RANCANG BANG UN PAP AN PERLUASAN HB2000...
8
SEMINAR NASIONAL II SDM TEKNOLOGI NUKLIR YOGY AKARTA, 21-22 DESEMBER 2006 ISSN 1978-0176 RANCANG BANG UN PAP AN PERLUASAN HB2000 UNTUK SISTEM KENDALl BERBASIS MIKROKONTROLER SERI AT89C51/52 SUTANTO, TOTO TRIKASJONO Sekolah Tinggi Teknologi Nuklir - BATAN Jl. Babarsari Kotak Pos 6101 YKBB Yogyakarta 55281 Telepon 0274-484085, 489716, Faksimili 0274-489715 e-mail: [email protected] Abstrak RANCANG BANGUN PAPAN PERLUASAN HB2000 UNTUK SISTEM KENDALl BERBASIS MIKROKONTROLER SERf AT89C51/52. Telah dibuat papan perluasan HB2000. Papan perluasan HB2000 dibuat untuk membantu pengguna dalam belajar sistem kendali berbasis mikrolwntroler seri AT89C51/52. Papan perluasan HB2000 terdiri dari rangkaian ADC 0809, DAC 0808, penggerak motor stepper, Iwnektor pencacah, dan rangkaian konverter tingkat RS-232. Rangkaian-rangkaian tersebut dihubungkan dengan 2 (dua) buah Iwnektor 2 (dua) baris. Masing-masing Iwnektor bisa dihubungkan dengan jalur I/O mikrokontroler yang dipasang pad a modul HB2000. Melalui kedua Iwnektor, mikrolwntroler dapat menjalankan rangkaian dalam papan perluasan HB2000. Hasil pengujian menunjukkan bahwafasilitas dalam papan perluasan HB2000 dapat bekerja dengan baik. Kata-kata kunci : Rancang Bangun, Papan perluasan, mikrokontroler Abstract DESIGN AND CONSTRUCTION AN EXPANSION MODULE OF HB2000 FOR CONTROL SYSTEM ON MICROCONTROLLER BASED TYPE AT89C51/52. An expansion module of HB2000 have been made. The purpose of design and construction an expansion module of HB2000 is to help user in studying control system on microcontroller based type AT89C51/52. An expansion module consists offacilities, i.e : assembly of ADC type 0809, DAC type 0808, stepper motor driver, counter connector, and level RS-232 converter. These facilities are connected into two connectors. Each connector can be connected to I/O of microcontroller that placed on HB2000 module. Through these connectors, each facility can be controlled by microcontroller. Function test shows that an expansion module can work well. Keyword: Design, construction, An expansion module, Microcontroller PENDAHULUAN Penerapan mikrokontroler yang efektif memerlukan pengetahuan perangkat keras dan perangkat lunak mikrokontroler. Pengetahuan perangkat keras meliputi pengertian arsitektur mikrokontroler dan teknik antarmuka antara mikrokontroler dengan sistem yang hendak dikendalikan. Pengetahuan perangkat lunak meliputi pengertian instruksi-instruksi dan penyusunannya dalam bentuk program. Perpaduan perangkat keras dan perangkat lunak yang sesuai akan memberikan derajad fleksibilitas desain sistem kendali yang besar. Oleh karena itu, pengetahuan tentang mikrokontroler dapat membantu meningkatkan mutu dan keahlian sumber daya manusia dalam menerapkan mikrokontroler (Putra : 2002). Dalam perancangan kendali sistem analog dengan mikrokontroler diperlukan pemahaman rangkaian perantara analog. Perantara analog meliputi rangkaian perantara tegangan analog ke nilai digitalnya dan perantara dari nilai digital ke tegangan analog. Perantara ini merupakan bagian dari antarmuka antara mikrokontroler dengan sistem analog (plant) Mikrokontroler juga dapat digunakan untuk menggerakkan motor stepper. Dalam hal Sutanto dkk 249 Sekolah Tinggi Teknologi Nuklir - BATAN
Transcript of RANCANG BANG UN PAP AN PERLUASAN HB2000...

SEMINAR NASIONAL IISDM TEKNOLOGI NUKLIR
YOGY AKARTA, 21-22 DESEMBER 2006ISSN 1978-0176
RANCANG BANG UN PAP AN PERLUASAN HB2000 UNTUKSISTEM KENDALl BERBASIS MIKROKONTROLER SERI
AT89C51/52
SUTANTO, TOTO TRIKASJONO
Sekolah Tinggi Teknologi Nuklir - BATANJl. Babarsari Kotak Pos 6101 YKBB Yogyakarta 55281Telepon 0274-484085, 489716, Faksimili 0274-489715
e-mail: [email protected]
Abstrak
RANCANG BANGUN PAPAN PERLUASAN HB2000 UNTUK SISTEM KENDALl BERBASIS
MIKROKONTROLER SERf AT89C51/52. Telah dibuat papan perluasan HB2000. Papan perluasanHB2000 dibuat untuk membantu pengguna dalam belajar sistem kendali berbasis mikrolwntroler seriAT89C51/52. Papan perluasan HB2000 terdiri dari rangkaian ADC 0809, DAC 0808, penggerak motorstepper, Iwnektor pencacah, dan rangkaian konverter tingkat RS-232. Rangkaian-rangkaian tersebutdihubungkan dengan 2 (dua) buah Iwnektor 2 (dua) baris. Masing-masing Iwnektor bisa dihubungkandengan jalur I/O mikrokontroler yang dipasang pad a modul HB2000. Melalui kedua Iwnektor,mikrolwntroler dapat menjalankan rangkaian dalam papan perluasan HB2000. Hasil pengujianmenunjukkan bahwafasilitas dalam papan perluasan HB2000 dapat bekerja dengan baik.
Kata-kata kunci : Rancang Bangun, Papan perluasan, mikrokontroler
Abstract
DESIGN AND CONSTRUCTION AN EXPANSION MODULE OF HB2000 FOR CONTROL SYSTEM
ON MICROCONTROLLER BASED TYPE AT89C51/52. An expansion module of HB2000 have beenmade. The purpose of design and construction an expansion module of HB2000 is to help user in studyingcontrol system on microcontroller based type AT89C51/52. An expansion module consists offacilities, i.e :assembly of ADC type 0809, DAC type 0808, stepper motor driver, counter connector, and level RS-232converter. These facilities are connected into two connectors. Each connector can be connected to I/O ofmicrocontroller that placed on HB2000 module. Through these connectors, each facility can be controlled bymicrocontroller. Function test shows that an expansion module can work well.Keyword: Design, construction, An expansion module, Microcontroller
PENDAHULUAN
Penerapan mikrokontroler yang efektifmemerlukan pengetahuan perangkat keras danperangkat lunak mikrokontroler. Pengetahuanperangkat keras meliputi pengertian arsitekturmikrokontroler dan teknik antarmuka antaramikrokontroler dengan sistem yang hendakdikendalikan. Pengetahuan perangkat lunakmeliputi pengertian instruksi-instruksi danpenyusunannya dalam bentuk program.Perpaduan perangkat keras dan perangkat lunakyang sesuai akan memberikan derajadfleksibilitas desain sistem kendali yang besar.
Oleh karena itu, pengetahuan tentangmikrokontroler dapat membantu meningkatkanmutu dan keahlian sumber daya manusia dalammenerapkan mikrokontroler (Putra : 2002).
Dalam perancangan kendali sistemanalog dengan mikrokontroler diperlukanpemahaman rangkaian perantara analog.Perantara analog meliputi rangkaian perantarategangan analog ke nilai digitalnya danperantara dari nilai digital ke tegangan analog.Perantara ini merupakan bagian dari antarmukaantara mikrokontroler dengan sistem analog(plant) Mikrokontroler juga dapat digunakanuntuk menggerakkan motor stepper. Dalam hal
Sutanto dkk 249 Sekolah Tinggi Teknologi Nuklir - BATAN

SEMINAR NASIONAL IISDM TEKNOLOGI NUKLIR
YOGYAKARTA, 21-22 DES EMBER 2006ISSN 1978-0176
Penerapan ini memberikan pengetahuan danketrampilan pengguna dalam menggunakanport-port paralel mikrokontroler.
Mikrokontroler Seri AT89C51/52
Komponen dasar penyusunmikrokontroler AT89C5l/52 terdiri dari bagianprosesor berukuran 8 bit, memori programinternal 4 Kbyte, 256 byte RAM internal, 128byte register fungsi khusus (SFR), perantaramasukan-keluaran (I/O), dan rangkaian osilatorinternal. Perantara I/O terdiri dari empat portparalel, sebuah kanal serial, dua buahTimer/Counter (untuk AT89C52 ada tiga) dandua buahjalur interupsi eksternal. Keempat portparalel masing-masing dinamakan sebagai Port0, Port 1, Port 2 dan Port 3. Jalur kanal serial,Timer/Counter dan interupsi merupakan fungsikhusus yang tergabung dalam Port 3(Christanto : 2004).
1. Port ParalelPort 1, Port 2, dan Port 3 merupakan port
I/O 8 bit dua arah (bi-directional) yang telahdilengkapi dengan pull-up internal. Jika suatulogik 1 dituliskan pada port ini, maka port akandibuat tinggi oleh pull up internal dan dapatdigunakan sebagai masukan. Port 0 merupakanport 8 bit dua arah yang bersifat open drain.Saat logika I dituliskan pada port ini, pin portdapat digunakan sebagai masukan denganimpedansi tinggi.
2. Port SerialPada mikrokontroler AT89C5l/52, port
serial dikontrol oleh register SCaN (serialPort Control) dan SBUF (Serial Data Buffer).Data dari dan menuju ke port serial akanmelalui register SBUF. Isi dari register SCaNadalah sebagai berikut :
ini diperlukan pemahaman tentang rangkaianpenggerak motor stepper (driver). Dalam kasuslain, misalnya : pemantauan multi-sistemkendali diperlukan teknik antarmuka antarakendali dengan piranti digital lain (komputer).Dalam hal ini diperlukan pemahaman teknikkomunikasi secara serial dan paralel (Garland:1984).
Rancang bangun papan perluasanHB2000 merupakan upaya untuk melengkapimodul HB2000. Modul HB2000 merupakanpapan pelatihan mikrokontroler yangmenyediakan fasilitas penampil led dan sevensegmen, keypad, dan rangkaian downloader.Penulis memandang fasilitas ini belummencukupi bagi . pengguna di dalammempelajari perangkat keras dan perangkatlunak mikrokontroler. Sesuai dengan kegunaanmikrokontroler yang cukup luas, makadiperlukan tambahan fasilitas yang mendukungpenggunaan HB2000. Tambahan fasilitas inimeliputi : rangkaian perantara analog, konektorpencacah, penggerak motor stepper danrangkaian untuk komunikasi serial dengankomputer. Adanya fasilitas ini memungkinkanmodul HB2000 bisa menjadi prasarana yanglebih efektif bagi pengguna di dalam menguasaiperangkat mikrokontroler.
Berdasarkan uraian di atas maka penulismengambil pokok permasalahan, yaitubagaimana merancang dan membangun papanperluasan HB2000 yang terdiri dari rangkaianperantara analog (ADC seri 0809 dan DAC seri0808), konektor pencacah, penggerak motorstepper 4 (empat) pole, dan rangkaian konvertertingkat RS-232 dengan MAX-232. Hasilpembuatan alat ini dapat digunakan sebagaipapan tambahan modul HB2000 sehinggapengguna bisa mensimulasikan mikrokontrolersebagai basis suatu sistem kendali.
DASAR TEORl
Modul HB2000
Modul HB2000 merupakan papanpelatihan mikrokontroler. Modul HB2000terdiri dari bagian mikrokontroler seriAT89C5l/52, bagian penampil (penampil leddan seven segmen), keypad, dan bagiandownloader. Sesuai dengan fasilitas tersebutmaka pengguna dapat berlatih menerima datadari keypad dan mengirimkan data ke penampil.
MSB
SMO SMI SM2 REN TB8 RB8 TI
Keterangan,Bit (0) Rl =Receive Interupt Flag.
Diset oleh perangkat kerasmenunjukkan suatu byte telahditerima.
Bit(l) TI = Transmit Interupt FlagDiset oleh perangkat kerasmenunjukkan suatu byte telahdikirimkan.
Bit(2) RB8 =Receive bit 8
LSB
Rl
untuklengkap
untuk
komplit
Sekolah Tinggi Teknologi Nuklir - BATAN 250 Sutanto dkk

~--------------------------~
Gambar 1. Diagram Blok Modu1 HB2000
Antarmuka antara fasilitas-fasilitas dalampapan perluasan HB2000 denganmikrokontro1er dalam modul HB2000digunakan pin-pin seperti dalam Tabel 1.
SEMINAR NASIONAL IISDM TEKNOLOGI NUKLIRYOGYAKARTA, 21-22 DESEMBER 2006ISSN 1978-0176
Bit ini digunakan sesuai modepengoperasian. Pada mode 2 dan 3 dengan 9bit diterima, bit terakhir akan dikopi ke RE8.
Bit (3) TB8= Transmit bit 8.Adalah data ke 9 yang akan dikirimkan padamode 2 dan 3. Diset atau dihapus dengansofware sesuai kebutuhan.
Bit (4) REN= Receive EnableBit ini hams diset untuk menerima data. Jikatidak data akan diblok.
Bit(5) SM2= Serial Mode (bit 2)Digunakan pada mode 2 dan 3 untukmendukung komunikasi multiprosesor.
Bit (6) SM1= Serial mode bit 1Bit (7) SMO=Serial mode bit 2
Untuk komunikasi se rial, beberapaparameter yang ditetapkan ErA (ElectronicsIndustry Association) antara lain : (Putra :2002). Sebuah 'spasi' (logika 0) antarategangan +3 sid +25 volt. Sebuah 'tanda'(logika 1) antara tegangan -3 sid -25 volt.Daerah tegangan antara +3 sid -3 volt tidakdidefinisikan. Tegangan rangkaian terbukatidak boleh lebih dari 25 volt (dengan acuanground). Arus hubung singkat rangkaian tidakboleh lebih dari 500 mA.
PERANCANGAN DAN PEMBUA TAN
ADC0809 o
PI
P2
Modul HB2000 terdiri dari bagianmikrokontroler, masukan dari keypad, keluaranke penampil led dan seven segmen dan bagiandownloader. Diagram blok modul HB2000ditunjukkan oleh Gambar 1. Papan perluasanHB2000 yang dibangun terdiri dari fasilitasfasilitas meliputi : rangkaian ADC 0809,rangkaian DAC 0808, penggerak motor stepper,konektor pencacah, dan rangkaian konvertertingkat RS-232 dengan MAX-232. Gambar 2menunjukkan diagram blok papan perluasanHB2000.
P3
COUNTERIII
: I STEPPER I------------- 1
Gambar 2. Diagram biok papan perluasan HB2000
Tabel 1. Pin I/O mikrokontroler yang digunakanpapan perluasan HB2000
Rangkaian Pin I/OFungsimikrokontroler Port 0
Jalur dataADC 0809
Port 2 pin no 5-7Jalur alamat inputPort 3 pin no 2, 6
Jalur kendalidan 7DAC 0808
Port 1Jalur dataMotor
Port 2 pin no 0-4Jalur data
stepper KonektorPort 3 pin 4Jalur pulsa
pencacah Max-232Port 3 pin 0Jalur penerima
Port 3 pin 1Jalur pengirim
Sutanto dkk 251 Sekolah Tinggi Teknologi Nuklir - BATAN
SEMINAR NASIONAL IISDM TEKNOLOGI NUKLIR
YOGYAKARTA, 21-22 DESEMBER 2006ISSN 1978-0176
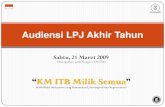
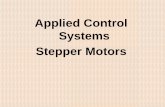
3. Rangkaian ADC 0809Rangkaian kendali ADC 0809 ditunjukkan oleh Gambar 3
28
12
:u,••'I;.2-1
IN-1
2-2
2-3IN-2
2-+
2-3IN-3
2-'
2-7IN-+
],:'b2-8
IN-3
]!C)C
IN-'
ADD-A
ADD-BIN-7
ADD-C
-1(-)
7
1 18 212 ~ ~3 ~+3,78
Gambar 3 Rangkaian kendali ADC 0809 (Datasheet ADC 0809)
ADC0809 merupakan komponen akuisisi datadengan teknologi CMOS dan pengkonversi 8bit analog ke digital. Teknik konversimenggunakan metode pendekatan beruntun(successive approximation). ADC0809memiliki 8 kanal masukan analog yangtermultipleks, yaitu pin nomor 1-5 dan nomor26-28. Pemilihan kanal masukan dilakukandengan memberikan data digital pada pinnomor 23 - 25. Data digital hasil konversi
diambil melalui pin nomor 8, 14, 15, dan 17 21. Pengambilan data digital dilakukan denganmemberikan sinyal Output Enable ke pin 9.Data digital ditransfer ke mikrokontrolermelalui Port O.
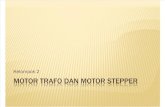
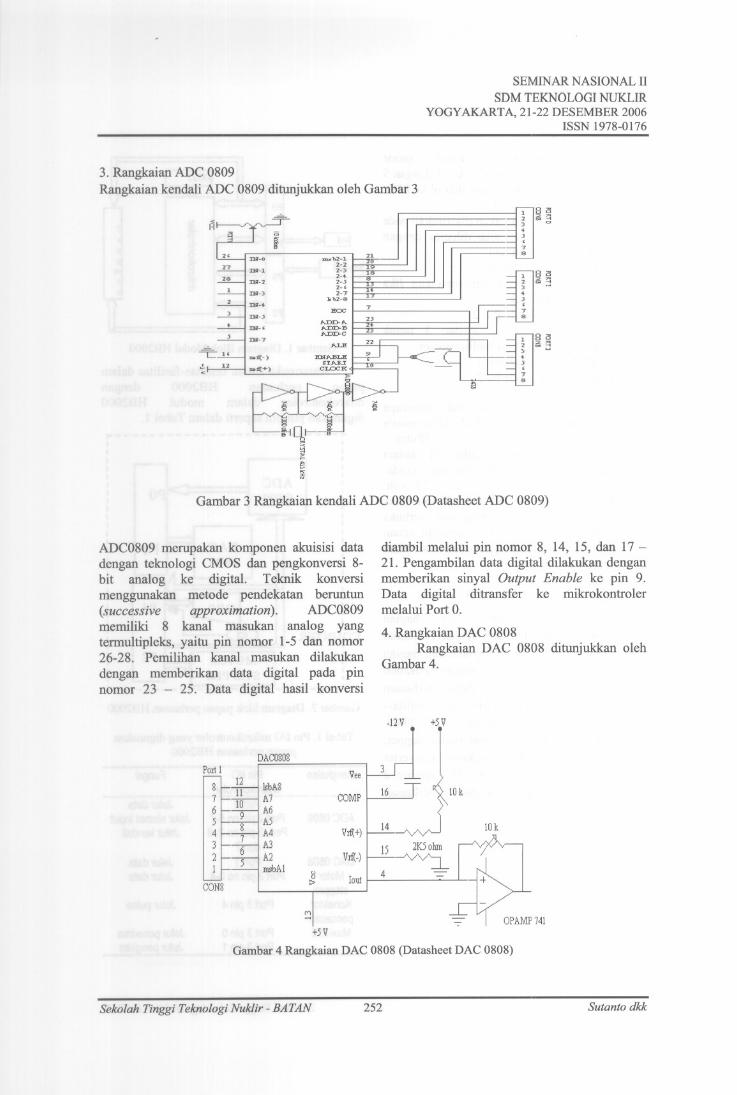
4. Rangkaian DAC 0808Rangkaian DAC 0808 ditunjukkan oleh
Gambar 4.
-12V +5V
DAC0808Vee
Port 1
16
I'\) 10 kI8
COMP
10k
7
14~ tl6
Vrl(+)
5
"~»4
Vrl(-)
3
=- +
2
4 ~
"IOllt -/
1
"'""CON8
-:- OP AMP 741
S;I
+5V
Gambar 4 Rangkaian DAC 0808 (Datasheet DAC 0808)
Sekolah Tinggi Teknologi Nuklir - SATAN 252 Sutanto dkk

SEMINAR NASIONAL II
SDM TEKNOLOGI NUKLIR
YOGY AKARTA, 21-22 DESEMBER 2006ISSN 1978-0176
Data digital yang hendak diubah menjaditegangan analog dikeluarkan darimikrokontroler melalui Port 1. Data digital iniditerima DAC 0808, berturut-turut dari lsb(least significant bit) sarnpai msb (mostsignificant bit), melalui pin nomor 12 sampai 5.Keluaran DAC 0808 berupa arus dan diubahmenjadi tegangan oleh rangkaian Op-Amp 741.
5. Rangkaian Penggerak Motor StepperGarnbar 5 menunjukkan rangkaian
pengendali motor stepper yang digunakanmemiliki 4 fase (pole atau kutub). Pengirimanpulsa dari mikrokontroler ke rangkaian motorstepper dilakukan secara bergantian melalui pinnomor 5 - 8 Port 2. Sebelum sampai ke motorstepper, data dilewatkan ULN 2003A untukdikuatkan sehingga mampu menggerakkanmotor stepper
PORT 2---,87654321L-J
CON8
ULN 2003A
VCC
1
"2
:3"4
3"
"6
"i
8"
"-A"-A"-A"-A"-A"-A"-A"-A
RESPACK3
16
15141312ITTO
9"
VCC
MSoGambar 5. Rangkaian Kendali Motor Stepper
6. Rangkaian Konverter Tingkat RS-232Konverter tingkat RS-232 yang
digunakan dalam papan ini adalah MAX-23.Gambar 6 menunjukkan rangkaian konvertertingkat RS-232.
MAX-232 merupakan komponenpengubah data digital dari tingkat logika TTLke tingkat logika RS-232, demikian sebaliknya.IC ini memiliki dua penerima dan pengirimpada kemasan yang sarna. Jalur penerima
ditunjukkan oleh pin nomor 8 dan 13 dan jalurpengirim ditunjukkan oleh pin nomor 7 dan 14.Jalur pengirim bertugas mengirimkan dataserial dari mikrokontroler ke komputer,sedangkan jalur penerima bertugas menerimadata kiriman dari komputer. Dari rangkaianGambar 3,4, 5, dan 6 disusun menjadi sistempapan perluasan HB2000. Dalam bentukdiagram blok seperti pada Garnbar 7..
•P3 I ••
••• MAX 232
VCC Sv
"-.-/DB9
Gambar 6. Rangkaian Antarmuka Serial Antara Mikrokontroler dengan PC (Datasheet MAX-232)
Sutanto dkk 253 Sekolah Tinggi Teknologi Nuklir - BATAN
SEMINARNASIONALIISDMTEKNOLOGINUKLIR
YOGYAKARTA,21-22DESEMBER2006ISSN 1978-0176
~----------------------
DC PO
COUNTERIIII~---------------------
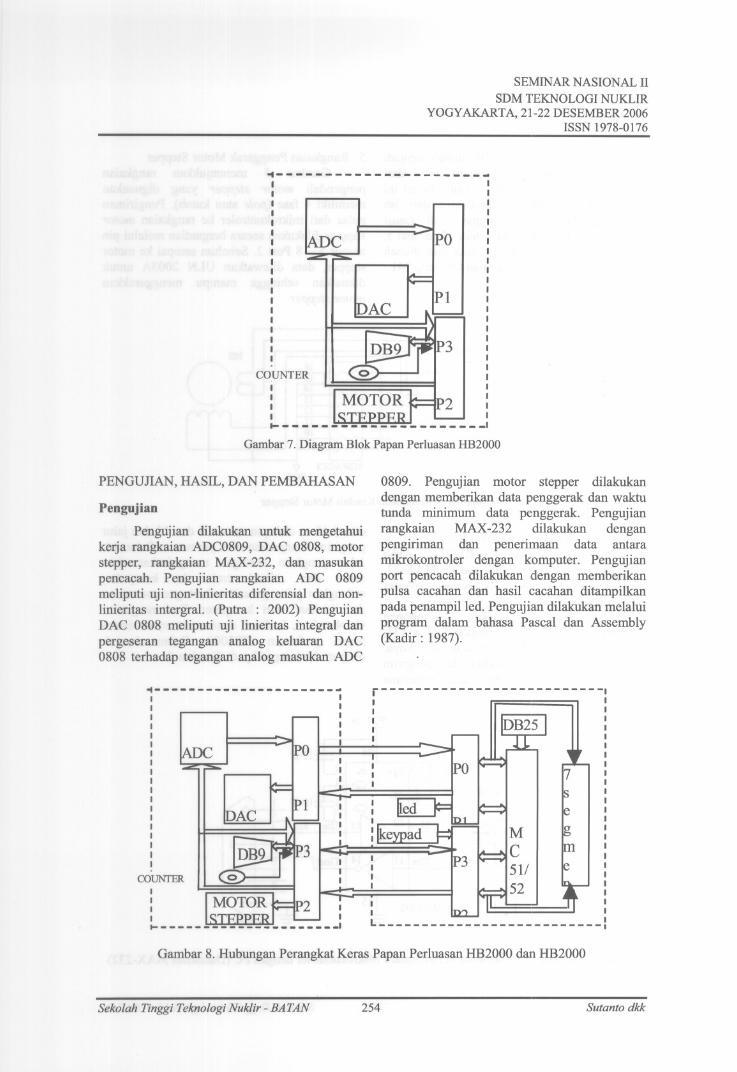
Gambar7. DiagramBlokPapanPerluasanHB2000
PENGUJIAN, HASIL, DAN PEMBAHASAN
Pengujian
Pengujian dilakukan untuk mengetahuikerja rangkaian ADC0809, DAC 0808, motorstepper, rangkaian MAX-232, dan masukanpencacah. Pengujian rangkaian ADC 0809meliputi uji non-linieritas diferensial dan nonlinieritas intergral. (Putra : 2002) PengujianDAC 0808 meliputi uji linieritas integral danpergeseran tegangan analog keluaran DAC0808 terhadap tegangan analog masukan ADC
~---------------------- IIIIII
COUNfERII
I I~~_~_'-'~~r-1t'L I II I..SIEEEERJ L..-..J I~--------------------~
0809. Pengujian motor stepper dilakukandengan memberikan data penggerak dan waktutunda minimum data penggerak. Pengujianrangkaian MAX-232 dilakukan denganpengiriman dan penerimaan data antararnikrokontroler dengan komputer. Pengujianport pencacah dilakukan dengan memberikanpulsa cacahan dan hasil cacahan ditampilkanpada penampilled. Pengujian dilakukan melaluiprogram dalam bahasa Pascal dan Assembly(Kadir : 1987).
r--------------------------IIIII
IIL _
Gambar 8. Hubungan Perangkat Keras Papan Perluasan HB2000 dan HB2000
Sekolah Tinggi Teknologi Nuklir - BATAN 254 Sutanto dkk
SEMINAR NASIONAL IISDM TEKNOLOGI NUKLIR
YOGY AKART A, 21-22 DESEMBER 2006ISSN 1978-0176
data digital
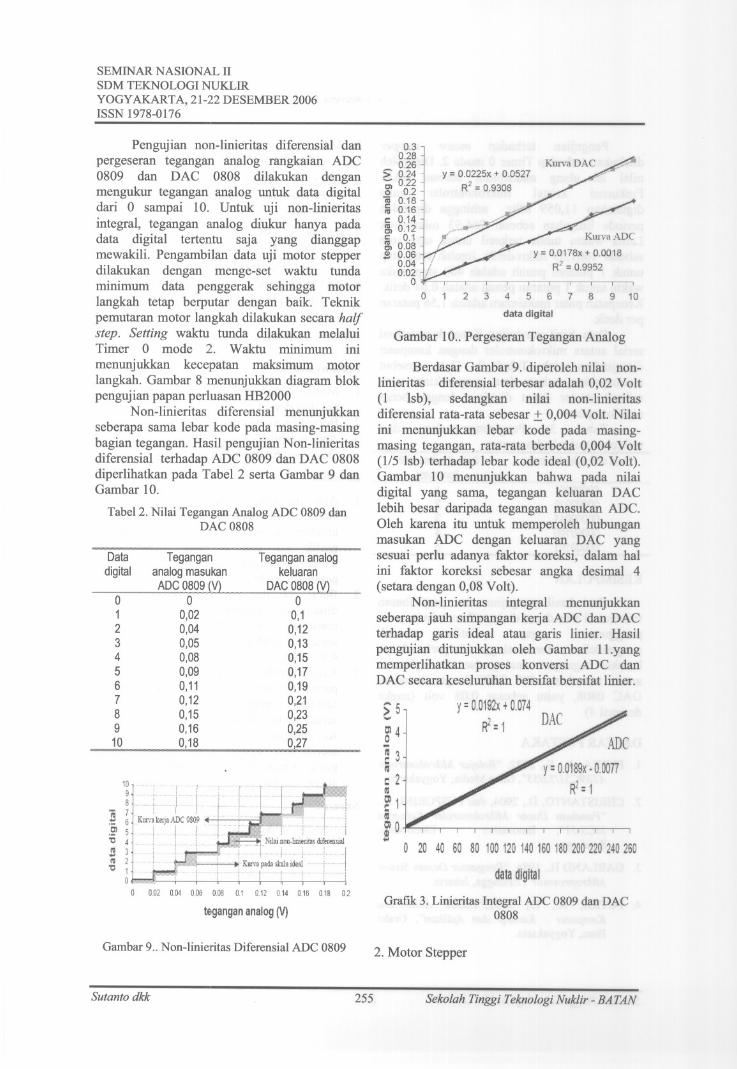
Gambar 10.. Pergeseran Tegangan Analog
Grafik 3. Linieritas Integral ADC 0809 dan DAC0808
0.30.280.26
5> 0.24 i Y = 0.0225x + 0.0527g; O~~ J R2 = 0.9308
~ 0.18'" 0.16t: 0.14~ 0.121ij 0.10\ 0.08
2 0.06 V ~ Y = 0.0178x + 0.0018g:g~iI .~ R2 = 0.9952o
o 1 2 3 4 5 6 7 8 9 10
y = 0.0192x + 0.074
~ = 1 DAC
20 40 60 80 100 120 140 160 180 200 220 240 260
data digital
)'5....
0)4o
~ 3IU
:: 2IU
~ 1tII
CiO!o
Berdasar Gambar 9. diperoleh nilai nonlinieritas diferensial terbesar adalah 0,02 Volt(1 lsb), sedangkan nilai non-linieritasdiferensial rata-rata sebesar ± 0,004 Volt. Nilaiini menunjukkan lebar kode pada masingmasing tegangan, rata-rata berbeda 0,004 Volt(1/5 19b)terhadap lebar kode ideal (0,02 Volt).Gambar 10 menunjukkan bahwa pada nilaidigital yang sarna, tegangan keluaran DAClebih besar daripada tegangan masukan ADC.Oleh karena itu untuk memperoleh hubunganmasukan ADC dengan keluaran DAC yangsesuai perIu adanya faktor koreksi, dalam halini faktor koreksi sebesar angka desimal 4(setara dengan 0,08 Volt).
Non-linieritas integral menunjukkanseberapa jauh simpangan ketja ADC dan DACterhadap garis ideal atau garis linier. Hasilpengujian ditunjukkan oleh Gambar l1.yangmemperIihatkan proses konversi ADC danDAC secara keseluruhan bersifat bersifat linier.
Data TeganganTegangan analogdigital
analog masukan keluaran
ADC 0809 (V)DAC 0808 01)
°° °
10,02 0,1
20,04 0,12
30,05 0,13
40,08 0,15
50,09 0,17
60,11 0,19
70,12 0,21
80,15 0,23
90,16 0,25
100,18 0,27
10
9
8
c; 7~ 6.E' 5
'0 4nI..nI
'0 1o
o 0.02 0.04 0.00 0.00 0.1 0.12 014 0.16 0.1£ 02
tegangan analog (V)
Pengujian non-linieritas diferensial danpergeseran tegangan analog rangkaian ADC0809 dan DAC 0808 dilakukan denganmengukur tegangan analog untuk data digitaldari 0 sampai 10. Untuk uji non-linieritasintegral, tegangan analog diukur hanya padadata digital tertentu saja yang dianggapmewakili. Pengambilan data uji motor stepperdilakukan dengan menge-set waktu tundaminimum data penggerak sehingga motorlangkah tetap berputar dengan baik. Teknikpemutaran motor langkah dilakukan secara halfstep. Setting waktu tunda dilakukan melaluiTimer 0 mode 2. Waktu minimum inimenunjukkan kecepatan maksimum motorlangkah. Gambar 8 menunjukkan diagram blokpengujian papan perIuasan HB2000
Non-linieritas diferensial menunjukkanseberapa sarna lebar kode pada masing-masingbagian tegangan. Hasil pengujian Non-linieritasdiferensial terhadap ADC 0809 dan DAC 0808diperIihatkan pada Tabel 2 serta Gambar 9 danGambar 10.
Tabel2. Nilai Tegangan Analog ADC 0809 danDAC 0808
Gambar 9.. Non-linieritas Diferensial ADC 08092. Motor Stepper
Sutanto dkk 255 Sekolah Tinggi Teknologi Nuklir - BA TAN

SEMINARNASIONALIISDMTEKNOLOGINUKLIR
YOGYAKARTA,21-22DESEMBER2006ISSN 1978-0176
DAFTAR PUSTAKA
KESIMPULAN
Dari hasil pengujian dan pembahasantersebut di atas dapat disimpulkan bahwa, padapenggunaan papan pelatihan untukpengendalian sistem analog, maka perlu adanyakoreksi tegangan analog (secara software)antara masukan ADC 0809 dengan keluaranDAC 0808, yaitu sebesar 0,08 volt (angkadesima14)
1. PUTRA, A., E., 2002, "Belajar MikrokontrolerAT89C51/52/55", GavaMedia,Yogyakarta.
2. CHRISTANTO,D., 2004, clanPUSPORINI,K.,"Panduan Dasar Mikrokontroler KeluargaMCS-51", Innovative Electronics,Surabaya.
3. GARLANDH., 1984,"Pengantar Desain SistemMikroprosesor", Erlangga,Jakarta.
4. PUTRA, A., E., 2002,"Teknik AntarmukaKomputer : Konsep dan Aplikasi", GrahaIlmu,Yogyakarta.
5. ZAKS, R., "Dari Chip ke Sistem : PengantarMikroprosesor", 1991,Erlangga,Jakarta.
6. ZAKS, R., dan LESEA, A., 1979, "TeknikPerantaraan Mikroprosesor", Erlangga,Jakarta.
7. KADIR,A., 1987,"Pemrograman Turbo PascalUntuk IBM PC Menggunakan Versi 5.0 dan5.5", E1ekMediaKomputindo,Jakarta.
8. DATASHEETADC 0809, datasheetDAC 0808,datasheetMAX-232.
TANYAJAWAB
Pertanyaan :
1. Mohon disajikan karakterisasi input vs output dari design
2. Berapa batas atas dan bawah penggunaan ?3. Apa kelebihan dan kekurangan design ?
(Mulyono Syampuan, Bapeten)
Jawaban :
1. Alat ini bukan suatu system lengkap,namun merupakan papan pelatihankarakteristik input Vs output ditunjukkangrafik 1,2 dan 3 yang menunjukkankarakteritik input Vs output dari fasilitasperantara analog.
2. Batas atas dan batas bawah penyusunanditunjukkan dengan batas tegangan analogmasukan ADC 0890 (0-4,97 volt) dantegangan analog keluaran DAC 0808 (04,97 volt).
3. Kelebihan alat ini adalah bersama HB 2000,papan perluasan ini memberikan tambahanfasilitas berupa perantara analog, portserial, motor stepner P konektor pencacah.Kekurangan alat ini adalah untukmembentuk system yang lengkap makaperlu dibuat lagi rangkaian pengkondisisinyal dan sensor.
Saran :
Perlu aplikasi yangjelas.
Data diterima oleh
komputer12
34
5
00000001
00000010
00000011
00000100
00000101
Pengujian terhadap motor stepperdilakukan terhadap Timer 0 mode 2. Diperolehnilai isi ulang maksimum sebesar OAR.Frekuensi kristal mikrokontroler yangdigunakan 11,059 Mhz sehingga diperolehperiode limpahan sebesar 266,93 mikrodetikLama waktu tunda terkecil untuk satu stepsebesar 1601,59 mikrodetik. Jumlah total stepuntuk 1 putaran penuh adalah 400 step makawaktu untuk 1 putaran penuh adalah 0,64 detik.Kecepatan putar maksimum adalah 1,56 putaranper detik.
Data hasil pengujian Kanal komunikasiserial antara mikrokontroler dengan komputerditunjukkan oleh Tabel 3. Data tersebutmenunjukkan bahwa data yang dikirim olehmikrokontroler dapat diterima dengan benaroleh komputer.
Tabel 3. Pengiriman data darimikrokontroler ke komputer
Data dari mikrokontroler
Sekolah Tinggi Teknologi Nuklir - BATAN 256 Sutanto dkk