Tugas Proyek EL2007 - Revi Muharam Fadli - 13214116
5
Laporan Praktikum - Laboratorium Dasar Teknik Elektro – STEI ITB 1 PROYEK EL2007 SINYAL SISTEM PEMODELAN 1 DIMENSI SUSPENSI KENDARAAN DENGAN MEMPERTIMBANGKAN ELASTISITAS, PEREDAMAN SE RTA MASSA DARI RODA DAN KOMPONEN SUSPENSI Revi Muharam Fadli ( 13214116) Kontak: 087824195150(HP), [email protected](email) Kelas: 01 Sekolah Teknik Elektro dan Informatika - Institut Teknologi Bandung Abstrak Pada proyek ini dilakukan pemodelan sistem suspensi kendaraan beroda dengan hanya mempertimbangkan gerak vertikal 1 dimensi pada satu roda saja. Pemodelan yang digunakan berupa rangkaian seri dari dua rangkaian paralel pegas dan peredam(damper). Kedua rangkaian paralel terhubung ke massa roda serta suspensi, dan masing-masing berturut-turut dihubungkan ke tanah dan massa kendaraan. Pada proyek ini ditentukan persamaan diferensial, fungsi transfer, diagram blok, representasi state space, serta respon frekuensi(diagram pole-zero dan Bode plot) da ri siste m ters ebut. 1. SISTEM YANG DITINJAU Sistem yang ditinjau berupa suspensi kendaraan beroda. Input sistem berupa ketinggian tanah, dan output sistem adalah ketinggian kendaraan. 1.1 D ASAR TEORI Pegas adalah benda elastis yang digunakan untuk menyimpan energi mekanis. Pegas biasanya terbuat dari baja. Pegas juga ditemukan di sistem suspensi mobil. Pada mobil, pegas memiliki fungsi menyerap kejut dari jalan dan getaran roda agar tidak diteruskan ke bodi kendaraan secara langsung. Selain itu, pegas juga berguna untuk menambah daya cengkeram ban terhadap permukaan jalan.[1] Hukum Hooke adalah hukum atau ketentuan mengenai gaya dalam bidang ilmu fisika yang terjadi karena sifat elastisitas dari sebuah pir atau pegas. Besarnya gaya Hooke ini secara proporsional akan berbanding lurus dengan jarak pergerakan pegas dari posisi normalnya, atau lewat rumus matematis dapat digambarkan sebagai berikut:[2] di mana: F adalah gaya (dalam unit newton) k adalah konstanta pegas (dalam newton per meter) x adalah jarak pergerakan pegas dari posisi normalnya (dalam unit meter). Karena gaya itu sama dengan massa, m, dikali akselerasi, a maka persamaannya berubah menjadi:[3] Massa pegas diabaikan karena sangat kecil dibandingkan dengan massa benda yang dipasang pada pegas. Karena akselerasi adalah turunan kedua dari x pada waktu maka,[3] Ini adalah fungsi orde kedua yang linear untuk perpindahan x sebagai fungsi waktu, persamaan menjadi:[3] Maka solusi umum dari persamaan orde dua ini adalah sebagai berikut: Jika diasumsikan gaya redaman pegas berbanding lurus dengan kecepatan dan arahnya berlawanan dengan gerak pegas sehingga dapat dimodelkan: Dimana C adalah konstanta redaman sehingga hukum newton kedua menjadi:
-
Upload
revi-muharam-fadli -
Category
Documents
-
view
228 -
download
0
Transcript of Tugas Proyek EL2007 - Revi Muharam Fadli - 13214116

8/16/2019 Tugas Proyek EL2007 - Revi Muharam Fadli - 13214116
http://slidepdf.com/reader/full/tugas-proyek-el2007-revi-muharam-fadli-13214116 1/5
Laporan Praktikum - Laboratorium Dasar Teknik Elektro – STEI ITB 1
PROYEK EL2007 SINYAL SISTEM
PEMODELAN 1 DIMENSI SUSPENSI KENDARAAN DENGAN MEMPERTIMBANGKAN ELASTISITAS,
PEREDAMAN SERTA MASSA DARI RODA DAN KOMPONEN SUSPENSI
Revi Muharam Fadli (13214116)Kontak: 087824195150(HP), [email protected](email)
Kelas: 01
Sekolah Teknik Elektro dan Informatika - Institut Teknologi Bandung
Abstrak
Pada proyek ini dilakukan pemodelan sistem suspensikendaraan beroda dengan hanya mempertimbangkan gerakvertikal 1 dimensi pada satu roda saja. Pemodelan yangdigunakan berupa rangkaian seri dari dua rangkaian paralel pegas dan peredam(damper). Kedua rangkaian paralelterhubung ke massa roda serta suspensi, dan masing-masingberturut-turut dihubungkan ke tanah dan massa kendaraan.Pada proyek ini ditentukan persamaan diferensial, fungsitransfer, diagram blok, representasi state space, serta respon
frekuensi(diagram pole-zero dan Bode plot) dari sistem tersebut.
1. SISTEM YANG DITINJAU
Sistem yang ditinjau berupa suspensi kendaraanberoda. Input sistem berupa ketinggian tanah, danoutput sistem adalah ketinggian kendaraan.
1.1 D ASAR TEORI
Pegas adalah benda elastis yang digunakan untukmenyimpan energi mekanis. Pegas biasanyaterbuat dari baja. Pegas juga ditemukan di sistem
suspensi mobil. Pada mobil, pegas memiliki fungsimenyerap kejut dari jalan dan getaran roda agartidak diteruskan ke bodi kendaraan secaralangsung. Selain itu, pegas juga berguna untukmenambah daya cengkeram ban terhadappermukaan jalan.[1]
Hukum Hooke adalah hukum atau ketentuanmengenai gaya dalam bidang ilmu fisika yangterjadi karena sifat elastisitas dari sebuah pir ataupegas. Besarnya gaya Hooke ini secaraproporsional akan berbanding lurus dengan jarakpergerakan pegas dari posisi normalnya, ataulewat rumus matematis dapat digambarkansebagai berikut:[2]
di mana:
F adalah gaya (dalam unit newton)
k adalah konstanta pegas (dalam newton permeter)
x adalah jarak pergerakan pegas dari posisi
normalnya (dalam unit meter).
Karena gaya itu sama dengan massa, m, dikaliakselerasi, a maka persamaannya berubahmenjadi:[3]
Massa pegas diabaikan karena sangat kecildibandingkan dengan massa benda yang dipasangpada pegas. Karena akselerasi adalah turunankedua dari x pada waktu maka,[3]
Ini adalah fungsi orde kedua yang linear untukperpindahan x sebagai fungsi waktu, persamaanmenjadi:[3]
Maka solusi umum dari persamaan orde dua iniadalah sebagai berikut:
Jika diasumsikan gaya redaman pegas berbandinglurus dengan kecepatan dan arahnya berlawanandengan gerak pegas sehingga dapat dimodelkan:
Dimana C adalah konstanta redaman sehinggahukum newton kedua menjadi:
8/16/2019 Tugas Proyek EL2007 - Revi Muharam Fadli - 13214116
http://slidepdf.com/reader/full/tugas-proyek-el2007-revi-muharam-fadli-13214116 2/5
Laporan Praktikum - Laboratorium Dasar Teknik Elektro – STEI ITB 2
Jika persamaan dipindah kearah kanan semuamaka akan didapat persamaan:
Dengan akar persamaan
( Overdamped)
Untuk 2−4>0 Maka didapat solusi persamaanyaitu:
(Critically damped)
Untuk 2−4=0 Maka didapat solusi persamaanyaitu:
(Underdamped)
Untuk 2−4<0 Maka didapat solusi persamaanyaitu:
[3]
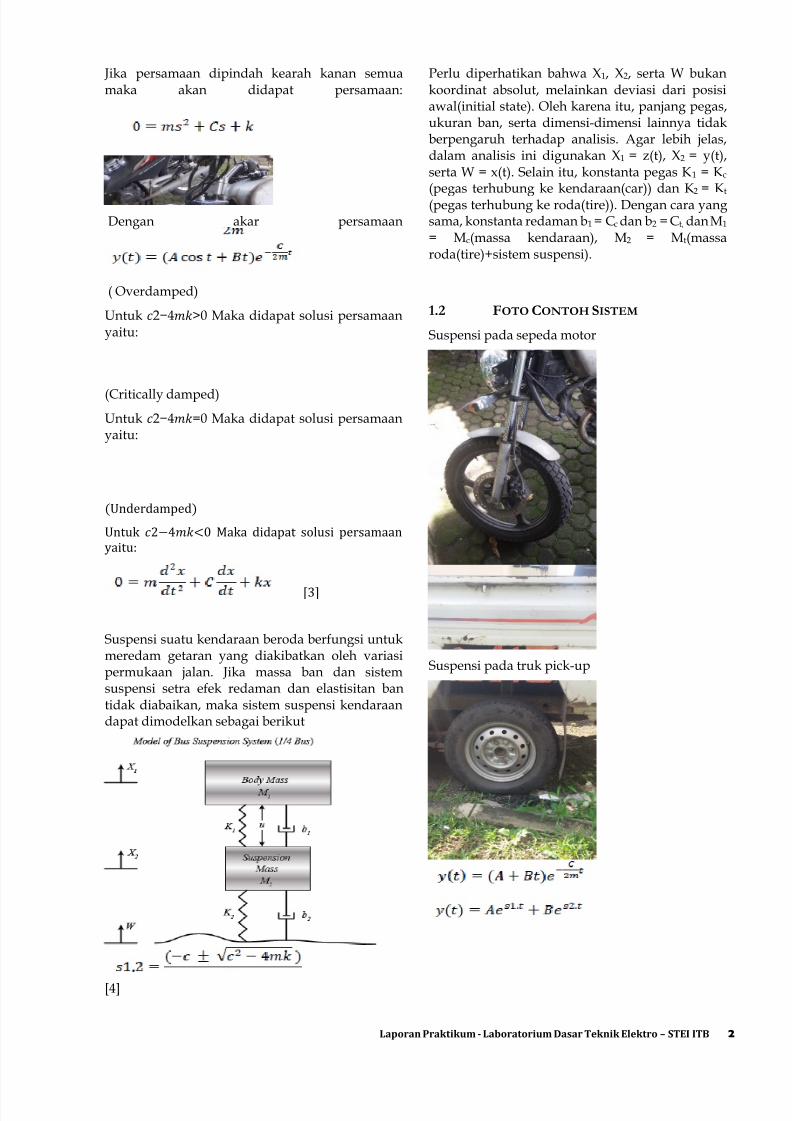
Suspensi suatu kendaraan beroda berfungsi untukmeredam getaran yang diakibatkan oleh variasipermukaan jalan. Jika massa ban dan sistemsuspensi setra efek redaman dan elastisitan bantidak diabaikan, maka sistem suspensi kendaraandapat dimodelkan sebagai berikut
[4]
Perlu diperhatikan bahwa X1, X2, serta W bukankoordinat absolut, melainkan deviasi dari posisiawal(initial state). Oleh karena itu, panjang pegas,ukuran ban, serta dimensi-dimensi lainnya tidakberpengaruh terhadap analisis. Agar lebih jelas,dalam analisis ini digunakan X1 = z(t), X2 = y(t),serta W = x(t). Selain itu, konstanta pegas K 1 = Kc (pegas terhubung ke kendaraan(car)) dan K2 = Kt
(pegas terhubung ke roda(tire)). Dengan cara yangsama, konstanta redaman b1 = Cc dan b2 = Ct, dan M1
= Mc(massa kendaraan), M2 = Mt(massaroda(tire)+sistem suspensi).
1.2 FOTO CONTOH SISTEM
Suspensi pada sepeda motor
Suspensi pada truk pick-up

8/16/2019 Tugas Proyek EL2007 - Revi Muharam Fadli - 13214116
http://slidepdf.com/reader/full/tugas-proyek-el2007-revi-muharam-fadli-13214116 3/5
Laporan Praktikum - Laboratorium Dasar Teknik Elektro – STEI ITB 3
Sistem peredam kejut merupakan suatu sistemyang dapat ditemui di beragam jenis kendaraanberoda.
1.3 PERSAMAAN DIFERENSIAL
Misal = gaya dari pegas Kt, = gaya daridamper Ct, = gaya dari pegas Kc, dan = gaya
dari damper Cc.
Tinjau Mc
∑ = ∙
+ = ∙
∙ = − + −
Tinjau Mt
∑ = ∙
+ − + = ∙ ∙ = − + − − − − −
2. FUNGSI TRANSFER
Pada analisis ini, x(t) diambil sebagai input dan z(t)sebagai output
Pada domain Laplace,
= − + − + −
= + − + +
Selanjutnya, persamaan di Mc
= − + − +
= + + +
Substitusi Y(s) dengan persamaan sebelumnyadidapat
= +
+ +
+ −
+ +
=
= + + + + 3 + + + + + + + + +
3. DIAGRAM BLOK
Persamaan fungsi transfer dapat ditulis sebagai
= + 1 + + 1
+ + + + + + + + 1 + + 1
+ + + + + + + + 1
+ + 1
= + 1 + + 1
= − ( + + + + + +
+ 1 + + 1
) + + 1 +
+ 1
Sehingga didapat diagram blok sebagai berikut
Dengan a = , b = + , c = , d = , e = + + , dan f = + +
4. DIAGRAM POLE-ZERO DAN DIAGRAM
R ESPON FREKUENSI (BODE PLOT)
Untuk bagian ini, parameter yang digunakandiambil dari rata-rata mobil bis[4], yaitu
Kc = 80,000 N/m
Kt = 500,000 N/m
Cc = 350 N.s/m
Ct, = 15,020 N.s/m
Mc = 2500 kg (massa total dibagi 4)
Mt. = 320 kg
4.1 DIAGRAM POLE-ZERO
Poles
p = -0.109843214001 +5.25044540429i
|p|= 0.835817188674[Hz]
p = -23.975781786 +35.1869235307i
|p|= 6.77663301422[Hz]
p = -23.975781786-35.1869235307i
|p|= 6.77663301422[Hz]p = -0.109843214001-5.25044540429i
|p|= 0.835817188674[Hz]
Zeroes
z = -33.2889480692
|z|= 5.29810063555[Hz]
z = -228.571428571
|z|= 36.3782727067[Hz]Diagram(satuan dalam Hz)
8/16/2019 Tugas Proyek EL2007 - Revi Muharam Fadli - 13214116
http://slidepdf.com/reader/full/tugas-proyek-el2007-revi-muharam-fadli-13214116 4/5
Laporan Praktikum - Laboratorium Dasar Teknik Elektro – STEI ITB 4
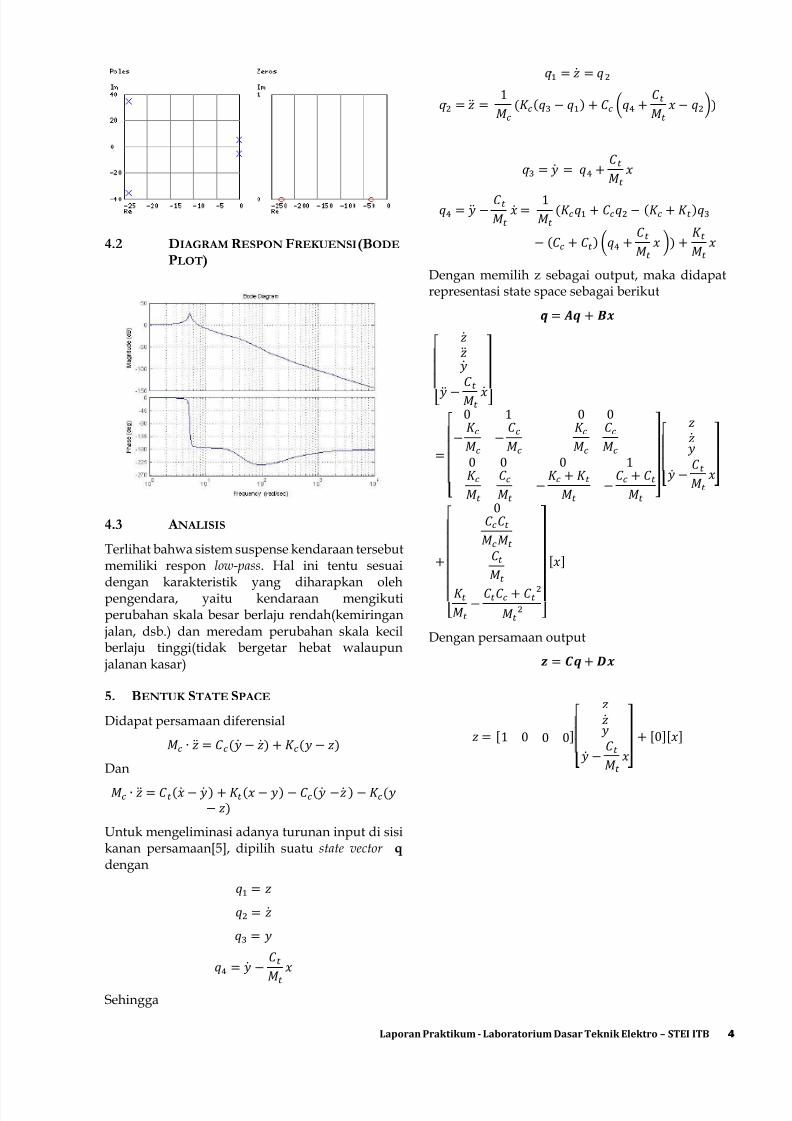
4.2 DIAGRAM R ESPON FREKUENSI(BODE
PLOT)
4.3 A NALISIS
Terlihat bahwa sistem suspense kendaraan tersebutmemiliki respon low-pass. Hal ini tentu sesuai
dengan karakteristik yang diharapkan olehpengendara, yaitu kendaraan mengikutiperubahan skala besar berlaju rendah(kemiringan jalan, dsb.) dan meredam perubahan skala kecilberlaju tinggi(tidak bergetar hebat walaupun jalanan kasar)
5. BENTUK S TATE SPACE
Didapat persamaan diferensial
∙ = − + −
Dan
∙ = − + − − − − −
Untuk mengeliminasi adanya turunan input di sisikanan persamaan[5], dipilih suatu state vector q
dengan
=
=
3 =
= −
Sehingga
= =
= = 1
3 − + ( +
− )
3 = = +
= −
= 1 + − + 3
− + ( +
) +
Dengan memilih z sebagai output, maka didapatrepresentasi state space sebagai berikut
= +
[
− ]
=
0 1−
−
0 0
0 0
0 1− +
− +
−
+
[
0
− + ]
Dengan persamaan output
= +
= 1 0 0 0
−
+ 0
8/16/2019 Tugas Proyek EL2007 - Revi Muharam Fadli - 13214116
http://slidepdf.com/reader/full/tugas-proyek-el2007-revi-muharam-fadli-13214116 5/5
Laporan Praktikum - Laboratorium Dasar Teknik Elektro – STEI ITB 5
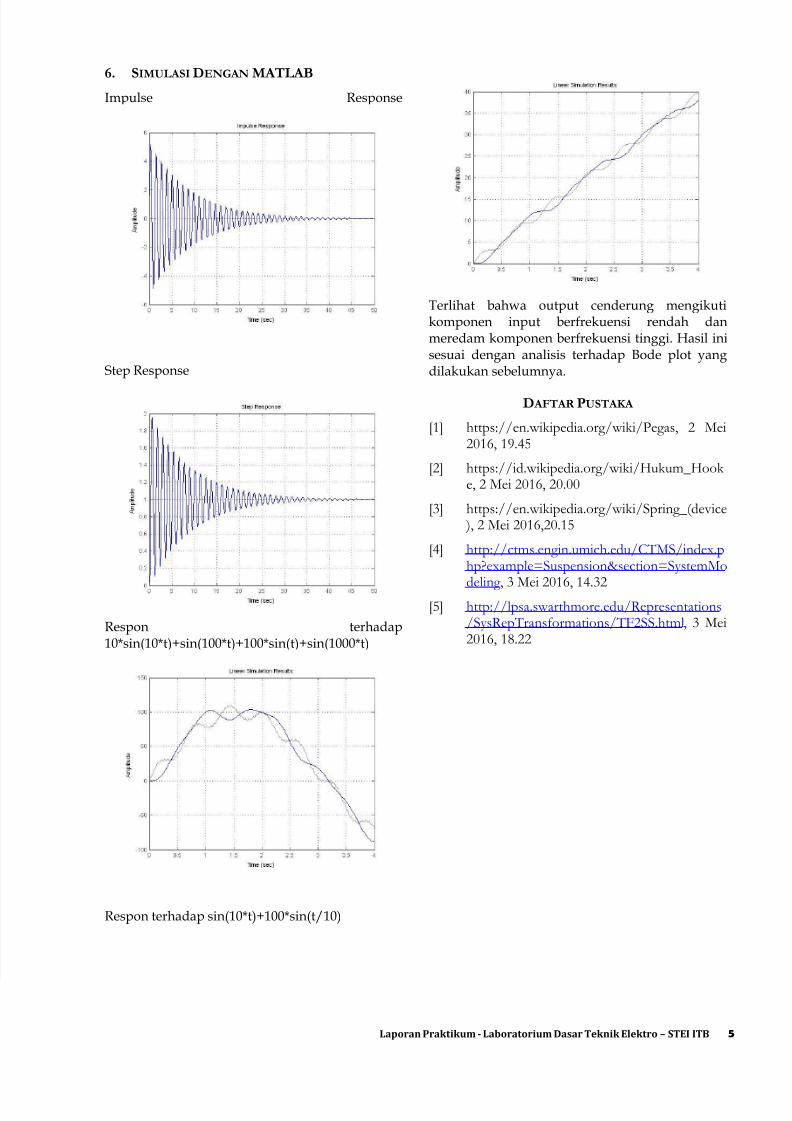
6. SIMULASI DENGAN MATLAB
Impulse Response
Step Response
Respon terhadap10*sin(10*t)+sin(100*t)+100*sin(t)+sin(1000*t)
Respon terhadap sin(10*t)+100*sin(t/10)
Terlihat bahwa output cenderung mengikutikomponen input berfrekuensi rendah danmeredam komponen berfrekuensi tinggi. Hasil inisesuai dengan analisis terhadap Bode plot yangdilakukan sebelumnya.
D AFTAR PUSTAKA
[1]
https://en.wikipedia.org/wiki/Pegas, 2 Mei2016, 19.45
[2] https://id.wikipedia.org/wiki/Hukum_Hook e, 2 Mei 2016, 20.00
[3] https://en.wikipedia.org/wiki/Spring_(device ), 2 Mei 2016,20.15
[4]
http://ctms.engin.umich.edu/CTMS/index.php?example=Suspension§ion=SystemMo
deling , 3 Mei 2016, 14.32[5] http://lpsa.swarthmore.edu/Representations
/SysRepTransformations/TF2SS.html, 3 Mei2016, 18.22