
Statistical Analysis of Incomplete Data - Course Notes: Prof. Dr ...
Upload
independentCategory
view
0download
0
IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. XX, NO. Y, MONTH 2007 1
Cross-layer Adaptive Transmission with Incomplete
System State InformationAnh Tuan Hoang, Member, IEEE, and Mehul Motani, Member, IEEE
Abstract— We consider a point-to-point communication systemin which data packets randomly arrive to a finite-length bufferand are subsequently transmitted to a receiver over a time-varying wireless channel. Data packets are subject to loss due tobuffer overflow and transmission errors. We study the problemof adapting the transmit power and rate based on the buffer andchannel conditions so that the system throughput is maximized,subject to an average transmit power constraint. Here, the systemthroughput is defined as the rate at which packets are successfullytransmitted to the receiver. We consider this buffer/channel adap-tive transmission when only incomplete system state informationis available for making control decisions. Incomplete systemstate information includes delayed and/or imperfectly estimatedchannel gain and quantized buffer occupancy. We show that,when some delayed but error-free channel state information isavailable, optimal buffer/channel adaptive transmission policiescan be obtained using Markov decision theories. When thechannel state information is subject to errors and when thebuffer occupancy is quantized, we discuss various buffer/channeladaptive heuristics that achieve good performance. In this paper,we also consider the tradeoff between packet loss due to bufferoverflow and packet loss due to transmission errors. We showby simulation that exploiting this tradeoff leads to a significantgain in the system throughput.
Index Terms— Cross-layer design, adaptive transmission,
throughput maximization, partially observable Markov decision
processes.
I. INTRODUCTION
In this paper, we study the problem of buffer and channel
adaptive transmission in a point-to-point wireless communi-
cation scenario with the objective of maximizing the system
throughput, subject to an average transmit power constraint.
We term our adaptive transmission schemes cross-layer since
transmission decisions at the physical layer take into account
not only the channel condition but also the data arrival
statistics and buffer occupancy, which are the parameters of
higher network layers.
Our system model is depicted in Fig. 1. Time is divided
into frames of equal length and during each frame, data
packets arrive at the transmitter buffer according to some
known stochastic distribution. The buffer has a finite length
and when there is no space left, arriving packets are dropped.
Manuscript received November 08, 2006; revised May 31, 2007, andAugust 22, 2007.
A. T. Hoang is with the Department of Networking Protocols, Institute forInfocomm Research (I2R), 21 Heng Mui Keng Terrace, Singapore 119613.Previously, he was with the Department of Electrical and Computer Engineer-ing, National University of Singapore. E-mail: [email protected].
M. Motani is with the Department of Electrical and Computer En-gineering, National University of Singapore, Singapore 119260. E-mail:[email protected].
Data packets in the buffer are transmitted to a receiver over
a discrete-time block-fading channel. The fading process is
represented by a finite state Markov chain (FSMC) ( [1], [2]).
We define the system state during each time frame as the
combination of the buffer occupancy and the channel state and
assume that there is a signaling mechanism for the transmitter
and receiver to exchange some system state information (SSI).
In our system model, data packets are subject to loss due
to buffer overflow and transmission errors. We define the
system throughput as the rate at which packets are successfully
transmitted to the receiver. The control problem is to adapt
the transmit power and rate according to some SSI so that the
system throughput is maximized, subject to an average trans-
mit power constraint. We are interested in scenarios in which
only an incomplete observation of the instantaneous system
state is available for making control decisions. Incomplete
SSI includes delayed and/or imperfectly estimated channel
state and quantized buffer occupancy. The case when control
decisions can be made based on complete SSI is considered
in our related work [3], where interesting structural properties
of optimal adaptive transmission policies are studied.
In the context of adaptive transmission, our paper is related
to the well-known works of Goldsmith in [4] and [5]. In these
works, it is shown that when the channel state information
(CSI) is available at both the transmitter and receiver, the
optimal power allocation scheme that achieves the capacity of
a time-varying wireless channel, subject to an average transmit
power constraint, exhibits a water-filling structure over time.
The insight is that the transmitter should transmit at a higher
power and rate when the channel is good while reducing the
transmit power in poorer channel conditions. However, data
arrival statistics and buffer conditions are not of concern in
[4] and [5].
In the context of cross-layer design, our paper is closely
related to the works in [6]–[16], which consider similar
problems of buffer/channel adaptive transmission. An early
work of Collins and Cruz adapts transmit power and rate
based on the queue length and channel condition in order to
minimize the average transmit power, subject to an average
delay constraint [6]. In [7] Berry and Gallager quantify the
behavior of the power-delay tradeoff in the regime of asymp-
totically large delay. The same model is further studied in [8],
[9], with some structural properties of the optimal policies
identified. In [10], Rajan et al. consider a more generalized
queueing model where packets can be dropped. They propose
transmission policies that are near-optimal, in terms of mini-
mizing packet loss subject to an average delay and an average
power constraint. In [11], Karmokar et al. further extend the

IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. XX, NO. Y, MONTH 2007 2
Transmitter Receiver Wireless
Channel
Control Signals Buffer
Packets
Fig. 1. System model of a point-to-point wireless communication scenario.Data packets arrive to the buffer according to some stochastic distribution.The packets are then transmitted over a time-varying wireless channel. Thereare control signals for the transmitter and receiver to exchange buffer andchannel state information.
tradeoff to include average packet delay, average transmit
power, and average packet dropping probability. They also
propose a suboptimal policy that approximates the behaviors
of the optimal policies. In [12]–[16] the problem of cross-layer
adaptive transmission is considered from a different angle
in which transmission is carried out given a fixed amount
of energy and a limited amount of time. The authors adapt
the transmit power and rate according to the amount of data
remaining, the present time relative to the deadline, and the
present channel state, in order to maximize the achievable
throughput ( [12]–[14]) or to maximize the probability of a
data file being successfully transmitted ( [15], [16]).
We note that the works in [6]–[16] assume perfect knowl-
edge of the instantaneous buffer occupancy and channel state.
In [17], Karmokar et al. consider the problem of adapting the
error control coding scheme base on some imperfect observa-
tions of traffic statistics and channel condition. In particular,
the channel observations are in the form of NACK/ACK that
are fed back from the receiver to the transmitter. Similar to
our paper, the problem in [17] is formulated as a partially
observable Markov decision process (POMDP). Even though
the problem setup in [17] differs from that of our paper in
several points, the authors come to a similar conclusion that,
given partial observations, a heuristic called QMDP ( [18])
achieves good performance.
An important contribution that differentiates our work from
[6]–[16] is that we exploit the tradeoff between packet loss
due to buffer overflow and packet loss due to transmission
errors. Our results show that, by balancing these sources of
packet loss, significant gain in the system throughput can
be achieved. From the implementation point of view, when
imperfect channel state information is considered, it is not
possible to calculate transmit power to guarantee a target
packet error rate. We note that the problem formulation in
[10] and [16] allows for optimizing over both packet losses
due to transmission failure and buffer overflow. However, their
assumptions result in no packet losses due to transmission
errors. Specifically, their policies never transmit above the
Shannon capacity and they assume no transmission errors
at rates below capacity. In their recent works ( [19], [20]),
Liu at al. do take into account both packet losses due to
transmission errors and buffer overflows. Their definition of
system throughput is also similar to ours. However, the policies
considered in [19], [20] adapt to the channel state information
only, not to the buffer and data arrival statistics.
The main contributions of this paper can be summarized as
follows.
• We present tractable models of buffer/channel adaptive
transmission given imperfect SSI.
• We exploit the tradeoff between packet loss due to buffer
overflow and packet loss due to transmission errors. This
tradeoff results in a performance gain in the overall
system throughput.
• We show how buffer and channel adaptive transmission
can be carried out given incomplete SSI. In particular, we
show that optimal adaptive policies can be obtained for
the cases when some delayed but error-free channel state
information is available. When the channel state informa-
tion is subject to errors and when the buffer occupancy
is quantized, we present various buffer/channel adaptive
heuristics that achieve good performance.
The rest of this paper is organized as follows. In Section II,
we present our system model and discuss the approach that can
be used to obtain optimal adaptive transmission policies when
the transmit power and rate can be chosen based on a perfect
knowledge of the instantaneous system state. Next, in Section
III, we discuss the situations in which the transmitter and
receiver only have partial information about the current buffer
and channel states. In Section IV, we show that optimal control
policies can be obtained when some delayed but error-free
channel states are available for making decision. When this is
not possible, we propose various heuristics to obtain policies
with good performance in Section V. Numerical results and
discussion are given in Section VI. Finally, we conclude the
paper in Section VII.
II. THROUGHPUT MAXIMIZATION PROBLEM
A. System Model
The system model considered in this paper is depicted in
Fig. 1. Time is divided into frames of equal length of Tf
seconds. During frame i, Ai packets arrive at the transmitter
buffer. We assume that Ai is independent and identically dis-
tributed (i.i.d.) over time and follows a stationary distribution
pA(a). Each data packet contains L bits, the buffer can store
up to B packets and when the buffer is full, all arriving packets
are dropped. We further assume that arriving packets are only
added to the buffer at the end of each time frame.
We consider a discrete-time block-fading channel with
additive white Gaussian noise (AWGN). The fading process
is represented by a stationary and ergodic K-state Markov
chain, with the channel states numbered from 0 to K−1. The
power gain of channel state g, g ∈ {0, . . .K − 1}, is denoted
by γg . During each time frame, we assume that the channel
remains in a single state, between two consecutive frames, the
probability of transitioning from channel state g to channel
state g′ is denoted by PG(g, g′). The stationary distribution of
each channel state is denoted by pG(g).In general, a finite state Markov channel model (FSMC)
is suitable for modeling a slowly varying flat-fading channel
[1], [21]–[23]. A FSMC is constructed for a particular fading
distribution, e.g., log-normal shadowing or Rayleigh fading,
by first partitioning the range of the fading gain into a finite
number of sections. Then each section of the gain value
corresponds to a state in the Markov chain. Given knowledge
of the fading process, the stationary distribution pG(g) as well

IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. XX, NO. Y, MONTH 2007 3
as the channel state transition probabilities PG(g, g′) can be
derived. For more details, the reader is referred to [1], [21]–
[23].
Let Bi denote the number of packets in the buffer at the
beginning of frame i and Gi denote the channel state through-
out frame i, the system state at frame i is Si , (Bi, Gi). For
time frame i, let Pi(Watts) and Ui(packets/frame) denote the
transmit power and rate, respectively. We have 0 ≤ Ui ≤ Bi
and Pi ∈ P , where P is the set of all power levels at which
the transmitter can operate.
B. Buffer and Channel Adaptive Transmission
Given a particular system state (b, g), where b is the buffer
occupancy and g is the channel state (0 ≤ b ≤ B, 0 ≤ g <K), each chosen pair of transmission rate and power (u, P )results in some expected number of packets lost due to buffer
overflow and transmission errors. We characterize these losses
by two functions: Lo(b, u) is the expected number of packets
lost due to buffer overflow and Le(g, u, P ) is the expected
number of packets discarded due to transmission error. Note
that in this paper, we do not consider retransmission of
erroneous packets.
For our system model, when the data arrival process is fixed,
maximizing the system throughput is equivalent to minimizing
total packet loss due to buffer overflow and transmission
errors. This is achieved by varying the transmission rate and
power (Ui, Pi) according to some knowledge of Si. Note
that there are various ways for the transmitter to change its
transmission rate Ui. It can be done by changing the channel
coding scheme [24], i.e. by encoding data bits in the buffer
using different code rates while keeping the transmission rate
for the coded bits fixed. Ui can also be varied by keeping the
symbol rate fixed and changing the signal constellation size of
a modulator [5], [8], [25]. In existing communication standards
such as IEEE.802.11 and IEEE.802.16, different transmission
rates are achieved by combinations of different coding and
modulation schemes.
C. Buffer Overflow and Transmission Error Tradeoff
At this point, let us point out an interesting tradeoff between
the two sources of packet loss, i.e., buffer overflow and
transmission errors. Consider a particular system state (b, g)and a fixed transmit power P . If we increase the transmission
rate u, the amount of buffer overflow is reduced. However,
increasing u when P is fixed results in a greater number of
packet transmission errors. The reverse is also true, for fixed
P , the amount of packet transmission errors can be reduced by
lowering the transmission rate u, but that will be at the cost of
increasing the buffer overflow rate. This argument highlights
the need to find a good tradeoff between packet transmission
errors and buffer overflow when choosing transmit power and
rate. In this paper, our control decision strives for an optimal
tradeoff between these two sources of packet loss.
D. Throughput Maximization with Complete SSI
Before considering buffer/channel adaptive transmission
with incomplete SSI, let us briefly discuss how optimal
buffer/channel adaptive transmission policies can be obtained
for the case of complete SSI. With complete SSI, the through-
put maximization problem can be reformulated as the problem
of minimizing the weighted sum of the long-term packet loss
rate and the average transmission power. In particular, consider
the following problem of selecting transmission rate and power
(Ui, Pi):
arg minUi,Pi
{lim supT→∞
1
TE
{T−1∑
i=0
C(Bi, Gi, Ui, Pi)
}}, (1)
where
C(b, g, u, P ) = P + β (Lo(b, u) + Le(g, u, P )) . (2)
Here β is a positive weighting factor that gives the priority
of reducing packet loss over conserving power. When β is
increased, we tend to transmit at a higher rate in order to lower
the packet loss rate at the expense of using higher transmit
power. On the other hand, for smaller values of β, the average
transmission power will be reduced at the cost of increasing
the packet loss rate. If P β and Lβ are the average power
and packet loss rate (due to buffer overflow and transmission
errors) obtained when solving (1) for a particular value of
β, then Lβ is also the minimum achievable loss rate given a
power constraint of P β .
For our system model in which the channel state Gi
evolves according to a stationary, ergodic Markov process, the
optimization problem in (1) can be classified as an infinite-
horizon, average-cost Markov decision process [26]. For such
a problem, given complete system SSI, there exists a stationary
control policy that is optimal. Let π be a stationary policy
which maps system states into transmission rate and power
for each frame i, i.e., π(Bi, Gi) , (Ui, Pi). Defining
Javr(π) = lim supT→∞
1
TE
{T−1∑
i=0
C(Bi, Gi, Ui, Pi) | π
}, (3)
the optimization problem in (1) becomes
π∗ = arg min
πJavr(π). (4)
The above infinite-horizon, average-cost Markov decision pro-
cess (MDP) can be solved effectively using dynamic program-
ming techniques such as policy iteration and value iteration
[26, Chapter 6].
It is also useful to consider the discounted cost of using
policy π with initial system state (b, g), i.e.,
Jα(b, g, π)
= limT→∞
E
{T−1∑
i=0
αiC (Bi, Gi, Ui, Pi) |B0 = b, G0 = g, π
},
(5)
where 0 < α < 1 is the discounting factor. As the immediate
cost function C(b, g, u, P ) is bounded, the limit in (5) always
exists. Correspondingly, we have the problem of finding a
control policy that minimizes the discounted cost, i.e.,
π∗α = arg min
πJα(b, g, π). (6)

IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. XX, NO. Y, MONTH 2007 4
It can be shown that π∗α converges to π
∗ which is the solution
of (4) as α → 1 ( [26, Chapter 6]). Moreover, let J∗α(b, g) be
the minimum discounted cost when starting with initial state
(b, g), the solution of the discounted cost problem satisfies the
simple Bellman equation ( [26, Chapter 6]):
J∗α(b, g) = min
(u,P )
{C (b, g, u, P ) + α
K−1∑
g′=0
∞∑
a=0
(PG(g, g′)
pA(a)J∗α
(min{b − u + a, B}, g′
))}.
(7)
The physical interpretation of (7) is that, for the discounted
cost problem, at each stage of control, the optimal control
action should minimize the sum of the immediate cost C(.)and the α-weighted future cost, provided that in the sub-
sequent future stages, optimal control actions are selected.
This elegant Bellman equation is useful for analyzing the
structural properties of optimal control policies. It is also
the inspiration behind the effective QMDP heuristic ( [18])
when only incomplete system state information is available
for making control decisions. This is discussed in Section V-
B.3.
III. INCOMPLETE SYSTEM STATE INFORMATION
Let us now consider the cases when only imperfect knowl-
edge of the instantaneous system state is available for making
control decisions. Rather, the transmit power and rate are
adapted based on a partially observed system state which
includes quantized buffer occupancy and delayed and/or im-
perfectly estimated channel state.
A. Quantized Buffer State Information
Although the transmitter usually knows the exact buffer
occupancy, we may not want to adapt the transmission pa-
rameters to this exact value. Firstly, the buffer occupancy can
change frequently, therefore, adapting to its exact value may
require a significant amount of signaling from the transmitter
to the receiver. Secondly, apart from the signaling issue,
we may want to quantize the buffer occupancy in order to
reduce the complexity in obtaining and implementing the
buffer/channel adaptive policies. Given that the buffer capacity
is B and the number of channel states is K , using the exact
buffer occupancy results in the total number of system states of
(B +1)K . When B and K are large, by quantizing B using a
small number of levels, we can significantly reduce the number
of system states and consequently reduce the complexity of
obtaining and implementing the adaptive transmission policies.
We can quantize the buffer occupancy using a small number
of thresholds and only update the transmit power and rate
when there is a threshold crossing. In this paper, the buffer
occupancy is quantized using M +1 thresholds, i.e., 0 = b0 <b1 < . . . < bM = B+1. The buffer is said to be in state k, 0 ≤k < M , if the number of packets currently queueing satisfies
bk ≤ b < bk+1. Denoting the quantized buffer occupancy at
time i by Bi, we have
Bi = bk, where k satisfies bk ≤ Bi < bk+1 . (8)
B. Delayed Imperfect Channel Estimates
We assume that the channel gain is first estimated at
the receiver, then quantized into one of the possible values
{γ0, γ1, . . . γK−1}, and finally the estimated channel index is
fed back to the transmitter. This process introduces both delay
and errors in the transmitter knowledge of the channel state.
If we take into account the effects of both delay and errors,
then at time i, what available at the transmitter is a sequence
of delayed imperfect estimates of the channel states up to time
i−m, i.e., {G0, . . . Gi−m}, i ≥ m ≥ 0. Note that mTf is the
total estimation and feedback delay. We account for the fact
that Gi can be erroneous by the following function:
PE(g, g) = Pr(Gi = g | Gi = g), (9)
which gives the probability of wrongly estimating channel
state g as channel state g. Note that PE(g, g) depends on the
specific channel estimation technique employed at the receiver.
In this paper, we assume that the channel estimation error
does not depend on the chosen transmission parameters and
is i.i.d. over time. We also assume that PE(g, g) is known at
the transmitter for all pairs (g, g).As an example, let us assume that if the actual channel state
is g, then the estimated channel gain prior to quantization is
of the form:
γ = γg + v, (10)
where v is a Gaussian random variable with zero mean and
variance σ2. Quantizing γ to the closest value in the set
{γ0, γ1, . . . γK−1} to obtain the estimated channel index g,
we have:
PE(g, g) =1
2
(erf(γbg + γbg+1 − 2γg
2√
2σ
)
− erf(γbg + γbg−1 − 2γg
2√
2σ
)), 0 < g < K − 1,
(11)
and
PE(g, 0) =1
2
(1 + erf
(γ0 + γ1 − 2γg
2√
2σ
)), (12)
PE(g, K − 1) =1
2
(1 − erf
(γK−2 + γK−1 − 2γg
2√
2σ
)),
(13)
where erf(.) is the standard error function.
IV. OPTIMAL ADAPTIVE TRANSMISSION POLICIES GIVEN
DELAYED ERROR-FREE CHANNEL STATES
In this section, we consider a special case in which
the channel information for choosing the transmit
power and rate at time frame i is of the form
{G0, . . .Gi−m−n, Gi−m−n+1, . . . Gi−m}, i ≥ m + n, m ≥0, n ≥ 0. This means that, at time i, in addition to the
imperfect channel estimates {Gi−m−n+1, . . . Gi−m}, the
transmitter knows all the exact channel states up to time
i − m − n. This assumption can be justified by the fact
that the accuracy of channel estimation process may be
improved if the receiver is given extra time and information
to do processing [5]. For example, when a certain estimation
delay is permitted, the receiver can interpolate between past

IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. XX, NO. Y, MONTH 2007 5
and future estimates to obtain more accurate predictions.
Therefore, our assumption corresponds to the case when the
delay (m + n)Tf is long enough so that the receiver can
obtain a near perfect channel estimate.
Due to the Markov property of the channel model, it is
enough to only maintain a truncated sequence of the channel
observation history which can be represented by the following
channel observation vector:
Hi = (Gi−m−n, Gi−m−n+1 . . . Gi−m). (14)
As there are K possible channel states, the number of all pos-
sible channel observation vectors Hi is Kn+1. The important
point to note is that even though the channel state information
is incomplete, the number of possible values for Hi is still
finite. This allows the problem of minimizing a weighted
sum of the long term packet loss rate and average transmit
power to be formulated as a finite-state MDP, with the actual
channel state Gi being replaced by the channel observation
vector Hi. In order to fully specify the MDP, we need to
derive the dynamics of Hi, together with the cost functions
associated with choosing transmission rate and power (u, P )in state (Bi, Hi).
A. When Hi = (Gi−1, Gi)
To simplify the derivations, we consider the case when
Hi = (Gi−1, Gi). Physically, this means that at time i,the transmitter knows the exact previous channel state Gi−1
and has an estimate of the current channel state Gi. This
corresponds to setting m = 0 and n = 1 in (14). We note
that the subsequent derivations can be extended for general
values of m and n.
At time i, given the channel observation vector H i =(Gi−1, Gi), we can derive the conditional probability distri-
bution of the channel state Gi as:
ρG
(g, g, g
), Pr(Gi = g|Hi = (g, g))
= Pr(Gi = g|Gi−1 = g, Gi = g)
=Pr(Gi = g, Gi−1 = g, Gi = g)
Pr(Gi−1 = g, Gi = g)
=Pr(Gi = g, Gi = g|Gi−1 = g)Pr(Gi−1 = g)
Pr(Gi = g|Gi−1 = g)Pr(Gi−1 = g)
=Pr(Gi = g, Gi = g|Gi−1 = g)
Pr(Gi = g|Gi−1 = g)
=PG(g, g)PE(g, g)
∑K−1g′=0 PG(g, g′)PE(g′, g)
.
(15)
Based on (15), the dynamics of H i can be written as:
PH(g, g, g′, g′) , Pr(H i+1 = (g′, g′)|H i = (g, g)
)
= Pr(Gi = g′, Gi+1 = g′ |H i = (g, g)
)
= Pr(Gi = g′|Hi = (g, g)
)Pr(Gi+1 = g′|Gi = g′)
= ρG(g′, g, g) ×K−1∑
k=0
PG(g′, k)PE(k, g′).
(16)
At time i, given that the buffer occupancy is Bi = b and the
channel observation vector is H i = (g, g), if the transmission
rate and power are set to u and P respectively, the average
number of packets lost due to buffer overflow is still given
by Lo(b, u) while the expected number of packets lost due to
transmission error is
LHe (g, g, u, P ) =
K−1∑
g=0
ρG
(g, g, g
)Le(g, u, P ). (17)
Knowing the dynamics of H i together with the cost of a
transmission action in each state (Bi, Hi), an MDP can be
readily formulated, i.e., similar to that given in Section II-D,
to minimize the weighted sum of the long term packet loss
rate and average transmit power.
B. When Hi = Gi−m
In the special case when Hi = Gi−m, i.e., the transmission
decisions at time i can be made based on the perfect knowl-
edge of channel state at time i − m, the number of possible
values for H i is K . As the result, the size of the newly form
MDP is the same as the size of the MDP for the case of
complete channel state information.
V. ADAPTIVE TRANSMISSION POLICIES WHEN NO
ERROR-FREE CHANNEL STATE IS AVAILABLE
Now, we consider the situation when no delayed error-free
channel estimate is available for choosing transmit power and
rate. At time i, the transmitter knows a sequence of imperfect
channel estimates which can be represented by the following
channel observation vector:
Ii = (G0 . . . Gi−m). (18)
A. Optimal Control Policy Given Delayed Imperfect Channel
Estimates With i.i.d. Channel Model
In the special case when the channel states are i.i.d. over
time, there is no extra information gained by keeping estimates
of past channel states. We suppose that during frame i, the
transmitter knows the estimates of channel state i, i.e., Gi,
then the channel observation vector Ii in (18) is simplified to
defined as
Ii = Gi. (19)
The dynamics of Ii can be derived as:
PI(g, g′) , Pr(Ii+1 = g′|Ii = g)
= Pr(Gi+1 = g′|Gi = g) =K−1∑
g=0
PE(g, g′)pG(g).(20)
Also, during time frame i, given that the channel estimate
is Ii = g, we can derive the probability distribution of the
current channel states as
φG(g, g) , Pr(Gi = g|Ii = g) = Pr(Gi = g|Gi = g)
=PE(g, g)pG(g)
∑K−1g′=0 PE(g′, g)pG(g′)
.(21)

IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. XX, NO. Y, MONTH 2007 6
At time i, given that the buffer occupancy is Bi = b and
the channel observation vector is Ii = (g), if the transmission
rate and power are set to u and P respectively, the average
number of packets lost due to buffer overflow is still given
by Lo(b, u) while the expected number of packets lost due to
transmission error is
LIe(g, u, P ) =
K−1∑
g=0
φG
(g, g)Le(g, u, P ). (22)
Note that the number of possible values for Ii is K .
Knowing the dynamics of Ii together with the cost of a
transmission action in each state (Bi, Ii), an MDP can be
readily formulated, i.e., similar to that given in Section II-D,
to minimize the weighted sum of the long term packet loss
rate and average transmit power.
B. Suboptimal Control Policies Given Imperfect Channel Es-
timates
Now let us consider the case when the channel states are
correlated over time and at time i, the transmitter knows
only a sequence of delayed imperfect channel estimates Ii =(G0 . . . Gi−m). To simplify the notations, we further assume
that m = 0, however, when m > 0 the analysis is similar.
The control problem in this situation can be modeled as a
partially observable Markov decision process (POMDP). For a
POMDP in which the system states are correlated over time, in
order to make an optimal control decision, the controller needs
to keep track of the entire observation history. That means
for our control problem, the transmitter needs to record the
entire channel estimation history, i.e., Ii, in order to select
optimal transmit power and rate. Instead of remembering the
entire observation history, the controller in a POMDP can keep
track of the so called belief state, which is the probability
distribution of the system state, conditioned on the observation
history. For our particular problem, we can define Ψi as the
belief channel state at time i, i.e., then
Ψi(g) = Pr(Gi = g | Ψ0, G0, . . . Gi), (23)
where the initial probability distribution Ψ0 is assumed
known. In case Ψ0 is not given, it can be set to Ψ0(g) =pG(g), i.e., the stationary distribution of the channel states.
The advantage of keeping a belief state for every time frame
is that it contains all relevant information for making control
actions [26]. Furthermore, in the next time frame, given a new
channel estimation Gi+1 = g, the new belief state can be
readily derived from
Ψi+1(g) = Pr(Gi+1 = g | Ψ0, G0, . . . , Gi, Gi+1 = g)
= Pr(Gi+1 = g|Ψi, Gi+1 = g)
=Pr(Gi+1 = g, Gi+1 = g|Ψi)
Pr(Gi+1 = g|Ψi)
=PE(g, g)
∑K−1g′=0 Ψi(g
′)PG(g′, g)∑K−1
g′=0 PE(g′, g)∑K−1
g′′=0 Ψi(g′′)PG(g′′, g′).
(24)
Unfortunately, the number of possible channel observation
vectors Ii and possible belief channel states Ψi are infinite.
Due to this it is essentially impossible to obtain an optimal
adaptive policy based on either Ii or Ψi as doing so may
require infinite time and memory. Therefore, instead of aiming
for an optimal control policy, let us look at some approaches
that can be used to approximate it. All of these approximations
start with the assumption that we have already obtained the
MDP policy π∗, i.e., an optimal policy when the system state
is fully observable.
1) Employing the MDP Policy π∗: The most straightfor-
ward approach is to ignore the partial observability of the
channel states and just employ policy π∗. In other words,
at time i, given the channel estimate Gi and buffer occupancy
Bi, the transmission parameters are set as:
(Ui, Pi) = π∗(Bi, Gi). (25)
2) The Most Likely State Heuristic: In this approach, we
first determine the state that the channel is most likely in, i.e.,
GMLSi = arg max
g∈{0,...K−1}
{Ψi(g)} (26)
Note that Ψi is the belief channel state at time i and is
calculated using (24). Then the transmission parameters are
set as:
(Ui, Pi) = π∗(Bi, G
MLSi ). (27)
This approach, which is usually termed the Most Likely State
(MLS) approach, was proposed in [27].
3) The QMDP Heuristic: This approach relates to the
discounted cost problem defined in (6). Let the Q function
be defined as:
Q(b, g, u, P ) = C(b, g, u, P )
+ α
K−1∑
g′=0
∞∑
a=0
PG(g, g′)pA(a)J∗α
(min{b − u + a, B}, g′
),
(28)
from the Bellman equation (7), when the system state is fully
observed, Q(b, g, u, P ) represents the cost of taking action
(u, P ) in state (b, g) and then acting optimally afterward.
Based on this, the popular QMDP heuristic takes into account
the belief state for one step and then assumes that the state is
entirely known [18]. Applying to our control problem, at time
i, given the buffer occupancy Bi and the belief channel state
ΨI , the transmission rate and power are chosen according to:
(Ui, Pi) = arg minu∈{0,...Bi}, P∈P
{K−1∑
g=0
Ψi(g)Q(Bi, g, u, P )}.
(29)
For a deeper discussion on different approaches to approx-
imate an optimal solution for POMDP, please refer to [28].
4) The Minimum Immediate Cost Heuristic: Finally, to
assess the effectiveness of the MDP, MLS, and QMDP ap-
proaches, which are all MDP-based, we introduce a non-
MDP heuristic called the Minimum Immediate Cost (MIC)
approach. In the MIC approach, at time frame i, given the
belief state Ψi, the transmission parameters are selected so
IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. XX, NO. Y, MONTH 2007 7
that the expected immediate cost is minimized, i.e.,
(Ui, Pi) = arg minu∈{0,...Bi}, p∈P
{K−1∑
g=0
Ψi(g)C(Bi, g, u, P )}.
(30)
VI. NUMERICAL RESULTS AND DISCUSSION
A. System Parameters
The system for our numerical study is as follows. Packets
arrive to the buffer according to a Poisson distribution with
rate λ = 3 × 103 packets/second. All packets have the same
length of L = 100 bits. The buffer length is B = 15 packets.
The channel bandwidth is W = 100 kHz and AWGN noise
power density is No/2 = 10−5 Watt/Hz. We consider two 8-
state FSMCs as described in Table I, where the channel model
in Scenario 1 is obtained by quantizing the fading range of a
Rayleigh fading channel that has average gain γ = 0.8 and
Doppler frequency fD = 10 Hz and the channel model in
Scenario 2 corresponds to fD = 20 Hz.
Adaptive transmission is based on a variable-rate, variable-
power M-ary quadrature amplitude modulation (MQAM)
scheme similar to that described in [5]. Let Ts be the symbol
period of the MQAM modulator and assume a Nyquist signal-
ing pulse, sinc(t/Ts), is used so that the value of Ts is fixed at
1/W seconds. When the symbol period Ts is kept unchanged,
varying the signal constellation size of the modulator gives
us different data transmission rates. As has been specified in
Section II, the power and rate adaptation are carried out in
a frame-by-frame basis. Each frame contains F modulated
symbols and therefore, Tf = FTs. Here we set F = L = 100so that when a signal constellation of size M = 2u is used,
exactly u packets are transmitted from the buffer during each
time frame.
Given a particular system state (b, g), a control action
(u, P ), and a Poisson arrival with rate λ, the expected number
of packets lost due to buffer overflow is
Lo(b, u) = (λTf )
(1 −
B−b+u−1∑
a=0
pA(a)
)
− (B − b + u)
(1 −
B−b+u∑
a=0
pA(a)
),
(31)
where
pA(a) =exp(−λTf)(λTf )a
a!. (32)
We assume that a transmitted packet is in error if at least
V out of the L bits in the packet are in error. The expected
number of packets discarded due to transmission errors can be
calculated by
Le(g, u, P ) =u
L∑
j=V
((L
j
)(Pb(g, u, P ))
j
(1 − Pb(g, u, P ))(L−j)
),
(33)
where Pb(g, u, P ) is the (uncoded) bit error rate when using
transmit power P and rate u on channel state g. Pb(g, u, P )
14 16 18 20 22 24 26
0.1
0.15
0.2
0.25
0.3
0.4
0.5
0.6
Power (dB)
No
rma
lize
d P
acke
t L
oss R
ate
Correlated Channel Model
OCPI, fixed BER = 10−3
OCPI, fixed BER = 10−4
OCPI, fixed BER = 10−5
OCPI, fixed BER = 10−6
OCPI without BER constraint
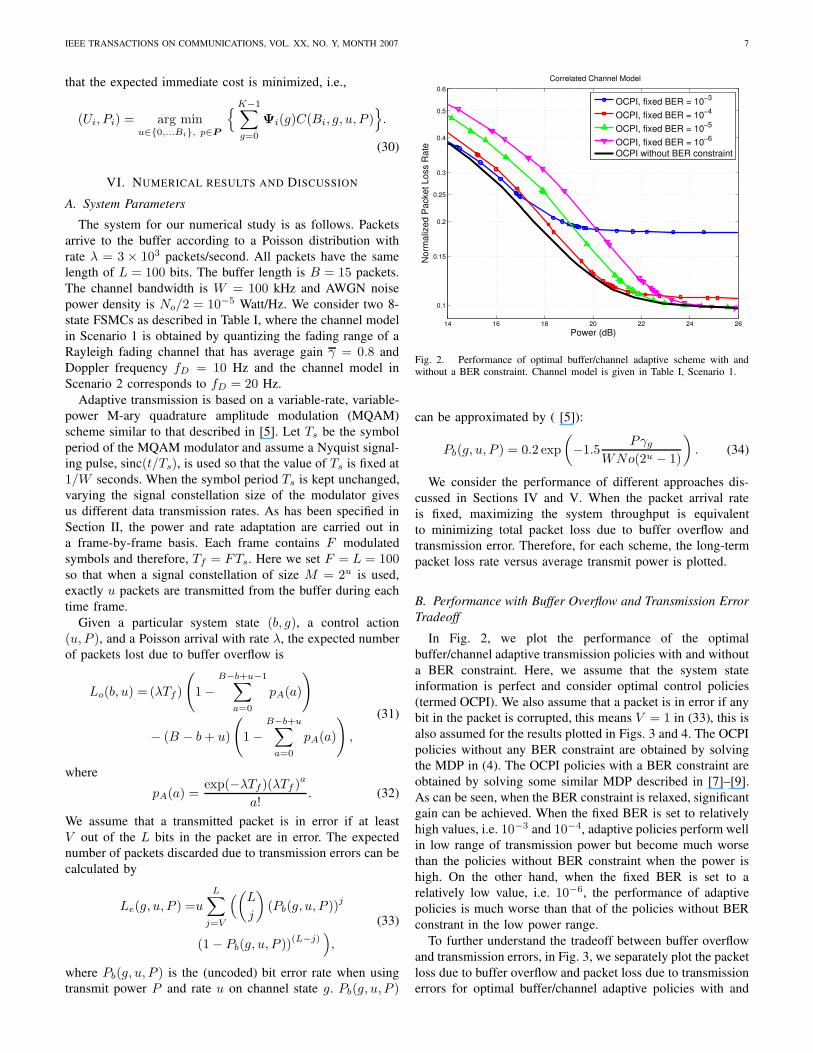
Fig. 2. Performance of optimal buffer/channel adaptive scheme with andwithout a BER constraint. Channel model is given in Table I, Scenario 1.
can be approximated by ( [5]):
Pb(g, u, P ) = 0.2 exp
(−1.5
Pγg
WNo(2u − 1)
). (34)
We consider the performance of different approaches dis-
cussed in Sections IV and V. When the packet arrival rate
is fixed, maximizing the system throughput is equivalent
to minimizing total packet loss due to buffer overflow and
transmission error. Therefore, for each scheme, the long-term
packet loss rate versus average transmit power is plotted.
B. Performance with Buffer Overflow and Transmission Error
Tradeoff
In Fig. 2, we plot the performance of the optimal
buffer/channel adaptive transmission policies with and without
a BER constraint. Here, we assume that the system state
information is perfect and consider optimal control policies
(termed OCPI). We also assume that a packet is in error if any
bit in the packet is corrupted, this means V = 1 in (33), this is
also assumed for the results plotted in Figs. 3 and 4. The OCPI
policies without any BER constraint are obtained by solving
the MDP in (4). The OCPI policies with a BER constraint are
obtained by solving some similar MDP described in [7]–[9].
As can be seen, when the BER constraint is relaxed, significant
gain can be achieved. When the fixed BER is set to relatively
high values, i.e. 10−3 and 10−4, adaptive policies perform well
in low range of transmission power but become much worse
than the policies without BER constraint when the power is
high. On the other hand, when the fixed BER is set to a
relatively low value, i.e. 10−6, the performance of adaptive
policies is much worse than that of the policies without BER
constrant in the low power range.
To further understand the tradeoff between buffer overflow
and transmission errors, in Fig. 3, we separately plot the packet
loss due to buffer overflow and packet loss due to transmission
errors for optimal buffer/channel adaptive policies with and

IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. XX, NO. Y, MONTH 2007 8
TABLE I
CHANNEL STATES AND TRANSITION PROBABILITIES (AN 8-STATE FSMC OBTAINED BY QUANTIZING A RAYLEIGH FADING CHANNEL WITH AVERAGE
GAIN 0.8 AND DOPPLER FREQUENCY 10 HZ IN SCENARIO 1 AND 20 HZ IN SCENARIO 2).
Channel states k 0 1 2 3 4 5 6 7
Scenario 1 γk 0 0.1068 0.2301 0.3760 0.5545 0.7847 1.1090 1.6636Pkk 0.9359 0.8552 0.8334 0.8306 0.8420 0.8665 0.9048 0.9639
Pk,k+1 0.0641 0.0807 0.0859 0.0835 0.0745 0.0590 0.0361 0Pk,k−1 0 0.0641 0.0807 0.0859 0.0835 0.0745 0.0590 0.0361
Scenario 2 γk 0 0.1068 0.2301 0.3760 0.5545 0.7847 1.1090 1.6636Pkk 0.8718 0.7104 0.6668 0.6612 0.6841 0.7330 0.8097 0.9277
Pk,k+1 0.1282 0.1613 0.1718 0.1670 0.1489 0.1181 0.0723 0Pk,k−1 0 0.1282 0.1613 0.1718 0.1670 0.1489 0.1181 0.0723
10 12 14 16 18 20 22 24 2610
−5
10−4
10−3
10−2
10−1
100
Power (dB)
No
rma
lize
d P
acke
t L
oss R
ate
Overflow Rate (BER = 10−3
Error Rate (BER = 10−3
)
Overflow Rate (BER = 10−6
)
Error Rate (BER = 10−6
)
Overflow Rate (no BER constraint)
Error Rate (no BER constraint)
Fig. 3. Packet loss due to buffer overflow and transmission errors of optimalbuffer/channel adaptive scheme with and without a BER constraint. Channelmodel is given in Table I, Scenario 1.
without a BER constraint. It is clear that, without a BER
constraint, an optimal policy varies the transmission error
rate dynamically according to the available transmit power.
In particular, at low power, a greater number of transmission
errors can be tolerated in order to reduce buffer overflow. On
the other hand, when plenty of transmit power is available,
a good adaptive policy should transmit at a high rate and
high power to minimize both transmission errors and buffer
overflow. This argument can be further illustrated in Fig. 4,
where we plot the ratio between packet loss due to buffer
overflow and packet loss due to transmission errors.
C. Performance Under Quantized Buffer Occupancy
First, let us look at the performance of the buffer/channel
adaptive transmission approach when the buffer occupancy
is quantized. When the buffer occupancy is quantized, the
performance of policy π∗ (obtained by solving (4)) depends
on two factors, i.e., the number of quantized buffer states, and
the selected quantization thresholds. Clearly, the greater the
number of quantized states, the closer the performance to the
optimal. At the same time, given a fixed number of quantized
states, the performance depends on the set of selected thresh-
olds. An intuitive way to select good quantization thresholds
is to divide the range of buffer occupancy more finely at the
14 16 18 20 22 24 2610
0
101
102
103
104
105
Power (dB)
Ove
rflo
w_
Ra
te/E
rro
r_R
ate
Overflow/Errors (BER = 10−3
)
Overflow/Errors (BER = 10−6
)
Overflow/Errors (no BER constraint)
Fig. 4. Ratio between packet loss due to buffer overflow and packet loss dueto transmission errors of optimal adaptive scheme with and without a BERconstraint. Channel model is given in Table I, Scenario 1.
range of high probability distribution. For example, if we know
that most of the time, the buffer occupancy is low, then a
greater number of thresholds should be set at low values.
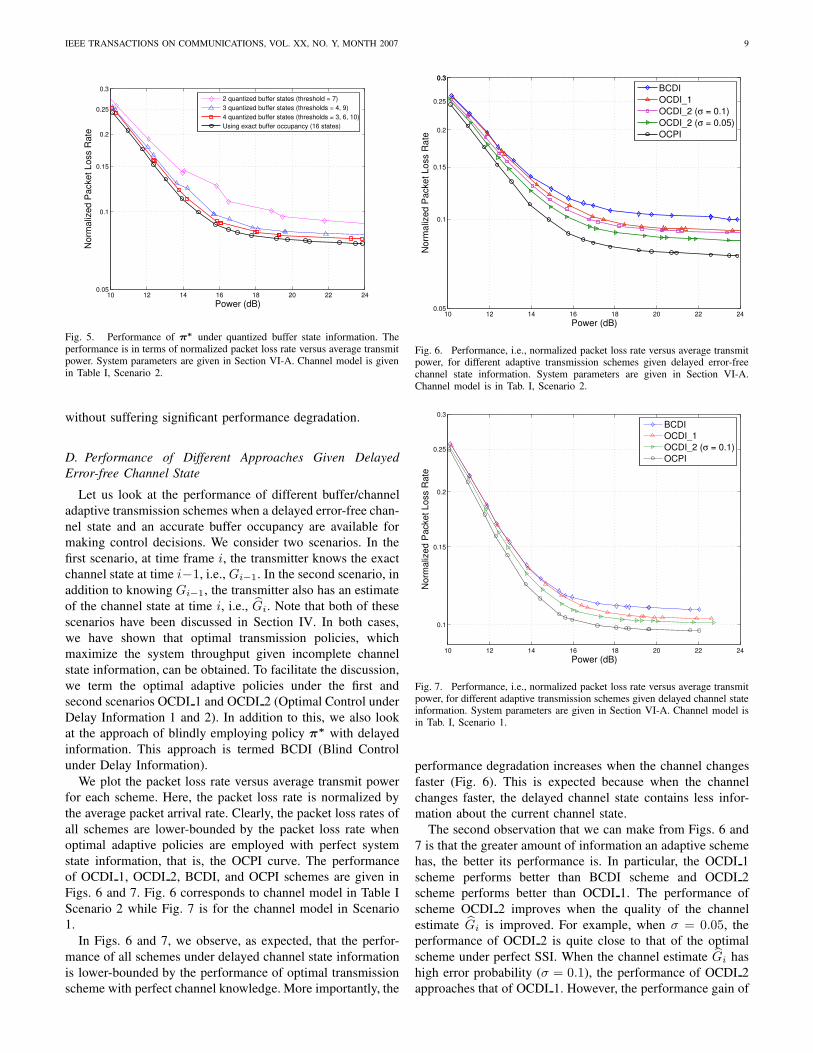
In Fig. 5, we plot the performance of π∗, in terms of total
long term packet loss rate versus average transmit power,
for different buffer quantization schemes. The number of
quantized buffer states is increased from two to four. In
particular, in the first quantization scheme, we set a single
threshold at 7. When the buffer occupancy is less than 7, it
is quantized to 0, otherwise, it is quantized to 7. Similarly,
for the case of three quantized buffer states, we set the two
thresholds at 4 and 9, and for the case of four quantized buffer
states, we set the three thresholds at 3, 6, and 10. For the
results in Fig. 5, as well as in Figs. 6-9, we assume that a
packet is in error if more than ten out of 100 bits in the
packet are corrupted, this means V = 11 in (33). As can
be seen, when only two quantized states are used, there is a
significant loss compared to the case of adapting to the exact
buffer occupancy. However, the performance loss is reduced
significantly when the number of quantized buffer states is
increased to three and four. When four quantized buffer states
are used, the performance is very near optimal. This suggests
that we can often quantize the buffer occupancy in order
to reduce the complexity of the adaptive transmission policy
IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. XX, NO. Y, MONTH 2007 9
10 12 14 16 18 20 22 240.05
0.1
0.15
0.2
0.25
0.3
Power (dB)
No
rma
lize
d P
acke
t L
oss R
ate
2 quantized buffer states (threshold = 7)
3 quantized buffer states (thresholds = 4, 9)
4 quantized buffer states (thresholds = 3, 6, 10)
Using exact buffer occupancy (16 states)
Fig. 5. Performance of π∗ under quantized buffer state information. Theperformance is in terms of normalized packet loss rate versus average transmitpower. System parameters are given in Section VI-A. Channel model is givenin Table I, Scenario 2.
without suffering significant performance degradation.
D. Performance of Different Approaches Given Delayed
Error-free Channel State
Let us look at the performance of different buffer/channel
adaptive transmission schemes when a delayed error-free chan-
nel state and an accurate buffer occupancy are available for
making control decisions. We consider two scenarios. In the
first scenario, at time frame i, the transmitter knows the exact
channel state at time i−1, i.e., Gi−1. In the second scenario, in
addition to knowing Gi−1, the transmitter also has an estimate
of the channel state at time i, i.e., Gi. Note that both of these
scenarios have been discussed in Section IV. In both cases,
we have shown that optimal transmission policies, which
maximize the system throughput given incomplete channel
state information, can be obtained. To facilitate the discussion,
we term the optimal adaptive policies under the first and
second scenarios OCDI 1 and OCDI 2 (Optimal Control under
Delay Information 1 and 2). In addition to this, we also look
at the approach of blindly employing policy π∗ with delayed
information. This approach is termed BCDI (Blind Control
under Delay Information).
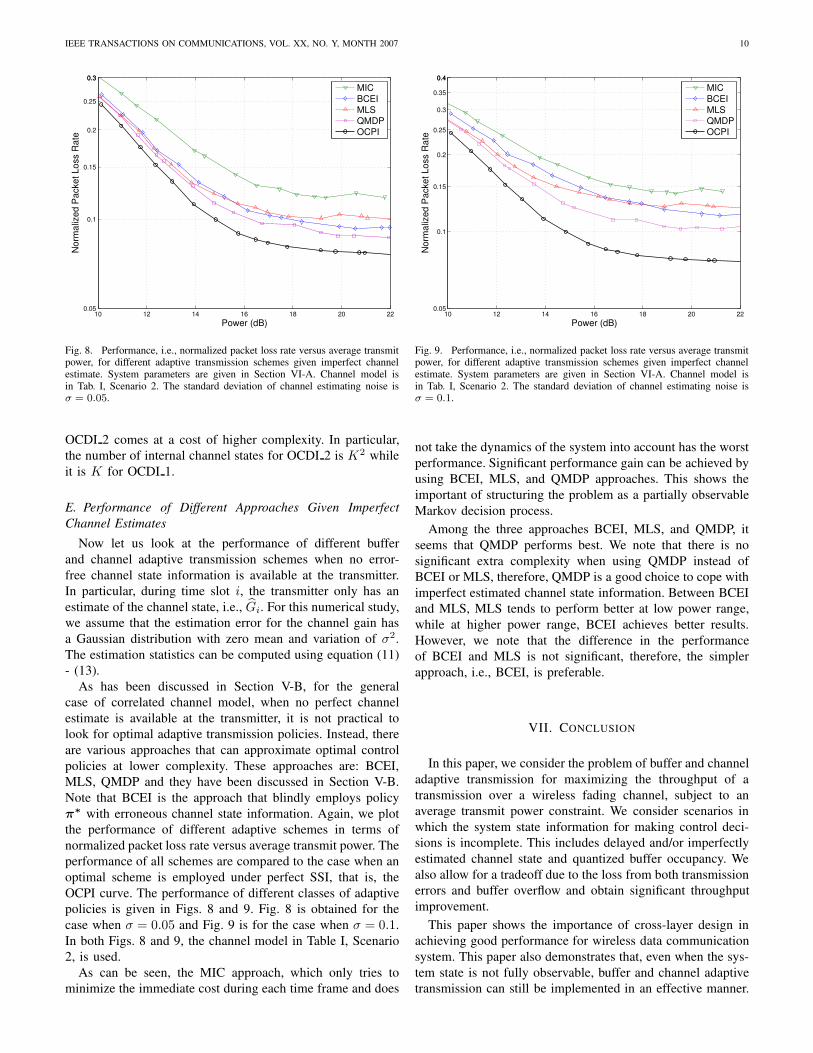
We plot the packet loss rate versus average transmit power
for each scheme. Here, the packet loss rate is normalized by
the average packet arrival rate. Clearly, the packet loss rates of
all schemes are lower-bounded by the packet loss rate when
optimal adaptive policies are employed with perfect system
state information, that is, the OCPI curve. The performance
of OCDI 1, OCDI 2, BCDI, and OCPI schemes are given in
Figs. 6 and 7. Fig. 6 corresponds to channel model in Table I
Scenario 2 while Fig. 7 is for the channel model in Scenario
1.
In Figs. 6 and 7, we observe, as expected, that the perfor-
mance of all schemes under delayed channel state information
is lower-bounded by the performance of optimal transmission
scheme with perfect channel knowledge. More importantly, the
10 12 14 16 18 20 22 240.05
0.1
0.15
0.2
0.25
0.30.3
Power (dB)
Norm
aliz
ed P
acket Loss R
ate
BCDI
OCDI_1
OCDI_2 (σ = 0.1)
OCDI_2 (σ = 0.05)
OCPI
Fig. 6. Performance, i.e., normalized packet loss rate versus average transmitpower, for different adaptive transmission schemes given delayed error-freechannel state information. System parameters are given in Section VI-A.Channel model is in Tab. I, Scenario 2.
10 12 14 16 18 20 22 24
0.1
0.15
0.2
0.25
0.3
Power (dB)
Norm
aliz
ed P
acket Loss R
ate
BCDI
OCDI_1
OCDI_2 (σ = 0.1)
OCPI
Fig. 7. Performance, i.e., normalized packet loss rate versus average transmitpower, for different adaptive transmission schemes given delayed channel stateinformation. System parameters are given in Section VI-A. Channel model isin Tab. I, Scenario 1.
performance degradation increases when the channel changes
faster (Fig. 6). This is expected because when the channel
changes faster, the delayed channel state contains less infor-
mation about the current channel state.
The second observation that we can make from Figs. 6 and
7 is that the greater amount of information an adaptive scheme
has, the better its performance is. In particular, the OCDI 1
scheme performs better than BCDI scheme and OCDI 2
scheme performs better than OCDI 1. The performance of
scheme OCDI 2 improves when the quality of the channel
estimate Gi is improved. For example, when σ = 0.05, the
performance of OCDI 2 is quite close to that of the optimal
scheme under perfect SSI. When the channel estimate Gi has
high error probability (σ = 0.1), the performance of OCDI 2
approaches that of OCDI 1. However, the performance gain of
IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. XX, NO. Y, MONTH 2007 10
10 12 14 16 18 20 220.05
0.1
0.15
0.2
0.25
0.30.3
Power (dB)
Norm
aliz
ed P
acket Loss R
ate
MIC
BCEI
MLS
QMDP
OCPI
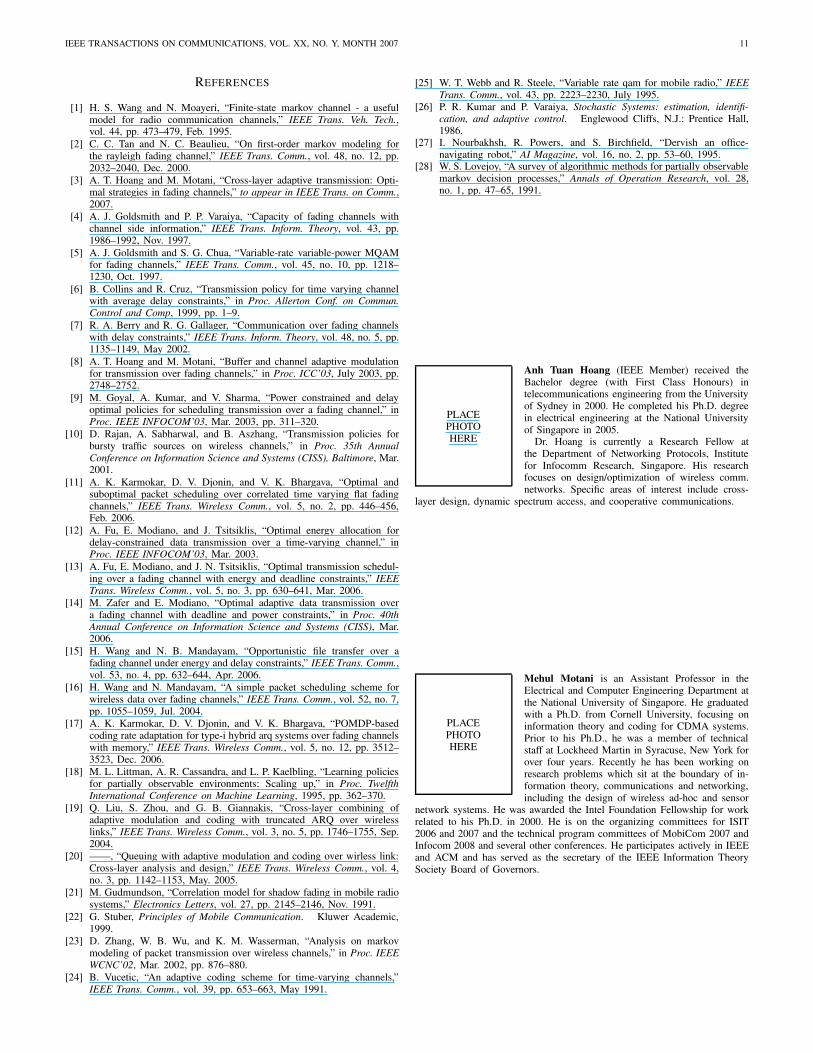
Fig. 8. Performance, i.e., normalized packet loss rate versus average transmitpower, for different adaptive transmission schemes given imperfect channelestimate. System parameters are given in Section VI-A. Channel model isin Tab. I, Scenario 2. The standard deviation of channel estimating noise isσ = 0.05.
OCDI 2 comes at a cost of higher complexity. In particular,
the number of internal channel states for OCDI 2 is K2 while
it is K for OCDI 1.
E. Performance of Different Approaches Given Imperfect
Channel Estimates
Now let us look at the performance of different buffer
and channel adaptive transmission schemes when no error-
free channel state information is available at the transmitter.
In particular, during time slot i, the transmitter only has an
estimate of the channel state, i.e., Gi. For this numerical study,
we assume that the estimation error for the channel gain has
a Gaussian distribution with zero mean and variation of σ2.
The estimation statistics can be computed using equation (11)
- (13).
As has been discussed in Section V-B, for the general
case of correlated channel model, when no perfect channel
estimate is available at the transmitter, it is not practical to
look for optimal adaptive transmission policies. Instead, there
are various approaches that can approximate optimal control
policies at lower complexity. These approaches are: BCEI,
MLS, QMDP and they have been discussed in Section V-B.
Note that BCEI is the approach that blindly employs policy
π∗ with erroneous channel state information. Again, we plot
the performance of different adaptive schemes in terms of
normalized packet loss rate versus average transmit power. The
performance of all schemes are compared to the case when an
optimal scheme is employed under perfect SSI, that is, the
OCPI curve. The performance of different classes of adaptive
policies is given in Figs. 8 and 9. Fig. 8 is obtained for the
case when σ = 0.05 and Fig. 9 is for the case when σ = 0.1.
In both Figs. 8 and 9, the channel model in Table I, Scenario
2, is used.
As can be seen, the MIC approach, which only tries to
minimize the immediate cost during each time frame and does
10 12 14 16 18 20 220.05
0.1
0.15
0.2
0.25
0.3
0.35
0.40.4
Power (dB)
Norm
aliz
ed P
acket Loss R
ate
MIC
BCEI
MLS
QMDP
OCPI
Fig. 9. Performance, i.e., normalized packet loss rate versus average transmitpower, for different adaptive transmission schemes given imperfect channelestimate. System parameters are given in Section VI-A. Channel model isin Tab. I, Scenario 2. The standard deviation of channel estimating noise isσ = 0.1.
not take the dynamics of the system into account has the worst
performance. Significant performance gain can be achieved by
using BCEI, MLS, and QMDP approaches. This shows the
important of structuring the problem as a partially observable
Markov decision process.
Among the three approaches BCEI, MLS, and QMDP, it
seems that QMDP performs best. We note that there is no
significant extra complexity when using QMDP instead of
BCEI or MLS, therefore, QMDP is a good choice to cope with
imperfect estimated channel state information. Between BCEI
and MLS, MLS tends to perform better at low power range,
while at higher power range, BCEI achieves better results.
However, we note that the difference in the performance
of BCEI and MLS is not significant, therefore, the simpler
approach, i.e., BCEI, is preferable.
VII. CONCLUSION
In this paper, we consider the problem of buffer and channel
adaptive transmission for maximizing the throughput of a
transmission over a wireless fading channel, subject to an
average transmit power constraint. We consider scenarios in
which the system state information for making control deci-
sions is incomplete. This includes delayed and/or imperfectly
estimated channel state and quantized buffer occupancy. We
also allow for a tradeoff due to the loss from both transmission
errors and buffer overflow and obtain significant throughput
improvement.
This paper shows the importance of cross-layer design in
achieving good performance for wireless data communication
system. This paper also demonstrates that, even when the sys-
tem state is not fully observable, buffer and channel adaptive
transmission can still be implemented in an effective manner.
IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. XX, NO. Y, MONTH 2007 11
REFERENCES
[1] H. S. Wang and N. Moayeri, “Finite-state markov channel - a usefulmodel for radio communication channels,” IEEE Trans. Veh. Tech.,vol. 44, pp. 473–479, Feb. 1995.
[2] C. C. Tan and N. C. Beaulieu, “On first-order markov modeling forthe rayleigh fading channel,” IEEE Trans. Comm., vol. 48, no. 12, pp.2032–2040, Dec. 2000.
[3] A. T. Hoang and M. Motani, “Cross-layer adaptive transmission: Opti-mal strategies in fading channels,” to appear in IEEE Trans. on Comm.,2007.
[4] A. J. Goldsmith and P. P. Varaiya, “Capacity of fading channels withchannel side information,” IEEE Trans. Inform. Theory, vol. 43, pp.1986–1992, Nov. 1997.
[5] A. J. Goldsmith and S. G. Chua, “Variable-rate variable-power MQAMfor fading channels,” IEEE Trans. Comm., vol. 45, no. 10, pp. 1218–1230, Oct. 1997.
[6] B. Collins and R. Cruz, “Transmission policy for time varying channelwith average delay constraints,” in Proc. Allerton Conf. on Commun.
Control and Comp, 1999, pp. 1–9.
[7] R. A. Berry and R. G. Gallager, “Communication over fading channelswith delay constraints,” IEEE Trans. Inform. Theory, vol. 48, no. 5, pp.1135–1149, May 2002.
[8] A. T. Hoang and M. Motani, “Buffer and channel adaptive modulationfor transmission over fading channels,” in Proc. ICC’03, July 2003, pp.2748–2752.
[9] M. Goyal, A. Kumar, and V. Sharma, “Power constrained and delayoptimal policies for scheduling transmission over a fading channel,” inProc. IEEE INFOCOM’03, Mar. 2003, pp. 311–320.
[10] D. Rajan, A. Sabharwal, and B. Aszhang, “Transmission policies forbursty traffic sources on wireless channels,” in Proc. 35th Annual
Conference on Information Science and Systems (CISS), Baltimore, Mar.2001.
[11] A. K. Karmokar, D. V. Djonin, and V. K. Bhargava, “Optimal andsuboptimal packet scheduling over correlated time varying flat fadingchannels,” IEEE Trans. Wireless Comm., vol. 5, no. 2, pp. 446–456,Feb. 2006.
[12] A. Fu, E. Modiano, and J. Tsitsiklis, “Optimal energy allocation fordelay-constrained data transmission over a time-varying channel,” inProc. IEEE INFOCOM’03, Mar. 2003.
[13] A. Fu, E. Modiano, and J. N. Tsitsiklis, “Optimal transmission schedul-ing over a fading channel with energy and deadline constraints,” IEEE
Trans. Wireless Comm., vol. 5, no. 3, pp. 630–641, Mar. 2006.
[14] M. Zafer and E. Modiano, “Optimal adaptive data transmission overa fading channel with deadline and power constraints,” in Proc. 40th
Annual Conference on Information Science and Systems (CISS), Mar.2006.
[15] H. Wang and N. B. Mandayam, “Opportunistic file transfer over afading channel under energy and delay constraints,” IEEE Trans. Comm.,vol. 53, no. 4, pp. 632–644, Apr. 2006.
[16] H. Wang and N. Mandayam, “A simple packet scheduling scheme forwireless data over fading channels,” IEEE Trans. Comm., vol. 52, no. 7,pp. 1055–1059, Jul. 2004.
[17] A. K. Karmokar, D. V. Djonin, and V. K. Bhargava, “POMDP-basedcoding rate adaptation for type-i hybrid arq systems over fading channelswith memory,” IEEE Trans. Wireless Comm., vol. 5, no. 12, pp. 3512–3523, Dec. 2006.
[18] M. L. Littman, A. R. Cassandra, and L. P. Kaelbling, “Learning policiesfor partially observable environments: Scaling up,” in Proc. Twelfth
International Conference on Machine Learning, 1995, pp. 362–370.
[19] Q. Liu, S. Zhou, and G. B. Giannakis, “Cross-layer combining ofadaptive modulation and coding with truncated ARQ over wirelesslinks,” IEEE Trans. Wireless Comm., vol. 3, no. 5, pp. 1746–1755, Sep.2004.
[20] ——, “Queuing with adaptive modulation and coding over wirless link:Cross-layer analysis and design,” IEEE Trans. Wireless Comm., vol. 4,no. 3, pp. 1142–1153, May. 2005.
[21] M. Gudmundson, “Correlation model for shadow fading in mobile radiosystems,” Electronics Letters, vol. 27, pp. 2145–2146, Nov. 1991.
[22] G. Stuber, Principles of Mobile Communication. Kluwer Academic,1999.
[23] D. Zhang, W. B. Wu, and K. M. Wasserman, “Analysis on markovmodeling of packet transmission over wireless channels,” in Proc. IEEE
WCNC’02, Mar. 2002, pp. 876–880.
[24] B. Vucetic, “An adaptive coding scheme for time-varying channels,”IEEE Trans. Comm., vol. 39, pp. 653–663, May 1991.
[25] W. T. Webb and R. Steele, “Variable rate qam for mobile radio,” IEEE
Trans. Comm., vol. 43, pp. 2223–2230, July 1995.[26] P. R. Kumar and P. Varaiya, Stochastic Systems: estimation, identifi-
cation, and adaptive control. Englewood Cliffs, N.J.: Prentice Hall,1986.
[27] I. Nourbakhsh, R. Powers, and S. Birchfield, “Dervish an office-navigating robot,” AI Magazine, vol. 16, no. 2, pp. 53–60, 1995.
[28] W. S. Lovejoy, “A survey of algorithmic methods for partially observablemarkov decision processes,” Annals of Operation Research, vol. 28,no. 1, pp. 47–65, 1991.
PLACEPHOTOHERE
Anh Tuan Hoang (IEEE Member) received theBachelor degree (with First Class Honours) intelecommunications engineering from the Universityof Sydney in 2000. He completed his Ph.D. degreein electrical engineering at the National Universityof Singapore in 2005.
Dr. Hoang is currently a Research Fellow atthe Department of Networking Protocols, Institutefor Infocomm Research, Singapore. His researchfocuses on design/optimization of wireless comm.networks. Specific areas of interest include cross-
layer design, dynamic spectrum access, and cooperative communications.
PLACEPHOTOHERE
Mehul Motani is an Assistant Professor in theElectrical and Computer Engineering Department atthe National University of Singapore. He graduatedwith a Ph.D. from Cornell University, focusing oninformation theory and coding for CDMA systems.Prior to his Ph.D., he was a member of technicalstaff at Lockheed Martin in Syracuse, New York forover four years. Recently he has been working onresearch problems which sit at the boundary of in-formation theory, communications and networking,including the design of wireless ad-hoc and sensor
network systems. He was awarded the Intel Foundation Fellowship for workrelated to his Ph.D. in 2000. He is on the organizing committees for ISIT2006 and 2007 and the technical program committees of MobiCom 2007 andInfocom 2008 and several other conferences. He participates actively in IEEEand ACM and has served as the secretary of the IEEE Information TheorySociety Board of Governors.
Copyright © 2022 FDOKUMEN




















