
Bab 3 Analisis Hasil Survey
33
BAB 3 ANALISIS TOPOGRAFI,BATHYMETRI DAN HIDRO-OCEANOGRAFI 3.1 SURVEY TOPOGRAFI Survey ini bertujuan untuk mendapatkan gambaran bentuk permukaan tanah yang berupa situasi dan ketinggian serta posisi kenampakan yang ada di areal lokasi Pelabuhan Kapal Negara Kabupaten Bitung beserta areal sekitarnya. Areal survey memanjang sejajar dengan garis pantai. Hasilnya kemudian akan dipetakan dengan skala dan interval kontur tertentu. 3.1.1 Metodologi Pelaksanaan Survey Topografi A. Peralatan Survey Peralatan survey yang dipergunakan dalam survey topografi meliputi: 1. Total Station 2. Theodolite DT-100 (1 set) 3. Waterpass Wild NAK.1 (1 set) 4. Rambu ukur (4 set) 5. Pita ukur 50 m (2 buah) 6. Meteran Rol 5 m (3 buah) 7. Kalkulator (3 unit) B. Pengamatan Azimuth Astronomis Pengamatan matahari dilakukan untuk mengetahui arah/azimuth awal yaitu : 1. Sebagai koreksi azimuth guna menghilangkan kesalahan akumulatif pada sudut- sudut terukur dalam jaringan poligon.
-
Upload
ulans-land -
Category
Documents
-
view
95 -
download
1
Transcript of Bab 3 Analisis Hasil Survey

BAB 3 ANALISIS TOPOGRAFI,BATHYMETRI
DAN HIDRO-OCEANOGRAFI 3.1 SURVEY TOPOGRAFI
Survey ini bertujuan untuk mendapatkan gambaran bentuk permukaan tanah yang
berupa situasi dan ketinggian serta posisi kenampakan yang ada di areal lokasi
Pelabuhan Kapal Negara Kabupaten Bitung beserta areal sekitarnya. Areal survey
memanjang sejajar dengan garis pantai. Hasilnya kemudian akan dipetakan dengan
skala dan interval kontur tertentu.
3.1.1 Metodologi Pelaksanaan Survey Topografi
A. Peralatan Survey
Peralatan survey yang dipergunakan dalam survey topografi meliputi:
1. Total Station
2. Theodolite DT-100 (1 set)
3. Waterpass Wild NAK.1 (1 set)
4. Rambu ukur (4 set)
5. Pita ukur 50 m (2 buah)
6. Meteran Rol 5 m (3 buah)
7. Kalkulator (3 unit)
B. Pengamatan Azimuth Astronomis
Pengamatan matahari dilakukan untuk mengetahui arah/azimuth awal yaitu :
1. Sebagai koreksi azimuth guna menghilangkan kesalahan akumulatif pada sudut-
sudut terukur dalam jaringan poligon.
LAPORAN DED PELABUHAN KAPAL NEGARA
III - 2
P2
P1
M T
Matahari Utara
M
T
2. Untuk menentukan azimuth/arah titik-titik kontrol/poligon yang tidak terlihat satu
dengan yang lainnya.
3. Penentuan sumbu X dan Y untuk koordinat bidang datar pada pekerjaan
pengukuran yang bersifat lokal/koordinat lokal.
Pengukuran azimuth matahari dilakukan pada jalur poligon utama terhadap patok
terdekat dengan titik pengamatan pada salah satu patok yang lain.
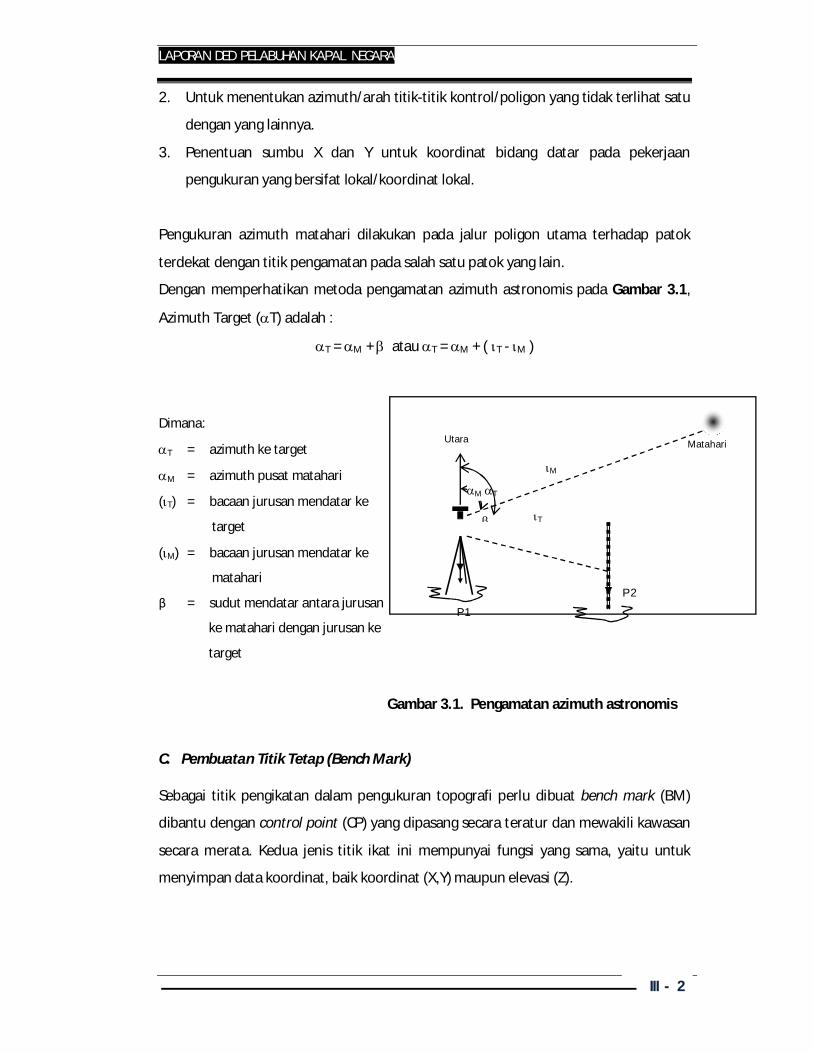
Dengan memperhatikan metoda pengamatan azimuth astronomis pada Gambar 3.1,
Azimuth Target (T) adalah :
T = M + atau T = M + ( T - M )
Dimana:
T = azimuth ke target
M = azimuth pusat matahari
(T) = bacaan jurusan mendatar ke
target
(M) = bacaan jurusan mendatar ke
matahari
β = sudut mendatar antara jurusan
ke matahari dengan jurusan ke
target
Gambar 3.1. Pengamatan azimuth astronomis
C. Pembuatan Titik Tetap (Bench Mark)
Sebagai titik pengikatan dalam pengukuran topografi perlu dibuat bench mark (BM)
dibantu dengan control point (CP) yang dipasang secara teratur dan mewakili kawasan
secara merata. Kedua jenis titik ikat ini mempunyai fungsi yang sama, yaitu untuk
menyimpan data koordinat, baik koordinat (X,Y) maupun elevasi (Z).

LAPORAN DED PELABUHAN KAPAL NEGARA
III - 3
Mengingat fungsinya tersebut maka patok-patok beton ini diusahakan ditanam pada
kondisi tanah yang stabil dan aman. Kedua jenis titik ikat ini diberi nomenklatur atau
kode, untuk memudahkan pembacaan peta yang dihasilkan. Disamping itu perlu pula
dibuat deskripsi dari kedua jenis titik ikat yang memuat sketsa lokasi dimana titik ikat
tersebut dipasang dan nilai koordinat maupun elevasinya.
D. Penentuan Kerangka Dasar Horizontal
Pengukuran titik kontrol horizontal (titik poligon) dilaksanakan dengan cara mengukur
jarak dan sudut menurut lintasan tertutup. Pada pengukuran poligon ini, titik akhir
pengukuran berada pada titik awal pengukuran.
Pengukuran sudut dilakukan dengan pembacaan double series, dimana besar sudut
yang akan dipakai adalah harga rata-rata dari pembacaan tersebut. Azimuth awal akan
ditetapkan dari pengamatan matahari dan dikoreksikan terhadap azimuth magnetis.
1. Pengukuran Jarak
Pengukuran jarak dilakukan dengan menggunakan pita ukur 50 meter. Tingkat
ketelitian hasil pengukuran jarak dengan menggunakan pita ukur, sangat tergantung
pada cara pengukuran itu sendiri dan keadaan permukaan tanah.
Khusus untuk pengukuran jarak pada daerah yang miring dilakukan dengan cara
seperti yang diilustrasikan pada Gambar 3.3.
Gambar 3.2. Pengukuran jarak pada permukaan miring
d1 d2
d3
A
B 2
1
LAPORAN DED PELABUHAN KAPAL NEGARA
III - 4
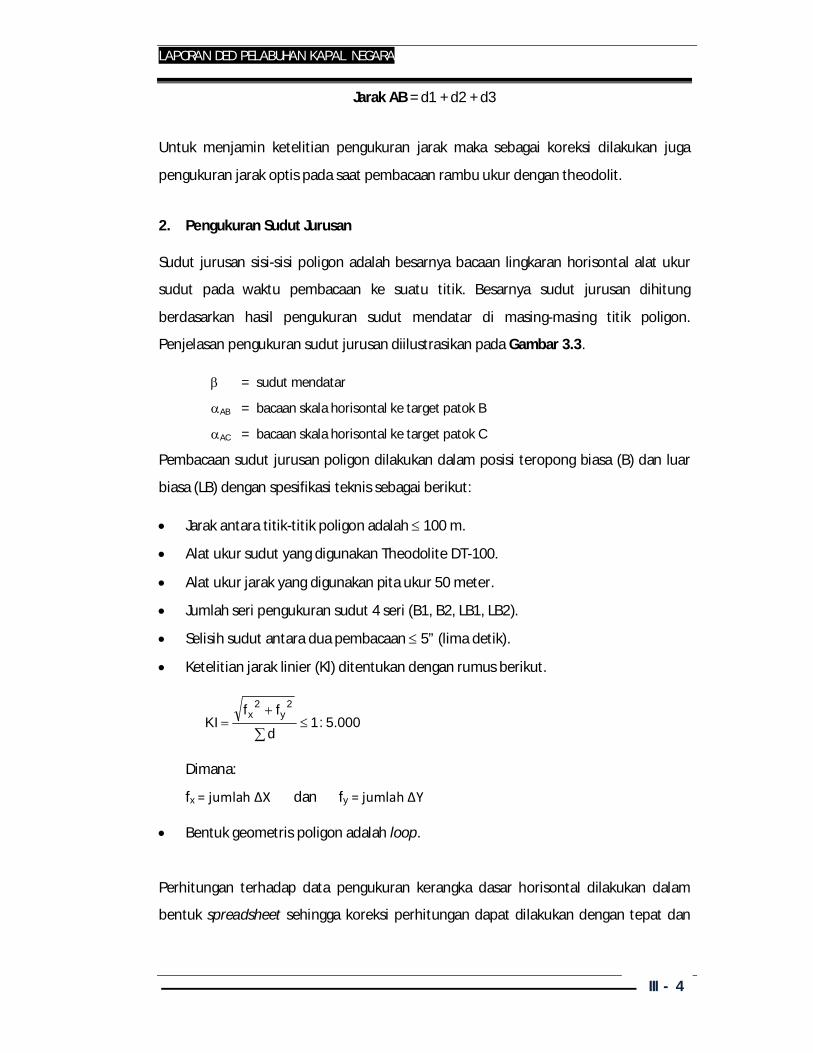
Jarak AB = d1 + d2 + d3
Untuk menjamin ketelitian pengukuran jarak maka sebagai koreksi dilakukan juga
pengukuran jarak optis pada saat pembacaan rambu ukur dengan theodolit.
2. Pengukuran Sudut Jurusan
Sudut jurusan sisi-sisi poligon adalah besarnya bacaan lingkaran horisontal alat ukur
sudut pada waktu pembacaan ke suatu titik. Besarnya sudut jurusan dihitung
berdasarkan hasil pengukuran sudut mendatar di masing-masing titik poligon.
Penjelasan pengukuran sudut jurusan diilustrasikan pada Gambar 3.3.
= sudut mendatar
AB = bacaan skala horisontal ke target patok B
AC = bacaan skala horisontal ke target patok C
Pembacaan sudut jurusan poligon dilakukan dalam posisi teropong biasa (B) dan luar
biasa (LB) dengan spesifikasi teknis sebagai berikut:
Jarak antara titik-titik poligon adalah 100 m.
Alat ukur sudut yang digunakan Theodolite DT-100.
Alat ukur jarak yang digunakan pita ukur 50 meter.
Jumlah seri pengukuran sudut 4 seri (B1, B2, LB1, LB2).
Selisih sudut antara dua pembacaan 5” (lima detik).
Ketelitian jarak linier (Kl) ditentukan dengan rumus berikut.
000.5:1d
ffKI
2y
2x
Dimana:
fx = jumlah ΔX dan fy = jumlah ΔY
Bentuk geometris poligon adalah loop.
Perhitungan terhadap data pengukuran kerangka dasar horisontal dilakukan dalam
bentuk spreadsheet sehingga koreksi perhitungan dapat dilakukan dengan tepat dan

LAPORAN DED PELABUHAN KAPAL NEGARA
III - 5
merata. Hasil perhitungan tersebut diplot dalam bentuk gambar grafik poligon
pengukuran.
Gambar 3.3. Pengukuran sudut antar dua patok
E. Penentuan Kerangka Dasar Vertikal
Kerangka dasar vertikal diperoleh dengan melakukan pengukuran sifat datar pada titik-
titik jalur poligon. Jalur pengukuran dilakukan tertutup (loop), yaitu pengukuran
dimulai dan diakhiri pada titik yang sama. Pengukuran beda tinggi dilakukan double
stand dan pergi pulang. Seluruh ketinggian di traverse net (titik-titik kerangka
pengukuran) telah diikatkan terhadap BM.
Penentuan posisi vertikal titik-titik kerangka dasar dilakukan dengan melakukan
pengukuran beda tinggi antara dua titik terhadap bidang referensi seperti
diilustrasikan pada Gambar 3.4.
A
B
C
AB
AC

LAPORAN DED PELABUHAN KAPAL NEGARA
III - 6
Gambar 3.4. Pengukuran Waterpass
Spesifikasi Teknis pengukuran waterpass adalah sebagai berikut:
1. Jalur pengukuran dibagi menjadi beberapa seksi.
2. Tiap seksi dibagi menjadi slag yang genap.
3. Setiap pindah slag rambu muka menjadi rambu belakang dan rambu belakang
menjadi rambu muka.
4. Pengukuran dilakukan double stand pergi pulang pembacaan rambu lengkap
Benang Atas, Benang Tengah, dan Benang Bawah.
5. Selisih pembacaan stand 1 dengan stand 2 lebih kecil atau sama dengan 2 mm.
6. Jarak rambu ke alat maksimum 75 m.
7. Setiap awal dan akhir pengukuran dilakukan pengecekan garis bidik.
8. Toleransi salah penutup beda tinggi (T) ditentukan dengan rumus berikut:
mmDT 8
Dimana :
D = Jarak antara 2 titik kerangka dasar vertikal dalam satuan km
Hasil pengukuran lapangan terhadap kerangka dasar vertikal diolah dengan
menggunakan spreadsheet sebagaimana kerangka horisontalnya. Dari hasil
pengolahan tersebut didapatkan data ketinggian relatif pada titik-titik patok terhadap
BM acuan. Ketinggian relatif tersebut pada proses selanjutnya akan dikoreksi dengan
pengikatan terhadap elevasi muka air laut paling surut (Lowest Low Water Level -
LLWL) yang dihitung sebagai titik ketinggian nol (0.00).
Bidang Referensi
Slag 1 Slag 2
b1 b2
m1m21
D D

LAPORAN DED PELABUHAN KAPAL NEGARA
III - 7
F. Pengukuran Situasi Rinci
Penentuan situasi dilakukan untuk mengambil data rinci lapangan, baik obyek alam
maupun bangunan-bangunan, jembatan, jalan dan sebagainya. Obyek-obyek yang
diukur kemudian dihitung harga koordinatnya (x,y,z). Untuk selanjutnya garis kontur
untuk masing-masing ketinggian dapat ditentukan dengan cara interpolasi.
Pengukuran rinci/situasi dilaksanakan memakai metoda tachymetri dengan cara
mengukur besar sudut dari poligon (titik pengamatan situasi) kearah titik rinci yang
diperlukan terhadap arah titik poligon terdekat lainnya, dan juga mengukur jarak optis
dari titik pengamatan situasi. Pada metoda tachymetri ini didapatkan hasil ukuran
jarak dan beda tinggi antara stasiun alat dan target yang diamati. Dengan cara ini
diperoleh data-data sebagai berikut :
1. Azimuth magnetis
2. Pembacaan benang diafragma (atas, tengah, bawah)
3. Sudut zenith atau sudut miring
4. Tinggi alat ukur
Spesifikasi pengukuran situasi adalah sebagai berikut:
1. Metode yang digunakan adalah metode tachymetri dengan membuat jalur ray,
dimana setiap ray terikat pada titik-titik poligon sehingga membentuk jalur
poligon dan waterpass terikat sempurna.
2. Pembacaan detail dilakukan menyebar ke seluruh areal yang dipetakan dengan
kerapatan disesuaikan dengan skala peta yang akan dibuat. Gundukan tanah,
batu-batu besar yang mencolok serta garis pantai akan diukur dengan baik. Juga
bangunan-bangunan yang penting dan berkaitan dengan pekerjaan desain akan
diambil posisinya.
3.1.2 Pelaksanaan Survei Topografi
Survei topografi dilaksanakan pada areal seluas ± 42 ha. Survei topografi telah selesai
dilakukan pada tanggal 2 Juni – 5 Juni 2013. Beberapa foto pelaksanaan survei
topografi dapat dilihat pada Gambar 3.5 sampai Gambar 3.6.
LAPORAN DED PELABUHAN KAPAL NEGARA
III - 8
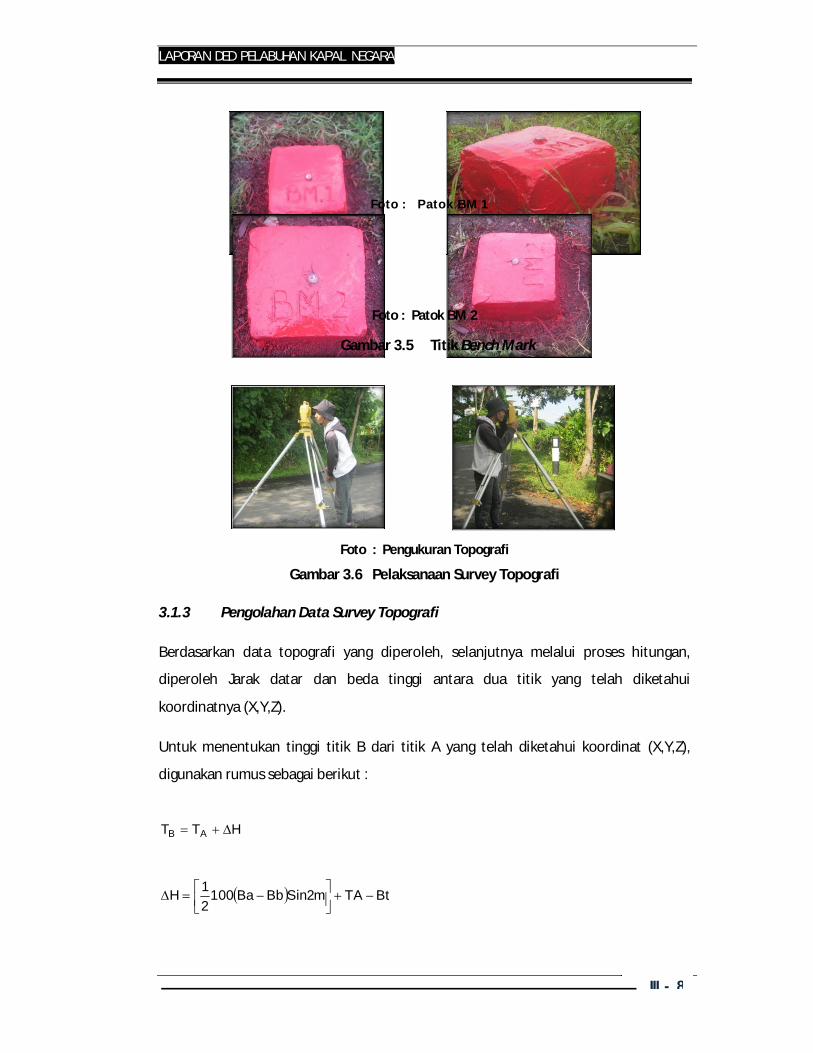
Foto : Patok BM 1
Foto : Patok BM 2
Gambar 3.5 Titik Bench Mark
Foto : Pengukuran Topografi
Gambar 3.6 Pelaksanaan Survey Topografi
3.1.3 Pengolahan Data Survey Topografi
Berdasarkan data topografi yang diperoleh, selanjutnya melalui proses hitungan,
diperoleh Jarak datar dan beda tinggi antara dua titik yang telah diketahui
koordinatnya (X,Y,Z).
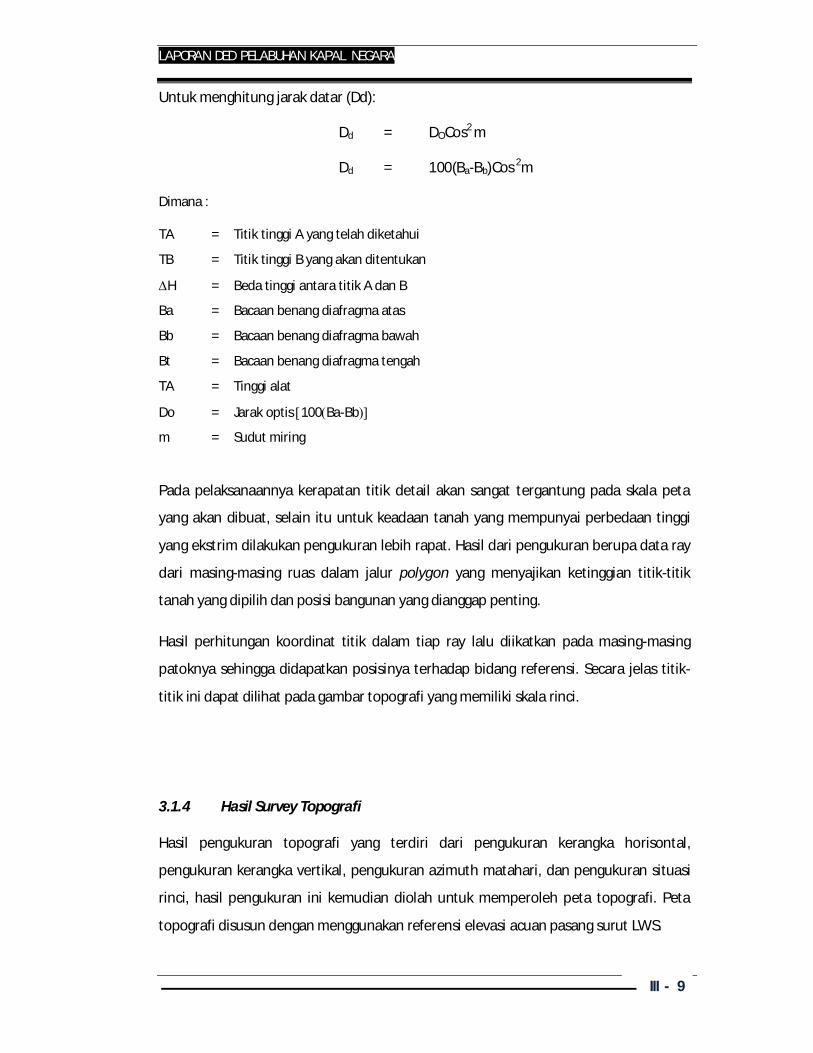
Untuk menentukan tinggi titik B dari titik A yang telah diketahui koordinat (X,Y,Z),
digunakan rumus sebagai berikut :
HTT AB
BtTAm2SinBbBa10021H
LAPORAN DED PELABUHAN KAPAL NEGARA
III - 9
Untuk menghitung jarak datar (Dd):
Dd = DOCos2 m
Dd = 100(Ba-Bb)Cos 2m
Dimana :
TA = Titik tinggi A yang telah diketahui
TB = Titik tinggi B yang akan ditentukan
H = Beda tinggi antara titik A dan B
Ba = Bacaan benang diafragma atas
Bb = Bacaan benang diafragma bawah
Bt = Bacaan benang diafragma tengah
TA = Tinggi alat
Do = Jarak optis 100Ba-Bb
m = Sudut miring
Pada pelaksanaannya kerapatan titik detail akan sangat tergantung pada skala peta
yang akan dibuat, selain itu untuk keadaan tanah yang mempunyai perbedaan tinggi
yang ekstrim dilakukan pengukuran lebih rapat. Hasil dari pengukuran berupa data ray
dari masing-masing ruas dalam jalur polygon yang menyajikan ketinggian titik-titik
tanah yang dipilih dan posisi bangunan yang dianggap penting.
Hasil perhitungan koordinat titik dalam tiap ray lalu diikatkan pada masing-masing
patoknya sehingga didapatkan posisinya terhadap bidang referensi. Secara jelas titik-
titik ini dapat dilihat pada gambar topografi yang memiliki skala rinci.
3.1.4 Hasil Survey Topografi
Hasil pengukuran topografi yang terdiri dari pengukuran kerangka horisontal,
pengukuran kerangka vertikal, pengukuran azimuth matahari, dan pengukuran situasi
rinci, hasil pengukuran ini kemudian diolah untuk memperoleh peta topografi. Peta
topografi disusun dengan menggunakan referensi elevasi acuan pasang surut LWS.
LAPORAN DED PELABUHAN KAPAL NEGARA
III - 10
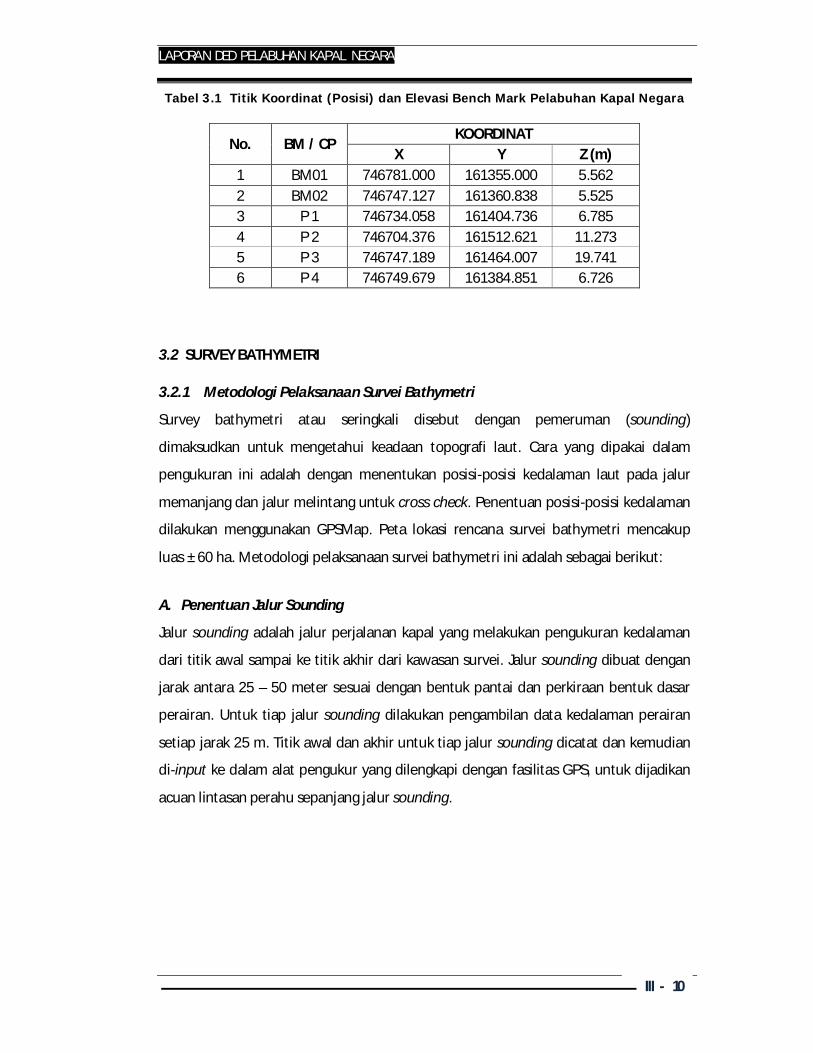
Tabel 3.1 Titik Koordinat (Posisi) dan Elevasi Bench Mark Pelabuhan Kapal Negara
No. BM / CP KOORDINAT
X Y Z (m) 1 BM01 746781.000 161355.000 5.562 2 BM02 746747.127 161360.838 5.525 3 P 1 746734.058 161404.736 6.785 4 P 2 746704.376 161512.621 11.273 5 P 3 746747.189 161464.007 19.741 6 P 4 746749.679 161384.851 6.726
3.2 SURVEY BATHYMETRI
3.2.1 Metodologi Pelaksanaan Survei Bathymetri
Survey bathymetri atau seringkali disebut dengan pemeruman (sounding)
dimaksudkan untuk mengetahui keadaan topografi laut. Cara yang dipakai dalam
pengukuran ini adalah dengan menentukan posisi-posisi kedalaman laut pada jalur
memanjang dan jalur melintang untuk cross check. Penentuan posisi-posisi kedalaman
dilakukan menggunakan GPSMap. Peta lokasi rencana survei bathymetri mencakup
luas ± 60 ha. Metodologi pelaksanaan survei bathymetri ini adalah sebagai berikut:
A. Penentuan Jalur Sounding
Jalur sounding adalah jalur perjalanan kapal yang melakukan pengukuran kedalaman
dari titik awal sampai ke titik akhir dari kawasan survei. Jalur sounding dibuat dengan
jarak antara 25 – 50 meter sesuai dengan bentuk pantai dan perkiraan bentuk dasar
perairan. Untuk tiap jalur sounding dilakukan pengambilan data kedalaman perairan
setiap jarak 25 m. Titik awal dan akhir untuk tiap jalur sounding dicatat dan kemudian
di-input ke dalam alat pengukur yang dilengkapi dengan fasilitas GPS, untuk dijadikan
acuan lintasan perahu sepanjang jalur sounding.

LAPORAN DED PELABUHAN KAPAL NEGARA
III - 11
Gambar 3.7 Contoh Jalur Sounding
B. Peralatan Survei
Peralatan survei yang diperlukan pada pengukuran bathymetri adalah:
1. Echo Sounder GPSMap dan perlengkapannya. Alat ini mempunyai fasilitas GPS
(Global Positioning System) yang akan memberikan posisi alat pada kerangka
horisontal dengan bantuan satelit. Dengan fasilitas ini, kontrol posisi dalam
kerangka horisontal dari suatu titik tetap di darat tidak lagi diperlukan. Selain
fasilitas GPS, alat ini mempunyai kemampuan untuk mengukur kedalaman
perairan dengan menggunakan gelombang suara yang dipantulkan ke dasar
perairan. Gambar alat ini disajikan pada Gambar 3.11, sedangkan penempatan
alat ini dan perlengkapannya pada perahu dapat dilihat pada Gambar 3.12.
2. Notebook. Satu unit portable computer diperlukan untuk menyimpan data yang di-
download dari alat GPSMap setiap 300 kali pencatatan data.
3. Perahu. Perahu digunakan untuk membawa surveyor dan alat-alat pengukuran
menyusuri jalur-jalur sounding yang telah ditentukan. Dalam operasinya, perahu
tersebut harus memiliki beberapa kriteria, antara lain:
Perahu harus cukup luas dan nyaman untuk para surveyor dalam melakukan
kegiatan pengukuran dan downloading data dari alat ke komputer, dan lebih
baik tertutup dan bebas dari getaran mesin.
Jalur pemeruman
LOKASI
Jalur pemeruman
perahu
LAUT

LAPORAN DED PELABUHAN KAPAL NEGARA
III - 12
dasar laut
permukaan air
TAMPAK DEPAN TAMPAK SAMPING
transducer
antena
kedalaman z
transducer
antena
satelit
Perahu harus stabil dan mudah bermanuver pada kecepatan rendah.
Kapasitas bahan bakar harus sesuai dengan panjang jalur sounding.
4. Papan pasang surut. Papan pasang surut digunakan pada kegiatan pengamatan
fluktuasi muka air di laut.
5. Peralatan keselamatan. Peralatan keselamatan yang diperlukan selama kegiatan
survei dilakukan antara lain life jacket.
Gambar 3.8 GPSmap reader (kiri), Proses Survey Bathymetri
Gambar 3.9 Penempatan GPSMap (transducer, antena, reader) di perahu

LAPORAN DED PELABUHAN KAPAL NEGARA
III - 13
3.2.2 Pelaksanaan Survei Bathymetri
Survei bathymetri dilaksanakan pada areal seluas ±69 ha. Survey bathymetri telah
selesai dilakukan pada tanggal 5 Juni – 8 Juni 2013.
3.2.3 Pengolahan Data Survei Bathymetri
A. Koreksi Terhadap Kedalaman
Data yang tercatat pada alat GPSMap adalah jarak antara transducer ke dasar perairan.
Transducer tersebut diletakkan di bawah permukaan air yang terpengaruh oleh pasang
surut. Karena itu diperlukan suatu koreksi kedalaman terhadap jarak transducer ke
permukaan air dan koreksi kedalaman terhadap pasang surut. Gambar 3.10
menampilkan sketsa definisi besaran-besaran yang terlibat dalam proses koreksi
tersebut.
Gambar 3.10. Sketsa Definisi Koreksi Kedalaman
Keterangan gambar:
EMA = Elevasi muka air diukur dari nol papan duga.
Z = Kedalaman air hasil sounding (jarak dasar perairan ke transducer).
A = Jarak transducer ke muka air.
permukaan air
transducer
antena
z
dasar laut
A titik nol EMA

LAPORAN DED PELABUHAN KAPAL NEGARA
III - 14
Dari definisi-definisi di atas maka elevasi dasar laut dihitung dari nol papan duga
adalah (ED):
EMAAZED
B. Pengikatan Terhadap Titik Referensi Hasil dari koreksi pertama (koreksi terhadap jarak tranducer ke muka air dan terhadap
pasang surut) menghasilkan elevasi dasar perairan terhadap nol papan. Elevasi ini
kemudian diikatkan kepada elevasi rencana (dalam hal ini LLWL) yang dihitung pada
pengolahan data pasang surut.
Pengikatan terhadap LLWL dapat dicari dengan menggunakan persamaan berikut ini:
EDLWS = ED - ELWS
Dimana : EDLWS = elevasi dasar perairan relatif terhadap LWS
ED = elevasi dasar perairan relatif terhadap nol papan duga
ELWS = elevasi LWS relatif terhadap nol papan duga
Dengan demikian LWS berada pada elevasi + 0.00m.
3.2.4 Hasil Survey Bathymetri Hasil pengukuran bathymetri kemudian diolah untuk memperoleh peta bathymetri.
Peta bathymetri tersebut diolah dengan menggunakan referensi elevasi acuan pasang
surut LWS. Gambar hasil survey bisa dilihat pada lembar lampiran.
3.3 SURVEI HIDRO-OSEANOGRAFI
3.3.1 U m u m
Survei hidro-oseanografi dilakukan dengan tujuan untuk mendapatkan gambaran
mengenai kondisi perairan di areal sekitar lokasi pekerjaan, yaitu kondisi pasang surut.
Sehubungan hal tersebut maka pekerjaan yang dilakukan dalam survei hidro-
oseanografi ini adalah pengamatan pasang surut atau pengukuran tinggi/fluktuasi
muka air. Hasilnya kemudian akan dipetakan dengan skala dan interval kontur
tertentu.
LAPORAN DED PELABUHAN KAPAL NEGARA
III - 15
3.3.2 Pengamatan Pasang Surut
Pengamatan pasang surut (pasut) dilaksanakan selama tiga hari dengan pembacaan
ketinggian air setiap satu jam. Pengukuran dilakukan pada satu tempat yang secara
teknis memenuhi syarat. Namun untuk mendapatkan nilai representatif dari pasang
surut lokasi, analisa juga didasarkan data Jawatan Hidrooseanografi Angkatan Laut dan
pemodelan dengan program SMS (Surface Modelling Systems).
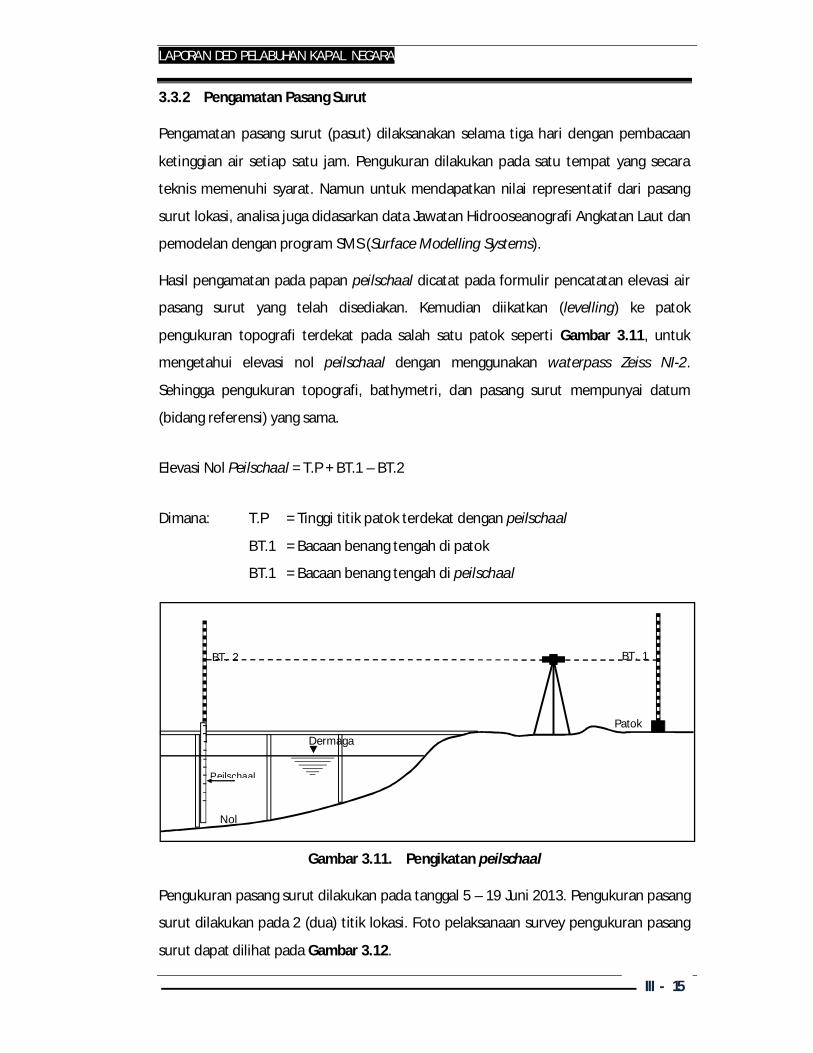
Hasil pengamatan pada papan peilschaal dicatat pada formulir pencatatan elevasi air
pasang surut yang telah disediakan. Kemudian diikatkan (levelling) ke patok
pengukuran topografi terdekat pada salah satu patok seperti Gambar 3.11, untuk
mengetahui elevasi nol peilschaal dengan menggunakan waterpass Zeiss NI-2.
Sehingga pengukuran topografi, bathymetri, dan pasang surut mempunyai datum
(bidang referensi) yang sama.
Elevasi Nol Peilschaal = T.P + BT.1 – BT.2
Dimana: T.P = Tinggi titik patok terdekat dengan peilschaal
BT.1 = Bacaan benang tengah di patok
BT.1 = Bacaan benang tengah di peilschaal
Gambar 3.11. Pengikatan peilschaal
Pengukuran pasang surut dilakukan pada tanggal 5 – 19 Juni 2013. Pengukuran pasang
surut dilakukan pada 2 (dua) titik lokasi. Foto pelaksanaan survey pengukuran pasang
surut dapat dilihat pada Gambar 3.12.
Patok
BT. 1 BT. 2
Peilschaal
Nol
Dermaga
LAPORAN DED PELABUHAN KAPAL NEGARA
III - 16
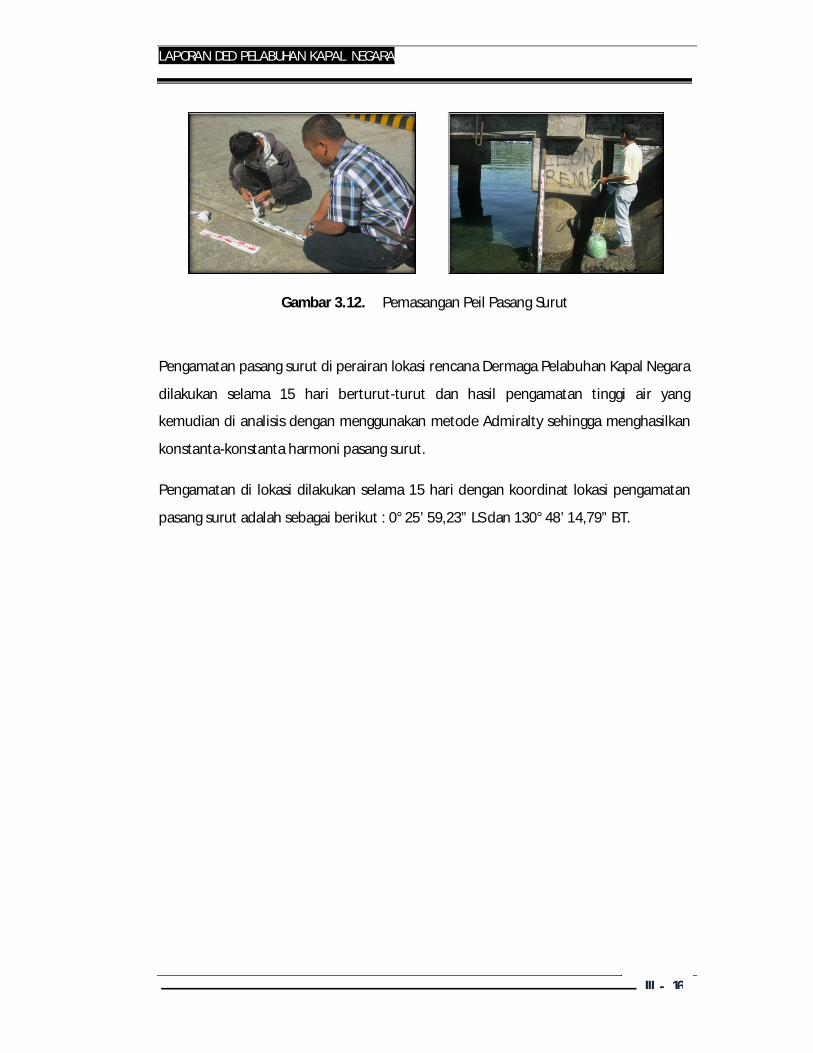
Gambar 3.12. Pemasangan Peil Pasang Surut
Pengamatan pasang surut di perairan lokasi rencana Dermaga Pelabuhan Kapal Negara
dilakukan selama 15 hari berturut-turut dan hasil pengamatan tinggi air yang
kemudian di analisis dengan menggunakan metode Admiralty sehingga menghasilkan
konstanta-konstanta harmoni pasang surut.
Pengamatan di lokasi dilakukan selama 15 hari dengan koordinat lokasi pengamatan
pasang surut adalah sebagai berikut : 0° 25’ 59,23” LS dan 130° 48’ 14,79” BT.
LAPORAN DED PELABUHAN KAPAL NEGARA
III - 17
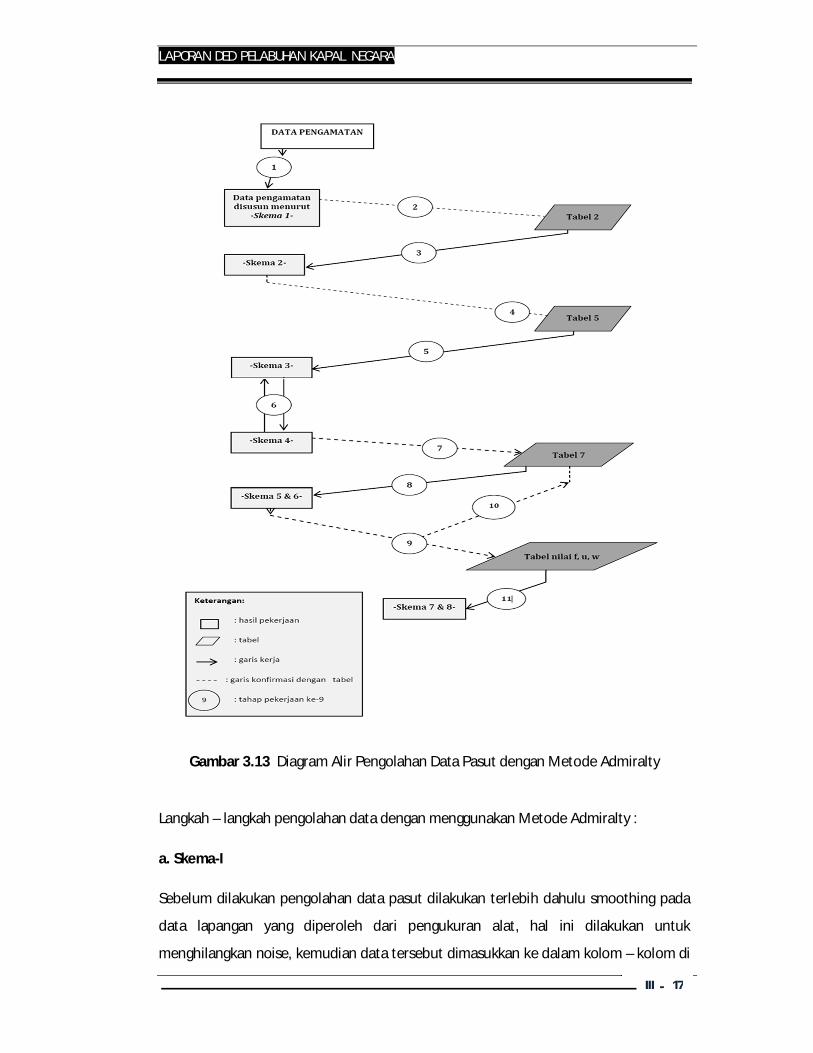
Gambar 3.13 Diagram Alir Pengolahan Data Pasut dengan Metode Admiralty
Langkah – langkah pengolahan data dengan menggunakan Metode Admiralty :
a. Skema-I
Sebelum dilakukan pengolahan data pasut dilakukan terlebih dahulu smoothing pada
data lapangan yang diperoleh dari pengukuran alat, hal ini dilakukan untuk
menghilangkan noise, kemudian data tersebut dimasukkan ke dalam kolom – kolom di
LAPORAN DED PELABUHAN KAPAL NEGARA
III - 18
skema-I, kekanan menunjukkan waktu pengamatan dari pukul 00.00 sampai 23.00 dan
kebawah adalah tanggal selama 15 hari, yaitu mulai tanggal 05 Juni s/d 19 Juni 2013.
b. Skema-II
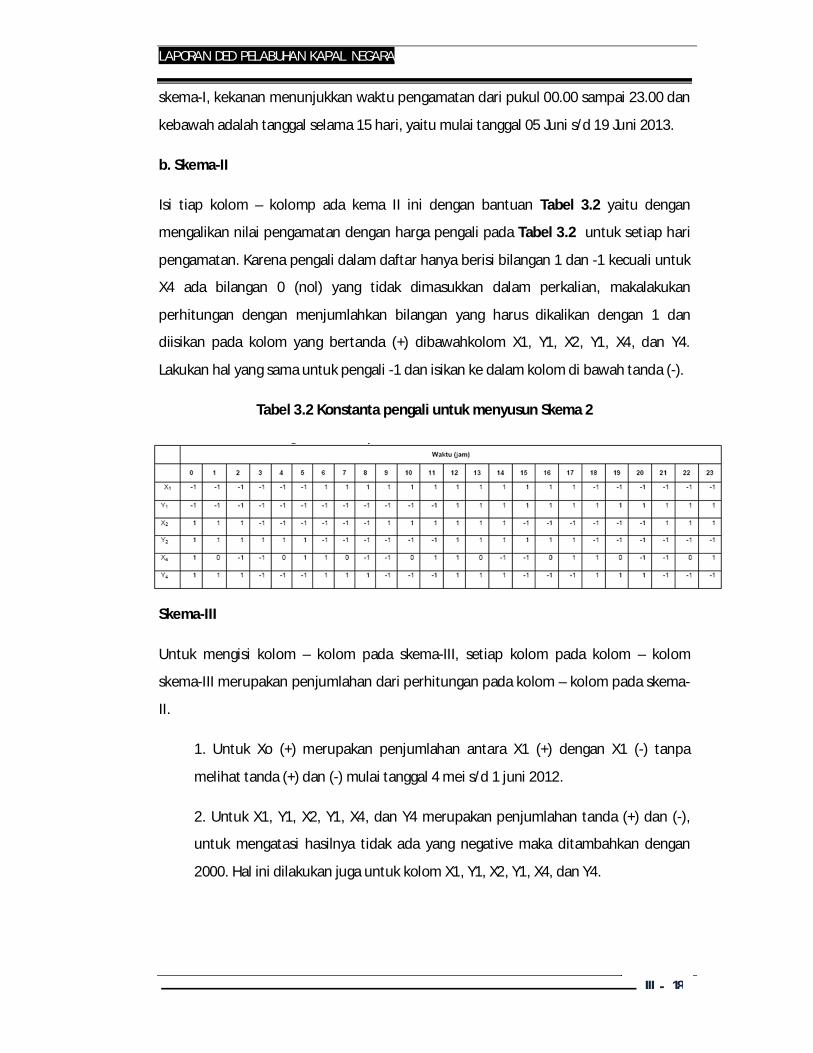
Isi tiap kolom – kolomp ada kema II ini dengan bantuan Tabel 3.2 yaitu dengan
mengalikan nilai pengamatan dengan harga pengali pada Tabel 3.2 untuk setiap hari
pengamatan. Karena pengali dalam daftar hanya berisi bilangan 1 dan -1 kecuali untuk
X4 ada bilangan 0 (nol) yang tidak dimasukkan dalam perkalian, makalakukan
perhitungan dengan menjumlahkan bilangan yang harus dikalikan dengan 1 dan
diisikan pada kolom yang bertanda (+) dibawahkolom X1, Y1, X2, Y1, X4, dan Y4.
Lakukan hal yang sama untuk pengali -1 dan isikan ke dalam kolom di bawah tanda (-).
Tabel 3.2 Konstanta pengali untuk menyusun Skema 2
Skema-III
Untuk mengisi kolom – kolom pada skema-III, setiap kolom pada kolom – kolom
skema-III merupakan penjumlahan dari perhitungan pada kolom – kolom pada skema-
II.
1. Untuk Xo (+) merupakan penjumlahan antara X1 (+) dengan X1 (-) tanpa
melihat tanda (+) dan (-) mulai tanggal 4 mei s/d 1 juni 2012.
2. Untuk X1, Y1, X2, Y1, X4, dan Y4 merupakan penjumlahan tanda (+) dan (-),
untuk mengatasi hasilnya tidak ada yang negative maka ditambahkan dengan
2000. Hal ini dilakukan juga untuk kolom X1, Y1, X2, Y1, X4, dan Y4.

LAPORAN DED PELABUHAN KAPAL NEGARA
III - 19
SKEMA -IV
Mengisi seluruh kolom – kolom pada skema-IV, diisi dengan data setelah penyelesaian
skema-III dibantu dengan daftar 2 (Tabel 3.3).
Arti indeks pada skema-IV :
Indeks 00 untuk X berarti X oo, Xo pada skema-III dan indeks 0 pada daftar konstanta 2
Indeks 00 untuk Y, berartiYoo, Yo pada skema-III dan indeks 0 pada daftar konstanta 2
Tabel 3.3 Daftar Konstanta 2

LAPORAN DED PELABUHAN KAPAL NEGARA
III - 20
Skema-V dan Skema-VI :
Mengisi kolom – kolom pada skema-V dan kolom – kolom pada skema-VI dengan
bantuan daftar factor analisa untuk pengamatan 15 hari skema-V mempunyai 10
kolom, kolom kedua disisi pertama kali sesuai dengan perintah pada kolom satu dan
angka – angkanya dilihat pada skema-V. Untuk kolom 3,4,5,6,7,8,9 dan 10 dengan
melihat angka – angka pada kolom 2 dikalikan dengan factor pengali sesuai dengan
kolom yang ada pada daftar factor analisa untuk pengamatan 15 hari.
Tabel 3.4 Daftar Factor Analisa Untuk Pengamatan 15 hari

LAPORAN DED PELABUHAN KAPAL NEGARA
III - 21
Skema VII
Tabel 3.5 Struktur Data untuk Skema VII
1. Baris 1 untuk V:PRcos r, merupakan penjumlahan semua bilangan pada kolom –
kolom Skema V untuk masing – masing kolom.
2. Baris 2 untukVI : PR sin r, merupakan penjumlahan semua bilangan pada kolom
– kolom Skema VI untuk masing – masing kolom.
3. Baris 3 untuk PR dicari dengan rumus : PR = (PR sin r)2 + (PR cos r)2
4. Baris 4 untuk P didapat dari daftar 3a untuk masing – masing So, M2, S2, N2,
K1, 01, M4, dan MS4.
5. Baris 5 untuk f didapatkan dari daftar (table node factor f) atau dengan
menggunakan perhitungan berikut ini.
Dapatkan nilai s, h, p dan N dari persamaan berikut :
s = 277,025 + 129,38481 (Y- 1900) + 13,17640 ( D+l )
h = 280,190 – 0,23872 (Y- 1900) + 0,98565 ( D+l )
p = 334,385 + 40,66249 (Y- 1900) + 0,11140 ( D+l )
N = 259,157 – 19,32818 (Y- 1900) – 0,05295 ( D+l )

LAPORAN DED PELABUHAN KAPAL NEGARA
III - 22
Y = tahun dari tanggal tengah pengamatan
D = jumlah hari yang berlalu dari jam 00.00 pada tanggal 1 januari tahun
tersebut sampai jam 00.00 tanggal pertengahan pengamatan.
l = bagian integral tahun= ¼ ( Y – 1901 )
Untuk mencari nilai f pada M2, K2, O1, K1, S2, P1, N2, M4, MS4 menggunakan
persamaan yang telah ditentukan :
Nilaif :
fM2 = 1,0004 – 0,0373 cos N + 0,0002 cos 2N
fK2 = 1,0241 + 0,2863 cos N + 0,0083 cos 2N – 0,0015 cos 3N
fO1 = 1,0089 + 0,1871 cos N + - 0,0147 cos 2N + 0,0014 cos 3N
fK1 = 1,0060 + 0,1150 cos N – 0,0088 cos 2N + 0,0006 cos 3N
fS2 = 1,0 (Tetap)
fP1 = 1,0 (Tetap)
fN2 = fM2
fM4 = (fM2)2
fMS4 = fM2
6. Baris 6 untuk (1+W) ditunggu dulu karena pengisiannya merupakan hasil dari
kolom - kolom pada skema-VIII.
7. Baris 7 untuk V diperoleh dari persamaan berikut :
V M2 = -2s + 2h
V k1 = h + 90
V O1 = -2s + h + 270
V K2 = 2h
V S2 = 0 (Tetap )
V P1 = -h + 270
LAPORAN DED PELABUHAN KAPAL NEGARA
III - 23
V M4 = 2(V M2)
V MS4 = VM2 = -2s +2h
8. Untuk nilai u diperoleh dari daftar atau berdasarkan persamaan berikut.
Pertama dapatka nnilai s, h, p dan N dari persamaan yang telah dijelaskan
sebelumnya pada langkah ke-5. Setelah nilai s, h, p dan N diperoleh maka nilai
u pada masing-masing komponen dapat dihitung dengan persamaan berikut:
u M2 = -2,14 sin N
u K2 = -17,74 sin N + 0,68 sin N – 0,04 sin 3N u K1 = -8,86 sin N + 0,68 sin 2N –
0,07 sin 3N
u O1 = 10,80 sin N – 1,34 sin 2N + 0,19 sin 3N
u S2 = 0 (Tetap)
u P1 = 0 (Tetap)
u M4 = 2 (uM2)
u MS4 = u M2
u N2 = u M2
9. Baris 9 untuk w diperoleh dari skema-VIII.
10. Baris 10 untuk p diisi dengan harga p yang ada di daftar 3a sesuai dengan
masing – masing kolom.
11. Baris 11 untuk r ditentukan dari : r arctan x (PR sin r / PR cos r), sedangkan
untuk harganya dilihat dari tanda pada masing – masing kuadran.
12. Baris 15 untuk g ditentukandari : g = V + u + w + p + r
13. Baris 16 untuk nx 3600 ditentukan dari kelipatan 3600 , maksudnya untuk
mencari harga kelipatan 3600 terhadap g, besaran tersebut diisikan pada baris
ke 13. Misalnya : 1181 maka n x 360 = 3 x 360 = 1080, dan harga ini masih
dibawah dari harga 1181, yang diisikan adalah 1080.
14. Baris 17 untuk A ditentukan dengan rumus : A = (PR / (pf (1+w)
15. Baris 18 untuk go ditentukan dari go = g – (n x 360)
LAPORAN DED PELABUHAN KAPAL NEGARA
III - 24
SKEMA VIII
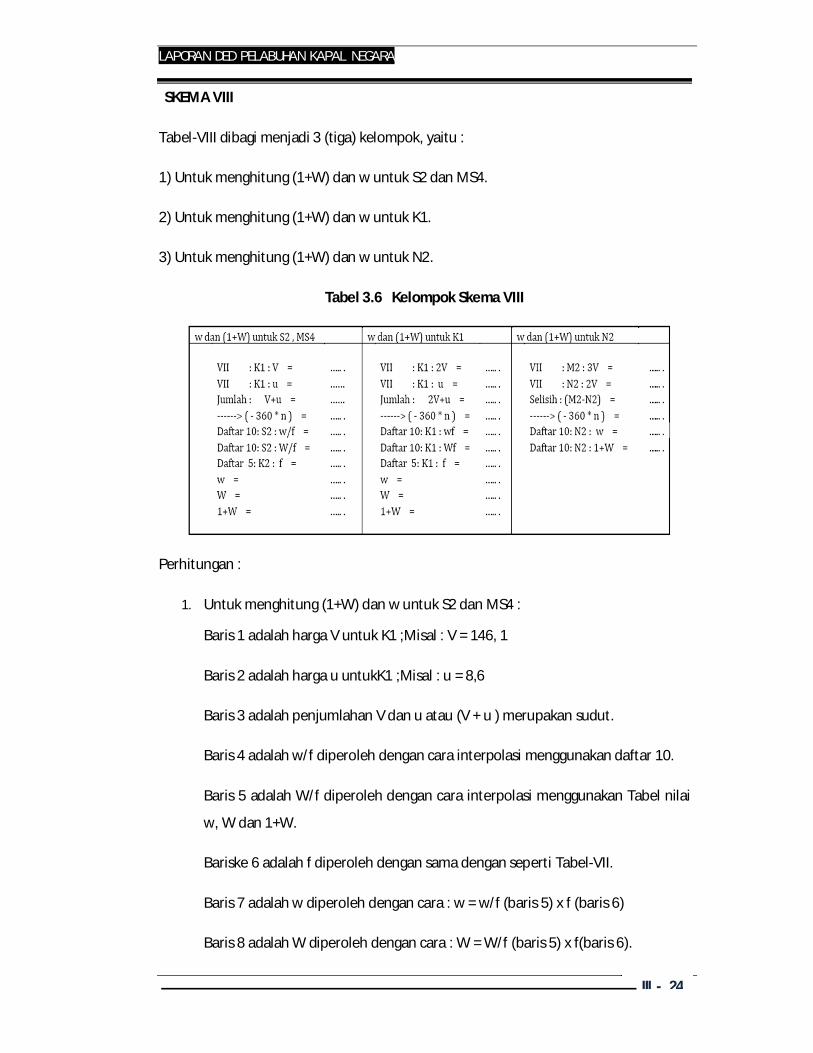
Tabel-VIII dibagi menjadi 3 (tiga) kelompok, yaitu :
1) Untuk menghitung (1+W) dan w untuk S2 dan MS4.
2) Untuk menghitung (1+W) dan w untuk K1.
3) Untuk menghitung (1+W) dan w untuk N2.
Tabel 3.6 Kelompok Skema VIII
Perhitungan :
1. Untuk menghitung (1+W) dan w untuk S2 dan MS4 :
Baris 1 adalah harga V untuk K1 ;Misal : V = 146, 1
Baris 2 adalah harga u untukK1 ;Misal : u = 8,6
Baris 3 adalah penjumlahan V dan u atau (V + u ) merupakan sudut.
Baris 4 adalah w/f diperoleh dengan cara interpolasi menggunakan daftar 10.
Baris 5 adalah W/f diperoleh dengan cara interpolasi menggunakan Tabel nilai
w, W dan 1+W.
Bariske 6 adalah f diperoleh dengan sama dengan seperti Tabel-VII.
Baris 7 adalah w diperoleh dengan cara : w = w/f (baris 5) x f (baris 6)
Baris 8 adalah W diperoleh dengan cara : W = W/f (baris 5) x f(baris 6).

LAPORAN DED PELABUHAN KAPAL NEGARA
III - 25
Baris 9 adalah (1+W) diperoleh dengan cara : 1+W (baris 8)
2. Untuk menghitung (1+W) dan w untuk K1 :
Baris 1 adalah harga 2v untuk K1 (baris ke 7 skema-VII)
Baris 2 adalah harga u untuk K1 (baris ke 8 skema-VII)
Bariske 3 adalah penjumlahan 2V dan U atau (2V + u ) merupakan sudut
Baris 4 adalah wf diperoleh dengan cara interpolasi menggunakan daftar 10.
Baris 5 adalah Wf diperoleh dengan cara interpolasi menggunakan daftar 10.
Baris 6 adalah f diperoleh dengan cara interpolasi menggunakan daftar 5, cara
interpolasinya sama dengan skema-VII.
3. Untuk menghitung (1+W) dan w untuk N2 :
Baris 1 adalah harga 3V untuk M2 (Baris ke 7 skema-VII).
Baris 2 adalah harga 2V untuk N2 (Baris ke 7 skema-VII).
Baris 3 adalah selisih 3V dan 2V atau( 3V – 2V) merupakan sudut.
Baris 4 adalah w diperoleh dengan cara interpolasi menggunakan daftar 10.
Baris 5 adalah 1+ W diperoleh dengan cara interpolasi menggunakan daftar 10.
Hasil data pasang surut yang diperoleh dianalisis menggunakan metode admiralty.
Berikut ini adalah perhitungan admiralty terhadap data hasil pengamatan yang
diperoleh selama 15 hari pengamatan di lapangan:

LAPORAN DED PELABUHAN KAPAL NEGARA
III - 26
Jam 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23
5-Jun-13 120 , 150 , 170 , 180 , 180 , 170 , 150 , 130 , 110 , 100 , 90 , 90 , 90 , 100 , 110 , 120 , 120 , 120 , 110 , 100 , 80 , 80 , 80 , 100
6-Jun-13 110 , 140 , 170 , 190 , 190 , 190 , 170 , 150 , 120 , 100 , 80 , 70 , 80 , 90 , 100 , 110 , 120 , 120 , 120 , 100 , 90 , 80 , 80 , 90
7-Jun-13 100 , 130 , 160 , 190 , 200 , 200 , 190 , 170 , 140 , 110 , 80 , 70 , 60 , 70 , 90 , 100 , 120 , 120 , 120 , 110 , 100 , 80 , 80 , 80
8-Jun-13 90 , 120 , 150 , 180 , 200 , 210 , 200 , 180 , 150 , 120 , 90 , 70 , 60 , 60 , 70 , 90 , 110 , 120 , 130 , 120 , 100 , 90 , 80 , 60
9-Jun-13 80 , 110 , 140 , 170 , 200 , 210 , 210 , 200 , 170 , 140 , 100 , 70 , 90 , 50 , 60 , 80 , 100 , 120 , 130 , 120 , 110 , 100 , 80 , 70
10-Jun-13 80 , 100 , 120 , 160 , 190 , 210 , 220 , 210 , 190 , 150 , 120 , 80 , 60 , 50 , 60 , 70 , 90 , 110 , 120 , 130 , 120 , 100 , 90 , 80
11-Jun-13 80 , 90 , 110 , 140 , 170 , 200 , 210 , 210 , 200 , 170 , 130 , 100 , 70 , 60 , 60 , 70 , 90 , 110 , 120 , 130 , 120 , 110 , 100 , 80
12-Jun-13 80 , 80 , 100 , 130 , 160 , 180 , 200 , 210 , 200 , 180 , 150 , 110 , 80 , 60 , 60 , 60 , 80 , 100 , 120 , 130 , 130 , 120 , 110 , 90
13-Jun-13 90 , 80 , 90 , 110 , 140 , 170 , 190 , 200 , 200 , 180 , 160 , 130 , 100 , 70 , 60 , 60 , 70 , 90 , 110 , 120 , 130 , 130 , 120 , 110
14-Jun-13 110 , 90 , 90 , 100 , 120 , 150 , 170 , 190 , 190 , 180 , 160 , 140 , 110 , 80 , 70 , 60 , 70 , 80 , 100 , 120 , 130 , 130 , 130 , 120
15-Jun-13 130 , 100 , 100 , 100 , 120 , 130 , 150 , 170 , 180 , 170 , 160 , 140 , 120 , 100 , 80 , 70 , 70 , 80 , 90 , 110 , 120 , 130 , 140 , 130
16-Jun-13 140 , 120 , 110 , 110 , 110 , 120 , 140 , 150 , 160 , 160 , 160 , 140 , 130 , 110 , 90 , 80 , 70 , 80 , 90 , 100 , 110 , 130 , 140 , 140
17-Jun-13 150 , 140 , 130 , 120 , 120 , 120 , 130 , 130 , 140 , 140 , 140 , 140 , 130 , 120 , 100 , 90 , 80 , 80 , 80 , 90 , 100 , 120 , 130 , 140
18-Jun-13 150 , 150 , 150 , 140 , 140 , 130 , 120 , 120 , 120 , 120 , 120 , 130 , 120 , 120 , 110 , 100 , 90 , 80 , 80 , 80 , 90 , 100 , 120 , 140
19-Jun-13 150 , 160 , 170 , 160 , 160 , 140 , 130 , 120 , 110 , 110 , 100 , 110 , 110 , 110 , 110 , 110 , 100 , 90 , 90 , 80 , 80 , 90 , 100 , 120
MIN
MAX 220.0
INPUT Q-BASICTANGGAL
50.0
Tabel 3.7 Pengamatan Pasang Surut
Sedangkan elevasi-elevasi penting yang didapatkan adalah sebagai berikut :
HWS = + 250,0 cm LWS
MSL = + 125,0 cm LWS
LWS = + 0,00 cm LWS
Gambar 3.14. Grafik Elevasi Pasang Surut

LAPORAN DED PELABUHAN KAPAL NEGARA
III - 27
3.3.3 Pengukuran Arus dan Sedimentasi
A. Pengukuran Arus
Tujuan pengukuran arus adalah untuk mendapatkan besaran kecepatan dan arah arus
yang berguna dalam penentuan sifat dinamika perairan lokal yang berfungsi untuk juga
sebagai data dasar rencana dalam desain struktur bangunan di pelabuhan nantinya.
Dalam pengukuran arus laut dan pengukuran sedimen transport ini peralatan yang
dipergunakan adalah :
- Perahu motor / kapal kelotok
- Alat ukur arus / currentmeter merk A.OTT - ex Germany type C-31 lengkap dengan
peralatan lainnya a.l ; counter type Z-200 untuk membaca kecepatan arusnya dan
sounding reel untuk menggantung pemberat 15 kg yang dapat mengukur
kedalaman sampai 40 m dan walaupun arus yang cukup tinggi propeller
currentmeter tersebut dapat berputar dengan konstan.
- Stop watch untuk mengukur lamanya waktu yang diperlukan dalam pengukuran
arus sungai.
- Pengukur Jarak, untuk mengukur jarak setiap melakukan pengukuran dipergunakan
peralatan dua buah distand meter Merk Wild dan Topcon.
Pengukuran arus dilakukan pada satu lokasi dimana arus mempunyai pengaruh
penting. Penempatan titik pengamatan ini disesuaikan dengan kondisi oceanography
lokal serta ditentukan hasil studi pengamatan/survei pendahuluan (reconnaissance
survei). Yang dilakukan ialah pengukuran distribusi kecepatan, dalam hal ini
pengukuran dilaksanakan di beberapa kedalaman dalam satu penampang. Berdasarkan
teori yang ada, kecepatan arus rata-rata pada suatu penampang yang besar adalah:
V=0.25 (V0.2d + 2 x V0.6d +V0.8d)
Dimana:
V0.2d = arus pada kedalaman 0.2d
d = kedalaman lokasi pengamatan arus

LAPORAN DED PELABUHAN KAPAL NEGARA
III - 28
Pengamatan kecepatan arus dilakukan pada kedalaman 0.2d, 0.6d, 0.8d. Disamping
mengetahui besar arus, arah arus juga diamati.
Gambar 3.15. Skema pengukuran arus di lokasi survei
Data arus daerah lokasi didasarkan pada data pengukuran arus yang diambil pada
tanggal 20-21 Juni 2013. Pengukuran arus dilakukan pada 2 (dua) titik lokasi.
Pengukuran dilakukan pada 2 (dua) titik lokasi dengan posisi sebagai berikut
titik 1,dengan koordinat sebagai berikut :
X = 700737,91 m
Y = 9952048,04 m
Z = -7m LWS
titik 2, dengan koordinat sebagai berikut:
X = 700794,71 m
Y = 9952063,61 m
Z = -7m LWS
Posisi pengukuran secara vertikal adalah pada kedalaman 0,20d, 0,60d, 0,80d,
dimana d adalah kedalaman laut.

LAPORAN DED PELABUHAN KAPAL NEGARA
III - 29
Hasil pengukuran arus disajikan dalam Tabel 3.8
Tabel 3.8 Kecepatan dan Arah Arus
Kondisi Lokasi Ked ( m )
Kec. Arus m/dtk Kec. Arus m/dtk Arah Dominan
Min Rata2 Max Rata2
Neap Tide
A 0,2 d 0.010
0.010 0.025
0.026 200
0,6 d 0.010 0.026 210
0,8 d 0.009 0.026 199
B
0,2 d 0.009 0.009
0.029 0.037
196
0,6 d 0.008 0.031 219
0,8 d 0.011 0.051 196
Spring Tide
A
0,2 d 0.015
0.017
0.118
0.128
199
0,6 d 0.019 0.154 208
0,8 d 0.018 0.112 202
B
0,2 d 0.019
0.018
0.216
0.24
205
0,6 d 0.016 0.300 203
0,8 d 0.018 0.204 201
Secara umum, arus disebabkan oleh adanya pergerakan angin, dinamika gelombang
dan pasang surut, dan adanya pergerakan arus global (stream) akibat perbedaan suhu
air laut antara daerah katulistiwa dengan kutub bumi.
Arus yang timbul akibat adanya pergerakan angin akan mengakibatkan arus
permukaan menjadi lebih besar daripada arus yang terjadi pada dasar. Seperti halnya
arus yang disebabkan oleh dinamika gelombang. Hal ini tercermin jelas pada pola
pergerakan patikel dimana gerak orbit patikel lebih cepat dipermukaan dibandingkan
dengan daripada didasar. Pada laut dalam gerak orbit partikel tidak menyentuh dasar
sedangkan pada laut dangkal gerak orbit partikel yang terjadi mampu menyentuh
dasar. Seperti terlihat pada Gambar 3.16

LAPORAN DED PELABUHAN KAPAL NEGARA
III - 30
Gambar 3.16. Pola pergerakan partikel pada laut dalam dan laut dangkal
Arus juga dapat disebabkan oleh kekuatan alam lainnya yakni pasang surut dan stream
global. Dua kekuatan ini juga dapat menyebabkan adanya arus namun karena sifatnya
yang dapat membentuk gelombang yang sangat panjang menyebabkan kecepatan
arus antara bagian permukaan dan dasar dapat mendekati nilai yang seragam
sehingga besar kecepatan arus permukaan dan arus di dasar hampir sama. Arus yang
disebabkan oleh kedua kekuatan ini biasanya bersifat tidak kencang dengan
kecenderungan lamban.
Berdasarkan hasil pengukuran arus dapat diketahui bahwa lokasi berada daerah yang
tenang dengan arus, <15 cm/s, sesuai dengan letaknya yang berada pada teluk
sehingga di lokasi arus yang terjadi secara umum disebabkan oleh adanya pengaruh
pasang surut. Karena dari hasill pengukuran kecepatan arus menunjukkan hasil
dengan kecepatan yang seragam antara bagian permukaan dan bagian dasar. Hal ini
didukung juga oleh posisi lokasi yang berada di daerah teluk.
B. Pengukuran Sedimentasi Transport
Untuk mengetahui sediment transport pada lokasi rencana pelabuhan, contoh
sediment diambil pada saat pengukuran arus. Pengambilan sampel air ini dilakukan
dengan menggunakan water sample type US - DH 59 yang diambil pada kedalaman 4,3
meter dengan jarak 200 lepas pantai dan kedalaman 6.5 meter pada jarak 400 meter
Y = -½ Lc
LAPORAN DED PELABUHAN KAPAL NEGARA
III - 31
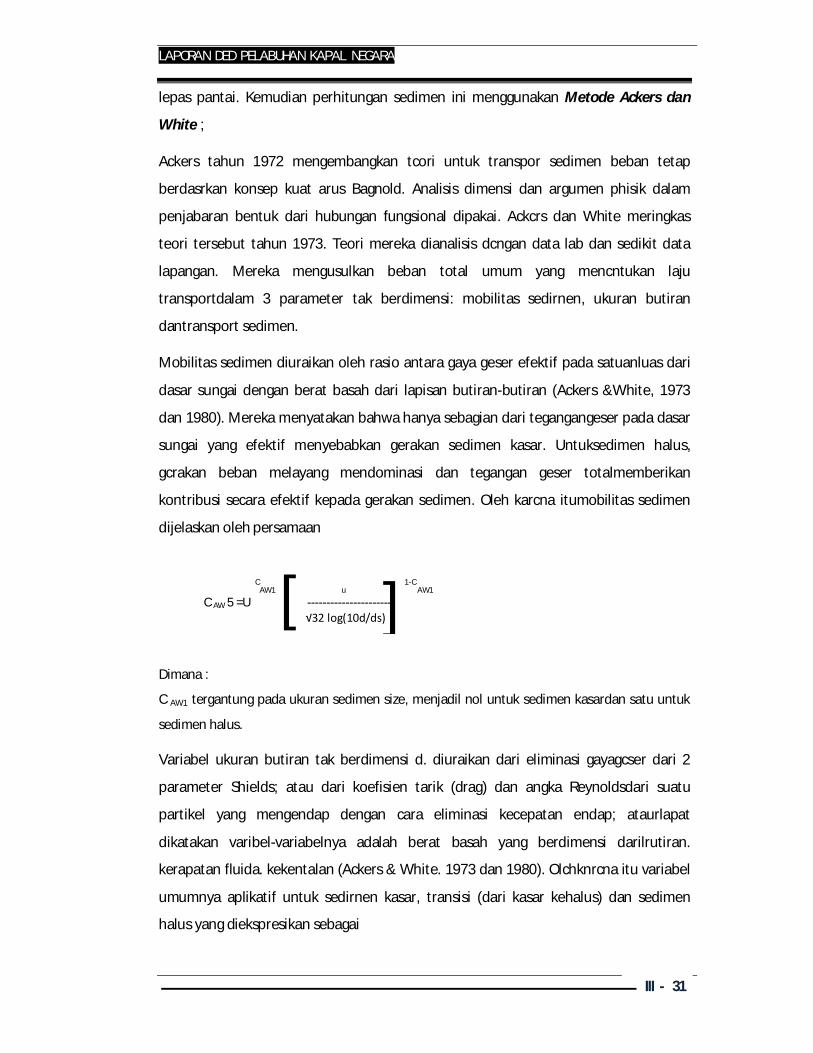
lepas pantai. Kemudian perhitungan sedimen ini menggunakan Metode Ackers dan
White ;
Ackers tahun 1972 mengembangkan tcori untuk transpor sedimen beban tetap
berdasrkan konsep kuat arus Bagnold. Analisis dimensi dan argumen phisik dalam
penjabaran bentuk dari hubungan fungsional dipakai. Ackcrs dan White meringkas
teori tersebut tahun 1973. Teori mereka dianalisis dcngan data lab dan sedikit data
lapangan. Mereka mengusulkan beban total umum yang mencntukan laju
transportdalam 3 parameter tak berdimensi: mobilitas sedirnen, ukuran butiran
dantransport sedimen.
Mobilitas sedimen diuraikan oleh rasio antara gaya geser efektif pada satuanluas dari
dasar sungai dengan berat basah dari lapisan butiran-butiran (Ackers &White, 1973
dan 1980). Mereka menyatakan bahwa hanya sebagian dari tegangangeser pada dasar
sungai yang efektif menyebabkan gerakan sedimen kasar. Untuksedimen halus,
gcrakan beban melayang mendominasi dan tegangan geser totalmemberikan
kontribusi secara efektif kepada gerakan sedimen. Oleh karcna itumobilitas sedimen
dijelaskan oleh persamaan
C
AW1 u 1-C
AW1 C AW 5 =U ---------------------- √32 log(10d/ds)
Dimana :
C AW1 tergantung pada ukuran sedimen size, menjadil nol untuk sedimen kasardan satu untuk
sedimen halus.
Variabel ukuran butiran tak berdimensi d. diuraikan dari eliminasi gayagcser dari 2
parameter Shields; atau dari koefisien tarik (drag) dan angka Reynoldsdari suatu
partikel yang mengendap dengan cara eliminasi kecepatan endap; ataurlapat
dikatakan varibel-variabelnya adalah berat basah yang berdimensi darilrutiran.
kerapatan fluida. kekentalan (Ackers & White. 1973 dan 1980). Olchknrcna itu variabel
umumnya aplikatif untuk sedirnen kasar, transisi (dari kasar kehalus) dan sedimen
halus yang diekspresikan sebagai
[ ]

LAPORAN DED PELABUHAN KAPAL NEGARA
III - 32
(G-1)g 1/3
d = ---------------------- √32 log(10d/ds)
ds u CAw1 C Aw5 CAW4 C W =C
AW2 G---- --------- ------------ - 1 d u* C Aw3
dimana :
CAw1, Caw2:, Caw3 , dan CAw4 tergantung dari diarncter partikel tak berdimensi d
Hubungan untuk Cawr, Cewz, Crwl dan Cayya yang diperoleh dari data eksperimen
untuk ukuran partikeldengan jangkauan dari 0.04 mm sampai 4.0 mm adalah
Untuk t.0 < d. < 60.0,
CAw1 = 1.0 – 0.56 log d
LogCAW2 = 2.86 log d. - (log d )2 - 3.53
0.23
CAW3 = ------- + 0.14
d 1/2
9.66
CAW4 = ------- + 1.34
d
Untuk d > 60.0,
CAwl =0. CAW2=0.025, CAW3=0.17, CAW4 = l.50,
Gerakan awal terjadi pada waktu CRw3 = Cnws. Kondisi ini sesuai dengan kriterion dari
hield untuk sedimen kasar, namun material halus kondisi berada antara Shields dan
White Julien, 1995). Untuk gerakan pasir sangat halus metodc ini cenderung
memberikan perkiraan konsentrasi yang berlcbih (averestimatel)
( ) ( )[ ]

LAPORAN DED PELABUHAN KAPAL NEGARA
III - 33
Dari hasil perhitungan sediment didapat :
Sample no. 1
Kedalaman : -2.5 mLWS
Tabel 3.9 Hasil Perhitungan sediment untuk sample no.1
No Berat Jenis Berat Volume
(gr/cm3) Kecepatan Dasar Rata2
(m/det) Laju Sedimentasi
(mm/thn)
1 2.61 1.78 0.067708 1.2
Sample no. 2
Kedalaman : -5.0 mLWS
Tabel 3.10 Hasil Perhitungan sediment untuk sample no.2
No Berat Jenis Berat Volume
(gr/cm3) Kecepatan Dasar Rata2
(m/det) Laju Sedimentasi
(mm/thn)
1 2.27 1.27 0.067708 0.9




















