
Kinematical characteristic of mechanical frictional variable ...

NOLTA, IEICE
Paper
Analysis of dynamics characteristic ofdeterministic PSO
Takuya Shindo 1a) and Kenya Jin’no 1b)
1 Graduate School of Electrical Engineering, Nippon Institute of Technology
4-1 Gakuendai, Miyashiro, Minamisaitama, Japan
a) [email protected]) [email protected]
Received January 25, 2013; Revised May 8, 2013; Published October 1, 2013
Abstract: Particle Swarm Optimization (PSO) is a heuristic optimal value searching method.The method can find the better solution quickly comparing with other heuristic algorithms.The searching ability of PSO is depended on parameters. Since the parameters of PSO containa stochastic factor, the rigorous theoretical analysis is not sufficient. In order to analyze thedynamics rigorously, a deterministic PSO has been proposed. This paper pays attention tosuch deterministic PSO. We derive a damping factor and a rotation angle of the trajectoryfrom its eigenvalues. We discuss the relationship between the parameters and the searchingability. Based on the results of our numerical simulations, we clarify that the damping factorand the rotation angle influence the stability of the trajectory and the searching ability of theoptimal value.
Key Words: particle swarm optimization, deterministic, optimization, eigenvalue
1. IntroductionSearching for an optimal value of a given evaluation function of various problems is very important inengineering fields. In order to solve such optimization problems speedily, various heuristic optimizationalgorithms have been proposed. Particle swarm optimization (PSO), which was originally proposedby J. Kennedy and co-worker [1, 2], is one of such heuristic algorithms. The PSO algorithm is a usefultool for optimization problems.
The original PSO is described as
vt+1j = wvt
j + c1r1
(pbestt
j − xtj
)+ c2r2
(gbestt − xt
j
)(1)
xt+1j = xt
j + vt+1j (2)
where w ≥ 0 is an inertia weight coefficient, c1 ≥ 0, and c2 ≥ 0 are acceleration coefficients, andr1 ∈ [0, 1]N , and r2 ∈ [0, 1]N are two separately generated uniformly distributed random numbervectors. xt
j ∈ RN denotes a position of the j-th particle on the t-th iteration in the N -dimensional
space, and vtj ∈ R
N denotes a velocity vector of the j-th particle on the t-th iteration. pbesttj ∈ R
N
means the position that gives the best value of the evaluation function of the j-th particle until the
451
Nonlinear Theory and Its Applications, IEICE, vol. 4, no. 4, pp. 451–461 c©IEICE 2013 DOI: 10.1588/nolta.4.451
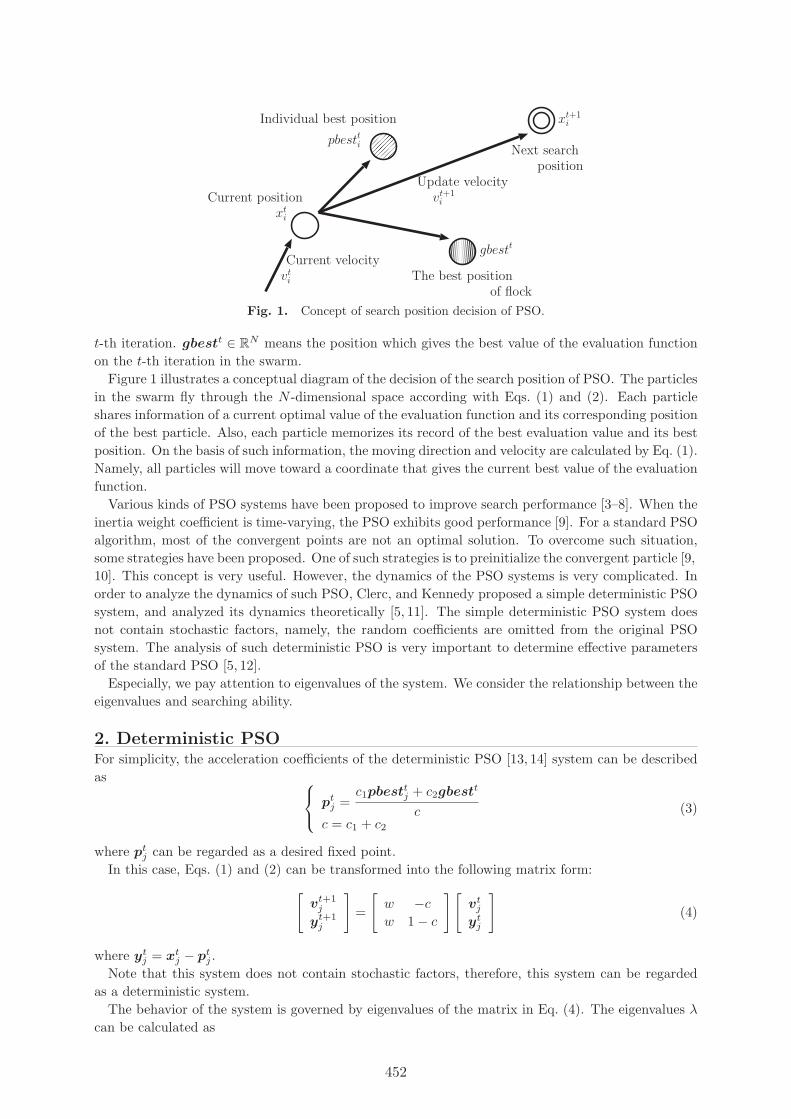
Fig. 1. Concept of search position decision of PSO.
t-th iteration. gbestt ∈ RN means the position which gives the best value of the evaluation function
on the t-th iteration in the swarm.Figure 1 illustrates a conceptual diagram of the decision of the search position of PSO. The particles
in the swarm fly through the N -dimensional space according with Eqs. (1) and (2). Each particleshares information of a current optimal value of the evaluation function and its corresponding positionof the best particle. Also, each particle memorizes its record of the best evaluation value and its bestposition. On the basis of such information, the moving direction and velocity are calculated by Eq. (1).Namely, all particles will move toward a coordinate that gives the current best value of the evaluationfunction.
Various kinds of PSO systems have been proposed to improve search performance [3–8]. When theinertia weight coefficient is time-varying, the PSO exhibits good performance [9]. For a standard PSOalgorithm, most of the convergent points are not an optimal solution. To overcome such situation,some strategies have been proposed. One of such strategies is to preinitialize the convergent particle [9,10]. This concept is very useful. However, the dynamics of the PSO systems is very complicated. Inorder to analyze the dynamics of such PSO, Clerc, and Kennedy proposed a simple deterministic PSOsystem, and analyzed its dynamics theoretically [5, 11]. The simple deterministic PSO system doesnot contain stochastic factors, namely, the random coefficients are omitted from the original PSOsystem. The analysis of such deterministic PSO is very important to determine effective parametersof the standard PSO [5, 12].
Especially, we pay attention to eigenvalues of the system. We consider the relationship between theeigenvalues and searching ability.
2. Deterministic PSOFor simplicity, the acceleration coefficients of the deterministic PSO [13, 14] system can be describedas ⎧⎨
⎩ ptj =
c1pbesttj + c2gbestt
cc = c1 + c2
(3)
where ptj can be regarded as a desired fixed point.
In this case, Eqs. (1) and (2) can be transformed into the following matrix form:[
vt+1j
yt+1j
]=
[w −c
w 1 − c
] [vt
j
ytj
](4)
where ytj = xt
j − ptj .
Note that this system does not contain stochastic factors, therefore, this system can be regardedas a deterministic system.
The behavior of the system is governed by eigenvalues of the matrix in Eq. (4). The eigenvalues λ
can be calculated as
452

Fig. 2. Behavior of particle in each parameter region of the deterministicPSO.
λ =(w − c + 1) ± √
c2 − 2(w + 1)c + (w − 1)2
2(5)
If the parameters satisfy(w + 1) − 2
√w < c < (w + 1) + 2
√w (6)
the eigenvalues must be complex conjugate numbers.When the eigenvalues are complex conjugate numbers, the behavior of the trajectory of Eq. (4) in
the phase space vj-xj becomes a spiral. Since the system is a discrete-time system, it becomes stableif the eigenvalues must exist within the unit circle on the complex plane.
We collect above facts, the deterministic PSO is said to be a stable when the parameters w and c
are set in the shaded triangle portion shown in Fig. 2. Figure 2 also illustrates four typical trajectorieswhich are corresponded to the parameter sets.
The conventional stochastic PSO may be unstable because the acceleration coefficients are deter-mined as randomly. The unstable state effects that the trajectory escapes from a local minimum,however, the trajectory may diverge. Therefore, many previous studies applied the method of thelimitation of the velocity of each particle to control the divergence of the trajectory. This method iseffective to search the optimal solution, however, the system may be unstable. Therefore, we considerthe case where all parameters are satisfied the stable condition. We analyze such parameters for su-perior performance. We expect the analysis of such parameters will contribute to improve the searchperformance of the conventional stochastic PSO.
2.1 Damping factor Δ and rotation angle θIf the eigenvalues are inside of the unit circle in the complex plane, the trajectory converges to a fixedpoint while spiral motion in the phase space as shown in a Fig. 3. Real and imaginary parts of thecomplex eigenvalues are represented as the followings.
Re(λ) =1 + w − c
2(7)
Im(λ) = ±√
4w − (1 + w − c)2
2(8)
453

Fig. 3. Trajectory of particle in phase plane. (gbest = 0).
Fig. 4. Appearance of convergence of solution by each Δ and θ. (DimensionN = 1, Number of particles 1, Initial position(x0, v0) = (5, 0)).
In this case, the damping factor and the rotation angle are derived as the followings.
Δ =√{Re(λ)}2 + {Im(λ)}2 =
√w (9)
θ = arctanIm(λ)Re(λ)
= arctan
√4w − (1 + w − c)2
(1 + w − c)
In this paper, we consider the influence of these parameters for the solution search ability.
2.2 Behavior of particle in deterministic PSOTo confirm the influence of the damping factor and the rotation angle, we carry out numerical simula-tions in the case where the desired fixed point pt
j is fixed. Since each dimension variable of the particleis independent, we can consider one dimensional case without loss of generality. Therefore, we applythe case where the number of particles is 1. The number of the iteration of each numerical simulationis set as 200. The initial values are set as (x0, v0) = (5, 0). Under this condition, all particles convergeto the desired fixed point. Figure 4 illustrates the convergence state of the particle when the dampingfactor and the rotation angle are varied. The vertical axis denotes the position of the particle, and thehorizontal axis denotes the number of iterations. The result indicates the convergence time becomeslong when the damping factor is increased. Also, we confirmed that the frequency of the vibrationbecomes high when the rotation angle is increased.
Figure 5 represents the frequency distribution of the position of the particle within 200 iterations.In Fig. 5, the vertical axis denotes the frequency distribution, and the horizontal axis denotes thesection of the searching position. Each rank corresponds to the interval which is divided the searchrange into 200 sections. This frequency distribution indicates that more than 120 times searching arecarried out around the optimal solution when the damping factor is 0.95. On the other hand, whenthe damping factor is 0.98, the particle can explore the global area. From this result, we can say thatthese parameters control the global search and the local search. Especially, the damping oscillation isan important role since the particle can search around the desired fixed point. When the parameters
454

Fig. 5. Frequency distribution of search range of particle by each Δ and θ.The number of particles in 1. The number of dimensions is 1.
Table I. Simulation parameters.
The range of Δ 0.0 ≤ Δ ≤ 1.0 (0.1Step)The range of θ 0 ≤ θ ≤ 360[deg] (10[deg]Step)
Initial value of x −5.12 ≤ xt=0j ≤ 5.12 (uniform random number)
Initial value of v vt=0j = 0
The dimension 10The number of particles 10
Iteration number 200Trials 10
Fig. 6. The surface of benchmark function N = 2.
lead to the overdamped, the particle searches only one side. If the damping factor becomes 0, thesearch is stagnant.
3. Influence of damping factor Δ and rotation angle θIn order to search the optimal damping factor and the optimal rotation angle, we carry out numericalsimulations under the conditions shown in Table I. The numerical simulations are carried out byusing four well-known benchmark functions as shown in Table II. f1 and f2 functions are unimodalfunctions. f3 and f4 functions are multimodal functions. The optimum value of all functions is 0.Excepting f2 function, the optimum solution of each function is the origin. The optimum solution off2 function is xd = 1. The surface of each function of N = 2 is shown in Fig. 6.
3.1 Solution search performance by ΔAfter 200 times iteration, the obtained superior solution of each benchmark function is illustrated inFig. 7 when the damping factor is varied. In the numerical simulations, the number of dimensionis 10, and the number of particles is 10. The horizontal axis in Fig. 7 denotes the damping factorwhich is 0.1 increment. The vertical axis represents the mean error between the optimal value andthe obtained superior value.
For each benchmark function, the error is decreased with the damping factor is increased. The
455

Table II. Benchmark functions.
Function Optimum value
Sphere function f1(x) =N∑
d=1
x2d f1(0, 0, 0, . . . , 0) = 0
Rosenbrock function f2(x) =N−1∑d=1
(100(xd+1 − x2d)
2 + (xd − 1)2) f3(1, 1, 1, . . . , 1) = 0
Rastrigin function f3(x) = 10N +N∑
d=1
((xd)2 − 10 cos(2πxd)) f3(0, 0, 0, . . . , 0) = 0
Griewank function f4(x) = 1 +1
4000
N∑d=1
x2d −
N∏d=1
cos(
xd√d
)f4(0, 0, 0, . . . , 0) = 0
Fig. 7. The influence of damping factor ΔMean error at the end of 200 iterations for 10-dimensional evaluation functions.The number of trials is 10. The number of particles is 10.
error takes the minimum value around Δ = 0.9. We confirmed the influence of the rotation angle issmaller than the damping factor.
3.2 Solution search performance by θ
Figure 8 shows the simulation results when the rotation angle is varied. The conditions of thesimulations are the same of the previous experiments. The horizontal axis denotes the rotationangle which is 10 degree increments. The vertical axis denotes the mean error between the optimalvalue and the obtained superior value.
Depending on the benchmark function, the characteristic of the rotation angle tends toward thesmallest error is inverted. In the case of Δ = 0.9 which exhibits the best search performance, thesmallest error is obtained in the vicinity of θ = 60.
456

Fig. 8. The influence of rotation angle θ on errorMean error at the end of 200 iterations for 10-dimensional evaluation functions.The number of trials is 10. The number of particles is 10.
3.3 Solution search performance by Δ and θFigure 9 shows an example of the smallest obtained error of Rastrigin function in w − c plane.Figure 10 shows the results of each benchmark function on Δ − θ plane. In these results, the colorshading corresponds to the magnitude of the error. The dark color denotes the small error. Figure 9indicates that the shaded region of Fig. 2 exhibits the small mean error. Figure 10 indicates that themean error is reduced when the damping factor is close to 1. From these results of the deterministicPSO, the large damping factor in the stable region leads to the effective solution search. However,the damping factor which closes to 1 requires the long convergence time. Therefore, there exists atrade-off between the accuracy of the obtained solution and the number of iterations.
4. Comparison of the conventional PSO and deterministic PSOThe most large difference between the conventional PSO and the deterministic PSO is stochasticfactors r1 and r2. Thus, we consider the influence of the stochastic factors. Figure 11 shows theinfluence of the stochastic factors to compare the conventional PSO with the deterministic PSO. Inthis case, we applied 10 dimensional Sphere function and Rastrigin function as an evaluation function.The simulation is carried out when the damping factor is varied from 0.70 to 1.00 by 0.01 step. Thevertical axis denotes the mean error between the optimal value and the obtained superior value. Theother conditions are shown in Table I.
The simulation results of the deterministic PSO indicate that the damping factor is a dominantfactor for the performance, and the influence of the rotation angle is small. On the other hand, inthe case of the conventional PSO, the influence of the rotation angle becomes large with the increaseof the damping factor. Though the deterministic PSO is a deterministic system, we confirmed thecase that the error of the deterministic PSO is smaller than the conventional PSO depending on theparameters.
457
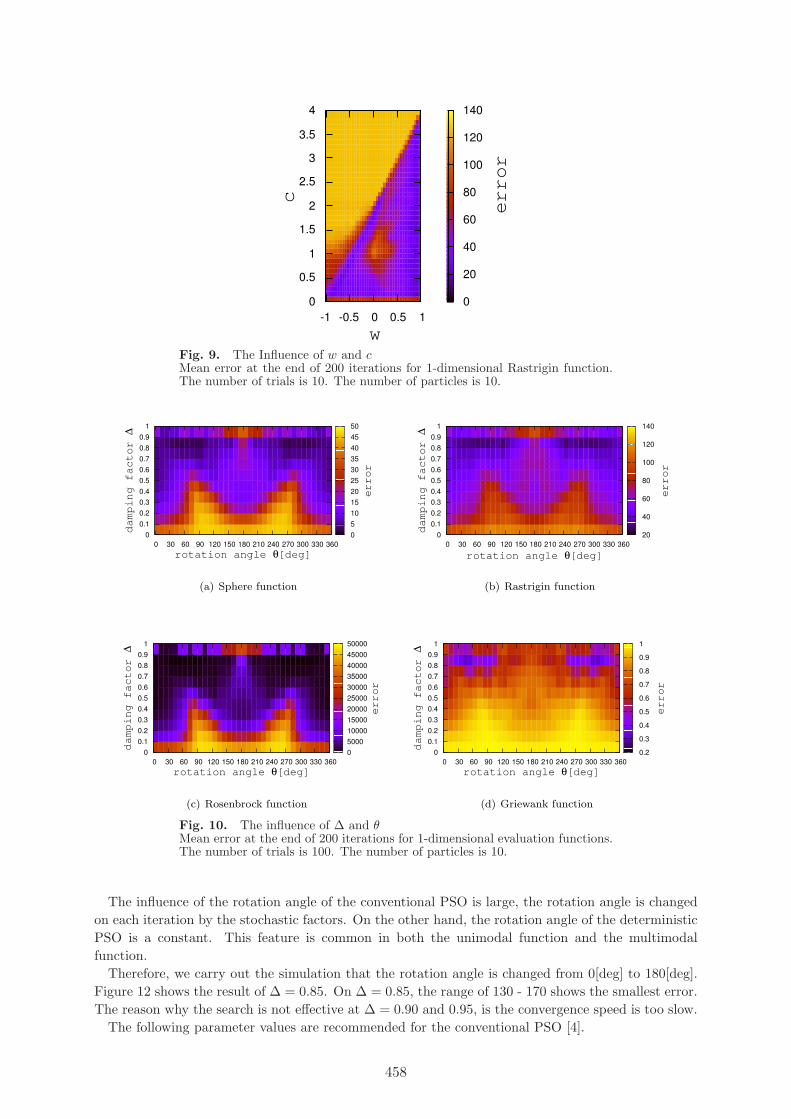
Fig. 9. The Influence of w and cMean error at the end of 200 iterations for 1-dimensional Rastrigin function.The number of trials is 10. The number of particles is 10.
Fig. 10. The influence of Δ and θMean error at the end of 200 iterations for 1-dimensional evaluation functions.The number of trials is 100. The number of particles is 10.
The influence of the rotation angle of the conventional PSO is large, the rotation angle is changedon each iteration by the stochastic factors. On the other hand, the rotation angle of the deterministicPSO is a constant. This feature is common in both the unimodal function and the multimodalfunction.
Therefore, we carry out the simulation that the rotation angle is changed from 0[deg] to 180[deg].Figure 12 shows the result of Δ = 0.85. On Δ = 0.85, the range of 130 - 170 shows the smallest error.The reason why the search is not effective at Δ = 0.90 and 0.95, is the convergence speed is too slow.
The following parameter values are recommended for the conventional PSO [4].
458

Fig. 11. Comparison with the conventional stochastic PSO and the deter-ministic PSOMean error at the end of 200 iterations for 10-dimensional function. The num-ber of trials is 100. The number of particles is 10.
Fig. 12. Variation of searching ability by parameters of the conventionalstochastic PSO.(Mean error at the end of 200 iterations for 10-dimensional Sphere function.The number of trials is 100. The number of particles is 10.){
w = 0.729c1 = c2 = 1.49445
(10)
The following damping factor and rotation angle correspond to the recommended parameter values.{Δ = 0.854θ = 137.63 [deg]
(11)
This rotation angle is approximated to the golden angle. The simulation results of the deterministic
459

Fig. 13. The rotation angle θ is acquired from a golden angle.
PSO indicate that these parameter setting are contained in the range of high search performance.The golden angle is the smaller of the two angles created by sectioning the circumference of a circleaccording to the golden ratio φ = 2π/(3+
√5
2 ). Using the golden angle, The rotation angle does nothave an overlap, namely, the system has the diversity as shown in Fig. 13(a). The radius correspondsto the damping factor. Considering the parameter range of the conventional stochastic PSO, therange of the rotation angle is normalized as illustrated in Fig. 13(b).
In the deterministic PSO, the diversity of particles is generated by the rotation angle close to thegolden angle. We have clarified that the golden angle leads to the improvement of the performanceof the deterministic PSO [15, 16].
5. ConclusionsIn this paper, we derived the damping factor and the rotation angle, from the parameters w and c
of the deterministic PSO. By using the damping factor and the rotation factor, we confirmed theinfluence of the parameters for the solution search ability. The damping factor and the rotation anglecan be set as intuitively. When the recommended parameter values of the conventional stochastic PSOare transformed into the damping factor and the rotation angle, we clarified that these parameters issimilar to the golden angle ratio. Therefore, the recommended parameter setting of the conventionalstochastic PSO is equivalent to that each dimension of the particles does not overlap. This is a reasonwhy these parameters give the effective searching ability. The search performance can be improvedby applying such golden angle to deterministic PSO. Furthermore, the effective search performancecan be realized by deterministic using the golden angle.
Acknowledgments
This work was supported by JSPS KAKENHI Grant-in-Aid for Scientific Research (C) 22560389.
References[1] J. Kennedy and R. Eberhart, “Particle swarm optimization,” in Proc. IEEE Int. Conf. Neural
Networks, pp. 1942–1948, 1995.[2] J. Kennedy, “The particle swarm: Social adaptation of knowledge,” in Proc. IEEE Int. Conf.
Evolutionaly Computation, pp. 303–308, 1997.[3] M. Clerc, “The swarm and the queen: towards a deterministic and adaptive particle swarm
optimization,” Proc. ICEC 1999, pp. 1951–1957, 1999.[4] R. Eberhart and Y. Shi, “Comparing inertia weight and constriction factors in particle swarm
optimization,” in Proc. ICEC 2000, pp. 84–88, 2000.[5] M. Clerc and J. Kennedy, “The particle swarm − explosion, stability, and convergence in a
multidimensional complex space,” IEEE Trans. Evol. Comput. , vol. 6, no. 1, pp. 58–73, 2002.[6] I.C. Trelea, “The particle swarm optimization algorithm: convergence analysis and parameter
selection,” Info. Proc. Lett. , vol. 85, pp. 317–325, 2003.
460

[7] R. Mendes, J. Kennedy, and J. Noves, “The fully informed particle swarm: simpler, maybebetter,” IEEE Trans. Evol. Comput. , vol. 8, no. 3, pp. 204–210, 2004.
[8] F.v.d. Bergh and A.P. Engelbrecht, “A cooperative approach to particle swarm optimization,”IEEE Trans. Evol. Comput. , vol. 8, no. 3, pp. 225–239, 2004.
[9] A. Ratnaweera, S.K. Halgamuge, and H.C. Watson, “Self-organizing hierarchical particle swarmoptimizer with time-varying acceleration coefficients,” IEEE Trans. Evol. Comput. , vol. 8, no. 3,pp. 240–255, 2004.
[10] K.J. Binkley and M. Hagiwara, “Balancing exploitation and exploration in particle swarm op-timization: velocity-based reinitialization,” Trans. Japanese Society for Artificial Intelligence,vol. 23, no. 1, pp. 27–35, 2008.
[11] V. Kaidirkamanathan, K. Selvarajah, and P.J. Fleming, “Stability analysis of the particle dy-namics in particle swarm optimizer,” IEEE Trans. Evol. Comput. , vol. 10, no. 3, pp. 245–255,2006.
[12] E.F. Campana, G. Fasano, D. Peri, and A. Pinto, “Particle swarm optimization: efficient glob-ally convergent modifications,” in Proc. III European Conference on Computational MechanicsSolids, Structures and Coupled Problems in Engineering, 2006.
[13] K. Jin’no and K. Aihara, “On a searching ability of DT-PSO,” IEICE Technical Report. Non-linear problems, vol. 108, no. 442, pp. 13–18, 2009.
[14] K. Jin’no, “A novel deterministic particle swarm optimization system,” RISP Journal, vol. 13,no. 6, pp. 507–513, 2009.
[15] T. Shindo, R. Sano, T. Saito, and K. Jin’no, “Improvement in solution search performance ofdeterministic PSO using a golden angle,” Journal of Signal Processing, vol. 16, no. 4, pp. 299–302, July 2012.
[16] T. Shindo and K. Jin’no, “Parameter setting procedure by using golden angle for generation ofdiversity,” in Proc. 2012 International Conference on NOLTA, pp. 146–149, 2012.
461
Copyright © 2022 FDOKUMEN




















