Diagnosing chaos in the Space Circle
20
Physica D 50 (1991) 239-258 North-Holland Diagnosing chaos in the Space Circle Alan Wolf and Tom Bessoir Department of Physics, The Cooper Union, Cooper Square, New York, NY 10003, USA Received 9 August 1990 Revised manuscript received 20 January 1991 Accepted 25 January 1991 Communicated by H. Flaschka The Space Circle is a toy whose motion is chaotic. A modified version of the device with a tunable stress parameter exhibits a variety of periodic and chaotic states. We have derived and numerically solved the equations of motion for the system and find excellent agreement with experimental results. The problems with some widely used algorithms for diagnosing experimental chaos are discussed. For the Space Circle we find that estimates of the dominant Lyapunov exponent are more robust than estimates of the fractal dimension. 1. Introduction The Space Circle, shown in fig. la, is an execu- tive desk toy whose appeal lies in the erratic motion of the dumbbell-shaped rotor and in its apparent perpetual motion. The source of its motive power was easily determined by disassem- bling the device. Confirming the widely held sus- picion that the rotor's motion was chaotic was a more difficult problem that required both theo- retical and experimental efforts. The Space Circle (sometimes referred to as the Space Ball) is labeled "Made in Taiwan", but there are no markings to indicate the manufac- turer. It is available in novelty stores for about $10. Its three primary components are shown in fig. 2: the rotor, the outer ring, and the base. The rotor consists of a thin metal rod with hollow plastic spheres friction fit to each end. The center of the rotor is soldered to an axle which is mounted diagonally in the outer ring with low-quality journal bearings. The rotor is driven by the motion of the outer ring and is damped by friction in the journal bearings. The outer ring is a circular metallic ring with a permanent magnet attached to the bottom and support rods mounted at the side. The support rods rest on broad shallow troughs on arms that rise from the base, so that in addition to rotating, the outer ring is free to slide several millimeters in two directions (forward/backward and later- ally in fig. 1). The base contains the hidden driving circuit shown in fig. 3, which consists of a 9V battery, a transistor, a "detector" coil, and an electromag- net. When the permanent magnet on the bottom of the outer ring passes over the detector coil, the induced emf in the coil biases the transistor to 0167-2789/91/$03.50 © 1991- Elsevier Science Publishers B.V. (North-Holland)
-
Upload
independent -
Category
Documents
-
view
0 -
download
0
Transcript of Diagnosing chaos in the Space Circle

Physica D 50 (1991) 239-258 North-Holland
Diagnosing chaos in the Space Circle
Alan Wol f and T o m Bessoir Department of Physics, The Cooper Union, Cooper Square, New York, NY 10003, USA
Received 9 August 1990 Revised manuscript received 20 January 1991 Accepted 25 January 1991 Communicated by H. Flaschka
The Space Circle is a toy whose motion is chaotic. A modified version of the device with a tunable stress parameter exhibits a variety of periodic and chaotic states. We have derived and numerically solved the equations of motion for the system and find excellent agreement with experimental results. The problems with some widely used algorithms for diagnosing experimental chaos are discussed. For the Space Circle we find that estimates of the dominant Lyapunov exponent are more robust than estimates of the fractal dimension.
1. Introduction
The Space Circle, shown in fig. la, is an execu- tive desk toy whose appeal lies in the erratic motion of the dumbbell-shaped rotor and in its apparent perpetual motion. The source of its motive power was easily determined by disassem- bling the device. Confirming the widely held sus- picion that the rotor's motion was chaotic was a more difficult problem that required both theo- retical and experimental efforts.
The Space Circle (sometimes referred to as the Space Ball) is labeled "Made in Taiwan", but there are no markings to indicate the manufac- turer. It is available in novelty stores for about $10. Its three primary components are shown in fig. 2: the rotor, the outer ring, and the base.
The rotor consists of a thin metal rod with hollow plastic spheres friction fit to each end.
The center of the rotor is soldered to an axle which is mounted diagonally in the outer ring with low-quality journal bearings. The rotor is driven by the motion of the outer ring and is damped by friction in the journal bearings.
The outer ring is a circular metallic ring with a permanent magnet attached to the bottom and support rods mounted at the side. The support rods rest on broad shallow troughs on arms that rise from the base, so that in addition to rotating, the outer ring is free to slide several millimeters in two directions (forward/backward and later- ally in fig. 1).
The base contains the hidden driving circuit shown in fig. 3, which consists of a 9V battery, a transistor, a "detector" coil, and an electromag- net. When the permanent magnet on the bottom of the outer ring passes over the detector coil, the induced emf in the coil biases the transistor to
0167-2789/91/$03.50 © 1991- Elsevier Science Publishers B.V. (North-Holland)

240 A. Wolf and T. Bessoir / Diagnosing chaos in the Space Circle
Fig. 1. (a) The original Space Circle and (b) the modified Space Circle.
conduct, briefly energizing the electromagnet. The interaction between the electromagnet and the permanent magnet results in a kick to the outer ring each time it passes through the vertical posi- tion. With a fresh 9V battery a "good" Space Circle (we reject about one out of four new units as insufficiently lively) will run for several days. During this time the outer ring appears to act like a physical pendulum with an amplitude of roughly 80 ° from the vertical. The rotor, on the other hand, exhibits quite erratic behavior; for example, hours of slow unidirectional rotation may be in- terrupted by sudden quick reversals.
Several factors motivated our study of the Space Circle:
(1) While the device has often been spoken of as chaotic, it has apparently never been subjected to dynamical analysis.
(2) The Space Circle is of pedagogic interest because of the simplicity of the underlying physics, the low cost of the device and a suitable data collection system, and some highly engrossing be- havior.
(3) From the perspective of dynamical diagno- sis, this clean, few degree of freedom system is a good test case for numerical methods.

Rotor
Outer Ring
%.
I I
A. Wolf and T. Bessoir ~Diagnosing chaos in the Space Circle 241
Base
/ • Fig. 2. The principal components of the Space Circle: the rotor, the outer ring, and the base. The base contains the circuit of fig. 3 which supplies the motive power for the outer ring.
detector coil
T
electromagnet
Fig. 3. The driving circuit for the Space Circle. When the permanent magnet of the outer ring passes over the detector coil, the transistor is briefly biased to activate the electromag- net, which delivers a kick to the permanent magnet. The circuit is similar to one described in US Patent #3 783 550.
(4) With apologies to the designer of the Space Circle, we suspect its chaotic behavior is largely accidental, rather than the result of careful scien- tific analysis and engineering design.
(5) With apologies to the toy's manufacturer, the poor construction of the device makes the task of modeling its motion nontrivial. The low- quality journal bearings and the freedom of the outer ring to both slide and rotate on the base provide additional possibilities for the source of erratic rotor behavior.
As a damped, driven, nonlinear system, the Space Circle is a paradigm of both classical me- chanics and nonlinear dynamics. Studies of such systems usually introduce a "stress" parameter to take the system from simple to complex behavior. In our experimental work and numerical simula- tions we varied the driving voltage of the electro- magnet and found a variety of periodic and chaotic states.
Experimental details are discussed in section 2. The equations of motion for a modified Space Circle are derived and solved numerically in sec- tion 3. We find good agreement between experi- mental data and numerical results for both periodic and chaotic states. In section 4 we argue for the presence of chaos in the Space Circle.
In section 5 we discuss some widely used tech- niques for diagnosing experimental chaos. In sec- tion 6 we apply these methods to Space Circle data. For a particular chaotic state, we found that time series, reconstructed phase space diagrams [1, 2], and power spectra [3] obtained experimen- tally and numerically were in excellent agree- ment. For this state, Lyapunov exponents [4-6] #1 estimated from experimental and simulation time series are clearly positive indicating and (with less reliability) quantifying chaos. Pointwise dimen- sion [7-9] estimates were not convincingly non-
#1The efficient program referred to in ref. [4] is available from A. Wolf in executable form for IBM compatible PC's or as C or Fortran source code. A user's manual that includes a discussion of parameter selection will be provided with the code.

242 A. Wolf and T. Bessoir /Diagnosing chaos in the Space Circle
integral, so this diagnostic failed to detect chaos. Conclusions a re found in section 7.
2. Experimental details
We have studied the Space Circle both in its original form and in a slightly modified form. The modifications were small in the sense that they did not significantly alter the appearance of the time series for chaotic states. Modifications were implemented singly to isolate their effects, and then simultaneously during data collection.
Our first modification was to remove two .small magnets that were apparently intended to compli- cate the motion of the rotor. Removing the mag- nets allows us to model the Space Circle as a purely mechanical system with driving. One of the magnets is glued to the inside of one of the rotor 's spheres; the other is attached to the outer ring (we chose to omi t it from fig. 2), where each sphere passes within a centimeter of it. A signifi- cant interaction between the two magnets was only observed when the rotor was moving very slowly near the plane of the outer ring. In remov- ing the magnet from the sphere we did not want to turn the balanced rotor into a physical pendu- lum, so we replaced the magnetic sphere with a non-magnetic sphere from another Space Circle and carefully adjusted the rotor's balance.
A more substantial modification involved re- mounting the rotor vertically as shown in fig. lb. This was done to simplify the physics of the device and thereby its equations of motion, as well as to increase the signal-to-noise ratio during data collection. This modification caused in- creased friction in the lower journal bearing, such that a 9V battery often did not produce chaotic behavior. To overcome the friction, and to add a stress parameter to the system, we replaced the battery with a 0-40 V dc power supply (20 mA is suffÉcient). Appropriate driving voltages varied from one Space Circle to another, but were gen- erally in the range of 15-25 V. Outside of this range, the modified Space Circle tended to lock
pin ~ support rod of outer ring ---base
6 J
Fig. 4. A side view of the portion of the base that supports the outer ring. With straight pins glued to the base, the support rods of the outer ring are prevented from sliding along the trough.
up with the rotor perpendicular to the outer ring (we refer to this as the "perpendicular position"). We also reduced friction by injecting a Teflon- based lubricant into the lower bearing. This lubri- cation was sometimes observed to substantially alter the dynamics and was one of several factors that made it extremely difficult to reproduce ex- perimental conditions.
In anticipation of objections that chaotic rotor motion might arise from the sliding and rotating motion of the outer ring on the base, we reduced the forward/backward (fig. 1) sliding of the outer ring by more than an order of magnitude. This was accomplished by cementing pairs of straight pins to the base as shown in the side view of fig. 4. This modification resulted in slightly increased friction, which we offset with lubrication at the support rods. The outer ring was still free to move laterally on the base, but this motion took place on the time scale of minutes rather than seconds, and could be reduced by placing the unit on a level surface.
The most successful of the several methods of data collection that we explored involved the use of a metal detector. We recommend the simplest inductive units, such as those available from Ra- dio Shack for about $40. More elaborate models do additional signal processing (rejection of min- eralized soil, fe r rous /nonferrous metal discrimi- nation) which may be useful at the beach, but complicate data analysis and the comparison of experiment to theory. A block diagram of the
A. Wolf and T. Bessoir ~Diagnosing chaos in the Space Circle 243
Metal I DC Power ] Detector
supply / 0-40 Volts /
Frequency i to Voltage Converter
t Operational
Amplifier
18-bit Dotol I I Personal I / I Acquisition Filter [ Computer ~ Board
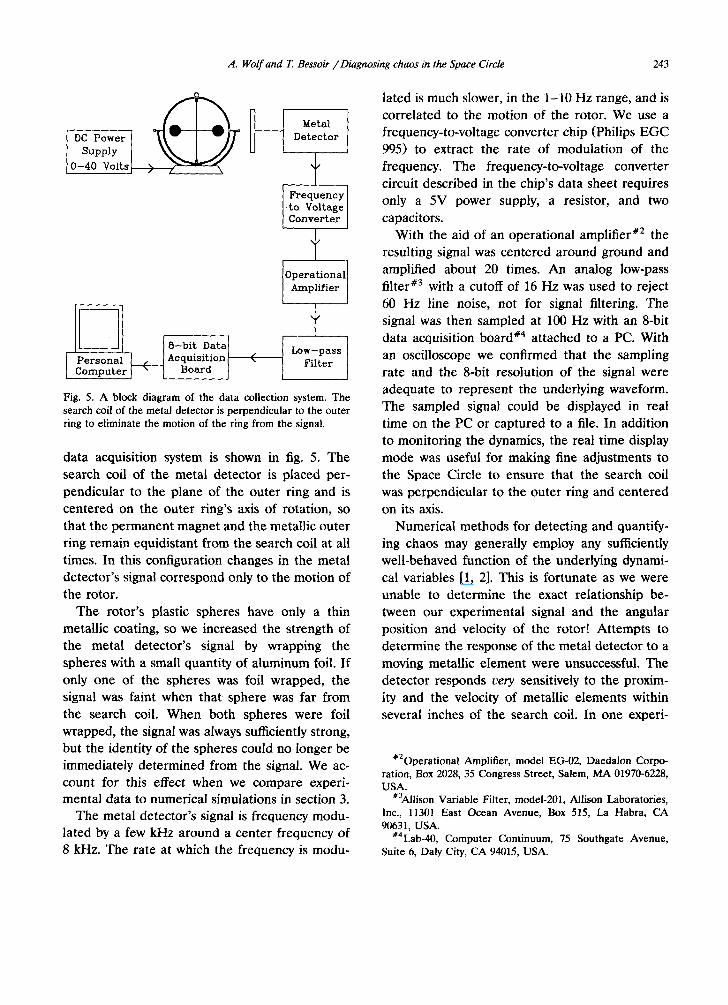
Fig. 5. A block diagram of the data collection system. The search coil of the metal detector is perpendicular to the outer ring to eliminate the motion of the ring from the signal.
data acquisition system is shown in fig. 5. The search coil of the metal detector is placed per- pendicular to the plane of the outer ring and is centered on the outer ring's axis of rotation, so that the permanent magnet and the metallic outer ring remain equidistant from the search coil at all times. In this configuration changes in the metal detector 's signal correspond only to the motion of the rotor.
T h e rotor's plastic spheres have only a thin metallic coating, so we increased the strength of the metal detector 's signal by wrapping the spheres with a small quantity of aluminum foil. If only one of the spheres was foil wrapped, the signal was faint when that sphere was far from the search coil. When both spheres were foil wrapped, the signal was always sufficiently strong, but the identity of the spheres could no longer be immediately determined from the signal. We ac- count for this effect when we compare experi- mental data to numerical simulations in section 3.
The metal detector 's signal is frequency modu- lated by a few kHz around a center frequency of 8 kHz. The rate at which the frequency is modu-
lated is much slower, in the 1-10 Hz range, and is correlated to the motion of the rotor. We use a frequency-to-voltage converter chip (Philips EGC 995) to extract the rate of modulation of the frequency. The frequency-to-voltage converter circuit described in the chip's data sheet requires only a 5V power supply, a resistor, and two capacitors.
With the aid of an operational amplifier #2 the resulting signal was centered around ground and amplified about 20 times. An analog low-pass filter #3 with a cutoff of 16 Hz was used to reject 60 Hz line noise, not for signal filtering. The signal was then sampled at 100 Hz with an 8-bit data acquisition board #4 attached to a PC. With an oscilloscope we confirmed that the sampling rate and the 8-bit resolution of the signal were adequate to represent the underlying waveform. The sampled signal could be displayed in real time on the PC or captured to a file. In addition to monitoring the dynamics, the real time display mode was useful for making fine adjustments to the Space Circle to ensure that the search coil was perpendicular to the outer ring and centered on its axis.
Numerical methods for detecting and quantify- ing chaos may generally employ any sufficiently well-behaved function of the underlying dynami- cal variables [1, 2]. This is fortunate as we were unable to determine the exact relationship be- tween our experimental signal and the angular position and velocity of the rotor! Attempts to determine the response of the metal detector to a moving metallic element were unsuccessful. The detector responds very sensitively to the proxim- ity and the velocity of metallic elements within several inches of the search coil. In one experi-
#2Operational Amplifier, model EG-02, Daedalon Corpo- ration, Box 2028, 35 Congress Street, Salem, MA 01970-6228, USA.
#~Allison Variable Filter, model-201, Allison Laboratories, Inc., 11301 East Ocean Avenue, Box 515, La Habra, CA 90631, USA.
*4Lab-40, Computer Continuum, 75 Southgate Avenue, Suite 6, Daly City, CA 94015, USA.

244
Osci I l a t i o n
A. Wolf and T. Bessoir /Diagnosing chaos in the Space Circle
U n i d i r e c t i o n a l r o t o t i o n
Choos
s e c
vV VWVV gvv vV gv v '
Fig. 6. Experimental data from the modified Space Circle for (from top to bottom) small-amplitude periodic motion about the perpendicular position, unidirectional rotation, and small-amplitude chaotic motion.
ment a foil wrapped sphere was placed at the 16 vertices of a 5 cm grid located parallel to and 8 cm from the search coil. The detector 's response to the stationary test element was noted, and a 3D surface of response was plotted. The follow- ing day we reassembled the apparatus with toler- ances of a fraction of a centimeter, returned the metal detector to get a strong signal (the daily adjustment of this resonant circuit was a major source of experimental irreproducibility), and ob- tained a very different response surface. Never- theless, from simultaneous observation of the Space Circle and the signal trace, it is clear that the signal is smoothly related to the motion of the rotor.
In fig. 6 we show experimental data for small- amplitude oscillation about the perpendicular po- sition, unidirectional rotation, and apparently chaotic small-amplitude motion. We did not study the latter state, which occurred when the system was overdriven at about 35 V. In fig. 7a we show an experimental time series for a typical chaotic state at about 20 V. Except for fig. 6c (an early run employing a single foil-wrapped sphere), the bottom of each trace represents a state in which the rotor is in the perpendicular position. The top of each trace represents a state in which the rotor lies in the plane of the outer ring. In fig. 7a, notice that the rotor occasionally exhibits a few small-amplitude oscillations about the perpendic- ular position, then moves on to larger scale too-
tion, such as unidirectional or bidirectional rotation.
3. Modeling the Space Circle
We now address the problem of simulating the motion of the Space Circle. We first consider the motion of the ring and rotor about the axis of rotation of the outer ring for the unmodified Space Circle (see fig. 8). We treat the ring and rotor as a single entity, so the rotational version of Newton's second law of motion reads
E-= (*sca) (1)
where Isc is the moment of inertia of the Space Circle (ring and rotor), E~" is the net torque on the system, and O is the angular velocity of the system.
The moment of inertia of the ring and rotor is t ime-dependent, as the mass distribution varies with the t ime-dependent position of the rotor. We therefore evaluate the derivative in eq. (1) as
Y',r = Iscg~ + / s c O. (2)
Using the parallel axis theorem, the moment of inertia of the rotor is found to be
IR =/rod + 2mr2 + m[ Rsin( y)] z, (3)

A. Wolf and T. Bessoir / Diagnosing chaos in the Space Circle 245
a
b
Fig. 7. Chaos in the Space Circle. Each figure is a single time series with 15 000 samples acquired at 100 Hz. (a) Experimen- tal data obtained at a driving voltage of approximately 20 V. (b) The result of a numerical solution of eq. (25). To mimic the experimental signal we plot the time series cos[29(t)], In each figure the bottom of the trace represents a state in which the rotor is in the perpendicular position. The top of each trace represents a state in which the rotor lies in the plane of the outer ring,
where 1to a is the moment of inertia of the thin rod about the outer ring's axis of rotation, m is the combined mass of the spheres, r is the radius of each sphere, R is the distance from the center of each sphere to the center of the rotor, and y is the angle between the thin rod of the rotor and the horizontal axis of rotation.
o: , , ~ (a)
Fig. 8. Variables used in deriving the equations of motion of the Space Circle. O and tr are the angular position variables for the rotor and ring respectively, ¢a and /~ are the angular velocities. R defines the position of each sphere relative to the center of the rod. ~o is the fixed mounting angle of the rotor within the outer ring.
y is related to the mounting angle of the rotor in the outer ring, ~0, and the angle of the rotor relative to the plane of the outer ring, 0. With the law of cosines for right spherical triangles we find
cos(r) = cos(q) cos(0). (4)
Adding the constant moment of inertia of the outer ring, /OR, the total moment of inertia of ring and rotor may be written as
2 2 /sc = fOR + 4od + -gmr
+ mR2[1 - cos2(~) cos: (O)] . (5)
Since 10R and mR 2 are much larger than ~mr 2 and /rod, we ignore the latter terms and find
I s c m l o a + m R 2 [ 1 -- cosZ(~) cos2(O)]. (6)
The moment of inertia is smallest when the rotor lies in the plane of the outer ring, and largest when the rotor is in the perpendicular position.
The system is subject to three torques: a fric- tional torque at the support rods, opposed to the angular velocity and assumed proportional to it; a gravitational torque due to the force of gravity acting on the center of mass of the Space Circle

2 4 6 A. Wolf and T. Bessoir /Diagnosing chaos in the Space Circle
(the mass of the permanent magnet lowers the center of mass below the axis of rotation); and the driving torque produced by the electromag- net:
"/ 'friction ~ - - Plr-~, ^
7"gravity = - M g R cm s i n ( a ) / ] ,
~'kiCk = k ick(a) ~ ,
(7)
(8)
(9)
where u is the coefficient of friction, M is the total mass of ring and rotor, g is the acceleration due to gravity, Rcm is the distance from the center of the rotor to the center of mass of the system, a is the angle the ring makes with the vertical, and kick(a) describes the driving torque.
Solving eq. (2) for g~, we find
a = -- w Q - M g R c m s in (a ) + k ick(a)
/OR + mR2[ 1 - c°s2(qQ c°s2(O)]
m R 2 cos2(qQ sin(20) wg2
I o g + mRZ[ 1 - c°s2(~P) c°s2(O)] " (lO)
In our first numerical studies we solved eq. (10) together with a coupled equation for the rotor. However, our results confirmed what we had sus- pected from visual observation: that not only is the motion of the outer ring very nearly periodic, it is not far from being simple harmonic. In fig. 9 we show experimental data for the duration of 5000 consecutive periods of the motion of the outer ring. For this measurement, the search coil was oriented to respond primarily to the proxim- ity of the permanent magnet on the bottom of the outer ring. The variation of the period from a nominal value of 1.25 s is a fraction of a percent. Measuring the masses and dimensions of Space Circle components, we estimated the moment of inertia of the ring and the rotor. We then calcu- lated the period of the outer ring as a simple harmonic oscillator for the two extreme configu- rations (rotor in the plane of the outer ring, rotor in the perpendicular position). These two periods differed from a nominal value of 1.45 s by about one percent. The 15% difference between mea-
sured and calculated periods is consistent with irregularities in Space Circle components and other measurement difficulties.
The ring and rotor are coupled through friction and inertial forces in the journal bearings, so if the rotor's motion is chaotic, the ring's motion cannot be exactly periodic. However, the ratio of ring to rotor mass is about 6 to 1, and the ratio of ring to rotor moment of inertia is about 15 to 1. These ratios are large enough to insure that while the ring drives the rotor, the rotor does not have much effect on the ring. In what follows we assume that the motion of the outer ring is simple harmonic and described by
a = A cos(Wt) (11)
so that
g2 = & = - A W sin(Wt). (12)
If we select 1.25 s as the typical period of the outer ring, W is very close to 5 radian/s . In numerical studies we treated A and W as inde- pendent, with W constant at 5 rad ian / s as A was varied in the interval (0.5, 2.5). This is supported by our experimental observation of a weak A dependence of W. A nominal value of 1.7 radians for A is consistent with the ring's amplitude for typical driving voltages, and results in chaotic behavior for a large class of initial conditions. Variations between Space Circles and the diffi- culty in reproducing experimental conditions pre- clude writing A as a function of the driving voltage.
We now consider the more interesting problem of determining the motion of the rotor. In the frame of the outer ring, the rotor's moment of inertia is constant at
l R = I~o a + 2 m r 2 + m R 2, (13)
where -/~od is the moment of inertia of the thin rod about the rotor's axis. Again, since m R ~ is much larger than I~'od and 2 2 ~ m r we may use
d ]~-r = ~--/(IRtO) = mR2d~. (14)

A. Wolf and T. Bessoir / Diagnosing chaos in the Space Circle 247
Period (sec)
1.2513
1.2465
Fig. 9. The duration of 5000 consecutive oscillations of the outer ring. The variation of the period is a fraction of one percent, confirming that the motion of the outer ring is very nearly periodic.
As the rotor moves in the accelerating reference frame of the outer ring, there will be pseudo- torques that arise from the Coriolis, centrifugal, and transverse pseudo-forces [10]:
7Coriolis = R X [ - - 2m(O X/~)]
= - 2 m [ ( R . [ ~ ) g I - ( R . g l ) I ~ ]
= 2m(R • t~)/~, (15)
"rcentrifugal = R X [ --/-'n~'~ X ( ~'~ X R ) ]
= - m ( R × [ ( a . R ) a - ( a . g ~ ) R ] )
= - ~ [ ( a - R ) ( R x a ) - a~(R xR)]
= - m ( O . R ) ( R × O ) , (16)
"rtransverse = e X ( - m r ) x R)
= - m [ ( R " R ) a - ( R . D)R]
= - m [ R 2 1 ~ - ( R ' g } ) R ] , (17)
where we have used the fact that the rotor's motion is constrained to the surface of a sphere
to write
R.k=0 .
Taking the components of the torques along the o~ direction, the Coriolis term disappears and we find
"/'centrifugal Iw = - m ( O . R ) ( R X O)I,, ,
= -m{[RS2 cos(0) cos(f)]
• [ - R O sin(0) cos(~o)] }
= ½ m R Z O 2 sin(20) cosZ(,¢) (18)
and
'Ttransverse I . "~- - - m [ R 2 0 - - ( R ' O ) R ] I , , ,
= - raRe1) I~,
= - m R 2 ~ sin(q0. (19)

248 A. Wolf and T. Bessoir /Diagnosing chaos in the Space Circle
We add a frictional torque at the journal bear- ings, but no term for air resistance, which ap- pears to be negligible. The equation of motion for the rotor is then
o =
- vtomR2g2 sin(q~) m R 2
+ ½ m R 2 0 sin(20) cos2(qO
m R 2 (20)
The only significant forces in the modified Space Circle are the linear damping and the centrifugal force.
We have also derived the equations of motion of the Space Circle by Lagrange's method [10]. The potential energy of the system is gravita- tional, and may be written as
V = MgRcm[1 - cos( co l . (26)
In the modified Space Circle, ¢ -- O, so the trans- verse term disappears and the centrifugal force term is simplified.
In the modified Space Circle the axes of rotation are perpendicular, so the kinetic energy evaluates to
1._ , , 2 ~ 2 s in(20) (21) do = m R 2
With eq. (12) and 0 = o~ we obtain
d = - /30 +/x sin(20) sin2(Wt),
where we define the constants
(22)
k'
/3 = m R 2 (23)
and
1 2 2 / x = ~ A W . (24)
The assumption of a frictional torque propor- tional to the velocity of the rotor was experimen- tally confirmed for the special case of a stationary outer ring. The rotor was spun by hand, data were collected, and the decay of the angular velocity of the rotor was determined. As expected for a linear friction term, the decay was observed to be almost exactly exponential in time. /3 was determined to be 0.08 s - i . Simulations in which the coefficient of friction was varied confirm that this level of friction is quite significant for the dynamics, and so we can expect to see dissipative rather than conservative dynamics.
With our standard parameter values, the equa- tion of motion for the rotor reads
1 2 1 2 T = ~lscg2 + ~ I R ~ . (27)
Eq. (6) simplifies to
I s c = / O R + m R 2 sin2(0) (28)
so the Lagrangian is
= ' sin2(0)] g22 L - ~ [ I o R + m R 2
+ 2mt~' ~2oj2 _ M g R c m [ 1 _ c o s ( a ) ] . (29)
Lagrange's method produces eqs. (10) and (20) for q~ = 0 once the nonconservative friction and driving terms are added.
We have written a program #5 which solves eq. (22) using a fourth-order Runge-Kut ta algo- rithm [12]. With the aid of this program we con- firmed the existence of a variety of periodic and chaotic states in the Space Circle, depending on the values of the friction coefficient, the ampli- tude of the motion of the outer ring, and the initial conditions. The program generates time series (O(t) mod 2w), phase space plots (O(t) mod2"rr versus w(t)), and an animation of the Space Circle from the perspective of the search coil. A solution obtained from a predictor-cor- rector algorithm [12] independently confirmed that the chaotic solutions did not arise from nu- merical errors.
#SThe program is contained in the software package "Chaos 0" = -0.08t~ + 36.125 sin(20) sinZ(5t). (25) Simulations" [11].
A. Wolf and T. Bessoir / Diagnosing chaos in the Space Circle 249
O s c i I l e t i o n
U n i d i r e c t ional R o t a t ion
B i d i r e c t i o n a l Rot a t i on
1 sec
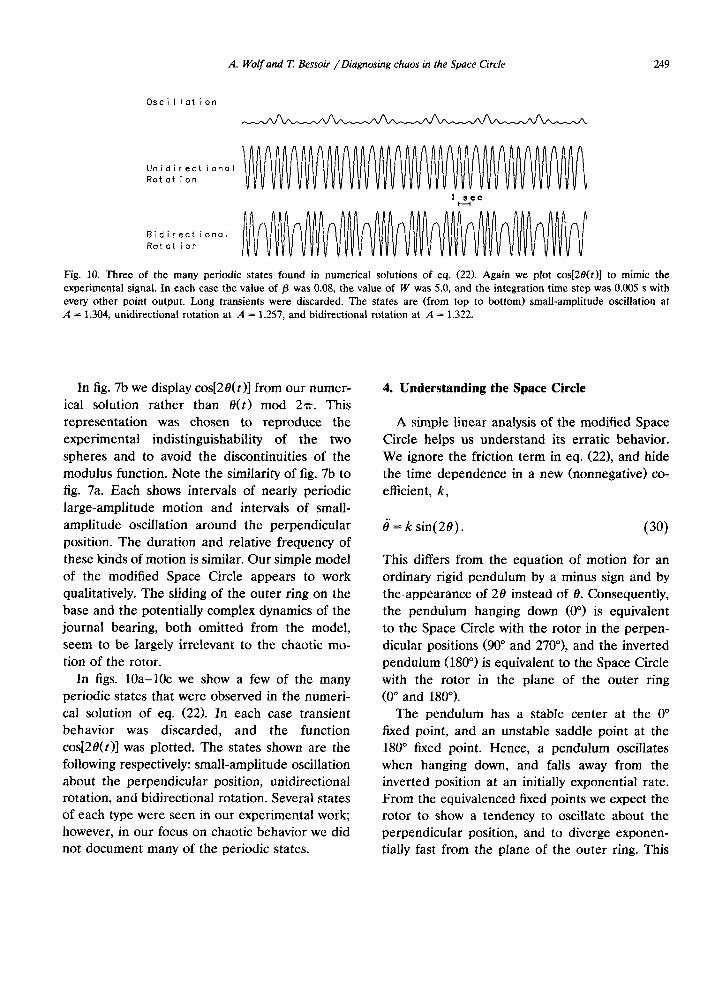
Fig. 10. Three of the many periodic states found in numerical solutions of eq. (22). Again we plot cos[20(t)l to mimic the experimental signal. In each case the value o f /3 was 0.08, the value of W was 5.0, and the integration time step was 0.005 s with every other point output. Long transients were discarded. The states are (from top to bottom) small-amplitude oscillation at A = 1.304, unidirectional rotation at A = 1.257, and bidirectional rotation at A = 1.322.
In fig. 7b we display cos[20(t)] from our numer- ical solution rather than O(t) mod 2w. This representation was chosen to reproduce the experimental indistinguishability of the two spheres and to avoid the discontinuities of the modulus function. Note the similarity of fig. 7b to fig. 7a. Each shows intervals of nearly periodic large-amplitude motion and intervals of small- amplitude oscillation around the perpendicular position. The duration and relative frequency of these kinds of motion is similar. Our simple model of the modified Space Circle appears to work qualitatively. The sliding of the outer ring on the base and the potentially complex dynamics of the journal bearing, both omitted from the model, seem to be largely irrelevant to the chaotic mo- tion of the rotor.
In figs. 10a-10c we show a few of the many periodic states that were observed in the numeri- cal solution of eq. (22). In each case transient behavior was discarded, and the function cos[20(t)] was plotted. The states shown are the following respectively: small-amplitude oscillation about the perpendicular position, unidirectional rotation, and bidirectional rotation. Several states of each type were seen in our experimental work; however, in our focus on chaotic behavior we did not document many of the periodic states.
4. Understanding the Space Circle
A simple linear analysis of the modified Space Circle helps us understand its erratic behavior. We ignore the friction term in eq. (22), and hide the time dependence in a new (nonnegative) co- efficient, k,
0" = k s in(20). (30)
This differs from the equation of motion for an ordinary rigid pendulum by a minus sign and by the.appearance of 20 instead of 0. Consequently, the pendulum hanging down (0 °) is equivalent to the Space Circle with the rotor in the perpen- dicular positions (90 ° and 270°), and the inverted pendulum (180 ° ) is equivalent to the Space Circle with the rotor in the plane of the outer ring (0 ° and 180°).
The pendulum has a stable center at the 0 ° fixed point, and an unstable saddle point at the 180 ° fixed point. Hence, a pendulum oscillates when hanging down, and falls away from the inverted position at an initially exponential rate. From the equivalenced fixed points we expect the rotor to show a tendency to oscillate about the perpendicular position, and to diverge exponen- tially fast from the plane of the outer ring. This

250 A. Wolf and T. Bessoir / Diagnosing chaos in the Space Circle
behavior is confirmed in figs. 7a and 7b and from visual observation of the device.
A potential energy barrier makes it difficult for a rigid pendulum to sample the unstable inverted position. Inversion (or near inversion) requires either the right initial conditions or the right forcing. The Space Circle, on the other hand, easily samples its most unstable configuration. The rotor simply turns to lie in the plane of the outer ring, which involves no increase in potential energy. In this sense, the Space Circle is similar to an ordinary damped, driven pendulum in a chaotic regime [13].
k is of course a t ime-dependent coefficient and so we must consider the possibility of resonance [10]. Time-dependent forcing often appears as a perturbation of the form
1 + E COS(Wft), (31)
where IE] << 1 and ~'f is the forcing frequency. Resonance generally occurs when the ratio of the forcing frequency to the natural frequency, wn, satisfies
w__~f=p (32) Wn q
for small integers p and q. From eq. (22) and the half angle formula we find that [el = 1, so the results of perturbation theory are not applicable here. More importantly, a balanced rotor has no natural frequency. Manipulation of eq. (22) al- lows us to formally define a natural frequency; however, we find the ratio of wf to w n to be independent of W, though proportional to A. (Again, we ignore the weak frequency depen- dence of the amplitude.)
Examination of eq. (22) reveals that the oscilla- tion frequency of the outer ring can be scaled out of the dynamics of the rotor, affecting only the coefficient of friction and the time scale of the solution. Defining T = Wt we obtain
0' = - /3 '0 +/z ' sin(20) sin2(T) (33)
for
/) /3' =- (34)
m R 2 W
and
. , i 2 (35) = ~ A .
In a Space Circle with negligible friction, a change in the driving frequency (possibly resulting from design modifications) affects only the time scale of the solution.
5. D i a g n o s i n g c h a o s
Traditional methods of data analysis such as power spectral estimation do not reliably distin- guish amongst chaos, randomness, and high com- plexity [14]. Two modern approaches to detecting and quantifying chaos are the estimation of a system's dominant Lyapunov exponent and the estimation of its fractal dimension [15]. In review- ing these methods we will see that they are not simple black boxes where data go in one end and unambiguous results come out the other. There are difficulties in determining what constitutes appropriate input, in selecting parameters for the black box, and in interpreting the output.
In a chaotic system, nearly identical states di- verge from each other at an exponential rate on the average. This property is known as "sensitive dependence upon initial conditions." The expo- nent characterizing this divergence is the Lya- punov exponent, whose units (for continuous systems) are bits of information per second. If we had an infinite amount of knowledge about the state of a system, the state could be identified as a point in phase space. The infinity here refers to the number of bits of information needed to specify the exact coordinates of the point. The limited precision of experimental work and corn-
A. Wolf and T. Bessoir / Diagnosing chaos in the Space Circle 251
t I - - t2 ~¢ lucla |
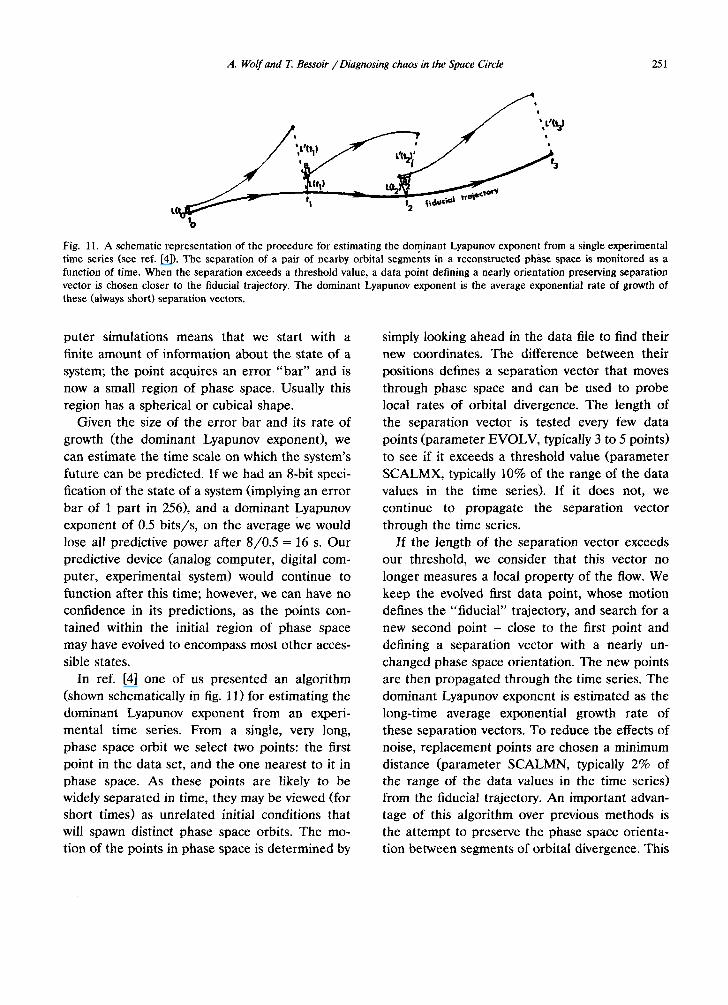
'o Fig. 11, A schematic representation of the procedure for estimating the dominant Lyapunov exponent from a single experimental time series (see ref. [4]). The separation of a pair of nearby orbital segments in a reconstructed phase space is monitored as a function of time. When the separation exceeds a threshold value, a data point defining a nearly orientation preserving separation vector is chosen closer to the fiducial trajectory. The dominant Lyapunov exponent is the average exponential rate of growth of these (always short) separation vectors.
purer simulations means that we start with a finite amount of information about the state of a system; the point acquires an error "ba r" and is now a small region of phase space. Usually this region has a spherical or cubical shape.
Given the size of the error bar and its rate of growth (the dominant Lyapunov exponent), we can estimate the time scale on which the system's future can be predicted. If we had an 8-bit speci- fication of the state of a system (implying an error bar of 1 part in 256), and a dominant Lyapunov exponent of 0.5 bits/s , on the average we would lose all predictive power after 8 /0 .5 = 16 s. Our predictive device (analog computer, digital com- puter, experimental system) would continue to function after this time; however, we can have no confidence in its predictions, as the points con- tained within the initial region of phase space may have evolved to encompass most other acces- sible states.
In ref. [4] one of us presented an algorithm (shown schematically in fig. 11) for estimating the dominant Lyapunov exponent from an experi- mental time series. From a single, very long, phase space orbit we select two points: the first point in the data set, and the one nearest to it in phase space. As these points are likely to be widely separated in time, they may be viewed (for short times) as unrelated initial conditions that will spawn distinct phase space orbits. The mo- tion of the points in phase space is determined by
simply looking ahead in the data file to find their new coordinates. The difference between their positions defines a separation vector that moves through phase space and can be used to probe local rates of orbital divergence. The length of the separation vector is tested every few data points (parameter EVOLV, typically 3 to 5 points) to see if it exceeds a threshold value (parameter SCALMX, typically 10% of the range of the data values in the time series). If it does not, we continue to propagate the separation vector through the time series.
If the length of the separation vector exceeds our threshold, we consider that this vector no longer measures a local property of the flow. We keep the evolved first data point, whose motion defines the "fiducial" trajectory, and search for a new second point - close to the first point and defining a separation vector with a nearly un- changed phase space orientation. The new points are then propagated through the time series. The dominant Lyapunov exponent is estimated as the long-time average exponential growth rate of these separation vectors. To reduce the effects of noise, replacement points are chosen a minimum distance (parameter SCALMN, typically 2% of the range of the data values in the time series) from the fiducial trajectory. An important advan- tage of this algorithm over previous methods is the attempt to preserve the phase space orienta- tion between segments of orbital divergence. This

252 A. Wolf and T. Bessoir / Diagnosing chaos in the Space Circle
is crucial if local rates of orbital divergence are to be correctly averaged for the Lyapunov exponent.
The mechanisms that cause orbital divergence in chaotic systems also produce fractal phase space structures. There are several definitions of fractal dimension, all relating to the clustering properties of points along phase space trajecto- ries, and most admitting algorithms that allow dimension estimation from an experimental time series [9]. In the widely used pointwise dimension algorithm, a randomly selected data point in phase space is surrounded by a sphere. As the radius of the sphere is increased, more and more neighbor- ing data points fall inside of it. The number of points grows linearly with the radius for a 1D phase space structure, quadratically for a 2D phase space structure, and as a nonintegral power of the radius for a typical chaotic system. If the number of enclosed neighbors is plotted versus the radius on a log-log "scaling" curve, the slope of the curve is defined to be the pointwise dimen- sion of the structure. (Implementations of most other fractal dimension definitions also result in scaling curves whose slope is the value of the dimension.) For improved statistical significance the calculation is typically repeated for a large number of randomly chosen data points and the results are averaged. Chaos is indicated by a convincingly nonintegral value of the slope. (Chaotic systems sometimes contain "fat" fractals [16], whose dimension, in principle, is integral. In practice, accessible length scales in such a system are likely to scale non-integrally. The problems we describe below are likely to complicate the matter in either case.)
We first consider some problems common to both Lyapunov exponent and dimension calcula- tions. Each utilizes the technique of delay recon- struction to build a phase space structure from time-delayed copies of a single experimental time series [1, 2]. Delay reconstruction requires two parameters: the time delay and the embedding dimension (i.e. the number of copies of the time series used to build the new phase space). While few calculations are sensitive to the value of the
time delay, the choice of embedding dimension is often important. On the one hand, a high-dimen- sional space ensures that each "degree of free- dom" in the time series finds a home. Increasing the embedding dimension also reduces the likeli- hood of near crossings of phase space orbits that may disrupt our calculations. On the other hand, experimental data are always somewhat contami- nated by infinite-dimensional noise. Noise spreads into each available phase space dimension and, in a reconstruction of sufficiently high dimension, could overwhelm a low-dimensional chaotic sig- nal. Unfortunately, low-pass filtering data prior to diagnostic calculations may be problematic [17]. Also, as the embedding dimension is increased past the minimum acceptable value, the recon- structed set will generally acquire a bit of curva- ture into each new dimension. In a finite data set, a gain in curvature means a decrease in the range of length scales that show consistent fractal scal- ing (if such exists). Strong embedding dimension dependence has plagued many dimension and Lyapunov calculations.
The size (length) of an experimental data set is a crucial factor in determining the accuracy of phase space reconstruction. By considering some extreme examples (one million data points span- ning one oscillation, ten points spanning one mil- lion oscillations), we conclude that there are two relevant quantities. The first is the number of data points per "orbit" (or oscillation or charac- teristic time scale) necessary to get a minimal sense of orbital continuity. The second is the number of orbits of data required to reproduce phase space structures (for the dimension calcu- lation) and obtain a long time average (for the Lyapunov exponent calculation), l_~ss obvious is a third factor, the number of points required to fill in the local structure of the phase space. We call this the "density factor." If this number is too small, fractal scaling will suffer, and we may not find suitably close Lyapunov replacement points.
For a hypothetical (and certainly unrealistic) data set consisting of points uniformly distributed in d-space, Lyapunov exponent calculations re-

A. Wolf and T. Bessoir ~Diagnosing chaos in the Space Circle 253
quire about 10-100 points per orbit, 10 a- 1 orbits, and 30 d total data points [4]. In this case the density factor generally exceeds the product of the other two factors, so it determines the re- quired data set size.
From an equally crude scaling argument, we find that dimension calculations generally require a somewhat larger number of data points. We consider N points uniformly distributed in a d-cube of unity side in d-space. For a robust slope estimate from a scaling curve, we insist on consistent scaling over a specified, dimension- independent range of length scales ( a decade or more is suggested). In terms of N and d we estimate the minimum and maximum length scales over which scaling may work (e.g. the interpoint distance N -1/d is too optimistic for the minimum length scale). The result of such a calculation is of the form N = Qd, where Q depends on several factors, but is generally somewhat larger than 30. This result is similar to the exponential depen- dence found in the simplest definitions of fractal dimension, but it is more useful since it tells us how much data is required for a robust calcula- tion.
For real systems we have no magic formula specifying the number of data points required for accurate calculations, but we believe that 30 d is an optimistic lower bound for calculations of frac- tal dimension and Lyapunov exponent. This sug- gests that 10000 points may suffice for a 2.5- dimensional system, but a billion points may be required for a 5.5-dimensional system. The result is unfortunate, but it appears to be an insur- mountable limitation to dynamical diagnosis. Despite improvements since the early days of "box-counting" methods [18] for estimating frac- tal dimension, no useful algorithm has circum- vented the exponential dependence on the fractal dimension.
Unfortunately, dimension and Lyapunov calcu- lations provide minimal and indirect feedback on the appropriateness of the size of a data set. This is because every data set with two or more points has some effective fractal dimension, and some
effective dominant Lyapunov exponent. As the size of the data set grows, one hopes these quan- tities will approach the values for the underlying system. For what its worth, they always correctly characterize the data set at hand.
We now consider the separate problems of the two dynamical diagnostics, some of which will turn out to be quite similar. Dimension estima- tion involves generating a scaling curve and ex- tracting its slope. A surprising number of prob- lems can interfere with this apparently simple procedure:
The scaling curve may not have a unique slope. Rejecting the upper and lower ends of the scaling curve which are certain to be problematic, we look to the "middle" of the curve. Th e re we may find a gradually changing slope or multiple re- gions of different (constant) slope. One possible explanation is that the system behaves differently on different length scales, and therefore cannot be characterized by a single value of the fractal dimension [19]. In this case, the scaling curve itself (or variants of it) may be the best way to describe the fractal properties of the system. The scaling curve may also exhibit an intrinsic oscillation, even with adequate quantities of noise-free data [20]. A data set that is too small a n d / o r too noisy may also cause or exacerbate the problem of nonunique slope. In practice, we will probably find that the extraction of a unique slope from a scaling curve involves the selection of one or more parameters by esthetic criteria.
The scaling curve may have a unique but incor- rect slope. A broad region of good scaling does not necessarily indicate that a correct value of the dimension has been found. A dramatic example is an unpublished calculation of ours on a system of known dimension 7 whose scaling curve had a broad region of slope 4. The calculation was first done with 64000 data points. A second calcula- tion with 256000 points gave nearly identical results. Only our knowledge of the correct di- mension suggested that there was a problem and that it was a grossly inadequate amount of data.

254 A. Wolf and T. Bessoir / Diagnosing chaos in the Space Circle
The slope may show strong embedding dimension dependence. A common procedure is to plot a series of scaling curves as a function of the em- bedding dimension. In some cases, the slopes are observed to level off to a small value, such as 2.5, as the embedding dimension approaches 30. In a space of such high dimension, we are very con- cerned about added curvature and the diffusion of noise. Again, the problem is worse in data sets that are small a n d / o r noisy.
The effects o f noise may not be limited to the low end of the scaling curve. In simple experiments with nonchaotic processes mildly contaminated by uniformly distributed random numbers, the entire scaling curve was found to be disrupted. Even if the effects of noise are confined to the low end of the curve, good scaling may also be confined to this region (especially in strongly dis- sipative systems). Strictly speaking, fractal dimen- sion characterizes scaling properties only in the limit of infinitesimal length scales.
The derivative o f the scaling curve is less well behaved than the scaling curve. We are looking for a region of constant slope in the scaling curve. It is therefore the derivative of the scaling curve that is of interest. Differentiating an experimen- tally determined curve makes it noisier.
No value o f the fractal dimension can differ from an integer by more than 0.5. The uncertainty in (nontrivial) fractal dimension calculations very of- ten exceeds 0.5 [21, 22]. It is therefore difficult to confirm chaos through a nonintegral dimension. We call this the "point-five" problem. A more realistic goal for dimension calculations is to de- termine the approximate number of degrees of freedom in a system by estimating the nearest integer dimension. This could be a valuable tool in comparing theory and experiment, but it is not of much help with the problem of detecting and quantifying chaos.
Some of the problems of Lyapunov exponent estimation are similar to the problems of dimen- sion estimation:
There may not be a unique value for the domi- nant Lyapunov exponent that characterizes average
orbital divergence on all accessible length scales. Lyapunov exponents are defined for infinitesimal length scales, inaccessible in finite data sets. For the length scales defined by parameters SCALMN and SCALMX, it is quite likely that a value other than the dominant Lyapunov exponent governs orbital divergence. Estimates of the dominant exponent have sometimes shown a strong depen- dence on these two parameters [6]. As with frac- tal dimension, the best solution may be to present Lyapunov exponent estimates as a function of the length scale parameters. If we attempt to extract a single "best" value from these results, we face problems similar to those involved in determining a unique slope for a scaling curve.
Other problems are: the dominant exponent may show strong embedding dimension depen- dence; as we increase SCALMN to reduce the effects of noise we may lose chaos present on small length scales; and the effects of noise may not be limited to small length scales. (We con- sider here only the Lyapunov exponent algorithm of ref. [4]. Matrix methods for estimation of Lyapunov exponents from time series experience the same problems and additional instabilities [23-25]. See refs. [26, 27] for an interesting his- torical perspective on the two approaches in the context of estimating dominant eigenvalues in matrices.) Nevertheless, there do appear to be advantages to Lyapunov exponent calculations.
Lyapunov exponents do not suffer from the point-five problem. Chaos is indicated by a posi- tive Lyapunov exponent, and positive values can get arbitrarily far from zero. We have never seen the sign of an exponent estimate change for a strongly chaotic system, even for large variations in Lyapunov algorithm parameters. Of course, when the dominant Lyapunov exponent is close to zero, it may be impossible to distinguish an estimated exponent as positive.
Dynamic properties such as Lyapunov exponents are more resilient to noise than static properties such as fractal dimension. Time series "glitches" are more likely to alter the clustering of data points than to disturb estimates of average orbital
- t
divergence. We believe that dynamic filtering schemes [28] are more likely to reduce the effects of noise in Lyapunov exponent calculations than in dimension calculations.
A strongly chaotic system may have a nearly
integral fractal dimension. A strongly chaotic but highly dissipative system may have a nearly inte- ger fractal dimension [9], making it difficult to confirm chaos. The dominant Lyapunov exponent has no special problem with such systems.
It is useful to compare Lyapunov exponent and fractal dimension calculations to a more routine method of data analysis such as power spectral estimation. Spectral estimation has its subtleties (e.g. aliasing, non-stationary processes), parame- ter selection may be important (in windowing, filtering, and averaging), and there are difficult problems best left to the experts [3]. Yet, in spite of these factors, many scientists and engineers have mastered the basic techniques. By compari- son, chaos diagnosis attempts to solve far more difficult problems with much less well understood tools.
6. Diagnosing chaos in the Space Circle
We now apply the dynamical diagnostics dis- cussed in the previous section to the Space Circle data of fig. 7a (experimental) and 7b (simulation).
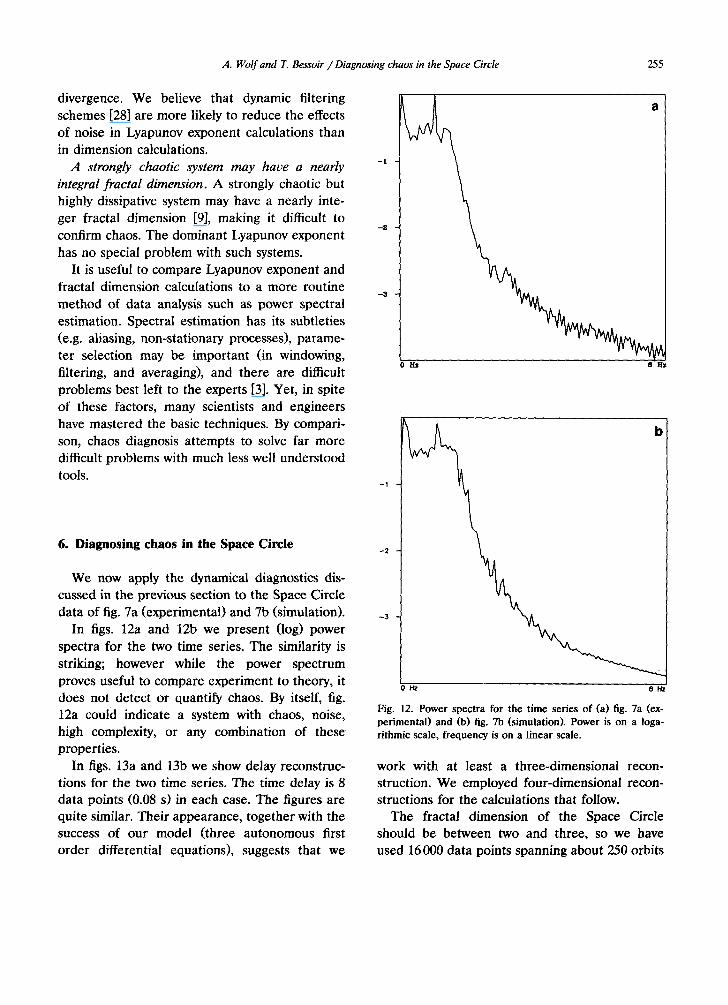
In figs. 12a and 12b we present (log) power spectra for the two time series. The similarity is striking; however while the power spectrum proves useful to compare experiment to theory, it does not detect or quantify chaos. By itself, fig. 12a could indicate a system with chaos, noise, high complexity, or any combination of these properties.
In figs. 13a and 13b we show delay reconstruc- tions for the two time series. The time delay is 8 data points (0.08 s) in each case. The figures are quite similar. Their appearance, together with the success of our model (three autonomous first order differential equations), suggests that we
- 2
- 3
0 HZ 8 Hz
A. Wolf and T. Bessoir / Diagnosing chaos in the Space Orcle 255
- I
- 2
- 3
Hz 6 Hz
Fig. 12. Power spectra for the time series of (a) fig. 7a (ex- perimental) and (b) fig. 719 (simulation). Power is on a loga- rithmic scale, frequency is on a linear scale.
work with at least a three-dimensional recon- struction. We employed four-dimensional recon- structions for the calculations that follow.
The fractal dimension of the Space Circle should be between two and three, so we have used 16 000 data points spanning about 250 orbits

a
256 A. Wolf and T. Bessoir / Diagnosing chaos in the Space Circle
Fig. 13. Phase space reconstructions from the time series of (a) fig. 7a (experimental) and (b) fig. 7b (simulation) each with a time delay of 8 samples.
los N(e)
I0000
1000
1 0 0
a
J I ~ 1 IILlJ I L I i I I i l l t t I L 1 t i l l
l o B e
m
s b
4
3
2
1
o t t t t R a i l I
1 o I •
Fig. 14. (a) Pointwise dimension scaling curves for the time series of fig. 7a (experimental) and fig. 7b (simulation). The embedding dimension was 4, the time delay was 8, and 256 reference points were used. The simulation curve has been displaced upwards by one decade. The scaling curve is a log-log plot of the number of data points, N(e), contained within a sphere versus the radius of the sphere e. (b) Slopes of these scaling curves. The simulation curve has been displaced upwards by one dimension. In each figure the maximum value of e is approximately the diagonal extent of the delay recon- structed attractor.
in our numer ica l studies. To confirm that we had
a sufficient n u m b e r of orbits, the t ime series of
fig. 7b was replaced with one that had four t imes
the n u m b e r of orbits and one four th the n u m b e r
of points per orbit. (By ma in t a in ing the previous
in tegra t ion stepsize and simply th inn ing the re-
sui t ing t ime series, we ob ta ined an extension of
the orbi t in fig. 7b.) Lyapunov and d imens ion
results did not change significantly, so we cont in-
ued to work with the original data set. This was
fo r tuna te as exper imenta l l imitat ions made the
use of a significantly longer data set inadvisable.
In figs. 14a and 14b we show the pointwise
d imens ion scaling curves for the two t ime series
for embedd ing d imens ion 4. Each scaling curve is
accompanied by its derivative curve. The la t ter
A. Wolf and T. Bessoir /Diagnosing chaos in the Space Circle 257
5 ¢ o c~
2 -
0 4 ~ '; 1'o ;2 ; , ~'8 l's 2'0 2'2 24 Maximum l e n g t h s c a l e
r ' IExper iment Z~SFrnulot i o n
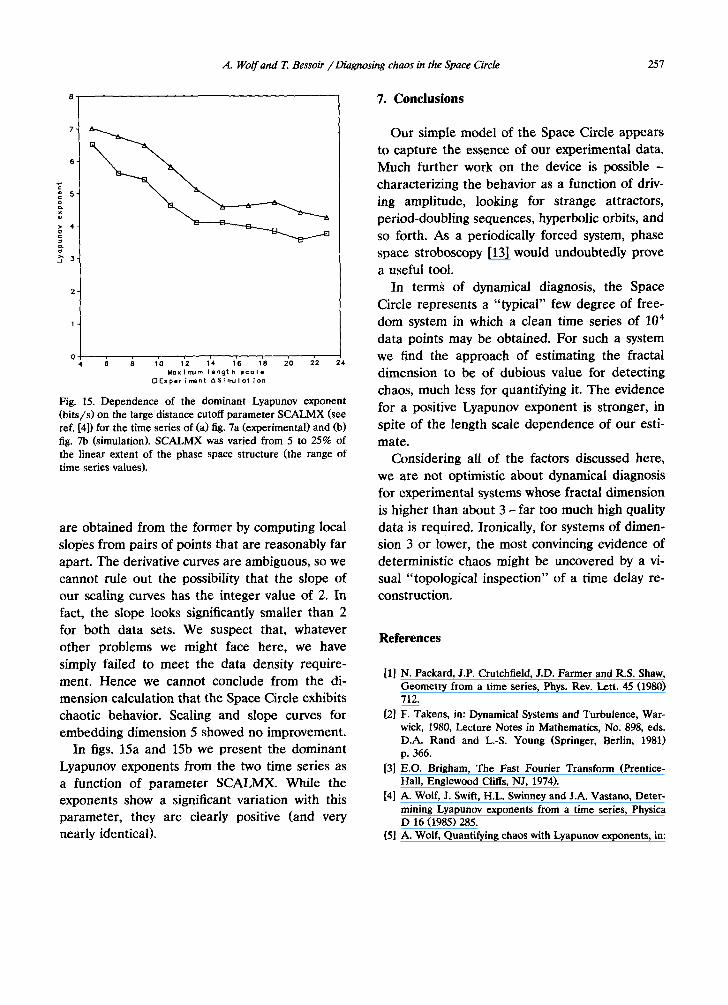
Fig. 15. Dependence of the dominant Lyapunov exponent (bits/s) on the large distance cutoff parameter SCALMX (see ref. [4]) for the time series of (a) fig. 7a (experimental) and (b) fig. 7b (simulation). SCALMX was varied from 5 to 25% of the linear extent of the phase space structure (the range of time series values).
are obtained from the former by computing local slopes from pairs of points that are reasonably far apart. The derivative curves are ambiguous, so we cannot rule out the possibility that the slope of our scaling curves has the integer value of 2. In fact, the slope looks significantly smaller than 2 for both data sets. We suspect that, whatever other problems we might face here, we have simply failed to meet the data density require- ment. Hence we cannot conclude from the di- mension calculation that the Space Circle exhibits chaotic behavior. Scaling and slope curves for embedding dimension 5 showed no improvement.
In figs. 15a and 15b we present the dominant Lyapunov exponents from the two time series as a function of parameter SCALMX. While the exponents show a significant variation with this parameter, they are clearly positive (and very nearly identical).
7. Conclusions
Our simple model of the Space Circle appears to capture the essence of our experimental data. Much further work on the device is possible - characterizing the behavior as a function of driv- ing amplitude, looking for strange attractors, period-doubling sequences, hyperbolic orbits, and so forth. As a periodically forced system, phase space stroboscopy [13] would undoubtedly prove a useful tool.
In terms of dynamical diagnosis, the Space Circle represents a "typical" few degree of free- dom system in which a clean time series of 10 4 data points may be obtained. For such a system we find the approach of estimating the fractal dimension to be of dubious value for detecting chaos, much less for quantifying it. The evidence for a positive Lyapunov exponent is stronger, in spite of the length scale dependence of our esti- mate.
Considering all of the factors discussed here, we are not optimistic about dynamical diagnosis for experimental systems whose fractal dimension is higher than about 3 - far too much high quality data is required. Ironically, for systems of dimen- sion 3 or lower, the most convincing evidence of deterministic chaos might be uncovered by a vi- sual "topological inspection" of a time delay re- construction.
References
[1] N. Packard, J.P. Crutchfield, J.D. Farmer and R.S. Shaw, Geometry from a time series, Phys. Rev. Lett. 45 (1980) 712.
[2] F. Takens, in: Dynamical Systems and Turbulence, War- wick, 1980, Lecture Notes in Mathematics, No. 898, eds. D.A. Rand and L.-S. Young (Springer, Berlin, 1981) p. 366.
[3] E.O. Brigham, The Fast Fourier Transform (Prentice- Hall, Englewood Cliffs, NJ, 1974).
[4] A. Wolf, J. Swift, H.L. Swinney and J.A. Vastano, Deter- mining Lyapunov exponents from a time series, Physica D 16 (1985) 285.
[5] A. Wolf, Quantifying chaos with Lyapunov exponents, in:

258 A. Wolf and T. Bessoir / Diagnosing chaos in the Space Circle
Chaos- Nonlinear Science: Theory and Applications, ed. A. Holden (Manchester Univ. Press, Manchester, 1986) p. 273.
[6] A. Wolf and J.A. Vastano, Intermediate length scale effects in Lyapunov exponent estimation, in: Dimensions and Entropies in Chaotic Systems, ed. G. Mayer-Kress (Springer, Berlin, 1986) p. 94.
[7] P. Grassberger and I. Procaccia, Measuring the strangeness of strange attractors, Physica D 9 (1983) 189.
[8] P. Grassberger and I. Procaccia, Characterization of strange attractors, Phys. Rev. Lett. 50 (1983) 346.
[9] J.D. Farmer, E. Ott and J.A. Yorke, The dimension of chaotic attractors, Physica D 7 (1983) 153.
[10] L.D. Landau and E.M. Lifshitz, Mechanics, 3rd Ed. (Pergamon Press, New York, 1976).
[11] T. Bessoir and A. Wolf, Chaos Simulations, Physics Aca- demic Software, North Carolina State University, Raleigh, NC 27695-8202, USA.
[12] B. Carnahan, H.A. Luther and J.O. Wilkes, Applied Numerical Methods (Wiley, New York, 1969).
[13] F. Moon, Chaotic Vibrations: An Introduction for Ap- plied Scientists and Engineers (Wiley, New York, 1987).
[14] B. Bunow and G. Weiss, How chaotic is chaos?, Math~ Biosci. 47 (1979) 221.
[15] A. Brandstater, Ji 'Swift; H.L. Swinney, A. Wolf, J.D. Farmer, E. Jen and J.P. Crutehfield, Low-dimensional chaos in a hydrodynamic system, Phys. Rev. Lett. 51 (1983) 1442.
[16] J.D. Farmer, Seaiing in fat fractals, in: Dimensions and Entropies in Chaotic Systems, ed. G. Mayer-Kress (Springer, Berlin, 1986) 54.
[17] R. Badii and A. Politi, On the fractal dimension of filtered chaotic signals, in: Dimensions and Entropies in Chaotic Systems, ed. G. Mayer-Kress (Springer, Berlin, 1986) p. 123.
[18] H.S. Greenside, A. Wolf, J. Swift and T. Pignaturo, Impracticality of box-counting algorithms for calculating the dimensionality of strange attractors, Phys. Rev. A 25 (1982) 3453.
[19] H.G.E. Hentschel and I. Procaccia, The infinite number of generalized dimensions of fractals and strange attrac- tors," Physica D 8 (1983) 435.
[20] R. Badii and A. Politi, Intrinsic oscillations in measuring the fractal dimension, Phys. Lett. A 104 (1984) 303.
[21] J. Holzfuss and G. Mayer-Kress, An approach to error- estimation in the application of dimension algorithms, in: Dimensions and Entropies in Chaotic Systems, ed. G. Mayer-Kress (Springer, Berlin, 1986) p. 114.
[22] W.E. Caswell and J.A. Yorke, Invisible errors in dimen- sion calculations: geometric and systematic effects, in: Dimensions and Entropies in Chaotic Systems, ed. G. Mayer-Kress (Springer, Berlin, 1986) p. 123.
[23] J.A. Vastano and E.J. Kostelich, Comparison of algo- rithms for determining Lyapunov exponents from experi- mental data, in: Dimensions and Entropies in Chaotic Systems, ed. G. Mayer-Kress (Springer, Berlin, 1986) p. 100.
[24] J.-P. Eckmann, S. Oliffson Kamphorst, D. Ruelle, S. Ciliberto, Lyapunov exponents from time series, Phys. Rev. A 34 (1986) 4971.
[25] P. Bryant, R. Brown and D.I. Abarbanel, Lyapunov expo- nents from observed time series, Phys. Rev. Lett. 65 (1990) 1523.
[26] F.S. Acton, Numerical Methods That Work (Harper and Row, New York, 1970).
[27] J.H. Wilkinson, The Algebraic Eigenvalue Problem (Clarendon Press, Oxford, 1965).
[28] E.J. Kostelich and J.A. Yorke, Noise reduction: Finding the simplest dynamical system consistent with the data, Physica D 41 (1990) 183.