Connected Automation | NASTO
20
Connected Automation Raj Rajkumar George Westinghouse Professor, ECE & Robotics Co-Director, GM-CMU Connected and Autonomous Driving Lab Director, T-SET National University Transportation Center for Safety Director, Mobility21 USDOT National UTC for Mobility http://www.ece.cmu.edu/~raj [email protected]
-
Upload
khangminh22 -
Category
Documents
-
view
5 -
download
0
Transcript of Connected Automation | NASTO

Connected Automation
Raj Rajkumar George Westinghouse Professor, ECE & Robotics
Co-Director, GM-CMU Connected and Autonomous Driving Lab
Director, T-SET National University Transportation Center for Safety
Director, Mobility21 USDOT National UTC for Mobility
http://www.ece.cmu.edu/~raj

Why Connected Automation?
• Connectivity: uses DSRC
+ Sees farther
+ Sees around corners
+ Inexpensive ‘sensor’
+ Sends alerts to distracted humans
– Not present everywhere yet
• Automation: uses vehicle sensors
– Pays attention all the time
– Reacts faster than humans
– Local sensors can be blinded or occluded
– Expensive sensors and processing
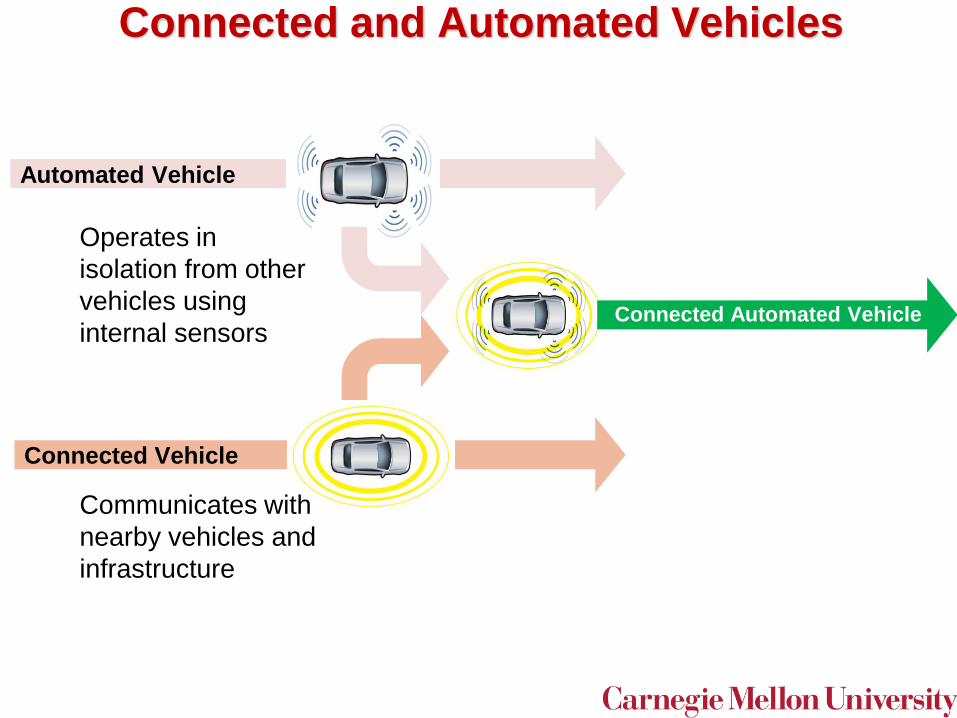
Automated Vehicle
Operates in
isolation from other
vehicles using
internal sensors
Connected Vehicle
Connected Automated Vehicle
Communicates with
nearby vehicles and
infrastructure
Connected and Automated Vehicles

SENSING CHALLENGES

Encounters of the Daily Kind

More Encounters

FEASIBILITY

Automated Cadillac SRX

SRX Interior

Public Roads/Highways


Automated Urban Driving

DSRC Testbeds
• Cranberry: 11 traffic lights
– Suburb north of Pittsburgh
– Along Route 19 @ 45mph speed limit
• Washington DC: 16 traffic lights
– Around the Capitol in Capitol Hill
• Harrisburg: 8 traffic lights
– Around the Capitol @ 25mph speed limit
• City of Pittsburgh: > 25 traffic lights
– In the Shadyside/East Liberty neighborhoods
– Along Baum, Center, Liberty Aves @ > 30 mph
• North Hills: suburb of Pittsburgh
– Along McKnight Road @ >30mph speed limit
• DSRC “On Demand” @ Buffalo, New York

IMPLICATIONS TO DOTS

Infrastructure 2040• Infrastructure elements communicate
– Smart construction zones
– Smart traffic lights
– Self-announcing disabled vehicles
– Smart traffic signs
– Smart tunnels
– Smart ramps
– Road condition sensors
– Smart parking
• Pedestrians
• Construction Workers
• Traffic conditions
• Trucks, buses and taxis drive themselves.
– Re-think parking, towing and emergency support.
• Lane markers get painted more frequently.
V2I
V2P
V2I or V2C

Design 2040
• Accidents, injuries and fatalities drop.
– Pedestrians, bicyclists and motor-cyclists use V2X.
– Automobiles are lighter and get more mileage.
• Empty space on highways is used more
efficiently.
– Need for additional lanes drops
– Shoulders continue to be needed for emergency
situations.
– Sprawl could potentially go up since people can be
productive while commuting
• Other unintended consequences?

Investments 2040
• Smart infrastructure
– DSRC gadgets affixable to infrastructure elements.
– Security and privacy of communications.
• Localization support in urban canyons and
tunnels.
• New regulations:
– Licensing, operations and liability
– Emergency stoppage and retrieval for repair
• “Black boxes”
• Lanemarkers that last.

Concluding Remarks
• Connectivity is a big leap
• Automation is an even bigger leap
• Connected automation represents the best of
both worlds
– Smarter the infrastructure, safer and more reliable is a
Connected Automated Vehicle