
Analytical estimation of solid angle subtended by complex well-resolved surfaces for infrared...
8
Analytical estimation of solid angle subtended by complex well-resolved surfaces for infrared detection studies Shripad P. Mahulikar,* Santosh K. Potnuru, and Pankaj S. Kolhe Department of Aerospace Engineering, Indian Institute of Technology, Bombay P.O. IIT Powai, Mumbai 400076, India *Corresponding author: [email protected] Received 8 December 2006; revised 4 April 2007; accepted 1 May 2007; posted 1 May 2007 (Doc. ID 77933); published 6 July 2007 The solid angle () subtended by the hot power-plant surfaces of a typical fighter aircraft, on the detector of an infrared (IR) guided missile, is analytically obtained. The use of the parallel rays projection method simplifies the incorporation of the effect of the optical blocking by engine surfaces, on -subtended. This methodology enables the evaluation of the relative contribution of the IR signature from well-resolved distributed sources, and is important for imaging infrared detection studies. The complex 3D surface of a rear fuselage is projected onto an equivalent planar area normal to the viewing aspect, which would give the same -subtended. © 2007 Optical Society of America OCIS codes: 040.3060, 110.3080, 110.6820. 1. Introduction Note that the following symbols are used in this pa- per: A, area m 2 ; D, diameter [m]; d, distance be- tween centers of two circles in Fig. 4(b) [m]; dS, differential surface area m 2 ; L, axial range in which particular element type is visible [Table 1 and Fig. 3(b)] [m]; l, lengthdistance [m]; R, r, radii of circles in Eq. (4) [m]; S, surface area m 2 ; x, distance from inlet disc center from which particular element type is visible in Table 1 [Fig. 3(b)] [m]; , semicone angle [deg, rad]; x, axial width of axially discretized ele- ment [m]; , viewing aspect angle [deg, rad]; , length of line of sight between IR-detector and source [m]; ˆ, unit vector along []; , solid angle [Sr]; a, b, sub- scripts in Eq. (7); bd, bounding disc; c, convergent- section; circ, end circle of cylinder; cyl, cylindrical surface; d, divergent-section; ed, end disc; ed bd, distance between end disc and bounding disc; fbd, first bounding disc of the element (from end disc); i, i 1, ith, i 1th bounding disc of fuselage frustum element, respectively; jp, jet-pipe; P, Q, area sub- scripts in Eq. (10); pl, planar; R r, area of intersec- tion of two circles of radii R and r; sbd, second bounding disc of the element (from end disc); t, throat; t bd, between throat and bounding disc; vis, visible; 1, view angle at which there is no common area be- tween end disc and bounding disc in visible elements of type 1; 2, view angle at which bounding disc starts intersecting throat in visible elements of type 2; 3, view angle at which bounding disc, throat disc, and end disc, intersect at single pair of points in visible elements of type 2; and 4, view angle at which there is no common area between end disc and bounding disc in visible elements of type 2. Infrared (IR) guided missiles pose a major threat to aircraft and helicopters, especially in wartime and also in peace-keeping operations. The advances in IR detection technologies and their application in mis- siles have substantially increased their lethality [1–3]. In particular, an enabling technology for tacti- cal IR missiles is imaging IR detection [2,3], which renders conventional decoys ineffective. The passive IR detection systems are tactically advantageous compared with their radar-guided counterparts [4]. Therefore, knowledge of aircraft IR signature and analysis has gained importance, especially in the last few decades. The aircraft IR signature as perceived by a heat- seeking missile’s IR detector is largely influenced by the following important parameters: (i) operating temperature and emissivity distribution of the air- craft, (ii) transmissivity of the intervening atmo- sphere between IR detector and aircraft [5], (iii) background IR-radiance that is replaced by the air- 0003-6935/07/224991-08$15.00/0 © 2007 Optical Society of America 1 August 2007 Vol. 46, No. 22 APPLIED OPTICS 4991
Transcript of Analytical estimation of solid angle subtended by complex well-resolved surfaces for infrared...
Analytical estimation of solid angle subtended by complexwell-resolved surfaces for infrared detection studies
Shripad P. Mahulikar,* Santosh K. Potnuru, and Pankaj S. KolheDepartment of Aerospace Engineering, Indian Institute of Technology, Bombay P.O. IIT Powai, Mumbai 400076, India
*Corresponding author: [email protected]
Received 8 December 2006; revised 4 April 2007; accepted 1 May 2007;posted 1 May 2007 (Doc. ID 77933); published 6 July 2007
The solid angle (�) subtended by the hot power-plant surfaces of a typical fighter aircraft, on the detectorof an infrared (IR) guided missile, is analytically obtained. The use of the parallel rays projection methodsimplifies the incorporation of the effect of the optical blocking by engine surfaces, on �-subtended. Thismethodology enables the evaluation of the relative contribution of the IR signature from well-resolveddistributed sources, and is important for imaging infrared detection studies. The complex 3D surface ofa rear fuselage is projected onto an equivalent planar area normal to the viewing aspect, which would givethe same �-subtended. © 2007 Optical Society of America
OCIS codes: 040.3060, 110.3080, 110.6820.
1. Introduction
Note that the following symbols are used in this pa-per: A, area �m2�; D, diameter [m]; d, distance be-tween centers of two circles in Fig. 4(b) [m]; dS,differential surface area �m2�; L, axial range in whichparticular element type is visible [Table 1 and Fig.3(b)] [m]; l, length�distance [m]; R, r, radii of circles inEq. (4) [m]; S, surface area �m2�; x, distance from inletdisc center from which particular element type isvisible in Table 1 [Fig. 3(b)] [m]; �, semicone angle[deg, rad]; �x, axial width of axially discretized ele-ment [m]; �, viewing aspect angle [deg, rad]; �, lengthof line of sight between IR-detector and source [m]; �̂,unit vector along � [�]; �, solid angle [Sr]; a, b, sub-scripts in Eq. (7); bd, bounding disc; c, convergent-section; circ, end circle of cylinder; cyl, cylindricalsurface; d, divergent-section; ed, end disc; ed � bd,distance between end disc and bounding disc; fbd,first bounding disc of the element (from end disc); i, i� 1, ith, �i � 1�th bounding disc of fuselage frustumelement, respectively; jp, jet-pipe; P, Q, area sub-scripts in Eq. (10); pl, planar; R � r, area of intersec-tion of two circles of radii R and r; sbd, secondbounding disc of the element (from end disc); t, throat;t � bd, between throat and bounding disc; vis, visible;
1, view angle at which there is no common area be-tween end disc and bounding disc in visible elementsof type 1; 2, view angle at which bounding disc startsintersecting throat in visible elements of type 2; 3,view angle at which bounding disc, throat disc, andend disc, intersect at single pair of points in visibleelements of type 2; and 4, view angle at which thereis no common area between end disc and boundingdisc in visible elements of type 2.
Infrared (IR) guided missiles pose a major threat toaircraft and helicopters, especially in wartime andalso in peace-keeping operations. The advances in IRdetection technologies and their application in mis-siles have substantially increased their lethality[1–3]. In particular, an enabling technology for tacti-cal IR missiles is imaging IR detection [2,3], whichrenders conventional decoys ineffective. The passiveIR detection systems are tactically advantageouscompared with their radar-guided counterparts [4].Therefore, knowledge of aircraft IR signature andanalysis has gained importance, especially in the lastfew decades.
The aircraft IR signature as perceived by a heat-seeking missile’s IR detector is largely influenced bythe following important parameters: (i) operatingtemperature and emissivity distribution of the air-craft, (ii) transmissivity of the intervening atmo-sphere between IR detector and aircraft [5], (iii)background IR-radiance that is replaced by the air-
0003-6935/07/224991-08$15.00/0© 2007 Optical Society of America
1 August 2007 � Vol. 46, No. 22 � APPLIED OPTICS 4991

craft [5] and earthshine (both are especially impor-tant in 8–12 �m band), (iv) viewing aspect angle (�),and (v) angular subtense of the aircraft at the IRdetector. Because the aircraft engine hot parts aredistributed sources of IR-radiation, directional de-pendence is an important consideration (unlike for anisotropic point source). For different viewing aspects,the solid angle (�) subtended by the surfaces of theengine hot parts change, which alters the IR signa-ture level as perceived by the IR guided missile. Thevariations in geometrical parameters of the enginehot parts should be appropriately modeled for esti-mating �-subtended. The engine tailpipe and rearfuselage are important sources of IR signature in amilitary aircraft operating in nonafterburning mode[5], relative to the engine exhaust plume [6]. There-fore, the present analysis is focused on evaluating thevariation of �-subtended by engine layout and rearfuselage, for different viewing aspects (in particularthe rear aspect).
When the distance between the aircraft and IR-detector is more ��1 km�, the angular subtense of theengine hot parts at the IR detector is very small.Hence, the engine hot parts appear as unresolvedsources in the IR detector’s instantaneous field of view;though the IR contrast with respect to backgroundchanges with aspect. For small angular subtense, theradiation from the engine tailpipe has been approxi-mated as a gray body with high emissivity at the noz-zle wall temperature [7]. Such simplifications inmodeling IR radiation are reasonable for calculatingthe lock-on range against IR guided missiles, which istypically of the order of several kilometers. Once themissile locks on and pursues the target aircraft con-tinuously, it approaches closer toward the aircraft. Es-pecially during the terminal phase, �-subtended bythe hot surfaces increase and the engine hot partsappear as well-resolved sources of complex geometry.Therefore, �-subtended by each component of the en-gine and rear fuselage skin must be estimated sep-arately, to obtain the incident irradiance. Suchelaborate calculations are necessary to reliably evalu-ate the effectiveness of countermeasures such as de-coys [8], especially for imaging IR detection systems.
In applications related to optical, radiation, andnuclear physics, it is important to accurately esti-mate the radiation incident on the detector. The frac-tion of radiation reaching the detector from thesource can be estimated if �-subtended by the sourceat the detector, and the radiation intensity in line ofsight (LOS) are known. The evaluation of � that acylinder subtends at a given point is also of specialimportance for radioactive sources. Investigatorshave reported the estimation of �-subtended by a discor a cylinder at a point in space. The �-subtended bya right circular cylinder at a point source located atan arbitrary position consists of a sum of the follow-ing two terms: (i) that defined by the cylindrical sur-face �cyl, and (ii) by either of the end circles �circ.Gardner and Camesale [9] and Gardner and Vergh-ese [10] approximated a circular disc by an n-sidedregular polygon of equal area, to analytically obtain
�circ. Verghese et al. [11] approximated the circularcylinder by an n-faced regular polyhedral surface, foranalytically estimating �cyl. Tryka [12] derived theangular distribution of �-subtended at a point by acircular disc, by solving the complete elliptic integralsof the first and third kind. Galiano and Pagnutti [13]analytically determined the �-subtended by a circu-lar detector for a line source in a parallel plane, whosemidpoint is coaxial with the detector’s center. Prata[14] analytically derived �-subtended by a right cir-cular cylinder at a point source with cosine angulardistribution, for the case when the source and cylin-der axes are mutually orthogonal. The � of the wholecylinder can be expressed in terms of elliptic inte-grals, which are well-known functions [15]. Prata [16]derived an expression for �cyl in terms of elliptic in-tegrals of the 1st and 3rd kinds, and gave similarexpressions for �circ using elliptic integrals of the 1stand 2nd kinds. The �-subtended by the whole cylin-der when the isotropic point source is located at anarbitrary location, can then be calculated using theseelliptic integrals. These investigators [9–14,16] es-sentially solved the �-integration from the 1st prin-ciples given as (e.g., [17])
� ��S
�̂ · dS
�2 ; (1)
where, �̂ · dS is the area of projection of dS onto aplane perpendicular to �̂.
Carchon et al. [18] and Stavroulaki and Kaplanis[19] used the Monte Carlo method to evaluate �.Wielopolski [20] applied the Monte Carlo method uti-lizing total variance reduction to estimate the aver-age �-subtended by a circular cylinder from adistributed source.
There is a dearth of investigations that address theestimation of �-subtended by complex geometries onan IR-detector, e.g., hot surfaces of aircraft engine lay-out. As an exact analytical approach based on Eq. (1)cannot handle such geometries, it is imperative to de-velop approximate analytical techniques that are validfor the application. Such approximate analytical closedform solutions are advantageous over purely numeri-cal approaches {e.g., [18–20]}, as they enable quick andreasonably accurate estimates. In this investigation,the �-subtended on the IR-detector by the exposedsurfaces of an aircraft engine (Fig. 1) that appear as aresolved distributed source, is obtained. For the case ofIR-detection of aircraft-engine hot surfaces, certainsurfaces partially�completely block the visibility ofother surfaces, depending on �. The projected planararea of the exposed surfaces of an engine layout on theplane normal to LOS �Apl � ��̂ · dS� is obtained usingthe parallel rays projection method. The Apl so ob-tained accounts for the complexity associated withthe effect of optical blockage, and �-subtended isobtained as
� � �Apl��2�. (2)
4992 APPLIED OPTICS � Vol. 46, No. 22 � 1 August 2007
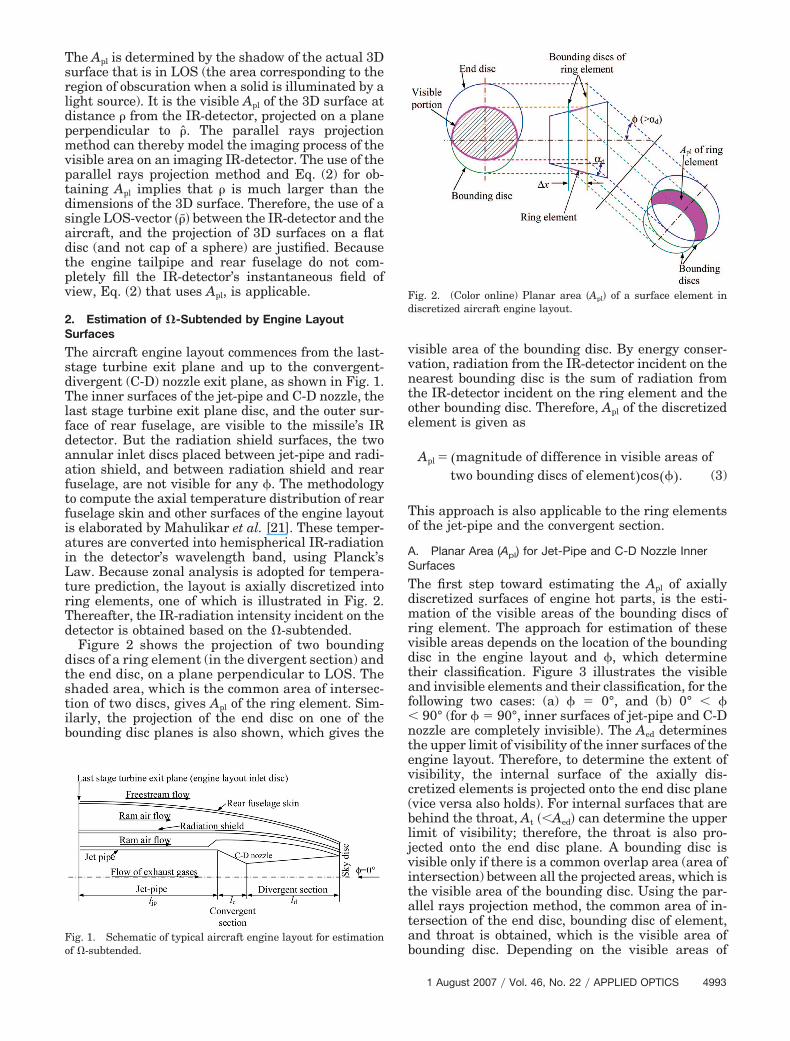
The Apl is determined by the shadow of the actual 3Dsurface that is in LOS (the area corresponding to theregion of obscuration when a solid is illuminated by alight source). It is the visible Apl of the 3D surface atdistance � from the IR-detector, projected on a planeperpendicular to �̂. The parallel rays projectionmethod can thereby model the imaging process of thevisible area on an imaging IR-detector. The use of theparallel rays projection method and Eq. (2) for ob-taining Apl implies that � is much larger than thedimensions of the 3D surface. Therefore, the use of asingle LOS-vector ��̄� between the IR-detector and theaircraft, and the projection of 3D surfaces on a flatdisc (and not cap of a sphere) are justified. Becausethe engine tailpipe and rear fuselage do not com-pletely fill the IR-detector’s instantaneous field ofview, Eq. (2) that uses Apl, is applicable.
2. Estimation of �-Subtended by Engine LayoutSurfaces
The aircraft engine layout commences from the last-stage turbine exit plane and up to the convergent-divergent (C-D) nozzle exit plane, as shown in Fig. 1.The inner surfaces of the jet-pipe and C-D nozzle, thelast stage turbine exit plane disc, and the outer sur-face of rear fuselage, are visible to the missile’s IRdetector. But the radiation shield surfaces, the twoannular inlet discs placed between jet-pipe and radi-ation shield, and between radiation shield and rearfuselage, are not visible for any �. The methodologyto compute the axial temperature distribution of rearfuselage skin and other surfaces of the engine layoutis elaborated by Mahulikar et al. [21]. These temper-atures are converted into hemispherical IR-radiationin the detector’s wavelength band, using Planck’sLaw. Because zonal analysis is adopted for tempera-ture prediction, the layout is axially discretized intoring elements, one of which is illustrated in Fig. 2.Thereafter, the IR-radiation intensity incident on thedetector is obtained based on the �-subtended.
Figure 2 shows the projection of two boundingdiscs of a ring element (in the divergent section) andthe end disc, on a plane perpendicular to LOS. Theshaded area, which is the common area of intersec-tion of two discs, gives Apl of the ring element. Sim-ilarly, the projection of the end disc on one of thebounding disc planes is also shown, which gives the
visible area of the bounding disc. By energy conser-vation, radiation from the IR-detector incident on thenearest bounding disc is the sum of radiation fromthe IR-detector incident on the ring element and theother bounding disc. Therefore, Apl of the discretizedelement is given as
Apl � �magnitude of difference in visible areas oftwo bounding discs of element�cos���. (3)
This approach is also applicable to the ring elementsof the jet-pipe and the convergent section.
A. Planar Area (Apl) for Jet-Pipe and C-D Nozzle InnerSurfaces
The first step toward estimating the Apl of axiallydiscretized surfaces of engine hot parts, is the esti-mation of the visible areas of the bounding discs ofring element. The approach for estimation of thesevisible areas depends on the location of the boundingdisc in the engine layout and �, which determinetheir classification. Figure 3 illustrates the visibleand invisible elements and their classification, for thefollowing two cases: (a) � � 0°, and (b) 0° � �� 90° (for � � 90°, inner surfaces of jet-pipe and C-Dnozzle are completely invisible). The Aed determinesthe upper limit of visibility of the inner surfaces of theengine layout. Therefore, to determine the extent ofvisibility, the internal surface of the axially dis-cretized elements is projected onto the end disc plane(vice versa also holds). For internal surfaces that arebehind the throat, At ��Aed� can determine the upperlimit of visibility; therefore, the throat is also pro-jected onto the end disc plane. A bounding disc isvisible only if there is a common overlap area (area ofintersection) between all the projected areas, which isthe visible area of the bounding disc. Using the par-allel rays projection method, the common area of in-tersection of the end disc, bounding disc of element,and throat is obtained, which is the visible area ofbounding disc. Depending on the visible areas of
Fig. 1. Schematic of typical aircraft engine layout for estimationof �-subtended.
Fig. 2. (Color online) Planar area �Apl� of a surface element indiscretized aircraft engine layout.
1 August 2007 � Vol. 46, No. 22 � APPLIED OPTICS 4993
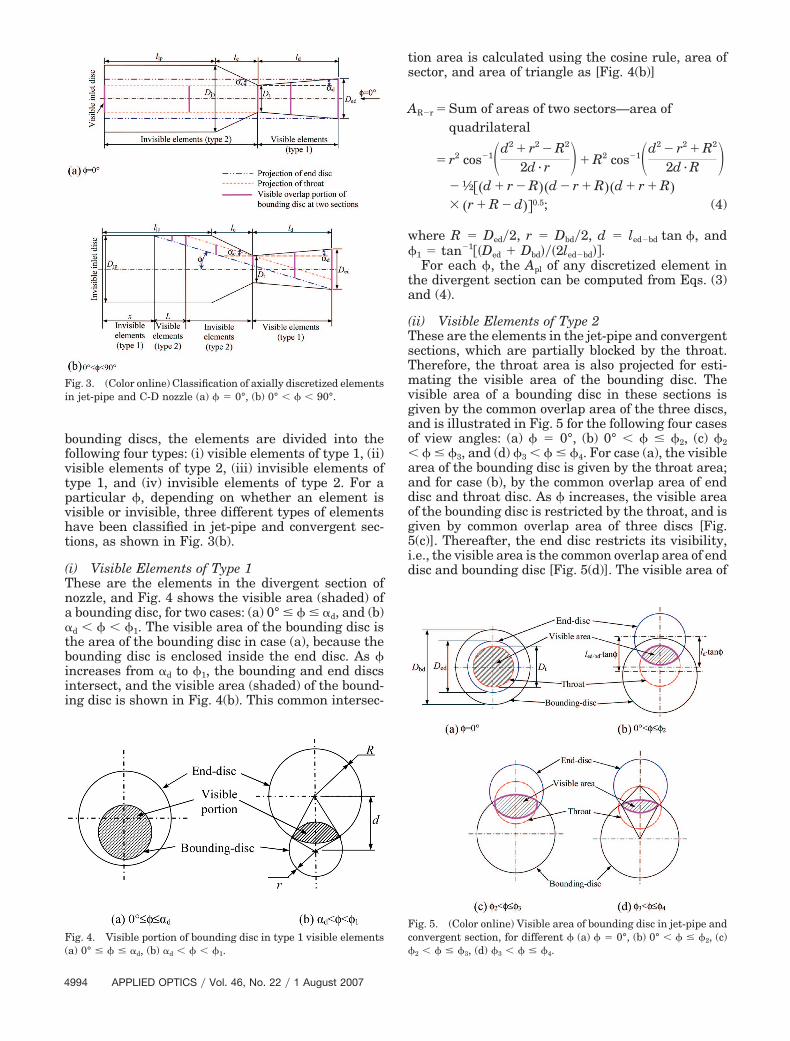
bounding discs, the elements are divided into thefollowing four types: (i) visible elements of type 1, (ii)visible elements of type 2, (iii) invisible elements oftype 1, and (iv) invisible elements of type 2. For aparticular �, depending on whether an element isvisible or invisible, three different types of elementshave been classified in jet-pipe and convergent sec-tions, as shown in Fig. 3(b).
(i) Visible Elements of Type 1These are the elements in the divergent section ofnozzle, and Fig. 4 shows the visible area (shaded) ofa bounding disc, for two cases: (a) 0° � d, and (b)d � � � �1. The visible area of the bounding disc isthe area of the bounding disc in case (a), because thebounding disc is enclosed inside the end disc. As �increases from d to �1, the bounding and end discsintersect, and the visible area (shaded) of the bound-ing disc is shown in Fig. 4(b). This common intersec-
tion area is calculated using the cosine rule, area ofsector, and area of triangle as [Fig. 4(b)]
AR�r � Sum of areas of two sectors—area ofquadrilateral
� r2 cos�1�d2 � r2 � R2
2d · r �� R2 cos�1�d2 � r2 � R2
2d · R �� ½��d � r � R��d � r � R��d � r � R�� �r � R � d��0.5; (4)
where R � Ded�2, r � Dbd�2, d � led�bd tan �, and�1 � tan�1��Ded � Dbd���2led�bd��.
For each �, the Apl of any discretized element inthe divergent section can be computed from Eqs. (3)and (4).
(ii) Visible Elements of Type 2These are the elements in the jet-pipe and convergentsections, which are partially blocked by the throat.Therefore, the throat area is also projected for esti-mating the visible area of the bounding disc. Thevisible area of a bounding disc in these sections isgiven by the common overlap area of the three discs,and is illustrated in Fig. 5 for the following four casesof view angles: (a) � � 0°, (b) 0° � � �2, (c) �2� � �3, and (d) �3 � � �4. For case (a), the visiblearea of the bounding disc is given by the throat area;and for case (b), by the common overlap area of enddisc and throat disc. As � increases, the visible areaof the bounding disc is restricted by the throat, and isgiven by common overlap area of three discs [Fig.5(c)]. Thereafter, the end disc restricts its visibility,i.e., the visible area is the common overlap area of enddisc and bounding disc [Fig. 5(d)]. The visible area of
Fig. 5. (Color online) Visible area of bounding disc in jet-pipe andconvergent section, for different � (a) � � 0°, (b) 0° � � �2, (c)�2 � � �3, (d) �3 � � �4.
Fig. 3. (Color online) Classification of axially discretized elementsin jet-pipe and C-D nozzle (a) � � 0°, (b) 0° � � � 90°.
Fig. 4. Visible portion of bounding disc in type 1 visible elements(a) 0° � d, (b) d � � � �1.
4994 APPLIED OPTICS � Vol. 46, No. 22 � 1 August 2007
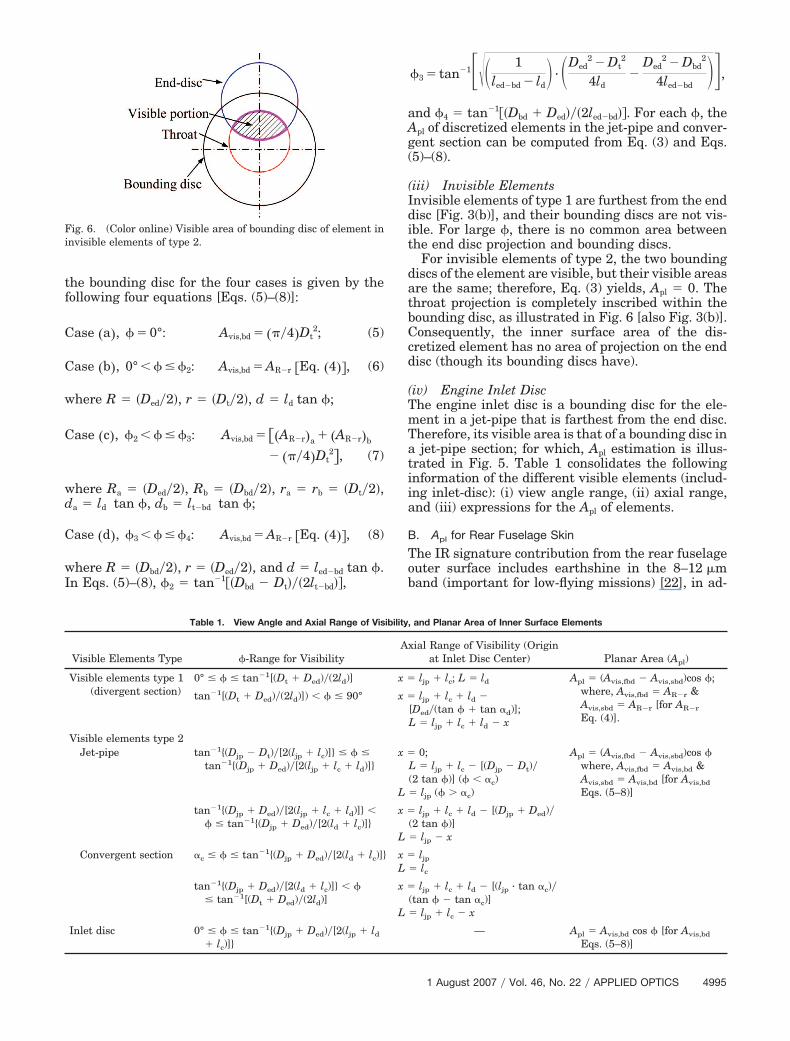
the bounding disc for the four cases is given by thefollowing four equations [Eqs. (5)–(8)]:
Case �a�, � � 0°: Avis,bd � � �4�Dt2; (5)
Case �b�, 0° � � �2: Avis,bd � AR�r �Eq. �4��, (6)
where R � �Ded�2�, r � �Dt�2�, d � ld tan �;
Case �c�, �2 � � �3: Avis,bd � ��AR�r�a � �AR�r�b
� � �4�Dt2�, (7)
where Ra � �Ded�2�, Rb � �Dbd�2�, ra � rb � �Dt�2�,da � ld tan �, db � lt�bd tan �;
Case �d�, �3 � � �4: Avis,bd � AR�r �Eq. �4��, (8)
where R � �Dbd�2�, r � �Ded�2�, and d � led�bd tan �.In Eqs. (5)–(8), �2 � tan�1��Dbd � Dt���2lt�bd��,
�3 � tan�1� 1led�bd � ld
� · �Ded2 � Dt
2
4ld�
Ded2 � Dbd
2
4led�bd��,
and �4 � tan�1��Dbd � Ded���2led�bd��. For each �, theApl of discretized elements in the jet-pipe and conver-gent section can be computed from Eq. (3) and Eqs.(5)–(8).
(iii) Invisible ElementsInvisible elements of type 1 are furthest from the enddisc [Fig. 3(b)], and their bounding discs are not vis-ible. For large �, there is no common area betweenthe end disc projection and bounding discs.
For invisible elements of type 2, the two boundingdiscs of the element are visible, but their visible areasare the same; therefore, Eq. (3) yields, Apl � 0. Thethroat projection is completely inscribed within thebounding disc, as illustrated in Fig. 6 [also Fig. 3(b)].Consequently, the inner surface area of the dis-cretized element has no area of projection on the enddisc (though its bounding discs have).
(iv) Engine Inlet DiscThe engine inlet disc is a bounding disc for the ele-ment in a jet-pipe that is farthest from the end disc.Therefore, its visible area is that of a bounding disc ina jet-pipe section; for which, Apl estimation is illus-trated in Fig. 5. Table 1 consolidates the followinginformation of the different visible elements (includ-ing inlet-disc): (i) view angle range, (ii) axial range,and (iii) expressions for the Apl of elements.
B. Apl for Rear Fuselage Skin
The IR signature contribution from the rear fuselageouter surface includes earthshine in the 8–12 �mband (important for low-flying missions) [22], in ad-
Fig. 6. (Color online) Visible area of bounding disc of element ininvisible elements of type 2.
Table 1. View Angle and Axial Range of Visibility, and Planar Area of Inner Surface Elements
Visible Elements Type �-Range for VisibilityAxial Range of Visibility (Origin
at Inlet Disc Center) Planar Area (Apl)
Visible elements type 1(divergent section)
0° � tan�1[(Dt � Ded)�(2ld)] x � ljp � lc; L � ld Apl � (Avis,fbd � Avis,sbd)cos �;where, Avis,fbd � AR�r &Avis,sbd � AR�r [for AR�r
Eq. (4)].
tan�1[(Dt � Ded)�(2ld)]) � 90° x � ljp � lc � ld �[Ded�(tan � � tan �d)];L � ljp � lc � ld � x
Visible elements type 2Jet-pipe tan�1{(Djp � Dt)�[2(ljp � lc)]} �
tan�1{(Djp � Ded)�[2(ljp � lc � ld)]}x � 0;
L � ljp � lc � [(Djp � Dt)�(2 tan �)] (� �c)
L � ljp (� �c)
Apl � (Avis,fbd � Avis,sbd)cos �where, Avis,fbd � Avis,bd &Avis,sbd � Avis,bd [for Avis,bd
Eqs. (5–8)]
tan�1{(Djp � Ded)�[2(ljp � lc � ld)]} � tan�1{(Djp � Ded)�[2(ld � lc)]}
x � ljp � lc � ld � [(Djp � Ded)�(2 tan �)]
L � ljp � x
Convergent section �c � tan�1{(Djp � Ded)�[2(ld � lc)]} x � ljpL � lc
tan�1{(Djp � Ded)�[2(ld � lc)]} � tan�1[(Dt � Ded)�(2ld)]
x � ljp � lc � ld � [(ljp · tan �c)�(tan � � tan �c)]
L � ljp � lc � x
Inlet disc 0° � tan�1{(Djp � Ded)�[2(ljp � ld� lc)]}
— Apl � Avis,bd cos � [for Avis,bd
Eqs. (5–8)]
1 August 2007 � Vol. 46, No. 22 � APPLIED OPTICS 4995
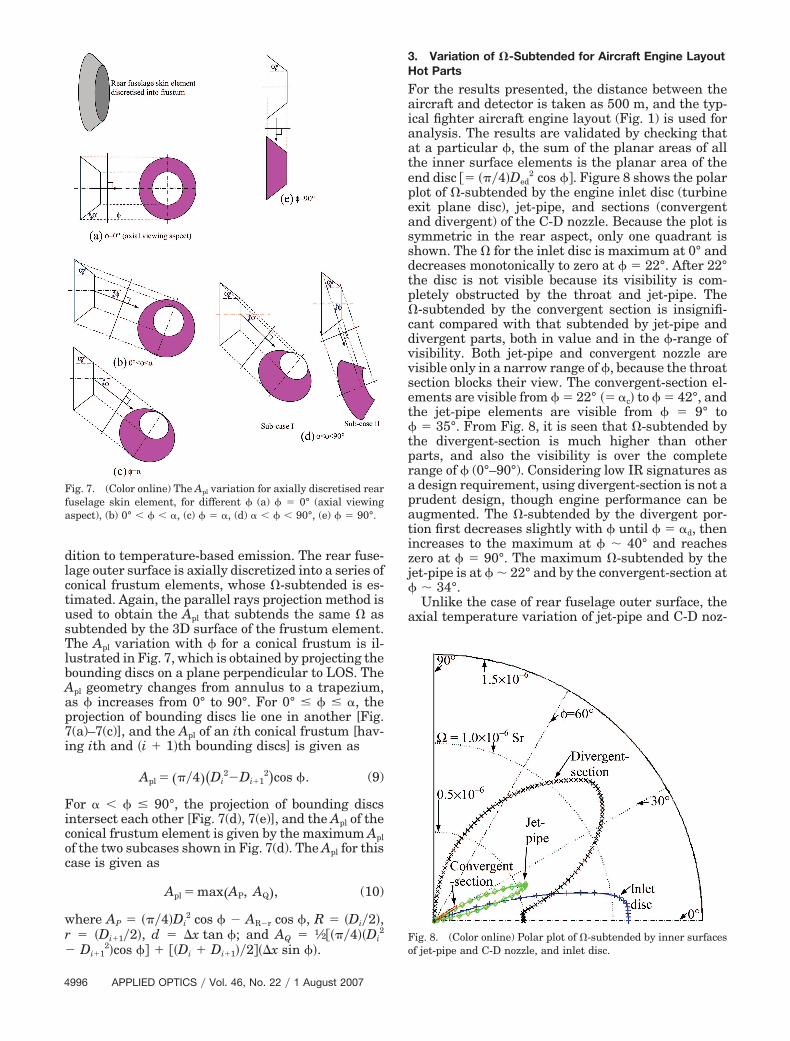
dition to temperature-based emission. The rear fuse-lage outer surface is axially discretized into a series ofconical frustum elements, whose �-subtended is es-timated. Again, the parallel rays projection method isused to obtain the Apl that subtends the same � assubtended by the 3D surface of the frustum element.The Apl variation with � for a conical frustum is il-lustrated in Fig. 7, which is obtained by projecting thebounding discs on a plane perpendicular to LOS. TheApl geometry changes from annulus to a trapezium,as � increases from 0° to 90°. For 0° � , theprojection of bounding discs lie one in another [Fig.7(a)–7(c)], and the Apl of an ith conical frustum [hav-ing ith and �i � 1�th bounding discs] is given as
Apl � � �4��Di2�Di�1
2�cos �. (9)
For � � 90°, the projection of bounding discsintersect each other [Fig. 7(d), 7(e)], and the Apl of theconical frustum element is given by the maximum Aplof the two subcases shown in Fig. 7(d). The Apl for thiscase is given as
Apl � max�AP, AQ�, (10)
where AP � � �4�Di2 cos � � AR�r cos �, R � �Di�2�,
r � �Di�1�2�, d � �x tan �; and AQ � ½�� �4��Di2
� Di�12�cos �� � ��Di � Di�1��2���x sin ��.
3. Variation of �-Subtended for Aircraft Engine LayoutHot Parts
For the results presented, the distance between theaircraft and detector is taken as 500 m, and the typ-ical fighter aircraft engine layout (Fig. 1) is used foranalysis. The results are validated by checking thatat a particular �, the sum of the planar areas of allthe inner surface elements is the planar area of theend disc �� � �4�Ded
2 cos ��. Figure 8 shows the polarplot of �-subtended by the engine inlet disc (turbineexit plane disc), jet-pipe, and sections (convergentand divergent) of the C-D nozzle. Because the plot issymmetric in the rear aspect, only one quadrant isshown. The � for the inlet disc is maximum at 0° anddecreases monotonically to zero at � � 22°. After 22°the disc is not visible because its visibility is com-pletely obstructed by the throat and jet-pipe. The�-subtended by the convergent section is insignifi-cant compared with that subtended by jet-pipe anddivergent parts, both in value and in the �-range ofvisibility. Both jet-pipe and convergent nozzle arevisible only in a narrow range of �, because the throatsection blocks their view. The convergent-section el-ements are visible from � � 22° �� c� to � � 42°, andthe jet-pipe elements are visible from � � 9° to� � 35°. From Fig. 8, it is seen that �-subtended bythe divergent-section is much higher than otherparts, and also the visibility is over the completerange of � (0°–90°). Considering low IR signatures asa design requirement, using divergent-section is not aprudent design, though engine performance can beaugmented. The �-subtended by the divergent por-tion first decreases slightly with � until � � d, thenincreases to the maximum at � � 40° and reacheszero at � � 90°. The maximum �-subtended by thejet-pipe is at � � 22° and by the convergent-section at� � 34°.
Unlike the case of rear fuselage outer surface, theaxial temperature variation of jet-pipe and C-D noz-
Fig. 7. (Color online) The Apl variation for axially discretised rearfuselage skin element, for different � (a) � � 0° (axial viewingaspect), (b) 0° � � � , (c) � � , (d) � � � 90°, (e) � � 90°.
Fig. 8. (Color online) Polar plot of �-subtended by inner surfacesof jet-pipe and C-D nozzle, and inlet disc.
4996 APPLIED OPTICS � Vol. 46, No. 22 � 1 August 2007
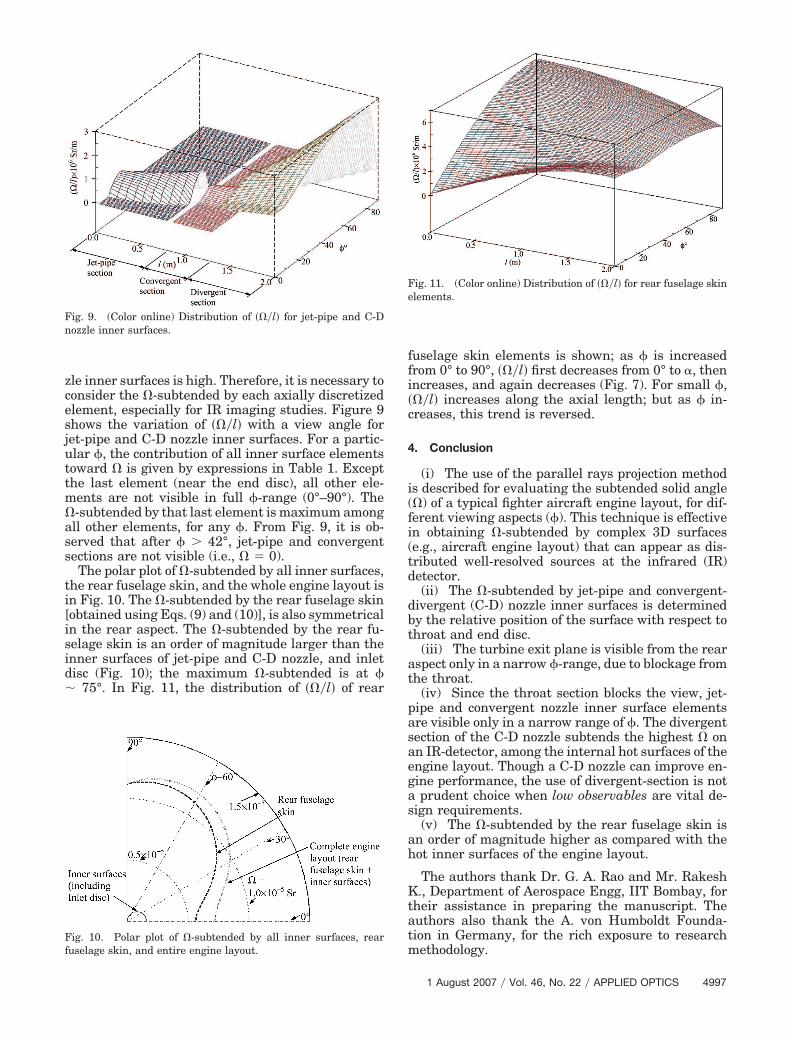
zle inner surfaces is high. Therefore, it is necessary toconsider the �-subtended by each axially discretizedelement, especially for IR imaging studies. Figure 9shows the variation of ���l� with a view angle forjet-pipe and C-D nozzle inner surfaces. For a partic-ular �, the contribution of all inner surface elementstoward � is given by expressions in Table 1. Exceptthe last element (near the end disc), all other ele-ments are not visible in full �-range (0°–90°). The�-subtended by that last element is maximum amongall other elements, for any �. From Fig. 9, it is ob-served that after � � 42°, jet-pipe and convergentsections are not visible (i.e., � � 0).
The polar plot of �-subtended by all inner surfaces,the rear fuselage skin, and the whole engine layout isin Fig. 10. The �-subtended by the rear fuselage skin[obtained using Eqs. (9) and (10)], is also symmetricalin the rear aspect. The �-subtended by the rear fu-selage skin is an order of magnitude larger than theinner surfaces of jet-pipe and C-D nozzle, and inletdisc (Fig. 10); the maximum �-subtended is at �� 75°. In Fig. 11, the distribution of ���l� of rear
fuselage skin elements is shown; as � is increasedfrom 0° to 90°, ���l� first decreases from 0° to �, thenincreases, and again decreases (Fig. 7). For small �,���l� increases along the axial length; but as � in-creases, this trend is reversed.
4. Conclusion
(i) The use of the parallel rays projection methodis described for evaluating the subtended solid angle(�) of a typical fighter aircraft engine layout, for dif-ferent viewing aspects (�). This technique is effectivein obtaining �-subtended by complex 3D surfaces(e.g., aircraft engine layout) that can appear as dis-tributed well-resolved sources at the infrared (IR)detector.
(ii) The �-subtended by jet-pipe and convergent-divergent (C-D) nozzle inner surfaces is determinedby the relative position of the surface with respect tothroat and end disc.
(iii) The turbine exit plane is visible from the rearaspect only in a narrow �-range, due to blockage fromthe throat.
(iv) Since the throat section blocks the view, jet-pipe and convergent nozzle inner surface elementsare visible only in a narrow range of �. The divergentsection of the C-D nozzle subtends the highest � onan IR-detector, among the internal hot surfaces of theengine layout. Though a C-D nozzle can improve en-gine performance, the use of divergent-section is nota prudent choice when low observables are vital de-sign requirements.
(v) The �-subtended by the rear fuselage skin isan order of magnitude higher as compared with thehot inner surfaces of the engine layout.
The authors thank Dr. G. A. Rao and Mr. RakeshK., Department of Aerospace Engg, IIT Bombay, fortheir assistance in preparing the manuscript. Theauthors also thank the A. von Humboldt Founda-tion in Germany, for the rich exposure to researchmethodology.
Fig. 10. Polar plot of �-subtended by all inner surfaces, rearfuselage skin, and entire engine layout.
Fig. 9. (Color online) Distribution of ���l� for jet-pipe and C-Dnozzle inner surfaces.
Fig. 11. (Color online) Distribution of ���l� for rear fuselage skinelements.
1 August 2007 � Vol. 46, No. 22 � APPLIED OPTICS 4997

References1. C. J. Chen, K. K. Choi, W. H. Chang, and D. C. Tsui, “Two-color
corrugated quantum-well infrared photodetector for remotetemperature sensing,” Appl. Phys. Lett. 72, 7–9 (1998).
2. K. K. Choi, “Corrugated quantum well infrared photodetectorsand arrays,” Int. J. High Speed Electronics and Systems 12,715–759 (2002).
3. W. A. Bell and B. B. Glasgow, “Impact of advances in imaginginfrared detectors on antiaircraft missile performance,” inProc. SPIE, Infrared Imaging Systems: Design, Analysis, Mod-elling, and Testing, G. C. Holst, ed. 3701, SPIE, Washington,244–253 (1999).
4. D. Howe, “Introduction to the basic technology of stealth air-craft. Part 1. Basic considerations and aircraft self-emittedsignals (passive considerations),” ASME J. Engineering forGas Turbines and Power 113, 75–79 (1991).
5. G. A. Rao and S. P. Mahulikar, “Effect of atmospheric trans-mission and radiance on aircraft infrared signatures,” AIAA J.Aircraft 42, 1046–1054 (2005).
6. S. P. Mahulikar, G. A. Rao, S. K. Sane, and A. G. Marathe,“Aircraft plume infrared signature in non-afterburning mode,”AIAA J. Thermophysics & Heat Transfer 19, 413–415 (2005).
7. D. R. Hudson, Jr., Infrared System Engineering (Wiley, 1969),pp. 85–87.
8. W. De Jong, S. P. Van Den Broek, and R. Van Der Nol, “IRseeker simulator to evaluate IR decoy effectiveness,” in Proc.SPIE, Targets and Backgrounds VIII: Characterization andRepresentation, W. R. Watkins, D. Clement, and W. R. Reyn-olds, eds. 4718, SPIE, Washington, 164–172 (2002).
9. R. P. Gardner and A. Carnesale, “The solid angle subtended ata point by a circular disk,” Nuclear Instruments and Methods73, 228–230 (1969).
10. R. P. Gardner and K. Verghese, “On the solid angle subtendedby a circular disk,” Nucl. Instrum. Methods 93, 163–167(1971).
11. K. Verghese, R. P. Gardner, and R. M. Felder, “Solid angle
subtended by a circular cylinder,” Nucl. Instrum. Methods 101,391–393 (1972).
12. S. Tryka, “Angular distribution of the solid angle at a pointsubtended by a circular disk,” Opt. Comm. 137, 317–333(1997).
13. E. Galiano and C. Pagnutti, “An analytical solution for thesolid angle subtended by a circular detector for a symmetri-cally positioned linear source,” Appl. Radiat. Isot. 64, 603–607(2006).
14. M. J. Prata, “Analytical calculation of the solid angle definedby a cylindrical detector and a point cosine source with orthog-onal axes,” Radiat. Phys. Chem. 66, 387–395 (2003).
15. L. M. Milne-Thomson, “Elliptic integrals,” in Handbook ofMathematical Functions, M. Abramowitz and I. A. Stegun, eds.(9th Printing, Dover, 1964), pp. 589–627.
16. M. J. Prata, “Solid angle subtended by a cylindrical detector ata point source in terms of elliptic integrals,” Radiat. Phys.Chem. 67, 599–603 (2003).
17. A. V. Paxton, “Solid angle calculation for a circular disk,” Rev.Sci. Instrum. 30, 254–258 (1959).
18. R. Carchon, E. Van Camp, G. Knuyt, R. Van De Vyver, J.Devos, and H. Ferdinande, “A general solid angle calculationby a Monte Carlo method,” Nuclear Instrum. Methods 128,195–199 (1975).
19. B. Th. Stavroulaki and S. N. Kaplanis, “Monte Carlo solutionsof the solid angle integrals for radiation detectors,” Comput.Phys. Commun. 18, 7–12 (1979).
20. L. Wielopolski, “The Monte Carlo calculation of the averagesolid angle subtended by a right circular cylinder from distrib-uted sources,” Nucl. Instrum. Methods 143, 577–581 (1977).
21. S. P. Mahulikar, P. S. Kolhe, and G. A. Rao, “Skin temperatureprediction of aircraft rear fuselage with multi-mode thermalmodel,” AIAA J. Thermophysics and Heat Transfer 19, 114–124 (2005).
22. S. P. Mahulikar, G. A. Rao, and P. S. Kolhe, “Infrared signa-tures of low flying aircraft and their rear fuselage skin’s emis-sivity optimization,” AIAA J. Aircraft 43, 226–232 (2006).
4998 APPLIED OPTICS � Vol. 46, No. 22 � 1 August 2007







![[IN FIRST-ANGLE PROJECTION METHOD]](https://static.fdokumen.com/doc/165x107/6312eb38b1e0e0053b0e36b0/in-first-angle-projection-method.jpg)












