Pertemuan 2 Konsep Linefollower Analog
9
Click here to load reader
-
Upload
muhammad-allien -
Category
Documents
-
view
118 -
download
1
Transcript of Pertemuan 2 Konsep Linefollower Analog


Konsep Dasar
Robot line follower analog adalah robot yang berfungsi sebagai robot pengikut garis,
dimana robot ini memiliki bagian-bagian seperti berikut ini :
1. Sensor menerima intensitas pantulan cahaya dari lantai
- Warna lantai putih akan memantulkan cahaya lampu LED sehingga Photo Diode
menerima cahaya.
- Kondisi sebaliknya jika lantai bewarna hitam yang mempunyai sifat menyerap cahaya
sehingga Photo Diode tidak menerima masukan cahaya.
Keterangan :
- Ketika photo dioda menerima masukan
cahaya yang terjadi adalah aliran arus listrik
dapat mengalir, yang akan dialirkan ke
kontroler / komparator untuk diolah lebih
lanjut.
www.afterschoolrobotic.web.id
Input / SensorInput / Sensor
Proses / Kontroler
Output / Driver
Lantai / Lingkungan
M
Motor DC / DinamoRoda / Transmisi
Mekanik / Bodi Robot

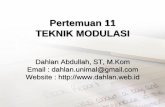
2. Sinyal dari blok sensor disampaikan ke blok kontroler untuk diolah, yaitu
menentukan sinyal sensor tersebut bernilai logika nol / satu, low / high, hitam /
putih. Untuk mendefinisikan nilai hitam / putih kepada kontroler yaitu dengan cara
memberikan nilai referensi.
Keterangan :
- Simbol segitiga hijau adalah kontroler yang bersifat membandingkan dua buah
masukan dan menghasilkan satu hasil keluaran.
- Vin+ adalah sinyal dari sensor (photo diode) sinyal yang bergelombang tersebut
adalah sinyal intensitas cahaya yang diterima sensor, semakin tinggi intensitas
cahayanya maka akan semakin tinggi nilai sinyalnya.
- Vin- adalah sinyal referensi untuk membedakan hitam / putih, sinyal ini
memutuskan nilai minimal untuk sinyal dari sensor yang akan diartikan putih
atau akan menghasilkan keluaran high / satu / 1.
3. Driver adalah suatu blok elektronik yang bertugas mengolah sinyal yang diterima dari
blok kontroler untuk digenerasikan menjadi sinyal yang lebih besar yang berfungsi
untuk menggerakkan komponen elektronik yang lebih besar seperti relay / coil,
motor dc / dinamo, dll.
Keterangan :
- Rangkaian driver terdiri dari komponen
penguat yaitu transistor tipe NPN / PNP.
- Sinyal dari kontroler yang berupa tegangan
kecil digunakan untuk mengaktifkan
transistor yang bersifat seperti saklar
elektris yg dapat mengalirkan tegangan
dan arus yang lebih besar.
www.afterschoolrobotic.web.id

Kata Kunci
- Sinyal : suatu tanda / bentuk komunikasi / isyarat, dalam rangkaian elektronik sinyal
berupa tengangan listrik. Pada umumnya besaran sinyal dalam komunikasi kontrol
elektronika adalah tegangan 0 hingga 5 Volt.
- LED : Led Emiting Diode adalah sebuah lampu yang bertegangan kerja rendah,
biasanya lampu ini digunakan sebagai indikator, sumber cahaya kecil, dll. Lampu ini
bisa bekerja hanya jika sumber tegangan disambungkan sesuai dengan kutup2 nya
(+/-).
Sumber : http://glcgreenlightcool.com/article/apa-itu-lampu-led/
- Photo Diode : jenis dioda yang berfungsi mendeteksi cahaya. Fotodioda merupakan
sensor cahaya semikonduktor yang dapat mengubah besaran cahaya menjadi
besaran listrik. Fotodioda merupakan sebuah dioda dengan sambungan pn yang
dipengaruhi cahaya dalam kerjanya. Cahaya yang dapat dideteksi oleh fotodioda ini
mulai dari cahaya infra merah, cahaya tampak, ultra ungu sampai dengan sinar-X.
Aplikasi fotodioda mulai dari aplikasi robotika, penghitung kendaraan di jalan umum
secara otomatis, pengukur cahaya pada kamera serta beberapa peralatan di bidang
medis.
Sumber : http://sinelectronic.blogspot.com/2011/12/fotodioda-photodiode.html
- Komparator : sebuat rangkaian yang dapat membandingkan besar tegangan
masukan. Komparator tegangan biasanya menggunakan Op-Amp sebagai piranti
utama dalam rangkaian. Ada dua jenis komparator tegangan, yaitu komparator
tegangan sederhana, dan komparator tegangan dengan histerisis.
Sumber : http://atmelmikrokontroler.wordpress.com/2009/06/25/komparator-tegangan/
- Driver : sebuah rangkaian yang berfungsi menerima suatu sinyal untuk dirubah
kebentuk sinyal yang lain, pada umumnya untuk merubah sinyal yang kecil menjadi
sinyal yang besar yang digunakan untuk menggerakkan komponen elektronik yang
lebih besar seperti relay / coil / motor dc dan lain-lain.
www.afterschoolrobotic.web.id

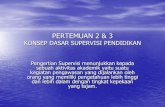
Bagaimana Logika Robot Bekerja ?
Diagram Elektronik Robot
www.afterschoolrobotic.web.id
Sensor Cahaya(0….5V)PembandingYa /
Tidak
Potensiometer
(0….5V)
Transistor
Penjelasan :Keluaran dari sensor
berupa tegangan antara0 s/d 5V yang tergantungdari intensitas cahaya yang masuk.
Potensiometer menghasilkantegangan 0 s/d 5V sebagaireferensi untuk prosesperbandingan
Pembanding (LM358) berfungsimembandingkan dua buahinputan tegangan, jika hasilnyabenar maka pembanding akanmenghasilkan keluaran berupategangan Logic yaitu 5V, jika tidakmaka keluaran tegangannya 0V.
RelayMotor
Baterai
Transistor menerima tegangan masukan dari pembanding, jika masukannya mencukupi tegangan minimum (+ 2..3V) maka tansistor akan aktif sehingga bisa menggerakkan koil relay. Ketika relay Aktif / Non Aktif, maka tegangan baterai ke motor bisa tersalurkan melalui relay sehingga motor bisa berputar.

Logika Robot Mengikuti Garis
Logika robot dalam mengikuti garis sangat berfariasi dan tergantung dari medan yang akan dihadapi, serta bagai mana mekanik dan tata letak sensor cahanya.
Robot yang baik dalam mengikuti garis adalah yang pergerakan / osilasi goyang kanan dan kirinya paling sedikit.
http://robotechno.us/wp-content/uploads/2011/12/line-follower-with-single-sensor.jpghttp://sonoku.com/electronic-projects/membuat-line-follower-robot-tanpa-mikrokontroler-2/
www.afterschoolrobotic.web.id
sensor
Prosesor / Pembanding
Transistor
&
sensor
Transistor
&Relay
Relay
Regulator 5V
Supply
rangkaian
Bebas 3…10V
Supply
MotorMotor
Motor
6…12V
Supply
elektrik
Memotong tegangan
hingga bernilai 5
Volt
Dari Baterai AA(1.3V) x 4
Atau LiPo 9V / 12V x 1
Dari Baterai AA(1.3V) x 4
Atau LiPo 9V / 12V x 1

Presepsi Robot :
Sebuah garis adalah perbedaan antara dua buah medium/warna yang berbeda,
misalkan antara hitam dan putih, robot bertugas mengikuti garis jadi kondisi robot
mendeteksi garis dengan mengunakan dua buah sensor adalah sebagai berikut :
1. Ketika kedua sensor mendeteksi warna (putih, hitam) maka robot akan bergerak lurus.
2. Ketika kedua sensor tidak mendeteksi garis / diluar garis / tikungan kanan (putih, putih) maka robot berputar ke kanan.
3. Ketika kedua sensor mendeteksi tikungan kiri (hitam, hitam) maka robot berputar ke kiri.4. Ketika kedua sensor mendeteksi (putih, hitam) berarti sebuah garis maka robot akan
bergerak lurus.
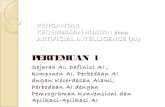
Arsitektur Robot Line Follower
Setelah beberapa penjelasan diatas mengeneai seluk beluk robot line follower
analog, berikut ini dapat disimpulkan bahwa sebuah robot line follower analog memiliki
bentuk arsitektur dasar yaitu seperti pada gambar berikut ini :
www.afterschoolrobotic.web.id
Blok Sensor
Blok Sensor
Blok Sensor

Kesimpulan :
1. Robot line follower analog menggunakan komparator untuk mengartikan sinyal dari sensor untuk mengartikan warna apakah berarti hitam / putih.
2. Untuk dapat bergerak ke kanan dan keiri robot menggerakan dua buah rodanya secara berlainan arah melalui driver.
3. Logika robot dalam membaca sebuah garis adalah dengan membedakan dua buah warna yaitu hitam dan putih.
4. Robot mengikuti garis sesuai dengan logika yang diterapkan pada kontroler analog.
Tugas :
1. Buatlah presentasi mengenai “robot beroda” kecuali robot line follower analog.2. Isi presentasi berupa penjelasan robot secara garis besar, fungsi, sensor yang
digunakan, cara kerja sensor , kontroler, driver, dll.3. Gambarkan blok diagram robot secara keseluruhan / garis besar seperti pada
penjelasan diatas.4. Robot beroda : military robot, robot pemadam api, robot vacum cleaner, robot
maze solver, robot transporter, dll.
www.afterschoolrobotic.web.id
Bodi robot / chasis
roda
Dinamo
Gearbox
Driver
Kontroler
Sensor
Baterai Rangkaian Elektroink
Baterai Motor
Lantai / Garis