Bab 3 Landasan Teori - Offshore

of 12
-
Upload
tugatuga89 -
Category
Documents
-
view
234 -
download
3
Transcript of Bab 3 Landasan Teori - Offshore
-
8/19/2019 Bab 3 Landasan Teori - Offshore
1/26
Bab 3 Landasan Teori
Analisis Struktur Lepas Pantai Tipe Jacket 4 Kaki 3 - 1
Landasan Teori
3.1 Pembebanan Struktur
Beban yang diterima struktur berdasarkan API RP2A dapat berupa beban-beban
seperti dibawah ini:
1. Beban mati
Beban mati struktur adalah berat struktur itu sendiri, semua perlengkapan yang
permanen dan perlengkapan struktur yang tidak berubah selama beroperasinya
struktur.
Beban mati terdiri dari:
a. Berat platform di udara
b. Berat perlengkapan yang permanen
c. Gaya hidrostatik dibawah permukaan garis air termasuk tekanan dan gaya
angkat.
2. Beban hidup
Beban hidup antara lain adalah beban yang mengenai struktur dan berubah selama
operasi platform berlangsung. Beban hidup terdiri dari:
a. Beban perlengkapan pengeboran dan perlengkapan produksi yang bisa dipasang
dan dipindahkan dari platform.
b. Berat dari tempat tinggal (living quarters), heliport dan perlengkapan penunjang
lainnya yang bisa dipasang dan dipindahkan dari platform.
c. Berat dari suplai kebutuhan dan benda cair lainnya yang mengisi tangki
penyimpanan.
ab
3
-
8/19/2019 Bab 3 Landasan Teori - Offshore
2/26
-
8/19/2019 Bab 3 Landasan Teori - Offshore
3/26
Bab 3 Landasan Teori
Analisis Struktur Lepas Pantai Tipe Jacket 4 Kaki 3 - 3
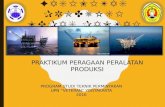
Gambar 3.1 Sketsa profil gelombang.
Keterangan:
L = Panjang gelombang
H = Tinggi gelombang
A = Amplitudo gelombang (=1/2H)
u = Kecepatan horisontal partikel air
w = Kecepatan vertikal partikel air
MWL = Mean Water Level
),( t xη = Elevasi muka air di lokasi x pada saat t
h = Kedalaman perairan
Dalam membangun suatu teori gelombang diperlukan suatu persamaan pengatur
yang dapat mewakili kondisi fisik gelombang yang sebenarnya. Persamaan
pengatur dalam teori gelombang adalah persamaan Laplace. Persamaan pengatur
bersifat umum, untuk mendapatkan persamaan (solusi) yang bersifat khusus
(unique solution) diperlukan syarat-syarat batas, yaitu syarat batas kinematis,
dinamis, dan syarat batas periodic . Perbedaan cara dan pengambilan asumsi yang
berbeda dalam penyelesaian persamaan gelombang akan menghasilkan teori
Z
w
u
L
η (x,t)H
h
seabed
MWL X
-
8/19/2019 Bab 3 Landasan Teori - Offshore
4/26
Bab 3 Landasan Teori
Analisis Struktur Lepas Pantai Tipe Jacket 4 Kaki 3 - 4
gelombang yang berbeda pula. Namun tiap teori gelombang memiliki keunggulan
dan keterbatasan masing-masing.
A. Persaman Pengatur
Teori gelombang dibangun dari asumsi bahwa fluida (air) merupakan fluida yang
incompressible (tak mampu mampat) dan irrotasional motion (tidak terjadi gerak
berputar fluida). Dengan asumsi ini maka potensial kecepatan Φ akan memenuhi
persamaan kontinuitas.
.∇ U = 0.............................................(3.1)
atau
0. =∇∇ φ .............................................(3.2)
Persamaan (3.2) dapat ditulis dalam bentuk persamaan Laplace sbb:
02
2
2
2
2
22 =
∂
∂+
∂
∂+
∂
∂=∇
z y x
φ φ φ φ .........................(3.3)
Dalam tinjauan dua dimensi x dan z, persamaan Laplace menjadi:
02
2
2
22 =
∂∂
+∂∂
=∇ y x
φ φ φ .................................(3.4)
Persamaan Laplace dapat dituliskan dalam bentuk fungsi stream function:
02
2
2
22 =
∂∂+
∂∂=∇
z x
ψ ψ ψ ................................(3.5)
B. Syarat Batas
Penyelesaian persamaan (3.4) dan (3.5) memerlukan nilai syarat batas tertentu
untuk memperoleh solusi yang bersifat khusus (unique solution).
1. Syarat batas permukaan, meliputi:
a. Syarat batas kinematis (kinematic free surface boundary condition, KFSBC)
x xt z ∂∂
∂∂
−∂∂
=∂∂
− η φ η φ
pada ),( t x z η = .........................................(3.6)
-
8/19/2019 Bab 3 Landasan Teori - Offshore
5/26
Bab 3 Landasan Teori
Analisis Struktur Lepas Pantai Tipe Jacket 4 Kaki 3 - 5
b. Syarat batas dinamis (dynamic free surface boundary condition, DFSBC)
)(2
1 22
t C g z xt
=+⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟ ⎠
⎞⎜⎝
⎛ ∂∂
+⎟ ⎠
⎞⎜⎝
⎛ ∂∂
+∂∂
− η φ φ φ
pada ),( t x z η = ...............(3.7)
2. Syarat batas dasar perairan (the bottom boundary condition, BBC)
Untuk dasar perairan yang datar, syarat batas menjadi:
0=∂∂
−= z
w φ
pada z = -h.......................................................(3.8)
Kondisi ini menggambarkan bahwa kecepatan partikel fluida tegak lurus dasar
perairan impermeabel dan diam, adalah nol.
3. Syarat batas periodik
( ) ( )( ) ( )T t xt x
t L xt x
+=+=,,
,,
φ φ
φ φ .................................................................(3.9)
3.2.1 Teori Gelombang Airy/ Linier
Teori gelombang airy menitikberatkan pada asumsi bahwa tinggi gelombang jauh
lebih kecil jika dibandingkan panjang gelombang L dan kedalaman h, jadi H
-
8/19/2019 Bab 3 Landasan Teori - Offshore
6/26
Bab 3 Landasan Teori
Analisis Struktur Lepas Pantai Tipe Jacket 4 Kaki 3 - 6
• Kecepatan (u) dan percepatan partikel air pada arah horisontal:
( )( )t kx
kh
zhk H
xu ϖ ϖ
φ −
+=
∂∂
−= cossinh
cosh
2...................................(3.13)
( ) ( )t kxkh
zhk H t u ϖ ϖ −+=∂∂ sin
sinhcosh
22 .........................................(3.14)
• Kecepatan (w) dan percepatan partikel air arah vertikal:
( )( )t kx
kh
zhk H
zw ϖ ϖ
φ −
+=
∂∂
−= sinsinh
sinh
2....................................(3.15)
( )( )t kx
kh
zhk H
t
wϖ ϖ −
+−=
∂∂
cossinh
sinh
2
2.......................................(3.16)
dimana:
H = tinggi gelombang
k = bilangan gelombang = L
π 2
L = panjang gelombang
ω = frekuensi gelombang =T
π 2
T = periode gelombang
3.2.2 Teori Gelombang Stokes
Pengembangan teori gelombang airy dilakukan oleh Skjelbreia dan Hendrickson
(1961) sampai orde ke-5 dan sampai saat ini banyak digunakan dalam perhitungan
teknik kelautan untuk gelombang dengan amplitudo kecil. Karena masalah
konvergensi yang lebih sulit untuk kondisi laut dangkal, teori gelombang stokes
orde ke-5 dianggap valid untuk kondisi perairan dimana rasio kedalaman h/L lebih
besar dari. Kondisi ini umumnya sesuai dengan gelombang badai (storm wave)
yang biasanya diperhitungkan dalam perancangan bangunan lepas pantai.
Untuk tinggi gelombang H , bilangan gelombang k , dan frekuensi ϖ , yang bergerak
dalam arah sumbu x , permukaan gelombang Stokes dituliskan :
( )∑=
−=5
1
cos1
n
n t kxnF k
ϖ η .................................................(3.17)
-
8/19/2019 Bab 3 Landasan Teori - Offshore
7/26
Bab 3 Landasan Teori
Analisis Struktur Lepas Pantai Tipe Jacket 4 Kaki 3 - 7
dimana :
55
5
5
44
4
4
35
5
33
3
3
24
4
22
2
2
1
F aF
F aF F aF aF
F aF aF
aF
=
= +=
+=
=
..........................................................(3.18)
,, 2422 F F dan seterusnya, merupakan parameter profil (bentuk) gelombang yang
tergantung pada kh dan a merupakan tinggi gelombang di dalam persamaan
berikut:
( )55355
33
32 F F aF aakH +++= .......................................(3.19)
Kecepatan horisontal (u) dan kecepatan vertikal (w) partikel air gelombang Stokes(pada posisi x , waktu t , dan sejauh z dari dasar perairan) adalah :
( )∑=
−=5
1
cossinh
cosh
n
n t kxn
nkh
nkzG
k u ϖ
ϖ ......................................(3.20)
( )∑=
−=5
1
sinsinh
sinh
n
n t kxn
nkh
nkzG
k w ϖ
ϖ ......................................(3.21)
dimana ,, 21 GG dan seterusnya dituliskan sbb :
( )( )
55
5
5
44
4
4
35
5
33
3
3
24
4
22
2
2
155133111
5
4
3
2
GaG
GaG
GaGaG
GaGaG
GaGaaGG
=
=
+=
+=++=
..................................................(3.22)
,, 1311 GG dst adalah parameter kecepatan gelombang yang bergantung pada kh.
Persamaan parameter ,,, 112422 GF F dst diberikan oleh Skjebreia dan Hendrickson
( ,, 24242222 BF BF == dst, dan kh AGkh AG 2sinh,sinh 24241111 == , dst).
Hubungan antara frekuensi gelombang dengan bilangan gelombang dalam teori
Stokes:
( ) khC aC agk tanh21 4122 ++=ϖ .........................................(3.23)
-
8/19/2019 Bab 3 Landasan Teori - Offshore
8/26
Bab 3 Landasan Teori
Analisis Struktur Lepas Pantai Tipe Jacket 4 Kaki 3 - 8
dimana 1C dan 2C adalah parameter frekuensi gelombang, tabel 3.3 memberikan
ilustrasi harga parameter frekuensi gelombang untuk berbagai harga h/L.
Kecepatan gelombang c ditentukan seperti pada gelombang Airy,k
c σ = , dimana
kecepatan gelombang Stokes orde-5 dituliskan sebagai berikut:
( ) 2
1
2
4
1
2 tanh1 ⎥⎦
⎤⎢⎣
⎡ ++= khC aC ak
gc .......................................(3.24)
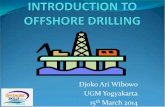
3.2.3 Pemilihan Teori Gelombang
Dalam perencanaan desain gelombang suatu struktur anjungan lepas pantai perlu
ditentukan teori gelombang yang sesuai, Baltrop et al (1990) menawarkan suatu
diagram yang diperoleh dari hasil membandingkan kecepatan partikel air, tinggi
gelombang dan panjang gelombang yang dihitung dari teori gelombang yang sering
digunakan. Gambar 3.2 adalah diagram daerah aplikasi dari Stream Function,
Stokes dan Teori Geombang Linier yang telah dimodifikasi API RP2A untuk
keperluan desain.
Gambar 3.2 Daerah aplikasi dari Stream Function, Stokes dan Airy.
0.00005
0.00010
0.00020
0.00050
0.00100
0.00200
0.00500
0.01000
0.02000
0.05000
0.001 0.002 0.005 0.010 0.020 0.050 0.100 0.200
>11
11
97
5 3
Stream Function
Shallow Water Waves Intermediate Depth Waves
Deep Water
Waves
Shallow Water Breaking Limit
H/d = 0.78
Deep Water Breaking Limit
H/d = 0.14
Hb
Stokes 5
or Stream Function 3
Linear/Airy
or Stream Function 3
gT app²H
gT app²d
-
8/19/2019 Bab 3 Landasan Teori - Offshore
9/26
Bab 3 Landasan Teori
Analisis Struktur Lepas Pantai Tipe Jacket 4 Kaki 3 - 9
3.2.4 Perhitungan Gaya Gelombang
Gaya hidrodinamika akibat gelombang pada tiang silinder bergantung pada pola
aliran di sekitar tiang yang dipengaruhi oleh derajat ketergantungan aliran oleh
adanya tiang. Derajat ketergantungan aliran ditentukan oleh perbandingan
diameter tiang silinder terhadap panjang gelombang (D/L). Apabila D/L ≤ 0.2, maka
pola aliran fluida tidak terganggu dan gaya gelombang dapat dihitung dengan
menggunakan persamaan Morison. Sebaliknya bila D/L > 0.2, maka pola aliran
mengalami difraksi dan gaya gelombang dihitung menggunakan persamaan
difraksi.
A. Persamaan Morrison
Persamaan Morison (O’Brien and Morison, 1952) menyatakan bahwa gaya
gelombang dapat diekspresikan sebagai penjumlahan dari gaya seret (drag force,
FD), yang muncul akibat kecepatan partikel air saat melewati struktur, dan gaya
inersia (inertia force, FM) akibat percepatan partikel air.
Persamaan Morison:
M D dF dF dF += ..........................................(3.25)
dzU AC UdzU DC dF M D ρ ρ +=2
1...................(3.26)
Keterangan:
dF = gaya per unit panjang
ρ = massa jenis air
Cd = koefisien drag
Cm = koefisien inersia
D = diameter atau lebar proyeksi bidang muka yang menghadap arah gelombang
U = percepatan partikel air, tegak lurus terhadap sumbu struktur
A = luas penampang elemen struktur
U = percepatan partikel air tegak lurus terhadap elemen struktur
-
8/19/2019 Bab 3 Landasan Teori - Offshore
10/26
Bab 3 Landasan Teori
Analisis Struktur Lepas Pantai Tipe Jacket 4 Kaki 3 - 10
1. Gaya Gelombang pada Tiang Silinder Tegak
Gaya total F diperoleh dengan cara mengintegrasikan persamaan Morison
sepanjang elemen struktur yang diinginkan. Gaya total pada tiang silinder tegak
dapat dituliskan sebagia berikut:
∫∫−−
+=η η
π ρ ρ h
M
h
D Udz
DC UdzU DC F
42
1 2.............................(3.27)
Koefisien CD dan CM ditentukan berdasarkan hasil percobaan dan nilainya
tergantung pada bilangan Reynold dan bilangan Keulegan–Carpenter. Bilangan-
bilangan tersebut tergantung pada harga parameter kecepatan partikel maksimum
dan diameter tiang seperti bentuk berikut:
D
U K
DU
T max
maxRe
=
=υ ................................................................(3.28)
Keterangan:
Re = Bilangan reynold
K = Bilangan Keulegan-Carpenter
Umax = Kecepatan maksimum
D = Diameter
υ = Viskositas kinematik = 1.2363x10-5 ft2 /s
T = Perioda
Pada Gambar 3.3 dan Gambar 3.4 dapat dilihat besaran Cd dan Cm untuk
berbagai macam nilai bilangan Reynolds dan Keulegan-Carpenter.
Gambar 3.3 Diagram hubungan koefisien drag (Cd) dengan bilangan Reynolds.
-
8/19/2019 Bab 3 Landasan Teori - Offshore
11/26
Bab 3 Landasan Teori
Analisis Struktur Lepas Pantai Tipe Jacket 4 Kaki 3 - 11
Gambar 3.4 Diagram hubungan Cd dan Cm dengan bilangan Keulegan-Carpenter.
2. Gaya Gelombang pada Tiang Silinder Miring
Chakrabarti dkk, (1975) mengembangkan metode persamaan Morison untuk
menentukan gaya gelombang pada tiang dengan menguraikan kecepatan dan
percepatan partikel ke dalam komponen tegak lurus dan sejajar/tangensial sumbu
tiang silinder.
Arah gaya yang bekerja adalah tegak lurus terhadap sumbu tiang dan sesuai
dengan arah komponen kecepatan dan percepatan partikel tegak lurus sumbu tiang
silinder miring. Untuk keperluan analisa struktur, gaya tersebut bisa disesuaikan
lagi ke dalam komponen gaya vertikal dan gaya horisontal, seperti dapat dilihat
pada Gambar 3.5.
Gambar 3.5 Profil tiang silinder miring.
Dengan menggunakan sistem koordinat polar dan sudut θ dan β untuk
mendefinisikan orientasi dari sumbu tiang, maka besar kecepatan partikel arah
tegak lurus/ normal sumbu miring adalah:
-
8/19/2019 Bab 3 Landasan Teori - Offshore
12/26
Bab 3 Landasan Teori
Analisis Struktur Lepas Pantai Tipe Jacket 4 Kaki 3 - 12
[ ] 2122 /)( v c uc v uV y x n +−+= ................................(3.29)
Komponen kecepatan pada arah x, y dan z adalah sebagai berikut:
)(
)(
)(
v c uc c w
v c uc c uv
v c uc c uu
y x z n
y x y n
y x x n
+−=
+−=
+−=
..........................................(3.30)
Hal yang sama dapat dilakukan pula pada percepatan. Percepatan partikel arah
normal sumbu tiang silinder dapat diuraikan kedalam komponen dalam arah x, y
dan z yaitu:
)(
)(
)(
y y x x z nz
y y x x y y ny
y y x x x x nx
ac ac c a
ac ac c aa
ac ac c aa
+−=
+−=
+−=
...................................(3.31)
Maka komponen gaya per satuan panjang dalam arah x, y dan z adalah:
nz I nnD z
ny I nnDy
nx I nnD x
aD
C uDV C f
aD
C uDV C f
aD
C uDV C f
42
1
42
1
42
1
2
2
2
π ρ ρ
π ρ ρ
π ρ ρ
+=
+=
+=
..........................(3.32)
sehingga, gaya per satuan panajng dalam arah tegak lurus sumbu tiang adalah:
( ) 21222 / z y x f f f f ++±= ...........................................(3.33)
Komponen total gaya yang bekerja pada tiang silinder miring harus dihitung
dengan cara integrasi numerik berdasarkan persamaan berikut:
∫
∫
∫
=
=
=
S
z z
S
y y
S
x X
dsf F
dsf F
dsf F
.........................................................(3.34)
-
8/19/2019 Bab 3 Landasan Teori - Offshore
13/26
Bab 3 Landasan Teori
Analisis Struktur Lepas Pantai Tipe Jacket 4 Kaki 3 - 13
B. Persamaan Difraksi
Struktur dengan diameter yang besar mempengaruhi bentuk gelombang karena
adanya pemantulan gelombang oleh struktur. Metode tekanan luas seperti dibawah
ini:
∫=∂
∂−=
A
PdAF
t P
φ ρ
.........................................................(3.35)
dengan:
P = Tekanan akibat gelombang
A = Luas penampang
F = Gaya
φ = Potensial kecepatan gelombang
3.3 Angin
Gaya angin yang mengenai struktur adalah fungsi dari kecepatan angin, orientasi
struktur dan karakteristik aerodinamika dari struktur dan setiap elemennya adalah
sebagai berikut:
AC V F sW 2
2
1 ρ = ..........................................(3.36)
dimana:
F = Gaya angin
ρ = massa jenis udara pada kondisi STP = 0.00238 lb.sec2 /ft
Cs = koefisien bentuk
Vw = kecepatan angin pada ketinggian 33 ft diatas permukaan air
A = luas tegak lurus angin
Menurut API RP2A, koefisien bentuk adalah seperti pada Tabel 3.1 berikut.
-
8/19/2019 Bab 3 Landasan Teori - Offshore
14/26
Bab 3 Landasan Teori
Analisis Struktur Lepas Pantai Tipe Jacket 4 Kaki 3 - 14
Tabel 3.1 Koefien Bentuk
Bentuk Cs
Beams 1.5
Sides of Building 1.5
Overall Platform Projected Area 1.0
Cylindrical Section 0.5
Koreksi kecepatan angin apabila tidak sama dengan ketinggian referensi dalam
meter
x
Z
yV V ⎥⎦
⎤⎢⎣
⎡=10
10 .............................................(3.37)
Dimana:
V10 = kecepatan angin pada ketinggian 10 meter
y = ketinggian yang diinginkan (m)
10 = ketinggian refernsi (m)
X = eksponensial biasanya 1/7 atau 1/13 tergantung durasi hembusan angin
Rekomendasi dari API RP 2A
x = 1/13 untuk angin yang berhembus keras
x = 1/8 untuk angin yang berhembus terus-menerus
3.4 Arus
Arus di laut biasanya terjadi akibat adanya pasang surut dan gesekan angin pada
permukaan air (wind-drift current ). Kecepatan arus dianggap pada arah horizontal
dan bervariasi menurut kedalaman.
Besar dan arah arus pasang surut di permukaan biasanya ditentukan berdasarkan
pengukuran di lokasi. Wind drift current di permukaan biasanya diasumsikan sekitar
1 % dari kecepatan angin pada ketinggian 30 ft di atas permukaan air. Untuk
kebutuhan rekayasa, variasi arus pasang surut terhadap kedalaman baisanya
diasumsikan mengikuti profil pangkat 1/7 (‘one seventh power law’ ) dan variasi
arus akibat gesekan angin diasumsikan linier terhadap kedalaman. Gambar 3.6
menyajikan ilustrasi distribusi vertikal Tidal Current dan Wind Drift Current .
-
8/19/2019 Bab 3 Landasan Teori - Offshore
15/26
Bab 3 Landasan Teori
Analisis Struktur Lepas Pantai Tipe Jacket 4 Kaki 3 - 15
Gambar 3.6 Asumsi distribusi vertikal arus pasang surut dan wind drift current
⎟ ⎠
⎞
⎜⎝
⎛ =
⎟ ⎠
⎞⎜⎝
⎛ =
h
zU U
h
zU U
WindDrift
Tidal
WindDrift
oTidal
0
7
1
..................................(3.38)
Untuk kebutuhan desain, sesuai rekomendasi API, perhitungan gaya akibat arus
dan gelombang yang bekerja pada struktur dilakukan dengan menambahkan
kecepatan arus dengan kecepatan partikel gelombang arah horizontal.
Dalam kondisi badai, arus terjadi bersamaan dengan gerakan air akibat gelombang.
Arah arus pasang surut bisa tidak sama dengan arah rambat gelombang, tetapi
wind-drift current biasanya diasumsikan searah dengan gelombang.
Kombinasi arus laut dan kecepatan partikel gelombang dapat menghasilkan
peningkatan yang sangat besar terhadap gelombang. Gaya drag:
2)(2
1vuC f
D D += ρ .................................... (3.39)
dengan:
u = kecepatan orbit horizontal
v = arus langgeng (steady current)
Resultan kecepatan merupakan vektor tambahan. Untuk perairan dalam
menggunakan teori gelombang linier.
θ π
coskzeT
H u = ..........................................(3.40)
Pada elevasi muka air rata-rata pada posisi puncak z = 0 dan θ = 0, diperoleh:
-
8/19/2019 Bab 3 Landasan Teori - Offshore
16/26
Bab 3 Landasan Teori
Analisis Struktur Lepas Pantai Tipe Jacket 4 Kaki 3 - 16
T
H u
π =0 ....................................................(3.41)
Kondisi ekstrim terjadi ketika arus langgeng memiliki arah yang sama dengan
gelombang propagasi, maka pada posisi puncak θ = 0 gaya drag maksimum pada
pile vertikal di perairan adalah:
2
)(2
1⎟ ⎠
⎞⎜⎝
⎛ += zveT
H C f kz D D
π ρ ...........................(3.42)
dimana v(z) merupakan kecepatan arus sebagai fungsi dari kedalaman. Pada
permukaan air rata-rata z = 0 dan v(z) = 0, maka
2
0max2
1⎟ ⎠
⎞⎜⎝
⎛ += vT
H C f
D D
π ρ .............................(3.43)
3.5 Modifikasi Koefisien Drag dan Inersia
Modifikasi nilai koefisien Drag dan Inersia diperlukan apabila pada batang tubular
tersebut terdapat tambahan struktur atau komponen lain, misalnya anode.
Modifikasi koefisien drag dan inersia tersebut ditentukan dengan rumusan sebagai
berikut:
1
2211
1
2211
V C nV C V C
A
C nAC AC
mmm
d d d
+=
+=
'
'
.................................(3.44)
dengan:
A1 = luas drag batang tubular
Cd1 = koefisien drag batang tubular
A2 = luas drag komponen/anode
Cd2 = koefisien drag komponen/anode
V1 = volume batang tubular
Cm1 = koefisien massa batang tubular
V2 = volume komponen/anode
Cm2 = koefisien massa komponen/anode
n = jumlah komponen/anode
-
8/19/2019 Bab 3 Landasan Teori - Offshore
17/26
Bab 3 Landasan Teori
Analisis Struktur Lepas Pantai Tipe Jacket 4 Kaki 3 - 17
3.6 M a r i n e Gr o w t h
Struktur yang terbenam di dalam air akan mengalami penambahan luas area
melintang akibat adanya marine growth. Marine growth ditimbulkan oleh organisme
laut yang menempel pada struktur.
Gambar 3.7 Marine Growth
Maka diameter struktur dimodifikasi menjadi :
D = DC + 2t................................................(3.45)
Pertambahan luas melintang ini mengakibatkan gaya gelombang yang diterima oleh
struktur menjadi lebih besar.
3.7 Gaya Apung (B o u y a n t Fo r c e )
Tekanan hidrostatik yang terjadi akibat berat air di atasnya, yaitu :
( ) zh p f −= γ ...............................................(3.46)
dimana :
γf = berat jenis air
h = kedalaman perairan
z = jarak vertikal dari dasar perairan
Tekanan tersebut menimbulkan gaya apung yang akan tetap ada meskipun kondisi
tidak ada gelombang di permukaan. Besar gaya apung yang bekerja pada struktur
terendam dalam fluida, baik itu sebagian atau seluruhnya adalah :
V F f b γ = ....................................................(3.47)
dimana :
γf = berat jenis air
V = volume benda/struktur yang terendam
Dc
Dc + 2t
-
8/19/2019 Bab 3 Landasan Teori - Offshore
18/26
Bab 3 Landasan Teori
Analisis Struktur Lepas Pantai Tipe Jacket 4 Kaki 3 - 18
Perhitungan gaya apung pada struktur lepas pantai biasanya dikombinasikan
dengan berat struktur tersebut, sehingga didapat berat efektif dari struktur sebagai
berikut:
V W W f
γ −=' .............................................(3.48)
dimana :
W’ = berat efektif struktur
W = berat struktur di udara
Dalam menerapkan gaya apung pada komponen struktur, maka perlu diperhatikan
beberapa hal yang berkaitan dengan analisa tegangan yang terjadi seperti pada
Gambar 3.8 berikut.
Gambar 3.8 Gaya apung dan berat pada tiang pancang
Pada gambar diatas, tiang pancang vertikal dibagi menjadi elemen 1-2 dan elemen
2-3. Berat elemen 2-3 di udara adalah w1 dan elemen 1-2 adalah w2. Dasar
perairan biasanya dianggap tembus air ( porous), sehingga akan terjadi tegangan
hidrostatik.
Gaya apung yang bekerja pada dasar tiang pancang adalah :
)( d h AF f h += γ ..............................................(3.49)
-
8/19/2019 Bab 3 Landasan Teori - Offshore
19/26
Bab 3 Landasan Teori
Analisis Struktur Lepas Pantai Tipe Jacket 4 Kaki 3 - 19
dimana :
A = luas ujung tiang pancang
h = kedalaman perairan
d = kedalaman penetrasi tiang pancang
Besar gaya apung sama dengan berat air yang dipindahkan, sehingga berat efektif
tiang adalah berat tiang di udara dikurangi berat air yang dipindahkan. Karena
gaya apung bekerja pada ujung dasar tiang pancang, maka berat efektif elemen 2-
3 akan terlihat sama dengan berat di udara.
3.8 Dasar-dasar Elemen Hingga
Metode elemen hingga (finite element method ) adalah salah satu cara yang
digunakan dalam melakukan analisa terhadap struktur. Dalam melakukan analisastruktur menggunakan metode elemen hingga ini digunakan persamaan metriks
untuk menyederhanakan formulasi dari elemen matriks kekakuan.
3.8.1 Rangka Batang
A. Penentuan Matriks Kekakuan
Batang tarik dan batang tekan pada hakekatnya adalah pegas linier, dengan
konstanta pegas, k,yang dapat diperoleh dari Hukum Hooke.
Gambar 3.9. Elemen batang dengan gaya aksial nodal F1,F2 dan perpindahan
nodalnya u1 dan u2
Hubungan-hubungan yang digunakan untuk mencari perpindahan dituliskan pada
persamaan regangan dan tegangan berikut ini:
dxdu=ε ..............................................................(3.50)
dan
ε σ E = .............................................................(3.51)
-
8/19/2019 Bab 3 Landasan Teori - Offshore
20/26
Bab 3 Landasan Teori
Analisis Struktur Lepas Pantai Tipe Jacket 4 Kaki 3 - 20
Dengan menggunakan persamaan (3.50) dan (3.51) perpindahan u1 akibat gaya
F1 yang bekerja pada nodal 1 pada kondisi dimana nodal 2 dipertahankan tetap (u2
= 0) diturunkan sebagai berikut :
L L
uu Δ=
−=
12ε .................................................(3.52)
L
E E
Δ== ε σ ...................................................(3.53)
Tegangan dapat dituliskan sebagai berikut :
A
F =σ ...........................................................(3.54)
dengan mensubstitusikan persamaan (3.53) ke persamaan (3.54) menghasilkan :
Δ=Δ= k L
EAF ..................................................(3.55)
di mana L
EAk = adalah koefisien kekakuan, maka perpindahan pada nodal 1
adalah :
EA
FLu =1 ...........................................................(3.56)
koefisien kekakuan k11 (gaya pada nodal 1 yang mengakibatkan satu satuan
perpindahan u1 = 1 ) adalah :
L
EAk =11 .........................................................(3.57)
Keseimbangan segmen batang yang dibebani oleh gaya k11 memerlukan sebuah
gaya k21 pada ujung lainnya yaitu :
k21 = - L
EAk −=11 ...........................................(3.58)
dengan cara yang sama, koefisien kekakuan pada ujung yang lain dapat diperoleh.
Koefisien kekakuan yang diberikan oleh persamaan (3.56) adalah elemen-elemen
dari matrik kekakuan yang sesuai dengan gaya-gaya aksial dan perpindahan-
perpindahan untuk sebuah segmen batang, yaitu :
-
8/19/2019 Bab 3 Landasan Teori - Offshore
21/26
Bab 3 Landasan Teori
Analisis Struktur Lepas Pantai Tipe Jacket 4 Kaki 3 - 21
⎥⎦
⎤⎢⎣
⎡−
−=⎥
⎦
⎤⎢⎣
⎡11
11
2
1
L
EA
F
F ⎥
⎦
⎤⎢⎣
⎡2
1
u
u .......................................(3.58)
atau
{F} = [ k ]{ u }
B. Tranformasi Matriks Kekakuan
Orientasi elemen batang yang membentuk plane truss tidaklah seragam. Susunan
sumbu ortogonal lokal terdiri atas sumbu-x yang berimpit dengan sumbu batang
dan sumbu-y yang tegak lurus sumbu batang.
Disamping susunan sumbu lokal yang didirikan di tiap elemen, dibuat pula satu
susunan sumbu global (X,Y), yang biasanya terdiri atas sumbu horizontal X dan
sumbu vertikal Y. Demikian juga gaya batang yang bekerja pada kedua titik nodal
elemen, yang dalam susunan sumbu lokal adalah F1, F2, F3, dan F4, pada susunan
sumbu global, keempat gaya batang tersebut masing-masing mempunyai
komponen ,1F ,2F 3F , 4F .
Gambar 3.10 memperlihatkan gaya-gaya yang bekerja pada elemen batang dalam
sistem sumbu koordinat lokal dan global.
Gambar 3.10 Gaya-gaya nodal pada sumbu koordinat lokal (x,y) dan pada sumbu
koordinat global (X,Y)
Tujuan dari transformasi koordinat adalah mentransformasikan matrik-matrik
elemen dari sistem sumbu koordinat lokal menjadi matrik-matrik pada sistem
-
8/19/2019 Bab 3 Landasan Teori - Offshore
22/26
Bab 3 Landasan Teori
Analisis Struktur Lepas Pantai Tipe Jacket 4 Kaki 3 - 22
sumbu koordinat umum. Transformasi ini memerlukan matrik-matrik dari elemen
dengan suatu susunan koordinat yang sama, hingga matrik-matrik tersebut dapat
disusun menjadi matrik-matrik dari struktur. Langkah pertama adalah dimulai
dengan menyatakan gaya-gaya ( F1,F2,F3,F4 ) dalam besaran gaya-gaya
( ,1F ,2F 3F , 4F ).
Karena kedua kumpulan gaya-gaya ini adalah ekivalen, maka dari Gambar 3.10
diperoleh hubungan- hubungan sebagai berikut :
F1 = 1F cos θ + 2F sin θ .............................................(3.59a)
F2 = - 1F sin θ + 2F cos θ ..........................................(3.59b)
Persamaan (5.13a) dan (5.13b) dapat ditulis dalam notasi matrik sebagai:
⎥⎦⎤⎢
⎣⎡
21
F F = ⎥
⎦⎤⎢
⎣⎡− θ θ
θ θ cossinsincos ...............................................(3.60)
dengan cara yang sama, diperoleh hubungan untuk gaya-gaya dari titik nodal yang
lain;
F3 = 3F cos θ + 4F sin θ ............................................(3.61a)
F4 = - 3F sin θ + 4F cos θ ...........................................(3.61b)
Persamaan (5.13) dan (5.15) dapat disusun secara tepat dalam bentuk matriks
sebagai berikut;
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
−=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
4
3
2
1
cossin00
sincos00
00cossin
00sincos
4
3
2
1
F
F
F
F
F
F
F
F
θ θ
θ θ
θ θ
θ θ
.....................(3.62)
atau dalam notasi
{FM} = [ T ]
di mana {FM} dan { }FM adalah vektor-vektor gaya nodal elemen dalam koordinatlokal dan koordinat umum, dan [ T ] adalah matrik transformasi yang dinyatakan
oleh matrik bujur sangkar.
-
8/19/2019 Bab 3 Landasan Teori - Offshore
23/26
Bab 3 Landasan Teori
Analisis Struktur Lepas Pantai Tipe Jacket 4 Kaki 3 - 23
Dengan mengulangi prosedur yang sama, diperoleh hubungan antara perpindahan-
perpindahan nodal ( u1,v 1,u2,v 2, ) pada koordinat lokal dan komponen
perpindahan nodal pada koordinat umum( 1u , 1v , 2u , 2v ), yaitu
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
−=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
2
2
11
cossin00
sincos00
00cossin00sincos
2
2
11
v
u
vu
v
u
vu
θ θ
θ θ
θ θ θ θ
................(3.63)
atau dengan notasi
{ u }= [ T ]{ u }
Dengan mensubstitusikan {FM} dan {u} ke dalam persamaan kekakuan pada
koordinat lokal {FM} = [K]{u} menghasilkan
[ T ]{ FM }= [ K ][ T ] { u }......................................(3.64)
atau
{FM } = [ T ]-1[ K ][ T ]{ u } ....................................(3.65)
di mana [ T ]-1 adalah invers matrik [ T ] dan matrik transformasi [ T ] adalah
matrik ortoghonal, dimana [ T ]-1 = [ T ]T. Jadi
{FM } = [ T ]T[ K ][ T ]{ u }.....................................(3.66)
atau dengan notasi
{FM } = [ K ]{ u }................................................(3.67)
dimana
[ K ] = [ T ]T[ K ][ T ]..............................................(3.68)
3.8.2 Rangka Balok
Elemen balok adalah merupakan elemen yang lurus dan memiliki luas penampang
yang konstan sepanjang batangnya. Solusi permasalahan rangka balok
memberikan penjelasan bahwa derajat kebebasan rangka balok adalah
perpindahan arah melintang dan rotasi pada nodal elemen balok.
Struktur balok adalah suatu struktur yang terdiri dari satu atau beberapa balok
yang bertumpu di atas sejumlah tumpuan yang berupa jepit, sendi atau sendi-roll
-
8/19/2019 Bab 3 Landasan Teori - Offshore
24/26
Bab 3 Landasan Teori
Analisis Struktur Lepas Pantai Tipe Jacket 4 Kaki 3 - 24
sedemikian rupa sehingga membentuk struktur balok yang stabil. Struktur balok
merupakan sebuah elemen struktur panjang dan ramping, yang secara umum
diberikan gaya melintang (tegak lurus) atau sejajar terhadap sumbu balok, atau
momen yang menghasilkan efek yang signifikan. Deformasi inilah yang diukur
sebagai perpindahan arah melintang dan rotasi.
Gambar 3.11 Elemen balok
Asumsikan perpindahan arah melintang sepanjang elemen batang adalah :
( ) 432
2
3
1 ˆˆˆˆˆ a xa xa xa xv +++= ..................................................... (3.69)
Asumsi ini digunakan karena pada elemen balok terdapat empat derajat kebebasan
yaitu berupa perpindahan arah melintang dan rotasi untuk setiap node batang.
Dapat diperoleh :
( ) 41 0ˆˆ avd y == ..............................................................................(3.70)
( )31
0ˆˆ adx
vd ==φ ..........................................................................(3.71)
( ) 432
2
3
12 ˆˆ
a La La La Lvd y +++== ...............................................(3.72)
( )32
2
12 23ˆˆ a La Ladx
Lvd ++==φ ...................................................(3.73)
Hubungan-hubungan yang digunakan untuk mencari perpindahan dituliskan pada
persamaan regangan dan tegangan berikut ini:
y y d f 11ˆ,ˆ y y d f 22
ˆ,ˆ
x̂
ŷ
22ˆ,ˆ φ m
11ˆ,ˆ φ m
-
8/19/2019 Bab 3 Landasan Teori - Offshore
25/26
Bab 3 Landasan Teori
Analisis Struktur Lepas Pantai Tipe Jacket 4 Kaki 3 - 25
( ) xd
ud y x x
ˆ
ˆˆ,ˆ =ε ..........................................................................(3.74)
Dimana û adalah fungsi perpindahan arah aksial. Hubungan fungsi perpindahan
arah aksial dengan perpindahan arah melintang adalah sebagai berikut :
xd
vd yu
ˆ
ˆˆ −= ..............................................................................(3.75)
Sehingga diperoleh :
( )2
2
ˆ
ˆˆ,ˆ
xd
vd y y x
x −=ε ...................................................................(3.76)
Hubungan momen dan gaya geser terhadap perpindahan arah melintang dapat
dituliskan sebagai berikut :
( )2
2
ˆ
ˆˆˆ
xd
vd EI xm = .........................................................................(3.77)
3
3
ˆ
ˆˆ xd
vd EI V = ...........................................................................(3.78)
Dapat dituliskan momen dan gaya geser pada masing-masing node :
( )
( )221133
3
1
ˆ6ˆ12ˆ6ˆ12ˆ
0ˆˆˆ φ φ Ld Ld L
EI
xd
vd EI V f
y y y +−+===
.............(3.79)
( ) ( )222121322
1ˆ2ˆ6ˆ4ˆ6
ˆ
0ˆˆˆ φ φ Ld L Ld L
L
EI
xd
vd EI mm y y +−+=−=−= .......(3.80)
Dimana untuk node 2 adalah berlawanan arah dari node 1 :
( ) ( )2211333
2ˆ6ˆ12ˆ6ˆ12
ˆ
ˆˆˆ φ φ Ld Ld L
EI
xd
Lvd EI V f y y y −+−−=−=−= ........(3.81)
( )
( )2
2
21
2
132
2
2 ˆ4ˆ6ˆ2ˆ6ˆ
ˆ
ˆˆ φ φ Ld L Ld L L
EI
xd
Lvd
EI mm y y +−+=== .......(3.82)
Sehingga, dapat dituliskan :
-
8/19/2019 Bab 3 Landasan Teori - Offshore
26/26
Bab 3 Landasan Teori
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
−−−
−
−
=
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
2
2
1
1
2
22
3
2
2
1
1
ˆ
ˆ
ˆ
ˆ
4626
612612
2646
612612
ˆ
ˆ
ˆ
ˆ
φ
φ
y
y
y
y
d
d
L L L L
L L
L L L L
L L
L
EI
m
f
m
f
...................................(3.83)
Maka, dapat diketahui matriks kekakuan lokal k ̂ elemen untuk struktur balok
adalah :
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
−−−
−
−
=
L L L L
L L
L L L L
L L
L
EI k
4626
612612
2646
612612
ˆ
2
22
3 .........................................(3.84)