
A dynamic elastic model for segmentation and tracking of the heart in MR image sequences
12
A dynamic elastic model for segmentation and tracking of the heart in MR image sequences Joël Schaerer, Christopher Casta * , Jérôme Pousin, Patrick Clarysse Creatis-LRMN, CNRS UMR #5220, INSERM U630, INSA Bât. Blaise Pascal, F-69621 Villeurbanne Cedex, France article info Article history: Received 28 February 2008 Received in revised form 7 April 2010 Accepted 31 May 2010 Available online xxxx Keywords: Cardiac MRI Dynamic segmentation Deformable elastic template Fourier-based model abstract Strong prior models are a prerequisite for reliable spatio-temporal cardiac image analysis. While several cardiac models have been presented in the past, many of them are either too complex for their parame- ters to be estimated on the sole basis of MR Images, or overly simplified. In this paper, we present a novel dynamic model, based on the equation of dynamics for elastic materials and on Fourier filtering. The explicit use of dynamics allows us to enforce periodicity and temporal smoothness constraints. We pro- pose an algorithm to solve the continuous dynamical problem associated to numerically adapting the model to the image sequence. Using a simple 1D example, we show how temporal filtering can help removing noise while ensuring the periodicity and smoothness of solutions. The proposed dynamic model is quantitatively evaluated on a database of 15 patients which shows its performance and limita- tions. Also, the ability of the model to capture cardiac motion is demonstrated on synthetic cardiac sequences. Moreover, existence, uniqueness of the solution and numerical convergence of the algorithm can be demonstrated. Ó 2010 Elsevier B.V. All rights reserved. 1. Introduction The detailed analysis of cardiac images remains a challenging task. In particular, the automated analysis of cardiac anatomical and functional MR images could yield detailed anatomical and functional cardiac parameters such as 3D shapes and volumes, mo- tion, strain and stresses in the myocardium. In this paper, we present a new approach for the segmentation and motion tracking of the myocardium in dynamic image se- quences. This approach includes strong priors without depending on statistical models. It is based on the Deformable Elastic Template (DET) method introduced by Pham et al. (2001), and later im- proved by Rouchdy et al. (2007).A Deformable Elastic Template is a combination of: A topological and geometrical model of the object to be segmented. A constitutive equation (elasticity) defining its behavior under applied external image forces that push the model’s interfaces towards the image edges. Here, we extend this approach to explicitly take into account the temporal dimension, in order to fully take into account the dynamics of the heart over the cardiac cycle. It is a regularized solution to a data modeling problem, which does not attempt to biophysically simulate the cardiac deformation. The proposed ap- proach adds smoothness and periodicity constraints to the model, thus improving the robustness. It also analyzes all time frames concurrently, contrarily to most other approaches which analyze only one instant at a time. Moreover, existence and uniqueness of a solution, as well as convergence of the numerical algorithm to- wards the desired solution can be established. The paper is organized as follows: after a presentation of previ- ous works in the field, the principle of DET in the static case is re- called before introducing its extension to the dynamic case with the associated assumptions and constraints (Section 3). Implemen- tation issues are detailed in Section 4. In a last section, results on synthetic data and real pathological human Magnetic Resonance Imaging sequences (MRI) are presented and discussed. 2. Previous work Many methods have been presented to tackle the problem of cardiac cine MRI segmentation. In particular, statistical methods, have encountered a certain success. Mitchell et al. (2001) first pre- sented an Active Appearance Model (AAM) for the segmentation of 2D MR slices of the heart. The method was later extended to a full 3D AAM (Mitchell et al., 2002). Lötjönen et al. presented a method based on a statistical point distribution model and a mean gray- scale model (Lötjönen et al., 2004). 1361-8415/$ - see front matter Ó 2010 Elsevier B.V. All rights reserved. doi:10.1016/j.media.2010.05.009 * Corresponding author. Tel.: +33 472438227. E-mail address: [email protected] (C. Casta). Medical Image Analysis xxx (2010) xxx–xxx Contents lists available at ScienceDirect Medical Image Analysis journal homepage: www.elsevier.com/locate/media Please cite this article in press as: Schaerer, J., et al. A dynamic elastic model for segmentation and tracking of the heart in MR image sequences. Med. Image Anal. (2010), doi:10.1016/j.media.2010.05.009
-
Upload
independent -
Category
Documents
-
view
2 -
download
0
Transcript of A dynamic elastic model for segmentation and tracking of the heart in MR image sequences

Medical Image Analysis xxx (2010) xxx–xxx
Contents lists available at ScienceDirect
Medical Image Analysis
journal homepage: www.elsevier .com/locate /media
A dynamic elastic model for segmentation and tracking of the heart in MRimage sequences
Joël Schaerer, Christopher Casta *, Jérôme Pousin, Patrick ClarysseCreatis-LRMN, CNRS UMR #5220, INSERM U630, INSA Bât. Blaise Pascal, F-69621 Villeurbanne Cedex, France
a r t i c l e i n f o a b s t r a c t
Article history:Received 28 February 2008Received in revised form 7 April 2010Accepted 31 May 2010Available online xxxx
Keywords:Cardiac MRIDynamic segmentationDeformable elastic templateFourier-based model
1361-8415/$ - see front matter � 2010 Elsevier B.V. Adoi:10.1016/j.media.2010.05.009
* Corresponding author. Tel.: +33 472438227.E-mail address: [email protected]
Please cite this article in press as: Schaerer, J.,Image Anal. (2010), doi:10.1016/j.media.2010.0
Strong prior models are a prerequisite for reliable spatio-temporal cardiac image analysis. While severalcardiac models have been presented in the past, many of them are either too complex for their parame-ters to be estimated on the sole basis of MR Images, or overly simplified. In this paper, we present a noveldynamic model, based on the equation of dynamics for elastic materials and on Fourier filtering. Theexplicit use of dynamics allows us to enforce periodicity and temporal smoothness constraints. We pro-pose an algorithm to solve the continuous dynamical problem associated to numerically adapting themodel to the image sequence. Using a simple 1D example, we show how temporal filtering can helpremoving noise while ensuring the periodicity and smoothness of solutions. The proposed dynamicmodel is quantitatively evaluated on a database of 15 patients which shows its performance and limita-tions. Also, the ability of the model to capture cardiac motion is demonstrated on synthetic cardiacsequences. Moreover, existence, uniqueness of the solution and numerical convergence of the algorithmcan be demonstrated.
� 2010 Elsevier B.V. All rights reserved.
1. Introduction
The detailed analysis of cardiac images remains a challengingtask. In particular, the automated analysis of cardiac anatomicaland functional MR images could yield detailed anatomical andfunctional cardiac parameters such as 3D shapes and volumes, mo-tion, strain and stresses in the myocardium.
In this paper, we present a new approach for the segmentationand motion tracking of the myocardium in dynamic image se-quences. This approach includes strong priors without dependingon statistical models. It is based on the Deformable Elastic Template(DET) method introduced by Pham et al. (2001), and later im-proved by Rouchdy et al. (2007). A Deformable Elastic Template isa combination of:
� A topological and geometrical model of the object to besegmented.� A constitutive equation (elasticity) defining its behavior under
applied external image forces that push the model’s interfacestowards the image edges.
Here, we extend this approach to explicitly take into accountthe temporal dimension, in order to fully take into account thedynamics of the heart over the cardiac cycle. It is a regularized
ll rights reserved.
.fr (C. Casta).
et al. A dynamic elastic model5.009
solution to a data modeling problem, which does not attempt tobiophysically simulate the cardiac deformation. The proposed ap-proach adds smoothness and periodicity constraints to the model,thus improving the robustness. It also analyzes all time framesconcurrently, contrarily to most other approaches which analyzeonly one instant at a time. Moreover, existence and uniquenessof a solution, as well as convergence of the numerical algorithm to-wards the desired solution can be established.
The paper is organized as follows: after a presentation of previ-ous works in the field, the principle of DET in the static case is re-called before introducing its extension to the dynamic case withthe associated assumptions and constraints (Section 3). Implemen-tation issues are detailed in Section 4. In a last section, results onsynthetic data and real pathological human Magnetic ResonanceImaging sequences (MRI) are presented and discussed.
2. Previous work
Many methods have been presented to tackle the problem ofcardiac cine MRI segmentation. In particular, statistical methods,have encountered a certain success. Mitchell et al. (2001) first pre-sented an Active Appearance Model (AAM) for the segmentation of2D MR slices of the heart. The method was later extended to a full3D AAM (Mitchell et al., 2002). Lötjönen et al. presented a methodbased on a statistical point distribution model and a mean gray-scale model (Lötjönen et al., 2004).
for segmentation and tracking of the heart in MR image sequences. Med.

2 J. Schaerer et al. / Medical Image Analysis xxx (2010) xxx–xxx
Statistical a priori based methods have also been implementedwith success for analyzing images of the heart from other modali-ties. Jacob et al. (2002) proposed a semi-automatic method forquantifying regional heart function from two-dimensional echo-cardiography. They track the myocardial boundaries using ashape-space-based approach, ie. a variant of the dynamic snake ap-proach. For the segmentation of tagged MR images, Qian et al.(2005) proposed a method based on an Active Shape Model forthe shape coupled with an appearance model based on the Ada-boost statistical method and Gabor filters. Lorenz and von Berg(2006) also proposed a statistical shape model based on imagesfrom 13 patients for the automated segmentation of computedtomography (CT) scans of the heart. Bernard et al. (2007, 2009)proposed a statistical model for the distribution of intensities inechographic images of the heart. The segmentation is then per-formed using a level-set technique. Finally, Zheng et al. (2008) pro-posed an automatic four-chamber heart segmentation system forthe quantitative functional analysis of the heart from cardiac CTvolumes.
Not all methods are based on statistical models, though. Someauthors feel that statistical models are too dependent on the train-ing data, and cannot account for all the variability in real patients.For example, Creswell et al. (1994) were the first to propose a FEMdeformable elastic model to analyze cardiac images. In the field ofsegmentation of echocardiographic images, Gérard et al. (2002)proposed a 3D deformable model based on a simplex mesh. Ange-lini et al. (2005) presented a solution based on deformable modelsand brushlet filtering of the image data for the segmentation of 3Dultrasound data. Vincent et al. (2000) proposed a volumetricdeformable model based on linear elasticity, named DeformableElastic Template (DET). Based on this work, Pham et al. (2001) con-structed a two cavities 3D model of the heart, for the segmentationof the heart in multimodality imaging. This model was further usedto extract patient specific 3D models integrating both metabolicand magneto electric mapping (Makela et al., 2003). Rouchdyet al. (2007) proposed a nonlinear formulation of DET, allowinglarge deformations, with good theoretical properties.
Priorly extracted information about the heart motion can beused. Lorenzo-Valdes et al. (2004) proposed using a 4D probabilis-tic atlas together with the expectation maximization algorithm toperform the segmentation of Cine MRI. Debreuve et al. (2001) pro-posed a space-time level-set method for the segmentation of myo-cardial SPECT images, taking the whole sequence as one 4D image.More recently, methods derived from mathematical morphologyhave appeared: Cousty et al. presented a framework based on dis-crete watersheds, also working in 4D (Cousty et al., 2010).
However, none of these methods provide a convenient frame-work for analyzing the heart motion both on the contours and in-side the myocardium, nor take into account the temporaldimension explicitly. A few papers have targeted the spatio-tem-poral analysis of the heart function from dynamic image se-quences. Montagnat proposed a dynamic framework based onsimplex meshes to analyze 4D SPECT data (Montagnat and Deling-ette, 2005), treating the temporal dimension geometrically. Serme-sant proposed a bio-inspired electromechanical model of the heartdesigned both for the simulation of its electrical and mechanicalactivity, as well as for the segmentation of time series of medicalimages (Sermesant et al., 2006). Recently, Lynch proposed a para-metric motion model, using a priori knowledge about the temporaldeformation of the myocardium that is embedded in a level-setscheme (Lynch et al., 2008). Nastar proposed a deformable surfacemodel with a Fourier basis for expressing the motion of controlpoints (Nastar and Ayache, 1996). The method we present in thispaper is very close to this last work. However, instead of the simplemass-spring shape model, we propose a more realistic elasticmodel.
Please cite this article in press as: Schaerer, J., et al. A dynamic elastic modelImage Anal. (2010), doi:10.1016/j.media.2010.05.009
Some works integrate additional information to recover theheart’s motion. Shi et al. (2000) proposed a point-tracked analysisof the left ventricle surface motion in 3D image sequences. Chenet al. (2008) proposed a fast motion tracking of tagged MR imagesusing angle-preserving meshless registration. Recently, Zhu et al.(2009) proposed dynamical shape prior for the segmentation ofthe left ventricle in Real-Time 3D Echocardiography, to handlesimultaneously inter-subject variablility as well as cardiac dynam-ics. The extension of the previously introduced DET model (Phamet al., 2001) presented in this paper constitutes our proposal totrack both the myocardial borders and motion throughout the im-age sequence over the cardiac cycle.
3. Model and theoretical background
3.1. Static DET model
Before describing the dynamic model, we briefly introduce thestatic Deformable Elastic Template (DET), upon which it is based(Pham et al., 2001).
The DET model is a deformable volumetric model submitted toexternal constraints imposed by the image. The equilibrium of themodel is obtained through the minimization of the following glo-bal energy functional:
E ¼ Eelastic þ Edata
where Eelastic represents the elastic deformation energy of the modeland Edata is the energy due to the external image forces.
The model is considered as a linear elastic body (Ciarlet, 1988).Its elastic energy can be expressed as:
Eelastic ¼12
ZX
trðr�TÞdX
where X is the model domain at rest. �ðuÞ ¼ 12 ðruþruTÞ is the
strain tensor and rðuÞ ¼ ktrð�ðuÞÞIþ 2l�ðuÞ (I is the identity ma-trix) is the stress tensor as a function of the displacement u. Thecoefficients k and l stand for the Lamé coefficients (see Ciarlet,1988). The material is considered to be isotropic, homogenousand defined by its Young modulus and its Poisson coefficient.
The object boundaries are submitted to a superficial force field f.The expression of the external energy Edata is:
EdataðuÞ ¼ �Z@X
f T udc
with oX the border of the object domain X.These energy terms can be approximated by discretizing the
underlying functions, namely the displacement u and the force f.To perform the discretization, we use the finite element method(FEM) (Zienkiewicz et al., 2005): the elastic domain X is approxi-mated by a polyhedron divided into tetrahedral elements. The dis-placement is approximated by linear functions on these elements,while the forces are sampled at nodal points.
Under this approximation, the minimum of the energy mustsatisfy the following equation:
KU ¼ F ð1Þ
where K is the stiffness matrix, corresponding to the response of theelastic material, and U and F are respectively the displacement andthe force at mesh nodes. This equation results in a sparse linear sys-tem and can be solved using standard numerical methods. Howeversince the force depends on the displacement, we do not solve thisequation directly. Rather, an evolution equation solves the nonlin-ear problem through a series of linear systems:
dUdsþ KU ¼ FðUÞ
for segmentation and tracking of the heart in MR image sequences. Med.

J. Schaerer et al. / Medical Image Analysis xxx (2010) xxx–xxx 3
where s is the evolution parameter. The derivative of the displace-ment relative to s can be approximated using finite differences, andF is supposed to be constant for small variations of U.
The model resulting from Eq. (1) is purely static, and its termsdo not explicitly depend on time. It is thus not very well suitedfor the analysis of the heart through dynamic image sequences.In particular, limitations of the static approach have been observedusing the 3D DET model in its static version for the segmentationand progressive tracking (from time step to time step) of both LVand RV (Schaerer et al., 2005). This was obvious notably when trac-ing the LV volume curve along the cardiac cycle: often, outliers oc-curs introducing a discontinuity in the volume variation. In thispaper, we extend the method to the analysis of dynamic image se-quences by investigating the use of the equation of Dynamics inplace of Eq. (1).
3.2. Dynamical DET model
3.2.1. Image data and model requirementsWe assume the data is available as sequences of N 2D or 3D
images, sampling the cardiac cycle. Dynamic MRI or X-ray com-puted tomography can provide such sequences. To simplify themathematical treatment of the problem, we assume that the car-diac cycle occurs for t 2 [0,1[.
Our goal is to match a geometrical heart template to a sequenceof images, while satisfying certain constraints: the motion shouldbe periodic and smooth. Our approach is to design our model tobe inspired from the real physics of the myocardium, while beingsimple enough for its parameters to be estimated from medicalimages. To this end, we propose the use of a simplified equationof Dynamics introduced in the next section.
3.2.2. Simplified equation of dynamicsThe full equation of Dynamics is as follows:
M€Uþ D _Uþ KðUÞU ¼ FðU; tÞ
where M is the generalized mass matrix, accounting for both massand rotational inertia and D is the damping matrix and is usuallydiagonal. For more details on finite-element based dynamical mod-els, the reader can refer to (Metaxas and Terzopoulos, 1993) and thereferences cited in.
Note that K and F both depend on the displacement in the non-linear case (Rouchdy et al., 2007). As such, the problem is nonlinearand significantly harder than the linear one.
In this work, the inertia contribution (second-order term),namely M€U, is neglected. Whether this approximation is realisticremains to be shown, however, we believe that a first order modelis sufficient for image analysis. Removing the second-order termalso renders the problem more stable and easier to treat mathe-matically. The model equation therefore becomes:
D _Uþ KðUÞU ¼ FðU; tÞ ð2Þ
We consider the matrix D to be an invertible diagonal matrix. More-over, the matrix D is reduced to a multiple of Identity. It can thus bereplaced by a single scalar a:
a _Uþ KðUÞU ¼ FðU; tÞ ð3Þ
In Appendix A.1, a result of existence and uniqueness of a solutionto Problem (3) is given in the case where the stiffness matrix doesnot depend on displacement.
3.2.3. Function basisSolutions to the preceding equation do not necessarily satisfy
the periodicity and smoothness constraints. In order to enforcethese constraints, we look for solutions in a finite-dimension sub-
Please cite this article in press as: Schaerer, J., et al. A dynamic elastic modelImage Anal. (2010), doi:10.1016/j.media.2010.05.009
space F generated by a set of Fourier harmonics (Oppenheim et al.,1999).
The image data represents a certain number (N) of uniformly-spaced noisy samples of a smooth and periodic phenomenon. Thus,we can assume the force fields Fn derived from the images to besamples of an element of F. One and only one element of F satis-fies F n
N
� �¼ Fn; 8n; 0 6 n < N. The discrete Fourier Transform of
the Fn samples is defined as:
dft½l� ¼ 1N
XN�1
n¼0
Fne�2piln
N
with
f l ¼dft½l�; 8l; 0 6 l < N
2
dft½lþ N�; 8l; � N2 < l < 0
12 dft½N2�; 8l; l ¼ � N
2
8><>:
then
FðtÞ ¼XN=2
l¼�N=2
f le2pilt ð4Þ
Note that the previous expressions are only valid if N is even. Sim-ilar expressions can be easily derived for the odd case. For reasonsof brevity, we only consider the case where N is even in the remain-ing part of this paper.
3.3. Integration methods
We now focus on solving Eq. (3) taking into account the har-monic model in Eq. (4). We first consider the linear case, whereneither K nor F depend on the displacement:
a _Uþ KU ¼ FðtÞ ð5Þ
In Section 4.1.1, we will show how to solve the real problem using aseries of these simplified linear problems.
The K matrix derived from the finite-element formulation oflinear elasticity is symmetric. Thus there exists an invertible ma-trix P such that:
P�1KP ¼ diagðkkÞ
where diag(kk) is a diagonal matrix composed of the eigenvalues ofK.
We can rewrite Eq. (5) in the new basis. Let Y be the vector suchthat U = PY.
aP _Y þ KPY ¼ F
aP�1P _Y þ P�1KPY ¼ P�1F
Finally, setting P�1F = G, we get:
a _Y þ diagðkkÞY ¼ G ð6Þ
Eq. (6) is a set of independent 1-D problems, since the matrices arediagonal and each line is thus independent from the others.
We consider two methods to solve this problem: the collocationmethod and the finite difference method.
If Y is a solution of Eq. (6) and Y 2F, then each component Yk ofY satisfies:
YkðtÞ ¼XN=2
l¼�N=2
ylke2pilt
where ylk is the lth component of the Fourier decomposition of Yk
given by both the collocation and the finite difference method,which ensure that
for segmentation and tracking of the heart in MR image sequences. Med.

4 J. Schaerer et al. / Medical Image Analysis xxx (2010) xxx–xxx
ylk ¼
glk
kk þ 2pilað7Þ
with glk being Gk’s Fourier coefficient in Eq. (6).
3.4. Force vs. displacement filtering
The previous section dealt with a problem of interpolation: thevalues of the force vector field F measured in the images are sup-posed to drive the model towards the object’s boundaries in theimage. However, in practice, MR images are noisy and contain alot of structures. It is thus impossible to derive a perfect force fieldfrom the images. Typical force fields derived for example from theGradient Vector Flow (GVF) approach (Xu and Prince, 1998) sufferfrom two main problems:
� Temporal jittering: the border of the object will not be detectedexactly at the same position in consecutive frames, resulting inan unrealistically irregular motion.� Sporadic absence of data, due to various MR artifacts.
The force field acting on our model is either derived from a gra-dient based method (e.g. GVF), or from a sophisticated segmenta-tion algorithm (Cousty et al., 2010). In this latter case, althoughless prone to the second problem, it still suffers from some tempo-ral jittering. It is thus interesting to filter either the data or thecomputed solutions, in order to remove noise and to enforce con-tinuity and smoothness of the motion. In the Fourier basis, filteringthe high frequencies can be as easy as removing the high frequencyharmonics, more precisely, setting fl = f�l = 0 for l > a, where a is thehighest admissible frequency. The choice of a is a trade-off be-tween filtering power and reconstruction accuracy. It should benoted that while truncation in the Fourier space is clearly not theoptimal strategy for low-pass filtering, it is easy to replace it withbetter filters. However, we found that this simple approach wassufficient for our application. Note that filtering F before solvingthe equation is equivalent as filtering U a posteriori.
4. Implementation issues
4.1. Algorithm implementation
4.1.1. Pseudo-instationary schemeWe now discuss how to solve Eq. (3) when forces depend on the
displacement. We propose to solve it by considering a series of lin-ear problems, in a so-called pseudo-instationary process (Ciarletand Lions, 1990). Roughly speaking, it consists in introducing aparameter s, and to consider a pseudo-instationary problem withrespect to s derived from the original problem. The original prob-lem will then be recovered as the asymptotic limit of the instation-ary problem when s goes to infinity. Doing so allows to treat thenonlinear terms explicitly. Let’s define the operator A ¼ a d
dsþ Kand consider,
dUds ¼ FðUÞ � AUUð0Þ ¼ 0:
(ð8Þ
if U converges when s ? +1, then it tends towards a limit which isa solution of the nonlinear problem (Eq. (3)). In Appendix A.2, re-sults of existence, uniqueness and asymptotic behavior with respectto s are specified mathematically. Discretizing the previous equa-tion gives:
Us � Us�1
Dsþ AUs ¼ FðUs�1Þ
or
Please cite this article in press as: Schaerer, J., et al. A dynamic elastic modelImage Anal. (2010), doi:10.1016/j.media.2010.05.009
1Dsþ A
� �Us ¼ FðUs�1Þ þ 1
DsUs�1
Using finite differences to solve the temporal equation,
1Ds
Usn þ
aDnðUs
n � Usn�1Þ þ KUs
n ¼ FðUs�1n Þ þ 1
DsUs�1
n
1Dsþ a
Dnþ K
� �Us
n ¼ FðUs�1n Þ þ 1
DsUs�1
n þ aDn
Usn�1
This latter equation is a linear system and is straightforward tosolve.
4.1.2. Constrained schemeWhen a prior segmentation in which we have a high confidence
is available as a binary map, one may wish to force the model to fitthe contours. In this case, solution must strictly respect the condi-tion F(U) = 0 on the boundaries, which the previous scheme doesnot ensure. In this case, we propose to use a singular-perturbativescheme:
dUds¼ FðUÞ � e�csAU
where c is a constant. It is quite obvious that if U converges, it willsatisfy F(U) = 0. Furthermore, if c is chosen small enough, thisscheme is close to solving a series of unconstrained problems withthe pseudo-instationary scheme. Thus, even though the displace-ment on the border of the domain is fixed, we still ensure thatthe displacement over the whole domain is the solution of an elasticproblem. Further development of the convergence of this periodicsingular perturbative model is given in Appendix A.3.
4.2. Impact of damping and filtering
Although our method is general and applies to any number ofspatial dimensions, we illustrate the effect of damping and filteringwith only one spatial dimension, in order to ease result interpreta-tion. In this setting, Eq. (3) becomes:
au0ðtÞ þ kuðtÞ ¼ f ðtÞ
where a and k are scalars, and f and u are scalar functions.In this context, we use the dynamic model to match a target sig-
nal s(t) which is the 1D equivalent of image contour data. The forcefunction f(t) was defined with an incremental method:
au0jðtÞ þ kujðtÞ ¼Xj
i¼0
sign sðtÞ � uiðtÞð ÞffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffijsðtÞ � uiðtÞj
p
where j is the iteration step. The force is thus gradually increaseduntil uj(t) is very close to s(t), or the maximum number of iterationsis reached. Although in this case the force depends on the displace-ment and is nonlinear, we have a series of linear problems and theresults of the previous sections still apply.
Similarly to real conditions, the signal s(t) was contaminatedwith noise. Furthermore, in order to simulate an absence of data,the force was set to zero for 30 6 t 6 40.
Fig. 1 illustrates the results of this experiment, with various set-tings. Without damping or filtering, the model is unable to copewith the absence of data or to filter the noise (Fig. 1b). The additionof damping on Fig. 1c, allows the model to cope with the absence ofdata in a convincing way. The addition of filtering in the Fourierdomain allows to remove the noise and retrieve a smoothed signalthat is very similar to the original one. This simple 1D experimentillustrates well the model’s behavior and allows to anticipate itsaction in higher spatial dimensions (2D+t, 3D+t).
for segmentation and tracking of the heart in MR image sequences. Med.

Fig. 1. Sample 1D results: (a) target signal (green curve) and initialization (U = 0), (b) results without filtering or damping (k = 1), (c) results with damping but no filtering(d = 0.2, k = 1), (d) results with damping and filtering (d = 0.2, k = 1 and h = 8 harmonics). (For interpretation of the references to colour in this figure legend, the reader isreferred to the web version of this article.)
Fig. 2. Sample ring mesh used as initial template for 2D short-axis cardiac MRsegmentation tracking.
J. Schaerer et al. / Medical Image Analysis xxx (2010) xxx–xxx 5
4.3. Method parameters and user interaction
In this section, we describe the method’s parameters and theuser interactions needed to correctly perform the segmentationof a 2D cardiac sequence in practice. We also describe how we gen-erate the force field. The parameters of the algorithms can be di-vided into the following categories:
� Initial template: In 2D spatial dimensions, the initial templateconsists in a ring representing both endocardium and epicar-dium. It is defined with three geometrical parameters: the cen-ter of the annulus, the radius and the thickness. The template ismeshed with a very simple method: first divide the ring intoquadrangles using sectors and concentric rings, then divideeach quadrangle into two triangles. Better meshing methodscould be used, but the triangles generated by our simplemethod proved good enough for this application. The numberof rings and sectors are two other parameters defining the mesh.Fig. 2 shows a sample generated mesh.� Mechanical parameters: The Young modulus represents the rigid-
ity of the model, while the Poisson coefficient characterizes theability of the material to be compressed.� Algorithm parameters: The stopping criteria is defined as the
lower bound of the average displacement difference betweentwo successive iterations. The number of image resolution levelscan also be chosen. Using a single level works correctly if themagnitude of the deformation is moderate. However, if thereis a large movement or thickening throughout the dynamicsequence, it may be necessary to use several resolution levelsto allow for larger deformations. Finally, the number of harmon-ics used for Fourier filtering is usually fixed to 5.
In order to ensure a good positioning of the template at thebeginning of the algorithm, a semi-automatic initialization of thetemplate is achieved before the segmentation. It consists in choos-ing a point approximately in the center of the left ventricle at the
Please cite this article in press as: Schaerer, J., et al. A dynamic elastic modelImage Anal. (2010), doi:10.1016/j.media.2010.05.009
end-diastolic (ED) phase. A circle which center is the previouslychosen point is then fitted to the endocardium, and taken as initial-ization for the inner part of the annulus at ED phase. Alternativemethods can be used to initialize the template in a more automaticmanner. An approach based on a priori learning has been experi-mented with a certain success to automatically identify endocar-dial points and then fit the circle. A contraction parameter (CP)has also been defined, to initialize the template correctly duringthe end-systolic (ES) phase, by making the ring thicker. If it is setto 0, the thickness at ES will be the same as ED. If set to 1, the thick-ness of the annulus at ES will be equal to its radius, which meansthe cavity of the left ventricle will disappear. In the evaluation,CP was set to 0.2.
for segmentation and tracking of the heart in MR image sequences. Med.

6 J. Schaerer et al. / Medical Image Analysis xxx (2010) xxx–xxx
In practice, we mainly act onto only one parameter which is theYoung modulus. If the Young modulus is set too high, the modelwill not deform at all. If set too low, the model will deform tomatch all image features, real structures and artifacts alike.Throughout the whole evaluation conducted in Section 5, we usedvalues of Young’s modulus between 0.1 and 0.5, with forces withmaximal norm of 1.
Finally, all our experiments were conducted using a force fieldgenerated with the following sequence of operations:
� Preprocess image with a median filter (5 � 5 kernel).� Extract the contours with a Sobel edge detector.� Compute a Gaussian smoothed gradient of the contours
(r = 0.5) to obtain a vector field.� Ensure that forces are null on the contours by applying a
Geman–McClure function to the vector norms. The vector normis set to d2
r2þd2, where d is a distance computed as a distance mapof the previously extracted contour map. In our experiments, rwas set to 2.5 pixels.
The resulting force map is a vector image with vector attributesat each node of a regular grid (image). The forces at arbitrary loca-tions of mesh nodes are computed by linear interpolation from thefour nearest neighbours. Using linear interpolation instead of near-est neighbor ensures a smooth transition at contours and preventsoscillation problems.
Fig. 3. DET Model superimposed onto the images of HF-I-10 sequence at a medianslice of the heart over the cardiac cycle. The sequence should be read like a book,with end-diastole on the top-left corner (only one over two frames are shown). Thepink mesh is the model. It is translucent so that correspondence between modeland image contours can be appreciated.
5. Results
The results obtained in the context of a segmentation challengeon a rather large MRI patient database are first presented. Then, wegive qualitative results about the estimated motion of the left ven-tricle from a 2D synthetic sequence.
5.1. Results on real cardiac MR images
5.1.1. ContextThe evaluation of the Dynamic DET model was conducted on
clinical data in the context of the MICCAI 2009 LV SegmentationChallenge: http://smial.sri.utoronto.ca/LV_Challenge/Home.html(Radau et al., 2009). Three datasets were made available: training,validation and on-line. The training set allowed us to test our algo-rithm and optimize it, with comparison against an availableground truth. Results of the segmentation of the validation setwere sent to the organizers of the Challenge, for prior competitionselection. Results are reported in Casta et al. (2009). Finally, on-lineset was available the day of the challenge, at the MICCAI confer-ence. Each set consisted of 15 examinations, each belonging toone of the four categories: normal (N), heart failure with (HF-I)or without (HF-NI) ischemia and hypertrophy (HYP). Examinationswere made of 8–14 slice levels, each consisting of 20 frames. Eval-uation is performed only for endocardial and pericardial contoursat ED and ES time points.
5.1.2. Quantitative resultsThe evaluation was done on series of 2D slices, covering the
whole heart. This allows, by interpolation, to estimate 3D volumesand global parameters such as the left ventricle mass (LVM) andthe ejection fraction (EF). The EF and LVM (calculated at ED phase)determined by the manual and automatic methods were comparedby Bland–Altman plot analysis separately. Dice metric and averageperpendicular distance between estimated and reference contourswere also computed.
During the segmentation of all the datasets, we mainly actedonto the Young modulus, which value was set between 0.1 and
Please cite this article in press as: Schaerer, J., et al. A dynamic elastic modelImage Anal. (2010), doi:10.1016/j.media.2010.05.009
0.5. We usually set its value to 0.2, and manually adapted it whennecessary. The Poisson coefficient was fixed to 0.2. The center ofthe annulus and its radius were found using a semi-automatic ini-tialization, while the thickness was set to eight pixels. The annuluswas generated with five rings and 40 sectors. Finally, the numberof resolution levels was set to 3, the stopping criteria to 10�5,and CP to 0.2.
The results presented here are those obtained on the 15 on-line datasets. Quality indices are only estimated at two instants:ED and ES. Note that the present results are not those obtainedduring the on-line contest, but later on after experimenting morewith the method. Fig. 3 shows the results of a LV segmentationon a patient affected by heart failure with ischemia (4th slicelevel of the HF-I-10 dataset), with Mean Distance equal to3.0815 mm and StD = 2.6594 mm at ES and Mean = 1.8861 mmand StD = 1.4004 mm at ED, both for inner contours. Fig. 4 com-pares the estimated segmentation with the expert one (sameHF-I-10 dataset, 7th slice level), with Mean Distance = 2.5119 mmand StD = 1.504 mm at ES and Mean = 1.6691 mm and StD =1.3027 mm at ED, both for inner contours.
Table 1 compares the LVM for a selection of patients, betweenautomatic and manual segmentations. Volume Ratio (VR) is de-fined as the ratio of expert and estimated LVM. Table 2 referencesaverage values and standard deviation for VR for the differentpathology classes. Table 3 presents the ejection fraction with therelative errors for different datasets, for both automatic and man-ual segmentations. Finally, Table 4 references average perpendicu-lar distances and Dice metrics, for inner and outer contours, for thedifferent pathology classes.
5.2. Discussion
The main advantage of our method is that it allows for thesimultaneous segmentation of both endocardium and epicardiumover a whole dynamic sequence of images, after the initialization
for segmentation and tracking of the heart in MR image sequences. Med.
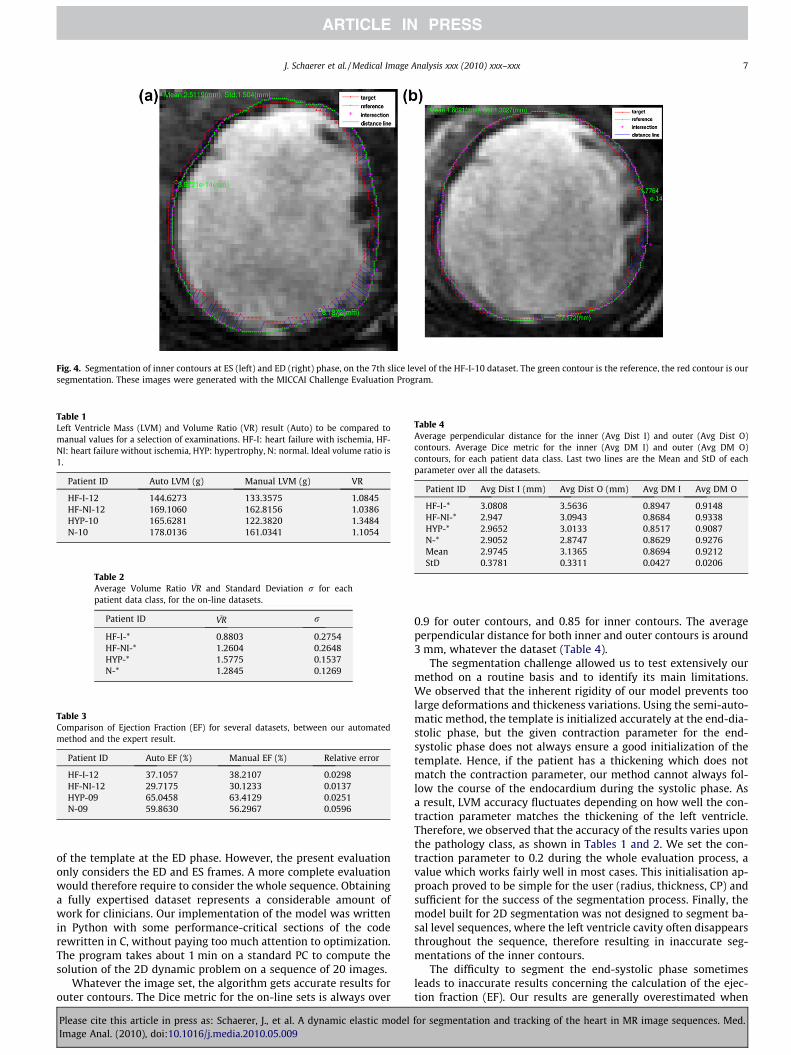
Fig. 4. Segmentation of inner contours at ES (left) and ED (right) phase, on the 7th slice level of the HF-I-10 dataset. The green contour is the reference, the red contour is oursegmentation. These images were generated with the MICCAI Challenge Evaluation Program.
Table 1Left Ventricle Mass (LVM) and Volume Ratio (VR) result (Auto) to be compared tomanual values for a selection of examinations. HF-I: heart failure with ischemia, HF-NI: heart failure without ischemia, HYP: hypertrophy, N: normal. Ideal volume ratio is1.
Patient ID Auto LVM (g) Manual LVM (g) VR
HF-I-12 144.6273 133.3575 1.0845HF-NI-12 169.1060 162.8156 1.0386HYP-10 165.6281 122.3820 1.3484N-10 178.0136 161.0341 1.1054
Table 2Average Volume Ratio �VR and Standard Deviation r for eachpatient data class, for the on-line datasets.
Patient ID �VR r
HF-I-* 0.8803 0.2754HF-NI-* 1.2604 0.2648HYP-* 1.5775 0.1537N-* 1.2845 0.1269
Table 3Comparison of Ejection Fraction (EF) for several datasets, between our automatedmethod and the expert result.
Patient ID Auto EF (%) Manual EF (%) Relative error
HF-I-12 37.1057 38.2107 0.0298HF-NI-12 29.7175 30.1233 0.0137HYP-09 65.0458 63.4129 0.0251N-09 59.8630 56.2967 0.0596
Table 4Average perpendicular distance for the inner (Avg Dist I) and outer (Avg Dist O)contours. Average Dice metric for the inner (Avg DM I) and outer (Avg DM O)contours, for each patient data class. Last two lines are the Mean and StD of eachparameter over all the datasets.
Patient ID Avg Dist I (mm) Avg Dist O (mm) Avg DM I Avg DM O
HF-I-* 3.0808 3.5636 0.8947 0.9148HF-NI-* 2.947 3.0943 0.8684 0.9338HYP-* 2.9652 3.0133 0.8517 0.9087N-* 2.9052 2.8747 0.8629 0.9276Mean 2.9745 3.1365 0.8694 0.9212StD 0.3781 0.3311 0.0427 0.0206
J. Schaerer et al. / Medical Image Analysis xxx (2010) xxx–xxx 7
of the template at the ED phase. However, the present evaluationonly considers the ED and ES frames. A more complete evaluationwould therefore require to consider the whole sequence. Obtaininga fully expertised dataset represents a considerable amount ofwork for clinicians. Our implementation of the model was writtenin Python with some performance-critical sections of the coderewritten in C, without paying too much attention to optimization.The program takes about 1 min on a standard PC to compute thesolution of the 2D dynamic problem on a sequence of 20 images.
Whatever the image set, the algorithm gets accurate results forouter contours. The Dice metric for the on-line sets is always over
Please cite this article in press as: Schaerer, J., et al. A dynamic elastic modelImage Anal. (2010), doi:10.1016/j.media.2010.05.009
0.9 for outer contours, and 0.85 for inner contours. The averageperpendicular distance for both inner and outer contours is around3 mm, whatever the dataset (Table 4).
The segmentation challenge allowed us to test extensively ourmethod on a routine basis and to identify its main limitations.We observed that the inherent rigidity of our model prevents toolarge deformations and thickeness variations. Using the semi-auto-matic method, the template is initialized accurately at the end-dia-stolic phase, but the given contraction parameter for the end-systolic phase does not always ensure a good initialization of thetemplate. Hence, if the patient has a thickening which does notmatch the contraction parameter, our method cannot always fol-low the course of the endocardium during the systolic phase. Asa result, LVM accuracy fluctuates depending on how well the con-traction parameter matches the thickening of the left ventricle.Therefore, we observed that the accuracy of the results varies uponthe pathology class, as shown in Tables 1 and 2. We set the con-traction parameter to 0.2 during the whole evaluation process, avalue which works fairly well in most cases. This initialisation ap-proach proved to be simple for the user (radius, thickness, CP) andsufficient for the success of the segmentation process. Finally, themodel built for 2D segmentation was not designed to segment ba-sal level sequences, where the left ventricle cavity often disappearsthroughout the sequence, therefore resulting in inaccurate seg-mentations of the inner contours.
The difficulty to segment the end-systolic phase sometimesleads to inaccurate results concerning the calculation of the ejec-tion fraction (EF). Our results are generally overestimated when
for segmentation and tracking of the heart in MR image sequences. Med.

8 J. Schaerer et al. / Medical Image Analysis xxx (2010) xxx–xxx
thickening is moderate (HYP and N patient class) and underesti-mated when thickening is important (HF, Table 3). This is problem-atic given that EF is one of the important functional parameters inclinics. To tackle this problem, we currently investigate various ap-proaches. One of them consists in attributing to the LV endocar-dium a specific rigidity with a Young modulus higher than theinside LV. Another solution is to refine the edge map which attractsthe DET model based on a prior segmentation (e.g. a 2D+t morpho-logical segmentation) and selective application of forces.
It is interesting to evaluate the effect of the different parame-ters of the model. The Young modulus represents the balance be-tween prior knowledge and image data. If set too high, the modelwill not deform at all. If set too low, the model will deform tomatch perfectly all image features, real structures and artifactsalike. The Young modulus is a real positive number. In practice,for the analysis of normal MR sequences of the heart, its valuewas taken in the range 0.1–0.5. For most of the cases, the YoungModulus was set to 0.2, and manually adapted in a limited num-ber of cases.
The Poisson coefficient characterizes the ability of the materialto be compressed, ie. to change volume when under stress. It isgenerally admitted that the whole myocardium is nearly incom-pressible. However, since we do not know the volume of the pa-tients myocardium prior to analyzing the images, it is better toallow the volume to change during the adaptation of the modelto the patient’s images. An idea would be to do a first run with acompressible material to estimate the volume, then rerun with
Fig. 5. Effect of Fourier filtering. Each row shows several frames of a dynamic sequencediastole and the second frame corresponding to end-systole. For each row, the forces areharmonics. Third row, 4 harmonics, Fourth row, 5 harmonics, and last row, no filtering
Please cite this article in press as: Schaerer, J., et al. A dynamic elastic modelImage Anal. (2010), doi:10.1016/j.media.2010.05.009
the Poisson coefficient set to 0.5. This could be interesting, espe-cially to deal with the problem of papillary muscles touching themyocardial wall during systole. However, due to the problem ofthe myocardial motion across the image slices (longitudinal con-traction), it is not guaranteed that the imaged area of myocardiumremains the same. In practice, an intermediate value of 0.2 wasfound to work well in 2D. The approach could also be applied tolong axis slices with a template adapted to the LV shape in this ori-entation (e.g ellipsoidal shell), with the aim to estimate the longi-tudinal contraction.
Fig. 5 shows the effect of the filtering order on tracking results.The top row shows that using two harmonics is clearly insufficientfor accurately capturing the cardiac motion. However, as few as 4to 5 harmonics are enough to capture most of the cardiac motion,while filtering a significant part of the noise introduced by the low-level segmentation. The last row shows the results in the absenceof filtering: while motion is captured accurately, the borders arenot smooth and temporal consistency is reduced. In Young et al.(1992) also used Fourier basis functions for cardiac motion analy-sis, and it was also found that five harmonics were sufficient in thecase of 60 fps cineangiographic data.
Damping acts in a complementary way with Fourier filtering:while Fourier filtering ensures global periodicity and smoothness,it does not filter local and smooth oscillations. Damping allowsto enforce temporal consistency at the local level. In our experi-ments on the synthetic sequence, best results were obtained withdamping a set to 0.6.
, uniformly sampled over the cardiac cycle, with first frame corresponding to end-filtered with a different number of harmonics. Top row, 2 harmonics. Second row, 3at all.
for segmentation and tracking of the heart in MR image sequences. Med.
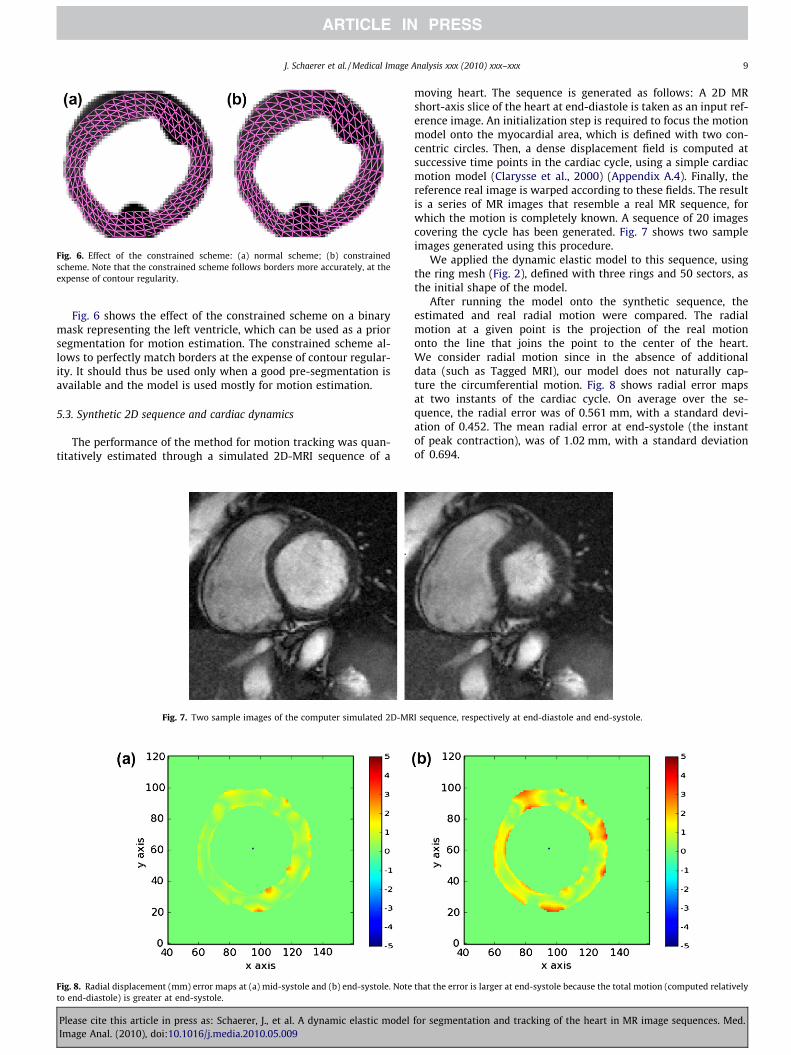
Fig. 6. Effect of the constrained scheme: (a) normal scheme; (b) constrainedscheme. Note that the constrained scheme follows borders more accurately, at theexpense of contour regularity.
J. Schaerer et al. / Medical Image Analysis xxx (2010) xxx–xxx 9
Fig. 6 shows the effect of the constrained scheme on a binarymask representing the left ventricle, which can be used as a priorsegmentation for motion estimation. The constrained scheme al-lows to perfectly match borders at the expense of contour regular-ity. It should thus be used only when a good pre-segmentation isavailable and the model is used mostly for motion estimation.
5.3. Synthetic 2D sequence and cardiac dynamics
The performance of the method for motion tracking was quan-titatively estimated through a simulated 2D-MRI sequence of a
Fig. 7. Two sample images of the computer simulated 2D-MR
Fig. 8. Radial displacement (mm) error maps at (a) mid-systole and (b) end-systole. Noteto end-diastole) is greater at end-systole.
Please cite this article in press as: Schaerer, J., et al. A dynamic elastic modelImage Anal. (2010), doi:10.1016/j.media.2010.05.009
moving heart. The sequence is generated as follows: A 2D MRshort-axis slice of the heart at end-diastole is taken as an input ref-erence image. An initialization step is required to focus the motionmodel onto the myocardial area, which is defined with two con-centric circles. Then, a dense displacement field is computed atsuccessive time points in the cardiac cycle, using a simple cardiacmotion model (Clarysse et al., 2000) (Appendix A.4). Finally, thereference real image is warped according to these fields. The resultis a series of MR images that resemble a real MR sequence, forwhich the motion is completely known. A sequence of 20 imagescovering the cycle has been generated. Fig. 7 shows two sampleimages generated using this procedure.
We applied the dynamic elastic model to this sequence, usingthe ring mesh (Fig. 2), defined with three rings and 50 sectors, asthe initial shape of the model.
After running the model onto the synthetic sequence, theestimated and real radial motion were compared. The radialmotion at a given point is the projection of the real motiononto the line that joins the point to the center of the heart.We consider radial motion since in the absence of additionaldata (such as Tagged MRI), our model does not naturally cap-ture the circumferential motion. Fig. 8 shows radial error mapsat two instants of the cardiac cycle. On average over the se-quence, the radial error was of 0.561 mm, with a standard devi-ation of 0.452. The mean radial error at end-systole (the instantof peak contraction), was of 1.02 mm, with a standard deviationof 0.694.
I sequence, respectively at end-diastole and end-systole.
that the error is larger at end-systole because the total motion (computed relatively
for segmentation and tracking of the heart in MR image sequences. Med.

X;
10 J. Schaerer et al. / Medical Image Analysis xxx (2010) xxx–xxx
6. Conclusion
We have presented a new dynamic elastic model (dynamic DET)for segmentation and motion estimation in cardiac MR sequences,and more generally, for the analysis of images of soft deformablestructures in periodic motion. Experiments on a MR database showa good overall ability of the model to track the heart borders andcapture the heart motion in 2D image sequences. Its main advan-tage is that it can process a whole dynamical sequence and providea temporally consistent segmentation of the LV over the whole car-diac cycle. Other models proposed in the literature take into ac-count account the temporal information. For instance, theapproach presented in (Lynch et al., 2008) performs a spatio-tem-poral segmentation based on level sets and a parametric model ofthe cardiac motion. Evaluation with such approaches would re-quire the extension of the MICCAI challenge evaluation protocolto evaluate over all time points. The model also exhibits very goodtheoretical properties; in particular convergence of the proposedalgorithm was proven (see Appendices A.1, A.2 and A.3). The iner-tial term was discarded in Eq. (2) at the basis of our dynamic DETmodel. Considering the results, this is obviously efficient in ourobjective of heart contour segmentation and tracking. This wouldprobably not be realistic enough if one would expect to recoverthe true dynamical mechanical behavior of the heart.
Extending dynamic DET model to track heart borders and mo-tion in 3D is indeed appealing. It should be noted that this doesnot require any further theoretical developments, since the equa-tions we have presented remain valid in 3D. However, 3D MR im-age processing poses a number of purely technical problems (inter-slice alignment, 3D interpolations, data visualization, computationtime, model initialization, etc.), which incited us to first experi-ment the model in 2D+time, in order to fully control the modelin 2D before extending it to 3D.
Another very interesting perspective would be to use additionaldata such as tagged MRI to drive the model. This information couldbe injected into the model by using a force field derived from thetagged data. This would allow to retrieve information that is not di-rectly available in Cine MRI, such as rotational motion. As more andmore detailed imaging modalities become available, it would alsobe interesting to integrate in the future more detailed physics intothe model, such as the cardiac fiber architecture that could be pro-vided by DT-MRI (Frindel et al., 2009).
Acknowledgements
This work has been supported by the French research projectACI-AGIR (http://www.aci-agir.org) and the Région Rhônes Alpesthrough the Simed project of cluster ISLE, as well as the CNRS-GDR STIC-Santé through the support of the IMPEIC action (Multi-centric Initiative for Evaluation of Cardiac Image segmentationmethods). It is also part of the French ANR (http://www.agence-nationale-recherche.fr/) project GWENDIA.
Appendix A
A.1. Formal description of the dynamic problem: existence anduniqueness of a solution
Let us begin with some definitions and hypotheses. The finite-dimension subset of rigid displacements is denoted by R and Xis a bounded domain of R3. The space H ¼ ðL2ðXÞÞ3=R is the quo-tient space with rigid displacements of measurable functions withintegrable square, and the space V ¼ ðH1ðXÞÞ3=R is the Sobolevspace of functions belonging to H with distributional derivatives
Please cite this article in press as: Schaerer, J., et al. A dynamic elastic modelImage Anal. (2010), doi:10.1016/j.media.2010.05.009
in H (see for example Ciarlet, 1988). We will assume the followinghypotheses to be satisfied.
� H1: X is a bounded domain of R3, the boundary of which oX isof C4 class.� H2: The function f : R3 ! R3 is Lipschitz with a constant Kf, and
is a gradient function: 9F R3 ! Rþ, such that: �DFðxÞ ¼ f ðxÞ; 8x2 R3. Furthermore, f verifies f ? R.
Here we only consider the linear elasticity body case. Thus wedeal with the operator A defined by A ¼ d
dt � divðrðvÞÞ.Let L2
pð0;1; VÞ denote the 1-periodic functions with values in V,then we have.
Theorem 7.1. Assume Hypothesis H1 and H2 to be satisfied, and thatu(0) = u(1) = 0. Then there exists a unique u 2 L2
pð0;1; VÞ which is aweak solution to:
ddt uðtÞ � divðrðuðtÞÞÞ ¼ AuðtÞ ¼ 0 in ð0;1Þ �X;
rðuðtÞÞ=nð ÞR3 ¼ f ðI þ uðtÞÞ on ð0;1Þ � @X;
uð0Þ ¼ uð1Þ in X:
8><>: ð9Þ
Moreover, the solution has the following regularity: u 2L2(0,1;V \ (H2(X))3) \ H1(0,1;H), where H1(0,1;H) is the space of func-tions from (0,1) with values in H which are in L2(0,1;H) with a timederivative in distributional sense in L2(0,1;H).
For a proof the reader is referred to Pousin (2009).
A.2. Convergence of the pseudo-instationnary solving scheme
Let K be fixed, set Ds ¼ KP and consider the sequence
fVDsn g
Pn¼0 � L2ð0;1; VÞ verifying:
VDsnþ1ðtÞ � VDs
n ðtÞ þ Ds ddt VDs
nþ1ðtÞ � divðrðVDsnþ1ðtÞÞÞ
� �¼ 0 in ð0;1Þ �
written as VDsnþ1 � VDs
n þ Ds AVDsnþ1ðtÞ
� �¼ 0 in ð0;1Þ �X;
rðVDsnþ1ðtÞÞ=n
� �R3¼ f ðI þ VDs
nþ1ðtÞÞ on ð0;1Þ � @X;
VDsnþ1ð0Þ ¼ VDs
nþ1ð1Þ in X;
VDs0 ¼ 0 in ð0;1Þ �X:
8>>>>>>>>>><>>>>>>>>>>:
ð10Þ
Problem (10) corresponds to a semi-discretized version of the con-tinuous pseudo-instationnary problem.
Lemma 1. Assume the hypotheses H1 and H2 to be satisfied. Then forall 0 < n 6 P there exists a unique VDs
n 2 L2pð0;1; V \ ðH2ðXÞÞ3Þ
\H1ð0;1; HÞ.Thanks to the sequence fVDs
n gPn¼0 a piecewise linear function
with respect to s, VP(s) is built. The function VPðsÞ 2 C0
ð0;K; L2pð0;1; HÞÞ is linear on each intervals (kDs, (k + 1)Ds). Now
we have a sequence fVPgP2N which can be proved a Cauchy se-quence, and the following existence result is established (see Pou-sin, 2009).
Theorem 2. Assume the hypotheses H1 and H2 to be satisfied. Thenthere exists a unique function vðs; t; xÞ 2 C0ð0;1; L2
pð0;1; VÞÞ \ H1loc
ð0;1; L2pð0;1; HÞÞ solution to
dds v þ Av ¼ 0 in ð0;1Þ � ð0;1Þ �X;
rðvÞ=nð ÞR3 ¼ f ðI þ vÞ on ð0;1Þ� ð0;1Þ � @X;
vð�;0; �Þ ¼ vð�;1; �Þ in ð0;1Þ�X;
vð0; �; �Þ ¼ 0 in ð0;1Þ �X:
8>>><>>>:
ð11Þ
Now, let us specify the asymptotic behavior with respect to s ofsolutions to (11).
for segmentation and tracking of the heart in MR image sequences. Med.

J. Schaerer et al. / Medical Image Analysis xxx (2010) xxx–xxx 11
Theorem 3. Assume the hypotheses H1 and H2 to be satisfied. Whens goes to infinity, then vðsÞ 2 C0ð0;1; L2
pð0;1; VÞÞ \ H1locð0;1; L2
pð0;1; HÞÞ solution to (11) converges towards u 2 L2(0,1;V \(H2(X))3) \ H1(0,1;H) solution to (9) given in Theorem 7.1.
A.3. Convergence of the periodic singular perturbative model
In order to be able to enforce the constraint f(I + u) = 0 on theboundary oX, a singular perturbation technique is proposed. Whenwe take the limit with respect to the parameter s, the limit of thefunction u(s) will not verify the elasticity equation. Nevertheless,since the discrete Fourier Transform is truncated (which is equiva-lent to neglecting high energy terms), it is reasonable to decreasethe value of the elasticity coefficients in order to have a largerdeformation with the truncated force terms. We introduce the fol-lowing hypothesis:
� H3: The function a : Rþ ! ½0;1� is regular, integrable over Rþ,non increasing and bounded from below on any compact subsetof Rþ with limt?1a(t) = 0. Moreover,
ffiffiffiap
is integrable over Rþ
and verifies:
PleaseImage
limt!1
1t
Z t
0
Z t
s
ffiffiffiffiffiffiffiffiffiffiaðsÞ
pdsds ¼ 0:
We have for the static problem:
Theorem 7.2. Assume hypotheses H1, H2 and H3 are satisfied. Thenfor all 0 < K, the following problem
dds uðsÞ � divðaðsÞrðuðsÞÞÞ ¼ 0; in ð0;KÞ �X;
aðsÞrðuðsÞÞ=nð ÞR3 ¼ f ðI þ vÞ on ð0;KÞ � @X;
uð0Þ ¼ 0 in X:
8>><>>: ð12Þ
has a unique solution u 2 L2ð0;K; ðH2ðXÞÞ3 \ HÞ \ C0ð0;K; HÞ; dds u 2 L2
ð0;K; HÞFor Problem (12) the asymptotic behavior with respect to
parameter s is given in the next theorem.
Theorem 7.3. Assume hypotheses H1, H2 and H3 are satisfied. Thenu(s) solution to (12) converges towards �u 2 ðL2ðXÞÞ3 which verifies
lims#þ1
f ðI þ uðsÞÞ ¼ 0 on @X:
For a complete proof the reader is referred to Pousin (2009).
Now we consider the perturbed periodic problem (11) whichreads:
dds v þ aðsÞ d
dt v � divðaðsÞrðvÞÞ ¼ 0 in ð0;1Þ�X;
aðsÞrðvÞ=nð ÞR3 ¼ f ðI þ vÞ on ð0;1Þ� @X;
vð�; 0; �Þ ¼ vð�;1; �Þ in ð0;1Þ�X;
vð0; �; �Þ ¼ 0 in ð0;1Þ �X:
8>>>>>><>>>>>>:
ð13Þ
The asymptotic behavior with respect to parameter s is given by:
Theorem 7.4. Assume hypotheses H1, H2 and H3 are satisfied. Thenv(s) solution to (13) converges towards �v 2 L2ð0;1; L2ðXÞÞ3 whichverifies
lims#þ1
f ðI þ vðsÞÞ ¼ 0 on ð0;1Þ � @X:
Multiplying Eq. (13) with dds vðsÞ and integrate by parts the diver-
gence term. For controlling the term aðsÞ ddt vðsÞ d
ds vðsÞ, use theinequality:
cite this article in press as: Schaerer, J., et al. A dynamic elastic modelAnal. (2010), doi:10.1016/j.media.2010.05.009
aðsÞ ddt
vðsÞ dds
vðsÞ
6
12
ffiffiffiffiffiffiffiffiffiffiffiffiffiðaðsÞÞ
p ddt
vðsÞ� �2
� dds
vðsÞ� �2
þ aðsÞ ddt
vðsÞ � dds
vðsÞ� �2
" #
since a(s) 6 1.
A.4. Analytic 2D short-axis cardiac motion model
The warping is defined analitically over the whole cardiac cycleand controlled by a temporal 1D status function S(t), which has anasymmetric bell-shape to represent both the systolic and diastolicphases. The points are expressed in a polar coordinate systemwhose center corresponds to the center of the ring R. The deforma-tion / within R is defined by:
c0 ¼R0
h0
� �; t
� �!/ ct
Rðc0; tÞhðc0; tÞ
� �
with /: X0 �t ? Xt and X0 = [Rint,Rext] �[0,2p].c0 denotes the polar coordinates of a material point at the initial
end-diastolic reference time point and ct, its transformed coordi-nates at time t. The Lagrangian formulation of the analytical trans-formation / is defined by:
ct ¼ /ðc0; tÞ ¼Rðc0; tÞ ¼ kðtÞðR0 � RintÞ þ ð1� SðtÞÞRint þ SðtÞRmin
hðc0; tÞ ¼ h0 þ wðt;R0Þ þ nðtÞ
with
kðtÞ ¼ Rext � ð1� SðtÞÞRint þ SðtÞRmin
Rext � Rint
And
wðt;R0Þ ¼ ð�0:1p=180Þ SðtÞ R0
nðtÞ ¼ ð10p=180Þ SðtÞ
Rmin is a constant value representing the minimal end-systolic limitvalue of the internal wall location. All these values model the thick-ening and rotation of the myocardium during the whole cardiaccycle.
Appendix B. Supplementary material
Supplementary data associated with this article can be found, inthe online version, at doi:10.1016/j.media.2010.05.009.
References
Pham, Q., Vincent, F., Clarysse, P., Croisille, P., Magnin, I., 2001. A FEM-baseddeformable model for the 3D segmentation and tracking of the heart in cardiacMRI. In: Proceedings of the 2nd International Symposium on Image and SignalProcessing and Analysis (ISPA 2001), pp. 250–254.
Rouchdy, Y., Pousin, J., Schaerer, J., Clarysse, P., 2007. A nonlinear elastic deformabletemplate for soft structure segmentation: application to the heart segmentationin MRI. Inverse Probl. 23, 1017–1035.
Mitchell, S., Lelieveldt, B., van der Geest, R., Bosch, H., Reiver, J., Sonka, M., 2001.Multistage hybrid active appearance model matching: segmentation of left andright ventricles in cardiac MR images. IEEE Trans. Med. Imaging 20 (5), 415–423.
Mitchell, S., Bosch, J., Lelieveldt, B., van der Geest, R., Reiber, J., Sonka, M., 2002. 3-Dactive appearance models: segmentation of cardiac MR and ultrasound images.IEEE Trans. Med. Imaging 21 (9), 1167–1178.
Lötjönen, J., Kivisto, S., Koikkalainen, J., Smutek, D., Lauerma, K., 2004. Statisticalshape model of atria, ventricles and epicardium from short- and long-axis MRimages. Med. Image Anal. 8, 371–386.
Jacob, G., Noble, J.A., Behrenbruch, C., Kelion, A.D., Banning, A.P., 2002. A shape-space-based approach to tracking myocardial borders and quantifying regionalleft-ventricular function applied in echocardiography. IEEE Trans. Med. Imaging21 (3), 226–238.
for segmentation and tracking of the heart in MR image sequences. Med.

12 J. Schaerer et al. / Medical Image Analysis xxx (2010) xxx–xxx
Qian, Z., Metaxas, D.N., Axel, L., 2005. A learning framework for the automatic andaccurate segmentation of cardiac tagged MRI images. In: Proceedings of theICCV workshop on Computer Vision for Biomedical Image Applications,Springer, LNCS 3765, pp. 93–102.
Lorenz, C., von Berg, J., 2006. A comprehensive shape model of the heart. Med.Image Anal. 10, 657–670.
Bernard, O., Touil, B., de Hooge, J., Friboulet, D., 2007. Statistical modeling of theradio-frequency signal for partially- and fully-developed speckle based on ageneralized gaussian model with application to echocardiography. IEEE Trans.Ultrason. Ferroelectr. Freq. Control 54, 2189–2194.
Bernard, O., Friboulet, D., Thevenaz, P., Unser, M., 2009. Variational B-spline level-set: a linear filtering approach for fast deformable model evolution. IEEE Trans.Image Process. 18 (6), 1179–1191.
Zheng, Y., Barbu, A., Georgescu, B., Scheuering, M., Comaniciu, D., 2008. Four-chamber heart modeling and automatic segmentation for 3-D cardiac CTvolumes using marginal space learning and steerable features. IEEE Trans. Med.Imaging 27 (11), 1668–1681.
Creswell, L.L., Moulton, M.J., Wyers, S.G., et al., 1994. An experimental method forevaluating constitutive models of myocardium in vivo hearts. Am. J. Physiol.Heart Circ. Physiol. 267, 853–863.
Gérard, O., Billon, A., Rouet, J.-M., Jacob, M., Fradkin, M., Allouche, C., 2002. Efficientmodel-based quantification of left ventricular function in 3-Dechocardiography. IEEE Trans. Med. Imaging 21, 1059–1068.
Angelini, E.D., Homma, S., Pearson, G., Holmes, J.W., Laine, A.F., 2005. Segmentationof real-time three-dimensional ultrasound for quantification of ventricularfunction: a clinical study on right and left ventricles. Ultrasound Med. Biol. 31,1143–1158.
Vincent, F., Clarysse, P., Croisille, P., Magnin, I., 2000. An elasticity-based model andits application to the estimation of the heart deformation in tagged MRI. IEEEInt. Conf. Image Process, vol. 1. Vancouver, Canada, pp. 629–632.
Makela, T., Pham, Q., Clarysse, P., Lotjonen, J., Sipila, O., Hanninen, H., Lauerma, K.,Knutti, J., Katila, T., Magnin, I., 2003. A 3D model-based registration approach forthe PET, MR and MCG cardiac data fusion. Med. Image Anal. 7 (3), 377–389.
Lorenzo-Valdes, M., Sanchez-Ortiz, G.I., Elkington, A.G., Mohiaddin, R.H., Rueckert,D., 2004. Segmentation of 4D cardiac MR images using a probabilistic atlas andthe EM algorithm. Med. Image Anal. 8 (3), 255–265.
Debreuve, E., Barlaud, M., Aubert, G., Laurette, I., Darcourt, J., 2001. Space-timesegmentation using level set active contours applied to myocardial gated SPECT.IEEE Trans. Med. Imaging 20, 643–659.
Cousty, J., Najman, L., Couprie, M., Clément-Guinaudeau, S., Goissen, T., Garot, J.,2010. Segmentation of 4D cardiac MRI: automated method based on spatio-temporal watershed cuts. Image Vis. Comput. 28, 1229–1243.
Montagnat, J., Delingette, H., 2005. 4D deformable models with temporalconstraints: application to 4D cardiac image segmentation. Med. Image Anal.9 (1), 87–100.
Sermesant, M., Delingette, H., Ayache, N., 2006. An electromechanical model of theheart for image analysis and simulation. IEEE Trans. Med. Imaging 25 (5), 612–625.
Please cite this article in press as: Schaerer, J., et al. A dynamic elastic modelImage Anal. (2010), doi:10.1016/j.media.2010.05.009
Lynch, M., Ghita, O., Whelan, P.F., 2008. Segmentation of the left ventricle of theheart in 3D+t MRI data using an optimised non-rigid temporal model. IEEETrans. Med. Imaging 27 (2), 195–203.
Nastar, C., Ayache, N., 1996. Frequency-based nonrigid motion analysis: applicationto four dimensional medical images. IEEE Trans. Pattern Anal. Mach. Intell. 18(11), 1067–1079.
Shi, P., Sinusas, A.J., Constable, R.T., Ritman, E.L., Duncan, J.S., 2000. Point-trackedquantitative analysis of left ventricular surface motion from 3D imagesequences. IEEE Trans. Med. Imaging 19 (1), 36–50.
Chen, T., Wang, X., Metaxas, D.N., Axel, L., 2008. Fast motion tracking of tagged MRIusing angle-preserving meshless registration. In: Med. Image Comput. Comput.Assist. Interv., vol. 2, pp. 313–320.
Zhu, Y., Papademetris, X., Sinusas, A.J., Duncan, J.S., 2009. A dynamical shape priorfor LV segmentation from real-time 3D echocardiography. In: Med. ImageComput. Comput. Assist. Interv., vol. 1, pp. 206–213.
Ciarlet, P.G., 1988. Mathematical Elasticity Volume I: Three-Dimensional Elasticity.North-Holland, Amsterdam.
Zienkiewicz, O.C., Taylor, R.L., Zhu, J.Z., 2005. The Finite Element Method: Its Basisand Fundamentals. Butterworth-Heinemann.
Schaerer, J., Rouchdy, Y., Clarysse, P., Hiba, B., Croisille, P., Pousin, J., Magnin, I., 2005.Simultaneous segmentation of the left and right heart ventricles in 3D cine MRimages of small animals. In: Comput. Cardiol., pp. 231–234.
Metaxas, D., Terzopoulos, D., 1993. Shape and nonrigid motion estimation throughphysics-based synthesis. IEEE Trans. Pattern Anal. Mach. Intell. 15 (6), 580–591.
Oppenheim, A.V., Schafer, R.W., Buck, J.R., 1999. Discrete-Time Signal Processing,second ed. Prentice-Hall, Inc., Upper Saddle River, NJ, USA.
Xu, C., Prince, J.L., 1998. Snakes, shapes, and gradient vector flow. IEEE Trans. ImageProcess. 7, 359–369.
Ciarlet, P.G., Lions, J.-L., 1990. Handbook of numerical analysis. Finite DifferenceMethods, Solution of Equations in Rn , vol. 1. North-Holland.
Radau, P., Lu, Y., Connelly, K., Paul, G., Dick, A., Wright, G., 2009. Evaluationframework for algorithms segmenting short axis cardiac MRI. In: The MIDASJournal, Cardiac MR Left Ventricle Segmentation Challenge.
Casta, C., Clarysse, P., Schaerer, J., Pousin, J., 2009. Evaluation of the dynamicdeformable elastic template model for the segmentation of the heart in MRIsequences. In: The MIDAS Journal, Cardiac MR Left Ventricle SegmentationChallenge, London, UK.
Young, A., Hunter, P., Smaill, B., 1992. Estimation of epicardial strain using themotions of coronary bifurcations in biplane cineangiography. IEEE Trans.Biomed. Eng. 39 (5), 526–531.
Clarysse, P., Basset, C., Khouas, L., Croisille, P., Friboulet, D., Odet, C., Magnin, I.E.,2000. 2D spatial and temporal displacement field fitting from cardiac MRtagging. Med. Image Anal. 3, 253–268.
Frindel, C., Robini, M., Schaerer, J., Croisille, P., Zhu, Y.-M., 2009. Improved globalcardiac tractography with simulated annealing. In: Proc. 16th Int. Conf. IEEEICIP, Cairo (Egypt), pp. 813–816.
Pousin, J., 2009. Singular perturbations for heart image segmentation tracking.Math. Model. Nat. Phenom. 5, 185–195.
for segmentation and tracking of the heart in MR image sequences. Med.




















