IV. Motor AC
35
description
dis ebook ferry ea ea
Transcript of IV. Motor AC
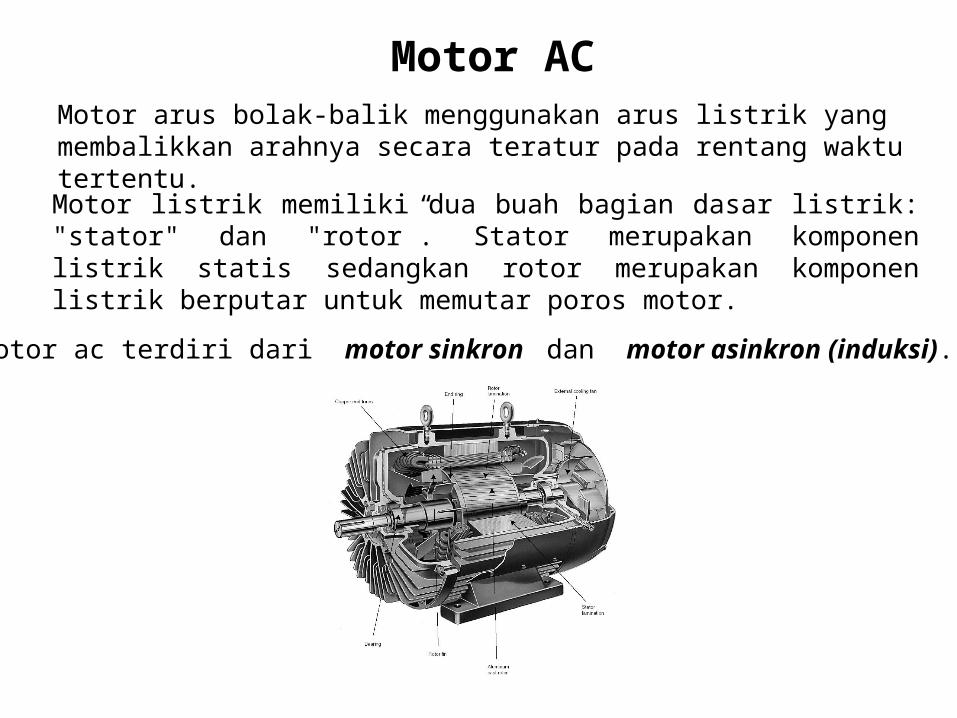
Motor AC
Motor arus bolak-balik menggunakan arus listrik yang membalikkan arahnya secara teratur pada rentang waktu tertentu.
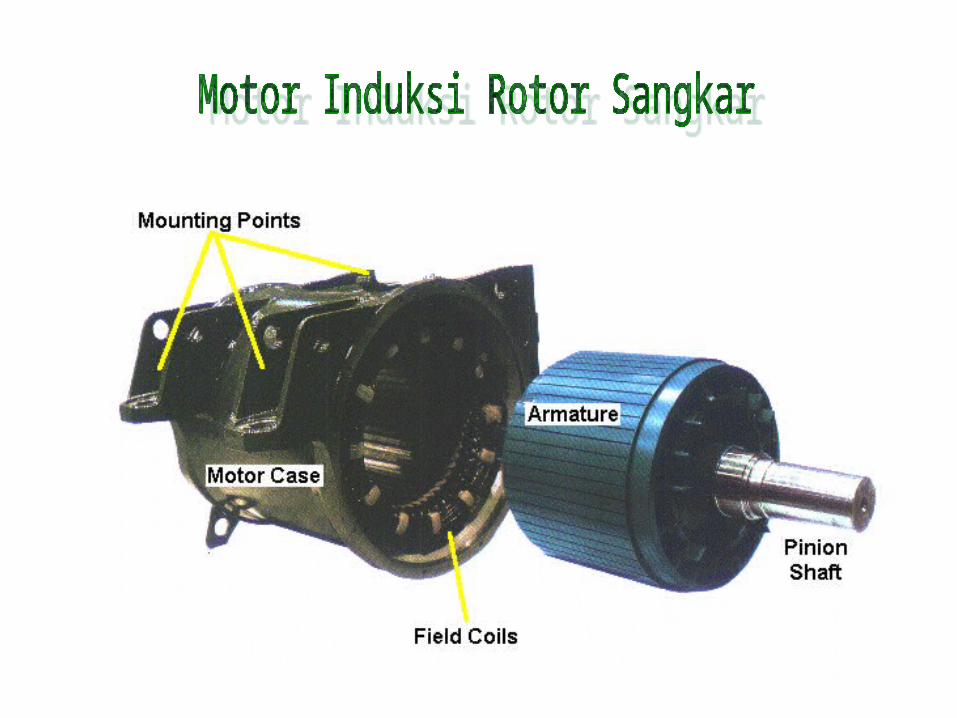
Motor listrik memiliki dua buah bagian dasar listrik: "stator" dan "rotor”. Stator merupakan komponen listrik statis sedangkan rotor merupakan komponen listrik berputar untuk memutar poros motor.
Motor ac terdiri dari motor sinkron dan motor asinkron (induksi).
Motor sinkron
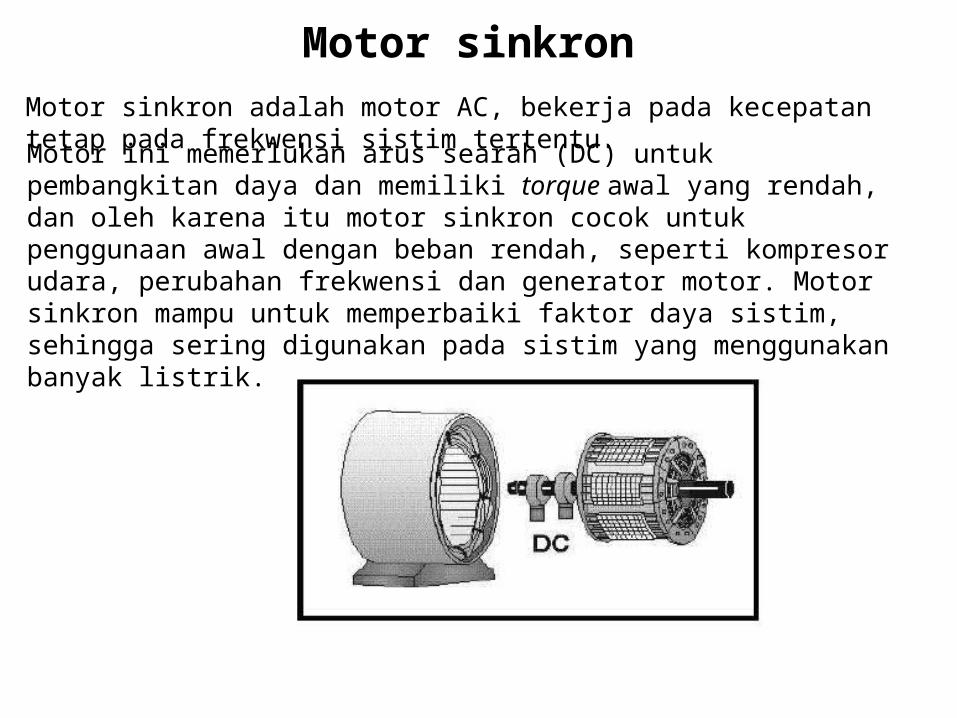
Motor sinkron adalah motor AC, bekerja pada kecepatan tetap pada frekwensi sistim tertentu.
Motor ini memerlukan arus searah (DC) untuk pembangkitan daya dan memiliki torque awal yang rendah, dan oleh karena itu motor sinkron cocok untuk penggunaan awal dengan beban rendah, seperti kompresor udara, perubahan frekwensi dan generator motor. Motor sinkron mampu untuk memperbaiki faktor daya sistim, sehingga sering digunakan pada sistim yang menggunakan banyak listrik.
Rotor
Perbedaan utama antara motor sinkron dengan motor induksi adalah bahwa rotor motor sinkron berputar pada kecepatan yang sama dengan perputaran medan magnet. Hal ini tidak menimbulkan induksi medan magnet. Rotor memiliki magnet permanen atau arus DC-excited, yang dipaksa untuk memperkuat pada posisi tertentu bila dihadapkan dengan medan magnet lainnya.
Stator
Stator menghasilkan medan magnet berputar yang sebanding dengan frekwensi yang disuplai. Motor ini berputar pada kecepatan sinkron, yang diberikan oleh persamaan berikut (Parekh, 2003):
Ns = 120 f / P
Dimana:f = frekwensi dari pasokan frekwensiP= jumlah kutub
Motor induksi
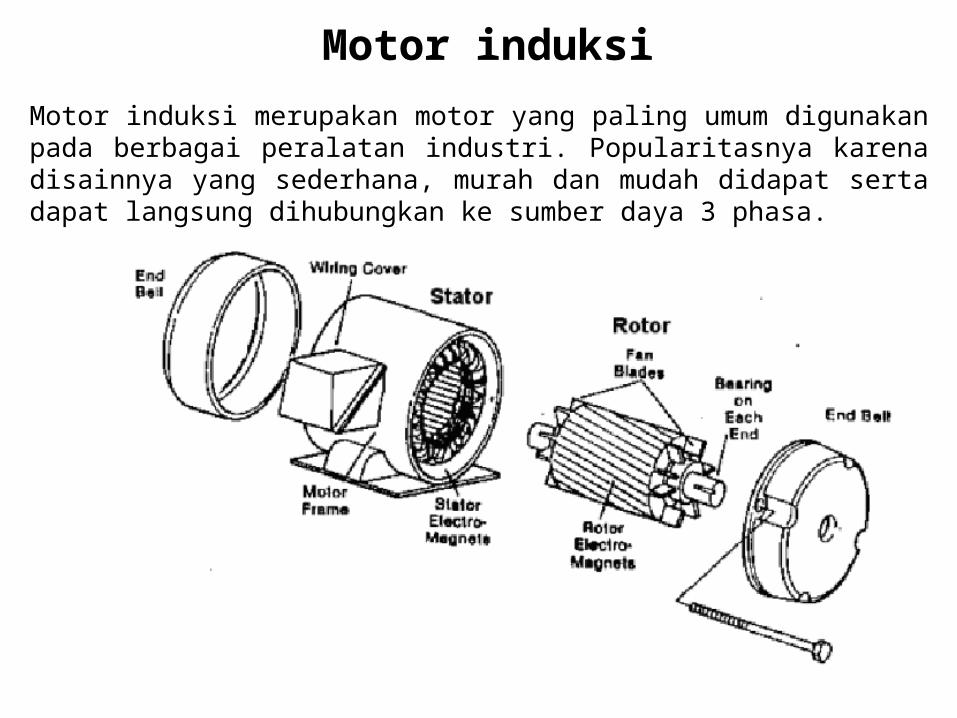
Motor induksi merupakan motor yang paling umum digunakan pada berbagai peralatan industri. Popularitasnya karena disainnya yang sederhana, murah dan mudah didapat serta dapat langsung dihubungkan ke sumber daya 3 phasa.
Rotor.
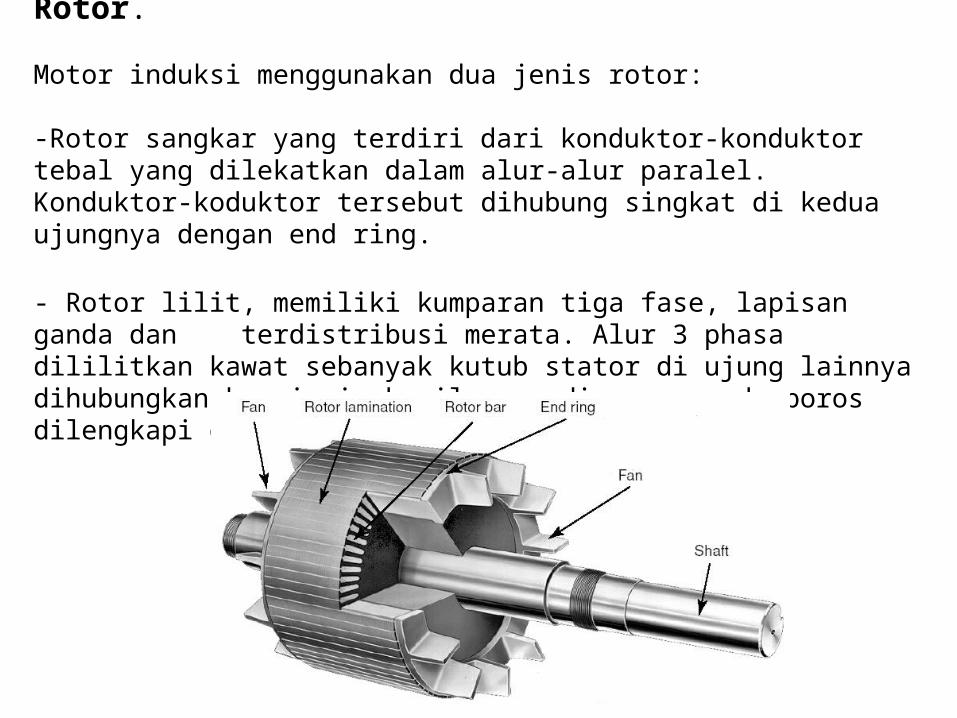
Motor induksi menggunakan dua jenis rotor:
-Rotor sangkar yang terdiri dari konduktor-konduktor tebal yang dilekatkan dalam alur-alur paralel. Konduktor-koduktor tersebut dihubung singkat di kedua ujungnya dengan end ring.
- Rotor lilit, memiliki kumparan tiga fase, lapisan ganda dan terdistribusi merata. Alur 3 phasa dililitkan kawat sebanyak kutub stator di ujung lainnya dihubungkan ke cincin kecil yang dipasang pada poros dilengkapi dengan sikat.
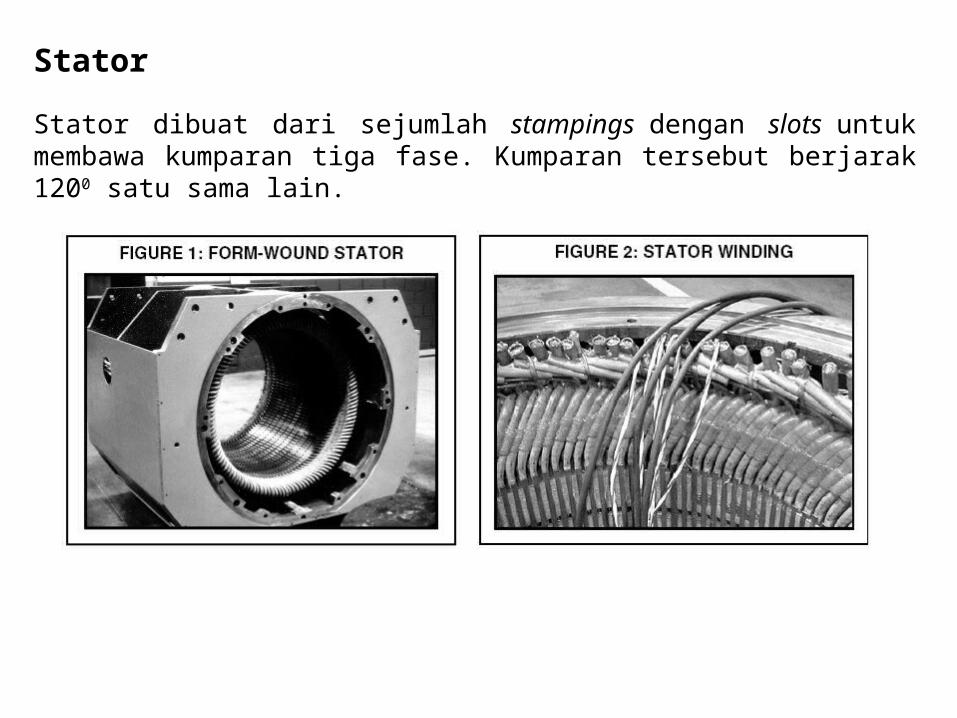
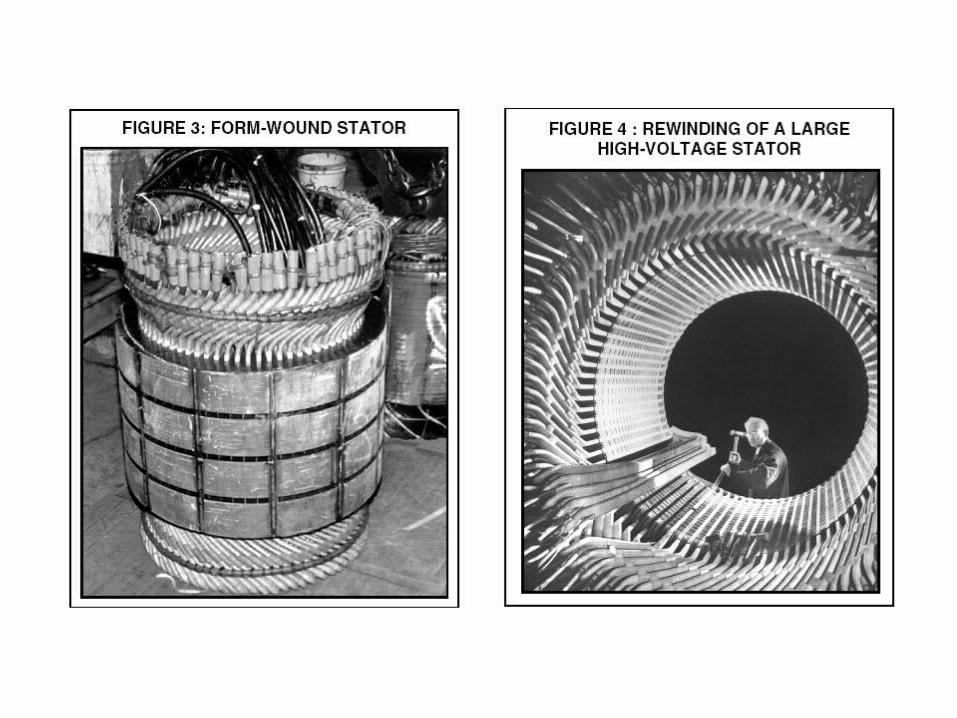
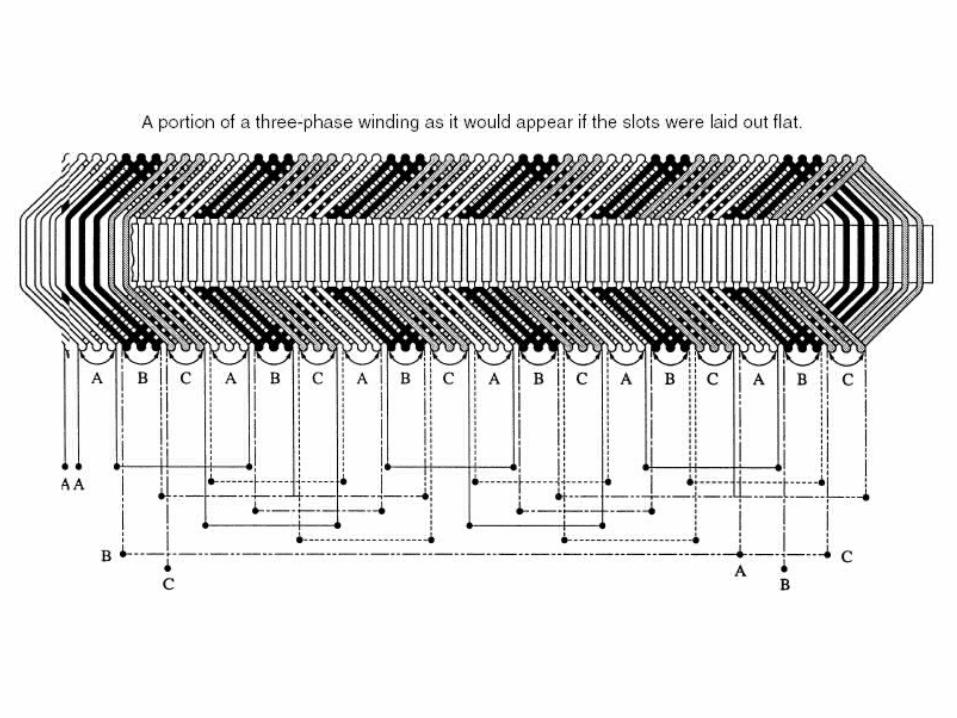
Stator
Stator dibuat dari sejumlah stampings dengan slots untuk membawa kumparan tiga fase. Kumparan tersebut berjarak 1200 satu sama lain.
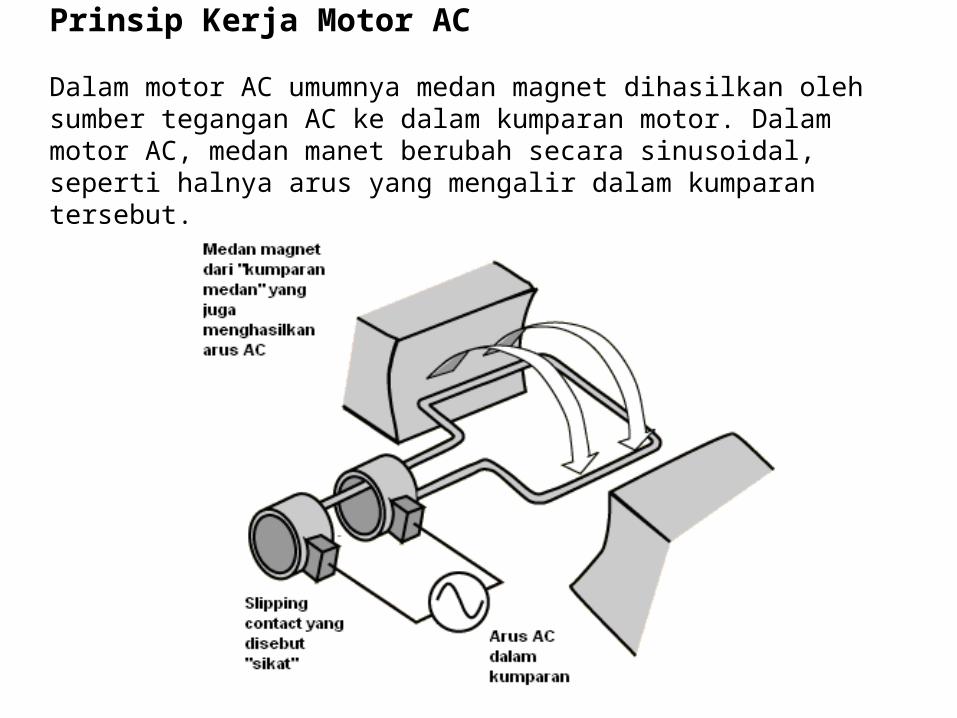
Prinsip Kerja Motor AC
Dalam motor AC umumnya medan magnet dihasilkan oleh sumber tegangan AC ke dalam kumparan motor. Dalam motor AC, medan manet berubah secara sinusoidal, seperti halnya arus yang mengalir dalam kumparan tersebut.
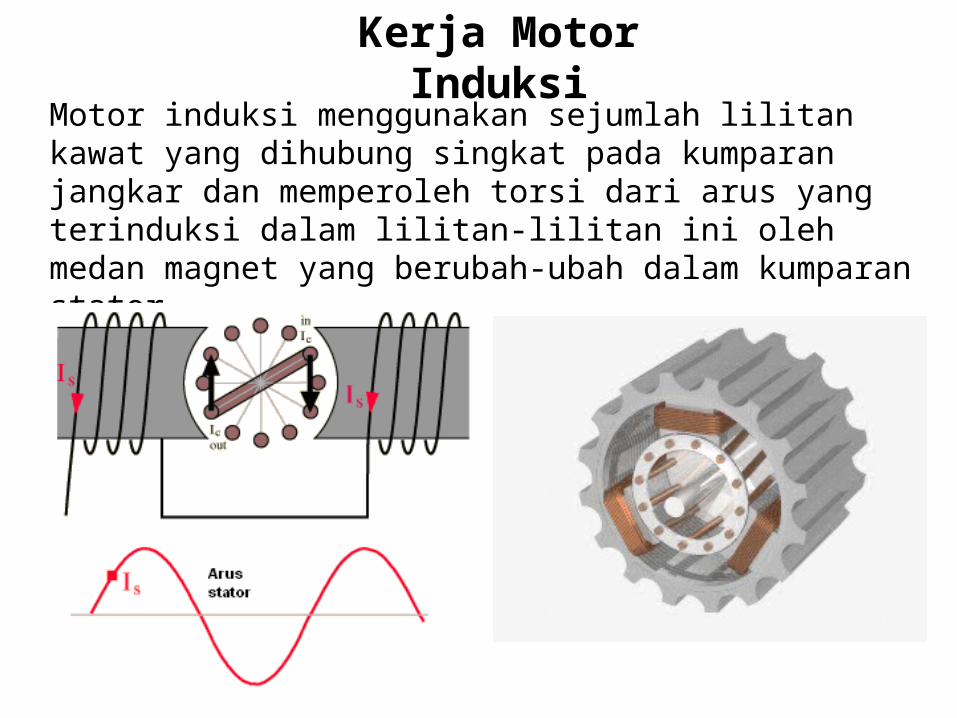
Kerja Motor Induksi
Motor induksi menggunakan sejumlah lilitan kawat yang dihubung singkat pada kumparan jangkar dan memperoleh torsi dari arus yang terinduksi dalam lilitan-lilitan ini oleh medan magnet yang berubah-ubah dalam kumparan stator.
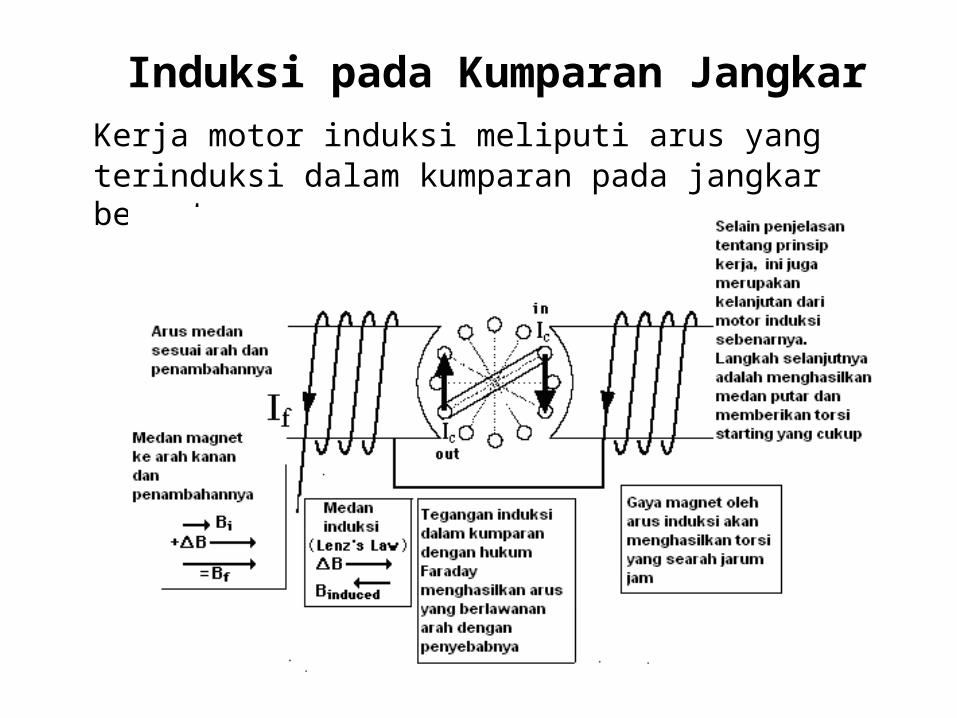
Induksi pada Kumparan JangkarKerja motor induksi meliputi arus yang terinduksi dalam kumparan pada jangkar berputar.
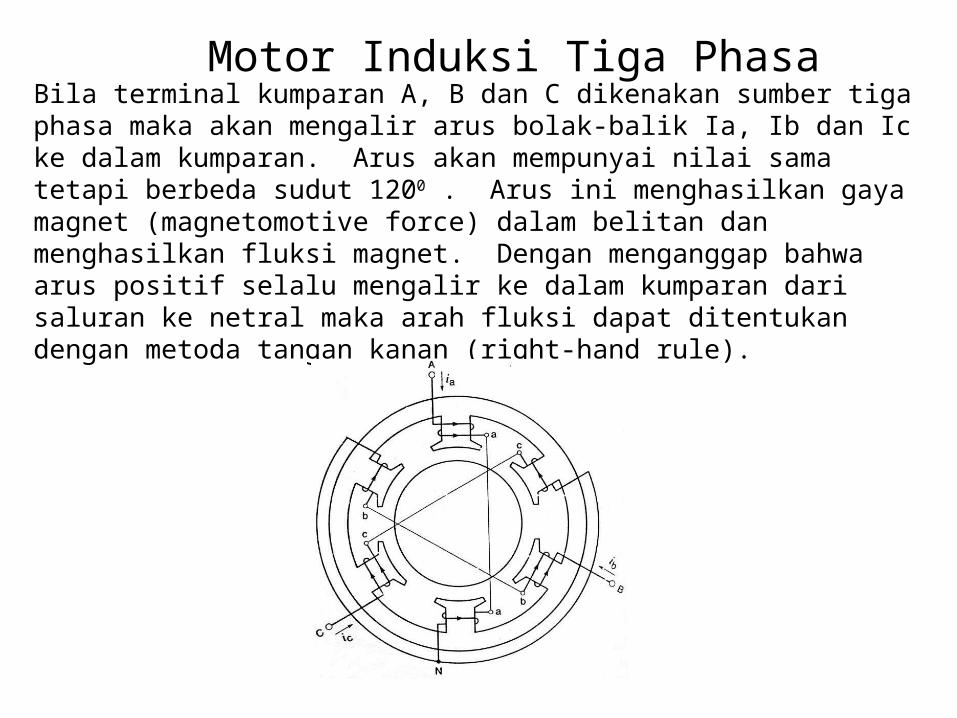
Motor Induksi Tiga Phasa
Bila terminal kumparan A, B dan C dikenakan sumber tiga phasa maka akan mengalir arus bolak-balik Ia, Ib dan Ic ke dalam kumparan. Arus akan mempunyai nilai sama tetapi berbeda sudut 1200 . Arus ini menghasilkan gaya magnet (magnetomotive force) dalam belitan dan menghasilkan fluksi magnet. Dengan menganggap bahwa arus positif selalu mengalir ke dalam kumparan dari saluran ke netral maka arah fluksi dapat ditentukan dengan metoda tangan kanan (right-hand rule).
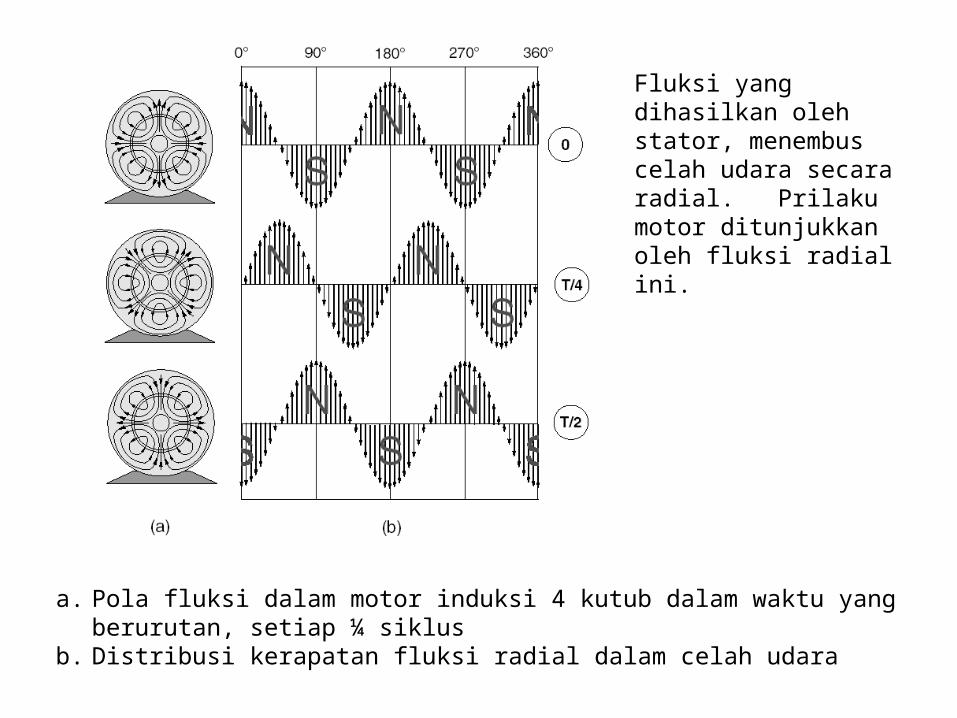
a. Pola fluksi dalam motor induksi 4 kutub dalam waktu yang berurutan, setiap ¼ siklus
b. Distribusi kerapatan fluksi radial dalam celah udara
Fluksi yang dihasilkan oleh stator, menembus celah udara secara radial. Prilaku motor ditunjukkan oleh fluksi radial ini.
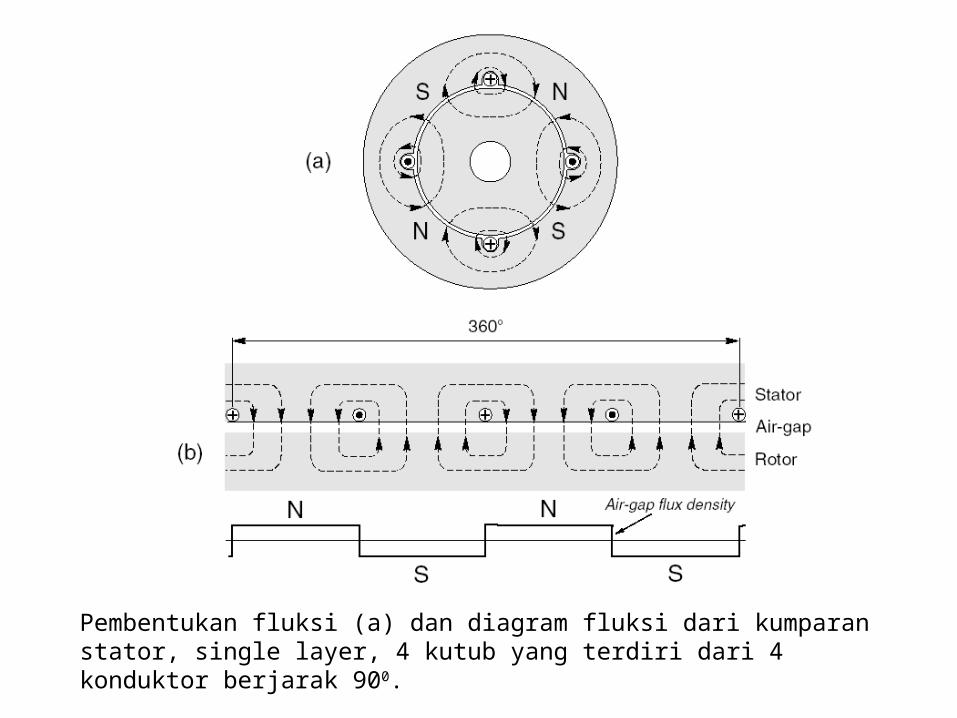
Pembentukan fluksi (a) dan diagram fluksi dari kumparan stator, single layer, 4 kutub yang terdiri dari 4 konduktor berjarak 900.
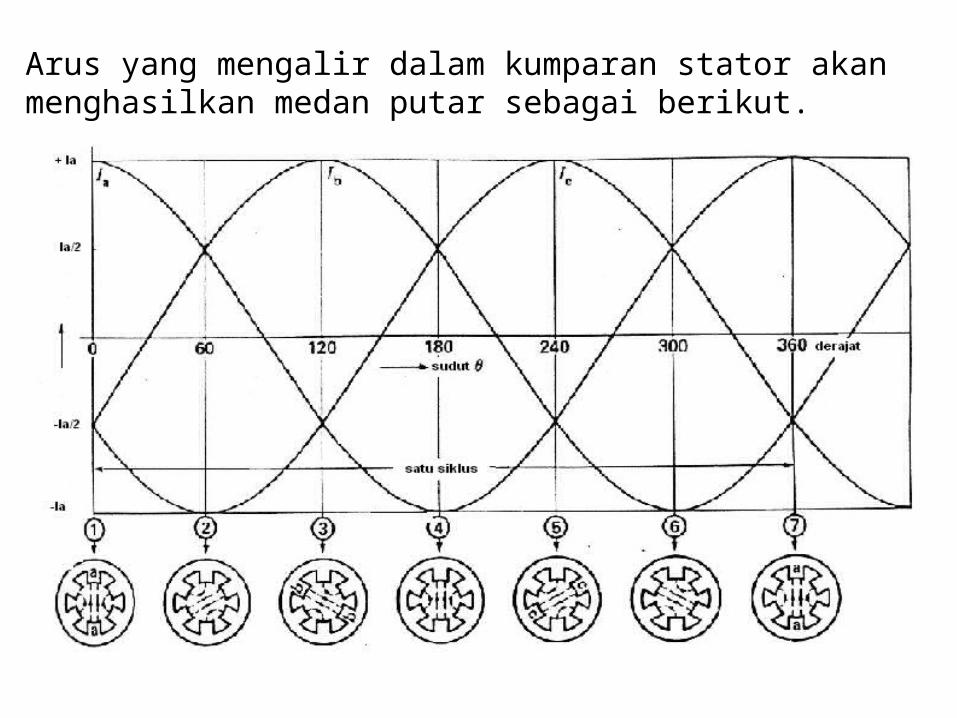
Arus yang mengalir dalam kumparan stator akan menghasilkan medan putar sebagai berikut.
cosaF
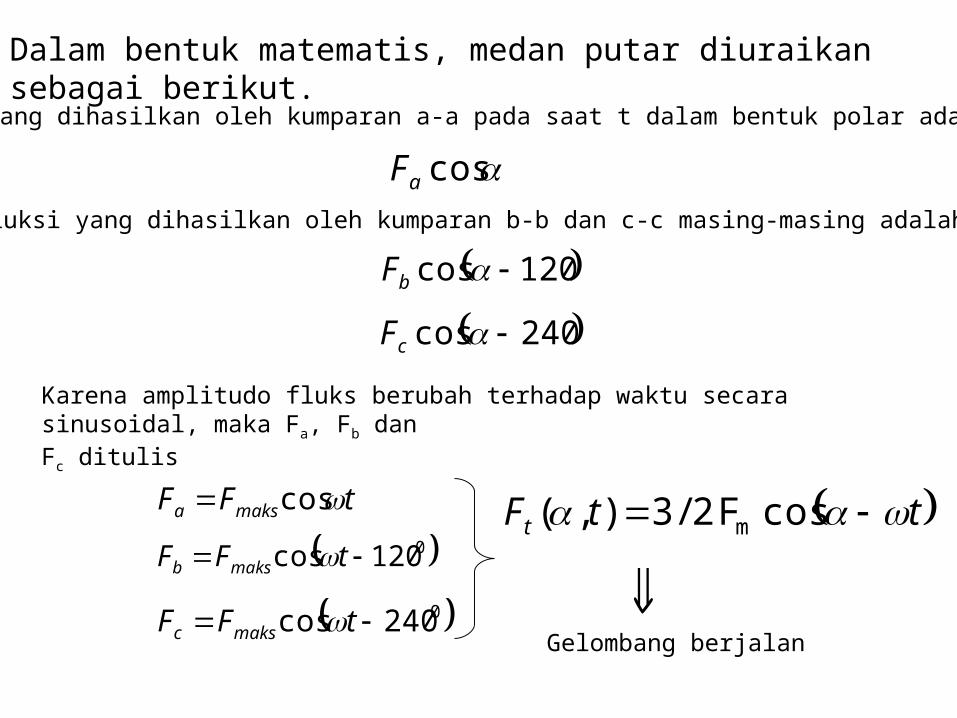
Dalam bentuk matematis, medan putar diuraikan sebagai berikut.
Fluksi yang dihasilkan oleh kumparan a-a pada saat t dalam bentuk polar adalah :
Dan fluksi yang dihasilkan oleh kumparan b-b dan c-c masing-masing adalah :
120cos bF
240cos cF
Karena amplitudo fluks berubah terhadap waktu secara sinusoidal, maka Fa, Fb danFc ditulis
tFF maksa cos
0120cos tFF maksb
0240cos tFF maksc
ttFt cosF 2/3),( m
Gelombang berjalan
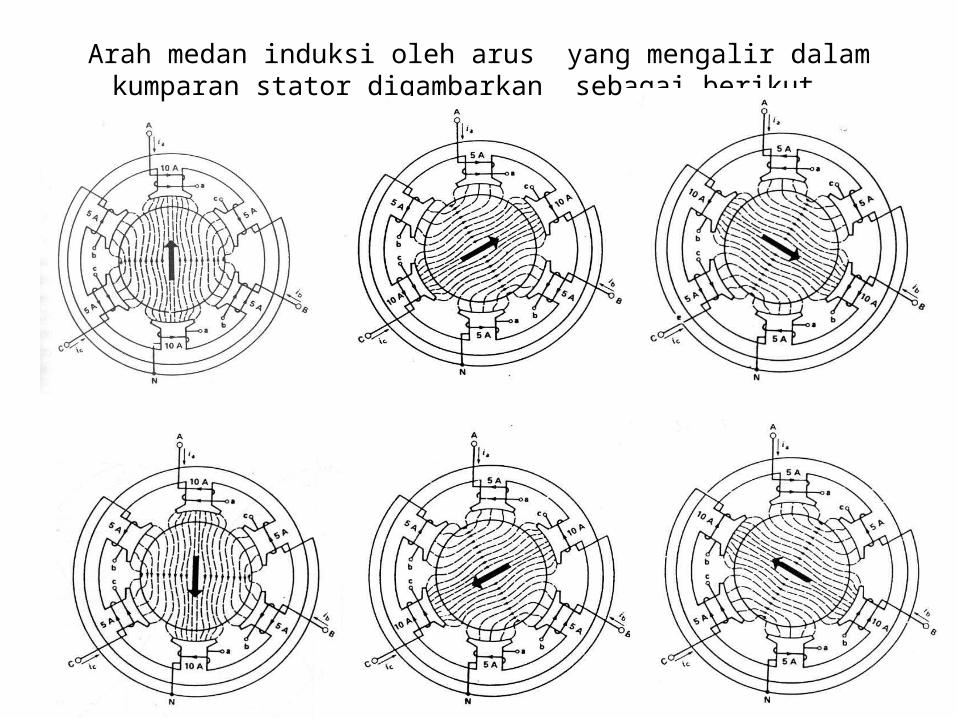
Arah medan induksi oleh arus yang mengalir dalam kumparan stator digambarkan sebagai berikut.
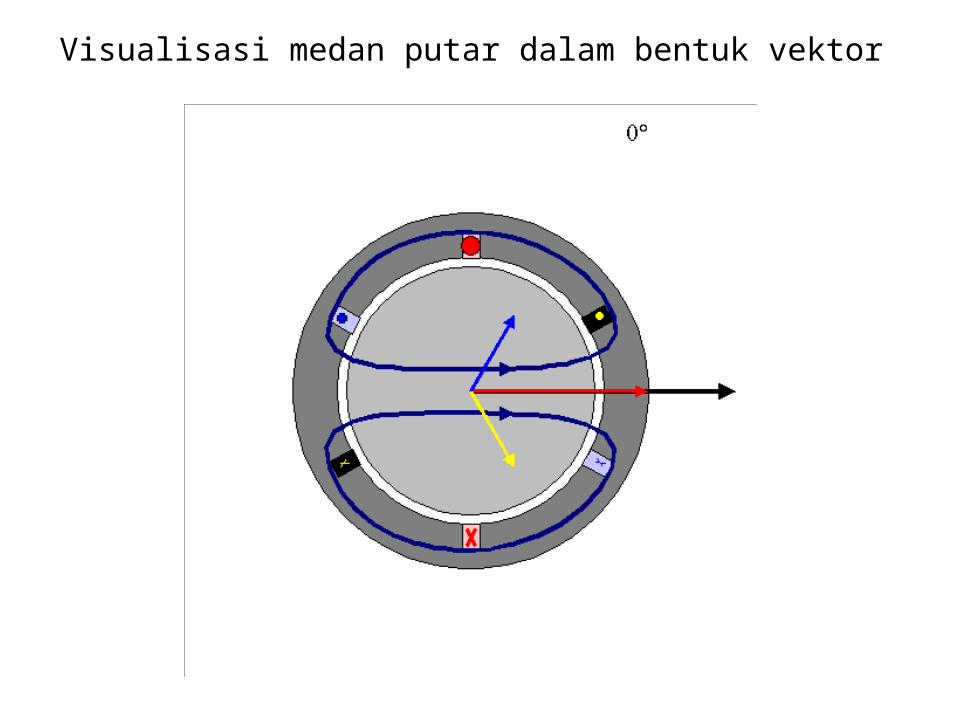
Visualisasi medan putar dalam bentuk vektor
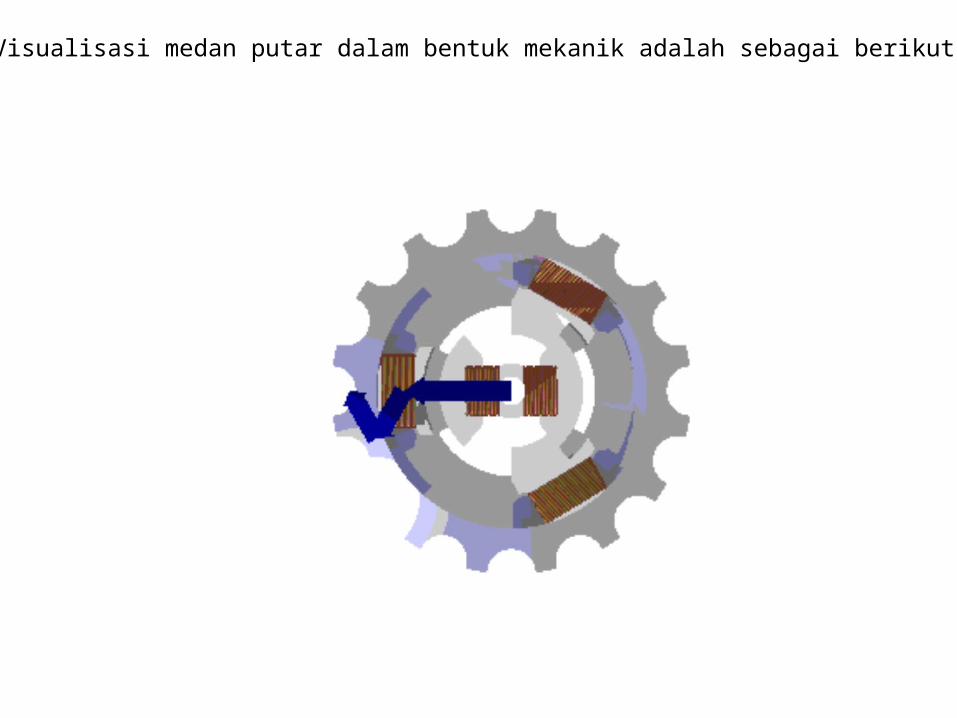
Visualisasi medan putar dalam bentuk mekanik adalah sebagai berikut.
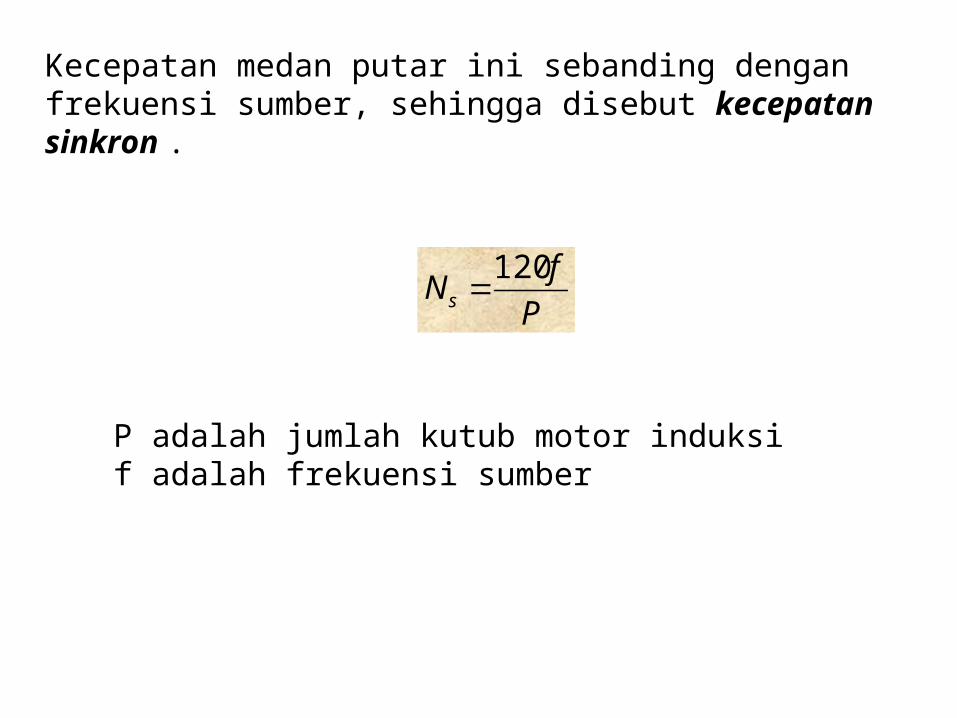
Kecepatan medan putar ini sebanding dengan frekuensi sumber, sehingga disebut kecepatan sinkron .
P
fN s
120
P adalah jumlah kutub motor induksif adalah frekuensi sumber
Dimana:Ns = kecepatan sinkron dalam RPMNr = kecepatan dasar rotor dalam RPM
Motor induksi berputar di bawah kecepatan sinkronnya, sehingga ada slip antara kecepatan sinkron dengan kecepatan putar rotor, yang dinyatakansebagai berikut :
% Slip = (Ns – Nr)/Ns x 100
Slip akan meningkat dengan bertambahnya beban.
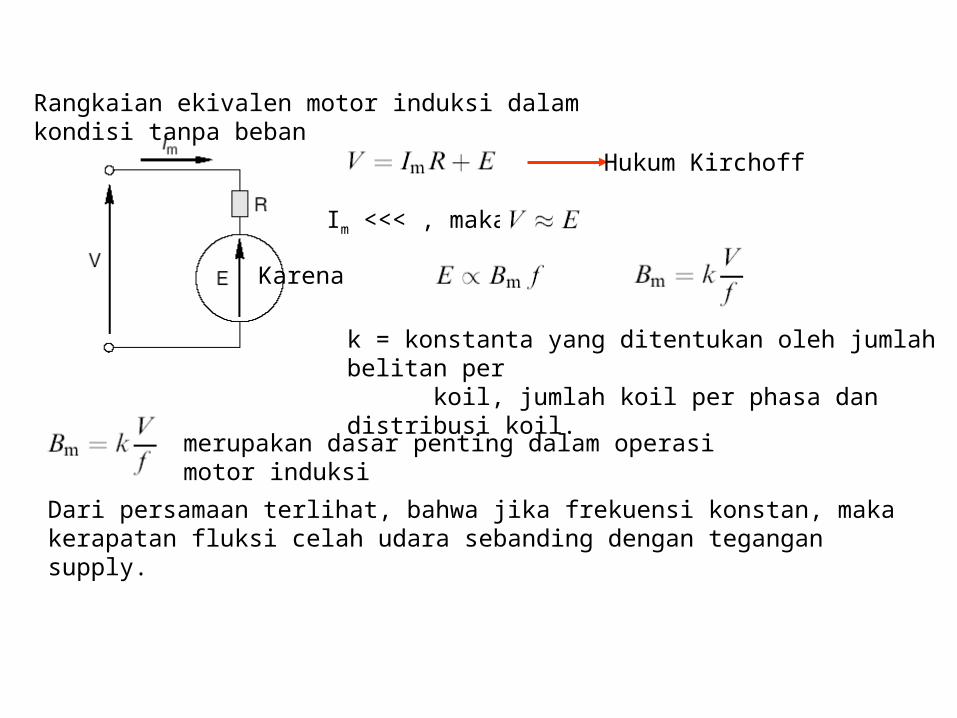
Rangkaian ekivalen motor induksi dalam kondisi tanpa beban
Hukum Kirchoff
Im <<< , maka
Karena maka
k = konstanta yang ditentukan oleh jumlah belitan per koil, jumlah koil per phasa dan distribusi koil.
merupakan dasar penting dalam operasi motor induksi
Dari persamaan terlihat, bahwa jika frekuensi konstan, maka kerapatan fluksi celah udara sebanding dengan tegangan supply.
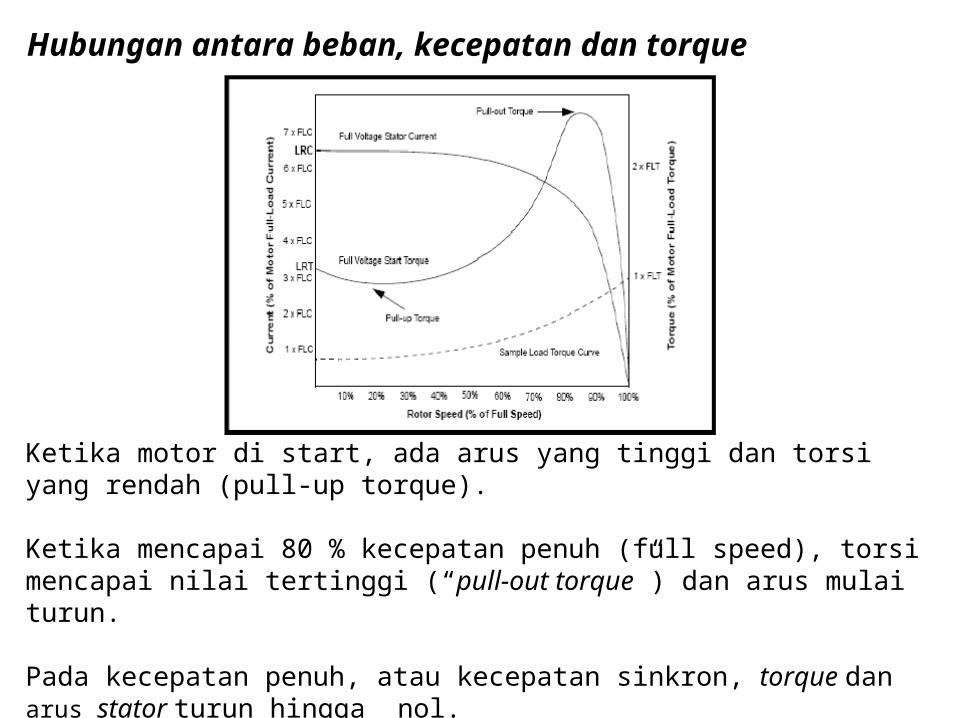
Hubungan antara beban, kecepatan dan torque
Ketika motor di start, ada arus yang tinggi dan torsi yang rendah (pull-up torque).
Ketika mencapai 80 % kecepatan penuh (full speed), torsi mencapai nilai tertinggi (“pull-out torque”) dan arus mulai turun.
Pada kecepatan penuh, atau kecepatan sinkron, torque dan arus stator turun hingga nol.
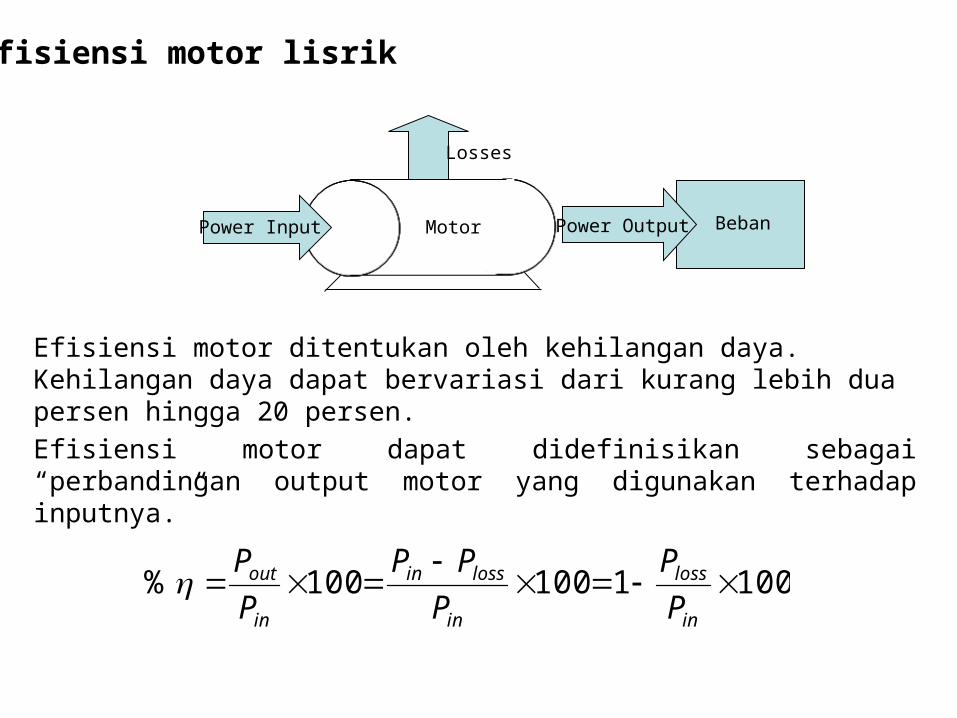
Efisiensi motor lisrik
Power Input Motor
Losses
Power Output Beban
Efisiensi motor ditentukan oleh kehilangan daya. Kehilangan daya dapat bervariasi dari kurang lebih dua persen hingga 20 persen.
Efisiensi motor dapat didefinisikan sebagai “perbandingan output motor yang digunakan terhadap inputnya.”
1001100100 %
in
loss
in
lossin
in
out
P
P
P
PP
P
P
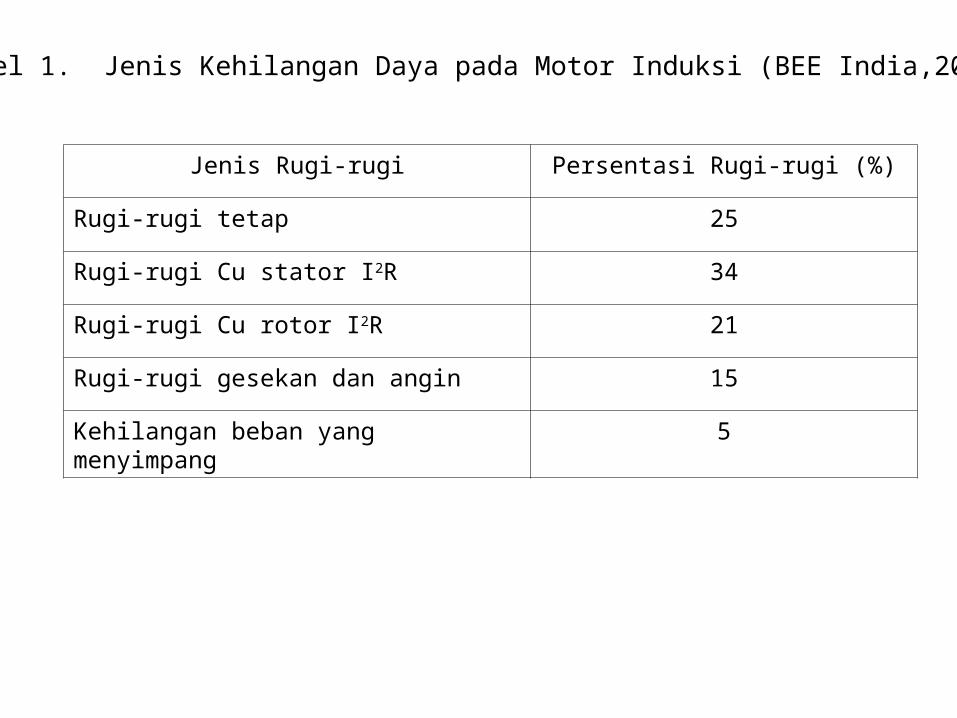
Tabel 1. Jenis Kehilangan Daya pada Motor Induksi (BEE India,2004)
Jenis Rugi-rugi Persentasi Rugi-rugi (%)
Rugi-rugi tetap 25
Rugi-rugi Cu stator I2R 34
Rugi-rugi Cu rotor I2R 21
Rugi-rugi gesekan dan angin 15
Kehilangan beban yang menyimpang 5
Faktor-faktor yang mempengaruhi efisiensi adalah:
Usia. Motor baru lebih efisien.
Kapasitas. Sebagaimana pada hampir kebanyakan peralatan, efisiensi motor meningkat dengan laju kapasitasnya.
Kecepatan. Motor dengan kecepatan yang lebih tinggi biasanya lebih efisien.
Jenis. Sebagai contoh, motor rotor sangkar biasanya lebih efisien daripada motor rotor lilit.Suhu. Motor yang didinginkan oleh fan dan tertutup total (TEFC) lebih efisien daripada motor screen drip-proof (SPDP).
Rewinding motor dapat mengakibatkan penurunan efisiensi.
Beban, seperti yang dijelaskan berikut.
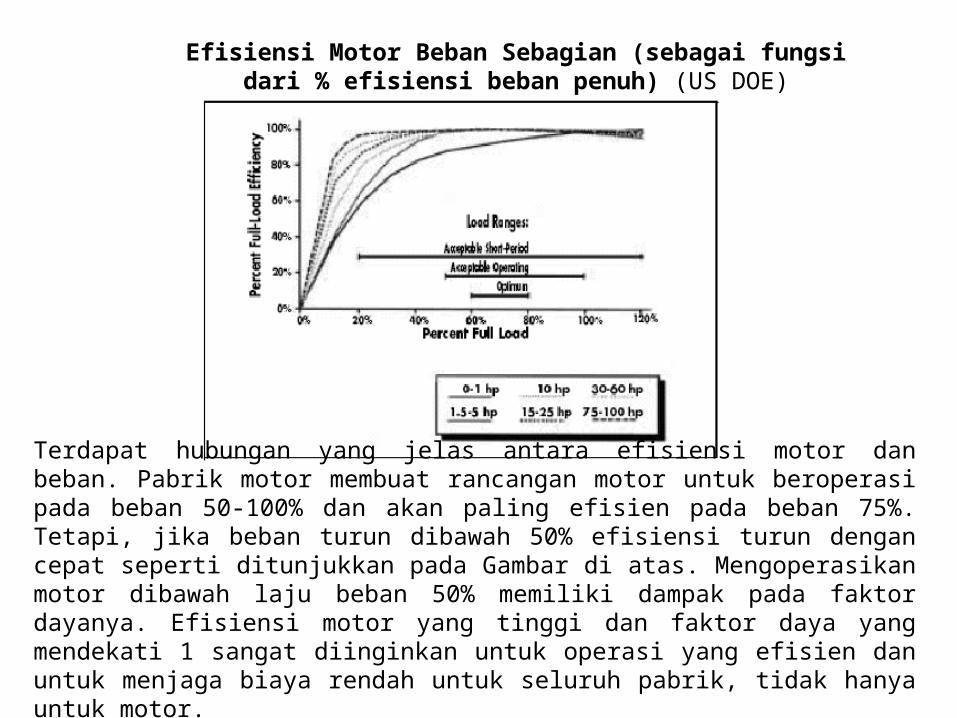
Efisiensi Motor Beban Sebagian (sebagai fungsidari % efisiensi beban penuh) (US DOE)
Terdapat hubungan yang jelas antara efisiensi motor dan beban. Pabrik motor membuat rancangan motor untuk beroperasi pada beban 50-100% dan akan paling efisien pada beban 75%. Tetapi, jika beban turun dibawah 50% efisiensi turun dengan cepat seperti ditunjukkan pada Gambar di atas. Mengoperasikan motor dibawah laju beban 50% memiliki dampak pada faktor dayanya. Efisiensi motor yang tinggi dan faktor daya yang mendekati 1 sangat diinginkan untuk operasi yang efisien dan untuk menjaga biaya rendah untuk seluruh pabrik, tidak hanya untuk motor.
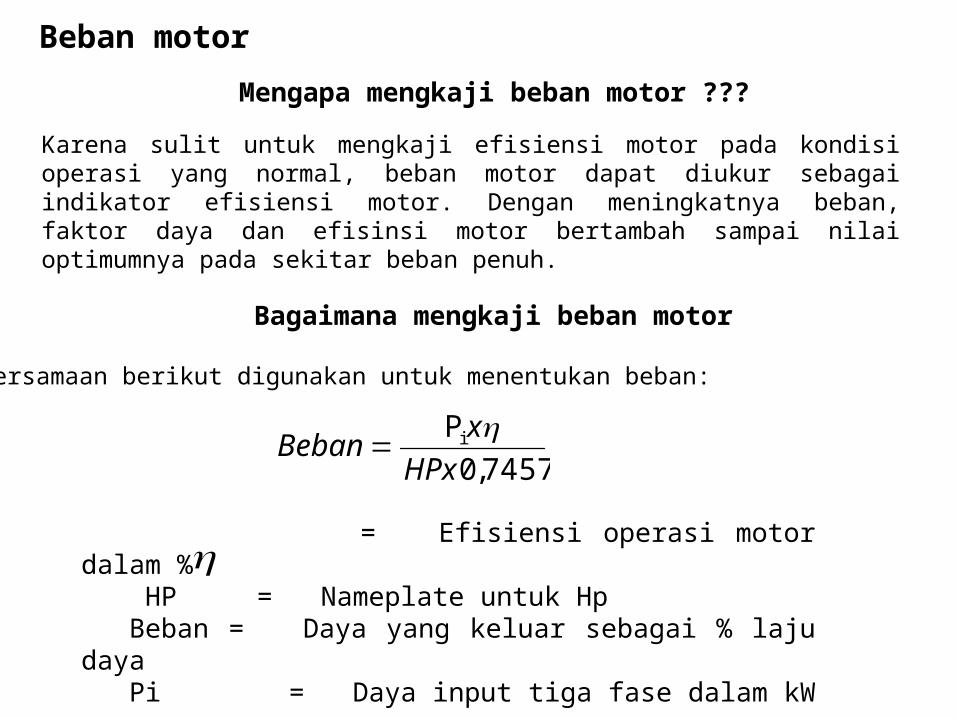
Beban motor
Mengapa mengkaji beban motor ???
Karena sulit untuk mengkaji efisiensi motor pada kondisi operasi yang normal, beban motor dapat diukur sebagai indikator efisiensi motor. Dengan meningkatnya beban, faktor daya dan efisinsi motor bertambah sampai nilai optimumnya pada sekitar beban penuh.
Bagaimana mengkaji beban motor
Persamaan berikut digunakan untuk menentukan beban:
7457,0
P i
HPx
xBeban
= Efisiensi operasi motor dalam % HP = Nameplate untuk HpBeban = Daya yang keluar sebagai % laju
dayaPi = Daya input tiga fase dalam kW
Terdapat tiga metode untuk menentukan beban motor bagi motor yang beroperasi secara individu:Pengukuran daya masuk. Metode ini menghitung beban sebagai perbandingan antara daya masuk (diukur dengan alat analisis daya) dan nilai daya pada pembebanan 100%.
Pengukuran arus listrik. Beban ditentukan dengan membandingkan amper terukur (diukur dengan alat analisis daya) dengan laju amper. Metode ini digunakan bila faktor daya tidak diketahui dan hanya nilai amper yang tersedia. Juga direkomendasikan untuk menggunakan metode ini bila persen pembebanan kurang dari 50%.
Metode Slip. Beban ditentukan dengan membandingkan slip yang terukur bila motor beroperasi dengan slip untuk motor dengan beban penuh. Ketelitian metode ini terbatas namun dapat dilakukan dengan hanya penggunaan tachometer (tidak diperlukan alat analisis daya).Karena pengukuran daya masuk merupakan metode yang paling umum digunakan, maka hanya metode ini yang dijelaskan untuk motor tiga fase.
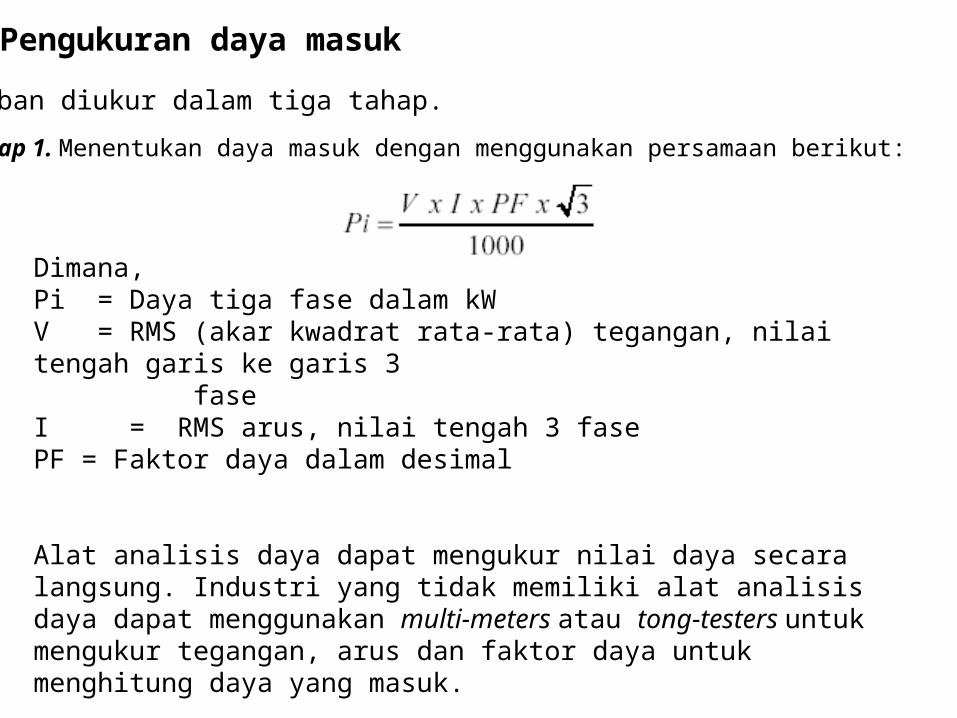
Pengukuran daya masuk
Beban diukur dalam tiga tahap.
Tahap 1. Menentukan daya masuk dengan menggunakan persamaan berikut:
Dimana,Pi = Daya tiga fase dalam kWV = RMS (akar kwadrat rata-rata) tegangan, nilai tengah garis ke garis 3 faseI = RMS arus, nilai tengah 3 fasePF = Faktor daya dalam desimal
Alat analisis daya dapat mengukur nilai daya secara langsung. Industri yang tidak memiliki alat analisis daya dapat menggunakan multi-meters atau tong-testers untuk mengukur tegangan, arus dan faktor daya untuk menghitung daya yang masuk.
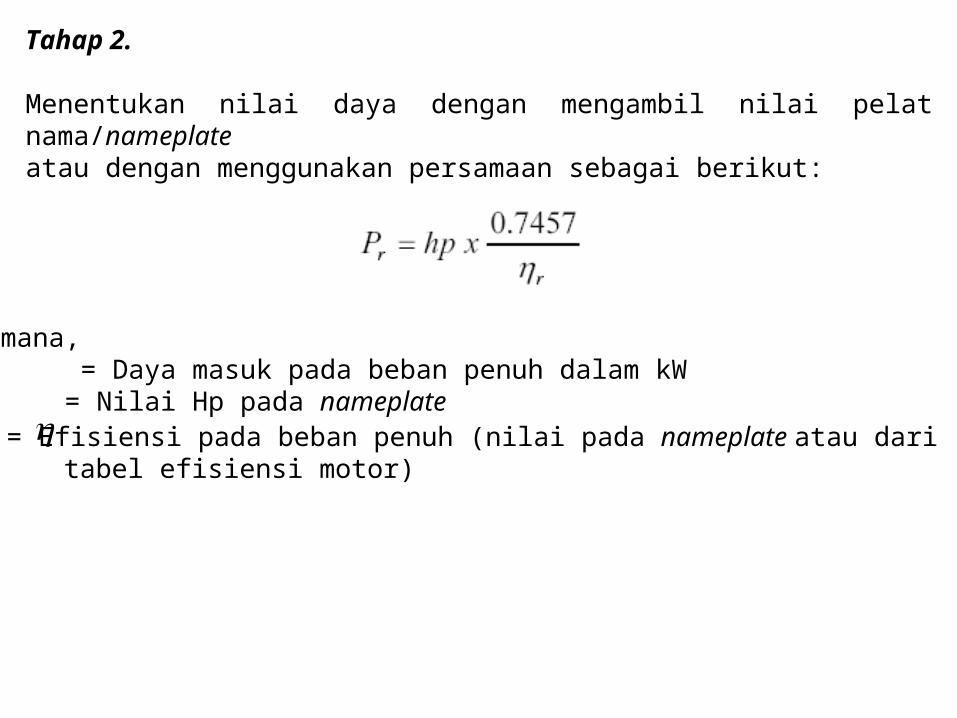
Tahap 2.
Menentukan nilai daya dengan mengambil nilai pelat nama/nameplate atau dengan menggunakan persamaan sebagai berikut:
Dimana,Pr = Daya masuk pada beban penuh dalam kWHP = Nilai Hp pada nameplate = Efisiensi pada beban penuh (nilai pada nameplate atau dari
tabel efisiensi motor)
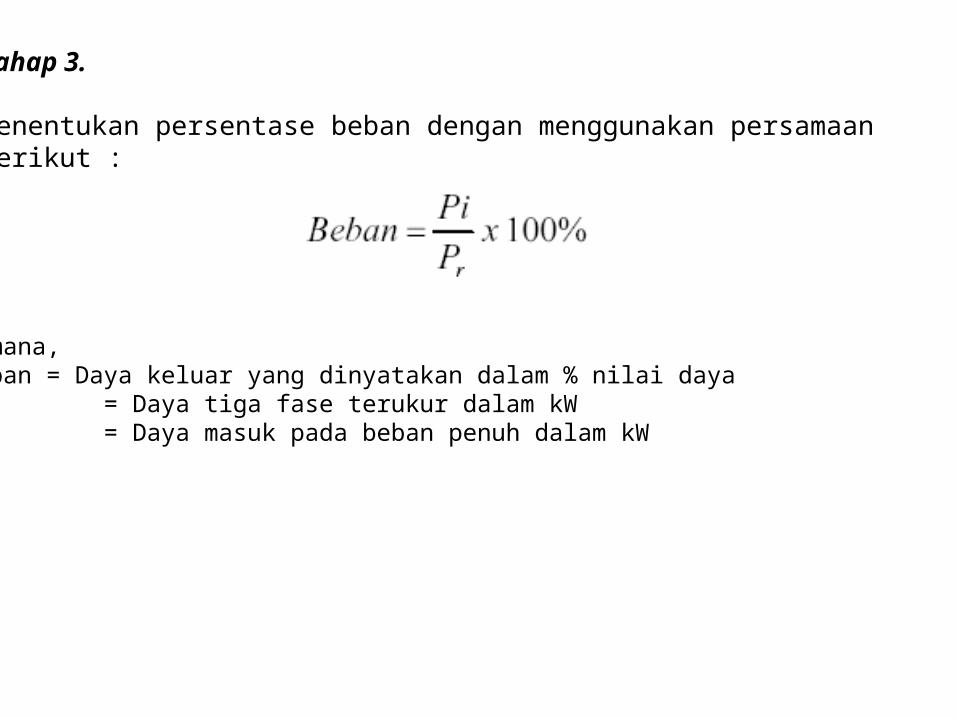
Tahap 3.
Menentukan persentase beban dengan menggunakan persamaan berikut :
Dimana,Beban = Daya keluar yang dinyatakan dalam % nilai dayaPi = Daya tiga fase terukur dalam kWPr = Daya masuk pada beban penuh dalam kW
3.2.4 Contoh
Pengamatan terhadap pengukuran daya berikut dilakukan untuk motor induksi tiga fase 45 kW dengan efisiensi beban penuh 88%. V = 418 Volt I = 37 Amp PF = 0.81
Hitung beban.
Jawab: Daya Masuk = (1,732 x 418 x 37 x 0,81)/1000 = 21,70 kW % Pembebanan = [21,70 /(45/0,88)] x 100 = 42,44 %