
DESPLAZAMIENTO HORIZONTAL TRASLACIONALIDAD E INTRASLACIONALIDAD
19
UNIVER SIDAD TÉCNIC A DE AMBATO Facultad de Ing. Civil y Mecánica ESTRUCTUR AS II TEMA: “DESPLA ZAMIENT O HORIZON TAL Y DEFLEXI ON DE LOS ELEMENT OS”
-
Upload
independent -
Category
Documents
-
view
4 -
download
0
Transcript of DESPLAZAMIENTO HORIZONTAL TRASLACIONALIDAD E INTRASLACIONALIDAD
UNIVERSIDADTÉCNICA DEAMBATO
Facultadde Ing.Civil yMecánica
ESTRUCTURAS II
TEMA:“DESPLAZAMIENT
OHORIZONTAL YDEFLEXION DELOS
ELEMENTOS”

1.- DESPLAZAMIENTO HORIZONTAL
TRASLACIONALIDAD E INTRASLACIONALIDAD
Una estructura se califica de intraslacional bajo un estadode cargas cuando sus nudos (puntos de unión de las barras)no sufren desplazamientos aunque si pueden girar. En la
figura 4.41 se muestran ejemplos de estructurasintraslacionales.
Las estructuras intraslacionales suelen descomponerse, parasu análisis, en elementos, imponiendo las condiciones decompatibilidad de giros que se precise.
Una estructura se califica de traslacional bajo un estadode cargas cuando sus nudos se desplazan respecto a su
TEMA:“DESPLAZAMIENT
OHORIZONTAL YDEFLEXION DELOS
ELEMENTOS”

posición inicial. En la figura 4.42 se muestran ejemplosde estructuras intraslacionales.
En la descomposición de una estructura traslacional enelementos, a efectos de su análisis, ha de tenerse encuenta que en el giro de los nudos interviene, también, elvalor del desplazamiento que la estructura haya podidosufrir, desplazamiento que es una incógnita del problema.
Una misma estructura puede comportarse como intraslacionalpara un sistema de cargas y como traslacional para otro
(figura 4.43).
Cargas horizontales
Una de las características principales de las estructurases soportar las cargas horizontales así es que entre losestados de carga postulados para el diseño de laestructura, tendrán especial importancia aquellos debidos acargas variables o accidentales. Las cargas horizontalespueden ser debidas al viento o a sismos
En general en edificios que no sean demasiado esbeltos odemasiado flexibles (más precisamente, cuyo periodo naturalde vibración se sitúa por debajo de 1 segundo), la accióndel viento se traduce en una presión lateral que puedeaceptarse actuando estáticamente. Las presiones del vientovarían con la altura pero, conservativamente, puedentomarse con valor constante resultando así, para edificiosprismáticos, en un conjunto de fuerzas lateralesuniformemente distribuidas con la altura. Esta aproximación
TEMA:“DESPLAZAMIENT
OHORIZONTAL YDEFLEXION DELOS
ELEMENTOS”

es frecuentemente utilizada para describir la acción delviento
Formulación matricial
Se intentará la teoría fundamental del comportamiento elástico de vigas y pórticos.
El problema puede plantearse de la siguiente forma, sobre un pórtico elástico actúan una serie de cargas pA,pB……. Encuyos puntos de aplicación se producen unos desplazamientosdA,dB….. si el vector presenta el conjunto completo de las cargas aplicadas y el vector del conjunto de los desplazamientos correspondientes.
Y el valor de k será la matriz de rigidez
p=kd
Hallada la matriz k las cargas p pueden obtenerse en función de los desplazamientos d, o bien invirtiendo la matriz k así tenemos
d=k−1p=Fp
Donde F es la matriz de flexibilidad de la estructura.

En la figura se muestra la deformada de un elemento de sección constante; originariamente, el extremo 1 estaba en el origen de coordenadas y el elemento estaba dispuesto a lo largo del eje x. sobre el extremo 1 actúa el esfuerzo p componentes px1 py1 y m1- los extremos 1 y 2 se han movido
d1 y d2. Donde por ejemplo d1 es jun vector desplazamiento de componentes δx1,δy1,θ1.
Se pueden escribir en forma abreviada
Como puede verse k11 y k22 son simétricas y k12=kt21 esta simetría es característica del análisis elástico.
Todas las formulaciones que dio como resultado el sistema anterior, se han hecho según las coordenadas del elemento, es decir se toma arbitrariamente, el eje x en la dirección original del elemento. Para montar la matriz de rigidez de

la estructura completa, hay que elegir unos ejes de referencia fijos. Llamaremos a éstos ejes sistema de coordenadas y se denotará por (x´,y´) al sumar las componentes de las fuerzas en la dirección x´ se llega a:
Donde se ha supuesto que las coordenadas del elemento estángiradas a un ángulo αrespecto al sistema fijo de coordenadas.
2.- DEFLEXION DE LOS ELEMENTOSSe entiende por deflexión aquella deformación que sufre unelemento por el efecto de las flexiones internas.Trazado tentativo de la curva elástica
Se denomina por curva elástica, la curva que representa ladeformada del elemento en su línea centroidal.
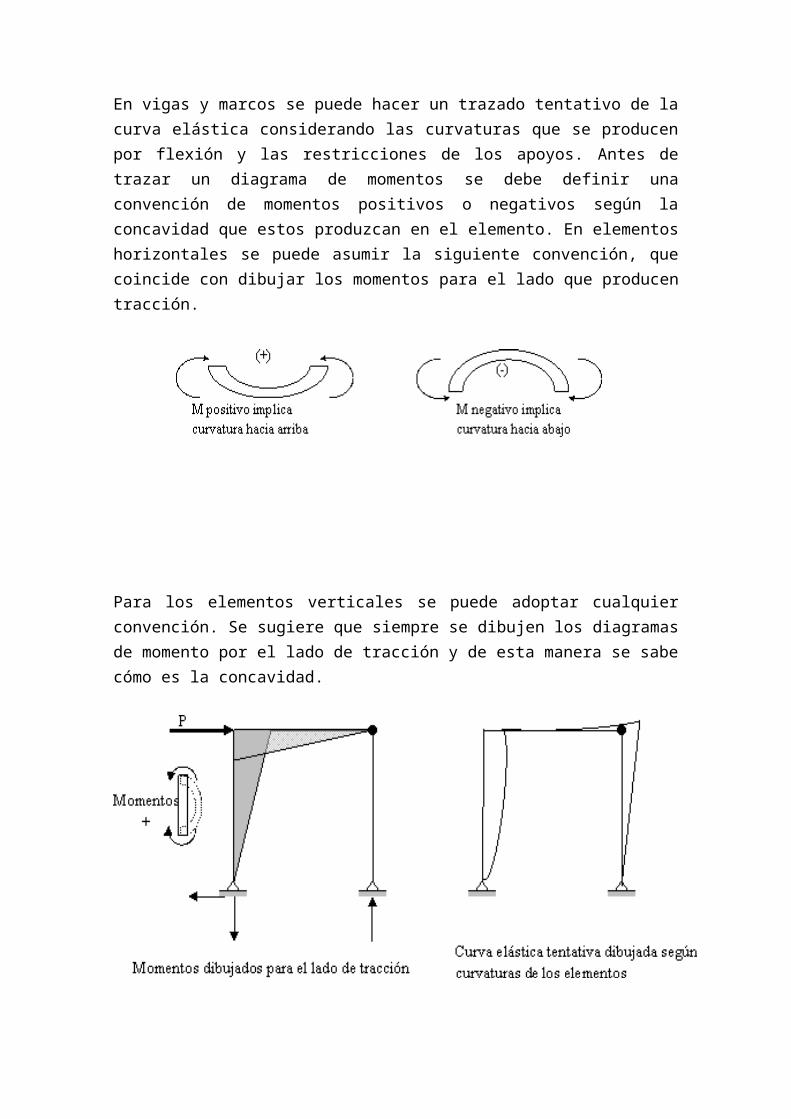
En vigas y marcos se puede hacer un trazado tentativo de lacurva elástica considerando las curvaturas que se producenpor flexión y las restricciones de los apoyos. Antes detrazar un diagrama de momentos se debe definir unaconvención de momentos positivos o negativos según laconcavidad que estos produzcan en el elemento. En elementoshorizontales se puede asumir la siguiente convención, quecoincide con dibujar los momentos para el lado que producentracción.
Para los elementos verticales se puede adoptar cualquierconvención. Se sugiere que siempre se dibujen los diagramasde momento por el lado de tracción y de esta manera se sabecómo es la concavidad.
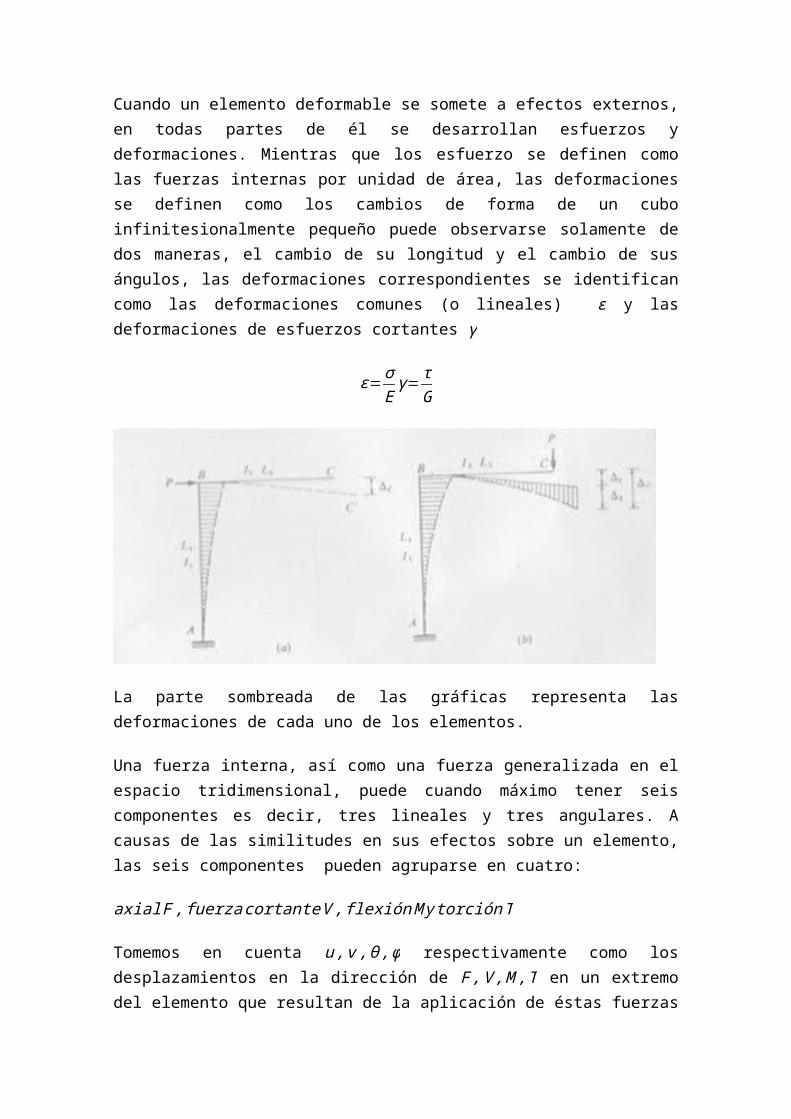
Cuando un elemento deformable se somete a efectos externos,en todas partes de él se desarrollan esfuerzos ydeformaciones. Mientras que los esfuerzo se definen comolas fuerzas internas por unidad de área, las deformacionesse definen como los cambios de forma de un cuboinfinitesionalmente pequeño puede observarse solamente dedos maneras, el cambio de su longitud y el cambio de susángulos, las deformaciones correspondientes se identificancomo las deformaciones comunes (o lineales) ε y lasdeformaciones de esfuerzos cortantes γ
ε=σEγ=
τG
La parte sombreada de las gráficas representa lasdeformaciones de cada uno de los elementos.
Una fuerza interna, así como una fuerza generalizada en elespacio tridimensional, puede cuando máximo tener seiscomponentes es decir, tres lineales y tres angulares. Acausas de las similitudes en sus efectos sobre un elemento,las seis componentes pueden agruparse en cuatro:
axialF,fuerzacortanteV,flexiónMytorciónT
Tomemos en cuenta u,v,θ,ϕ respectivamente como losdesplazamientos en la dirección de F,V,M,T en un extremodel elemento que resultan de la aplicación de éstas fuerzas

en el mismo extremo. La relación entre estos dos conjuntosde cantidades puede establecerse por la suma de lasdeformaciones desde un extremo del elemento hasta el otro.
La deformación total axial u puede representarse así:
u=FL/EA
Según con el segundo teorema de Castigliano,
u=∂U∂F
v=∂U∂V
θ=∂U∂M
ϕ=∂U∂T
Entonces podemos integrar cada expresión de acuerdo alteorema y obtenemos la matriz que representa la relaciónentre las fuerzas en los extremos de un elemento y los
desplazamientos en el mismo extremo
Considerando que todas las fuerzas internas pueden tenerseis componentes, podemos escribir la ecuación en su formamás genera
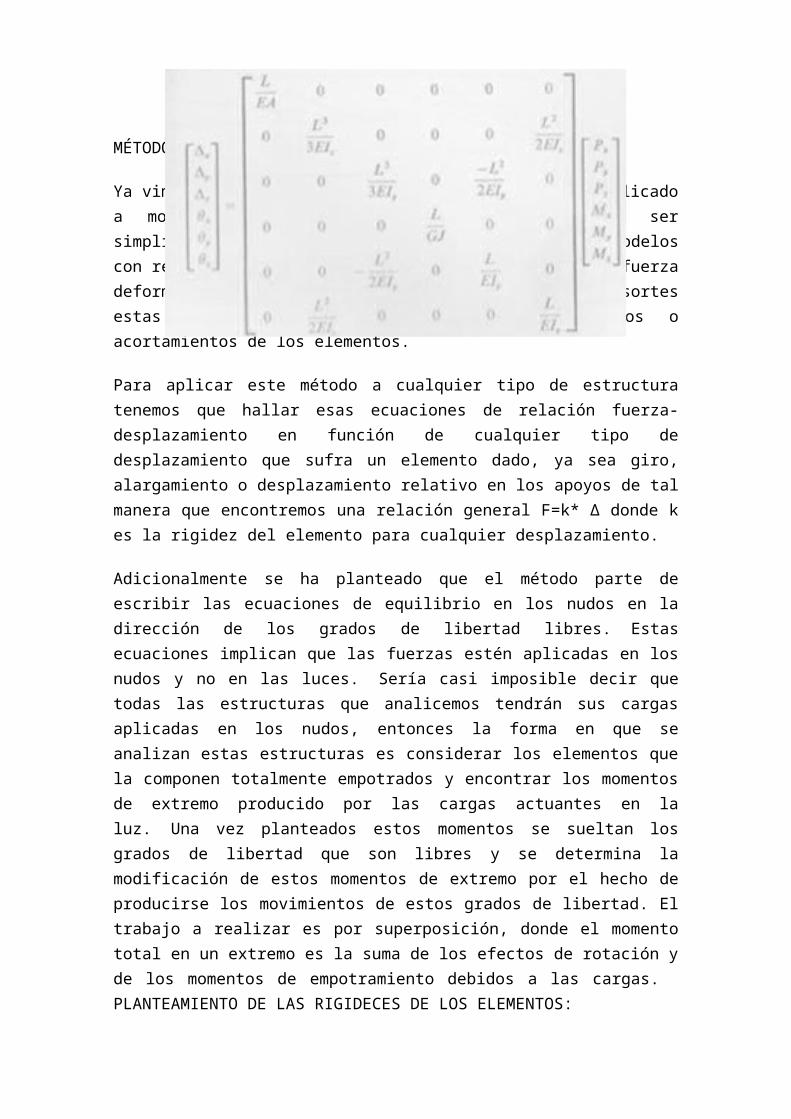
MÉTODO PENDIENTE DEFLEXIÓN:
Ya vimos la forma general del método de la rigidez aplicadoa modelos con resortes los cuales resultaban sersimplificaciones de las estructuras reales. En los modeloscon resortes expresábamos las ecuaciones de relación fuerzadeformación simplemente como F=kΔ y cómo eran resortesestas deformaciones correspondían a alargamientos oacortamientos de los elementos.
Para aplicar este método a cualquier tipo de estructuratenemos que hallar esas ecuaciones de relación fuerza-desplazamiento en función de cualquier tipo dedesplazamiento que sufra un elemento dado, ya sea giro,alargamiento o desplazamiento relativo en los apoyos de talmanera que encontremos una relación general F=k* Δ donde kes la rigidez del elemento para cualquier desplazamiento.
Adicionalmente se ha planteado que el método parte deescribir las ecuaciones de equilibrio en los nudos en ladirección de los grados de libertad libres. Estasecuaciones implican que las fuerzas estén aplicadas en losnudos y no en las luces. Sería casi imposible decir quetodas las estructuras que analicemos tendrán sus cargasaplicadas en los nudos, entonces la forma en que seanalizan estas estructuras es considerar los elementos quela componen totalmente empotrados y encontrar los momentosde extremo producido por las cargas actuantes en laluz. Una vez planteados estos momentos se sueltan losgrados de libertad que son libres y se determina lamodificación de estos momentos de extremo por el hecho deproducirse los movimientos de estos grados de libertad. Eltrabajo a realizar es por superposición, donde el momentototal en un extremo es la suma de los efectos de rotación yde los momentos de empotramiento debidos a las cargas. PLANTEAMIENTO DE LAS RIGIDECES DE LOS ELEMENTOS:
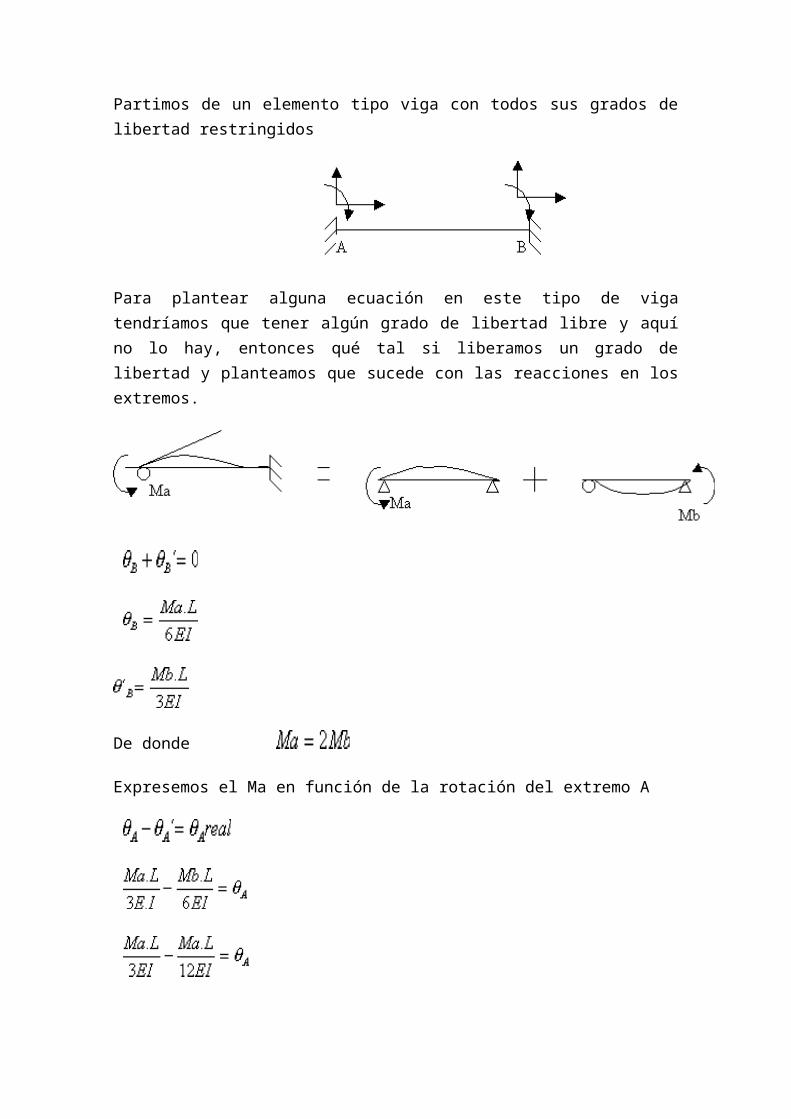
Partimos de un elemento tipo viga con todos sus grados delibertad restringidos
Para plantear alguna ecuación en este tipo de vigatendríamos que tener algún grado de libertad libre y aquíno lo hay, entonces qué tal si liberamos un grado delibertad y planteamos que sucede con las reacciones en losextremos.
De donde
Expresemos el Ma en función de la rotación del extremo A

Y
Note que el hecho de liberar el extremo A produce unmomento de reacción en B.
Se aplica lo mismo para el extremo B
Lo que hemos encontrado aquí no es más que la rigidez delelemento a un movimiento de extremo, o sea el valor de k.
En el caso de tener un desplazamiento en uno de losextremos, o sea liberar el grado de libertadcorrespondiente a una reacción vertical, tendríamos:
Donde ΔB corresponde a un desplazamiento perpendicular alelemento.
Podríamos definir una ecuación que contenga todos estosdesplazamientos para hallar el momento de extremo de unelemento:

Esta ecuación me está asociando cada uno de los movimientosde extremo con el momento producido.
MOMENTOS DE EMPOTRAMIENTO PERFECTO:
Para encontrar los momentos que se producen en los apoyoscuando tenemos un elemento totalmente empotrado aplicamosel método de las fuerzas:
Con estos planteamos las ecuaciones de compatibilidad ypodemos encontrar las reacciones. La solución sepresentará en clase.
Donde simplemente volvemos a expresar las rigideces de loselementos en forma matricial.
De aquí se pueden encontrar los momentos de empotramientoperfecto en función de los giros de extremo de loselementos estáticos.
Estos momentos de empotramiento se denominan MEP y soncaracterísticos para cada tipo de carga.
En el estado en que estamos tenemos ya unas ecuaciones derelación fuerza desplazamiento resueltas en función de losgiros de extremo de los elementos y unas ecuaciones de MEP.
Los pasos del método de rigidez vistos contemplan plantearlas ecuaciones de equilibrio en los nudos en la direcciónde los grados de libertad libres, plantear las ecuacionesde compatibilidad donde se expresan los desplazamientos delos elementos en función de los desplazamientos de losgrados de libertad libres de toda la estructura y plantearlas ecuaciones de relación fuerza desplazamiento.
Una vez tenidas estas ecuaciones se debe expresar lasfuerzas de los elementos en función de los desplazamientosde los grados de libertad libres y pasar a reemplazarlas enlas de equilibrio.
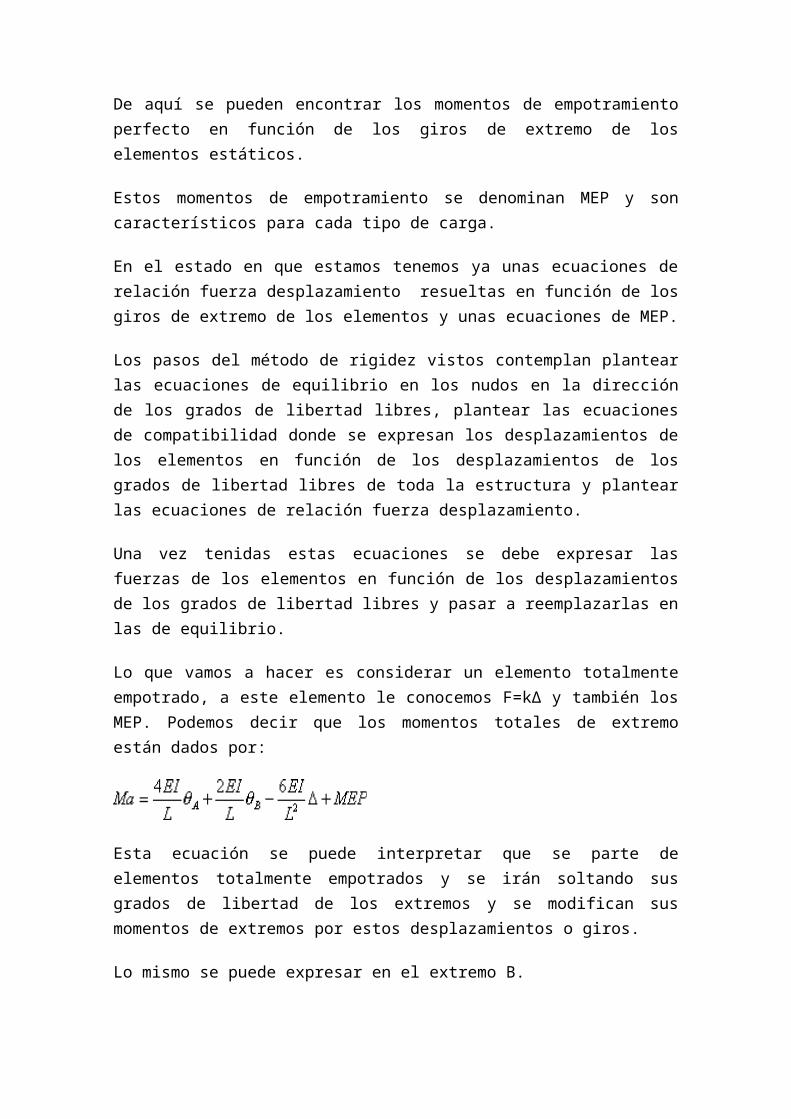
Lo que vamos a hacer es considerar un elemento totalmenteempotrado, a este elemento le conocemos F=kΔ y también losMEP. Podemos decir que los momentos totales de extremoestán dados por:
Esta ecuación se puede interpretar que se parte deelementos totalmente empotrados y se irán soltando susgrados de libertad de los extremos y se modifican susmomentos de extremos por estos desplazamientos o giros.
Lo mismo se puede expresar en el extremo B.

Conocidos los momentos de extremo de los elementosprocedemos a aplicar el equilibrio en los nudos
Esta ecuación queda definida en función de losdesplazamientos de la estructura los cuales constituyen lasincógnitas a despejar en el método de la rigidez.
Escribiremos aquí los momentos de empotramiento perfectopara dos tipos de carga comunes:
Recuerde que estos momentos se encontraron con el método delas fuerzas.
1. Ejemplo de una viga estáticamente indeterminada:
Se determina el número de elementos y se reconocen losgrados de libertad de toda la estructura. En este casotenemos rotación en A, rotación en B y rotación ydesplazamiento en C. (θa, θb, θc y Δc)
El método parte de plantear las ecuaciones de equilibrioen los nudos y en el sentido de los grados de libertad

libres.
A. Ecuaciones de equilibrio:
Nudo A:
Nudo B
Nudo C
Para facilitar las ecuaciones a solucionar y en vistaque las ecuaciones de pendiente deflexión están enfunción de los momentos de extremo, cuando en lasecuaciones de equilibrio se involucren fuerzas cortantesestas se expresan en función de los momentos de extremopor medio de la estática en el elemento. En este casoese cortante en C se expresa así:
Esta constituye la última ecuación de equilibrio.

B. Ecuaciones de compatibilidad de deformaciones:
Los giros propios de los elementos los expresamos comoΦ. Podemos observar que el giro de los elementos, Φ, esigual al giro θ de los grados de libertad externos de laestructura. Entonces las ecuaciones de compatibilidadson:
Note que el desplazamiento en c se puede expresar enfunción del grado de libertad de rotación en b, estarelación facilita la solución de las ecuacionessimultáneas al disminuir una de las incógnitas.
C. Ecuaciones de relación fuerza desplazamiento
Este tipo de ecuaciones está planteado en las ecuacionesde pendiente deflexión donde expresamos los momentos deextremo en función de los giros y desplazamientos de losextremos de los elementos, observe que aquí también seincluyen las ecuaciones de compatibilidad.

Luego para el método de la rigidez se reemplazan lasecuaciones del numeral C en las ecuaciones de equilibrioy se resuelve para los desplazamientos.
De la viga sabemos que , entonces (aunque nohubiéramos planteado esta solución ella debe salir deestas ecuaciones):
De la última ecuación vemos que se cumple mcb=0
Resolviendo simultáneamente la primera y la segundaecuación tenemos:

En la metodología general estos valores de rotación sereemplazan en las ecuaciones del numeral C y seencuentran los momentos, en este caso como la viga eraestáticamente determinada, los momentos salíandirectamente Mab=0 y Mba=0, confirmando de esta maneraque las ecuaciones de pendiente deflexión funcionan bienpara todo tipo de estructura.




















