Activeintegrated aperture lens antenna - DiVA portal
71
DEGREE PROJECT IN ELECTRICAL ENGINEERING, SECOND CYCLE, 30 CREDITS STOCKHOLM, SWEDEN 2021 Activeintegrated aperture lens antenna Jesús Ventas Muñoz de Lucas KTH ROYAL INSTITUTE OF TECHNOLOGY ELECTRICAL ENGINEERING AND COMPUTER SCIENCE
-
Upload
khangminh22 -
Category
Documents
-
view
5 -
download
0
Transcript of Activeintegrated aperture lens antenna - DiVA portal

DEGREE PROJECT IN ELECTRICAL ENGINEERING,SECOND CYCLE, 30 CREDITSSTOCKHOLM, SWEDEN 2021
Activeintegratedaperture lens antenna
Jesús Ventas Muñoz de Lucas
KTH ROYAL INSTITUTE OF TECHNOLOGYELECTRICAL ENGINEERING AND COMPUTER SCIENCE

Activeintegrated aperture lens antenna
Thesis submitted for the degree of
Master of Science in Electrical Engineering
and
Máster Universitario en Ingeniería de Telecomunicación (MUIT)
AuthorJesús Ventas Muñoz de LucasKTH Royal Institute of Technology
Place for ProjectStockholm, Sweden
ExaminerÓscar QuevedoTeruelDivision of Electromagnetic Engineering (EME)KTH Royal Institute of Technology
Supervisor
Qiao Chen
Division of Electromagnetic Engineering (EME)
KTH Royal Institute of Technology
ii

Abstract
Luneburg lens antennas are gaining popularity in new communication systems,
as increasingly higher frequencies are being used. Broadband fullymetallic
implementations of Luneburg lenses, such as RinehartLuneburg lenses, constitute
simple, cheap and efficient beamformers. However, Luneburg lenses need to have one
amplifier per port, which constrains the maximum power that can be transmitted and
increases the cost of the system.
In this thesis, an investigation to integrate amplifiers within the aperture of Luneburg
lenses is conducted. This concept allows for increasing the maximum transmitted
power with reduced costs.
Special attention has been paid to the design principles. Active integration without
altering the Luneburg lens functionality has been a key task in this work.
A design in Kaband (2640 GHz) has been also exemplified in order to show the
feasibility of the concept. The final design includes transitions to a PCB in the aperture
of the Luneburg lens, where amplifiers can be mounted. Good results were obtained
in terms of directivity and sidelobe levels, and the antenna achieves a scanning range
up to ±64 with reasonable scan losses.
iii

Sammanfattning
Luneburgs linsantenner blir alltmer populära i nya kommunikationssystem eftersom
högre frekvenser används. Det finns bredbandiga Luneburglinser som är helt
metallicof, som RinehartLuneburglinsen, vilket gör den till en enkel, billig och
effektiv strålformare. Luneburglinser måste dock ha en förstärkare per port, vilket
begränsar den maximala sändningseffekten och ökar kostnaden för systemet.
I den här avhandlingen undersöks hur man kan integrera förstärkare, monterade på
ett PCB, i Luneburglinsernas öppning. Detta tillvägagångssätt gör det möjligt att öka
den maximala överförda effekten och minska kostnaderna.
Särskild uppmärksamhet har ägnats åt konstruktionsprinciperna. Att hitta en
geometri som gör det möjligt att integrera förstärkare inuti utan att ändra Luneburg
linsens strålningsegenskaper har varit en viktig uppgift i detta arbete.
En specifik konstruktion för Kabandet (2640 GHz) har också utvecklats för att visa
att konceptet är genomförbart. Den slutliga utformningen omfattar övergångar till
ett kretskort i Luneburglinsens öppning, där förstärkare kan monteras. Resultaten
visar på rimliga värden för riktverkan och sidolobnivåer, och antennen har ett
avläsningsområde på upp till ±64.
iv

Resumen
Las lentes de Luneburg se están haciendo cada vez más populares en los nuevos
sistemas de comunicaciones, debido al uso de frecuencias cada vez más altas. Existen
implementaciones totalmente metálicas y de banda ancha de las lentes de Luneburg,
como las lentes de RinehartLuneburg, lo que las convierte en conformadores de haz
simples, baratos y eficientes. Sin embargo, las lentes de Luneburg necesitan tener un
amplificador en cada uno de sus puertos, lo que limita lamáxima potencia que se puede
transmitir e incrementa el coste del sistema.
En este trabajo de fin de Máster se lleva a cabo una investigación que busca la
integración de amplificadores, montados en una PCB, dentro de la apertura de las
lentes de Luneburg. Este enfoque permite transmitir potencias mayores y además
reduce costes.
Se ha puesto especial atención en los principios de diseño. Encontrar una geometría
que permite integrar amplificadores dentro sin alterar las características de radiación
de la lente de Luneburg ha sido uno de los puntos clave de este trabajo.
También se ha desarrollado un diseño específico en banda Ka (2640 GHz) para
mostrar la viabilidad de la idea. El diseño final incluye transiciones a un PCB en
la apertura de la lente, donde se pueden incluir los amplificadores. Los resultados
muestran valores razonables de directividad y lóbulos secundarios, y la antena permite
un rango de escaneo de hasta ±64.
v

Acknowledgements
This work ends up a beautiful life stage. I will never forget my university years and the
great people I have met here.
First, Iwould like to thankmyparents, whichhave always supportedmeandhavemade
the person I am today. AndAlba, for beingwithme in the good and badmoments.
I would like to say thank you to my supervisor Qiao, for all the guidance, help, advice
and knowledge provided to me throughout these months at KTH. Also to my examiner
Óscar Quevedo, not only for givingme this opportunity but also for the good treatment
and support duringmy stay in Sweden. And, of course, to all my colleagues and friends
from the Master student room in the lab. I have spent really good moments with all
you and it would not have been the same without you. Last, but not least, to all my
friends.
vi

Acronyms
CPW Coplanar Waveguide
GEO Geostationary Earth Orbit
IDFT Inverse Discrete Fourier Transform
ITU International Telecommunication Union
LEO Low Earth Orbit
LNA Low Noise Amplifier
MMIC Monolithic Microwave Integrated Circuits
PA Power Amplifier
PEC Perfect Electric Conductor
PCB Printed Circuit Board
PPW Parallel Plate Waveguide
SNR Signal to Noise Ratio
SLL Side Lobe Levels
SMT Surface Mount Technology
TEM Transverse Electromagnetic
vii

Contents
1 Introduction 11.1 Background . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Luneburg lens and State of the Art . . . . . . . . . . . . . . . . . . . . . 3
1.3 Motivation and goals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.4 Scope of the project . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.5 Outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2 Design Principles and Theoretical Background 72.1 Multilayer structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.2 Circular Array Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.2.1 Basic Array Antenna Theory . . . . . . . . . . . . . . . . . . . . 12
2.2.2 Model description . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.2.3 Model validation . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.2.4 Aperture discretization analysis . . . . . . . . . . . . . . . . . . 23
2.3 Ridge Rectangular Waveguide . . . . . . . . . . . . . . . . . . . . . . . 24
2.4 Amplifier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3 Designs and Results 303.1 Transition design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.2 Full multilayer structure . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.2.1 Multilayer structure without transition . . . . . . . . . . . . . . . 38
3.2.2 Multilayer structure with transition . . . . . . . . . . . . . . . . . 43
3.2.3 Multilayer structure with transition and 9 ports . . . . . . . . . . 45
4 Conclusions and Future Work 50
References 52
viii

CONTENTS
A Analysis of Social, Economic, Environmental and EthicalImplications 56A.1 Social Implications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56A.2 Economic implications . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57A.3 Enviromental implications . . . . . . . . . . . . . . . . . . . . . . . . . . 57A.4 Ethical implications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
B Cost and price of the project 59
ix

Chapter 1
Introduction
1.1 Background
Emerging wireless communication systems are demanding higher data rates, and
hence larger bandwidth, to enable new use cases. This has motivated companies and
academia to increase the frequency, moving up to the millimeter wave band, where
more bandwidth can be used. Moreover, the size of the components is reduced as the
frequency increase, allowing more compact systems and easier integration.
The fifthgeneration (5G) of mobile communication systems is one important example
of such emerging communication systems. 5G is aimed at achieving up to 20 Gbps
peak speed in the downlink and latencies not higher than 1 ms for some use cases. One
of the main usage scenarios of 5G reported by international telecommunication union
(ITU) [1] is devoted to covering high demands of data in highpopulated and high
mobility situations. The previous capacity and speed requirement can be achieved
at high frequencies, such as the millimeter wave band, as higher bandwidths can be
used. However, the use of higher frequencies implies also higher freespace losses, so
using directive antennas is a good option in these systems. They are characterized for
having a narrow beam, allowing the system to focus the power in a given direction.
Additionally, scanning capability is needed when using directive antennas in order
to achieve a wide coverage. Furthermore, having scanning capability allows to use
beamforming and nulling techniques to reduce interference between users, which is
an important challenge in scenarios with high density of users.
Mega constellations of satellites are also emerging nowadays. The geostationary earth
1

CHAPTER 1. INTRODUCTION
orbit (GEO) satellites have been widely used since they allow high coverage and have a
fixed relative position, so global coverage can be easily achieved with them. However,
GEO satellite communications have to deal with high propagation delay and high
propagation losses due to the high altitude of geostationary orbit [2]. Therefore, low
earth orbit (LEO) satellites have become a good alternative to overcome the drawbacks
of classical GEO satellites. LEO orbits have altitudes between 500 km and 2000 km, so
path losses and propagation delay are noticeably reduced. However, as LEO satellites
are close to the Earth surface, theymove with a high relative velocity. If high data rates
are desired, as in these emerging mega constellations, then steerable antennas with
directive beams have to be used.
The use of directive antennas with scanning capability is then a key point in the
communication systems of these emerging scenarios. Luneburg lens antennas have
become a good choice for achieving high directivity while having good scanning
capability, without high scan losses. This type of antenna was not widely used in the
past because they were bulky at low frequencies, but their popularity have increased
nowadays with these emerging applications at higher frequencies. Unlike phased
arrays, Luneburg lens antennas avoid using complex feeding networks and phase
shifters. Moreover, fullymetallic implementations of Luneburg lens antennas [3–5]
can achievewide band and low antenna losses due to the absence of dielectricmaterials
in the antenna. Several feeding ports are typically included in Luneburg lens antennas
to achieve the desired angular coverage.
In typical communication systems, a power amplifier (PA) is included to increase the
output power in the transmitter and a low noise amplifier (LNA) is placed in the
receiver in order to amplify the received signal without decreasing significantly the
signal to noise ratio (SNR). The output power provided by a single amplifier is limited
by the size and by the supply voltage [6]. Nevertheless, high output powers are required
in these next generation communication systems, so in order to overcome this power
limitation, spatial power combining is becoming a research topic. With the power
combining approach, the signal can be amplified in a parallel manner giving rise to
a higher overall power[7, 8]. Smaller and less powerful amplifiers are used in spatial
power combiningnetworks, so the final cost is reduced. Furthermore, the use of several
amplifiers in a spatial combining network increase the robustness and reliability of the
system. In a single amplifier architecture, the whole system is down if the amplifier
breaks, while the system could continue working if one amplifier from the combining
2

CHAPTER 1. INTRODUCTION
network is faulted.
1.2 Luneburg lens and State of the Art
Luneburg lens antennas were first introduced in 1944 by Rudolf K. Luneburg. A
Luneburg lens is a spherically symmetric gradientindex lens characterized by a
varying refractive index with the radius according to Eq. 1.1. If the lens is placed in the
air, there are no reflections at the boundary of the Luneburg lens, since the refractive
index is 1 in the surface.
n(r) =
…2−
( r
R
)2(1.1)
The feeder of the antenna is ideally a point source placed in the surface, and due to the
varying refractive index, a collimated beam is achieved in the diametrically opposite
side of the lens. In other words, a spherical wave from the feeder is turned into a plane
wave after going through the lens. The spherical symmetry of the Luneburg lens allows
for placing several feeders along the surface, each one producing a directive beam in a
different direction. The sketch in Figure 1.1 shows a Luneburg lens with two feeders, A
and B, giving rise to collimated beams towards different directions in the other side of
the lens.
Figure 1.1: Luneburg lens sketch
Luneburg lens antennas are made of dielectric materials and have a spherical shape
in the classical implementation. According to Equation 1.1, the refractive index have a
continuous variation, but in a real design they can be only made with a finite number
of dielectricmaterials, and hence a stepped variation in the refractive index. One of the
first designs using steppedindex implementations was performed in 1958 [9], where
hemispherical shells with the appropriate refractive index were stacked to design the
Luneburg lens. However, these designs with dielectric shells have a complicated
3

CHAPTER 1. INTRODUCTION
manufacturing process afterwards, and alternative implementations of Luneburg lens
antennas have been proposed in recent years.
One way of getting the gradient index variation of Equation 1.1 is employing
metasurfaces. The variation of some parameters in the metasurface modifies its
dispersion diagram and hence does the refractive index. One example of this approach
is shown in [10], where a 2D Luneburg lens is designed using a mushroomtype unit
cell in a printed circuit board (PCB). The size of the unit cell is kept, and the refractive
index is adjusted by modifying the size of the printed patch. The size of the patches
arranged in the final design varies with the radius of the lens, so that the refractive
index varies with the radius according to Equation 1.1. The design carried out in [11]
is another example of this approach using printed transmission lines onto a copper
cladded substrate with a relative permittivity close to 1. Two different transmission
lines are proposed, and the geometrical parameters of both are varied in order to
achieve the desired refractive index at each point on the final lens design. However,
the previous implementations of Luneburg lens antennas are lossy due to the use
of dielectric materials. The same idea using fullymetallic unit cells has been also
proposed, so that there are no dielectric losses. In [12], the unitcell consists of two
metallic plates including a pin inside a square hole with glidesymmetry, avoiding the
use of lossy dielectrics. The refractive index is adjusted changing the pin height.
The previous approaches achieve good performance in a wide band, being the
complexity their main drawback. Another alternative implementation of Luneburg
lens antennas are geodesic lenses, that were first introduced by R. F. Rinehart [13].
Geodesic lenses are 3D fullymetallic implementations of the Luneburg lens in a
homogeneous medium with a parallel plate waveguide (PPW). The height z of the
metallic lens changeswith the radial coordinate ρ according to the differential equation
1.2, which is proved tomimic the behaviour of the refractive index variation of Equation
1.1.
∂z
∂ρ= −
Ã(1
2+
1
2√
1− ρ2
)2
− 1 (1.2)
Several implementations of geodesic lenses exist in the literature. One example
appears in [5], where a fullymetallic geodesic Luneburg lens is designed working at
60 GHz. Geodesic lenses employs outofplane deformation in the third dimension,
4

CHAPTER 1. INTRODUCTION
so they sometimes bulkier than other implementations, which can be problematic
in spaceconstrained systems. For this reason, there is research focused in folding
geodesic lenses, so that the overall height can be reduced [3, 4]. Furthermore, compact
designs of geodesic lenses are a research topic. For example, the design of a compact
half geodesic Luneburg lens is proposed in [14] using a ground plane to halve the size
of the lens.
1.3 Motivation and goals
Luneburg lens antennas have become a very interesting option to include in new
wireless communication systems, specially geodesic lenses. They can achieve directive
beams in a wide band while providing scanning capability without significant scan
losses, and also avoiding the use of dielectric materials, as explained in the previous
sections. In order to achieve scanning capability, several ports are typically used in
Luneburg lens antennas.
Having several ports would imply to have one amplifier per port when including the
antenna in a real communication system. Moreover, these systems typically handle
high powers, meaning that powerful, and hence expensive, amplifiers are needed in
each port. Furthermore, the maximum output power of the amplifier is limited by the
size of the device.
Therefore, the main goal of this project is to study the possibility of integrating a set of
amplifiers within the aperture of a fullymetallic Luneburg lens. If the amplifiers are
included in the aperture instead of in the ports, there are several advantages:
• The robustness and reliability of the system increase, because all the
amplifiers are shared by all the ports, so that, if one amplifier is down, the system
is still able to work.
• The overall cost of the amplifiers is reduced, since less powerful amplifiers
are needed. Even ifmore amplifiers are needed in the aperture, the cost of a single
smaller amplifier is highly reduced and the final cost is still reduced.
• The system can handle higher output power in the transmitting link, because
the power is spatially distributed along the aperture.
• Thedynamic range is improved in the receiving link. The overall phase noise
5

CHAPTER 1. INTRODUCTION
is reduced as the number of amplifiers increase, because the noise fluctuations
add incoherently [15].
• A further control on the aperture illumination, so that optimal side lobe levels
(SLL) is possible by setting the gain of the different amplifiers, depending on their
position in the aperture.
1.4 Scope of the project
This project is aimed to be a proofofconcept about the integration of several
amplifiers in the aperture of a fullymetallic geodesic Luneburg lens antenna. The
first requirement of the project is to find a proper system architecture that allows the
integration of the amplifiers within the aperture.
In this project, monolithic microwave integrated circuits (MMIC) technology
amplifiers have been considered, because they are easier to integrate in a fullymetallic
structure. The amplifiers will be placed on a PCB, so transitions from the fullymetallic
structure to the PCB have to be designed.
Finally, the performance of the full structure including the PCB inside has to be
assessed.
The Luneburg lens is going to work in the Kaband (2640 GHz), and the bandwidth
has been imposed to be higher than a 20%.
1.5 Outline
In Chapter 2 all the theoretical background needed for this project, as well as some
design considerations are explained. The reasons and limitations affecting the main
features of the antenna designed in this project are stated here.
Chapter 3 covers the different designs included in this work. The transition from a
fullymetallic waveguide to a PCBwhere the amplifiers are integrated is explained here.
Finally, the full structure design, where the amplifiers could be finally integrated, is
also stated here.
In Chapter 4 the main conclusions extracted from this thesis and the future work are
presented.
6

Chapter 2
Design Principles and TheoreticalBackground
This chapter is aimed at explaining the design process, including all the considerations,
assumptions, methodologies and models used along this work. The basic theory
to properly understand this work is also presented in this chapter. However,
basic knowledge about electromagnetic theory, waveguides and the main antenna
parameters is assumed.
The antenna proposed in this work has several stacked layers, in order to enable the
integration of amplifiers inside without distorting significantly the radiation pattern.
Here, the reasons behind the use of amultilayer design are presented. A circular array
model is also described in this section, because it has been very useful to analyze the
antenna and decide its final architecture. Ridge rectangular waveguides have been
used to divide the aperture in different subapertures where amplifiers are placed, so
the reasons for using them as well as the main features of this type of waveguide are
stated here. Finally, a comparison among several amplifiers available in the market is
presented, in order to assess the different options and choose the most suitable.
As mentioned before, the design considered in this work will be working in Kaband
(2640 GHz) and the bandwidth has to be of at least 20%.
7

CHAPTER 2. DESIGN PRINCIPLES AND THEORETICAL BACKGROUND
2.1 Multilayer structure
As mentioned before, the main goal of this project is to study the feasibility of
integrating several amplifiers along the aperture of a fullymetallic geodesic Luneburg
lens.
If several amplifiers are going to be included in the aperture of the antenna, one
important consideration to keep in mind is the need of discretizing (or sampling) the
aperture. That is, the aperture has to be divided in different parts in order to place
one amplifier in each of them, in such a way that one transmission line is opened
in each of them. The geometry of these transmission lines defines the maximum
number of amplifiers that can be placed in the aperture. Isolation between the different
discretized lines must be ensured, since undesired coupling would affect the final
performance of the antenna.
A Luneburg lens antenna produces a phase distribution along the aperture that gets
a planar phase front in the diametrically opposite direction to the feeding point.
According to Huygens principle, the circular aperture of the Luneburg lens can be
thought as an infinite set of point sources with a relative phase distribution that
produces a planewave. Discretizing (or sampling) the aperture consists of taking only a
fraction of those point sources, keeping the relative phase distribution generated by the
Luneburg lens. After sampling the aperture, the fields of each sampled subaperture
are confined inside a transmission line, where they are amplified. Figure 2.1 shows
a sketch illustrating this idea of aperture discretization. The Luneburg lens antenna
is inside a metallicshielded structure, fed by a rectangular waveguide and with the
aperture discretized into several transmission lines.
LuneburgLens
Feed
PEC
TransmissionLines
Figure 2.1: Aperture discretization
When the continuous aperture is turned into a discretized aperture, consisting of a
8

CHAPTER 2. DESIGN PRINCIPLES AND THEORETICAL BACKGROUND
finite number of transmission lines, it can be modelled like a circularring array. This
circular array model will allow to know the maximum distance that can be assumed
between discretized elements and other parameters. It will be explained with more
detail in the next section.
The idea of sampling the aperture is close to the structure proposed in [16], where
a Luneburg lens is used as a beamforming network for a circular array of Vivaldi
antennas. In [16], the aperture of the Luneburg lens is sampled using coaxial cables
to feed the array elements with the proper phase distribution got by the Luneburg
lens.
After the fields in the aperture are sampled and confined inside transmission lines,
amplifiers are included inside each line boosting the signal. The amplifiers considered
in this project are MMIC with a surface mount technology (SMT) packaging, so that
they will be mounted on a PCB in order to ease the integration process. However, the
considered transmission lines that discretizing the aperture are metallic structures, so
transitions from fullymetallic waveguides to PCB technology have to be designed. The
design of the transition will be discussed with more detail in the next chapter.
When the signal is amplified, the fieldsmust be combined again and be radiated to free
space. The phase distribution got by the Luneburg lens in the aperture has to be kept
in order to get a directive beam in the desired direction. However, according to Figure
2.1, the radial coordinate of the discretized aperture is modified after amplifying. If
the aperture is thought as a circular ring array, the effect of including this transmission
lines is similar to displacing each element in the radial direction. All the transmission
lines have the same length, so the phase distribution of all the elements is kept.
Nevertheless, the distance between elements, and hence their relative position, is
different than before sampling. Modifying the geometrical arrangement of the sampled
points gives rise to aberrations, even if the phase distribution between elements is
kept.
As the relative position between the sampled elements is modified, the fields can not
be radiated immediately after amplifying the signal. One solution for correcting these
aberrations is to include phase shifters, but this approach would make the Luneburg
lens useless, since it has been already included to get a proper phase distribution.
Furthermore, this would make the structure more complex and expensive. Another
option could be adjusting the distances of the different transmission lines, so that
9

CHAPTER 2. DESIGN PRINCIPLES AND THEORETICAL BACKGROUND
a directive beam is achieved after amplifying. However, this adjustment could be
only done for one beam, loosing the scanning capability, which is one of the main
requirements for this antenna.
The proposed solution to overcome these displacement of the elements after
discretizing the aperture is to use a multilayer structure. Stacking the different layers
ensures all the elements are placed in the initial radial position when the radiation to
free space is produced.
There are different ways of integrating the amplifiers in the antenna while ensuring
the elements are in the right position for radiation. Three approaches to proceed
are proposed in Figure 2.2, where different side views of the Luneburg lens with one
example transmission line are sketched.
Luneburg Lens
(a)
Luneburg Lens
(b)
Luneburg Lens
(c)
Figure 2.2: Different approaches for multilayer structure. (a) Amplifiers in theperpendicular plane, (b) Amplifiers in the intermediate layer (c) Amplifiers in thebottom layer
The geometry proposed in Figure 2.2 (a) (left) places the amplifier in a perpendicular
plane with respect to the lens. This approach is the most similar to the one in [16]
and becomes a very compact solution. However, the proposed design works at higher
frequencies, so that the wavelength is reduced, and hence does the distance between
elements in order to keep the same electrical distance. This implementation would
require perpendicular transitions to a folded PCB or a set of PCBs, resulting in a
very expensive structure. In Figure 2.2 (b) (center), the aperture is discretized, then
includes a transition to a second layer where the amplifier is included and finally a
transition to a third layer where radiation to free space occurs. This approach is also
a compact design if the first bending is placed close to the Luneburg lens. However,
due to the distance limitation between sampled elements, the transmission lines are
very close each other in the transition from the second to the third layer, and there is
not enough room to arrange them together. This issue highly complicates the design
of a proper transition from the second to the third layer. Finally, the arrangement
shown in Figure 2.2 (c) (right) proposes to place the amplifiers in the bottom layer,
then use the intermediate layer only to come back to the initial radial position, and
10

CHAPTER 2. DESIGN PRINCIPLES AND THEORETICAL BACKGROUND
finally, the radiation occurs in the third layer. As the transmission lines are arranged
radially (Figure 2.1), the distance between consecutive transmission lines is larger after
amplifying, so there is muchmore room to place the transition to the second layer. For
the same reason, there is also more room to design the transition from the second to
the third layer. The main drawback of this geometry is to be bulkier than the previous
ones. However, in the final design an extra space is in any case needed to place the
entire feeding network of the Luneburg lens, so this increase in size is affordable.
Due to the limitations mentioned previously in options (a) and (b) from Figure 2.2, the
option (c) is going to be implemented in this project.
PCBLuneburg Lens Bottom Layer
Interm. Layer
Top Layer
Figure 2.3: Multilayer structure Side view
Bottom Layer
LuneburgLens
Feed
PEC
TransmissionLines
PCB
Intermediate Layer
TransmissionLines
Top Layer
FlaredAperture
Figure 2.4: Multi layer structure Top View (Bottom layer in the left, intermediatelayer in the center and top layer in the right)
The bottom (or first) layer contains the feeding ports of the antenna, a Luneburg lens
inside a perfect electric conductor (PEC) and the transmission lines along the aperture
utilized to discretize it. The transitions to the PCB are inside each transmission line, in
the bottom layer. After going through the amplifiers, the transmission lines are then
bent to the intermediate (or second) layer. This intermediate layer is only intended to
11

CHAPTER 2. DESIGN PRINCIPLES AND THEORETICAL BACKGROUND
return to the initial radial position. Finally, the waves travelling inside the different
transmission lines are combined into a flared aperture, and radiated to free space.
The side view of the multilayer structure, including one transmission line, is shown in
Figure 2.3 and the top views of the different layers are shown in Figure 2.4.
2.2 Circular Array Model
2.2.1 Basic Array Antenna Theory
An array antenna is formed by a set of radiating elements arranged in an arbitrary
shape. The radiation pattern of the array antenna is determined by the contribution of
all the fields radiated by the individual elements. Thus, the relative position between
the geometry of the array, as well as the individual radiation pattern of the different
elements are the key features affecting the radiation pattern of the array. In a general
case, the elementary radiators can be different and can be arranged in any shape, but
in this work all the elementary radiators will be the same, so more attention will be
paid to this case.
This type of antennas allow to synthesize radiation patterns with a desired directivity,
SLL and shape. Array synthesis is possible choosing a convenient geometry, individual
elements and also the right feeding amplitude and phase distribution for each of
them.
Due to the linearity of Maxwell equations, the contribution of the different radiators
in far field can be added to obtain the final radiation pattern, as presented in Equation
2.1. The approximations in Equation 2.1 are valid in farfield, since |−→r | ≫ |−→ri |. Thismathematical model assumes low coupling between elements, so that all the radiators
keep their original radiation patterns as if they were isolated.
−→E (r, θ, ϕ) =
N−1∑i=0
−→E i (r, θ, ϕ) =
N−1∑i=0
−→E i0 (θ, ϕ) e
−jk|−→r −−→ri |
|−→r −−→ri |≈
≈N−1∑i=0
−→E i0 (θ, ϕ) e
−jkrejk−→ri ·r
r=
e−jkr
r
N∑i=1
−→E i0 (θ, ϕ) e
jk−→ri ·r
(2.1)
The arrangement of the elements has been considered arbitrary so far, but in this work
12

CHAPTER 2. DESIGN PRINCIPLES AND THEORETICAL BACKGROUND
only the circular or ring arraywill be used. For this reason, two typical array geometries
will be presented: linear arrays and circular arrays. Linear arrays are also considered
here because they are the most basic model and they help to understand better any
other geometry.
An array antenna is considered to be linear if all the elements are arranged in a straight
line. Moreover, the analysis presented here will consider all the radiators to be the
same, with the same radiation pattern, and evenly spaced. The typical geometry of this
type of 1D linear array is shown in Figure 2.5, where it has been considered to be in
the z axis in order to simplify the mathematical formulation.
y
z
θ
−→r
d
Figure 2.5: Linear array
Equation 2.1 can be particularized to the linear array case of Figure 2.5, so that−→ri = idz
and the elementary pattern term can be taken out of the sum, because it is the same for
all the elements. The only difference between the electric field of each element comes
from the feed, so the electric field of the ith element is−→Ei0(θ, ϕ) =
−→E0(θ, ϕ)·ejk
−→ri r ·Aiejαi ,
being−→E0 the radiated field of the element in (0, 0). This element in the origin is taken
as reference, soAi and αi are the feeding amplitude and phase, respectively, of the ith
element relative to it. For this particular case of linear arrays, the radiated field is given
by Equation 2.2.
It can be seen that the contribution of the elementary pattern and the array feeding
together with the geometrical parameters can be separated in the equation. On one
hand, the elementary pattern term contains not only the single element pattern, but
also its polarization vector. On the other hand, the term known as array factor,
AF (θ, ϕ) depends on the geometry and the feeding of the radiators. If the radiators
13

CHAPTER 2. DESIGN PRINCIPLES AND THEORETICAL BACKGROUND
have a non directive elementary pattern, then the array pattern is mainly dependant
on the array factor.
−→E (r, θ, ϕ) =
−→E0
e−jkr
r
N−1∑i=0
Aieαiejk
−→ri ·r =−→E0
e−jkr
r
N−1∑i=0
Aiej(ikdcosθ+αi) =
−→E0
e−jkr
r· AF (θ, ϕ)
(2.2)
The array factor is particularly interesting when the array excitation has a progressive
phase, αi = iα. In this case, the array factor can be calculated with the inverse
discrete fourier transform (IDFT) of the amplitude distribution coefficients as shown
in Equation 2.3. The maximum of the array factor will occur, according to Equation
2.3, whenΨ = 2πn, n ∈ Z. Ψ can take only the set of values corresponding to θ ∈ [0, π],
which have physical meaning, as they represent a value of the angular coordinate θ. As
Ψ = kdcosθ + α, then Ψ ∈ [−kd+ α, kd+ α].
AF (θ, ϕ) =N−1∑i=0
Aieji(kdcosθ+α) =
N−1∑i=0
AiejiΨ = IDFTAi (2.3)
If there is more than one n ∈ Z fulfilling Ψ = 2πn with Ψ ∈ [−kd+ α, kd+ α], then the
array factor will have more than one maximum. This typically happens if the distance
between elements is so large, and it is usually undesired, because this means splitting
most of power among more than one direction. These undesired lobes in another
directions are known as grating lobes and they can be avoided placing the elements
close enough depending on α. Safe values of d for not having grating lobes are those
fulfilling d < λ/2. However, there is also a lower bound in the minimum d that can be
used, imposed by the physical size of the elementary antennas.
It can be seen from the previous explanations that the beam can be steered modifying
the phase distribution of the array elements. On the other hand, the amplitude can
control the SLL. In the case of uniform and progressive phase, the array factor
shape and the amplitude distribution are related with a IDFT, as obtained in Equation
2.3.
There are more techniques to synthesize arrays with a given shape or a given value of
SLL and directivity, likeWoodyardLawson synthesis, Schelkunoffmethod andDolph
Chebyshev method. This type of techniques are not relevant for this work and will not
14

CHAPTER 2. DESIGN PRINCIPLES AND THEORETICAL BACKGROUND
be described here, but more details can be found in classical books like [17].
Another type of array antennas are circular arrays. For these specific arrays, the
elements are arranged inside a circle. In this work only circular arrays having elements
in one ring will be considered and they will be referred indistinctly as circular or ring
arrays. An example of this type of circular arrays is shown in Figure 2.6.
x
y
z
−→r
−→riRn∆ϕ′
Figure 2.6: Circular Array
Equation 2.1 can be also written for the specific case of circular arrays. The considered
array has N elements, arranged in a ring with radius R in the XY plane, and the
elements will be considered to be evenly spaced, with an angular distance of ∆ϕ′
between adjacent elements. Thus, −→ri = Rcos (i∆ϕ′) x + Rsin (i∆ϕ′) y, and −→ri · r =
Rcos (ϕ− i∆ϕ′) sinθ. The farfield of the array is particularized to the ringarray case
in Equation 2.4.
−→E (r, θ, ϕ) =
e−jkr
r
N−1∑i=0
−→Ei (θ, ϕ) e
jkRcos(ϕ−i∆ϕ′)sinθ =
=e−jkr
r
N−1∑i=0
Ai
−→E0 (θ, ϕ− i∆ϕ′) ejkRcos(ϕ−i∆ϕ′)sinθ
(2.4)
The circular array model needed in this thesis will be done in the horizontal XY plane,
so Equation 2.4 can be written only for θ = π/2 to remove the dependance on θ. This
15

CHAPTER 2. DESIGN PRINCIPLES AND THEORETICAL BACKGROUND
particularization gives rise to Equation 2.5.
−→E (r, π/2, ϕ) =
−→E (r, ϕ) =
e−jkr
r
N−1∑i=0
Ai
−→E0 (ϕ− i∆ϕ′) ejkRcos(ϕ−i∆ϕ′) (2.5)
Circular arrays can be analyzed with the phase mode theory [18], taking advantage
of the periodicity in the excitation function and the single element far field. The
starting point of this theory is to assume an array of infinite elements, that is, a
continuous source. The excitation function in the discrete case is given by a set of
coefficients A0, A1, . . . , AN−1 for the different radiators, so in the continuous caseit becomes a function A (ϕ′), which is indeed 2π periodic. The periodicity allows
A (ϕ′) to be expanded in a Fourier series (Equation 2.6) with the coefficients obtained
from Equation 2.7. The single element pattern (Equation 2.8), E0 (α) (excluding the
polarization vector), can be also expanded in a Fourier series as it is also periodic, being
α = ϕ− i∆ϕ′ for the element located in the position ϕ′.
A (ϕ′) =∞∑
m=−∞
Cmejmϕ′
(2.6)
Cm =1
2π
∫ π
−π
A (ϕ′) e−jmϕ′dϕ′ (2.7)
E0 (α) =∞∑
p=−∞
Dpejmα (2.8)
In a continuous case (infinite elements), Equation 2.5 can be replaced by Equation
2.9.
−→E (r, ϕ) =
e−jkr
r
1
2π
∫ π
−π
A (ϕ′)−→E0 (ϕ− ϕ′) ejkRcos(ϕ−ϕ′)dϕ′ (2.9)
When Equations 2.6 and 2.8 are inserted into Equation 2.9, the total radiated far field
can be found. Moreover, the total radiated field is also a 2π periodic function and can
be expanded in a Fourier series. The total radiated field is given by Equation 2.10,
and according to this, each mode Em in the sum can be related to its corresponding
excitation mode Cm according to Equation 2.11. Here, Dp are the coefficients of the
elementary pattern expansion, j is the imaginary unit and Jm−p(kR) is the first kind
16

CHAPTER 2. DESIGN PRINCIPLES AND THEORETICAL BACKGROUND
andm− p order Bessel function.
−→E (r, ϕ) =
e−jkr
r
∞∑m=−∞
Cmejmϕ′
∞∑p=−∞
Dp
2π
∫ π
−π
ej(m−p)(ϕ′−ϕ)ejkRcos(ϕ′−ϕ)dϕ′ =
=e−jkr
r
∞∑m=−∞
[Cm
∞∑p=−∞
Dpjm−pJm−p(kR)
]ejmϕ′
=e−jkr
r
∞∑m=−∞
Emejmϕ′
(2.10)
Em = Cm
∞∑p=−∞
Dpjm−pJm−p(kR) (2.11)
The elementary radiation pattern of typical array elements have the highest mode
amplitudes in the low order modes, so a truncation in the sum in p considering only
somemodes provides approximationswith very small errors inmost cases. That sum in
p coming from the single radiation pattern, which also depends on the Bessel functions,
can be seen as an scaling factor between the excitation coefficients and the radiated
field coefficients.
This analysis canbeused to synthesize the desired total radiationpattern, by getting the
excitation coefficients needed to get the required pattern. The total radiation pattern
can be expressed as a sum of phase modes (Equation 2.10), which in a real case can be
truncated considering onlyM modes, withM fixed to limit the error to an affordable
value. Finally, the excitation coefficients Cm are obtained with equation 2.11. When
choosing the number of modesM to synthesise the total pattern, it must be taken into
account that when m increases, the sum∞∑
p=−∞
Dpjm−pJm−p(kR) goes typically to 0, so
higher modes does not have an important effect on the pattern.
In a practical case, the circular array has a finite number of elements, N . If there is
only a finite number of elements (evenly spaced), the excitation source is multiplied
by a sum of Dirac’s delta functionN−1∑i=0
δ(ϕ′ − i2π/N). Applying Fourier transform
properties, it comes that the effect in the excitation source spectrum is a periodic shift
of it with period N/2π. A similar behaviour occurs in the total radiation pattern, but
the coefficients are scaled by a factor which depends on the sum of Bessel functions
(Equation 2.11). The Bessel functions here act as ”window” functions to reduce
the effect of those shifted versions of the spectrum, avoiding possible grating lobes.
17

CHAPTER 2. DESIGN PRINCIPLES AND THEORETICAL BACKGROUND
Therefore, in circular arrays grating lobes may also appear if the distance between
elements is not small enough. In this case, the Bessel functions depend on R, so the
bigger R is, the more number of elements N are needed to avoid grating lobes.
The previous analysis is interesting to understand the origin of grating lobes in ring
arrays and how to avoid them. However, the phase mode theory method is not very
practical in some situations because there are toomany parameters to adjust, specially
in the case of non isotropic elementary patterns. Another method called Aperture
Projection Method [19] is faster and hence more appropriate to analyze the case
presented here. Thismethod starts fromaplanar aperture, with an already synthesised
pattern, and the amplitude distribution is projected on the circular array contour, as
sketched in Figure 2.7. The phase distribution can be calculated to have a directive
beam in the desired direction.
Linear Aperture
IluminationCurved aperture
projection
Figure 2.7: Aperture Projection Method
2.2.2 Model description
As introduced in the previous sections, when the aperture is sampled and the waves
are confined inside the transmission lines, the lens starts to behave like a circular
array. Therefore, the effect of discretizing the aperture can be analysed with circular
array theory. Based on that, the model presented here can be used to predict how the
radiation pattern is affected when the aperture is discretized. It also allows to study
themaximum allowable distance between elements and the influence of modifying the
geometry of the array. The model is a quick way for knowing the factors that would
limit the performance of the antenna, before doing any full wave simulation.
Figure 2.8 shows an sketch of this circular array model. The Luneburg lens will have
several feeding ports, and the aperture is discretized into a finite number of points,
which will be the radiating elements of the array.
Several key parameters are needed to build the model:
• The aperture illumination, in order to determine the amplitude distribution of
18

CHAPTER 2. DESIGN PRINCIPLES AND THEORETICAL BACKGROUND
FeedingPoints
RadiatingPoints
LuneburgLens
Figure 2.8: Circular arraymodel in a Luneburg lenswith a discretized aperture Sketch
the circular array. This is determined by the feeding ports of the Luneburg
lens. The feeding ports of the proposed antenna are going to be rectangular
waveguides.
• The phase distribution in the aperture, which provides the relative phases of the
array elements. This can be obtained using a raytracing model, knowing that an
ideal Luneburg lens produces a planar phase front in the diametrically opposite
direction.
• The elementary patterns, which are given by the single radiators, in this case the
transmission lines that sample the aperture. Ridged rectangular waveguides will
be used for this purpose. The choice of this specific type of waveguide will be
motivated later.
The feeding ports in the final antenna are going to be rectangular waveguides, in
particular the one shown in Figure 2.9a. In order to simplify themodel and avoid using
full wave simulation, the radiation pattern can be approximated by a function with a
similar shape. Typical approximations for the main beam of rectangular waveguides
or horn patterns are the cosine function cospϕ in linear units, where p is fixed to fit the
beamwidth, and the parabolic model, given by ϕ(dB)/ϕ3dB.
These two models have been validated with a fullwave simulation of the waveguide
shown in Figure 2.9a, using PEC boundary conditions in the top and the bottom of
the waveguide. The exponent p of the cosine function has been adjusted to the 3dB
beamwidth of the feeding waveguide. In Figure 2.9b a comparison between both
models is shown. Although both are a good approximation, the parabolic model
is better for angles above 30. Thus, the only information required for getting the
aperture illumination is the 3dB beamwidth of the feeder, which can be calculated
or estimated. However, the cosine model is very fast to adjust when the specific
beamwidth value is not known.
The phase distribution in the aperture can be estimated with a simplified raytracing
model, starting from the planar phase front produced by a Luneburg lens, in an ideal
19

CHAPTER 2. DESIGN PRINCIPLES AND THEORETICAL BACKGROUND
(a) Feeding waveguide. Dimensions: a =7.2 mm, b = 1.75 mm.
−90 −60 −30 0 30 60 90−20
−15
−10
−5
0
ϕ()Norm.Radiation
Pattern(dB)
cospϕ (ϕ/ϕ3dB)2 Full Wave Simulation
(b) Radiation patterns
Figure 2.9: Feeding model validation
case.
The phase distribution in the aperture is calculated following the model shown in
Figure 2.10. Starting from a planar phase front and taking the element in (R, 0) (polar
coordinates) as a reference, the phase difference needed of a element positioned at
an arbitrary angle α can be calculated with Equation 2.12. The path difference to get
the planar phase front is obtained using basic geometry in Figure 2.10, and the phase
difference is calculated multiplying the path difference by the wave number.
∆φ = R · (1− cosα) · 2πλ
= k ·R · (1− cosα) (2.12)
Finally, the elementary patterns of the array elements can be approximated using the
same method stated previously to approximate the feeding radiation patterns, since
the array elements will be double ridge rectangular waveguides. Then, a cosqϕ model
will be used, where p = q, because the feeder and the elements have in general different
patterns.
20

CHAPTER 2. DESIGN PRINCIPLES AND THEORETICAL BACKGROUND
∆φ
α
R
x
y
Phase Fronts
Figure 2.10: Phase distribution raytracing model
2.2.3 Model validation
The model has been validated using a Luneburg lens with a continuous aperture, as
shown in Figure 2.11. The model was validated by simulating a continuous aperture
with a full wave simulator (CSTMicrowave Studio) and the obtained radiation pattern
was compared with the result provided by the model. The continuous aperture has
been modelled with an array of a large number of elements, precisely 700. The feeder
of the structure in Figure 2.11 is a rectangular waveguide, and the parameters of the
model (p,q and ϕ3dB) have been adjusted according to the feeder beamwidth. Themodel
parameters generally change with frequency.
The elementary patterns have been assumed to be a cosqϕ with q = 0.5 in order to have
radiators with poor directivty that properly imitates the continuous aperture.
(a) (b)
Figure 2.11: Structure for circular array model validation
Figure 2.12 shows the comparison between the radiation pattern obtained with the
model and with full wave simulation for different frequencies. The model shows good
21

CHAPTER 2. DESIGN PRINCIPLES AND THEORETICAL BACKGROUND
fitting with full wave simulation for different frequencies.
−90−60−30 0 30 60 90−40
−30
−20
−10
0
ϕ()
Norm.Radiation
Pattern(dB)
cospϕ (ϕ/ϕ3dB)2 Full Wave Simulation
(a) f = 30 GHz
−90−60−30 0 30 60 90−40
−30
−20
−10
0
ϕ()
Norm.Radiation
Pattern(dB)
(b) f = 34 GHz
−90−60−30 0 30 60 90−40
−30
−20
−10
0
ϕ()
Norm.Radiation
Pattern(dB)
(c) f = 38 GHz
Figure 2.12: Array model validation with continuous aperture
This model can then be used to analyze the effect of discretizing the aperture, with a
proper adjustment of the parameters. It could be also utilized to assess the degradation
in terms of radiation pattern when one or several amplifiers break.
22

CHAPTER 2. DESIGN PRINCIPLES AND THEORETICAL BACKGROUND
2.2.4 Aperture discretization analysis
One of the main goals of the circular array model is to analyze the impact of increasing
or decreasing the distance between sampled elements in the radiation pattern. This is
a key parameter in the design, since it will determine the type of transmission line that
should be used to discretize the aperture. Another important parameter to be analyzed
is the effect of having an offset in the radial position of the elements.
Figure 2.13 shows a sketch with the general geometry of the discretized aperture. The
distance between elements is represented by d, and the offset with respect to the ideal
radius is represented by o.
o
dx
y
Luneburg
Lens
RadiatingPoints
Offset
RadiatingPoints
Ideal
Figure 2.13: Aperture discretization with offset radiators
According to the array theory presented before, if the distance between elements
is increased too much, grating lobes appear in undesired directions. The antenna
proposed in this work has to be directive in one direction, so having grating lobes
is an important inconvenient, not only because it decreases the directivity, but also
because these grating lobeswillmean transmitting high amounts of power to undesired
directions. The effect of increasing the distance between elements have been analyzed
in Figure 2.14a, where it is clear that for a distance d = λ between elements an
important grating lobe is produced. Thus, the distance between elements must be
kept as close as possible to d = λ/2 in order to avoid grating lobes. This limitation
will affect the choice of a proper transmission line, which will be discussed in the next
section.
23

CHAPTER 2. DESIGN PRINCIPLES AND THEORETICAL BACKGROUND
Another important distortion in the radiation pattern can arise from placing the
radiators in a different radial position compared to the sampling points, as mentioned
before. The main impact on the radiation pattern is the loss of directivity due to the
phase aberrations introduced when moving the elements. This is shown in Figure
2.14b. Offsets below λ/2 are affordable, whereas offsets above λ completely distort
the radiation pattern.
−90−60−30 0 30 60 90−40
−30
−20
−10
0
ϕ()
Norm.Radiation
Pattern(dB)
d/λ = 0.5 d/λ = 0.75 d/λ = 1
(a) Different element distance (o = 0)
−90−60−30 0 30 60 90−40
−30
−20
−10
0
ϕ()
Norm.Radiation
Pattern(dB)
o/λ = 0 o/λ = 1 o/λ = 2
o/λ = 0.5 o/λ = 1.5
(b) Different offset (d = λ/2)
Figure 2.14: Normalized radiation patterns for different offset and element distances
2.3 Ridge Rectangular Waveguide
The choice of the transmission line used to discretize is of great relevance in this
project, since this will determine the final system architecture, the transitions needed
to insert the PCB within the antenna and the transitions to the different layers of the
antenna.
The transmission line must be isolated from the neighbouring lines, avoiding
undesired couplings and phase aberrations. In an ideal case, the phase and amplitude
of the sampled fields should be kept after sampling the aperture. The amplitude
distribution will depend mainly on the transition from the continuous aperture to the
transmission lines. If the amplitude distribution were distorted, the main undesired
effect would be an increase in the SLL. Furthermore, this distortion on the amplitude
distribution could be corrected if amplifiers with gain control are used, adjusting the
24

CHAPTER 2. DESIGN PRINCIPLES AND THEORETICAL BACKGROUND
gain of each amplifier. However, if the phase is not kept, the radiation pattern may be
completely distorted if the distortion is high enough. Thus, the transmission lines that
discretize the aperture must keep the phase distribution produced by the Luneburg
lens.
Another important limitation in the choice of transmission lines is the distance
between elements, which can not be much bigger than λ/2, in order to avoid grating
lobes, as explained in the previous section.
It is preferred that the transmission lines are closed to ensure that there is no
coupling between lines. However, closed waveguides does not allow the propagation
of transverse electromagnetic (TEM) modes, and hence there is only propagation
above a cutoff frequency, which depends on the geometry and dimensions of the
waveguide. The cutoff frequencies of the classical rectangular and circular waveguides
are summarized in Table 2.1.
WaveguideFundamentalMode
Cutofffrequency
Rectangular
a
b TE10
c
2a√εr
Circular
a TE11
p′11c
2πa√εr
Table 2.1: Cutoff frequency for classical waveguides
According to Table 2.1 the cutoff frequency of a holey rectangular waveguide is fc =
c/2a, which corresponds to a cutoff wavelength of λc = 2a, and hence the minimum
width to be above cutoff is amin = λ/2 for a given frequency. However, the distance
between transmission lines should not be much higher than λ/2 in order to avoid
grating lobes, as mentioned before. The rectangular waveguide is very dispersive
when working at frequencies close to the cutoff. Circular waveguides have a similar
problem. A holey circular waveguide has a cutoff wavelength of λc = 2πa/p′11, where
p′11 is the first zero of the derivative of the firstorder and first kind Bessel function,
J ′1(x). Therefore, the minimum radius is amin = λ · p′11/2π ≈ 0.293λ and the minimum
distance between lines is close to 0.6λ. For this reason, the traditional rectangular and
circular waveguides are definitely not a good option to discretize the aperture.
A waveguide with lower cutoff frequency for the same width must be found, in order
25

CHAPTER 2. DESIGN PRINCIPLES AND THEORETICAL BACKGROUND
to decrease the distance between elements. The cutoff frequency of a rectangular
waveguide can be reduced by adding ridges, giving rise to a ridge rectangular
waveguide. This kind of waveguide can be a single ridge rectangular waveguide (Figure
2.15a) or double ridge rectangular waveguide (Figure 2.15b). Both types reduce the
cutoff frequency for the same width, because the fields are well confined, between
the ridges in the double ridge cases, and between the ridge and the bottom in the
single ridge case. This approach has been followed in [20, 21] to design a fullymetallic
Rotman lens minimising the distance between lines.
br
r1
a
b
(a) Single
br
r1
a
b
(b) Double
Figure 2.15: Ridge rectangular waveguides
In this project, only the doubleridge rectangular waveguide will be included, mainly
because it allows to have a shorter transition to PCB. This transition will be presented
in the next chapter.
Figure 2.16 shows a comparison between the dispersion diagrams, including only the
fundamental mode, in both a rectangular waveguide and a doubleridge rectangular
waveguide of the same width, a = 4mm. It is clear that the cutoff frequency is lower
when adding the ridges in thewaveguide. Ridge rectangularwaveguides have a broader
monomode bandwidth and they are also less dispersive than rectangular waveguides
(considering the same dimensions), which is another important advantage. The cut
off frequency is reduced as the distance between ridges, br, is decreased. The closer
the ridges are, the lower the cutoff frequency is. However, as these waveguides will be
manufactured in two pieces fastened with screws, having a very small gap between
ridges might be problematic when assembling the structure. Thus, the distance
between ridges has been chosen to have a cutoff frequency below the lowest frequency
in the band, with a margin, to avoid working extremely close to the cutoff.
The dimensions of the doubleridged rectangular waveguide of Figure 2.16 can fulfill
the requirements of this project, because there is propagation in the entire Ka
band, while keeping affordable distances between adjacent lines. Thus, the double
26

CHAPTER 2. DESIGN PRINCIPLES AND THEORETICAL BACKGROUND
π/4 π/2 3π/4 π0
20
40
60
80
100
120
k (rad/mm)
f(GHz)
ab
br
r1
Figure 2.16: Dispersion diagram of rectangular waveguide (red) and double ridgerectangular waveguide (blue). a = 4mm, b = 1.75mm, r1 = 2mm, br = 0.35mm
ridge rectangular waveguides used to discretize the aperture will have the following
parameters:
• a = 4mm
• b = 1.75mm
• r1 = 2mm
• br = 0.35mm
2.4 Amplifier
The amplifiers will be mounted on a PCB and properly integrated in the different
transmission lines. The PCB will have several layers. The amplifier will be mounted
on the top layer, and the necessary DC circuit used to feed the amplifier will be placed
on the bottom layer.
The transmission lines are double ridge rectangular waveguides, as introduced in
27

CHAPTER 2. DESIGN PRINCIPLES AND THEORETICAL BACKGROUND
the previous section, and the main limitation when integrating the amplifiers is the
available room, due to the small width of these waveguides. This project is intended to
be a proof of concept, so amplifiers with high gain are not needed here.
According to the aforementioned reasons, simplicity and small size are the most
important features to account for when choosing the amplifiers. Table 2.2 shows a
comparison among different amplifiers available in the market and working in Ka
band, considering different criteria to compare them. The most important parameter
is the size due to the space limitation, as mentioned before, but also the DC bias should
be as simple as possible for the same reason. There are some models that require two
different voltages for feeding the amplifier, which would make more complex the PCB
design in the future and hence should be avoided. On the other hand, the gain is not
a relevant parameter, but it has been included in the table to get an insight about the
typical gain of MMIC amplifiers in Kaband.
Model Manufacturer Frequency Band (GHz) Size (mm2) DC Bias Gain Control Amplifier Price
AMM6702SM Marki Microwave 20 50 4 x 4 mm 2 Voltages 23 dB NO 1400 SEKCMD299K4 CustomMMIC 18 40 4 x 4 mm 1 Voltage 16 dB NO 480 SEKHMC1040 ADI 24 – 43.5 3 x 3 mm 1 Voltage 23 dB NO 450 SEKHMC263 ADI 24 36 4 x 4 mm 1 Voltage 20 dB NO 450 SEKMAAL011111 MACOM 22 38 3 x 3 mm 1 Voltage 19 dB NO 400 SEKMAAAL011129 MACOM 18 – 31.5 2 x 2 mm 1 Voltage 23 dB YES 350 SEKTSS44+ Mini Circuits 22 – 43.5 3 x 3 mm 1 Voltage 17 dB YES 300 SEKXL1010QT MACOM 20 38 3 x 3 mm 1 Voltage 17 dB NO 400 SEK
Table 2.2: Comparison between different amplifier models available in the market.
The amplifiers with a size bigger than 3mm× 3mm have been discarded, because the
width of the ridgerectangular waveguide is 4mm, and also those with a complicated
DC bias circuit. Another relevant parameter is the bandwidth of the amplifier, which
has to be as wide as possible, of at least a 20% subband within Kaband. The best
tradeoff among all the options in Table 2.2 is the TSS44+ fromMini Circuits, because
it is a 3mm× 3mm amplifier, with simple bias. Furthermore, the TSS44+ covers the
whole Kaband, is cheap and includes a control voltage for switching off the amplifier,
which can help to control the SLL of the antenna. This amplifier will be taken as
reference for all the designs performed along the project. The S parameters of the
TSS44+ are shown in Figure 2.17. The S11 parameter, shown in Figure 2.17a, can be
considered as an upper bound of the overall S11 of the transitions to PCB that will be
designed. In other words, the S11 of the designed transitions has to be good enough so
that the totalS11 is limited by the amplifier andnot by the transition performance.
28

CHAPTER 2. DESIGN PRINCIPLES AND THEORETICAL BACKGROUND
26 28 30 32 34 36 38 40−40
−30
−20
−10
0
f (GHz)
|S11|(dB)
(a) S11
26 28 30 32 34 36 38 40−60
−50
−40
−30
−20
−10
0
f (GHz)
|S12|(dB)
(b) S12
26 28 30 32 34 36 38 400
5
10
15
20
f (GHz)
|S21|(dB)
(c) S21
26 28 30 32 34 36 38 40−40
−30
−20
−10
0
f (GHz)
|S22|(dB)
(d) S22
Figure 2.17: Amplifier TSS44+ S parameters
29

Chapter 3
Designs and Results
In this chapter, the designs accomplished in this thesis and the simulated results are
presented.
First, a transition from double ridge rectangular waveguide to PCB is designed, to
enable the integration of the amplifiers in the discretized aperture of the antenna. The
transition has been designed in different steps, in order to ensure a 50Ωmatching with
the amplifier, while keeping a good performance in terms of reflection coefficient. The
behaviour of these transitions is critical for the entire system, and they should not limit
the overall system performance.
Finally, the full antenna structure, including an ideal Luneburg lens with a discretized
aperture, is presented. As a first approach, the full structure has only one feeding
port and does not contain any transition, in order to validate the concept of aperture
discretization. Finally, the aforementioned transitions to PCB are included, to assess
their impact in the main antenna parameters, and also several ports added to assess
the scanning capability of the structure.
3.1 Transition design
The aperture of the antenna is discretized into double ridge rectangular waveguides
with the dimensions stated in Figure 2.16. As explained in previous chapters, the
amplifierswill bemounted on aPCB, so that a transition from the fullymetallic double
ridged rectangular waveguide to a printed transmission line, such as microstrip or
coplanar waveguide (CPW), has to be designed.
30

CHAPTER 3. DESIGNS AND RESULTS
There are different approaches to design transitions from fullymetallic waveguides to
printed technology. One way is to use slot coupling to go from a metallic waveguide to
a printed transmission line placed in another layer. The design of [22], for example,
proposes a transition from ridge gap waveguide to microstrip line using a stepped
transformer in the ridge waveguide and a slot in the microstrip ground plane. Designs
from rectangular waveguide to microstrip using slot coupling have been also proposed
[23]. However, this type of designs are not suitable for the proposed structure
for several reasons. If slot coupling were used, microstriptomicrostrip transitions
similar to [24–26] would be required in the intermediate layer if a slot coupling
transition is also going to be used from the intermediate to the top layer. What is more,
the second slot coupling transition might have not enough room, as the transmission
lines are closer in the transition to the top layer. Another type of transitions from
waveguide to printed lines are perpendicular transitions including probes to allow
the coupling. For example, [27, 28] propose printed patches with different shapes
to produce coupling into the microstrip line. This type of transition would require
either plenty PCB or a flexible PCB, which are expensive solutions. Coaxial probes are
another way, like the design in [29], but they are very prone to human errors during
the assembly of the full structure, apart from having similar drawbacks to those of the
aforementioned slot coupling. Another design approaches include inline transitions,
where Chebyshev transformers are a good solution for matching impedances. In
[30], a stepped transition frommicrostrip to doubleridge rectangular waveguide with
chamfered ridges is designed.
The transition proposed in this project will be an inline transition from double ridge
rectangular waveguide to microstrip. The configuration is backtoback, as it begins
and ends with the doubleridge rectangular waveguide and includes the microstrip
line between. The amplifier has an input impedance of 50Ω in both input and output
pads, so the line where the amplifier is placed should have 50Ω in order to ensure good
matching. The transition design is carried out in different steps, in order to get a wide
band transition with the required 50Ωmatching in the amplifier ports.
The first approach in the transition design is shown in Figure 3.1. The substrate
utilized for this transition is Rogers R04350Bwith a dielectric constant εr = 3.66 and a
thickness hsubs = 0.168 mm, following the suggested mounting provided in the TSS
44+ amplifier manufacturer website. The transition includes a stepped impedance
transformer, that goes from the initial distance between ridges, br = 0.35 mm, to
31

CHAPTER 3. DESIGNS AND RESULTS
the substrate thickness hsubs = 0.168 mm. Most of the electric field in the double
ridge rectangular waveguide is well confined between the ridges. For this reason, the
line impedance can be approximated as a parallel plate waveguide of width r1 and
distance between plates br, being the line impedance approximated by Z0 ≈ η0brW
,
where η0 = 120π is the impedance of free space. The length of each step in the stepped
transition is close toλ/4, so this value has been taken as an starting point for f = 30GHz.
The structurewas then optimized by adjusting the parameters to fulfill the design goals.
As can be seen in Figure 3.1b and 3.1c, there is a tip in the metallic part ensuring the
electric contact between the metallic waveguide and the signal trace in the microstrip
line. The values of hcav and Lmicr were selected to avoid unwanted resonances inside
the cavity.
(a) 3D view
(b) Side cut (c) Top cut
Figure 3.1: Doubleridge rectangular waveguide to microstrip transition. a = 4 mm,L0 = 2mm,L1 = 2.76mm,L2 = 2.42mm,L3 = 0.52mm,Lmicr = 21.04mm, hcav = 1.51mm, hsubs = 0.168 mm, h0 = 0.35 mm, h1 = 0.29 mm, h2 = 0.21 mm, g = 1 mm,Wmicr = 0.9mm, r1 = 2mm.
The S parameters of this transition in Kaband are shown in Figure 3.3. The S11 is
below 20 dB over the entire band, and the S21 is greater than 0.6 dB. The dielectric
losses are the main contribution to the losses in this transition. Figure 3.2 shows the
magnitude in dB(V/m) of the electric field in the transition, within the dielectric and
between the ridges (Figure 3.2a) and a side cut view throughout the symmetry axis of
the geometry (Figure 3.2b). It can be seen that the electric field is well confined in the
microstrip line, without significant unwanted modes in the cavity.
The width of the previous microstrip line is 0.9mm and the substrate height is
32

CHAPTER 3. DESIGNS AND RESULTS
(a) Top View
(b) Side View
Figure 3.2: Doubleridged rectangular waveguide to microstrip transition Electricfield magnitude
26 28 30 32 34 36 38 40−40
−30
−20
−10
0
f (GHz)
|S11|(dB)
(a) S11
26 28 30 32 34 36 38 40−3
−2.5
−2
−1.5
−1
−0.5
0
f (GHz)
|S21|(dB)
(b) S21
Figure 3.3: Double ridge rectangular waveguide tomicrostrip transition S parameters
0.168mm. According to the approximated formulas for calculating the line impedance
of a microstrip line stated in [31], the impedance of this microstrip line is 26.8Ω.
Therefore, if the amplifier were placed in this microstrip line, there would be a
significant mismatch because the transmission line has not 50Ω. Another drawback of
this implementation is its size. The microstrip line length should be reduced as much
as possible in order to minimize dielectric losses, while ensuring that unwantedmodes
in the cavity are prevented. The minimum size of the transition is limited by the room
needed to mount the amplifier and also by the size of a 50Ω matching network that
will be added in the microstrip line.
The width of the signal trace in the microstrip line has to be reduced to increase the
33

CHAPTER 3. DESIGNS AND RESULTS
characteristic impedance up to 50Ω. One manner to achieve a 50Ω line is to design a
transition in the PCB from the initialmicrostrip line included in the previous transition
(Figure 3.1) to a 50Ω line. The proposedmatching circuit in the PCB is shown in Figure
3.4. A backtoback stepped transformer is proposed, where both the width of the
signal trace and the gap between the signal trace and the side grounds are optimized.
The line in the center part of Figure 3.4a, which has the dimensions recommended
by the amplifier manufacturer, has a characteristic impedance of 50Ω. The total
length of the PCB have been reduced from 21.04mm to 15.06mm, having enough
room to place the impedance transformer and the amplifier without using needless
space. The side grounds included in this design are necessary to place the lines that
will feed the amplifiers. In order to avoid unwanted modes between the bottom and
side grounds, some vias will surround the signal trace, as shown in Figure 3.4b. Thus,
the predominant mode is the quasiTEM mode of a microstrip line. Another mode
can be excited between the signal trace and the side grounds, typical in CPW, but this
mode is not predominant in this case, since the gap between the signal trace and the
side ground is not small enough. The S parameters of this network are shown in Figure
3.6. The S11 is below 15 dB in the whole band, and below 20 dB between 27GHz and
39GHz, which is better than the S11 of the amplifier and hence does not deteriorate
too much the overall performance.
(a) 3D view (b) Vias (continuous model)
Figure 3.4: Microstrip line impedance matching to 50Ω. L0 = 2 mm, L1 = 1.28 mm,L2 = 1.31mm, L3 = 1.17mm, L4 = 1.77mm,W0 = 0.9mm,W1 = 0.56mm,W2 = 0.34mm,W3 = 0.28mm, g0 = 1mm, g1 = 1.07mm, g2 = 0.54mm, g3 = 0.41mm, g4 = 0.2mm, dvias = 0.1mm
The vias shown in Figure 3.4b are a continuous wall of PEC, but in a real case these
vias are small cylinders connecting the side and the bottom grounds. The real vias
are discrete, but when placed in a row they act similarly to a continuous PEC. This
continuous model is a good approximation of the real case and it greatly facilitates the
optimization process. When the optimum design was obtained, then the continuous
vias were replaced by discrete ones and the result was compared with the continuous
34

CHAPTER 3. DESIGNS AND RESULTS
vias model. The S11 of both cases are compared in Figure 3.5.
26 28 30 32 34 36 38 40−40
−30
−20
−10
0
f (GHz)
|S11|(dB)
Figure 3.5: Discrete (blue) and Continuous (red) vias comparison
26 28 30 32 34 36 38 40−40
−30
−20
−10
0
f (GHz)
|S11|(dB)
(a) S11
26 28 30 32 34 36 38 40−3
−2.5
−2
−1.5
−1
−0.5
0
f (GHz)
|S21|(dB)
(b) S21
Figure 3.6: Microstrip line impedance matching S parameters
The PCB from Figure 3.4 can replace the microstrip line included in the initial
transition, giving rise to a doubleridge rectangular waveguide to microstrip transition
matched to 50Ω. The new transition matched to 50Ω is shown in Figure 3.7. The
overall transition length has been reduced compared to the initial case, as the PCB
35

CHAPTER 3. DESIGNS AND RESULTS
is now shorter. The dimensions of the stepped transformer in the double ridge
rectangular waveguide have been slightly adjusted to have a good matching, since the
microstrip line has been modified and hence the input impedance.
The electric field magnitude in the transition matched to 50Ω is presented in Figure
3.8. In this case, some radiation occur in the center part of the PCB as seen in Figure
3.8b, which produces unwanted resonances. This radiation occurring in the center
part is 10 dB below the maximum, so the effect does not significantly affect the overall
transition performance.
The S parameters of this transition are shown in Figure 3.9. The S11 is below 20 dB
between 27GHz and 39GHz and below 15 dB in the whole Kaband, and hence it will
not significantly worsen the overall system performance. The magnitude of S11 of the
amplifier shown in Figure 2.17a around 26GHz is smaller than the S11 of the transition
from Figure 3.9a, meaning that the transition limits the system around that frequency
However, the lower limit of the band is not very relevant for this project, because the
Luneburg lens antenna will have a small aperture and hence low directivity in that
case.
(a) 3D view
(b) Side cut (c) Top cut
Figure 3.7: Doubleridge rectangular waveguide to microstrip transition. L0 = 2mm,L1 = 2.62 mm, L2 = 2.55 mm, L3 = 0.53 mm, Lmicr = 15.06 mm, hcav = 1.51 mm,hsubs = 0.168mm, h0 = 0.35mm, h1 = 0.29mm, h2 = 0.2mm
When the transition design is concluded, the next step is to include the amplifier
inside the transition to evaluate the overall performance of the transition with the
amplifier mounted on the PCB. A physical model of the amplifier is not available,
so the amplifier itself cannot be included in the full wave simulator. However, the
36

CHAPTER 3. DESIGNS AND RESULTS
(a) Top View
(b) Side View
Figure 3.8: Doubleridged rectangular waveguide to microstrip transition matched to50Ω Electric field magnitude
26 28 30 32 34 36 38 40−40
−30
−20
−10
0
f (GHz)
|S11|(dB)
(a) S11
26 28 30 32 34 36 38 40−3
−2.5
−2
−1.5
−1
−0.5
0
f (GHz)
|S21|(dB)
(b) S21
Figure 3.9: Microstrip line impedance matching S parameters
S parameters are provided by the manufacturer (Figure 2.17), so a networkbased
analysis can be performed.
The transition from Figure 3.7 is a 2port network, but it can be slightly modified to
add 2 extra ports where the amplifier can be connected. The modified structure with
the two extra ports is shown in Figure 3.10a. The right and left sides of the transition
have been isolated, so that the amplifier can be mounted in the center part of the
transition.
Since the Sparameters of the amplifier are known, the CSTschematics can be used
to get the Sparameters of the 2port network obtained when connecting the amplifier
37

CHAPTER 3. DESIGNS AND RESULTS
between Port 2 and Port 3 in the structure of Figure 3.10a. The network scheme is
shown in Figure 3.10b, where the input of the amplifier is connected to Port 2 and the
output to Port 3.
The S parameters of the transition with the amplifier connected are shown in Figure
3.11. This result can be compared with the S parameters of the amplifier itself (Figure
2.17) to assess the reflections and losses produced by the transition. The magnitude
of S11 and S22 are very similar in both cases, being the only important degradation
between 26 and 27GHz, as expected from the previous results. The S21 and S12 are
very close with and without the transition in the whole band. Therefore, according
to these simulation results, the transition barely affects the amplifier gain, reflection
coefficient and reverse isolation.
(a) Transition 4Port networkdefinition (Topview)
(b) Amplifier and transition networksconfiguration in CST Schematics
Figure 3.10: Transition and amplifier TSS44+ connection
3.2 Full multilayer structure
In this section the multilayer structure simulations and results are presented. The
geometry sketched in Chapter 2 (Figures 2.3 and 2.4) has been built inCSTMicrowave
Studio and simulated. It was first simulated without the PCB, in order to study the
effect of the aperture discretization in the radiation pattern. The transition of Figure
3.7 is included afterwards in the bottom layer, to assess the degradation it introduces
in terms of radiation pattern and reflection coefficient. Finally, several ports are added
to evaluate the scanning capability of the full antenna.
3.2.1 Multilayer structure without transition
The first simulation model includes the metallic multilayer structure with an ideal
Luneburg lens inside. The antenna model is fed with a single waveguide port. A 3D
view of the structure can be seen in Figure 3.12, where the Luneburg lens is blue in
38

CHAPTER 3. DESIGNS AND RESULTS
26 28 30 32 34 36 38 40−40
−30
−20
−10
0
f (GHz)
|S11|(dB)
(a) S11
26 28 30 32 34 36 38 40−60
−50
−40
−30
−20
−10
0
f (GHz)
|S12|(dB)
(b) S12
26 28 30 32 34 36 38 400
5
10
15
20
f (GHz)
|S21|(dB)
(c) S21
26 28 30 32 34 36 38 40−40
−30
−20
−10
0
f (GHz)
|S22|(dB)
(d) S22
Figure 3.11: TSS44+ integrated in the 4port transition (solid line) andTSS44withouttransition (dashed line) S parameters
color. The aperture of the Luneburg lens is discretized and the waves are confined
within double ridge rectangular waveguides with dimensions a = 4mm, b = 1.75mm,
r1 = 2mm and br = 0.35mm according to Figure 2.15b definition.
(a) 3D View (b) 3D View (interior)
Figure 3.12: Multilayer structure without transition CST model 3D view
39

CHAPTER 3. DESIGNS AND RESULTS
In order to better understand the geometry, several cuts are presented to see the
interior and the different layers. Figure 3.13 shows a side cut made through the
symmetry axis. The feeding port is on the left part and the Luneburg lens is positioned
in the center. Then, the side cut of the central double ridge rectangular waveguide
can be seen. Linear tapers are used as smooth transitions from the lens aperture to
the ridge waveguides. A linear taper is zoomed in 3.14. In the intermediate layer, the
confined waves return to the initial position, and finally the ridge waveguides radiate
to free space in the top layer through a rotated linear taper. It can be seen that the
lines have a small offset o from the ideal position. The reason of this offset is to
avoid overlapping between lines. This offset has been set as small as possible, so that
aberrations are minimized.
Figure 3.13: Multilayer structure without transition CSTmodel Side view. Ltaper = 5mm, L1 = 35.6mm, h1 = 4.75mm, h2 = 7.25mm, o = 1.45mm
Figure 3.14: Linear taper
Figure 3.15 shows the top view of the different layers. The cut has been made with
planes crossing between the waveguides’ ridges.
• The bottom layer (Figure 3.15a) includes the feeding port, which is a rectangular
waveguide of 7.2 x 1.75mmxmm. The ideal Luneburg lens is centered inside, and
it has a radius of 25mm, that is, a diameter of 5λ at 30 GHz. The aperture of the
lens is discretized into 17 lines, separated 5mm each other (λ/2 at 30 GHz). This
40

CHAPTER 3. DESIGNS AND RESULTS
value has been chosen as a tradeoff between cutoff frequency of the waveguide
and grating lobes.
• The intermediate layer (Figure 3.15b) includes the 17 waveguides coming back to
the initial radial position. It is not possible to go further back because the lines
would overlap.
• The top layer (Figure 3.15c) includes another set of linear tapers to smooth the
transitions towards the flare.
(a) Bottom layer
(b) Intermediate layer (c) Top layer
Figure 3.15: Multilayer structurewithout transitionCSTmodel Top view. RLuneburg =25mm,W = 5mm,Wfeed = 7.2mm.
Figure 3.16 shows the reflection coefficient in the feeding port of the antenna. The
magnitude of this S11 remains below −10 dB for all the frequencies between 30 and
40 GHz and below −7 dB from 26 to 40 GHz. This value of reflection coefficient
is affordable in this structure, since the signal is amplified afterwards. However, it
could be further optimized by replacing the linear tapers by other solutions. These
optimizations have not been carried out in this work, because the main goal of the
project is to proof the idea of amplifier integration. This idea can be extended to
41

CHAPTER 3. DESIGNS AND RESULTS
future designs with given specifications, where the optimization process of the specific
structure becomes a key task.
26 28 30 32 34 36 38 40−40
−30
−20
−10
0
f (GHz)
|S11|(dB)
Figure 3.16: Multilayer structure without transitions to PCB inside S11
The directivities achieved for different frequencies are shown in Figure 3.17. The
maximum directivity and the SLL depend on the frequency. This variation arises
from the dispersive nature of the different parts of the structure (tapers, bends,
transitions...). However, the obtained values are consistent with the expected values
for a 50mm diameter Luneburg lens. The SLL are −15.4 dB at 30 GHz, −13.3 dB at 34
GHZ, −12.5 dB at 38 GHz and −15.9 dB at 40 GHz. For the remaining band the SLL
has similar values, varying from −17 dB in the best case and −11.5 dB in the worst.
The directivity is 14.22 dBi at 30 GHz, 14.65 dBi at 34 GHz, 14.09 dBi at 38 GHz and
13.61 dBi at 40 GHz. These values are consistent with the aperture size. The directivity
increases typically with frequency, because the electrical size of the aperture also does.
However, when the frequency increases, the electrical distance between elements,W/λ
and the electrical offset o/λ also does. When the frequency is incremented, the pattern
is slightly distorted, and hence the directivity decreases somewhat in the upper part of
the band (3840GHz). The electrical distance has been kept within reasonable values in
the entire band, and it will be seen later that the variations with frequency in directivity
and radiation pattern arise mainly from the dispersive transitions and tapers included
in this design and the internal reflections.
42

CHAPTER 3. DESIGNS AND RESULTS
−90−60−30 0 30 60 90−15
−10
−5
0
5
10
15
ϕ()
Directivity(dBi)
(a) f = 30 GHz
−90−60−30 0 30 60 90−15
−10
−5
0
5
10
15
ϕ()
Directivity(dBi)
(b) f = 34 GHz
−90−60−30 0 30 60 90−15
−10
−5
0
5
10
15
ϕ()
Directivity(dBi)
(c) f = 38 GHz
−90−60−30 0 30 60 90−15
−10
−5
0
5
10
15
ϕ()
Directivity(dBi)
(d) f = 40 GHz
Figure 3.17: Multilayer structure without transitions to PCB Radiation patterns
3.2.2 Multilayer structure with transition
The previousmultilayer structure was able to keep the directive beamproduced by the
Luneburg lens. Therefore, the use of this multilayer structure allows to discretize the
aperture while maintaining the advantages of the Luneburg lens. The next step is to
include the previously presented transitions from double ridge rectangular waveguide
to PCB where the amplifiers will be mounted. These transitions will be included in the
bottom layer, but they could also be included in the intermediate layerwithout affecting
the final performance. The side view of the multilayer structure after including the
transitions is shown in Figure 3.18. The top view of the different layers are shown
in Figure 3.19, being the transitions to PCB included in the bottom layer the only
43

CHAPTER 3. DESIGNS AND RESULTS
difference with respect to the previous case.
Figure 3.18: Multilayer structure with transitions to PCB CST model Side view.Ltaper = 5 mm, L1 = 4 mm, Ltr = 25.4, L2 = 6.2 mm, mm, h1 = 4.75 mm, h2 = 7.25mm, o = 1.45mm
(a) Bottom layer (b) Intermediate layer
(c) Top layer
Figure 3.19: Multilayer structure with transitions to PCB CST model Top view
Figure 3.20 shows the reflection coefficient S11 magnitude in the feeding port. It is
compared with the reflection coefficient obtained before introducing the transition,
44

CHAPTER 3. DESIGNS AND RESULTS
and it can be seen that the transitions do not worsen the performance. This result was
expected, since the S11 of the transition isolated is much smaller than the S11 of the full
structure without the transition.
26 28 30 32 34 36 38 40−40
−30
−20
−10
0
f (GHz)
|S11|(dB)
Figure 3.20: Multilayer structure with (solid line) and without (dashed line)transitions to PCB inside S11
The radiation patterns are shown in Figure 3.21 with solid line and they are compared
to the previous case, which are in dashed line. The shape of the main beam is similar,
but the side lobe levels modifies slightly with respect to the case without transitions.
The reason of this variation is the inclusion of the transitions, which slightly modify
the frequency response of the lines. The aforementioned variations in SLL reduce the
directivity. The directivity for this case is 14.25 dBi at 30 GHz, 13.49 dBi at 34 GHz,
13.61 dBi at 38 GHz and 13.03 dBi at 40 GHz.
3.2.3 Multilayer structure with transition and 9 ports
The structure designed so far works properly when the transitions to microstrip are
included. In the previous cases, only one port was added in order to assess the aperture
discretization and the performance after including the transitions. However, one of the
main advantages of Luneburg lens antennas is the scanning capability, which provides
high angular coverage sharing the same aperture by all the ports. For this reason, 9
ports in total have been included in the antenna to get scanning capability.
Figure 3.22 shows the top and side views of the multilayer structure after adding 8
extra ports. The ports do not overlap each other, and have been separated 16, so that a
coverage up to 64 canbe obtained. An additional line has been added in each side of the
45

CHAPTER 3. DESIGNS AND RESULTS
−90−60−30 0 30 60 90−15
−10
−5
0
5
10
15
ϕ()
Directivity(dBi)
(a) f = 30 GHz
−90−60−30 0 30 60 90−15
−10
−5
0
5
10
15
ϕ()
Directivity(dBi)
(b) f = 34 GHz
−90−60−30 0 30 60 90−15
−10
−5
0
5
10
15
ϕ()
Directivity(dBi)
(c) f = 38 GHz
−90−60−30 0 30 60 90−15
−10
−5
0
5
10
15
ϕ()
Directivity(dBi)
(d) f = 40 GHz
Figure 3.21: Multilayer structure with PCB (solid line) and without PCB (dashed line) Radiation patterns
aperture in order to minimize the scan losses, so that the aperture has 19 transmission
lines in this case.
The feeding network of this multiport architecture has been slightly modified
compared to the previous structures. In this case, the port is bent and the waveguide
ports feed the structure from the bottom part, as can be seen in Figure 3.22a. Themain
reason of thismodification are some limitations introduced by the full wave simulation
software. CSTMicrowave Studio does not allow to create waveguide ports misaligned
with respect to the axis, and hence all the ports must be in a plane orthogonal to one
of the Cartesian axis. The edges of the bend have been chamfered, as shown in Figure
3.23a. The dimensions have been optimized in order to minimize the S11, ensuring it
46

CHAPTER 3. DESIGNS AND RESULTS
(a) Side view (b) Top view (Bottom Layer)
Figure 3.22: Multilayer structure with 9 ports CST model. α = 16
is much smaller than the S11 of the full antenna. w1 and w2 were optimized and the S11
is below −24 dB in the entire band.
(a) Side view
26 28 30 32 34 36 38 40−40
−30
−20
−10
0
f (GHz)
|S11|(dB)
(b) S11
Figure 3.23: Chamfered bend in feeding ports. w1 = 2mm, w2 = 0.7mm
Having good isolation between ports, as well as affordable reflection coefficients,
are important considerations in the design of the structure. Figure 3.24a shows the
reflection coefficient at each port from Figure 3.22. It can be seen that the reflection
coefficient in all the ports is very similar to the previous caseswith only one port (Figure
3.20), being below−10 dB in nearly all the band, apart from a few peaks which are still
below −7 dB. The coupling from port 1 (in the center) to the other ports is stated in
Figure 3.24b. The coupling is below −10 dB for all the ports in the entire band. The
remaining ports show a similar behaviour. These results state that most of the power
is caught by the lines, and hence, amplified.
47

CHAPTER 3. DESIGNS AND RESULTS
The radiation patterns obtained when feeding from the different ports are shown
in Figure 3.25, where each pattern has been drawn with the same colour than its
corresponding port in Figure 3.22b. It can be seen in Figure 3.25 that a scanning angle
up to 64 can be obtainedwith this structure for all the frequencies. The different beams
are separated 16, which is the angular separation between adjacent ports. The scan
losses in this antenna depend on the frequency, due to the dispersive nature of the
structure. The scan losses at 30 GHz are 0.36 dB. At 34 GHz scan losses are 1.45 dB, at
38 GHz they are 1.12 dB and finally at 40 GHz this value is 0.5 dB. It can be seen that
the worst case has 1.45 dB of scan losses and the best case has 0.36 dB.
Directivity and SLL are different from the previous cases (Figure 3.21), specially in
the upper part of the band. In Figure 3.25, the directivity at 30 GHz is 13.5 dBi, 13.75
dBi at 34 GHz, 14.22 dBi at 38 GHz and 14.85 at 40 GHz. The SLL are below −14 dB
at all frequencies. The reason of these variations is the addition of the new ports in
the structure. Before adding the ports, the power reflected back to the lens was very
likely to couple again into a different waveguide and was, thus, radiated somewhere.
When the ports are added, most of those reflections turn into coupling in the other
ports when arriving there and they are not reflected back. For this reason, the SLL
have been reduced in the central beam, and the directivities have improved.
26 28 30 32 34 36 38 40−40
−30
−20
−10
0
f (GHz)
|S11|(dB)
S11 S22 S33 S44 S55
(a) Reflection coefficients
26 28 30 32 34 36 38 40−40
−30
−20
−10
0
f (GHz)
|Sn1|(dB)
S21 S31 S41 S51
(b) Coupling from Port 1
Figure 3.24: S parameters multilayer structure with 9 ports
48

CHAPTER 3. DESIGNS AND RESULTS
−90−60−30 0 30 60 90−15
−10
−5
0
5
10
15
ϕ()
Directivity(dBi)
(a) f = 30 GHz
−90−60−30 0 30 60 90−15
−10
−5
0
5
10
15
ϕ()
Directivity(dBi)
(b) f = 34 GHz
−90−60−30 0 30 60 90−15
−10
−5
0
5
10
15
ϕ()
Directivity(dBi)
(c) f = 38 GHz
−90−60−30 0 30 60 90−15
−10
−5
0
5
10
15
ϕ()
Directivity(dBi)
(d) f = 40 GHz
Figure 3.25: Multilayer structure with 9 ports Radiation patterns
49

Chapter 4
Conclusions and Future Work
This project has been aimed at enabling the integration of multiple amplifiers inside
the aperture of a fullymetallic Luneburg lens antenna. Placing the amplifiers inside
the aperture instead of having them at the ports not only reduces the overall cost
of the system, but also permits to handle higher transmission powers, increases the
robustness and eases the control in the antenna parameters.
Different approaches for the integration of the amplifiers in the aperture has been
presented in this work. A multilayer architecture with the amplifiers in the bottom
layer was chosen as the best tradeoff after stating advantages and drawbacks of the
different options. The integration of amplifiers is achieved by discretizing the aperture
into a finite number of subapertures. Each subaperture contains a transmission
line where a PCB with an amplifier mounted can be included. The antenna has been
modelled and analyzed as a circular array after sampling the aperture. With thismodel,
the most important design considerations and limitations for the performance of the
Luneburg lens were obtained. The conclusions derived from this model have been key
for obtaining the final architecture of the antenna andmotivates the use of doubleridge
rectangular waveguides in the subapertures. They allow affordable distance between
lines without excessive dispersion, being a good tradeoff.
The aforementioned design considerations and guidelines were, therefore, used to
design a fullmultilayer structure, which demonstrates the feasibility of this technology
to integrate amplifierswithin a fullymetallic Luneburg lens antenna. First, a transition
from double ridge rectangular waveguide to microstrip line, where the amplifiers can
be mounted, was designed with full wave simulation. This transition showed good
50

CHAPTER 4. CONCLUSIONS AND FUTUREWORK
performance in terms of reflection coefficient, with values below −20 dB between 27
and 39 GHz. Finally, a full multilayer structure was designed, having the transitions
and nine feeding ports inside. The final structure shows a S11 below−7 dB in the entire
Kaband between 26 and 40 GHz, and below −10 dB for most of the frequencies apart
froma fewpeaks. The directivity and SLLdepend on the frequency, but they are similar
to those expected from a Luneburg lens of the same size.
This work is intended to be a proof of concept and the design presented does not
have stipulated specifications to fulfill. The main goal of this project is to show
the feasibility of the proposed method to integrate amplifiers. For this reason, the
flare, the linear tapers and the transitions from the lens aperture to the double ridge
rectangular waveguides are not optimized. However, if this structure were used in
a communication system with given specifications, it could be optimized to fulfill
the requirements (increasing the lens size to improve directivity, optimize tapers
and transitions to improve S11...), while keeping the basic design principles stated
here.
This work is the beginning of a research line that will continue, and hence there ismuch
future work that can continue the contributions started here:
• Replace the ideal Luneburg lens by a geodesic Luneburg lens.
• Optimization of linear tapers, flare and the aperture discretization transitions to
waveguide.
• Analyze gap and misalignments that may arise during the assembling of
the transition designed. Improve the robustness of the transition against
misalignments.
• Find a physical MMIC model to include the amplifier in full wave simulation.
• Manufacture prototypes to verify the results obtained in full wave simulation.
• Analyze and design a similar structure working at higher frequencies (V band).
51

Bibliography
[1] ITUR. IMT Vision Framework and overall objectives of the future
development of IMT for 2020 and beyond. Tech. rep. International
Telecommunication Union, Sept. 2015.
[2] Su, Y., Liu, Y., Zhou, Y., Yuan, J., Cao, H., and Shi, J. “Broadband LEO Satellite
Communications: Architectures and Key Technologies”. In: IEEE Wireless
Communications 26.2 (2019), pp. 55–61. DOI: 10.1109/MWC.2019.1800299.
[3] Liao, Q., Fonseca, N. J. G., and QuevedoTeruel, O. “Compact Multibeam Fully
Metallic Geodesic Luneburg Lens Antenna Based on NonEuclidean
Transformation Optics”. In: IEEE Transactions on Antennas and Propagation
66.12 (2018), pp. 7383–7388. DOI: 10.1109/TAP.2018.2872766.
[4] Fonseca, Nelson J. G., Liao, Qingbi, and QuevedoTeruel, Oscar. “Equivalent
Planar Lens RayTracing Model to Design Modulated Geodesic Lenses Using
NonEuclidean Transformation Optics”. In: IEEE Transactions on Antennas
and Propagation 68.5 (2020), pp. 3410–3422. DOI:
10.1109/TAP.2020.2963948.
[5] Petek, M., Zetterstrom, O., Pucci, E., Fonseca, N. J. G., and QuevedoTeruel, O.
“FullyMetallic RinehartLuneburg Lens at 60 GHz”. In: 2020 14th European
Conference on Antennas and Propagation (EuCAP). 2020, pp. 1–5. DOI:
10.23919/EuCAP48036.2020.9135587.
[6] Lianming, Li, Jiachen, Si, and Linhui, Chen. “Design of Power Amplifier for
mmWave 5G and Beyond”. In: IEEE Transactions on Antennas and
Propagation 36.4 (2019), pp. 579–588. DOI:
10.16356/j.1005-1120.2019.04.004.
52

BIBLIOGRAPHY
[7] Roev, A., Taghikhani, P., Maaskant, R., Fager, C., and Ivashina, M. V. “A
Wideband and LowLoss Spatial Power Combining Module for mmWave
HighPower Amplifiers”. In: IEEE Access 8 (2020), pp. 194858–194867. DOI:
10.1109/ACCESS.2020.3033623.
[8] Kang, Y., Jin Pin, X., and Zheng Hua, C. “A full Kaband waveguidebased
spatial powercombining amplifier using eplane antiphase probes”. In: 2014
IEEE International Wireless Symposium (IWS 2014). 2014, pp. 1–4. DOI:
10.1109/IEEE-IWS.2014.6864257.
[9] Peeler, G. and Coleman, H. “Microwave steppedindex luneberg lenses”. In:
IRE Transactions on Antennas and Propagation 6.2 (1958), pp. 202–207.
DOI: 10.1109/TAP.1958.1144575.
[10] Dockrey, J. A., Lockyear, M. J., Berry, S. J., Horsley, S. A. R., Sambles, J. R.,
and Hibbins, A. P. “Thin metamaterial Luneburg lens for surface waves”. In:
Phys. Rev. B 87 (12 Mar. 2013), p. 125137. DOI: 10.1103/PhysRevB.87.125137.
URL: https://link.aps.org/doi/10.1103/PhysRevB.87.125137.
[11] Pfeiffer, C. and Grbic, A. “A Printed, Broadband Luneburg Lens Antenna”. In:
IEEE Transactions on Antennas and Propagation 58.9 (2010),
pp. 3055–3059. DOI: 10.1109/TAP.2010.2052582.
[12] Manholm, L., Brazalez, A. A., Johansson, M., Miao, J., and QuevedoTeruel, O.
“A twodimensional all metal luneburg lens using glidesymmetric holey
metasurface”. In: 12th European Conference on Antennas and Propagation
(EuCAP 2018). 2018, pp. 1–3. DOI: 10.1049/cp.2018.0795.
[13] Rinehart, R. F. “A Family of Designs for Rapid Scanning Radar Antennas”. In:
Proceedings of the IRE 40.6 (1952), pp. 686–688. DOI:
10.1109/JRPROC.1952.274061.
[14] Fonseca, Nelson J.G., Liao, Qingbi, and QuevedoTeruel, Oscar. “Compact
parallelplate waveguide halfLuneburg geodesic lens in the Kaband”. In: IET
Microwaves, Antennas & Propagation 15.2 (2021), pp. 123–130. DOI:
https://doi.org/10.1049/mia2.12028. URL: https:
//ietresearch.onlinelibrary.wiley.com/doi/abs/10.1049/mia2.12028.
[15] York, R. A. “Some considerations for optimal efficiency and low noise in large
power combiners”. In: IEEE Transactions on Microwave Theory and
Techniques 49.8 (2001), pp. 1477–1482. DOI: 10.1109/22.939929.
53

BIBLIOGRAPHY
[16] Chou, H. T., Chang, S. C., and Huang, H. J. “Multibeam Radiations From
Circular Periodic Array of Vivaldi Antennas Excited by an Integrated 2D
Luneburg Lens Beamforming Network”. In: IEEE Antennas and Wireless
Propagation Letters 19.9 (2020), pp. 1486–1490. DOI:
10.1109/LAWP.2020.3006561.
[17] Balanis, Constantine A. Antenna theory: analysis and design. John wiley &
sons, 2016.
[18] “Circular Array Theory”. In: Conformal Array Antenna Theory and Design.
John Wiley Sons, Ltd, 2006. Chap. 2, pp. 15–47. ISBN: 9780471780120. DOI:
https://doi.org/10.1002/047178012X.ch2.
[19] “Conformal Array Pattern Synthesis”. In: Conformal Array Antenna Theory
and Design. John Wiley Sons, Ltd. Chap. 10, pp. 395–420. ISBN:
9780471780120. DOI: https://doi.org/10.1002/047178012X.ch10.
[20] Gomanne, S., Fonseca, N. J. G., Jankovic, P., Galdeano, J., Toso, G., and
Angeletti, P. “Rotman Lenses with Ridged Waveguides in QBand”. In: 2020
14th European Conference on Antennas and Propagation (EuCAP). 2020,
pp. 1–5. DOI: 10.23919/EuCAP48036.2020.9135218.
[21] Gomanne, Sophie, Fonseca, Nelson, Jankovic, Petar, Toso, Giovanni, and
Angeletti, Piero. “Comparative Study of Waveguide Rotman Lens Designs for
Q/V Band Applications”. In: Oct. 2019.
[22] Molaei, B. and Khaleghi, A. “A Novel Wideband Microstrip Line to Ridge Gap
Waveguide Transition Using Defected Ground Slot”. In: IEEE Microwave and
Wireless Components Letters 25.2 (2015), pp. 91–93. DOI:
10.1109/LMWC.2014.2382658.
[23] Huang, X. and Wu, K. “A Broadband USlot Coupled MicrostriptoWaveguide
Transition”. In: IEEE Transactions on Microwave Theory and Techniques
60.5 (2012), pp. 1210–1217. DOI: 10.1109/TMTT.2012.2187677.
[24] Yang, L., Zhu, L., Choi, W., and Tam, K. “Wideband vertical
microstriptomicrostrip transition designed with crosscoupled
microstrip/slotline resonators”. In: 2015 AsiaPacific Microwave Conference
(APMC). Vol. 2. 2015, pp. 1–3. DOI: 10.1109/APMC.2015.7413129.
54

BIBLIOGRAPHY
[25] Anand, G., Lahiri, R., and Sadhu, R. “Wide band microstrip to microstrip
vertical coaxial transition for radar EW applications”. In: 2016 AsiaPacific
Microwave Conference (APMC). 2016, pp. 1–4. DOI:
10.1109/APMC.2016.7931432.
[26] Huang, X. and Wu, K. “A Broadband and Vialess Vertical
MicrostriptoMicrostrip Transition”. In: IEEE Transactions on Microwave
Theory and Techniques 60.4 (2012), pp. 938–944. DOI:
10.1109/TMTT.2012.2185945.
[27] Kumar, G. A. and Poddar, D. R. “Broadband Rectangular Waveguide to
Suspended Stripline Transition Using Dendritic Structure”. In: IEEE
Microwave and Wireless Components Letters 26.11 (2016), pp. 900–902.
DOI: 10.1109/LMWC.2016.2615009.
[28] Głogowski, R., Zürcher, J., Peixeiro, C., and Mosig, J. R. “KaBand Rectangular
Waveguide to Suspended Stripline Transition”. In: IEEE Microwave and
Wireless Components Letters 23.11 (2013), pp. 575–577. DOI:
10.1109/LMWC.2013.2281408.
[29] Wei Tang and Xiao Bo Yang. “Design of Kaband probe transitions”. In: 2011
International Conference on Applied Superconductivity and Electromagnetic
Devices. 2011, pp. 25–28. DOI: 10.1109/ASEMD.2011.6145059.
[30] MontejoGarai, J. R., Marzall, L., and Popović, Z. “Octave Bandwidth
HighPerformance MicrostriptoDoubleRidgeWaveguide Transition”. In:
IEEE Microwave and Wireless Components Letters 30.7 (2020),
pp. 637–640. DOI: 10.1109/LMWC.2020.3000283.
[31] Pozar, D.M.Microwave Engineering, 4th Edition. Wiley, 2011. ISBN:
9781118213636. URL: https://books.google.es/books?id=JegbAAAAQBAJ.
55

Appendix A
Analysis of Social, Economic,Environmental and EthicalImplications
This appendix contains a reflection about how the work developed in this thesis might
affect the society and the environment. The work carried out is within the beginning
of a research project, aimed at proofing a concept which can be useful in the industry
to be applied in future communication systems. For this reason, only potential uses
are known and the specific systems where it will be used are still not perfectly clear, so
quantifying the impacts of this project in the society is not an easy task. The analysis
will be done considering possible scenarios where this work may be included, as well
as the research process.
A.1 Social Implications
The project presented in this thesis is the beginning of a research line aimed to enhance
civil telecommunications. Each new mobile generation have had great influence in
people life, contributing more and more to a digital transformation in many aspects
of the society. The new fifth generation, also known as 5G, will play a key role in
changing the way of doing many daily and professional activities nowadays. Some
ideas like driverless cars can become reality due to 5G, and this concept, for example,
will completely change the driving paradigmwhen becoming a reality. There aremany
56

APPENDIX A. ANALYSIS OF SOCIAL, ECONOMIC, ENVIRONMENTAL AND ETHICALIMPLICATIONS
other use cases of 5G that impact straightly to the society, affecting healthcare (remote
surgering) and our hobbies (streaming of high quality video in real time) among others.
The concept of integrating amplifiers and its advantages proposed in this project can
not only be applied to mobile communications, but also to other areas like satellite
megaconstellations and radar systems. These megaconstellations also affect society,
as they are aimed to get global coverage allowing connectivity even in themore isolated
and rural areas. Therefore, even though the isolated idea of amplifier integration
does not affect directly to the society, the system where the concept is applied clearly
does.
A.2 Economic implications
One of the benefits of using distributed amplifiers is the cost reduction it implies.
Having numerous small integrated amplifiers is cheaper than having only a few
powerful amplifiers, because the price of a single amplifier is highly reduced. This
fact becomesmore important at higher frequencies, where powerful amplifiers become
harder to design and more expensive. In that case, power combining becomes a good
and cheaper alternative.
The project covered in the thesis is aimed to be a proof of concept in Kaband, but the
same concept is intended to be also applied at higher frequencies in the future, such as
Vband or Eband.
A.3 Enviromental implications
Themain environmental effects of the structure proposed in this project arise from the
manufacturing process. The final structure is fullymetallic, meaning that metal slabs
have to be drilled to obtain the designed geometry, producing waste coming from the
disposal of those drilled parts. Hopefully, mostmetals used tomanufacturemicrowave
devices and antennas, can be recycled and hence reused.
The system proposed has indirect influence in the environment through the
applications where is used. The fifth generation of mobile communications will turn
the society into a more connected one, including not only people using the technology
but also sensor networks. This enhancement in use and capability of these new
57

APPENDIX A. ANALYSIS OF SOCIAL, ECONOMIC, ENVIRONMENTAL AND ETHICALIMPLICATIONS
technologies implies an increase in the energy consumption. In addition to mobile
communications, this work can be used in satellite communication systems, where the
emerging megaconstellations could have a negative impact to the environment as a
result of the space trash produced at the end of satellites life.
A.4 Ethical implications
The main ethical impact the system may have is related to unethical nonintended
uses (e.g. military uses) or ethical issues in the applications where it might be
included.
As the work presented here contains only a part and not a whole communication
system, it could be misused and included in military, illegal or unethical systems.
Nevertheless, this particular work is intended to be used only in civil systems,
contributing the society to improve our lives quality and promoting technological
development.
58

Appendix B
Cost and price of the project
In this annex the total cost of this project is estimated, considering the human
resources, material and objects needed, licenses of simulation softwares and further
indirect costs.
The human resources involved in this project are a Master Electrical Engineer and
a Senior Electrical Engineer to supervise the project. A typical monthly salary of
an electrical engineer with less than 5 years of experience in Sweden is 32800 SEK,
which corresponds approximately to 3280 €. The salary of a person having between
5 and 10 years of experience amounts to 43300 SEK (close to 4330 €). Assuming
the typical workload of 40 hours per week and 4.5 weeks per month, the price of
one hour of work is around 18 €/hour for the Master Electrical Engineer and 24
€/hour for the supervisor. A master thesis requires 900 hours for a student, and
around 150 hours for the supervisor, considering that the supervisor is working in
another tasks simultaneously. Therefore, the human costs associated to the project
are 24 · 150 + 18 · 900 = 19800 €.
The main physical resource needed for this project was a desktop computer with the
following specifications summarized in Table B.1.
With the prices of Table B.1, and adding a 50% to account for the other components
and extras (monitor, operative system, case, etc.) and the benefit for the seller, the
cost of the desktop computer is estimated to be around 1530€. This computer has been
utilized for 6months, so assuming and amortization time of 7 years, the cost associated
to the computer in this project is 109.28 €.
59

APPENDIX B. COST AND PRICE OF THE PROJECT
Component Model Approx. Price
CPU Intel Core i77700 3.60GHz 450 €SSD ADATA SSD DM900 1 TB. 150 €RAM 64 GB DDR4 2400 MHz 320 €GPU AMD Radeon R5430 100 €
Table B.1: Main components price desktop computer
The essential software used here have been MATLAB and CST Microwave Studio. An
annual license of MATLAB costs 800 €, and the CST cost for one year can be estimated
around 2000 €. As the project lasts 6 months, and assuming both software used only
for this project, the overall cost coming from licenses is 1400 €.
Apart from the previous costs, there are indirect costs arising fromnondirect expenses
such as light, water, paper, printers usage, meeting rooms usage, internet, etc. The
indirect costs are estimated as a 15% of the direct costs presented before, since
the exact cost cannot be known. Thus, the indirect costs can be estimated to be
(19800 + 109.28 + 1400) · 0.15 = 3196.40 €.
Finally, the industrial profit after selling the solution is set to 6%, resulting in a profit
of (19800 + 109.28 + 1400 + 3196.40) · 0.06 = 1470.30 €.
The work carried out in this thesis is within a research project, so the product to be
sold can be the outcome of the research and/or amanufactured prototype. Therefore, if
selling the results, the Value Added Taxes (VAT) has to be added to the aforementioned
costs and profit. As the project has been developed in Sweden, where VAT is 25% of
the final price. The VAT is (19800 + 109.28 + 1400 + 3196.40 + 1470.30) · 0.25 = 6494
€.
The final budget of the overall project is summarized in Table B.2.
60

APPENDIX B. COST AND PRICE OF THE PROJECT
Cost Object Price (€)
Human Resources 19800 €Material Resources 109.28 €Licenses 1400 €Indirect Costs (15 %) 3196.40 €Industrial Profit (6 %) 1470.30 €
Price without VAT 25975.98 €
VAT 6494 €
Total price 32469.98 €
Table B.2: Total project budget
61

TRITA-EECS-EX-2021:391
www.kth.se

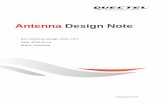
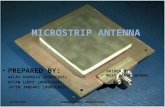

![Patch Antenna[1]](https://static.fdokumen.com/doc/165x107/63158e4cc32ab5e46f0d5c89/patch-antenna1.jpg)















