Transformasi Z - yulisun.staff.telkomuniversity.ac.id · Sifat-Sifat Transformasi Z Sifat 1 ini...
18
Transformasi Z
Transcript of Transformasi Z - yulisun.staff.telkomuniversity.ac.id · Sifat-Sifat Transformasi Z Sifat 1 ini...

Transformasi Z

Transformasi Z
Transformasi-Z adalah salah satu alat bantu pada
analisis sistem LTI (Linier Time Invariant).
Transformasi Z merupakan suatu teknik untuk
menggambarkan dan memanipulasi deretan (seperti
Transformasi Laplace pada Sinyal waktu Kontinyu).

Kegunaan Transformasi Z
• Mengurangi perhitungan dalam operasi konvolusi
• Solusi persamaan beda dapat ditemukan dengan
perhitungan aljabar yang lebih mudah
• Fungsi transfer pada sistem LTI

Definisi
Transformasi-z, X(z), dari fungsi waktu diskrit x(n) adalah: ∞
Z[ X (n)] = F(z) =
dengan z adalah variabel kompleks
∑n=−∞
−nx (n)z (1)
Hubungan pada Pers. (1) -> Transformasi-z bilateral.Pers. (1) dapat ditulis:
0 X(z) = x (n)z
∞−n −n + x (n)z ∑
n=−∞
Jika f(n)=0 untuk n > 0, maka: X(z)
∑n=0
∞−n= x (n)z (2) ∑
n=0
Hubungan pada Pers. (2) -> Transformasi-z unilateral (satu sisi)

Definisi Transformasi z

Contoh
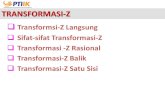
Diberikan sinyal waktu diskrit x(n), yang mempunyai jumlah
elemen yang terbatas seperti yang ditunjukkan oleh gambar
berikut ini :
0-1
-2
-3 1 2
3 4
23
4
2
-5
x(n)
-4
-2

Secara matematis gambar diatas dapat dinyatakan sebagai :
x(-3) = 2,
x(-2) = -5,
x(-1) = 3,
x(0) = 0,
x(1) = 4,
x(2) = 2,
x(3) = -4,
x(4) = -2
maka transformasi Z dari x(n) akan diperoleh :
TZ(x(n)) = X(Z) = 𝑛=−∞𝑛=∞ 𝑥(𝑛)𝑧
_𝑛
X(Z) = 2Z3 – 5Z2 + 3Z1 + 4Z-1 + 2Z-2 – 4Z-3 – 2Z-4
0-1
-2
-3 1 2
3 4
23
4
2
-5
x(n)
-4
-2

x(n) = {1, 2, 5, 7, 0, 1}
x(n) = {1, 2, 5, 7, 0, 1}

Karena Transformasi-z adalah deret pangkat tak hingga
Transforamsi-z hanya berlaku untuk nilai-nilai z yang konvergen
Himpunan seluruh nilai z, agar F(z)
konvergen ROC
4
ROC

ContohTentukan transformasi Z dari x(n) = u(n)
Jawab:
Sinyal x(n) = u(n) memiliki nilai 1 untuk n ≥ 0. Dengan demikian:
TZ(x(n)) = X(Z) = 𝑛=−∞𝑛=∞ 𝑧
_𝑛. 𝑥(𝑛)
X(z) = ... + z2 . x(-2) + z . x(-1) + x(0) + z-1 . x(1) + z-2 . x(2) + ...
= ... + z2 . 0 + z . 0 + 1 + z-1 . 1 + z-2 . 1 + ...
= 1 + + + ...
Kita bisa memandang X(z) tersebut sebagai deret geometri dengan suku awal 1 dan rasio
Deret ini dapat dijumlahkan menjadi = asalkan | | <1 atau |z| > 1 ,jadi
x(n) = u(n) X(z) = , | Z | > 1
Syarat |Z| > 1 disebut dengan area ke-konvergen-an (Region of Convergence / ROC).
1
𝑧
1
𝑧2
1
1 −1𝑧
𝑧
𝑧 − 1
𝑧
𝑧 − 1
1
𝑧
1
𝑧
Dengan menggunakan rumus jumlah deret geometri didapat :
Jumlah tak berhinggaSn = a/(1-r)
Deret geometri tak berhingga akan konvergen (mempunyai jumlah) untuk -1 < r < 1

Region Of Convergence (ROC)
ROC dengan bentuk |z| > r dan |z| < r.
Transformasi-z dari suatu sinyal x(n) adalah X(Z) disertai
dengan Region of Convergence-nya.
Ada kemungkinan dua buah sinyal berbeda memiliki
transformasi z yang sama, namun ROC-nya berbeda.
Mari tinjau kasus berikut:

Seperti yang kita ketahui bahwa Transformasi-z dari
x1(n) = u(n) adalah X1(z) = 𝒛
(𝒛−𝟏)dengan ROC |z|> 1.
Di sisi lain, transformasi-z dari x2(n) = -u(-n -1) adalah:
Tz(x2(n)) = X2(z) = 𝑛=−∞𝑛=∞ 𝑧
_𝑛. 𝑥(𝑛)
= - 𝑛=−∞𝑛=∞ 𝑧
_𝑛. 𝑢(−𝑛 − 1)
= 𝑧
(𝑧−1)dengan ROC |z| < 1

X(n) X(z) ROC
u(n) |Z| > 1
-u(-n-1) |Z| < 1
Dengan demikian, transformasi-z yang lengkap adalah transformasi-z yang
disertai dengan nilai ROC-nya.
𝑧
(𝑧 − 1)𝑧
(𝑧 − 1)

Selanjutnya bisa kita lihat pula bahwa:
x1(n) = an u(n) dan x2(n) = -an u(-n - 1)
juga memiliki bentuk transformasi-z yang sama yaitu
, Hanya ROC nya yang berbeda.
X(n) X(z) ROC
an u(n) |Z| > a
-an -u(-n-1) |Z| < a
𝑧
(𝑧 − 𝑎)
𝑧
(𝑧 − 𝑎)𝑧
(𝑧 − 𝑎)

Pasangan Umum Transformasi Z
𝑥(𝑛) 𝑋(𝑧) ROC𝜕(𝑛) 1 Semua z
𝑎𝑛𝑢(𝑛) 1
1 − 𝑎𝑧−1=
𝑧
𝑧 − 𝑎𝑧 > 𝑎
−𝑎𝑛𝑢(−𝑛 − 1) 1
1 − 𝑎𝑧−1=
𝑧
𝑧 − 𝑎𝑧 < 𝑎
𝑛𝑎𝑛𝑢(𝑛) 𝑎𝑧−1
1 − 𝑎𝑧−1 2 =𝑎𝑧
𝑧 − 𝑎 2𝑧 > 𝑎
−𝑛𝑎𝑛𝑢(−𝑛 − 1) 𝑎𝑧−1
1 − 𝑎𝑧−1 2=
𝑎𝑧
𝑧 − 𝑎 2𝑧 < 𝑎
cos 𝑛𝜔0 𝑢(𝑛) 1 − cos𝜔0 𝑧−1
1 − 2 cos𝜔0 𝑧−1 + 𝑧−2= 𝑧 > 1
sin 𝑛𝜔0 𝑢(𝑛) sin 𝜔0 𝑧−1
1−2 cos 𝜔0 𝑧−1+𝑧−2=
𝑧 > 1
ancos 𝑛𝜔0 𝑢(𝑛) 1 − cos𝜔0 𝑧−1
𝑎−2 − 2 cos𝜔0 𝑧−1 + 𝑧−2= 𝑧 > 1
ansin 𝑛𝜔0 𝑢(𝑛) sin𝜔0 𝑧−1
𝑎−2 − 2 cos𝜔0 𝑧−1 + 𝑧−2= 𝑧 > 1
20
20
cos2 cos 1
z zz z
0
20
(sin )2 cos 1
zz z
20
2 20
cos2 cos
z zz z a
0
2 20
sin2 cos
zz z a

Sifat Transformasi Z
No Sifat 𝑥(𝑛) 𝑋(𝑧) ROC
1 Linieritas 𝑎𝑥 𝑛 + 𝑏𝑦(𝑛) 𝑎𝑋 𝑧 + 𝑏𝑌(𝑧) 𝑅𝑥 ∩ 𝑅𝑦
2 Pergeseran 𝑥(𝑛 − 𝑛0) 𝑧−𝑛0𝑋(𝑧) 𝑅𝑥
3 Pencerminan pada sumbu vertikal 𝑥(−𝑛) 𝑋(𝑧−1) 1 𝑅𝑥
4 Penskalaan pada domain z 𝑎𝑛𝑝(𝑛) 𝑃(𝑎−1𝑧) 𝑎 𝑅𝑥
5 Konvolusi 𝑝 𝑛 ∗ 𝑞(𝑛) 𝑃 𝑧 𝑄(𝑧) 𝑅𝑥 ∩ 𝑅𝑦
6 Turunan/perkalianx(n) dengan n 𝑛𝑥(𝑛) −𝑧𝑑𝑋(𝑧)
𝑑𝑧𝑅𝑥


Sifat-Sifat Transformasi Z
Sifat 1 ini disebut sifat linier dari transformasi-Z. Sifat ini berguna untuk
menghitung transformasi-z dari jumlah dua atau lebih sinyal.
Sifat 2 ini disebut sebagai sifat pergeseran pada sumbu waktu atau x(n).
Sifat 3 ini disebut juga sebagai pencerminan pada sumbu vertikal dari
Sifat 4 ini disebut juga sebagai sifat penskalaan pada domain-z.
Sifat 5 menyatakan bahwa konvolusi di domain waktu adalah sama dengan
perkalian di domain-z.
Sifat 6 ini adalah perkalian x(n) dengan n.