiduel. A l’instant k, il est donné par :
SPE(k) = tm−ℓ(k)Ttm−ℓ(k) =
m∑
j=ℓ+1
t2j (k) [18]
Le processus est considéré en fonctionnement anormal (présence d’un défaut) à
l’instant k si :
SPE(k) > δ2α [19]
où δ2α est le seuil de confiance du SPE(k) déterminé par Box (1954) ou empirique-
ment à partir des données.
Cependant, l’indicateur SPE est un indicateur global qui somme les résidus sans
tenir compte des différences de variance entre ceux-ci. Lorsque les systèmes considé-
rés ne sont plus linéaires, ce qui est souvent le cas, les résidus avec une forte variance
portent les erreurs de modélisation engendrées par l’ACP. Ainsi les résidus avec une

424 RS - JESA – 39/2005. Information et pollution atmosphérique
faible variance auront une influence moindre sur la quantité SPE par rapport aux ré-
sidus ayant une variance plus élevée alors qu’ils correspondent aux relations de redon-
dance linéaires ou quasi-linéaires. Cette sensibilité de l’indicateur SPE aux erreurs
de modélisation peut entraîner de nombreuses fausses alarmes.
Face à ce problème, nous proposons un nouvel indicateur de détection de défauts
basé sur les sommes successives des carrés des dernières composantes principales,
que l’on note Di (i = 1, 2, ..., (m − ℓ)). Il est calculé de la façon suivante :
Di(k) = ti(k)Tti(k) =
m∑
j=m−i+1
t2j (k) i = 1, 2, ..., (m − ℓ) [20]
Avec cet indicateur, la détection est réalisée successivement dans différents sous-
espaces de l’espace résiduel en commençant par les sous-espaces les moins sensibles
aux erreurs de modélisation.
Il existe une forte similitude entre les indicateurs Di et SPE. En effet, l’indicateur
Di correspond à l’indicateur SPE calculé avec un modèle ACP à (m − i) compo-
santes principales. De ce fait, les seuils de détection δ2i,α de cet indicateur peuvent être
calculés avec un raisonnement semblable à celui de Box (1954).
Le processus est considéré en fonctionnement anormal à l’instant k si :
Di(k) > δ2i,α i = 1, 2, ..., (m − ℓ) [21]
Pour améliorer la qualité de la détection en réduisant le taux de fausses alarmes
dues à la présence d’erreurs à caractère aléatoire mais en introduisant un retard à la
détection, le filtre EWMA (Exponentially Weighted Moving Average) peut être appli-
qué aux résidus. On obtient ainsi les résidus filtrés :
¯ti(k) = (I − β) ¯
ti(k)(k − 1) + βti(k) [22]
où β est une matrice diagonale dont les éléments sont les facteurs d’oubli pour les
résidus, I est la matrice identité et la condition initiale suivante ¯t(0) = 0 est imposée.
Le facteur β peut être ajusté en fonction du type de défauts à détecter : β proche de
la matrice identité favorise la détection des changements lents, tandis que β proche de
zéro est plus sensible aux changements brusques. Dans la suite, la matrice des facteurs
d’oubli est simplifiée en β = γI où γ est le facteur d’oubli (0 < γ < 1).
Le seuil de détection de Di(k), indicateur Di(k) filtré, peut être calculé comme
proposé par Qin et al. (1997) pour l’indicateur SPE ou empiriquement.
2.3. Localisation des défauts de capteurs
Lorsqu’un défaut est détecté, il est nécessaire d’identifier la ou les variables qui
sont en cause : c’est la localisation de défauts. Pour la localisation de défauts par ACP,
on retrouve plusieurs approches :

Diagnostic de fonctionnement par ACP 425
– approche par structuration des résidus (Gertler et al., 1998), (Huang et Gertler,
1999), (Qin et Li, 1999). Le vecteur des résidus primaires t(k) est transformé en ré-
sidus secondaires ayant les propriétés de localisation recherchées. Pour des systèmes
de grande dimension, il est souvent difficile de trouver cette transformation car les
propriétés de localisation sont définies uniquement en fonction de l’occurrence des
défauts dans les résidus sans tenir compte des sensibilités des résidus aux défauts,
– approche par ACP partielles (Gertler et al., 1998), (Huang et Gertler, 1999). Elle
utilise des bancs de modèles ACP avec des ensembles de variables réduits et différents
d’un modèle à l’autre. L’objectif est de générer des résidus sensibles à certains défauts
et pas aux autres. Cependant, là aussi les modèles partiels sont construits uniquement
en fonction de l’occurrence des défauts dans les résidus alors qu’il faut également s’as-
surer que les modèles ACP réduits ont les capacités désirées en termes de détectabilité
des défauts,
– approche par calcul des contributions des variables à l’indicateur de détection(Macgregor et Kourti, 1995), (Wise et Gallagher, 1996), (Miller et al., 1998), (Har-
kat et al., 2002). Cette méthode consiste à calculer les contributions des différentes
variables à l’indicateur de détection, la variable ayant la plus grande contribution à la
statistique de détection (calculée à l’instant de détection) est la variable incriminée.
La plupart des contributions définies dans la littérature sont de simples approxima-
tions, les contributions exactes des variables à l’indicateur de détection ne pouvant
être calculées.
Dans la suite, nous allons utiliser une méthode de localisation basée sur le principe
de reconstruction (Dunia et Qin, 1998) et l’indicateur de détection Di proposé.
2.3.1. Localisation de capteurs défaillants par reconstruction
Cette méthode consiste à éliminer l’influence du défaut sur l’indicateur de détec-
tion lorsque la variable en défaut est reconstruite. Cependant, pour localiser un défaut
de capteur, les directions des défauts projetées dans l’espace résiduel ne doivent pas
être colinéaires (Dunia et Qin, 1998).
Notons D(j)i l’indicateur Di calculé après la reconstruction de la jème variable.
Pour étudier la propagation d’un défaut sur cet indicateur, nous allons nous intéresser
à l’expression du vecteur de mesure xj(k) dont la jème composante est reconstruite
(voir [7]) :
xj(k) = Gj x(k) [23]
avec :
GTj =
[ξ1 ξ2 · · · gj · · · ξm
]et gT
j =
[cT−j 0 cT
+j
]
1 − cjj
[24]
où x(k) est le vecteur de mesure affecté d’un défaut d’amplitude d(k) agissant dans
la direction ξf (voir [15]). Notons ξj la direction de reconstruction.
L’expression de xj(k) est alors donnée par :
xj(k) = Gj(xo(k) + ǫ(k)) + Gj ξfd(k) [25]
426 RS - JESA – 39/2005. Information et pollution atmosphérique
Si la variable en défaut est la variable reconstruite (j = f) alors :
Gj ξf = 0 [26]
A partir de l’équation [26], on constate que si la reconstruction se fait dans la
direction du défaut (j = f), l’effet du défaut est éliminé sur xj et par conséquent
sur l’indicateur D(j)i . L’indicateur D
(j)i qui se trouve en dessous du seuil de détection
indique que la jème variable est en défaut. On peut également utiliser un filtre EWMA
pour filtrer l’indicateur D(j)i , noté alors D
(j)i .
Ainsi, nous pouvons définir l’indicateur de localisation suivant à l’instant k :
A(j)i (k) =
D(j)i (k)
δ2i,α
[27]
La variable pour laquelle l’indicateur de localisation A(j)i est inférieur à un est la
variable défaillante.
Il est à noter que la méthode de localisation par reconstruction peut être utilisée
pour la localisation de défauts multiples en reconstruisant simultanément les variables
supposées en défauts (Dunia et Qin, 1998).
3. Application à un réseau de surveillance de la qualité
Dans cette partie, la procédure proposée de détection et localisation de défauts de
capteurs est appliquée à un réseau de surveillance de la qualité de l’air.
3.1. Position du problème
Le réseau de surveillance AIRLOR (Lorraine) se compose de douze stations de
mesures placées dans des sites ruraux, périurbains et urbains. Chaque station de sur-
veillance se compose d’un ensemble de capteurs de mesure des concentrations des
polluants suivants : le monoxyde de carbone CO, les oxydes d’azote (NO et NO2)
mesurés par le même analyseur, le dioxyde de soufre SO2 et l’ozone O3. Certaines
stations mesurent en plus des paramètres météorologiques (température, humidité re-
lative, rayonnement solaire global, pression atmosphérique, vitesse du vent et direc-
tion du vent). La mesure se fait en continu tous les quarts d’heure.
L’objectif est de déceler d’éventuelles anomalies de fonctionnement des capteurs
mesurant les concentrations d’ozone et d’oxydes d’azote (NO et NO2). Rappelons en
quelques mots la phénoménologie. L’ozone étant un polluant secondaire formé à partir
de réactions chimiques complexes entre les polluants primaires (NO, NO2 et COV),
il constitue des nappes se déplaçant en fonction des mouvements des masses d’air.
Par contre, les oxydes d’azotes sont des polluants primaires essentiellement émis par
l’activité humaine ; ces polluants sont donc plus localisés car leur concentration dé-
pend directement des sources d’émissions. La complexité du phénomène et l’absence

Diagnostic de fonctionnement par ACP 427
de mesures de certaines grandeurs essentielles rendent difficiles l’élaboration de re-
lations entre les mesures d’ozone et de NOx pour une station de mesure (Mourot etal., 1999). Notre objectif étant d’élaborer un modèle pour le diagnostic, nous avons
cherché, cette fois, à mettre en évidence les relations entre les polluants des différents
sites de mesure. Pour cela, nous avons utilisé l’analyse en composantes principales
qui nous semble particulièrement bien adaptée à la dimension élevée du processus
(ici le réseau de mesures) et au fort degré de corrélation existant au moins entre cer-
taines variables. Seul bémol, nous pouvons nous interroger sur les performances de
l’ACP compte tenu du caractère non linéaire et variant dans le temps du phénomène
de pollution photochimique.
Dans cette présentation, seulement 18 variables ont été considérées. Les sites de
mesure choisis sont géographiquement voisins. La matrice X contient donc 18 va-
riables v1, v2, . . . , v18 correspondant, respectivement, à l’ozone O3, le dioxyde d’azote
NO2 et le monoxyde d’azote NO pour six stations de mesure proches de l’agglomé-
ration nancéienne. S’agissant d’une étude de faisabilité, nous nous sommes limités à
analyser de courtes périodes de mesures et nous avons simulé des défauts dont l’am-
plitude est réglée en fonction des incertitudes de mesures fournies par les spécialistes
du réseau (environ 15 % de la mesure pour l’ozone). Le jeu de données utilisé est com-
posé de 1080 observations soit un peu plus de 11 journées. Les 800 premières obser-
vations ont été utilisées pour élaborer le modèle ACP et nous avons simulé des défauts
de capteurs sur les 280 observations restantes. Les données de la période considérée
présentent des niveaux de polluants faibles, moyens et élevés (figure 2).
3.2. Identification du modèle ACP
Pour l’identification du modèle ACP, la matrice des corrélations des mesures est
calculée. Une première analyse des corrélations a été réalisée. Seules les mesures des
concentrations d’ozone des différents sites ont des coefficients de corrélation significa-
tifs (supérieurs à 85 %). Ces premiers résultats sont en accord avec nos remarques sur
la phénoménologie des polluants. En effet, l’ozone formant des nappes, on retrouve
de fortes corrélations entre les mesures d’ozone des différents sites de mesures. Par
contre, les mesures des capteurs de NOx ne sont pas très corrélées entre elles car ce
sont des polluants très localisés. On entrevoit donc qu’une des seules possibilités pour
réaliser un diagnostic de fonctionnement de ces capteurs est de relier ces grandeurs
aux mesures d’ozone des différentes stations de mesure.
Une analyse préliminaire des données nous a permis de constater que les relations
entre les variables pouvaient être approximées par des relations linéaires statiques.
L’analyse des valeurs propres de la matrice de corrélation des données et du cumul
des pourcentages de corrélation expliquée par chaque valeur propre n’a pas permis
de déterminer le nombre de composantes à retenir car les valeurs propres ont une
décroissance exponentielle. La figure 1 montre l’évolution du critère de la variance
de l’erreur de reconstruction en fonction du nombre de composantes. Cette courbe
présentant un minimum pour ℓ = 7, un modèle ACP à sept composantes a été retenu
expliquant ainsi 91 % des corrélations entre les variables.

428 RS - JESA – 39/2005. Information et pollution atmosphérique
1 2 3 4 5 6 7 8 9 10 11
5
10
15
20
var
iance
Nombre de composantes
Figure 1. Evolution de la variance de l’erreur de reconstruction en fonction de ℓ
Dans le tableau 1, nous avons indiqué les variances de l’erreur de reconstruction
des différentes variables pour le nombre de composantes retenues. Toutes les variables
peuvent être reconstruites car leur variance est inférieure à 1. Cependant, les variables
9, 11, 12 et 15 ont des coefficients un peu élevés par rapport aux autres variables (en
gras dans le tableau) ce qui laisse présager quelques difficultés pour la suite. Il faut
noter que ces variables représentent les concentrations de NO et NO2 sur certains sites
urbains ou périurbains, i.e. proches des émissions. Globalement, les concentrations
d’ozone ont des variances de reconstruction beaucoup plus faibles que NO et NO2.
i 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18
ℓ = 7 .09 .11 .15 .10 .37 .41 .04 .29 .59 .04 .54 .57 .04 .37 .61 .09 .42 .37
Tableau 1. Variances des erreurs de reconstruction des différentes variables
La figure 2 présente les mesures et les estimations d’ozone, de NO2 et de NO
pour une station de mesure. Cette station péri-urbaine ayant les niveaux d’ozones les
plus élevés des six sites considérés et des niveaux de NOx proches de ceux d’une
station urbaine, les résultats obtenus pour cette station sont assez représentatifs de
ceux obtenus pour l’ensemble des stations. Pour la concentration d’ozone, on constate
que les valeurs les plus élevées sont légèrement sous-estimées par le modèle, ce qui
n’est pas le cas pour les autres stations. Par contre, les niveaux de NO2 et de NO sont
bien estimés.
Globalement, compte tenu de la complexité des phénomènes impliqués, les résul-
tats obtenus sont très satisfaisants. En effet, on estime la plupart des pics de NO, O3
et NO2 qui sont les niveaux prépondérants pour les procédures d’alerte. De plus, dans
le cas des oxydes d’azote (NO et NO2) qui sont des polluants plus localisés, et donc
plus difficiles à modéliser, l’estimation de ces deux grandeurs reste correcte pour les
faibles valeurs ainsi que pour les valeurs élevées.
En conclusion, nous n’avons pas vu la nécessité de remettre en cause l’utilisation
de l’ACP linéaire pour modéliser les relations entre les différentes variables. Cepen-
dant, comme nous avons pu le constater, certaines variables étant moins bien estimées

Diagnostic de fonctionnement par ACP 429
que d’autres, nous allons maintenant examiner l’effet de ces erreurs de modélisation
sur la détection et localisation de défauts de capteurs.
0 200 400 600 800 1000
50
100
150
0 200 400 600 800 1000
100
200
300
400
500
0 200 400 600 800 1000
100
200
300Mesures Estimations
Temps
NO
NO
2O
3
Figure 2. Mesures et estimations des différents polluant pour une station de mesure
3.3. Détection et localisation de défauts de capteurs
Ayant identifié le modèle ACP à partir de données réputées saines, il est possible
d’appliquer la procédure de détection et localisation de défauts de capteurs proposée.
Dans un premier temps, nous présentons quelques exemples simples de détection
de défauts de capteurs sur chaque type de capteurs (O3, NO et NO2) pour illustrer
cette procédure. Les défauts simulés sont des défauts additifs constants dont l’ampli-
tude est nettement supérieure aux incertitudes de mesures. Ensuite, nous réalisons une
étude plus systématique pour comparer les performances de l’indicateur de détection
proposé par rapport à l’indicateur SPE classiquement utilisé.
3.4. Quelques exemples
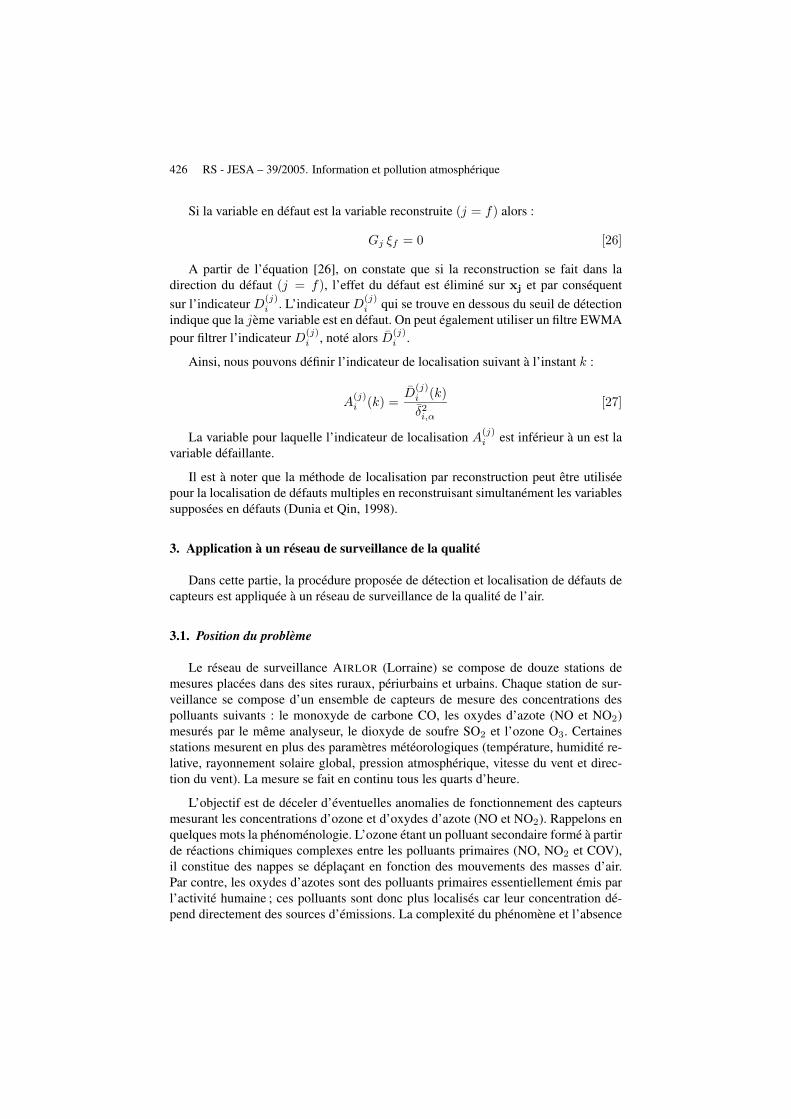
Pour ce premier exemple, nous avons simulé un défaut dont l’amplitude s’élève à
20 % de la plage de variation de la mesure v7 (O3) entre les instants 801 et 1080. Sur
430 RS - JESA – 39/2005. Information et pollution atmosphérique
cet exemple, nous allons illustrer nos propos concernant les limitations de l’indicateur
SPE. Ainsi, la figure 3 présente l’évolution de SPE en présence d’un défaut affectant
la variable v7. Comme on peut le constater, le défaut n’est pas détecté à partir de SPEà cause des erreurs de modélisation. En appliquant la procédure de détection utilisant
l’indicateur Di, le défaut a été nettement détecté avec l’indicateur D2 (figure 4).
0 200 400 600 800 10000
1
2
3
4
SP
E
Temps
Figure 3. Evolution de l’indicateur de détection SPE en présence d’un défaut affec-tant v7
0 100 200 300 400 500 600 700 800 900 10000
0.2
0.4
D2
Temps
Figure 4. Evolution de l’indice D2 avec un défaut affectant la variable v7
Le défaut étant détecté, nous cherchons à localiser la variable incriminée avec
la procédure de reconstruction appliquée à l’indicateur de détection D2. La figure 5
présente l’évolution des indicateurs de détection calculés après la reconstruction des
neuf premières variables. L’indicateur calculé après reconstruction de la variable v7
est le seul ne dépassant pas son seuil, ce qui implique que v7 est la variable en défaut.
Après localisation de la variable en défaut, cette dernière est reconstruite en utili-
sant le modèle ACP et les mesures des autres capteurs. La figure 6 représente l’évo-
lution de la variable v7 (ozone), l’évolution de cette variable avec le défaut simulé et
la reconstruction de cette dernière. Globalement, les concentrations d’ozone recons-
truites représentées sur la figure 6 sont des estimations assez correctes des mesures
réelles, en particulier les valeurs élevées des niveaux d’ozone.
La simulation précédente montre que la procédure de détection et localisation est
efficace pour la variable v7 ; il en est de même pour les mesures d’ozone des autres

Diagnostic de fonctionnement par ACP 431
stations car ces variables étant assez corrélées entre elles, il est possible d’extraire des
relations de redondance linéaires les liant.
600 800 10000
0.2
0.4
600 800 10000
0.2
0.4
600 800 10000
0.2
0.4
600 800 10000
0.2
0.4
600 800 10000
0.2
0.4
600 800 10000
0.2
0.4
600 800 10000
0.2
0.4
0.6
600 800 10000
0.2
0.4
600 800 10000
0.2
0.4
D(7
)2
D(4
)2
D(1
)2
D(8
)2
D(5
)2
D(2
)2
D(9
)2
D(6
)2
D(3
)2
Temps Temps Temps
Figure 5. Evolution de l’indicateur de détection D2 après reconstruction des neufpremières variables
500 600 700 800 900 1000
0
50
100
150
O3
Temps
Mesures avec défaut
Mesures sans défaut
Reconstructions
Figure 6. Reconstruction de la variable v7 (O3) en défaut
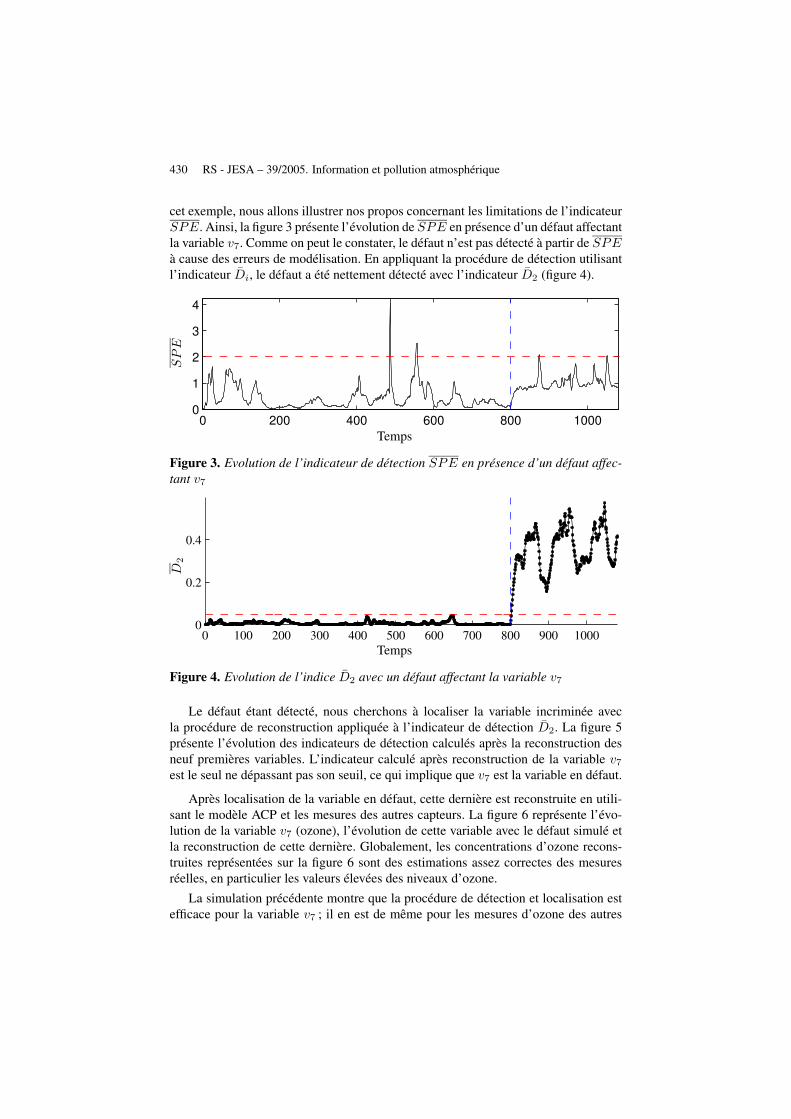
Maintenant, intéressons nous aux oxydes d’azote. Dans la suite nous avons simulé
un défaut affectant la variable v2 représentant le NO2 de la première station avec une
amplitude de 20 % de la plage de variation de cette variable entre les instants 801 et
1080. Le défaut est aisément détecté grâce à l’indicateur D1 (figure 7).
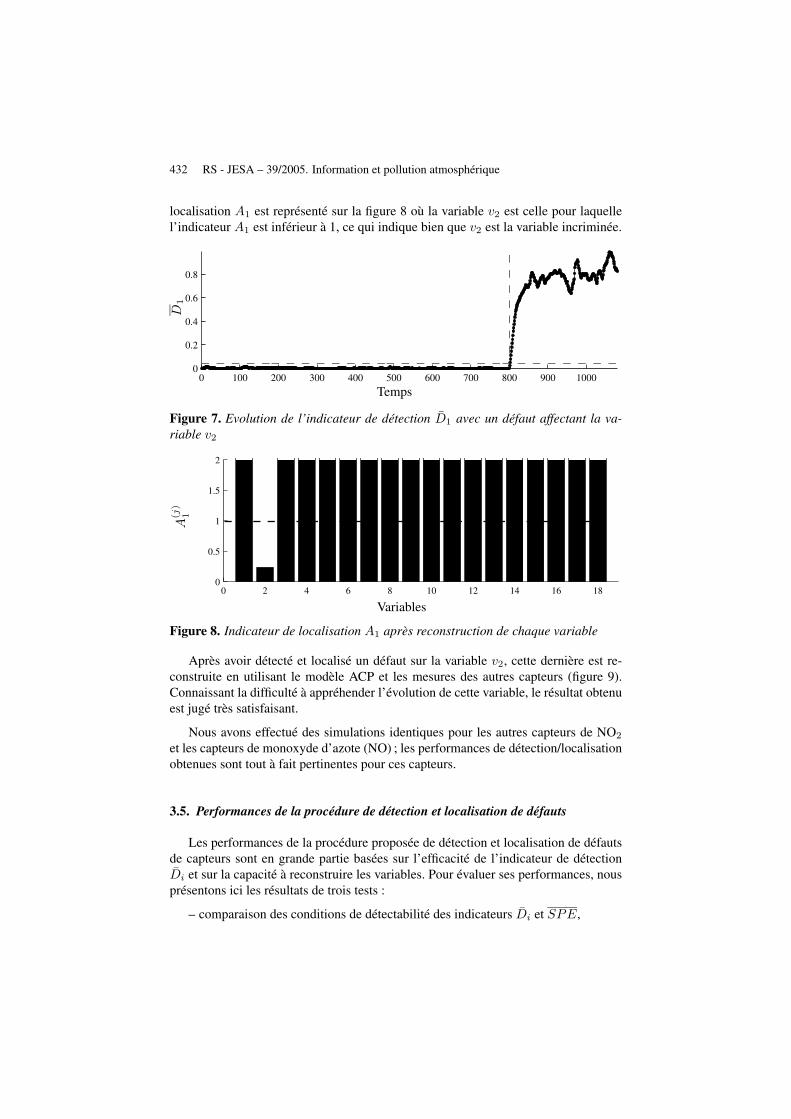
Comme dans le cas de l’ozone, pour la localisation du capteur défaillant, on ap-
plique la procédure de reconstruction à l’indicateur de détection D1. L’indicateur de
432 RS - JESA – 39/2005. Information et pollution atmosphérique
localisation A1 est représenté sur la figure 8 où la variable v2 est celle pour laquelle
l’indicateur A1 est inférieur à 1, ce qui indique bien que v2 est la variable incriminée.
0 100 200 300 400 500 600 700 800 900 10000
0.2
0.4
0.6
0.8
D1
Temps
Figure 7. Evolution de l’indicateur de détection D1 avec un défaut affectant la va-riable v2
0 2 4 6 8 10 12 14 16 180
0.5
1
1.5
2
A(j
)1
Variables
Figure 8. Indicateur de localisation A1 après reconstruction de chaque variable
Après avoir détecté et localisé un défaut sur la variable v2, cette dernière est re-
construite en utilisant le modèle ACP et les mesures des autres capteurs (figure 9).
Connaissant la difficulté à appréhender l’évolution de cette variable, le résultat obtenu
est jugé très satisfaisant.
Nous avons effectué des simulations identiques pour les autres capteurs de NO2
et les capteurs de monoxyde d’azote (NO) ; les performances de détection/localisation
obtenues sont tout à fait pertinentes pour ces capteurs.
3.5. Performances de la procédure de détection et localisation de défauts
Les performances de la procédure proposée de détection et localisation de défauts
de capteurs sont en grande partie basées sur l’efficacité de l’indicateur de détection
Di et sur la capacité à reconstruire les variables. Pour évaluer ses performances, nous
présentons ici les résultats de trois tests :
– comparaison des conditions de détectabilité des indicateurs Di et SPE,

Diagnostic de fonctionnement par ACP 433
– comparaison des taux de bonne détection des indicateurs Di et SPE,
– test de la qualité de la reconstruction des variables.
500 600 700 800 900 1000
0
100
200
300
400
500
NO
2
Temps
Mesures avec défaut
Mesures sans défaut
Reconstructions
Figure 9. Reconstruction de la variable v2 (NO2) en défaut
3.5.1. Comparaison des conditions de détectabilité des défauts
Nous avons étendu à l’indicateur Di la condition de détectabilité des défauts in-
troduite par Qin et al. (1997) pour SPE. La sensibilité aux défauts ϑi,j de Di par
rapport à SPE est définie comme le rapport des amplitudes des défauts vérifiant ces
conditions de détectabilité des défauts des deux indicateurs pour la même variable j :
ϑi,j =δα
τi,α
∥∥∥ξ
(i)j
∥∥∥
∥∥∥ξj
∥∥∥
[28]
où ξ(i)j = (I − Ci)ξj , Ci = P (i) ˆP (i)
T
et P (i) est formé par les i derniers vecteurs
propres de la matrice Σ.
La sensibilité aux défauts a été calculée pour chaque variable (tableau 2). A partir
de ce tableau, il est clair qu’il existe au moins un indicateur Di (i = 1, ..., (m − ℓ))qui est plus sensible ou au moins aussi sensible aux défauts que l’indicateur SPE.
Par exemple, l’indicateur D1 peut détecter un défaut affectant la variable v2 avec une
amplitude 11 fois plus petite que celle que l’on peut détecter avec SPE.
3.5.2. Comparaison des taux de bonne détection des indicateurs Di et SPE
Nous nous sommes placés ici dans des conditions de test particulièrement diffi-
ciles pour mieux discriminer les capacités des deux indicateurs. Pour cela, nous avons
simulé des défauts d’amplitude aléatoire comprise entre 10 et 30 µg/m3 affectant
les différentes variables. Les bornes de cet intervalle sont très proches des erreurs
d’estimation obtenues par le modèle ACP pour les différentes variables. Le tableau 3
regroupe, pour chaque variable, les taux de bonne détection des défauts pour les deux

434 RS - JESA – 39/2005. Information et pollution atmosphérique
indicateurs Di et SPE. A partir de ces résultats, on constate que les taux de bonne
détection de l’indicateur Di sont nettement supérieurs à ceux de SPE.
3.5.3. Test de la qualité de la reconstruction des variables
Sur le tableau 3, nous avons représenté les taux de bonne reconstruction dans la
dernière colonne, une variable étant bien reconstruite si l’erreur de reconstruction est
inférieure à l’écart type de l’erreur d’estimation de la variable considérée. On peut
constater que la reconstruction utilisant le modèle ACP donne de bons résultats per-
mettant ainsi de proposer des valeurs de remplacement pour les mesures aberrantes
des différents capteurs.
4. Conclusion
Dans ce papier, nous proposons une méthode de diagnostic basée sur l’analyse
en composantes principales pour la détection et la localisation de défauts de capteurs
d’un réseau de surveillance de la qualité de l’air.
Tout d’abord, nous avons montré comment élaborer le modèle ACP du système
en minimisant la variance de l’erreur de reconstruction des différentes variables ce
qui permet la prise en compte de la détectabilité des défauts lors de la synthèse du
modèle. Ensuite, nous avons proposé un nouvel indicateur de détection de défauts de
capteurs. Il est basé sur les sommes successives des carrés des dernières composantes
principales. Avec cet indicateur, la détection est réalisée successivement dans diffé-
rents sous-espaces de l’espace résiduel en commençant par les sous-espaces les moins
sensibles aux perturbations. Enfin, la reconstruction des variables permet à la fois de
localiser les capteurs défaillants et d’estimer l’amplitude des défauts.
La méthode proposée a été appliquée avec succès à la détection et la localisation de
défauts de capteurs d’ozone et d’oxydes d’azote. Relier l’ensemble des grandeurs des
différents sites de mesure à l’aide du modèle ACP du réseau nous a permis d’établir
les relations de redondance nécessaires à la détection et à la localisation des défauts
de capteurs. Nous avons présenté, dans un premier temps, sur des exemples simples
l’intérêt de notre approche. Ensuite, nous avons montré que, pour notre application,
l’indicateur de détection Di a des performances supérieures à l’indicateur SPE clas-
siquement utilisé. Enfin, la reconstruction de la variable défaillante a permis d’obtenir
une estimation très satisfaisante de cette dernière.
Les résultats de cette étude de faisabilité, réalisée sur de courtes périodes de me-
sures, doivent être confirmés, d’une part, sur des périodes de mesures plus longues et,
d’autre part, en quantifiant de manière systématique les performances de la méthode
par une étude de type Monte-Carlo. Pour des périodes de mesure plus longues, cer-
taines caractéristiques du phénomène (non-linéarité et variation dans le temps) seront
certainement plus marquées ; nous envisageons, d’ores et déjà, d’utiliser des exten-
sions de l’ACP telles que l’ACP non linéaire (Harkat et al., 2005) ou l’ACP récursive
(Li et al., 2000).

Diagnostic de fonctionnement par ACP 435d1
d2
d3
d4
d5
d6
d7
d8
d9
d10
d11
d12
d13
d14
d15
d16
d17
d18
ϑ1
3.21
11.6
510
.60
1.09
0.88
0.29
1.20
0.57
0.10
0.94
0.11
0.41
1.87
0.73
0.17
0.19
0.09
0.18
ϑ2
1.67
6.08
5.52
1.20
0.96
0.18
4.43
1.97
1.65
1.27
0.39
0.44
5.35
1.13
0.10
0.72
0.66
0.15
ϑ3
1.51
4.28
3.89
1.14
0.78
0.14
3.21
1.42
0.13
4.39
1.09
0.34
3.81
0.88
0.48
2.31
1.04
0.13
ϑ4
1.27
3.62
3.29
1.91
1.30
0.18
3.80
1.33
0.15
3.80
0.92
0.30
3.80
0.85
0.40
2.56
1.19
0.11
ϑ5
2.40
2.69
2.63
2.33
1.27
0.48
2.83
1.20
0.42
2.82
0.68
0.23
2.85
0.62
0.46
1.92
0.88
0.16
ϑ6
2.37
2.23
2.18
2.24
1.43
0.43
2.37
1.00
0.39
2.40
0.64
0.43
2.36
0.68
0.41
2.32
0.96
0.14
ϑ7
1.81
1.70
1.66
1.82
1.47
1.08
1.83
1.43
0.47
1.84
1.06
0.83
1.81
0.63
0.91
1.77
0.73
0.25
ϑ8
1.56
1.46
1.45
1.57
1.34
1.21
1.58
1.33
0.48
1.58
0.94
0.75
1.56
0.55
0.80
1.54
1.49
1.47
ϑ9
1.35
1.27
1.25
1.36
1.23
1.29
1.36
1.23
0.46
1.37
1.01
0.95
1.36
1.10
1.04
1.36
1.31
1.30
ϑ10
1.20
1.12
1.11
1.21
1.20
1.20
1.20
1.11
0.45
1.21
1.20
1.17
1.21
1.18
1.19
1.21
1.21
1.20
Tab
leau
2.
Sens
ibil
ité
del’
indi
cate
urD
(i)(i
=1,
...,
m−
ℓ)pa
rra
ppor
tàl’
indi
cate
urS
PE
Var
iable
sT
BD
TB
R
D(i
)S
PE
O3−
BR
A75
%4
%94
%N
O2−
BR
A92
%4
%78
%N
OB
RA
99
%7
%92
%O
3−
DA
N84
%21
%85
%O
3−
FL
E89
%11
%90
%N
O2−
FL
E88
%45
%86
%O
3−
ST
N89
%8
%88
%N
O2−
ST
N80
%59
%85
%O
3−
TO
M97
%6
%88
%N
O2−
TO
M97
%89
%85
%N
OT
OM
100
%97
%84
%O
3−
LU
N82
%15
%90
%N
O2−
LU
N70
%30
%86
%
Tab
leau
3.
Taux
debo
nne
déte
ctio
n(T
BD
)po
urD
(i)
etS
PE
,tau
xde
bonn
ere
cons
truc
tion
(TB
R)
des
diffé
rent
esva
riab
les

436 RS - JESA – 39/2005. Information et pollution atmosphérique
5. Bibliographie
Box G.E.P., « Some theorems on quadratic forms applied in the study of analysis of variance
problems : Effect of inequality of variance in one-way classification », The Annals of Ma-thematical Statistics, vol. 25, 1954, p. 290-302.
Dunia R., Qin S.J., « Subspace approach to multidimentional identification and reconstruction »,
AIChE Journal, vol. 44, 1998, p. 1813-1831.
Gertler J., Weihua L., HUANG Y., MCAVOY T., « Isolation enhanced principal component
analysis », 3rd IFAC Workshop on On-line Fault Detection and Supervision in the Chemical
Process Industries, Lyon, June 4-5, France, 1998.
Harkat M.F., Mourot G., Ragot J., « Différentes méthodes de localisation de défauts basées sur
les dernières composantes principales », Conférence Internationale Francophone d’Auto-matique, CIFA2002, Nantes, France, 6-8 juillet 2002.
Harkat M.F., Mourot G., Ragot J., « Sensor fault detection and isolation of an air quality moni-
toring network using non linear principal component analysis »,16th IFAC World Congress,
Prague, Czech Republic, July 4-8, 2005.
Huang Y., Gertler J., « Fault isolation by partial PCA and partial NLPCA », IFAC’99, 14thTriennial world congress, Beijing, P. R. China, 1999, p. 545-550.
Ku W., Storer R.H., Georgakis C., « Disturbance detection and isolation by dynamic principal
component analysis », Chemometrics and Intelligent Laboratory Systems, vol. 30, 1995,
p. 179-196
Li W., Yue H., Valle S., Qin S.J., « Recursive PCA for adaptive process monitoring »Journal ofProcess Control, vol. 10, 2000, p. 471-486
Li W., Qin S.J., « Consistent dynamic PCA based on errors-in-variables subspace identifica-
tion. », Journal of Process Control, vol. 11, 2001, p. 661-678
MacGregor J.F., Kourti T., « Statistical process control of multivariate process », Control Engi-neering Practice, vol. 3, no 3, 1995, p. 403-414.
Miller P., Swanson R.E., HECKLER C.E., « Contribution plots : A missing link in multivariate
quality control », Applied Mathematics and Computer Science, vol. 8, no 4, 1998, p. 775-
792.
Mourot G., Gasso K., Ragot J., « Modelling ozone concentration using a Takagi-Sugeno mo-
del », Control Engineering Practice, vol. 7, 1999, p. 707-715.
Qin S.J., Hongyu Y., Dunia R., « Self validating inferential sensors with application to air emis-
sion monitoring », Industrial & Engineering Chemistry Research, vol. 36, 1997, p. 1675-
1685.
Qin S.J., Li W., « Detection, identification and reconstruction of faulty sensors with maximized
sensitivity », AIChE Journal, vol. 45, no 9, 1999, p. 1963-1976.
Qin S.J., Dunia R., « Determining the number of principal components for best reconstruction »,
Journal of Process Control, vol. 10, 2000, p. 245-250.
Valle S., Weihua L., Qin S.J., « Selection of the number of principal components : The variance
of the reconstruction error criterion with a comparison to other methods ». Industrial &Engineering Chemistry Research, vol. 38, 1999, p. 4389-4401.
Qin S.J., Wang J., « A new subspace identification approach based on principal component
analysis ». Journal of Process Control, vol. 12, 2002, p. 841-855.
Wise B.M., Gallagher N.B., « The process chemometrics approach to process monitoring and
fault detection », Journal of Process Control, vol. 6, no 6, 1996, p. 329-348.
Copyright © 2022 FDOKUMEN




















