
Automatización X10 - MicroPIC
109
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA UNIDAD PROFESIONAL AZCAPOTZALCO PROYECTO TERMINAL Automatización de un hogar mediante tecnología X-10 MigSantiago
-
Upload
khangminh22 -
Category
Documents
-
view
5 -
download
0
Transcript of Automatización X10 - MicroPIC
IINNSSTTIITTUUTTOO PPOOLLIITTÉÉCCNNIICCOO NNAACCIIOONNAALL
EESSCCUUEELLAA SSUUPPEERRIIOORR DDEE IINNGGEENNIIEERRÍÍAA MMEECCÁÁNNIICCAA YY EELLÉÉCCTTRRIICCAA
UUNNIIDDAADD PPRROOFFEESSIIOONNAALL AAZZCCAAPPOOTTZZAALLCCOO
PPRROOYYEECCTTOO TTEERRMMIINNAALL Automatización de un hogar mediante tecnología X-10
MigSantiago
Contenido CAPÍTULO 1........................................................................................................................................... 1 1.1 Antecedentes ................................................................................................................................... 2 1.1.1 La historia de la electricidad en México y sus aplicaciones actuales ...................................... 2 1.1.2 Historia del protocolo X-10 ..................................................................................................... 6 1.1.3 Los microcontroladores PIC de Microchip.............................................................................. 7
CAPÍTULO 2........................................................................................................................................... 9 2.1 La domótica................................................................................................................................... 10 2.1.1 Características de la domótica................................................................................................ 11 2.1.2 Gestión de la Domótica.......................................................................................................... 11 2.1.3 Descripción del sistema domótico ......................................................................................... 12
2.2 El Protocolo X-10 ......................................................................................................................... 16 2.2.1 La teoría de transmisión del protocolo X-10 ......................................................................... 16
CAPÍTULO 3......................................................................................................................................... 20 3.1 Los microcontroladores PIC ......................................................................................................... 21 3.1.1 La arquitectura RISC Harvard ............................................................................................... 21 3.1.2 Frecuencias de trabajo............................................................................................................ 21 3.1.3 Memoria de programa FLASH .............................................................................................. 22 3.1.4 Los temporizadores ................................................................................................................ 22 3.1.5 Módulo de Captura-Comparación-PWM............................................................................... 22 3.1.6 El convertidor analógico a digital .......................................................................................... 23
3.2 La automatización con PICs ......................................................................................................... 24 3.2.1 Descripción del hardware....................................................................................................... 24 3.2.2 Detector de cruce por cero ..................................................................................................... 25 3.2.3 Detector de señal de 120kHz ................................................................................................. 26 3.2.4 Generador de la señal de 120kHz .......................................................................................... 27 3.2.5 Fuente de 5V sin transformador............................................................................................. 30
3.3 Sensores a emplear........................................................................................................................ 32 3.3.1 Sensor de iluminación............................................................................................................ 32 3.3.2 Sensor de humo...................................................................................................................... 34 3.3.3 Sensor de presencia................................................................................................................ 35 3.3.4 Sensor de temperatura............................................................................................................ 36 3.3.5 Sensor de humedad ................................................................................................................ 37 3.3.6 Sensor de gas.......................................................................................................................... 38
3.4 Dispositivos y mecanismos de control.......................................................................................... 41 3.4.1 Control de iluminación........................................................................................................... 41 3.4.2 Control de riego ..................................................................................................................... 45 3.4.3 Control de puerta de cochera ................................................................................................. 50 3.4.4 Control de persianas............................................................................................................... 58 3.4.5 Respaldo de energía vía UPS ................................................................................................. 70 3.4.6 Control de temperatura........................................................................................................... 71 3.4.7 Control de bombeo de agua ................................................................................................... 77 3.4.8 Protección de ventanas........................................................................................................... 87
CAPÍTULO 4......................................................................................................................................... 90 4.1 Automatización y programación................................................................................................... 91
4.1.1 Componentes de la automatización........................................................................................ 91 4.1.2 Transmisión y recepción de la portadora ............................................................................... 92 4.1.3 La computadora central.......................................................................................................... 95 4.1.4 Las desventajas del protocolo X10 ...................................................................................... 106
CAPÍTULO 5....................................................................................................................................... 107 5.1 Costos.......................................................................................................................................... 108 Apéndice ........................................................................................................................................... 117 A.1 Programas de transmisión recepción de portadora................................................................. 117 A.2 Programa del control de iluminación ..................................................................................... 119 A.3 Programa del control de temperatura ..................................................................................... 121 B.1 Diagrama electrónico de la fuente de 5V sin transformador.................................................. 126 B.2 Diagrama electrónico del receptor X10.................................................................................. 127 B.3 Diagrama electrónico del transmisor X10.............................................................................. 128 B.4 Diagrama electrónico del control de iluminación .................................................................. 129 B.5 Diagrama electrónico del control de velocidad del ventilador............................................... 130 B.6 Conexionado básico de un PIC16F877A ............................................................................... 131 B.7 Circuito electrónico del transmisor del sensor de presencia .................................................. 132 B.8 Circuito electrónico del receptor del sensor de presencia ...................................................... 133 B.9 Circuito electrónico del detector de intrusión de ventanas..................................................... 134 B.10 Tornillo sinfín del garage ..................................................................................................... 135 B.11 Medidas del engrane helicoidal y del tornillo sinfín ............................................................ 136 B.12 Vista general del garage automático .................................................................................... 137 B.13 Diagrama electrónico del control de la cochera ................................................................... 138
Bibliografía ....................................................................................................................................... 142
Introducción La evolución de los seres humanos ha generado una serie de eventos que han dado lugar a etapas históricas de gran trascendencia, como lo son los desarrollos tecnológicos. La tecnología nace con los seres humanos y se va transformando en un elemento de prioridad para los grupos sociales que la emplean, les permite habituarse a medios ambientes extremosos o, simplemente, a subsistir. Gracias a los avances tecnológicos generados por años de estudio e investigación, los seres humanos han logrado obtener un nivel de vida muy alto; sus vidas ya no corren peligro ante situaciones de la naturaleza. Ahora no se busca cumplir necesidades básicas de supervivencia únicamente, también se busca lograr un nivel de vida con confort y control de los alrededores. Ante estas nuevas necesidades la tecnología de la información entra en escena. Gracias a ella se puede conocer, manipular y programar el ambiente en el que una persona se desenvuelve, pudiendo ser una oficina o hasta el mismo hogar. Así es como surge la domótica. En Francia, donde son muy amantes de adaptar términos propios a las nuevas disciplinas, se acuñó la palabra "Domotique", contracción de las palabras "domo" e "informatique". Este término se puede definir como: "el concepto de vivienda que integra todos los automatismos en materia de seguridad, gestión de la energía, comunicaciones, etc.". Es decir, el objetivo es asegurar al usuario de la vivienda un aumento del confort, de la seguridad, del ahorro energético y de las facilidades de comunicación. En este trabajo se presenta el proyecto de cinco estudiantes de noveno semestre de la Escuela Superior de Ingeniería Mecánica y Eléctrica, Unidad Profesional Azcapotzalco. Se tratará el uso de tecnologías como los microcontroladores y computadoras personales para manipular las diversas variables que se encuentran en un hogar, tales como temperatura, control de iluminación, seguridad, gestión de energía, sistemas de riego, etc. El sistema de comunicación entre los dispositivos que controlarán todas esas variables será el protocolo X-10, el cuál será explicado en el marco teórico de este trabajo.
Abstract The humankind evolution has generated a series of events that form part of great transcendence historic stages. Technology is born along human beings and has turned to be a priority element for social groups that use it, it allows them to live in harmful environments and survive. Due to the technological advances generated by years of research, humans have achieved a high quality life level, their lives are not threatened by nature situations anymore. Humans are not just looking to fulfil basic survival needs, they are looking for a comfortable life and control of their surroundings as well. Considering these new needs, the information technology comes into scene. By using it, the environment in which a person interacts can be known, can be manipulated and can be programmed; this environment could be an office or a home itself. That is how domotics appears. In France, where people love to adapt self-invented names to new disciplines, the word "domotique" was coined, from the contraction of the words "domo" and "informatique". This term can be defined as follows: "a home concept which unites all automatisms related to security issues, energy management, communications, etc.". The objective is to guarantee the home owner an improvement in comfort, security, energy savings and communication simplicities. This work reports the project of five students of ninth grade at Superior School of Mechanical and Electrical Engineering, Professional Unit Azcapotzalco. It introduces the use of microcontroller and computer technologies to manipulate the diverse variables that can be found in a home such as: temperature, illumination control, security, energy management, sprinkler systems, etc. The system used to communicate between devices and control all these variables, is the X-10 protocol, which will be explained in this paper.
OBJETIVO GENERAL
Aplicar la tecnología X-10 para controlar el ambiente de un hogar
OBJETIVOS ESPECÍFICOS
Entender el funcionamiento del protocolo X-10 Intercomunicar dos elementos a controlar mediante el cableado de energía eléctrica
de un hogar Desarrollar un sistema central que esté a cargo de la gestión de todos los elementos
de control del hogar

1
CAPÍTULO 1 MARCO HISTÓRICO
Automatización de un hogar mediante el protocolo X-10 El protocolo X10
2
1.1 Antecedentes
La creciente dedicación del Homo Erectus a la caza, dio origen al desarrollo de una organización social claramente humana, basada en una estricta división del trabajo entre hombres, cazadores y mujeres que buscaban y recogían el alimento ... desarrollando un lenguaje que muestra al hombre como el único animal cultural, que pudo sobrevivir y triunfar adaptando su comportamiento, más que su cuerpo, a las modificaciones del medio.1
- Jonathan N. Leonard - Una vivienda domótica se puede definir como: "aquella vivienda en la que existen agrupaciones automatizadas de equipos, normalmente asociados por funciones, que disponen de la capacidad de comunicarse interactivamente entre sí de un bus doméstico multimedia que las integra". Para lograr la intercomunicación de estos equipos se cuenta con la transmisión de información por la línea de alimentación eléctrica. Esa información se envía siguiendo las normas del protocolo X-10, que será explicado posteriormente. Este intercambio se logra mediante circuitería eléctrica y microcontroladores PIC, encargados de decodificar y/o codificar la información a transmitir. En este apartado se tratarán los temas de la energía eléctrica en México, el desarrollo del protocolo X-10 y el desarrollo de los microcontroladores PIC de Microchip. 1.1.1 La historia de la electricidad en México y sus aplicaciones actuales
La historia de la electricidad en México ha sido seguida por la Compañía Federal de Electricidad, a continuación se muestran los datos obtenidos y que se presentan en su página de Internet. En 1937, México tenía 18.3 millones de habitantes; de los cuales, únicamente siete millones (38%) contaban con servicio de energía eléctrica, proporcionado con serias dificultades por tres empresas privadas. La oferta no satisfacía la demanda, las interrupciones de luz eran constantes y las tarifas muy elevadas. Además, esas empresas se enfocaban a los mercados urbanos más redituables, sin contemplar en sus planes de expansión a las poblaciones rurales, donde habitaba más de 62% de la población. Para dar respuesta a esas situaciones que no permitían el desarrollo económico del país, el Gobierno federal decidió crear, el 14 de agosto de 1937, la Comisión Federal de Electricidad, que en una primera etapa se dio a la tarea de construir plantas generadoras para satisfacer
1 Editorial Time-Life, El Primer Hombre: Orígenes del Hombre, Netherlands, Time-Life International, 1976, pp 15-18
Automatización de un hogar mediante el protocolo X-10 El protocolo X10
3
la demanda, y con ello beneficiar a más mexicanos mediante el bombeo de agua de riego, el arrastre y la molienda; pero sobre todo, con alumbrado público y para casas habitación. Los primeros proyectos de CFE se emprendieron en Teloloapan, Guerrero; Pátzcuaro, Michoacán; Suchiate y Xía, en Oaxaca, y Ures y Altar, en Sonora. En 1938, la empresa tenía apenas una capacidad de 64 kW, misma que, en ocho años, aumentó hasta alcanzar 45,594 kW. Entonces, las compañías privadas dejaron de invertir y la CFE se vio obligada a generar energía para que éstas la revendieran. En 1960, de los 2,308 MW de capacidad instalada en el país, CFE aportaba 54%; la Mexican Light, 25%; la American and Foreign, 12%, y el resto de las compañías, 9%. Sin embargo, a pesar de los esfuerzos de generación y electrificación, para esas fechas apenas 44% de la población contaba con electricidad. Tal situación del Sector Eléctrico Mexicano motivó al entonces Presidente Adolfo López Mateos a nacionalizar la industria eléctrica, el 27 de septiembre de 1960. A partir de entonces, se comenzó a integrar el Sistema Eléctrico Nacional, extendiendo la cobertura del suministro y acelerando la industrialización del país. Para ello, el Estado mexicano adquirió los bienes e instalaciones de las compañías privadas, mismas que operaban con serias deficiencias, por la falta de inversión y los problemas laborales. Para 1961, la capacidad total instalada en el país ascendía a 3,250 MW. CFE vendía 25% de la energía que producía y su participación en la propiedad de centrales generadoras de electricidad pasó de cero a 54%. En poco más de 20 años, la CFE había cumplido uno de sus más importantes cometidos: ser la entidad rectora en la generación de energía eléctrica. En esa década, la inversión pública se destinó en más de 50% a obras de infraestructura. Con parte de estos recursos se construyeron importantes centros generadores, entre ellos los de Infiernillo y Temascal. En esos años se instalaron plantas generadoras por el equivalente a 1.4 veces lo hecho hasta entonces, alcanzando, en 1971, una capacidad instalada de 7,874 MW. Al finalizar los 70, se superó el reto de sostener el mismo ritmo de crecimiento, al instalarse entre 1970 y 1980 centrales generadoras por el equivalente a 1.6 veces, para llegar a una capacidad instalada de 17,360 MW. En la década de los 80, el crecimiento fue menos espectacular, principalmente por la disminución en la asignación de recursos. No obstante, en 1991 la capacidad instalada ascendía a 26,797 MW. En 2005, la capacidad instalada en el país es de 46,171.02 MW, de los cuales 50.32% corresponde a generación termoeléctrica de CFE; 16.79% a productores independientes de energía (PIE); 22.22% a hidroelectricidad; 5.63% a centrales carboeléctricas; 2.08% a geotérmica; 2.96% a nucleoeléctrica, y 0.005% a eoloeléctrica. Debe señalarse que, en los inicios de la industria eléctrica mexicana operaban varios sistemas aislados, con características técnicas diferentes; llegando a coexistir casi 30 voltajes de distribución, siete de alta tensión para líneas de transmisión y dos frecuencias eléctricas de 50 y 60 hertz. Ello dificultaba el suministro de electricidad a todo el país, por lo que CFE definió y unificó los criterios técnicos y económicos del Sistema Eléctrico Nacional,
Automatización de un hogar mediante el protocolo X-10 El protocolo X10
4
normalizando los voltajes de operación, con la finalidad de estandarizar los equipos, reducir sus costos y los tiempos de fabricación, almacenaje e inventariado. Luego, unificó la frecuencia a 60 hertz en todo el país e integró los sistemas de transmisión, en el Sistema Interconectado Nacional. Otro rubro con logros contundentes, se refiere a la red de transmisión de electricidad, el cual se compone actualmente de: 44,424 kilómetros de líneas de 400, 230 y 161 kV; 324 subestaciones de potencia con una capacidad de 129,771 MVA, y 45,216 kilómetros de líneas de subtransmisión de 138 kV y tensiones menores. Por su parte, el sistema de distribución (que también estaba en ceros en 1937) cuenta actualmente con 1,497 subestaciones con 39,072 MVA de capacidad; 6,484 circuitos de distribución con una longitud de 359,598 kilómetros; 935,654 transformadores de distribución con una capacidad de 30,455 MVA; 231,109 kilómetros de líneas secundarias de baja tensión y 562,633 kilómetros de acometidas. El día de hoy, 125,934 localidades tienen electricidad y sus habitantes reciben una atención más rápida y cómoda en las 951 oficinas de atención al público y los 1,505 cajeros CFEmático, en los que se puede pagar el recibo de luz a cualquier hora, los 365 días del año.2 Hoy en día, la CFE está buscando aplicar la tecnología para el desarrollo social del país; no sólo se encarga de entregar energía eléctrica a poblaciones rurales. Existe un proyecto piloto a cargo de la Comisión Federal de Electricidad (CFE) para la transmisión de voz, audio y datos a través de redes eléctricas en comunidades remotas. A continuación se muestra una parte de la información que la página de la presidencia de México contiene. El Proyecto Power Line Communication (PLC), Comunicación a la Velocidad de la Luz, es un sistema que utiliza la red eléctrica para enlazar a los usuarios con la telefonía pública e Internet, y cuya aplicación se extiende a ámbitos tan importantes para el desarrollo del país como la educación, salud, vivienda, cultura y recreación para las familias mexicanas. El primero de febrero de 2005, el Presidente Vicente Fox realizó la primera llamada telefónica a través del sistema PLC, tecnología desarrollada por la CFE, desde la escuela primaria “Coronel Filiberto Gómez”, en Jocotitlán, estado de México, para comunicarse a la ciudad de México. En 2003, la CFE suscribió un convenio de colaboración con el Instituto Politécnico Nacional y Grupo IUSA para desarrollar el programa piloto en Jocotitlán, en donde ya hay 80 accesos a Internet gratuitos y se desarrolla otra prueba de campo en Morelia, en donde se da servicio a 700 casas. El Mandatario resaltó que este proyecto se suma a diversas esfuerzos de conectividad emprendidas por el Gobierno Federal, como el programa e-México que busca llevar el Internet a los 165 mil salones de clases de quinto y sexto año de primaria que hay en todo el país.
2 CFE - Historia, leída el 11/sep/2005, <http://www.cfe.gob.mx/es/LaEmpresa/queescfe/historia/>
Automatización de un hogar mediante el protocolo X-10 El protocolo X10
5
Asimismo, se suma al programa Enciclomedia –cuyos beneficiarios serán las más de 200 mil escuelas públicas de todo el país--, y al proyecto e-México, para brindar conexión al mundo del conocimiento, la tecnología y la red Mundial. De igual modo, el Proyecto PLC impactará a los siete mil 500 Centros del Conocimiento o Plazas Comunitarias que ya están operando, y que sin costo alguno dan acceso a toda la población abierta de comunidades indígenas y rurales a la computadora y al Internet. Otro importante lugar de aplicación para el Proyecto será el programa e-Salud, que a través de telemedicina, conectará a los pacientes de todo el país con los expertos de los institutos nacionales de especialidades médicas instalados en la Ciudad de México. La operatividad de Proyecto PLC consiste en que, mediante cualquier contacto de luz, se podrán transmitir video, voz y datos a alta velocidad.3 Estos avances tecnológicos son importantes debido al medio de transmisión propuesto. En otros países del primer mundo la transmisión de Internet se hace mediante cableado especial, el cual necesita grandes inversiones que en nuestro país no se podrían dar. Es por esto que las líneas de alimentación, que ya están previamente instaladas, constituyen un medio barato, seguro y presente en todas las comunidades y ciudades del país.
3 Luis Alberto García Castillo, México - Presidencia de la República _ Las Buenas Noticias también son Noticia, leída el 11/sep/2005, <http://www.presidencia.gob.mx/buenasnoticias/?contenido=16627&pagina=97>
Automatización de un hogar mediante el protocolo X-10 El protocolo X10
6
1.1.2 Historia del protocolo X-10
Los orígenes de X-10 están en una compañía llamada Pico Electronics, en Glenrothes, Escocia. Pico fue fundada en 1970 por un grupo de ingenieros que trabajaban para General Instrument Microelectronics (G.I.). Los fundadores de Pico tuvieron la idea de que era posible desarrollar una calculadora chip única; la mayoría de calculadoras en aquel momento usaban como mínimo 5 circuitos integrados (ICs). Pico lo hizo y esta calculadora IC fue precisamente el primer microprocesador del mundo, una historia muy diferente a lo que Intel o Texas Instruments aseveran. Pico pasó a desarrollar una gama de calculadoras ICs que fueron fabricadas por G.I. y vendidas a fabricantes de calculadoras como Bowmar, Litton, y Casio. A Pico le pagaron los derechos de patente de ICs pero como el precio de los ICs para calculadoras descendió de $20 a menos de un dólar, los directores de Pico vieron la necesidad de desarrollar productos completos y no sólo ICs. En 1974 presentaron la idea de un cambiadiscos que seleccionaría las pistas en un disco LP vinil. Pico desarrolló el producto entero que incluía el IC de costumbre, todos los aspectos mecánicos, la caja, etc. Se necesitó un fabricante, BSR en ese momento era el fabricante más grande del mundo de cambiadores de discos. Por lo tanto se formó una nueva empresa llamada Accutrac Ltd., una asociación a medias entre BSR y Pico. BSR fabricó el cambiador de discos, llamado Accutrac 2000, y pasó a la fabricación de varios modelos desarrollados por Pico. El éxito de los proyectos Accutrac financió el desarrollo de la siguiente gran idea. El Accutrac tenía muchas características únicas, como que era teledirigido. Utilizaba un telecomando “ultrasónico” desarrollado por Pico. Esto pasó a mediados de los 70, incluso antes de que fuera popular para los televisores con mando a distancia. La idea del mando a distancia de Accutrac engendró la idea de controlar las luces y los electrodomésticos con mando a distancia, y así en 1975 el proyecto X-10 fue concebido (había 8 proyectos diferentes de calculadoras IC y Accutrac era el proyecto X9). Se llegó a la idea de utilizar la instalación eléctrica existente AC para transmitir señales para controlar luces y electrodomésticos. Los ICs se desarrollaron en un periodo de tres años, y se realizaron extensas pruebas en una casa. Después de numerosas pruebas se encontró que el sistema funcionaba bien durante el día, pero parecía que paraba de funcionar cuando el dueño venía a verlo por la tarde. Después de una investigación exhaustiva se descubrió que cuando todos llegaban a casa de trabajar y empezaban a poner en marcha sus electrodomésticos, el ruido en la línea AC aumentaba hasta tal punto que el sistema paraba de funcionar. Para remediarlo, los ingenieros de Pico propusieron sincronizar las transmisiones de la línea de conducción eléctrica con el punto de cruce cero de la línea AC, que es cuando hay menos ruido. En 1978 se presentó X-10 al público americano. RadioShack fue el primer cliente. RadioShack es incluso hoy día uno de los minoristas más grandes de productos X-10. Ya se mantenía una relación con BSR, tenían un buen nombre y una buena distribución, por tanto se formó otra empresa a medias con ellos y se fundó X10 Ltd. El día en que la prensa iba a anunciar la presentación del sistema todavía no se había otorgado un nombre, por tanto se acordó el nombre “El Sistema X10 BSR", el cuál más adelante fue renombrado como sistema X10 de fuente de energía.
Automatización de un hogar mediante el protocolo X-10 El protocolo X10
7
En 1978 el sistema constaba de una consola de comandos de 16 canales, un Módulo de Lámpara, y un Módulo para los Electrodomésticos. Muy pronto se continuó con la adición de un módulo para el interruptor de pared. Un año después se presentó el primer reloj automático X10. Esta vez se creyó necesario asignar un nombre propio al sistema, por tanto fue contratada la mejor agencia de publicidad que había entonces y se invirtió mucho dinero en proponer un nombre. El nombre ofrecido fue “El Reloj Automático”.4 Actualmente, la compañía X10 desarrolla productos que van más allá del control centralizado dentro del hogar del usuario, pueden controlarse equipos desde Internet, o con controles PDA (Personal Digital Assistant); incluso se puede controlar lo que se está viendo en el televisor o saber quién está llamando a la puerta sin levantarse a verificarlo. 1.1.3 Los microcontroladores PIC de Microchip
Un microcontrolador es un circuito integrado o chip que incluye en su interior las tres unidades funcionales de un ordenador: CPU, Memoria y Unidades de E/S, es decir, se trata de un computador completo en un solo circuito integrado. Aunque sus prestaciones son limitadas, además de dicha integración, su característica principal es su alto nivel de especialización. Aunque los hay del tamaño de un sello de correos, lo normal es que sean incluso más pequeños, ya que, lógicamente, forman parte del dispositivo que controlan. Un microcontrolador es un microprocesador optimizado para ser utilizado para controlar equipos electrónicos. Los microcontroladores representan la inmensa mayoría de los chips de ordenador vendidos, sobre un 50% son controladores "simples" y otros son procesadores de señales digitales (DSP5) más especializados. Mientras se pueden tener uno o dos microprocesadores de propósito general en casa, probablemente hay distribuidos entre los electrodomésticos de una casa entre una y dos docenas de microcontroladores. Pueden encontrarse en casi cualquier dispositivo eléctrico como automóviles, lavadoras, hornos microondas, teléfonos, etc. Un microcontrolador difiere de una CPU normal, debido a que es más fácil convertirla en un ordenador en funcionamiento, con un mínimo de chips externos de apoyo. La idea es que el chip se coloque en el dispositivo, enganchado a la fuente de energía y de información que necesite, y eso es todo. Un microprocesador tradicional no permite hacer esto, ya que espera que todas estas tareas sean manejadas por otros chips. Por ejemplo, un microcontrolador típico tendrá un generador de reloj integrado y una pequeña cantidad de memoria RAM (memoria de acceso aleatorio) y ROM/EPROM/EEPROM (memorias borrables de sólo lectura), significando que para hacerlo funcionar, todo lo que se necesita son unos pocos programas de control y un cristal de sincronización. Los microcontroladores disponen generalmente también de una gran variedad de dispositivos de entrada/salida, como convertidores de analógico a digital,
4 La historia de X10 por uno de sus pioneros, leída el 04/sep/2005, <http://www.domotica.net/La_historia_de_X10_por_uno_de_sus_pioneros.htm> 5 Del inglés, Digital Signal Processors.
Automatización de un hogar mediante el protocolo X-10 El protocolo X10
8
temporizadores y buses de interfaz serie especializados, como I2C (Inter Integrated Circuits) y CAN (Redes de controladores). Frecuentemente, estos dispositivos integrados pueden ser controlados por instrucciones de procesadores especializados. 6 En 1965 GI formó una división de microelectrónica, destinada a generar las primeras arquitecturas viables de memoria EPROM y EEPROM. De forma complementaria GI Microelectronics Division fué también responsable de desarrollar una amplia variedad de funciones digitales y analógicas en las familias de circuitos integrados AY3-xxxx y AY5-xxxx. GI también creó un microprocesador de 16 bit, denominado CP1600 a principios de los 70. Este fue un microprocesador razonable, pero no particularmente bueno manejando puertos de entrada/salida. Para algunas aplicaciones muy específicas GI diseñó un Controlador de Interface Periférico (PIC) entorno a 1975. Fue diseñado para ser muy rápido, además de ser un controlador de entradas/salidas para una máquina de 16 bits pero sin necesitar una gran cantidad de funcionalidades, por lo que su lista de instrucciones fue pequeña. No es de extrañar que la estructura diseñada en 1975 es la arquitectura del actual PIC16C5x. Además, la versión de 1975 fue fabricada con tecnología NMOS y sólo estaba disponible en versiones de ROM de máscara, pero seguía siendo un buen pequeño microcontrolador. El mercado, no obstante, no pensó así y el PIC quedó reducido a ser empleado por grandes fabricantes únicamente. Durante los 80, GI renovó su apariencia y se reestructuró, centrando su trabajo en sus principales actividades, semiconductores de potencia esencialmente, lo cual siguen haciendo actualmente con bastante éxito. GI Microelectronics Division cambió a GI Microelectronics Inc. (una especie de subsidiaria), la cual fue finalmente vendida en 1985 a Venture Capital Investors, incluyendo la fábrica en Chandler, Arizona. La gente de Ventura realizó una profunda revisión de los productos en la compañía, desechando la mayoría de los componentes AY3, AY5 y otra serie de cosas, dejando sólo el negocio de los PIC y de las memorias EEPROM y EPROM. Se tomó la decisión de comenzar una nueva compañía, denominada Arizona Microchip Technology, tomando como elemento diferenciador sus controladores integrados. Como parte de esta estrategia, la familia NMOS PIC16C5x fue rediseñada para emplear algo que la misma compañía fabricaba bastante bien, memoria EPROM. De esta forma nació el concepto de basarse en tecnología CMOS, OTP7 y memoria de programación EPROM, naciendo la familia PIC16C5x. Actualmente Microchip ha realizado un gran número de mejoras a la arquitectura original, adaptándola a las actuales tecnologías y al bajo costo de los semiconductores.8
6 Microcontrolador - Wikipedia, leída el 11/sep/2005, < http://es.wikipedia.org/wiki/Microcontrolador> 7 Del inglés, One Time Programming, programación de una sola vez. 8 Miguel Angel Montejo Ráez, Introducción a los microcontroladores PIC, leída el 10/sep/2005 <http://www.redeya.com/electronica/tutoriales/pic1.htm>

CAPÍTULO 2 MARCO CONCEPTUAL
Automatización de un hogar mediante el protocolo X-10 El protocolo X10
10
2.1 La domótica Domótica es el término que se utiliza para denominar la parte de la tecnología (electrónica e informática), que integra el control y supervisión de los elementos existentes en un edificio de oficinas o en uno de viviendas o simplemente en cualquier hogar. También, un término muy familiar es el de "edificio inteligente", que se aplica más al ámbito de los grandes bloques de oficinas, bancos, universidades y edificios industriales. El uso de las tecnologías de la información y las comunicaciones en la vivienda genera nuevas aplicaciones y tendencias basadas en la capacidad de proceso de información y en la integración y comunicación entre los equipos e instalaciones. Una vivienda inteligente puede ofrecer una amplia gama de aplicaciones en áreas tales como: * Seguridad * Gestión de la energía * Automatización de tareas domésticas * Formación, cultura y entretenimiento * Comunicación con servidores externos * Ocio y entretenimiento * Operación y mantenimiento de las instalaciones, etc. De una manera general, un sistema domótico dispondrá de una red de comunicación que permite la interconexión de una serie de equipos a fin de obtener información sobre el entorno doméstico y, basándose en ésta, realizar determinadas acciones sobre dicho entorno. Los elementos de campo (detectores, sensores, captadores, actuadotes, etc.), transmitirán las señales a una unidad central inteligente que tratará y elaborará la información recibida. En función de dicha información y de una determinada programación, la unidad central actuará sobre determinados circuitos de potencia relacionados con las señales recogidas por los elementos de campo correspondientes.
Automatización de un hogar mediante el protocolo X-10 El protocolo X10
11
2.1.1 Características de la domótica
Se pueden resaltar las siguientes características: * Control remoto desde dentro de la vivienda: a través de un esquema de comunicación con los distintos equipos (mando a distancia, bus de comunicación, etc.). Reduce la necesidad de moverse dentro de la vivienda, este hecho puede ser particularmente importante en el caso de personas de la tercera edad o discapacitadas. * Control remoto desde fuera de la vivienda: presupone un cambio en los horarios en los que se realizan las tareas domésticas y como consecuencia permite al usuario un mejor aprovechamiento de su tiempo. * Programabilidad: el hecho de que los sistemas de la vivienda se pueden programar ya sea para que realicen ciertas funciones con sólo tocar un botón o que las lleven a cabo en función de otras condiciones del entorno (hora, temperatura interior o exterior, etc.) produce un aumento del confort y un ahorro de tiempo. 2.1.2 Gestión de la Domótica
La domótica se encarga de gestionar los siguientes cuatro aspectos del hogar:
Energía eléctrica. Se encarga de gestionar el consumo de energía, mediante temporizadores, relojes programadores, termostatos, etc.
Comodidad. La domótica proporciona una serie de comodidades, como pueden ser el
control automático de los servicios de: calefacción, refrigeración, iluminación y la gestión de elementos como accesos, persianas, toldos, ventanas, riego automático, etc.
Seguridad. La seguridad que proporciona un sistema domótico es más amplia que la
que puede proporcionar cualquier otro sistema, pues integra tres campos de la seguridad que normalmente están controlados por sistemas distintos:
* Seguridad de los bienes: Gestión del control de acceso y control de presencia, así como la simulación de presencia. Alarmas ante intrusiones. * Seguridad de las personas: Especialmente, para las personas mayores y los enfermos. Mediante el nodo telefónico, se puede tener acceso (mediante un pulsador radiofrecuencia que se lleve encima, por ejemplo) a los servicios de ambulancias, policía, etc. * Incidentes y averías: Mediante sensores, se pueden detectar los incendios y las fugas de gas y agua, y, mediante el nodo telefónico, desviar la alarma hacia los bomberos, por ejemplo.
Comunicaciones: Este aspecto es imprescindible para acceder a multitud de servicios ofrecidos por los operadores de telecomunicaciones. La domótica tiene una característica fundamental, que es la integración de sistemas, por eso hay nodos que interconectan la red domótica con diferentes dispositivos, como Internet, la red telefónica, etc.
Automatización de un hogar mediante el protocolo X-10 El protocolo X10
12
2.1.3 Descripción del sistema domótico
Tipo de Arquitectura
La arquitectura de un sistema domótico, como la de cualquier sistema de control, especifica el modo en que los diferentes elementos de control del sistema se van a ubicar. Existen dos arquitecturas básicas: la arquitectura centralizada y la distribuida. Arquitectura centralizada: Es aquella en la que los elementos a controlar y supervisar (sensores, luces, válvulas, etc.) han de conectarse hasta el sistema de control de la vivienda (computadora o similar). El sistema de control es el corazón de la vivienda, en cuya falta todo deja de funcionar, y su instalación no es compatible con la instalación eléctrica convencional en cuanto que en la fase de construcción hay que elegir esta topología de cableado. Arquitectura distribuida: Es aquella en la que el elemento de control se sitúa próximo al elemento a controlar. Hay sistemas que son de arquitectura distribuida en cuanto a la capacidad de proceso, pero no lo son en cuanto a la ubicación física de los diferentes elementos de control y viceversa. En los sistemas de arquitectura distribuida que utilizan como medio de transmisión el cable, existe un concepto a tener en cuenta que es la topología de la red de comunicaciones. La topología de la red se define como la distribución física de los elementos de control respecto al medio de comunicación (cable). Cada elemento del sistema tiene su propia capacidad de proceso y puede ser ubicado en cualquier parte de la vivienda. Esta característica proporciona al instalador domótico una libertad de diseño que le posibilita adaptarse a las características físicas de cada vivienda en particular. Medio de Transmisión
A continuación se enumeran los siguientes tipos de medios:
1. Líneas de distribución de energía eléctrica (Corrientes portadoras) Si bien no es el medio más adecuado para la transmisión de datos, si es una alternativa a tener en cuenta para las comunicaciones domésticas dado el bajo costo que implica su uso, dado que se trata de una instalación existente por lo que es nulo el costo de la instalación. Para aquellos casos en los que las necesidades del sistema no impongan requerimientos muy exigentes en cuanto a la velocidad de transmisión, la línea de distribución de energía eléctrica puede ser suficiente como soporte de dicha transmisión.
2. Soportes metálicos La infraestructura de las redes de comunicación actuales, tanto públicas como privadas, tiene en un porcentaje muy elevado, cables metálicos de cobre como soporte de transmisión de las señales eléctricas que procesa.
Automatización de un hogar mediante el protocolo X-10 El protocolo X10
13
En general se pueden distinguir dos tipos de cables metálicos:
a. Par metálico Los cables formados por varios conductores de cobre pueden dar soporte a un amplio rango de aplicaciones en el entorno domestico. Este tipo de cables pueden transportar voz, datos y alimentación de corriente continua. Los denominados cables de pares están formados por cualquier combinación de los tipos de conductores que a continuación se detallan: 1.- Cables formados por un solo conductor con un aislamiento exterior plástico, como los utilizados para la transmisión de las señales telefónicas. 2.- Par de cables, cada uno de los cables esta formado por un arrollamiento helicoidal de varios hilos de cobre. (Por ejemplo, los utilizados para la distribución de señales de audio). 3.- Par apantallado, formado por dos hilos recubiertos por un trenzado conductor en forma de malla cuya misión consiste en aislar las señales que circulan por los cables de las interferencias electromagnéticas exteriores. (Por ejemplo, los utilizados para la distribución de sonido alta fidelidad o datos). 4.- Par trenzado, esta formado por dos hilos de cobre recubiertos cada uno por un trenzado en forma de malla. El trenzado es un medio para hacer frente a las interferencias electromagnéticas. (Por ejemplo, los utilizados para interconexión de ordenadores).
b. Coaxial Un par coaxial es un circuito físico asimétrico, constituido por un conductor que ocupa el eje longitudinal del otro conductor en forma de tubo, manteniéndose la separación entre ambos mediante un dieléctrico apropiado. Este tipo de cables permite el transporte de las señales de video y señales de datos a alta velocidad. Dentro del ámbito de la vivienda, el cable coaxial puede ser utilizado como soporte de transmisión para: - Señales de teledifusión que provienen de las antenas - Señales procedentes de las redes de TV por cable - Señales de control y datos a media y baja velocidad
c. Fibra óptica La fibra óptica es el resultado de combinar dos disciplinas no relacionadas, como son la tecnología de semiconductores (que proporciona los materiales necesarios para las fuentes y los detectores de luz), y la tecnología de guiado de ondas ópticas (que proporciona el medio de transmisión, el cable de fibra óptica). La fibra óptica esta constituida por un material dieléctrico transparente, conductor de luz, compuesto por un núcleo con un índice de refracción menor que el del revestimiento, que envuelve a dicho núcleo. Estos dos elementos forman una guía para que la luz se desplace por la fibra. La luz transportada es generalmente infrarroja, y por lo tanto no es visible por el ojo humano. A continuación se detallan sus ventajas e inconvenientes:
Fiabilidad en la transferencia de datos.
Automatización de un hogar mediante el protocolo X-10 El protocolo X10
14
Inmunidad frente a interferencias electromagnéticas y de radiofrecuencias. Alta seguridad en la transmisión de datos. Distancia entre los puntos de la instalación limitada, en el entorno doméstico estos
problemas no existen. Elevado costo de los cables y las conexiones. Transferencia de gran cantidad de datos.
d. Conexión sin hilos
a) Infrarrojos El uso de mandos a distancia basados en transmisión por infrarrojos esta ampliamente extendido en el mercado residencial para controlar equipos de audio y vídeo. La comunicación se realiza entre un diodo emisor que emite una luz en la banda de infrarrojos, sobre la que se superpone una señal, convenientemente modulada con la información de control, y un fotodiodo receptor cuya misión consiste en extraer de la señal recibida la información de control. Los controladores de equipos domésticos basados en la transmisión de ondas en la banda de los infrarrojos presentan gran comodidad y flexibilidad y admiten un gran número de aplicaciones. Al tratarse de un medio de transmisión óptico es inmune a las radiaciones electromagnéticas producidas por los equipos domésticos o por los demás medios de transmisión (coaxial, cables pares, red de distribución de energía eléctrica, etc.). Sin embargo, hay que tomar precauciones en el caso de las interferencias electromagnéticas que pueden afectar a los extremos del medio. b) Radiofrecuencias La introducción de las radiofrecuencias como soporte de transmisión en la vivienda ha venido precedida por la proliferación de los teléfonos inalámbricos y controles remotos. Este medio de transmisión puede parecer, en principio, idóneo para el control a distancia de los sistemas domóticos, dada la gran flexibilidad que supone su uso. Sin embargo, resulta particularmente sensible a las perturbaciones electromagnéticas producidas, tanto por los medios de transmisión, como por los equipos domésticos. Las ventajas e inconvenientes de los sistemas basados en transmisión por radiofrecuencias son: - Alta sensibilidad a las interferencias. - Fácil interceptación de las comunicaciones. - Dificultad para la integración de las funciones de control y comunicación, en su modalidad de transmisión analógica.
Automatización de un hogar mediante el protocolo X-10 El protocolo X10
15
Protocolo de comunicaciones
Una vez establecido el soporte físico y la velocidad de comunicaciones, un sistema domótico se caracteriza por el protocolo de comunicaciones que utiliza, que no es otra cosa que el idioma o formato de los mensajes que los diferentes elementos de control del sistema deben utilizar para entenderse unos con otros y que puedan intercambiar su información de una manera coherente. Dentro de los protocolos existentes, se puede realizar una primera clasificación atendiendo a su estandarización: * Protocolos estándar. Los protocolos estándar son los utilizados ampliamente por diferentes empresas y éstas fabrican productos que son compatibles entre sí, como son el X10, el EHS, el EIB y el BatiBus * Protocolos propietarios. Son aquellos que, desarrollados por una empresa, solo son capaces de comunicarse entre sí Preinstalación domótica
La preinstalación domótica es la posibilidad de dejar preparada una vivienda para que se le pueda instalar el sistema domótico en el momento en que el usuario lo demande. Para que un sistema pueda ofrecer una verdadera preinstalación domótica en una vivienda, ha de ser compatible con la instalación eléctrica actual, de tal manera que el usuario pueda elegir la preinstalación domótica y la instalación eléctrica convencional y con posterioridad, realizar cualquier tipo de automatización de su vivienda.9
9 José Manuel Huidobro, Edificios Inteligentes y Domótica, leída el 10/sep/2005, <http://www.monografias.com/trabajos14/domotica/domotica.shtml>

Automatización de un hogar mediante el protocolo X-10 El protocolo X10
2.2 El Protocolo X-10 2.2.1 La teoría de transmisión del protocolo X-10
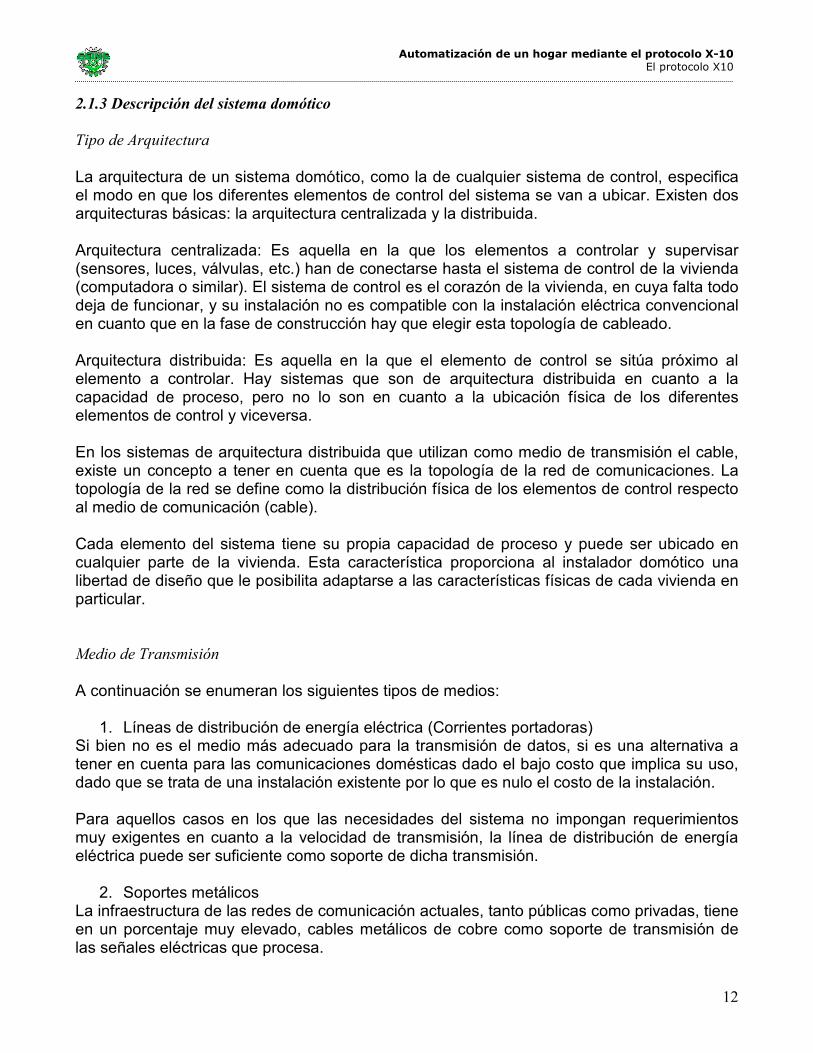
El protocolo X-10 se comunica entre transmisores y receptores mediante el envío y recepción de señales sobre el cableado de alimentación eléctrica de un hogar. Estas transmisiones están sincronizadas al punto de cruce por cero de la línea de corriente alterna. El objetivo es transmitir lo más cerca posible del punto de cruce por cero en un intervalo de 300 microsegundos. Se decidió sincronizar el envío de información cuando ocurre el cruce por cero porque en ese instante el ruido en la línea es menor y es más fácil amplificar la señal. En X-10 se usan trenes de pulsos de 120kHz sincronizados con el cruce por cero de la línea. Estos trenes de pulsos tienen una duración de 1ms. Cuando se quiere transmitir un '1' binario, se transmite el tren de 120kHz con una duración de 1ms; cuando se transmite un '0' binario, simplemente no se transmite nada. Cada medio ciclo de onda de la señal de corriente alterna es capaz de transportar un bit de información.
Nota 1: Estos trenes de pulsos de 120kHz están sincronizados para coincidir con el cruce porcero de otras fases, cuando éstas son implementadas.
Figura 2.1. Tiempos de sincronización de X10
Un mensaje completo de X-10 está compuesto por un código de inicio (1110), seguido por un código de casa y un código llave, dependiendo si el mensaje es una dirección o un comando.
Automatización de un hogar mediante el protocolo X-10 El protocolo X10
17
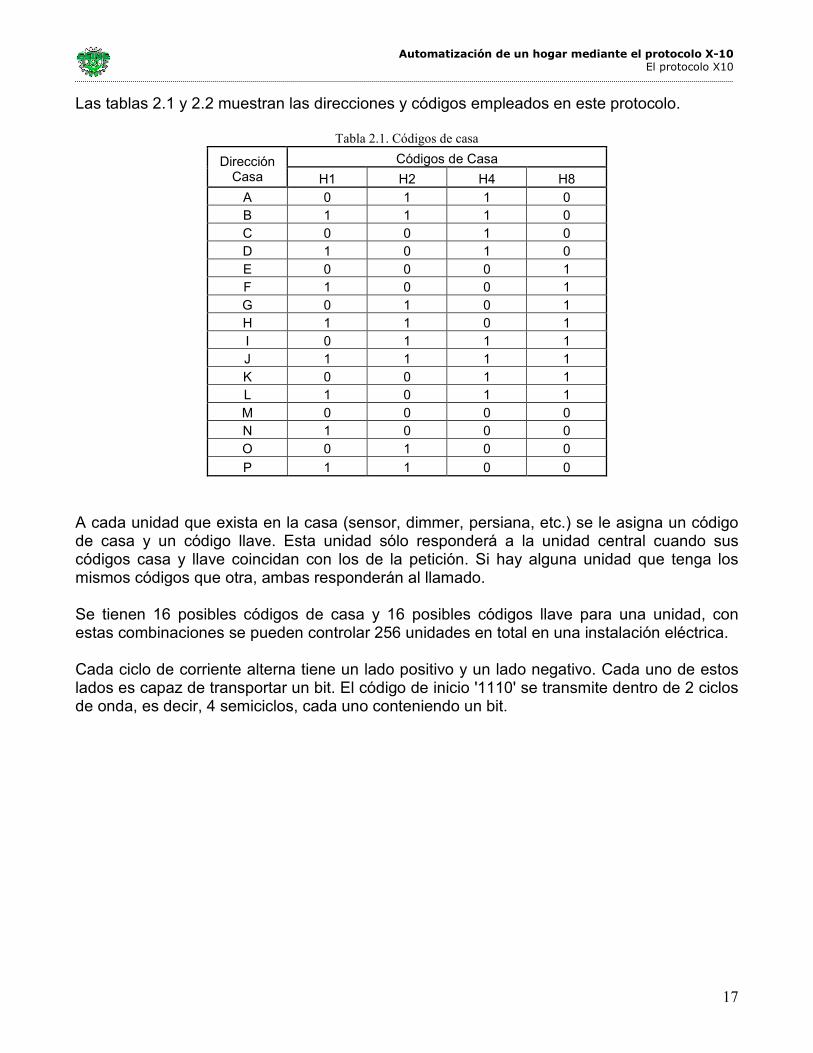
Las tablas 2.1 y 2.2 muestran las direcciones y códigos empleados en este protocolo.
Tabla 2.1. Códigos de casa
Códigos de Casa Dirección Casa H1 H2 H4 H8
A 0 1 1 0 B 1 1 1 0 C 0 0 1 0 D 1 0 1 0 E 0 0 0 1 F 1 0 0 1 G 0 1 0 1 H 1 1 0 1 I 0 1 1 1 J 1 1 1 1 K 0 0 1 1 L 1 0 1 1 M 0 0 0 0 N 1 0 0 0 O 0 1 0 0
P 1 1 0 0
A cada unidad que exista en la casa (sensor, dimmer, persiana, etc.) se le asigna un código de casa y un código llave. Esta unidad sólo responderá a la unidad central cuando sus códigos casa y llave coincidan con los de la petición. Si hay alguna unidad que tenga los mismos códigos que otra, ambas responderán al llamado. Se tienen 16 posibles códigos de casa y 16 posibles códigos llave para una unidad, con estas combinaciones se pueden controlar 256 unidades en total en una instalación eléctrica. Cada ciclo de corriente alterna tiene un lado positivo y un lado negativo. Cada uno de estos lados es capaz de transportar un bit. El código de inicio '1110' se transmite dentro de 2 ciclos de onda, es decir, 4 semiciclos, cada uno conteniendo un bit.
Automatización de un hogar mediante el protocolo X-10 El protocolo X10
18
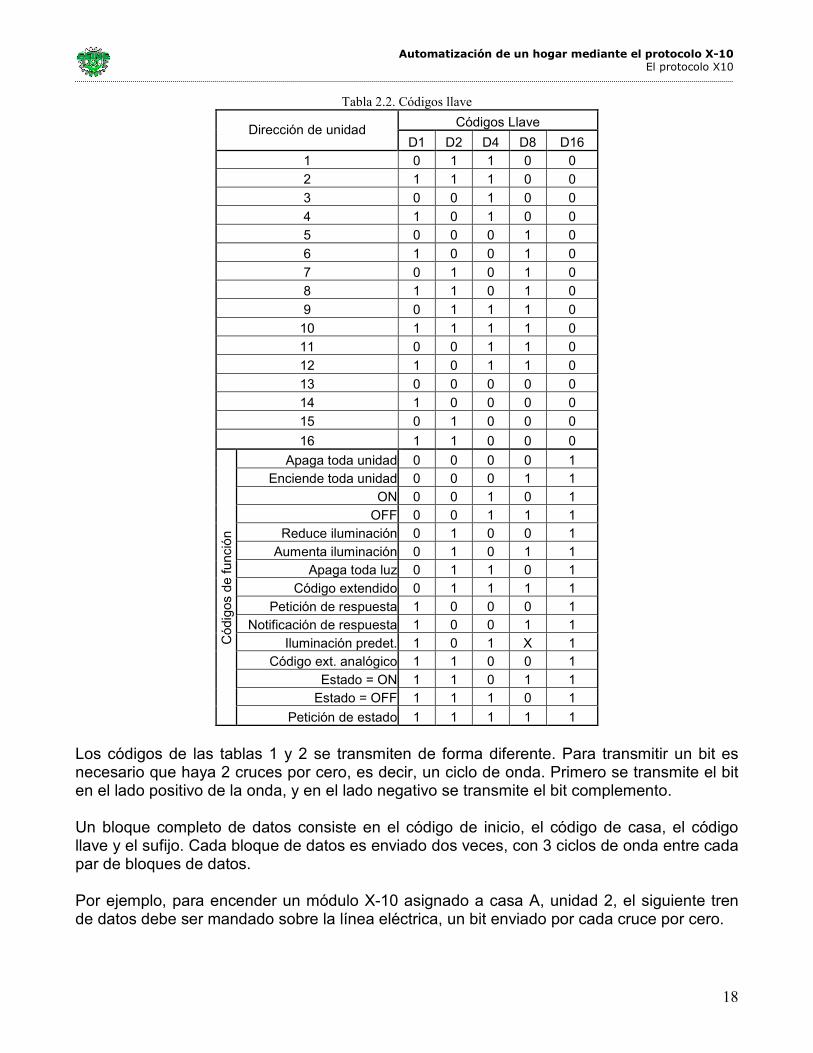
Tabla 2.2. Códigos llave
Códigos Llave Dirección de unidad
D1 D2 D4 D8 D16
1 0 1 1 0 0
2 1 1 1 0 0
3 0 0 1 0 0
4 1 0 1 0 0
5 0 0 0 1 0
6 1 0 0 1 0
7 0 1 0 1 0
8 1 1 0 1 0
9 0 1 1 1 0
10 1 1 1 1 0
11 0 0 1 1 0
12 1 0 1 1 0
13 0 0 0 0 0
14 1 0 0 0 0
15 0 1 0 0 0
16 1 1 0 0 0
Apaga toda unidad 0 0 0 0 1 Enciende toda unidad 0 0 0 1 1
ON 0 0 1 0 1
OFF 0 0 1 1 1 Reduce iluminación 0 1 0 0 1
Aumenta iluminación 0 1 0 1 1 Apaga toda luz 0 1 1 0 1
Código extendido 0 1 1 1 1
Petición de respuesta 1 0 0 0 1 Notificación de respuesta 1 0 0 1 1
Iluminación predet. 1 0 1 X 1 Código ext. analógico 1 1 0 0 1
Estado = ON 1 1 0 1 1 Estado = OFF 1 1 1 0 1
Códigos de función
Petición de estado 1 1 1 1 1
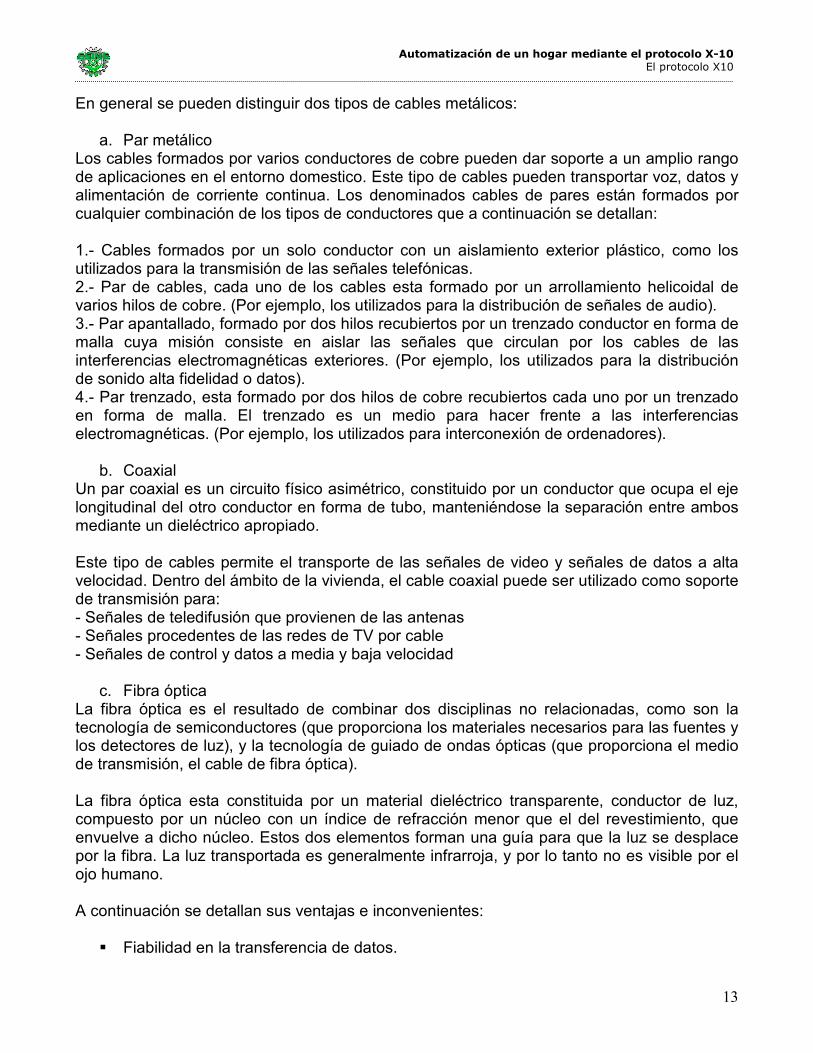
Los códigos de las tablas 1 y 2 se transmiten de forma diferente. Para transmitir un bit es necesario que haya 2 cruces por cero, es decir, un ciclo de onda. Primero se transmite el bit en el lado positivo de la onda, y en el lado negativo se transmite el bit complemento. Un bloque completo de datos consiste en el código de inicio, el código de casa, el código llave y el sufijo. Cada bloque de datos es enviado dos veces, con 3 ciclos de onda entre cada par de bloques de datos. Por ejemplo, para encender un módulo X-10 asignado a casa A, unidad 2, el siguiente tren de datos debe ser mandado sobre la línea eléctrica, un bit enviado por cada cruce por cero.
Automatización de un hogar mediante el protocolo X-10 El protocolo X10
19
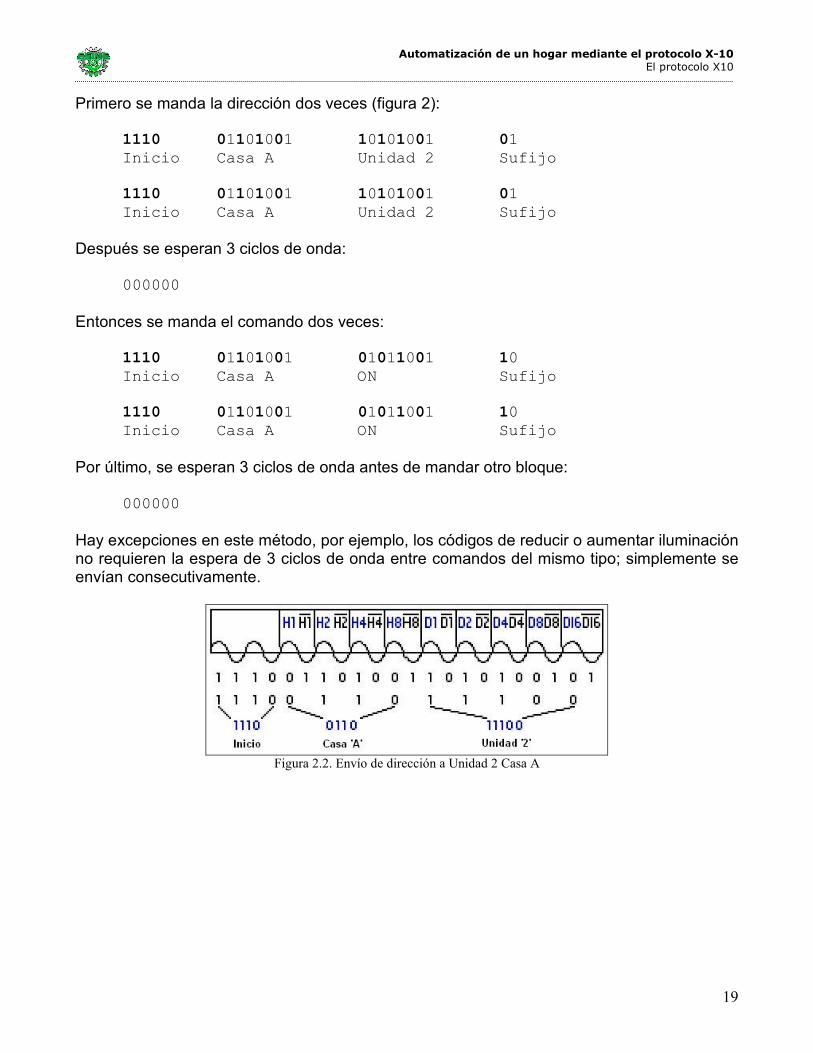
Primero se manda la dirección dos veces (figura 2): 1110 01101001 10101001 01 Inicio Casa A Unidad 2 Sufijo 1110 01101001 10101001 01 Inicio Casa A Unidad 2 Sufijo Después se esperan 3 ciclos de onda:
000000 Entonces se manda el comando dos veces: 1110 01101001 01011001 10 Inicio Casa A ON Sufijo 1110 01101001 01011001 10 Inicio Casa A ON Sufijo Por último, se esperan 3 ciclos de onda antes de mandar otro bloque:
000000 Hay excepciones en este método, por ejemplo, los códigos de reducir o aumentar iluminación no requieren la espera de 3 ciclos de onda entre comandos del mismo tipo; simplemente se envían consecutivamente.
Figura 2.2. Envío de dirección a Unidad 2 Casa A
CAPÍTULO 3 ANÁLISIS Y CÁLCULOS
Automatización de un hogar mediante el protocolo X-10 Los microcontroladores PIC
21
3.1 Los microcontroladores PIC Los PIC16F son una familia de microcontroladores de la gama media, que se identifica por tener como memoria de programa una de tipo FLASH y una serie de recursos que a continuación se explicarán. Entre ellos se encuentran los siguientes:
• Procesador de arquitectura RISC avanzada • Juego de 35 instrucciones a nivel ensamblador • Frecuencia máxima de trabajo de 20MHz • Memoria tipo FLASH • Voltaje de alimentación comprendido entre 2 y 5.5V
Algunos de sus dispositivos periféricos son los siguientes.
• Temporizadores para control de tiempo y otros periféricos • Módulo de Captura-Comparación-PWM • Convertidor Analógico Digital
3.1.1 La arquitectura RISC Harvard
Esta arquitectura implementada por Microchip en sus microcontroladores se caracteriza por la independencia entre la memoria de código y la de datos. Así, tanto como la capacidad como el tamaño de los buses de cada memoria se adaptan estrictamente a las necesidades del diseño, facilitando el trabajo en paralelo de las dos memorias, lo que permite tener un buen rendimiento. La filosofía RISC10 se caracteriza por el reducido número de instrucciones que forman su repertorio. Los PIC cuentan con sólo 35 instrucciones, que se ejecutan en un ciclo de instrucción, equivalente a cuatro periodos de reloj, a excepción de instrucciones de salto. 3.1.2 Frecuencias de trabajo
Los PIC pueden ser operados en cuatro diferentes modos de oscilación.
• LP. Cristal de baja potencia (hasta 4MHz) • XT. Cristal (hasta 4MHz) • HS. Cristal de alta velocidad (de 4MHz hasta 20MHz) • RC. Resistencia-Capacitor
En este caso, se eligió la opción de cristal de alta velocidad para correr al PIC a 20MHz. Esta velocidad es requerida para poder generar una frecuencia de 120kHz como se verá posteriormente en este trabajo.
10 Del inglés, Reduced Instruction Set Computer, computadora con juego de instrucciones reducido.
Automatización de un hogar mediante el protocolo X-10 Los microcontroladores PIC
22
3.1.3 Memoria de programa FLASH
La memoria FLASH es un tipo de memoria EEPROM que permite que varias localidades de memoria sean programadas y leídas al mismo tiempo. Es un tipo de circuito integrado que a diferencia de las memorias RAM, retiene la información sin necesidad de estar siendo alimentado con energía. En esta memoria se carga el programa que el PIC ha de ejecutar. Es muy conveniente tener este tipo de memoria ya que su programación y lectura requiere de tiempos cortos y tiene la facilidad de ser reprogramable eléctricamente. 3.1.4 Los temporizadores
Los PIC disponen de un potente conjunto de temporizadores para manejar eficientemente todas las operaciones que involucran al tiempo. Dichos temporizadores se denominan TMR. Son capaces de funcionar como temporizadores, contadores síncronos, contadores asíncronos, etc. 3.1.5 Módulo de Captura-Comparación-PWM
Los PIC disponen de módulos CCP que pueden realizar tres funciones principales:
1. Modo captura. Una pareja de registros de un módulo CCP captura el valor que tiene el TMR1 cuando ocurre un evento especial en la terminal CCP correspondiente.
2. Modo comparación. Se compara el valor de 16 bits del TMR1 con otro valor cargado en una pareja de registros de un módulo CCP y cuando coinciden se produce un evento en la terminal CCP.
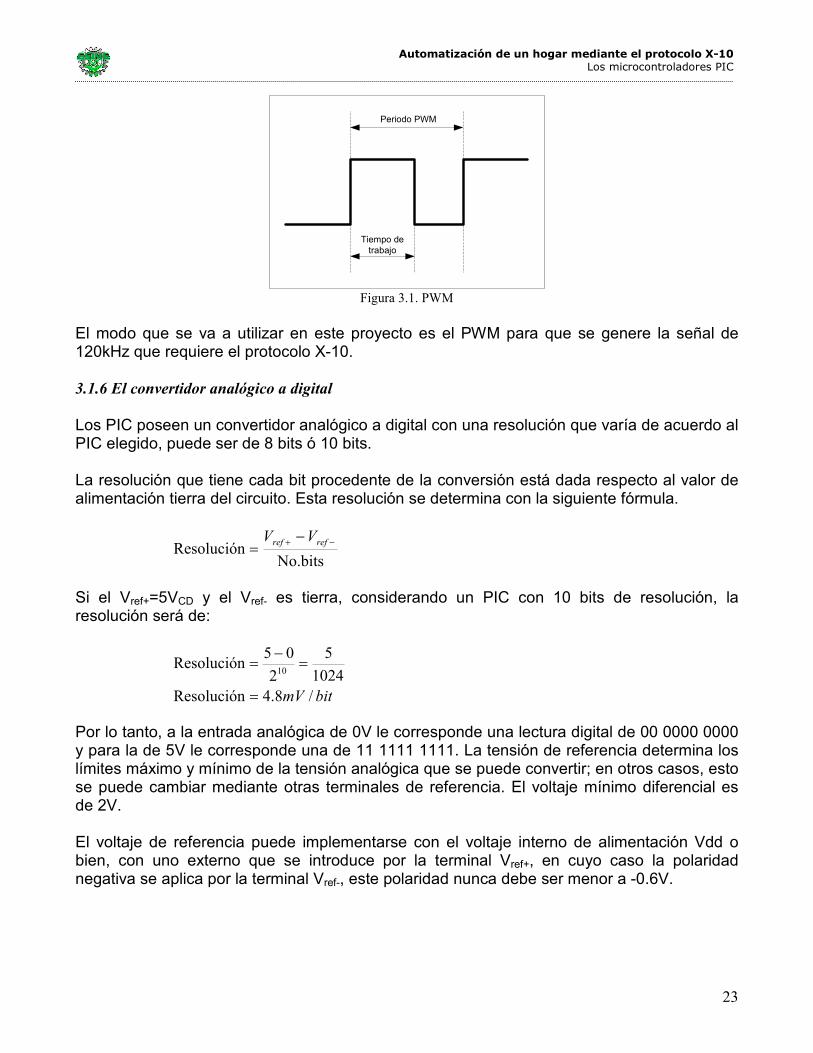
3. Modo de anchura de pulsos (PWM11). Dentro del intervalo del periodo de un impulso controla la anchura en que la señal vale nivel alto.
En el modo PWM, la terminal CCP del PIC está configurada como salida y oscila entre los niveles lógicos 0 y 1 a intervalos variables de tiempo. Lo que se intenta es obtener un impulso cuyo nivel alto tenga una anchura variable (tiempo de trabajo) dentro del intervalo del periodo de trabajo. Para lograr la oscilación de la terminal CCP del PIC se integró un comparador que pone a uno lógico un flip-flop cuando el valor del registro PR2 coincide con la parte alta del TMR2, momento en que el TMR2 toma el valor 00 hexadecimal. Luego el flip-flop se pone a cero cuando otro comparador detecta la coincidencia del valor existente en CCPR1H con el de la parte alta del TMR2. De esta manera, variando los valores que se cargan en PR2 y en CCPR1L se varía el intervalo de tiempo en el que la terminal de salida está en alto o bajo.
11 Del inglés, Pulse Width Modulation (PWM).
Automatización de un hogar mediante el protocolo X-10 Los microcontroladores PIC
23
Periodo PWM
Tiempo detrabajo
Figura 3.1. PWM
El modo que se va a utilizar en este proyecto es el PWM para que se genere la señal de 120kHz que requiere el protocolo X-10. 3.1.6 El convertidor analógico a digital
Los PIC poseen un convertidor analógico a digital con una resolución que varía de acuerdo al PIC elegido, puede ser de 8 bits ó 10 bits. La resolución que tiene cada bit procedente de la conversión está dada respecto al valor de alimentación tierra del circuito. Esta resolución se determina con la siguiente fórmula.
No.bitsResolución −+ −= refref VV
Si el Vref+=5VCD y el Vref- es tierra, considerando un PIC con 10 bits de resolución, la resolución será de:
bitmV /8.4Resolución1024
5
2
05Resolución
10
=
=−
=
Por lo tanto, a la entrada analógica de 0V le corresponde una lectura digital de 00 0000 0000 y para la de 5V le corresponde una de 11 1111 1111. La tensión de referencia determina los límites máximo y mínimo de la tensión analógica que se puede convertir; en otros casos, esto se puede cambiar mediante otras terminales de referencia. El voltaje mínimo diferencial es de 2V. El voltaje de referencia puede implementarse con el voltaje interno de alimentación Vdd o bien, con uno externo que se introduce por la terminal Vref+, en cuyo caso la polaridad negativa se aplica por la terminal Vref-, este polaridad nunca debe ser menor a -0.6V.
Automatización de un hogar mediante el protocolo X-10 La automatización con PICs
24
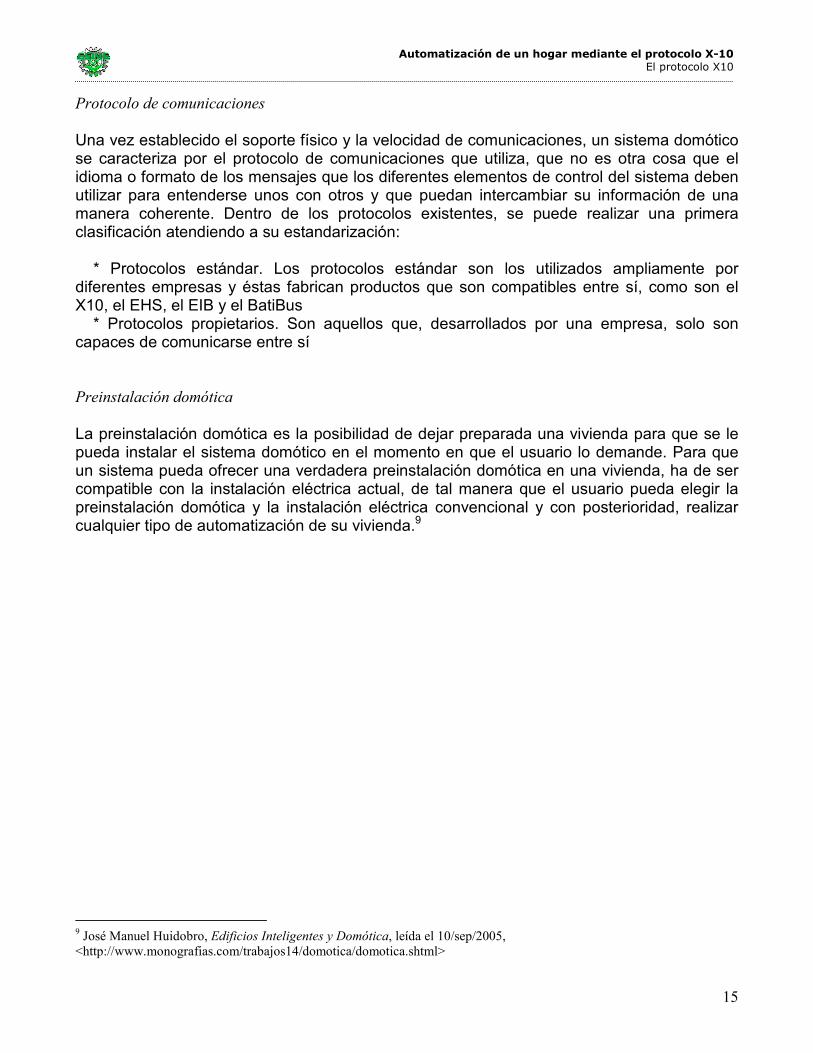
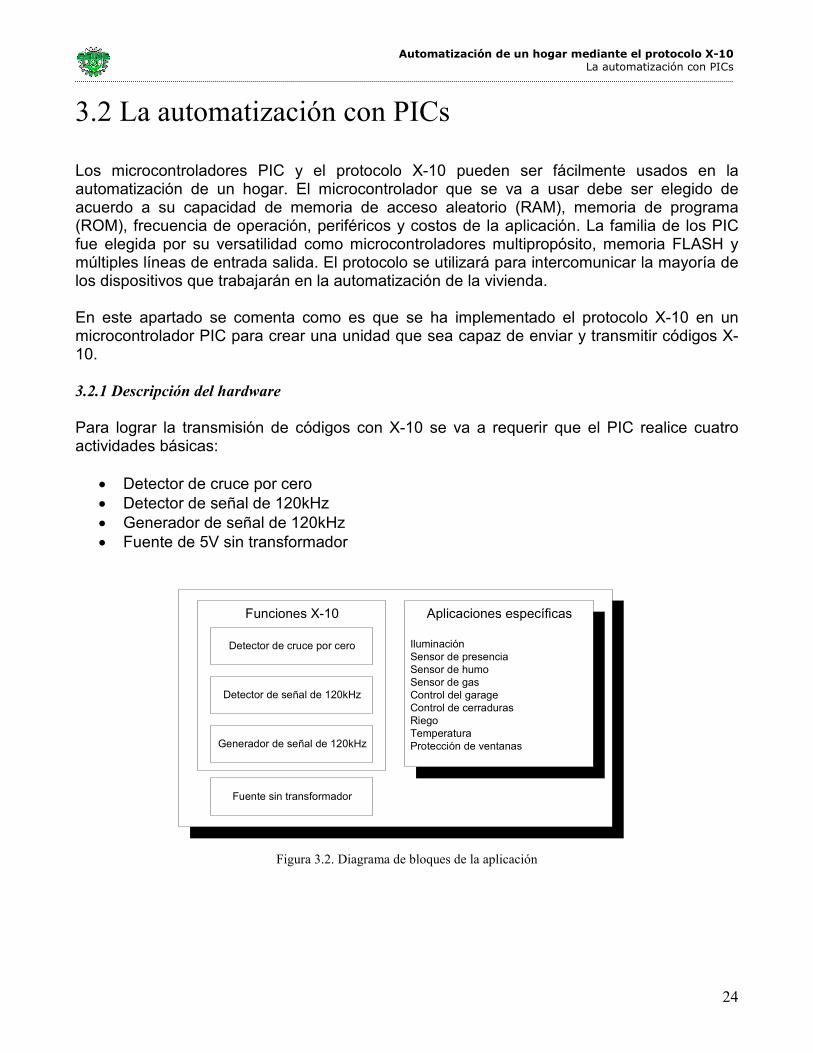
3.2 La automatización con PICs Los microcontroladores PIC y el protocolo X-10 pueden ser fácilmente usados en la automatización de un hogar. El microcontrolador que se va a usar debe ser elegido de acuerdo a su capacidad de memoria de acceso aleatorio (RAM), memoria de programa (ROM), frecuencia de operación, periféricos y costos de la aplicación. La familia de los PIC fue elegida por su versatilidad como microcontroladores multipropósito, memoria FLASH y múltiples líneas de entrada salida. El protocolo se utilizará para intercomunicar la mayoría de los dispositivos que trabajarán en la automatización de la vivienda. En este apartado se comenta como es que se ha implementado el protocolo X-10 en un microcontrolador PIC para crear una unidad que sea capaz de enviar y transmitir códigos X-10. 3.2.1 Descripción del hardware
Para lograr la transmisión de códigos con X-10 se va a requerir que el PIC realice cuatro actividades básicas:
• Detector de cruce por cero • Detector de señal de 120kHz • Generador de señal de 120kHz • Fuente de 5V sin transformador
Funciones X-10
Detector de cruce por cero
Detector de señal de 120kHz
Generador de señal de 120kHz
Fuente sin transformador
Aplicaciones específicas
IluminaciónSensor de presenciaSensor de humoSensor de gasControl del garageControl de cerradurasRiegoTemperaturaProtección de ventanas
Figura 3.2. Diagrama de bloques de la aplicación
Automatización de un hogar mediante el protocolo X-10 La automatización con PICs
25
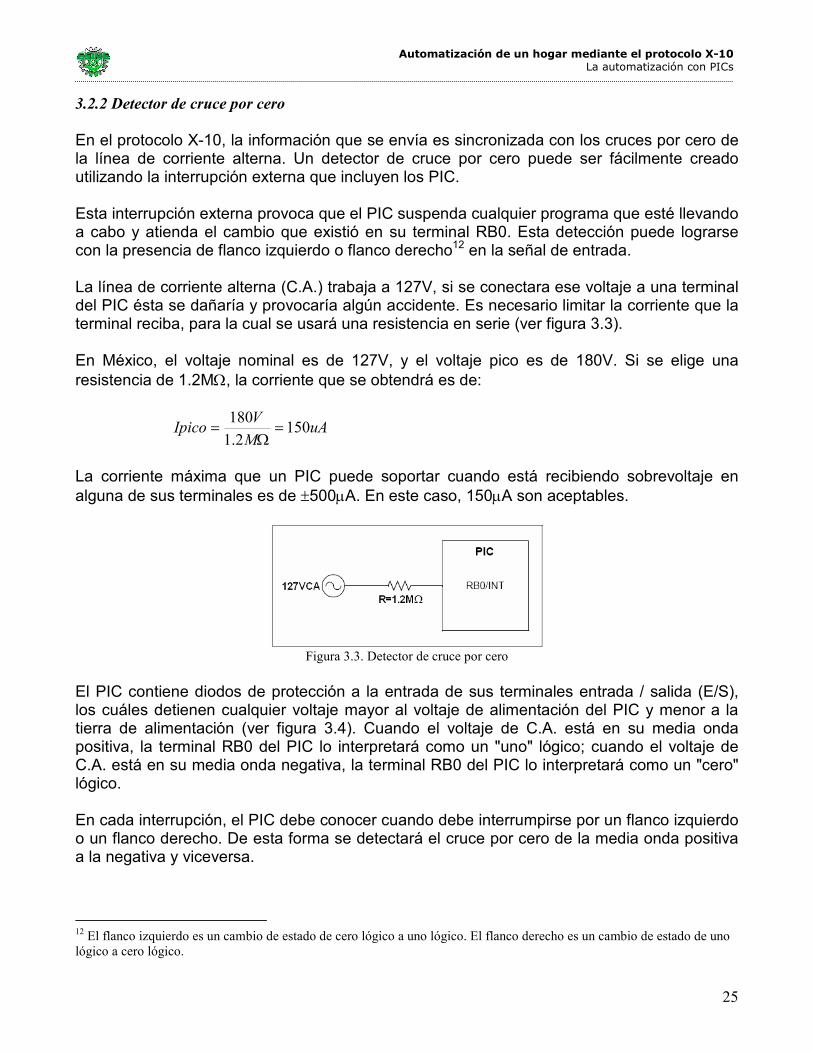
3.2.2 Detector de cruce por cero
En el protocolo X-10, la información que se envía es sincronizada con los cruces por cero de la línea de corriente alterna. Un detector de cruce por cero puede ser fácilmente creado utilizando la interrupción externa que incluyen los PIC. Esta interrupción externa provoca que el PIC suspenda cualquier programa que esté llevando a cabo y atienda el cambio que existió en su terminal RB0. Esta detección puede lograrse con la presencia de flanco izquierdo o flanco derecho12 en la señal de entrada. La línea de corriente alterna (C.A.) trabaja a 127V, si se conectara ese voltaje a una terminal del PIC ésta se dañaría y provocaría algún accidente. Es necesario limitar la corriente que la terminal reciba, para la cual se usará una resistencia en serie (ver figura 3.3). En México, el voltaje nominal es de 127V, y el voltaje pico es de 180V. Si se elige una resistencia de 1.2MΩ, la corriente que se obtendrá es de:
uAM
VIpico 150
2.1
180=
Ω=
La corriente máxima que un PIC puede soportar cuando está recibiendo sobrevoltaje en alguna de sus terminales es de ±500µA. En este caso, 150µA son aceptables.
Figura 3.3. Detector de cruce por cero
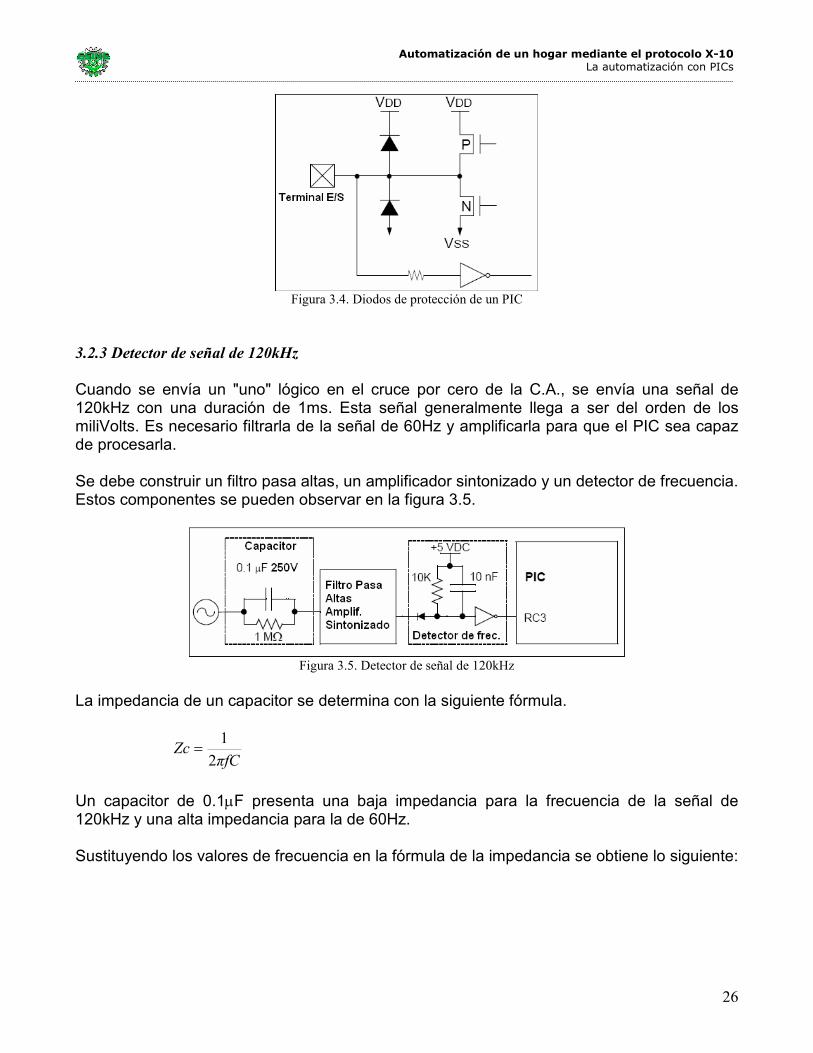
El PIC contiene diodos de protección a la entrada de sus terminales entrada / salida (E/S), los cuáles detienen cualquier voltaje mayor al voltaje de alimentación del PIC y menor a la tierra de alimentación (ver figura 3.4). Cuando el voltaje de C.A. está en su media onda positiva, la terminal RB0 del PIC lo interpretará como un "uno" lógico; cuando el voltaje de C.A. está en su media onda negativa, la terminal RB0 del PIC lo interpretará como un "cero" lógico. En cada interrupción, el PIC debe conocer cuando debe interrumpirse por un flanco izquierdo o un flanco derecho. De esta forma se detectará el cruce por cero de la media onda positiva a la negativa y viceversa.
12 El flanco izquierdo es un cambio de estado de cero lógico a uno lógico. El flanco derecho es un cambio de estado de uno lógico a cero lógico.
Automatización de un hogar mediante el protocolo X-10 La automatización con PICs
26
Figura 3.4. Diodos de protección de un PIC
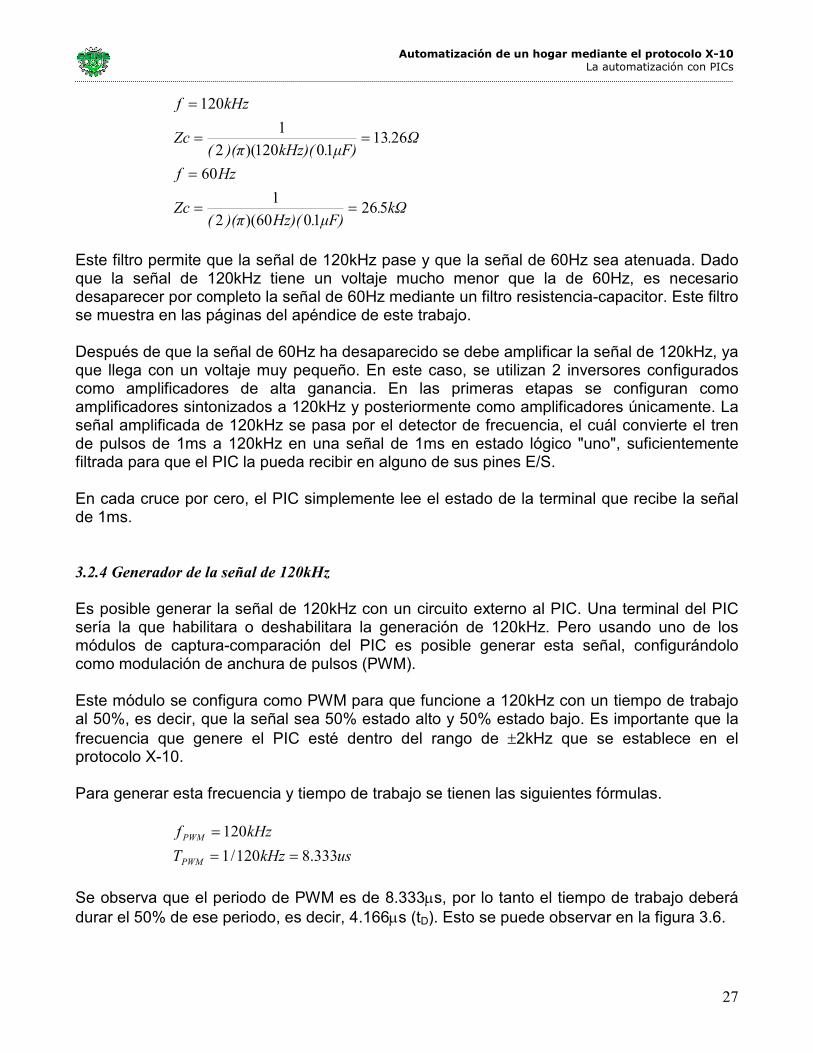
3.2.3 Detector de señal de 120kHz
Cuando se envía un "uno" lógico en el cruce por cero de la C.A., se envía una señal de 120kHz con una duración de 1ms. Esta señal generalmente llega a ser del orden de los miliVolts. Es necesario filtrarla de la señal de 60Hz y amplificarla para que el PIC sea capaz de procesarla. Se debe construir un filtro pasa altas, un amplificador sintonizado y un detector de frecuencia. Estos componentes se pueden observar en la figura 3.5.
Figura 3.5. Detector de señal de 120kHz
La impedancia de un capacitor se determina con la siguiente fórmula.
πfCZc
2
1=
Un capacitor de 0.1µF presenta una baja impedancia para la frecuencia de la señal de 120kHz y una alta impedancia para la de 60Hz. Sustituyendo los valores de frecuencia en la fórmula de la impedancia se obtiene lo siguiente:
Automatización de un hogar mediante el protocolo X-10 La automatización con PICs
27
kΩ.µF).Hz)()(π(
Zc
Hzf
Ω.µF).kHz)()(π(
Zc
kHzf
5261060)(2
1
60
261310120)(2
1
120
==
=
==
=
Este filtro permite que la señal de 120kHz pase y que la señal de 60Hz sea atenuada. Dado que la señal de 120kHz tiene un voltaje mucho menor que la de 60Hz, es necesario desaparecer por completo la señal de 60Hz mediante un filtro resistencia-capacitor. Este filtro se muestra en las páginas del apéndice de este trabajo. Después de que la señal de 60Hz ha desaparecido se debe amplificar la señal de 120kHz, ya que llega con un voltaje muy pequeño. En este caso, se utilizan 2 inversores configurados como amplificadores de alta ganancia. En las primeras etapas se configuran como amplificadores sintonizados a 120kHz y posteriormente como amplificadores únicamente. La señal amplificada de 120kHz se pasa por el detector de frecuencia, el cuál convierte el tren de pulsos de 1ms a 120kHz en una señal de 1ms en estado lógico "uno", suficientemente filtrada para que el PIC la pueda recibir en alguno de sus pines E/S. En cada cruce por cero, el PIC simplemente lee el estado de la terminal que recibe la señal de 1ms. 3.2.4 Generador de la señal de 120kHz
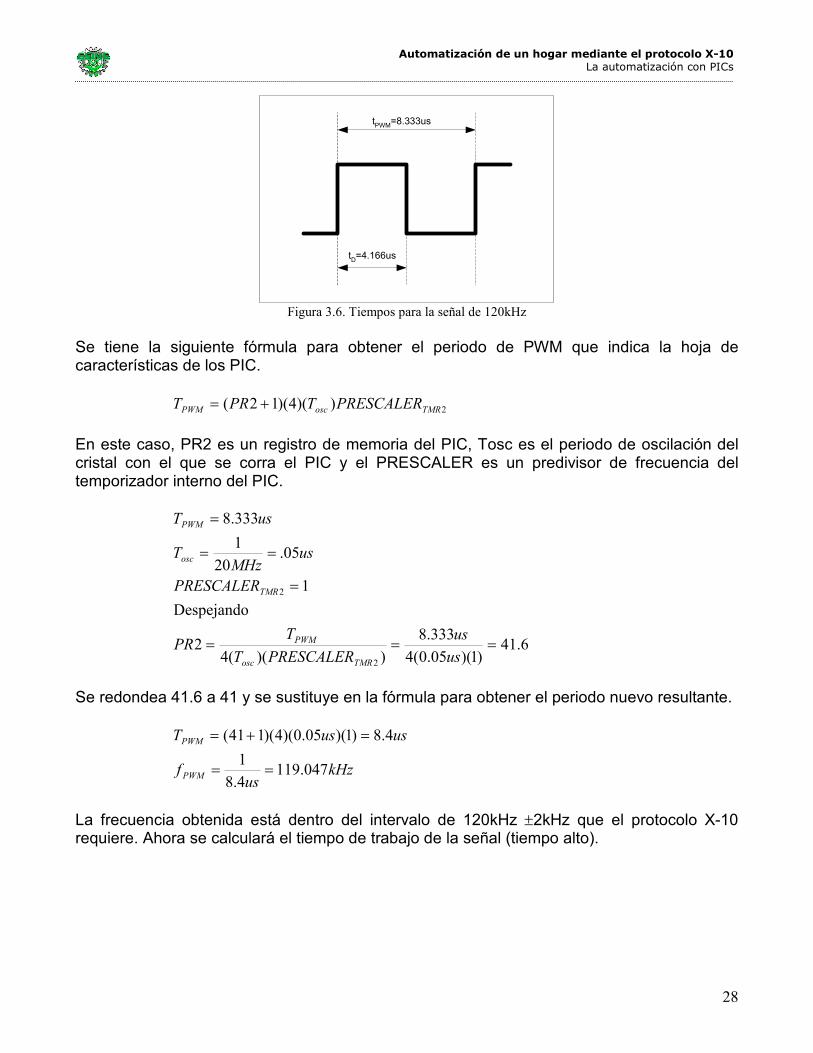
Es posible generar la señal de 120kHz con un circuito externo al PIC. Una terminal del PIC sería la que habilitara o deshabilitara la generación de 120kHz. Pero usando uno de los módulos de captura-comparación del PIC es posible generar esta señal, configurándolo como modulación de anchura de pulsos (PWM). Este módulo se configura como PWM para que funcione a 120kHz con un tiempo de trabajo al 50%, es decir, que la señal sea 50% estado alto y 50% estado bajo. Es importante que la frecuencia que genere el PIC esté dentro del rango de ±2kHz que se establece en el protocolo X-10. Para generar esta frecuencia y tiempo de trabajo se tienen las siguientes fórmulas.
uskHzT
kHzf
PWM
PWM
333.8120/1
120
==
=
Se observa que el periodo de PWM es de 8.333µs, por lo tanto el tiempo de trabajo deberá durar el 50% de ese periodo, es decir, 4.166µs (tD). Esto se puede observar en la figura 3.6.
Automatización de un hogar mediante el protocolo X-10 La automatización con PICs
28
tPWM=8.333us
tD=4.166us
Figura 3.6. Tiempos para la señal de 120kHz
Se tiene la siguiente fórmula para obtener el periodo de PWM que indica la hoja de características de los PIC.
2))(4)(12( TMRoscPWM PRESCALERTPRT += En este caso, PR2 es un registro de memoria del PIC, Tosc es el periodo de oscilación del cristal con el que se corra el PIC y el PRESCALER es un predivisor de frecuencia del temporizador interno del PIC.
41.6)1)(05.0(4
333.8
))((42
Despejando
1
05.20
1
333.8
2
2
===
=
==
=
us
us
PRESCALERT
TPR
PRESCALER
usMHz
T
usT
TMRosc
PWM
TMR
osc
PWM
Se redondea 41.6 a 41 y se sustituye en la fórmula para obtener el periodo nuevo resultante.
kHzus
f
ususT
PWM
PWM
047.1194.8
1
4.8)1)(05.0)(4)(141(
==
=+=
La frecuencia obtenida está dentro del intervalo de 120kHz ±2kHz que el protocolo X-10 requiere. Ahora se calculará el tiempo de trabajo de la señal (tiempo alto).
Automatización de un hogar mediante el protocolo X-10 La automatización con PICs
29
32.83)1)(05.0(
166.4
)(
166.4
))()((
2
2
==
=
=
=
us
usCCPR
PRESCALERT
tCCPR
Despejando
ust
PRESCALERTCCPRt
TMRosc
D
D
TMRoscD
Se redondea el 83.32 obtenido a 83 por ser un número a ser expresado en binario y se sustituye en la fórmula.
usustD 15.4)1)(05.0)(83( == Este último dato es muy aproximado a los 4.166µs requeridos para el 50% del tiempo PWM. Por último se deberá verificar que el PIC sea capaz de generar tal tiempo de trabajo mediante la fórmula de la resolución.
bitskHz
MHz
PSf
f
TMRPWM
osc
39.72log
)1)(120(
20log
Resolución
2log
))((log
Resolución 2
=
=
=
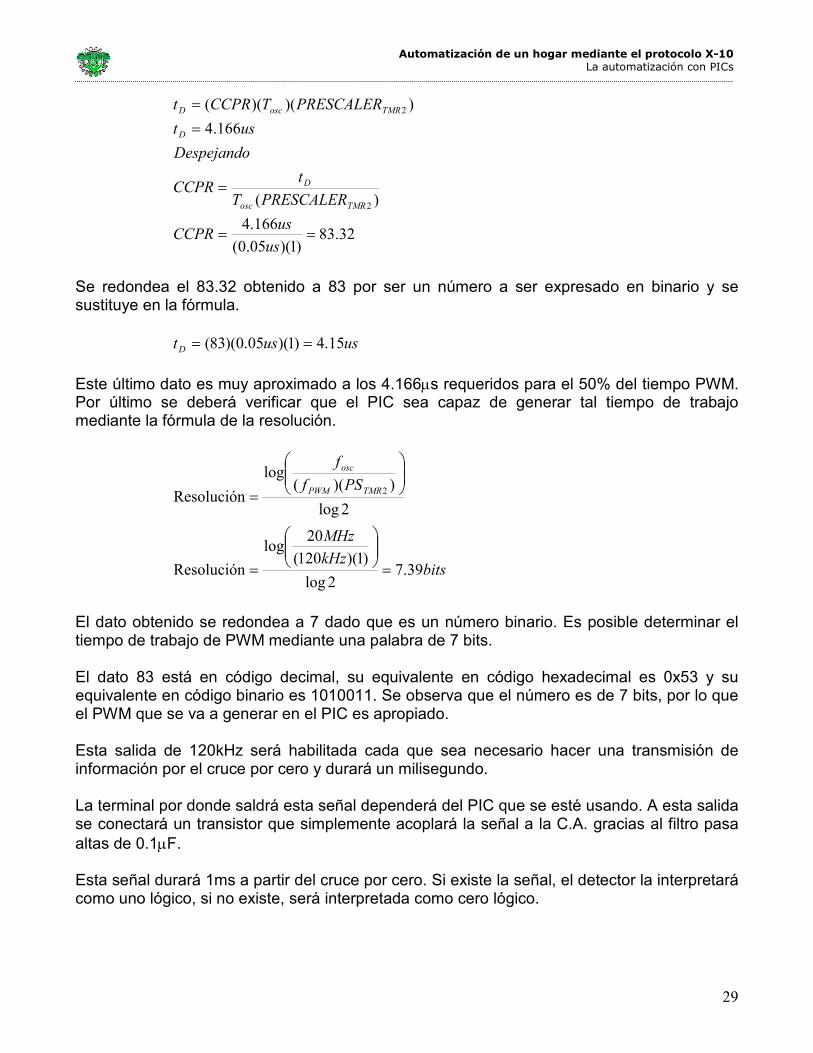
El dato obtenido se redondea a 7 dado que es un número binario. Es posible determinar el tiempo de trabajo de PWM mediante una palabra de 7 bits. El dato 83 está en código decimal, su equivalente en código hexadecimal es 0x53 y su equivalente en código binario es 1010011. Se observa que el número es de 7 bits, por lo que el PWM que se va a generar en el PIC es apropiado. Esta salida de 120kHz será habilitada cada que sea necesario hacer una transmisión de información por el cruce por cero y durará un milisegundo. La terminal por donde saldrá esta señal dependerá del PIC que se esté usando. A esta salida se conectará un transistor que simplemente acoplará la señal a la C.A. gracias al filtro pasa altas de 0.1µF. Esta señal durará 1ms a partir del cruce por cero. Si existe la señal, el detector la interpretará como uno lógico, si no existe, será interpretada como cero lógico.
Automatización de un hogar mediante el protocolo X-10 La automatización con PICs
30
Figura 3.7. Generador de señal de 120kHz
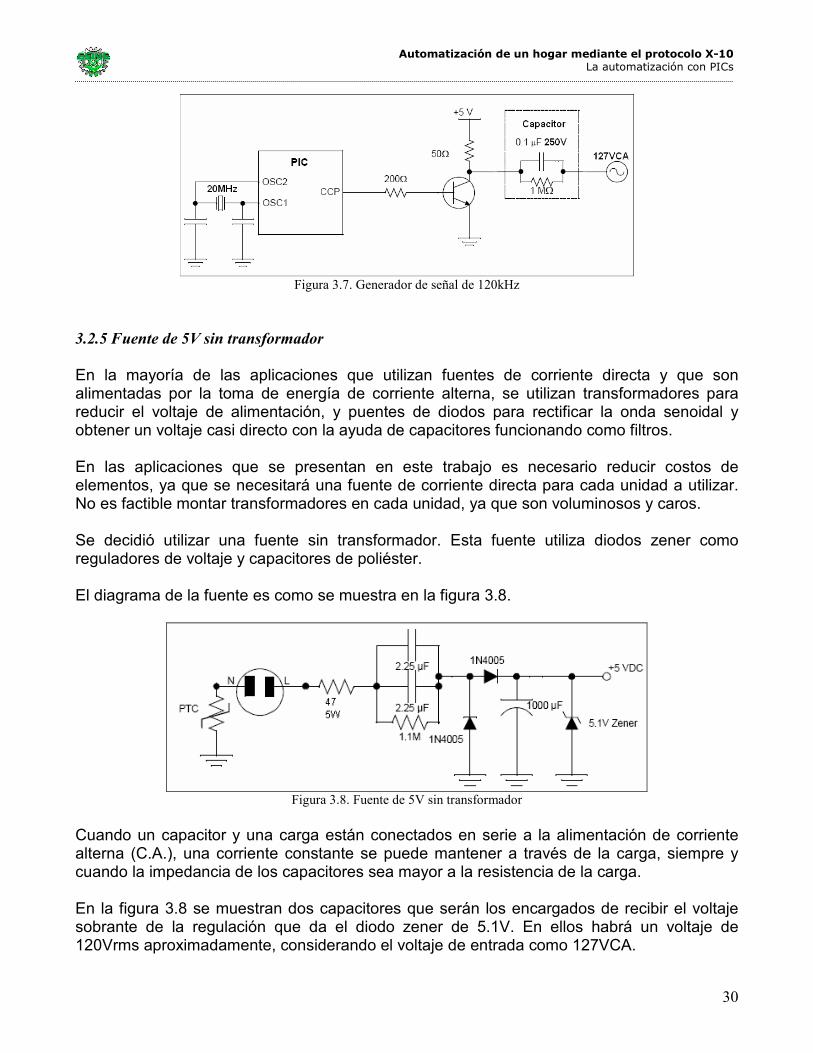
3.2.5 Fuente de 5V sin transformador
En la mayoría de las aplicaciones que utilizan fuentes de corriente directa y que son alimentadas por la toma de energía de corriente alterna, se utilizan transformadores para reducir el voltaje de alimentación, y puentes de diodos para rectificar la onda senoidal y obtener un voltaje casi directo con la ayuda de capacitores funcionando como filtros. En las aplicaciones que se presentan en este trabajo es necesario reducir costos de elementos, ya que se necesitará una fuente de corriente directa para cada unidad a utilizar. No es factible montar transformadores en cada unidad, ya que son voluminosos y caros. Se decidió utilizar una fuente sin transformador. Esta fuente utiliza diodos zener como reguladores de voltaje y capacitores de poliéster. El diagrama de la fuente es como se muestra en la figura 3.8.
Figura 3.8. Fuente de 5V sin transformador
Cuando un capacitor y una carga están conectados en serie a la alimentación de corriente alterna (C.A.), una corriente constante se puede mantener a través de la carga, siempre y cuando la impedancia de los capacitores sea mayor a la resistencia de la carga. En la figura 3.8 se muestran dos capacitores que serán los encargados de recibir el voltaje sobrante de la regulación que da el diodo zener de 5.1V. En ellos habrá un voltaje de 120Vrms aproximadamente, considerando el voltaje de entrada como 127VCA.
Automatización de un hogar mediante el protocolo X-10 La automatización con PICs
31
Estos capacitores deberán seleccionarse a 250V ya que trabajarán directamente con la línea de C.A. Es importante que sean de poliéster para su buen funcionamiento. La corriente de entrada que hay en la fuente se puede determinar obteniendo el voltaje RMS de una media onda senoidal.
VVVVVVV
V DZPICOHFRMS 9.86
2
7.01.5)127(2
2=
−−=
−−=
Posteriormente se obtiene la impedancia de los capacitores y la resistencia total.
( )Ω.
uF).uF.Hz)((ππfCXC 85602
2222602
1
2
1=
+==
La corriente de entrada es:
mAV
RX
VIent
C
HFRMS 7.1334785.602
9.86=
Ω+Ω=
+=
De esta forma se puede alimentar una carga de 100mA aproximadamente, lo cual es apropiado para los circuitos elaborados en este trabajo. La fuente también cuenta con un termistor conectado a Neutro, el cual funciona como fusible ante cortos. El termistor es una resistencia que varía su valor dependiendo de la corriente que pase a través de ella. Si se produce un corto circuito, la resistencia limitará la corriente para evitar accidentes.
Automatización de un hogar mediante el protocolo X-10 Sensores a emplear
32
3.3 Sensores a emplear En el presente trabajo se realizará la automatización de un hogar mediante varios sensores y actuadores conectados a lo largo de toda la línea C.A. El microcontrolador maestro y la computadora a la que se conecte, estarán a cargo de indagar el estado de los sensores instalados en el hogar. De esta forma se conocerá el estado de una habitación y se tomarán acciones para modificarlo. Estos sensores reportarán su estado al PIC mediante señales digitales (salidas tipo TTL) o mediante voltajes analógicos, los cuales podrán ser convertidos a información digital por el PIC al que estén conectadas esas señales y posteriormente el PIC las enviará mediante el bus X10. Los sensores que se emplearán en la automatización serán los siguientes:
• Sensor de iluminación • Sensor de humo • Sensor de presencia • Sensor de temperatura • Sensor de humedad • Sensor de gas
El PIC pedirá a la unidad a la que el sensor está conectado que envíe su estado. Habrá sensores que no muy frecuentemente reporten su estado, como el de temperatura o de humedad, ya que el cambio de estas variables es tardío. Pero sensores como el de humo o gas serán revisados frecuentemente. 3.3.1 Sensor de iluminación
El sensor de iluminación que se usará es una fotorresistencia. Las fotorresistencias o LDR13 son elementos que varían su resistencia dependiendo de la luz que reciban en su superficie, la cual está hecha con semiconductores. Si la luz recibida tiene una incidencia suficiente, los fotones recibidos por el semiconductor generan una liberación de electrones. Esta liberación de electrones facilita el flujo de corriente y hace variar el valor de la resistencia. Mediante la experimentación se ha obtenido el valor en Ohms de la fotorresistencia en dos situaciones:
• Oscuridad, valor promedio 1MΩ • Mucha iluminación, valor promedio 4kΩ
13 Del inglés, Light Dependent Resistor, resistencia que depende de la luz.
Automatización de un hogar mediante el protocolo X-10 Sensores a emplear
33
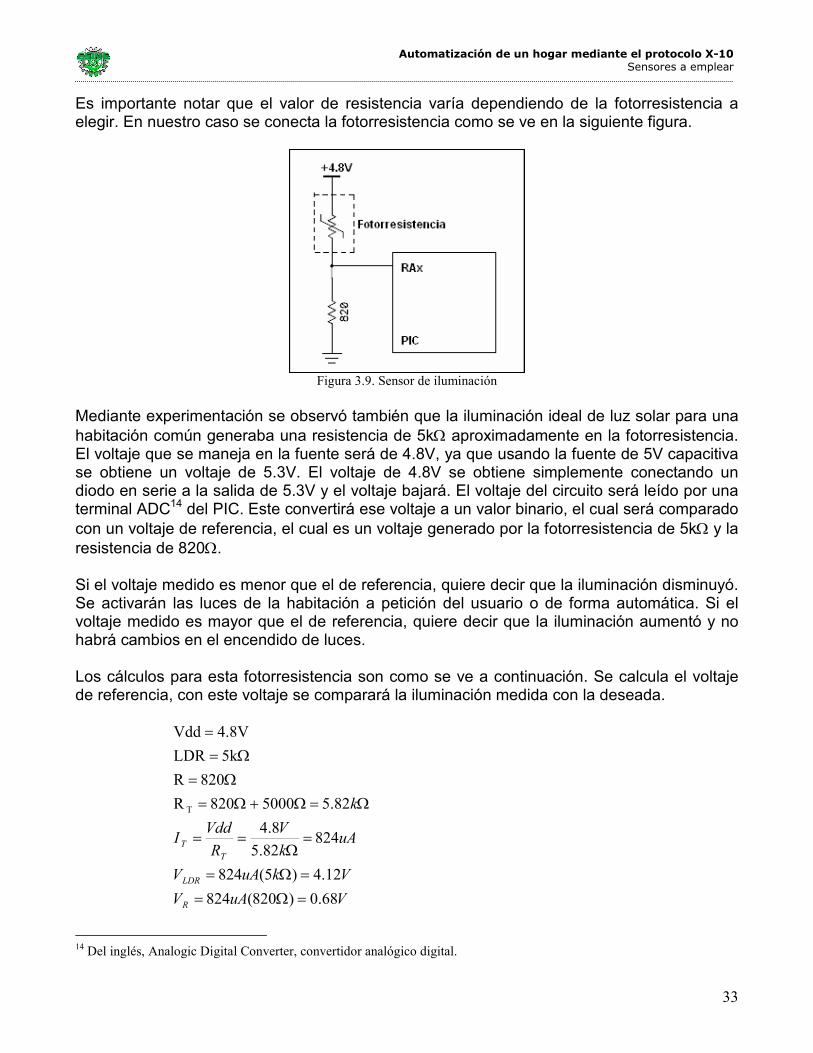
Es importante notar que el valor de resistencia varía dependiendo de la fotorresistencia a elegir. En nuestro caso se conecta la fotorresistencia como se ve en la siguiente figura.
Figura 3.9. Sensor de iluminación
Mediante experimentación se observó también que la iluminación ideal de luz solar para una habitación común generaba una resistencia de 5kΩ aproximadamente en la fotorresistencia. El voltaje que se maneja en la fuente será de 4.8V, ya que usando la fuente de 5V capacitiva se obtiene un voltaje de 5.3V. El voltaje de 4.8V se obtiene simplemente conectando un diodo en serie a la salida de 5.3V y el voltaje bajará. El voltaje del circuito será leído por una terminal ADC14 del PIC. Este convertirá ese voltaje a un valor binario, el cual será comparado con un voltaje de referencia, el cual es un voltaje generado por la fotorresistencia de 5kΩ y la resistencia de 820Ω. Si el voltaje medido es menor que el de referencia, quiere decir que la iluminación disminuyó. Se activarán las luces de la habitación a petición del usuario o de forma automática. Si el voltaje medido es mayor que el de referencia, quiere decir que la iluminación aumentó y no habrá cambios en el encendido de luces. Los cálculos para esta fotorresistencia son como se ve a continuación. Se calcula el voltaje de referencia, con este voltaje se comparará la iluminación medida con la deseada.
VuAV
VkuAV
uAk
V
R
VddI
k
R
LDR
T
T
68.0)820(824
12.4)5(824
82482.5
8.4
82.55000820R
820R
5kLDR
4.8VVdd
T
=Ω=
=Ω=
=Ω
==
Ω=Ω+Ω=
Ω=
Ω=
=
14 Del inglés, Analogic Digital Converter, convertidor analógico digital.
Automatización de un hogar mediante el protocolo X-10 Sensores a emplear
34
Se observa que el voltaje que la terminal del PIC recibirá es el de la resistencia de 820Ω, por lo tanto el voltaje de referencia será de 0.68V. 3.3.2 Sensor de humo
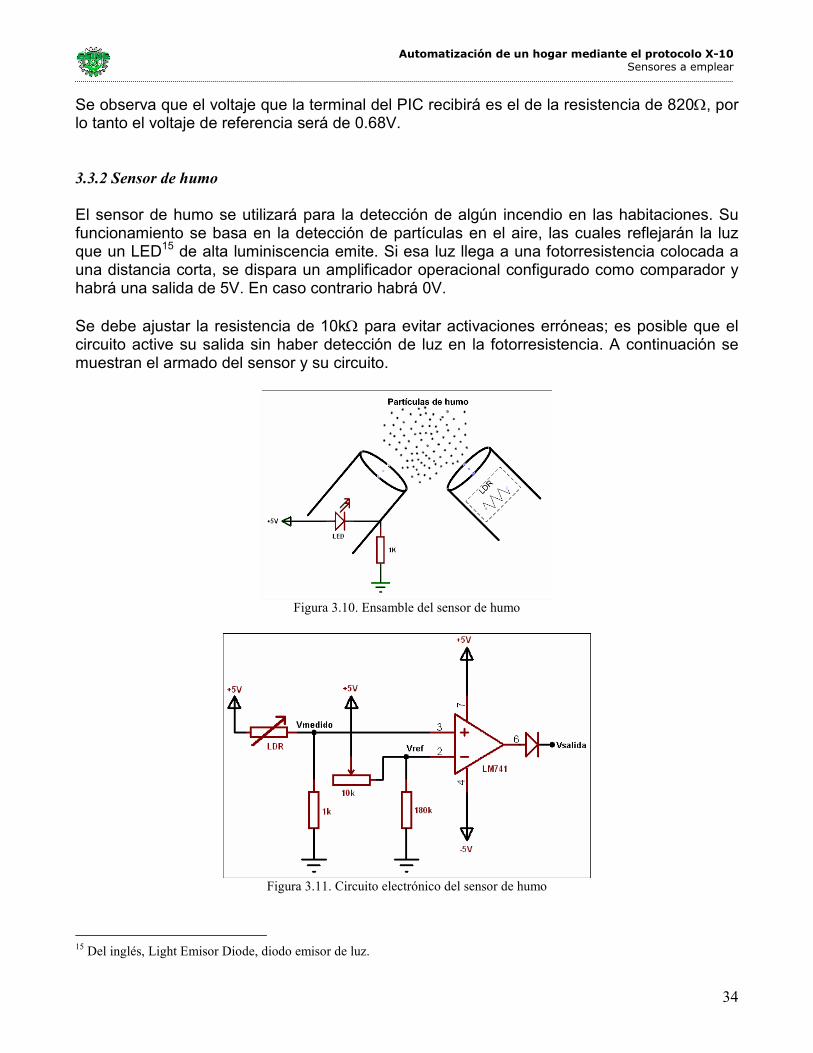
El sensor de humo se utilizará para la detección de algún incendio en las habitaciones. Su funcionamiento se basa en la detección de partículas en el aire, las cuales reflejarán la luz que un LED15 de alta luminiscencia emite. Si esa luz llega a una fotorresistencia colocada a una distancia corta, se dispara un amplificador operacional configurado como comparador y habrá una salida de 5V. En caso contrario habrá 0V. Se debe ajustar la resistencia de 10kΩ para evitar activaciones erróneas; es posible que el circuito active su salida sin haber detección de luz en la fotorresistencia. A continuación se muestran el armado del sensor y su circuito.
Figura 3.10. Ensamble del sensor de humo
Figura 3.11. Circuito electrónico del sensor de humo
15 Del inglés, Light Emisor Diode, diodo emisor de luz.
Automatización de un hogar mediante el protocolo X-10 Sensores a emplear
35
3.3.3 Sensor de presencia
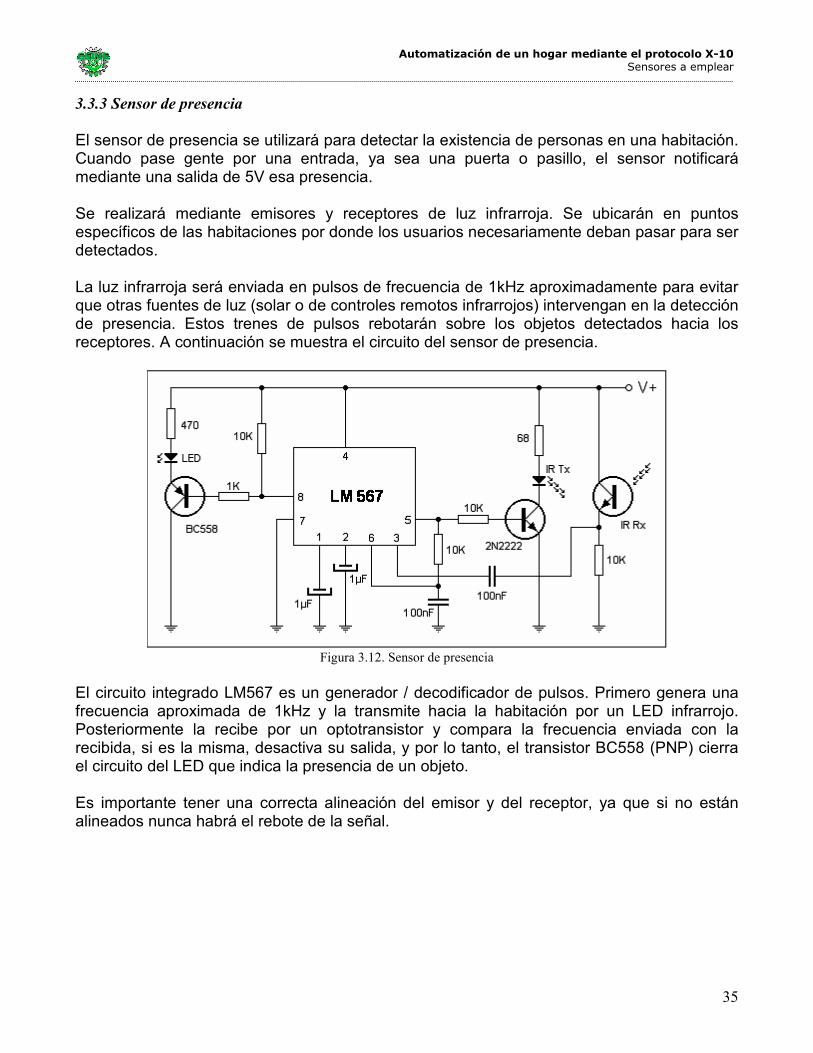
El sensor de presencia se utilizará para detectar la existencia de personas en una habitación. Cuando pase gente por una entrada, ya sea una puerta o pasillo, el sensor notificará mediante una salida de 5V esa presencia. Se realizará mediante emisores y receptores de luz infrarroja. Se ubicarán en puntos específicos de las habitaciones por donde los usuarios necesariamente deban pasar para ser detectados. La luz infrarroja será enviada en pulsos de frecuencia de 1kHz aproximadamente para evitar que otras fuentes de luz (solar o de controles remotos infrarrojos) intervengan en la detección de presencia. Estos trenes de pulsos rebotarán sobre los objetos detectados hacia los receptores. A continuación se muestra el circuito del sensor de presencia.
Figura 3.12. Sensor de presencia
El circuito integrado LM567 es un generador / decodificador de pulsos. Primero genera una frecuencia aproximada de 1kHz y la transmite hacia la habitación por un LED infrarrojo. Posteriormente la recibe por un optotransistor y compara la frecuencia enviada con la recibida, si es la misma, desactiva su salida, y por lo tanto, el transistor BC558 (PNP) cierra el circuito del LED que indica la presencia de un objeto. Es importante tener una correcta alineación del emisor y del receptor, ya que si no están alineados nunca habrá el rebote de la señal.
Automatización de un hogar mediante el protocolo X-10 Sensores a emplear
36
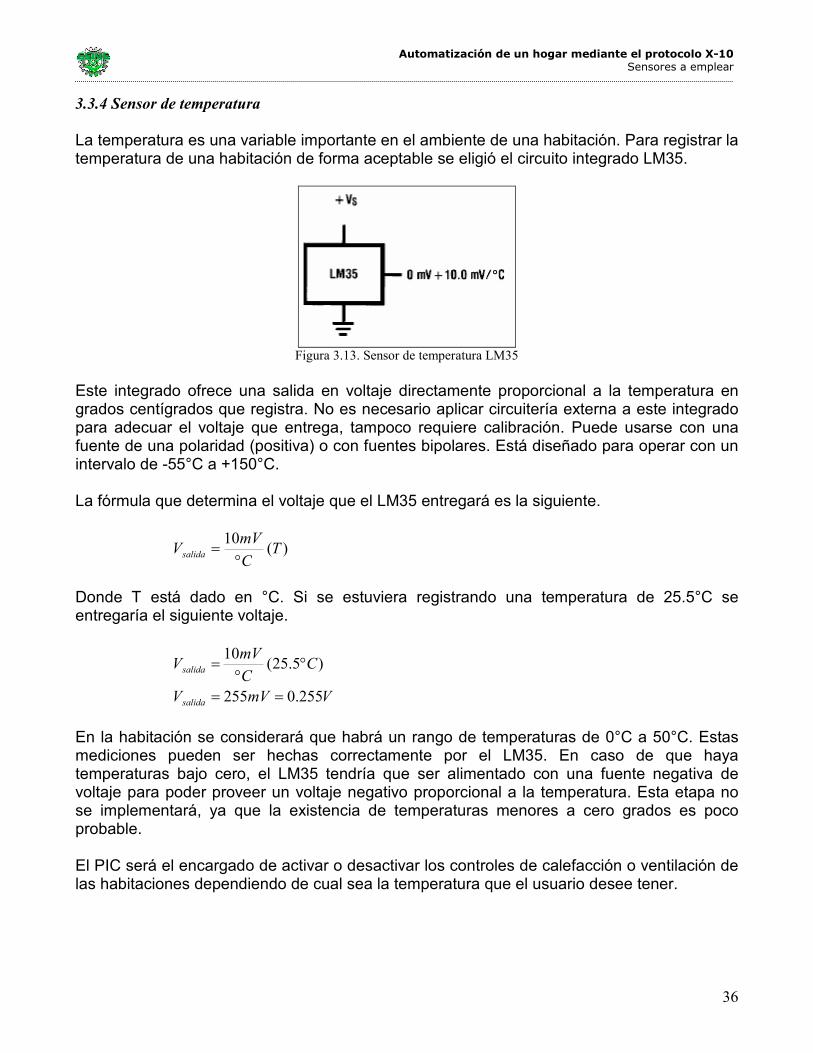
3.3.4 Sensor de temperatura
La temperatura es una variable importante en el ambiente de una habitación. Para registrar la temperatura de una habitación de forma aceptable se eligió el circuito integrado LM35.
Figura 3.13. Sensor de temperatura LM35
Este integrado ofrece una salida en voltaje directamente proporcional a la temperatura en grados centígrados que registra. No es necesario aplicar circuitería externa a este integrado para adecuar el voltaje que entrega, tampoco requiere calibración. Puede usarse con una fuente de una polaridad (positiva) o con fuentes bipolares. Está diseñado para operar con un intervalo de -55°C a +150°C. La fórmula que determina el voltaje que el LM35 entregará es la siguiente.
)(10
TC
mVVsalida °
=
Donde T está dado en °C. Si se estuviera registrando una temperatura de 25.5°C se entregaría el siguiente voltaje.
VmVV
CC
mVV
salida
salida
255.0255
)5.25(10
==
°°
=
En la habitación se considerará que habrá un rango de temperaturas de 0°C a 50°C. Estas mediciones pueden ser hechas correctamente por el LM35. En caso de que haya temperaturas bajo cero, el LM35 tendría que ser alimentado con una fuente negativa de voltaje para poder proveer un voltaje negativo proporcional a la temperatura. Esta etapa no se implementará, ya que la existencia de temperaturas menores a cero grados es poco probable. El PIC será el encargado de activar o desactivar los controles de calefacción o ventilación de las habitaciones dependiendo de cual sea la temperatura que el usuario desee tener.
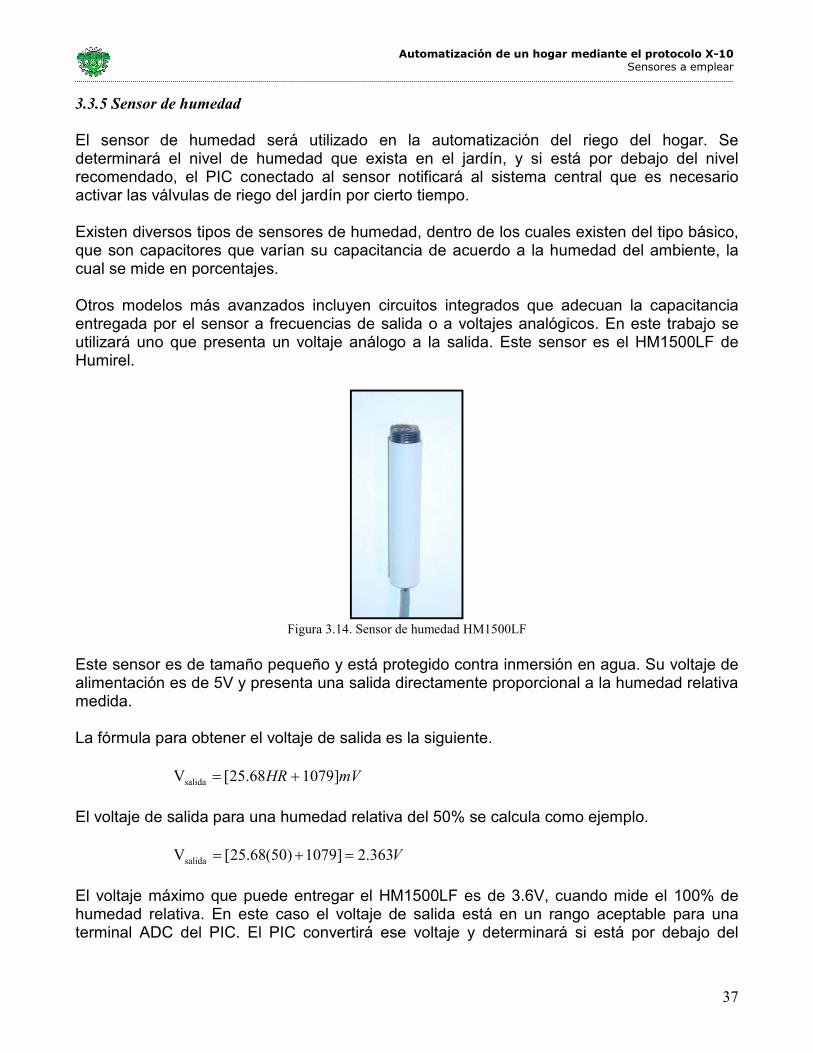
Automatización de un hogar mediante el protocolo X-10 Sensores a emplear
37
3.3.5 Sensor de humedad
El sensor de humedad será utilizado en la automatización del riego del hogar. Se determinará el nivel de humedad que exista en el jardín, y si está por debajo del nivel recomendado, el PIC conectado al sensor notificará al sistema central que es necesario activar las válvulas de riego del jardín por cierto tiempo. Existen diversos tipos de sensores de humedad, dentro de los cuales existen del tipo básico, que son capacitores que varían su capacitancia de acuerdo a la humedad del ambiente, la cual se mide en porcentajes. Otros modelos más avanzados incluyen circuitos integrados que adecuan la capacitancia entregada por el sensor a frecuencias de salida o a voltajes analógicos. En este trabajo se utilizará uno que presenta un voltaje análogo a la salida. Este sensor es el HM1500LF de Humirel.
Figura 3.14. Sensor de humedad HM1500LF
Este sensor es de tamaño pequeño y está protegido contra inmersión en agua. Su voltaje de alimentación es de 5V y presenta una salida directamente proporcional a la humedad relativa medida. La fórmula para obtener el voltaje de salida es la siguiente.
mVHR ]107968.25[Vsalida += El voltaje de salida para una humedad relativa del 50% se calcula como ejemplo.
V363.2]1079)50(68.25[Vsalida =+= El voltaje máximo que puede entregar el HM1500LF es de 3.6V, cuando mide el 100% de humedad relativa. En este caso el voltaje de salida está en un rango aceptable para una terminal ADC del PIC. El PIC convertirá ese voltaje y determinará si está por debajo del
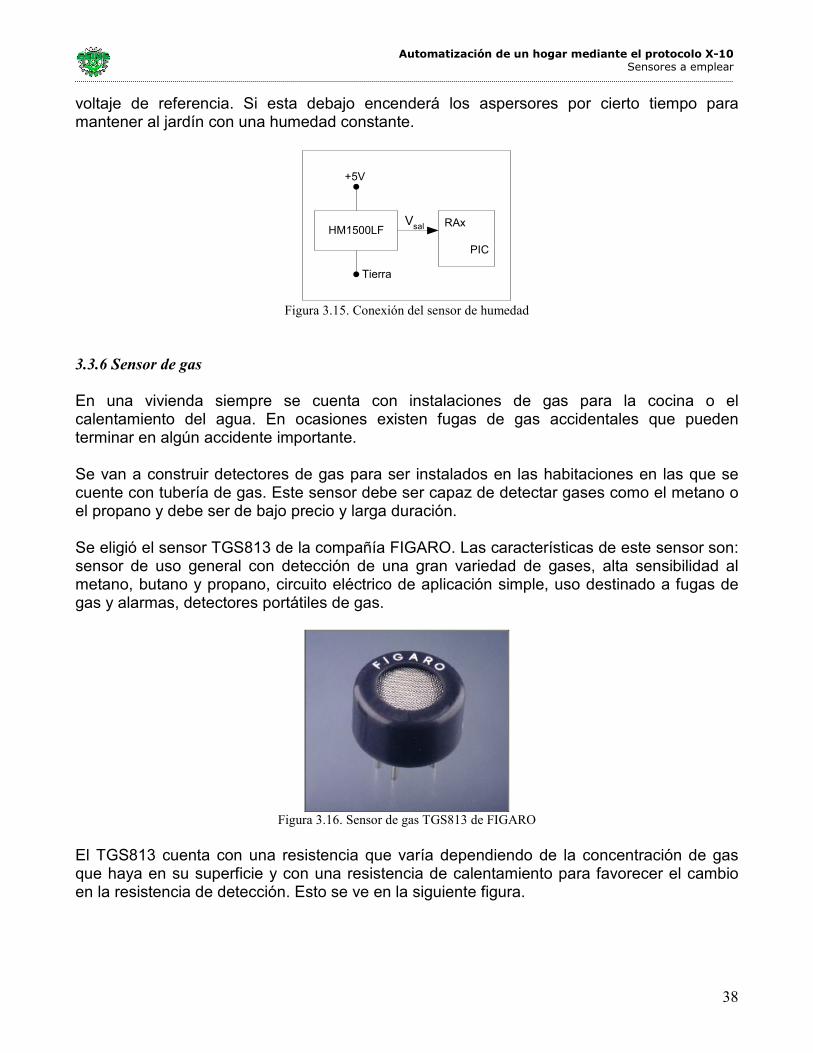
Automatización de un hogar mediante el protocolo X-10 Sensores a emplear
38
voltaje de referencia. Si esta debajo encenderá los aspersores por cierto tiempo para mantener al jardín con una humedad constante.
HM1500LFRAx
PIC
+5V
Tierra
Vsal
Figura 3.15. Conexión del sensor de humedad
3.3.6 Sensor de gas
En una vivienda siempre se cuenta con instalaciones de gas para la cocina o el calentamiento del agua. En ocasiones existen fugas de gas accidentales que pueden terminar en algún accidente importante. Se van a construir detectores de gas para ser instalados en las habitaciones en las que se cuente con tubería de gas. Este sensor debe ser capaz de detectar gases como el metano o el propano y debe ser de bajo precio y larga duración. Se eligió el sensor TGS813 de la compañía FIGARO. Las características de este sensor son: sensor de uso general con detección de una gran variedad de gases, alta sensibilidad al metano, butano y propano, circuito eléctrico de aplicación simple, uso destinado a fugas de gas y alarmas, detectores portátiles de gas.
Figura 3.16. Sensor de gas TGS813 de FIGARO
El TGS813 cuenta con una resistencia que varía dependiendo de la concentración de gas que haya en su superficie y con una resistencia de calentamiento para favorecer el cambio en la resistencia de detección. Esto se ve en la siguiente figura.
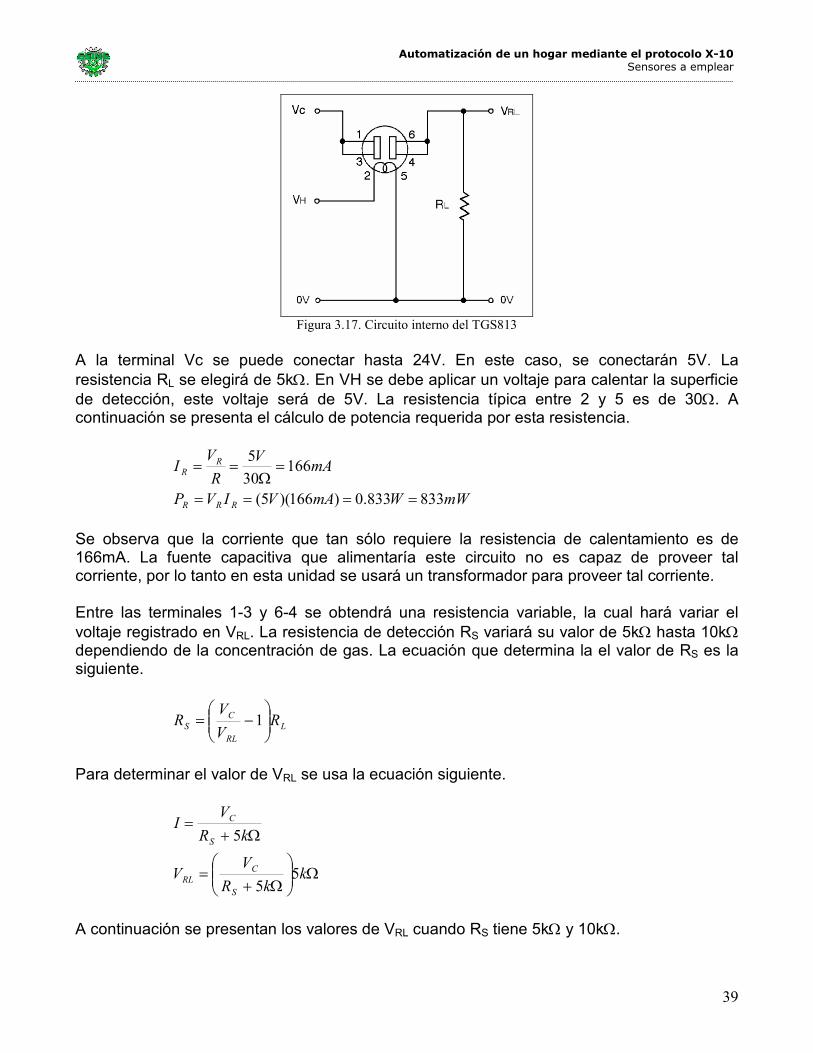
Automatización de un hogar mediante el protocolo X-10 Sensores a emplear
39
Figura 3.17. Circuito interno del TGS813
A la terminal Vc se puede conectar hasta 24V. En este caso, se conectarán 5V. La resistencia RL se elegirá de 5kΩ. En VH se debe aplicar un voltaje para calentar la superficie de detección, este voltaje será de 5V. La resistencia típica entre 2 y 5 es de 30Ω. A continuación se presenta el cálculo de potencia requerida por esta resistencia.
mWWmAVIVP
mAV
R
VI
RRR
R
R
833833.0)166)(5(
16630
5
====
=Ω
==
Se observa que la corriente que tan sólo requiere la resistencia de calentamiento es de 166mA. La fuente capacitiva que alimentaría este circuito no es capaz de proveer tal corriente, por lo tanto en esta unidad se usará un transformador para proveer tal corriente. Entre las terminales 1-3 y 6-4 se obtendrá una resistencia variable, la cual hará variar el voltaje registrado en VRL. La resistencia de detección RS variará su valor de 5kΩ hasta 10kΩ dependiendo de la concentración de gas. La ecuación que determina la el valor de RS es la siguiente.
L
RL
C
S RV
VR
−= 1
Para determinar el valor de VRL se usa la ecuación siguiente.
Ω
Ω+=
Ω+=
kkR
VV
kR
VI
S
C
RL
S
C
55
5
A continuación se presentan los valores de VRL cuando RS tiene 5kΩ y 10kΩ.
Automatización de un hogar mediante el protocolo X-10 Sensores a emplear
40
Vkkk
VV
Vkkk
VV
RL
RL
6.15510
5
k01R Para
5.2555
5
5kR Para
S
S
=Ω
Ω+Ω
=
Ω=
=Ω
Ω+Ω
=
Ω=
Al igual que en el sensor de humedad, será necesario obtener un voltaje referencia para compararlo con el voltaje VRL. Ese voltaje de referencia, el cual estará en el rango de 1.6V a 2.5V, se determinará en condiciones de no presencia de gas y se agregará a la programación del PIC.
Automatización de un hogar mediante el protocolo X-10 Dispositivos y mecanismos de control
41
3.4 Dispositivos y mecanismos de control Ya que se ha explicado el funcionamiento básico de los sensores que se colocarán a lo largo de la vivienda a automatizar, en este apartado se hablará sobre los dispositivos y mecanismos que modificarán las variables del entorno a automatizar. Los dispositivos que se tienen en consideración son los siguientes.
• Control de iluminación • Control de riego • Control de puerta de cochera • Control de persianas • Respaldo de energía vía UPS16 • Control de temperatura • Control automático de bombeo de agua • Protección de ventanas • Control de acceso por cerradura magnética
Todos ellos irán conectados a los PIC que estén encargados de capturar las variables respectivas. El respaldo de energía UPS, el control de la puerta de cochera y el bombeo de agua no tendrán conexión al PIC. 3.4.1 Control de iluminación
Comúnmente en los hogares se usan focos incandescentes para iluminar las habitaciones. El nivel de iluminación que estos focos entregan depende de la cantidad de voltaje que se les proporcione; generalmente funcionan con 127VCA. En caso de que ese voltaje disminuyera, su iluminación disminuiría igualmente. Existe otra forma de controlar el nivel de iluminación que estos proporcionan, esto es mediante el corte de alimentación del foco por determinado tiempo. La onda senoidal que alimenta a un foco es como se ve en la siguiente figura. Esta tiene una frecuencia de 60Hz y un voltaje de 127VCA.
Tiempo
Voltaje
Figura 3.18. Onda senoidal a 60Hz y 127VCA
16 Del inglés, Uninterrumped Power System, sistema de energía ininterrumpida.
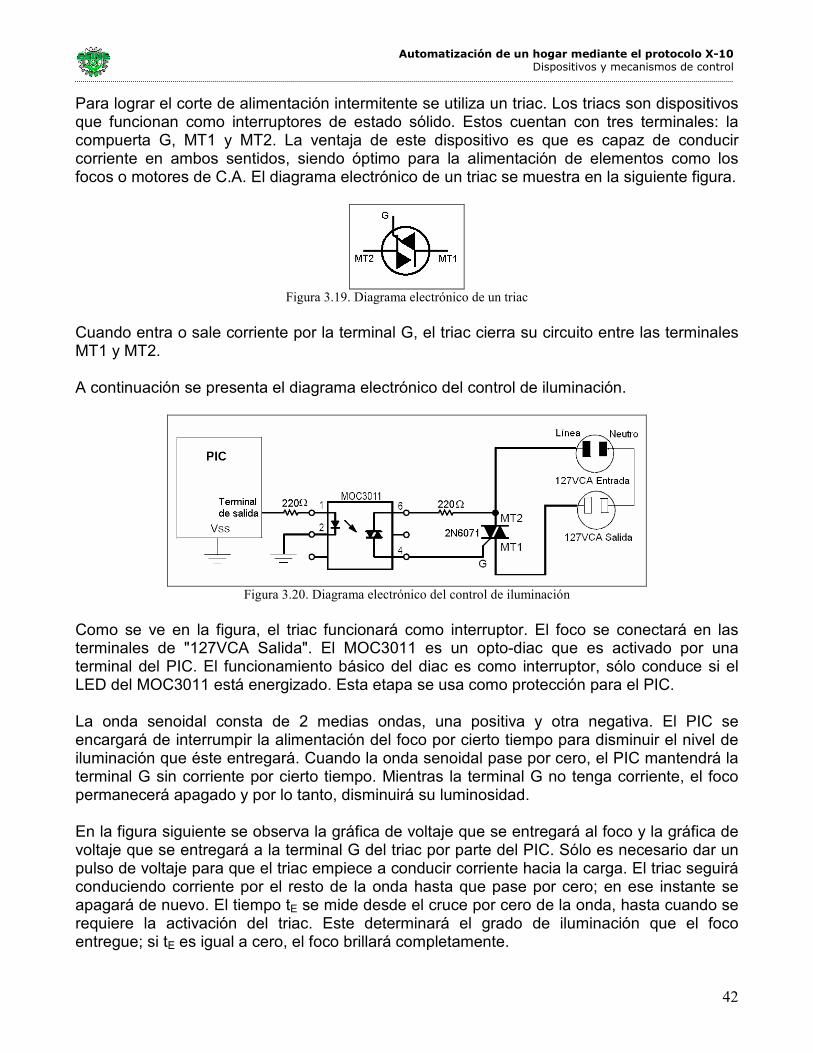
Automatización de un hogar mediante el protocolo X-10 Dispositivos y mecanismos de control
42
Para lograr el corte de alimentación intermitente se utiliza un triac. Los triacs son dispositivos que funcionan como interruptores de estado sólido. Estos cuentan con tres terminales: la compuerta G, MT1 y MT2. La ventaja de este dispositivo es que es capaz de conducir corriente en ambos sentidos, siendo óptimo para la alimentación de elementos como los focos o motores de C.A. El diagrama electrónico de un triac se muestra en la siguiente figura.
Figura 3.19. Diagrama electrónico de un triac
Cuando entra o sale corriente por la terminal G, el triac cierra su circuito entre las terminales MT1 y MT2. A continuación se presenta el diagrama electrónico del control de iluminación.
Figura 3.20. Diagrama electrónico del control de iluminación
Como se ve en la figura, el triac funcionará como interruptor. El foco se conectará en las terminales de "127VCA Salida". El MOC3011 es un opto-diac que es activado por una terminal del PIC. El funcionamiento básico del diac es como interruptor, sólo conduce si el LED del MOC3011 está energizado. Esta etapa se usa como protección para el PIC. La onda senoidal consta de 2 medias ondas, una positiva y otra negativa. El PIC se encargará de interrumpir la alimentación del foco por cierto tiempo para disminuir el nivel de iluminación que éste entregará. Cuando la onda senoidal pase por cero, el PIC mantendrá la terminal G sin corriente por cierto tiempo. Mientras la terminal G no tenga corriente, el foco permanecerá apagado y por lo tanto, disminuirá su luminosidad. En la figura siguiente se observa la gráfica de voltaje que se entregará al foco y la gráfica de voltaje que se entregará a la terminal G del triac por parte del PIC. Sólo es necesario dar un pulso de voltaje para que el triac empiece a conducir corriente hacia la carga. El triac seguirá conduciendo corriente por el resto de la onda hasta que pase por cero; en ese instante se apagará de nuevo. El tiempo tE se mide desde el cruce por cero de la onda, hasta cuando se requiere la activación del triac. Este determinará el grado de iluminación que el foco entregue; si tE es igual a cero, el foco brillará completamente.
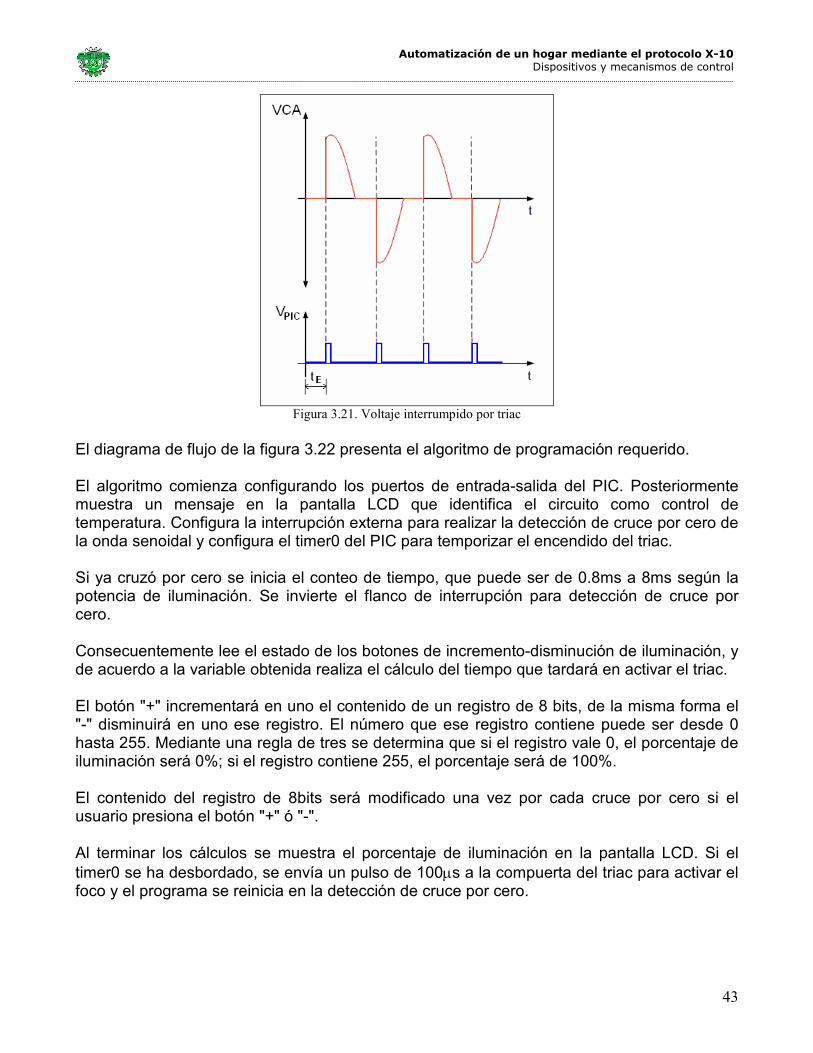
Automatización de un hogar mediante el protocolo X-10 Dispositivos y mecanismos de control
43
Figura 3.21. Voltaje interrumpido por triac
El diagrama de flujo de la figura 3.22 presenta el algoritmo de programación requerido. El algoritmo comienza configurando los puertos de entrada-salida del PIC. Posteriormente muestra un mensaje en la pantalla LCD que identifica el circuito como control de temperatura. Configura la interrupción externa para realizar la detección de cruce por cero de la onda senoidal y configura el timer0 del PIC para temporizar el encendido del triac. Si ya cruzó por cero se inicia el conteo de tiempo, que puede ser de 0.8ms a 8ms según la potencia de iluminación. Se invierte el flanco de interrupción para detección de cruce por cero. Consecuentemente lee el estado de los botones de incremento-disminución de iluminación, y de acuerdo a la variable obtenida realiza el cálculo del tiempo que tardará en activar el triac. El botón "+" incrementará en uno el contenido de un registro de 8 bits, de la misma forma el "-" disminuirá en uno ese registro. El número que ese registro contiene puede ser desde 0 hasta 255. Mediante una regla de tres se determina que si el registro vale 0, el porcentaje de iluminación será 0%; si el registro contiene 255, el porcentaje será de 100%. El contenido del registro de 8bits será modificado una vez por cada cruce por cero si el usuario presiona el botón "+" ó "-". Al terminar los cálculos se muestra el porcentaje de iluminación en la pantalla LCD. Si el timer0 se ha desbordado, se envía un pulso de 100µs a la compuerta del triac para activar el foco y el programa se reinicia en la detección de cruce por cero.
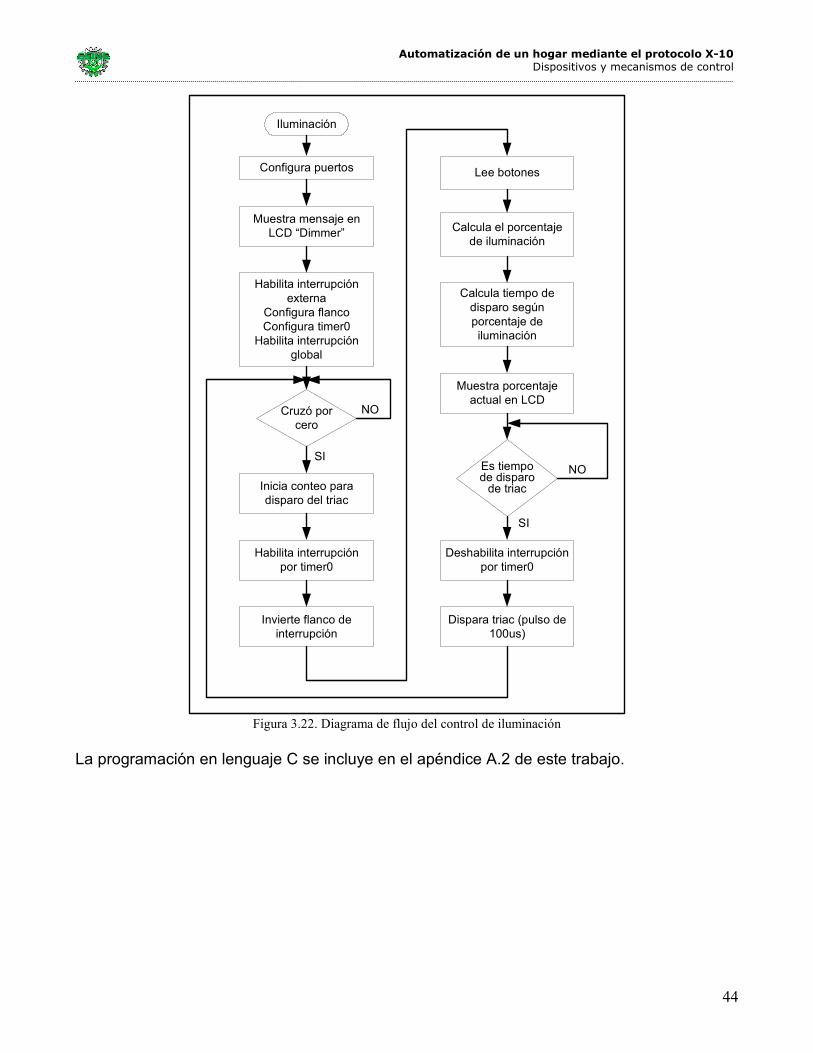
Automatización de un hogar mediante el protocolo X-10 Dispositivos y mecanismos de control
44
Iluminación
Configura puertos
Muestra mensaje enLCD “Dimmer”
Habilita interrupciónexterna
Configura flancoConfigura timer0
Habilita interrupciónglobal
Cruzó porcero
Inicia conteo paradisparo del triac
Habilita interrupciónpor timer0
Invierte flanco deinterrupción
Lee botones
Calcula el porcentajede iluminación
Calcula tiempo dedisparo segúnporcentaje deiluminación
Muestra porcentajeactual en LCD
Es tiempode disparode triac
Deshabilita interrupciónpor timer0
Dispara triac (pulso de100us)
NO
SI
NO
SI
Figura 3.22. Diagrama de flujo del control de iluminación
La programación en lenguaje C se incluye en el apéndice A.2 de este trabajo.
Automatización de un hogar mediante el protocolo X-10 Dispositivos y mecanismos de control
45
3.4.2 Control de riego
En la actualidad existen hogares en los que el riego se hace de forma automática. Para instalar un sistema de riego de este tipo es necesario conocer los factores siguientes. La automatización de este proceso se tratará en la sección de la programación de los PICs.
• Terreno de riego • Capacidad de diseño del sistema de riego • Selección de los aspersores y electroválvulas • División del sistema en zonas
♦ Terreno de riego Para el diseño del sistema de riego se debe medir el terreno en dónde se instalarán los aspersores. En el plano dibujado se dividirá la zona en áreas rectangulares o cuadradas y se trazarán los objetos que se encuentren en ella. ♦ Capacidad de diseño del sistema de riego Se determinará para conocer la cantidad de agua disponible para el sistema de riego. Cuando la presión de agua es proporcionada por una bomba, se pueden conocer el caudal y presión de funcionamiento directamente. En caso de que no se cuente con estos datos, se puede usar un manómetro y conectarlo a la toma de agua más cercana a el sistema de riego a instalar (ver figura 3.23).
Figura 3.23. Medición de la presión estática de agua
Esta medición se debe hacer cuando todas las otras tomas de agua que haya en la vivienda estén cerradas. Con esto se obtiene la presión estática del sistema. La presión estará dada en Bar o kiloPascales (kPa) y el flujo de agua en litros por minuto (LPM). Cuando no se conoce el caudal en LPM se puede buscar en la tabla 3.1. Esta tabla es proporcionada por la compañía Hunter para la selección de aspersores. La presión de trabajo es la que se tendrá en los aspersores. Para determinarla se debe conocer el diámetro de la tubería del medidor de agua, que es por donde pasa todo el caudal de agua. También se necesita el diámetro de la tubería con la que se va a alimentar el caudal de los aspersores.
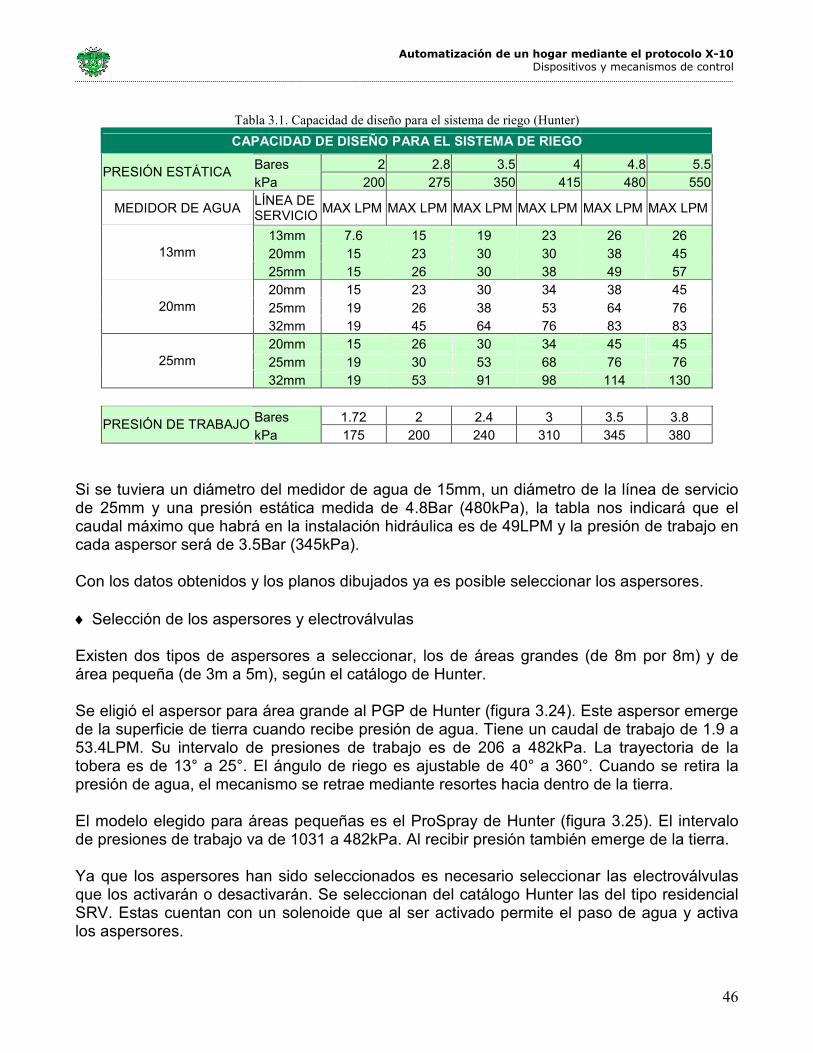
Automatización de un hogar mediante el protocolo X-10 Dispositivos y mecanismos de control
46
Tabla 3.1. Capacidad de diseño para el sistema de riego (Hunter)
CAPACIDAD DE DISEÑO PARA EL SISTEMA DE RIEGO
Bares 2 2.8 3.5 4 4.8 5.5 PRESIÓN ESTÁTICA
kPa 200 275 350 415 480 550
MEDIDOR DE AGUA LÍNEA DE SERVICIO
MAX LPM MAX LPM MAX LPM MAX LPM MAX LPM MAX LPM
13mm 7.6 15 19 23 26 26 20mm 15 23 30 30 38 45 13mm
25mm 15 26 30 38 49 57 20mm 15 23 30 34 38 45 25mm 19 26 38 53 64 76 20mm
32mm 19 45 64 76 83 83 20mm 15 26 30 34 45 45 25mm 19 30 53 68 76 76 25mm
32mm 19 53 91 98 114 130
Bares 1.72 2 2.4 3 3.5 3.8 PRESIÓN DE TRABAJO kPa 175 200 240 310 345 380
Si se tuviera un diámetro del medidor de agua de 15mm, un diámetro de la línea de servicio de 25mm y una presión estática medida de 4.8Bar (480kPa), la tabla nos indicará que el caudal máximo que habrá en la instalación hidráulica es de 49LPM y la presión de trabajo en cada aspersor será de 3.5Bar (345kPa). Con los datos obtenidos y los planos dibujados ya es posible seleccionar los aspersores. ♦ Selección de los aspersores y electroválvulas Existen dos tipos de aspersores a seleccionar, los de áreas grandes (de 8m por 8m) y de área pequeña (de 3m a 5m), según el catálogo de Hunter. Se eligió el aspersor para área grande al PGP de Hunter (figura 3.24). Este aspersor emerge de la superficie de tierra cuando recibe presión de agua. Tiene un caudal de trabajo de 1.9 a 53.4LPM. Su intervalo de presiones de trabajo es de 206 a 482kPa. La trayectoria de la tobera es de 13° a 25°. El ángulo de riego es ajustable de 40° a 360°. Cuando se retira la presión de agua, el mecanismo se retrae mediante resortes hacia dentro de la tierra. El modelo elegido para áreas pequeñas es el ProSpray de Hunter (figura 3.25). El intervalo de presiones de trabajo va de 1031 a 482kPa. Al recibir presión también emerge de la tierra. Ya que los aspersores han sido seleccionados es necesario seleccionar las electroválvulas que los activarán o desactivarán. Se seleccionan del catálogo Hunter las del tipo residencial SRV. Estas cuentan con un solenoide que al ser activado permite el paso de agua y activa los aspersores.
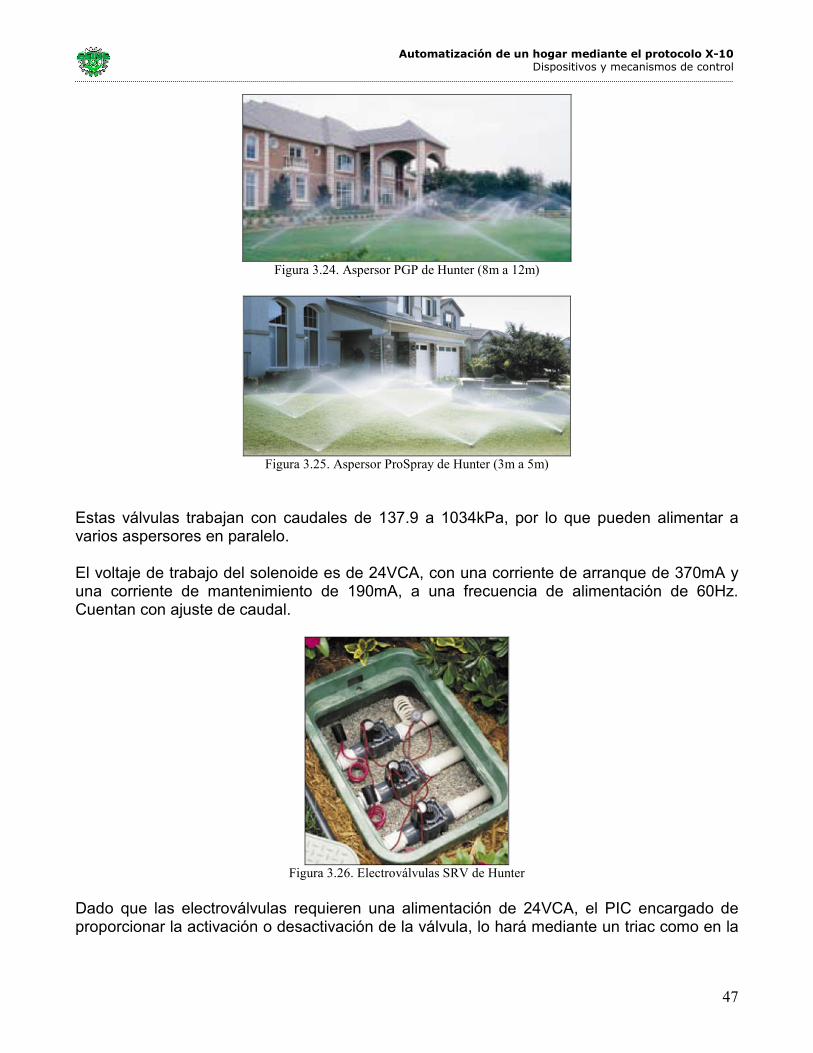
Automatización de un hogar mediante el protocolo X-10 Dispositivos y mecanismos de control
47
Figura 3.24. Aspersor PGP de Hunter (8m a 12m)
Figura 3.25. Aspersor ProSpray de Hunter (3m a 5m)
Estas válvulas trabajan con caudales de 137.9 a 1034kPa, por lo que pueden alimentar a varios aspersores en paralelo. El voltaje de trabajo del solenoide es de 24VCA, con una corriente de arranque de 370mA y una corriente de mantenimiento de 190mA, a una frecuencia de alimentación de 60Hz. Cuentan con ajuste de caudal.
Figura 3.26. Electroválvulas SRV de Hunter
Dado que las electroválvulas requieren una alimentación de 24VCA, el PIC encargado de proporcionar la activación o desactivación de la válvula, lo hará mediante un triac como en la
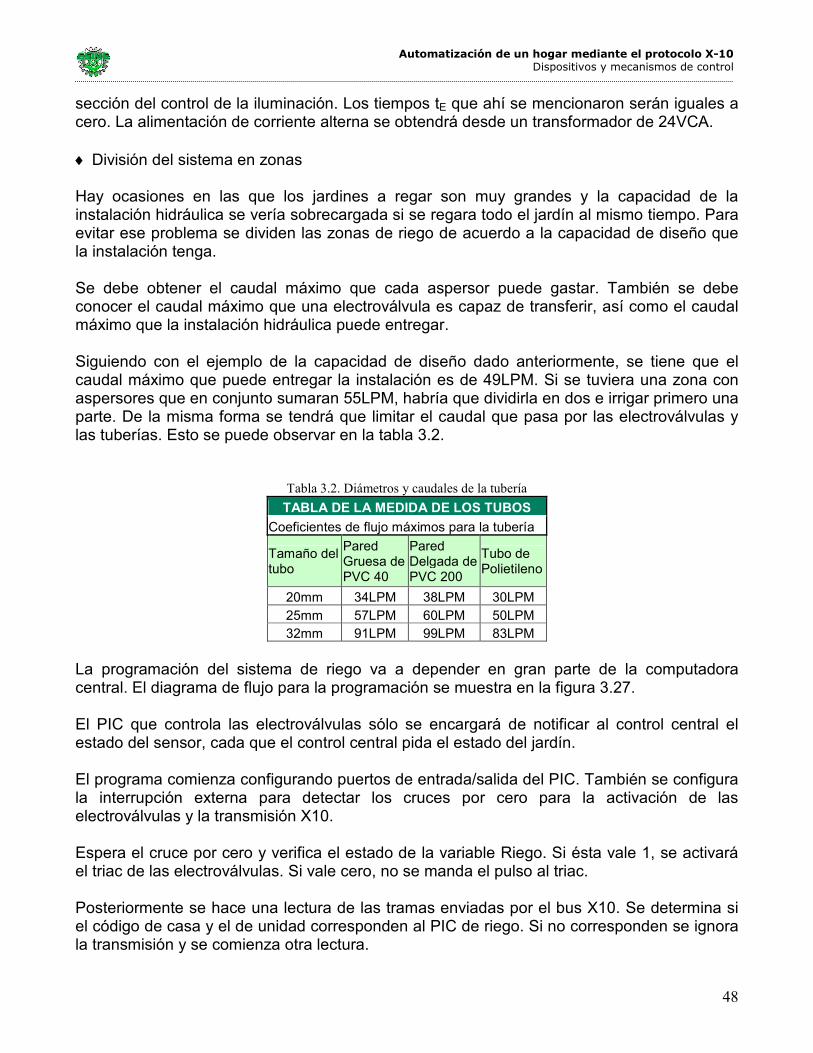
Automatización de un hogar mediante el protocolo X-10 Dispositivos y mecanismos de control
48
sección del control de la iluminación. Los tiempos tE que ahí se mencionaron serán iguales a cero. La alimentación de corriente alterna se obtendrá desde un transformador de 24VCA. ♦ División del sistema en zonas Hay ocasiones en las que los jardines a regar son muy grandes y la capacidad de la instalación hidráulica se vería sobrecargada si se regara todo el jardín al mismo tiempo. Para evitar ese problema se dividen las zonas de riego de acuerdo a la capacidad de diseño que la instalación tenga. Se debe obtener el caudal máximo que cada aspersor puede gastar. También se debe conocer el caudal máximo que una electroválvula es capaz de transferir, así como el caudal máximo que la instalación hidráulica puede entregar. Siguiendo con el ejemplo de la capacidad de diseño dado anteriormente, se tiene que el caudal máximo que puede entregar la instalación es de 49LPM. Si se tuviera una zona con aspersores que en conjunto sumaran 55LPM, habría que dividirla en dos e irrigar primero una parte. De la misma forma se tendrá que limitar el caudal que pasa por las electroválvulas y las tuberías. Esto se puede observar en la tabla 3.2.
Tabla 3.2. Diámetros y caudales de la tubería
TABLA DE LA MEDIDA DE LOS TUBOS
Coeficientes de flujo máximos para la tubería
Tamaño del tubo
Pared Gruesa de PVC 40
Pared Delgada de PVC 200
Tubo de Polietileno
20mm 34LPM 38LPM 30LPM 25mm 57LPM 60LPM 50LPM 32mm 91LPM 99LPM 83LPM
La programación del sistema de riego va a depender en gran parte de la computadora central. El diagrama de flujo para la programación se muestra en la figura 3.27. El PIC que controla las electroválvulas sólo se encargará de notificar al control central el estado del sensor, cada que el control central pida el estado del jardín. El programa comienza configurando puertos de entrada/salida del PIC. También se configura la interrupción externa para detectar los cruces por cero para la activación de las electroválvulas y la transmisión X10. Espera el cruce por cero y verifica el estado de la variable Riego. Si ésta vale 1, se activará el triac de las electroválvulas. Si vale cero, no se manda el pulso al triac. Posteriormente se hace una lectura de las tramas enviadas por el bus X10. Se determina si el código de casa y el de unidad corresponden al PIC de riego. Si no corresponden se ignora la transmisión y se comienza otra lectura.
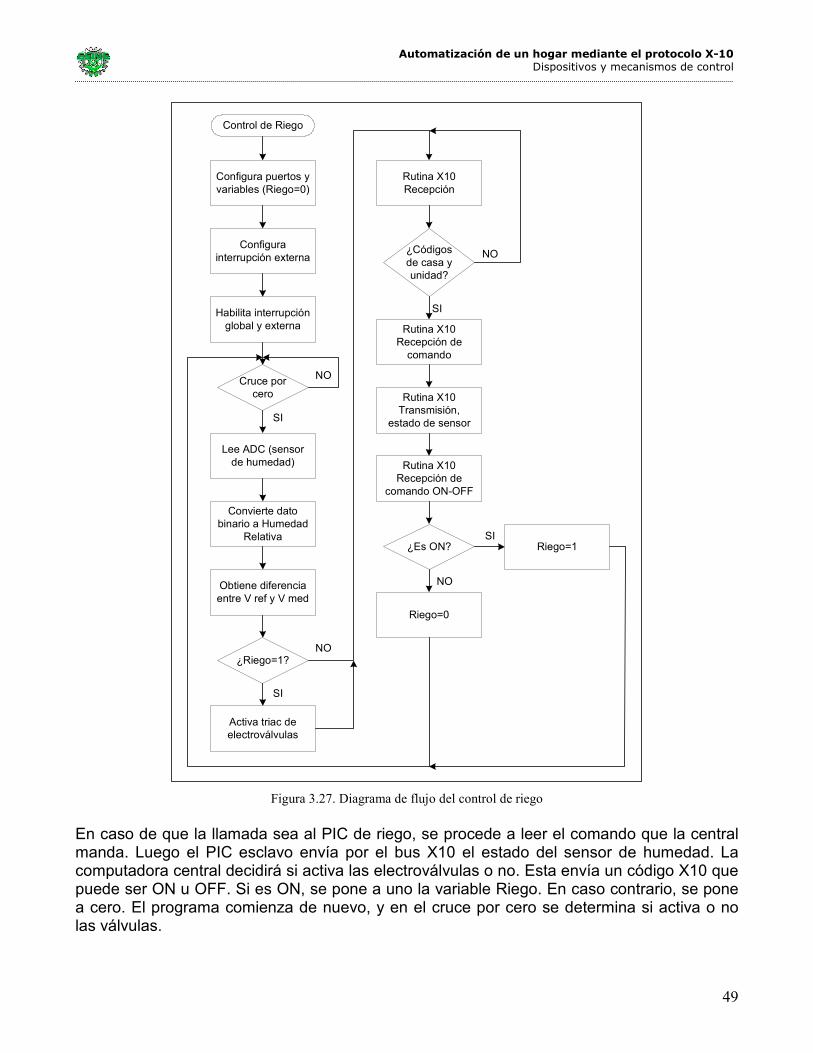
Automatización de un hogar mediante el protocolo X-10 Dispositivos y mecanismos de control
49
Control de Riego
Configura puertos yvariables (Riego=0)
Lee ADC (sensorde humedad)
Convierte datobinario a Humedad
Relativa
Obtiene diferenciaentre V ref y V med
Configurainterrupción externa
Habilita interrupciónglobal y externa
Cruce porcero
¿Riego=1?
Rutina X10Recepción
Riego=1
¿Códigosde casa yunidad?
Rutina X10Recepción decomando
Rutina X10Transmisión,
estado de sensor
Rutina X10Recepción de
comando ON-OFF
¿Es ON?
Riego=0
Activa triac deelectroválvulas
SI
SI
SI
SI
NO
NO
NO
NO
Figura 3.27. Diagrama de flujo del control de riego
En caso de que la llamada sea al PIC de riego, se procede a leer el comando que la central manda. Luego el PIC esclavo envía por el bus X10 el estado del sensor de humedad. La computadora central decidirá si activa las electroválvulas o no. Esta envía un código X10 que puede ser ON u OFF. Si es ON, se pone a uno la variable Riego. En caso contrario, se pone a cero. El programa comienza de nuevo, y en el cruce por cero se determina si activa o no las válvulas.
Automatización de un hogar mediante el protocolo X-10 Dispositivos y mecanismos de control
70
3.4.5 Respaldo de energía vía UPS
Es muy sabido que la mayoría de las viviendas que están en México y que cuentan con energía eléctrica de parte de la compañía de luz, pueden sufrir interrupciones en el suministro debido a fallas como tormentas eléctricas, accidentes u otras causas. Es importante tener un respaldo de energía ante estas situaciones, ya que el funcionamiento total de la automatización de la casa depende de la energía eléctrica. Para esto se considera instalar un sistema de energía ininterrumpida (UPS) en la vivienda. El UPS debe ser capaz de varias cosas:
• Proteger ante fallos del suministro • Proteger ante tensiones muy bajas o muy altas • Tener un tiempo de suministro considerable • Ser capaz de entregar 5kW • Sincronizar la fase de la compañía eléctrica
El UPS debe suministrar energía por un tiempo considerable, ya que los controles de acceso como las cerraduras funcionan con energía eléctrica. La CFE establece que un hogar común con servicio monofásico tendrá un límite de consumo de potencia de hasta 5kW. Usando este máximo se puede determinar la capacidad de potencia que el UPS debe entregar. En un fallo eventual de la energía, el suministro pasará por las siguientes situaciones: ♦ La carga es suministrada completamente por la compañía de electricidad. ♦ Una vez detectado un disturbio en la red, se desconecta el suministro de la compañía de electricidad y se conecta el banco de baterías y el inversor (convierte corriente directa a corriente alterna), entregando voltaje de alimentación con la misma fase que tenía la compañía de electricidad. ♦ Se arranca un generador de combustión. Cuando éste ha alcanzado un funcionamiento estable se desconectan las baterías y entra el generador sincronizándose con la fase del suministro. ♦ La vivienda se alimenta con el generador y las baterías se recargan. ♦ La compañía eléctrica ya regresó a su normalidad, pero su fase no es la misma que la del UPS. ♦ El suministro ahora depende de las baterías, el generador se desconecta. ♦ El voltaje del UPS se sincroniza a la fase de la compañía eléctrica. ♦ El suministro de la vivienda ya depende de la compañía eléctrica, las baterías se recargan. Si la fase de la onda senoidal es cambiada por algún disturbio del suministro de energía, la transmisión de información con el protocolo X-10 se verá afectada; por esto, es muy importante la selección de un UPS capaz de manejar estos cambios de fase.
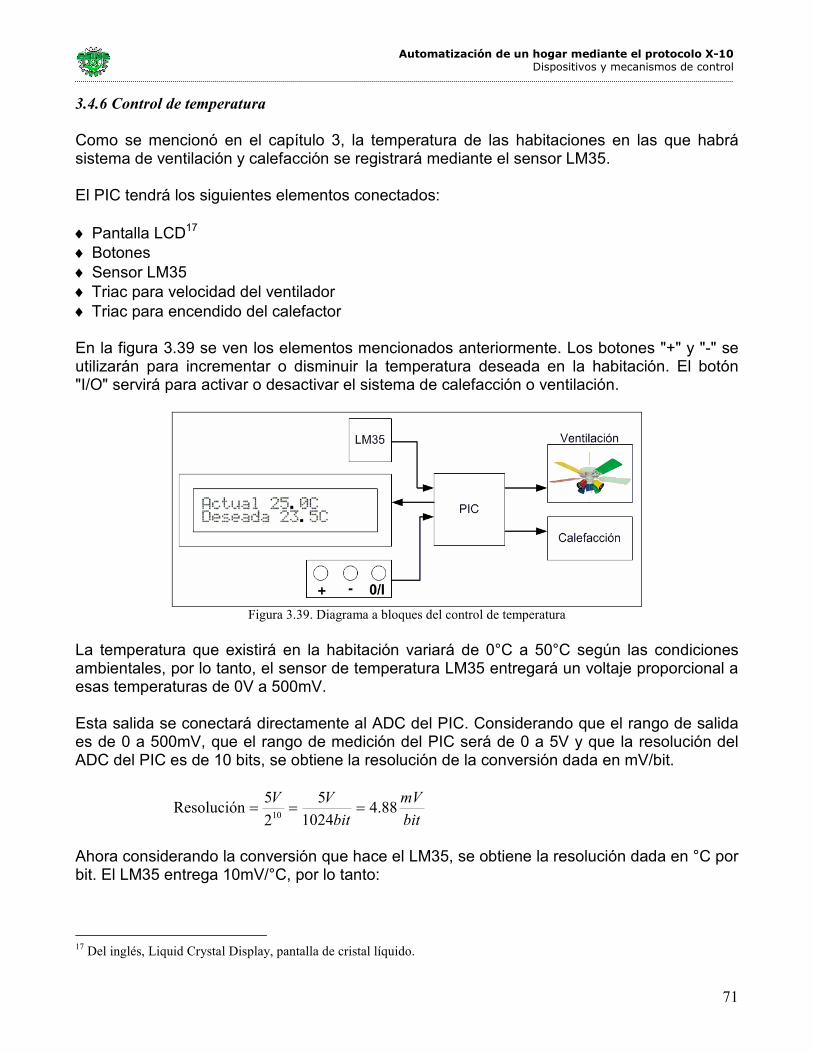
Automatización de un hogar mediante el protocolo X-10 Dispositivos y mecanismos de control
71
3.4.6 Control de temperatura
Como se mencionó en el capítulo 3, la temperatura de las habitaciones en las que habrá sistema de ventilación y calefacción se registrará mediante el sensor LM35. El PIC tendrá los siguientes elementos conectados: ♦ Pantalla LCD17 ♦ Botones ♦ Sensor LM35 ♦ Triac para velocidad del ventilador ♦ Triac para encendido del calefactor En la figura 3.39 se ven los elementos mencionados anteriormente. Los botones "+" y "-" se utilizarán para incrementar o disminuir la temperatura deseada en la habitación. El botón "I/O" servirá para activar o desactivar el sistema de calefacción o ventilación.
Figura 3.39. Diagrama a bloques del control de temperatura
La temperatura que existirá en la habitación variará de 0°C a 50°C según las condiciones ambientales, por lo tanto, el sensor de temperatura LM35 entregará un voltaje proporcional a esas temperaturas de 0V a 500mV. Esta salida se conectará directamente al ADC del PIC. Considerando que el rango de salida es de 0 a 500mV, que el rango de medición del PIC será de 0 a 5V y que la resolución del ADC del PIC es de 10 bits, se obtiene la resolución de la conversión dada en mV/bit.
bit
mV
bit
VV88.4
1024
5
2
5Resolución
10===
Ahora considerando la conversión que hace el LM35, se obtiene la resolución dada en °C por bit. El LM35 entrega 10mV/°C, por lo tanto:
17 Del inglés, Liquid Crystal Display, pantalla de cristal líquido.
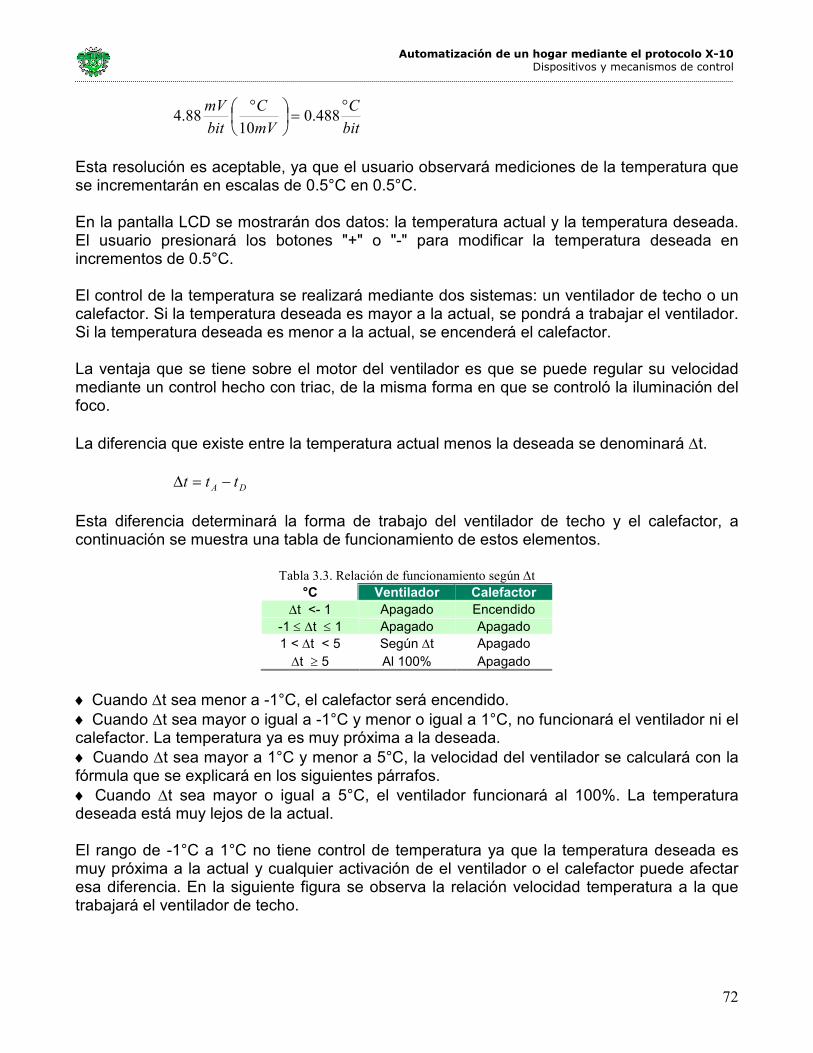
Automatización de un hogar mediante el protocolo X-10 Dispositivos y mecanismos de control
72
bit
C
mV
C
bit
mV °=
°488.0
1088.4
Esta resolución es aceptable, ya que el usuario observará mediciones de la temperatura que se incrementarán en escalas de 0.5°C en 0.5°C. En la pantalla LCD se mostrarán dos datos: la temperatura actual y la temperatura deseada. El usuario presionará los botones "+" o "-" para modificar la temperatura deseada en incrementos de 0.5°C. El control de la temperatura se realizará mediante dos sistemas: un ventilador de techo o un calefactor. Si la temperatura deseada es mayor a la actual, se pondrá a trabajar el ventilador. Si la temperatura deseada es menor a la actual, se encenderá el calefactor. La ventaja que se tiene sobre el motor del ventilador es que se puede regular su velocidad mediante un control hecho con triac, de la misma forma en que se controló la iluminación del foco. La diferencia que existe entre la temperatura actual menos la deseada se denominará ∆t.
DA ttt −=∆ Esta diferencia determinará la forma de trabajo del ventilador de techo y el calefactor, a continuación se muestra una tabla de funcionamiento de estos elementos.
Tabla 3.3. Relación de funcionamiento según ∆t °C Ventilador Calefactor
∆t <- 1 Apagado Encendido -1 ≤ ∆t ≤ 1 Apagado Apagado 1 < ∆t < 5 Según ∆t Apagado ∆t ≥ 5 Al 100% Apagado
♦ Cuando ∆t sea menor a -1°C, el calefactor será encendido. ♦ Cuando ∆t sea mayor o igual a -1°C y menor o igual a 1°C, no funcionará el ventilador ni el calefactor. La temperatura ya es muy próxima a la deseada. ♦ Cuando ∆t sea mayor a 1°C y menor a 5°C, la velocidad del ventilador se calculará con la fórmula que se explicará en los siguientes párrafos. ♦ Cuando ∆t sea mayor o igual a 5°C, el ventilador funcionará al 100%. La temperatura deseada está muy lejos de la actual. El rango de -1°C a 1°C no tiene control de temperatura ya que la temperatura deseada es muy próxima a la actual y cualquier activación de el ventilador o el calefactor puede afectar esa diferencia. En la siguiente figura se observa la relación velocidad temperatura a la que trabajará el ventilador de techo.
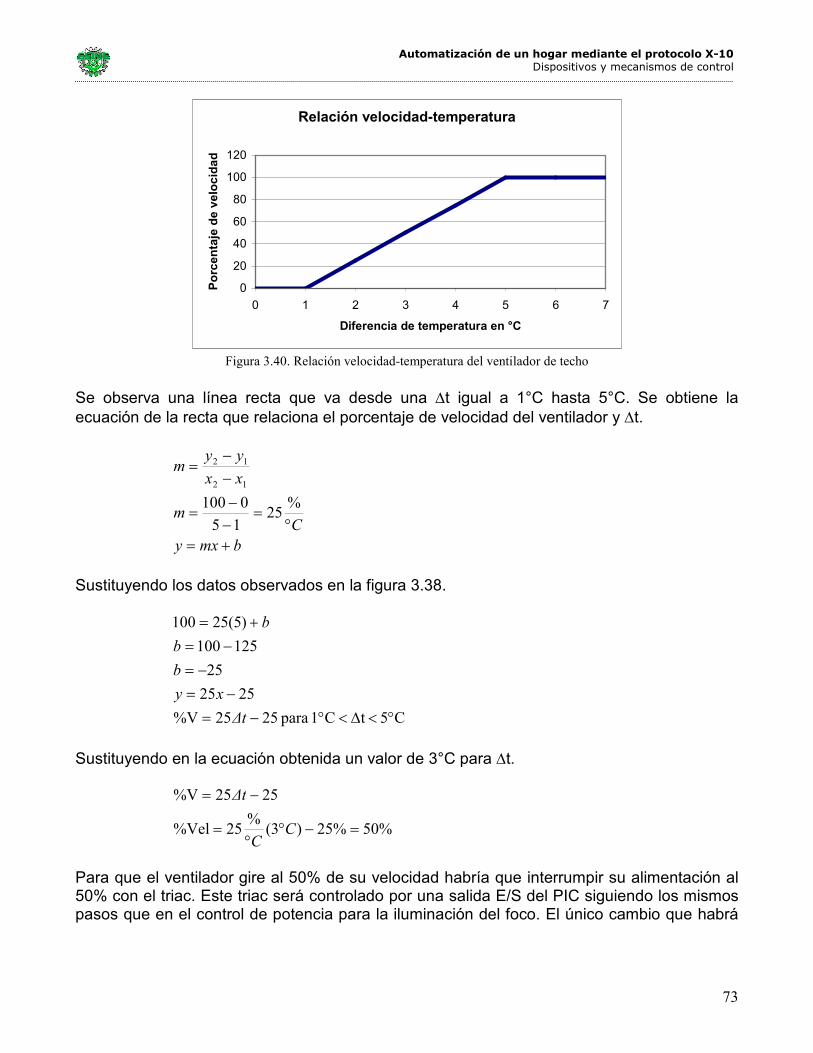
Automatización de un hogar mediante el protocolo X-10 Dispositivos y mecanismos de control
73
Relación velocidad-temperatura
0
20
40
60
80
100
120
0 1 2 3 4 5 6 7
Diferencia de temperatura en °C
Porcentaje de velocidad
Figura 3.40. Relación velocidad-temperatura del ventilador de techo
Se observa una línea recta que va desde una ∆t igual a 1°C hasta 5°C. Se obtiene la ecuación de la recta que relaciona el porcentaje de velocidad del ventilador y ∆t.
bmxy
Cm
xx
yym
+=°
=−−
=
−
−=
%25
15
010012
12
Sustituyendo los datos observados en la figura 3.38.
C5 t C1 para 2525%V
2525
25
125100
)5(25100
°<∆<°−=
−=
−=
−=
+=
∆t
xy
b
b
b
Sustituyendo en la ecuación obtenida un valor de 3°C para ∆t.
%50%25)3(%
25%Vel
2525%V
=−°°
=
−=
CC
∆t
Para que el ventilador gire al 50% de su velocidad habría que interrumpir su alimentación al 50% con el triac. Este triac será controlado por una salida E/S del PIC siguiendo los mismos pasos que en el control de potencia para la iluminación del foco. El único cambio que habrá
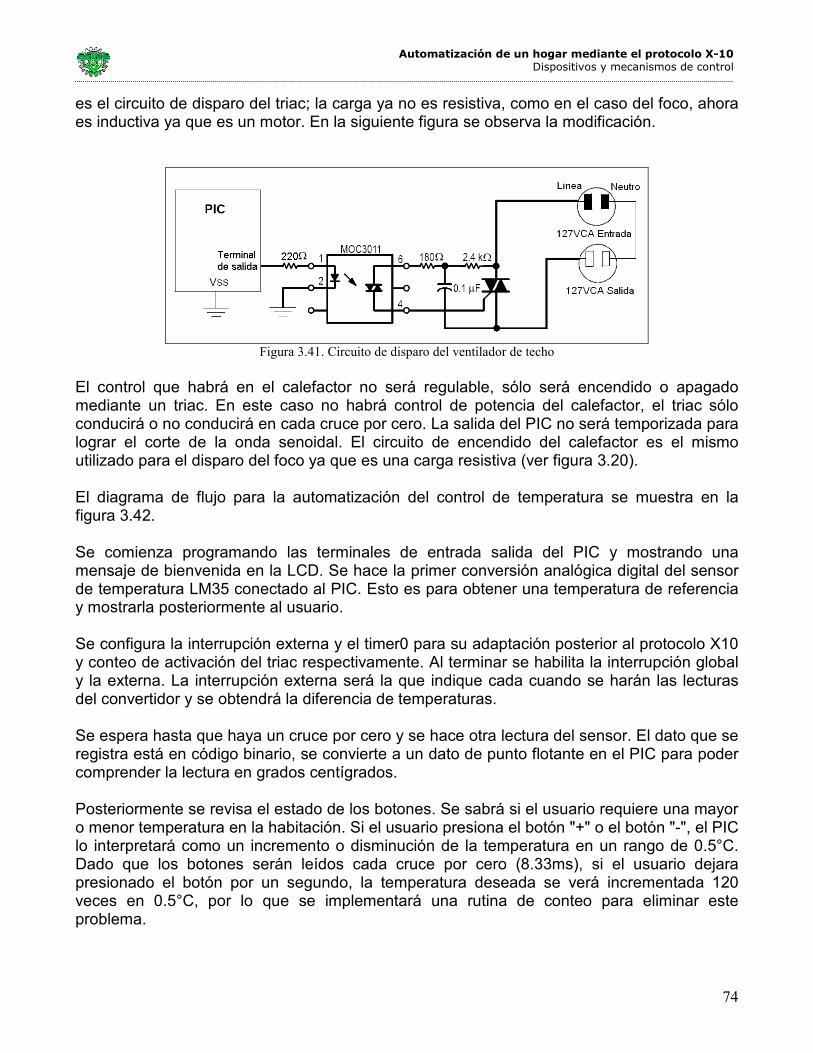
Automatización de un hogar mediante el protocolo X-10 Dispositivos y mecanismos de control
74
es el circuito de disparo del triac; la carga ya no es resistiva, como en el caso del foco, ahora es inductiva ya que es un motor. En la siguiente figura se observa la modificación.
Figura 3.41. Circuito de disparo del ventilador de techo
El control que habrá en el calefactor no será regulable, sólo será encendido o apagado mediante un triac. En este caso no habrá control de potencia del calefactor, el triac sólo conducirá o no conducirá en cada cruce por cero. La salida del PIC no será temporizada para lograr el corte de la onda senoidal. El circuito de encendido del calefactor es el mismo utilizado para el disparo del foco ya que es una carga resistiva (ver figura 3.20). El diagrama de flujo para la automatización del control de temperatura se muestra en la figura 3.42. Se comienza programando las terminales de entrada salida del PIC y mostrando una mensaje de bienvenida en la LCD. Se hace la primer conversión analógica digital del sensor de temperatura LM35 conectado al PIC. Esto es para obtener una temperatura de referencia y mostrarla posteriormente al usuario. Se configura la interrupción externa y el timer0 para su adaptación posterior al protocolo X10 y conteo de activación del triac respectivamente. Al terminar se habilita la interrupción global y la externa. La interrupción externa será la que indique cada cuando se harán las lecturas del convertidor y se obtendrá la diferencia de temperaturas. Se espera hasta que haya un cruce por cero y se hace otra lectura del sensor. El dato que se registra está en código binario, se convierte a un dato de punto flotante en el PIC para poder comprender la lectura en grados centígrados. Posteriormente se revisa el estado de los botones. Se sabrá si el usuario requiere una mayor o menor temperatura en la habitación. Si el usuario presiona el botón "+" o el botón "-", el PIC lo interpretará como un incremento o disminución de la temperatura en un rango de 0.5°C. Dado que los botones serán leídos cada cruce por cero (8.33ms), si el usuario dejara presionado el botón por un segundo, la temperatura deseada se verá incrementada 120 veces en 0.5°C, por lo que se implementará una rutina de conteo para eliminar este problema.
Automatización de un hogar mediante el protocolo X-10 Dispositivos y mecanismos de control
75
Habiendo obtenido la temperatura deseada por parte del usuario se calcula la diferencia de temperaturas (actual menos deseada). Conociendo esta temperatura se toma la decisión de que elementos activar para adecuar la temperatura según la tabla 3.3. En la pantalla LCD se muestran las temperaturas actual y deseada para que el usuario observe el estado de la habitación y los nuevos cambios que realizó. Si el ventilador está en funcionamiento proporcional a la diferencia de temperaturas se deberá esperar la interrupción por timer0. Cuando ésta ocurra se activará el triac por un periodo de 50µs. Al terminar se vuelve a esperar el cruce por cero y el programa comienza de nuevo. La programación en lenguaje C del control de temperatura se incluye en el apéndice A.3 de este trabajo.
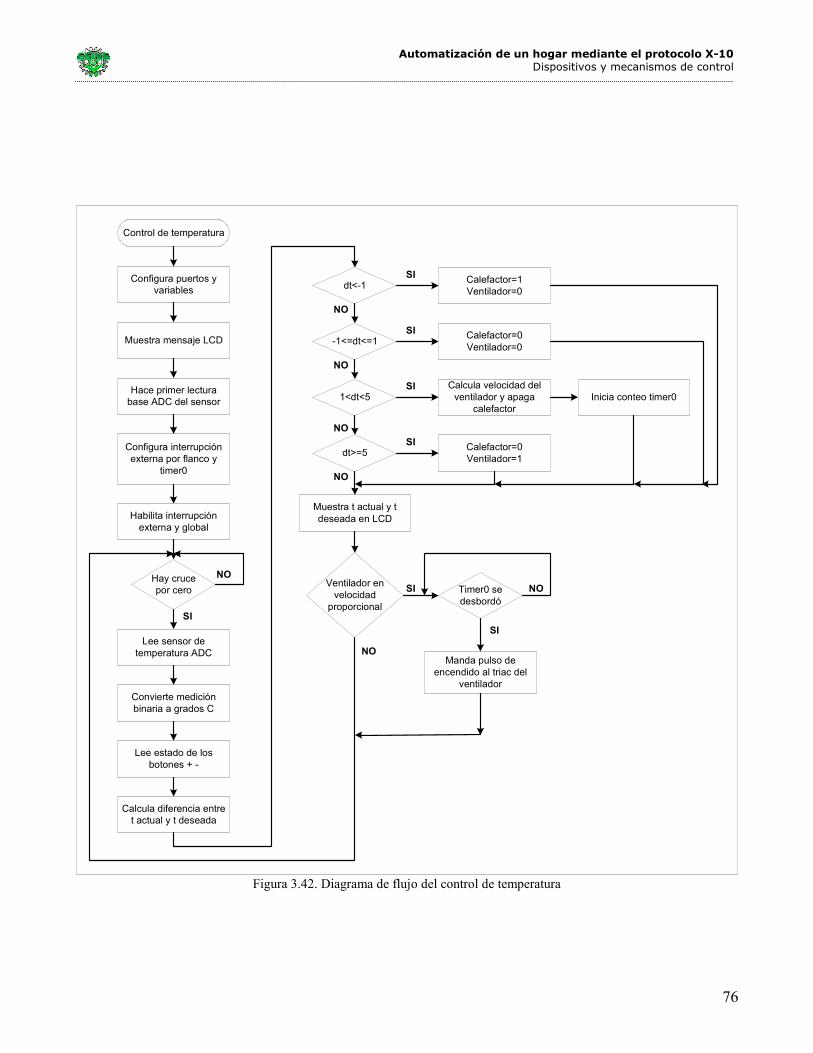
Automatización de un hogar mediante el protocolo X-10 Dispositivos y mecanismos de control
76
Control de temperatura
Configura puertos yvariables
Muestra mensaje LCD
Hace primer lecturabase ADC del sensor
Configura interrupciónexterna por flanco y
timer0
Habilita interrupciónexterna y global
Lee sensor detemperatura ADC
Hay crucepor cero
Convierte mediciónbinaria a grados C
Lee estado de losbotones + -
Calcula diferencia entret actual y t deseada
dt<-1Calefactor=1Ventilador=0
-1<=dt<=1Calefactor=0Ventilador=0
1<dt<5Calcula velocidad delventilador y apaga
calefactor
dt>=5Calefactor=0Ventilador=1
Inicia conteo timer0
Muestra t actual y tdeseada en LCD
Ventilador envelocidad
proporcional
Timer0 sedesbordó
Manda pulso deencendido al triac del
ventilador
SI
SI
SI
SI
SI
SI
SI
NO
NO
NO
NO
NO
NO
NO
Figura 3.42. Diagrama de flujo del control de temperatura
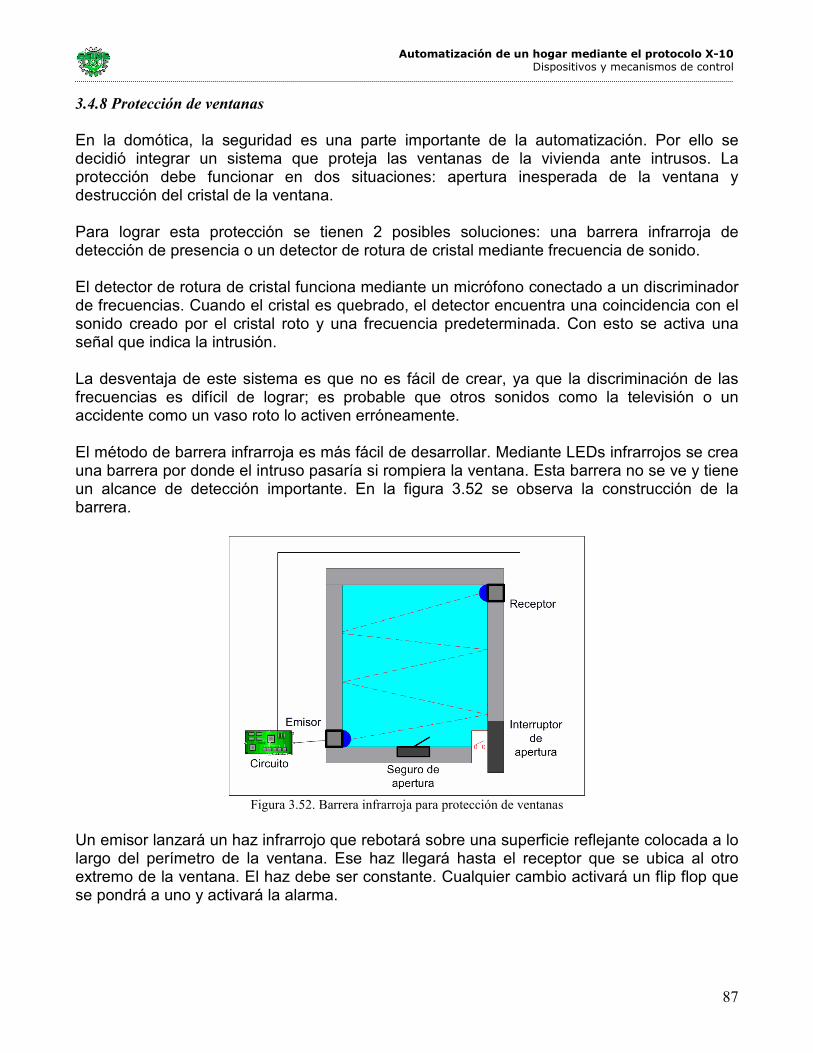
Automatización de un hogar mediante el protocolo X-10 Dispositivos y mecanismos de control
87
3.4.8 Protección de ventanas
En la domótica, la seguridad es una parte importante de la automatización. Por ello se decidió integrar un sistema que proteja las ventanas de la vivienda ante intrusos. La protección debe funcionar en dos situaciones: apertura inesperada de la ventana y destrucción del cristal de la ventana. Para lograr esta protección se tienen 2 posibles soluciones: una barrera infrarroja de detección de presencia o un detector de rotura de cristal mediante frecuencia de sonido. El detector de rotura de cristal funciona mediante un micrófono conectado a un discriminador de frecuencias. Cuando el cristal es quebrado, el detector encuentra una coincidencia con el sonido creado por el cristal roto y una frecuencia predeterminada. Con esto se activa una señal que indica la intrusión. La desventaja de este sistema es que no es fácil de crear, ya que la discriminación de las frecuencias es difícil de lograr; es probable que otros sonidos como la televisión o un accidente como un vaso roto lo activen erróneamente. El método de barrera infrarroja es más fácil de desarrollar. Mediante LEDs infrarrojos se crea una barrera por donde el intruso pasaría si rompiera la ventana. Esta barrera no se ve y tiene un alcance de detección importante. En la figura 3.52 se observa la construcción de la barrera.
Figura 3.52. Barrera infrarroja para protección de ventanas
Un emisor lanzará un haz infrarrojo que rebotará sobre una superficie reflejante colocada a lo largo del perímetro de la ventana. Ese haz llegará hasta el receptor que se ubica al otro extremo de la ventana. El haz debe ser constante. Cualquier cambio activará un flip flop que se pondrá a uno y activará la alarma.
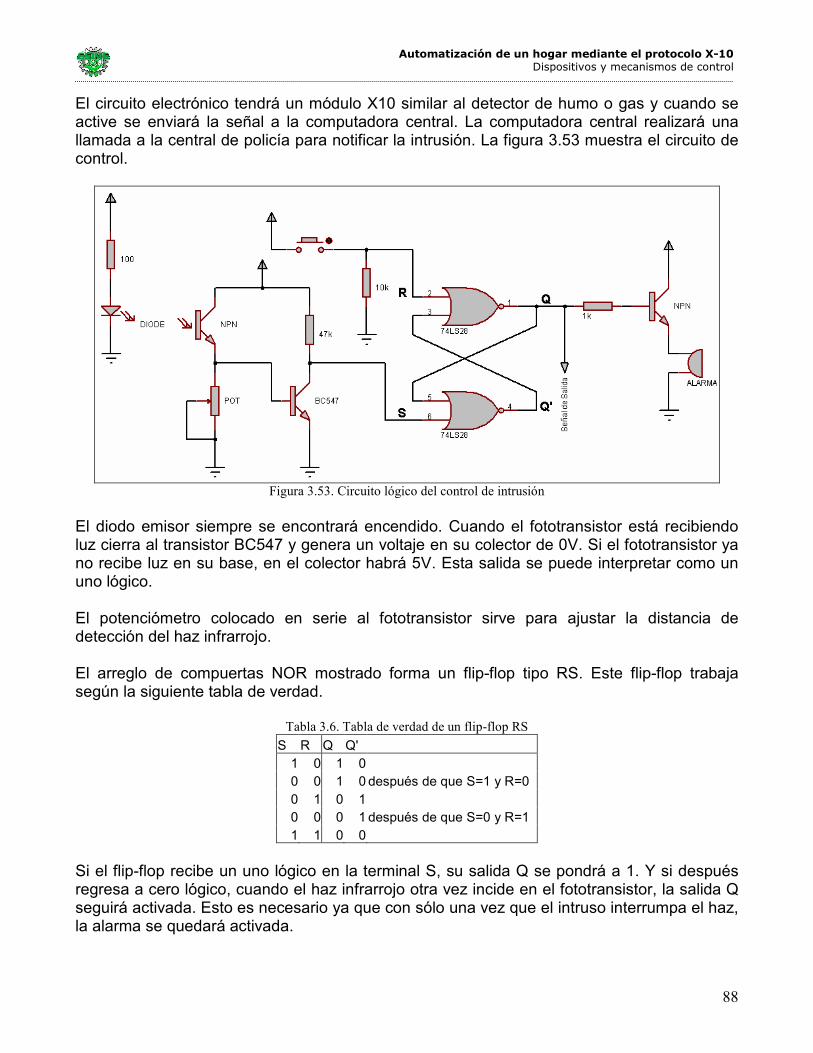
Automatización de un hogar mediante el protocolo X-10 Dispositivos y mecanismos de control
88
El circuito electrónico tendrá un módulo X10 similar al detector de humo o gas y cuando se active se enviará la señal a la computadora central. La computadora central realizará una llamada a la central de policía para notificar la intrusión. La figura 3.53 muestra el circuito de control.
Figura 3.53. Circuito lógico del control de intrusión
El diodo emisor siempre se encontrará encendido. Cuando el fototransistor está recibiendo luz cierra al transistor BC547 y genera un voltaje en su colector de 0V. Si el fototransistor ya no recibe luz en su base, en el colector habrá 5V. Esta salida se puede interpretar como un uno lógico. El potenciómetro colocado en serie al fototransistor sirve para ajustar la distancia de detección del haz infrarrojo. El arreglo de compuertas NOR mostrado forma un flip-flop tipo RS. Este flip-flop trabaja según la siguiente tabla de verdad.
Tabla 3.6. Tabla de verdad de un flip-flop RS
S R Q Q' 1 0 1 0 0 0 1 0 después de que S=1 y R=0 0 1 0 1 0 0 0 1 después de que S=0 y R=1 1 1 0 0
Si el flip-flop recibe un uno lógico en la terminal S, su salida Q se pondrá a 1. Y si después regresa a cero lógico, cuando el haz infrarrojo otra vez incide en el fototransistor, la salida Q seguirá activada. Esto es necesario ya que con sólo una vez que el intruso interrumpa el haz, la alarma se quedará activada.
Automatización de un hogar mediante el protocolo X-10 Dispositivos y mecanismos de control
89
Para desactivar esta alarma se dispone de un botón conectado a R del flip-flop. Siempre que haya un uno lógico en la terminal R del flip-flop, la salida Q se pondrá a cero. Q es la señal de salida que entrará a una terminal del PIC. Cuando la central pida el estado de la detección de intrusión, esta terminal será leída. Si está activada se comenzará el programa de llamada telefónica en la computadora central. El interruptor de apertura mostrado en la figura 3.52 se utilizará como botón normalmente abierto. Si la ventana se abriera el botón se cerraría y se activaría la terminal S del flip-flop generando el mismo resultado que la barrera infrarroja. La desventaja de esta barrera infrarroja es que puede ser activada de forma accidental. Un simple movimiento de las cortinas que se encuentran en la ventana puede interrumpir el haz de luz infrarroja y activar la alarma. Es necesario dar una buena posición al emisor y al receptor infrarrojos para evitar esto.
90
CAPÍTULO 4 AUTOMATIZACIÓN Y PROGRAMACIÓN
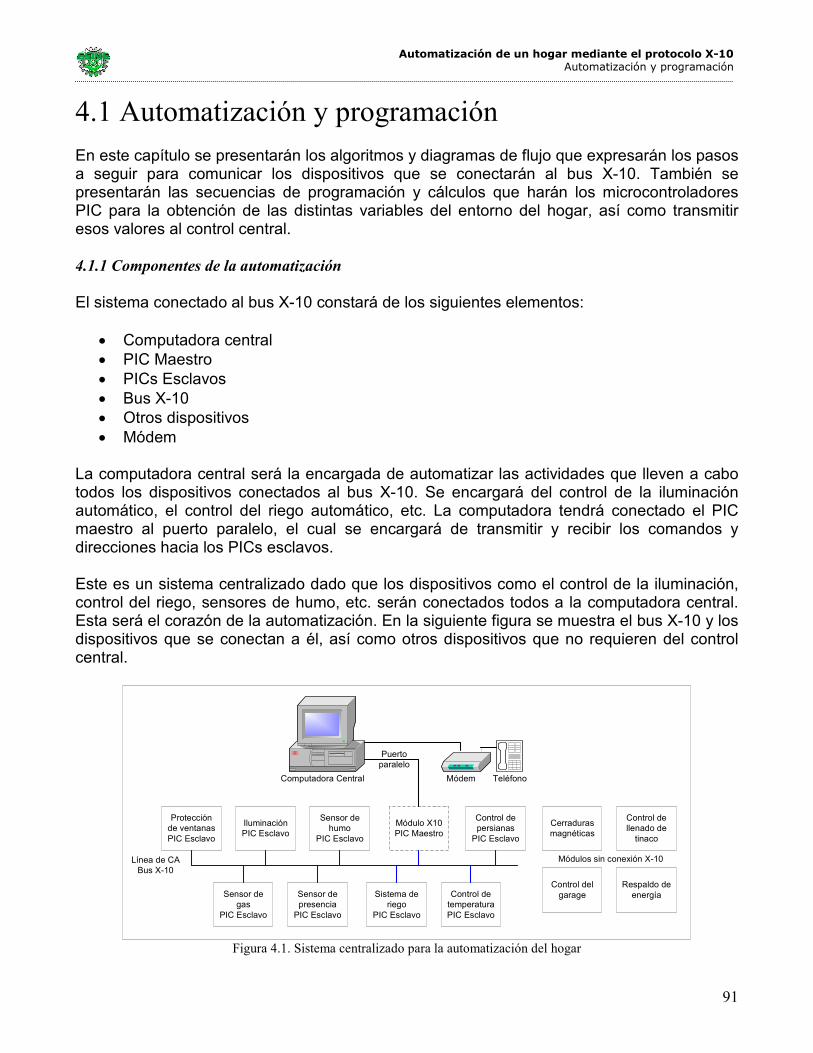
Automatización de un hogar mediante el protocolo X-10 Automatización y programación
91
4.1 Automatización y programación En este capítulo se presentarán los algoritmos y diagramas de flujo que expresarán los pasos a seguir para comunicar los dispositivos que se conectarán al bus X-10. También se presentarán las secuencias de programación y cálculos que harán los microcontroladores PIC para la obtención de las distintas variables del entorno del hogar, así como transmitir esos valores al control central. 4.1.1 Componentes de la automatización
El sistema conectado al bus X-10 constará de los siguientes elementos:
• Computadora central • PIC Maestro • PICs Esclavos • Bus X-10 • Otros dispositivos • Módem
La computadora central será la encargada de automatizar las actividades que lleven a cabo todos los dispositivos conectados al bus X-10. Se encargará del control de la iluminación automático, el control del riego automático, etc. La computadora tendrá conectado el PIC maestro al puerto paralelo, el cual se encargará de transmitir y recibir los comandos y direcciones hacia los PICs esclavos. Este es un sistema centralizado dado que los dispositivos como el control de la iluminación, control del riego, sensores de humo, etc. serán conectados todos a la computadora central. Esta será el corazón de la automatización. En la siguiente figura se muestra el bus X-10 y los dispositivos que se conectan a él, así como otros dispositivos que no requieren del control central.
Computadora Central
Módulo X10PIC Maestro
Sistema deriego
PIC Esclavo
Módem Teléfono
Control detemperaturaPIC Esclavo
Control depersianas
PIC Esclavo
IluminaciónPIC Esclavo
Sensor degas
PIC Esclavo
Sensor dehumo
PIC Esclavo
Sensor depresenciaPIC Esclavo
Puertoparalelo
Línea de CABus X-10
Cerradurasmagnéticas
Control delgarage
Control dellenado detinaco
Respaldo deenergía
Módulos sin conexión X-10
Protecciónde ventanasPIC Esclavo
Figura 4.1. Sistema centralizado para la automatización del hogar
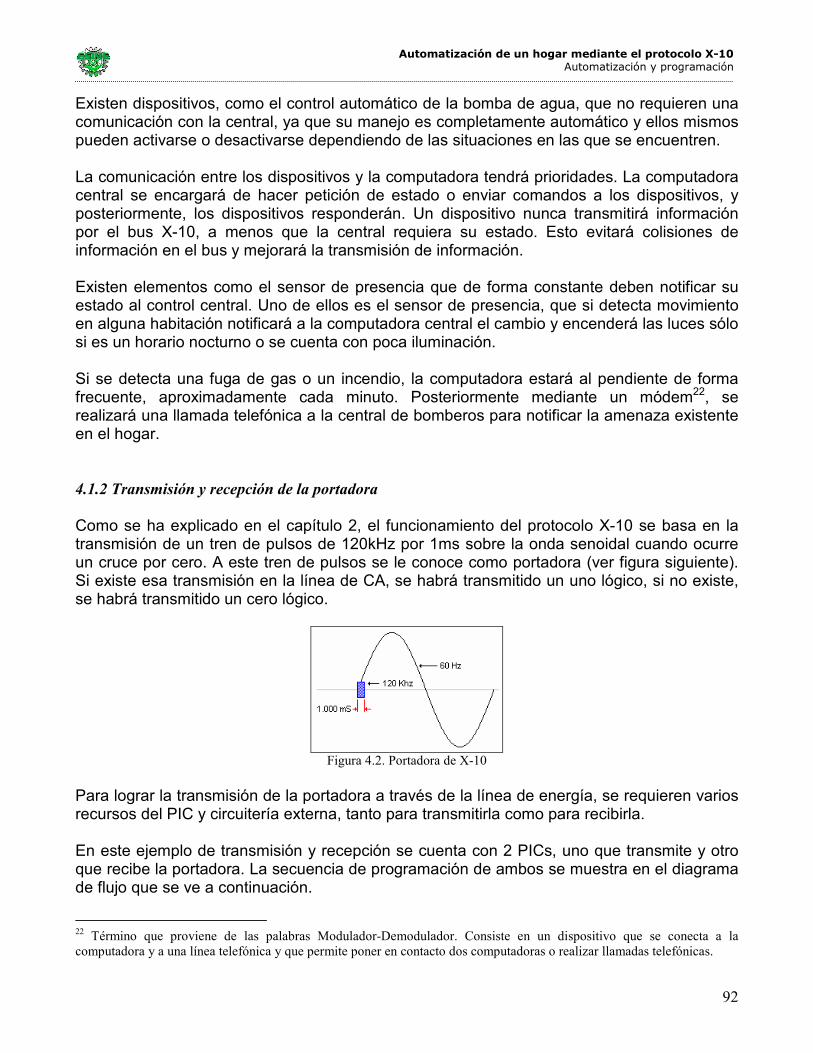
Automatización de un hogar mediante el protocolo X-10 Automatización y programación
92
Existen dispositivos, como el control automático de la bomba de agua, que no requieren una comunicación con la central, ya que su manejo es completamente automático y ellos mismos pueden activarse o desactivarse dependiendo de las situaciones en las que se encuentren. La comunicación entre los dispositivos y la computadora tendrá prioridades. La computadora central se encargará de hacer petición de estado o enviar comandos a los dispositivos, y posteriormente, los dispositivos responderán. Un dispositivo nunca transmitirá información por el bus X-10, a menos que la central requiera su estado. Esto evitará colisiones de información en el bus y mejorará la transmisión de información. Existen elementos como el sensor de presencia que de forma constante deben notificar su estado al control central. Uno de ellos es el sensor de presencia, que si detecta movimiento en alguna habitación notificará a la computadora central el cambio y encenderá las luces sólo si es un horario nocturno o se cuenta con poca iluminación. Si se detecta una fuga de gas o un incendio, la computadora estará al pendiente de forma frecuente, aproximadamente cada minuto. Posteriormente mediante un módem22, se realizará una llamada telefónica a la central de bomberos para notificar la amenaza existente en el hogar. 4.1.2 Transmisión y recepción de la portadora
Como se ha explicado en el capítulo 2, el funcionamiento del protocolo X-10 se basa en la transmisión de un tren de pulsos de 120kHz por 1ms sobre la onda senoidal cuando ocurre un cruce por cero. A este tren de pulsos se le conoce como portadora (ver figura siguiente). Si existe esa transmisión en la línea de CA, se habrá transmitido un uno lógico, si no existe, se habrá transmitido un cero lógico.
Figura 4.2. Portadora de X-10
Para lograr la transmisión de la portadora a través de la línea de energía, se requieren varios recursos del PIC y circuitería externa, tanto para transmitirla como para recibirla. En este ejemplo de transmisión y recepción se cuenta con 2 PICs, uno que transmite y otro que recibe la portadora. La secuencia de programación de ambos se muestra en el diagrama de flujo que se ve a continuación.
22 Término que proviene de las palabras Modulador-Demodulador. Consiste en un dispositivo que se conecta a la computadora y a una línea telefónica y que permite poner en contacto dos computadoras o realizar llamadas telefónicas.
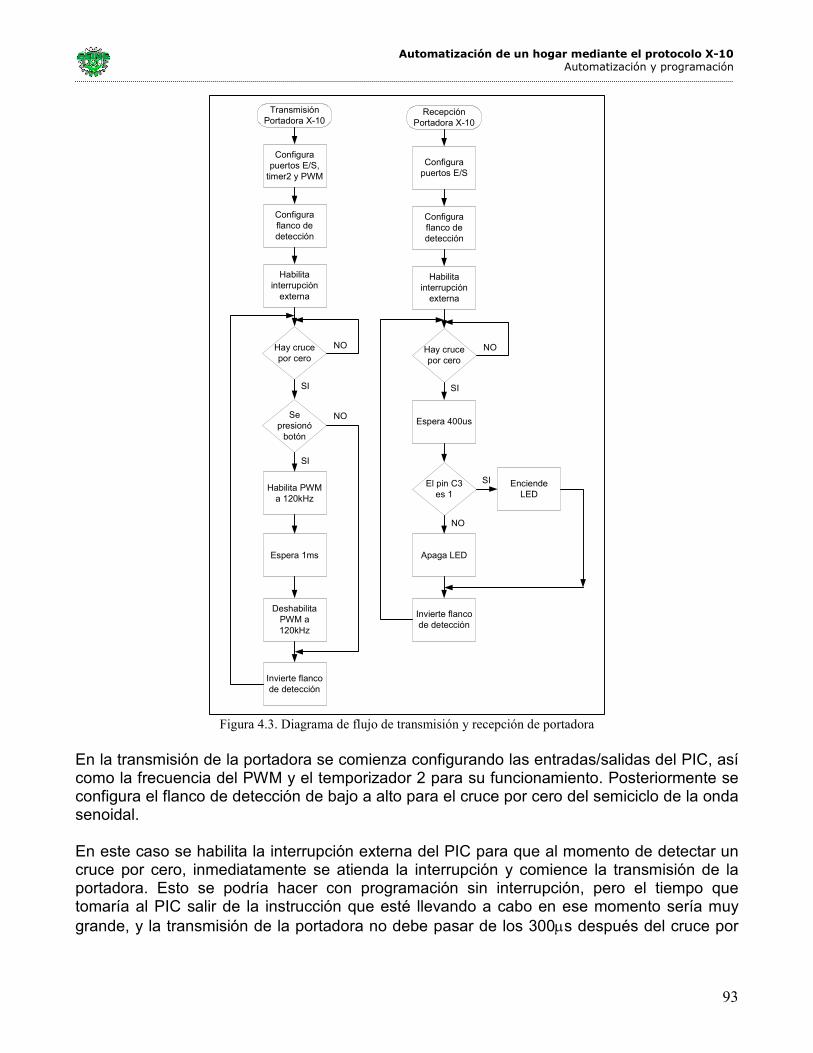
Automatización de un hogar mediante el protocolo X-10 Automatización y programación
93
TransmisiónPortadora X-10
Configurapuertos E/S,timer2 y PWM
Configuraflanco dedetección
Habilitainterrupciónexterna
Habilita PWMa 120kHz
Hay crucepor cero
Sepresionóbotón
Espera 1ms
DeshabilitaPWM a120kHz
Invierte flancode detección
SI
SI
NO
NO
RecepciónPortadora X-10
Configurapuertos E/S
Configuraflanco dedetección
Habilitainterrupciónexterna
Espera 400us
Hay crucepor cero
Invierte flancode detección
SI
NO
El pin C3es 1
EnciendeLED
Apaga LED
NO
SI
Figura 4.3. Diagrama de flujo de transmisión y recepción de portadora
En la transmisión de la portadora se comienza configurando las entradas/salidas del PIC, así como la frecuencia del PWM y el temporizador 2 para su funcionamiento. Posteriormente se configura el flanco de detección de bajo a alto para el cruce por cero del semiciclo de la onda senoidal. En este caso se habilita la interrupción externa del PIC para que al momento de detectar un cruce por cero, inmediatamente se atienda la interrupción y comience la transmisión de la portadora. Esto se podría hacer con programación sin interrupción, pero el tiempo que tomaría al PIC salir de la instrucción que esté llevando a cabo en ese momento sería muy grande, y la transmisión de la portadora no debe pasar de los 300µs después del cruce por
Automatización de un hogar mediante el protocolo X-10 Automatización y programación
94
cero. Además, el PIC tiene libertad de estar llevando a cabo otras tareas, en vez de estar leyendo el estado de la terminal RB0 a cada instante. Posteriormente empieza la detección del cruce por cero. Cuando ésta ocurre, bifurca y verifica que se haya oprimido un botón conectado en B1 del PIC. La tarea de este botón es comprobar que el usuario desee transmitir la portadora en ese semiciclo de onda. Si el botón fue oprimido se habilita la salida PWM del PIC y comienza el conteo de 1ms. Al pasar 1ms, se deshabilita la portadora, se cambia el flanco de interrupción de "bajo a alto" a "alto a bajo", es decir, cuando la onda es positiva y pasa a voltaje negativo y cuando la onda es negativa y pasa a voltaje positivo, respectivamente. En ese momento se va a verificar el cruce por cero del siguiente semiciclo, y el programa se ejecuta indefinidamente. En el caso del receptor de la portadora, primero se comienza por configurar las entradas/salidas del PIC. Posteriormente se configura el flanco de interrupción y se habilita la interrupción externa. El PIC no hace nada hasta que se detecta el cruce por cero. Se esperan 400us considerando que el máximo retraso de una transmisión puede ser de 300µs. Al término de este tiempo se lee la terminal C3, que es donde se conecta la salida del sintonizador amplificador de la portadora de 120kHz (puede variar dependiendo del tipo de PIC). Esta salida siempre estará a uno lógico o cero lógico ya que la frecuencia de 120kHz se vuelve una señal constante de 1ms por la circuitería aplicada después del amplificador. Si en C3 se obtuvo un uno, se activa un LED que indica la presencia de la portadora y si hubo un cero, se desactiva el LED. Al terminar se invierte el flanco de interrupción para el siguiente semiciclo senoidal y se ejecuta el programa indefinidamente. Este LED presenta de forma burda la existencia o ausencia de la señal portadora de 120kHz en la línea de CA. El programa que se carga en el PIC transmisor y en el PIC receptor se muestra en el apéndice de este trabajo (sección A.1). Todos los programas que se cargarán en los PIC serán hechos con el compilador CCS PCW Compiler versión 3.190.
Automatización de un hogar mediante el protocolo X-10 Automatización y programación
106
4.1.4 Las desventajas del protocolo X10
Gracias a la experimentación previa que se ha llevado a cabo con el envío y recepción de bits a través de la línea de CA se han encontrado desventajas que el protocolo X10 tiene. A continuación se mencionan algunas de las encontradas en la experimentación y otras mediante investigación en la Internet. El protocolo X10 falla cuando: - Hay instalado en la misma red eléctrica un sistema de escucha para vigilar bebes o un sistema de repetidor de infrarrojos para la TV. Estos sistemas transmiten una portadora continua que impide que el sistema X10 pueda transmitir sus datos, de modo que son autoexcluyentes, se usa una u otra cosa. - Se tiene en funcionamiento la lavadora, lavaplatos, etc... Cualquier motor de medianas a grandes dimensiones inserta en la red un número tan elevado de ruido electromagnético que destruye las señales X10. - Hay en la misma red muchos equipos con fuente de alimentación conmutada. Estas fuentes de alimentación generan también mucho ruido eléctrico y además debido a su impedancia interna destruyen la portadora. - Si los módulos tienen un comportamiento errático se suele deber a que un vecino tiene un sistema similar y coinciden los códigos de operación. La solución pasa por poner un filtro a la entrada de la red eléctrica de la casa y por cambiar los códigos de los aparatos.
107
CAPÍTULO 5 COSTOS
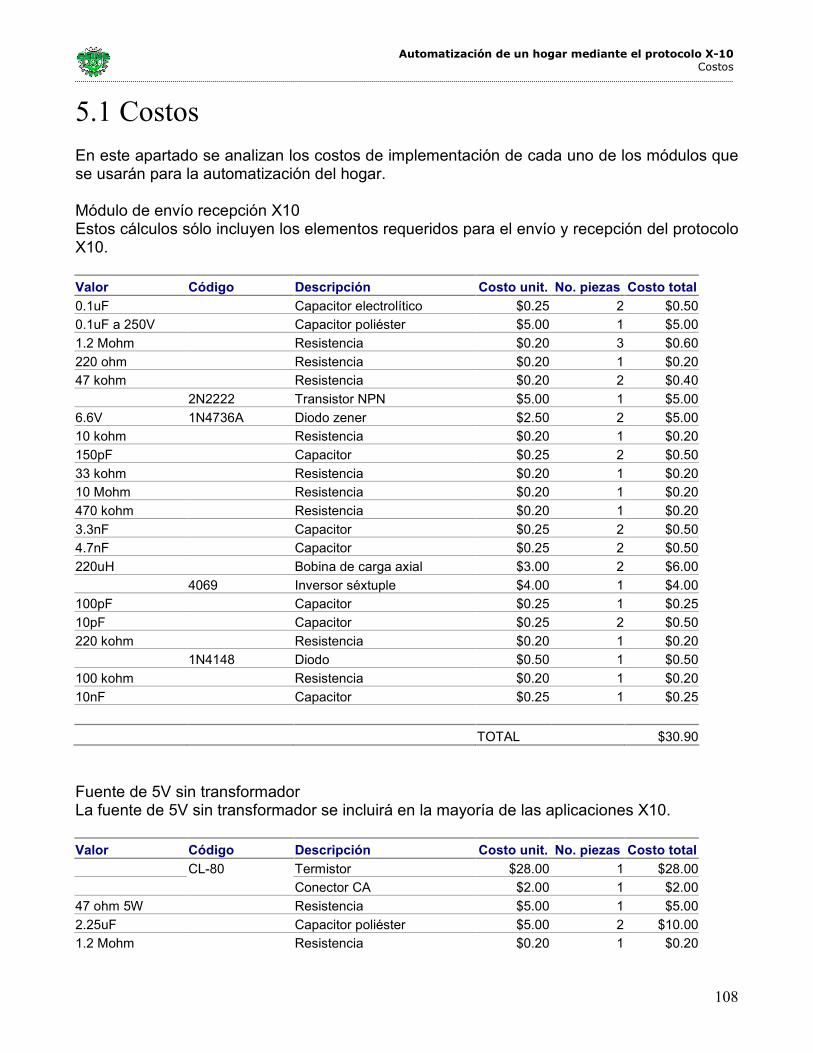
Automatización de un hogar mediante el protocolo X-10 Costos
108
5.1 Costos En este apartado se analizan los costos de implementación de cada uno de los módulos que se usarán para la automatización del hogar. Módulo de envío recepción X10 Estos cálculos sólo incluyen los elementos requeridos para el envío y recepción del protocolo X10. Valor Código Descripción Costo unit. No. piezas Costo total
0.1uF Capacitor electrolítico $0.25 2 $0.50
0.1uF a 250V Capacitor poliéster $5.00 1 $5.00
1.2 Mohm Resistencia $0.20 3 $0.60
220 ohm Resistencia $0.20 1 $0.20
47 kohm Resistencia $0.20 2 $0.40
2N2222 Transistor NPN $5.00 1 $5.00
6.6V 1N4736A Diodo zener $2.50 2 $5.00
10 kohm Resistencia $0.20 1 $0.20
150pF Capacitor $0.25 2 $0.50
33 kohm Resistencia $0.20 1 $0.20
10 Mohm Resistencia $0.20 1 $0.20
470 kohm Resistencia $0.20 1 $0.20
3.3nF Capacitor $0.25 2 $0.50
4.7nF Capacitor $0.25 2 $0.50
220uH Bobina de carga axial $3.00 2 $6.00
4069 Inversor séxtuple $4.00 1 $4.00
100pF Capacitor $0.25 1 $0.25
10pF Capacitor $0.25 2 $0.50
220 kohm Resistencia $0.20 1 $0.20
1N4148 Diodo $0.50 1 $0.50
100 kohm Resistencia $0.20 1 $0.20
10nF Capacitor $0.25 1 $0.25
TOTAL $30.90
Fuente de 5V sin transformador La fuente de 5V sin transformador se incluirá en la mayoría de las aplicaciones X10. Valor Código Descripción Costo unit. No. piezas Costo total
CL-80 Termistor $28.00 1 $28.00
Conector CA $2.00 1 $2.00
47 ohm 5W Resistencia $5.00 1 $5.00
2.25uF Capacitor poliéster $5.00 2 $10.00
1.2 Mohm Resistencia $0.20 1 $0.20
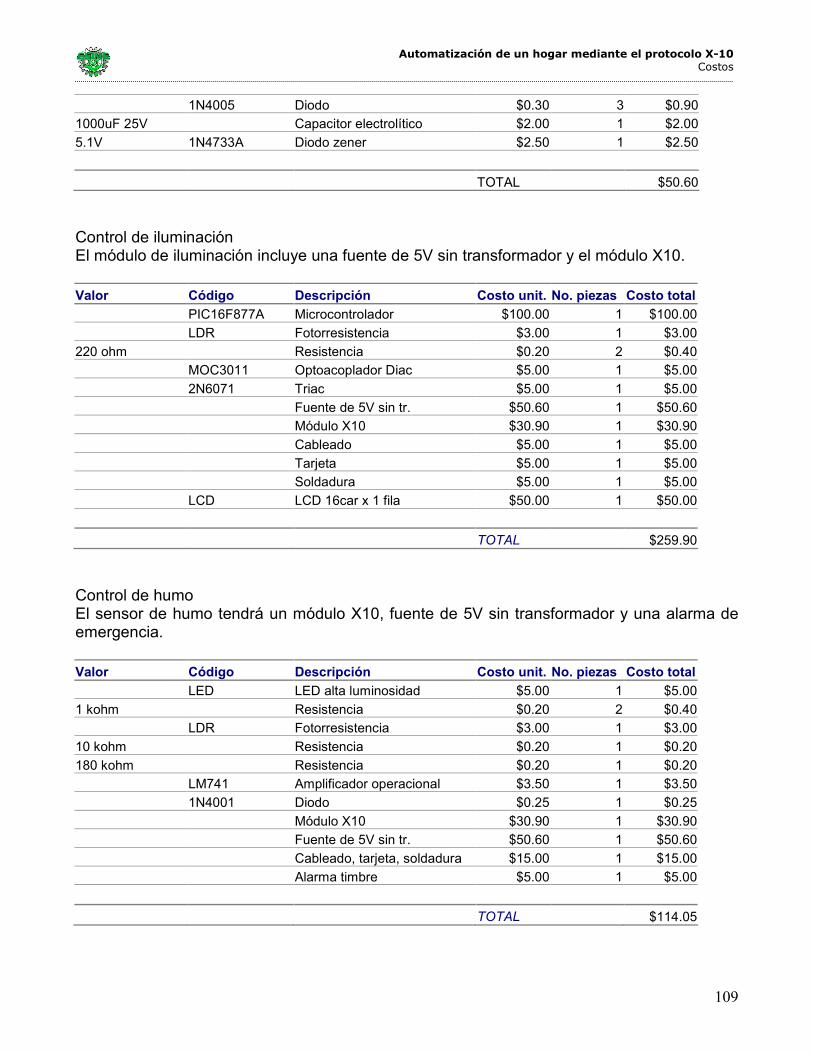
Automatización de un hogar mediante el protocolo X-10 Costos
109
1N4005 Diodo $0.30 3 $0.90
1000uF 25V Capacitor electrolítico $2.00 1 $2.00
5.1V 1N4733A Diodo zener $2.50 1 $2.50
TOTAL $50.60
Control de iluminación El módulo de iluminación incluye una fuente de 5V sin transformador y el módulo X10. Valor Código Descripción Costo unit. No. piezas Costo total
PIC16F877A Microcontrolador $100.00 1 $100.00
LDR Fotorresistencia $3.00 1 $3.00
220 ohm Resistencia $0.20 2 $0.40
MOC3011 Optoacoplador Diac $5.00 1 $5.00
2N6071 Triac $5.00 1 $5.00
Fuente de 5V sin tr. $50.60 1 $50.60
Módulo X10 $30.90 1 $30.90
Cableado $5.00 1 $5.00
Tarjeta $5.00 1 $5.00
Soldadura $5.00 1 $5.00
LCD LCD 16car x 1 fila $50.00 1 $50.00
TOTAL $259.90
Control de humo El sensor de humo tendrá un módulo X10, fuente de 5V sin transformador y una alarma de emergencia. Valor Código Descripción Costo unit. No. piezas Costo total
LED LED alta luminosidad $5.00 1 $5.00
1 kohm Resistencia $0.20 2 $0.40
LDR Fotorresistencia $3.00 1 $3.00
10 kohm Resistencia $0.20 1 $0.20
180 kohm Resistencia $0.20 1 $0.20
LM741 Amplificador operacional $3.50 1 $3.50
1N4001 Diodo $0.25 1 $0.25
Módulo X10 $30.90 1 $30.90
Fuente de 5V sin tr. $50.60 1 $50.60
Cableado, tarjeta, soldadura $15.00 1 $15.00
Alarma timbre $5.00 1 $5.00
TOTAL $114.05
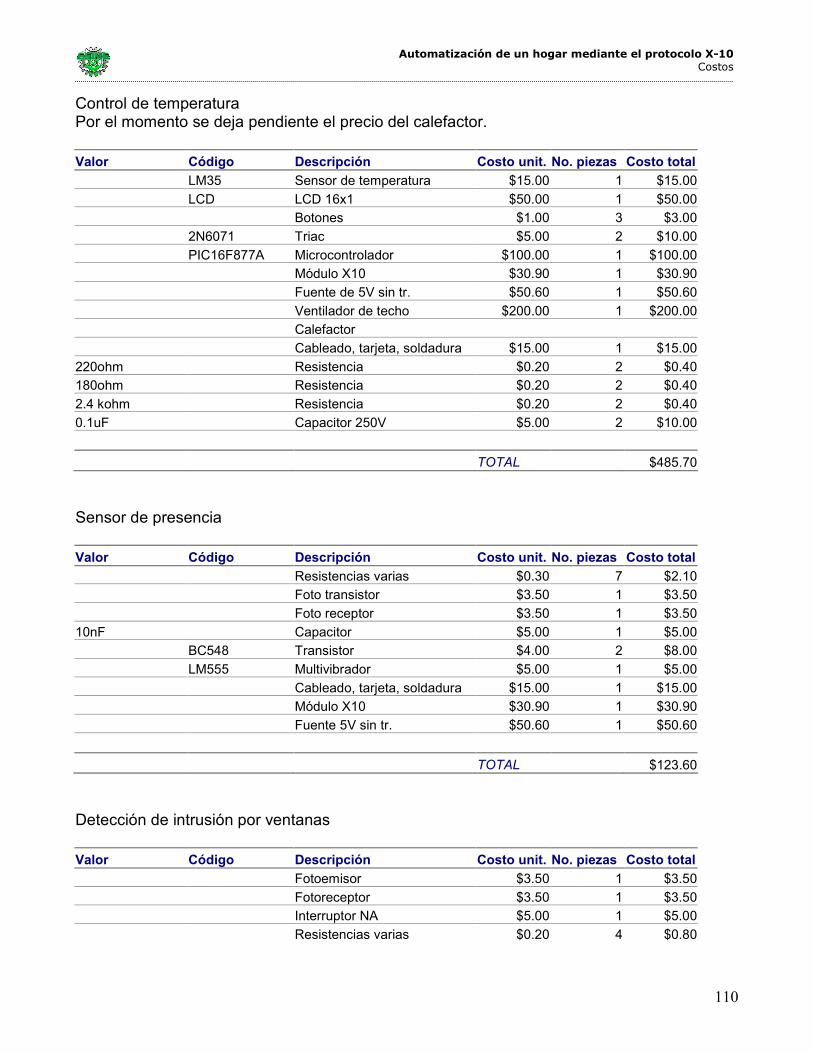
Automatización de un hogar mediante el protocolo X-10 Costos
110
Control de temperatura Por el momento se deja pendiente el precio del calefactor. Valor Código Descripción Costo unit. No. piezas Costo total
LM35 Sensor de temperatura $15.00 1 $15.00
LCD LCD 16x1 $50.00 1 $50.00
Botones $1.00 3 $3.00
2N6071 Triac $5.00 2 $10.00
PIC16F877A Microcontrolador $100.00 1 $100.00
Módulo X10 $30.90 1 $30.90
Fuente de 5V sin tr. $50.60 1 $50.60
Ventilador de techo $200.00 1 $200.00
Calefactor
Cableado, tarjeta, soldadura $15.00 1 $15.00
220ohm Resistencia $0.20 2 $0.40
180ohm Resistencia $0.20 2 $0.40
2.4 kohm Resistencia $0.20 2 $0.40
0.1uF Capacitor 250V $5.00 2 $10.00
TOTAL $485.70
Sensor de presencia Valor Código Descripción Costo unit. No. piezas Costo total
Resistencias varias $0.30 7 $2.10
Foto transistor $3.50 1 $3.50
Foto receptor $3.50 1 $3.50
10nF Capacitor $5.00 1 $5.00
BC548 Transistor $4.00 2 $8.00
LM555 Multivibrador $5.00 1 $5.00
Cableado, tarjeta, soldadura $15.00 1 $15.00
Módulo X10 $30.90 1 $30.90
Fuente 5V sin tr. $50.60 1 $50.60
TOTAL $123.60
Detección de intrusión por ventanas Valor Código Descripción Costo unit. No. piezas Costo total
Fotoemisor $3.50 1 $3.50
Fotoreceptor $3.50 1 $3.50
Interruptor NA $5.00 1 $5.00
Resistencias varias $0.20 4 $0.80
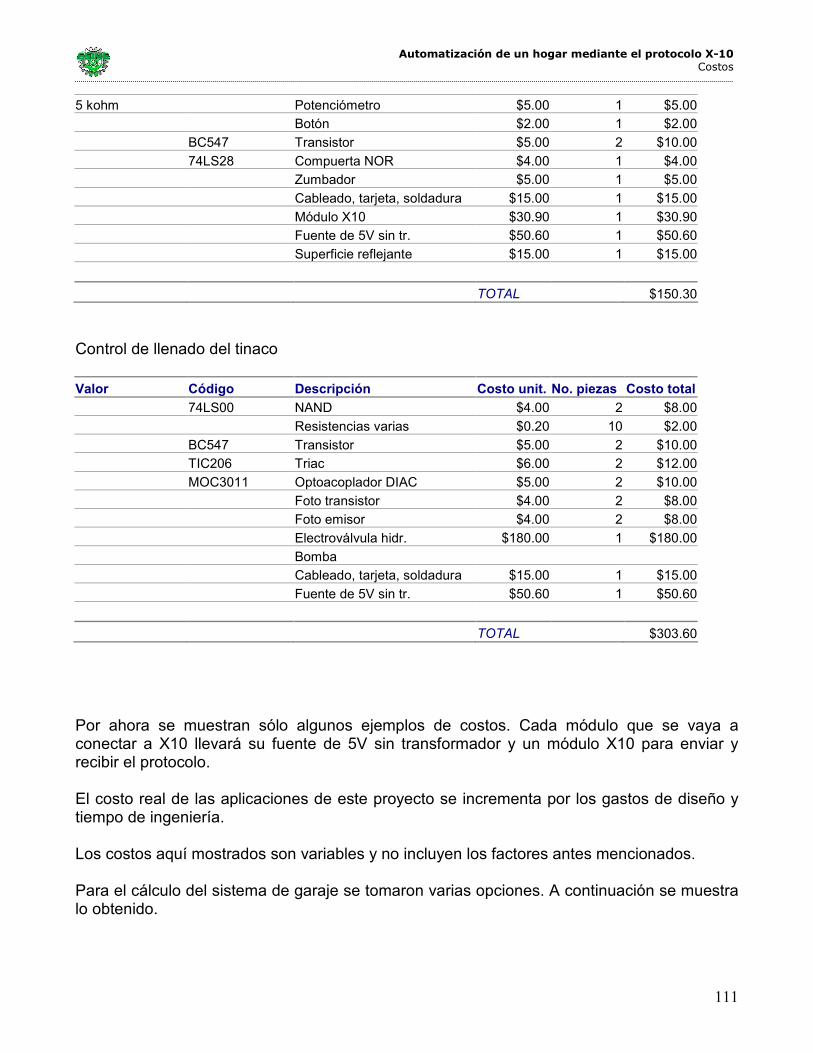
Automatización de un hogar mediante el protocolo X-10 Costos
111
5 kohm Potenciómetro $5.00 1 $5.00
Botón $2.00 1 $2.00
BC547 Transistor $5.00 2 $10.00
74LS28 Compuerta NOR $4.00 1 $4.00
Zumbador $5.00 1 $5.00
Cableado, tarjeta, soldadura $15.00 1 $15.00
Módulo X10 $30.90 1 $30.90
Fuente de 5V sin tr. $50.60 1 $50.60
Superficie reflejante $15.00 1 $15.00
TOTAL $150.30
Control de llenado del tinaco Valor Código Descripción Costo unit. No. piezas Costo total
74LS00 NAND $4.00 2 $8.00
Resistencias varias $0.20 10 $2.00
BC547 Transistor $5.00 2 $10.00
TIC206 Triac $6.00 2 $12.00
MOC3011 Optoacoplador DIAC $5.00 2 $10.00
Foto transistor $4.00 2 $8.00
Foto emisor $4.00 2 $8.00
Electroválvula hidr. $180.00 1 $180.00
Bomba
Cableado, tarjeta, soldadura $15.00 1 $15.00
Fuente de 5V sin tr. $50.60 1 $50.60
TOTAL $303.60
Por ahora se muestran sólo algunos ejemplos de costos. Cada módulo que se vaya a conectar a X10 llevará su fuente de 5V sin transformador y un módulo X10 para enviar y recibir el protocolo. El costo real de las aplicaciones de este proyecto se incrementa por los gastos de diseño y tiempo de ingeniería. Los costos aquí mostrados son variables y no incluyen los factores antes mencionados. Para el cálculo del sistema de garaje se tomaron varias opciones. A continuación se muestra lo obtenido.

Automatización de un hogar mediante el protocolo X-10 Costos
112
El estudio de costos para garaje se divide en tres partes principales: - El costo por el sistema de reducción y acoplamiento - El control electrónico - El diseño
El costo por sistema de reducción y acoplamiento
En este aspecto existen muchas variables que se deberán de considerar, para el sistema de reducción y acoplamiento se hicieron 3 estudios o ramas de cotización que a continuación serán enumeradas con sus ventajas y desventajas. La primera cotización dará un costo por el maquinado de las piezas necesarias para la transmisión y reducción de potencia así como su acoplamiento con el motor. Este maquinado sería realizado de acuerdo con los cálculos obtenidos durante el diseño. Todas las piezas cumplirían con lo especificado. La segunda cotización fue obtenida en base a productos fabricados por serie por la compañía Maquinados Nacionales (ubicada en Tlalnepantla) los cuales no cumplen con las características específicas determinadas en el proyecto pero sí con las necesidades finales de potencia, resistencia y velocidad. La tercera cotización es la compra del sistema reductor (corona sin fin) junto con el sistema de piñón de salida. A continuación se realizará la cotización de cada una de las opciones especificando costos y para obtener así cual es la opción más barata. 1ª cotización:
Maquinado de todas las piezas de acuerdo al diseño
A continuación se hará una descripción de cuales son los procesos para la obtención de cada pieza y el costo por cada una de ellas. Engrane helicoidal Este engrane será de acero sementado según las recomendaciones del manual Globley para selección de corona-sinfín. Debido a que del engrane a maquinar se tienen valores comerciales, el acero para producir el engrane será introducido en una máquina de generación de engranes, donde se colocará el disco cortador; ya cortado, se lleva a rectificación para una limpieza final; finalmente se lleva acabo el proceso de cementado. El costo de este engrane será de $750.00
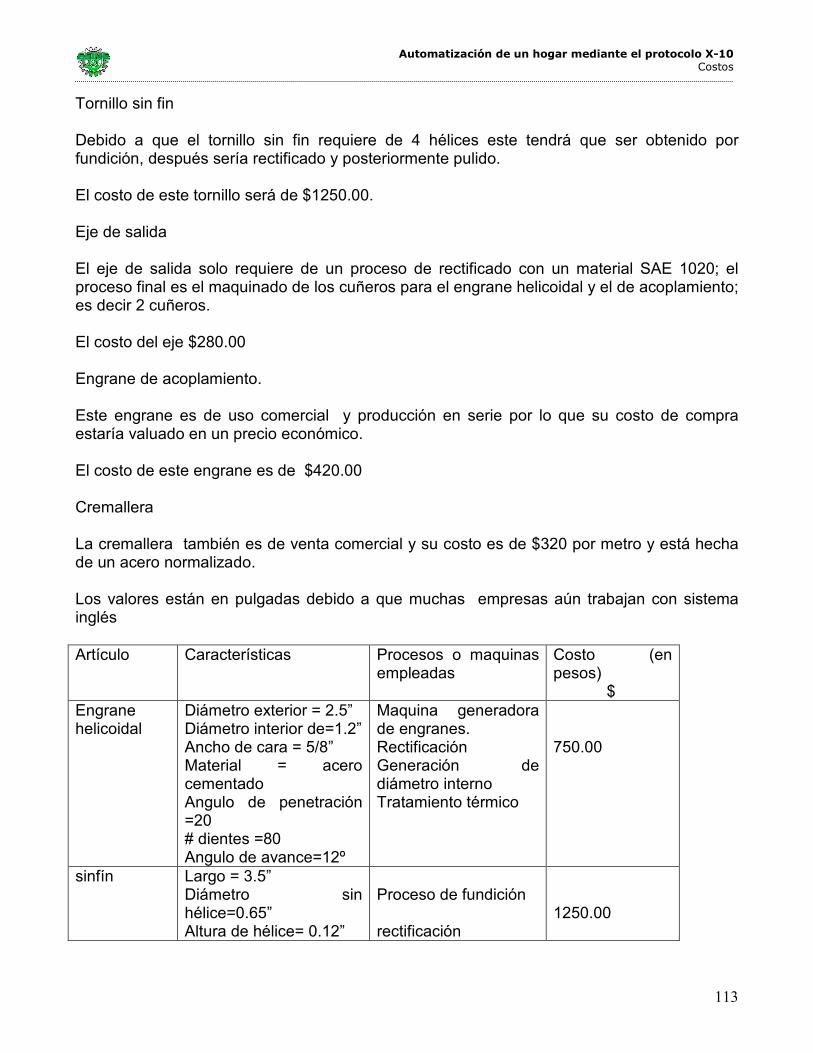
Automatización de un hogar mediante el protocolo X-10 Costos
113
Tornillo sin fin Debido a que el tornillo sin fin requiere de 4 hélices este tendrá que ser obtenido por fundición, después sería rectificado y posteriormente pulido. El costo de este tornillo será de $1250.00. Eje de salida El eje de salida solo requiere de un proceso de rectificado con un material SAE 1020; el proceso final es el maquinado de los cuñeros para el engrane helicoidal y el de acoplamiento; es decir 2 cuñeros. El costo del eje $280.00 Engrane de acoplamiento. Este engrane es de uso comercial y producción en serie por lo que su costo de compra estaría valuado en un precio económico. El costo de este engrane es de $420.00 Cremallera La cremallera también es de venta comercial y su costo es de $320 por metro y está hecha de un acero normalizado. Los valores están en pulgadas debido a que muchas empresas aún trabajan con sistema inglés Artículo Características Procesos o maquinas
empleadas Costo (en pesos) $
Engrane helicoidal
Diámetro exterior = 2.5” Diámetro interior de=1.2” Ancho de cara = 5/8” Material = acero cementado Angulo de penetración =20 # dientes =80 Angulo de avance=12º
Maquina generadora de engranes. Rectificación Generación de diámetro interno Tratamiento térmico
750.00
sinfín Largo = 3.5” Diámetro sin hélice=0.65” Altura de hélice= 0.12”
Proceso de fundición rectificación
1250.00
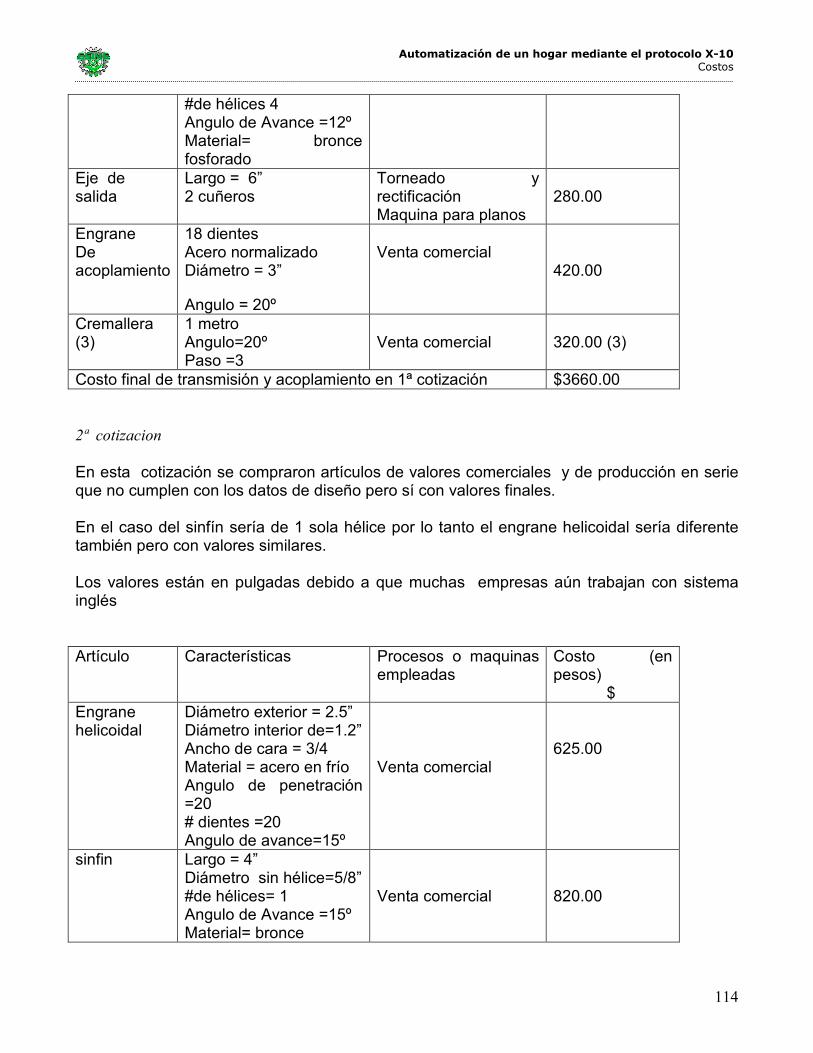
Automatización de un hogar mediante el protocolo X-10 Costos
114
#de hélices 4 Angulo de Avance =12º Material= bronce fosforado
Eje de salida
Largo = 6” 2 cuñeros
Torneado y rectificación Maquina para planos
280.00
Engrane De acoplamiento
18 dientes Acero normalizado Diámetro = 3”
Angulo = 20º
Venta comercial
420.00
Cremallera (3)
1 metro Angulo=20º Paso =3
Venta comercial
320.00 (3)
Costo final de transmisión y acoplamiento en 1ª cotización $3660.00 2ª cotizacion
En esta cotización se compraron artículos de valores comerciales y de producción en serie que no cumplen con los datos de diseño pero sí con valores finales. En el caso del sinfín sería de 1 sola hélice por lo tanto el engrane helicoidal sería diferente también pero con valores similares. Los valores están en pulgadas debido a que muchas empresas aún trabajan con sistema inglés Artículo Características Procesos o maquinas
empleadas Costo (en pesos) $
Engrane helicoidal
Diámetro exterior = 2.5” Diámetro interior de=1.2” Ancho de cara = 3/4 Material = acero en frío Angulo de penetración =20 # dientes =20 Angulo de avance=15º
Venta comercial
625.00
sinfin Largo = 4” Diámetro sin hélice=5/8” #de hélices= 1 Angulo de Avance =15º Material= bronce
Venta comercial
820.00
Automatización de un hogar mediante el protocolo X-10 Costos
115
Eje de salida
Largo = 6” Diámetro de =1.25” Acero normalizado
Venta comercial
210.00
Engrane De acoplamiento
18 dientes Acero normalizado
Diámetro = 3”
Angulo = 20
Venta comercial
420.00
Cremallera (3)
1 metro Angulo=20º Paso =3
Venta comercial
320.00 (3)
Costo final de transmisión y acoplamiento en 2ª cotización $3335.00 3a. cotización
En la tercera cotización se estudió el sistema de reducción como artículo así como el engrane y la cremallera en conjunto. Las características de la caja de reducción son la siguientes: Potencia máxima de entrada =3/4hp Potencia de salida= 1/2hp Diámetro del eje de salida = 1.5” Relación = 20:1 Capaz de soportar hasta 250kg en su eje de salida. El costo de la caja de reducción es de $2050.00 La cremallera tiene un costo de $250.00 el metro y el engrane un costo de $280.00 El costo de acoplamiento es de $1030.00 Por lo tanto el costo de esta cotización es de $3080.00 Por lo tanto como conclusión correspondiente la tercera cotización en la cual se compran la caja de reducción y el engrane y cremallera como artículos únicos es la mas económica, tal vez no cumplen con los valores de diseño pero sí con las necesidades finales Los datos del motor son los siguientes: Motor 1/5 hp 6polos 1200rpm 127vca
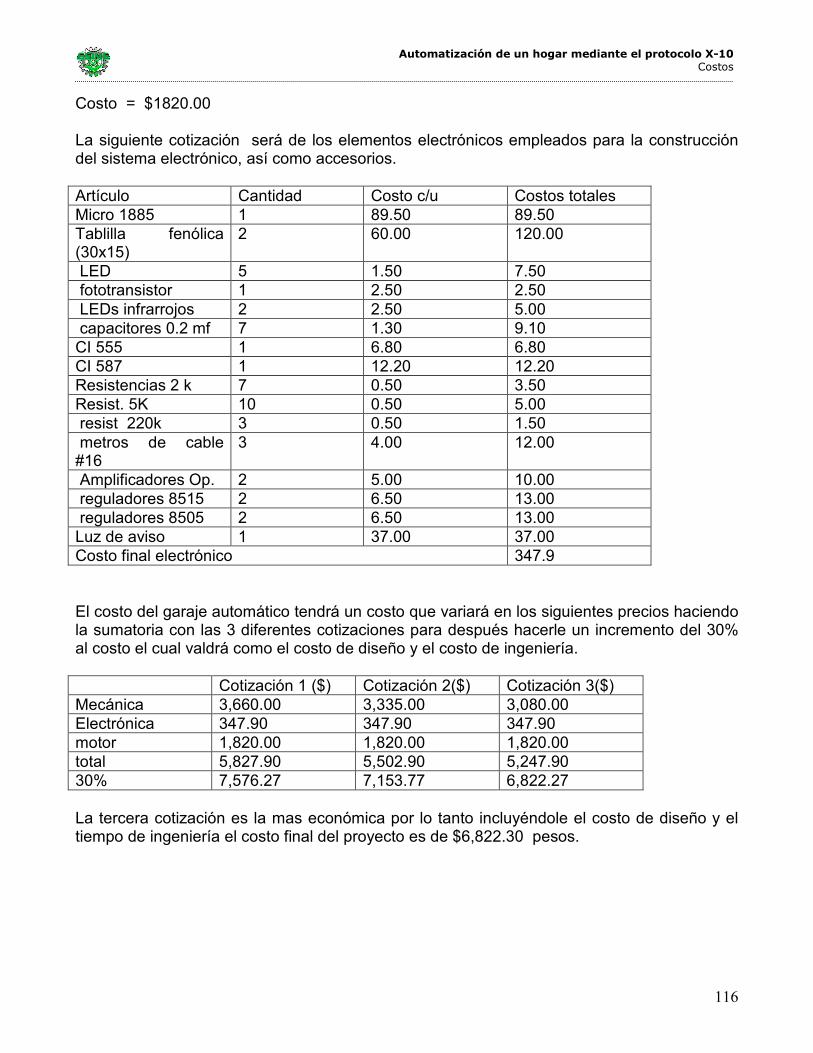
Automatización de un hogar mediante el protocolo X-10 Costos
116
Costo = $1820.00 La siguiente cotización será de los elementos electrónicos empleados para la construcción del sistema electrónico, así como accesorios. Artículo Cantidad Costo c/u Costos totales Micro 1885 1 89.50 89.50 Tablilla fenólica (30x15)
2 60.00 120.00
LED 5 1.50 7.50 fototransistor 1 2.50 2.50 LEDs infrarrojos 2 2.50 5.00 capacitores 0.2 mf 7 1.30 9.10 CI 555 1 6.80 6.80 CI 587 1 12.20 12.20 Resistencias 2 k 7 0.50 3.50 Resist. 5K 10 0.50 5.00 resist 220k 3 0.50 1.50 metros de cable #16
3 4.00 12.00
Amplificadores Op. 2 5.00 10.00 reguladores 8515 2 6.50 13.00 reguladores 8505 2 6.50 13.00 Luz de aviso 1 37.00 37.00 Costo final electrónico 347.9 El costo del garaje automático tendrá un costo que variará en los siguientes precios haciendo la sumatoria con las 3 diferentes cotizaciones para después hacerle un incremento del 30% al costo el cual valdrá como el costo de diseño y el costo de ingeniería. Cotización 1 ($) Cotización 2($) Cotización 3($) Mecánica 3,660.00 3,335.00 3,080.00 Electrónica 347.90 347.90 347.90 motor 1,820.00 1,820.00 1,820.00 total 5,827.90 5,502.90 5,247.90 30% 7,576.27 7,153.77 6,822.27 La tercera cotización es la mas económica por lo tanto incluyéndole el costo de diseño y el tiempo de ingeniería el costo final del proyecto es de $6,822.30 pesos.
Automatización de un hogar mediante el protocolo X-10 Apéndice
117
Apéndice A.1 Programas de transmisión recepción de portadora
Programa de transmisión
//Este programa sacará un PWM de 120kHz con un duty time al 50% cuando la línea //de alimentación de 60Hz cruce por cero y presione RB1 //Ese PWM sólo durará 1ms //Simula la salida de 120kHz del X-10 //f=120kHz //Tpwm=8.333us //duty time= 4.166us //Tpwm=(PR2+1)4 Tosc PRtm2 //Tpwm=(41+1)(4)(1/20MHz)(1)=8.4us //fpwm=1/8.4us=119.047kHz=120KHz //duty time=CCP Tosc PRtm2 //duty time=83(1/20MHz)(1)=4.15us=4.166us //Res=[log(20MHz/120KHz)/log 2]=7.39=7bit //83d=0x53=1010011b O.K. //En RB0 se conectará una R de 1.2Mohm para evitar daños al PIC //Ésta logrará la detección de cruce por cero de la onda senoidal #include "16f877a.h" #use delay(clock=20000000) //20MHz #fuses hs,nowdt,noput,nobrownout,nolvp,noprotect //hs high speed #use fast_io (b) #use fast_io (c) int16 duty_time=0x0053; //4.15us para 50% int1 cruce_cero=FALSE; //avisa que hubo cruce por cero int1 flanco=0; //Si el flanco es 0, la interrupción será L_to_H //Si el flanco es 1, la interrupción será H_to_L void main(void) //configura terminales e/s set_tris_c(0x00); //todo salida set_tris_b(0xff); //todo entrada //configura PWM setup_timer_2(T2_DIV_BY_1,41,1); //PR2=41 set_pwm1_duty(duty_time); //4.15us //configura interrupción enable_interrupts(INT_EXT); //habilita interrupción por flanco en RB0 //debe interrumpir en ambos cruces por cero de la onda senoidal if(flanco==0)EXT_INT_EDGE(L_to_H); //interrumpe cuando pasa de 0 a 1 if(flanco==1)EXT_INT_EDGE(H_to_L); //interrumpe cuando pasa de 1 a 0 enable_interrupts(global);

Automatización de un hogar mediante el protocolo X-10 Apéndice
118
while(1) if(cruce_cero==TRUE) delay_us(1000); //lo deja activado por 1ms setup_ccp1(ccp_off); //lo apaga cruce_cero=FALSE; //avisa que ya lo apagó output_low(pin_c2); //pone a cero ese pin (pwm) flanco++; //invierte su estado if(flanco==0)EXT_INT_EDGE(L_to_H); //interrumpe cuando pasa de 0 a 1 if(flanco==1)EXT_INT_EDGE(H_to_L); //interrumpe cuando pasa de 1 a 0 //aquí llega cuando el flanco es detectado //llega cada 8.333ms, cada cruce por cero #int_EXT void cruce_por_cero() if(input(pin_b1)) //si b1 está presionado setup_ccp1(ccp_pwm); //activa pwm inmediatamente cruce_cero=TRUE; //avisa que ya lo prendió
Programa de recepción
//Este programa leerá la señal de 120kHz que transmitirá otro PIC //La leerá cada cruce por cero de 60Hz //SI hay un bit transmitido en la señal de 60Hz, //se activará una salida en RB1 //En RB0 se conectará una R de 1.2Mohm para evitar daños al PIC //Ésta logrará la detección de cruce por cero de la onda senoidal #include "16f877a.h" #use delay(clock=20000000) //20MHz #fuses hs,nowdt,noput,nobrownout,nolvp,noprotect //hs high speed #use fast_io (b) #use fast_io (c) int1 cruce_cero=FALSE; //avisa que hubo cruce por cero int1 flanco=0; //Si el flanco es 0, la interrupción será L_to_H //Si el flanco es 1, la interrupción será H_to_L void main(void) //configura terminales e/s set_tris_c(0b00001000); //RC2 out, RC3 in set_tris_b(0b00000001); //RB0 in, RB1 out
Automatización de un hogar mediante el protocolo X-10 Apéndice
119
//configura interrupción enable_interrupts(INT_EXT); //habilita interrupción por flanco en RB0 //debe interrumpir en ambos cruces por cero de la onda senoidal if(flanco==0)EXT_INT_EDGE(L_to_H); //interrumpe cuando pasa de 0 a 1 if(flanco==1)EXT_INT_EDGE(H_to_L); //interrumpe cuando pasa de 1 a 0 enable_interrupts(global); while(1) if(cruce_cero==TRUE) cruce_cero=FALSE; //avisa que ya se enteró delay_us(400); //espera 400us if(input(pin_c3)) output_high(pin_b1); //si hay un 1 enciende RB1 if(input(pin_c3)==FALSE) output_low(pin_b1); //si hay un 0 apaga RB1 flanco++; //invierte su estado if(flanco==0)EXT_INT_EDGE(L_to_H); //interrumpe cuando pasa de 0 a 1 if(flanco==1)EXT_INT_EDGE(H_to_L); //interrumpe cuando pasa de 1 a 0 //aquí llega cuando el flanco es detectado //llega cada 8.333ms, cada cruce por cero #int_EXT void cruce_por_cero() cruce_cero=TRUE; //avisa que hubo cruce
A.2 Programa del control de iluminación
//Este programa controla la luminosidad de un foco //detecta cruce por cero con una R de 1.2M en RB0 //En la LCD muestra el porcentaje de luz //con 2 botones se sube o baja el porcentaje //b1 aumenta //b2 disminuye // Conexiones de la LCD: // D0 enable // D1 rs // D2 rw // D4 D4 // D5 D5 // D6 D6 // D7 D7 // // LCD pins D0-D3 are not used and PIC D3 is not used #include "16f877a.h" #use delay(clock=20000000) //20MHz #fuses hs,nowdt,noput,nobrownout,noprotect,nolvp
Automatización de un hogar mediante el protocolo X-10 Apéndice
120
#include "lcd.c" #use standard_io (D) #use fast_io (b) int1 cruce_cero=FALSE; //avisa que hubo cruce por cero int1 flanco=0; //Si el flanco es 0, la interrupción será L_to_H //Si el flanco es 1, la interrupción será H_to_L int8 luminosidad=0; //255 es 100% float porcentaje=0; int8 valor_tmr0=0; //el tiempo que tardará en activar triac //aquí llega cuando el flanco es detectado //llega cada 8.333ms, cada cruce por cero #int_EXT void cruce_por_cero() cruce_cero=TRUE; //avisa //aquí llega cuando el timer0 se desborda //va a variar el tiempo de desbordamiento con valor_tmr0 #INT_TIMER0 void activa_triac() disable_interrupts(INT_RTCC); //termina espera output_high(pin_e2); //activa gate del triac delay_us(100); //un pulso de 100us output_low(pin_e2); void main(void) set_tris_b(0xff); //todo entrada set_tris_e(0x00); //todo salida output_low(pin_e0); //apaga triac //Rutina LCD lcd_init(); //Inicia LCD lcd_putc("\f"); //Limpia LCD lcd_putc(" Dimmer\n Santiago"); delay_ms(3000); lcd_putc("\f"); //configura interrupción enable_interrupts(INT_EXT); //habilita interrupción por flanco en RB0 //debe interrumpir en ambos cruces por cero de la onda senoidal if(flanco==0)EXT_INT_EDGE(L_to_H); //interrumpe cuando pasa de 0 a 1 if(flanco==1)EXT_INT_EDGE(H_to_L); //interrumpe cuando pasa de 1 a 0 setup_counters(RTCC_INTERNAL,RTCC_DIV_256); set_timer0(valor_tmr0); //carga TMR0 enable_interrupts(global); while(1)
Automatización de un hogar mediante el protocolo X-10 Apéndice
121
if(cruce_cero==TRUE) set_timer0(valor_tmr0); //empieza conteo para activar triac enable_interrupts(INT_TIMER0); cruce_cero=FALSE; flanco++; //invierte su estado if(flanco==0)EXT_INT_EDGE(L_to_H); //interrumpe cuando pasa de 0 a 1 if(flanco==1)EXT_INT_EDGE(H_to_L); //interrumpe cuando pasa de 1 a 0 //ahora detectará aumento o decremento en luminosidad if(input(pin_b1)) luminosidad++; //aumento if(input(pin_b2)) luminosidad--; //disminuye //ahora calcula el porcentaje de luz para la LCD porcentaje=luminosidad*0.3921; //porcentaje=(luminosidad*100)/255; //ahora convierte luminosidad (8bit) a tiempo para timer0 //la fórmula para timer0 es //t=(256-valor_tmr0)(0.2us)(256) // //media onda senoidal dura 8.333ms // //para luz cercana al 100% //t=(256-240)(0.2us)(256)=0.8ms //tarda en encender sólo 0.8ms //para luz casi apagado 0% //t=(256-99)(0.2us)(256)=8ms //tarda en encender 8ms // //la pendiente m para relacionar luminosidad con valor_tmr0 es //m=(240-99)/(255-0)=0.564 //la ecuación es //valor_tmr0=(0.564)(luminosidad)+99 //si luminosidad=255, t=0.665ms, luz->100% //si luminosidad=0, t=8.03ms, luz->0% valor_tmr0=(0.564*luminosidad)+99; //hasta la próxima media onda printf(lcd_putc,"\f%03.0f%%",porcentaje); //limpia y escribe
A.3 Programa del control de temperatura
/* Controla la temperatura de una habitación mediante una lectura y control de un ventilador de techo y un calefactor. La temperatura será leída con un LM35. En una LCD se mostrará la temperatura actual y mediante botones + y - el usuario elegirá la temperatura deseada. Habrá un tercer botón que apague o encienda el control de temperatura. La potencia del ventilador será variable, dependiendo de la temperatura actual y la deseada. La diferencia de la temperatura actual y la deseada (dt) generará lo siguiente: dt<-1 vent=0 calef=1 -1<=dt<=1 vent=0 calef=0 1<dt<5 vent=% calef=0 aquí la potencia se da con el triac dt>=5 vent=100% calef=0
Automatización de un hogar mediante el protocolo X-10 Apéndice
122
Cada cruce por cero detectará la presión de los botones + y -. Dado que el cruce por cero es cada 8.3ms, se hará un divisor de conteo, ya que si presionara un segundo el botón, se incrementaría 120 veces la temperatura deseada. El óptimo es un incremento de 5 por segundo. 120/5=24 Cada 24 conteos, se hará un cambio en la t deseada. La entrada analógica será del LM35. Por cada °C, éste entrega 10mV. No se usará amplificador operacional, ya que en esta aplicación la resolución de la lectura no es crítica. Para convertir la lectura binaria en °C se usa la fórmula t actual= medicion(0.488) res=0.488°C/bit Se detecta el cruce por cero con una R de 1.2M. En la LCD muestra el porcentaje de luz con 2 botones se sube o baja el porcentaje. b1 aumenta b2 disminuye Conexiones de la LCD: D0 enable D1 rs D2 rw D4 D4 D5 D5 D6 D6 D7 D7 LCD pins D0-D3 are not used and PIC D3 is not used Para el cálculo de la %vel del vent... vel = 25 dt - 25 //la fórmula para timer0 es //t=(256-valor_tmr0)(0.2us)(256) //media onda senoidal dura 8.333ms //para velocidad cercana al 100% //t=(256-240)(0.2us)(256)=0.8ms //tarda en encender sólo 0.8ms //para luz casi apagado 0% //t=(256-99)(0.2us)(256)=8ms //tarda en encender 8ms // //la pendiente m para relacionar velocidad con valor_tmr0 es //m=(240-99)/(255-0)=0.564 //la ecuación es //valor_tmr0=(0.564)(velocidad)+99 */ #include "16f877a.h" #device adc=10 //Usa resolución de 10 bits ADC #use delay(clock=20000000) //20MHz #fuses hs,nowdt,noput,nobrownout,noprotect,nolvp #include "lcd.c" #use standard_io (D)

Automatización de un hogar mediante el protocolo X-10 Apéndice
123
#use fast_io (b) #use fast_io (e) //puerto para triacs int1 cruce_cero=FALSE; //avisa que hubo cruce por cero int1 flanco=0; //Si el flanco es 0, la interrupción será L_to_H //Si el flanco es 1, la interrupción será H_to_L int8 velocidad=0; //255 es 100% float porcentaje=0; int8 valor_tmr0=0; //el tiempo que tardará en activar triac int16 medicion; //aquí almacena la medición del LM35 ADC float temp_actual; //aquí pone la temperatura actual float temp_deseada; //aquí se almacena la temp deseada por el usuario float delta_t; //la diferencia entre ta y td int8 conteo_24=24; //cuenta 24 presiones de botón //aquí llega cuando el flanco es detectado //llega cada 8.333ms, cada cruce por cero #int_EXT void cruce_por_cero() cruce_cero=TRUE; //avisa //aquí llega cuando el timer0 se desborda //va a variar el tiempo de desbordamiento con valor_tmr0 #INT_TIMER0 void activa_triac() disable_interrupts(INT_RTCC); //termina espera output_high(pin_e1); //activa gate del triac ventilador delay_us(50); //un pulso de 50us output_low(pin_e1); void main(void) set_tris_b(0xff); //todo entrada set_tris_e(0x00); //todo salida output_low(pin_e1); //apaga triac ventilador output_low(pin_e2); //apaga triac calefactor //Rutina LCD lcd_init(); //Inicia LCD lcd_putc("\f"); //Limpia LCD lcd_putc("Control\nTemperatura"); delay_ms(3000); lcd_putc("\f"); //Realiza primera conversión para basar lectura deseada //Inicia lectura ADC setup_adc (adc_clock_div_32); //Enciende ADC setup_adc_ports (RA0_ANALOG); //RA0 mide, Vref es 5V set_adc_channel (0); //Elige canal a medir RA0 delay_us (20); medicion=read_adc (); //Hace conversión setup_adc (adc_off); //Apaga ADC temp_actual=medicion*(0.488); //convierte de binario a °C temp_deseada=temp_actual; //copia valor al inicio del programa
Automatización de un hogar mediante el protocolo X-10 Apéndice
124
//configura interrupción enable_interrupts(INT_EXT); //habilita interrupción por flanco en RB0 //debe interrumpir en ambos cruces por cero de la onda senoidal if(flanco==0)EXT_INT_EDGE(L_to_H); //interrumpe cuando pasa de 0 a 1 if(flanco==1)EXT_INT_EDGE(H_to_L); //interrumpe cuando pasa de 1 a 0 setup_counters(RTCC_INTERNAL,RTCC_DIV_256); enable_interrupts(global); while(1) if(cruce_cero==TRUE) //Inicia lectura ADC setup_adc (adc_clock_div_32); //Enciende ADC setup_adc_ports (RA0_ANALOG); //RA0 mide, Vref es 5V set_adc_channel (0); //Elige canal a medir RA0 delay_us (20); medicion=read_adc (); //Hace conversión setup_adc (adc_off); //Apaga ADC temp_actual=medicion*(0.488); //convierte de binario a °C //ahora detectará aumento o decremento en t deseada if(input(pin_b1)) conteo_24++; //aumento if(input(pin_b2)) conteo_24--; //disminuye if(conteo_24==48) conteo_24=24; temp_deseada=temp_deseada+0.5; //incrementa t deseada 0.5°C if(conteo_24==0) conteo_24=24; temp_deseada=temp_deseada-0.5; //disminuye t deseada 0.5°C delta_t=temp_actual-temp_deseada; //calcula la diferencia if(delta_t<-1) output_high(pin_e2); //enciende calefactor delay_us(50); output_low(pin_e2); //termina pulso if((delta_t>=-1)&&(delta_t<=1)) output_low(pin_e2); //apaga calefactor output_low(pin_e1); //apaga ventilador if((delta_t>1)&&(delta_t<5)) porcentaje=(25*delta_t)-25; //obtiene porcentaje de velocidad velocidad=porcentaje*2.55; //obtiene velocidad en int8 valor_tmr0=(0.564*velocidad)+99; //ver nota set_timer0(valor_tmr0); //inicia espera enable_interrupts(int_timer0); //habilita interrupción
Automatización de un hogar mediante el protocolo X-10 Apéndice
125
if(delta_t>=5) output_high(pin_e1); //activa ventilador 100% delay_us(50); output_low(pin_e1); //termina pulso //muestra datos en LCD lcd_gotoxy(1,1); printf(lcd_putc,"Actual %02.0fC\nDeseada %02.0fC",temp_actual,temp_deseada);
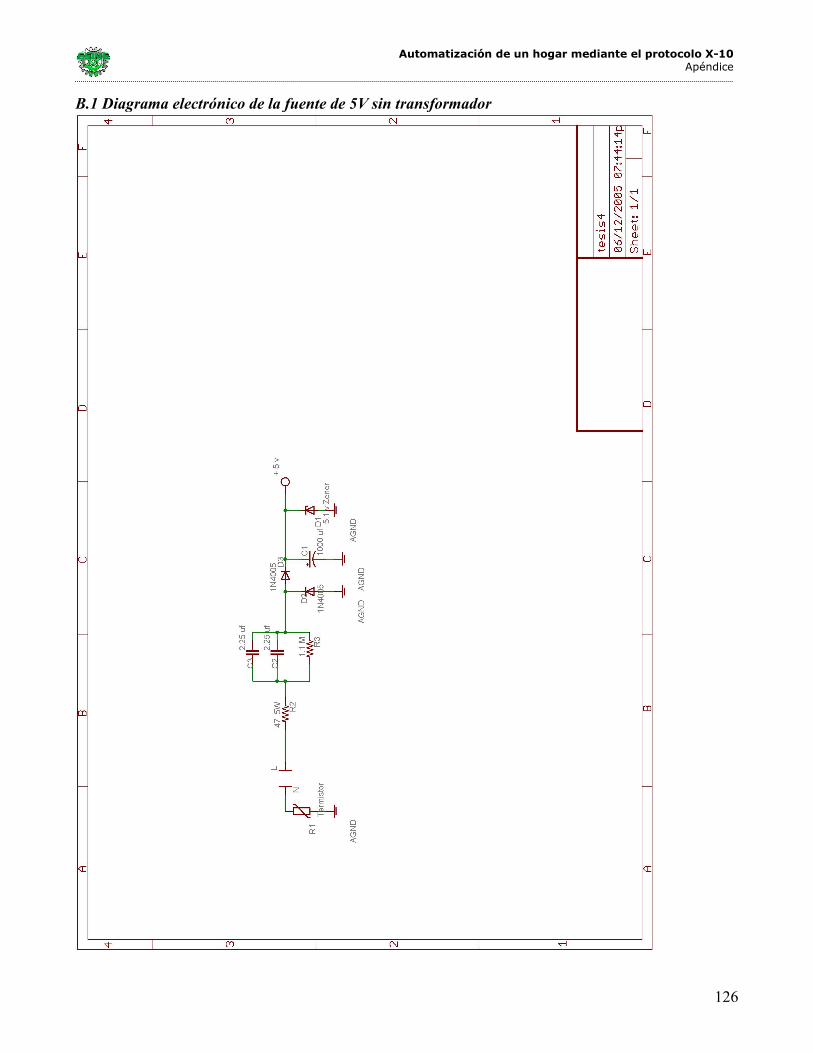
Automatización de un hogar mediante el protocolo X-10 Apéndice
126
B.1 Diagrama electrónico de la fuente de 5V sin transformador
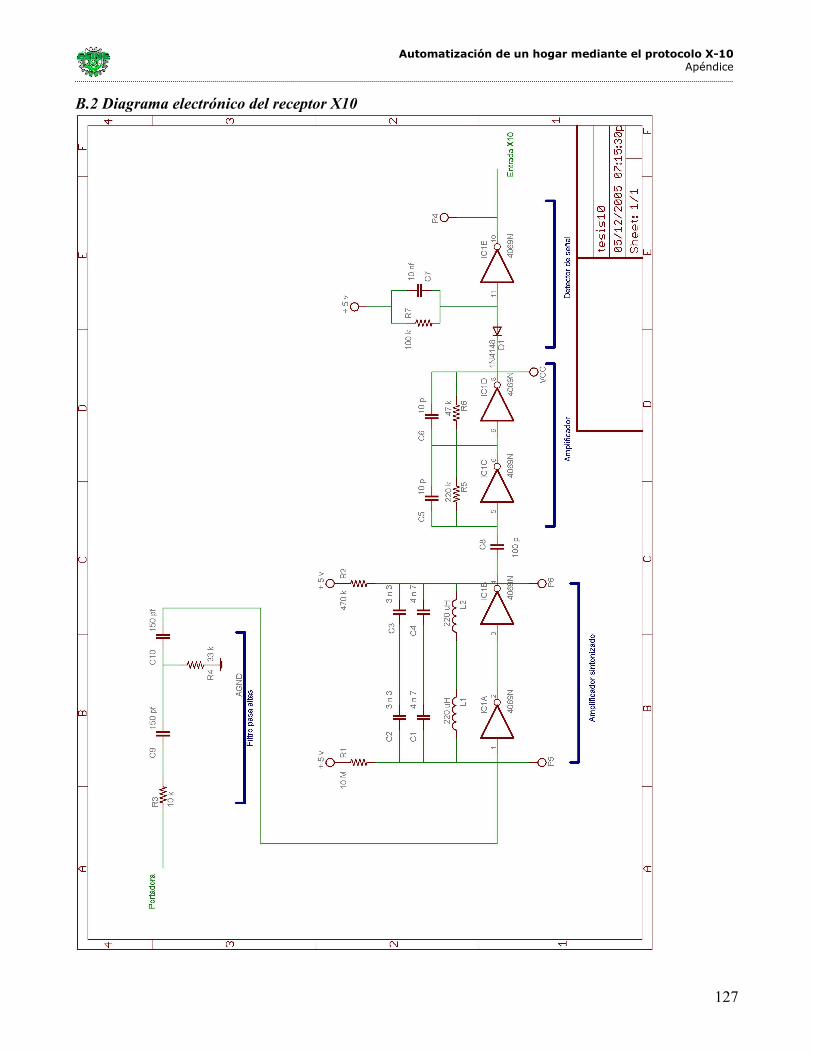
Automatización de un hogar mediante el protocolo X-10 Apéndice
127
B.2 Diagrama electrónico del receptor X10
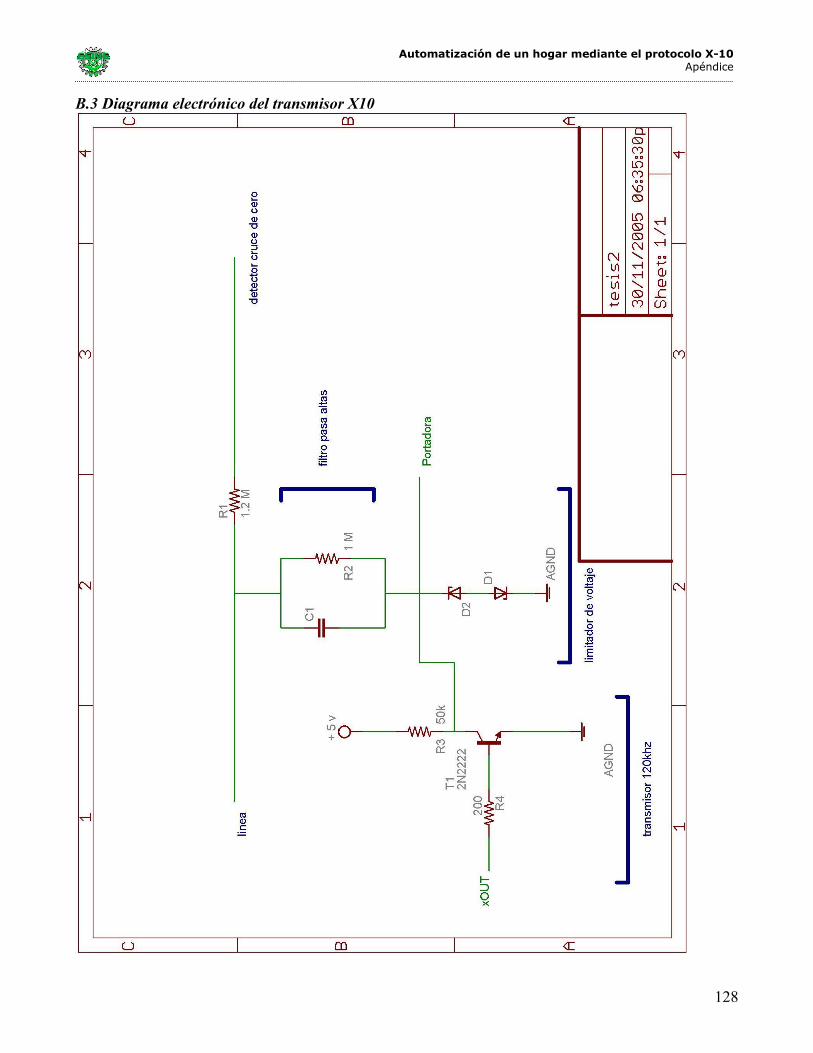
Automatización de un hogar mediante el protocolo X-10 Apéndice
128
B.3 Diagrama electrónico del transmisor X10
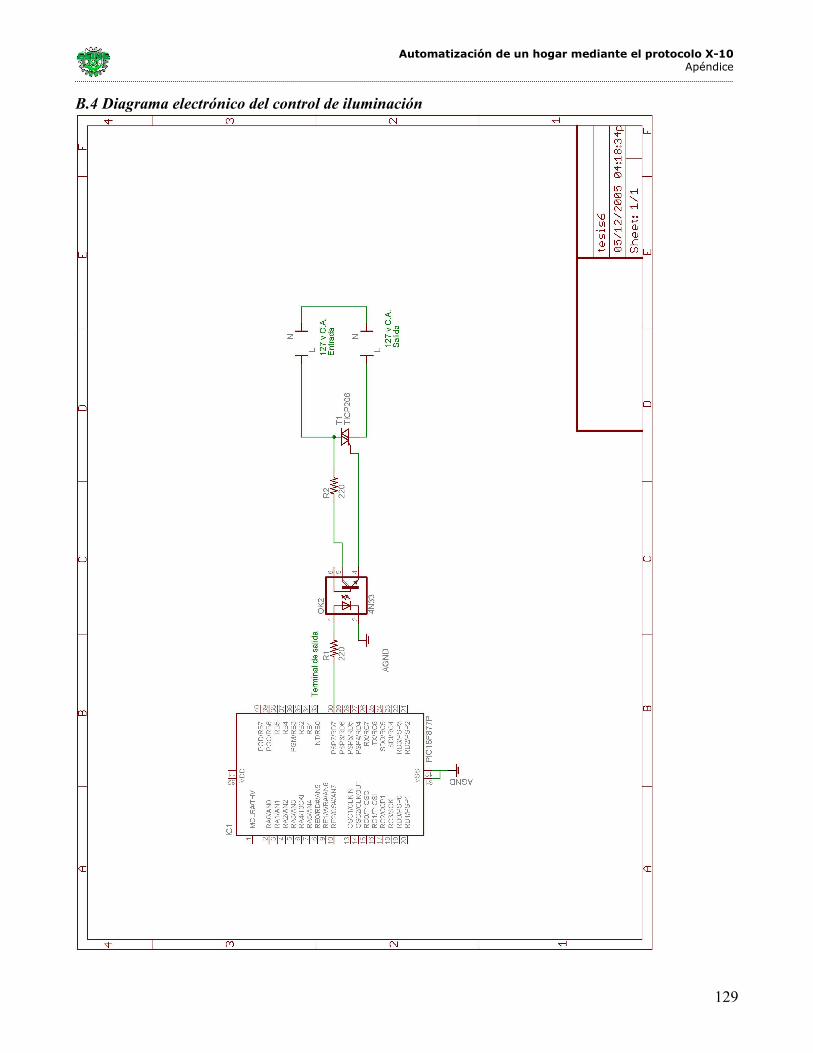
Automatización de un hogar mediante el protocolo X-10 Apéndice
129
B.4 Diagrama electrónico del control de iluminación
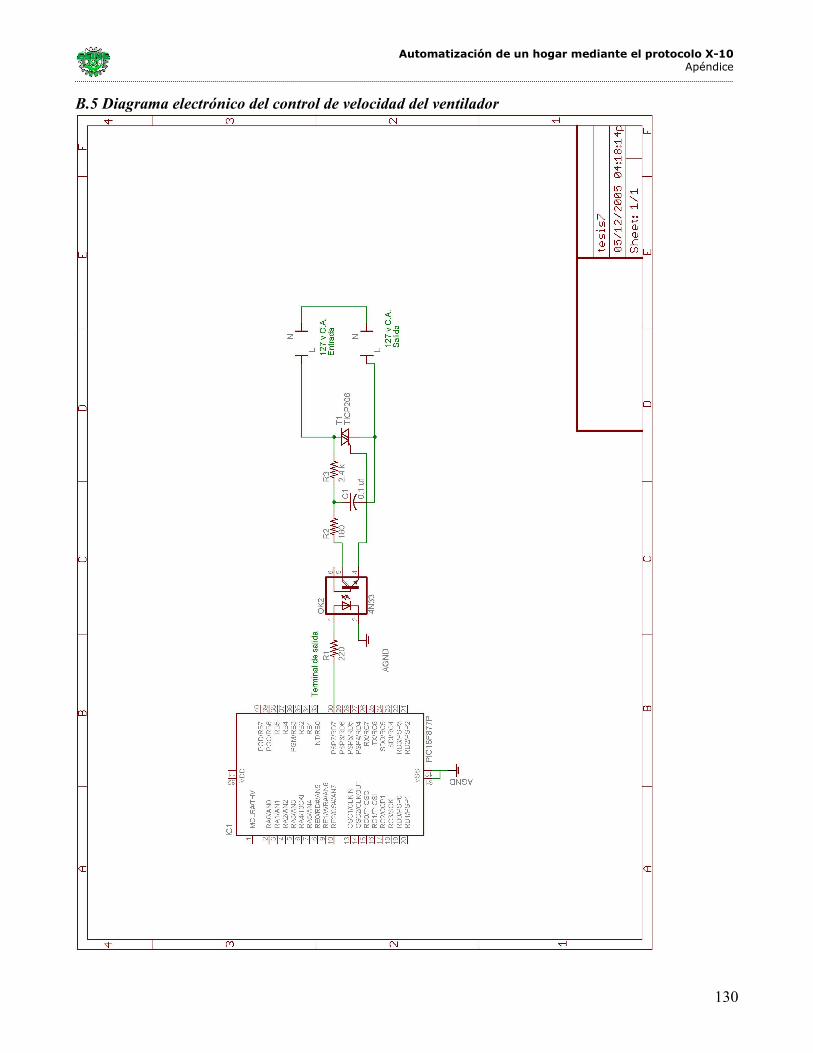
Automatización de un hogar mediante el protocolo X-10 Apéndice
130
B.5 Diagrama electrónico del control de velocidad del ventilador
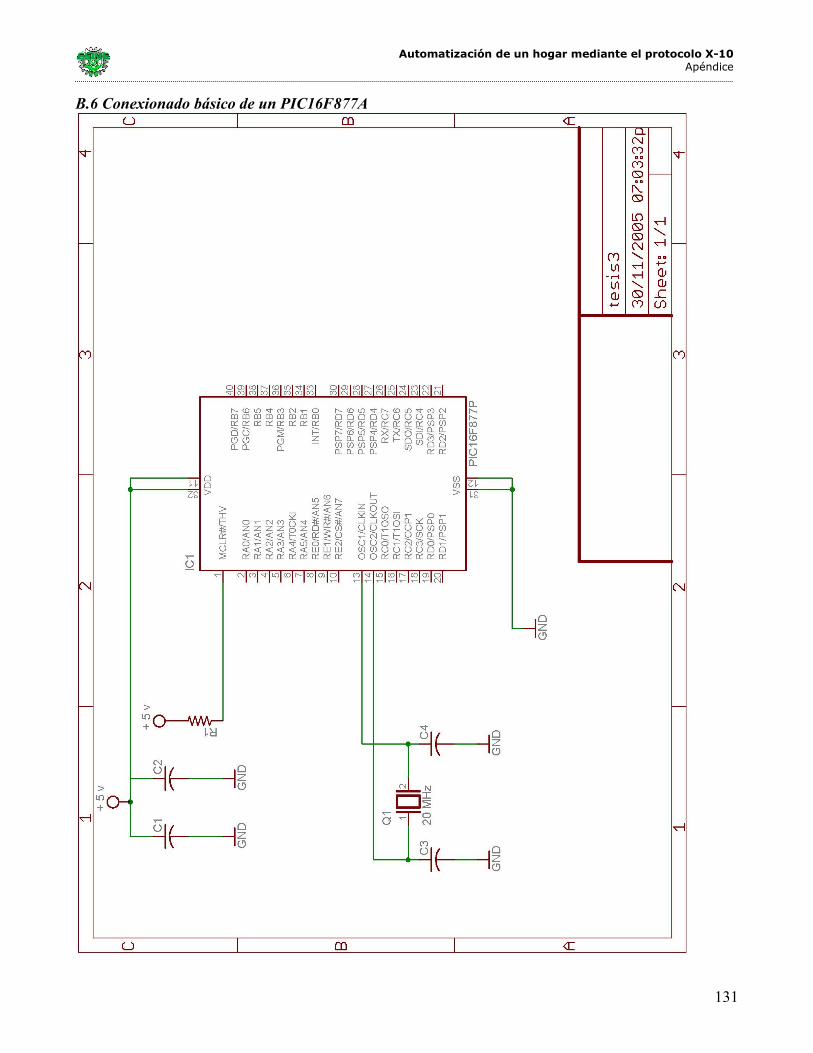
Automatización de un hogar mediante el protocolo X-10 Apéndice
131
B.6 Conexionado básico de un PIC16F877A
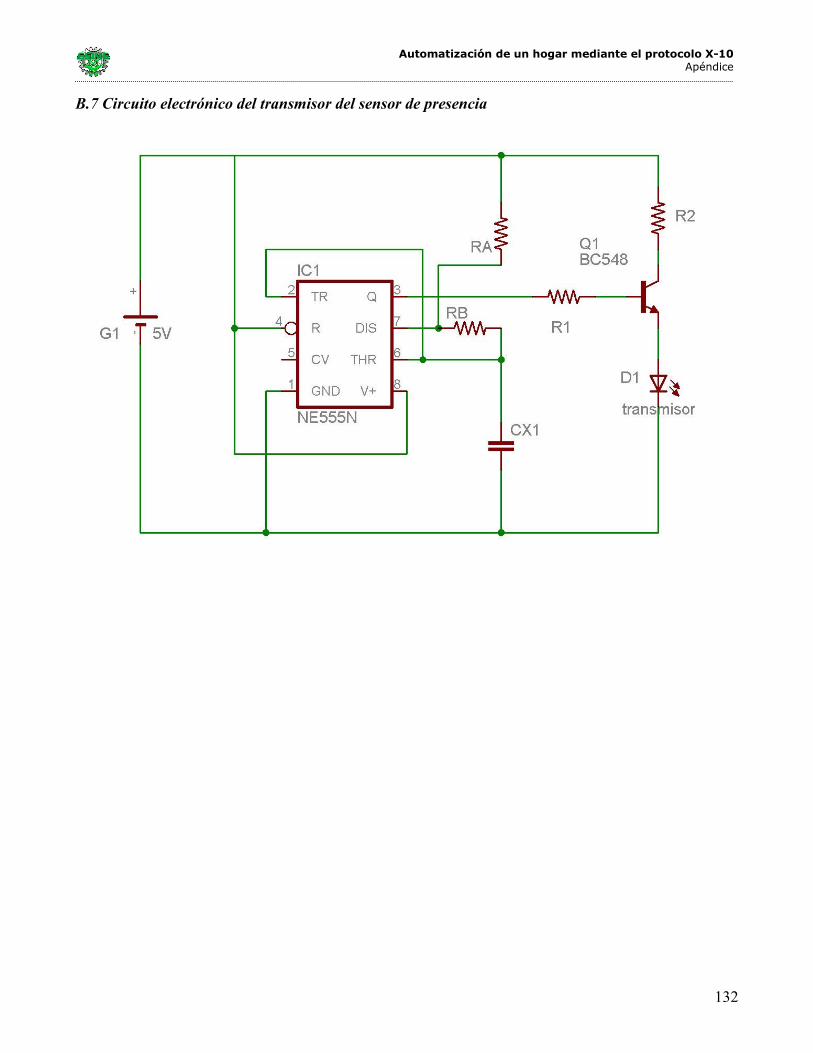
Automatización de un hogar mediante el protocolo X-10 Apéndice
132
B.7 Circuito electrónico del transmisor del sensor de presencia
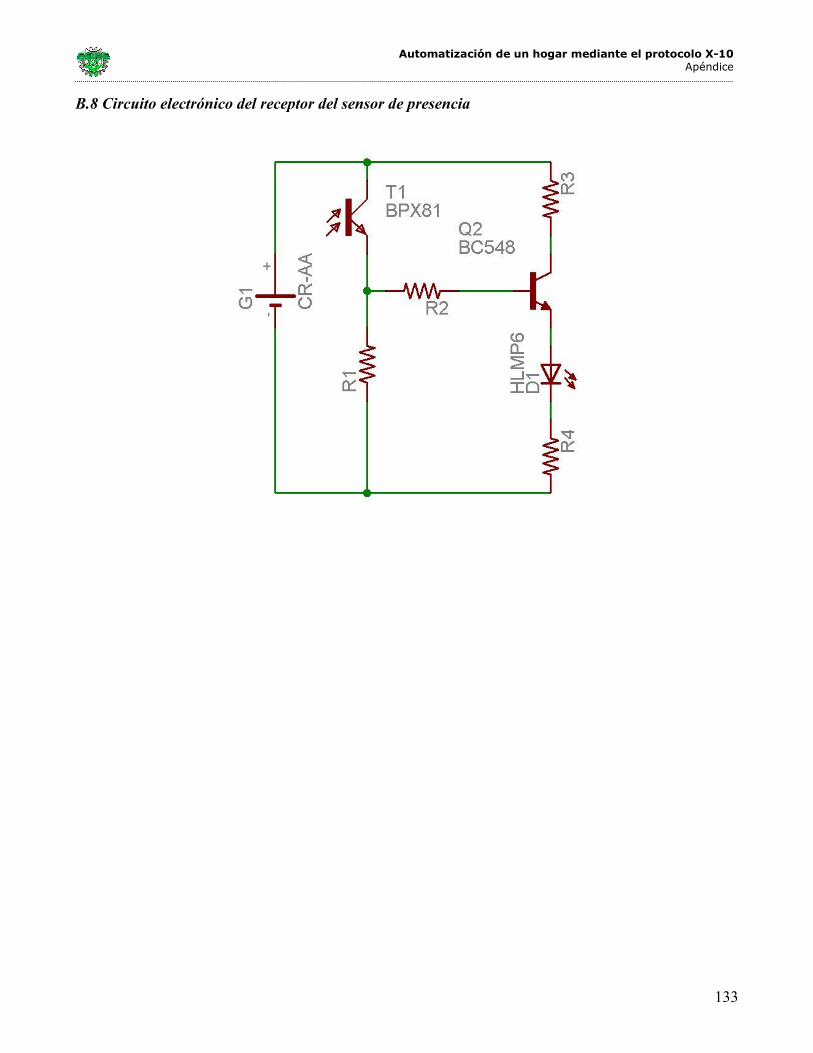
Automatización de un hogar mediante el protocolo X-10 Apéndice
133
B.8 Circuito electrónico del receptor del sensor de presencia
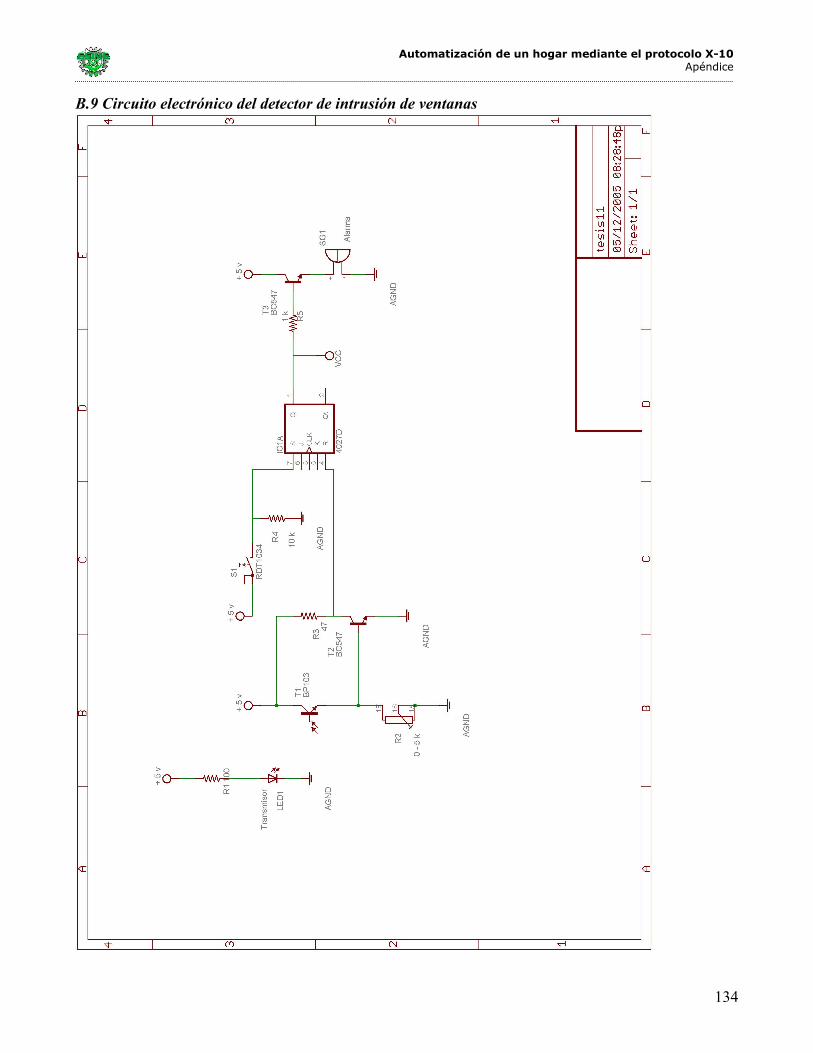
Automatización de un hogar mediante el protocolo X-10 Apéndice
134
B.9 Circuito electrónico del detector de intrusión de ventanas
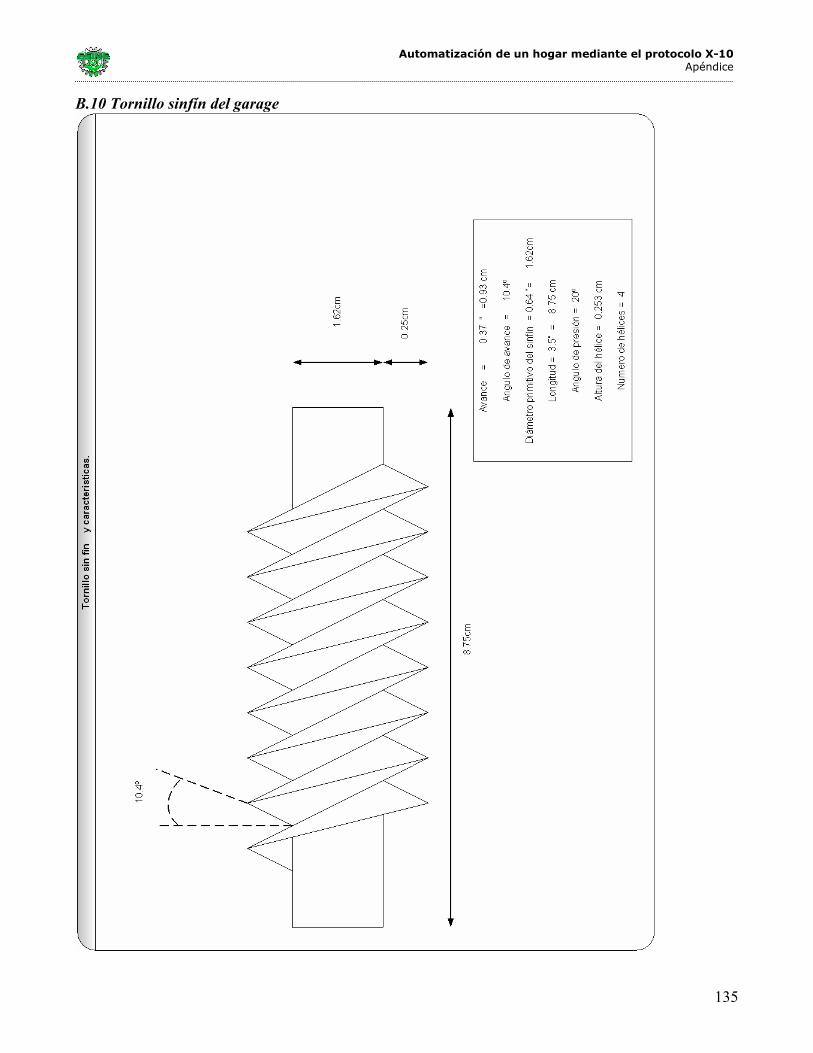
Automatización de un hogar mediante el protocolo X-10 Apéndice
135
B.10 Tornillo sinfín del garage
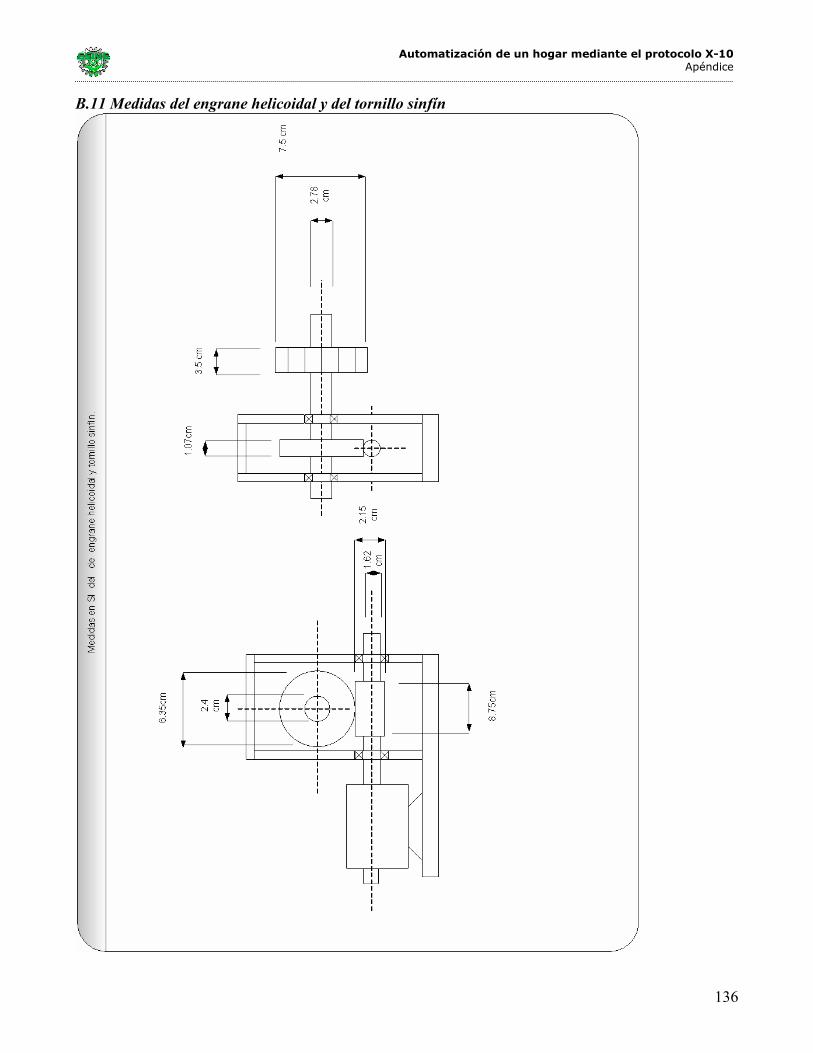
Automatización de un hogar mediante el protocolo X-10 Apéndice
136
B.11 Medidas del engrane helicoidal y del tornillo sinfín
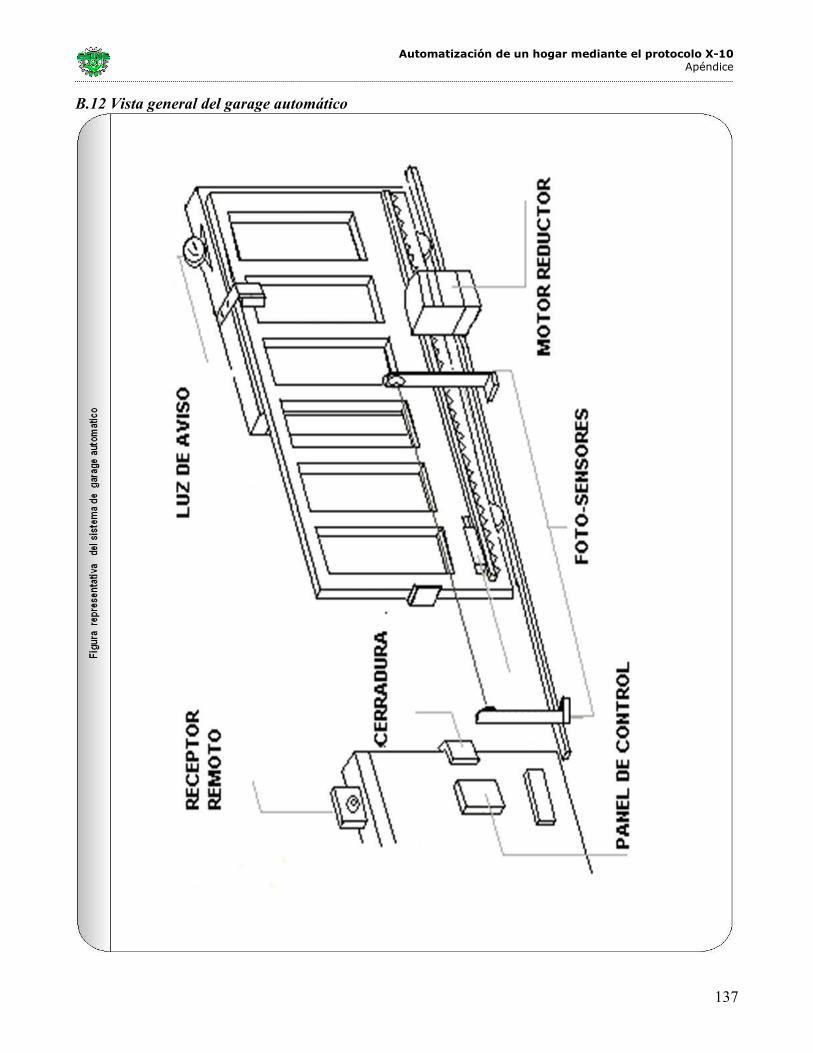
Automatización de un hogar mediante el protocolo X-10 Apéndice
137
B.12 Vista general del garage automático
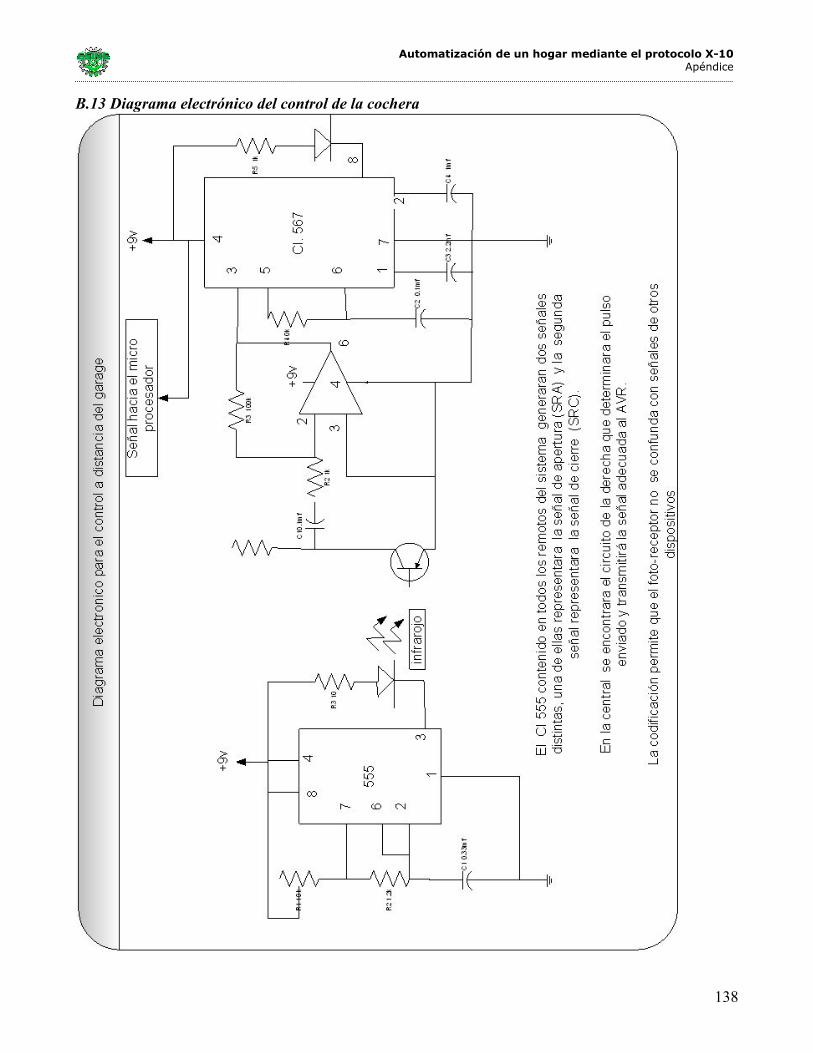
Automatización de un hogar mediante el protocolo X-10 Apéndice
138
B.13 Diagrama electrónico del control de la cochera

Automatización de un hogar mediante el protocolo X-10 Apéndice
139
Automatización de un hogar mediante el protocolo X-10 Apéndice
140
Índice de figuras Figura 2.1. Tiempos de sincronización de X10 ...................................................................................... 16 Figura 2.2. Envío de dirección a Unidad 2 Casa A................................................................................. 19 Figura 3.1. PWM..................................................................................................................................... 23 Figura 3.2. Diagrama de bloques de la aplicación .................................................................................. 24 Figura 3.3. Detector de cruce por cero.................................................................................................... 25 Figura 3.4. Diodos de protección de un PIC ........................................................................................... 26 Figura 3.5. Detector de señal de 120kHz ................................................................................................ 26 Figura 3.6. Tiempos para la señal de 120kHz......................................................................................... 28 Figura 3.7. Generador de señal de 120kHz............................................................................................. 30 Figura 3.8. Fuente de 5V sin transformador ........................................................................................... 30 Figura 3.9. Sensor de iluminación .......................................................................................................... 33 Figura 3.10. Ensamble del sensor de humo ............................................................................................ 34 Figura 3.11. Circuito electrónico del sensor de humo ............................................................................ 34 Figura 3.12. Sensor de presencia ............................................................................................................ 35 Figura 3.13. Sensor de temperatura LM35 ............................................................................................. 36 Figura 3.14. Sensor de humedad HM1500LF......................................................................................... 37 Figura 3.15. Conexión del sensor de humedad ....................................................................................... 38 Figura 3.16. Sensor de gas TGS813 de FIGARO................................................................................... 38 Figura 3.17. Circuito interno del TGS813 .............................................................................................. 39 Figura 3.18. Onda senoidal a 60Hz y 127VCA ...................................................................................... 41 Figura 3.19. Diagrama electrónico de un triac........................................................................................ 42 Figura 3.20. Diagrama electrónico del control de iluminación............................................................... 42 Figura 3.21. Voltaje interrumpido por triac ............................................................................................ 43 Figura 3.22. Diagrama de flujo del control de iluminación .................................................................... 44 Figura 3.23. Medición de la presión estática de agua ............................................................................. 45 Figura 3.24. Aspersor PGP de Hunter (8m a 12m)................................................................................. 47 Figura 3.25. Aspersor ProSpray de Hunter (3m a 5m) ........................................................................... 47 Figura 3.26. Electroválvulas SRV de Hunter.......................................................................................... 47 Figura 3.27. Diagrama de flujo del control de riego............................................................................... 49 Figura 3.28. Vista frontal de la puerta .................................................................................................... 51 Figura 3.29. Vista lateral de la puerta ..................................................................................................... 51 Figura 3.30. Cargas aplicadas a la puerta................................................................................................ 53 Figura 3.31. Rueda de la puerta .............................................................................................................. 54 Figura 3.32. Diagrama del motor y la caja de reducción de velocidad................................................... 57 Figura 3.33. Eje de transmisión de salida ............................................................................................... 57 Figura 3.34. Carretes de la persiana........................................................................................................ 59 Figura 3.35. Vista superior de las poleas ................................................................................................ 60 Figura 3.36. Unión del cordón al carrete ................................................................................................ 61 Figura 3.37. Fuerza involucrada en el carrete ......................................................................................... 62 Figura 3.38. Construcción de la persiana................................................................................................ 63 Figura 3.39. Diagrama a bloques del control de temperatura ................................................................. 71 Figura 3.40. Relación velocidad-temperatura del ventilador de techo ................................................... 73 Figura 3.41. Circuito de disparo del ventilador de techo ........................................................................ 74 Figura 3.42. Diagrama de flujo del control de temperatura .................................................................... 76
Automatización de un hogar mediante el protocolo X-10 Apéndice
141
Figura 3.43. Diagrama de tubería para sistema hidráulico ..................................................................... 77 Figura 3.44. Diagrama para cálculo por teorema de Bernoulli ............................................................... 80 Figura 3.45. Ubicación de los sensores en el sistema de Tinaco-Cisterna.............................................. 83 Figura 3.46. Diagrama electrónico de los sensores ópticos .................................................................... 83 Figura 3.47. Diagramas de flujo del control de la bomba....................................................................... 84 Figura 3.48. Diagrama lógico del control de la bomba........................................................................... 85 Figura 3.49. Diagrama lógico del sistema............................................................................................... 86 Figura 3.50. Diagrama de potencia para la bomba ................................................................................. 86 Figura 3.52. Barrera infrarroja para protección de ventanas................................................................... 87 Figura 3.53. Circuito lógico del control de intrusión.............................................................................. 88 Figura 4.1. Sistema centralizado para la automatización del hogar........................................................ 91 Figura 4.2. Portadora de X-10................................................................................................................. 92 Figura 4.3. Diagrama de flujo de transmisión y recepción de portadora ................................................ 93 Figura 4.4. Contraseña de acceso a la computadora central ................................................................... 95 Figura 4.5. Mensaje de error de acceso a Homation............................................................................... 95 Figura 4.6. Mensaje de error después de 4 intentos ................................................................................ 96 Figura 4.7. Ventana de bienvenida a Homation...................................................................................... 96 Figura 4.8. Entrada exitosa al sistema Homation.................................................................................... 96 Figura 4.9. Ventana principal del control central.................................................................................... 97 Figura 4.10. Habitación X10 activa ........................................................................................................ 98 Figura 4.11. Control de iluminación en Homation ................................................................................. 98 Figura 4.12. Ejemplo de uso del control de iluminación vía computadora central................................. 99 Figura 4.13. Calendario Homation.......................................................................................................... 99 Figura 4.14. Calendario Homation con tareas asignadas ...................................................................... 100 Figura 4.15. Opciones de funcionamiento de elementos X10 .............................................................. 101 Figura 4.16. Tareas del sistema Homation............................................................................................ 102 Figura 4.17. Búsqueda de tareas por fecha ........................................................................................... 102 Figura 4.18. Salida del sistema Homation ............................................................................................ 103 Figura 4.19. Conexionado del puerto paralelo de una PC .................................................................... 104 Figura 4.20. Configuración del puerto paralelo .................................................................................... 104 Figura 4.21. Circuito de conexión al puerto paralelo para evitar daños ............................................... 105
142
Bibliografía
• Editorial Time-Life, El Primer Hombre: Orígenes del Hombre, Netherlands, Time-Life International, 1976 • Miguel Angel Montejo Ráez, Introducción a los microcontroladores PIC, leída el 10/sep/2005
<http://www.redeya.com/electronica/tutoriales/pic1.htm> • La historia de X10 por uno de sus pioneros, leída el 04/sep/2005,
<http://www.domotica.net/La_historia_de_X10_por_uno_de_sus_pioneros.htm> • José Manuel Huidobro, Edificios Inteligentes y Domótica, leída el 10/sep/2005,
<http://www.monografias.com/trabajos14/domotica/domotica.shtml>
• Jon Burroughs, X-10 Home Automation Using the PIC16F877A, 2002, <http://ww1.microchip.com/downloads/en/AppNotes/00236a.pdf>
• CFE - Historia, leída el 11/sep/2005, <http://www.cfe.gob.mx/es/LaEmpresa/queescfe/historia/>
• Luis Alberto García Castillo, México - Presidencia de la República _ Las Buenas Noticias también son Noticia,
leída el 11/sep/2005, <http://www.presidencia.gob.mx/buenasnoticias/?contenido=16627&pagina=97>
• X10 Transmission Theory, leída el 11/Ago/2005, <http://www.x10.com/homepage.htm>
• José M. Angulo Usategui, 2000, Microcontroladores PIC16F87x, Editorial Mc Graw Hill
• Stan D'Souza, Transformerless Power Supply, leída el 29/sep/2005, <http://ww1.microchip.com/downloads/en/AppNotes/91008b.pdf>
• Jon Burroughs,2002, X-10 Home Automation Using the PIC16F877A,
<http://ww1.microchip.com/downloads/en/AppNotes/00236a.pdf>
• Reston Condit, Transformerless Power Supplies: Resistive and Capacitive, 2004, <http://ww1.microchip.com/downloads/en/AppNotes/00954A.pdf>
• Doug Cox, 1997, Interfacing to AC Lines, <http://ww1.microchip.com/downloads/en/AppNotes/00521c.pdf>
• Flash Memory, Wikipedia, leída el 24/oct/2005, <http://en.wikipedia.org/wiki/Flash_memory>
• Detector Infrarrojo de Proximidad, leída el 26/oct/2005,
<http://www.pablin.com.ar/electron/circuito/varios/proximid/index.htm>
• TGS813 - For the detection of combustible gases, leída el 30/oct/2005, <http://download.siliconexpert.com/pdfs/2005/02/17/c/2/fig/gas%20sensor/813pdf.pdf>
• HUNTER, Manual de Diseño para el Sistema de Riego Residencial, leída el 01/nov/2005,
<http://www.emmsa.com.mx/PDF/Cat-HunterManual.pdf>
• HUNTER, Catálogo de productos de riego 2004-2005, leída el 02/nov/2005, <http://www.hunterindustries.com/Resources/PDFs/Catalog/INT292w.pdf>
• Diseño de máquinas, Editorial Mg Graw-Hill, Año 1980

143
• Diseño de máquinas y elementos, Robert L. Norton, Editorial Prentice Hall
• Diseño de máquinas y elementos, L. Mott, Editorial Pearson
• Santiago Villafuerte, Página web de Santiago, <http://mx.geocities.com/migsantiagov/>
• Foro de microcontroladores Todopic, <http://www.todopic.foro.st>


















