Apuntes Electronicos Comunicaciones Digitales
193
1 COMUNICACIONES DIGITALES Guillermo Galaviz Yáñez Facultad de Ingeniería Universidad Autónoma de Baja California
-
Upload
independent -
Category
Documents
-
view
0 -
download
0
Transcript of Apuntes Electronicos Comunicaciones Digitales

1
COMUNICACIONES DIGITALES
Guillermo Galaviz Yáñez
Facultad de Ingeniería
Universidad Autónoma de Baja California

2
Objetivos del curso Entender los componentes que conforman un sistema de comunicación digital
Entender el concepto de modulación digital
Conocer los criterios de selección/comparación de un sistema de modulación digital
Comprender el funcionamiento de los esquemas de modulación en banda base (NRZ, RZ, Manchester, etc).
Comprender el funcionamiento de los esquemas de modulación con portadora (FSK, PSK, ASK)

3
Objetivos del curso Conocer las técnicas de sincronización para los distintos esquemas de modulación
Comprender las técnicas de modulación M-arias (M-PSK, M-ASK (QAM), M-FSK)
Conocer el rendimiento de los distintos esquemas de modulación con portadora y su ventajas/desventajas
Comprender el funcionamiento del receptor óptimo en presencia de Ruido Aditivo Gausiano (AWGN)
Conocer el funcionamiento y rendimiento del demodulador de los distintos esquemas de modulación con portadora

4
Contenido
Fundamentos de Modulación Digital Transmisión de señales binarias
Técnicas de modulación sin portadora
Técnicas de modulación con portadora PSK
FSK
ASK
Técnicas de modulación por cuadratura (I-Q) M-PSK
M-QAM
Análisis comparativo de las distintas técnicas de modulación

5
Contenido
Moduladores y Demoduladores
El receptor ideal para señales afectadas por ruido aditivo gausiano
Receptor de correlación
Receptor de filtro acoplado
Rendimiento del receptor en los distintos esquemas de modulación con portadora
6
Introducción
El primer sistema de comunicación digital puede considerarse el telégrafo (1837), desarrollado por Morse
En 1875, Emile Baudot desarrolló un código para telegrafía de longitud fija, donde los elementos binarios fueron llamados marca y espacio
El primer sistema de comunicación digital moderno se derivó del trabajo de Nyquist (1924)

7
Introducción
Para cualquier sistema de comunicación electrónica, se requiere la utilización de señales que puedan viajar a través de un medio.
El proceso de modulación consiste en modificar una o varias características de una señal (portadora) en base a una señal de información (moduladora).
La modulación digital convierte una cadena de información binaria en señales eléctricas analógicas

8
El sistema de comunicación digital
El siguiente esquema presenta un modelo de un sistema de comunicación digital básico:
Fuente de Información
Transductor deEntrada
Codificador
deFuente
Codificador
deCanal
Modulador
Digital
CANAL
Transductorde
Salida
Decodificadorde
Fuente
Decodificadorde
Canal
Demodulador
Digital

9
Elementos del sistema de comunicación digital
Codificador de Fuente
Reducir a la mínima cantidad necesaria el número de bits utilizados para representar la información
Codificador de Canal
Agregar redundancia para contrarrestar efectos del canal (ruido)
Modulador Digital
Mapear uno o varios bits de información en señales eléctricas que puedan viajar por el canal

10
Modelo del sistema de comunicación digital para modulación y demodulación
ModuladorDigital XFiltro del
Canal h(t) + DemoduladorDigital
Fading
A(t) AWGN
n(t)
r(t) = A(t)[s(t)*h(t)] + n(t)
H(f) = HT(f) HC(f) HR(f)
HT(f) = Respuesta del Transmisor
HC(f) = Respuesta del Canal
HR(f) = Respuesta del Receptor

11
Tipos de canales de transmisión
Canal de Ruido Aditivo Gausiano (AWGN)
R(t) = s(t) + n(t)
N(f) = No/2
Potencia infinita
Canal de banda limitada
Canal con desvanecimiento

12
Métodos de modulación básicos
El proceso de modulación digital imprime un símbolo digital en una señal apropiada para transmisión.
Para distancias cortas, generalmente se utiliza modulación en banda base (codificación de línea) En estos casos, se crea una onda de pulsos
cuadrados con características que representan cada símbolo directamente.
Las características a variar son amplitud del pulso, ancho del pulso y posición del pulso

13
Métodos de modulación básicos
Para transmisión a distancia, se utiliza la modulación con portadora (pasa bandas) La secuencia de información digital se utiliza para
cambiar los parámetros de una señal senoidal de alta frecuencia (portadora)
Los tres esquemas básicos de este tipo de modulación son: Modulación en Frecuencia (FSK), Modulación en Amplitud (ASK) y Modulación de Fase (PSK)
Basados en los esquemas básicos, se pueden derivar distintos métodos de modulación utilizando combinaciones.

14
Criterios de selección
El diseño de un sistema de comunicación digital busca transmitir eficientemente la información digital para recuperarla de la corrupción causada por el canal.
Los tres parámetros básicos para seleccionar un esquema de modulación son:
Eficiencia de potencia
Eficiencia espectral
Complejidad del sistema

15
Eficiencia de potencia
La tasa de error de bit (BER) es indirectamente proporcional al nivel de Eb/No
La eficiencia de potencia indica directamente el nivel Eb/No requerido para lograr un determinado BER en presencia de AWGN

16
Eficiencia espectral
Indica el número de bits por segundo que pueden ser transmitidos en un Hertz de ancho de banda.
Eficiencia de Nyquist:
Rb/W = log2M
Eficiencia Null to Null
Porcentaje de Eficiencia Espectral

17
Complejidad del sistema
Se refiere a la cantidad de circuitos involucrados y el nivel de dificultad técnico del sistema.
El nivel de complejidad va siempre de la mano con el costo de fabricación/diseño

Teoría de la Información La teoría de la información responde dos preguntas fundamentales de teoría de las comunicaciones: cuál es la máxima compresión de información que se puede lograr, y cuál es la máxima velocidad de transmisión en un canal de comunicación.
La teoría de la información se relaciona con muchos campos de la ciencia: Física (mecánica estadística), Matemáticas (teoría de probabilidad), Ingeniería Eléctrica (teoría de las comunicaciones), Ciencias Computacionales (complejidad algorítmica).

Relación entre Teoría de la Información y Teoría de las Comunicaciones
El matemático Claude Shannon demostró que existen límites que definen que tanto se puede comprimir la información y que tan rápido se puede transmitir información sin errores. Estos límites se conocen como Entropía (H) y Capacidad de Canal (C).

Codificación de Fuente
La conversión de la salida de una fuente discreta sin memoria (DMS) en una secuencia de símbolos es llamada “codificación de fuente”. Al dispositivo encargado de realizar esta conversión se le llama codificador de fuente:
Clasificación de códigos
Códigos de Longitud Fija: Cada palabra de código asignada a los símbolos de la fuente, tiene una longitud (cantidad de bits) fija.
Códigos de Longitud Variable: La longitud (cantidad de bits) de las palabras de código asignadas a cada símbolo es variable.
Códigos Distintos: Un código es llamado “distinto” si todas las palabras código son diferentes una de la otra.
Códigos sin prefijo: Ninguna palabra código es prefijo de otra.
Código decodificable único: Una secuencia de símbolos puede ser recuperada perfectamente de una secuencia de palabras código.
Códigos instantáneos: El final de cualquier palabra código es reconocido sin necesidad de examinar símbolos posteriores.
Códigos óptimos: Un código es óptimo si es instantáneo y tiene una longitud promedio mínima para una fuente dada.
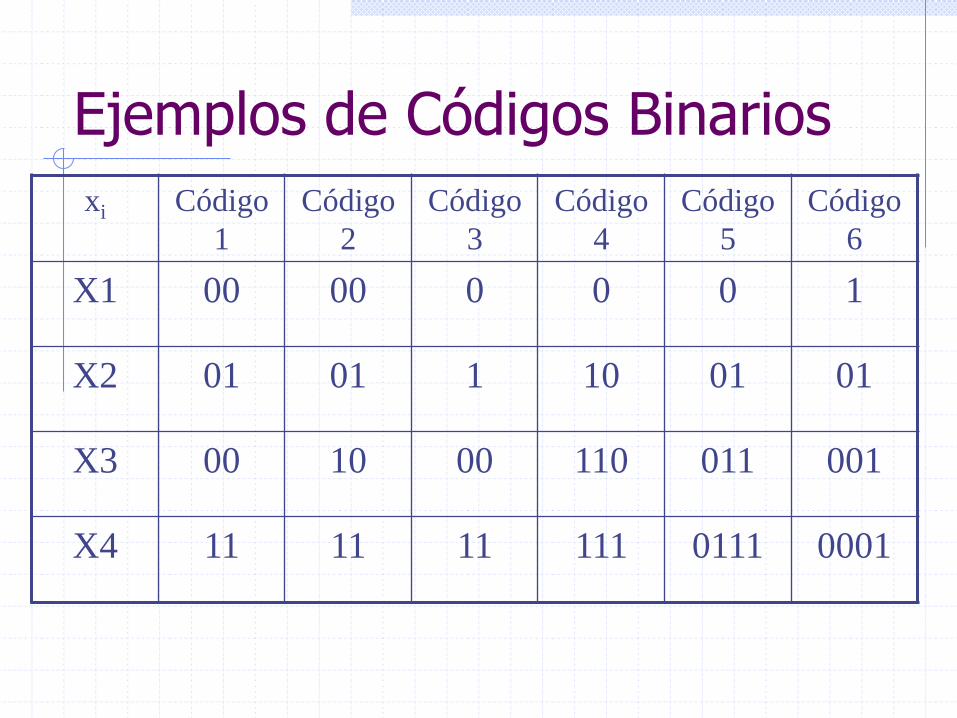
Ejemplos de Códigos Binarios
xi Código
1
Código
2
Código
3
Código
4
Código
5
Código
6
X1 00 00 0 0 0 1
X2 01 01 1 10 01 01
X3 00 10 00 110 011 001
X4 11 11 11 111 0111 0001

Codificación para fuentes discretas
La entropía H(X) nos indica el límite de compresión de una fuente discreta X.
Hablando de compresión digital, el ideal es que la cantidad promedio de dígitos binarios utilizados para codificar cada símbolo de la fuente discreta, sea igual a H(X). No puede ser menor.
Para lograr esto, símbolos con más alta probabilidad de ocurrencia son codificados con menos bits.
Entre mayor el bloque de símbolos que se codfique, menor el número de bits por símbolo requeridos, y más nos acercamos al límite H(X)
Codificación Shannon-Fano Enlistar los símbolos de la fuente en orden decreciente de probabilidad
Partir el conjunto de símbolos en dos conjuntos, tratando que la suma de probabilidades de los dos subconjuntos sea lo mas parecida posible.
Asignar un “0” binario a los elementos del subconjunto superior, y un “1” a los del inferior. Este será el bit mas significativo del código correspondiente al símbolo
Continuar con esta partición, ahora de los subconjuntos, hasta que no se puedan hacer más particiones.
Codificación Huffman Enlistar los símbolos de la fuente en orden decreciente de probabilidad.
Combinar las probabilidades de los dos símbolos que tienen la probabilidad más baja, y reordenar las probabilidades resultantes. Este proceso se repite hasta que sólo hay dos probabilidades restantes.
Comenzar a codificar con la última reducción. Asignar un “0” como el primer dígito de las palabras código para todos los símbolos de la fuente asociados con esta probabilidad. Asignar un 1 a la segunda probabilidad.
Regresar y asignar 0 y 1 al segundo dígito de para las dos probabilidades que fueron combinadas en el paso de reducción anterior, conservando las designaciones anteriores.
Continuar en esta forma hasta llegar a la primer columna.
Características de los códigos Huffman:
El código generado es del tipo sin-prefijo (ninguna palabra es prefijo de otra palabra código), y son códigos de longitud promedio mínima.
Los códigos Huffman satisfacen las siguientes desigualdades:
Si se diseña un código Huffman para bloques de símbolos en lugar de símbolos individuales, tendremos:
Donde K es la longitud del bloque, en símbolos, y podemos ver de la desigualdad mostrada, que al incrementar K, podemos acercarnos a H(X) cuanto queramos.
1)()( XHLXH
KXHLXH
1)()(

Cuantización Cuantización Escalar: Cada salida de la fuente es cuantizada individualmente. La salida de la fuente X es dividida en N regiones sin traslape Ri, donde el rango de i es desde 1 hasta N. Dentro de cada región, un solo punto llamado nivel de cuantización es elegido. Todos los valores de la variable que caigan dentro de la región Ri serán cuantizados al i-ésimo nivel de cuantización. Esto se expresa de la siguiente manera:
ii
ii
Rx
donde
xxQRx
^
^
)(

Error medio cuadrático por cuantización La cuantización produce un error medio cuadrático debido a la diferencia entre el valor real de la fuente y el valor cuantizado. El error medio cuadrático queda definido por la siguiente ecuación:
Donde indica la función de densidad de probabilidad de la fuente.
N
iR
Xii
dxxfxxD1
2^
)()(
)(xfX
Cuantización Uniforme Todas las regiones excepto la primera y la última son de igual tamaño, indicado como .El nivel de cuantización óptimo en cada intervalo de cuantización es el centroide de dicho intervalo, y está especificado como:
Diseñar el cuantizador consiste en determinar el punto máximo y mínimo, así como el incremento . En muchos casos es conveniente elegir como niveles de cuantización los puntos intermedios de cada intervalo.
i
i
RX
RX
i
dxxf
dxxxfx
)(
)(^

Cuantización No-Uniforme
Cada región de cuantización puede tener un tamaño distinto. Para encontrar los límites que definen el tamaño de cada nivel, y el centroide de cada nivel, de manera que se encuentre un cuantizador óptimo para una fuente dada, se utilizan las condiciones de Lloyd-Max:
2
)(
)(
)(
^
1
^
^
1
1
ii
i
a
aX
a
aX
xxa
dxxf
dxxxfx
i
i
i
i

Método Lloyd-Max
Para obtener la solución a las ecuaciones Lloyd-Max, se empieza seleccionando un conjunto de niveles de cuantización xi. De este conjunto, se pueden encontrar el conjunto de límites de las regiones de cuantización ai. De este conjunto de límites, un nuevo conjunto de niveles de cuantización puede ser obtenido. El proceso se continúa hasta que la distorsión entre dos iteraciones sea mínima (no se note cambio).

Modulación por Codificación de Pulso En la modulación por codificación de pulso (PCM), una señal analógica es primero muestreada a una frecuencia más alta que la de Nyquist, y después las muestras son cuantizadas.
PCM Uniforme: El intervalo [-xmax, xmax] de longitud 2xmax se divide en N subintervalos de igual tamaño, cada uno de longitud
Si N es lo suficientemente grande, la función de densidad de probabilidad puede ser considerada uniforme, resultando en una distorsión de
Si N es una potencia de 2, N = 2v , entonces v bits son requeridos para representar cada nivel. Esto significa que si el ancho de banda de la señal analógica es W, y el muestreo se hace a la frecuencia de Nyquist, el ancho de bada requerido para la señal PCM es por lo menos vW (en la práctica, 1.5 vW es más real).
Nx /2 max
12/2D

Modulación por Codificación de Pulso PCM No-uniforme: La señal pasa primero por un elemento no lineal para reducir su rango dinámico, y la salida se aplica a un sistema PCM uniforme. En el receptor, la salida pasa por el inverso del elemento no lineal utilizado en el transmisor. El efecto total es equivalente al de un sistema PCM con un espaciamiento no-uniforme entre niveles. En general para la transmisión de voz, los elementos no lineales empleados son correspondientes a la ley m o a la ley A.
Una no-linealidad de ley m está definida por la relación:
Donde x es la entrada normalizada (|x|<1) y m es un parámetro que en la ley m estándar es igual a 255.
El inverso de la no linealidad está dado por:
)sgn()1log(
)1log()( x
xxgy
m
m
)sgn(1)1( ||
yxy
m
m

PCM Diferencial En una modulación PCM, cada muestra de la forma de onda de entrada es codificada independientemente de todas las otras. Sin embargo, sabemos que las muestras de una señal muestreada a la frecuencia de Nyquist (o a alguna frecuencia mayor) presentan una correlación significativa entre muestras sucesivas, por lo que el cambio en amplitud entre muestras consecutivas es relativamente pequeño.
Para aprovechar esta característica de las señales muestreadas, podemos codificar la diferencia que existe entre muestras sucesivas, en lugar de codificar cada una de las muestras.
Debido a que se espera que la diferencia entre muestras sucesivas sea relativamente pequeña en comparación con la amplitud real de la muestra, se requieren menos bits para representar las diferencias.
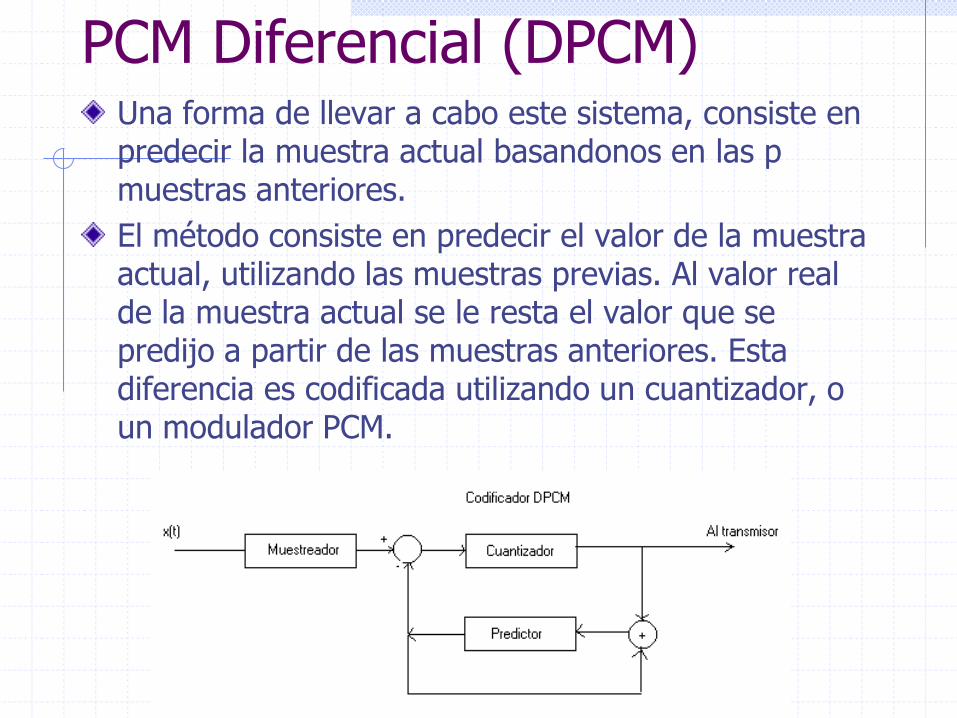
PCM Diferencial (DPCM) Una forma de llevar a cabo este sistema, consiste en predecir la muestra actual basandonos en las p muestras anteriores.
El método consiste en predecir el valor de la muestra actual, utilizando las muestras previas. Al valor real de la muestra actual se le resta el valor que se predijo a partir de las muestras anteriores. Esta diferencia es codificada utilizando un cuantizador, o un modulador PCM.

PCM y DPCM Adaptable Utilizado para fuentes quasi-estacionarias. Los codificadores DPCM y PCM están diseñados para fuentes cuya salida es estacionaria. La eficiencia de estos codificadores puede mejorar si se adaptan a las variaciones estadísticas con respecto al tiempo de la fuente.
Para hacer esto se puede utilizar un cuantizador adaptable. Un cuantizador sencillo de este tipo es un cuantizador uniforme que varíe la longitud de sus regiones de acuerdo a la varianza de las muestras anteriores de la señal.
En DPCM, el predictor se puede hacer adaptable. Los coeficientes del predictor pueden cambiar periodicamente para reflejar las características estadísticas cambiantes de la fuente.

Modulación Delta Forma simplificada de DPCM. Utiliza un cuantizador de dos niveles (1 bit) en conjunto con un predictor de primer orden.
Existen dos tipos de ruido que afectan este esquema de modulación: la distorsión por sobre-pendiente, y el ruido granular. Para minimizar el efecto, se puede utilizar un valor de pasos variable.

38
Técnicas de modulación en banda base
La modulación en banda base se refiere a la transformación directa sin transformación en frecuencia
Las distintas técnicas de modulación en banda base son comúnmente llamadas códigos de línea, formatos de banda base, ondas PCM.
El desarrollo de estas técnicas se dió en los 60’s por compañías como AT&T, IBM y RCA para transmisión telefónica. Los desarrollos actuales tienen su principal aplicación en sistemas de fibra óptica

39
Codificación Diferencial
Sea {aK} la secuencia original de datos, una secuencia codificada en forma diferencial {dK} se produce de acuerdo a la siguiente regla: dK= aK+ dK-1
El signo + indica adición en módulo 2 (XOR)
Se requiere un bit inicial que puede ser 1 o 0, lo cual da lugar a dos secuencias distintas las cuales se complementan.
La regla de decodificación: a’K= d’K+ d’K-1

40
Ejemplo Codificación Diferencial
La codificación diferencial tiene la capacidad de corregir cambios de polaridad

41
Códigos NRZ (No Regreso a Cero)
Se utilizan dos niveles de amplitud +A y –A para representar los dígitos binarios 1 y 0.
En el formato NRZ-M el cambio de nivel se da cuando aparece el 1, mientras que en el formato NRZ-S el cambio se da cuando aparece el 0
NRZ-L se puede obtener a partir de las versiones M y S utilizando decodificación diferencial
Puede existir en forma Unipolar si –A se convierte en 0 V.

42
Ejemplo de código NRZ
Codificar con NRZ-L, NRZ-M y NRZ-S la secuencia:
1 0 0 1 0 1 1 1 0 1 0 1 1 0 1 0 1

43
Densidad Espectral de Potencia de NRZ
Por el hecho de transmitir pulsos, la densidad espectral de potencia de NRZ está dada por:
La potencia fuera de banda está dada por:
2
2 )()(
fT
fTsenTAfS
dff
dffBP
S
B
BS
ob
)(
)(1)(

44
Densidad Espectral de Potencia de NRZ
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1Densidad Espectral de Potencia de NRZ
Frecuencia normalizada
Magnitud

45
Códigos Regreso a Cero (RZ)
Utilizando mas transiciones en la onda se puede incrustar la información de temporización.
Para lograr esto, los códigos RZ representan un 1 binario como un pulso positivo durante la mitad del periodo de un bit, regresando a cero la otra mitad.
En el RZ unipolar, el 0 binario se mantiene en cero todo el periodo, mientras que en RZ bipolar, se usa un pulso negativo por medio periodo.

46
Ejemplo de codificación RZ
Codificar con RZ Unipolar y RZ Bipolar la secuencia:
1 0 0 1 0 1 1 1 0 1 0 1 1 0 1 0 1

47
Densidad Espectral de Potencia de RZ
La densidad espectral de potencia de los códigos RZ está dada por:
2
2
2
)2
(
4)(
fT
fTsen
TAfS

48
Densidad Espectral de Potencia de RZ
0 1 2 3 4 5 6 7 8 9 100
0.05
0.1
0.15
0.2
0.25Densidad Espectral de Potencia de RZ
Frecuencia normalizada
Magnitud

49
Códigos Pseudo-Ternarios
Estos códigos utilizan tres niveles: +A, -A y 0.
Los códigos AMI (Alternative Mark Inversion) se encuentran en este grupo.

50
AMI-RZ
El 1 es representado por un pulso RZ con polaridad alternada si existen 1’s consecutivos. Un 0 es representado por el nivel 0

51
AMI - NRZ
La regla de codificación es la misma que en AMI-RZ, pero con pulsos completos

52
Características AMI
Un código NRZ-L se puede recuperar del AMI-NRZ con rectificación de onda completa.
Un código RZ-L se puede obtener por rectificación de onda completa de AMI-RZ
Ventaja de AMI: No hay componente de DC

53
Densidad Espectral de Potencia de Códigos AMI
AMI-RZ
AMI-NRZ
)()(
)( 2
2
2 fTsenfT
fTsenTAfS
)(
2
)2
(
4)( 2
2
2
fTsenfT
fTsen
TAfS

54
Densidad Espectral de Potencia de Códigos AMI
0 1 2 3 4 5 6 7 8 9 100
0.05
0.1
0.15
0.2
0.25Densidad Espectral de Potencia de AMI RZ
Frecuencia normalizada
Magnitud

55
Densidad Espectral de Potencia de Códigos AMI
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7Densidad Espectral de Potencia de AMI NRZ
Frecuencia normalizada
Magnitud

56
Códigos Bi-Fase
Estos códigos utilizan pulsos de medio periodo con distintas fases de acuerdo a ciertas reglas de codificación.
El código Manchester, un 1 es representado con la primer mitad del pulso alta y la segunda mitad baja. El 0 es representado como un pulso con la fase opuesta

57
Ejemplo de codificación Manchester
Codificar la secuencia
1 0 0 1 0 1 1 1 0 1 0 1 1 0 1 0 1

58
Densidad Espectral de Potencia de los códigos Manchester
Bi-Fase- Nivel
)2/(
2
)2
(
)( 2
2
2
fTsenfT
fTsen
TAfS

59
Densidad Espectral de Potencia de los códigos Manchester
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7Densidad Espectral de Potencia de Manchester
Frecuencia normalizada
Magnitud
60
Modulación por Retraso
Un 1 es representado por una transición a la mitad del bit, mientras que un cero no causa transición a menos de que sea seguido de otro cero. Entonces una transición es colocada al final del primer 0.
Presenta muy bajo ancho de banda y muy pequeña componente de DC, por lo que es adecuado para grabación magnética

61
Ejemplo de codificación por retraso
Codificar la secuencia
1 0 0 1 0 1 1 1 0 1 0 1 1 0 1 0 1
62
Densidad Espectral de Potencia de la Modulación por Retraso
fT
Tf
TAfS
)8cos27cos8
6cos25cos124cos53cos12
2cos22cos223()cos817()2(
2)(
2
2

63
Densidad Espectral de Potencia de la Modulación por Retraso
0 1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
1.2
1.4Densidad Espectral de Potencia de Retraso
Frecuencia normalizada
Magnitud

64
BER de Códigos Binarios
En presencia de AWGN, es necesario determinar la tasa de error de bit (BER) para los distintos tipos de modulación en banda base.
El análisis se hace en base a la distribución del ruido (Gausiana) y a la probabilidad de cometer un error en la decisión por consecuencia del mismo.
65
Figura de Mérito en Sistemas Digitales
A diferencia de los sistemas analógicos, donde una referencia directa de la calidad de la transmisión es el SNR, en los sistemas digitales es necesario utilizar otro tipo de medición debido a la forma en que se transmite la información.

66
Figura de Mérito en Sistemas Digitales
El SNR se define como:
SNRdB = 10 log (S/N)
Donde S = Potencia de la Señal de Información y N = Potencia del Ruido
Debido a que en un sistema digital una sola señal puede representar más de un dígito binario, la potencia por si sola de la señal no es una buena referencia.

67
Figura de Mérito en Sistemas Digitales
En los sistemas digitales, se utiliza como parámetro de comparación la Energía que contiene cada bit en forma individual. Este término se denomina Eb, y se define como:
Eb = S/R
Donde S = Potencia de la señal, y R es la tasa de transmisión en bits por segundo

68
Figura de Mérito en Sistemas Digitales
El término Eb representa la energía con la que cuenta cada bit, sin importar el tipo de modulación, cantidad de bits por símbolo, etc.
Para contar con una figura de mérito que sirva como referencia de la calidad de la recepción, se utiliza la comparación de la Energía por Bit con el término No, el cual representa la potencia de ruido por cada Hertz de ancho de banda, o lo que es lo mismo: No = N / W
Donde N = Potencia del Ruido y W es el ancho de banda

69
Figura de Mérito en Sistemas Digitales
El parámetro Eb/No se convierte entonces en la figura de mérito para sistemas de comunicación digital. Expresa la relación que existe entre la energía contenida por cada bit y la Densidad Espectral de Ruido No.
Eb/No dB = 10 log (Eb/No)

70
Capacidad de Canal
Definamos los siguientes términos:
W = Ancho de banda de un canal, en Hz
S = Potencia de la señal de información, en watts
N = Potencia total del ruido del canal, en watts
Eb = Energía por bit
K = Total de bits por símbolo
T = Duración de un símbolo
R = k/T = Razón de transmisión, en bits/seg
S/N = Relación señal a ruido
N = NoW
No = Densidad espectral de potencia del ruído considerando un solo lado.

Capacidad de Canal La capacidad de transmisión de un canal está definida por el máximo de la información:
C = max I(X;Y)
p(x)
El máximo se toma sobre todas las posibles distribuciones de la entrada p(x)
La capacidad de un canal, se puede analizar mas a fondo y encontrar que no es otra cosa mas que el complemento de la entropía de una fuente dada:
C = 1 – H(p)

Comportamiento de la Capacidad de Canal
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1Capacidad de un Canal para una fuente binaria
Probabilidad p
Capacid
ad C

73
Implantación práctica de la Capacidad de Canal
Shannon derivó la siguiente fórmula que describe la capacidad de un canal que tiene ruido blanco aditivo gausiano (AWGN):
C = W log2 (1 + S/N) bits/seg
Esta ecuación se puede utilizar para determinar la capacidad de transmisión, sin errores, de una señal digital a través de un canal con ancho de banda W y teniendo una relación señal a ruido de S/N.
Para cuestiones prácticas, se maneja la capacidad de un canal como una cantidad de bits/seg
74
Teorema de Codificación de Canal
El teorema de codificación de canal, nos dice que para una razón de transmisión R < C, existe un sistema de codificación con una razón de error de bloque y de bit arbitrariamente baja, a medida que la longitud del código tiende a infinito.
Para una R> C, las razones de error de bloque y de bit son mayores que cero para cualquier sistema de codificación.
El teorema establece límites en las máximas razones de transmisión para un canal que añade AWGN dependiendo de la potencia y en ancho de banda utilizado.

75
Eficiencia del Código y Potencia de la señal
La eficiencia del ancho de banda nos indica que tan eficientemente un sistema utiliza el ancho de banda permitido, y se define como
n = R/W bits/seg/Hz
De aquí, el límite de Shannon se puede calcular como:
nmax = log2 (1 + S/N) bits/seg/Hz
La potencia de la señal promedio puede ser expresada como:
S = k Eb/T = R Eb
El límite de Shannon en términos de la energía por bit y la potencia espectral de ruido, queda expresado por:
nmax = log2 (1 + REb/NoW) bits/seg/Hz

76
Eficiencia del Código y Potencia de la señal
Partiendo de la identidad:
Se puede reescribir:
R/W = log2 (1 + REb/NoW)
Sea
x = REb/NoW
Se obtiene
ex x
x
/1
0)1(lim
xxxW
R /1
2 )1(log

77
Eficiencia del Código y Potencia de la señal
El mínimo Eb/No se obtendrá si W tiende a infinito, lo que significa que x tiende a cero. De aquí y la identidad presentada:
xxWNo
REb
W
R /1
2 )1(log
xxNo
Eb /1
2 )1(log1
)(log1 2 eNo
Eb
)(log
1
2 eNo
Eb

78
Continuación:
El límite fundamental, para ancho de banda infinito, (nmax tiende a cero) se encuentra de la siguiente manera:
dBdBNo
Eb
eNo
Eb
59.1)6931.0log(10
69314718.0)(log
1
2

79
Técnicas de Modulación con Portadora
Para que una señal digital pueda viajar distancias grandes, es necesario utilizar modulación con portadora.
Los distintos tipos de modulación digital con portadora se basan en los mismos que las modulaciones analógicas: Modulación de frecuencia, amplitud y fase, con la diferencia de que la información contenida representa 1’s y 0’s.

80
Técnicas de Modulación con Portadora
Las distintas técnicas de modulación con portadora se pueden combinar para crear esquemas de modulación mas eficientes, pero aumentando su complejidad.
Los métodos de modulación con portadora básicos son: FSK-Modulación por Desplazamiento en
Frecuencia
PSK-Modulación por Desplazamiento en Fase
ASK-Modulación por Desplazamiento en Amplitud

81
Modulación FSK
Fué la primer forma de modulación utilizada en sistemas reales.
La forma básica es denominada FSK binaria.
Se describe a continuación la modulación FSK binaria

82
FSK Binaria
Se utilizan dos frecuencias distintas para representar el 0 y el 1:
bits de nes transiciolasen
contínua es no señal la tantolopor y iguales,son no general,En
bit del periodo el es T
0 en t iniciales fases lasson
0,)1(),2cos()(
1,)1(),2cos()(
2 1
2 1
222
111
y
y
paraTktkTtfAts
paraTktkTtfAts

83
FSK Binaria Esta forma de modulación es llamada no-coherente o discontínua, y se puede generar conmutando la salida del modulador entre dos osciladores diferentes, como se muestra:
Oscilador 1
Oscilador 2
Multiplexor
Línea de
Control
Salida
Entrada Binaria ak
f1
f2
fi

84
FSK Binaria Coherente
El segundo tipo de FSK cuenta con la misma fase
0,)1(),2cos()(
1,)1(),2cos()(
22
11
paraTktkTtfAts
paraTktkTtfAts

85
FSK Coherente
El sintetizador genera dos frecuencias las cuales están sincronizadas. La temporización de bits debe estar sincronizada con las frecuencias portadoras
Para demodulación coherente, las dos frecuencias se seleccionan de manera que las dos señales sean ortogonales:
0)()( 2
)1(
1
dttsts
Tk
kT

86
FSK Coherente Desarrollando
T
mnf
T
mnf
donde
mTffnTffLo
tffsenff
tffsentffsenff
dttfftff
dttftf
Tk
kT
Tk
kT
Tk
kT
Tk
kT
4
2
4
2
a lleva nos Esto enteros.son n y m
)(2 quey 2)(2 que requiereanterior
)(2)(4
1
])(2cos2)(22[cos)(4
1
])(2cos]2)(2[cos[
)2cos()2cos(
2
1
2121
)1(
21
21
)1(
2121
21
21
)1(
2121
2
)1(
1

87
FSK Coherente
Para lograr ortogonalidad, f1 y f2 deben ser enteros múltiplos de 1/4T y su diferencia debe ser un entero múltiplo de 1/2T.

88
Modulador FSK Coherente
Multiplexor
Línea de
Control
Salida
Entrada Binaria ak
f1
f2
fiSintetizador de
Frecuencias

89
Formas de Onda FSK

90
Modulación por Desplazamiento de Fase (PSK)
La modulación PSK incluye una amplia gama de esquemas.
El esquema mas simple de modulación PSK es el BPSK (Binario)
Actualmente, la modulación PSK es una de las más utilizadas en los sistemas comerciales
91
PSK Binario
La información es representada por señales con diferente fase
Este par de señales son llamadas antipodales, dado que su coeficiente de correlación es –1, lo que reduce la probabilidad de error
0 el para 0,2cos)(
1 el para 0,2cos)(
1
1
TttfAts
TttfAts
c
c

92
Constelación BPSK

93
Localización de las señales PSK
Todas las señales PSK pueden ser ubicadas en un sistemas de coordenadas bidimensional, con las siguientes condiciones:
tfsenT
t
y
tfT
t
c
c
22
)(
2cos2
)(
2
1

94
Ejemplo de Señales PSK

95
Modulador BPSK
X
Oscilador
Fuente NRZ Polar a(t) Aa(t)cos(2pift)
(-1,+1)
Acos(2pift)

96
Modulador BPSK
Primero, se forma una secuencia bipolar tipo NRZ a(t), la cual después se multiplica por una senoidal portadora A cos(2pift). El resultado es la señal BPSK.

97
PSK Diferencial
Tiene la capacidad de ser demodulada en forma diferencial.
Es comúnmente llamada DPSK
No requiere una señal de referencia coherente

98
Modulador DPSK
Dispositivo Lógico
RetrasoT
Generador deNivel
X
Información NRZ
Portadora
DBPSK
99
Modulación QPSK
Llamada PSK de Cuadratura (Quadrature), es el esquema más utilizado de PSK ya que no sufre degradación de BER cuando se aumenta la eficiencia espectral.
Las señales QPSK se definen como:
4
)12(
4,3,2,1),2cos()(
i
itfAts
i
ici

100
Modulación QPSK
Manejando Términos, la descripción anterior puede ser escrita como:
1
21
2
1
2211
tan
cos
:anterior lo De
)()(
22coscos)(
i
ii
ii
ii
ii
cicii
s
s
y
senEs
Es
tsts
tfsenAsentfAts

101
Modulación QPSK
De lo anterior se pueden obtener las coordenadas en el plano I-Q de la constelación QPSK
En la constelación, los símbolos (señales) deben ser codificadas con bits. Las cuatro posibilidades son: 00, 01, 10 y 11.
Para mejorar el rendimiento, las señales son codificadas utilizando un código Gray, el cual mapea señales aledañas con secuencias binarias que presetan cambios mínimos.

102
Constelación QPSK

103
Señales QPSK

104
Modulador QPSK
El modulador QPSK es un tipo de modulador I-Q que utiliza la suma de dos señales componentes para formar la señal QPSK
La estructura general de dicho modulador se presenta a continuación

105
Modulador QPSK

106
Offset QPSK
Es una representación de QPSK con los canales I y Q desfazados (offset).
La diferencia entre las dos secuencias (I y Q) se basa en un desplazamiento temporal en la señal Q, por lo que el rendimiento es idéntico en QPSK y OQPSK.
La ventaja de OQPSK sobre QPSK es que debido al retraso, solamente pueden existir cambios de 90º a la vez. Esto se ve reflejado en la reconstrucción.

107
Modulador OQPSK

108
Formas de onda OQPSK

109
Pi/4 QPSK
Similar a OQPSK, con la ventaja de que puede ser demodulado diferencialmente.
No permite cambios de fase de 180º.
Esquema preferido para comunicaciones móviles ya que se pueden reducir los efectos del canal con desvanecimiento.
Es el estándar en la mayoría de los sistemas de telefonía celular en Japón y Estados Unidos.

110
Pi/4-QPSK
El codificador Pi/4 codifica diferencialmente las señales I y Q de la en las señales u(t) y v(t) de acuerdo a las siguientes reglas:
)(2
1
)(2
1
11
11
kkkkk
kkkkk
IvQuv
QvIuu

111
Pi/4-QPSK
Donde uk es la amplitud de u(t) en el k-ésimo símbolo y así sucesivamente.
Tomando como valores iniciales u0 = 1 y v0 = 0, la salida del demodulador puede representarse como:
k
kk
kc
ckck
u
vdonde
tfA
tfsenvtfuts
1tan:
)2cos(
22cos)(

112
Constelación Pi/4-QPSK

113
Modulación por Desplazamiento Mínimo (MSK)
Esquema de modulación de fase contínua, que puede ser obtenido de OQPSK formando pulsos con media onda senoidal.
Por sus características espectrales, ha sido elegido para aplicaciones de comunicación vía satélite (NASA) y es utilizado en la forma GMSK (Gaussian MSK) en el sistema de telefonía celular europeo GSM

114
Descripción de MSK Para crear una señal MSK se hace lo siguiente:
Se toman las componentes I y Q de la señal OQPSK.
Cada bit es ponderado con medio periodo de una función senoidal o cosenoidal con periodo 4T, Acos(pi/2T) o Asen(pi/2T), luego se modulan en una o dos portadoras ortogonales.
Haciendo esto, se obtiene:
ninformació debit un de periodo el es T Donde
2)2
()(2cos)2
cos()()( tfsenT
tsentAQtf
T
ttAIts cc

115
Señales MSK

116
Modulador MSK

117
Modulador MSK

118
Modulador MSK

119
Modulación Multi-Símbolo
En los esquemas de modulación digital, es posible incrementar el número de símbolos utilizados para aumentar la eficiencia de ancho de banda.
Para lograr esto, en lugar de transmitir dos símbolos (uno para cada bit), se utilizan M símbolos.
En general, M = 2^n, donde n es el número de bits utilizados para codificar cada símbolo.

120
Modulación Multi-Símbolo
Los esquemas multi-símbolo son generalmente llamados M-arios, y se pueden manejar como:
M-FSK
M-PSK
M-ASK
QAM

121
Modulación Multi-Símbolo
En general, el costo por incrementar el número de símbolos es aumentar la probabilidad de error.
Al existir mas señales en el mismo espacio (I.e. constelación) es mas probable confundir una señal con otra.
La degradación en la calidad de la información (BER) se compensa con un mejor aprovechamiento del espectro.
122
M-PSK La constelación M-PSK consiste en una serie de puntos colocados a una misma distancia del centro, por lo que el esquema representa un círculo de símbolos alrededor del origen del diagrama I-Q.
Dado que en general los esquemas M-arios tienen un número de señales equivalente a una potencia de dos, los posibles esquemas M-PSK son: 8-PSK
16-PSK
32-PSK

123
Constelación 8-PSK
124
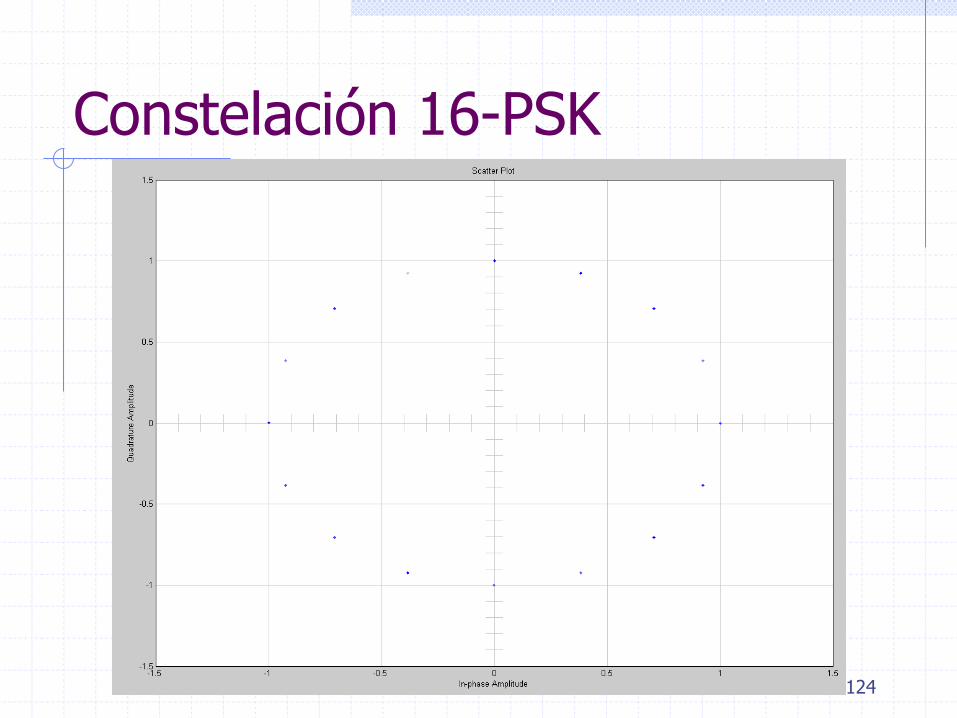
Constelación 16-PSK
125
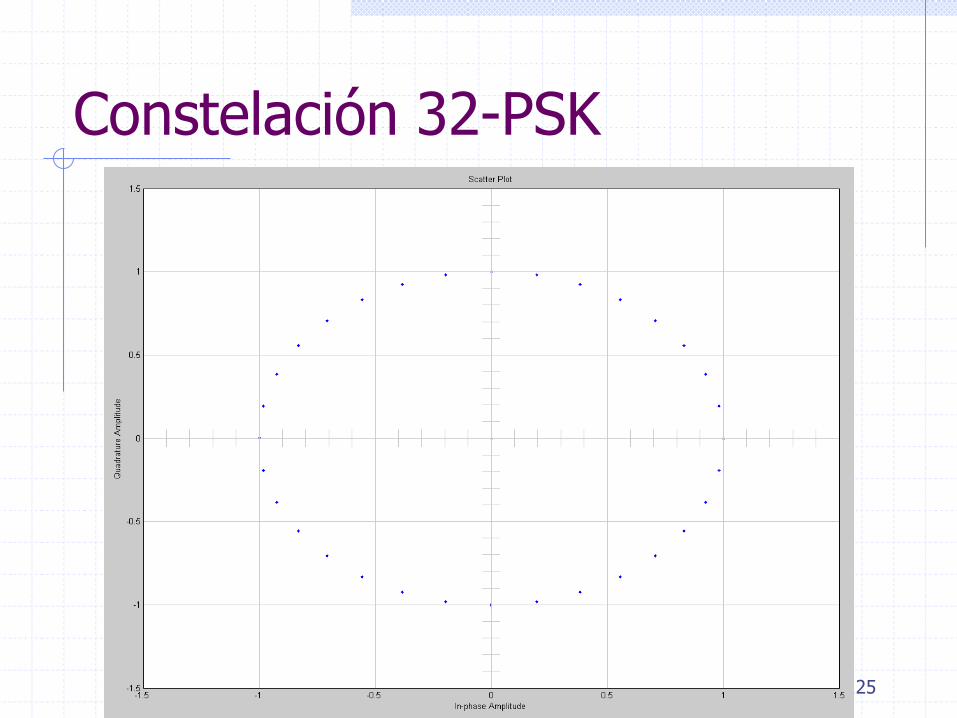
Constelación 32-PSK

126
Espectro de 32-PSK

127
M-FSK De la misma manera, es posible utilizar un total de M frecuencias distintas para transmitir cualquier número de símbolos.
Este esquema genera una forma de M-FSK
La característica principal de M-FSK es que su rendimiento no se ve degradado por el incremento de símbolos, sin embargo, su eficiencia espectral dependerá siempre de la separación en frecuencia de cada símbolo.
Dado que para un buen rendimiento la separación debe ser considerable, la eficiencia espectral de este esquema no es buena.

128
Espectro de esquema 16-FSK

129
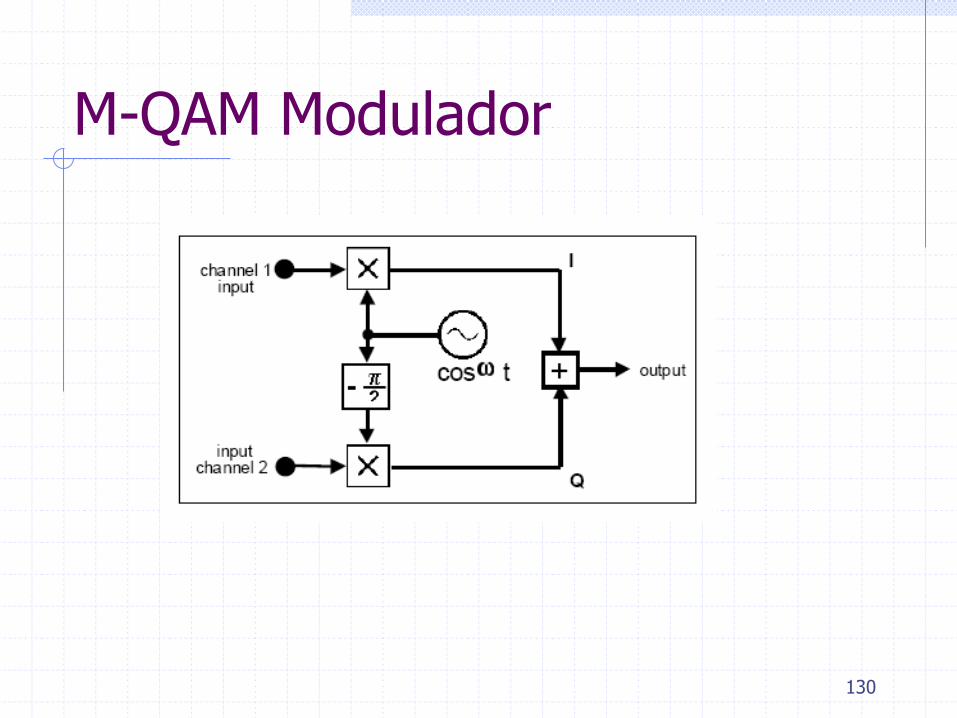
Modulación por Amplitud y Fase Múltiple
Es posible combinar la modulación de dos parámetros de una señal para incrementar la eficiencia espectral de un esquema de modulación.
Un ejemplo de esta técnica es la modulación QAM, la cual combina la modulación de fase y amplitud.
130
M-QAM Modulador

131
PSD de QAM-16

132
PSD de QAM-256

133
Constelación QAM 16

134
Constelación QAM 32

135
Constelación QAM 256

136
Receptor óptimo en presencia de AWGN
El análisis del receptor óptimo en presencia de AWGN se inicia definiendo lo siguiente:
R(t) = sm(t) + n(t)
Donde sm(t) es una de las m señales que pueden ser transmitidas

137
Demodulador de Correlación
Este receptor descompone la señal recibida en vectores N-dimensionales.
Cada una de las señales posiblemente transmitidas puede ser representada como una combinación lineal del conjunto de funciones ortonormales {fn(t)}
Suponiendo que la señal r(t) pasa por un banco de N correlacionadores, que calculan el índice de correlación de r(t) con las N funciones ortonormales, se obtiene:
Nknsr
dttftntsdttftr
kmkk
T
km
T
k
,...,2,1,
)()()()()(00

138
Demodulador de Correlación
Donde
La señal es ahora representada por el vector sm con componentes smk. Sus valores dependen de cual de las M señales fueron transmitidas.
Nkdttftnn
Nkdttftss
T
kk
T
kmmk
,...,2,1)()(
,...,2,1)()(
0
0

139
Receptor de correlación
Las salidas del correlacionador son estadísticamente válidas para llegar a una decisión sobre cual de las M señales fué transmitida, ya que la componente de ruido de la señal no tiene correlación con las salidas del correlacionador
0)(2
1)(
2
1
)()()()(
)(
)(
00
0 1
1
'
'''
tfNtfN
fnnEdtfntnE
ntfntnE
ntnE
ntnEstnErtnE
kk
T N
j
jkjk
k
N
j
jj
k
kmkk

140
Receptor de Correlación
Receptor de correlación con señales de referencia {si(t)}

141
Receptor de Correlación
Receptor de correlación con señales de referencia {uj(t)}

142
Receptor de Correlación
Receptor de correlación binario utilizando un solo correlacionador

143
Receptor de Correlación
Receptor de correlación binario utilizando dos correlacionadores
144
Detección Coherente
En sistemas de comunicación digitales, cuando se requiere “sincronía” entre transmisor y receptor (osciladores) para que el receptor puede recuperar la información, se dice que la detección es coherente.
Ejemplo: La modulación PSK coherente requiere saber que fase corresponde a la referencia de 0º para poder detectar los demás símbolos. Generalmente esto requiere la utilización de un bloque de recuperación de portadora, el cual puede ser construido con un PLL.

145
Detección No-Coherente
La detección de señales que contienen información binaria puede realizarse sin que exista sincronización perfecta entre transmisor y receptor. Cuando esto sucede se dice que la detección es no-coherente. Para lograrlo, generalmente la información necesita estar codificada en forma diferencial
Ejemplo: Utilizando un esquema de modulación de fase con codificación diferencial (DPSK) es posible conocer el valor que una señal representa en base al valor de fase anterior, sin necesidad de conocer qué señal es la referencia de 0º.

146
Arquitecturas de receptores
Receptor Heterodino

147
Arquitecturas de receptores
Receptor Heterodino de doble IF
148
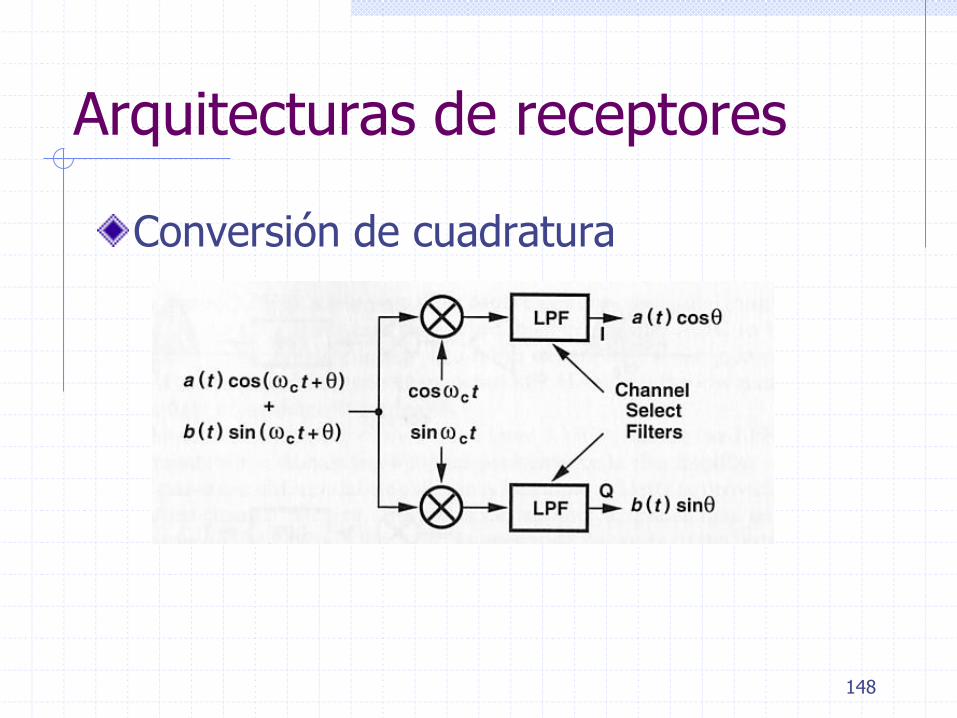
Arquitecturas de receptores
Conversión de cuadratura

149
Arquitecturas de receptores
Receptor Homodino
150
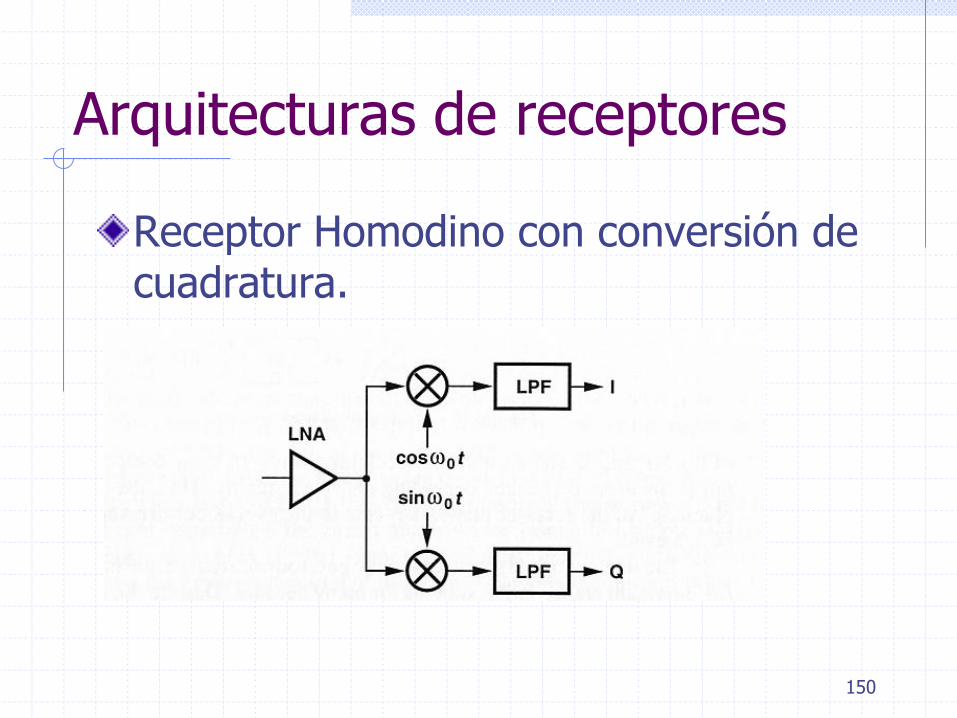
Arquitecturas de receptores
Receptor Homodino con conversión de cuadratura.

151
Arquitecturas de receptores
Receptor con Hartley con rechazo de imágen

152
Arquitecturas de receptores
Receptor con Weaver con rechazo de imágen

153
Arquitecturas de receptores
Receptores de IF-Digital

154
Arquitecturas de receptores Receptores de Sub Muestreo

155
Osciladores Controlados por Voltaje (VCO)
En los sistemas de comunicación modernos, es necesario que la frecuencia de oscilación de los LO sea ajustable para seleccionar uno de muchos canales disponibles.
El dispositivo que logra este funcionamiento es el denominado VCO.
Para ajustar la frecuencia del oscilador, generalmente se utiliza un diodo varactor en polarización inversa que el voltaje de polarización controle la frecuencia de resonancia de un circuito tanque.

156
Terminología de VCO’s
Característica de sintonización en frecuencia: Rendimiento del VCO en Frecuencia comparada contra voltaje de sintonización (gráfica voltaje-frecuencia)
Frecuencia contra Temperatura: Variación de frecuencia con temperatura a un voltaje de sintonización fijo
Sintonización monotónica: Se refiere al hecho de que para una característica voltaje-frecuencia dada, la frecuencia tiene un solo valor para un voltaje dado, y viceversa.
Sensibilidad a la sintonización: Pendiente de la característica de sintonización expresada como un cambio de frecuencia por unidad de voltaje (MHz/V, etc).
Linealidad en sintonización: Desviación de la característica de sintonización frecuencia-voltaje de una línea recta
No-linealidad de sintonización: La extensión sobre la cual la característica de sintonización de voltaje se sale de la línea recta
157
Terminología de VCO’s
Sintonización o modulación, y delta de sensibilidad a la modulación: La pendiente de la característica de sintonización a un voltaje de sintonización determinado es la sensibilidad a la modulación o sintonización. La diferencia en sensibilidad de modulación a dos voltajes de sintonización distintos es la delta de la sensibilidad de modulación.
Capacitancia de entrada: Capacitancia equivalente total vista en el puerto de sintonización del VCO. Este parámetro está en función de la amplitud y frecuencia de la señal de entrada en el puerto.
Ancho de banda de sintonización o modulación: La frecuencia de modulación a la cual la desviación de frecuencia se reduce a 0.7071 de su valor de DC. Usualmente en función de la impedancia de la fuente de modulación, generalmente 50 Ohms.

158
Terminología de VCO’s
Desviación post-sintonización (post tuning drift): La aplicación de un pulso de voltaje produce un cambio de una frecuencia f1 a una frecuencia f2 en el VCO. La frecuencia f2 se estabiliza después de cierto tiempo. El error post-sintonización es el error en frecuencia comparado con un valor final estable después de un tiempo específico posterior a la aplicación de un pulso de voltaje. Se expresa en Hz, kHz, etc.
Desviación de frecuencia con temperatura (frecuency drift): Es la variación de frecuencia del VCO con la temperatura a un voltaje de sintonización fijo, expresado como porcentaje relativo por unidad de temperatura, o como cambio de frecuencia por unidad de temperatura.
Empuje de frecuencia: El cambio de la frecuencia de salida correspondiente a un cambio dado en el voltaje de alimentación a un voltaje de sintonización fijo (expresado en MHz por volt)

159
Terminología de VCO’s
Jalón de frecuencia: Variación en frecuencia debido a los cambios en la carga de salida. Generalmente especificado como pérdida de regreso de carga de 12 dB para todas las fases posibles.
Potencia de salida: Salida fundamental senoidal del oscilador medida en una carga de 50 ohm.
Variación de frecuencia de salida: La variación máximo-mínimo de la potencia (expresada en dB) observada sobre el rango de frecuencia especificado en una carga de 50 Ohms a una temperatura determinada
Linealidad de la potencia de salida: Variación de la potencia de salida con respecto a la potencia promedio expresada en dB.
Cambio en la potencia de salida con la temperatura: Cambios en la potencia de salida sobre un rango de temperaturas determinado
Contenido o supresión armónica: Los niveles de armónicas son medidos en relación a la señal fundamental y expresados en dB con referencia a la portadora (dBc)

160
Terminología de VCO’s
Respuestas a espurias de contenido no armónico: Las frecuencias de espurias y señales no armónicas son indeseadas a la salida del oscilador. La respuesta de las espurias se expresa en dBc
Ruido de fase de banda lateral sencilla: Se mide en anchos de 1Hz en forma relativa a la potencia portadora a un desplazamiento determinado de la frecuencia portadora y se expresa en dBc/Hz.
Ruido “flicker”: Es una de las fuentes de ruido asociadas con dispositivos de estado sólido. Su amplitud varía inversamente con la frecuencia. Se le llama también ruido 1/f.
Factor de calidad Q: Figura de mérito utilizada para describir la exactitud (sharpness) de la respuesta de un circuito sintonizado. Un circuito con valor alto de Q cuenta con una respuesta mas exacta.
Diodo varactor: Diodo operado en condición de polarización inversa que proporciona una capacitancia de unión que es función del voltaje de polarización inverso aplicado

161
Terminología de VCO’s
FM residual: Otra forma de especificar la estabilidad en frecuencia de una señal. Es la desviación rms total de frecuencia en un ancho de banda dado: fa a fb. El ancho de banda generalmente se especifica entre 50Hz y 3kHz. Matemáticamente se expresa como:
PLL: Circuito con retroalimentación en el cual la frecuencia de operación del VCO se ajusta a la frecuencia y fase de una señal de referencia.
Sintetizador de frecuencia: Sistema que genera cualquier frecuencia equi-espaciada dentro de una banda, con una frecuencia estable de referencia.

162
Terminología de VCO’s
Detector de fase: Circuito que compara dos señales de RF coherentes y genera un voltaje de DC en función de la diferencia de fase de las dos señales.
Ganancia del detector de fase: Constante de un dispositivo, medida en volts/radian.
Filtro de lazo: Generalmente es un pasa bajas que filtra la salida del detector de fase y determina las características de ruido del VCO. Si el detector de fase genera una salida de corriente, el filtro de lazo integrará dicha salida en un voltaje de DC para controlar al VCO. Puede tomar diversas formas.

163
Ejemplos de VCO
Configuración Colpitts básica

164
Ejemplos de VCO
Configuración Colpitts básica

165
Descripción de Funcionamiento
Un VCO de bajo costo y considerablemente alto rendimiento se puede construir con un circuito tanque (LC) consistente de un inductor y un diodo varactor.
El inductor y el varactor implementan la resonancia variable en forma de red paralela o serial.
La red paralela puede ser utilizada a bajas frecuencias en las que varactores de valores altos son imprácticos. La configuración paralela permite un análisis directo del oscilador.

166
Descripción de Funcionamiento
El oscilador Colpitts puede redibujarse como un amplificador LC con retroalimentación positiva:

167
Descripción de Funcionamiento
Para predecir el funcionamiento, el circuito original puede ser redibujado como una impedancia negativa y una estructura resonante

168
Descripción de Funcionamiento
Ecuaciones básicas de diseño: Si se ignoran los elementos parásitos y asumiendo Cc >> C1 y C2, y C1 > Cbe:
El factor de calidad del circuito resonante:

169
Descripción de Funcionamiento
Ecuaciones básicas de diseño: Si se ignoran los elementos parásitos y asumiendo Cc >> C1 y C2, y C1 > Cbe:
El factor de calidad del circuito resonante:

170
Descripción de Funcionamiento
La amplitud de oscilación puede estimarse como:
La ganancia de lazo y criterio de arranque:
Ruido de fase:

171
Fuentes de error en la frecuencia de oscilación
Los componentes LC que determinan la frecuencia de oscilación no son ideales y contribuyen de la siguiente manera en errores de frecuencia: Variaciones entre piezas (tolerancia)
Rendimiento no-ideal (respuesta en frecuencia limitada a inductancia, capacitancia y resistencia en serie en las terminales)
Error inducido por las capacitancias e inductancias parásitas en el layout del circuito.

172
Lazo de Fase Cerrada (PLL)
Dinámica del VCO: Un VCO ideal se caracteriza por la ecuación (pag. 249). La función de transferencia puede ser vista como:
La integral en el VCO conlleva a una propiedad interesante: para cambiar la fase de la salida, debemos cambiar primero la frecuencia y dejar que ocurra la integración

173
Lazo de Fase Cerrada (PLL)
Diagrama básico de un PLL
174
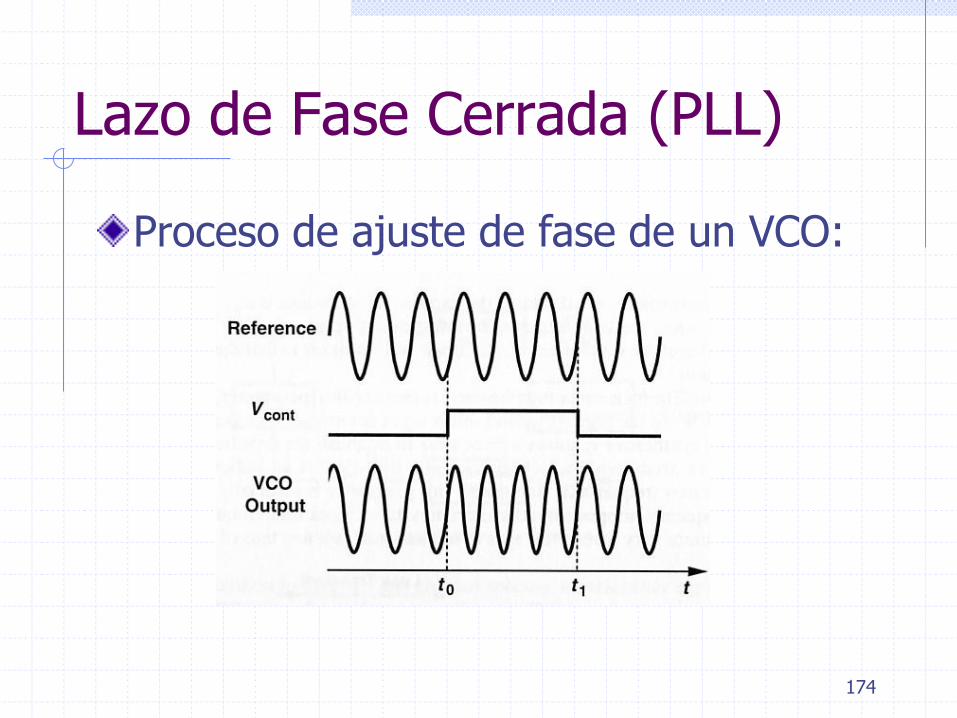
Lazo de Fase Cerrada (PLL)
Proceso de ajuste de fase de un VCO:

175
Lazo de Fase Cerrada (PLL)
La fase de la salida de un VCO no puede ser determinada solamente por el valor presente del voltaje de control, sino por la historia del mismo. Por esta razón, la fase del VCO es considerada como condición inicial independiente (variable de estado) dentro del análisis en el dominio del tiempo de un PLL.

176
Detector de fase
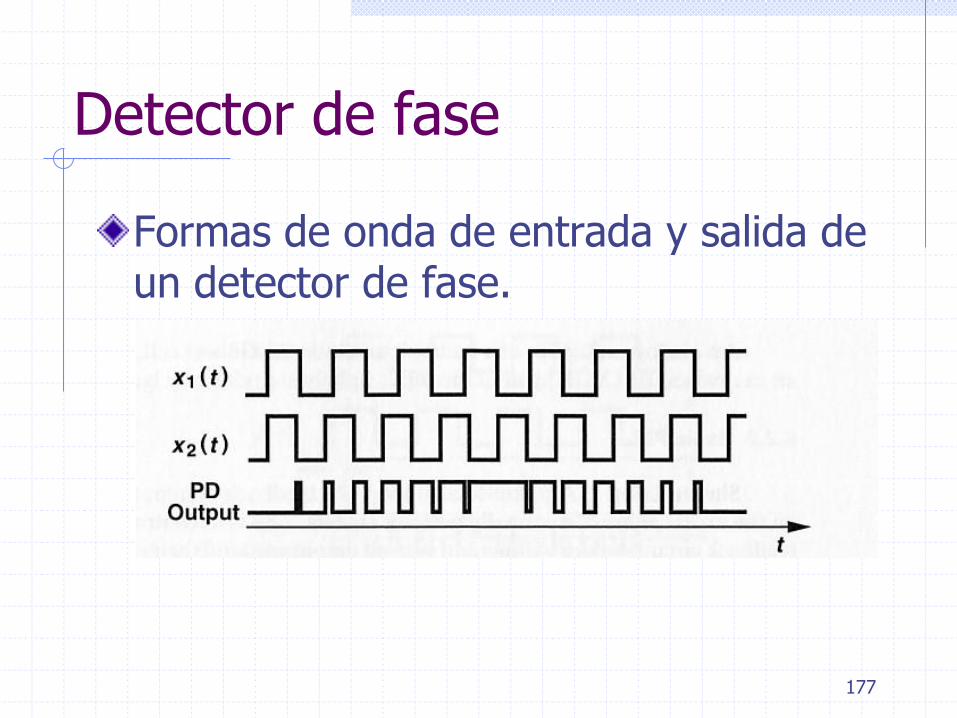
Un detector de fase ideal produce una señal de salida cuyo valor de DC es linealmente proporcional a la diferencia entre las fases de dos entradas periódicas
177
Detector de fase
Formas de onda de entrada y salida de un detector de fase.

178
Detector de fase
Un detector de fase comunmente utilizado es un multiplicador o mixer (también llamado detector de fase senoidal)

179
PLL Básico
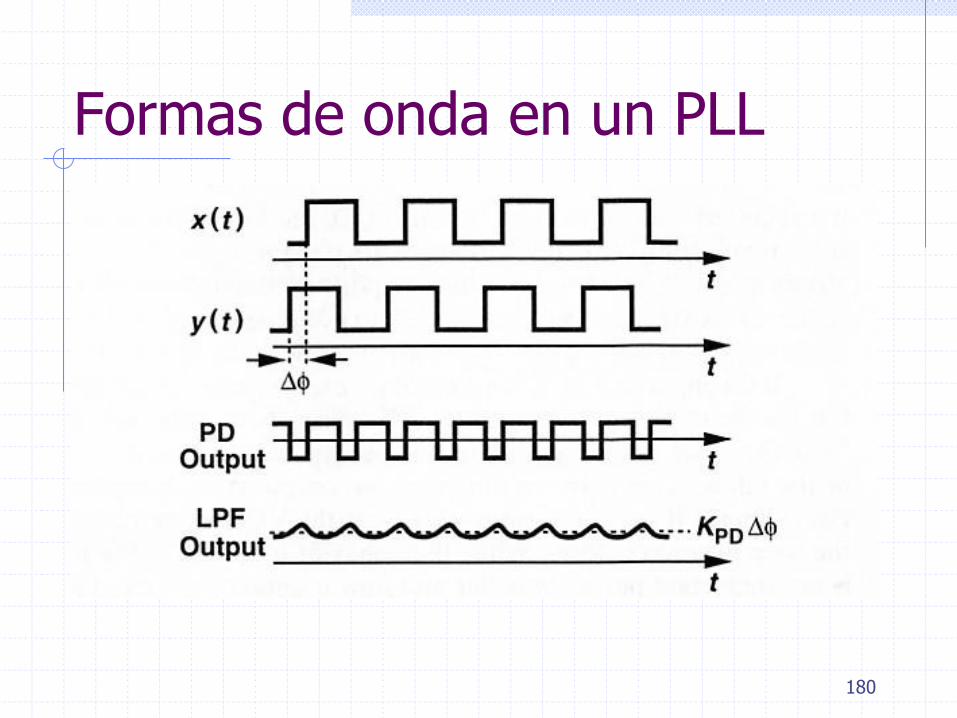
Un PLL básico es un sistema con retroalimentación que opera sobre el exceso de fase de señales normalmente periódicas.
180
Formas de onda en un PLL

181
Respuesta de un PLL a un cambio pequeño en frecuencia

182
Observaciones sobre el PLL
El PLL es un sistema con memoria. Requiere cierto tiempo para cambiar su salida con respecto a una entrada.
A diferencia de otros sistemas retroalimentados, la variable de interés cambia de dimensión en el lazo: Es convertida de fase a voltaje por el detector de fase, procesada por el filtro pasa bajas y convertida de vuelta a fase por el VCO.
En la condición de ajuste (lock) las frecuencias de entrada y salida son exactamente iguales, independientemente de la ganancia del lazo

183
Observaciones sobre el PLL
El comportamiento de seguimiento (tracking) de un PLL es útil en muchas aplicaciones. La capacidad de adquisición (pasar de un estado no ajustado a un ajuste de fase completo) también es importante.
Para lograr un buen desempeño en las características mencionadas, es necesario muchas veces incluir comparación de frecuencia además de la detección de fase.
En estos casos, primero se da un ajuste rápido en la frecuencia utilizando el comparador de frecuencia. Una vez que la diferencia en frecuencia es mínima, el comparador de fase toma control para permitir un ajuste completo de fase y frecuencia.

184
PLL’s de bombeo de carga (charge pump)
Para analizar este tipo de PLL’s, observemos primero los detectores de fase y frecuencia:
Un detector de fase/frecuencia genera dos salidas no complementarias.

185
PLL’s de bombeo de carga (charge pump)
Si la frecuencia de la entrada A es mayor a la de la entrada B, entonces Qa produce pulsos positivos y Qb se mantiene en cero. Si la frecuencia de A es menor que B, Qa se mantiene en cero y Qb produce pulsos positivos.
Si las frecuencias son iguales, el circuito genera pulsos en Qa o en Qb con un ancho igual a la diferencia de fase entre ambas entradas.
En principio, Qa y Qb no son altos al mismo tiempo. El valor promedio Qa-Qb es un indicador de la diferencia en fase o frecuencia de A y B.
Las salidas Qa y Qb son comúnmente llamadas señales “UP” y “DOWN”

186
Detector de Fase/Frecuencia
Para lograr las condiciones mencionadas, se puede diseñar una máquina de estados e implementar un circuito secuencial

187
Bombas de carga
A diferencia de un filtro pasa bajas, en la bomba de carga no hay caída considerable en la salida entre los instantes de comparación de fases.
Una combinación de una bomba de carga con un detector de fase y frecuencia se muestra a continuación
Un PLL que utilice este arreglo tendrá un ajuste que reducirá la diferencia de fase estática a cero.

188
Bombas de carga

189
PLL con bomba de carga
Se construyen incorporando un detector de frecuencia y fase y una bonba de carga en lugar del detector de fase y el filtro pasa bajas, como se muestra:

190
PLL con bomba de carga
Ventajas importantes: El rango de captura está limitado solamente por el
rango de frecuencia de salida del VCO
El error de fase estático es cero si se desprecian efectos externos (offsets y desajustes).
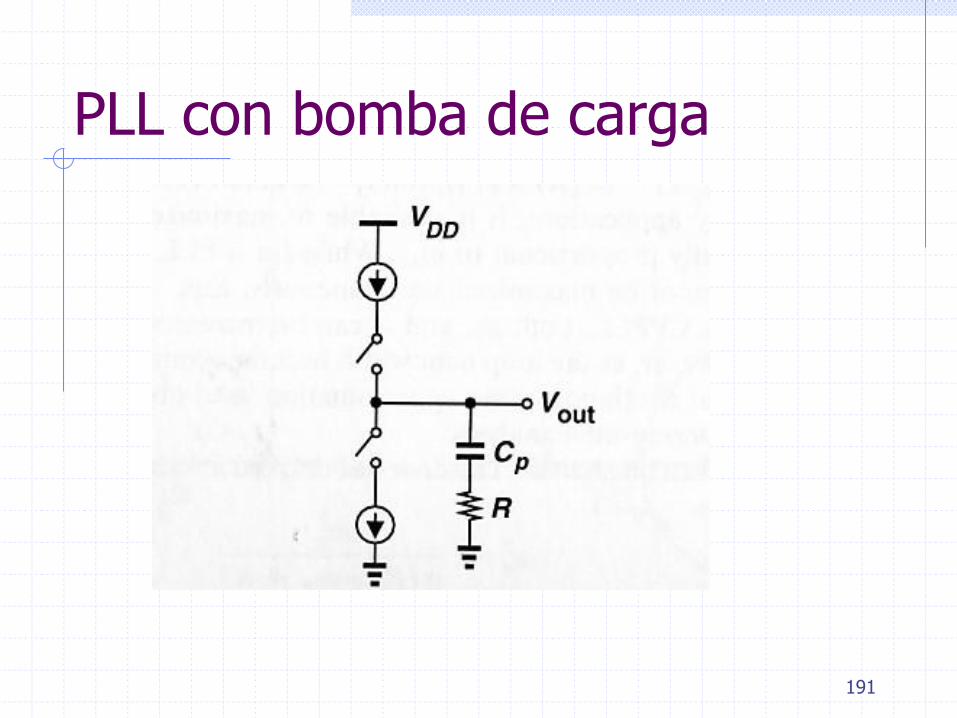
Sin embargo, la bomba de carga anteriormente vista es inestable con ganancia infinita. Para controlarla es necesario que se agregue un resistor en serie con el capacitor de la bomba, como se muestra en la siguiente figura.
191
PLL con bomba de carga

192
PLL’s tipo I y tipo II
El tipo de un PLL se refiere a la función de transferencia que presenta.
En general, el PLL que utiliza un comparador de fase y un filtro pasa bajas cuenta con un solo polo en el origen y es llamado “tipo I”
El PLL que utiliza comparadores de frecuencia y fase de tres estados en combinación con bombas de carga cuenta con dos polos en el origen y es llamado “tipo II”

193
PLL’s tipo I y tipo II
El análisis de la función de transferencia se realiza para conocer la estabilidad del dispositivo. En general, esta estabilidad depende de la ganancia de lazo abierto. Un PLL tipo I se vuelve inestable a medida que aumenta la ganancia, mientras que un tipo II se vuelve mas estable a medida que aumenta la ganancia.