
An enhanced QoS CBT multicast routing protocol based on Genetic Algorithm in a hybrid HAP-Satellite...
18
An enhanced QoS CBT multicast routing protocol based on Genetic Algorithm in a hybrid HAP–Satellite system Floriano De Rango * , Mauro Tropea, Amilcare F. Santamaria, Salvatore Marano D.E.I.S. Department, University of Calabria, Rende (CS) 87036, Italy Available online 27 June 2007 Abstract A QoS multicast routing scheme based on Genetic Algorithms (GA) heuristic is presented in this paper. Our proposal, called Con- strained Cost–Bandwidth–Delay Genetic Algorithm (CCBD-GA), is applied to a multilayer hybrid platform that includes High Altitude Platforms (HAPs) and a Satellite platform. This GA scheme has been compared with another GA well-known in the literature called Multi-Objective Genetic Algorithm (MOGA) in order to show the proposed algorithm goodness. In order to test the efficiency of GA schemes on a multicast routing protocol, these GA schemes are inserted into an enhanced version of the Core-Based Tree (CBT) protocol with QoS support. CBT and GA schemes are tested in a multilayer hybrid HAP and Satellite architecture and interesting results have been discovered. The joint bandwidth–delay metrics can be very useful in hybrid platforms such as that considered, because it is possible to take advantage of the single characteristics of the Satellite and HAP segments. The HAP segment offers low propagation delay permitting QoS constraints based on maximum end-to-end delay to be met. The Satellite segment, instead, offers high bandwidth capacity with higher propagation delay. The joint bandwidth–delay metric permits the balancing of the traffic load respecting both QoS constraints. Simulation results have been evaluated in terms of HAP and Satellite utilization, bandwidth, end-to-end delay, fitness func- tion and cost of the GA schemes. Ó 2007 Elsevier B.V. All rights reserved. Keywords: QoS; Multicast routing; Genetic Algorithms; DVB-RCS; HAP; Bandwidth; Delay 1. Introduction The rapid development and deployment of high-speed networks in recent years has given rise to many new distrib- uted real-time applications such as video-conferencing, tele-teaching, video-on-demand, computer visualization, etc. An immediate consequence of this new type of traffic is found in the Internet network, where thanks to the mul- ticast technique it has been possible to reduce drastically the packets flowing from a source towards several destinations. Applications such as digital audio, videoconference, video-on-demand, etc. require high-speed networks fulfill- ing several Quality of Services (QoS) requirements. Most of the current applications have been unicast in nature and without QoS constraints. Now, the situation is com- pletely different. Multimedia applications involve multiple users that require different QoS constraints. Therefore, the multicast routing problem is currently of great interest. This technique tries to optimize the usage of bandwidth allowing the data flow to be delivered from one source or multiple sources to multiple destinations. It can send data, through multicast tree towards different receivers or to a group of receiving applications without sending a multiple copy of packets but sending only a single copy of the data. In this way it is possible to reduce the link utilization and the number of packets that travel on the network. There are two fundamental elements of multicast routing: the multicast algorithm and the multicast protocol which cooperate between them. Moreover, owing to QoS issues many multicast protocols have been considered in the liter- 0140-3664/$ - see front matter Ó 2007 Elsevier B.V. All rights reserved. doi:10.1016/j.comcom.2007.05.058 * Corresponding author. E-mail addresses: [email protected] (F. De Rango), mtropea@ deis.unical.it (M. Tropea), [email protected] (A.F. Santamaria), marano@ deis.unical.it (S. Marano). www.elsevier.com/locate/comcom Available online at www.sciencedirect.com Computer Communications 30 (2007) 3126–3143
Transcript of An enhanced QoS CBT multicast routing protocol based on Genetic Algorithm in a hybrid HAP-Satellite...

Available online at www.sciencedirect.com
www.elsevier.com/locate/comcom
Computer Communications 30 (2007) 3126–3143
An enhanced QoS CBT multicast routing protocol based onGenetic Algorithm in a hybrid HAP–Satellite system
Floriano De Rango *, Mauro Tropea, Amilcare F. Santamaria, Salvatore Marano
D.E.I.S. Department, University of Calabria, Rende (CS) 87036, Italy
Available online 27 June 2007
Abstract
A QoS multicast routing scheme based on Genetic Algorithms (GA) heuristic is presented in this paper. Our proposal, called Con-strained Cost–Bandwidth–Delay Genetic Algorithm (CCBD-GA), is applied to a multilayer hybrid platform that includes High AltitudePlatforms (HAPs) and a Satellite platform. This GA scheme has been compared with another GA well-known in the literature calledMulti-Objective Genetic Algorithm (MOGA) in order to show the proposed algorithm goodness. In order to test the efficiency ofGA schemes on a multicast routing protocol, these GA schemes are inserted into an enhanced version of the Core-Based Tree (CBT)protocol with QoS support. CBT and GA schemes are tested in a multilayer hybrid HAP and Satellite architecture and interesting resultshave been discovered. The joint bandwidth–delay metrics can be very useful in hybrid platforms such as that considered, because it ispossible to take advantage of the single characteristics of the Satellite and HAP segments. The HAP segment offers low propagationdelay permitting QoS constraints based on maximum end-to-end delay to be met. The Satellite segment, instead, offers high bandwidthcapacity with higher propagation delay. The joint bandwidth–delay metric permits the balancing of the traffic load respecting both QoSconstraints. Simulation results have been evaluated in terms of HAP and Satellite utilization, bandwidth, end-to-end delay, fitness func-tion and cost of the GA schemes.� 2007 Elsevier B.V. All rights reserved.
Keywords: QoS; Multicast routing; Genetic Algorithms; DVB-RCS; HAP; Bandwidth; Delay
1. Introduction
The rapid development and deployment of high-speednetworks in recent years has given rise to many new distrib-uted real-time applications such as video-conferencing,tele-teaching, video-on-demand, computer visualization,etc. An immediate consequence of this new type of trafficis found in the Internet network, where thanks to the mul-ticast technique it has been possible to reduce drasticallythe packets flowing from a source towards severaldestinations.
Applications such as digital audio, videoconference,video-on-demand, etc. require high-speed networks fulfill-
0140-3664/$ - see front matter � 2007 Elsevier B.V. All rights reserved.
doi:10.1016/j.comcom.2007.05.058
* Corresponding author.E-mail addresses: [email protected] (F. De Rango), mtropea@
deis.unical.it (M. Tropea), [email protected] (A.F. Santamaria),marano@ deis.unical.it (S. Marano).
ing several Quality of Services (QoS) requirements. Mostof the current applications have been unicast in natureand without QoS constraints. Now, the situation is com-pletely different. Multimedia applications involve multipleusers that require different QoS constraints. Therefore,the multicast routing problem is currently of great interest.This technique tries to optimize the usage of bandwidthallowing the data flow to be delivered from one source ormultiple sources to multiple destinations. It can send data,through multicast tree towards different receivers or to agroup of receiving applications without sending a multiplecopy of packets but sending only a single copy of the data.In this way it is possible to reduce the link utilization andthe number of packets that travel on the network. Thereare two fundamental elements of multicast routing: themulticast algorithm and the multicast protocol whichcooperate between them. Moreover, owing to QoS issuesmany multicast protocols have been considered in the liter-

F. De Rango et al. / Computer Communications 30 (2007) 3126–3143 3127
ature [1–5]. Most multicast routing algorithms have beendeveloped in the last few years with the goal of minimizingthe cost of the constructed multicast tree. These two com-ponents work together in order to serve many multicastgroups. The protocol is aimed at managing the entire ses-sion of a generic multicast group. It must guarantee thedata flow through the multicast tree found by the multicastalgorithm, manage the log-in and log-out phase of a routeror a host. Moreover, it has the task of starting the multicastalgorithm in order to find the multicast tree and so of dis-tributing the data from source towards all multicast desti-nations. In the proposed CBT a particular node calledcore has the task of starting the multicast algorithm. Asradix, the found multicast tree has the core of the multicasttree [5,6]. At the end of the Algorithm the multicast tree isbuilt and this solution is sent towards all members of themulticast group in the form of a list (parent, children).The routing algorithms for multimedia applications shouldconsider many QoS parameters. The bandwidth–delay-constrained least-cost multicast routing problem in com-puter networks is also known as the Steiner tree problemwhich is NP-complete [5,7]. In order to find an optimalsolution with QoS constraints it is not possible to use clas-sic algorithm like Dijkstra or Bellman–Ford, but it is nec-essary to utilize heuristic algorithms that can find asuboptimal solution with lower complexity. Many typesof algorithms are proposed to calculate the minimum mul-ticast tree. But, owing to the problem complexity, deter-ministic algorithms for QoS multicast routing withmultiple constraints are hard to apply. In the last few years,new techniques based on heuristic, like genetic algorithmshave increased [8–11]. This paper presents a new QoS mul-ticast routing algorithm based on a genetic algorithm thatis introduced in a more interesting wireless network topol-ogy. The considered architecture is a DVB-RCS Satellitesystem [12,13] in cooperation with a HAP mesh network[14–16]. The considered QoS constraints are based onbandwidth–delay metrics that, in this platform, representvery interesting constraints, because of the balance betweenthe small HAP bandwidth and delay and the big Satelliteones. The genetic algorithm previews the classic three evo-lutionary operations: selection, crossover and mutation.Moreover, the coding phase is based on the Prufer codingand the decoding phase is performed on a specific proce-dure that permits a connected multicast tree to be builtfrom its vector representation. More details are explainedin Section 5 sub-paragraph G. The performance of the pro-posed GA-based multicast routing algorithm, measured interms of multicast tree cost, was evaluated through severalsimulations campaigns under different network topologies.The algorithm implements different cost types, such as theconnection cost, the management cost, the infrastructurecost, etc. The remainder of this article is organized as fol-lows: Section 2 presents the related works; the hybridHAP–Satellite architecture considered as reference isaddressed in Section 3; the QoS multicast routing problemformulation is presented in Section 4; the multicast routing
algorithm based on Genetic Algorithms heuristic is pre-sented in Section 5; the multicast routing protocol withQoS extensions based on the CBT is introduced in Section6; finally, performance evaluation and conclusions are,respectively, summarised in Sections 6 and 7.
2. Related works
2.1. Multicast algorithms
In the literature most works have been carried out toresolve the multi-constraints QoS and various approacheshave been proposed. Most works in the field of algorithmstry to resolve this issue, but the complexity of the problemhas driven the research towards the heuristic field. In fact,most Genetic Algorithms (GAs) have been proposed in thelast few years [17–19]. The use of this algorithm has permit-ted a reduction in the complexity. Protocols that permitQoS support have been addressed in the last few years.In the past, multicast protocols did not consider QoS con-straints; so in the management of the session QoS parame-ters were not considered, and the admitted or refuted callscould not depend on QoS metrics. A new heuristic algo-rithm, called Bounded Shortest Multicast Algorithm(BSMA), is presented in [17] in order to build a mini-mum-cost multicast tree with delay constraints. Two vari-ants of the cost functions are considered: one minimizingthe total link cost of the tree, and the other one minimizingthe most congested (maximal) link cost. Instead of usingthe one pass growing of the multicast tree used in most pre-vious works, Zhu et al. proposed an iterative optimizationprocess to further minimize the tree cost that is monoton-ically achieved after a series of tree refinements [17]. Anovel QoS-based (multiple constraints) multicast routingalgorithm based on evolutionary algorithms is proposedin [18]. Haghighat et al. proposed a connectivity matrixof edges encoding scheme for genotype representation.Moreover, they present some new heuristic algorithms formutation, crossover, pre-processing phase and random cre-ation of initial population. A new QoS multicast routingprotocol which has better genetic operations than the con-ventional algorithm is shown in [19]. It gives a better suc-cess ratio and computing time compared with theconventional algorithm.
A good algorithm that was proposed by Kompella et al.in [20] obtained great consideration. It analyzes the Steinertree problem and resolves it in a shorter time than a classicanalytic algorithm reducing the complexity of the problem.Kompella considers one QoS constraint, in particular, theend-to-end delay as QoS metric and also an upper boundis fixed over that metric. The delay constraint betweenthe source and all the destinations of the multicast groupmust be respected. Moreover, Kompella considers the min-imization of the multicast tree cost. A new class of GA isrepresented by Multi-Objective Genetic Algorithm(MOGA) [8,9]. This algorithm is based on two differenttechniques; the first one is the Genetic technique, while
3128 F. De Rango et al. / Computer Communications 30 (2007) 3126–3143
the second one is a specific technique used in the field ofoptimization. As we know in order to gain some advanta-ges, the GA must have a good fitness function. This pro-vides a good chance to mate the best chromosomes, so asto have better individuals in the next generation. To per-form the assignment of the fitness values to all chromo-somes MOGA uses an optimization technique tominimize the multi-objective function. The fitness functionis composed of three different terms: the cost, the end-to-end delay and the bandwidth that is available on the linkof the network.
A second class of problem resolution is represented by aspecific branch of the optimization research, which is calledthe Tabu Search Approach (TSA) [21]. TSA is anothermethod to perform multicast routing with a certain numberof QoS metrics. The TSA uses a version of PRIM algo-rithm that allows much more than one metric to be consid-ered. The TSA is simple; it uses a vector where it storeswhich node can be part of the partial solution; then, thissolution is compared with the current optimal solution, ifits cost is lower than the optimal solution, then the partialsolution will become the new optimal solution.
Another class of techniques that is able to resolve themulticast problem uses the Swarm Intelligence approach.Swarm Intelligence refers to complex behaviours that arisefrom very simple individual behaviours and interactions,which is often observed in nature, especially among socialinsects such as ants and honeybees. Although each individ-ual (for instance, an ant) has little intelligence and simplyfollows basic rules using local information obtained fromthe environment, global optimization objectives emergewhen they work collectively as a group. For each multicastgroup, it is possible to determine a set of intermediatenodes, called a forwarding set, that connects all the groupmembers together and are shared among all the groupsenders. The Swarm Intelligence allows nodes to learn abetter multicast connection with a lower forwarding cost[22].
2.2. Multicast protocols
The branch of multicast routing protocols has differentapproaches; these approaches depend on the nature ofthe network and also how the terminals are disposed inthe network and so on. Two approaches are mainly pro-posed in literature: the first one is the Source-basedapproach, while the second is the core-based approach.In the former, the router is connected with the source con-trols and manages the entire multicast session, while in thelatter a specific router is chosen to be the router that con-trols and manages the entire session [5,23]. The most usedprotocols are the Protocol Independent Multicast (PIM), inthe version of Sparse Mode (SM) or Dense Mode (DM)[21], Distance Vector Multicast Routing Protocol(DVMRP) or in the case of the core-based tree the CBT[5,23] protocols is used in most applications and architec-tures. The use of different protocols depends on the routers
capacity. These types of protocols have different character-istics but they cannot consider the QoS metrics. Only in thelast few years, in order to enhance these protocols, QoSsupport has been added. A protocol that uses QoS supportis the CBT. It modifies the join and leave procedures. Inorder to perform these changes some controls have beenintroduced in the protocols. These controls can be local,with only local exchange of messages between neighbourrouters, or global, in this case the control is made by therouter that manages the session (in the CBT protocol isthe core router).
In accordance with [23,24] the core-based treeapproaches have been chosen because they are more scal-able (in terms of active sources) than the Source-basedones. Moreover, the routers that are not on a multicast treeare not involved in group membership maintenance activi-ties. The CBT protocol has been preferred to the PIM-SMbecause it permits a shared tree to be obtained that allowsinformation to be sent from the core router towards thereceivers. It also allows information to be sent from thereceivers towards the core router. PIM-SM permits,instead, messages to be sent only from the core routertowards the receivers.
2.3. MOGA algorithm overview
The Multi-Objective Genetic Algorithm (MOGA) is aGenetic Algorithm which find the suboptimum solutionwith the Multi-Objective Optimization Principle (MOP).In an MOP we can minimize or maximize (min{F(X)}) or max (�F(X)}) the components of the vectorF(X), where X is an n-dimensional decision variable.MOGA functions are based on the Pareto dominanceand Pareto optimality principle and the algorithm usesthe following functions:
• F1 is based on the multicast tree cost.• F2 is based on the end-to-end delay.• F3 is based on the inverse of the bandwidth.
Genetic MOGA steps are equal to the CCDB-GA, butMOGA changes its mode of computing fitness functionand also MOGA changes how it evaluates the fitnessfunction.
Hence the Pareto rank of a generic individual i is for-malized in (1)
rankðiÞ ¼ 1þ pi ð1Þ
In order to penalize the same individual MOGA uses anEntropy based strategy [8,9]. Let us define m as thenumber of destination nodes. In order to obtain thedensity function, average entropy of individual i and jis:
Hi;jð2Þ ¼1
m
Xm
k¼1
H kð2Þ ð2Þ

F. De Rango et al. / Computer Communications 30 (2007) 3126–3143 3129
where :
H kð2Þ ¼ �P � lnðP Þ ð3Þ
If the individual i and individual j has the same path toreach the kth destination,
P ¼ 1m
P ¼ 0 otherwise
�ð4Þ
The Similarity of i and j is decided by the (5)
Si;j ¼1
1þ H i;jð2Þð5Þ
The density of an individual i is given by the Eq. (6)
CðiÞ ¼ sum of individuals whose similarity to i exceeds kpopulation size
� �ð6Þ
where k is the similarity constant and it has the followingvalues: 0.9 6 k 6 1
So, at the end of this process, the fitness value isobtained and it is shown in (7)
FitnessðiÞ ¼ rankðiÞ � ecðiÞ ð7Þ
Selection, crossover and mutation procedures are the essen-tial phases of a genetic process. In the selection phase weadopted the elitism model as in the CCDB-GA; the cross-over operator is based on a one point crossover with aprobability of 0.5; for the mutation procedure the probabil-ity was changed in order to obtain a complete simulative
Fig. 1. HAP–Satellite re
scenario and several simulation campaigns were carriedout.
3. Hybrid HAP–Satellite architecture
The reference architecture is composed of a GEO Satel-lite network based on DVB-RCS standard with the cooper-ation of a next generation stratospheric platform (HAP),that utilizes a DVB-RCS-like architecture. Both of thewireless platforms are considered intelligent systems withOn-Board Processing (OBP) on the payload and both ofthem have the specific elements previewed by the standard[12]. Fig. 1 shows the multilayer reference architecture withits GEO Satellite, HAPs and user terminals also calledReturn Channel Satellite Terminals (RCSTs).
Most of the air platforms in operation today or plannedfor deployment in the near future are characterised by thesupport of two interesting technologies: On-Board Switch-ing (OBS) and Spot-beams, which improve the platformperformances. The DVB-RCS was specified by an ad hocETSI technical group founded in 1999 [10,11]. This stan-dard previews the presence of particular terminals calledUser Terminals (sometimes known as a Satellite InteractiveTerminals (SITs) or Return Channel Satellite Terminals(RCSTs)). They support a two-way DVB Satellite system.They can be of four different types on the basis of differentbandwidth capacities: RCST A (144 kbps), B (384 kbps),C (1024 kbps), and D (2048 kbps). Each RCST is assignedto a specific bit rate, depending on its capabilities and local
ference architecture.

3130 F. De Rango et al. / Computer Communications 30 (2007) 3126–3143
conditions. The Return Link is implemented using theDVB-RCS standard. The transmission capability uses aMulti-Frequency Time Division Multiple Access (MF-TDMA) scheme to share the available capacity for trans-mission by user terminals. The mapping between sourcetraffic type and capacity category depends on the types ofservice provided, on the transmission used protocols andon constraints imposed by the Satellite orbit. Capacity cat-egories supported by standard are: Continuous RateAssignment (CRA), Rate Based Dynamic Capacity(RBDC), Volume Based Dynamic Capacity (VBDC),Absolute Volume Based Dynamic Capacity (AVBDC),Free Capacity Assignment (FCA). The standard previewsa frame structure lasting 47 ms and a possible use of IPpackets carried via DVB/MPEG2-TS. A frame consistsof a number of time slots on a certain number of carriers.The number and composition of time slots per frame isdetermined by the information bit rate to be supportedby the frame. The frame structure consists of 188 bytes, 4of which are of header and 184 of payload. For moredetails about the frame composition see [12].
3.1. Satellite architecture
The Satellite system architecture is an enhanced Satelliteplatform for multimedia applications which is composedmainly of the following parts [12,13]:
• Satellite uses typical frequency bands in Ku (12–18 GHz) for the forward link and/or Ka (18–30 GHz)for the return link;
• Traffic Gateway (TG) earth station: it interfaces the ter-restrial network through protocol adapting interfaces(ISDN, ATM, PSTN, etc.) and interworkingfunctionality;
• Network Control Centre (NCC): it is responsible for theoverall system super-visioning and control. In particu-lar, the NCC is responsible for Call Admission Control(CAC).
The main disadvantage is signal attenuation problemsand long propagation delay that make it suitable for moredelay-tolerant and low-interactive applications.
3.2. HAP architecture
HAP is a new technology of airships or planes that willoperate in the stratosphere at an altitude of 17–22 kmabove the ground. It has the potential capability of beingquickly deployed, and it does not need of a complex infra-structure, as with the terrestrial network. Also, the HAParchitecture provides for the presence of a TG for internet-working with other networks and an NCC where the CACmodule is located that performs the admission control. It isimportant to consider the new role played by the HAP seg-ment and to consider the potential integration of this newelement with the existing networks. In particular, it is inter-
esting to analyze the possible integration of HAPs with theexisting Satellite network in order to obtain an efficientmanagement and coexistence of the two networks. It is pos-sible to use the Satellite segment for services that do notneed specific delay restrictions and HAP (when the segmentis deployed) to give access to users that need specific delay-sensitive services [14–16]. Moreover, the HAPs network isvery flexible and it can quickly serve other zones of interestlike a disaster zone or military field. Its integration withanother broadband network, as a GEO Satellite network,is very interesting for several applications, such as telemed-icine or e-learning or to serve the civil protection centrecalled also Monitoring and Information Centre (MIC).
3.3. Satellite–HAP architecture
The multilayer architecture that we propose permits thetwo above architectures to be exploited with the use of theGenetic Algorithm (GA) and with a modification of a rout-ing protocol called Core-Based Tree (CBT). In fact, theHAP permits a low propagation delay to be obtained,while the Satellite permits a great bandwidth capacity tobe achieved. In order to obtain the maximum performanceof the network we must perform an algorithm that can takeadvantage of both architectures and, moreover, it mustchoose the best path to satisfy the QoS constraints. Inorder to obtain these goals we chose the end-to-end delayand the bandwidth as QoS constraints. A good trade-offof these metrics permits a path to be found that respectsthe end-to-end delay and the bandwidth constraints; atthe end of the algorithm execution a final path was foundover the considered multilayer platform.
4. QoS multicast problem formulation
A network can be modeled as an undirected graphG = (V,E), where V is the set of nodes that represent rou-ters and E is the set of arcs (arcs represent path betweennodes). Each link between two nodes is bi-directional andthis means that if there is a link e = (u,v), also the linke0= (u,v) exists. Each link e, has a cost(e), a delay(e)
and a bandwidth(e) associated to itself. The cost functiondefines the function to be minimized, while the delay()
and the bandwidth() function defines constraints to berespected.
A multicast tree T(s,D) is a sub-graph of G spanning thesource node s 2 V and the set of destination nodesD ˝ V � s. Let M be the destination group, mgd = |D| bethe number of multicast destination nodes and {s} [ D
be the multicast group. If PT(s,d) denotes a unique pathin the tree T from source node s to a destination noded 2 D, the total delay of the path PT(s,d) from the sources to the destination d is the sum of the delay of all linksalong PT(s,d) and it is denoted as Delay(Pt(s,d)):
DelayðP tðs; dÞÞ ¼X
e2P T ðs;dÞdelayðeÞ ð8Þ
F. De Rango et al. / Computer Communications 30 (2007) 3126–3143 3131
BandðP tðs; dÞÞ ¼ Mine2P T ðs;dÞ
bandwidthðeÞ ð9Þ
A path P = (v1,v2, . . . ,vn) presents three characteristics:
CostðP Þ ¼Xn�1
i¼1
Cðvi; viþ1Þ ð10Þ
DelayðPÞ ¼Xn�1
i¼1
Dlðvi; viþ1Þ ð11Þ
BandwidthðP Þ ¼ Minn�1i¼1 Bðvi; viþ1Þ ð12Þ
where v1 = s and vn = di with di 2 D.In a path P, the delay and cost are additive metrics,
while the bandwidth is concave metric. Accordingly, a treeT = (VT,ET) that is a sub-graph of G has an associated costdefined as:
CðT Þ ¼Xe2ET
CðeÞ ð13Þ
MCðT Þ ¼ CðT ÞjDj ð14Þ
where D = {d1,d2, . . . ,dk�1,dk} is the set of the multicastdestinations; Let us define a Multicast Call Request(MCR) in the network as a 4-tuple:
MCR ¼ ðs;R;Min Banda;Max DelayÞ ð15Þ
where s 2 V the source node in the call isD = (d1,d2, . . . ,dm) � V is a set of receiver or destinationsnodes. The Max_Delay (MD) is the delay constraint tobe satisfied for each source-receiver pair. The Min_Band-
width (MB) is the bandwidth constraint to be satisfied for
Fig. 2. Flow chart of t
each path from source to the destinations of the multicastgroup.
Given such a call, MC on the network G, let us define abandwidth–delay-constrained multicast tree to be a treeT = (VT,ET) routed at source node s and satisfying the fol-lowing conditions:
V T � V and ET � E; s 2 V T D � V T
BðvÞ > MB 8v 2 V T ; DlðP Þ < MD 8p � T
�ð16Þ
S(C) represents the set of all such multicast routing treescorresponding to the call. The problem can be formulatedsuch as finding a routing tree TS so that:
CðT SÞ ¼ minfCðT SÞ : T 2 SðCÞg ð17Þ
This tree TS is a bandwidth–delay-constrained least-costtree (BDCT).
5. QoS genetic multicast algorithm
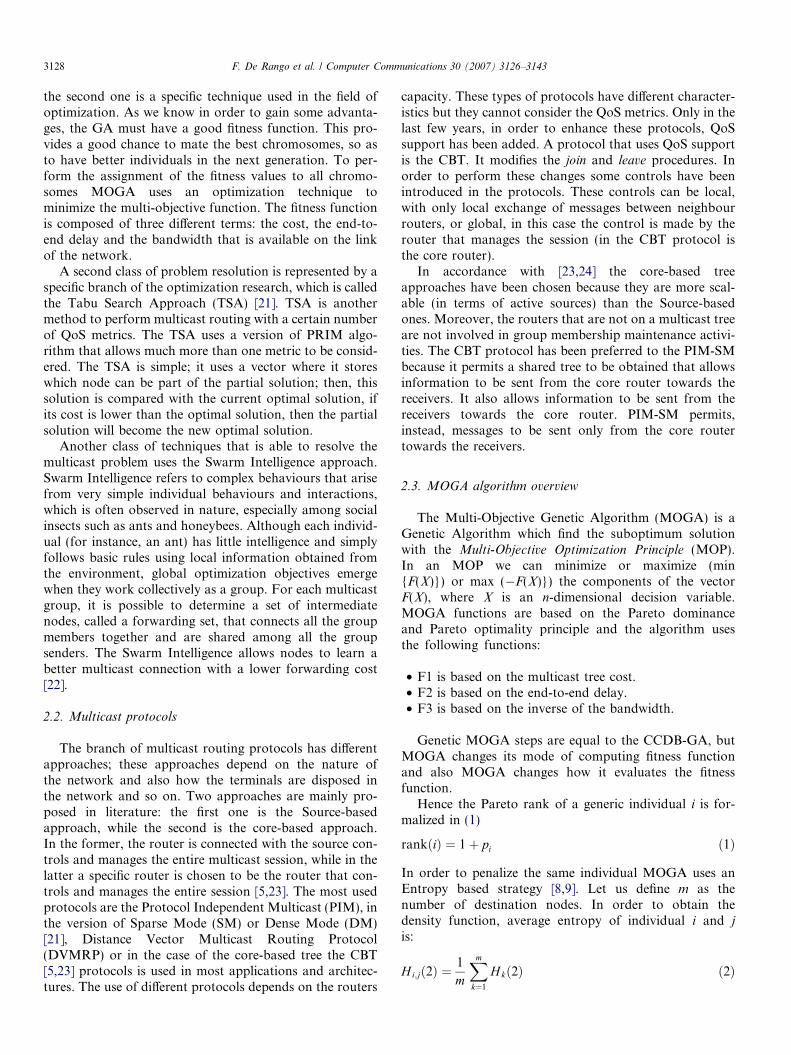
The main steps that a genetic multicast algorithmshould perform are shown in the following. The QoSgenetic algorithm proposed in this work is introducedin a hybrid HAP/Satellite topology. The Genetic Algo-rithms are utilized for solving optimization problembased on the evolutionary principle. They provide threemain operations: selection, crossover and mutation thathave to be able to generate new offspring. The reproduc-tion is based on Darwinian evolution, with new genera-tions having the best characteristics. The crossoveroperation can generate offspring totally different fromtheir parents. The mutation operator is utilized forchanging a single gene in the chromosome string. More-
he GA Algorithm.

3
5 61
2
4
3 4 2 2 4
Fig. 3. Example of Prufer coding.
3132 F. De Rango et al. / Computer Communications 30 (2007) 3126–3143
over, it is important to adopt valid coding/decoding cri-teria to guarantee that each chromosome represents avalid solution to the problem. Moreover the adoptedcoding/decoding criteria should guarantee working withsimple data structure in order to reduce the overall com-plexity of the algorithm; we have adopted the prufer cod-ing that we examine in sub section A [25]. An example ofGA flow diagram is shown in Fig. 2. The GA, which wehave implemented in C++ language, starts from theinput file reading that contains information about thesimulation parameters and the network topology. Thenetwork is represented as a graph. When all parametersand all information about the network are in the mem-ory then it is possible to generate the initial populationso to start the genetic evolution. An important step isto assign a fitness value to each chromosome. Each chro-mosome represents a multicast tree that composes thepopulation; they are codified with the prufer coding tech-nique. The genetic cycle performs the biological evolu-tion, each cycle performs the lifetime of a genericindividual that composes the population, in this timean individual born, can mate with another one in orderto generate other individuals, and then, at the end ofthe life cycle, the chromosome dies. When all generationsare processed the algorithm ends and the best chromo-some, which has the higher fitness value is chosen.
5.1. Prufer coding
The genetic algorithm utilizes a particular structurecalled chromosome (individual, genome). Chromosomecoding is an indispensable procedure in the genetic algo-rithm, which affects not only methods of decoding andevaluation, but also the realization of selection, crossoverand mutation procedures. Coding represents the core ofthe whole algorithm. The coding phase tries to find themanner of representing the chromosome with somewell-known data structure like vector or matrix. In thiswork, attention is focused on Prufer Number Encoding[25]. In a complete graph with n nodes, there are nn�2
distinct label trees. Prufer coding provides a one-to-onecorrespondence between such trees and the set of allstrings of n � 1 digits. This means that we can use onlyn � 2 digits permutation uniquely to represent a tree withn node where each digit is an integer between 1 and n
inclusive. This permutation is usually known as the pru-fer number. Coding is a key issue in the genetic algo-rithm. This coding choice guarantees optimalcomputing time.
An example of coding is shown in Fig. 3.
• Step 1 – identify all leaf nodes and pick out that with thelowest label.
• Step 2 – identify the father node of the previous chosennode and insert it into the vector tail.
• Step 3 – Repeat Step 1 and Step 2 until only the sourceremains, and add it to the vector tail.
5.2. Initial population
In order to build an initial population, the consideredalgorithm takes as input a network G = (V,E), a sourcenode vs and a specific number of multicast destinationnodes, say vd1
; vd2; . . . ; vdn . Then, it finds a pool of possible
multicast paths from vs to each of vd1; vd2
; . . . ; vdn , using aDepth First Search (DFS) algorithm. Thus an initial setof multicast trees is constructed. Each of these multicasttrees is mapped on a string consisting of the sequence ofnodes along the path from vs to each of the destinationsvd1; vd2
; . . . ; vdn :
5.3. Fitness
Chromosome fitness is a value that indicates the goodnessof the found solution. Through fitness function and the pen-alty function we can consider end-to-end delay and band-width constraints, because the penalty function reduces thefitness value of a chromosome, if these constraints are notsatisfied. In this way, the chromosome, which represents amulticast tree, has lower possibilities of being chosen in orderto perform the genes exchange (crossover procedure) andmoreover, it has lower probabilities of passing into the nextgeneration pools if elitism is applied.
The fitness function for each individual and the treeT(s,M) are defined using the penalty function as presentedin [4]:
FðTðs;RÞÞ ¼ aPe2Tðs;RÞ
CðeÞYd2M
/ðDðPðs; dÞÞÞ �MD
!
�Yd2M
/ðMB� BðPðs; dÞÞÞ !
ð18Þ
where a is a positive real coefficient (a possible value is 0.2),/(z) is the penalty function and c is the degree of penalty (apossible value is 0.5).
The penalty function is described as follows:
/ðzÞ ¼1 z 6 0
c z > 0
�ð19Þ

F. De Rango et al. / Computer Communications 30 (2007) 3126–3143 3133
5.4. Selection
In the adopted genetic algorithm, the selection process isbased on spinning the roulette wheel pop-size times, andeach time a single chromosome is selected as a new off-spring for the next generation. The probability Pi that aparent Ti is selected is given by:
P i ¼F ðT iÞPpop size
j¼1 F ðT iÞð20Þ
where F(Ti) is the fitness of the Ti individual. The selectionprocess performs the elitism model. The elitism model per-mits to insert directly some individual in the next popula-tion set. These chromosomes are chosen on the basis oftheir fitness values. The best chromosomes that have higherfitness value are chosen. The number of these chromo-somes influences the convergence time, but also it can affectthe goodness of the found solution, because a lower num-ber of chromosomes are mating and mutating. In thisway less solution space is explored.
5.5. Crossover
The crossover procedure makes the selection of bestindividuals in the chosen population according to the selec-tion rule described in sub-paragraph D. It selects a randompoint where performing the change of genotypes. After this
Fig. 4. Biological evo
change between two parents’ individuals, two novel chro-mosomes that substitute their parents are considered inthe next population. The crossover procedure is iteratedfor each new parent in the considered population until inthe chosen population remains lower than two elements.In this case, if just a single element remains in the popula-tion, it automatically will go in the new population in thenext step of the algorithm.
5.6. Mutation
Mutation operation is one kind of random change inchromosome. In our algorithm, point-wise mutation isadopted [3]. This technique permits the change of one bitin a chromosome string with a certain probability pm,referred to as mutation probability. Mutation operationgives to the Genetic Algorithm the possibility of searchingin a different solution space offering a greater probability tofind a solution nearest to the optimal one. The price to payfor high mutation probability could be a higher conver-gence algorithm execution time. The mutation probabilityis fixed to a value pm. First of all, a random number is gen-erated as mutation locus. The digit in this locus is replacedwith another node label. After the mutation operation, thesolution tree will be modified because the mutation opera-tion can destroy the tree structure. Moreover, this changecannot guarantee that the bandwidth and delay constraints
lution simulated.

3134 F. De Rango et al. / Computer Communications 30 (2007) 3126–3143
are respected. After the mutation operation, it is possible toobtain a disconnected tree, which can be connected by exe-cuting an extensive coding such as explained in Section 5.7.
5.7. Extensive coding
Extensive coding is applied to get a connected tree by adisconnected tree represented by the prufer coding. When amutation and/or crossover operation are applied to a geno-type, the extensive coding procedure could be executedsuch as explained in the following:
• Step 1: find the links which are in the constructing tree T
represented by chromosome but not in the originalgraph G.
• Step 2: remove these links from T, the remaining graphis composed of multiple sub-tree, denote as(T1, T2, . . . ,Tp).
• Step 3: find a link in the graph G, this link can connecttwo sub-tree Ti and Tj.
• Step 4: repeat Step 3, until all the sub-trees form anentire tree.
This procedure creates a sub-tree T of the original graphG. Step 3 is a repetition step to find a link to connect twosub-trees. In order to find the link, the following approachis applied: given any two sub-trees Ti and Tj, we can gettwo corresponding node sets si and sj. If we can find nodeu 2 Ti, v 2 Tj and (u,v) 2 E, then we can use edge (u,v) toconnect Ti and Tj. The schema utilized for the simulationof biological evolution is shown in Fig. 4; two chromo-somes are chosen to be the parents, then they are matedthrough the crossover operator, the new chromosomes thatare generated can change one gene through the mutationoperator. When the biological operator has performed itsfunction then the new chromosomes pass through theextensive coding function.
6. QoS multicast routing protocol over HAP–Satellitearchitecture
A multicast routing protocol is proposed, known as theCore-Based Tree [5,23], in a hybrid wireless platform com-posed of a Satellite that covers a group of stratosphericplatforms and, moreover, the HAPs mesh and the Satellitecover the RCST terminals. This protocol is inserted into anIntegrated Services (IntServ) context. The IntServ architec-ture assumes that explicit setup mechanisms are employedto convey information to the routers involved in a source-to-destination path. These mechanisms enable each flow torequest a specific QoS level. RSVP (Resource reSerVationProtocol) [14,26–28] is the most widely used setup mecha-nism enabling the resource reservation over a specific pathfrom source-to-destination. Through RSVP signalling, net-work elements are notified by ‘‘per-flow’’ resource require-ments using IntServ parameters (e.g. token bucket depth b,token generation rate r, peak data rate p, etc.). Subse-
quently, these networks elements apply admission controland traffic resource management policies to ensure thateach admitted flow receives the requested services. Inaccordance with the fluid model, the bandwidth requestedby a receiver is derived by fixing the delay bound (DB)desired by applications, the source parameters (peak ratep, average rate r and token bucket size b) and from ratedependent C and rate independent term D which accountsfor the deviation from the fluid model [14,26–28]. The DBis the overall queuing delay obtained in the path betweensource and destination. The end-to-end delay in thesource-receiver path takes into account two factors thatare the DB and the propagation delay (PD) which is thetime taken by a message to go from the source to the des-tination involved in the communication considering onlyphysical links.
6.1. Core-Based Tree (CBT)
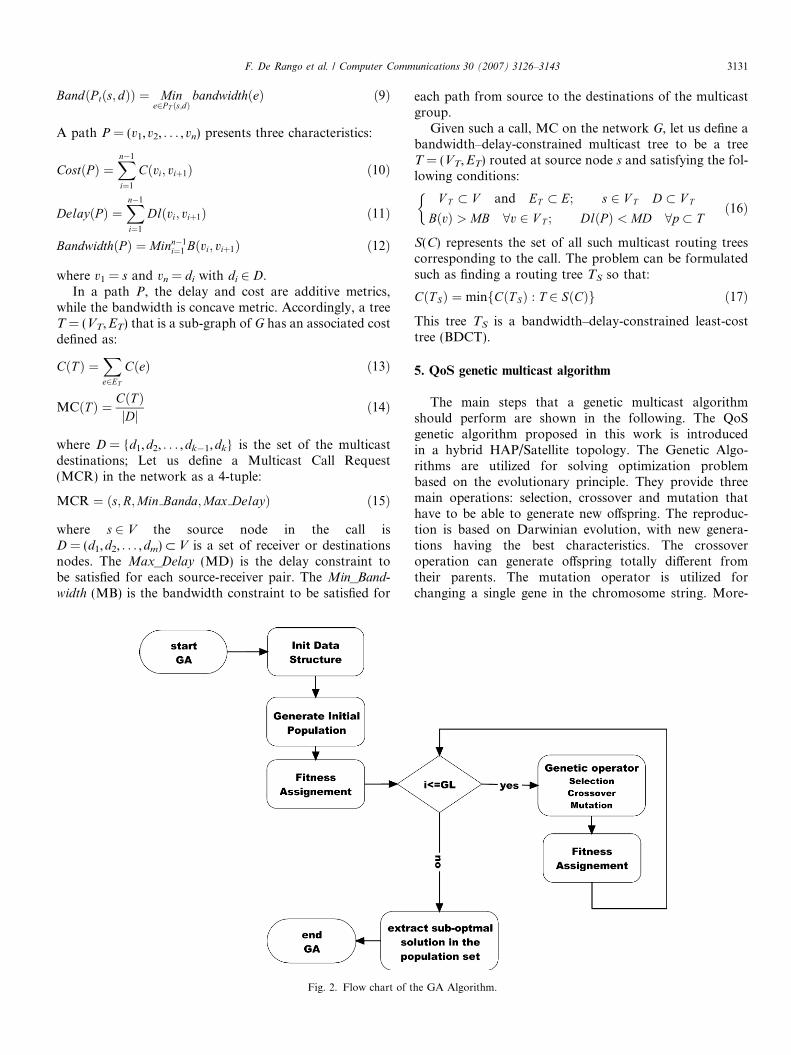
In the Core-Based Tree Protocol one element of a group(RCST, HAP or Satellite) is selected as the core of thegroup and, then, a tree is constructed to span all the groupmembers. The birth of the multicast group is determined bythe presence in the network of a source that, to communi-cate with other terminals, sends a specific message calledPath (msg number 1 in Fig. 5) which will reach all the net-work terminals. A terminal, which wants to participate inthe communication, expresses its interest in joining a groupthrough an IGMP message called host membership report
towards its local RCST. Then, the RCST sends anothermessage (msg number 2 in Fig. 5) called Join Request thattravels in upstream hop-by-hop along the network untilarriving to the group’s core element. This message pro-duces the change of the transient join state in the hop thatit traverses. If the transient join state is not ‘‘confirmed’’with a join-acknowledgment message from upstream thestate is eventually timed out. When a router receives ajoin-acknowledgment it updates its forwarding cache. Thatreflects the fact of being a new router in the multicast treeand then it sends back the message until it reaches the rou-ter that first sent the join-request. Tree maintenance isachieved in this way: each router sends in upstream aCBT keep-alive message periodically towards its tree parentrouter. The receipt of the message over a valid child inter-face prompts the sending of a response message called echo
reply that carries a list of groups for which the correspond-ing interface is a child interface. If there is no response aftera certain timeout then the router sends a message calledquit-notification on interface upstream and flushes all ofits downstream branches by sending flush-tree messages,allowing them to individually rejoin if necessary. In thecase of a group member decides to leave the multicast ses-sion it sends another message type called member-leave
towards its patent router. The parent router, now, controlswhether no other on-tree router is present on its down-stream interface and then it sends a quit-notification mes-sage to its parent and successively it deletes its
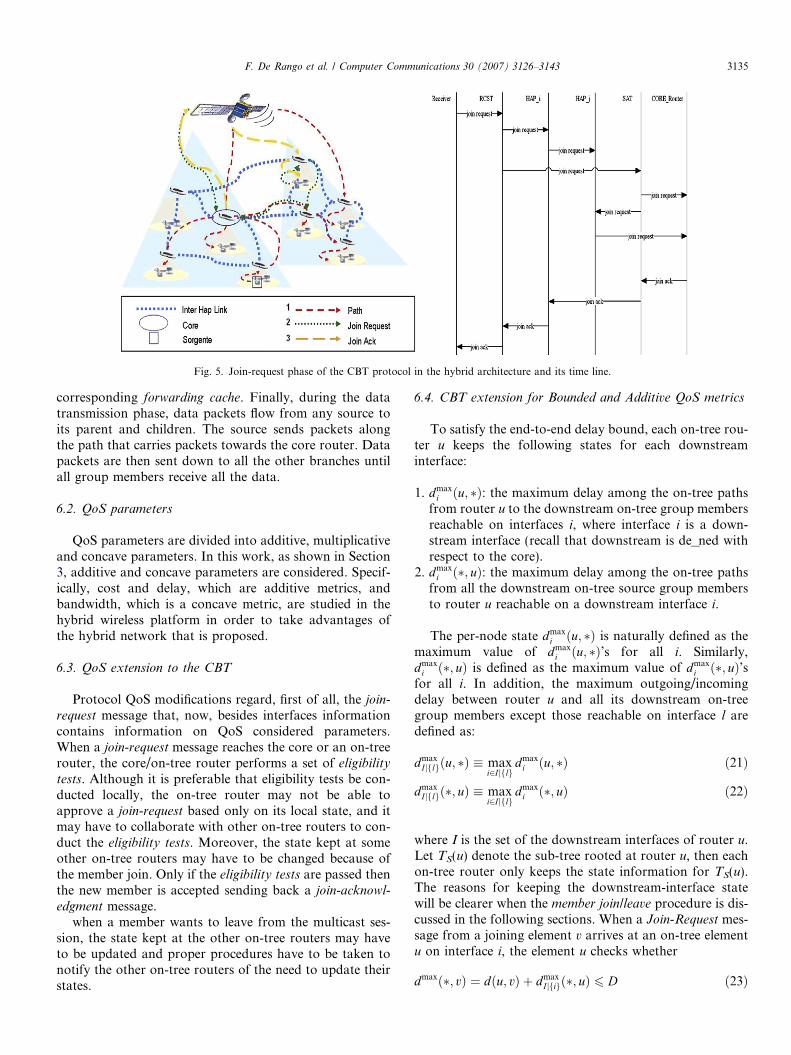
Fig. 5. Join-request phase of the CBT protocol in the hybrid architecture and its time line.
F. De Rango et al. / Computer Communications 30 (2007) 3126–3143 3135
corresponding forwarding cache. Finally, during the datatransmission phase, data packets flow from any source toits parent and children. The source sends packets alongthe path that carries packets towards the core router. Datapackets are then sent down to all the other branches untilall group members receive all the data.
6.2. QoS parameters
QoS parameters are divided into additive, multiplicativeand concave parameters. In this work, as shown in Section3, additive and concave parameters are considered. Specif-ically, cost and delay, which are additive metrics, andbandwidth, which is a concave metric, are studied in thehybrid wireless platform in order to take advantages ofthe hybrid network that is proposed.
6.3. QoS extension to the CBT
Protocol QoS modifications regard, first of all, the join-
request message that, now, besides interfaces informationcontains information on QoS considered parameters.When a join-request message reaches the core or an on-treerouter, the core/on-tree router performs a set of eligibility
tests. Although it is preferable that eligibility tests be con-ducted locally, the on-tree router may not be able toapprove a join-request based only on its local state, and itmay have to collaborate with other on-tree routers to con-duct the eligibility tests. Moreover, the state kept at someother on-tree routers may have to be changed because ofthe member join. Only if the eligibility tests are passed thenthe new member is accepted sending back a join-acknowl-
edgment message.when a member wants to leave from the multicast ses-
sion, the state kept at the other on-tree routers may haveto be updated and proper procedures have to be taken tonotify the other on-tree routers of the need to update theirstates.
6.4. CBT extension for Bounded and Additive QoS metrics
To satisfy the end-to-end delay bound, each on-tree rou-ter u keeps the following states for each downstreaminterface:
1. dmaxi ðu; �Þ: the maximum delay among the on-tree paths
from router u to the downstream on-tree group membersreachable on interfaces i, where interface i is a down-stream interface (recall that downstream is de_ned withrespect to the core).
2. dmaxi ð�; uÞ: the maximum delay among the on-tree paths
from all the downstream on-tree source group membersto router u reachable on a downstream interface i.
The per-node state dmaxi ðu; �Þ is naturally defined as the
maximum value of dmaxi ðu; �Þ’s for all i. Similarly,
dmaxi ð�; uÞ is defined as the maximum value of dmax
i ð�; uÞ’sfor all i. In addition, the maximum outgoing/incomingdelay between router u and all its downstream on-treegroup members except those reachable on interface l aredefined as:
dmaxIjflgðu; �Þ � max
i2Ijflgdmax
i ðu; �Þ ð21Þ
dmaxIjflgð�; uÞ � max
i2Ijflgdmax
i ð�; uÞ ð22Þ
where I is the set of the downstream interfaces of router u.Let TS(u) denote the sub-tree rooted at router u, then eachon-tree router only keeps the state information for TS(u).The reasons for keeping the downstream-interface statewill be clearer when the member join/leave procedure is dis-cussed in the following sections. When a Join-Request mes-sage from a joining element v arrives at an on-tree elementu on interface i, the element u checks whether
dmaxð�; vÞ ¼ dðu; vÞ þ dmaxIjfigð�; uÞ 6 D ð23Þ

3136 F. De Rango et al. / Computer Communications 30 (2007) 3126–3143
where dmax(*,u) is obtained from the states kept at router u.d(u,v) can be carried in the Join-Request message and up-dated as the message travels from element v to element u.D is an upper bound of the end-to-end delay perceivedby an RCST receiver. Only if all controls along the paththat goes from receiver to core are positive the messageof Join-Request will arrive to the core that will send backa message called Join Ack (msg number 3 in the Fig. 5)along the reverse path, forming a new branch of the tree.Otherwise, the node that performs a negative control sendsback a message of rejection to the precedent node. Whenan element receives a Join Ack message, it updates its for-warding cache to reflect the fact that it now becomes an on-tree element. When an RCST u leaves a multicast tree itsends a new message called Member Leave (msg number2 in the Fig. 6) to its parent element. Upon receiving thismessage the element can perform two actions. If it doesnot have any other child member directly attached it sendsthe message to its parent and it disconnects itself from themulticast tree. Otherwise, it sends the message towards thecore element and then checks whether:
dðu; vÞ < dmaxI jfigðu; �Þ ð24Þ
6.5. CBT extension for Bounded and Concave QoS metrics
Here, the case in which the requested QoS is expressed interms of bandwidth parameters is presented. To satisfy theminimum bandwidth requirement B for a multicast group,each on-tree router u keeps only the state B.
When a Join-Request message from a joining element v
arrives at an on-tree element u on interface i, the elementu checks if:
bðu; vÞP B ð25Þ
Fig. 6. Member leave phase of the CBT protocol in the hybridarchitecture.
If (25) does not hold, the join-request is immediately re-jected and a rejection-reply message is sent back to the join-ing router v. When a member router v leaves a multicasttree it sends a quit-notification message to its parent routeru. If router u does not have any other local members ordownstream on-tree routers, it sends a quit-notificationmessage to its parent router w and deletes the correspond-ing forwarding cache. Otherwise, router u deletes the inter-face from the forwarding cache on which the quit-notification message arrives.
6.6. Core selection
For the Core selection consider the members of the mul-ticast group are not known in advance [29]. Nodes areallowed to join and leave the multicast group dynamicallyas explained in Section 6.5.
Let V be the set of nodes in the area under consider-ation. Let E be the set of links that connect the nodes inV. Let G = (G = (V,E) be a connected undirected graphrepresenting the network in the area under consideration.If r(u,v) is the sum of the link costs along the shortest pathfrom node u to node v(u,v 2 V), the average cost cos t(c)associated to node c can be expressed as follows:
cos tðcÞ ¼ 1
jV jXx2V
rðc; xÞ ð26Þ
where jVj is the size of the set V. The core selection is basedon the minimum average cost method. It permits to fix thenode c as core node such that cos t(c) 6 cos t(v) for allv 2 V. The time complexity to calculate the average costis O(V) at each node.
7. Performance evaluation
Many simulation campaigns were carried out to test theperformance of GA with constraints of bandwidth, delayand bandwidth–delay and different simulations were con-ducted in order to show the protocol and algorithm perfor-mance these simulations were performed through twodifferent ad hoc C++ simulators; one realized in order tocarry out algorithm performances and its evaluations,and a second one that performs all the network simula-tions, it considers multilayer Network topologies, proposedprotocol and genetic algorithm. The latter is realizedthrough the discrete event technique [29,30]. In accordancewith theorem 2.7 in [7], the genetic algorithm convergestowards the global optimal solution. For a wide dimensiongraph the solution is reached consuming an importantresource that is the least-cost algorithm execution timesince the problem is an NP-complete. The solution is foundutilizing an appropriate execution time in order to reach asolution that is as near as possible to the optimal one. Eval-uated simulation indexes are: Fitness, Multicast Tree Cost,Bandwidth and End-to-End Delay for GA simulation;RCST and HAP link utilization for protocol simulation.

F. De Rango et al. / Computer Communications 30 (2007) 3126–3143 3137
In Tables 1 and 2, respectively, adopted simulation param-eters in GA schemes and the hybrid DVB-RCS/HAP plat-form were considered.
7.1. Network generator (NTG)
In order to generate the network a network generator,that realizes the multilayer architecture, was utilized. Ittakes the setting parameters from an input file and thenit returns a network graph in matrix form. The flow dia-
Table 1NTG parameters
Topology parameters Value
Number of Satellite 1Number of HAP 10Number of RCST 53Source probability 0.1–0.3–0.5Max number of multicast group 200
Table 2Algorithm parameters
Algorithm parameters Value
Mutation probability 0.1–0.5Crossover probability 0.5Generation number 100–200Initial population 40–50Fitness penalty (c) 0.5Delay Bound (DB) requested 350 msBandwidth value 548 kbps
Fig. 7. Flow diagram
gram of the NTG is shown in Fig. 7. The NTG buildsthe network in this way: firstly, it assigns the RCST tothe HAPs and to the SAT through an ID mechanism,moreover, it generates the HAPs mesh; through this infor-mation NTG builds the matrix that composes the finalgraph. The network generated in this way represents thesimulative scenario, where the algorithm and protocol areapplied.
7.2. Simulation parameters
The following simulation campaigns were built to showthe performances of the Algorithm and protocol proposedin the previous sections. In particular, Section 7.3 showsthe performance of the CCDB-GA algorithm; Section 7.4shows the performance of the algorithm against anotherone called MOGA; while section E shows the performanceof the protocol that works with the algorithm in order toperform a multicast session over the proposed hybrid Satel-lite–HAPs Architecture. Section 7.3 contains the simula-tion results for our algorithm called CCDB-GA. Thepurpose of this simulation campaign is to show the threemodalities of the algorithm and how it chooses the solutionin terms of Cost, Delay or Bandwidth. In order to obtainthese results the parameters used in our simulations arelisted in Table 1 and in Table 2 while Tables 3 and 4 areused for the multicast routing simulation results.
In Section 7.4, the CCDB-GA and the MOGA algo-rithm are compared; the best performances were ofCCDB-GA in terms of solution found and in terms of com-puting time. In Section 7.5 the proposed multicast routing
for the NTG.

Table 3HAP parameters
HAP parameters Value
Round trip time 0.4 msMedium access protocol MF-TDMATarget burst loss probability (c) 0.01Return Channel’s slots 469Forward Channel’s slots 469Atomic Satellite channel (slot) 32 kbpsReturn and Forward Channel’s trama 47 msRCST typology D (2048 kbps)Max number of sources for RCST 16
Table 4Satellite parameters
Satellite parameters Value
Round trip time 540 (ms)Medium access protocol MF-TDMATarget burst loss probability (c) 0.01Return Channel’s slots 1400Forward Channel’s slots 4000Atomic Satellite Channel (slot) 32 kbpsReturn and Forward Channel’s trama 47 msRCST type D
Max number of sources for RCST 16
Fig. 8. Fitness value for three different QoS metrics.
Fig. 9. Multicast tree cost for increasing number of generations with threedifferent QoS metrics.
3138 F. De Rango et al. / Computer Communications 30 (2007) 3126–3143
protocol over the hybrid Satellite–HAPs network is shownso as to have a complete overview of the proposed work. Inthis section the algorithm and the protocol work togetherin order to perform the multicast routing. The purpose ofthis section is to show the multicast protocol details in gen-eral terms and also to expose the effect of the multicastalgorithm in the distribution of the network flow. In thissense the utilization of the links can demonstrate how thealgorithm distributes the flow over the proposed multilayerarchitecture.
7.3. CCBD-GA simulation results
The algorithm is realized in order to support three differ-ent optimization types: the first one is the cost–delay, whichcan be used for real-time applications; it imposes an explicitconstraint on delay parameter and tries to optimize thecost; the second one is cost–bandwidth for bandwidth con-suming applications (e.g. multimedia or files downloads);the third case is in the middle of the other two and, forexample, it can be used when both applications arerequired and where the algorithm has to respect the upperbound on delay and the lower bound on bandwidth.
Fig. 8 shows how the fitness values increase for eachconsidered QoS metric. The fitness value indicates the chro-mosome suitability to the prefixed problem. In Fig. 8 it ispossible to note that a better solution is tried during thegeneration evolution. In all operative modalities it is possi-ble to view that the fitness increases. A fitness increasemeans that the found solution is better than the previousone in terms of cost, bandwidth or end-to-end delay.
Fig. 9 shows the Multicast Tree cost. It is important torecall that the cost function is closely correlated with delayand bandwidth, then a delay decrease or bandwidthincreases correspond to a cost decrease. This figure showshow the cost is optimized in all the algorithm modality.In particular, it is possible to note that the cost–band-width–delay modality has a lower value than other two,because both delay and bandwidth are optimized and forthis reason it gives a better value of suitability.
Fig. 10 shows the end-to-end delay slope for differentgeneration numbers. The optimization of delay is presentonly in cost–delay and cost–bandwidth–delay, as it is pos-sible to see in Fig. 10. In these two modalities the curveslope decreases with the increase of generation values. Onthe other hand, in the case of cost–bandwidth modality,the curve slope is constant on the maximum permittedend-to-end delay value and it does not decrease becauseit is not a value to optimize in this modality.
Fig. 11 shows the bandwidth slope values for differentgeneration number. It is possible to note that the band-width values increase for all adopted execution modalities.This is due to the fact that the optimization parametersthat consists of reducing cost and delay produces anincrease of the bandwidth. If one metric is fixed theCCDB-GA tries to find a solution that respectsthe imposed bound; for example in Fig. 12 we show how

Fig. 10. End-to-end delay for increasing generations and three differentQoS metrics.
Fig. 11. Bandwidth values for increasing number of generations withthree different QoS metrics.
Fig. 13. Bandwidth vs. operative modalities.
Fig. 14. Delay end-to-end vs. operative modalities.
F. De Rango et al. / Computer Communications 30 (2007) 3126–3143 3139
the CCDB-GA behaves when the requested end-to-enddelay is fixed. When the constraint over the delay is muchrestrictive the cost is much higher than the other cases. Aless restrictive constraint permits to the algorithm to mini-mize the cost with much more freedom. The last curvewhen a end-to-end delay equal to 400 ms is used the algo-rithm finds the lowest possible cost.
Figs. 13 and 14 show the different modalities that theCCDB-GA supports, with a fixed mutation probability;different solutions were found for the three modalities thatwere implemented and compared. The first one is themodality that performs in its fitness function the cost andthe bandwidth, the second one only the cost and the end-to-end delay while the third implements three metrics atthe same time. The imposed delay bound is of 270 ms forthe end-to-end delay and of 400 kbps for the bandwidth.
Fig. 12. Cost values of CCDB-GA vs. generation.
Fig. 13 shows the three curves of the bandwidth with theuse of three different modalities. In this figure it is possibleto note how the Cost–Bandwidth (CB) and the Cost–Band-width–Delay (CBD) have the same values but the curve ofthe CB has lower oscillation than the CBD. The CD,instead, does not have significant variation for increasingnumber of generations.
Fig. 14 shows the trends of the end-to-end delay whenthe operative modalities are changed. In the figure theend-to-end delay decreases under the imposed bound,which was fixed to 270 ms and, moreover, the algorithmconverges soon and few oscillations are present in thefigure.
Fig. 15 shows the Multicast Tree Cost, where the costdecreases in all the modalities. In this figure it is possibleto note how the algorithm converges soon for the CBand the CBD, whereas for the CD modality the algorithmhas more oscillation than the other two modalities.
7.4. CCBD-GA vs. MOGA simulation results
In order to show the goodness of the proposed algo-rithm a well-known genetic algorithm called MOGA wasconsidered. This algorithm presents some differences withrespect to CCBD-GA. First of all, it does not utilize thepenalty principle. It is based on Pareto optimality and onthe principle of immunity system and entropy. Genetic
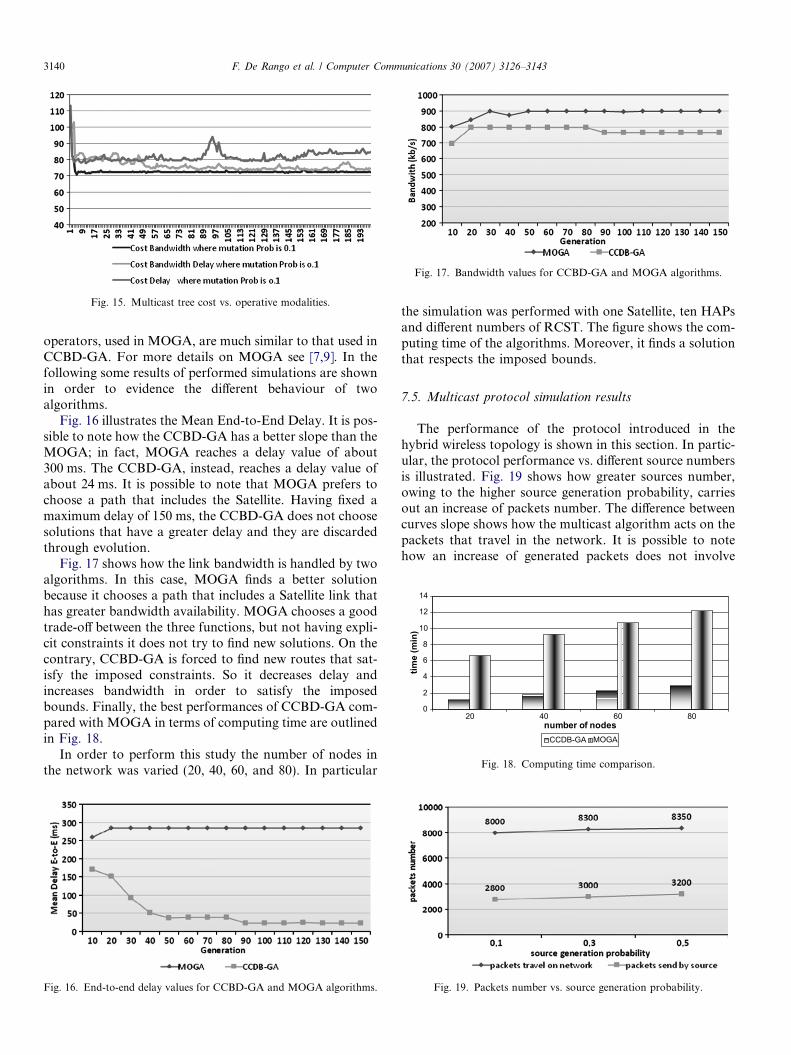
Fig. 15. Multicast tree cost vs. operative modalities.
Fig. 17. Bandwidth values for CCBD-GA and MOGA algorithms.
0
2
4
6
8
10
12
14
20 40 60 80number of nodes
time
(min
)
CCDB-GA MOGA
Fig. 18. Computing time comparison.
3140 F. De Rango et al. / Computer Communications 30 (2007) 3126–3143
operators, used in MOGA, are much similar to that used inCCBD-GA. For more details on MOGA see [7,9]. In thefollowing some results of performed simulations are shownin order to evidence the different behaviour of twoalgorithms.
Fig. 16 illustrates the Mean End-to-End Delay. It is pos-sible to note how the CCBD-GA has a better slope than theMOGA; in fact, MOGA reaches a delay value of about300 ms. The CCBD-GA, instead, reaches a delay value ofabout 24 ms. It is possible to note that MOGA prefers tochoose a path that includes the Satellite. Having fixed amaximum delay of 150 ms, the CCBD-GA does not choosesolutions that have a greater delay and they are discardedthrough evolution.
Fig. 17 shows how the link bandwidth is handled by twoalgorithms. In this case, MOGA finds a better solutionbecause it chooses a path that includes a Satellite link thathas greater bandwidth availability. MOGA chooses a goodtrade-off between the three functions, but not having expli-cit constraints it does not try to find new solutions. On thecontrary, CCBD-GA is forced to find new routes that sat-isfy the imposed constraints. So it decreases delay andincreases bandwidth in order to satisfy the imposedbounds. Finally, the best performances of CCBD-GA com-pared with MOGA in terms of computing time are outlinedin Fig. 18.
In order to perform this study the number of nodes inthe network was varied (20, 40, 60, and 80). In particular
Fig. 16. End-to-end delay values for CCBD-GA and MOGA algorithms.
the simulation was performed with one Satellite, ten HAPsand different numbers of RCST. The figure shows the com-puting time of the algorithms. Moreover, it finds a solutionthat respects the imposed bounds.
7.5. Multicast protocol simulation results
The performance of the protocol introduced in thehybrid wireless topology is shown in this section. In partic-ular, the protocol performance vs. different source numbersis illustrated. Fig. 19 shows how greater sources number,owing to the higher source generation probability, carriesout an increase of packets number. The difference betweencurves slope shows how the multicast algorithm acts on thepackets that travel in the network. It is possible to notehow an increase of generated packets does not involve
Fig. 19. Packets number vs. source generation probability.
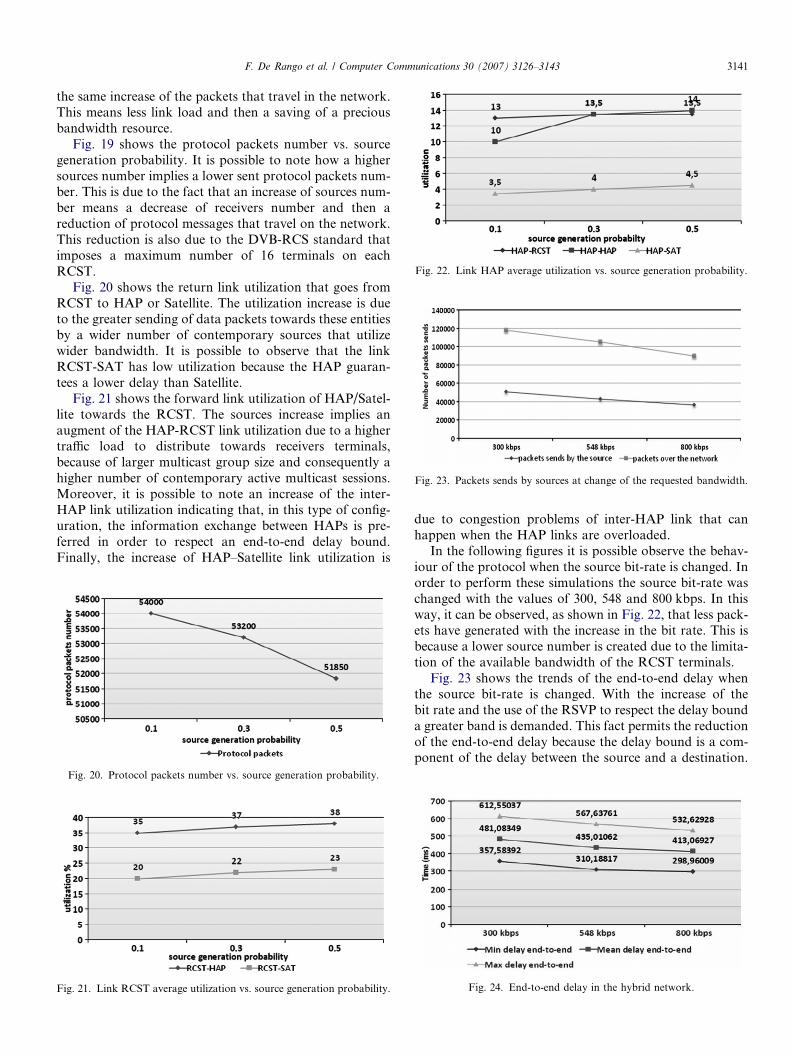
Fig. 22. Link HAP average utilization vs. source generation probability.
Fig. 23. Packets sends by sources at change of the requested bandwidth.
F. De Rango et al. / Computer Communications 30 (2007) 3126–3143 3141
the same increase of the packets that travel in the network.This means less link load and then a saving of a preciousbandwidth resource.
Fig. 19 shows the protocol packets number vs. sourcegeneration probability. It is possible to note how a highersources number implies a lower sent protocol packets num-ber. This is due to the fact that an increase of sources num-ber means a decrease of receivers number and then areduction of protocol messages that travel on the network.This reduction is also due to the DVB-RCS standard thatimposes a maximum number of 16 terminals on eachRCST.
Fig. 20 shows the return link utilization that goes fromRCST to HAP or Satellite. The utilization increase is dueto the greater sending of data packets towards these entitiesby a wider number of contemporary sources that utilizewider bandwidth. It is possible to observe that the linkRCST-SAT has low utilization because the HAP guaran-tees a lower delay than Satellite.
Fig. 21 shows the forward link utilization of HAP/Satel-lite towards the RCST. The sources increase implies anaugment of the HAP-RCST link utilization due to a highertraffic load to distribute towards receivers terminals,because of larger multicast group size and consequently ahigher number of contemporary active multicast sessions.Moreover, it is possible to note an increase of the inter-HAP link utilization indicating that, in this type of config-uration, the information exchange between HAPs is pre-ferred in order to respect an end-to-end delay bound.Finally, the increase of HAP–Satellite link utilization is
Fig. 20. Protocol packets number vs. source generation probability.
Fig. 21. Link RCST average utilization vs. source generation probability.
due to congestion problems of inter-HAP link that canhappen when the HAP links are overloaded.
In the following figures it is possible observe the behav-iour of the protocol when the source bit-rate is changed. Inorder to perform these simulations the source bit-rate waschanged with the values of 300, 548 and 800 kbps. In thisway, it can be observed, as shown in Fig. 22, that less pack-ets have generated with the increase in the bit rate. This isbecause a lower source number is created due to the limita-tion of the available bandwidth of the RCST terminals.
Fig. 23 shows the trends of the end-to-end delay whenthe source bit-rate is changed. With the increase of thebit rate and the use of the RSVP to respect the delay bounda greater band is demanded. This fact permits the reductionof the end-to-end delay because the delay bound is a com-ponent of the delay between the source and a destination.
Fig. 24. End-to-end delay in the hybrid network.
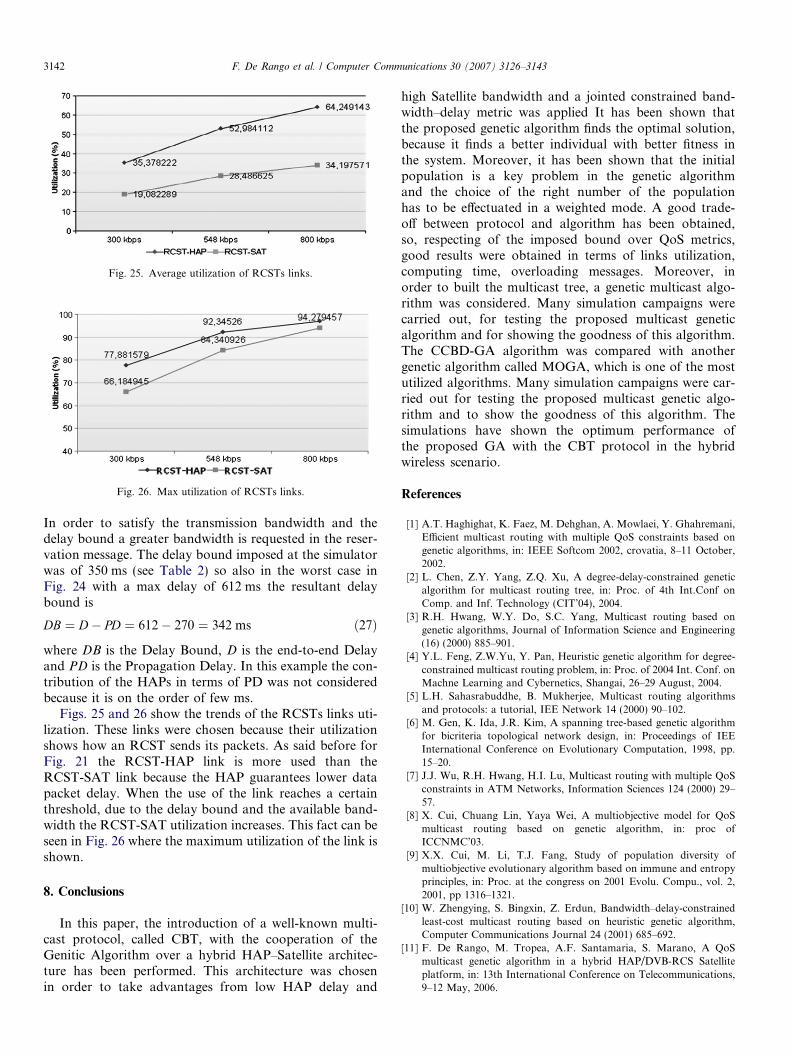
Fig. 25. Average utilization of RCSTs links.
Fig. 26. Max utilization of RCSTs links.
3142 F. De Rango et al. / Computer Communications 30 (2007) 3126–3143
In order to satisfy the transmission bandwidth and thedelay bound a greater bandwidth is requested in the reser-vation message. The delay bound imposed at the simulatorwas of 350 ms (see Table 2) so also in the worst case inFig. 24 with a max delay of 612 ms the resultant delaybound is
DB ¼ D� PD ¼ 612� 270 ¼ 342 ms ð27Þ
where DB is the Delay Bound, D is the end-to-end Delayand PD is the Propagation Delay. In this example the con-tribution of the HAPs in terms of PD was not consideredbecause it is on the order of few ms.
Figs. 25 and 26 show the trends of the RCSTs links uti-lization. These links were chosen because their utilizationshows how an RCST sends its packets. As said before forFig. 21 the RCST-HAP link is more used than theRCST-SAT link because the HAP guarantees lower datapacket delay. When the use of the link reaches a certainthreshold, due to the delay bound and the available band-width the RCST-SAT utilization increases. This fact can beseen in Fig. 26 where the maximum utilization of the link isshown.
8. Conclusions
In this paper, the introduction of a well-known multi-cast protocol, called CBT, with the cooperation of theGenitic Algorithm over a hybrid HAP–Satellite architec-ture has been performed. This architecture was chosenin order to take advantages from low HAP delay and
high Satellite bandwidth and a jointed constrained band-width–delay metric was applied It has been shown thatthe proposed genetic algorithm finds the optimal solution,because it finds a better individual with better fitness inthe system. Moreover, it has been shown that the initialpopulation is a key problem in the genetic algorithmand the choice of the right number of the populationhas to be effectuated in a weighted mode. A good trade-off between protocol and algorithm has been obtained,so, respecting of the imposed bound over QoS metrics,good results were obtained in terms of links utilization,computing time, overloading messages. Moreover, inorder to built the multicast tree, a genetic multicast algo-rithm was considered. Many simulation campaigns werecarried out, for testing the proposed multicast geneticalgorithm and for showing the goodness of this algorithm.The CCBD-GA algorithm was compared with anothergenetic algorithm called MOGA, which is one of the mostutilized algorithms. Many simulation campaigns were car-ried out for testing the proposed multicast genetic algo-rithm and to show the goodness of this algorithm. Thesimulations have shown the optimum performance ofthe proposed GA with the CBT protocol in the hybridwireless scenario.
References
[1] A.T. Haghighat, K. Faez, M. Dehghan, A. Mowlaei, Y. Ghahremani,Efficient multicast routing with multiple QoS constraints based ongenetic algorithms, in: IEEE Softcom 2002, crovatia, 8–11 October,2002.
[2] L. Chen, Z.Y. Yang, Z.Q. Xu, A degree-delay-constrained geneticalgorithm for multicast routing tree, in: Proc. of 4th Int.Conf onComp. and Inf. Technology (CIT’04), 2004.
[3] R.H. Hwang, W.Y. Do, S.C. Yang, Multicast routing based ongenetic algorithms, Journal of Information Science and Engineering(16) (2000) 885–901.
[4] Y.L. Feng, Z.W.Yu, Y. Pan, Heuristic genetic algorithm for degree-constrained multicast routing problem, in: Proc. of 2004 Int. Conf. onMachne Learning and Cybernetics, Shangai, 26–29 August, 2004.
[5] L.H. Sahasrabuddhe, B. Mukherjee, Multicast routing algorithmsand protocols: a tutorial, IEE Network 14 (2000) 90–102.
[6] M. Gen, K. Ida, J.R. Kim, A spanning tree-based genetic algorithmfor bicriteria topological network design, in: Proceedings of IEEInternational Conference on Evolutionary Computation, 1998, pp.15–20.
[7] J.J. Wu, R.H. Hwang, H.I. Lu, Multicast routing with multiple QoSconstraints in ATM Networks, Information Sciences 124 (2000) 29–57.
[8] X. Cui, Chuang Lin, Yaya Wei, A multiobjective model for QoSmulticast routing based on genetic algorithm, in: proc ofICCNMC’03.
[9] X.X. Cui, M. Li, T.J. Fang, Study of population diversity ofmultiobjective evolutionary algorithm based on immune and entropyprinciples, in: Proc. at the congress on 2001 Evolu. Compu., vol. 2,2001, pp 1316–1321.
[10] W. Zhengying, S. Bingxin, Z. Erdun, Bandwidth–delay-constrainedleast-cost multicast routing based on heuristic genetic algorithm,Computer Communications Journal 24 (2001) 685–692.
[11] F. De Rango, M. Tropea, A.F. Santamaria, S. Marano, A QoSmulticast genetic algorithm in a hybrid HAP/DVB-RCS Satelliteplatform, in: 13th International Conference on Telecommunications,9–12 May, 2006.

F. De Rango et al. / Computer Communications 30 (2007) 3126–3143 3143
[12] ETSI EN 301 790 V 1.3.1 (2003-03): Digital Video Broadcasting(DVB); Interaction channel for Satellite distribution systems.
[13] J. Neal, R. Green, J. Landovskis, Interactive channel for multimediaSatellite networks, IEEE Communications Magazine 39 (2001) 192–198.
[14] F. De Rango, M. Tropea, S. Marano, Integrated services on highaltitude platform: receiver driven smart selection of HAP-Geosatellite wireless access segment and performance evaluation, Inter-national Journal of Wireless Information Networks 13 (2006) 77–94.
[15] T.C. Tozer, D. Grace, High altitude platforms for wireless commu-nications, Electronics and Communications Engineering Journal(2001) 127–137.
[16] S. Karapantazis, F.N. Pavlidou, Broadband communiions via high-altitude platforms: a survey, IEEE Communiion Surveys 7 (1) (2005).
[17] Q. Zhu, M. Parsa, J.J. Garcia-Luna-Aceves, A source-based algo-rithm for delay-constrained minimum-cost multicast, IEEE INFO-COM (1995) 337–385.
[18] A.T. Haghighat, K. Faez, M. Dehghan, A. Mowlaei, Y. Ghahremani,An evolutionary algorithm for multicast routing with multiple QoSconstrains, in: SEAL02, Singapore, November 18–22, 2002, pp. 755–759.
[19] A. Koyama, T. Nishie, J. Arai, L. Barolli, A new quality of servicemulticast routing protocol based on gentic algorithm, in: 11thInternational Conference on Parallel and Distributed Systems, 20–22 July, vol. 1, 2005, pp. 655– 660.
[20] V.P. Kompella, J.C. Pasquale, G.C. Polyzos, Multicast routing formultimedia communication, IEEE/ACM Transactions on Network-ing 1 (3) (1993) 286–292.
[21] N. Skorin-Kapov, M. Kos, The application of steiner trees to delayconstrained multicast routing: a Tabu search approach in: 7thInternational Conference on Telecommunications – ConTel 2003,June 11–13, Zagreb, Croatia.
[22] Chien-Chung Shen, Chaiporn Jaikaeo, Ad hoc multicast routingalgorithm with swarm intelligence, Mobile Networks and Applica-tions 10 (1–2) (2005).
[23] H.Y. Tyan, J.C. Hou, B. Wang, Y.M. Chen, QoS extension to thecore-based tree protocol, in: The 9th ACM International Workshopon Network and Operating Systems Support for Digital Audio andVideo, June 1999.
[24] Seok Joo Koh, Shin-Gak Kang, Enhancement of the {CBT}multicast routing protocol, in: ICPADS 2001, pp. 209–213.
[25] R. Greelaw, R. Petreschi, Computing Prufer codes efficiently inparallel, Discrete Applied Mathematics 102 (3) (2000) 205–222.
[26] P. White, RSVP and integrated services in the internet: a tutorial,IEEE Communications Magazine (1997).
[27] L. Zhang, S. Berson, S. Herzog, S. Jamin, Resource ReSerVationProtocol (RSVP) – Version 1 Functional Specification, in: RFC 2205,September 1997.
[28] A. Molinaro, F. De Rango, S. Marano, M. Tropea, A scalableframework for end-to-end QoS assurance in IP-oriented terrestrial-Geo satellite networks, IEEE Communications Magazine (2005).
[29] H.C. Lin, Z.H. Lin, Selection of candidate cores for core-basedmulticast routing architectures, IEEE International Conference onCommunications (ICC’02) 4 (2002) 2662–2666.
[30] J. Banks, J.S. Carson, B.L. Nelson, D.M. Nicol, Discrete EventSystem Simulatiom, August 2000, Prentice Hall.
Floriano De Rango was born in Cosenza (CS),Italy, in 1976. He received the degree in computerscience engineering in October 2000, and a Ph.D.in electronics and communications engineering inJanuary 2005, both at University of Calabria,Italy. From January 2000 to October 2000 heworked in the Telecom Research LAB C.S.E.L.Tin Turin as visiting scholar student. From March2004 to November 2004 he was visiting researcherat the University of California at Los Angeles(UCLA). Since November 2004 he joined the
D.E.I.S Department, University of Calabria as Research Fellow. Heserved as reviewer of VTC’03, ICC’04, WCNC’05, Globecom’05, WTS’05,
WirelessCOM’05, IEEE Communication Letters, JSAC. His interestsinclude Satellite networks, IP QoS architectures, Adaptive Wireless Net-works and Ad Hoc Networks.Mauro Tropea graduated in computer engineer-ing at the University of Calabria, Italy, in 2003.Since 2003 he has been with the telecommuni-cations research group of D.E.I.S. in the Uni-versity of Calabria. In 2004 he won a regionalscholarship on Satellite and Terrestrial broad-band digital telecommunication systems. SinceNovember 2005 he has a Ph.D. student inElectronics and Communications Engineering atUniversity of Calabria. His research interestsinclude Satellite communication networks, QoS
architectures and interworking wireless and wired networks, mobilitymodel.
Amilcare-Francesco Santamaria graduated incomputer engineering at the University of Cala-bria, Italy, in 2005. Since 2005 he has been withthe telecommunications research group ofD.E.I.S. in the University of Calabria. Hisresearch interests include Satellite communica-tion networks, HAPs networks, Hybrid net-works, Genetic Algorithm, Swarm Intelligence,QoS multicast routing, mobility model.
Salvatore Marano, graduated in electronics engi-
neering at University of Rome in 1973. In 1974 hejoined the Fondazione Ugo Bordoni. Between1976 and 1977 he worked at ITT Laboratoriy inLeeds, United Kngdom. Since 1979 he has beenan associate professor at the University of Cala-bria, Italy. His research interests include perfor-mance evaluation in mobile communicationsystems.



















