Chapter 4 Series Solutions and Frobenius Method
29
Ordinary Differential Equations (Math 6302) A fi¸@ Aº Æ @.X. @ 2017-2016 œ GA J¸@ fi¸@ Chapter 4 Series Solutions and Frobenius Method Finding the general solution of a linear differential equation depends on determining a funda- mental set of solutions of the homogeneous equation. So far, we have given a systematic procedure for constructing fundamental solutions in terms of of known elementary functions when the equation has constant coefficients. To find fundamental solutions for equations with variable coefficients it is necessary to seek other means of expression for the solutions of these equations. The principal tool that we need is the representation of a given function by a power series. The basic idea is to assume that the solutions of a given differential equation have power series expansions, and then we attempt to determine the coefficients so as to satisfy the differential equation. 4.1 Ordinary and Singular Points Consider an nth-order linear equation y (n) + a 1 (t)y (n-1) + ··· + a n (t)y =0, (1) where y = y(t) is an unknown scalar function and a 1 (t), ··· ,a n (t) are real-valued functions and that are continuous functions on an interval I =(r 1 ,r 2 ). As we have seen before, for any t 0 ∈ I and constants y 0 , ˙ y 0 , ··· ,y (n-1) 0 , there exists a unique solution y = y(t) of equation (1), which is defined on I and satisfies the initial conditions y(t 0 )= y 0 , ˙ y(t 0 )=˙ y 0 , ··· ,y (n-1) (t 0 )= y (n-1) 0 . However, in many applications the coefficients will have points of discontinuity and one of the main questions is the behavior of the solutions near these points. This will be our topic. Definition. (Analytic function) We say that a function f (t) is analytic at t = t 0 if it can be expanded as a sum of a power series of the form f (x)= ∞ X n=1 f n (t - t 0 ) n with a radius of convergence R> 0. Definition. (Ordinary and singular points of an nth-order linear equation) (1) A point t 0 is called an ordinary point of the differential equation (1) if a 1 (t), ··· ,a n (t) are analytic at t = t 0 . Otherwise t = t 0 is called a singular point or singularity of the equation. 1
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of Chapter 4 Series Solutions and Frobenius Method

Ordinary Differential Equations (Math 6302)
A�®�Ë@ Õæ
��Aë áÖß
@ . X .
@
2017-2016 ú
GA
�JË @ É�
®Ë@
Chapter 4Series Solutions and Frobenius Method
Finding the general solution of a linear differential equation depends on determining a funda-mental set of solutions of the homogeneous equation. So far, we have given a systematic procedurefor constructing fundamental solutions in terms of of known elementary functions when the equationhas constant coefficients. To find fundamental solutions for equations with variable coefficients it isnecessary to seek other means of expression for the solutions of these equations. The principal toolthat we need is the representation of a given function by a power series. The basic idea is to assumethat the solutions of a given differential equation have power series expansions, and then we attemptto determine the coefficients so as to satisfy the differential equation.
4.1 Ordinary and Singular Points
Consider an nth-order linear equation
y(n) + a1(t)y(n−1) + · · ·+ an(t)y = 0, (1)
where y = y(t) is an unknown scalar function and a1(t), · · · , an(t) are real-valued functions and thatare continuous functions on an interval I = (r1, r2).
As we have seen before, for any t0 ∈ I and constants y0, y0, · · · , y(n−1)0 , there exists a uniquesolution y = y(t) of equation (1), which is defined on I and satisfies the initial conditions
y(t0) = y0, y(t0) = y0, · · · , y(n−1)(t0) = y(n−1)0 .
However, in many applications the coefficients will have points of discontinuity and one of themain questions is the behavior of the solutions near these points. This will be our topic.
Definition. (Analytic function)We say that a function f(t) is analytic at t = t0 if it can be expanded as a sum of a power series ofthe form
f(x) =∞∑n=1
fn (t− t0)n
with a radius of convergence R > 0.
Definition. (Ordinary and singular points of an nth-order linear equation)
(1) A point t0 is called an ordinary point of the differential equation (1) if a1(t), · · · , an(t) areanalytic at t = t0. Otherwise t = t0 is called a singular point or singularity of the equation.
1

Ordinary Differential Equations (Math 6302) A�®�Ë@ áÖß
@ . X .
@
(2) A singular point t = t0 of the equation (1) is called regular singular point if
(t− t0)jaj(t), j = 1, 2, . . . , n
are analytic at t = t0; otherwise it is called an irregular singular point.
Example. Find all singular points of the equation
t(t+ 1)2y′′ + (t− 2)y′ − 3ty = 0
and determine whether each one is regular or irregular.
Solution. The functions a1(t) =(t− 2)
t(t+ 1)2and a2(t) =
−3
(t+ 1)2are analytic at every t ∈ R−{0,−1}.
Thus, the singular points of the equation are t = 0 and t = −1.
The point t = 0 is a regular singular point since ta1(t) =(t− 2)
(t+ 1)2and t2a2(t) =
−3t2
(t+ 1)2are
analytic at t = 0.
The point t = −1 is an irregular singular point since (t + 1)a1(t) =(t− 2)
t(t+ 1)is not analytic at
t = −1.
Definition. (Ordinary and singular points of a linear system)
(1) A point t0 is called an ordinary point of the system
x = A(t)x
if A(t) is analytic at t = t0. Otherwise it t = t0 is called a singular point or singularity of thesystem.
(2) A singular point t = t0 of thex = A(t)x
is called regular singular point if (t − t0)A(t) is analytic at t = t0; otherwise it is called anirregular singular point.
Example. Find all singular points of the system
x = A(t)x
where
A =1
t2(t− 1)
(t 01 t− 1
).
Solution. A(t) is analytic at every t ∈ R − {0, 1}. Thus, the only singular points are t = 0 andt = 1.
tA(t) =1
t(t− 1)
(t 01 t− 1
)is not analytic at t = 0. Hence, t = 0 is an irregular singular point.
(t− 1)A(t) =1
t2
(t 01 t− 1
)is analytic at t = 1. So, t = 1 is a regular singular point.
Page 2 of 29

Ordinary Differential Equations (Math 6302) A�®�Ë@ áÖß
@ . X .
@
Solution for large |t|To study the solution for large |t|, that is near ∞, we have to determine if the point t = ∞ is
ordinary or singular point. To achieve this goal we use the transformation
s =1
t,
and transform the point t = ∞ into s = 0. The natural of the point t = ∞ is the same as that ofs = 0. Under the transformation
s =1
tthe equation
x(t) = A(t)x(t)
is transformed into the equation
d
dsx(s) = − 1
s2A
(1
s
)x(s).
Thus, the equationx(t) = A(t)x(t)
has an ordinary point at t =∞ if
d
dsx(s) = − 1
s2A
(1
s
)x(s)
has an ordinary point at s = 0.
Solution of second-order equations about ordinary points
Many problems in mathematical physics lead to second-order equations of the form
y′′ + p(t)y′ + q(t)y = 0,
where p(t) and q(t) are rational functions. For this reason we will consider second-order equationsin detail.
Example. Find a series solution in powers of t of the Airy equation
y′′ − ty = 0, t ∈ R.
Solution.
y(t) = c1
[1 +
∞∑n=1
t3n
2 · 3 · · · (3n− 1)(3n)
]+ c2
[t+
∞∑n=1
t3n+1
3 · 4 · · · (3n)(3n+ 1)
].
Theorem 1. (Solution about an ordinary point)If t = t0 is an ordinary point of the equation
y′′ + p(t)y′ + q(t)y = 0,
then the general solution of the equation is given by
y(t) = c1h1(t) + c2h2(t),
where hj(t) are analytic functions at t = t0. Moreover, the radius of convergence of each seriessolution hj(t) is at least as large as the minimum of the radii of convergence of the series of p(t) andq(t).
Page 3 of 29

Ordinary Differential Equations (Math 6302) A�®�Ë@ áÖß
@ . X .
@
Cauchy-Euler equations of the second order
The simplest equation with a regular singular point at t = 0 is the Cauchy-Euler equation
y′′ +p0ty′ +
q0t2y = 0, t > 0,
where p0 and q0 are constants.
In this equation a1(t) =p0t
and a2(t) =q0t2
. Thus, ta1(t) = p0 and t2a2(t) = q0 are analytic at
t = 0. The solution of the Cauchy-Euler equation is typical of solutions of all differential equationswith a regular singular point. Therefore, it is useful to to study the solutions of this equation indetail.
The transformationw(s) = y(t), s = ln(t), t > 0,
transforms the equation into the constant coefficient equation
d2w
ds2+ (p0 − 1)
dw
ds+ q0w = 0.
If t < 0, then the transformation
w(s) = y(t), s = ln(−t), t < 0,
transforms the equation into the constant coefficient equation
d2w
ds2+ (p0 − 1)
dw
ds+ q0w = 0.
The general solution of the new equation can be obtained in terms of the roots of the characteristicequation
λ2 + (p0 − 1)λ+ q0 = 0.
These roots are
λ1,2 =1
2
(1− p0 ±
√(p0 − 1)2 − 4q0
).
If λ1 6= λ2, then we have two linearly independent solutions
y1(t) = |t|λ1 , y2(t) = |t|λ2 .
If λ1 = λ2, then the two linearly independent solutions are
y1(t) = |t|λ1 , y2(t) = |t|λ2 ln |t|.
In order to turn to the general case, let us first consider first order equations.
Lemma 1. The first-order equationy′ + a1(t)y = 0
has a solution of the form
y(t) = tαh(t), h(t) =∞∑j=0
hjtj, h0 = 1
if and only if ta1(t) is an analytic function. In this case we have α = −limt→0
[ta1(t)].
Page 4 of 29

Ordinary Differential Equations (Math 6302) A�®�Ë@ áÖß
@ . X .
@
Proof. Assume that p(t) = ta1(t) is analytic. Then
a1(t) =p0t
+ p1 + p2t+ · · ·
and the solution of the above equation is explicitly given by
y(t) = exp
(−∫ t
a1(s)ds
)= exp(−p0 ln(t) + c− p1t+ · · · )
= t−p0 exp(c− p1t+ · · · ).
Conversely, if y(t) = tαh(t) is a solution, then we have
ta1(t) = −ty′(t)
y(t)= −α− th′(t)
h(t)
which is analytic at t = 0.
4.2 The Frobenius Method for Second-order Equations
In this section, we will consider second-order linear equations
y′′ + p(t)y′ + q(t)y = 0.
In many applications the coefficients will have singularities and one of the main questions is thebehavior of the solutions near such a singularity.
We will assume that the equation has a regular singularity at t = 0; that is, we will assume thatthe coefficients p(t) and q(t) are of the form
p(t) = t−1∞∑j=0
pjtj, q(t) = t−2
∞∑j=0
qjtj.
We will look for a solution of the formy(t) = tαh(t),
where h(t) is analytic near t = 0 with h(0) = 1. This is the generalized power series method, orFrobenius method.
Differentiating
y(t) = tα∞∑j=0
hjtj
we have
y′(t) =∞∑j=0
(α + j)hjtj+α−1,
y′′(t) =∞∑j=0
(α + j)(α + j − 1)hjtj+α−2.
Page 5 of 29

Ordinary Differential Equations (Math 6302) A�®�Ë@ áÖß
@ . X .
@
Substituting into the equation, we obtain
∞∑j=0
(α + j)(α + j − 1)hjtj+α−2
+
(∞∑j=0
pjtj−1
)(∞∑j=0
(α + j)hjtj+α−1
)
+
(∞∑j=0
qjtj−2
)(∞∑j=0
hjtj+α
)= 0.
This implies∞∑j=0
(α + j)(α + j − 1)hjtj+α−2
+∞∑j=0
j∑k=0
(α + k)hkpj−ktj+α−2
+∞∑j=0
j∑k=0
hkqj−ktj+α−2 = 0
or equivalently
∞∑j=0
[(α + j)(α + j − 1)hj +
j∑k=0
(α + k)hkpj−k +
j∑k=0
hkqj−k
]tj+α−2 = 0.
Thus, we must have
(α + j)(α + j − 1)hj +
j∑k=0
(α + k)hkpj−k +
j∑k=0
hkqj−k = 0, j = 0, 1, 2, · · ·
When j = 0, we get the indicial (or characteristic) equation
α2 + (p0 − 1)α + q0 = 0.
In the special case when t = 0 is an ordinary point, the indicial equation has the form
α2 − α = 0.
The roots α1,2 of the indicial equation are called the (characteristic) exponents at t = 0. Foreach root α, the relation
(α + j)(α + j − 1)hj +
j∑k=0
(α + k)hkpj−k +
j∑k=0
hkqj−k = 0, j =, 1, 2, · · ·
is a recurrence relation.Let F (α) = α2 + (p0 − 1)α + q0. Then the recurrence relation can be written as
F (α + j)hj = −j−1∑k=0
[(α + k)pj−k + qj−k]hk, j ≥ 1.
Page 6 of 29

Ordinary Differential Equations (Math 6302) A�®�Ë@ áÖß
@ . X .
@
If F (α1 + j) 6= 0 and F (α2 + j) 6= 0, then we can find hj for j ≥ 1. Since
F (α) = (α− α1)(α− α2)
we haveF (α1 + j) = j(α1 − α2 + j),
F (α2 + j) = j(α2 − α1 + j),
and hence we have to distinguish between the two cases:
α1 − α2 ∈ Z and α1 − α2 /∈ Z
Case (1): α1 − α2 /∈ ZIn this case F (α1 + j) 6= 0 and F (α2 + j) 6= 0. Thus, we can find two linearly independent solutions
y1(t) =∞∑j=0
hjtj+α1
and
y2(t) =∞∑j=0
hjtj+α2 .
Example. Consider the equation2ty′′ − y′ − y = 0.
In this example
p(t) =−1
2t= q(t).
Thus, p0 =−1
2, q0 = 0, and hence the indicial equation reads
2α2 − 3α = 0.
This gives the rootsα1 = 3/2, α2 = 0.
The recurrence relation is
hj =hj−1
(2j + α− 3)(α + j), j ≥ 1.
α1 = 3/2 :
hj =hj−1
(2j + 3)j, j ≥ 1.
h0 = 1, h1 =1
5, h2 =
1
2 · 5 · 7, h3 =
1
2 · 3 · 5 · 7 · 9, · · · .
Thus, we obtain the first solution
y1(t) = t3/2[1 +1
5t+
1
2 · 5 · 7t2 +
1
2 · 3 · 5 · 7 · 9t3 + · · · .]
Page 7 of 29

Ordinary Differential Equations (Math 6302) A�®�Ë@ áÖß
@ . X .
@
α2 = 0 :
hj =hj−1
(2j − 3)j, j ≥ 1.
h0 = 1, h1 = −1, h2 = −1
2, h3 = − 1
18, · · · .
Thus, we obtain the second solution
y2(t) = 1− t− 1
2t2 − 1
18t3 + · · · .
Case (2): α1 − α2 ∈ ZAssume Re(α1) ≥ Re(α2), and let α1 = α2 + m for some integer m ≥ 0. For the exponent α = α1,we can find all hj.
For the exponent α = α2, we may have a problem. In this case the recurrence relation reads
F (α2 + j)hj = −j−1∑k=0
[(α + k)pj−k + qj−k]hk, j ≥ 1.
But F (α) = (α− α1)(α− α2) implies
F (α2 + j) = j(α2 + j − α1) = j(j −m).
For 1 ≤ j ≤ m − 1, hj are determined recursively. But when j = m, F (α2 + m) = 0 and therecurrence relation gives
0 =m−1∑k=0
[(α2 + k)pm−k + qm−k]hk.
If this relation is satisfied, then we can choose hm as we like and the remaining hj, j > m, are againdetermined recursively. Otherwise there is no solution in the form y(t) = tα2h(t).
If we can not obtain the second solution from α = α2, then we use the method of variation ofconstants (or reduction of order method). Assume
y2(t) = c(t)y1(t) = c(t)tα1h1(t).
Then c(t) satisfies the equation
c′′(t) +
[2α1
t+
2h′1(t)
h1(t)+ p(t)
]c′(t) = 0.
Let w(t) = c′(t). Then we get a first order equation for w(t)
w′ + P (t)w = 0,
where
P (t) =2α1
t+
2h′1(t)
h1(t)+ p(t)
=1 +m
t+ 2h′1(0) + p1 + · · ·
Page 8 of 29

Ordinary Differential Equations (Math 6302) A�®�Ë@ áÖß
@ . X .
@
Therefore, by Lemma 1., the solution is given by
c′(t) = w(t) = t−m−1∞∑j=0
cjtj, c0 6= 0.
Integrating term-by-term, we obtain
c(t) = t−m∞∑
j=0,j 6=m
cjtj
j −m+ cm ln(t).
As a result we obtain the solution
y2(t) = h1(t)
[tα2
∞∑j=0,j 6=m
cjtj
j −m+ cmz
α1 ln(t)
].
Theorem 2. (Series solutions about a regular singular point)Suppose that the coefficients p(t) and q(t) are functions such that tp(t) and t2q(t) are analytic att = 0. Let α1 and α2 be the roots of the indicial equation
α2 + (p0 − 1)α + q0 = 0.
(1) If α1 − α2 /∈ Z, then a fundamental system of solutions is given by
yj(t) = |t|αjhj(t), j = 1, 2,
where the functions hj(t) are analytic near t = 0 and satisfy hj(0) = 1.
(2) If α1 − α2 = m, m ≥ 0 is an integer, then a fundamental system is given by
y1(t) = |t|α1h1(t),y2(t) = |t|α2h2(t) + c ln |t|y1(t),
where the functions hj(t) are analytic near t = 0 and satisfy hj(0) = 1. The constant c ∈ Rmight be zero unless m = 0.
How to obtain y2(t)
In practice there are three methods to find y2(t).The first method is reduction of order. The second method is to substitute
y2(t) = tα2g(t) + c ln(t)y1(t),
where
g(t) =∞∑j=0
gjtj, g0 = 1,
and find gj. Note that we can set c = 1 and remove the condition g0 = 1.A third method is as follows. Write the equation as
L(y) = y′′ + p(t)y′ + q(t)y = 0.
Page 9 of 29

Ordinary Differential Equations (Math 6302) A�®�Ë@ áÖß
@ . X .
@
Then y(t) = tα∞∑j=0
hjtj implies
L(y) =∞∑j=0
((α + j)(α + j − 1)hj +
j∑k=0
[(α + k)pj−k + qj−k]hk
)tj+α.
Substituting
hj = − 1
F (α + j)
j−1∑k=0
[(α + k)pj−k + qj−k]hk, j ≥ 1,
we obtainL(y) = F (α)tα−2.
Assume that∂
∂αL(y) = L
(∂y
∂α
).
Then
L
(∂y
∂α
)=
∂
∂α
[F (α)tα−2
]=
[ln tF (α) +
∂
∂αF (α)
]tα−2.
If α1 = α2, then F (α1) =∂
∂αF (α1) = 0. This implies that
L
(∂y
∂α
∣∣∣∣α=α1
)= 0,
and hence∂y
∂α
∣∣∣∣α=α1
is a solution.
If α1 − α2 = m, where m is a positive integer, then
F (α) = h0(α− α1)(α− α2).
Substituting h0 = α− α2, we again have F (α2) =∂
∂αF (α2) = 0.
In this case, we obtain the first solution by substituting α = α2 in the recurrence relation
F (α + j)hj = −j−1∑k=0
[(α + k)pj−k + qj−k]hk, j ≥ 1.
That is
y1(t) =∞∑j=0
hj(α2)tj+α2 .
The second solution is obtained by substituting α = α2 in
∂
∂αF (α + j)hj = −
j−1∑k=0
[(α + k)pj−k + qj−k]hk, j ≥ 1.
That is
y2(t) = y1(t) ln(t) +∞∑j=0
[∂hj∂α
∣∣∣∣α=α2
tj+α2 .
Page 10 of 29

Ordinary Differential Equations (Math 6302) A�®�Ë@ áÖß
@ . X .
@
Example 1. Find two linearly independent series solutions about t = 0 of the equation
t2y′′ + t2y′ − 2y = 0, t > 0.
Solution. The indicial equation reads
α2 − α− 2 = 0,
and hence the exponents areα1 = 2, α2 = −1.
The recurrence relation is given by
hj =−(j + α− 1)hj−1
(j + α + 1)(j + α− 2).
α1 = 2 :
In this case the recurrence relation is given by
hj =−(j + 1)hj−1j(j + 3)
.
h0 = 1 implies
h1 =−2 · 33 · 4
=−6
4!
h2 =2 · 3 · 3
2 · 3 · 4 · 5=
6 · 35!
h3 =−2 · 3 · 4
2 · 3 · 4 · 5 · 6=−6 · 4
6!...
hj =(−1)j6(j + 1)
(j + 3)!.
As a result, we obtain the first solution.
y1(t) =∞∑j=0
6(−1)j(j + 1)
(j + 3)!tj+2.
α2 = −1 :
In this case the recurrence relation is given by
hj =−(j − 2)hj−1j(j − 3)
.
h0 = 1 implies
h1 =−1
2
h2 = 0
0h3 = −h2Assume h3 = 0. Then we have hj = 0, j ≥ 3. Thus we get the second solution
y2(t) =1
t− 1
2.
Page 11 of 29

Ordinary Differential Equations (Math 6302) A�®�Ë@ áÖß
@ . X .
@
Example 2. Find the series solution of
t(t− 1)y′′ + (3t− 1)y′ + y = 0, t > 0,
about t = 0.
Solution. Indicial equationα2 = 0.
Thus the characteristic exponents areα1 = α2 = 0.
The recurrence relation readshj = hj−1.
The first solution is
y1(t) =1
1− t.
In order to find y2(t) let us use the method of reduction of order. Let
y2(t) = c(t)y1(t).
Differentiating we gety′2 = c′y1 + cu′1, y′′2 = c′′y1 + 2c′y′1 + cu′′1.
Substituting into the equation
t(t− 1)y′′ + (3t− 1)y′ + y = 0,
we obtaint(t− 1)(c′′y1 + 2c′y′1 + cu′′1) + (3t− 1)(c′y1 + cu′1) + cu1 = 0.
But y1 is a solution; that ist(t− 1)y′′1 + (3t− 1)y′1 + y1 = 0.
Thus, we havet(t− 1)(c′′y1 + 2c′y′1) + (3t− 1)c′y1 = 0.
This givesc′′
c′= −2y′1
y1− 3t− 1
t(t− 1).
Integrating we obtainln(c′) = −2 ln(y1)− ln(t)− 2 ln(t− 1).
This gives
c′ =1
y21t(t− 1)2=
1
t
and hencec(t) = ln(t).
Using the method of reduction of order, we find
y2(t) =ln t
1− t.
Page 12 of 29

Ordinary Differential Equations (Math 6302) A�®�Ë@ áÖß
@ . X .
@
Note that if we use the third method, then the second solution is
y2(t) = y1(t) ln(t) +∞∑j=0
[∂hj∂α
∣∣∣∣α=0
tj.
Buthj(α) = hj−1(α).
Before we differentiate we have to solve this difference equation.
h0(α) = 1, h1(α) = 1, hj(α) = 1, ∀j.
Therefore,∂hj∂α
= 0, ∀j.
Example 3. Find two linearly independent series solutions about t = 0 of the equation
t(t− 1)y′′ + 2(t− 1)y′ − 2y = 0, t > 0.
Solution. Indicial equationα2 + α = 0.
Thus, the characteristic exponents are
α1 = 0, α2 = −1.
The recurrence relation reads
hj(α) =(j + α− 2)
(j + α)hj−1(α).
We know that α1 = 0 always gives a solution. Let us check α2 = −1.
hj =(j − 3)
(j − 1)hj−1.
Thus, at j = 1, we have0h1 = −2h0.
But h0 6= 0 implies that we can not find another solution by this method.Let h0 = α− α2 = α + 1. Then
hj(α) =(j + α− 2)
(j + α)hj−1(α)
givesh0(α) = α + 1,
h1(α) = α− 1,
h2(α) =α(α− 1)
(α + 2)
h3 =α(α2 − 1)
(α + 2)(α + 3)
hj(α) =α(α2 − 1)
(α + j − 1)(α + j).
Page 13 of 29

Ordinary Differential Equations (Math 6302) A�®�Ë@ áÖß
@ . X .
@
In this method the first solution is given by
y1(t) =∞∑j=0
hj(−1)tj−1
and
y2(t) = y1(t) ln(t) +∞∑j=0
[∂hj∂α
∣∣∣∣α=−1
tj−1.
Taking α = −1, we obtainh0(−1) = 0,
h1(−1) = −2,
h2(−1) = 2,
hj(−1) = 0, ∀j ≥ 3.
Threrfore,y1(t) = −2 + 2t.
Now we will find y2(t).
∂
∂αhj(α) = hj(α)
[1
α+
1
α− 1+
1
α + 1− 1
α + j − 1− 1
α + j
].
Substituting α = −1, we obtain
h′0(−1) = 1,
h′1(−1) = 1,
h′2(−1) = −5,
h′j(−1) =2
(j − 1)(j − 2), ∀j ≥ 3.
Therefore,
y2(t) = y1(t) ln(t) + t−1 + 1− 5t+∞∑j=3
2
(j − 1)(j − 2)tj−1.
Let us now find y2(t) by another method. By theorem, y2(t) has the form
y2(t) = tα2g(t) + c ln(t)y1(t)
where the functions g(t) are analytic near t = 0. Since α2 = −1 we have
y2(t) = t−1g(t) + c ln(t)y1(t), g(t) =∞∑j=0
gjtj.
Page 14 of 29

Ordinary Differential Equations (Math 6302) A�®�Ë@ áÖß
@ . X .
@
If we set g0 = 1, then we choose c to satisfy this condition. Alternatively we can take c = 1 andremove the condition g0 = 1.
Let us choose g0 = 1. Differentiating, we get
y′2(t) = t−1g′(t)− t−2g(t) + c
[ln(t)y′1(t) +
1
ty1(t)
]
y′′2(t) = t−1g′′(t)− 2t−2g′(t) + 2t−3g(t) + c
[ln(t)y′′1(t) +
2
ty′1(t)−
1
t2y1(t)
]Substituting into the equation, we obtain
t(t− 1)
(t−1g′′(t)− 2t−2g′(t) + 2t−3g(t) + c
[ln(t)y′′1(t) +
2
ty1(t)−
1
t2y1(t)
])+2(t− 1)
(t−1g′(t)− t−2g(t) + c
[ln(t)y′1(t) +
1
ty1(t)
])− 2[t−1g(t) + c ln(t)y1(t)] = 0.
Substituting y1(t) = 1− t and simplifying we obtain
t(t− 1)g′′(t)− 2g = c[3t2 − 4t+ 1].
Now substituting g(t) =∞∑j=0
gjtj, we obtain c = −2
g0 = 1, g2 = −4− g1, g3 = 1,
(j − 1)gj = (j − 3)gj−1, j ≥ 4.
This gives
gj =2
(j − 1)(j − 2), j ≥ 3.
As a result we obtain
y2(t) = −2(1− t) ln(t) + t−1 + g1 − (g1 + 4)t+∞∑j=3
2
(j − 1)(j − 2)tj−1.
Example 4. Solvety′′ + y = 0, t > 0,
about t = 0
Solution. Indicial equationα2 − α = 0.
It follows that the characteristic exponents are
α1 = 1, α2 = 0.
The recurrence relation reads
hj(α) =−hj−1(α)
(j + α)(j + α− 1).
Page 15 of 29

Ordinary Differential Equations (Math 6302) A�®�Ë@ áÖß
@ . X .
@
Thus, we haveh0(α) = 1,
h1(α) =−1
α(α + 1),
h2(α) =1
α(α + 1)2(α + 2)
h3 =−1
α[(α + 1)(α + 2)]2(α + 3)
hj(α) =(−1)j
α[(α + 1)(α + 2) · · · (α + j − 1)]2(α + j)
Let us find the first solution. Using α = 1, we obtain
hj =(−1)j
j!(j + 1)!.
Therefore, the first solution is
y1(t) =∞∑j=0
(−1)j
j!(j + 1)!tj+1.
Let us now find y2(t). Using α = 0, we obtain
hj =−hj−1j(j − 1)
.
As a result we obtainh0 = 1,
h1 =−1
0,
and hence we can not find y2(t) by this method.The recurrence relation reads
hj(α) =(−1)jh0
α[(α + 1)(α + 2) · · · (j + α− 1)]2(j + α).
Setting h0 = α, we obtain
hj(α) =(−1)j
[(α + 1)(α + 2) · · · (j + α− 1)]2(j + α), j ≥ 1.
So at α = 0, we obtain h0 = 0 and
hj(0) =(−1)j
j!(j − 1)!.
Therefore, a first solution is
y1(t) =∞∑j=1
(−1)j
j!(j − 1)!tj.
Page 16 of 29

Ordinary Differential Equations (Math 6302) A�®�Ë@ áÖß
@ . X .
@
Now we will find
y2(t) = y1(t) ln(t) +∞∑j=0
[∂hj∂α
∣∣∣∣α=0
tj.
Firstly, h′0 = 1. Using logarithmic differentiation we get
∂hj∂α
∣∣∣∣α=0
= −hj(0)
[1
j+ 2
j−1∑k=1
1
k
], j ≥ 1.
Using the harmonic numbers
Hj =
j∑k=1
1
k,
we have∂hj∂α
∣∣∣∣α=0
=(−1)j+1
j!(j − 1)![Hj +Hj−1] , j ≥ 1.
As a result, we obtain
y2(t) = y1(t) ln(t) + 1 + t+∞∑j=2
(−1)j+1
j!(j − 1)![Hj +Hj−1] t
j.
Exercises
Find two linearly independent series solutions about t = 0 (t > 0) for each of the following equations:
1. 2t(t+ 1)y′′ + 3(t+ 1)y′ − y = 0.
2. 4t2y′′ + 4ty′ − (4t2 + 1)y = 0.
3. 2ty′′ + (2t+ 1)y′ − 5y = 0.
4. t2y′′ − t(t+ 1)y′ + y = 0.
5. 4t2y′′ − (2t− 1)y = 0.
6. t2y′′ + 2t(t− 21)y′ − 2(3t− 2)y = 0.
7. t2y′′ + t(3t+ 2)y′ − 2y = 0.
8. 2ty′′ + 6y′ + y = 0.
9. t2y′′ − 3ty′ + (4t+ 3)y = 0.
10. ty′′ + y′ + ty = 0.
4.3 Special Functions
Special functions are particular mathematical functions which have more or less established namesand notations due to their importance in mathematical analysis, functional analysis, physics, orother applications. Many special functions appear as solutions of differential equations or integralsof elementary functions.
Page 17 of 29

Ordinary Differential Equations (Math 6302) A�®�Ë@ áÖß
@ . X .
@
The Gamma Function
Definition. Let z be a complex number.
(1) If Re(z) > 0, we define the gamma function
Γ(z) =
∫ ∞0
e−ttz−1dt.
(2) If Re(z) /∈ Z and Re(z) < 0, we define
Γ(z) =1
zΓ(z + 1).
Remark. If z is a negative integer or zero, then Γ(z) is NOT defined.
Properties of the gamma function
(1) Γ(1) = 1.
(2) Γ(z + 1) = zΓ(z).
(3) If z ∈ N, then Γ(z + 1) = z!.
(4) Γ
(1
2
)=√π.
The Bessel Function
The equationt2y′′ + ty′ + (t2 − ν2)y = 0,
where ν is a constant, is called the Bessel equation. It has a regular singular point at t = 0 and anirregular singular point at t =∞.
Solving in the neighborhood of t = 0, we have the indicial equation
α2 − ν2 = 0
and the recurrence relation
h1 = 0, [(j + α)2 − ν2]hj = −hj−2, j ≥ 2.
Thus, the exponents areα1 = ν, and α2 = −ν.
Without loss of generality, we assume that Re(ν) ≥ 0.Substituting α = ν, we obtain
h1 = 0, hj =−1
j(j + 2ν)hj−2, j ≥ 2.
It follows thath2j+1 = 0, j ≥ 0
Page 18 of 29

Ordinary Differential Equations (Math 6302) A�®�Ë@ áÖß
@ . X .
@
and
h2j =(−1)j
4jj!(ν + 1)j, j ≥ 1,
where (a)j is the Pochhammer symbol (or Barne symbol) defined by
(a)0 = 1, (a)j = a(a+ 1) · · · (a+ j − 1) =Γ(a+ j)
Γ(a).
Therefore, we have obtained the first solution
y1(t) =∞∑j=0
(−1)j
4jj!(ν + 1)jt2j+ν .
The solution
Jν(t) =y1(t)
2νΓ(ν + 1)=∞∑j=0
(−1)j
j!Γ(ν + j + 1)
(t
2
)2j+ν
is called the Bessel function of the first kind of order (or index) ν.
What about the second solution?
Note that α1 − α2 = 2ν. Thus, if 2ν /∈ Z, we have a second solution
y2(t) = J−ν(t) =∞∑j=0
(−1)j
j!Γ(−ν + j + 1)
(t
2
)2j−ν
.
If 2ν = m ∈ Z, then when α = −ν, we have
h1 = 0, j(j −m)hj = −hj−2, j ≥ 2.
Again we have
h2j+1 = 0, 0 ≤ j ≤ m− 1
2.
At j = m, we havem(0)hm = −hm−2.
Thus, if m = 2n+ 1 is an odd integer, then hm−2 = h2n−1 = 0 and hence we can assume hm = 0. Inthis case we have
h2j =1
j!2j(2n− 1)(2n− 3) · · · (2n− j + 1).
The solution is
y2(t) =∞∑j=0
t2j−n−12
j!2j(2n− 1)(2n− 3) · · · (2n− 2j + 1).
If m = 2n is an even integer, then hm−2 = h2n−2 6= 0 and we have a logarithmic solution
y2(t) = t−ng(t) + cy1(t) ln t.
Let us find y1(t) and y2(t) by using the formulas
y1(t) =∞∑j=0
hj(α2)tj+α2 ,
Page 19 of 29

Ordinary Differential Equations (Math 6302) A�®�Ë@ áÖß
@ . X .
@
y2(t) = y1(t) ln(t) +∞∑j=0
[∂hj∂α
∣∣∣∣α=α2
tj+α2 .
Since m = 2n, we have ν = n ∈ Z. Thus, α2 = −n. The recurrence relation reads
h1(α) = 0, [(j + α)2 − ν2]hj(α) = −hj−2(α), j ≥ 2.
h1(α) = 0⇒ h2j+1(α) = 0, ∀j ≥ 0.
This impliesh′2j+1(α) = 0, ∀j ≥ 0.
Now h0(α) = α + n gives
h2j(α) =(−1)j(α + n)
j∏k=1
(α + 2k − n)(α + 2k + n)
, j ≥ 1.
We have to deal with h2j(α) carefully.For j < n, h2j(−n) = 0 and
h′2j(α) = h2j(α)
(1
α + n−
j∑k=1
[1
α + 2k − n+
1
α + 2k + n
]).
It follows that
h′2j(−n) =(−1)j
j∏k=1
2k(2k − 2n)
=(−1)j
4jj!(1− n)j.
For j ≥ n,
h2j(α) =(−1)j
(α + 3n)
j∏k=1,k 6=n
(α + 2k − n)(α + 2k + n)
.
So
h′2j(α) = −h2j(α)
(1
α + 3n+
j∑k=1,k 6=n
[1
α + 2k − n+
1
α + 2k + n
]).
This implies
h′2j(α) = −h2j(−n)
(1
2n+
1
2
j∑k=1,k 6=n
[1
k − n+
1
k
]),
h′2j(α) = −1
2h2j(−n) (Hj +Hj−n −Hn−1),
where
Hj =
j∑k=1
1
k
are the harmonic numbers. But
h2j(−n) =(−1)j−n+1
22j−1j!(n− 1)!(j − n)!.
Page 20 of 29

Ordinary Differential Equations (Math 6302) A�®�Ë@ áÖß
@ . X .
@
Therefore,
h′2j(α) =(−1)j−n
22jj!(n− 1)!(j − n)!(Hj +Hj−n −Hn−1),
and hence
y1(t) =∞∑j=n
(−1)j−n+1t2j−n
22j−1j!(n− 1)!(j − n)!
=∞∑j=0
(−1)j+1t2j+n
22j+2n−1j!(n− 1)!(j + n)!
=−Jn(t)
2n−1(n− 1)!.
The second solution is
y2(t) = y1(t) ln(t) +n−1∑j=0
(−1)jt2j−n
4jj!(1− n)j+∞∑j=n
(−1)j−n (Hj +Hj−n −Hn−1) t2j−n
22jj!(n− 1)!(j − n)!
= y1(t) ln(t) +n−1∑j=0
(−1)jt2j−n
4jj!(1− n)j+∞∑j=0
(−1)j (Hj +Hj+n −Hn−1) t2j+n
22j+2nj!(n− 1)!(j + n)!
= y1(t) ln(t) +n−1∑j=0
(−1)jt2j−n
4jj!(1− n)j−Hn−1
∞∑j=0
(−1)jt2j+n
22j+2nj!(n− 1)!(j + n)!
+∞∑j=0
(−1)j (Hj +Hj+n) t2j+n
22j+2nj!(n− 1)!(j + n)!
= y1(t) ln(t) +n−1∑j=0
(−1)jt2j−n
4jj!(1− n)j+
1
2Hn−1y1(t) +
∞∑j=0
(−1)j (Hj +Hj+n) t2j+n
22j+2nj!(n− 1)!(j + n)!.
The linear combination
Yn(t) =−2n(n− 1)!
π
[(γ − ln(2)− 1
2Hn−1)y1(t) + y2(t)
]gives the new solution
Yn(t) =2
π[γ + ln
(t
2
)]Jn(t)− 1
π
n−1∑j=1
(−1)j(n− 1)!
j!(1− n)j
(t
2
)2j−n
− 1
π
∞∑j=0
(−1)j (Hj +Hj+n)
j!(j + n)!
(t
2
)2j+n
,
where γ = limj→∞
[Hj − ln(j)] is the Euler constant. Yn(t) is called the Bessel’s function of the second
kind of order n or the Neumann’s function.Note that Yν(t) can be defined as
Yν(t) =cos(πν)Jν(t)− J−ν(t)
sin(νπ).
Properties of the Bessel function
(1)d
dt(t±νJν(t)) = ±t±νJν∓1(t).
Page 21 of 29
Ordinary Differential Equations (Math 6302) A�®�Ë@ áÖß
@ . X .
@
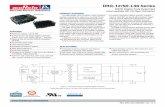
(2) Jν+1(t) + Jν−1(t) =2ν
tJν(t).
(2) Jν+1(t)− Jν−1(t) = 2J ′ν(t).
Proof. (1)d
dt(tνJν(t)) = tνJ ′ν(t) + νtν−1Jν(t)
Jν(t) =∞∑j=0
(−1)j
j!Γ(ν + j + 1)
(t
2
)2j+ν
⇒ J ′ν(t) =∞∑j=0
(−1)j(2j + ν)
2j!Γ(ν + j + 1)
(t
2
)2j+ν−1
⇒ tJ ′ν(t) + νJν(t) =∞∑j=0
(−1)j(2j + 2ν)
j!Γ(ν + j + 1)
(t
2
)2j+ν
.
UsingΓ(x+ 1) = xΓ(x)
we obtain
tJ ′ν(t) + νJν(t) =∞∑j=0
2(−1)j
j!Γ(ν + j)
(t
2
)2j+ν
= tJν−1(t).
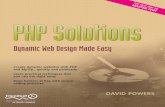
The Legendre Function
The equation(1− t2)y′′ − 2ty′ + n(n+ 1)y = 0
is called the Legendre differential equation. It has regular singular points at t = 1,−1,∞.Solving in the neighborhood of t =∞, we have the indicial equation
α2 + α− n(n+ 1) = 0
and the recurrence relation
h1 = 0, (α− n− j)(α + n+ 1− j)hj = (α− j + 1)(α− j + 2)hj−2, j ≥ 2.
Thus, the exponents areα1 = n, and α2 = −(n+ 1).
Substituting α = n, we obtain
h1 = 0, j(j − 2n− 1)hj = (j − n− 1)(j − n− 2)hj−2, j ≥ 2.
It follows thath2j+1 = 0, j ≥ 0
and
h0 = 1, h2j =(−n)(−n+ 1)(−n+ 2) . . . (−n+ 2j − 1)
j! 2j (−2n+ 1)(−2n+ 3) . . . (−2n+ 2j − 1), j ≥ 1.
Page 22 of 29

Ordinary Differential Equations (Math 6302) A�®�Ë@ áÖß
@ . X .
@
Note that h2j can be written as
h2j =(−n
2)j (1
2− n
2)j
j!(12− n)j
, j ≥ 0.
Thus, a first solution is
y1(t) =∞∑j=0
(−n2)j (1
2− n
2)j
j!(12− n)j
tn−2j.
If α1 − α2 = 2n+ 1 /∈ Z, then substituting α = −(n+ 1), we obtain
h1 = 0, j(j − 2n− 1)hj = (j + n− 1)(j + n)hj−2, j ≥ 2.
It follows thath2j+1 = 0, j ≥ 0
and
h2j =(n+ 1)(n+ 2) . . . (n+ 2j − 1)(n+ 2j)
j! 2j (−2n+ 3)(−2n+ 5) . . . (−2n+ 2j + 1), j ≥ 1.
Thus, a second solution solution is
y2(t) = t−n−1 +∞∑j=1
(n+ 1)(n+ 2) . . . (n+ 2j − 1)(n+ 2j)
j! 2j (−2n+ 3)(−2n+ 5) . . . (−2n+ 2j + 1)t−n−2j−1.
Legendre Polynomials
If n is a nonnegative integer, then the solution y1(t) of the Legendre’s equation is a polynomial.Indeed if n is a nonnegative integer, then h2j can be written as
h2j =(−1)jn(n− 1)(n− 2) . . . (n− 2j + 1)
j! 2j (2n− 1)(2n− 3) . . . (2n− 2j + 1), j ≥ 1.
But
n(n− 1)(n− 2) . . . (n− 2j + 1) =n!
(n− 2j)!
and
(2n− 1)(2n− 3) . . . (2n− 2j + 1) =(2n)!(n− j)!
2jn!(2n− 2j)!.
Thus, y1(t) can be written as
y1(t) =
[n/2]∑j=0
(−1)j(n!)2(2n− 2j)!
(2n)! j! (n− j)! (n− 2j)!tn−2j,
where [n/2] is the greatest integer less than or equal to n/2.
The Legendre polynomials Pn(t) =(2n)!
2n(n!)2y1(t) are given by
Pn(t) =1
2n
[n/2]∑j=0
(−1)j(2n− 2j)!
j!(n− j)!(n− 2j)!tn−2j.
P0(t) = 1, P1(t) = t, P2(t) =1
2(3t2 − 1), P3(t) =
1
2t(5t− 3), · · · .
Page 23 of 29

Ordinary Differential Equations (Math 6302) A�®�Ë@ áÖß
@ . X .
@
Properties of the Legendre function
(1) Pn(1) = 1.
(2) Pn(−1) = (−1)n.
(3) Pn(−t) = (−1)nPn(t).
(4) (n+ 1)Pn+1(t)− (2n+ 1)tPn(t) + nPn−1(t) = 0, n ∈ N.
(5) tP ′n(t)− P ′n−1(t) = nPn(t).
(6) P ′n+1 = tP ′n(t) + (n+ 1)Pn(t).
(7) Pn(t) =1
2nn!
dn
dtn[(t2 − 1)n], n = 0, 1, 2, · · · .
(8) (1− 2tx+ x2)−1/2 =∞∑n=0
Pn(t)xn.
The Hypergeometric Function
Let us consider the hypergeometric equation
t(1− t)y′′ + [c− (1 + a+ b)t]y′ − ab y = 0,
where a, b, c are complex parameters. It has regular singularities at 0, 1, ∞, and hence it is aFuchsian equation. The exponents of these singularities are as follows:
(1) t = 0: exponents 0 and 1− c.
(2) t = 1: exponents 0 and c− a− b.
(3) t =∞: exponents a and b.
All these information are symbolically represented by
y = P
0 1 ∞0 0 a t
1− c c− a− b b
.
P is called the Riemann-P-function.
Solution in the neighborhood of t = 0
Let us look for solutions
u(t) =∞∑j=0
hjtj+α
in the neighborhood of t = 0. The exponents are α1 = 0 and α2 = 1− c and the recurrence relationreads
(j + α)(j + α + c− 1)hj = (j + α + a− 1)(j + α + b− 1)hj−1, j ≥ 1.
Page 24 of 29

Ordinary Differential Equations (Math 6302) A�®�Ë@ áÖß
@ . X .
@
A first solution can obtained if we substitute α = α1 = 0. In this case the recurrence relationbecomes
hj =(j + a− 1)((j + b− 1)
j(j + c− 1)hj−1, j ≥ 1.
Thus, if 1− c /∈ N, then we have
hj =(a)j(b)jj!(c)j
,
where (a)j is the Pochhammer symbol. As a result we obtain the solution
y1(t) =∞∑j=0
(a)j(b)jj!(c)j
tj.
This function is called the hypergeometric function and it is denoted by F (a, b, c; t) or 2F1(a, b, c; t).
Remark. Many familiar functions are special cases of the hypergeometric function. For example
• sin−1 t = tF (1
2,1
2,3
2; t2),
• tan−1 t = tF (1
2, 1,
3
2;−t2),
• (1− t)n = F (−n, 1, 1; t).
Properties of the hypergeometric function
(1) F (a, b, c; 0) = 1.
(2)d
dzF (a, b, c : t) =
ab
cF (a+ 1.b+ 1, c+ 1 : t).
(3)d
dzF (a, b, c : t)
∣∣∣∣t=0
=ab
c.
(4) (a− b)F (a, b, c; t) = aF (a+ 1, b, c; t)− bF (a, b+ 1, c, t).
Second solution
Let y(t) = t1−cw(t). Then w(t) satisfies the hypergeometric equation
t(1− t)w′′ + [γ − (1 + α + β)t]w′ − αβ w = 0,
where α = a− c+ 1, β = b− c+ 1, γ = 2− c. We know that if 1− γ = −1 + c /∈ N, then
w(t) = F (α, β, γ; t)
is a solution of this equation. Hence
y2(t) = t1−cF (a− c+ 1, b− c+ 1, 2− c; t)
is a second solution of the hypergeometric equation provided that c /∈ Z. It can be shown that y1(t)and y2(t) are linearly independent.
Page 25 of 29

Ordinary Differential Equations (Math 6302) A�®�Ë@ áÖß
@ . X .
@
Exercises
(1) Prove the following:
(a) Γ(1) = 1.
(b) Γ(z + 1) = zΓ(z).
(c) If z ∈ N, then Γ(z + 1) = z!.
(d) Γ
(1
2
)=√π.
(2) Find two linearly independent series solutions of the Hermite equation
y′′ − 2ty′ + 2nu = 0, n ∈ R.
(3) Find two linearly independent series solutions of the Confluent Hypergeometric equation
ty′′ + (c− t)y′ − au = 0, a, c ∈ R.
(4) Find two linearly independent series solutions of the Lagurre equation
ty′′ + (1− t)y′ + nu, n ∈ R.
(5) Show that the general solution of the Chebyshev differential equation
(1− t2)y′′ − ty′ + a2x = 0, a ∈ R
is given by
y(t) = c0
[1 +
∞∑n=1
(−a)2(22 − a2) . . . ((2n− 2)2 − a2)(2n)!
t2n
]
+c1
[t+
∞∑n=1
(1− a2)(32 − a2) . . . ((2n− 1)2 − a2)(2n− 1)!
t2n+1
].
4.4 The Frobenius Method for Systems
In this section we will consider linear systems
x′ = A(t)x.
Assume that the systemx′ = A(t)x
has a regular singular point at t = 0; that is assume that
A(t) =1
t
∞∑j=0
Ajtj.
Then we will look for solution of the system in the form
x(t) = tαU(t), U(t) =∞∑j=0
Ujtj, U0 6= 0.
Page 26 of 29

Ordinary Differential Equations (Math 6302) A�®�Ë@ áÖß
@ . X .
@
Inserting into the equation, we obtain
∞∑j=0
(α + j)Ujtj+α =
(∞∑j=0
Ajtj
)(∞∑j=0
Ujtj+α
).
⇒ (j + α)Uj =
j∑k=0
AkUj−k, j ≥ 0.
Solving for Uj, we get
[(j + α)I − A0]Uj =
j∑k=1
AkUj−k, j ≥ 0.
In particular, for j = 0, we have(αI − A0)U0 = 0.
Thus, α must be an eigenvalue of A0.If all eigenvalues αj of A0 do not differ by integer, then each eigenvalue αj give a solution of the
system and we have n linearly independent solutions. If two eigenvalues differ by an integer, thenlogarithmic terms may occur.
Example. Considertx′ = Ax,
where
A =
(4 + t −1−4 4 + t
)= A0 + A1t.
Inserting
x =∞∑j=0
Ujtj+α, U0 6= 0,
into the equation, we obtain
∞∑j=0
(α + j)Ujtj+α = A0
∞∑j=0
Ujtj+α + A1
∞∑j=1
Uj−1tj+α.
This givesαU0 = A0U0, (α + j)Uj = A0Uj + A1Uj−1, j ≥ 1.
Thus, α are the eigenvalues of A0 =
(4 −1−4 4
); that is
α1 = 6, α2 = 2.
The recurrence relation is[A0 − (j + α)I]Uj = −Uj−1, j ≥ 1.
Let us find the first solution corresponding to α = α1 = 6.The recurrence relation in this case becomes
[A0 − (j + 6)I]Uj = −Uj−1, j ≥ 1.
Page 27 of 29

Ordinary Differential Equations (Math 6302) A�®�Ë@ áÖß
@ . X .
@
Let U0 =
(10
). Then
U1 = −[A0 − 7I]−1U0.
A0 − 7I =
(−3 −1−4 −3
)and
(A0 − 7I)−1 =1
5
(−3 14 −3
).
Thus
U1 = −1
5
(−3 14 −3
)(10
)=
1
5
(3−4
).
Now we can find U2.U2 = −[A0 − 8I]−1U1.
A0 − 8I =
(−4 −1−4 −4
)and
(A0 − 8I)−1 =1
12
(−4 14 −4
).
Thus,
U2 = − 1
60
(−4 14 −4
)(3−4
)=
1
15
(4−7
).
Let us look for a second solution:α = α2 = 2:The recurrence relation reads
[A0 − (j + 2)I]Uj = −Uj−1, j ≥ 1.
Let U0 =
(01
). Then
[A0 − 3I]U1 = −U0.
A0 − 3I =
(1 −1−4 1
)and
(A0 − 3I)−1 =−1
3
(1 14 1
).
So we find
U1 =1
3
(1 14 1
)(01
)=
1
3
(11
).
Now we calculateU2 = −[A0 − 4I]−1U1.
We have
A0 − 4I =
(0 −1−4 0
)and
(A0 − 4I)−1 =−1
4
(0 14 0
).
Page 28 of 29

Ordinary Differential Equations (Math 6302) A�®�Ë@ áÖß
@ . X .
@
Thus
U2 =1
12
(0 14 0
)(11
)=
1
12
(14
).
Next we calculateU3 = −[A0 − 5I]−1U2.
Since
A0 − 5I =
(−1 −1−4 −1
)and
(A0 − 5I)−1 =−1
3
(−1 14 −1
),
it follows that
U3 =1
36
(−1 14 −1
)(14
)=
1
36
(30
).
To find U4 we have to solve the system
[A0 − 6I]U4 = −U3.
The coefficient matrix reads
A0 − 6I =
(−2 −1−4 −2
).
Thus, det(A0 − 6I) = 0 and the system
[A0 − 6I]U4 = −U3
may or may not have a solution. The augmented matrix of the system reads(−2 −1 | − 1
12−4 −2 | 0
).
Hence, Gaussian elimination gives
(−2 −1 | − 1
12−4 −2 | 0
)−→
−2 −1 | − 1
12
0 0 | 1
6
.
Therefore, the system does not have a solution and hence α2 = 2 does not give a solution and itfollows that the second solution will involve a logarithmic term.
Page 29 of 29