CUDA Speed Up OPTION (Financial) Pricing By Using Binomial Pricing Tree Method
103
CUDA SPEED UP OPTION (FINANCIAL) PRICING BY USING BINOMIAL PRICING TREE METHOD By Xiaoyu Ma Submitted for the MSc in Computer Science The University of Hull 2012/9/4
-
Upload
independent -
Category
Documents
-
view
6 -
download
0
Transcript of CUDA Speed Up OPTION (Financial) Pricing By Using Binomial Pricing Tree Method

CUDA SPEED UP OPTION (FINANCIAL)PRICING BY USING BINOMIAL PRICING
TREE METHOD
By
Xiaoyu Ma
Submitted for the MSc in ComputerScience
The University of Hull
2012/9/4

ABSTRACT
Financial customers use computer technology very
widely in every aspect. In this project, there is a
analysis to compare different GPGPU technologies,
which to find the reason why chose CUDA to
accelerate option pricing operation. The content
covers from the real requirement from the evolution
of GPGPU technology to an implement of the binomial
tree algorithm. At last, it will give the
performance result for using GPGPU on the computing.
There are many different kinds of parallel computing
technology, but in financial field, which one is a
better choice for Option Pricing. Multi-core CPU is
the current main stream computing tools, but GPU
computing technology grows very quickly recent
years. Compare with traditional CPU, GPU has many

new futures making it is suitable for high-density
calculation.

TABLE OF CONTENTS
Chapter I: Introduction...........................1Chapter II: Project Background.....................3
Traditional Parallel Accelerating Technologies. .3GPGPU Parallel Accelerating Technologies........6Introduce NVIDIA GPU Hardware..................11Introduce CUDA Technology......................21Introduce Binomial Tree Method for Option Pricing...............................................30
Chapter III: Program Development..................36Program Requirement Analyze....................36Software Development Prepare...................37Software Design................................39Software Implement.............................40Software Performance Test......................63Software Improvement...........................65Self Assessment................................65Conclusion.....................................66
Appendix : Task List.............................67Appendix : Gantt Chart for Time Management........68References And Bibliography.......................75
i

C h a p t e r 1
INTRODUCTION
There are four main targets in this project.
Firstly, I will find the difference between CPU and
GPU platform on parallel computing technology. When
face the heavy computing task, the traditional
single thread CPU computing approach is limited of
its power and hardware physical character, but
parallel computing technology could provide more
computing power.
Secondly, to implement the option pricing model
based on binomial tree algorithms running on CPU and
GPU. Further more, to implement a binomial tree
algorithms code on Intel X86 CPU and on Nvidia GPU.
During the process of development, the code
optimization is very important as well, which the
optimization step should be included, especially on
the GPU side.
1

Thirdly, it is very essential that understanding how
to write hybrid code. Finally, though the
performance testing to demonstrate that GPGPU
technology has better performance to accelerate the
option pricing computing.
Higher performance means less input of computing
resource, saving more time and earning more benefit.
Especially in some crucial units or companies, such
like people working in these filed: energy,
earthquake, weather analyze, molecular dynamics, DNA
analyze and financial computing field and so on.
Therefore, finding a way to speed up these
calculations is very meaningful.
There are many accelerating technologies could be
chosen from various candidates. To choose a suitable
technology, the developer should think of their
advantages and disadvantages, and evaluate the most
accurate one for current project. The main processor
market is divided by three component including CPU
2

technology represented by Intel, GPGPU technology
represented by Nvidia and AMD, and special processer
provider like IBM, Tilera, ARM and so on. After some
years’ development, the CPU reaches a bottleneck of
performance. But recent years, GPGPU technology has
a great development, which brings the traditional
Graphics Processor to General-purpose computing.
Because GPU is used widely and good performance
under low cost, GPGPU is the most widely used
accelerating technology in many applications. This
important point is that people could get GPGPU
technology more easily than other accelerating
technologies, and get very good cost and efficiency
rate.
3

4

C h a p t e r 2
PROJECT BACKGROUND
2.1 Traditionnel Parallel Accelerating Technologies
The traditional method enhencing the computing power
is to increase the performance of CPU. When the
computer having one or two single core CPU gets the
bottleneck of performance, cluster technologies had
been developed. OpenMPI is a commoon cluster
technology to resolve computing problems. OpenMP is
the technology to use multi-core CPU fully, which
can use all cores in the CPU by a simple way.
2.1.1 OpenMPI
OpenMPI is a early technology used for clusters
application, and be used widely by many TOP500
supercomputers. This kind of accelerating technology
allows the applications runs on many computers
parallel, which could enhance all the computing
power.
5

This technology is a developed programming
technology, but it has some disadvantages including:
very difficulty of installation, complex
configuration and the compatibility between
different versions. And when the clusters become
bigger, some new problem will come out. For example,
when the number of computing node is big, it is very
important to control the delay of communications
between each node. In terms of the cost perspective,
the common customers can not afford a cluster
facility , which restrict the usage of this
technology service for more people. Therefore,
OpenMPI is not a good candidate technology for
common use.
2.1.1 OpenMP
Following by the huge development of multi-core CPU,
OpenMP was developed, which is anther open free
parallel accelerating technology. OpenMP is an
compiler API, which support multi-platform shared
memory multiprocessing programming on most processor
architectures. OpenMP programming model is portable
and scalable, which gives developers a flexible
6

interface for using parallel technology. This
accelerating technology covers from the standard
home use computer to supercomputer products.
The application could use OpenMP and OpenMPI
together, and through the extension of OpenMP for
non-shared memory computing system. For a common
computing filed, OpenMP is the easiest technology to
use. This is a diagram to describe how it works.
During the process of program, the program logic
could be parallel running automatically. The classic
example is speed up for loop. OpenMP could work well
on CPU, because of its working environment; it is
suitable for the most customers. The performance of
OpenMP depends on how many cores in the CPU. The
7

picture expresses an example for the effect of
accelerating computing.
Obviously, more number of cores mean more
performance. The main stream of compiler products
provide full support of OpenMP, and most develop
tools have the full ability of debug. Therefore,
OpenMP is a easy way to accelerate program by
parallel technology.
But OpenMP has a bottleneck of its performance.
Because the performance is based on the number of
cores, but there is a little of cores used in CPU,
which means that it is hard to enhance the power too
much on this way. Why CPU is hard to be more
8

powerful. The answer is that in current CPU
architecture, it is very complex for core design,
because CPU should process variety of kinds of task,
rather than computing. So that, too much size of
transistor be used for non-computing circuit, and
these make CPU do the computing inefficiently. This
circuit picture shows the complexity of the main
stream CPU that is produced by Intel.
From this diagram, it is clear that each core is a
complex, which offers the comprehensive functions.
Therefore, CPU can be the head of the computer
system, rather than a good calculator for computing.
Essentially, OpenMP the parallel accelerating
technology based on number of cores, has a
performance limit, despite it has some good
advantages.
9

The traditional way increasing the number of cores
in CPU has some restrictions including architecture,
production process and the final customer
requirement., there must be some new ways to
overcome these problems.
2.2 GPGPU Parallel Accelerating Technologies
Because the performance of CPU is restricted by its
architecture design when process a huge of mass
data, it is hardly to increase the number of cores
for computing. Therefore, another way is to add a
second computing processor into computing system.
GPGPU solution could satisfy this requirement, which
it is very effective as well. GPU is used for
graphic rendering work previously. It has many small
and simple structure processors. So that GPU’s
pipeline architecture is very suitable for parallel
computing. Another reason is that the price of GPU
is acceptable; rather then the professional
processors cost too much money.
10

this diagram shows the difference of design between
GPU and CPU
2.2.1 Early GPGPU Development
The general method of using GPU to do some parallel
computing is to use Shader Language, which is used
for graphic processor pipeline programming. Shader
Language is very powerful; it is the main graphics
technology that gives the power controlling GPU to
developer directly. But using Shader Language to
develop general-purpose program, which is a very
difficult thing. Firstly, this language is designed
for graphic programming; it is lack of some
important factors for general use. Secondly, there
are three main kinds of Shader Language to be chosen
for developers, including HLSL, GLSL and CG. They
are not compatible each other.
11

HLSL was created by Microsoft; it only works on
windows operations system platform with DirectX
graphic application interface. GLSL was created by
the OpenGL organization, it give developers the
ability of controlling the graphic pipeline cross-
different platforms. Actually, GLSL is used widely
covering range from graphic workstation to mobile
application such like data virtual applications,
mobile 3D games and so on. CG is created by Nvidia,
only works on its graphic processors and some game
consoles, but it is a cross platform technology as
well as GLSL. Traditionally, Shader development is
very unfriendly to developers, which makes many
obstacles to develop general-purpose application.
Therefore, the developers need a better way to use
GPU’s parallel character.
Shader Language cannot be used individually; it must
be integrated with other graphic programming
including OpenGL and DirectX. OpenGL is an open
source and free graphic programming interface. This
is big obstacle for general purpose programmer,
12

because most of the developers are not professional
graphic developer. When they decide to use GPU to
accelerate their application, they have to study new
knowledge, which will increase their workload.
Although OpenGL and DirectX are high level graphic
package technology, they are not designed for
general-purpose computing. Using graphic development
program will cause very inefficient development, so
that there are a little developers choosing this
way. In the early years, using GPU to compute
general problems was restricted in academic fields
and some top-end labs; it had not been spread widely
among most of the developers all over the world.
Therefore, some developers start to develop a new
way to release the power of graphic processor unit.
There was a reasonable approach that using these
graphic development API to develop a general-purpose
API. At first, BrookGPU a GPU project in Stanford
University and Lib Sh in Waterloo Computer Lab were
the most essential projects. They opened the door of
GPU general-purpose computing. BrookGPU was born in
13

Stanford, who submitted a concept of Stream
Programming. Furthermore, the data is boxed to set,
which is non-individual. One Kernel or multi Kernel
Running the Data consist of a Kernel chain. The
detail of parallel is hided, which means the
developer did not need to tell system some details
that what is loop or how to store data in texture
memory. BrookGPU was the original prototype of the
GPGPU, but it is not enough for satisfying
developers’ requirements. These methods did not
decline the difficulty of using them.
2.2.2 Modern GPGPU Technology
Obviously, wherever BrookGPU or Shader cannot
satisfy the huge requirements from developers. When
in the year 2005, Nvidia started to join GPGPU
field. They hired Ian Buck, a man is a GPGPU
professional people in charge of designing the CUDA
(Compute Unified Device Architecture), the first
programming API for GPGPU computing. And Nvidia
designed new GPU to support this new technology.
14
After the first version CUDA released, GPU start to
win CPU effectively in computing fields. In some
cases, GPU is faster 100 times than CPU. To face the
big performance ascendancy, Intel and AMD joined
this area as well. Apple developed a technology
named Grand Central, which is designed to adapt
different architectures of multi-core. Grand Central
could release the workload of writing parallel
program code. Apple opened an API standard named
OpenCL (Open Compute Language) based on Grand
Central, which it is be grouped by Khronos with the
main stream technology provider including Intel,
AMD, Nvidia, RapidMind, ClearSpeed, Apple, IBM and
so on. Then the group made the OpenCL version 1.0, a
new GPGPU standard supporting many kinds of multi-
core processors including CPU and GPU. CUDA and
OpenCL are the main GPGPU accelerating technologies.
To be the most important operation system provider,
Microsoft released its own parallel computing
technology – C++ AMP (accelerated massive
parallelism). C++ AMP is the extend of Vistal Studio
15
and C++ language, which it can help the developer to
adapt the parallel heterogeneous computing
environment. It uses C++ language grammar, and will
be released in the next version of Visual Studio.
Attentively, C++ AMP is an open standard like
OpenCL, which allow other compliers to integrate it.
2.2.3 Compare CUDA and OpenCL
Actually, OpenCL is an API for parallel programming
on heterogeneous computing system. During the
process of development of OpenCL, it worked on
Nvidia platform. It is used to call computing
resources on CPU and GPU, release their power to
make applications running faster.
CUDA is an original designed architecture, and its
instruments are very suitable for parallel
computing. The architecture of CUDA supports many
API such like OpenCL and DirectX and programming
languages like C, C++, Fortan and so on.
16

Because Nvidia GPU is used widely, after CUDA
released, it get much support from entertainment
providers, some important enterprise users and
academic users. For example, almost, all the video
applications are using CUDA to speed up their
performance, such like Adobe, Apple. In academic
fields, CUDA be used to accelerating Molecular
dynamics application. And in financial field, CUDA
also plays a crucial role in some products. In terms
of cost, technology support and other reasons, CUDA
is the best choice in current time for production
environment. The developer can get all information
and support from Nvidia web site, which is very
useful to spread this technology. Compared with
OpenCL support, there are sufficient documents,
example code and develop tools for learning and
developing CUDA application. Although OpenCL get
many supports of companies, there is not enough
support as much as CUDA has.
17

2.3 Introduce NVIDIA GPU Hardware
2.3.1 Introduce the early Nvidia GPU
In August 1998, Nvidia released its new generation
product Geforece 256 a revolutionary in the GPU
history. It had a most important character that
could program for geometric calculation, which means
it can reduce a huge workload for CPU. This was the
mark that the beginning of general-purpose computing
of GPU. In the next generation GPU GeForce6800, it
enhanced and expanded the power and functions of
GPU. Furthermore, vertex program started to access
texture directly, and it support dynamic branch.
Fragment program supported branch operations
including loop operation and subroutine. The new
hardware brought a great breakthrough for general-
purpose computing on GPU.
18

This diagram shows the architecture of GeForece7800
having three kinds of programmable engines for
different environment.
2.3.2 Introduce Nvidia G80 GPU
The architecture of G80 was the most important
change for using GPU to do GP computing. At the same
time, Microsoft released version 10 of DerectX,
which used unified Shader architecture to replace of
the traditional render pipeline architecture. It was
a significant change that there is only one kind of
the processor in GPU having strong ability of
computing. There are hundred of cores in the GPU,
too much more than CPU.
19

This picture introduces the G80’s unified Shader
architecture, it has 128 ALU individually could be
used for multiple purposes, and speed of computing
is much faster than CPU.
2.3.3 Introduce Nvidia G92 and GT200 GPU
The next two generation GPU were G92 and GT200,
which had some new features for general-purpose
computing. It was the first time to submit new
concepts “Gaming Beyond” and “Computing Beyond”. And
GT200 is the first GPU supporting Double-precision
float calculation, a great promotion. Because the
double precision is the necessary condition in many
science computing projects. Two new characters were
included into the products, both SIMT and shared
20

memory reduce the difficulty of the development of
general-purpose computing application.
2.3.4 Introduce Nvidia Fermi GPU
Fermi (GK100) is the name of current mainstream
product of Nvidia, which was a revolutionary product
in the history of GPU. This chip has 512
microprocessors; each processor can execute a
floating point or integer instruction per clock for
one thread. There are six 64-bit memory partitions,
a 384-bit memory interface together, and supporting
a total of 6GB of GDDR5 DRAM memory. This chip
communicates with motherboard by PCI-Express
interface.
21

Fermi has 16 SM are positioned around with L2 cache.
4 SM consist of 1 GPC, and 1 SM has 32 processors.
Fermi Streaming Multiprocessor (SM)
Especially, it has third generation streaming
multiprocessor. The processor replaces the original
Shader processor, and has a fully pipelined integer
arithmetic logic unit (ALU) and floating point unit
(FPU).
22

Fermi support new floating-point standard IEEE 754-
2008, and provides the fused multiply-add (FMA)
instruction for both single and double precision
mathematic calculation. Compare with GT200, Fermi is
more accurate than it on FMA operation. And the ALU
in Fermi support full 32-bit precision for all
instructions, rather than 24-bit be supported in
GT200. The integer ALU is optimized to support 64-
bit and extended precision operation efficiently as
well. A variety of instruments containing Boolean,
shift, move, compare, convert, bit-filed extract,
bit-reverse insert and population count are
supported by hardware. In terms of these upgrade,
Fermi have a big improvement for GPGPU computing.
23

Fermi’s double precision performance up to 4.2x
faster than GT200.
Fermi could reach the peak of the performance of its
hardware, because it has two warp schedulers and two
instruction units.
Fermi enlarges the size of shared memory and L1
Cache. There are 64 KB shared memory be configured
as 48 KB of Shared memory with 16 KB of L1 cache or
24

16 KB of Shared memory with 48 KB of L1 cache. The
shared memory makes threads to cooperate in the same
block to reduces off-chip traffic greatly; this is
very significant way to increase the performance of
applications. Fermi is the first GPU to support
Error Correcting Code (ECC) for the protection of
data in memory.
2.3.5 Introduce Nvidia Kepler GPU
Kepler architecture brings some new features could
enhance the ability of calculation for HPC and many
other fields and simplify the difficulty of writing
parallel program. Kepler provides computing of over
1 TFlop double precision and 80% of DGEMM
efficiency, which is greater than Fermi’s 60 – 65%.
25

Kepler has new four kinds of new features including
Dynamic Parallelism, Hyper-Q, Grid Management Unit
and GPUDirect, which make Kepler reduce the
consummation of electricity. Furthermore, Dynamic
Parallelism could make GPU using some special
accelerating hardware path to create its new task,
and synchronous computing results, schedule task.
Hyper-Q is the technology that allow multi-host core
applications running on the same GPU, which to
decline CPU idle time and increase the utilization
of GPU. Grid Management Unit is a management and
schedule system, which make GPU to control grid more
flexibility. GPUDirect provides the ability of the
communication between the GPU in single computer and
another GPU in different environments, and do not
need to be controlled by CPU and through system
memory.
Kepler architecture incudes 15 SMX units and six 64-
bit memory.
26
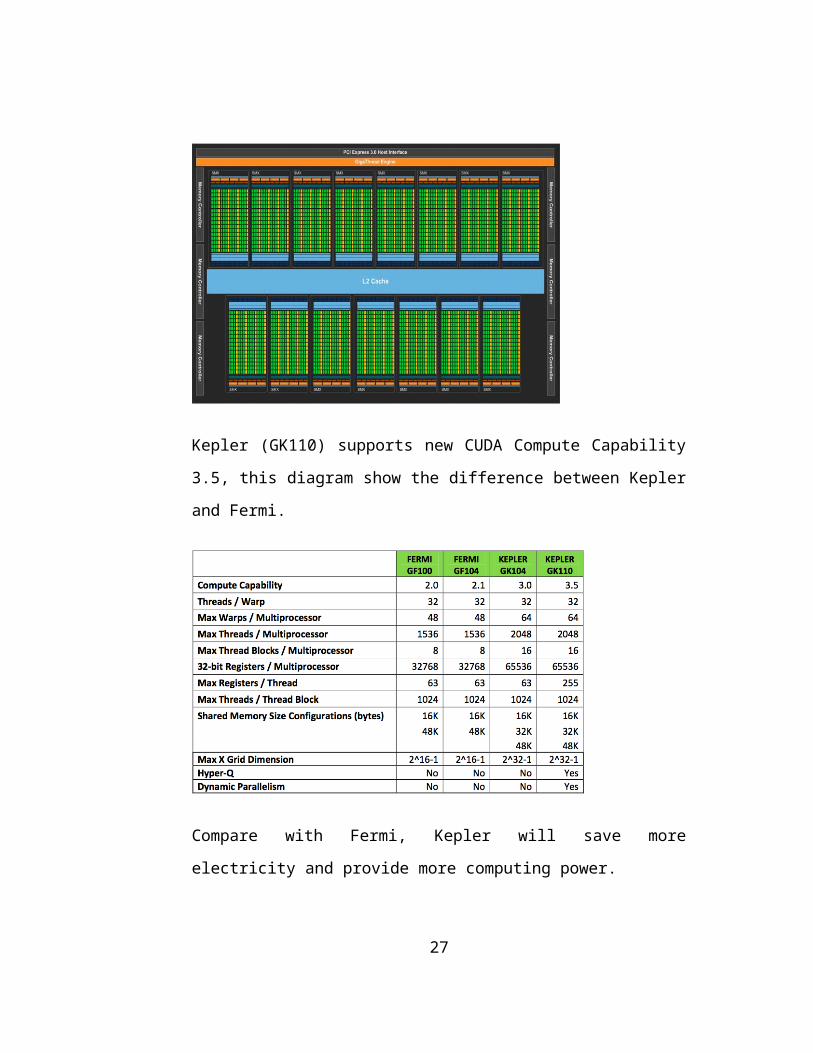
Kepler (GK110) supports new CUDA Compute Capability
3.5, this diagram show the difference between Kepler
and Fermi.
Compare with Fermi, Kepler will save more
electricity and provide more computing power.
27

Each Kepler SMX unit has 192 single precision CUDA
cores, which each core is consisted of ALU. Kepler
supports IEEE 754-2008 standard single and double
precision computing including the fused multiply-add
(FMA) operation.
One of the targets of design for Kepler is to
increase the GPU’s double precision performance
significantly, since double precision is the heart
28

of most of the HPC applications. Kepler also retains
the special function units (SFUs) for fast
transcendental operations as Fermi, and providing 8x
the number of this kinds of unit of Fermi.
2.3.6 Introduce Nvidia Tesla
Tesla is the computing module designed for server,
which could support high reliability and performance
under a low energy consummation. The main stream of
Tesla products is Tesla M-Class Computing Modules,
which are consisted of M2090, M2070/M2075 and M2050.
All the products based on Fermi architecture, have
512 cores, 448 cores and 448 cores, and built-in 6
GigaBytes, 6 GigaBytes and 3 GigaBytes memory. They
have 665 Gflops, 515 Gflops and 515 Gflops peak
double precision floating point performance
respectively.
The new generations of Tesla products are Tesla K10
and Tesla K20 based on Kepler architecture, which
29

focus on single precision computing and double
precision computing respectively. Both K10 and K20
are support the basic special characters including
ECC, L1 and L2 caches, dual DMA engines.
This is the difference of specific between Tesla K10
and K20.
2.4 Introduce CUDA Technology
2.4.1 what is CUDA
CUDA (Compute Unified Device Architecture) is a
parallel computing architecture invented by Nvidia
on its graphics processors products. It enables
increases the computing performance by using the
computing capability of the graphics processing
unit. CUDA can be used in many fields needing strong
30

computing service support, which includes Biology,
Fluid Mechanics, Molecular dynamics, Financial
analyze, Chemical formula, Finite Element Analysis
and so on. CUDA is friendly for software developers
to write parallel program running on million of
Nvidia GPU, which service for scientists and
researchers. This technology provides a variety of
support for standard programming languages including
C, C++, Fortran, Java, Python and so on.
2.4.2 CUDA History
Accompanied by the G80 the first generation product
for support CUDA released in 2006, Nvidia published
CUDA Beta version. In June 2007, CUDA 1.0 version
and Tesla series product were published. In the end
of 2007, CUDA 1.1 version released and brought some
new features such like Asynchronous execution, Data
copy, GPU SLI and so on.
31
When the GTX200 series products published, CUDA
upgraded to version 2.0. This version expanded new
features including Double-precision calculations,
profile analyzer and 3D Texture.
In Sept 2010, Nvidia published CUDA 3.2 version.
This version had a big update including new math
library contain CUSPARSE and CURAND, enhance the
efficacy of existing library. From this version,
CUDA started to support 6GB memory on board of
Quadro (a series graphics cards for professional
users) or Tesla product. Another significant
improvement is that it is the first time Nvidia
provided comprehensive developing tools to all
developers for free. These tools covered the main
platform Windows. Linux and MaxOSX. Especially, this
version corresponded Fermi architecture, the
developer could get hardware debug support.
One year later, Nvidia published the next version of
CUDA, its version number is 4.0. First, Uniform
32

Virtual Address (UVA) was brought into CUDA. The
memory resources on multi graphic cards were seen as
independent memories, which have their own memory
addresses in previous versions. When developers want
to use them, they have to write the special access
code. But in CUDA 4.0, UAV provides a complete
memory address list including the basic system
memory resource and the memory resources on one or
multi graphic cards.
In this situation, it is more convenient to use all
the memory resources. And this version supported
over 4G-address space on 32-bit system. This feature
reduces the level of workload of the developer
significantly. The Second feature is GPU Direct
2.0, which is an update for 1.0. The difference
between these two versions is that, when the system
33

has more than one graphic card, data copy from one
to another, just need copy one time rather than
twice, the first copy from one card’s memory to main
memory and the second copy from main memory to
another card’s memory. This will save the time
consumed on data transfer and increase the
performance of the application.
The third item is a new C++ develop library named
Thrust, which includes C++ Templatized Algorithms
and Data Structures. This library could help the
developer having no experience on CUDA development
to write the program accelerated by GPU. Compared
with Standard Template Library (STL) and Intel
34

Threading Building Blocks the speed of parallel
sorting algorithms is faster 5 or 100 times than
their implements.
In 2012, Nvidia published the newest version of
CUDA. The biggest updates from the previous version
are both better support for development tools and
support the newest GK110 series product. It is the
first time for CUDA developers to get the official
Integrated Development Environment (IDE) Nsight
Eclips, which provide a good development support
under both MacOSX and Linux. For windows platform
developers, the original Visual Studio Nsight
Environment gets more function’s update. One of the
most important updates is that Nsight support single
GPU debug. In the previous version, if the developer
wants to debug the CUDA program, they need to
prepare two GPU cards, one for display and another
for debugging. The development tools performance
profiler analyzer and example code updated as well.
35

After 4 year’s growth, although some GPGPU
technologies released, like OpenCL and C++AMP, CUDA
is the most widely used technology for real
production environment.
2.4.3 Introduce CUDA Develop Tools
Nvidia provides the professional develop tools to
common developers including programmers, students,
researchers and many people who get interesting at
this technology.
In the previous versions, Windows platform get the
comprehensive develop support, but Linux and MacOSX
do not get the same treatment.
On Windows, the developer could use Night Visual
Studio Edition the official compiling and debugging
tools for Visual Studio a official C++/C IDE
generated by Microsoft, which integrated with CUDA
SDK, debugger and performance visual Profiler
together.
36
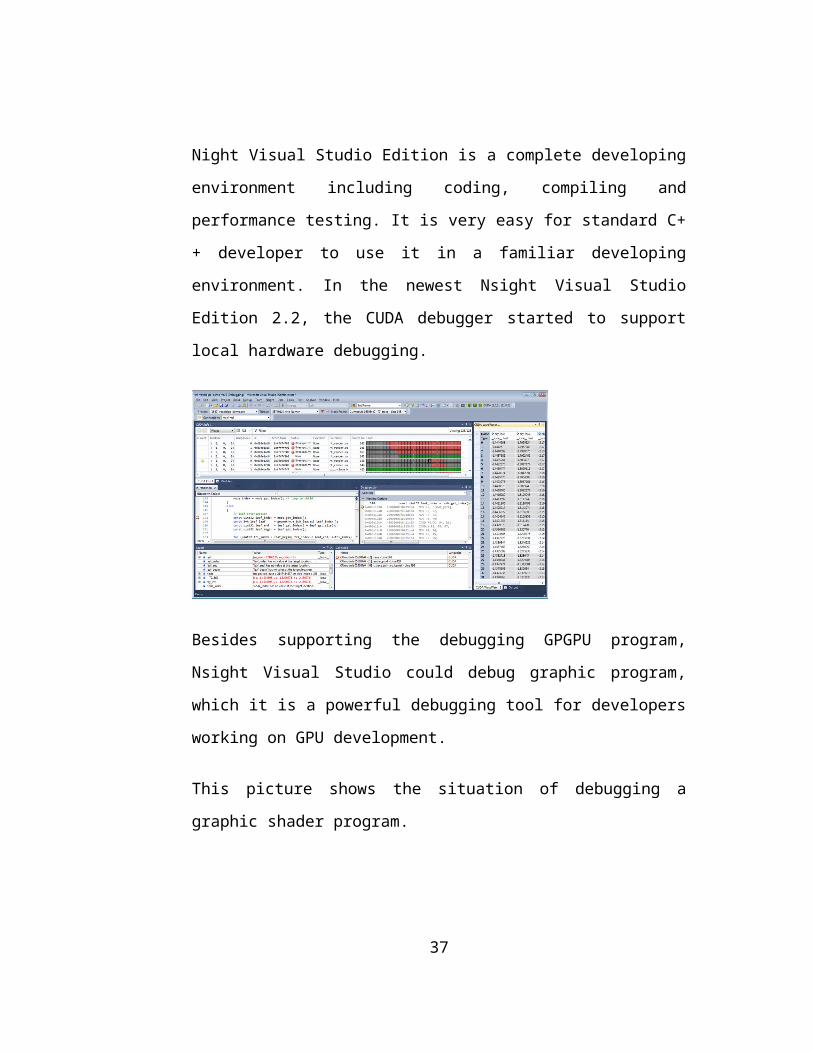
Night Visual Studio Edition is a complete developing
environment including coding, compiling and
performance testing. It is very easy for standard C+
+ developer to use it in a familiar developing
environment. In the newest Nsight Visual Studio
Edition 2.2, the CUDA debugger started to support
local hardware debugging.
Besides supporting the debugging GPGPU program,
Nsight Visual Studio could debug graphic program,
which it is a powerful debugging tool for developers
working on GPU development.
This picture shows the situation of debugging a
graphic shader program.
37
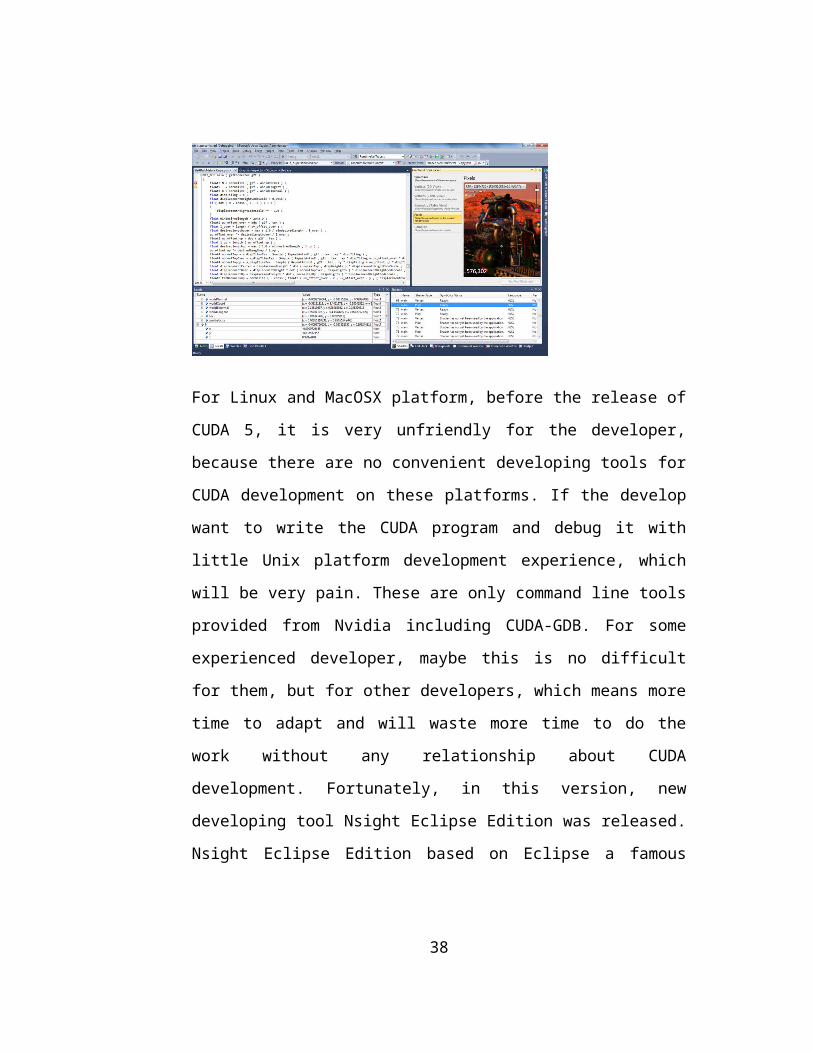
For Linux and MacOSX platform, before the release of
CUDA 5, it is very unfriendly for the developer,
because there are no convenient developing tools for
CUDA development on these platforms. If the develop
want to write the CUDA program and debug it with
little Unix platform development experience, which
will be very pain. These are only command line tools
provided from Nvidia including CUDA-GDB. For some
experienced developer, maybe this is no difficult
for them, but for other developers, which means more
time to adapt and will waste more time to do the
work without any relationship about CUDA
development. Fortunately, in this version, new
developing tool Nsight Eclipse Edition was released.
Nsight Eclipse Edition based on Eclipse a famous
38

open source IDE used for many program languages
development.
And Nvidia also provides Profile the standard
performance test tool for free on these platforms to
CUDA developers.
Basically, the developer could write the GPGPU
program with the assist from these powerful tools,
which reduce the hard level of development.
39

2.4.4 CUDA Programming Model
The programming running on GPU is difference from on
common CPU. The CUDA thread is extremely
lightweight, which means the cost to create, destroy
threads and switch between them are very fast, and
much faster than CPU threads. Further more, the
number of CUDA threads could be thousands rather
than single digits on CPU. Therefore, using CUDA to
do parallel work is very effective.
Before the development, the developer should
understand the concept of CUDA architecture model,
which will be very helpful for their development.
CUDA includes two main models both programming model
and memory model. Both of them base on the hardware
architecture. Understanding CUDA programming model
means the developer need to understands CUDA Kernel
and Thread. Kernel is the parallel portions of an
application executed on the device that is the GPU
or other parallel computing device in the common
situation. In the same time, there is only one of
kernel executing, and there are many threads execute
40

each kernel instance. This concept is difficult to
understand. In a another words, a kernel is a
special programming code executed by all the
threads, all the threads execute the same code. Each
thread has its own ID used to be distinguished from
other threads. The ID could be used to mark memory
address and control program logic.
.
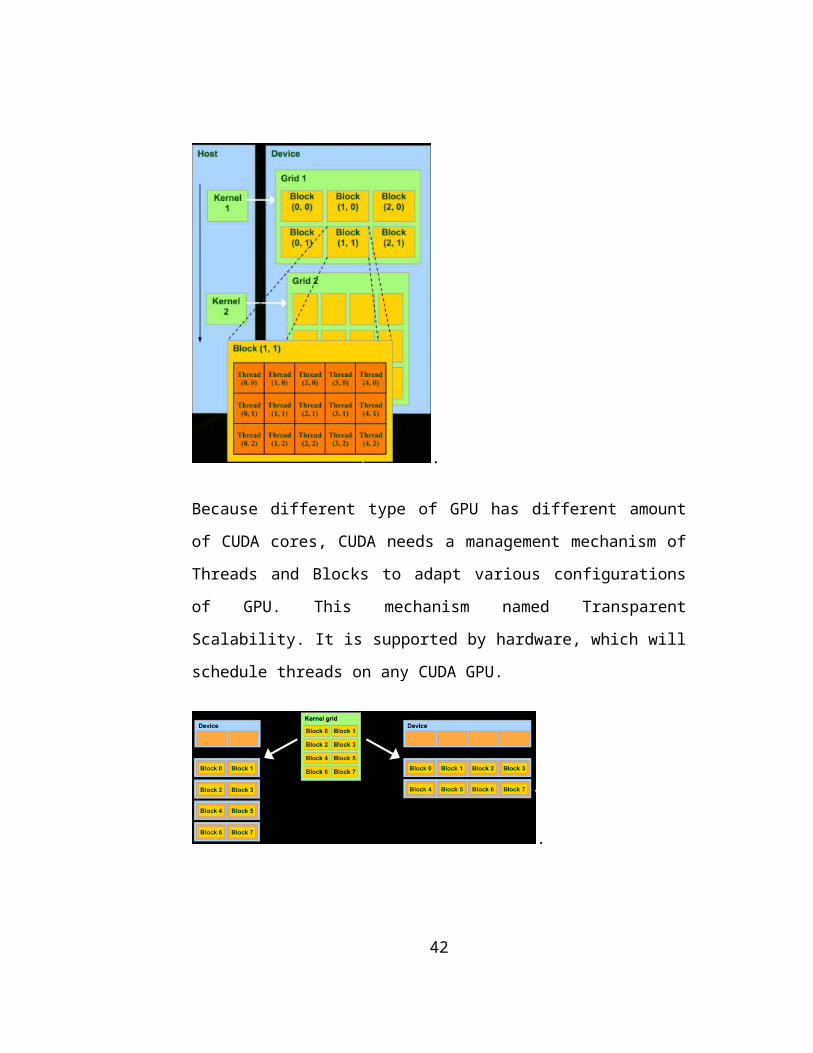
Threads are divided into many blocks a thread
running management unit in CUDA programming model. A
thread block is a batch of threads. In the block,
the threads can cooperate with each other by sharing
data through shared memory and synchronizing their
execution logic, which is a powerful feature of
CUDA.
41
.
Because different type of GPU has different amount
of CUDA cores, CUDA needs a management mechanism of
Threads and Blocks to adapt various configurations
of GPU. This mechanism named Transparent
Scalability. It is supported by hardware, which will
schedule threads on any CUDA GPU.
.
42

Another essential model is CUDA memory model.
Because Nvidia GPU is designed for GPGPU computing
and graphic application, to understand the memory
model is very helpful for development. As above
known, there are five kinds of memory model on the
GPGPU system including Host (CPU) memory, Global
(device) memory, Shared memory, Local memory and
Register. Registers be used in the thread field.
There are some registers be used for per thread. All
the number of register based on the running hardware
and its architecture. For example, in Fermi
architecture, 32768 registers could be used for per
block. Local memory is an another type memory for
thread, which is located in the on board memory. In
the common situation, Local memory is a kind of
supplement for the lack of register, which means
when the number of register is not enough for use;
the complier will allocate the temp variables to
Local memory. Shared memory is the key for threads
share data in the same block; it has very fast speed
of access. Although this type memory has a high
speed, its size is restricted to very low; in Fermi
there are 48KB for per block. Global memory is the
43

on board memory, it has the biggest size among all
the five kinds of memory. Any thread could access
Global memory. Host memory is the main system
memory.
2.5 Introduce Binomial Tree Method for Option
Princing
2.5.1 Option Pricing Methods
The option is a security, which gives its owner the
right to sell or buy in a fixed number of shares,
goods or stocks at a fixed price at any time for
American Option or a fixed time for European Option.
There are two kinds of options, one is call option,
another is put option. A call option gives the
rights to buy the shares; a put option gives the
rights to sell the shares. This is the difference
between call and put option, which cause different
model design for option pricing.
44

After a long time of development of financial
market, the people invented some useful methods to
price option. For example, there are binomial tree,
Black-Scholes model and Monte Carlo simulation.
Binomial Tree pricing is the most important method.
The implement of Binomial Tree method based on the
paper <<Option Pricing: A simplified Approach>>
whose authors are Cox, Ross and Rubinstein, which
released in 1979.
2.5.2 the principle of one step of binomial tree
method
The mathematic logic will give the developer a clear
understanding about the binomial tree method for
computing option pricing. Assume using a stock to be
the example. The example stock’s current price
equals and its option price equals . The
assumption is that the validity of the option is ,
during this time the stock’s price could jump up to
a new price higher than before, or down to a new
price ( > 1, < 1). When the stock’s price
increasing, the rate of increasing of the stock’s
price is - 1; when the stock’s price decreasing,
45

the rate of decreasing of the stock’s price is 1 -
. If the stock’s price rise to , set the
assumption of option’s price is ; if the stock’s
price decline to , set the assumption of option’s
price is .
So that, there is an assumption
that combination consisted of stock and
call option for generating a value of in no risk
range. If the stock’s price rise, in the end of the
validity, the option’s value is:
If the stock’s price decline, in the end of the
validity, the option’s value is:
46

When the two values equal to each other, the
equation is:
Transform:
In this situation, this combination is risk free,
and the yield must equal to Risk-free interest rate.
If define the Risk-free interest rate equal to ,
the current value of this combination is:
And the cost of consist the combination is:
Therefore, get this formula:
Then get
47

And import the above formula
to get the final formula and though a simplify
process, then get
In this formula
From the formula above, the analyst could calculate
the option price in the beginning.
2.5.3 the principle of two or more steps of binomial
tree method
Assume the original stock’s price is ; in each
step of binomial tree, the stock’s price could rise
up to time, or down to time. Assume the Risk-
48

free interest rate is , the length of time step is
year.
Because the length of time step is rather than ,
the formula above be changed to
Repeat computing to get:
49

Finally, to get the option pricing formula:
Make sure the value of both and :
And
Therefore, could transfer the formula to:
And
50

C H A P T E R 3
PROGRAM DEVELOPMENT
3.1 Program Requirement Analyze
The most important target of this program is used to
implement a programming algorithm, which could use
GPU to accelerate the option pricing method, and
verify this way is more efficient. So that,
basically, it is very clear to understand the
target.
Basic and Necessary Implement Target
1. The Common CPU version of Binomial Tree Option
Pricing Method
2. The GPGPU version of Binomial Tree Option Pricing
Method
3. The Comparison result of the performance
4. Finding a way to integrate C++ program with CUDA
C code fragments
51

The target of add functions
1. The program should have a GUI interface, which
could display a bar chart that distinguishes the
difference of the performance for these two
calculating ways.
The development process model
Because this is an implement program of algorithm,
which it does not need a complex interface business
logic and graphic object rendering. Therefore, the
prototype development loop is very suitable for this
kind of program.
3.2 Software Development Prepare
3.2.1 make sure the development environment
Running CUDA needs a special hardware environment,
which means the graphic card supporting CUDA is a
necessary condition. Here is the configuration
development.
CPU: i3-2100 with 3GB RAM
52

GPU: GTS-450 with 1 GB RAM on board
Software environment:
Operation System: Windows7 64bit
Develop tools: Visual Studio 2010 with Nsight Visual
Studio Edition
This configuration could allow developers to debug
the CUDA program on their developing machine.
3.2.2 Version Control
Version control is very important for development.
In terms of current version control service, GIT is
much better than SVN. And there are some good GIT
service for free on the internet, for example,
Github, Bitbucket and so on. Bitbucket is chosen for
this development, which provides version control
service for private project and free.
After the process of configuration, the final web
address of git store is
[email protected]:maxiaoyu/optionspricing.git
53

3.3 Software Design
The UML of the program
54

This UML diagram shows the structure of the
implement of this CUDA algorithm. All the logic
control is located in the main. For a C++ program,
the object class is used widely, but the CUDA kernel
program is written by C language. So that, the first
55

problem need to be resolved is that make the C
kernel program working together with C++ object-
oriented code. Using a class to package a C
interface function, which is a good solution for
this problem. For example, in this program, the
class gpu1_binomial_option_pricng and
gpu2_binomial_option_pricing call the C functions
provided by gpu1_kernel and gpu2_kernel
respectively.
3.4 Software Implement
3.4.1 the main logic of environment checking
In the main function the entrance of the program,
all the logic the function call here. There are six
main steps in the program including query CUDA
device, generating option data, using CPU to
computing the option price, using GPU to computing
option price and compare the result and their
performance.
56

In the first step, it is very important to make sure
the CUDA running environment. Therefore, the
CUDA_Device class is used for this task. The
function QueryDevice will check the running
environmeny, even though the current hardware
supports it, which is a common necessary work for
all CUDA program. The program could not guarantee
the hardware and software environment satisfy the
requirement, which is the reason. CUDA API has the
special structure named cudaDeviceProp that contain
much information about hardware environment.
57

The QueryDevice function will check these items
including:
1. Compute capability: a number point the computing
function characters supported by the GPU. For
example, if the number over and equal 1.3, which
means the GPU and its driver support double
precision computing and Shared Memory atom
operation.
2. Clock rate: the core speed for GPU
3. Device Copy Overlap: this item express a
important hardware specific function, which allow
the hardware to copy data when the core computing
data. This function based on DMA technology, and
it is the basis of Stream technology a advanced
technology to improve the GPU’s performance.
4. KernelExecTimeoutEnabled: for operation system,
graphic card is very important, it cannot run a
program too long to react back to operation
system. So that, there is mechanism to prevent
the GPU dead happen, that is the kernel executing
time out mechanism. When the GPU run a code too
58

long, the operation will kill the GPU work and
reset GPU to be controlled by CPU.
5. Total Global Memory: this item show the size of
the memory on graphic card.
6. Total Constant Memory: it shows the size of
constant memory, which is a very small high speed
and read only memory. For Fermi architecture,
there is 64 KB constant memory totally.
These items could tell developers the specific
hardware performance.
The code segment:
cudaDeviceProp prop; for(int i = 0;i<DeviceCount;i++) {
HANDLE_ERROR( cudaGetDeviceProperties(&prop,i));printf(" --- general Information for Device %d ---\n",i); printf( "Name: %s\n", prop.name );printf( "Compute capability: %d.%d\n", prop.major, prop.minor ); printf( "Device support double precision: " ); if(prop.major>=2||prop.minor>=3)
support_double_precision_ = true; if(support_double_precision_)
printf( "Supported\n" );else
printf( "Unsupported\n" );
59
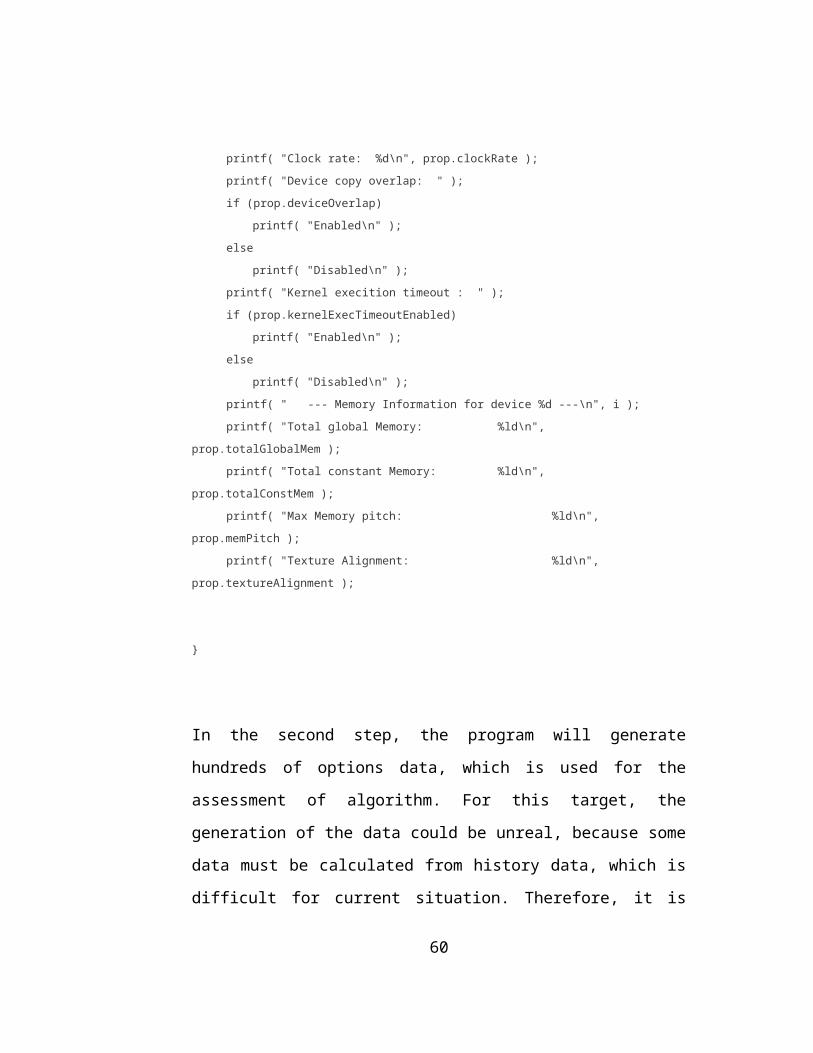
printf( "Clock rate: %d\n", prop.clockRate );printf( "Device copy overlap: " );if (prop.deviceOverlap)
printf( "Enabled\n" );else
printf( "Disabled\n" ); printf( "Kernel execition timeout : " ); if (prop.kernelExecTimeoutEnabled)
printf( "Enabled\n" ); else
printf( "Disabled\n" ); printf( " --- Memory Information for device %d ---\n", i );printf( "Total global Memory: %ld\n",
prop.totalGlobalMem );printf( "Total constant Memory: %ld\n",
prop.totalConstMem );printf( "Max Memory pitch: %ld\n",
prop.memPitch );printf( "Texture Alignment: %ld\n",
prop.textureAlignment );
}
In the second step, the program will generate
hundreds of options data, which is used for the
assessment of algorithm. For this target, the
generation of the data could be unreal, because some
data must be calculated from history data, which is
difficult for current situation. Therefore, it is
60

necessary to simulate data from a suitable range. In
terms of the current situation, there are five kinds
of data need to be estimated, including stock price,
target price for option executing time, time for how
long to keep it, Risk-free bank interest rates and
option volatility rate. The function
GenerateRandData in charge of producing a rand
number under a restriction. In this program, there
are 512 option data were generated by the program.
Assume the data under these ranges:
1. stock price (S) located in between 5.0 and 30.0
2. target price (X) located in between 1.0 and 100.0
3. the keep time located in between 0.25 and 2.0
4. set Risk-free bank interest rate to 0.06f
5. set option volatility rate to 0.10f.
because the Risk-free bank interest rate is a
different variable based on different banks and the
option volatility rate must be calculated from the
previous data, set them a fix value respectively.
61

Code Segment:
//stock price option_data[index].S = GenerateRandData(5.0f,30.0f); //target price option_data[index].X = GenerateRandData(1.0f,100.0f); //time option_data[index].T = GenerateRandData(0.25,2.0f); //No risk bank rate option_data[index].R = 0.06f; //rmuina bodong rate option_data[index].V = 0.10f;
3.4.2 the implement of CPU logic
Class CPU_Binomial_Option_Pricing implemented the
main part of CPU code for binomial tree algorithm.
Because CPU is single thread, so the 512 options
will be priced one by one, which means it is a
sequence work.
62

As above known, the binomial tree algorithm is a
backtracking method, therefore, the first task is to
computing the final option price. In terms of the
binomial tree growing type, the one step option
price could be calculated by this formula:
63

is the total number of steps, is the current
step, is the target stock price. Here is hard to
understand, to assume only one step will help
developer to make clear this formula. In one step
, , ,
Then, could expand the one step to multi-step
formula above.
So that the one step could be boxed by a function,
named calculateFinalCallOptionPrice, here is to
computing call option.
The code segments is:
double CPU_Binomial_Option_Pricing::calculateFinalCallOptionPrice(const double& S,const double& X,const double& vDt,const int& i){
double d = S * exp(vDt * (2.0 * i - NUM_STEPS)) - X; return (d > 0) ? d : 0;
}
64

After the calculation, the calculation of the one
step in the all steps is finished.
The next task is using loop to computing each result
from the previous step for option’s pricing. In the
memory, all the data of a option is stored in a
array. After the final estimate value, one option
data could do the backtracking work.
For example, here is a two-step option pricing.
If there are N steps, there must be N+1 elements be
generated in the last. And after one step of
backtracking, the number of elements be used for
computing reduce one.
So that, the second loop do the backtracking work.
Code segments:
65

for(int indexofstep = NUMBER_OF_STEPS; indexofstep > 0; indexofstep --)
for(int itemindex = 0; j <= indexofstep - 1; itemindex ++) option_cache[itemindex] = puMulDf *
option_cache[itemindex + 1] + pdMulDf * option_cache[itemindex];
In the deepest operation, the code expresses the
formula
For using CPU to calculate the option’s price, the
elements are processed one by one.
3.4.3 the implement of GPU version
The next step is to use CUDA to change the single
thread computing to parallel computing.
Obviously, the loop could be parallelization. But
using CUDA to do the parallel is a little different
from common programming.
This is the flow chart for this kind of CUDA
version.
66

In this parallel version, there are two places to be
processed in GPU, one is the calculation of
estimating data, and another one is the calculation
of each step.
Because by using the formula
could get the value directly, if the computing need
N step, the final result will have N + 1 elements.
67

Therefore, theoretically, the fast parallel approach
is that use N+1 threads to do the work. But
actually, there is a better way to release the power
of hardware.
Traditionally, there are many threads working from 0
to N+1 elements. When the size of elements is bigger
than the maximum of thread number supported by
hardware, it is impossible to finish the work. In
terms of the ability of CUDA scale ability, there is
a method could make the thread work for the
unlimited tasks.
“i” is the thread ID, can be used in the CUDA
program. If “i” expressed one common thread ID from
a limited number range, and i+1, i+2, ….. i+N (N is
68

unlimited) can express unlimited number range.
Therefore, for example, the CUDA program can use
limited thread to calculate unlimited computing
task.
Code Segment:
static __global__ void calculateFinalCallOptionPriceG1(double *call,int step, double S, double X, double vDt){
int tid = threadIdx.x; for(int i = tid; i<=step; i+=CACHE_SIZE) {
double d = S * exp(vDt * (2.0 * i - NUM_STEPS)) - X; call[i] = (d > 0) ? d : 0;
} __syncthreads();
}
This code is a kernel, must be called in a common C
environment. The CUDA organizes threads in a special
way. In the previous chapter, the content introduce
the CUDA running ways that CUDA allocate threads
into many blocks, each block has the same mode of
management of threads. But, each thread could
control its logic by distinguish its own ID.
Therefore, for this situation, there is only one
69

option data need to be generated, and the number of
steps is not bigger than the limited of the thread
restriction of the block. Using one block having
some enough threads could satisfy this requirement.
Code Segment:
calculateFinalCallOptionPriceG1<<<1,CACHE_SIZE>>>(temp_option_data,NUM_STEPS,S, X, vDt);
Explain: <<<1,CACHE_SIZE>>>, the position of 1 is
used to set the management of grid, which means how
the current grid be organized by block in 2D; the
position of CACHE_SIZE is used to set the management
of block, which means how the management of threads
in a block in 3D ways. In current setting
environment, the setting of it is that there is only
one block and this block has CACHE_SIZE (256)
threads
Based on the same way, the kernel program could do a
parallel computing for each step on the binomial
tree backtracking calculation. The CPU code could be
rewrite to the GPU code.
70

Code Segment:
static __global__ void binomialOptionsKernel1(double *call, int border, double puMulDf, double pyMulDf) { int tid = threadIdx.x; for(int i = tid; i<=border - 1; i+=CACHE_SIZE) { double a1 = puMulDf * call[i+1]; double a2 = pyMulDf * call[i]; __syncthreads(); call[i] = a1 + a2; __syncthreads(); } }
And for all the backtracking computing of an option
pricing, the code could simplify to this one.
Code Segment:
for(int i = NUMBER_OF_STEPS; i > 0; i--) { binomialOptionsKernel1<<<1,CACHE_SIZE>>>(temp_option_data, i, puMulDf, pdMulDf); }
<<<1,CACHE_SIZE>>> give CUDA core the same setting
for computing like the last operation.
71

Finally, the 512 option pricing works are processed
one by one as well. The CUDA function
“__syncthreads()” is very important for program,
which guarantee all the threads finish the executing
code before this command, then executes the next
codes. In this program, it avoids the different
threads get wrong data because of different
executing order.
Although CUDA be used in current program, does it
really play the essential role? Actually, after the
test, the speed of GPU method is slower than the
implemented by CPU. The test result of performance
will be expressed in the next chapter. Why does a
worse result after using CUDA? Is there any way to
improve the performance? Go back the check the
architecture of the GPU version code, ostensibly, it
use CUDA to accelerate the speed, but it has some
problems.
Here lists some apparent problems.
72
1. CUDA is suitable to process a huge of mass data,
but in this version, there is only one option
data at same time. In another way, it is still a
serial program; only the mathematics operation is
parallelization.
2. Although the data is transferred from host memory
to device memory before computing, the speed of
access global memory under CUDA memory model is
very slow and slower than between CPU and Host
memory. So that, the memory access consumes too
much time, and do not utilize the cache of CUDA
memory model.
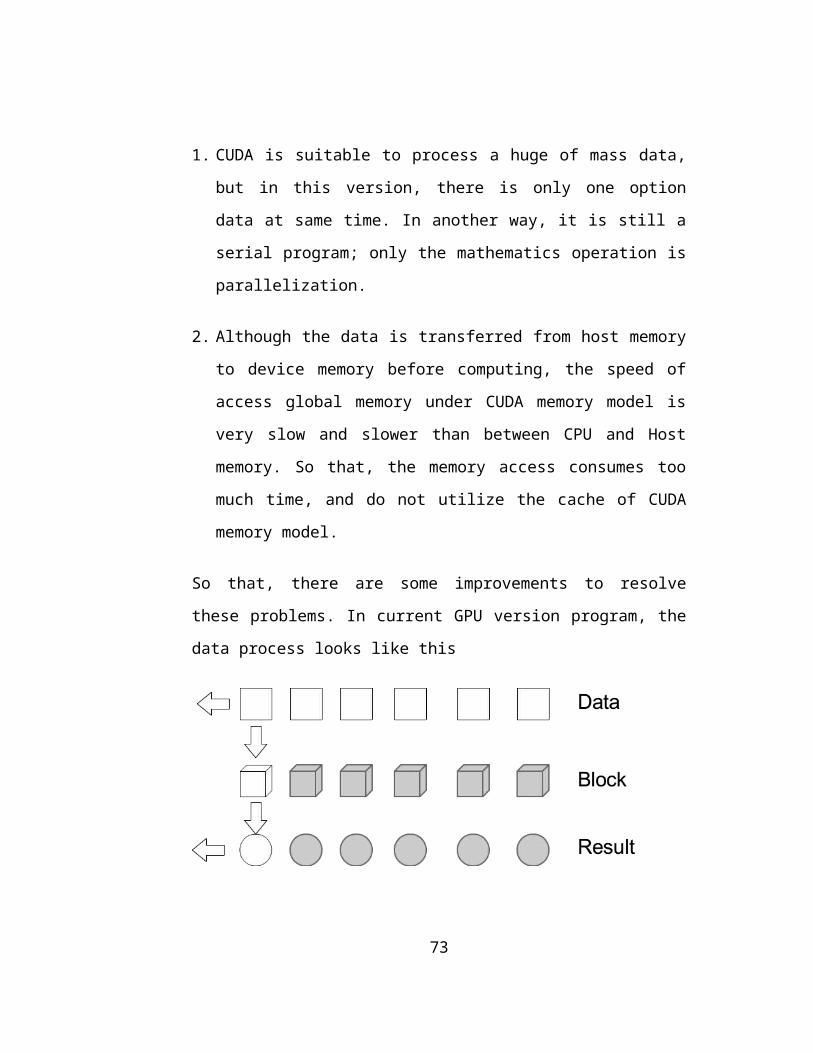
So that, there are some improvements to resolve
these problems. In current GPU version program, the
data process looks like this
73
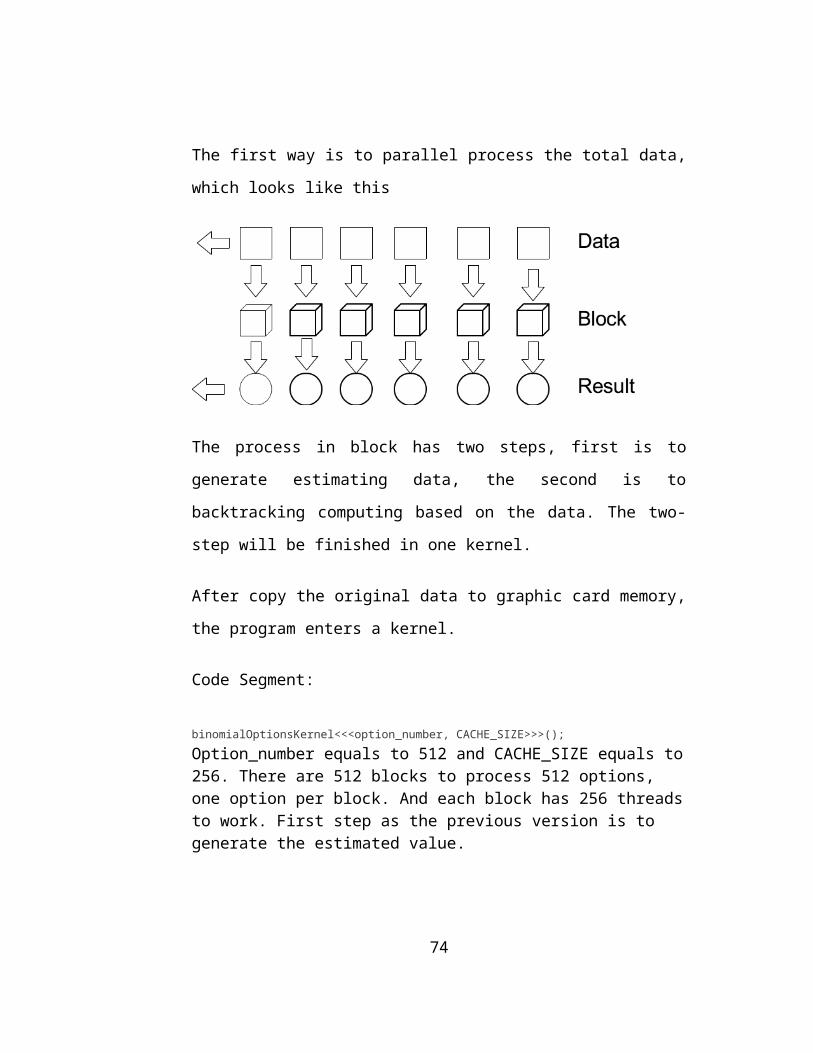
The first way is to parallel process the total data,
which looks like this
The process in block has two steps, first is to
generate estimating data, the second is to
backtracking computing based on the data. The two-
step will be finished in one kernel.
After copy the original data to graphic card memory,
the program enters a kernel.
Code Segment:
binomialOptionsKernel<<<option_number, CACHE_SIZE>>>();Option_number equals to 512 and CACHE_SIZE equals to256. There are 512 blocks to process 512 options, one option per block. And each block has 256 threadsto work. First step as the previous version is to generate the estimated value.
74

Here, this process function is not a single kernel
function, it is called in kernel function, so that,
it is a device function, and its content is the same
as the single kernel function.
Code Segment:
__device__ inline double calculateFinalCallOptionPriceG2 (double S, double X, double vDt, int i){
double d = S * exp(vDt * (2.0 * i - NUM_STEPS)) - X; return (d > 0) ? d : 0;
}
This is a device function, can only be called in
kernel functions and other device functions, and
must be executed in GPU.
Code Segment:
75

for(int i = tid; i <= NUM_STEPS; i += CACHE_SIZE)d_Call[i] = calculateFinalCallOptionPriceG2 (S, X, vDt, i);
This diagram shows how this device executed in the
GPU.
In each step of the loop, the number of the node of
the binomial tree is increasing, and the number of
GPU threads increasing as well. So that, this can
guarantee there are enough threads to support the
parallel computing.
After this step, one block has the all-estimating
data for one option, the next is to use backtracking
76

method to calculate the price of the option. As
above known, the formula
is implemented by CPU code
Call[j] = puByDf * Call[j + 1] + pdByDf * Call[j];and GPU function binomialOptionsKernel1 . In the previousGPU version, only one option and one block workingin the same time. But in this version, there are 512blocks working concurrently, so the next is to usethe hardware cache under CUDA memory model tooptimize the calculation in single one block.
There are four kinds of memory on the GPU; registersare allocated by NVCC compiler, the left areconstant memory, shared memory and global memory.Using the three kinds of memory is very important.After the first step of computing, the estimateddata stored in the global memory. In the secondstep, the algorithm should use the shared memory asmuch as possible, because its access speed is muchfaster than global memory.
Another important point is how to compute the optionprice in block concurrently. For one step of backtracking, the process likes this
77

Each node is processed by one thread. Therefore,
could guarantee to maximize the using of threads.
The memory change is like this
After one time operation, the sum of data will
reduce one. But there is a new question is that the
data stored in global memory, which means the
program will waste too much time on reading and
writing from global memory. The solution is that
move the temp computing result from global memory to
shared memory. So that, the data need to be copied
to shared memory before computing.
78

Code Segment:
callA[tid] = d_Call[c_base + tid];
The data is processed in shared memory. To keep a
high speed computing, it is helpful to prepare two
arrays in the shared memory in the current block.
79
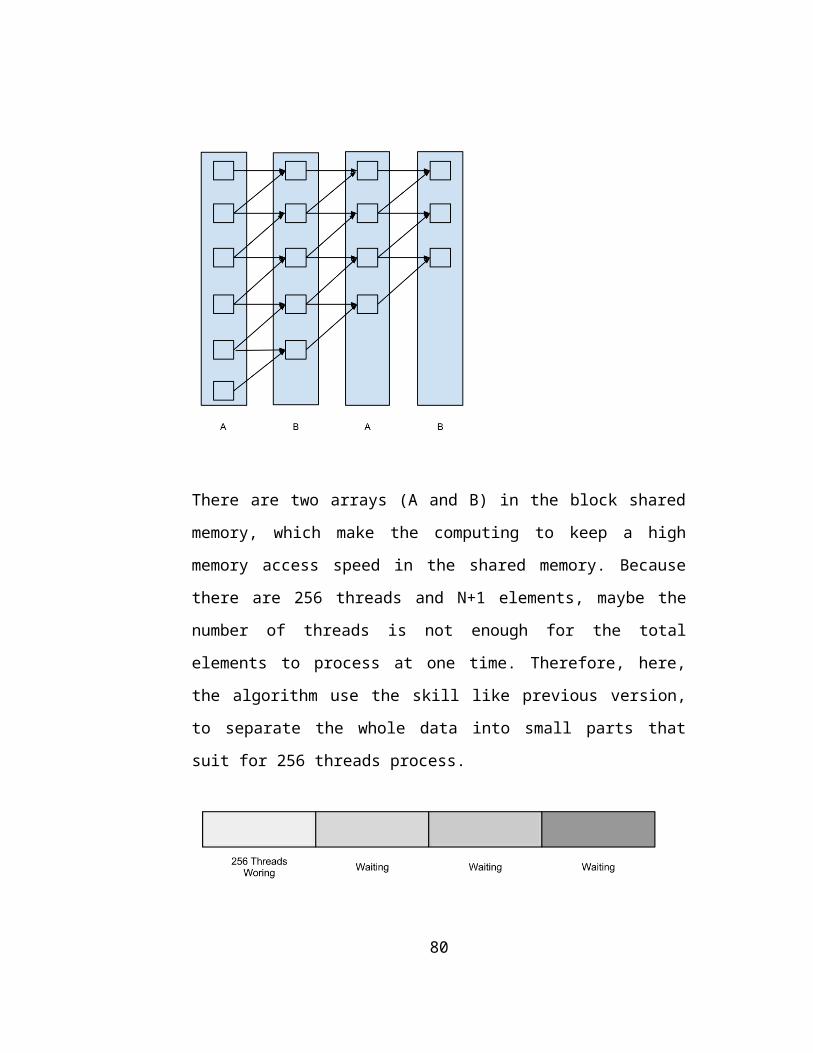
There are two arrays (A and B) in the block shared
memory, which make the computing to keep a high
memory access speed in the shared memory. Because
there are 256 threads and N+1 elements, maybe the
number of threads is not enough for the total
elements to process at one time. Therefore, here,
the algorithm use the skill like previous version,
to separate the whole data into small parts that
suit for 256 threads process.
80

Is there any way to accelerate the computing speed
from the algorithm of binomial tree again? Go back
the special binomial tree model.
Because the binomial tree is very special, there are
ways to accelerate the process speed. From this
diagram, this is a binomial tree with ten nodes. The
first thing need to be clear is that make sure the
direction of computing is from left to right.
81

If get the result of node 5 that needs node 1 and 2,
expand it to node 6, which needs node 2 and 3. So
that the node 5 and the node 6 share the node 2.
If get the result of node 8 that needs node 1,2,3,5
and 6. And getting the result of 9 needs 2,3,4,6 and
7. There is a principle here that if the level of
the two nearest nodes increases one level, the left
node will share its children nodes besides the left
children to its right node.
Therefore, in each block operation, the program do
not need to compute the node value one level by one
level, the height of each part of the level could
82

higher than two. So the abstract algorithm image
looks like this.
For the previous design, assume there are two
threads in one block, the image is
For the second design having multi-level computed
by many thread could provides more powerful
computing ability, which looks like this
83

Obviously, this design increase the capacity of data
in each step, because the computing happens at
shared memory, which guarantee the access speed. In
the shared memory, the computing model looks like
this
84

The computing happens at the two shared memory
spaces respectively.
Code Segment:
for(int i = NUMBER_OF_STEPS; i > 0; i -= CACHE_DELTA) for(int window_base = 0; window_base < i; window_base += CACHE_STEP){
int window_begin_point = min(CACHE_SIZE - 1, i - window_base);int window_end_point = window_begin_point - CACHE_DELTA;__syncthreads();if(tid <= window_begin_point)
shared_cacheA[tid] = base_point_in_All_Call[window_base + tid];
for(int windowitemindex = window_begin_point - 1; windowitemindex >= window_end_point;)
{__syncthreads();shared_cacheB[tid] = puMulDf * shared_cacheA[tid + 1]
+ pdMulDf * shared_cacheA[tid];windowitemindex --;__syncthreads();shared_cacheA[tid] = puMulDf * shared_cacheB[tid + 1]
+ pdMulDf * shared_cacheB[tid];windowitemindex --;
}__syncthreads();if(tid <= window_end_point)
base_point_in_All_Call[window_base + tid] = shared_cacheA[tid];}
85

After performance testing, the result is better than the previous version and CPU version.
3.5 Software Performance Test
On GTX450
CPU GPU1 GPU20
1
2
3
4
5
6
Running Time
Running Time
CPU, GPU1 and GPU2 spend 4s, 5.565s and 0.243s
respectively.
Obviously, GPU2 has a great performance superiority,
which it is faster 16.46 times than CPU and 22.90
times than GPU1 respectively. So that, this result
86

maybe verify the design defect of GPU1, which means
memory read and write operation spend too much time.
The next is to use Nvidia Compute Visual Profiler
the official performance checking tool to check the
detail of the code among CPU, GPU1 and GPU2 the
three implements of binomial tree.
By using Nvidia Compute Visual Profiler, more
details of the difference of the performance between
the two versions GPU1 and GPU2 will be shown.
On GTX560
CPU GPU1 GPU20
0.51
1.52
2.53
3.54
4.5
Running Time
Running Time
87

GPU1 get a better performance, because GTX560 has
384 cores, which is double number of cores than
GTX560. More cores means more block runs at the same
time.
The GPU Time Compare Result
This diagram shows that GPU2 version uses too much
GPU time than GPU1 version, which means GPU2 version
the GPU hardware is used fully.
The CPU Time Compare Result
The Compare of the instructions executed
88
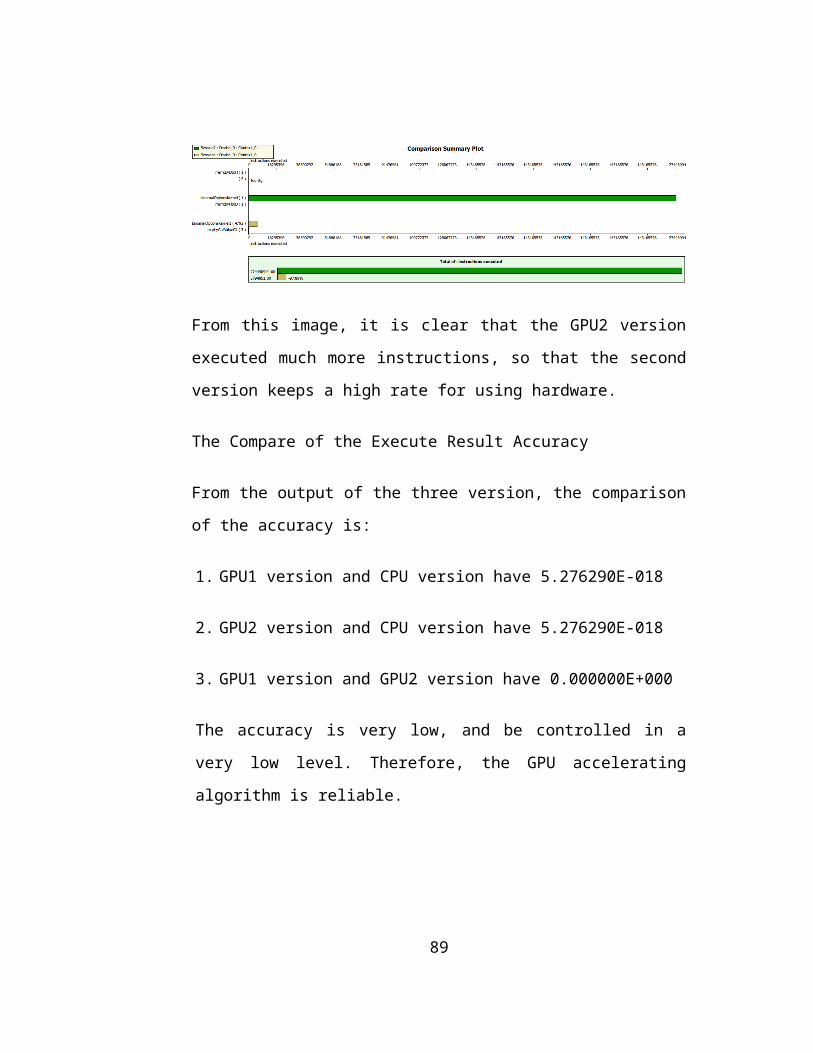
From this image, it is clear that the GPU2 version
executed much more instructions, so that the second
version keeps a high rate for using hardware.
The Compare of the Execute Result Accuracy
From the output of the three version, the comparison
of the accuracy is:
1. GPU1 version and CPU version have 5.276290E-018
2. GPU2 version and CPU version have 5.276290E-018
3. GPU1 version and GPU2 version have 0.000000E+000
The accuracy is very low, and be controlled in a
very low level. Therefore, the GPU accelerating
algorithm is reliable.
89

3.6 Software Improvement
Although the algorithm has been implemented and
running on the current main stream GPU architecture,
there are still some placement could be improved.
First, in the real situation, the number of option
is hard to control, sometime it is big, and sometime
it is small. When it is big, this algorithm is fine,
but when it is small, the hardware resource will
waste too much. Because Fermi architecture cannot
execute multi-kernel concurrently, so this problem
cannot be correct on this architecture. But in the
Kepler K110 architecture, this point could be
improved, which Kepler could launch multi-kernel to
optimize the implement of the algorithm.
Better GPU has better performance, current hardware
is GTX450 having 192 cores, but if executes on
GTX560 having 384 cores will get better time.
Because more cores means more block could run
concurrently.
90
3.7 Self Assessment
This project is a personal work. This project stands
at above both financial knowledge and computer
programming technology. Before the development, I
had to self-teaching the financial knowledge, and
read many references. To be a computer science
student, learning an untouched course is very
difficult, especially integrated with much math
information. Finally, I understood the knowledge.
It is the first time for me to develop a GPU
program, which is different from the common graphic
C++ program or other web, mobile application. This
kind of application focus on the data operation and
the implement of algorithm, therefore, it does not
have beautiful user interface. During the process of
the application, I understand the GPU programming
deeply, and understand how develop a real GPGPU
program. By the way, this project give me the fist
experience on financial computing project
development.
91

3.8 Conclusion
In this chapter, though diagram, code segments and
description to show three different kinds of
implement of the binomial tree option pricing
algorithm. Depends on the CUDA technology, the
traditional serial CPU algorithm could be
accelerated by GPGPU computing technology. Finally,
by the performance test verified GPGPU technology is
very helpful for accelerating Option Pricing by
binomial tree method.
92
A p p e n d i c e s
4.1 Task list
This a cross-filed project, there are many task need
to do. Before software development, the first thing
is learning the financial knowledge.
Development Prepare Task
1. Studying Financial Background knowledge
a) Basic Concept
b) The relationship between different area
2. Studying Option Knowledge
a) Basic Concept
b) Calculation Method
i. Binomial Tree Method
ii. Black-Sholes Method
3. Studying CUDA
93

a) Basic Knowledge
b) Programming Model
4. Algorithm Design
a) CPU version Design
b) GPU version Design
Development Task
1. Requirement Design
a) Make Clear Target
b) Understand how to implement
2. Software Design
a) Program Structure Design
3. Software Implement
a) CPU implement
b) GPU implement
c) Performance Compare
94

4.2 Gantt Chart for Time Management
95

REFERENCES AND BIBLIOGRAPHY
[1] John C. Hull, 2005, FUNDAMENTALS OF FUTURES AND
OPTIONS MARKETS
[2] John C. COX, Stephen A. ROSS, Mark RUBUNSTEIN,
July 1979, OPTION PRICING : A SIMPLIFIED
APPROACH, Massachusetts Institute of Technology,
Cambridge, MA 02139, USA Stanford University,
Stanford, CA 94305, USA, Yale University, New
Haven, CT 06520, USA, University of California,
Berkeley, CA 94720, USA
[3] Nathan Whitehead, Alex Fit-Florea, 2011,
Precision & Performance : Floating Point and
IEEE 754 Compliance for NVIDIA GPUs
[4] Nvidia Corporation, May 2011, Compute Visual
Profiler
[5] Nvidia Corporation, 2008, CUDA Programming Model
Overview
[6] Nvidia Corporation, 2006, CUDA Programming Model
Overview
96

[7] David Kirk, 2006-2008, NVIDIA and Web-mei Hwu,
Chapter 2 CUDA Programming Model
[8] Nvidia Corporation, 2011, The ‘Super’ Computing
Company From Super Phones to Super Computers
[9] Tim C. Schroeder, 2011, Peer-to-Peer & Unified
Virtual Addressing CUDA Webinar
[10] Peter N. Glaskowsky, 2009, NVIDIA’s Fermi : The
First Complete GPU Computing Architecture
[11] Nvidia Corporation, August 2011, TESLA M-CLASS
GPU COMPUTING MODULES
[12] Nvidia Corporation, March 2012, SDK CODE SAMPEL
GUIDE TO NEW FEATURES IN CUDA TOOLKIT v4.2
[13] Nvidia Corporation, January 2012, GETTING
STARTED WITH CUDA SDK SAMPLES
[14] Nvidia Corporation, May 2012, NVIDIA CUDA C
Programming Guide
[15] Nvidia Corporation, April 2012, NVIDIA CUDA
GETTING STARTED GUIDE FOR MICOSOFT WINDOWS
97

[16] Nvidia Corporation, January 2012, CUDA API
REFERENCE MANUAL Version 4.1
[17] Nvidia Corporation, May 2011, FERMI
COMPATIBILITY GUIDE FOR CUDA APPLICATIONS
[18] Nvidia Corporation, May 2011, TUNING CUDA
APPLICATIONS FOR FERMI
[19] Nvidia Corporation, 2012, NVIDIA’s Next
Generation CUDA Compute Architecture : Kepler
GK110
[20] Nvidia Corporatin, May 2012, KEPLER
COMPATIBILITY GUIDE FOR CUDA APPLICATIONS
[21] Jason Sanders, Edward Kandrot, 2010, CUDA BY
EXAMPLE An Introduction to General-Purpose GPU
Programming [source code] book.h
98

4