Sistem Kendali Keseimbangan Muatan Kapal Ferry...
17
Sistem Kendali Keseimbangan Muatan Kapal Ferry Menggunakan Flood Status Detector Berbasis Mikrokontroller ATMega8535 Menggunakan Bahasa C Nama, NPM : Dian Hermawan, 20108573 Pembimbing : Dr. Ridha Iskandar, SSi., MMSi E-Mail : [email protected] ABSTRAK Kata Kunci : keseimbangan, muatan kapal, mikrokontroller atmega8535, led, lcd, buzzer. Kapal Ferry merupakan salah satu jenis kapal yang digunakan sebagai alat transportasi untuk membawa penumpang dan barang di sungai maupun di laut. Saat ini, operasional kapal Ferry hampir ke seluruh kepulauan yang ada di Indonesia, akan tetapi, saat ini para awak kapal untuk mengontrol keseimbangan muatan kapal agar berlayar dalam keadaan stabil, masih dilakukan secara manual yaitu dengan melihat batas maksimal ketinggian air di kulit kapal dan memperhatikan banyak atau tidak muatan benda bergerak maupun benda tidak bergerak masuk ke dalam deck kapal. Berdasarkan masalah-masalah tersebut di atas, maka dibuatlah alat “sistem kendali keseimbangan muatan kapal ferry menggunakan flood status detector berbasis mikrokontroller atmega 8535 menggunakan bahasa C” alat ini ditempatkan di sisi kiri dan kanan kulit kapal yang dilengkapi dengan LED, LCD, dan buzzer. Dengan memperhatikan output pada led, lcd dan buzzer, maka petugas mengetahui sisi kapal mana yang tidak seimbang dan jalur kendaraan mana yang masih kosong, maka, prototipe alat yang penulis buat telah membantu masyarakat untuk mensimulasikan pengaturan pemuatan barang di kapal ferry. Hasil dari alat sistem kendali keseimbangan muatan kapal ferry menggunakan flood status detector berbasis mikrokontroller atmega 8535 menggunakan bahasa C berfungsi dengan baik, yaitu jika air berada pada batas 1 sampai 3 di sisi kiri maupun sisi kanan kulit kapal, maka output led dan lcd berfungsi sesuai dengan program yang telah ditentukan, namun jika air telah berada pada batas 4 atau batas maksimal, maka output lcd dan buzzer segera berfungsi sesuai dengan program yang telah ditentukan. Daftar Pustaka (2006-2012). BAB 1 PENDAHULUAN 1.1 Latar Belakang Kapal Ferry merupakan salah satu jenis kapal yang digunakan sebagai alat transportasi untuk membawa penumpang dan barang di sungai maupun di laut, kapal ferry mempunyai ukuran cukup besar untuk membawa muatan. Kapal ini merupakan jenis kapal penumpang atau passanger ship. Muatan kapal selalu ditetapkan oleh undang-undang berdasarkan Keputusan Menteri Perhubungan Nomor : KM. 33 TAHUN 2001 Tentang Penyelenggaraan dan Pengusahaan Angkutan Laut. Saat ini, operasional kapal Ferry hampir ke seluruh kepulauan yang ada di Indonesia, namun untuk menentukan muatan kapal Ferry harus memperhatikan Undang Undang yang berlaku berdasarkan kapasitas besar kecil kapal Ferry tersebut, jika tidak memperhatikan Undang Undang yang berlaku, maka berakibat dapat menyebabkan kapal tenggelam yang sehingga dapat
-
Upload
duongtuyen -
Category
Documents
-
view
238 -
download
4
Transcript of Sistem Kendali Keseimbangan Muatan Kapal Ferry...

Sistem Kendali Keseimbangan Muatan Kapal Ferry Menggunakan Flood Status Detector
Berbasis Mikrokontroller ATMega8535 Menggunakan Bahasa C
Nama, NPM : Dian Hermawan, 20108573
Pembimbing : Dr. Ridha Iskandar, SSi., MMSi
E-Mail : [email protected]
ABSTRAK
Kata Kunci : keseimbangan, muatan kapal, mikrokontroller atmega8535, led, lcd, buzzer.
Kapal Ferry merupakan salah satu jenis kapal yang digunakan sebagai alat transportasi untuk
membawa penumpang dan barang di sungai maupun di laut. Saat ini, operasional kapal Ferry
hampir ke seluruh kepulauan yang ada di Indonesia, akan tetapi, saat ini para awak kapal untuk
mengontrol keseimbangan muatan kapal agar berlayar dalam keadaan stabil, masih dilakukan
secara manual yaitu dengan melihat batas maksimal ketinggian air di kulit kapal dan
memperhatikan banyak atau tidak muatan benda bergerak maupun benda tidak bergerak masuk ke
dalam deck kapal.
Berdasarkan masalah-masalah tersebut di atas, maka dibuatlah alat “sistem kendali
keseimbangan muatan kapal ferry menggunakan flood status detector berbasis
mikrokontroller atmega 8535 menggunakan bahasa C” alat ini ditempatkan di sisi kiri dan
kanan kulit kapal yang dilengkapi dengan LED, LCD, dan buzzer. Dengan memperhatikan output
pada led, lcd dan buzzer, maka petugas mengetahui sisi kapal mana yang tidak seimbang dan jalur
kendaraan mana yang masih kosong, maka, prototipe alat yang penulis buat telah membantu
masyarakat untuk mensimulasikan pengaturan pemuatan barang di kapal ferry.
Hasil dari alat sistem kendali keseimbangan muatan kapal ferry menggunakan flood status
detector berbasis mikrokontroller atmega 8535 menggunakan bahasa C berfungsi dengan baik,
yaitu jika air berada pada batas 1 sampai 3 di sisi kiri maupun sisi kanan kulit kapal, maka output
led dan lcd berfungsi sesuai dengan program yang telah ditentukan, namun jika air telah berada
pada batas 4 atau batas maksimal, maka output lcd dan buzzer segera berfungsi sesuai dengan
program yang telah ditentukan.
Daftar Pustaka (2006-2012).
BAB 1 PENDAHULUAN
1.1 Latar Belakang
Kapal Ferry merupakan salah satu jenis kapal yang digunakan sebagai alat transportasi
untuk membawa penumpang dan barang di sungai maupun di laut, kapal ferry mempunyai ukuran
cukup besar untuk membawa muatan. Kapal ini merupakan jenis kapal penumpang atau passanger
ship. Muatan kapal selalu ditetapkan oleh undang-undang berdasarkan Keputusan Menteri
Perhubungan Nomor : KM. 33 TAHUN 2001 Tentang Penyelenggaraan dan Pengusahaan
Angkutan Laut.
Saat ini, operasional kapal Ferry hampir ke seluruh kepulauan yang ada di Indonesia,
namun untuk menentukan muatan kapal Ferry harus memperhatikan Undang Undang yang berlaku
berdasarkan kapasitas besar kecil kapal Ferry tersebut, jika tidak memperhatikan Undang Undang
yang berlaku, maka berakibat dapat menyebabkan kapal tenggelam yang sehingga dapat

merugikan harta benda, kapal bahkan nyawa manusia. Sedemikian penting pengetahuan mengenai
muatan yang berhubungan dengan stabilitas kapal untuk keselamatan pelayaran, maka setiap awak
kapal yang bersangkutan bahkan calon awak kapal harus dibekali dengan seperangkat pengetahuan
dan keterampilan dalam menjaga kondisi stabilitas kapal, sehingga keselamatan dan kenyamanan
pelayaran dapat dicapai. Para awak kapal perlu mengontrol keseimbangan muatan agar kapal
berlayar dalam keadaan stabil, hal tersebut masih dilakukan secara manual yaitu dengan melihat
batas maksimal ketinggian air di kulit kapal dan memperhatikan banyak atau tidak muatan benda
bergerak maupun benda tidak bergerak. Di antaranya kendaraan yang masuk ke dalam deck kapal
belum diatur tata letak parkirnya, antara truck, mobil, bus, serta motor belum ada pengaturan jalur
khusus sehingga dapat mengakibatkan posisi kapal tidak stabil.
Berdasarkan uraian yang penulis jabarkan, maka penulis mengusulkan membuat alat yang
disebut dengan sistem kendali keseimbangan muatan kapal ferry menggunakan flood status
detector berbasis mikrokontroller atmega 8535 menggunakan bahasa C. Sensor air ini ditempatkan
di sisi kiri dan kanan di kulit kapal kemudian output dari alat ini disesuaikan dengan program yang
dibuat. Melalui program yang penulis buat diharapkan dapat mengantisipasi tenggelamnya kapal.
Mikrokontroller ATMega 8535 yang dirancang khusus untuk dapat men-download program
langsung dari komputer melalui parallel port printer, sehingga dapat mengendalikan semua mesin
yang bersifat elektronik, seperti atap otomatis untuk atap stadion sepak bola, auto fan, palang
parkir mall, rangkaian robotika, palang pintu kereta api, alat flood status detector dalam kapal
ferry, flood status detector dalam kapal ferry masih dioperasikan secara manual.
1.2 Batasan Masalah
Karena ruang lingkup yang luas dalam bidang elektronika dalam tugas akhir ini, maka
dalam penulisan makalah ini penulis hanya membatasi sejauh pembuatan miniatur sistem kendali
keseimbangan muatan dalam kapal ferry menggunakan flood status detector berbasis
mikrokontroler ATMega 8535. Pemrograman menggunakan bahasa C dengan code vision AVR .
Alat ini juga dilengkapi dengan buzzer, led, dan LCD.
1.3 Tujuan Penulisan
Penulisan yang penulis buat bertujuan untuk membuat prototipe alat yang dapat digunakan
untuk mensimulasikan pengaturan pemuatan barang di kapal ferry.
1.4 Metode Penelitian
Penulisan ini menggunakan beberapa metode penelitian, antara lain:
1. Studi Pustaka, yaitu dengan mengambil referensi dari berbagai sumber baik melalui
situs internet maupun buku-buku elektronika dan pemrograman.
2. Studi Lapangan, yaitu dengan mengamati, meneliti, mengumpulkan dan menganalisa
secara langsung segala sesuatu yang berhubungan dengan penelitian.
3. Konsultasi, yaitu mencari sumber dengan cara bertanya kepada narasumber yang lebih
berpengalaman di bidang elektronika dan pemrograman.

1.5 Sistematika Penulisan
Sistematika dalam penulisan makalah ini terdiri dari 5 (lima) bab yang bertujuan agar
mempermudah pembaca untuk memahami dan mengerti isi dari makalah ini, bagian – bagian
tersebut tersusun secara garis besar, sebagai berikut :
BAB I Pendahuluan
Pada bab ini berisikan tentang materi yang akan dibahas dalam penulisan tugas akhir
ini, serta penjelasan singkat mengenai alat yang buat dan pengaplikasiannya dalam kehidupan
sehari-hari.
BAB 2 Tinjauan Pustaka
Berisikan tentang teori dasar yang berhubungan dengan analisa rangkaian, dan
kerangka terbentuknya rangkaian.
BAB 3 Analisa Rangkaian
Bab ini akan menjelaskan dan menganalisa rangkaian secara detail, mengenai fungsi-
fungsi cara kerja dan pengoperasian alat dari tiap blok rangkaian yang dipergunakan.
BAB 4 Uji Coba Alat Dan Data Pengamatan
Membahas tentang tata cara dan panduan dalam mengoperasikan alat yang akan
dijelaskan secara detil serta memberikan hasil dari data pengamatan yang didapat.
BAB 5 Penutup
Berisi tentang kesimpulan dan saran-saran kepada penulis berdasarkan kepada apa
yang telah diuraikan dalam bab-bab terdahulu.
BAB 2 TINJAUAN PUSTAKA
2.1 . Mikrokontroler
Mikrokontroler adalah suatu komponen elektronik kecil yang mengendalikan operasi
komponen elektronik lain dalam suatu sirkuit elektronik.
2.1.1. Mikrokontroler ATMega 8535
Mikrokontroler, sesuai dengan namanya adalah suatu alat atau komponen pengontrol atau
pengendali yang berukuran mikro atau kecil. Sebelum adanya mikrokontroler, telah ada yang
terlebih dahulu muncul yaitu mikroprosesor.
2.1.1.1. Blok diagram ATMega 8535
Dari gambar 2.1, dapat dilihat bahwa ATMega 8535 memiliki bagian sebagai berikut :
1. Saluran I/O sebanyak 32 buah, yaitu Port A, Port B, Port C, Port D.
2. ADC 10 bit sebanyak 8 saluran.
3. Tiga buah Timer/Counter dengan kemampuan pembandingan.
4. CPU yang terdiri atas 32 buah register.
5. Watchdog Timer dengan osilator internal.
6. SRAM sebesar 512 byte.

7. Memori Flash sebesar 8 kb dengan kemampuan Read While Write.
8. Unit interupsi internal dan eksternal.
9. Port antarmuka SPI.
10. EEPROM sebesar 512 byte yang dapat diprogram saat operasi.
11. Antarmuka komparator analog.
12. Port USART untuk komunikasi serial.
2.1.2. Fitur ATMega 8535
Kapabiltas detail dari ATMega 8535 adalah sebagai berikut :
1. Sistem mikroprosesor 8 bit berbasis RISC dengan kecepatan maksimal 16MHz..
2. Kapabiltas memori flash 8 Kb, SRAM sebesar 512 byte, dan EEPROM (Electrically
Erasable Programmable Read Only Memory) sebesar 512 byte.
3. ADC internal dengan fidelitas 10 bit sebanyak 8 channel.
4. Portal komunikasi serial (USART) dengan kecepatan maksimal 2,5 Mbps.
5. Enam pilihan mode sleep menghemat penggunaan daya listrik.
2.1.3. Konfigurasi Pin ATMega 8535
Konfigurasi pin ATMega 8535 bisa dilihat di Gambar 2.2. Dari gambar tersebut dapat
dijelaskan secara fungsional konfigurasi pin ATMega 8535 sebagai berikut :
1. VCC merupakan pin yang berfungsi sebagai pin input catu daya.
2. GND merupakan pin ground.
3. Port A (PA0-PA7) merupakan pin I/O dua arah dan input ADC.
4. Port B (PB0-PB7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu Timer/Counter,
komparator analog, dan SPI.
5. Port C (PC0-PC7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu TWI, komparator
analog, dan Timer Osilator.
6. Port D (PD0-PD7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu komparator
analog, interupsi eksternal, dan komunikasi serial.
7. RESET merupakan pin yang digunakan untuk me-reset mikrokontroler.
8. XTAL1 dan XTAL2 merupakan pin input clock eksternal.
9. AVCC merupakan pin input tegangan untuk ADC.
10. AREF merupakan pin input tegangan referensi ADC.
2.1.4. Konsep Komunikasi Serial
2.1.5. Mode Komunikasi Serial
Port masukan/keluaran serial mempunyai empat pilihan mode komunikasi, yaitu :
2.1.5.1. Mode 0 (Shift Register)

Mode 0 data dikirim dan diterima melalui RXD, sedangkan clock melalui TRD.
2.1.5.2. Mode 1 (UART 8 bit baud rate dapat diatur)
Mode 1 pengiriman data sebanyak 10 bit yang terdiri atas 1 bit start (logika 0), 8 bit data
(dimulai dari LSB), dan 1 bit stop (logika 1).
2.1.5.3. Mode 2 (UART 9 bit baud rate tetap)
Mode 2 pengiriman dan penerimaan data sebanyak 11 bit yang terdiri atas 1 bit start (logika
0), 8 bit data (dimulai dari LSB), 1 bit data ke 9 (ditempatkan di TB8 disaat kirim dan di RB8
disaat terima), 1 bit stop (logika 1). Kecepatan transmisi dapat diatur dalam kecepatan Fosc/64
atau Fosc/32.
2.1.5.4. Mode 3 (UART 9 bit baud rate dapat diatur)
Mode 3 sama dengan mode 2 kecual dalam kecepatan transmisi. Dalam mode 3 kecepatan
transmisi dapat diatur menggunakan timer 1 dan atau timer 2.
2.1.6. Karakteristik Sinyal RS-232
1. Dalam standard RS-232, tegangan antara +3 sampai +15 Volt dalam input Line Receiver
dianggap sebagai level tegangan „0‟, dan tegangan antara –3sampai –15 Volt dianggap
sebagai level tegangan „1‟.
2. Agar output Line Driver bisa dihubungkan dengan baik, tegangan output Line Driver
berkisar antara +5 sampai +15 Volt untuk menyatakan level tegangan „0‟, dan berkisar antara
–5 sampai –15 Volt untuk menyatakan level tegangan „1‟. Beda tegangan sebesar 2 Volt
ini disebut sebagai noise margin dari RS-232.
2.1.7. Pemrograman Dalam AVR ATMega 8535
Untuk melakukan pemrograman dalam mikrokontroler AVR, Atmel telah menyediakan
software khusus yang dapat diunduh dari website resmi Atmel. Software tersebut adalah AVR
Studio. Software ini menggunakan bahasa assembly sebagai bahasa perantaranya. Selain AVR
Studio, ada beberapa software pihak ketiga yang dapat digunakan untuk membuat program dalam
AVR. Software dari pihak ketiga ini menggunakan bahasa pemrograman tingkat tinggi seperti
bahasa C, Java, atau Basic. Untuk melakukan pemindahan dari komputer ke dalam chip, dapat
digunakan beberapa cara seperti menggunakan kabel JTAG atau menggunakan STK buatan
ATMEL.
2.2. Arti Kapal Ferry
Kapal Ferry merupakan kapal yang berfungsi sebagai alat penyeberangan antarpulau secara
tetap.
2.2.1. Jenis Jenis Kapal Ferry
2.2.1.1. Kapal RoRo Ferry
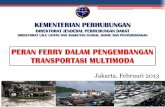
Kapal Ro-Ro atau Roll on / Roll off adalah salah satu jenis kapal ferry yang berfungsi
sebagai alat transportasi penyebrangan antar pulau.

Gambar 2.1 Kapal RoRo Ferry
2.2.1.2. Kapal Fast Ferry
Kapal-kapal jenis ini banyak dipakai oleh maskapai-maskapai kapal penumpang yang
menghubungkan pulau-pulau kecil.
2.2.1.3. Catamaran
Catamaran berasal dari bahasa India Tamil “Kattumaram” yang bermaksud multi lambung
yang berarti kapal yang mempunyai dua lambung.
2.2.1.4. Trimaran
Merupakan perubahan dari catamaran dimana kapal ini mempunyai tiga lambung. Namun
biasanya kapal-kapal hanya digunakan untuk tujuan olahraga.
2.3 Arti Deck
Geladak dalam bahasa Inggrisnya deck adalah lantai kapal.
2.4. Arti Sensor
Sensor adalah elemen yang mengubah sinyal fisik menjadi sinyal elektronik yang
dibutuhkan komputer. (Kamus Besar Bahasa Indonesia, 1995, : 916) .
2.4.1. Arti Sensor dan Tranduser
Sensor adalah komponen yang dapat digunakan untuk mengkonversi suatu besaran
tertentu menjadi satuan analog sehingga dapat dibaca oleh satuan rangkaian elektronik. Sensor
juga dapat disebut sebagai piranti yang mentransform (mengubah) suatu nilai fisik ke nilai fisik
lain. Sensor merupakan komponen utama dari suatu tranduser, sedangkan tranduser merupakan
sistem yang melengkapi agar sensor tersebut mempunyai keluaran sesuai yang kita inginkan dan
dapat langsung dibaca di keluarannya.
2.4.1.1 Arti Sensor Air
Sensor Air adalah sensor yang hanya memanfaatkan transistor sebagai saklar otomatis
dalam proses kerjanya.
2.5. Arti LCD
LCD (Liquid Crysral Display) dapat berfungsi untuk menampilakan suatu nilai hasil
sensor, menampilakan teks, atau menampilakan menu dalam aplikasi mikrokontroler.
2.6. Buzzer
Buzzer adalah komponen yang dapat mengeluarkan suara.
2.7. Arti Led
Dioda cahaya atau lebih dikenal dengan sebutan LED (light-emitting diode) adalah suatu

semikonduktor yang memancarkan cahaya monokromatik yang tidak koheren ketika diberi
tegangan maju.
2.8. Bahasa C
Akar bahasa C adalah bahasa BCPL yang dikembangkan oleh Martin Richards ditahun
1967. Bahasa C adalah bahasa standart, artinya suatu program yang ditulis dengan versi bahasa C
tertentu akan dapat dikompilasi dengan versi bahasa C yang lain dengan sedikit modifikasi.
2.8.1. Proses Kompilasi dan Linking Program C
Agar suatu program dalam bahasa pemrograman dapat dimengerti oleh komputer, program
haruslah diterjemahkan dahulu ke dalam kode mesin. Adapun penerjemah yang digunakan bias
berupa interpreter atau kompiler.
2.8.2. Struktur Penulisan Program C
Struktur dari program C dapat dilihat sebagai kumpulan dari sebuah atau lebih fungsi –
fungsi.
main()
{ Fungsi
statemen – statemen; Utama
}
Fungsi_Fungsi_Lain()
{ Fungsi-fungsi lain
statemen – statemen yang ditulis oleh
} pemrograman komputer
2.8.3. Dasar – Dasar Pemrograman C
2.8.3.1. Tipe Data Dasar
Data merupakan suatu nilai yang biasa dinyatakan dalam bentuk konstanta atau variabel.
Konstanta menyatakan nilai yang tetap, sedangkan variabel menyatakan nilai yang dapat diubah –
ubah selama eksekusi berlangsung.
2.8.3.2. Operator
Operator atau tanda operasi adalah suatu tanda atau simbol yang digunakan untuk suatu
operasi tertentu.
2.8.3.3. Fungsi Komunikasi Serial
Untuk keperluan komunikasi serial, C menyediakan sejumlah fungsi. Beberapa diantaranya
adalah berupa putchar() dan getchar().
1. Fungsi putchar()
Fungsi putchar() selain digunakan untuk menampilkan sebuah karakter di layar, digunakan juga
dalam komunikasi serial sebagai perintah untuk mengirimkan data.
Contoh :

data_transmit = PINC;
putchar (data_transmit);
2. Fungsi getchar()
Fungsi getchar() selain digunakan untuk menerima masukan berupa sebuah karakter dari
keyboard, juga digunakan dalam komunikasi serial sebagai perintah untuk menerima data.
Contoh :
data_receive = getchar();
PORTA = data_receive;
2.8.3.4. Pernyataan Switch
Pernyataan switch digunakan untuk melakukan pengambilan keputusan terhadap banyak
kemungkinan. Bentuk pernyataan switch adalah sebagai berikut :
Switch (ekspresi)
{
Case nilai_1 : pernyataan_1;break;
Case nilai_2 : pernyataan_2;break;
Case nilai_3 : pernyataan_3;break;
};
BAB 3 ANALISA RANGKAIAN
3.1 Analisa Rangkaian Secara Blok Diagram
Gambar 3.1 Blok diagram rangkaian
A. Blok Aktivator
Sumber tegangan berfungsi untuk mengaktifkan komponen dalam alat, dimana sumber
tegangan yang keluar dari trafo dimasukkan ke regulator berfungsi sebagai pengubah tegangan
sumber sebesar +12 Volt menjadi +5 Volt yang akan digunakan untuk komponen-komponen
dengan kebutuhan tegangan sebesar +5 Volt.

1.Blok Aktivator +12 Volt
Sumber tegangan +12 Volt menggambarkan tegangan yang digunakan adalah +12 Volt.
Tegangan +12 Volt akan digunakan untuk mengaktifkan komponen-komponen yang
membutuhkan tegangan sebesar +12 Volt.
2.Blok Aktivator +5 Volt
Tegangan +5 Volt digunakan untuk mengaktifkan komponen-komponen yang
membutuhkan tegangan sebesar +5 Volt. Tegangan +5 Volt diperoleh dari hasil konversi tegangan
sumber menggunakan IC 7805 sebagai regulator.
B. Blok Input
Blok input ini mendapat catu daya dari blok aktivator untuk mengaktifkan semua
komponen dalam rangkaian ini yang dapat mempengaruhi output sehingga output dapat berjalan
sesuai dengan program yang telah ditentukan. Dalam rangkaian ini input berupa sensor air,
medianya diperoleh dari sensor air, yang memberikan kondisi yang kemudian dikirim ke
mikrokontroller untuk diproses. Input disini memiliki 20 (dua puluh) kondisi, yang dimana setiap
kondisi memiliki tingkat ketinggian dalam pengukuran level air yang berbeda. Input disini bekerja
bila terkena air.
C. Blok Proses
Hasil kerja dari blok input akan diproses oleh mikrokontroller ATMega 8535, kondisi yang
diberikan sensor air masuk ke port input ATmega 8535, kemudian kondisi diproses dan dikirim
melalui port output dari mikrokontroller dilengkapi dengan LED, LCD, dan Buzzer, kemudian
dihubungkan dengan rangkaian Flood Status Detector. Untuk mengetahui keadaan Ka 1, Ka 2, Ka
3, Ka 4 (sisi kanan) Ki 1, Ki 2, Ki 3, Ki 4 (sisi kiri) penulis memanfaatkan air sebagai perantara
arus yang menghubungkan antara ground dengan Port C.
Rangkaian LED yang terdiri dari enam buah LED mendapatkan +Vcc di kaki anoda, kaki
katoda, buzzer, dan LCD terhubung dengan pin IC. Arus dapat mengalir jika PortC.0, PortC.1,
PortC.2, PortC.3, PortC.4, PortC.5, PortC.6, dan PortC.7 sudah mendapatkan ground dengan
memanfaatkan air sebagai pengantar arus dalam lempeng kawat yang dibuat terputus. Rangkaian
ini menggunakan IC yang sudah diprogram dengan kondisi aktif LOW, sehingga rangkaian ini
menjadi rangkaian tertutup jika input LOW (-).
Jika ketinggian air berada dalam kondisi Ka 1 (PortC.0 terhubung dengan ground) maka
LED hijau sisi kanan menyala (LED terhubung dengan pin PD.0) dan tampilan di LCD adalah Sisi
Kanan Aman, saat ketinggian air berada dalam kondisi Ka 2 (PortC.0,PortC.1 terhubung dengan
ground) maka LED kuning sisi kanan menyala (LED terhubung dengan pin PD.1) dan tampilan di
LCD adalah Sisi Kanan Siaga.
Jika ketinggian air berada dalam kondisi Ki 1 (PortC.4 terhubung dengan ground) maka
LED hijau sisi kiri menyala (LED terhubung dengan pin PD.4) dan tampilan di LCD adalah Sisi
Kiri Aman, saat ketinggian air berada dalam kondisi Ki 2 (PortC.4,PortC.5 terhubung dengan

ground) maka LED kuning sisi kiri menyala (LED terhubung dengan pin PD.5) dan tampilan di
LCD adalah Sisi Kiri Siaga.
Jika ketinggian air berada dalam kondisi Ka 1 dan Ki 1 (PortC.0 dan PortC.4 terhubung
dengan ground) maka LED hijau sisi kanan dan kiri menyala (LED terhubung dengan pin PD.0
dan PD.4) dan tampilan di LCD adalah Sisi Kanan dan Kiri Aman, saat ketinggian air berada
dalam kondisi Ka 2 dan Ki 2 (PortC.0.PortC.1 dan PortC.4.PortC.5 terhubung dengan ground)
maka LED kuning sisi kanan dan kiri menyala (LED terhubung dengan pin PD.1 dan PD.5) dan
tampilan di LCD adalah Sisi Kanan dan Kiri Siaga, saat ketinggian air berada dalam kondisi Ka 3
dan Ki 3 (PortC.0.PortC.1,PortC.2 dan PortC.4,PortC.5,PortC.6 terhubung dengan ground) maka
LED merah sisi kanan dan Kiri menyala (LED terhubung dengan pin PD.2 dan PD.6) dan tampilan
di LCD adalah Sisi Kanan dan Kiri Waspada, dan saat ketinggian air berada dalam kondisi Ka 4
dan Ki 4 (PortC.0, PortC.1, PortC.2, PortC.3 dan PortC.4, PortC.5, PortC.6, PortC.7 terhubung
dengan ground) maka buzzer akan bunyi dan tampilan di LCD Kapal Akan Tenggelam, untuk
menandakan air di sisi kiri sudah berada sampai batas maksimal.
Jika ketinggian air berada dalam kondisi Ka 2 dan Ki 1 (PortC.0,PortC.1 dan PortC.4
terhubung dengan ground) maka LED kuning kanan dan LED hijau sisi kiri menyala (LED
terhubung dengan pin PD.1 dan PD.4) dan tampilan di LCD adalah Sisi Kanan Siaga dan Kiri
Aman, saat ketinggian air berada dalam kondisi Ka 3 dan Ki 1 (PortC.0,PortC.1,PortC.2 dan
PortC.4 terhubung dengan ground) maka LED merah sisi kanan dan LED hijau sisi kiri menyala
(LED terhubung dengan pin PD.2 dan PD.4) dan tampilan di LCD adalah Sisi Kanan Waspada dan
Kiri Aman, saat ketinggian air berada dalam kondisi Ka 4 dan Ki 1
(PortC.0,PortC.1,PortC.2,PortC.3 dan PortC.4 terhubung dengan ground) maka buzzer pada sisi
kanan akan berbunyi dan LED hijau sisi kiri menyala (LED terhubung dengan pin PD.4) dan
tampilan di LCD adalah Sisi Kanan Akan Tenggelam.
Jika ketinggian air berada dalam kondisi Ka 1 dan Ki 2 (PortC.0 dan PortC.4,PortC.5
terhubung dengan ground) maka LED hijau sisi kanan dan LED kuning sisi kiri menyala (LED
terhubung dengan pin PD.0 dan PD.5) dan tampilan di LCD adalah Sisi Kanan Aman dan Kiri
Siaga, saat ketinggian air berada dalam kondisi Ka 3 dan Ki 2 (PortC.0,PortC.1,PortC.2 dan
PortC.4,PortC.5 terhubung dengan ground) maka LED merah sisi kanan dan LED kuning sisi kiri
menyala (LED terhubung dengan pin PD.2 dan PD.5) dan tampilan di LCD adalah Sisi Kanan
Waspada dan Kiri Siaga, saat ketinggian air berada dalam kondisi Ka 4 dan Ki 2
(PortC.0,PortC.1,PortC.2,PortC.3 dan PortC.4, PortC.5 terhubung dengan ground) maka buzzer
pada sisi kanan akan berbunyi dan LED kuning sisi kiri menyala (LED terhubung dengan pin
PD.4) dan tampilan di LCD adalah Sisi Kanan Akan Tenggelam.
Jika ketinggian air berada dalam kondisi Ka 1 dan Ki 3 (PortC.0 dan
PortC.4,PortC.5,PortC.6 terhubung dengan ground) maka LED hijau sisi kanan dan LED merah
sisi kiri menyala (LED terhubung dengan pin PD.0 dan PD.6) dan tampilan di LCD adalah Sisi

Kanan Aman dan Kiri Waspada, saat ketinggian air berada dalam kondisi Ka 2 dan Ki
3(PortC.0,PortC.1 dan PortC.4,PortC.5,PortC.6 terhubung dengan ground) maka LED kuning sisi
kanan dan LED merah sisi kiri menyala (LED terhubung dengan pin PD.1 dan PD.6) dan tampilan
di LCD adalah Sisi Kanan Siaga dan Kiri Waspada, saat ketinggian air berada dalam kondisi Ka 4
dan Ki 3 (PortC.0,PortC.1,PortC.2,PortC.3 dan PortC.4, PortC.5, PortC.6 terhubung dengan
ground) maka buzzer pada sisi kanan akan berbunyi dan LED merah sisi kiri menyala (LED
terhubung dengan pin PD.6) dan tampilan di LCD adalah Sisi Kanan Akan Tenggelam.
Jika ketinggian air berada dalam kondisi Ki 4 dan Ka 1 (PortC.4,PortC.5,PortC.6,PortC.7
dan PortC.0 terhubung dengan ground) maka buzzer di sisi kiri akan berbunyi dan LED hijau sisi
kanan menyala (LED terhubung dengan pin PD.0) dan tampilan di LCD adalah Sisi Kiri Akan
Tenggelam, saat ketinggian air berada dalam kondisi Ki 4 dan Ka 2
(PortC.4,PortC.5,PortC.6,PortC.7 dan PortC.0,PortC.1 terhubung dengan ground) maka buzzer di
sisi kiri akan berbunyi dan LED kuning sisi kanan menyala (LED terhubung dengan pin PD.1) dan
tampilan di LCD adalah Sisi Kiri Akan Tenggelam , saat ketinggian air berada dalam kondisi Ki 4
dan Ka 3 (PortC.4,PortC.5,PortC.6,PortC.7 dan PortC.0,PortC.1,PortC.2 terhubung dengan
ground) maka buzzer di sisi kiri akan berbunyi dan LED merah sisi kanan menyala (LED
terhubung dengan pin PD.2) dan tampilan di LCD adalah Sisi Kiri Akan Tenggelam, untuk
menandakan air sudah berada sampai batas maksimal. Namun jika keadaan Ka 1, Ka 2, Ka 3, Ka 4
(sisi kanan) Ki 1, Ki 2, Ki 3, Ki 4 (sisi kiri) belum terkena atau tidak terkena air,maka tampilan di
LCD „kondisi kapal aman‟.
D. Blok Output
Setelah diolah dari blok proses, maka didapat output 6 (enam) Led yaiutu menuju 3 (tiga)
buah LED untuk setiap sisi kapal yang masing-masing memiliki ketentuan dengan kondisi
tersendiri. Selain led, dalam rangkaian ini juga memiliki output berupa 1 (satu) buah LCD dimana
setiap kondisi dari sensor air yang telah diproses oleh mikrokontroller memiliki tampilan
tersendiri, pin pin LCD dalam rangkaian ini masuk kedalam port dalam mikrokontroller, susunan
pinnya adalah untuk pin P2.4 mikrokontroller terhubung dengan port lcd DB4, pin P2.5 terhubung
dengan port DB5, pin P2.6 terhubung dengan port DB6, pin P2.7 terhubung dengan port Db7, pin
P2.2 terhubung dengan port E, pin P2.1 terhubung dengan port R/W, pin P2.0 terhubung dengan
port Rs. Tampilan di LCD akan berubah disetiap kondisi bersamaan dengan LED dan buzzer.
Namun buzzer dalam rangkaian ini berfungsi saat level volume air sudah sangat maksimal, hal ini
ditunjukkan dari bunyi buzzer tersebut. Kaki katoda dibuzzer terhubung dengan pin PD.3 dan
PD.7 di mikrokontroller.

3.2. Analisa Rangkaian Secara Detail
Gambar 3.2 Rangkaian Flood Status Detector
Dari gambar 3.2 diatas dapat disimpulkan sebagai berikut :
Rangkaian Flood Status Detector ini, dibutuhkan catu daya sebesar 12 volt sebagai sumber
tegangan untuk mengaktifkannya, dan untuk mengetahui keadaan Ka 1, Ka 2, Ka 3, Ka 4 (sisi
kanan) Ki 1, Ki 2, Ki 3, Ki 4 (sisi kiri) penulis memanfaatkan air sebagai perantara arus yang
menghubungkan antara ground dengan Port C.
Rangkaian LED yang terdiri dari enam buah LED mendapatkan +Vcc di kaki anoda, kaki
katoda, buzzer, dan LCD terhubung dengan pin IC. Arus dapat mengalir jika PortC.0, PortC.1,
PortC.2, PortC.3, PortC.4, PortC.5, PortC.6, dan PortC.7 sudah mendapatkan ground dengan
memanfaatkan air sebagai pengantar arus dalam lempeng kawat yang dibuat terputus. Rangkaian
ini menggunakan IC yang sudah diprogram dengan kondisi aktif LOW, sehingga rangkaian ini
menjadi rangkaian tertutup jika input LOW (-).
Jika ketinggian air berada dalam kondisi Ka 1 (PortC.0 terhubung dengan ground) maka
LED hijau sisi kanan menyala (LED terhubung dengan pin PD.0) dan tampilan di LCD adalah Sisi
Kanan Aman, saat ketinggian air berada dalam kondisi Ka 2 (PortC.0,PortC.1 terhubung dengan
ground) maka LED kuning sisi kanan menyala (LED terhubung dengan pin PD.1) dan tampilan di
LCD adalah Sisi Kanan Siaga.
Jika ketinggian air berada dalam kondisi Ki 1 (PortC.4 terhubung dengan ground) maka
LED hijau sisi kiri menyala (LED terhubung dengan pin PD.4) dan tampilan di LCD adalah Sisi
Kiri Aman, saat ketinggian air berada dalam kondisi Ki 2 (PortC.4,PortC.5 terhubung dengan
ground) maka LED kuning sisi kiri menyala (LED terhubung dengan pin PD.5) dan tampilan di
LCD adalah Sisi Kiri Siaga.

Jika ketinggian air berada dalam kondisi Ka 1 dan Ki 1 (PortC.0 dan PortC.4 terhubung
dengan ground) maka LED hijau sisi kanan dan kiri menyala (LED terhubung dengan pin PD.0
dan PD.4) dan tampilan di LCD adalah Sisi Kanan dan Kiri Aman, saat ketinggian air berada
dalam kondisi Ka 2 dan Ki 2 (PortC.0.PortC.1 dan PortC.4.PortC.5 terhubung dengan ground)
maka LED kuning sisi kanan dan kiri menyala (LED terhubung dengan pin PD.1 dan PD.5) dan
tampilan di LCD adalah Sisi Kanan dan Kiri Siaga, saat ketinggian air berada dalam kondisi Ka 3
dan Ki 3 (PortC.0.PortC.1,PortC.2 dan PortC.4,PortC.5,PortC.6 terhubung dengan ground) maka
LED merah sisi kanan dan Kiri menyala (LED terhubung dengan pin PD.2 dan PD.6) dan tampilan
di LCD adalah Sisi Kanan dan Kiri Waspada, dan saat ketinggian air berada dalam kondisi Ka 4
dan Ki 4 (PortC.0, PortC.1, PortC.2, PortC.3 dan PortC.4, PortC.5, PortC.6, PortC.7 terhubung
dengan ground) maka buzzer akan bunyi dan tampilan di LCD Kapal Akan Tenggelam, untuk
menandakan air di sisi kiri sudah berada sampai batas maksimal.
Jika ketinggian air berada dalam kondisi Ka 2 dan Ki 1 (PortC.0,PortC.1 dan PortC.4
terhubung dengan ground) maka LED kuning kanan dan LED hijau sisi kiri menyala (LED
terhubung dengan pin PD.1 dan PD.4) dan tampilan di LCD adalah Sisi Kanan Siaga dan Kiri
Aman, saat ketinggian air berada dalam kondisi Ka 3 dan Ki 1 (PortC.0,PortC.1,PortC.2 dan
PortC.4 terhubung dengan ground) maka LED merah sisi kanan dan LED hijau sisi kiri menyala
(LED terhubung dengan pin PD.2 dan PD.4) dan tampilan di LCD adalah Sisi Kanan Waspada dan
Kiri Aman, saat ketinggian air berada dalam kondisi Ka 4 dan Ki 1
(PortC.0,PortC.1,PortC.2,PortC.3 dan PortC.4 terhubung dengan ground) maka buzzer pada sisi
kanan akan berbunyi dan LED hijau sisi kiri menyala (LED terhubung dengan pin PD.4) dan
tampilan di LCD adalah Sisi Kanan Akan Tenggelam.
Jika ketinggian air berada dalam kondisi Ka 1 dan Ki 2 (PortC.0 dan PortC.4,PortC.5
terhubung dengan ground) maka LED hijau sisi kanan dan LED kuning sisi kiri menyala (LED
terhubung dengan pin PD.0 dan PD.5) dan tampilan di LCD adalah Sisi Kanan Aman dan Kiri
Siaga, saat ketinggian air berada dalam kondisi Ka 3 dan Ki 2 (PortC.0,PortC.1,PortC.2 dan
PortC.4,PortC.5 terhubung dengan ground) maka LED merah sisi kanan dan LED kuning sisi kiri
menyala (LED terhubung dengan pin PD.2 dan PD.5) dan tampilan di LCD adalah Sisi Kanan
Waspada dan Kiri Siaga, saat ketinggian air berada dalam kondisi Ka 4 dan Ki 2
(PortC.0,PortC.1,PortC.2,PortC.3 dan PortC.4, PortC.5 terhubung dengan ground) maka buzzer
pada sisi kanan akan berbunyi dan LED kuning sisi kiri menyala (LED terhubung dengan pin
PD.4) dan tampilan di LCD adalah Sisi Kanan Akan Tenggelam.
Jika ketinggian air berada dalam kondisi Ka 1 dan Ki 3 (PortC.0 dan
PortC.4,PortC.5,PortC.6 terhubung dengan ground) maka LED hijau sisi kanan dan LED merah
sisi kiri menyala (LED terhubung dengan pin PD.0 dan PD.6) dan tampilan di LCD adalah Sisi
Kanan Aman dan Kiri Waspada, saat ketinggian air berada dalam kondisi Ka 2 dan Ki
3(PortC.0,PortC.1 dan PortC.4,PortC.5,PortC.6 terhubung dengan ground) maka LED kuning sisi

kanan dan LED merah sisi kiri menyala (LED terhubung dengan pin PD.1 dan PD.6) dan tampilan
di LCD adalah Sisi Kanan Siaga dan Kiri Waspada, saat ketinggian air berada dalam kondisi Ka 4
dan Ki 3 (PortC.0,PortC.1,PortC.2,PortC.3 dan PortC.4, PortC.5, PortC.6 terhubung dengan
ground) maka buzzer pada sisi kanan akan berbunyi dan LED merah sisi kiri menyala (LED
terhubung dengan pin PD.6) dan tampilan di LCD adalah Sisi Kanan Akan Tenggelam.
Jika ketinggian air berada dalam kondisi Ki 4 dan Ka 1 (PortC.4,PortC.5,PortC.6,PortC.7
dan PortC.0 terhubung dengan ground) maka buzzer di sisi kiri akan berbunyi dan LED hijau sisi
kanan menyala (LED terhubung dengan pin PD.0) dan tampilan di LCD adalah Sisi Kiri Akan
Tenggelam, saat ketinggian air berada dalam kondisi Ki 4 dan Ka 2
(PortC.4,PortC.5,PortC.6,PortC.7 dan PortC.0,PortC.1 terhubung dengan ground) maka buzzer di
sisi kiri akan berbunyi dan LED kuning sisi kanan menyala (LED terhubung dengan pin PD.1) dan
tampilan di LCD adalah Sisi Kiri Akan Tenggelam , saat ketinggian air berada dalam kondisi Ki 4
dan Ka 3 (PortC.4,PortC.5,PortC.6,PortC.7 dan PortC.0,PortC.1,PortC.2 terhubung dengan
ground) maka buzzer di sisi kiri akan berbunyi dan LED merah sisi kanan menyala (LED
terhubung dengan pin PD.2) dan tampilan di LCD adalah Sisi Kiri Akan Tenggelam, untuk
menandakan air sudah berada sampai batas maksimal. Namun jika keadaan Ka 1, Ka 2, Ka 3, Ka 4
(sisi kanan) Ki 1, Ki 2, Ki 3, Ki 4 (sisi kiri) belum terkena atau tidak terkena air,maka tampilan di
LCD „kondisi kapal aman‟.
BAB 4 UJI COBA ALAT DAN DATA PENGAMATAN
4.1 Pengujian Secara Terpisah
1. Pengujian Terhadap Beban
2. Pengujian Terhadap Keseimbangan
4.1.1 Pengujian Terhadap Beban
Pengujian terhadap beban ini dilakukan agar penulis dapat mengetahui seberapa berat
beban yang dapat di tampung oleh kapal agar kapal dapat berlayar dalam keadaan seimbang.
4.1.2 Pengujian Terhadap Keseimbangan
Pengujian terhadap keseimbangan ini dilakukan agar penulis mengetahui kemiringan
maksimal yang dapat diterima kapal agar kapal dapat berlayar dalam keadaan seimbang.
4.2 Pengujian Secara Keseluruhan
Pengujian secara keseluruhan ini dilakukan untuk mencoba kinerja alat sistem kendali
keseimbangan muatan kapal ferry menggunakan flood status detector berbasis mikrokontroller
atmega 8535 menggunakan bahasa C mulai dari awal hingga akhir, sehingga dapat diketahui
apakah alat yang dibuat beroperasi dengan benar dan mampu menyelesaikan tugasnya secara
akurat.
Berikut ini adalah tabel hasil pengujian alat secara keseluruhan terhadap beban dan
keseimbangan, yaitu:

Tabel 4.1 Tabel Pengujian Terhadap Beban dan Keseimbangan
KEADAAN BEBAN
( gram )
Derajat
Keseimbangan
LED
Kanan
LED Kiri LCD BUZZER
K
a
1
K
a
2
K
a
3
K
a
4
K
i
1
K
i
2
K
i
3
K
i
4
R L R L H K M H K M R L
Kondisi Kapal Aman
100 5 Sisi Kanan Aman
200 10 Sisi Kanan Siaga
100 5 Sisi Kiri Aman
200 10 Sisi Kiri Siaga
100 100 Sisi Kanan dan Kiri
Aman
200 200 Sisi Kanan dan Kiri
Siaga
300 300 Sisi Kanan dan Kiri
Waspada
400 400 Kapal Akan
Tenggelam
200 100 5 Sisi Kanan Siaga dan
Kiri Aman
300 100 10 Sisi Kanan Waspada
dan Kiri Aman
400 100 15 Sisi Kanan Akan
Tenggelam
100 200 5 Sisi Kanan Aman dan
Kiri Siaga
300 200 5 Sisi Kanan Waspada
dan Kiri Siaga
400 200 10 Sisi Kanan Akan
Tenggelam
100 300 10 Sisi Kanan Aman dan
Kiri Waspada
200 300 5 Sisi Kanan Siaga dan
Kiri Siaga

Dari tabel 4.1 menunjukan bahwa kapal dapat menampung beban maksimal sampai 800
gram saja, sedangkan berat kapal keseluruhan 1400 gram, jadi presentase untuk beban yang
diberikan terhadap muatan adalah 800/1400 *100 = 58 % dari berat kapal dan kemiringan kapal
maksimal sebesar 15 derajat, jadi jika lebih dari derajat kemiringan kapal yang ditentukan, maka
kapal tidak dapat menerima masukan berupa beban.
Keterangan :
Ka : Kanan : terkena air
Ki : Kiri : led hijau aktif
H : Hijau : led kuning aktif
K : Kuning : led merah aktif
M : Merah : buzzer aktif
R : Right / Kanan
L : Left / Kiri
BAB 5 PENUTUP
5.1 Kesimpulan
Setelah melakukan perencanaan dan pembuatan sistem, pengujian dan analisanya, maka
dapat diambil beberapa kesimpulan tentang sistem kerja dari alat sistem kendali keseimbangan
muatan kapal ferry menggunakan flood status detector berbasis mikrokontroller atmega 8535
menggunakan bahasa C yang dibuat oleh Penulis, antara lain:
1. Kapal dapat menampung beban maksimal sampai 800 gram saja, sedangkan berat kapal
keseluruhan 1400 gram, jadi presentase untuk beban yang diberikan terhadap muatan adalah
800/1400 *100 = 58 % dari berat kapal.
2. Kemiringan kapal maksimal sebesar 15 derajat, jadi jika lebih dari derajat kemiringan kapal
yang ditentukan, maka kapal tidak dapat menerima masukan berupa beban.
3. Alat ini selain ditempatkan di kapal ferry, dapat juga ditempatkan di semua jenis kapal,
seperti kapal tongkang.
5.2 Saran
Alat ini masih memerlukan beberapa penyempurnaan, untuk itu ada beberapa hal yang
harus diperhatikan.
1. Dari segi penampilan, agar tidak terkesan monoton, maka buatlah maket yang atraktif.
2. Untuk pintu rampa kapal, dapat dipasangkan secara otomatis yang dihubungkan dengan
mikrokontroller yang sama sesuai dengan prosedur yang ada.
3. Untuk para awak kapal, diharapkan bisa mengoperasikan komputer jika ingin menampilkan
output di LCD sesuai yang diinginkan.
Untuk kedepannya alat ini dapat dikembangkan, dari segi penampilan maupun hasil
keluaran yang ditampilkan dan diharapkan alat ini dapat berguna dan dapat dipakai dalam
kehidupan sehari-hari.
400 300 5 Sisi Kanan Akan
Tenggelam
100 400 15 Sisi Kiri Akan
Tenggelam
200 400 10 Sisi Kiri Akan
Tenggelam
300 400 5 Sisi Kiri Akan
Tenggelam

DAFTAR PUSTAKA
[1] Abdul Wahhab dan Arief Rosyadi, Landasan Teori, Modul Panduan Elektronika II,
Laboratorium Menengah Universitas Gunadarma, Jakarta, 2010.
[2] Anonim, Modul Praktikum Mikroprosesor S1, Laboratorium Menengah Elektronika dan
Komputer, Universitas Gunadarma, 2009.
[3] Budiharto, Sigit, Elektronika Digital + Mikroprosesor, Yogjakarta, 2008.
[4] Chandra, Franky & Deni Arifianto, Jago Elektronika, PT Kawan Pustaka, Jakarta, 2008.
[5] URL:
http://3.bp.blogspot.com/_4LxlcCFie4Y/S7SXXyHxeGI/AAAAAAAAAQY/NFNx3gk08c4/
s1600/ferryroro.jpg, 4 Maret 2012
[6] URL: http://amalia07.files.wordpress.com, 13 Maret 2012
[7] URL: http://bocah-cakil.blogspot.com/2011/06/rangkaian-sensor-air.html, 7 Maret 2012
[8] URL: http://htmlimg4.scribdassets.com/9fpdc81gxs1ghhmc/images/4-e6d98b7e28.jpg, 10
Maret 2012
[9] URL: http://id.wikibooks.org/wiki/Pelayaran_Sungai_dan_Danau/Dasar-dasar_Kapal, 17
Maret 2012
[10] URL: http://img.nauticexpo.com/images_ne/photo-m2/car-deck-for-ro-ro-ships-without-
integrated-lifting-system-195893.jpg, 21 Maret 2012
[11] URL: http://www.datasheetcatalog.org/datasheet/atmel/2502S.pdf, 01 September 2012
[12] URL: http://www.scribd.com/doc/85004999/Jenis-Kapal, 19 Maret 2012
[13] Widodo Budiharto, Belajar Sendiri Membuat Robot Cerdas, Elex Media Komputindo,
Jakarta, 2006.