Laporan Lengkap Motor Ac
48
1 BAB I PENDAHULUAN 1.1 Latar Belakang Motor arus bolak-balik (motor AC) adalah suatu mesin yang berfungsi untuk mengubah energi listrik arus bolak- balik menjadi energi gerak atau energi mekanik berupa putaran rotor. Motor Induksi merupakan motor arus bolak- balik (AC) yang paling luas penggunaannya. Penamaannya berasal dari kenyataan bahwa tegangan dan arus motor ini bukan diperoleh dari sumber tertentu tetapi merupakan tegangan dan arus yang terinduksi sebagai akibat adanya perbedaan relatif antara putaran rotor dengan medan putar stator. Motor induksi banyak diaplikasikan dalam bidang industri dan komersial. Hal ini didukung karena motor induksi mempunyai konstruksi yang kuat dan tahan lama sehingga pemeliharaannya cukup mudah. Disisi lain motor induksi juga merupakan beban yang bersifat induktif dan mempunyai kelemahan dari segi karakteristik kerja motor baik pada saat starting maupun running. Nilai efisiensi, power faktor, dan arus start pada motor ini berubah-ubah sesuai dengan kondisi pembebanan yang diberikan. Oleh karena itu akan dilakukan suatu analisa mengenai pemasangan kapasitor pada motor induksi dimana diharapkan dapat memperbaiki power faktor dan menurunkan konsumsi arus running motor. Salah satu jenis motor arus bolak- balik adalah motor sinkron/serempak tiga phasa. Dikatakan 1
-
Upload
aldhy-dwi-cahyo -
Category
Documents
-
view
70 -
download
0
description
Laporan lengkap praktikum
Transcript of Laporan Lengkap Motor Ac

1
BAB I
PENDAHULUAN
1.1 Latar Belakang
Motor arus bolak-balik (motor AC) adalah suatu mesin yang berfungsi untuk
mengubah energi listrik arus bolak-balik menjadi energi gerak atau energi mekanik
berupa putaran rotor. Motor Induksi merupakan motor arus bolak-balik (AC) yang
paling luas penggunaannya. Penamaannya berasal dari kenyataan bahwa tegangan dan
arus motor ini bukan diperoleh dari sumber tertentu tetapi merupakan tegangan dan
arus yang terinduksi sebagai akibat adanya perbedaan relatif antara putaran rotor
dengan medan putar stator. Motor induksi banyak diaplikasikan dalam bidang industri
dan komersial. Hal ini didukung karena motor induksi mempunyai konstruksi yang
kuat dan tahan lama sehingga pemeliharaannya cukup mudah. Disisi lain motor
induksi juga merupakan beban yang bersifat induktif dan mempunyai kelemahan dari
segi karakteristik kerja motor baik pada saat starting maupun running. Nilai efisiensi,
power faktor, dan arus start pada motor ini berubah-ubah sesuai dengan kondisi
pembebanan yang diberikan. Oleh karena itu akan dilakukan suatu analisa mengenai
pemasangan kapasitor pada motor induksi dimana diharapkan dapat memperbaiki
power faktor dan menurunkan konsumsi arus running motor. Salah satu jenis motor
arus bolak-balik adalah motor sinkron/serempak tiga phasa. Dikatakan motor sinkron
tiga phasa karena motor ini beroperasi pada sumber tegangan tiga phasa. Dan
dikatakan motor sinkron karena putaran medan stator (medan putar) dan putaran rotor
serempak/sinkron. Motor sinkron pada pengoperasiannya tidak dapat melakukan start
awal (self starting), oleh karena itu motor sinkron tiga phasa membutuhkan penggerak
mula (prime mover) untuk memutar medan pada stator sampai pada kecepatan putar
medan putar stator. Pada motor sinkron, perubahan beban tidak mempengaruhi
kecepatan putar motor karena ketika motor masih bekerja maka rotor akan selalu
terikat atau terkopel secara magnetis dengan medan putar dan dipaksa untuk berputar
dengan kecepatan sinkronnya. Karena demikian, motor sinkron biasanya digunakan
pada sistem operasi yang membutuhkan kecepatan konstan dengan beban yang
berubah-ubah. Contohnya Rolling Mills, Mesin Penghancur (Crusher), Pulp Grinders,
Reciprocating Pump dan lain-lain. Dengan demikian kita perlu mempelajari konsep
1

2
dari motor sinkron, dimana motor sinkron ini dapat menjadi suatu pilihan yang tepat
untuk sistem operasi yang membutuhkan kecepatan yang konstan dengan beban yang
berubah-ubah [1].
1.2 Maksud Dan Tujuan
1. Mahasiswa dapat mempelajari prinsip kerja motor sinkron
2. Mahasiswa dapat mengetahui karakteristik motor sinkron
3. Mahasiswa dapat mengetahui komponen-komponen yang terdapat dalam motor AC
2

3
BAB II
LANDASAN TEORI
2.1 Motor Listrik
Motor listrik arus bolak-balik diklasifikasikan dengan dasar prinsip pengoperasian
sebagai motor asinkron (induksi) atau motor sinkron. Motor induksi adalah jenis motor
dimana tidak ada tegangan eksternal yang diberikan pada rotornya, tetapi arus pada stator
menginduksikan tegangan pada celah udara dan pada lilitan rotor untuk menghasilkan arus
rotor dan medan magnet. Medan magnet stator dan rotor kemudian berinteraksi dan
menyebabkan rotor motor berputar. Gambar 2.1 menunjukkan Gambar dari motor induksi.
Gambar 2.1 Motor induksi [ 1]
Motor listrik memiliki 2 komponen listrik utama yaitu:
1. Rotor, motor induksi menggunakan 2 jenis rotor:
a) Rotor sangkar tupai, terdiri dari batang penghantar tebal yang dilekatkan
dalam petak-petak slot paralel. Batang-batang tersebut diberi hubungan
pendek pada kedua ujungnya dengan alat cincin hubungan pendek.
b) Rotor belitan, yang memiliki gulungan 3 fasa, lapisan ganda dan
terdistribusi. Dibuat melingkar sebanyak kutub stator. Tiga fasa digulungi
3

4
kawat pada bagian dalamnya dan ujung lainnya dihubungkan ke cincin
kecil yang dipasang pada batang as dengan sikat yang menempel padanya.
2. Stator. Stator dibuat dari sejumlah stampings dan slots untuk membawa
gulungan tiga fasa. Gulungan ini dilingkarkan untuk sejumlah kutub yang
tertentu. Gulungan diberi spasi geometri sebesar 120 derajat.
Motor listrik dapat diklsifikasikan menjadi dua kelompok utama, yaitu:
1. Motor induksi satu fasa. Motor ini hanya memiliki satu gulungan stator,
beroperasi dengan pasokan daya satu fasa, meiliki sebuah motor sangkar tupai,
dan memerlukan sebuah alat untuk menghidupkan motornya. Sejauh ini motor
ini merupakan jenis motor yang paling umum digunakan dalam peralatan
rumah tangga, seperti kipas angin, mesin cuci dan pengering pakaian, dan
untuk penggunaan hingga 3 sampai 4HP.
2. Motor induksi tiga fasa. Medan magnet yang berputar dihasilkan oleh pasokan
tiga fasa yang seimbang. Motor tersebut memiliki kemampuan daya yang
tinggi, dapat berupa sangkar tupai atau gulungan rotor (walaupun 90%
memiliki rotor sangkar tupai), dan penyalaan sendiri. Diperkirakan bahwa
sekitar 70% motor di industri menggunakan jenis ini. Sebagai contoh pompa,
kompresor, belt conveyor, jaringan listrik, dan grinder. Tersedia dalam ukuran
1/3 atau ratusan HP.
2.2 Motor Induksi Satu Phase
Motor induksi satu phase hampir sama dengan motor induksi tiga phase. Motor ini
terdiri dari sebuah rotor squired-cage dan sebuah stator. Stator terdiri dari lilitan utama yang
terdiri dari kutub utara dan selatan. Pada stator juga terdapat lilitan tambahan yang lebih kecil
yang bekerja hanya pada saat motor bekerja ( start-up ). Lilitan tambahan memiliki jumlah
kutub yang sama dengan lilitan utama. Motor induksi satu fasa sering digunakan sebagai
penggerak pada peralatan yang memerlukan daya rendah dan kecepatan yang relatif konstan.
Hal ini disebabkan karena motor induksi satu fasa memiliki beberapa kelebihan yaitu
konstruksi yang cukup sederhana, kecepatan putar yang hampir konstan terhadap perubahan
beban, dan umumnya digunakan pada sumber jala-jala satu fasa yang banyak terdapat pada
peralatan domestik. Walaupun demikian motor ini juga memiliki beberapa kekurangan, yaitu
kapasitas pembebanan yang relatif rendah, tidak dapat melakukan pengasutan sendiri tanpa
pertolongan alat bantu dan efisiensi yang rendah. [2]
4

5
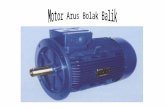
Gambar 2.2 Motor AC induksi 1 fasa [2]
2.2.1 Konstruksi Motor AC Induksi Satu Fasa
Konstruksi motor induksi satu fasa hampir sama dengan konstruksi motor induksi tiga
fasa, yaitu terdiri dari dua bagian utama yaitu stator dan rotor. Keduanya merupakan rangkaian
magnetik yang berbentuk silinder dan simetris. Di antara rotor dan stator ini terdapat celah
udara yang sempit.
Gambar 2.3 Konstruksi umum motor induksi satu fasa [2]
Stator merupakan bagian yang diam sebagai rangka tempat kumparan stator yang
terpasang. Stator terdiri dari : inti stator, kumparan stator, dan alur stator. Motor induksi satu
fasa dilengkapi dengan dua kumparan stator yang dipasang terpisah, yaitu kumparan utama
5

6
(main winding) atau sering disebut dengan kumparan berputar dan kumparan bantu (auxiliary
winding) atau sering disebut dengan kumparan start.
Gambar 2.4 Stator motor AC induksi satu fasa [2]
Rotor merupakan bagian yang berputar. Bagian ini terdiri dari : inti rotor, kumparan
rotor dan alur rotor. Pada umumnya ada dua jenis rotor yang sering digunakan pada motor
induksi, yaitu rotor belitan (wound rotor) dan rotor sangkar (squirrel cage rotor).
Gambar 2.5 Rotor motor AC induksi satu fasa [2]
6

7
2.2.2 Prinsip Kerja Motor AC Induksi Satu Fasa
Prinsip kerja motor AC induksi satu fasa dibagi dalam dua jenis yaitu sebagai berikut:
1. Teori Medan Putar Silang
Prinsip kerja motor induksi satu fasa dapat dijelaskan dengan menggunakan teori
medan putar silang (cross-field theory). Jika motor induksi satu fasa diberikan tegangan
bolak-balik satu fasa maka arus bolak-balik akan mengalir pada kumparan stator. Arus pada
kumparan stator ini menghasilkan medan magnet seperti yang di tunjukkan oleh garis putus-
putus pada Gambar 2.6.
Gambar 2.6 Motor dalam keadaan berputar silang [2]
Jika fluks rotor seperti yang diperlihatkan pada Gambar 2.6 mengarah ke atas sesuai
dengan kaidah tangan kanan Fleming, arah gaya gerak listrik rotor akan mengarah keluar
kertas pada setengah bagian atas rotor dan mengarah ke dalam kertas pada setengah bagian
bawah rotor. Pada setengah periode berikutnya arah dari gaya gerak listrik yang dibangkitkan
akan terbalik. Gaya gerak listrik yang diinduksikan ke rotor adalah berbeda dengan arus dan
fluks stator. Karena konduktor-konduktor rotor terbuat dari bahan dengan tahanan rendah dan
induktansi tinggi, maka arus rotor yang dihasilkan akan tertinggal terhadap gaya gerak listrik
rotor mendekati 90°. Gambar 2.7 menunjukkan hubungan fasa dari arus dan fluks stator, gaya
gerak listrik, arus dan fluks rotor.
7

8
Gambar 2.7 Fluks rotor tertinggal terhadap fluks stator sebesar 90° [2]
Sesuai dengan kaidah tangan kanan Fleming, arus rotor ini akan menghasilkan medan
magnet, seperti yang ditunjukkan pada Gambar 2.8 karena medan rotor ini terpisah sebesar
90o dari medan stator, maka disebut sebagai medan silang (cross-field). Nilai maksimum dari
medan ini seperti yang ditunjukkan oleh Gambar 2.8, terjadi pada saat seperempat periode
setelah gaya gerak listrik rotor yang dibangkitkan adalah telah mencapai nilai maksimumnya.
Karena arus rotor yang mengalir disebabkan oleh suatu gaya gerak listrik bolak-balik maka
medan magnet yang dihasilkan oleh arus ini adalah juga bolak-balik dan aksi ini terjadi
sepanjang sumbu DB.
Gambar 2.8. Medan Putar yang dibangkitkan arus stator [2]
8

9
Karena medan silang beraksi pada sudut 90° terhadap medan magnet stator dengan
sudut fasa yang juga tertinggal 90° terhadap medan stator, kedua medan bersatu untuk
membentuk sebuah medan putar resultan yang berputar dengan kecepatan sinkron yang
ditunjukkan pada Gambar 2.9.
Gambar 2.9. Phasor medan putar yang dihasilkan oleh belitan stator dan rotor [2].
2. Teori Medan Putar Silang
Teori medan putar ganda (double revolving-field theory) adalah suatu metode lain
untuk menganalisis prinsip perputaran motor induksi satu fasa disamping teori medan putar
silang. Menurut teori ini, medan magnet yang berpulsa dalam waktu tetapi diam dalam
ruangan dapat dibagi menjadi dua medan magnet, dimana besar kedua medan magnet ini
sama dan berputar dalam arah yang berlawanan. Dengan kata lain, suatu fluks sinusoidal
bolak-balik dapat diwakili oleh dua fluks yang berputar, yang masing-masing nilainya sama
9

10
dengan setengah dari nilai fluks bolak-balik tersebut dan masing-masing berputar secara
sinkron dengan arah yang berlawanan.
Pada Gambar 2.9 menunjukkan suatu fluks bolak-balik yang mempunyai nilai
maksimum Mφ . Komponen fluksnya A dan B mempunyai nilai yang sama yaitu mφ/2,
berputar dengan arah yang berlawanan dan searah jarum jam, seperti ditunjukkan anak panah.
Gambar 2.9 Konsep medan putar ganda [2]
Pada beberapa saat ketika A dan B telah berputar dengan sudut +θ dan –θ seperti pada
Gambar 2.9. maka besar fluks resultan adalah [1] :
( 2.1 )
( weber )
diman
= fluks resultan ( weber )
= fluks maksimum ( weber )
θ = sudut ruang
10

11
Setelah seperempat periode putaran, fluks A dan B akan berlawanan arah seperti yang
ditunjukkan pada Gambar 2.9 sehingga resultan fluksnya sama dengan nol. Setelah setengah
putaran, fluks A dan B akan mempunyai resultan sebesar -2 x mφ /2 = - mφ, seperti yang
ditunjukkan pada Gambar 2.9. Setelah tiga perempat putaran, resultan akan kembali nol
seperti yang ditunjukkan pada Gambar 2.9 dan demikianlah seterusnya. Jika nilai-nilai dari
fluks resultan diGambar kan terhadap θ diantara θ = 0° sampai θ = 360°, maka akan didapat
suatu kurva seperti yang ditunjukkan pada Gambar 2.10.
Gambar 2.10 Kurva Fluks Resultan Terhadap θ [2]
Pada saat rotor berputar sesuai dengan arah momen putar medan maju dengan kecepatan
tertentu, maka besar slip terhadap momen putar medan maju (sf) yang terjadi adalah [2] :
(2.2)
dimana :
ns = kecepatan sinkron ( rpm )
11

12
nr = kecepatan putaran rotor (rpm)
Sedangkan slip terhadap momen mundur (sb) dengan rotor menentang arah momen putar
mundur adalah :
(2.3)
(2.4)
Masing-masing dari komponen fluks tersebut memotong konduktor rotor sehingga
menginduksikan ggl dan pada akhirnya menghasilkan torsi sendiri. Kedua torsi mempunyai
arah saling berlawanan seperti yang ditunjukkan pada Gambar 2.11. Pada keadaan diam
kedua komponen torsi tersebut adalah sama besar, sehingga torsi asut adalah nol. Pada saat
motor berputar, besar kedua komponen torsi tersebut tidaklah sama sehingga torsi resultan
membuat motor tetap berputar pada putarannya.
Gambar 2.11 Karakteristik Torsi - Kecepatan Motor Induksi Satu Fasa [2]
2.2.3 Jenis-jenis Motor Iduksi Satu Fasa
Cara paling mudah untuk menjalankan motor induksi satu fasa adalah dengan
menambahkan sebuah kumparan bantu pada kumparan utama di bagian stator sehingga motor
dapat dijalankan. Jika dua kumparan terpisah 90° listrik pada stator motor dan eksitasi dengan
12

13
dua ggl bolak-balik yang berbeda fasa sebesar 90° listrik, dihasilkan medan magnet putar.
Jika dua kumparan terpisah demikian dihubungkan paralel ke suatu sumber fasa, medan yang
dihasilkan akan bolak-balik, tetapi tidak berputar Karena kedua kumparannya ekivalen
dengan satu kumparan fasa. Akan tetapi, jika suatu impedansi dihubungkan seri dengan salah
satu kumparan ini, arusnya akan berbeda fasa. Dengan pemilihan impedansi yang cocok, arus
dapat dibuat agar berbeda fasa sampai 90° listrik, sehingga menghasilkan medan putar sama
seperti medan dari motor dua fasa. Inilah prinsip dari pemisahan fasa (phase splitting) [2].
Pada keadaan berputar, motor induksi satu fasa dapat menghasilkan momen putar hanya
dengan satu kumparan. Sehingga dengan bertambahnya kecepatan motor kumparan bantu
dapat dilepas dari rangkaian. Pada kebanyakan motor, hal ini dilakukan dengan
menghubungkan sebuah saklar sentrifugal yang bekerja melepaskan hubungan kumparan
bantu sistem.
Motor induksi satu fasa dikenal dengan beberapa nama. Penerapannya menjelaskan
cara-cara yang dipakai untuk menghasilkan perbedaan fasa antara arus yang mengalir pada
kumparan utama dan arus yang mengalir pada kumparan bantu.
1. Motor Fasa Terpisah
Gambar rangkaian motor induksi fasa terpisah ditunjukkan pada Gambar 2.12
Kumparan bantu memiliki perbandingan tahanan terhadap reaktansi yang lebih tinggi
daripada kumparan utama, sehingga kedua arus akan berbeda fasa seperti yang ditunjukkan
pada Gambar 2.12 Perbandingan tahanan terhadap reaktansi yang tinggi dapat dengan
menggunakan kawat yang lebih murni pada kumparan bantu. Hal ini diizinkan karena
kumparan bantu hanya dipakai pada saat start. Saklar sentrifugal akan memisahkan dari
rangkaian segera setelah dicapai kecepatan sinkron sekitar 70 sampai 80 persen kecepatan
sinkron.
Karakteristik momen putar vs kecepatan dari motor ini ditunjukkan pada Gambar 2.12.
Gambar ini memperlihatkan nilai torsi masing-masing kecepatan motor, mulai dari posisi
diam sampai kecepatan nominal, dan seterusnya sampai kecepatan sinkron. Torsi start adalah
torsi yang tersedia bila motor mulai berputar dari posisi diam. Torsi beban penuh adalah torsi
yang dihasilkan bila motor berputar pada keluaran nominal. Bila beban terus berangsur-
angsur diperbesar dari keadaan dimana motor berputar pada keluaran nominal untuk melayani
beban dan torsi maksimum dari poros motor yang dapat digunakan dapat dilampaui, maka
motor menjadi tidak mampu melayani beban dan berhenti. Nilai maksimum dari torsi dalam
hal ini disebut torsi maksimum Tmaks.
13

14
Gambar 2.12. Motor Fasa Terpisah [2]
2. Motor Kapasitor Start
Konstruksi motor kapasitor start ditunjukkan pada Gambar 2.13. Untuk mendapatkan
torsi putar awal yang lebih besar, yaitu : dengan cara menghubungkan sebuah kapasitor yang
dipasang secara seri dengan kumparan bantu seperti yang ditunjukkan pada Gambar 2.13. Hal
ini akan menaikkan sudut fasa antara arus kumparan seperti yang ditunjukkan pada Gambar
2.13. Karakteristik momen putar-kecepatan putar dari motor ini dapat ditunjukkan pada
Gambar 2.13. Karena kapasitor dipakai hanya untuk pada saat start, jenis kapasitor yang
dipakai adalah kapasitor elektrolit. Motor ini menghasilkan momen putar start yang lebih
tinggi
Gambar 2.13 Motor Kapasitor start [2]
14

15
3. Motor Kapasitor Permanen
Konstruksi dari motor kapasitor permanen ditunjukkan pada Gambar 2.14. Gambar
rangkaian ekivalen motor ini seperti yang ditunjukkan pada Gambar 2.14. kapasitor
dihubungkan seri dengan kumparan bantu dan tidak dilepas setelah pengasutan dilakukan dan
tetap tinggal pada rangkaian. Hal ini menyederhanakan konstruksi dan mengurangi biaya serta
memperbaiki ketahanan motor karena saklar sentrifugal tidak digunakan. Faktor daya,
denyutan momen putar, dan efisiensi akan lebih baik karena motor berputar seperti motor dua
fasa. Sudut fasa antar kumparan ditunjukkan pada Gambar 2.14. Jenis kapasitor yang
digunakan adalah kapasitor kertas. Karakteristik momen putar–kecepatan motor ini
ditunjukkan pada Gambar 2.14.
Gambar 2.14 Motor Kapasitor Permanen [2]
4. Motor Kapasitor Start – Kapasitor Run
Motor ini mempunyai dua buah kapasitor, satu digunakan pada saat start dan satu lagi
digunakan pada saat berputar, seperti ditunjukkan pada Gambar 2.15. Secara praktis keadaan
start dan berputar yang optimal dapat diperoleh dengan menggunakan dua buah kapasitor
elektrolit. Kapasitor Run secara permanen dihubungkan seri dengan kumparan bantu dengan
nilai yang lebih kecil dan dipakai kapasitor kertas. Sudut fasa antar kumparan sama seperti
pada motor kapasitor permanen seperti pada Gambar 2.15. Karakteristik momen putar-
kecepatan dari motor ini ditunjukkan pada Gambar 2.15.
15

16
Gambar 1.15 Motor Kapasitor Start – Kapasitor Run [2]
5. Motor Shaded Pole
Motor ini mempunyai kutub tonjol dan sebagian dari masing-masing kutub dikelilingi
oleh lilitan rangkaian terhubung singkat yang terbuat dari tembaga yang disebut kumparan
terarsir seperti pada Gambar 2.16. Arus imbas yang terdapat pada kumparan yang terarsir
menyebabkan fluksi yang berada pada bagian lain. Hasilnya seperti medan putar yang
bergerak dalam arah dari daerah kutub yang tidak terarsir ke bagian kutub yang terarsir dan
menimbulkan momen putar saat dihidupkan yang kecil. Karakteristik motor shaded pole
ditunjukkan pada Gambar 2.16.
Gambar 2.16. Motor Shaded Pole [2]
2.2.4 Rangkaian Ekivalen Motor Induksi Satu Fasa
Konsep medan putar ganda pada motor induksi satu fasa menjelaskan bahwa fluks
yang dihasilkan ekivalen dengan dua buah fluks yang mempunyai besar yang sama dan
berputar dalam arah yang berlawanan pada kecepatan sinkron. Masing-masing fluks ini akan
mengimbaskan komponen arus rotor dan menghasilkan gerak motor induksi seperti pada
16

17
motor induksi fasa banyak. Hal yang sederhana dan penting bahwa motor induksi ini hanya
beroperasi pada kumparan utama.
1. Pada Keadaan Diam
Pada saat keadaan diam, jika rangkaian stator dihubungkan dengan tegangan satu fasa,
maka motor induksi dapat dinyatakan sebagai transformator dengan kumparan sekunder
terhubung singkat. Rangkaian motor induksi satu fasa tersebut dapat dilihat pada Gambar
2.17.
Gambar 2.17. Rangkaian Ekivalen Motor Induksi Satu Fasa [2]
Dengan menggunakan konsep medan putar fluks yang dihasilkan kumparan stator
dapat dipecah menjadi dua bagian yaitu : medan putar maju dan medan putar mundur. Kedua
medan putar ini akan mengimbaskan ggl pada kumparan rotor sehingga tahanan dan reaktansi
pada kumparan rotor diekivalenkan masing-masing adalah setengah dari nilai tahanan dan
reaktansi kumparan rotor sesungguhnya, yaitu R2/2 dan X2/2 seperti yang terlihat pada
Gambar 2.18.
Gambar 2.18. Motor Induksi Satu Fasa Dalam Keadaan Diam [2]
17

18
2. Pada Saat Beroperasi
Pada saat kecepatan motor induksi mulai bertambah dan bekerja hanya pada kumparan
utama. Pada arah medan maju menggunakan slip s, arus rotor yang diimbaskan medan maju
mempunyai frekuensi s.f, dimana f adalah frekuensi stator. Arus rotor ini akan menghasilkan
fluks yang bergerak maju pada kecepatan slip. Fluks ini akan membangkitkan ggl dengan arah
maju pada kumparan utama stator. Pangaruh pada rotor jika dilihat dari sisi stator dapat
dinyatakan sebagai suatu impedansi sebesar 0,5 R2/s + j 0,5 X2 paralel dengan Xm dan Rc.
Seperti yang terlihat pada Gambar 2.19 dengan menggunakan simbol f.
Pada arah medan putar mundur, rotor tetap bergerak dengan slip s berpatokan pada medan
maju dan besarnya kecepatan putar medan maju adalah :
n = 1 –s (2.5)
Selanjutnya medan mundur mengimbaskan arus rotor dengan frekuensi (2 – s)f. Arus rotor
ini akan menghasilkan fluks yang bergerak mundur. Fluks ini akan mengimbaskan ggl pada
medan mundur kumparan stator. Pengaruh tersebut dapat diperlihatkan pada Gambar 2.19.
Gambar 2.19 Motor Induksi Satu Fasa Dalam Keadaan Beroperasi [1]
18

19
Dengan menggunakan rangkaian ekivalen di atas, kita dapat menghitung arus stator,
arus rotor, daya masukan, dan faktor daya untuk sembarang harga slip apabila tegangan yang
diberikan dan impedansi motor diketahui.
Dari rangkaian di atas, didapat [3] :
( Ω ) (2.6)
( Ω ) (2.7)
( Ω ) (2.8)
( ampere ) (2.9)
dimana :
R1 = Resistansi kumparan stator
R2 = Resistansi kumparan rotor
X1 = Reaktansi bocor kumparan stator
X2 = Reaktansi bocor kumparan rotor
Xm = Reaktansi pemagnetan
Rc = Tahanan inti tembaga
Zm = Impedansi pemagnetan
I1 = Arus pada kumparan stator
2.3 Motor Induksi Tiga Fasa
19

20
Motor induksi tiga fasa merupakan motor listrik arus bolak-balik yang paling banyak
digunakan dalam dunia industri. Dinamakan motor induksi karena pada kenyataannya arus
rotor motor ini bukan diperoleh dari suatu sumber listrik, tetapi merupakan arus yang
terinduksi sebagai akibat adanya perbedaan relatif antara putaran rotor dengan medan putar.
Dalam kenyataannya, motor induksi dapat diperlakukan sebagai sebuah transformator, yaitu
dengan kumparan stator sebagai kumparan primer yang diam, sedangkan kumparan rotor
sebagai kumparan sekunder yang berputar. [4]
Motor induksi tiga fasa berputar pada kecepatan yang pada dasarnya adalah konstan,
mulai dari tidak berbeban sampai mencapai keadaan beban penuh. Kecepatan putaran motor
ini dipengaruhi oleh frekuensi, dengan demikian pengaturan kecepatan tidak dapat dengan
mudah dilakukan terhadap motor ini. Walaupun demikian, motor induksi tiga fasa memiliki
beberapa keuntungan, yaitu sederhana, konstruksinya kokoh, harganya relatif murah, mudah
dalam melakukan perawatan, dan dapat diproduksi dengan karakteristik yang sesuai dengan
kebutuhan industri.
2.3.1 Konstruksi Motor Induksi Tiga Fasa
Sebuah motor induksi tiga fasa memiliki konstruksi yang hampir sama dengan motor
listrik jenis lainnya. Motor ini memiliki dua bagian utama, yaitu
stator yang merupakan bagian yang diam, dan rotor sebagai bagian yang berputar. Antara
bagian stator dan rotor dipisahkan oleh celah udara yang sempit, dengan jarak berkisar dari
0,4 mm sampai 4 mm [4].
Gambar 2.20. Penampang Stator dan Rotor Motor Induksi Tiga Fasa [4]
20

21
1. Stator
Stator terdiri atas tumpukan laminasi inti yang memiliki alur yang menjadi tempat
kumparan dililitkan yang berbentuk silindris. Alur pada tumpukan laminasi inti diisolasi
dengan kertas Gambar 2.21. Tiap elemen laminasi inti dibentuk dari lempengan besi. Tiap
lempengan besi tersebut memiliki beberapa alur dan beberapa lubang pengikat untuk
menyatukan inti. Tiap kumparan tersebar dalam alur yang disebut belitan fasa dimana untuk
motor tiga fasa, belitan tersebut terpisah secara listrik sebesar 120°. Kawat kumparan yang
digunakan terbuat dari tembaga yang dilapis dengan isolasi tipis. Kemudian tumpukan inti
dan belitan stator diletakkan dalam cangkang silindris. Berikut ini contoh lempengan laminasi
inti, lempengan inti yang telah disatukan, belitan stator yang telah dilekatkan pada cangkang
luar untuk motor induksi tiga fasa.
Gambar 2.21 Komponen Stator Motor Induksi Tiga Fasa [4]
2. Rotor
Berdasarkan jenis rotornya, motor induksi tiga fasa dapat dibedakan menjadi dua jenis,
yang juga akan menjadi penamaan untuk motor tersebut, yaitu rotor belitan (wound rotor) dan
rotor sangkar tupai (squirrel cage rotor).
Jenis rotor belitan terdiri dari satu set lengkap belitan tiga fasa yang merupakan
bayangan dari belitan pada statornya. Belitan tiga fasa pada rotor belitan biasanya terhubung
Y, dan masing-masing ujung dari tiga kawat belitan fasa rotor tersebut dihubungkan pada slip
ring yang terdapat pada poros rotor. Belitan-belitan rotor ini kemudian dihubung singkatkan
melalui sikat (brush) yang menempel pada slip ring, dengan menggunakan sebuah
perpanjangan kawat untuk tahanan luar.
21

22
Gambar 2.22 Rotor Belitan Motor Induksi Tiga Fasa [4]
Gambar 2.23 Skema Motor Induksi Rotor Belitan [4]
Dari Gambar 2.23 dapat dilihat bahwa semata-mata keberadaan slip ring dan sikat
hanyalah sebagai penghubung belitan rotor ke tahanan luar (exsternal resistance). Keberadaan
tahanan luar disini berfungsi pada saat pengasutan yang berguna untuk membatasi arus mula
yang besar. Tahanan luar ini kemudian secara perlahan dikurangi sampai resistansinya nol
sebagaimana kecepatan motor bertambah mencapai kecepatan nominalnya. Ketika motor
telah mencapai kecepatan nominalnya, maka tiga buah sikat akan terhubung singkat tanpa
tahanan luar sehingga rotor belitan akan bekerja seperti halnya rotor sangkar tupai.
Rotor sangkar mempunyai kumparan yang terdiri atas beberapa batang konduktor
yang disusun sedemikian rupa hingga menyerupai sangkar tupai. Rotor terdiri dari tumpukan
lempengan besi tipis yang dilaminasi dan batang konduktor yang mengitarinya. Tumpukan
besi yang dilaminasi disatukan untuk membentuk inti rotor. Alumunium (sebagai batang
konduktor) dimasukan ke dalam slot dari inti rotor untuk membentuk serangkaian konduktor
yang mengelilingi inti rotor. Rotor yang terdiri dari sederetan batang-batang konduktor yang
22

23
terletak pada alur-alur sekitar permukaan rotor, ujung-ujungnya dihubung singkat dengan
menggunakan cincin hubung singkat (shorting ring) atau disebut juga dengan end ring.
Gambar 2.24 Motor Induksi Tiga Fasa Rotor Sangkar Tupai [4]
2.3.2 Prinsip Kerja Motor Induksi Tiga fasa
Pada saat terminal tiga fasa stator motor induksi diberi suplai tegangan tiga fasa
seimbang, maka akan mengalir arus pada konduktor di tiap belitan fasa stator dan akan
menghasilkan fluksi bolak-balik . Amplitudo fluksi per fasa yang dihasilkan berubah secara
sinusoidal dan menghasilkan fluks resultan (medan putar) dengan magnitud yang nilainya
konstan yang berputar dengan kecepatan sinkron [3] :
(2.10)
dimana :
ns = kecepatan sinkron/medan putar (rpm)
f = frekuensi sumber daya (Hz)
P = jumlah kutub motor induksi
Medan putar akan terinduksi melalui celah udara menghasilkan ggl induksi (ggl lawan) pada
belitan fasa stator sebesar [3] :
(2.11)
23

24
=
=
=
jadi :
(2.12)
(2.13)
dimana,
= ggl induksi sesaat stator/fasa (Volt)
= ggl induksi maksimum stator/fasa (Volt)
= ggl induksi efektif stator/fasa (Volt)
= frekuensi saluran (Hz)
= jumlah lilitan kumparan stator/fasa
= fluks magnetik maksimum (Weber)
Medan putar tersebut juga akan memotong konduktor-konduktor belitan rotor yang
diam. Hal ini terjadi karena adanya perbedaan relatif antara kecepatan fluksi yang berputar
dengan konduktor rotor yang diam, yang disebut juga dengan slip (s) [3].
(2.14)
Akibat adanya slip, maka ggl (gaya gerak listrik) akan terinduksi pada konduktor-konduktor
rotor sebesar [3] :
24

25
(2.15)
dimana :
= ggl induksi sesaat pada saat rotor diam/fasa (Volt)
= ggl induksi efektif pada saat rotor diam/fasa (Volt)
= frekuensi arus rotor (Hz)
= jumlah lilitan pada kumparan rotor/fasa
= fluks magnetik maksimum (Weber)
Gambar 2.25 Proses Induksi Medan Putar Stator pada Kumparan Rotor [4]
Karena belitan rotor merupakan rangkaian tertutup, baik melalui cincin ujung (end
ring) ataupun tahanan luar, maka arus akan mengalir pada konduktor-konduktor rotor. Karena
konduktor-konduktor rotor yang mengalirkan arus ditempatkan di dalam daerah medan
magnet yang dihasilkan stator, maka akan terbentuklah gaya mekanik (gaya lorentz) pada
konduktor-konduktor rotor. Hal ini sesuai dengan hukum gaya lorentz yaitu bila suatu
konduktor yang dialiri arus berada dalam suatu kawasan medan magnet, maka konduktor
tersebut akan mendapat gaya elektromagnetik (gaya lorentz) sebesar [3] :
Dimana :
F = gaya yang bekerja pada konduktor (Newton)
B = kerapatan fluks magnetik (Wb/m2)
i = besar arus pada konduktor (A)
l = panjang konduktor (m)
25

26
θ = sudut antara konduktor dan vektor kerapatan fluks magnetik
Arah dari gaya elektromagnetik tersebut dapat dijelaskan oleh kaidah tangan kanan
(right-hand rule). Kaidah tangan kanan menyatakan, jika jari telunjuk menyatakan arah dari
vektor arus i dan jari tengah menyatakan arah dari vektor kerapatan fluks B, maka ibu jari
akan menyatakan arah gaya F yang bekerja pada konduktor tersebut.
Gaya F yang dihasilkan pada konduktor-konduktor rotor tersebut akan menghasilkan
torsi (τ). Bila torsi mula yang dihasilkan pada rotor lebih besar daripada torsi beban (τ0 > τb),
maka rotor akan berputar searah dengan putaran medan putar stator.
Gambar 2.10. Konduktor Berarus Dalam Ruang Medan Magnet
Motor akan tetap berputar bila kecepatan medan putar lebih besar dari pada kecepatan
putaran rotor (ns > nr). Apabila ns = nr, maka tidak ada perbedaan relatif antara kecepatan
medan putar (ns) dengan putaran rotor (nr), atau dengan kata lain slip (s) adalah nol. Hal ini
menyebabkan tidak adanya ggl terinduksi pada kumparan rotor sehingga tidak ada arus yang
mengalir, dengan demikian tidak akan dihasilkan gaya yang dapat menghasilkan kopel untuk
memutar rotor [4].
26

27
BAB III
JURNAL PRAKTIKUM
3.1 Maksud dan Tujuan
1) Mahasiswa dapat mengenal dan mengetahui komponen dalam motor AC.
2) Mahasiswadapatmemahami pengoperasian motor AC.
3) Mahasiswa dapat mengetahui jenis-jenis motor AC dan kegunaan dari motor AC
tersebut.
3.2 Alat dan Bahan
1) Motor induksi 1 fase
2) Multimeter analog
3) Tachometer
4) Multimeter analog
5) Fibrometer dan osiloskop
6) Tag ampere
3.3 Langkah Kerja
1) Siapkan motor induksi tanpa beban
2) Hubung dan ukurkan sumber tegangan menggunakan multimeter analog yang di
atur pada pengukuran arus bolak-balik. Catat hasil pengukuran
3) Hubungkan motor listrik dengan sumber tegangan tersebut, lalu ukur arus dan
tegangan dengan menggunakan tang ampere. Catat hasil pengukuran.
27

28
4) Nyalakan motor tersebut, ukur putaran poros motor tersebut dengan menggunakan
tachometer. Catat hasil pengukuran.
5) Ukurlah getaran yang terjadi pada motor di lima titik yang berbeda sebagai berikut.
6) Amati gambar pada layar osiloskop. Gambar kembali pada data hasil pengukuran.
7) Bandingkan kondisi motor listrik yang telah anda ukur dengan kriteria besar getaran
motor listrik. Apakah motor / mesin tersebut masih memenuhi syarat dan
diperkenankan untuk tetap digunakan?
8) Ulangi kembali langkah 1 sampai dengan 7, namun menggunakan beban yang telah
disediakan oleh asisten.
9) Buat jurnal praktikum
3.4 Data Percobaan
NoVariabel
Pengukuran
Hasil Pengukuran
1 2 3 4 5
1Frekuensi Sumber
(f)50 Hz 50 Hz 50 Hz 50 Hz 50 Hz
2 Jumlah Kutub ( P ) 4 4 4 4 4
3Sudut Phasa Antara
Arus (Ia) Dan (Is)90 90 90 90 90
4 Tegangan 100 100 100 100 100
5Arus Pada Stator
(Is)1.33 0.99 0.62 0.61 0.55
6 Tegangan (v) 100 100 100 100 100
Tabel 3.1 Hasil pengukuran
28

29
Grafik 3.1. Hubungan Antara Arus pada Stator dan Jumlah Putaran
Ketidakpastian:
1) Arus pada stator (Is):
Jadi, harga Is = 0.82 A ± 0.272 A
2) Putaran (n):
rpm
rpm
29

30
Jadi, harga n = 66,54 ± 18,192 rpm
3.5 Kesimpulan
1) Arus pada stator yang terbesar adalah 1.33 A dan yang terkecil adalah 0.55 A serta
ketidakpastiannya sebesar 0.82 A ± 0.272 A
2) Putaran yang terbesar adalah 83,4 rpm dan yang terkecil adalah 37,4 rpm serta
ketidakpastiannya sebesar 66,54 ± 18,192 rpm
BAB IV
PEMBAHASAN SOAL
4.1. Soal
1) Jelaskan prinsip kerja motor AC !
2) Jelaskan konsep medan putar motor AC !
3) Jelaskan jenis motor AC berdasarkan karakteristik arus yang mengalir !
4) Jelaskan jenis motor 3 fasa !
5) Jelaskan aplikasi motor AC ! minimal 4 contoh
6) Berapakah kecepatan stator ?
7) Berapakah slip yang terjadi pada motor ?
30

31
8) Buatlah grafik perbandingan !
a) Grafik perbandingan antara ns dengan n.
b) Grafik perbandingan antara ns dengan s.
4.2. Jawaban
1) Motor arus bolak-balik (motor AC) ialah suatu mesin yang berfungsi mengubah tenaga
listrik arus bolak-balik (listrik AC) menjadi tenaga gerak atau tenaga mekanik berupa
putaran dari pada Rotor. Motor listrik arus bolak-balik dapat dibedakan atas beberapa
jenis Seperti pada motor DC pada motor AC, arus dilewatkan melalui kumparan,
menghasilkan torsi pada kumparan. Sejak saat itu bolak, motor akan berjalan lancar
hanya pada frekuensi gelombang sinus. Hal ini disebut motor sinkron. Lebih umum
adalah motor induksi, dimana arus listrik induksi dalam kumparan berputar dari pada
yang diberikan kepada mereka secara langsung.
Salah satu kelemahan dari jenis motor AC adalah arus tinggi yang harus mengalir melalui
kontak berputar. Memicu dan pemanasan pada kontak-kontak dapat menghabiskan energi
dan memperpendek masa pakai motor. Dalam motor AC umum medan magnet yang
dihasilkan oleh elektro magnet didukung oleh tegangan AC sama dengan kumparan
motor. Kumparan yang menghasilkan medan magnet yang kadang-kadang disebut
sebagai “stator”, sedangkan kumparan dan inti padat yang berputar disebut “dinamo”.
Dalam motor AC medan magnet sinusoidal bervariasi, seperti arus dalam kumparan
bervariasi. [2]
2) Kumparan yang menghasilkan medan magnet yang kadang-kadang disebut sebagai
"stator", sedangkan kumparan dan inti padat yang berputar disebut "dinamo". Dalam
motor AC medan magnet sinusoidal bervariasi, seperti arus dalam kumparan bervariasi.
Pada rotor dan stator akan timbul fluks magnetik yang akan menyebabkan rotor berputar.
Pada motor 3 fase, flux magnetik yang terbentuk di sekitar stator merupakan medan
magnet yang berputar karena listrik yang dimasukkan pada lilitan stator sudah merupakan
arus listrik yang berputar. Sedangkan pada motor 1 fase, flux magnet hanya berganti-
ganti arah saja sehingga menyulitkan motor pada waktu start. Oleh karena itu, pada motor
induksi satu fase selalu memiliki medan magnet lilitan tambahan sebagai. Lilitan medan
31

32
magnet start ( Starting Winding/ Auxilary Winding ). Apabila motor telah berjalan
normal, maka lilitan bantu ini dapat dilepas (tidak digunakan lagi ). [1]
3) Berdasarkan karakteristik arus yang mengalir, motor AC dibedakan menjadi 2, yaitu:
a) Motor AC 1 fasa
Konstruksi motor induksi satu fasa terdiri atas dua komponen yaitu stator dan rotor.
Stator adalah bagian dari motor yang tidak bergerak dan rotor adalah bagian yang
bergerak yang bertumpu pada bantalan poros terhadap stator. Motor induksi terdiri
atas kumparan kumparan stator dan rotor yang berfungsi membangkitkan gaya gerak
listrik akibat dari adanya arus listrik bolak-balik satu fasa yang melewati kumparan-
kumparan tersebut sehingga terjadi suatu interaksi induksi medan magnet antara stator
dan rotor.
b) Motor AC 3 fasa
Motor induksi tiga fasa memiliki dua komponen dasar yaitu stator dan rotor, bagian
rotor dipisahkan dengan bagian stator oleh celah udara yang sempit (air gap) dengan
jarak antara 0,4 mm sampai 4 mm. Tipe dari motor induksi tiga fasa berdasarkan
lilitan pada rotor dibagi menjadi dua macam yaitu rotor belitan (wound rotor) adalah
tipe motor induksi yang memiliki rotor terbuat dari lilitan yang sama dengan lilitan
statornya dan rotor sangkar tupai (Squirrel-cage rotor) yaitu tipe motor induksi
dimana konstruksi rotor tersusun oleh beberapa batangan logam yang dimasukkan
melewati slot-slot. Yang ada pada rotor motor induksi, kemudian setiap bagian
disatukan oleh cincin sehingga membuat batangan logam terhubung singkat dengan
batangan logam yang lain. [1]
4) Bekerja dengan memanfaatkan perbedaan fasa sumber untuk menimbulkan gaya putar
pada rotornya. Jika pada motor AC 1 phase untuk menghasilkan beda phase diperlukan
penambahan komponen Kapasitor, pada motor 3 phase perbedaan phase sudah di dapat
langsung dari sumber seperti terlihat pada gambar arus 3 phase berikut ini:
32

33
Gambar 4.1. Motor AC 3 Phasa
Gambar 4.2. Grafik Arus 3 Fase
Pada gambar di atas, arus 3 phase memiliki perbedaan phase 60 derajat antar phasenya.
Dengan perbedaan ini, maka penambahan kapasitor tidak diperlukan [1]
5) Contoh-contoh alat yang menggunakan menggunakan motor AC:
1) Kipas angin
2) Televisi
3) Solder listrik
6) Dik : f = 50 Hz
= 4
Dit: ?
Jawab:
= 1500 rps x 60 = 90.000 rpm
33
Keterangan : 1 rps = 60 rpm

34
Keterangan : 1 rps = 60 rpm7) Slip yang terjadi saat motor AC bekerja adalah:
=
=
=
=
=
1 2 3 4 5
Putaran
(n)37.4 50.2 80.5 81.2 83.4
Jumlah
Slip yang
terjadi
0.9750 0.9665 0.9463 0.9458 0.9444
Tabel 4.1. Jumlah slip yang terjadi
Sehingga rata-rata jumlah slip yang terjadi dapat di hitung dengan:
8) Grafik perbandingan:
a) Grafik perbandingan antara ns dengan n:
34

35
Grafik 4.1. Perbandingan Antara Putaran Sinkron dengan Kecepatan Sinkron Medan Putar
b) Grafik perbandingan antara ns dengan s:
Grafik 4.2. Perbandingan Antara Slip pada Motor dengan Kecepatan Sinkron Medan Putar
BAB V
PENUTUP
5.1 Kesimpulan
Motor arus bolak-balik (AC) adalah suatu mesin yang berfungsi untuk mengubah
energi listrik arus bolak-balik menjadi energi mekanik berupa putaran rotor.35
0,925
0,93
0,935
0,94
0,945
0,95
0,955
0,96
0,965
0,97
0,975
0,98
1000 1200 1300 1400 1500
Slip
Pad
a M
otor
(S)
Kecepatan Sinkron Medan Putar ns (rpm)

36
Dari hasil pengambilan data pada praktikum yang terdapat pada Tabel 3.1. yaitu
dengan menggunakan motor listrik induksi tiga fasa sebanyak lima kali percobaan. Maka
akan menghasilkan kecepatan putaran rotor (rpm) rata-rata sebesar 66,54 ± 18,192 rpm
dan arus rata-rata yang terdapat pada stator sebesar 0.82 A ± 0.272 A
36