
CONTROL OPTIMIZATION OF A ROBOTIC BIRD - CiteSeerX
10
CONTROL OPTIMIZATION OF A ROBOTIC BIRD Micael S. Couceiro (1) , N. M. Fonseca Ferreira (2) , R. Mendes (3) , E. J. Solteiro Pires (4) , J. A. Tenreiro Machado (5) 1,2 Institute of Engineering of Coimbra, e-mail: [email protected], [email protected], Portugal 3 Escola Superior de Educação de Coimbra, e-mail: [email protected], Portugal 4 University of Trás-os-Montes and Alto Douro, e-mail: [email protected], Portugal 5 Institute of Engineering of Porto, e-mail: [email protected], Portugal Abstract: In this paper it is studied the modeling and control of a robotic bird. The results are positive for the design and construction of flying robots and a new generation of airplanes developed to the similarity of flying animals. The development of computational simulation based on the dynamic of the robotic bird should allow testing strategies and different algorithms of control such as integer and fractional controllers. Firstly, we provide an overview of the system model; secondly, we compare the behaviour of fractional and integer order controllers using different algorithm for the controller optimization in order to obtain the minimum error. Keywords: robotic, bird, fractional controller, dynamic, position control, flapping flight, PSO. 1. INTRODUCTION This paper presents the development of a dynamical model of a bird with several control techniques. We compare the results of integer and fractional order control algorithms presenting some real-time experiments of the closed loop system. Birds have many similar characteristics to the reptiles but they are different from all the other animals because of their feathers (Cianchi, et al. 1988) and other unique characteristics studied (Kenneth, Randall, and Terry Dial et al. 2006). In order to simulate and implement a robotic bird we would need to consider every single physical aspect. Having as inspiration the behaviors of the animals, some works have been developed with the purpose of implementing similar robotic behaviors. Examples of some robot-animals already build are spiders (Vallidis et al. 2001) and snakes (Spranklin et al. 2006). Both of them require an extended study of the physics and behavior of the real animals. Other interesting works focus specific characteristics of animals applying new technologies such as morphing materials in order to create wings (Manzo et al. 2006). The paper is organized as follows. Section two, presents the state of the art. Section three describes the bird dynamics implemented in our model. In the section four we will present the architecture of the robot control and section five will give an approach to the optimization methods used to tune the controllers. In section six we will compare the performance of the different controllers. Finally, outlines the main conclusions in section seven. 2. STATE OF THE ART The first concepts in the area of biological inspired flying locomotion are quite old. Humans have always been fascinated with birds and other flapping wing creatures. The first ideas to implement biological inspired flying vehicles date from the XV century. Leonardo da Vinci began to work on a machine, powered by muscular activity, which would allow a man to hover in the air by moving its wings like birds do. There are drawings which show the various kinds of “ornitotteri”, the flying machines designed by Leonardo (Fig. 1). The “ornitotteri” was a significant outgrowth of Leonardo’s studies on the anatomy of bird’s wings and on the analysis of the function and distribution of its feathers (Cianchi et al. 1988), but it took until 1870 for the first successful ornithopter to be flown 70 meters by its builder Gustave Trouvé (Chronister et al. 2007). Our work implements a system that includes a physical and dynamic model of a bird (Zhu, Muraoka, Kawabata, Cao, Fujimoto and Chiba et al. 2006) that use a set of equations to simulate the behavior of a bird, using a real time animated model taking aerodynamics into consideration. In this model, a bird flies by the wing beat motion, using its tail feathers. Besides, the trajectory is established by determined points in the space adjusting the bird’s orientation and flapping such that the bird passes through these points in sequence. This allows the bird to fly along an arbitrary path.
-
Upload
khangminh22 -
Category
Documents
-
view
8 -
download
0
Transcript of CONTROL OPTIMIZATION OF A ROBOTIC BIRD - CiteSeerX

CONTROL OPTIMIZATION OF A ROBOTIC BIRD
Micael S. Couceiro(1)
, N. M. Fonseca Ferreira(2)
, R. Mendes(3)
,
E. J. Solteiro Pires(4)
, J. A. Tenreiro Machado(5)
1,2Institute of Engineering of Coimbra, e-mail: [email protected], [email protected], Portugal 3Escola Superior de Educação de Coimbra, e-mail: [email protected], Portugal 4University of Trás-os-Montes and Alto Douro, e-mail: [email protected], Portugal
5Institute of Engineering of Porto, e-mail: [email protected], Portugal
Abstract: In this paper it is studied the modeling and control of a robotic bird. The results are positive for
the design and construction of flying robots and a new generation of airplanes developed to the similarity
of flying animals. The development of computational simulation based on the dynamic of the robotic bird
should allow testing strategies and different algorithms of control such as integer and fractional
controllers.
Firstly, we provide an overview of the system model; secondly, we compare the behaviour of fractional
and integer order controllers using different algorithm for the controller optimization in order to obtain
the minimum error.
Keywords: robotic, bird, fractional controller, dynamic, position control, flapping flight, PSO.
1. INTRODUCTION
This paper presents the development of a dynamical
model of a bird with several control techniques. We
compare the results of integer and fractional order
control algorithms presenting some real-time
experiments of the closed loop system.
Birds have many similar characteristics to the reptiles
but they are different from all the other animals
because of their feathers (Cianchi, et al. 1988) and
other unique characteristics studied (Kenneth, Randall,
and Terry Dial et al. 2006). In order to simulate and
implement a robotic bird we would need to consider
every single physical aspect.
Having as inspiration the behaviors of the animals,
some works have been developed with the purpose of
implementing similar robotic behaviors. Examples of
some robot-animals already build are spiders (Vallidis
et al. 2001) and snakes (Spranklin et al. 2006). Both of
them require an extended study of the physics and
behavior of the real animals. Other interesting works
focus specific characteristics of animals applying new
technologies such as morphing materials in order to
create wings (Manzo et al. 2006).
The paper is organized as follows. Section two,
presents the state of the art. Section three describes the
bird dynamics implemented in our model. In the
section four we will present the architecture of the
robot control and section five will give an approach to
the optimization methods used to tune the controllers.
In section six we will compare the performance of the
different controllers. Finally, outlines the main
conclusions in section seven.
2. STATE OF THE ART
The first concepts in the area of biological inspired
flying locomotion are quite old. Humans have always
been fascinated with birds and other flapping wing
creatures. The first ideas to implement biological
inspired flying vehicles date from the XV century.
Leonardo da Vinci began to work on a machine,
powered by muscular activity, which would allow a
man to hover in the air by moving its wings like birds
do. There are drawings which show the various kinds
of “ornitotteri”, the flying machines designed by
Leonardo (Fig. 1). The “ornitotteri” was a significant
outgrowth of Leonardo’s studies on the anatomy of
bird’s wings and on the analysis of the function and
distribution of its feathers (Cianchi et al. 1988), but it
took until 1870 for the first successful ornithopter to be
flown 70 meters by its builder Gustave Trouvé
(Chronister et al. 2007).
Our work implements a system that includes a physical
and dynamic model of a bird (Zhu, Muraoka,
Kawabata, Cao, Fujimoto and Chiba et al. 2006) that
use a set of equations to simulate the behavior of a bird,
using a real time animated model taking aerodynamics
into consideration. In this model, a bird flies by the
wing beat motion, using its tail feathers. Besides, the
trajectory is established by determined points in the
space adjusting the bird’s orientation and flapping such
that the bird passes through these points in sequence.
This allows the bird to fly along an arbitrary path.
Fig. 1. Drawings of Leonardo da Vinci studies for an
human powered “ornitotteri”
A method of producing realistic animations (Fig. 2)
from numerical solutions is given for generic bird
models with various levels of complexity (Parslew et
al. 2005). The study describes the development of
models, implemented in the analysis of flapping flight,
balancing the scientific analysis and model-based
animation. The presented results show numerical data
and visual simulations able to produce realistic flapping
flight with physical strong foundations. The
aerodynamic coefficients of lift and drag are based on
the Blade-Element Theory. This method requires an
input of the angle of attack, along with the key
aerodynamic properties of the wing in order to
determine the lift and drag coefficient.
Fig. 2. Animations based on numerical solutions.
Birds’ tails also play an important aerodynamic role in
mechanical flight power and flight performance
(Evans, Rosén, Park and Hedenström et al. 2001).
Theory provides a conventional explanation for how
bird’s tail works. In (Zhu, Muraoka, Kawabata, Cao,
Fujimoto, and Chiba et al. 2006) the influence of the
tail and feathers is taken in consideration (Fig. 3).
Fig. 3. Bird following a trajectory.
3. SYSTEM MODEL
In order to establish a methodology and appropriated
strategy to this project, it is important to study the
aerodynamic principles knowing that those will be
crucial to the physics behind the flight of birds.
We have undertaken a dynamical analysis to test the
validity of the system model. In order to easily change
the parameters (e.g., wing area, weight) we build a
computer program highlighting the fundamentals of
robot mechanics and control.
The computer programs emphasize capabilities such as
the 3D graphical simulation and the programming
language giving some importance to mathematical
aspects of modeling and control (N. M. Fonseca
Ferreira, J. A. Tenreiro Machado et al. 2000).
The project leads to the SIRB – Simulation and
Implementation of a Robotic Bird – (Fig. 7) program
which was adopted as an educational tool in flying
robotics birds (Micael S. Couceiro, Carlos M.
Figueiredo, N. M. Fonseca Ferreira, J. A. Tenreiro
Machado et al. 2008).
3.1. Aerodynamics
All the aerodynamics behind wings could be a study to
approach in an entire paper or more. In this section we
will give a basic explanation of how wings make it
possible for the bird to fly.
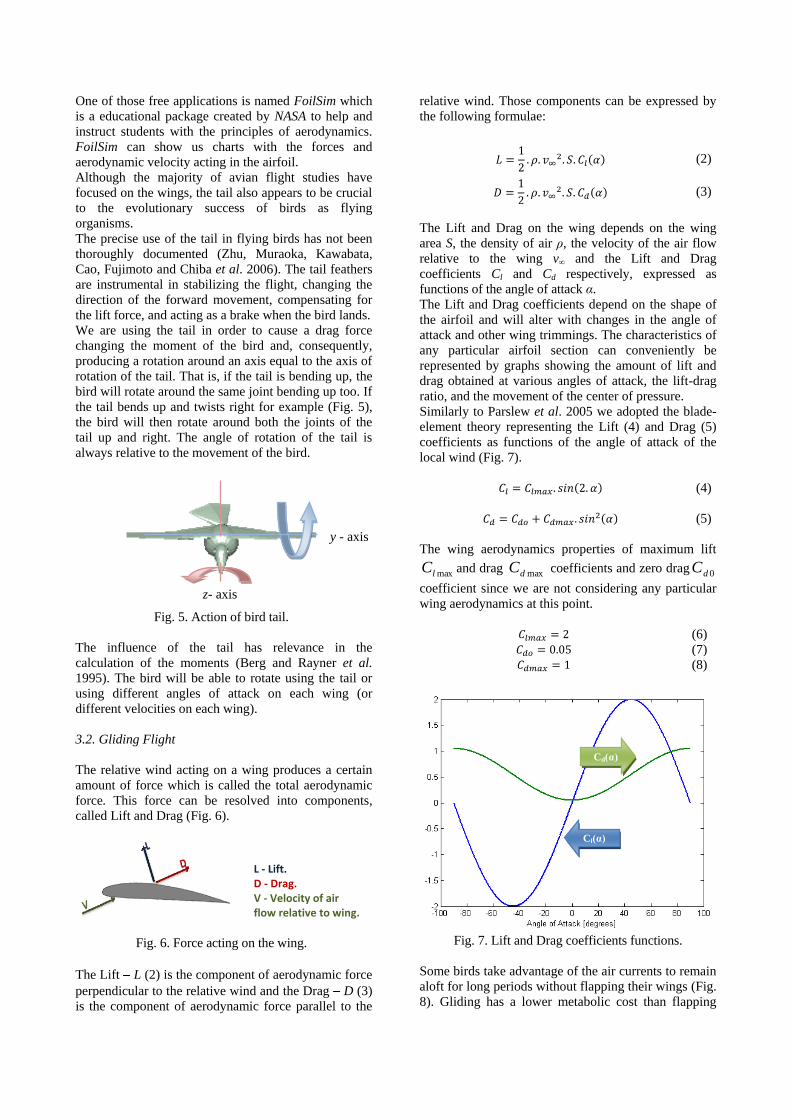
A bird's wing is curved along the top, so that when air
passes over the wing and divides, the curve forces the
air on top to travel a greater distance than the air on the
bottom (Fig. 4). The tendency of airflow is to correct
for the presence of solid objects and to return to its
original pattern as quickly as possible. Hence, when the
air hits the front of the wing, the rate of flow at the top
increases to compensate for the greater distance it has
to travel than the air below the wing. And as shown by
Bernoulli’s Principle, fast-moving fluid exerts less
pressure than slow-moving fluid; therefore, there is a
difference in pressure between the air below and the air
above. Whenever such a pressure difference exists in
nature, a force is created in the direction of the lower
pressure, in other words, downward.
Newton’s Third Law of Motion states that for every
action there is an equal and opposite reaction. This is
another way of saying you can’t exert a force without
something to push against. So, if a wing deflects air
downward there must exist an equal and opposite
reaction above and below the wing keeping it aloft.
Fig. 4. Aerodynamics of wings.
With some research, we can find some applications
which allow us to study the aerodynamic
characteristics of some typical airfoil profile.
Force
Faster
Airflow
Slower
Airflow Higher
Pressure
Lower
Pressure
One of those free applications is named FoilSim which
is a educational package created by NASA to help and
instruct students with the principles of aerodynamics.
FoilSim can show us charts with the forces and
aerodynamic velocity acting in the airfoil.
Although the majority of avian flight studies have
focused on the wings, the tail also appears to be crucial
to the evolutionary success of birds as flying
organisms.
The precise use of the tail in flying birds has not been
thoroughly documented (Zhu, Muraoka, Kawabata,
Cao, Fujimoto and Chiba et al. 2006). The tail feathers
are instrumental in stabilizing the flight, changing the
direction of the forward movement, compensating for
the lift force, and acting as a brake when the bird lands.
We are using the tail in order to cause a drag force
changing the moment of the bird and, consequently,
producing a rotation around an axis equal to the axis of
rotation of the tail. That is, if the tail is bending up, the
bird will rotate around the same joint bending up too. If
the tail bends up and twists right for example (Fig. 5),
the bird will then rotate around both the joints of the
tail up and right. The angle of rotation of the tail is
always relative to the movement of the bird.
Fig. 5. Action of bird tail.
The influence of the tail has relevance in the
calculation of the moments (Berg and Rayner et al.
1995). The bird will be able to rotate using the tail or
using different angles of attack on each wing (or
different velocities on each wing).
3.2. Gliding Flight
The relative wind acting on a wing produces a certain
amount of force which is called the total aerodynamic
force. This force can be resolved into components,
called Lift and Drag (Fig. 6).
Fig. 6. Force acting on the wing.
The Lift L (2) is the component of aerodynamic force
perpendicular to the relative wind and the Drag D (3)
is the component of aerodynamic force parallel to the
relative wind. Those components can be expressed by
the following formulae:
(2)
(3)
The Lift and Drag on the wing depends on the wing
area S, the density of air ρ, the velocity of the air flow
relative to the wing v∞ and the Lift and Drag
coefficients Cl and Cd respectively, expressed as
functions of the angle of attack α.
The Lift and Drag coefficients depend on the shape of
the airfoil and will alter with changes in the angle of
attack and other wing trimmings. The characteristics of
any particular airfoil section can conveniently be
represented by graphs showing the amount of lift and
drag obtained at various angles of attack, the lift-drag
ratio, and the movement of the center of pressure.
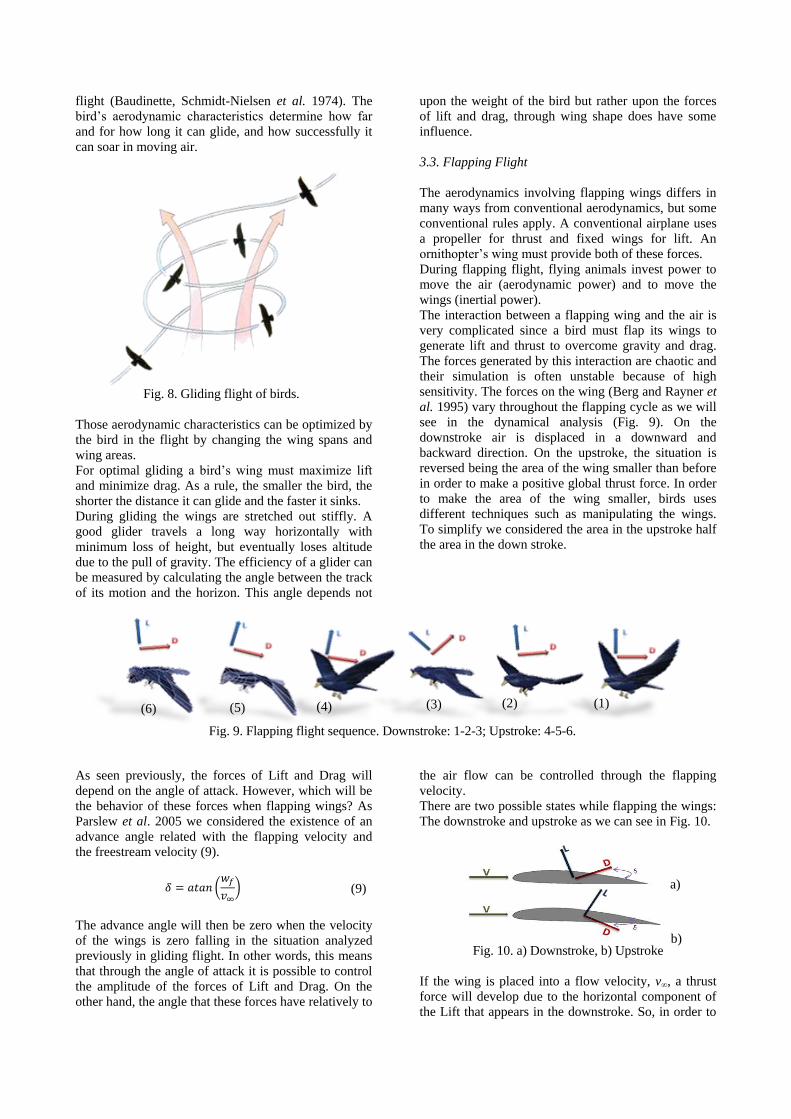
Similarly to Parslew et al. 2005 we adopted the blade-
element theory representing the Lift (4) and Drag (5)
coefficients as functions of the angle of attack of the
local wind (Fig. 7).
(4)
(5)
The wing aerodynamics properties of maximum lift
maxlC and drag maxdC coefficients and zero drag 0dC
coefficient since we are not considering any particular
wing aerodynamics at this point.
(6) (7) (8)
Fig. 7. Lift and Drag coefficients functions.
Some birds take advantage of the air currents to remain
aloft for long periods without flapping their wings (Fig.
8). Gliding has a lower metabolic cost than flapping
L - Lift. D - Drag. V - Velocity of air flow relative to wing.
Cl(α)
Cd(α)
y - axis
z- axis
flight (Baudinette, Schmidt-Nielsen et al. 1974). The
bird’s aerodynamic characteristics determine how far
and for how long it can glide, and how successfully it
can soar in moving air.
Fig. 8. Gliding flight of birds.
Those aerodynamic characteristics can be optimized by
the bird in the flight by changing the wing spans and
wing areas.
For optimal gliding a bird’s wing must maximize lift
and minimize drag. As a rule, the smaller the bird, the
shorter the distance it can glide and the faster it sinks.
During gliding the wings are stretched out stiffly. A
good glider travels a long way horizontally with
minimum loss of height, but eventually loses altitude
due to the pull of gravity. The efficiency of a glider can
be measured by calculating the angle between the track
of its motion and the horizon. This angle depends not
upon the weight of the bird but rather upon the forces
of lift and drag, through wing shape does have some
influence.
3.3. Flapping Flight
The aerodynamics involving flapping wings differs in
many ways from conventional aerodynamics, but some
conventional rules apply. A conventional airplane uses
a propeller for thrust and fixed wings for lift. An
ornithopter’s wing must provide both of these forces.
During flapping flight, flying animals invest power to
move the air (aerodynamic power) and to move the
wings (inertial power).
The interaction between a flapping wing and the air is
very complicated since a bird must flap its wings to
generate lift and thrust to overcome gravity and drag.
The forces generated by this interaction are chaotic and
their simulation is often unstable because of high
sensitivity. The forces on the wing (Berg and Rayner et
al. 1995) vary throughout the flapping cycle as we will
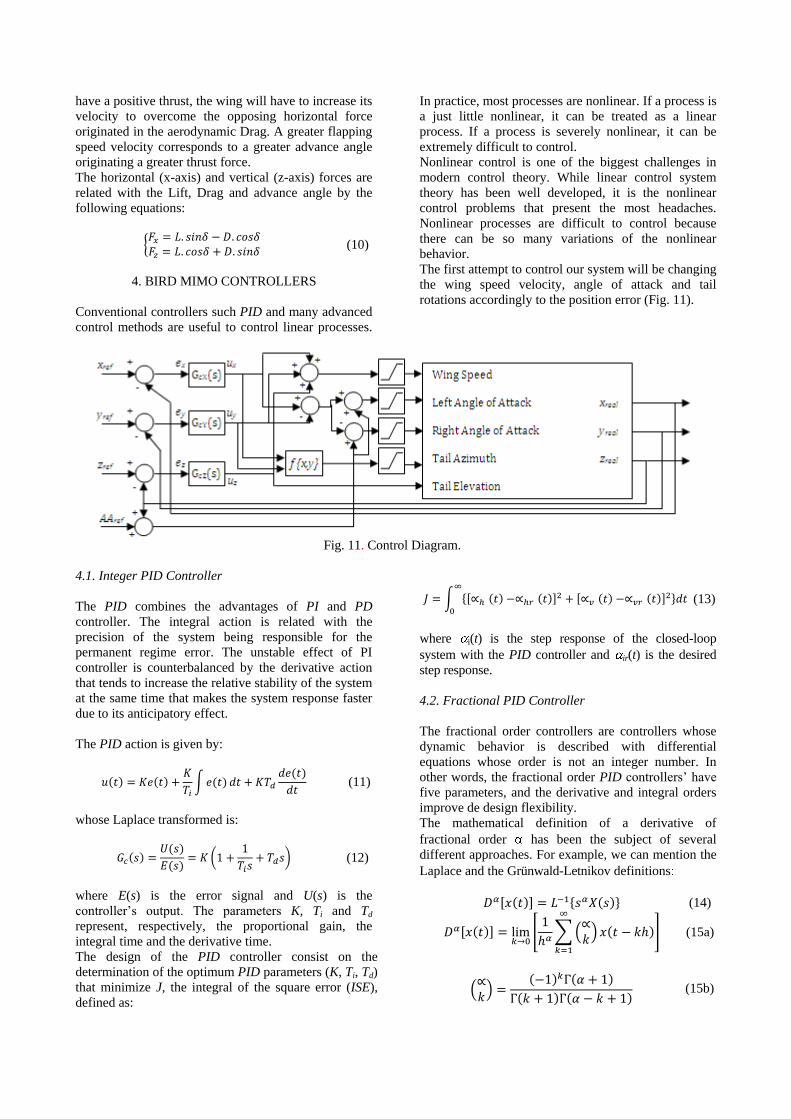
see in the dynamical analysis (Fig. 9). On the
downstroke air is displaced in a downward and
backward direction. On the upstroke, the situation is
reversed being the area of the wing smaller than before
in order to make a positive global thrust force. In order
to make the area of the wing smaller, birds uses
different techniques such as manipulating the wings.
To simplify we considered the area in the upstroke half
the area in the down stroke.
Fig. 9. Flapping flight sequence. Downstroke: 1-2-3; Upstroke: 4-5-6.
As seen previously, the forces of Lift and Drag will
depend on the angle of attack. However, which will be
the behavior of these forces when flapping wings? As
Parslew et al. 2005 we considered the existence of an
advance angle related with the flapping velocity and
the freestream velocity (9).
(9)
The advance angle will then be zero when the velocity
of the wings is zero falling in the situation analyzed
previously in gliding flight. In other words, this means
that through the angle of attack it is possible to control
the amplitude of the forces of Lift and Drag. On the
other hand, the angle that these forces have relatively to
the air flow can be controlled through the flapping
velocity.
There are two possible states while flapping the wings:
The downstroke and upstroke as we can see in Fig. 10.
Fig. 10. a) Downstroke, b) Upstroke
If the wing is placed into a flow velocity, v∞, a thrust
force will develop due to the horizontal component of
the Lift that appears in the downstroke. So, in order to
a)
b)
(1) (2) (3) (4) (5) (6)
have a positive thrust, the wing will have to increase its
velocity to overcome the opposing horizontal force
originated in the aerodynamic Drag. A greater flapping
speed velocity corresponds to a greater advance angle
originating a greater thrust force.
The horizontal (x-axis) and vertical (z-axis) forces are
related with the Lift, Drag and advance angle by the
following equations:
(10)
4. BIRD MIMO CONTROLLERS
Conventional controllers such PID and many advanced
control methods are useful to control linear processes.
In practice, most processes are nonlinear. If a process is
a just little nonlinear, it can be treated as a linear
process. If a process is severely nonlinear, it can be
extremely difficult to control.
Nonlinear control is one of the biggest challenges in
modern control theory. While linear control system
theory has been well developed, it is the nonlinear
control problems that present the most headaches.
Nonlinear processes are difficult to control because
there can be so many variations of the nonlinear
behavior.
The first attempt to control our system will be changing
the wing speed velocity, angle of attack and tail
rotations accordingly to the position error (Fig. 11).
Fig. 11. Control Diagram.
4.1. Integer PID Controller
The PID combines the advantages of PI and PD
controller. The integral action is related with the
precision of the system being responsible for the
permanent regime error. The unstable effect of PI
controller is counterbalanced by the derivative action
that tends to increase the relative stability of the system
at the same time that makes the system response faster
due to its anticipatory effect.
The PID action is given by:
(11)
whose Laplace transformed is:
(12)
where E(s) is the error signal and U(s) is the
controller’s output. The parameters K, Ti and Td
represent, respectively, the proportional gain, the
integral time and the derivative time.
The design of the PID controller consist on the
determination of the optimum PID parameters (K, Ti, Td)
that minimize J, the integral of the square error (ISE),
defined as:
(13)
where i(t) is the step response of the closed-loop
system with the PID controller and ir(t) is the desired
step response.
4.2. Fractional PID Controller
The fractional order controllers are controllers whose
dynamic behavior is described with differential
equations whose order is not an integer number. In
other words, the fractional order PID controllers’ have
five parameters, and the derivative and integral orders
improve de design flexibility.
The mathematical definition of a derivative of
fractional order has been the subject of several
different approaches. For example, we can mention the
Laplace and the Grünwald-Letnikov definitions
(14)
(15a)
(15b)

where is the gamma function and h is the time increment.
Grünwald-Letnikov definition is perhaps the best known one being more suitable for the realization of discrete control.
In our case, for implementing FO (Fractional Order) algorithms of the type,
(16)
we adopt a 4th-order discrete-time Pade approximation (ai, bi, c i, di , k = 4):
(17)
where KP are the position loop gain.
Fractional PID’s are also known as PIλDμ controllers. If
both λ and μ are 1, the result is a usual PID (henceforth
called integer PID as opposed to a fractional PID). If λ
= 0 (Ti = 0) we obtain a PDμ controller. All these types
of controllers are particular cases of the PIλDμ
controller (Fig. 12).
It can be expected that PIλDμ controller may enhance
the systems control performance due to more tuning
knobs introduced. Actually, in theory, PIλDμ itself is an
infinite dimensional linear filter due to the fractional
order in differentiator or integrator. For controller
tuning techniques, refer to (Monje, Vinagre, Chen,
Feliu, Lanusse, and Sabatier et al. 2004; Liang, Chen,
and Fullmer et al. 2004).
Fig. 12. PIλDμ controller performance.
Actually, in theory, PIλDμ itself is an infinite
dimensional linear filter due to the fractional order in
the differentiator or integrator. It should be pointed out
that a band-limit implementation of FO is important in
practice, i.e., the finite dimensional approximation of
the FO should be done in a proper range of frequencies
of practical interest
5. OPTIMIZATION METHODS
The value of PID terms depends on characteristics of
the process and must be tuned accordingly to yield
satisfactory control. Properly tuned PID controllers
provide adequate control for a large portion of
applications.
By tuning the constants in the PID or the PIλDµ
controller algorithm, the controller can provide control
action designed for specific process requirements. The
response of the controller can be described in terms of
the responsiveness of the controller to an error, the
degree to which the controller overshoots the setpoint
and the degree of system oscillation. Note that the use
of the PID algorithm for control does not guarantee
optimal control of the system or system stability.
This tuning, or optimization, can occur at a number of
levels. At the highest level, the design may be
optimized to make best use of the available resources.
The implementation of this design will benefit from the
use of efficient algorithms (Jan A. Snyman et al. 2005)
and the implementation of these algorithms will benefit
from writing good quality code.
5.1. The Gradient Descent Optimization Methods
To find a local minimum of a function using gradient
descent, one takes steps proportional to the negative of
the gradient (or the approximate gradient) of the
function at the current point.
Gradient descent is based on the observation that if the
real-valued function F(x) is defined and differentiable
in a neighborhood of a point a, then F(x) decreases
fastest if one goes from a in the direction of the
negative gradient of F at a. It follows that, if
(18)
for γ > 0 a small enough number, then F(a)≥F(b). With
this observation in mind, one starts with a guess x0 for a
local minimum of F, and considers the sequence
x0,x1,x2,… such that
(19)
We have
(20)
so hopefully the sequence (xn) converges to the desired
local minimum. Note that the value of the step size γ is
allowed to change at every iteration.
This process is illustrated in the Figure 13. Here F is
assumed to be defined on the plane, and that its graph
has a bowl shape. The blue curves are the contour lines,
that is, the regions on which the value of F is constant.
A red arrow originating at a point shows the direction
of the negative gradient at that point. Note that the
(negative) gradient at a point is orthogonal to the
contour line going through that point. We see that
gradient descent leads us to the bottom of the bowl,
that is, to the point where the value of the function F is
minimal.
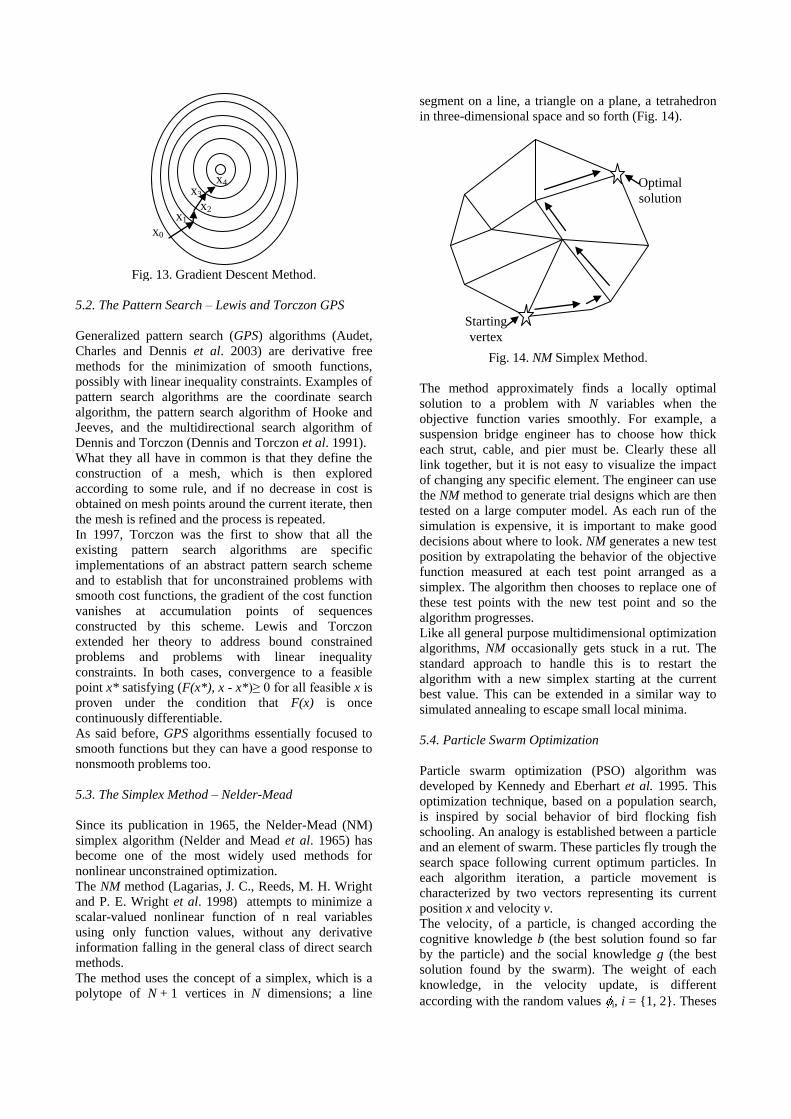
Fig. 13. Gradient Descent Method.
5.2. The Pattern Search – Lewis and Torczon GPS
Generalized pattern search (GPS) algorithms (Audet,
Charles and Dennis et al. 2003) are derivative free
methods for the minimization of smooth functions,
possibly with linear inequality constraints. Examples of
pattern search algorithms are the coordinate search
algorithm, the pattern search algorithm of Hooke and
Jeeves, and the multidirectional search algorithm of
Dennis and Torczon (Dennis and Torczon et al. 1991).
What they all have in common is that they define the
construction of a mesh, which is then explored
according to some rule, and if no decrease in cost is
obtained on mesh points around the current iterate, then
the mesh is refined and the process is repeated.
In 1997, Torczon was the first to show that all the
existing pattern search algorithms are specific
implementations of an abstract pattern search scheme
and to establish that for unconstrained problems with
smooth cost functions, the gradient of the cost function
vanishes at accumulation points of sequences
constructed by this scheme. Lewis and Torczon
extended her theory to address bound constrained
problems and problems with linear inequality
constraints. In both cases, convergence to a feasible
point x* satisfying (F(x*), x - x*)≥ 0 for all feasible x is
proven under the condition that F(x) is once
continuously differentiable.
As said before, GPS algorithms essentially focused to
smooth functions but they can have a good response to
nonsmooth problems too.
5.3. The Simplex Method – Nelder-Mead
Since its publication in 1965, the Nelder-Mead (NM)
simplex algorithm (Nelder and Mead et al. 1965) has
become one of the most widely used methods for
nonlinear unconstrained optimization.
The NM method (Lagarias, J. C., Reeds, M. H. Wright
and P. E. Wright et al. 1998) attempts to minimize a
scalar-valued nonlinear function of n real variables
using only function values, without any derivative
information falling in the general class of direct search
methods.
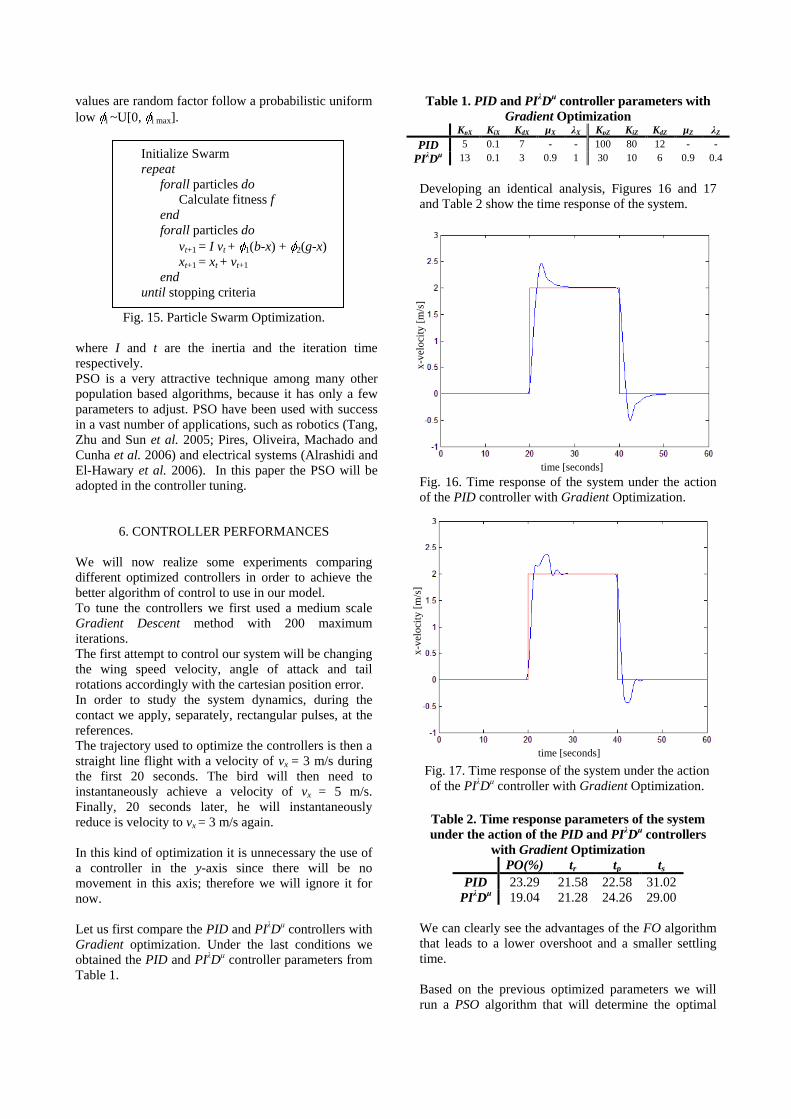
The method uses the concept of a simplex, which is a
polytope of N + 1 vertices in N dimensions; a line
segment on a line, a triangle on a plane, a tetrahedron
in three-dimensional space and so forth (Fig. 14).
Fig. 14. NM Simplex Method.
The method approximately finds a locally optimal
solution to a problem with N variables when the
objective function varies smoothly. For example, a
suspension bridge engineer has to choose how thick
each strut, cable, and pier must be. Clearly these all
link together, but it is not easy to visualize the impact
of changing any specific element. The engineer can use
the NM method to generate trial designs which are then
tested on a large computer model. As each run of the
simulation is expensive, it is important to make good
decisions about where to look. NM generates a new test
position by extrapolating the behavior of the objective
function measured at each test point arranged as a
simplex. The algorithm then chooses to replace one of
these test points with the new test point and so the
algorithm progresses.
Like all general purpose multidimensional optimization
algorithms, NM occasionally gets stuck in a rut. The
standard approach to handle this is to restart the
algorithm with a new simplex starting at the current
best value. This can be extended in a similar way to
simulated annealing to escape small local minima.
5.4. Particle Swarm Optimization
Particle swarm optimization (PSO) algorithm was
developed by Kennedy and Eberhart et al. 1995. This
optimization technique, based on a population search,
is inspired by social behavior of bird flocking fish
schooling. An analogy is established between a particle
and an element of swarm. These particles fly trough the
search space following current optimum particles. In
each algorithm iteration, a particle movement is
characterized by two vectors representing its current
position x and velocity v.
The velocity, of a particle, is changed according the
cognitive knowledge b (the best solution found so far
by the particle) and the social knowledge g (the best
solution found by the swarm). The weight of each
knowledge, in the velocity update, is different
according with the random values i, i = {1, 2}. Theses
Starting
vertex
Optimal
solution
x0
x3
x1 x2
x4
values are random factor follow a probabilistic uniform
low i ~U[0, i max].
Fig. 15. Particle Swarm Optimization.
where I and t are the inertia and the iteration time
respectively.
PSO is a very attractive technique among many other
population based algorithms, because it has only a few
parameters to adjust. PSO have been used with success
in a vast number of applications, such as robotics (Tang,
Zhu and Sun et al. 2005; Pires, Oliveira, Machado and
Cunha et al. 2006) and electrical systems (Alrashidi and
El-Hawary et al. 2006). In this paper the PSO will be
adopted in the controller tuning.
6. CONTROLLER PERFORMANCES
We will now realize some experiments comparing
different optimized controllers in order to achieve the
better algorithm of control to use in our model.
To tune the controllers we first used a medium scale
Gradient Descent method with 200 maximum
iterations.
The first attempt to control our system will be changing
the wing speed velocity, angle of attack and tail
rotations accordingly with the cartesian position error.
In order to study the system dynamics, during the
contact we apply, separately, rectangular pulses, at the
references.
The trajectory used to optimize the controllers is then a
straight line flight with a velocity of vx = 3 m/s during
the first 20 seconds. The bird will then need to
instantaneously achieve a velocity of vx = 5 m/s.
Finally, 20 seconds later, he will instantaneously
reduce is velocity to vx = 3 m/s again.
In this kind of optimization it is unnecessary the use of
a controller in the y-axis since there will be no
movement in this axis; therefore we will ignore it for
now.
Let us first compare the PID and PIλDμ controllers with
Gradient optimization. Under the last conditions we
obtained the PID and PIλDμ controller parameters from
Table 1.
Table 1. PID and PIλD
μ controller parameters with
Gradient Optimization KpX KiX KdX µX λX KpZ KiZ KdZ µZ λZ
PID 5 0.1 7 - - 100 80 12 - -
PIλD
μ 13 0.1 3 0.9 1 30 10 6 0.9 0.4
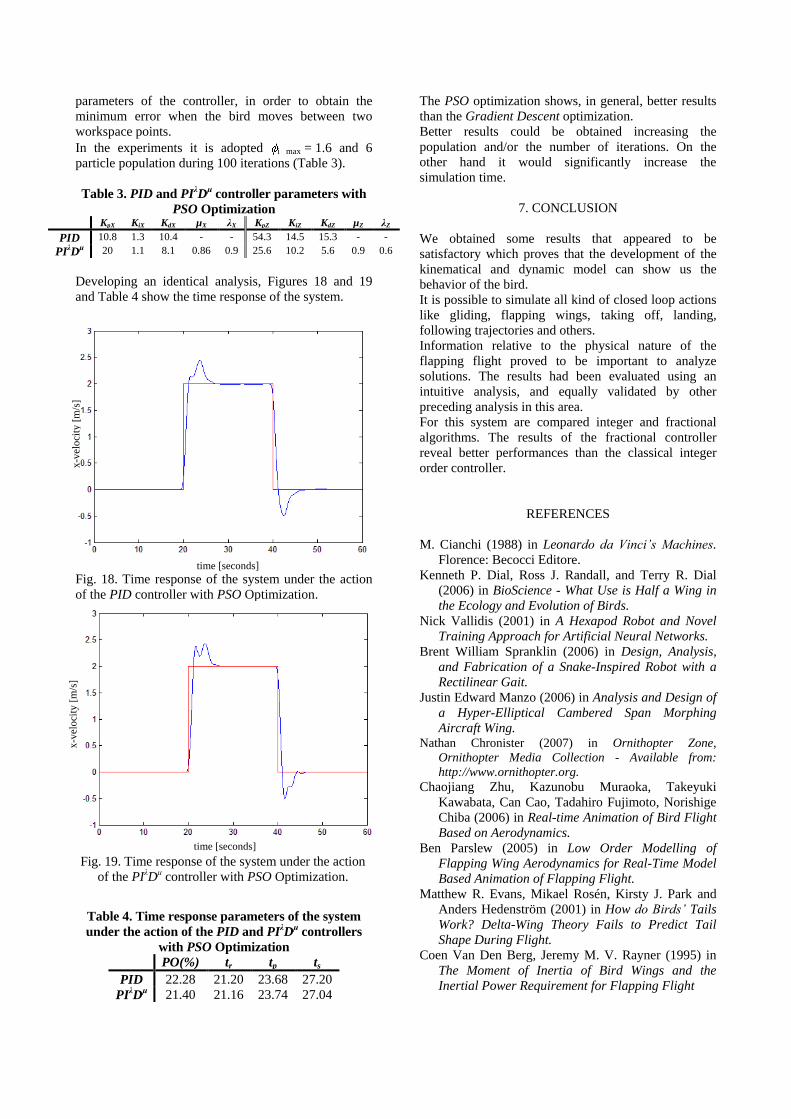
Developing an identical analysis, Figures 16 and 17
and Table 2 show the time response of the system.
Fig. 16. Time response of the system under the action
of the PID controller with Gradient Optimization.
Fig. 17. Time response of the system under the action
of the PIλDμ controller with Gradient Optimization.
Table 2. Time response parameters of the system
under the action of the PID and PIλD
μ controllers
with Gradient Optimization
PO(%) tr tp ts
PID 23.29 21.58 22.58 31.02
29.00 PIλD
μ 19.04 21.28 24.26
We can clearly see the advantages of the FO algorithm
that leads to a lower overshoot and a smaller settling
time.
Based on the previous optimized parameters we will
run a PSO algorithm that will determine the optimal
Initialize Swarm
repeat
forall particles do
Calculate fitness f
end
forall particles do
vt+1 = I vt + 1(b-x) + 2(g-x)
xt+1 = xt + vt+1
end
until stopping criteria
time [seconds]
x-v
elo
city
[m
/s]
time [seconds]
x-v
elo
city
[m
/s]
parameters of the controller, in order to obtain the
minimum error when the bird moves between two
workspace points.
In the experiments it is adopted i max = 1.6 and 6
particle population during 100 iterations (Table 3).
Table 3. PID and PIλD
μ controller parameters with
PSO Optimization KpX KiX KdX µX λX KpZ KiZ KdZ µZ λZ
PID 10.8 1.3 10.4 - - 54.3 14.5 15.3 - -
PIλD
μ 20 1.1 8.1 0.86 0.9 25.6 10.2 5.6 0.9 0.6
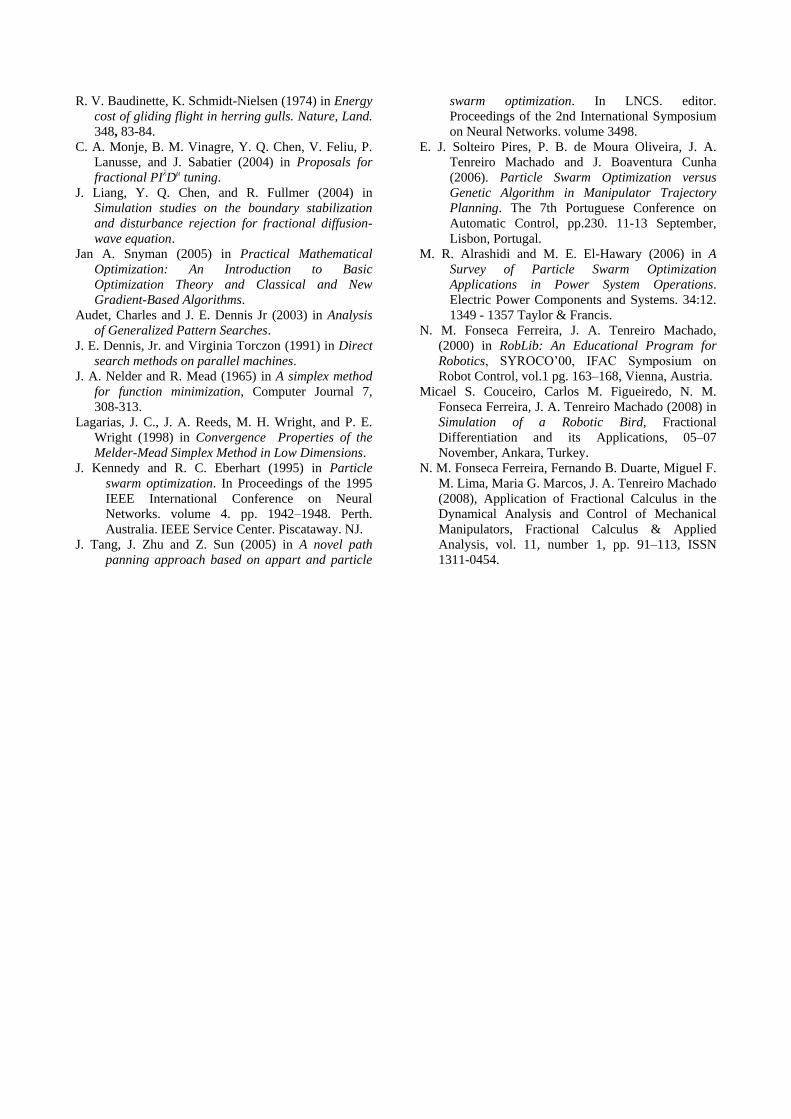
Developing an identical analysis, Figures 18 and 19
and Table 4 show the time response of the system.
Fig. 18. Time response of the system under the action
of the PID controller with PSO Optimization.
Fig. 19. Time response of the system under the action
of the PIλDμ controller with PSO Optimization.
Table 4. Time response parameters of the system
under the action of the PID and PIλD
μ controllers
with PSO Optimization
PO(%) tr tp ts
PID 22.28 21.20 23.68 27.20
PIλD
μ 21.40 21.16 23.74 27.04
The PSO optimization shows, in general, better results
than the Gradient Descent optimization.
Better results could be obtained increasing the
population and/or the number of iterations. On the
other hand it would significantly increase the
simulation time.
7. CONCLUSION
We obtained some results that appeared to be
satisfactory which proves that the development of the
kinematical and dynamic model can show us the
behavior of the bird.
It is possible to simulate all kind of closed loop actions
like gliding, flapping wings, taking off, landing,
following trajectories and others.
Information relative to the physical nature of the
flapping flight proved to be important to analyze
solutions. The results had been evaluated using an
intuitive analysis, and equally validated by other
preceding analysis in this area.
For this system are compared integer and fractional
algorithms. The results of the fractional controller
reveal better performances than the classical integer
order controller.
REFERENCES
M. Cianchi (1988) in Leonardo da Vinci’s Machines.
Florence: Becocci Editore. Kenneth P. Dial, Ross J. Randall, and Terry R. Dial
(2006) in BioScience - What Use is Half a Wing in
the Ecology and Evolution of Birds.
Nick Vallidis (2001) in A Hexapod Robot and Novel
Training Approach for Artificial Neural Networks. Brent William Spranklin (2006) in Design, Analysis,
and Fabrication of a Snake-Inspired Robot with a
Rectilinear Gait.
Justin Edward Manzo (2006) in Analysis and Design of
a Hyper-Elliptical Cambered Span Morphing
Aircraft Wing. Nathan Chronister (2007) in Ornithopter Zone,
Ornithopter Media Collection - Available from:
http://www.ornithopter.org. Chaojiang Zhu, Kazunobu Muraoka, Takeyuki
Kawabata, Can Cao, Tadahiro Fujimoto, Norishige
Chiba (2006) in Real-time Animation of Bird Flight
Based on Aerodynamics.
Ben Parslew (2005) in Low Order Modelling of
Flapping Wing Aerodynamics for Real-Time Model
Based Animation of Flapping Flight.
Matthew R. Evans, Mikael Rosén, Kirsty J. Park and
Anders Hedenström (2001) in How do Birds’ Tails
Work? Delta-Wing Theory Fails to Predict Tail
Shape During Flight.
Coen Van Den Berg, Jeremy M. V. Rayner (1995) in
The Moment of Inertia of Bird Wings and the
Inertial Power Requirement for Flapping Flight
time [seconds]
x-v
elo
city
[m
/s]
time [seconds]
x-v
elo
city
[m
/s]
R. V. Baudinette, K. Schmidt-Nielsen (1974) in Energy
cost of gliding flight in herring gulls. Nature, Land.
348, 83-84. C. A. Monje, B. M. Vinagre, Y. Q. Chen, V. Feliu, P.
Lanusse, and J. Sabatier (2004) in Proposals for
fractional PIλDμ tuning.
J. Liang, Y. Q. Chen, and R. Fullmer (2004) in
Simulation studies on the boundary stabilization
and disturbance rejection for fractional diffusion-
wave equation.
Jan A. Snyman (2005) in Practical Mathematical
Optimization: An Introduction to Basic
Optimization Theory and Classical and New
Gradient-Based Algorithms.
Audet, Charles and J. E. Dennis Jr (2003) in Analysis
of Generalized Pattern Searches.
J. E. Dennis, Jr. and Virginia Torczon (1991) in Direct
search methods on parallel machines.
J. A. Nelder and R. Mead (1965) in A simplex method
for function minimization, Computer Journal 7,
308-313.
Lagarias, J. C., J. A. Reeds, M. H. Wright, and P. E.
Wright (1998) in Convergence Properties of the
Melder-Mead Simplex Method in Low Dimensions.
J. Kennedy and R. C. Eberhart (1995) in Particle
swarm optimization. In Proceedings of the 1995
IEEE International Conference on Neural
Networks. volume 4. pp. 1942–1948. Perth.
Australia. IEEE Service Center. Piscataway. NJ.
J. Tang, J. Zhu and Z. Sun (2005) in A novel path
panning approach based on appart and particle
swarm optimization. In LNCS. editor.
Proceedings of the 2nd International Symposium
on Neural Networks. volume 3498.
E. J. Solteiro Pires, P. B. de Moura Oliveira, J. A.
Tenreiro Machado and J. Boaventura Cunha
(2006). Particle Swarm Optimization versus
Genetic Algorithm in Manipulator Trajectory
Planning. The 7th Portuguese Conference on
Automatic Control, pp.230. 11-13 September,
Lisbon, Portugal.
M. R. Alrashidi and M. E. El-Hawary (2006) in A
Survey of Particle Swarm Optimization
Applications in Power System Operations.
Electric Power Components and Systems. 34:12.
1349 - 1357 Taylor & Francis.
N. M. Fonseca Ferreira, J. A. Tenreiro Machado,
(2000) in RobLib: An Educational Program for
Robotics, SYROCO’00, IFAC Symposium on
Robot Control, vol.1 pg. 163–168, Vienna, Austria.
Micael S. Couceiro, Carlos M. Figueiredo, N. M.
Fonseca Ferreira, J. A. Tenreiro Machado (2008) in
Simulation of a Robotic Bird, Fractional
Differentiation and its Applications, 05–07
November, Ankara, Turkey.
N. M. Fonseca Ferreira, Fernando B. Duarte, Miguel F.
M. Lima, Maria G. Marcos, J. A. Tenreiro Machado
(2008), Application of Fractional Calculus in the
Dynamical Analysis and Control of Mechanical
Manipulators, Fractional Calculus & Applied
Analysis, vol. 11, number 1, pp. 91–113, ISSN
1311-0454.




















