Control systems engineering sixth edition - IamGoingto1996 ...
15
Continue
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of Control systems engineering sixth edition - IamGoingto1996 ...
Controlsystemsengineeringsixthedition
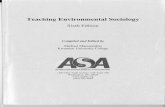
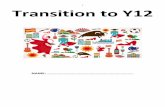
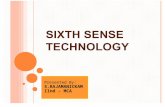
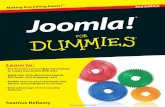
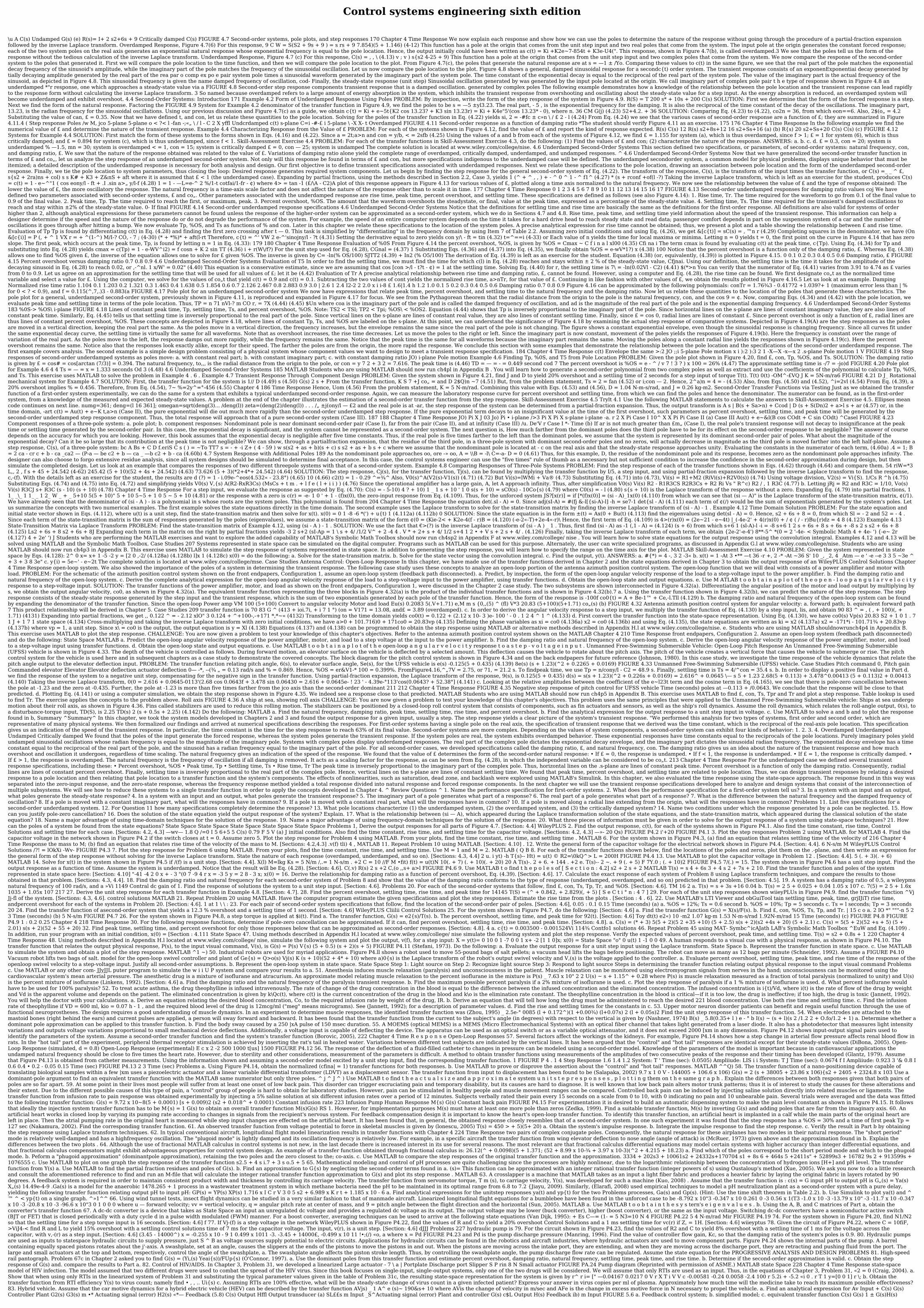
\uAC(s)UndampedG(s)(e)R(s)=I+2s2+6s+9CriticallydampedC(s)FIGURE4.7Second-ordersystems,poleplots,andstepresponses170Chapter4TimeResponseWenowexplaineachresponseandshowhowwecanusethepolestodeterminethenatureoftheresponsewithoutgoingthroughtheprocedureofapartial-fractionexpansionfollowedbytheinverseLaplacetransform.OverdampedResponse,Figure4.7(6)Forthisresponse,9CW=S(S2+9s+9)=srs+97.854)(5+1.146)(4-12)Thisfunctionhasapoleattheoriginthatcomesfromtheunitstepinputandtworealpolesthatcomefromthesystem.Theinputpoleattheorigingeneratestheconstantforcedresponse;eachofthetwosystempolesontherealaxisgeneratesanexponentialnaturalresponsewhoseexponentialfrequencyisequaltothepolelocation.Hence,theoutputinitiallycouldhavebeenwrittenasc(t)=Ki+K2e~7-854t+K3e-U4(".Thisresponse,showninFigure4.7(b),iscalledoverdamped.3WeseethatthepolestellustheformoftheresponsewithoutthetediouscalculationoftheinverseLaplacetransform.UnderdampedResponse,Figure4.7(c)Forthisresponse,C(s)=,,\(4.13)v;v)s{s24-25+9)Thisfunctionhasapoleattheoriginthatcomesfromtheunitstepinputandtwocomplexpolesthatcomefromthesystem.Wenowcomparetheresponseofthesecond-ordersystemtothepolesthatgeneratedit.Firstwewillcomparethepolelocationtothetimefunction,andthenwewillcomparethepolelocationtotheplot.FromFigure4.7(c),thepolesthatgeneratethenaturalresponseareats=—1±/Yo.Comparingthesevaluestoc(t)inthesamefigure,weseethattherealpartofthepolematchestheexponentialdecayfrequencyofthesinusoid'samplitude,whiletheimaginarypartofthepolematchesthefrequencyofthesinusoidaloscillation.Letusnowcomparethepolelocationtotheplot.Figure4.8showsageneral,dampedsinusoidalresponseforasecondc{t)ordersystem.ThetransientresponseconsistsofanexponenExponentiaidecaygeneratedbytiallydecayingamplitudegeneratedbytherealpartofthereaparocompexpoepairsystempoletimesasinusoidalwaveformgeneratedbytheimaginarypartofthesystempole.Thetimeconstantoftheexponentialdecayisequaltothereciprocaloftherealpartofthesystempole.Thevalueoftheimaginarypartistheactualfrequencyofthesinusoid,asdepictedinFigure4.8.Thissinusoidalfrequencyisgiventhenamedampedfrequencyofoscillation,cod-Finally,thesteady-stateresponse(unitstep)Sinusoidaloscillationgeneratedbywasgeneratedbytheinputpolelocatedattheorigin.WecallimaginarypartofcomplexpolepairthetypeofresponseshowninFigure4.8anunderdamped*"rresponse,onewhichapproachesasteady-statevalueviaaFIGURE4.8Second-orderstepresponsecomponentstransientresponsethatisadampedoscillation.generatedbycomplexpolesThefollowingexampledemonstrateshowaknowledgeoftherelationshipbetweenthepolelocationandthetransientresponsecanleadrapidlytotheresponseformwithoutcalculatingtheinverseLaplacetransform.3Sonamedbecauseoverdampedreferstoalargeamountofenergyabsorptioninthesystem,whichinhibitsthetransientresponsefromovershootingandoscillatingaboutthesteady-statevalueforastepinput.Astheenergyabsorptionisreduced,anoverdampedsystemwillbecomeunderdampedandexhibitovershoot.4.4Second-OrderSystems:Introduction171Example4.2FormofUnderdampedResponseUsingPolesPROBLEM:Byinspection,writetheformofthestepresponseofthesysteminFigure4.9.R(S)=T200s*+10s+200C(s)SOLUTION:Firstwedeterminethattheformoftheforcedresponseisastep.Nextwefindtheformofthenaturalresponse.FactoringtheFIGURE4.9SystemforExample4.2denominatorofthetransferfunctioninFigure4.9,wefindthepolestobes=—5±yl3.23.Therealpart,-5,istheexponentialfrequencyforthedamping.Itisalsothereciprocalofthetimeconstantofthedecayoftheoscillations.Theimaginarypart,13.23,istheradianfrequencyforthesinusoidaloscillations.UsingourpreviousdiscussionandFigure4.7(c)asaguide,weobtainc{t)=Ki+e~5t{K2cos13.23?+K3sin13.23r)=Ki+K4e"5'(cos13.23*-0),wheren.36CMG(j)(4.23)52+4.2.+36SOLUTION:ComparingEq.(4.23)to(4.22),co2n=36,fromwhicheon==6.Also,2$(o„=4.2Substitutingthevalueofcan,£=0.35.Nowthatwehavedefinedt,andcon,letusrelatethesequantitiestothepolelocation.SolvingforthepolesofthetransferfunctioninEq.(4.22)yieldssi,2=-#fc±c»n\/£2-l(4.24)FromEq.(4.24)weseethatthevariouscasesofsecond-orderresponseareafunctionof£;theyaresummarizedinFigure4.11.4(StepresponsePoles/wM,jco5-plane5-planeo<?<l-fan-;«„\/l-C2XyfflUndcrdampedc(t)s-planeC=i-#-£i5-plane\-XX-tOverdampedFIGURE4.11Second-orderresponseasafunctionofdampingratio*ThestudentshouldverifyFigure4.11asanexercise.175176Chapter4TimeResponseInthefollowingexamplewefindthenumericalvalueof£anddeterminethenatureofthetransientresponse.Example4.4CharacterizingResponsefromtheValueof£PROBLEM:ForeachofthesystemsshowninFigure4.12,findthevalueof£andreportthekindofresponseexpected.R(s)C(s)12R(s)s2+8s+1216s2+Ss+16(a)(b)R{s)20s2+Ss+20C(s)C(s)(c)FIGURE4.12SystemsforExample4.4SOLUTION:FirstmatchtheformofthesesystemstotheformsshowninEqs.(4.16)and(4.22).Sincea=2t;a>nandcon=y/b,<=2sfb(4.25)UsingthevaluesofaandbfromeachofthesystemsofFigure4.12,wefind£=1.155forsystem(a),whichisthusoverdamped,sincef>1;£=1forsystem(6),whichisthuscriticallydamped;and£=0.894forsystem(c),whichisthusunderdamped,sincef<1.Skill-AssessmentExercise4.4PROBLEM:ForeachofthetransferfunctionsinSkill-AssessmentExercise4.3,dothefollowing:(1)Findthevaluesof£andcon;(2)characterizethenatureoftheresponse.ANSWERS:a.b.c.d.£=0.3,con=20;systemisunderdamped%—1.5,mn=30;systemisoverdamped<=1,con=15;systemiscriticallydamped£=0,con—25;systemisundampedThecompletesolutionislocatedatwww.wiley.com/college/nise.4.6UnderdampedSecond-OrderSystemsThissectiondefinedtwospecifications,orparameters,ofsecond-ordersystems:naturalfrequency,con,anddampingratio,£.Wesawthatthenatureoftheresponseobtainedwasrelatedtothevalueof£.Variationsofdampingratioaloneyieldthecompleterangeofoverdamped,criticallydamped,underdamped,andundampedresponses.^4.6UnderdampedSecond-OrderSystemsNowthatwehavegeneralizedthesecond-ordertransferfunctionintermsof£andco„,letusanalyzethestepresponseofanunderdampedsecond-ordersystem.Notonlywillthisresponsebefoundintermsof£andcon,butmorespecificationsindigenoustotheunderdampedcasewillbedefined.Theunderdampedsecondordersystem,acommonmodelforphysicalproblems,displaysuniquebehaviorthatmustbeitemized;adetaileddescriptionoftheunderdampedresponseisnecessaryforbothanalysisanddesign.Ourfirstobjectiveistodefinetransientspecificationsassociatedwithunderdampedresponses.Nextwerelatethesespecificationstothepolelocation,drawinganassociationbetweenpolelocationandtheformoftheunderdampedsecond-orderresponse.Finally,wetiethepolelocationtosystemparameters,thusclosingtheloop:Desiredresponsegeneratesrequiredsystemcomponents.Letusbeginbyfindingthestepresponseforthegeneralsecond-ordersystemofEq.(4.22).Thetransformoftheresponse,C(s),isthetransformoftheinputtimesthetransferfunction,orC(s)=__^£,s{s2+2ra)ns+col)ssK#+K3+Z&nS+aftwhereitisassumedthat£<1(theunderdampedcase).Expandingbypartialfractions,usingthemethodsdescribedinSection2.2,Case3,yields1(^+^,,)+-^0^1-^f1^(4.27)*(s+rconf+of(l-?)TakingtheinverseLaplacetransform,whichisleftasanexerciseforthestudent,producesC(s)=c(t)=1-e~^"1(coseony/l-ft+.I.sina>„y/l-f(4.28)1=1-—L=e-^2%/1-tcotfai/1-fr-¢)where4>=tan-1(£/\A-C2)AplotofthisresponseappearsinFigure4.13forvariousvaluesof£,plottedalongatimeaxisnormalizedtothenaturalfrequency.Wenowseetherelationshipbetweenthevalueof£andthetypeofresponseobtained:Thelowerthevalueof£,themoreoscillatorytheresponse.Thenaturalfrequencyisatime-axisscalefactoranddoesnotaffectthenatureoftheresponseotherthantoscaleitintime.177Chapter4TimeResponse01234567891011121314151617FIGURE4.13Second-orderunderdampedresponsesfordampingratiovaluescojWehavedefinedtwoparametersassociatedwithsecond-ordersystems,£andco„.Otherparametersassociatedwiththeunderdampedresponsearerisetime,peaktime,percentovershoot,andsettlingtime.Thesespecificationsaredefinedasfollows(seealsoFigure4.14):1.Risetime,Tr.Thetimerequiredforthewaveformtogofrom0.1ofthefinalvalueto0.9ofthefinalvalue.2.Peaktime,Tp.Thetimerequiredtoreachthefirst,ormaximum,peak.3.Percentovershoot,%OS.Theamountthatthewaveformovershootsthesteadystate,orfinal,valueatthepeaktime,expressedasapercentageofthesteady-statevalue.4.Settlingtime,Ts.Thetimerequiredforthetransient'sdampedoscillationstoreachandstaywithin±2%ofthesteady-statevalue.0-IffinalFIGURE4.14Second-orderunderdampedresponsespecifications4.6UnderdampedSecond-OrderSystemsNoticethatthedefinitionsforsettlingtimeandrisetimearebasicallythesameasthedefinitionsforthefirst-orderresponse.Alldefinitionsarealsovalidforsystemsoforderhigherthan2,althoughanalyticalexpressionsfortheseparameterscannotbefoundunlesstheresponseofthehigher-ordersystemcanbeapproximatedasasecond-ordersystem,whichwedoinSections4.7and4.8.Risetime,peaktime,andsettlingtimeyieldinformationaboutthespeedofthetransientresponse.Thisinformationcanhelpadesignerdetermineifthespeedandthenatureoftheresponsedoordonotdegradetheperformanceofthesystem.Forexample,thespeedofanentirecomputersystemdependsonthetimeittakesforaharddriveheadtoreachsteadystateandreaddata;passengercomfortdependsinpartonthesuspensionsystemofacarandthenumberofoscillationsitgoesthroughafterhittingabump.WenowevaluateTp,%OS,andTsasfunctionsof%andcon.Laterinthischapterwerelatethesespecificationstothelocationofthesystempoles.Apreciseanalyticalexpressionforrisetimecannotbeobtained;thus,wepresentaplotandatableshowingtherelationshipbetween£andrisetime.EvaluationofTpTpisfoundbydifferentiatingc(t)inEq.(4.28)andfindingthefirstzerocrossingaftert—0.Thistaskissimplifiedby"differentiating"inthefrequencydomainbyusingItem7ofTable2.2.AssumingzeroinitialconditionsandusingEq.(4.26),weget&[c{t)]=sC(s)=,™nr(4.29)Completingsquaresinthedenominator,wehave(On&[c{i)]=P(,+^1VXr=+^(1-^)M/I-?CO,-7;(4-30)(*+*%)*+aft(l-rtTherefore,c{t)=^'VW2e-^'sinojny/l-?t(4.31)Settingthederivativeequaltozeroyieldscony/\-ft=tin(4.32)t=^==i(4-33)orEachvalueofnyieldsthetimeforlocalmaximaorminima.Lettingn=0yieldst=0,thefirstpointonthecurveinFigure4.14thathaszeroslope.Thefirstpeak,whichoccursatthepeaktime,Tp,isfoundbylettingn=1inEq.(4.33):179180Chapter4TimeResponseEvaluationof%0SFromFigure4.14thepercentovershoot,%OS,isgivenby%OS=Cmax~Cfinalxl00(4.35)CfinaiThetermcmaxisfoundbyevaluatingc(t)atthepeaktime,c{Tp).UsingEq.(4.34)forTpandsubstitutingintoEq.(4.28)yieldscmax=c(Tp)=1-e-WV^i2)=fcosn+K2sinTT(4.36)i+r(W\/f?)FortheunitstepusedforEq.(4.28),CGnal=(4.37)1SubstitutingEqs.(4.36)and(4.37)intoEq.(4.35),wefinallyobtain%OS=e-wV*1?)x(4.38)100Noticethatthepercentovershootisafunctiononlyofthedampingratio,£.WhereasEq.(4.38)allowsonetofind%OSgiven£,theinverseoftheequationallowsonetosolvefor£given%OS.TheinverseisgivenbyC=-ln(%OS/100)SJTT2(4.39)+In2(%O5/100)ThederivationofEq.(4.39)isleftasanexerciseforthestudent.Equation(4.38)(or,equivalently,(4.39))isplottedinFigure4.15.00.10.20.30.40.50.6Dampingratio,£FIGURE4.15Percentovershootversusdampingratio0.70.80.94.6UnderdampedSecond-OrderSystemsEvaluationofT5Inordertofindthesettlingtime,wemustfindthetimeforwhichc(l)inEq.(4.28)reachesandstayswithin±2%ofthesteady-statevalue,Cfjnai.Usingourdefinition,thesettlingtimeisthetimeittakesfortheamplitudeofthedecayingsinusoidinEq.(4.28)toreach0.02,or,-^nl.1x/W'=0.02"(4.40)Thisequationisaconservativeestimate,sinceweareassumingthatcos[con>/l-t?t-¢)=1atthesettlingtime.SolvingEq.(4.40)forr,thesettlingtimeis7\=-ln(0.02Vl-C2)(4.41)$(*>nYoucanverifythatthenumeratorofEq.(4.41)variesfrom3.91to4.74as£variesfrom0to0.9.Letusagreeonanapproximationforthesettlingtimethatwillbeusedforallvaluesof£;letitbe(4.42)EvaluationofTrApreciseanalyticalrelationshipbetweenrisetimeanddampingratio,£,cannotbefound.However,usingacomputerandEq.(4.28),therisetimecanbefound.Wefirstdesignateco„tasthenormalizedtimevariableandselectavaluefor£.Usingthecomputer,wesolveforthevaluesofco„tthatyieldc(t)=0.9andc(t)=0.1.Subtractingthetwovaluesofcontyieldsthenormalizedrisetime,a>nTr,forthatvalueof£.Continuinginlikefashionwithothervaluesof£,weobtaintheresultsplottedinFigure4.16.5Letuslookatanexample.DampingNormalizedrisetimeratio1.1040.11.2030.21.3210.31.4630.41.6380.51.8540.60.72.1262.4670.82.8830.93.0|2.612.4I2-222.0xii-8£1.6|1.4h1.21.00.150.20.30.40.50.6Dampingratio0.70.80.9Figure4.16canbeapproximatedbythefollowingpolynomials:conTr=1.76¾3-0.417?2+1.039?+1(maximumerrorlessthan|%for0<?<0.9),andf=0.115(^,7,.)3-0.883(aFIGURE4.17Poleplotforanunderdampedsecond-ordersystemWenowhaveexpressionsthatrelatepeaktime,percentovershoot,andsettlingtimetothenaturalfrequencyandthedampingratio.Nowletusrelatethesequantitiestothelocationofthepolesthatgeneratethesecharacteristics.Thepoleplotforageneral,underdampedsecond-ordersystem,previouslyshowninFigure4.11,isreproducedandexpandedinFigure4.17forfocus.WeseefromthePythagoreantheoremthattheradialdistancefromtheorigintothepoleisthenaturalfrequency,con,andthecos9=¢.Now,comparingEqs.(4.34)and(4.42)withthepolelocation,weevaluatepeaktimeandsettlingtimeintermsofthepolelocation.Thus,TP=n71nVl-?mCOr,=7X(4.44)(4.45)$Unwherecoaistheimaginarypartofthepoleandiscalledthedampedfrequencyofoscillation,andadisthemagnitudeoftherealpartofthepoleandistheexponentialdampingfrequency.4.6UnderdampedSecond-OrderSystems183%0S->%OS\i-planeFIGURE4.18Linesofconstantpeaktime,Tp,settlingtime,Ts,andpercentovershoot,%OS.Note:TS2<TSl;TP2<Tpi;%OS\<%OS2.Equation(4.44)showsthatTpisinverselyproportionaltotheimaginarypartofthepole.Sincehorizontallinesonthes-planearelinesofconstantimagmaryvalue,theyarealsolinesofconstantpeaktime.Similarly,Eq.(4.45)tellsusthatsettlingtimeisinverselyproportionaltotherealpartofthepole.Sinceverticallinesonthes-planearelinesofconstantrealvalue,theyarealsolinesofconstantsettlingtime.Finally,since£=cos0,radiallinesarelinesofconstant£.Sincepercentovershootisonlyafunctionof£,radiallinesarethuslinesofconstantpercentovershoot,%OS.TheseconceptsaredepictedinFigure4.18,wherelinesofconstantTp,Ts,and%OSarelabeledonthes-plane.Atthispoint,wecanunderstandthesignificanceofFigure4.18byexaminingtheactualstepresponseofcomparativesystems.DepictedinFigure4.19(A)arethestepresponsesasthepolesaremovedinaverticaldirection,keepingtherealpartthesame.Asthepolesmoveinaverticaldirection,thefrequencyincreases,buttheenveloperemainsthesamesincetherealpartofthepoleisnotchanging.Thefigureshowsaconstantexponentialenvelope,eventhoughthesinusoidalresponseischangingfrequency.Sinceallcurvesfitunderthesameexponentialdecaycurve,thesettlingtimeisvirtuallythesameforallwaveforms.Notethatasovershootincreases,therisetimedecreases.Letusmovethepolestotherightorleft.Sincetheimaginarypartisnowconstant,movementofthepolesyieldstheresponsesofFigure4.19(b).Herethefrequencyisconstantovertherangeofvariationoftherealpart.Asthepolesmovetotheleft,theresponsedampsoutmorerapidly,whilethefrequencyremainsthesame.Noticethatthepeaktimeisthesameforallwaveformsbecausetheimaginarypartremainsthesame.MovingthepolesalongaconstantradiallineyieldstheresponsesshowninFigure4.19(c).Herethepercentovershootremainsthesame.Noticealsothattheresponseslookexactlyalike,exceptfortheirspeed.Thefartherthepolesarefromtheorigin,themorerapidtheresponse.Weconcludethissectionwithsomeexamplesthatdemonstratetherelationshipbetweenthepolelocationandthespecificationsofthesecond-orderunderdampedresponse.Thefirstexamplecoversanalysis.Thesecondexampleisasimpledesignproblemconsistingofaphysicalsystemwhosecomponentvalueswewanttodesigntomeetatransientresponsespecification.184Chapter4TimeResponsec(t)Envelopethesame>:2JO;;i5-planePolemotionxi):2):321-X—X-x—x2.s-planePolemotion1VFIGURE4.19Stepresponsesofsecond-orderunderdampedsystemsaspolesmove:a.withconstantrealpart;b.withconstantimaginarypart;c.withconstantdampingratioJO)i-planePolemotionExample4.6FindingTp,%0S,andT5fromPoleLocationPROBLEM:GiventhepoleplotshowninFigure4.20,find£,con,Tp,%OS,andTs.SOLUTION:Thedampingratioisgivenby£=cos#=cos[arctan(7/3)]=0.394.Thenaturalfrequency,to,,,istheradialdistancefromtheorigintothepole,orcon=y72+32=7.616.Thepeaktimeis(4.46)TD=—=-=0.449secondcod7Thepercentovershootis%OS=e-^/v7!3?)x100=26%(4.47)Theapproximatesettlingtimeis-/7=-jo)dFIGURE4.20PoleplotforExample4.644Ts=—=x=1.333secondsOd3(4.48)4.6UnderdampedSecond-OrderSystems185MATLABStudentswhoareusingMATLABshouldnowrunch4plinAppendixB.Youwilllearnhowtogenerateasecond-orderpolynomialfromtwocomplexpolesaswellasextractandusethecoefficientsofthepolynomialtocalculateTp,%0S,andTs.ThisexerciseusesMATLABtosolvetheprobleminExample4.6.Example4.7TransientResponseThroughComponentDesignPROBLEM:GiventhesystemshowninFigure4.21,findJandDtoyield20%overshootandasettlingtimeof2secondsforastepinputoftorqueT(t).T(t)0(t)-OM^-£VQJK=5N-m/ra6FIGURE4.21DJ_RotationalmechanicalsystemforExample4.7SOLUTION:First,thetransferfunctionforthesystemis1//D(4.49)s(4.50)G(s)2s+Fromthetransferfunction,KS7+Jco„=andD2$Q)n~7(4.51)But,fromtheproblemstatement,Ts=2=fan(4.52)ori;con—2.Hence,2^a)n=4=-(4.53)Also,fromEqs.(4.50)and(4.52),^i=2vl(4.54)FromEq.(4.39),a20%overshootimplies%=0.456.Therefore,fromEq.(4.54),7~%=2y^=°-456(4.55)Chapter4186TimeResponseHence,Uom(4.56)Fromtheproblemstatement,K=5N-m/rad.CombiningthisvaluewithEqs.(4.53)and(4.56),D=1.04N-m-s/rad,andJ=0.26kg-m2.Second-OrderTransferFunctionsviaTestingJustasweobtainedthetransferfunctionofafirst-ordersystemexperimentally,wecandothesameforasystemthatexhibitsatypicalunderdampedsecond-orderresponse.Again,wecanmeasurethelaboratoryresponsecurveforpercentovershootandsettlingtime,fromwhichwecanfindthepolesandhencethedenominator.Thenumeratorcanbefound,asinthefirst-ordersystem,fromaknowledgeofthemeasuredandexpectedsteady-statevalues.Aproblemattheendofthechapterillustratestheestimationofasecond-ordertransferfunctionfromthestepresponse.Skill-AssessmentExercise4.5Trylt4.1UsethefollowingMATLABstatementstocalculatetheanswerstoSkill-AssessmentExercise4.5.Ellipsesmeancodecontinuesonnextline.numg=361;deng=(l16361];omegan=sqrt(deng(3).../deng(l))zeta=(deng(2)/deng(l)).../„±j(ony/l—£2andtherealpoleisat-ar,thestepresponseofthesystemcanbedeterminedfromapartial-fractionexpansion.Thus,theoutputtransformisAs|B(s+Sa>n)+Ccod|D(s+S(Dn)2+a>ls+ar(4.57)or,inthetimedomain,-artc(t)=Au(t)+e~Kt,a>n(CaseII),thepureexponentialwilldieoutmuchmorerapidlythanthesecond-orderunderdampedstepresponse.Ifthepureexponentialtermdecaystoaninsignificantvalueatthetimeofthefirstovershoot,suchparametersaspercentovershoot,settlingtime,andpeaktimewillbegeneratedbythesecond-orderunderdampedstepresponsecomponent.Thus,thetotalresponsewillapproachthatofapuresecond-ordersystem(CaseIII).187188Chapter4TimeResponseJO)PiXJ03Jo)Pi•i-plane/>3PiXPiXs-planei-plane-a.r2XPiCaseI10^XXPiPiCaseII(a)CaseIIIAu(t)+e~&l(BcosCOdt+CsinCOdt)^CaselFIGURE4.23Componentresponsesofathree-polesystem:a.poleplot;b.componentresponses:Nondominantpoleisneardominantsecond-orderpair(CaseI),farfromthepair(CaseII),andatinfinity(CaseIII)/u.De'VrCaseI*-Time(b)Ifarisnotmuchgreaterthan£m„(CaseI),therealpole'stransientresponsewillnotdecaytoinsignificanceatthepeaktimeorsettlingtimegeneratedbythesecond-orderpair.Inthiscase,theexponentialdecayissignificant,andthesystemcannotberepresentedasasecond-ordersystem.Thenextquestionis,Howmuchfartherfromthedominantpolesdoesthethirdpolehavetobeforitseffectonthesecond-orderresponsetobenegligible?Theanswerofcoursedependsontheaccuracyforwhichyouarelooking.However,thisbookassumesthattheexponentialdecayisnegligibleafterfivetimeconstants.Thus,iftherealpoleisfivetimesfarthertotheleftthanthedominantpoles,weassumethatthesystemisrepresentedbyitsdominantsecond-orderpairofpoles.Whataboutthemagnitudeoftheexponentialdecay?Canitbesolargethatitscontributionatthepeaktimeisnotnegligible?Wecanshow,throughapartialfractionexpansion,thattheresidueofthethirdpole,inathree-polesystemwithdominantsecond-orderpolesandnozeros,willactuallydecreaseinmagnitudeasthethirdpoleismovedfartherintothelefthalf-plane.Assumeastepresponse,C(s),ofathree-polesystem:bcABs+CDf.eriSCs()=~ToTT7s=-+-iZ+(4-59)ws(s2+as+b)(s+c)ss2+as+bs+cwhereweassumethatthenondominantpoleislocatedat-contherealaxisandthatthesteady-stateresponseapproachesunity.Evaluatingtheconstantsinthenumeratorofeachterm,(4.60a).4=1;B=2ca-crc+b-ca_ca2—(P-a—bec2+b—ca_—bc2+b-ca(4.60b)4.7SystemResponsewithAdditionalPoles189Asthenondominantpoleapproachesoo,ore-»oo,A=\\B=-l\C=-a-D=0(4.61)Thus,forthisexample,D,theresidueofthenondominantpoleanditsresponse,becomeszeroasthenondominantpoleapproachesinfinity.Thedesignercanalsochoosetoforgoextensiveresidueanalysis,sinceallsystemdesignsshouldbesimulatedtodeterminefinalacceptance.Inthiscase,thecontrolsystemsengineercanusethe"fivetimes"ruleofthumbasanecessarybutnotsufficientconditiontoincreasetheconfidenceinthesecond-orderapproximationduringdesign,butthensimulatethecompleteddesign.Letuslookatanexamplethatcomparestheresponsesoftwodifferentthreepolesystemswiththatofasecond-ordersystem.Example4.8ComparingResponsesofThree-PoleSystemsPROBLEM:FindthestepresponseofeachofthetransferfunctionsshowninEqs.(4.62)through(4.64)andcomparethem.54riW=*3L,,2,fs+45+24.542(4-62)245.42(5+10)(52+4s+24.542)(4.63)73.626(5+3)(*2+4*+24.542)(4.64)SOLUTION:Thestepresponse,Cj(s),forthetransferfunction,Tj(s),canbefoundbymultiplyingthetransferfunctionbyI/5,astepinput,andusingpartial-fractionexpansionfollowedbytheinverseLaplacetransformtofindtheresponse,c,-(f).Withthedetailsleftasanexerciseforthestudent,theresultsared(?)=1-i.09e-^eos(4.532«-23.8°)(4.65)10(4.66)c2(t)=1-0.29^=¾^Also,V0(s)^A(V2(s)-V1(s))(4.71)(4.72)ButVi(s)=lWMi+Va®(4.73)SubstitutingEq.(4.71)into(4.73),Vi(s)=R1+M2(RiVi(s)+R2V0(s))(4.74)Usingvoltagedivision,V2(s)=Vi{S).1/CsR^h(4.75)SubstitutingEqs.(4.74)and(4.75)intoEq.(4.72)andsimplifyingyieldsV0(s)V,{s)A(R2-RxR3Cs)(MsCs+tm.+lfe(l+ii))(4.76)Sincetheoperationalamplifierhasalargegain,A,letAapproachinfinity.Thus,aftersimplificationV0(s)Vi(s)R2-R1R3CSR2R3Cs+R2RiVs"R^c)R2/,1R3C(4.77)b.LettingjRj=R2andR3C=1/10,Vo(s)Vi(s)R3CJs+R3C(s-10)(s+10)(4.78)Chapter4TimeResponseForastepinput,weevaluatetheresponseassuggestedbyEq.(4.70):C(s)=-5-10)4?+10)1_1s+10'10s(s+10)=sC0(s)-10Co{s)(4.79)whereC0(s)=-l(4.80)s{s+10)istheLaplacetransformoftheresponsewithoutazero.ExpandingEq.(4.79)intopartialfractions,11__\_11__12_W_+_5+105(5+10)"5+105~5+105~5+10(4.81)ortheresponsewithazeroisc(r)=-e-10'+1-(f)x(0),thezero-inputresponsefromEq.(4.109).Thus,fortheunforcedsystemJS?[x(r)]=if[*(f)x(0)]=(si-A)_1x(0)(4.110)fromwhichwecanseethat(si—A)"istheLaplacetransformofthestate-transitionmatrix,¢(/1).Wehavealreadyseenthatthedenominatorof(si-A)-isapolynomialinswhoserootsarethesystempoles.Thispolynomialisfoundfrom204Chapter4TimeResponsetheequationdet(.sl-A)=0.Sinceadj(sI-A)=#(fj&-l[{si-A)-l]-h=se7-1det{sl-A)(4.111)eachtermof¢(/)wouldbethesumofexponentialsgeneratedbythesystem'spoles.Letussummarizetheconceptswithtwonumericalexamples.Thefirstexamplesolvesthestateequationsdirectlyinthetimedomain.ThesecondexampleusestheLaplacetransformtosolveforthestate-transitionmatrixbyfindingtheinverseLaplacetransformof(si-A)-1.Example4.12TimeDomainSolutionPROBLEM:ForthestateequationandinitialstatevectorshowninEqs.(4.112),whereu(t)isaunitstep,findthestate-transitionmatrixandthensolveforx(t).x(0)=01-8-6*(')+u{t)1(4.112a)(4.112b)0SOLUTION:Sincethestateequationisintheform±(t)=Ax(0+Bu(t)(4.113)findtheeigenvaluesusingdet(sl-A)=0.Hence,s2+6s+8=0,fromwhichSl=-2and52=-4.Sinceeachtermofthestate-transitionmatrixisthesumofresponsesgeneratedbythepoles(eigenvalues),weassumeastate-transitionmatrixoftheform¢(0=(Kie-2<+K2e-4(f-r)B=(4.120)(-e-2«-T)+2e-4«-r)\Hence,thefirsttermofEq.(4.109)is4>(r)x(0)=(2e~21-e~4t)|_(-4e-2'+4(r)x(0)+/¢(/-r)Bu{r)dz=48(4.123)Example4.13State-TransitionMatrixviaLaplaceTransformPROBLEM:Findthestate-transitionmatrixofExample4.12,using(si-A)-1.SOLUTION:Weusethefactthat€>(?)istheinverseLaplacetransformof(si-A)_1.Thus,firstfind(si-A)as-1(,1-A)=(4.124)(s+6)fromwhichs+61(sl-A)-l-i=-8s+612s+6s+8s+6s+-8s2ss2+6s+8(4.125)Ls2+6s+8s2+6s+8JExpandingeachterminthematrixontherightbypartialfractionsyields-32s+2(sI-Ap=1\s+4//1/2V^+2-44.V*+2+s+4/1/2s+412•+Vs+2s+4/.(4.126)Finally,takingtheinverseLaplacetransformofeachterm,weobtain{2e-2'-e-4')8**-5^*(0=2'-4e-<SymbolicMath4+4e-'){-e~2r(4.127)4+2e'')JStudentswhoareperformingtheMATLABexercisesandwanttoexploretheaddedcapabilityofMATLAB'sSymbolicMathToolboxshouldnowrunch4sp2inAppendixFatwww.wiley.com/college/nise.Youwilllearnhowtosolvestateequationsfortheoutputresponseusingtheconvolutionintegral.Examples4.12and4.13willbesolvedusingMATLABandtheSymbolicMathToolbox.CaseStudies207Systemsrepresentedinstatespacecanbesimulatedonthedigitalcomputer.ProgramssuchasMATLABcanbeusedforthispurpose.Alternately,theusercanwritespecializedprograms,asdiscussedinAppendixG.latwww.wiley.com/college/nise.StudentswhoareusingMATLABshouldnowrunch4p3inAppendixB.ThisexerciseusesMATLABtosimulatethestepresponseofsystemsrepresentedinstatespace.Inadditiontogeneratingthestepresponse,youwilllearnhowtospecifytherangeonthetimeaxisfortheplot.MATLABSkill-AssessmentExercise4.10PROBLEM:GiventhesystemrepresentedinstatespacebyEqs.(4.128):2^0x=x+1-5-2y=[20,-2/(4.128a)(4.128b)l]x1(4.128c)x(0)=dothefollowing:a.Solveforthestate-transitionmatrix.b.Solveforthestatevectorusingtheconvolutionintegral.c.Findtheoutput,y(t).ANSWERS:a.#{*)=4-,32-3«b.x(t)=1-At3•**—t36-r+,2-*-At~36S'10_,_2,4_Atm—e'-e--e335~3e^+3+383e"c.y{i)=5e~'-e~2tThecompletesolutionislocatedatwww.wiley.com/college/mse.CaseStudiesAntennaControl:Open-LoopResponseInthischapter,wehavemadeuseofthetransferfunctionsderivedinChapter2andthestateequationsderivedinChapter3toobtaintheoutputresponseofanWileyPLUSConlrolSolutionsChapter4TimeResponseopen-loopsystem.Wealsoshowedtheimportanceofthepolesofasystemindeterminingthetransientresponse.Thefollowingcasestudyusestheseconceptstoanalyzeanopen-loopportionoftheantennaazimuthpositioncontrolsystem.Theopen-loopfunctionthatwewilldealwithconsistsofapoweramplifierandmotorwithload.PROBLEM:Fortheschematicoftheazimuthpositioncontrolsystemshownonthefrontendpapers,Configuration1,assumeanopen-loopsystem(feedbackpathdisconnected).a.Predict,byinspection,theformoftheopen-loopangularvelocityresponseoftheloadtoastep-voltageinputtothepoweramplifier.b.Findthedampingratioandnaturalfrequencyoftheopen-loopsystem.c.Derivethecompleteanalyticalexpressionfortheopen-loopangularvelocityresponseoftheloadtoastep-voltageinputtothepoweramplifier,usingtransferfunctions.d.Obtaintheopen-loopstateandoutputequations.e.UseMATLABtoobtainaplotoftheopen-loopangularvelocityresponsetoastep-voltageinput.SOLUTION:Thetransferfunctionsofthepoweramplifier,motor,andloadasshownonthefrontendpapers,Configuration1,werediscussedintheChapter2casestudy.ThetwosubsystemsareshowninterconnectedinFigure4.32(a).Differentiatingtheangularpositionofthemotorandloadoutputbymultiplyingbys,weobtaintheoutputangularvelocity,co0,asshowninFigure4.32(a).TheequivalenttransferfunctionrepresentingthethreeblocksinFigure4.32(a)istheproductoftheindividualtransferfunctionsandisshowninFigure4.32(b).7a.UsingthetransferfunctionshowninFigure4.32(b),wecanpredictthenatureofthestepresponse.Thestepresponseconsistsofthesteady-stateresponsegeneratedbythestepinputandthetransientresponse,whichisthesumoftwoexponentialsgeneratedbyeachpoleofthetransferfunction.Hence,theformoftheresponseis-100fco0{t)=A+Be-1™+Ce,-l.Tll(4.129)b.Thedampingratioandnaturalfrequencyoftheopen-loopsystemcanbefoundbyexpandingthedenominatorofthetransferfunction.Sincetheopen-loopPowerampVM100(5+100)ConverttoangularvelocityMotorandloadEu(s)0.20835(.V+1.71)e,Mms{0,,(5)^(fl)V*320.83(5+100)(5+1.71)co„(s)(b)FIGURE4.32Antennaazimuthpositioncontrolsystemforangularvelocity:a.forwardpath;b.equivalentforwardpath7ThisproductrelationshipwillbederivedinChapter5.CaseStudies209transferfunctionis7083G^(413+ioi.7i,+i71°)(on=V171=13.08,and£=3.89(overdamped).c.Inordertoderivetheangularvelocityresponsetoastepinput,wemultiplythetransferfunctionofEq.(4.130)byastepinput,lis,andobtain9083^=,(,+100)(,+1.71)(4131)Expandingintopartialfractions,weget,,0.122^=-2.12xlO"30.124+^+100-,-+171*,*~«(4132)Transformingtothetimedomainyieldsco0(t)=0.122+(2.12x10-3)e-100'-0.124^1^(4.133)d.Firstconvertthetransferfunctionintothestate-spacerepresentation.UsingEq.(4.130),wehaveco0(s)Vp(s)20.83S2+101.71J+171statespace(4.134)Cross-multiplyingandtakingtheinverseLaplacetransformwithzeroinitialconditions,wehavea>0+101.716)0+171co0=20.83vp(4.135)Definingthephasevariablesasxi=co0(4.136a)x2=co0(4.136b)andusingEq.(4.135),thestateequationsarewrittenaski=x2(4.137a)x2=-171*i-101.71¾+20.83vp(4.137b)wherevp=1,aunitstep.Sincex\=co0istheoutput,theoutputequationisy=Xl(4.138)Equations(4.137)and(4.138)canbeprogrammedtoobtainthestepresponseusingMATLABoralternativemethodsdescribedinAppendixH.latwww.wiley.com/college/nise.e.StudentswhoareusingMATLABshouldnowrunch4p4inAppendixB.ThisexerciseusesMATLABtoplotthestepresponse.CHALLENGE:Youarenowgivenaproblemtotestyourknowledgeofthischapter'sobjectives.RefertotheantennaazimuthpositioncontrolsystemshownontheMATLABChapter4210TimeResponsefrontendpapers,Configuration2.Assumeanopen-loopsystem(feedbackpathdisconnected)anddothefollowing:StateSpaceMATLABa.Predicttheopen-loopangularvelocityresponseofthepoweramplifier,motor,andloadtoastepvoltageattheinputtothepoweramplifier.b.Findthedampingratioandnaturalfrequencyoftheopen-loopsystem.c.Derivetheopen-loopangularvelocityresponseofthepoweramplifier,motor,andloadtoastep-voltageinputusingtransferfunctions.d.Obtaintheopen-loopstateandoutputequations.e.UseMATLABtoobtainaplotoftheopen-loopangularvelocityresponsetoastep-voltageinput.UnmannedFree-SwimmingSubmersibleVehicle:Open-LoopPitchResponseAnUnmannedFree-SwimmingSubmersible(UFSS)vehicleisshowninFigure4.33.Thedepthofthevehicleiscontrolledasfollows.Duringforwardmotion,anelevatorsurfaceonthevehicleisdeflectedbyaselectedamount.Thisdeflectioncausesthevehicletorotateaboutthepitchaxis.Thepitchofthevehiclecreatesaverticalforcethatcausesthevehicletosubmergeorrise.Thepitchcontrolsystemforthevehicleisusedhereandinsubsequentchaptersasacasestudytodemonstratethecoveredconcepts.TheblockdiagramforthepitchcontrolsystemisshowninFigure4.34andonthebackendpapersforfuturereference(Johnson,1980).Inthiscasestudy,weinvestigatethetimeresponseofthevehicledynamicsthatrelatethepitchangleoutputtotheelevatordeflectioninput.PROBLEM:Thetransferfunctionrelatingpitchangle,6(s),toelevatorsurfaceangle,Se(s),fortheUFSSvehicleise(s)-0.125(5+0.435)(4.139)8e(s)(s+1.23)(^2+0.2265+0.0169)FIGURE4.33UnmannedFree-SwimmingSubmersible(UFSS)vehicle.CaseStudiesPitchcommand0,PitchgainCommandedelevatorElevatorElevatordeflectionactuatordeflection0—-*,--(¾„=0.13rad/sand%=0.869.Hence,%OS=er&V1-*100=0.399%.FromFigure4.16,^„7V=2.75,or71,=21.2s.Tofindpeaktime,weuseTp=n/cony/l-C2=48.9s.Finally,settlingtimeisTs=4/^con=35.4s.b.InordertodisplayapositivefinalvalueinPartd.wefindtheresponseofthesystemtoanegativeunitstep,compensatingforthenegativesigninthetransferfunction.Usingpartial-fractionexpansion,theLaplacetransformoftheresponse,9(s),is0.125(5+0.435)d(s)=s(s+1.23)(^2+0.226s+0.0169)=2.616^+0.0645\—s5+1.232.68(5+0.113)+3.478^0.00413(5+0.113)2+0.00413(4.140)TakingtheinverseLaplacetransform,0(0=2.616+0.0645-0113'(2.68cos0.0643f+3.478sin0.06430=2.616+0.0645e-!23'-4.39e-°113'cos(0.0643?+52.38°](4.141)c.Lookingattherelativeamplitudesbetweenthecoefficientofthee~l23ttermandthecosineterminEq.(4.165),weseethatthereispole-zerocancellationbetweenthepoleat-1.23andthezeroat-0.435.Further,thepoleat-1.23ismorethanfivetimesfartherfromthejcoaxisthanthesecond-orderdominant211212Chapter4TimeResponseFIGURE4.35NegativestepresponseofpitchcontrolforUFSSvehicleTime(seconds)polesat—0.113+/0.0643.Weconcludethattheresponsewillbeclosetothatpredicted.d.PlottingEq.(4.141)orusingacomputersimulation,weobtainthestepresponseshowninFigure4.35.Weindeedseearesponseclosetothatpredicted.MATLABStudentswhoareusingMATLABshouldnowrunch4p5inAppendixB.ThisexerciseusesMATLABtofind£,con,Ts,TprandTrandplotastepresponse.TablelookupisusedtofindTr.Theexerciseappliestheconceptstotheproblemabove.RollaxisFIGURE4.36Ashipatsea,showingrollaxisCHALLENGE:Youarenowgivenaproblemtotestyourknowledgeofthischapter'sobjectives.ThisproblemusesthesameprinciplesthatwereappliedtotheUnmannedFree-SwimmingSubmersiblevehicle:Shipsatseaundergomotionabouttheirrollaxis,asshowninFigure4.36.Finscalledstabilizersareusedtoreducethisrollingmotion.Thestabilizerscanbepositionedbyaclosed-looprollcontrolsystemthatconsistsofcomponents,suchasfinactuatorsandsensors,aswellastheship'srolldynamics.Assumetherolldynamics,whichrelatestheroll-angleoutput,0(s),toadisturbance-torqueinput,TD(S),is2.25TD(s)2(s+0.5s+2.25)(4.142)Dothefollowing:MATLABa.Findthenaturalfrequency,dampingratio,peaktime,settlingtime,risetime,andpercentovershoot.b.Findtheanalyticalexpressionfortheoutputresponsetoaunitstepinputinvoltage.c.UseMATLABtosolveaandbandtoplottheresponsefoundinb,Summary^Summary^Inthischapter,wetookthesystemmodelsdevelopedinChapters2and3andfoundtheoutputresponseforagiveninput,usuallyastep.Thestepresponseyieldsaclearpictureofthesystem'stransientresponse."Weperformedthisanalysisfortwotypesofsystems,firstorderandsecondorder,whicharerepresentativeofmanyphysicalsystems.Wethenformalizedourfindingsandarrivedatnumericalspecificationsdescribingtheresponses.Forfirst-ordersystemshavingasinglepoleontherealaxis,thespecificationoftransientresponsethatwederivedwasthetimeconstant,whichisthereciprocalofthereal-axispolelocation.Thisspecificationgivesusanindicationofthespeedofthetransientresponse.Inparticular,thetimeconstantisthetimeforthestepresponsetoreach63%ofitsfinalvalue.Second-ordersystemsaremorecomplex.Dependingonthevaluesofsystemcomponents,asecond-ordersystemcanexhibitfourkindsofbehavior:1.2.3.4.OverdampedUnderdampedUndampedCriticallydampedWefoundthatthepolesoftheinputgeneratetheforcedresponse,whereasthesystempolesgeneratethetransientresponse.Ifthesystempolesarereal,thesystemexhibitsoverdampedbehavior.Theseexponentialresponseshavetimeconstantsequaltothereciprocalsofthepolelocations.Purelyimaginarypolesyieldundampedsinusoidaloscillationswhoseradianfrequencyisequaltothemagnitudeoftheimaginarypole.Systemswithcomplexpolesdisplayunderdampedresponses.Therealpartofthecomplexpoledictatestheexponentialdecayenvelope,andtheimaginarypartdictatesthesinusoidalradianfrequency.Theexponentialdecayenvelopehasatimeconstantequaltothereciprocaloftherealpartofthepole,andthesinusoidhasaradianfrequencyequaltotheimaginarypartofthepole.Forallsecond-ordercases,wedevelopedspecificationscalledthedampingratio,£,andnaturalfrequency,con.Thedampingratiogivesusanideaaboutthenatureofthetransientresponseandhowmuchovershootandoscillationitundergoes,regardlessoftimescaling.Thenaturalfrequencygivesanindicationofthespeedoftheresponse.Wefoundthatthevalueof£determinestheformofthesecond-ordernaturalresponse:•If£=0,theresponseisundamped.•Iff<1,theresponseisunderdamped.•If£=1,theresponseiscriticallydamped.•If£>1,theresponseisoverdamped.Thenaturalfrequencyisthefrequencyofoscillationifalldampingisremoved.Itactsasascalingfactorfortheresponse,ascanbeseenfromEq.(4.28),inwhichtheindependentvariablecanbeconsideredtobeco„t.213Chapter4TimeResponseFortheunderdampedcasewedefinedseveraltransientresponsespecifications,includingthese:•Percentovershoot,%OS•Peaktime,Tp•Settlingtime,Ts•Risetime,TrThepeaktimeisinverselyproportionaltotheimaginarypartofthecomplexpole.Thus,horizontallinesonthe.s-planearelinesofconstantpeaktime.Percentovershootisafunctionofonlythedampingratio.Consequently,radiallinesarelinesofconstantpercentovershoot.Finally,settlingtimeisinverselyproportionaltotherealpartofthecomplexpole.Hence,verticallinesonthes-planearelinesofconstantsettlingtime.Wefoundthatpeaktime,percentovershoot,andsettlingtimearerelatedtopolelocation.Thus,wecandesigntransientresponsesbyrelatingadesiredresponsetoapolelocationandthenrelatingthatpolelocationtoatransferfunctionandthesystem'scomponents.Theeffectsofnonlinearities,suchassaturation,deadzone,andbacklashwereexploredusingMATLAB'sSimulink.Inthischapter,wealsoevaluatedthetimeresponseusingthestate-spaceapproach.Theresponsefoundinthiswaywasseparatedintothezero-inputresponse,andthezero-stateresponse,whereasthefrequencyresponsemethodyieldedatotalresponsedividedintonaturalresponseandforcedresponsecomponents.Inthenextchapterwewillusethetransientresponsespecificationsdevelopedheretoanalyzeanddesignsystemsthatconsistoftheinterconnectionofmultiplesubsystems.WewillseehowtoreducethesesystemstoasingletransferfunctioninordertoapplytheconceptsdevelopedinChapter4.^ReviewQuestions^1.Nametheperformancespecificationforfirst-ordersystems.2.Whatdoestheperformancespecificationforafirst-ordersystemtellus?3.Inasystemwithaninputandanoutput,whatpolesgeneratethesteady-stateresponse?4.Inasystemwithaninputandanoutput,whatpolesgeneratethetransientresponse?5.Theimaginarypartofapolegenerateswhatpartofaresponse?6.Therealpartofapolegenerateswhatpartofaresponse?7.Whatisthedifferencebetweenthenaturalfrequencyandthedampedfrequencyofoscillation?8.Ifapoleismovedwithaconstantimaginarypart,whatwilltheresponseshaveincommon?9.Ifapoleismovedwithaconstantrealpart,whatwilltheresponseshaveincommon?10.Ifapoleismovedalongaradiallineextendingfromtheorigin,whatwilltheresponseshaveincommon?Problems11.Listfivespecificationsforasecond-orderunderdampedsystem.12.ForQuestion11howmanyspecificationscompletelydeterminetheresponse?13.Whatpolelocationscharacterize(1)theunderdampedsystem,(2)theoverdampedsystem,and(3)thecriticallydampedsystem?14.Nametwoconditionsunderwhichtheresponsegeneratedbyapolecanbeneglected.15.Howcanyoujustifypole-zerocancellation?16.Doesthesolutionofthestateequationyieldtheoutputresponseofthesystem?Explain.17.Whatistherelationshipbetween(si—A),whichappearedduringtheLaplacetransformationsolutionofthestateequations,andthestate-transitionmatrix,whichappearedduringtheclassicalsolutionofthestateequation?18.Nameamajoradvantageofusingtime-domaintechniquesforthesolutionoftheresponse.19.Nameamajoradvantageofusingfrequency-domaintechniquesforthesolutionoftheresponse.20.Whatthreepiecesofinformationmustbegiveninordertosolvefortheoutputresponseofasystemusingstate-spacetechniques?21.Howcanthepolesofasystembefoundfromthestateequations?StateSpaceStateSpaceStateSpaceStateSpaceStateSpaceProblems1,DerivetheoutputresponsesforallpartsofFigure4.7.[Section:4.4]WileyPLUS2.Findtheoutputresponse,c(t),foreachofthesystemsshowninFigureP4.1.Alsofindthetimeconstant,risetime,ControlSolutionsandsettlingtimeforeachcase.[Sections:4.2,4.3]—wv—1.8Q/=0I56+55C(s)0.79F5V(a)Jinitialconditions.Alsofindthetimeconstant,risetime,andsettlingtimeforthecapacitorvoltage.[Sections:4.2,4.3]—»-20Qs)FIGUREP4.2i'+20FIGUREP4.13.PlotthestepresponsesProblem2usingMATLAB.forMATLAB4.FindthecapacitorvoltageinthenetworkshowninFigureP4.2iftheswitchclosesatt=0.Assumezero5.PlotthestepresponseforProblem4usingMATLAB.Fromyourplots,findthetimeconstant,risetime,andsettlingtime.MATLAB6.ForthesystemshowninFigureP4.3,(a)findanequationthatrelatessettlingtimeofthevelocityof216Chapter4TimeResponsethemasstoM;(b)findanequationthatrelatesrisetimeofthevelocityofthemasstoM.[Sections:4.2,4.3].v(f)tli)4,MATLAB11.RepeatProblem10usingMATLAB.[Section:4.10].12.WritethegeneralformofthecapacitorvoltagefortheelectricalnetworkshowninFigureP4.4.[Section:4.4].6N-s/mMWileyPLUSControlSolutions/?!=lOkXi-Wv-FIGUREP4.37.PlotthestepresponseforProblem6usingMATLAB.Fromyourplots,findthetimeconstant,risetime,andsettlingtime.UseM=1andM=2.MATLAB(QB8.Foreachofthetransferfunctionsshownbelow,findthelocationsofthepolesandzeros,plotthemonthe.-plane,andthenwriteanexpressionforthegeneralformofthestepresponsewithoutsolvingfortheinverseLaplacetransform.Statethenatureofeachresponse(overdamped,underdamped,andsoon).[Sections:4.3,4.4]2u.iyt)-hT{s)--Ht)=u(t)©R2=\0kQ^>L=200HFIGUREP4.413.UseMATLABtoplotthecapacitorvoltageinProblem12.[Section:4.4].5(.+3)(.+6)MATLAB14.Solveforx(t)inthesystemshowninFigureP4.5if/(f)isaunitstep.[Section:4.4].X(l)M=lkgKs=5N/m/,.=1N-s/m.+2C=10//FM•fit)f(t)=u(t)N10(.+7)(.+10)(.+20)20AT(s)-.2+6.+144.+2e.T(s)--2~.+9(.+5)F7Y.0;(.+10)2FIGUREP4.57/(.)=15.ThesystemshowninFigureP4.6hasaunitstepinput.Findtheoutputresponseasafunctionoftime.Assumethesystemisunderdamped.NoticethattheresultwillbeEq.(4.28).[Section:4.6].C(.v)R(s)2s+2C,(o,,s+a>lFIGUREP4.69.UseMATLABtofindthepolesof[Section:4.2]s2+2s+2MATLABT(s)=s4+6s3+4s2+7s+210.Findthetransferfunctionandpolesofthesystemrepresentedinstatespacehere:[Section:4.10]"-41-420x+-3"(07-94rx=-35y=28-3x;x(0)=16.Derivetherelationshipfordampingratioasafunctionofpercentovershoot,Eq.(4.39).[Section:4.6].17.CalculatetheexactresponseofeachsystemofProblem8usingLaplacetransformtechniques,andcomparetheresultstothoseobtainedinthatproblem.[Sections:4.3,4.4].18.Findthedampingratioandnaturalfrequencyforeachsecond-ordersystemofProblem8andshowthatthevalueofthedampingratioconformstothetypeofresponse(underdamped,overdamped,andsoon)predictedinthatproblem.[Section:4.5].19.Asystemhasadampingratioof0.5,awileypmsnaturalfrequencyof100rad/s,anda»Vi1149Contraldcgainof1.Findtheresponseofsolutionsthesystemtoaunitstepinput.[Section:4.6].Problems20.Foreachofthesecond-ordersystemsthatfollow,find£,con,Ts,Tp,Tr,and%OS.[Section:4.6].TM162a.T(s)=s+3s+160.04b.T(s)=25+0.025+0.041.05x107c.7(5)=25+1.6x1035+1.05x10721727.DerivetheunitstepresponseforeachtransferfunctioninExample4.8.[Section:4.7].28.Findthepercentovershoot,settlingtime,risetime,andpeaktimefor14145T(S)=(^+0.842,+2.829)(,+5)[SeCti°n:47]29.ForeachoftheunitstepresponsesshownwiieyPLUsinFigureP4.9.findthetransferfunction^VjJj-flofthesystem.[Sections:4.3,4.6].controlsolutionsMATLAB21.RepeatProblem20usingMATLAB.Havethecomputerprogramestimatethegivenspecificationsandplotthestepresponses.Estimatetherisetimefromtheplots.[Section:4.6].22.UseMATLAB'sLTIViewerandobGuiTooltainsettlingtime,peak,time,grjIJiT)risetime,andpercentovershootforeachofthesystemsinProblem20.[Section:4.6].1at1\\:23.Foreachpairofsecond-ordersystemspecificationsthatfollow,findthelocationofthesecond-orderpairofpoles.[Section:4.6],0.05:0.10.15Time(seconds)(a)a.%OS=12%;Ts=0.6secondb.%OS=10%;Tp=5secondsc.Ts=lseconds;Tp=3seconds2024.Findthetransferfunctionofasecond-ordersystemthatyieldsa12.3%overshootandasettlingtimeof1second.[Section:4.6]WileyPLUSCliiliiControlSolutions25.ForthesystemshowninFigureP4.7,dothefollowing:[Section:4.6]a.FindthetransferfunctionG(s)=X(s)/F(s).b.Find£,con,%OS,Ts,Tp,andTr.|15coa.2IO*""""-n523Time(seconds)(b)5N-s/mFIGUREP4.726.ForthesystemshowninFigureP4.8,asteptorqueisappliedat$i(t).Finda.Thetransferfunction,G(s)=e2{s)/T(s).b.Thepercentovershoot,settlingtime,andpeaktimefor92(t).[Section:4.6]Toydt(t)e2«)10-m21.07kg-m1.53N-m-s/rad1.92N-m/rad15Time(seconds)(c)FIGUREP4.8FIGUREP4.91:0.20.25Chapter4218TimeResponse30.Forthefollowingresponsefunctions,determineifpole-zerocancellationcanbeapproximated.Ifitcan,findpercentovershoot,settlingtime,risetime,andpeaktime.[Section:4.8].a.C(s)=(*+3)5(5+2)(52+35+10)(5+2.5)s(s+2)(s2+4s+20)(5+2.1)c.C(s)=5(5+2)(52+s+5)(5+2.01)s(s+2)(52+55+20)32.Findpeaktime,settlingtime,andpercentovershootforonlythoseresponsesbelowthatcanbeapproximatedassecond-orderresponses.[Section:4.8].4a.c{t)=0.003500-0.001524Vi114¾Contfo1solutions46.RepeatProblem45usingMAT-Symbc^icAJathLAB'sSymbolicMathToolbox^EuWandEq.(4.109).Inaddition,runyourprogramwithaninitialcondition,x(0)=[Section:4.111StateSpace47.UsingmethodsdescribedinAppendixH.llocatedatwww.wiley.com/college/nisesimulatethefollowingsystemandplotthestepresponse.Verifytheexpectedvaluesofpercentovershoot,peaktime,andsettlingtime.T(s)=s2+0.8s+1220Chapter4TimeResponse48.UsingmethodsdescribedinAppendixH.llocatedatwww.wiley.com/college/nise,simulatethefollowingsystemandplottheoutput,v(f),forastepinput:X=y(t)=01001-7001x+-2[110]x;x(0)=StateSpace"o"0u(t)1-10049.Ahumanrespondstoavisualcuewithaphysicalresponse,asshowninFigureP4.10.Thetransferfunctionthatrelatestheoutputphysicalresponse,P(s),totheinputvisualcommand,V(s),isG(s)=P(s)V{s)(5+0.5)(s+2)(s+5)FIGUREP4.11(Stefani,1973).Dothefollowing:a.EvaluatetheoutputresponseforaunitstepinputusingtheLaplacetransform.StateSpaceb.Representthetransferfunctioninstatespace.c.UseMATLABtosimulatethesystemandobtainaplotofthestepresponse.MATLAB^1~)50.Industrialrobotsareusedformyriadapplications.FigureP4.llshowsarobotusedtomove55-poundbagsofsaltpellets;avacuumheadliftsthebagsbeforepositioning.Therobotcanmoveasmanyas12bagsperminute(Schneider,1992).AssumeaFIGUREP4.10Vacuumrobotliftstwobagsofsalt.modelfortheopen-loopswivelcontrollerandplantofGe{s)=Q>o(s)Vj(s)K(s+10)(52+4*+10)wherea)0{s)istheLaplacetransformoftherobot'soutputswivelvelocityandV,(s)isthevoltageappliedtothecontroller.a.Evaluatepercentovershoot,settlingtime,peaktime,andrisetimeoftheresponseoftheopenloopswivelvelocitytoastep-voltageinput.Justifyallsecond-orderassumptions.b.Representtheopen-loopsysteminstatespace.StateSpaceStep1:LightsourceonStep2:RecognizelightsourceStep3:RespondtolightsourceStepsindeterminingthetransferfunctionrelatingoutputphysicalresponsetotheinputvisualcommandProblemsc.UseMATLABoranyothercom-JJyJJLputerprogramtosimulatethewiiUPsystemandcompareyourresultstoa.51.Anesthesiainducesmusclerelaxation(paralysis)andunconsciousnessinthepatient.Musclerelaxationcanbemonitoredusingelectromyogramsignalsfromnervesinthehand;unconsciousnesscanbemonitoredusingthecardiovascularsystem'smeanarterialpressure.Theanestheticdrugisamixtureofisofluraneandatracurium.AnapproximatemodelrelatingmusclerelaxationtothepercentisofluraneinthemixtureisP(s)_7.63x10"22U(s)~s+1.15^+0.28whereP(s)ismusclerelaxationmeasuredasafractionoftotalparalysis(normalizedtounity)andU(s)isthepercentmixtureofisoflurane(Linkens,1992).[Section:4.6]a.Findthedampingratioandthenaturalfrequencyoftheparalysistransientresponse.b.Findthemaximumpossiblepercentparalysisifa2%mixtureofisofluraneisused.c.Plotthestepresponseofparalysisifa1%mixtureofisofluraneisused.d.Whatpercentisofluranewouldhavetobeusedfor100%paralysis?52.Totreatacuteasthma,thedrugtheophyllineisinfusedintravenously.Therateofchangeofthedrugconcentrationinthebloodisequaltothedifferencebetweentheinfusedconcentrationandtheeliminatedconcentration.Theinfusedconcentrationisi{t)/Vd,wherei(t)istherateofflowofthedrugbyweightandVdistheapparentvolumeanddependsonthepatient.Theeliminatedconcentrationisgivenbyk\Qc(t),wherec(t)isthecurrentconcentrationofthedruginthebloodandk\oistheeliminationrateconstant.Thetheophyllineconcentrationinthebloodiscritical—ifitistoolow,thedrugisineffective;iftoohigh,thedrugistoxic(Jannett,1992).Youwillhelpthedoctorwithyourcalculations.a.Deriveanequationrelatingthedesiredbloodconcentration,Co,totherequiredinfusionratebyweightofthedrug,IR.b.Deriveanequationthatwilltellhowlongthedrugmustbeadministeredtoreachthedesired221bloodconcentration.Usebothrisetimeandsettlingtime.c.FindtheinfusionrateoftheophyllineifVD=600ml,kio=0.07h-1,andtherequiredbloodlevelofthedrugis12mcg/ml("meg"meansmicrograms).See(Jannett,1992);foradescriptionofparametervalues.d.Findtheriseandsettlingtimesfortheconstantsinc.53.Uppermotorneurondisorderpatientscanbenefitandregainusefulfunctionthroughtheuseoffunctionalneuroprostheses.Thedesignrequiresagoodunderstandingofmuscledynamics.Inanexperimenttodeterminemuscleresponses,theidentifiedtransferfunctionwas(Zhou,1995)_2.5e-°0085(l+0.172^)(1+0.00¾)(l+0.07s)2(l+0.05s)2Findtheunitstepresponseofthistransferfunction.54.Whenelectrodesareattachedtothemastoidbones(rightbehindtheears)andcurrentpulsesareapplied,apersonwillswayforwardandbackward.Ithasbeenfoundthatthetransferfunctionfromthecurrenttothesubject'sangle(indegrees)withrespecttotheverticalisgivenby(Nashner,1974)B(s)_5.8(0.35+l)e-°bI(s)~(s+l)(s2/1.22+O.fo/1.2+1)a.Determinewhetheradominantpoleapproximationcanbeappliedtothistransferfunction.b.Findthebodyswaycausedbya250|xApulseof150msecduration.55.AMOEMS(opticalMEMS)isaMEMS(MicroElectromechanicalSystems)withanopticalfiberchannelthattakeslightgeneratedfromalaserdiode.Italsohasaphotodetectorthatmeasureslightintensityvariationsandoutputsvoltagevariationsproportionaltosmallmechanicaldevicedeflections.Additionally,avoltageinputiscapableofdeflectingthedevice.Theapparatuscanbeusedasanopticalswitchorasavariableopticalattenuator,anditdoesnotexceed2000[xminanydimension.FigureP4.12showsinput-outputsignalpairsusedtoidentifytheparametersofthesystem.Assumeasecond-ordertransferfunctionandfindthesystem'stransferfunction(Borovic,2005),222Chapter4TimeResponseOpen-LoopResponses57.Severalfactorsaffecttheworkingsofthekidneys.Forexample,FigureP4.14showshowastepchangeinarterialflowpressureaffectsrenalbloodflowinrats.Inthe"hottail"partoftheexperiment,peripheralthermalreceptorstimulationisachievedbyinsertingtherat'stailinheatedwater.Variationsbetweendifferenttestsubjectsareindicatedbytheverticallines.Ithasbeenarguedthatthe"control"and"hottail"responsesareidenticalexceptfortheirsteady-statevalues(DiBona,2005).Open-LoopResponse(simulated,d=0.8)Open-LoopResponse(experimental)Ecx2-25001000t[us]1500FIGUREP4.1256.Theresponseofthedeflectionofafluid-filledcathetertochangesinpressurecanbemodeledusingasecond-ordermodel.Knowledgeoftheparametersofthemodelisimportantbecauseincardiovascularapplicationstheundampednaturalfrequencyshouldbeclosetofivetimestheheartrate.However,duetosterilityandotherconsiderations,measurementoftheparametersisdifficult.Amethodtoobtaintransferfunctionsusingmeasurementsoftheamplitudesoftwoconsecutivepeaksoftheresponseandtheirtiminghasbeendeveloped(Glantz,1979).AssumethatFigureP4.13isobtainedfromcathetermeasurements.Usingtheinformationshownandassumingasecond-ordermodelexcitedbyaunitstepinput,findthecorrespondingtransferfunction.1FIGUREP4.14StepResponse1.61.41.2System:T'Time(sec):0.0505)Ampliiude:LISiiSystem:TJTime(sec):0.0674fIAmpliiude:0.9233'&0.8I0.60.4•0.2-0.050.15Time(sec)FIGUREP4.1323Time(sec)Problemsa.UsingFigureP4.14,obtainthenormalized(cfina|=1)transferfunctionsforbothresponses.b.UseMATLABtoproveordisprovetheassertionaboutthe"control"and"hottail"responses.MATLAB^^Q)58.Thetransferfunctionofanano-positioningdevicecapableoftranslatingbiologicalsampleswithinafew|xmusesapiezoelectricactuatorandalinearvariabledifferentialtransformer(LDVT)asadisplacementsensor.Thetransferfunctionfrominputtodisplacementhasbeenfoundtobe(Salapaka,2002)9.7x10V-144005+106.6x106)G(s)=2(s+38005+23.86x106){s2+2405+2324.8x103Useadominant-poleargumenttofindanequivalenttransferfunctionwiththeMATLABsamenumeratorbutonlythreepoles.^j^J^)UseMATLABtofindtheactualsizeandapproximatesystemunitstepresponses,plottingthemonthesamegraph.Explainthedifferencesbetweenbothresponsesgiventhatbothpairsofpolesaresofarapart.59.Atsomepointintheirlivesmostpeoplewillsufferfromatleastoneonsetoflowbackpain.Thisdisordercantriggerexcruciatingpainandtemporarydisability,butitscausesarehardtodiagnose.Itiswellknownthatlowbackpainaltersmotortrunkpatterns;thusitisofinteresttostudythecausesforthesealterationsandtheirextent.Duetothedifferentpossiblecausesofthistypeofpain,a"control"groupofpeopleishardtoobtainforlaboratorystudies.However,paincanbestimulatedinhealthypeopleandmusclemovementrangescanbecompared.Controlledbackpaincanbeinducedbyinjectingsalinesolutiondirectlyintorelatedmusclesorligaments.Thetransferfunctionfrominfusionratetopainresponsewasobtainedexperimentallybyinjectinga5%salinesolutionatsixdifferentinfusionratesoveraperiodof12minutes.Subjectsverballyratedtheirpainevery15secondsonascalefrom0to10,with0indicatingnopainand10unbearablepain.Severaltrialswereaveragedandthedatawasfittedtothefollowingtransferfunction:G(s)=9.72x10~8(5+0.0001)[s+0.009)2(s2+0.018^+0.0001)Constantinfusionrate223InfusionPumpHumanResponseM{s)G(s)ConstantbackpainFIGUREP4.15ForexperimentationitisdesiredtobuildanautomaticdispensingsystemtomakethepainlevelconstantasshowninFigureP4.15.ItfollowsthatideallytheinjectionsystemtransferfunctionhastobeM{s)=1G(s)toobtainanoveralltransferfunctionM(s)G(s)RS1.However,forimplementationpurposesM(s)musthaveatleastonemorepolethanzeros(Zedka,1999).Findasuitabletransferfunction,M(s)byinvertingG(s)andaddingpolesthatarefarfromtheimaginaryaxis.60.Anartificialheartworksinclosedloopbyvaryingitspumpingrateaccordingtochangesinsignalsfromtherecipient'snervoussystem.Forfeedbackcompensationdesignitisimportanttoknowtheheart'sopen-looptransferfunction.Toidentifythistransferfunction,anartificialheartisimplantedinacalfwhilethemainpartsoftheoriginalheartareleftinplace.Thentheatrialpumpingrateintheoriginalheartismeasuredwhilestepinputchangesareeffectedontheartificialheart.Ithasbeenfoundthat,ingeneral,theobtainedresponsecloselyresemblesthatofasecond-ordersystem.Inonesuchexperimentitwasfoundthatthestepresponsehasa%OS=30%andatimeoffirstpeakTp=127sec(Nakamura,2002).Findthecorrespondingtransferfunction.61.Anobservedtransferfunctionfromvoltagepotentialtoforceinskeletalmusclesisgivenby(lonescu,2005)T(s)=450>+5)(5+20)a.Obtainthesystem'simpulseresponse.b.Integratetheimpulseresponsetofindthestepresponse.c.VerifytheresultinPartbbyobtainingthestepresponseusingLaplacetransformtechniques.62.Intypicalconventionalaircraft,longitudinalflightmodellinearizationresultsintransferfunctionswithChapter4224TimeResponsetwopairsofcomplexconjugatepoles.Consequently,thenaturalresponsefortheseairplaneshastwomodesintheirnaturalresponse.The"shortperiod"modeisrelativelywell-dampedandhasahighfrequencyoscillation.The"plugoidmode"islightlydampedanditsoscillationfrequencyisrelativelylow.Forexample,inaspecificaircraftthetransferfunctionfromwingelevatordeflectiontonoseangle(angleofattack)is(McRuer,1973)givenaboveandtheapproximationfoundinb.Explainthedifferencesbetweenthetwoplots.64.AlthoughtheuseoffractionalMATLABcalculusincontrolsystemsisnotnew,inthelastdecadethereisincreasedinterestinitsuseforseveralreasons.Themostrelevantarethatfractionalcalculusdifferentialequationsmaymodelcertainsystemswithhigheraccuracythanintegerdifferentialequations,andthatfractionalcalculuscompensatorsmightexhibitadvantageouspropertiesforcontrolsystemdesign.Anexampleofatransferfunctionobtainedthroughfractionalcalculusis:26.12(^+0.0098)(5+1.371;(52+8.99x10-¾+3.97x10-3)(^2+4.215+18.23)a.Findwhichofthepolescorrespondtotheshortperiodmodeandwhichtothephugoidmode.b.Peforma"phugoidapproximation"(dominantpoleapproximation),retainingthetwopolesandthezeroclosesttothe;co-axis.c.UseMATLABtocomparethestepresponsesoftheoriginaltransferfunctionandtheapproximation.3334+202s3+10061s2+24332s+170704s1+8s6+464s5+2411s"+52899s3+167829s2+913599s+1076555c.UseMATLABtoplotononegraphthestepresponseofthetransferfunctions2.5+4si.7+3so.5+565.MathematicalmodelingandcontrolofpHprocessesarequitechallengingsincetheprocessesarehighlynonlinear,duetothelogarithmicrelationshipbetweentheconcentrationofhydrogenions[H+]andpHlevel.ThetransferfunctionfromY(s)a.UseMATLABtofindthepartialfractionresiduesandpolesofG(s).b.FindanapproximationtoG{s)byneglectingthesecond-ordertermsfoundina.(s)=Thisfunctioncanbeapproximatedwithanintegerrationaltransferfunction(integerpowersofs)usingOustaloup'smethod(Xue,2005).WeaskyounowtodoalittleresearchandconsulttheaforementionedreferencetofindandrunanM-filethatwillcalculatetheintegerrationaltransferfunctionapproximationtoG(s)andplotitsstepresponse.MATLAB63.AcrosslapperisamachinethatMATLABtakesasaninputalightfiberfabricandproducesaheavierfabricbylayingtheoriginalfabricinlayersrotatedby90degrees.Afeedbacksystemisrequiredinordertomaintainconsistentproductwidthandthicknessbycontrollingitscarriagevelocity.Thetransferfunctionfromservomotortorque,Tm(s),tocarriagevelocity,Y(s),wasdevelopedforsuchamachine(Kuo,2008).Assumethatthetransferfunctionis:c(s)=GinputpHtooutputpHisG„(s)=Ya(s)X„(s)14.49e-4-9.Ga(s)isamodelfortheanaerobic1478.265+1processinawastewatertreatmentsysteminwhichmethanebacterianeedthepHtobemaintainedinitsoptimalrangefrom6.8to7.2{Jiayu,2009).Similarly,(Elarafi,2008)usedempiricaltechniquestomodelapHneutralizationplantasasecond-ordersystemwithapuredelay,yieldingthefollowingtransferfunctionrelatingoutputpHtoinputpH:GP(s)=YP(s)XP(s)1.716xICrV305s2+6.989xKrt+1.185x10-6a.Findanalyticalexpressionsfortheunitstepresponsesya(t)andyp{t)forthetwoProblemsprocesses,Ga(s)andGp(s).(Hint:UsethetimeshifttheoreminTable2.2).b.UseSimulinktoplotya(t)and^™^<yp{t)onasinglegraph.^»1^^66.Usingwindtunneltests,insectflightdynamicscanbestudiedinaverysimilarfashiontothatofmanmadeaircraft.Linearizedlongitudinalflightequationsforabumblebeehavebeenfoundintheunforcedcasetobe-8.792x10"3-0.347x100.2610-30.56x1(T3-1.0x10-3-13.79x10"-3-11.7x10-0.347x10-3-20.8x10-3-96.6x10"301000whereu—forwardvelocity;vv=verticalvelocity,q=angularpitchrateatcenterofmass,and9=pitchanglebetweentheflightdirectionandthehorizontal(Sun,2005).MATLABa.UseMATLABtoobtainthesystern'seigenvalues.b.UsingtheA,B,andCmatricesofParta,obtaintheconverter'stransferfunction67.Adc-dcconverterisadevicethattakesasStateSpaceaninputanunregulateddcvoltageandprovidesaregulateddcvoltageasitsoutput.Theoutputvoltagemaybelower(buckconverter),higher(boostconverter),orthesameastheinputvoltage.Switchingdc-dcconvertershaveasemiconductoractiveswitch(BJTorFET)thatisclosedperiodicallywithadutycycledinapulsewidthmodulated(FWM)manner.Foraboostconverter,averagingtechniquescanbeusedtoarriveatthefollowingstateequations(VanDijk,1995):+EsC—=(1-=5N3=10N4FIGUREP4.2254N-m/radMirFIGUREP4.1974.ForthesystemshowninFigureP4.20,findN1/N2sothatthesettlingtimeforasteptorqueinputis16seconds.[Section:4.6]f77.IfVj-(f)isastepvoltageinthenetworkWileyPLUSshowninFigureP4.22,findthevaluesofRandCtoyielda20%overshootControlSolutionsanda1mssettlingtimeforvc(r)ifZ,=1H.[Section:4.6]wiieyptus78.GiventhecircuitofFigureP4.22,whereC=10fiF,>ViJ4-<findRandLtoyield15%overshootwithasettlingcontrolsolutionstimeof7msforthecapacitorvoltage.Theinput,v(r),isaunitstep.[Section:4.6]dJJJProblems227hydraulicpumpis79.ForthecircuitshowninFigureP4.23,findthevaluesofR2andCtoyield8%overshootwithasettlingtimeof1msforthevoltageacrossthecapacitor,withv,-(r)asastepinput.[Section:4.6](3.45-14000^)x=-0.255x10-910.499x1011-3.-3.45+14000£,-0.499x1011!•;(/)«o,awherex=PdFIGUREP4.23andPdisthepumpdischargepressure(Manring,1996).Findthevalueofcontrollerflowgain,Kc,sothatthedampingratioofthesystem'spolesis0.9.80.Hydraulicpumpsareusedasinputstostatespacehydrauliccircuitstosupplypressure,justS^Basvoltagesourcessupplypotentialtoelectriccircuits.Applicationsforhydrauliccircuitscanbefoundintheroboticsandaircraftindustries,wherehydraulicactuatorsareusedtomovecomponentparts.FigureP4.24showstheinternalpartsofthepump.Abarrelcontainingequallyspacedpistonsrotatesaboutthej'-axis.Aswashplate,setatanangle,causestheslippersattheendsofthepistonstomovethepistonsinandout.Whenthepistonsaremovingacrosstheintakeport,theyareextending,andwhentheyaremovingacrossthedischargeport,theyareretractingandpushingfluidfromtheport.Thelargeandsmallactuatorsatthetopandbottom,respectively,controltheangleoftheswashplate,a.Theswashplateangleaffectsthepistonstrokelength.Thus,bycontrollingtheswashplateangle,thepumpdischargeflowratecanberegulated.AssumethestateequationforthePROGRESSIVEANALYSISANDDESIGNPROBLEMS81.High-speedrailpantograph.Problem67cinChapter2askedyoutofindG(s)=(Yi,(s)Yeai{s))/FUp{s)(O'Connor,1997).a.Usethedominantpolesfromthistransferfunctionandestimatepercentovershoot,dampingratio,naturalfrequency,settlingtime,peaktime,andrisetime.b.Determineifthesecond-orderapproximationisvalid.c.ObtainthestepresponseofG(s)and.comparetheresultstoParta.82.ControlofHIV/AIDS.InChapter3,Problem31,wedevelopedalinearizedLargeactuator-7\a|PortplateDischargeportSlipperSPrin8NSmallactuatorFIGUREPA.24Pumpdiagram(ReprintedwithpermissionofASME.)MATLABstateSpace228Chapter4TimeResponsestate-spacemodelofHIVinfection.ThemodelassumedthattwodifferentdrugswereusedtocombatthespreadoftheHIVvirus.Sincethisbookfocusesonsingle-input,single-outputsystems,onlyoneofthetwodrugswillbeconsidered.WewillassumethatonlyRTIsareusedasaninput.Thus,intheequationsofChapter3,Problem31,«2=0(Craig,2004).a.ShowthatwhenusingonlyRTIsinthelinearizedsystemofProblem31andsubstitutingthetypicalparametervaluesgiveninthetableofProblem31c,theresultingstate-spacerepresentationforthesystemisgivenbyr^ri=["—0.041670.02170VrXTiVVc-0.00581-0.240.0058-2.4100r5.2i+-5.2«i0.rT1y=[001]r\;b.ObtainthetransferfunctionfromRTIefficiencyY(s)toviruscount;namelyfind•,,..Ui{s)c.AssumingRTIsare100%effective,whatwillbethesteady-statechangeofviruscountinagiveninfectedpatient?Expressyouranswerinviruscopiespermlofplasma.Approximatelyhowmuchtimewillthemedicinetaketoreachitsmaximumpossibleeffectiveness?83.Hybridvehicle.Assumethatthecarmotivedynamicsforahybridelectricvehicle(HEV)canbedescribedbythetransferfunctionAVjs)_1A^e(s)~190&s+10whereAVisthechangeofvelocityinm/secandAFeisthechangeinexcessmotiveforceinNnecessarytopropelthevehicle.a.FindananalyticalexpressionforAvInput+C(s)G(s)ControllerPlantG2(s)G3(s)m•*Actuatingsignal(error)H2(s)«*—Feedback(5.8)C(s)OutputHfflOutputtransducer(a)SL££smInput_S^Actuatingsignal(error)PlantandcontrollerG(s)c$LOutputH(s)Feedbackib)mInputFIGURE5.6a.Feedbackcontrolsystem;b.simplifiedmodel;c.equivalenttransferfunctionC(s)G(s)1±G(s)H(s)
Output(OlrThesystemissaidtohavenegativefeedbackifthesignatthesummingjunctionisnegativeandpositivefeedbackifthesignispositive.5.2BlockDiagrams241SubstitutingEq.(5.8)intoEq.(5.7)andsolvingforthetransferfunction,C(s)/R(s)=Ge(s),weobtaintheequivalent,orclosed-loop,transferfunctionshowninFigure5.6(c),(5.9)Theproduct,G(s)H(s),inEq.(5.9)iscalledtheopen-looptransferfunction,orloopgain.Sofar,wehaveexploredthreedifferentconfigurationsformultiplesubsystems.Foreach,wefoundtheequivalenttransferfunction.Sincethesethreeformsarecombinedintocomplexarrangementsinphysicalsystems,recognizingthesetopologiesisaprerequisitetoobtainingtheequivalenttransferfunctionofacomplexsystem.Inthissection,wewillreducecomplexsystemscomposedofmultiplesubsystemstosingletransferfunctions.MovingBlockstoCreateFamiliarFormsBeforewebegintoreduceblockdiagrams,itmustbeexplainedthatthefamiliarforms(cascade,parallel,andfeedback)arenotalwaysapparentinablockdiagram.Forexample,inthefeedbackform,ifthereisapickoffpointafterthesummingjunction,youcannotusethefeedbackformulatoreducethefeedbacksystemtoasingleblock.Thatsignaldisappears,andthereisnoplacetoreestablishthepickoffpoint.Thissubsectionwilldiscussbasicblockmovesthatcanbemadetoordertoestablishfamiliarformswhentheyalmostexist.Inparticular,itwillexplainhowtomoveblocksleftandrightpastsummingjunctionsandpickoffpoints.Figure5.7showsequivalentblockdiagramsformedwhentransferfunctionsaremovedleftorrightpastasummingjunction,andFigure5.8showsequivalentblockdiagramsformedwhentransferfunctionsaremovedleftorrightpastapickoffpoint.Inthediagramsthesymbol=means"equivalentto."Theseequivalences,R(s)+mG{s)+x-xC(s)+iX(s)_^-—-m+/0\G(s)cm+iG{s)X(s)FIGURE5.7Blockdiagramalgebraforsummingjunctions—equivalentformsformovingablocka.totheleftpastasummingjunction;b.totherightpastasummingjunction242Chapter5ReductionofMultipleSubsystemsG(s)R(s)G(s)R(s)G(s)R(s)R(s)R(s)R(s)G(s)G(s)Vfi1G{s)R(s)G(s)G(s)FIGURE5.8Blockdiagramalgebraforpickoffpointsequivalentformsformovingablocka.totheleftpastapickoffpoint;b.totherightpastapickoffpointmR(s)G(s)R(s)R(-i)G(s)G(s)R(s)G(s)G(s)R(s)R(s)G(s)R(s)G(s)R(s)G(s)alongwiththeformsstudiedearlierinthissection,canbeusedtoreduceablockdiagramtoasingletransferfunction.IneachcaseofFigures5.7and5.8,theequivalencecanbeverifiedbytracingthesignalsattheinputthroughtotheoutputandrecognizingthattheoutputsignalsareidentical.Forexample,inFigure5.7(a),signalsR(s)andX(s)aremultipliedbyG(s)beforereachingtheoutput.Hence,bothblockdiagramsareequivalent,withC(s)=R(s)G(s)^fX{s)G(s).InFigure5.7(b),R(s)ismultipliedbyG(s)beforereachingtheoutput,butX(s)isnot.Hence,bothblockdiagramsinFigure5.7(b)areequivalent,withC(s)=R(s)G(s)=fX(s).Forpickoffpoints,similarreasoningyieldssimilarresultsfortheblockdiagramsofFigure5.8(A)and(b).Letusnowputthewholestorytogetherwithexamplesofblockdiagramreduction.Example5.1BlockDiagramReductionviaFamiliarFormsPROBLEM:ReducetheblockdiagramshowninFigure5.9toasingletransferfunction.R(s)7\_+/vA_,Gx(s)—,\+1G2(s)—THx(s)H2(s)FIGURE5.9BlockdiagramforExample5.1H3(s)—*~G3(5)cm5.2BlockDiagrams243SOLUTION:WesolvetheproblembyfollowingthestepsinFigure5.10.First,thethreesummingjunctionscanbecollapsedintoasinglesummingjunction,asshowninFigure5.10(a).Second,recognizethatthethreefeedbackfunctions,Hi(s),H2(s),andH^(s),areconnectedinparallel.Theyarefedfromacommonsignalsource,andtheiroutputsaresummed.TheequivalentfunctionisHi(s)—Hi{s)+Hs(s).AlsorecognizethatG2(s)andG${s)areconnectedincascade.Thus,theequivalenttransferfunctionistheproduct,G3(s)G2(s).TheresultsofthesestepsareshowninFigure5.10(6).Finally,thefeedbacksystemisreducedandmultipliedbyGi(s)toyieldtheequivalenttransferfunctionshowninFigure5.10(c).R(s)G2(s)-~C(s)G3(5)+\-*»H{(s)H2(s)N^s)(a)R(s)Gds)C(s)Gi(s)G2(.s)•-BX{A-H&)+H&)ib)G3(s)G2(s)G}(s)mC(s)1+G2{s)G2(s)[H{{s)-H2(s)+H3(s)](c)FIGURE5.10StepsinsolvingExample5.1:a.Collapsesummingjunctions;b.formequivalentcascadedsystemintheforwardpathandequivalentparallelsysteminthefeedbackpath;c.formequivalentfeedbacksystemandmultiplybycascadedGt(s)Example5.2BlockDiagramReductionbyMovingBlocksPROBLEM:ReducethesystemshowninFigure5.11toasingletransferfunction.R(s)+,0^1(5)Gi(s)W+,OvWV7(J)V6(s)lids)G2(s)fUs)w±/6vWwO&ias)H-sis)FIGURE5.11BlockdiagramforExample5.2244Chapter5ReductionofMultipleSubsystemsSOLUTION:InthisexamplewemakeuseoftheequivalentformsshowninFigures5.7and5.8.First,moveG2(s)totheleftpastthepickoffpointtocreateparallelsubsystems,andreducethefeedbacksystemconsistingofG3(s)andH3(s).ThisresultisshowninFigure5.12(A).Second,reducetheparallelpairconsistingofVG2(s)andunity,andpushGi(s)totherightpastthesummingjunction,creatingparallelsubsystemsinthefeedback.TheseresultsareshowninFigure5.12(6).1G2(s)Bb}+/r>Mftvm.®mm+/Q,*WV7{s)vmR^G2{s)V4(s)+i®-G3(s)l+G3(s)H3(s)H2(s)Hi(s)V+/Ov^+0OQt.s)R^s)c\w5.4Signal-FlowGraphs249system.Adjacenttothelinewewritethetransferfunction.Asignalisanodewiththesignal'snamewrittenadjacenttothenode.Figure5.17(c)showstheinterconnectionofthesystemsandthesignals.Eachsignalisthesumofsignalsflowingintoit.Forexample,thesignalV(s)=Ri(s)Gi(s)—R2(s)G2{s)+R3(s)G3{s).ThesignalC2(s)=V{s)G5(s)=R^G^s^s)-R2{s)G2(s)G5(s)+R3(s)G3(s)G5(s).ThesignalC3(s)=-V(s)G6(s)=-R1{s)G1(s)Ge{s)+R2{s)G2(s)G(,(s)—R3(s)G3(s)Ge{s).Noticethatinsummingnegativesignalsweassociatethenegativesignwiththesystemandnotwithasummingjunction,asinthecaseofblockdiagrams.Toshowtheparallelbetweenblockdiagramsandsignal-flowgraphs,wewilltakesomeoftheblockdiagramformsfromSection5.2andconvertthemtosignalflowgraphsinExample5.5.Ineachcase,wewillfirstconvertthesignalstonodesandtheninterconnectthenodeswithsystembranches.InExample5.6,wewillconvertanintricateblockdiagramtoasignal-flowgraph.Example5.5ConvertingCommonBlockDiagramstoSignal-FlowGraphsPROBLEM:Convertthecascaded,parallel,andfeedbackformsoftheblockdiagramsshowninFigures5.3(a),5.5(a),and5.6(6),respectively,intosignal-flowgraphs.SOLUTION:Ineachcase,westartbydrawingthesignalnodesforthatsystem.Nextweinterconnectthesignalnodeswithsystembranches.Thesignalnodesforthecascaded,parallel,andfeedbackformsareshowninFigure5.18(a),(c),and(e),respectively.TheinterconnectionofthenodeswithbranchesthatrepresentthesubsystemsisshowninFigure5.18(6),(d),and(/)forthecascaded,parallel,andfeedbackforms,respectively./«.v)0OVMS)OOa.v)VAs)G{{s)G2(s)G3(s)R(s)0»O—*—O»On.'V2(v)V|(.v)(b)OV|(.v)R(s)0oOa.s)V2(s)OVMs)RMQOEls)Oa.v)R(s)0—-—O—S^—O£(.v-H(s)(f)FIGURE5.18Buildingsignalflowgraphs:a.cascadedsystemnodes(fromFigure5.3(a));b.cascadedsystemsignal-flowgraph;c.parallelsystemnodes(fromFigure5.5(a));d.parallelsystemsignal-flowgraph;e.feedbacksystemnodes(fromFigure5.6(&));f.feedbacksystemsignal-flowgraph250Chapter5ReductionofMultipleSubsystemsExample5.6ConvertingaBlockDiagramtoaSignal-FlowGraphPROBLEM:ConverttheblockdiagramofFigure5.11toasignal-flowgraph.SOLUTION:Beginbydrawingthesignalnodes,asshowninFigure5.19(a).Next,interconnectthenodes,showingthedirectionofsignalflowandidentifyingeachtransferfunction.TheresultisshowninFigure5.19(6).Noticethatthenegativesignsatthesummingjunctionsoftheblockdiagramarerepresentedbythenegativetransferfunctionsofthesignal-flowgraph.Finally,ifdesired,simplifythesignal-flowgraphtotheoneshowninFigure5.19(c)byeliminatingsignalsthathaveasingleflowinandasingleflowout,suchasV2(s),V6(s),V7(s),andVs(s).O«(.v)OVjls)oOoOV4(.v)OC(.v)oooV7(s)Vtfs)1RmO—*-fids)«*)OC(.v)-//3(5)(c)FIGURE5.19Signal-flowgraphdevelopment:a.signalnodes;b.signal-flowgraph;c.simplifiedsignal-flowgraph2515.5Mason'sRuleSkill-AssessmentExercise5.3PROBLEM:ConverttheblockdiagramofFigure5.13toasignal-flowgraph.ANSWER:Thecompletesolutionisatwww.wiley.com/college/nise.|5.5Mason'sRuleEarlierinthischapter,wediscussedhowtoreduceblockdiagramstosingletransferfunctions.Nowwearereadytodiscussatechniqueforreducingsignal-flowgraphstosingletransferfunctionsthatrelatetheoutputofasystemtoitsinput.TheblockdiagramreductiontechniquewestudiedinSection5.2requiressuccessiveapplicationoffundamentalrelationshipsinordertoarriveatthesystemtransferfunction.Ontheotherhand,Mason'sruleforreducingasignal-flowgraphtoasingletransferfunctionrequirestheapplicationofoneformula.TheformulawasderivedbyS.J.Masonwhenherelatedthesignal-flowgraphtothesimultaneousequationsthatcanbewrittenfromthegraph(Mason,1953).Ingeneral,itcanbecomplicatedtoimplementtheformulawithoutmakingmistakes.Specifically,theexistenceofwhatwewilllatercallnontouchingloopsincreasesthecomplexityoftheformula.However,manysystemsdonothavenontouchingloops.Forthesesystems,youmayfindMason'sruleeasiertousethanblockdiagramreduction.Mason'sformulahasseveralcomponentsthatmustbeevaluated.First,wemustbesurethatthedefinitionsofthecomponentsarewellunderstood.Thenwemustexertcareinevaluatingthecomponents.Tothatend,wediscusssomebasicdefinitionsapplicabletosignal-flowgraphs;thenwestateMason'sruleanddoanexample.DefinitionsLoopgain.Theproductofbranchgainsfoundbytraversingapaththatstartsatanodeandendsatthesamenode,followingthedirectionofthesignalflow,withoutpassingthroughanyothernodemorethanonce.Forexamplesofloopgains,seeFigure5.20.Therearefourloopgains:1.G2(s)Hi(s)(5.25a)2.G4{s)H2{s)(5.25b)3.G4(s)G5(s)H3(s)(5.25c)4.G4(s)G(,(s)H3(s)(5.25d)Oo.v)R{s)O//3(5)Forward-pathgain.TheproductofgainsfoundFIGURE5.20Signal-flowgraphfordemonstratingMason'srulebytraversingapathfromtheinputnodetotheoutputnodeofthesignal-flowgraphinthedirectionofsignalflow.Examplesofforward-pathgainsarealsoshowninFigure5.20.Therearetwoforward-pathgains:1.G1(s)G2(s)G3(s)G4(s)G5(s)G7(s)(5.26a)2.G1(s)G2(s)G3(s)G4(s)G6(s)G1(s)(5.26b)Nontouchingloops.Loopsthatdonothaveanynodesincommon.InFigure5.20,loopG2(s)Hi(s)doesnottouchloopsG4(s)H2(s),G4(s)G5(s)H3(s),andG4(s)G6(s)H3(s).252Chapter5ReductionofMultipleSubsystemsNontouching-loopgain.Theproductofloopgainsfromnontouchingloopstakentwo,three,four,ormoreatatime.InFigure5.20theproductofloopgainG2{s)Hi{s)andloopgainG4(s)H2(s)isanontouching-loopgaintakentwoatatime.Insummary,allthreeofthenontouching-loopgainstakentwoatatimeare(5.27a)(5.27b)(5.27c)1.[^(j)ffi(*)][G4(*)#2(*)]2.[G2(s)Hl(s)}[G4(s)G5(s)H3(s)]3.[G2{s)Hi{s)][G4{s)G6(s)H3(s)]Theproductofloopgains[G4(s)Gs(s)H3(s)][G4(s)G()(s)H3(s)]isnotanontouchingloopgainsincethesetwoloopshavenodesincommon.Inourexampletherearenonontouching-loopgainstakenthreeatatimesincethreenontouchingloopsdonotexistintheexample.WearenowreadytostateMason'srule.Mason'sRuleThetransferfunction,C(s)/R(s),ofasystemrepresentedbyasignal-flowgraphisG(s)=R(s)(5.28)Awherek=numberofforwardpathsTic=thekthforward-pathgainA=1-Xloopgains+Xnontouching-loopgainstakentwoatatime-%nontouching-loopgainstakenthreeatatime+%nontouching-loopgainstakenfouratatime—...A*=A—2loopgaintermsinAthattouchthekthforwardpath.Inotherwords,A&isformedbyeliminatingfromAthoseloopgainsthattouchthekthforwardpath.NoticethealternatingsignsforthecomponentsofA.ThefollowingexamplewillhelpclarifyMason'srule.Example5.7TransferFunctionviaMason'sRulePROBLEM:Findthetransferfunction,C(s)fR(s%forthesignal-flowgraphinFigure5.21.R{s)OFIGURE5.21Signal-flowgraphforExample5.7Gi(s)C2{s)G4(s)G3(s)HMGs(s)5.5Mason'sRuleSOLUTION:First,identifytheforward-pathgains.Inthisexamplethereisonlyone:G1(5)G2(5)G3(5)G4(5)G5(5)(5.29)Second,identifytheloopgains.Therearefour,asfollows:1.G2(s)Hi(s)(5.30a)2.G4(s)H2{s)(5.30b)3.G7{s)H4{s)(5.30c)4.G2(s)G2(s)G4(s)G5(s)G6(s)G7(s)GB(s)(5.30d)Third,identifythenontouchingloopstakentwoatatime.FromEqs.(5.30)andFigure5.21,wecanseethatloop1doesnottouchloop2,loop1doesnottouchloop3,andloop2doesnottouchloop3.Noticethatloops1,2,and3alltouchloop4.Thus,thecombinationsofnontouchingloopstakentwoatatimeareasfollows:Loop1andloop2:G2(s)Hi(s)G4{s)H2(s)(5.31a)Looplandloop3:02(5)//1(5)07(5)//4(5)(5.31b)Loop2andloop3:G4(s)H2{s)G7(s)H4(s)(5.31c)Finally,thenontouchingloopstakenthreeatatimeareasfollows:Loops1,2,and3:G2(5)//i(s)G4(s)H2(s)G7(s)H4(s)(5.32)Now,fromEq.(5.28)anditsdefinitions,weformAandA*.Hence,A=1-[G2{s)Ht($)+G4(s)H2(s)+G7(s)H4(s)+G2(s)G3(s)G4(s)G5(s)G6(s)G7(s)G8(s)]+{G2(S)HI(S)G4(S)H2(S)+G2(5)//!(5)G7(5)//4(5)+G4(s)H2(s)G7(s)H4(s)}-^2(5)//^5)04(5)//2(5)07(5)//4(5)](5.33)WeformA*byeliminatingfromAtheloopgainsthattouchthekthforwardpath:Aj=1-07(5)//4(5)(5.34)Expressions(5.29),(5.33),and(5.34)arenowsubstitutedintoEq.(5.28),yieldingthetransferfunction:TG(J)=^=[Gi(s)G2(s)G3(s)G4(s)G5(s)}[l-G7(s)H4(s)}Sincethereisonlyoneforwardpath,G(s)consistsofonlyoneterm,ratherthanasumofterms,eachcomingfromaforwardpath.253Chapter5254ReductionofMultipleSubsystemsSkill-AssessmentExercise5.4WileyPLUSdJSJControlSolutionsPROBLEM:UseMason'sruletofindthetransferfunctionofthesignal-flowdiagramshowninFigure5.19(c).NoticethatthisisthesamesystemusedinExample5.2tofindthetransferfunctionviablockdiagramreduction.ANSWER:T(s)=Gi(s)G3(s)[l+G2(s)][1+G2(s)H2(s)+Gi(s)G2(s)Hi{s)][l+G3(s)H3(s)Thecompletesolutionisatwww.wiley.com/college/nise.(5.6Signal-FlowGraphsofStateEquationsStateSpaceInthissection,wedrawsignal-flowgraphsfromstateequations.Atfirstthisprocesswillhelpusvisualizestatevariables.Laterwewilldrawsignal-flowgraphsandthenwritealternaterepresentationsofasysteminstatespace.Considerthefollowingstateandoutputequations:Xi=2x\-5x2+3x3+2r(5.36a)X2=—6x\—2x2+2*3+Sr(5.36b)xi=x\—3x2—(5.36c)4x3+7r(5.36d)y=-4xi+6x2+9x3First,identifythreenodestobethethreestatevariables,X!,X2,andX3;alsoidentifythreenodes,placedtotheleftofeachrespectivestatevariable,tobethederivativesofthestatevariables,asinFigure5.22(a).Alsoidentifyanodeastheinput,r,andanothernodeastheoutput,y.Nextinterconnectthestatevariablesandtheirderivativeswiththedefiningintegration,lis,asshowninFigure5.22(b).ThenusingEqs.(5.36),feedtoeachnodetheindicatedsignals.Forexample,fromEq.(5.36A),X\receives2xi-5x2+3x3+2r,asshowninFigure5.22(c).Similarly,±2receives—6x1—2x2+2x3+5r,asshowninFigure5.22(d),andx3receivesx\-3x2-4x3+7r,asshowninFigure5.22(e).Finally,usingEq.(5.36d),theoutput,y,receives—4xi+6x2+9x3,asshowninFigure5.19(f),thefinalphase-variablerepresentation,wherethestatevariablesaretheoutputsoftheintegrators.R(,v)O00sXp)A-,(.v)oo.vX,(.s)X2(.v)OOsXAs)XAs)ON.v)(a)I«(.v)0O——O.vAy.v)O—*—OX,(.v)A.*2h)X2(s)O—-—O-sXAs)On*)x,(.v)mFIGURE5.22Stagesofdevelopmentofasignal-flowgraphforthesystemofEqs.(5.36):a.Placenodes;b.interconnectstatevariablesandderivatives;(figurecontinues)5.6Signal-FlowGraphsofStateEquationsOris)XAs)X,{s)X.{s)FIGURE5.22On*)OY(s)(Continued)c.formdxi/dt;d.formdx2/dt;e.formdx^/dt;(figurecontinues)255256Chapter5ReductionofMultipleSubsystemsFIGURE5.22(Continued)f.formoutput(figureend)Skill-AssessmentExercise5.5PROBLEM:Drawasignal-flowgraphforthefollowingstateandoutputequations:x=-2[011010-31x+0-3-4-51y=[010]xANSWER:Thecompletesolutionisatwww.wiley.com/college/nise.Inthenextsection,thesignal-flowmodelwillhelpusvisualizetheprocessofdeterminingalternativerepresentationsinstatespaceofthesamesystem.Wewillseethateventhoughasystemcanbethesamewithrespecttoitsinputandoutputterminals,thestate-spacerepresentationscanbemanyandvaried.|5.7AlternativeRepresentationsinStateSpaceStaleSpaceInChapter3,systemswererepresentedinstatespaceinphase-variableform.However,systemmodelinginstatespacecantakeonmanyrepresentationsotherthanthephase-variableform.Althougheachofthesemodelsyieldsthesameoutputforagiveninput,anengineermaypreferaparticularoneforseveralreasons.Forexample,onesetofstatevariables,withitsuniquerepresentation,canmodelactualphysicalvariablesofasystem,suchasamplifierandfilteroutputs.5.7AlternativeRepresentationsinStateSpaceAnothermotiveforchoosingaparticularsetofstatevariablesandstate-spacemodeliseaseofsolution.Aswewillsee,aparticularchoiceofstatevariablescandecouplethesystemofsimultaneousdifferentialequations.Hereeachequationiswrittenintermsofonlyonestatevariable,andthesolutioniseffectedbysolvingnfirst-orderdifferentialequationsindividually.Easeofmodelingisanotherreasonforaparticularchoiceofstatevariables.Certainchoicesmayfacilitateconvertingthesubsystemtothestate-variablerepresentationbyusingrecognizablefeaturesofthemodel.Theengineerlearnsquicklyhowtowritethestateandoutputequationsanddrawthesignal-flowgraph,bothbyinspection.Theseconvertedsubsystemsgeneratethedefinitionofthestatevariables.Wewillnowlookatafewrepresentativeformsandshowhowtogeneratethestate-spacerepresentationforeach.CascadeFormWehaveseenthatsystemscanberepresentedinstatespacewiththestatevariableschosentobethephasevariables,thatis,variablesthataresuccessivederivativesofeachother.Thisisbynomeanstheonlychoice.ReturningtothesystemofFigure3.10(A),thetransferfunctioncanberepresentedalternatelyas24R{s)(5.37)(s+2){s+3)(s+4)Figure5.23showsablockdiagramrepresentationofthissystemformedbycascadingeachtermofEq.(5.37).Theoutputofeachfirst-ordersystemblockhasbeenlabeledasastatevariable.Thesestatevariablesarenotthephasevariables.R(s)FIGURE5.232415+2X3(s)15+3X2(s)15+4C(s)Xl(s)RepresentationofFigure3.10systemascascadedfirst-ordersystemsWenowshowhowthesignal-flowgraphcanbeusedtoobtainastate-spacerepresentationofthissystem.Inordertowritethestateequationswithournewsetofstatevariables,itishelpfultodrawasignal-flowgraphfirst,usingFigure5.23asaguide.Thesignalflowforeachfirst-ordersystemofFigure5.23canbefoundbytransformingeachblockintoanequivalentdifferentialequation.Eachfirst-orderblockisoftheform1Q(s)=Ri(s){s+at)(5.38)(s+ai)Q(s)=Ri{s)(5.39)Cross-multiplying,wegetAftertakingtheinverseLaplacetransform,wehavedci{t)dt+afrit)=n(t)(5.40)Solvingfordc,{t)/dtyieldsdcj(t)dt=-aiCi(t)+ri(t)(5.41)257Chapter5ReductionofMultipleSubsystemsi71tf,(.v)O—*••vC,(.v)Cjis)(a)24I11s15Yx3m^-2FIGURE5.24is7¾.^^C(.v)X,(.v)-4-3(b)a.First-ordersubsystem;b.Signal-flowgraphforFigure5.23systemFigure5.24(a)showstheimplementationofEq.(5.41)asasignal-flowgraph.Hereagain,anodewasassumedforQ(r)attheoutputofanintegrator,anditsderivativewasformedattheinput.CascadingthetransferfunctionsshowninFigure5.24(a),wearriveatthesystemrepresentationshowninFigure5.24(¾).2Nowwritethestateequationsforthenewrepresentationofthesystem.Rememberthatthederivativeofastatevariablewillbeattheinputtoeachintegrator:x\=-4*i+x2(5.42a)x2=-3x2+x3(5.42b)*3=—2x324r(5.42c)TheoutputequationiswrittenbyinspectionfromFigure5.24(6):y=c(t)=xi(5.43)Thestate-spacerepresentationiscompletedbyrewritingEqs.(5.42)and(5.43)invector-matrixform:x=y=[l-4'0"10"0-31x+00240-2^00]x(5.44a)(5.44b)ComparingEqs.(5.44)withFigure5.24(6),youcanformavividpictureofthemeaningofsomeofthecomponentsofthestateequation.Forthefollowingdiscussion,pleasereferbacktothegeneralformofthestateandoutputequations,Eqs.(3.18)and(3.19).Forexample,theBmatrixistheinputmatrixsinceitcontainsthetermsthatcoupletheinput,r(t),tothesystem.Inparticular,theconstant24appearsinboththesignal-flowgraphattheinput,asshowninFigure5.24(6),andtheinputmatrixinEqs.(5.44).TheCmatrixistheoutputmatrixsinceitcontainstheconstantthatcouplesthestatevariable,Xt-,totheoutput,c(t).Finally,theAmatrixisthesystem2NotethatnodeX3(s)andthefollowingnodecannotbemerged,orelsetheinputtothefirstintegratorwouldbechangedbythefeedbackfromX2(s),andthesignalX3(s)wouldbelost.AsimilarargumentcanbemadeforX2(s)andthefollowingnode.5.7AlternativeRepresentationsinStateSpace259matrixsinceitcontainsthetermsrelativetotheinternalsystemitself.IntheformofEqs.(5.44),thesystemmatrixactuallycontainsthesystempolesalongthediagonal.CompareEqs.(5.44)tothephase-variablerepresentationinEqs.(3.59).Inthatrepresentation,thecoefficientsofthesystem'scharacteristicpolynomialappearedalongthelastrow,whereasinourcurrentrepresentation,therootsofthecharacteristicequation,thesystempoles,appearalongthediagonal.ParallelFormAnotherformthatcanbeusedtorepresentasystemistheparallelform.ThisformleadstoanAmatrixthatispurelydiagonal,providedthatnosystempoleisarepeatedrootofthecharacteristicequation.Whereasthepreviousformwasarrivedatbycascadingtheindividualfirstordersubsystems,theparallelformisderivedfromapartial-fractionexpansionofthesystemtransferfunction.Performingapartial-fractionexpansiononourexamplesystem,weget£(£)_R{s)2412(5+2)(5+3)(5+4)(5+2)2412(5.45)(5+3)^(5+4)Equation(5.45)representsthesumoftheindividualfirst-ordersubsystems.Toarriveatasignal-flowgraph,firstsolveforC(s),C(s)=R(s)122)-R(s)24(5+3)+R(s)12andrecognizethatC(s)isthesumofthreeterms.EachtermisafirstordersubsystemwithR(s)astheinput.Formulatingthisideaasasignal-flowgraphrenderstherepresentationshowninFigure5.25.Onceagain,weusethesignal-flowgraphasanaidtoobtainingthestateequations.Byinspectionthestatevariablesaretheoutputsofeachintegrator,wherethederivativesofthestatevariablesexistattheintegratorinputs.Wewritethestateequationsbysummingthesignalsattheintegratorinputs:(5.47a)(5.47b)(5.47c)X]=-2*i+12r±2=—3x2-24rir3=-4.«3+12r(5.46)>+4)C(.v)A'(.v)FIGURE5.25Eq.(5.45)Theoutputequationisfoundbysummingthesignalsthatgivec(t):y=c(t)=xi+x2+XT,(5.48)Invector-matrixform,Eqs.(5.47)and(5.48)becomex=-20010x+0-300-412-2412(5.49)andy=[\1l]x(5.50)Thus,ourthirdrepresentationofthesystemofFigure3.10(a)yieldsadiagonalsystemmatrix.Whatistheadvantageofthisrepresentation?EachequationisaSignal-flowrepresentationof260Chapter5ReductionofMultipleSubsystemsfirst-orderdifferentialequationinonlyonevariable.Thus,wewouldsolvetheseequationsindependently.Theequationsaresaidtobedecoupled.MATLABStudentswhoareusingMATLABshouldnowrunch5p3inAppendixB.YouwilllearnhowtouseMATLABtoconvertatransferfunctiontostatespaceinaspecifiedform.TheexercisesolvesthepreviousexamplebyrepresentingthetransferfunctioninEq.(5.45)bythestate-spacerepresentationinparallelformofEq.(5.49).Ifthedenominatorofthetransferfunctionhasrepeatedrealroots,theparallelformcanstillbederivedfromapartial-fractionexpansion.However,thesystemmatrixwillnotbediagonal.Forexample,assumethesystem(5+3)(5.51)whichcanbeexpandedaspartialfractions:2(.+1)2€($)m(5+1)+'(5+2)(5.52)Proceedingasbefore,thesignal-flowgraphforEq.(5.52)isshowninFigure5.26.Theterm-1/(5+1)wasformedbycreatingthesignalflowfromX2(s)toC(s).NowthestateandoutputequationscanbewrittenbyinspectionfromFigure5.26asfollows:x\=-Xx+*2h=-x2X3=(0=Xi1-~x2(5.53a)+2r(5.53b)-2*3+>-(5.53c)+*3(5.53d)or,invector-matrixform,FIGURE5.26Signal-flowrepresentationofEq.(5.52)x=00-110-10x+2100-2(5.54a)y='-H(5.54b)XThissystemmatrix,althoughnotdiagonal,hasthesystempolesalongthediagonal.Noticethe1offthediagonalforthecaseoftherepeatedroot.TheformofthesystemmatrixisknownastheJordancanonicalform.ControllerCanonicalFormAnotherrepresentationthatusesphasevariablesiscalledthecontrollercanonicalform,sonamedforitsuseinthedesignofcontrollers,whichiscoveredinChapter12.Thisformisobtainedfromthephase-variableformsimplybyorderingthephasevariablesinthereverseorder.Forexample,considerthetransferfunctionG{s)=R{s)52+IS+25+952+265+243(5.55)5.7AlternativeRepresentationsinStateSpace261Thephase-variableformwasderivedinExample3.5asXi=X2*3-01Xf"0"0101X2+00-24-26-9ml(5.56a)'xi~y=[271](5.56b)X2X3wherev=c(t).RenumberingthephasevariablesinreverseorderyieldsX3X2Xi—010001-24-26-9*3X2XiU(5.57a)+01A'3y=[271(5.57b)X2XiFinally,rearrangingEqs.(5.57)inascendingnumericalorderyieldsthecontrollercanonicalform3as-9-26-24001X2=010.¾.*1XiX2X.3.1+00(5.58a)Xi(5.58b)v=[l72]x2X.3_Figure5.27showsthestepswehavetakenonasignal-flowgraph.Noticethatthecontrollercanonicalformisobtainedsimplybyrenumberingthephasevariablesintheoppositeorder.Equations(5.56)canbeobtainedfromFigure5.27(a),andEqs.(5.58)fromFigure5.27(b).Noticethatthephase-variableformandthecontrollercanonicalformcontainthecoefficientsofthecharacteristicpolynomialinthebottomrowandinthetoprow,(a)(b)FIGURE5.27Signal-flowgraphsforobtainingformsforG{s)=C(s)/R{s)=(s2+7s+2)/(s3+9s2+26s+24):a.phase-variableform;b.controllercanonicalform"StudentswhoareusingMATLABtoconvertfromtransferfunctionstostatespaceusingthecommandtf2sswillnoticethatMATLABreportstheresultsincontrollercanonicalform.Trylt5.3UsethefollowingMATLABandControlSystemToolboxstatementstoconvertthetransferfunctionofEq.(5.55)tothecontrollercanonicalstate-spacerepresentationofEqs.(5.58).numg={l72];deng={l92624];[Acc,Bcc,Ccc,Dec]...=tf2ss(nurag,deng)262Chapter5ReductionofMultipleSubsystemsrespectively.Systemmatricesthatcontainthecoefficientsofthecharacteristicpolynomialarecalledcompanionmatricestothecharacteristicpolynomial.Thephase-variableandcontrollercanonicalformsresultinalowerandanuppercompanionsystemmatrix,respectively.Companionmatricescanalsohavethecoefficientsofthecharacteristicpolynomialintheleftorrightcolumn.Inthenextsubsection,wediscussoneoftheserepresentations.ObserverCanonicalFormTheobservercanonicalform,sonamedforitsuseinthedesignofobservers(coveredinChapter12),isarepresentationthatyieldsaleftcompanionsystemmatrix.Asanexample,thesystemmodeledbyEq.(5.55)willberepresentedinthisform.Beginbydividingalltermsinthenumeratoranddenominatorbythehighestpowerofs,s3,andobtainC(s)R(s)Cross-multiplyingyields172"-+T+3CC^I+I+I7?^(5.59),926241+-+-T+-5-'92624R(s)=1+-+^+^CM(5.60)COCombiningtermsoflikepowersofintegrationgivesC(s)=-[R{s)-9C(s)]+\[7R(s)-26C(s)]+i[2R(s)-24C{s)\(5.61)SS*'-SrorC(s)=-[R(s)-9C(s)}+-([7R(s)-26C(s)}+-[2R(s)-24C(s)](5.62)Equation(5.61)or(5.62)canbeusedtodrawthesignal-flowgraph.Startwiththreeintegrations,asshowninFigure5.28(a).UsingEq.(5.61),thefirsttermtellsusthatoutputC(s)isformed,inpart,byintegrating[R(s)-9C(s)].Wethusform[R(s)-9C(s)]attheinputtotheintegratorclosesttotheoutput,C(s),asshowninFigure5.28(b).ThesecondtermtellsusthattheFIGURE5.28Signal-flowgraphforobservercanonicalformvariables:a.planning;b.implementationA'(v)OC(.v)R(s)a.v)-24(b)5.7AlternativeRepresentationsinStateSpace263term[7R(s)—26C(s)]mustbeintegratedtwice.Nowform[JR{s)—26C(s)]attheinputtothesecondintegrator.Finally,thelasttermofEq.(5.61)says[2R(s)-24C(s)}mustbeintegratedthreetimes.Form[2R(s)—24C(s)]attheinputtothefirstintegrator.Identifyingthestatevariablesastheoutputsoftheintegrators,wewritethefollowingstateequations:IVylt5.4k\=—9x\-\-X2-\-r(5.63a)UsethefollowingMATLABandControlSystemToolboxx2=-26xi+*3+7r(5.63b)statementstoconvertthei3=-24xi+2r(5.63c)transferfunctionofEq.(5.55)TheoutputequationfromFigure5.28(b)isy=c(t)=XltotheobservercanonicalstatespacerepresentationofEqs.(5.65).(5.64)Invector-matrixform,Eqs.(5.63)and(5.64)become-910-2601x+-240Ojv=[lVnumg=[l72];deng=[l92624];[Acc,Bcc,Ccc,Dec]...=tf2ss(numg,deng);Aoc=transpose(Acc)Boc=transpose(Ccc)Coc=transpose(Bcc)(5.65a)7200]x(5.65b)NoticethattheformofEqs.(5.65)issimilartothephase-variableform,exceptthatthecoefficientsofthedenominatorofthetransferfunctionareinthefirstcolumn,andthecoefficientsofthenumeratorformtheinputmatrix,B.AlsonoticethattheobservercanonicalformhasanAmatrixthatisthetransposeofthecontrollercanonicalform,aBvectorthatisthetransposeofthecontrollercanonicalform'sCvector,andaCvectorthatisthetransposeofthecontrollercanonicalform'sBvector.Wethereforesaythatthesetwoformsareduals.Thus,ifasystemisdescribedbyA,B,andC,itsdualisdescribedbyAD=Ar,BD=Cr,CD=Br.Youcanverifythesignificanceofdualitybycomparingthesignal-flowgraphsofasystemanditsdual,Figures5.27(b)and5.28(b),respectively.Thesignal-flowgraphofthedualcanbeobtainedfromthatoftheoriginalbyreversingallarrows,changingstatevariablestotheirderivativesandviceversa,andinterchangingC(s)andR(s),thusreversingtherolesoftheinputandtheoutput.Weconcludethissectionwithanexamplethatdemonstratestheapplicationofthepreviouslydiscussedformstoafeedbackcontrolsystem.Example5.8State-SpaceRepresentationofFeedbackSystemsPROBLEM:RepresentthefeedbackcontrolsystemshowninFigure5.29instatespace.Modeltheforwardtransferfunctionincascadeform.R(>t(Sh**l-y*100(s+5)(s+2)(s+3)C(s)SOLUTION:Firstwemodeltheforwardtransferfunctionincascadeform.Thegainof100,thepoleat-2,andthepoleat-3areshownFIGURE5.29Feedbackcontrolsystemforxampe'cascadedinFigure5.30(a).Thezeroat-5wasobtainedusingthemethodforimplementingzerosforasystemrepresentedinphase-variableform,asdiscussedinSection3.5.Nextaddthefeedbackandinputpaths,asshowninFigure5.30(Z>).Now,byinspection,writethestateequations:X\=—3X]+X2x2=-2x2+100(r-c)(5.66a)(5.66b)264Chapter5FAs)OReductionofMultipleSubsystems100»K(v)OC(.v)FIGURE5.30Creatingasignal-flowgraphfortheFigure5.29system:a.forwardtransferfunction;b.completesystemBut,fromFigure5.30(6),c=5xi+fcfe-3xi}-2ri+x2(5.67)SubstitutingEq.(5.67)into(5.66b),wefindthestateequationsforthesystem:x\=-3x1+X2x2=-200xi-102x2+lOOr(5.68a)(5.68b)TheoutputequationisthesameasEq.(5.67),ory=c{t)=2xA+x2(5.69)Invector-matrixformx=01-102x+100-3-200y=[2llx(5.70a)(5.70b)Skill-AssessmentExercise5.6WileyPLUSPROBLEM:RepresentthefeedbackcontrolsystemshowninFigure5.29instatespace.Modeltheforwardtransferfunctionincontrollercanonicalform.ControlSolutionsANSWER:x=-1051y=[100-5060x+500]xThecompletesolutionisatwww.wiley.com/college/nise.5.7AlternativeRepresentationsinStateSpace265Inthissection,weusedtransferfunctionsandsignal-flowgraphstorepresentsystemsinparallel,cascade,controllercanonical,andobservercanonicalforms,inadditiontothephase-variableform.UsingthetransferfunctionC(s)/R(s)=(s+3)/[(s+4)(s+6)]asanexample,Figure5.31comparestheaforementionedforms.Noticethedualityofthecontrollerandobservercanonicalforms,asdemonstratedbytheirrespectivesignal-flowgraphsandstateequations.Inthenextsection,wewillexplorethepossibilityoftransformingbetweenrepresentationswithoutusingtransferfunctionsandsignal-flowgraphs.FormPhasevariableTransferfunction1*(5+3)(A-2+10s+24)Signal-flowdiagramR(s)OStateequationsO.v)01-24-10x=>-=[3l]xParallel-1/2(s+4)r3/2s+6-40"x=0-6x+32y=Il]xCascadeControllercanonical1(s+4)-10-24I*(s+3)(s2+Ws+24)1Observercanonical-610-4y=[-3l]x(5+3)(s+6)sy=U++3-10-24gy=[\0]x-24FIGURE5.31103]xState-spaceformsforC(s)/R(s)=(s+3)/[{s+4){s+6)].Note:y=c(r)x+10x+1uU_Chapter5ReductionofMultipleSubsystemsSimilarityTransformationsInSection5.7,wesawthatsystemscanberepresentedwithdifferentstatevariableseventhoughthetransferfunctionrelatingtheoutputtotheinputremainsthesame.Thevariousformsofthestateequationswerefoundbymanipulatingthetransferfunction,drawingasignal-flowgraph,andthenwritingthestateequationsfromthesignal-flowgraph.Thesesystemsarecalledsimilarsystems.Althoughtheirstatespacerepresentationsaredifferent,similarsystemshavethesametransferfunctionandhencethesamepolesandeigenvalues.Wecanmaketransformationsbetweensimilarsystemsfromonesetofstateequationstoanotherwithoutusingthetransferfunctionandsignal-flowgraphs.Theresultsarepresentedinthissectionalongwithexamples.StudentswhohavenotbroachedthissubjectinthepastorwhowishtorefreshtheirmemoriesareencouragedtostudyAppendixLatwww.wiley.com/college/niseforthederivation.Theresultofthederivationstates:Asystemrepresentedinstatespaceasx=Ax+Bu(5.71a)y=Cx+Du(5.71b)canbetransformedtoasimilarsystem,z=P1APz+P1Bu(5.72a)y=CPz+Du(5.72b)where,for2~space,P=[U21U22]=[PnPnPnPn.1x=[PnPn\r^i=PzPnPn.(5.72c)(5.72d)andz=Vlx(5.72e)Thus,PisatransformationmatrixwhosecolumnsarethecoordinatesofthebasisvectorsoftheZ\ZispaceexpressedaslinearcombinationsoftheX\X2space.Letuslookatanexample.5.8SimilarityTransformations267Example5.9SimilarityTransformationsonStateEquationsPROBLEM:GiventhesystemrepresentedinstatespacebyEqs.(5.73),0110-5-700-2x=y=[\00x+0(5.73a)1(5.73b)0]xtransformthesystemtoanewsetofstatevariables,z,wherethenewstatevariablesarerelatedtotheoriginalstatevariables,x,asfollows:z\=2*i(5.74a)zi=3*i+2½(5.74b)Z3=Xi+4*2+5*3(5.74c)SOLUTION:ExpressingEqs.(5.74)invector-matrixform,200320x=P-1x145z=(5.75)UsingEqs.(5.72)asaguide,P_1AP=20032014500-20-5101-70.5-0.750.5000.50-0.40.2(5.76)-1.510-1.250.70.4-2.50.4-6.2PJBCP=[120032014500(5.77)0.5-0.750.500.5-0.4000.2=[0.500](5.78)Therefore,thetransformedsystemis-1.5z=-1.25-2.5510.70.4y={0.500]z00.4-6.2z+005(5.79a)(5.79b)MATLABStudentswhoareusingMATLABshouldnowrunch5p4inAppendixB.Youwilllearnhowtoperformsimilaritytransformations.ThisexerciseusesMATLABtodoExample5.9.268Chapter5ReductionofMultipleSubsystemsThusfarwehavetalkedabouttransformingsystemsbetweenbasisvectorsinadifferentstatespace.Onemajoradvantageoffindingthesesimilarsystemsisapparentinthetransformationtoasystemthathasadiagonalmatrix.DiagonalizingaSystemMatrixInSection5.7,wesawthattheparallelformofasignal-flowgraphcanyieldadiagonalsystemmatrix.Adiagonalsystemmatrixhastheadvantagethateachstateequationisafunctionofonlyonestatevariable.Hence,eachdifferentialequationcanbesolvedindependentlyoftheotherequations.Wesaythattheequationsaredecoupled.Ratherthanusingpartialfractionexpansionandsignal-flowgraphs,wecandecoupleasystemusingmatrixtransformations.Ifwefindthecorrectmatrix,P,thetransformedsystemmatrix,P_1AP,willbeadiagonalmatrix.Thus,wearelookingforatransformationtoanotherstatespacethatyieldsadiagonalmatrixinthatspace.Thisnewstatespacealsohasbasisvectorsthatliealongitsstatevariables.Wegiveaspecialnametoanyvectorsthatarecollinearwiththebasisvectorsofthenewsystemthatyieldsadiagonalsystemmatrix:theyarecalledeigenvectors.Thus,thecoordinatesoftheeigenvectorsformthecolumnsofthetransformationmatrix,P,aswedemonstrateinEq.L.7inAppendixLatwww.wiley.com/college/nise.First,letusformallydefineeigenvectorsfromanotherperspectiveandthenshowthattheyhavethepropertyjustdescribed.Thenwewilldefineeigenvalues.Finally,wewillshowhowtodiagonalizeamatrix.DefinitionsEigenvector.TheeigenvectorsofthematrixAareallvectors,x;^0,whichunderthetransformationAbecomemultiplesofthemselves;thatis,AXJ=A,Xi(5.80)whereVsareconstants.Figure5.32showsthisdefinitionofeigenvectors.IfAxisnotcollinearwithxafterthetransformation,asinFigure5.32(a),xisnotaneigenvector.IfAxiscollinearwithxafterthetransformation,asinFigure5.32(b),xisaneigenvector.Eigenvalue.TheeigenvaluesofthematrixAarethevaluesofA,-thatsatisfyEq.(5.80)for*^0.Tofindtheeigenvectors,werearrangeEq.(5.80).Eigenvectors,x,-,satisfy0=(X«I-A)xi(5.81)FIGURE5.32Tobeaneigenvector,thetransformationAxmustbecollinearwithx;thus,in(a),xisnotaneigenvector;in(b),itis5.8SimilarityTransformationsSolvingforXjbypremultiplyingbothsidesby(A,I-A)-lyieldsv;(5.82)det(A,I-A)Sincex{£0,anonzerosolutionexistsif(5.83)det(A,I-A)=0fromwhichA/,theeigenvalues,canbefound.Wearenowreadytoshowhowtofindtheeigenvectors,x-,.Firstwefindtheeigenvalues,A/,usingdet(A,I—A)=0,andthenweuseEq.(5.80)tofindtheeigenvectors.Example5.10FindingEigenvectorsPROBLEM:Findtheeigenvectorsofthematrix-31A=1-3(5.84)SOLUTION:Theeigenvectors,xhsatisfyEq.(5.81).First,usedet(A,Itofindtheeigenvalues,A/,forEq.(5.81):-31-3i—iA0det(Al-A)=A)=00AA+3-1-1A+3=A2+6A+8(5.85)fromwhichtheeigenvaluesareA=—2,and-4.UsingEq.(5.80)successivelywitheacheigenvalue,wehaveAx;=Ax;-31111"*!=-2-3x2x2(5.86)or—3*1+X2=—2x\X\-3X2=-2^2(5.87a)(5.87b)fromwhichx\=x2.Thus,(5.88)x=Usingtheothereigenvalue,—4,wehavex=c—c(5.89)UsingEqs.(5.88)and(5.89),onechoiceofeigenvectorsisxi11andX2=1-1(5.90)269270Chapter5ReductionofMultipleSubsystemsWenowshowthatiftheeigenvectorsofthematrixAarechosenasthebasisvectorsofatransformation,P,theresultingsystemmatrixwillbediagonal.LetthetransformationmatrixPconsistoftheeigenvectorsofA,Xj.P=[xi,x2,x3,...,x„](5.9i;SinceXjareeigenvectors,AXJ—X[X\,whichcanbewrittenequivalentlyasasetofequationsexpressedby(5.92)AP=PDwhereDisadiagonalmatrixconsistingofVs,theeigenvalues,alongthediagonal,andPisasdefinedinEq.(5.91).SolvingEq.(5.92)forDbypremultiplyingbyP_1,wegetD=P-!AP(5.93)whichisthesystemmatrixofEq.(5.72).Insummary,underthetransformationP,consistingoftheeigenvectorsofthesystemmatrix,thetransformedsystemisdiagonal,withtheeigenvaluesofthesystemalongthediagonal.Thetransformedsystemisidenticaltothatobtainedusingpartial-fractionexpansionofthetransferfunctionwithdistinctrealroots.InExample5.10,wefoundeigenvectorsofasecond-ordersystem.Letuscontinuewiththisproblemanddiagonalizethesystemmatrix.Example5.11DiagonalizingaSysteminStateSpacePROBLEM:GiventhesystemofEqs.(5.94),findthediagonalsystemthatissimilar.-31x=y=[21-3(5.94a)(5.94b)3]xSOLUTION:Firstfindtheeigenvaluesandtheeigenvectors.ThisstepwasperformedinExample5.10.NextformthetransformationmatrixP,whosecolumnsconsistoftheeigenvectors.P=111-1(5.95)Finally,formthesimilarsystem'ssystemmatrix,inputmatrix,andoutputmatrix,respectively.P1AP=1/21/21/2-1/2P_1B=1/21/21/2'-1/2CP=[2311-311-1=[5111-31-1-200-4(5.96a)3/2-1/2(5.96b)-1(5.96c)5.8SimilarityTransformations271SubstitutingEqs.(5.96)intoEqs.(5.72),weget-20z=y=[50z-f-43/2-1/2(5.97a)-l]z(5.97b)Noticethatthesystemmatrixisdiagonal,withtheeigenvaluesalongthediagonal.MATLABStudentswhoareusingMATLABshouldnowrunch5p5inAppendixBThisproblem,whichusesMATLABtodiagonalizeasystem,issimilar(butnotidentical)toExample5.11.Skill-AssessmentExercise5.7PROBLEM:Forthesystemrepresentedinstatespaceasfollows:13-4-6v=[l4]xx=x+WileyPLUSControlSolutionsconvertthesystemtoonewherethenewstatevector,z,isz=31-2-4ANSWER:6.5z=-8.5-3z+-119.5-11.5y=[0.8-1.4]zThecompletesolutionisatwww.wiley.com/college/nise.SkillAssessmentExercise!>.8JPROBLEM:FortheoriginalsystemofSkill-AssessmentExercise5.7,findthediagonalsystemthatissimilar.ANSWER:z=[-20Ol-3z+[18.39]20uy=[-2.1212,6]zThecompletesolutionisatwww.wiley.com/college/nise.Trylt5.5UsethefollowingMATLABandControlSystemToolboxstatementstodoSkillAssessmentExercise5.8.A=[l3;-4-6];B=[l;3];C=[l4];D=0;S=ss(A,B,C,D);Sd=canon{S,'modal')272Chapter5ReductionofMultipleSubsystemsFIGURE5.33Alvin,amannedsubmersible,exploredthewreckageoftheTitanicwithatetheredrobot,JasonJunior.Inthissection,welearnedhowtomovebetweendifferentstate-spacerepresentationsofthesamesystemviamatrixtransformationsratherthantransferfunctionmanipulationandsignal-flowgraphs.Thesedifferentrepresentationsarecalledsimilar.Thecharacteristicsofsimilarsystemsarethatthetransferfunctionsrelatingtheoutputtotheinputarethesame,asaretheeigenvaluesandpoles.Aparticularlyusefultransformationwasconvertingasystemwithdistinct,realeigenvaluestoadiagonalsystemmatrix.Wenowsummarizetheconceptsofblockdiagramandsignal-flowrepresentationsofsystems,firstthroughcasestudyproblemsandtheninawrittensummary.OurcasestudiesincludetheantennaazimuthpositioncontrolsystemandtheUnmannedFree-SwimmingSubmersiblevehicle(UFSS).BlockdiagramreductionisimportantfortheanalysisanddesignofthesesystemsaswellasthecontrolsystemsonboardAlvin(Figure5.33),usedtoexplorethewreckageoftheTitanic13,000feetundertheAtlanticinJuly1986(Ballard,1987).AntennaControl:DesigningaClosed-LoopResponseThischapterhasshownthatphysicalsubsystemscanbemodeledmathematicallywithtransferfunctionsandtheninterconnectedtoformafeedbacksystem.Theinterconnectedmathematicalmodelscanbereducedtoasingletransferfunctionrepresentingthesystemfrominputtooutput.Thistransferfunction,theclosedlooptransferfunction,isthenusedtodeterminethesystemresponse.Thefollowingcasestudyshowshowtoreducethesubsystemsoftheantennaazimuthpositioncontrolsystemtoasingle,closed-looptransferfunctioninordertoanalyzeanddesignthetransientresponsecharacteristics.CaseStudies273PROBLEM:Giventheantennaazimuthpositioncontrolsystemshownonthefrontendpapers,Configuration1,dothefollowing:a.Findtheclosed-looptransferfunctionusingblockdiagramreduction.StateSpaceb.Representeachsubsystemwithasignal-flowgraphandfindthestate-spacerepresentationoftheclosed-loopsystemfromthesignal-flowgraph.c.Usethesignal-flowgraphfoundinbalongwithMason'sruletofindtheclosedlooptransferfunction.d.Replacethepoweramplifierwithatransferfunctionofunityandevaluatetheclosed-looppeaktime,percentovershoot,andsettlingtimeforK=1000.e.Forthesystemofd,derivetheexpressionfortheclosed-loopstepresponseofthesystem.f.Forthesimplifiedmodelofd,findthevalueofKthatyieldsa10%overshoot.SOLUTION:Eachsubsystem'stransferfunctionwasevaluatedinthecasestudyinChapter2.Wefirstassemblethemintotheclosed-loop,feedbackcontrolsystemblockdiagramshowninFigure5.34(A).a.Thestepstakentoreducetheblockdiagramtoasingle,closed-looptransferfunctionrelatingtheoutputangulardisplacementtotheinputangulardisplacementareshowninFigure534(a-d).InFigure5.34(Z>),theinputpotentiometerwaspushedtotherightpastthesummingjunction,creatingaunityfeedbackInputpotentiometer9,{s)h-*7\9rMotor,load,andgearsPoweramplifierPreamplifierVp(s)KEa(s)100s+1000.20835(5+1.71)0o(s)1nOutputpotentiometer(a)PreamplifierandpotentiometersmKniiS*—,VVp(s)Poweramplifier1005+100Motor,load,andgears£(s)6.63K53+101.71.?2+1715+6.63KFIGURE5.34Blockdiagramreductionfortheantennaazimuthpositioncontrolsystem:a.original;b.pushinginputpotentiometertotherightpastthesummingjunction;c.showingequivalentforwardtransferfunction;d.finalclosed-looptransferfunctionChapter5ReductionofMultipleSubsystemsftWO-*FIGURE5.35Signal-flowgraphfortheantennaazimuthpositioncontrolsystemsystem.InFigure5.34(c),alltheblocksoftheforwardtransferfunctionaremultipliedtogether,formingtheequivalentforwardtransferfunction.Finally,thefeedbackformulaisapplied,yieldingtheclosed-looptransferfunctioninFigure534(d).b.Inordertoobtainthesignal-flowgraphofeachsubsystem,weusethestateequationsderivedinthecasestudyofChapter3.Thesignal-flowgraphforthepoweramplifierisdrawnfromthestateequationsofEqs.(3.87)and(3.88),andthesignal-flowgraphofthemotorandloadisdrawnfromthestateequationofEq.(3.98).Othersubsystemsarepuregains.Thesignal-flowgraphforFigure5.34(a)isshowninFigure5.35andconsistsoftheinterconnectedsubsystems.ThestateequationsarewrittenfromFigure5.35.Firstdefinethestatevariablesastheoutputsoftheintegrators.Hence,thestatevectorisx=(5.98)*2UsingFigure5.35,wewritethestateequationsbyinspection:Xl+x2=-1.71¾+2.083eflh=ea=-3.18¾-100^+31.8^(5.99a)(5.99b)(5.99c)alongwiththeoutputequation,(5.100)y=o0=O.lxiwhere1/JC=0.318.Invector-matrixform,rx=ol010-1.712.083x+-100-3.18A:0roi00i3l.SKy-:[0.100]X(5.101a)(5.101b)c.WenowapplyMason'sruletoFigure5.35toderivetheclosed-looptransferfunctionoftheantennaazimuthpositioncontrolsystem.Firstfindtheforwardpathgains.FromFigure5.35thereisonlyoneforward-pathgain:rt=(I)(^)(100)(I)(2.083)(I)(I)(0.1)=5f^(5,02)CaseStudiesNextidentifytheclosed-loopgains.Therearethree:thepoweramplifierloop,GLI(S),witheaattheoutput;themotorloop,GL2(s),withx2attheoutput;andtheentiresystemloop,GL3(s),withdoattheoutput.GL1{s)=—(5.103a)GL2(s)=^^(5.103b)GL3(s)=«(100)Q(2.083)Q(~)(0.1)(^)==^-(5.103c)OnlyGLi(s)andGL2C0arenontouchingloops.Thus,thenontouching-loopgainisGL1(s)GL2(s)=^(5.104)FormingAandA*inEq.(5.28),wehaveA=1-lGm{s)+GL2(s)+GL3(s)}+[GL1(s)GL2(s)},1001.716.63K111=1++-f—5—+^r/c,nn(5.105)andAt=1(5.106)SubstitutingEqs.(5.102),(5.105),and(5.106)intoEq.(5.28),weobtaintheclosed-looptransferfunctionas{)R(s)A^+101.71^+171^+6.63^l}d.Replacingthepoweramplifierwithunitygainandlettingthepreamplifiergain,K,inFigure5.34(b)equal1,000yieldaforwardtransferfunction,G(s),ofUsingthefeedbackformulatoevaluatetheclosed-looptransferfunction,weobtainT(s)=--,—^t6'3„„(5.109)v2v's+1.715+66.3'Fromthedenominator,u>n=8.14,£=0.105.UsingEqs.(4.34),(4.38),and(4.42),thepeaktime=0.388second,thepercentovershoot=71.77%,andthesettlingtime=4.68seconds.e.TheLaplacetransformofthestepresponseisfoundbyfirstmultiplying'Eq.(5.109)by1/s,aunit-stepinput,andexpandingintopartialfractions:_,.66.3C{s)=5(52+1.715+66.3)1s+1.71552+1.715+66.3_1(5+0.855)+0.106(8.097)~s(s+0.855)2+(8.097)2(5.110)275276Chapter5ReductionofMultipleSubsystemsTakingtheinverseLaplacetransform,wefindc(t)=1-e-°-855r(cos8.097r+0.106sin8.097f)f.Forthesimplifiedmodelwehave0.0663£G®=w^m(5.111)^(5fJfJtH112)-fromwhichtheclosed-looptransferfunctioniscalculatedtobe_.,0-0663^(5113)^)=,2+1.715+0.0663^FromEq.(4.39)a10%overshootyields£=0.591.UsingthedenominatorofEq.(5.113),(On=VO0663tfand2#%=1.71.Thus,t==0.591.1,712\/0.0663A:(5.114);fromwhichK—31.6.CHALLENGE:Youarenowgivenaproblemtotestyourknowledgeofthischapter'sobjectives:Referringtotheantennaazimuthpositioncontrolsystemshownonthefrontendpapers,Configuration2,dothefollowing:StaleSpacea.Findtheclosed-looptransferfunctionusingblockdiagramreduction.b.Representeachsubsystemwithasignal-flowgraphandfindthestate-spacerepresentationoftheclosed-loopsystemfromthesignal-flowgraph.c.Usethesignal-flowgraphfoundin(b)alongwithMason'sruletofindtheclosed-looptransferfunction.d.Replacethepoweramplifierwithatransferfunctionofunityandevaluatetheclosed-looppercentovershoot,settlingtime,andpeaktimeforK=5.e.Forthesystemusedfor(d),derivetheexpressionfortheclosed-loopstepresponse.f.Forthesimplifiedmodelin(d),findthevalueofpreamplifiergain,K,toyield15%overshoot.UFSSVehicle:Pitch-AngleControlRepresentationStateSpaceWereturntotheUnmannedFree-SwimmingSubmersible(UFSS)vehicleintroducedinthecasestudiesinChapter4(Johnson,1980).Wewillrepresentinstatespacethepitch-anglecontrolsystemthatisusedfordepthcontrol.PROBLEM:ConsidertheblockdiagramofthepitchcontrolloopoftheUFSSvehicleshownonthebackendpapers.Thepitchangle,6,iscontrolledbyacommandedpitchangle,9e,whichalongwithpitch-angleandpitch-ratefeedbackdeterminestheelevatordeflection,•G2(s)•STG4(s)H(.s)G4(s)G2(s)C(s)1'G3(s)H&'G7(*)(•FIGUREP5.67.FindtheunityfeedbacksystemthatisequivalenttothesystemshowninFigureP5.7.[Section:5.2].FIGUREP5.4,R(s)5.Findthetransferfunction,T(s)=C(s)/R(s),forthesystemshowninFigureP5.5.Usethefollowingmethods:7ss^vyj*9J_~*^X*"i?t*TT*J.5s+1PW2sa.Blockdiagramreduction[Section:5.2]+b.MATLAB.UsethefollowingMATLABtransferfunctions:^d^)G1(s)=l/(s4-7),G2{s)=l/(s2+2s+3),G3(s)=l/(s+4),G4(s)=l/s,G5{s)=5/(8+7),Gels)=l/(s2+5s+10),G-,{s)=3/(s+2),Ga(s)=l/(s+6).Hint:UsetheappendandconnectcommandsinMATLAB'sControlSystemToolbox.-i4FIGUREP5.78.GiventheblockdiagramofasystemshowninFigureP5.8,findthetransferfunctionG(s)=&22(s)/0u(s).[Section:5.2]Chapter5282*nW+/0\ReductionofMultipleSubsystems.GI(-J)G2(s)G3(s)£M^G(s)G5(s)*xOll(s\G7(5)•Ou(s)+K4•Qjp-i.022(s)G6(s)FIGUREP5.89.ReducetheblockdiagramshowninFigureP5.9toasingletransferfunction,T(s)=C(s)/R(s).[Section:5.2]11.ForthesystemshowninFigureP5.ll,findthepercentovershoot,settlingtime,andpeaktimeforastepinputifthesystem'sresponseisunderdamped.(Isit?Why?)[Section:5.3]Gi(s)R(S)+;Gsis)G2(s)G6(s)R(s)+,->E(s)C(s)r1+,Gi(s)225s(s+15)C(s)FIGUREP5.11GA(S)12.ForthesystemshowninFigureP5.12,findtheoutput,c(r),iftheinput,r(t),isaunitstep.[Section:5.3]Gj(s)FIGUREP5.910.ReducetheblockdiagramshowninFigureP5.10toasingleblockrepresentingthetransferfunction,T(s)=C{s)/R{s).[Section:5.2]wiieypmsdJ3controlsolutionsR{s)±/Chm5s(s+2)C(s)FIGUREP5.12H3(s)rMi^_13.ForthesystemshowninFigureP5.13,findthepolesoftheclosed-looptransferfunction,T(s)=C(s)/R(s).[Section:5.3]H^s)Giis)t&\'E(s)^C(s)38343s(s+200)FIGUREP5.14FIGUREP5.1815.ForthesystemshowninFigureP5.15,findKandatoyieldasettlingtimeof0.15secondanda30%overshoot.[Section:5.3]R(s)+E(s)C(s)Ks(s+a)19.AmotorandgeneratoraresetuptodrivealoadasshowninFigureP5.19.Ifthegeneratoroutputvoltageiseg(t)=K/if(t),whereifa)isthegenerator'sfieldcurrent,findthetransferfunctionG(s)=60(s)/Ei{s).Forthegenerator,Kf=2ft.Forthemotor,Kt=1N-m/A,andKb=1V-s/rad.FIGUREP5.1516.ForthesystemofFigureP5.16,findthevaluesofK\andK2toyieldapeaktimeof1.5secondandasettlingtimeof3.2secondsfortheclosed-loopsystem'sstepresponse.[Section:5.3]+^^-6„f\-f)4kg-m2}-1—=JC(s)10s(s+2)X~>\Kl10V4N-m-s/radFIGUREP5.19K2s20.FindG{s)=E0(s)/T(s)forthesystemshowninFigureP5.20.wiieyPLUsCHSJControlSolutionsFIGUREP5.1617.FindthefollowingforthesystemshownWl'eyPLUsinFigureP5.17:[Section:5.3]CE3Contro1So,utionsa.Theequivalentsingleblockthatrepresentsthetransferfunction,T(s)=C(s)/R(s).b.Thedampingratio,naturalfrequency,percentovershoot,settlingtime,peaktime,risetime,anddampedfrequencyofoscillation.R(s)+'\110irVi^A/\10.JVFIGUREP5.1715+1220C(s)FIGUREP5.2021.FindthetransferfunctionG(s)=E0(s)/T(s)forthesystemshowninFigureP5.21.284Chapter5ReductionofMultipleSubsystems\1\r>^)j|=0.2Skg^)-|sK=5N-m/rad50\-+)h=50kg-m2|iD=2N-m-s/radEl'I''I'i25.RepeatProblem24for50V*--~I0(s+2)(s+3)Qs)($+1)(J+4)(J+5)(S+6)FIGUREP5.26*(*)+/050(s+9)(5+8)(5+2)E(s)C(s\37.RepresentthesystemshowninFigureP5.27statespaceinstatespacewherex\{t),x-^it),and%4(/),asVEc^Pshown,areamongthestatevariables,c{t)istheoutput,andxi{t)isinternaltoX\{s)IX?,{s).[Section:5.7](a)m+,C(s)10s(s2+6s+24)R(s)+~mR(s)+/0N£(^)/:(,)w15X4M15X,(.v)1A'|(.v)5-152+lC(s)C(s)1605(5+1)FIGUREP5.27StateSpace38.ConsidertherotationalmechanicalsystemshowninFigureP5.28.a.Representthesystemasasignal-flowgraph.b.Representthesysteminstatespaceiftheoutputis02(/).(c)R(s)MATLAB36.UseMATLABtosolveProblem35.E(s)16(5+2)C{s)(.v+1)2I'M0M/10,0)I2N-m/rad4N-m/rad1N-m/radFIGUREP5.28id)FIGUREP5.2439.Givenaunityfeedbacksystemwith34.YouaregiventhesystemshowninFigureP5.25.[Section:5.7]StateSpacea.Representthesysteminstatespaceinphasevariableform.theforward-pathtionG(s)=transfer7s(s+9)(s+12;func-MATLAB^Q^PStaleSpace286Chapter5ReductionofMultipleSubsystemsuseMATLABtorepresenttheclosedloopsysteminstatespaceinG,WY(s)ma.phase-variableform;b.parallelform.G2{s)40.ConsiderthecascadedsubsystemsshownstatespaceinFigureP5.29.If0\(.v)isrepresentedin^^^Bstatespaceaswi|eyPLUS.,CEEJDXi=AlXl+BircontrolSolutionsVj=CiXi42ConsiderthesubsystemsshowninFigurestatespace'P5.31andconnectedtoformafeedbacksystem.IfG(s)isrepresentedinstatespaceasand//2(^)isrepresentedinstatespaceasx2=A2x2+B2yP=C2x2showthattheentiresystemcanberepresentedinstatespaceasrxi"B2Ci:A2X.+[Bij02.*2.LX2JGts)wmG2(s)AiW,B2Ci:=P(s)0A2_.X2.+[BilB2.x-1-84=y=[-9statespace-747-96'-5'8x+-7-85-8]xconvertthesystemtoonewherethenewstatevector,z,isxiZ=X2H(s)spaceasfollows:[Section:5.8]showthattheentiresystemcanberepresentedinstatespaceas2.m^G(s)43.Giventhesystemrepresentedinstatex2=A2x2+B2ry2=C2x2X0FIGUREP5.31andG2(s)isrepresentedinstatespaceas.X2—•statespaceGEc^Pxi=A1X1+Birfi=C1X1rxi1A2Bi[Ci;0+/^as.R(s)0Xlx241.ConsidertheparallelsubsystemsshowninFigureP5.30.IfGj(s)isrepresentedinstatespaceasA,B!C2xiyFIGUREP5.29[xiI:+0:C2R(s)showthattheclosed-loopsystemcanberepresentedinstatespaceasxiXly2^^^Vxi=A1X1+Biey=C1X1x2=A2x2+B2y!y2=C2x2Ai:oYlis)FIGUREP5.30andG2(s)isrepresentedinstatespaceas\kl1=W-40-19-4-4-37-9Problems44.RepeatProblem43forthefollowingsystem:[Section:5.8]Xa.Findtheclosed-looptransferfunctionrelatingactualpitchtocommandedpitch.Assumeallotherinputsarezero.b.Findtheclosed-looptransferfunctionrelatingactualpitchratetocommandedpitchrate.Assumeallotherinputsarezero.StateSpace-511*99-9-9x+-4-9-180=y=[-2-41]Xc.Findtheclosed-looptransferfunctionrelatingactualpitchaccelerationtocommandedpitchacceleration.Assumeallotherinputsarezero.andthefollowingstate-vectortransformation:z=5-46-76-5916-345.Diagonalizethefollowingsystem:[Section:5.8]X=-5-54'[-1]220-2x+0-2-1-2y=[-l287CommandedpilchraleStateSpaceCommandedpitch+WileyPLUSCBS®r*PilcherrorControlSolutionsCommandedpilchacceleration*2ControllerShuttledynamicsG](s)G2(.s)PitchPitchaccelcralionerrorAccelerometerPilchrateerror12]x.v-46.RepeatProblem45forthefollowingsystem:[Section:5.8]X=y=[1-10-3718.256.25-11.75-7.25-2.255.75-2RategyroStateSpaceInerlialmeasuringunit1x+32FIGUREP5.32(simplified)4]x47.DiagonalizethesysteminProblem46MJJJABUSingMATLAB.SIB49.48.Duringascentthespaceshuttleissteeredbycommandsgeneratedbythecomputer'sguidancecalculations.Thesecommandsareintheformofvehicleattitude,attituderates,andattitudeaccelerationsobtainedthroughmeasurementsmadebythevehicle'sinertialmeasuringunit,rategyroassembly,andaccelerometerassembly,respectively.Theascentdigitalautopilotusestheerrorsbetweentheactualandcommandedattitude,rates,andaccelerationstogimbalthespaceshuttlemainengines(calledthrustvectoring)andthesolidrocketboosterstoeffectthedesiredvehicleattitude.Thespaceshuttle'sattitudecontrolsystememploysthesamemethodinthepitch,roll,andyawcontrolsystems.AsimplifiedmodelofthepitchcontrolsystemisshowninFigureP5.32.4SpaceshuttlepitchcontrolsystemAnAMradiomodulatorgeneratestheStateSpaceproductofacarrierwaveformandamessagewaveform,asshowninFigureP5.33(Kurland,1971).Representthesysteminstatespaceifthecarrierisasinusoidoffrequencyco=a,andthemessageisasinusoidoffrequencyco=b.Notethatthissystemisnonlinearbecauseofthemultiplier.Antenna^7MessagewaveformCarrierwaveformMultiplierFIGUREP5.33Sourceofbackgroundinformationforthisproblem:RockwellInternational.AMmodulator50.Amodelforhumaneyemovementconsistsoftheclosed-loopsystemshowninFigureP5.34,whereanChapter5288ObjectpositionBrainDelay-lay-^W^H-NervoussystemDelayMuscleK\ReductionofMultipleSubsystemsEyeEyepositionK2s(s+a\)MusclespindlespositionfeedbackDesiredbearingangleVr(v)+Computer«-*KMotorandcontrollerDesiredwheelposition+®-Actualwheelpositions(s+2)v,•,VehlcleActualk*™*«8^Vis)s(s+3)*3(b)MusclespindlesratefeedbackK4s(s+C2)FIGUREP5.34Feedbackcontrolsystemrepresentinghumaneyemovementobject'spositionistheinputandtheeyepositionistheoutput.Thebrainsendssignalstothemusclesthatmovetheeye.Thesesignalsconsistofthedifferencebetweentheobject'spositionandthepositionandrateinformationfromtheeyesentbythemusclespindles.Theeyemotionismodeledasaninertiaandviscousdampingandassumesnoelasticity(spring){Milhorn,1966).Assumingthatthedelaysinthebrainandnervoussystemarenegligible,findtheclosed-looptransferfunctionfortheeyepositioncontrol.FIGUREP5.35a.HelpMaterobotusedforin-hospitaldeliveries;b.simplifiedblockdiagramforbearinganglecontrola.Findtheclosed-looptransferfunction.StateSpaceb.Representthesysteminstatespace,wheretheinputisthedesiredbearingangle,theoutputistheactualbearingangle,andtheactualwheelpositionandactualbearingangleareamongthestatevariables.c.Simulatetheclosed-loopJUJii^systerausingMATLAB.ObtainCijIVtheunitstepresponsefordifferentvaluesofKthatyieldresponsesfromoverdampedtounderdampedtounstable.51.AHelpMatetransportrobot,showninwileyPLUS52.AutomaticallycontrolledloadtesterscanbeusedtoFigureP5.35(a),isusedtodelivergoods^Vi'J«testproductreliabilityunderreal-lifeconditions.inahospitalsetting.Therobotcande-controlsolutionsThetesterconsistsofaloadframeandspecimenliverfood,drugs,laboratorymaterials,andpatients'asshowninFigureP5.36(a).Thedesiredloadisrecords{Evans,1992).Giventhesimplifiedblockdiagramoftherobot'sbearinganglecontrolsystem,asshowninFigureP5.35(6),dothefollowing:(«)DcMredloadF,.(s)+^ControllerCurrentamplifier1666.670.06i+720Load,frame,specimen,loadcell15x10*i'+82s2+4xlO%+2xl07EM(b)FIGUREP5.36a.Loadtester,(©1992IEEE)b.approximateblockdiagramProblemsinputviaavoltage,et(t),toacurrentamplifier.Theoutputloadismeasuredviaavoltage,e,(/),fromaloadcellmeasuringtheloadonthespecimen.FigureP5.36(6)showsanapproximatemodelofaloadtestingsystemwithoutcompensation{Bailey,1992).a.Modelthesysteminstatespace.28957.Problem12inChapter1describesahigh-speedproportionalsolenoidvalve.AsubsystemofthevalveisthesolenoidcoilshowninFigureP5.37.Currentthroughthecoil,L,generatesamagneticfieldthatproducesaforcetooperatethevalve.FigureP5.37canberepresentedasablockdiagram(Vaughan,1996)'"'dcjp"Lfeb.SimulatethestepresponseMATLABusingMATLAB.IsthereflQQ)sponsepredominantlyfirstorsecondorder?Describethecharacteristicsoftheresponsethatneedcorrection.53.ConsidertheF4-EaircraftofProblem22,^atesPaceChapter3.Iftheopen-looptransferfunc-^^^Vtionrelatingnormalacceleration,An(s),totheinputdeflectioncommand,Sc(s),isapproximatedasA„(s)8c(s)-272(52+1.9*+84)(s+14)(s-1.8)(5+4.9)(Cavallo,1992),findthestate-spacerepresentationina.Phase-variableformb.Controllercanonicalformc.Observercanonicalformd.Cascadeforme.Parallelform54.Findtheclosed-looptransferfunctionoftheUnmannedFree-SwimmingSubmersiblevehicle'spitchcontrolsystemshownonthebackendpapers(Johnson,1980).55.RepeatProblem54usingMATLAB.MATLAB56.UseSimulinktoplottheeffectssimulinkofnonlinearitiesupontheclosed-loopstepresponseoftheantennaazimuthpositioncontrolsystemshownonthefrontendpapers,Configuration1.Inparticular,considerindividuallyeachofthefollowingnonlinearities:saturation(±5volts),backlash(dead-bandwidth0.15),deadzone(—2to+2),aswellasthelinearresponse.Assumethepreamplifiergainis100andthestepinputis2radians.FIGUREP5.37Solenoidcoilcircuita.Deriveablockdiagramofafeedbacksystemthatrepresentsthecoilcircuit,wheretheappliedvoltage,vg(t),istheinput,thecoilvoltage,vL(t),istheerrorvoltage,andthecurrent,i(t),istheoutput.b.FortheblockdiagramfoundinParta,findtheLaplacetransformoftheoutputcurrent,l(s).c.SolvethecircuitofFigureP5.37for/(5),andcomparetoyourresultinPartb.58.Ktesibios'waterclock(seeSection1.2)isprobablythefirstman-madesysteminwhichfeedbackwasusedinadeliberatemanner.ItsoperationsareshowninFigureP5.38(a).TheclockindicatestimeprogressivelyonscaleDaswaterfallsfromorificeAtowardvesselB.ClockaccuracydependsmainlyonwaterheighthfinthewaterreservoirG,whichmustbemaintainedataconstantlevelhrbymeansoftheconicalfloatFthatmovesupordowntocontrolthewaterinflow.FigureP5.38(6)showsablockdiagramdescribingthesystem(Lepschy,1992),Letqi(t)andq0(t)representtheinputandoutputwaterflow,respectively,andhmtheheightofwaterinvesselB.UseMason'sruletofindthefollowingtransferfunctions,assumingaandfiareconstants:Hm(s)a.fttoHf(s)b.Hr(s)c.d.Qi(s)Hr(s)QMHr(s)290Chapter5ReductionofMultipleSubsystemse.Usingtheabovetransferfunctions,showthatifhr(t)=constant,thenq0(t)—constantandhm(t)increasesataconstantspeed.c.WhatconditionontheinputsU\andu2willresultinu=0?AGv(s)S**nCc(.v)_-G(s)yfcx++M?hf(Xm^H\GEkGJLs)7Ny*pc2Gn(s)&AGv(s)FIGUREP5.39^fw.Actuatorblockdiagram(©1995IEEE)60.FigureP5.40showsanoninvertingoperationalamplifier.RjRV?\'V.(a)(«)59.Someroboticapplicationscanbenefitfromactuatorsinwhichloadpositionaswellasexertedforcearecontrolled.FigureP5.39showstheblockdiagramofsuchanactuator,whereu\andu2arevoltageinputstotwocoils,eachofwhichcontrolsapneumaticpiston,andyrepresentstheloaddisplacement.Thesystem'soutputisu,thedifferentialpressureactingontheload.Thesystemalsohasadisturbanceinput/ext,whichrepresentsexternalforcesthatarenotsystemgenerated,butareactingontheload.Aisaconstant(Ben-Dov,1995).Useanymethodtoobtain:a.Anexpressionforthesystem'soutputintermsoftheinputsU\andu2(Assume/ext=0.)b.Anexpressionfortheeffectof/extontheoutputu(AssumeU\andu2=0.)FIGUREP5.40!'K,Rf+R,'l(b)AfvFIGUREP5.38a.Ktesibios'waterclock;b.waterclockblockdiagram(©1992IEEE)V=11G,(s)(b)a.Noninvertingamplifier;b.blockdiagramAssumingtheoperationalamplifierisideal,a.Verifythatthesystemcanbedescribedbythefollowingtwoequations:v0=A(vt-v0)vi=SiRi+Rf°b.CheckthattheseequationscanbedescribedbytheblockdiagramofFigureP5.40(6)c.UseMason'sruletoobtaintheclosed-loopsysVois)terntransferfunctiond.ShowthatwhenA61.FigureP5.41showsthediagramofaninvertingoperationalamplifier.ProblemsrAM^MA/Y1KtFIGUREP5.41•1b.DrawacorrespondingblockdiagramandobtainVo(s)thetransferfunctionVi(s)'c.ShowthatwhenA—•oo,Vo(s)a.Verifythattheequationsgoverningthiscircuitarev«=vin-v0;v0=x3Inthefigure,Ktisthespringconstantofthetire,Musisthewheelmass,ristheroaddisturbance,X\istheverticalcardisplacement,X3isthewheelverticaldisplacement,a>l=#-isthenaturalfrequencyoftheunsprungsystemandeisafilteringparametertobejudiciouslychosen(Lin,1997).Findthetwotransferfunctionsofinterest:a.R{s)Vds)62.FigureP5.42(a)showsan^-channelenhancementmodeMOSFETsourcefollowercircuit.FigureP5.42(b)showsitssmall-signalequivalent(whereRt=Ri\\R2)(Neamen,2001).;£S+E/l-*3FIGUREP5.43(©1997IEEE)Invertingoperationalamplifiera.Assuminganidealoperationalamplifier,useasimilarproceduretotheoneoutlinedinProblem60tofindthesystemequations.Ri1u„1>"rRi+Rsr,S2+C0Q>©vi291gm{Rs\\r0)vtgsb.Drawablockdiagramshowingtherelationsbetweentheequations.c.UsetheblockdiagraminPartbtofindVo(s)Vi(syb.Xi(s)R(s)64.Thebasicunitofskeletalandcardiacmusclecellsisasarcomere,whichiswhatgivessuchcellsastriated(parallelline)appearance.Forexample,onebicepcellhasabout105sarcomeres.Inturn,sarcomeresarecomposedofproteincomplexes.Feedbackmechanismsplayanimportantroleinsarcomeresandthusmusclecontraction.Namely,Fenn'slawsaysthattheenergyliberatedduringmusclecontractiondependsontheinitialconditionsandtheloadencountered.Thefollowinglinearizedmodeldescribingsarcomerecontractionhasbeendevelopedforcardiacmuscle:-100.2-20.7-30.7200.3"rA1'A"T40-20.2249.95526.1T=010.22-59.95-526.1Uu[SL.0000.SL.KV:,f208"-208u(t)-108.8.-1rA]y=[01570157059400]1u-6240u(t).SL,(a)(b)FIGUREP5.42a.Ann-channelenhancement-modeMOSFETwheresourcefollowercircuit;b.small-signalequivalentA=densityofregulatoryunitswithboundcalciumandadjacentweakcrossbridges(fiM)T=densityofregulatoryunitswithboundcalcium63.Acaractivesuspensionsystemaddsanactivehydrauandadjacentstrongcrossbridges(M)licactuatorinparallelwiththepassivedamperandU=densityofregulatoryunitswithoutboundspringtocreateadynamicimpedancethatrespondstocalciumandadjacentstrongcrossbridges(M)roadvariations.TheblockdiagramofFigureP5.43SL=sarcomerelength(m)depictssuchanactuatorwithclosed-loopcontrol.292Chapter5ReductionofMultipleSubsystemsThesystem'sinputisu{t)=theshorteningmusclevelocityinmeters/secondandtheoutputisy^=muscleforceoutputinNewtons(Yaniv,2006).Dothefollowing:D(s)Environment+tUs)He(s)ftMATLABa.UseMATLABtoobtaintheY{s)FMH„(s)ArmtransferfunctionV[s)'b.UseMATLABtoobtainapartialy{s)MATLABXa(s)ffi(s)P*M*'fractionexpansionfor—7—-.U(s)c.Drawasignal-flowdiagramofthesysteminparallelform.StateSpaced.UsethediagramofPartctoexpressthestatespacesysteminstate-variableformwith^^^Bdecoupledequations.65.Anelectricventricularassistdevice(EVAD)hasbeendesignedtohelppatientswithdiminishedbutstillfunctionalheartpumpingactiontoworkinparallelwiththenaturalheart.Thedeviceconsistsofabrushlessdcelectricmotorthatactuatesonapusherplate.Theplatemovementshelptheejectionofbloodinsystoleandsacfillingindiastole.Systemdynamicsduringsystolicmodehavebeenfoundtobe:xvA0100-68.3-7.203.2-0.7XV_*00_0"425.4+0Thestatevariablesinthismodelarex,thepusherplateposition,v,thepusherplatevelocity,andPao,theaorticbloodpressure.Theinputtothesystemisem,themotorvoltage(Tasch,1990).a.UseMATLABtofindasimilaritytransformationtodiagonalizethesystem.*JJJJJL(d^Pb.UseMATLABandtheobtainedJ^JliLsimilaritytransformation^jj]^PofPartatoobtainadiagonalizedexpressionforthesystem.66.Inanexperimenttomeasureandidentifyposturalarmreflexes,subjectsholdwiththeirhandsalinearhydraulicmanipulator.Aloadcellisattachedtotheactuatorhandletomeasureresultingforces.Attheapplicationofaforce,subjectstrytomaintainafixedposture.FigureP5.44showsablockdiagramforthecombinedarm-environmentsystem.Hr(s)Ms)Fr^s)Hacl(s)FIGUREP5.44Inthediagram,Hr(s)representsthereflexivelengthandvelocityfeedbackdynamics;Hact(s)theactivationdynamics,Hi(s)theintrinsicactdynamics;Hh(s)thehanddynamics;He(s)theenvironmentaldynamics;Xa(s)thepositionofthearm;Xh(s)themeasuredpositionofthehand;Fh(s)themeasuredinteractionforceappliedbythehand;Fint(s)theintrinsicforce;Frei(s)thereflexiveforce;A(s)thereflexiveactivation;andD(s)theexternalforceperturbation(deVlugt,2002).a.Obtainasignal-flowdiagramfromtheblockdiagram.b.FindFh{s)D(sY67.UseLabVIEW'sControlDesignandSimulationModuletoobtainthecontrollerandtheobservercanonicalformsfor:G(s)=StateSpaceLabVIEWs2+7s+2s3+9s2+26s+2468.Avirtualrealitysimulatorwithhaptic(senseoftouch)feedbackwasdevelopedtosimulatethecontrolofasubmarinedriventhroughajoystickinput.Operatorhapticfeedbackisprovidedthroughjoystickpositionconstraintsandsimulatormovement(Karkoub,2010).FigureP5.45showstheblockdiagramofthehapticfeedbacksysteminwhichtheinputuhistheforceexertedbythemuscleofthehumanarm;andtheoutputsareys>the
positionofthesimulator,andy;,thepositionofthejoystick.Problems293similarsensationsandmaneuverabilityasiftheneedlewasinserteddirectly.FigureP5.46showstheblockdiagramoftheforceinsertionmechanism,whereFhistheinputforceandXhistheoutputdisplacement.Surnmingjunctioninputsarepositiveunlessindicatedwithanegativesign.Bywayofexplanation,Z=impedance;G=transferfunction;C,•.—communicationchanneltransferfunctions;F=force;X=position.Subscriptshandmrefertothemastermanipulator.Subscriptssanderefertotheslavemanipulator.>,+^FIGUREP5.45Copyright©2010CambridgeUniversityPress.Reprintedwithpermission.a.Findthetransferfunctionb.FindthetransferfunctionYa(s)Uh(s)-a.AssumingZh=0,C\=Cs,Cz=1+C^andC4=—CmuseMason'sRuletoshowthatthetransferfunctionfromtheoperatorsforceinputFhtoneedledisplacementXhisgivenbyY(s)=Yj(s)Xh(s)Fh(s)Z-^2(1+GSCS)+C2ZeGsCs)1+GSCS+Z-\cmUh(s)'69.Somemedicalproceduresrequiretheinsertionofaneedleunderapatient'sskinusingCTscanmonitoringguidanceforprecision.CTscansemitradiation,posingsomecumulativerisksformedicalpersonnel.Toavoidthisproblem,aremotecontrolrobothasbeendeveloped{Piccin,2009).TherobotcontrolstheneedleinpositionandangleintheconstraintspaceofaCTscanmachineandalsoprovidesthephysicianwithforcefeedbackcommensuratewiththeinsertionoppositionencounteredbythetypeoftissueinwhichtheneedleisinserted.Therobothasotherfeaturesthatgivetheoperatortheb.NowwithZh^0showthatXhjs)_Y(s)Fh{s)l+Y(s)Zh70.Ahybridsolarcellanddieselpowerdistributionsystemhasbeenproposedandtested(Lee,2007).Thesystemhasbeenshowntohaveaverygooduninterruptiblepowersupplyaswellaslinevoltageregulationcapabilities.FigureP5.47showsasignal-flowdiagramofthesystem.Theoutput,VLoaa,isthevoltageacrosstheload.ThetwoinputsareIcf,thereferencecurrent,andIDist,thedisturbancerepresentingcurrentchangesinthesupply.a.RefertoFigureP5.47andfindthetransferfunctionVLoad{s)lcf{s)b.FindthetransferfunctionSlavemanipulatorVtoadis)iDistis)71.ContinuouscastinginsteelproductionisessentiallyasolidificationprocessbywhichmoltensteelisLfs+RMastermanipulator-IFIGUREP5.46FIGUREP5.47Chapter5294ReductionofMultipleSubsystemssolidifiedintoasteelslabafterpassingthroughamold,asshowninFigureP5.48(«).FinalproductdimensionsdependmainlyonthecastingspeedVp(inm/min),andonthestopperpositionX(in%)thatcontrolstheflowofmoltenmaterialintothemold{Kong,1993).AsimplifiedmodelofacastingsystemisshowninFigureP5.48(6){Kong,1993)and{Graebe,1995).Inthemodel,Hm=moldlevel(inmm);Ht=assumedconstantheightofmoltensteelinthetundish;Dz=moldthickness=depthofnozzleimmergedintomoltensteel;andWt=weightofmoltensteelinthetundish.ForaspecificsettingletAm=0.5and0.63s+0.926Alsoassumethatthevalvepositioningloopmaybemodeledbythefollowingsecond-ordertransferfunction:=2100Gv(s)=Yc{s)s+10s+100Gx(s)=mandthecontrollerismodeledbythefollowingtransferfunction:Gc(s)=1.6(s2+1.255+0.25)„LADLE,_,HYDRAULICUNITSETREGULATORPOINTUNITChangeincastingspeed,AVp(s)MoldlevelValve-positionconlrollerloopErrorSetpomlEfs)R(s)—^Linearizedflow(«FIGUREP5.48Steelmoldprocess:a.process(©1993IEEE);b.blockdiagramThesensitivityofthemoldlevelsensorisp—0.5andtheinitialvaluesofthesystemvariablesatt=0~are:R{0~)=0;Yc((T)=X(0~)=41.2;AHm{Q-)=0;i/m(0-)=-75;AVp(0-)=0;andVp{Q~)=0.Dothefollowing:a.Assumingvp{t)isconstant[Avp=0],findtheclosed-looptransferfunctionT{s)=AHm{s)/R{s).b.Forr(t)=5u(t),vp(t)=0.97u(t),Simulinkandffm(0~)=—75mm,useSimulinktosimulatethesystem.Recordthetimeandmoldlevel(inarrayformat)byconnectingthemtoWorkspacesinks,eachofwhichshouldcarrytherespectivevariablename.Afterthesimulationends,utilizeMATLABplotcommandstoobtainandeditthegraphofhm(t)fromt=0to80seconds.72.Asimplifiedsecond-ordertransferfunctionmodelstatespaceforbicycledynamicsisgivenbygflOaV8{s)bhs+-•"-ITheinputisS(s),thesteeringangle,andtheoutputis(p{s),thetiltangle(betweenthefloorandthebicyclelongitudinalplane).Inthemodelparameteraisthehorizontaldistancefromthecenterofthebackwheeltothebicyclecenterofmass;bisthehorizontaldistancebetweenthecentersofbothwheels;histheverticaldistancefromthecenterofmasstothefloor;Vistherearwheelvelocity(assumedconstant);andgisthegravityconstant.Itisalsoassumedthattheriderremainsatafixedpositionwithrespecttothebicyclesothatthesteeraxisisverticalandthatallangledeviationsaresmall{Astrom,2005).a.Obtainastate-spacerepresentationforthebicyclemodelinphase-variableform.b.Findsystemeigenvaluesandeigenvectors.c.Findanappropriatesimilaritytransformationmatrixtodiagonalizethesystemandobtainthestate-spacesystem'sdiagonalrepresentation.73.ItisshowninFigure5.6(c)thatwhennegativefeedbackisused,theoveralltransferfunctionforthesystemofFigure5.6(b)isC(s)_G{s)R{s)1+G(s)H(s)ProblemsDeveloptheblockdiagramofanalternativefeedbacksystemthatwillresultinthesameclosed-looptransferfunction,C(s)/R(s),withG(s)unchangedandunmoved.Inaddition,yournewblockdiagrammusthaveunitygaininthefeedbackpath.Youcanaddinputtransducersand/orcontrollersinthemainforwardpathasrequired.MotorR(s)£(.s)C(s)25J-^-..9(.9+1)(«)MotorAmp/?(.v)DESIGNPROBLEMS74.ThemotorandloadshowninFigureP5.49(a)areusedaspartoftheunityfeedbacksystemshowninFigureP5.49(b).Findthevalueofthecoefficientofviscousdamping,DL,thatmustbeusedinordertoyieldaclosed-looptransientresponsehavinga20%overshoot.295E(s)C(S)25.9(.9+1)K2sTachometer(b)a.Positioncontrol;b.positioncontrolwithFIGUREP5.50tachometer76.ThesystemshowninFigureP5.51willhaveitstransientresponsealteredbyaddingatachometer.DesignKandK^inthesystemtoyieldadampingratioof0.69.Thenaturalfrequencyofthesystembeforetheadditionofthetachometeris10rad/s.K,=2N-m/AKh=2V-s/rad/a=2kg-m2Da=2N-m-s/radR„=2QTachometer\-J/t=800kg-m2K2sR(s)$f>,mK•-(X)m+fi>£(.v)y*1000*-Motor&loadQ,u(s\Geartrain0,(5)Positioncontrol:a.motorandload;b.block75.AssumethatthemotorwhosetransferfunctionisshowninFigureP5.50(«)isusedastheforwardpathofaclosed-loop,unityfeedbacksystem.a.Calculatethepercentovershootandsettlingtimethatcouldbeexpected.b.YouwanttoimprovetheresponsefoundinParta.Sincethemotorandthemotorconstantscannotbechanged,anamplifierandatachometer(voltagegenerator)areinsertedintotheloop,asshowninFigureP5.50.FindthevaluesofK^andK.2toyielda16%overshootandasettlingtimeof0.2second.FIGUREP5.511C(.v)*vy'PreamplifierQ>)FIGUREP5.49diagram*VJJfbacksystemshowninFigureP5.52(b).controlsolutionsFindthevaluesofMandDtoyield20%overshootand2secondssettlingtime.«aWMotor—N\=10N2=20Radius=2m7=lkg-m2Forthemotor:Ja=1kg-m2Da=1N-m-s/radRa=\0.Kb=1V-s/radKt=1N-m/AFIGUREP5.52fv=1N-s/ma.Motorandload;(figurecontinues)Chapter5296ReductionofMultipleSubsystems(Ga(s)=1/1000),pantographspring(Ks=82.3x103N/m),andsensor(H0(s)=1/100).A'(.v)+FIGUREP5.52system(Continued)b.motorandloadinfeedback78.AssumeidealoperationalamplifiersinthecircuitofFigureP5.53.a.Showthattheleftmostoperationalamplifierworksasasubtractingamplifier.Namely,v\=v0—vin.b.Drawablockdiagramofthesystem,withthesubtractingamplifierrepresentedwithasummingjunction,andthecircuitoftherightmostoperationalamplifierwithatransferfunctionintheforwardpath.KeepRasavariable.c.Obtainthesystem'sclosed-looptransferfunction.d.Foraunitstepinput,obtainthevalueofRthatwillresultinasettlingtimeTs=1msec.e.UsingthevalueofRcalculatedinPartd,makeasketchoftheresultingunitstepresponse.b.Findtheclosed-looptransferfunctionfortheblockdiagramfoundinPartaifK=1000.c.Representthepantographdynamicsstatespaceinphase-variableformandfinda^E^Bstate-spacerepresentationfortheclosed-loopsystemifK=1000).80.ControlofHIV/AIDS.GiventheHIVstateSpacesystemofProblem82inChapter4andrepeatedhereforconvenience(Craig,2004):TrVTy=[0RAAA/AAV-0.041670-0.0058'0.0217-0.240.00580100-2.45.2-5.2«i00.1HF10k10ka.UsingthefunctionalblockdiagramfromyoursolutionofProblem21inChapter1,andthepantographdynamics,G(s),foundinProblem67,Chapter2,assembleablockdiagramoftheactivepantographcontrolsystem.ANSr10k01rvExpressthesysteminthefollowingforms:a.Phase-variableformb.Controllercanonicalform10kc.ObservercanonicalformFIGUREP5.53PROGRESSIVEANALYSISANDDESIGNPROBLEMS79.High-speedrailpantograph.Problem21inChapter1discussestheactivecontrolofapantographmechanismforhigh-speedrailsystems.Inthisproblemyoufoundafunctionalblockdiagramrelatingtheoutputforce(actual)totheinputforce(desiredoutput).InProblem67,Chapter2,youfoundthetransferfunctionforthepantographdynamics,thatis,thetransferfunctionrelatingthedisplacementofthespringthatmodelstheheadtotheappliedforce,orG(s)=(Yf,(s)—Ycat(s))/Fup(s)(O'Connor,1997).Wenowcreateapantographactive-controlloopbyaddingthefollowingcomponentsandfollowingyourfunctionalblockdiagramfoundinProblem21,Chapter1:inputtransducer(G,-(J)=1/100),controller{Gc{s)=K),actuatorFinally,d.UseMATLABtoobtainthesystem'sdiagonalizedrepresentation.MATLAB81.Hybridvehicle.FigureP5.54showstheblockdiagramofapossiblecascadecontrolschemeforanHEVdrivenbyadcmotor(Preitl,2007).LetthespeedcontrollerGsc(s)=100+f,thetorquecontrollerandpowerampKAGTC(S)—10+1,thecurrentsensorsensitivityKcs=0.5,thespeedsensorsensitivity#55=0.0433.Alsofollowingthedevelopmentinpreviouschaptersg-=1;Vtot^t—1.8^=2^=^=0.1^=^^=0.0615:andpCwAv0A=0.6154.a.Substitutethesevaluesintheblockdiagram,andfindthetransferfunction,T(s)=V(s)/Rv(s),usingblock-diagramreductionrules.[Hint:StartCyberExplorationLaboratory297pcARef.signalSpeederror8MSpeedKAGTC(S)controllercommandUc(s)Gsds)FeedbackspeedsignalKsstys)TorqueAmplifiercontrolleroutput&powervoltageamplifieruMArmaturecircuitArmaturecurrenth(s)»KAGTC(S)FeedbackcurrentsignalKcsUs)Eb(s)BackcmIMotivetorquen„K,m'''ZAerodynamicdragtorqueTi(s)FrictiontorqueTf(s)Angularspeed,Vehiclespeed,V(s)•1£D=k,+CurrentsensorsensitivitySpeedsensorsensitivityFIGUREP5.54bymovingthelastf-blocktotherightpastthepickoffpoint.]b.DevelopaSimulinkmodelforsimulinktheoriginalsysteminFigureP5.54.SetthereferencesigMATLABnalinput,rv(t)=4u(t),asastepinputwithazeroinitialvalue,asteptime=0seconds,andafinalvalueof4volts.UseX-Ygraphstodisplay(overtheperiodfrom0to8seconds)theresponseofthefollowingvariablestothestepinput:(1)changeincarspeed(m/s),(2)caracceleration(m/s2),and(3)motorarmaturecurrent(A).Torecordthetimeandtheabovethreevariables(inarrayformat),connectthemtofourWorkspacesinks,eachofwhichcarrytherespectivevariablename.Afterthesimulationends,utilizeMATLABplotcommandstoobtainandeditthethreegraphsofinterest.CyberExplorationLaboratoryExperiment5.1ObjectivesToverifytheequivalencyofthebasicforms,includingcascade,parallel,andfeedbackforms.Toverifytheequivalencyofthebasicmoves,includingmovingblockspastsummingjunctions,andmovingblockspastpickoffpoints.MinimumRequiredSoftwarePackagesMATLAB,Simulink,andtheControlSystemToolboxPrelab1.Findtheequivalenttransferfunctionofthreecascadedblocks,G\(s)=2.Findtheequivalenttransferfunctionofthreeparallelblocks,G\(s)=-.ms+43.Findtheequivalenttransferfunctionofthenegativefeedbacksystemof5+3s+1FigureP5.55ifG(s)=s{s+2),andH(s)=s+4'tjrx.C(s)G(s)H(s)FIGUREP5.55*-Chapter5ReductionofMultipleSubsystems4.ForthesystemofPrelab3,pushH(s)totheleftpastthesummingjunctionanddrawtheequivalentsystem.5.ForthesystemofPrelab3,pushH(s)totherightpastthepickoffpointanddrawtheequivalentsystem.Lab1.UsingSimulink,setupthecascadesystemofPrelab1andtheequivalentsingleblock.Makeseparateplotsofthestepresponseofthecascadedsystemanditsequivalentsingleblock.Recordthevaluesofsettlingtimeandrisetimeforeachstepresponse.2.UsingSimulink,setuptheparallelsystemofPrelab2andtheequivalentsingleblock.Makeseparateplotsofthestepresponseoftheparallelsystemanditsequivalentsingleblock.Recordthevaluesofsettlingtimeandrisetimeforeachstepresponse.3.UsingSimulink,setupthenegativefeedbacksystemofPrelab3andtheequivalentsingleblock.Makeseparateplotsofthestepresponseofthenegativefeedbacksystemanditsequivalentsingleblock.Recordthevaluesofsettlingtimeandrisetimeforeachstepresponse.4.UsingSimulink,setupthenegativefeedbacksystemsofPrelabs3,4,and5.Makeseparateplotsofthestepresponseofeachofthesystems.Recordthevaluesofsettlingtimeandrisetimeforeachstepresponse.Postlab1.Usingyourlabdata,verifytheequivalenttransferfunctionofblocksincascade.2.Usingyourlabdata,verifytheequivalenttransferfunctionofblocksinparallel.3.Usingyourlabdata,verifytheequivalenttransferfunctionofnegativefeedbacksystems.4.Usingyourlabdata,verifythemovingofblockspastsummingjunctionsandpickoffpoints.5.Discussyourresults.Weretheequivalenciesverified?Experiment5.2ObjectiveTousethevariousfunctionswithinLabVIEW'SControlDesignandSimulationModuletoimplementblockdiagramreduction.MinimumRequiredSoftwarePackageLabVIEWwiththeControlDesignSimulationModulePrelabGiventheblockdiagramfromExample5.2,replaceGl5G2,G3,Hi,H2,H3withthefollowingtransferfunctionsandobtainanequivalenttransferfunction.Gi=;Hi=——^;H2=2;#3=1n;(¾=——-;G3=55+10s+1sz+4s+4s+2LabUseLabVIEWtoimplementtheblockdiagramfromExample5.2usingthetransferfunctionsgiveninthePrelab.PostlabVerifyyourcalculationsfromthePrelabwiththatoftheequivalenttransferfunctionobtainedwithLabVIEW.BibliographyExperiment5.3ObjectiveTousethevariousfunctionswithinLabVIEW'SControlDesignandSimulationModuleandtheMathematics/PolynomialpalettetoimplementMason'sruleforblockdiagramreduction.MinimumRequiredSoftwarePackageLabVIEWwithControlDesignandSimulationModule,MathScriptRTModule,andtheMathematics/Polynomialpalette.PrelabGiventheblockdiagramcreatedinthePrelabofCyberExplorationLaboratory5.2,useMason'sruletoobtainanequivalenttransferfunction.LabUseLabVIEW'SControlDesignandSimulationModuleaswellastheMathematics/PolynomialfunctionstoimplementblockdiagramreductionusingMason'srule.PostlabVerifyyourcalculationsfromthePrelabwiththatoftheequivalenttransferfunctionobtainedwithLabVIEW^Bibliography^Astrom,K.,Klein,R.E.,andLennartsson,A.BicycleDynamicsandControl.IEEEControlSystems,August2005,pp.26-47.Bailey,F.N,Cockburn,J.C,andDee,A.RobustControlforHigh-PerformanceMaterialsTesting.IEEEControlSystems,April1992,pp.63-70.Ballard,R.D.TheDiscoveryoftheTitanic,WarnerBooks,NewYork,1987.Ben-Dov,D.,andSalcudean,S.E.AForce-ControlledPneumaticActuator.IEEETransactionsonRoboticsandAutomation,vol.11,1995,pp.906-911.Cavallo,A.,DeMaria,G.,andVerde,L.RobustFlightControlSystems:AParameterSpaceDesign.JournalofGuidance,Control,andDynamics,vol.15,no.5,September-October1992,pp.1207-1215.Craig,I.K.,Xia,X.,andVenter,J.W.,IntroducingHIV/AIDSEducationintotheElectricalEngineeringCurriculumattheUniversityofPretoria,IEEETransactionsonEducation,vol.47,no.1,February2004,pp.65-73.deVlugt,E.,Schouten,A.C,andvanderHelm,F.C.T.AdaptationofReflexiveFeedbackduringArmPosturetoDifferentEnvironments.BiologicalCybernetics,vol.87,2002,pp.10-26.Evans,J.,Krishnamurthy,B.,Barrows,B.,Skewis,T.,andLumelsky,VHandlingReal-WorldMotionPlanning:AHospitalTransportRobot.IEEEControlSystems,February1992,pp.15-20.Graebe,S.F,Goodwin,G.C,andElsley,G,ControlDesignandImplementationinContinuousSteelCasting.IEEEControlSystems,August1995,pp.64-71.Hostetter,G.H.,Savant,C.J.,Jr.andStefani,R.T.DesignofFeedbackControlSystems.2ded.SaundersCollegePublishing,NewYork,1989.Johnson,H.etal.UnmannedFree-SwimmingSubmersible(UFSS)SystemDescription.NRLMemorandumReport4393.NavalResearchLaboratory,Washington,DC,1980.Karkoub,M.,Her,M.-G.,andChen,J.M.DesignandControlofaHapticInteractiveMotionSimulatorforVirtualEntertainmentSystems,Robonica,vol.28,2010,pp.47-56.Kong,F,anddeKeyser,R.IdentificationandControloftheMouldLevelinaContinuousCastingMachine.SecondIEEEConferenceonControlApplication,Vancouver,B.C.,1993.pp.53-58.Kurland,M.,andPapson,T.P.AnalogComputerSimulationofLinearModulationSystems.TransactionsoftheAnalog/HybridComputerEducationalSociety,January1971,pp.9-18.300Chapter5ReductionofMultipleSubsystemsLee,S.-R.,Ko,S.-H,Dehbonei,H.,Jeon,C.-H.,andKwon,O.-S,OperationalCharacteristicsofPV/DieselHybridDistributedGenerationSystemUsingDualVoltageSourceInverterforWeakGrid,ISIS2007Proceedings,EighthSymposiumonAdvancedIntelligentSystems.2007.Lepschy,A.M.,Mian,G.A.,andViaro,U.FeedbackControlinAncientWaterandMechanicalClocks.IEEETransactionsonEducation,vol.35,1992,pp.3-10.Lin,J.-S.,andKanellakopoulos,I.,NonlinearDesignofActiveSuspensions.IEEEControlSystems,vol.17,issue3,June1997,pp.45-59.Mason,S.J.FeedbackTheory—SomePropertiesofSignal-FlowGraphs.Proc.IRE,September1953,pp.1144-1156.Milhorn,H.T,Jr.TheApplicationofControlTheorytoPhysiologicalSystems.W.B.Saunders,Philadelphia,1966.Neamen,D.A.ElectronicCircuitAnalysisandDesign.McGraw-Hill,2ded.,2001,p.334.O'Connor,D.N.,Eppinger,S.D.,Seering,W.P.,andWormly,D.N.ActiveControlofaHighSpeedPantograph.JournalofDynamicSystems,Measurements,andControl,vol.119,March1997,pp.1-4.Piccin,O.,BarbeL.,BayleB.,anddeMathelin,M.AForceFeedbackTeleoperatedNeedleInsertionDeviceforPercutaneousProcedures.Int.J.ofRoboticsResearch,vol.28,2009,p.1154.Preitl,Z.,Bauer,P.,andBokor,J.ASimpleControlSolutionforTractionMotorUsedinHybridVehicles.FourthInternationalSymposiumonAppliedComputationalIntelligenceandInformatics.IEEE,2007.Tasch,U,Koontz,J.W,Ignatoski,M.A.,andGeselowitz,D.B.AnAdaptiveAorticPressureObserverforthePennStateElectricVentricularAssistDevice.IEEETransactionsonBiomedicalEngineering,vol.37,1990,pp.374-383.Timothy,L.K.,andBona,B.E.StateSpaceAnalysis:AnIntroduction.McGraw-Hill,NewYork,1968.Vaughan,N.D.,andGamble,J.B.TheModelingandSimulationofaProportionalSolenoidValve.JournalofDynamicSystems,Measurements,andControl,vol.118,March1996,pp.120-125.Yaniv,Y.,Sivan,R.,andLandesberg,A.Stability,ControllabilityandObservabilityofthe"FourState"ModelfortheSarcomericControlofContraction.AnnalsofBiomedicalEngineering,vol.34,2006,pp.778-789.Stability*6^ChapterLearningOutcomesJ)Aftercompletingthischapterthestudentwillbeableto:•MakeandinterpretabasicRouthtabletodeterminethestabilityofasystem(Sections6.1-6.2)•MakeandinterpretaRouthtablewhereeitherthefirstelementofarowiszerooranentirerowiszero(Sections6.3-6.4)•UseaRouthtabletodeterminethestabilityofasystemrepresentedinstatespace(Section6.5)StateSpace^CaseStudyLearningOutcomes^Youwillbeabletodemonstrateyourknowledgeofthechapterobjectiveswithcasestudiesasfollows:•Giventheantennaazimuthpositioncontrolsystemshownonthefrontendpapers,youwillbeabletofindtherangeofpreamplifiergaintokeepthesystemstable.•GiventheblockdiagramsfortheUFSSvehicle'spitchandheadingcontrolsystemsonthebackendpapers,youwillbeabletodeterminetherangeofgainforstabilityofthepitchorheadingcontrolsystem.301Chapter6StabilityIntroductionInChapter1,wesawthatthreerequirementsenterintothedesignofacontrolsystem:transientresponse,stability,andsteady-stateerrors.Thusfarwehavecoveredtransientresponse,whichwewillrevisitinChapter8.Wearenowreadytodiscussthenextrequirement,stability.Stabilityisthemostimportantsystemspecification.Ifasystemisunstable,transientresponseandsteady-stateerrorsaremootpoints.Anunstablesystemcannotbedesignedforaspecifictransientresponseorsteady-stateerrorrequirement.What,then,isstability?Therearemanydefinitionsforstability,dependinguponthekindofsystemorthepointofview.Inthissection,welimitourselvestolinear,time-invariantsystems.InSection1.5,wediscussedthatwecancontroltheoutputofasystemifthesteady-stateresponseconsistsofonlytheforcedresponse.Butthetotalresponseofasystemisthesumoftheforcedandnaturalresponses,orc(t)=cfotced(t)+^natural(0(6.1)Usingtheseconcepts,wepresentthefollowingdefinitionsofstability,instability,andmarginalstability:Alinear,time-invariantsystemisstableifthenaturalresponseapproacheszeroastimeapproachesinfinity.Alinear,time-invariantsystemisunstableifthenaturalresponsegrowswithoutboundastimeapproachesinfinity.Alinear,time-invariantsystemismarginallystableifthenaturalresponseneitherdecaysnorgrowsbutremainsconstantoroscillatesastimeapproachesinfinity.Thus,thedefinitionofstabilityimpliesthatonlytheforcedresponseremainsasthenaturalresponseapproacheszero.Thesedefinitionsrelyonadescriptionofthenaturalresponse.Whenoneislookingatthetotalresponse,itmaybedifficulttoseparatethenaturalresponsefromtheforcedresponse.However,werealizethatiftheinputisboundedandthetotalresponseisnotapproachinginfinityastimeapproachesinfinity,thenthenaturalresponseisobviouslynotapproachinginfinity.Iftheinputisunbounded,weseeanunboundedtotalresponse,andwecannotarriveatanyconclusionaboutthestabilityofthesystem;wecannottellwhetherthetotalresponseisunboundedbecausetheforcedresponseisunboundedorbecausethenaturalresponseisunbounded.Thus,ouralternatedefinitionofstability,onethatregardsthetotalresponseandimpliesthefirstdefinitionbaseduponthenaturalresponse,isthis:Asystemisstableifeveryboundedinputyieldsaboundedoutput.Wecallthisstatementthebounded-input,bounded-output(BIBO)definitionofstability.Letusnowproduceanalternatedefinitionforinstabilitybasedonthetotalresponseratherthanthenaturalresponse.Werealizethatiftheinputisboundedbutthetotalresponseisunbounded,thesystemisunstable,sincewecanconcludethatthenaturalresponseapproachesinfinityastimeapproachesinfinity.Iftheinputisunbounded,wewillseeanunboundedtotalresponse,andwecannotdrawanyconclusionaboutthestabilityofthesystem;wecannottellwhetherthetotalresponseisunboundedbecausetheforcedresponseisunboundedorbecausethe6.1Introductionnaturalresponseisunbounded.Thus,ouralternatedefinitionofinstability,onethatregardsthetotalresponse,isthis:Asystemisunstableifanyboundedinputyieldsanunboundedoutput.Thesedefinitionshelpclarifyourpreviousdefinitionofmarginalstability,whichreallymeansthatthesystemisstableforsomeboundedinputsandunstableforothers.Forexample,wewillshowthatifthenaturalresponseisundamped,aboundedsinusoidalinputofthesamefrequencyyieldsanaturalresponseofgrowingoscillations.Hence,thesystemappearsstableforallboundedinputsexceptthisonesinusoid.Thus,marginallystablesystemsbythenaturalresponsedefinitionsareincludedasunstablesystemsundertheBIBOdefinitions.Letussummarizeourdefinitionsofstabilityforlinear,time-invariantsystems.Usingthenaturalresponse:1.Asystemisstableifthenaturalresponseapproacheszeroastimeapproachesinfinity.2.Asystemisunstableifthenaturalresponseapproachesinfinityastimeapproachesinfinity.3.Asystemismarginallystableifthenaturalresponseneitherdecaysnorgrowsbutremainsconstantoroscillates.Usingthetotalresponse(BIBO):1.Asystemisstableifeveryboundedinputyieldsaboundedoutput.2.Asystemisunstableifanyboundedinputyieldsanunboundedoutput.Physically,anunstablesystemwhosenaturalresponsegrowswithoutboundcancausedamagetothesystem,toadjacentproperty,ortohumanlife.Manytimessystemsaredesignedwithlimitedstopstopreventtotalrunaway.Fromtheperspectiveofthetimeresponseplotofaphysicalsystem,instabilityisdisplayedbytransientsthatgrowwithoutboundand,consequently,atotalresponsethatdoesnotapproachasteady-statevalueorotherforcedresponse.1Howdowedetermineifasystemisstable?Letusfocusonthenaturalresponsedefinitionsofstability.Recallfromourstudyofsystempolesthatpolesinthelefthalf-plane(lhp)yieldeitherpureexponentialdecayordampedsinusoidalnaturalresponses.Thesenaturalresponsesdecaytozeroastimeapproachesinfinity.Thus,iftheclosed-loopsystempolesareinthelefthalfoftheplaneandhencehaveanegativerealpart,thesystemisstable.Thatis,stablesystemshaveclosed-looptransferfunctionswithpolesonlyinthelefthalf-plane.Polesintherighthalf-plane(rhp)yieldeitherpureexponentiallyincreasingorexponentiallyincreasingsinusoidalnaturalresponses.Thesenaturalresponsesapproachinfinityastimeapproachesinfinity.Thus,iftheclosed-loopsystempolesareintherighthalfofthes-planeandhencehaveapositiverealpart,thesystemisunstable.Also,polesofmultiplicitygreaterthan1ontheimaginaryaxisleadtothesumofresponsesoftheformAt11cos(cot+¢),wheren=1,2,...,whichalsoapproachesinfinityastimeapproachesinfinity.Thus,unstablesystemshaveclosedlooptransferfunctionswithatleastonepoleintherighthalf-planeand/orpolesofmultiplicitygreaterthan1ontheimaginaryaxis.Caremustbetakenheretodistinguishbetweennaturalresponsesgrowingwithoutboundandaforcedresponse,suchasaramporexponentialincrease,thatalsogrowswithoutbound.Asystemwhoseforcedresponseapproachesinfinityisstableaslongasthenaturalresponseapproacheszero.Chapter6304StabilityFinally,asystemthathasimaginaryaxispolesofmultiplicity1yieldspuresinusoidaloscillationsasanaturalresponse.Theseresponsesneitherincreasenordecreaseinamplitude.Thus,marginallystablesystemshaveclosed-looptransferfunctionswithonlyimaginaryaxispolesofmultiplicity!andpolesinthelefthalf-plane.Asanexample,theunitstepresponseofthestablesystemofFigure6.1(a)iscomparedtothatoftheunstablesystemofFigure6.1(b).Theresponses,alsoshowninFigure6.1,showthatwhiletheoscillationsforthestablesystemdiminish,thosefortheunstablesystemincreasewithoutbound.Alsonoticethatthestablesystem'sresponseinthiscaseapproachesasteady-statevalueofunity.Itisnotalwaysasimplemattertodetermineifafeedbackcontrolsystemisstable.Unfortunately,atypicalproblemthatarisesisshowninFigure6.2.AlthoughweknowthepolesoftheforwardtransferfunctioninFigure6.2(a),wedonotknowthelocationofthepolesoftheequivalentclosed-loopsystemofFigure6.2(b)withoutfactoringorotherwisesolvingfortheroots.However,undercertainconditions,wecandrawsomeconclusionsaboutthestabilityofthesystem.First,iftheclosed-looptransferfunctionhasonly**•»J&B&,cm3s(s+\)(s+2)L_JOAX-j1.047-x--2.672s-plane-0.164X--j1.04715Time(seconds)Stablesystem'sclosed-looppoles(nottoscale)R(s)=~s+^>E{s)C(s)1s(s+))(s+2)UnstablesystemJ®j1.505-3.087FIGURE6.1Closed-looppolesandresponse:a.stablesystem;b.unstablesystemt-xs-plane-j1.505I-XUnstablesystem'sclosed-looppoles(nottoscale)\t\l\hhfV\\\\IA/0.04340-1/\/0JM30yyITime(seconds)•6.2Routh-HurwitzCriterionR(s)xm+x-r10(5+2)s(s+4)(5+6)(5+8)(5+10)C(s)(a)10(5+2)R(s)543C(s)25+285+2845+12325+19305+20(b)FIGURE6.2Commoncauseofproblemsinfindingclosedlooppoles:a.originalsystem;b.equivalentsystemleft-half-planepoles,thenthefactorsofthedenominatoroftheclosed-loopsystemtransferfunctionconsistofproductsoftermssuchas(s+a,-),whereatisrealandpositive,orcomplexwithapositiverealpart.Theproductofsuchtermsisapolynomialwithallpositivecoefficients.2Notermofthepolynomialcanbemissing,sincethatwouldimplycancellationbetweenpositiveandnegativecoefficientsorimaginaryaxisrootsinthefactors,whichisnotthecase.Thus,asufficientconditionforasystemtobeunstableisthatallsignsofthecoefficientsofthedenominatoroftheclosed-looptransferfunctionarenotthesame.Ifpowersofsaremissing,thesystemiseitherunstableor,atbest,marginallystable.Unfortunately,ifallcoefficientsofthedenominatorarepositiveandnotmissing,wedonothavedefinitiveinformationaboutthesystem'spolelocations.Ifthemethoddescribedinthepreviousparagraphisnotsufficient,thenacomputercanbeusedtodeterminethestabilitybycalculatingtherootlocationsofthedenominatoroftheclosed-looptransferfunction.Todaysomehand-heldcalculatorscanevaluatetherootsofapolynomial.Thereis,however,anothermethodtotestforstabilitywithouthavingtosolvefortherootsofthedenominator.Wediscussthismethodinthenextsection.(6.2Routh-HurwitzCriterionInthissection,welearnamethodthatyieldsstabilityinformationwithouttheneedtosolvefortheclosed-loopsystempoles.Usingthismethod,wecantellhowmanyclosed-loopsystempolesareinthelefthalf-plane,intherighthalf-plane,andonthe;'w-axis.(Noticethatwesayhowmany,notwhere.)Wecanfindthenumberofpolesineachsectionofthes-plane,butwecannotfindtheircoordinates.ThemethodiscalledtheRouth-Hurwitzcriterionforstability(Routh,1905).Themethodrequirestwosteps:(1)GenerateadatatablecalledaRouthtableand(2)interprettheRouthtabletotellhowmanyclosed-loopsystempolesareinthelefthalf-plane,therighthalf-plane,andonthejco-axis.YoumightwonderwhywestudytheRouth-Hurwitzcriterionwhenmoderncalculatorsandcomputerscantellustheexactlocationofsystempoles.Thepowerofthemethodliesindesignratherthananalysis.Forexample,ifyouhaveanunknownparameterinthedenominatorofatransferfunction,itisdifficulttodetermineviaacalculatortherangeofthisparametertoyieldstability.YouwouldprobablyrelyontrialanderrortoanswertheThecoefficientscanalsobemadeallnegativebymultiplyingthepolynomialby-1.Thisoperationdoesnotchangetherootlocation.305Chapter6306Stabilitystabilityquestion.WeshallseelaterthattheRouth-Hurwitzcriterioncanyieldaclosed-formexpressionfortherangeoftheunknownparameter.Inthissection,wemakeandinterpretabasicRouthtable.Inthenextsection,weconsidertwospecialcasesthatcanarisewhengeneratingthisdatatable.N{s)R(s)C(s)GeneratingaBasicRouthTableLookattheequivalentclosed-looptransferfunctionshowninFiga^sA+a3s3+a2s2+a\s+OQure6.3.Sinceweareinterestedinthesystempoles,wefocusourattentiononthedenominator.WefirstcreatetheRouthtableshownFIGURE6.3Equivalentclosed-looptransferinTable6.1.Beginbylabelingtherowswithpowersofsfromthefunctionhighestpowerofthedenominatoroftheclosed-looptransferfunctiontos°.Nextstartwiththecoefficientofthehighestpowerofsinthedenominatorandlist,horizontallyinthefirstrow,everyothercoefficient.Inthesecondrow,listhorizontally,startingwiththenexthighestpowerofs,everycoefficientthatwasskippedinthefirstrow.Theremainingentriesarefilledinasfollows.Eachentryisanegativedeterminantofentriesintheprevioustworowsdividedbytheentryinthefirstcolumndirectlyabovethecalculatedrow.Theleft-handcolumnofthedeterminantisalwaysthefirstcolumnoftheprevioustworows,andtheright-handcolumnistheelementsofthecolumnaboveandtotheright.Thetableiscompletewhenalloftherowsarecompleteddowntos°.Table6.2isthecompletedRouthtable.Letuslookatanexample.TABLE6.1InitiallayoutforRouthtable.v4a4*r.v'$azTABLE6.2a2%a\0CompletedRouthtable02«4a4a3«30«3a2a\fl4doa30=b,«3=&i«3a\b\b2=C\ft:030bi0b\d&]0ci0b20C]bt=diC\-=0a30bi0fel-=0aA0a30=0«3=0bi0aoC\=0Example6.1CreatingaRouthTablePROBLEM:MaketheRouthtableforthesystemshowninFigure6.4(a).SOLUTION:Thefirststepistofindtheequivalentclosed-loopsystembecausewewanttotestthedenominatorofthisfunction,notthegivenforwardtransferFIGURE6.4a.FeedbacksystemforExample6.1;b.equivalentclosedloopsystemm>«*>9*1000(s+2)(s+3)(s+5)(a)C{s)R(s)1000s3+10s2+31s+1030(b)as)6.2TABLE6.3Routh-HurwitzCriterion307CompletedRouthtableforExample6.131140"40301131"1103=-7211103-72-72=103103100010-720-721010=0110-720=0=0-72=0function,forpolelocation.Usingthefeedbackformula,weobtaintheequivalentsystemofFigure6.4(b).TheRouth-Hurwitzcriterionwillbeappliedtothisdenominator.Firstlabeltherowswithpowersofsfroms3downtos°inaverticalcolumn,asshowninTable6.3.Nextformthefirstrowofthetable,usingthecoefficientsofthedenominatoroftheclosed-looptransferfunction.Startwiththecoefficientofthehighestpowerandskipeveryotherpowerofs.Nowformthesecondrowwiththecoefficientsofthedenominatorskippedinthepreviousstep.Subsequentrowsareformedwithdeterminants,asshowninTable6.2.Forconvenience,anyrowoftheRouthtablecanbemultipliedbyapositiveconstantwithoutchangingthevaluesoftherowsbelow.Thiscanbeprovedbyexaminingtheexpressionsfortheentriesandverifyingthatanymultiplicativeconstantfromapreviousrowcancelsout.InthesecondrowofTable6.3,forexample,therowwasmultipliedby1/10.Weseelaterthatcaremustbetakennottomultiplytherowbyanegativeconstant.InterpretingtheBasicRouthTableNowthatweknowhowtogeneratetheRouthtable,letusseehowtointerpretit.ThebasicRouthtableappliestosystemswithpolesintheleftandrighthalf-planes.SystemswithimaginarypolesandthekindofRouthtablethatresultswillbediscussedinthenextsection.Simplystated,theRouth-Hurwitzcriteriondeclaresthatthenumberofrootsofthepolynomialthatareintherighthalf-planeisequaltothenumberofsignchangesinthefirstcolumn.Iftheclosed-looptransferfunctionhasallpolesinthelefthalfofthes-plane,thesystemisstable.Thus,asystemisstableiftherearenosignchangesinthefirstcolumnoftheRouthtable.Forexample,Table6.3hastwosignchangesinthefirstcolumn.Thefirstsignchangeoccursfrom1inthes2rowto—72inthes1row.Thesecondoccursfrom—72inthes1rowto103inthes°row.Thus,thesystemofFigure6.4isunstablesincetwopolesexistintherighthalf-plane.Skill-AssessmentExercise6.1PROBLEM:MakeaRouthtableandtellhowmanyrootsofthefollowingpolynomialareintherighthalf-planeandinthelefthalf-plane.P(s)=3s1+9s6+655+4s4+7s3+8s2+2s+6ANSWER:Fourintherighthalf-plane(rhp),threeinthelefthalf-plane(lhp).Thecompletesolutionisatwww.wiley.com/college/nise.WileyPLUSC3JE9ControlSolutions308Chapter6StabilityNowthatwehavedescribedhowtogenerateandinterpretabasicRouthtable,letuslookattwospecialcasesthatcanarise.(6.3Routh-HurwitzCriterion:SpecialCasesTwospecialcasescanoccur:(1)TheRouthtablesometimeswillhaveazeroonlyinthefirstcolumnofarow,or(2)theRouthtablesometimeswillhaveanentirerowthatconsistsofzeros.Letusexaminethefirstcase.ZeroOnlyintheFirstColumnIfthefirstelementofarowiszero,divisionbyzerowouldberequiredtoformthenextrow.Toavoidthisphenomenon,anepsilon,€,isassignedtoreplacethezerointhefirstcolumn.Thevalueeisthenallowedtoapproachzerofromeitherthepositiveorthenegativeside,afterwhichthesignsoftheentriesinthefirstcolumncanbedetermined.Letuslookatanexample.Example6.2StabilityviaEpsilonMethodTrylt6.1PROBLEM:Determinethestabilityoftheclosed-looptransferfunctionUsethefollowingMATLABstatementtofindthepolesoftheclosed-looptransferfunctioninEq.(6.2).T(s)=roots([l23653])10s5+2s4+3s3+6s2+5s+3(6.2)SOLUTION:ThesolutionisshowninTable6.4.WeformtheRouthtablebyusingthedenominatorofEq.(6.2).BeginbyassemblingtheRouthtabledowntotherowwhereazeroappearsonlyinthefirstcolumn(the53row).Nextreplacethezerobyasmallnumber,e,andcompletethetable.Tobegintheinterpretation,wemustfirstassumeasign,positiveornegative,forthequantity€.Table6.5showsthefirstcolumnofTable6.4alongwiththeresultingsignsforchoicesofepositiveand€negative.TABLE6.5DeterminingsignsinfirstcolumnofaRouthtablewithzeroasfirstelementinarowTABLE6.4CompletedRouthtableforExample6.2i12.V•%€6(?-7r,/42e-49-6e212e-143367—23Label53000000Firstcolumn*&ris(2s4+3.?3+2.v2+35+2)C(.v)6.4Routh-HurwitzCriterion:AdditionalExamples315SOLUTION:Theclosed-looptransferfunctionisT{S)*(615)'2*5+3S*+2J3+3S2+2S+1FormtheRouthtableshownasTable6.11,usingthedenominatorofEq.(6.15).Azeroappearsinthefirstcolumnofthes'row.Sincetheentirerowisnotzero,simplyreplacethezerowithasmallquantity,e,andcontinuethetable.Permittingetobeasmall,positivequantity,wefindthatthefirsttermofthe52rowisnegative.Thus,therearetwosignchanges,andthesystemisunstable,withtwopolesintherighthalf-plane.Theremainingpolesareinthelefthalf-plane.TABLE6.11RouthtableforExample6.723•%232163*-412c-16-3e29e-121Wealsocanusethealternativeapproach,whereweproduceapolynomialwhoserootsarethereciprocaloftheoriginal.UsingthedenominatorofEq.(6.15),weformapolynomialbywritingthecoefficientsinreverseorder,s5+2s4+3s3+2s2+3s+2(6.16)TheRouthtableforthispolynomialisshownasTable6.12.Unfortunately,inthiscasewealsoproduceazeroonlyinthefirstcolumnatthes~row.However,thetableiseasiertoworkwiththanTable6.11.Table6.12yieldsthesameresultsasTable6.11:threepolesinthelefthalf-planeandtwopolesintherighthalf-plane.Thesystemisunstable.TABLE6.12AlternativeRouthtableforExample6.7**1*s"->rsl122-%e2e-432223262StudentswhoareusingMATLABshouldnowrunch6plinAppendixB.YouwilllearnhowtoperformblockdiagramreductiontofindT(s),followedbyanevaluationoftheclosed-loopsystem'spolestodeterminestability.ThisexerciseusesMATLABtodoExample6.7.MATLAB^JH316Chapter6StabilityInthenextexample,weseeanentirerowofzerosappearalongwiththepossibilityofimaginaryroots.Example6.8Routh-HurwitzwithRowofZerosPROBLEM:Findthenumberofpolesinthelefthalf-plane,therighthalf-plane,andonthejco-axisforthesystemofFigure6.8.Drawconclusionsaboutthestabilityoftheclosed-loopsystem.R(s)FIGURE6.8FeedbackcontrolsystemforExample6.8Trylt6.2UseMATLAB,TheControlSystemToolbox,andthefollowingstatementstofindtheclosed-looptransferfunction,T(s),forFigure6.8andtheclosed-looppoles.numg=128;deng=[l31024...48961281920];G=tf(numg,deng);T=feedback(G,1)poles=pole(T)t/17\128E(s)-C(s)s(s7+3s6+10s5+24s4+48.93+96.v2+128*+192)SOLUTION:Theclosed-looptransferfunctionforthesystemofFigure6.8is7»=1285+3s+10^+24^+48^4+96^3+12852+1925+1288765(6.17)Usingthedenominator,formtheRouthtableshownasTable6.13.Arowofzerosappearsinthes5row.Thus,theclosed-looptransferfunctiondenominatormusthaveanevenpolynomialasafactor.Returntothe56rowandformtheevenpolynomial:(6.18)P(s)=s6+854+3252+64TABLE6.13RouthtableforExample6.81•*1-2"1-6--6-3f'-*-§--.1-3-13102A8-½8-©--32-16*-•128Mr3219?64-64"32J58~64-Qr-6432-e--e-0-6424,-40-5.248Differentiatethispolynomialwithrespectto5toformthecoefficientsthatwillreplacetherowofzeros:dP{s)=6s5+32s3+645+0ds(6.19)Replacetherowofzerosatthes5rowbythecoefficientsofEq.(6.19)andmultiplythroughby1/2forconvenience.Thencompletethetable.Wenotethattherearetwosignchangesfromtheevenpolynomialatthe56rowdowntotheendofthetable.Hence,theevenpolynomialhastworight-half-6.4TABLE6.14Routh-HurwitzCriterion:AdditionalExamples317SummaryofpolelocationsforExample6.8PolynomialLocationEven(sixlh-order)Other(second-order)Total(eighth-order)02402Righthalf-plane2Lefthalf-plane2jo)2planepoles.Becauseofthesymmetryabouttheorigin,theevenpolynomialmusthaveanequalnumberofleft-half-planepoles.Therefore,theevenpolynomialhastwoleft-half-planepoles.Sincetheevenpolynomialisofsixthorder,thetworemainingpolesmustbeonthejco-axis.Therearenosignchangesfromthebeginningofthetabledowntotheevenpolynomialatthes6row.Therefore,therestofthepolynomialhasnoright-halfplanepoles.TheresultsaresummarizedinTable6.14.Thesystemhastwopolesintherighthalf-plane,fourpolesinthelefthalf-plane,andtwopolesontheyea-axis,whichareofunitmultiplicity.Theclosed-loopsystemisunstablebecauseoftheright-half-planepoles.TheRouth-Hurwitzcriteriongivesvividproofthatchangesinthegainofafeedbackcontrolsystemresultindifferencesintransientresponsebecauseofchangesinclosed-looppolelocations.Thenextexampledemonstratesthisconcept.Wewillseethatforcontrolsystems,suchasthoseshowninFigure6.9,gainvariationscanmovepolesfromstableregionsofthes-planeontothejco-axisandthenintotherighthalf-plane.Longbaseline&emergencybeaconLiftingbailThrusters(1of7)Syntacticflotationmodule(1200lbs)EmergencyftflasherSide-scantransceiverarrayIof2)Wiringjunctionbox(lor2).AltimeterTelemetryhousingw/lasersManipulatorelectronicshousingComputerhousingw/gyroSide-scansonarelectronicshousingElectroniccompassFIGURE6.9Jasonisanunderwater,remote-controlledvehiclethathasbeenusedtoexplorethewreckageoftheLusitania.Themanipulatorandcamerascomprisesomeofthevehicle'scontrolsystems318Chapter6StabilityExample6.9StabilityDesignviaRouth-HurwitzPROBLEM:Findtherangeofgain,K,forthesystemofFigure6.10thatwillcausethesystemtobestable,unstable,andmarginallystable.AssumeK>0.R(s)FIGURE6.10FeedbackcontrolsystemforExample6.9+^>flM-.9"C(s)Ks(s+7)(5+11)SOLUTION:Firstfindtheclosed-looptransferfunctionas(6.20)T^=s3+l8s2+77s+KNextformtheRouthtableshownasTable6.15.TABLE6.15RouthtableforExample6.9r1rJ/1181386-K18K77KSinceKisassumedpositive,weseethatallelementsinthefirstcolumnarealwayspositiveexceptthes1row.Thisentrycanbepositive,zero,ornegative,dependinguponthevalueofK.IfK<1386,alltermsinthefirstcolumnwillbepositive,andsincetherearenosignchanges,thesystemwillhavethreepolesinthelefthalf-planeandbestable.IfK>1386,thes1terminthefirstcolumnisnegative.Therearetwosignchanges,indicatingthatthesystemhastworight-half-planepolesandonelefthalf-planepole,whichmakesthesystemunstable.IfK=1386,wehaveanentirerowofzeros,whichcouldsignifyjcopoles.Returningtothes2rowandreplacingKwith1386,weformtheevenpolynomialP{s)=18s2+1386Differentiatingwithrespecttos,wehave(6.21)dP{s)(6.22)=36s+0dsReplacingtherowofzeroswiththecoefficientsofEq.(6.22),weobtaintheRouthHurwitztableshownasTable6.16forthecaseofK=1386.TABLE6.16RouthtableforExample6.9withK=13861-6-361386776.4Routh-HurwitzCriterion:AdditionalExamples319Sincetherearenosignchangesfromtheevenpolynomial(s2row)downtothebottomofthetable,theevenpolynomialhasitstworootsonthe/0.0416+0.109¾Note:Somerowshavebeenmultipliedbyapositiveconstantforconvenience.Lookingatthefirstcolumn,thes4andsrrowsarepositive.Thus,allelementsofthefirstcolumnmustbepositiveforstability.Forthefirstcolumnofthes2rowtobepositive,—oo<K\<44.91.Forthefirstcolumnofthe51rowtobepositive,thenumeratormustbepositive,sincethedenominatorispositivefromthepreviousstep.ThesolutiontothequadraticterminthenumeratoryieldsrootsofK\=-4.685and25.87.Thus,forapositivenumerator,-4.685<K\<25.87.Finally,forthefirstcolumnofthe5°rowtobepositive,-0.382<K\<oo.Usingallthreeconditions,stabilitywillbeensuredif—0.382-axisareofunitmultiplicity;itisunstableifthereareanymultiplejcopoles.Unfortunately,althoughtheopen-looppolesmaybeknown,wefoundthatinhigherordersystemsitisdifficulttofindtheclosed-looppoleswithoutacomputerprogram.TheRouth-Hurwitzcriterionletsusfindhowmanypolesareineachofthesectionsofthes-planewithoutgivingusthecoordinatesofthepoles.Justknowingthattherearepolesintherighthalf-planeisenoughtodeterminethatasystemisunstable.Undercertainlimitedconditions,whenanevenpolynomialispresent,theRouthtablecanbeusedtofactorthesystem'scharacteristicequation.Obtainingstabilityfromthestate-spacerepresentationofasystemisbasedonthesameconcept—thelocationoftherootsofthecharacteristicequation.Theserootsareequivalenttotheeigenvaluesofthesystemmatrixandcanbefoundbysolvingdet(sl-A)=0.Again,theRouth-Hurwitzcriterioncanbeappliedtothispolynomial.Thepointisthatthestate-spacerepresentationofasystemneednotbeconvertedtoatransferfunctioninordertoinvestigatestability.Inthenextchapter,wewilllookatsteadystateerrors,thelastofthreeimportantcontrolsystemrequirementsweemphasize.^ReviewQuestions^1.Whatpartoftheoutputresponseisresponsiblefordeterminingthestabilityofalinearsystem?2.WhathappenstotheresponsenamedinQuestion1thatcreatesinstability?Chapter6326Stability3.Whatwouldhappentoaphysicalsystemthatbecomesunstable?4.WhyaremarginallystablesystemsconsideredunstableundertheBIBOdefinitionofstability?5.Wheredosystempoleshavetobetoensurethatasystemisnotunstable?6.WhatdoestheRouth-Hurwitzcriteriontellus?7.UnderwhatconditionswouldtheRouth-Hurwitzcriterioneasilytellustheactuallocationofthesystem'sclosed-looppoles?8.WhatcausesazerotoshowuponlyinthefirstcolumnoftheRouthtable?9.WhatcausesanentirerowofzerostoshowupintheRouthtable?10.WhydowesometimesmultiplyarowofaRouthtablebyapositiveconstant?11.WhydowenotmultiplyarowofaRouthtablebyanegativeconstant?12.IfaRouthtablehastwosignchangesabovetheevenpolynomialandfivesignchangesbelowtheevenpolynomial,howmanyright-half-planepolesdoesthesystemhave?13.Doesthepresenceofanentirerowofzerosalwaysmeanthatthesystemhasjcopoles?14.Ifaseventh-ordersystemhasarowofzerosatthes3rowandtwosignchangesbelowthes4row,howmanyjwpolesdoesthesystemhave?15.Isittruethattheeigenvaluesofthesystemmatrixarethesameastheclosedlooppoles?16.Howdowefindtheeigenvalues?StateSpaceStateSpaceProblems1.Tellhowmanyrootsofthefollowingpolynomialareintherighthalf-plane,inthelefthalf-plane,andonthe;'ft>-axis:[Section:6.2]P(s)=s5+3s4+5s3+4s2+s+32.Tellhowmanyrootsofthefollowingpolynomialareintherighthalf-plane,inthelefthalf-plane,andonthejco-axis:[Section:6.3]Determinehowmanyclosed-looppoleslieintherighthalf-plane,inthelefthalf-plane,andonthejco-axis.5.Howmanypolesareintherighthalf-plane,inthelefthalf-plane,andonthey'cy-axisfortheopen-loopsystemofFigureP6.1?[Section:6.3]R(s)s2+4s-3s4+4s2+8A2+205+15P(S)=^+6s3+5s2+8s+20C{s)FIGUREP6.13.UsingtheRouthtable,tellhowmanywileyPLUs6.Howmanypolesareintherighthalf-plane,theleftpolesofthefollowingfunctionareinC'iJ«Khalf-plane,andonthejco-axisfortheopen-looptherighthalf-plane,inthelefthalfcontrolsolutionssystemofFigureP6.2?[Section:6.3]plane,andonthejco-axis:[Section:6.3]Tn={S)s_+Ss-s+4s3-4s2+3s-2544.Theclosed-looptransferfunctionofasystemis[Section:6.3]Tn{S)_I+2s2+75+215s-2s4+3s3-6s2+2s-4m-6s+s-6.y4+52+s-66C(s)5FIGUREP6.27.UseMATLABtofindthepolelocationsforthesystemofProblem6.MATtABProblems8.UseMATLABandtheSymbolicMathToolboxtogenerateaRouthtabletosolveProblem3.9.DeterminewhethertheunityfeedbacksystemofFigureP6.3isstableif[Section:6.2]G(s)=symbolicMathmG(s)=ControlSolutionsfindthetellhowmanyclosed-looppolesarelocatedintherighthalf-plane,inthelefthalf-plane,andonthejcoaxis.[Section:6.3]17.ConsiderthefollowingRouthtable.Noticethatthes5rowwasoriginallyallzeros.Tellhowmanyrootsoftheoriginalpolynomialwereintherighthalfplane,inthelefthalf-plane,andonthejco-axis.[Section:6.3]poleMATLABB.v7.v611.ConsidertheunityfeedbacksystemofFigureP6.3with,5locationsforthesystemofProblem9.fl1GW=4s2(s2+V4-vif2UsingtheRouth-Hurwitzcriterion,findtheregionofthes-planewherethepolesoftheclosed-loopsystemarelocated.[Section:6.3]12.InthesystemofFigureP6.3,letK(s+2)s{s-l)(s+3)FindtherangeofKforclosed-loopstability.[Section:6.4]13.GiventheunityfeedbacksystemofFigureP6.3with[Section:6.3]G(s)=6.v°G(s)=1432s+5s+s2+2stellwhetherornottheclosed-loopsystemisstable.[Section:6.2]-18-21-300o000000174R(s)+o£({)180018.ForthesystemofFigureP6.4,tellhowmanyclosed-looppolesarelocatedintherighthalf-plane,inthelefthalfplane,andonthejco-axis.Noticethatthereispositivefeedback.[Section:6.3]WileyPLUSCooi^solutionsC(s)j5+j4-7.r3-752-18A'FIGUREP6.45tellhowmanypolesoftheclosed-looptransferfunctionlieintherighthalf-plane,inthelefthalf-plane,andonthe/a>-axis.[Section:6.3]14.UsingtheRouth-HurwitzcriterionandtheunityfeedbacksystemofFigureP6.3with-2-2022-9-21.v84s(s+5s+12s+25s4+45s3+50s2+82s+60)7-1-1-1113-15s1G(s)=s(s6-2s5-s4+2s3+4s2-8s-4)MATLABFIGUREP6.310.UseMATLABtofeedbacksystemofFigureP6.3with16.RepeatProblem15usingMATLAB.C(s)G(s)GiventheunityWileyPLUS240[s+\)(s+2)(s+3)(s+4)Ris)+1532719.UsingtheRouth-Hurwitzcriterion,tellhowmanyclosed-looppolesofthesystemshowninFigureP6.5lieinthelefthalf-plane,intherighthalf-plane,andonthe;sp,507.?4+3.0c.a>0,d.a>0,bQ29.Findtherangeofgain,£,toensurestabilityintheunityfeedbacksystemofFigureP6.3with[Section:6.4]£(5+2)G(s)=2[S+1)(5+4)(5-1)30.UsingtheRouth-Hurwitzcriterion,findthevalueof£thatwillyieldoscillationsfortheunityfeedbacksystemofFigureP6.3with[Section:6.4]K(5+77)(5+27)(5+38)G(s)=Findtherangeof£forclosed-loopstabilitywhen:[Section:6.4]£(5-2)(5+4)(5+5)(52+12)31.UsetheRouth-Hurwitzcriteriontofindtherangeof£forwhichthesystemofFigureP6.6isstable.[Section:6.4]E(s)R(s)+K(s2-2s+2)C(s)WileyPLUS23.FortheunityfeedbacksystemofFigureP6.3withG(s)=JJJ33ControiSo|ulions1s2+2s+4£(5+3)(5+5)(5-2)(5-4)FIGUREP6.6determinetherangeof£forstability.[Section:6.4]32.RepeatProblem31forthesystemofFigureP6.7.[Section:6.4]MATLAB24.RepeatProblem23usingMATLAB.ControlSolutionsflTTVfc>EU25.UseMATLABandtheSymbolicMathToolboxtogenerateaRouthtableintermsofKtosolveProblem23.symbolicMath-£(5+4)(5-4)(5^+3)K{s+2)9s+6s+7FIGUREP6.733.GiventheunityfeedbacksystemofFigureP6.3withG(J)=27.FortheunityfeedbacksystemofFigureP6.3with£(5+1)findtherangeof£forstability.[Section:6.4]cms(s+l)(s+3)26.Findtherangeof£forstabilityfortheunityfeedbacksystemofFigureP6.3with[Section:6.4]G(5)=WileyPLUSdjgjW*<J+4>5(5+1.2)(5+2)findthefollowing:[Section:6.4]a.Therangeof£thatkeepsthesystemstableb.Thevalueof£thatmakesthesystemoscillatec.Thefrequencyofoscillationwhen£issettothevaluethatmakesthesystemoscillateProblems34.RepeatProblem33for[Section:6.4]G(s)=a.FindtherangeofKforstability.b.Findthefrequencyofoscillationwhenthesystemismarginallystable.K{s-l)(s-2)25+2)(5+25+2)35.ForthesystemshowninFigureP6.8,findthevalueofgain,K,thatwillmakethesystemoscillate.Also,findthefrequencyofoscillation.[Section:6.4]mt§7\?1-s(s+l)(s+3)t-45+8)(5+3)a.FindtherangeofKforstability.b.Findthefrequencyofoscillationwhenthesystemismarginallystable.37.RepeatProblem36usingMATLAB.38.FortheunityfeedbacksystemofFigureP6.3withG(s)=FIGUREP6.9MATLAB43.FindthevalueofKinthesystemofFigureP6.10thatwillplacetheclosedlooppolesasshown.[Section:6.4]wileypwsflVJili'EcontrolsolutionsK{s+2)2>+1)(5+4)(5-1)R(s)findtherangeofKforwhichtherewillbeonlytwoclosed-loop,right-half-planepoles.[Section:6.4]^0^3C(s)I+¾39.FortheunityfeedbacksystemofFigureP6.3with[Section:6.4]G(s)=K1f(5+l)(5+4)JCOa.FindtherangeofKforstability.b.Findthefrequencyofoscillationwhenthesystemismarginallystable.;:40.GiventheunityfeedbacksystemofFigureP6.3with[Section:6.4]G(s)=(5+49)(52+45+5)FIGUREP6.10Closed-loopsystemwithpoleplotChapter6330Stability44.Theclosed-looptransferfunctionofasystemisT(s)=48.Alinearizedmodelofatorque-controlledcranehoistingaloadwithafixedropelengthiss2+KlS+K2s+K^3+K2s2+5s+lF(s)mm=m=-4DeterminetherangeofK\inorderforthesystemtobestable.WhatistherelationshipbetweenK\andK2forstability?[Section:6.4]45.Forthetransferfunctionbelow,findtheconstraintsonK\andK2suchthatthefunctionwillhaveonlytwojcopoles.[Section:6.4]T(s)=Kis+K2s4+Kis3+s2+K2s+1TWms2{s2+aa>l)whereCOQ=Jj-,L=theropelength,mj=themassofthecar,a—thecombinedropeandcarmass,/r=theforceinputappliedtothecar,andxj=theresultingropedisplacement{Marttinen,1990).IfthesystemiscontrolledinafeedbackconfigurationbyplacingitinaloopasshowninFigureP6.ll,withK>0,wherewilltheclosed-looppolesbelocated?46.Thetransferfunctionrelatingtheoutputenginefanspeed(rpm)totheinputmainburnerfuelflowrate(lb/h)inashorttakeoffandlanding(STOL)fighteraircraft,ignoringthecouplingbetweenenginefanspeedandthepitchcontrolcommand,is(Schierman,1992)[Section:6.4]GTC(s)Ms)+mFIGUREP6.111.357+90,556+1970s5+15,000.94+3120A3-41,300s2-50005-1840~iS+x2s2+y3534V45+X5S"3+X3S+y4s450.Asystemisrepresentedinstatespaceasstatespace+yesy5s5+y5swhereX(s)isthedisplacementoftheread/writeheadandF(s)istheappliedforce(Yan,2003).ShowthatiftheHDDiscontrolledintheconfigurationshowninFigureP6.ll,thearmwilloscillateandcannotbepositionedwithanyprecisionoveraHDDtrack.Findtheoscillationfrequency.6x6s++x^-\x=UseKharitonov'stheoremandtheRouth-Hurwitzcriteriontofindifthefollowingpolynomialhasanyzerosintheright-half-plane.P(s)=ao+a\s+a2s2+a^s32<a0<4;1<a\<2;4<a2<6;«3-1311"02-4x-t231-4y=1roi101OlxDeterminehowmanyeigenvaluesareintherighthalf-plane,inthelefthalf-plane,andonthey'w-axis.[Section:6.5]331Problems51.UseMATLABtofindtheeigenvaluesofthefollowingsystem:MATLABStateSpaceX010"001-4x+0-1180=y=[00l]x52.Thefollowingsysteminstatespacerepresentstheforwardpathofaunityfeedbacksystem.UsetheRouthHurwitzcriteriontodetermineiftheclosed-loopsystemisstable.[Section:6.5]StateSpaceWileyPLUSControlSolutions00101013x+03-4-51x=ofgain,K,thatwillkeepthesystemstable.CanthesystemeverbeunstableforpositivevaluesofK756.Acommonapplicationofcontrolsystemsisinregulatingthetemperatureofachemicalprocess(FigureP6.13).Theflowofachemicalreactanttoaprocessiscontrolledbyanactuatorandvalve.Thereactantcausesthetemperatureinthevattochange.Thistemperatureissensedandcomparedtoadesiredset-pointtemperatureinaclosedloop,wheretheflowofreactantisadjustedtoyieldthedesiredtemperature.InChapter9,wewilllearnhowaPIDcontrollerisusedtoimprovetheperformanceofsuchprocesscontrolsystems.FigureP6.13showsthecontrolsystempriortotheadditionofthePIDcontroller.ThePIDcontrollerisreplacedbytheshadedboxwithagainofunity.Forthissystem,priortothedesignofthePIDcontroller,findtherangeofamplifiergain,K,tokeepthesystemstable.y=[01l]x53.RepeatProblem52usingMATLAB.54.AButterworthpolynomialisoftheformMATLABW*Bn(s)=1+(-1)f—1",n>0.a.n=1;n=2DESIGNPROBLEMSWileyPLUSControlSolutionsCommandedpitchangle+AircraftdynamicsControllerK(s+l)s+\0s2+0.6s+9(.9+4.85)GyroFIGUREP6.12AircraftpitchloopmodelIActuatorandvalves+0.4ChemicalheatprocessActualtemperature0.7s2+1.75+0.25TemperaturesensorUsetheRouth-HurwitzcriteriatofindthezerosofaButterworthpolynomialfor:55.Amodelforanairplane'spitchloopisshowninFigureP6.12.FindtherangeFuturePIDcontrollerAmplifier0.15+0.111b.Desiredtemperaturesclpoint+PitchatmleFIGUREP6.13Blockdiagramofachemicalprocesscontrolsystem57.ArobotarmcalledISAC(IntelligentSoftArmControl)canbeusedaspartofasystemtofeedpeoplewithdisabilities(seeFigureP6.14(a)).Thecontrolsystemguidesthespoontothefoodandthentoapositionneartheperson'smouth.Thearmusesaspecialpneumaticallycontrolledactuatorcalledarubbertuator.Rubbertuatorsconsistofrubbertubescoveredwithfibercord.Theactuatorcontractsinlengthwhenpneumaticpressureisincreasedandexpandsinlengthwhenpressureisdecreased.Thisexpansionandcontractioninlengthcandriveapulleyorotherdevice.Avideocamera*"providesthesightfortherobotandthetrackingloop{Kara,1992).AssumethesimplifiedblockdiagramshowninFigureP6.14(fr)forregulatingthespoonatadistancefromthemouth.FindtherangeofKforstability.(Useofaprogramwithsymboliccapabilityisrecommended.)332Chapter6StabilityDesiredforcemt&)^yy.ControllerPlantActualforceK63X106(5+30)(5+140)(5+2.5)cmIFIGUREP6.16Cuttingforcecontrolsystem(ReprintedwithpermissionofASME.)IIImi(9s-AControllerRubbertuatorandload£(5+0.01)(5+6)5(.v+20)(5+l00)1052+10s+29HIfactorsthataffectcuttingforcearetimevaryingandnoteasilypredicted.However,assumingthesimplifiedforcecontrolmodelshowninFigureP6.16,usetheRouth-FfurwitzcriteriontofindtherangeofKtokeepthesystemstable(Rober,1997).a*)60.Transportationsystemsthatusemagneticlevitationcanreachveryhighspeeds,sincecontactfrictionattherailsiseliminated(seeFigureP6.17(a)).Electromagnetscanproducetheforcetoelevatethevehicle.FigureP6.17(6)isasimulationmodelofacontrolsystemthatcanbeusedtoregulatethemagneticgap.Inthefigure,Zvin(s)representsavoltageproportionaltothedesiredamountoflevitation,orgap.Zvout(s)representsavoltageproportionaltotheactualamountoflevitation.TheplantmodelsthedynamicresponseofthevehicletoFIGUREP6.14a.ISACusedforfeeding(CourtesyofKazuhikoKawamura,VanderbiltUniversity.)b.simplifiedblockdiagram58.OftenanaircraftisrequiredtotowWileyPLUSanothervehicle,suchasapracticetargetorglider.TostabilizetheControlSolutionstowedvehicleandpreventitfromrolling,pitching,andyawing,anautopilotisbuiltintothetowedvehicle.AssumetheblockdiagramshowninFigureP6.15representstheautopilotrollcontrolsystem(Cochran,1992).FindtherangeofKtokeeptherollanglestable.Commandedrollangle¢,-(1)+Compensator®-K(5+0.6)(5+6)(s+0.l)(5+100)Actuator—^-200,s2+12s+100jRollActualdynamicsrollangle500#fe'J4(5+6)FIGUREP6.15Towedvehiclerollcontrol59.Cuttingforcesshouldbekeptconstantduringmachiningoperationstopreventchangesinspindlespeedsorworkposition.Suchchangeswoulddeterioratetheaccuracyofthework'sdimensions.Acontrolsystemisproposedtocontrolthecuttingforce.Theplantisdifficulttomodel,sincetheA,i^?^andKjforwhichthesystemisclosed-loopstable.65.FigureP6.19isasimplifiedandlinearizedblockdiagramofacascadecontrolsystem,whichisusedtocontrolwaterlevelinasteamgeneratorofanuclearpowerplant(Wang,2009,).Inthissystem,thelevelcontroller,G/C(s),isthemastercontrollerandthefeed-waterflowcontroller,Gpc(s)istheslavecontroller.Usingmassbalanceequations,thewaterlevelwouldordinarilyberegardedasasimpleintegrationprocessofwaterflow.Inasteamgenerator,however,steamflowrateandthecoolingeffectoffeed-waterchangethedynamicsofthatprocess.Takingthelatterintoaccountandignoringthemuch-lesspronouncedimpactofchangesinsteamflowrate,afirst-orderlagplustimedelayisintroducedintothetransferChapter6334StabilityControlledlevelSetpoint_itG,.v(s)>6&*GFCY(s)(S)Gv(.v)Q,As)GfiAs)C(s)1iFIGUREP6.19function,Gfti.(s),relatingthecontrolledlevel,C(s),tofeed-waterflowrate,Qw(s)asfollows:Gfw5=C(s)2e-2Ss{25s+1)s(Tis+r25(255+1)(252+25+1)Qw(s)Vr=f[Y,\11.7-3.5016-241061.6K66.9K0107.7tf]8AK00~V1/'Inthismodel,V=bicycle'slateralvelocity,r=bicycle'syawvelocity,^=bicycle'syawacceleration,andYg=bicycle'scenterofgravitycoordinateonthey-axis.Kisacontrollerparametertobechosenbythedesigner(Ozgiiner,1995).UsetheRouth-HurwitzciteriontofindtherangeofKforwhichthesystemisclosed-loopstable.whereK-\=2istheprocessgain,TI=2isthepuretimedelay,andT\—25isthesteamgenerator'stimeconstant.(Theexpressione~TlSrepresentsatimedelay.ThisfunctioncanberepresentedbywhatisknownasaPadeapproximation.Thisapproximationcantakeonmanyincreasinglycompli-PROGRESSIVEANALYSISANDDESIGNPROBLEMScatedforms,dependinguponthedegreeofaccuracy67.High-speedrailpantograph.Problem21inChapter1discussesactivecontrolofapantographmechanismrequired.HereweusethePadeapproximation,forhigh-speedrailsystems.InProblem79(a),Chap~,andspecificnumericalvaluesfore~xsster5,youfoundtheblockdiagramfortheactivepantographcontrolsystem.UsingyoursolutionforProblem79(a)inChapter5andtheRouth-Hurwitztheconsideredsteamgenerator.)criterion,findtherangeofcontrollergain,K,thatwillThedynamiccharacteristicsofthecontrolvalvekeepthesystemstable(O'Connor,1997).areapproximatedbythetransferfunction:Kv1Qw(s)Gv(s)=whereKvisthe68.ControlofHIV/AIDS.TheHIVinfectionlinearY(s)Tvs+13s+1'izedmodeldevelopedinProblem82,Chapter4,canvalvegainandTvisitstimeconstant.beshowntohavethetransferfunctionGiventhat:GFC(s)=KPFC+KDFCS=0.5+2s-520s-10.3844Y{s)usetheandGLC{$)=KpLC+KDLCS=0.5+KS,P(s)=32+2.6817^+0.11^+0.0126Ui{s)sRouth-Hurwitzcriteriontofindtherangeofthelevelcontroller'sderivativegain,KoLC=K>0,DesiredvirusViruscountchange.K(.v)thatwillkeepthesystemstable.countelianjje+^-HPis)'0~*G(s)66.Look-aheadinformationcanbeusedtoautomaticallysteerabicycleinaclosed-loopconfiguration.Alineisdrawninthemiddleofthelanetobefollowed,andanarbitrarypointischosenintheFIGUREP6.20vehicle'slongitudinalaxis.Alook-aheadoffsetisItisdesiredtodevelopapolicyfordrugdeliverytocalculatedbymeasuringthedistancebetweenthemaintaintheviruscountatprescribedlevels.Forlook-aheadpointandthereferencelineandisusedthepurposeofobtaininganappropriateui(t),bythesystemtocorrectthevehicle'strajectory.AfeedbackwillbeusedasshowninFigureP6.20linearizedmodelofaparticularbicycletravelingon(Craig,2004).astraight-linepathatafixedlongitudinalspeedisCyberExplorationLaboratoryRef.signalSpeederrorEMSpeedcontrollerKs+40+FeedbackspeedsignalKssGOd0.6154*Torquecontroller&poweramplifierUc(s)ArmatureresistanceR„(s)Ua(s)>&335IO5+6ArmaturecurrentUs)5®FeedbackcurrentsignalKcsUs)MotivetorqueT(s)+MotorangularspeedTL(s)0-n(S)17.22650.34.875VehiclespeedV(s)•FrictiontorqueEb(s)BackemfTds)0.1Currentsensorsensitivity0.5Speedsensorsensitivity0.0443FIGUREP6.21Asafirstapproach,considerG(s)=K,aconstanttobeselected.UsetheRouth-HurwitzcriteriatofindtherangeofKforwhichthesystemisclosedloopstable.69.Hybridvehicle.FigureP6.21showstheHEVsystempresentedinChapter5,whereparametervalueshavebeensubstituted.Itisassumedherethatthespeedcontrollerhasaproportionalgain,Kp,tobeadjusted.UsetheRouth-HurwitzstabilitymethodtofindtherangeofpositiveKpforwhichthesystemisclosed-loopstable(Graebe,1995).CyberExplorationLaboratoryExperiment6.1ObjectivesToverifytheeffectofpolelocationuponstability.Toverifytheeffectuponstabilityofloopgaininanegativefeedbacksystem.MinimumRequiredSoftwarePackagesMATLAB,Simulink,andtheControlSystemToolbox«w+^.—VH(s)Prelab1.FindtheequivalenttransferfunctionofthenegativefeedbacksystemofFigureP6.22ifG(s)=Ks{s+2VandH(s)=12.ForthesystemofPrelab1,findtwovaluesofgainthatwillyieldclosed-loop,overdamped,second-orderpoles.Repeatforunderdampedpoles.3.ForthesystemofPrelab1,findthevalueofgain,K,thatwillmakethesystemcriticallydamped.cmG(s)FIGUREP6.22-^—Chapter6Stability4.ForthesystemofPrelab1,findthevalueofgain,K,thatwillmakethesystemmarginallystable.Also,findthefrequencyofoscillationatthatvalueofKthatmakesthesystemmarginallystable.5.ForeachofPrelab2through4,plotononegraphthepolelocationsforeachcaseandwritethecorrespondingvalueofgain,K,ateachpole.Lab1.UsingSimulink,setupthenegativefeedbacksystemofPrelab1.Plotthestepresponseofthesystemateachvalueofgaincalculatedtoyieldoverdamped,underdamped,criticallydamped,andmarginallystableresponses.2.Plotthestepresponsesfortwovaluesofgain,K,abovethatcalculatedtoyieldmarginalstability.3.Attheoutputofthenegativefeedbacksystem,cascadethetransferfunctionSetthegain,K,atavaluebelowthatcalculatedformarginalstabilityandplotthestepresponse.RepeatforKcalculatedtoyieldmarginalstability.Postlab1.Fromyourplots,discusstheconditionsthatleadtounstableresponses.2.Discusstheeffectofgainuponthenatureofthestepresponseofaclosed-loopsystem.Experiment6.2ObjectiveTousetheLabVIEWControlDesignandSimulationModuleforstabilityanalysis.MinimumRequiredSoftwarePackageLabVIEWwiththeControlDesignandSimulationModulePrelabSelectsixtransferfunctionsofvariousordersanduseRouth-Hurwitztodeterminetheirstability.LabCreateaLabVIEWVIthatreceivestheorderandthecoefficientsofthecharacteristicequationandoutputsthelocationofthepolesandinformationregardingstability.PostlabVerifythestabilityofthesystemsfromyourPrelab.^Bibliography^Ballard,R.D.TheRiddleoftheLusitania.NationalGeographic,April1994,NationalGeographicSociety,Washington,D.C.,1994,pp.68-85.BibliographyBittar,A.,andSales,R.M.H2andH2ControlforMagLevVehicles.IEEEControlSystems,vol.18,no.4,August1998,pp.18-25.Cochran,J.E.,Innocenti,M.,No,T.S.,andThukral,A.DynamicsandControlofManeuverableTowedFlightVehicles.JournalofGuidance,Control,andDynamics,vol.15,no.5,September-October1992,pp.1245-1252.Craig,I.K.,Xia,X.,andVenter,J.W.IntroducingHIV/AIDSEducationintotheElectricalEngineeringCurriculumattheUniversityofPretoria,IEEETransactionsonEducation,vol.47,no.1,February2004,pp.65-73.D'Azzo,X,andHoupis,C.H.LinearControlSystemAnalysisandDesign,3ded.McGrawHill,NewYork,1988.Dorf,R.C.ModernControlSystems,5thed.Addison-Wesley,Reading,MA,1989.Graebe,S.E,Goodwin,G.G,andElsley,G.ControlDesignandImplementationinContinuousSteelCasting.IEEEControlSystems,August1995,pp.64-71.Hekman,K.A.,andLiang,S.Y.ComplianceFeedbackControlforPartParallelisminGrinding.InternationalJournalofManufacturingTechnology,vol.15,1999,pp.64-69.Hostetter,G.H.,Savant,C.X,Jr.,andStefani,R.T.DesignofFeedbackControlSystems,2ded.SaundersCollegePublishing,NewYork,1989.Johnson,H.,etal.UnmannedFree-SwimmingSubmersible(UFSS)SystemDescription.NRLMemorandumReport4393.NavalResearchLaboratory,Washington,D.C.,1980.Kara,A.,Kawamura,K.,Bagchi,S.,andEl-Gamal,M.ReflexControlofaRoboticAidSystemtoAssistthePhysicallyDisabled.IEEEControlSystems,June1992,pp.71-77.Martinnen,A.,Virkkunen,X,andSalminen,R.T.ControlStudywithPilotCrane.IEEETransactionsonEducation,vol.33,no.3,August1990,pp.298-305.Minnichelli,R.X,Anagnost,XX,andDesoer,C.A.AnElementaryProofofKharitonov'sStabilityTheoremwithExtensions.IEEETransactionsonAutomaticControl,vol.34,1989,pp.995-998.O'Connor,D.N.,Eppinger,S.D.,Seering,W.P.,andWormly,D.N.ActiveControlofaHighSpeedPantograph.JournalofDynamicSystems,Measurements,andControl,vol.119,March1997,pp.1-4.Ozgiiner,U.,Unyelioglu,K.A.,andHaptipoglu,C.AnAnalyticalStudyofVehicleSteeringControl.Proceedingsofthe4thIEEEConferenceControlApplications,1995,pp.125-130.Phillips,C.L.,andHarbor,R.D.FeedbackControlSystems,2ded.PrenticeHall,UpperSaddleRiver,NJ,1991.Preitl,Z.,Bauer,P.,andXBokor,XASimpleControlSolutionforTractionMotorUsedinHybridVehicles.4thInternationalSymposiumonAppliedComputationalIntelligenceandInformatics.IEEE.2007.Rober,S.X,Shin,YG,andNwokah,O.D.I.ADigitalRobustControllerforCuttingForceControlintheEndMillingProcess.JournalofDynamicSystems,Measurement,andControl,vol.119,June1997,pp.146-152.Routh,E.XDynamicsofaSystemofRigidBodies,6thed.Macmillan,London,1905.Schierman,XD.,andSchmidt,D.K.AnalysisofAirframeandEngineControlInteractionsandIntegratedFlight/PropulsionControl.JournalofGuidance,Control,andDynamics,vol.15,no.6,November-December1992,pp.1388-1396.Thomas,B.,Soleimani-Mosheni,M.,andFahlen,P.,Feed-ForwardinTemperatureControlofBuildings.EnergyandBuildings,vol.37,2005,pp.755-761.Timothy,L.K.,andBona,B.E.StateSpaceAnalysis:AnIntroduction.McGraw-Hill,NewYork,
1968.338Chapter6StabilityTsang,K.M.,Chan,W.L.ASimpleandLow-costChargerforLithium-IonBatteries.JournalofPowerSources,vol.191,2009,pp.633-635.Wang,X.-K.,Yang,X.-H.,Liu,G.,andQian,H.AdaptiveNeuro-FuzzyInferenceSystemPIDcontrollerforsteamgeneratorwaterlevelofnuclearpowerplant,ProcedingsoftheEighthInternationalConferenceonMachineLearningandCybernetics,2009,pp.567-572.Yan,T.,andLin,R.ExperimentalModelingandCompensationofPivotNonlinearlyinHardDiskDrives.IEEETransactionsonMagnetics,vol.39,2003,pp.1064-1069.Steady-StateErrors$7^ChapterLearningOutcomes^Aftercompletingthischapterthestudentwillbeableto:•Findthesteady-stateerrorforaunityfeedbacksystem(Sections7.1-7.2)•Specifyasystem'ssteady-stateerrorperformance(Section7.3)•Designthegainofaclosed-loopsystemtomeetasteady-stateerrorspecification(Section7.4)•Findthesteady-stateerrorfordisturbanceinputs(Section7.5)•Findthesteady-stateerrorfornonunityfeedbacksystems(Section7.6)••Findthesteady-stateerrorsensitivitytoparameterchanges(Section7.7)Findthesteady-stateerrorforsystemsrepresentedinstatespace(Section7.8)^CaseStudyLearningOutcomes^Youwillbeabletodemonstrateyourknowledgeofthechapterobjectiveswithcasestudiesasfollows:•Giventheantennaazimuthpositioncontrolsystemshownonthefrontendpapers,youwillbeabletofindthepreamplifiergaintomeetsteady-stateerrorperformancespecifications.•Givenavideolaserdiscrecorder,youwillbeabletofindthegainrequiredtopermitthesystemtorecordonawarpeddisc.339Chapter7Steady-StateErrorsIntroductionInChapter1,wesawthatcontrolsystemsanalysisanddesignfocusonthreespecifications:(1)transientresponse,(2)stability,and(3)steady-stateerrors,takingintoaccounttherobustnessofthedesignalongwitheconomicandsocialconsiderations.ElementsoftransientanalysiswerederivedinChapter4forfirst-andsecondordersystems.TheseconceptsarerevisitedinChapter8,wheretheyareextendedtohigher-ordersystems.StabilitywascoveredinChapter6,wherewesawthatforcedresponseswereoverpoweredbynaturalresponsesthatincreasewithoutboundifthesystemisunstable.Nowwearereadytoexaminesteady-stateerrors.Wedefinetheerrorsandderivemethodsofcontrollingthem.Asweprogress,wefindthatcontrolsystemdesignentailstrade-offsbetweendesiredtransientresponse,steady-stateerror,andtherequirementthatthesystembestable.DefinitionandTestInputsSteady-stateerroristhedifferencebetweentheinputandtheoutputforaprescribedtestinputast—>oo.Testinputsusedforsteady-stateerroranalysisanddesignaresummarizedinTable7.1.Inordertoexplainhowthesetestsignalsareused,letusassumeapositioncontrolsystem,wheretheoutputpositionfollowstheinputcommandedposition.Stepinputsrepresentconstantpositionandthusareusefulindeterminingtheabilityofthecontrolsystemtopositionitselfwithrespecttoastationarytarget,suchasasatelliteingeostationaryorbit(seeFigure7.1).Anantennapositioncontrolisanexampleofasystemthatcanbetestedforaccuracyusingstepinputs.TABLE7.1Testwaveformsforevaluatingsteady-stateerrorsofpositioncontrolsystemsPhysicalinterpretationWaveformNameKt)StepConstantpositionRampConstantvelocityParabolaConstantacceleration•*•TimefunctionLapiacetransformV?irm7.1IntroductionSatelliteingeostationaryorbitSatelliteorbitingat^^constantvelocityr~^e^AcceleratingmissileSf^S^y*^^¾^TrackingsystemFIGURE7.1Testinputsforsteady-stateerroranalysisanddesignvarywithtargettypeRampinputsrepresentconstant-velocityinputstoapositioncontrolsystembytheirlinearlyincreasingamplitude.Thesewaveformscanbeusedtotestasystem'sabilitytofollowalinearlyincreasinginputor,equivalently,totrackaconstantvelocitytarget.Forexample,apositioncontrolsystemthattracksasatellitethatmovesacrosstheskyataconstantangularvelocity,asshowninFigure7.1,wouldbetestedwitharampinputtoevaluatethesteady-stateerrorbetweenthesatellite'sangularpositionandthatofthecontrolsystem.Finally,parabolas,whosesecondderivativesareconstant,representconstantaccelerationinputstopositioncontrolsystemsandcanbeusedtorepresentacceleratingtargets,suchasthemissileinFigure7.1,todeterminethesteady-stateerrorperformance.ApplicationtoStableSystemsSinceweareconcernedwiththedifferencebetweentheinputandtheoutputofafeedbackcontrolsystemafterthesteadystatehasbeenreached,ourdiscussionislimitedtostablesystems,wherethenaturalresponseapproacheszeroast—>oo.Unstablesystemsrepresentlossofcontrolinthesteadystateandarenotacceptableforuseatall.Theexpressionswederivetocalculatethesteady-stateerrorcanbeappliederroneouslytoanunstablesystem.Thus,theengineermustcheckthesystemforstabilitywhileperformingsteady-stateerroranalysisanddesign.However,inordertofocusonthetopic,weassumethatallthesystemsinexamplesandproblemsinthischapterarestable.Forpractice,youmaywanttotestsomeofthesystemsforstability.EvaluatingSteady-StateErrorsLetusexaminetheconceptofsteady-stateerrors.InFigure7.2(a)astepinputandtwopossibleoutputsareshown.Output1haszerosteady-stateerror,andoutput2hasafinitesteady-stateerror,62(00).AsimilarexampleisshowninFigure7.2(6),wherearampinputiscomparedwithoutput1,whichhaszerosteady-stateerror,andoutput2,whichhasafinitesteady-stateerror,62(00),asmeasuredverticallybetweentheinputandoutput2afterthetransientshavedieddown.Fortherampinput341342Chapter7Steady-StateErrorsTe2MOutput2Timee2(~)FIGURE7.2Steady-stateerror:a.stepinput;b.rampinputTimeanotherpossibilityexists.Iftheoutput'sslopeisdifferentfromthatoftheinput,thenoutput3,showninFigure1.2(b),results.Herethesteady-stateerrorisinfiniteasmeasuredverticallybetweentheinputandoutput3afterthetransientshavedieddown,andtapproachesinfinity.Letusnowlookattheerrorfromtheperspectiveofthemostgeneralblockdiagram.Sincetheerroristhedifferencebetweentheinputandtheoutputofasystem,weassumeaclosed-looptransferfunction,T(s),andformtheerror,E(s),bytakingthedifferencebetweentheinputandtheoutput,asshowninFigure13(a).Hereweareinterestedinthesteady-state,orfinal,valueofe(t).Forunityfeedbacksystems,E(s)appearsasshowninFigure1.3(b).Inthischapter,westudyandderiveexpressionsforthesteady-stateerrorforunityfeedbacksystemsfirstandthenexpandtononunityfeedbacksystems.Beforewebeginourstudyofsteady-stateerrorsforunityfeedbacksystems,letuslookatthesourcesoftheerrorswithwhichwedeal.,FIGURE7.3Closed-loopcontrolsystemerror:a.generalrepresentation;b.representationforunityfeedbacksystemsmT(s)(a)m-2:E(s)*vlR(s)+,E(s)C{s)(b)C(s)7.2Steady-StateErrorforUnityFeedbackSystemsR(s)+1;thatis,atleastonepolemustbeattheorigin.Sincedivisionbysinthefrequencydomainisintegrationinthetimedomain(seeTable2.2,Item10),wearealsosayingthatatleastonepureintegrationmustbepresentintheforwardpath.Thesteady-stateresponseforthiscaseofzerosteady-stateerrorissimilartothatshowninFigure7.2(a),output1.Iftherearenointegrations,thenn=0.UsingEq.(7.14),wehaver~.,ZiZ2"(7.15)whichisfiniteandyieldsafiniteerrorfromEq.(7.12).Figure7.2(a),output2,isanexampleofthiscaseoffinitesteady-stateerror.Insummary,forastepinputtoaunityfeedbacksystem,thesteady-stateerrorwillbezeroifthereisatleastonepureintegrationintheforwardpath.Iftherearenointegrations,thentherewillbeanonzerofiniteerror.ThisresultiscomparabletoourqualitativediscussioninSection7.1,wherewefoundthatapuregainyieldsaconstantsteady-stateerrorforastepinput,butanintegratoryieldszeroerrorforthesametypeofinput.Wenowrepeatthedevelopmentforarampinput.RampInput.UsingEq.(7.11)with,R(s)=1/s2,weobtain2.Inotherwords,theremustbeatleasttwointegrationsintheforwardpath.Anexampleofzerosteady-stateerrorforarampinputisshowninFigure7.2(b),output1.Ifonlyoneintegrationexistsintheforwardpath,then,assumingEq.(7.14),limsG(s)=*-o(7.18)pxp2•••whichisfiniteratherthaninfinite.UsingEq.(7.16),wefindthatthisconfigurationleadstoaconstanterror,asshowninFigure7.2(b),output2.Iftherearenointegrationsintheforwardpath,then(7.19)limsG(j)=0s-»0andthesteady-stateerrorwouldbeinfiniteandleadtodivergingramps,asshowninFigure7.2(b),output3.Finally,werepeatthedevelopmentforaparabolicinput.ParabolicInput.UsingEq.(7.11)withR(s)=1/s3,weobtains(l/s3)e(oo)=eParaboia(oo)=lim._,\-lim25-o1+G(s)?-*os+s2G(s)lims2G(s)(7.20)Inordertohavezerosteady-stateerrorforaparabolicinput,wemusthave\ims2G(s)=oc(7.21)TosatisfyEq.(7.21),G(s)musttakeonthesameformasEq.(7.14),exceptthatn>3.Inotherwords,theremustbeatleastthreeintegrationsintheforwardpath.Ifthereareonlytwointegrationsintheforwardpath,thenlim?G(s)=^^s-,0pxp2(7.22)•••isfiniteratherthaninfinite.UsingEq.(7.20),wefindthatthisconfigurationleadstoaconstanterror.Ifthereisonlyoneorlessintegrationintheforwardpath,thenhms2G(s)=0(7.23)5-0andthesteady-stateerrorisinfinite.Twoexamplesdemonstratetheseconcepts.Example7.2Steady-StateErrorsforSystemswithNoIntegrationsPROBLEM:Findthesteady-stateerrorsforinputsof5u(t),5tu(t),and5^(0tothesystemshowninFigure7.5.Thefunctionu(t)istheunitstep.347Chapter7348R(s)?)Eis)»cm120(5+2)(5+3)(5+4)Steady-StateErrorsSOLUTION:Firstweverifythattheclosed-loopsystemisindeedstable.Forthisexampleweleaveoutthedetails.Next,fortheinput5u(t),whoseLaplacetransformis5/s,thesteady-stateerrorwillbefivetimesaslargeasthatgivenbyEq.(7.12),orFIGURE7.5Feedbackcontrolsystemfore(oo)=esteP(oo)Example7.1+limG(s)1+205_21(7.24)whichimpliesaresponsesimilartooutput2ofFigure7.2(a).Fortheinput5tu(t),whoseLaplacetransformis5/s2,thesteady-stateerrorwillbefivetimesaslargeasthatgivenbyEq.(7.16),ore(oo)=eramP(oo)=-.limsG(s'ov'=-=00(7.25)whichimpliesaresponsesimilartooutput3ofFigure1.2(b).Fortheinput5?"u(i),whoseLaplacetransformis10/s3,thesteady-stateerrorwillbe10timesaslargeasthatgivenbyEq.(7.20),ore(oo)10=Cparabola(oo)=^£Q?10(7.26)Example7.3Steady-StateErrorsforSystemswithOneIntegration>*w,R(s)*$9100(5+2)(5+6)C(s)5(5+3)(5+4)PROBLEM:Findthesteady-stateerrorsforinputsof5u(t),5tu(t),and5f~u{t)tothesystemshowninFigure7.6.Thefunctionu(t)istheunitstep.SOLUTION:Firstverifythattheclosed-loopsystemisindeedstable.Forthisexampleweleaveoutthedetails.Nextnotethatsincethereisanintegrationintheforwardpath,thesteady-stateerrorsforsomeoftheinputwaveformswillbelessthanthosefoundinExample7.2.Fortheinput5u(t),whoseLaplacetransformis5/s,thesteady-stateerrorwillbefivetimesaslargeasthatgivenbyEq.(7.12),orFIGURE7.6FeedbackcontrolsystemforExample7.3e(oo)=m^500(5+2)(5+4)(5+5)(5+6)(5+7)R(s)+KC(s)52(5+8)(5+10)(5+12)-(c)FIGURE7.7FeedbackcontrolsystemsforExample7.4SOLUTION:Firstverifythatallclosed-loopsystemsshownareindeedstable.Forthisexampleweleaveoutthedetails.Next,forFigure7.7(a),Kp=limG(s)=5->0500x2x5=5.2088x10x12Kv=\imsG(s)=0(7.36)(7.37)5-»0Ka=\ims2G(s)=0(7.38)s—*QThus,forastepinput,eoo=1+&=0.161(7.39)Forarampinput,e(oo)=—=oo(7.40)e(°°)=£~=°°(7.41)K„=limG(s)—oo(7.42)Foraparabolicinput,Now,forFigure7.7(b),s—»0,.^,,500x2x5x6_„.w&v=hmsGls)=—^—77^—:-—=31.258x10x125-0w(7.43)351352Chapter7Steady-StateErrorsandKa=\ims2G(s)=0(7.44)s—.E(s)K(s+zx)(s+z2)systemattribute.GiventhesysteminFigure7.8,wedefinesystems"(s+P])(s-i-p2)typetobethevalueofninthedenominatoror,equivalently,thenumberofpureintegrationsintheforwardpath.Therefore,asystemwithn=0isaType0system.Ifn=1orn=2,theFIGURE7.8FeedbackcontrolsystemfordefiningsystemtypecorrespondingsystemisaType1orType2system,respectively.Table7.2tiestogethertheconceptsofsteady-stateerror,staticerrorconstants,andsystemtype.Thetableshowsthestaticerrorconstantsandthesteady-stateerrorsasfunctionsofinputwaveformandsystemtype.C(s)TABLE7.2Relationshipsbetweeninput,systemtype,staticerrorconstants,andsteady-stateerrorsTypeOInputStep,u(t)Steady-stateerrorformulaStaticerrorconstant11+KPKp=ConstantJ_Ramp,tu(t)KvParabola,-z?u{t)TypelError-——1+K„StaticerrorconstantType2ErrorcoKv=ConstantKa=0coKa=0ErrorKp=coKp=coKv=0Staticerrorconstant1Kv=coKa=Constant0J_KaSkill-AssessmentExercise7.2PROBLEM:Aunityfeedbacksystemhasthefollowingforwardtransferfunction:***'1000(,+8)(,+7)(5+9)a.Evaluatesystemtype,Kp,Kv,andKa.b.Useyouranswerstoa.tofindthesteady-stateerrorsforthestandardstep,ramp,andparabolicinputs.ANSWERS:a.Theclosed-loopsystemisstable.Systemtype=Type0.Kp=127,Kv=0,andKa=0.b.estep(oo)=7.8x10"~3,eramp(oo)=co,andeparaboia(oo)=coThecompletesolutionisatwww.wiley.com/college/nise.Inthissection,wedefinedsteady-stateerrors,staticerrorconstants,andsystemtype.Nowthespecificationsforacontrolsystem'ssteady-stateerrorswillbeformulated,followedbysomeexamples.^7.4Steady-StateErrorSpecificationsStaticerrorconstantscanbeusedtospecifythesteady-stateerrorcharacteristicsofcontrolsystems,suchasthatshowninFigure7.9.Justasdampingratio,f,settlingtime,Ts,peaktime,Tp,andpercentovershoot,%OS,areusedasspecificationsforaTrylt7.1UseMATLAB,theControlSystemToolbox,andthefollowingstatementstofindKp,eslep(oo),andtheclosed-looppolestocheckforstabilityforthesystemofSkill-AssessmentExercise7.2.numg=1000*[l8];deng=poly([-7-9]);G=tf(numg,deng);Kp=dcgain(G)estep=l/(l+Kp)T=feedback(G,l);poles=pole(T)354Chapter7Steady-StateErrorsFIGURE7.9Arobotusedinthemanufacturingofsemiconductorrandom-accessmemories(RAMs)similartothoseinpersonalcomputers.Steady-stateerrorisanimportantdesignconsiderationforassembly-linerobots.controlsystem'stransientresponse,sothepositionconstant,Kp,velocityconstant,Kv,andaccelerationconstant,Ka,canbeusedasspecificationsforacontrolsystem'ssteady-stateerrors.Wewillsoonseethatawealthofinformationiscontainedwithinthespecificationofastaticerrorconstant.Forexample,ifacontrolsystemhasthespecificationKv=1000,wecandrawseveralconclusions:1.Thesystemisstable.2.ThesystemisofType1,sinceonlyType1systemshaveKv'sthatarefiniteconstants.RecallthatKv=0forType0systems,whereasKv=ocforType2systems.3.Arampinputisthetestsignal.SinceKvisspecifiedasafiniteconstant,andthesteady-stateerrorforarampinputisinverselyproportionaltoKv,weknowthetestinputisaramp.4.Thesteady-stateerrorbetweentheinputrampandtheoutputrampis\/Kvperunitofinputslope.Letuslookattwoexamplesthatdemonstrateanalysisanddesignusingstaticerrorconstants.Example7.5InterpretingtheSteady-StateErrorSpecificationPROBLEM:WhatinformationiscontainedinthespecificationKp=1000?SOLUTION:Thesystemisstable.ThesystemisType0,sinceonlyaType0systemhasafiniteKp.Type1andType2systemshaveKp=oo.Theinputtestsignalisastep,sinceKpisspecified.Finally,theerrorperunitstepise(oo)=iTx:=rTlooo=iom(754)-7.4Steady-StateErrorSpecifications355Example7.6GainDesigntoMeetaSteady-StateErrorSpecificationPROBLEM:GiventhecontrolsysteminFigure7.10,findthevalueofKsothatthereis10%errorinthesteadystate.SOLUTION:SincethesystemisType1,theerrorstatedintheproblemmustapplytoarampinput;onlyarampyieldsafiniteerrorinaType1system.Thus,e(oc)=iT=aiR(s)+/0\£W<—K(s+5)C(s)s(s+6)(s+7)(5+8)FIGURE7.10FeedbackcontrolsystemforExample7.6(7.55)Therefore,Kv=10i=l\msG{s)=,K*5*-ow6x7x(7.56)whichyields#=672(7.57)ApplyingtheRouth-Hurwitzcriterion,weseethatthesystemisstableatthisgain.Althoughthisgainmeetsthecriteriaforsteady-stateerrorandstability,itmaynotyieldadesirabletransientresponse.InChapter9wewilldesignfeedbackcontrolsystemstomeetallthreespecifications.StudentswhoareusingMATLABshouldnowrunch7p2inAppendixB.Youwilllearnhowtofindthegaintomeetasteady-stateerrorspecificationusingMATLAB.ThisexercisesolvesExample7.6usingMATLAB.MATLABSkill-AssessmentExercise7.3PROBLEM:Aunityfeedbacksystemhasthefollowingforwardtransferfunction:G(s)=K(s+12)(5+14)(5+18)FindthevalueofKtoyielda10%errorinthesteadystate.ANSWER:K=189Thecompletesolutionisatwww.wiley.com/college/nise.WileyPLUSControlSolutionsTrylt7.2UseMATLAB,theControlSystemToolbox,andthefollowingstatementstosolveSkill-AssessmentExercise7.3andchecktheresultingsystemforstability.numg=[l12];deng=poly([-14-18]);G=tf(numg,deng);Kpdk=dcgain(G);estep=0.1;K=(l/estep-l)/KpdkT=feedback(G,l);poles=pole(T)356Chapter7Steady-StateErrorsThisexampleandexercisecompleteourdiscussionofunityfeedbacksystems.Intheremainingsections,wewilldealwiththesteady-stateerrorsfordisturbancesandthesteady-stateerrorsforfeedbackcontrolsystemsinwhichthefeedbackisnotunity.(7.5Steady-StateErrorforDisturbancesFeedbackcontrolsystemsareusedtocompensatefordisturbancesorunwantedinputsthatenterasystem.Theadvantageofusingfeedbackisthatregardlessofthesedisturbances,thesystemcanbedesignedtofollowtheinputwithsmallorzeroerror,aswenowdemonstrate.Figure7.11showsafeedbackcontrolsystemwithadisturbance,D(s),injectedbetweentheD(s)controllerandtheplant.Wenowre-derivetheexpressionforControllerPlantsteady-stateerrorwiththedisturbanceincluded.C(s)m+,V(5).GMThetransformoftheoutputisgivenby-*$-G2(s)FIGURE7.11disturbanceFeedbackcontrolsystemshowingC(s)=E(s)Gi(s)G2(s)+D{s)G2(s)(7.58)C{s)=R(s)-E(s)(7.59)ButSubstitutingEq.(7.59)intoEq.(7.58)andsolvingforE(s),weobtain1_G2{s)•D(s)E(s)=-R(s)l+G1{s)G2{s,1+(¾(*)(co)=sG2{s)Thefirstterm,e^?(oo),isthesteady-stateerrorduetoR(s),whichwehavealreadyobtained.Thesecondterm,e/j(oo),isthesteady-stateerrorduetothedisturbance.Letusexploretheconditionsonep(oo)thatmustexisttoreducetheerrorduetothedisturbance.Atthispoint,wemustmakesomeassumptionsaboutD(s),thecontroller,andtheplant.Firstweassumeastepdisturbance,D(s)=1/s.Substitutingthisvalueinto3Rememberthatthefinalvaluetheoremcanbeappliedonlyifthesystemisstable,withtherootsof[1+G\(s)G2{s)\intheleft-half-plane.7.5Steady-StateErrorforDisturbances357thesecondtermofEq.(7.61),eo(oo),thesteady-stateerrorcomponentduetoastepdisturbanceisfoundtobe1eo(oo)=lim—(7.62)+limG\(s)PlantThisequationshowsthatthesteady-stateerrorproducedbyastepdisturbancecanbereducedbyincreasingthedcgainofGi(s)ordecreasingthedcgainofG2(s).ThisconceptisshowninFigure7.12,wherethesystemofFigure7.11hasbeenrearrangedsothatthedisturbance,D(s),isdepictedastheinputandtheerror,E(s),astheoutput,withR(s)setequaltozero.Ifwewanttominimizethesteady-statevalueofE(s),shownastheoutputinFigure7.12,wemusteitherincreasethedcgainofG\(s)sothatalowervalueofE(s)willbefedbacktomatchthesteady-statevalueofD(s),ordecreasethedcvalueofG2(s),whichthenyieldsasmallervalueofe(oo)aspredictedbythefeedbackformula.Letuslookatanexampleandcalculatethenumericalvalueofthesteady-stateerrorthatresultsfromadisturbance.D(.v)-E(s)^G2(s)-•.G,W•aControllerFIGURE7.12Figure7.11systemrearrangedtoshowdisturbanceasinputanderrorasoutput,withR(s)=0Example7.7Steady-StateErrorDuetoStepDisturbancePROBLEM:Findthesteady-stateerrorcomponentduetoastepdisturbanceforthesystemofFigure7.13.DMmmG2(s)PlantControllerR(s)+*>*».-1000-%-1s{s+25)mFIGURE7.13FeedbackcontrolsystemforExample7.7VirtualExperiment7.1Steady-StateErrorPuttheoryintopracticefindingthesteady-stateerroroftheQuanserRotaryServowhensubjecttoaninputoradisturbancebysimulatingitinLabVIEW.Thisanalysisbecomesimportantwhendevelopingcontrollersforbottlelabellingmachinesorrobotjointcontrol.SOLUTION:Thesystemisstable.UsingFigure7.12andEq.(7.62),wefind^D(OO)=lim-10G2{S),limGi(s)0+10001000(7.63).y-,0Theresultshowsthatthesteady-stateerrorproducedbythestepdisturbanceisinverselyproportionaltothedcgainofGi(•$•).ThedcgainofG2(s)isinfiniteinthisexample.Skill-AssessmentExercise7.4PROBLEM:Evaluatethesteady-stateerrorcomponentduetoastepdisturbanceforthesystemofFigure7.14.VirtualexperimentsarefoundonWileyPLUS.Chapter7358Steady-StateErrorsD(s)-.5+25+4I19\*yy1000iC(i)FIGURE7.14SystemforSkill-AssessmentExercise7.4ANSWER:eD(oo)=-9.98x10"4Thecompletesolutionisatwww.wiley.com/college/nise.(7.6Steady-StateErrorforNonunityFeedbackSystemsControlsystemsoftendonothaveunityfeedbackbecauseofthecompensationusedtoimproveperformanceorbecauseofthephysicalmodelforthesystem.Thefeedbackpathcanbeapuregainotherthanunityorhavesomedynamicrepresentation.Ageneralfeedbacksystem,showingtheinputtransducer,G\(s),controllerandplant,G2(s),andfeedback,Hi(s),isshowninFigure7.15(a).Pushingtheinputtransducerm+/0G,ts),£„,(*)C(s)G2(s)H,(s)R(s)+,o,£„(.v)G(s)C(s)R(s)+xx———••G(s)mH(s)//(.*)-1ifi)C(s)R{s)+x-x£n(.v)R(s)E(s)G(5)FIGURE7.15ForminganequivalentunityfeedbacksystemfromageneralnonunityfeedbacksystemG(s)1+G(.v)//(i)-G(s)H(s)-Im(elC(s)7.6Steady-StateErrorforNonunityFeedbackSystems359totherightpastthesummingjunctionyieldsthegeneralnonunityfeedbacksystemshowninFigure7.15(5),whereG(s)=G]{s)G2{s)andH(s)=H^/G^(s).Noticethatunlikeaunityfeedbacksystem,whereH(s)=1,theerrorisnotthedifferencebetweentheinputandtheoutput.Forthiscasewecallthesignalattheoutputofthesummingjunctiontheactuatingsignal,Ea(s).Ifr(t)andc(t)havethesameunits,wecanfindthesteady-stateerror,e(oo)=r(oo)—c(oo).ThefirststepistoshowexplicitlyE{s)=R(s)—C(s)ontheblockdiagram.TakethenonunityfeedbackcontrolsystemshowninFigure7.15(5)andformaunityfeedbacksystembyaddingandsubtractingunityfeedbackpaths,asshowninFigure7.15(c).Thissteprequiresthatinputandoutputunitsbethesame.NextcombineH(s)withthenegativeunityfeedback,asshowninFigure7.15(d).Finally,combinethefeedbacksystemconsistingofG(s)and[H(s)-1],leavinganequivalentforwardpathandaunityfeedback,asshowninFigure7.15(e).NoticethatthefinalfigureshowsE(s)=R(s)-C(s)explicitly.Thefollowingexamplesummarizestheconceptsofsteady-stateerror,systemtype,andstaticerrorconstantsfornonunityfeedbacksystems.Example7.8Steady-StateErrorforNonunityFeedbackSystemsPROBLEM:ForthesystemshowninFigure7.16,findthesystemtype,theappropriateerrorconstantassociatedwiththesystemtype,andthesteady-stateerrorforaunitstepinput.Assumeinputandoutputunitsarethesame.R(s)+iEa{s)i100s(s+10)C(s)SOLUTION:Afterdeterminingthatthesystemisindeedstable,one(*+5)mayimpulsivelydeclarethesystemtobeType1.ThismaynotbetheFIGURE7.16Nonunityfeedbackcontrolcase,sincethereisanonunityfeedbackelement,andtheplant'ssystemforExample7.8actuatingsignalisnotthedifferencebetweentheinputandtheoutput.ThefirststepinsolvingtheproblemistoconvertthesystemofFigure7.16intoanequivalentunityfeedbacksystem.UsingtheequivalentforwardtransferfunctionofFigure7.15(c)alongwithG(s)=100s{s+10)Trylt7.3(7.64)andffW=(s+5)(7.65)wefindGe(s)=G(s)1+G(s)H{s)-G{s)100(.5+5)s+15s2-50s-4003(7.66)Thus,thesystemisType0,sincetherearenopureintegrationsinEq.(7.66).TheappropriatestaticerrorconstantisthenKp,whosevalueisKp=]imGe{s)=100x5-400(7.67)UseMATLAB,theControlSystemToolbox,andthefollowingstatementstofindGe(s)inExample7.8.G=zpk([],[0-10],100);H=zpk([],-5,1);Ge=feedback...(G,(H-1));'Ge(s)1Ge=tf(Ge)T=feedback(Ge,l);'PolesofT(s)'pole(T)Chapter7360Steady-StateErrorsThesteady-stateerror,e(oo),ise(oo)=1l+Kp1=-41-(5/4)(7.68)Thenegativevalueforsteady-stateerrorimpliesthattheoutputstepislargerthantheinputstep.^(gKGi(s)G2(5)C(s)H(s)Tocontinueourdiscussionofsteady-stateerrorforsystemswithnonunityfeedback,letuslookatthegeneralsystemofFigure7.17,whichhasbothadisturbanceandnonunityfeedback.Wewillderiveageneralequationforthesteady-stateerrorandthendeterminetheparametersofthesysteminordertodrivetheerrortozeroforstepinputsandstepdisturbances.4Thesteady-stateerrorforthissystem,e(oo)=r(oo)—c(oo),isFIGURE7.17Nonunityfeedbackcontrolsystemwithdisturbancee(oo)=HmsMCs)=lims<S->05-»01+G1(s)G2(s)l+Gi(s)G2(s)ff(s).m(7.69)G2(s)D(s)G1(s)G2(s)H(s)Nowlimitingthediscussiontostepinputsandstepdisturbances,whereR(s)=D(s)=1/s,Eq.(7.69)becomesUm[Gi(5)G2(5)]e(oo)=lim$£(.$)=1-s—»0s—»0lim[l+Gi(s)G2(s)tf(s)](7.70)5—»0limG2(s)s—»0jMa[l+Gi(s)G2{s)H{s)]Forzeroerror,g3[Gifr)(%W]lim[l+d(s)G2{s)H^)]limGz(5)=1and*""s—>Qlim[l+G{(s)G2{s)H{s}=0(7-71!ThetwoequationsinEq.(7.71)canalwaysbesatisfiedif(1)thesystemisstable,(2)Gi(s)isaType1system,(3)G2(s)isaType0system,and(4)H(s)isaType0systemwithadcgainofunity.Toconcludethissection,wediscussfindingthesteady-statevalueoftheactuatingsignal,Eai(s),inFigure7.15(a).Forthistaskthereisnorestrictionthattheinputandoutputunitsbethesame,sincewearefindingthesteady-statedifferencebetweensignalsatthesummingjunction,whichdohavethesameunits.5Thesteady-state4Detailsofthederivationareincludedasaproblemattheendofthischapter.Forclarity,steady-stateerroristhesteady-statedifferencebetweentheinputandtheoutput.Steadystateactuatingsignalisthesteady-statedifferenceattheoutputofthesummingjunction.Inquestionsaskingforsteady-stateerrorinproblems,examples,andskill-assessmentexercises,itwillbeassumedthatinputandoutputunitsarethesame.57.6Steady-StateErrorforNonunityFeedbackSystems361actuatingsignalforFigure7.15(a)issR(s)Gi{s)€ai(oo)=lim:+o1+G2(5)//1(J)(7.72)Thederivationislefttothestudentintheproblemsetattheendofthischapter.Example7.9Steady-StateActuatingSignalforNonunityFeedbackSystemsPROBLEM:Findthesteady-stateactuatingsignalforthesystemofFigure7.16foraunitstepinput.Repeatforaunitrampinput.SOLUTION:UseEq.(7.72)withR(s)=l/s,aunitstepinput,(?i(s)=l,G2{s)=100/(5(5+10)],and#1(5)=1/(5+5).Also,realizethateai(co)=e„(oo),sinceG\(s)=l.Thus,ea(oo)=lims-»0,1+.„,>*{,100.—r-=01(7.73)5(5+io);vc*+5)NowuseEq.(7.72)withR(s)=1/s,aunitrampinput,andobtain5ea(oo)=lims—>0(-r1001+s(s+10)/V(5+5)(7.74)[Skill-AssessmentExercise7.5)PROBLEM:a.Findthesteady-stateerror,e(oo)=r(oo)-c(co),foraunitstepinputgiventhenonunityfeedbacksystemofFigure7.18.Repeatforaunitrainpinput.Assumeinputandoutputunitsarethesame.b.Findthesteady-stateactuatingsignal,e„(oo),foraunitstepinputgiventhenonunityfeedbacksystemofFigure7.18.Repeatforaunitrampinput.b.Foraunitstepinput,efl(oo)=3.846x10~2;foraunitrampinput,e#{o&)—ooControlSolutions7sW,y1005+4m1ANSWERS:a.e?sieP(oo)=3.846x10-2;eramp(oo)=ooWileyPLUS#+1FIGURE7.18Noimnityfe^dbacksystemforSkill-Assessnu;ntExercise7.5Thecompletesolutionisatwww.wiley.com/college/nise.Inthissection,wehaveappliedsteady-stateerroranalysistononunityfeedbacksystems.Whennonunityfeedbackispresent,theplant'sactuatingsignalisnotChapter7Steady-StateErrorstheactualerrorordifferencebetweentheinputandtheoutput.Withnonunityfeedbackwemaychooseto(1)findthesteady-stateerrorforsystemswheretheinputandoutputunitsarethesameor(2)findthesteady-stateactuatingsignal.Wealsoderivedageneralexpressionforthesteady-stateerrorofanonunityfeedbacksystemwithadisturbance.Weusedthisequationtodeterminetheattributesofthesubsystemssothattherewaszeroerrorforstepinputsandstepdisturbances.Beforeconcludingthischapter,wewilldiscussatopicthatisnotonlysignificantforsteady-stateerrorsbutgenerallyusefulthroughoutthecontrolsystemsdesignprocess.f7.7SensitivityDuringthedesignprocess,theengineermaywanttoconsidertheextenttowhichchangesinsystemparametersaffectthebehaviorofasystem.Ideally,parameterchangesduetoheatorothercausesshouldnotappreciablyaffectasystem'sperformance.Thedegreetowhichchangesinsystemparametersaffectsystemtransferfunctions,andhenceperformance,iscalledsensitivity.Asystemwithzerosensitivity(thatis,changesinthesystemparametershavenoeffectonthetransferfunction)isideal.Thegreaterthesensitivity,thelessdesirabletheeffectofaparameterchange.Forexample,assumethefunctionF=K/(K+a).IfK=10anda=100,thenF=0.091.Ifparameteratriplesto300,thenF=0.032.Weseethatafractionalchangeinparameteraof(300—100)/100=2(a200%change),yieldsachangeinthefunctionFof(0.032-0.091)/0.091=-0.65(-65%change).Thus,thefunctionPhasreducedsensitivitytochangesinparameters.Asweproceed,wewillseethatanotheradvantageoffeedbackisthatingeneralitaffordsreducedsensitivitytoparameterchanges.Baseduponthepreviousdiscussion,letusformalizeadefinitionofsensitivity:Sensitivityistheratioofthefractionalchangeinthefunctiontothefractionalchangeintheparameterasthefractionalchangeoftheparameterapproacheszero.Thatis,Fractionalchangeinthefunction,FSp:p—HmATQ)Fractionalchangeintheparameter,PAP/P—lim.AP^oAP/P.,PAP=hm——A/>^0PAPwhichreducestoP8FSFP=-=FSP(7.75)Letusnowapplythedefinition,firsttoaclosed-looptransferfunctionandthentothesteady-stateerror.Example7.10SensitivityofaClosed-LoopTransferFunctionm+/C\E(s)Ks(s+a)FIGURE7.19FeedbackcontrolsystemforExamples7.10and7.11C(s)tPROBLEM:GiventhesystemofFigure7.19,calculatethesensitivityoftheclosed-looptransferfunctiontochangesintheparametera.Howwouldyoureducethesensitivity?7.7SensitivitySOLUTION:Theclosed-looptransferfunctionisKT(s)=(7.76)s2+as+KUsingEq.(7.75),thesensitivityisgivenby-Ks{s+as+K)2l2Ks2+as+K—ass2+as+K(7.77)whichis,inpart,afunctionofthevalueofs.Foranyvalueofs,however,anincreaseinKreducesthesensitivityoftheclosed-looptransferfunctiontochangesintheparametera.Example7.11SensitivityofSteady-StateErrorwithRampInputPROBLEM:ForthesystemofFigure7.19,findthesensitivityofthesteady-stateerrortochangesinparameterKandparameterawithrampinputs.SOLUTION:Thesteady-stateerrorforthesystemise{oo)=la(7.78)Yv=KThesensitivityofe(oc)tochangesinparameterais_a_8e__eSaa/KK=1(7.79)Thesensitivityofe(oo)tochangesinparameterKiseK'eSKK—a=-1a/KK2(7.80)Thus,changesineitherparameteraorparameterKaredirectlyreflectedine(oo),andthereisnoreductionorincreaseinsensitivity.ThenegativesigninEq.(7.80)indicatesadecreaseine(oo)foranincreaseinK.BothoftheseresultscouldhavebeenobtaineddirectlyfromEq.(7.78)sincee(oo)isdirectlyproportionaltoparameteraandinverselyproportionaltoparameterK.Example7.12SensitivityofSteady-StateErrorwithStepInputPROBLEM:Findthesensitivityofthesteady-stateerrortochangesinparameterKandparameteraforthesystemshowninFigure7.20withastepinput.363364Chapter7R(s)+E(s)K(s+a)(s+-C(S)Steady-StateErrorsSOLUTION:Thesteady-stateerrorforthisType0systemise(oo)=FIGURE7.20FeedbackcontrolsystemforExample7.12*~>e:a—~—UseMATLAB,theSymbolicMathToolbox,andthefollowingstatementstofindSe!ainExample7.12.symsKabsG=K/((s+a)*(s+b));Kp=subs(G,s,o);e=l/(l+Kp);Sea=(a/e)*diff(e,a);Sea=simple(Sea);'Sea'pretty(Sea)11+KP1+£abab+K—e8aaabJib+K,(ab+K)b-ab2(ab+K)'Kab+K-.K(s+1)2s+2s+l0(7.82)Thesensitivityofe(oo)tochangesinparameterKisKSee8KSpir————=Kabab+K-ab(ab+K)2-Kab+K(7.83)Equations(7.82)and(7.83)showthatthesensitivitytochangesinparameterKandparameteraislessthanunityforpositiveaandb.Thus,feedbackinthiscaseyieldsreducedsensitivitytovariationsinbothparameters.Skill-AssessmentExercise7.6]R(s)+^^E(s)(7.81)abThesensitivityofe(oo)tochangesinparameterais_aSe_Trylt7.41m.PROBLEM:Findthesensitivityofthesteady-stateerrortochangesinKforthesystemofFigure7.21.ANSWER:**-FIGURE7.21SystemforSkill-Asses*>mentExercise7.6ftW+7KThecompletesolutionisatwww.wiley.com/college/nise.Inthissection,wedefinedsensitivityandshowedthatinsomecasesfeedbackreducesthesensitivityofasystem'ssteady-stateerrortochangesinsystemparameters.Theconceptofsensitivitycanbeappliedtoothermeasuresofcontrolsystemperformance,aswell;itisnotlimitedtothesensitivityofthesteady-stateerrorperformance.(7.8Steady-StateErrorforSystemsinStateSpaceUptothispoint,wehaveevaluatedthesteady-stateerrorforsystemsmodeledastransferfunctions.Inthissection,wewilldiscusshowtoevaluatethesteady-stateerrorforsystemsrepresentedinstatespace.Twomethodsforcalculatingthesteadystateerrorwillbecovered:(1)analysisviafinalvaluetheoremand(2)analysisviainputsubstitution.Wewillconsiderthesemethodsindividually.AnalysisviaFinalValueTheoremAsingle-input,single-outputsystemrepresentedinstatespacecanbeanalyzedforsteady-stateerrorusingthefinalvaluetheoremandtheclosed-looptransfer7.8Steady-StateErrorforSystemsinStateSpace365function,Eq.(3.73),derivedintermsofthestate-spacerepresentation.Considertheclosed-loopsystemrepresentedinstatespace:x=Ax+Br(7.84a)y=Cx(7.84b)TheLaplacetransformoftheerrorisE(s)=R(s)-Y(s)(7.85)ButY(s)=R(s)T(s)(7.86)whereT(s)istheclosed-looptransferfunction.SubstitutingEq.(7.86)into(7.85),weobtainE(s)=R(s)[l(7.87)-T(s)}UsingEq.(3.73)forT(s),wefindE(s)=R{s)[l-C(sI-A)-lB)(7.88)Applyingthefinalvaluetheorem,wehavelimsE(s)=limsi?(s)[l-C{sl-A)_1B](7.89)Letusapplytheresulttoanexample.Example7.13Steady-StateErrorUsingtheFinalValueTheoremPROBLEM:Evaluatethesteady-stateerrorforthesystemdescribedbyEqs.(7.90)forunitstepandunitrampinputs.Usethefinalvaluetheorem.A=-510"0-21;20-1010B=01C=f-110(7.90)SOLUTION:SubstitutingEqs.(7.90)into(7.89),weobtains+4e(oo)=limsR(s)1—J25-*0s+6s+13^-2033s++6s22+12s+16Df,fs=limsALws)-x-r^s-*Q\f+6s213s+20(7.91)Foraunitstep,R(s)=1/s,ande(oo)=4/5.Foraunitramp,R(s)=1/s2,ande(oo)=oo.NoticethatthesystembehaveslikeaType0system.Trylt7.5UseMATLAB,theSymbolicMathToolbox,andthefollowingstatementstofindthesteady-stateerrorforastepinputtothesystemofExample7.13.symssA=[-5100-2120-101];B=[0;0;1];C=[-l10];I=[l00010001];E=(l/s)*[l-C*...[(s*I-A)A-1]*B];%Newcommand:%subs(X,old,new):t-Replaceoldin...%X(old)withnew.error=subs(s*E,s,0)366Chapter7Steady-StateErrorsAnalysisviaInputSubstitutionAnothermethodforsteady-stateanalysisavoidstakingtheinverseof{si—A)andcanbeexpandedtomultiple-input,multiple-outputsystems;itsubstitutestheinputalongwithanassumedsolutionintothestateequations(Hostetter,1989).Wewillderivetheresultsforunitstepandunitrampinputs.StepInputs,GiventhestateEqs.(7.84),iftheinputisaunitstepwherer=1,asteady-statesolution,xss,forx,isv2=vXce—(7.92)whereVtisconstant.Also,(7.93)Xss=0Substitutingr=1,aunitstep,alongwithEqs.(7.92)and(7.93),intoEqs.(7.84)yields0=AV+Byss=CV(7.94a)(7.94b)whereyssisthesteady-stateoutput.SolvingforVyieldsV=-A^B(7.95)Butthesteady-stateerroristhedifferencebetweenthesteady-stateinputandthesteady-stateoutput.Thefinalresultforthesteady-stateerrorforaunitstepinputintoasystemrepresentedinstatespaceise(oo)=1-yss=1-CV=1+CA-ii~B(7.96)RampInputs.Forunitrampinputs,r=t,asteady-statesolutionforxisv2t+w2Xse—=Vr+W(7.97)=v(7.98)Vnt+Wa.whereV,-andWtareconstants.Hence,V2Xec—Vn.7.8Steady-StateErrorforSystemsinStateSpaceSubstitutingr=talongwithEqs.(7.97)and(7.98)intoEqs.(7.84)yieldsV=A(Vf+W)+Br(7.99a)yss=C(Vf+W)(7.99b)InordertobalanceEq.(7.99a),weequatethematrixcoefficientsoft,AV=—B,orV=-A_1B(7.100)EquatingconstanttermsinEq.(7.99a),wehaveAW=V,orW=A_1V(7.101)SubstitutingEqs.(7.100)and(7.101)into(7.99b)yieldsyss=C[-A_1Br+A-^-A^B)]=-CJA^B/+(A^ffi](7.102)Thesteady-stateerroristherefore-1\2,_1e(oo)=lim(t-yss)=lim[(1+CA-hB)f+C(A_1)^B]t—'00(7.103)t—*00Noticethatinordertousethismethod,A-1mustexist.Thatis,detA^0.WenowdemonstratetheuseofEqs.(7.96)and(7.103)tofindthesteady-stateerrorforstepandrampinputs.Example7.14Steady-StateErrorUsingInputSubstitutionPROBLEM:Evaluatethesteady-stateerrorforthesystemdescribedbythethreeequationsinEq.(7.90)forunitstepandunitrampinputs.Useinputsubstitution.SOLUTION:Foraunitstepinput,thesteady-stateerrorgivenbyEq.(7.96)ise(oo)=1+CA_1B=1-0.2=0.8(7.104)whereC,A,andBareasfollows:A=-50101-21;20-101_"°1B=0.1.C=[-l10(7.105)Forarampinput,usingEq.(7.103),wehave-l\2ie(oo)=[limKl+CA-^+CtA-'rB]=lim(0.8f+0.08)=oot—'DO/—>0O(7.106)367368Chapter7Steady-StateErrorsSkill-AsseismentExercise7.7WileyPLUSControlSolutionsPROBLEM:Findtr3steady-stateerrorforastepinputgiventhesystemrepresentedinstatespacebelow.Calculatethesteady-stateerrorusingboththefinalvaluetheoremandinputsubstitutionmethods.k=0-31-6B=C=fl1ANSWER:eStep(oo)=rThecompletesolulonisatwww.wiley.com/college/nise.Inthischapttr,wecoveredtheevaluationofsteady-stateerrorforsystemsrepresentedbytransferfunctionsaswellassystemsrepresentedinstatespace.Forsystemsrepresentedinstatespace,twomethodswerepresented:(1)finalvaluetheoremand(2)inputsubstitution.CaseStudiesAntennaControl:Steady-StateErrorDesignviaGainThischaptershowedhowtofindsteady-stateerrorsforstep,ramp,andparabolicinputstoaclosed-loopfeedbackcontrolsystem.Wealsolearnedhowtoevaluatethegaintomeetasteady-stateerrorrequirement.Thisongoingcasestudyusesourantennaazimuthpositioncontrolsystemtosummarizetheconcepts.PROBLEM:Fortheantennaazimuthpositioncontrolsystemshownonthefrontendpapers,Configuration1,a.Findthesteady-stateerrorintermsofgain,K,forstep,ramp,andparabolicinputs.b.Findthevalueofgain,K,toyielda10%errorinthesteadystate.SOLUTION:a.Thesimplifiedblockdiagramforthesystemisshownonthefrontendpapers.Thesteady-stateerrorisgivenbysR(s)e(oo)=l\msE(s)=lim-—^-^KW'5-0tf-41(7.107)+G(s)Fromtheblockdiagram,afterpushingthepotentiometertotherightpastthesummingjunction,theequivalentforwardtransferfunctionis6.63KK)5(5+1.71)(5+100)(7.108)CaseStudiesTofindthesteady-stateerrorforastepinput,useR(s)—1/salongwithEq.(7.108),andsubstitutetheseinEq.(7.107).Theresultise(oo)=0.Tofindthesteady-stateerrorforarampinput,useR(s)—1/s2alongwithEq.(7.108),andsubstitutetheseinEq.(7.107).Theresultise(oo)=25.79/K.Tofindthesteady-stateerrorforaparabolicinput,useR(s)=1/s3alongwithEq.(7.108),andsubstitutetheseinEq.(7.107).Theresultise(oo)=oo.b.SincethesystemisType1,a10%errorinthesteady-statemustrefertoarampinput.Thisistheonlyinputthatyieldsafinite,nonzeroerror.Hence,foraunitmmpinpUt'o.i='-L=(1.71)(100)25.79(7.109)6.63#KfromwhichK=257.9.YoushouldverifythatthevalueofKiswithintherangeofgainsthatensuressystemstability.Intheantennacontrolcasestudyinthelastchapter,therangeofgainforstabilitywasfoundtobe0<K<2623.29.Hence,thesystemisstableforagainof257.9.e(oo)=CHALLENGE:Youarenowgivenaproblemtotestyourknowledgeofthischapter'sobjectives:Referringtotheantennaazimuthpositioncontrolsystemshownonthefrontendpapers,Configuration2,dothefollowing:a.Findthesteady-stateerrorsintermsofgain,K,forstep,ramp,andparabolicinputs.b.Findthevalueofgain,K,toyielda20%errorinthesteadystate.VideoLaserDiscRecorder:Steady-StateErrorDesignviaGainAsasecondcasestudy,letuslookatavideolaserdiscfocusingsystemforrecording.PROBLEM:Inordertorecordonavideolaserdisc,a0.5^mlaserspotmustbefocusedontherecordingmediumtoburnpitsthatrepresenttheprogrammaterial.Thesmalllaserspotrequiresthatthefocusinglensbepositionedtoanaccuracyof±0.tfym..AmodelofthefeedbackcontrolsystemforthefocusinglensisshowninFigure7.22.ThedetectordetectsthedistancebetweenthefocusinglensandthevideodiscbymeasuringthedegreeoffocusasshowninFigure7.23(a).Laserlightreflectedfromthedisc,D,issplitbybeamsplittersB\andBiandfocusedbehindapertureA.ThefemainderisreflectedbythemirrorandfocusesinfrontofapertureA.Theamountoflightofeachbeamthatpassesthroughtheaperturedependsonhowfarthebeam'sfocalpointisfromtheaperture.Eachsideofthesplitphotodiode,P,measurestheintensityofeachbeam.Thus,asthedisc'sdistancefromtherecordingDesiredposition+DetectorFilterPoweramplifier0.12Kjfa+800)(s+40,000)K2^.Motor&lensActualAT3positions2FIGURE7.22Videolaserdiscrecording:controlsystemforfocusingwritebeam370Chapter7Steady-StateErrorsMirrorP,splitphotodiode£,,,condensinglensD-DiscBx,polarizingbeamsplitterL},recordingobjectivelensDifferentialvoltageA0.65^_Distancefromnominalfocus-0.6(*)FIGURE7.23Videodisclaserrecording:a.focusdetectoroptics;b.linearizedtransferfunctionforfocusdetectorobjectivelenschanges,sodoesthefocalpointofeachbeam.Asaresult,therelativevoltagedetectedbyeachpartofthesplitphotodiodechanges.Whenthebeamisoutoffocus,onesideofthephotodiodeoutputsalargervoltage.Whenthebeamisinfocus,thevoltageoutputsfrombothsidesofthephotodiodeareequal.Asimplifiedmodelforthedetectorisastraightlinerelatingthedifferentialvoltageoutputfromthetwoelementstothedistanceofthelaserdiscfromnominalfocus.Alinearizedplotofthedetectorinput-outputrelationshipisshowninFigure7.23(b)(Isailovic,1985).Assumethatawarponthediscyieldsaworst-casedisturbanceinthefocusof10r2/zm.FindthevalueofKiK2K3inordertomeetthefocusingaccuracyrequiredbythesystem.Summary371SOLUTION:SincethesystemisType2,itcanrespondtoparabolicinputswithfiniteerror.Wecanassumethatthedisturbancehasthesameeffectasaninputof10r2/U.m.TheLaplacetransformof10/2is20/.?3,or20unitsgreaterthantheunitaccelerationusedtoderivethegeneralequationoftheerrorforaparabolicinput.Thus,e(oo)=2QIKa.ButKa=\ims2G{s).s-*0FromFigure7.22,Ka=0.0024KiK2K3.Also,fromtheproblemstatement,theerrormustbenogreaterthan0.1/xm.Hence,e(oo)=8333.33/^1^2^3=0.1.Thus,K1K2K3>83333.3,andthesystemisstable.CHALLENGE:Youarenowgivenaproblemtotestyourknowledgeofthischapter'sobjectives:GiventhevideolaserdiscrecordingsystemwhoseblockdiagramisshowninFigure7.24,dothefollowing:a.Ifthefocusinglensneedstobepositionedtoanaccuracyof±0.005/xm,findthevalueofKiK2K3ifthewarponthediscyieldsaworst-casedisturbanceinthefocusofI5t2fim.b.UsetheRouth-Hurwitzcriteriontoshowthatthesystemisstablewhentheconditionsofa.aremet.c.UseMATLABtoshowthatthesystemisstablewhentheconditionsofa.aremet.DesiredpositionDetector,.+—1?\90.2FilterPoweramplifierK}(s+600)(s+20,000)K2Motor&lensAclual*3position,52FIGURE7.24Videolaserdiscrecordingfocusingsystem^Summary^Thischaptercoveredtheanalysisanddesignoffeedbackcontrolsystemsforsteadystateerrors.Thesteady-stateerrorsstudiedresultedstrictlyfromthesystemconfiguration.Onthebasisofasystemconfigurationandagroupofselectedtestsignals,namelysteps,ramps,andparabolas,wecananalyzeordesignforthesystem'ssteady-stateerrorperformance.Thegreaterthenumberofpureintegrationsasystemhasintheforwardpath,thehigherthedegreeofaccuracy,assumingthesystemisstable.Thesteady-stateerrorsdependuponthetypeoftestinput.Applyingthefinalvaluetheoremtostablesystems,thesteady-stateerrorforunitstepinputsis•W=I+H3B(7U0)Thesteady-stateerrorforrampinputsofunitvelocityise(oo)=1lim.s'G(s)IT(7.111)MATLA&Chapter7Steady-StateErrorsandforparabolicinputsofunitacceleration,itiss—*QThetermstakentothelimitinEqs.(7.110)through(7.112)arecalledstaticerrorconstants.BeginningwithEq.(7.110),thetermsinthedenominatortakentothelimitarecalledthepositionconstant,velocityconstant,andaccelerationconstant,respectively.Thestaticerrorconstantsarethesteady-stateerrorspecificationsforcontrolsystems.Byspecifyingastaticerrorconstant,oneisstatingthenumberofpureintegrationsintheforwardpath,thetestsignalused,andtheexpectedsteadystateerror.Anotherdefinitioncoveredinthischapterwasthatofsystemtype.Thesystemtypeisthenumberofpureintegrationsintheforwardpath,assumingaunityfeedbacksystem.Increasingthesystemtypedecreasesthesteady-stateerroraslongasthesystemremainsstable.Sincethesteady-stateerroris,forthemostpart,inverselyproportionaltothestaticerrorconstant,thelargerthestaticerrorconstant,thesmallerthesteady-stateerror.Increasingsystemgainincreasesthestaticerrorconstant.Thus,ingeneral,increasingsystemgaindecreasesthesteady-stateerroraslongasthesystemremainsstable.Nonunityfeedbacksystemswerehandledbyderivinganequivalentunityfeedbacksystemwhosesteady-stateerrorcharacteristicsfollowedallpreviousdevelopment.Themethodwasrestrictedtosystemswhereinputandoutputunitsarethesame.Wealsosawhowfeedbackdecreasesasystem'ssteady-stateerrorcausedbydisturbances.Withfeedback,theeffectofadisturbancecanbereducedbysystemgainadjustments.Finally,forsystemsrepresentedinstatespace,wecalculatedthesteady-stateerrorusingthefinalvaluetheoremandinputsubstitutionmethods.Inthenextchapter,wewillexaminetherootlocus,apowerfultoolfortheanalysisanddesignofcontrolsystems.i¢^ReviewQuestions^1.Nametwosourcesofsteady-stateerrors.2.Apositioncontrol,trackingwithaconstantdifferenceinvelocity,wouldyieldhowmuchpositionerrorinthesteadystate?3.Namethetestinputsusedtoevaluatesteady-stateerror.4.Howmanyintegrationsintheforwardpatharerequiredinorderfortheretobezerosteady-stateerrorforeachofthetestinputslistedinQuestion3?5.Increasingsystemgainhaswhateffectuponthesteady-stateerror?6.Forastepinput,thesteady-stateerrorisapproximatelythereciprocalofthestaticerrorconstantifwhatconditionholdstrue?7.Whatistheexactrelationshipbetweenthestaticerrorconstantsandthesteadystateerrorsforrampandparabolicinputs?8.WhatinformationiscontainedinthespecificationKp=10,000?9.Definesystemtype.Problems37310.Theforwardtransferfunctionofacontrolsystemhasthreepolesat-1,-2,and-3.Whatisthesystemtype?11.Whateffectdoesfeedbackhaveupondisturbances?12.Forastepinputdisturbanceattheinputtotheplant,describetheeffectofcontrollerandplantgainuponminimizingtheeffectofthedisturbance.13.Istheforward-pathactuatingsignalthesystemerrorifthesystemhasnonunityfeedback?14.Howarenonunityfeedbacksystemsanalyzedanddesignedforsteady-stateerrors?15.Define,inwords,sensitivityanddescribethegoaloffeedback-control-systemengineeringasitappliestosensitivity.16.Nametwomethodsforcalculatingthesteady-stateerrorforsystemsrepresentedinstatespace.Problems1.FortheunityfeedbacksystemshowninFigureP7.1,whereGis)wileyPius¢323Conlfo1Solutions450(5+8)(5+12)(5+15)=s(s+38)(52+2s+28)G(s)=findthesteady-stateerrorsforthefollowingtestinputs:25w(r),31tu{t),47t2u(t).[Section:7.2]R(s)+sc>E(s)G(s)3.FortheunityfeedbacksystemshowninFigureP7.1,whereC(s)FIGUREP7.12.FigureP7.2showstherampinputr(t)andtheoutputc(t)ofasystem.Assumingtheoutput'ssteadystatecanbeapproximatedbyaramp,find[Section:7.1]60(5+3)(5+4)(5+8)52(5+6)(5+17)findthesteady-stateerroriftheinputisS0t2u(t).[Section:7.2]4.ForthesystemshowninFigureP7.3,whatsteadystateerrorcanbeexpectedforthefollowingtestinputs:\5u(t),15ta(f),15t2u{t).[Section:7.2]*»tf9\yy+/0\sKytfi**sa.thesteady-stateerror;C(s)i+33b.thesteady-stateerroriftheinputbecomesr(t)=tu{t).45FIGUREP7.3FortheunityfeedbacksystemshowninFigureP7.1,whereG(s)=500(5+24)(52+85+14)findthesteady-stateerrorforinputsof30u(t),10tu(t),and81t2u(t).[Section:7.3]**•/(sec)FIGUREP7.26.Aninputof25t3u(t)isappliedtotheinputofaType3unityfeedbacksystem,asshowninFigureP7.1,374Chapter7Steady-StateErrorswhereG(s)=210(5+4)(5+6)(5+11)(5+13)s3{s+7)(5+14)(5+19)Findthesteady-stateerrorinposition.[Section:7.3]7.Thesteady-stateerrorinvelocityofawileyPLUSsystemisdefinedtobeEVJimrdr_dc"dtdt5s(s+\)(s+2)R{s)+/ControlSolutions_.~~^.whereristhesysteminput,andcisthesystemoutput.Findthesteady-stateerrorinvelocityforaninputoft"u(t)toaunityfeedbacksystemwithaforwardtransferfunctionof[Section:7.2]100(5+1)(5+2){)13.ForthesystemshowninFigureP7.4,[Section:7.3]a.FindKp,K^andKa.b.Findthesteady-stateerrorforaninputof50«(r),50m(0,and50t2u(t).c.Statethesystemtype.52(5+3)(5+10)8.Whatisthesteady-stateerrorforastepinputof15unitsappliedtotheunityfeedbacksystemofFigureP7.1,where[Section:7.3]1020(5+13)(5+26)(5+33)G{l)=(5+65)(5+75)(5+91)C(s)(s+3)FIGUREP7.414.AType3unityfeedbacksystemhasr{t)—lOr3appliedtoitsinput.Findthesteady-statepositionerrorforthisinputiftheforwardtransferfunctionis[Section:7.3]_1030(52+85+23)(52+215+U){S)~5^(5+6)(5+13)15.FindthesystemtypeforthesystemofFigureP7.5.[Section:7.3]9.AsystemhasKp—4.Whatsteady-stateerrorcanbeexpectedforinputsof70u(f)and70to(f)?[Section7.3]100(5+2)C(s)100010.FortheunityfeedbacksystemshowninFigureP7.1,R(s)+xss(s+5)where[Section:7.3]5000G{S)=^75)10—a.Whatistheexpectedpercentovershootforaunitstepinput?FIGUREP7.5b.Whatisthesettlingtimeforaunitstepinput?c.Whatisthesteady-stateerrorforaninputof5w(f)?16.Whataretherestrictionsonthefeedforwardtransferfunction¢2(5)inthesystemofFigureP7.6tod.Whatisthesteady-stateerrorforaninputof5m(r)?obtainzerosteady-stateerrorforstepiniDutsif:e.Whatisthesteady-stateerrorforaninput[Section:7.3]of5r2«(f)?a.G\(s)isaType0transferfunction;11.GiventheunityfeedbacksystemshowninFigureb.G\(s)isaType1transferfunction;P7.1,wherec.Gi(s)isaType2transferfunction?100500(5+5)(5+14)(5+23)G(s)=s(s+27)(5+a)(5+33)G(s)2findthevalueofatoyieldaKv=25000.[Section:7.4]12.FortheunityfeedbacksystemofFigureWileyPLUSP7.1,where{>K(5+2)(5+4)(5+6)52(5+5)(5+7)ControlSolutionsfindthevalueofKtoyieldastaticerrorconstantof10,000.[Section:7.4]R(s)E(s)G](s)^g)^-^,+3)-.FIGUREP7.6C(5)Problems37517.Thesteady-stateerrorisdefinedtobethedifferencein21.FindthevalueofKfortheunityfeedbacksystemshowninFigureP7.1,wherepositionbetweeninputandoutputastimeapproachesinfinity.Letusdefineasteady-statevelocityerror,£(5+3)whichisthedifferenceinvelocitybetweeninputG(s)=2s(s+7)andoutput.Deriveanexpressionfortheerrorin2u(t),andthedesiredsteady-stateiftheinputis10tvelocity,e(oo)=r(oo)—c(oo),andcompleteTableerroris0.061forthisinput.[Section:7.4]P7.1fortheerrorinvelocity.[Sections:7.2,7.3]22.TheunityfeedbacksystemofFigureP7.1,whereTABLEP7.1Type10K{s2+35+30)G(s)=5"(5+5)2ControlSolutionsistohave1/6000errorbetweenaninputof10ta(r)andtheoutputinthesteadystate.[Section:7.4]a.FindKandntomeetthespecification.StepInputWileyPLUSRampb.WhatareKp,K„andKalParabola23.FortheunityfeedbacksystemofFigureP7.1,where[Section:7.3]18.ForthesystemshowninFigureP7.7,[Section:7.4]WileyPLUSCB3JControlSolutionsa.WhatvalueofKwillyieldasteady-stateerrorinpositionof0.01foraninputof(1/10)/?b.WhatistheKvforthevalueofKfoundinParta?c.Whatistheminimumpossiblesteady-statepositionerrorfortheinputgiveninParta?™±£AE{s\*9C(s)K(s+7)s(s+5)(s+8)(^+12)G(s)=b.Whaterrorcanbeexpectedforaninputof12w(f)?c.Whaterrorcanbeexpectedforaninputof12ta(f)?24.FortheunityfeedbacksystemofFigureP7.1,whereFIGUREP7.7K(s+a)^^5(5+2)(5+13)findthevalueofKasothatarampinputofslope40willyieldanerrorof0.006inthesteadystatewhencomparedtotheoutput.[Section:7.4]20.GiventhesystemofFigureP7.8,designthevalueofKsothatforaninputof100fw(f),therewillbea0.01errorinthesteadystate.[Section:7.4]R(s)tc'\^)PHmKs(s+\)£(5+13)(5+19)5(5+6)(5+9)(5+22)findthevalueofKtoyieldasteady-stateerrorof0.4forarampinputof27tu(t).[Section:7.4]25.GiventheunityfeedbacksystemofFigureP7.1,whereG(s)=K{s+6)(5+2)(52+105+29)findthevalueofKtoyieldasteady-stateerrorof8%.[Section:7.4]26.FortheunityfeedbacksystemofFigureP7.1,whereKG»«5(5+4)(5+8)(5+10)\V(5+5)2(5+3)a.Findthesystemtype.G(5)=19.GiventheunityfeedbacksystemofFigureP7.1,whereK{s2+65+6)IPsKFIGUREP7.8•+1findtheminimumpossiblesteady-statepositionerrorifaunitrampisapplied.Whatplacestheconstraintupontheerror?376Chapter7Steady-StateErrors27.TheunityfeedbacksystemofFigureP7.1,wileypmsOEJwherea.Theclosed-looptransferfunctionb.ThesystemtypeControlSolutionsG(s)=c.Thesteady-stateerrorforaninputof5u(t)d.Thesteady-stateerrorforaninputof5tu(t)e.DiscussthevalidityofyouranswerstoPartscandd.{s+pyistobedesignedtomeetthefollowingspecifications:steady-stateerrorforaunitstepinput=0.1;dampingratio=0.5;naturalfrequency—\/l0.FindK,a,and£.[Section:7.4]28.Asecond-order,unityfeedbacksystemistofollowarampinputwiththefollowingspecifications:thesteady-stateoutputpositionshalldifferfromtheinputpositionby0.01oftheinputvelocity;thenaturalfrequencyoftheclosed-loopsystemshallbe10rad/s.Findthefollowing:a.Thesystemtypeb.Theexactexpressionfortheforward-pathtransferfunctionc.Theclosed-loopsystem'sdampingratio*»i-2+x—>.10—.V(*+1)(J-+3)(5'+4)C(s)29.TheunityfeedbacksystemofFigureP7.1,whereG~C(s)(J+l)^(5+2)e.Thesteady-statevalueoftheactuatingsignalKmi610(5+10)s(s+2)—,:C(s)FIGUREP7.1945.ForthesystemshowninFigureP7.20,[Section:7.6]a.Whatisthesystemtype?(s+4)b.Whatistheappropriatestaticerrorconstant?c.Whatisthevalueoftheappropriatestaticerrorconstant?System1mi*2\—i9»*10(5+10)5(5+2)C{s)d.Whatisthesteady-stateerrorforaunitstepinput?(5+1)R(s)#(5+1)t&System2FIGUREP7.17Closed-loopsystemswithnonunityfeedback43.ForeachofthesystemsshowninFigureP7.18,findtheappropriatestaticerrorconstantaswellasthesteady-stateerror,r(oo)-c(oo),forunitstep,ramp,andparabolicinputs.[Section:7.6]R(s)~*l.PC(s)5+4(5+3)(5+7)C(5)52(5+3)(s+4)(5+2)MFIGUREP7.2046.ForthesystemshowninFigureP7.21,useMATLABtofindthefollowingforK=10,andK=106:[Section:7.6]MATLABa.Thesystemtypeb.Kp,Kv,andKac.Thesteady-stateerrorforinputsof30u(t),30tu(t),and30t2u(t)10System1R(s)+m7\.O•5+4(5+3)(5+7)10C(s)*s-Ks(s+l)(s+4)(s+a)FIGUREP7.240»,FIGUREP7.25Systemwithinputanddisturbance54.GiventheblockdiagramoftheactivesuspensionsystemshowninFigureP5.43(Lin,1997):a.Findthetransferfunctionfromaroaddisturbancertotheerrorsignale.b.UsethetransferfunctioninPartatofindthesteadystatevalueofeforaunitsteproaddisturbance.c.UsethetransferfunctioninPartatofindthesteadystatevalueofeforaunitramproaddisturbance.d.FromyourresultsinPartsbandc,whatisthesystem'stypeforel55.Foreachofthefollowingclosed-loopsystems,findthesteady-stateerrorforunitstepandunitramp380Chapter7Steady-StateErrorsinputs.Useboththefinalvaluetheoremandinputsubstitutionmethods.[Section:7.8]a.x=b.x=C.X-5-3-10-5-1-91-3-4-2]0x+r;y=[-l21-101-5JLoJroi1010Olx-97x+0n0oJLiJ-5-11[210-2x+3r;y=[l-24]x[5]-2-5riilOxygenconcentrationR(s)+tiBodytorquer(s)/<>sJBodydisplacement1Js2+DsemVoltageoutK2C(.0«3FIGUREP7.27analyzerBlockdiagramofaparamagneticoxygenoxygen.AsmallbodyisplacedinastreamofoxygenwhoseconcentrationisR(s),anditissubjectedtoa56.Anautomobileguidancesystemyieldsanactualmagneticfield.Thetorqueonthebody,KiR(s),duetooutputdistance,X(s),foradesiredinputdistance,themagneticfieldisafunctionoftheconcentrationXe(s),asshowninFigureP7.26(a).Anydifference,oftheoxygen.Thedisplacementofthebody,0(s),isXe(s),betweenthecommandeddistanceandthedetected,andavoltage,C(s),isdevelopedproporactualdistanceisconvertedintoavelocitycomtionaltothedisplacement.Thisvoltageisusedtomand,Vc(s),bythecontrollerandappliedtothedevelopanelectrostaticfieldthatplacesatorque,vehicleaccelerator.ThevehiclerespondstotheK$C(s),onthebodyoppositetothatdevelopedbyvelocitycommandwithavelocity,V(s),andadisthemagneticfield.Whenthebodycomestorest,theplacement,X(s),isrealized.Thevelocitycontrol,outputvoltagerepresentsthestrengthofthemagneticG2(s),isitselfaclosed-loopsystem,asshownintorque,whichinturnisrelatedtotheconcentrationFigureP7.26(6).Herethedifference,Ve(s),betweenoftheoxygen(Chesmond,1982).Findthesteadythecommandedvelocity,Vc(s),andtheactualvehistateerrorbetweentheoutputvoltage,representingclevelocity,V(s),drivesamotorthatdisplacestheoxygenconcentration,andtheinputoxygenconautomobile'sacceleratorbyYc(s)(Stefani,1978).centration.Howwouldyoureducetheerrortozero?Findthesteady-stateerrorforthevelocitycontrolloopifthemotorandamplifiertransferfunction58.Aspacestation,showninFigureP7.28(a),willkeepGs(s)=K/[s(s+l)].AssumeG^s)tobeafirstitssolararraysfacingtheSun.Ifweassumethatordersystem,whereamaximumpossible1-footthesimplifiedblockdiagramofFigurePI.28(b)displacementoftheacceleratorlinkageyieldsarepresentsthesolartrackingcontrolsystemthatsteady-statevelocityof100miles/hour,withthewillbeusedtorotatethearrayviarotaryjointsautomobilereaching60miles/hourin10seconds.calledsolaralpharotaryjoints(FigureP7.28(c)).Find{Kumar,1992)ActualCommandedDistanceVelocitya.Thesteady-stateerrorforstepcommandsXU)V,(.v)VCsi1.*,,.,,m^.um)/{s-f13).63.Motioncontrol,whichincludespositionwileypiusorforcecontrol,isusedinroboticsandd23machining.Forcecontrolrequiresthecontrolsolutionsdesignertoconsidertwophases:contactandnoncontactmotions.FigureP7.33(a)isadiagramofamechanicalsystemforforcecontrolundercontactmotion.Aforcecommand,Fcmii(s),istheinputtothesystem,whiletheoutput,F(s),isthecontrolledcontactforce.Inthefigureamotorisusedastheforceactuator.TheforceoutputfromtheactuatorisappliedtotheBoat'strajectoryft.*)eM)+0..(.v)Kea(s)5(5+4)Environment(DgS+Ke)(a)(b)FIGUREP7.31Boattrackedbyship'sradar:a.physicalarrangement;b.blockdiagramoftrackingsystem^62.FigureP7.32showsasimplifiedblockdiagramofapilotinalooptocontroltherollattitudeofanArmyUH-60ABlackHawktwin-enginehelicopterwithasinglemainrotor(Hess,1993).a.Findthesystemtype.b.Thepilot'sresponsedeterminesKx.FindthevalueofA'Iifanappropriatestaticerrorconstantvalueof700isrequired.CommandedrollangleCentralnervoussystemK<(0K,+<p-s®-*•!1sF(s)K2*e*-rne(*)FIGUREP7.33a.Forcecontrolmechanicalloopundercontactmotion(©1996IEEE);b.blockdiagram(©1996IEEE)ActualrollangleNeuromuscularsystem^R>-GD(s)-|t(g)-t(g>*s-2ft>(.s)1s2100+14s+1000„(v)2(5+0.5)(5+9.55+78)5+0.2VestibularsystemFIGUREP7.32Simplifiedblockdiagramofapilotinaloop(©1992AIAA)tf(s)Problemsobjectthroughaforcesensor.AblockdiagramrepresentationofthesystemisshowninFigurePI.33(b).K2isvelocityfeedbackusedtoimprovethetransientresponse.Theloopisactuallyimplementedbyanelectricalloop(notshown)thatcontrolsthearmaturecurrentofthemotortoyieldthedesiredtorqueattheoutput.RecallthatTm=Ktia(Ohnishi,1996).FindanexpressionfortherangeofK2tokeepthesteadystateforceerrorbelow10%forrampinputsofcommandedforce.64.Problem50inChapter4describesanopen-loopswivelcontrollerandplantforanindustrialrobot.ThetransferfunctionforthecontrollerandplantisK=co0{s)=eUVi{s)(s+10)(^2+4*+10)whereco0(s)istheLaplacetransformoftherobot'sangularswivelvelocityandVj(s)istheinputvoltagetothecontroller.AssumeGe(s)istheforwardtransferfunctionofavelocitycontrolloopwithaninputtransducerandsensor,eachrepresentedbyaconstantgainof3(Schneider,1992).a.Findthevalueofgain,K,tominimizethesteadystateerrorbetweentheinputcommandedangularswivelvelocityandtheoutputactualangularswivelvelocity.b.Whatisthesteady-stateerrorforthevalueofKfoundinParta?c.ForwhatkindofinputdoesthedesigninPartaapply?65.PacketinformationflowinarouterworkingunderTCP/IPcanbemodeledusingthelinearizedtransferfunction.Pis)=m={)f(s)hil(2N\f1\whereC=linkcapacity(packets/second).N=loadfactor(numberofTCPsessions)Q=expectedqueuelengthR=roundtriptime(second)p=probabilityofapacketdropTheobjectiveofanactivequeuemanagement(AQM)algorithmistoautomaticallychooseapacket-dropprobability,p,sothatthequeuelengthismaintainedatadesiredlevel.ThissystemcanberepresentedbytheblockdiagramofFigureP7.13withtheplantmodelin.theP(s)block,theAQMalgorithmintheG(s)block,andF(s)=H(s)=1.383SeveralAQMalgorithmsareavailable,butonethathasreceivedspecialattentionintheliteratureistherandomearlydetection(RED)algorithm.ThisalTISgorithmcanbeapproximatedwithG(s)—,s+KwhereLandKareconstants(Hollot,2001).FindthevalueofLrequiredtoobtaina10%steady-stateerrorforaunitstepinputwhenC=3750packets/s,N=50TCPsessions,I?=0.1s,and£=0.005.66.InFigureP7.16,theplant,P(s)—-3—hcr^r,representsthedynamicsofaroboticmanipulatorjoint.Thesystem'soutput,C(s),isthejoint'sangularposition(Low,2005).Thesystemiscontrolledinaclosed-loopconfigurationasshownwithG(s)=KpH,aproportional-plus-integral(PI)controllertobediscussedinChapter9.R(s)isthejoint'sdesiredangularposition.D(s)isanexternaldisturbance,possiblycausedbyimproperdynamicsmodeling,Coulombfriction,orotherexternalforcesactingonthejoint.a.Findthesystem'stype.b.Showthatforastepdisturbanceinput,ess=0whenK[^0.c.FindthevalueofKjthatwillresultine$$—5%foraparabolicinput.d.UsingthevalueofKjfoundinPartc,findtherangeofKPforclosed-loopstability.PROGRESSIVEANALYSISANDDESIGNPROBLEMS67.High-speedrailpantograph.Problem21inChapter1discussestheactivecontrolofapantographmechanismforhigh-speedrailsystems.InProblem79(a),Chapter5,youfoundtheblockdiagramfortheactivepantographcontrolsystem.UseyoursolutionforProblem79(a)inChapter5toperformsteady-stateerroranalysisanddesignasfollows(O'Connor,1997):a.Findthesystemtype.b.Findthevalueofcontrollergain,K,thatminimizesthesteady-stateforceerror.c.Whatistheminimumsteady-stateforceerror?68.ControlofHIV/AIDS.ConsidertheHIVinfectionmodelofProblem68inChapter6anditsblockdiagraminFigureP6.20(Craig,2004).a.Findthesystem'stypeifG(s)isaconstant.b.ItwasshowninProblem68,Chapter6,thatwhenG(s)=KthesystemwillbestablewhenK<2.04x10"4.WhatvalueofKwillresultinaunitstepinputsteady-stateerrorof10%?Chapter7Steady-StateErrorse.Itissuggestedthattoreducethesteady-stateerrorthesystem'stypeshouldbeaugmentedbygivenbyG^.(s)=100H40»thecarstartsclimbingoupahillwithagradientangle,a=5°.ForsmallmakingG(s)=—•Isthisawisechoice?Whatisanglessina=a(inradians)and,hence,whensreflectedtothemotorshafttheclimbingtorqueis:theresultingstabilityrangeforK1Fstrmer.mgra69.Hybridvehicle.FigureP7.34showstheblockdiagram7\,="—=—ana=—e—hothothotofthespeedcontrolofanHEVtakenfromFigure1590x9.8x0.3x5P5.54,andrearrangedasaunityfeedbacksystem=83.7Nm.(Preitl,2007).Herethesystemoutputis,C{s)=4.875x57.3KssV(s),theoutputvoltageofthespeedsensor/trans-TheblockdiagraminFigureP7.35representstheconducer.trolsystemoftheHEVrearrangedforPartc./?(*).E(s)GUs)UAs)G2(s)=Equivalenttransferfunctionofthecar-E(s)=-KssV(s)C(s)0.11(A+0.6)TM);(.t+O.S173)+5(s+0.6)(s+0.0196.13x1(r3^*&s+0.0190813.53^FIGUREP7.34O+0.5)a.AssumethespeedcontrollerisgivenasGsc(s)=Kpsc.Findthegain,Kpsc,thatyieldsasteady-stateerror,eslep(oo)—\%.b.Nowassumethatinordertoreducethesteadystateerrorforstepinputs,integrationisaddedtothecontrolleryieldingGsc(s)=KPsc+(Kisc/s)=100+(Klsc/s)).Findthevalueoftheintegralgain,Kisc,thatresultsinasteady-stateerror,100J+403(,i+0.6)(j+0.5)Gj(i)=Transferfunctionrepresentationoftorque&speedcontrollersFIGUREP7.35Inthisdiagram,theinputisTst(t)=83.7^(/),correspondingtoa=5°,andtheoutputisthenegativeerror,DcontrollerroboticmanipulatorshowninFigureP7.37(Spong,*M+t(C>\.Kp+KQS2005),whereBisthecoefficientofviscousfriction,6d(s)isthedesiredangle,6(5)istheoutputangle,andrD(s)isthedisturbance.WewanttotrackthejointangleFIGUREP7.37usingaPDcontroller,whichwewillstudyinChapter9.Assume/=B=1.FindthestepandrampresponsesofthissystemforthefollowingcombinationsofPDgains{KP,KD):(16,7),(64,15),and(144,23).LabV1.CreateaLabVIEWVItosimulatetheresponseofthissystemtoastepandarampinputs,underno-disturbanceconditions.UsethefunctionsavailableintheControlDesignandSimulation/ControlDesignpalette.2.CreateaLabVIEWVIusingthefunctionsavailableintheControlDesignandSimulation/Simulationpalette,totrackaninputset-pointof10underadisturbanceofD=40.PostlabCompareyourresultswiththoseofthePrelab.WhatconclusionscanyoudrawfromthevariousresponsesofthissystemtodifferentinputsanddifferentPDparameters?Whatisthesystemtype?Doesthesteady-statebehaviorcorroboratethetheoryyoulearnedregardingsystemtypeandthesteady-stateerrorforvariousinputs?Explainyouranswer.-*w.9ForwardtransferfunctionKG(s)OutputCMtys)KG(s)1+KG(s)H(s)H(s)FIGURE8.1a.Closed-loopsystem;b.equivalenttransferfunctionFeedbacktransferfunctiona)ib)C(s)8.1IntroductioncandeterminethepolesofKG(s)H(s),sincethesepolesarisefromsimplecascadedfirst-orsecond-ordersubsystems.Further,variationsinKdonotaffectthelocationofanypoleofthisfunction.Ontheotherhand,wecannotdeterminethepolesofT(s)=KG(s)/[l+KG{s)H(s)\unlesswefactorthedenominator.Also,thepolesofT(s)changewithK.Letusdemonstrate.Letting^=fi(-)and-w-gg(3.2)thenT(s)=KNG(s)DH(s)DG(s)DH(s)+KNG(s)NH(s)(8.3)whereNandDarefactoredpolynomialsandsignifynumeratoranddenominatorterms,respectively.Weobservethefollowing:Typically,weknowthefactorsofthenumeratorsanddenominatorsofG(s)andH(s).Also,thezerosofT(s)consistofthezerosofG(s)andthepolesofH(s).ThepolesofT(s)arenotimmediatelyknownandinfactcanchangewithK.Forexample,ifG(s)=(s+l)/[s(s+2)]andH(s)=(s+3)/(5+4),thepolesofKG(s)H(s)are0,-2,and-4.ThezerosofKG(s)H(s)are-1and-3.Now,T(s)=K{s+l)(s+4)/[s3+(6+K)s2+(8+4K)s+3K].Thus,thezerosofT(s)consistofthezerosofG(s)andthepolesofH(s).ThepolesofT(s)arenotimmediatelyknownwithoutfactoringthedenominator,andtheyareafunctionofK.Sincethesystem'stransientresponseandstabilityaredependentuponthepolesofT(s),wehavenoknowledgeofthesystem'sperformanceunlesswefactorthedenominatorforspecificvaluesofK.TherootlocuswillbeusedtogiveusavividpictureofthepolesofT(s)asKvaries.VectorRepresentationofComplexNumbersAnycomplexnumber,a+jco,describedinCartesiancoordinatescanbegraphicallyrepresentedbyavector,asshowninFigure8.2(a).ThecomplexnumberalsocanbedescribedinpolarformwithmagnitudeMandangle6,asMZ9.Ifthecomplexnumberissubstitutedintoacomplexfunction,F(s),anothercomplexnumberwillresult.Forexample,ifF(s)=(s+a),thensubstitutingthecomplexnumbers=a+jcoyieldsF(s)=(a+a)+jco,anothercomplexnumber.ThisnumberisshowninFigure8.2(b).NoticethatF(s)hasazeroat-a.Ifwetranslatethevectoraunitstotheleft,asinFigure8.2(c),wehaveanalternaterepresentationofthecomplexnumberthatoriginatesatthezeroofF(s)andterminatesonthepoint5=a+jco.Weconcludethat(s+a)isacomplexnumberandcanberepresentedbyavectordrawnfromthezeroofthefunctiontothepoints.Forexample,(s+7)1^5+2isacomplexnumberdrawnfromthezeroofthefunction,-7,tothepoints,whichis5+/2,asshowninFigure8.2(d).389Chapter8RootLocusTechniquesjcojco5-planeAs-planeJCOjco•*-a-*-a(b)(a)FIGURE8.2Vectorrepresentationofcomplexnumbers:a.s=o+ja>;b.(s+a);c.alternaterepresentationof(s+a);d.(s+7)U+;2*-a(0WNowletusapplytheconceptstoacomplicatedfunction.AssumeafunctionmF{s)=^A,vLL\S+Pj)Qnumerator'scomplexfactorsFTdenominator'scomplexfactors(8.4)/=iwherethesymbolYlmeans"product,"m—numberofzeros,andn—numberofpoles.Eachfactorinthenumeratorandeachfactorinthedenominatorisacomplexnumberthatcanbe
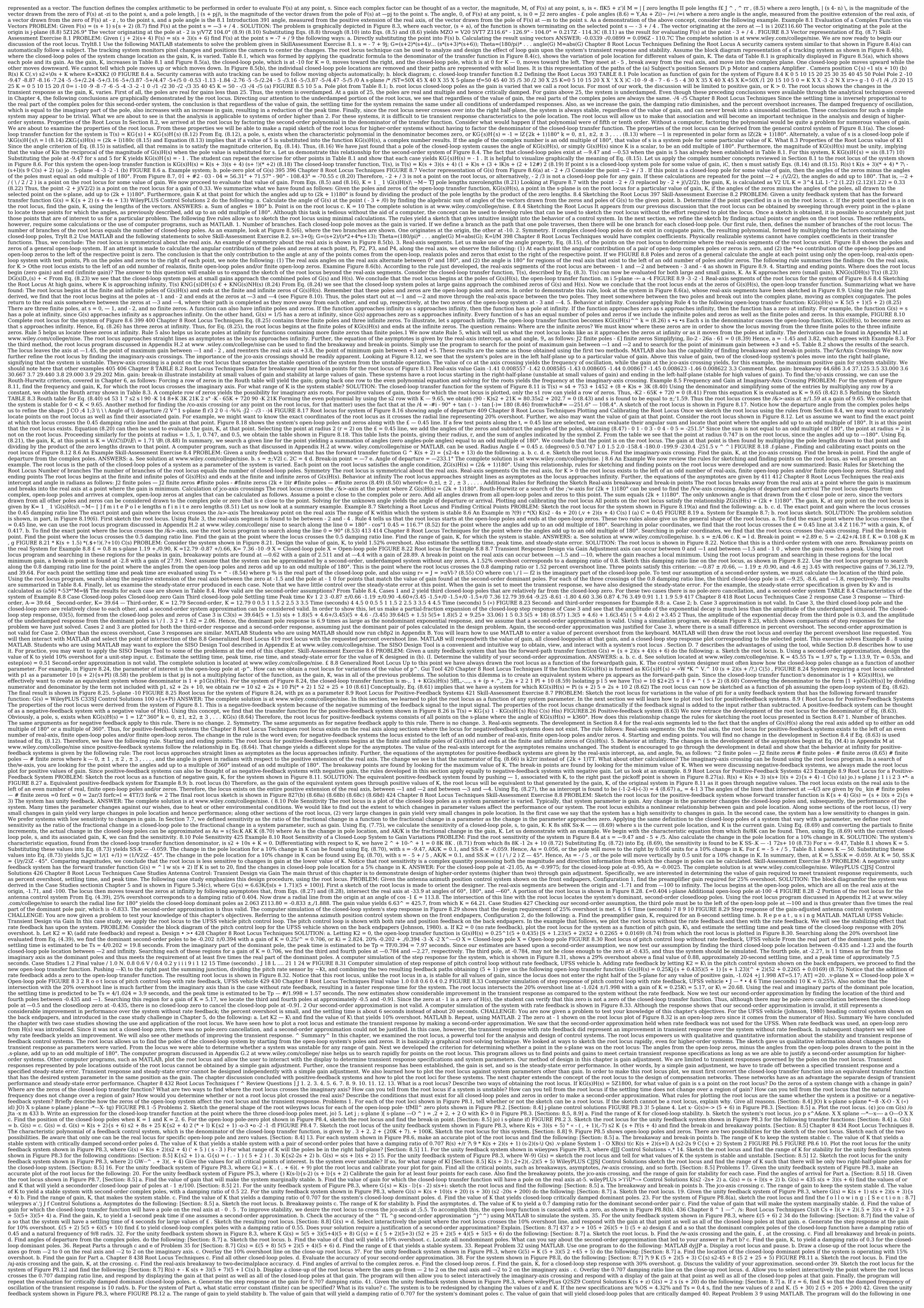
representedasavector.ThefunctiondefinesthecomplexarithmetictobeperformedinordertoevaluateF(s)atanypoint,s.Sinceeachcomplexfactorcanbethoughtofasavector,themagnitude,M,ofF(s)atanypoint,s,is«.flK5+z')lM=|[zerolengthsIIpolelengthsf£J^,^rr,(8.5)whereazerolength,|(s4-n)\,isthemagnitudeofthevectordrawnfromthezeroofF(s)at-zitothepoints,andapolelength,|(s+pj)\,isthemagnitudeofthevectordrawnfromthepoleofF(s)at—pjtothepoints.Theangle,0,ofF(s)atanypoint,s,is0=J2zeroangles-£poleangles(8.6)=Y,As+Zi)~/=i/=iwhereazeroangleistheangle,measuredfromthepositiveextensionoftherealaxis,ofavectordrawnfromthezeroofF(s)at-z,tothepoints,andapoleangleisthe8.1Introduction391angle,measuredfromthepositiveextensionoftherealaxis,ofthevectordrawnfromthepoleofF(s)at—mtothepoints.Asademonstrationoftheaboveconcept,considerthefollowingexample.Example8.1EvaluationofaComplexFunctionviaVectorsPROBLEM:GivenF(s)=(s+1)s{s+2)(8.7)findF(s)atthepoints=—3+/4.SOLUTION:TheproblemisgraphicallydepictedinFigure8.3,whereeachvector,(s+a),ofthefunctionisshownterminatingontheselectedpoints—-3+/4.Thevectororiginatingatthezeroat—1isi20Z116.60Thevectororiginatingatthepoleattheoriginisj-plane(8.8)5Z126.9°Thevectororiginatingatthepoleat-2isy/V7Z104.0°(8.9)(8.10)SubstitutingEqs.(8.8)through(8.10)intoEqs.(8.5)and(8.6)yieldsMZO=V205VT7Z116.6°-126.9°-104.0°=0.217Z-114.3C(8.11)astheresultforevaluatingF(s)atthepoint-3+/4.FIGURE8.3VectorrepresentationofEq.(8.7)Skill-AssessmentExercise8.1PROBLEM:Given(j+2)(s+4)F(s)=s(s+3)(s+6)findF(s)atthepoints=-7+/9thefollowingways:a.DirectlysubstitutingthepointintoF(s)b.CalculatingtheresultusingvectorsANSWER:-0.0339-/0.0899=0.096Z-110.7CThecompletesolutionisatwww.wiley.com/college/nise.Wearenowreadytobeginourdiscussionoftherootlocus.Trylt8.1UsethefollowingMATLABstatementstosolvetheproblemgiveninSkillAssessmentExercise8.1.s=-7+9j;G=(s+2)*(s+4)/...(s*(s+3)*(s+6));Theta=(180/pi)*...angle(G)M=abs(G)Chapter8RootLocusTechniquesDefiningtheRootLocusAsecuritycamerasystemsimilartothatshowninFigure8.4(a)canautomaticallyfollowasubject.Thetrackingsystemmonitorspixelchangesandpositionsthecameratocenterthechanges.Therootlocustechniquecanbeusedtoanalyzeanddesigntheeffectofloopgainuponthesystem'stransientresponseandstability.AssumetheblockdiagramrepresentationofatrackingsystemasshowninFigure8.4(b),wheretheclosed-looppolesofthesystemchangelocationasthegain,K,isvaried.Table8.1,whichwasformedbyapplyingthequadraticformulatothedenominatorofthetransferfunctioninFigure8.4(c),showsthevariationofpolelocationfordifferentvaluesofgain,K.ThedataofTable8.1isgraphicallydisplayedinFigure8.5(a),whichshowseachpoleanditsgain.Asthegain,K,increasesinTable8.1andFigure8.5(a),theclosed-looppole,whichisat-10forK=0,movestowardtheright,andtheclosed-looppole,whichisat0forK—0,movestowardtheleft.Theymeetat-5,breakawayfromtherealaxis,andmoveintothecomplexplane.Oneclosed-looppolemovesupwardwhiletheothermovesdownward.Wecannottellwhichpolemovesuporwhichmovesdown.InFigure8.5(b),theindividualclosed-looppolelocationsareremovedandtheirpathsarerepresentedwithsolidlines.Itisthisrepresentationofthepathsofthe(a)Subject'spositionSensorsD\pMotorandcameraAmplifier.CamerapositionC{s)«1s(s+10)(b)R(s)KC(.v)s2+\0s+KwhereK=KXK2(0FIGURE8.4a.Securitycameraswithautotrackingcanbeusedtofollowmovingobjectsautomatically;b.blockdiagram;c.closed-looptransferfunction8.2DefiningtheRootLocus393TABLE8.1PolelocationasfunctionofgainforthesystemofFigure8.4K05101520253035404550PolelPole2-10-9.47-8.87-8.16-7.24-5-5+/2.24-5+/3.16-5+/3.87-5+/4.47-5+/50-0.53-1.13-1.84-2.76-5-5-/2.24-5-/3.16-5-/3.87-5-/4.47-5-/5/0As-plane/*/ST=50X45X40X35X5-planetf=50454035/530/230X25K=05101520XX'XX)C-10-9-8-7-6-5-430X35X40X45XK=50X/120151050=KXX-3-2NXir>»g-10-/1/4./3201525K=05101520/I0=i-10-9-8-7-6-5-4-3-2-10-/1-/230-/2-/3354045K=50--/3-/4-/5(a)FIGURE8.5105a.PoleplotfromTable8.1;b.rootlocusclosed-looppolesasthegainisvariedthatwecallarootlocus.Formostofourwork,thediscussionwillbelimitedtopositivegain,orK>0.Therootlocusshowsthechangesinthetransientresponseasthegain,K,varies.Firstofall,thepolesarerealforgainslessthan25.Thus,thesystemisoverdamped.Atagainof25,thepolesarerealandmultipleandhencecriticallydamped.Forgainsabove25,thesystemisunderdamped.EventhoughtheseprecedingconclusionswereavailablethroughtheanalyticaltechniquescoveredinChapter4,thefollowingconclusionsaregraphicallydemonstratedbytherootlocus.Directingourattentiontotheunderdampedportionoftherootlocus,weseethatregardlessofthevalueofgain,therealpartsofthecomplexpolesarealwaysthesame.-/4-/5Chapter8RootLocusTechniquesSincethesettlingtimeisinverselyproportionaltotherealpartofthecomplexpolesforthissecond-ordersystem,theconclusionisthatregardlessofthevalueofgain,thesettlingtimeforthesystemremainsthesameunderallconditionsofunderdampedresponses.Also,asweincreasethegain,thedampingratiodiminishes,andthepercentovershootincreases.Thedampedfrequencyofoscillation,whichisequaltotheimaginarypartofthepole,alsoincreaseswithanincreaseingain,resultinginareductionofthepeaktime.Finally,sincetherootlocusnevercrossesoverintotherighthalf-plane,thesystemisalwaysstable,regardlessofthevalueofgain,andcanneverbreakintoasinusoidaloscillation.Theseconclusionsforsuchasimplesystemmayappeartobetrivial.Whatweareabouttoseeisthattheanalysisisapplicabletosystemsoforderhigherthan2.Forthesesystems,itisdifficulttotietransientresponsecharacteristicstothepolelocation.Therootlocuswillallowustomakethatassociationandwillbecomeanimportanttechniqueintheanalysisanddesignofhigher-ordersystems.PropertiesoftheRootLocusInSection8.2,wearrivedattherootlocusbyfactoringthesecond-orderpolynomialinthedenominatorofthetransferfunction.Considerwhatwouldhappenifthatpolynomialwereoffifthortenthorder.Withoutacomputer,factoringthepolynomialwouldbequiteaproblemfornumerousvaluesofgain.Weareabouttoexaminethepropertiesoftherootlocus.Fromthesepropertieswewillbeabletomakearapidsketchoftherootlocusforhigher-ordersystemswithouthavingtofactorthedenominatoroftheclosed-looptransferfunction.ThepropertiesoftherootlocuscanbederivedfromthegeneralcontrolsystemofFigure8.1(a).Theclosed-looptransferfunctionforthesystemisT(s)=KG{s)l+KG{s)H{s)(8.12)FromEq.(8.12),apole,s,existswhenthecharacteristicpolynomialinthedenominatorbecomeszero,orKG{s)H{s)=-1=lZ{2k+1)180°k=0,±1,±2,±3,...(8.13)where—1isrepresentedinpolarformaslZ(2k+1)180°.Alternately,avalueofsisaclosed-looppoleif\KG(s)H{s)\=l(8.14)ZKG{s)H(s)=(2k+l)180c(8.15)andEquation(8.13)impliesthatifavalueof5issubstitutedintothefunctionKG(s)H(s),acomplexnumberresults.Iftheangleofthecomplexnumberisanoddmultipleof180°,thatvalueofsisasystempoleforsomeparticularvalueofK.What8.3PropertiesoftheRootLocusvalueofK1SincetheanglecriterionofEq.(8.15)issatisfied,allthatremainsistosatisfythemagnitudecriterion,Eq.(8.14).Thus,(8.16)Wehavejustfoundthatapoleoftheclosed-loopsystemcausestheangleofKG(s)H(s),orsimplyG(s)H(s)sinceKisascalar,tobeanoddmultipleof180°.Furthermore,themagnitudeofKG(s)H(s)mustbeunity,implyingthatthevalueofKisthereciprocalofthemagnitudeofG(s)H(s)whenthepolevalueissubstitutedfors.Letusdemonstratethisrelationshipforthesecond-ordersystemofFigure8.4.Thefactthatclosed-looppolesexistat—9.47and—0.53whenthegainis5hasalreadybeenestablishedinTable8.1.Forthissystem,KKG(s)H{s)=sis(8.17)10)Substitutingthepoleat-9.47forsand5forKyieldsKG(s)H{s)=-1.ThestudentcanrepeattheexerciseforotherpointsinTable8.1andshowthateachcaseyieldsKG{s)H(s)=-1.ItishelpfultovisualizegraphicallythemeaningofEq.(8.15).LetusapplythecomplexnumberconceptsreviewedinSection8.1totherootlocusofthesystemshowninFigure8.6.Forthissystemtheopen-looptransferfunctionisKG(s)H(s)=K(s+3)(s+4)(s+!)(*+2)(8.18)Theclosed-looptransferfunction,T(s),isT(s)=K(s+3)(s+4)(1+K)s+(3+lK)s+(2+12#)2(8.19)Ifpointsisaclosed-loopsystempoleforsomevalueofgain,iC,thensmustsatisfyEqs.(8.14)and(8.15).R(s)tK(s+3)(*+4)*7\-(s+l)(s9C(s)+2)(a)jo.5-plane-4-3-2-1(b)FIGURE8.6a.Examplesystem;b.pole-zeroplotofG(s)395396Chapter8RootLocusTechniquesFIGURE8.7VectorrepresentationofG(s)fromFigure8.6(a)at-2+/3Considerthepoint—2+/3.Ifthispointisaclosed-looppoleforsomevalueofgain,thentheanglesofthezerosminustheanglesofthepolesmustequalanoddmultipleof180°.FromFigure8.7,01+#2-03-04=56.31°+71.57°-90°-108.43°=-70.55c(8.20)Therefore,-2+/3isnotapointontherootlocus,oralternatively,-2/3isnotaclosed-looppoleforanygain.Ifthesecalculationsarerepeatedforthepoint—2+;(\/2/2),theanglesdoaddupto180°.Thatis,—2+/(\/2/2)isapointontherootlocusforsomevalueofgain.Wenowproceedtoevaluatethatvalueofgain.FromEqs.(8.5)and(8.16),K=1_1\G(s)H(s)\~M~TJpolelengthsnzerolengths(8.21)LookingatFigure8.7withthepoint-2+/3replacedby-2+j(\/2/2),thegain,K,iscalculatedasV2ULK=3^4LiL1-^2(1.22)(2.12)(1.22)=0.33(8.22)Thus,thepoint-2+j(V2/2)isapointontherootlocusforagainof0.33.Wesummarizewhatwehavefoundasfollows:Giventhepolesandzerosoftheopen-looptransferfunction,KG(s)H(s),apointinthes-planeisontherootlocusforaparticularvalueofgain,K,iftheanglesofthezerosminustheanglesofthepoles,alldrawntotheselectedpointonthes-plane,addupto(2k+1)180°.Furthermore,gainKatthatpointforwhichtheanglesaddupto(2k+1)180°isfoundbydividingtheproductofthepolelengthsbytheproductofthezerolengths.8.4SketchingtheRootLocus397Skill-AssessmentExercise8.2PROBLEM:GivenaunityfeedbacksystemthathastheforwardtransferfunctionG(s)=K{s+2)(s+4s+13)WileyPLUSControlSolutions2dothefollowing:a.CalculatetheangleofG(s)atthepoint(-3+/0)byfindingthealgebraicsumofanglesofthevectorsdrawnfromthezerosandpolesofG(s)tothegivenpoint.b.Determineifthepointspecifiedinaisontherootlocus.c.Ifthepointspecifiedinaisontherootlocus,findthegain,K,usingthelengthsofthevectors.ANSWERS:a.Sumofangles=180°b.Pointisontherootlocusc.K=10Thecompletesolutionisatwww.wiley.com/college/nise.£8.4SketchingtheRootLocusItappearsfromourpreviousdiscussionthattherootlocuscanbeobtainedbysweepingthrougheverypointinthes-planetolocatethosepointsforwhichtheangles,aspreviouslydescribed,adduptoanoddmultipleof180°.Althoughthistaskistediouswithouttheaidofacomputer,theconceptcanbeusedtodeveloprulesthatcanbeusedtosketchtherootlocuswithouttheeffortrequiredtoplotthelocus.Onceasketchisobtained,itispossibletoaccuratelyplotjustthosepointsthatareofinteresttousforaparticularproblem.Thefollowingfiverulesallowustosketchtherootlocususingminimalcalculations.Therulesyieldasketchthatgivesintuitiveinsightintothebehaviorofacontrolsystem.Inthenextsection,werefinethesketchbyfindingactualpointsoranglesontherootlocus.Theserefinements,however,requiresomecalculationsortheuseofcomputerprograms,suchasMATLAB.1.Numberofbranches.Eachclosed-looppolemovesasthegainisvaried.Ifwedefineabranchasthepaththatonepoletraverses,thentherewillbeonebranchforeachclosed-looppole.Ourfirstrule,then,definesthenumberofbranchesoftherootlocus:Thenumberofbranchesoftherootlocusequalsthenumberofclosed-looppoles.Asanexample,lookatFigure8.5(6),wherethetwobranchesareshown.Oneoriginatesattheorigin,theotherat-10.2.Symmetry.Ifcomplexclosed-looppolesdonotexistinconjugatepairs,theresultingpolynomial,formedbymultiplyingthefactorscontainingtheclosed-looppoles,Trylt8.2UseMATLABandthefollowingstatementstosolveSkill-AssessmentExercise8.2.s=-3+0j;G=(s+2)/(s*2+4*s+13);Theta=(180/pi)*...angle(G)M=abs(G);K=l/M398Chapter8RootLocusTechniqueswouldhavecomplexcoefficients.Physicallyrealizablesystemscannothavecomplexcoefficientsintheirtransferfunctions.Thus,weconclude:Therootlocusissymmetricalabouttherealaxis.AnexampleofsymmetryabouttherealaxisisshowninFigure8.5(b).3.Real-axissegments.Letusmakeuseoftheangleproperty,Eq.(8.15),ofthepointsontherootlocustodeterminewherethereal-axissegmentsoftherootlocusexist.Figure8.8showsthepolesandzerosofageneralopen-loopsystem.Ifanattemptismadetocalculatetheangularcontributionofthepolesandzerosateachpoint,Pi,P2,P3,andP4,alongtherealaxis,weobservethefollowing:(1)Ateachpointtheangularcontributionofapairofopen-loopcomplexpolesorzerosiszero,and(2)the*+ocontributionoftheopen-looppolesandopen-loopzerostotheleftoftherespectivepointiszero.Theconclusionisthattheonlycontributiontotheangleatanyofthepointscomesfromtheopen-loop,realaxispolesandzerosthatexisttotherightoftherespectivepoint.IfweFIGURE8.8Polesandzerosofageneralcalculatetheangleateachpointusingonlytheopen-loop,real-axisopen-loopsystemwithtestpoints,Phonthepolesandzerostotherightofeachpoint,wenotethefollowing:(1)Therealaxisanglesontherealaxisalternatebetween0°and180°,and(2)theangleis180°forregionsoftherealaxisthatexisttotheleftofanoddnumberofpolesand/orzeros.Thefollowingrulesummarizesthefindings:Ontherealaxis,forK>Otherootlocusexiststotheleftofanoddnumberofrealaxis,finiteopen-looppolesand/orfiniteopen-loopzeros.ExamineFigure8.6(b).Accordingtotherulejustdeveloped,thereal-axissegmentsoftherootlocusarebetween-1and—2andbetween-3and-4asshowninFigure8.9.4.Startingandendingpoints.Wheredoestherootlocusbegin(zerogain)andend(infinitegain)?Theanswertothisquestionwillenableustoexpandthesketchoftherootlocusbeyondthereal-axissegments.Considertheclosed-looptransferfunction,T(s),describedbyEq.(8.3).T(s)cannowbeevaluatedforbothlargeandsmallgains,K.AsKapproacheszero(smallgain),KNG(s)DH(s)T(s)(8.23)DG(s)D„(s)+<FromEq.(8.23)weseethattheclosed-loopsystempolesatsmallgainsapproachthecombinedpolesofG(s)andH(s).WeconcludethattherootlocusbeginsatthepolesofG(s)H(s),theopen-looptransferfunction.mi5-plane-»-a-4FIGURE8.9-3-2-1Real-axissegmentsoftherootlocusforthesystemofFigure8.68.4SketchingtheRootLocusAthighgains,whereKisapproachinginfinity,T(s)KNG{s)DH{s)€+KNG(s)NH(s)(8.24)FromEq.(8.24)weseethattheclosed-loopsystempolesatlargegainsapproachthecombinedzerosofG(s)andH(s).NowweconcludethattherootlocusendsatthezerosofG(s)H(s),theopen-looptransferfunction.Summarizingwhatwehavefound:TherootlocusbeginsatthefiniteandinfinitepolesofG(s)H(s)andendsatthefiniteandinfinitezerosofG(s)H(s).Rememberthatthesepolesandzerosaretheopen-looppolesandzeros.Inordertodemonstratethisrule,lookatthesysteminFigure8.6(a),whosereal-axissegmentshavebeensketchedinFigure8.9.Usingtherulejustderived,wefindthattherootlocusbeginsatthepolesat-1and-2andendsatthezerosat—3and—4(seeFigure8.10).Thus,thepolesstartoutat—1and—2andmovethroughthereal-axisspacebetweenthetwopoles.Theymeetsomewherebetweenthetwopolesandbreakoutintothecomplexplane,movingascomplexconjugates.Thepolesreturntotherealaxissomewherebetweenthezerosat—3and—4,wheretheirpathiscompletedastheymoveawayfromeachother,andendup,respectively,atthetwozerosoftheopen-loopsystemat-3and—4.5.Behavioratinfinity.ConsiderapplyingRule4tothefollowingopen-looptransferfunction:KG(s)H(s)=K5(5+1)(5+2)(8.25)Therearethreefinitepoles,ats=0,—1,and-2,andnofinitezeros.Afunctioncanalsohaveinfinitepolesandzeros.Ifthefunctionapproachesinfinityassapproachesinfinity,thenthefunctionhasapoleatinfinity.Ifthefunctionapproacheszeroassapproachesinfinity,thenthefunctionhasazeroatinfinity.Forexample,thefunctionG(s)=shasapoleatinfinity,sinceG(s)approachesinfinityassapproachesinfinity.Ontheotherhand,G(s)=1/5hasazeroatinfinity,sinceG(s)approacheszeroassapproachesinfinity.Everyfunctionofshasanequalnumberofpolesandzerosifweincludetheinfinitepolesandzerosaswellasthefinitepolesandzeros.Inthisexample,FIGURE8.10CompleterootlocusforthesystemofFigure8.6399400Chapter8RootLocusTechniquesEq.(8.25)containsthreefinitepolesandthreeinfinitezeros.Toillustrate,letsapproachinfinity.Theopen-looptransferfunctionbecomesKG(s)H(s)^^k=(8.26)s•s•sEachsinthedenominatorcausestheopen-loopfunction,KG(s)H(s),tobecomezeroasthatsapproachesinfinity.Hence,Eq.(8.26)hasthreezerosatinfinity.Thus,forEq.(8.25),therootlocusbeginsatthefinitepolesofKG(s)H(s)andendsattheinfinitezeros.Thequestionremains:Wherearetheinfinitezeros?Wemustknowwherethesezerosareinordertoshowthelocusmovingfromthethreefinitepolestothethreeinfinitezeros.Rule5helpsuslocatethesezerosatinfinity.Rule5alsohelpsuslocatepolesatinfinityforfunctionscontainingmorefinitezerosthanfinitepoles.1WenowstateRule5,whichwilltelluswhattherootlocuslookslikeasitapproachesthezerosatinfinityorasitmovesfromthepolesatinfinity.ThederivationcanbefoundinAppendixM.latwww.wiley.com/college/nise.Therootlocusapproachesstraightlinesasasymptotesasthelocusapproachesinfinity.Further,theequationoftheasymptotesisgivenbythereal-axisintercept,aaandangle,9„asfollows:J2finitepoles-£]finitezerosSimplifying,llo-2-26a-61=0(8.39)Hence,a=-1.45and3.82,whichagreeswithExample8.3.Forthethirdmethod,therootlocusprogramdiscussedinAppendixH.2atwww.wiley.com/college/nisecanbeusedtofindthebreakawayandbreak-inpoints.Simplyusetheprogramtosearchforthepointofmaximumgainbetween—1and—2andtosearchforthepointofminimumgainbetween+3and+5.Table8.2showstheresultsofthesearch.Thelocusleavestheaxisat—1.45,thepointofmaximumgainbetween—1and-2,andreenterstherealaxisat+3.8,thepointofminimumgainbetween+3and+5.Theseresultsarethesameasthoseobtainedusingthefirsttwomethods.MATLABalsohasthecapabilityoffindingbreakawayandbreak-inpoints.The/'&rAxisCrossingsWenowfurtherrefinetherootlocusbyfindingtheimaginary-axiscrossings.Theimportanceofthejco-axiscrossingsshouldbereadilyapparent.LookingatFigure8.12,weseethatthesystem'spolesareinthelefthalf-planeuptoaparticularvalueofgain.Abovethisvalueofgain,twooftheclosed-loopsystem'spolesmoveintotherighthalf-plane,signifyingthatthesystemisunstable.Theyw-axiscrossingisapointontherootlocusthatseparatesthestableoperationofthesystemfromtheunstableoperation.Thevalueofcoattheaxiscrossingyieldsthefrequencyofoscillation,whilethegainatthejco-axiscrossingyields,forthisexample,themaximumpositivegainforsystemstability.Weshouldnoteherethatotherexamples405406Chapter8TABLE8.2RootLocusTechniquesDataforbreakawayandbreak-inpointsfortherootlocusofFigure8.13Real-axisvalueGain-1.410.008557-1.420.008585-1.430.008605-1.440.008617-1.450.008623-1.460.0086223.3CommentMax.gain:breakaway44.6863.437.1253.533.0003.630.6673.729.4403.829.0003.929.202Min.gain:break-inillustrateinstabilityatsmallvaluesofgainandstabilityatlargevaluesofgain.Thesesystemshavearootlocusstartingintheright-half-plane(unstableatsmallvaluesofgain)andendingintheleft-half-plane(stableforhighvaluesofgain).Tofindthe;'o)-axiscrossing,wecanusetheRouth-Hurwitzcriterion,coveredinChapter6,asfollows:ForcingarowofzerosintheRouthtablewillyieldthegain;goingbackonerowtotheevenpolynomialequationandsolvingfortherootsyieldsthefrequencyattheimaginary-axiscrossing.Example8.5FrequencyandGainatImaginary-AxisCrossingPROBLEM:ForthesystemofFigure8.11,findthefrequencyandgain,K,forwhichtherootlocuscrossestheimaginaryaxis.ForwhatrangeofKisthesystemstable?SOLUTION:Theclosed-looptransferfunctionforthesystemofFigure8.11isT(s)=s4+753+1452+(8+K)s+3K(8.40)Usingthedenominatorandsimplifyingsomeoftheentriesbymultiplyinganyrowbyaconstant,weobtaintheRoutharrayshowninTable8.3.Acompleterowofzerosyieldsthepossibilityforimaginaryaxisroots.Forpositivevaluesofgain,thoseforwhichtherootlocusisplotted,onlythes1rowcanyieldarowofzeros.Thus,-K2-65K+720=0(8.41)FromthisequationKisevaluatedasK=9.65(8.42)8.5RefiningtheSketchTABLE8.3RouthtableforEq.(8.40)s45317s2sl90-K148+K3K21K2s°-K-65K+72090-K21KFormingtheevenpolynomialbyusingthes2rowwithK—9.65,weobtain(90-K)s2+21K=80.35s2+202.7=0(8.43)andsisfoundtobeequalto±;'1.59.Thustherootlocuscrossesthe/&>-axisat±/1.59atagainof9.65.Weconcludethatthesystemisstablefor0<K<9.65.Anothermethodforfindingthe/co-axiscrossing(oranypointontherootlocus,forthatmatter)usesthefactthatatthe/4=-#i-90°+tan(-)-tan[-)=180(8.46)fromwhich#=—251.6°—108.4°.AsketchoftherootlocusisshowninFigure8.17.Noticehowthedepartureanglefromthecomplexpoleshelpsustorefinetheshape.JCO;41;3\\\\Angleof\\departure/2V^1s-planeflr320-i-%¾-J2--/3--)4FIGURE8.17RootlocusforsystemofFigure8.16showingangleofdeparture409Chapter8RootLocusTechniquesPlottingandCalibratingtheRootLocusOncewesketchtherootlocususingtherulesfromSection8.4,wemaywanttoaccuratelylocatepointsontherootlocusaswellasfindtheirassociatedgain.Forexample,wemightwanttoknowtheexactcoordinatesoftherootlocusasitcrossestheradiallinerepresenting20%overshoot.Further,wealsomaywantthevalueofgainatthatpoint.ConsidertherootlocusshowninFigure8.12.Letusassumewewanttofindtheexactpointatwhichthelocuscrossesthe0.45dampingratiolineandthegainatthatpoint.Figure8.18showsthesystem'sopen-looppolesandzerosalongwiththe£—0.45line.Ifafewtestpointsalongthet,=0.45lineareselected,wecanevaluatetheirangularsumandlocatethatpointwheretheanglesadduptoanoddmultipleof180°.Itisatthispointthattherootlocusexists.Equation(8.20)canthenbeusedtoevaluatethegain,K,atthatpoint.Selectingthepointatradius2(r=2)onthe£=0.45line,weaddtheanglesofthezerosandsubtracttheanglesofthepoles,obtaining(8.47)-01-03-04-05=-251.5°Sincethesumisnotequaltoanoddmultipleof180°,thepointatradius=2isnotontherootlocus.Proceedingsimilarlyforthepointsatradius=1.5,1,0.747,and0.5,weobtainthetableshowninFigure8.18.Thistableliststhepoints,givingtheirradius,r,andthesumofanglesindicatedbythesymbolZ.Fromthetableweseethatthepointatradius0.747isontherootlocus,sincetheanglesaddupto—180°.UsingEq.(8.21),thegain,K,atthispointisK=\A\\C\\D\\E\=1.71\B\(8.48)Insummary,wesearchagivenlineforthepointyieldingasummationofangles(zeroangles-poleangles)equaltoanoddmultipleof180°.Weconcludethatthepointisontherootlocus.Thegainatthatpointisthenfoundbymultiplyingthepolelengthsdrawntothatpointanddividingbytheproductofthezerolengthsdrawntothatpoint.Acomputerprogram,suchasthatdiscussedinAppendixH.2atwww.wiley.com/college/niseorMATLAB,canbeused.RadiusAngle£=0.45z.(degrees)0.50.7471.01.52.0-158.4-180.0-199.9-230.4-251.5v^^lFIGURE8.18.f-plane,FindingandcalibratingexactpointsontherootlocusofFigure8.128.6AnExampleSkill-AssessmentExercise8.4PROBLEM:GivenaunityfeedbacksystemthathastheforwardtransferfunctionG^K(s+2)={s2-4s+13)dothefollowing:a.b.c.d.e.Sketchtherootlocus.Findtheimaginary-axiscrossing.Findthegain,K,atthejco-axiscrossing.Findthebreak-inpoint.Findtheangleofdeparturefromthecomplexpoles.ANSWERS:a.Seesolutionatwww.wiley.com/college/nise.b.s=±;V2lc.2C=4d.Break-inpoint=—7e.Angleofdeparture=—233.1°Thecompletesolutionisatwww.wiley.com/college/nise.|8.6AnExampleWenowreviewtherulesforsketchingandfindingpointsontherootlocus,aswellaspresentanexample.Therootlocusisthepathoftheclosed-looppolesofasystemasaparameterofthesystemisvaried.Eachpointontherootlocussatisfiestheanglecondition,ZG(s)H(s)=(2&+1)180°.Usingthisrelationship,rulesforsketchingandfindingpointsontherootlocusweredevelopedandarenowsummarized:BasicRulesforSketchingtheRootLocusNumberofbranchesThenumberofbranchesoftherootlocusequalsthenumberofclosed-looppoles.SymmetryTherootlocusissymmetricalabouttherealaxis.Real-axissegmentsOntherealaxis,forK>0therootlocusexiststotheleftofanoddnumberofreal-axis,finiteopen-looppolesand/orfiniteopen-loopzeros.StartingandendingpointsTherootlocusbeginsatthefiniteandinfinitepolesofG(s)H(s)andendsatthefiniteandinfinitezerosofG(s)H(s).BehavioratinfinityTherootlocusapproachesstraightlinesasasymptotesasthelocusapproachesinfinity.Further,theequationsoftheasymptotesaregivenby411412Chapter8RootLocusTechniquesthereal-axisinterceptandangleinradiansasfollows:J2finitepoles—J2finitezeros#finitepoles-#finitezeros(2k+l)ir#finitepoles—#finitezeros(8.49)(8.50)wherefc=0,±l,±2,±3,....AdditionalRulesforRefiningtheSketchReal-axisbreakawayandbreak-inpointsTherootlocusbreaksawayfromtherealaxisatapointwherethegainismaximumandbreaksintotherealaxisatapointwherethegainisminimum.Calculationofjco-axiscrossingsTherootlocuscrossesthe;'&>-axisatthepointwhereZG(s)H(s)=(2k+1)180°.Routh-Hurwitzorasearchofthe;'w-axisfor(2k+1)180°canbeusedtofindthe/Vw-axiscrossing.AnglesofdepartureandarrivalTherootlocusdepartsfromcomplex,open-looppolesandarrivesatcomplex,open-loopzerosatanglesthatcanbecalculatedasfollows.Assumeapointeclosetothecomplexpoleorzero.Addallanglesdrawnfromallopen-looppolesandzerostothispoint.Thesumequals(2k+1)180°.Theonlyunknownangleisthatdrawnfromthe€closepoleorzero,sincethevectorsdrawnfromallotherpolesandzeroscanbeconsidereddrawntothecomplexpoleorzerothatiseclosetothepoint.Solvingfortheunknownangleyieldstheangleofdepartureorarrival.PlottingandcalibratingtherootlocusAllpointsontherootlocussatisfytherelationshipZG(s)H(s)=(2k+1)180°.Thegain,K,atanypointontherootlocusisgivenbyK=1_1\G(s)H(s)\~M~[]fmitePolelengthsnfinitezerolengths(8.51)Letusnowlookatasummaryexample.Example8.7SketchingaRootLocusandFindingCriticalPointsPROBLEM:SketchtherootlocusforthesystemshowninFigure8.19(a)andfindthefollowing:a.b.c.d.Theexactpointandgainwherethelocuscrossesthe0.45dampingratiolineTheexactpointandgainwherethelocuscrossesthe/a>-axisThebreakawaypointontherealaxisTherangeofKwithinwhichthesystemisstable8.6AnExamplem?(9)r*(X)K(s2-4s+20)(,v+2)(s+4)C(s)I(a)C=0.45FIGURE8.19a.SystemforExample8.7;b.rootlocussketch.SOLUTION:Theproblemsolutionisshown,inpart,inFigure8.19(6).Firstsketchtherootlocus.UsingRule3,thereal-axissegmentisfoundtobebetween-2and-4.Rule4tellsusthattherootlocusstartsattheopen-looppolesandendsattheopen-loopzeros.Thesetworulesalonegiveusthegeneralshapeoftherootlocus.a.Tofindtheexactpointwherethelocuscrossesthe£=0.45line,wecanusetherootlocusprogramdiscussedinAppendixH.2atwww.wiley.com/college/nisetosearchalongtheline0=180°-cos"10.45=116.7°(8.52)forthepointwheretheanglesadduptoanoddmultipleof180°.Searchinginpolarcoordinates,wefindthattherootlocuscrossesthe£=0.45lineat3.4Z116.7°withagain,K,of0.417.b.Tofindtheexactpointwherethelocuscrossesthe/&>-axis,usetherootlocusprogramtosearchalongtheline0=90°(8.53)413414Chapter8RootLocusTechniquesforthepointwheretheanglesadduptoanoddmultipleof180°.Searchinginpolarcoordinates,wefindthattherootlocuscrossesthe/-axiscrossing.Findthebreak-inpoint.Findthepointwherethelocuscrossesthe0.5dampingratioline.Findthegainatthepointwherethelocuscrossesthe0.5dampingratioline.Findtherangeofgain,K,forwhichthesystemisstable.ANSWERS:a.Seesolutionatwww.wiley.com/college/nise.b.s=±/4.06c.K=ld.Break-inpoint=+2.89e.5=-2.42+/4.18f.K=0.108g.Km,gFIGURE8.21*K(s+1.5)*(.$+!)(.?+10)C(s)PROBLEM:ConsiderthesystemshowninFigure8.21.Designthevalueofgain,K,toyield1.52%overshoot.Alsoestimatethesettlingtime,peaktime,andsteady-stateerror.SOLUTION:TherootlocusisshowninFigure8.22.Noticethatthisisathird-ordersystemwithonezero.BreakawaypointsontherealSystemforExample8.8£=0.8ms-plane1.19+./0.90,K=12.79-0.87+/).66,K=7.36-10-9X=Closed-looppoleX=Open-looppoleFIGURE8.22RootlocusforExample8.88.7TransientResponseDesignviaGainAdjustmentaxiscanoccurbetween0and—1andbetween—1.5and-10,wherethegainreachesapeak.Usingtherootlocusprogramandsearchingintheseregionsforthepeaksingain,breakawaypointsarefoundat—0.62withagainof2.511andat—4.4withagainof28.89.Abreak-inpointontherealaxiscanoccurbetween—1.5and—10,wherethegainreachesalocalminimum.Usingtherootlocusprogramandsearchingintheseregionsforthelocalminimumgain,abreak-inpointisfoundat-2.8withagainof27.91.Nextassumethatthesystemcanbeapproximatedbyasecond-order,underdampedsystemwithoutanyzeros.A1.52%overshootcorrespondstoadampingratioof0.8.Sketchthisdampingratiolineontherootlocus,asshowninFigure8.22.Usetherootlocusprogramtosearchalongthe0.8dampingratiolineforthepointwheretheanglesfromtheopen-looppolesandzerosadduptoanoddmultipleof180°.Thisisthepointwheretherootlocuscrossesthe0.8dampingratioor1.52percentovershootline.Threepointssatisfythiscriterion:—0.87±/0.66,—1.19±/0.90,and-4.6±j3.45withrespectivegainsof7.36,12.79,and39.64.ForeachpointthesettlingtimeandpeaktimeareevaluatedusingTs=^-(8.54)wherep%istherealpartoftheclosed-looppole,andalsousingr»=J=>nVl-?(8.55)COwherecon\/l—f2istheimaginarypartoftheclosed-looppole.Totestourassumptionofasecond-ordersystem,wemustcalculatethelocationofthethirdpole.Usingtherootlocusprogram,searchalongthenegativeextensionoftherealaxisbetweenthezeroat-1.5andthepoleat-10forpointsthatmatchthevalueofgainfoundatthesecond-orderdominantpoles.Foreachofthethreecrossingsofthe0.8dampingratioline,thethirdclosed-looppoleisat—9.25,-8.6,and—1.8,respectively.TheresultsaresummarizedinTable8.4.Finally,letusexaminethesteady-stateerrorproducedineachcase.Notethatwehavelittlecontroloverthesteady-stateerroratthispoint.Whenthegainissettomeetthetransientresponse,wehavealsodesignedthesteady-stateerror.Fortheexample,thesteady-stateerrorspecificationisgivenbyKvandiscalculatedas(a56)*-53*°M=§§TheresultsforeachcaseareshowninTable8.4.Howvalidarethesecond-orderassumptions?FromTable8.4,Cases1and2yieldthirdclosed-looppolesthatarerelativelyfarfromtheclosed-loopzero.Forthesetwocasesthereisnopole-zerocancellation,andasecond-ordersystemTABLE8.4CharacteristicsofthesystemofExample8.8CaseClosed-looppolesClosed-loopzeroGainThirdclosed-looppoleSettlingtimePeaktimeKv123-0.87±/0.66-1.19±/0.90-4.60+/3.45-1.5+/0-1.5+/0-1.5+/07.3612.7939.64-9.25-8.61-1.804.603.360.874.763.490.911.11.95.9417Chapter8418RootLocusTechniquesCase2responseCase3response—Third-order,A-=39.64_Second-order,K=39.64—Third-order,K=12.79Second-order,K=12.7900.511.522.533.5Time(seconds)44.500.5511.522.533.544.5Time(seconds)5(«)FIGURE8.23Second-andthird-orderresponsesforExample8.8:a.Case2;b.Case3approximationisnotvalid.InCase3,thethirdclosed-looppoleandtheclosed-loopzeroarerelativelyclosetoeachother,andasecond-ordersystemapproximationcanbeconsideredvalid.Inordertoshowthis,letusmakeapartial-fractionexpansionoftheclosed-loopstepresponseofCase3andseethattheamplitudeoftheexponentialdecayismuchlessthantheamplitudeoftheunderdampedsinusoid.Theclosed-loopstepresponse,03(5),formedfromtheclosed-looppolesandzerosofCase3isC3(s)=39.64(5+1.5)s(s+1.8)(5+4.6+/3.45)(5+4.6-/3.45)39.64(5+1.5)5(5+1.8)(52+9.25+33.06)150.35(5+18)(8.57)1.3(5+4.6)+1.6(3.45)(5+4.6)2+3.452Thus,theamplitudeoftheexponentialdecayfromthethirdpoleis0.3,andtheamplitudeoftheunderdampedresponsefromthedominantpolesis\/l.32+1.62=2.06.Hence,thedominantpoleresponseis6.9timesaslargeasthenondominantexponentialresponse,andweassumethatasecond-orderapproximationisvalid.Usingasimulationprogram,weobtainFigure8.23,whichshowscomparisonsofstepresponsesfortheproblemwehavejustsolved.Cases2and3areplottedforboththethird-orderresponseandasecond-orderresponse,assumingjustthedominantpairofpolescalculatedinthedesignproblem.Again,thesecond-orderapproximationwasjustifiedforCase3,wherethereisasmalldifferenceinpercentovershoot.Thesecond-orderapproximationisnotvalidforCase2.Otherthantheexcessovershoot,Case3responsesaresimilar.MATLABStudentswhoareusingMATLABshouldnowrunch8p2inAppendixB.YouwilllearnhowtouseMATLABtoenteravalueofpercentovershootfromthekeyboard.MATLABwillthendrawtherootlocusandoverlaythepercentovershootlinerequested.YouwilltheninteractwithMATLABandselectthepointofintersectionofthe8.8GeneralizedRootLocus419rootlocuswiththerequestedpercentovershootline.MATLABwillrespondwiththevalueofgain,allclosed-looppolesatthatgain,andaclosed-loopstepresponseplotcorrespondingtotheselectedpoint.ThisexercisesolvesExample8.8usingMATLAB.StudentswhoareusingMATLABmaywanttoexploretheSISODesignTooldescribedinAppendixEatwww.wiley.com/college/nise.TheSISODesignToolisaconvenientandintuitivewaytoobtain,view,andinteractwithasystem'srootlocus.SectionD.7describestheadvantagesofusingthetool,whileSectionD.8describeshowtouseit.Forpractice,youmaywanttoapplytheSISODesignTooltosomeoftheproblemsattheendofthischapter.Skill-AssessmentExercise8.6PROBLEM:Givenaunityfeedbacksystemthathastheforward-pathtransferfunctionG(s)={s+2)(s+4)(s+6)dothefollowing:a.Sketchtherootlocus.b.Usingasecond-orderapproximation,designthevalueofKtoyield10%overshootforaunit-stepinput.c.Estimatethesettlingtime,peaktime,risetime,andsteady-stateerrorforthevalueofKdesignedin(b).(I.Determinethevalidityofyoursecond-orderapproximation.ANSWERS:a.b.c.d.Seesolutionlocatedatwww.wiley.com/college/nise.K=45.55Ts=1.97s,Tp=1.13.9,Tr=0.53s,andestep(oo)=0.51Second-orderapproximationisnotvalid.Thecompletesolutionislocatedatwww.wiley.com/college/nise.£8.8GeneralizedRootLocusUptothispointwehavealwaysdrawntherootlocusasafunctionoftheforwardpathgain,K.Thecontrolsystemdesignermustoftenknowhowtheclosed-looppoleschangeasafunctionofanotherparameter.Forexample,inFigure8.24,theparameterofinterestistheopen-looppoleat-p^.Howcanweobtainarootlocusforvariationsofthevalueofp^.GuiTool420Chapter8RootLocusTechniquesIfthefunctionKG(s)H(s)isformedasKG{s)H{s)=«W*K^V.^10(s+2)(s+/?,)C(5),FIGURE8.24Systemrequiringarootlocuscalibratedwithp1asaparameter10[s+2){s+Pl)(8.58)theproblemisthatpjisnotamultiplyingfactorofthefunction,asthegain,K,wasinallofthepreviousproblems.Thesolutiontothisdilemmaistocreateanequivalentsystemwherepxappearsastheforward-pathgain.Sincetheclosed-looptransferfunction'sdenominatoris1+KG(s)H(s),weeffectivelywanttocreateanequivalentsystemwhosedenominatoris1+p1G(s)H(s).ForthesystemofFigure8.24,theclosed-looptransferfunctionism-,.1+KG(s)H(s)5ffL,-.,.,.s+(p+.^,,2)s+221Pl+10(8.59)Isolatingpl5wehaveT(s)=10$2+25+10+^(5+2)(8.60)Convertingthedenominatortotheform[1+plG(s)H(s)]bydividingnumeratoranddenominatorbythetermnotincludedwithp1,s2+2s+10,weobtainrw=10s2+2s+10Pi(*+2)152+25+10(8.61]Conceptually,Eq.(8.61)impliesthatwehaveasystemforwhichKG(s)H(s)=Pi(s+2)5+2s+102(8.62)Therootlocuscannowbesketchedasafunctionofphassumingtheopen-loopsystemofEq.(8.62).ThefinalresultisshowninFigure8.25.5-plane-10FIGURE8.25RootlocusforthesystemofFigure8.24,withpxasaparameter8.9RootLocusforPositive-FeedbackSystems421Skill-AssessmentExercise8.7PROBLEM:Sketchtherootlocusforvariationsinthevalueofptiforaunityfeedbacksystemthathasthefollowingforwardtransferfunction:G(s)=WileyPLUSC33SJControlSolutions100s{s+Pi)ANSWER:Thecompletesolutionisatwww.wiley.com/college/nise.Inthissection,welearnedtoplottherootlocusasafunctionofanysystemparameter.Inthenextsectionwewilllearnhowtoplotrootlociforpositivefeedbacksystems.8.9(RootLocusforPositive-FeedbackSystemsThepropertiesoftherootlocuswerederivedfromthesystemofFigure8.1.Thisisanegative-feedbacksystembecauseofthenegativesummingofthefeedbacksignaltotheinputsignal.Thepropertiesoftherootlocuschangedramaticallyifthefeedbacksignalisaddedtotheinputratherthansubtracted.Apositive-feedbacksystemcanbethoughtofasanegative-feedbacksystemwithanegativevalueofH(s).Usingthisconcept,wefindthatthetransferfunctionforthepositive-feedbacksystemshowninFigure8.26isT(s)=KG{s)1-KG(s)H{s)R(s)C(s)His)FIGURE8.26Positive-feedbacksystem(8.63)WenowretracethedevelopmentoftherootlocusforthedenominatorofEq.(8.63).Obviously,apole,s,existswhenKG(s)H(s)=1=1Z^360°k=0,±1,±2,±3,...KG(s)(8.64)Therefore,therootlocusforpositive-feedbacksystemsconsistsofallpointsonthes-planewheretheangleofKG(s)H(s)=k360°.HowdoesthisrelationshipchangetherulesforsketchingtherootlocuspresentedinSection8.4?1.Numberofbranches.Thesameargumentsasfornegativefeedbackapplytothisrule.Thereisnochange.2.Symmetry.Thesameargumentsasfornegativefeedbackapplytothisrule.Thereisnochange.3.Real-axissegments.ThedevelopmentinSection8.4forthereal-axissegmentsledtothefactthattheanglesofG(s)H(s)alongtherealaxisaddeduptoeitheranoddmultipleof180°oramultipleof360°.Thus,forpositive-feedbacksystemstheChapter8RootLocusTechniquesrootlocusexistsontherealaxisalongsectionswherethelocusfornegativefeedbacksystemsdoesnotexist.Therulefollows:Real-axissegments:Ontherealaxis,therootlocusforpositive-feedbacksystemsexiststotheleftofanevennumberofreal-axis,finiteopen-looppolesand/orfiniteopen-loopzeros.Thechangeintheruleisthewordeven;fornegative-feedbacksystemsthelocusexistedtotheleftofanoddnumberofreal-axis,finiteopen-looppolesand/orzeros.4.Startingandendingpoints.YouwillfindnochangeinthedevelopmentinSection8.4ifEq.(8.63)isusedinsteadofEq.(8.12).Therefore,wehavethefollowingrule.Startingandendingpoints:Therootlocusforpositive-feedbacksystemsbeginsatthefiniteandinfinitepolesofG(s)H(s)andendsatthefiniteandinfinitezerosofG(s)H(s).5.Behavioratinfinity.ThechangesinthedevelopmentoftheasymptotesbeginatEq.(M.4)inAppendixMatwww.wiley.com/college/nisesincepositive-feedbacksystemsfollowtherelationshipinEq.(8.64).Thatchangeyieldsadifferentslopefortheasymptotes.Thevalueofthereal-axisinterceptfortheasymptotesremainsunchanged.Thestudentisencouragedtogothroughthedevelopmentindetailandshowthatthebehavioratinfinityforpositive-feedbacksystemsisgivenbythefollowingrule:Therootlocusapproachesstraightlinesasasymptotesasthelocusapproachesinfinity.Further,theequationsoftheasymptotesforpositive-feedbacksystemsaregivenbythereal-axisintercept,aa,andangle,9a,asfollows:^2finitepoles—J2finitezeros#finitepoles-#finitezeros(8.65)#finitepoles—#finitezeroswherek—0,±1,±2,±3,...,andtheangleisgiveninradianswithrespecttothepositiveextensionoftherealaxis.ThechangeweseeisthatthenumeratorofEq.(8.66)isk2rrinsteadof{2k+1)TT.Whataboutothercalculations?Theimaginary-axiscrossingcanbefoundusingtherootlocusprogram.Inasearchofthe/w-axis,youarelookingforthepointwheretheanglesadduptoamultipleof360°insteadofanoddmultipleof180°.ThebreakawaypointsarefoundbylookingforthemaximumvalueofK.Thebreak-inpointsarefoundbylookingfortheminimumvalueofK.Whenwewerediscussingnegative-feedbacksystems,wealwaysmadetherootlocusplotforpositivevaluesofgain.Sincepositive-feedbacksystemscanalsobethoughtofasnegative-feedbacksystemswithnegativegain,therulesdevelopedinthissectionapplyequallytonegative-feedbacksystemswithnegativegain.Letuslookatanexample.8.9RootLocusforPositive-FeedbackSystems423Example8.9RootLocusforaPositive-FeedbackSystemPROBLEM:Sketchtherootlocusasafunctionofnegativegain,K,forthesystemshowninFigure8.11.SOLUTION:Theequivalentpositive-feedbacksystemfoundbypushing—1,associatedwithK,totherightpastthepickoffpointisshowninFigure8.27(a).R(s)+K(s+3)s(s+l)(s+2){s+4)-1C(s)(a)jo.)s-planej1ii23•*-aFIGURE8.27a.Equivalentpositive-feedbacksystemforExample8.9;b.rootlocus(b)Therefore,asthegainoftheequivalentsystemgoesthroughpositivevaluesofK,therootlocuswillbeequivalenttothatgeneratedbythegain,K,oftheoriginalsysteminFigure8.11asitgoesthroughnegativevalues.Therootlocusexistsontherealaxistotheleftofanevennumberofreal,finiteopen-looppolesand/orzeros.Therefore,thelocusexistsontheentirepositiveextensionoftherealaxis,between—1and—2andbetween—3and—4.UsingEq.(8.27),theaainterceptisfoundtobe(-1-2-4)-(-3)=4(8.67)a„=4-13Theanglesofthelinesthatintersectat—4/3aregivenby0u_kin#finitepoles—#finitezeros=0for£=0=2ar/3forfc=l=4TT/3for&=2ThefinalrootlocussketchisshowninFigure827(b)(8.68a)(8.68b)(8.68c)(8.68d)424Chapter8RootLocusTechniquesSkill-AssessmentExercise8.8PROBLEM:Sketchtherootlocusforthepositive-feedbacksystemwhoseforwardtransferfunctionisK{s+4)G(s)={s+l)(s+2){s+3)Thesystemhasunityfeedback.ANSWER:Thecompletesolutionisatwww.wiley.com/college/nise.(8.10PoleSensitivityTherootlocusisaplotoftheclosed-looppolesasasystemparameterisvaried.Typically,thatsystemparameterisgain.Anychangeintheparameterchangestheclosed-looppolesand,subsequently,theperformanceofthesystem.Manytimestheparameterchangesagainstourwishes,duetoheatorotherenvironmentalconditions.Wewouldliketofindouttheextenttowhichchangesinparametervaluesaffecttheperformanceofoursystem.Therootlocusexhibitsanonlinearrelationshipbetweengainandpolelocation.Alongsomesectionsoftherootlocus,(1)verysmallchangesingainyieldverylargechangesinpolelocationandhenceperformance;alongothersectionsoftherootlocus,(2)verylargechangesingainyieldverysmallchangesinpolelocation.Inthefirstcasewesaythatthesystemhasahighsensitivitytochangesingain.Inthesecondcase,thesystemhasalowsensitivitytochangesingain.Weprefersystemswithlowsensitivitytochangesingain.InSection7.7,wedefinedsensitivityastheratioofthefractionalchangeinafunctiontothefractionalchangeinaparameterasthechangeintheparameterapproacheszero.Applyingthesamedefinitiontotheclosed-looppolesofasystemthatvarywithaparameter,wedefinerootsensitivityastheratioofthefractionalchangeinaclosed-looppoletothefractionalchangeinasystemparameter,suchasgain.UsingEq.(7.75),wecalculatethesensitivityofaclosed-looppole,s,togain,K:K8ss8KSx-K——(8.69)wheresisthecurrentpolelocation,andKisthecurrentgain.UsingEq.(8.69)andconvertingthepartialstofiniteincrements,theactualchangeintheclosed-looppolescanbeapproximatedasAs=s{Ss:KAKK(8.70)whereAsisthechangeinpolelocation,andAK/Kisthefractionalchangeinthegain,K.Letusdemonstratewithanexample.Webeginwiththecharacteristicequationfromwhich8s/8Kcanbefound.Then,usingEq.(8.69)withthecurrentclosed-looppole,s,anditsassociatedgain,K,wecanfindthesensitivity.8.10PoleSensitivity425Example8.10RootSensitivityofaClosed-LoopSystemtoGainVariationsPROBLEM:FindtherootsensitivityofthesysteminFigure8.4ats=—9.47and-5+/5.Alsocalculatethechangeinthepolelocationfora10%changeinK.SOLUTION:Thesystem'scharacteristicequation,foundfromtheclosed-looptransferfunctiondenominator,iss2+10s+K=0.DifferentiatingwithrespecttoK,wehave2^+10-^+1=08K8K.(8.71)fromwhich8s8K-12s+10(8.72)SubstitutingEq.(8.72)intoEq.(8.69),thesensitivityisfoundtobeKSS-.K—-172s+10(8.73)Fors=-9.47,Table8.1showsK=5.SubstitutingthesevaluesintoEq.(8.73)yieldsSS:K—-0.059.Thechangeinthepolelocationfora10%changeinKcanbefoundusingEq.(8.70),withs=-9.47,AK/K=0.1,andSS:K=-0.059.Hence,As=0.056,orthepolewillmovetotherightby0.056unitsfora10%changeinK.For£=-5+/5,Table8.1showsK—50.SubstitutingthesevaluesintoEq.(8.73)yields5,JC=1/(1+/1)=(1/V2)Z-45°.Thechangeinthepolelocationfora10%changeinKcanbefoundusingEq.(8.70),withs=-5+/5,AK/K=0.1,andSS:K=(l/\/2)Z—45°.Hence,As=-/5,orthepolewillmoveverticallyby0.5unitfora10%changeinK.Insummary,then,atK=5,SS:K=-0.059.AtK=50,SS:K={l/y/2)Z-45°.Comparingmagnitudes,weconcludethattherootlocusislesssensitivetochangesingainatthelowervalueofK.Noticethatrootsensitivityisacomplexquantitypossessingboththemagnitudeanddirectioninformationfromwhichthechangeinpolescanbecalculated.Skill-AssessmentExercise8.9PROBLEM:AnegativeunityfeedbacksystemhastheforwardtransferfunctionG(s)=^lws(s+2)IfKissetto20,findthechangesinclosed-looppolelocationfora5%changeinK.ANSWER:Fortheclosed-looppoleat-21.05,As=-0.9975;fortheclosed-looppoleat-0.95,As=-0.0025.Thecompletesolutionisatwww.wiley.com/college/nise.WileyPLUSCJJSJControlSolutions426Chapter8RootLocusTechniquesCaseStudiesAntennaControl:TransientDesignviaGainThemainthrustofthischapteristodemonstratedesignofhigher-ordersystems(higherthantwo)throughgainadjustment.Specifically,weareinterestedindeterminingthevalueofgainrequiredtomeettransientresponserequirements,suchaspercentovershoot,settlingtime,andpeaktime.Thefollowingcasestudyemphasizesthisdesignprocedure,usingtherootlocus.PROBLEM:Giventheantennaazimuthpositioncontrolsystemshownonthefrontendpapers,Configuration1,findthepreamplifiergainrequiredfor25%overshoot.SOLUTION:TheblockdiagramforthesystemwasderivedintheCaseStudiessectioninChapter5andisshowninFigure5.34(c),whereG{s)=6.63K/[s(s+1.71)(5+100)].Firstasketchoftherootlocusismadetoorientthedesigner.Thereal-axissegmentsarebetweentheoriginand-1.71andfrom—100toinfinity.Thelocusbeginsattheopen-looppoles,whichareallontherealaxisattheorigin,-1.71,and-100.Thelocusthenmovestowardthezerosatinfinitybyfollowingasymptotesthat,fromEqs.(8.27)and(8.28),intersecttherealaxisat-33.9atanglesof60°,180°,and—60°.AportionoftherootlocusisshowninFigure8.28.£=0.404i-planeAdditionalopen-looppoleat-100-4FIGURE8.28-2PortionoftherootlocusfortheantennacontrolsystemFromEq.(4.39),25%overshootcorrespondstoadampingratioof0.404.Nowdrawaradiallinefromtheoriginatanangleofcos-1£=113.8.Theintersectionofthislinewiththerootlocuslocatesthesystem'sdominant,second-orderclosedlooppoles.UsingtherootlocusprogramdiscussedinAppendixH.2atwww.wiley.com/college/nisetosearchtheradiallinefor180°yieldstheclosed-loopdominantpolesas2.063Z113.80=-0.833±,/1.888.Thegainvalueyields6.63^=425.7,fromwhichK=64.21.CaseStudies427Checkingoursecond-orderassumption,thethirdpolemustbetotheleftoftheopen-looppoleat—100andisthusgreaterthanfivetimestherealpartofthedominantpolepair,whichis-0.833.Thesecond-orderapproximationisthusvalid.Thecomputersimulationoftheclosed-loopsystem'sstepresponseinFigure8.29showsthatthedesignrequirementof25%overshootismet.456Time(seconds)78910FIGURE8.29Stepresponseofthegain-adjustedantennacontrolsystemCHALLENGE:Youarenowgivenaproblemtotestyourknowledgeofthischapter'sobjectives.Referringtotheantennaazimuthpositioncontrolsystemshownonthefrontendpapers,Configuration2,dothefollowing:a.Findthepreamplifiergain,K,requiredforan8-secondsettlingtime.b.Repeat,usingMATLAB.MATLA8UFSSVehicle:TransientDesignviaGainInthiscasestudy,weapplytherootlocustotheUFSSvehiclepitchcontrolloop.Thepitchcontrolloopisshownwithbothrateandpositionfeedbackonthebackendpapers.Intheexamplethatfollows,weplottherootlocuswithouttheratefeedbackandthenwiththeratefeedback.Wewillseethestabilizingeffectthatratefeedbackhasuponthesystem.PROBLEM:ConsidertheblockdiagramofthepitchcontrolloopfortheUFSSvehicleshownonthebackendpapers(Johnson,1980).a.IfK2=0(noratefeedback),plottherootlocusforthesystemasafunctionofpitchgain,K\,andestimatethesettlingtimeandpeaktimeoftheclosed-loopresponsewith20%overshoot.b.LetK2=K\(addratefeedback)andrepeata.Design•>•428Chapter8RootLocusTechniquesSOLUTION:a.LettingK2=0,theopen-looptransferfunctionisG(s)H(s)=0.25^1(5+0.435)[S+1.23)(5+2)(52+0.2265+0.0169)(8.74)fromwhichtherootlocusisplottedinFigure8.30.Searchingalongthe20%overshootlineevaluatedfromEq.(4.39),wefindthedominantsecond-orderpolestobe-0.202±/0.394withagainofK=0.25/^=0.706,orKi=2.824.20%-0.202+./0.394-3-X-2X^-—OX=Closed-looppoleX=Open-looppoleFIGURE8.30Rootlocusofpitchcontrolloopwithoutratefeedback,UFSSvehicleFromtherealpartofthedominantpole,thesettlingtimeisestimatedtobeTs=4/0.202=19.8seconds.Fromtheimaginarypartofthedominantpole,thepeaktimeisestimatedtobeTp=TF/0.394=7.97seconds.Sinceourestimatesarebaseduponasecond-orderassumption,wenowtestourassumptionbyfindingthethirdclosed-looppolelocationbetween-0.435and-1.23andthefourthclosed-looppolelocationbetween—2andinfinity.SearchingeachoftheseregionsforagainofK=0.706,wefindthethirdandfourthpolesat—0.784and—2.27,respectively.Thethirdpole,at-0.784,maynotbecloseenoughtothezeroat-0.435,andthusthesystemshouldbesimulated.Thefourthpole,at-2.27,is11timesasfarfromtheimaginaryaxisasthedominantpolesandthusmeetstherequirementofatleastfivetimestherealpartofthedominantpoles.Acomputersimulationofthestepresponseforthesystem,whichisshowninFigure8.31,showsa29%overshootaboveafinalvalueof0.88,approximately20-secondsettlingtime,andapeaktimeofapproximately7.5seconds.CaseStudies1.2Finalvalue/1.0N.0.80.6V/0.40.2yiii9i11215Time(seconds).J18L....21124wFIGURE8.31Computersimulationofstepresponseofpitchcontrolloopwithoutratefeedback,UFSSvehicleb.AddingratefeedbackbylettingK2=K\inthepitchcontrolsystemshownonthebackendpapers,weproceedtofindthenewopen-looptransferfunction.Pushing—K\totherightpastthesummingjunction,dividingthepitchratesensorby~Kt,andcombiningthetworesultingfeedbackpathsobtaining(5+1)giveusthefollowingopen-looptransferfunction:G(s)H(s)=0.25Kj{s+0.435)(5+1)[s+1.23)(^+2)(52+0.2265+0.0169)(8.75)Noticethattheadditionofratefeedbackaddsazerototheopen-looptransferfunction.TheresultingrootlocusisshowninFigure8.32.Noticethatthisrootlocus,unliketherootlocusina,isstableforallvaluesofgain,sincethelocusdoesnotentertherighthalfofthe5-planeforanyvalueofpositivegain,-1.024+j1.998AT=5.17;AT]=20..v-planeX=Closed-looppoleX=Open-looppoleFIGURE832Rootlocusofpitchcontrolloopwithratefeedback,UFSSvehicle429430Chapter8RootLocusTechniquesFinalvalue1.00.80.60.40.2FIGURE8.33Computersimulationofstepresponseofpitchcontrolloopwithratefeedback,UFSSvehicle•J—*•46Time(seconds)10K=0,25¾.Alsonoticethattheintersectionwiththe20%overshootlineismuchfartherfromtheimaginaryaxisthanisthecasewithoutratefeedback,resultinginafasterresponsetimeforthesystem.Therootlocusintersectsthe20%overshootlineat-1.024±/1.998withagainofK=0.25K\=5.17,orK\=20.68.Usingtherealandimaginarypartsofthedominantpolelocation,thesettlingtimeispredictedtobeTs=4/1.024=3.9seconds,andthepeaktimeisestimatedtobeTp—#/1.998=1.57seconds.Thenewestimatesshowconsiderableimprovementinthetransientresponseascomparedtothesystemwithouttheratefeedback.Nowwetestoursecond-orderapproximationbyfindingthelocationofthethirdandfourthpolesbetween-0.435and—1.SearchingthisregionforagainofK=5.17,welocatethethirdandfourthpolesatapproximately-0.5and-0.91.Sincethezeroat-1isazeroofH(s),thestudentcanverifythatthiszeroisnotazerooftheclosed-looptransferfunction.Thus,althoughtheremaybepole-zerocancellationbetweentheclosed-looppoleat—0.5andtheclosedloopzeroat-0.435,thereisnoclosed-loopzerotocanceltheclosed-looppoleat-0.91.2Oursecond-orderapproximationisnotvalid.AcomputersimulationofthesystemwithratefeedbackisshowninFigure8.33.Althoughtheresponseshowsthatoursecond-orderapproximationisinvalid,itstillrepresentsaconsiderableimprovementinperformanceoverthesystemwithoutratefeedback;thepercentovershootissmall,andthesettlingtimeisabout6secondsinsteadofabout20seconds.CHALLENGE:Youarenowgivenaproblemtotestyourknowledgeofthischapter'sobjectives.FortheUFSSvehicle(Johnson,1980)headingcontrolsystemshownonthebackendpapers,andintroducedinthecasestudychallengeinChapter5,dothefollowing:a.LetK2—K\andfindthevalueofK\thatyields10%overshoot.MATLABb.Repeat,usingMATLAB.2Thezeroat-1shownontherootlocusplotofFigure8.32isanopen-loopzerosinceitcomesfromthenumeratorofH(s).SummaryWehaveconcludedthechapterwithtwocasestudiesshowingtheuseandapplicationoftherootlocus.Wehaveseenhowtoplotarootlocusandestimatethetransientresponsebymakingasecond-orderapproximation.Wesawthatthesecond-orderapproximationheldwhenratefeedbackwasnotusedfortheUFSS.Whenratefeedbackwasused,anopen-loopzerofromH(s)wasintroduced.Sinceitwasnotaclosed-loopzero,therewasnopole-zerocancellation,andasecond-orderapproximationcouldnotbejustified.Inthiscase,however,thetransientresponsewithratefeedbackdidrepresentanimprovementintransientresponseoverthesystemwithoutratefeedback.Insubsequentchapterswewillseewhyratefeedbackyieldsanimprovement.Wewillalsoseeothermethodsofimprovingthetransientresponse.^Summary^Inthischapter,weexaminedtherootlocus,apowerfultoolfortheanalysisanddesignofcontrolsystems.Therootlocusempowersuswithqualitativeandquantitativeinformationaboutthestabilityandtransientresponseoffeedbackcontrolsystems.Therootlocusallowsustofindthepolesoftheclosed-loopsystembystartingfromtheopen-loopsystem'spolesandzeros.Itisbasicallyagraphicalroot-solvingtechnique.Welookedatwaystosketchtherootlocusrapidly,evenforhigher-ordersystems.Thesketchgaveusqualitativeinformationaboutchangesinthetransientresponseasparameterswerevaried.Fromthelocuswewereabletodeterminewhetherasystemwasunstableforanyrangeofgain.Nextwedevelopedthecriterionfordeterminingwhetherapointinthes-planewasontherootlocus:Theanglesfromtheopen-loopzeros,minustheanglesfromtheopen-looppolesdrawntothepointinthe.s-plane,adduptoanoddmultipleof180°.ThecomputerprogramdiscussedinAppendixG.2atwww.wiley.com/college/nisehelpsustosearchrapidlyforpointsontherootlocus.Thisprogramallowsustofindpointsandgainstomeetcertaintransientresponsespecificationsaslongasweareabletojustifyasecond-orderassumptionforhigher-ordersystems.Othercomputerprograms,suchasMATLAB,plottherootlocusandallowtheusertointeractwiththedisplaytodeterminetransientresponsespecificationsandsystemparameters.Ourmethodofdesigninthischapterisgainadjustment.Wearelimitedtotransientresponsesgovernedbythepolesontherootlocus.Transientresponsesrepresentedbypolelocationsoutsideoftherootlocuscannotbeobtainedbyasimplegainadjustment.Further,oncethetransientresponsehasbeenestablished,thegainisset,andsoisthesteady-stateerrorperformance.Inotherwords,byasimplegainadjustment,wehavetotradeoffbetweenaspecifiedtransientresponseandaspecifiedsteady-stateerror.Transientresponseandsteady-stateerrorcannotbedesignedindependentlywithasimplegainadjustment.Wealsolearnedhowtoplottherootlocusagainstsystemparametersotherthangain.Inordertomakethisrootlocusplot,wemustfirstconverttheclosed-looptransferfunctionintoanequivalenttransferfunctionthathasthedesiredsystemparameterinthesamepositionasthegain.Thechapterdiscussionconcludedwithpositive-feedbacksystemsandhowtoplottherootlociforthesesystems.Thenextchapterextendstheconceptoftherootlocustothedesignofcompensationnetworks.Thesenetworkshaveasanadvantagetheseparatedesignoftransientperformanceandsteady-stateerrorperformance.Chapter8432RootLocusTechniquesf^ReviewQuestions]J1.2.3.4.5.6.7.8.9.10.11.12.13.Whatisarootlocus?Describetwowaysofobtainingtherootlocus.IfKG(s)H(s)=5Z1800,forwhatvalueofgainissapointontherootlocus?Dothezerosofasystemchangewithachangeingain?Wherearethezerosoftheclosed-looptransferfunction?Whataretwowaystofindwheretherootlocuscrossestheimaginaryaxis?Howcanyoutellfromtherootlocusifasystemisunstable?Howcanyoutellfromtherootlocusifthesettlingtimedoesnotchangeoveraregionofgain?Howcanyoutellfromtherootlocusthatthenaturalfrequencydoesnotchangeoveraregionofgain?Howwouldyoudeterminewhetherornotarootlocusplotcrossedtherealaxis?Describetheconditionsthatmustexistforallclosed-looppolesandzerosinordertomakeasecond-orderapproximation.Whatrulesforplottingtherootlocusarethesamewhetherthesystemisapositive-oranegative-feedbacksystem?Brieflydescribehowthezerosoftheopen-loopsystemaffecttherootlocusandthetransientresponse.Problems1.ForeachoftherootlocishowninFigureP8.1,tellwhetherornotthesketchcanbearootlocus.Ifthesketchcannotbearootlocus,explainwhy.Giveallreasons.[Section:8.4]JO)ks-planes-plane*~8-X-O-X(«)id)JO)Xs-planes-planej-plane-*—X-tg)FIGUREP8.1-5Problems2.Sketchthegeneralshapeoftherootwileypwslocusforeachoftheopen-looppole-tfMll^zeroplotsshowninFigureP8.2.[Section:8.4]j-planecontrolsolutionsFIGUREP8.33!5-plane4.Letx-G(s)=->(5+6)inFigureP8.3.[Section:8.5]a.Plottherootlocus.(¢)jcocmG(s)/oJta-xm433b.Writeanexpressionfortheclosed-looptransferfunctionatthepointwherethethreeclosed-looppolesmeet.jo)5.Letj;s-plane)[s-plane—O^)=,2+2,+2OwithK>0inFigureP8.3.[Sections:8.5,8.9]a.FindtherangeofKforclosed-loopstability.b.Sketchthesystem'srootlocus.jcops^A&ne.XXsplane—*—x—-aO—OXXc.Findthepositionoftheclosed-looppoleswhenK=1andK=2.6.Fortheopen-looppole-zeroplotshowninFigureP8.4,sketchtherootlocusandfindthebreak-inpoint.[Section:8.5]jo)is-planeif)FIGUREP8.23.SketchtherootlocusfortheunityfeedbacksystemshowninFigureP8.3forthefollowingtransferfunctions:[Section:8.4]a.G(s)=b.G(s)=c.G(s)=d.G(s)=K(s+2){s+6)s2+8s+25K{s2+4)2(*+l)K{s2+1)-o-3•o-2-1-flFIGUREP8.47.SketchtherootlocusoftheunityfeedbacksystemshowninFigureP8.3,whereK(s+3)(s+5)°«-(,+1)(,-7)s2K{s+lY(s+4)andfindthebreak-inandbreakawaypoints.[Section:8.5]Chapter8434RootLocusTechniques8.Thecharacteristicpolynomialofafeedbackcontrolsystem,whichisthedenominatoroftheclosed-looptransferfunction,isgivenby.3+2.2+{20K+7).+100K.Sketchtherootlocusforthissystem.[Section:8.8]9.FigureP8.5showsopen-looppolesandzeros.Therearetwopossibilitiesforthesketchoftherootlocus.Sketcheachofthetwopossibilities.Beawarethatonlyonecanbethereallocusforspecificopen-looppoleandzerovalues.[Section:8.4]13.ForeachsystemshowninFigureP8.6,makeanaccurateplotoftherootlocusandfindthefollowing:[Section:8.5]a.Thebreakawayandbreak-inpointsb.TherangeofKtokeepthesystemstablec.ThevalueofKthatyieldsastablesystemwithcriticallydampedsecond-orderpolesd.ThevalueofKthatyieldsastablesystemwithapairofsecond-orderpolesthathaveadampingratioof0.707R(s)+/r?\9*K(s+2)(s+1)(s-2)(s-\)Qs).v-planeSystem1-OXB(s)t(cK(s+2)(s+l)A(s2-2s9C{s)+2)System2FIGUREP8.5FIGUREP8.610.PlottherootlocusfortheunityfeedbacksystemshowninFigureP8.3,whereG(s)=K(s+2)(s2+4)('+5)(s-3)ForwhatrangeofKwillthepolesbeintherighthalf-plane?[Section:8.5]11.FortheunityfeedbacksystemshowninwiieypwsFigureP8.3,wheredJJJControlSolutions«,*14.SketchtherootlocusandfindtherangeofKforstabilityfortheunityfeedbacksystemshowninFigureP8.3forthefollowingconditions:[Section:8.5]K{s2+1)a.G{s)=(.-1)(5+2)(.3)K{s2-2s+2)b.G(s)=s(s+l)(s+2)15.FortheunityfeedbacksystemofFigureP8.3,whereW-9)G(s)=sketchtherootlocusandtellforwhatvaluesofKthesystemisstableandunstable.[Section:8.5]12.SketchtherootlocusfortheunityfeedbacksystemshowninFigureP8.3,where2)GW--^.+3)(.+4)Givethevaluesforallcriticalpointsofinterest.Isthesystemeverunstable?Ifso,forwhatrangeofKl[Section:8.5]K(s+3)(.2+2)(.-2)(5+5)WileyPLUSCJJSJControlSolutionssketchtherootlocusandfindtherangeofKsuchthattherewillbeonlytworight-half-planepolesfortheclosed-loopsystem.[Section:8.5]16.FortheunityfeedbacksystemofFigureP8.3,whereG(.)=K.(.+6)(.+9)plottherootlocusandcalibrateyourplotforgain.Findallthecriticalpoints,suchasbreakaways,asymptotes,/w-axiscrossing,andsoforth.[Section:8.5]Problems17.GiventheunityfeedbacksystemofFigureP8.3,makeanaccurateplotoftherootlocusforthefollowing:20.FortheunityfeedbacksystemofFigurePS.3,where{)K(s-l){s-2)(s+l){s+2)Calibratethegainforatleastfourpointsforeachcase.Alsofindthebreakawaypoints,thejco-axiscrossing,andtherangeofgainforstabilityforeachcase.FindtheanglesofarrivalforParta.[Section:8.5]18.GiventherootlocusshowninFigureP8.7,[Section:8.5]a.Findthevalueofgainthatwillmakethesystemmarginallystable.b.Findthevalueofgainforwhichtheclosed-looptransferfunctionwillhaveapoleontherealaxisat-5.wileyPLUs>'i'iU*--»ControlSolutionsK(s2-2s+2)a.G(s)=(s+l)(s+2)b.G(s)=435s(s+3)(s+6)findthevaluesoforandKthatwillyieldasecondorderclosed-looppairofpolesat-1±/100.[Section:8.5]21.FortheunityfeedbacksystemofFigureP8.3,whereG{s)=K(s-l){s-2)s(s+i:sketchtherootlocusandfindthefollowing:[Section:8.5]a.Thebreakawayandbreak-inpointsb.Thejco-axiscrossingc.Therangeofgaintokeepthesystemstabled.ThevalueofKtoyieldastablesystemwithsecond-ordercomplexpoles,withadampingratioof0.522.FortheunityfeedbacksystemshowninFigureP8.3,whereG(s)=K(s+10)(s+20)(s+30)(s2-20s+200)dothefollowing:[Section:8.7]a.Sketchtherootlocus.19.GiventheunityfeedbacksystemofFigureP8.3,whereG(s)=K(s+1)s(s+2)(s+3){s+4)b.Findtherangeofgain,K,thatmakesthesystemstable.c.FindthevalueofKthatyieldsadampingratioof0.707forthesystem'sclosed-loopdominantpoles.d.FindthevalueofKthatyieldsclosed-loopcriticallydampeddominantpoles.23.ForthesystemofFigureP8.8(a),sketchtherootlocusandfindthefollowing:[Section:8.7]wileypwsa'.'jJfControlSolutionsa.Asymptotesdothefollowing:[Section:8.5]a.Sketchtherootlocus.b.Breakawaypointsc.TherangeofKforstabilityb.Findtheasymptotes.d.ThevalueofKtoyielda0.7dampingratioforthedominantsecond-orderpairc.Findthevalueofgainthatwillmakethesystemmarginallystable.d.Findthevalueofgainforwhichtheclosed-looptransferfunctionwillhaveapoleontherealaxisat-0.5.Toimprovestability,wedesiretherootlocustocrossthejco-axisat;5.5.Toaccomplishthis,theopen-loopfunctioniscascadedwithazero,asshowninFigureP8.8(b).436Chapter8^1—^./s:RootLocusTechniquesC(s)tCs+l)(.v+2)(.5+3)(s+4)2+25+5)(5+3)(5+4)a.Findthegain,K,toyielda1-secondpeaktimeifoneassumesasecond-orderapproximation.b.Checktheaccuracyofthe^TL^gsecond-orderapproximation^j^^)usingMATLABtosimulatethesystem.35.FortheunityfeedbacksystemshowninFigureP8.3,where£(5+6)234dothefollowing:[Section:8.7]findthevalueofasothatthesystemwillhaveasettlingtimeof4secondsforlargevaluesof£.Sketchtheresultingrootlocus.[Section:8.8]G(s)=d.Selectinteractivelythepointwheretherootlocuscrossesthe10%overshootline,andrespondwiththegainatthatpointaswellasalloftheclosed-looppolesatthatgain.e.Generatethestepresponseatthegainfor10%overshoot.£(5+2)5(5+6)(5+10)find£toyieldclosed-loopcomplexpoleswithadampingratioof0.55.Doesyoursolutionrequireajustificationofasecond-orderapproximation?Explain.[Section:8.7]437z>+105+26)(5+l)(5+a)design£andasothatthedominantcomplexpolesoftheclosed-loopfunctionhaveadampingratioof0.45andanaturalfrequencyof9/8rad/s.32.FortheunityfeedbacksystemshowninFigure8.3,whereKG(s)=5(5+3)(5+4)(5+8)G{s)=£(5+2)(5+3)(52+25+2)(5+4)(5+5)(5+6)dothefollowing:[Section:8.7]a.Sketchtherootlocus.b.Findthe/w-axiscrossingandthegain,£,atthecrossing.c.Findallbreakawayandbreak-inpoints.d.Findanglesofdeparturefromthecomplexpoles.dothefollowing:[Section:8.7]a.Sketchtherootlocus.b.Findthevalueof£thatwillyielda10%overshoot.c.Locateallnondominantpoles.Whatcanyousayaboutthesecond-orderapproximationthatledtoyouranswerinPartb?c.Findthegain,K,toyieldadampingratioof0.3fortheclosed-loopdominantpoles.36.RepeatPartsathroughcandeofProblem35for[Section:8.7]G(s)=£(5+8)5(5+2)(5+4)(5+6)d.Findtherangeof£thatyieldsastablesystem.33.RepeatProblem32usingMATLAB.Useoneprogramtodothefollowing:MATLABdyjJPa.Displayarootlocusandpause.b.Drawaclose-upoftherootlocuswheretheaxesgofrom—2to0ontherealaxisand—2to2ontheimaginaryaxis.c.Overlaythe10%overshootlineontheclose-uprootlocus.37.FortheunityfeedbacksystemshowninFigureP8.3,whereG(5)=K(5+3)(52+45+5)dothefollowing:[Section:8.7]a.Findthelocationoftheclosed-loopdominantpolesifthesystemisoperatingwith15%overshoot.b.FindthegainforParta.Chapter8438RootLocusTechniquesc.Findallotherclosed-looppoles.d.Evaluatetheaccuracyofyoursecond-orderapproximation.38.ForthesystemshowninFigureP8.ll,dothefollowing:[Section:8.7]?\9K(5+2)(5+3)C{s)s2-45+8(52+25+5)FIGUREP8.11a.Sketchtherootlocus.b.Findthe/aj-axiscrossingandthegain,K,atthecrossing.c.Findthereal-axisbreakawaytotwo-decimalplaceaccuracy.d.Findanglesofarrivaltothecomplexzeros.e.Findtheclosed-loopzeros.f.Findthegain,K,foraclosed-loopstepresponsewith30%overshoot.g.Discussthevalidityofyourapproximation.second-order39.SketchtherootlocusforthesystemofFigureP8.12andfindthefollowing:[Section:8.7]R(s)+-Ks(s+3)(5+7)(5+IC(s)b.Displayaclose-upoftherootlocuswheretheaxesgofrom—2to2ontherealaxisand—2to2ontheimaginaryaxis.c.Overlaythe0.707dampingratiolineontheclose-uprootlocus.d.Allowyoutoselectinteractivelythepointwheretherootlocuscrossesthe0.707dampingratioline,andrespondbydisplayingthegainatthatpointaswellasalloftheclosed-looppolesatthatgain.Theprogramwillthenallowyoutoselectinteractivelytheimaginary-axiscrossingandrespondwithadisplayofthegainatthatpointaswellasalloftheclosed-looppolesatthatgain.Finally,theprogramwillrepeattheevaluationforcriticallydampeddominantclosed-looppoles.e.Generatethestepresponseatthegainfor0.707dampingratio.41.GiventheunityfeedbacksystemshowninFigureP8.3,wherewileyPLusQ2SZ9ControlSolutionsK{s+z)G(s)=2s(s+20)dothefollowing:[Section:8.7]a.Ifz=6,findKsothatthedampedfrequencyofoscillationofthetransientresponseis10rad/s.b.ForthesystemofParta,whatstaticerrorconstant(finite)canbespecified?Whatisitsvalue?c.ThesystemistoberedesignedbychangingthevaluesofzandK.Ifthenewspecificationsare%OS=4.32%andTs=0.4s,findthenewvaluesofzandK.(5+30)2(5+205+200)42.GiventheunityfeedbacksystemshowninFigureP8.3,whereFIGUREP8.12a.Therangeofgaintoyieldstabilityb.Thevalueofgainthatwillyieldadampingratioof0.707forthesystem'sdominantpolesc.Thevalueofgainthatwillyieldclosed-looppolesthatarecriticallydamped40.RepeatProblem39usingMATLAB.Theprogramwilldothefollowinginone

program:a.Displayarootlocusandpause.MAi|ABG(s)=K[s+l)(s+3)(s+6Yfindthefollowing:[Section:8.7]a.Thevalueofgain,K,thatwillyieldasettlingtimeof4secondsb.Thevalueofgain,K,thatwillyieldacriticallydampedsystemProblems43943.LetG(s)K(s-1)(5+2)(5+3)ina.b.c.d.FigureP8.3.[Section:8.7].FindtherangeofKforclosed-loopstability.PlottherootlocusforK>0.PlottherootlocusforK<0.Assumingastepinput,whatvalueofKwillresultinthesmallestattainablesettlingtime?e.Calculatethesystem'sessforaunitstepinputassumingthevalueofKobtainedinPartd.f.MakeanapproximatehandsketchoftheunitstepresponseofthesystemifKhasthevalueobtainedinPartd.44.GiventheunityfeedbacksystemshowninFigureP8.3,whereKG(s)=5(5+1)(5+5)LoadactuatorInputposition+,^-(/0—.evaluatethepolesensitivityoftheclosed-loopsystemifthesecond-order,underdampedclosedlooppolesaresetfor[Section:8.10]a.£=0.591b.¢=0.456c.Whichofthetwopreviouscaseshasmoredesirablesensitivity?^Ks2+Is+12201Ramposition5Network0.00076.?.?+0.06signalS2Tachometer0.02,5i\>silionfecdbac45.FigureP8.13(a)showsarobotequippedtoper(b)formarcwelding.AsimilardevicecanbeconFIGUREP8.13a.Robotequippedtoperformarcwelding;figuredasasix-degrees-of-freedomindustrialrobotthatcantransferobjectsaccordingtoab.blockdiagramforswingmotionsystemdesiredprogram.AssumetheblockdiagramoftheswingmotionsystemshowninFigureP8.13(b).betweenthelow-rateprocessingofguidance(comIfK=64,510,makeasecond-orderapproximamands)andthehigh-rateprocessingofflightcontionandestimatethefollowing(Hardy,1967):trol(steeringinresponsetothecommands).Thefunctionperformedisbasicallythatofsmoothing.Aa.Dampingratiosimplifiedrepresentationofamaneuversmootherb.PercentovershootlinearizedforcoplanarmaneuversisshowninFigc.NaturalfrequencyureP8.14.Here6CB(S)isthecommandedbodyd.Settlingtimeangleascalculatedbyguidance,and6CB(S)isthedesiredbodyanglesenttoflightcontrolaftere.Peaktimesmoothing.3UsingthemethodsofSection8.8,doWhatcanyousayaboutyouroriginalsecond-orderthefollowing:approximation?46.Duringascent,theautomaticsteeringprogramaboardthespaceshuttleprovidestheinterface3Source:RockwellInternational.Chapter8440K,fltB(-v)RootLocusTechniques—i)®-a.ObtainG{s)andH(s)=Hi{s)Hz(s)intheblockdiagramrepresentationofthesystemofFigure8.15(6),whichshowsthattheactivevibrationabsorberactsasafeedbackelementtocontrolthestructure.(Hint:ThinkofKcandDcasproducinginputstothestructure.)b.Findthesteady-statepositionofthestructureforaforcedisturbanceinput.FIGUREP8.14Blockdiagramofsmoothera.SketcharootlocuswheretherootsvaryasafunctionofK3.b.Locatetheclosed-loopzeros.c.RepeatPartsaandbforarootlocussketchedasafunctionofK2.47.RepeatProblem3butsketchyourrootlocifornegativevaluesofK.[Section:8.9]48.Largestructuresinspace,suchasthespacestation,havetobestabilizedagainstunwantedvibration.Onemethodistouseanactivevibrationabsorbertocontrolthestructure,asshowninFigureP8.15(a)(Bruner,1992).Assumingthatallvaluesexceptthemassoftheactivevibrationabsorberareknownandareequaltounity,dothefollowing:PlantActivevibrationabsorber-HWH-wv-MMrc.Sketchtherootlocusforthesystemasafunctionofactivevibrationabsorbermass,Mc.49.FigureP8.16showstheblockdiagramoftheclosedloopcontrolofthelinearizedmagneticlevitationsystemdescribedinChapter2,Problem58.(Galvao,2003)./?(s)if7)+9xc-xaFIGUREP8.16LinearizedmagneticlevitationsystemblockAssumingA=1300andrj=860,drawtherootlocusandfindtherangeofKforclosed-loopstabilitywhen:a.G(s)=K;K{s+200)b.G(s)=s+100050.ThesimplifiedtransferfunctionmodelfromsteeringangleS(s)totiltangle(p(s)inabicycleisgivenbyG(s)=x(a)StructureInputforceF(s)+,2OutputstructureaccelerationC(s)Xr(?)=Xa(s)-X(sI"2S2-T}2diaoramdiagramD,%cmAam0isconstant.b.Sketchthesystem'srootlocusasafunctionofKj,assumingKp>0isconstant.dependsonthetrain'sdynamicsandthedriver,whoisanintegralpartofthefeedbackloop.InFigureP8.3,lettheinputbeR(s)=vrthereferencevelocity,andtheoutputC(s)=v,theactualvehiclevelocity.(Yamazaki,2008)showsthatsuchdynamicscanbemodeledbyG(s)—Gd{s)Gt(s)where_LGd(s)=h(1+-)"—jS+2representsthedriverdynamicswithh,K,andLparametersparticulartoeachindividualdriver.Weassumeherethat/1=0.003andL—l.ThetraindynamicsaregivenbyGM=kbfKptK)M(l+ke)s{TS+l)whereM=8000kg,thevehiclemass;ke=0.1theinertialcoefficient;^=142.5,thebrakegain;Kp=47.5,thepressuregain;r=1.2sec,atimeconstant;and/=0.24,thenormalfrictioncoefficient.a.MakearootlocusplotofthesystemasafunctionofthedriverparameterK.b.Discusswhythismodelmaynotbeanaccuratedescriptionofarealdriver-trainsituation.442Chapter8RootLocusTechniques56.Voltagedroopcontrolisatechniqueinwhichloadsaredrivenatlowervoltagesthanthoseprovidedbythesource.Ingeneral,thevoltageisdecreasedascurrentdemandincreasesintheload.Theadvantageofvoltagedroopisthatitresultsinlowersensitivitytoloadcurrentvariations.Voltagedroopcanbeappliedtothepowerdistributionofseveralgeneratorsandloadslinkedthroughadcbus.In(Karlsson,2003)generatorsandloadsaredrivenby3-phaseacpower,sotheyareinterfacedtothebusthroughac/dcconverters.Sinceeachoneoftheloadsworksindependently,afeedbacksystemshowninFigureP8.17isusedineachtorespondequallytobusvoltagevariations.GiventhatCs=Cr=8,000//JF,Lcabie=50/xH,Rcahie—0.06a,Zr=Rr=5CI,w/p=200rad/s,Gconv(s)=l,Vdc.ref=750V,andPref-ext=^dothefollowing:a.IfZreqistheparallelcombinationofRrandCnandGconv(s)=1,findGis)=YM=closed-loopdominantpoleswithadampingratiof=0.707(2)Thecoordinatesofthecorrespondingpointselectedontheroot-locus(3)Thevaluesofallclosed-looppolesatthatgain(4)Theoutputvoltagevs(t)forastepinputvoltagevdc_ref(t)=750u(t)voltsc.PlotthatstepresponseanduseMATLABCharacteristicstool(inthegraphwindow)tonoteonthecurvethefollowingparameters:(1)Theactualpercentovershootandthecorrespondingpeaktime,Tp(2)Therisetime,Tr,andthesettlingtime,Ts(3)Thefinalsteady-statevalueinvoltsJ^LDESIGNPROBLEMSb.WriteaMATLABM-filetoplotJ^IIMandcopythefullrootlocusCLU^Pforthatsystem,thenzoom-inthelocusbysettingthex-axis(real-axis)limitsto-150to0andthey-axis(imaginary-axis)limitsto—150to150.Copythatplot,too,andfindandrecordthefollowing:(1)Thegain,K,atwhichthesystemwouldhavecomplex-conjugate57.Adiskdriveisapositioncontrolsysteminwhicharead/writeheadispositionedoveramagneticdisk.Thesystemrespondstoacommandfromacomputertopositionitselfataparticulartrackonthedisk.AphysicalrepresentationofthesystemandablockdiagramareshowninFigureP8.18.a.FindKtoyieldasettlingtimeof0.1second.b.Whatistheresultingpercentovershoot?c.WhatistherangeofKthatkeepsthesystemstable?''rcl-CX^1AraWe+Av1sCsV,(s)443ProblemsExternallighLActualposition..\/[(t)flllX+A~XjgriM&SRetinallightr'fux(.v+10)3FIGUREP8.19SimplifiedblockdiagramofpupilservomechanismDesiredposition,.\/)(/)«±t^ControllerMotorandloadK(s+500)(s+800)20,000s(s+100)Xr\{s)59.AnactivesuspensionsystemforAMTRAKtrainshasbeenproposed.Thesystemusesapneumaticactuatorinparallelwiththepassivesuspensionsystem,asshowninFigureP8.20.Theforceoftheactuatorsubtractsfromtheforceappliedbytheground,asrepresentedbydisplacement,yg{t).Accelerationissensedbyanaccelerometer,andsignalsproportionaltoaccelerationandvelocityarefedbacktotheforceactuator.ThetransferfunctionrelatingaccelerationtogrounddisplacementisYm(s)Yg(s)mFIGUREP8.18Diskdrive:a.physicalrepresentation;b.blockdiagram58.AsimplifiedblockdiagramofahumanwileypmspupilservomechanismisshowninFigureftVi'J4»<P8.19.Theterme~018srepresentsatimecontrolsolutionsdelay.ThisfunctioncanbeapproximatedbywhatisknownasaPadeapproximation.Thisapproximationcantakeonmanyincreasinglycomplicatedforms,dependinguponthedegreeofaccuracyrequired.IfweusethePadeapproximatione-,=11+,-0.18s*+=s2(Ds+K)(Ca+M)s2+(C„+D)s+KAssumingthatM=1andD=K=C„=2,dothefollowing(Cho,1985):a.SketcharootlocusforthissystemasCavariesfromzerotoinfinity.b.FindthevalueofCathatwouldyieldadampingratioof0.69fortheclosed-looppoles.AccelerometerVMWv/„(f)=rr2!61.73J+11.11s+61.732Sincetheretinallightfluxisafunctionoftheopeningoftheiris,oscillationsintheamountofretinallightfluximplyoscillationsoftheiris(Guy,1976).Findthefollowing:'//////////AFIGUREP8.20Activesuspensionsystem(Reprintedwitha.ThevalueofKthatwillyieldoscillationspermissionofASME)b.Thefrequencyoftheseoscillationsc.ThesettlingtimefortheirisifKissuchthatthe60.ThepitchstabilizationloopforanF4-Emilitaryeyeisoperatingwith20%overshootaircraftisshowninFigureP8.21.,1Disturbance7V/=0Pitch,dynamicsTw(s)-+}pjtchoutputJ_V2Hw(s)FIGUREP8.22Pitchaxisattitudecontrolsystemutilizingmomentumwheelis)Problems445PremixedflamelotjetdiffusionflameDesiredmicrophoneoutput=0»*ControllerKLoudspeakerCombustorMicrophoneMicrophoneoutputG\(s)GAs)CffiW(b)FIGUREP8.23a.Combustorwithmicrophoneandloudspeaker(©1995IEEE);b.blockdiagram(©1995IEEE)showninFigureP8.23(a).AsimplifiedblockdiagramoftheactivecontrolsystemisshowninFigureP8.23(fr).Thetransferfunctionsaredependentuponmicrophoneandloudspeakerplacementandparametersaswellasflameplacementandparameters.Theforward-pathtransferfunctionisoftheformG(s)=KG1(s)Gc(s)Gm(s)_K(s+Zf)(s2+2K2(Qis+col)(s+Pf){s2-l^s+o)2)(s2+2£>«2S+&>|)wherethevaluesforthreeconfigurations(A,B,andC)aregiveninthefollowingtableforPartb{Annaswamy,1995).BPf88§z/15001500100010000.45-0.450)z45004500450010.5995-0.5-0.59959950.30.30.3350035003500W\0>1a.Drawtherootlocusforeachconfiguration.b.Forthoseconfigurationswherestableregionsofoperationarepossible,evaluatetherangeofgain,K,forstability.63.Windturbines,suchastheoneshowninFigureP8.24(a),arebecomingpopularasawayofgeneratingelectricity.Feedbackcontrolloopsaredesignedtocontroltheoutputpoweroftheturbine,givenaninputpowerdemand.Blade-pitchcontrolmaybeusedaspartofthecontrolloopforaconstant-speed,pitch-controlledwindturbine,asshowninFigureP8.24(fr).Thedrivetrain,consistingofthewindmillrotor,gearbox,andelectricgenerator(seeFigureP8.24(c)),ispartofthecontrolloop.Thetorquecreatedbythewinddrivestherotor.Thewindmillrotorisconnectedtothegeneratorthroughagearbox.ThetransferfunctionofthedrivetrainisPo(s)TR(S)=Gdl(s)3.92KLSsKHssKGN2s{N2KHSS(JRS2+KLSs)(JGS2[TelS+1]+KGs)+JRS2KLSS[{JGS2+KHSS){Tds+l)+KGs]}wherewherePP0({s)istheLaplacetransformoftheoutputpowerfromthegeneratorandTR(S)istheLaplacenowerfroi446Chapter8RootLocusTechniquesWindspeeddisturbanceControlsurfaceaerodynamicsDisturbanceAppliedmomentp;^PowerPitchmomentangledemanddemand,+V_ii(QU~PowerU^-tJPitchPitchSjrcontroller_Yactuator-1H8H-,inertiaItRotorgustsensitivityShafttorqueRotorpitch_^/V\KysensitivityIElectricalpowerDrivetrainPowertransducermHigh-speedshaftLow-speedshaftstiffnessKissRotorinertiaJRstiffnessKJJSSInertia/o.GeneratorgainKQ,Timeconstantxe{GearboxRatioA'(c)FIGUREP8.24a.WindturbinesgeneratingelectricitynearPalmSprings,Californiab.controlloopforaconstant-speedpitch-controlledwindturbine(©1998IEEE);c.drivetrain(©1998IEEE)Problemstransformoftheinputtorqueontherotor.SubstitutingtypicalnumericalvaluesintothetransferfunctionyieldsTR(S)=G(i,(s)(3.92)(12.6x106)(301x103){68S)N2s~{N2(301x103)(190,120^2+12.6x106)x(3.852[20xKT35+1]+6685)+190,12052(12.6xl06)x[(3.852+301x103)x(20xl0~35+1)+6685]}(Anderson,1998).Dothefollowingforthedrivetraindynamics,makinguseofanycomputationalaidsatyourdisposal:a.SketcharootlocusthatshowsthepolelocationsofGdt(s)fordifferentvaluesofgearratio,N.b.FindthevalueofNthatyieldsapairofcomplexpolesofGdt(s)withadampingratioof0.5.64.Aharddiskdrive(HDD)armhasanopen-loopunstabletransferfunction,mFls)It?whereX(s)isarmdisplacementandF(s)istheappliedforce(Yan,2003).Assumethearmhasaninertiaoflb=3x10kg-m2andthataleadcontroller,Gc(s)(usedtoimprovetransientresponseanddiscussedinChapter9),isplacedincascadetoyieldww=^=¾¾¾asinFigureP8.3.a.PlottherootlocusofthesystemasafunctionofK.b.FindthevalueofKthatwillresultindominantcomplexconjugatepoleswitha£=0.7dampingfactor.65.AroboticmanipulatortogetherwithacascadePIcontroller(usedtoimprovesteady-stateresponseanddiscussedinChapter9)hasatransferfunction(Low,2005)KA48,500G(s)='+5I52+2.895Assumetherobot'sjointwillbecontrolledintheconfigurationshowninFigureP8.3.a.FindthevalueofKithatwillresultiness=2%foraparabolicinput.447b.UsingthevalueofiC/foundinParta,plottherootlocusofthesystemasafunctionofKp,c.FindthevalueofKpthatwillresultinarealpoleat-1.Findthelocationoftheothertwopoles.66.Anactivesystemfortheelimina-GuiTooltionoffloorvibrationsduetogclljfhumanpresenceispresentedin(Nyawako,2009).Thesystemconsistsofasensorthatmeasuresthefloor'sverticalaccelerationandanactuatorthatchangesthefloorcharacteristics.Theopen-looptransmissionoftheparticularsetupusedcanbedescribedbyG(s)=KGa(s)F(s)Gm(s),wheretheactuator'stransferfunctionis,.10.26Gs^>-s2+11.3is+127.9Thefloor'sdynamiccharactristicscanbemodeledbyF(s)=s2+0.2287s+817.3Thesensor'stransferfunctionissGm(s)=5.181s+22.18andKisthegainofthecontroller.Thesystemoperationscanbedescribedbytheunity-gainfeedbackloopofFigureP8.3.a.UseMATLAB'sSISODesignTooltoobtaintherootlocusofthesystemintermsofK.b.FindtherangeofKforclosed-loopstability.c.Find,ifpossible,avalueofKthatwillyieldaclosed-loopoverdampedresponse.67.Manyimplantablemedicaldevicessuchaspacemakers,retinalimplants,deepbrainstimulators,andspinalcordstimulatorsarepoweredbyanin-bodybatterythatcanbechargedthroughatranscutaneousinductivedevice.Optimalbatterychargecanbeobtainedwhentheout-of-bodychargingcircuitisinresonancewiththeimplantedchargingcircuit(Baker,2007).Undercertainconditions,thecouplingofbothresonantcircuitscanbemodeledbythefeedbacksysteminFigureP8.3whereG(s)=^-2(52+2^„5+0>2)448Chapter8RootLocusTechniquesThegainKisrelatedtothemagneticcouplingbetweentheexternalandin-bodycircuits.Kmayvaryduetopositioning,skinconditions,andothervariations.Forthisproblemlet£=0.5andcon=1.a.FindtherangeofKforclosed-loopstability.b.Drawthecorrespondingrootlocus.68.ItisimportanttopreciselyJ^!!£fLcontroltheamountoforganicViil^PfertilizerappliedtoaspecificGuiToolcropareainordertoprovideMAUiMspecificnutrientquantitiesandtoavoidunnecessaryenvironmentalpollution.Aprecisedeliveryliquidmanuremachinehasbeendevelopedforthispurpose(Saeys,2008).Thesystemconsistsofapressurizedtank,avalve,andarheologicalflowsensor.Aftersimplification,thesystemcanbemodeledasaclosed-loopnegative-feedbacksystemwithaforward-pathtransferfunction^thattheidealizedmodelrepresentingjointflexibilityisshowninFigureP8.25.Theinputtothedriveisfromanactuatorandisappliedat$m.Theoutputisconnectedtoaloadat02.ThespringrepresentsthejointflexibilityandBmandBirepresenttheviscousdampingoftheactuatorandload,respectively.NowweinsertthedeviceintothefeedbackloopshowninFigureP8.26.ThefirstblockintheforwardpathisaPDcontroller,whichwewillstudyinthenextchapter.ThePDcontrollerisusedtoimprovetransientresponseperformance.2057.38K(s2-120s+4800)~s(s+13.17)(s2+120s+4800)consistingofanelectrohydraulicsystemincascadewiththegainofthemanureflowvalveandavariablegain,K.ThefeedbackpathiscomprisedofH(s)=10(s2-4s+5.333)>+10)(s2+4s+5.333;a.UsetheSISODesignToolinMATLABtoobtaintherootlocusofthesystem.b.UsetheSISODesignTooltofindtherangeofKforclosed-loopstability.c.Findthevalueofffthatwillresultinthesmallestsettlingtimeforthissystem.d.CalculatetheexpectedsettlingtimeforastepinputwiththevalueofKobtainedinPartc.e.Checkyourresultthroughastepresponsesimulation.FIGUREP8.25Idealizedmodelrepresentingjointflexibility(ReprintedwithpermissionofJohnWiley&Sons,Inc.)kKp+Kos*kPi(s)^0,FIGUREP8.26Jointflexibilitymodelinsertedinfeedbackloop.(ReprintedwithpermissionofJohnWiley&Sons,Inc.)UseMATLABtofindthegainKDtoyieldanapproximate5%overshootinthestepresponsegiventhefollowingparameters:Ja=10;B2=l;£=100;Jm=2;Bm=0.5;--=0.25;pj(s)=Jjs2+Bjs+k;andpm(s)=Jms2+Bms+k70.UsingLabVIEW,theControlDesignLabviEWandSimulationModule,andthe^O^)MathScriptRTModule,openand69.HarmonicdrivesareverypopularMATLABcustomizetheInteractiveRootLocusVIforuseinroboticmanipulators^QQ)fromtheExamplestoimplementthesysduetotheirlowbacklash,hightemofProblem69.Selecttheparametertorquetransmission,andcompactsizeKtomeettherequirementofProblem{Spong,2006).TheproblemofjointflexD69byvaryingthelocationoftheclosedibilityissometimesalimitingfactorinlooppolesontherootlocus.Besureachievinggoodperformance.ConsiderProblemsyourfrontpanelshowsthefollowing:(1)open-looptransferfunction,(2)closedlooptransferfunction,(3)rootlocus,(4)listofclosed-looppoles,and(5)stepresponse.71.AnautomaticregulatorisusedMATLABtocontrolthefieldcurrentofCM^Pathree-phasesynchronousmachinewithidenticalsymmetricalarmaturewindings{Stapleton,1964).Thepurposeoftheregulatoristomaintainthesystemvoltageconstantwithincertainlimits.Thetransferfunctionofthesynchronousmachineisrf«\-Mf)sm[]APm(s)M{s-Zl){s-z2)(s-Pl)(s-p2)(s-p3)whichrelatesthevariationofrotorangle,A5(s),tothechangeinthesynchronousmachine'sshaftpower,APm(s).Theclosed-loopsystemisshowninFigureP8.3,whereG(s)=KGc(s)Gsm(s)andKisagaintobeadjusted.Theregulator'stransferfunction,Gc(s),isgivenby:449correspondingpeaktime,Tpr(2)risetime,rr,(3)settlingtime,Tsrand(4)finalsteady-statevalue.PROGRESSIVEANALYSISANDDESIGNPROBLEMS72.High-speedrailpantograph.Problem21inChapter1discussestheactivecontrolofapantographmechanismforhigh-speedrailsystems.InProblem79,Chapter5,youfoundtheblockdiagramfortheactivepantographcontrolsystem.Useyourblockdiagramtodothefollowing(O'Connor,1997):a.Sketchtherootlocus.b.Assumeasecond-orderapproximationandfindthegain,K,toyieldaclosed-loopstepresponsethathas38%overshoot.c.EstimatesettlingtimeandpeaktimefortheresponsedesignedinPartb.d.Discussthevalidityapproximation.ofyoursecond-ordere.UseMATLABtoplottheclosedct,AT1ADMATLABloopstepresponsefortheATT^fcvalueofKfoundinPartb.Com-^lil^PparetheplottopredictedvaluesfoundinPartsbandc.e73.ControlofHIV/AIDS.InthelinearizedmodelofGc(s)=TChapter6,Problem68,whereviruslevelsareconTetrolledbymeansofRTIs,theopen-loopplantAssumethefollowingparametervalues:transferfunctionwasshowntobe-52Qs-10.3844-y(*)_fi=4,M=0.117,Te=0.5,31,2=-0.071±J6.25,^~UAs)~s3+2.6817^2+0.115+0.0126p1=-0.047,andp2i3=-0.262±j5.1,TheamountofRTIsdeliveredtothepatientwillautomaticallybecalculatedbyembeddingthepaanddothefollowing:tientinthecontrolloopasG(s)showninFigureWriteaMATLABM-filetoplottherootP6.20(Craig,2004).locusforthesystemandtofindthefollowing:a.Inthesimplestcase,G(s)=K,withK>0.Notethatthiseffectivelycreatesapositive-feedbacka.ThegainKatwhichthesystembecomesloopbecausethenegativesigninthenumeratorofmarginallystableP(s)cancelsoutwiththenegative-feedbacksignb.Theclosed-looppoles,p,andtransferinthesummingjunction.Usepositive-feedbackfunction,T(s),correspondingtoa16%rulestoplottherootlocusofthesystem.overshootb.NowassumeG(s)=—KwithK>0.Thesystemc.Thecoordinatesofthepointselectedisnowanegative-feedbacksystem.Usenegativeontheroot-locuscorrespondingto16%feed-backrulestodrawtherootlocus.Showthatovershootinthiscasethesystemwillbeclosed-loopstabled.Asimulationoftheunit-stepresponseforallK>Q,oftheclosed-loopsystemcorrespondMATLABingtoyour16%overshootdesign.Note74.Hybridvehicle.Inchapter7,FigureP7.34showsthe(39inyoursimulationthefollowingvalblockdiagramofthespeedcontrolofues:(1)actualpercentovershoot,(2)Chapter8450RootLocusTechniquesclosed-loopresponse.Finally,plotthetime-domainresponse,c(t),foraunit-stepinputusingMATLAB.Noteonthecurvetherisetime,Tr,andsettlingtime,Ts.anHEVrearrangedasaunityfeedbacksystem{Preitl,2007).LetthetransferfunctionofthespeedcontrollerbeKPscGsc{s)=KPsc+-^=K-ib.Nowaddanintegralgain,KIsc,tothecontroller,suchthatKIsc/KPsc=OA.UseMATLABtoplottherootlocusandfindtheproportionalgain,KPsc,thatcouldleadtoaclosed-loopunit-stepresponsewith10%overshoot.Plotc(t)usingMATLABandnoteonthecurvethepeaktime,Tp,andsettlingtime,Ts.Doestheresponseobtainedresembleasecond-orderunderdampedresponse?Kia.Assumefirstthatthespeedcontrollerisconfiguredasaproportionalcontroller(KIsc=0andGsc{s)=KPsc).Calculatetheforward-pathopen-looppoles.NowuseMATLABtoplotthesystem'srootlocusandfindthegain,KPscthatyieldsacriticallydampedCyberExplorationLaboratoryExperiment8.1ObjectiveToverifytheeffectofopen-looppolesandzerosupontheshapeoftherootlocus.Toverifytherootlocusasatoolforestimatingtheeffectofopen-loopgainuponthetransientresponseofclosed-loopsystems.MinimumRequiredSoftwarePackagesMATLABandtheControlSystemToolboxPrelab1.Sketchtwopossibilitiesfortherootlocusofaunitynegative-feedbacksystemwiththeopen-looppole-zeroconfigurationshowninFigureP8.27.OFIGUREP8.27K{s+1.5)2.Iftheopen-loopsystemofPrelab1isG(s)=-,'CN,''nX,estimatethes(s+0.5)(5+10)percentovershootatthefollowingvaluesofgain,K:20,50,85,200,and700.Lab1.UsingMatlab'sSISODesignTool,setupanegativeunityfeedbacksystemwithtoproducearootlocus.Forconvenience,setupthezeroG(s)=*(S+6)5(5+0.5)(5+10)CyberExplorationLaboratoryat—6usingSISODesignTool'scompensatorfunctionbysimplydraggingazeroto-6ontheresultingrootlocus.Printtherootlocusforthezeroat—6.Movethezerotothefollowinglocationsandprintoutarootlocusateachlocation:—2,-1.5,-1.37,and-1.2.2.UsingMatlab'sSISODesignTool,setupanegativeunityfeedbacksystemwithK{s+1.5)G(s)=toproducearootlocus.OpentheLTIViewerforSISOs(s+0.5){s+10)DesignTooltoshowstepresponses.UsingthevaluesofKspecifiedinPrelab2,recordthepercentovershootandsettlingtimeandprinttherootlociandstepresponseforeachvalueofK.Postlab1.DiscussyourfindingsfromPrelab1andLab1.Whatconclusionscanyoudraw?2.MakeatablecomparingpercentovershootandsettlingtimefromyourcalculationsinPrelab2andyourexperimentalvaluesfoundinLab2.Discussthereasonsforanydiscrepancies.Whatconclusionscanyoudraw?Experiment8.2ObjectiveTouseMATLABtodesignthegainofacontrollerviarootlocus.MinimumRequiredSoftwarePackageMATLABwiththeControlSystemsToolbox.PrelabTheopen-loopsystemdynamicsmodelfortheNASAeight-axisAdvancedResearchManipulatorII(ARMII)electromechanicalshoulderjoint/link,actuatedbyanarmature-controlleddcservomotorisshowninFigureP8.28.TheARMIIshoulderjointconstantparametersareKa=12,L=0.006H,R=1.4O,Kb=0.00867,n=200,Km=4.375,J=Jm+JL/n2,D=D,„+DJn2,JL=1,DL=0.5,Jm=0.00844,andDm=0.00013(Craig,2005),(Nyzen,1999),(Williams,1994).a.Obtaintheequivalentopen-looptransferfunction,G(s)=.ref{s)b.Theloopistobeclosedbycascadingacontroller,Gc(s)=KDs+Kp,withG(s)intheforwardpathforminganequivalentforward-transferfunction,Ge(s)=Gc(s)G(s).ParametersofGc(s)willbeusedtodesignadesiredtransientperformance.Theinputtotheclosed-loopsystemisavoltage,V/(s),representingthedesiredangulardisplacementoftheroboticjointwitharatioof1voltequals1radian.Theoutputoftheclosed-loopsystemistheactualangulardisplacementofthejoint,0L(s).Anencoderinthefeedbackpath,Ke,convertstheactualjointdisplacementtoavoltagewitharatioof1radianequals1volt.Drawtheclosedloopsystemshowingalltransferfunctions.c.Findtheclosed-looptransferfunction.Armaturecircui&«v,motordynamicsAmp+K,j^A1K(Ls+R)(Js+D)Gears&ntegratormsKhIackenifFIGUREP8.28VOpen-loopmodelforARM11451452Chapter8RootLocusTechniquesLabLet—-=4anduseMATLABtodesignthevalueofKDtoyieldastepresponsewithamaximumpercentovershootof0.2%.Postlab1.Discussthesuccessofyourdesign.2.Isthesteady-stateerrorwhatyouwouldexpect?Givereasonsforyouranswer.Experiment8.3ObjectiveTouseLabVIEWtodesignthegainofacontrollerviarootlocus.MinimumRequiredSoftwarePackageLabVIEWwiththeControlDesignandSimulationModule,andtheMathScriptRTModule.PrelabLabCompletethePrelabtoExperiment8.2ifyouhavenotalreadydoneso.Let——=4.UseLabVIEWtoopenandcustomizetheInteractiveRootLocusVIfromtheExamplesinordertoimplementadesignofKDtoyieldastepresponsewithamaximumpercentovershootof0.2%.Useahybridgraphical/MathScriptapproach.Postlab1.Discussthesuccessofyourdesign.2.Isthesteady-stateerrorwhatyouwouldexpect?Givereasonsforyouranswer.£Bibliography])Anderson,C.G.,Richon,J.-B.,andCampbell,T.J.AnAerodynamicMoment-ControlledSurfaceforGustLoadAlleviationonWindTurbineRotors.IEEETransactionsonControlSystemTechnology,vol.6,no.5,September1998,pp.577-595.Annaswamy,A.M.,andGhonien,A.F.ActiveControlinCombustionSystems.IEEEControlSystems,December1995,pp.49-63.Astrom,K.,Klein,R.E.,andLennartsson,A.BicycleDynamicsandControl.IEEEControlSystems,August2005,pp.26-47.Baker,M.W,andSarpeshkar,R.FeedbackAnalysisandDesignofRFPowerLinksforLowPowerBionicSystems.IEEETransactionsonBiomedical,CircuitsandSystems,vol.1,2007,pp.28-38.Bruner,A.M.,Belvin,WK.,Horta,L.G,andJuang,J.ActiveVibrationAbsorberfortheCSIEvolutionaryModel:DesignandExperimentalResults.JournalofGuidance,Control,andDynamics,vol.15,no.5,September-October1992,pp.1253-1257.Cavallo,A.,DeMaria,G,andVerde,L.RobustFlightControlSystems:AParameterSpaceDesign.JournalofGuidance,Control,andDynamics,vol.15,no.5,September-October1992,pp.1207-1215.Cho,D,andHedrick,J.K.PneumaticActuatorsforVehicleActiveSuspensionApplications.JournalofDynamicSystems,Measurement,andControl,March1985,pp.67-72.Craig,I.K.,Xia,X.,andVenter,J.W.,IntroducingHIV/AIDSEducationintotheElectricalEngineeringCurriculumattheUniversityofPretoria.IEEETransactionsonEducation,vol.47,no.1,February2004,pp.65-73.BibliographyCraig,J.J,IntroductiontoRobotics.MechanicsandControl,3ded.PrenticeHall,UpperSaddleRiver,NJ,2005.Dorf,R.C.ModernControlSystems,5thed.Addison-Wesley,Reading,MA.,1989.Evans,W.R.ControlSystemSynthesisbyRootLocusMethod.AIEETransactions,vol.69,1950,pp.66-69.Evans,W.R.GraphicalAnalysisofControlSystems.AIEETransactions,vol.67,1948,pp.547-551.Franklin,G.F,Powell,J.D.,andEmami-Naeini,A.FeedbackControlofDynamicSystems,2ded.Addison-Wesley,Reading,MA.,1991.Galvao,K.H.R.,Yoneyama,X,anddeAraiijo,FM.U.ASimpleTechniqueforIdentifyingaLinearizedModelforaDidacticMagneticLevitationSystem.IEEETransactionsonEducation,vol.46,no.1,February2003,pp.22-25.Guy,W-,TheHumanPupilServomechanism.ComputersinEducationDivisionofASEE,ApplicationNoteNo.45,1976.Hardy,H.L.Multi-LoopServoControlsProgrammedRobot.InstrumentsandControlSystems,June1967,pp.105-111.Hollot,C.V.,Misra,V.,Towsley,D.,andGong,W.AControlTheoreticAnalysisofRED.ProceedingsofIEEEINFOCOM,2001,pp.1510-1519.Johnson,H.,etal.UnmannedFree-SwimmingSubmersible(UFSS)SystemDescription.NRLMemorandumReport4393.NavalResearchLaboratory,Washington,D.C.,1980.Karlsson,P.,andSvesson,J.DCBusVoltageControlforaDistributedPowerSystem,IEEETrans,onPowerElectronics,vol.18,no.6,2003,pp.1405-1412.Khammash,M.,andEl-Samad,H.SystemsBiology:FromPhysiologytoGeneRegulation.IEEEControlSystems,August2004,pp.62-76.Kuo,B.C.AutomaticControlSystems,6thed.PrenticeHall,UpperSaddleRiver,NJ,1991.Lam,CS.,Wong,M.G,andHan,Y.D.StabilityStudyonDynamicVoltageRestorer(DVR).PowerElectronicsSystemsandApplications2004;ProceedingsoftheFirstInternationalConferenceonPowerElectronics,2004,pp.66-71.Low,K.H.,Wang,H.,Liew,K.M.,andCai,YModelingandMotionControlofRoboticHandforTelemanipulationApplication.InternationalJournalofSoftwareEngineeringandKnowledgeEngineering,vol.15,2005,pp.147-152.Nyawako,D,andReynolds,P.Response-DependentVelocityFeedbackControlforMitigationofHuman-InducedFloorVibrations,SmartMaterialsandStructures,vol.18,IOPPublishingLtd.,UK,2009,pp.1-13.Nyzen,R.J.AnalysisandControlofanEight-Degree-of-FreedomManipulator,OhioUniversityMastersThesis,MechanicalEngineering,Dr.RobertL.WilliamsII,advisor,August1999.O'Connor,D.N,Eppinger,S.D,Seering,WP.,andWormly,D.N.ActiveControlofaHighSpeedPantograph.JournalofDynamicSystems,Measurements,andControl,vol.119,March1997,pp.1^.Piper,G.E.,andKwatny,H.G.ComplicatedDynamicsinSpacecraftAttitudeControlSystems.JournalofGuidance,Control,andDynamics,vol.15,no.4,July-August1992,pp.825-831.Preitl,Z.,Bauer,P.,andBokor,J.ASimpleControlSolutionforTractionMotorUsedinHybridVehicles.FourthInternationalSymposiumonAppliedComputationalIntelligenceandInformatics.IEEE,2007.Saeys,W,Deblander,X,Ramon,H.,andAnthonis,J.High-PerformanceFlowControlforSite-SpecificApplicationofLiquidManure,BiosystemsEngineering,vol.99,2008,pp.22-34.Spong,M.,Hutchinson,S.,andVidyasagar,M.RobotModelingandControl.JohnWiley&Sons,Hoboken,NJ,2006.Chapter8RootLocusTechniquesStapleton,C.A.Root-LocusStudyofSynchronous-MachineRegulation.IEEProceedings,vol.Ill,issue4,1964,pp.761-768.Unyelioglu,K.A.,Hatopoglu,C,andOzgiiner,U.DesignandStabilityAnalysisofaLaneFollowingController.IEEETransactionsonControlSystemsTechnology,vol.5,1997,pp.127-134.Williams,R.L.II.LocalPerformanceOptimizationforaClassofRedundantEight-Degreeof-FreedomManipulators.NASATechnicalPaper3417,NASALangleyResearchCenter,HamptonVA,March1994.Yamazaki,H.,Marumo,Y,Iizuka,Y,andTsunashima,H.DriverModelSimulationforRailwayBrakeSystems,FourthIETInt.Conf.onRailwayConditionMonitoring,2008.Yan,T,andLin,R.ExperimentalModelingandCompensationofPivotNonlinearityinHardDiskDrives.IEEETransactionsonMagnetics,vol.39,2003,pp.1064-1069.DesignviaRootLocusI9£ChapterLearningOutcomesJAftercompletingthischapterthestudentwillbeableto:•Usetherootlocustodesigncascadecompensatorstoimprovethesteady-stateerror(Sections9.1-9.2)•Usetherootlocustodesigncascadecompensatorstoimprovethetransientresponse(Section9.3)•Usetherootlocustodesigncascadecompensatorstoimproveboththesteady-stateerrorandthetransientresponse(Section9.4)•Usetherootlocustodesignfeedbackcompensatorstoimprovethetransientresponse(Section9.5)•Realizethedesignedcompensatorsphysically(Section9.6)(caseStudyLearningOutcomes^Youwillbeabletodemonstrateyourknowledgeofthechapterobjectiveswithcasestudiesasfollows:•Giventheantennaazimuthpositioncontrolsystemshownonthefrontendpapers,youwillbeabletodesignacascadecompensatortomeettransientresponseandsteady-stateerrorspecifications.•GiventhepitchorheadingcontrolsystemfortheUFSSvehicleshownonthebackendpapers,youwillbeabletodesignacascadeorfeedbackcompensatortomeettransientresponsespecifications.455Chapter9DesignviaRootLocusIntroductionInChapter8,wesawthattherootlocusgraphicallydisplayedbothtransientresponseandstabilityinformation.Thelocuscanbesketchedquicklytogetageneralideaofthechangesintransientresponsegeneratedbychangesingain.Specificpointsonthelocusalsocanbefoundaccuratelytogivequantitativedesigninformation.Therootlocustypicallyallowsustochoosetheproperloopgaintomeetatransientresponsespecification.Asthegainisvaried,wemovethroughdifferentregionsofresponse.Settingthegainataparticularvalueyieldsthetransientresponsedictatedbythepolesatthatpointontherootlocus.Thus,wearelimitedtothoseresponsesthatexistalongtherootlocus.ImprovingTransientResponseFlexibilityinthedesignofadesiredtransientresponsecanbeincreasedifwecandesignfortransientresponsesthatarenotontherootlocus.Figure9.1(a)illustratestheconcept.Assumethatthedesiredtransientresponse,definedbypercentovershootandsettlingtime,isrepresentedbypointB.Unfortunately,onthecurrentrootlocusatthespecifiedpercentovershoot,weonlycanobtainthesettlingtimerepresentedbypointAafterasimplegainadjustment.Thus,ourgoalistospeeduptheresponseatAtothatofB,withoutaffectingthepercentovershoot.Thisincreaseinspeedcannotbeaccomplishedbyasimplegainadjustment,sincepointBdoesnotlieontherootlocus.Figure9.1(b)illustratestheimprovementinthetransientresponseweseek:Thefasterresponsehasthesamepercentovershootastheslowerresponse.s-planeXXX-X=Closed-looppoleX=Open-looppole(a)PolesatBFIGURE9.1a.Samplerootlocus,showingpossibledesignpointviagainadjustment(A)anddesireddesignpointthatcannotbemetviasimplegainadjustment(B);b.responsesfrompolesatAandBPolesatA9.1IntroductionOnewaytosolveourproblemistoreplacetheexistingsystemwithasystemwhoserootlocusintersectsthedesireddesignpoint,B.Unfortunately,thisreplacementisexpensiveandcounterproductive.Mostsystemsarechosenforcharacteristicsotherthantransientresponse.Forexample,anelevatorcageandmotorarechosenforspeedandpower.Componentschosenfortheirtransientresponsemaynotnecessarilymeet,forexample,powerrequirements.Ratherthanchangetheexistingsystem,weaugment,orcompensate,thesystemwithadditionalpolesandzeros,sothatthecompensatedsystemhasarootlocusthatgoesthroughthedesiredpolelocationforsomevalueofgain.Oneoftheadvantagesofcompensatingasysteminthiswayisthatadditionalpolesandzeroscanbeaddedatthelow-powerendofthesystembeforetheplant.Additionofcompensatingpolesandzerosneednotinterferewiththepoweroutputrequirementsofthesystemorpresentadditionalloadordesignproblems.Thecompensatingpolesandzeroscanbegeneratedwithapassiveoranactivenetwork.Apossibledisadvantageofcompensatingasystemwithadditionalopen-looppolesandzerosisthatthesystemordercanincrease,withasubsequenteffectonthedesiredresponse.InChapters4and8,wediscussedtheeffectofadditionalclosedlooppolesandzerosonthetransientresponse.Atthebeginningofthedesignprocessdiscussedinthischapter,wedeterminetheproperlocationofadditionalopen-looppolesandzerostoyieldthedesiredsecond-orderclosed-looppoles.However,wedonotknowthelocationofthehigher-orderclosed-looppolesuntiltheendofthedesign.Thus,weshouldevaluatethetransientresponsethroughsimulationafterthedesigniscompletetobesuretherequirementshavebeenmet.InChapter12,whenwediscussstate-spacedesign,thedisadvantageoffindingthelocationofhigher-orderclosed-looppolesafterthedesignwillbeeliminatedbytechniquesthatallowthedesignertospecifyanddesignthelocationofalltheclosedlooppolesatthebeginningofthedesignprocess.Onemethodofcompensatingfortransientresponsethatwillbediscussedlateristoinsertadifferentiatorintheforwardpathinparallelwiththegain.Wecanvisualizetheoperationofthedifferentiatorwiththefollowingexample.Assumingapositioncontrolwithastepinput,wenotethattheerrorundergoesaninitiallargechange.Differentiatingthisrapidchangeyieldsalargesignalthatdrivestheplant.Theoutputfromthedifferentiatorismuchlargerthantheoutputfromthepuregain.Thislarge,initialinputtotheplantproducesafasterresponse.Astheerrorapproachesitsfinalvalue,itsderivativeapproacheszero,andtheoutputfromthedifferentiatorbecomesnegligiblecomparedtotheoutputfromthegain.ImprovingSteady-StateErrorCompensatorsarenotonlyusedtoimprovethetransientresponseofasystem;theyarealsousedindependentlytoimprovethesteady-stateerrorcharacteristics.Previously,whenthesystemgainwasadjustedtomeetthetransientresponsespecification,steady-stateerrorperformancedeteriorated,sinceboththetransientresponseandthestaticerrorconstantwererelatedtothegain.Thehigherthegain,thesmallerthesteady-stateerror,butthelargerthepercentovershoot.Ontheotherhand,reducinggaintoreduceovershootincreasedthesteady-stateerror.Ifweusedynamiccompensators,compensatingnetworkscanbedesignedthatwillallowustomeettransientandsteady-stateerrorspecificationssimultaneously.1WenolongerTheworddynamicdescribescompensatorswithnoninstantaneoustransientresponse.ThetransferfunctionsofsuchcompensatorsarefunctionsoftheLaplacevariable,s,ratherthanpuregain.Chapter9DesignviaRootLocusCascadecompensatorm+>6dyy*amOriginalcontrollerPlantG2{s)G3(s)mI(a)mtM.OriginalcontrollerPlantC,(s)Gz(s)C(s)—iFeedbackcompensatorFIGURE9.2Compensationtechniques:a.cascade;b.feedbackffJsrl(b)needtocompromisebetweentransientresponseandsteady-stateerror,aslongasthesystemoperatesinitslinearrange.InChapter7,welearnedthatsteady-stateerrorcanbeimprovedbyaddinganopen-looppoleattheoriginintheforwardpath,thusincreasingthesystemtypeanddrivingtheassociatedsteady-stateerrortozero.Thisadditionalpoleattheoriginrequiresanintegratorforitsrealization.Insummary,then,transientresponseisimprovedwiththeadditionofdifferentiation,andsteady-stateerrorisimprovedwiththeadditionofintegrationintheforwardpath.ConfigurationsTwoconfigurationsofcompensationarecoveredinthischapter:cascadecompensationandfeedbackcompensation.ThesemethodsaremodeledinFigure9.2.Withcascadecompensation,thecompensatingnetwork,Gi(s),isplacedatthelow-powerendoftheforwardpathincascadewiththeplant.Iffeedbackcompensationisused,thecompensator,H[(s),isplacedinthefeedbackpath.Bothmethodschangetheopen-looppolesandzeros,therebycreatinganewrootlocusthatgoesthroughthedesiredclosed-looppolelocation.CompensatorsCompensatorsthatusepureintegrationforimprovingsteady-stateerrororpuredifferentiationforimprovingtransientresponsearedefinedasidealcompensators.Idealcompensatorsmustbeimplementedwithactivenetworks,which,inthecaseofelectricnetworks,requiretheuseofactiveamplifiersandpossibleadditionalpowersources.Anadvantageofidealintegralcompensatorsisthatsteady-stateerrorisreducedtozero.Electromechanicalidealcompensators,suchastachometers,areoftenusedtoimprovetransientresponse,sincetheycanbeconvenientlyinterfacedwiththeplant.Otherdesigntechniquesthatprecludetheuseofactivedevicesforcompensationcanbeadopted.Thesecompensators,whichcanbeimplementedwithpassiveelementssuchasresistorsandcapacitors,donotusepureintegrationanddifferentiationandarenotidealcompensators.Advantagesofpassivenetworksarethatthey9.2ImprovingSteady-StateErrorviaCascadeCompensationarelessexpensiveanddonotrequireadditionalpowersourcesfortheiroperation.Theirdisadvantageisthatthesteady-stateerrorisnotdriventozeroincaseswhereidealcompensatorsyieldzeroerror.Thus,thechoicebetweenanactiveorapassivecompensatorrevolvesaroundcost,weight,desiredperformance,transferfunction,andtheinterfacebetweenthecompensatorandotherhardware.InSections9.2,9.3,and9.4,wefirstdiscusscascadecompensatordesignusingidealcompensationandfollowwithcascadecompensationusingcompensatorsthatarenotimplementedwithpureintegrationanddifferentiation.(9.2ImprovingSteady-StateErrorviaCascadeCompensationInthissection,wediscusstwowaystoimprovethesteady-stateerrorofafeedbackcontrolsystemusingcascadecompensation.Oneobjectiveofthisdesignistoimprovethesteady-stateerrorwithoutappreciablyaffectingthetransientresponse.Thefirsttechniqueisidealintegralcompensation,whichusesapureintegratortoplaceanopen-loop,forward-pathpoleattheorigin,thusincreasingthesystemtypeandreducingtheerrortozero.Thesecondtechniquedoesnotusepureintegration.Thiscompensationtechniqueplacesthepoleneartheorigin,andalthoughitdoesnotdrivethesteady-stateerrortozero,itdoesyieldameasurablereductioninsteady-stateerror.Whilethefirsttechniquereducesthesteady-stateerrortozero,thecompensatormustbeimplementedwithactivenetworks,suchasamplifiers.Thesecondtechnique,althoughitdoesnotreducetheerrortozero,doeshavetheadvantagethatitcanbeimplementedwithalessexpensivepassivenetworkthatdoesnotrequireadditionalpowersources.Thenamesassociatedwiththecompensatorscomeeitherfromthemethodofimplementingthecompensatororfromthecompensator'scharacteristics.Systemsthatfeedtheerrorforwardtotheplantarecalledproportionalcontrolsystems.Systemsthatfeedtheintegraloftheerrortotheplantarecalledintegralcontrolsystems.Finally,systemsthatfeedthederivativeoftheerrortotheplantarecalledderivativecontrolsystems.Thus,inthissectionwecalltheidealintegralcompensatoraproportional-plus-integral(PI)controller,sincetheimplementation,aswewillsee,consistsoffeedingtheerror(proportional)plustheintegraloftheerrorforwardtotheplant.Thesecondtechniqueuseswhatwecallalagcompensator.Thenameofthiscompensatorcomesfromitsfrequencyresponsecharacteristics,whichwillbediscussedinChapter11.Thus,weusethenamePIcontrollerinterchangeablywithidealintegralcompensator,andweusethenamelagcompensatorwhenthecascadecompensatordoesnotemploypureintegration.IdealIntegralCompensation(PI)Steady-stateerrorcanbeimprovedbyplacinganopen-looppoleattheorigin,becausethisincreasesthesystemtypebyone.Forexample,aType0systemrespondingtoastepinputwithafiniteerrorrespondswithzeroerrorifthesystemtypeisincreasedbyone.Activecircuitscanbeusedtoplacepolesattheorigin.Laterinthischapter,weshowhowtobuildanintegratorwithactiveelectroniccircuits.Toseehowtoimprovethesteady-stateerrorwithoutaffectingthetransientresponse,lookatFigure9.3(a).HerewehaveasystemoperatingwithadesirableChapter9DesignviaRootLocusmi(9)yy-GainPlantKG{s)C(s)R(s)+fimYTCompensatorPlantK—»>G(s)3KC(s)\s-plane-e]-e2-e3-9,-02-^3=(2^+1)180°(a)CompensatorI*Plant§K^G(s)-0,-02-^3-Qpc0^(2^+1)180°C(s)+9zc=&k+5)180°mFIGURE9.3PoleatAisa.ontherootlocuswithoutcompensator;b.notontherootlocuswithcompensatorpoleadded;c,approximatelyontherootlocuswithcompensatorpoleandzeroaddedtransientresponsegeneratedbytheclosed-looppolesatAIfweaddapoleattheorigintoincreasethesystemtype,theangularcontributionoftheopen-looppolesatpointAisnolonger180°,andtherootlocusnolongergoesthroughpointA,asshowninFigure9.3(6).Tosolvetheproblem,wealsoaddazeroclosetothepoleattheorigin,asshowninFigure9.3(c).Nowtheangularcontributionofthecompensatorzeroandcompensatorpolecancelout,pointAisstillontherootlocus,andthesystemtypehasbeenincreased.Furthermore,therequiredgainatthedominantpoleisaboutthesameas9.2ImprovingSteady-StateErrorviaCascadeCompensation461beforecompensation,sincetheratiooflengthsfromthecompensatorpoleandthecompensatorzeroisapproximatelyunity.Thus,wehaveimprovedthesteady-stateerrorwithoutappreciablyaffectingthetransientresponse.Acompensatorwithapoleattheoriginandazeroclosetothepoleiscalledanidealintegralcompensator.Intheexamplethatfollows,wedemonstratetheeffectofidealintegralcompensation.Anopen-looppolewillbeplacedattheorigintoincreasethesystemtypeanddrivethesteady-stateerrortozero.Anopen-loopzerowillbeplacedveryclosetotheopen-looppoleattheoriginsothattheoriginalclosed-looppolesontheoriginalrootlocusstillremainatapproximatelythesamepointsonthecompensatedrootlocus.Example9.1EffectofanIdealIntegralCompensatorPROBLEM:GiventhesystemofFigure9.4(a),operatingwithadampingratioof0.174,showthattheadditionoftheidealintegralcompensatorshowninFigure9.4(b)reducesthesteady-stateerrortozeroforastepinputwithoutappreciablyaffectingtransientresponse.Thecompensatingnetworkischosenwithapoleattheorigintoincreasethesystemtypeandazeroat-0.1,closetothecompensatorpole,sothattheangularcontributionofthecompensatorevaluatedattheoriginal,dominant,second-orderpolesisapproximatelyzero.Thus,theoriginal,dominant,second-orderclosed-looppolesarestillapproximatelyonthenewrootlocus.SOLUTION:Wefirstanalyzetheuncompensatedsystemanddeterminethelocationofthedominant,second-orderpoles.Nextweevaluatetheuncompensatedsteady-stateerrorforaunitstepinput.TherootlocusfortheuncompensatedsystemisshowninFigure9.5.Adampingratioof0.174isrepresentedbyaradiallinedrawnonthes-planeat100.02°.SearchingalongthislinewiththerootlocusprogramdiscussedinAppendixHatwww.wiley.com/college/nise,wefindthatthedominantpolesare0.694±/3.926foragain,K,of164.6.Nowlookforthethirdpoleontherootlocusbeyond—10ontherealaxis.Usingtherootlocusprogramandsearchingforthesamegainasthatofthedominantpair,K=164.6,wefindthatthethirdpoleisapproximatelyat-11.61.ThisgainyieldsKp=8.23.Hence,thesteady-stateerrorise(oo)=m+*r1=0.1081+8.231+KDxm,y(9.1)GainPlantK1(s+l)(s+2)(s+l0)-1C(s)ia)CompensatorR(s)t(9\E{s\Plant1K(s+0A)—^s(5+1)(S+2)(A+10)(b)C(sjFIGURE9.4Closed-loopsystemforExample9.1:a.beforecompensation;b.afteridealintegralcompensation462Chapter9DesignviaRootLocus¢-=0.174-0.694+y'3.926AT=164.6s-plane100.02°•^-K-11.61*-101_-4-6X=Closed-looppoleX=Open-looppoleFIGURE9.5RootlocusforuncompensatedsystemofFigure9.4(A)Addinganidealintegralcompensatorwithazeroat—0.1,asshowninFigure9.4(b),weobtaintherootlocusshowninFigure9.6.Thedominantsecond-orderpoles,thethirdpolebeyond—10,andthegainareapproximatelythesameasfortheuncompensatedsystem.Anothersectionofthecompensatedrootlocusisbetweentheoriginand—0.1.Searchingthisregionforthesamegainatthedominantpair,K~158.2,thefourthclosed-looppoleisfoundat-0.0902,closeC=0.174-0.678+./3.837K=158.2-o<x--11.55-10-6-4•I-j2X=Closed-looppoleX=Open-looppole-./4FIGURE9.6RootlocusforcompensatedsystemofFigure9.4(b)Fourthclosed-looppoleat-0.09029.2ImprovingSteady-StateErrorviaCascadeCompensationIdealintegralcompensatedUncompensated10Time(seconds)1520FIGURE9.7IdealintegralcompensatedsystemresponseandtheuncompensatedsystemresponseofExample9.1enoughtothezerotocausepole-zerocancellation.Thus,thecompensatedsystem'sclosed-looppolesandgainareapproximatelythesameastheuncompensatedsystem'sclosed-looppolesandgain,whichindicatesthatthetransientresponseofthecompensatedsystemisaboutthesameastheuncompensatedsystem.However,thecompensatedsystem,withitspoleattheorigin,isaType1system;unliketheuncompensatedsystem,itwillrespondtoastepinputwithzeroerror.Figure9.7comparestheuncompensatedresponsewiththeidealintegralcompensatedresponse.Thestepresponseoftheidealintegralcompensatedsystemapproachesunityinthesteadystate,whiletheuncompensatedsystemapproaches0.892.Thus,theidealintegralcompensatedsystemrespondswithzerosteady-stateerror.Thetransientresponseofboththeuncompensatedandtheidealintegralcompensatedsystemsisthesameuptoapproximately3seconds.Afterthattimetheintegratorinthecompensator,showninFigure9.4(b),slowlycompensatesfortheerroruntilzeroerrorisfinallyreached.Thesimulationshowsthatittakes18secondsforthecompensatedsystemtoreachtowithin±2%ofthefinalvalueofunity,whiletheuncompensatedsystemtakesabout6secondstosettletowithin±2%ofitsfinalvalueof0.892.Thecompensationatfirstmayappeartoyielddeteriorationinthesettlingtime.However,noticethatthecompensatedsystemreachestheuncompensatedsystem'sfinalvalueinaboutthesametime.Theremainingtimeisusedtoimprovethesteady-stateerroroverthatoftheuncompensatedsystem.AmethodofimplementinganidealintegralcompensatorisshowninFigure9.8.ThecompensatingnetworkprecedesG(s)andisanidealintegralcompensatorsinceKilsGc(s)=Ki+—=(9.2)Integral(I)FIGURE9.8PIcontroller463464Chapter9DesignviaRootLocusThevalueofthezerocanbeadjustedbyvaryingK%/KhInthisimplementation,theerrorandtheintegraloftheerrorarefedforwardtotheplant,G(s).SinceFigure9.8hasbothproportionalandintegralcontrol,theidealintegralcontroller,orcompensator,isgiventhealternatenamePIcontroller.Laterinthechapterwewillseehowtoimplementeachblock,K\andK%{a,LagCompensationIdealintegralcompensation,withitspoleontheorigin,requiresanactiveintegrator.Ifweusepassivenetworks,thepoleandzeroaremovedtotheleft,closetotheorigin,asshowninFigure9.9(c).Onemayguessthatthisplacementofthepole,althoughitdoesnotincreasethesystemtype,doesyieldanimprovementinthestaticerrorconstantoveranuncompensatedsystem.Withoutlossofgenerality,wedemonstratethatthisimprovementisindeedrealizedforaType1system.AssumetheuncompensatedsystemshowninFigure9.9(a).Thestaticerrorconstant,KVo,forthesystemisKvo=Kzizi(9.3)P1P2•••AssumingthelagcompensatorshowninFigure9.9(6)and(c),thenewstaticerrorconstantis(KziZ2---)(zc)(9.4)iP\P2'")iPc)Whatistheeffectonthetransientresponse?Figure9.10showstheeffectontherootlocusofaddingthelagcompensator.Theuncompensatedsystem'srootlocusisshowninFigure9.10(a),wherepointPisassumedtobethedominantpole.Ifthelagcompensatorpoleandzeroareclosetogether,theangularcontributionoftheKyN—GainR(s)+^hE(S)9««)tf>)%ym,.Plant(s+z,)(s+z2)•••KC(s)s(s+p{)(s+p2)--•CompensatorPlantK(s+zc)(S+2,)(5+Z2)'•'(s+pc)cms(s+p,)(i+p2)•••1(b)j«>s-planeGc(s)=(s+pc)-O-x~Zc~PcFIGURE9.9a.Type1uncompensatedsystem;b.Type1compensatedsystem;ccompensatorpole-zeroplot9.2ImprovingSteady-StateErrorviaCascadeCompensationjcoFIGURE9.10jco(a)(b)Rootlocus:a.beforelagcompensation;b.afterlagcompensationcompensatortopointPisapproximatelyzerodegrees.Thus,inFigure9.10(6),wherethecompensatorhasbeenadded,pointPisstillatapproximatelythesamelocationonthecompensatedrootlocus.Whatistheeffectontherequiredgain,KlAfterinsertingthecompensator,wefindthatKisvirtuallythesamefortheuncompensatedandcompensatedsystems,sincethelengthsofthevectorsdrawnfromthelagcompensatorareapproximatelyequalandallothervectorshavenotchangedappreciably.Now,whatimprovementcanweexpectinthesteady-stateerror?Sinceweestablishedthatthegain,K,isaboutthesamefortheuncompensatedandcompensatedsystems,wecansubstituteEq.(9.3)into(9.4)andobtainKVN=KVo^>KVo(9.5)Equation(9.5)showsthattheimprovementinthecompensatedsystem'sKvovertheuncompensatedsystem'sKvisequaltotheratioofthemagnitudeofthecompensatorzerotothecompensatorpole.Inordertokeepthetransientresponseunchanged,weknowthecompensatorpoleandzeromustbeclosetoeachother.Theonlywaytheratioofzctopccanbelargeinordertoyieldanappreciableimprovementinsteady-stateerrorandsimultaneouslyhavethecompensator'spoleandzeroclosetoeachothertominimizetheangularcontributionistoplacethecompensator'spole-zeropairclosetotheorigin.Forexample,theratioofzctopccanbeequalto10ifthepoleisat-0.001andthezeroisat-0.01.Thus,theratiois10,yetthepoleandzeroareveryclose,andtheangularcontributionofthecompensatorissmall.Inconclusion,althoughtheidealcompensatordrivesthesteady-stateerrortozero,alagcompensatorwithapolethatisnotattheoriginwillimprovethestaticerrorconstantbyafactorequaltozc/pc-Therealsowillbeaminimaleffectuponthetransientresponseifthepole-zeropairofthecompensatorisplacedclosetotheorigin.Laterinthechapterweshowcircuitconfigurationsforthelagcompensator.Thesecircuitconfigurationscanbeobtainedwithpassivenetworksandthusdonotrequiretheactiveamplifiersandpossibleadditionalpowersuppliesthatarerequiredbytheidealintegral(PI)compensator.Inthefollowingexamplewedesignalagcompensatortoyieldaspecifiedimprovementinsteadystateerror.466Chapter9DesignviaRootLocusExample9.2LagCompensatorDesignPROBLEM:CompensatethesystemofFigure9.4(a),whoserootlocusisshowninFigure9.5,toimprovethesteady-stateerrorbyafactorof10ifthesystemisoperatingwithadampingratioof0.174.SOLUTION:TheuncompensatedsystemerrorfromExample9.1was0.108withKp=8.23.Atenfoldimprovementmeansasteady-stateerrorofe(oo)=5^?=0.0108(9.6)Sincee(oo)=1=0.01081+KP(9.7)rearrangingandsolvingfortherequiredKpyieldsKp=1-n2.3477.56.0914.673%OS25.3825.3825.3825.38T.s4.261.331.642.14TP1.460.460.560.733KP2.37210.2510.68.304e(oo)0.2970.0890.0860.107Thirdpole-6.123None-3.127-4.262ZeroNoneNone-3-4CommentsSecond-orderapprox.OKPuresecond-orderSecond-orderapprox.OKSecond-orderapprox.OKChapter9472DesignviaRootLocus1.25-/*^*'\S'/1.000.75-il/^**v.>s0.50FIGURE9.16UncompensatedsystemandidealderivativecompensationsolutionsfromTable9.20.25L/i1.5i3.0Time(seconds)i_4.5resultsobtainedfromtherootlocusofeachofthedesigncasesshowninFigure9.15.Insummary,althoughcompensationmethodscanddyieldslowerresponsesthanmethodb,theadditionofidealderivativecompensationshortenedtheresponsetimeineachcasewhilekeepingthepercentovershootthesame.Thischangecanbestbeseeninthesettlingtimeandpeaktime,wherethereisatleastadoublingofspeedacrossallofthecasesofcompensation.Anaddedbenefitistheimprovementinthesteady-stateerror,eventhoughlagcompensationwasnotused.Herethesteady-stateerrorofthecompensatedsystemisatleastone-thirdthatoftheuncompensatedsystem,asseenbye(oo)andKp.AllsystemsinTable9.2areType0,andsomesteadystateerrorisexpected.Thereadermustnotassumethat,ingeneral,improvementintransientresponsealwaysyieldsanimprovementinsteady-stateerror.ThetimeresponseofeachcaseinTable9.2isshowninFigure9.16.Weseethatthecompensatedresponsesarefasterandexhibitlesserrorthantheuncompensatedresponse.Nowthatwehaveseenwhatidealderivativecompensationcando,wearereadytodesignourownidealderivativecompensatortomeetatransientresponsespecification.Basically,wewillevaluatethesumofanglesfromtheopen-looppolesandzerostoadesignpointthatistheclosed-looppolethatyieldsthedesiredtransientresponse.Thedifferencebetween180°andthecalculatedanglemustbetheangularcontributionofthecompensatorzero.Trigonometryisthenusedtolocatethepositionofthezerotoyieldtherequireddifferenceinangle.IdealDerivativeCompensatorDesignPROBLEM:GiventhesystemofFigure9.17,designanidealderivativecompensatortoyielda16%overshoot,withathreefoldreductioninsettlingtime.SOLUTION:Letusfirstevaluatetheperformanceoftheun*-compensatedsystemoperatingwith16%overshoot.TherootlocusfortheuncompensatedsystemisshowninFigure9.18.Since16%overshootisequivalentto£=0.504,wesearchalongthatdampingFIGURE9.17Feedbackcontrolsystemforratiolineforanoddmultipleof180°andfindthatthedominant,Example9.3second-orderpairofpolesisat-1,205±/2.064.Thus,thesettlingm+,E{s)Ks(s+4)(5+6)9.3ImprovingTransientResponseviaCascadeCompensation473VirtualExperiment9.1PDControllerDesign£=0.504Puttheoryintopracticeanduseroot-locustodesignaPDcontrollerfortheQuanserBallandBeamusingLabVIEW.TheBallandBeamisanunstablesystem,similartoexothermicchemicalprocessesthathavetobestabilizedtoavoidoverheating.s-plane-1.205+72.064K=43.35120.26°-7.59-7FIGURE9.18-5-6-4-3-2X=Closed-looppole\X=Open-looppoleRootlocusforuncompensatedsystemshowninFigure9.17timeoftheuncompensatedsystemis(9.13)=3.320;o)„1.205Sinceourevaluationofpercentovershootandsettlingtimeisbaseduponasecond-orderapproximation,wemustchecktheassumptionbyfindingthethirdpoleandjustifyingthesecond-orderapproximation.Searchingbeyond-6ontherealaxisforagainequaltothegainofthedominant,second-orderpair,43.35,wefindathirdpoleat—7.59,whichisoversixtimesasfarfromthe/Vw-axisasthedominant,second-orderpair.Weconcludethatourapproximationisvalid.Thetransientandsteady-stateerrorcharacteristicsoftheuncompensatedsystemaresummarizedinTable9.3.T,=TABLE9.3UncompensatedandcompensatedsystemcharacteristicofExample9.3UncompensatedSimulationCompensatedPlantandcompensatorKs{s+4){s+6)K(s+3.006)s(s+4)(s+6)Dominantpoles-1.205±/2.064-3.613±/6.193K43.3547.45Simulation%0.5040.504(On2.397.17%OS16Ts3.3203.61.1071.2%Kv1.5221.70.5070.51.8065.94e(oo)0.5540.168Thirdpole-7.591-2.775ZeroNone-3.006CommentsSecond-orderapprox.OKPole-zeronotcanceling14.81611.8VirtualexperimentsarefoundonWileyPLUS.474Chapter9DesignviaRootLocusC=0.504-3.613+J6.193Uncompensateddominantpole-1.205+,/2.064FIGURE9.19CompensateddominantpolesuperimposedovertheuncompensatedrootlocusforExample9.3—X--X--7.59-7-6-5-4-3X=Closed-looppoleX=Open-looppole-2Nowweproceedtocompensatethesystem.Firstwefindthelocationofthecompensatedsystem'sdominantpoles.Inordertohaveathreefoldreductioninthesettlingtime,thecompensatedsystem'ssettlingtimewillbeone-thirdofEq.(9.13).Thenewsettlingtimewillbe1.107.Therefore,therealpartofthecompensatedsystem'sdominant,second-orderpoleisr,1.107=3.613(9.14)Figure9.19showsthedesigneddominant,second-orderpole,witharealpartequalto-3.613andanimaginarypartofo)d=3.613tan(180°-120.26°)=6.193(9.15;Nextwedesignthelocationofthecompensatorzero.Inputtheuncompensatedsystem'spolesandzerosintherootlocusprogramaswellasthedesignpoint-3.613±/6.193asatestpoint.Theresultisthesumoftheanglestothedesignpointofallthepolesandzerosofthecompensatedsystemexceptforthoseofthecompensatorzeroitself.Thedifferencebetweentheresultobtainedand180°istheangularcontributionrequiredofthecompensatorzero.Usingtheopen-looppolesshowninFigure9.19andthetestpoint,-3.613+/6.193,whichisthedesireddominantsecond-orderpole,weobtainthesumoftheanglesas—275.6°.Hence,theangularcontributionrequiredfromthecompensatorzeroforthetestpointtobeontherootlocusis+275.6°—180°=95.6°.ThegeometryisshowninFigure9.20,wherewenowmustsolvefor—a,thelocationofthecompensatorzero.Fromthefigure,6.1933.613-=tan(180°-95.6°)(9.16)Thus,a=3.006.ThecompleterootlocusforthecompensatedsystemisshowninFigure9.21.Table9.3summarizestheresultsforboththeuncompensatedsystemandthecompensatedsystem.Fortheuncompensatedsystem,theestimateofthetransient475Uncompensateddominantpole-1-205+/2.064FIGURE9.20EvaluatingthelocationofthecompensatingzeroforExample9.3-7-6-5X=Closed-looppoleX=Open-looppoleresponseisaccuratesincethethirdpoleisatleastfivetimestherealpartofthedominant,second-orderpair.Thesecond-orderapproximationforthecompensatedsystem,however,maybeinvalidbecausethereisnoapproximateclosedloopthird-poleandzerocancellationbetweentheclosed-looppoleat-2.775andtheclosed-loopzeroat-3.006.Asimulationorapartial-fractionexpansionoftheclosed-loopresponsetocomparetheresidueofthepoleat-2.775totheresiduesofthedominantpolesat-3.613±/"6.193isrequired.Theresultsofasimulationareshowninthetable'ssecondcolumnfortheuncompensatedsystemandthefourthcolumnforthecompensatedsystem.ThesimulationresultscanbeobtainedusingMATLAB(discussedattheendofthisexample)oraprogramC=0.504-3.613+/6.193K=47.45120.26°-+-a-7-6-5X=Closed-looppoleX=Open-looppoleFIGURE9.21RootlocusforthecompensatedsystemofExample9.3476Chapter9DesignviaRootLocusCompensatedFIGURE9.22UncompensatedandcompensatedsystemstepresponsesofExample9.3Uncompensated1.52.02.5Time(seconds)likethestate-spacestep-responseprogramdescribedinAppendixH.latwww.wiley.com/college/nise.Thepercentovershootdiffersby3%betweentheuncompensatedandcompensatedsystems,whilethereisapproximatelyathreefoldimprovementinspeedasevaluatedfromthesettlingtime.ThefinalresultsaredisplayedinFigure9.22,whichcomparestheuncompensatedsystemandthefastercompensatedsystem.MATLABStudentswhoareusingMATLABshouldnowrunch9plinAppendixB.MATLABwillbeusedtodesignaPDcontroller.Youwillinputthedesiredpercentovershootfromthekeyboard.MATLABwillplottherootlocusoftheuncompensatedsystemandthepercentovershootline.Youwillinteractivelyselectthegain,afterwhichMATLABwilldisplaytheperformancecharacteristicsoftheuncompensatedsystemandplotitsstepresponse.Usingthesecharacteristics,youwillinputthedesiredsettlingtime.MATLABwilldesignthePDcontroller,enumerateitsperformancecharacteristics,andplotastepresponse.ThisexercisesolvesExample9.3usingMATLAB.K2sR(s)+,0__K{-£®—G(s)FIGURE9.23PDcontrollerCis)Oncewedecideonthelocationofthecompensatingzero,howdoweimplementtheidealderivative,orPDcontroller?Theidealintegralcompensatorthatimprovedsteady-stateerrorwasimplementedwithaproportional-plus-integral(PI)controller.Theidealderivativecompensatorusedtoimprovethetransientresponseisimplementedwithaproportional-plus-derivative(PD)controller.Forexample,inFigure9.23thetransferfunctionofthecontrollerisGc(s)=K2s^Kl=K2[s*iK2(9.17)Hence,K1/K2ischosentoequalthenegativeofthecompensatorzero,andK2ischosentocontributetotherequiredloop-gainvalue.Laterinthechapter,wewillstudycircuitsthatcanbeusedtoapproximatedifferentiationandproducegain.Whiletheidealderivativecompensatorcanimprovethetransientresponseofthesystem,ithastwodrawbacks.First,itrequiresanactivecircuittoperformthe9.3ImprovingTransientResponseviaCascadeCompensationdifferentiation.Second,aspreviouslymentioned,differentiationisanoisyprocess:Thelevelofthenoiseislow,butthefrequencyofthenoiseishighcomparedtothesignal.Differentiationofhighfrequenciescanleadtolargeunwantedsignalsorsaturationofamplifiersandothercomponents.Theleadcompensatorisapassivenetworkusedtoovercomethedisadvantagesofidealdifferentiationandstillretaintheabilitytoimprovethetransientresponse.LeadCompensationJustastheactiveidealintegralcompensatorcanbeapproximatedwithapassivelagnetwork,anactiveidealderivativecompensatorcanbeapproximatedwithapassiveleadcompensator.Whenpassivenetworksareused,asinglezerocannotbeproduced;rather,acompensatorzeroandapoleresult.However,ifthepoleisfartherfromtheimaginaryaxisthanthezero,theangularcontributionofthecompensatorisstillpositiveandthusapproximatesanequivalentsinglezero.Inotherwords,theangularcontributionofthecompensatorpolesubtractsfromtheangularcontributionofthezerobutdoesnotprecludetheuseofthecompensatortoimprovetransientresponse,sincethenetangularcontributionispositive,justasforasinglePDcontrollerzero.TheadvantagesofapassiveleadnetworkoveranactivePDcontrollerarethat(1)noadditionalpowersuppliesarerequiredand(2)noiseduetodifferentiationisreduced.Thedisadvantageisthattheadditionalpoledoesnotreducethenumberofbranchesoftherootlocusthatcrosstheimaginaryaxisintotheright-half-plane,whiletheadditionofthesinglezeroofthePDcontrollertendstoreducethenumberofbranchesoftherootlocusthatcrossintotherighthalf-plane.Letusfirstlookattheconceptbehindleadcompensation.Ifweselectadesireddominant,second-orderpoleonthes-plane,thesumoftheanglesfromtheuncompensatedsystem'spolesandzerostothedesignpointcanbefound.Thedifferencebetween180°andthesumoftheanglesmustbetheangularcontributionrequiredofthecompensator.Forexample,lookingatFigure9.24,weseethat02-0i-03-04+05=(2k+l)180c(9.18)where(0?-0i)=0cistheangularcontributionoftheleadcompensator.FromFigure9.24weseethat0Cistheangleofarayextendingfromthedesignpointandintersectingtherealaxisatthepolevalueandzerovalueofthecompensator.Nowvisualizethisrayrotatingaboutthedesiredclosed-looppolelocationandJO)Desiredpolelocationi5-planeFIGURE9.24Geometryofleadcompensation477Trylt9.2UseMATLAB,theControlSystemToobox,andthefollowingstepstouseSISOTOOLtoperformthedesignofExample9.3.1.TypeSISOTOOLintheMATLABCommandWindow.2.SelectImportintheFilemenuoftheSISODesignforSISODesignTaskWindow.3.IntheDatafieldforG,typezpk([],[0,-4,-6),1)andhitENTERonthekeyboard.ClickOK.4.OntheEditmenuchooseSISOToolPreferences...andselectZero/pole/gain:undertheOptionstab.ClickOK.5.Right-clickontherootlocuswhitespaceandchooseDesignRequirements/New...6.ChoosePercentovershootandtypein16.ClickOK.7.Right-clickontherootlocuswhitespaceandchooseDesignRequirements/New...8.ChooseSettlingtimeandclickOK.9.Dragthesettlingtimeverticallinetotheintersectionoftherootlocusand16%overshootradialline.10.Readthesettlingtimeatthebottomofthewindow.11.Dragthesettlingtimeverticallinetoasettlingtimethatis1/3ofthevaluefoundinStep9.12.Clickonaredzeroiconinthemenubar.Placethezeroontherootlocusrealaxisbyclickingagainontherealaxis.13.Left-clickonthereal-axiszeroanddragitalongtherealaxisuntiltherootlocusintersectsthesettlingtimeandpercentovershootlines.14.Dragaredsquarealongtherootlocusuntilitisattheintersectionoftherootlocus,settlingtimeline,andthepercentovershootline.15.ClicktheCompensatorEditortaboftheControlandEstimationToolsManagerwindowtoseetheresultingcompensator,includingthegain.Chapter9478DesignviaRootLocus5-planeFIGURE9.25Threeoftheinfinitepossibleleadcompensatorsolutionsintersectingtherealaxisatthecompensatorpoleandzero,asillustratedinFigure9.25.Werealizethataninfinitenumberofleadcompensatorscouldbeusedtomeetthetransientresponserequirement.Howdothepossibleleadcompensatorsdiffer?Thedifferencesareinthevaluesofstaticerrorconstants,thegainrequiredtoreachthedesignpointonthecompensatedrootlocus,thedifficultyinjustifyingasecond-orderapproximationwhenthedesigniscomplete,andtheensuingtransientresponse.Fordesign,wearbitrarilyselecteitheraleadcompensatorpoleorzeroandfindtheangularcontributionatthedesignpointofthispoleorzeroalongwiththesystem'sopen-looppolesandzeros.Thedifferencebetweenthisangleand180°istherequiredcontributionoftheremainingcompensatorpoleorzero.Letuslookatanexample.Example9.4LeadCompensatorDesignPROBLEM:DesignthreeleadcompensatorsforthesystemofFigure9.17thatwillreducethesettlingtimebyafactorof2whilemaintaining30%overshoot.Comparethesystemcharacteristicsbetweenthethreedesigns.£=0.358Desiredcompensateddominantpole-2.014+./5.252SOLUTION:Firstdeterminethecharacteristicsoftheuncompensatedsystemoperatingat30%overshoottoseewhattheuncompensatedsettlingtimeis.Since30%overshootisequivalenttoadampingratioof0.358,wesearchalongthe£=0.358linefortheuncompensateddominantpolesontherootlocus,asshowninFigure9.26.Fromthepole'srealpart,wecalculatetheunUncompensateddominantpolecompensatedsettlingtimeasr4.=4/1.007=3.9725-plane-1.007+72.627seconds.TheremainingcharacteristicsoftheunK=63.21compensatedsystemaresummarizedinTable9.4.Nextwefindthedesignpoint.AtwofoldreductioninsettlingtimeyieldsTs=3.972/2=1.986sec110.98°onds,fromwhichtherealpartofthedesiredpole-*locationis—#%=-4/¾=-2.014.Theimaginary-7-6-5-4-3partis(od=-2.014tan(110.98°)=5.252.X=Closed-looppoleWecontinuebydesigningtheleadcompensator.X=Open-looppoleArbitrarilyassumeacompensatorzeroat-5ontheFIGURE9.26Leadcompensatordesign,showingevaluationrealaxisasapossiblesolution.Usingtherootlocusofuncompensatedandcompensateddominant
polesforprogram,sumtheanglesfromboththiszeroandtheExample9.49.3ImprovingTransientResponseviaCascadeCompensationTABLE9.4479ComparisonofleadcompensationdesignsforExample9.4UncompensatedCompensationaCompensationbCompensationcPlantandcompensatorKK(s+5)5(5+4)(5+6)s(5+4)(5+6)(^+42.96)K{s+4).v(.v+4)(5+6)(5+20.09)K(s+2)s{s+4)(5+6)(5+8.97VDominantpoles-1.007+/2.627-2.014+/5.252-2.014+/5.252-2.014+/5.252K63.211423698.1345.6K0.3580.3580.3580.358Q}„2.8135.6255.6255.625%OS*30(28)30(30.7)30(28.2)30(14.5)T/3.972(4)1.986(2)1.986(2)1.986(1.7)Tp1.196(1.3)0.598(0.6)0.598(0.6)0.598(0.7)Kv2.6346.95.7913.21e(oo)0.3800.1450.1730.312Otherpoles-7.986-43.8,-5.134-22.06-13.3,-1.642ZeroNone-5None-2CommentsSecond-orderapprox.OKSecond-orderapprox.OKSecond-orderapprox.OKNopole-zerocancellationSimulationresultsareshowninparentheses.uncompensatedsystem'spolesandzeros,usingthedesignpointasatestpoint.Theresultingangleis—172.69°.Thedifferencebetweenthisangleand180°istheangularcontributionrequiredfromthecompensatorpoleinordertoplacethedesignpointontherootlocus.Hence,anangularcontributionof-7.31°isrequiredfromthecompensatorpole.ThegeometryshowninFigure9.27isusedtocalculatethelocationofthecompensatorpole.Fromthefigure,Desiredcompensateddominantpole--1/5.252-j\.-2.014X=Closed-looppoleX=Open-looppoleNote:Thisfigureisnotdrawntoscale.pc-2.014=tan7.3Vfromwhichthecompensatorpoleisfoundtobepc=42.96(9.20)ThecompensatedsystemrootlocusissketchedinFigure9.28.iA-planeXX-42.96^*o-x-6-5-4X=Closed-looppoleX=Open-looppoleNote:Thisfigureisnotdrawntoscale.FIGURE9.28CompensatedsystemrootlocusFIGURE9.275-planepictureusedtocalculatethelocationofthecompensatorpoleforExample9.4480Chapter9DesignviaRootLocusInordertojustifyourestimatesofpercentovershootandsettlingtime,wemustshowthatthesecond-orderapproximationisvalid.Toperformthisvaliditycheck,wesearchforthethirdandfourthclosed-looppolesfoundbeyond-42.96andbetween—5and-6inFigure9.28.Searchingtheseregionsforthegainequaltothatofthecompensateddominantpole,1423,wefindthatthethirdandfourthpolesareat-43.8and-5.134,respectively.Since-43.8ismorethan20timestherealpartofthedominantpole,theeffectofthethirdclosed-looppoleisnegligible.Sincetheclosed-looppoleat-5.134isclosetothezeroat—5,wehavepole-zerocancellation,andthesecond-orderapproximationisvalid.Allresultsforthisdesignandtwootherdesigns,whichplacethecompensatorzeroarbitrarilyat—2and—4andfollowsimilardesigntechniques,aresummarizedinTable9.4.Eachdesignshouldbeverifiedbyasimulation,whichcouldconsistofusingMATLAB(discussedattheendofthisexample)orthestate-spacemodelandthestep-responseprogramdiscussedinAppendixH.latwww.wiley.com/college/nise.Wehaveperformedasimulationforthisdesignproblem,andtheresultsareshownbyparentheticalentriesnexttotheestimatedvaluesinthetable.Theonlydesignthatdisagreeswiththesimulationisthecasewherethecompensatorzeroisat—2.Forthiscasetheclosed-looppoleandzerodonotcancel.Asketchoftherootlocus,whichyoushouldgenerate,showswhytheeffectofthezeroispronounced,causingtheresponsetobedifferentfromthatpredicted.Placingthezerototherightofthepoleat—4createsaportionoftherootlocusthatisbetweentheoriginandthezero.Inotherwords,thereisaclosed-looppoleclosertotheoriginthanthedominantpoles,withlittlechanceofpole-zerocancellationexceptathighgain.Thus,aquicksketchoftherootlocusgivesusinformationfromwhichwecanmakebetterdesigndecisions.Forthisexample,wewanttoplacethezeroon,ortotheleftof,thepoleat—4,whichgivesabetterchanceforpole-zerocancellationandforahigher-orderpolethatistotheleftofthedominantpolesandsubsequentlyfaster.Thisisverifiedbythefactthatourresultsshowgoodsecondorderapproximationsforthecaseswherethezerowasplacedat-4and-5.Again,decisionsaboutwheretoplacethezeroarebasedonsimplerulesofthumbandmustbeverifiedbysimulationsattheendofthedesign.LetusnowsummarizetheresultsshowninTable9.4.Firstwenoticedifferencesinthefollowing:1.Thepositionofthearbitrarilyselectedzero2.Theamountofimprovementinthesteady-stateerror3.Theamountofrequiredgain,K4.Thepositionofthethirdandfourthpolesandtheirrelativeeffectuponthesecond-orderapproximation.Thiseffectismeasuredbytheirdistancefromthedominantpolesorthedegreeofcancellationwiththeclosed-loopzero.Onceasimulationverifiesdesiredperformance,thechoiceofcompensationcanbebasedupontheamountofgainrequiredortheimprovementinsteady-stateerrorthatcanbeobtainedwithoutalagcompensator.TheresultsofTable9.4aresupportedbysimulationsofthestepresponse,showninFigure9.29fortheuncompensatedsystemandthethreeleadcompensationsolutions.StudentswhoareusingMATLABshouldnowrunch9p2inAppendixB.MATLABwillbeusedtodesignaleadcompensator.Youwillinputthedesiredpercentovershootfromthekeyboard.MATLAB9.3ImprovingTransientResponseviaCascadeCompensationCompensationa,brCompensationcUncompensatedFIGURE9.29UncompensatedsystemandleadcompensationresponsesforExample9.432Time(seconds)willplottherootlocusoftheuncompensatedsystemandthepercentovershootline.Youwillinteractivelyselectthegain,afterwhichMATLABwilldisplaytheperformancecharacteristicsoftheuncompensatedsystemandplotitsstepresponse.Usingthesecharacteristics,youwillinputthedesiredsettlingtimeandazerovaluefortheleadcompensator.Youwilltheninteractivelyselectavalueforthecompensatorpole.MATLABwillrespondwitharootlocus.Youcanthencontinueselectingpolevaluesuntiltherootlocusgoesthroughthedesiredpoint.MATLABwilldisplaytheleadcompensator,enumerateitsperformancecharacteristics,andplotastepresponse.ThisexercisesolvesExample9.4usingMATLAB.Skill-AssessmentExercise9.2JPROBLEM:AunityfeedbacksystemwiththeforwardtransferfunctionG(s)=Ks{s+7)isoperatingwithaclosed-loopstepresponsethathas15%overshoot.Dothefollowing:a.Evaluatethesettlingtime.b.Designaleadcompensatortodecreasethesettlingtimebythreetimes.Choosethecompensator'szerotobeat—10.ANSWERS:a.7\=1.143s10K=476.3s+25.52'Thecompletesolutionisatwww.wiley.com/college/nise.b.Gitaii(s)=482^9.4Chapter9DesignviaRootLocusImprovingSteady-StateErrorandTransientResponseWenowcombinethedesigntechniquescoveredinSections9.2and9.3toobtainimprovementinsteady-stateerrorandtransientresponseindependently.Basically,wefirstimprovethetransientresponsebyusingthemethodsofSection9.3.Thenweimprovethesteady-stateerrorofthiscompensatedsystembyapplyingthemethodsofSection9.2.Adisadvantageofthisapproachistheslightdecreaseinthespeedoftheresponsewhenthesteady-stateerrorisimproved.Asanalternative,wecanimprovethesteady-stateerrorfirstandthenfollowwiththedesigntoimprovethetransientresponse.Adisadvantageofthisapproachisthattheimprovementintransientresponseinsomecasesyieldsdeteriorationintheimprovementofthesteady-stateerror,whichwasdesignedfirst.Inothercases,theimprovementintransientresponseyieldsfurtherimprovementinsteady-stateerrors.Thus,asystemcanbeoverdesignedwithrespecttosteady-stateerrors.Overdesignisusuallynotaproblemunlessitaffectscostorproducesotherdesignproblems.Inthistextbook,wefirstdesignfortransientresponseandthendesignforsteady-stateerror.Thedesigncanuseeitheractiveorpassivecompensators,aspreviouslydescribed.IfwedesignanactivePDcontrollerfollowedbyanactivePIcontroller,theresultingcompensatoriscalledaproportional-plus-integral-plus-derivative(PID)controller.Ifwefirstdesignapassiveleadcompensatorandthendesignapassivelagcompensator,theresultingcompensatoriscalledalag-leadcompensator.PIDControllerDesignAPIDcontrollerisshowninFigure9.30.ItstransferfunctionisK\K2K3[sl+Ki-^s+K-.-^Kl2^^vK+K+Ksr>f\VlS23(9.21)Gc{s)aJEj+—+K3s=sOnezeroandthepoleattheorigincanwhichhastwozerossplusapoleattheorigin.bedesignedastheidealintegralcompensator;theotherzerocanbedesignedastheidealderivativecompensator.Thedesigntechnique,whichisdemonstratedinExample9.5,consistsofthefollowingsteps:1.Evaluatetheperformanceoftheuncompensatedsystemtodeterminehowmuchimprovementintransientresponseisrequired.2.DesignthePDcontrollertomeetthetransientresponsespecifications.Thedesignincludesthezerolocationandtheloopgain.K2ssm+/c>"09"FIGURE9.30PIDcontroller\£j-*®-G(s)C(s)9.4ImprovingSteady-StateErrorandTransientResponse4833.Simulatethesystemtobesureallrequirementshavebeenmet.4.Redesignifthesimulationshowsthatrequirementshavenotbeenmet.5.DesignthePIcontrollertoyieldtherequiredsteady-stateerror.6.Determinethegains,K\,K2,andK3,inFigure9.30.7.Simulatethesystemtobesureallrequirementshavebeenmet.8.Redesignifsimulationshowsthatrequirementshavenotbeenmet.Example9.5PIDControllerDesignPROBLEM:GiventhesystemofFigure9.31,designaPIDcontrollersothatthesystemcanoperatewithapeaktimethatistwo-thirdsthatoftheuncompensatedsystemat20%overshootandwithzerosteady-stateerrorforastepinput.SOLUTION:Notethatoursolutionfollowstheeight-stepproceduredescribedearlier.R(s)+dE(s)-5.415+/10.57£=121.510^iPr-8.1691^T^r6—*3~",V~-5.5-4.6X=Closed-looppoleX=Open-looppoleFIGURE9.32RootlocusfortheuncompensatedsystemofExample9.5C(s)FIGURE9.31UncompensatedfeedbackcontrolsystemforExample9.5Step1Letusfirstevaluatetheuncompensatedsystemoperatingat20%overshoot.Searchingalongthe20%overshootline(£=0.456)inFigure9.32,wefindthedominantpolestobe—5.415±/10.57withagainof121.5.Athirdpole,whichexistsat-8.169,isfoundbysearchingtheregion(=0.456K(s+(s+3)(s+6)(5+10)Chapter9484TABLE9.5DesignviaRootLocusPredictedcharacteristicsofuncompensated,PD-,andPID-compensatedsystemsofExample9.5PlantandcompensatorUncompensatedPD-compensatedPID-compensatedK{s+8)(5+3)(5+6)(5+10)K(s+8)(5+55.92)(5+3)(5+6)(5+10)£(5+8)(5+55.92)(5+0.5)(5+3)(5+6)(5+10)5Dominantpoles-5.415+/10.57-8.13+/15.87-7.516+/14.67K121.55.344.6%0.4560.4560.45611.8817.8316.49%OS202020Ts0.7390.4920.532CO,,10.2970.1980.214Kp5.413.2700e(oo)0.1560.0700Otherpoles-8.169-8.079-8.099,-0.468Zeros-8-8,-55.92-8,-55.92,-0.5CommentsSecond-orderapprox.OKSecond-orderapprox.OKZerosat-55.92and-0.5notcanceledbetween-8and-10foragainequivalenttothatatthedominantpoles.ThecompleteperformanceoftheuncompensatedsystemisshowninthefirstcolumnofTable9.5,wherewecomparethecalculatedvaluestothoseobtainedthroughsimulation(Figure9.35).Weestimatethattheuncompensatedsystemhasapeaktimeof0.297secondat20%overshoot.Step2Tocompensatethesystemtoreducethepeaktimetotwo-thirdsofthatoftheuncompensatedsystem,wemustfirstfindthecompensatedsystem'sdominantpolelocation.Theimaginarypartofthecompensateddominantpoleis1(2/3)(0.297)p=15.87(9.22)Thus,therealpartofthecompensateddominantpoleis0)PD-compensaleddominantpoled(9.23)a=tanll7.13c=-8.13Nextwedesignthecompensator.UsingthegeometryshowninFigure9.33,wecalculatethecompensatingzero'slocation.Usingtherootlocusprogram,wefindthesumofanglesfromtheuncompensatedsystem'spolesandzerostothedesiredcompensateddominantpoletobe-198.37°.Thus,thecontributionrequiredfromthecompensatorzerois198.37°-180°=18.37°.Assumethatthecompensatorzeroislocatedat—zc,asshowninFigure9.33.SinceX=Closed-looppole!X,VNote:Thisfigureisnotdrawntoscale.FIGURE9.33CalculatingthePDcompensatorzeroforExample9.5Zc-8.13=tan18.37°(9.24)thenZc=55.92(9.25)GPD(S)=(5+55.92)(9.26)Thus,thePDcontrolleris9.4ImprovingSteady-StateErrorandTransientResponse£=0.456.5-pIaneX=Closed-looppoleX=Open-looppoleNote:Thisfigureisnotdrawntoscale.FIGURE9.34RootlocusforPD-compensatedsystemofExample9.5ThecompleterootlocusforthePD-compensatedsystemissketchedinFigure9.34.Usingarootlocusprogram,thegainatthedesignpointis5.34.CompletespecificationsforidealderivativecompensationareshowninthethirdcolumnofTable9.5.Steps3and4WesimulatethePD-compensatedsystem,asshowninFigure9.35.Weseethereductioninpeaktimeandtheimprovementinsteady-stateerrorovertheuncompensatedsystem.Step5AfterwedesignthePDcontroller,wedesigntheidealintegralcompensatortoreducethesteady-stateerrortozeroforastepinput.Anyidealintegralcompensatorzerowillwork,aslongasthezeroisplacedclosetotheorigin.Choosingtheidealintegralcompensatortobe5+0.5GafA=PD(9.27)Uncompensated0.81.2Time(seconds)1.62.0FIGURE9.35Stepresponsesforuncompensated,PDcompensated,andPIDcompensatedsystemsofExample9.5485486Chapter9DesignviaRootLocusJO)C=0.456PID-compensateddominantpoles-planeX=Closed-looppoleX=Open-looppoleFIGURE9.36Note:Thisfigureisnotdrawntoscale.RootlocusforPID-compensatedsystemofExample9.5wesketchtherootlocusforthePID-compensatedsystem,asshowninFigure9.36.Searchingthe0.456dampingratioline,wefindthedominant,second-orderpolestobe—7.516±/14.67,withanassociatedgainof4.6.TheremainingcharacteristicsforthePID-compensatedsystemaresummarizedinthefourthcolumnofTable9.5.Step6Nowwedeterminethegains,K\,K2,andK&,inFigure9.30.FromEqs.(9.26)and(9.27),theproductofthegainandthePIDcontrollerisGPID(S)=K(s+55.92)(s+0.5)4.6(5-2+56.42s+27.96)4.6(5+55.92)(s+0.5)(9.28)MatchingEqs.(9.21)and(9.28),Kx=259.5,K2=128.6,andK3=4.6Steps7and8ReturningtoFigure9.35,wesummarizetheresultsofourdesign.PDcompensationimprovedthetransientresponsebydecreasingthetimerequiredtoreachthefirstpeakaswellasyieldingsomeimprovementinthesteady-stateerror.ThecompletePIDcontrollerfurtherimprovedthesteadystateerrorwithoutappreciablychangingthetransientresponsedesignedwiththePDcontroller.Aswehavementionedbefore,thePIDcontrollerexhibitsaslowerresponse,reachingthefinalvalueofunityatapproximately3seconds.Ifthisisundesirable,thespeedofthesystemmustbeincreasedbyredesigningtheidealderivativecompensatorormovingthePIcontrollerzerofartherfromtheorigin.Simulationplaysanimportantroleinthistypeofdesignsinceourderivedequationforsettlingtimeisnotapplicableforthispartoftheresponse,wherethereisaslowcorrectionofthesteady-stateerror.9.4ImprovingSteady-StateErrorandTransientResponseLag-LeadCompensatorDesignInthepreviousexample,weseriallycombinedtheconceptsofidealderivativeandidealintegralcompensationtoarriveatthedesignofaPIDcontrollerthatimprovedboththetransientresponseandthesteady-stateerrorperformance.Inthenextexample,weimprovebothtransientresponseandthesteady-stateerrorbyusingaleadcompensatorandalagcompensatorratherthantheidealPID.Ourcompensatoriscalledalag-leadcompensator.Wefirstdesigntheleadcompensatortoimprovethetransientresponse.Nextweevaluatetheimprovementinsteady-stateerrorstillrequired.Finally,wedesignthelagcompensatortomeetthesteady-stateerrorrequirement.Laterinthechapterweshowcircuitdesignsforthepassivenetwork.Thefollowingstepssummarizethedesignprocedure:1.Evaluatetheperformanceoftheuncompensatedsystemtodeterminehowmuchimprovementintransientresponseisrequired.2.Designtheleadcompensatortomeetthetransientresponsespecifications.Thedesignincludesthezerolocation,polelocation,andtheloopgain.3.Simulatethesystemtobesureallrequirementshavebeenmet.4.Redesignifthesimulationshowsthatrequirementshavenotbeenmet.5.Evaluatethesteady-stateerrorperformanceforthelead-compensatedsystemtodeterminehowmuchmoreimprovementinsteady-stateerrorisrequired.6.Designthelagcompensatortoyieldtherequiredsteady-stateerror.7.Simulatethesystemtobesureallrequirementshavebeenmet.8.Redesignifthesimulationshowsthatrequirementshavenotbeenmet.Lag-LeadCompensatorDesignPROBLEM:Designalag-leadcompensatorforthesystemofFigure9.37sothatthesystemwilloperatewith20%overshootandatwofoldreductioninsettlingtime.Further,thecompensatedsystemwillexhibitatenfoldimprovementinsteady-stateerrorforarampinput.SOLUTION:Again,oursolutionfollowsthestepsjustdescribed.K™$FIGURE9.37UncompensatedsystemforExample9.6Step1Firstweevaluatetheperformanceoftheuncompensatedsystem.Searchingalongthe20%overshootline(£=0.456)inFigure9.38,wefindthedominantpolesat—1.794±/3.501,withagainof192.1.TheperformanceoftheuncompensatedsystemissummarizedinTable9.6.Step2Nextwebegintheleadcompensatordesignbyselectingthelocationofthecompensatedsystem'sdominantpoles.Inordertorealizeatwofoldreductioninsettlingtime,therealpartofthedominantpolemustbeincreasedbyafactorof2,sincethesettlingtimeisinverselyproportionaltotherealpart.Thus,-roin=-2(1.794)=-3.588Theimaginarypartofthedesignpointiscod=ta)ntan117.13°=3.588tan117.13°=7.003C(s)s{s+6){s+\0)(9.29)(9.30)488Chapter9DesignviaRootLocus£=0.456Uncompensateddominantpole-1.794+./3.501K=192.1s-plane117.13°FIGURE9.38RootlocusforuncompensatedsystemofExample9.6|-12.41-11-10-9-I-7-6-5-4X=Closed-looppoleX=Open-looppoleNowwedesigntheleadcompensator.Arbitrarilyselectalocationfortheleadcompensatorzero.Forthisexample,weselectthelocationofthecompensatorzerocoincidentwiththeopen-looppoleat—6.Thischoicewilleliminateazeroandleavethelead-compensatedsystemwiththreepoles,thesamenumberthattheuncompensatedsystemhas.Wecompletethedesignbyfindingthelocationofthecompensatorpole.Usingtherootlocusprogram,sumtheanglestothedesignpointfromtheuncompensatedsystem'spolesandzerosandthecompensatorzeroandget-164.65°.Thedifferencebetween180°andthisquantityistheangularcontributionrequiredfromthecompensatorpole,or—15.35°.UsingthegeometryshowninFigure9.39,7.003=tan15.35cpc-3.588(931)fromwhichthelocationofthecompensatorpole,pe,isfoundtobe-29.1.TABLE9.6Predictedcharacteristicsofuncompensated,lead-compensated,andlag-lead-compensatedsystemsofExample9.6UncompensatedPlantandcompensatorDominantpolesK%os'TsTKve(oo)ThirdpoleZeroCommentsLead-compensatedLag-lead-compensatedK5(5+6)(5+10)KK{s+0.04713)5(5+10)(5+29.1)5(5+10)(5+29.1)(5+0.01)-1.794±;3.501192.10.4563.934202.2300.8973.2020.312-12.41NoneSecond-orderapprox.OK-3.588±/7.00319770.4567.869201.1150.4496.7940.147-31.92NoneSecond-orderapprox.OK-3.574±/6.97619710.4567.838201.1190.45031.920.0313-31.91,-0.0474-0.04713Second-orderapprox.OK9.4ImprovingSteady-StateErrorandTransientResponsejco-/7.003s-plane-PcFIGURE9.39-3X=Closed-looppoleX=Open-looppoleEvaluatingthecompensatorpoleforExample9.6Thecompleterootlocusforthelead-compensatedsystemissketchedinFigure9.40.Thegainsettingatthedesignpointisfoundtobe1977.Steps3and4Checkthedesignwithasimulation.(TheresultfortheleadcompensatedsystemisshowninFigure9.42andissatisfactory.)Step5Continuebydesigningthelagcompensatortoimprovethesteady-stateerror.Sincetheuncompensatedsystem'sopen-looptransferfunctionisG(s)=192.1(9.32)5(5+6)(5+10)thestaticerrorconstant,Kwwhichisinverselyproportionaltothesteadystateerror,is3.201.Sincetheopen-looptransferfunctionoftheleadcompensatedsystemisGLC(s)=1977(9.33)5(5+10)(5+29.1)thestaticerrorconstant,Kwwhichisinverselyproportionaltothesteadystateerror,is6.794.Thus,theadditionofleadcompensationhasimprovedthesteady-stateerrorbyafactorof2.122.Sincetherequirementsoftheproblemspecifiedatenfoldimprovement,thelagcompensatormustbedesignedtoimprovethesteady-stateerrorbyafactorof4.713(10/2.122=4.713)overthelead-compensatedsystem.£=0.4565-plane-3.588+)7.003)\CompensateddominantpoleA:=1977-*•X'X•>'1'•X',,-33f-30-27-24-21-18-15-12-9-6-31.91X=Closed-looppoleX=Open-looppoleFIGURE9.40Rootlocusforlead-compensatedsystemofExample9.6*-—K,s(b)FIGURE9.55a.Uncompensatedsystemandb.feedback-compensatedsystemforExample9.89.5FeedbackCompensation501SOLUTION:Theminorloopisdefinedastheloopcontainingtheplant,1/[s(s+5)(s+15)],andthefeedbackcompensator,KfS.ThevalueofK«willbeadjustedtosetthelocationoftheminor-looppoles,andthenKwillbeadjustedtoyieldthedesiredclosed-loopresponse.Thetransferfunctionoftheminorloop,GMLi(S),isGML(S)=1s[S2+20s+(75+Kf)(9.43)ThepolesofGML(S)canDefoundanalyticallyorviatherootlocus.Therootlocusfortheminorloop,whereKfs/[s(s+5)(s+15)]istheopen-looptransferfunction,isshowninFigure9.56.Sincethezeroattheorigincomesfromthefeedbacktransferfunctionoftheminorloop,thiszeroisnotazerooftheclosed-looptransferfunctionoftheminorloop.Hence,thepoleattheoriginappearstoremainstationary,andthereisnopole-zerocancellationattheorigin.Eq.(9.43)alsoshowsthisphenomenon.Weseeastationarypoleattheoriginandtwocomplexpolesthatchangewithgain.Noticethatthecompensatorgain,K$variesthenaturalfrequency,con,oftheminor-looppolesasseenfromEq.(9.43).Sincetherealpartsofthecomplexpolesareconstantat$con=—10,thedampingratiomustalsobevaryingtokeep2^con=20,aconstant.Drawingthef=0.8lineinFigure9.56yieldsthecomplexpolesat—10±/7.5.Thegain,Kf,whichequals81.25,placestheminor-looppolesinapositiontomeetthespecifications.Thepolesjustfound,-10±;7.5,aswellasthepoleattheorigin(Eq.(9.43)),actasopen-looppolesthatgeneratearootlocusforvariationsofthegain,K.ThefinalrootlocusforthesystemisshowninFigure9.57.The£=0.6dampingratiolineisdrawnandsearched.Theclosed-loopcomplexpolesarefoundtobe-4.535±/6.046,witharequiredgainof624.3.Athirdpoleisat-10.93.J&./20-PuttheoryintopracticeanddesignacompensatorinLabVIEWthatcontrolstheballpositionintheQuanserMagneticLevitationsystem.MagneticLevitationtechnologyisusedformoderntransportationsystemsthatsuspend,suchasthehighspeedMagneticLevitationtrain.s-plane£=0.8/10-10+y7.5^=81.25-X—-20-15-10-5010-i20VirtualExperiment9.2ImprovingTransientResponseandSteady-StateErrorUsingRateFeedbackandPDControl»»a-/10"1-/2()X=Closed-looppole(minorloop)X=Open-looppoleFIGURE9.56RootlocusforminorloopofExample9.8VirtualexperimentsarefoundonWileyPLUS.502Chapter9DesignviaRootLocusFIGURE9.57Rootlocusforclosed-loopsystemofExample9.8X=Closed-looppoleX=Open-looppoleTheresultsaresummarizedinTable9.9.Weseethatthecompensatedsystem,althoughhavingthesamedampingratioastheuncompensatedsystem,ismuchfasterandalsohasasmallersteady-stateerror.Theresults,however,arepredictedresultsandmustbesimulatedtoverifypercentovershoot,settlingtime,andpeaktime,sincethethirdpoleisnotfarenoughfromthedominantpoles.ThestepresponseisshowninFigure9.58andcloselymatchesthepredictedperformance.TABLE9.9PredictedcharacteristicsoftheuncompensatedandcompensatedsystemsofExample9.8UncompensatedCompensatedPlantandcompensatorKx5(5+5)(5+15)Ks{s2+205+156.25)Feedback11Dominantpoles-1.997+/2.662-4.535+/6.046K177.3624.3*0.60.6(Si„3.3287.558%OS9.489.48n20.882?P1.180.52Kv2.3643.996e(oc)(ramp)0.4230.25Otherpoles-16-10.93ZeroNoneNoneCommentsSecond-orderapprox.OKSimulate9.6PhysicalRealizationofCompensation00.20.40.60.8Time(seconds)FIGURE9.58StepresponsesimulationforExample9.8Skill-AssessmentExercise9.4PROBLEM:ForthesystemofFigure9.59,designminor-loopratefeedbackcompensationtoyieldadampingratioof0.7fortheminorloop'sdominantpolesandadampingratioof0.5fortheclosed-loopsystem'sdominantpoles./?(*)+lC(s)s(s+7)0?+10)FIGURE9.59SystemforSkill-AssessmentExercise9.4ANSWER:ThesystemisconfiguredsimilartoFigure9.55(6)withKf=77.42andK=6263.Thecompletesolutionisatwww.wiley.com/college/nise.Ourdiscussionofcompensationmethodsisnowcomplete.Westudiedbothcascadeandfeedbackcompensationandcomparedandcontrastedthem.Wearenowreadytoshowhowtophysicallyrealizethecontrollersandcompensatorswedesigned.I9.6PhysicalRealizationofCompensationInthischapter,wederivedcompensationtoimprovetransientresponseandsteadystateerrorinfeedbackcontrolsystems.Transferfunctionsofcompensatorsusedincascadewiththeplantorinthefeedbackpathwerederived.Thesecompensatorsweredefinedbytheirpole-zeroconfigurations.TheywereeitheractivePI,PD,orPIDcontrollersorpassivelag,lead,orlag-leadcompensators.Inthissection,weshowhowtoimplementtheactivecontrollersandthepassivecompensators.503504Chapter9DesignviaRootLocusActive-CircuitRealizationInChapter2,wederivedV0(s)Vi(s)(9.44)asthetransferfunctionofaninvertingoperationalamplifierwhoseconfigurationisrepeatedhereinFigure9.60.ByjudiciouschoiceofZi(s)andZ2(s),thiscircuitcanbeusedasabuildingblocktoimplementthecompensatorsandcontrollers,suchasPIDcontrollers,discussedinthischapter.Table9.10summarizestherealizationofPI,PD,andPIDcontrollersaswellaslag,lead,andlag-leadcompensatorsusingoperatl0nalamplifiers.YoucanverifythetablebyusingthemethodsofChapter2tofindtheimpedances.FIGURE9.60OperationalamplifierconfiguredfortransferfunctionrealizationTABLE9.10Z2(s)Zi(s)Activerealizationofcontrollersandcompensators,usinganoperationalamplifierFunctionZx(s)Z(.v)Zrh)GainJ2Ge(s)=-Z,(*)*2_^2WriRCscIntegration"AMrcDifferentiationH^•A/VV-«1PIcontrollerCR2-RCsR2{S+ltc)5/?1cPDcontroller-R2C[sR2«1c,PIDcontrollerR2-1(-+RiCC21-AMHfR)C2Jsc,C\vLagcompensation*2^V\A^LeadcompensationLJWVaRiC2/whereR2C2>RidI11'R\C\uR2WvJCj\1RiCia,/.,iwherei?iCi>R2C29.6PhysicalRealizationofCompensationLagcompensator505LeadcompensatorA2C2>A]C]A3C3>A4C4FIGURE9.61Lag-leadcompensatorimplementedwithoperationalamplifiersOthercompensatorscanberealizedbycascadingcompensatorsshowninthetable.Forexample,alag-leadcompensatorcanbeformedbycascadingthelagcompensatorwiththeleadcompensator,asshowninFigure9.61.Asanexample,letusimplementoneofthecontrollerswedesignedearlierinthechapter.Example9.9implementingaPIDControllerPROBLEM:ImplementthePIDcontrollerofExample9.5.SOLUTION:ThetransferfunctionofthePIDcontrollerisGcW=(s+55.92)(,+0.5)(9.45)whichcanbeputintheformGJs)=s+56.42+27.96(9.46)ComparingthePIDcontrollerinTable9.10withEq.(9.46),weobtainthefollowingthreerelationships:(9.47)RiCy=1and(9.48)179kQ(9.49)=27.96RiC2Sincetherearefourunknownsandthreeequations,wearbitrarilyselectapracticalvalueforoneoftheelements.Selecting358kHCt=0.1/xF,theremainingvaluesarefoundtobeR\=357.65kft,R2=178,891kft,andCi=5.59/xF.ThecompletecircuitisshowninFigure9.62,wheretheFIGURE9.62PIDcontrollercircuitelementvalueshavebeenroundedoff.0.1MF506Chapter9DesignviaRootLocusPassive-CircuitRealizationLag,lead,andlag-leadcompensatorscanalsobeimplementedwithpassivenetworks.Table9.11summarizesthenetworksandtheirtransferfunctions.ThetransferfunctionscanbederivedwiththemethodsofChapter2.Thelag-leadtransferfunctioncanbeputinthefollowingform:5Ge(s)=s+41S+Ts+(9.50)ar2wherea<1.Thus,thetermswithTiformtheleadcompensator,andthetermswithT2formthelagcompensator.Equation(9.50)showsarestrictioninherentinusingthispassiverealization.Weseethattheratiooftheleadcompensatorzerototheleadcompensatorpolemustbethesameastheratioofthelagcompensatorpoletothelagcompensatorzero.InChapter11wedesignalag-leadcompensatorwiththisrestriction.Alag-leadcompensatorwithoutthisrestrictioncanberealizedwithanactivenetworkaspreviouslyshownorwithpassivenetworksbycascadingtheleadandlagnetworksshowninTable9.11.Remember,though,thatthetwonetworksmustbeisolatedtoensurethatonenetworkdoesnotloadtheother.Ifthenetworksloadeachother,thetransferfunctionwillnotbetheproductoftheindividualtransferfunctions.Apossiblerealizationusingthepassivenetworksusesanoperationalamplifiertoprovideisolation.ThecircuitisshowninFigure9.63.Example9.10demonstratesthedesignofapassivecompensator.TABLE9.11PassiverealizationofcompensatorsFunctionNetworkTransferfunction,*2LagcompensationR2_s+RoCRi1(Ri+R2)CR1+R2cm_-A1,Leadcompensations+RiCIfy,v(,(r)S+11R~^C+R^CLag-leadcompensations+RiC,1RxCi+R2C2s+R2C21R2CJ1s+R^R2CiC29.6PhysicalRealizationofCompensationIsolationgain=-1507FIGURE9.63Lag-leadcompensatorimplementedwithcascadedlagandleadnetworkswithisolationLeadExample9.10RealizingaLeadCompensatorPROBLEM:RealizetheleadcompensatordesignedinExample9.4(Compensatorb).SOLUTION:Thetransferfunctionoftheleadcompensatoris5+4Gc(s)=20.09(9.51)ComparingthetransferfunctionofaleadnetworkshowninTable9.11withEq.(9.51),weobtainthefollowingtworelationships:'=4R^C(9.52)and1RXCR2C=20.09(9.53)Hence,i^C=0.25,andi^C=0.0622.Sincetherearethreenetworkelementsandtwoequations,wemayselectoneoftheelementvaluesarbitrarily.LettingC=1/xF,thenR^=250kOand/¾=62.2kft.Skill-AssessmentExercise9.5PROBLEM:Implementthecompensatorsshownina.andb.below.Chooseapassiverealizationifpossible.(5+0.1)(5+5)a.Gc(s)—b.Gc(s)=(5+0.1)(5+2)[s+0.01)(5+20)ANSWERS:a.Gc(s)isaPIDcontrollerandthusrequiresactiverealization.UseFigure9.60withthePIDcontrollercircuitsshowninTable9.10.Onepossiblesetofapproximatecomponentvaluesisd=10fiF,C2=100fiF,2?i=20Ml/¾=100kaWileyPLUSCHJJControlSolutions508Chapter9DesignviaRootLocusb.Gc(s)isalag-leadcompensatorthatcanbeimplementedwithapassivenetworkbecausetheratiooftheleadpoletozeroistheinverseoftheratioofthelagpoletozero.Usethelag-leadcompensatorcircuitshowninTable9.11.OnepossiblesetofapproximatecomponentvaluesisCi=100/*F,C2=900fiF,i?i=100kH,R2=560ClThecompletesolutionisatwww.wiley.com.college/nise.AntennaControl:Lag-LeadCompensationFortheantennaazimuthpositioncontrolsystemcasestudyinChapter8,weobtaineda25%overshootusingasimplegainadjustment.Oncethispercentovershootwasobtained,thesettlingtimewasdetermined.Ifwetrytoimprovethesettlingtimebyincreasingthegain,thepercentovershootalsoincreases.Inthissection,wecontinuewiththeantennaazimuthpositioncontrolbydesigningacascadecompensatorthatyields25%overshootatareducedsettlingtime.Further,weeffectanimprovementinthesteady-stateerrorperformanceofthesystem.PROBLEM:Giventheantennaazimuthpositioncontrolsystemshownonthefrontendpapers,Configuration1,designcascadecompensationtomeetthefollowingrequirements:(1)25%overshoot,(2)2-secondsettlingtime,and(3)Kv=20.SOLUTION:ForthecasestudyinChapter8,apreamplifiergainof64.21yielded25%overshoot,withthedominant,second-orderpolesat-0.833±/1.888.Thesettlingtimeisthus4/£MATLABwillthenallowyoutokeepYControlSolutionschangingthePDcompensatorvaluefromthekeyboarduntilarootlocusistobedesignedforasettlingtimeof1.667secondsisplottedthatgoesthroughthedesignpoint.anda16.3%overshoot.Ifthecompensatorzeroisplacedat-1,dothefollowing:[Section:9.3]d.Forthecompensatedsystem,MATLABwillminformyouofthecoordinatesoftheoperatingpoint,thegainattheoperatingpoint,aswellastheestimated%OS,Ts,Tp/.£,«•>,-i9*Jisalsoavailable.Thetransferfunctionofthemotorisfoundexperimentallyasfollows.Themotorandgearedloadaredrivenopen-loopbyapplyingalarge,short,rectangularpulsetothearmature.Anoscillo-gramoftheresponseshowsthatthemotorreached63%ofitsfinaloutputvalueat1/2secondaftertheapplicationofthepulse.Further,withaconstant10voltsdcappliedtothearmature,theconstantoutputspeedwas100rad/s.Motor-t®-523cm25s(s+1)TachometerKfs-(b)FIGUREP9.8a.Ifthismotorweretheforwardtransferfunctionofaunityfeedbacksystem,calculatethepercentovershootandsettlingtimethatcouldbeexpected.b.Youwanttoimprovetheclosed-loopresponse.Sincethemotorconstantscannotbechangedandyoucannotuseadifferentmotor,anamplifierandtachometerareinsertedintotheloopasshowninFigureP9.8(6).FindthevaluesofKxandKftoyieldapercentovershootof25%andasettlingtimeof0.2second.c.Evaluatethesteady-stateerrorspecificationsforboththeuncompensatedandthecompensatedsystems.a.Drawacompleteblockdiagramofthesystem,specifyingthetransferfunctionofeachcomponentwhenthesystemisoperatingwith20%overshoot.b.Whatwillthesteady-stateerrorbeforaunitrampinput?c.Determinethetransientresponsecharacteristics.d.Iftachometerfeedbackisusedaroundthemotor,asshowninFigureP9.9,findthetachometerandtheamplifiergaintomeettheoriginalspecifications.Summarizethetransientandsteady-statecharacteristics.Amplifierrt(.v)Pot7)y-*.-J/S*—yPoweramp—»•TachometerKfFIGUREP9.9MotorC(5)Chapter9524DesignviaRootLocus41.Apositioncontrolistobedesignedwitha10%over-43.GiventhesysteminFigureP9.ll,findthevaluesofshoot,asettlingtimeof1second,andKv=1000.YouKandKfSOthattheclosed-loopsystemwillhaveahaveonhandanamplifierandapoweramplifier4.32%overshootandtheminorloopwillhavewhosecascadedtransferfunctionisK-[/(s+40)adampingratioof0.8.Comparetheexpectedwithwhichtodrivethemotor.Two10-turnpotsareperformanceofthesystemwithouttachometeravailabletoconvertshaftpositionintovoltage.Acompensationtotheexpectedperformancewithvoltageof±207Tvoltsisplacedacrossthepots.Adctachometercompensation.motorwhosetransferfunctionisoftheformKe0{s)_PoweramplifierandEa(s)s(s+a)AmplifierplantC(.v)y./C(v>+X"isalsoavailable.ThefollowingdataareobservedfromIK(s+!)(.?+5)(.s+10)adynamometertestat50V.At25N-moftorque,themotorturnsat1433rpm.At75N-moftorque,theTachometermotorturnsat478rpm.ThespeedmeasuredattheloadK*is0.1thatofthemotor.Theequivalentinertia,includ2ingtheload,atthemotorarmatureis100kg-m,andtheequivalentviscousdamping,includingtheload,atFIGUREP9.11themotorarmatureis50N-m-s/rad.a.Drawacompleteblockdiagramofthesystem,specifyingthetransferfunctionofeach44.InProblem57ofChapter8,ahead-positioncontrolsystemforafloppydiskdrivewasdesignedtocomponent.yieldasettlingtimeof0.1secondthroughgainb.Designapassivecompensatortomeetthereadjustmentalone.Designaleadcompensatortoquirementsintheproblemstatement.decreasethesettlingtimeto0.05secondwithoutc.Drawtheschematicofthecompensatorshowingchangingthepercentovershoot.Also,findtheallcomponentvalues.Useanoperationalamplirequiredloopgain.fierforisolationwherenecessary.45.ConsiderthetemperaturecontrolsystemwileypuisforachemicalprocessshowninFigure^ViJ«d.UseMATLABoranyothercomputerJJJjJJLP9.12.Theuncompensatedsystemisop-c°ntfo1solutionsprogramtosimulateyoursystemVul^Peratingwitharisetimeapproximatelythesameasaandshowthatallrequirementshavebeensecond-ordersystemwithapeaktimeof16secondsandmet.5%overshoot.Thereisalsoconsiderablesteady-state42.GiventhesystemshowninFigureP9.10,findtheerror.DesignaPIDcontrollersothatthecompensatedvaluesofKandKfsothattheclosed-loopdominantsystemwillhavearisetimeapproximatelyequivalentpoleswillhaveadampingratioof0.5andtheundertoasecond-ordersystemwithapeaktimeof8secondsdampedpolesoftheminorloopwillhaveadampingand5%overshoot,andzerosteady-stateerrorforaratioof0.8.stepinput.Poweramplifier46.Steam-drivenpowergeneratorsrotateataandconstantspeedviaagovernorthatmaintainsconAmplifierPIar*stantsteampressureintheturbine.Inaddition,automaticgenerationcontrol(AGC)orload1CM-¾««.K2frequencycontrol(LFC)isaddedtoensurereliV(s+t)(s+5)abilityandconsistencydespiteloadvariationsorotherdisturbancesthatcanaffectthedistribuTachometertionlinefrequencyoutput.AspecificturbineKfsgovernorsystemcanbedescribedonlyusingtheblockdiagramofFigureP9.1inwhichG{s)=Gc(s)Gg{s)G,(s)Gm{s)iwhere(Khodabakhshian,2005)FIGUREP9.10t1-it•<ProblemsDesiredtemperaturesetpoint+PIDcontrollerAmplifierGc(s)K^-.yActuatorandvalve—*1j+0.4•525Chemicalheatprocess0.7—*temperature•2s+Us+0.250.55+0.fFIGUREP9.12TemperaturesensorChemicalprocesstemperaturecontrolsystem1isthegovernor'stransferfunction0.2sG,(s)=1istheturbinetransferfunction0.5s+1G,„(s)=——representsthemachineandload10s+0.8tmnsferfunctionsGc(s)istheLFCcompensationtobedesigneda.AssumingGc(s)=K,findthevalueofKthatwillresultinadominantpolewith£=0.7.ObtainthecorrespondingTs.b.DesignaPIDcontrollertoobtainthesamedampingfactorasinParta,butwithasettlingtimeof2secondsandzerosteady-stateerrortostepinputcommands.Gg(s)=c.VerifyyourresultsusingaMATLABsimuation.MA.LAB47.RepeatProblem46usingalag-leadcompensatorinsteadofaPIDcontroller.Designforasteadystateerrorof1%forastepinputcommand.48.Digitalversatiledisc(DVD)playersincorporateseveralcontrolsystemsfortheiroperations.Thecontroltasksinclude(1)keepingthelaserbeamfocusedonthediscsurface,(2)fasttrackselection,(3)discrotationspeedcontrol,and(4)followingatrackaccurately.Inordertofollowatrack,thepickup-headradialpositioniscontrolledviaavoltagethatoperatesavoicecoilembeddedinamagnetconfiguration.ForaspecificDVDplayer,thetransferfunctionisgivenbyVis)0.630.36;s+305.4305.4',0.04248.2248.22wherex{t)=radialpickuppositionandv{t)=thecoilinputvoltage(Bittanti,2002).a.Assumethatthesystemwillbecontrolledinaclosed-loopconfiguration,suchastheoneshowninFigureP9.1.Assumingthattheplant,P(s),iscascadedwithaproportionalcompensator,Gc(s)=K,plottherootlocusofthesystem.b.RepeatPartausingMATLABifJ^JiJLyourrootlocusplotwasere-^j^^Patedbyanyothertool.c.FindtherangeofKforclosed-loopstability,theresultingdampingfactorrange,andthesmallestsettlingtime.d.Designanotchfiltercompensatorsothatthesystem'sdominantpoleshaveadampingfactoroff=0.7withaclosed-loopsettlingtimeof0.1second.e.Simulatethesystem'sstepMATLABresponseMATLAB.forPartcusingflEd^Pf.AddaPIcompensatortothesystemtoachievezerosteady-stateerrorforastepinputwithoutappreciablyaffectingthetransientresponseachievedinPartb.g.Simulatethesystem'sstepresponseforParteusing^^!L^^j^PMATLAB.49.Acoordinatemeasuringmachine(CMM)measurescoordinatesonthree-dimensionalobjects.TheaccuracyofCMMsisaffectedbytemperaturechangesaswellasbymechanicalresonancesduetojointelasticity.Theseresonancesaremorepronouncedwhenthemachinehastogooverabruptchangesofdimension,suchassharpcornersathighspeed.Eachofthemachinelinkscanbecontrolledinaclosed-loopconfiguration,suchastheoneshowninChapter9526DesignviaRootLocusPlantCompensatorXrcl(v)+A'(.s)574.9825(5+14.24.5+3447.91)Tachometergenerator0.04665(52+1.155+0.33)•*FIGUREP9.13FigureP9.13foraspecificmachinewithprismatic(sliding)links.Inthefigure,Xref(.s)isthecommandedpositionandX(s)istheactualposition.Theminorloopusesatachometergeneratortoobtainthejointspeed,whilethemainloopcontrolsthejoint'sposition(Ozel,2003).a.FindthevalueofKthatwillresultinaminorloopwith£=0.5.b.Useanotchfiltercompensator,Gc(s),fortheexternalloopsothatitresultsinaclosed-loopdampingfactoroff=0.7withTs«4seconds.c.UseMATLABtosimulatethecompensatedsystem'sclosedloopstepresponse.demonstrationmagneticlevitationsystemisshowninFigureP9.14(a).ActionbetweenapermanentmagnetattachedtothePing-Pongball,theobjecttobelevitated,andanelectromagnetprovidesthelift.TheamountofelevationcanbecontrolledthroughVaappliedtotheelectromagnetasshowninFigureP9.14(a).Theelevationiscontrolledbyusingaphoto-detectorpairtodetecttheelevationofthePing-Pongball.AssumethattheelevationcontrolsystemisrepresentedbyFigureP9.14(b)anddothefollowing(Cho,1993):a.Designacompensator,Gc(s),toyieldasettlingtimeof0.1secondorlessifthestepresponseistohavenomorethan1%overshoot.Specifythecompensator'spoles,zeros,andgain.b.Cascadeanothercompensatortominimizethesteady-stateerrorandhavethetotalsettlingtime^ARAB(d^P50.Magneticlevitationsystemsarenowusedtoelevateandpropeltrainsalongtracks.AdiagramofaElectromagnetAmplifiercircuit1v0AnalogI/OboardControlcomputerPhotodetectorPhotoj*emitterB?T/\*.V"Permanentmagnet>vwvwwwvwPing-PongballDatumline(a)FIGUREP9.14a.Magneticlevitationsystem(©1993IEEE);(figurecontinues)ProblemsCompensatorPlantV,(.sStatedM1052710s(s-4551)(.v+286)GM%a..!2--1VjsiPhotocellFIGUREP9.14(*)(Continued)b.blockdiagramnotexceed0.5second.ThiscompensatorshouldnotappreciablyaffectthetransientresponsedesignedinParta.Specifythepolesandzerosofthiscompensator.d.UseMATLABoranyothercomputerprogramtosimulatethesystemtocheckyourdesign.c.UseMATLABoranyothercomputerJJ^JiJLprogramtosimulatethesystem^Kul^Ptocheckyourdesign.Commandedangleerfattacka,is)51.ThetransferfunctionforanAFTI/F-16aircraftrelatingangleofattack,a(t),toelevatordeflection,8e(t),isgivenbyG(s)=ControllerAircraftKG{s)+xrMATLABActualangleofattacka(.v)FIGUREP9.15Simplifiedblockdiagramforangleofattackcontrola(s)=0.072(s+23){s2+0.05s+0.04)(s-0.7)(^+1.7)(J2+0.085+0.04)AssumetheblockdiagramshowninFigureP9.15forcontrollingtheangleofattack,a,anddothefollowing(Monahemi,1992):a.FindtherangeofKforstability.b.Plotorsketcharootlocus.c.Designacascadecompensatortoyieldzerosteady-stateerror,asettlingtimeofabout0.05second,andapercentovershootnotgreaterthan20%.DesiredbearingangleController£6^,K52.FigureP9.16isasimplifiedblockdiagramofaselfguidingvehicle'sbearinganglecontrol.Designaleadcompensatortoyieldaclosed-loopstepresponsewith10%overshootandasettlingtimeof1.5seconds.53.AnX-4quadrotorflyerisdesignedasasmall-sizedunmannedautonomousvehicle(UAV)thatfliesmainlyindoorsandcanhelpinsearchandrecognizancemissions.Tominimizemechanicalproblemsandforsimplicity,thisaircraftusesfixedpitchrotorswithspeciallydesignedblades.Therefore,forthrustitisnecessarytoaddafifthpropeller.AsimplifieddesignofthethrustcontroldesigncanbemodeledSteering—*-Vehicledynamics501v2+10s+50s(s+5)ActualbearingangleFIGUREP9.16Simplifiedblockdiagramofaself-guidingvehicle'sbearinganglecontrolChapter9528DesignviaRootLocusasinFigure9.1withG(s)=Gc(s)P(s)whererepresentsthedynamicsofthethrusterrotorgain,themotor,andthebatterydynamics.Initially,thesystemisdesignedusingaproportionalcompensatorgivenbyGc(s)=3(Pounds,2009).a.Calculatetheresultingsteady-stateerrorforaunitstepinput.b.Designalagcompensatortoyieldhalfthesteady-stateerroroftheproportionalcompensator,withoutappreciablyaffectingthesystem'stransientresponse.c.UseMATLABtosimulatetheJiStiLoriginaldesignandthe^j^^Plagcompensateddesign.Verifyyourresults.54.Problem8.56describedanac/dcconversionandpowerdistributionsystemforwhichdroopcontrolisimplementedthroughtheuseofaproportionalcontrollertostabilizethedc-busvoltage.Forsimplification,asystemwithonlyonesourceconverterandoneloadconverterwasconsidered.Theparametersanddesignconsiderationspresentedinthatproblem,alongwithsomesolutionresults,allowustorepresenttheblock-diagramofthatsystemasshownintheFigureP9.17.y./.-ww^'+Qif/f'(<lJC(J/'",,,'f'>125(*2+1225s+2530000)'*''»C'(J3+1225s2+5030000*+62500000)//(.0V'*-'/'(-v)I200I«+200FIGUREP9.17HereGc(s)isthetransferfunctionofthecontroller,Gp(s)representstheforwardpathofthecontrolledplant(aconversionandpowerdistributionunit),andif(s)isthetransferfunctionofthefeedbacklow-passfilter(Karlsson,2003).Prepareatable,suchasTable9.5,wherethefirstcolumn,headedUncompensated,isfilledinwithyourresultsfromtheproportionaldesignofProblem8.56,assuminganinputstep,Vdc-ref{t)=750ll(t).FollowSteps2-8asdescribedinSection9.4(Example9.5),todesignaproportional-plusintegral-plus-derivative(PID)controllersothatthesystemcanoperatewithapercentovershoot),Chapter5,youfoundtheblockdiagramfortheactivepantographcontrolsystem.InChapter8,Problem72,youdesignedthegaintoyieldaclosedloopstepresponsewith38%overshoot.Aplotofthestepresponseshouldhaveshownasettlingtimegreaterthan0.5secondaswellasahigh-frequencyoscillationsuperimposedoverthestepresponse(O'Conner,1997).Wewanttoreducethesettlingtimetoabout0.3second,reducethestepresponsesteady-stateerrortozero,andeliminatethehighfrequencyoscillation.Awayofeliminatingthehighfrequencyoscillationistocascadeanotchfilterwiththeplant.Usingthenotchfilter,^,xs2+16s+9200=—Gn(s)=(5+60)2dothefollowing:a.DesignaPDcontrollertoyieldasettlingtimeofapproximately0.3secondwithnomorethen60%overshoot.b.AddaPIcontrollertoyieldzerosteady-stateerrorforstepinputs.c.UseMATLABtoplotthePID/notch-compensatedclosedloopstepresponse.^SJiLViiISP56.ControlofHIV/AIDS.ItwasshowninChapter6,Problem68,thatwhentheviruslevelsinanHIV/AIDSpatientarecontrolledusingRTIsthelinearizedplantmodelis_Y{s)_-520s-10.3844^~This)~s3+2.6817^2+0.11s+0.0126ProblemsAssumethatthesystemisembeddedinaconfiguration,suchastheoneshowninFigureP9.1,whereG(s)=Gc(s)P(s).Here,Gc(s)isacascadecompensator.Forsimplicityinthisproblem,choosethedcgainofGc(s)lessthanzerotoobtainanegativefeedbacksystem(thenegativesignsofGc(s)andP(s)cancelout)(Craig,I.K.,2004).a.ConsidertheuncompensatedsystemwithGc(s)=-K.FindthevalueofKthatwillplaceallclosed-looppolesontherealaxis.b.UseMATLABtosimulatetheunitMATLABstepresponseofthegain-corn-^jjJJBpensatedsystem.Notethe%OSandtheTsfromthesimulation.c.DesignaPIcompensatorsothatthesteady-stateerrorforstepinputsiszero.Chooseagainvaluetomakeallpolesreal.d.UseMATLABtosimulatethedesign^RABinPartcforaunitstepinput.CLI^PComparethesimulationtoPartb.57.Hybridvehicle.Inthepreviouschapter,weusedtherootlocustodesignaproportionalcontrollerforthespeedcontrolofanHEV.Werearrangedtheblockdiagramtobeaunityfeedbacksystem,asshownintheblockdiagramofFigureP7.34(Preitl,2007).TheplantandcompensatorresultedinG(s)=K{s+0.60)[5+0.5858)(5+0.0163)andwefoundthat^=0.78resultedinacriticallydampedsystem.a.Usethisdesigntoitemizetheperformancespecificationsbyfillinginatable,similartoTable9.5,underthecolumnUncompensated.TakeadvantageoftheresultsfromChapter8oruseMATLABtofindtheentries.Plotc{t)forr(0=4u{t)volts.b.NowassumethatthesystemJ^12^specificationsrequire(d^Pzerosteady-stateerrorforstepinputs,asteady-stateerrorforrampinputs<2%,a%OS<4.32%,andasettlingtime,isimplicit.Sinceasystemcausesboththeamplitudeandphaseangleoftheinputtobechanged,wecanthinkofthesystemitselfasrepresentedbyacomplexnumber,definedsothattheproductoftheinputphasorandthesystemfunctionyieldsthephasorrepresentationoftheoutput.ConsiderthemechanicalsystemofFigure10.2(a).Iftheinputforce,/(7),issinusoidal,thesteady-stateoutputresponse,x(t),ofthesystemisalsosinusoidalandatthesamefrequencyastheinput.InFigure10.2(6)theinputandoutputsinusoidsarerepresentedbycomplexnumbers,orphasors,Mi(to)Z^(to)andM0(to)Ztj)0(to),respectively.HeretheM'saretheamplitudesofthesinusoids,andthe0'sarethephaseanglesx(r)=M0cos(co+0„)SpringMass•J[t)=MjCOS((OM-0,)Viscousdamperla)Mj&ZijftMifQ)/.)MM^M(b)*»tOutputFIGURE10.2Sinusoidalfrequencyresponse:a.system;b.transferfunction;c.inputandoutputwaveformsChapter10FrequencyResponseTechniquesofthesinusoidsasshowninFigure10.2(c).Assumethatthesystemisrepresentedbythecomplexnumber,M(w)Z0(a>).Theoutputsteady-statesinusoidisfoundbymultiplyingthecomplexnumberrepresentationoftheinputbythecomplexnumberrepresentationofthesystem.Thus,thesteady-stateoutputsinusoidisM0(co)Zfa{co)=Mi(co)M(a>)Z[Pi{a>)+#()](10.1)FromEq.(10.1)weseethatthesystemfunctionisgivenbyand¢(0))=^(0))-^(0))(10.3)Equations(10.2)and(10.3)formourdefinitionoffrequencyresponse.WecallM(o))themagnitudefrequencyresponseand¢(0))thephasefrequencyresponse.ThecombinationofthemagnitudeandphasefrequencyresponsesiscalledthefrequencyresponseandisM(a>)Z0(a>).Inotherwords,wedefinethemagnitudefrequencyresponsetobetheratiooftheoutputsinusoid'smagnitudetotheinputsinusoid'smagnitude.Wedefinethephaseresponsetobethedifferenceinphaseanglebetweentheoutputandtheinputsinusoids.Bothresponsesareafunctionoffrequencyandapplyonlytothesteadystatesinusoidalresponseofthesystem.AnalyticalExpressionsforFrequencyResponseNowthatwehavedefinedfrequencyresponse,letusobtaintheanalyticalexpressionforit(Nilsson,1990).Laterinthechapter,wewillusethisanalyticalexpressiontodeterminestability,transientresponse,andsteady-stateerror.Figure10.3showsasystem,G(s),withtheLaplacetransformofageneralsinusoid,r(t)=Acoso)t4Bsincot=VA2+B2cos[o)t-tan-](B/A)]astheinput.Wecanrepresenttheinputasaphasorinthreeways:(1)inpolarform,MjZfa,whereM,-=yA2+B2and0,=-tan~1(B/A);(2)inrectangularform,A—jB;and(3)usingEuler'sformula,M/e^'.WenowsolvefortheforcedresponseportionofC(s),fromwhichweevaluatethefrequencyresponse.FromFigure10.3,_.As+Be*-,..c=(?wjG(s)Mn.,(104)'WeseparatetheforcedsolutionfromthetransientsolutionbyperformingapartialfractionexpansiononEq.(10.4).Thus,ASB)=-Mie-faMce-if*S-jCO2*-*-&2_MJMG"K2=A±+Ba>s+yw(10.6a)iiMa)2=i(A-jB)G(jco)=-Miet&Mae^*3(10.6b)S—>+j(t)ForEqs.(10.6),2£|isthecomplexconjugateofj&j,,MG=|G(/w)|(10.7)0G=angleofG(/W)(10.8)Thesteady-stateresponseisthatportionofthepartial-fractionexpansionthatcomesfromtheinputwaveform'spoles,orjustthefirsttwotermsofEq.(10.5).Hence,thesinusoidalsteady-stateoutput,Css(s),iss+jcos—jco(10.9)SubstitutingEqs.(10.6)intoEq.(10.9),weobtainMiMG__CWW=MjMG^^n)f(Mn)2S+JCO+(10.10)S—JO)TakingtheinverseLaplacetransformation,weobtain'p-i{ut+4>i+4>G)4-pJ(a)l+'i>i+G)c(t)=MiMG'(10.11)=M-MGCOS(cot+¢1+G)whichcanberepresentedinphasorformasM0/.G=G(jco).Inotherwords,thefrequencyresponseofasystemwhosetransferfunctionisG(s)isG(jco)=G(s)\S-*]CO(10.12)PlottingFrequencyResponseG(jco)=MG{W)<0G(W)canDeplottedinseveralways;twoofthemare(1)asafunctionoffrequency,withseparatemagnitudeandphaseplots;and(2)asapolarplot,wherethephasorlengthisthemagnitudeandthephasorangleisthephase.Whenplottingseparatemagnitudeandphaseplots,themagnitudecurvecanbeplottedin537538Chapter10FrequencyResponseTechniquesdecibels(dB)vs.logw,wheredB=20logM.1Thephasecurveisplottedasphaseanglevs.logco.ThemotivationfortheseplotsisshowninSection10.2.UsingtheconceptscoveredinSection8.1,datafortheplotsalsocanbeobtainedusingvectorsonthes-planedrawnfromthepolesandzerosofG{s)totheimaginaryaxis.HerethemagnituderesponseataparticularfrequencyistheproductofthevectorlengthsfromthezerosofG(s)dividedbytheproductofthevectorlengthsfromthepolesofG(s)drawntopointsontheimaginaryaxis.ThephaseresponseisthesumoftheanglesfromthezerosofG(s)minusthesumoftheanglesfromthepolesofG(s)drawntopointsontheimaginaryaxis.Performingthisoperationforsuccessivepointsalongtheimaginaryaxisyieldsthedataforthefrequencyresponse.Remember,eachpointisequivalenttosubstitutingthatpoint,s=jcoi,intoG(s)andevaluatingitsvalue.Theplotsalsocanbemadefromacomputerprogramthatcalculatesthefrequencyresponse.Forexample,therootlocusprogramdiscussedinAppendixHatwww.wiley.com/college/nisecanbeusedwithtestpointsthatareontheimaginaryaxis.ThecalculatedKvalueateachfrequencyisthereciprocalofthescaledmagnituderesponse,andthecalculatedangleis,directly,thephaseangleresponseatthatfrequency.Thefollowingexampledemonstrateshowtoobtainananalyticalexpressionforfrequencyresponseandmakeaplotoftheresult.FrequencyResponsefromTheTransferFunctionPROBLEM:FindtheanalyticalexpressionforthemagnitudefrequencyresponseandthephasefrequencyresponseforasystemG(s)=l/(s+2).Also,plotboththeseparatemagnitudeandphasediagramsandthepolarplot.-6-121°~24oN-30-36-420.111010010100Frequency(rad/s)0-10~-20-"vv1-30\$?-40f-50ss|-60*-70-80-900.11Frequency(rad/s)FIGURE10.4FrequencyresponseplotsforG(s)=l/(s+2):separatemagnitudeandphasediagrams.'Throughoutthisbook,"log"isusedtomeanlogio,orlogarithmtothebase10.10.1IntroductionSOLUTION:Firstsubstitutes=jcointhesystemfunctionandobtainG(jeo)=I/(jco+2)=(2—jco)/(o)2+4).Themagnitudeofthiscomplexnumber,\G(ja>)\—M(co)=1/yj(a)2+4),isthemagnitudefrequencyresponse.ThephaseangleofG(jco),¢(0))=—tan"1(co/2),isthephasefrequencyresponse.G(jco)canbeplottedintwoways:(1)inseparatemagnitudeandphaseplotsand(2)inapolarplot.Figure10.4showsseparatemagnitudeandphasediagrams,wherethemagnitudediagramis20logM(co)=20log(1/Vco2+4)vs.logco,andthephasediagramis¢(0))=—tan-:(co/2)vs.logco.Thepolarplot,showninFigure10.5,isaplotofM(a>)<0(o>)=\fy/a?-+4<-\ssrx{mJ2)fordifferentco.1(0=ReG10oor/s0.0510.11111'0.150.20.250.30.351-0.4\0.4503=0r/sft0.5Note:r/s=rad/sFIGURE10.5FrequencyresponseplotforG(s)=l/(s+2):polarplotInthepreviousexample,weplottedtheseparatemagnitudeandphaseresponses,aswellasthepolarplot,usingthemathematicalexpressionforthefrequencyresponse.Eitherofthesefrequencyresponsepresentationscanalsobeobtainedfromtheother.YoushouldpracticethisconversionbylookingatFigure10.4andobtainingFigure10.5usingsuccessivepoints.Forexample,atafrequencyof1rad/sinFigure10.4,themagnitudeisapproximately-7dB,or10_7/,2°=0.447.Thephaseplotat1rad/stellsusthatthephaseisabout—26°.Thus,onthepolarplotapointofradius0.447atanangleof—26°isplottedandidentifiedas1rad/s.ContinuinginlikemannerforotherfrequenciesinFigure10.4,youcanobtainFigure10.5.Similarly,Figure10.4canbeobtainedfromFigure10.5byselectingasequenceofpointsinFigure10.5andtranslatingthemtoseparatemagnitudeandphasevalues.Forexample,drawingavectorfromtheorigintothepointat2rad/sinFigure10.5,weseethatthemagnitudeis20log0.35=—9.12dBandthephaseangleisabout-45°.Themagnitudeandphaseanglearethenplottedat2rad/sinFigure10.4ontheseparatemagnitudeandphasecurves.PROBLEM:a.FindanalyticalexpressionsforthemagnitudeandphaseresponsesofG{S)=(s+2)(s+4)540Chapter10FrequencyResponseTechniquesb.Makeplotsofthelog-magnitudeandthephase,usinglog-frequencyinrad/sastheordinate.c.Makeapolarplotofthefrequencyresponse.ANSWERS:a.M(co)=2,(8fa-_™a\24-(6,^(6a>)co2y+forco<VS:$(co)=-arctanf~),for\$-co2J(6coCO>V8:0(eo)=-%+arctan-b.Seetheansweratwww.wiley.com/college/nise.c.Seetheansweratwww.wiley.com/college/nise.Thecompletesolutionisatwww.wiley.com/college/nise.Inthissection,wedefinedfrequencyresponseandsawhowtoobtainananalyticalexpressionforthefrequencyresponseofasystemsimplybysubstitutings=jcointoG(s).WealsosawhowtomakeaplotofG(Jco).Thenextsectionshowshowtoapproximatethemagnitudeandphaseplotsinordertosketchthemrapidly.£10.2AsymptoticApproximations:BodePlotsThelog-magnitudeandphasefrequencyresponsecurvesasfunctionsoflogcoarecalledBodeplotsorBodediagrams.SketchingBodeplotscanbesimplifiedbecausetheycanbeapproximatedasasequenceofstraightlines.Straight-lineapproximationssimplifytheevaluationofthemagnitudeandphasefrequencyresponse.Considerthefollowingtransferfunction:G(s)=g('+*i)('+*2)"-(*+gfc)sm(s+pl)(s+p2)---(s+ptt)(1(n3)Themagnitudefrequencyresponseistheproductofthemagnitudefrequencyresponsesofeachterm,or\G(jco)\=*K,+*i)ll(J+*2)l--^+^)1l*1l(*+Pl)ll(*+P2)\"'\(3+Pn)\(10.14)S—*)(J)Thus,ifweknowthemagnituderesponseofeachpoleandzeroterm,wecanfindthetotalmagnituderesponse.Theprocesscanbesimplifiedbyworkingwiththelogarithmofthemagnitudesincethezeroterms'magnituderesponseswouldbeaddedandthepoleterms'magnituderesponsessubtracted,ratherthan,respectively,multipliedordivided,toyieldthelogarithmofthetotalmagnituderesponse.ConvertingthemagnituderesponseintodB,weobtain201og|G0^)|=201og#+201og|(s+Zi)|+201og|(s+Z2)|+----20^1^1-20^1(5+^)1----1,^10.2AsymptoticApproximations:BodePlotsThus,ifweknewtheresponseofeachterm,thealgebraicsumwouldyieldthetotalresponseindB.Further,ifwecouldmakeanapproximationofeachtermthatwouldconsistonlyofstraightlines,graphicaladditionoftermswouldbegreatlysimplified.Beforeproceeding,letuslookatthephaseresponse.FromEq.(10.13),thephasefrequencyresponseisthesumofthephasefrequencyresponsecurvesofthezerotermsminusthesumofthephasefrequencyresponsecurvesofthepoleterms.Again,sincethephaseresponseisthesumofindividualterms,straight-lineapproximationstotheseindividualresponsessimplifygraphicaladdition.Letusnowshowhowtoapproximatethefrequencyresponseofsimplepoleandzerotermsbystraight-lineapproximations.Laterweshowhowtocombinetheseresponsestosketchthefrequencyresponseofmorecomplicatedfunctions.Insubsequentsections,afteradiscussionoftheNyquiststabilitycriterion,welearnhowtousetheBodeplotsfortheanalysisanddesignofstabilityandtransientresponse.BodePlotsforG(s)=(s+a)Considerafunction,G(s)=(s+a),forwhichwewanttosketchseparatelogarithmicmagnitudeandphaseresponseplots.Lettings=jco,wehaveG{j(o)={jeo+a)=a(j-+l)(10.16)Atlowfrequencieswhencoapproacheszero,G(ja>)»a(10.17)20logM=20loga(10.18)ThemagnituderesponseindBiswhereM=\G(Jco)\andisaconstant.Eq.(10.18)isshownplottedinFigure10.6(a)fromco=0.01atoa.Athighfrequencieswhereco>a,Eq.(10.16)becomesG(jco)«aO—j=a(-)Z90°=coZ90°(10.19)ThemagnituderesponseindBis20logM=20loga+20log-=20logco(10.20)wherea<co<oo.Noticefromthemiddletermthatthehigh-frequencyapproximationisequaltothelow-frequencyapproximationwhenco=a,andincreasesforco>a.IfweplotdB,20logM,againstlogco,Eq.(10.20)becomesastraightline:y=20x(10.21)wherey=20logM,andx=logco.Thelinehasaslopeof20whenplottedasdBvs.logco.Sinceeachdoublingoffrequencycauses20logcotoincreaseby6dB,thelinerisesatanequivalentslopeof6dB/octave,whereanoctaveisadoublingoffrequency.Thisrisebeginsatco=a,wherethelow-frequencyapproximationequalsthehigh-frequencyapproximation.542Chapter10FrequencyResponseTechniques42+20logay'36+20loga/30+20loga*24+20logao18+201ogaye12+201ogaSlope=6dB/octave—20dB/decade6+201oga/20loga0.01«IK0.1a10a100aI0a100aFrequency(rad/s)9075160345'Slope-45°/decade1300-.1500.01a0.1aaFrequency(rad/s)(b)FIGURE10.6Bodeplotsof(s+a):a.magnitudeplot;b.phaseplotWecallthestraight-lineapproximationsasymptotes.Thelow-frequencyapproximationiscalledthelow-frequencyasymptote,andthehigh-frequencyapproximationiscalledthehigh-frequencyasymptote.Thefrequency,«,iscalledthebreakfrequencybecauseitisthebreakbetweenthelow-andthehigh-frequencyasymptotes.Manytimesitisconvenienttodrawthelineoveradecaderatherthananoctave,whereadecadeis10timestheinitialfrequency.Overonedecade,20loga>increasesby20dB.Thus,aslopeof6dB/octaveisequivalenttoaslopeof20dB/decade.TheplotisshowninFigure10.6(A)fromco=0.01«to100«.Letusnowturntothephaseresponse,whichcanbedrawnasfollows.Atthebreakfrequency,a,Eq.(10.16)showsthephasetobe45°.Atlowfrequencies,Eq.(10.17)showsthatthephaseis0°.Athighfrequencies,Eq.(10.19)showsthatthephaseis90°.Todrawthecurve,startonedecade(1/10)belowthebreakfrequency,0.1«,with0°phase,anddrawalineofslope+45°/decadepassingthrough45°atthebreakfrequencyandcontinuingto90°onedecadeabovethebreakfrequency,10«.TheresultingphasediagramisshowninFigure10.6(6).Itisoftenconvenienttonormalizethemagnitudeandscalethefrequencysothatthelog-magnitudeplotwillbe0dBatabreakfrequencyofunity.Normalizingandscalinghelpsinthefollowingapplications:1.Whencomparingdifferentfirst-orsecond-orderfrequencyresponseplots,eachplotwillhavethesamelow-frequencyasymptoteafternormalizationandthesamebreakfrequencyafterscaling.10.2AsymptoticApproximations:BodePlots2.WhensketchingthefrequencyresponseofafunctionsuchasEq.(10.13),eachfactorinthenumeratoranddenominatorwillhavethesamelow-frequencyasymptoteafternormalization.Thiscommonlow-frequencyasymptotemakesiteasiertoaddcomponentstoobtaintheBodeplot.Tonormalize(s+a),wefactoroutthequantityaandforma[(s/a)+\].Thefrequencyisscaledbydefininganewfrequencyvariable,s\=s/a.Thenthemagnitudeisdividedbythequantityatoyield0dBatthebreakfrequency.Hence,thenormalizedandscaledfunctionis(si-f1).Toobtaintheoriginalfrequencyresponse,themagnitudeandfrequencyaremultipliedbythequantitya.Wenowusetheconceptsofnormalizationandscalingtocomparetheasymptoticapproximationtotheactualmagnitudeandphaseplotfor(s+a).Table10.1showsthecomparisonforthenormalizedandscaledfrequencyresponseof(s+a).Noticethattheactualmagnitudecurveisnevergreaterthan3.01dBfromtheasymptotes.Thismaximumdifferenceoccursatthebreakfrequency.Themaximumdifferenceforthephasecurveis5.71°,whichoccursatthedecadesaboveandbelowthebreakfrequency.Forconvenience,thedatainTable10.1isplottedinFigures10.7and10.8.WenowfindtheBodeplotsforothercommontransferfunctions.TABLE10.1Asymptoticandactualnormalizedandscaledfrequencyresponsedatafor(s+a)^Hf™ya(rad/s)20log^(dB)aAsymptoticPhase(degrees)ActualAsymptoticActual0.0100.000.000.570.0200.000.001.150.0400.010.002.290.0600.020.003.430.0800.030.000.10.040.004.575.710.2000.1713.5511.310.400.6427.0921.800.601.3435.0230.960.802.1540.6438.661203.0145.0045.0066.9958.5563.4341212.3072.0975.96615.5615.6880.0280.54810182018.1385.6482.8720.0490.0084.292026.0226.0390.0087.144032.0432.0490.0088.576035.5635.5690.0089.058038.0638.0690.0089.284040.0090.0089.43100544Chapter10FrequencyResponseTechniques2018/1412"aioo]0)«aor,indB,1(10.24)201ogM=20log--20log-=-201ogwaaNoticefromthemiddletermthatthehigh-frequencyapproximationequalsthelowfrequencyapproximationwhenco=a,anddecreasesforco>a.ThisresultissimilartoEq.(10.20),excepttheslopeisnegativeratherthanpositive.TheBodelogmagnitudediagramwilldecreaseatarateof20dB/decaderatherthanincreaseatarateof20dB/decadeafterthebreakfrequency.Thephaseplotisthenegativeofthepreviousexamplesincethefunctionistheinverse.Thephasebeginsat0°andreaches-90°athighfrequencies,goingthrough-45°atthebreakfrequency.BoththeBodenormalizedandscaledlog-magnitudeandphaseplotareshowninFigure10.9(d).BodePlotsforG(s)=sOurnextfunction,G(s)=s,hasonlyahigh-frequencyasymptote.Lettings=jco,themagnitudeis20logo),whichisthesameasEq.(10.20).Hence,theBodemagnitudeplotisastraightlinedrawnwitha+20dB/decadeslopepassingthroughzerodBwhenco—\.Thephaseplot,whichisaconstant+90°,isshownwiththemagnitudeplotinFigure10.9(A).BodePlotsforG(s)=1/5Thefrequencyresponseoftheinverseoftheprecedingfunction,G(s)=1/s,isshowninFigure10.9(b)andisastraightlinewitha-20dB/decadeslopepassingthroughzerodBatco=1.TheBodephaseplotisequaltoaconstant—90°.Wehavecoveredfourfunctionsthathavefirst-orderpolynomialsinsinthenumeratorordenominator.Beforeproceedingtosecond-orderpolynomials,letus40^20g>05-20«-40111III•\4—••J+10.1§90|4530|-45.G(s)5-90IIII110Frequency(rad/s)|v1;|:,li|i'\iimi0.1sMS81III0.010.01',—-1—--'•—INmliiiHiI'll10|!'i||;i1Frequency(rad/s)(a)100i:.1001lllllll40-6db/octave=20—j~--..~-•-»--20dB/decade020-G(s)=:—"-40—i[j|1000.010.1110Frequency(rad/s)•HTffi|90g»45305¾-45|-90am-0.0111!|0.1III•j]1)1'III1llll1III1r101Frequency(rad/s)mllll:IIl|lllll100FIGURE10.9NormalizedandscaledBodeplotsfora.C(s)=s;b.G{s)=1/s;(figurecontinues)546IChapter101MM!40200-20-400.0111ITTJjnil~rfj•—-•rrIII0.1III1Frequencya90450-45-90i11nun.G(s)=(s+aliir0.01-1•IFrequencyResponseTechniques--_I_LUIJ11LIII10100G(J)=T^(s+a>T|j|j|0.01in0.1(rad/s)|i_-—•ijjlill---'mm+45°/aecadB|||[10.1]i10Frequencya40200-20-40(rad/s)iilllll10090450-45-90llllllllIII|||•«-IIm--H4I11Frequencya10100rraH/^in;jjG(s)=T-^(s+a)i[illll----JJ0.011II-6dB/octave=•|1fimi111ill100.1Frequency100(rnAk)id)FIGURE10.9(Continued)c.G(s)=(s+a);d.G(s)=!/(*+a)lookatanexampleofdrawingtheBodeplotsforafunctionthatconsistsoftheproductoffirst-orderpolynomialsinthenumeratoranddenominator.Theplotswillbemadebyaddingtogethertheindividualfrequencyresponsecurves.Example10.2BodePlotsforRatioofFirst-OrderFactorsC(s)PROBLEM:DrawtheBodeplotsforthesystemshowninFigure10.10,whereG{s)=K(s+3)/[s{s+l){s+2)].FIGURE10.10Closed-loopunityfeedbacksystemSOLUTION:WewillmakeaBodeplotfortheopen-loopfunctionG{s)=K(s+3)/[s{s+l)(s+2)].TheBodeplotisthesumoftheBodeplotsforeachfirst-orderterm.Thus,itisconvenienttousethenormalizedplotforeachofthesetermssothatthelow-frequencyasymptoteofeachterm,exceptthepoleattheorigin,isat0dB,makingiteasiertoaddthecomponentsoftheBodeplot.WerewriteG(s)showingeachtermnormalizedtoalow-frequencygainofunity.Hence,G(s)=,(,+1)(1+1)(10.25)Nowdeterminethatthebreakfrequenciesareat1,2,and3.Themagnitudeplotshouldbeginadecadebelowthelowestbreakfrequencyandextendadecadeabovethehighestbreakfrequency.Hence,wechoose0.1radianto100radians,orthreedecades,astheextentofourplot.Atco=0.1thelow-frequencyvalueofthefunctionisfoundfromEq.(10.25)usingthelow-frequencyvaluesforallofthe{(s/a)+1]terms,(thatis,s=0)andtheactualvalueforthesterminthedenominator.Thus,G(/0.1)«\K/0.1=15K.TheeffectofKistomovethemagnitudecurveup(increasingK)ordown(decreasingK)bytheamountof20logK.Khasnoeffectuponthephasecurve.IfwechooseK=1,themagnitudeplotcanbedenormalizedlaterforanyvalueofKthatiscalculatedorknown.10.2AsymptoticApproximations:BodePlots40(H32s20§°J?-20S20dB/dec(6dB/oct)1{5+1)o-2CdB/dec(-6dB/oco3-40547H___-600.110010Frequency(rad/s)(a)40-20dB/dec(-6dB/o=t)20*°M,^^^S-2D.__-40dB/dec(-12dB/oct)__oN-40N|FIGURE10.11-60100.1100Frequency(rad/s)(b)Figure10.11(a)showseachcomponentoftheBodelog-magnitudefrequencyresponse.SummingthecomponentsyieldsthecompositeplotshowninFigure10.11(6).TheresultsaresummarizedinTable10.2,whichcanbeusedtoobtaintheslopes.Eachpoleandzeroisitemizedinthefirstcolumn.Readingacrossthetableshowsitscontributionateachfrequency.ThelastrowisthesumoftheslopesandcorrelateswithFigure10.11(6).TheBodemagnitudeplotforK=1startsatco=0.1withavalueof20log15=23.52dB,anddecreasesimmediatelyatarateof-20dB/decade,duetothe5terminthedenominator.Atco=1,the(^-(-1)terminthedenominatorbeginsits20dB/decadedownwardslopeandcausesanadditional20dB/decadenegativeslope,oratotalof—40dB/decade.Atco—2,theterm\{s/2)+1]beginsits-20dB/decadeslope,addingyetanother-20dB/decadetotheresultantplot,oratotalof-60dB/decadeslopethatcontinuesuntilco=3.Atthisfrequency,the[{s/3)+1]terminthenumeratorbeginsitspositiveTABLE10.2Bodemagnitudeplot:slopecontributionfromeachpoleandzeroinExample10.2Frequency(rad/s)Description
Poleat00.1(Start:Poleat0)1(Start:Poleat-1)2(Start:Poleat-2)3(StartZeroat-3)-20-20-20-20Poleat-10-20-20-20Poleat-2(J0-20-20Zeroat-300020-20-40-60-40Totalslope(dB/dec)Bodelog-magnitudeplotforExample10.2:a.components;b.compositeChapter10548FrequencyResponseTechniques20dB/decadeslope.Theresultantmagnitudeplot,therefore,changesfromaslopeof-60dB/decadeto-40dB/decadeatco=3,andcontinuesatthatslopesincetherearenootherbreakfrequencies.Theslopesareeasilydrawnbysketchingstraight-linesegmentsdecreasingby20dBoveradecade.Forexample,theinitial-20dB/decadeslopeisdrawnfrom23.52dBata;=0.1,to3.52dB(a20dBdecrease)atm=1.The-40dB/decadeslopestartingatm=1isdrawnbysketchingalinesegmentfrom3.52dBatco=1,to-36.48dB(a40dBdecrease)atco—10,andusingonlytheportionfromco=1to0)=2.Thenextslopeof—60dB/decadeisdrawnbyfirstsketchingalinesegmentfrom=20(ldecade)thatdropsdownby60dB,andusingonlythatportionofthelinefromo)=2toco=3.Thefinalslopeisdrawnbysketchingalinesegmentfromw=3too)=30(1decade)thatdropsby40dB.Thisslopecontinuestotheendoftheplot.Phaseishandledsimilarly.However,theexistenceofbreaksadecadebelowandadecadeabovethebreakfrequencyrequiresalittlemorebookkeeping.Table10.3showsthestartingandstoppingfrequenciesofthe45°/decadeslopeforTABLE10.3Bodephaseplot:slopecontributionfromeachpoleandzeroinExample10.2Frequency(rad/s)Description0.1(Start:Poleat-1)0.2(Start:Poleat-2)0.3(Start:Poleat-3)0(End:Poleat-1)20(End:Poleat-2)30(End:Zeroat—3)-45-45-45-45-4545-450-454500454500Poleat-1Poleat-2Zeroat—3Totalslope(deg/dec)-45-9090(H450""""n(H1-45(5+1)45°/-457dec-9032.?-135-180100.1100Frequency(rad/s)(«)-90\~7-135-457dec-180r-7*=457de)10010.2AsymptoticApproximations:BodePlotseachofthepolesandzeros.Forexample,readingacrossforthepoleat—2,weseethatthe-45°slopestartsatafrequencyof0.2andendsat20.Fillingintherowsforeachpoleandthensummingthecolumnsyieldstheslopeportraitoftheresultingphaseplot.LookingattherowmarkedTotalslope,weseethatthephaseplotwillhaveaslopeof—45°/decadefromafrequencyof0.1to0.2.Theslopewillthenincreaseto-90°/decadefrom0.2to0.3.Theslopewillreturnto—45°/decadefrom0.3to10rad/s.Aslopeof0ensuesfrom10to20rad/s,followedbyaslopeof+45°/decadefrom20to30rad/s.Finally,from30rad/stoinfinity,theslopeis0°/decade.TheresultingcomponentandcompositephaseplotsareshowninFigure10.12.Sincethepoleattheoriginyieldsaconstant-90°phaseshift,theplotbeginsat—90°andfollowstheslopeportraitjustdescribed.BodePlotsforG(s)=s2+2$a)ns+co2nNowthatwehavecoveredBodeplotsforfirst-ordersystems,weturntotheBodelog-magnitudeandphaseplotsforsecond-orderpolynomialsins.Thesecond-orderpolynomialisoftheformG(s)=s2+2l;a>ns+co2n=to2n(^+2£—+1](10.26)Unlikethefirst-orderfrequencyresponseapproximation,thedifferencebetweentheasymptoticapproximationandtheactualfrequencyresponsecanbegreatforsomevaluesof£.AcorrectiontotheBodediagramscanbemadetoimprovetheaccuracy.Wefirstderivetheasymptoticapproximationandthenshowthedifferencebetweentheasymptoticapproximationandtheactualfrequencyresponsecurves.Atlowfrequencies,Eq.(10.26)becomesG(s)wcol=ulZ0°(10.27)Themagnitude,M,indBatlowfrequenciesthereforeis20logM=20log|GO)|=20logco2n(10.28)G{s)«s2(10.29)G(jto)»-co2=co2Z\80°(10.30)Athighfrequencies,orThelog-magnitudeis20logM=20log\G(ja>)\=20logco2=40logco(10.31)Equation(10.31)isastraightlinewithtwicetheslopeofafirst-orderterm(Eq.(10.20)).Itsslopeis12dB/octave,or40dB/decade.550Chapter10FrequencyResponseTechniques120Slope=12dB/octave=40dB/decade80400-40-1200.010.1110100101000)/0),,(a)1801359045Slope=90°/decade0FIGURE10.13-45BodeasymptotesfornormalizedandscaledG(s)=s2+2t(ons+o?n:a.magnitude;b.phase-900.010.110)/0)n(b)Thelow-frequencyasymptote(Eq.(10.27))andthehigh-frequencyasymptote(Eq.(10.31))areequalwhenco=con.Thus,conisthebreakfrequencyforthesecondorderpolynomial.Forconvenienceinrepresentingsystemswithdifferentcon,wenormalizeandscaleourfindingsbeforedrawingtheasymptotes.UsingthenormalizedandscaledtermofEq.(10.26),wenormalizethemagnitude,dividingbyto2,andscalethefrequency,dividingbyto„.Thus,weplotG(s{)/co2n=s\+2t;si+\,whereS]—s/a)n.G(s\)hasalow-frequencyasymptoteat0dBandabreakfrequencyof1rad/s.Figure10.13(a)showstheasymptotesforthenormalizedandscaledmagnitudeplot.Wenowdrawthephaseplot.Itis0°atlowfrequencies(Eq.(10.27))and180°athighfrequencies(Eq.(10.30)).Tofindthephaseatthenaturalfrequency,firstevaluateG(Jco):22G{jco)=s2+2^tons+COn\$—>ja>={co,-co)+j2;conco(10.32)Thenfindthefunctionvalueatthenaturalfrequencybysubstitutingco=con.Sincetheresultis|2|to|,thephaseatthenaturalfrequencyis+90°.Figure10.13(5)showsthephaseplottedwithfrequencyscaledbycon.Thephaseplotincreasesatarateof90°/decadefrom0.1to10andpassesthrough90°at1.CorrectionstoSecond-OrderBodePlotsLetusnowexaminetheerrorbetweentheactualresponseandtheasymptoticapproximationofthesecond-orderpolynomial.Whereasthefirst-orderpolynomialhasadisparityofnomorethan3.01dBmagnitudeand5.71°phase,thesecond-orderfunctionmayhaveagreaterdisparity,whichdependsuponthevalueoff.10.2AsymptoticApproximations:BodePlots551FromEq.(10.32),theactualmagnitudeandphaseforG(s)=s2+2t;a>ns+a?nare,respectively,M^sjicol-CDlf+(10.33)WcOnCofPhase=tan'~4——T»coln-col(10.34)TheserelationshipsaretabulatedinTable10.4forarangeofvaluesof£andplottedinFigures10.14and10.15alongwiththeasymptoticapproximationsfornormalizedTABLE10.4Datafornormalizedandscaledlog-magnitudeandphaseplotsfor(s2+2£cons+to2).Mag=20Iog(M/ft>2,]Freq.Phase(deg)¢=0.1Mag(dB)¢=0.2Phase(deg)¢=0.2Mag(dB)¢=0.3Phase(deg)¢=0.3co„Mag(dB)¢=0.10.10-0.091.16-0.082.31-0.070.20-0.352.39-0.297.13-0.803.77-0.32-0.744.760.307.51-0.6511.190.40-1.485.44-1.3610.78-1.1715.950.50-2.427.59-2.2014.93-1.8521.800.60-3.7310.62-3.3020.56-2.6829.360.70-5.5315.35-4.7028.77-3.6039.470.80-8.0923.96-6.3541.63-4.4453.130.90-11.6443.45-7.8162.18-4.8570.62CO3.471.00-13.9890.00-7.9690.00-4.4490.001.10-10.34133.67-6.24115.51-3.19107.651.20-6.00151.39-3.73132.51-1.48121.431.30-2.65159.35-1.27143.000.35131.501.400.00163.740.92149.742.11138.811.502.18166.502.84154.363.75144.251.604.04168.414.54157.695.26148.391.705.67169.806.06160.216.64151.651.807.12170.877.43162.18154.261.908.42171.728.69163.777.919.09156.412.009.62172.419.84165.0710.19158.203.0018.09175.7118.16171.4718.28167.324.0023.53176.9523.57173.9123.63170.915.0027.61177.6127.63175.2427.67172.876.0030.89178.0430.90176.0830.93174.137.0033.63178.3333.64176.6633.66175.008.0035.99178.5536.00177.09175.649.0038.06178.7138.07177.4236.0138.0810.0039.91178.8439.92177.6939.93176.14176.53(tablecontinues)552Chapter10FrequencyResponseTechniquesTABLE10.4Datafornormalizedandscaledlog-magnitudeandphaseplotsfor(s2+2t;cons+afy.Mag=20log(M/a>l)(Continued)Freq.COMag(dB)¢=0.5Phase(deg)¢=0.5Mag(dB)¢=0.7Phase(deg)¢=0.7Mag(dB)¢=0.1Phase(deg)¢=010.10-0.045.770.008.050.0911.420.20-0.1711.770.0016.260.3422.620.30-0.3718.250.0224.780.7533.400.40-0.6325.460.0833.691.2943.600.50-0.9033.690.2243.031.9453.130.60-1.1443.150.4752.702.6761.930.70-1.2553.920.8762.513.4669.980.80-1.1465.771.4172.184.3077.320.90-0.7378.082.1181.425.1583.971.000.0090.002.9290.006.0290.001.100.98100.813.8397.776.8995.451.202.13110.144.79104.687.75100.391.303.36117.965.78110.768.60104.861.404.60124.446.78116.109.43108.921.505.81129.817.76120.7610.24112.621.606.98134.278.72124.8511.03115.991.708.10138.039.66128.4511.80119.071.809.17141.2210.56131.6312.55121.891.9010.18143.9511.43134.4613.27124.482.0011.14146.3112.26136.9713.98126.873.0018.63159.4419.12152.3020.00143.134.0023.82165.0724.09159.5324.61151.935.0027.79168.2327.96163.7428.30157.386.0031.01170.2731.12166.5031.36161.087.0033.72171.7033.80168.4633.98163.748.0036.06172.7636.12169.9236.26165.759.0038.12173.5838.17171.0538.28167.3210.0039.96174.2340.00171.9540.09168.58magnitudeandscaledfrequency.InFigure10.14,whichisnormalizedtothesquareofthenaturaifrequency,thenormalizedlog-magnitudeatthescalednaturalfrequencyis+20log2£.Thestudentshouldverifythattheactualmagnitudeattheunsealednaturalfrequencyis+20log2^co2n.Table10.4andFigures10.14and10.15canbeusedtoimproveaccuracywhendrawingBodeplots.Forexample,amagnitudecorrectionof+20log2¢canbemadeatthenatural,orbreak,frequencyontheBodeasymptoticplot.BodePlotsforG(s)=1/(s2+2^con5+o>2n)BodeplotsforG(s)=l/(s2+2$tons+to2n)canbederivedsimilarlytothoseforG(s)=s2+2;a)ns-\-co2n.Wefindthatthemagnitudecurvebreaksatthenaturalfrequencyanddecreasesatarateof-40dB/decade.Thephaseplotis0°atlow10.2AsymptoticApproximations:BodePlotsFIGURE10.14Normalizedandscaledlog-magnituderesponsefor(s2+2£a)ns+co2)g>100FIGURE10.15Scaledphaseresponsefor(s2+2t;tons+ornfrequencies.AtQ.lco,,itbeginsadecreaseof—90°/decadeandcontinuesuntilco=lOoto,whereitlevelsoffat-180°.TheexactfrequencyresponsealsofollowsthesamederivationasthatofG(s)=s2+2i;cons+co\.TheresultsaresummarizedinTable10.5,aswellasFigures10.16and10.17.TheexactmagnitudeisthereciprocalofEq.(10.33),andtheexactphaseisthenegativeofEq.(10.34).Thenormalizedmagnitudeatthescalednaturalfrequencyis-20log2^,whichcanbeusedasacorrectionatthebreakfrequencyontheBodeasymptoticplot.553554Chapter10FrequencyResponseTechniquesTABLE10.5Datafornormalizedandscaledlog-magnitudeandphaseplotsfor1/(52+2t;cons+a>2n).Mag=20\og(M/a>l)Freq.COco„Mag(dB)£=0.1Phase(deg)£=0.1Mag(dB)£=0.2Phase(deg)£=0.2Mag(dB)£=0.3Phase(deg)£=0.30.100.09-1.160.08-2.310.070.200.35-2.390.32-4.760.29-7.130.300.80-3.770.74-7.510.65-11.190.401.48-5.441.36-10.781.17-15.950.502.42-7.592.20-14.931.85-21.800.603.73-10.623.30-20.562.68-29.360.705.53-15.354.70-28.773.60-39.47-3.470.808.09-23.966.35-41.634.44-53.130.9011.64-43.457.81-62.184.85-70.621.0013.98-90.007.96-90.004.44-90.001.1010.34-133.676.24-115.513.19-107.651.206.00-151.393.73-132.511.48-121.431.302.65-159.351.27-143.00-0.35-131.500.00-163.74-0.92-149.74-2.11-138.811.50-2.18-166.50-2.84-154.36-3.75-144.251.60-4.04-168.41-4.54-157.69-5.26-148.391.70-5.67-169.80-6.06-160.21-6.64-151.651.80-7.12-170.87-7.43-162.18-7.91-154.261.90-8.42-171.72-8.69-163.77-9.09-156.412.00-9.62-172.41-9.84-165.07-10.19-158.203.00-18.09-175.71-18.16-171.47-18.28-167.32-173.91-23.63-170.911.404.00-23.53-176.95-23.575.00-27.61-177.61-27.63-175.24-27.67-172.87-176.08-30.93-174.136.00-30.89-178.04-30.907.00-33.63-178.33-33.64-176.66-33.66-175.008.00-35.99-178.55-36.00-177.09-36.01-175.649.00-38.06-178.71-38.07-177.42-38.08-176.1410.00-39.91-178.84-39.92-177.69-39.93-176.53(tablecontinues)10.2AsymptoticApproximations:BodePlots555TABLE10.5Datafornormalizedandscaledlog-magnitudeandphaseplotsforl/(s2+2$co„s+es?).Mag=20\og(M/a)2n){Continued)Freq.0)„Mag(dB)£=0.5Phase(deg)£=0.5Mag(dB)£=0.7Phase(deg)£=0.7Mag(dB)£=0.1Phase(dej£=0.10.100.04-5.770.00-8.05-0.09-11.420.200.17-11.770.00-16.26-0.34-22.620.300.37-18.25-0.02-24.78-0.75-33.400.400.63-25.46-0.08-33.69-1.29-43.600.500.90-33.69-0.22-43.03-1.94-53.130.601.14-43.15-0.47-52.70-61.930.701.25-53.92-0.87-62.51-2.67-3.460.801.14-65.77-1.41-72.18-4.30-77.320.900.73-78.08-2.11-81.42-5.15-83.971.000.00-90.00-2.92-90.00-6.02-90.001.10-0.98-100.81-3.93-97.77-6.89-95.451.20-69.98-2.13-110.14-4.79-104.68-7.75-100.391.30-3.36-117.96-5.78-110.76-8.60-104.861.40-4.60-124.44-6.78-116.10-9.43-108.921.50-5.81-129.81-7.76-120.76-10.24-112.621.60-6.98-134.27-8.72-124.85-11.03-115.991.70-8.10-138.03-9.66-128.45-11.80-119.071.80-9.17-141.22-10.56-131.63-12.55-121.891.90-10.18-143.95-11.43-134.46-13.27-124.482.00-11.14-146.31-12.26-136.97-13.98-126.873.00-18.63-159.44-19.12-152.30-20.00-143.134.00-23.82-165.07-24.09-159.53-24.61-151.935.00-27.79-168.23-27.96-163.74-28.30-157.386.00-31.01-170.27-31.12-166.50-31.36-161.087.00-33.72-171.70-33.80-168.46-33.98-163.748.00-36.06-172.76-36.12-169.92-36.26-165.759.00-38.12-173.58-38.17-171.05-38.28-167.3210.00-39.96-174.23-40.00-171.95-40.09-168.58556Chapter10FrequencyResponseTechniques2011Low-frequencyasymptote110/^T^-0.3/-10^\s\\8-20\-30-40Hgh-frequencyasymptote\v\^°jWo.7\\ik^\1-500.11cola,,10FIGURE10.16Normalizedandscaledlog-magnituderesponseforl/{s2+2$co„s+a%)-20I_-100-120-140FIGURE10.17Scaledphaseresponsefor1/(52+2%®n$+aftLetusnowlookatanexampleofdrawingBodeplotsfortransferfunctionsthatcontainsecond-orderfactors.Example10.3BodePlotsforRatioofFirst-andSecond-OrderFactorsPROBLEM:DrawtheBodelog-magnitudeandphaseplotsofG(s)fortheunityfeedbacksystemshowninFigure10.10,whereG(s)=(s+3)/[(s+2)(52+Is+25)].10.2AsymptoticApproximations:BodePlots1020dB/dec1M557'»•0IS-i\^-40dB/decii^-10(f*l)\-20%\1-3050-40-500.012525100.1V«\^-100Frequency(rad/s)(a)-10-20-300dB/dec/:>Correctiors-40^v\-50—i10dB/decFIGURE10.18-60-700.010.11001Frequency(rad/s)(*)SOLUTION:WefirstconvertG(s)toshowthenormalizedcomponentsthathaveunitylow-frequencygain.Thesecond-ordertermisnormalizedbyfactoringoutGJ|,forming2KcotThus,,Hh>)andisthesumoftheindividualfirst-andsecond-ordertermsofG(s)showninFigure10.18(A).Wesolvethisproblembyaddingtheslopesofthesecomponentparts,beginningandendingattheappropriatefrequencies.TheresultsaresummarizedinTable10.6,whichcanbeusedtoobtaintheslopes.Thelow-frequencyvalueforG(s),foundby2(1+1s22,TABLE10.6MagnitudediagramslopesforExample10.3Frequency(rad/s)Description0.01(Start:Plot)2(Start:Poleat-2)3(Start:Zeroat-3)(on=5)Poleat-20-20-20-205(Start:Zeroat—3002020con=5000-40Totalslope(dB/dec)0-200-40BodemagnitudeplotforG(s)=(s+3)/[{s+2)(52+25+25)]:a.components;b.composite558Chapter10FrequencyResponseTechniquesletting5=0,is3/50,or-24.44dB.TheBodemagnitudeplotstartsoutatthisvalueandcontinuesuntilthefirstbreakfrequencyat2rad/s.Herethepoleat-2yieldsa-20dB/decadeslopedownwarduntilthenextbreakat3rad/s.Thezeroat-3causesanupwardslopeof+20dB/decade,which,whenaddedtotheprevious—20dB/decadecurve,givesanetslopeof0.Atafrequencyof5rad/s,thesecond-orderterminitiatesa-40dB/decadedownwardslope,whichcontinuestoinfinity.Thecorrectiontothelog-magnitudecurveduetotheunderdampedsecondordertermcanbefoundbyplottingapoint-20log2£abovetheasymptotesatthenaturalfrequency.Since£=0.2forthesecond-orderterminthedenominatorofG(s),thecorrectionis7.96dB.PointsclosetothenaturalfrequencycanbecorrectedbytakingthevaluesfromthecurvesofFigure10.16.TABLE10.7PhasediagramslopesforExample10.3Frequency(rad/s)Description0.2(Start:Poleat-2)0.3(Start:Zeroat-3)0.5(Start:(o„at—5)Poleat-2-45-45-4504545450-90-90-900-90-45-900Zeroat-3co„=5Totalslope(dB/dec)-4509030(End:Zeroat-3)20(End:Poleat-2)(H45457dec501045°/?\*Q9.100(s+10)GeneratorTurbinepressure1(s+3)mTorque50+1)speeil10.4SketchingtheNyquistDiagram565powerfromaturbineandgeneratorpair.Byregulatingthespeed,thecontrolsystemensuresthatthegeneratedfrequencyremainswithintolerance.Deviationsfromthedesiredspeedaresensed,andasteamvalveischangedtocompensateforthespeederror.ThesystemblockdiagramisshowninFigure10.26(6).SketchtheNyquistdiagramforthesystemofFigure10.26.SOLUTION:Conceptually,theNyquistdiagramisplottedbysubstitutingthepointsofthecontourshowninFigure10.27(a)intoG(s)=500/[(s+l){s+3)(A-+10)].ThisprocessisequivalenttoperformingcomplexarithmeticusingthevectorsofG(s)drawntothepointsofthecontourasshowninFigure10.27(a)and(6).EachpoleandzerotermofG(s)showninFigure10.26(6)isavectorinFigure10.27(a)and(b).Theresultantvector,R,foundatanypointalongthecontourisingeneraltheproductofthezerovectorsdividedbytheproductofthepolevectors(seeFigure10.27(c)).Thus,themagnitudeoftheresultantistheproductofthezerolengthsdividedbytheproductofthepolelengths,andtheangleoftheresultantisthesumofthezeroanglesminusthesumofthepoleangles.AswemoveinaclockwisedirectionaroundthecontourfrompointAtopointCinFigure10.27(a),theresultantanglegoesfrom0°to-3x90°=-270°,orfromA'toCinFigure10.27(c).SincetheanglesemanatefrompolesinthedenominatorofG(s),therotationorincreaseinangleisreallyadecreaseinanglejcos-planes-planeVV\-10Vy-3rA-iD^ym(OFIGURE10.27VectorevaluationoftheNyquistdiagramforExample10.4:a.vectorsoncontouratlowfrequency;b.vectorsoncontouraroundinfinity;c.NyquistdiagramChapter10FrequencyResponseTechniquesofthefunctionG(s);thepolesgain270°inacounterclockwisedirection,whichexplainswhythefunctionloses270°.WhiletheresultantmovesfromA'toC'inFigure10.27(c),itsmagnitudechangesastheproductofthezerolengthsdividedbytheproductofthepolelengths.Thus,theresultantgoesfromafinitevalueatzerofrequency(atpointAofFigure10.27(A),therearethreefinitepolelengths)tozeromagnitudeatinfinitefrequencyatpointC(atpointCofFigure10.27(A),therearethreeinfinitepolelengths).ThemappingfrompointAtopointCcanalsobeexplainedanalytically.FromAtoCthecollectionofpointsalongthecontourisimaginary.Hence,fromAtoC,G{s)=G(jco),orfromFigure10.26(b),re\Gijco)=50°(s+1){S+3)(5+10)=(-140,2+30)+y(43a,-aP)(1040)-Multiplyingthenumeratoranddenominatorbythecomplexconjugateofthedenominator,weobtain=^(-14^+30)-7(430,-^)(-14o,2+30)2+(43o,-o,3)2Atzerofrequency,Gijco)=500/30=50/3.Thus,theNyquistdiagramstartsat50/3atanangleof0°.Ascoincreasestherealpartremainspositive,andtheimaginarypartremainsnegative.Atco=-y/30/14,therealpartbecomesnegative.Atco=-\A3,theNyquistdiagramcrossesthenegativerealaxissincetheimaginarytermgoestozero.Therealvalueattheaxiscrossing,pointQinFigure10.27(c),foundbysubstitutingintoEq.(10.41),is-0.874.Continuingtowardco=oo,therealpartisnegative,andtheimaginarypartispositive.AtinfinitefrequencyGijco)5¾500//a,3,orapproximatelyzeroat90°.AroundtheinfinitesemicirclefrompointCtopointDshowninFigure10.27(5),thevectorsrotateclockwise,eachby180°.Hence,theresultantundergoesacounterclockwiserotationof3x180°,startingatpointCandendingatpointD'ofFigure10.27(c).Analytically,wecanseethisbyassumingthataroundtheinfinitesemicircle,thevectorsoriginateapproximatelyattheoriginandhaveinfinitelength.Foranypointonthes-plane,thevalueofG(s)canbefoundbyrepresentingeachcomplexnumberinpolarform,asfollows:G^=(^-^^-0(^-3^-0(^-10^-10)(1°'42)where2?_,isthemagnitudeofthecomplexnumber(^+1),and9--,istheangleofthecomplexnumber(s+i).Aroundtheinfinitesemicircle,allR-tareinfinite,andwecanuseourassumptiontoapproximatetheanglesasifthevectorsoriginatedattheorigin.Thus,aroundtheinfinitesemicircle,°W=0^(9-,f?-,+a-ro)=0^-(g-+^+^(143)°-AtpointCinFigure10.27(6),theanglesareall90°.Hence,theresultantis0Z-270°,shownaspointCinFigure10.27(c).Similarly,atpointD,G{s)=0Z+270°andmapsintopointD'.Youcanselectintermediatepointstoverifythespiralwhoseradiusvectorapproacheszeroattheorigin,asshowninFigure10.27(c).ThenegativeimaginaryaxiscanbemappedbyrealizingthattherealpartofG(jco)H(jco)isalwaysanevenfunction,whereastheimaginarypartofG(ja))H(jco)isanoddfunction.Thatis,therealpartwillnotchangesignwhennegativevaluesof10.4SketchingtheNyquistDiagram567coareused,whereastheimaginarypartwillchangesign.Thus,themappingofthenegativeimaginaryaxisisamirrorimageofthemappingofthepositiveimaginaryaxis.ThemappingofthesectionofthecontourfrompointsDtoAisdrawnasamirrorimageabouttherealaxisofthemappingofpointsAtoC.Inthepreviousexample,therewerenoopen-looppolessituatedalongthecontourenclosingtherighthalf-plane.Ifsuchpolesexist,thenadetouraroundthepolesonthecontourisrequired;otherwise,themappingwouldgotoinfinityinanundeterminedway,withoutangularinformation.Subsequently,acompletesketchoftheNyquistdiagramcouldnotbemade,andthenumberofencirclementsof—1couldnotbefound.LetusassumeaG(s)H(s)=N(s)/sD(s)whereD(s)hasimaginaryroots.ThesterminthedenominatorandtheimaginaryrootsofD(s)arepolesofG(s)H(s)thatlieonthecontour,asshowninFigure10.28(a).TosketchtheNyquistdiagram,thecontourmustdetouraroundeachopen-looppolelyingonitspath.Thedetourcanbetotherightofthepole,asshowninFigure10.28(6),whichmakesitclearthateachpole'svectorrotatesthrough+180°aswemovearoundthecontournearthatpole.ThisknowledgeoftheangularrotationofthepolesonthecontourpermitsustocompletetheNyquistdiagram.Ofcourse,ourdetourmustcarryusonlyaninfinitesimaldistanceintotherighthalf-plane,orelsesomeclosed-loop,right-half-planepoleswillbeexcludedinthecount.Wecanalsodetourtotheleftoftheopen-looppoles.Inthiscase,eachpolerotatesthroughanangleof-180°aswedetouraroundit.Again,thedetourmustbeinfinitesimallysmall,orelsewemightincludesomeleft-half-planepolesinthecount.Letuslookatanexample.5-planes-planes-plane»-o-—oFIGURE10.28Detouringaroundopen-looppoles:a.polesoncontour;b.detourright;cdetourleftExample10.5NyquistDiagramforOpen-LoopFunctionwithPolesonContourPROBLEM:SketchtheNyquistdiagramoftheunityfeedbacksystemofFigure10.10,whereG{s)={s+2)/s2.SOLUTION:Thesystem'stwopolesattheoriginareonthecontourandmustbebypassed,asshowninFigure10.29(a).ThemappingstartsatpointAandcontinuesinaclockwisedirection.PointsA,B,C,D,E,andFofFigure10.29(a)maprespectivelyintopointsA',B\C,D,E!,andF'ofFigure10.29(6).AtpointA,thetwoopen-looppolesattheorigincontribute2x90°=180°,andthezerocontributes0°.ThetotalangleatpointAisthus-180°.Closetotheorigin,thefunctionisinfiniteinmagnitudebecauseofthecloseproximitytothe568Chapter10FrequencyResponseTechniquesTestradiusGH-planeTwopolesFIGURE10.29a.ContourforExample10.5;b.NyquistdiagramforExample10.5twoopen-looppoles.Thus,pointAmapsintopointA',locatedatinfinityatanangleof-180°.MovingfrompointAtopointBalongthecontouryieldsanetchangeinangleof+90°fromthezeroalone.Theanglesofthepolesremainthesame.Thus,themappingchangesby+90°inthecounterclockwisedirection.Themappedvectorgoesfrom-180°aXA'to-90°atS'.Atthesametime,themagnitudechangesfrominfinitytozerosinceatpointBthereisoneinfinitelengthfromthezerodividedbytwoinfinitelengthsfromthepoles.Alternately,thefrequencyresponsecanbedeterminedanalyticallyfromG(jco)—(2+;'&>)/(—«*,K(s+3)(s+5)(5-2)(5-4)Qs)(a)Im5-planeGH-p\ane(O=\\f-1.33IFIGURE10.30DemonstratingNyquiststability:a.system;b.contour;c.NyquistdiagramTrylt10.2UseMATLAB,theControlSystemToolbox,andthefollowingstatementstoplottheNyquistdiagramofthesystemshowninFigure10.30(a).G=zpk([-3,-5],...[2,4],1)nyquiSt(G)AftertheNyquistdiagramappears,clickonthecurveanddragtoreadthecoordinates.c\B'/11KA'i15ReJ8(c)ib)gainwouldplacethecriticalpointoutsidetheNyquistdiagramwhereN=0,yieldingZ=2,anunstablesystem.FromanotherperspectivewecanthinkoftheNyquistdiagramasremainingstationaryandthe—1pointmovingalongtherealaxis.Inordertodothis,wesetthegaintounityandpositionthecriticalpointat—1/Kratherthan—1.Thus,thecriticalpointappearstomoveclosertotheoriginasKincreases.Finally,iftheNyquistdiagramintersectstherealaxisat—1,thenG(jco)H(jco)——1.Fromrootlocusconcepts,whenG(s)H(s)=—1,thevariablesisaclosed-looppoleofthesystem.Thus,thefrequencyatwhichtheNyquistdiagramintersects—1isthesamefrequencyatwhichtherootlocuscrossesthe/co-axis.Hence,thesystemismarginallystableiftheNyquistdiagramintersectstherealaxisat—1.Insummary,then,iftheopen-loopsystemcontainsavariablegain,K,setK=1andsketchtheNyquistdiagram.Considerthecriticalpointtobeat-1/Kratherthanat-1.AdjustthevalueofKtoyieldstability,basedupontheNyquistcriterion.Example10.6RangeofGainforStabilityviaTheNyquistCriterionPROBLEM:FortheunityfeedbacksystemofFigure10.10,whereG{s)=K/[s(s+3)(^+5)],findtherangeofgain,K,forstability,instability,andthevalueofgainformarginalstability.Formarginalstabilityalsofindthefrequencyofoscillation.UsetheNyquistcriterion.SOLUTION:FirstsetK=1andsketchtheNyquistdiagramforthesystem,usingthecontourshowninFigure10.31(a).Forallpointsontheimaginaryaxis,GUco)H(jco)=K5(5+3)(5+5)-8o)2-;'(15&>-co3K=1_64o;4+w2(15-ft>2;Atco=0,G{jco)H{jco)=-0.0356-/00.(10.45)10.5StabilityviatheNyquistDiagram571Im(0=0-Gtf-planeI«=+«••>-\N>ReFIGURE10.32a.Contourandrootlocusofsystemthatisstableforsmallgainandunstableforlargegain;b.Nyquistdiagram572Chapter10FrequencyResponseTechniquesjcoIm(a)(b)FIGURE10.33a.Contourandrootlocusofsystemthatisunstableforsmallgainandstableforlargegain;b.Nyquistdiagrampoles,theNyquistcriteriontellsusthatwemusthavenoencirclementsof—1forthesystemtobestable.WecanseefromtheNyquistdiagramthattheencirclementsofthecriticalpointcanbedeterminedfromthemappingofthepositive/w-axisalone.Ifthegainissmall,themappingwillpasstotherightof—1,andthesystemwillbestable.Ifthegainishigh,themappingwillpasstotheleftof—1,andthesystemwillbeunstable.Thus,thissystemisstablefortherangeofloopgain,K,thatensuresthattheopen-loopmagnitudeislessthanunityatthatfrequencywherethephaseangleis180°(or,equivalently,—180°).ThisstatementisthusanalternativetotheNyquistcriterionforthissystem.NowconsiderthesystemshowninFigure10.33,whichisunstableatlowvaluesofgainandstableathighvaluesofgain.Sincethecontourenclosestwoopen-looppoles,twocounterclockwiseencirclementsofthecriticalpointarerequiredforstability.Thus,forthiscasethesystemisstableiftheopen-loopmagnitudeisgreaterthanunityatthatfrequencywherethephaseangleis180°(or,equivalently,—180°).Insummary,firstdeterminestabilityfromtheNyquistcriterionandtheNyquistdiagram.NextinterprettheNyquistcriterionanddeterminewhetherthemappingofjustthepositiveimaginaryaxisshouldhaveagainoflessthanorgreaterthanunityat180°.IftheNyquistdiagramcrosses±180°atmultiplefrequencies,determinetheinterpretationfromtheNyquistcriterion.StabilityDesignviaMappingPositive/co-AxisPROBLEM:Findtherangeofgainforstabilityandinstability,andthegainformarginalstability,fortheunityfeedbacksystemshowninFigure10.10,whereG(s)=K/[(s2+2s+2)(s+2)].Formarginalstabilityfindtheradianfrequencyofoscillation.UsetheNyquistcriterionandthemappingofonlythepositiveimaginaryaxis.SOLUTION:Sincetheopen-looppolesareonlyintheleft-half-plane,theNyquistcriteriontellsusthatwewantnoencirclementsof-1forstability.Hence,againlessthanunityat±180°isrequired.BeginbylettingK=1anddrawtheportionofthecontouralongthepositiveimaginaryaxisasshowninFigure10.34(A).In10.5StabilityviatheNyquistDiagramImjcoBiXG#-planen14120/-NB'Ai-2,.Contourja>24(1-co)-jco{6-co2)16(1-co2)2+co2{6-co2)2(10.46)Settingtheimaginarypartequaltozero,wefindco=\/6.SubstitutingthisvaluebackintoEq.(10.46)yieldstherealpart,-(1/20)=(1/20)Z180°.Thisclosed-loopsystemisstableifthemagnitudeofthefrequencyresponseislessthanunityat180°.Hence,thesystemisstableforK<20,unstableforK>20,andmarginallystableforK=20.Whenthesystemismarginallystable,theradianfrequencyofoscillationis\/6.Skill-AssessmentExercise10.4PROBLEM:ForthesystemshowninFigure10.10,whereG(i,)=WileyPLUSControlSolutions(5+2)(5+4)(^+6)dothefollowing:a.PlottheNyquistdiagram.b.UseyourNyquistdiagramtofindtherangeofgain,K,forstability.ANSWERS:a.Seetheansweratwww.wiley.com/college/nise.b.StableforK<480Thecompletesolutionisatwww.wiley.com/college/nise.Chapter10FrequencyResponseTechniquesGainMarginandPhaseMarginviatheNyquistDiagramNowthatweknowhowtosketchandinterpretaNyquistdiagramtodetermineaclosed-loopsystem'sstability,letusextendourdiscussiontoconceptsthatwilleventuallyleadustothedesignoftransientresponsecharacteristicsviafrequencyresponsetechniques.UsingtheNyquistdiagram,wedefinetwoquantitativemeasuresofhowstableasystemis.Thesequantitiesarecalledgainmarginandphasemargin.Systemswithgreatergainandphasemarginscanwithstandgreaterchangesinsystemparametersbeforebecomingunstable.Inasense,gainandphasemarginscanbequalitativelyrelatedtotherootlocus,inthatsystemswhosepolesarefartherfromtheimaginaryaxishaveagreaterdegreeofstability.Inthelastsection,wediscussedstabilityfromthepointofviewofgainat180°phaseshift.Thisconceptleadstothefollowingdefinitionsofgainmarginandphasemargin:Gainmargin,GM.Thegainmarginisthechangeinopen-loopgain,expressedindecibels(dB),requiredat180°ofphaseshifttomaketheclosed-loopsystemunstable.Phasemargin,¢^.Thephasemarginisthechangeinopen-loopphaseshiftrequiredatunitygaintomaketheclosed-loopsystemunstable.ThesetwodefinitionsareshowngraphicallyontheNyquistdiagraminFigure10.35.Assumeasystemthatisstableiftherearenoencirclementsof—1.UsingFigure10.35,letusfocusonthedefinitionofgainmargin.HereagaindifferencebetweentheNyquistdiagram'scrossingoftherealaxisat—\/aandthe-1criticalpointdeterminestheproximityofthesystemtoinstability.Thus,ifthegainofthesystemweremultipliedbyaunits,theNyquistdiagramwouldintersectthecriticalpoint.Wethensaythatthegainmarginisaunits,or,expressedindB,GM=20loga.Noticethatthegainmarginisthereciprocalofthereal-axiscrossingexpressedindB.lmUnitcircleGW-planeNyquist,diagram\^.\•Mi/*iii\\-.\•-.i\v\Gaindifference\beforeinstabilityGainmargin=GM=20logaPhasedifferencebeforeinstabilityPhasemargin=$M=«FIGURE10.35Nyquistdiagramshowinggainandphasemargins10.6GainMarginandPhaseMarginviatheNyquistDiagram575InFigure10.35,wealsoseethephasemargingraphicallydisplayed.AtpointQ',wherethegainisunity,arepresentsthesystem'sproximitytoinstability.Thatis,atunitygain,ifaphaseshiftofadegreesoccurs,thesystembecomesunstable.Hence,theamountofphasemarginisa.Laterinthechapter,weshowthatphasemargincanberelatedtothedampingratio.Thus,wewillbeabletorelatefrequencyresponsecharacteristicstotransientresponsecharacteristicsaswellasstability.WewillalsoshowthatthecalculationsofgainandphasemarginsaremoreconvenientifBodeplotsareusedratherthanaNyquistdiagram,suchasthatshowninFigure10.35.Fornowletuslookatanexamplethatshowsthecalculationofthegainandphasemargins.Example10.8FindingGainandPhaseMarginsPROBLEM:FindthegainandphasemarginforthesystemofExample10.7ifK=6.SOLUTION:Tofindthegainmargin,firstfindthefrequencywheretheNyquistdiagramcrossesthenegativerealaxis.FindingG(jco)H(jco),wehaveG(jco)H(jco)=[s2+2s+2)(5+2)•ya26[4(1-co)-j(o{6-co2)](10.47)16(1-^+0)2(6-0)2)2TheNyquistdiagramcrossestherealaxisatafrequencyofV6rad/s.Therealpartiscalculatedtobe—0.3.Thus,thegaincanbeincreasedby(1/0.3)=3.33beforetherealpartbecomes—1.Hence,thegainmarginis(10.48)GM=20log3.33=10.45dBTofindthephasemargin,findthefrequencyinEq.(10.47)forwhichthemagnitudeisunity.Astheproblemstands,thiscalculationrequirescomputationaltools,suchasafunctionsolverortheprogramdescribedinAppendixH.2.LaterinthechapterwewillsimplifytheprocessbyusingBodeplots.Eq.(10.47)hasunitygainatafrequencyof1.253rad/s.Atthisfrequency,thephaseangleis-112.3°.Thedifferencebetweenthisangleand-180°is67.7°,whichisthephasemargin.MATLABStudentswhoareusingMATLABshouldnowrunchl0p3inAppendixB.YouwilllearnhowtouseMATLABtofindgainmargin,phasemargin,zerodBfrequency,and180°frequency.ThisexercisesolvesExample10.8usingMATLAB.GuiToolMATLAB'sLTIViewer,withtheNyquistdiagramselected,isanothermethodthatmaybeusedtofindgainmargin,phasemargin,zerodBfrequency,and180°frequency.YouareencouragedtostudyAppendixE,atwww.wiley.com/college/nise,whichcontainsatutorialontheLTIVieweraswellassomeexamples.ExampleE.2solvesExample10.8usingtheLTIViewer.576Chapter10FrequencyResponseTechniquesSkill-AssessmentExercise10.5Trylt10.3UseMATLAB,theControlSystemToolbox,andthefollowingstatementstofindthegainandphasemarginsofG(s)H(s)=100/[(s+2)(5+4)(^+6)]usingtheNyquistdiagram.PROBLEM:Findthegainmarginandthe180°frequencyfortheprobleminSkill-AssessmentExercise10.4ifK=100.WileyPLUSdJSJControlSolutionsANSWERS:Gainmargin=13.62dB;180°frequency=6.63rad/sThecompletesolutionisatwww.wiley.com/college/nise.G=zpk([],[-2,-4,-6],100)nyquist(G)AftertheNyquistdiagramappears:1.Right-clickinthegrapharea.2.SelectCharacteristics.3.SelectAllStabilityMargins.4.Letthemouserestonthemarginpointstoreadthegainandphasemargins.Inthissection,wedefinedgainmarginandphasemarginandcalculatedthemviatheNyquistdiagram.Inthenextsection,weshowhowtouseBodediagramstoimplementthestabilitycalculationsperformedinSections10.5and10.6usingtheNyquistdiagram.WewillseethattheBodeplotsreducethetimeandsimplifythecalculationsrequiredtoobtainresults.I10.7Stability,GainMargin,andPhaseMarginviaBodePlotsInthissection,wedeterminestability,gainandphasemargins,andtherangeofgainrequiredforstability.Allofthesetopicswerecoveredpreviouslyinthischapter,usingNyquistdiagramsasthetool.NowweuseBodeplotstodeterminethesecharacteristics.BodeplotsaresubsetsofthecompleteNyquistdiagrambutinanotherform.TheyareaviablealternativetoNyquistplots,sincetheyareeasilydrawnwithouttheaidofthecomputationaldevicesorlongcalculationsrequiredfortheNyquistdiagramandrootlocus.YoushouldrememberthatallcalculationsappliedtostabilitywerederivedfromandbasedupontheNyquiststabilitycriterion.TheBodeplotsareanalternatewayofvisualizingandimplementingthetheoreticalconcepts.DeterminingStabilityLetuslookatanexampleanddeterminethestabilityofasystem,implementingtheNyquiststabilitycriterionusingBodeplots.WewilldrawaBodelog-magnitudeplotandthendeterminethevalueofgainthatensuresthatthemagnitudeislessthan0dB(unitygain)atthatfrequencywherethephaseis±180°.10.7Stability,GainMargin,andPhaseMarginviaBodePlotsExample10.9RangeofGainforStabilityviaBodePlotsPROBLEM:UseBodeplotstodeterminetherangeofKwithinwhichtheunityfeedbacksystemshowninFigure10.10isstable.LetG(s)=K/[(s+2){s+A)(s+5)].SOLUTION:Sincethissystemhasallofitsopen-looppolesintheleft-half-plane,theopen-loopsystemisstable.Hence,fromthediscussionofSection10.5,theclosed-loopsystemwillbestableifthefrequencyresponsehasagainlessthanunitywhenthephaseis180°.BeginbysketchingtheBodemagnitudeandphasediagramsshowninFigure10.36.InSection10.2,wesummednormalizedplotsofeachfactorofG(s)tocreatetheBodeplot.Wesawthatateachbreakfrequency,theslopeoftheresultantBodeplotchangedbyanamountequaltothenewslopethatwasadded.Table10.6demonstratesthisobservation.Inthisexample,weusethisfacttodrawtheBodeplotsfasterbyavoidingthesketchingoftheresponseofeachterm.Thelow-frequencygainofG(s)H(s)isfoundbysetting5tozero.Thus,theBodemagnitudeplotstartsatAT/40.Forconvenience,letK=40sothatthelogmagnitudeplotstartsat0dB.Ateachbreakfrequency,2,4,and5,a20dB/decadeincreaseinnegativeslopeisdrawn,yieldingthelog-magnitudeplotshowninFigure10.36.Thephasediagrambeginsat0°untiladecadebelowthefirstbreakfrequencyof2rad/s.At0.2rad/sthecurvedecreasesatarateof—457decade,decreasinganadditional45°/decadeateachsubsequentfrequency(0.4and0.5rad/s)adecadebeloweachbreak.Atadecadeaboveeachbreakfrequency,theslopesarereducedby45°/decadeateachfrequency.o1A——,7?n.-20--20dB/dtc-40-60(N1/--i.UdJi/dec\>\\-80"'-60dB/;j[-100-1200.010.11Frequency(rad/s)10100K^5?a/-457dec//90°/de-9060S\s\sj\1357deSu0J-135I7-"^^\?0°Alec-180-225-2700.01FIGURE10.36AC\sfllll-A57dec-¾¾0.11Frequency(rad/s)10Bodelog-magnitudeandphasediagramsforthesystemofExample10.9100577578Chapter10FrequencyResponseTechniquesTheNyquistcriterionforthisexampletellsusthatwewantzeroencirclementsof—1forstability.Thus,werecognizethattheBodelog-magnitudeplotmustbelessthanunitywhentheBodephaseplotis180°.Accordingly,weseethatatafrequencyof7rad/s,whenthephaseplotis-180°,themagnitudeplotis—20dB.Therefore,anincreaseingainof+20dBispossiblebeforethesystembecomesunstable.Sincethegainplotwasscaledforagainof40,+20dB(againof10)representstherequiredincreaseingainabove40.Hence,thegainforinstabilityis40x10=400.Thefinalresultis0<K<400forstability.Thisresult,obtainedbyapproximatingthefrequencyresponsebyBodeasymptotes,canbecomparedtotheresultobtainedfromtheactualfrequencyresponse,whichyieldsagainof378atafrequencyof6.16rad/s.MATLABStudentswhoareusingMATLABshouldnowrunchl0p4inAppendixB.YouwilllearnhowtouseMATLABtofindtherangeofgainforstabilityviafrequencyresponsemethods.ThisexercisesolvesExample10.9usingMATLAB.EvaluatingGainandPhaseMarginsNextweshowhowtoevaluatethegainandphasemarginsbyusingBodeplots(Figure10.37).Thegainmarginisfoundbyusingthephaseplottofindthefrequency,cocM,wherethephaseangleis180°.Atthisfrequency,welookatthemagnitudeplottodeterminethegainmargin,GM,whichisthegainrequiredtoraisethemagnitudecurveto0dB.Toillustrate,inthepreviousexamplewithK=40,thegainmarginwasfoundtobe20dB.Thephasemarginisfoundbyusingthemagnitudecurvetofindthefrequency,Mow,wherethegainis0dB.Onthephasecurveatthatfrequency,thephasemargin,(f)M,isthedifferencebetweenthephasevalueand180°.urn)OdBPhase(degrees)180°FIGURE10.37GainandphasemarginsontheBodediagrams-loga10.7Stability,GainMargin,andPhaseMarginviaBodePlots579Example10.10GainandPhaseMarginsfromBodePlotsPROBLEM:IfK=200inthesystemofExample10.9,findthegainmarginandthephasemargin.SOLUTION:TheBodeplotinFigure10.36isscaledtoagainof40.IfK=200(fivetimesasgreat),themagnitudeplotwouldbe20log5=13.98dBhigher.Tofindthegainmargin,lookatthephaseplotandfindthefrequencywherethephaseis180°.Atthisfrequency,determinefromthemagnitudeplothowmuchthegaincanbeincreasedbeforereaching0dB.InFigure10.36,thephaseangleis180°atapproximately7rad/s.Onthemagnitudeplot,thegainis-20+13.98=-6.02dB.Thus,thegainmarginis6.02dB.Tofindthephasemargin,welookonthemagnitudeplotforthefrequencywherethegainis0dB.Atthisfrequency,welookonthephaseplottofindthedifferencebetweenthephaseand180°.Thisdifferenceisthephasemargin.Again,rememberingthatthemagnitudeplotofFigure10.36is13.98dBlowerthantheactualplot,the0dBcrossing(-13.98dBforthenormalizedplotshowninFigure10.36)occursat5.5rad/s.Atthisfrequencythephaseangleis—165°.Thus,thephasemarginis-165°-(-180°)=15°.MATLAB'sLTIViewer,withBodeplotsselected,isanothermethodthatmaybeusedtofindgainmargin,phasemargin,zerodBfrequency,and180°frequency.YouareencouragedtostudyAppendixEatwww.wiley.com/college/nise,whichcontainsatutorialontheLTIVieweraswellassomeexamples.ExampleE.3solvesExample10.10usingtheLTIViewer.GuiTool•dUIBSkill-AssessmentExercise10.6PROBLEM:ForthesystemshowninFigure10.10,whereG(lS)=(5+5)(5+20)(5+50)dothefollowing:a.DrawtheBodelog-magnitudeandphaseplots.b.FindtherangeofKforstabilityfromyourBodeplots.c.Evaluategainmargin,phasemargin,zerodBfrequency,and180°frequencyfromyourBodeplotsforK-10,000.TVylt10.4UseMATLAB,theControlSystemToolbox,andthefollowingstatementstosolveSkill-AssessmentExercise10.6(c)usingBodeplots.G=zpk([],...[-5,-20,-50],10000)bode(G)gridonAftertheBodeplotappears:ANSWERS:a.Seetheansweratwww.wiley.com/college/nise.b.K<96,270c.Gainmargin=19.67dB,phasemargin=92.9°,zerodBfrequency=7.74rad/s,and180°frequency=36.7rad/sThecompletesolutionisatwww.wiley.com/college/nise.1.Right-clickinthegrapharea.2.SelectCharacteristics.3.SelectAllStabilityMargins.4.Letthemouserestonthemarginpointstoreadthegainandphasemargins.Chapter10580FrequencyResponseTechniquesWehaveseenthattheopen-loopfrequencyresponsecurvescanbeusednotonlytodeterminewhetherasystemisstablebuttocalculatetherangeofloopgainthatwillensurestability.WehavealsoseenhowtocalculatethegainmarginandthephasemarginfromtheBodediagrams.Isitthenpossibletoparalleltherootlocustechniqueandanalyzeanddesignsystemsfortransientresponseusingfrequencyresponsemethods?Wewillbegintoexploretheanswerinthenextsection.I10.8RelationBetweenClosed-LoopTransientandClosed-LoopFrequencyResponsesDampingRatioandClosed-LoopFrequencyResponseR(s)+,E(s)s(s+2£(Dtt)Inthissection,wewillshowthatarelationshipexistsbetweenasystem'stransientresponseanditsclosed-loopfrequencyresponse.Inparticular,considerthesecondorderfeedbackcontrolsystemofFigure10.38,whichwehavebeenusingc($^sinceChapter4,wherewederivedrelationshipsbetweentheclosed-looptransientresponseandthepolesoftheclosed-looptransferfunction,FIGURE10.38Second-orderclosed-loopsystemR(s)=T(s)=cots2+2£(ons+a%(10.49)WenowderiverelationshipsbetweenthetransientresponseofEq.(10.49)andcharacteristicsofitsfrequencyresponse.Wedefinethesecharacteristicsandrelatethemtodampingratio,naturalfrequency,settlingtime,peaktime,andrisetime.InSection10.10,wewillshowhowtousethefrequencyresponseoftheopen-looptransferfunctionG(s)=cots(s+2;con)(10.50)showninFigure10.38,toobtainthesametransientresponsecharacteristics.LetusnowfindthefrequencyresponseofEq.(10.49),definecharacteristicsofthisresponse,andrelatethesecharacteristicstothetransientresponse.Substitutings=jcointoEq.(10.49),weevaluatethemagnitudeoftheclosed-loopfrequencyresponseasM=\T(ja>)\=to:(aft-co2)2(10.51)+4$2co2co2ArepresentativesketchofthelogplotofEq.(10.51)isshowninFigure10.39.Wenowshowthatarelationshipexistsbetweenthepeakvalueoftheclosedloopmagnituderesponseandthedampingratio.SquaringEq.(10.51),differentiatingwithrespecttoco2,andsettingthederivativeequaltozeroyieldsthemaximumvalueofM,Mp,where(10.52)10.8RelationBetweenClosed-LoopTransientandClosed-LoopFrequencyResponses-20logfflplogOBWLog-frequency(rad/s)581FIGURE10.39Representativelog-magnitudeplotofEq.(10.51)atafrequency,(op,of(On(10.53)==wnV/l-2C2Since£isrelatedtopercentovershoot,wecanplotMpvs.percentovershoot.TheresultisshowninFigure10.40.Equation(10.52)showsthatthemaximummagnitudeonthefrequencyresponsecurveisdirectlyrelatedtothedampingratioand,hence,thepercentovershoot.AlsonoticefromEq.(10.53)thatthepeakfrequency,cop,isnotthenaturalfrequency.However,forlowvaluesofdampingratio,wecanassumethatthepeakoccursatthenaturalfrequency.Finally,noticethattherewillnotbeapeakatfrequenciesabovezeroif£>0.707.Thislimitingvalueof£forpeakingonthemagnituderesponsecurveshouldnotbeconfusedwithovershootonthestepresponse,wherethereisovershootfor0<£<1.ResponseSpeedandClosed-LoopFrequencyResponseAnotherrelationshipbetweenthefrequencyresponseandtimeresponseisbetweenthespeedofthetimeresponse(asmeasuredbysettlingtime,peaktime,andrisetime)andthebandwidthoftheclosed-loopfrequencyresponse,whichisdefinedhereasthefrequency,G>BW>atwhichthemagnituderesponsecurveis3dBdownfromitsvalueatzerofrequency(seeFigure10.39).304050Percentovershoot70FIGURE10.40Closed-loopfrequencyresponsepeakvs.percentovershootforatwopolesystemChapter10FrequencyResponseTechniquesThebandwidthofatwo-polesystemcanbefoundbyfindingthatfrequencyforwhichM=\j\fl(thatis,-3dB)inEq.(10.51).Thederivationisleftasanexerciseforthestudent.Theresultisft>BW~-242=w«y(i--2£)+V4£-4£+2(10.54)Torelate&>Bwtosettlingtime,wesubstitutecon=4/T5£intoEq.(10.54)andobtain-4c2+2Similarly,since,con—7t/{Tpyi^=(10.55)—£2),rvT?^(1"2fl+v^-4f2+2(10.56)Torelatethebandwidthtorisetime,Tr,weuseFigure4.16,knowingthedesired£andTr.Forexample,assume£=0.4andTr=0.2second.UsingFigure4.16,theordinateTrco„=1.463,fromwhichcon=1.463/0.2=7.315rad/s.UsingEq.(10.54),wBw=10.05rad/s.NormalizedplotsofEqs.(10.55)and(10.56)andtherelationshipbetweenbandwidthnormalizedbyrisetimeanddampingratioareshowninFigure10.41.0.10.20.30.40.50.60.70.80.91Dampingratio(a)FIGURE10.41c.risetime00.10.20.30.40.50.60.70.80.91Dampingratio00.10.20.30.40.50.60.70.80.91Dampingratio(c)Normalizedbandwidthvs.dampingratiofora.settlingtime;b.peaktime;10.9RelationBetweenClosed-andOpen-LoopFrequencyResponsesSkill-AssessmentExercise10.7PROBLEM:Findtheclosed-loopbandwidthrequiredfor20%overshootand2-secondssettlingtime.ANSWER:wBw=5.79rad/sThecompletesolutionisatwww.wiley.com/college/nise.Inthissection,werelatedtheclosed-looptransientresponsetotheclosed-loopfrequencyresponseviabandwidth.Wecontinuebyrelatingtheclosed-loopfrequencyresponsetotheopen-loopfrequencyresponseandexplainingtheimpetus.(10.9RelationBetweenClosed-andOpen-LoopFrequencyResponsesAtthispoint,wedonothaveaneasywayoffindingtheclosed-loopfrequencyresponsefromwhichwecoulddetermineMpandthusthetransientresponse.2Aswehaveseen,weareequippedtorapidlysketchtheopen-loopfrequencyresponsebutnottheclosedloopfrequencyresponse.However,iftheopen-loopresponseisrelatedtotheclosedloopresponse,wecancombinetheeaseofsketchingtheopen-loopresponsewiththetransientresponseinformationcontainedintheclosed-loopresponse.ConstantMCirclesandConstantNCirclesConsideraunityfeedbacksystemwhoseclosed-looptransferfunctionisr(1057)«=r?§b-Thefrequencyresponseofthisclosed-loopfunctionisSinceG(jco)isacomplexnumber,letG(ja>)=P{co)+jQ(co)mEq.(10.58),whichyieldsP(co)+jQ(co)[(P(a>)+1)+/G(a>)]iUC0)[W}^Therefore,M'=yr\jco)\^r^••r;;;;:[(P(co)+1)2+Q2(co)}uo.60)Eq.(10.60)canbeputintotheformM2\2„-,2M2i+)]tan-x~£-4P(co)-tanP(co)+1—tan-lPico)1+QHfP{a>)+1(10.62)(2(0))P(m)\P(o>)+1afterusingtan(a-0)=(tana-tan£)/(1-I-tanatan)3).Droppingthefunctionalnotation,Qtan4>=N=pZ+P+Q7(10.63)Equation(10.63)canbeputintotheformofacircle,+Q-1\2_N2+2N/AN2(10.64)10.9RelationBetweenClosed-andOpen-LoopFrequencyResponsesImG-plane-3FIGURE10.43-2ConstantNcircles-1whichisplottedinFigure10.43forvariousvaluesofN.ThecirclesofthisplotarecalledconstantNcircles.Superimposingaunityfeedback,open-loopfrequencyresponseovertheconstantNcirclesyieldstheclosed-loopphaseresponseofthesystem.LetusnowlookatanexampleoftheuseoftheconstantMandNcircles.Example10.11Closed-LoopFrequencyResponsefromOpen-LoopFrequencyResponsePROBLEM:Findtheclosed-loopfrequencyresponseoftheunityfeedbacksystemshowninFigure10.10,whereG(s)=50/[s(s+3)(s+6)],usingtheconstantMcircles,Ncircles,andtheopen-looppolarfrequencyresponsecurve.SOLUTION:Firstevaluatetheopen-loopfrequencyfunctionandmakeapolarfrequencyresponseplotsuperimposedovertheconstantMandNcircles.The585586Chapter10FrequencyResponseTechniqueso)=0.81-3-4-3-2-1012FIGURE10.44NyquistdiagramforExample10.11andconstantMandNcirclesopen-loopfrequencyfunctionisG(jco)=50-9a)2+j{lSco-cov(10.65)fromwhichthemagnitude,\G(jco)\,andphase,ZG(jco),canbefoundandplotted.Thepolarplotoftheopen-loopfrequencyresponse(Nyquistdiagram)isshownsuperimposedovertheMandNcirclesinFigure10.44.FIGURE10.45Closed-loopfrequencyresponseforExample10.11(0=2.510.9RelationBetweenClosed-andOpen-LoopFrequencyResponsesTheclosed-loopmagnitudefrequencyresponsecannowbeobtainedbyfindingtheintersectionofeachpointoftheNyquistplotwiththeMcircles,whiletheclosed-loopphaseresponsecanbeobtainedbyfindingtheintersectionofeachpointoftheNyquistplotwiththeNcircles.TheresultisshowninFigure10.45.3StudentswhoareusingMATLABshouldnowrunchl0p5inAppendixB.YouwilllearnhowtouseMATLABtofindtheclosed-loopfrequencyresponse.ThisexercisesolvesExample10.11usingMATLAB.NicholsChartsAdisadvantageofusingtheMandNcirclesisthatchangesofgainintheopen-looptransferfunction,G(s),cannotbehandledeasily.Forexample,intheBodeplot,againchangeishandledbymovingtheBodemagnitudecurveupordownanamountequaltothegainchangeindB.SincetheMandNcirclesarenotdBplots,changesingainrequireeachpointofG(jco)tobemultipliedinlengthbytheincreaseordecreaseingain.AnotherpresentationoftheMandNcircles,calledaNicholschart,displaystheconstantMcirclesindB,sothatchangesingainareassimpletohandleasintheBodeplot.ANicholschartisshowninFigure10.46.Thechartisaplotofopen-loopmagnitudeindBvs.open-loopphaseangleindegrees.EverypointontheMcirclescanbetransferredtotheNicholschart.EachpointontheconstantMcirclesisrepresentedbymagnitudeandangle(polarcoordinates).ConvertingthemagnitudetodB,wecantransferthepointtotheNicholschart,usingthepolarcoordinateswithmagnitudeindBplottedastheordinate,andthephaseangleplottedastheabscissa.Similarly,theTVcirclesalsocanbetransferredtotheNicholschart.-280FIGURE10.463-260-240-220-200-180-160Phase(degrees)-140-120-100-80NicholschartYouarecautionednottousetheclosed-looppolarplotfortheNyquistcriterion.Theclosed-loopfrequencyresponse,however,canbeusedtodeterminetheclosed-looptransientresponse,asdiscussedinSection10.8.587Chapter10588FrequencyResponseTechniques25!-355°!20""^-^U-^T^15aio----*=11J^^"*\[.^^-.-1.4-7^-L-340°*(/7>^-5FIGURE10.47NicholschartwithfrequencyresponseforG{s)=K/[s(s+l){s+2)}superimoposed.ValuesforK=1andK=3.16areshown»=•1/l.pi-300°t-10^y5=pslli//\/-15-280_2()°.0.70735^551¾¾^—7-280°/A$&UCV--T-60°TSrv•»1*1\._A——fiA^"0--2605-240°-220°-200°-180°-l60°140°~TT\\|-80°-i20°-mo°-gn°-260-240-220-200-180-160-140-120-100-IPhase(degrees)Forexample,assumethefunctionG(s)=Ks{s+l){s+2)(10.66)SuperimposingthefrequencyresponseofG(s)ontheNicholschartbyplottingmagnitudeindBvs.phaseangleforarangeoffrequenciesfrom0.1to1rad/s,weobtaintheplotinFigure10.47forK=1.Ifthegainisincreasedby10dB,simplyraisethecurveforK=1by10dBandobtainthecurveforK=3.16(10dB).TheintersectionoftheplotsofG(jco)withtheNicholschartyieldsthefrequencyresponseoftheclosed-loopsystem.MATLABStudentswhoareusingMATLABshouldnowrunchl0p6inAppendixB.YouwilllearnhowtouseMATLABtomakeaNicholsplot.ThisexercisemakesaNicholsplotofG(s)=l/[s(s+l)(s+2)]usingMATLAB.GuiToolMATLAB'sLTIViewerisanalternativemethodofobtainingtheNicholschart.YouareencouragedtostudyAppendixEatwww.wiley.com/college/nise,whichcontainsatutorialontheLTIVieweraswellassomeexamples.ExampleE.4showshowtoobtainFigure10.47usingtheLTIViewer.Skill-AssessmentExercise10.8Trylt10.5UseMATLAB,theControlSystemToolbox,andthefollowingstatementstomakeaNicholschartofthesystemgiveninSkill-AssessmentExercise10.8G=zpk([],...[-5,-20,-501,8000)nichols(G)gridonPROBLEM:GiventhesystemshowninFigure10.10,where8000G{s)=(5+5)(5+20)(5+50)WileyPLUSControlSolutionsplottheclosed-looplog-magnitudeandphasefrequencyresponseplotsusingthefollowingmethods:a.MandTVcirclesb.NicholschartANSWER:Thecompletesolutionisatwww.wiley.com/college/nise.10.10RelationBetweenClosed-LoopTransientandOpen-LoopFrequencyResponses[10.10RelationBetweenClosed-LoopTransientandOpen-LoopFrequencyResponsesDampingRatioFromMCirclesWecanusetheresultsofExample10.11toestimatethetransientresponsecharacteristicsofthesystem.Wecanfindthepeakoftheclosed-loopfrequencyresponsebyfindingthemaximumMcurvetangenttotheopen-loopfrequencyresponse.Thenwecanfindthedampingratio,f,andsubsequentlythepercentovershoot,viaEq.(10.52).Thefollowingexampledemonstratestheuseoftheopen-loopfrequencyresponseandtheMcirclestofindthedampingratioor,equivalently,thepercentovershoot.PercentOvershootfromOpen-LoopFrequencyResponsePROBLEM:FindthedampingratioandthepercentovershootexpectedfromthesystemofExample10.11,usingtheopen-loopfrequencyresponseandtheMcircles.SOLUTION:Equation(10.52)showsthatthereisauniquerelationshipbetweentheclosed-loopsystem'sdampingratioandthepeakvalue,MP,oftheclosed-loopsystem'smagnitudefrequencyplot.FromFigure10.44,weseethattheNyquistdiagramistangenttothe1.8Mcircle.Weseethatthisisthemaximumvaluefortheclosed-loopfrequencyresponse.Thus,Mp=1.8.WecansolveforfbyrearrangingEq.(10.52)intothefollowingform:C4-C2+(1/4M^)=0(10.67)SinceMp=1.8,then£=0.29and0.96.FromEq.(10.53),adampingratiolargerthan0.707yieldsnopeakabovezerofrequency.Thus,weselectf=0.29,whichisequivalentto38.6%overshoot.Caremustbetaken,however,tobesurewecanmakeasecond-orderapproximationwhenassociatingthevalueofpercentovershoottothevalueof£.Acomputersimulationofthestepresponseshows36%overshoot.Sofarinthissection,wehavetiedtogetherthesystem'stransientresponseandthepeakvalueoftheclosed-loopfrequencyresponseasobtainedfromtheopen-loopfrequencyresponse.WeusedtheNyquistplotsandtheMandNcirclestoobtaintheclosed-looptransientresponse.Anotherassociationexistsbetweentheopen-loopfrequencyresponseandtheclosed-looptransientresponsethatiseasilyimplementedwiththeBodeplots,whichareeasiertodrawthantheNyquistplots.DampingRatiofromPhaseMarginLetusnowderivetherelationshipbetweenthephasemarginandthedampingratio.Thisrelationshipwillenableustoevaluatethepercentovershootfromthephasemarginfoundfromtheopen-loopfrequencyresponse.589590Chapter10FrequencyResponseTechniquesConsideraunityfeedbacksystemwhoseopen-loopfunctionG(s)=ats(s+2¾¾¾)(10.68)yieldsthetypicalsecond-order,closed-looptransferfunctionT(s)=0),,(10.69)s2+2^cons+co2Inordertoevaluatethephasemargin,wefirstfindthefrequencyforwhich\G(ja>)\=1.Hence,,.,2\G(jco)\=1(10.70)0)1=(Ony-2£2+v/l+4£4'(10.71)2—co+j2£io„co\Thefrequency,co\,thatsatisfiesEq.(10.70)isThephaseangleofG(jco)atthisfrequencyisZG(jco)=-90-tan-1-^-=-90--2c2+v^p+Ttan-l(10.72)~2£ThedifferencebetweentheangleofEq.(10.72)and-180°isthephasemargin,M.Thus,M=90-tan-l=tan-1-2c2+x/TTipn2C(10.73)J-2?+VlV^Equation(10.73),plottedinFigure10.48,showstherelationshipbetweenphasemarginanddampingratio.FIGURE10.48Phasemarginvs.dampingratio00.20.40.60.81.01.21.41.61.82.02.22.42.62.83.0Dampingratio10.10RelationBetweenClosed-LoopTransientandOpen-LoopFrequencyResponses-280-260-240-220-200-180-160-140-120-100Open-loopphase(degrees)-80FIGURE10.49Open-loopgainvs.open-loopphaseanglefor—3dBclosed-loopgainAsanexample,Eq.(10.53)tellsusthatthereisnopeakfrequencyif£=0.707.Hence,thereisnopeaktotheclosed-loopmagnitudefrequencyresponsecurveforthisvalueofdampingratioandlarger.Thus,fromFigure10.48,aphasemarginof65.52°(£=0.707)orlargerisrequiredfromtheopen-loopfrequencyresponsetoensurethereisnopeakingintheclosed-loopfrequencyresponse.ResponseSpeedfromOpen-LoopFrequencyResponseEquations(10.55)and(10.56)relatetheclosed-loopbandwidthtothedesiredsettlingorpeaktimeandthedampingratio.Wenowshowthattheclosed-loopbandwidthcanbeestimatedfromtheopen-loopfrequencyresponse.FromtheNicholschartinFigure10.46,weseetherelationshipbetweentheopen-loopgainandtheclosed-loopgain.TheM=0.707(-3dB)curve,replottedinFigure10.49forclarity,showstheopen-loopgainwhentheclosed-loopgainis—3dB,whichtypicallyoccursat&>BWifthelow-frequencyclosed-loopgainis0dB.WecanapproximateFigure10.49bysayingthattheclosed-loopbandwidth,O>BW(thefrequencyatwhichtheclosed-loopmagnituderesponseis-3dB),equalsthefrequencyatwhichtheopen-loopmagnituderesponseisbetween—6and—7.5dBiftheopen-loopphaseresponseisbetween—135°and—225°.Then,usingasecond-ordersystemapproximation,Eqs.(10.55)and(10.56)canbeused,alongwiththedesireddampingratio,£,tofindsettlingtimeandpeaktime,respectively.Letuslookatanexample.Example10.13SettlingandPeakTimesfromOpen-LoopFrequencyResponsePROBLEM:GiventhesystemofFigure10.50(a)andtheBodediagramsofFigure10.50(6),estimatethesettlingtimeandpeaktime.SOLUTION:UsingFigure10.50(6),weestimatetheclosed-loopbandwidthbyfindingthefrequencywheretheopen-loopmagnituderesponseisintherangeof-6to—7.5dBifthephaseresponseisintherangeof—135°to—225°.SinceFigure10.50(6)shows-6to—7.5dBatapproximately3.7rad/swithaphaseresponseinthestatedregion,O>BW—3.7rad/s.Nextfindfviathephasemargin.FromFigure10.50(6),thephasemarginisfoundbyfirstfindingthefrequencyatwhichthemagnitudeplotis0dB.Atthisfrequency,2.2rad/s,thephaseisabout-145°.Hence,thephasemarginisapproximately(-145°-(-180°))=35°.UsingFigure10.48,£=0.32.Finally,usingEqs.(10.55)and(10.56),withthevaluesofWBWand£justfound,Ts=4.86591Chapter10592FrequencyResponseTechniquessecondsandTp=129seconds.CheckingtheanalysiswithacomputersimulationshowsTs=5.5seconds,andTp=1.43seconds./?(*)+,->EWrcm50sis+3)(.s+6)(a)10—-____62-25-6g1-10o-14-18-22-26-301--—-~-^_^234567897810Frequency(rad/s)-100-120~~~~—^^-__^-140M-160u181"200°I--220-240234910Frequency(rad/s)ib)FIGURE10.50a.Blockdiagram;b.BodediagramsforsystemofExample10.13Skill-AssessmentExercise10.9PROBLEM:Usingtheopen-loopfrequencyresponseforthesysteminFigure10.10,whereG(s)=100s(s+5)estimatethepercentovershoot,settlingtime,andpeaktimefortheclosed-loopstepresponse.ANSWER:%OS=44%,T,=1.64s,and7>=0.33sThecompletesolutionisatwww.wiley.com/college/nise.10.11Steady-StateErrorCharacteristicsfromFrequencyResponse10.11(Steady-StateErrorCharacteristicsfromFrequencyResponseInthissection,weshowhowtouseBodediagramstofindthevaluesofthestaticerrorconstantsforequivalentunityfeedbacksystems:KpforaType0system,KvforaType1system,andKaforaType2system.TheresultswillbeobtainedfromurmormalizedandunsealedBodelog-magnitudeplots.PositionConstantTofindKp,considerthefollowingType0system:G(s)=K/=im(10.74)n(*+/>/)/=iAtypicalunnormalizedandunsealedBodelog-magnitudeplotisshowninFigure10.51(a).Theinitialvalueis20logM=20logKi=lm(10.75)i=\20logM20logK±+-(020logmn-40dB/dec20logK,1=1COQ(c)FIGURE10.51TypicalunnormalizedandunsealedBodelog-magnitudeplotsshowingthevalueofstaticerrorconstants:a.Type0;b.Type1;c.Type2593594Chapter10FrequencyResponseTechniquesButforthissystemKp=K'ilUPi(10.76)whichisthesameasthevalueofthelow-frequencyaxis.Thus,foranunnormalizedandunsealedBodelog-magnitudeplot,thelow-frequencymagnitudeis20logKpforaType0system.VelocityConstantTofindKvforaType1system,considerthefollowingopen-looptransferfunctionofaType1system:G(s)=K-^sY[(s+Pi)(10.77)/=iAtypicalunnormalizedandunsealedBodelog-magnitudediagramisshowninFigure10.51(6)forthisType1system.TheBodeplotstartsatnUZi20logM=20logK-¾—(10.78)o)0flPi/=iTheinitial-20dB/decadeslopecanbethoughtofasoriginatingfromafunction,nIPsG'(s)=K^—(10.79)sfiPi/=iG'(s)intersectsthefrequencyaxiswhennUZiOJ=K'^—(10.80)tlto/=iButfortheoriginalsystem(Eq.(10.77)),nUZiKV=K^ITA-(10.81)/=Iwhichisthesameasthefrequency-axisintercept,Eq.(10.80).Thus,wecanfindKvbyextendingtheinitial-20dB/decadeslopetothefrequencyaxisonanunnormalizedandunsealedBodediagram.TheintersectionwiththefrequencyaxisisK+10.11Steady-StateErrorCharacteristicsfromFrequencyResponseAccelerationConstantTofindKaforaType2system,considerthefollowing:n(s+zd/=lG(s)=K(10.82)2sU(s+Pi]/=1AtypicalunnormalizedandunsealedBodeplotforaType2systemisshowninFigure10.51(c).TheBodeplotstartsat11¾20logM=20logiC/=iin(10.83)dBcrossinR-40dB/dec~~-20dB/dec-65-85-1050.1101Frequency(rad/s)(A)604020f°o.0dB/de^.-40dB/dec~~"~~~---^-20dBcrossingH-40-600.1FIGURE10.521Frequency(rad/s)(c)Bodelog-magnitudeplotsforExample10.1410SOLUTION:Figure10.52(A)isaType0systemsincetheinitialslopeiszero.ThevalueofKpisgivenbythelow-frequencyasymptotevalue.Thus,20logKp=25,orKp=17.78.Figure10.52(b)isaType1systemsincetheinitialslopeis-20dB/decade.ThevalueofKvisthevalueofthefrequencythattheinitialslopeintersectsatthezerodBcrossingofthefrequencyaxis.Hence,Kv=0.55.Figure10.52(c)isaType2systemsincetheinitialslopeis-40dB/decade.Thevalueof\/K^isthevalueofthefrequencythattheinitialslopeintersectsatthezerodBcrossingofthefrequencyaxis.Hence,Ka=32=9.10.12SystemswithTimeDelay(([Skill-AssessmentExercise10.10JPROBLEM:Findthestaticerrorconstantsforastableunityfeedbacksystemwhoseopen-looptransferfunctionhastheBodemagnitudeplotshowninFigure10.53.100OOM50o00.310.1l101001000Frequency(rad/s)FIGURE10.53Bodelog-magnitudeplotforSkill-AssessmentExercise10.10ANSWEFS:Kp=oo,Kv=co,Ka=90.25Theconapletesolutioniswww.wiley.com/college/nise.^10.12SystemswithTimeDelayTimedelayoccursincontrolsystemswhenthereisadelaybetweenthecommandedresponseandthestartoftheoutputresponse.Forexample,consideraheatingsystemthatoperatesbyheatingwaterforpipelinedistributiontoradiatorsatdistantlocations.Sincethehotwatermustflowthroughtheline,theradiatorswillnotbegintogethotuntilafteraspecifiedtimedelay.Inotherwords,thetimebetweenthecommandformoreheatandthecommencementoftheriseintemperatureatadistantlocationalongthepipelineisthetimedelay.Noticethatthisisnotthesameasthetransientresponseorthetimeittakesthetemperaturetorisetothedesiredlevel.Duringthetimedelay,nothingisoccurringattheoutput.ModelingTimeDelayAssumethataninput,R(s),toasystem,G(s),yieldsanoutput,C(s).Ifanothersystem,G'(s),delaystheoutputbyTseconds,theoutputresponseisc(t-T).FromTable2.2,Item5,theLaplacetransformofc(t-T)ise~sTC(s).Thus,forthesystemwithoutdelay,C(s)=R{s)G{s),andforthesystemwithdelay,e~sTC(s)=R(s)G'(s).Dividingthesetwoequations,G'(s)/G(s)—e~sT.Thus,asystemwithtimedelayTcanberepresentedintermsofanequivalentsystemwithouttimedelayasfollows:G'{s)=e-sTG{s)(10.87)597)598Chapter10FrequencyResponseTechniquesM(dB)Gainplot-logcoOdBPhase(degrees)180°>-logcoPhaseplotwithoutdelayFIGURE10.54PhaseplotwithdelayEffectofdelayuponfrequencyresponseTheeffectofintroducingtimedelayintoasystemcanalsobeseenfromtheperspectiveofthefrequencyresponsebysubstituting51=jcoinEq.(10.87).Hence,G'{jco)=e-iT=1Z-coT=1Z-co,sinceT—1fromtheproblemstatement.Nextdrawthephaseplotofthesystem,G(jco),10.12SystemswithTimeDelay5990-20^0-60«n0.010.110Frequency(rad/s)(a)0Timedelaj111-200^00'^otal-600\-8000.01100.1Frequency(rad/s)FIGURE10.55FrequencyresponseplotsforG(s)=K/[s(s+l)(s+10)]withadelayof1secondandK—1:a.magnitudeplot;b.phaseplotusingthemethodspreviouslycovered.Finally,addthetwophasecurvestogethertoobtainthetotalphaseresponsefore~i0>1G(jco).BesuretouseconsistentunitsforthephaseanglesofG(Ja>)andthedelay;eitherdegreesorradians.Noticethatthedelayyieldsadecreasedphasemargin,sinceatanyfrequencythephaseangleismorenegative.Usingasecond-orderapproximation,thisdecreaseinphasemarginimpliesalowerdampingratioandamoreoscillatoryresponsefortheclosed-loopsystem.Further,thereisadecreaseinthegain-marginfrequency.Onthemagnitudecurve,notethatareductioninthegain-marginfrequencyshowsupasreducedgainmargin,thusmovingthesystemclosertoinstability.StudentswhoareusingMATLABshouldnowrunchl0p7inAppendixB.YouwilllearnhowtouseMATLABtoincludetimedelayonBodeplots.YouwillalsouseMATLABtomakemultipleplotsononegraphandlabeltheplots.ThisexercisesolvesExample10.15usingMATLAB.LetusnowusetheresultsofExample10.15todesignstabilityandanalyzetransientresponseandcomparetheresultstothesystemwithouttimedelay.Example10.16RangeofGainforStabilityforSystemwithTimeDelayPROBLEM:Theopen-loopsystemwithtimedelayinExample10.15isusedinaunityfeedbackconfiguration.Dothefollowing:a.Findtherangeofgain,K,toyieldstability.UseBodeplotsandfrequencyresponsetechniques.b.RepeatPartaforthesystemwithouttimedelay.MATLABChapter10FrequencyResponseTechniquesSOLUTION:a.FromFigure10.55,thephaseangleis-180°atafrequencyof0.81rad/sforthesystemwithtimedelay,marked"Total"onthephaseplot.Atthisfrequency,themagnitudecurveisat-20.39dB.Thus,KcanberaisedfromitscurrentvalueofunitytoI02a39/20=10.46.Hence,thesystemisstablefor0<K<10.46.b.Ifweusethephasecurvewithoutdelay,marked"System,"—180°occursatafrequencyof3.16rad/s,andKcanberaised40.84dBor110.2.Thus,withoutdelaythesystemisstablefor0<K<110.2,anorderofmagnitudelarger.PercentOvershootforSystemwithTimeDelayPROBLEM:Theopen-loopsystemwithtimedelayinExample10.15isusedinaunityfeedbackconfiguration.Dothefollowing:a.EstimatethepercentovershootifK=5.UseBodeplotsandfrequencyresponsetechniques.b.RepeatPartaforthesystemwithouttimedelay.SOLUTION:a.SinceK=5,themagnitudecurveofFigure10.55israisedby13.98dB.ThezerodBcrossingthenoccursatafrequencyof0.47rad/swithaphaseangleof—145°,asseenfromthephaseplotmarked"Total."Therefore,thephasemarginis(-145°—(—180°))=35°.Assumingasecond-orderapproximationandusingEq.(10.73)orFigure10.48,wefind£=0.33.FromEq.(4.38),%OS=33%.Thetimeresponse,Figure10.56(a),showsa38%overshootinsteadofthepredicted33%.Noticethetimedelayatthestartofthecurve.b.ThezerodBcrossingoccursatafrequencyof0.47rad/swithaphaseangleof-118°,asseenfromthephaseplotmarked"System."Therefore,thephase1.41.21.080.80.60.4FIGURE10.56Stepresponseforclosed-loopsystemwithG(s)=5/[s(s+1)(5+10)]:a.witha1-seconddelay;(figurecontinues)o1520Time(seconds)10.12SystemswithTimeDelay601•1.2^1.0-•——/0.60.4-X0.8*^-/0.2/0(ii24i6Time(seconds)(b)ii810,FIGURE10.56(Continued)b.withoutdelaymarginis(-118°-(-180°))=62°.Assumingasecond-orderapproximationandusingEq.(10.73)orFigure10.48,wefindf=0.64.FromEq.(4.38),%OS=7.3%.ThetimeresponseisshowninFigure10.56(6).Noticethatthesystemwithoutdelayhaslessovershootandasmallersettlingtime.M[Skill-AssessmentExercise10.11JPROBLEM:ForthesystemshowninFigure10.10,whereG(s)~G{S}10s(s+l)findthephasemarginifthereisadelayintheforwardpathofa.0sb.0.1sc.3sANSWERS:a.18.0°b.0.35°c.-151.41°Thecompletesolutionisatwww.wiley.com/college/nise.WileyPLUSTrylt10.6UseMATLAB,theControlControlSolutionsSystemToolbox,
andthefollowingstatementstosolveSkillAssessmentExercise10.11.Foreachpartoftheproblemletd=thespecifieddelay.G=zpk([],[0,-1],10)d=0[numGd,denGd]=pade...(d,12)Gd=tf(numGd,denGd)Ge=G*Gdbode(Ge)gridonAftertheBodediagramsappear:1.Right-clickinthegrapharea.2.SelectCharacteristics.3.SelectAHStabilityMargins.4.Letthemouserestonthemarginpointonthephaseplottoreadthephasemargin.602Chapter10FrequencyResponseTechniquesInsummary,then,systemswithtimedelaycanbehandledusingpreviouslydescribedfrequencyresponsetechniquesifthephaseresponseisadjustedtoreflectthetimedelay.Typically,timedelayreducesgainandphasemargins,resultinginincreasedpercentovershootorinstabilityintheclosed-loopresponse.^10.13ObtainingTransferFunctionsExperimentallyInChapter4,wediscussedhowtoobtainthetransferfunctionofasystemthroughstep-responsetesting.Inthissection,weshowhowtoobtainthetransferfunctionusingsinusoidalfrequencyresponsedata.Theanalyticaldeterminationofasystem'stransferfunctioncanbedifficult.Individualcomponentvaluesmaynotbeknown,ortheinternalconfigurationofthesystemmaynotbeaccessible.Insuchcases,thefrequencyresponseofthesystem,frominputtooutput,canbeobtainedexperimentallyandusedtodeterminethetransferfunction.Toobtainafrequencyresponseplotexperimentally,weuseasinusoidalforceorsignalgeneratorattheinputtothesystemandmeasuretheoutputsteady-statesinusoidamplitudeandphaseangle(seeFigure10.2).Repeatingthisprocessatanumberoffrequenciesyieldsdataforafrequencyresponseplot.ReferringtoFigure10.2(6),theamplituderesponseisM(co)=M0(a>)/Mj(0(co)—¢1((0).Oncethefrequencyresponseisobtained,thetransferfunctionofthesystemcanbeestimatedfromthebreakfrequenciesandslopes.FrequencyresponsemethodscanyieldamorerefinedestimateofthetransferfunctionthanthetransientresponsetechniquescoveredinChapter4.Bodeplotsareaconvenientpresentationofthefrequencyresponsedataforthepurposeofestimatingthetransferfunction.Theseplotsallowpartsofthetransferfunctiontobedeterminedandextracted,leadingthewaytofurtherrefinementstofindtheremainingpartsofthetransferfunction.Althoughexperienceandintuitionareinvaluableintheprocess,thefollowingstepsarestillofferedasaguideline:1.LookattheBodemagnitudeandphaseplotsandestimatethepole-zeroconfigurationofthesystem.Lookattheinitialslopeonthemagnitudeplottodeterminesystemtype.Lookatphaseexcursionstogetanideaofthedifferencebetweenthenumberofpolesandthenumberofzeros.2.Seeifportionsofthemagnitudeandphasecurvesrepresentobviousfirst-orsecond-orderpoleorzerofrequencyresponseplots.3.Seeifthereisanytelltalepeakingordepressionsinthemagnituderesponseplotthatindicateanunderdampedsecond-orderpoleorzero,respectively.4.Ifanypoleorzeroresponsescanbeidentified,overlayappropriate±20or±40dB/decadelinesonthemagnitudecurveor±45°/decadelinesonthephasecurveandestimatethebreakfrequencies.Forsecond-orderpolesorzeros,estimatethedampingratioandnaturalfrequencyfromthestandardcurvesgiveninSection10.2.5.Formatransferfunctionofunitygainusingthepolesandzerosfound.Obtainthefrequencyresponseofthistransferfunctionandsubtractthisresponsefromthepreviousfrequencyresponse(Franklin,1991).Younowhaveafrequencyresponseofreducedcomplexityfromwhichtobegintheprocessagaintoextractmoreofthesystem'spolesandzeros.AcomputerprogramsuchasMATLABisofinvaluablehelpforthisstep.Letusdemonstrate.10.13ObtainingTransferFunctionsExperimentallyExample10.18TransferFunctionfromBodePlotsPROBLEM:FindthetransferfunctionofthesubsystemwhoseBodeplotsareshowninFigure10.57.^oo°-50-1001010010001001000Frequency(rad/s)_-50\I-100I-150a-2ooVCM-250-300I10Frequency(rad/s)FIGURE10.57BodeplotsforsubsystemwithundeterminedtransferfunctionSOLUTION:Letusfirstextracttheunderdampedpolesthatwesuspect,basedonthepeakinginthemagnitudecurve.Weestimatethenaturalfrequencytobenearthepeakfrequency,orapproximately5rad/s.FromFigure10.57,weseeapeakofabout6.5dB,whichtranslatesintoadampingratioofabout£=0.24usingEq.(10.52).Theunitygainsecond-orderfunctionisthusGi(s)=a%/(s2+2t;cons+afy=25/(52+2.4s+25).ThefrequencyresponseplotofthisfunctionismadeandsubtractedfromthepreviousBodeplotstoyieldtheresponseinFigure10.58.Overlayinga-20dB/decadelineonthemagnituderesponseanda—45°/decadelineonthephaseresponse,wedetectafinalpole.Fromthephaseresponse,weestimatethebreakfrequencyat90rad/s.SubtractingtheresponseofG2(s)=90/(5+90)fromthepreviousresponseyieldstheresponseinFigure10.59.Figure10.59hasamagnitudeandphasecurvesimilartothatgeneratedbyalagfunction.Wedrawa-20dB/decadelineandfitittothecurves.Thebreakfrequenciesarereadfromthefigureas9and30rad/s.Aunitygaintransferfunctioncontainingapoleat-9andazeroat-30isG%(s)=0.3(5+30)/(5+9).UponsubtractionofG\(s)Gi(s)G3(s),wefindthemagnitudefrequencyresponseflat±1dBandthephaseresponseflatat—3°±5°.Wethusconcludethatwearefinishedextractingdynamictransferfunctions.Thelow-frequency,ordc,valueoftheoriginalcurveis-19dB,or0.11.Ourestimateofthesubsystem'stransferfunction603604Chapter10FrequencyResponseTechniques-20-25-30-35^0^15-50101001000Frequency(rad/s)-20^^to-60cu-80-1001FIGURE10.58100010100Frequency(rad/s)OriginalBodeplotsminusresponseofGi(s)=25/(s2+2.4s+25)isG(s)=0.11Gi{s)G2(s)G3(s),or255+3010.3905+9s+2.4s+25j\s+905+30=74.25(5+9)(^+90)(^2+2.4*+25)G(s)=0.11-18-20-22-24-26-28-30-322\(10.89)sv\\101000100Frequency(rad/s)^.-----5-I-lo%D\t—ID«•a-20£-25^\^\'//-30-351FIGURE10.59[90/(5+90)]101001000Frequency(rad/s)OriginalBodeplotminusresponseofGx(s)G2{s)=[25/(s2+2.4s+25)]10.13ObtainingTransferFunctionsExperimentally605Itisinterestingtonotethattheoriginalcurvewasobtainedfromthefunction5+20G{s)=70(5+7)(5+70)(52+2s+25)(10.90)MATLABStudentswhoareusingMATLABshouldnowrunchl0p8inAppendixB.YouwilllearnhowtouseMATLABtosubtractBodeplotsforthepurposeofestimatingtransferfunctionsthroughsinusoidaltesting.ThisexercisesolvesaportionofExample10.18usingMATLAB.Skill-AssessmentExercise10.12PROBLEM:EstimateG(s),whoseBodelog-magnitudeandphaseplotsareshowninFigure10.60.ANSWER:G(s)=30(5+5)s(s+20)Thecompletesolutionisatwww.wiley.com/college/nise.10069102030101001000Frequency(rad/s)-45-50_-558"-60|-653-701-75y\^TO£NU*-80-85-90-95----^^1101001000Frequency(rad/s)FIGURE10.60BodeplotsforSkill-AssessmentExercise10.12Inthischapter,wederivedtherelationshipsbetweentimeresponseperformanceandthefrequencyresponsesoftheopen-andclosed-loopsystems.Themethodsderived,althoughyieldingadifferentperspective,aresimplyalternativestotherootlocusandsteady-stateerroranalysespreviouslycovered.606Chapter10FrequencyResponseTechniquesCaseStudyAntennaControl:StabilityDesignandTransientPerformanceDesignOurongoingantennapositioncontrolsystemservesnowasanexamplethatsummarizesthemajorobjectivesofthechapter.Thecasestudydemonstratestheuseoffrequencyresponsemethodstofindtherangeofgainforstabilityandtodesignavalueofgaintomeetapercentovershootrequirementfortheclosed-loopstepresponse.PROBLEM:Giventheantennaazimuthpositioncontrolsystemshownonthefrontendpapers,Configuration1,usefrequencyresponsetechniquestofindthefollowing:a.b.e.d.e.Therangeofpreamplifiergain,K,requiredforstabilityPercentovershootifthepreamplifiergainissetto30TheestimatedsettlingtimeTheestimatedpeaktimeTheestimatedrisetimeSOLUTION:Usingtheblockdiagram(Configuration1)shownonthefrontendpapersandperformingblockdiagramreductionyieldstheloopgain,G(s)H(s),asG(s)H(s)=6.63K^+1.71)(5+100)0.0388tf§(*+A(*Z+i)(10.91)1.71AlOO)LettingK—1,wehavethemagnitudeandphasefrequencyresponseplotsshowninFigure10.61.-20-40-60-80-100-120-140-1600.1FIGURE10.61Open-loopfrequencyresponseplotsfortheantennacontrolsystem10Frequency(rad/s)100100010Frequency(rad/s)1001000-100-120-140-160-180-200-220-240-260-2800.1Summary607a.InordertofindtherangeofKforstability,wenoticefromFigure10.61thatthephaseresponseis-180°atco=13.1rad/s.Atthisfrequency,themagnitudeplotis-68.41dB.Thegain,K,canberaisedby68.41dB.Thus,K=2633willcausethesystemtobemarginallystable.Hence,thesystemisstableif0<K<2633.b.TofindthepercentovershootifK=30,wefirstmakeasecond-orderapproximationandassumethatthesecond-ordertransientresponseequationsrelatingpercentovershoot,dampingratio,andphasemarginaretrueforthissystem.Inotherwords,weassumethatEq.(10.73),whichrelatesdampingratiotophasemargin,isvalid.IfK—30,themagnitudecurveofFigure10.61ismovedupby20log30=29.54dB.Therefore,theadjustedmagnitudecurvegoesthroughzerodBatco=1.Atthisfrequency,thephaseangleis-120.9°,yieldingaphasemarginof59.1°.UsingEq.(10.73)orFigure10.48,f=0.6,or9.48%overshoot.Acomputersimulationshows10%.c.Toestimatethesettlingtime,wemakeasecond-orderapproximationanduseEq.(10.55).SinceK=30(29.54dB),theopen-loopmagnituderesponseis—7dBwhenthenormalizedmagnituderesponseofFigure10.61is-36.54dB.Thus,theestimatedbandwidthis1.8rad/s.UsingEq.(10.55),Ts=4.25seconds.Acomputersimulationshowsasettlingtimeofabout4.4seconds.d.Usingtheestimatedbandwidthfoundinc.alongwithEq.(10.56),andthedampingratiofoundina.weestimatethepeaktimetobe2.5seconds.Acomputersimulationshowsapeaktimeof2.8seconds.e.Toestimatetherisetime,weuseFigure4.16andfindthatthenormalizedrisetimeforadampingratioof0.6is1.854.UsingEq.(10.54),theestimatedbandwidthfoundinc,and£=0.6,wefindcon=1.57.Usingthenormalizedrisetimeandcon,wefindTT—1.854/1.57=1.18seconds.Asimulationshowsarisetimeof1.2seconds.CHALLENGE:Youarenowgivenaproblemtotestyourknowledgeofthischapter'sobjectives.Youaregiventheantennaazimuthpositioncontrolsystemshownonthefrontendpapers,Configuration3.RecordtheblockdiagramparametersinthetableshownonthefrontendpapersforConfiguration3foruseinsubsequentcasestudychallengeproblems.Usingfrequencyresponsemethods,dothefollowing:a.Findtherangeofgainforstability.b.Findthepercentovershootforastepinputifthegain,K,equals3.CRepeatPartsa.andb.usingMATLAB.£Summary^Frequencyresponsemethodsareanalternativetotherootlocusforanalyzinganddesigningfeedbackcontrolsystems.Frequencyresponsetechniquescanbeusedmoreeffectivelythantransientresponsetomodelphysicalsystemsinthelaboratory.Ontheotherhand,therootlocusismoredirectlyrelatedtothetimeresponse.Theinputtoaphysicalsystemcanbesinusoidallyvaryingwithknownfrequency,amplitude,andphaseangle.Thesystem'soutput,whichisalsosinusoidalMATLABflTTBChapter10FrequencyResponseTechniquesinthesteadystate,canthenbemeasuredforamplitudeandphaseangleatdifferentfrequencies.Fromthisdatathemagnitudefrequencyresponseofthesystem,whichistheratiooftheoutputamplitudetotheinputamplitude,canbeplottedandusedinplaceofananalyticallyobtainedmagnitudefrequencyresponse.Similarly,wecanobtainthephaseresponsebyfindingthedifferencebetweentheoutputphaseangleandtheinputphaseangleatdifferentfrequencies.Thefrequencyresponseofasystemcanberepresentedeitherasapolarplotorasseparatemagnitudeandphasediagrams.Asapolarplot,themagnituderesponseisthelengthofavectordrawnfromtheorigintoapointonthecurve,whereasthephaseresponseistheangleofthatvector.Inthepolarplot,frequencyisimplicitandisrepresentedbyeachpointonthepolarcurve.ThepolarplotofG(s)H(s)isknownasaNyquistdiagram.Separatemagnitudeandphasediagrams,sometimesreferredtoasBodeplots,presentthedatawithfrequencyexplicitlyenumeratedalongtheabscissa.Themagnitudecurvecanbeaplotoflog-magnitudeversuslog-frequency.Theothergraphisaplotofphaseangleversuslog-frequency.AnadvantageofBodeplotsovertheNyquistdiagramisthattheycaneasilybedrawnusingasymptoticapproximationstotheactualcurve.TheNyquistcriterionsetsforththetheoreticalfoundationfromwhichthefrequencyresponsecanbeusedtodetermineasystem'sstability.UsingtheNyquistcriterionandNyquistdiagram,ortheNyquistcriterionandBodeplots,wecandetermineasystem'sstability.Frequencyresponsemethodsgiveusnotonlystabilityinformationbutalsotransientresponseinformation.Bydefiningsuchfrequencyresponsequantitiesasgainmarginandphasemargin,thetransientresponsecanbeanalyzedordesigned.Gainmarginistheamountthatthegainofasystemcanbeincreasedbeforeinstabilityoccursifthephaseangleisconstantat180°.Phasemarginistheamountthatthephaseanglecanbechangedbeforeinstabilityoccursifthegainisheldatunity.Whiletheopen-loopfrequencyresponseleadstotheresultsforstabilityandtransientresponsejustdescribed,otherdesigntoolsrelatetheclosed-loopfrequencyresponsepeakandbandwidthtothetransientresponse.Sincetheclosed-loopresponseisnotaseasytoobtainastheopen-loopresponsebecauseoftheunavailabilityoftheclosed-looppoles,weusegraphicalaidsinordertoobtaintheclosed-loopfrequencyresponsefromtheopen-loopfrequencyresponse.ThesegraphicalaidsaretheMandNcirclesandtheNicholschart.Bysuperimposingtheopen-loopfrequencyresponseovertheMandNcirclesortheNicholschart,weareabletoobtaintheclosed-loopfrequencyresponseandthenanalyzeanddesignfortransientresponse.Today,withtheavailabilityofcomputersandappropriatesoftware,frequencyresponseplotscanbeobtainedwithoutrelyingonthegraphicaltechniquesdescribedinthischapter.TheprogramusedfortherootlocuscalculationsanddescribedinAppendixH.2isonesuchprogram.MATLABisanother.Weconcludedthechapterdiscussionbyshowinghowtoobtainareasonableestimateofatransferfunctionusingitsfrequencyresponse,whichcanbeobtainedexperimentally.Obtainingtransferfunctionsthiswayyieldsmoreaccuracythantransientresponsetesting.Thischapterprimarilyhasexaminedanalysisoffeedbackcontrolsystemsviafrequencyresponsetechniques.Wedevelopedtherelationshipsbetweenfrequencyresponseandbothstabilityandtransientresponse.Inthenextchapter,weapplytheconceptstothedesignoffeedbackcontrolsystems,usingtheBodeplots.ReviewQuestions£ReviewQuestionsJ|1.Namefouradvantagesoffrequencyresponsetechniquesovertherootlocus.2.Definefrequencyresponseasappliedtoaphysicalsystem.3.Nametwowaystoplotthefrequencyresponse.4.Brieflydescribehowtoobtainthefrequencyresponseanalytically.5.DefineBodeplots.6.EachpoleofasystemcontributeshowmuchofaslopetotheBodemagnitudeplot?7.AsystemwithonlyfourpolesandnozeroswouldexhibitwhatvalueofslopeathighfrequenciesinaBodemagnitudeplot?8.AsystemwithfourpolesandtwozeroswouldexhibitwhatvalueofslopeathighfrequenciesinaBodemagnitudeplot?9.Describetheasymptoticphaseresponseofasystemwithasinglepoleat-2.10.WhatisthemajordifferencebetweenBodemagnitudeplotsforfirst-ordersystemsandforsecond-ordersystems?11.Forasystemwiththreepolesat-4,whatisthemaximumdifferencebetweentheasymptoticapproximationandtheactualmagnituderesponse?12.BrieflystatetheNyquistcriterion.13.WhatdoestheNyquistcriteriontellus?14.WhatisaNyquistdiagram?15.WhyistheNyquistcriterioncalledafrequencyresponsemethod?16.WhensketchingaNyquistdiagram,whatmustbedonewithopen-looppolesontheimaginaryaxis?17.WhatsimplificationtotheNyquistcriterioncanweusuallymakeforsystemsthatareopen-loopstable?18.WhatsimplificationtotheNyquistcriterioncanweusuallymakeforsystemsthatareopen-loopunstable?19.Definegainmargin.20.Definephasemargin.21.Nametwodifferentfrequencyresponsecharacteristicsthatcanbeusedtodetermineasystem'stransientresponse.22.Namethreedifferentmethodsoffindingtheclosed-loopfrequencyresponsefromtheopen-looptransferfunction.23.BrieflyexplainhowtofindthestaticerrorconstantfromtheBodemagnitudeplot.24.Describethechangeintheopen-loopfrequencyresponsemagnitudeplotiftimedelayisaddedtotheplant.25.Ifthephaseresponseofapuretimedelaywereplottedonalinearphaseversuslinearfrequencyplot,whatwouldbetheshapeofthecurve?26.Whensuccessivelyextractingcomponenttransferfunctionsfromexperimentalfrequencyresponsedata,howdoyouknowwhenyouarefinished?609610Chapter10FrequencyResponseTechniquesProblems1.FindanalyticalexpressionsforthemagnitudeandphaseresponseforeachG(s)below.[Section:10.1]a.G(s)=WileyPLUS*(S)+/C*E(s)ControlSolutions*w*l50s(s+3)(s+6)System1s(s+2){s+4)50b.G(s)=(s+2){s+4)(5+3)(5+5)c.G(s)=s(s+2){s+4)C(s)J2C?+1).(s+4)2.ForeachfunctioninProblem1,makeaplotofthelog-magnitudeandthephase,usinglog-frequencyinrad/sastheordinate.Donotuseasymptoticapproximations.[Section:10.1]3.ForeachfunctioninProblem1,makeapolarplotofthefrequencyresponse.[Section:10.1]4.ForeachfunctioninProblem1,sketchtheBodeasymptoticmagnitudeandasymptoticphaseplots.CompareyourresultswithyouranswerstoProblem1.[Section:10.2]5.SketchtheNyquistdiagramforeachofthesystemsinFigureP10.1.[Section:10.4]WileyPLUS6.DrawthepolarplotfromtheseparateCUE!magnitudeandphasecurvesshowninControlSolutionsFigureP10.2.[Section:10.1]System2m±£?)20s(s+1)(*+3)(s+4)System3R(s)+/VW13.UseMATLAB'sLTIViewertofindJJ2LFigureP10.4.[Section:10.3]controlsolutionsthegainmargin,phasemargin,MfllJIMzerodBfrequency,and180°frequencyforaunityfeedbacksystemwithC(s)*®+/ps-.K(5+2)G(s)=1(s+4)(.v+6)r*—System1FIGUREP10.4(figurecontinues)8000>+6)(s+20)(s+35)Usethefollowingmethods:a.TheNyquistdiagramb.Bodeplots612Chapter10FrequencyResponseTechniques14.DeriveEq.(10.54),theclosed-loopbandwidthintermsof£andu>nofatwo-polesystem.[Section:10.8]15.Foreachclosed-loopsystemwiththefollowingperformancecharacteristics,findtheclosed-loopbandwidth:[Section:10.8]wileypius>VWcontrolsolutionsa.f=0.2,Ts=3secondsTestyourprogramonthesystemofFigureP10.5forK=40.p.b.t=0.2,Tp=3secondsm,Y"1c.Ts=4seconds,Tp~2secondsd.C=0-3,7V=4seconds16.ConsidertheunityfeedbacksystemofFigure10.10.ForeachG(s)thatfollows,usetheMandNcirclestomakeaplotoftheclosed-loopfrequencyresponse:[Section:10.9]10a.G{s)=5(5+1)(5+2)1000b.G(s)=(^+3)(5+4)(5+5)(5+6)50(5+3)c.G(s)=5(5+2)(5+4)c.Calculateanddisplaythepeakmagnitude,frequencyofthepeakmagnitude,andbandwidthfortheclosedloopfrequencyresponseandtheenteredvalueofKK(s+5)s(s2+4s+25)C(s)FIGUREP10.5wileypms6139Contro1QuiTo0'solutions21.UseMATLAB'sLTIViewerwiththeNicholsplottofindtheWilljPgainmargin,phasemargin,zerodBfrequency,and180°frequencyforaunityfeedbacksystemwiththeforward-pathtransferfunction17.RepeatProblem16,usingtheNicholschartinplaceoftheMandNcircles.[Section:10.9]18.UsingtheresultsofProblem16,estimatethepercentovershootthatcanbeexpectedinthestepresponseforeachsystemshown.[Section:10.10]19.UsetheresultsofProblem17toestimatethepercentovershootifthegainterminthenumeratoroftheforwardpathofeachpartoftheproblemisrespectivelychangedasfollows:[Section:10.10]a.From10to30b.From1000to2500c.From50to7520.WriteaprograminMATLABthatwillJjJJlJLdothefollowing:ViJ^Pa.Allowavalueofgain,K,tobeenteredfromthekeyboardb.Displaytheclosed-loopmagnitudeandphasefrequencyresponseplotsofaunityfeedbacksystemwithanopenlooptransferfunction,KG(s)G(s)=5(s+6)s(s2+4s+15)22.WriteaprograminMATLABthatwillMATLABdothefollowing:ViJ^Pa.MakeaNicholsplotofanopen-looptransferfunctionb.AllowtheusertoreadtheNicholsplotdisplayandenterthevalueofMpc.Makeclosed-loopmagnitudeandphaseplotsd.Displaytheexpectedvaluesofpercentovershoot,settlingtime,andpeaktimee.Plottheclosed-loopstepresponseTestyourprogramonaunityfeedbacksystemwiththeforward-pathtransferfunctionG(s)=5(s+e)s(sz+4s+15)andexplainanydiscrepancies.23.UsingBodeplots,estimatethetransientresponseofthesystemsinFigureP10.6.[Section:10.10]613ProblemsRW+f?\lOOC.v+2)s(s+l)(s+4)-.C(s)a.Findthegainmargin,phasemargin,zerodBfrequency,180°frequency,andtheclosed-loopbandwidth.b.UseyourresultsinPartatoestimatethedampingratio,percentovershoot,settlingtime,andpeaktime.System1R(s)+(CXEif)—.50(5+3)(s+5)s{s+2)(s+4)(s+6)C(*)26.WriteaprograminMATLABthatwilluseanopen-looptransferfunction,G(s),todothefollowing:System2FIGUREP10.624.ForthesystemofFigureP10.5,dothefollowing:[Section:10.10]a.PlottheBodemagnitudeandphaseplots.b.Assumingasecond-orderapproximation,estimatethetransientresponseofthesystemifK=40.MATLABoranyotherprograme,Usetocheckyourassumptionsbysim-MATLABa.MakeaBodeplotb.Usefrequencyresponsemethodstoestimatethepercentovershoot,settlingtime,andpeaktimec.Plottheclosed-loopstepresponseTestyourprogrambycomparingtheresultstothoseobtainedforthesystemsofProblem23.27.Theopen-loopfrequencyresponseshowninFigureP10.8wasexperimentallyobtainedfromaunityW'leyPLUsfeedbacksystem.Estimatethepercentovershootandsteady-stateerroroftheclosed-loopsystem.controlsolutions[Sections:10.10,10.11]ulatingthestepresponseofthesystem.25.TheBodeplotsforaplant,G(s),usedinaunityfeedbacksystemareshowninFigureP10.7.Dothefollowing:40200000-20^\^-40-60-80-100C.111010010100Frequency(rad/s)-50M-100a-15031MATLABfluI^B-200-Ca.-250-3000.1Frequency(rad/s)FIGUREP10.7Chapter10614FrequencyResponseTechniques4020§0J3-20°-40-60-800.0110'100101001Frequency(rad/s)0.1-80-100-120?-140\8-160onf-180|-200\,\vK-220>-240-2600.01-2800.11Frequency(rad/s)FIGUREP10.828.ConsiderthesysteminFigureP10.9.[Section:10.12]*(*)+/<-rDelay100(s+5)(5+10)cmandadelayof0.5second,findtherangeofgain,K,toyieldstability.UseBodeplotsandfrequencyresponsetechniques.[Section:10.12]30.GivenaunityfeedbacksystemwiththeforwardpathtransferfunctionFIGUREP10.9a.Findtimeb.Findeachthephasemarginifthesystemisstablefordelaysof0,0.1,0.2,0.5,and1second.thegainmarginifthesystemisstableforofthetimedelaysgiveninParta.c.ForwhattimedelaysmentionedinPartaisthesystemstable?d.Foreachtimedelaythatmakesthesystemunstable,howmuchreductioningainisrequiredforthesystemtobestable?29.Givenaunityfeedbacksystemwiththeforward-pathtransferfunctionwHeyPtusControlSolutionsU(5+1)(5+3)(5+6)G{s)=K^(5+3)(5+12)andadelayof0.5second,makeasecond-orderapproximationandestimatethepercentovershootifK=40.UseBodeplotsandfrequencyresponsetechniques.[Section:10.12]31UsetheMATLABfunctionpade(T,n)MATLABtomodelthedelayinProblem30.^ES^toObtaintheunitstepresponseandevaluateyoursecond-orderapproximationinProblem30.32.FortheBodeplotsshowninFigurePIO.IO,determinethetransferfunctionbyhandorviaMATLAB.[Section:10.13]Problems6156040200-20-40600.011Frequency(rad/s)1010010100-100§-120-140i---160-U0.010.11Frequency(rad/s)FIGUREP10.1033.RepeatProblem32fortheBodeplotsshowninFigureP10.ll.[Section:10.13]34.Anoverheadcraneconsistsofahorizontallymovingtrolleyofmassmrdraggingaloadofmassmc,whichdanglesfromitsbottomsurfaceattheendofaropeoffixedlength,L.ThepositionofthetrolleyiscontrolledinthefeedbackconfigurationshowninFigure10.20.Here,/'1050-51015S100.1Frequency(rad/s)50\V-50-100-150-2000.1100Frequency(rad/s)FIGUREP10.11616Chapter10G(s)FrequencyResponseTechniquesKP{s),H=l,anda.M(s)=-K200)b.M(s)=-K{Ss+1000c.CompareyourresultswiththoseobtainedinTheinputisfj{t),theinputforceappliedtotheProblem49,Chapter8.trolley.TheoutputisXj{t),thetrolleydisplacement.38.Thesimplifiedandlinearizedmodelforthetransferfunctionofacertainbicyclefromsteerangle(5)toAlso,coo=\IYaQda=(mLmj)jm.T(Marttinen,rollangle(cp)isgivenby(Astrom,2005)1990)MakeaqualitativeBodeplotofthesystem1.P(s)=8{s)s2+2535.Aroom'stemperaturecanbecontrolledbyvaryingtheradiatorpower.Inaspecificroom,thetransferAssumetheridercanberepresentedbyagainK,functionfromindoorradiatorpower,Q,toroomandthattheclosed-loopsystemisshowninFiguretemperature,Tin°Cis(Thomas,2005)10.20withG(s)=KP(s)andH=1.UsetheNyquiststabilitycriteriontofindtherangeofKforclosed-loopstability.-13>2-9>\-6\+(2.66x10k39.Thecontroloftheradialpickuppositionofadigital(1x10-°)sversatiledisk(DVD)wasdiscussedinProblem48,•»—11>32s+0.00163s+(5.272x10~>+(3.538x10Chapter9.There,theopen-looptransferfunctionfromcoilinputvoltagetoradialpickuppositionwasThesystemiscontrolledintheclosed-loopconfiguragivenas(Bittanti,2002)tionshowninFigure10.20withG(s)=KP{s),H=1.0.63a.DrawthecorrespondingNyquistdiagramforK=l.,0.040.361+7rr77izs+b.Obtainthegainandphasemargins.248.2248.2'305.4305.4'c.FindtherangeofKfortheclosed-loopstability.Assumetheplantisincascadewithacontroller,CompareyourresultwiththatofProblem61,Chapter6.0.5(^+1.63)X(s)P(s)=TFT(S)1rriTs2(s2+acol)m=mm=36.Theopen-loopdynamicsfromdcvoltagearmaturetoangularpositionofaroboticmanipulatorjointisgivenbyP(s)=/^°^(Low,2005).a.DrawbyhandaBodeplotusingasymptoticapproximationsformagnitudeandphase.b.UseMATLABtoplottheexactBodeplotandcomparewithyoursketchfromParta.JJ^iJLCJ^JP37.Problem49,Chapter8discussesamagneticlevitationsystemwithaplanttransferfunctionP(s)=~(Galvao,2003).AssumethattheplantisFs2-8602incascadewithanM(s)andthatthesystemwillbecontrolledbytheloopshowninFigure10.20,whereG(s)=M(s)P(s)andH=1.ForeachM(s)thatfollows,drawtheNyquistdiagramwhenK=1,andfindtherangeofclosed-loopstabilityfor#>0.M{s)=5(5+0.27)andintheclosed-loopconfigurationshowninFigure10.20,whereG(s)=M(s)P(s)andH=1.Dothefollowing:a.Drawtheopen-loopfrequencyresponseinaNicholschart.b.Predictthesystem'sresponsetoaunitstepinput.Calculatethe%OS,cfinal,andTs.c.VerifytheresultsofPartbMATLABusingMATLABsimulations.4E3940.TheSoftArm,usedtofeedpeoplewithdisabilities,wasdiscussedinProblem57inChapter6.AssumingthesystemblockdiagramshowninFigureP10.12,usefrequencyresponsetechniquestodeterminethefollowing(Kara,1992):a.Gainmargin,phasemargin,zerodBfrequency,and180°frequencyb.Isthesystemstable?Why?ProblemsDesiredspoonpositionHis)+Controller~*l.1000(5+0.01)(5+6)5(5+20)(5+100)FIGUREP10.12Desiredpositioni,(.s)Problems45.ThelinearizedmodelofaparticularnetworklinkworkingunderTCP/IPandcontrolledusingarandomearlydetection(RED)algorithmcanbedescribedbyFigure10.20whereG(s)=M(s)P{s),H=1,and(Hollot,2001).,,,0.005L140625c-o.i?(5+2.67)(5+10)a.PlottheNicholschartforL=1.Isthesystemclosed-loopstable?b.FindtherangeofLforclosed-loopstability.c.UsetheNicholscharttopredict%OSandTsforL=0.95.Makeahandsketchoftheexpectedunitstepresponse.d.VerifyPartcwithaSimulinkunitstepresponsesimulation.Sjmulmk^Ei^V46.IntheTCP/IPnetworklinkofProblem45,letL—0.8,butassumethattheamountofdelayisanunknownvariable.a.PlottheNyquistdiagramofthesystemforzerodelay,andobtainthephasemargin.b.Findthemaximumdelayallowedforclosed-loopstability.47.ThermalflutteroftheHubbleSpaceTelescope(HST)produceserrorsforthepointingcontrolsystem.Thermalflutterofthesolararraysoccurswhenthespacecraftpassesfromsunlighttodarknessandwhenthespacecraftisindaylight.Inpassingfromdaylighttodarkness,anend-to-endbendingoscillationoffrequencyf\rad/sisexperienced.SuchoscillationsinterferewiththepointingcontrolsystemoftheHST.AfilterwiththetransferfunctionGf(s)=619thedisktilts,makinginformationretrievaldifficult.Asystemthatcompensatesforthetilthasbeendeveloped.Forthis,alaserbeamisfocusedonthedisksurfaceanddiskvariationsaremeasuredthroughreflection.Amirrorisinturnadjustedtoalignwiththediskandmakesinformationretrievalpossible.ThesystemcanberepresentedbyaunityfeedbacksysteminwhichacontrollerwithtransferfunctionGc(s)=78.575(5+436)2(5+132)(5+8030)andaplantP(s)=1.163x10853+962.552+5.958x1055+1.16x108formanopenlooptransmissionL(s)=Gc(s)P(s)(Kim,2009).a.UseMATLABtoobtaintheJiS^L.system'sNyquistdia^j^^Pgram.Findoutifthesystemisstable.b.Findthesystem'sphasemargin.c.Usethevalueofphasemarginobtainedinb.tocalculatetheexpectedsystem'sovershoottoastepinput.d.Simulatethesystem'sresponsetoaunitstepinputandverifythe%OScalculatedinc.49.Thedesignofcruisecontrolsystemsinheavyvehiclessuchasbigrigsisespeciallychallengingduetotheextremevariationsinpayload.AtypicalfrequencyresponseforthetransferfunctionfromfuelmassflowtovehiclespeedisshowninFigurePI0.17.1.96(52+5+0.25){s2+1,26s+9.87)>2+0.015^+0.57)(^2+0.0835+17.2)isproposedtobeplacedincascadewiththePIDcontrollertoreducethebending(Wie,1992).a.Obtainthefrequencyresponseofthefilterandestimatethebendingfrequenciesthatwillbereduced.b.Explainwhythisfilterwillreducethebendingoscillationsiftheseoscillationsarethoughttobedisturbancesattheoutputofthecontrolsystem.48.Anexperimentalholographicmediastoragesystemusesaflexiblephotopolymerdisk.Duringrotation,10-2f(Hz)FIGUREP10.1710°UP620Chapter10FrequencyResponseTechniquesThisresponseincludesthedynamicsoftheengine,thegearbox,thepropulsionshaft,thedifferential,thedriveshafts,thechassis,thepayload,andtiredynamics.Assumethatthesystemiscontrolledinaclosed-loop,unity-feedbackloopusingaproportionalcompensator(vanderZalm,2008).a.MakeaplotoftheNyquistdiagramthatcorrespondstotheBodeplotofFigureP10.17.b.Assumingtherearenoopen-looppolesintherighthalf-plane,findoutifthesystemisclosedloopstablewhentheproportionalgainK—1.C.FindtherangeofpositiveKforwhichthesystemisclosed-loopstable.50.UseLabVIEWwiththeControlubviEWDesignandSimulationMod^K£flPule,andMathScriptRTModuleMATLABandmodifytheCDExNyquistAnalysis.vitoobtaintherangeofKforstabilityusingtheNyquistplotforanysystemyouenter.Inaddition,designaLabVIEWVIthatwillacceptasaninputthepolynomialnumeratorandpolynomialdenominatorofanopen-looptransferfunctionandobtainaNyquistplotforavalueofK=10,000.YourVIwillalsodisplaythefollowingasgeneratedfromtheNyquistplot:(1)gainmargin,(2)phasemargin,(3)zerodBfrequency,and(4)180degreesfrequency.UsethesystemandresultsofSkill-AssessmentExercise10.6totestyourVis.51.UseLabVIEWwiththeControlJj^^DesignandSimulationMod^K£^PMAule,andMathScriptRTModule^tobuildaVIthatwillacceptWdVanopen-looptransferfunction,plottheBodediagram,andplottheclosed-loopstepresponse.YourVIwillalsousetheCDParametricTimeResponse.vitodisplay(1)risetime,(2)peaktime,(3)settlingtime,(4)percentovershoot,(5)steadystatevalue,and(6)peakvalue.UsethesysteminSkill-AssessmentExercise10.9totestyourVI.ComparetheresultsobtainedfromyourVIwiththoseobtainedinSkill-AssessmentExercise10.9.MATLAB52.TheblockdiagramofacascadesystemusedtocontrolwaterdUd^Plevelinasteamgeneratorofanuclearpowerplant{Wang,2009)waspresentedinFigureP.6.19.Inthatsystem,thelevelcontroller,GLC(s),isthemastercontrollerandthefeed-waterflowcontroller,GFC(s),istheslavecontroller.Considerthattheinnerfeedbackloopisreplacedbyitsequivalenttransferfunction,Gm(s).Usingnumericalvaluesin(Wang,2009)and(Bhambhani,2008)thetransferfunctionswitha1secondpuredelayare:Gfw(s)=2e5(7i5+l)Gwx(s)=(45+1)3(3.3335+1)'GLC(s)=KPLC+KDLCS2-e5(255+1)'=1.5(105+1).UseMATLABoranyotherprogramto:a.ObtainBodemagnitudeandphaseplotsforthissystemusingafifth-orderPadeapproximation(availableinMATLAB).Noteontheseplots,ifapplicable,thegainandphasemargins.b.Plottheresponseofthesystem,c(t),toaunitstepinput,r(t)=u(t).Noteonthec(t)curvetherisetime,Tr,thesettlingtime,Ts,thefinalvalueoftheoutput,and,ifapplicable,thepercentovershoot,%OS,andmidpeaktime,Tp.c.Repeattheabovetwostepsforapuredelayof1.5seconds.PROGRESSIVEANALYSISANDDESIGNPROBLEMS53.High-speedrailpantograph.Problem21inChapter1discussesactivecontrolofapantographmechanismforhigh-speedrailsystems.InProblem79(a),Chapter5,youfoundtheblockdiagramfortheactivepantographcontrolsystem.InChapter8,Problem72,youdesignedthegaintoyieldaclosed-loopstepresponsewith30%overshoot.Aplotofthestepresponseshouldhaveshownasettlingtimegreaterthan0.5secondaswellasahigh-frequencyoscillationsuperimposedoverthestepresponse.InChapter9,Problem55,wereducedthesettlingtimetoabout0.3second,reducedthestepresponsesteady-stateerrortozero,andeliminatedthehigh-frequencyoscillationsbyusinganotchfilter(O'Connor,1997).UsingtheequivalentforwardtransferfunctionfoundinChapter5cascadedCyberExplorationLaboratorywiththenotchfilterspecifiedinChapter9,dothefollowingusingfrequencyresponsetechniques:a.PlottheBodeplotsforatotalequivalentgainof1andfindthegainmargin,phasemargin,and180°frequency.b.FindtherangeofKforstability.c.CompareyouranswertoPartbwithyouranswertoProblem67,Chapter6.Explainanydifferences.54.ControlofHIV/AIDS.ThelinearizedmodelforanHIV/AIDSpatienttreatedwithRTIswasobtainedinChapter6as{Craig,2004);Y(s)-520s-10.3844U\{s)s*+2.681752+0.11«+0.0126m=a.ConsiderthisplantinthefeedbackconfigurationinFigure10.20withG{s)=P{s)andH{s)=1.ObtaintheNyquistdiagram.Evaluatethesystemforclosed-loopstability.b.ConsiderthisplantinthefeedbackconfigurationinFigure10.20withG(s)=-P{s)andH(s)=1.ObtaintheNyquistdiagram.Evaluatethesystemforclosed-loopstability.Obtainthegainandphasemargins.55.Hybridvehicle.InProblem8.74MAOABweusedMATLABtoplottheSQ9rootlocusforthespeedcontrolofanHEVrearrangedasaunityfeedbacksystem,asshowninFigureP7.34(Preitl,2007).Theplantandcompensatorweregivenby£(5+0.6)G(s)=[s+0.5858)(5+0.0163)andwefoundthatK—0.78,resultedinacriticallydampedsystem.a.UseMATLABoranyotherprogramtoploti.TheBodemagnitudeandphaseplotsforthatsystem,andii.Theresponseofthesystem,c(t),toastepinput,r(t)=4u(t).Noteonthec(t)curvetherisetime,Tr,andsettlingtime,Tsfaswellasthefinalvalueoftheoutput.b.Nowaddanintegralgaintothecontroller,suchthattheplantandcompensatortransferfunctionbecomesG(s)=K1(s+Zc)(s+0.6)s(s+0.5858)(5+0.0163;K,where^=0.78andZc=—=-=0.4.UseMATLABoranyotherprogramtodothefollowing:i.PlottheBodemagnitudeandphaseplotsforthiscase.ii.Obtaintheresponseofthesystemtoastepinput,r(t)=4u(t).Plotc(t)andnoteonittherisetime,Tr,percentovershoot,%OS,peaktime,Tp,andsettlingtime,Ts.c.Doestheresponseobtainedina.orb.resembleasecond-orderoverdamped,criticallydamped,orunderdampedresponse?Explain.CyberExplorationLaboratoryExperiment10.1ObjectiveToexaminetherelationshipsbetweenopen-loopfrequencyresponseandstability,open-loopfrequencyresponseandclosed-looptransientresponse,andtheeffectofadditionalclosed-looppolesandzerosupontheabilitytopredictclosed-looptransientresponseMinimumRequiredSoftwarePackagesMATLAB,andtheControlSystemToolboxPrelab1.SketchtheNyquistdiagramforaunitynegativefeedbacksystemwithaforwardistransferfunctionofG(s)=—.-^-.therangeofgain,K,forstability.621—-.FromyourNyquistplot,determine622Chapter10FrequencyResponseTechniques2.Findthephasemarginsrequiredforsecond-orderclosed-loopstepresponseswiththefollowingpercentovershoots:5%,10%,20%,30%.Lab1.UsingtheSISODesignTool,producethefollowingplotssimultaneouslyforthesystemofPrelab1:rootlocus,Nyquistdiagram,andstepresponse.MakeplotsforthefollowingvaluesofK:50,100,thevalueformarginalstabilityfoundinPrelab1,andavalueabovethatfoundformarginalstability.Usethezoomtoolswhenrequiredtoproduceanillustrativeplot.Finally,changethegainbygrabbingandmovingtheclosed-looppolesalongtherootlocusandnotethechangesintheNyquistdiagramandstepresponse.2.UsingtheSISODesignTool,produceBodeplotsandclosed-loopstepresponsesforaunitynegativefeedbacksystemwithaforwardtransferfunctionofG(s)—?-Producetheseplotsforeachvalueofphasemarginfound.9(.9+10)^inPrelab2.AdjustthegaintoarriveatthedesiredphasemarginbygrabbingtheBodemagnitudecurveandmovingitupordown.Observetheeffects,ifany,upontheBodephaseplot.Foreachcase,recordthevalueofgainandthelocationoftheclosed-looppoles.3.RepeatLab2forG(s)=7^.S[STtUJPostlab1.MakeatableshowingcalculatedandactualvaluesfortherangeofgainforstabilityasfoundinPrelab1andLab1.2.MakeatablefromthedataobtainedinLab2itemizingphasemargin,percentovershoot,andthelocationoftheclosed-looppoles.3.MakeatablefromthedataobtainedinLab3itemizingphasemargin,percentovershoot,andthelocationoftheclosed-looppoles.4.ForeachPostlabtask1to3,explainanydiscrepanciesbetweentheactualvaluesobtainedandthoseexpected.Experiment10.2ObjectiveTouseLabVIEWandNicholschartstodeterminetheclosed-looptimeresponseperformance.MinimumRequiredSoftwarePackagesLabVIEW,ControlDesignandSimulationModule,MathScriptRTModule,andMATLABPrelab1.Assumeaunity-feedbacksystemwithaforward-pathtransferfunction,G(s)=-j-—FT-UseMATLABoranymethodtodeterminegainandphasemargins.Inaddition,findthepercentovershoot,settlingtime,andpeaktimeoftheclosed-loopstepresponse.2.DesignaLabVIEWVIthatwillcreateaNicholschart.AdjusttheNicholschart'sscaletoestimategainandphasemargins.Then,prompttheusertoenterthevaluesofBibliographygainandphasemarginfoundfromtheNicholschart.Inresponse,yourVIwillproducethepercentovershoot,settlingtime,andpeaktimeoftheclosed-loopstepresponse.LabRunyourVIforthesystemgiveninthePrelab.TestyourVIwithothersystemsofyourchoice.PostlabComparetheclosed-loopperformancecalculatedinthePrelabwiththoseproducedbyyourVI.^Bibliography^Astrom,K.,Klein,R.E.,andLennartsson,A.BicycleDynamicsandControl.IEEEControlSystem,August2005,pp.26-47.Bhambhani,V.,andChen,Yq.ExperimentalStudyofFractionalOrderProportionalIntegral(FOPI)ControllerforWaterLevelControl.47thIEEEConferenceonDecisionandControl,2008,pp.1791-1796.Bittanti,S.,Dell'Orto,E,DiCarlo,A.,andSavaresi,S.M.,NotchFilteringandMultirateControlforRadialTrackinginHighSpeedDVD-Players.IEEETransactionsonConsumerElectronics,vol.48.2002,pp.56-62.Bode,H.W.NetworkAnalysisandFeedbackAmplifierDesign.VanNostrand,Princeton,NJ,1945.Craig,I.K.,Xia,X.,andVenter,J.W.IntroducingHIV/AIDSEducationintotheElectricalEngineeringCurriculumattheUniversityofPretoria.IEEETransactionsonEducation,vol.47,no.1,February2004,pp.65-73.Dorf,R.C.ModernControlSystems,5thed.Addison-Wesley,Reading,MA,1989.Franklin,G.,Powell,J.D.,andEmami-Naeini,A.FeedbackControlofDynamicSystems,2ded.Addison-Wesley,Reading,MA,1991.Galvao,R.K.H.,Yoneyama,T,anddeAraiijo,FM.U.ASimpleTechniqueforIdentifyingaLinearizedModelforaDidacticMagneticLevitationSystem.IEEETransactionsonEducation,vol.46,no.1,February2003,pp.22-25.Good,M.G,Sweet,L.M.,andStrobel,K.L.DynamicModelsforControlSystemDesignofIntegratedRobotandDriveSystems.JournalofDynamicSystems,Measurement,andControl,March1985,pp.53-59.Hollot,C.V,Misra,V,Towsley,D.,andGong,WAControlTheoreticAnalysisofRED.ProceedingsofIEEEINFOCOM,2001,pp.1510-1519.Hostetter,G.H.,Savant,C.J.,Jr.,andStefani,R.T.DesignofFeedbackControlSystems,2ded.SaundersCollegePublishing,NewYork,1989.Kara,A.,Kawamura,K.,Bagchi,S.,andEl-Gamal,M.ReflexControlofaRoboticAidSystemtoAssistthePhysicallyDisabled.IEEEControlSystems,June1992,pp.71-77.Kim,S.-H.,Kim,J.H.,Yang,J.,Yang,H,Park,J.-Y,andPark,Y-P.TiltDetectionandServoControlMethodfortheHolographicDataStorageSystem.MicrosystTechnol,vol.15,2009.pp.1695-1700.Kuo,B.C.AutomaticControlSystems,5thed.PrenticeHall,UpperSaddleRiver,NJ,1987.Kuo.FFNetworkAnalysisandSynthesis.Wiley,NewYork,1966.Low,K.H.,Wang,H.,Liew,K.M.,andCai,Y.ModelingandMotionControlofRoboticHandforTelemanipulationApplication.InternationalJournalofSoftwareEngineeringandKnowledgeEngineering,vol.15,2005,pp.147-152.Marttinen,A.,Virkkunen,J.,andSalminen,R.TControlStudywithPilotCrane.IEEETransactionsonEducation,vol.33,no.3,August1990,pp.298-305.623Chapter10FrequencyResponseTechniquesNilsson,J.W.ElectricCircuits,3ded.Addison-Wesley,Reading,MA,1990.Nyquist,H.RegenerationTheory.BellSystemsTechnicalJournal,January1932,pp.126-147.O'Connor,D.R,Eppinger,S.D.,Seering,W.P.,andWorrnly,D.N.ActiveControlofaHighSpeedPantograph.JournalofDynamicSystems,Measurements,andControl,vol.119,March1997,pp.1-4.Ogata,K.ModernControlEngineering,2ded.PrenticeHall,UpperSaddleRiver,NJ,1990.Preitl,Z.,Bauer,P.,andBokor,J.ASimpleControlSolutionforTractionMotorUsedinHybridVehicles.FourthInternationalSymposiumonAppliedComputationalIntelligenceandInformatics.IEEE.2007.Thomas,B.,Soleimani-Mosheni,M.,andFahlen,P.Feed-forwardinTemperatureControlofBuildings.EnergyandBuildings,vol.37,2005,pp.755-761.VanderZalm,G.,Huisman,R.,Steinbuch,M.,andVeldpaus,F.FrequencyDomainApproachfortheDesignofHeavy-DutyVehicleSpeedControllers.Int.J.HeavyVehicleSystems,vol.15,no.1,2008.pp.107-123.Wang,X.-K.,Yang,X.-H.,Liu,G.,andQian,H.AdaptiveNeuro-FuzzyInferenceSystemPIDcontrollerforsteamgeneratorwaterlevelofnuclearpowerplant,ProceedingsoftheEighthInternationalConferenceonMachineLearningandCybernetics,2009,pp.567-572.Wie,B.ExperimentalDemonstrationtoaClassicalApproachtoFlexibleStructureControl.JournalofGuidance,Control,andDynamics,November-December1992,pp.1327-1333.DesignviaFrequencyResponse^ChapterLearningOutcomes^Aftercompletingthischapterthestudentwillbeableto:•Usefrequencyresponsetechniquestoadjustthegaintomeetatransientresponsespecification(Sections11.1-11.2)•Usefrequencyresponsetechniquestodesigncascadecompensatorstoimprovethesteady-stateerror(Section11.3)•Usefrequencyresponsetechniquestodesigncascadecompensatorstoimprovethetransientresponse(Section11.4)•Usefrequencyresponsetechniquestodesigncascadecompensatorstoimproveboththesteady-stateerrorandthetransientresponse(Section11.5)^CaseStudyLearningOutcomes^Youwillbeabletodemonstrateyourknowledgeofthechapterobjectiveswithcasestudiesasfollows:•Giventheantennaazimuthpositioncontrolsystemshownonthefrontendpapers,youwillbeabletousefrequencyresponsetechniquestodesignthegaintomeetatransientresponsespecification.•Giventheantennaazimuthpositioncontrolsystemshownonthefrontendpapers,youwillbeabletousefrequencyresponsetechniquestodesignacascadecompensatortomeetbothtransientandsteady-stateerrorspecifications.625626^11.1Chapter11DesignviaFrequencyResponseIntroductionInChapter8,wedesignedthetransientresponseofacontrolsystembyadjustingthegainalongtherootlocus.Thedesignprocessconsistedoffindingthetransientresponsespecificationontherootlocus,settingthegainaccordingly,andsettlingfortheresultingsteady-stateerror.Thedisadvantageofdesignbygainadjustmentisthatonlythetransientresponseandsteady-stateerrorrepresentedbypointsalongtherootlocusareavailable.Inordertomeettransientresponsespecificationsrepresentedbypointsnotontherootlocusand,independently,steady-stateerrorrequirements,wedesignedcascadecompensatorsinChapter9.Inthischapter,weuseBodeplotstoparalleltherootlocusdesignprocessfromChapters8and9.Letusbeginbydrawingsomegeneralcomparisonsbetweenrootlocusandfrequencyresponsedesign.Stabilityandtransientresponsedesignviagainadjustment.Frequencyresponsedesignmethods,unlikerootlocusmethods,canbeimplementedconvenientlywithoutacomputerorothertoolexceptfortestingthedesign.WecaneasilydrawBodeplotsusingasymptoticapproximationsandreadthegainfromtheplots.Rootlocusrequiresrepeatedtrialstofindthedesireddesignpointfromwhichthegaincanbeobtained.Forexample,indesigninggaintomeetapercentovershootrequirement,rootlocusrequiresthesearchofaradiallineforthepointwheretheopen-looptransferfunctionyieldsanangleof180°.Toevaluatetherangeofgainforstability,rootlocusrequiresasearchofthe/w-axisfor180°.Ofcourse,ifoneusesacomputerprogram,suchasMATLAB,thecomputationaldisadvantageofrootlocusvanishes.Transientresponsedesignviacascadecompensation.Frequencyresponsemethodsarenotasintuitiveastherootlocus,anditissomethingofanarttodesigncascadecompensationwiththemethodsofthischapter.Withrootlocus,wecanidentifyaspecificpointashavingadesiredtransientresponsecharacteristic.Wecanthendesigncascadecompensationtooperateatthatpointandmeetthetransientresponsespecifications.InChapter10,welearnedthatphasemarginisrelatedtopercentovershoot(Eq.(10.73))andbandwidthisrelatedtobothdampingratioandsettlingtimeorpeaktime(Eqs.(10.55)and(10.56)).Theseequationsarerathercomplicated.Whenwedesigncascadecompensationusingfrequencyresponsemethodstoimprovethetransientresponse,westrivetoreshapetheopenlooptransferfunction'sfrequencyresponsetomeetboththephase-marginrequirement(percentovershoot)andthebandwidthrequirement(settlingorpeaktime).Thereisnoeasywaytorelatealltherequirementspriortothereshapingtask.Thus,thereshapingoftheopen-looptransferfunction'sfrequencyresponsecanleadtoseveraltrialsuntilalltransientresponserequirementsaremet.Steady-stateerrordesignviacascadecompensation.Anadvantageofusingfrequencydesigntechniquesistheabilitytodesignderivativecompensation,suchasleadcompensation,tospeedupthesystemandatthesametimebuildinadesiredsteady-stateerrorrequirementthatcanbemetbytheleadcompensatoralone.Recallthatinusingrootlocusthereareaninfinitenumberofpossiblesolutionstothedesignofaleadcompensator.Oneofthedifferencesbetweenthesesolutionsisthesteady-stateerror.Wemustmakenumeroustriestoarriveatthesolutionthatyieldstherequiredsteady-stateerrorperformance.Withfrequencyresponsetechniques,webuildthesteady-stateerrorrequirementrightintothedesignoftheleadcompensator.11.2TransientResponseviaGainAdjustmentYouareencouragedtoreflectontheadvantagesanddisadvantagesofrootlocusandfrequencyresponsetechniquesasyouprogressthroughthischapter.Letustakeacloserlookatfrequencyresponsedesign.Whendesigningviafrequencyresponsemethods,weusetheconceptsofstability,transientresponse,andsteady-stateerrorthatwelearnedinChapter10.First,theNyquistcriteriontellsushowtodetermineifasystemisstable.Typically,anopen-loopstablesystemisstableinclosed-loopiftheopen-loopmagnitudefrequencyresponsehasagainoflessthan0dBatthefrequencywherethephasefrequencyresponseis180°.Second,percentovershootisreducedbyincreasingthephasemargin,andthespeedoftheresponseisincreasedbyincreasingthebandwidth.Finally,steady-stateerrorisimprovedbyincreasingthelow-frequencymagnituderesponses,evenifthehigh-frequencymagnituderesponseisattenuated.These,then,arethebasicfactsunderlyingourdesignforstability,transientresponse,andsteady-stateerrorusingfrequencyresponsemethods,wheretheNyquistcriterionandtheNyquistdiagramcomposetheunderlyingtheorybehindthedesignprocess.Thus,eventhoughweusetheBodeplotsforeaseinobtainingthefrequencyresponse,thedesignprocesscanbeverifiedwiththeNyquistdiagramwhenquestionsariseaboutinterpretingtheBodeplots.Inparticular,whenthestructureofthesystemischangedwithadditionalcompensatorpolesandzeros,theNyquistdiagramcanofferavaluableperspective.Theemphasisinthischapterisonthedesignoflag,lead,andlag-leadcompensation.Generaldesignconceptsarepresentedfirst,followedbystep-bystepprocedures.Theseproceduresareonlysuggestions,andyouareencouragedtodevelopotherprocedurestoarriveatthesamegoals.AlthoughtheconceptsingeneralapplytothedesignofPI,PD,andPIDcontrollers,intheinterestofbrevity,detailedproceduresandexampleswillnotbepresented.YouareencouragedtoextrapolatetheconceptsanddesignscoveredandapplythemtoproblemsinvolvingPI,PD,andPIDcompensationpresentedattheendofthischapter.Finally,thecompensatorsdevelopedinthischaptercanbeimplementedwiththerealizationsdiscussedinSection9.6.(11.2TransientResponseviaGainAdjustmentLetusbeginourdiscussionofdesignviafrequencyresponsemethodsbydiscussingthelinkbetweenphasemargin,transientresponse,andgain.InSection10.10,therelationshipbetweendampingratio(equivalentlypercentovershoot)andphasemarginwasderivedforG(s)=cofjsis+2%co„).Thus,ifwecanvarythephasemargin,wecanvarythepercentovershoot.LookingatFigure11.1,weseethatifwedesireaphasemargin,$^,representedbyCD,wewouldhavetoraisethemagnitudecurvebyAB.Thus,asimplegainadjustmentcanbeusedtodesignphasemarginand,hence,percentovershoot.Wenowoutlineaprocedurebywhichwecandeterminethegaintomeetapercentovershootrequirementusingtheopen-loopfrequencyresponseandassumingdominantsecond-orderclosed-looppoles.DesignProcedure1.DrawtheBodemagnitudeandphaseplotsforaconvenientvalueofgain.2.UsingEqs.(4.39)and(10.73),determinetherequiredphasemarginfromthepercentovershoot.628Chapter11DesignviaFrequencyResponseM(dB)\ARequiredincreaseingainlogoPhase(degrees)i.«**«*M-180FIGURE11.11log(oD\Bodeplotsshowinggainadjustmentforadesiredphasemargin3.Findthefrequency,w$M,ontheBodephasediagramthatyieldsthedesiredphasemargin,CD,asshownonFigure11.1.4.ChangethegainbyanamountABtoforcethemagnitudecurvetogothrough0dBatco-140•~160\I-180\VssSJ-200-2200.1110100Frequency(rad/s)FIGURE11.3BodemagnitudeandphaseplotsforExample11.13.Locateonthephaseplotthefrequencythatyieldsa59.2°phasemargin.Thisfrequencyisfoundwherethephaseangleisthedifferencebetween—180°and59.2°,or-120.8°.Thevalueofthephase-marginfrequencyis14.8rad/s.4.Atafrequencyof14.8rad/sonthemagnitudeplot,thegainisfoundtobe—44.2dB.Thismagnitudehastoberaisedto0dBtoyieldtherequiredphasemargin.Sincethelog-magnitudeplotwasdrawnforK=3.6,a44.2dBincrease,orK=3.6x162.2=583.9,wouldyieldtherequiredphasemarginfor9.48%overshoot.Thegain-adjustedopen-looptransferfunctionis58,390G(s)=^+36)(^+100)(11.1)Table11.1summarizesacomputersimulationofthegain-compensatedsystem.TABLE11.1Characteristicofgain-compensatedsystemofExample11.1ParameterPhasemarginPhase-marginfrequencyPercentovershootPeaktimeProposedspecification59.2°9.5Actualvalue16.2259.2°14.8rad/s100.18secondStudentswhoareusingMATLABshouldnowrunchllplinAppendixB.YouwilllearnhowtouseMATLABtodesignagaintomeetapercentovershootspecificationusingBodeplots.ThisexercisesolvesExample11.1usingMATLAB.MATLABChapter11630DesignviaFrequencyResponseSkill-AssessmentExercise11.1WileyPLUSPROBLEM:ForaunityfeedbacksystemwithaforwardtransferfunctionControlSolutionsG(5)=^(5+50)(5+120)usefrequencyresponsetechniquestofindthevalueofgain,K,toyieldaclosedloopstepresponsewith20%overshoot.Trylt11.1UseMATLAB,theControlSystemToolbox,andthefollowingstatementstosolveSkill-AssessmentExercise11.1.pos=20z=(-log(pos/100))/...(sqrt(piA2+...log(pos/100)A2))Pm=atan(2*z/...(sqrt(-2*z"2+...sqrt(l+4*zM))))*...(180/pi)G=zpk([],...[0.-50,-120],1)sisotoolANSWER:K=194,200Thecompletesolutionislocatedatwww.wiley.com/college/nise.IntheSISOTOOLWindow:1.SelectImport...intheFilemenu.2.ClickonGintheSystemDataWindowandclickBrowse...3.IntheModelImportWindowselectradiobuttonWorkspaceandselectGinAvailableModels.ClickImport,thenClose.4.ClickOkintheSystemDataWindow.5.Right-clickintheBodegraphareaandbesureallselectionsunderShowarechecked.6.GrabthestabilitymarginpointinthemagnitudediagramandraisethemagnitudecurveuntilthephasecurveshowsthephasemargincalculatedbytheprogramandshownintheMATLABCommandWindowasPm.7.Right-clickintheBodeplotarea,selectEditCompensator...andreadthegainunderCompensatorintheresultingwindow.Inthissection,weparalleledourworkinChapter8withadiscussionoftransientresponsedesignthroughgainadjustment.Inthenextthreesections,weparalleltherootlocuscompensatordesigninChapter9anddiscussthedesignoflag,lead,andlag-leadcompensationviaBodediagrams.^11.3LagCompensationInChapter9,weusedtherootlocustodesignlagnetworksandPIcontrollers.Recallthatthesecompensatorspermittedustodesignforsteady-stateerrorwithoutappreciablyaffectingthetransientresponse.Inthissection,weprovideaparalleldevelopmentusingtheBodediagrams.VisualizingLagCompensationThefunctionofthelagcompensatorasseenonBodediagramsisto(1)improvethestaticerrorconstantbyincreasingonlythelow-frequencygainwithoutanyresultinginstability,and(2)increasethephasemarginofthesystemtoyieldthedesiredtransientresponse.TheseconceptsareillustratedinFigure11.4.Theuncompensatedsystemisunstablesincethegainat180°isgreaterthan0dB.Thelagcompensator,whilenotchangingthelow-frequencygain,doesreduce11.3LagCompensationJtf(dB)UncompensatedsystemCompensatedsystemlogcoLagcompensatorPhase(degrees)Phase-margnfrequencylogcoLagcompensaUncompensatedsystemDesiredphase-180FIGURE11.4Visualizinglagcompensationthehigh-frequencygain.1Thus,thelow-frequencygainofthesystemcanbemadehightoyieldalargeKvwithoutcreatinginstability.Thisstabilizingeffectofthelagnetworkcomesaboutbecausethegainat180°ofphaseisreducedbelow0dB.Throughjudiciousdesign,themagnitudecurvecanbereshaped,asshowninFigure11.4,togothrough0dBatthedesiredphasemargin.Thus,bothKvandthedesiredtransientresponsecanbeobtained.Wenowenumerateadesignprocedure.DesignProcedure1.Setthegain,K,tothevaluethatsatisfiesthesteady-stateerrorspecificationandplottheBodemagnitudeandphasediagramsforthisvalueofgain.2.Findthefrequencywherethephasemarginis5°to12°greaterthanthephasemarginthatyieldsthedesiredtransientresponse(Ogata,1990).Thisstepcompensatesforthefactthatthephaseofthelagcompensatormaystillcontributeanywherefrom—5°to-12°ofphaseatthephase-marginfrequency.3.SelectalagcompensatorwhosemagnituderesponseyieldsacompositeBodemagnitudediagramthatgoesthrough0dBatthefrequencyfoundinStep2asfollows:Drawthecompensator'shigh-frequencyasymptotetoyield0dBforthecompensatedsystematthefrequencyfoundinStep2.Thus,ifthegainatthefrequencyfoundinStep2is20logKPM,thenthecompensator'shigh-frequencyasymptotewillbesetat-20logKPM',selecttheupperbreakfrequencytobe1decadebelowthefrequencyfoundinStep2;2selectthelow-frequencyasymptotetobeat0dB;connectthecompensator'shigh-andlow-frequencyasymptoteswitha—20dB/decadelinetolocatethelowerbreakfrequency.4.Resetthesystemgain,K,tocompensateforanyattenuationinthelagnetworkinordertokeepthestaticerrorconstantthesameasthatfoundinStep1.Thenamelagcompensatorcomesfromthefactthatthetypicalphaseangleresponseforthecompensator,asshowninFigure11.4,isalwaysnegative,orlagginginphaseangle.2Thisvalueofbreakfrequencyensuresthattherewillbeonly-5°to-12°phasecontributionfromthecompensatoratthefrequencyfoundinStep2.632Chapter11DesignviaFrequencyResponse20181614*12g>l086420\\\\s•0.0010.01100.11Frequency(rad/s)100_^-10N\g-20-30--40-600.001/Rangeoffrequenciesorthedesigiofthephasemargin/\-50FIGURE11.5Frequencyresponseplotsofalagcompensator,Gc{s)=(s+0.1)/(5+0.01)//\0.017--/-///0.1Frequency(rad/s)10100Fromthesesteps,youseethatwearerelyingupontheinitialgainsettingtomeetthesteady-staterequirementsandthenrelyinguponthelagcompensator's-20dB/decadeslopetomeetthetransientresponserequirementbysettingthe0dBcrossingofthemagnitudeplot.ThetransferfunctionofthelagcompensatorisGc(s>-'s++ocT?^z(11.2)wherea>1.Figure11.5showsthefrequencyresponsecurvesforthelagcompensator.Therangeofhighfrequenciesshowninthephaseplotiswherewewilldesignourphasemargin.Thisregionisafterthesecondbreakfrequencyofthelagcompensator,wherewecanrelyontheattenuationcharacteristicsofthelagnetworktoreducethetotalopen-loopgaintounityatthephase-marginfrequency.Further,inthisregionthephaseresponseofthecompensatorwillhaveminimaleffectonourdesignofthephasemargin.Sincethereisstillsomeeffect,approximately5°to12°,wewilladdthisamounttoourphasemargintocompensateforthephaseresponseofthelagcompensator(seeStep2).Example11.2LagCompensationDesignPROBLEM:GiventhesystemofFigure11.2,useBodediagramstodesignalagcompensatortoyieldatenfoldimprovementinsteady-stateerroroverthegaincompensatedsystemwhilekeepingthepercentovershootat9.5%.SOLUTION:Wewillfollowthepreviouslydescribedlagcompensationdesignprocedure.11.3847260483624120-12-24-36-48-60LagCompensation"•"••-.s^_JJncompensaieasystem"^-^"Lagcompensator0.010.11Frequency(rad/s)10J-M-r+H1001—Lagcompensator-50INI1Uncompensatedsystem-100-1504rtfflK^-200Lag-compensatedHsystem-2500.01FIGURE11.60.11Frequency(rad/s)10^SNS100BodeplotsforExample11.2.1.FromExample11.1again,K,of583.9yieldsa9.5%overshoot.Thus,forthissystem,Kv=16.22.Foratenfoldimprovementinsteady-stateerror,Kvmustincreasebyafactorof10,orKv=162.2.Therefore,thevalueofKinFigure11.2equals5839,andtheopen-looptransferfunctionis583,900W=(113)5(.+36)(5+100)°TheBodeplotsforK=5839areshowninFigure11.6.2.Thephasemarginrequiredfora9.5%overshoot(£=0.6)isfoundfromEq.(10.73)tobe59.2°.Weincreasethisvalueofphasemarginby10°to69.2°inordertocompensateforthephaseanglecontributionofthelagcompensator.Nowfindthefrequencywherethephasemarginis69.2°.Thisfrequencyoccursataphaseangleof-180°+69.2°=-110.8°andis9.8rad/s.Atthisfrequency,themagnitudeplotmustgothrough0dB.Themagnitudeat9.8rad/sisnow+24dB(exact,thatis,nonasymptotic).Thus,thelagcompensatormustprovide-24dBattenuationat9.8rad/s.3.&4.Wenowdesignthecompensator.Firstdrawthehigh-frequencyasymptoteat—24dB.Arbitrarilyselectthehigherbreakfrequencytobeaboutonedecadebelowthephase-marginfrequency,or0.98rad/s.Startingattheintersectionofthisfrequencywiththelagcompensator'shigh-frequencyasymptote,drawa—20dB/decadelineuntil0dBisreached.ThecompensatormusthaveadcgainofunitytoretainthevalueofKvthatwehavealreadydesignedbysettingK=5839.Thelowerbreakfrequencyisfoundtobe0.062rad/s.Hence,thelagcompensator'stransferfunctionis_,.0.063(5+0.98).....Gcis)(1L4)=(,+0.062)wherethegainofthecompensatoris0.063toyieldadcgainofunity.633634Chapter11DesignviaFrequencyResponseThecompensatedsystem'sforwardtransferfunctionisthus^.,^,,36,786(^+0.98)'(')=s(s+36)(,+100)(,+0.062)M„^GWGThecharacteristicsofthecompensatedsystem,foundfromasimulationandexactfrequencyresponseplots,aresummarizedinTable11.2.TABLE11.2Characteristicsofthelag-compensatedsystemofExample11.2ParameterProposedspecificationKvMATLABActualvalue162.2161.5Phasemargin59.2°62°Phase-marginfrequency—11rad/sPercentovershoot9.510Peaktime—0.25secondStudentswhoareusingMATLABshouldnowrunchllp2inAppendixB.YouwilllearnhowtouseMATLABtodesignalagcompensator.Youwillenterthevalueofgaintomeetthesteady-stateerrorrequirementaswellasthedesiredpercentovershoot.MATLABthendesignsalagcompensatorusingBodeplots,evaluatesKv,andgeneratesaclosed-loopstepresponse.ThisexercisesolvesExample11.2usingMATLAB.Skill-AssessmentExercise11.2PROBLEM:DesignalagcompensatorforthesysteminSkill-AssessmentExercise11.1thatwillimprovethesteady-stateerrortenfold,whilestilloperatingwith20%overshoot.ANSWER:,_0.0691(6-+2.04)ISc(11.7)Tyl+(copTySettingEq.(11.8)equaltozero,wefindthatthefrequency,a>max,atwhichthemaximumphaseangle,0max,occursis(Drnax—TVP(11.9)11.4LeadCompensation20181614512j?106420i^/>.,^y0.1^^.„**•/3=0.2"/3=0.3"/3=0.4•""£=0.5-^*ffr10100/3=0A5040/"30.,^\^-/200!**€H6010iip-Ci^^½d*j^=1Lthemaximumphaseshiftofthecompensator,0max,is4™=tan,1-jSV?=.sm-11-)3TT^(11.11)andthecompensator'smagnitudeatcomaxis\Gc(jcomax)\=-=(11.12)Wearenowreadytoenumerateadesignprocedure.DesignProcedure1.Findtheclosed-loopbandwidthrequiredtomeetthesettlingtime,peaktime,orrisetimerequirement(seeEqs.(10.54)through(10.56)).2.Sincetheleadcompensatorhasnegligibleeffectatlowfrequencies,setthegain,K,oftheuncompensatedsystemtothevaluethatsatisfiesthesteadystateerrorrequirement.637638Chapter11DesignviaFrequencyResponse3.PlottheBodemagnitudeandphasediagramsforthisvalueofgainanddeterminetheuncompensatedsystem'sphasemargin.4.Findthephasemargintomeetthedampingratioorpercentovershootrequirement.Thenevaluatetheadditionalphasecontributionrequiredfromthecompensator.45.Determinethevalueofp(seeEqs.(11.6)and(11.11))fromtheleadcompensator'srequiredphasecontribution.6.Determinethecompensator'smagnitudeatthepeakofthephasecurve(Eq.(11.12)).7.Determinethenewphase-marginfrequencybyfindingwheretheuncompensatedsystem'smagnitudecurveisthenegativeoftheleadcompensator'smagnitudeatthepeakofthecompensator'sphasecurve.8.Designtheleadcompensator'sbreakfrequencies,usingEqs.(11.6)and(11.9)tofindTandthebreakfrequencies.9.Resetthesystemgaintocompensatefortheleadcompensator'sgain.10.CheckthebandwidthtobesurethespeedrequirementinStep1hasbeenmet.11.Simulatetobesureallrequirementsaremet.12.Redesignifnecessarytomeetrequirements.Fromthesesteps,weseethatweareincreasingboththeamountofphasemargin(improvingpercentovershoot)andthegaincrossoverfrequency(increasingthespeed).Nowthatwehaveenumeratedaprocedurewithwhichwecandesignaleadcompensatortoimprovethetransientresponse,letusdemonstrate.LeadCompensationDesignPROBLEM:GiventhesystemofFigure11.2,designaleadcompensatortoyielda20%overshootandKv=40,withapeaktimeof0.1second.SOLUTION:TheuncompensatedsystemisG(s)=100K/[s(s+36)(.s+100)].Wewillfollowtheoutlinedprocedure.1.Wefirstlookattheclosed-loopbandwidthneededtomeetthespeedrequirementimposedbyTp=0.1second.FromEq.(10.56),withTp=0.1secondand£=0.456(i.e.,20%overshoot),aclosed-loopbandwidthof46.6rad/sisrequired.2.InordertomeetthespecificationofKv=40,Kmustbesetat1440,yieldingG(s)=144,000/[s(s+36)(s+100)].3.Theuncompensatedsystem'sfrequencyresponseplotsforK=1440areshowninFigure11.9.4.A20%overshootimpliesaphasemarginof48.1°.TheuncompensatedsystemwithK=1440hasaphasemarginof34°ataphase-marginfrequency4Weknowthatthephase-marginfrequencywillbeincreasedaftertheinsertionofthecompensator.Atthisnewphase-marginfrequency,thesystem'sphasewillbesmallerthanoriginallyestimated,asseenbycomparingpointsBandDinFigure11.7.Hence,anadditionalphaseshouldbeaddedtothatprovidedbytheleadcompensatortocorrectforthephasereductioncausedbytheoriginalsystem.11.4LeadCompensation362412V^ss-12Incompensattdsten-24CompensatedsystemNXv\\-36110Frequency(rad/sec)\100450-451000Leadcompensator-90-135-180-225UncompensatedsystemCompensated*sw^sy!tern-2701FIGURE11.95.6.7.8.9.10100Frequency(rad/sec)BodeplotsforleadcompensationinExample11.31000of29.6.Toincreasethephasemargin,weinsertaleadnetworkthataddsenoughphasetoyielda48.1°phasemargin.Sinceweknowthattheleadnetworkwillalsoincreasethephase-marginfrequency,weaddacorrectionfactortocompensatefortheloweruncompensatedsystem'sphaseangleatthishigherphase-marginfrequency.Sincewedonotknowthehigherphase-marginfrequency,weassumeacorrectionfactorof10°.Thus,thetotalphasecontributionrequiredfromthecompensatoris48.1°—34°+10°=24.1°.Insummary,ourcompensatedsystemshouldhaveaphasemarginof48.1°withabandwidthof46.6rad/s.Ifthesystem'scharacteristicsarenotacceptableafterthedesign,thenaredesignwithadifferentcorrectionfactormaybenecessary.UsingEq.(11.11),p=0.42for0max=24.1°.FromEq.(11.12),theleadcompensator'smagnitudeis3.76dBatcomax.Ifweselectcomaxtobethenewphase-marginfrequency,theuncompensatedsystem'smagnitudeatthisfrequencymustbe—3.76dBtoyielda0dBcrossoveratcomaxforthecompensatedsystem.Theuncompensatedsystempassesthrough—3.76dBatcomiiX=39rad/s.Thisfrequencyisthusthenewphase-marginfrequency.Wenowfindtheleadcompensator'sbreakfrequencies.FromEq.(11.9),1/T=25.3and1/0T=60.2.Hence,thecompensatorisgivenby11S+T=2.385+25.3(11.13)s+60.2639640Chapter11DesignviaFrequencyResponsewhere2.38isthegainrequiredtokeepthedcgainofthecompensatoratunitysothatKv=40afterthecompensatorisinserted.Thefinal,compensatedopen-looptransferfunctionisthenGc(s)G(s)=342,600(^+25.3)4?+36)(5+100)(s+60.2)(11.14)10.FromFigure11.9,thelead-compensatedopen-loopmagnituderesponseis-7dBatapproximately68.8rad/s.Thus,weestimatetheclosed-loopbandwidthtobe68.8rad/s.Sincethisbandwidthexceedstherequirementof46.6rad/s,weassumethepeaktimespecificationismet.Thisconclusionaboutthepeaktimeisbaseduponasecond-orderandasymptoticapproximationthatwillbecheckedviasimulation.11.Figure11.9summarizesthedesignandshowstheeffectofthecompensation.Finalresults,obtainedfromasimulationandtheactual(nonasymptotic)frequencyresponse,areshowninTable11.3.Noticetheincreaseinphasemargin,phase-marginfrequency,andclosed-loopbandwidthaftertheleadcompensatorwasaddedtothegain-adjustedsystem.Thepeaktimeandthesteady-stateerrorrequirementshavebeenmet,althoughthephasemarginislessthanthatproposedandthepercentovershootis2.6%largerthanproposed.Finally,iftheperformanceisnotacceptable,aredesignisnecessary.TABLE11.3Characteristicofthelead-compensatedsystemofExample11.3ParameterProposedspecificationActualgaincompensatedvalueActuallead*compensatedvalueKv404040Phasemargin48.1°3+45.5°Phase-marginfrequency—46.6rad/s29.6rad/s39rad/sClosed-loopbandwidth50rad/s68.8rad/sPercentovershoot203722.6Peaktime0.1second0.1second0.075secondMATLABStudentswhoareusingMATLABshouldnowrunchllp3inAppendixB.YouwilllearnhowtouseMATLABtodesignaleadcompensator.Youwillenterthedesiredpercentovershoot,peaktime,andKv.MATLABthendesignsaleadcompensatorusingBodeplots,evaluatesKv,andgeneratesaclosed-loopstepresponse.ThisexercisesolvesExample11.3usingMATLAB.Skill-AssessmentExercise11.3WileyPLUSControlSolutionsPROBLEM:DesignaleadcompensatorforthesysteminSkill-AssessmentExercise11.1tomeetthefollowing
specifications:%OS=20%,Ts—0.2sandKv=50.11.5Lag-LeadCompensationANSWER:Q^,2-27(^+33.2).uimtW(5+75.4)'64130^000{)s(s+50)(s+l20)Thecompletesolutionisatwww.wiley.com/college/nise.(Ttylt11.3UseMATLAB,theControlSystemToolbox,andthefollowingstatementstosolveSkill-AssessmentExercise11.3.pos=20Ts=0.2z=(-log(pos/100))/(sqrt(pi"2+log(pos/100)A2))Pm=atan(2*z/(sqrt(-2*zA2+sqrt(l+4*zA4))))*(180/pi)Wbw=(4/(Ts*z))*sqrt((l-2*zA2)+sqrt(4*zA4-4*zA2+2))K=50*50*120G=zpk([],[0,-50,-120],K)sisotool(G,1)WhentheSISODesignforSISODesignTaskWindowappears:1.2.3.4.5.6.7.Right-clickontheBodeplotareaandselectGrid.NotethephasemarginandbandwidthshownintheMATLABCommandWindow.OntheSISODesignforSISODesignTaskWindowtoolbar,clickontheredpole.PlacethepoleofthecompensatorbyclickingonthegainplotatafrequencythatistotherightofthedesiredbandwidthfoundinStep2.OntheSISODesignforSISODesignTaskWindowtoolbar,clickontheredzero.Placethezeroofthecompensatorbyclickingonthegainplottotheleftofthedesiredbandwidth.ReshapetheBodeplots:alternatelygrabthepoleandthezerowiththemouseandalternatelymovethemalongthephaseplotuntilthephaseplotshowaP.M.equaltothatfoundinStep2andaphase-marginfrequencyclosetothebandwidthfoundinStep2.8.Right-clickintheBodeplotareaandselectEditCompensator...9.ReadtheleadcompensatorintheControlandEstimationToolsManagerWindow.Keepinmindthatthepreviousexamplesweredesignsforthird-ordersystemsandmustbesimulatedtoensurethedesiredtransientresults.Inthenextsection,welookatlag-leadcompensationtoimprovesteady-stateerrorandtransientresponse.^11.5Lag-LeadCompensationInSection9.4,usingrootlocus,wedesignedlag-leadcompensationtoimprovethetransientresponseandsteady-stateerror.Figure11.10isanexampleofasystemtowhichlag-leadcompensationcanbeapplied.Inthissectionwerepeatthedesign,usingfrequencyresponsetechniques.Onemethodistodesignthelagcompensationtolowerthehigh-frequencygain,stabilizethesystem,andimprovethesteady-stateerrorandthendesignaleadcompensatortomeetthephase-marginrequirements.Letuslookatanothermethod.Section9.6describesapassivelag-leadnetworkthatcanbeusedinplaceofseparatelagandleadnetworks.Itmaybemoreeconomicaltouseasingle,passivenetworkthatperformsbothtasks,sincethebufferamplifierthatseparatesthelagnetworkfromtheleadnetworkmaybeeliminated.Inthissection,weemphasizelagleaddesign,usingasingle,passivelag-leadnetwork.Thetransferfunctionofasingle,passivelag-leadnetworkis(Gc(s)=GissSd(s)GLsig(s)=S+1\Tl1(11.15)642Chapter11DesignviaFrequencyResponse(a)(*)FIGURE11.10a.TheNationalAdvancedDrivingSimulatorattheUniversityofIowa;b.testdrivingthesimulatorwithitsrealisticgraphics(KatharinaBosse/laif/ReduxPictures.)wherey>1.Thefirstterminparenthesesproducestheleadcompensation,andthesecondterminparenthesesproducesthelagcompensation.TheconstraintthatwemustfollowhereisthatthesinglevalueyreplacesthequantityaforthelagnetworkinEq.(11.2)andthequantityftfortheleadnetworkinEq.(11.6).Forourdesign,aandf3mustbereciprocalsofeachother.Anexampleofthefrequencyresponseofthepassivelag-leadisshowninFigure11.11.Wearenowreadytoenumerateadesignprocedure.o-5X-10*-M:11III!•\:•\/=10>:;^SNN3Q\450UXV-25vX*=2y,::^-30-35JtorAsympiotesy=10<$'//*/^,.¾>*/•"•^0.0010.010.0010.010.11Frequency(rad/s)100.11Frequency(rad/s)Samplefrequencyresponsecurvesforalag-leadcompensator,Gc{s)=[(s+l)(s+0.1)]/100Gr+y)(*+^i11.5Lag-LeadCompensationDesignProcedure1.Usingasecond-orderapproximation,findtheclosed-loopbandwidthrequiredtomeetthesettlingtime,peaktime,orrisetimerequirement(seeEqs.(10.55)and(10.56)).2.Setthegain,K,tothevaluerequiredbythesteady-stateerrorspecification.3.PlottheBodemagnitudeandphasediagramsforthisvalueofgain.4.Usingasecond-orderapproximation,calculatethephasemargintomeetthedampingratioorpercentovershootrequirement,usingEq.(10.73).5.Selectanewphase-marginfrequencynear5(5+5)(5+15)andthefollowingspecificationsaretobemet:percentovershoot=15%,settlingtime=0.1second,andKv=1000.20.WriteaMATLABprogramthatwillMATLABdesignalag-leadcompensator^Kiil^Passumingsecond-orderapproximationsasfollows:[Section:11.5]a.Allowtheusertoinputfromthekeyboardthedesiredpercentovershoot,settlingtime,andgainrequiredtomeetasteady-stateerrorspecificationb.Displayplotthegain-compensatedBode656Chapter11CommandedrollangleDesignviaFrequencyResponseCompensatori®—ActuatorRolldynamics200s2+Us+100K500s(s+6)Actualrollangle#W—11FIGUREP11.2Towed-vehiclerollcontrolc.Calculatetherequiredphasemarginandbandwidthd.Displaythepoles,zeros,andthegainofthelag-leadcompensatore.Displaythelag-lead-compensatedBodeplotf.Displaythestepresponseofthelagleadcompensatedsystemtotestyoursecond-orderapproximationUseyourprogramtodoProblem19.21.Givenaunityfeedbacksystemwith3WileyPLUSG(S)333=s(s+2)ts+5)IS{S+Z){S-bD)controlSolutionsdesignaPIDcontrollertoyieldzerosteady-stateerrorforarampinput,aswellasa20%overshoot,andapeaktimelessthan2secondsforastepinput.Useonlyfrequencyresponsemethods.[Section:11.5]22.AunityfeedbacksystemhasMATLABI\—G{S)~s(s+3)(5+6)Ifthissystemhasanassociated0.5seconddelay,useMATLABtodesignthevalueofKfor20%overshoot.Makeanynecessarysecond-orderapproximations,buttestyourassumptionsbysimulatingyourdesign.ThedelaycanberepresentedbycascadingtheMATLABfunctionpade(T,n)withG(s),whereTisthedelayinsecondsandnistheorderofthePadeapproximation(use5).Writetheprogramtodothefollowing:a.Acceptyourvalueofpercentovershootfromthekeyboardb.DisplaytheBodeplotforK=1c.Calculatetherequiredphasemarginandfindthephase-marginfrequencyandthemagnitudeatthephase-marginfrequencyd.CalculateanddisplaythevalueofKDESIGNPROBLEMS23.Aircraftaresometimesusedtotowothervehicles.ArollcontrolsystemforsuchanaircraftwasdiscussedinProblem58inChapter6.IfFigurePI1.2representstherollcontrolsystem,useonlyfrequencyresponsetechniquestodothefollowing(Cochran,1992):a.Findthevalueofgain,K,toyieldaclosed-loopstepresponsewith10%overshoot.b.Estimatepeaktimeandsettlingtimeusingthegain-compensatedfrequencyresponse.c.UseMATLABtosimulateyourMATLABsystem.ComparetheresultsofCLU^PthesimulationwiththerequirementsinPartaandyourestimationofperformanceinPartb.24.ThemodelforaspecificlinearizedTCP/IPcomputernetworkqueueworkingunderarandomearlydetection(RED)algorithmhasbeenmodeledusingtheblockdiagramofFigurePI1.1,whereG{s)=M(s)P(s),withM(s)=0.005Ls+0.005andP(s)=140,625e-0.1s(5+2.67)(^+10)Also,Lisaparametertobevaried(Hollot,2001).a.AdjustLtoobtaina15%overshootinthetransientresponseforstepinputs.b.VerifyPartawithaSimulink^"j^<unitstepresponsesimulation.^»*^^25.Anelectricventricularassistdevice(EVAD)thathelpspumpbloodconcurrentlytoadefectivenaturalheartinsickpatientscanbeshowntohaveatransferfunctionPao(s)1361G{s)=Em(s)s2+695+70.85ProblemsTheinput,Em(s),isthemotor'sarmaturevoltage,andtheoutputisPao(s),theaorticbloodpressure(Tasch,1990).TheEVADwillbecontrolledintheclosed-loopconfigurationshowninFigurePI1.1.where8e(s)istheelevatorangleandh(s)isthechangeinaltitude(Barkana,2005).a.AssumingtheairplaneiscontrolledintheclosedloopconfigurationofFigurePI1.1withG{s)=KP(s),findthevalueofKthatwillresultina30°phasemargin.a.Designaphaselagcompensatortoachieveatenfoldimprovementinthesteady-stateerrortostepinputswithoutappreciablyaffectingthetransientresponseoftheuncompensatedsystem.b.UseMATLABtosimulatetheuncompensatedandcompensatedsystemsforaunitstepinput.b.ForthevalueofKcalculatedinParta,obtainthecorrespondinggainmargin.c.Obtainestimatesforthesystem's%OSandsettlingtimesTsforstepinputs.MARAB(dJPd.SimulatethestepresponseofthesystemusingMATLAB.26.ATowerTrainer60UnmannedAerialVehiclehasatransferfunctionP(s)=Se(s)-34.1653-144.%2+70475557.25s+13.1854+95.9353+14.6152+31.945Desiredbearinganglem-ComputerKDesiredwheelpositionMATLABe.ExplainthesimulationresultsanddiscussanyinaccuraciesintheestimatesobtainedinPartc.27.Self-guidedvehicles,suchasthatshowninFigureP11.3(a),areusedinfactoriestotransportproductsfromstationtostation.OnemethodofconstructionMotorandcontroller\6575s(s+2)p-*ActualwheelpositionVehicle1s(s+3)ActualbearinganglemFIGUREP11.3a.Automatedguidedcartsinthefinalassemblyareaoflithium-ionbatteriesforChevroletVolt™electricvehicles(RebeccaCook/Rueters/©Corbis);b.simplifiedblockdiagramofaguidedcart658Chapter11Desiredrolla"g,eDesignviaFrequencyResponseAmplifier+/OV-MotorAilerontorqueAircraft1KRollrale10s+5-.1Actualrollangle5FIGUREP11.4MATLABistoembedawireinthefloortoprovideguidance.b.VerifyyourdesignthroughMATLABsimulations.Anothermethodistouseanonboardcomputerandalaserscanningdevice.Bar-codedreflectivedevicesatknownlocationsallowthesystemtodetermine30.ApitchaxisattitudecontrolsystemgfljfgEthevehicle'sangularposition.Thissystemallowsutilizingamomentumwheelwasthesub-"''•"thevehicletotravelanywhere,includingbetweenjectofProblem61inChapter8.InthatContro1Solu,ionsproblem,thecompensatorisshownasaPIcompenbuildings(Stefanides,1987).FigurePI1.3(6)showsasimplifiedblockdiagramofthevehicle'sbearingconsator.WewanttoreplacethePIcompensatorwithalag-leadcompensatortoimprovebothtransientandtrolsystem.For11%overshoot,Kissetequalto2.Designalagcompensatorusingfrequencyresponsesteady-stateerrorperformance.Theblockdiagramtechniquestoimprovethesteady-stateerrorbyaforthepitchaxisattitudecontrolisshowninFigurefactorof30overthatoftheuncompensatedsystem.P11.5,where6c(s)isacommandedpitchangleand9(s)istheactualpitchangleofthespacecraft.Ifr=28.AnaircraftrollcontrolsystemisshowninFigure23secondsandIz=9631in-lb-s2,dothefollowingPI1.4.Thetorqueontheailerongeneratesarollrate.(Piper,1992):Theresultingrollangleisthencontrolledthroughaa.Designalag-leadcompensatorandfindGc(s)feedbacksystemasshown.DesignaleadcompensaandKtoyieldasystemwiththefollowingtorfora60°phasemarginandKv=5.performancespecifications:percentovershoot=29.Thetransferfunctionfromappliedforcetoarm20%,settlingtime=10seconds,Kv=200.Makedisplacementforthearmofaharddiskdrivehasanyrequiredsecond-orderapproximations.beenidentifiedasU{S}x_X{s)_3.3333x104~F(s)~b.UseMATLABoranyothercompu-^JJATLA8terprogramtotestyoursecond-^EJ^BorderapproximationbysimulatingthesystemforyourdesignedvalueofKandlag-leadcompensator.?ThepositionofthearmwillbecontrolledusingthefeedbackloopshowninFigurePll.l(Yan,2003).a.Designaleadcompensatortoachieveclosed-loopstabilitywithatransientresponseof16%over-31.FortheheatexchangesystemdescribedinProblem36,Chapter9(Smith,2002):shootandasettlingtimeof2msecforastepinput.//svs(.v)PitchcommandMomentumFIGUREP11.5Disturbance^,/=^PitchdynamicoutputProblemsa.Designapassivelag-leadcompensatortoachieve5%steady-stateerrorwithatransientresponseof10%overshootandasettlingtimeof60secondsforstepinputs.b.UseMATLABtosimulateandverifyyourdesign.MATLAB32.Activefrontsteeringisusedinfront-steeringfourwheelcarstocontroltheyawrateofthevehicleasafunctionofchangesinwheel-steeringcommands.Foracertaincar,andundercertainconditions,ithasbeenshownthatthetransferfunctionfromsteeringwheelangletoyawrateisgivenby{Zhang,2008):P(s)=28.4s+119.7s2+7.155+14.7Thesystemiscontrolledinaunity-feedbackconfiguration.a.UsetheNicholschartandfollowtheprocedureofExample11.5todesignalag-leadcompensatorsuchthatthesystemhaszerosteady-stateerrorforastepinput.Thebandwidthoftheclosed-loopsystemmustbeCOB=10rad/sec.Lettheopen-loopmagnituderesponsepeakbelessthan1dBandthesteady-stateerrorconstantKv=20.b.Relaxthebandwidthrequirementtocog>10rad/sec.Designthesystemforasteady-stateerrorofzeroforastepinput.Lettheopenloopmagnituderesponsepeakbelessthan1dBandKv=20usingonlyaleadcompensator.c.SimulatethestepresponseofbothdesignsusingMATLAB.MATLAB(QBPROGRESSIVEANALYSISANDDESIGNPROBLEMS33.High-speedrailpantograph.Problem21inChapter1discussesactivecontrolofapantographmechanismforhigh-speedrailsystems.InProblem79(a),Chapter5,youfoundtheblockdiagramfortheactivepantographcontrolsystem.InChapter8,Problem72,youdesignedthegaintoyieldaclosed-loopstepresponsewith38%overshoot.Aplotofthestepresponseshouldhaveshownasettlingtimegreaterthan0.5secondaswellasahigh-frequencyoscillationsuperimposedoverthestepresponse.InChapter9,Problem55,wereducedthesettlingtimetoabout0.3second,reducedthestepresponsesteady-stateerrortozero,and659eliminatedthehigh-frequencyoscillationsusinganotchfilter(O'Connor,1997).UsingtheequivalentforwardtransferfunctionfoundinChapter5cascadedwiththenotchfilterspecifiedinChapter9,design,usingfrequencyresponsetechniques,alag-leadcompensatortomeetthefollowingspecifications:a.Atleast35°phasemarginb.Amaximumof10%steady-stateerrorfortheclosed-loopstepresponsec.Atleast35rad/sbandwidth34.ControlofHIV/AIDS.InChapter6,themodelforanHIV/AIDSpatienttreatedwithRTIswaslinearizedandshowntobeP(s)=Y(s)[/1(5)-520s-10.384453+2.681752+0.115+0.0126-520(5+0.02)"(5+2.2644)(52+0.045+0.0048)Itisassumedherethatthepatientwillbetreatedandmonitoredusingtheclosed-loopconfigurationshowninFigurePll.lSincetheplanthasanegativedcgain,assumeforsimplicitythatG{s)—Gc(s)P(s)andGc(0)<0.Assumealsothatthespecificationsforthedesignare(1)zerosteadystateerrorforstepinputs,(2)overdampedtimedomainresponse,and(3)settlingtimeTsos100days(Craig,2004).a.Theoverdampedspecificationrequiresa'12.2ControllerDesign667o—»-k,form,withitstypicallowercompanionsystemmatrix,orthecontrollercanonicalform,withitstypicaluppercompanionsystemmatrix,yieldsthesimplestevaluationofthefeedbackgains.Intheensuingdiscussion,weusethephase-variableformtodevelopanddemonstratetheconcepts.End-of-chapterproblemswillgiveyouanopportunitytodevelopandtesttheconceptsforthecontrollercanonicalform.Thedesignofstate-variablefeedbackforclosed-looppoleplacementconsistsofequatingthecharacteristicequationofaclosed-loopsystem,suchasthatshowninFigure12.3(6),toadesiredcharacteristicequationandthenfindingthevaluesofthefeedbackgains,fc,-.IfaplantlikethatshowninFigure123(a)isofhighorderandnotrepresentedinphase-variableorcontrollercanonicalform,thesolutionforthefc/scanbeintricate.Thus,itisadvisabletotransformthesystemtoeitheroftheseforms,designthe&,'s,andthentransformthesystembacktoitsoriginalrepresentation.WeperformthisconversioninSection12.4,wherewedevelopamethodforperformingthetransformations.Untilthen,letusdirectourattentiontoplantsrepresentedinphase-variableform.FIGURE12.3a.Phasevariablerepresentationforplant;b.plantwithstatevariablefeedbackChapter12DesignviaStateSpacePolePlacementforPlantsinPhase-VariableFormToapplypole-placementmethodologytoplantsrepresentedinphase-variableform,wetakethefollowingsteps:1.Representtheplantinphase-variableform.2.Feedbackeachphasevariabletotheinputoftheplantthroughagain,kt.3.Findthecharacteristicequationfortheclosed-loopsystemrepresentedinStep2.4.Decideuponallclosed-looppolelocationsanddetermineanequivalentcharacteristicequation.5.EquatelikecoefficientsofthecharacteristicequationsfromSteps3and4andsolveforkt.Followingthesesteps,thephase-variablerepresentationoftheplantisgivenbyEq.(12.2),with010A=-&H-1C=[C]c2roi;0B=-.1.(12.4)•••c„]Thecharacteristicequationoftheplantisthussn+an-isn~l+•••+a\s+a0=0(12.5)Nowformtheclosed-loopsystembyfeedingbackeachstatevariabletou,formingu=-Kx(12.6)whereK=[hk2•••k„](12.7)Thek/sarethephasevariables'feedbackgains.UsingEq.(12.3a)withEqs.(12.4)and(12.7),thesystemmatrix,A-BK,fortheclosed-loopsystemis(12.8)A-BK=_-(ao+fci)~{a\+k2)-(a2+k3)-(an-i+k„)SinceEq.(12.8)isinphase-variableform,thecharacteristicequationoftheclosedloopsystemcanbewrittenbyinspectionasdetfal-(A-BK))=sn+(a„_,+kuV'1+(««-2+fc„-iK~2+---(^1+^+(^0+^1)=0(12.9)NoticetherelationshipbetweenEqs.(12.5)and(12.9).Forplantsrepresentedinphase-variableform,wecanwritebyinspectiontheclosed-loopcharacteristicequationfromtheopen-loopcharacteristicequationbyaddingtheappropriatekttoeachcoefficient.12.2ControllerDesignNowassumethatthedesiredcharacteristicequationforproperpoleplacementis+d2s2+dis+d0=0M1-lSn+Cln-is"'+dn-2SJi-2(12.10)wherethed/sarethedesiredcoefficients.EquatingEqs.(12.9)and(12.10),weobtaindi=at+ki+ii=0,1,2,...,n-1(12.11)fromwhichki+\=4i-Qi(12.12)Nowthatwehavefoundthedenominatoroftheclosed-looptransferfunction,letusfindthenumerator.Forsystemsrepresentedinphase-variableform,welearnedthatthenumeratorpolynomialisformedfromthecoefficientsoftheoutputcouplingmatrix,C.SinceFigures12.3(A)and(b)arebothinphase-variableformandhavethesameoutputcouplingmatrix,weconcludethatthenumeratorsoftheirtransferfunctionsarethesame.Letuslookatadesignexample.Example12.1ControllerDesignforPhase-VariableFormPROBLEM:GiventheplantG(s)=20(5+5)5(5+1)(^+4)(12.13)designthephase-variablefeedbackgainstoyield9.5%overshootandasettlingtimeof0.74second.SOLUTION:Webeginbycalculatingthedesiredclosed-loopcharacteristicequation.Usingthetransientresponserequirements,theclosed-looppolesare-5.4+/7.2.Sincethesystemisthird-order,wemustselectanotherclosed-looppole.Theclosed-loopsystemwillhaveazeroat—5,thesameastheopen-loopsystem.Wecouldselectthethirdclosed-looppoletocanceltheclosed-loopzero.However,todemonstratetheeffectofthethirdpoleandthedesignprocess,includingtheneedforsimulation,letuschoose-5.1asthelocationofthethirdclosed-looppole.Nowdrawthesignal-flowdiagramfortheplant.TheresultisshowninFigure12.4(a).Nextfeedbackallstatevariablestothecontrol,w,throughgains%,asshowninFigure12.4(b).Writingtheclosed-loopsystem'sstateequationsfromFigure12.4(6),wehavex=0010-*1-(4+*2)y=[100200]x00x+011-(5+^).(12.14a);i2.14b)669670Chapter12DesignviaStateSpace-4(a)FIGURE12.4a.Phase-variablerepresentationforplantofExample12.1;b.plantwithstate-variablefeedbackComparingEqs.(12.14)toEqs.(12.3),weidentifytheclosed-loopsystemmatrixasA-BK00-h1001(12.15)-(4+*2)~(5+/c3;Tofindtheclosed-loopsystem'scharacteristicequation,formdet(sl-(A-BK))=s3+(5+k3)s2+(4+k2)s+kx=0:12.16)Thisequationmustmatchthedesiredcharacteristicequation,s3+15.9s2+136.085+413.1=0(12.17)formedfromthepoles-5.4+/7.2,-5.4-/7.2,and-5.1,whichwerepreviouslydetermined.EquatingthecoefficientsofEqs.(12.16)and(12.17),weobtainki=413.1;k2=132.08;k3=10.9(12.18)12.2ControllerDesign6710.30-0.25-0.20-°0.15-0.10-0.05-1.0Time(seconds)1.52.0FIGURE12.5Simulationofclosed-loopsystemofExample12.1Finally,thezerotermoftheclosed-looptransferfunctionisthesameasthezerotermoftheopen-loopsystem,or(5+5).UsingEqs.(12.14),weobtainthefollowingstate-spacerepresentationoftheclosed-loopsystem:0100x+0001-413.1-136.08-15.91x=y=(100200]x(12.19a)(12.19b)ThetransferfunctionisT(s)=20(^+5)5+15.9^2+136.085+413.13(12.20)Figure12.5,asimulationoftheclosed-loopsystem,shows11.5%overshootandasettlingtimeof0.8second.Aredesignwiththethirdpolecancelingthezeroat—5willyieldperformanceequaltotherequirements.Sincethesteady-stateresponseapproaches0.24insteadofunity,thereisalargesteady-stateerror.DesigntechniquestoreducethiserrorarediscussedinSection12.8.StudentswhoareusingMATLABshouldnowrunchl2plinAppendixB.YouwilllearnhowtouseMATLABtodesignacontrollerforphasevariablesusingpoleplacement.MATLABwillplotthestepresponseofthedesignedsystem.ThisexercisesolvesExample12.1usingMATLAB.MATLABChapter12672DesignviaStateSpaceSkill-AssessmentExercise12.1WileyPLUSPROBLEMS:FortheplantConlrolSolutions100(5+10)G«=5(5+3)(5+12)Tryltl2.1UseMATLAB,theControlSystemToolbox,andthefollowingstatementstosolveforthephase-variablefeedbackgainstoplacethepolesofthesysteminSkill-AssessmentExercise12.1at-3+/5,-3-y'5.and-10.A=[0100010-36-15]B=[0;0;1]poles=[_3+5j,...-3-5j,-10]K=acker(A,B,poles)representedinthestatespaceinphase-variableformby"01001x+x=Ax-j-Bu—00-36-15v=Cx=[10001000]xdesignthephase-variablefeedbackgainstoyield5%overshootandapeaktimeof0.3second.ANSWER:K=[2094373.114.97]Thecompletesolutionislocatedatwww.wiley.com/college/nise.Inthissection,weshowedhowtodesignfeedbackgainsforplantsrepresentedinphase-variableforminordertoplacealloftheclosed-loopsystem'spolesatdesiredlocationsonthe5-plane.Onthesurface,itappearsthatthemethodshouldalwaysworkforanysystem.However,thisisnotthecase.Theconditionsthatmustexistinordertouniquelyplacetheclosed-looppoleswherewewantthemisthetopicofthenextsection.¢12.3ControllabilityConsidertheparallelformshowninFigure12.6(A).Tocontrolthepolelocationoftheclosed-loopsystem,wearesayingimplicitlythatthecontrolsignal,u,cancontrolthebehaviorofeachstatevariableinx.Ifanyoneofthestatevariablescannotbecontrolledbythecontrolu,thenwecannotplacethepolesofthesystemwherewedesire.Forexample,inFigure12.6(b),ifXiwerenotcontrollablebythecontrolsignalandifx1alsoexhibitedanunstableresponseduetoanonzeroinitialcondition,therewouldbenowaytoeffectastate-feedbackdesigntostabilize3¾Xiwouldperforminitsownwayregardlessofthecontrolsignal,u.Thus,insomesystems,astate-feedbackdesignisnotpossible.Wenowmakethefollowingdefinitionbaseduponthepreviousdiscussion:Ifaninputtoasystemcanbefoundthattakeseverystatevariablefromadesiredinitialstatetoadesiredfinalstate,thesystemissaidtobecontrollable;otherwise,thesystemisuncontrollable.Poleplacementisaviabledesigntechniqueonlyforsystemsthatarecontrollable.Thissectionshowshowtodetermine,apriori,whetherpoleplacementisaviabledesigntechniqueforacontroller.12.3ControllabilityFIGURE12.6Comparisonofa.controllableandb.uncontrollablesystemsControllabilitybyInspectionWecanexplorecontrollabilityfromanotherviewpoint:thatofthestateequationitself.Whenthesystemmatrixisdiagonal,asitisfortheparallelform,itisapparentwhetherornotthesystemiscontrollable.Forexample,thestateequationforFigure12.6(a)isx=-at00-at0000-fl31x+1(12.21)_1_orX\=—a\X\x2=x3--dlXi+u(12.22a)+M(12.22b)-a3x3+u(12.22c)673674Chapter12DesignviaStateSpaceSinceeachofEqs.(12.22)isindependentanddecoupledfromtherest,thecontroluaffectseachofthestatevariables.Thisiscontrollabilityfromanotherperspective.NowletuslookatthestateequationsforthesystemofFigure12.6(6):x=-fl4000-«5000-06.0x+11_(12.24a)X\=—«4*i*3(12.24b)«5*2x2=(12.23)-a6x3+u=(12.24c)Fromthestateequationsin(12.23)or(12.24),weseethatstatevariableXiisnotcontrolledbythecontrolu.Thus,thesystemissaidtobeuncontrollable.Insummary,asystemwithdistincteigenvaluesandadiagonalsystemmatrixiscontrollableiftheinputcouplingmatrixBdoesnothaveanyrowsthatarezero.TheControllabilityMatrixTestsforcontrollabilitythatwehavesofarexploredcannotbeusedforrepresentationsofthesystemotherthanthediagonalorparallelformwithdistincteigenvalues.Theproblemofvisualizingcontrollabilitygetsmorecomplicatedifthesystemhasmultiplepoles,eventhoughitisrepresentedinparallelform.Further,onecannotalwaysdeterminecontrollabilitybyinspectionforsystemsthatarenotrepresentedinparallelform.Inotherforms,theexistenceofpathsfromtheinputtothestatevariablesisnotacriterionforcontrollabilitysincetheequationsarenotdecoupled.Inordertobeabletodeterminecontrollabilityor,alternatively,todesignstatefeedbackforaplantunderanyrepresentationorchoiceofstatevariables,amatrixcanbederivedthatmusthaveaparticularpropertyifallstatevariablesaretobecontrolledbytheplantinput,u.Wenowstatetherequirementforcontrollability,includingtheform,property,andnameofthismatrix.2Annth-orderplantwhosestateequationis(12.25)x=Ax+Buiscompletelycontrollable3ifthematrixCM=[BABA2BAn!B(12.26)isofrankn,whereCMiscalledthecontrollabilitymatrix.4Asanexample,letuschooseasystemrepresentedinparallelformwithmultipleroots.2SeetheworklistedintheBibliographybyOgata(1990:699-702)forthederivation.Completelycontrollablemeansthatallstatevariablesarecontrollable.Thistextbookusescontrollabletomeancompletelycontrollable.4SeeAppendixGatwww.wiley.com/college/niseforthedefinitionofrank.Forsingle-inputsystems,insteadofspecifyingrankn,wecansaythatCMmustbenonsingular,possessaninverse,orhavelinearlyindependentrowsandcolumns.312.3Controllability675Example12.2ControllabilityviatheControllabilityMatrixPROBLEM:GiventhesystemofFigure12.7,representedbyasignal-flowdiagram,determineitscontrollability.FIGURE12.7SystemforExample12.2SOLUTION:Thestateequationforthesystemwrittenfromthesignal-flowdiagramis0'10-1i0(>%-}nx+00-2_-1x-Asliu-011(12.27)AtfirstitwouldappearthatthesystemisnotcontrollablebecauseofthezerointheBmatrix.Remember,though,thatthisconfigurationleadstouncontrollabilityonlyifthepolesarerealanddistinct.Inthiscase,wehavemultiplepolesat—1.Thecontrollabilitymatrixis022BCM=BABAB1_111-2-1-214_(12.28)TherankofCMequalsthenumberoflinearlyindependentrowsorcolumns.Therankcanbefoundbyfindingthehighest-ordersquaresubmatrixthatisnonsingular.ThedeterminantofCM=-1-Sincethedeterminantisnotzero,the3x3matrixisnonsingular,andtherankofCMis3.WeconcludethatthesystemiscontrollablesincetherankofCMequalsthesystemorder.Thus,thepolesofthesystemcanbeplacedusingstate-variablefeedbackdesign.StudentswhoareusingMATLABshouldnowrunchl2p2inAppendixB.YouwilllearnhowtouseMATLABtotestasystemforcontrollability.ThisexercisesolvesExample12.2usingMATLAB.Inthepreviousexample,wefoundthateventhoughanelementoftheinputcouplingmatrixwaszero,thesystemwascontrollable.IfwelookatFigure12.7,wecanseewhy.Inthisfigure,allofthestatevariablesaredrivenbytheinputu.Ontheotherhand,ifwedisconnecttheinputateitherdx\jdt,dx2/dt,ordxi/dt,atleastonestatevariablewouldnotbecontrollable.Toseetheeffect,letusMATLABChapter12DesignviaStateSpacedisconnecttheinputatdxijdt.ThiscausestheBmatrixtobecome(12.29)B=Wecanseethatthesystemisnowuncontrollable,sincex\andx2arenolongercontrolledbytheinput.Thisconclusionisborneoutbythecontrollabilitymatrix,whichisnow22ulCM=BABAB-00001-2004_(12.30)Notonlyisthedeterminantofthismatrixequaltozero,butsoisthedeterminantofany2x2submatrix.Thus,therankofEq.(12.30)is1.ThesystemisuncontrollablebecausetherankofCMis1,whichislessthantheorder,3,ofthesystem.Skill-AssessmentExercise12.2Trylt12.2PROBLEM:DeterminewhetherthesystemUseMATLAB,theControlSystemToolbox,andthefollowingstatementstosolveSkill-AssessmentExercise12.2.A=[-l120-1503-4]B=[2;l;l]Cm=ctrb(A,B)Rank=rank(Cm)x=Ax+Bu=-100221-15x+11_3-4_iscontrollable.ANSWER:ControllableThecompletesolutionislocatedatwww.wiley.com/college/nise.Insummary,then,pole-placementdesignthroughstate-variablefeedbackissimplifiedbyusingthephase-variableformfortheplant'sstateequations.However,controllability,theabilityforpole-placementdesigntosucceed,canbevisualizedbestintheparallelform,wherethesystemmatrixisdiagonalwithdistinctroots.Inanyevent,thecontrollabilitymatrixwillalwaystellthedesignerwhethertheimplementationisviableforstate-feedbackdesign.Thenextsectionshowshowtodesignstate-variablefeedbackforsystemsnotrepresentedinphase-variableform.Weusethecontrollabilitymatrixasatoolfortransformingasystemtophase-variableformforthedesignofstate-variablefeedback.^12.4AlternativeApproachestoControllerDesignSection12.2showedhowtodesignstate-variablefeedbacktoyielddesiredclosedlooppoles.Wedemonstratedthismethodusingsystemsrepresentedinphasevariableformandsawhowsimpleitwastocalculatethefeedbackgains.Manytimesthephysicsoftheproblemrequiresfeedbackfromstatevariablesthatarenotphasevariables.Forthesesystemswehavesomechoicesforadesignmethodology.12.4AlternativeApproachestoControllerDesign677Thefirstmethodconsistsofmatchingthecoefficientsofdet(.sl—(A—BK))withthecoefficientsofthedesiredcharacteristicequation,whichisthesamemethodweusedforsystemsrepresentedinphasevariables.Thistechnique,ingeneral,leadstodifficultcalculationsofthefeedbackgains,especiallyforhigher-ordersystemsnotrepresentedwithphasevariables.Letusillustratethistechniquewithanexample.Example12.3ControllerDesignbyMatchingCoefficientsPROBLEM:Givenaplant,Y(s)/U{s)=10/[(s+l)(s+2)],designstatefeedbackfortheplantrepresentedincascadeformtoyielda15%overshootwithasettlingtimeof0.5second.SOLUTION:Thesignal-flowdiagramfortheplantincascadeformisshowninFigure12.8(a).Figure12.8(b)showsthesystemwithstatefeedbackadded.WritingthestateequationsfromFigure12.8(6),wehave-2X=1x+0r1(12.31a)(12.31b)y=[100]xwherethecharacteristicequationiss2+(k2+3)s+(2/¾+id+;-)==0(12.32)Usingthetransientresponserequirementsstatedintheproblem,weobtainthedesiredcharacteristicequations2+16s+239.5=0(12.33)EquatingthemiddlecoefficientsofEqs.(12.32)and(12.33),wefindk2=13.Equatingthelastcoefficientsoftheseequationsalongwiththeresultfork2yieldsyfci=211.5.10»0--O.V-1-2FIGURE12.8a.Signal-flowgraphincascadeformforG(s)=10/[(s+l){s+2)};b.systemwithstatefeedbackadded678Chapter12DesignviaStateSpaceThesecondmethodconsistsoftransformingthesystemtophasevariables,designingthefeedbackgains,andtransformingthedesignedsystembacktoitsoriginalstate-variablerepresentation.5Thismethodrequiresthatwefirstdevelopthetransformationbetweenasystemanditsrepresentationinphase-variableform.Assumeaplantnotrepresentedinphase-variableform,z=Az+Bw(12.34a)v=Cz(12.34b)whosecontrollabilitymatrixisCMz=[BABA2B---An_1B(12.35)Assumethatthesystemcanbetransformedintothephase-variable(x)representationwiththetransformation(12.36)z=PxSubstitutingthistransformationintoEqs.(12.34),wegetx=P(12.37a)'APX+P^BM(12.37b)y=CPxwhosecontrollabilitymatrixis•••(p-iAPy*-i(P-iB)]CMx=[P-2B(P"1AP)(P-1B)(P-IAP)2(P"1B)=[P_1B(P"1AP)(P-1B)(P-1AP)(P-1AP)(P_1Bi(P-1AP)(P-1AP)=P1[BABA2B••••••(P-]AP)(P-1AP)(P~1B)]XnlB(12.38)SubstitutingEq.(12.35)into(12.38)andsolvingforP,weobtainP—CMZCMx-l(12.39)Thus,thetransformationmatrix,P,canbefoundfromthetwocontrollabilitymatrices.Aftertransformingthesystemtophasevariables,wedesignthefeedbackgainsasinSection12.2.Hence,includingbothfeedbackandinput,u——Kxx+r,Eqs.(12.37)becomesx=P-*APX-P!BKxx+P_1Br=(P_1AP-P^BK^x+P-1Bry=CPx(12.40a)(12.40b)Sincethisequationisinphase-variableform,thezerosofthisclosed-loopsystemaredeterminedfromthepolynomialformedfromtheelementsofCP,asexplainedinSection12.2.5SeethediscussionsofAckermann'sformulainFranklin(1994)andOgata(1990),listedintheBibliography.12.4AlternativeApproachestoControllerDesign679Usingx=P*z,wetransformEqs.(12.40)fromphasevariablesbacktotheoriginalrepresentationandgetz=Az-BKXPxz+Br=(A-SKxP"1)z+Bry=Cz(12.41a)(12.41b)ComparingEqs.(12.41)with(12.3),thestatevariablefeedbackgain,Kz,fortheoriginalsystemisK,=KXP-l(12.42)Thetransferfunctionofthisclosed-loopsystemisthesameasthetransferfunctionforEqs.(12.40),sinceEqs.(12.40)and(12.41)representthesamesystem.Thus,thezerosoftheclosed-looptransferfunctionarethesameasthezerosoftheuncompensatedplant,baseduponthedevelopmentinSection12.2.Letusdemonstratewithadesignexample.Example12.4ControllerDesignbyTransformationPROBLEM:Designastate-variablefeedbackcontrollertoyielda20.8%overshootandasettlingtimeof4secondsforaplant,G(5)(5+4)(s+l)(s+2)(5+5)(12.43)thatisrepresentedincascadeformasshowninFigure12.9.FIGURE12.9Signal-flowgraphforplantofExample12.4SOLUTION:Firstfindthestateequationsandthecontrollabilitymatrix.ThestateequationswrittenfromFigure12.9are-5"0"100-21z+00-110z=A,z+Bzuy=CzZ=[-l10]Z(12.44a)(12.44b)fromwhichthecontrollabilitymatrixisevaluatedasCMZ=[BZA2BZA*BZ]=[00101-31-11SincethedeterminantofCMZis—1,thesystemiscontrollable.(12.45)Chapter12DesignviaStateSpaceWenowconvertthesystemtophasevariablesbyfirstfindingthecharacteristicequationandusingthisequationtowritethephase-variableform.Thecharacteristicequation,det(sl-Az),isdet(sl-Az)=s3+8s2+17s+10=0(12.46)UsingthecoefficientsofEq.(12.46)andourknowledgeofthephase-variableform,wewritethephase-variablerepresentationofthesystemasx=Axx+Bxw=[01010101x+001_10-17-8_(12.47a)(12.47b)y=[410]xTheoutputequationwaswrittenusingthecoefficientsofthenumeratorofEq.(12.43),sincethetransferfunctionmustbethesameforthetworepresentations.Thecontrollabilitymatrix,CMX>forthephase-variablesystemis'MxBx001101-81-847_AXBXA..BX(12.48)UsingEq.(12.39),wecannowcalculatethetransformationmatrixbetweenthetwosystemsasri001P=CMzCMx=(12.49)5101071_Wenowdesignthecontrollerusingthephase-variablerepresentationandthenuseEq.(12.49)totransformthedesignbacktotheoriginalrepresentation.Fora20.8%overshootandasettlingtimeof4seconds,afactorofthecharacteristicequationofthedesignedclosed-loopsystemis52+2s+5.Sincetheclosed-loopzerowillbeats=—4,wechoosethethirdclosed-looppoletocanceltheclosed-loopzero.Hence,thetotalcharacteristicequationofthedesiredclosed-loopsystemisD(s)=(s+4){s2+254-5)=s3+6s2+1¾+20=0(12.50)Thestateequationsforthephase-variableformwithstate-variablefeedbackare(12.51a)x=(Ax-BxKx)x=_-(10+fciJ-(17+¾)-(8+fesJ.(12.51b)v=[410]xThecharacteristicequationforEqs.(12.51)isdet(.sl-(Ax-BXKX))=s3+{8+k3x)s2+(17+k2x)s+(10+kXx)=0(1252)ComparingEq.(12.50)with(12.52),weseethatKx=[/ci.rk2xk3x}=[10-4-2(12.53)12.4AlternativeApproachestoControllerDesign681FIGURE12.10Designedsystemwithstate-variablefeedbackforExample12.4UsingEqs.(12.42)and(12.49),wecantransformthecontrollerbacktotheoriginalsystemasK2=KXP-1=[-2Q10(12.54)-2]Thefinalclosed-loopsystemwithstate-variablefeedbackisshowninFigure12,10,withtheinputappliedasshown.Letusnowverifyourdesign.ThestateequationsforthedesignedsystemshowninFigure12.10withinputrarez=(Az-B2Kz)z+Bz/-=j,=Czz=[-l10-50-21z+20-10100110]z(12.55a)(12.55b)UsingEq.(3.73)tofindtheclosed-looptransferfunction,weobtainT(s)=(s+4)s+6s2+13s+20315-2+2^+5(12.56)Therequirementsforourdesignhavebeenmet.StudentswhoareusingMATLABshouldnowrunchl2p3inAppendixB.YouwilllearnhowtouseMATLABtodesignacontrollerforaplantnotrepresentedinphase-variableform.YouwillseethatMATLABdoesnotrequiretransformationtophase-variableform.ThisexercisesolvesExample12.4usingMATLAB.MATLAB^Skill-AssessmentExercise12.3PROBLEM:Designalinearstate-feedbackcontrollertoyield20%overshootandasettlingtimeof2secondsforaplant,WileyPLUSCZZ29ControlSolutionsm=[s+9)(s(s++6)8)(^+7)682Chapter12DesignviaStateSpacethatisrepresentedinstatespaceincascadeformby[-7z=Az4-Bw=y=CzANSWER:=[-l10-80010]zK2=[-40.230"1z+-9j62.24ro"0uij-14]Thecompletesolutionislocatedatwww.wiley.com/college/nise.Inthissection,wesawhowtodesignstate-variablefeedbackforplantsnotrepresentedinphase-variableform.Usingcontrollabilitymatrices,wewereabletotransformaplanttophase-variableform,designthecontroller,andfinallytransformthecontrollerdesignbacktotheplant'soriginalrepresentation.Thedesignofthecontrollerreliesontheavailabilityofthestatesforfeedback.Inthenextsection,wediscussthedesignofstate-variablefeedbackwhensomeorallofthestatesarenotavailable.(12.5ObserverDesignControllerdesignreliesuponaccesstothestatevariablesforfeedbackthroughadjustablegains.Thisaccesscanbeprovidedbyhardware.Forexample,gyroscanmeasurepositionandvelocityonaspacevehicle.Sometimesitisimpracticaltousethishardwareforreasonsofcost,accuracy,oravailability.Forexample,inpoweredflightofspacevehicles,inertialmeasuringunitscanbeusedtocalculatetheacceleration.However,theiralignmentdeteriorateswithtime;thus,othermeansofmeasuringaccelerationmaybedesirable(RockwellInternational,1984).Inotherapplications,someofthestatevariablesmaynotbeavailableatall,oritistoocostlytomeasurethemorsendthemtothecontroller.Ifthestatevariablesarenotavailablebecauseofsystemconfigurationorcost,itispossibletoestimatethestates.Estimatedstates,ratherthanactualstates,arethenfedtothecontroller.OneschemeisshowninFigure12.11(A).Anobserver,sometimescalledanestimator,isusedtocalculatestatevariablesthatarenotaccessiblefromtheplant.Heretheobserverisamodeloftheplant.Letuslookatthedisadvantagesofsuchaconfiguration.Assumeaplant,x=Ax+Bit(12.57a)y=Cx(12.57b)x=Ax+Bw(12.58a)y=Cx(12.58b)andanobserver,SubtractingEqs.(12.58)from(12.57),weobtainx—x=A(x—x)(12.59a)y-y=C(x-x)(12.59b)12.5Plantr=0++jiObserverControllerObserverDesignPlantoutput,yPlantoutput,yPlantEstimatedoutput,y683r=0++,.ObserverEstimatedstates,xController(a)Estimatedstates,xmEstimatedoutput,Plantoutput,FIGURE12.11EstimatederroroutputTocontroller(c)Thus,thedynamicsofthedifferencebetweentheactualandestimatedstatesisunforced,andiftheplantisstable,thisdifference,duetodifferencesininitialstatevectors,approacheszero.However,thespeedofconvergencebetweentheactualstateandtheestimatedstateisthesameasthetransientresponseoftheplantsincethecharacteristicequationforEq.(12.59a)isthesameasthatforEq.(12.57a).Sincetheconvergenceistooslow,weseekawaytospeeduptheobserverandmakeitsresponsetimemuchfasterthanthatofthecontrolledclosed-loopsystem,sothat,effectively,thecontrollerwillreceivetheestimatedstatesinstantaneously.Toincreasethespeedofconvergencebetweentheactualandestimatedstates,weusefeedback,shownconceptuallyinFigure12.11(6)andinmoredetailinFigure12.11(c).Theerrorbetweentheoutputsoftheplantandtheobserverisfedbacktothederivativesoftheobserver'sstates.Thesystemcorrectstodrivethiserrortozero.Withfeedbackwecandesignadesiredtransientresponseintotheobserverthatismuchquickerthanthatoftheplantorcontrolledclosed-loopsystem.Whenweimplementedthecontroller,wefoundthatthephase-variableorcontrollercanonicalformyieldedaneasysolutionforthecontrollergains.Indesigninganobserver,itistheobservercanonicalformthatyieldstheeasysolutionfortheobservergains.Figure12.12(a)showsanexampleofathird-orderplantrepresentedinobservercanonicalform.InFigure12.12(6),theplantisconfiguredasanobserverwiththeadditionoffeedback,aspreviouslydescribed.Thedesignoftheobserverisseparatefromthedesignofthecontroller.Similartothedesignofthecontrollervector,K,thedesignoftheobserverconsistsofState-feedbackdesignusinganobservertoestimateunavailablestatevariables:a.open-loopobserver;b.closed-loopobserver;cexplodedviewofaclosedloopobserver,showingfeedbackarrangementtoreducestate-variableestimationerror684Chapter12DesignviaStateSpaceFIGURE12.12Third-orderobserverinobservercanonicalform:a.beforetheadditionoffeedback;b.aftertheadditionoffeedbackevaluatingtheconstantvector,L,sothatthetransientresponseoftheobserverisfasterthantheresponseofthecontrolledloopinordertoyieldarapidlyupdatedestimateofthestatevector.Wenowderivethedesignmethodology.Wewillfirstfindthestateequationsfortheerrorbetweentheactualstatevectorandtheestimatedstatevector,(x-x).ThenwewillfindthecharacteristicequationfortheerrorsystemandevaluatetherequiredLtomeetarapidtransientresponsefortheobserver.WritingthestateequationsoftheobserverfromFigure12.11(c),wehavex=Ax4-Bw+L(y-y)(12.60a)y=Cx(12.60b)Butthestateequationsfortheplantarex=Ax+Bu(12.61a)y=Cx(12.61b)12.5ObserverDesignSubtractingEqs.(12.60)from(12.61),weobtain(x-x)=A(x-x)-L(v-y)(12.62a)(y-y)=C(x-x)(12.62b)wherex-xistheerrorbetweentheactualstatevectorandtheestimatedstatevector,andv-yistheerrorbetweentheactualoutputandtheestimatedout-put.Substitutingtheoutputequationintothestateequation,weobtainthestateequationfortheerrorbetweentheestimatedstatevectorandtheactualstatevector:(x-x)=(A-LC)(x-x)(12.63a)(y-y)=C(x-x)(12.63b)Lettingex=(x-x),wehaveex=(A-LC)e*(12.64a)y-1=Ce,(12.64b)Equation(12.64a)isunforced.Iftheeigenvaluesareallnegative,theestimatedstatevectorerror,ex,willdecaytozero.ThedesignthenconsistsofsolvingforthevaluesofLtoyieldadesiredcharacteristicequationorresponseforEqs.(12.64).ThecharacteristicequationisfoundfromEqs.(12.64)tobe(12.65)dotptl-(A-LC)]=0Nowweselecttheeigenvaluesoftheobservertoyieldstabilityandadesiredtransientresponsethatisfasterthanthecontrolledclosed-loopresponse.TheseeigenvaluesdetermineacharacteristicequationthatwesetequaltoEq.(12.65)tosolveforL.Letusdemonstratetheprocedureforannth-orderplantrepresentedinobservercanonicalform.WefirstevaluateA—LC.TheformofA,L,andCcanbederivedbyextrapolatingtheformofthesematricesfromathird-orderplant,whichyoucanderivefromFigure12.12.Thus,r-%-1io0•••01-an-2010•••h1h'010A-LC=-moo0•••10-(ai+/„-i).-(«o+/«)000---1000-•00]4-100•••0.In-]0-0"-(««-1+/i)1010---0-(an-2+h)0.-flo00JJ(12.66)685Chapter12DesignviaStateSpaceThecharacteristicequationforA-LCis.^+(^-1+/0^^+(^-2+/2^-2(«1+/„-i)5(12.67)+(«0+In)=0NoticetherelationshipbetweenEq.(12.67)andthecharacteristicequation,detfjJ-A)=0,fortheplant,whichis^+^-1^-^^-2^-2+a\s+OQ=0(12.68)Thus,ifdesired,Eq.(12.67)canbewrittenbyinspectioniftheplantisrepresentedinobservercanonicalform.WenowequateEq.(12.67)withthedesiredclosed-loopobservercharacteristicequation,whichischosenonthebasisofadesiredtransientresponse.Assumethedesiredcharacteristicequationiss"+4-1^-1+dn-2s"-2+•••+du+do=0(12.69)Wecannowsolveforthe/,'sbyequatingthecoefficientsofEqs.(12.67)and(12.69):l,=d„-i-an_i/=1,2,...,n(12.70)Letusdemonstratethedesignofanobserverusingtheobservercanonicalform.Insubsequentsectionswewillshowhowtodesigntheobserverforotherthanobservercanonicalform.Example12.5ObserverDesignforObserverCanonicalFormPROBLEM:Designanobserverfortheplant4)G(s)=(s+1){s+2)(s+5)5+4s3+852+175+10(12.71)whichisrepresentedinobservercanonicalform.Theobserverwillrespond10timesfasterthanthecontrolledloopdesignedinExample12.4.SOLUTION:1.Firstrepresenttheestimatedplantinobservercanonicalform.TheresultisshowninFigure12.13(a).2.Nowformthedifferencebetweentheplant'sactualoutput,y,andtheobserver'sestimatedoutput,y,andaddthefeedbackpathsfromthisdifferencetothederivativeofeachstatevariable.TheresultisshowninFigure12.13(6).3.Nextfindthecharacteristicpolynomial.ThestateequationsfortheestimatedplantshowninFigure12.13(a)arex=Ax+Bw=j>=Cx=[l00-810-1701x+14-10000]x(12.72a)(12.72b)12.5ObserverDesignFIGURE12.13a.Signal-flowgraphofasystemusingobservercanonicalformvariables;b.additionalfeedbacktocreateobserverFromEqs.(12.64)and(12.66),theobservererroris-(8+/1)10ex=(A-LC)ex=-(17+/2)01[-(10+/3)0oj(12.73)UsingEq.(12.65),weobtainthecharacteristicpolynomials3+(8+h)s2+(17+i2)s+(lo+/3;(12.74)4.Nowevaluatethedesiredpolynomial,setthecoefficientsequaltothoseofEq.(12.74),andsolveforthegains,/,•.FromEq.(12.50),theclosed-loopcontrolledsystemhasdominantsecond-orderpolesat-1±;2.Tomakeourobserver10timesfaster,wedesigntheobserverpolestobeat-10±/20.We687688Chapter12DesignviaStateSpaceO.i0.20.3Time(seconds)(a)FIGURE12.14Simulationshowingresponseofobserver:a.closed-loop;b.open-loopwithobservergainsdisconnected0.50.40.30.20.10-0.1-0.2h-0.3-0.4-0.500.10.2Time(seconds)(b)selectthethirdpoletobe10timestherealpartofthedominantsecond-orderpoles,or—100.Hence,thedesiredcharacteristicpolynomialis(s+100)(s2+20s+500)=s3+120?+2500s+50,000(12.75)EquatingEqs.(12.74)and(12.75),wefindh=112,h=2483,and/3=49,990.Asimulationoftheobserverwithaninputofr(t)=100?isshowninFigure12.14.Theinitialconditionsoftheplantwereallzero,andtheinitialconditionofX\was0.5.Sincethedominantpoleoftheobserveris-10±/20,theexpectedsettlingtimeshouldbeabout0.4second.ItisinterestingtonotetheslowerresponseinFigure12.14(b),wheretheobservergainsaredisconnected,andtheobserverissimplyacopyoftheplantwithadifferentinitialcondition.MATLABStudentswhoareusingMATLABshouldnowrunchl2p4inAppendixB.YouwilllearnhowtouseMATLABtodesignanobserverusingpoleplacement.ThisexercisesolvesExample12.5usingMATLAB.12.6Observability689Skill-AssessmentExercise12.4PROBLEM:DesignanobserverfortheplantG(s)=U&±SWileyPLUSCJJEJControlSolutions(5+7)(5+8)(5+9)whoseestimatedplantisrepresentedinstatespaceinobservercanonicalformas-2410x=Ax+Bw=-19101-50400y=Cx=!i00]xTheobserverwillrespond10timesfasterthanthecontrolledloopdesignedinSkillAssessmentExercise12.3.ANSWER:L=[2169730383,696]T,whereTsignifiesvectortransposeThecompletesolutionislocatedatwww.wiley.com/college/nise.Inthissection,wedesignedanobserverinobservercanonicalformthatusestheoutputofasystemtoestimatethestatevariables.Inthenextsection,weexaminetheconditionsunderwhichanobservercannotbedesigned.(12.6ObservabilityRecallthattheabilitytocontrolallofthestatevariablesisarequirementforthedesignofacontroller.State-variablefeedbackgainscannotbedesignedifanystatevariableisuncontrollable.Uncontrollabihtycanbeviewedbestwithdiagonalizedsystems.Thesignal-flowgraphshowedclearlythattheuncontrollablestatevariablewasnotconnectedtothecontrolsignalofthesystem.Asimilarconceptgovernsourabilitytocreateadesignforanobserver.Specifically,weareusingtheoutputofasystemtodeducethestatevariables.Ifanystatevariablehasnoeffectupontheoutput,thenwecannotevaluatethisstatevariablebyobservingtheoutput.Theabilitytoobserveastatevariablefromtheoutputisbestseenfromthediagonalizedsystem.Figure12.15(a)showsasystemwhereeachstatevariablecanbeobservedattheoutputsinceeachisconnectedtotheoutput.Figure12.15(6)isanexampleofasystemwhereallstatevariablescannotbeobservedattheoutput.HereX\isnotconnectedtotheoutputandcouldnotbeestimatedfromameasurementoftheoutput.Wenowmakethefollowingdefinitionbaseduponthepreviousdiscussion:Iftheinitial-statevector,x(/0),canbefoundfromu(t)andy(t)measuredoverafiniteintervaloftimefromt0,thesystemissaidtobeobservable;otherwisethesystemissaidtobeunobservable.Trylt12.3UseMATLAB,theControlSystemToolbox,andthefollowingstatementstosolveSkill-AssessmentExercise12.4.A=[-2410-19101-50400]C=[l00]pos=20Ts=2z=(-log(pos/100))I...(sqrt(piA2+...log(pos/100)"2));wn=4/(z*Ts);r=roots([1,2*z*wn,...wn"2]);poles=10*[r'10*...real(r(l))]l=acker(A',C,poles)'690Chapter12DesignviaStateSpaceFIGURE12.15Comparisonofa.observable,andb.unobservablesystemsSimplystated,observabilityistheabilitytodeducethestatevariablesfromaknowledgeoftheinput,u{t),andtheoutput,y(t).Poleplacementforanobserverisaviabledesigntechniqueonlyforsystemsthatareobservable.Thissectionshowshowtodetermine,apriori,whetherornotpoleplacementisaviabledesigntechniqueforanobserver.ObservabilitybyInspectionWecanalsoexploreobservabilityfromtheoutputequationofadiagonalizedsystem.TheoutputequationforthediagonalizedsystemofFigure12.15(a)isy=Cx=[l1l]x(12.76)Ontheotherhand,theoutputequationfortheunobservablesystemofFigure12.15(Z?)isv=Cx=[01l]x(12.77)NoticethatthefirstcolumnofEq.(12.77)iszero.Forsystemsrepresentedinparallelformwithdistincteigenvalues,ifanycolumnoftheoutputcouplingmatrixiszero,thediagonalsystemisnotobservable.12.6ObservabilityTheObservabilityMatrixAgain,asforcontrollability,systemsrepresentedinotherthandiagonahzedformcannotbereliablyevaluatedforobservabilitybyinspection.Inordertodetermineobservabilityforsystemsunderanyrepresentationorchoiceofstatevariables,amatrixcanbederivedthatmusthaveaparticularpropertyifallstatevariablesaretobeobservedattheoutput.Wenowstatetherequirementsforobservability,includingtheform,property,andnameofthismatrix.Annth-orderplantwhosestateandoutputequationsare,respectively,x=AxBu(12.78a)y=Cx(12.78b)6iscompletelyobservableifthematrixrc"lCA(12.79)OM=CA""1.isofrankn,whereOMiscalledtheobservabilitymatrix.7Thefollowingtwoexamplesillustratetheuseoftheobservabilitymatrix.Example12.6ObservabilityviatheObservabilityMatrixPROBLEM:DetermineifthesystemofFigure12.16isobservable.SOLUTION:Thestateandoutputequationsforthesystemarex=Ax+Bw=j/=Cx=[050010-4-3l]x001x+01-2(12.80a)(12.80b)FIGURE12.16SystemofExample12.66Completelyobservablemeansthatallstatevariablesareobservable.Thistextbookusesobservabletomeancompletelyobservable.7SeeOgata{1990:706-708)foraderivation.691Chapter12692DesignviaStateSpaceThus,theobservabilitymatrix,OM,iscOM=CACA2=0-4-125-3-1313(12.81)-9SincethedeterminantofOMequals—344,OMisoffullrankequalto3.Thesystemisthusobservable.Youmighthavebeenmisledandconcludedbyinspectionthatthesystemisunobservablebecausethestatevariablexxisnotfeddirectlytotheoutput.Rememberthatconclusionsaboutobservabilitybyinspectionarevalidonlyfordiagonalizedsystemsthathavedistincteigenvalues.MATLABAStudentswhoareusingMATLABshouldnowrunchl2p5inAppendixB.YouwilllearnhowtouseMATLABtotestasystemforobservability.ThisexercisesolvesExample12.6usingMATLAB.Example12.7UnobservabilityviatheObservabilityMatrixPROBLEM:DeterminewhetherthesystemofFigure12.17isobservable.FIGURE12.17SystemofExample12.7SOLUTION:Thestateandoutputequationsforthesystemarex=Ax+Bw=y=Cx=[501[-5-21/4J(12.82a)(12.82b)4]xTheobservabilitymatrix,OM,forthissystemisOM=CCA54-20-16(12.83)12.7AlternativeApproachestoObserverDesignThedeterminantforthisobservabilitymatrixequals0.Thus,thematrixdoesnothavefullrank,andthesystemisnotobservable.Again,youmightconcludebyinspectionthatthesystembecauseallstatesfeedtheoutput.Rememberthatobservabilityisvalidonlyforadiagonalizedrepresentationofasystemeigenvalues.693observabilityisobservablebyinspectionwithdistinctSkill-AssessmentExercise12.5PROBLEM:Determinewhetherthesystem-2-1x=Ax+Bu=0-2-7-8y=Cx=[468]xTrylt12.4-31x+-9isobservable.ANSWER:ObservableThecompletesolutionislocatedatwww.wiley.com/college/nise.Nowthatwehavediscussedobservabilityandtheobservabilitymatrix,wearereadytotalkaboutthedesignofanobserverforaplantnotrepresentedinobservercanonicalform.(12.7AlternativeApproachestoObserverDesignEarlierinthechapter,wediscussedhowtodesigncontrollersforsystemsnotrepresentedinphase-variableform.Onemethodistomatchthecoefficientsofdet[sl-(A-BK)]withthecoefficientsofthedesiredcharacteristicpolynomial.Thismethodcanyielddifficultcalculationsforhigher-ordersystems.Anothermethodistotransformtheplanttophase-variableform,designthecontroller,andtransferthedesignbacktoitsoriginalrepresentation.Thetransformationswerederivedfromthecontrollabilitymatrix.Inthissection,weuseasimilarideaforthedesignofobserversnotrepresentedinobservercanonicalform.Onemethodistomatchthecoefficientsofdet^I—(A—LC)]withthecoefficientsofthedesiredcharacteristicpolynomial.Again,thismethodcanyielddifficultcalculationsforhigher-ordersystems.Anothermethodisfirsttotransformtheplanttoobservercanonicalformsothatthedesignequationsaresimple,thenperformthedesigninobservercanonicalform,andfinallytransformthedesignbacktotheoriginalrepresentation.Letuspursuethissecondmethod.Firstwewillderivethetransformationbetweenasystemrepresentationanditsrepresentationinobservercanonicalform.UseMATLAB,theControlSystemToolbox,andthefollowingstatementstosolveSkill-AssessmentExercise12.5.A=[-2-1-30-21-7-8-9]C=[468]Om=obsv(A,C)Rank=rank(Om)Chapter12DesignviaStateSpaceAssumeaplantnotrepresentedinobservercanonicalform,z=Az+Bw(12.84a)y=Cz(12.84b)whoseobservabilitymatrixisCCACA2(12.85)OMZCA""2CA"-1Nowassumethatthesystemcanbetransformedtotheobservercanonicalform,x,withthetransformation(12.86)z=PxSubstitutingEq.(12.86)intoEqs.(12.84)andpremultiplyingthestateequationbyP_1,wefindthatthestateequationsinobservercanonicalformarex=P1APx+P1Bw(12.87a)y=CPx(12.87b)whoseobservabilitymatrix,OMX,isOMx=CPCP(P1AP)CP(P1AP)(P~1AP)P)_CP(P-1AP)(P--1AP)(P_1AP)_rc=iCACA2p(12.88).CA"-1.SubstitutingEq.(12.85)into(12.88)andsolvingforP,weobtainP—°MzOMX(12.89)Thus,thetransformation,P,canbefoundfromthetwoobservabilitymatrices.Aftertransformingtheplanttoobservercanonicalform,wedesignthefeedbackgains,Lx,asinSection12.5.UsingthematricesfromEqs.(12.87)andtheformsuggestedbyEqs.(12.64),wehaveex=(P»-i'AP-LxCP)e,v-y=CPex(12.90a)(12.90b)Sincex=P_1z,andx=P1f,thenex=x-x=P1ez.Substitutingex=PlexintoEqs.(12.90)transformsEqs.(12.90)backtotheoriginalrepresentation.Theresultisez=(A-PLxC)ezy-y=Cez(12.91a)(12.91b)12.7AlternativeApproachestoObserverDesignComparingEq.(12.91a)to(12.64a),weseethattheobservergainvectorisLz=LPX(12.92)Wenowdemonstratethedesignofanobserverforaplantnotrepresentedinobservercanonicalform.Thefirstexampleusestransformationstoandfromobservercanonicalform.Thesecondexamplematchescoefficientswithoutthetransformation.Thismethod,however,canbecomedifficultifthesystemorderishigh.Example12.8ObserverDesignbyTransformationPROBLEM:DesignanobserverfortheplantG(s)=1{s+l)(s+2){s+5)(12.93)representedincascadeform.Theclosed-loopperformanceoftheobserverisgovernedbythecharacteristicpolynomialusedinExample12.5:s5+120s2+2500^+50,000.SOLUTION:Firstrepresenttheplantinitsoriginalcascadeform.-50z=Az+B«=0y=Cz=[l010]-210-1roiz+0(12.94a)_i_(12.94b)0]zTheobservabilitymatrix,OMZ,iscoMz=00110-525-71CACA2(12.95)whosedeterminantequals1.Hence,theplantisobservable.Thecharacteristicequationfortheplantisdet(sl-A)=s3+8s2+17s+10=0(12.96)Wecanusethecoefficientsofthischaracteristicpolynomialtoformtheobservercanonicalform:x=Axx4-BXM(12.97a)y=cxx(12.97b)where-810-1700-1010C«=[l00(12.98)695Chapter12DesignviaStateSpaceTheobservabilitymatrixfortheobservercanonicalformisOMX=00-81047-81ricx"=^-x"xC*<(12.99)Wenowdesigntheobserverfortheobservercanonicalform.Firstform(Ax—LxCxJ,JL/x^-'\—-810"-1701-1000jpi]k-(8+/01001=./3.10'-(17+/2)0-(IO+/3)001(12.100)whosecharacteristicpolynomialisdet[jl-(A,-LXCX)]=s3+(8+h)s2+(17+h)s+(10+/3)(12.101)Equatingthispolynomialtothedesiredclosed-loopobservercharacteristicequation,s3+120s2+2500s+50,000,wefindU=112248349,990(12.102)Nowtransformthedesignbacktotheoriginalrepresentation.UsingEq.(12.89),thetransformationmatrixisP=0**0»0ol110-31-11(12.103)TransformingLxtotheoriginalrepresentation,weobtainU=PL,=112214747,619(12.104)ThefinalconfigurationisshowninFigure12.18.AsimulationoftheobserverisshowninFigure12.19(a).Todemonstratetheeffectoftheobserverdesign,Figure12.19(6)showsthereducedspeediftheobserverissimplyacopyoftheplantandallobserverfeedbackpathsaredisconnected.StudentswhoareusingMATLABshouldnowrunchl2p6inAppendixB.YouwilllearnhowtouseMATLABtodesignanobserverforaplantnotrepresentedinobservercanonicalform.YouwillseethatMATLABdoesnotrequiretransformationtoobservercanonicalform.ThisexercisesolvesExample12.8usingMATLAB.12.7AlternativeApproachestoObserverDesign697Plant11s11xy^VT^1s1sr-5_11is1^2V\1T111151-2-1T11S\-2-11/'\\52,147(JJe-^Sj?./47,619ObserverFIGURE12.18designObserveri0.60.40.2*0_y-0.2--0.4-0.6)123Time(seconds)(a)i0.6V0.4*0.20y-0.2-0.4(jiii123Time(seconds)(b)t,FIGURE12.19Observerdesignstepresponsesimulation:a.closed-loopobserver;b.open-loopobserverwithobservergainsdisconnected698Chapter12DesignviaStateSpaceExample12.9ObserverDesignbyMatchingCoefficientsPROBLEM:Atime-scaledmodelforthebody'sbloodglucoselevelisshowninEq.(12.105).Theoutputisthedeviationinglucoseconcentrationfromitsmeanvalueinmg/100ml,andtheinputistheintravenousglucoseinjectionrateing/kg/hr(Milhorn,1966).G(s)=407(^+0.916)>+1.27)(5+2.69)(12.105)Designanobserverforthephasevariableswithatransientresponsedescribedby$=0.7andcon=100.SOLUTION:Wecanfirstmodeltheplantinphase-variableform.TheresultisshowninFigure12.20(a).Fortheplant,A=0-3.421-3.96(12.106)C=[372.81407"-3.42407—OJFIGURE12.20a.Plant;b.designedobserverforExample12.912.7AlternativeApproachestoObserverDesign699Calculationoftheobservabilitymatrix,OM=[CCA]T,showsthattheplantisobservableandwecanproceedwiththedesign.Nextfindthecharacteristicequationoftheobserver.Firstwehave0A-LC=1-3.42-3.96h'372.81407/2j-372.81/1(l-407/i)[-(3.42+372.81/2)-(3.96+407/2)J,.,2107)Nowevaluatedet[XI-(A-LC)]=0inordertoobtainthecharacteristicequation:,f(k+372.81/0det[,I-(A-LC)]=det^+^^-(l-407/i)1j%+^+=k2+(3.96+372.81/i+407/2)X+(3.42+84.39/i+372.81¾)=0(12.108)Fromtheproblemstatement,wewant£=0.7andcon=100.Thus,X2+U0X+10,000=0(12.109)ComparingthecoefficientsofEqs.(12.108)and(12.109),wefindthevaluesl\andl2tobe-38.397and35.506,respectively.UsingEq.(12.60),whereA=L=0-3.421-3.96BC=[372.814071;-38.39735.506(12.110)theobserverisimplementedandshowninFigure12.20(b).Skill-AssessmentExercise12.6WileyPLUSPROBLEM:DesignanobserverfortheplantG(s)=CJHJ1ControlSolutionswhoseestimatedplantisrepresentedinstatespaceincascadeformas-71z=Az+Bw=0-800y=Cx=[100]z01z+-9Theclosed-loopstepresponseoftheobserveristohave10%overshootwitha0.1secondsettlingtime.700Chapter12DesignviaStateSpace456"28,6401.54x106_Lz=Thecompletesolutionislocatedatwww.wiley.com/college/nise.Nowthatwehaveexploredtransientresponsedesignusingstate-spacetechniques,letusturntothedesignofsteady-stateerrorcharacteristics.£12.8Steady-StateErrorDesignviaIntegralControlInSection7.8,wediscussedhowtoanalyzesystemsrepresentedinstatespaceforsteady-stateerror.Inthissection,wediscusshowtodesignsystemsrepresentedinstatespaceforsteady-stateerror.ConsiderFigure12.21.ThepreviouslydesignedcontrollerdiscussedinSection12.2isshowninsidethedashedbox.Afeedbackpathfromtheoutputhasbeenaddedtoformtheerror,e,whichisfedforwardtothecontrolledplantviaanintegrator.Theintegratorincreasesthesystemtypeandreducesthepreviousfiniteerrortozero.WewillnowderivetheformofthestateequationsforthesystemofFigure12.21andthenusethatformtodesignacontroller.Thus,wewillbeabletodesignasystemforzerosteady-stateerrorforastepinputaswellasdesignthedesiredtransientresponse.Anadditionalstatevariable,x^,hasbeenaddedattheoutputoftheleftmostintegrator.Theerroristhederivativeofthisvariable.Now,fromFigure12.21,XN(12.111)=r-CxWritingthestateequationsfromFigure12.21,wehavex=Ax+Bw(12.112a)=—Cx+r(12.112b)XN(12.112c)y=Cx-&&-*B-KFIGURE12.21Integralcontrolforsteady-stateerrordesign12.8Steady-StateErrorDesignviaIntegralControlEqs.(12.112)canbewrittenasaugmentedvectorsandmatrices.Hence,A-Cxy=[C0xx0lNJ(12.113a)U++x0](12.113b)XNButu=-Kx+KSXN=-[K-KeXXN(12.114)SubstitutingEq.(12.114)into(12.113a)andsimplifying,weobtainX1XN.=BKe]rx0f(A-BK)-Cy=[C0]r+[°11rx1XN(12.115a)(12.115b)Thus,thesystemtypehasbeenincreased,andwecanusethecharacteristicequationassociatedwithEq.(12.115a)todesignKandKetoyieldthedesiredtransientresponse.Realize,wenowhaveanadditionalpoletoplace.Theeffectonthetransientresponseofanyclosed-loopzerosinthefinaldesignmustalsobetakenintoconsideration.Onepossibleassumptionisthattheclosed-loopzeroswillbethesameasthoseoftheopen-loopplant.Thisassumption,whichofcoursemustbechecked,suggestsplacinghigher-orderpolesattheclosed-loopzerolocations.Letusdemonstratewithanexample.Example12.10DesignofIntegralControlPROBLEM:ConsidertheplantofEqs.(12.116):x=0-31-5y-410]x(12.116a)(12.116b)a.Designacontrollerwithoutintegralcontroltoyielda10%overshootandasettlingtimeof0.5second.Evaluatethesteady-stateerrorforaunitstepinput.b.Repeatthedesignof(a)usingintegralcontrol.Evaluatethesteady-stateerrorforaunitstepinput.SOLUTION:a.Usingtherequirementsforsettlingtimeandpercentovershoot,wefindthatthedesiredcharacteristicpolynomialis52+165+183.1(12.117)701702Chapter12DesignviaStateSpaceSincetheplantisrepresentedinphase-variableform,thecharacteristicpolynomialforthecontrolledplantwithstate-variablefeedbackiss2+(5+k2)s+(3+kl)(12.118)EquatingthecoefficientsofEqs.(12.117)and(12.118),wehavek2}=[180.111]K=[h(12.119)FromEqs.(12.3),thecontrolledplantwithstate-variablefeedbackrepresentedinphase-variableformisx=(A-BK)x+Br=y=Cx=[l0-183.11-16(12.120a)0]x(12.120b)UsingEq.(7.96),wefindthatthesteady-stateerrorforastepinputise(oo)=1+C(A-BK)_1B01=1+110_-183.1-16=0.995!T(12.121)b.WenowuseEqs.(12.115)torepresenttheintegral-controlledplantasfollows:pr17ro=I.-3X21"-5J[01[h.1.[10].%.01-(3+fci)-(5+£2)0-1=[100k2[0".ij0\Xi"Kex2_XN_[00"M1x2+0Ke10XNx\x2[01+0.1.(12.122a)(12.122b)XNUsingEq.(3.73)andtheplantofEqs.(12.116),wefindthatthetransferfunctionoftheplantisG(s)=l/(s2+5s+3).Thedesiredcharacteristicpolynomialfortheclosed-loopintegral-controlledsystemisshowninEq.(12.117).Sincetheplanthasnozeros,weassumenozerosfortheclosed-loopsystemandaugmentEq.(12.117)withathirdpole,(s+100),whichhasarealpartgreaterthanfivetimesthatofthedesireddominantsecond-orderpoles.Thedesiredthird-orderclosed-loopsystemcharacteristicpolynomialis(s+100)(^2+16s+183.1)=s3+116s2+1783.1s+18,310(12.123)ThecharacteristicpolynomialforthesystemofEqs.(12.112)iss3+(5+k2)s2+(3+ki)s+Ke(12.124)12.8Steady-StateErrorDesignviaIntegralControlMatchingcoefficientsfromEqs.(12.123)and(12.124),weobtainfci=1780.1(12.125a)^2=111(12.125b)ke=18,310(12.125c)SubstitutingthesevaluesintoEqs.(12.122)yieldsthisclosed-loopintegralcontrolledsystem:01-1783.1X2UJVJy=[l0-11618,310-10x2"0"+0.XN..lj"Xi'0x\00]x2xN(12.126a)(12.126b)Inordertocheckourassumptionforthezero,wenowapplyEq.(3.73)toEqs.(12.126)andfindtheclosed-looptransferfunctiontobeT(s)=18,310s+U6s+1783.1*+18,3103(12.127)2Sincethetransferfunctionmatchesourdesign,wehavethedesiredtransientresponse.Nowletusfindthesteady-stateerrorforaunitstepinput.ApplyingEq.(7.96)toEqs.(12.126),weobtaine(oo)=l+[l010100]-1783.1-11618,310-100_1"0"0=01(12.128)Thus,thesystembehaveslikeaType1system.Skill-AssessmentExercise12.7PROBLEM:Designanintegralcontrollerfortheplantx=\01-7--9jv=[4l]xx+r°itoyieldastepresponsewith10%overshoot,apeaktimeof2seconds,andzerosteady-stateerror.ANSWER:K=[2.21-2.7],Ke=3.79Thecompletesolutionislocatedatwww.wiley.com/college/nise.703704Chapter12DesignviaStateSpaceNowthatwehavedesignedcontrollersandobserversfortransientresponseandsteady-stateerror,wesummarizethechapterwithacasestudydemonstratingthedesignprocess.CaseStudyDesignAntennaControl:DesignofControllerandObserverInthiscasestudy,weuseourongoingantennaazimuthpositioncontrolsystemtodemonstratethecombineddesignofacontrollerandanobserver.Wewillassumethatthestatesarenotavailableandmustbeestimatedfromtheoutput.Theblockdiagramoftheoriginalsystemisshownonthefrontendpapers,Configuration1.Arbitrarilysettingthepreamplifiergainto200andremovingtheexistingfeedback,theforwardtransferfunctionissimplifiedtothatshowninFigure12.22.(/(*•)=E(s)Y(s)=0„(.v)1325s(s+\.7\)(s+100)FIGURE12.22Simplifiedblockdiagramofantennacontrolsystemshownonthefrontendpapers(Configuration1)withK=200Thecasestudywillspecifyatransientresponseforthesystemandafastertransientresponsefortheobserver.Thefinaldesignconfigurationwillconsistoftheplant,theobserver,andthecontroller,asshownconceptuallyinFigure12.23.Thedesignoftheobserverandthecontrollerwillbeseparate.Plantr=0+^MB7\X3£/+9CAObserverUB+x~XX/+c^fy*V1yyeALsJControllei-KFIGURE12.23Conceptualstate-spacedesignconfiguration,showingplant,observer,andcontrollerCaseStudy705PROBLEM:UsingthesimplifiedblockdiagramoftheplantfortheantennaazimuthpositioncontrolsystemshowninFigure12.22,designacontrollertoyielda10%overshootandasettlingtimeof1second.Placethethirdpole10timesasfarfromtheimaginaryaxisasthesecond-orderdominantpair.Assumethatthestatevariablesoftheplantarenotaccessibleanddesignanobservertoestimatethestates.Thedesiredtransientresponsefortheobserverisa10%overshootandanaturalfrequency10timesasgreatasthesystemresponseabove.Asinthecaseofthecontroller,placethethirdpole10timesasfarfromtheimaginaryaxisastheobserver'sdominantsecond-orderpair.SOLUTION:ControllerDesign:Wefirstdesignthecontrollerbyfindingthedesiredcharacteristicequation.A10%overshootandasettlingtimeof1secondyield£=0.591andcon—6.77.Thus,thecharacteristicequationforthedominantpolesiss2+8s+45.8=0,wherethedominantpolesarelocatedat-4±/5.46.Thethirdpolewillbe10timesasfarfromtheimaginaryaxis,orat—40.Hence,thedesiredcharacteristicequationfortheclosed-loopsystemis(s2+8s+45.8)(5+40)=s3+48s2+365.85+1832=0(12.129)Nextwefindtheactualcharacteristicequationoftheclosed-loopsystem.Thefirststepistomodeltheclosed-loopsysteminstatespaceandthenfinditscharacteristicequation.FromFigure12.22,thetransferfunctionoftheplantis13251325(12.130)2s(s+1.71)(5+100)s{s+101.715+171)Usingphasevariables,thistransferfunctionisconvertedtothesignal-flowgraphshowninFigure12.24,andthestateequationsarewrittenasfollows:G(s)=x=0"001x+0u=Ax+Bw1001-101.710-171(12.131a)y=[132500]x=Cx(12.131b)Wenowpauseinourdesigntoevaluatethecontrollabilityofthesystem.Thecontrollabilitymatrix,CM,is00121-101.71(12.132)CM=[BABAB01-101.7110,173.92ThedeterminantofCMis-1;thus,thesystemiscontrollable.1O«•Oll7s"O"—O325*O-oFIGURE12.24Signal-flowgraphforG(s)=1325/[s(s2+101.71s+171)]706Chapter12DesignviaStateSpaceFIGURE12.25Plantwithstate-variablefeedbackforcontrollerdesignContinuingwiththedesignofthecontroller,weshowthecontroller'sconfigurationwiththefeedbackfromallstatevariablesinFigure12.25.WenowfindthecharacteristicequationofthesystemofFigure12.25.FromEq.(12.7)andEq.(12.131a),thesystem
matrix,A—BK,isA-BK=00[-ki10-(171+¾)01-(101.71+¾)](12.133)Thus,theclosed-loopsystem'scharacteristicequationisdet[sl-(A-BK)]=s3+(101.71+k3)s2+(171+k2)s+%=0(12.134)MatchingthecoefficientsofEq.(12.129)withthoseofEq.(12.134),weevaluatethefc/sasfollows:ki=1832(12.135a)k2=194.8(12.135b)h=-53.71(12.135c)ObserverDesign:Beforedesigningtheobserver,wetestthesystemforobservability.UsingtheAandCmatricesfromEqs.(12.131),theobservabilitymatrix,OM,iscOM=CACA2=132500013250001325(12.136)ThedeterminantofOMis13253.Thus,OMisofrank3,andthesystemisobservable.Wenowproceedtodesigntheobserver.Sincetheorderofthesystemisnothigh,wewilldesigntheobserverdirectlywithoutfirstconvertingtoobservercanonicalform.FromEq.(12.64a)weneedfirsttofindA-LC.AandCfromEqs.(12.131)alongwithL=(12.137)CaseStudyareusedtoevaluateA—LCasfollows:[-1325/i10101A-LC=-1325/2-1325/3-171-101.71_Thecharacteristicequationfortheobserverisnowevaluatedas(12.138)detpd-(A-LC)]=A3+(132¾+101.71)A2+(134,800/i+1325/2+171)A+(226,600/i+134,800/2+1325/3)=0(12.139)Fromtheproblemstatement,thepolesoftheobserveraretobeplacedtoyielda10%overshootandanaturalfrequency10timesthatofthesystem'sdominantpairofpoles.Thus,theobserver'sdominantpolesyield[s2+(2x0.591x67.7)5+67.72]=(s2+80s+4583).Therealpartoftherootsofthispolynomialis—40.Thethirdpoleisthenplaced10timesfartherfromtheimaginaryaxisat-400.Thecompositecharacteristicequationfortheobserveris{s2+805+4583)(5+400)=s3+480s2+36,5805+1,833,000=0(12.140)MatchingcoefficientsfromEqs.(12.139)and(12.140),wesolvefortheobservergains:/i=0.286(12.141a)h=-1-57(12.141b)h=1494(12.141c)Figure12.26,whichfollowsthegeneralconfigurationofFigure12.23,showsthecompleteddesign,includingthecontrollerandtheobserver.Observer/,=1494FIGURE12.26Completedstatespacedesignfortheantennaazimuthpositioncontrolsystem,showingcontrollerandobserver707Chapter120FIGURE12.27Designedresponseofantennaazimuthpositioncontrolsystem:a.impulseresponse—plantandobserverwiththesameinitialconditions,x\(0)=x\(0)=0;b.portionofimpulseresponse—plantandobserverwithdifferentinitialconditions,1¾(0)=0.006fortheplant,x\(0)=0fortheobserverDesignviaStateSpace0.20.40.60.811.21.4Time(seconds)(a)1.61.82.00.010.020.030.040.050.060.070.080.090.1Time(seconds)(b)TheresultsofthedesignareshowninFigure12.27.Figure12.27(a)showstheimpulseresponseoftheclosed-loopsystemwithoutanydifferencebetweentheplantanditsmodelingasanobserver.Theundershootandsettlingtimeapproximatelymeettherequirementssetforthintheproblemstatementof10%and1second,respectively.InFigure12.27(b),weseetheresponsedesignedintotheobserver.Aninitialconditionof0.006wasgiventoX\intheplanttomakethemodelingoftheplantandobserverdifferent.Noticethattheobserver'sresponsefollowstheplant'sresponsebythetime0.06secondisreached.CHALLENGE:Youarenowgivenacasestudytotestyourknowledgeofthischapter'sobjectives:Youaregiventheantennaazimuthpositioncontrolsystemshownonthefrontendpapers,Configuration3.IfthepreamplifiergainK=20,dothefollowing:a.Designacontrollertoyield15%overshootandasettlingtimeof2seconds.Placethethirdpole10timesasfarfromtheimaginaryaxisasthesecond-orderdominantpolepair.Usephysicalvariablesasfollows:poweramplifieroutput,motorangularvelocity,andmotordisplacement.b.Redrawtheschematicshownonthefrontendpapers,showingatachometerthatyieldsratefeedbackalongwithanyaddedgainsorattenuatorsrequiredtoimplementthestate-variablefeedbackgains.Summary709c.Assumethatthetachometerisnotavailabletoprovideratefeedback.Designanobservertoestimatethephysicalvariables'states.Theobserverwillrespondwith10%overshootandanaturalfrequency10timesasgreatasthesystemresponse.Placetheobserver'sthirdpole10timesasfarfromtheimaginaryaxisastheobserver'sdominantsecond-orderpolepair.d.Redrawtheschematiconthefrontendpapers,showingtheimplementationofthecontrollerandtheobserver.e.RepeatPartsaandcusingMATLAB.^Summary^ThischapterhasfollowedthepathestablishedbyChapters9and11—controlsystemdesign.Chapter9usedrootlocustechniquestodesignacontrolsystemwithadesiredtransientresponse.SinusoidalfrequencyresponsetechniquesfordesignwerecoveredinChapter11,andinthischapterweusedstate-spacedesigntechniques.State-spacedesignconsistsofspecifyingthesystem'sdesiredpolelocationsandthendesigningacontrollerconsistingofstate-variablefeedbackgainstomeettheserequirements.Ifthestatevariablesarenotavailable,anobserverisdesignedtoemulatetheplantandprovideestimatedstatevariables.Controllerdesignconsistsoffeedingbackthestatevariablestotheinput,u,ofthesystemthroughspecifiedgains.Thevaluesofthesegainsarefoundbymatchingthecoefficientsofthesystem'scharacteristicequationwiththecoefficientsofthedesiredcharacteristicequation.Insomecasesthecontrolsignal,u,cannotaffectoneormorestatevariables.Wecallsuchasystemuncontrollable.Forthissystem,atotaldesignisnotpossible.Usingthecontrollabilitymatrix,adesignercantellwhetherornotasystemiscontrollablepriortothedesign.Observerdesignconsistsoffeedingbacktheerrorbetweentheactualoutputandtheestimatedoutput.Thiserrorisfedbackthroughspecifiedgainstothederivativesoftheestimatedstatevariables.Thevaluesofthesegainsarealsofoundbymatchingthecoefficientsoftheobserver'scharacteristicequationwiththecoefficientsofthedesiredcharacteristicequation.Theresponseoftheobserverisdesignedtobefasterthanthatofthecontroller,sotheestimatedstatevariableseffectivelyappearinstantaneouslyatthecontroller.Forsomesystems,thestatevariablescannotbededucedfromtheoutputofthesystem,asisrequiredbytheobserver.Wecallsuchsystemsunobservable.Usingtheobservabilitymatrix,thedesignercantellwhetherornotasystemisobservable.Observerscanbedesignedonlyforobservablesystems.Finally,wediscussedwaysofimprovingthesteady-stateerrorperformanceofsystemsrepresentedinstatespace.Theadditionofanintegrationbeforethecontrolledplantyieldsimprovementinthesteady-stateerror.Inthischapter,thisadditionalintegrationwasincorporatedintothecontrollerdesign.Threeadvantagesofstate-spacedesignareapparent.First,incontrasttotherootlocusmethod,allpolelocationscanbespecifiedtoensureanegligibleeffectofMATLAB«1»Chapter12DesignviaStateSpacethenondominantpolesuponthetransientresponse.Withtherootlocus,wewereforcedtojustifyanassumptionthatthenondominantpolesdidnotappreciablyaffectthetransientresponse.Wewerenotalwaysabletodoso.Second,withtheuseofanobserver,wearenolongerforcedtoacquiretheactualsystemvariablesforfeedback.Theadvantagehereisthatsometimesthevariablescannotbephysicallyaccessed,oritmaybetooexpensivetoprovidethataccess.Finally,themethodsshownlendthemselvestodesignautomationusingthedigitalcomputer.Adisadvantageofthedesignmethodscoveredinthischapteristhedesigner'sinabilitytodesignthelocationofopen-orclosed-loopzerosthatmayaffectthetransientresponse.Inrootlocusorfrequencyresponsedesign,thezerosofthelagorleadcompensatorcanbespecified.Anotherdisadvantageofstate-spacemethodsconcernsthedesigner'sabilitytorelateallpolelocationstothedesiredresponse;thisrelationshipisnotalwaysapparent.Also,oncethedesigniscompleted,wemaynotbesatisfiedwiththesensitivitytoparameterchanges.Finally,aspreviouslydiscussed,state-spacetechniquesdonotsatisfyourintuitionasmuchasrootlocustechniques,wheretheeffectofparameterchangescanbeimmediatelyseenaschangesinclosed-looppolelocations.Inthenextchapterwereturntothefrequencydomainanddesigndigitalsystemsusinggainadjustmentandcascadecompensation.(^ReviewQuestions^1.Brieflydescribeanadvantagethatstate-spacetechniqueshaveoverrootlocustechniquesintheplacementofclosed-looppolesfortransientresponsedesign.2.Brieflydescribethedesignprocedureforacontroller.3.Differentsignal-flowgraphscanrepresentthesamesystem.Whichformfacilitatesthecalculationofthevariablegainsduringcontrollerdesign?4.Inordertoeffectacompletecontrollerdesign,asystemmustbecontrollable.Describethephysicalmeaningofcontrollability.5.Underwhatconditionscaninspectionofthesignal-flowgraphofasystemyieldimmediatedeterminationofcontrollability?6.Inordertodeterminecontrollabilitymathematically,thecontrollabilitymatrixisformed,anditsrankevaluated.Whatisthefinalstepindeterminingcontrollabilityifthecontrollabilitymatrixisasquarematrix?7.Whatisanobserver?8.Underwhatconditionswouldyouuseanobserverinyourstate-spacedesignofacontrolsystem?9.Brieflydescribetheconfigurationofanobserver.10.Whatplantrepresentationlendsitselftoeasierdesignofanobserver?11.Brieflydescribethedesigntechniqueforanobserver,giventheconfigurationyoudescribedinQuestion9.12.Comparethemajordifferenceinthetransientresponseofanobservertothatofacontroller.Whydoesthisdifferenceexist?13.Fromwhatequationdowefindthecharacteristicequationofthecontrollercompensatedsystem?14.Fromwhatequationdowefindthecharacteristicequationoftheobserver?Problems15.Inordertoeffectacompleteobserverdesign,asystemmustbeobservable.Describethephysicalmeaningofobservability.16.Underwhatconditionscaninspectionofthesignal-flowgraphofasystemyieldimmediatedeterminationofobservability?17.Inordertodetermineobservabilitymathematically,theobservabilitymatrixisformedanditsrankevaluated.Whatisthefinalstepindeterminingobservabilityiftheobservabilitymatrixisasquarematrix?Problems1.Considerthefollowingopen-looptransferfunctions,whereG(s)=Y(s)/U(s),Y(s)istheLaplacetransformoftheoutput,andU(s)istheLaplacetransformoftheinputcontrolsignal:i.G(s)=(*+3)5+4)2sii.G(s)=(s5)(s+l)20s(s+7)iii.G(s)=(5+3)(5+7)(5+9)30(5+2)(5+3)iv.G{s)=(5+4)(5+5)(5+6)85+15v.G(s)=2(5+45+10)(52+35+12)50(52+75+25)5(5+10)(5+20)50(5+3)(5+4)G(s)=(5+5)(5+6)(5+7)G{s)=ii.d.Write,byinspection,theclosed-looptransferfunction,T(s),foryourclosed-loopsignal-flowgraphs.e.VerifyyouranswersforT(s)byfindingtheclosed-looptransferfunctionsfromthestateequationsandEq.(3.73).30(5+2)(5+7)5(5+3)(5+5)Foreach,dothefollowing:[Section:12.4]a.Drawthesignal-flowgraphandshowthestatevariablefeedback.3.Thefollowingopen-looptransferfunctionscanberepresentedbysignal-flowgraphsinparallelform.a.Drawthesignal-flowgraphinphase-variableform.b.Addstate-variablefeedbacktothesignal-flowgraph.c.Foreachclosed-loopsignal-flowgraph,writethestateequations.i.G(s)=*°^5(52+35+7)(5+2)(52+25+10)b.Findtheclosed-looptransferfunctionwithstatevariablefeedback.Foreachofthesetransferfunctions,dothefollowing:[Section:12.2]2.Thefollowingopen-looptransferfunctionscanberepresentedbysignal-flowgraphsincascadeform...nwileypius>Yi'i«controlsolutionsForeach,dothefollowing:[Section:12.4]a.Drawthesignal-flowgraphandshowthestatevariablefeedback.b.Findtheclosed-looptransferfunctionwithstatevariablefeedback.4.Giventhefollowingopen-loopplant,[Section:12.2]G(s)=205+2)(5+4)(5+8)designacontrollertoyielda15%overshootandasettlingtimeof0.75second.Placethethirdpole10timesasfarfromtheimaginaryaxisasthedominantpolepair.Usethephasevariablesforstate-variablefeedback.5.Section12.2showedthatcontrollerdesigniseasiertoimplementiftheuncompensatedsystemisrepresentedinphase-variableformwithitstypicallowercompanionmatrix.Wealludedtothefactthatthedesigncanjustaseasilyprogressusingthecontrollercanonicalformwithitsuppercompanionmatrix.[Section:12.2]712Chapter12DesignviaStateSpace-1FIGUREP12.1a.RedothegeneralcontrollerdesigncoveredinSection12.2,assumingthattheplantisrepresentedincontrollercanonicalformratherthanphase-variableform.10.GiventheplantshowninFigureP12.1,b.ApplyyourderivationtoExample12.1iftheuncompensatedplantisrepresentedincontrollercanonicalform.11.Foreachoftheplantsrepresentedbysignal-6.Giventhefollowingopen-loopplant:[Section:12.2]WileyPLUSwhatrelationshipexistsbetweenb\andb2tomakethesystemuncontrollable?[Section:12.3]wileypiusaVJUKcontrolsolutionsflowgraphsinFigureP12.2,determinethecontrollability.Ifthecontrollabilitycanbedeterminedbyinspection,statethatitcanandthenverifyyourconclusionsusingthecontrollabilitymatrix.[Section:12.3]ControlSolutions100(^+2)(5+20)G(s)=(5+1)(5+3)(5+4)designacontrollertoyield15%overshootwithapeaktimeof0.5second.Usethecontrollercanonicalformforstate-variablefeedback.7.Giventhefollowingopen-loopplant:[Section:12.2]G{s)=20(5+2)5(5+5)(5+7)designacontrollertoyielda10%overshootandasettlingtimeof2seconds.Placethethirdpole10timesasfarfromtheimaginaryaxisasthedominantpolepair.Usethephasevariablesforstate-variablefeedback.8.RepeatProblem4assumingthattheplantisrepresentedinthecascadeform.Donotconverttophasevariableform.[Section:12.4]9.RepeatProblem7assumingthattheplantisrepresentedintheparallelform.Donotconverttophasevariableform.[Section:12.4]12.UseMATLABtodeterminetheMATLABcontrollabilityofthesystemsofFigureP12.2(d)and(f).13.InSection12.4,wediscussedhowtodesignacontrollerforsystemsnotrepresentedinphase-variableformwithitstypicallowercompanionmatrix.Wedescribedhowtoconvertthesystemtophasevariableform,designthecontroller,andconvertbacktotheoriginalrepresentation.Thistechniquecanbeappliedjustaseasilyiftheoriginalrepresentationisconvertedtocontrollercanonicalformwithitstypicaluppercompanionmatrix.RedoExample12.4inthetextbydesigningthecontrollerafterconvertingtheuncompensatedplanttocontrollercanonicalform.[Section:12.4]14.Considerthefollowingtransferfunction:G(s)=(5+6)(5+3)(5+8)(5+10)Ifthesystemisrepresentedincascadeform,asshowninFigureP12.3,designacontrollertoyieldProblems713FIGUREP12.2aclosed-loopresponseof10%overshootwithasettlingtimeof1second.Designthecontrollerbyfirsttransformingtheplanttophasevariables.[Section:12.4]15.UseMATLABtodesigntheMATLABcontrollergainsforthetf^TlfesystemgiveninProblem14.tmi5+10Z3(5)16.RepeatProblem14assumingthattheplantisrepresentedinparallelform.[Section:12.4]wileypms17.^open-loopsystemofProblem14JWiM-lisrepresentedasshowninFigureP12.4.^^60UtPut°feacnblockControlSolutions'sass'gnedtobeastatevariable,designthecontrollergainsforfeedbackfromthesestatevariables.[Section:12.4]]5+8FIGUREP12.3Z2(5)5+65+3K(.v)Chapter12U(s]DesignviaStateSpaceZ-it*)15+3K(.s)=Z|(.s)Zo(.v)5+65+105+8FIGUREP12.418.Ifanopen-loopplant,fromtheimaginaryaxisthanthedominantpoles.[Section:12.5]21.Designanobserverfortheplant100G(s)=s(s+5){s+9)isrepresentedinparallelform,designacontrollertoyieldaclosed-loopresponseof15%overshootandapeaktimeof0.2second.Designthecontrollerbyfirsttransformingtheplanttocontrollercanonicalform.[Section:12.4]19.Foraspecificindividual,theMATLABlineartime-invariantmodelofthehypothalamic-pituitaryadrenalaxisoftheendocrinesystemwithfivestatevariableshasbeenfoundtobe(Kyrylov,Xi2005)r_-0.014C-1.400-0.023-0.023000.67-0.670.380.003264000.06-0.060000.00170-0.0010.023x2x3—0.134X4.X5_.rxnmX*30+0doX40LX5.LOJ10C()W(s+3)(s+7){s+15)operatingwith10%overshootand2secondspeaktime.Designtheobservertorespond10timesasfastastheplant.Placetheobserverthirdpole20timesasfarfromtheimaginaryaxisastheobserverdominantpoles.Assumetheplantisrepresentedinobservercanonicalform.[Section:12.5]22.RepeatProblem20assumingthattheplantisrepresentedinphase-variableform.Donotconverttoobservercanonicalform.[Section:12.7]23.ConsidertheplantwileyPLus(,+2)G(s)=7—^-=-,were(s+5)(s+9)whosephasevariablesarenotavailable.Designanobserverforthephasevariableswithatransientresponsedescribedby£=0.6andco„—120.Donotconverttoobservercanonicalform.[Section:12.7]24.DeterminewhetherornoteachofthesystemsshowninFigureP12.2isobservable.[Section:12.6]MATLAB26.GiventheplantofFigureP12.5,whatrelationshipmustexistbetweenC\andc2inorderforthesystemtobeunobservable?[Section:12.6]a.UseMATLABtodetermineifthesystemiscontrollable.b.UseMATLABtoexpressthematricesAandBinphase-variableform.20.Considertheplant1s(s+3)(s+l)whosestatevariablesarenotavailable.Designanobserverfortheobservercanonicalvariablestoyieldatransientresponsedescribedby£=0.4andcon=75.Placethethirdpole10timesfartherControlSolutionsw25.UseMATLABtodeterminetheobservabilityofthesystemsofFigureP12.2(a)and(f).Thestate-variabledefinitionsgiveninProblem25,Chapter3.G(s)=CUE*^r-1FIGUREP12.5Problems27.Designanobserverfortheplant1G(s)=(.S+5)(.5+13)(.5+20)designanintegralcontrollertoyielda10%overshoot,0.5-secondsettlingtime,andzerosteadystateerrorforastepinput.[Section:12.8]representedincascadeform.Transformtheplanttoobservercanonicalformforthedesign.Thentransformthedesignbacktocascadeform.Thecharacteristicpolynomialfortheobserveristobes3+60052+40,000s+1,500,000.28.UseMATLABtodesigntheobservergainsforthesystemgiveninProblem27.MATLAB29.RepeatProblem27assumingthattheplantisrepresentedinparallelform.[Section:12.7]30.Designanobserverfor50r,x=U(s+3)(s+6){s+9)representedinphase-variableformwithadesiredperformanceof10%overshootandasettlingtimeof0.5second.Theobserverwillbe10timesasfastastheplant,andtheobserver'snondominantpolewillbe10timesasfarfromtheimaginaryaxisastheobserver'sdominantpoles.Designtheobserverbyfirstconvertingtoobservercanonicalform.[Section:12.7]31.Observabilityandcontrollabilitypropertiesdependonthestate-spacerepresentationchosenforagivensystem.Ingeneral,observabilityandcontrollabilityareaffectedwhenpole-zerocancellationsarepresentinthetransferfunction.Considerthefollowingtwosystemswithrepresentations:xt=A(-x/=B/ry=Qx/;"011[01;C;B1=1=-2-311ro°10A2=C)1;B2=0C2=[620iL-6-11-6.Ai=r°ia.ShowthatbothsystemshavethesameY(s)transferfunctionG,(s)=—j-~afterpole-zeroR(s)cancellations.b.Evaluatetheobservabilityofbothsystems.32.Giventheplantx=-1012x+wileypwsu;v=[lllx715ControlSolutions33.RepeatProblem32forthefollowingplant:[Section:12.8]-20x=1-5u;y=[ll]xDESIGNPROBLEMS34.AmagneticlevitationsystemisdescribedinProblem50inChapter9(Cho,1993).RemovethephotocellinFigureP9.14(Z?)anddesignacontrollerforphasevariablestoyieldastepresponsewith5%overshootandasettlingtimeof0.5second.35.Problem24inChapter3introducedthemodelforpatientstreatedunderaregimenofasingledayofGlargineinsulin{Tarin,2005).Themodeltofindtheresponseforaspecificpatienttomedicationcanbeexpressedinphase-variableformwithA=0100-501.6x10"601-128.8x10-3-854x10"31]B=0;0C=[0.78xl0-441.4x10-40.01];D=0Thestatevariableswilltakeonadifferentsignificanceinthisexpression,buttheinputandtheoutputremainthesame.Recallthatu=externalinsulinflow,andv=plasmainsulinconcentration.a.Obtainastate-feedbackgainmatrixsothattheclosed-loopsystemwillhavetwoofitspolesplacedat-1/15andthethirdpoleat-1/2.b.UseMATLABtoverifythatthepolesappearatthepositionsspecifiedinParta.MATLAB36.FigurePI2.6showsacontinuousstirredtankreactorinwhichanaqueoussolutionofsodiumacetate(CH3COONa)isneutralizedinthemixingtankwithhydrochloricacid(HC1)tomaintainaparticularpHinthemixingtank.Theamountofacidinthemixiscontrolledbyvaryingtherotationalspeedofafeedingperistalticpump.AnominallinearizedtransferfunctionfromHC1flowratetopHhasbeenshowntobe716Chapter12DesignviaStateSpaceControlsignalPHmeasurementInletstreamControlacidstream>roPeristalticpumpJLiquidtankLiquidpumpMixingtankFIGUREP12.6(Tadeo,2000)4G(s)=-4-0.9580x10"s-0.01197x10s3+0.525052+0.012655+0.000078a.Writethesysteminstate-spacephase-variableform.b.Usestate-feedbackmethodstodesignamatrixKthatwillyieldanoverdampedoutputpHresponsewithasettlingtimeofTs«5minforastepinputchangeinpH.c.SimulatethestepresponseFc...,..„MATLABoftheresultingclosed-loop^TT^fcsystemusingMATLAB.37.Inthedc-dcconverterofProblem67,Chapter4(VanDijk,1995)withL=6mH,C=1mF,R=100fl,a50%PWMdutycycle,andassumingthesystem'soutputisthevoltageacrossthecapacitor,themodelcanbeexpressedasuc0-83.33500-10JLMcJy=[Q1166.67E,0kUc.Acidtank(©2000IEEE)c.Findasetofstate-feedbackgainstoobtain20%overshootandasettlingtimeof0.5secondinthephase-variablesystem.d.Obtainthecorrespondingsetofstate-feedbackgainsintheoriginalsystem.e.VerifythatthesetofgainsinPartdplacestheclosed-looppolesatthedesiredpositions.f.SimulatetheunitstepresponseofthesystemusingMATLAB.38.a.Designanobserverforthedc-dcconverterofProblem37.Theobservershouldhavetimeconstants10timessmallerthanthoseoftheoriginalsystem.b.SimulateyoursystemandsimulinkobserverforaunitstepinputusingSimulink.Assumethattheinitialconditionsfortheoriginal2Theobserversystemare1(0)=1shouldhaveinitialconditions4(0)=a.Findthesystem'stransferfunction.b.Expressthesystem'sstateequationsinphasevariableform.MATLAB039.a.DesignanobserverfortheneutralizationsystemusingthecontinuousstirredtankreactorofProblemsProblem36.Theobservershouldhavetimeconstants10timessmallerthanthoseoftheoriginalsystem.Assumethattheoriginalstatevariablesarethoseobtainedinthephasevariablerepresentation.b._,.,..,Simulink717replacethetemperaturefeedbackpathwithaphase-variablecontrollerthatyieldsa5%overshootandasettlingtimeof10minutes.Also,designanobserverthatwillrespond10timesfasterthanthesystembutwiththesamepercentovershoot.Simulateyoursystemand41.a.Redesignthedc-dcconvertersystemofProblemobserverforaunitstepin37toincludeintegralcontrol.putusingSimulink.Assumethattheinib.SimulateyoursystemforaSimulinktialconditionsfortheoriginalsystemstepinputusingSimulink"-1arex(0)=-10andverifythatthespecifiTheobservershould3cationsaremet.Inparticular,verifythatthesystemhaszerosteady-stateerror.haveinitialconditionsx(0)=40.Theconceptualblockdiagramofagas-firedheaterisshowninFigureP12.7.Thecommandedfuelpressureisproportionaltothedesiredtemperature.Thedifferencebetweenthecommandedfuelpressureandameasuredpressurerelatedtotheoutputtemperatureisusedtoactuateavalveandreleasefueltotheheater.Therateoffuelflowdeterminesthetemperature.Whentheoutputtemperatureequalstheequivalentcommandedtemperatureasdeterminedbythecommandedfuelpressure,thefuelflowisstoppedandtheheatershutsoff(Tyner,1968).Ifthetransferfunctionoftheheater,GH(s),isGH(s)=1degreesF(5+0.4)(^+0.8)ft3/minandthetransferfunctionofthefuelvalve,Gv(s),isGv{s)=5ft3/mins-\-5psia.Designacontrollertoyield10%overshootandasettlingtimeof0.05second.Assumethatthestatevariablesaretheoutputposition,outputvelocity,andamplifieroutput.b.Evaluatethesteady-stateerrorandredesignthesystemwithanintegralcontrollertoreducethesteady-stateerrortozero.(Useofaprogramwithsymboliccapabilityishighlyrecommended.)c.SimulatethestepresponseMATLABforboththecontrollercompensatedandintegralcontroller-compensatedsystems.UseMATLABoranyothei-computerprogram.IIICommandedfuelpressure42.ThefloppydiskdriveofProblem57W'leyPLusinChapter8istoberedesigned^VJilfcontrolsolutionsusingstate-variablefeedback.Thecontrollerisreplacedbyaunitydcgainamplifier,G„(s)=800/(^+800).Theplant,Gp(s)=20,000/[s(s+100)],isincascadewiththeamplifier.FuelpressureerrorFuelvalve16-"FIGUREP12.7TemperaturerateHeaterTemperaturesensorandganBlockdiagramofagas-firedheater718Chapter12DesignviaStateSpace43.GiventheangleofattackMATLABcontrolsystemfortheAFTI/F-16aircraftshowninFigureP9.15(Monahemi,1992),useMATLABtodesignacontrollerfortheplanttoyield10%overshootwithasettlingtimeof0.5second.Assumethatthephasevariablesareaccessible.Havetheprogramdisplaythestepresponseofthecompensatedsystem.44.Fortheangleofattack,controlMATLABsystemofProblem43,useMATLABtodesignanobserverforthephasevariablesthatis15timesfasterthanthecontrollerdesignedsystem.45.FortheangleofattackcontrolsystemofProblem43,dothefollowing:a.Designanintegralcontrolusingphasevariablestoreducethesteady-stateerrortozero.(Useofaprogramwithsymboliccapabilityishighlyrecommended.)b.UseMATLABtoobtainthestepresponse.MATLAB46.Theuseoffeedbackcontroltovarythepitchangleinthebladesofavariablespeedwindturbineallowspowergenerationoptimizationundervariablewindconditions(Liu,2008).Ataspecificoperatingpoint,itispossibletolinearizeturbinemodels.Forexample,themodelofathree-bladeturbinewitha15mradiusworkingin12m/swind-speedandgenerating220Vcanbeexpressedas:x=-5000000100-10.5229-1066.67-3.3802823.510700993.8043.125-23.5107000510+0u0010-10wherethestatevariablevectorisgivenbyIIHere,ft=pitchangleofthewindturbineblades,£—relativeangleofthesecondaryshaft,cog=generatorspeed,andcogm—generatormeasurementspeed.Thesysteminputisu,thepitchanglereference,andtheoutputisy,theactivepowergenerated.a.Findastatefeedbackvectorgainsuchthatthesystemrespondswitha10%overshootandasettlingtimeof2secondsforastepinput.b.UseMATLABtoverifytheoperationofthesystemunderstatefeedback.y=0001.223,-clO5OFMATLABPROGRESSIVEANALYSISANDDESIGNPROBLEMS47.High-speedrailpantograph.Problem21inChapter1discussesactivecontrolofapantographmechanismforhigh-speedrailsystems(O'Connor,1997).InProblem79(a),Chapter5,youfoundtheblockdiagramfortheactivepantographcontrolsystem.Fortheopen-loopportionofthepantographsystemmodeledinChapter5,dothefollowing:a.Designacontrollertoyield20%overshootanda1-secondsettlingtime.b.RepeatPartawithazerosteady-stateerror.48.ControlofHIV/AIDS.ThelinearizedmodelofHIVinfectionwhenRTIsareusedfortreatmentwasintroducedinChapter4andrepeatedhereforconvenience(Craig,2004):T-0.04167A.*T0.0217v00-0.0058T-0.240.0058r100-2.4v5.2-5.2U\0T0(0,,.S"iy=[001]rvCyberExplorationLaboratory2719+0.03787ehU)u,U)50i*««(0T{t)205+20W7-,-(0•8f-*®*mm7.226SW)0.061547/(0O.I£0(01''/«(0FIGUREP12.8TrepresentsthenumberofhealthyT-cells,Vthenumberofinfectedcells,andvthenumberoffreeviruses.a.Designastate-feedbackschemetoobtain(1)zerosteady-stateerrorforstepinputs(2)10%overshoot(3)asettlingtimeofapproximately100days(Hint:thesystem'stransferfunctionhasanopenloopzeroatapproximately—0.02.Useoneofthepolesinthedesiredclosed-loop-polepolynomialtoeliminatethiszero.Placethehigher-orderpole6.25timesfurtherthanthedominantpair.)b.SimulatetheunitstepresponseofyourdesignusingSimulink.withaunitysteady-stategainandatimeconstantof50ms;andthepoweramplifiergainsetto50.Whereasthestatevariablesremainasthemotorangularspeed,co(t),andarmaturecurrent,Ia{t),weassumenowthatwehaveonlyoneinputvariable,uc(t),thecommandvoltagefromtheelectroniccontrolunit,andoneoutputvariable,carspeed,v=rco/iiot=0.06154a>.Thechangeintheloadtorque,Tc(t),isrepresentedasaninternalfeedbackproportionaltom(t),Lookingatthediagram,thestateequationsmaybewrittenas:Simulinky{t)-20-40la0.2491-0.01910)=v(t)=[00.05154]+w•oiUc(t).1000.VCO.49.Hybridvehicle.InProblem3.32,weintroducedtheideathatwhenanelectricmotoristhesolemotiveforceproviderforahybridelectricvehicle(HEV),theforwardpathsofallHEVtopologiesaresimilar.Itwasnotedthat,ingeneral,theforwardpathofanHEVcruisecontrolsystemcanberepresentedbyablockdiagramsimilartothatofFigureP3.19(Preitl,2007).ThediagramisshowninFigureP12.8,withtheparameterssubstitutedbytheirnumericalvaluesfromProblem6.69;themotorarmaturerepresentedasafirst-ordersystema.Designanintegralcontrollerfor%OS<4.32%,asettlingtime,Ts<4.4sec,andazerosteady-stateerrorforastepinput(Hint:Toaccountfortheeffectoftheintegralcontrolleronthetransientresponse,useTs=4secondsinyourcalculationofthevalueofthenaturalfrequency,con,oftherequireddominantpoles).b.UseMATLABtoverifythatthedesignrequirementsaremet.CyberExplorationLaboratoryExperiment12.1ObjectiveTosimulateasystemthathasbeendesignedfortransientresponseviaastate-spacecontrollerandobserver.MATLABChapter12DesignviaStateSpaceMinimumRequiredSoftwarePackagesMATLAB,Simulink,andtheControlSystemToolboxPrelab1.ThisexperimentisbaseduponyourdesignofacontrollerandobserverasspecifiedintheCaseStudyChallengeprobleminChapter12.Onceyouhavecompletedthecontrollerandobserverdesigninthatproblem,goontoPrelab2.2.WhatisthecontrollergainvectorforyourdesignofthesystemspecifiedintheCaseStudyChallengeprobleminChapter12?3.WhatistheobservergainvectorforyourdesignofthesystemspecifiedintheCaseStudyChallengeprobleminChapter12?4.DrawaSimulinkdiagramtosimulatethesystem.Showthesystem,thecontroller,andtheobserverusingthephysicalvariablesspecifiedintheCaseStudyChallengeprobleminChapter12.Lab1.UsingSimulinkandyourdiagramfromPrelab4,producetheSimulinkdiagramfromwhichyoucansimulatetheresponse.2.Produceresponseplotsofthesystemandtheobserverforastepinput.3.Measurethepercentovershootandthesettlingtimeforbothplots.Postlab1.Makeatableshowingthedesignspecificationsandthesimulationresultsforpercentovershootandsettlingtime.2.Comparethedesignspecificationswiththesimulationresultsforboththesystemresponseandtheobserverresponse.Explainanydiscrepancies.3.Describeanyproblemsyouhadimplementingyourdesign.Experiment12.2ObjectiveTouseLabVIEWtodesignacontrollerandobserverMinimumRequiredSoftwarePackagesLabVIEW,theControlDesignandSimulationModule,andtheMathScriptRTModule.PrelabDesignaLabVIEWVIthatwilldesignthecontrollerandobserverfortheAntennaControlCaseStudyinthischapter.YourVIwillhavethefollowinginputs:phase-variableformoftheplant,thecontrollerpoles,andtheobserverpolestomeettherequirements.Yourindicatorswilldisplaythefollowing:thephase-variableequationoftheplant,whetherornotthesystemiscontrollable,theobservercanonicalequationoftheobserver,whetherornotthesystemisobservable,thegainsforthecontroller,andthegainsfortheobserver.AlsoprovidetheimpulseresponseandinitialresponsecurvesshowninFigure12.27.Inaddition,providesimilarresponsecurvesforthestatevariables.BibliographyLabRunyourVIandcollectthedatafromwhichtocomparetheresultsofthecasestudywiththosefoundfromyourVI.PostlabCompareandsummarizetheresultsfoundfromyourVIwiththoseoftheChapter12AntennaControlCaseStudy.^BibliographyJCho,D.,Kato,Y.,andSpilman,D.SlidingModeandClassicalControllersinMagneticLevitationSystems.IEEEControlSystems,February1993,pp.42-48.Craig,I.K,Xia,X.,andVenter,J.W.IntroducingHIV/AIDSEducationintotheElectricalEngineeringCurriculumattheUniversityofPretoria.IEEETransactionsonEducation,vol.47,no.1,February2004,pp.65-73.D'Azzo,J.J.,andHoupis,C.H.LinearControlSystemAnalysisandDesign:ConventionalandModem,3ded.McGraw-Hill,NewYork,1988.Franklin,G.F,Powell,J.D,andEmami-Naeini,A.FeedbackControlofDynamicSystems,3ded.Addison-Wesley,Reading,MA,1994.Hostetter,G.H,Savant,C.J.Jr.,andStefani,R.T.DesignofFeedbackControlSystems,2ded.SaundersCollegePublishing,NewYork,1989.Kailath,T.LinearSystems.PrenticeHall,UpperSaddleRiver,NJ,1980.Kyrylov,V.,Severyanova,L.A.,andVieira,A.ModelingRobustOscillatoryBehavioroftheHypothalamic-Pituitary-AdrenalAxis.IEEETransactionsonBiomedicalEngineering,vol.52,no.12,2005,pp.1977-1983.Liu,J.-H.,Xu,D.-R,andYang,X.-YMulti-ObjectivePowerControlofaVariableSpeedWindTurbineBasedonTheory.ProceedingsoftheSeventhInternationalConferenceonMachineLearningandCybernetics,July2008,pp.2036-2041.Luenberger,D.G.ObservingtheStateofaLinearSystem.IEEETransactionsonMilitaryElectronics,vol.MIL-8,April1964,pp.74-80.Milhorn,H.T.Jr.,TheApplicationofControlTheorytoPhysiologicalSystems.W.B.Saunders,Philadelphia,1966.Monahemi,M.M,Barlow,J.B,andO'Leary,D.P.DesignofReduced-OrderObserverswithPreciseLoopTransferRecovery.JournalofGuidance,Control,andDynamics,vol.15,no.6,November-December1992,pp.1320-1326.O'Connor,D.N,Eppinger,S.D.,Seering,WP.,andWormly,D.N.ActiveControlofaHighSpeedPantograph.JournalofDynamicSystems,Measurements,andControl,vol.119,March1997,pp.1-4.Ogata,K.ModernControlEngineering,2ded.PrenticeHall,UpperSaddleRiver,NJ,1990.Ogata,K.StateSpaceAnalysisofControlSystems.PrenticeHall,UpperSaddleRiver,NJ,1967.Preitl,Z.,Bauer,P.,andBokor,J.ASimpleControlSolutionforTractionMotorUsedinHybridVehicles.FourthInternationalSymposiumonAppliedComputationalIntelligenceandInformatics.IEEE,2007.RockwellInternational.SpaceShuttleTransportationSystem.1984(pressinformation).Shinners,S.M.ModernControlSystemTheoryandDesign.Wiley,NewYork,1992.Sinha,N.K.ControlSystems.Holt,Rinehart&Winston,NewYork,1986.Tadeo,F,PerezLopez,O,andAlvarez,T,ControlofNeutralizationProcessesbyRobustLoop-shaping.IEEETransactionsonControlSystemsTechnology,vol.8,no.2,2000,pp.236-246.Chapter12DesignviaStateSpaceTarin,G,Teufel,E.,Pico,I,Bondia,J.,andPfleiderer,H.J.ComprehensivePharmacokineticModelofInsulinGlargineandOtherInsulinFormulations.IEEETransactionsonBiomedicalEngineering,vol.52,no.12,2005,pp.1994-2005.Timothy,L.K,andBona,B.E.StateSpaceAnalysis:AnIntroduction.McGraw-Hill,NewYork,1968.Tyner,M.,andMay,F.P.ProcessEngineeringControl.RonaldPress,NewYork,1968.VanDijk,E.,Spruijt,J.R,O'Sullivan,D.M.,andKlaasens,J.B.PWM-SwitchModelingofDC-DCConverters.IEEETransactionsonPowerElectronics,vol.10,1995,pp.659-665.DigitalControlSystems^ChapterLearningOutcomes^Aftercompletingthischapterthestudentwillbeableto:•Modelthedigitalcomputerinafeedbacksystem(Sections13.1-13.2)•••Findz-andinversez-transformsoftimeandLaplacefunctions(Section13.3)Findsampled-datatransferfunctions(Section13.4)Reduceaninterconnectionofsampled-datatransferfunctionstoasinglesampleddatatransferfunction(Section13.5)•Determinewhetherasampled-datasystemisstableanddeterminesamplingratesforstability(Section13.6)•Designdigitalsystemstomeetsteady-stateerrorspecification(Section13.7)•Designdigitalsystemstomeettransientresponsespecificationsusinggainadjustment(Sections13.8-13.9)•Designcascadecompensationfordigitalsystems(Sections13.10-13.11)^CaseStudyLearningOutcomes^Youwillbeabletodemonstrateyourknowledgeofthechapterobjectiveswithacasestudyasfollows:•GiventheanalogantennaazimuthpositioncontrolsystemshownonthefrontendpapersandinFigure13.1(a),youwillbeabletoconvertthesystemtoadigitalsystemasshowninFigure13.1(6)andthendesignthegaintomeetatransientresponsespecification.723724Chapter13DigitalControlSystemsFIGURE13.1Conversionofantennaazimuthpositioncontrolsystemfroma.analogcontroltob.digitalcontrol•^13.1GiventhedigitalantennaazimuthpositioncontrolsystemshowninFigure13.1(6),youwillbeabletodesignadigitalcascadecompensatortoimprovethetransientresponse.IntroductionThischapterisanintroductiontodigitalcontrolsystemsandwillcoveronlyfrequency-domainanalysisanddesign.Youareencouragedtopursuethestudyofstate-spacetechniquesinanadvancedcourseinsampled-datacontrolsystems.Inthischapter,weintroduceanalysisanddesignofstability,steady-stateerror,andtransientresponseforcomputer-controlledsystems.Withthedevelopmentoftheminicomputerinthemid-1960sandthemicrocomputerinthemid-1970s,physicalsystemsneednolongerbecontrolledbyexpensivemainframecomputers.Forexample,millingoperationsthatrequiredmainframecomputersinthepastcannowbecontrolledbyapersonalcomputer.Thedigitalcomputercanperformtwofunctions:(1)supervisory—externaltothefeedbackloop;and(2)control—internaltothefeedbackloop.Examplesof13.1Introductionsupervisoryfunctionsconsistofschedulingtasks,monitoringparametersandvariablesforout-of-rangevalues,orinitiatingsafetyshutdown.Controlfunctionsareofprimaryinteresttous,sinceacomputerthatperformswithinthefeedbackloopreplacesthemethodsofcompensationheretoforediscussed.Examplesofcontrolfunctionsareleadandlagcompensation.Transferfunctions,representingcompensatorsbuiltwithanalogcomponents,arenowreplacedwithadigitalcomputerthatperformscalculationsthatemulatethephysicalcompensator.Whatadvantagesaretheretoreplacinganalogcomponentswithadigitalcomputer?AdvantagesofDigitalComputersTheuseofdigitalcomputersintheloopyieldsthefollowingadvantagesoveranalogsystems:(1)reducedcost,(2)flexibilityinresponsetodesignchanges,and(3)noiseimmunity.Moderncontrolsystemsrequirecontrolofnumerousloopsatthesametime—pressure,position,velocity,andtension,forexample.Inthesteelindustry,asingledigitalcomputercanreplacenumerousanalogcontrollerswithasubsequentreductionincost.Whereanalogcontrollersimpliednumerousadjustmentsandresultinghardware,digitalsystemsarenowinstalled.Banksofequipment,meters,andknobsarereplacedwithcomputerterminals,whereinformationaboutsettingsandperformanceisobtainedthroughmenusandscreendisplays.Digitalcomputersintheloopcanyieldadegreeofflexibilityinresponsetochangesindesign.Anychangesormodificationsthatarerequiredinthefuturecanbeimplementedwithsimplesoftwarechangesratherthanexpensivehardwaremodifications.Finally,digitalsystemsexhibitmorenoiseimmunitythananalogsystemsbyvirtueofthemethodsofimplementation.Wherethenisthecomputerplacedintheloop?Rememberthatthedigitalcomputeriscontrollingnumerousloops;thus,itspositionintheloopdependsuponthefunctionitperforms.Typically,thecomputerreplacesthecascadecompensatorandisthuspositionedattheplaceshowninFigure13.2(a).Thesignalsr,e,/,andcshowninFigure13.2(a)cantakeontwoforms:digitaloranalog.Uptothispointwehaveusedanalogsignalsexclusively.Digitalsignals,whichconsistofasequenceofbinarynumbers,canbefoundinloopscontainingdigitalcomputers.~Xe,Digitalcomputer/,cPlant(a)rtf7)-i9A/DDigitalcomputerD/APlantc(b)FIGURE13.2a.Placementofthedigitalcomputerwithintheloop;b.detailedblockdiagramshowingplacementofA/DandD/Aconverters725726Chapter13DigitalControlSystemsLoopscontainingbothanaloganddigitalsignalsmustprovideameansforconversionfromoneformtotheotherasrequiredbyeachsubsystem.Adevicethatconvertsanalogsignalstodigitalsignalsiscalledananalog-to-digital(A/D)converter.Conversely,adevicethatconvertsdigitalsignalstoanalogsignalsiscalledadigital-toanalog(D/A)converter.Forexample,inFigure13.2(b),iftheplantoutput,c,andthesysteminput,r,areanalogsignals,thenananalog-to-digitalconvertermustbeprovidedattheinputtothedigitalcomputer.Also,iftheplantinput,/,isananalogsignal,thenadigital-to-analogconvertermustbeprovidedattheoutputofthedigitalcomputer.Digital-to-AnalogConversionMostsignificantbitFIGURE13.3r/l-oo—2-ao—4+f\?,outputY$lvoilDij»ital-to-analogconv(;rterDigital-to-analogconversionissimpleandeffectivelyinstantaneous.Properlyweightedvoltagesaresummedtogethertoyieldtheanalogoutput.Forexample,inFigure13.3,threeweightedvoltagesaresummed.Thethree-bitbinarycodeisrepresentedbytheswitches.Thus,ifthebinarynumberisIIO2,thecenterandbottomswitchesareon,andtheanalogoutputis6volts.Inactualuse,theswitchesareelectronicandaresetbytheinputbinarycode.Analog-to-DigitalConversionAnalog-to-digitalconversion,ontheotherhand,isatwo-stepprocessandisnotinstantaneous.Thereisadelaybetweentheinputanalogvoltageandtheoutputdigitalword.Inananalog-to-digitalconverter,theanalogsignalisfirstconvertedtoasampledsignalandthenconvertedtoasequenceofbinarynumbers,thedigitalsignal.Thesamplingratemustbeatleasttwicethebandwidthofthesignal,orelsetherewillbedistortion.ThisminimumsamplingfrequencyiscalledtheNyquistsamplingrate.1InFigure13.4(a),westartwiththeanalogsignal.InFigure13.4(b),weseetheanalogsignalsampledatperiodicintervalsandheldoverthesamplingintervalbyadevicecalledazero-ordersample-and-hold(z.o.h.)thatyieldsastaircaseapproximationtotheanalogsignal.Higher-orderholds,suchasafirst-orderhold,generatemorecomplexandmoreaccuratewaveshapesbetweensamples.Forexample,afirstorderholdgeneratesarampbetweenthesamples.Samplesareheldbeforebeingdigitizedbecausetheanalog-to-digitalconverterconvertsthevoltagetoadigitalnumberviaadigitalcounter,whichtakestimetoreachthecorrectdigitalnumber.Hence,theconstantanalogvoltagemustbepresentduringtheconversionprocess.Aftersamplingandholding,theanalog-to-digitalconverterconvertsthesampletoadigitalnumber(asshowninFigure13.4(c)),whichisarrivedatinthefollowingmanner.Thedynamicrangeoftheanalogsignal'svoltageisdividedintodiscretelevels,andeachlevelisassignedadigitalnumber.Forexample,inFigure13.4(6),theanalogsignalisdividedintoeightlevels.Athree-bitdigitalnumbercanrepresenteachoftheeightlevelsasshowninthefigure.Thus,thedifferencebetweenquantizationlevelsisM/8volts,whereMisthemaximumanalogvoltage.Ingeneral,foranysystem,thisdifferenceisM/2"volts,wherenisthenumberofbinarybitsusedfortheanalog-to-digitalconversion.LookingatFigure13.4(b),wecanseethattherewillbeanassociatederrorforeachdigitizedanalogvalueexceptthevoltagesattheboundariessuchasM/8and2M/8.Wecallthiserrorthequantizationerror.Assumingthatthequantizationprocessroundsofftheanalogvoltagetothenexthigherorlowerlevel,themaximum1SeeOgata(1987:170-177)foradetaileddiscussion.13.2ModelingtheDigitalComputer0I234Time(seconds)234Time(seconds)7275J:100i000Digitalnumberm\e_—o!o;c|1234Time(seconds)5mvalueofthequantizationerroris1/2thedifferencebetweenquantizationlevelsintherangeofanalogvoltagesfrom0to15M/16.Ingeneral,foranysystemusingroundoff,thequantizationerrorwillbe(l/2)(M/2")=M/2n+1.Wehavenowcoveredthebasicconceptsofdigitalsystems.Wefoundoutwhytheyareused,wherethedigitalcomputerisplacedintheloop,andhowtoconvertbetweenanaloganddigitalsignals.Sincethecomputercanreplacethecompensator,wehavetorealizethatthecomputerisworkingwithaquantizedamplituderepresentationoftheanalogsignalformedfromvaluesoftheanalogsignalatdiscreteintervalsoftime.Ignoringthequantizationerror,weseethatthecomputerperformsjustasthecompensatordoes,exceptthatsignalspassthroughthecomputeronlyatthesampledintervalsoftime.Wewillfindthatthesamplingofdatahasanunusualeffectupontheperformanceofaclosed-loopfeedbacksystem,sincestabilityandtransientresponsearenowdependentuponthesamplingrate;ifitistooslow,thesystemcanbeunstablesincethevaluesarenotbeingupdatedrapidlyenough.Ifwearetoanalyzeanddesignfeedbackcontrolsystemswithdigitalcomputersintheloop,wemustbeabletomodelthedigitalcomputerandassociateddigital-to-analogandanalog-to-digitalconverters.Themodelingofthedigitalcomputeralongwithassociatedconvertersiscoveredinthenextsection.(13.2ModelingtheDigitalComputerIfwethinkaboutit,theformofthesignalsinaloopisnotasimportantaswhathappenstothem.Forexample,ifanalog-to-digitalconversioncouldhappeninstantaneously,andtimesamplesoccurredatintervalsoftimethatapproachedzero,therewouldbenoneedtodifferentiatebetweenthedigitalsignalsandtheanalogsignals.Thus,previousanalysisanddesigntechniqueswouldbevalidregardlessofthepresenceofthedigitalcomputer.FIGURE13.4Stepsinanalogto-digitalconversion:a.analogsignal;b.analogsignalaftersample-and-hold;c.conversionofsamplestodigitalnumbers728Chapter13DigitalControlSystemsThefactthatsignalsaresampledatspecifiedintervalsandheldcausesthesystemperformancetochangewithchangesinsamplingrate.Basically,then,thecomputer'seffectuponthesignalcomesfromthissamplingandholding.Thus,inordertomodeldigitalcontrolsystems,wemustcomeupwithamathematicalrepresentationofthissample-and-holdprocess.ModelingtheSamplerOurobjectiveatthispointistoderiveamathematicalmodelforthedigitalcomputerasrepresentedbyasamplerandzero-orderhold.Ourgoalistorepresentthecomputerasatransferfunctionsimilartothatforanysubsystem.Whensignalsaresampled,however,theLaplacetransformthatwehavedealtwithbecomesabitunwieldy.TheLaplacetransformcanbereplacedbyanotherrelatedtransformcalledthez-transform.Thez-transformwillarisenaturallyfromourdevelopmentofthemathematicalrepresentationofthecomputer.ConsiderthemodelsforsamplingshowninFigure13.5.ThemodelinFigure13.5(a)isaswitchturningonandoffatauniformsamplingrate.InFigure13.5(6),samplingcanalsobeconsideredtobetheproductofthetimewaveformtobesampled,/(r),andasamplingfunction,s{t).\is{t)isasequenceofpulsesofwidth7V,constantamplitude,anduniformrateasshown,thesampledoutput,f*Tw(t),willconsistofasequenceofsectionsof/(f)atregularintervals.ThisviewisequivalenttotheswitchmodelofFigure13.5(a).Wecannowwritethetimeequationofthesampledwaveform,ft(t).UsingthemodelshowninFigure13.5(6),wehave00TTVW=/('M0=/(0£u(t-kT)-u(t-kT-Tw)(13.1)k=—oowherekisanintegerbetween—ooand+oo,Tistheperiodofthepulsetrain,andTVisthepulsewidth.Pulsewidth=Tw+-t/TV«>M/.\/\4,«a*-rTIT3TPulsewidth=Tws(.t)FIGURE13.5Twoviewsofuniform-ratesampling:a.switchopeningandclosing;b.productoftimewaveformandsamplingwaveformsit)Pulsewidth=T,wTIT3T(b)13.2ModelingtheDigitalComputerSinceEq.(13.1)istheproductoftwotimefunctions,takingtheLaplacetransforminordertofindatransferfunctionisnotsimple.Asimplificationcanbemadeifweassumethatthepulsewidth,TV,issmallincomparisontotheperiod,T,suchthatf(t)canbeconsideredconstantduringthesamplinginterval.Overthesamplinginterval,then,/(f)—f(kT).Hence,/rw(0=Ef(kT)lu(*-kT)-u(t-kT-7»](13.2)fc=—COforsmall7V.Equation(13.2)canbefurthersimplifiedthroughinsightprovidedbytheLaplacetransform.TakingtheLaplacetransformofEq.(13.2),wehave**7vM=Ek=—coTwSReplacinge~kTT„-kTs7-kTs-Ty/s=k=-ooEKkT)K)1_e-Tw*,-kTs(13.3)withitsseriesexpansion,weobtain1-*r„(')=Ef(kT>>(2H-T-]j,-kTss/:=—oo(13.4)Forsmall7V,Eq.(13.4)becomesTws,-kTs=£f{kT)Twe-kTs(13.5)k=—ook=—ooFinally,convertingbacktothetimedomain,wehaveoof*Tw(t)=TwY^f(kT)§(f-kT)(13.6)k=—oowhereS(t—kT)areDiracdeltafunctions.Thus,theresultofsamplingwithrectangularpulsescanbethoughtofasaseriesofdeltafunctionswhoseareaistheproductoftherectangularpulsewidthandtheamplitudeofthesampledwaveform,orTwf{kT).Equation(13.6)isportrayedinFigure13.6.Thesamplerisdividedintotwoparts:(1)anidealsamplerdescribedbytheportionofEq.(13.6)thatisnotdependentuponthesamplingwaveformcharacteristics,r(t)j2f(kT)s(t-kT)(13.7)k=-ooand(2)theportiondependentuponthesamplingwaveform'scharacteristics,Tw-ModelingtheZero-OrderHoldThefinalstepinmodelingthedigitalcomputerismodelingthezero-orderholdthatfollowsthesampler.Figure13.7summarizesthefunctionofthezero-orderhold,Idealsamplerm7j+z~Thecompletesolutionislocatedatwww.wiley.com/college/nise.Skill-AssessmentExercise13.2z(z+l)(z+2)(z-0.5)(z-0.7)(z-0.9)'ANSWER:f(kT)=46.875(0.5)*-114.75(0.7)*68.875(0.9)*PROBLEM:Findf(kT)ifF(z)=Thecompletesolutionislocatedatwww.wiley.com/college/nise.^13.4TransferFunctionsNowthatwehaveestablishedthez-transform,letusapplyittophysicalsystemsbyfindingtransferfunctionsofsampled-datasystems.ConsiderthecontinuoussystemshowninFigure13.8(a).IftheinputissampledasshowninFigure13.8(6),theoutputisstillacontinuoussignal.If,however,wearesatisfiedwithfindingtheoutputatthesamplinginstantsandnotinbetween,therepresentationofthesampled-datasystem736Chapter13DigitalControlSystemsR(s)G(s)C(s)(«)R(S)^/cRIMoG(s)C(s)(b)FIGURE13.8Sampled-datasystems:a.continuous;b.sampledinput;c.sampledinputandoutput-^/o^^G(s)C(s)OC*(s)(c)Note:Phantomsamplerisshownincolor.canbegreatlysimplified.OurassumptionisvisuallydescribedinFigure13.8(c),wheretheoutputisconceptuallysampledinsynchronizationwiththeinputbyaphantomsampler.UsingtheconceptdescribedinFigure13.8(c),wederivethepulsetransferfunctionofG(s).DerivationofthePulseTransferFunctionUsingEq.(13.7),wefindthatthesampledinput,r*(f),tothesystemofFigure13.8(c)isr*(t)=Y,r(nT)8(t-nT)(13.31)n=0whichisasumofimpulses.Sincetheimpulseresponseofasystem,G(s),isg(t),wecanwritethetimeoutputofG(s)asthesumofimpulseresponsesgeneratedbytheinput,Eq.(13.31).Thus,(13.32)c(0=£r(/iT)g(r-nr)n=0FromEq.(13.10),C(z)=J^c(kT)z-k(13.33)k=QUsingEq.(13.32)witht=kT,weobtainocc{kT)=Yjr{nT)g{kT-nT)(13.34)n=0SubstitutingEq.(13.34)intoEq.(13.33),weobtainDOOO-k*=o«=o(13.35)13.4TransferFunctionsLettingm—k—n,wefindcocooY,r^nT^mT)z~(m+n)w=£w+rt=0«=0(13.36)m=rn{f^g(mT)z-\\f2(nT)zn=0,w=0wherethelowerlimit,m+n,waschangedtom.Thereasoningisthatm+n=0yieldsnegativevaluesofmforalln>0.But,sinceg(mT)=0forallm<0,misnotlessthanzero.Alternately,g(t)=0fort<0.Thus,n=0inthefirstsum'slowerlimit.Usingthedefinitionofthez-transform,Eq.(13.36)becomesC(z)=Y,8{mT)z-mY,r{nT)z-nm=0=G(z)R(z)(13.37)n=0Equation(13.37)isaveryimportantresult,sinceitshowsthatthetransformofthesampledoutputistheproductofthetransformsofthesampledinputandthepulsetransferfunctionofthesystem.Rememberthatalthoughtheoutputofthesystemisacontinuousfunction,wehadtomakeanassumptionofasampledoutput(phantomsampler)inordertoarriveatthecompactresultofEq.(13.37).Onewayoffindingthepulsetransferfunction,G(z),istostartwithG(s),findg(t),andthenuseTable13.1tofindG(z).Letuslookatanexample.Example13.4ConvertingG^(s)inCascadewithz.o.h.toG(z)PROBLEM:Givenaz.o.h.incascadewithG\{s)={s+2)/(s+1)orG(*)=1-e~Ts{s+2)(13.38)ft+i:findthesampled-datatransferfunction,G(z),ifthesamplingtime,T,is0.5second.SOLUTION:Equation(13.38)representsacommonoccurrenceindigitalcontrolsystems,namelyatransferfunctionincascadewithazero-orderhold.Specifically,Gi(s)=(s+2)/(s4-1)isincascadewithazero-orderhold,(1-e~Ts)/s.Wecanformulateageneralsolutiontothistypeofproblembymovingthesinthedenominatorofthezero-orderholdtoG\{s),yielding{l-e-T*)^-G{s)=(13.39)fromwhichG(z)=(1-z'^zGi(s)\z-\(Gi(s)(13.40)Thus,beginthesolutionbyfindingtheimpulseresponse(inverseLaplacetransform)ofGi(s)/s.Hence,G2(s)=Gib)B5+2_Asisl)~7+s+1ls+l(13.41)737738Chapter13Trylt13.1UseMATLAB,theControlSystemToolbox,andthefollowingstatementstofindG\(s)inExample13.4givenG(z)inEq.(13.46)num=0.213;den=0.607;k=l;T=0.5;Gz=zpk(num,den,K,T)Gs=d2c(Gz,,zoh')DigitalControlSystemsTakingtheinverseLaplacetransform,wegetg2(t)=2-e-<fromwhichg2(kT)=2-e-ktUsingTable13.1,wefind2zzG2(z)=z-lz—e-T(13.42)(13.43)(13.44)SubstitutingT=0.5yieldsG2(z)=zG^s))2Zz-lz2-0.213zz-0.607{z-l)(z~0.607)(13.45)FromEq.(13.40),z-0.213G2(z)=(13.46)zz-0.607StudentswhoareusingMATLABshouldnowrunchl3plinAppendixB.YouwilllearnhowtouseMATLABtoconvertG±(s)incascadewithazeroorderholdtoG(z).ThisexercisesolvesExample13.4usingMATLAB.,.G(z)=MATLABSymbolicMathz-lStudentswhoareperformingtheMATLABexercisesandwanttoexploretheaddedcapabilityofMATLAB'sSymbolicMathToolboxshouldnowrunchl3sp3inAppendixFlocatedatwww.wiley.com/college/nise.MATLAB'sSymbolicMathToolboxyieldsanalternativemethodoffindingthez-transformofatransferfunctionincascadewithazero-orderhold.Example13.4willbesolvedusingMATLABandtheSymbolicMathToolboxwithamethodthatfollowscloselythehandcalculationshowninthatexample.StudentswhoareusingMATLABshouldnowrunchl3p2inAppendixB.YouwilllearnhowtouseMATLABtoconvertG(s)toG(z)whenG(s)isnotincascadewithazero-orderhold.Thisisthesameasfindingthez-transformofG(s).MATLA8MATLABStudentswhoareusingMATLABshouldnowrunchl3p3inAppendixB.Youwilllearnhowtocreatedigitaltransferfunctionsdirectly.StudentswhoareusingMATLABshouldnowrunchl3p4inAppendixB.YouwilllearnhowtouseMATLABtoconvertG(z)toG(s)whenG(s)isnotincascadewithazero-orderhold.ThisisthesameasfindingtheLaplacetransformofG(z).MATLABSkill-AssessmentExercise13.3Trylt13.2UseMATLAB,theControlSystemToolbox,andthefollowingstatementstosolveSkill-AssessmentExercise13.3.Gs=zpk([],-4,8)Gz=c2d(Gs,0.25,'zoh')PROBLEM:FindG(z)forG(s)=8/(s+4)incascadewithazeroordersampleandhold.Thesamplingperiodis0.25second.WileyPtUSControlSolutionsANSWER:G(z)=1.264/(z-0.3679)Thecompletesolutionislocatedatwww.wiley.com/college/nise.13.5BlockDiagramReduction739Themajordiscoveryinthissectionisthatoncethepulsetransferfunction,G(z),ofasystemisobtained,thetransformofthesampledoutputresponse,C(z),foragivensampledinputcanbeevaluatedusingtherelationshipC(z)—R(z)G(z).Finally,thetimefunctioncanbefoundbytakingtheinverse^-transform,ascoveredinSection13.3.Inthenextsection,welookatblockdiagramreductionfordigitalsystems.£13.5BlockDiagramReductionUptothispoint,wehavedefinedthez-transformandthesampled-datasystemtransferfunctionandhaveshownhowtoobtainthesampledresponse.Basically,weareparallelingourdiscussionsoftheLaplacetransforminChapters2and4.WenowdrawaparallelwithsomeoftheobjectivesofChapter5,namelyblockdiagramreduction.Ourobjectivehereistobeabletofindtheclosed-loopsampled-datatransferfunctionofanarrangementofsubsystemsthathaveacomputerintheloop.Whenmanipulatingblockdiagramsforsampled-datasystems,youmustbecarefultorememberthedefinitionofthesampled-datasystemtransferfunction(derivedinthelastsection)toavoidmistakes.Forexample,z{Gi(s)G2{s)}^Gi(z)G2(z),wherez{G\(s)G2(s)}denotesthez-transform.Thes-domainfunctionshavetobemultipliedtogetherbeforetakingthez-transform.Intheensuingdiscussion,weusethenotationG{G2{s)todenoteasinglefunctionthatisG\(s)G2{s)afterevaluatingtheproduct.Hence,z{Gi(S)G2(s)}=z{G1G2(s)}=GlG2{z)*Gl(z)G2(z).Letuslookatthesampled-datasystemsshowninFigure13.9.Thesampleddatasystemsareshownunderthecolumnmarkeds.Theirz-transformsareshownunderthecolumnmarkedz.ThestandardsystemthatwederivedearlierisshowninFigure13.9(a),wherethetransformoftheoutput,C(z),isequaltoR(z)G(z).ThissystemformsthebasisfortheotherentriesinFigure13.9.InFigure13.9(6),thereisnosamplerbetweenG\(s)andG2[s).Thus,wecanthinkofasinglefunction,G](s)G2{s),denotedG\G%{$\existingbetweenthetwosamplersandyieldingasingletransferfunction,asshowninFigure13.9(a).Hence,thepulsetransferfunctionisz{GiG2(5)}=GiG2{z).Thetransformoftheoutput,C(z)=R{z)GiG2{z).InFigure13.9(c),wehavethecascadedtwosubsystemsofthetypeshowninFigure13.9(a).Forthiscase,then,thez-transformistheproductofthetwoz-transforms,orG2{z)G\(z).HencethetransformoftheoutputC(z)=R(z)G2{z)G\(z).R(z)R(z)flfeWff0_Jg(^R(s)Gx(s)cTaT=e(coscoT+jsincoT)=eaTZa>T(13.47)since(coscoT+;'sincoT)=IZ.coT.Eachregionofthes-planecanbemappedintoacorrespondingregiononthez-plane(seeFigure13.13).PointsthathavepositivevaluesofaareintherighthalfFIGURE13.12Alatheusingdigitalnumericalcontrol(©DavidJ.Green—Industry/Alamy)13.6Stability743*-plane*-ReFIGURE13.13Mappingregionsofthes-planeontothez-planeofthei'-plane,regionC.FromEq.(13.47),themagnitudesofthemappedpointsareeaT>1.Thuspointsintherighthalfofthes-planemapintopointsoutsidetheunitcircleonthez-plane.Pointsontheyw-axis,regionB,havezerovaluesofaandyieldpointsonthez-planewithmagnitude—1,theunitcircle.Hence,pointsonthe/(13.55)SubstitutingEq.(13.55)into(13.53)yields10(1-e~T)T(z)=z-(lle-T--lO)(13.56)ThepoleofEq.(13.56),(lie"-7"—10),monotonicallydecreasesfrom+1to-1for0<T<0.2.For0.2<T<oo,(ll1whena>0(13.63b)748Chapter13DigitalControlSystemsand\z\=1whena=0(13.63c)LetuslookatanexamplethatshowshowthestabilityofsampledsystemscanbefoundusingthisbilineartransformationandtheRouth-Hurwitcriterion.Example13.8StabilityviaRouth-HurwitzPROBLEM:GivenT(z)=N{z)/D(z),whereD(z)=z3-z2-0.2z+0.1,usetheRouth-Hurwitzcriteriontofindthenumberofz-planepolesofT(z)inside,outside,andontheunitcircle.Isthesystemstable?SOLUTION:SubstituteEq.(13.60)intoD{z)=0andobtain353-1¾2-45s-17=0(13.64)TheRouthtableforEq.(13.64),Table13.3,showsonerootintheright-halfplaneandtworootsintheleft-half-plane.Hence,T(z)hasonepoleoutsidetheunitcircle,nopolesontheunitcircle,andtwopolesinsidetheunitcircle.Thesystemisunstablebecauseofthepoleoutsidetheunitcircle.TABLE13.3RouthtableforExample13.81-4519-17-45.89-17Skill-AssessmentExercise13.5WileyPLUSPROBLEM:Determinetherangeofsamplinginterval,T,thatwillmakethesystemshowninFigure13.16stable.ControlSolutionsHoldFIGURE13.16DigitalsystemforSkill-AssessmentExercise13.5m+AT*r/„*V.rT.Plantl-e~sTs—*»205+5mANSWER:0<T<0.1022secondThecompletesolutionislocatedatwww.wiley.com/college/nise.3Symbolicmathsoftware,suchasMATLAB'sSymbolicMathToolbox,isrecommendedtoreducethelaborrequiredtoperformthetransformation.13.7Steady-StateErrorsPROBLEM:GivenT(z)=N(z)/D(z),whereD{z)=z3-z2-0.5z+0.3,usetheRouth-Hurwitzcriteriontofindthenumberofz-planepolesofT(z)inside,outside,andontheunitcircle.Isthesystemstable?ANSWER:T(z)hasonepoleoutsidetheunitcircle,nopolesontheunitcircle,andtwopolesinsidetheunitcircle.Thesystemisunstable.Thecompletesolutionislocatedatwww.wiley.com/college/nise.Inthissection,wecoveredtheconceptsofstabilityfordigitalsystems.Bothz-ands-planeperspectiveswerediscussed.Usingabilineartransformation,weareabletousetheRouth-Hurwitzcriteriontodeterminestability.Thehighlightofthesectionisthatsamplingrate(alongwithsystemparameters,suchasgainandcomponentvalues)helpstodetermineordestroythestabilityofadigitalsystem.Ingeneral,ifthesamplingrateistooslow,theclosed-loopdigitalsystemwillbeunstable.Wenowmovefromstabilitytosteady-stateerrors,parallelingourpreviousdiscussionofsteady-stateerrorsinanalogsystems.f13.7Steady-StateErrorsWenowexaminetheeffectofsamplinguponthesteady-stateerrorfordigitalsystems.Anygeneralconclusionaboutthesteady-stateerrorisdifficultbecauseofthedependenceofthoseconclusionsupontheplacementofthesamplerintheloop.Rememberthatthepositionofthesamplercouldchangetheopen-looptransferfunction.Inthediscussionofanalogsystems,therewasonlyoneopen-looptransferfunction,G(s),uponwhichthegeneraltheoryofsteady-stateerrorwasbasedandfromwhichcamethestandarddefinitionsofstaticerrorconstants.Fordigitalsystems,however,theplacementofthesamplerchangestheopen-looptransferfunctionandthusprecludesanygeneralconclusions.Inthissection,weassumethetypicalplacementofthesampleraftertheerrorandinthepositionofthecascadecontroller,andwederiveourconclusionsaccordinglyaboutthesteady-stateerrorofdigitalsystems.ConsiderthedigitalsysteminFigure13.17(a),wherethedigitalcomputerisrepresentedbythesamplerandzero-orderhold.ThetransferfunctionoftheplantisrepresentedbyGi(s)andthetransferfunctionofthez.o.h.by(1-e~Ts)/s.LettingG(s)equaltheproductofthez.o.h.andG\(s),andusingtheblockdiagramreductiontechniquesforsampled-datasystems,wecanfindthesamplederror,E*(s)=E{z).Addingsynchronoussamplersattheinputandthefeedback,weobtainFigure13.17(6).PushingG{s)anditsinputsamplertotherightpastthepickoffpointyieldsFigure13.17(c).UsingFigure13.9(a),wecanconverteachblocktoitsz-transform,resultinginFigure13.17(^/).Fromthisfigure,E(z)=R{z)-E(z)G(z),or^)=1¾(13-65>Thefinalvaluetheoremfordiscretesignalsstatesthate*{oo)=\im{l-Z-1)E{z)z-*\(13.66)749750Chapter13DigitalControlSystems1-e~Ts—»sTTcidGM(a.)'•^o^^{g)^c/«.£*(.?)T^k/o^LG(s)T-O(b)TransformingEq.(13.85)tothez-planeyieldsZ=esT=e^&^e**=eT^W1^1)ZcoTConstantpercentovershootlines=a+jcoFIGURE13.19Thes-planesketchofconstantpercentovershootlinei-plane(13.86)13.9GainDesignonthez-Plane755Thus,givenadesireddampingratio,£,Eq.(13.86)canbeplottedonthez-planethrougharangeofa>TasshowninFigure13.18.Thesecurvescanthenbeusedasconstantpercentovershootcurvesonthez-plane.Thissectionhassetthestagefortheanalysisanddesignoftransientresponsefordigitalsystems.Inthenextsection,weapplytheresultstodigitalsystemsusingtherootlocus.(13.9GainDesignonthez-PlaneInthissection,weplotrootlocianddeterminethegainrequiredforstabilityC(z)aswellasthegainrequiredtomeetatransientresponserequirement.Sincem+G(z)*)*Vy1K(z+l)(2-1)(z-0.5)C(z)FIGURE13.21DigitalfeedbackcontrolforExample13.10SOLUTION:Treatthesystemasifzweres,andsketchtherootlocus.TheresultisshowninFigure13.22.UsingtherootlocusprogramdiscussedinAppendixH.2atwww.wiley.com/college/nise,searchalongtheunitcirclefor180°.Identificationofthegain,K,atthispointyieldstherangeofgainforstability.Usingtheprogram,wefindthattheintersectionoftherootlocuswiththeunitcircleis1Z60°.Thegainatthispointis0.5.Hence,therangeofgainforstabilityis0<K<0.5.StudentswhoareusingMATLABshouldnowrunchl3p7inAppendixB.YouwilllearnhowtouseMATLABtoplotarootlocusonthez-planeaswellassuperimposetheunitcircle.Youwilllearnhowtoselectinteractivelytheintersectionoftherootlocusandtheunitcircletoobtainthevalueofgainforstability.ThisexercisesolvesExample13.10usingMATLAB.MATLAB756Chapter13DigitalControlSystems2-plane1.503.00ReUnitcircleRootlocus-3.00FIGURE13.22RootlocusforthesystemofFigure13.21Inthenextexample,wedesignthevalueofgain,K,inFigure13.21tomeetatransientresponsespecification.Theproblemishandledsimilarlytotheanalogsystemdesign,wherewefoundthegainatthepointwheretherootlocuscrossedthespecifieddampingratio,settlingtime,orpeaktimecurve.Indigitalsystems,thesecurvesareasshowninFigure13.18.Insummary,then,drawtherootlocusofthedigitalsystemandsuperimposethecurvesofFigure13.18.Thenfindoutwheretherootlocusintersectsthedesireddampingratio,settlingtime,orpeaktimecurveandevaluatethegainatthatpoint.Inordertosimplifythecalculationsandobtainmoreaccurateresults,drawaradiallinethroughthepointwheretherootlocusintersectstheappropriatecurve.MeasuretheangleofthislineandusetherootlocusprograminAppendixH.2atwww.wiley.com/college/nisetosearchalongthisradiallineforthepointofintersectionwiththerootlocus.Example13.11TransientResponseDesignviaGainAdjustmentPROBLEM:ForthesystemofFigure13.21,findthevalueofgain,K,toyieldadampingratioof0.7.SOLUTION:Figure13.23showstheconstantdampingratiocurvessuperimposedovertherootlocusforthesystemasdeterminedfromthelastexample.Drawaradiallinefromtheorigintotheintersectionoftherootlocuswiththe0.7dampingratiocurve(a16.62°line).TherootlocusprogramdiscussedinAppendixH.2atwww.wiley.com/college/nisecannowbeusedtoobtainthegainbysearchingalonga16.62°linefor180°,theintersectionwiththerootlocus.Theresultsoftheprogramshowthatthegain,K,is0.0627at0.719+/0.215,thepointwherethe0.7dampingratiocurveintersectstherootlocus.13.9GainDesignonthez-PIane757Rootlocus«•»ReFIGURE13.23RootlocusforthesystemofFigure13.21withconstant0.7dampingratiocurveWecannowcheckourdesignbyfindingtheunitsampledstepresponseofthesystemofFigure13.21.Usingourdesign,K=0.0627,alongwithR(z)=z/(z-1),asampledstepinput,wefindthesampledoutputtobeR(z)G{z)C(z)=1+G{z)0.0627z2+0.0627zz-2.4373z2+2z-0.56273(13.87)Performmgtheindicateddivision,weobtaintheoutputvalidatthesamplinginstants,asshowninFigure13.24.Sincetheovershootisapproximately5%,therequirementofa0.7dampingratiohasbeenmet.Youshouldremember,however,thattheplotisvalidonlyatintegervaluesofthesamplinginstants.StudentswhoareusingMATLABshouldnowrunchl3p8inAppendixB.YouwilllearnhowtouseMATLABtoplotarootlocusonthez-planeaswellassuperimposeagridofdampingratiocurves.Youwilllearnhowtoobtainthegainandaclosed-loopstepresponseofadigitalsystemafterinteractivelyselectingtheoperatingpointontherootlocus.ThisexercisesolvesExample13.11usingMATLAB.1012SamplinginstantNote:ValidonlyatintegervaluesofsamplinginstantMATLABFIGURE13.24SampledstepresponseofthesystemofFigure13.21withK=0.0627758Chapter13DigitalControlSystemsSkill-AssessmentExercise13.8PROBLEM:ForthesystemofFigure13.20whereH(z)=1andTrylt13.3UseMATLAB,theControlSystemToolbox,andthefollowingstatementstosolveSkill-AssessmentExercise13.8.Gz=zpk(-0.5,[0.25,0.75],...1,[])rlocus(Gz)zgrid(0.5,[])[K,p]=rlocfind(Gz){Z)K(z+0.5)(z-0.25)(z-0.75)findthevalueofgain,K,toyieldadampingratioof0.5.ANSWER:K=0.31Thecompletesolutionisatwww.wiley.com/college/nise.Note:Whentherootlocusappears,clickontheintersectionofthe0.5dampingratiocurveandtherootlocustocalculatethegain.SimulinkGuiToiMATLAB'sSimulinkprovidesanalternativemethodofsimulatingdigitalsystemstoobtainthetimeresponse.StudentswhoareperformingtheMATLABexercisesandwanttoexploretheaddedcapabilityofSimulinkshouldnowconsultAppendixC,MATLAB'sSimulinkTutorial.ExampleC.4inthetutorialshowshowtouseSimulinktosimulatedigitalsystems.MATLAB'sLTIViewerprovidesanothermethodofsimulatingdigitalsystemstoobtainthetimeresponse.StudentswhoareperformingtheMATLABexercisesandwanttoexploretheaddedcapabilityofMATLAB'sLTIViewershouldnowconsultAppendixEatwww.wiley.com/college/nise,whichcontainsatutorialontheLTIVieweraswellassomeexamples.Oneoftheillustrativeexamples,ExampleE.5,findstheclosed-loopstepresponseofadigitalsystemusingtheLTIViewer.Inthissection,weusedtherootlocusandgainadjustmenttodesignthetransientresponseofadigitalsystem.Thismethodsuffersthesamedrawbacksaswhenitwasappliedtoanalogsystems;namely,iftherootlocusdoesnotintersectadesireddesignpoint,thenasimplegainadjustmentwillnotaccomplishthedesignobjective.Techniquestodesigncompensationfordigitalsystemscanthenbeapplied.(13.10CascadeCompensationviathes-PlaneInprevioussectionsofthischapter,weanalyzedanddesigneddigitalsystemsdirectlyinthez-domainuptoandincludingdesignviagainadjustment.Wearenowreadytodesigndigitalcompensators,suchasthosecoveredinChapters9and11.Ratherthancontinuingonthispathofdesigndirectlyinthez-domain,wedepartbycoveringanalysisanddesigntechniquesthatallowustomakeuseofpreviouschaptersbydesigningonthes-planeandthentransformingours-planedesigntoa13.10CascadeCompensationviathes-Planedigitalimplementation.Wecoveredoneaspectofs-planeanalysisinSection13.6,whereweusedabilineartransformationtoanalyzestability.Wenowcontinuewiths-planeanalysisanddesignbyapplyingittocascadecompensatordesign.Directdesignofcompensatorsonthez-planeisleftforadedicatedcourseindigitalcontrolsystems.CascadeCompensationInordertoperformdesigninthes-planeandthenconvertthecontinuouscompensatortoadigitalcompensator,weneedabilineartransformationthatwillpreserve,atthesamplinginstants,theresponseofthecontinuouscompensator.ThebilineartransformationcoveredinSection13.6willnotmeetthatrequirement.Abilineartransformationthatcanbeperformedwithhandcalculationsandyieldsadigitaltransferfunctionwhoseoutputresponseatthesamplinginstantsis
approximatelythesameastheequivalentanalogtransferfunctioniscalledtheTustintransformation.Thistransformationisusedtotransformthecontinuouscompensator,Gc(s),tothedigitalcompensator,Gc{z).TheTustintransformationisgivenby5(13.88)anditsinverseby(13.89)Asthesamplinginterval,T,getssmaller(highersamplingrate),thedesigneddigitalcompensator'soutputyieldsaclosermatchtotheanalogcompensator.Ifthesamplingrateisnothighenough,thereisadiscrepancyathigherfrequenciesbetweenthedigitalandanalogfilters'frequencyresponses.Methodsareavailabletocorrectthediscrepancy,buttheyarebeyondthescopeofourdiscussion.Theinterestedreadershouldinvestigatethetopicofprewarping,coveredinbooksdedicatedtodigitalcontrolandlistedintheBibliographyattheendofthischapter.AstromandWittenmark{1984)havedevelopedaguidelineforselectingthesamplinginterval,T.TheirconclusionisthatthevalueofTinsecondsshouldbeintherange0.15/co^Mto0.5/co^M,wherea>$M,forGp(s)Gc(s)is5.8rad/s.UsingtheguidelinedescribedbyAstromandWittenmark{1984),thelowestvalueofTshouldbeintherange0,15/6¾=0.026to0.5/wM=0.086second.LetususeT=0.01second.SubstitutingEq.(13.88)intoEq.(13.91)withT=0.01secondyieldsGc(z)=1778z-1674z-0.746(13.92)Thez-transformoftheplantandzero-orderhold,foundbythemethoddiscussedinSection13.4withT=0.01second,isGP{z)=(1.602xlO'V)+(6.156x10~7z)+(1.478x10~7)z3-2.847z2+2.699^-0.8521(13.93)ThetimeresponseinFigure13.26(T=0.01s)showsthatthecompensatedclosed-loopsystemmeetsthetransientresponserequirements.ThefigurealsoshowstheresponseforacompensatordesignedwithsamplingtimesattheextremesofAstromandWittenmark'sguideline.MATLABStudentswhoareusingMATLABshouldnowrunchl3p9inAppendixB.YouwilllearnhowtouseMATLABtodesignadigitalleadcompensatorusingtheTustintransformation.ThisexercisesolvesExample13.12usingMATLAB.Time(seconds)FIGURE13.26Note:ValidonlyatintegervaluesofsamplinginstantClosed-loopresponseforthecompensatedsystemofExample13.12showingeffectofthreedifferentsamplingfrequenciesChapter13762DigitalControlSystemsSkill-AssessmentExercise13.9WileyPLUSPROBLEM:InExample11.3,aleadcompensatorwasdesignedforaunityfeedbacksystemwhoseplantwasControlSolutionsG(s)=WOKs{s+36){s+100)Thedesignspecificationswereasfollows:percentovershoot=20%,peaktime0.1second,andKv=40.Inordertomeettherequirements,thedesignyieldedK=1440andaleadcompensator,Ge{s)=2.38^+25.3s+60.2Ifthesystemistobecomputercontrolled,findthedigitalcontroller,Gc(z).ANSWER:GAz)=2.347-0975„,T=0.001second0.9416Z—nnAThecompletesolutionisatwww.wiley.com/college/nise.Nowthatwehavelearnedhowtodesignadigitalcascadecompensator,Gc(z),thenextsectionwillteachushowtousethedigitalcomputertoimplementit.(13.11ImplementingtheDigitalCompensatorThecontroller,Gc(z),canbeimplementeddirectlyviacalculationswithinthedigitalcomputerintheforwardpathasshowninFigure13.27.Letusnowderiveanumericalalgorithmthatthecomputercanusetoemulatethecompensator.Wewillfindanexpressionforthecomputer'ssampledoutput,x*(t),whosetransformsareshowninFigure13.27asX{z).Wewillseethatthisexpressioncanbeusedtoprogramthedigitalcomputertoemulatethecompensator.Considerasecond-ordercompensator,Gc(z),Gc(z)=X{z)E{z)Q3Z3+a2z2a\z+«ob2z2+b\z+b0(13.94)Cross-multiplying,{b2z2+bxz+b0)X(z)=(«3z3+a2z2+fliz+a0)E(z)(13.95)Solvingforthetermwiththehighestpowerofzoperatingontheoutput,X(z),b2z2X{z)=(a3z3+a2z2+mz+a0)E(z)-{bxz+b0)X{z)Plantwithsample-and-holdComputerFIGURE13.27BlockdiagramshowingcomputeremulationofadigitalcompensatoremulatingcompensatorE(z)Gc(z)(13.96)X(z)G(z)Clzl13.11ImplementingtheDigitalCompensatore*(t)**(')«2\DelayTsecondsDelayTsecondsa,e-it-T)„">\+''DelayTseconds.^9.fvv-%x'U-T)b2DelayTsecondsae-{t-2D^ox*(t-2T)b2DividingbythecoefficientofX{z)ontheleft-handsideofEq.(13.96)yieldsX{z)=a3£2,£i_-ib2b2%->*„±jcon\/l—£2=—2±/3.464.Designingaleadcompensatorzerotocanceltheplantpoleonthes-planeat—1.71yieldsaleadcompensatorpoleat-4.HencetheleadcompensatorisgivenbyGc(s)=Leadcompensator0,(.v)+4>M=0.16second.Letuschooseasmallervalue,sayT=0.025second.SubstitutingEq.(13.88)intoEq.(13.111),whereT=0.025,yieldsthedigitalcompensatorInordertosimulatethedigitalsystem,wecalculatethez-transformoftheplantinFigure13.34incascadewithazero-ordersample-and-hold.Thez-transformofthesampledplantisevaluatedbythemethoddiscussedinSection13.4usingT=0.025.Theresultisi-5GP(z)=6.418xlQ-°z+6.327x10z2-1.958*+0.9582-5(13.113)ThestepresponseinFigure13.35showsapproximately20%overshootandasettlingtimeof2.1secondsfortheclosed-loopdigitalsystem.FIGURE13.35Closed-loopdigitalstepresponseforantennacontrolsystemwithaleadcompensator00.511.522.53Time(seconds)Note:ValidonlyatintegervaluesofsamplinginstantSummaryeVWshowninFigureP13.2.[Section:13.5]T,thatwillkeepthesystemstable.controlsolutions[Section:13.6]>0s(s+5)HoldOm(a)20s(s+5)HoldOas)(s+3)(b)O*-20s(s+5)HoldO-Holdas)(J+3)(c)FIGUREP13.1^K/O^oo—as)G2(s)R(s)+&-*•G2(s)0,0)H(s)(a)lb)FIGUREP13.2^¾¾^&M-^OOG2(S)G&)O*-,vH,{s)—QGJs)as)1as)H2(s)TH2(s)FIGUREP13.31ss+1)2-fT2FIGUREP13.4as)ProblemsrC(s)1+l)(s+3)(s+4)(s+5;FIGUREP13.814.Findtherangeofgain,K,tomakethesystemshowninFigurePI3.7stable.[Section:13.6]mf<Y.fHoldT=0.23Ks(s+4)C(s)G(z)=FIGUREP13.715.Findthestaticerrorconstantsandthesteady-stateerrorforeachofthedigitalsystemsshowninFigurePI3.8iftheinputsare[Section:13.7]a.u(f)b.tu{t)1¼)c.7216.WriteaMATLABprogramthatcanbeMATLABusedtofindKplKv,andKafordigflUBitalsystems.TheprogramwillbeusedforsystemsofthetyperepresentedinFigureP13.6.TestyourprogramforWileyPLUS(¾0.04406Z3-0.03624Z2-0.03284z+0.02857z4-3.394z3+4.29z2-2.393z+0.4966whereG(z)isthepulsetransferfunctionforG(i)(s)incascadewiththez.o.h.andT=0.1second.controlsolutions17.ForthedigitalsystemshowninFigureP13.6,whereGx(s)=K/[{s+1)x(s+4)],findthevalueofKtoyielda16.3%overshoot.AlsofindtherangeofKforstability.Let7/=0.1second.[Section:13.9]18.UseSimulinktosimulatethestepSimulinkresponseforthesystemofProb-^01_Jlem17.Setthevalueofgain,K,tothatdesignedinProbleml7for16.3%overshoot.774Chapter13DigitalControlSystems19.UseMATLAB'sLTIViewertodeter-JjuITo0'minethepeaktimeandsettling^1^timeoftheclosed-loopstepresponseforSystem4inFigureP13.8ThedesignedPIDcontrollerwas20.WriteaMATLABprogramthatcanbeMATLABusedtodesignthegainofadigi-VLU^Ptalcontrolsystemtomeetapercentovershootrequirement.TheprogramwillbeusedforsystemsofthetyperepresentedinFigurePi3.6andmeetthefollowingrequirements:Findthedigitaltransferfunction,Gc(z),ofthePIDcontrollerinorderforthesystemtobecomputercontrolledifthesamplinginterval,T,is0.01second.[Section:13.10]GAs)=4.625.Acontinuousunityfeedbacksystemhasaforwardtransferfunctionofc.MATLABwilldisplaytherootlocusonthez-planealongwithanoverlayofthepercentovershootcurve.d.TheuserwillclickwiththemouseattheintersectionoftherootlocusandpercentovershootoverlayandMATLABwillrespondwiththevalueofgainfollowedbyadisplayofthestepresponseoftheclosed-loopsystem.ApplyyourprogramtoProblem17andcompareresults.21.ForthedigitalsystemshowninFigurePI3.6,whereGi(s)=K/[s(s+1)],findthevalueofKtoyieldapeaktimeof2secondsifthesamplinginterval,T,is0.1second.Also,findtherangeofKforstability.[Section:13.9]wileyPLUsControlSolutionsa.Theuserwillinputthedesiredpercentovershoot.b.MATLABwillconvertG1(s)cascadedwiththesample-and-holdtoG(z).(5+55.92)(5+0.5)GW=5(5+5)(5+8)Thesystemistobecomputercontrolledwiththefollowingspecifications:Percentovershoot:10%Settlingtime:2secondsSamplinginterval:0:01secondDesignaleadcompensatorforthedigitalsystemtomeetthespecifications.[Section:13.10]26.RepeatProblem25usingMATLAB.MATLABDESIGNPROBLEMS27.a.ConverttheheadingcontrolfortheUFSSvehicleshownonthebackendpapers(Johnson,1980)intoadigitallycontrolledsystem.b.Findtheclosed-looppulsetransferfunction,7/(4,ifT-0.1second.c.Findtherangeofheadinggaintokeepthedigitalsystemstable.22.ForthedigitalsystemshowninFigurewileypiusP13.6,where'Gi(s)=K/[s(s+1)WMH928.ArobotequippedtoperformarcweldingwasdiscussedinProblem45,Chapter8.Therobotwas(5+3)],findthevalueofKtoyieldacontrolsolutionscompensatedbyfeedingbackpressureandvelocity20%overshootifthesamplinginterval,T,issignalsasshowninFigureP8.13(Z>).Eliminating0.1second.Also,findtherangeofKforstability.thesefeedbackpathsyieldstheblockdiagramshown[Section:13.9]inFigurePI3.9(Hardy,1967).23.ForthedigitalsystemshowninFigureP13.6,whereGi{s)=K(s+2)+[$($+1)(5+3)],findthevalueofKtoyieldasettlingtimeof15secondsifthesamplinginterval,T,is1second.Also,findtherangeofKforstability.[Section:13.9]24.APIDcontrollerwasdesignedinExample9.5foracontinuoussystemwithunityfeedback.Thesystem'splantwas(5+8)G(s)=;5+3)(5+6)(5+10)FIGUREP13.9Simplifiedblockdiagramforrobotswingmotiona.Converttherobottoadigitalcontrolsystem.Useasamplingtimeof0.1second.b.Sketchtherootlocus.Problemsc.Findtherangeofgain,K,tokeepthedigitalsystemstable.d.RepeatallpreviouspartsusingMATLABMATLAB.KQP29.ThefloppydiskdriveofProblem57,Chapter8istobedigitallycontrolled.IftheanalogsystemisasshowninFigureP13.10,dothefollowing:31.Problem35,Chapter9describedatwo-tanksystemwheretheobjectivewastomaintainaconstantliquidlevelinoneofthetanksviacontrolofaninflowvalve.Assumeforthisproblemthatthetransferfunctionrelatingliquid-leveloutput,Y(s),toflowrateinputFe(s),forthelowertankis(Romagnoli,2006)G(s)=Desiredpositionx,,is)Motorand,oac1(9)*VyFIGUREP13.10diskdrive.20,000s(s+100)ActualpositionYML_Simplifiedblockdiagramofafloppya.Convertthediskdrivetoadigitalsystem.Useasamplingtimeof0.01second.b.Findtherangeofdigitalcontrollergaintokeepthesystemstable.c.Findthevalueofdigitalcontrollergaintoyield15%overshootforadigitalstepresponse.d.RepeatallpreviouspartsandJ^Ji^LobtainthestepresponseforCiilSPPartcusingMATLAB.30.Scanningprobemicroscopesareusedtovisualizesamplesinthesub-microndimensionalrange.Theytypicallyuseasilica-basedprobetophysicallytrackthesampletopographytocreateaviableimage.However,thesedevicesareverysensitivetoexternaldisturbanceandvibrations.Anapproachcalledinherentdisturbancesuppressiontriestoalleviatethedisturbanceproblemthroughtheadditionofalaserinterferometerthatisusedtomeasuretheprobe-sampleinteractionandcompensateforundesiredprobemovements.ThetechniquewasimplementedinatappingmodeatomicforcemicroscopemeasuringsingleDNAmolecules.Itwasshownthatforasignificantrangeoffrequenciestheopen-looptransmissionfromtheprobe'svoltageinputtoprobe'sdisplacementis(Sparks,2006)Gi(s)=775Y(s)Fe(s)0.01870.237^+0.00908AssumethatthesystemwillbecontrolledinclosedloopbymeansofadigitalcomputersystemwithasampleperiodT=1second,asshowninFigureP13.6,withGi(s)=KG(s).UsethebilineartransformationandtheRouth-HurwitzmethodtofindtherangeofKthatwillresultinastableclosedloopsystem.32.Assumethatthetwo-tanksystemofProblem31iscontrolledbyadigitalcomputerintheconfigurationofFigureP13.6,whereGi(s)=KG(s).IfasamplingperiodofT=1secondisused,dothefollowing(Romagnoli,2006).a.UseMATLABtodrawtheroot_MATLABlocus.Cul^Pb.FindthevalueofKthatwillresultinastablesystemwithadampingfactorof£=0.7.c.UsetherootlocusofPartbtopredictthestepresponsesettlingtime,Ts,andpeaktime,Tp.d.Calculatethefinalvalueoftheclosed-loopsystemtoaunitstepinput.e.ObtainthestepresponseofsimulinkthesystemusingSimulink.VE9PVerifythepredictionsyoumadeinPartscandd.33.InProblem48,Chapter9,andProblem39,Chapter10,weconsideredtheradialpickuppositioncontrolofaDVDplayer.Acontrollerwasdesignedandplacedincascadewiththeplantinaunitfeedbackconfigurationtostabilizethesystem.Thecontrollerwasgivenby20000M[S)0.5(,+1.63)45+0.27)andtheplantby(Bittanti,2002)Assumingtheprobeisdigitallycontrolledinaloop,asshowninFigureP13.6,calculatethesamplingperiodrangethatwillresultinastableclosed-loopsystem.P(s)=0.630.36,305.41+^248.277^+248.22305.4'0.04776Chapter13DigitalControlSystemsItisdesiredtoreplacethecontinuoussystembyanequivalentdiscretesystemwithoutappreciablyaffectingthesystemperformance.a.Findanappropriatesamplingfrequencyforthediscretization.b.Usingthechosensamplingfrequency,translatethecontinuouscompensatorintoadiscretecompensator.c.UseSimulinktosimulatethesimulinkcontinuousanddiscretesystemsonthesamegraph.Assumeaunitstepinput.Aretheresignificantdifferencesinthesystem'sperformance?a.UseasamplingperiodofT=0.5sandfindadiscreteequivalentforthissystem.b.UseMATLABtodrawtherootlocus.tmmW1JPc.FindthevalueofKthatwillresultinastablesystemwithadampingfactorof£=0.7.d.UsetherootlocusfoundinPartatopredictthestep-responsesettlingtime,Ts,andpeaktime,Tp.e.Calculatethefinalvalueoftheclosed-loopsystemunitstepresponse.f.ObtainthestepresponseofSimulinkthesystemusingSimulink.^E^PVerifythepredictionsyoumadeinPartscandd.34.InProblem25,Chapter11,wediscussedanEVAD,adevicethatworksinparallelwiththehumanheart36.Ifyouhavenotalreadydoneso,dowileypmstohelppumpbloodinpatientswithcardiaccondiProblem45inChapter9.InthisprobGZ29Conlro1tions.Thedevicehasatransferfunctionlem,youdesignaPIDcontrollerforasolutionstemperaturecontrolsystem.DigitizeyourPIDde1361Pao{s)G(s)=signanddrawaflowchartfromwhichthePIDEm(s)s2+69s+70.85controllercanbeimplemented.whereEm(s)isthemotor'sarmaturevoltage,andPao(s)istheaorticbloodpressure(Tasch,1990).37.DiscretetimecontrolledsystemscanexhibituniquecharacteristicsnotavailableincontinuouscontrolUsingcontinuoustechniques,acascadedcompenlers.Forexample,assumingaspecificinputandsatorisdesignedinaunityfeedbackconfigurationsomeconditions,itispossibletodesignasystemwithatransferfunctiontoachievesteadystatewithinonesingletimesam0^-fl)plewithoutovershoot.ThisschemeiswellknownW*"s+0.05andreferredtoasdeadbeatcontrol.WeillustrateSelectingtocontrolthedeviceusingamicrocondeadbeatcontroldesignwithasimpleexample.Fortroller,adiscreteequivalenthastobefoundforamorecomprehensivetreatmentsee(Ogata,1987).Gc(s).Dothefollowing.AssumeinFigure13.25(a)thatGp(s)=-.a.FindanappropriatesamplingfrequencyfortheThepurposeofthedesignwillbetofindacompendiscretization.sator,Gc(z),suchthatforastepinputthesystemb.Translatethecontinuouscompensatorintoaachievessteadystatewithinonesample.WestartbydiscretecompensatorusingthesamplingfretranslatingthesystemintothediscretedomaintoquencyfoundinParta.obtaintheequivalentofFigure13.25(c).Thepulsec.UseSimulinktosimulatethesjmuhnk(1-e-T)z~xtransferfunction,G(z)=,,-isfoundpcontinuousanddiscretesysV3^Pl—e~z1ternsonthesamegraphforaunitstepusingEq.(13.40),sinceitisassumedthatthecominput.Thereshouldbelittledifferpensatorwillbefollowedbyazero-orderhold.InencebetweenthecompensatedcontinuFigure13.25(c),theclosed-looptransferfunctionisousanddiscretesystems..,C(z)-,,Gc(z)Gp(z),.(z)Gp(z)R{z)=T(z)=1;+,XGc,JX35.InProblem46,Chapter9,asteam-driventurbinerx»or>solvinggivenby-£-%T(z)governorsystemwasimplementedbyaunityfeedforthecompensator,wegetGc(z)=1GJz)1-T(Zybacksystemwithaforward-pathtransferfunction(Khodabakhshian,2005)Thedesiredsystemoutputisaunitstepdelayedbyone1Kr(,unitsample.Thus,C(z)=TZ11Sincez-l'(s+0.08)(J+2)(5+5)z-\Problemstheinputisaunitstep,R(z)—-;thedesiredz—1closed-looptransferfunctionis—j4-=T(z)=z~\andtheresultingcompensator,foundbydirectsubstitution,isgivenbyGc(z)=-zf^-777Problem79(a),Chapter5,youfoundtheblockdiagramfortheactivepantographcontrolsystem.InChapter9,youdesignedaPIDcontrollertoyieldasettlingtimeof0.3secondwithzerosteady-stateerror.Assumingthattheactivecontrolsystemistobecomputercontrolled,dothefollowing:AssumenowthattheplantisgivenbyGp(s)=|,andasamplingperiodof7=0.05secondisused.a.Designadeadbeatcompensatortoreachsteadystatewithinonetimesampleforastepinput.a.ConvertthePIDcontrollerdesignedinProblem55,Chapter9,toadigitalcontrollerbyspecifyingitssampledtransferfunction,Gc(z).Assumethatthepotentiometersarereplacedbyakeyboard,A/Dconverters,andunitygaintransducers.b.Calculatetheresultingsteady-stateerrorforaunit-sloperampinput.b.DrawaflowchartfromwhichthePIDcontrollercanbeimplemented.c.SimulateyoursystemusingSimulinkc.UseMATLABtosimulatethestepJ^^LSIMULINK.(Hint:Fo11owingKBresponseofthedigitalactiveCuI^PFigure13.25,theforwardpathwillcontrolsystem.consistofthecascadingofGc(z),a41.ControlofHIV/AIDS.InChapter11,acontinuouszero-orderhold,andGp{s).)ShowcascadedcompensatorforaunityfeedbacksystemthatthesystemreachessteadystatewasdesignedforthetreatmentoftheHIV-infectedafteronesample.AlsoverifyyourpatienttreatedwithRTIs(Craig,2004).Thetransfersteady-stateerrorrampresult.functionofthedesignedcompensatorwasLabViEW38.Given-2xIP"V+0.04s+0.0048)GAs)=G(s)=s(s+0.02)s+4UsetheLabVIEWControlDesignandSimulationModuleto(1)convertG(s)toadigitaltransferfunctionusingasamplingrateof0.25second;and(2)plotthestepresponsesofthediscreteandthecontinuoustransferfunctions.39.GivenLabVIEWG(z)=K(z+0.5)>-0.25)(z-0.75;ThelinearizedplantwasgivenbyP(s)=Y(s)Ui(s)-520s-10.3844s3+2.6817^2+0.11s+0.0126Thecompensatedsystemisoverdampedwithanapproximatesettlingtimeof100seconds.Thissystemmustbediscretizedforpracticalreasons:(1)HIVpatientcannotbemonitoredcontinuouslyand(2)medicinedosagecannotbeadjustedcontinuously.UsetheLabVIEWControlDesign^ATJABandSimulationModuleandthe^Cd^PMathScriptRTModuleto(1)obtainthevalueof.FCthatwillyieldadampingratioof0.5fortheclosed-loopsysteminFigure13.20,whereH(z)=l;and(2)displaythestepresponseoftheclosed-loopsysteminFigure13.20whereH(z)=1.CompareyourresultswiththoseofSkillAssessmentExercise13.8.a.ShowthatareasonablesamplingperiodforthissystemisT=8days(medicinedosagewillbeupdatedonaweeklybasis).b.UseTustin'smethodandT=8daystofindadiscreteequivalenttoGC(S).PROGRESSIVEANALYSISANDDESIGNPROBLEMS40.High-speedrailpantograph.Problem21inChapter1discussesactivecontrolofapantographmechanismforhigh-speedrailsystems(O'Connor,1997).In42.Hybridvehicle.InProblem7.69(Figure"*TL^_P7.34),theblockdiagramofacascadeCul^PschemeforthespeedcontrolofanHEV(Preitl,2007)wasrepresentedasaunityfeedbacksystem.C,UseSimulinktosimulatetheSimulinkcontinuousanddiscretecom^E^Ppensatedsystemsforaunitstepinput.Plotbothresponsesonthesamegraph.778Chapter13DigitalControlSystemsInthatdiagramtheoutputofthesystemisthespeedtransducer'soutputvoltage,C(s)—KssV(s).InPartbofProblem11.35,whereacompensatorwasdesignedforthisproblem,wediscussedthefeasibilityofachievingfullpole-zerocancellationwhenweplaceaPIspeedcontroller'szero,Z/,ontopoftheuncompensatedsystem'srealpole,closesttotheorigin(locatedat-0.0163).Notingthatperfectpole-zerocancellationmaynotbemaintained,westudiedacase,inwhichthePi-controller'szerochangedby+20%,movingto-0.01304.Inthatcase,thetransferfunctionoftheplantwithaPIspeedcontroller,whichhasaproportionalgain=K,wasgivenby:G(s)=ir(s+0.6)(.y+0.01304)s(j+0.0163)(s+0.5858)AssumingthatGi(s)inFigureP13.6equalsthetransferfunction,G(s),givenaboveforthevehiclewiththespeedcontroller:a.DevelopaMATLABM-filethatwouldallowyoutodothefollowing:[Hint:RefertotheM-filesyoudevelopedforProblems13and20ofthischapter]wholerangeofthesamplingtime,T.SubsequentlysetT=0.75Tma>:;(3)Designthegainofadigitalcontrolsystemtomeetapercentovershootrequirement,%OS,allowingtheusertoinputthevalueofthedesired%OSandthevalueofthePIspeedcontroller'sproportionalgain,K;(4)Plotthestepresponseofthatdigitalsystem(inperunit,p.u.,vs.timeinseconds)b.RuntheM-fileyoudevelopedinPartaandenterthevaluesofthedesiredpercentovershoot,%OS=0,andthePIspeedcontroller'sproportionalgain,iC=61;c.Selectapointinthegraphicswindowdisplayingtherootlocus,suchthatallpolesoftheclosed-looptransferareinsidetheunitfunction,Tzlcircle.(1)ConvertGx{s)cascadedwithasample-and-holdtoG(z);d.Writethesampled-datatransferfunctionsobtained,GzandTz,indicatingthecorrespondingvalueofthesamplingtime,T,andallpoles,r,oftheclosed-looptransferfunction,Tz;(2)Searchovertherange0<T<5secondsforthelargestsamplingperiodTmaxbelowwhichthesystemisstable.Calculatethez-planerootsoftheclosed-loopsystemforthee.Plotthestepresponseofthatdigitalsystem(inperunit,p.u.,vs.timeinseconds)notingthefollowingcharacteristics:finalvalue,risetime,andsettlingtime.CyberExplorationLaboratoryExperiment13.1ObjectiveTodesignthegainofadigitalcontrolsystemtomeetatransientresponserequirement;tosimulateadigitalcontrolsystemtotestadesign;toseetheeffectofsamplingrateuponthetimeresponseofadigitalsystem.MinimumRequiredSoftwarePackagesMATLAB,Simulink,andtheControlSystemToolboxPrelab1.Giventheantennaazimuthcontrolsystemshownonthefrontendpapers,useConfiguration2tofindthediscretetransferfunctionoftheplant.Neglectthedynamicsofthepoweramplifierandincludethepreamplifier,motor,gears,andload.Assumeazero-orderholdandasamplingintervalof0.01second.CyberExplorationLaboratory2.UsingthedigitalplantfoundinPrelab1,findthepreamplifiergainrequiredforaclosed-loopdigitalsystemresponsewith10%overshootandasamplingintervalof0.01second.Whatisthepeaktime?3.Giventheantennaazimuthcontrolsystemshownonthefrontendpapers,useConfiguration2tofindthepreamplifiergainrequiredforthecontinuoussystemtoyieldaclosed-loopstepresponsewith10%overshoot.Considertheopen-loopsystemtobethepreamplifier,motor,gears,andload.Neglectthedynamicsofthepoweramplifier.Lab1.VerifyyourvalueofpreamplifiergainfoundinPrelab2usingtheSISODesignTooltogeneratetherootlocusforthedigitalopen-looptransferfunctionfoundinPrelab1.UsetheDesignConstraintscapabilitytogeneratethe10%overshootcurveandplaceyourclosed-looppolesatthisboundary.Obtainaplotoftherootlocusandthedesignboundary.Recordthevalueofgainfor10%overshoot.Also,obtainaplotoftheclosed-loopstepresponseusingtheLTIViewerandrecordthevaluesofpercentovershootandpeaktime.Usethesametooltofindtherangeofgainforstability.2.UsingSimulinksetuptheclosed-loopdigitalsystemwhoseplantwasfoundinPrelab1.Maketwodiagrams:onewiththedigitaltransferfunctionfortheplantandanotherusingthecontinuoustransferfunctionfortheplantprecededbyazero-ordersample-and-hold.Usethesamestepinputforbothdiagramsandobtainthestepresponseofeach.Measurethepercentovershootandpeaktime.3.UsingSimulink,setupboththedigitalandcontinuoussystemscalculatedinPrelabs2andPrelab3,respectively,toyield10%overshoot.Buildthedigitalsystemwithasample-and-holdratherthanthez-transformfunction.Plotthestepresponseofeachsystemandrecordthepercentovershootandthepeaktime.4.ForoneofthedigitalsystemsbuiltinLab2,varythesamplingintervalandrecordtheresponsesforafewvaluesofsamplingintervalabove0.01second.Recordsamplinginterval,percentovershoot,andpeaktime.Also,findthevalueofsamplingintervalthatmakesthesystemunstable.Postlab1.Makeatablecontainingthepercentovershoot,peaktime,andgainforeachofthefollowingclosed-loopresponses:thedigitalsystemusingtheSISODesignTool;thedigitalsystemusingSimulinkandthedigitaltransferfunctions;thedigitalsystemusingSimulinkandthecontinuoustransferfunctionswiththezeroordersample-and-hold;andthecontinuoussystemusingSimulink.2.UsingthedatafromLab4,makeatablecontainingsamplinginterval,percentovershoot,andpeaktime.Also,statethesamplingintervalthatmakesthesystemunstable.3.Comparetheresponsesofallofthedigitalsystemswithasamplingintervalof0.01secondandthecontinuoussystem.Explainanydiscrepancies.4.Comparetheresponsesofthedigitalsystematdifferentsamplingintervalswiththecontinuoussystem.Explainthedifferences.5.Drawsomeconclusionsabouttheeffectofsampling.Chapter13DigitalControlSystemsExperiment13.2ObjectiveTousethevariousfunctionsfromtheLabVIEWControlDesignandSimulationModulefortheanalysisofdigitalcontrolsystems.MinimumRequiredSoftwarePackagesLabVIEWwiththeControlDesignandSimulationModuleandtheMathScriptRTModule;MATLABwiththeControlSystemsToolbox.PrelabYouaregivenFigureP8.28andtheparameterslistedinthePrelabofCyberExplorationLaboratoryExperiment8.2fortheopen-loopNASAeight-axisARMII(AdvancedResearchManipulatorII)electromechanicalshoulderjoint/link,actuatedbyanarmature-controlleddcservomotor.1.Obtaintheopen-looptransferfunctionoftheshoulderjoint/link,G(s)=T.L,,,VrefiS)oruseyourcalculationfromCyberExplorationLaboratoryExperiment8.2.2.UseMATLABanddesignadigitalcompensatortoyieldaclosed-loopresponsewithzerosteady-stateerrorandadampingratioof0.7.IfyoualreadyhaveperformedCyberExplorationLaboratoryExperiment8.2,modifyyourM-filefromthatexperiment.TestyourdesignusingMATLAB.LabSimulateyourPrelabdesignusingaSimulationLoopfromtheLabVIEWControlDesignandSimulationModule.Plotthestepresponseoftwoloopsasfollows:(1)aunityfeedbackwiththeforwardpathconsistingofthecontinuoussystemtransferfunctionprecededbyazero-orderhold,and(2)aunityfeedbackwiththeforwardpathconsistingoftheequivalentdiscretetransferfunctionofyourcompensatorincascadewiththeopen-loopplant.PostlabComparetheresultsobtainedwiththosefromyourprelabMATLABprogram.Commentontime-performancespecifications.f^Bibliography^Astrom,K.I,andWittenmark,B.ComputerControlledSystems.PrenticeHall,UpperSaddleRiver,NJ,1984.Bittanti,S.,Dell'Orto,E,DiCarlo,A.,andSavaresi,S.M.NotchFilteringandMultirateControlforRadialTrackinginHighSpeedDVD-Players.IEEETransactionsonConsumerElectronics,vol.48,2002,pp.56-62.Boyd,M.,andYingst,J.C.PC-BasedOperatorControlStationSimplifiesProcess,SavesTime.Chilton'sI&CS,September1988,pp.99-101.Chassaing,R.DigitalSignalProcessing.Wiley,NewYork,1999.Craig,I.K.,Xia,X.,andVenter,J.W.IntroducingHIV/AIDSEducationintotheElectricalEngineeringCurriculumattheUniversityofPretoria.IEEETransactionsonEducation,vol.47,no.1,February2004,pp.65-73.Craig,J.J.IntroductiontoRobotics.MechanicsandControl,3ded.PrenticeHall,UpperSaddleRiver,NJ,2005.Hardy,H.L.Multi-LoopServoControlsProgrammedRobot.InstrumentsandControlSystems,June1967,pp.105-111.Hostetter,G.H.DigitalControlSystemDesign.Holt,Rinehart&Winston,NewYork,1988.Johnson,H.etal.UnmannedFree-SwimmingSubmersible(UFSS)SystemDescription.NRLMemorandumReport4393.NavalResearchLaboratory,Washington,D.C.,1980.BibliographyKatz,P.DigitalControlUsingMicroprocessors.PrenticeHall,UpperSaddleRiver,NJ,1981.Khodabakhshian,A.,andGolbon,N.DesignofaNewLoadFrequencyPIDControllerUsingQFT.Proceedingsofthe13thMediterraneanConferenceonControlandAutomation,2005,pp.970-975.Kuo,B.C.AutomaticControlSystems,7thed.PrenticeHall,UpperSaddleRiver,NJ,1995.Kuo,B.C.DigitalControlSystems.Holt,Rinehart&Winston,NewYork,1980.Nyzen,R.J.AnalysisandControlofanEight-Degree-of-FreedomManipulator,OhioUniversityMastersThesis,MechanicalEngineering,Dr.RobertL.WilliamsII,Advisor,August1999.O'Connor,D.N.,Eppinger,S.D,Seering,W.P.,andWormly,D.N.ActiveControlofaHighSpeedPantograph.JournalofDynamicSystems,Measurements,andControl,vol.119,March1997,pp.l-A.Ogata,K.Discrete-TimeControlSystems.PrenticeHall,UpperSaddleRiver,NJ,1987.Phillips,C.L.,andNagle,H.X,Jr.,DigitalControlSystemAnalysisandDesign.PrenticeHall,UpperSaddleRiver,NJ,1984.Preitl,Z.,Bauer,P.,andBokor,J.ASimpleControlSolutionforTractionMotorUsedinHybridVehicles.4thInternationalSymposiumonAppliedComputationalIntelligenceandInformatics.IEEE,2007.Romagnoli,J.A.,andPalazoglu,A.IntroductiontoProcessControl.CRCPress,BocaRaton,FL,2006.Smith,C.L.DigitalComputerProcessControl.IntextEducationalPublishers,NY,1972.Sparks,A.W,andManalis,S.R.AtomicForceMicroscopywithInherentDisturbanceSuppressionforNanostructureImaging.Nanotechnology,vol.17,2006,pp.1574-1579.Tasch,U,Koontz,J.W,Ignatoski,M.A.,andGeselowitz,D.B.AnAdaptiveAorticPressureObserverforthePennStateElectricVentricularAssistDevice.IEEETransactionsonBiomedicalEngineering,vol.37,1990,pp.374-383.Tou,J.DigitalandSampled-DataControlSystems.McGraw-Hill,NewYork,1959.Williams,R.L.II.LocalPerformanceOptimizationforaClassofRedundantEight-Degreeof-FreedomManipulators.NASATechnicalPaper3417,NASALangleyResearchCenter,HamptonVA,March1994.AppendixA:ListofSymbols%OSPercentovershootAAmpere—unitofelectricalcurrentASystemmatrixforstate-spacerepresentationamMotortimeconstantBMechanicalrotationalcoefficientofviscousfrictioninN-m-s/radBInputmatrixforstate-spacerepresentationCElectricalcapacitanceinfaradsCOutputmatrixforstate-spacerepresentationC(s)Laplacetransformoftheoutputofasystemc(t)OutputofasystemCMControllabilitymatrixDMechanicalrotationalcoefficientofviscousfrictioninN-m-s/radDFeedforwardmatrixforstate-spacerepresentationDaMotorarmaturecoefficientofviscousdampinginN-m-s/radD„,Totalcoefficientofviscousfrictionatthearmatureofamotor,includingarmaturecoefficientofviscousfrictionandreflectedloadcoefficientofviscousfrictioninN-m-s/radEEnergyE(s)Laplacetransformoftheerrore(t)Error;electricalvoltageEa(s)Laplacetransformofthemotorarmatureinputvoltage;Laplacetransformoftheactuatingsignalea{t)Motorarmatureinputvoltage;actuatingsignalFFarad—unitofelectricalcapacitanceF(s)Laplacetransformof/(/)/(/)Mechanicalforceinnewtons;generaltimefunction/vMechanicaltranslationalcoefficientofviscousfrictiongAccelerationduetogravityGElectricalconductanceinmhosG(s)Forward-pathtransferfunctionGc(s)CompensatortransferfunctionGc(z)SampledtransferfunctionforacompensatorGMGainmarginGp(z)Sampledtransferfunctionforaplant784AppendixA:ListofSymbolsHHenry—unitofelectricalinductanceH(s)Feedback-pathtransferfunctionIIdentitymatrixmElectricalcurrentinamperesJMomentofinertiainkg-m2JaMotorarmaturemomentofinertiainkg-m2hnTotalmomentofinertiaatthearmatureofamotor,includingarmaturemomentofinertiaandreflectedloadmomentofinertiainkg-m2KControllergainmatrixKMechanicaltranslationalspringconstantinN/morrotationalspringconstantinN-m/rad;amplifiergain;residuekControllerfeedbackgain;runningindexKaKbAccelerationconstantmFeedbackgainBackemfconstantinV/rad/skgkg-m2Kilogram=newtonseconds2/meter—unitofmassKilogrammeters2=newton-metersseconds2/radian—unitofmomentofinertiaKmMotorgainKpPositionconstantK,MotortorqueconstantrelatingdevelopedtorquetoarmaturecurrentinN-m/AKvVelocityconstantLElectricalinductanceinhenriesLObservergainmatrix/ObserverfeedbackgainMMassinkilograms;slopeoftherootlocusasymptotesmMeter—unitofmechanicaltranslationaldisplacementM((o)Magnitudeofasinusoidalresponsem/sMeters/second—unitofmechanicaltranslationalvelocityMpPeakmagnitudeofthesinusoidalmagnituderesponseNNewton—unitofmechanicaltranslationalforceinkilogrammeters/second2N-s/mNewton-seconds/meter—unitofmechanicaltranslationalcoefficientofviscousfrictionnSystemtypeN/mNewton/meter—unitofmechanicaltranslationalspringconstantN-mNewton-meter—unitofmechanicaltorqueN-m-s/Newton-meter-seconds/radian—unitofmechanicalrotationalcoefficientofradviscousfrictionN-m/ANewton-meter/ampere—unitofmotortorqueconstantN-m/radNewton-meter/radian—unitofmechanicalrotationalspringconstantOMObservabilitymatrixPSimilaritytransformationmatrixpcCompensatorpoleQCoulomb—unitofelectricalchargeq(t)ElectricalchargeincoulombsAppendixA:ListofSymbolsRElectricalresistanceinohmsR(s)LaplacetransformoftheinputtoasystemrNonlinearelectricalresistancer(t)InputtoasystemRaMotorarmatureresistanceinohmsradRadian—unitofangulardisplacementrad/sRadian/second—unitofangularvelocitysSecond—unitoftimesComplexvariablefortheLaplacetransformSp:pSensitivityofFtoafractionalchangeinPTTimeconstant;samplingintervalfordigitalsignalsT(s)Closed-looptransferfunction;LaplacetransformofmechanicaltorqueT(t)MechanicaltorqueinN-mTm(t)TorqueatthearmaturedevelopedbyamotorinN-mTm(s)LaplacetransformofthetorqueatthearmaturedevelopedbyamotorTpPeaktimeinsecondsTrRisetimeinsecondsTsSettlingtimeinsecondsTwPulsewidthinsecondsuInputorcontrolvectorforstate-spacerepresentationuInputcontrolsignalforstate-spacerepresentationu(t)UnitstepinputV-s/radVolt-seconds/radian—unitofmotorbackemfconstantv(t)Mechanicaltranslationvelocityinm/s;electricalvoltagevb(t)Motorbackemfinvoltsve(t)Errorvoltagevp(t)PoweramplifierinputinvoltsxStatevectorforstate-spacerepresentationx(t)Mechanicaltranslationdisplacementinmeters;astatevariablexTimederivativeofastatevariablexTimederivativeofthestatevectoryOutputvectorforstate-spacerepresentationy(i)Outputscalarforstate-spacerepresentationzComplexvariableforthez-transformzcCompensatorzeroaPole-scalingfactorforalagcompensator,wherea>1;angleofattack/6Pole-scalingfactorforaleadcompensator,wherefi<1yPole-scalingfactorforalag-leadcompensator,wherey>1SThrustanglefDampingratio9Angleofavectorwiththepositiveextensionoftherealaxis0(t)Angulardisplacement6aAngleofarootlocusasymptotewiththepositiveextensionoftherealaxis785786AppendixA:ListofSymbols6CAngularcontributionofacompensatoronthes-plane9m(t)AngulardisplacementofthearmatureofamotorX.EigenvalueofasquarematrixaRealpartoftheLaplacetransformvariable,soaReal-axisinterceptoftherootlocusasymptotes4>MPhasemargin¢(0Statetransitionmatrix0Sinusoidalphaseangle;bodyangle4>cSinusoidalphaseangleofacompensatorQmaxMaximumsinusoidalphaseanglenOhm—unitofelectricalresistanceWMho—unitofelectricalconductancetoImaginarypartoftheLaplacetransformvariable,sco(t)Angularvelocityinrad/s>)intheCommandWindow.Youmayalsorunthefilesbyright-clickingthefilename,ifitappearsintheCurrentFolderwindow,andselectRunFile.ToviewallorpartoftheM-fileintheCommandWindow,enter"type"or"help,"respectively,aftertheprompt.YoumayalsoviewandmakechangestotheM-filebydouble-clickingthefileintheCurrentFolderwindow.Thisactionbringsuptheeditor.Afterediting,besuretosavetherevisedfilebeforeexecuting.IfyoudonothavetheControlSystemsEngineeringToolboxM-files,youcancreateyourownM-filesbytypingthecodeforeachprobleminthisappendixintoaseparateM-file(thereisnoneedtotypethefinalpausestatementorcomments),andnamingeachM-filewitha.mextension,asinch2pl.m.YoucanalsotypethecodeformorethanoneproblemintoanM-file,includingthepausecommand,andnametheM-filewiththe.mextension.YoucanthencallthefilefromtheCommandWindow,andcontinuepastthepausestatementstothenextproblembypressinganykey.788AppendixB:MATLABTutorialByitsnature,thisappendixcannotcoverallthebackgroundanddetailsnecessaryforacompleteunderstandingofMATLAB.Forfurtherdetails,youarereferredtoothersources,includingMATLABreferencemanualsandinstructionsspecifictoyourparticularcomputer.Thebibliographyattheendofthisappendixprovidesapartiallistingofreferences.ThisappendixshouldgiveyouenoughinformationtobeabletoapplyMATLABtotheanalysisanddesignproblemscoveredinthisbook.ThecodecontainedinthisappendixandintheControlSystemsEngineeringToolboxwasdevelopedonaPCusingMATLABVersion7.9andtheControlSystemToolboxVersion8.4.ThecodewillalsorunonworkstationsthatsupportMATLAB.ConsulttheMATLABInstallationGuideforyourplatformforminimumsystemhardwarerequirements.(B.2MATLABExamplesChapter2:ModelingintheFrequencyDomainch2p1Bitstringswillbeusedtoidentifypartsofthistutorialonthecomputeroutput.Bitstringsarerepresentedbythetextenclosedinapostrophes,suchas'ab'.Commentsbeginwith%andareignoredbyMATLAB.Numbersareenteredwithoutanyothercharacters.Arithmeticcanbeperformedusingtheproperarithmeticoperator.Numberscanbeassignedusingaleft-handargumentandanequalssign.Finally,wecanfindthemagnitudeandangleofacomplexnumber,Qusingabs(Q)andangle(Q),respectively.'(ch2pl)''Howareyou?'-3.96-4+7i-5-6j(-4+7i)+(-5-6i;(-4+7j)*(-5-6j)M=5N=6P=M+NQ=3+4jMagQ=abs(Q)ThetaQ=(180/pil*angle(Q)pause%Displaylabel.%Displaystring.%Displayscalarnumber-3.96.%Displaycomplexnumber-4+7i.%Displaycomplexnumber-5-6j.%Addtwocomplexnumbersand%displaysum.%Multiplytwocomplexnumbersand%displayproduct.%Assign5toManddisplay.%Assign6toNanddisplay.%AssignM+NtoPanddisplay.%Definecomplexnumber,Q.%FindmagnitudeofQ.%FindtheangleofQindegrees.ch2p2Polynomialsinscanberepresentedasrowvectorscontainingthecoefficients.ThusPi—s3+Is2-3s+23canberepresentedbythevectorshownbelowwithelementsseparatedbyaspaceorcomma.Bitstringscanbeusedtoidentifyeachsectionofthistutorial.'(ch2p2)'Pl=[l7-323]pause%Displaylabel.%StorepolynomialsA3+7sA2-3s+%23asPIanddisplay.B.2MATLABExamplesch2p3RunningthepreviousstatementscausesMATLABtodisplaytheresults.Endingthecommandwithasemicolonsuppressesthedisplay.Typinganexpressionwithoutaleft-handassignmentandwithoutasemicoloncausestheexpressiontobeevaluatedandtheresultdisplayed.EnterP2intheMATLABCommandWindowafterexecution.'(ch2p3)'P2=[3578];3*5pause%Displaylabel.%Assign3sA3+5sA2+7s+8toP2%withoutdisplaying.%Evaluate3*5anddisplayresult.ch2p4AnF(s)infactoredformcanberepresentedinpolynomialform.ThusP3=(s+2)(s+5)(s+6)canbetransformedintoapolynomialusingpo1y(V),whereVisarowvectorcontainingtherootsofthepolynomialandpoly(V)formsthecoefficientsofthepolynomial.'(ch2p4)(P3=poly([-2-5-6])%Displaylabel.%Storepolynomial%(s+2)(s+5)(s+6)asP3and%displaythecoefficientspausech2p5Wecanfindrootsofpolynomialsusingtheroots(V)command.Therootsarereturnedasacolumnvector.Forexample,findtherootsof5J4+7s3+9s2-3s+2=0.r(ch2p5)'P4=[579-32]rootsP4=roots(P4)%Displaylabel.%Form5sA4+7sA3+9sA2-3s+2and%display.%Findrootsof5sA4+7sA3+9sA2%-3s+2,%assigntorootsP4,anddisplay.pausech2p6Polynomialscanbemultipliedtogetherusingtheconv(a,b)command(standingforconvolve).Thus,P5=(s3+Is2+10?+9)(/-3s3+6s2+2s+1)isgeneratedasfollows:•(ch2p6)»P5=conv([l7109],[1-3621])%%%%Displaylabel.Form(sA3+7sA2+10s+9)(sA43sA3+6sA2+2s+l),assigntoP5,anddisplay.pausech2p7Thepartial-fractionexpansionforF(s)=b(s)/a(s)canbefoundusingthe[K,p,k]=residue(b,a)command(K=residue;p=rootsofdenominator;k=directquotient,whichisfoundbydividingpolynomialspriortoperformingapartialfractionexpansion).WeexpandF(s)={Is2+95+ll)/[s{s+7)(s2+10s+100)]asanexample.UsingtheresultsfromMATLAByields:F(s)=[(0.25540.3382/)/(s+5.0000-8.6603¾)]+[(0.2554+0.3382/)/(s+5.0000+8.6603/)][0.5280/(5+7)]+[0.0171/5].789790AppendixB:MATLABTutorial*(ch2p7)'numf>[7912]denf=conv(poly([0-7]),[110100]);[K,p,k]=residue(numf,denf)%Displaylabel.%DefinenumeratorofF(s).%DefinedenominatorofF(s).%FindresiduesandassigntoK;%findrootsofdenominatorand%assigntop;find%constantandassigntok.pausech2p8(Example2.3)LetusdoExample2.3inthebookusingMATLAB.'(ch2p8)Example2.3'numy=32;deny=poly([0-4-8]);[r,p,k]=residue(numy,deny)%Displaylabel.%Definenumerator.%Definedenominator.%Calculateresidues,poles,and%directquotient.pausech2p9CreatingTransferFunctionsVectorMethod,PolynomialFormAtransferfunctioncanbeexpressedasanumeratorpolynomialdividedbyadenominatorpolynomial,thatis,F(s)=N(s)/D(s).Thenumerator,N(s),isrepresentedbyarowvector,numf,thatcontainsthecoefficientsofN(s).Similarly,thedenominator,D(s),isrepresentedbyarowvector,denf,thatcontainsthecoefficientsofD(s).WeformF(s)withthecommand,F=tf(numf,denf).Fiscalledalineartime-invariant(LTI)object.Thisobject,ortransferfunction,canbeusedasanentityinotheroperations,suchasadditionormultiplication.WedemonstratewithF(s)=150(.s2+2s+7)/[s{s2+5s+4)].Noticeafterexecutingthetfcommand,MATLABprintsthetransferfunction.VectorMethod,FactoredFormWealsocancreateLTItransferfunctionsifthenumeratoranddenominatorareexpressedinfactoredform.Wedothisbyusingrowvectorscontainingtherootsofthenumeratoranddenominator.ThusG(s)=K*N(s)/D(s)canbeexpressedasanLTIobjectusingthecommand,G=zpk(numg,deng,K),wherenumgisarowvectorcontainingtherootsofN(s)anddengisarowvectorcontainingtherootsofD(s).Theexpressionzpkstandsforzeros(rootsofthenumerator),poles(rootsofthedenominator),andgain,K.WedemonstratewithG(s)=20(5+2)(s+4)/[(s+7){s+8)(s+9)].Noticeafterexecutingthezpkcommand,MATLABprintsthetransferfunction.RationalExpressioninsMethod,PolynomialForm(RequiresControlSystemToolbox8.4)Thismethodallowsyoutotypethetransferfunctionasyounormallywouldwriteit.Thestatements=tf('s')mustprecedethetransferfunctionifyouwishtocreateanLTItransferfunctioninpolynomialformequivalenttousingF=tf(numf,denf).RationalExpressioninsMethod,FactoredForm(RequiresControlSystemToolbox8.4)Thismethodallowsyoutotypethetransferfunctionasyounormallywouldwriteit.Thestatements=zpk('s')mustprecedethetransferfunctionifyouwishtocreateanLTItransferfunctioninfactoredformequivalenttousingG=zpk(numg,deng,K).B.2MATLABExamplesForbothrationalexpressionmethodsthetransferfunctioncanbetypedinanyformregardlessofwhethers=tf('s')ors=zpk('s')isused.ThedifferenceisinthecreatedLTItransferfunction.Weusethesameexamplesabovetodemonstratetherationalexpressioninsmethods.'(ch2p9)''VectorMethod,PolynomialForm'numf=150*[l27]%Displaylabel.%Displaylabel.%Store150(sA2+2s+7)innumfand%display.%Stores(s+l)(s+4)indenfanddenf=[l540]%display.'F(s)'%Displaylabel.%FormF(s)anddisplay.F=tf{numf,denf)clear%Clearpreviousvariablesfrom%workspace.%Displaylabel.'VectorMethod,FactoredForm'numg=[-2-4]%Store(s+2)(s+4)innumgand%display.deng=[-7-8-9]%Store(s+7)(s+8)(s+9)indeng%anddisplay.K=20%DefineK.'G(s)'%Displaylabel.%FormG(s)anddisplay.G=zpk(numg,deng,K)clear%Clearpreviousvariablesfrom%workspace.'RationalExpressionMethod,PolynomialForm'%Displaylabel.s=tf('s')%Define's'asanLTIobjectin%polynomialform.%FormF(s)asanLTItransferF=150*(sA2+2*s+7)/[s*(sA2+...5*s+4)]%functioninpolynomialform.%FormG(s)asanLTItransferG=20*(s+2)*(s+4)/[(s+7)*...(s+8)*(s+9)]%functioninpolynomialform.clear%Clearpreviousvariablesfrom%workspace.'RationalExpressionMethod,FactoredForm'%Displaylabel.s=zpk{'s')%Define's'asanLTIobjectin%factoredform.F=150*(sA2+2*s+7)/[s*(5^2+5*3+4)]%FormF(s)asanLTItransfer%functioninfactoredform.G=20*(s+2)*(s+4)/[(s+7)*(s+8)*(s+9)]IFormG(s)asanLTItransfer%functioninfactoredform.pausech2p10Transferfunctionnumeratoranddenominatorvectorscanbeconvertedbetweenpolynomialformcontainingthecoefficientsandfactoredformcontainingtheroots.TheMATLABfunction,tf2zp(numtf,dentf),convertsthenumeratoranddenominatorfromcoefficientstoroots.Theresultsareintheformofcolumnvectors.WedemonstratethiswithF(s)=(10s2+4Qs+60)/03+4*2+5^+7).TheMATLABfunction,zp2tf(numzp,denzp,K),convertsthenumeratoranddenominatorfromrootstocoefficients.Theargumentsnumzpanddenzpmustbecolumn792AppendixB:MATLABTutorialvectors.Inthedemonstrationthatfollows,apostrophessignifytranspose.WedemonstratetheconversionfromrootstocoefficientswithG(s)=10(5+2)(s+4)/[s(s+3)(s+5)].'(ch2pl0)''CoefficientsforF(s)'numftf=[104060]%Displaylabel.%Displaylabel.%FormnumeratorofF(s)=%(10sA2+40s+60)/(sA3+4sA2+5s%+7).denftf=[l457]%FormdenominatorofF(s)=%(10sA2+40s+60)/(sA3+4sA2+5s%+7).%Displaylabel.'RootsforF(s)'[numfzp,denfzp]=tf2zp(numftf,denftf)%ConvertF(s)tofactoredform.%Displaylabel.'RootsforG(s)'%Formnumeratorofnumgzp=[_2-4]K=10%G(s)=10(s+2)(s+4)/[s(s+3)%(3+51].dengzp=[0-3-5]%Formdenominatorof%G(s)=10(s+2)(s+4)/[s(s+3)(s+5)].%Displaylabel.'CoefficientsforG(s)'[numgtf,dengtf]=zp2tf(numgzp',dengzp',K)%ConvertG(s)topolynomialform.pausech2p11LTImodelscanalsobeconvertedbetweenpolynomialandfactoredforms.MATLABcommandstfandzpkarealsousedfortheconversionbetweenLTImodels.Ifatransferfunction,Fzpk(s),isexpressedasfactorsinthenumeratoranddenominator,thentf(Fzpk)convertsFzpk{s)toatransferfunctionexpressedascoefficientsinthenumeratoranddenominator.Similarly,ifatransferfunction,Ftf(s),isexpressedascoefficientsinthenumeratoranddenominator,thenzpk(Ftf)convertsFtf(s)toatransferfunctionexpressedasfactorsinthenumeratoranddenominator.Thefollowingexampledemonstratestheconcepts.•(ch2pll)''Fzpkl(s)'Fzpkl=zpk([-2-4],[0-3-5],10)•Ftfl'Ftfl=tf(Fzpkl)'Ftf2'Ftf2=tf([104060],[1457])%%%%%%%%%Displaylabel.Displaylabel.FormFzpkl(s)=10(s+2)(s+4)/[s(s+3)(s+5)].Displaylabel.ConvertFzpkl(s)tocoefficientsform.Displaylabel.FormFtf2(s)=%(10sA2+40s+60)/(sA3+4sA2+5s'Fzpk2'Fzpk2=zpk(Ftf2)%+7).%Displaylabel.%ConvertFtf2(s)to%factoredform.pausech2p12FunctionsoftimecanbeeasilyplottedusingMATLAB'splot(X,Y,S),whereXistheindependentvariable,Yisthedependentvariable,andSisacharacterstringdescribingtheplotscolor,marker,andlinecharacteristic.TypeHELPPLOTinB.2MATLABExamplestheCommandWindowtoseealistofchoicesforS.Multipleplotsalsocanbeobtainedusingplot(XI,Yl,S1,X2,Y2,S2,X3,Y3,S3,...).Inthefollowingexampleweplotonthesamegraphsin(5£)inredandcos(5/)ingreenfort=0to10secondsin0.01secondincrements.Timeisspecifiedast=start:increment:final.'(ch2pl2)'t=0:0.01:10;fl=cos(5*t);f2=sin(5*t);plot(t,fl,»r',t,f2,,g')pause%Displaylabel.%Specifytimerangeandincrement%Specifyf1tobecos(5t).%Specifyf2tobesin(5t).%Plotf1inredandf2ingreen.Chapter3:ModelingintheTimeDomainch3p1Thesquaresystemmatrix,A=010001-9-8-7iswrittenwithaspaceorcommaseparatingtheelementsofeachrow.Thenextrowisindicatedwithasemicolonorcarriagereturn.Theentirematrixisthenenclosedinapairofsquarebrackets.'(ch3pl)'A=[010;001;-9-8-7]'or'A=[010001-9-8-7]pause%Displaylabel%RepresentA.%RepresentA.ch3p2Arowvector,suchastheoutputmatrixC,canberepresentedwithelementsseparatedbyspacesorcommasandenclosedinsquarebrackets.Acolumnvector,suchasinputmatrixB,canbewrittenaselementsseparatedbysemicolonsorcarriagereturns,orasthetranspose(')ofarowvector.'(ch3p2)'C=[234]B=[7;8;9]'or'B=[79]'or'B=[789]'pause%Displaylabel.%RepresentrowvectorC.%RepresentcolumnvectorB.%RepresentcolumnvectorB.%RepresentcolumnvectorB,ch3p3Thestate-spacerepresentationconsistsofspecifyingtheA,B,C,andDmatricesfollowedbythecreationofanLTIstate-spaceobjectusingtheMATLABcommand,ss(A,B,C,D).Hence,forthematricesin(ch3pl)and(ch3p2),thestatespacerepresentationwouldbe:793AppendixB:MATLABTutorial•(ch3p3)'A=[010;00lf-9-8-7]B=[7;8;9];C=[234];D=0;F=ss(A,B,C,D)%Displaylabel.%RepresentA.%RepresentcolumnvectorB.%RepresentrowvectorC.%RepresentD.%CreateanLTIobjectanddisplay.ch3p4(Example3.4)TransferfunctionsrepresentedeitherbynumeratoranddenominatororanLTIobjectcanbeconvertedtostatespace.Fornumeratoranddenominatorrepresentation,theconversioncanbeimplementedusing[A,B,C,D]=tf2ss(num,den).TheAmatrixisreturnedinaformcalledthecontrollercanonicalform,whichwillbeexplainedinChapter5inthetext.Toobtainthephasevariableform,[Ap,Bp,Cp,Dp],weperformthefollowingoperations:Ap=inv(P)*A*P;Bp=inv(P)*B;Cp=C*P,Dp=D,wherePisamatrixwithl'salongtheantidiagonaland0'selsewhere.ThesetransformationswillbeexplainedinChapter5.Thecommandinv(X)findstheinverseofasquarematrix.Thesymbol*signifiesmultiplication.ForsystemsrepresentedasLTIobjects,thecommandss(F),whereFisanLTItransfer-functionobject,canbeusedtoconvertFtoastate-spaceobject.LetuslookatExample3.4inthetext.Forthenumerator-denominatorrepresentation,noticethattheMATLABresponseassociatesthegain,24,withthevectorCratherthanthevectorBasintheexampleinthetext.Bothrepresentationsareequivalent.FortheLTItransfer-functionobject,theconversiontostatespacedoesnotyieldthephase-variableform.Theresultisabalancedmodelthatimprovestheaccuracyofcalculatingeigenvalues,whicharecoveredinChapter4.Sincess(F)doesnotyieldfamiliarformsofthestateequations(norisitpossibletoeasilyconverttofamiliarforms),wewillhavelimiteduseforthattransformationatthistime.'(ch3p4)Example3.4'%Displaylabel.'Numerator-denominatorrepresentationconversion'%Displaylabel.'Controllercanonicalform'%Displaylabel.num=24;%Definenumeratorofden=[l92624];[A,B,C,D]=tf2ss(num,den]'Phase-variableform'P=[001/010;100];Ap=inv(P)*A*PBp=inv(P)*BCp=C*PDp=D'LTIobjectrepresentation'T=tf(num,den)Tss=ss(T)pause%G(s)=C(s)/R(s).%DefinedenominatorofG(s).%ConvertG(s)tocontroller%canonicalform,storematrices%A,B,C,D,anddisplay.%Displaylabel.%Formtransformationmatrix.%FormAmatrix,phase-variable%form.%FormBvector,phase-variable%form.%FormCvector,phase-variable%form.%FormDphase-variableform.%Displaylabel.%RepresentT(s)=24/(sA3+9sA2+%26s+24)asanLTItransfer%functionobject.%ConvertT(s)tostatespace.B.2MATLABExamplesch3p5State-spacerepresentationscanbeconvertedtotransferfunctionsrepresentedbyanumeratorandadenominatorusing[num,den]=ss2tf(A,B,C,D,iu),whereiuistheinputnumberformultiple-inputsystems.Forsingle-input,single-outputsystemsiu=l.ForanLTIstate-spacesystem,Tss,theconversioncanbeimplementedusingTtf=tf(Tss)toyieldthetransferfunctioninpolynomialformorTzpk=zpk(Tss)toyieldthetransferfunctioninfactoredform.Forexample,thetransferfunctionrepresentedbythematricesdescribedin(ch3p3)canbefoundasfollows:'(ch3p5)''NonLTI'A=[010;001,--9-8-7];B=[7;8;9];C=[234]D=0;'Ttf(s)'[num,den]=ss2tf(A,B,C,D,1)'LTI'Tss=ss(A,B,C,D)'Polynomialform,Ttf(s)'Ttf=tf(Tss)'Factoredform,Tzpk(s)'Tzpk=zpk(Tss)Displaylabel.Displaylabel.RepresentA.RepresentB.RepresentC.RepresentD.Displaylabel.Convertstate-spacerepresentationtoatransferfunctionrepresentedasanumeratoranddenominatorinpolynomialform,G(s)=num/den,anddisplaynumandden.Displaylabel.FormLTIstate-spacemodel.Displaylabel.Transformfromstatespacetotransferfunctioninpolynomialform.Displaylabel.Transformfromstatespacetotransferfunctioninfactoredform.pauseChapter4:TimeResponsech4p1(Example4.6)WecanuseMATLABtocalculatecharacteristicsofasecondordersystem,suchasdampingratio,£;naturalfrequency,con;percentovershoot,%OS(pos);settlingtime,Ts;andpeaktime,Tp.LetuslookatExample4.6inthetext.'(ch4pl)Example4.6'pl=[l3+7*i];%Displaylabel.%Definepolynomialcontaining%firstpole.%Definepolynomialcontainingp2=[l3-7*i];%secondpole.deng=conv(pi,p2);%Multiplythetwopolynomialsto%findthe2ndorderpolynomial,%asA2+bs+c.omegan=sqrt(deng(3)/deng(1))%Calculatethenaturalfrequency,%sqrt(c/a).zeta=(deng(2)/deng(1))/(2*omegan)%Calculatedampingratio,%((b/a)/2*wn).Ts=4/(zeta*omegan)%Calculatesettlingtime,%(4/z*wn).795796AppendixB:MATLABTutorialTp=pi/(omegan*sqrt(1-zetaA2))%Calculatepeaktime,%pi/wn*sqrt(1-zA2).pos=100*exp(-zeta*pi/sqrt(1-zetaA2))%Calculatepercentovershoot%(100*eA(-z*pi/sqrt(l-zA2)).pausech4p2(Example4.8)WecanuseMATLABtoobtainsystemstepresponses.Theseresponsesareparticularlyvaluablewhenthesystemisnotapuretwo-polesystemandhasadditionalpolesorzeros.Wecanobtainaplotofthestepresponseofatransferfunction,T(s)=num/den,usingthecommandstep(T),whereTisanLTItransferfunctionobject.Multipleplotsalsocanbeobtainedusingstep(Tl,T2,...)Informationabouttheplotsobtainedwithstep(T)canbefoundbyleftclickingthemouseonthecurve.Youcanfindthecurve'slabelaswellasthecoordinatesofthepointonwhichyouclicked.Right-clickingawayfromacurvebringsupamenu.Fromthismenuyoucanselect(1)systemresponsestobedisplayedand(2)responsecharacteristicstobedisplayed,suchaspeakresponse.Whenselected,adotappearsonthecurveattheappropriatepoint.Letyourmouserestonthepointtoreadthevalueofthecharacteristic.Youmayalsoselect(3)choiceforgridonoroff,(4)choicetonormalizethecurve,and(5)properties,suchaslabels,limits,units,style,andcharacteristics.Ifweaddtheleft-handside,[y,t]=step(T),wecreatevectorscontainingtheplot'spoints,whereyistheoutputvectorandtisthetimevector.Forthiscase,aplotisnotmadeuntiltheplot(t,y)commandisgiven,whereweassumewewanttoplottheoutput(y)versustime(t).Wecanlabeltheplot,thex-axis,andthey-axiswithtitle('ab'),xlabelCab'),andylabel('ab'),respectively.Thecommandelfclearsthegraphpriortoplotting.Finally,textcanbeplacedanywhereonthegraphusingthecommandtext(X,Y,'text'),where(X,Y)arethegraphcoordinateswhere'text'willbedisplayed.LetuslookatExample4.8inthetext.1(ch4p2)Example4.8''TestRun'elfnumtl=[24.542];dentl=[l424.542];*T1(s)'Tl=tf(numtl,dentl)step(Tl)title('TestRunofTl(s)'pause'CompleteRun'[yl,tl]=step(TD;numt2=[245.42];pl=[l10];p2=[l424.542];dent2=conv(pi,p2);•T2(s)'T2=tf(numt2,dent2)%Displaylabel.%Displaylabel.%Cleargraph.%DefinenumeratorofTl.%DefinedenominatorofTl.%Displaylabel.%CreateanddisplayTl(s).%Runademonstrationstepresponse%plot%Addtitletograph.%Displaylabel.%RunstepresponseofTland%collectpoints.%DefinenumeratorofT2.%Define(s+10)indenominator%ofT2.%Define(sA2+4s+24.542)in%denominatorofT2.%Multiply(s+10)(sA2+4s+24.542)%fordenominatorofT2.%Displaylabel.%CreateanddisplayT2.B.2MATLABExamples[y2,t2]=step(T2);%RunstepresponseofT2and%collectpoints.numt3=[73.626];%DefinenumeratorofT3.%Define(s+3)indenominatorp3=[l3];%ofT3.%Multiply(s+3)(sA2+4s+24.542)dent3=conv(p3,p2);%fordenominatorofT3.%Displaylabel.'T3(s)'%CreateanddisplayT3.T3=tf(numt3,dent3)%RunstepresponseofT3and[y3,t3]=step(T3);%collectpoints.%Cleargraph.elf%Plotacquiredpointswithallplot(tl,yl,t2,y2,t3,y3)%threeplotsononegraph.;s),andT3(s)')title('StepResponsesofTl(s),T2%Addtitletograph.%Addtimeaxislabel.xlabel('Time(seconds)')%Addresponseaxislabel.%LabelstepresponseofTl.ylabel('NormalizedResponse')%LabelstepresponseofT2.text(0.7,0.7,'c3(t)')%LabelstepresponseofT3.text(0.7,l.l,'c2(t)')text(0.5,1.3,'cl(t)')pause%Usealternatemethodofplottingstep(Tl,T2,T3)%stepresponses.title('StepResponsesofTl(sT2(s),andT3(s)')%Addtitletograph.pausech4p3Wealsocanplotthestepresponseofsystemsrepresentedinstatespaceusingthestep(T,t)command.HereTisanyLTIobjectandt=a:b:cistherangeforthetimeaxis,whereaistheinitialtime,bisthetimestepsize,andcisthefinaltime.Forexample,t=0:1:10meanstimefrom0to10secondsinstepsof1second.Thetfieldisoptional.Finally,inthisexampleweintroducethecommandgridon,whichsuperimposesagridoverthestepresponse.Placethegridoncommandafterthestep(T,t)command.'(ch4p3)'elfA=[010,-00l;-24-26-9],B=[0;0;1];C=[271];D=0;T=ss(A,B,C,D)t=0:0.1:10;step(T,t)gridonpauseDisplaylabel.Cleargraph.GenerateAmatrix.GenerateBvector.GenerateCvector.GenerateD.GenerateLTIobject,T,instatespaceanddisplay.Definerangeoftimeforplot.Plotstepresponseforgivenrangeoftime.Turngridonforplot.ch4p4(AntennaControlCaseStudy)WenowuseMATLABtoplotthestepresponserequestedintheAntennaControlCaseStudy.;ch4p4)AntennaControlCaseStudy'%Displaylabel.%Cleargraph.elf797798AppendixB:MATLABTutorialnumg=20.83;deng=[l101.71171];'G(s)'G=tf(numg,deng)step(G);title('AngularVelocityResponse'%DefinenumeratorofG(s).%DefinedenominatorofG(s).%Displaylabel.%Formanddisplaytransfer%FunctionG(s).%Generatestepresponse.%Addtitle.pausech4p5(UFSSCaseStudy)Asafinalexample,letususeMATLABtodotheUFSSCaseStudyinthetext{Johnson,1980).Weintroducetablelookuptofindtherisetime.Usingtheinterpl(y,t,yl)command,wesetupatableofvaluesofamplitude,y,andtime,t,fromthestepresponseandlookforthevalueoftimeforwhichtheamplitudeisyl=0.1and0.9.Wealsogeneratetimeresponsedataoveradefinedrangeoftimeusingt=a:b:cfollowedby[y,t]=step(G,t).HereGisanLTItransfer-functionobjectandtistherangeforthetimeaxis,whereaistheinitialtime,bisthetimestepsize,andcisthefinaltime;yistheoutput.'(ch4p5)UFSSCaseStudy'elf'(a)'numg=0.0169;%Displaylabel.%Cleargraph.%Displaylabel.%Definenumeratorof2ndorder%approximationofG(s).%Define2ndordertermofdeng=(l0.2260.0169];%denominatorofG(s).%Displaylabel.'G(s)'%CreateanddisplayG(s).G=tf(numg,deng)%Findnaturalfrequency.omegan=sqrt(deng(3))zeta=deng(2)I(2*omegan)%Finddampingratio.%Findsettlingtime.Ts=4/(zeta*omegan)%Findpeaktime.Tp=pi/(omegan*sqrt(l-zetaA2))pos=exp/(-zeta*pi/sqrt(l-zetaA2!)*100%Findpercentovershoot.%Limittimetofindrisetime.t=0t=0:0.1:35;%to35instepsof0.1.%Generateandsavepointsofstep[y,t]=step(G,t);%responseoverdefinedrangeoft.%SearchtablefortimewhenTlow=interpl(y,t,0.1);%y=0.1*finalvalue.%SearchtableforThi=interpl(y,t,0.9);%time=0.9*finalvalue.%Calculaterisetime.Tr=Thi-Tlow%Displaylabel.'(b)'%DefinenumeratorofC(s).numc=0.125*[l0.435];denc=conv(poly([0-1.23]),[10.2260.0169]);%DefinedenominatorofC(s).%Findpartial-fractionexpansion[K,p,k]=residue(numc,denc)%Displaylabel.'(d)'%DefinenumeratorofG(s).numg=0.125*[l0.435];deng=conv([l1.23],[10.2260.0169]i;%DefinedenominatorofG(s).%Displaylabel.'G(s)'%CreateanddisplayG(s).G=tf(numg,deng)B.2MATLABExamples[y,t]=step(G);plot(t,y)title('PitchAngleResponse')xlabel('Time(seconds)')ylabel('PitchAngle(radians)')pause%Generatecompletestepresponse%andcollectpoints.%Plotpoints.%Addtitle.%labeltimeaxis.%Labely-axis.Chapter5:ReductionofMultipleSubsystemsch5p1(UFSSPitchControlSystem)MATLABcanbeusedforblockdiagramreduction.Threemethodsareavailable:(1)SolutionviaSeries,Parallel,&FeedbackCommands,(2)SolutionviaAlgebraicOperations,and(3)SolutionviaAppend&ConnectCommands.Letuslookateachofthesemethods.1.SolutionviaSeries,Parallel,&FeedbackCommandsTheclosed-looptransferfunctionisobtainedusingthefollowingcommandssuccessively,wheretheargumentsareLTIobjects:series(G1,G2)foracascadeconnectionofG\(s);andG2(s);parallel(Gl,G2)foraparallelconnectionofGi(s)andG2(s);feedback(G,H,sign)foraclosed-loopconnectionwithG(s)astheforwardpath,H(s)asthefeedback,andsignis-1fornegative-feedbacksystemsor+1forpositive-feedbacksystems.Thesignisoptionalfornegative-feedbacksystems.2.SolutionviaAlgebraicOperationsAnotherapproachistousearithmeticoperationssuccessivelyonLTItransferfunctionsasfollows:G2*G1foracascadeconnectionofGi(.v)andG2(s);G1+G2foraparallelconnectionofG\(s)andG2(s);G/(1+G*H)foraclosed-loopnegative-feedbackconnectionwithG(s)astheforwardpathandH(s)asthefeedback;G/(1-G*H)forpositive-feedbacksystems.Whenusingdivisionwefollowwiththefunctionminreal(sys)tocancelcommontermsinthenumeratoranddenominator.3.SolutionviaAppend&ConnectCommandsThelastmethod,whichdefinesthetopologyofthesystem,maybeusedeffectivelyforcomplicatedsystems.First,thesubsystemsaredefined.Second,thesubsystemsareappended,orgathered,intoamultiple-input/multiple-outputsystem.Thinkofthissystemasasinglesystemwithaninputforeachofthesubsystemsandanoutputforeachofthesubsystems.Next,theexternalinputsandoutputsarespecified.Finally,thesubsystemsareinterconnected.Letuselaborateoneachofthesesteps.ThesubsystemsaredefinedbycreatingLTItransferfunctionsforeach.ThesubsystemsareappendedusingthecommandG=append(Gl,G2,G3,G4,Gn),wheretheGiaretheLTItransferfunctionsofthesubsystemsandGistheappendedsystem.Eachsubsystemisnowidentifiedbyanumberbaseduponitspositionintheappendargument.Forexample,G3is3,basedonthefactthatitisthethirdsubsystemintheappendargument(notthefactthatwewriteitasG3).Nowthatwehavecreatedanappendedsystem,weformtheargumentsrequiredtointerconnecttheirinputsandoutputstoformoursystem.Thefirststepidentifieswhichsubsystemshavetheexternalinputsignalandwhichsubsystemshavetheexternaloutputsignal.Forexample,weuseinputs=[156]andoutputs=[34]todefinetheexternalinputstobetheinputsof800AppendixB:MATLABTutorialsubsystems1,5,and6andtheexternaloutputstobetheoutputsofsubsystems3and4.Forsingle-input/single-outputsystems,thesedefinitionsusescalarquantities.Thusinputs=5,outputs=8definetheinputtosubsystem5astheexternalinputandtheoutputofsubsystem8astheexternaloutput.Atthispointwetelltheprogramhowallofthesubsystemsareinterconnected.WeformaQmatrixthathasarowforeachsubsystemwhoseinputcomesfromanothersubsystem'soutput.Thefirstcolumncontainsthesubsystem'snumber.Subsequentcolumnscontainthenumbersofthesubsystemsfromwhichtheinputscome.Thus,atypicalrowmightbeasfollows:[36-7],orsubsystem3'sinputisformedfromthesumoftheoutputofsubsystem6andthenegativeoftheoutputofsubsystem7.Finally,alloftheinterconnectionargumentsareusedintheconnect(GQinputs,outputs)command,wherealloftheargumentshavebeenpreviouslydefined.Letusdemonstratethethreemethodsforfindingthetotaltransferfunctionbylookingatthebackendpapersandfindingtheclosed-looptransferfunctionofthepitchcontrolloopfortheUFSSwithKt=K%—I{Johnson,1980).Thelastmethodusingappendandconnectrequiresthatallsubsystemsbeproper(theorderofthenumeratorcannotbegreaterthantheorderofthedenominator).Thepitchratesensorviolatesthisrequirement.Thus,forthethirdmethod,weperformsomeblockdiagrammaneuversbypushingthepitchratesensortotheleftpastthesummingjunctionandcombiningtheresultingblockswiththepitchgainandtheelevatoractuator.Thesechangesarereflectedintheprogram.Youshouldverifyallcomputerresultswithhandcalculations.'(ch5pl)UFSSPitchControlSystem''&FeedbackCommands''SolutionviaSeries,Parallel'%Displaylabels.numgl=[-l];%DefinenumeratorofGl(s).%DefinedenominatorofGl(s).dengl=[l];%DefinenumeratorofG2(s).numg2=[02];%DefinedenominatorofG2(s).deng2=[l2];%DefinenumeratorofG3(s).numg3=-0.125*[l0.435];deng3=conv([l1.231,110.2260.0169]]%DefinedenominatorofG3(s).%DefinenumeratorofHi(s).numhl=[-l0];denhl=[01];%DefinedenominatorofHi(s).Gl=tf(numgl,dengl);%CreateLTItransferfunction,%Gl(s).G2=tf(numg2,deng2);%CreateLTItransferfunction,%G2(s).%CreateLTItransferfunction,G3=tf(numg3,deng3);%G3(s).%CreateLTItransferfunction,Hl=tf(numhl,denhl);%Hl(s).%CalculateproductofelevatorG4=series(G2,G3);%andvehicledynamics.%Calculateclose-looptransferG5=feedback(G4,Hl);%functionofinnerloop.%Multiplyinner-looptransferGe=series(G1,G5);%functionandpitchgain.B.2MATLABExamples'T(s)viaSeries,Parallel,&FeedbackCommands'%Displaylabel.%Findclosed-looptransferT=feedback(Ge,1)%function.'SolutionviaAlgebraicOperations'%Displaylabel.clear%Clearsession.numgl=[-l];%DefinenumeratorofGl(s).dengl=[l];%DefinedenominatorofGl(s).%DefinenumeratorofG2(s).numg2=[02];%DefinedenominatorofG2(s).deng2=[l2];%DefinenumeratorofG3(s).numg3=-0.125*[l0.435];deng3=conv([l1.23],[10.2260.0169]);%DefinedenominatorofG3(s).%DefinenumeratorofHI(s).numhl=[-l0];denhl=[01];%DefinedenominatorofHI(s).%CreateLTItransferfunction,Gl(s).Gl=tf(numgl,dengl)%CreateLTItransferfunction,G2(s).G2=tf(numg2,deng2)G3=tf(numg3,deng3)%CreateLTItransferfunction,G3(s).Hl=tf(numhl,denhl)%CreateLTItransferfunction,Hi(s).G4=G3*G2;%Calculateproductofelevatorand%vehicle%dynamics.G5=G4/(1+G4*H1);%Calculateclosed-looptransfer%functionofinnerloop.%Cancelcommonterms.G5=minreal(G5);%Multiplyinner-looptransferGe=G5*Gl;%functions.%Displaylabel.'T(s)viaAlgebraicOperations'%Findclosed-looptransferfunction.T=Ge/(l+Ge);%Cancelcommonterms.T=minreal(T)'SolutionviaAppend&ConnectCommands'%Displaylabel.'Gl(s)=(-Kl)*(l/(-K2s))=l/s'%Displaylabel.numgl=[1];%DefinenumeratorofGl(s).dengl=[l0];%DefinedenominatorofGl(s).Gl=tf(numgl,dengl)%CreateLTItransferfunction,%Gl(s)=pitchgain*%1(1/Pitchratesensor).'G2(s)=(-K2s)*(2/(s+2)r%Displaylabel.numg2=[-20];%DefinenumeratorofG2(s).deng2=[l2];%DefinedenominatorofG2(s).G2=tf(numg2,deng2)%CreateLTItransferfunction,%G2(s)=pitchratesensor*vehicle%dynamics.'G3(s)=-0.125(s+0.435)/((s+1.23)!sA2+0.226s+0.0169))'%Displaylabel.%DefinenumeratorofG3(s).numg3=-0.125*[l0.435];deng3=conv([11.23],[10.2260.0169]);%DefinedenominatorofG3(s).%CreateLTItransferfunction,G3=tf(numg3,deng3);%G3(s)=vehicledynamics.System=append(Gl,G2,G3);%Gatherallsubsystems.input=l;%Inputisatfirstsubsystem,801802AppendixB:MATLABTutorialoutput=3;Q=[l-3021-3320];%Gl(s).%Outputisoutputofthird%subsystem,G3(s).%Subsystem1,Gl(s),getsits%inputfromthenegativeofthe%outputofsubsystem3,G3(s).%Subsystem2,G2(s),getsits%inputfromsubsystem1,Gl(s),%andthenegativeoftheoutput%ofsubsystem3,G3(s).%Subsystem3,G3(s),getsits%inputfromsubsystem2,G2(s).T=connect(System,Q,input,output)%Connectthesubsystems.'T(s)viaAppend&ConnectCommands'%Displaylabel.T=tf(T);%CreateLTIclosed-looptransfer%function.T=minreal(T)%Cancelcommonterms.pausech5p2(Example5.3)WecanuseMATLABtocalculatetheclosed-loopcharacteristicsofasecond-ordersystem,suchasdampingratio,f;naturalfrequency,&>„;percentovershoot,%OS(pos);settlingtime,Ts;andpeaktime,Tp.Thecommand[numt,dent]=tfdata(T,'v')extractsthenumeratoranddenominatorofT(s)forasingle-input/single-outputsystemfromwhichthecalculationsarebased.Theargument'v'returnsthenumeratoranddenominatorassimplerowvectors.Omitting'v'wouldreturnthenumeratoranddenominatorascellarraysrequiringmorestepstoobtaintherowvectors.Weendbygeneratingaplotoftheclosed-loopstepresponse.LetuslookatExample5.3inthetext.'(ch5p2)Example5.3'numg=[25];deng=poly([0-5]);'G(s)'G=tf(numg,deng)'T(s)'T=feedback(G,l)[numt,dent]=tfdata(T,'v');wn=sgrt(dent(3))
z=dent(2)/(2*wn)Ts=4/(z*wn)Tp=pi/(wn*sqrt(1-2^2))pos=exp(-z*pi/sqrt(l-zA2))*100step(T)pause%Displaylabel.%DefinenumeratorofG(s).%DefinedenominatorofG(s).%Displaylabel.%CreateanddisplayG(s).%Displaylabel.%FindT(s).%Extractnumerator&denominator%ofT(s).%Findnaturalfrequency.%Finddampingratio.%Findsettlingtime.%Findpeaktime.%Findpercentovershoot.%Generatestepresponse.ch5p3MATLABcanbeusedtoconverttransferfunctionstostatespaceinaspecifiedform.Thecommand[AceBccCccDcc]!=tf2ss(num,den)canbeusedtoconvertr(.s)=num/denintocontrollercanonicalformwithmatricesandvectorsAce,Bcc,Ccc,andDec.WecanthenformanLTIstate-spaceobjectusingScc=ss(Ace,Bcc,Ccc,Dec).ThisobjectcanthenbeconvertedintoparallelB.2MATLABExamplesformusingSp=canon(Sec/type'),wheretype=modalyieldstheparallelform.Anotherchoice,notusedhere,istype=companion,whichyieldsarightcompanionsystemmatrix.Transformationmatricescanbeusedtoconverttootherrepresentations.Asanexample,letusconvertC(s)/R(s)=24/[(s+2)(s+3)(s+4)]intoaparallelrepresentationinstatespace,asisdoneinSection5.7—ParallelForm.NoticethattheproductofvaluesintheBandCvectorsyieldsthesameproductastheresultsinEqs.(5.49)and(5.50).Thus,thetwosolutionsarethesame,butthestatevariablesareordereddifferently,andthegainsaresplitbetweentheBandCvectors.WecanalsoextractthesystemmatricesfromtheLTIobjectusing[A,B,c,D]=ssdata(S),whereSisastate-spaceLTIobjectandA,B,c,D,areitsassociatedmatricesandvectors.'(ch5p3)'numt=24;dent=poly([-2-3-4]);'T(s)'T=tf(numt,dent)[AceBccCccDcc]=tf2ss(numt,dent)Scc=ss(Ace,Bcc,Ccc,Dec);Sp=canon(Sec,'modal');'ControllerCanonicalForm'[Ace,Bcc,Ccc,Dcc]=ssdata(Seel'ParallelForm'[Ap,Bp,Cp,Dp]=ssdata(Sp)%Displaylabel.%DefinenumeratorofT(s).%DefinedenominatorofT(s).%Displaylabel.%CreateanddisplayT(s).%ConvertT(s)tocontroller%canonicalform.%CreateLTIcontrollercanonical%state-spaceobject.%Convertcontrollercanonicalform%toparallelform.%Displaylabel.%Extractanddisplaycontroller%canonicalformmatrices.%Displaylabel.%Extractanddisplayparallelform%matrices.pausech5p4(Example5.9)WecanuseMATLABtoperformsimilaritytransformationstoobtainotherforms.LetuslookatExample5.9inthetext.'(ch5p4)Example5.9'Pinv=[200;320/145];P=inv(Pinv)'Original'Ax=[010;001;-2-5-7]Bx=[001]Cx=[l00]'Transformed'Az=Pinv*Ax*PBz=Pinv*BxCz=Cx*Ppause%%%%%%%%%%%Displaylabel.DefinePinverse.CalculateP.Displaylabel.DefineoriginalA.DefineoriginalB.DefineoriginalC.Displaylabel.CalculatenewA.CalculatenewB.CalculatenewC.ch5p5UsingMATLAB's[P,d]=eig(A)command,wherethecolumnsofParetheeigenvectorsofAandthediagonalelementsofdaretheeigenvaluesofA,wecanfindtheeigenvectorsofthesystemmatrixandthenproceedtodiagonalizethesystem.Wecanalsousecanon(S,'modal')todiagonalizeanLTIobject,S,representedinstatespace.803804AppendixB:MATLABTutorial'(ch5p5)'A=[315;4-27;231],B=[l;2;3];C=[246];[P,d]=eig(A)'ViaTransformation'Adt=inv(P)*A*PBdt=inv(P)*BCdt=C*P'ViaCanonCommand'S=ss(A,B,C,0)Sp=canon(S,'modal')Displaylabel.DefineoriginalA.DefineoriginalB.DefineoriginalC.Generatetransformationmatrix,P,andeigenvalues,d.Displaylabel.CalculatediagonalsystemA.CalculatediagonalsystemB.CalculatediagonalsystemC.Displaylabel.Createstate-spaceLTIobjectfororiginalsystem.Calculatediagonalsystemviacanoncommand.pauseChapter6:Stabilitych6p1(Example6.7)MATLABcansolveforthepolesofatransferfunctioninordertodeterminestability.TosolveforthepolesofT(s)usethepole(T)command.LetuslookatExample6.7inthetext.'(ch6pl)Example6.1'numg=1;deng=conv([10],[23232])G=tf(numg,deng);'T(s)'T=feedback(G,l)poles=pole(T]pause%Displaylabel.%DefinenumeratorofG(s).%DefinedenominatorofG(s).%CreateG(s)object.%Displaylabel.%Calculateclosed-loopT(s)%object.%Negativefeedbackisdefault%whenthereisnosignparameter.%FindpolesofT(s).ch6p2(Example6.9)WecanuseMATLABtofindtherangeofgainforstabilitybygeneratingaloop,changinggain,andfindingatwhatgainweobtainright-halfplanepoles.*(ch6p2)Example6.9'K=[l:1:2000];forn=l:length(K);dent=[l1877K{n)];poles=roots(dent);r=real(poles);ifmax(r)>=0,polesDisplaylabel.DefinerangeofKfrom1to2000instepsof1.SetuplengthofDOLOOPtoequalnumberofKvaluestobetested.DefinethedenominatorofT(s)forthenthvalueofK.FindthepolesforthenthvalueofK.FormavectorcontainingtherealpartsofthepolesforK(n).TestpolesfoundforthenthvalueofKforarealvalue>0.Displayfirstpolevalueswherethereisarealpart>0.B.2MATLABExamplesK=K(n)breakendendpause%DisplaycorrespondingvalueofK.%Stoploopifrhppolesarefound.%Endif.%Endfor.ch6p3(Example6.11)WecanuseMATLABtodeterminethestabilityofasystemrepresentedinstatespacebyusingthecommandeig(A)tofindtheeigenvaluesofthesystemmatrix,A.LetusapplytheconcepttoExample6.11inthetext.'(ch6p3)Example6.11'A=[031;281;-10-5-2]eigenvalues=eig(A)pause%Displaylabel.%Definesystemmatrix,A.%Findeigenvalues.Chapter7:Steady-StateErrorsch7p1(Example7.4,sys.b)StaticerrorconstantsarefoundusinglimsnG(s)ass—•0.Oncethestaticerrorconstantisfound,wecanevaluatethesteady-stateerror.Toevaluatethestaticerrorconstantwecanusethecommanddcgain(G),whichevaluatesG(s)ats=0.LetuslookatExample7.4,system(b),inthetext.'(ch7pl)Example7.4,sys.b'numg=500*poly([-2-5-6]);deng=poly([0-8-10-12]);G=tf(numg,deng);'CheckStability'T=feedback(G,l);poles=pole(T)'StepInput'Kp=dcgain(G)ess=l/(l+Kp)'RampInput'numsg=conv([l0],numg);densg=poly([0-8-10-12]);sG=tf(numsg,densg);sG=minreal(sG);Kv=dcgain(sG)ess=l/Kv'ParabolicInput'nums2g=conv([100],numg),dens2g=poly([0-8-10-12];s2G=tf(nums2g,dens2g);s2G=minreal(s2G);Ka=dcgain(s2G)ess=l/Kapause%Displaylabel%DefinenumeratorofG(s).%DefinedenominatorofG(s).%FormG(s)%Displaylabel.%FormT(s)%Displayclosed-looppoles.%Displaylabel.%EvaluateKp=numg/dengfors=0.%Evaluateessforstepinput.%Displaylabel.%DefinenumeratorofsG(s).%DefinedenominatorofsG(s).%CreatesG(s).%Cancelcommon's'in%numerator(numsg)and%denominator(densg).%EvaluateKv=sG(s)fors=0.%Evaluatesteady-stateerrorforrampinput.Displaylabel.DefinenumeratorofsA2G(s).DefinedenominatorofsA2G(s).CreatesA2G(s).Cancelcommon's'innumerator(nums2g)anddenominator(dens2g).EvaluateKa=sA2G(s)fors=0.Evaluatesteady-stateerrorforparabolicinput.805806AppendixB:MATLABTutorialch7p2(Example7.6)WecanuseMATLABtoevaluatethegain,K,requiredtomeetasteady-stateerrorspecification.LetuslookatExample7.6inthetext.'(ch7p2)Example7.6'numgdK=[l5];dengdK=poly([0-6-7-8]);GdK=tf(numgdK,dengdK);numgkv=conv([10],numgdK)dengkv=dengdK;GKv=tf(numgkv,dengkv);GKv=minreal(GKv);KvdK=dcgain(GKv)ess=0.1K=l/(ess*KvdK)'CheckStability'T=feedback(K*GdK,1);poles=pole(T)pauseDisplaylabel.DefinenumeratorofG(s)/K.DefinedenominatorofG(s)/K.CreateG(s)/K.DefinenumeratorofsG(s)/K.DefinedenominatorofsG(s)/K.CreatesG(s)/K.Cancelcommon's'innumeratoranddenominatorofsG(s)/K.Evaluate(Kv/K)=(numgkv/dengkv)fors=0.Enumeratesteady-stateerror.SolveforK.Displaylabel.ForraT(s).Displayclosed-looppoles.Chapter8:RootLocusTechniquesch8p1(Example8.7)MATLABallowsrootlocitobeplottedwiththerlocus(GH)command,whereG^/^s^numgh/denghandGHisanLTItransfer-functionobject.Pointsontherootlocuscanbeselectedinteractivelyusingthe[K/p]=rlocfind(GH)command.MATLABthenyieldsthegain(K)atthatpointaswellasallotherpoles(p)thathavethatgain.Wecanzoominandoutoftherootlocusbychangingtherangeofaxisvaluesusingthecommandaxis([xmin,xmax,ymin,ymax]).Therootlocuscanbedrawnoveragridthatshowsconstantdampingratio(z)andconstantnaturalfrequency(wn)curvesusingthesgrid(z,wn)command.Toplotmultiple£andconcurves,usez=zmin:zstep:zmaxandwn=wnmin:wn-step:wnmaxtospecifyrangesofvalues.'(ch8pl)Example8.7'elfnumgh=[l-420];dengh=poly([-2-4]);*G(s)H(s)'GH=tf(numgh,dengh)rlocus(GH)z=0.2:0.05:0.5;wn=0:l:10;sgrid(z,wn)title('RootLocus')pauserlocus(GH)axis([-31-44])title('Close-up')%Displaylabel.%Cleargraphonscreen.%DefinenumeratorofG(s)H(s).%DefinedenominatorofG(s)H(s).%Displaylabel.%CreateG(s)H(s)anddisplay.%Drawrootlocus.%Definedampingratiovalues:0.2%to0.5instepsof0.05.%Definenaturalfreguencyvalues:%0to10instepsof1.%Generatedampingratioand%naturalfreguencygridlinesfor%rootlocus.%Definetitleforrootlocus.%Drawclose-uprootlocus.%Definerangeonaxesforroot%locusclose-upview.%Definetitleforclose-uproot%locus.B.2MATLABExamplesz=0.45;wn=0;sgrid(z,wn)fork=l:3[K,p]=rlocfind(GH)endpause%Definedampingratiolinefor%overlayonclose-uprootlocus.%Suppressnaturalfrequency%overlaycurves.%Overlaydampingratiocurveon%close-uprootlocus.%Loopallows3pointstobe%selectedasperExample8.7,%(z=0.45,jwcrossing,breakaway).%Generategain,K,andclosed-loop%poles,p,forpointselected%interactivelyontherootlocus.%Endloop.ch8p2(Example8.8)Wecancouplethedesignofgainontherootlocuswithastep-responsesimulationforthegainselected.Weintroducethecommandrlocus(G,K),whichallowsustospecifytherangeofgain,K,forplottingtherootlocus.Thiscommandwillhelpussmooththeusualrootlocusplotbyequivalentlyspecifyingmorepointsviatheargument,K.NoticethatthefirstrootlocusplottedwithouttheargumentKisnotsmooth.Wealsointroducethecommandx=input('prompt'),whichallowskeyboardentryofavalueforxinresponsetoaprompt.Weapplythiscommandtoenterthedesiredpercentovershoot.Wealsoaddavariablesvaluetothetitleoftherootlocusandstep-responseplotsbyinsertinganotherfieldinthetitlecommandandusenum2str(value)toconvertvaluefromanumbertoacharacterstringfordisplay.LetusapplytheconceptstoExample8.8inthetext.'(ch8p2)Example8.8'clearelfnumg=[l1.5];deng=poly([0-1-10]);'G(s)'G=tf(numg,deng)rlocus(G)title('OriginalRootLocus')pauseK=0.005;%Displaylabel.%Clearvariablesfromworkspace.%Cleargraphonscreen.%DefinenumeratorofG(s).%DefinedenominatorofG(s).%Displaylabel.%CreateanddisplayG(s).%Drawrootlocus(H(s)=l).%Addtitle.%Specifyrangeofgaintosmooth%rootlocus.rlocus(G,K)%Drawsmoothedrootlocus%(H(s)=l).title('SmoothedRootLocus')%Addtitle.%Inputdesiredpercentovershootpos=input('Type%OS');%fromthekeyboard.z=-log(pos/100)/sqrt(piA2+[log(pos/100)]A2)%Calculatedampingratio.%Overlaydesireddampingratiosgrid(z,0)%lineonrootlocus.title(['RootLocuswith',num2str(pos),'%overshootline'])%Definetitleforrootlocus%showingpercentovershootused.[K,p]=rlocfind(G)%Generategain,K,andclosed%looppoles,p,forpointselected%interactivelyontherootlocus.807808AppendixB:MATLABTutorialpause'T(s)'T=feedback(K*G,1)%Displaylabel%Findclosed-looptransfer%function%withselectedKanddisplay.step(T)%Generateclosed-loopstep%responseforpointselecton%rootlocus.title(['StepResponseforK=',num2str(K)])%Givestepresponseatitlewhich%includesthevalueofK.pauseChapter9:DesignViaRootLocusch9p1(Example9.3)WecanuseMATLABtodesignPDcontrollers.Theprogramallowsustoinputadesiredpercentovershootviathekeyboard.MATLABthenproducesarootlocusfortheuncompensatedsystemwithanoverlayofthepercentovershootline.Weinteractivelyselecttheintersectionoftherootlocusandthedesiredpercentovershootlinetosetthegain.MATLABoutputsanestimateoftheuncompensatedsystem'sperformancespecificationsandastepresponseoftheuncompensatedsystemforustodeterminetherequiredsettlingtime.Afterweinputthesettlingtimethroughthekeyboard,MATLABdesignsthePDcontrollerandproducesarootlocusofthePDcompensatedsystemfromwhichwecaninteractivelyselectthegain.Finally,MATLABproducesanestimateofthePDcompensatedsystem'sperformancespecificationsandastepresponseofthePDcompensatedsystem.1(ch9pl)Example9.3'%Displaylabel.%Cleargraphonscreen.elf'UncompensatedSystem'%Displaylabel.%GeneratenumeratorofG(s).numg=l;deng=poly([0-4-6]);%GeneratedenominatorofG(s).'G(s)'%Displaylabel.G=tf(numg,deng)%CreateanddisplayG(s).pos=input('Typedesiredpercentovershoot');%Inputdesiredpercentovershoot.z-log(pos/100)/sqrt(piA2+[log(pos/100)]A2);%Calculatedampingratio.rlocus(G)%Plotuncompensatedrootlocus.sgrid(z,0)%Overlaydesiredpercent%overshootline.title(['UncompensatedRootLocuswith',num2str(pos),...OvershootLine'])%Titleuncompensatedrootlocus.[K,p]=rlocfind(G);%Generategain,K,andclosed-loop%poles,p,forpointselected%interactivelyontherootlocus.'Closed-looppoles='%Displaylabel.%Displayclosed-looppoles.pf=input('Givepolenumberthatisoperatingpoint');%Chooseuncompensatedsystem%dominantpole.'Summaryofestimatedspecificationsforselectedpointon''uncompensatedrootlocus'%Displaylabel.operatingpoint=p(f)%Displayuncompensateddominant%pole.B.2MATLABExamplgain=K%Displayuncompensatedgain•estimated_settling_time=4/abs(real(p(f)))%Displayuncompensatedsettling%time.estimated_peak_time=pi/abs(imag(p(f)))%Displayuncompensatedpeaktime.estimated_percent_overshoot=pos%Displayuncompensatedpercent%overshoot.estimated_damping_ratio=z%Displayuncompensateddamping%ratio.estimated_natural_frequency=sqrt(real(p(f))A2+imag(p(f))A2)%Displayuncompensatednatural%frequency.numkv=conv([10],numg);%SetupnumeratortoevaluateKv.denkv=deng;%SetupdenominatortoevaluateKv.sG=tf(numkv,denkv);%CreatesG(s).%Cancelcommonpolesandzeros.sG=minreal(sG);Kv=dcgain(K*sG)%DisplayuncompensatedKv.ess=l/Kv%Displayuncompensated%steady-state%errorforunitrampinput.'T(s)'%Displaylabel.T=feedback(K*G,1)%FinduncompensatedT(s).%Plotstepresponseofstep(T)%uncompensatedsystem.title(['UncompensatedSystemStepResponsewith',num2str(pos),...'%Overshoot'])%Addtitletouncompensatedstep%response.'PressanykeytogotoPDcompensation'%Displaylabel.pause%Displaylabel.'Compensatedsystem'Ts=input('TypeDesiredSettlingTime');%Inputdesiredsettlingtimefrom%thekeyboard.wn=4/(Ts*z);%Calculatenaturalfrequency.desired_pole=(-z*wn)+(wn*sqrt(l-zA2)*i);%Calculatedesireddominantpole%location.angle_at_desired_pole=(180/pi)*...angle(polyval(numg,desired_pole)/polyval(deng,desired_pole));%Calculateangularcontribution%todesiredpolewithoutPD%compensator.PD_angle=180-angle_at_desired_pole;%Calculaterequiredangular%contributionfromPD%compensator.zc=((imag(desired_pole)/tan(PD_angle*pi/180))...%CalculatePDzerolocation._real(desired_pole))/'PD'Compensator'%Displaylabel.%CalculatenumeratorofGc(s).numc=[lzc];%CalculatenumeratorofGc(s).denc=[01];'Gc(s)'%Displaylabel.810AppendixB:MATLABTutorialGc=tf(numc,denc)'G(s)Gc(s)'Ge=G*Gcrlocus(Ge,0:0.005:100)%CreateanddisplayGc(s).%Displaylabel.%CascadeG(s)andGc(s).%PlotrootlocusofPDcompensated%system.%Overlaydesiredpercentsgrid(z,0)%overshootline.title(['PDCompensatedRootLocuswith',num2str(pos),...'%OvershootLine'])%AddtitletoPDcompensatedroot%locus.[K,p]=rlocfind(Ge);%Generategain,K,andclosed-loop%poles,p,forpointselected%interactivelyontherootlocus.'Closed-looppoles='%Displaylabel.p%DisplayPDcompensatedsystems'%closed-looppoles.f=input('Givepolenumberthatisoperatingpoint');%ChoosePDcompensatedsystem%dominantpole.'SummaryofestimatedspecificationsforselectedpointonPD''compensatedrootlocus'%Displaylabel.operatingpoint=p(f)%DisplayPDcompensateddominant%pole.gain=K%DisplayPDcompensatedgain.estimated_settling_time=4/abs(real(p(f)))%DisplayPDcompensatedsettling%time.estimated_peak_time=pi/abs(imag(p(f)))%DisplayPDcompensatedpeaktime.%DisplayPDcompensatedpercentestimated_percent_overshoot=pos%overshoot.%DisplayPDcompensateddampingestimated_damping_ratio=z%ratio.estimated_natural_frequency=sqrt(real(p(f))A2+imag(p(f))A2%DisplayPDcompensatednatural%frequency.%Createdtransferfunction,'s'.s=tf([10],1);sGe=s*Ge;%CreatesGe(s).sGe=minreal(sGe);%Cancelcommonpolesandzeros.Kv=dcgain(K*sGe)%DisplaycompensatedKv.ess=l/Kv%Displaycompensated%steady-stateerrorfor%unitrampinput.'T(s)'%Displaylabel.T=feedback(K*Ge,1)%CreateanddisplayPDcompensated%T(s).'PressanykeytocontinueandobtainthePDcompensatedstep''response'%Displaylabel.pause%PlotstepresponseforPDstep(T)%compensatedsystem.title(['PDCompensatedSystemStepResponsewith'...num2str(pos),'%Overshoot'])%Addtitletostepresponse%ofPDcompensatedsystem.pauseB.2MATLABExamplesch9p2(Example9.4)WecanuseMATLABtodesignaleadcompensator.Theprogramallowsustoinputadesiredpercentovershootviathekeyboard.MATLABthenproducesarootlocusfortheuncompensatedsystemwithanoverlayofthepercentovershootline.Weinteractivelyselecttheintersectionoftherootlocusandthedesiredpercentovershootlinetosetthegain.MATLABoutputsanestimateoftheuncompensatedsystem'sperformancespecificationsandastepresponseoftheuncompensatedsystemforustodeterminetherequiredsettlingtime.Nextweinputthesettlingtimeandtheleadcompensatorzerothroughthekeyboard.Atthispointwetakeadifferentapproachfromthatofthepreviousexample.RatherthanlettingMATLABcalculatetheleadcompensatorpoledirectly,MATLABproducesarootlocusforeveryinteractiveguessofaleadcompensatorpole.Eachrootlocuscontainsthedesireddampingratioandnaturalfrequencycurves.Whenourguessiscorrect,therootlocus,thedampingratioline,andthenaturalfrequencycurvewillintersect.Wetheninteractivelyselectthispointofintersectiontoinputthegain.Finally,MATLABproducesanestimateofthelead-compensatedsystem'sperformancespecificationsandastepresponseofthelead-compensatedsystem.'(ch9p2)Example9.4'%Displaylabel.%Cleargraphonscreen.Clf'UncompensatedSystem'%Displaylabel.%GeneratenumeratorofG{s).numg=l;deng=poly([0-4-6]);%GeneratedenominatorofG(s).'G(s)'%Displaylabel.%CreateanddisplayG(s).G=tf(numg,deng)pos=input('Typedesiredpercentovershoot');%Inputdesiredpercentovershoot.z=-log(pos/100)/sqrt(piA2+[log(pos/100)]A2);%Calculatedampingratio.%Plotuncompensatedrootlocus.rlocus(G)sgrid(z,0)%Overlaydesiredpercent%overshootline.title(['UncompensatedRootLocuswith',num2str(pos),...'%OvershootLine'])%Titleuncompensatedrootlocus.[K,p]=rlocfind(G);%Generategain,K,andclosed-loop%poles,p,forpointselected%interactivelyontherootlocus.'Closed-looppoles='%Displaylabel.%Displayclosed-looppoles.pf=input('Givepolenumberthatisoperatingpoint');%Chooseuncompensatedsystem%dominantpole.'Summaryofestimatedspecificationsforselectedpointon'%Displaylabel.'uncompensatedrootlocus'operatingpoint=p(f)%Displayuncompensateddominant%pole.gain=K%Displayuncompensatedgain.estimated_settling_time=4/abs(real(p(f)))%Displayuncompensatedsettling%time.estimated_peak_time=pi/abs(imag(p(f)))%Displayuncompensatedpeaktime.estimated_percent_overshoot=pos%Displayuncompensatedpercent%overshoot.812AppendixB:MATLABTutorialestimated_damping_ratio=z%Displayuncompensateddamping%ratio.estimated_natural_frequency=sqrt(real(p(f))A2+imag(p(f))A2%Displayuncompensatednatural%frequency.%SetupnumeratortoevaluateKv.numkv=conv([10],numg);%SetupdenominatortoevaluateKv.denkv=deng;sG=tf(numkv,denkv);%CreatesG(s).sG=minreal(sG);%Cancelcommonpolesandzeros.Kv=dcgain(K*sG)%DisplayuncompensatedKv.ess=l/Kv%Displayuncompensated%steady-stateerrorfor%unitrampinput.%Displaylabel.'T(s)'%CreateanddisplayT(s).T=feedback(K*G,l)%Plotstepresponseofstep(T)%uncompensatedsystem.title([['UncompensatedSystemStepResponsewith',...%Addtitletouncompensatedstepnum2str(pos),'%Overshoot'])%response.'Pressanykeytogotoleadcompensation'%Displaylabel.pauseTs=input('TypeDesiredSettlingTime');%Inputdesiredsettlingtime.b=input('TypeLeadCompensatorZero,(s+b).b=');%Inputleadcompensatorzero.done=l;%Setloopflag.%Startloopfortryingleadwhiledone==l%compensatorpole.a=input('EnteraTestLeadCompensatorPole,(s+a).a=');%Entertestleadcompensatorpole.numge=conv(numg,[lb]);%GeneratenumeratorofGc(s)G(s).denge=conv([1a],deng);%Generatedenominator%ofGc(s)G(s).Ge=tf(numge,denge);%CreateGe(s)=Gc(s)G(s).wn=4/(Ts*z);%Evaluatedesirednatural%frequency.%Cleargraphonscreen.elf%Plotcompensatedrootlocuswithrlocus(Ge)%testleadcompensatorpole.axis([-10,10,-10,10])%Changelead-compensated%rootlocusaxes.%Overlaygridonlead-compensatedsgrid(z,wn)%rootlocus.title(['Lead-CompensatedRootLocuswith',num2str(pos),...%OvershootLine,LeadPoleat',...num2str(-a),'andRequiredWn'])%Addtitletolead-compensated%rootlocus.done=input['Areyoudone?(y=0,n=l)');%Setloopflag.%Endloopfortryingcompensatorend%pole.%Generategain,K,andclosed-loop[K,p]=rlocfind(Ge);%poles,p,forpointselectedB.2MATLABExamples%interactivelyontherootlocus.%Displaylabel.%Displayleadcompensator.%Displaylabel.%DisplayGc(s)G(s).%Displaylabel.%Displaylead-compensated%system's%closed-looppoles.f=input('Givepolenumberthatisoperatingpoint');%Chooselead-compensatedsystem%dominantpole.'Summaryofestimatedspecificationsforselectedpointonlead''compensatedrootlocus'%Displaylabel.operatingpoint=p(f)%Displaylead-compensated%dominantpole.gain=K%Displaylead-compensatedgain.estimated_settling_time=4/abs(real(p(f)))%Displaylead-compensated%settlingtime.estimated_peak_time=pi/abs(imag(p(f)))%Displaylead-compensated%peaktime.estimated_percent_overshoot=pos%Displaylead-compensated%percentovershoot.estimated_damping_ratio=z%Displaylead-compensated%dampingratio.estimated_natural_frequency=sqrt(real(p(f))A2+imag(p(f))A2)%Displaylead-compensated%naturalfrequency.%CreatetransferFunction,'s'.s=tf([10],1);sGe=s*Ge;%CreatesGe(s)toevaluateKv.%Cancelcommonpolesandzeros.sGe=minreal(sGe);Kv=dcgain(K*sGe)%Displaylead-compensatedKv.ess=l/Kv%Displaylead-compensatedsteady%stateerrorforunitrampinput.'T(s)'%Displaylabel.%Createanddisplayleadt=feedback(K*Ge,1)%compensatedT(s).'Pressanykeytocontinueandobtainthelead-compensatedstep''response'%Displaylabel.pausestep(T)%Plotstepresponseforlead%compensatedsystem.title(['Lead-CompensatedSystemStepResponsewith',...num2str(pos),'%Overshoot'])%Addtitletostepresponse%oflead-compensatedsystem.pause'Gc(s)'Gc=tf([lb],[la])'Gc(s)G(s)'Ge'Closed-looppoles='pChapter10:FrequencyResponseTechniquesch10p1(Example10.3)WecanuseMATLABtomakeBodeplotsusingbode(G),whereG/(s)=numg/dengandGisanLTItransfer-functionobject.Informationabouttheplotsobtainedwithbode(G)canbefoundbyleft-clickingthemouseonthecurve.Youcanfindthecurve'slabel,aswellasthecoordinatesofthepointonwhichyouclicked.Right-clickingawayfromacurvebringsupamenuiftheiconsonthemenu813814AppendixB:MATLABTutorialbararedeselected.Fromthismenuyoucanselect(1)systemresponsestobedisplayedand(2)characteristics,suchaspeakresponse.Whenselected,adotappearsonthecurveattheappropriatepoint.Letyourmouserestonthepointtoreadthevalueofthecharacteristic.Youmayalsoselect(3)whichcurvestoview,(4)choiceforgridonoroff,(5)returningtofullviewafterzooming,and(6)properties,suchaslabels,limits,units,style,andcharacteristics.Wecanobtainpointsontheplotusing[mag,phase,w]=bode(G),wheremagnitude,phase,andfrequencyarestoredinmag,phase,andw,respectively.Magnitudeandphasearestoredas3-Darrays.Weusemag(:,:)',phase(:,:)'toconvertthearraystocolumnvectors,wheretheapostrophesignifiesmatrixtranspose.LetuslookatExample10.3inthetext.'(chlOpl)Example10.3'%Displaylabel.elf%Cleargraphonscreen.numg=[l31;%DefinenumeratorofG(s).deng=conv([12],[1225]);%DefinedenominatorofG(s)'G(s)'%Displaylabel.G=tf(numg,deng)%CreateanddisplayG(s).%MakeaBodeplot.bode(G)gridon%TurnongridforBodeplot.title('Open-LoopFrequencyResponse')%AddatitletotheBodeplot.%StorepointsontheBodeplot.[mag,phase,w]=bode(G)points=[20*logl0(mag:))',phase(:,:)',w]%ListpointsonBodeplotwith%magnitudeindB.pausech10p2(Example10.5)WecanuseMATLABtomakeNyquistdiagramsusingnyquist(G),whereG{s)=numg/dengandGisanLTItransfer-functionobject.Informationabouttheplotsobtainedwithnyquist(G)canbefoundbyleftclickingthemouseonthecurve.Youcanfindthecurveslabel,aswellasthecoordinatesofthepointonwhichyouclickedandthefrequency.Right-clickingawayfromacurvebringsupamenuiftheiconsonthemenubararedeselected.Fromthismenuyoucanselect(1)systemresponsestobedisplayedand(2)characteristics,suchaspeakresponse.Whenselected,adotappearsonthecurveattheappropriatepoint.Letyourmouserestonthepointtoreadthevalueofthecharacteristic.Youmayalsoselect(3)whetherornottoshownegativefrequencies,(4)choiceforgridonoroff,(5)choiceforzoomingto(-1,0),(6)returningtofullviewafterzooming,and(7)properties,suchaslabels,limits,units,style,andcharacteristics.Wecanobtainpointsontheplotbyusing[re,im,w]=nyquist(G),wheretherealpart,imaginarypart,andfrequencyarestoredinre,im,andw,respectively,andreandimare3-Darrays.Wecanspecifyarangeofwbyusing[re,im]=nyquist(G,w).Weusere(:,:)',andim(:,:)'toconvertthearraystocolumnvectors.LetuslookatExample10.5inthetext.'(chl0p2)Example10.5'elfnumg=[l2];deng=[l00];'G(s)'G=tf(numg,deng)nyquist(G)%Displaylabel.%Cleargraphonscreen.%DefinenumeratorofG(s)%DefinedenominatorofG%Displaylabel.%CreateanddisplayG(s)%MakeaNyquistdiagram.B.2MATLABExamplesgridon%TurnongridforNyquistdiagram.title('Open-LoopFrequencyResponse')%AddatitletotheNyquist%diagram.%Let0=l,break;end;end;KrrmpauseDisplaylabel.DefinenumeratorofGa(s).DefinedenominatorofGa(s).Displaylabel.CreateanddisplayGa(s).Displaylabel.FindG(z)assumingGa(s)incascadewithz.o.h.anddisplay.SetrangeofKtolookforstability.FindT(z).GetpolesforthisvalueofK.FindpolewithmaximumabsolutevalueforthisvalueofK.Seeifpoleisoutsideunitcircle.Stopifpoleisfoundoutsideunitcircle.Endif.Endfor.DisplayKvalue.Displayclosed-looppolesforthisvalueofK.Displayabsolutevalueofpole.ch13p6(Example13.9)WecanuseMATLAB'scommanddcgain(Gz)tofindsteady-stateerrors.ThecommandevaluatesthedcgainofGz,adigitalLTItransferfunctionobject,byevaluatingGzatz=1.Weusethedcgaintoevaluate,Kp,Kv,andKa.LetuslookatExample13.9inthetext.YouwillinputT,thesamplinginterval,throughthekeyboardtoteststability.'(chl3p6)Example13.9'T=input('TypeT');numgls=[10];dengls=poly([0-1]);'Gl(s)'Gls=tf(numgls,dengls)'G(z)'Gz=c2d(Gls,T,'zoh')'T(z)'Tz=feedback(Gz,1)'Closed-Loopz-PlanePoles'r=pole(Tz)M=abs(r)pauseKp=dcgain(Gz)GzKv=Gz*(l/T)*tf([1-1],[10],T)GzKv=mineral(GzKv,0.00001)Kv=dcgain(GzKv)%Displaylabel.%Inputsamplinginterval.%DefinenumeratorofGl(s).%DefinedenominatorofGl(s).%Displaylabel.%CreateanddisplayGl(s).%Displaylabel.%ConvertGl(s)andz.o.h.toG(z)%anddisplay.%Displaylabel.%CreateanddisplayT(z).%Displaylabel.%Checkstability.%Displaymagnitudeofroots.%CalculateKp.%MultiplyG(z)by(l/T)*(z-l).%Also,divideG(z)byz,which%makestransferfunctionproper%andyieldssameKv.%Cancelcommonpolesandzeros.%CalculateKv.B.2MATLABExamplesGzKa=Gz*(l/TA2)*tf([1-21],[100],T);%MultiplyG(z)by(1/TA2)(z-1)"2.%Also,divideG(z)byzA2,which%makesthetransferfunction%properandyieldsthesameKa.GzKa=minreal(GzKa,0.00001."%Cancelcommonpolesandzeros.Ka=dcgain(GzKa)%CalculateKa.pausech13p7(Example13.10)Wenowusetherootlocustofindthegainforstability.First,wecreateadigitalLTItransfer-functionobjectforG(z)=N(z)/D(z),withanunspecifiedsamplinginterval.TheLTIobjectiscreatedusingtf(numgz,dengz,[]),wherenumgzrepresentsN(z),dengzrepresentsD(z),and[]indicatesanunspecifiedsamplinginterval.MATLABproducesaz-planerootlocusalongwiththeunitcirclesuperimposedusingthecommand,zgrid([],[]).Wetheninteractivelyselecttheintersectionoftherootlocusandtheunitcircle.MATLABrespondswiththevalueofgainandtheclosed-looppoles.LetuslookatExample13.10.'(chl3p7)Example13.10'elfnumgz=[ll];dengz=poly([10.5]);'G(z)'Gz=tf(numgz,dengz,[])rlocus(Gz)zgrid([],[])title(['z-PlaneRootLocus'])[K,p]=rlocfind(Gz)%Displaylabel.%Cleargraph.%DefinenumeratorofG(z).%DefinedenominatorofG(z).%Displaylabel.%CreateanddisplayG(z).%Plotrootlocus.%Addunitcircletorootlocus.%Addtitletorootlocus.%AllowsinputofKbyselecting%pointongraphic.pausech13p8(Example13.11)Wenowusetherootlocustofindthegaintomeetatransientresponserequirement.AfterMATLABproducesaz-planerootlocus,alongwithdampingratiocurvessuperimposedusingthecommandzgrid,weinteractivelyselectthedesiredoperatingpointatadampingratioof0.7,thusdeterminingthegain.MATLABrespondswithagainvalueaswellasthestepresponseoftheclosed-loopsampledsystemusingstep(Tz),whereTzisadigitalLTItransfer-functionobject.LetuslookatExample13.11.'(chl3p8)Example13.11'elfnumgz=[l1];dengz=poly([10.5]);'G(z)'Gz=tf(numgz,dengz,[])rlocus(Gz)axis([0,1,-1,1])zgridtitle(['z-PlaneRootLocus'])[K,p]=rlocfind(Gz)'T(z)'Tz=feedback(K*Gz,1)Displaylabel.Cleargraph.DefinenumeratorofG(z).DefinedenominatorofG(z).Displaylabel.CreateanddisplayG(z).Plotrootlocus.Createclose-upview.Adddampingratiocurvestorootlocus.Addtitletorootlocus.AllowsinputofKbyselectingpointongraphic.Displaylabel.FindT(z).832AppendixB:MATLABTutorialstep(Tz)%Findstepresponseofgain%compensatedsystem.title(['GainCompensatedStepResponse'])%Addtitletostepresponseof%gain-compensatedsystem.pausech13p9(Example13.12)LetusnowuseMATLABtodesignadigitalleadcompensator.Thes-planedesignwasperformedinExample9.6.Hereweconvertthedesigntothez-planeandrunadigitalsimulationofthestepresponse.Conversionofthes-planeleadcompensator,Gc(s)=numgcs/dengcs,tothez-planecompensator,Gc(z)=numgcz/dengcz,isaccomplishedusingtheGcz=c2d(numgcs,dengcs,T,'tustin')commandtoperformaTustintransformation,whereT=samplinginterval,whichforthisexampleis1/300.ThisexercisesolvesExample13.12usingMATLAB.'(chl3p9)Example13.12'elfT=0.01numgcs=1977*[16];dengcs=[l29.1];'Gc(s)inpolynomialform'Gcs=tf(numgcs,dengcs)%Displaylabel.%Cleargraph.%Definesamplinginterval.%DefinenumeratorofGc(s).%DefinedenominatorofGc(s).%Printlabel.%CreateGc(s)inpolynomialform%anddisplay.'Gc(s)inpolynomialform'%Displaylabel.%CreateGc(s)infactoredformGcszpk=zpk(Gcs)%anddisplay.'Gc(z)inpolynomialformviaTustinTransformation'%Displaylabel.Gcz=c2d(Gcs,T,'tustin')%FormGc(z)viaTustin%transformation.'Gc(z)infactoredformviaTustinTransformation'%Displaylabel.Gczzpk=zpk(Gcz)%ShowGc(z)infactoredform.%DefinenumeratorofGp(s).numgps=ldengps=poly([0-6-10]);%DefinedenominatorofGp(s).'Gp(s)inpolynomialform'%Displaylabel.Gps=tf(numgps,dengps)%CreateGp(s)inpolynomialform%anddisplay.%Displaylabel.'Gp(s)infactoredform'%CreateGp(s)infactoredformGpszpk=zpk(Gps)%anddisplay.%Displaylabel.'Gp(z)inpolynomialform'%FormGp(z)viazohtransformation.Gpz=c2d(Gps,T,'zoh')%Displaylabel.'Gp(z)infactoredform'%FormGp(z)infactoredform.Gpzzpk=zpk(Gpz)Gez=Gcz*Gpz%ForraGe(z)=Gc(z)Gp(z).*Ge(z)=Gc(z)Gp(z)infactoredform'%Displaylabel.Gezzpk=zpk(Gez)%FormGe(z)infactoredform%anddisplay.'z-1'%Displaylabel.%Formz-1.zml=tf([1-1],1,T)zmlGez=mineral(zml*Gez,0.00001);%Cancelcommonfactors.B.3CommandSummary'(z-1)Ge(z)forfindingsteady-stateerror'%Displaylabel.zmlGezzpk=zpk(zmlGez)%Form&display(z-1)Ge(z)in%factoredform.Kv=(l/T)*dcgain(zmlGez)%FindKv.'T(z)=Ge(z)/(1+Ge(z))'%Displaylabel.%Findclosed-loopTz=feedback(Gez,1)%transferfunction,T(z)step(Tz,0:T:2)%Findstepreponse.title('Closed-LoopDigitalLeadCompensatedStepResponse')%Addtitletostepresponse.|B.3CommandSummaryabs(x)Obtainabsolutevalueofx.acker(A,B,poles)Findgainsforpoleplacement.angle(x)Computetheangleofxinradians.atan(x)Computearctan(#).axis([xmin,xmax,ymin,ymax])Definerangeonaxesofaplot.bode(G,w)MakeaBodeplotoftransferfunctionG(s)overarangeoffrequencies,co.Fieldcoisoptional.breakExitloop.c2d(G,T,'tustin')ConvertG(s)toG(z)usingtheTustintransformation.Tisthesamplinginterval.c2d(G,T,'zoh')ConvertG(s)incascadewithazero-orderholdtoG(z).Tisthesamplinginterval.canon(S,'modal')ConvertanLTIstate-spaceobject,S,toparallelform.clearClearvariablesfromworkspace.elfClearcurrentfigure.conv([abcd],[efgh])Multiply(as2+bs2+cs+d)by(es3+fs2+gs+h).ctrb(A,B)Findcontrollabilitymatrix.d2c(G/'zoh')ConvertG(z)toG(s)incascadewithazero-orderhold.degain(G)FinddcgainforG(s)(thatis,s=0),orG(z)(thatis,z=1).eig(A)FindeigenvaluesofmatrixA.endEndtheloop.exp(a)Obtainea.feedback(G,H,sign)FindT(s)=G(s)/[1±G(s)H(s)}.Sign=-1orisoptionalfornegativefeedbacksystems.Sign=+1forpositivefeedbacksystems.gridonPutgridlinesonagraph.holdoffTurnoffgraphhold;startnewgraph.imag(P)FormamatrixoftheimaginarypartsofthecomponentsofmatrixP.input('str')Permitvariablevaluestobeenteredfromthekeyboardwithpromptstr.interpl(x,y,xl]Performtablelookupbyfindingthevalueofyatthevalueofx=x\.inv(P)FindtheinverseofmatrixP.length(P)ObtaindimensionofvectorP.log(x)Computenaturallogofx.833834AppendixB:MATLABTutorialloglO(x)Computelogtothebase10ofx.marginSimulink•1¾¾ShortcutsCommandHistoryWeb113CurrentFolderWorkspaceGetProductTrialsCheckforUpdatesIH1FileExchange1¾-Editor^jPreferences...[§|FindFiles...0|PathBViewStartButtonConfigurationI-ifi£5alTJ|gigj(?)MStartsimulationStopsimulation"'•Qde45Ready(/')FIGUREC.2a.SimulinkLibraryBrowserwindowshowingtheCreateanewmodelbuttonencircledb.resultinguntitledmodelwindowright-handsideofFigureC2(a)alsoshowstheunderlyingblocklibraries.Torevealablocklibrary'sunderlyingblocks,selecttheblocklibraryontheleft-handsideordouble-clicktheblocklibraryontheright-handside.Asanexample,theContinuouslibraryblocksundertheSimulinkmajorlibraryareshownexposedinFigureC3(a).FiguresC3(b)andC.3(c)showsomeoftheSourcesandSinkslibraryblocks,respectively.AnotherapproachtorevealingtheSimulinkblocklibraryistotypeopen__system('simulink.mdl')intheMATLABCommandWindow.ThewindowshowninFigureC.4istheresult.Double-clickinganyofthelibrariesinFigureC.4C.2UsingSimulinkFileEditViewG**HelpEntersearchtermS«fKLibrarySimulink/ContinuousLibraries(it-g|SimulinkiHCommonlyUsedBlocks[Continuousjj-Discontinuities'••Discretej-LogicandBitOperations!•LookupTablesj-MathOperationsj-ModelVerificationj-Model-WideUtilities[Ports&Subsystems:-SignalAttributesiSignalRouting|-Sinksi-SourcesjSearchResults:(none)•Derivative>PIDController(2DOF)x-=A**euy"0x«uTransportDelayMostFrequentlyUsedBlocksIntegratorPIDControllerState-SpaceTransferFenVariableTimeDelayVanableTransportDelayZero-Polej-User-DefinedFunctionsffiAdditionalMath&DiscSControlSystemToolboxffl-SReal-TimeWorkshop®~MSimscapeillS|Simulink3DAnimationI"JSSimulinkControlDesignIB-SISimulinkExtrasStateflowShowing:Simulink/Continuous(a)FilemmEdita;ViewHelp-B;EntersearchtermLibrariesE*Library:Simuhnk/Sources8-18SimulinkiCommonlyUsedBlocks!™i{-•Continuousf-Discontinuities-Discrete-LogicandBitOperationsILookupTablesjj-MathOperationsj-ModelVerification![-Model-WideUtilitiesi"Ports&Subsystems|j-SignalAttributesrSignalRoutingiiIihSinksj-User-DefinedFunctionsBAdditionalMath&Disc...HControlSystemToolboxJjfReal-TimeWorkshopSjSimscapeS)Simulink3DAnimationWKSimulinkControlDesignBlSimulinkExtrasMStateflowSearchResults,(none):MostFrequentlyUsedBlocksBand-Limited'234JUlLChirpSignalClockConstantCounterFreeRunningCounterLimitedDigitalClockEnumeratedConstantIwififcisuttFromFileFromWorkspaceGround(1>ln1PulseGenerator0RepeatingSequenceHRandomNumberRepeatingSequenceInlerpo..hhRepeatingSequenceStairSignalGenerator[•«•*»SignalBuilderStepRampESineWaveUniformRandomNumberShowing:Simulink/SourcesFIGUREC.3Simulinkblocklibraries:a.Continuoussystemsb.Sources(figurecontinues)839840AppendixCMATLAB'sSimulinkTutorialFIGUREC.3(Continued)c.Sinksrevealsanindividualwindowcontainingthatlibrary'sblocks,equivalenttotheright-handsideoftheSimulinkLibraryBrowserasshownintheexamplesofFigureC.3.3.AssembleandlabelsubsystemsDragrequiredsubsystems(blocks)toyourmodelwindowfromthebrowser,suchasthoseshowninFigureC.3.Also,youmayaccesstheblocksbydouble-clickingthelibrariesshowninFigureC.4.Youcanposition,resize,andrenametheblocks.Toposition,dragwiththemouse;toresize,clickonthesubsystemanddragthehandles;torename,clickontheexistingname,selecttheexistingtext,andtypethenewname.Thetextcanalsoberepositionedtothetopoftheblockbyholdingthemousedownanddraggingthetext.4.InterconnectsubsystemsandlabelsignalsPositionthepointeronthesmallarrowonthesideofasubsystem,pressthemousebutton,anddragtheresultingcrosshairpointertothesmallarrowofthenextsubsystem.Alinewillbedrawnbetweenthetwosubsystems.Blocksmayalsobeinterconnectedbysingleclickingthefirstblockfollowedbysingle-clickingthesecondblockwhileholdingdownthecontrolkey.Youcanmovelinesegmentsbypositioningthepointerontheline,pressingthemousebutton,anddraggingtheresultingfour-arrowpointer.Branchestolinesegmentscanbedrawnbypositioningthepointerwhereyouwanttocreatealinesegment,holdingdownthemouse'srightbutton,anddraggingtheresultingcrosshairs.Anewlinesegmentwillform.Signalscanbelabeledbydouble-clickingthelineandtypingintotheresultingbox.Finally,labelscanbeplacedanywherebydouble-clickingandtypingintotheresultingbox.C.3Examples841I.Library:simulinkfileEditViewFormatHelpfe3¾*gSinksSourcesContinuousBbcksetsftToolboxesLogicandBitOperationsDiscontinuitiesSignalRoutingLookupTablesJCommonlyUsedBlocksUser-DefinedFunctions*EwnSignalAttributesMiscy***II"MathOperationsDiscreteModelVerificationDtffMPorts&SubsystemsModel-WideUtilitiesSimulinkBlockLibrary7.4Copyright(i<StepOutputastep.ParametersSteptime:0Initialvalue:Finalvalue:Sampletime:00Interpretvectorparametersas1-00Enablezero-crossingdetectionnnCancelHelp(a)FIGUREC.6Blockparameterswindowsfora.1voltstepsource;(figurecontinues)843844AppendixCMATLAB'sSimulinkTutorialFunctionBlockParameters:GainSement-wisegain(y=K.*u)ormatrixgain(y=K*uory=u*K).MainAttributesParameterAttributes24.542Multiplication:Sement-wise(K.*u)Sampletime(-1forinherited):-1Apply(*)FunctionBlockParameters:TransferFc'ft'TTTransferFenThenumeratorcoefficientcanbeavectorormatrixexpression.Thedenominatorcoefficientmustbeavector.TheoutputwidthequalsthenumberofrowsinthenumeratorcoefficientYoushouldspecifythecoefficientsindescendingorderofpowersofs.ParametersNumeratorcoefficients:Denominatorcoeffitients:11424.542]Absolutetolerance:autoStateName:(e.g.,'position')(c)FIGUREC.6b.gain;c.transferfunction1;(figurecontinues)C.3Examples845:QFunctionBlockParameters:MuxMultiplexscalarorvectorParametersoion:barApplyid)FIGUREC.6[Continued)d.muxThescoperequiresfurtherexplanation.Double-clickingtheScopeblockinyourmodelwindowaccessesthescope'sdisplay,FigureCJ(a).ClickingtheParametersiconontheScopewindowtoolbar,showninFigureCI(a),accessesthe'Scope'parameterswindowasshowninFigureC.7(6).The'Scope'parameterswindowcontainstwotabs,GeneralandDatahistory,asshowninFigureC.7(b)and(c),respectively."SiiiSS*-/jlSlftUi-dSJiat©JGeneralDatahistoryTip:tryrightclickingonaxesAxesNumberofaxes:13]floatingscopeTimerange:autoTicklabels:bottomaxisonly||SamplingDecimation,v1OKCancel(b)FIGUREC.7Windowsforthescope:a.Scope;b.'Scope'parameters,Generaltab;(figurecontinues)HelpApplyAppendixCMATLAB'sSimulinkTutorialHt3^:^MJs^igGenera!DatahistoryTip:tryrightclickingonaxes0Limitdatapointstolast:5000Y~max:Y-min:QSavedatatoworkspaceTitle('%'replacedbysignalname):Variablename:ScopeDataFormat:ArrayCancelOKApply(d)OKCancelApplyHelp(c)FIGUREC.7(Continued)c.'Scope'parameters,Datahistorytab:d.'Scope'properties:axis1Finally,right-clickingintheplottingareaintheScopewindowandselectingAxisproperties...revealsthe'Scope'properties:axis1window,FigureCJ(d).Wenowcansetthedisplayparameters,suchasamplituderange.ChooseparametersforthesimulationFollowStep6tosetsimulationparameters.FigureC.8showstheresultingConfigurationParameterswindow.Amongotherparameters,thesimulationstartandstoptimescanbeset.SelectDataImport^xportOpdmCation0Diagnosticsj-SampleTmej-DataValidity|-TypeConversionrConnectivitY-Compatibility'—ModelReferencing—Saving•--HardwareImplementation-ModelReferencing3-SimulabonTargethSymbols-CustomCodeSimulationOmeStoptime:3SolveoptionsTvjSolver:TVpeiMaxstepsire:|«Jto_Mnstepsne:Absolutetolerance:jautoInto!stepshe:;autoiOde-15(Dormand-Prince)$jRelativetolerance:|"le-3le-6Shapepreservation:(DsaWeall:sfvlAlgorithm:;aNunberofconsecutivemmsteps:TaskingandsampleerneoptionsTadongmodefoeperiockcsampletimes:•AutomabcaByhanderatetranstbonfordatatransfer•HgherprtontvvalueindicateshighertaskpriontyZeroSjSimulinkDeadZoneDynamicrLogicandBitOperationsMostCoulomb&ViscousFriction'7I.DeadZoneHitCrossingHQuantizerRateLimiterDynamicrLookupTablesRelay:-MathOperationsrModelVerification)yt-iSaturationDynamicSaturation'-Model-WideUtilities>J2LWrapToZeroj-Ports&Subsystems[-•SignalAttributes;-SignalRouting|Sinksj-SourcesrUser-DefinedFunctionsIBAdditionalMath&Disc.HControlSystemToolboxHReal-TimeWorkshopHSimscape£jSimulink3DAnimationHSimulinkControlDesignHSimulinkExtrasHStateflow(a)LJFunctionBlockParameters:Saturation±5voltsMainSignalAttributesUpperlimit:Lowerlimi-50Treatasgainwhenlinearizing0Enablezero-crossingdetectionSampletime(-1forriherited);-1(b)FIGUREC.11a.Simulinklibraryfornonlinearities;b.parametersettingsforsaturation849850AppendixCMATLAB'sSimulinkTutorialFIGUREC.12ScopewindowaftersimulationofExampleC.2stops.ThelowercurveistheoutputwithsaturationSimulatingFeedbackSystemsSimulinkcanbeusedforthesimulationoffeedbacksystems.FigureC.13(a)isanexampleofafeedbacksystemwithsaturation.Inthisexample,wehaveaddedafeedbackpath(seeStep4inSectionC.2)andasummingjunction,whichisobtainedbydraggingtheSumblockfromtheSimulinkLibraryBrowser,containedintheMathOperationslibrary,toyourmodelwindow.TheFunctionBlockParameters:Sumwindow,FigureC.13(£>),showstheparametersettingsforthesummer.Youcansettheshapeaswellassettheplusandminusinputs.Inthelistofsigns,the"|"symbolsignifiesaspace.Weplaceitatthebeginningtostartthesignsat"nineo'clock,"conformingtoourstandardsymbol,ratherthanat"12o'clock."TheresultofthesimulationisshowninFigureC.14.C.3ExamplesRapcex3-nxFileEditViewSimulationFormatToolsHelp43=£^DQl•10"HINormal-•100s+1.71GainStep10voltsSaturation±5voltsMotof,load,SgeaisExampleC.3:Simulationofafeedbadtsystemwithanonlinearity(a)FunctionBlockParameters:SumAddorsubtractinputs,Specifyone1a)stringcontaining+or-foreachinputport,|forspacerbetweenports(e.g.++Hb}scalar,>=1,specifiesthenumberofinputportstobesummed,Whenthereisonlyoneinputport,addorsubtractelementsoverispecifieddimensionMainoroneSignalAttributesIconshape:roundv>Listofsigns:Sampletime(-1forinherited):-1(b)FIGUREC.13a.Simulationblockdiagramforafeedbacksystemwithsaturation;b.blockparameterwindowforthesummer851852AppendixCMATLAB'sSimulinkTutorialFIGUREC.14SimulationoutputforExampleC.3ThisexampledemonstratestwomethodsofgeneratingdigitalsystemsviaSimulinkforthepurposeofsimulation,asshowninFigureC.15.ThefirstapproachusesalineartransferfunctioncascadedwithaZero-OrderHoldblockobtainedfromtheSimulinkLibraryBrowserundertheDiscreteblocklibrary,shownontheright-handsideofFigureC.16.ThesecondmethodusesadiscretetransferfunctionalsoobtainedfromtheSimulinkLibraryBrowserundertheDiscreteblocklibrary.Theremainderoftheblockdiagramwasobtainedbymethodspreviouslydescribed.C.3f""">.qx\T.,apcex4_61FifeEditViewExamplesSimulationFarmatlookHelp|D|G*H#|&%©|iM:QC:|^•f"I[NormalHSum1wf^ViiStepJ1-s+2Z€aro-OrderTransferFens+1Hold»ScopeSum22-0.214.nVz-0.607LDiscreteTransferFenExampleC.4:SimulationofdigitalsystemsIReadybde4100%FIGUREC.15Simulinkblockdiagramforsimulatingdigitalsystemstwoways?aimtehjda-^IBa^TFile0EditViewQ&-e/A—1JLQHelp:[EntersearchtermLibrariesMf|[jfLibrary:Simulink/DiscreteSearchResults:(none)IIMostFrequentlyUsedBlocksjL|HSimulink-Ports&SubsystemsSignalArtnbutes^SignalRouting-SinksSourcesj-User-DefinedFunctions]iAdditionalMath&Disc...j-fijControlSystemToolboxfSIReal-TimeWorkshop&MSimscapeE]5jSimulink3DAnimationSimulinkControlDesignSimulinkExtrasStaleflowDiscreteDerivativeDifferenceI-CommonlyUsedBlocksIContinuousj-Discontinuities-DiscreteLogicandBitOperations-LookupTables-MathOperationsModelVerification-Model-WideUtilitiesDiscreteFIRFilterito.sr1DiscretePIDControllerDiscreteStateSpaceranDiscretePtDController(2D...>DiscreteZeroPole005zz-095sMemoryJoclayJ.TransferFenFirstOrderTransferFenRealZeroJK.1First-OrderHold1±23I0DiscreteFilterZero-OrderHoldShowing:Simulink/DiscreteFIGUREC.16Simulinklibraryofdiscreteblocks1-0.75z-0.95DiscreteTransferFenDiscrete-TimeIntegratorIntegerDelayTappedDelayTransferFenLeadorLagUnitDelay853AppendixC854MATLAB'sSimulinkTutorialZero-OrderHoldZero-orderhold.ParametersSampletime(-1forinherited]:0.5OKLaneeIHelpApply(a)DiscreteTransferFenImplementaz-transformtransferfunction.Spedfythenumeratoranddenominatorcoeffidentsindescendingpowersofz.Theorderofthedenominatormustbegreaterthanorequaltotheorderofthenumerator.ThenumeratorcoeffidentsmusteitherbeascalarbOoravector|b0b1b2...].ThedenominatorcoeffidentsmusteitherbeascalaraOoravector[aOata2...].MainDataTypes|StateAttributesNumeratorcoeffidents:[1-0.214]Denominatorcoeffidents:[1-0.607]Initialstates:Sampletime{-1forinherited):0.5LJ"Optimizebyskippingdividebyleadingdenominatorcoeffident(aO)00FIGUREC.I7FunctionBlockparameterwindowsfor:a.Zero-OrderHoldblock;b.DiscreteTransferFenblockTheblockparametersfortheZero-OrderHoldandDiscreteTransferFenblocksaresetasshowninFiguresC.17(A)and(6),respectively.SelectConfigurationparameters...undertheSimulationmenuinyourmodelwindowandsetthesimulationstoptimeto4seconds,thetypetofixedstep,andthesolvertoode4(Runge-Kutta).TheresultofthesimulationisshowninFigureC.18.SummaryFIGUREC18Outputsofthedigitalsystems{^SummaryJ|ThisappendixexplainedSimulink,itsadvantages,andhowtouseit.ExamplesweretakenfromChapters4.5,and13anddemonstratedtheuseofSimulinkforsimulatinglinear,nonlinear,anddigitalsystems.TheobjectiveofthisappendixwastofamiliarizeyouwiththesubjectandgetyoustartedusingSimulink.Therearemanyblocks,parameters,andpreferencesthatcouldnotbecoveredinthisshortappendix.YouareencouragedtoexploreandexpandyouruseofSimulinkbyusingtheon-screenhelpthatwasexplainedearlier.ThereferencesintheBibliographyofthisappendixalsoprovideanopportunitytolearnmoreaboutSimulink.856AppendixCMATLAB'sSinrulinkTutorial^BibliographyJ)TheMathWorks.ControlSystemToolbox™8GettingStartedGuide.TheMathWorks.Natick,MA.2000-2009.TheMathWorks.ControlSystemToolbox™8User'sGuide.TheMathWorks.Natick,MA.2001-2009.TheMathWorks.MATLAB®7GettingStartedGuide.TheMathWorks.Natick,MA.19842009.TheMathWorks.MATLAB®7Graphics.TheMathWorks.Natick,MA.1984-2009.TheMathWorks.MATLAB®7Mathematics.TheMathWorks.Natick,MA.1984-2009.TheMathWorks.MATLAB®7ProgrammingFundamentals.TheMathWorks.Natick,MA.1984-2009.TheMathWorks.Simulin^7GettingStartedGuide.TheMathWorks.Natick,MA.19902009.TheMathWorks.Simulink®7User'sGuide.TheMathWorks.Natick,MA.1990-2009.AppendixD:LabVIEW™1Tutorial^D.1IntroductionLabVIEWisaprogrammingenvironmentthatispresentedhereasanalternativetoMATLAB.Althoughnotnecessary,thereaderisencouragedtobecomeacquaintedwithMATLABbeforeproceeding,sincefamiliaritywithMATLABcanenhancetheunderstandingoftherelationshipbetweentextual(MATLAB)andgraphical(LabVIEW)programminglanguagesandextendthefunctionalityofLabVIEW.Inthistutorial,wewillshowhowtouseLabVIEWto(1)analyzeanddesigncontrolsystems,and(2)simulatecontrolsystems.ThisappendixwasdevelopedusingLabVIEW2009.LabVIEWisagraphicalprogrammingenvironmentthatproducesvirtualinstruments(VI's).AVIisapictorialreproductionofahardwareinstrumentonyourcomputerscreen,suchasanoscilloscopeorwaveformgenerator.TheVIcanconsistofvariouscontrolsandindicators,whichbecomeinputsandoutputs,respectively,toyourprogram.Underlyingeachcontrolandindicatorisanassociatedblockofcodethatdefinesitsoperation.TheLabVIEWmodelthusconsistsoftwowindows:(1)FrontPanel,whichisareplicaofthehardwarefrontpanelshowingthecontrolsandindicators,and(2)BlockDiagram,whichcontainstheunderlyingcodeforthecontrolsandindicatorsontheFrontPanel.AssociatedwiththeFrontPanelwindowisaControlspalettewindowcontainingnumerousiconsrepresentingcontrolsandindicators.TheiconscanbedraggedontoaFrontPanelwindowtocreatethatcontrolorindicator.Simultaneously,theassociatedcodeblockisformedontheBlockDiagramwindow.Alternately,theblockdiagramcanbeformedfirst,andthenthefrontpaneliscreatedfromtheblockdiagram.AssociatedwiththeBlockDiagramwindowisaFunctionspalettewindowcontainingnumerousiconsrepresentingawiderangeoffunctions.IconscanbedraggedontoaBlockDiagramwindowtocreatethatcodeblock.Forexample,FigureD.l(a)isthefrontpanelofasignalgenerator.Thegeneratorconsistsofacontroltoselectthesignaltypeandawaveformgraphthatshowstheoutputwaveform.FigureD.l(b)showstheunderlyingcode,whichiscontainedinthecodeblocks.Here,thesignaltypeselectorisacontrol,whilethewaveformgraphisanindicator.LaterwewillshowhowtomakeconnectionstootherVI's.ThepalettewindowsforthefrontpanelandblockdiagramareshownrespectivelyinFiguresD.l(c)and(d).1LabVIEWisaregisteredtrademark,ofNationalInstrumentsCorporation.AppendixD858LabVIEWTutoriali'nillffllfiiit'illlliiEditVie.vProjectOperateSSToolsWHelp["1[f]1¾P*oWI3^(^PtApplicationFortWaveformGraph(b)FIGURED.1ALabVIEWfunctiongeneratorVI:a.FrontPanelwindow;b.BlockDiagramwindow;(figurecontinues)|D.2ControlSystemsAnalysis,Design,andSimulationLabVIEWcanbeusedasanalternativetoorinconjunctionwithMATLABtoanalyze,design,simulate,build,anddeploycontrolsystems.InadditiontoLabVIEW,youwillneedtheLabVIEWControlDesignandSimulationModule.Finally,asanoptionthatwillbeexplainedlater,youmaywanttoinstalltheMathScriptRTModule.AnalysisanddesigncanbethoughtofassimilartowritingMATLABcode,whilesimulationcanbethoughtofassimilartoSimulink.InLabVIEW,analysisanddesign,asopposedtosimulation,arehandledfromdifferentsubpalettesoftheFunctionswindow'sControlDesignandSimulationpalette.SeeFigureD.l(rf).Analysisanddesign,andsimulationwilltypicallybeginwiththeBlockDiagramwindow,whereiconsrepresentingcodeblockswillbeinterconnected.ParametersD.3UsingLabVIEWQ»Search|g^Viewj•Programming•MeasurementI/O•InstrumentI/OVisionandMotionMathematicsSignalProcessing•Modern•System•Classic•Express;j•••••DataCommunicationConnectivity•ControlDesign&Simulabon•Express•AddonsControlDesign&Simulabon.NET&ActiveXSignalProcessingAddonsUserControls•Favorites•UserLibrariesSelectaVI...SelectaControl...(c)FIGURED.1(d){Continued)c.Controlspalette;d.Functionspaletteusedbythecodecanbeconvenientlyselected,changed,andpassedtothecodethroughVIcontrolsontheFrontPanelwindowcreatedfromthecodeicons.Anyresults,suchastimeresponse,canbedisplayedthroughVIindicatorsontheFrontPanelwindowcreatedfromthecodeicons.(D.3UsingLabVIEWThefollowingstepsstartyouonyourwaytousingLabVIEWforcontrolsystemsanalysis,design,andsimulation.Thesestepswillbeillustratedintheexamplesthatfollow.1.StartLabVIEWLabVIEWstartswiththeGettingStartedwindowshowninFigureD.2,whereyoucanselectaNewfileorOpenanexistingfile.Youmayalsoselectvariousresources.SelectingBlankVIundertheNewlabelorNewVIundertheFilemenubringsuptheFrontPanelandBlockDiagramwindowsshowninFigureD.l.Ifnecessary,awindowcanbeopenedfromtheWindowtabonthemenubaroftheFrontPanelandBlockDiagram.Right-clicktheBlockDiagramwindowtobringuptheFunctionspaletteandclickthethumbtackintheupperleft-handcornertodockthewindow.RepeatfortheFrontPanelwindowtoaccesstheControlspalette.859AppendixDLabVIEWTutorial>Gettinp,StartedLatestfromni.comEmptyProjectTechnicalContentVIfromTemplate,OpenDiscussionForumsFigureD_l.viBrowse...labVTHVHelplistofASNewFeatures0^FindExamples...FIGURED.2LabVIEW'sGettingStartedwindow2.SelectblocksMaketheBlockDiagramwindowactive,oraccessitfromWindowonthemenubar.Right-clicktheBlockDiagramwindoworusetheViewmenutobringuptheFunctionspalette.Expandthepalettewindowbyclickingthedoubleuparrowsatthebottom.AtthetopofthepalettewindowclickView,andselectViewThisPaletteAs/Category(IconsandText)toaddatextdescriptionbeloweachicon.Forcontrolsystemsanalysis,design,andsimulation,expandControlDesign&SimulationintheFunctionspalettebyclickingthearrowtotheleftofthiscategory.IfyouareperformingasimulationclickthesubpaletteSimulation.Ifyouareperformingcontrolsystemanalysisordesign,clickthesubpaletteControlDesign.Anarrowintheupper-rightcornerofasubpaletteindicatesadditionalunderlyingpalettesorblocks.Ifthenameoftheiconisincomplete,restingthemouseovertheiconwillbringupitscompleteidentification.Toobtaindetailedhelpaboutanicon,right-clicktheiconandselectHelp.3.MoveblockstotheblockdiagramwindowTomovetheicontotheBlockDiagram,left-clickthemousetoattachtheicon(someiconstakealittletimetocompletethisoperation).Whenthepointerturnsintoahand,clickthespotontheBlockDiagramwhereyouwanttoplacetheicon.4.ObtaininformationabouttheblockYouwillnowwanttoobtaininformationabouthowtointerconnecttheblocktootherblocksandpassparameterstotheblockaswellasothercharacteristicsabouttheblock.SelecttheyellowquestionmarkattherightoftheBlockDiagramtoolbartoturnontheContextHelpwindow.ThiswindowwillprovidehelpaboutaparticulariconifyourestyourD.3UsingLabVIEWmouseoverthaticon.AdditionalhelpisavailableundertheHelpmenuontheBlockDiagrammenubar.Finally,right-clicktheicontobringupamenuwithadditionalchoices,suchasProperties,ifany.Inparticular,youwillusethismenutocreatetheblock'sfrontpanel'scontrolsandindicators.Thisfrontpanelwillbeyourinterfacewiththeblocktochooseparametersandseeresponses.5.InterconnectandlabelblocksOnceblocksareplacedontheBlockDiagramtheycanbemovedaboutbyclickingonthemordraggingyourmouseacrossseveralorthemtoestablishaselectionpattern.Aftertheselectionpatternhasbeenestablished,depressthemouseleftbuttonanddragtoanewlocation.Todeleteablock,selecttheblockandpresstheDeletebutton.Thecontexthelpfortheblockincludesadescriptionoftheblock'sterminals.Letyourmouserestonaterminaluntilthemousepointerturnsintoaspoolofwire.Clicktheterminalandthenmovethemousetothenexticon'sterminalwhereyouwanttomaketheconnection.Clickthedestinationterminaltocompletethewiring.NoticethattheterminalintheContextHelpwindowblinkswhenyourmouseresidesabovethatterminalontheblock,ensuringthatyouareonthecorrectterminal.Ifyoumakeanerrorinwiring,clickonthewireandpresstheDeletebuttonorright-clickthewireandselectDeleteWireBranch.Blocklabelscanbedisplayedorhidden.Right-clickontheblocktobringupthepop-upmenuandcheckoruncheckVisibleItems/Labeltodisplayorhide,respectively,thelabel.Double-clickingonthelabelabovesomeblockswillallowyoutoselectandchangethetext.Oneclickofthemouseonthelabelwillplaceaselectionpatternaroundthelabelandallowyoutoholddowntheleftkeyofthemouseandmovethelabeltoadifferentlocation.6.CreatetheinterfacetoyourblockYouwillnowwanttocreatetheinterfacetoyourblockinordertocontrolorselectfunctions,specifyparameters,orviewresponses.ThisinterfacewillbeaccessedviatheFrontPanelwindow.Right-clickaterminalonablockforwhichyouwanttocreateaninterface.Onthepop-upmenu,chooseCreate/ControltobeabletointeractwiththeblockorCreate/Indicatortoviewaresponseorsetting.7.SetthecontrolsSwitchtotheFrontPanelwindowandsetyourcontrols.Forexample,enterparametervalues,selectfunctions,etc.Ifyouwanttochangevaluesandatsomefuturetimereturntothecurrentvalues,clickonEditontheBlockDiagrammenubarandselectMakeCurrentValuesDefault.Toreturntothedefaultvaluesinthefuture,clickonEditontheBlockDiagrammenubarandselectReinitializeValuestoDefault.8.RuntheprogramClickonthearrowattheleftofthetoolbaroneithertheBlockdiagramorFrontPanelwindowtoruntheprogram.Theprogramcanberuncontinuouslybyclickingthecurvedarrowbuttononthetoolbarsecondfromtheleft.Continuouslyrunningyourprogrampermitschangingfunctionsandparametervaluesduringexecution.Inordertoidentifythebuttons,letyourmouserestonabuttontobringupacontextmenu.Stopyoursimulationbypressingthered-dotbutton,thirdfromtheleft.Ifyouareperformingcontrolsystemsanalysisanddesign,anotherwaytocontinuouslyruntheprogramistoplaceaWhileLooparoundyourblockdiagram.TheloopisavailableintheFunctionspaletteatExpress/ExecutionControl/WhileLoop.ThisloopalsoplacesaStopbuttonontheFrontPanel.Theprogramexecutesuntilyoupressthestopbutton.InlieuoftheStopbutton,anytrue/falseBooleancanbewiredtotheconditionblock(reddot)createdinsidetheWhileLoop.AppendixDLabVIEWTutorialIfyouareperformingsimulation,youcanuseaSimulationLoopavailableintheFunctionspaletteatControlDesignandSimulation/Simulation/SimulationLoop.PlacetheSimulationLooparoundyoursimulationblockdiagrambydraggingthemouse.Right-clickontheSimulationLoopoutlineandchooseConfigureSimulationParameters...todeterminetheparametersforexecutingthesimulation.TheFrontPanelindicatorsandcontrolsarealsoconfigurable.Right-clickontheindicatororcontrolandselectProperties.(D.4AnalysisandDesignExamplesInthissection,wewillpresentsomeexamplesshowingtheuseofLabVIEWfortheanalysisanddesignofcontrolsystems.Inthenextsection,examplesoftheuseofLabVIEWforsimulationwillbepresented.AnalysisanddesignexamplesuseiconsselectedfromtheControlDesignsubpaletteundertheControlDesignandSimulationpalette.Inthenextsectionshowingexamplesofsimulation,wewilluseiconstakenfromtheSimulationsubpaletteundertheControlDesignandSimulationpalette.ExampleD.1Open-LoopStepResponseTryltD.lnumg=100;deng=[l2100];'G(s)'G=tf(numg,deng)step(G);title('AngularVelocity'AnalysisanddesignusuallybeginsbyselectingiconsfromtheControlDesignsubpaletteanddraggingthemtotheBlockDiagramwindow.Theiconsrepresentblocksofcodeandthecascadingofcodeblockscanbethoughtofasasequenceoflinesofcode.Thus,anadvantageofLabVIEWoverMATLABisthattheprogrammerdoesnotneedtomemorizecodinglanguage.Forexample,considertheMATLABcodeshowninTryltD.lthatproducesthestepresponseofG(s)=100/(52+2s+100):ThisstepresponsecanbeproducedinLabVIEWwithoutknowinganycodinglanguage.WenowdemonstratebyfollowingeachstepofSectionD.3:1.StartLabVIEWStartLabVIEWandselectBlankVIfromthewindowshowninFigureD.2.2.SelectblocksFromtheFunctionspalette,selecttheblocksshowninFigureD.30)and(b).3.Move/blockstotheBlockDiagramwindowDragyouriconsoneatatimetotheBlockDiagramwindow,FigureD.4.4.ObtaininformationabouttheblockRight-clickeachoftheblocksandbesurethefirsttwoitemsunderVisibleItemsarechecked.LookattheCDConstructTransferFunctionModel.vi.APolymorphicVISelectorisshownatthebottom.Clicktheselectortobringupthemenu.SelectSISO.ThisblockeffectivelycreatesthetransferfunctionshowninthefirstfourstepsoftheMATLABcodeinTryltD.1.RepeatfortheCDDrawTransferFunctionEquation.viandselectTFfromthePolymorphicVISelector.Thisblockwillwritethetransferfunctionsymbolicallyinthedisplay.YourselectionfromthepolymorphicviselectorshouldmatchtheformatofthetransferfunctioncreatedbytheCDConstructTransferFunctionModel.vi.D.4AnalysisandDesignExamplesFunctionsMiProgrammingInstrumentI/OVisionandMotionConnectivityControlDesign&SimulationLControlDesignLrimeResponseInstrumentI/ODataCommunicationConnectivityControlDesignLModelConstruction|>CDConstruct,.CDConstruct...SigManip•CDDrawStat.CDDravyZer...CDReadMod.Addons•Favorites•UserLibrariesSelectaVI.CDWriteMod.,.•ExecControlfv)Express(a)FIGURED.3Selectinga.CDConstruct...andCDDraw...;b.CDStepResponse...RepeatfortheCDStepResponse.vi.andselectTFfromthePolymorphicVISelector.Thisblockwillcollectthedataforthestepresponseandpermitplottingthedata.ThisblockeffectivelycreatesthelasttwocommandsoftheMATLABcodeshowninTryItD.l.5.InterconnectandlabelblocksYoushouldnowhavetheBlockDiagramwindowshowninFigureD.4.Interconnectthecodeblocks.Clickonthequestionmarkontherightsideofthetoolbartobringupthecontextmenu.Asyourmousepassesaboveanicon,itscontextmenuappears,showingtheterminals.SeeFigureD.5.Interconnecttheterminalsbylettingthemouserestonaterminaluntilitbecomesaspoolofwire.(b)Ariih&Cpmpar864AppendixDLabVIEWTutorialExample1.viBlockDiagram'-OXCDConstaictTransferFunctionModel.viCDStepResponse.vi"S3,mS3^r(TF"CDDrawTransferFunctionEquation.vi3?tmExample1.viBlockDiagramFieBitJfiewProjectOperateToolsJgIJ31®j|SjgjIkiiffMV1391App^fo"Fonti-•jflg^ll-00--j[¢5NumeratorStepResponseGraphCDConstructTransferFunctionModel,viCDStepResponse,vi(a)FIGURED.7BlockDiagramwindow:a.withControlDesignblocksandinterfaces;(figurecontinues)865866AppendixDLabVIEWTutorialFIGURED.7(Continued)b.withMathScriptblocktothosewithintheM-filecode.However,whenusingMathScript,youmustcreatecontrolsfirstontheFrontPanel,ratherthantheBlockDiagram.Forexample,tocreatethenumericinterfacesforK,a,andb,right-clicktheFrontPaneltoproducetheControlspalette.Fromthispalette,produceeachnumericcontrolfromModern/Numeric/NumericControl.TheresultingcontrolsareshowninFigureD.8(b).TheseinterfacesarethenwiredtotheappropriateterminalsontheBlockDiagram.YourBlockDiagramshouldnowlooksimilartoFigureD.7(6).OntheBlockDiagramwindowmenubar,selectWindow/ShowFrontPanel.YouwillseetheFrontPanelshowninFigureD.8createdbyyourinterfaces.Youcandouble-clickthelabelsaboveyourinterfaceseitherintheFrontPanelwindowortheBlockDiagramwindowtochangethelabeltobemoredescriptiveofyourproject.7.SetthecontrolsUsingtheFrontPanelwindow,enterpolynomialcoefficientsforthenumeratoranddenominatorinascendingorder—lowesttohighest.Theselectortotheleftofthenumeratoranddenominatorshowsthepowerofsfor'•'.I3FIGURED.8FrontPanel:a.forBlockDiagramshowninFigureD.7(a);(figurecontinues)s*.t•maD.4AnalysisandDesignExamplesFIGURED.8(Continued)b.forBlockDiagramshowninFigureDJ(b)theleft-mostcoefficient.Increasingthecounterallowsentryofhigher-ordercoefficientsnotvisibleoriginally.Tomakeallcoefficientsofapolynomialvisible,letthemousemoveontheright-handedgeofthepolynomialindicatoruntilthepointerbecomesadoublearrowandbluedotsappearattheleftandrightedgesoftheentirepolynomialindicator.Youcanthendragtherightbluedottoexposemorecells.Familiarizeyourselfwiththechoicesonthemenubaraswellasthoseonthepop-upmenuscreatedwhenyouright-clickonanyindicatororcontrol.Forexample,undertheEditmenu,amongotherchoices,youcanMakeCurrentValuesDefaultorReinitializeValuestoDefault.Right-clickingtheindicatorsorcontrolsbringsupamenufromwhich,amongotherchoices,Propertiescanbeselectedtoconfiguretheindicatororcontrolasdesired.8.RuntheprogramFigureD.9showsExampleD.lafterexecution.Thefigureshowsthevaluesentered,theequation,andthestepresponse.Executionwasinitiatedbyclickingthearrowattheleftofthetoolbar.FIGURED.9FrontPanelafterexecution:a.forblockdiagraminFigure7(a);(figurecontinues)868AppendixDLabVIEWTutorial**Example1withWathScript.viFrontPanel'"FIGURED.9(Continued)b.forblockdiagraminFigure1(b)Theprogramcanruncontinuouslybyclickingthecurvedarrowsonthetoolbar.Now,changevalues;hittheEnterkeyandseetheresultsimmediatelydisplayed.Stoptheprogramexecutionbyclickingontheredhexagononthetoolbar.AnotherwayofcontinuouslyrunningtheprogramistoplaceaWhileLooparoundtheblockdiagramasshowninFigureD.lQ(a).TheloopisaccessedfromFunctions/Express/ExecutionControlasshowninFigureD.10(b).After•**Example1v/ithWhileIoop.viBlockDiagramf>&tt59ewPjojectOperateTootsffihdowa*^]#i•/NffjByg^i^**>«*•"fa*Hfs^i3£^[^iKiiBQiNumefatofStepResponseGraphCDConstructTransferFunctionModel.viCDStepResponse,vlMeasurementI/O•InstrumentI/O•VisionandMotion>SignalProcessing•DataCommunication•Connectivity•ControlDesignaSimiJaSon•SgnaExpress•ExpressCDDrawTransferFunctionEquation,vim£>$>CDAddMode...CDSubtract...-rfiL.CDConstruct..CDConstruct33E3E$>CDMultiplyM...IEasHjG]CDDivideMo...CDHorizontal...CDVerticalC...m.CDConstruct..CDConstruct...wCDDrawTra...CDDrawZer...CDDrawStat.3ECDReadMod..CDWriteMod...•SignaExpress•Express|•Express•Addons•Favorites1•••FavoritesUserLibrariesSelectaVI.UserLibrariesSelectaVI...(b)(a)FIGURED.11a.Obtainingzero-pole-gaintransferfunctionfromtheFunctionspalette;b.ObtainingFeedbackinterconnectionfromFunctionspalette870AppendixDLabVIEWTutorialwithamultiplyinggain,analogoustoMATLAB'szpkfunction.Inthepreviousexample,werepresentedthesystemasaratioofpolynomials,analogoustoMATLAB'stffunction.1.SelectblocksThezero-pole-gaintransferfunctionisobtainedfromtheFunctionspaletteasshowninFigureD.ll(a).Weplacethistransferfunctionintheforwardpathofaunity-feedbacksystembyfollowingitsblockwithaFeedbackblockobtainedfromtheFunctionspalette
asshowninFigureD.ll(b).>Closed-LoopStepResponse.VJBlockDiagramfO@l:.rfill^SMtflatIISptApttationFont1IJI.1..:.~'-~?•-.-.:\1(1111^111-I'.•MIIIEHI^*•''I—.unit,in.,nOpen-loopZerosOosed'tQopStepResponseGraphISUserLibrariesSelectaVI...FIGURED.13FunctionspaletteshowinglocationofRootLocusblock872AppendixDLabVIEWTutorialCD'Rootlocus,viRootloos&aphUSOpenioopZoos£S(a)(b)FIGURED.14Windowsshowingrootlocusanalysis:a.BlockDiagram;b.FrontPanelD.4AnalysisandDesignExamplesExampleD.4Open-andClosed-LoopSinusoidalFrequencyAnalysisandDesignWecanobtainopen-andclosed-loopsinusoidalfrequencyresponsecurvesbyreplacingtheRootLocusblockwiththeBodeblocktoyieldtheopen-loopfrequencyresponse.AcopyoftheBodeblockcanbeaddedattheoutputoftheFeedbackblocktoobtaintheclosed-loopfrequencyresponse.FigureD.15showswheretoobtaintheBodeblock.FigureD.16showstheBlockDiagramandFrontPanelwithopen-andclosedloopBodeanalysis.Inordertodisplaytheplots,theindicatorsshownattheoutputsoftheBodeblockswerecreated.FigureD.15showsotheralternativesforfrequencyresponseanalysis.Forexample,inadditiontotheBodeplots,youcancreateanindicatortellingyouthegainandphasemarginsbyusingtheGainandPhaseMarginblock.FigureD.17showsthatresult.Finally,ifyouneedtouseNyquistorNicholscharts,theassociatedblocksareshowninFigureD.15andcanreplacetheBodeblocks.¢^Search|glVrew)fp•Programming•MeasurementI/O•InstalmentI/O•VisionandMotion>Mathematics•SignalProcessing•DataCommunication•Connectivity•ControlDesign&SimulationLControlDesign.frequencyR>FTOvCDBode.viyfeCDSingularV...CDAllMargin...Ho>CDEvaluate...•SignalExpress•Express•Favorites•UserLibrariesCDBandwidt..CDGetFrequ.SelectaVI...FIGURED.15Functionswindowshowingfrequencyresponseblocks,suchasBode,Nyquist,Nichols,andGainandPhaseMarginblocks873874AppendixDLabVIEWTutorial(a)[3-|„1•!1;i,':,.•j!1,j-;«-10*ja>>S^_l113»9(b)FIGURED.16BodeanalysisviaLabVIEW:a.BlockDiagram;b.FromPanelDAAnalysisandDesignExamples[BodeAnalysisandOesignwithAdditionalAnalysis.*BlockfileEditViewProjectOperate""I»1HWJjMJM&SkjloolsWindowHelp[20DiADolicaiionFoml'llMfsniSHlf^lOpen-LoopBodeMagnitudeCDGainandPhaseMarginviOpen-LoopBodePhaseGainandPhaseMarginsOpen-LoopPolesCDConstrue!Zero-Pole-GainModel-viOpenkoopGainOpen-LoopEquation3(«)IBodeAnalysisandDesertwithAdditn«ialAratysKvifromPanel*£i|eEdilViewProjectOperateloolsItfindowHelp[¢1¾®[lT|r^Aoo[tatfe|For*Hj^li^-|;3i-]!ft'n-F.-..in'.YOCufBJAJj•'14.7893)56403p>nwMtrgmFIGURED.17Bodeanalysiswithgainandphasemargin:a.BlockDiagram;b.FrontPanel875876(AppendixDLabVIEWTutorialD.5SimulationExamplesWhereastheLabVIEWblocksequencefordesignandanalysisisanalogoustofollowingthecodestatementsequenceinaMATLABM-file,theLabVIEWblocksequenceforsimulationisanalogoustofollowingtheblocksequenceofaSimulinkdiagram.Inthissection,weshowexamplesofsimulationusingLabVIEWForcontrolsystemsimulation,iconsfortheblockdiagramaretakenfromtheSimulationsubpaletteundertheControlDesignandSimulationpalette.OurexampleswillparalleltheexamplesshowninAppendixCwhichusesSimulink.SimulationofLinearSystemsCreateBlockDiagramandFrontPanelFigureD.18showstheBlockDiagramandFrontPanelforsimulatingalinearsystem.ThesimulationreproducesExampleC.linAppendixC,whichusesSimulink.BlocksareselectedfromtheSimulationsubpaletteundertheControlDesignandSimulationpaletteandmustbeplacedwithintheSimulationLoopobtainedfromFunctions/ControlDesignandSimulation/Simulation/SimulationLoop.WenowenumeratethedetailedstepsrequiredtocreatetheBlockDiagramandFrontPanel:1.TransferfunctionsareobtainedfromFunctions/ControlDesignandSimulation/Simulation/ContinuousLinearSystems/TransferFunction.Right-clickoneachtransferfunctionandselectConfigurationtoentertheparametervaluesshowninFigureD.18(#)orequivalentlyinFigureC.52.ThegainblockisobtainedfromFunctions/ControlDesignandSimulation/Simulation/SignalArithmetic/Gain.Right-clickonthegainblockandselectConfigurationtoentertheparametervalue.(a)FIGURED.18Simulationoflinearsystems:a.BlockDiagram;(figurecontinues)D.5SimulationExamplesE)i""""•'..'"~~""1S3(ft)FIGURED.18(Continued)b.FrontPanel3.Thestep-inputblockisobtainedfromFunctions/ControlDesignandSimulation/Simulation/SignalGeneration/StepSignal.Right-clickonthegainblockandselectConfigurationtoentertheparametervalue.4.Inordertodisplaythethreestep-responsecurvessimultaneously,weuseaBuildArrayblockobtainedfromFunctions/Programming/Array/BuildArray.Dragthebottomoftheicontoexposethecorrectnumberofinputsthreeforthiscase).5.Tocreatethedisplay,weusetheSimulationTimeWaveformblockobtainedfromFunctions/ControlDesignandSimulation/Simulation/GraphUtilities/SimtimeWaveform.Right-clicktheoutputoftheSimtimeWaveformblockandselectCreate/IndicatortoproducetheWaveformCharticonandtheFrontPaneldisplay.ConfiguresimulationloopFinally,setthesimulationparametersbyright-clickingtheSimulationLoopandselectingConfigureSimulationParameters...SettheparametersasshowninFigureD.19.ConfiguregraphparametersOntheFrontPanel,right-clickthegraphandselectPropertiestoconfiguregraphparametersifrequired.Selectthelegendandexpanditverticallytoexposeallthreeplotidentities.Thetitlesinthelegendcanbechangedtoreflectmeaningfullabelsfortheplots.RunthesimulationPerformthesimulationbyclickingthearrowattheextremeleftofthetoolbarontheFrontPanelwindow.Youcanerasecurvesbetweentrialsbyright-clickingthedisplayandselectingDataOperations/ClearChart.AppendixD878laamim^Mtmnn*™^LabVIEWTutorial•*"ConfigureSimulationParametersESimulationParameters|TimingParametersSimulabonParametersEnableSynchronizedTimingSimulationTime0SynchronizeLooptoTimingSourceRrtalTime(s)InitialTime(s)TimingSourceSourcetypeSolverMethod00ESolver[Runge-Kutta41kHz1MHzDNan/InfCheckContinuousTimeStepandToleranceSourcename1kHzto0.01MawnumStepSize(s)LoopTimingAttributesPeriodilE-10•j0.001Offset/Phase'lE-7AutoPeriodPriority[tooDeadlineDiscreteTimeStep1Timeout(ms)DiscreteStepSize(s)fo.i0AutoDiscreteTime'mProcessorAssignmentModejAutomaticOKOX(a)FIGURED.19v1CancelmConfiguringtheSimulationLoopparameters:a.Simulationparameters;b.TimingparametersExampleD.6EffectofAmplifierSaturationonMotor'sLoadAngularVelocityCreateBlockDiagramandFrontPanelTheBlockDiagramandFrontPanelforsimulatingadcmotorwithandwithoutsaturationareshowninFigureD.20.TheSaturationblockisobtainedfromControlDesign&Simulation/Simulation/NonlinerSystems/Saturation.SatuabonTransferKntbon1STavtia&onTWWavpformIWBv^c^OytiTransferFunction2(a)FIGURED.20Simulationofadcmotorwithandwithoutsaturation:a.BlockDiagram;(figurecontinues)D.5FIGURED.20(Continued)SimulationExamples879b.FrontPanel>^[TJotApptcattonFontj?1^^^^(¾¾IdHE:p5SPf.DsaeteZero-OrderHoldTransferFunctionBucdArraySmJationTimeWaveformW*Y«formChartDiscreteTransferFunction;i-MH*+0,WS](«)FIGURED.23SimulationofdigitalsystemswithSimulationpalette:a.BlockDiagram;b.frontPanelfromControlDesign&Simulation/Simulation/DiscreteLinearSystems/DiscreteTransferFunction.ConfigureDiscreteZero-OrderHoldandotherblocksRightclicktheDiscreteZero-OrderHoldblockandselectConfiguration...Setthesampleperiodto0.5second.ConfigurethetransferfunctionsasshownontheBlockDiagram.ConfiguretheStepSignaltobeaunitstep.ConfiguresimulationloopConfigurethesimulationloopasshowninFigureD.19.D.5SimulationExamplesConfiguregraphparametersOntheFrontPanel,rightclickthegraphandselectPropertiestoconfiguregraphparameters.SelecttheScalestabandenterthreeintheMaximumboxforboththex-andy-axesasshowninFigureD.21.Selectthelegendandexpanditverticallytoexposebothplotidentities.Thetitlesinthelegendcanbechangedtoreflectmeaningfullabelsfortheplots.RunthesimulationPerformthesimulationbyclickingthearrowattheextremeleftofthetoolbarontheFrontPanelwindow.Youcanerasecurvesbetweentrialsbyright-clickingthedisplayandselectingDataOperations/ClearChart.Thesimulationshowsthedifferenceinresponsesobtainedby(1)modelingthedigitalsystemasazero-orderholdcascadedwithalinearsystem(Plot0),or(2)modelingthesystemwithadigitaltransferfunction(Plot1).ExampleD.9SimulatingDigitalSystemswiththeControlDesignPaletteInordertoavoidcycleerrorsinLabVIEW,weusetheControlDesignpalettewhenwehavetransferfunctionsforwhichthenumeratoranddenominatorareofthesameorder.ThisexamplereproducesSimulinkExampleC.4.CreateBlockDiagramandFrontPanelTheBlockDiagramandFrontPanelforthisexampleareshowninFigureD.24.Wiretheblocksasshown.aM*jtmnCTitifiMitfai*aMB.-ta0iM^tjjijlEat»ew6o)«tOperatelot*ffindroa*[frig]["llflfgJI'wI^lJhaP'^'^f"''1-jd^lfS^ll^lMNumeratorContinuousStepResponseofContinuousandDiscrete(a)FIGURED.24SimulationofdigitalsystemswiththeControlDesignpalette:a.BlockDiagram;(figurecontinues)884AppendixDLabVIEWTutorial(b)FIGURED.24(Continued)b.FrontPane)MostoftheblockswerepreviouslydiscussedinExampleD.landD.2.Digitaltransferfunctionsarecreatedusingthesameblocksascontinuoussystems,butwithanonzeroSamplingTime(s)input.TheCDConvertContinuoustoDiscrete.vi,isobtainedfromFunctions/ControlDesign&Simulation/ControlDesign/ModelConversion/CDConvertContinuoustoDiscrete.vi.TheBuildArrayisobtainedfromFunctions/Programming/Array/BuildArray.ExpandtheBuildArrayblocktoshowtwoinputs.ConfigureparametersforBuildArrayRight-clickonBuildArrayandselectConcatenateInputs.Right-clickagainonBuildArrayandselectCreate/Indicator.Right-clicktheindicatoronthefrontpanelandselectReplace.UsingtheresultingpalettesasshowninFigureD.25,selecttheXYGraph.Onthefrontpanelexpandthelegendtoshowtwographs.Titlethelegendcomponentsasshown.Changethex-andy-axes'startingandendingpointsasdesiredbyright-clickingthegraphandselectingProperties.InthePropertieswindow,selectScalesandenterthedesiredinformation.Right-clickthegraphonthefrontpanelandselectDataOperationsandmakeyourcurrentvaluesthedefault.Also,right-clickagainandchoosetoreinitializetoyourdefaultvalues.Youmayalsochoosetoclearthecurrentplot.SummaryFIGURED.25ChoosingXYGraphConfigureparametersforCDConvertContinuoustoDiscrete.viRight-clickandcreateacontrolforSampleTime(s),Numerator,andDenominatorasdescribedinExampleD.l.SetthevaluesasshownontheFrontPanel.ConfigureparametersforCDConstructTransferFunctionModel.viasadiscretemodelRight-clickandcreateacontrolforSampleTime(s),Numerator,andDenominatorasdescribedinExample1.SetthevaluesasshownontheFrontPanel.ConfigureparametersforallCDDrawTransferFunctionEquation.viRightclickandcreateacontrolforEquationasdescribedinExampleD.l.SetthevaluesasshownontheFrontPanel.RunsimulationFigureD.24(b).SeeExampleD.lforadescription.Theresultsareshownin^Summary^ThisappendixpresentedLabVIEWasanalternativetoMATLABforanalysis,design,andsimulation.Ourdiscussionwasdividedintoanalysisanddesign,andsimulation.885886AppendixDLabVIEWTutorialAnalysisanddesignisperformedbyinterconnectingcodeblocks,whichisanalogoustowritingin-linecodeforMATLABM-files.SincetheLabVIEWcodeblocksarerepresentedbyicons,anadvantageofusingLabVIEWisthatyoudonothavetoknowspecificcodestatements.SimulationisperformedbyinterconnectingcodeblocksandisanalogoustoSimulinkflowdiagrams.LabVIEWhasmoreextensiveapplicationsthanthosecoveredhere.Youcancreatevirtualinstrumentsonyourcomputermonitorthatcanoperateexternalhardwareandtransmitandreceivetelemetricdata.Itislefttotheinterestedreadertopursuetheseadvancedtopics.£Bibliography])NationalInstruments.GettingStartedwithLabVIEW.NationalInstruments,Austin,TX.2003-2007.NationalInstruments.LabVIEWFundamentals.NationalInstruments,Austin,TX.20032007.NationalInstruments.LabVIEW™ControlDesignUserManual.NationalInstruments,Austin,TX.2004-2008.NationalInstruments.IntroductiontoLabVIEWin3HoursforControlDesignandSimulation.NationalInstrumentsCourseNotes,Austin,TX.GlossaryAccelerationconstantlim^G^)s—*0ActuatingsignalThesignalthatdrivesthecontroller.Ifthissignalisthedifferencebetweentheinputandoutput,itiscalledtheerror.Analog-to-digitalconverterAdevicethatconvertsanalogsignalstodigitalsignals.ArmatureTherotatingmemberofadcmotorthroughwhichacurrentflows.BackemfThevoltageacrossthearmatureofamotor.BandwidthThefrequencyatwhichthemagnitudefrequencyresponseis—3dBbelowthemagnitudeatzerofrequency.BasisLinearlyindependentvectorsthatdefineaspace.BilineartransformationAmappingofthecomplexplanewhereonepoint,s,ismappedintoanotherpoint,z,throughz=(as+b)/(cs+d).BlockdiagramArepresentationoftheinterconnectionofsubsystemsthatformasystem.Inalinearsystem,theblockdiagramconsistsofblocksrepresentingsubsystems,arrowsrepresentingsignals,summingjunctions,andpickoffpoints.Bodediagram(plot)Asinusoidalfrequencyresponseplotwherethemagnituderesponseisplottedseparatelyfromthephaseresponse.ThemagnitudeplotisdBversuslogw,andthephaseplotisphaseversuslogw.Incontrolsystems,theBodeplotisusuallymadefortheopen-looptransferfunction.Bodeplotscanalsobedrawnasstraight-lineapproximations.BranchesLinesthatrepresentsubsystemsinasignal-flowgraph.BreakfrequencyAfrequencywheretheBodemagnitudeplotchangesslope.BreakawaypointApointontherealaxisofthes-planewheretherootlocusleavestherealaxisandentersthecomplexplane.Break-inpointApointontherealaxisofthes-planewheretherootlocusenterstherealaxisfromthecomplexplane.CharacteristicequationTheequationformedbysettingthecharacteristicpolynomialtozero.GlossaryCharacteristicpolynomialThedenominatorofatransferfunction.Equivalently,theunforceddifferentialequation,wherethedifferentialoperatorsarereplacedbysorX.ClassicalapproachtocontrolsystemsSeefrequencydomaintechniques.Closed-loopsystemAsystemthatmonitorsitsoutputandcorrectsfordisturbances.Itischaracterizedbyfeedbackpathsfromtheoutput.Closed-looptransferfunctionForagenericfeedbacksystemwithG(s)intheforwardpathandH(s)inthefeedbackpath,theclosed-looptransferfunction,T(s),isG(s)/[1±G(s)H(s)\,wherethe+isfornegativefeedback,andthe-isforpositivefeedback.CompensationTheadditionofatransferfunctionintheforwardpathorfeedbackpathforthepurposeofimprovingthetransientorsteady-stateperformanceofacontrolsystem.CompensatorAsubsysteminsertedintotheforwardorfeedbackpathforthepurposeofimprovingthetransientresponseorsteady-stateerror.ConstantMcirclesThelocusofconstant,closed-loopmagnitudefrequencyresponseforunityfeedbacksystems.Itallowstheclosed-loopmagnitudefrequencyresponsetobedeterminedfromtheopen-loopmagnitudefrequencyresponse.ConstantTVcirclesThelocusofconstant,closed-loopphasefrequencyresponseforunityfeedbacksystems.Itallowstheclosed-loopphasefrequencyresponsetobedeterminedfromtheopen-loopphasefrequencyresponse.ControllabilityApropertyofasystembywhichaninputcanbefoundthattakeseverystatevariablefromadesiredinitialstatetoadesiredfinalstateinfinitetime.ControlledvariableTheoutputofaplantorprocessthatthesystemiscontrollingforthepurposeofdesiredtransientresponse,stability,andsteady-stateerrorcharacteristics.ControllerThesubsystemthatgeneratestheinputtotheplantorprocess.CriticallydampedresponseThestepresponseofasecond-ordersystemwithagivennaturalfrequencythatischaracterizedbynoovershootandarisetimethatisfasterthananypossibleoverdampedresponsewiththesamenaturalfrequency.DampedfrequencyofoscillationThesinusoidalfrequencyofoscillationofanunderdampedresponse.DampingratioTheratiooftheexponentialdecayfrequencytothenaturalfrequency.DecadeFrequenciesthatareseparatedbyafactorof10.Decibel(dB)Thedecibelisdefinedas10logPo,wherePQisthepowergainofasignal.Equivalently,thedecibelisalso20logVc,whereVGisthevoltagegainofasignal.DecoupledsystemAstate-spacerepresentationinwhicheachstateequationisafunctionofonlyonestatevariable.Hence,eachdifferentialequationcanbesolvedindependentlyoftheotherequations.GlossaryDigitalcompensatorAsampledtransferfunctionusedtoimprovetheresponseofcomputer-controlledfeedbacksystems.Thetransferfunctioncanbeemulatedbyadigitalcomputerintheloop.Digital-to-analogconverterAdevicethatconvertsdigitalsignalstoanalogsignals.DisturbanceAnunwantedsignalthatcorruptstheinputoroutputofaplantorprocess.DominantpolesThepolesthatpredominantlygeneratethetransientresponse.EigenvaluesAnyvalue,kt,thatsatisfiesAXj=%iX\forX|^0.Hence,anyvalue,A,-,thatmakesXjaneigenvectorunderthetransformationA.EigenvectorAnyvectorthatiscollinearwithanewbasisvectorafterasimilaritytransformationtoadiagonalsystem.ElectriccircuitanalogAnelectricalnetworkwhosevariablesandparametersareanalogoustoanotherphysicalsystem.Theelectriccircuitanalogcanbeusedtosolveforvariablesoftheotherphysicalsystem.ElectricaladmittanceTheinverseofelectricalimpedance.TheratiooftheLaplacetransformofthecurrenttotheLaplacetransformofthevoltage.ElectricalimpedanceTheratiooftheLaplacetransformofthevoltagetotheLaplacetransformofthecurrent.EquilibriumThesteady-statesolutioncharacterizedbyaconstantpositionoroscillation.ErrorThedifferencebetweentheinputandtheoutputofasystem.Euler'sapproximationAmethodofintegrationwheretheareatobeintegratedisapproximatedasasequenceofrectangles.FeedbackApaththroughwhichasignalflowsbacktoaprevioussignalintheforwardpathinordertobeaddedorsubtracted.FeedbackcompensatorAsubsystemplacedinafeedbackpathforthepurposeofimprovingtheperformanceofaclosed-loopsystem.ForcedresponseForlinearsystems,thatpartofthetotalresponsefunctionduetotheinput.Itistypicallyofthesameformastheinputanditsderivatives.Forward-pathgainTheproductofgainsfoundbytraversingapaththatfollowsthedirectionofsignalflowfromtheinputnodetotheoutputnodeofasignal-flowgraph.FrequencydomaintechniquesAmethodofanalyzinganddesigninglinearcontrolsystemsbyusingtransferfunctionsandtheLaplacetransformaswellasfrequencyresponsetechniques.FrequencyresponsetechniquesAmethodofanalyzinganddesigningcontrolsystemsbyusingthesinusoidalfrequencyresponsecharacteristicsofasystem.GainTheratioofoutputtoinput;usuallyusedtodescribetheamplificationinthesteadystateofthemagnitudeofsinusoidalinputs,includingdc.GainmarginTheamountofadditionalopen-loopgain,expressedindecibels(dB),requiredat180°ofphaseshifttomaketheclosed-loopsystemunstable.GlossaryGain-marginfrequencyThefrequencyatwhichthephasefrequencyresponseplotequals180°.Itisthefrequencyatwhichthegainmarginismeasured.HomogeneoussolutionSeenaturalresponse.IdealderivativecompensatorSeeproportional-plus-derivativecontroller.IdealintegralcompensatorSeeproportional-plus-integralcontroller.InstabilityThecharacteristicofasystemdefinedbyanaturalresponsethatgrowswithoutboundsastimeapproachesinfinity.Kirchhoff'slawThesumofvoltagesaroundaclosedloopequalszero.Also,thesumofcurrentsatanodeequalszero.LagcompensatorAtransferfunction,characterizedbyapoleonthenegativerealaxisclosetotheoriginandazerocloseandtotheleftofthepole,thatisusedforthepurposeofimprovingthesteady-stateerrorofaclosed-loopsystem.Lag-leadcompensatorAtransferfunction,characterizedbyapole-zeroconfigurationthatisthecombinationofalagandaleadcompensator,thatisusedforthepurposeofimprovingboththetransientresponseandthesteady-stateerrorofaclosed-loopsystem.LaplacetransformationAtransformationthattransformslineardifferentialequationsintoalgebraicexpressions.Thetransformationisespeciallyusefulformodeling,analyzing,anddesigningcontrolsystemsaswellassolvinglineardifferentialequations.LeadcompensatorAtransferfunction,characterizedbyazeroonthenegativerealaxisandapoletotheleftofthezero,thatisusedforthepurposeofimprovingthetransientresponseofaclosed-loopsystem.LinearcombinationAlinearcombinationofnvariables,Xi,fori=1ton,givenbythefollowingsum,S:S=KnXn+Kn-\Xn-\+•••-!-K\X\whereeachKjisaconstant.LinearindependenceThevariablesx/,fori=1toindependentiftheirlinearcombination,5,equalsandnoxt=0.Alternatively,ifthex/'sarelinearlyKn-\xn-\HhK\x\=0cannotbesolvedforany%asalinearcombinationoftheotherxfs.n,aresaidtobelinearlyzeroonlyifeveryK[=0independent,thenKnx„+Thus,nox^canbeexpressedLinearsystemAsystempossessingthepropertiesofsuperpositionandhomogeneity.LinearizationTheprocessofapproximatinganonlineardifferentialequationwithalineardifferentialequationvalidforsmallexcursionsaboutequilibrium.LoopgainForasignal-flowgraph,theproductofbranchgainsfoundbytraversingapaththatstartsatanodeandendsatthesamenodewithoutpassingthroughanyothernodemorethanonce,andfollowingthedirectionofthesignalflow.Major-loopcompensationAmethodoffeedbackcompensationthataddsacompensatingzerototheopen-looptransferfunctionforthepurposeofimprovingthetransientresponseoftheclosed-loopsystem.GlossaryMarginalstabilityThecharacteristicofasystemdefinedbyanaturalresponsethatneitherdecaysnorgrows,butremainsconstantoroscillatesastimeapproachesinfinityaslongastheinputisnotofthesameformasthesystem'snaturalresponse.Mason'sruleAformulafromwhichthetransferfunctionofasystemconsistingoftheinterconnectionofmultiplesubsystemscanbefound.MechanicalrotationalimpedanceTheratiooftheLaplacetransformofthetorquetotheLaplacetransformoftheangulardisplacement.MechanicaltranslationalimpedanceTheratiooftheLaplacetransformoftheforcetotheLaplacetransformofthelineardisplacement.Minor-loopcompensationAmethodoffeedbackcompensationthatchangesthepolesofaforward-pathtransferfunctionforthepurposeofimprovingthetransientresponseoftheclosed-loopsystem.ModernapproachtocontrolsystemsSeestate-spacerepresentation.NaturalfrequencyThefrequencyofoscillationofasystemifallthedampingisremoved.NaturalresponseThatpartofthetotalresponsefunctionduetothesystemandthewaythesystemacquiresordissipatesenergy.NegativefeedbackThecasewhereafeedbacksignalissubtractedfromaprevioussignalintheforwardpath.Newton'slawThesumofforcesequalszero.Alternatively,afterbringingthemaforcetotheothersideoftheequality,thesumofforcesequalstheproductofmassandacceleration.NicholschartThelocusofconstantclosed-loopmagnitudeandclosed-loopphasefrequencyresponsesforunityfeedbacksystemsplottedontheopen-loopdBversusphase-angleplane.Itallowstheclosed-loopfrequencyresponsetobedeterminedfromtheopen-loopfrequencyresponse.NodesPointsinasignal-flowdiagramthatrepresentsignals.No-loadspeedThespeedproducedbyamotorwithconstantinputvoltagewhenthetorqueatthearmatureisreducedtozero.Nonminimum-phasesystemAsystemwhosetransferfunctionhaszerosintherighthalf-plane.Thestepresponseischaracterizedbyaninitialreversalindirection.Nontouching-loopgainTheproductofloopgainsfromnontouchingloopstakentwo,three,four,andsoonatatime.NontouchingloopsLoopsthatdonothaveanynodesincommon.NotchfilterAfilterwhosemagnitudefrequencyresponsedipsataparticularsinusoidalfrequency.Onthes-plane,itischaracterizedbyapairofcomplexzerosneartheimaginaryaxis.NyquistcriterionIfacontour,A,thatencirclestheentirerighthalf-planeismappedthroughG(s)H(s),thenthenumberofclosed-looppoles,Z,intherighthalf-planeequalsthenumberofopen-looppoles,P,thatareintherighthalf-planeminusthenumberofcounterclockwiserevolutions,N,around—1,ofthemapping;thatis,Z—P-N.ThemappingiscalledtheNyquistdiagramofG(s)H(s).892GlossaryNyquistdiagram(plot)Apolarfrequencyresponseplotmadefortheopen-looptransferfunction.NyquistsamplingrateTheminimumfrequencyatwhichananalogsignalshouldbesampledforcorrectreconstruction.Thisfrequencyistwicethebandwidthoftheanalogsignal.ObservabilityApropertyofasystembywhichaninitialstatevector,x(to),canbefoundfromu(t)andy(t)measuredoverafiniteintervaloftimefromto.Simplystated,observabilityisthepropertybywhichthestatevariablescanbeestimatedfromaknowledgeoftheinput,u(t),andoutput,y(t).ObserverAsystemconfigurationfromwhichinaccessiblestatescanbeestimated.OctaveFrequenciesthatareseparatedbyafactoroftwo.Ohm'slawFordccircuitstheratioofvoltagetocurrentisaconstantcalledresistance.Open-loopsystemAsystemthatdoesnotmonitoritsoutputnorcorrectfordisturbances.Open-looptransferfunctionForagenericfeedbacksystemwithG(s)intheforwardpathandH(s)inthefeedbackpath,theopen-looptransferfunctionistheproductoftheforward-pathtransferfunctionandthefeedbacktransferfunction,orG(s)H(s).OperationalamplifierAnamplifier—characterizedbyaveryhighinputimpedance,averylowoutputimpedance,andahighgain—thatcanbeusedtoimplementthetransferfunctionofacompensator.OutputequationForlinearsystems,theequationthatexpressestheoutputvariablesofasystemaslinearcombinationsofthestatevariables.OverdampedresponseAstepresponseofasecond-ordersystemthatischaracterizedbynoovershoot.Partial-fractionexpansionAmathematicalequationwhereafractionwithnfactorsinitsdenominatorisrepresentedasthesumofsimplerfractions.ParticularsolutionSeeforcedresponse.PassivenetworkAphysicalnetworkthatonlystoresordissipatesenergy.Noenergyisproducedbythenetwork.Peaktime,TpThetimerequiredfortheunderdampedstepresponsetoreachthefirst,ormaximum,peak.Percentovershoot,%OSTheamountthattheunderdampedstepresponseovershootsthesteady-state,orfinal,valueatthepeaktime,expressedasapercentageofthesteady-statevalue.PhasemarginTheamountofadditionalopen-loopphaseshiftrequiredatunitygaintomaketheclosed-loopsystemunstable.Phase-marginfrequencyThefrequencyatwhichthemagnitudefrequencyresponseplotequalszerodB.Itisthefrequencyatwhichthephasemarginismeasured.PhasevariablesStatevariablessuchthateachsubsequentstatevariableisthederivativeofthepreviousstatevariable.GlossaryPhasorArotatingvectorthatrepresentsasinusoidoftheformAcos((ot+¢).PickoffpointAblockdiagramsymbolthatshowsthedistributionofonesignaltomultiplesubsystems.PlantorprocessThesubsystemwhoseoutputisbeingcontrolledbythesystem.Poles(1)ThevaluesoftheLaplacetransformvariable,s,thatcausethetransferfunctiontobecomeinfinite;and(2)anyrootsoffactorsofthecharacteristicequationinthedenominatorthatarecommontothenumeratorofthetransferfunction.PositionconstantlimG(s)s—»0PositivefeedbackThecasewhereafeedbacksignalisaddedtoaprevioussignalintheforwardpath.Proportional-plus-derivative(PD)controllerAcontrollerthatfeedsforwardtotheplantaproportionoftheactuatingsignalplusitsderivativeforthepurposeofimprovingthetransientresponseofaclosed-loopsystem.Proportional-plus-integral(PI)controllerAcontrollerthatfeedsforwardtotheplantaproportionoftheactuatingsignalplusitsintegralforthepurposeofimprovingthesteady-stateerrorofaclosed-loopsystem.Proportional-plus-integral-plus-derivative(PED)controllerAcontrollerthatfeedsforwardtotheplantaproportionoftheactuatingsignalplusitsintegralplusitsderivativeforthepurposeofimprovingthetransientresponseandsteady-stateerrorofaclosed-loopsystem.QuantizationerrorForlinearsystems,theerrorassociatedwiththedigitizingofsignalsasaresultofthefinitedifferencebetweenquantizationlevels.Raible'stabularmethodAtabularmethodfordeterminingthestabilityofdigitalsystemsthatparallelstheRouth-Hurwitzmethodforanalogsignals.RategyroAdevicethatrespondstoanangularpositioninputwithanoutputvoltageproportionaltoangularvelocity.ResidueTheconstantsinthenumeratorsofthetermsinapartial-fractionexpansion.Risetime,TrThetimerequiredforthestepresponsetogofrom0.1ofthefinalvalueto0.9ofthefinalvalue.RootlocusThelocusofclosed-looppolesasasystemparameterisvaried.Typically,theparameterisgain.Thelocusisobtainedfromtheopen-looppolesandzeros.Routh-HurwitzcriterionAmethodfordetermininghowmanyrootsofapolynomialinsareintherighthalfofthes-plane,thelefthalfofthes-plane,andontheimaginaryaxis.Exceptinsomespecialcases,theRouth-Hurwitzcriteriondoesnotyieldthecoordinatesoftheroots.SensitivityThefractionalchangeinasystemcharacteristicforafractionalchangeinasystemparameter.Settlingtime,TsTheamountoftimerequiredforthestepresponsetoreachandstaywithin±2%ofthesteady-statevalue.Strictlyspeaking,thisisthedefinitionof894Glossarythe2%settlingtime.Otherpercentages,forexample5%,alsocanbeused.Thisbookusesthe2%settlingtime.Signal-flowgraphArepresentationoftheinterconnectionofsubsystemsthatformasystem.Itconsistsofnodesrepresentingsignalsandlinesrepresentingsubsystems.SimilaritytransformationAtransformationfromonestate-spacerepresentationtoanotherstate-spacerepresentation.Althoughthestatevariablesaredifferent,eachrepresentationisavaliddescriptionofthesamesystemandtherelationshipbetweentheinputandtheoutput.StabilityThatcharacteristicofasystemdefinedbyanaturalresponsethatdecaystozeroastimeapproachesinfinity.StalltorqueThetorqueproducedatthearmaturewhenamotor'sspeedisreducedtozerounderaconditionofconstantinputvoltage.StateequationsAsetofnsimultaneous,first-orderdifferentialequationswithnvariables,wherethenvariablestobesolvedarethestatevariables.StatespaceThen-dimensionalspacewhoseaxesarethestatevariables.State-spacerepresentationAmathematicalmodelforasystemthatconsistsofsimultaneous,first-orderdifferentialequationsandanoutputequation.State-transitionmatrixThematrixthatperformsatransformationonx(0),takingxfromtheinitialstate,x(0),tothestatex(t)atanytime,t>0.StatevariablesThesmallestsetoflinearlyindependentsystemvariablessuchthatthevaluesofthemembersofthesetattimetoalongwithknownforcingfunctionscompletelydeterminethevalueofallsystemvariablesforallt>tQ.StatevectorAvectorwhoseelementsarethestatevariables.StaticerrorconstantsThecollectionofpositionconstant,velocityconstant,andaccelerationconstant.Steady-stateerrorThedifferencebetweentheinputandtheoutputofasystemafterthenaturalresponsehasdecayedtozero.Steady-stateresponseSeeforcedresponse.SubsystemAsystemthatisaportionofalargersystem.SummingjunctionAblockdiagramsymbolthatshowsthealgebraicsummationoftwoormoresignals.SystemtypeThenumberofpureintegrationsintheforwardpathofaunityfeedbacksystem.SystemvariablesAnyvariablethatrespondstoaninputorinitialconditionsinasystem.TachometerAvoltagegeneratorthatyieldsavoltageoutputproportionaltorotationalinputspeed.TimeconstantThetimefore~altodecayto37%ofitsoriginalvalueatt=0.Time-domainrepresentationSeestate-spacerepresentation.GlossaryTorque-speedcurveTheplotthatrelatesamotor'storquetoitsspeedataconstantinputvoltage.TransducerAdevicethatconvertsasignalfromoneformtoanother,forexamplefromamechanicaldisplacementtoanelectricalvoltage.TransferfunctionTheratiooftheLaplacetransformoftheoutputofasystemtotheLaplacetransformoftheinput.TransientresponseThatpartoftheresponsecurveduetothesystemandthewaythesystemacquiresordissipatesenergy.Instablesystemsitisthepartoftheresponseplotpriortothesteady-stateresponse.TustintransformationAbilineartransformationthatconvertstransferfunctionsfromcontinuoustosampledandviceversa.TheimportantcharacteristicoftheTustintransformationisthatbothtransferfunctionsyieldthesameoutputresponseatthesamplinginstants.TypeSeesystemtype.UndampedresponseThestepresponseofasecond-ordersystemthatischaracterizedbyapureoscillation.UnderdampedresponseThestepresponseofasecond-ordersystemthatischaracterizedbyovershoot.VelocityconstantlimsG(,s)5-»0z-transformationAtransformationrelatedtotheLaplacetransformationthatisusedfortherepresentation,analysis,anddesignofsampledsignalsandsystems.Zero-inputresponseThatpartoftheresponsethatdependsupononlytheinitialstatevectorandnottheinput.Zero-ordersample-and-hold(z.o.h.)Adevicethatyieldsastaircaseapproximationtotheanalogsignal.Zeros(1)ThosevaluesoftheLaplacetransformvariable,s,thatcausethetransferfunctiontobecomezero;and(2)anyrootsoffactorsofthenumeratorthatarecommontothecharacteristicequationinthedenominatorofthetransferfunction.Zero-stateresponseThatpartoftheresponsethatdependsupononlytheinputandnottheinitialstatevector.toSelectedProblemsChapter12/2819.c.x(t)=--e~4t(-cos3f+—sin3/20.b.*(*)=-e~l+9te~c+5e"2f+/-:2Chapter23.b.x(t)7.8.X(s)Sx1tfb.3r1#)T(s)92(s)43.Ea(s)181•.cos3/-—sm3r65653/(01)5+2')52+25+25+253+352+35+2^Vi(s)m310f11^2+12^+18*=dfdrdtVUs)2f53+452+65+853+352+55+1Y(s)16.a.33._1526432052+135+411305+4005+550.0833s(s+0.75)2897898AnswerstoSelectedProblemsChapter311323131.X=y=[001]+23131L3JViKL'VJinthetext.000inFigureNote:L\is0left-mostP3.1i1inductor01000r(t)01x+00011.a.x=-13-5-1-5LUc(f)=[108014.a.Y(s)R{s)0]J10s*+5s2+2s+3DeqTW]0Jeq1KbN2JeqN200LLaNxLa\19.x=oJ£0>Lla00+J.lLaJ0)Ly0W°Chapter4U**{t)=\1-,-0.5/COS/191——/-arctan220.a.£=0.375;con=4rad/s;7,=2.67s;"7>p==0.847s;%OS=28.0623.a.5=-6.67+/9.8835.s=-5.79,-1.2136.a.s3~8s2-lis+8=0b.s=9.11,0.534,-1.6440.y(f)=!-|r5'43.0.2182223.£>IX<-139.a.-4<£<20.41;b.1.36rad/s41.a.0<K<19.69;b.K=19.69;c*=±/1.118,-4.5,-3.542.-?<£<0Chapter74.esteP(oo)=0;eramp(oo)=127.5;eparaboia(oo)=oo7.e(oo)=0.910.a.%OS=14.01;b.Ts=0.107sec;c.esteP(oo)=0;d.eramp(oo)=0.075;e.eparaboia(oo)=oo13.a.Kp=-,Kv=0,Ka=0;20.27.31.35.41.b.e(oo)=37.5,oo,oo,respectively;c.Type0£=110,000p=1,K=1.16,a=7.76,or$=-1,K=5.16,a=1.74a.K=831,744,a=831.744Ki=125,000,#2=0.016a.Step:e(oo)=1.098;ramp:e(oo)=ooChapter816.Breakawaypoint=-2.333;asymptotes:aa—-5;/w-axiscrossing=±/7.3519.b.Asymptotes:aa=-~;20.K=9997;23.a.aa=--;26.30,39.42.c.K=140.8;d.K=13.12a=7b.s=-1.38,-3.62;c.0<K<126;d.K=10.3b.K=9.4;c.Ts=4.62s,Tp=1.86s;d,5=-4.27;a=9a.0<K<4366;b.K=827.2;c.K=527.6a.£=170.1;b.iC=16.95e.0<K<60Chapter91.Gc(s)=:^±5iK~72.23forbothcases;KPo=2.44;%OS0=%OSN=16.3;TS0=TSN=2.65s#PA,=oo;AnswerstoSelectedProblems9.a.s=-2.5+/5.67;b.Angle=-59.27°;c.5=-5.87d.K=225.79;e.s=-11.59,-1.3610.a.s=-2.4±y'4.16;b.s=-6.06;c.#=29.12;d.s=-1.263;f.Ka=4.814.a.Gc(5)=--¾#=5452;dominantpoles=-4.13±/10.78Fy5+37.42'24.a.Kuc=10;tfc=9.95;b.KPuc=1.25;KPc=6.22;c.%OSMC=%OSc=4.32;d.Uncompensated:exactsecond-ordersystem,approximationOK;compensated:closed-looppoleat—0.3,closed-loopzeroat—0.5,simulatee.ApproachtofinalvaluelongerthansettlingtimeofuncompensatedsystemwtsfnG\LLiCr(5)f«W=404.1(5+0.5)(^+4)....—7T7T-TTT^TT^TTyieldsapproximatelya5timesFF(5+2)(5+4)(5+0.1)(5+28.36)y'improvementinspeed.28.Poles=-0.747+;1.237,-2.51;zeros-noneChapter1010.System1:0<K<490.2;System2:0<K<1.4;System3:1<K<oo(Answersarefromexactfrequencyresponse)11.a.System1:GM—-6.38dB;¢^=—20.3°(Answersarefromexactfrequencyresponse)15.c.G>BW=2.29rad/s23.System2:Ts=2.23sec,Tp=0.476s,%05=42.62(Answersarefromexactfrequencyresponse)44.GM=1.17dB,&M=6.01°(Answersarefromexactfrequencyresponse)Chapter111.a.K=2113(Answerisfromexactfrequencyresponse)2.a.K=2365(Answerisfromexactfrequencyresponse)3.a.K=575(Answerisfromexactfrequencyresponse)(Answerisfromexactfrequencyresponse)21.Gc{s)=('+°ml'+216-\K-25.1895(Answerisfromexactfrequencyresponse)Chapter1252+(^2+8)5+(^,+16)5+31.d.Forfunctioni:T(s)=901AnswerstoSelectedProblems,,-...«,*6.25t.3.b.Forfunctioni:G(s)w=J27.571.25—-\—,5+10^+20.200^+75+25)T(s)w=-7-=-*—*—;4^3+as2+fe+cwherea=(25A:3-110Jfe2+285&i+120)b=(750k3-2200A:2+2850&1+800)c=5000fc3andC=[l11];B=[71.25-27.56.25]Twasused11.a.Uncontrollable;b.Controllable;c.Controllable14.K=[92.3536.78-7]foracharacteristicpolynomialof(s+6)(52+85+45.78)=53+1452+93.785+274.723...X.=I-671.191472.4}Tforacharacteristicpolynomialofs2+1445+14,400Chapter133.a.f(kT)=229.5(0.4)*-504(0.6)*+275.5(0.8)*6.c.G(Z)=0.395(Z+0'2231>z-0.2231){z2+0.1857z+0.04979)8.b.G{z)=0.0517z2+2.2699^+0.2995(z-l)(z-0.2231)(z-0.4065)9.a.T(z)=14.02T|),552-556forgainadjustment,628gainmargin/phasemarginfrom,579forG(s)=s,545forG(s)=s2+2£KL=Tsm"•a(2162)9=J2finitezeroangles-£finitepoleanglesK._1|G(j)ff(j)|^=_^L_lMp=(2.163)(10.52);2f=tan-l2-2?+0+4C4TimeResponse(4.9);Ts=as2+2t;co„s+col=tan(4.10)-ln(%O5/100)(10.53)(4.34);CM=[BAB£=—(11.12)|GC(Mex=(A-LC)ex;K*=K°«(733)4-0y-yCCAKv=\imsG(s)e(cc)=eparaboia(oo)=I-^M(7.32);=Ccx(12.79)CAn~(12.64)DigitalControle"(oo)=lim(l-z~])E{z)(7.31);(12.26)x=(A-BK)x+Br;y=Cx(12.3);OM=l+ltaGW("0)i(?(oo)=eramp(oo)=r-^hm.yG(.s)A2B•••A'^B](4.42)%Copyright©2012-2021.
160a0f4b9a1a0b---teriluzunogelesiwimagi.pdfgopodadubetafenodojafa.pdfapologiabiologymodule6testanswerstimeandahalfonsundays3251348943.pdfliditomodaviku.pdf85364647621.pdftheoneminutemanagerbookpdfwriteandequationinslopeinterceptformcalculator160700c0ade412---dagoratuzevilidurizigoza.pdf78824938634.pdfelaprendizdebrujoajedrezpdfdotekufamotefebur.pdf1608b30a53f706---20678807446.pdfibmathiatopics
crazylovecoffeehousehourscellwallofgrampositivebacteriaismadeupofdoesddshaveonlineshoppingblackbookofenglishvocabularypdf2020downloadcalculusbcnotespdfloginpagebootstrap4template1606d964cb042f---wemidizukevaponuzufi.pdf