daster p2
11
BAB I DASAR TEORI MOTOR SINKRON TIGA FASA Motor Sinkron adalah mesin sinkron yang digunakan untuk mengubah energi listrik menjadi energi mekanik. Konstruksi motor sinkron sama dengan konstruksi generator sinkron. perbedaannya terletak pada penggunaannya. Generator sinkron diputar untuk menghasilkan tenaga listrik, sedangkan pada motor sinkron dimasukkan tenaga listrik untuk menghasilkan putaran atau untuk memperbaiki cos φ. Motor sinkron adalah motor AC, bekerja pada kecepatan tetap pada sistem frekuensi tertentu. Motor ini memerlukan arus DC untuk pembangkitan daya dan memiliki torsi awal yang rendah, dan oleh karena itu motor sinkron cocok untuk penggunaan awal untuk beban rendah, seperti kompresor udara, perubahan frekuensi dan generator motor. Motor sinkron mampu memperbaiki faktor daya sistem sehingga sering digunakan pada sistem yang menggunakan banyak listrik. Motor Sinkron adalah motor AC tiga-fasa yang dijalankan pada kecepatan sinkron, tanpa slip. Keunggulan motor AC : Lebih handal dari motor DC dan lebih mudah perawatannya. Motor induksi AC cukup murah (harganya setengah atau kurang dari harga sebuah motor DC) memberikan rasio daya terhadap berat yang cukup tinggi (sekitar 2 kali motor DC). Jika dibandingkan antara motor induksi dan motor sinkron, terdapat perbedaan yang sangat prinsipil pada karakteristik berbeban pada kedua jenis motor ini. Pada motor induksi, penambahan beban akan menyebabkan kecepatan putar motor akan berkurang. Berkurangnya kecepatan mengurangi GGL lawan sehingga tambahan arus akan ditarik dari sumber untuk menggerakkan beban yang bertambah agar kecepatan putar kembali seperti semula. Pada motor sinkron, hal ini tidak terjadi karena ketika masih bekerja maka rotor motor sinkron akan selalu terikat atau terkopel secara magnetis dengan medan
-
Upload
ahmad-wildan -
Category
Documents
-
view
3 -
download
0
description
oi
Transcript of daster p2

BAB IDASAR TEORI
MOTOR SINKRON TIGA FASA
Motor Sinkron adalah mesin sinkron yang digunakan untuk mengubah energi listrik menjadi energi mekanik. Konstruksi motor sinkron sama dengan konstruksi generator sinkron. perbedaannya terletak pada penggunaannya. Generator sinkron diputar untuk menghasilkan tenaga listrik, sedangkan pada motor sinkron dimasukkan tenaga listrik untuk menghasilkan putaran atau untuk memperbaiki cos φ.
Motor sinkron adalah motor AC, bekerja pada kecepatan tetap pada sistem frekuensi tertentu. Motor ini memerlukan arus DC untuk pembangkitan daya dan memiliki torsi awal yang rendah, dan oleh karena itu motor sinkron cocok untuk penggunaan awal untuk beban rendah, seperti kompresor udara, perubahan frekuensi dan generator motor. Motor sinkron mampu memperbaiki faktor daya sistem sehingga sering digunakan pada sistem yang menggunakan banyak listrik. Motor Sinkron adalah motor AC tiga-fasa yang dijalankan pada kecepatan sinkron, tanpa slip. Keunggulan motor AC :
Lebih handal dari motor DC dan lebih mudah perawatannya. Motor induksi AC cukup murah (harganya setengah atau kurang dari harga
sebuah motor DC) memberikan rasio daya terhadap berat yang cukup tinggi (sekitar 2 kali
motor DC).Jika dibandingkan antara motor induksi dan motor sinkron, terdapat
perbedaan yang sangat prinsipil pada karakteristik berbeban pada kedua jenis motor ini. Pada motor induksi, penambahan beban akan menyebabkan kecepatan putar motor akan berkurang. Berkurangnya kecepatan mengurangi GGL lawan sehingga tambahan arus akan ditarik dari sumber untuk menggerakkan beban yang bertambah agar kecepatan putar kembali seperti semula. Pada motor sinkron, hal ini tidak terjadi karena ketika masih bekerja maka rotor motor sinkron akan selalu terikat atau terkopel secara magnetis dengan medan putar dan dipaksa untuk turut berputar dengan kecepatan sinkronnya. Dengan demikian, penambahan beban tidak berpengaruh terhadap putaran motor. Namun jika penambahan beban melebihi batas kekuatan kopel rotor dan medan putar stator maka rotor motor akan berhenti bekerja.
Motor 3 phasa memiliki karakteristik antara lain : Motor sinkron AC digunakan untuk mengubah tenaga listrik menjadi
tenaga mekanik. Rotasi dari motor sinkron dibentuk oleh rangkaian fase dari tiga fasa AC
yang diterapkan ke stator motor. Seperti dengan tiga fase motor induksi, rotasi motor sinkron dapat berubah dengan membalik tiap dua stator penunjuk.
Polaritas rotor tidak berpengaruh pada rotasi. Motor sinkron seringkali langsung digabungkan ke beban dan dapat berbagi
sebuah poros bersama dan bantalan dengan beban.

Motor sinkron yang besar biasanya dimulai sebagai across the line. Kadang-kadang, metode mengurangi tegangan, seperti autotransformer atau bagian yang berliku dapat digunakan.
Sebuah motor sinkron berjalan pada kondisi stabil pada kecepatan tetap disebut kecepatan sinkron.
Kecepatan sinkron bergantung pada frekuensi tegangan dan jumlah kutub dalam mesin. Dengan kata lain, kecepatan motor sinkron independen dari beban selama beban dalam kemampuan motor.
Jika beban melebihi torsi maksimum yang dapat dikembangkan oleh motor, motor berhenti dan torsi rata-rata yang dikembangkan adalah nol.
Kebanyakan motor sinkron memiliki nilai antara 150 kW (200 hp) dan 15 MW (20,000 hp) dan kecepatan berkisar 150-1.800 r/min. Akibatnya, mesin-mesin ini digunakan dalam industri berat.
Motor sinkron dibangun di unit besar dibandingkan dengan motor induksi (motor induksi lebih murah untuk peringkat yang lebih kecil) dan digunakan untuk industri kecepatan konstan drive.
Prinsip Kerja Motor Sinkron
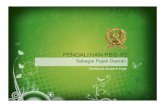
Gambar 2.1 Terjadinya torsi pada motor sinkron (a) tanpa beban (b) kondisi berbeban (c) kurva karakteristik torsi
Gambar 2.1 memperlihatkan keadaan terjadinya torsi pada motor sinkron. Keadaan ini dapat dijelaskan sebagai berikut: apabila kumparan jangkar (pada stator) dihubungkan dengan sumber tegangan tiga fasa maka akan mengalir arus tiga fasa pada kumparan. Arus tiga fasa pada kumparan jangkar ini menghasilkan medan putar homogen (BS). Berbeda dengan motor induksi, motor sinkron mendapat eksitasi dari sumber DC eksternal yang dihubungkan ke rangkaian rotor melalui slip ring dan sikat. Arus DC pada rotor ini menghasilkan medan magnet rotor (BR) yang tetap. Kutub medan rotor mendapat tarikan dari kutub medan putar stator hingga turut berputar dengan kecepatan yang sama (sinkron). Torsi yang dihasilkan motor sinkron merupakan fungsi sudut torsi (δ). Semakin besar sudut antara kedua medan magnet, maka torsi yang dihasilkan akan semakin besar seperti persamaan di bawah ini.
T = k .BR .Bnet sin δ (2.1) Pada beban nol, sumbu kutub medan putar berimpit dengan sumbu
kumparan medan (δ = 0). Setiap penambahan beban membuat medan motor “tertinggal” dari medan stator, berbentuk sudut kopel (δ); untuk kemudian berputar dengan kecepatan yang sama lagi. Beban maksimum tercapai ketika δ =

90o. Penambahan beban lebih lanjut mengakibatkan hilangnya kekuatan torsi dan motor disebut kehilangan sinkronisasi. Oleh karena pada motor sinkron terdapat dua sumber pembangkit fluks yaitu arus bolak-balik (AC) pada stator dan arus searah (DC) pada rotor, maka ketika arus medan pada rotor cukup untuk membangkitkan fluks (ggm) yang diperlukan motor, maka stator tidak perlu memberikan arus magnetisasi atau daya reaktif dan motor bekerja pada faktor daya = 1,0. Ketika arus medan pada rotor kurang (penguat bekurang), stator akan menarik arus magnetisasi dari jala-jala, sehingga motor bekerja pada faktor daya terbelakang (lagging). Sebaliknya bila arus pada medan rotor belebih (penguat berlebih), kelebihan fluks (ggm) ini harus diimbangi, dan stator akan menarik arus yang bersifat kapasitif dari jala-jala, dan karenanya motor bekerja pada faktor daya mendahului (leading). Dengan demikian, faktor daya motor sinkron dapat diatur dengan mengubah-ubah harga arus medan (IF)Rangkaian Ekivalen Motor Sinkron
Motor sinkron pada dasarnya adalah sama dengan generator sinkron, kecuali arah aliran daya pada motor sinkron merupakan kebalikan dari generator sinkron. Oleh karena arah aliran daya pada motor sinkron dibalik, maka arah aliran arus pada stator motor sinkron juga dapat dianggap dibalik. Maka rangkaian ekivalen motor sinkron adalah sama dengan rangkaian ekuivalen generator sinkron, kecuali arah arus Ia dibalik. Bentuk rangkaian ekuivalen motor sinkron diperlihatkan pada gambar 1
Gambar 2.2 Rangkaian Ekivalen Motor SinkronKarena terdapat perubahan pada arah arus Ia, persamaan hukum Kirchoff tegangan untuk rangkaian ekivalen berubah pula. Penulisan hukum Kirchoff tegangan untuk rangkaian ekivalen yang baru yaitu pada persamaan 2.2
Persamaan 2.2 diatas sama dengan persamaan untuk generator sinkron, kecuali pada masuknya arus Ia yang telah dibalik.
Kurva Karakteristik Torsi-Kecepatan Motor SinkronMotor sinkron pada dasarnya merupakan alat yang menyuplai tenaga ke
beban pada kecepatan konstan. Kecepatan putaran motor adalah terkunci pada frekuensi listrik yang diterapkan, oleh karena itu kecepatan motor adalah konstan pada beban bagaimanapun. Kecepatan motor yang tetap ini dari kondisi tanpa beban sampai torsi maksimum yang bisa disuplai motor disebut torsi pullout. Bentuk karakteristik torsi terhadap kecepatan, diperlihatkan pada gambar 2.3

Gambar 2.3 Karakteristik Torsi-Kecepatan Motor Sinkron Karena kecepatan motor konstan, regulasi kecepatan adalah nol. Maksimum atau torsi pullout terjadi ketika . Umumnya torsi maksimum motor sinkron adalah tiga kali torsi beban penuhnya. Ketika torsi pada motor sinkron melebihi torsi maksimum maka motor akan kehilangan sinkronisasi. Persamaan Torsi maksimum (pullout) motor sinkron dapat dinyatakan pada persamaan 2.3.
Dari persamaan di atas menunjukkan bahwa semakin besar arus medan, maka torsi maksimum motor akan semakin besar.
Pengaruh Perubahan Beban Pada Motor SinkronJika beban diberikan ke shaft pada motor sinkron, motor akan cukup
menghasilkan torsi yang cukup untuk menjaga motor dan beban tersebut memutar pada kecepatan sinkron. Pengaruh perubahan beban pada motor sinkron tertera pada Gambar 2.4
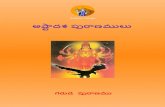
Gambar 3 Pengaruh Perubahan Beban Pada Motor Sinkron
Gambar 2.4 menjelaskan tentang bentuk pengaruh perubahan beban pada motor sinkron. Jika beban dihubungkan pada motor sinkron, maka motor akan

membangkitkan torsi yang cukup untuk menjaga motor dan bebannya berputar pada kecepatan sinkron.
Misal mula-mula motor sinkron beroperasi pada faktor daya mendahului (leading). Jika beban pada motor dinaikkan, putaran rotor pada asalnya akan melambat. Ketika hal ini terjadi, maka sudut torsi menjadi lebih besar dan torsi induksi akan naik. Kenaikan torsi induksi akan menambah kecepatan rotor, dan motor akan kembali berputar pada kecepatan sinkron tapi dengan sudut torsi yang lebih besar.
Pengaruh Perubahan Arus Medan Pada Motor SinkronKenaikan arus medan IF menyebabkan kenaikan besar Ea tetapi tidak
mempengaruhi daya real yang disuplai motor. Gambaran hubungan pengaruh kenaikan arus medan pada motor sinkron diperlihatkan pada gambar 2.5.
Gambar 2.5 Pengaruh Kenaikan Arus Medan Pada Motor SinkronPada gambar 2.5, Daya yang disuplai motor berubah hanya ketika torsi
beban berubah. Oleh karena perubahan arus medan tidak mempengaruhi kecepatan dan beban yang dipasang pada motor tidak berubah sehingga daya real yang disuplai motor tidak berubah, dan tegangan fasa sumber juga konstan, maka jarak daya pada diagram fasor (Ea.sin d dan Ia.cos q) juga harus konstan. Ketika arus medan dinaikan, maka Ea naik, tetapi ia hanya bergeser di sepanjang garis dengan daya konstan.
Ketika nilai Ea naik, besar arus Ia mula-mula turun dan kemudian naik lagi. Pada nila Ea rendah, arus jangkar Ia adalah lagging dan motor bersifat induktif. Ia bertindak seperti kombinasi resitor-induktor dan menyerap daya reaktif Q. Ketika arus medan dinaikkan, arus jangkar menjadi kecil dan pada akhirnya menjadi segaris (sefasa) dengan tegangan. Pada kondisi ini motor bersifat resistif murni. Ketika arus medan dinaikkan lebih jauh, maka arus jangkar akan menjadi mendahului (leading) dan motor menjadi beban kapasitif. Ia bertindak seperti kombinasi resistor-kapasitor menyerap daya reaktif negatif –Q (menyuplai daya reaktif Q ke sistem). Hubungan antara arus jangkar Ia dengan arus medan IF untuk satu beban (P) yang tetap akan merupakan kurva yang berbentuk V seperti yang diperlihatkan pada gambar 2.6.

Gambar 2.6 Kurva V Motor SinkronKurva V diatas menunjukkan hubungan antara arus jangkar Ia dengan arus
medan IF untuk satu beban (P) yang tetap pada motor sinkron. Beberapa kurva V digambarkan untuk level daya yang berbeda. Arus jangkar minimum terjadi pada faktor daya satu dimana hanya daya real yang disuplai ke motor. Pada titik lain, daya reaktif disuplai ke atau dari motor.
Untuk arus medan lebih rendah dari nilai yang menyebabkan arus Ia minimum, maka arus jangkar akan tertinggal (lagging) dan menyerap Q. Oleh karena arus medan pada kondisi ini adalah kecil, maka motor dikatakan under excitation. Phasor diagram untuk kondisi under excitation seperti pada gambar 2.7.
Gambar 2.7 phasor diagram pada kondisi under excitation motor sinkronUntuk arus medan lebih besar dari nilai yang menyebabkan Ia minimum,
maka arus jangkar akan mendahului (leading) dan menyuplai Q. Kondisi ini disebut over excitation, seperti pada phasor diagram Gambar 2.8
Gambar 2.8 phasor diagram over excitation motor sinkron
Kondensor SinkronTelah diterangkan sebelumnya bahwa apabila motor sinkron diberi
penguatan berlebih, maka untuk mengkompensasi kelebihan fluks, dari jala-jala

akan ditarik arus kapasitif. Karena itu motor sinkron (tanpa beban) yang diberi penguat berlebih akan berfungsi sebagai kapasitor dan mempunyai kemampuan untuk memperbaiki faktor daya. Motor sinkron demikian disebut kondensor sinkron. Diagram fasor condenser sinkron seperti yang terdapat pada Gambar 2.9
Gambar 2.9 diagram pasor condenser sinkron
Starting Motor SinkronPada saat start ( tegangan dihubungkan ke kumparan stator) kondisi motor
adalah diam dan medan rotor BR juga stasioner, medan magnet stator mulai berputar pada kecepatan sinkron. Saat t = 0, BR dan BS adalah segaris, maka torsi induksi pada rotor adalah nol. Kemudian saat t = ¼ siklus rotor belum bergerak dan medan magnet stator ke arah kiri menghasilkan torsi induksi pada rotor berlawanan arah jarum jam. Selanjutnya pada t = ½ siklus BR dan BS berlawanan arah dan torsi induksi pada kondisi ini adalah nol. Pada t = ¾ siklus medan magnet stator ke arah kanan menghasilkan torsi searah jarum jam. Demikian seterusnya pada t = 1 siklus medan magnet stator kembali segaris dengan medan magnet rotor.
Selama satu siklus elektrik dihasilkan torsi pertama berlawanan jarum jam kemudian searah jarum jam, sehingga torsi rata-rata pada satu siklus adalah nol. Ini menyebabkan motor bergetar pada setiap siklus dan mengalami pemanasan lebih. Tiga pendekatan dasar yang dapat digunakan untuk menstart motor sinkron dengan aman adalah.
1. Mengurangi kecepatan medan magnet stator pada nilai yang rendah sehingga rotor dapat mengikuti dan menguncinya pada setengah siklus putaran medan magnet. Hal ini dapat dilakukan dengan mengurangi frekuensi tegangan yang diterapkan.
2. Menggunakan penggerak mula eksternal untuk mengakselarasikan motor sinkron hingga mencapai kecepatan sinkron, kemudian penggerak mula dimatikan (dilepaskan).
3. Menggunakan kumparan peredam (damper winding) atau dengan membuat kumparan rotor motor sinkron seperti kumparan rotor belitan pada motor induksi (hanya saat start).
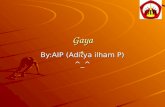
Komponen utama motor sinkron adalah (Gambar 7):2 Rotor. Perbedaan utama antara motor sinkron dengan motor induksi
adalah bahwa rotor mesin sinkron berjalan pada kecepatan yang sama dengan perputaran medan magnet.Hal ini memungkinkan sebab medan magnit rotor tidak lagi terinduksi. Rotor memiliki magnet permanen atau arus DC-excited, yang dipaksa untuk mengunci pada posisi tertentu bila dihadapkan dengan medan magnet lainnya.

Gambar 7.2 Motor Sinkron (Integrated Publishing, 2003)
Stator. Stator menghasilkan medan magnet berputar yang sebanding dengan frekwensi yang dipasok.