
Nonstationary cluster-size inference with random field and permutation methods
Upload
independentCategory
view
1download
0
Applied Mathematics and Computation 175 (2006) 773–785
www.elsevier.com/locate/amc
A similar particle swarmoptimization algorithm for permutation
flowshop scheduling to minimize makespan q
Zhigang Lian a,*, Xingsheng Gu a, Bin Jiao a,b
a Research Institute of Automation, East China University of Science and Technology,
Shanghai 200237, Chinab Electrical Engineering Department, Shanghai DianJi University, Shanghai 200240, China
Abstract
The flow-shop scheduling problem (FSSP) is a branch of production scheduling,which is among the hardest combinatorial optimization problems. It is well known thatthis problem with current algorithms even moderately sized problems cannot be solvedto guaranteed optimality. Many different approaches have been applied for permutationflowshop scheduling to minimize makespan, but these methods are not satisfying.Particle swarm optimization (PSO) has been developing rapidly and has been appliedwidely since it was introduced, as it is easily understood and realized. This paperthrough the improvement of the option modes of gBest and pBest of PSO algorithm,a similar particle swarm optimization algorithm (SPSOA) applied for permutation
0096-3003/$ - see front matter � 2005 Elsevier Inc. All rights reserved.doi:10.1016/j.amc.2005.07.042
q This work is supported by The National Natural Science Foundation of China (GrantNo.60474043) and The Key Technologies Program of Shanghai Municipal Science and TechnologyCommission (Grant No. 04dz11008).
* Corresponding author.E-mail addresses: [email protected] (Z. Lian), [email protected] (X. Gu), [email protected]
(B. Jiao).

774 Z. Lian et al. / Appl. Math. Comput. 175 (2006) 773–785
flowshop scheduling to minimize makespan is firstly presented. The comparisons aremade with SPSOAs and the standard GAs, in which we obtained that the SPSOAsare more clearly efficacious than standard GAs for FSSP to minimize makespan.Computational experiments show the efficiency of the proposed (SPSOA) solvingapproaches.� 2005 Elsevier Inc. All rights reserved.
Keywords: Flow-shop scheduling; Genetic algorithm; Particle swarm optimization; Similar particleswarm optimization algorithm (SPSOA); Crossover operators
1. Introduction
Scheduling problems occur in all the economic domains, from computerengineering to manufacturing techniques. Flow-shop scheduling problems(FSSP) frequently arise in industrial processes, good manufacturing systems,production echelon lines, etc. FSSP is a strongly NP-hard [9] combinatorialoptimization problem that has captured the interest of a significant numberof researchers. It is well known that FSSP is non-polynomial (NP)-complete,and has proved to be a difficult task for human planners and schedulers, par-ticularly if optimal solutions are required. It is now widely recognized that find-ing optimal solution to large combinatorial problems is not a practicableoption, because of harvest amount of computer time needed to find such solu-tions. Many different approaches have been applied to solve FSSP and haveobtained effective harvest. GAs was originally developed by Holland in theearly 1970s and since it has been applied to a large number of complex searchproblems. Since the pioneered work of Johnson, several heuristic techniqueshave been proposed for solving the FSSP characterized as either constructiveor improvement [5]. Most research has been devoted to developing heuristicalgorithms for FSSP to obtain good solutions within a limited amount of com-putation time. The proposed heuristic methods for the FSSP correspond toAllahverdi and Aldowaisan [1] and Wang et al. [14]. Rather recently, the basicstructure of GA implementation was introduced by Reeves [7] and has been ap-plied with high success on the FSSP.
Particle swarm optimization (PSO) is an evolutionary computation tech-nique developed by Dr. Eberhart and Dr. Kennedy in 1995 [2,4], inspired bysocial behavior of bird flocking or fish schooling. Similar to genetic algorithms(GA), PSO is a population based optimization tool. Compared to GA, theadvantages of PSO are that PSO is easy to implement and there are few param-eters to adjust. In recent years there have been a lot of reported works focusedon the PSO which has been applied widely in the function optimization, artifi-

Z. Lian et al. / Appl. Math. Comput. 175 (2006) 773–785 775
cial neural network training, pattern recognition, fuzzy control and some otherfields in [3,10–13] where GA can be applied, but the PSO to solve FSSP doesnot have a rich literature. Similar hybrid PSO algorithms are proposed byintroducing operations of GAs into PSO systems by Robinson et al. [8]. Im-proved PSO has also been developed for multi-objective flexible flow-shopscheduling problems [15], etc.
In this paper firstly propose SPSOA and attempts to apply it for permuta-tion flowshop scheduling to minimize makespan. This work differs from theexisting ones at least in three aspects: it firstly proposes a similar particle swarmoptimization algorithm for permutation flowshop scheduling to minimizemakespan. The second is to investigate the effect of various operators (cross-overs) under the framework of difficult combinatorial problems such as theFSSP. The third, computational experiments are performed on different sizeFSSP testing instances to compare the efficiency of AGs and SPSOA and showthat the SPSOA is more obviously efficacious than AGs. The rest of the paperis organized as follow: in Section 2 gives a brief overview of the FSSP and for-mulate its model that is to minimize makespan. The similar particle swarm opti-mization algorithm (SPSOA) implementation for FSSP to minimize ispresented in Section 3. Section 4 discusses comparative experimental resultsobtained by the GAs and SPSOA on public benchmark FSSPs ranging from20 jobs on 5 machines, 20 jobs on 10 machines, 20 jobs on 20 machines, 50 jobson 10 machines, 50 jobs on 20 machines, 100 jobs on 5 machines, to 100 jobs on10 machines. Finally, Section 5 summarizes the contribution of this paper andconclusions.
2. FSSP: a brief overview
It is well known that the minimum makespan FSSP in the deterministic casecan be defined in the following terms. It is necessary to perform n jobs on m
machines. The machines are specialized in such a way that any job Jj is dividedinto m operations Oij, i = 1,2, . . . ,m. The jobs must follow the same machinepath. Then, without loss of generality, it is possible to number machines andoperations in such a way that the machine path is M1,M2, . . . ,Mm and opera-tion Oij is the ith operation of job Jj, which is performed by machine Mi withfixed processing time Tij, i = 1,2, . . . ,m, j = 1,2, . . . ,n. Each job consists of m
operations and each operation must proceed on a different machine. Preemp-tion of an operation is not allowed, thus, the operation of each job on a ma-chine requires an uninterrupted period of time. Each job can be processedon one machine at a time and each machine can handle only one job at a time.The objective is to find the sequence of jobs minimizing the maximum flowtime, which is called makespan.
776 Z. Lian et al. / Appl. Math. Comput. 175 (2006) 773–785
Let C(k, jj) denote the completion time of job jj on machine k, and let{j1, j2, . . . , jn} denote a permutation of jobs, then the completion time for ann-job m-machine flow-shop problem model is calculated as follows:
Cð1; J 1Þ ¼ T ð1; J 1Þ;Cð1; J jÞ ¼ Cð1; J j�1Þ þ T ð1; J jÞ;Cði; J 1Þ ¼ Cði� 1; J 1Þ þ T ði; J 1Þ;
Cði; J jÞ ¼ maxfCði; J j�1Þ;Cði� 1; J jÞg þ T ði; J jÞ. ð2:1ÞThe makespan is calculated by the relation:
Cmax ¼ Cðm; J nÞ. ð2:2ÞThe objective function for the FSSP corresponds to the minimization of themakespan given in Eq. (2.2). In follow section, propose SPSOA and use it tofind a near optimal schedule whose objective cost, i.e. whose makespan, isthe minimum over the set of all possible feasible schedules.
3. The similar particle swarm optimization algorithm (SPSOA)
PSO is an evolutionary algorithm that the system is initialized with a pop-ulation (named swarm in PSO) of random solutions and searches for optimaby updating generations. Each individual or potential solution, named particle,flies in the dimensional problem space with a velocity which is dynamically ad-justed according to the flying experiences of its own and its colleagues. ThePSO algorithm mimics the behavior of flying birds and their means of informa-tion exchange to solve optimization problems. However, unlike GA, PSO hasno evolution operators such as crossover and mutation. PSO has been intro-duced as an optimization technique in real-number spaces. But many optimi-zation problems are set in a discrete space. Typical examples includeproblems that require ordering, such as in FSSP. In this section we introducea method of converting domain to discrete domain for permutation flowshopscheduling to minimize makespan.
3.1. Standard particle swarm optimization algorithm [2,4]
Suppose that the searching space is D-dimensional and m particles form thecolony. The ith particle represents a D-dimensional vector Xi (i = 1,2, . . . ,m). Itmeans that the ith particle locates at Xi = (xi1,xi2, . . . ,xiD) (i = 1,2, . . . ,m) inthe searching space. The position of each particle is a potential result. We couldcalculate the particle�s fitness by putting its position into a designated objectivefunction. When the fitness is higher, the corresponding Xi is ‘‘better’’. The ithparticle�s ‘‘flying’’ velocity is also a D-dimensional vector, denoted as Vi = (vi1,

Z. Lian et al. / Appl. Math. Comput. 175 (2006) 773–785 777
vi2, . . . ,viD). Denote the best position of the ith particle as Pi = (pi1,pi2, . . . ,piD),and the best position of the colony as Pg = (pg1,pg2, . . . ,pgD) respectively. ThePSO algorithm could be performed by the following equations:
vidðk þ 1Þ ¼ vidðkÞ þ c1r1ðpidðkÞ � xidðkÞÞ þ c2r2ðpgdðkÞ � xidðkÞÞ; ð3:1Þxidðk þ 1Þ ¼ xidðkÞ þ vidðk þ 1Þ; ð3:2Þ
where k represents the iterative number, c1, c2 are learning factors, usuallyc1 = c2 = 2. r1, r2 are random numbers between (0, 1). The termination criterionfor the iterations is determined according to whether the max generation or adesignated value of the fitness of Pg is reached.
3.2. The similar particle swarm optimization algorithm for FSSP to minimizemakespan
FSSP is set in a discrete space, so in this section we introduce a method ofconverting domain to discrete domain for it. The most important issue inapplying PSO successfully to FSSP is to develop an effective �problem mapping�and �solution generation� mechanism. If these two mechanisms are devisedsuccessfully, it is possible to find good solutions for a given optimizationproblem in acceptable time. According to the character of FSSP, we will designthe particle, Particles� velocities and iterative formula of PSOA. In computa-tional experiments, the crossover and mutation operators will be used in theGAs, and the crossover operators will be used in the SPSOA for permuta-tion flowshop scheduling to minimize makespan, so they are proposed infollowing.
3.2.1. Crossover and mutation operators
One-segment crossover (C1): A pair of crossing point is randomly selectedalong the length of the first parent chromosome. The jobs inside crossing pointare copied into the offspring. The remaining places of the offspring are filled upby taking in order each legitimate gene from the second parent. This operatoris illustrated in Fig. 1(a) with crossing point at 3 and 8 of the string.
Two-segment crossover (C2): Four crossing points are randomly selectedalong the length of the first parent chromosome. The jobs from crossing point1 to 2 and from 3 to 4 are copied into the child and the remaining jobs are legit-imately copied from the second parent in the order of their appearance. Thisoperator is illustrated in Fig. 1(b) with crossing segment at 2–4 and 6–7 ofthe string.
Three-segment crossover (C3): Six crossing points are randomly selectedalong the length of the first parent. The chromosome is then divided into seven(or less seven) distinct sections. Copy the second, four and six sub-sections ofjobs into the same places of the child. Legitimately fill up the remaining empty

Crossover operators:
C 1: One-segment crossover
Crossing point
Parent1 5 6 2 4 7 8 1 9 3 Parent2 6 4 9 5 3 7 1 2 8
Pro child # # 2 4 7 8 1 9 # Final child 6 5 2 4 7 8 1 9 3
(a)
C 2: Two-segment crossover
Crossing point
Parent1 5 6 2 4 7 8 1 9 3 Parent2 6 4 9 5 3 7 1 2 8
Pro child # 6 2 4 # 8 1 9 # Final child 9 6 2 4 7 8 1 5 3
(b)
C 3: Three-segment crossover
Crossing point
Parent1 5 6 2 4 7 8 1 9 3 Parent2 6 4 9 5 3 7 1 2 8
Pro child # 6 2 4 7 8 1 9 3 Final child 4 6 2 5 7 8 1 9 3
(c)
C 4: Four-segment crossover
Crossing point
Parent1 5 6 2 4 7 8 1 9 3 Parent2 6 4 9 5 3 7 1 2 8
Pro child # 6 2 4 7 8 1 9 3 Final child 5 6 2 4 7 8 1 9 3
(d)
Fig. 1. Illustration of the various types of crossover operators with permutation strings.
778 Z. Lian et al. / Appl. Math. Comput. 175 (2006) 773–785
locations of the child with jobs from the second parent according to their orderof appearance. Again, no duplication of jobs is permitted. Fig. 1(c) displays asample example of the operation of this operator with crossing segment at 2–3,5–6 and 8–9 of the first parent.
Four-segment crossover (C4): Eight crossing points are randomly selectedalong the length of the first parent. The chromosome is then divided into nine(or less nine) distinct sections. Copy the second, four, six and eight sub-sectionsof jobs into the same places of the child. Legitimately fill up the remainingempty locations of the child with jobs from the second parent according totheir order of appearance. Again, no duplication of jobs is permitted.Fig. 1(d) displays a sample example of the operation of this operator withcrossing segment at 2–3, 4–5, 6–7 and 8–9 of the first parent.
Nearchou in [6] formulated six kinds of mutation operators, and with com-putational experiments he has obtained that the shift mutation operator is thebest for different size FSSP, so in our comparison experiments, the shift muta-tion operator will be used. In following the shift mutation is formulated.

Shift mutation
Move point Inserting point
Parent 5 6 2 4 7 8 1 9 3 child 5 6 4 7 8 2 1 9 3
Fig. 2. Illustration of the shift mutation operator with permutation strings.
Z. Lian et al. / Appl. Math. Comput. 175 (2006) 773–785 779
Shift mutation (M3) [6]: A single job (move point) is selected randomly andinserted in a random position (inserting point) as illustrated in Fig. 2. A sampleexample of the operation of shift mutation operator with move point at 3 andthe inserting point 6.
3.2.2. Iterative model of similar particle swarm optimization algorithm for
FSSP to minimize makespan
If the FSSP is n-jobs and m-machines, suppose that the searching space isn-dimensional and S particles form the colony. The ith particle represents ann-dimensional vector Xi (i = 1,2, . . . , s). It means that the ith particle locatesat Xi which is one sequence in the searching space. The position of each particleis a potential result. We could calculate the particle�s fitness by putting its posi-tion into a designated objective function. When the fitness is lower, the corre-sponding Xi is ‘‘better’’. The ith particle�s ‘‘flying’’ acceleration and velocity isalso an n-dimensional vector, denoted as V 0i and Vi respectively. Denote thebest position of the ith particle as pi, and the best position of the colony aspg respectively. The SPSO algorithm could be performed by the followingequations:
v0iðk þ 1Þ ¼ piðkÞ � pgðkÞ; ð3:3Þ
viðk þ 1Þ ¼ v0iðk þ 1Þ � viðkÞ; ð3:4Þ
xiðk þ 1Þ ¼ xiðkÞ � viðk þ 1Þ; ð3:5Þ
where k represents the iterative generation number, and � is crossover denota-tion which denoting two particles make crossover operator and its detailedoperator was shown in Section 3.2.1. The termination criterion for the itera-tions is determined according to whether the max generation or a designatedvalue of the fitness of Pg is reached.
3.2.3. Step of similar particle swarm optimization algorithm for FSSP to
minimize makespan
Step 1. Let initialization iterative generation number be k = 0, initializationpopulation number psize, the termination iterative generation numberMaxgen. Give birth to 2 * psize initializing particles. Calculate eachparticle�s fitness value of initialization population, and rank them from

780 Z. Lian et al. / Appl. Math. Comput. 175 (2006) 773–785
small to big, then let pi(1) = Xi(1), moreover the first generation popu-lation particles come from initialization population relevant particlesthat obtain anterior psize smaller fitness value respectively. Choosethe particle with the best fitness value of all the particles as thepg(gBest).
Step 2. Using (3.3) obtain 2 * psize particles, calculate each particle�s fitnessvalue, and rank them from small to big, then let the ith particle�s ‘‘fly-ing’’ acceleration V 0i equal to relevant particles which obtain anteriorpsize smaller fitness value respectively. And using (3.4) and (3.5) withsame method give birth to the ith particle�s ‘‘flying’’ velocity Vi andnext generational particles Xi respectively. If the fitness value is betterthan the best fitness value pi(pBest) in history, let current value as thenew pi(pBest). Choose the particle with the best fitness value of all theparticles as the pg(gBest). If k = Maxgen, go to Step 3, or else letk = k + 1 go to Step 2.
Step 3. Put out the pg.
We can learn that there are two key steps when applying SPSOA to FSSP:the representation of the solution and the fitness function. The searching is arepeat process, and the stop criteria are that the maximum iteration numberis reached or the minimum error condition is satisfied. There are not manyparameter need to be tuned in SPSOA. The stop condition depends on theproblem to be optimized.
In SPSOA, each particle of the swarm shares mutual information globallyand benefits from the discoveries and previous experiences of all other col-leagues during the search process. SPSOA requires only primitive and simplemathematical operators, and is computationally inexpensive in terms of bothmemory requirements and time.
3.3. Comparisons between GAs and SPSOAs
We can learn that SPSOA shares many common points with GA from theirprocedure. Both algorithms start with a group of a randomly generated popu-lation; both have fitness values to evaluate the population. The GA updates thepopulation and search for the optimum with random techniques but theSPSOA does not. However, SPSOA for FSSP does not have genetic operatorslike mutation. Particles update themselves with the internal acceleration andvelocity. They also have memory, which is important to the algorithm. Com-pared with genetic algorithms (GAs), the information sharing mechanism inSPSOA is significantly different. In GAs, chromosomes share information witheach other. So the whole population moves like a one group towards an opti-mal area. In SPSOA, pi, pg and Vi gives out the information to others. It is aone-way information sharing mechanism. The evolution only looks for the best

Z. Lian et al. / Appl. Math. Comput. 175 (2006) 773–785 781
solution. Compared with GA, in the SPSOA all the particles tend to convergeto the best.
4. The experimental results and discussion
To illustrate the effectiveness and performance of SPSOA for permuta-tion flowshop scheduling to minimize makespan proposed in this paper,eight different size representative (Taillard) instances taken from Internetbased on practical data have been selected to compute. To examine the effi-ciency of the SPSOAs, the comparisons are made with them and the standardGAs with different parameters. From the paper [6] we can know that GAs withthe shift mutation operator is more efficacious for solving different size FSSP,so in this comparing computational experiment use the shift mutationoperator.
To get the average performance of the SPSOA 10 runs on each probleminstance were performed and the solution quality was averaged. AppendixA shows SPSOAs effectiveness by comparison with GAs on eight differentsize representative (Taillard) FSSP. Through experiments we can clearlyget that the SPSOAs are better than the GAs for permutation flowshop sched-uling to minimize makespan. Using any crossover operator, SPSOAs obtainsmaller upper bound of makespan, smaller average of makespan and smallerlower bound makespan than GAs in run 10 times. From Appendix A onecan observe that crossover operator C2 has the highest performance for smallFSSP, but operator C3 and C4 are more efficacious to solve middling sizeFSSP.
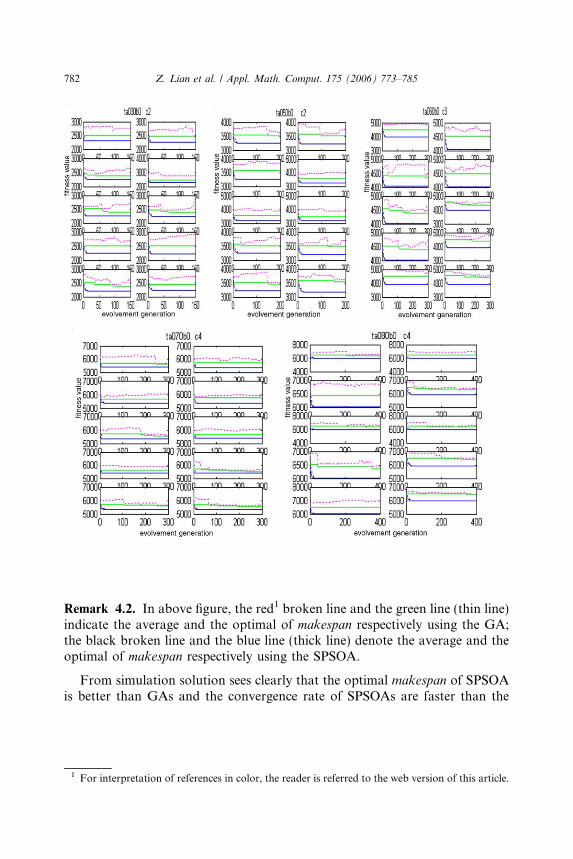
Eight instances� convergence rate figure of the most effective SPSOAs in fourcrossover operators and GAs contrast as following:
782 Z. Lian et al. / Appl. Math. Comput. 175 (2006) 773–785
Remark 4.2. In above figure, the red1 broken line and the green line (thin line)indicate the average and the optimal of makespan respectively using the GA;the black broken line and the blue line (thick line) denote the average and theoptimal of makespan respectively using the SPSOA.
From simulation solution sees clearly that the optimal makespan of SPSOAis better than GAs and the convergence rate of SPSOAs are faster than the
1 For interpretation of references in color, the reader is referred to the web version of this article.

Z. Lian et al. / Appl. Math. Comput. 175 (2006) 773–785 783
GAs. Computational experiments show that the SPSOA for permutation flow-shop scheduling to minimize makespan is very valid.
5. Conclusion and perspectives
Although there is a huge amount of literature on classical PSO, the PSO forFSSP does not have a rich literature. In this paper we have discussed a new ap-proach SPSOA based on PSO and crossover operator to solve FSSP. Althoughit does not guarantee the optimality, such an approach provides solutions withgood quality in a reasonable time limit, and compared with GAs, all the par-ticles tend to converge to the best. The performance of the new approach isevaluated in comparison with the results obtained from GAs for eight represen-tative instances. The obtained results show the effectiveness of the proposed ap-proach. The proposed SPSOA approach in this paper can be considered aseffective mechanisms from this point of view. In fact, SPSOAs have globaland local version. Global version is faster but might converge to local optimumfor some problems. Local version is a little bit slower but not easy to betrapped into local optimum. One can use global version to get quick resultand use local version to refine the search. This paper studied the global version,and in future we will investigate the local version.
There are a number of research directions that can be considered as usefulextensions of this research. Although the proposed algorithm is tested witheight representative instances, a more comprehensive computational studyshould be made to test the efficiency of proposed solution technique. Researchon generalization of such an approach to solve job-shop optimization problemsshould be an interesting subject. Furthermore, applying SPSOA to other com-binatorial optimization problems is also possible in further research. The devel-opment of PSO is still ongoing. And there are still many unknown areas inSPSOA research such as the mathematical validation of particle swarm theory.In the future the heuristic rule combine SPSOA should be more effective forFSSP to minimize makespan. The SPSOA maybe can be improved for FSSPand other similar optimization problems.
Appendix A
The comparisons of SPSOAs and the GAs for FSSP
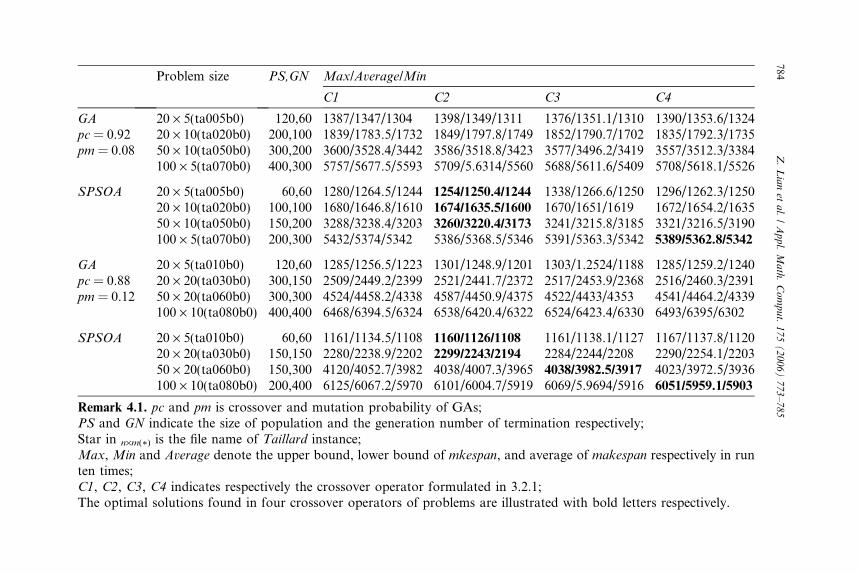
Problem size PS,GN Max/Average/Min
C1 C2 C3 C4
GA
pc = 0.92pm = 0.08
20 · 5(ta005b0) 120,60 1387/1347/1304 1398/1349/1311 1376/1351.1/1310 1390/1353.6/132420 · 10(ta020b0) 200,100 1839/1783.5/1732 1849/1797.8/1749 1852/1790.7/1702 1835/1792.3/173550 · 10(ta050b0) 300,200 3600/3528.4/3442 3586/3518.8/3423 3577/3496.2/3419 3557/3512.3/3384100 · 5(ta070b0) 400,300 5757/5677.5/5593 5709/5.6314/5560 5688/5611.6/5409 5708/5618.1/5526
SPSOA 20 · 5(ta005b0) 60,60 1280/1264.5/1244 1254/1250.4/1244 1338/1266.6/1250 1296/1262.3/125020 · 10(ta020b0) 100,100 1680/1646.8/1610 1674/1635.5/1600 1670/1651/1619 1672/1654.2/163550 · 10(ta050b0) 150,200 3288/3238.4/3203 3260/3220.4/3173 3241/3215.8/3185 3321/3216.5/3190100 · 5(ta070b0) 200,300 5432/5374/5342 5386/5368.5/5346 5391/5363.3/5342 5389/5362.8/5342
GA
pc = 0.88pm = 0.12
20 · 5(ta010b0) 120,60 1285/1256.5/1223 1301/1248.9/1201 1303/1.2524/1188 1285/1259.2/124020 · 20(ta030b0) 300,150 2509/2449.2/2399 2521/2441.7/2372 2517/2453.9/2368 2516/2460.3/239150 · 20(ta060b0) 300,300 4524/4458.2/4338 4587/4450.9/4375 4522/4433/4353 4541/4464.2/4339100 · 10(ta080b0) 400,400 6468/6394.5/6324 6538/6420.4/6322 6524/6423.4/6330 6493/6395/6302
SPSOA 20 · 5(ta010b0) 60,60 1161/1134.5/1108 1160/1126/1108 1161/1138.1/1127 1167/1137.8/112020 · 20(ta030b0) 150,150 2280/2238.9/2202 2299/2243/2194 2284/2244/2208 2290/2254.1/220350 · 20(ta060b0) 150,300 4120/4052.7/3982 4038/4007.3/3965 4038/3982.5/3917 4023/3972.5/3936100 · 10(ta080b0) 200,400 6125/6067.2/5970 6101/6004.7/5919 6069/5.9694/5916 6051/5959.1/5903
Remark 4.1. pc and pm is crossover and mutation probability of GAs;PS and GN indicate the size of population and the generation number of termination respectively;Star in n·m(*) is the file name of Taillard instance;Max, Min and Average denote the upper bound, lower bound of mkespan, and average of makespan respectively in runten times;C1, C2, C3, C4 indicates respectively the crossover operator formulated in 3.2.1;The optimal solutions found in four crossover operators of problems are illustrated with bold letters respectively.
784Z
.L
ian
eta
l./
Ap
pl.
Ma
th.
Co
mp
ut.
17
5(
20
06
)7
73
–7
85

Z. Lian et al. / Appl. Math. Comput. 175 (2006) 773–785 785
References
[1] A. Allahverdi, T. Aldowaisan, New heuristics to minimize total completion time in m-machineflowshops, Int. J. Product. Econom. 77 (2002) 71–83.
[2] R. Eberhart, J. Kennedy, A new optimizer using particle swarm theory [C], in: Proceeding ofthe Sixth International Symposium on Micro Machine and Human Science, Nagoya, Japan1995, pp. 39–43.
[3] R.C. Eberhart, Y. Shi, Tracking and optimizing dynamic systems with particle swarms, in:Proceedings of the IEEE Congress on Evolutionary Computation (CEC 2001), IEEE, Seoul,Korea, 2001, pp. 94–97.
[4] J. Kennedy, R. Eberhart, Particle swarm optimization [C], in: IEEE International Conferenceon Neural Networks, Perth, Australia, 1995, pp. 1942–1948.
[5] T. Murata, H. Ishibuchi, H. Tanaka, Genetic algorithms for flowshop scheduling problems,Comput. Ind. Eng. 30 (4) (1996) 1061–1071.
[6] A.C. Nearchou, The effect of various operators on the genetic search for large schedulingproblems, Int. J. Product. Econom. 88 (2004) 191–203.
[7] C.R. Reeves, A genetic algorithm for flowshop sequencing, Comput. Oper. Res. (1995) 5–13.[8] J. Robinson, S. Sinton, R.S. Yahya, Particle swarm, genetic algorithm, and their hybrids:
optimization of a profiled corrugated horn antenna, in: IEEE Antennas and PropagationSociety International Symposium, San Antonio, vol. I, 2002, pp. 314–317.
[9] A.H.G. Rinnooy Kan, Machine Scheduling Problems: Classification, Complexity andComputations, Martinus Nijhoff, The Hague, 1976.
[10] Y. Shi, R. Eberhart, A modified particle swarm optimizer [C], in: IEEE World Congress onComputational Intelligence, 1998, p. 69–73.
[11] Y. Shi, R.C. Eberhart, Parameter selection in particle swarm optimization, in: EvolutionaryProgramming VII: Proceedings of the Seventh Annual Conference on EvolutionaryProgramming, New York, 1998, pp. 591–600.
[12] A. Salman, I. Ahmad, S. Al-Madani, Particle swarm optimization for task assignmentproblem, Microprocess. Microsyst. 26 (8) (2002) 363–371.
[13] I.C. Trelea, The particle swarm optimization algorithm: convergence analysis and parameterselection, Inform. Process. Lett. 85 (6) (2003) 317–325.
[14] C. Wang, C. Chu, J.M. Proth, Heuristic approaches for n=m=F =P
ci scheduling problems,Eur. J. Oper. Res. 96 (1997) 636–644.
[15] X.J. Wei, Z.M. Wu, An effective hybrid optimization approach for multi-objective flexibleflowshop scheduling problems, Comput. Ind. Eng. 48 (2005) 409–425.
Copyright © 2022 FDOKUMEN




















