
Detection of Vortical Structures in 4D Velocity Encoded Phase Contrast MRI Data Using Vector...
8
Detection of Vortical Structures in 4D Velocity Encoded Phase Contrast MRI Data Using Vector Template Matching Johann Drexl 1 , Haider Khan 1 , Michael Markl 2 , Anja Hennemuth 1 , Sebastian Meier 1 , Ramona Lorenz 3 , and Horst K. Hahn 1 1 Fraunhofer MEVIS, Bremen, Germany 2 Departments of Radiology and Biomedical Engineering, Northwestern University, Chicago, USA 3 Department of Radiology, Medical Physics, University Medical Center Freiburg, Germany Abstract. We present the Adaptive Vector Pattern Matching (AVPM) method, a novel method for the detection of vortical structures specifi- cally designed for velocity encoded 4D PCMRI datasets. AVPM is based on vector pattern matching combined with robust orientation estimation. This combination provides for a simple yet robust algorithm, which is a priori axial flow invariant. We demonstrate these properties by compar- ing the performance of AVPM with Heiberg’s Vector Pattern Matching algorithm. Key words: vortical structures, phase contrast MRI, vector template matching 1 Introduction 4D velocity encoded Phase Contrast Magnetic Resonance Imaging (PCMRI) is an evolving functional imaging technique. With PCMRI, it is possible to acquire a time resolved 3D velocity field v(x,t), in addition to anatomical information. One clinical specialty expected to benefit from PCMRI is cardiology, as PCMRI allows the in-vivo assessment of individual patient hemodynamic flow patterns. Currently, computer-aided visualization techniques (such as streamlines, path- lines or particle traces) allow human observers to examine and analyze the highly complex flow patterns in PCMRI measurements of the heart and the great ves- sels. For instance, in a recent study Frydrychowicz et al visually analyzed the impact of age, aortic arch geometry and size on the flow characteristics of helical and vortical structures in the human aorta [1]. However, when done per eye sight such studies are very labor intensive and also prone to observer bias. To bet- ter support such cardiological studies, a computer-aided observer-independent characterization of flow patterns would certainly be welcome [1]. In this work, we focus on the computer-aided detection of vortical structures (VS). Vortical structures (vortices, helices and swirls) are frequently described in- formally as ”the rotating motion of a multitude of particles around a common
Transcript of Detection of Vortical Structures in 4D Velocity Encoded Phase Contrast MRI Data Using Vector...

Detection of Vortical Structures in 4D VelocityEncoded Phase Contrast MRI Data Using
Vector Template Matching
Johann Drexl1, Haider Khan1, Michael Markl2, Anja Hennemuth1, SebastianMeier1, Ramona Lorenz3, and Horst K. Hahn1
1 Fraunhofer MEVIS, Bremen, Germany2 Departments of Radiology and Biomedical Engineering, Northwestern University,
Chicago, USA3 Department of Radiology, Medical Physics, University Medical Center Freiburg,
Germany
Abstract. We present the Adaptive Vector Pattern Matching (AVPM)method, a novel method for the detection of vortical structures specifi-cally designed for velocity encoded 4D PCMRI datasets. AVPM is basedon vector pattern matching combined with robust orientation estimation.This combination provides for a simple yet robust algorithm, which is apriori axial flow invariant. We demonstrate these properties by compar-ing the performance of AVPM with Heiberg’s Vector Pattern Matchingalgorithm.
Key words: vortical structures, phase contrast MRI, vector templatematching
1 Introduction
4D velocity encoded Phase Contrast Magnetic Resonance Imaging (PCMRI) isan evolving functional imaging technique. With PCMRI, it is possible to acquirea time resolved 3D velocity field v(x, t), in addition to anatomical information.One clinical specialty expected to benefit from PCMRI is cardiology, as PCMRIallows the in-vivo assessment of individual patient hemodynamic flow patterns.Currently, computer-aided visualization techniques (such as streamlines, path-lines or particle traces) allow human observers to examine and analyze the highlycomplex flow patterns in PCMRI measurements of the heart and the great ves-sels. For instance, in a recent study Frydrychowicz et al visually analyzed theimpact of age, aortic arch geometry and size on the flow characteristics of helicaland vortical structures in the human aorta [1]. However, when done per eye sightsuch studies are very labor intensive and also prone to observer bias. To bet-ter support such cardiological studies, a computer-aided observer-independentcharacterization of flow patterns would certainly be welcome [1]. In this work,we focus on the computer-aided detection of vortical structures (VS).
Vortical structures (vortices, helices and swirls) are frequently described in-formally as ”the rotating motion of a multitude of particles around a common
2 Detection of vortical structures in 4D PCMRI
axis” [2]. In the human circulatory system, VS are a prominent flow patternin the great vessels such as the aorta. Although VS can be identified by visualinspection, translating the informal description into a formal criterion is notstraightforward [3]. A seemingly ”obvious” possibility for a formal criterion isto consider the curl of the velocity field (the vorticity vector), and to define aVS as a region of high vorticity magnitude ||∇ × v||. However, high vorticitymagnitude is a necessary, but not sufficient criterion for the existence of a VS[2]. An example of this is the well-known Poiseuille flow in a straight tube, wherethe vorticity magnitude is actually maximal at the tube wall.
Furthermore, real world data often have coarse resolution and are noisy. Inthe case of PCMRI data (although spatial and time resolution in MRI stillcontinues to improve), this makes the robust detection of VS in PCMRI datadifficult [4].
In this paper, we present a novel method ”Adaptive Vector Pattern Match-ing” (AVPM) for the robust detection of VS. AVPM is a modification of Heiberg’sVector Pattern Matching (VPM) method [4]. We compare the performance ofAVPM against the original VPM method. The comparison is performed on syn-thetic and in-vivo PCMRI data.
2 Methods and Material
2.1 Methods
Vector Pattern Matching: The basic idea of Heiberg’s vector template match-ing (VPM) is to search for predefined swirl-like template patterns in the L2-normalized velocity field u := v/||v||. Template matching a velocity field v(x)to a vector template p(x) is implemented by vector convolution [4]:
h(x) =
∫< u(x′),p(x− x′) > dx′. (1)
The templates p(x) must be axisymmetric and L2-normalized. Because of thenoise smoothing properties of the integration operator, template matching tendsto be robust against degradations in the data [4]. For handling arbitrary orien-tations of the template, the structure tensor approach is employed, allowing therepresentation of arbitrary template orientations in 3D with only six canonicaltemplate orientations [4].
Apart from the still quite high computational costs, an open question withVPM is how to choose the templates. In [4], a semi-formal ”construction kit”consisting of six basic flow templates is provided: vortex, left swirl, right swirl,convergence, divergence, and parallel flow. But even with such a basic set of flowtemplates a template for the matching must be constructed beforehand, andthis requires a priori knowledge. For example, to construct a swirl template forVPM, the axial velocity must be coded a priori into the template. However, thereexist vortices (as in the Burgers-Rott model [5]) where the axial flow component(primary flow) is not constant along the vortex axis. As a consequence, thetemplate can only match some part of the vortex core.

Detection of vortical structures in 4D PCMRI 3
The Proposed Method ”Adaptive Vector Pattern Matching”: We ap-proach these difficulties with a ”generate candidates and test” strategy:
1. Identify candidates by the vorticity magnitude criterion, and then estimateorientation by the vorticity vector.
2. Verify a candidate by vector pattern matching, utilizing the knowledge ofthe orientation.
We refer to this method as ”Adaptive vector pattern matching (AVPM)” (Table1).
Table 1: The AVPM method.
Input: velocity field v1) Calculate ω = ∇× v.2) Select candidate voxels with||ω|| > θ0.
3) Estimate orientation n by the vorticity vector ω.4) Project v (in local neighborhood):
vp = (I − n̂n̂T )v, n̂ = n/||n||.5) L2-normalize the projected velocities:
up = vp/||vp||.6) Rotate template p so that its axis is now n.7) Compute vector convolution between the
rotated template and up to obtain similarity h.8) Threshold the absolute value of the similarity
to obtain the vortex core:|h| < θ1.
In AVPM, the velocity field is projected normal to the vorticity vector, result-ing in an axial flow invariant detection (unlike VPM, which is clearly not axialflow invariant). The L2-normalization step ensures that the topological similar-ity of the flow pattern is matched rather than the actual velocity distribution.The structure tensor approach is not employed in AVPM.
In accordance with Lugt’s definition of VS [2], we choose as the template aL2-normalized rotational vortex template:
p(x) = [− sinφ, cosφ, 0]T , (2)
with φ as the angle of the vector x in the x-y-plane.To make the orientation estimation process more robust and reliable, we do
not employ the naive implementation of the curl operator using finite differences,but resort to a ”integral curl” formulation:
[∇× v]i = lim|Ci|→0
1
|Ci|
∮Ci
< v(x), dx >. (3)

4 Detection of vortical structures in 4D PCMRI
with Ci being the orthogonal curves, i = 1, 2, 3 and |Ci| the area enclosed bysuch a curve. This ”integral curl” is a simple application of Stoke’s theorem fromvector analysis. We use the fact that inside the vortex core, the vorticity vectorsare all parallel. Therefore, the average vorticity vector in a local neighborhoodhas the same direction as the actual vorticity vector. Because the candidate selec-tion process works on the same spatial scale as the vector pattern matching, weuse identical kernel sizes for the vector template matching and the integral curlcomputation. Comparing the computational complexity of VPM and AVPM, wesee that instead of using six filters we use only one filter for AVPM. On the otherhand, this gain is offset by the fact that the AVPM kernel must be computedon the fly for every spatial position, and the additional burden for computingthe integral curl. The question of the net gain of AVPM will be analyzed by anexperiment.
In the simplest case, the threshold θ0 for candidate selection is chosen asθ0 = 0, to prohibit the trivial case n = 0. Choosing a threshold θ0 > 0 providesan additional speedup. To directly control the speedup factor, θ0 is chosen as afixed quantile in the histogram of the vorticity vector magnitude ||ω||. It shouldbe noted that this involves a tradeoff between computation time and detectionperformance.
2.2 Data
We first perform the evaluation on synthetically generated datasets with a prioriknown properties: velocity vector fields given both in analytical form and fromCFD calculations. We study robustness by adding noise and coarse subsampling.We further use in-vivo PCMRI scans of patients and volunteers.The following datasets have been used in the evaluation:
1. Synthetic:(a) Analytical: ”Helix” (rotational vortex with an additional constant axial
component), and the Burgers-Rott vortex model [5].(b) A CFD simulation of a lid driven cavity [6] (Reynolds number Re = 10).
2. In-vivo: From a database of patient and volunteer cases we selected fivedatasets containing complex flow patterns. Case 1 to 4 are aortic datasets,Case 5 is a carotid bifurcation. Case 1 has a pronounced aortic aneurysm,showing complex hemodynamic phenomena involving prominent vortical andhelical flows. The in-vivo datasets have between 17 and 24 time points, anda temporal resolution ranging from 40 msec to 45 msec. For the four aorticdatasets, the in plane spatial resolution ranges from 1.672 mm2 to 1.772
mm2 and the slice thickness from 2 mm to 2.6 mm. The carotid bifurcationdataset has a slightly finer spatial resolution, with inplane spatial resolution0.862 mm2 and a slice thickness 1.4 mm.
3 Results
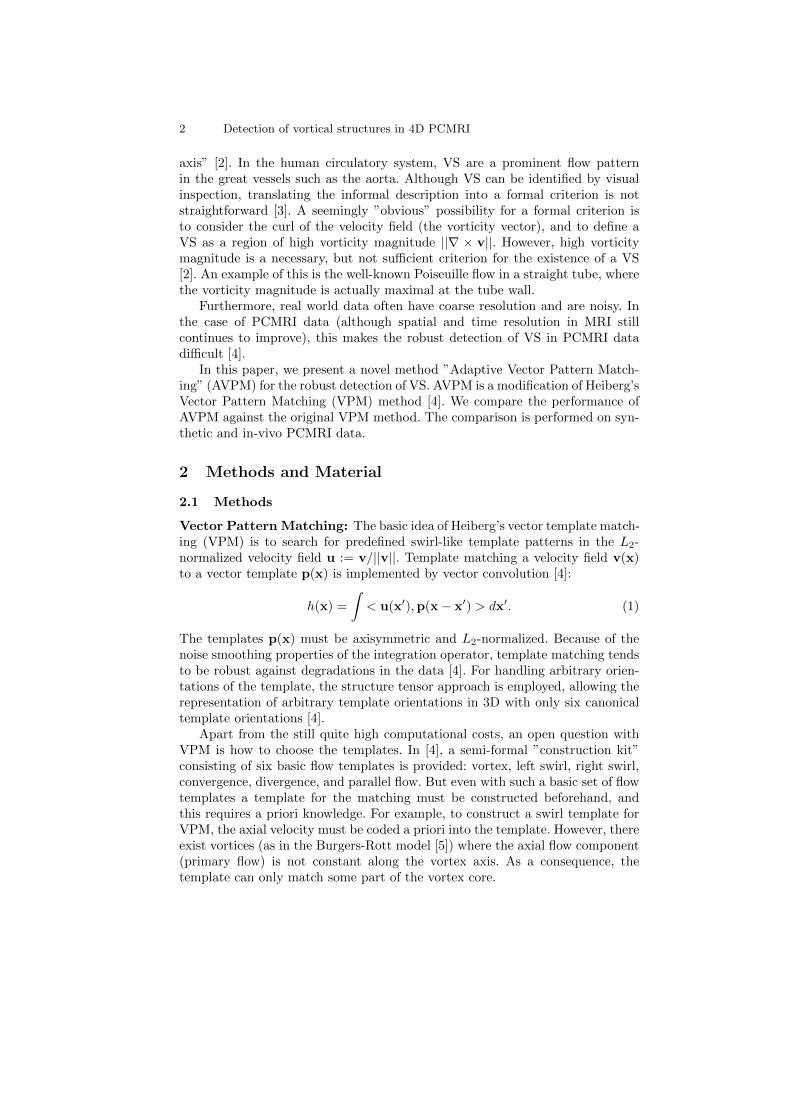
Axial-Flow Invariance: We use the Burgers-Rott vortex (without noise), asthis vortex model has a pronounced non-constant primary flow component along

Detection of vortical structures in 4D PCMRI 5
the vortex axis [5]. VPM can only detect part of the vortex core, while AVPMdetects the complete vortex core (Fig. 1).
Computation Time and Noise Resilience: We use a helix (rotational vortexwith angular velocity = 5 rad/s, radial velocity = 0 m/s, and additional axialvelocity = 2 m/s), sampled on a regular grid with 1 mm resolution (433 voxels).White Gaussian noise is superimposed on the vortex to obtain a (deliberatelypoor) SNR of 6 dB. We generate 100 synthetic datasets of signal plus noise andnoise alone. AVPM and VPM are computed on the generated data (both witha 5x5x5 kernel). As a control, we also compute the magnitude of the integralcurl (5x5x5 kernel). We use θ0 = 0 for AVPM, to study best case detectionperformance and worst case computation time.
For an implementation of VPM and AVPM in C++, we measured the com-putation times on a 12 GB, 3.07 GHz machine (single threading used). Theresults are tabulated in Table 2. We observe that AVPM is faster than VPMeven for θ0 = 0. Thus, even with the additional costs for computing the tem-plate ”on the fly” and for computing the integral curl there is still a net gain incomputation time for AVPM over VPM. This gain is largely due to the smallercosts for template matching of AVPM (one template match) versus VPM (sixtemplate matches).
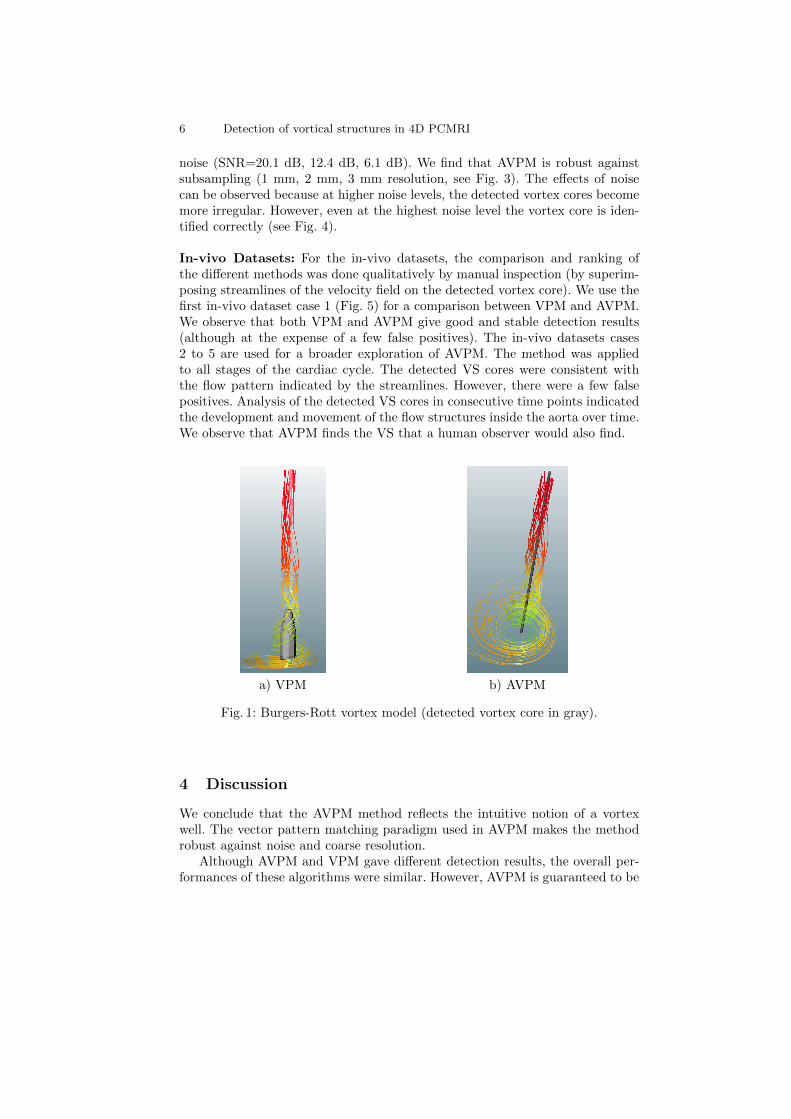
To assess the detection performance, we performed a ROC analysis (see Fig.2 for the ROC curves, and also Table 2 for the corresponding AUC values). Forthe ROC, a ground truth was defined as a cylinder with radius 5 mm around thevortex axis. The true positive fraction is the fraction of detected voxels containedin the ground truth cylinder in all ”signal+noise” synthetic datasets. The falsepositive fraction is the number of detected voxels in all ”noise” synthetic datasets.We observe:
1. AVPM is a significantly better vortex detector than a naive thresholding ofthe magnitude of the integral curl alone.
2. For very noisy data, VPM is slightly better in the ROC. This is possiblydue to the fact that the VPM response is the combination of several filteroutputs, which may add some additional robustness.
Table 2: Average times and AUCs for the noisy helix data (433 voxels).Algorithm VPM AVPM Integral Curl
Average processing time 1.03 sec 0.53 sec 0.12 secArea-under-the-curve (AUC) 97.95% 91.67% 70.43%
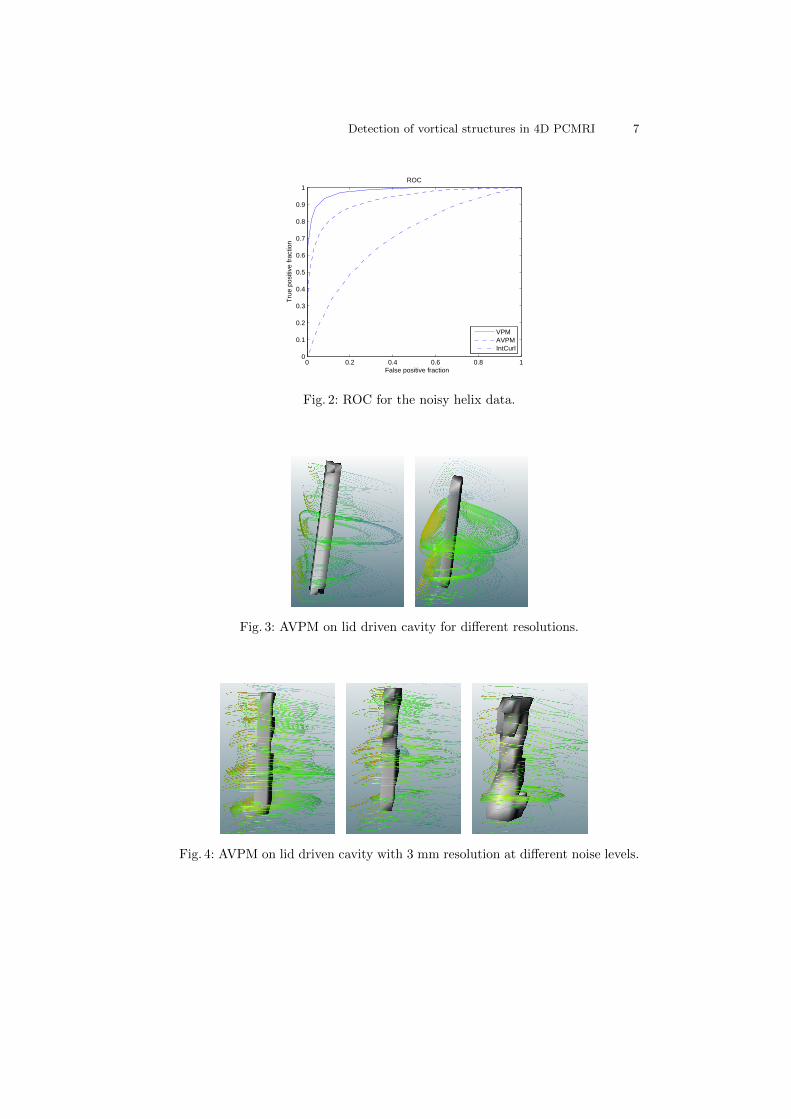
Resilience of AVPM to Downsampling and Noise: To study the com-bined effect of downsampling and noise of AVPM, we use the CFD simulationof a lid driven cavity. The original resolution is 1 mm, and we subsampled thedataset to 2 mm and 3 mm. The 3 mm version was additionally corrupted with
6 Detection of vortical structures in 4D PCMRI
noise (SNR=20.1 dB, 12.4 dB, 6.1 dB). We find that AVPM is robust againstsubsampling (1 mm, 2 mm, 3 mm resolution, see Fig. 3). The effects of noisecan be observed because at higher noise levels, the detected vortex cores becomemore irregular. However, even at the highest noise level the vortex core is iden-tified correctly (see Fig. 4).
In-vivo Datasets: For the in-vivo datasets, the comparison and ranking ofthe different methods was done qualitatively by manual inspection (by superim-posing streamlines of the velocity field on the detected vortex core). We use thefirst in-vivo dataset case 1 (Fig. 5) for a comparison between VPM and AVPM.We observe that both VPM and AVPM give good and stable detection results(although at the expense of a few false positives). The in-vivo datasets cases2 to 5 are used for a broader exploration of AVPM. The method was appliedto all stages of the cardiac cycle. The detected VS cores were consistent withthe flow pattern indicated by the streamlines. However, there were a few falsepositives. Analysis of the detected VS cores in consecutive time points indicatedthe development and movement of the flow structures inside the aorta over time.We observe that AVPM finds the VS that a human observer would also find.
a) VPM b) AVPM
Fig. 1: Burgers-Rott vortex model (detected vortex core in gray).
4 Discussion
We conclude that the AVPM method reflects the intuitive notion of a vortexwell. The vector pattern matching paradigm used in AVPM makes the methodrobust against noise and coarse resolution.
Although AVPM and VPM gave different detection results, the overall per-formances of these algorithms were similar. However, AVPM is guaranteed to be
Detection of vortical structures in 4D PCMRI 7
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1ROC
Tru
e po
sitiv
e fr
actio
n
False positive fraction
VPMAVPMIntCurl
Fig. 2: ROC for the noisy helix data.
Fig. 3: AVPM on lid driven cavity for different resolutions.
Fig. 4: AVPM on lid driven cavity with 3 mm resolution at different noise levels.

8 Detection of vortical structures in 4D PCMRI
a) VPM b) AVPM
Fig. 5: Comparison between VPM and AVPM for in-vivo dataset 1 (t = 10).
axial flow invariant. This is clearly seen on the Burgers-Rott vortex model. Ax-ial flow invariance makes the template selection for AVPM much easier, becausethere is only one canonical template for detection. Also, AVPM is 51.5% fasterthan VPM in the experiment, in spite of the overhead for orientation estimationand the ”on the fly” generation of rotated templates. In practice, these overheadcosts are offset because for AVPM, only one template match has to be performedinstead of the six template matches necessary for VPM, and only at a fractionof the total voxel sites.
References
1. Frydrychowicz, A., Berger, A., del Rio, A.M., Russe, M., Bock, J., Harloff, A.,Markl, M.: Interdependencies of aortic arch secondary flow patterns, geometry, andage analysed by 4-dimensional phase contrast magnetic resonance imaging at 3 tesla.European Radiology 22 (2012) 11221130
2. Jeong, J., Hussain, F.: On the Identification of a Vortex. J. Fluid Mechanics 285(1995) 69–94
3. Jiang, M., Machiraju, R., Thompson, D.: Detection and Visualization of Vortices.In: MICCAI 2003. (2003)
4. Heiberg, E., Ebbers, T., Wigstroem, L., Karlsson, M.: Three dimensional flowcharacterization using vector pattern matching. IEEE Transactions on Visualizationand Computer Graphics 9(3) (2003) 313–319
5. Batterson, J.W., Maicke, B.A., Majdalani, J.: Advancements in Theoretical Modelsof Confined Vortex Flowfields. In: JANNAF Propulsion Conference, Denver, CO,May 14-17, 2007. (2007)
6. Bozeman, J., Dalton, C.: Numerical Study of viscous flow in a cavity. Journal ofComputational Physics 12 (1973) 348–363










![2W ^fde_¶e SV cVXZ`_R] eYcVRe+ 3C:4D - Daily Pioneer](https://static.fdokumen.com/doc/165x107/631aa8d85d5809cabd0f7e42/2w-fdee-sv-cvxzr-eycvre-3c4d-daily-pioneer.jpg)









