
Modelo Heuristico Para Analisis de Flujo Vehicular
125
Un modelo heurístico nuevo para el análisis del flujo vehicular Por Juan Manuel González Calleros Tesis sometida como requisito parcial para obtener el grado de Maestro en Ciencias en la especialidad de Ciencias Computacionales en el Instituto Nacional de Astrofísica, Óptica y Electrónica. Supervisada por: Dr. Gustavo Rodríguez Gómez INAOE Tonantzintla, Pue. Agosto 2003
Transcript of Modelo Heuristico Para Analisis de Flujo Vehicular

Un modelo heurístico nuevo para el
análisis del flujo vehicular
Por
Juan Manuel González Calleros
Tesis sometida como requisito parcial para obtener el grado de
Maestro en Ciencias en la especialidad de Ciencias
Computacionales en el Instituto Nacional de Astrofísica, Óptica y
Electrónica.
Supervisada por:
Dr. Gustavo Rodríguez Gómez
INAOE
Tonantzintla, Pue.
Agosto 2003

1 2 3 4 5 Resumen Las sociedades actuales se caracterizan por un elevado tráfico vehicular, dando
origen a congestionamientos que causan su lento avance o la detención de estos.
Los problemas de tráfico de autos pueden ser ocasionados cuando mucha gente
quiere llegar al mismo lugar al mismo tiempo, suscitando una alta densidad de
autos en las horas pico. Aunado a lo anterior, se puede presentar limitaciones en
los carriles de circulación que no permiten un flujo adecuado de los autos. El
modo particular de conducir podría también influir en este tipo de
congestionamientos. En forma sarcástica, los investigadores del fenómeno
coinciden en decir: hay demasiada gente y muy pocas carreteras. El objetivo
principal de la presente tesis es presentar un modelo de tráfico para analizar
diferentes condiciones de circulación a través de la simulación digital. La
formulación del modelo considera restricciones, para acotarlo, en los siguientes
parámetros: tipificación del flujo de tráfico, velocidad, condiciones deseables de
tráfico, homogeneidad en autos y calles. Además, hay dos objetivos secundarios
dentro de la tesis. El primero es, la presentación de un método nuevo para el
desarrollo de modelos, que en especial se adapta a los modelos de tráfico. El
segundo, es usar la simulación del modelo para lograr una sincronización de
semáforos que permitan la mejora del flujo vehicular. El modelo es validado con
parámetros asociados a calles de la ciudad de Puebla. A través de las simulaciones
se probaron diferentes estrategias que permiten determinar una adecuada
sincronización de semáforos para mejorar el flujo vehicular.

6 7 8 9 10 Abstract
Nowadays the societies around the world are characterized by the high levels
in their vehicular traffic, that origin traffic jams which are the cause of the low
movement or the detention of the cars. The vehicular traffic problems could be
caused when many people want to arrive at the same place at the same time,
which causes high car densities during the peak hour. Even worse, few lines on
the road do not allow the correct flow for the cars. The driver behavior could be
cause of the traffic jams. In a sarcastic form, the specialist of the phenomenon
said: there are so many people and just to few roads. The main objective for the
present thesis is to present a traffic model to analyze different traffic conditions
using digital simulation. The model formulation considers restrictions, in the
following parameters: different flow types, speed, desirable traffic conditions,
homogeneity in cars and streets. Besides, there are two secondary objectives of
this thesis. The first one, is to present a new method to formulate models, the
interest is the traffic models. The second one is using the simulation of the model
to synchronize the traffic lights and improve the traffic flow. The model is
validated with parameters associated with the streets of Puebla City in Mexico.
Using the simulation different strategies were probed to determine the adequate
synchronization for the traffic lights and improved the traffic flow.

Gracias Dios mío porque he aprendido
a reconocer mi condición de ser humano, gracias a ti nací, gracias a ti crecí
y vivo todo intensamente.
Como un eterno y humilde testimonio
de gratitud por su apoyo y amor a mis queridos padres:
Rodolfo González Montealegre
Blanca Calleros Sosa

El vínculo que une a tu auténtica familia no es de sangre, sino
de respeto y de goce mutuo.
A mis hermanos: Verónica Rodolfo
Claudia
En agradecimiento a Josefina Guerrero García por su afán de brindarme
su apoyo en todo momento y cuya sola presencia me alentó a llegar a
la meta fijada.

Para quienes no limitaron mis pensamientos sino que los encausaron libremente
lo que me permite estudiar mi pasado y corregir mi futuro.
A mis maestros.
Mi sincera amistad a mis amigos y compañeros.

De manera especial a mi asesor, por su apoyo, asesoria y consejos para cumplir
mi objetivo:
Gustavo Rodríguez Gómez
Un especial agradecimiento a quien formo parte importante para el desarrollo del
modelo presentado en esta tesis
Jorge Martínez Carballido

En agradecimiento al Consejo Nacional de Ciencia y Tecnología
por el apoyo brindado a lo largo de la maestría .
En agradecimiento al Instituto Nacional de Astrofísica Optica y Electronica
por la infraestructura prestada para tener una educación de calidad.

PREFACIO
1
CAPÍTULO 1. Introducción
1.1 Modelado de tráfico macroscópico 1.1.1 Características de la cinematica 1.1.2 Modelos Macroscópicos de Greenshields y Greenberg
1.2 Modelo de tráfico mesoscópico 1.2.1 Modelos de distribución en un “Headway” 1.2.2 Modelo continuo de cinemática de gases de Prigogine
y Herman 1.2.3 Modelo mejorado basado en la cinemática de gases 1.2.4 Modelado de multiclases de cinemática de gases para
flujo de tráfico 1.2.5 Ecuación de multicarriles para cinemática de gases 1.2.6 Modelos genéricos de cinemática de gases y modelo
de multiclase y multicarril basado en un pelotón
1.3 Modelo de tráfico microscópico 1.3.1 Modelos de seguimiento de autos con respuesta a
estímulos (Stimulus - response) 1.3.2 Modelos de Psicoespacio
1.4 Modelo de tráfico submicroscópico 1.5 Modelos con autómatas celulares 1.6 Teoría de colas 1.7 Control de semáforos 1.8 Control inteligente de semáforos 1.9 La problemática
3
3 4 8
13 13 14
16 16
17 18
19 21
21
26
26
27
29
34
37
CAPÍTULO 2. Modelado y Simulación del Flujo de Tráfico
2.1 Modelos físicos o a escala 2.2 Modelo de concepción mental 2.3 Modelos matemáticos 2.4 Modelos computacionales 2.5 Modelos híbridos 2.6 Modelado de flujo de tráfico
41
41
45
47
50
52
52

2.7 Proceso de construcción de modelos 2.7.1 Interesados 2.7.2 Propósito 2.7.3 Nivel de abstracción 2.7.4 Modelo 2.7.5 Simulación
2.8 Proceso para la generación de un modelo de tráfico macroscópico 2.8.1 Interesados del modelo macroscópico 2.8.2 Propósito del modelo macroscópico 2.8.3 Nivel de abstracción del modelo macroscópico 2.8.4 Modelo macroscópico 2.8.5 Simulación del modelo macroscópico
2.9 Proceso para la generación de un modelo de tráfico mesoscópico 2.9.1 Interesados del modelo mesoscópico 2.9.2 Propósito del modelo mesoscópico 2.9.3 Nivel de abstracción del modelo mesoscópico 2.9.4 Modelo mesoscópico 2.9.5 Simulación del modelo mesoscópico
56 56 56 57 57 57
59 59 59 60 60 61
61 61 62 62 62 63
CAPÍTULO 3. Desarrollo
3.1 Elementos característicos 3.2 Formulación del Modelo
3.2.1 Interesados 3.2.2 Propósito 3.2.3 Nivel de abstracción 3.2.4 Modelo Sin tiempo de retraso 3.2.5 Simulación
3.3 Modelo con tiempo de retraso 3.3.1 Manejo de las colas para los estados intermedios de
los cruces 3.3.2 Tiempo de llegada al siguiente cruce
3.4 Modelo con retraso y control de semáforos
64
65
68 68 69 69 69 72
73 76
78
81
CAPÍTULO 4. Resultados 4.1 Validación del modelo 4.2 Resultados del modelo sin retraso
4.3 Resultados del modelo con retraso y manejo de semáforos
84
84
86
87

Conclusiones
Trabajo Fututo
96 97
Apéndice A
99
Apéndice B
104
Indice de Figuras
110
Índice de Tablas
111
Bibliografía 112

- 1 -
Prefacio
Las sociedades actuales se caracterizan por un elevado tráfico vehicular que dan
origen a congestionamientos, esto provoca que los autos tengan un lento avance o se
detengan. Los problemas de tráfico de autos pueden ser ocasionados cuando mucha
gente quiere llegar al mismo lugar al mismo tiempo, suscitando una alta densidad de
autos en las horas pico. Aunado a lo anterior, se pueden presentar limitaciones en los
carriles de circulación que no permiten un flujo adecuado de los autos. El modo
particular de conducir podría también influir en este tipo de congestionamientos. En
forma sarcástica, los investigadores del fenómeno coinciden en decir: “hay demasiada
gente y muy pocas carreteras”.
Muchos han sido los avances que se tienen hasta el momento para el estudio del
flujo de tráfico, modelos que han sido creados y mejorados desde mediados del siglo
XX con la finalidad de representar el comportamiento de los autos en las calles. Los
desarrollos que se han realizado a través de los años involucran diferentes factores
para la formulación de los modelos, simplificaciones que se hacen para estudiar las
características que les han interesado a los investigadores. La investigación
comprende una amplia gama que va desde la descripción de la distancia segura que
debe existir entre dos autos, hasta el modelado detallado de los autos.
El objetivo principal del presente trabajo es presentar un modelo de tráfico para
analizar diferentes condiciones de circulación a través de la simulación digital. La
formulación del modelo considera restricciones, para acotarlo, en los siguientes
parámetros: tipificación del flujo de tráfico, velocidad, condiciones deseables de
tráfico, homogeneidad en autos y calles. Además, un objetivo secundario es usar la
simulación del modelo para lograr una sincronización de semáforos que permita la
mejora del flujo vehicular. El modelo es validado con parámetros asociados a calles

- 2 -
de la ciudad de Puebla. A través de las simulaciones se probaron diferentes
estrategias que permiten determinar una adecuada sincronización de semáforos para
mejorar el flujo vehicular.
Los objetivos secundarios son:
• Un método para la elaboración de modelos, en especial cubre los
requerimientos del modelado de flujo de tráfico.
• Establecer los ciclos de los semáforos para la mejora del flujo vehicular.
El presente trabajo está desarrollado de la siguiente forma:
• El capítulo 1 presenta una descripción de modelos representativos de tráfico
vehicular creados hasta el momento y el manejo de semáforos para
establecer los ciclos de los mismos.
• El capítulo 2 presenta la teoría de modelado y simulación, analizando la
intersección que hay de ésta con el flujo de tráfico; además, se propone un
método para formular modelos, en especial los de tráfico.
• El capítulo 3 presenta el desarrollo del modelo propuesto, los algoritmos
utilizados y las mejoras propuestas al primer modelo que se generó.
• El capítulo 4 presenta los resultados encontrados y la interpretación de los
mismos que representan los objetivos para lo que se desarrolló este trabajo.
• El capítulo 5 presenta las conclusiones del trabajo realizado y las pautas
para un trabajo futuro.
• Por último se encuentran los apéndices que contienen:
o Apéndice A. Contiene el código de los programas usados para hacer la
tesis.
o Apéndice B. Contiene la muestra realizada para validar el modelo.

- 3 -
Capítulo 1
Introducción
El crecimiento del uso de vehículos es un problema hoy en día por diferentes
causas. Algunas de estas son: la falta de capacidad de las calles para que los autos
circulen rápido, ineficacia de los semáforos para adaptarse a los cambios que ocurren
en el tráfico durante el día, en lo que concierne a la cantidad de carros que hay en las
calles. Esto trajo como consecuencia mi interé s por crear un modelo de flujo de
tráfico que ayude a mejorar el tránsito de las calles en la ciudad de Puebla.
El flujo de tráfico ha sido motivo de estudio desde los años 50’s del siglo pasado y
no es un problema privativo de esta entidad. Muchos han sido los desarrollos
efectuados hasta el momento alrededor de todo el mundo, dentro de grandes empresas
gubernamentales y privadas, se encargan de este estudio en los países de primer
mundo.
También, los centros de investigación se han dedicado a crear simuladores que
involucran el modelado del flujo vehicular. La industria automotriz es una de las más
interesadas en esta investigación, se encuentran desarrollando mapas que sirvan para
indicar al conductor cuál es la trayectoria más expedita para llegar a su destino. Para
lograr esto es necesario contar con un modelo que permita calcular el tiempo de
llegada del auto tomando en cuenta las condiciones de tráfico existentes al momento
de la consulta. Estos ejemplos ayudan a entender la diversidad de intereses que hay
para crear simuladores de este tipo.

- 4 -
La consecuencia que se tiene de lo anterior, ha generado diversas formas para
crear modelos, estas dependen del enfoque y los objetivos que se buscan alcanzar. Es
por eso que se han creado tres grandes categorías para los modelos conocidas como:
macroscópica, mesoscópica y microscópica, sus modelos más destacados son
descritos en esta sección.
Mención aparte merecen los nuevos desarrollos hechos usando equipos de
cómputo sofisticados que han permitido incrementar el nivel de detalle de los
modelos, creando la nueva categoría llamada modelos submicroscópicos. Aquí se
ocupan teorías como los autómatas celulares que han contribuido a la creación de
simuladores bastante completos y con gran cantidad de características del flujo
vehicular involucradas, es posible determinar si conviene o no poner un puente dentro
de una red de carreteras. La simulación de estos modelos requiere del uso de
supercomputadoras por lo que es complicado trabajar con modelos que involucren
mucho detalle [Howard].
1.1 Modelado de tráfico macroscópico Un modelo macroscópico asume que el comportamiento de los conductores
depende de las condiciones del tráfico. Las variables independientes de estos modelos
son la posición x y el tiempo t. Lo que se describe es la densidad, velocidad y el flujo.
1.1.1 Características de la cinemática La capacidad de aceleración de un vehículo es muy importante dentro de muchas
operaciones de tráfico, una de las características importantes es determinar cómo
afecta la velocidad y la posición del auto [Garber et Hoel].

- 5 -
De acuerdo a la cinemática se sabe que hay una relación entre la aceleración,
velocidad, distancia y el tiempo. Si se considera la aceleración como una función de
la velocidad se tiene:
uu
t
t
dt
dβα −= ,
donde α y β son constantes y u representa la velocidad del vehículo. El máximo de aceleración que se puede presentar es α . El término βu debe ser una
unidad de aceleración ya que α es una medida de aceleración. Debido a que u
representa velocidad, β tiene unidades del inverso del tiempo t-1.
Si se integra la ecuación diferencial se tiene
tt
t eueuββ
βα −− +−= 0)1( ,
donde u0 es la velocidad al tiempo t = 0.
Ya que u es dx/dt, la distancia x(t) recorrida en cualquier momento t se obtiene
integrando la ecuación anterior,
dteuedtux
t
tt
t
t ∫∫ −− +−==0
0
0
)1( ββ
βα
,
)1()1( 02
tte
uetx
ββ
ββα
βα −− −+−−
= .
Hay otros factores a tomar en cuenta para estos cálculos pero para fines prácticos
del modelo no se tomarán en cuenta, como son: resistencia del aire, grado de
resistencia, resistencia al rodamiento, resistencia en las curvas, requerimientos para la
potencia, distancia de frenado [Garber et Hoel]. Las características del camino como

- 6 -
? ?max
Vmax
son los señalamientos y las reacciones de conductores a éstas se descartan como parte
del modelo.
Dado que la velocidad v debe ser una función estrictamente monótona decreciente
de la densidad ?. La implicación es que hay menos autos en un tramo dado, si los
carros están viajando rápido, las observaciones de tráfico confirman este hecho
[Fowkes et Mahony]. En una avenida vacía, los conductores viajan a una velocidad
promedio que es la velocidad máxima permitida, esto es:
v à Vmax cuando ? à 0
Cuando los autos viajan separados por una distancia corta, los conductores deben
conducir a baja velocidad, esto es:
v à 0 cuando ?à ?max, ?max es el máximo valor de la densidad.
En la Figura 1 se observa la relación v(p).
Figura 1. Relación entre la velocidad y la densidad1
1 [Haberman] página 284

- 7 -
La relación flujo-densidad, está dada por:
q = q (?) = v (?) ?. Que puede inferirse de la relación fundamental de flujo y densidad,
q= ?v, (1) [Haberman] y la relación tendrá la forma mostrada en la gráfica. En el caso lineal de
V(?) esto da:
q(?)=Vmax ? [1-( ? / ? max)].
Es posible determinar experimentalmente la relación del flujo y la densidad
usando fotografía aérea para determinar la densidad del tráfico y colocando sensores
para grabar los niveles del flujo. Sin embargo, hay evidencia de esta relación que
proviene directamente de la relación de V(?) [Haberman]
q à 0 cuando ? à ?max ó ? à 0,
la explicación física para esto es clara: en condiciones de densidad baja, los autos
viajan a alta velocidad, hay pocos carros [Fowkes et Mahony]. Bajo condiciones de
tráfico pesado, dado que hay muchos autos en el camino, estos autos viajan despacio,
así que los flujos serán nuevamente bajos.
Hay un nivel donde el flujo es máximo qmax y es cuando ? es ?*, ver Figura 2.
Los niveles de flujo arriba de qmax no son alcanzables. Además, qmax puede depender
del ancho del camino, la luz, las condiciones del clima.

- 8 -
Figura 2. Relación entre la densidad y el flujo de tráfico2
1.1.2 Modelos Macroscópicos de Greenshields y Greenberg Con los elementos del modelo macroscópico de tráfico es posible determinar la
densidad y velocidad que se presentan en el punto del flujo máximo. Una vez
obtenidos estos valores y usando la ecuación (1) es posible encontrar flujo máximo.
Partimos de la suposición de que existe una relación lineal entre la velocidad y la
densidad, dada por la ecuación
ρρ
j
f
fs
uuu −= , (2)
donde,
• ρj densidad máxima,
• us la velocidad promedio ,
• uf la velocidad máxima,
• ρ la densidad.
2 [Haberman] página 290
? ?* ?max
qmax

- 9 -
De la relación fundamental entre el flujo q, la velocidad vs y la densidad ρ, es claro
que después de unas manipulaciones algebraicas se encuentran las siguientes
relaciones:
qu
uuuj
f
sfs ρ−=2
, (3)
j
f
f
uuq
ρρ
ρ2
−= . (4)
Diferenciando la ecuación (4) con respecto a ρ, se obtiene
j
f
f
uu
d
dq
ρρ
ρ2−= .
El flujo máximo se presenta cuando dq/dρ = 0, esto es
20
jρρ = . (5)
Se puede observar que la densidad inicial es la mitad de la densidad máxima en el
flujo máximo. Diferenciando la ecuación (3) respecto de us se encuentra
f
j
fj
su
udu
dq ρρ 2−= .
El máximo flujo se presenta cuando dq/dus = 0, es decir
20
fu
u = . (6)

- 10 -
En el flujo máximo la velocidad inicial es la mitad de la velocidad máxima.
Con las tres ecuaciones que se han encontrado;
q =ρ us , 20f
uu = y 20
jρ
ρ = ,
se obtiene el flujo máximo:
4max
fju
qρ
= . (7)
Greenberg propone el siguiente modelo basado en la analogía con los fluidos.
ρρ j
s cu ln= (8)
ρρ
ρ jcq ln= (9)
diferenciando esta ecuación con respecto a ρ se obtiene:
−= 1ln
ρρ
ρj
cd
dq,
el flujo máximo se presenta en dq/dρ = 0, substituyendo en (8) se obtiene
cus
= .
Luego el flujo máximo tiene velocidad c.

- 11 -
Las condiciones bajo las cuales los modelos funcionan son:
a) Greenshields satisface que la densidad tienda a cero y a la densidad
máxima, las condiciones de densidad libre y saturada.
b) Greenberg satisface sólo que la densidad tienda a la densidad máxima,
condición de densidad saturada.
Con estos modelos se pueden determinar la velocidad y la densidad del tráfico
cuando ocurre el flujo máximo. Es necesario recolectar los datos apropiados para
obtener estos valores [Garber et Hoel]. Una vez recolectada la información es posible
usar la regresión lineal para probar el conjunto de datos, estos pueden ser
recolectados durante un experimento en algún cruce para medir las variables, y
encontrar los valores de la velocidad, densidad y flujo. Debido a que la variable
dependiente q está relacionada linealmente con las variables independientes u y ρ,
que es parte de la suposiciones del modelo tradicional planteado hasta ahora.
A continuación aplicaremos los modelos de Greenshields y Greenberg a un
conjunto de datos recolectados en el cruce de la Avenida Juárez con la calle 29 sur.
Esta muestra de datos midió la densidad de algunas calles, el flujo y la velocidad de
paso de los coches.
Con el método de mínimos cuadrados de las diferencias entre la muestra obtenida
y los datos esperados se hace un análisis de regresión lineal. Para lograr determinar la
densidad de los autos se recurre a la ecuación ρ = q/u. La muestra arrojó un flujo de
12 autos por ciclo de semáforo, dado que el ciclo en verde dura 40 segs., entonces el
flujo es de 0.33 carros por segundo. Tomando las velocidades de los autos en
diferentes momentos, a distancias disímiles, se determina la densidad, número autos
por unidad de distancia. En la Tabla 1 se muestran los datos recolectados.

- 12 -
Velocidades
(yi)
Densidades
(xi Greenshield)
Ln Densidad
(xi Greenberg)
5.61 5.34 1.67
6.31 4.75 1.56
5.13 5.84 1.76
6.09 4.92 1.59
4.9 6.03 1.80
7.30 4.10 1.41
8.47 3.54 1.26
7.53 3.98 1.38
6.61 4.53 1.51
8.47 3.54 1.26
11.43 2.62 0.96
9.61 3.12 1.14
11.22 2.67 0.98
8.15 3.68 1.30
10.13 2.96 1.08
Tabla 1. Muestra de velocidades y densidades en la Avenida Juárez
Los valores de la evaluación de los modelos usando la información de la Tabla 1
son:
Modelo de Greenshields Modelo de Greenberg R = 0.9447 velocidad = 7.7188 densidad = 4.1502 flujo máximo = 32.0348
R = 0.9863 velocidad = 7.7381 densidad máxima = 10.8590 densidad = 3.9948 flujo máximo = 30.9120

- 13 -
El valor de R indica la aceptabilidad de la muestra. El modelo Greenberg tiene la
mejor R ya que es la que más se aproxima a 1. La velocidad que proponen los
modelos es casi la misma. La densidad ideal que proponen es diferente, aunque esta
diferencia no es muy grande, se puede observar que la del modelo Greenberg es
menor. Así, el modelo Greenberg presenta mejor aceptabilidad, mejor densidad,
mayor velocidad y presenta mayor información, el valor de la densidad máxima.
1.2 Modelo de tráfico mesoscópico Las reglas de comportamiento son descritas bajo un nivel individual ya que están
basadas en el modelo de cinemática de gases, describe la distribución de la velocidad
en posiciones e instantes específicos. Un modelo de tráfico mesoscópico no describe
el comportamiento de conductores y vehículos de forma individual.
La dinámica de estos movimientos depende de varios procesos, aceleración,
interacción entre vehículos, cambio de carril, describiendo el comportamiento
individual de los conductores.
1.2.1 Modelos de distribución en un “Headway” El tiempo en un Headway se define por el tiempo que hay de diferencia entre el
paso de dos autos que se van siguiendo. Los modelos de distribución son
considerados mesoscópicos porque describen la distribución de los headways para
vehículos individuales, mientras que no hay una consideración explícita ni tampoco
un trazo separado de cada vehículo. Los modelos de distribución de headways han
sido criticados por negar el rol que juega la dinámica del tráfico. Además, se asume
una homogeneidad en los autos [Hoogendoorn et Bovy].

- 14 -
Los modelos de grupos están basados por el rol que juega el agrupamiento de
autos, un grupo está formado por autos que poseen la misma característica. Los
modelos de grupos usan variables como velocidad y tamaño de los grupos, el cual
puede crecer o decrecer en forma dinámica.
1.2.2 Modelo continuo de cinemática de gases de Prigogine y Herman
Los modelos de cinemática de gases describen la dinámica de la densidad fase-
espacio reducida (phase-space density PSD), P(x,v,t ). En el instante t el número
esperado de vehículos dentro de una región [x, x+dx ] conduciendo a una velocidad [v,
v+dv ].
Prigogine y Herman asumen que cambios dinámicos en la densidad fase-espacio-
reducida son provocados por los siguientes procesos:
• Convección (transmisión de calor de un cuerpo a otro). Los vehículos con
velocidad v fluyen dentro o fuera del segmento de carretera [x, x+dx ].
• Aceleración hacia la velocidad deseada. Los autos que no viajen a la
velocidad ideal tienden a acelerar.
• Desaceleración provocada por la interacción entre conductores. Un vehículo
que interactúa con un vehículo lento debe reducir su velocidad si no es posible
rebasar.
Su trabajo generó la siguiente ecuación diferencial parcial [Prigogine et Herman]
int
∂∂+
∂∂=
∂∂+
∂∂
t
p
t
p
x
pv
t
p
acc
,

- 15 -
la parcial con subíndice acc representa los cambios hechos al acelerar hacia la
velocidad deseada y la parcial con subíndice int representa los cambios generados por
la interacción entre vehículos.
La propuesta de Prigogine, hecha en 1961, para dar solución a la interacció n es la
siguiente:
• El evento de bajar la velocidad tiene una probabilidad de 1 - π , mientras que
un rebase inmediato tiene la probabilidad π . El rebase no afecta la velocidad
del auto rápido.
• La velocidad del auto lento w no es afectada por los eventos de interacción.
• El tamaño de los autos puede ser omitido.
• El auto rápido disminuye su velocidad instantáneamente.
• La interacción que afecta a más de dos vehículos no se toma en cuenta
De esta forma con estas suposiciones se propone la siguiente ecuación
( ) ( ) ( )∫ −−=
∂∂
dwtwxpvwtvxpt
p,,),,(1
int
π .
Ahora para el proceso de aceleración se toma en cuenta la relajación de la
velocidad del conductor hacia una velocidad de equilibrio, que va a estar basada en
las condiciones del tráfico. Para esto [Prigogine et Herman] propusieron la siguiente
expresión:
( )( )( )
∂
−∂−=
∂∂
v
vtxvVp
t
p
acc
τ/,* 0
,
donde τ representa el tiempo de aceleración y ( )txvV ,0 representa la distribución de
velocidad deseada.

- 16 -
1.2.3 Modelo mejorado basado en la cinemática de gases
El término de interacción ha sido criticado, principalmente por la validez del caos
vehicular que se asume [Hoogendoorn et Bovy]. Paveri y Fontana consideran un
escenario ficticio donde los autos con seguimiento libre entre ellos llegan a una cola
de avance lento, con dos casos extremos considerados:
• El vehículo que llega a la cola, la pasa de la misma forma que pasaría un solo
auto.
• Cada carro pasa la cola de forma independiente.
Este modelo muestra que el modelo presentado por Prigogine y Herman refleja el
segundo caso, mientras que los dos puntos se acercan más a la vida real [Prigogine et
Herman].
1.2.4 Modelado de multiclases de cinemática de gases para flujo de tráfico
En el 2000 Hoogendoorn y Bovy desarrollaron un modelo de tráfico basado en
cinemática de gases multiclases. Ellos describen la dinámica de lo que llaman
multiclases de la densidad fase-espacio reducida, MUC-PSD, denotada por la
expresión: pu(x,v,v0,t), donde u indica la clase del usuario u de un universo U, dando
como resultado [Hoogendoorn et Bovy]:
int
∂∂
+
∂∂
=∂
∂+
∂∂
t
p
t
p
x
pv
t
p u
acc
uuu,

- 17 -
donde
( )( )
v
vvp
t
p uu
acc
u
∂−
=
∂∂ τ/. 0
,
describe el proceso de aceleración de los vehículos de la clase u hacia la velocidad
deseada v0, con un tiempo de aceleración τu y
( )( )∑ −−−=
∂∂
ssusuu
u txtxt
pRI ),(,)1(
,,int
π ,
donde
( ) 000
,),,,(),,,(, dwdwtwwxptvvxpvwtx
su
vw
suI ∫<
−= ,
∫>
−=vw
susudwdwtwvxptvwxpvwtxR
000,
),,,(),,,(),( .
Estas dos últimas ecuaciones denotan la dinámica de la interacción vehicular con
vehículos de la misma clase s o de alguna otra que sea diferente.
Esta distinción entre clases de usuarios da como resultado la presentación del
proceso de disminución de la velocidad de los vehículos rápidos que es más cercano a
la realidad, donde vehículos rápidos se encuentran con vehículos lentos y tienen que
frenar.
1.2.5 Ecuación de multicarriles para cinemática de gases En 1997 [Helbing] presentó un modelo de cinemática de gases para operaciones de
tráfico de varios carriles. El desarrollo es similar al hecho en 1975 por [Paveri et
Fontana] pero el intercambio de carriles es considerado explícitamente.

- 18 -
−+ −+
∂
∂+
∂
∂+
∂
∂+
∂
∂=
∂∂
+∂
∂jj
LC
j
vc
jj
acc
jjjvv
t
p
t
p
t
p
t
p
x
pv
t
p
int
,vc
j
t
p
∂
∂
,LC
j
t
p
∂∂
±jv
CLC
cju
ILC
cjucju
acc
cjucjucju
t
p
t
p
t
p
t
p
x
pv
t
p
∂
∂+
∂
∂+
∂
∂+
∂
∂=
∂∂
+∂
∂ ),,(),,(
int
),,(),,(),,(),,(
Si se denota con j el índice del carril entonces pj(x,v,v0,t) denota lo que llama
multicarril de la densidad fase-espacio reducida, ML-PSD, del carril j con la siguiente
relación:
donde
denota la velocidad de difusión tomando en cuenta las fluctuaciones individuales con
la imperfección de conducir,
denota el intercambio entre líneas desde o hacia la línea j, y
es el porcentaje de autos que entran y salen del carril.
1.2.6 Modelos genéricos de cinemática de gases y modelo de multiclase y multicarril basado en un pelotón
En 1999 [Hoogendoorn] especificó un modelo genérico de cinemática de gases de
multiclase y multicarril basado en el modelo de un pelotón. En su modelo se describe
lo que pasa entre vehículos de clase y sobre el carril j, con flujo libre c = 1 o estilo
pelotón c = 2 da la multiclase y multicarril (MLMC) PSD p(u,j,c)(x,v,v0,t):

- 19 -
Para el autor de este modelo los creadores del modelo de cinemática sobreestiman
el número de interacciones y el caos provocado entre los autos. En segundo lugar dice
que en la vida real el flujo, cuando marcha como pelotón, está completamente
determinado por el líder. Estas dos limitantes se pueden resolver con su modelo sólo
variando el valor de c.
1.3 Modelo de tráfico microscópico El desarrollo comenzó en la década de los 60’s con los modelos de seguimiento
entre autos (car-following). De los cuales se derivan otros, estos son: los modelos de
distancia segura que describen la dinámica de un auto con respecto a su predecesor.
La regla de Pipes dice: “Una buena regla para ir detrás de otro vehículo a una
distancia segura es permitirse uno mismo una distancia, al menos, de un carro de
distancia entre los carros por cada 10 millas/hr (16.1 km/hr) de velocidad que trae el
auto” [Pipes]. Usando esta regla de conducir, se puede determinar la distancia que
requiere el auto n a velocidad v con respecto del auto n-1.
Dn (v)=Ln (1+ v/16.1).
En éste modelo la distancia de seguridad se incrementa linealmente junto con la
velocidad del modelo; un modelo similar fue hecho en 1958 [Forbes et al].
Considerando la simplicidad de los modelos es sorprendente lo exactos que son con
observaciones hechas en la vida real [Pignataro].
En 1988 Leutzbach genera un modelo más refinado describiendo el espacio
existente entre los autos. La distancia de frenado se define con respecto de la
distancia que requiere un auto para frenar por completo, incorporando la distancia que
requiere el auto para frenar y la máxima desaceleración [Leutzbach].

- 20 -
Dn (v)=Ln + Tv + v2 / (2ug).
La ecuación anterior indica la distancia que requiere un auto para frenar, sin
provocar un accidente, después de que el auto que va al frente de él frena, un modelo
similar al de Forbes. En 1998 Jepsen discute que esta distancia de seguridad para un
vehículo n con velocidad v es [Jepsen]:
Dn (v)=(Ln + dmin) + v(T + vF)
donde
• Ln es el tamaño del auto.
• dmin constante que representa la distancia mínima entre autos, depende de las
condiciones de densidad en momentos de congestionamiento.
• T es el tiempo de reacción a un evento inesperado 0.6 a 1.5 segs.
• F es el factor de riesgo que se asume está en relación con la velocidad que
llevan los autos.
Los conductores con experiencia tienen conocido el factor T pero los novatos
requieren tener en cuenta las reglas de seguridad, como por ejemplo:
• Mantente dos segundos atrás del vehículo del frente
Se ha encontrado en muchos estudios que el tiempo de reacción de un conductor
es de 0.6 a 1.5 segundos.

- 21 -
1.3.1 Modelos de seguimiento de autos con respuesta a estímulos (Stimulus - response)
Este tipo de modelos tienen como base el comportamiento que tienen los autos con
respecto del auto que va delante de ellos. En general, la respuesta generada es
provocada por el frenado o la aceleración del vehículo al frente, esta respuesta
depende del tiempo de reacción del conductor T [Hoogendoorn et Bovy].
Muchos modelos han sido creados, todos ocupan los mismos parámetros para las
clases de usuarios y los carriles. Describiendo la diferencia entre la aceleración real y
la aceleración ideal se creo una regla simple de seguimiento al líder que deriva en un
modelo macroscópico de segundo orden [Payne]
V ( x( t + T ), t+T ) = Ve (r (x+D, t)).
Esta ecuación muestra que los conductores adaptan su velocidad a una velocidad
de equilibrio, que es una función de la densidad del tráfico en la posición x+D. La
velocidad de equilibrio representa un cambio entre la velocidad del conductor y la
reducción de la velocidad cuando empeoran las condiciones del tráfico.
1.3.2 Modelos de Psicoespacio Psicología perceptiva ha sido usada para mostrar que los conductores tienen
límites para sus reacciones a los estímulos que provocan sus reacciones [Todosiev et
Barbosa]. Las reglas básicas del comportamiento que representa el modelo llamado
psico-espacio son:
• Con grandes espacios libres entre los autos el conductor no modifica su
comportamiento con respecto a nadie.

- 22 -
• Con pequeños espacios entre los autos, las combinaciones de las velocidades
y las distancias en las calles no provocan una reacción en el conductor, esto es
por que el movimiento es muy lento.
En 1971 [Widerman] desarrolló el primer modelo de este tipo distinguiendo
restricciones y no restricciones de manejo considerando la percepción. El cambio de
carril y los rebases son incorporados en este modelo. El modelo microscópico de
tráfico está basado en la teoría del seguimiento entre carros que considera la
separación entre autos y la velocidad a la que viajan los autos. Entre las restricciones
que dificultan su estudio es la de obtener una solución analítica del modelo , la cual
puede ser muy complicada de resolver [Garber et Hoel].
Muchas son las razones que pueden provocar la detención del flujo de autos en un
camino, éstas son: accidentes, reducción de carriles en la carretera, una luz roja en un
semáforo, etc. El modelo de ondas de choque de lo s flujos de tráfico (Shock waves in
traffic streams) representa la forma como se propaga el frenado de los autos a partir
de un cuello de botella. Si un observador caminara en dirección contraria a la que se
mueve el tráfico podría observar cómo los autos van formando una cola con sentido
opuesto al de la circulación de los autos. La forma en la que se genera la cola tiene
una velocidad y un efecto de onda ya que se propaga el frenado de los autos, por eso
el nombre del modelo.
La forma en la que empiezan a frenar los autos es conocida como onda de choque ;
ver Figura 3, donde hay dos curvas que representan la gráfica de densidad contra flujo
de autos pero bajo condiciones diferentes, dos flujos diferentes por causa de un
embotellamiento. La densidad es la misma sólo que el flujo se reduce y por lo tanto
las condiciones cambian, un ejemplo es el punto donde se alcanza el flujo máximo la
densidad ideal cambia de ?0a a ?0
b. Con esta información es posible deducir
información cuantitativa para medir el tamaño de las colas que se pueden formar.

- 23 -
La velocidad de los vehículos se reduce mientras se acercan y pasan por el cuello
de botella, hay un cambio de densidad ?1 a ?2 y de flujo q1 a q2. La onda de
propagación de la velocidad se origina en w, el punto donde se produce el cambio de
capacidad del camino, el tamaño del carril y el número de autos que pueden pasar por
él. La velocidad esperada de los autos uw se obtiene a partir de:
12
12
ρρ −−
uw ,
esta ecuación representa la pendiente de la cuerda CD de la Figura 3 que es la
velocidad creada por el cambio en la densidad del camino.
Con esta ecuación es posible determinar el tamaño de la cola que se va a formar
con el cambio de densidad, siempre y cuando se conozca la densidad y el flujo del
camino antes y después del cuello de botella.
Figura 3. Medidas de cinemática y ondas de choque relacionadas con las curvas de flujo y densidad3
3 [Garber et Hoel] página 195
Curva normal Curva de cuello de botella
Cc D C2
?3 ?3b ?1 ?0b ?0
a ?2
C1
q1
q2
q3

- 24 -
Es posible que el cuello de botella no sea un punto fijo, es decir, hay un auto que
evita el paso de los demás y viaja a una cierta velocidad, el punto está en movimiento.
Si conocemos cual es la velocidad a la cuál se mueve el cuello de botella es posible
determinar el crecimiento de la cola CC detrás del embotellamiento. Este está dado
por la diferencia entre la velocidad del auto generador del cuello de botella vcb y la
velocidad de la onda de choque generada uw
CC = vcb- uw.
Puede ser posible también deducir la longitud de la cola longc formada si se sabe
la distancia d que va a recorrer el auto al frente.
longc = CC * d/vcb. Usando la densidad del cuello de botella ?2 se puede determinar el número de
autos que se encuentran en el cuello
?2 ( longc). Cuando los autos entran en el área de menor capacidad, las condiciones de la cola
crecen de forma compleja, resultando en un incremento automático en la densidad de
?1 a ?2 y en un decremento en la velocidad. Es posible complicar el modelo y pensar
en cambios constantes entre la densidad y como consecuencia de flujo y se puede
usar el modelo de Greenshields para representar esta situación de la siguiente forma:
−=
j
i
fsiuu
ρρ
1 ó ( )ifsi
uu η−= 1 ,
donde
j
ii ρ
ρη = ,
es la densidad normalizada.

- 25 -
De esta ecuación es posible obtener la velocidad uw usando la densidad:
( )[ ]211 ηη +−=
fwuu ,
que es la propagación de la onda de choque de Greenshields.
Puede ocurrir que haya poca diferencia entre las densidades, entonces ?1 y ?2 son
casi iguales por lo que se puede despreciar esta diferencia entre ellas quedando la
ecuación de densidad casi similar de esta forma:
[ ]121 η−= fw uu .
Además, esta ecuación puede ser us ada para determinar la onda de choque que se
genera al ponerse una luz roja en el semáforo de una esquina. Durante la etapa que
dura en verde el semáforo, la densidad normalizada es ?1 y cuando la luz cambia a
rojo el tráfico en la esquina se detiene, que da como resultado una densidad de
congestionamiento, luego el valor de la densidad ?2 es 1. Entonces, la velocidad de la
onda de choque, que en este caso es la velocidad de frenado, puede obtenerse por la
ecuación:
1η
fwuu −= .
Por tanto, si el tiempo de duración del rojo en el semáforo es t la longitud de la
línea de autos formada en la calle es tu f 1η . Después de esto se calcula la velocidad
de movimiento del flujo us2 cuando se pone la luz verde con una densidad ?2, ahora ?1
es 1. De la ecuación ( )ifsi
uu η−= 1 se obtiene la velocidad us2
2sfw uuu +−= .
Ya que la velocidad de arranque us2 es muy pequeña, representa la velocidad de
arranque cuando se pone el semáforo verde, se puede concluir que la velocidad de
inicio de la onda de choque es –uf.

- 26 -
1.4 Modelo de tráfico submicroscópico La disponibilidad de las computadoras ha dado como resultado el uso de su poder
de cómputo para resolver modelos complejos de micro simulaciones.
Un gran número de estos modelos han sido creados y algunos fueron revisados por
el proyecto SMARTEST [Algers et al], que encontró 58 modelos microscópicos de
los cuales analizó 32, encontrando simulaciones microscópicas.
Los modelos incluyen el comportamiento del seguimiento entre autos y el
intercambio de carriles, particularizando cada auto.
Los modelos de simulación submicroscópica describen el funcionamiento de
partes específicas de los autos, así como los procesos que siguen durante su
conducción. Están enfocados para determinar el impacto que tiene un sistema de
soporte en el auto.
1.5 Modelos con autómatas celulares Los modelos con autómatas celulares describen los sistemas de tráfico con una
superficie de células de tamaño similar, aproximadamente 7.5 m. Un autómata celular
describe el movimiento de las células de una celda a otra de forma discreta. La
desventaja que tienen es que tardan en presentar resultados por que requieren de un
gran número de iteraciones para converger a un estado ideal. Han sido usados para
simular operaciones de tráfico en gran escala, así como para predicciones de tráfico.
En general, son aplicables para redes de gran escala para lo que requieren del uso
de supercomputadoras para efectuar los cálculos de los modelos [Howard]. El
desarrollo de modelos usando este paradigma es costoso y de manejo restringido por
la necesidad de tecnología de punta.

- 27 -
Los autómatas tienden a representar las ventajas de los modelos micro, que son
complejos, apoyándose de la eficiencia de las computadoras, Al tener la posibilidad
de manejar supercomputadoras es posible incrementar el número de características y
variables en los modelos. La simulación de los procesos y la interacción entre
variables es posible.
También, hay modelos que muestran resultados realistas sobre una escala
macroscópica, especialmente en las redes urbanas en términos de reducir las curvas
de densidad [Nagel et al], [Esser et al]. La reducción en la densidad es una de las
metas que se busca al diseñar modelos, con la finalidad de ayudar a la mejora del
flujo. Si hay un flujo continuo de autos en las calles el tamaño de la densidad
disminuye.
En conclusión, los modelos usando autómatas celulares son más completos, es
posible incluir más variables logrando mayor cercanía con la realidad. El uso de este
paradigma es reciente y la investigación encontrada hasta ahora ha contribuido a la
mejora en el tráfico. El beneficio obtenido por la inversión en equipo de cómputo de
gran capacidad tiene un valor social muy grande. Es necesario hacer un comparativo
entre modelos similares a los desarrollados con autómatas celulares para determinar si
la mejora es lo suficientemente significativa.
1.6 Teoría de colas Los congestionamientos tan molestos, sobre todo en las horas pico, dentro de las
calles generan siempre colas que son formadas por las llegadas de autos que esperan
por un servicio; la luz verde en el semáforo o una oportunidad para avanzar cuando
los carros lo permiten. Este servicio es proporcionado por uno o varios canales.
Existen muchos modelos para analizar este fenómeno, en la presente tesis se examinó

- 28 -
el que toma en cuenta un carril. Para entender el sistema de colas es necesario definir
las siguientes variables [Garber et Hoel]:
• La distribución de las llegadas. Las llegadas pueden ser simuladas por una
distribución determinista o aleatoria, la distribución de un tráfico que va de
ligero a medio es descrita por la distribución de Poisson [Garber et Hoel], que
es usada generalmente en la teoría de colas para flujo de tráfico.
• Método de servicio. Las colas pueden ser clasificadas de acuerdo al método
que le va a dar servicio a las llegadas. Pueden ser estructuras de atención del
primero en llegar es el primero en salir (FIFO first in - first out), también, se
toma en cuenta la prioridad que se tiene para atender la cola.
• Características de la longitud de la cola. La longitud máxima de la cola puede
ser finita o infinita, en las calles consideradas tienen un número finito en su
capacidad de agrupar los autos.
• Distribución del servicio. Esta distribución es también considerada aleatoria,
la distribución de Poisson y la exponencial negativa son las más usadas
[Garber et Hoel].
• Número de carriles. El número de carriles indica el número de carriles que
hay en la calle.
• Colas sobresaturadas y no saturadas. Las colas sobresaturadas son aquellas
donde los carros que llegan al cruce exceden la capacidad de la calle y las no
saturadas son aquellas donde la capacidad de la calle excede los carros que
llegan al cruce. Esta variable va cambiando con el paso del tiempo y depende
de la capacidad de cada calle, representa la ocupación de la calle.
Las colas de tamaño finito requieren que se defina dicho tamaño para su estudio,
suponiendo que este número es N, el tiempo de llegadas de los autos es q y Q denota
el tiempo de servicio de cada auto, ambas variables son aleatorias. Se han

- 29 -
desarrollado la siguiente ecuación para las colas finitas que indica la probabilidad de
que haya n autos en la cola [Garber et Hoel]:
n
NnP ρ
ρρ
11
1)( +−
+= , donde
Q
q=ρ ,
el número de carros en el sistema es:
1
1
1
)1(1
1)( +
+
−++−
−=
N
NNNN
nEρ
ρρρ
ρ.
1.7 Control de semáforos El semáforo tiene un control que sirve para cambiar los colores del mismo de
acuerdo con un plan fijo o variable. Hay diferentes partes que conforman el semáforo,
las más importantes son: el ciclo del semáforo que es el tiempo que tarda una
secuencia completa de cambio de colores, el tiempo de la señal de los colores verde,
amarillo y rojo.
Si se toma una muestra durante la hora pico de una calle y se muestrea el flujo en
intervalos de 15 minutos, es posible tener el volumen para el diseño de la hora pico
usando el factor de la hora pico PHF que indica el flujo máximo presentado en un
intervalo de 15 minutos, este es el tiempo usado en las intersecciones [Garber et
Hoel], con la siguiente ecuación para calcular este valor:
picohoraladedurantevolumen
picohoralaenVolumenPHF
KKKKKK
KKKK
min15max*4= .

- 30 -
Este factor sirve para el diseño de los tiempos de las señales de los semáforos,
pues existe la posibilidad de que las llegadas en los intervalos de tiempo durante la
hora pico pueda ser mayor que el valor total de toda la hora pico. Así, el volumen
para la hora pico (DHV) puede definirse por:
PHF
picohoralaenVolumenDHV
KKKK= .
El PCE es usado para convertir los volúmenes de carriles con camiones y
autobuses a volúmenes de autos, esta conversión es necesaria por que el tiempo que
toma a cada auto cruzar el semáforo es diferente al de los transportes pesados, los
valores usados oscilan entre 1.6 y 2.5 segundos. También, el tiempo que requieren los
autos para dar vuelta varía por lo que se usa un factor que es de 1.4 a 1.6 segundos
para los que dan vuelta a la izquierda y de 1.0 a 1.4 segundos para los que dan vuelta
a la derecha [Garber et Hoel].
El tiempo de los ciclos de los semáforos ha sido creado para reducir el lapso de
espera promedio de los autos en los cruces y los accidentes. Cuando los semáforos
son colocados en cruces independientes, es decir, el semáforo no tiene conexión con
ningún otro semáforo, es necesario tener intervalos de tiempo pequeños entre 35 y 60
segundos. Aunque, es necesario usar ciclos más grandes cuando el flujo es grande, los
tiempos no deben de rebasar los 120 segundos [Garber et Hoel].
El ciclo en amarillo, que se considera parte del ciclo en verde, sirve para prevenir
a los autos que deben frenar. Muchos han sido los estudios desarrollados para
encontrar cuál es la distancia segura y el tiempo que debe durar el intervalo de color
amarillo, para prevenir accidentes. El rango para el ciclo en amarillo debe ser de 3 a 5
segundos, esto depende de la velocidad máxima permitida y de la aceleración [Garber
et Hoel], con la siguiente ecuación es posible determinar el tiempo del ciclo:

- 31 -
( )Gga
u
u
LW
++++=
20
0
min δτ .
De esta ecuación, d representa el tiempo de reacción de un conductor a un
cambio, puede ser 1.0 segundo, W ancho de la intersección, L longitud del vehículo
puede ser la promedio, u0 el límite de velocidad, a es la constante de desaceleración,
Gg es la aceleración de la gravedad.
Así mismo, muchos métodos han sido desarrollados para el cálculo de los ciclos
de los semáforos. Uno de estos es el de Webster [Garber et Hoel] que demostró que
se puede obtener un tiempo de retraso para los autos, el tiempo que tarda en llegar un
auto a la esquina donde se encuentra el semáforo, si el ciclo de semáforo es calculado
por la siguiente ecuación:
∑=
−
+= φ
1
0
1
55.1
i
iY
LC ,
donde L representa el total del tiempo perdido por cada ciclo que se obtiene por la
fórmula:
RlLi
i += ∑=
φ
1
,
donde R es el tiempo del ciclo en rojo.
Para obtener los valores de li es el tiempo perdido por fase i, que se calcula con la
ecuación:

- 32 -
eiiaiiGGl −+= τ ,
donde aiG el ciclo en verde del semáforo sin contar el tiempo de amarillo, iτ es el
tiempo del ciclo en amarillo y eiG es el tiempo efectivo del ciclo en verde, el tiempo
en el que pasan autos por el semáforo. La definición de iY queda definida por la
siguiente expresión
j
ij
iS
VY = ,
donde
ijV es el flujo en el carril j y
jS el flujo de saturación en la línea j, el valor de
φ es el número de fases, un semáforo puede atender diferentes calles, el semáforo
tiene un ciclo para cada calle lo que es conocido como fase. Ahora, el ciclo en verde
efectivo te
G se obtiene con la ecuación:
LCGte −= ,
C representa la longitud del ciclo usado actualmente, se obtiene redondeando 0C al
múltiplo de 5 segundos más cercanos. Para obtener el retraso mínimo total, se calcula
el tiempo efectivo de verde para cada fase.
te
i
ei GYYY
YG
φ+++=
L21
,
y el tiempo actual para cada fase se obtiene,
iieiai
lGG τ−+= , desde la fase φ,,1K=i .
Hay otro método para el cálculo del intervalo mínimo del ciclo de semáforo,
llamado administración de tiempo, se usa para permitir el paso de los autos durante la

- 33 -
( )
,
36001
1
1min
PHF
hV
R
C
iii
i
i
−
+=
∑
∑
=
=
φ
φ
τ
hora pico, tomando en cuenta el ciclo en rojo requerido R, usando la siguiente
ecuación:
iV es el volumen crítico dentro de la fase i,
iτ es el intervalo de amarillo en la fase i,
ih es el promedio del camino para la fase i en la línea crítica, donde pasan más
coches, se da en segundos.
El tiempo mínimo de verde para cada fase se calcula con:
+−= ∑
∑ =
=
φ
φ τ1
1
i
i
i
i
i
ai RC
V
VG .
Parte del desarrollo de las ecuaciones anteriores tienen como finalidad reducir el
tiempo de espera de los conductores. El tiempo de espera se calcula usando los
valores de los ciclos de semáforos establecidos al aplicar las ecuaciones de Webster y
el método de administración de tiempo [Garber et Hoel]. Para lograr el cálculo del
tiempo de retraso Webster desarrolló una ecuación, la más frecuentemente empleada
[Garber et Hoel], ésta representa el tiempo de espera promedio de un auto en el
j-ésimo intervalo de la i-ésima fase de semáforo j
d :

- 34 -
100
100 P
V
BCAd
j
j
−
+= ,
donde
( )( )ji
i
xA
λλ
−−=
12
1 2
, ( )j
j
x
xB
−=
12
2
,
iλ es la porción del ciclo en verde efectivo CGeii =λ ,
eiG es el tiempo efectivo de verde durante la fase i,
jx es el grado de saturación para el j-ésimo intervalo sVx
ijjλ=
js el flujo de saturación en el j-ésimo intervalo (vehículos/carril/segundos)
P representa el porcentaje de corrección, que en condiciones normales va de 5 a 15
porciento.
C es la longitud del ciclo
jV es el volumen de autos en el j-esimo intervalo (vehículos/carril/segundos).
El retraso total para cada intervalo puede estimarse determinando j
d para cada
carril del intervalo, multiplicando cada j
d por su volumen correspondiente al carril y
sumando estos valores. Y si se hace este cálculo para cada fase del semáforo se puede
obtener el retraso total del semáforo.
1.8 Control inteligente de semáforos Una de las desventajas originadas por el uso de señales de semáforo
preestablecidas es que no pueden reaccionar o dar solució n a situaciones dinámicas.
Los semáforos que funcionan de acuerdo con las llegadas de los autos en la calle son
los indicados en estas situaciones [Garber et Hoel]. Para tomar control de estos
semáforos se toman en consideración los siguientes eventos:

- 35 -
• La demanda se refiere a la petición de paso de una cola al control.
• La porción inicial representa los vehículos esperando entre el detector y la
línea de alto durante el ciclo en rojo del semáforo.
• El periodo mínimo es el tiempo debe mantenerse prendida el ciclo en verde
del semáforo.
• La porción extra puede añadirse a la porción inicial del ciclo en verde para
aumentar el flujo a través de la intersección.
• El límite de la extensión es el valor máximo que puede agregarse a la porción
inicial.
• La unidad de extensión es el valor mínimo que puede aumentarse al tiempo de
la porción inicial semáforo.
Los semáforos pueden ser totalmente controlados o semicontrolados [Garber et
Hoel]. Los semicontrolados sólo usan sensores en la zona de flujo mínimo, a pesar de
que esto no satisface los requerimientos para un buen funcionamiento, funciona
cuando se logra explotar la habilidad que tienen lo semáforos de modificar sus ciclos.
Las fases de los semáforos con estas características se establecen de la siguiente
forma :
1. La fase principal del ciclo en verde es predeterminada con un periodo mínimo
pero puede mantenerse prendido hasta que la señal de la cola de autos
pequeña se active.
2. Si el ciclo en verde se ha mantenido prendido durante un tiempo mayor o
igual al valor máximo preestablecido, la fase debe cambiarse a rojo.
3. La fase verde cuando el sensor está en cola pequeña tendrá que mantenerse
por lo menos un periodo igual al predeterminado, este valor genera un
incremento en el tiempo por cada llegada de un nuevo auto.
4. Si el sensor de la cola pequeña prende, el semáforo cambia a rojo y en las
colas de mayor tamaño cambia a verde.

- 36 -
Cuando siempre hay un flujo grande el verde siempre se prende por el punto 4,
pero no un tiempo mayor al preestablecido en el punto 1. Lo anterior deriva en un
semáforo con el mismo comportamiento de uno sin sensores. Es necesario tener
valores predeterminados que se adecuen para ayudar al flujo en las horas pico [Garber
et Hoel].
Para determinar el tiempo que se va a añadir al ciclo de semáforo es necesario
tomar en cuenta la velocidad del vehículo y la distancia X existente entre los sensores
y la línea de alto. Así la extensión, tiempo requerido por un auto viajando a la
velocidad promedio u para llegar a la línea de alto, es: uX . Con los valores
obtenidos es posible aumentar el valor del ciclo para permitir el paso de los autos con
la siguiente ecuación:
u
LWXextencióndeunidad
++= ,
W es lo ancho del cruce y L la longitud del auto.
La porción inicial debe permitir a los vehículos que están en la cola del cruce,
durante la fase roja del semáforo, pasar y despejar el cruce. El cálculo de este valor
depende del tamaño de la cola n, el promedio de paso de autos h y el tiempo de
retraso al arranque k1, los valores para n y k1 recomendados son de 2 segs. y 3.5 segs
respectivamente [Garber et Hoel]
Porción inicial = (hn + k1).
El valor del ciclo en verde es el resultado de la suma de la porción inicial y la
unidad de extensión.

- 37 -
Los semáfo ros que son totalmente manejados por sensores son buenos en lugares
donde las fluctuaciones en los volúmenes de tráfico son muy grandes. Se usan
sensores en todos los lugares donde el semáforo tiene control y reglas si-entonces.
Además, es necesario tener valores de mínimos y máximos para los ciclos en verde y
rojo del semáforo para que operen en forma equitativa en todos los carriles que
controla el semáforo.
1.9 La problemática El problema del tráfico en la ciudad de Puebla, como en muchos otros lugares, es
ocasionado por el avance lento o detención del movimiento de los autos, algunas
veces provocado por accidentes o por limitaciones existentes de los caminos: la baja
capacidad para permitir el paso rápido de los autos. Lo más común es que mucha
gente quiere llegar al mismo lugar al mismo tiempo, originando un flujo grande en
horas pico.
Hasta ahora no ha sido posible agrupar factores que modelen el tráfico con todas
las características que intervienen en él. La tendencia de los modelos que se están
desarrollando es considerar factores no-homogéneos. Howard (1997) presenta el
modelo TRANSIMS (Transportation Analysis Simulation System) creado para
analizar escenarios de tráfico, con la finalidad de predecir los efectos que provoca
poner un puente o añadir una avenida dentro de una ciudad. Un problema diferente es
el presentado en [Botom et al.1999] DinyMIT es un sistema desarrollado que
funciona con un conjunto de puntos que representan un mapa de una ciudad. Además,
se han agregado características que pueden influir en el bloqueo de las calles como
son accidentes, obras, etc., que se presentan de forma sorpresiva.
Se ha desarrollado a lo largo de muchos años gran cantidad de información que
trata de describir el comportamiento del flujo de autos y se han logrado avances

- 38 -
importantes en este aspecto. Sin embargo, la complejidad del modelado del flujo
vehicular a través de sistemas dinámicos, en el que muchos factores intervienen, es
grande. Si se buscara representar el comportamiento de los conductores en los
modelos, podría ser una tarea imposible ya que implica querer representar el
comportamiento humano, tarea que no ha sido posible recrear hasta el momento.
A la luz de las observaciones anteriores, a lo largo de este trabajo se va a presentar
la formulación de un nuevo modelo de tráfico heurístico, basado en la
experimentación de campo. La generación de dicho modelo se basó en lo observado
en las calles y en buscar una identificación entre lo que son los semáforos: unos
prestadores de servicios, y lo que son los autos: clientes en busca de ser atendidos por
el semáforo.
Los factores involucrados para la formulación del modelo son:
• El planteamiento para representar un número n de calles.
• Los diferentes tipos de tráfico que se presentan en la vida cotidiana.
• El manejo del flujo de carros en las calles considerando factores como:
o el espacio disponible en las calles.
o las velocidades de los autos
o el paso de los autos después de un ciclo en rojo.
• La interacción que hay entre los carros y la capacidad de las calles.
• La formación de las colas en los cruces donde el semáforo se pone en el ciclo
en rojo.
El manejo de tres versiones del modelo que son:
• Modelo 1. No considera un tiempo de retraso en el paso de los carros de una
calle a otra, lo cual se comprobó sirve para condiciones donde las calles se
mantienen con una ocupación de mayor al 60%.

- 39 -
• Modelo 2. Considera tiempo de retraso entre el paso de los carros de una calle
a otra. Es más cercano a la realidad pues ayuda a medir el flujo de los carros y
a observar los tiempos que demoran los autos en su paso en las calles, además
sirve para todo tipo de tráfico sin importar la ocupación de la calle.
• Modelo 3. Es igual al 2 con la variante que tiene control de semáforos, en este
modelo es posible predecir los ciclos de semáforo que generan un aumento en
el flujo y una disminución en la densidad de las calles.
La presentación de reportes que permiten comparar los tres modelos, analizando:
• La densidad calle por calle y global, todas las calles.
• Los tiempos de paso de los carros a través de todas las calles.
• Las entradas y salidas del sistema.
También, se presenta el planteamiento de los beneficios que se pueden obtener con
el uso de sensores para controlar el tráfico, pues para el modelo 3 se requiere de
controles que permitan conocer las condiciones de tráfico. Los beneficios que se
pueden obtener con el aumento del flujo vehicular son: la reducción del tiempo de
espera de los autos en las colas, la disminución de la contaminación, mejora en el
aspecto emocional de los conductores, sobre todo cuando están en un cruce esperando
el verde en el semáforo, cuando no hay autos pasando. El problema del uso de este
tipo de sistemas es el elevado costo de los sensores y su colocación, los controles en
los semáforos también son de valor considerable. No obstante, los beneficios que se
pueden encontrar con el uso de dispositivos justifican satisfactoriamente la inversión
requerida.
El modelo creado cae dentro de la categoría de modelos macroscopicos ya que las
variables usadas para su desarrollo son parte de éste tipo de modelos. Además, se esta
analizando el comportamiento general del tráfico sin buscar comportamientos
individuales de los autos, parte del interés de los modelos microscópicos y

- 40 -
mesoscópicos. Con las variables involucradas, para el planteamiento del modelo, se
facilita la simulación, debido a que hay pocas variables involucradas. El
requerimiento técnico para hacer simulaciones de modelos macroscópicos es: una
computadora personal, esto hace posible desarrollar trabajos usando esta categoría de
modelos.

- 41 -
Capítulo 2
Modelado y simulación del flujo de tráfico La palabra simulación significa “imitar algo” [Roberts et al], cualquier cosa o
situación que se presente en el mundo y que se represente para su estudio. Ejemplos
de simuladores hay muchos, las aplicaciones de estos también varían, se pueden
encontrar en la industria, los centros de investigación, las escuelas, etc. “De la mano
de un simulador siempre hay un modelo” [Roberts et al] que sirve de base para
efectuar la simulación.
Un modelo es una abstracción de la realidad que quiere ser simulada, dicha
abstracción depende del propósito que tenga la investigación. Para hacer un modelo
es necesario hacer simplificaciones y con esto se pierde información. No obstante, el
interés del modelo motiva a despreciar los datos perdidos al hacer la reducción del
problema. Existen varios tipos de abstracciones para generar los modelos, las más
comunes son: modelos físicos, modelos de concepciones mentales, modelos
matemáticos, modelos computacionales o algún híbrido de los anteriores [Roberts et
al].
2.1 Modelos físicos o a escala Un modelo físico es una representación a escala de la realidad. Tal y como lo
menciona [Kelton et al], la primera impresión que se tiene de estos modelos es una
réplica física o un modelo a escala del sistema que se quiere estudiar. También
conocidos como modelos icono, con estos se pueden estudiar fenómenos naturales
que son difíciles, en muchos casos imposibles, de medir. Ejemplos de estos

- 42 -
fenómenos hay muchos, la fuerza de las olas que puede derribar a un barco, el
comportamiento de una avalancha de nieve, por mencionar algunos.
Este tipo de fenómenos, que por su naturaleza son complicados de analizar en el
momento que ocurren, se busca modelar para estudiar sus efectos. Los arquitectos y
diseñadores de nuevas tecnologías para la construcción efectúan las pruebas de
resistencia sobre maquetas, modelos de la estructura, para proceder a la construcción.
Parte del desarrollo que un modelo físico requiere, según la propuesta de
[Khoshnevis], para realizar un proceso de simulación son los siguientes pasos:
• Definición del propósito
• Estudio del sistema
• Recolección de datos
• Construcción del modelo
• Validación del modelo
• Experimentación del modelo
• Resultados de la simulación. Para entender estas propiedades veamos un ejemplo de un modelo a escala de
tráfico. Las condiciones que se representan son: existe sólo una intersección de cuatro
calles, cada calle tiene dos sentidos. Además, el cruce se encuentra regulado por un
semáforo con los ciclos tradicionales y con señalamiento para dar vuelta a la
izquierda, la vuelta a la derecha está considerada con el ciclo en verde del semáforo.
Para dar solución a este sistema es necesario hacer una recolección de datos para
determinar los tiempos de llegada de los autos al cruce y su paso a través del cruce,
ya sea seguir de frente, ir a la izquierda o a la derecha. Para esto se requiere de cuatro
asistentes, cada uno tomando en cuenta una calle hacia la intersección. Asignando un
cronómetro a cada persona se guarda el tiempo de llegada de cada auto. También, se
lleva un registro de la que toma cada auto al pasar la intersección.

- 43 -
El propósito del modelo es tener el mejor ciclo en verde posible, no hay necesidad
de tomar en cuenta el actual a menos que se desee comparar el comportamiento actual
con el propuesto. Esta etapa es conocida como la recolección de datos.
El siguiente paso es la construcción del modelo físico para las intersecciones del
sistema. El modelo físico que propone [Khoshnevis] usa una tabla donde se
representa la intersección, los autos, los dos carriles por cada vista de la intersección
y un semáforo. Suponen que el semáforo funciona y es manejado por un cronómetro.
También, se pone un reloj central para la simulación y cada asistente toma sus carros
y se coloca en cada extremo de la mesa, la Figura 4 muestra el experimento.
Figura 4. Experimento del modelo de tráfico a escala4
4 [Khoshnevis] página 41

- 44 -
Usando los datos recolectados, cada asistente va a introducir un auto a la
intersección sólo cuando el reloj central coincida con los tiempos de llegada que
recolectó. Cada asistente podrá hacer que su auto pase la intersección sólo si la luz
del semáforo es la apropiada, recordar que los autos pueden tomar diferentes rumbos.
Conforme el tiempo avanza se crea un registro del tiempo de espera de los autos de
cada intersección. El proceso termina hasta que los asistentes agotan sus datos. Una
vez terminado el proceso, se hace un cambio en el ciclo del semáforo y se repite el
experimento. Este ciclo se repite y se saca un promedio de la espera de los autos.
Esta etapa es conocida como la experimentación del modelo. El modelo es
utilizado usando los valores del ciclo del semáforo con el que fue tomada la muestra,
la finalidad es probar el modelo y determinar si representa la realidad. Si no hay
mucha diferencia entre los datos recolectados y los expresados por el modelo esto
quiere decir que se puede pensar que el modelo es válido.
Finalmente se procede a analizar la salida del modelo, es decir, los datos
encontrados en el modelo sirven para usar el menor de los promedios como valor para
el semáforo. Entonces se debe ir al semáforo de verdad y poner este tiempo que se
encontró, esto es la implementación del modelo. Para este ejemplo es posible hacer
dicha implementación ya que sólo consiste en una configuración del ciclo del
semáforo. Este modelo muestra la desventaja de tener un tiempo de simulación con
tiempo medido en segundos reales. Resulta impráctico realizar simulaciones usando
este método sobre todo por que se tiene acceso a las computadoras y es posible hacer
que el proceso se haga en segundos. También, este modelo muestra la dificultad que
involucra hacer un modelo sin el uso de lenguaje simbólico.

- 45 -
2.2 Modelo de concepción mental Los modelos de concepciones mentales comenta [Sterman] son usados en las
ramas de la psicología y la filosofía. Acorde con los estudiosos de estas ramas los
modelos mentales son descritos como una colección de rutinas o estándares de
operación, elementos que van a permitir tomar alguna acción basada en un grupo de
opciones, una muestra de lo que se ha aprendido con la experiencia o simplemente
una representación de lo que se ve en la vida diaria. Los dos últimos puntos de esta
definición manifiestan el hecho de que un modelo, en este caso mental, se basa en la
experiencia u observación que tiene del fenómeno el desarrollador del modelo y bajo
este punto de vista es creado.
Sterman propone cinco pasos para desarrollar un modelo mental. En primer lugar,
encontrar cuál es el problema a resolverse y quién es el cliente real. Estas dos
cuestiones deben solucionarse antes de empezar a trabajar porque representa el punto
donde se va a mirar cuando exista alguna duda sobre el correcto avance del modelo:
es el punto de referencia del trabajo. En la Tabla 2 se muestran los puntos que para
[Sterman] se deben cubrir al hacer un modelo mental.
1. Definición del problema. • Selección del tema. ¿Cuál es el problema y por qué es un problema? • Variables importantes ¿Cuáles son las variables que son importantes
que se pueden considerar? • Tiempo. ¿Cuánto va a ser el tiempo futuro que se va a considerar?
¿Cuánto tiempo del pasado debe de tomarse en cuenta? • Definición dinámica del problema. ¿Cuál es el comportamiento
histórico de las variables involucradas? ¿Cuál podría ser su comportamiento en el futuro?
2. Formular una hipótesis dinámica • Generación de la hipótesis inicial. ¿Cuáles son las teorías actuales del
problema? • Variables Endógenas. Hacer una hipótesis basada en las salidas
esperadas del sistema. • Mapeo. Buscar cuáles son las relaciones que hay entre los elementos

- 46 -
encontrados hasta ahora. 3. Formular un modelo de simulación • Especificar la estructura y las reglas de decisión. • Estimación de los parámetros, relaciones del comportamiento y
condiciones iniciales. • Pruebas de consistencia del propósito y los límites. 4. Pruebas • Comparación del modelo con la realidad para ubicarlo. • Robustez bajo condiciones extremas 5. Plan de diseño y evaluación • Descripción del escenario • Plan de diseño • Efectos de los planes • Análisis de la robustez con diferentes escenarios • Interacción de los planes
Tabla 2. Pasos del proceso de modelado5
Pese a guías como la mostrada en la Tabla 2, no se garantiza el éxito del trabajo.
Por otro lado, si se desea tener un mayor éxito en el desarrollo de un modelo mental
hay que seguir un proceso iterativo. [Sterman] propone un ciclo donde explica que
cada punto puede ser probado antes de pasar al siguiente y si la prueba no es
satisfactoria se puede regresar a cualquier fase, depende del origen de la falla
encontrada.
La Figura 5 muestra este comportamiento entre los pasos y ayuda al entendimiento
del proceso. Las líneas exteriores definen la ruta tradicionalmente seguida, basada en
una lista de pasos a seguir de forma secuencial. En la realidad no se trabaja así ya que
el ciclo no es una secuencia de pasos si no una interacción entre ellos.
Hoy en día los ciclos iterativos forman parte del desarrollo de sistemas. Las
pruebas en cada paso son necesarias antes de moverse a otra fase, pueden ser tan
simples o sofisticadas dependiendo del punto en el que se encuentre el proceso.
5 [Sterman] página 86

- 47 -
Frecuentemente hay que retroceder a un paso anterior o a otro localizado más atrás,
este salto es indicado por la nube al centro de la Figura 5.
Figura 5. El proceso de modelos mentales es iterativo6
2.3 Modelos matemáticos Un modelo lógico o matemático es un conjunto de suposiciones y aproximaciones,
ambas estructuradas y cuantitativas, hacia el camino que el sistema ha de tomar o
tomará [Kelton et al]. Estos modelos generalmente se prueban usando la simulación
por computadora mas no siempre. Para [Bender], un modelo matemático es una
abstracción simplificada de una construcción matemática relacionada con una parte
de la realidad y creada con un propósito particular.
6 [Sterman] página 87
Planes de formulación y evaluación
Formulación
Hipótesis
Definición del problema
Pruebas

- 48 -
Ambas definiciones nos hablan de lo que implica construir un modelo matemático,
la simplificación de la realidad con el fin de entender el sistema en estudio. Una
realidad es que se obtiene sólo una aproximación del sistema, no la totalidad de él.
Esto es debido a la complejidad que tienen los sistemas y lo complicado que es hacer
una copia exacta de la realidad. No obstante, es posible diseñar partes de esta
realidad, lo más cercanas a ésta, y así se logra estudiar el fenómeno.
El mundo, para la construcción de modelos, puede ser dividido en tres partes
[Bender], éstas son:
• Las cosas cuyos efectos son despreciados, cosas que afectan al modelo pero cuyo
comportamiento no es de interés en el modelo en estudio.
• Variables exógenas o independientes.
• Las cosas que se quieren evaluar al crear el modelo, variables endógenas o
dependientes.
Esto define las entradas, salidas y suposiciones del sistema. Éstas últimas, son de
vital importancia, el éxito del desarrollo del modelo depende de hacer las
suposiciones correctas. El desarrollo de los modelos depende de los diseñadores,
éstos hacen diferentes suposiciones y simplificaciones, no hay un solo modelo que de
la mejor descripción del sistema. Levins descubrió que no se puede tener al mismo
tiempo generalidad, realismo y precisión en un modelo [Bender]. Cada una al
incrementarse origina disminución en las otras. Lograr maximizar las tres no es
posible.
La definición de las variables y su interrelación constituyen el proceso de construir
las suposiciones del sistema. Después, es posible usar el modelo para obtener las
conclusiones. Esto es un proceso deductivo que dice: si las suposiciones son correctas
entonces las conclusiones también lo son. Por eso una conclusión falsa indica algo
erróneo en las suposiciones hechas sobre el modelo [Bender]. Esto es muy importante

- 49 -
ya que se debe tener algo contra lo que se va a probar el modelo y así ver si se llega a
los mismos resultados al usar el modelo.
El mismo autor nos dice, “un resultado es robusto si es derivado de diferentes
modelos de la misma situación”. Aunque llega a ocurrir que dos modelos, del mismo
objeto, lleguen a diferentes conclusiones, no se puede saber cuál de las dos es la
correcta. Esto es porque cada modelo se construye con una finalidad diferente,
usando suposiciones que no coinciden con las de otro modelo, por eso las
conclusiones pueden ser diferentes.
En general, un modelo sirve para predecir cosas no para explicarlas, ya que la
explicación depende de las condiciones bajo las cuales fue creado el modelo y puede
ser que éstas no tengan nada que ver con la explicación real del fenómeno. Bender
describe un proceso a seguir para la construcción de modelos descrito en la Tabla 3.
Tabla 3. Plan del proceso de modelado matemático 7
Una vez concluido este proceso es posible usar el modelo. Se debe tener cuidado
en su uso aunque en las pruebas haya salido muy bien. Cada uso del modelo debe ser
7 [Bender] página 6
1. Formulación de l problema. ¿Qué es lo que deseas saber? Determinar si la naturaleza del modelo depende lo suficiente de lo que quieres que haga.
2. Esquema del modelo. Separar todas las partes que están involucradas. Desechar lo que no sirve y buscar las variables dependientes e independientes. La interrelación entre las variables debe ser especificada.
3. ¿Es funcional? Determinar si es posible utilizar el modelo y obtener los datos que se requieren para probarlo. Si no es posible regresar al paso 2 o incluso al 1. Si es posible ir al paso 4.
4. Prueba del modelo. Usar el modelo para obtener conclusiones que deben coincidir con los datos de prueba o con el sentido común. Si las conclusiones son erróneas y no hay errores en el modelo entonces regresar al paso 1 y 2.

- 50 -
considerado una prueba, sobre todo si esta difiere de las ya efectuadas. Existen
aplicaciones que no son aptas para este tipo de modelo, por ejemplo, un modelo del
impacto de una guerra nuclear no podría ser probado.
En este caso, para efectuar las pruebas se requiere de experiencia en el ámbito del
modelo, para hacer una buena evaluación.
2.4 Modelos computacionales Los modelos computacionales son usados en un amplio rango de aplicaciones de
las ciencias exactas, así como en las ciencias sociales y económicas, [Roberts et al].
Muchos de los sistemas que se usan hoy en día para predecir el comportamiento de
sistemas complejos emplean la simulación por computadora para obtener
conclusiones. Actualmente, los servicios metereológicos usan simuladores de clima
para predecir el comportamiento del tiempo.
De la mano de un modelo está la simulación por computadora, ésta se refiere a los
métodos que sirven para estudiar la gran variedad de modelos, usando evaluaciones
numéricas. Se requiere de software diseñado para imitar las características y la
operación de los sistemas representados, regularmente sobre el tiempo. Desde un
punto de vista práctico, la simulación es el proceso de diseño y creación de un
modelo computarizado de un sistema real o uno propuesto.
La popularidad de la simulación ha crecido durante las últimas tres décadas, la
principal razón es la posibilidad de trabajar con modelos complicados de sistemas de
la misma complejidad. Se ha convertido en una herramienta poderosa y versátil.

- 51 -
La construcción de un modelo computacional consta de dos etapas y éstas a su vez
de 3 subetapas [Roberts et al], donde se incluye el proceso de construcción del
modelo de simulación, la Figura 6 muestra con más detalle estos pasos. En ésta se
observa un proceso iterativo, donde después de llegar a un nivel de evaluación se
puede regresar a cualquier etapa. Con los datos obtenidos en la etapa de evaluación
del modelo es posible determinar si es suficiente o es necesario modificar algo. Si es
necesario hacer algún cambio, se determina en qué etapa hay que trabajar.
La primera etapa de este esquema comprende la parte conceptual. Donde la
definición del problema se hace primero, aquí se debe reconocer y definir el problema
en estudio; las variables que intervienen y la dinámica de las mismas ya que es muy
importante tomar en cuenta las causas y los efectos que provocan. Enseguida, la
conceptualización del problema, involucra documentar los datos generados en la
definición del problema.
Figura 6. Etapas del proceso de construcción de un modelo8
8 [Roberts et al] página 8
Definición del problema
Conceptualización del sistema
Representación del modelo
Comportamiento del modelo
Evaluación del modelo
Políticas de análisis y uso del modelo
Refinamiento
Técnico
Conceptual

- 52 -
Existen diversos medios para hacerlo, los diagramas de ciclos causales, las
gráficas de las variables y los diagramas de flujo, son tres de los más comunes. Por
último, se genera una representación del modelo en términos computacionales.
La segunda etapa comprende la parte técnica del desarrollo. El primer paso a
seguir es usar la simulación por computadora para verificar el comportamiento del
modelo, así como el comportamiento de las variables. Una vez hecho esto, se procede
a hacer pruebas al modelo. Esto involucra comprobar que los datos que se generan
corresponden a la realidad. Finalmente, el modelo se usa para probar otras cosas que
van a formar parte del sistema.
2.5 Modelos híbridos Un modelo híbrido se compone de dos o más elementos diferentes, los modelos
pueden formularse usando más de una de las clasificaciones de los modelos, ya sean
matemáticos, físicos, computacionales o concepción mental. De hecho la definición
de modelos matemáticos indica que no sólo dependen del uso del lenguaje de las
matemáticas sino que en muchos casos también de la simulación por computadora.
Hoy en día la mayoría de los modelos usan las computadoras para efectuar sus
pruebas, es decir se hace un híbrido de los modelos con los computacionales.
2.6 Modelado de flujo de tráfico
Hoogendoorn comenta que las operaciones de tráfico pueden ser representadas
usando como base una investigación de campo, ésta realizada sobre las actividades de
la vida real. Con este tipo de información se generan modelos representando una
realidad, basada en el punto de vista del diseñador del modelo. Esta realidad puede
ser simulada y ayudar en la toma de decisiones. Los sistemas de flujo de tráfico no

- 53 -
están exentos de la complejidad, ésta se refleja en los modelos de estos sistemas. Aún
en los casos, en que a pesar de la complejidad se pueden encontrar soluciones
analíticas, la simulación de estas soluciones es difícil de realizar.
Con los estudios y avances en el modelado de tráfico hechos hasta el momento se
ha encontrado que la descripción generada del fenómeno, usando modelos
matemáticos, no es un reflejo de la realidad. La única ley física precisa de la teoría de
tráfico es la ecuación de conservación del número de autos. Todas las demás
estructuras creadas reflejan ya sea idealizaciones intuitivas o aproximaciones
reducidas de observaciones empíricas. [Papageorgius en Hoogendoorn et Bovy].
Los modelos de tráfico creados hasta el momento cumplen con una serie de
características las cuales sirven para diferenciarlos unos de otros, éstas se han
generalizado y son de uso común. Un modelo de tráfico microscópico describe el
comportamiento de conductores y vehículos de forma individual. Un modelo
submicroscópico describe el mismo comportamiento de un modelo microscópico,
añade al modelo mayor especificación, en especial sobre el auto. En los modelos
mesoscópicos se estudian los autos por grupos, se clasifican de acuerdo a sus
velocidades y se obtienen tipos de autos que se pueden estudiar de forma individual.
Un modelo macroscópico asume el comportamiento de los conductores dependientes
de las condiciones del tráfico y estudia el comportamiento de los autos a gran escala.
En la Tabla 4 se presenta una descripción de la clasificación propuesta por
[Hoogendoorn et Bovy].
De esta descripción se observa el fenómeno descrito por Levins “no es posible
maximizar en forma simultánea generalidad, realismo y precisión” [Bender]. Esto se
ve en los modelos del tipo microscópico y submicroscópico se obtiene precisión y
realismo pero se sacrifica la generalidad. Ocurre lo mismo también con el modelo
mesoscópico donde no hay tanta precisión ni generalidad, está en un punto

- 54 -
Submicroscópico
Mesoscópico
M A C R O S C O P I C O
Microscópico
intermedio. Finalmente, el modelo macroscópico tiene mucha generalidad pero pierde
toda precisión.
Los modelos de esta clasificación pueden ser observados como agrupaciones unos
de otros. El conjunto más grande es el macroscópico, en él se encuentran contenidos
los demás modelos. El siguiente, es el modelo mesoscópico. Después, está el modelo
microscópico donde se encuentra contenido el submicroscópico. La Figura 7 ayuda al
entendimiento de esta descripción.
Figura 7. Niveles de detalle de los modelos
2

- 55 -
Microscópicos. Un modelo de tráfico microscópico describe el comportamiento de conductores y vehículos de forma individual. El propósito es determinar el comportamiento del seguimiento entre autos. Este tipo de modelos se desarrollan con base en el comportamiento que tienen los autos con respecto del auto que va delante de ellos. Algunos ejemplos son: • Distancia segura . Se busca obtener la distancia segura para ir detrás de un auto. • Respuesta a estímulos. Se basa en la respuesta que tiene un conductor provocada por el
frenado o la aceleración del vehículo que va al frente de él. • Psicoespacio. La psicología ha sido usada para mostrar que los conductores tienen límites
en sus reacciones a los estímulos que recibe de las acciones del conductor al frente. Submicroscópicos . Un modelo submicroscópico describe el mismo comportamiento de un modelo microscópico y añade al modelo mayor especificación, en especial sobre el auto. El propósito de estos modelos es describir el funcionamiento de partes específicas de los autos, así como los procesos que siguen durante su conducción. Están enfocados para determinar el impacto que tiene un sistema de soporte en el auto. Algunos ejemplos son: • SIMONE. Donde se describe el comportamiento de los conductores influenciados por la
operación de un sistema de control inteligente en un crucero. Además se toma en cuenta el entorno del vehículo.
Mesoscópicos. Se estudian los autos por grupos, se clasifican de acuerdo a sus velocidades y se obtienen tipos de autos que se pueden estudiar de forma individual. El propósito del modelo es estudiar el comportamiento de los autos como grupos homogéneos y mostrar que así ocurre en la vida real. Algunos ejemplos son: • Distribución en el camino. Describe la distribución de los vehículos como iguales. No hay
una consideración explicita ni tampoco un trazo separado de cada vehículo. • Modelo de pelotón. Los modelos de grupos están basados por el rol que juega el
agrupamiento de autos. Para este fin un grupo esta formado por autos que poseen la misma característica, usan variables como velocidad y tamaño de los grupos, el cual puede crecer o decrecer en forma dinámica.
• Modelo de cinemática de gases. Las modelos de cinemática de gases describen la dinámica de la densidad fase-espacio reducida de los gases. Muchos han sido los desarrollos de esta teoría, se han incluido multiclases de autos y multicarriles en las carreteras.
Macroscópicos. Un modelo macroscópico asume que el comportamiento de los conductores depende de las condiciones del tráfico. El propósito de estos modelos es Estudiar el comportamiento de los autos a gran escala para tomar decisiones a nivel masivo. Con los elementos del modelo macroscópico de tráfico es posible determinar el flujo máximo, la densidad y velocidad que se presentan en el punto del flujo máximo. Algunos ejemplos son: • Conservación del número de vehículos. Explica que el número de autos que entra a un
tramo de carretera, donde no entran ni salen autos, se mantiene constante. • Relación del flujo, densidad y velocidad. Esta relación define la interacción y
dependencia que hay entre tres variables que son el flujo, densidad y la velocidad.
Tabla 4. Descripción de las clasificaciones hechas por Hoogendoorn y Bovy

- 56 -
2.7 Proceso de construcción de modelos A continuación se propone un proceso nuevo para construir modelos, es especial
de tráfico. La Figura 8 muestra el esquema bajo el cual un modelo puede
desarrollarse, para cumplir con las expectativas para las que fue creado. Dentro del
esquema de la Figura 8 se presenta el proceso, que puede ser iterativo. Hay
comunicación hacia delante o hacia atrás el número de veces que sea necesario hasta
refinar el modelo, una estrella similar como la propuesta por Sterman, Figura 5 de la
sección 2.2 de éste capítulo.
2.7.1 Interesados Definir quién es el cliente, ayuda a orientar el trabajo. Si no se sabe para quién se
está trabajando o a quién se busca satisfacer, no podemos definir qué es lo que se
quiere hacer. Como dice Orozco “todo proceso debe satisfacer las expectativas del
cliente, debe deleitarlo” [Orozco et Jiménez]. A su vez un proceso es definido como
cualquier actividad realizada en nuestra vida, no sólo se encuentra orientado a la
industria. Lo anterior motiva a definir a quién queremos ayudar o beneficiar al hacer
el modelo.
2.7.2 Propósito Una vez definido el interés por hacer el modelo se debe establecer de forma clara
evitando ambigüedades lo que se quiere hacer. Es importante la claridad en este punto
porque el propósito sirve para definir si algo en proceso de desarrollo cumple con lo
establecido desde un principio. Además, evita tomar caminos equivocados y a
enderezar el rumbo del trabajo a tiempo.

- 57 -
2.7.3 Nivel de abstracción Definido lo que se quiere hacer se elabora un diseño con un plan de trabajo cuyo
seguimiento es necesario. El nivel de abstracción forma parte del diseño, éste
representa el nivel de detalle a tomar en cuenta del problema. Para el caso de flujo de
tráfico existen categorías definidas como son los modelos macroscópicos,
microscópicos, etc.; así dependiendo del nivel de especificación que se desee tener en
el modelo, se diseña éste.
2.7.4 Modelo Una vez obtenida la abstracción de la realidad se propone el modelo que la
represente. Las simplificaciones y restricciones asumidas, deben ir de acuerdo con el
punto de vista de interés en el fenómeno.
2.7.5 Simulación
La simulación de un modelo sirve para obtener conclusiones. En este momento es
posible dar solución al modelo especificado de dos formas. Una de ellas es
resolviendo de forma analítica las ecuaciones propuestas, incluso es posible efectuar
una solución simulada de este proceso pero esto es complicado de hacer. La otra es
realizando una simulación para determinar si es correcto el modelo. Una vez probado
el modelo y mostrado su correcto funcionamiento se revisa si cumple con la
especificación de nuestro cliente ya que después de la simulación puede ocurrir que el
interés cambie debido por el mayor entendimiento del sistema. Es importante recalcar
que los resultados de la simulación sólo sirven para tomar decisiones o sacar
conclusiones, una explicación del fenómeno no puede obtenerse del modelo creado.

- 58 -
Figura 8. Dinámica del proceso de elaboración de un modelo
Las flechas de la Figura 8 indican que durante el proceso de refinamiento y
evolución del modelo es posible ir a cualquier etapa del desarrollo para analizar
dónde se cometió una falla o dónde se puede mejorar el trabajo.
Para ejemplificar y mostrar que esta metodología se aplica a los modelos
existentes se van a describir los puntos del método para los modelos macroscópico y
mesoscópico. Es posible generar el método para los modelos microscópicos y
submicroscópicos de forma análoga a la efectuada con los otros dos modelos.
INTERESADOS ¿Para quién lo queremos hacer?
PROPOSITO ¿Qué es lo que se quiere hacer? ¿Para qué?
NIVEL DE ABSTRACCION Con qué se va a resolver. Diseño del modelo.
MODELO Representación del modelo
SIMULACION Prueba del modelo Debe cumplir con lo que esperan los interesados

- 59 -
2.8 Proceso para la generación de un modelo de tráfico macroscópico
Un modelo macroscópico asume que el comportamiento de los conductores
depende de las condiciones de tráfico afectando a los conductores directamente en su
ambiente. Las variables independientes de estos modelos son la posición x y el
tiempo t. Se describe la densidad, velocidad y el flujo. Los modelos de tipo
macroscópico estudian el comportamiento global del tráfico ganando generalidad en
el desarrollo, aun así pueden establecer la posición de un auto.
2.8.1 Interesados del modelo macroscópico El interés por el desarrollo de modelos macroscópicos es estudiar el
comportamiento global del tráfico sin ocuparse de los individuos, se interpreta que el
tráfico es un todo y sus componentes también lo son. El grupo de interés son los
diseñadores de modelos que carecen de medios para hacer simulaciones usando gran
cantidad de variables.
2.8.2 Propósito del modelo macroscópico Cuando los recursos de los que se dispone para el desarrollo del modelo, esto es
tiempo y equipo que se tiene, son limitados se recurre a desarrollar un modelo simple
como es el ma croscópico. No obstante esta limitante, los resultados mostrados en
modelos como éste son mejores que en los que presenta gran cantidad de detalle,
modelos microscópicos [Hoogendoorn et Bovy]. Además, la ventaja que se tienen de
la construcción de estos modelos es que requieren de poco cómputo y puede usarse en
línea, dar soluciones en tiempo real, por la velocidad con que ofrecen respuestas.
También, la validación de este tipo de modelos se puede hacer usando muestras ya
que la densidad y el flujo pueden ser medidos.

- 60 -
2.8.3 Nivel de abstracción del modelo macroscópico Lograr una representación del flujo de tráfico para mostrar que las condiciones
del tráfico como son: la densidad, el flujo y la velocidad de campo, influyen
directamente en el desempeño de los conductores y en el movimiento global de los
autos. Logrando entender esta parte se puede predecir cuál va a ser la densidad y el
flujo de una carretera después de un tiempo t y tomar medidas para prevenir
congestionamientos y mejorar el flujo vehicular. Los elementos que considera el
modelo macroscópico son carreteras de tamaño finito o infinito y tres variables
fundamentales: densidad, flujo y velocidad de campo.
La relación que hay entre estas variables han generado ecuaciones fundamentales
de esta categoría de modelos como son la ley de conservación de autos y la ecuación
fundamental del flujo de autos que relaciona el flujo y la densidad [Haberman]. Con
estas ecuaciones es posible predecir el flujo y la densidad a futuro y así estimar cuá l
debe ser el flujo que debe entrar en una carretera si se requiere de mantener un flujo
uniforme, por ejemplo.
2.8.4 Modelo macroscópico El modelo macroscópico tiene dos ecuaciones fundamentales que relacionan el
flujo, la densidad y la velocidad de campo, estas son:
q = ?u y 0=∂∂
+∂∂
x
q
t
ρ.
Para estas ecuaciones se requiere del desarrollo de otras ecuaciones que sirvan
para dar solución a estas ecuaciones. Los modelos creados son: continuo, el semi-

- 61 -
discreto y discreto, en la sección donde se describen los modelos macroscópicos se
detallan los desarrollos hechos hasta el momento.
2.8.5 Simulación del modelo macroscópico Los modelos macroscópicos pueden tener una solución analítica muy cercana a la
real [Hoogendoorn et Bovy], y la simulación de estos modelos es para comprobar los
datos de la solución analítica, además, es posible encontrar estimaciones, predecir y
controlar el flujo de tráfico usando la simulación.
2.9 Proceso para la generación de un modelo de tráfico mesoscópico Un modelo de tráfico mesoscópico no describe el comportamiento de conductores
y vehículos de forma individual. Sin embargo, las reglas de comportamiento son
descritas bajo un nivel individual ya que están basadas en el modelo de cinemática de
gases, describe la distribución de la velocidad en posiciones e instantes específicos.
La dinámica de estos movimientos depende de varios procesos, aceleración,
interacción entre vehículos, cambio de carril, describiendo el comportamiento
individual de los conductores.
2.9.1 Interesados de l modelo mesoscópico Los interesados en el desarrollo de modelos mesoscópicos son las personas que
requieren de pruebas de laboratorio, es decir, no buscan respuestas en tiempo real
sino estudiar el fenómeno. El problema de estos modelos es la gran cantidad de
variables que involucran por lo que lograr un control del flujo no es posible
[Hoogendoorn et Bovy].

- 62 -
2.9.2 Propósito del modelo mesoscópico La creación de los modelos mesoscópicos tiene la intención de disminuir el detalle
de los modelos microscópicos y hacer cálculos menos complicados. Posteriormente
ha servido de escalón para la creación de modelos macroscópicos ya que esta teoría
ha sido usada para la formulación de modelos menos complicados que se convierten
en macroscópicos.
2.9.3 Nivel de abstracción del modelo mesoscópico El nivel de abstracción de los modelos mesoscópicos está integrado por los grupos
formados en la red de tráfico, éstos tiene homogeneidad. Diferentes son las
características ha tomarse en consideración para la formación de estos grupos que
después se consideran autónomos e interactúan con otros grupos. La interacción
produce un nivel de detalle pero no de cada auto sino de cada grupo por lo que pierde
la característica de modelo microscópico, aun así es un modelo con gran nivel de
detalle porque pueden existir tantos grupos como se especifiquen. Los grupos tienen
una analogía con el movimiento de un pelotón de la milicia que se mueve
uniformemente y siguiendo a un líder y este grupo puede pasar o unirse con otro
grupo según lo decida su líder. El análisis de los grupos se hace con la teoría de
cinemática de gases y las propiedades que se derivan.
2.9.4 Modelo mesoscópico Los modelos mesoscópicos han sido analizados y explicados con anterioridad,
sección 1.2 del capítulo 1, es importante es tomar en cuenta la densidad-fase-espacio
que forma parte de la teoría de cinemática de gases y es de esta ecuación de donde se
derivan lo demás modelos. La generalización de este tipo de modelos, es decir tomar

- 63 -
en cuenta multicarriles y multiclases de grupos, no tiene resultados que sean
considerados buenos [Hoogendoorn et Bovy].
2.9.5 Simulación del modelo mesoscópico La simulación de este tipo de modelos es muy compleja ya que la representación
de las características ha derivado en muchas variables y su cálculo es complicado así
que no es posible usarlos en situaciones reales.
El nuevo método para la formulación de modelos es una de las contribuciones de
la tesis. La propuesta que se plantea demuestra que los modelos de tráfico
desarrollados hasta ahora bien pudieron seguir éste método para su formulación. El
modelo desarrollado para esta tesis siguió el método propuesto.
La diferencia principal en comparación con los métodos tradicionales es la
inclusión de los interesados, que en muchos casos puede ser la persona que conoce el
problema a fondo y ayudara a evitar que se hagan suposiciones falsas. Además, la
interacción que debe haber entre todas las etapas es importante y no todos los
métodos lo tienen. Los procesos iterativos para la evaluación y corrección de
procesos es vital para llegar a un correcto desenlace.

- 64 -
Capítulo 3
Desarrollo
El modelo de tráfico tradicional agrupa las variables velocidad, flujo y densidad
[Haberman], donde la velocidad del tráfico v corresponde a la velocidad de los carros.
La densidad del tráfico ? está definida por el número de autos que hay en una
distancia d. El flujo de tráfico q es un número de carros que pasan en un punto del
camino en un intervalo de tiempo t. El rendimiento del sistema de caminos se da en
términos del flujo a través del sis tema. Algunos de los modelos tradicionales, por
ejemplo el desarrollado por Lighthill-Whitman-Richards [Lighthill et Whitman],
[Whitham], [Richards], [Helbing], han estado sujetas a controversias respecto a su
validez y aplicabilidad a los problemas reales del flujo de tráfico [Klar et Wegener].
La única ley física precisa de la teoría de tráfico es la ecuación de conservación del
número de autos. Todas las demás estructuras creadas reflejan ya sea idealizaciones
intuitivas o aproximaciones reducidas de observaciones empíricas [Hoogendoorn et
Bovy].
Las operaciones de tráfico pueden ser representadas con base en una investigación
de campo, ésta realizada sobre las actividades de la vida real [Hoogendoorn et Bovy].
Esta información permite generar modelos representando una realidad, basada en el
punto de vista del diseñador del modelo, ésta al ser simulada ayuda en la toma de
decisiones. Ya se ha explicado sobre la complejidad que involucra el desarrollo de
modelos, las soluciones analíticas, cuando las hay, no producen los resultados
esperados [Hoogendoorn et Bovy].

- 65 -
Ya se ha hablado extensamente de la problemática del tráfico dentro de los
capítulos 1 y 2 de este documento, también, de las limitaciones que hay en los
modelos hechos hasta el momento. Dentro de este apartado se va a mostrar cómo se
desarrolló un modelo nuevo que representa el flujo vehicular y ayuda a su mejora.
Son tres los las variantes que se presentan de este modelo, estas son: modelo sin
retraso, modelo con retraso y modelo con retraso y manejo de semáforos. En primer
lugar, se va a explicar los elementos característicos que se van a tomaron en cuenta
para el diseño del modelo. Después, se explicarán los componentes de modelo.
Finalmente, se muestran los tres diferentes modelos creados.
3.1 Elementos característicos Los elementos, contenidos dentro de cada uno de los modelos expuestos en los
capítulos anteriores, considerados comunes por su uso se tomaron en cuenta para el
desarrollo del modelo presentado en este trabajo. En primer lugar, las tres variables
del modelo tradicional, que se consideran en la mayoría de los modelos creados hasta
ahora. La velocidad y el flujo son variables que pueden ser medidas con mayor
sencillez que la densidad, esta última es complicada de calcular, sobre todo si es
necesario hacerlo físicamente ya que se requiere de una toma aérea para contar los
autos, afortunadamente el uso de sensores ayuda a medir de ésta variable. Entonces se
tiene:
• v la velocidad del tráfico, corresponde a la velocidad de los carros.
• ? densidad del tráfico, el número de autos en una distancia d, el espacio entre los
autos depende de cada conductor,
Si k es la longitud del carro, entonces, la distancia de la defensa delantera de
un carro a la defensa trasera del carro que le sigue está dada por (1 - ?k) / (?-1)

- 66 -
• q flujo de tráfico, es un número de carros que pasan en un punto del camino en
una unidad de tiempo. El rendimiento del sistema de caminos se da en términos
del flujo a través del sistema.
Aunque existen ecuaciones que permiten calcular la densidad a partir de la
velocidad es muy complejo obtener este cálculo [Haberman]. Dentro de este trabajo
el interés es determinar el comportamiento de los cruces y las colas que se forman en
estos.
Como parte de la descripción del modelo se consideran los siguientes factores:
• Vehículos. Se pueden construir diferentes categorías de autos, en caso que se
consideren importantes. La simplificación del modelo considera a los autos de
igual tamaño. También, es necesario introducirle la variable velocidad de los
carros, ésta depende de las calles y las condiciones del tráfico. El modelo toma en
cuenta las velocidades promedio, presentes en cada calle.
• Bloqueos. Estos detienen la circulación. Son provocados por muchas razones,
accidentes, obra pública, etcétera. Lo más común es el ciclo en rojo de un
semáforo.
• Calles. En esta etapa es necesario definir el tamaño y la longitud de las calles para
conocer sus capacidades, el flujo máximo de autos que pueden transit ar en ellas.
El planteamiento permite representar un número n de calles.
• Cruce. Un cruce sirve para representar el paso de los coches de una calle a otra.
• Los diferentes tipos de tráfico, en la vida cotidiana, permiten dar una
clasificación que va desde el tráfico muy ligero al congestionado.
• Manejo de semáforos para todos los cruces donde se maneja los ciclos que
permiten el paso a los autos o la detención de estos. Para el manejo de los
semáforos hay dos variantes, la primera es cuando los ciclos de semáforos son

- 67 -
establecidos y no se modifican durante la simulación, la segunda permite que los
ciclos de semáforo se modifiquen dependiendo de las condiciones de tráfico que
se presenten.
El manejo del flujo de autos a través de las calles considerando factores como:
• El espacio disponible en las calles para el flujo vehicular.
• Las velocidades de los autos para transitar en las calles.
• El tiempo que demoran los automóviles en cruzar, la calle después de un ciclo en
rojo, depende de su posición en la cola.
• La interacción que hay entre los carros y la capacidad de las calles para avanzar o
quedarse detenidos.
• La formación de las colas en los cruces donde el semáforo se pone en el ciclo en
rojo.
El manejo de tres versiones del modelo que son:
• Modelo 1. No considera un tiempo de retraso en el paso de los carros de una calle
a otra, lo cual se comprobó sirve para condiciones donde las calles se mantienen
con una ocupación de mayor al 60%.
• Modelo 2. Considera tiempo de retraso entre el paso de los carros de una calle a
otra. Es más cercano a la realidad pues ayuda a medir el flujo de los carros y a
observar los tiempos que demoran los autos en su paso en las calles. Además, este
modelo sirve para todo tipo de tráfico, sin importar la ocupación de la calle.
• Modelo 3. Es igual al 2 con la variante que tiene control de semáforos. En este
modelo es posible predecir los ciclos de semáforo que generan un aumento en el
flujo y una disminución en la densidad de las calles.

- 68 -
La presentación de reportes que permiten comparar los tres modelos, analizando:
• La densidad calle por calle y la de todas las calles.
• Los tiempos de paso de los carros a través de todas las calles.
• Las entradas y salidas del sistema.
En la siguiente sección se explica el modelo y la forma como se obtuvo,
posteriormente se presentan las tres variantes del mismo.
3.2 Formulación del Modelo El desarrollo del modelo consta de varias etapas. La primera, consistió en observar
el fenómeno en las calles, una investigación de campo, donde se colectaron datos para
la validación del modelo. Después, la formulación del modelo siguiendo el proceso
explicado en el capítulo anterior, sección 2.7, con las sub-etapas que forman parte de
este método.
3.2.1 Interesados El problema del tráfico en la ciudad de Puebla, como en muchos otros lugares, ha
tenido un incremento digno de llamar la atención. La intención de resolver problemas
de carácter social para mi es importante y necesario para contribuir en la mejora de la
ciudad. El interés es modelar el tráfico, haciéndolo de la forma más sencilla posible,
para mejorar el flujo vehicular.

- 69 -
3.2.2 Propósito El objetivo del modelo de tráfico es analizar diferentes condiciones de circulación
a través de la simulación digital. La formulación del modelo considera restricciones,
para acotarlo, en los siguientes parámetros: tipificación del flujo de tráfico, velocidad,
condiciones deseables de tráfico, homogeneidad en autos y calles. Además, un
objetivo secundario es usar la simulación del modelo para lograr una sincronización
de semáforos que permitan la mejora del flujo vehicular. El modelo se valida con
parámetros asociados a calles de la ciudad de Puebla.
3.2.3 Nivel de abstracción El modelo que presento toma en cuenta los eve ntos que ocurren en un conjunto de
cruces, que hacen una analogía con un grupo de servidores de red conectados en
serie. Recordando la Figura 8 y el proceso para la generación de un modelo vamos a
definir los elementos de cada uno de los elementos que forman el método.
En el modelo ocurren diferentes cosas o eventos a considerar, estos son: paso de
autos a través de un cruce, llegada de autos a la esquina de un cruce, entrada de un
auto a una calle, modificación del tamaño de las colas en los cruces.
3.2.4 Modelo Sin tiempo de retraso El modelo creado es heurístico. El interés principal es observar los cruces, con la
finalidad de analizar diferentes condiciones de circulación. A cada cruce se le asigna
un estado que indica la cantidad de autos en la cola: autos que llegan menos los autos
que dejan de estar en ella. Los autos camino al cruce se identifican por medio de un
estado intermedio. En este estado se toman en cuenta los autos que están en la calle
conectada al cruce y aún no han llegado a él. Las entradas al cruce están definidas por

- 70 -
los autos que pasan de estar en estado intermedio y llegan a él. Las salidas de una
intersección se miden con el tiempo de paso de cada coche por esta intersección.
Finalmente, se cuenta la cantidad de coches que salen del cruce, estos autos pueden
formar parte del estado intermedio de la siguiente intersección. Se asume tiempo
instantáneo del paso del estado intermedio a la entrada al cruce y la llegada de los
coches es simulada por medio de una distribución de Poisson, esta distribución
describe la llegada de los autos [Garber et Hoel].
El modelo esquematizado se presenta en la Figura 9. Un generador de llegadas
simula los arribos de coches a la primera calle, esta operación depende de las
condiciones de tráfico que se requiera presentar, puede ir de ligero a congestionado.
Se considera un carril por donde van los coches y dentro de éste no se generan ni se
pierden autos. Los carros llegan al primer cruce y dependiendo de las condiciones de
los semáforos y de la ocupación de la cola en la calle podrán pasar o esperar su turno
para dejar el cruce. El paso de los autos puede ser a la siguiente calle o simplemente
dejar de estar en el sistema, puede ocurrir que el auto requiera dar vuelta, por lo tanto
pasa el cruce pero no entra a la siguiente calle. Las entradas a las calles pueden
producir ganancia de autos y ésta puede ser representada con generadores de llegadas
como el usado para la primera calle. El uso de estos generadores sirve para
representar las llegadas de los autos que provienen de la intersección pero no de la
calle anterior. Los arribos de los automóviles a las calles requiere del cálculo del
tiempo de retraso entre el momento de su entrada a la calle y la llegada a la cola o el
paso por el cruce, en este tiempo los autos están en un estado intermedio: los carros
están en la calle pero no han llegado a la esquina. Las condiciones, hasta ahora,
mencionadas se repiten para un grupo de k cruces y al final de estos se contabilizan
los autos que sale n, con la finalidad de lograr maximizar este valor.

- 71 -
Cruce 1 Cruce 2 . . . Cruce k
Generador de llegadas
Contador
∆ tk tiempo de retraso depende de la intersección
Figura 9. Modelo de tráfico
Los parámetros del modelo son: la capacidad del cruce que representa la cantidad
máxima de autos que puede formarse en la cola, la ocupación del cruce que indica
qué cantidad de autos hay en la cola de la esquina, el ciclo del cruce que representa
los ciclos completos de los semáforos, el tiempo del “siga” (verde) del cruce, desfase
en cada intermedio. Para realizar la simulación hay que definir el tiempo de
simulación, el estado inicial de los parámetros usados para el sistema. Finalmente, los
valores almacenados son el tiempo de arribo de los coches a los diferentes cruces, el
tiempo de salida, las posiciones de llegada que ocupan los autos, pueden estar en la
cola, en el intermedio o fuera del sistema.
Un primer desarrollo presenta cada cruce y su ocupación. La ocupación es
definida por el número de autos que llegan al cruce menos los autos que dejan de
estar en él: los que ya están 0kt
Ocu , más los que llegan k
In , menos los que salen
kOut
.
0 kkktkOutInOcuOcu −+=
Además, los autos en camino al cruce se encuentran en un estado que llamamos
intermedio. Aquí se toman en cuenta los autos que están en la calle conectada al cruce
y que aún no han llegado a él. Los autos que pasan de una calle a otra se encuentran
en este intervalo de calle mientras no lleguen al cruce
.1−= kk OutInter

- 72 -
Las entradas del cruce se definen por los autos que llegan a él al abandonar el
estado intermedio. El tiempo que demora a un auto puede estar en función de muchos
parámetros como: velocidad de los autos, capacidad de la calle, entre otros. Sin
embargo, este tiempo se asume igual a cero, es decir, el paso es instantáneo
.kk
InterIn =
Finalmente, las salidas de un cruce se miden con el tiempo del ciclo en verde del
semáforo, el lapso de simulación donde el verde es activo, entre la velocidad
promedio obtenida de la muestra
,
=
pasodeVelocidad
lapsodelVerdeOut
kLL
KK donde es la función techo [Graham].
3.2.5 Simulación
La simulación del modelo y sus resultados se presentan en el capítulo siguiente y
forman parte de los resultados obtenidos.

- 73 -
3.3 Modelo con tiempo de retraso
Figura 10. Diagrama para el cálculo del tiempo de retraso
Los vectores Vk registran el tiempo de paso Ti de los autos al estado intermedio
(Interk). Al principio, el generador de llegadas guarda los tiempos de arribo de los
autos en un arreglo v1, es decir, entran al estado intermedio de la calle con rumbo al
cruce 1. Esto ocurre de forma análoga en el resto de los cruces, el paso de un auto a
través del cruce genera el almacenamiento de su tiempo en el vector Vk
correspondiente.
El tiempo de llegada del auto, en el estado intermedio Interk, al cruce k depende de
la distancia que recorra el carro en la calle. En caso de haber cola en el cruce no se
recorre toda la distancia.
El funcionamiento de los vectores es similar a una cola, el primero en entrar al
estado intermedio Interk es el primero en llegar al cruce k. El tamaño de la cola es
restringido y depende del máximo aforo que puede proporcionar la calle.
∆ tk tiempo de retraso depende de la intersección
Cruce 1 Cruce 2 . . . Cruce k
Generador de llegadas
Contador Salidas
V1
Ti
: : T
V2 Ti
: : T
Vk Ti
: : T

- 74 -
Como el tiempo de simulación es por periodos de tiempo, van de t0 a t1, se mide el
estado del cruce en este lapso de tiempo, es decir, cuantos carros hay en la cola del
cruce al inicio y al final del intervalo .
Con los datos que contiene la cola del vector Vk, se procede a sacar los carros que
pueden pasar del estado intermedio Interk al cruce k. Para determinar si un carro
llegará al cruce se calcula que distancia que debe recorrer y se divide éste valor entre
la velocidad promedio del auto, así se obtiene el tiempo que tardará en recorrer esa
distancia el carro. El valor del tiempo de recorrido es sumado al valor del tiempo de
entrada al estado intermedio Interk, que fue extraído del vector Vk. Si la suma
obtenida cae dentro del intervalo que va de t0 a t1, el carro pasa a formar parte de la
cola del cruce k. Además, se elimina el valor del vector Vk, el carro deja de formar
parte del estado intermedio. El algoritmo para el proceso de extracción de valores del
vector Vk es el siguiente:
1. Si hay valores en la cola, ir a paso 3.
2. Si no hay valores ir a paso 6.
3. Se toma el valor al frente de la cola.
4. Se calcula el tiempo faltante para llegar al cruce
5. Si el tiempo está dentro del intervalo [t0, t1] se saca el valor del inicio de la
cola y se inserta dentro de los llegados al cruce. Después, regresa al paso 1.
6. Si no cae dentro del rango, entonces, ir a 7.
7. Termina proceso.
A continuación se muestra un ejemplo de este proceso. Suponiendo que el tiempo
de simulación va de t0 =10 segundos a t1=15 segundos, y la cola presenta los
siguientes datos. Los tiempos de llagada son colocados arbitrariamente ya que la
finalidad es mostrar el manejo de las colas, la forma de cómo se calcula éste tiempo
es presentada en la sección 3.4.2.

- 75 -
1. Si hay valores en la cola, ir a paso 3
3. Valor 1.2
4. Tiempo de llegada al cruce 11.2 segundos, el tiempo de llegada se asume que
es de 10 segundos.
5. Esta dentro del intervalo así que pasa al cruce y se regresa a 1
1. Si hay valores en la cola, ir a paso 3
3. Valor 1.5
4. Tiempo de llegada al cruce 14.5 segundos, el tiempo de llegada se asuma es
de 13 segundos.
5. Esta dentro del intervalo así que pasa al cruce y se regresa a 1
1. Si hay valores en la cola, ir a paso 3
3. Valor 2.1
Frente Cola Tamaño = 3
0.0 1.2 1.5 2.1 0.0
Frente Cola Tamaño = 2
0.0 0.0 1.5 2.1 0.0
Frente Cola Tamaño = 1
0.0 0.0 0.0 2.1 0.0

- 76 -
4. Tiempo de llegada al cruce 17.1 segundos, el tiempo de llegada se asuma es
de 15 segundos.
6. Esta fuera del intervalo, ir a 7
7. Termina recorrido
Esta es la forma es como se van a manejar los vectores y las colas que almacenan.
3. 3.1 Manejo de las colas para los estados intermedios de los cruces El manejo de las diferentes cola s requeridas en el desarrollo del sistema necesita
un administrador de ellas. Las operaciones de estas colas son las tradicionales,
insertar en la cola (push), sacar de la cola (pop), saber si la cola está vacía (isempty) y
de forma contraria saber si la cola está llena (isfull).
Los datos requeridos de la cola son: el frente, la cola, el tamaño actual de la cola y
el tamaño máximo permitido. Dado que hay muchas colas, se usa una estructura de
datos para almacenar la continuación referente a cada cola. El uso de un vector, por
ejemplo, sirve para este fin, donde el índice de cada vector indica el número del cruce
y el valor almacenado. A continuación se representa el empleo de los vectores para
almacenar estos datos.
Vector de posición de las colas
Vector de posición de los frentes
Vector para almacenar el tamaño actual
de las colas
Vector que almacena el valor máximo
permitido en la colas
5 2 . . . 8 4
1 8 . . . 5 3
5 5 . . . 4 2
8 10 . . . 8 15
Indice 1 2 . . . n-1 n

- 77 -
El tamaño máximo de la cola dos, de este ejemplo, es de diez elementos,
actualmente ocupa sólo cinco de estos. El frente de la cola está en la posición ocho y
la cola se encuentra en la posición dos. Esto es:
Colas de este tipo no requieren de recorrer elementos cada vez que se hace una
operación de eliminación, operación que toma tiempo de procesamiento sobre todo si
hay muchos datos en la cola. Sólo se tiene que mover el valor de la cola y limpiar la
casilla. El empleo de una estructura de datos adecuada para manejo de las colas, que
se creen en el sistema, facilita las operaciones asociadas a éstas. A lo largo del
capítulo se emplean vectores para el manejo de las colas.
Las operaciones básicas de las colas son: cola vacía, cola llena, inserción y
eliminación. Las dos primeras operaciones son de gran utilidad para el desarrollo de
los métodos de inserción y eliminación de la cola. A continuación se van a explicar
las funciones de las colas y el uso de los vectores para manejarlas. Los algoritmos
para manejo de colas se pueden consultar en el apéndice A.
La detección cola vacía consulta el valor que hay en el vector que almacena el
tamaño actual de cola, si su valor es cero la cola está vacía. Es de suma importancia
ya que evita hacer operaciones, como la eliminación de un elemento de la cola,
cuando no hay elementos en ella.
Otra característica de las colas, es determinar si una cola está llena. Esto se detecta
comparando el vector que almacena el tamaño actual de la cola con el tamaño
máximo permitido para ésta.
12.5 14.2 8.5 10.2 11.2
1 2 3 4 5 6 7 8 9 10

- 78 -
El índice de la cola está localizado entre dos valores: su tamaño actual y su tamaño
máximo permitido. La operación residuo obtiene este índice y regresa el valor cero si
ambos valores son iguales.
Para insertar un dato en la cola es necesario verificar si la cola no está llena, la
operación cola llena lo verifica. Después se incrementa la posición actual de la cola,
la operación residuo obtiene la nueva posición en ésta. Finalmente, se inserta el valor
en la cola y se incrementa el valor del tamaño de ésta.
La otra operación que se requiere es la eliminación de elementos de la cola. Lo
primero que se debe hacer es comprobar que hay elementos en la cola, para esto se
creó la función cola vacía. Una vez comprobado la existencia de elementos se copia
el valor del frente de la cola. Después, se borra el elemento de la cola y se recorre el
frente a la siguiente posición, similarmente que en la inserción se usa la operación
residuo para hacer este cálculo. El interés de esta función es obtener el valor de la
cola por lo que en caso de no haber elementos en la cola se regresa un valor de
default.
3.3.2 Tiempo de llegada al siguiente cruce En esta sección se presenta el algoritmo que se diseñó para el manejo del tiempo
de llegada de los autos a los cruces, tomando en cuenta el retraso de los autos.
El tiempo de llegada de un auto al cruce depende del estado intermedio Interk
donde se ubique, del estado del cruce k a donde quiere llegar, y el tamaño de la cola.
Se debe tomar en cuenta el decremento, que pudiera existir en la cola, durante el ciclo
de simulación. El decremento de la cola se produce sólo cuando el ciclo de semáforo
esta en “siga”.

- 79 -
La primera parte del algoritmo es la verificación del tiempo del ciclo en verde
durante el intervalo de simulación t0 y t1. La Figura 11 muestra un diagrama de los
posibles escenarios que se pueden presentar, son cuatro los casos.
Figura 11. Posición del intervalo de simulación dentro del ciclo de semáforo
La razón para encontrar éste tiempo, del ciclo en verde durante el intervalo de
simulación t0 y t1, es: determinar el tiempo en el que los autos pueden pasar por el
cruce. Es claro que si el interva lo cae dentro del caso c, no van a pasar los carros por
el cruce así que el tiempo de paso de autos TFS es cero. Si se cae dentro del caso d,
quiere decir que los autos pasan durante todo el tiempo que contemple el intervalo.
Cuando el inicio del intervalo t0 es dentro del ciclo en rojo y termina el intervalo t1 en
el ciclo en verde, caso a, el tiempo a considerar se mide entre el inicio del ciclo en
verde y el fin del intervalo t1. Finalmente, el caso de que el intervalo comience dentro
del ciclo en verde y termine dentro del ciclo en rojo, caso b, el tiempo a considerar se
mide entre el inicio del intervalo t0 y el inicio del ciclo en rojo.
Una vez obtenido el valor del tiempo en que los autos pueden pasar por el cruce,
se calcula cuantos autos van a pasar. Es necesario introducir un nuevo término PPC
que indica el tiempo promedio que tarda en pasar un carro por el cruce. Con una
división, entre el tiempo en que pueden pasar los carros y el promedio que tarda un
a) c)
b) d)
[t0, t1]
Verde Rojo Verde
[t0, t1]
Verde Rojo Verde
[t0, t1]
Verde Rojo Verde
[t0, t1]
Verde Rojo Verde

- 80 -
carro en pasar por el cruce, se obtiene el número de autos que van a dejar el cruce
dentro del intervalo y la cola se va a reducir tanto como sea posible.
Después, se calcula la distancia que debe recorrer un auto, que se encuentra en el
estado intermedio, para llegar a la cola del cruce. El tamaño de la cola del cruce es
conocido, el tamaño de las calles y el tamaño promedio de los autos, con estos datos
se puede obtener la distancia que deben recorrer los carros, que resulta de la resta del
valor del tamaño de la calle menos la distancia que ocupan los autos de la cola.
El paso final es calcular el tiempo en que el auto va a recorrer la distancia, el
tiempo de retraso. La velocidad del auto es conocida, se considera la velocidad
promedio de los carros que circulan por esa calle, y con la formula clásica de
distancia sobre velocidad se encuentra el tiempo de recorrido.
El algoritmo creado es el siguiente:
1. Calcular el número de autos que van a dejar la cola en el intervalo 1.1 Determinar el tiempo que va a funcionar el semáforo TFS dentro del intervalo
1.1.1 Si el intervalo de simulación cae totalmente dentro del ciclo en verde. TFS = t1-t0
1.1.2 Si el intervalo de simulación empieza dentro del ciclo en rojo y termina dentro del ciclo en verde.
TFS = t1-ICV, donde ICV es el inicio del ciclo en verde del semáforo 1.1.3 Si el intervalo de simulación empieza en el ciclo en verde y termina dentro
del ciclo en rojo. TFS = ICR-t0, donde ICR es el inicio del ciclo en rojo del semáforo 1.1.4 Si el intervalo de simulación no cae dentro del ciclo en verde el valor es
cero. TFS = 0.0
1.2 Determinar cuántos carros pasan CP en el tiempo TFS CP = TFS/PPC, donde PPC es el paso de carros en el cruce. 1.3 El tamaño actual de la cola TAC es decrementado en CP quedando el tamaño de la cola
TCO. TCO = TAC – CP
2. Determinar cuál es la distancia que hay que recorrer hacia la cola, tomando en cuenta el tamaño que ocupe.
2.1 Tomando en cuenta el tamaño de la calle TCA y el tamaño del auto TAU se obtiene la distancia a recorrer DR
DR = TCA – (TAU * TCO) 3. El tiempo de llegada TLL se calcula usando la velocidad promedio del auto VA TLL = VA / DR

- 81 -
Con este algoritmo y el manejo de colas es posible hacer una representación del
tiempo que demoran los autos en llegar a cada cruce. Las condiciones de tráfico que
existen al momento de hacer el cálculo son tomadas en cuenta y las distancias que
deben recorrer los carros. También, se considera el tiempo en que los autos entran al
estado intermedio ya que para poder sacar un carro del estado intermedio es necesario
que cumpla con el tiempo de llegada al cruce, ver sección 3.4.1.
3. 4 Modelo con retraso y control de semáforos Los dos modelos anteriormente presentados contienen el manejo de los semáforos
con valores que no son modificados durante la simulación. En este apartado se
presenta el algoritmo diseñado para el control de los semáforos. Los tiempos de los
ciclos de los semáforos se ajustan basados en los tiempos mínimos y máximos de los
ciclos en verde y rojo de los semáforos. En la sección 1.8 se explicó que los ciclos de
semáforo deben tener valores mínimos y máximos para las fases de semáforo en color
verde y rojo.
El valor del ciclo en verde es establecido al principio y corresponde al tiempo
mínimo recomendado para el cruce. Los valores de los ciclos en verde de todos los
cruces se almacenan en el vector VV. El tiempo extra que se puede agregar al ciclo en
verde es almacenado en el vector VE, para cada cruce puede haber un valor extra
diferente.
Tomando en cuenta que la simulación ocurre en intervalos de simulación que van
de t0 a t1, es durante éste tiempo que se va a examinar si es necesario incrementar el
ciclo en verde del cruce. La rutina funciona dentro de un ciclo de semáforo en verde,
es decir, si el ciclo de semáforo esta en rojo no hay verde que incrementar. Los carros

- 82 -
que están en la cola, así como los que están en el estado intermedio deben ser
considerados para el incremento del ciclo, si no hay carros, el ciclo debe terminar.
En el caso de que haya autos, se calcula el tiempo necesario para que pasen por el
cruce, hay que tomar en cuenta sólo los carros que pasen por el cruce dentro del
intervalo de simulación. El tiempo necesario para el paso de los carros es calculado
con las ecuaciones ya utilizadas, para el cálculo del paso de carros a través de un
cruce y el cálculo del tiempo de llegada al cruce, usando estas formulas se determina
el tiempo extra necesario para despachar los carros.
Debido a que el cálculo del tiempo extra toma en cuenta el intervalo de
simulación, es posible que para el siguiente intervalo de simulación sea necesario
incrementar una vez más el ciclo en verde. Como ejemplo del funcionamiento del
algoritmo, supongamos que el ciclo en verde ha terminado en el segundo 20 de la
simulación. Además, que tenemos la opción de incrementar el ciclo en 10 segundos.
Asumiendo que nos encontramos en el intervalo de simulación entre los segundos 20
y 25, donde el ciclo en verde ya terminó. También, suponemos que los carros que
pueden pasar por el cruce requieren de 5 segundos por lo que el tiempo del ciclo en
verde crece hasta los 25 segundos y el valor extra se convierte en 5. Durante el
siguiente intervalo de simulación que va de los segundos 25 a 30, suponiendo que el
incremento es de 5 segundos por cada intervalo, el ciclo en verde ha concluido. Una
vez más es necesario calcular si es preciso incrementar el ciclo, si hay carros que van
a pasar se incrementa el ciclo, en caso contrario se pone el semáforo en su fase roja y
termina el algoritmo.

- 83 -
Los vectores que almacenan los valores de los ciclos en verde y los extras tienen la
siguiente notación:
• Vector de valores originales de los ciclos en verde VV[1 … k].
• Vector de valores extras para los ciclos en verde VE[1 … k].
• Tiempo de simulación del intervalo TS.
El algoritmo es el siguiente:
El ciclo checa desde i = 1 hasta k
1 Si ya se cumplió el tiempo del ciclo en verde en el cruce i VV(i)=TS 1.1. Si hay tiempo extra VE(i)<>0
1.1.1.1.Si hay carros en el cruce numero de carros(i) <> 0 1.1.1.1.1. Calcular el tiempo de paso TP = numero de carros (i)*tiempo promedio de paso (i) 1.1.1.1.2. Agregar el tiempo extra disponible para dar paso a los
coches Si (VE(i)>=TP)
VE(i)= VE(i)-TP y VV(i)= VV(i)+TP Si no VV(i)= VV(i)+ VE(i) y VE(i)= 0
1.1.1.2.No hay carros en el cruce ni en camino ir a 1.2. 1.2. Terminar ciclo en verde
Con éste método para manejar semáforos se va a lograr una mejora en el flujo de
tráfico, logrando una reducción en la densidad de las calles, lo que implica un flujo
mayor.
En este capítulo se ha descrito la formulación de un nuevo modelo de tráfico
heurístico, con tres variantes. La abstracción de l modelo es la misma, la diferencia
radica en los elementos tomados en cuanta para la implementación del modelo. En el
siguiente capítulo se van a mostrar los resultados que se encontraron al aplicar el
modelo a un grupo de calles. También, se va a presentar la comparación de los
resultados con los datos de la muestra para la validación del modelo.

- 84 -
Capítulo 4 Resultados
Dentro de este capítulo se van a presentar los resultados obtenidos de la
simulación de los modelos. Los ejemplos aquí expuestos asumen que el modelo es
valido, la demostración de la validez del modelo será expuesta en primera instancia.
Después, se consideran condiciones de las calles observadas en la muestra, como son:
los tiempos promedio de paso de los autos por el cruce, los tamaños de las calles, las
velocidades promedio, los ciclos de semáforo. Usando estos datos se simularon
diferentes condiciones de tráfico para analizar las ventajas y desventajas del uso del
modelo bajo diferentes condiciones.
4.1 Validación del modelo
La validación de este modelo se efectuó por medio de la simulación usando
datos experimentales tomados de una muestra que realicé en la ciudad de Puebla.
La muestra que se presenta en el apéndice B sirvió para poder validar el modelo.
Dado que el modelo considera un carril, la muestra tomada en la avenida Juárez
dentro de las intersecciones con las calles 29 sur, 25 sur y 13 sur fue tomada sólo
observando el comportamiento de un carril. La muestra tomada en las calles del
Boulevard 5 de mayo y la 14 oriente consideran 3 carriles, no obstante se puede
usar la información de cada carril de forma independiente y hacer el comparativo
con lo presentado por el modelo.

- 85 -
La condición estudiada y comparada es la formación de las colas en los cruces.
A continuación se presenta una tabla donde se indica el error encontrado entre los
datos de la muestra y los generados por el simulador.
Calle Valor muestra
Modelo sin retraso
Error Modelo con retraso
Error
Carril 1 del Boulevard 5 de
mayo
5 6 1 7 2
Carril 2 del Boulevard 5 de
mayo
7 6 1 6 1
Carril 3 del Boulevard 5 de
mayo
5 6 1 7 2
Carril 1 de la 14 oriente
8 8 0 9 1
Carril 2 de la 14 oriente
9 8 1 9 0
Carril 3 de la 14 oriente
9 10 1 10 1
Avenida Juárez y 29 sur
9 8 1 9 0
Avenida Juárez y 25 sur
8 8 0 10 2
Avenida Juárez y 13 sur
6 6 0 6 0
Tabla 5. Valores de validación del modelo
En la Tabla 5, los valores comparados son los tamaños promedio redondeados de
las colas. Se puede apreciar que la diferencia, en la mayoría de los casos, es de un
solo carro. El peor de los casos muestra una diferencia de 2 carros entre los valores de
la muestra y los resultados del simulador por lo que la simulación del modelo nos
permite decir que es valido para analizar condiciones de tráfico.

- 86 -
4.2 Resultados del modelo sin retraso
Con el modelo sin retraso se simuló la modificación del ciclo de los semáforos de
los cruces que tiene la Avenida Juárez y las calles 29 sur y 25 sur. Se encontró una
disminución del tamaño de las colas.
La Figura 12 presenta los datos obtenidos para el primer y segundo cruce, la parte
superior de las gráficas son histogramas que presentan el tamaño de las colas
generados por el simulador y la parte inferior son histogramas que presentan el
tamaño de las colas con datos obtenidos de la muestra. El eje x representa el tamaño
de las colas y el eje y representa el número de repeticiones que hubo de ese tamaño de
cola.
Cruce 1 Cruce 2
Figura 12. Resultados de la simulación del modelo
Se aprecia que el tamaño de las colas generadas con el simulador en algunos casos
son menores, esto fue posible modificando los ciclos de semáforo bajo la suposición
de que sincronizados los semáforos el flujo mejoraría.
Datos muestra Datos muestra

- 87 -
4.3 Resultados del modelo con retraso y manejo de semáforos
El modelo simple tiene limitaciones las cuales son: el manejo para el control de
semáforos y la falta de los tiempos de retraso. El problema radica que las calles se
encuentran vacías en condiciones de tráfico normal o menor, y el paso instantáneo de
los carros de los estados intermedios a las colas genera una diferencia notable con la
realidad. Es necesario introducir el tiempo de retraso.
El modelo mejorado presenta varias características extras al modelo simple, estas
son:
• El cálculo del tiempo de retraso. Involucró la creación de una estructura de
datos para su manejo.
• Manejo de tiempos de los ciclos de semáforos para adecuarlos al tráfico y
mejorar el flujo.
• Generación de diferentes categorías de tráfico, éstas son:
o Congestionado. Indica una ocupación que va del 80% al 100% de las
calles.
o Pesado. Indica una ocupación que va del 60% al 80% de las calles.
o Normal. Indica una ocupación que va del 40% al 60% de las calles.
o Ligero. Indica una ocupación que va del 20% al 40% de las calles.
o Muy ligero. Indica una ocupación que va del 0% al 20% de las calles.
Una vez comprobado el modelo se probaron, bajo las mismas condiciones de
tráfico, los tres modelos: el modelo sin retraso (SR), el modelo con retraso (CR) y el
modelo con retraso y control de semáforos (CRS).

- 88 -
Para considerar válidos los datos obtenidos a través de las simulaciones, se
hicieron el número suficiente de iteraciones para que la diferencia entre el promedio
de la iteración anterior y la actual fuera menor al 1%. Las iteraciones necesarias para
la convergencia de los modelos, un error menor al 1%, se muestran en la Tabla 8. Se
puede ver que el máximo número de iteraciones necesarias fue de 76, un número
pequeño. De esta forma, se logró que las pruebas se efectuaran bajo las mismas
condiciones de tráfico
El modelo SR puede ser considerado como un caso particular del modelo CR, con
la condición que el retraso sea considerado cero. En uno de los resultados del
simulador se muestra el número de carros que entran al simulador y las salidas que
hay de él; ver Tabla 6.
También, las salidas son muy parecidas excepto en el modelo CRS debido a que el
semáforo permanece más tiempo en verde hay un número mayor de salidas. No
obstante, se aprecia una disminución en las salidas del modelo CRS, del tipo de
tráfico normal y ligero, con respecto al modelo CR que parece contrariar la intención
de sincronizar los semáforos para mejorar las salidas. Sin embargo, hay que notar que
las entradas son menos y la diferencia es poco significativa, sólo un carro. Estos datos
se presentan en la Tabla 7, el tiempo promedio que demoró un auto en atravesar
todas las calles.
No obstante, el interés para comparar los tres modelos se hace para analizar una
condición especial, el modelo SR y CR presentan datos muy similares para las
condiciones de tráfico congestionado y pesado, coinciden los tiempos de salida; ver
Tabla 7. Esto demuestra que bajo condiciones de tráfico congestionado y pesado los
resultados tomando en cuenta el retraso en las calles y no tomándolo es lo mismo. La
diferencia se da en la columna del modelo CRS.

- 89 -
En la Tabla 7 se puede apreciar la mejora en los tiempos obtenidos por el modelo
con retrazo y por lo tanto un flujo de tráfico más eficiente.
Modelo SR Modelo 2 CR Modelo 2 CRS Tipo Entradas Salidas Sin salir Entradas Salidas Sin salir Entradas Salidas Sin salir
Congestionado 270 184 86 270 184 86 270 188 82 Pesado 213 183 30 213 183 30 213 187 26 Normal 172 152 20 172 154 18 170 153 17 Ligero 101 91 10 99 92 7 100 92 8
Muy Ligero 51 46 5 52 47 5 50 46 4
Tabla 6. Datos del paso de carros en los simuladores
Tipo de tráfico Simulador Sin retraso Simulador con retraso Simulador con semáforo Congestionado 10.39 10.45 9.10
Pesado 6.28 6.36 5.04 Normal 3.93 4.14 3.26 Ligero 2.42 3.72 2.02
Muy Ligero 1.45 2.91 2.71
Tabla 7. Tiempo promedio de paso de los carros a través del sistema
Tipo de tráfico Simulador Sin retraso Simulador con retraso Simulador con semáforo Congestionado 12 12 12
Pesado 20 20 7 Normal 10 18 7 Ligero 42 6 8
Muy Ligero 25 76 14
Tabla 8. Iteraciones necesarias para que el simulador convergiera
Además, se muestran los ciclos de semáforos que el simulador ocupó durante la
simulación, estos crecieron. El valor normal de la fase verde para los datos que se
están presentando fue de 43 segundos y nunca alcanzaron el valor máximo de 70
segundos. Este valor es arbitrario y puede ser definido acorde a las necesidades del
usuario.
En la Tabla 9 se observa el ciclo en verde promedio que generó el simulador para
cada tipo de tráfico.

- 90 -
Tipo de tráfico Ciclo de semáforo Congestionado 68
Pesado 65 Normal 61 Ligero 57
Muy Ligero 50
Tabla 9. Ciclos de semáforo propuestos por el simulador Hay que notar que en el tipo de tráfico muy ligero el ciclo no creció
significativamente, sólo 7 segundos. Los resultados muestran que el tiempo de
traslado decrece con este cambio.
La densidad es una variable que representa la ocupación en las calles y el interés
es mantenerla lo más baja posible. Es por eso que se analiza el comportamiento de
esta variable y es comparada en todos los modelos para observar su comportamiento
en el tiempo de simulación.
Un histograma, como el presentado en las Figuras 13 a 17, muestra el número de
repeticiones que hay de los tamaños de las colas. Al medir la ocupación de las calles
en cada intervalo del ciclo de simulación sé está midiendo la densidad de la calle. En
las Figuras 13, 14, 15, 15 y 17 se presentan histogramas de la densidad de una calle
que simboliza la mejora en este valor, en el caso del simulador con semáforos.
Además, se presenta una gráfica comparativa de la densidad a través del tiempo en
cada modelo, que es también de una calle. La última gráfica, de cada Figura,
representa la densidad total que se presenta en los cruces simulados, lo cuales fueron
seis. Se puede ver que el fenómeno de reducción de densidad se da en todas las calles
para el caso de modificación de semáforos.

- 91 -
Simulador Cruce Sin retraso Histograma Densidad
Con retraso Histograma Densidad
Semáforos Histograma Densidad
Densidad del cruce. Azul SR. Rojo CR. Amarrillo CRS.
Densidad de todos los cruces. Azul SR. Rojo CR. Amarrillo CRS.
Figura 13. Comportamiento de la densidad de tráfico congestionado
Los histogramas muestran una disminución en la densidad cuando se modifica el
ciclo de los semáforos. La gráfica de la densidad muestra un comportamiento similar
entre los dos modelos CR y SR pero hay una disminución notoria en el modelo CRS.
Cuando se observa un solo cruce no es tan clara la diferencia pero existe.

- 92 -
Simulador Cruce Sin retraso Histograma Densidad
Con retraso Histograma Densidad
Semáforos Histograma Densidad
Densidad del cruce. Azul SR. Rojo CR. Amarrillo CRS.
Densidad de todos los cruces. Azul SR. Rojo CR. Amarrillo CRS.
Figura 14. Comportamiento de la densidad de tráfico pesado
El tráfico pesado muestra resultados similares al congestionado. Los histogramas
muestran una disminución en la densidad cuando se modifica el ciclo de los
semáforos. La gráfica de la densidad muestra un comportamiento similar entre los dos
modelos CR y SR pero hay una disminución notoria en el modelo CRS. Cuando se
observa un solo cruce no es tan clara la diferencia pero existe.

- 93 -
Simulador Cruce Sin retraso Histograma Densidad
Con retraso Histograma Densidad
Semáforos Histograma Densidad
Densidad del cruce. Azul SR. Rojo CR. Amarrillo CRS.
Densidad de todos los cruces. Azul SR. Rojo CR. Amarrillo CRS.
Figura 15. Comportamiento de la densidad de tráfico normal
Para el tráfico normal es más notorio que los histogramas muestran una
disminución en la densidad cuando se modifica el ciclo de los semáforos. La gráfica
de la densidad muestra un comportamiento similar entre al de los dos tipos de tráfico
anteriores.

- 94 -
Simulador Cruce Sin retraso Histograma Densidad
Con retraso Histograma Densidad
Semáforos Histograma Densidad
Densidad del cruce. Azul SR. Rojo CR. Amarrillo CRS.
Densidad de todos los cruces. Azul SR. Rojo CR. Amarrillo CRS.
Figura 16. Comportamiento de la densidad de tráfico ligero
Para éste tipo de tráfico la gráfica de la densidad muestra una mejora entre los
tráficos CR y CRS, que es de esperarse por el manejo del ciclo de los semáforos. El
modelo SR presenta una densidad menor debido a que las calles se encuentran más
libres y al no tomar en cuenta el tiempo de retraso las calles se vacían muy rápido.

- 95 -
Simulador Cruce Sin retraso Histograma Densidad
Con retraso Histograma Densidad
Semáforos Histograma Densidad
Densidad del cruce. Azul SR. Rojo CR. Amarrillo CRS.
Densidad de todos los cruces. Azul SR. Rojo CR. Amarrillo CRS.
Figura 17. Comportamiento de la densidad de tráfico muy ligero
Para el tráfico muy ligero la densidad muestra un comportamiento donde los
modelos presentan variantes. No obstante cerca del final de la simulación la densidad
se comportó similar en ellos.

- 96 -
Conclusiones
Actualmente, los avances tecnológicos están contribuyendo a la solución de
problemas que en otro tiempo eran imposibles de resolver. El desarrollo de las
computadoras y los sistemas de software permiten el manejo de grandes volúmenes
de información y su procesamiento en tiempos eficientes. Los dispositivos cada vez
son más sofisticados y de menor tamaño; además, su costo es cada vez más bajo. Esto
hace posible la implementación de sistemas complejos que contribuyen a tener una
mejor calidad de vida para las personas ya que facilitan las actividades cotidianas de
la gente.
Para mi la mejor forma de resolver un problema es mediante la formulación de
modelos. Pienso que se tiene control casi total sobre las condiciones que se presentan
y hay un camino hacia donde ir. Se define perfectamente la problemática, se establece
la forma en que se plantea resolver, se comprueba la táctica y si la prueba no es
satisfactoria se regresa al punto en el que se produjo la falla. Lo más importante es
que se tiene claro a dónde se quiere llegar y cómo se va a llegar ahí, donde la forma
de cómo llegar puede variar tanto como uno lo quiera, depende del diseñador del
modelo la manera de crearlo.
Junto con los modelos, hay una herramienta muy valiosa que ayuda a la
verificación de éstos que es la simulación. El proceso de la información es rápido con
el uso de las computadoras y es posible probar en reiteradas ocasiones y bajo
diferentes circunstancias los modelos.
El uso de la simulación permitió verificar que las colas observadas en los cruces
coinciden, dentro de márgenes razonables, con las que se generan por medio de la

- 97 -
simulación del modelo. Con esta información fue posible modificar los ciclos de los
semáforos y mejorar el número de autos que había a la salida del último cruce, lo que
trae como consecuencia una mejora en el flujo vehicular.
La aportación de un nuevo método que sirve para desarrollar modelos, en
especial los de tráfico, los modelos hechos hasta el momento encajan perfectamente
dentro del método propuesto y el diseño del modelo que se desarrolló se baso en la
misma metodología. Esta es una herramienta de trabajo que puede facilitar el camino
a la concepción de un problema y su solución siguiendo un proceso bien definido.
También, dentro del trabajo de campo, las muestras obtenidas son representativas
de las condiciones vehiculares dadas en los horarios en que fueron tomadas las
pruebas. Estas pueden variar de acuerdo al horario. Una alternativa que se propone
para medir la condición del tráfico es disponer de algún tipo de instrumentación que
permita alimentar en tiempo real al simulador para realizar análisis con mayor
precisión. Sin embargo, instrumentaciones del tipo anterior son en general muy
costosas pero el beneficio que se podría obtener lo puede justificar.
Los resultados que presenta el modelo contienen errores mínimos en los
comparativos entre la muestra y los datos del simulador, sólo una diferencia de un
carro o dos en el caso extremo. Fue posible analizar diferentes condiciones de tráfico
y mejorar el flujo modificando el ciclo de los semáforos. Se alcanzó, el objetivo
propuesto al inicio del trabajo.
Trabajo Fututo Los trabajos futuros para robustecer el modelo son varios y el trabajo realizado
hasta hora puede servir de punto de partida para hacerlo.

- 98 -
El manejo de más carriles es algo que debe ser tomado en cuenta, dentro de la tesis
se analizaron dos calles, la 14 sur y el boulevard 5 de mayo, con tres carriles cada
una. Los resultados de simulador permitieron ver que el comportamiento de cada
carril puede ser representado, la extensión necesaria es lograr el análisis de más de un
carril a la vez.
Dentro del modelo no se considera que entre calle y calle salgan o entren autos. La
entrada de autos al sistema puede ser representada con generadores de entradas para
cada cruce. La salida de autos puede hacerse usando una función de probabilidad para
cada cruce y determinar si el carro sigue al frente o toma otra dirección.
Otras condiciones especiales como accidentes, topes, baches, pueden ser
presentadas usando una disminución en la velocidad de los autos. La idea es dividir la
calle en dos partes donde la línea divisoria es la contingencia que reduce el paso de
los autos. Considerar que el imprevisto puede ser representado como un cruce y que
en lugar de una calle se tienen dos. El cruce nuevo, tendría un ciclo en verde siempre,
el tráfico no se detiene por completo sólo disminuye su velocidad, los autos pasan a
cierta velocidad a la otra parte de la calle.
Las soluciones pensadas requieren de muestrear las condiciones de tráfico
especiales, los accidentes resultaría complicado de medir las velocidades. Una vez
levantada la muestra se deberá probar el modelo y demostrar que las hipótesis son
correctas.

- 99 -
Apéndice A
Cálculo de velocidades y posición Código para calcular la posición y la velocidad de los autos a partir de la ecuación
)1()1( 02
tte
uetx
ββ
ββα
βα −− −+−−
== con una aceleración y un tiempo dado.
Usando el código en MATLAB para este cálculo %Determina la posición de function [velocidad , distancia] = calculaVelPos(alpha,beta,tiempo,u) u0=convierte_kph_mps(u); u=(alpha/beta)*(1-exp(-beta*tiempo))+(u0*exp(-beta*tiempo)); velocidad=convierte_mps_kph(u) distancia= ( (alpha/beta)*tiempo ) - ( (alpha/(beta*beta)) * (1 - exp(-beta*tiempo)) ) +( (u0/beta)* (1-exp(-beta*tiempo)))
%conversion de KPH a MPS function u0=convierte_kph_mps(u) u0=u*0.27;
%conversion de MPS a KPH function u0=convierte_mps_kph(u) u0=u/0.27;
Código para el modelo de Greenberg function [regresion, velocidad, densidad, flujomax] = regresion1 (xs,ys) SUMAxPORy=sum(xs .* ys) n=size(xs) SUMAxALA2=sum(xs.^2) SUMAy=sum(ys) SUMAx=sum(xs) k=SUMAx^2 b=( (SUMAxPORy) - ( (1/n(1,2)) * (SUMAx) * (SUMAy) ) ) / ( SUMAxALA2 - ( (1/n(1,2)) * (SUMAx^2) ) ) a= ( (1/n(1,2)) * (SUMAy) ) - ( (b/n(1,2)) * (SUMAx) )
%media de valores de y

- 100 -
media=mean(ys)
%llenado del vector de valores Y=a+bx
for i=1:n(1,2) Ys(1,i)=funcion(a,b,xs(1,i)); end; SUMYsDIFmedia=sum( (Ys-media).^2 ) SUMysDIFmedia=sum( (ys-media).^2 ) R=SUMYsDIFmedia/SUMysDIFmedia regresion= R;
%valores para el modelo greenshields
velocidad=-b densidadmax=exp(a/(-b)) densidad=densidadmax*(exp(-1)) flujomax=densidad*(-b) function [valory] = funcion (a,b,x) valory=a+(b*x);
Código para el modelo de Greenshield function [regresion, velocidad, densidad, flujomax] = regresion (xs,ys) SUMAxPORy=sum(xs .* ys) n=size(xs) SUMAxALA2=sum(xs.^2) SUMAy=sum(ys) SUMAx=sum(xs) k=SUMAx^2 b=( (SUMAxPORy) - ( (1/n(1,2)) * (SUMAx) * (SUMAy) ) ) / ( SUMAxALA2 - ( (1/n(1,2)) * (SUMAx^2) ) ) a= ( (1/n(1,2)) * (SUMAy) ) - ( (b/n(1,2)) * (SUMAx) )
%media de valores de y
media=mean(ys)
%llenado del vector de valores Y=a+bx
for i=1:n(1,2) Ys(1,i)=funcion(a,b,xs(1,i)); end; SUMYsDIFmedia=sum( (Ys-media).^2 ) SUMysDIFmedia=sum( (ys-media).^2 ) R=SUMYsDIFmedia/SUMysDIFmedia regresion= R;
%valores para el modelo greenshields
velocidad=a/2 densidad=a/(-2*b) flujomax=a^2/(-4*b) function [valory] = funcion (a,b,x) valory=a+(b*x);

- 101 -
Ejemplo del libro de [Garber et Hoel]
Densidad Velocidad Ln Densidad
20
27
35
44
52
58
60
64
70
75
82
90
100
115
53.2000
48.1000
44.8000
40.1000
37.3000
35.2000
34.1000
27.2000
20.4000
17.5000
14.6000
13.1000
11.2000
8.0000
2.9900
3.2900
3.5500
3.7800
3.9500
4.0600
4.0900
4.1500
4.2400
4.3100
4.4000
4.4900
4.6000
4.7400
Obteniendo los resultados siguientes.
Para el modelo Greenberg
R = 0.9196 velocidad = 28.5930 densidadmax = 157.1106 densidad = 57.7978 flujomax = 1.6526e+003 Para el modelo de Greenshield R = 0.9468 velocidad = 31.2779 densidad = 59.2378 flujomax = 1.8528e+003

- 102 -
Pseudo códigos para manejo de colas Las funciones de colas reciben algunos parámetros por referencia, denotado por un
símbolo de &, esto es debido a que los valores se modifican y es necesario guarda r
esta modificación en las variables originales.
ColaVacia (VectroActualColas, n)
Si ( VectorTamActualColas (n) == 0)
return true;
else
return false;
ColaLlena (VectorTamMaxColas, VectorTamActualColas, n)
Si ( VectorTamMaxColas (n) = VectorTamActualColas (n) )
return true;
else
return false;
EntraACola (&cola, VectorTamMaxCola, &VectorPosCola,
&VectorTamActualCola, n, valor)
Si (NO ColaLlena (VectorTamMaxColas, VectorTamActualCola s, n))
/*Incrementar el índice de la cola*/
cola (n) = mod [ cola (n), VectorTamMaxColas(n) ] + 1;
/*Incrementar tamaño de la cola*/
VectorTamActualColas(n) ++;
/*Insertar el nuevo elemento*/
cola(n, VectorPosCola ( n ) ) = valor;

- 103 -
return true;
Sino
return false;
SaleDeCola (&Cola, VectorTamMaxCola, &VectorPosFrente,
&VectorTamActualCola, n, ts)
/*Checa si hay algo en la cola */
Si (ColaVacia (VectorTamActualCola, n) )
/*Valor que indica que no hay nada*/
valor=tiemposimulacion+1;
Sino
/*Elimina el elemento de la cola*/
/*Guarda el valor del frente*/
/*El valor buscado esta en el número de cruce n y el frente de la cola*/
valor = cola( n, VectorPosFrente(n) );
cola ( n, VectorPosFrente(n) ) = 0;
/*Recorre el frente a su siguiente posición*/
VectorPosFrente(n) = mod [ VectorPosFrente(n),
VectorTamColas(n)] + 1 ;
/*Decremento el tamaño de l cola*/
VectorTamActualColas(n)= VectorTamActualColas(n) - 1;
return valor;

- 104 -
Apéndice B
La muestra
La importancia de tener una investigación de campo para tener mayor sensibilidad
sobre el fenómeno fue ratificada al hacer la recolección de los datos que se presentan
en este apartado. Las características del modelo descritas en el capítulo 3, sección 3.1,
requieren de una medición para validar los datos que arroja la simulación por lo que
acudí a diferentes cruces dentro de la ciudad de Puebla para tener un comparativo y
probar el modelo.
Los primeros datos recolectados corresponden al cruce del boulevard 5 de mayo
con la 14 oriente, el día en que se tomo la muestra fue el miércoles 25 de Octubre de
2002 a las 9:30 de la mañana. Sobre el boulevard hay 3 carriles donde circulan todo
tipo de vehículos de transporte. La característica del carril 1 es que lo ocupan, la
mayor parte del tiempo, el transporte público. El tiempo que tarda el ciclo de
semáforo en verde es de 1 minuto y 5 segundos. En las Figuras 18 y 19 las líneas
unidas con figuras romboidales representan el carril 1, las líneas unidas con figuras
rectangulares el carril 2 y las líneas unidas con figuras triangulares el carril 3.
La Figura 18 muestra el flujo de autos durante el ciclo de semáforo en verde por
cada carril.

- 105 -
Figura 18. Comparativo de flujos en el boulevard 5 de mayo
El carril 1 es ocupado principalmente por transporte público, requiere detenerse
para subir y bajar gente, lo cual genera un flujo bajo. Por otro lado, el carril 2
transporta más autos, situación curiosa ya que el carril 3 es el de alta velocidad y se
esperaba que por él pasaran más autos pero esto no pasó.
La Figura 19 muestra la formación de colas cuando el ciclo de semáforo cambió a
rojo, una de las características que se buscan modelar, además, del flujo y la
densidad. La formación de colas se concentró en el carril central y se dividió de
forma similar en los carriles laterales.
Se observa el fenómeno de la campana de Gauss de una distribución aleatoria que
aparece en cualquier evento de la vida real que involucre la toma de decisiones
casuales [Orozco et Jiménez]. En la formación de colas se observa este fenómeno
donde la mayoría de los conductores prefieren hacer cola al centro de la calle y el
resto se dividen por igual en los carriles laterales.
Carriles del blvd 5 de mayo
0
5
10
15
20
25
30
35
1 2 3 4 5
intervalos
nu
mer
o d
e au
tos
Serie1
Serie2
Serie3

- 106 -
Figura 19. Comparativo de formación de colas en el boulevard 5 de mayo
La Tabla 10 muestra los promedios de autos que pasan por cada carril, en estos
datos se observa el fenómeno de las colas, donde el promedio es igual en los carriles
laterales al carril central, carriles 1 y 3.
Carril Promedio de cola Promedio de autos
1 5.4 12
2 6.6 26.6
3 5.4 22
Tabla 10. Datos promedio de la muestra en el cruce 5 de mayo con 14 oriente
También, la calle 14 oriente esquina con 5 de mayo se muestreó, cuenta con tres
carriles. La circulación por esta calle es de mucho transporte público. El tiempo del
ciclo de semáforo en verde es de 51 segundos.
En las Figuras 20 y 21 las líneas unidas con figuras romboidales representan el
carril 1, las líneas unidas con figuras rectangulares el carril 2 y las líneas unidas con
figuras triangulares el carril 3.
0
2
4
6
8
10
12
1 2 3 4 5
Serie1
Serie2
Serie3

- 107 -
En la Figura 20 se observa que el carril 2 es por el que más autos circulan. El carril
1 es el de menor flujo y esto se debe a que el transporte público se detiene
constantemente y detiene el tráfico en este carril.
Figura 20. Comparativo de flujo de autos en la calle 14 oriente
La Figura 21 muestra los datos de las colas acumuladas durante la fase del ciclo en
rojo de semáforo. Los datos encontrados en este cruce son muy parecidos, hay una
diferencia menor de un carro entre cada carril, por lo que no se puede observar nada
raro excepto que por el carril 3 hay una flujo extra porque hay una entrada de carros
que generan una cola instantánea en este carril.
Figura 21. Comparativo de las colas formadas en la calle 14 oriente
En la Tabla 11 se representan los promedios de autos que pasan por cada carril.
Comparativo del paso de autos en calle 14 ote
05
10
15
2025
1 2 3 4 5
Serie1
Serie2
Serie3
Colas de autos en los carriles de la 14 ote
0
5
10
15
1 2 3 4 5
Serie1
Serie2
Serie3

- 108 -
Carril Promedio de cola Promedio de autos
1 8.4 10.2
2 8.6 15.4
3 8.8 15
Tabla 11. Datos promedio de la muestra en el cruce 14 oriente con 5 de mayo
Parte de la muestra se hizo a lo largo de la avenida Juárez. Los datos corresponden
a tres cruces diferentes ubicados en: la 29 sur, 25 sur y 13 sur. La muestra se tomó
durante los días sábado 28 de Septiembre de 2002 y lunes 30 de septiembre de 2002 a
las 11:00 de la mañana.
La calle que conecta la avenida Juárez con la 29 sur se alimenta del boulevard
Atlixco y además de un cruce que utiliza una rotonda para distribuir el flujo de autos.
El promedio de autos que pasan en ese cruce es de 12 autos y el tiempo que tarda el
semáforo en el “siga” es de 40 segundos. Promedio de la cola es de 8.85 y el tiempo
de desalojo de 2.15 seg.
En el cruce de la 25 sur se observó un comportamiento distinto ya que por
momentos no se generó cola de autos pero después se volvieron a formar. La forma
de las colas no era constante. El promedio de autos que pasan en ese cruce es de 17
autos y el tiempo que tarda el semáforo en su ciclo en verde es de 58 segundos. El
promedio del tamaño de las colas formadas es de 11.28 y el tiempo de desalojo es de
2.09 seg. En esta intersección se dio un caso que considero es ideal, cola pequeña de
dos o tres autos y flujo grande de más de 10 autos. Sin embargo, se dio el caso
opuesto, cola grande con más de 11 autos y flujo pequeño con menos de 6 autos. La
razón que doy a esta situación es el desfase que ocurre entre el semáforo anterior y el
que opera en el cruce, los tiempos en que opera el “siga” es diferente debido a ello
hay momentos con un flujo continuo y momentos donde se genera la cola.

- 109 -
El cruce de la 13 sur y la avenida Juárez necesariamente los autos toman la 13 sur
para continuar su recorrido. La 13 sur es una calle por la que transita transporte
público. Los promedios de esta calle se ajustaron a la realidad observada. Sólo existió
un caso extremo con una cola de 12 autos pero su tiempo de desocupación está cerca
del valor promedio. Esta calle mantiene un tiempo de vaciado que es similar a los
otros cruces estudiados sin grandes diferencias. El caso extremo fue un tiempo
promedio de paso de autos de 3.04, que se presentó porque un joven lavador de
parabrisas no dejaba avanzar la cola.
El promedio de autos que pasan en el cruce de la 13 sur y la avenida Juárez es de
16 autos y el tiempo que tarda el semáforo en “siga” es de 45 segundos. El promedio
del tamaño de la cola es de 6.4 y el tiempo que tardan en pasar los autos es de 2.36
seg. En esta intersección, en general, hay una cola pequeña de cinco o seis autos y
flujo grande de más de 10 autos.
Con estos datos recolectados y la experiencia observada en las calles me fue
posible idear una representación del tráfico en la ciudad y comenzar el proceso de
estudio de mejorarlo. Además, ayudó a determinar la importancia de modelar
acciones individuales de los carros o considerar comportamiento s promedios de estos.
Las detenciones de carros, provocadas por diferentes causas, no generaron que la
muestra presentara diferencias significativas en las salidas.
La muestra tomada contiene los tamaños de las colas que es lo que se busca
comparar con el modelo. También, se obtuvieron densidades de las calles, flujos,
velocidades de los carros, etcétera. En éste apéndice solo se colocaron algunos datos
relevantes de la muestra.

- 110 -
3 Índice de figuras
Nombre
Página
Figura 1. Relación entre la velocidad y la densidad 6 Figura 2. Relación entre la densidad y el flujo de tráfico 8 Figura 3. Medidas de cinemática y ondas de choque relacionadas con las curvas de flujo y densidad
23
Figura 4. Experimento del modelo de tráfico a escala 43 Figura 5. El proceso de modelos mentales es iterativo 47 Figura 6. Etapas del proceso de construcción de un modelo 51 Figura 7. Niveles de detalle de los modelos 54 Figura 8. Dinámica del proceso de elaboración de un modelo 58 Figura 9. Modelo de tráfico 71 Figura 10. Diagrama para el cálculo del tiempo de retraso 73 Figura 11. Posición del intervalo de simulación dentro del ciclo de semáforo
79
Figura 12. Resultados de la simulación del modelo 86 Figura 13. Comportamiento de la densidad de tráfico congestionado
91
Figura 14. Comportamiento de la densidad de tráfico pesado 92 Figura 15. Comportamiento de la densidad de tráfico normal 93 Figura 16. Comportamiento de la densidad de tráfico ligero 94 Figura 17. Comportamiento de la densidad de tráfico muy ligero
95
Figura 18. Comparativo de flujos en el boulevard 5 de mayo 105 Figura 19. Comparativo de formación de colas en el boulevard 5 de mayo
106
Figura 20. Comparativo de flujo de autos en la calle 14 oriente 107 Figura 21. Comparativo de las colas formadas en la calle 14 oriente
107
4

- 111 -
5 6 Índice de tablas
Nombre
Página
Tabla 1. Muestra de velocidades y densidades en la Avenida Juárez
12
Tabla 2. Pasos del proceso de modelado 46 Tabla 3. Plan del proceso de modelado matemático 49 Tabla 4. Descripción de las clasificaciones hechas por Hoogendoorn y Bovy
55
Tabla 5. Valores de validación del modelo 85 Tabla 6. Datos del paso de carros en los simuladores 89 Tabla 7. Tiempo promedio de paso de los carros a través del sistema
89
Tabla 8. Iteraciones necesarias para que el simulador convergiera
89
Tabla 9. Ciclos de semáforo propuestos por el simulador 90 Tabla 10. Datos promedio de la muestra en el cruce 5 de mayo con 14 oriente
106
Tabla 11. Datos promedio de la muestra en el cruce 14 oriente con 5 de mayo
108

- 112 -
Bibliografía
[Alger et al.] Algers, S., E. Bernauer, M. Boero, L. Breheret, C. Di Taranto, M. Dougherty, K. Fox and J.F. Gabard, “Review of Micro-Simulation Models, Review
Report os the SMARTEST project; deliverable 3”, 1997. [Bender] Edward A. Bender, “An Introduction to Mathematical Modeling”, Dover Publications, Inc. Mineola New York, 2000. [Bottom et al.] J. Bo ttom, M. Ben-Active, M. Bierlaire , I. Chabini, H. Koutsopoulos and Q. Yang, “Investigation of Route Guidance Generation Issues by Simulation with
DynaMIT ”, International Symposium on Transportation and Traffic Theory Pergamon 1999. [Esser et al.] Esse, J., L. Neubert, J. Wahle, M. Schreckenberg, “Microscopic online Simulations of Urban Traffic“, Proceedings of the 14th International Symposium of Transportation and Traffic Theory, Jerusalem, 517-534, 1999. [Forbes et al.] Forbes, T. w., H. j. Zagorski, E.L. Holshouser, W.A. Deterline, “Measurement of Driver Reactions to Tunnel Conditions“, Highway Research Board, Proceedings 37, 345-357, 1958. [Fowkes et Mahony] Neville D. Fowkes, John J. Mahony, “An Introduction to
Mathematical Modelling”, John Wiley & Sons, 1994. [Garber et Hoel] Nicholas J. Garber, Lester A. Hoel, “Traffic and Highway
Engineering”, Second Edition, , PWS Publishing Company, 1997. [Graham] Ronald Graham, Oren Patashnik, Donald Ervin Knuth, “Concrete
Mathematics: a formation for computer science”, Addison Wesley, Second Edition, 1969. [Haberman] Richard Haberman, “Mathematical Models. Mechanical Vibrations,
Population Dynamics, Traffic Flow ”, SIAM, 1998. [Helbing] D. Helbing, “Improved fluid dynamic model for vehicular traffic”, Phys.
Rev. E, 51 (1995), pp. 31-64

- 113 -
[Helbing] D. Helbing, “Modeling Multi-Lane Traffic Flow with Queuing Effects”, Physica A 242, 175-194, 1997. [Hoogendoorn] Serge P. Hoogendoorn, “Multiclass Continuum Modeling of
Multiclass Traffic Flow”, PhD. Thesis T99/5, Trail Thesis Series, Delft University Press, 1999. [Hoogendoorn et Bovy] Serge P. Hoogendoorn, Piet H. L. Bovy, “State of the art of
Vehicular Traffic Flow Modeling”, 2001. [Howard] Kenneth R. Howard, “Unjamming traffic with computers”, Scientific American, October 1997. [Jepsen] M. Jepsen, “On the Speed-Flow Relationships in Road Traffic: A model of
Driver Behavior”, Proceedings of the third International Symposium on highway Capacity, 297-319, Copenhagen, Denmark, 1998. [Kelton et al.] W. David Kelton, Randall P. Sadowski, Deborah A. Sadowski, “Simulation with Arena”, Second Edition, McGraw-Hill, 2002. [Khoshnevis] B. Khoshnevis, “Discrete Systems Simulation”, McGraw-Hill, 1994 [Klar et Wegener] Axel Klar, Raimund Wegener, “A hierarchy of models for
multilane vehicular traffic I: modeling”, SIAM J. Appl. Math., Vol. 99, No. 3, pp. 983-1001, 1999. [Leutzbach] W. Leutzbach, “An introduction to the theory of traffic-flow”, Springer-Verlag, Berlin, 1988. [Lighthill et Whitham] M. J. Lighthill, J. B. Whitham, “On kinetic waves. I: Flow
movement in long rivers. II: A theory of traffic flow on long crowded roads”, Proc. Royal Soc. London Ser. A, 229 (1955), pp. 281-345. [Nagel et al.] K. Nagel, P. Simon, M. Rickert, J. Esser, “Iterated Transportation Simulation for Dallas and Portland“, 1999. [Orozco et Jiménez] Francisco J. Orozco Ochoa, Rafael Jiménez Salazar,”El nuevo paradigma de la competitividad”, Panorama, 1999. [Paveri-Fontana] S. L. Paveri-Fontana, “On Boltzmann-Like treatments for traffic
flow: a critical review of the basic model and an alternative proposal for dilute traffic analysis”, Transportation Research B 9, 225-235, 1975. [Payne] H. J. Payne, “Models for freeway Traffic and Control”, 1971.

- 114 -
[Pignataro] L.J. Pignataro, “Traffic Engineering – Theory and Practise”, Prentice-Hall, Inc., Englewood Cliffs, N.J., 1973. [Pipes] L. A. Pipes, “An Operational Analysis of Traffic Dynamics”, journal of Applied Physics, vol. 24, no. 1, 274-287, 1953. [Prigogine et Herman] I. Prigogine, R. Herman, “Kinetic theory of Vehicular Traffic“, American Elsevier New York, 1971. [Prigogine] I. Prigogine, “A Boltzmann-like Approach to the Statical Theory of traffic
Flow”, 1961. [Richards] P. I. Richards, “Shock waves on a highway”, Oper. Res., 4 (1956), pp. 42-51. [Roberts et al.] Nancy Roberts, David Andersen, Ralph Deal, Michael Garet, William Shaffer, “Introduction to Computer Simulation, a system dynamics modeling
approach”, Productivity press, 1983. [Sterman] John D. Sterman, “Business Dynamics: Systems Thinking and Modeling for a Complex world”, McGraw-Hill Higher Education, 2000. [Todosiev et Barbosa] E. P. Todosiev, L. C. Barbosa, “A Proponed Model for the Driver-Vehicle System ”, Traffic Engineering 34, 17-20, 1964. [Whitham] G. B. Whitham, “Linear and Nonlinear Waves”, Pure and Applied Math, Wiley-Interscience, New York, 1974. [Wiedemann] R. Wiedemann, “Simulation des StraBenverkehrsflubes”, Technical Report, Institute for traffic Engineering, University of Karlsrühe , 1978.

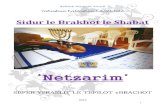








![Modelo Para Diplomas[1]](https://static.fdokumen.com/doc/165x107/55cf9a47550346d033a115a6/modelo-para-diplomas1.jpg)








