modul-3
10
PELATIHAN ROBOTIKA TINGKAT BEGINNER MODUL 3 MENDESAIN BODI ROBOT, MERAKIT MOTOR DC dan RODA, MERAKIT SENSOR PENJEJAK GARIS Disusun oleh : Deddy Susilo, ST Divisi Hardware CREATE – Centre for Electronic and Information Technology Fakultas Teknik Elektronika dan Komputer Universitas Kristen Satya Wacana 2011
description
robot
Transcript of modul-3
7/17/2019 modul-3
http://slidepdf.com/reader/full/modul-3-568c3d492e4e0 1/10
PELATIHAN ROBOTIKA TINGKAT BEGINNER
MODUL 3
MENDESAIN BODI ROBOT, MERAKIT MOTOR DC dan RODA,
MERAKIT SENSOR PENJEJAK GARIS
Disusun oleh :
Deddy Susilo, ST
Divisi Hardware
CREATE – Centre for Electronic and Information Technology
Fakultas Teknik Elektronika dan Komputer
Universitas Kristen Satya Wacana
2011

7/17/2019 modul-3
http://slidepdf.com/reader/full/modul-3-568c3d492e4e0 2/10
MODUL PELATIHAN ROBOTIKA – CREATE FTEK UKSW Page 30
2.1. Motor DC KR-300
Motor DC yang digunakan adalah motor 300 RPM bermerk KR-300 dari Korea seperti
yang ditunjukkan pada gambar 3.1, biasa di gunakan untuk robot line tracer atau maze
solving yang punya spesifikasi sebagai berikut :
- Jangkah tegangan operasi 4.8 ~ 6.0 Volt DC.
- Kecepatan pengoperasian : 100/126rpm pada 4.8V/6.0V.
- Maximum torque: 4.2kg.f.cm at 4.8V / 5.2kg.f.cm at 6.0V.
- Dimensi KR-300: (p x l x t) 40×20×36.6 mm.
- Berat: 34 gram.
- Bahan mekanik gear: Ultra Resin Bushing.
Untuk roda menggunakan standar yang bisa langsung diaplikasikan pada motor KR-300
Bahan dari Plastik dengan pelapis dari karet
Diameter roda : 55 mm.
Poros roda berupa segi 6
Tebal roda : 7 mm.
Gambar 3.1. Motor KR-300 dan roda standar
Motor ini dapat segera dipasangkan dengan bagian landasan robot yang dapat
dibuat dengan PCB polos seperti yang sudah disertakan dalam paket modul. Dimensi
panjang dari motor kira-kira 40mm atau 4 cm. Untuk ketentuan yang biasanya diberikan
pada perlombaan line follower, dimensi robot maksimum untuk lebar dan panjang adalah
20 cm. Sehingga untuk jarak antara roda ke roda dibuat dibawah 20 cm. Sebagai misal 15cm
seperti pada gambar berikut.

7/17/2019 modul-3
http://slidepdf.com/reader/full/modul-3-568c3d492e4e0 3/10
MODUL PELATIHAN ROBOTIKA – CREATE FTEK UKSW Page 31
Gambar 3.2. Landasan Robot (bentuk sesuai kreativitas siswa)
Note : sediakan gergaji triplek atau cutter untuk memotong PCB polos menjadi bentuk
menyerupai gambar 3.2 atau sesuai dengan kreativitas siswa. Kemudian pasang motor pada
landasan. Posisi motor diatas landasan PCB tersebut. Tugas adik-adik membuat landasan
robot ini sebagus mungkin dan semenarik mungkin.
2.2. Mengatur Arah dan Kecepatan Putar Motor DC
Motor DC dalam penerapannya pada sistem robotika banyak digunakan karena
mudah dalam pengendalian arah putaran dan kecepatannya. Dengan memberikan arah arus
listrik searah dapat memberikan pengaturan arah pada motor DC tersebut. Sebagai contoh
ilustrasi diberikan pada gambar 3.3 kiri arah arus listrik searah jarum jam dan gambar kanan
adalah sebaliknya, hal ini akan menghasilkan arah putaran yang berbeda karena arah medan
magnit dan gaya yang dihasilkan juga berbeda.
P=12,5cm L=3cm
L=3cm
P=9cm
2cm 2cm
12,5cm
Motor
KR300
4cm
Motor
KR300
4cm
7/17/2019 modul-3
http://slidepdf.com/reader/full/modul-3-568c3d492e4e0 4/10
MODUL PELATIHAN ROBOTIKA – CREATE FTEK UKSW Page 32
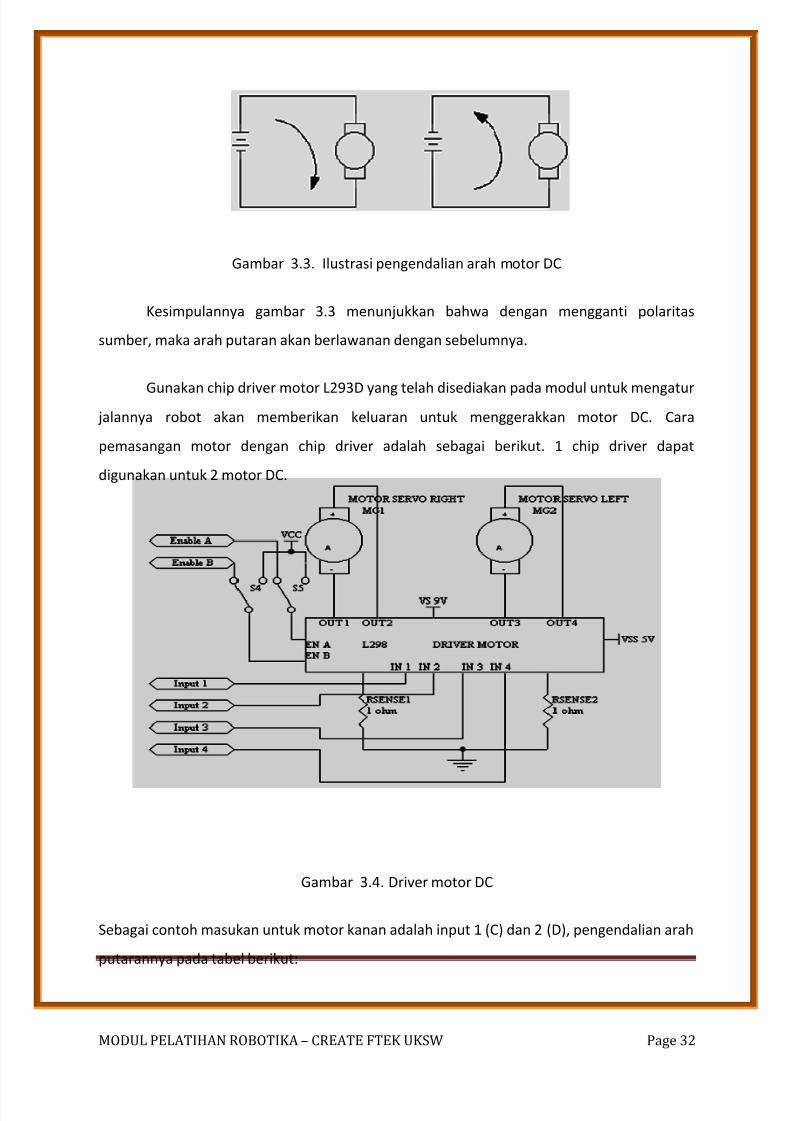
Gambar 3.3. Ilustrasi pengendalian arah motor DC
Kesimpulannya gambar 3.3 menunjukkan bahwa dengan mengganti polaritas
sumber, maka arah putaran akan berlawanan dengan sebelumnya.
Gunakan chip driver motor L293D yang telah disediakan pada modul untuk mengatur jalannya robot akan memberikan keluaran untuk menggerakkan motor DC. Cara
pemasangan motor dengan chip driver adalah sebagai berikut. 1 chip driver dapat
digunakan untuk 2 motor DC.
Gambar 3.4. Driver motor DC
Sebagai contoh masukan untuk motor kanan adalah input 1 (C) dan 2 (D), pengendalian arah
putarannya pada tabel berikut:

7/17/2019 modul-3
http://slidepdf.com/reader/full/modul-3-568c3d492e4e0 5/10
MODUL PELATIHAN ROBOTIKA – CREATE FTEK UKSW Page 33
Gambar 3.5. Cara pemasangan dan tabel kebenaran dari kendali motor DC.
Modul yang ditunjukkan pada gambar 3.4 menggunakan IC driver L293D yang
memiliki kemampuan menggerakkan motor DC sampai arus 0,5A dan tegangan maksimum
40 VoltDC untuk satu kanalnya. Pin Enable A dan B untuk mengendalikan jalan atau
kecepatan motor, pin Input 1 sampai 4 untuk mengendalikan arah putaran. Pin Enable diberi
VCC 5 Volt untuk kecepatan penuh atau memberikan arus maksimum ke motor DC.
Gambar 3.6. Rangkaian didalam IC driver motor
Dengan chip L293D, untuk mengendalikan arah putaran motor digunakan metode bridge-H
dari kombinasi transistor. Dengan metode demikian arus yang mengalir ke motor
polaritasnya dapat diatur dengan memberikan logika ke transistor Q1 sampai Q4.
Pengaturannya seperti tabel kebenaran pada gambar 3.5. Kondisi high atau level ’1’ untuk
semua input tidak diizinkan sebab akan mengakibatkan semua transistor aktif dan akan

7/17/2019 modul-3
http://slidepdf.com/reader/full/modul-3-568c3d492e4e0 6/10
MODUL PELATIHAN ROBOTIKA – CREATE FTEK UKSW Page 34
merusakkan transistor karena secara otomatis arus dari kolektor Q1 dan Q2 langsung
mengalir ke Q2 dan Q3 sehingga arus sangat besar tanpa melalui beban motor DC. Fungsi
Rsense 1 dan 2 adalah untuk mengindera arus untuk keperluan umpan balik kestabilan
sistem, jika tidak perlu feedback langsung saja hubungkan dengan ground.
(a) (b)
(c)
Gambar 3.7. (a) Bentuk fisik chip L293D ; (b) Pinout L293D versi DIP ; (c) Diagram skematik
2.3. Sensor Photodioda
Sensor dapat dianalogikan sebagai ‘mata’ dari sebuah sistem robot. Mata di sini
digunakan untuk ‘membaca’ garis hitam dari track atau jalur robot. Track robot biasa
disebut maze, dan lombanya dinamakan Maze Solving Robot. Kapan dia akan berbelok ke
kanan, kapan dia berbelok ke kiri. Semua berawal dari mata bukan? Manusia tahu arah kitaberjalan karena kita memiliki mata.

7/17/2019 modul-3
http://slidepdf.com/reader/full/modul-3-568c3d492e4e0 7/10
MODUL PELATIHAN ROBOTIKA – CREATE FTEK UKSW Page 35
Pada robot line follower, sensor robot yang dapat digunakan ada 3 jenis, yaitu LDR
(Light Dependent Resistor), Photo Dioda, dan Photo Transistor. Pada paket modul
digunakan photo dioda sebagai sensor robot.
Gambar 3.8. Bentuk fisik receiver (penerima) photodiode dan led transmitter (pengirim)
Pada gambar 3.8 adalah 1 pasang sensor yang akan kita gunakan pada robot line
follower. Bentuknya mirip seperti LED, yang berwarna ungu bernama receiver (photo dioda-
pada paket modul berwarna putih bening) dan yang berwarna bening bernama transmitter
(infrared).
Kemudian, setelah kita mengetahui sensor apa yang akan kita pakai, coba buat dulu
rangkaian seperti di bawah ini untuk setiap 1 pasang sensor :
Gambar 3.9 menunjukkan pasangan led dan photodioda dan posisi pemasangannya.
Ingat untuk photodiode kaki katoda (tanda garis pada lambang) malah terkena polaritas

7/17/2019 modul-3
http://slidepdf.com/reader/full/modul-3-568c3d492e4e0 8/10
MODUL PELATIHAN ROBOTIKA – CREATE FTEK UKSW Page 36
lebih positif. (Asisten akan lebih menjelaskan dengan peragaan). Untuk nilai R1 pada led
diberi resistor antara 220 hingga 1kohm dan pada receiver bisa diberi resistor 5k sampai
100kOhm. Maka coba R1 diatur 1000ohm dan resistor photodiode 100kohm saja.
Nah, untuk 2 pasang sensor..kita perlu membuat 2 rangkaian seperti pada gambar
3.9 tersebut.
Lambang LED yang berwarna hitam adalah transmitter atau infrarednya yang
memancarkan cahaya infrared terus menerus jika disusun seperti rangkaian di gambar 3.9.
Lambang LED yang kanan adalah receiver atau photo dioda-nya yang menangkap cahaya
infrared yang ada di dekatnya. INGAT masang photo dioda-nya HARUS terbalik. Dari
rangkaian sensor ini, kita ambil OUTPUT (to comparator, A/D converter, dll) yang
ditunjukkan oleh gambar 3.9.
Gambar 3.10 Ilustrasi pemancar dan penerima IR pada bidang gelap dan terang
Ketika transmitter (infrared) memancarkan cahaya ke bidang berwarna putih,
cahaya akan dipantulkan hampir semuanya oleh bidang berwarna putih tersebut.
Sebaliknya, ketika transmitter memancarkan cahaya ke bidang berwarna gelap atau hitam,
maka cahaya akan banyak diserap oleh bidang gelap tersebut, sehingga cahaya yang sampaike receiver tinggal sedikit. Nah, artinya kita sudah bisa membedakan pembacaan garis dari
sensor bukan? Kalau kita sudah tahu, perbedaan cahaya yang diterima oleh receiver akan
menyebabkan hambatan yang berbeda-beda di dalam receiver (photo dioda) tersebut.
Ilustrasinya seperti gambar di bawah ini.

7/17/2019 modul-3
http://slidepdf.com/reader/full/modul-3-568c3d492e4e0 9/10
MODUL PELATIHAN ROBOTIKA – CREATE FTEK UKSW Page 37
Gambar 3.11. Langkah kerja sensor jika melihat garis putih dan hitam
Setelah kita tahu ilustrasi sensor, tinjau kembali rangkaian sensornya, bisa kita analogikan
seperti :
Tadi kita tahu kalau hambatan receiver berubah-ubah, jadi otomatis rangkaian sensor yang
bagian kanan bisa kita analogikan seperti gambar. Receiver bisa kita analogikan dengan
resistor variabel, yaitu resistor yang nilai hambatannya bisa berubah. Otomatis, dengan
pembagi tegangan, nilai tegangan di output rangkaian juga akan berubah-ubah bukan? Jadi,
baca putih akan mengeluarkan output dengan tegangan rendah (sekitar 0 Volt) dan baca
hitam akan mengeluarkan output dengan tegangan tinggi (mendekati Vcc = 5 Volt). Kalau
rangkaian sensor pembaca sudah jadi, bisa dibandingkan dengan punya saya yang
ditunjukkan oleh gambar di bawah ini.

7/17/2019 modul-3
http://slidepdf.com/reader/full/modul-3-568c3d492e4e0 10/10
MODUL PELATIHAN ROBOTIKA – CREATE FTEK UKSW Page 38
Silakan mencoba. God Bless You. Sampai jumpa di modul 4.




















