
Aplikasi Pid Sebagai Kontrol Suhu Panas Ruangan
15
APLIKASI PID SEBAGAI KONTROL SUHU PANAS RUANGAN 1 Feranita, 1 Suwitno, 2 Hamim 1 Staf Pengajar Jurusan Teknik Elektro, Fakultas Teknik, Universitas Riau 1 Alumni Teknik Elektro, Fakultas Teknik, Universitas Riau Kampus: Binawidya Km. 12,5 Simpang Baru Pekanbaru 28293, Riau. e-mail: [email protected] Abstrak Pengontrolan suhu panas ruangan dengan kontroler Proporsional Integral Derivative (PID) merupakan suatu kontrol umpan balik yang digunakan untuk mendapatkan suhu panas pada nilai tertentu dan kemudian mempertahankannya. Pengontrolan suhu panas ruangan ini dilakukan dengan cara menyesuaikan tegangan yang menjadi referensi (set point) agar sama dengan tegangan yang keluar dari sensor suhu. PID difungsikan sebagai kontroler, plant yang dikontrol adalah sebuah pemanas (heater) dan sensor yang digunakan adalah LM35D. Input referensi berasal dari set point yang diberikan oleh user. Tegang- an set point ini akan dibandingkan dengan tegangan umpan balik yang merupakan output dari sensor suhu. Apabila terdapat perbedaan, berarti suhu yang terjadi belum sama dengan suhu yang diinginkan. PID sebagai kontroler yang mengontrol pemanas secara otomatis akan melakukan aksi pengendalian suhu yaitu meminimalisasi perbedaan nilai tegangan tersebut sehingga tercapai suatu keadaan dimana nilai set point akan sama atau mendekati dengan nilai tegangan umpan balik keluaran sensor suhu. Suhu ruangan dapat diketahui melalui LCD melalui pemrograman pada mikrokontroller ATmega8535. Kata kunci: Mikrokontroller Atmega8535, PID Controller, Temperature Controller. 1. PENDAHULUAN Sistem pengontrolan otomatis banyak memberikan keuntungan bagi manusia. Selain dapat mempercepat waktu kerja, pengontrolan otomatis juga dapat mengurangi kesalahan yang dilakukan oleh manusia (human error) dan meningkatkan efektifitas
-
Upload
mahadirga-rizkiawan -
Category
Documents
-
view
262 -
download
32
Transcript of Aplikasi Pid Sebagai Kontrol Suhu Panas Ruangan

APLIKASI PID SEBAGAI KONTROL SUHU PANAS RUANGAN
1 Feranita, 1 Suwitno, 2 Hamim 1 Staf Pengajar Jurusan Teknik Elektro, Fakultas Teknik, Universitas Riau
1 Alumni Teknik Elektro, Fakultas Teknik, Universitas Riau Kampus: Binawidya Km. 12,5 Simpang Baru Pekanbaru 28293, Riau.
e-mail: [email protected]
Abstrak
Pengontrolan suhu panas ruangan dengan kontroler Proporsional Integral Derivative (PID) merupakan suatu kontrol umpan balik yang digunakan untuk mendapatkan suhu panas pada nilai tertentu dan kemudian mempertahankannya. Pengontrolan suhu panas ruangan ini dilakukan dengan cara menyesuaikan tegangan yang menjadi referensi (set point) agar sama dengan tegangan yang keluar dari sensor suhu. PID difungsikan sebagai kontroler, plant yang dikontrol adalah sebuah pemanas (heater) dan sensor yang digunakan adalah LM35D. Input referensi berasal dari set point yang diberikan oleh user. Tegang-an set point ini akan dibandingkan dengan tegangan umpan balik yang merupakan output dari sensor suhu. Apabila terdapat perbedaan, berarti suhu yang terjadi belum sama dengan suhu yang diinginkan. PID sebagai kontroler yang mengontrol pemanas secara otomatis akan melakukan aksi pengendalian suhu yaitu meminimalisasi perbedaan nilai tegangan tersebut sehingga tercapai suatu keadaan dimana nilai set point akan sama atau mendekati dengan nilai tegangan umpan balik keluaran sensor suhu. Suhu ruangan dapat diketahui melalui LCD melalui pemrograman pada mikrokontroller ATmega8535.
Kata kunci: Mikrokontroller Atmega8535, PID Controller, Temperature Controller.
1. PENDAHULUAN
Sistem pengontrolan otomatis banyak memberikan keuntungan bagi manusia. Selain dapat mempercepat waktu kerja, pengontrolan otomatis juga dapat mengurangi kesalahan yang dilakukan oleh manusia (human error) dan meningkatkan efektifitas
32
kerja. Salah satu aplikasi pengontrolan otomatis yang dapat kita jumpai dalam kehidupan sehari-hari adalah pengontrolan suhu.
Berbicara tentang pengontrolan suhu, maka sebuah pengontrol otomatis diperlukan untuk mengontrol suhu sebuah ruangan. Suhu sebuah ruangan perlu dikendalikan dan tetap terjaga agar dapat dimanfaatkan untuk keperluan tertentu. Beberapa ruangan seperti ruangan server, ruang penyimpanan darah, ruang perawatan bayi dan sebagainya, memerlukan pengontrolan otomatis untuk mengontrol suhu ruangan tersebut.
Control Proportional, Integral, Derivative (PID) sebagai salah satu alat kontrol otomatis yang terkenal didunia industri akan digunakan untuk mengontrol suhu panas sebuah ruangan. Dengan menggunakan kontrol PID, tegangan umpan balik yang merupakan output dari sensor suhu bernilai sesuai atau mendekati dengan besarnya tegangan yang diberikan oleh user melalui set point.
2. BAHAN DAN METODE
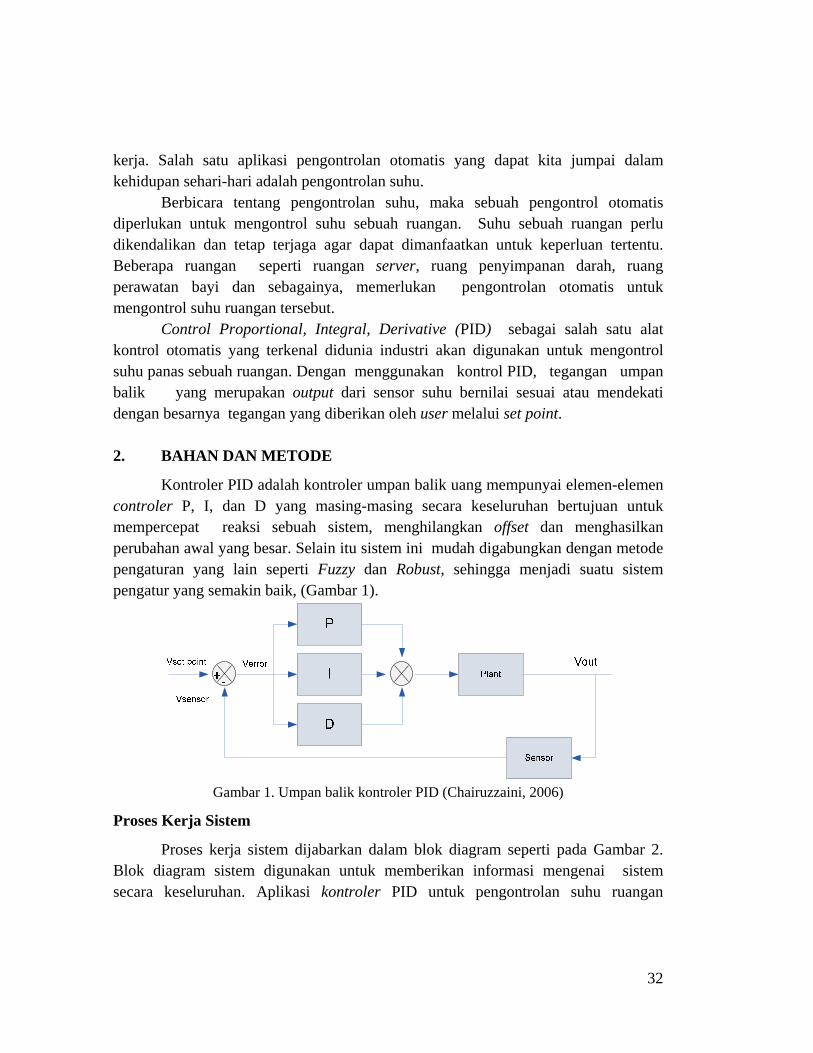
Kontroler PID adalah kontroler umpan balik uang mempunyai elemen-elemen controler P, I, dan D yang masing-masing secara keseluruhan bertujuan untuk mempercepat reaksi sebuah sistem, menghilangkan offset dan menghasilkan perubahan awal yang besar. Selain itu sistem ini mudah digabungkan dengan metode pengaturan yang lain seperti Fuzzy dan Robust, sehingga menjadi suatu sistem pengatur yang semakin baik, (Gambar 1).
Gambar 1. Umpan balik kontroler PID (Chairuzzaini, 2006)
Proses Kerja Sistem
Proses kerja sistem dijabarkan dalam blok diagram seperti pada Gambar 2. Blok diagram sistem digunakan untuk memberikan informasi mengenai sistem secara keseluruhan. Aplikasi kontroler PID untuk pengontrolan suhu ruangan
33
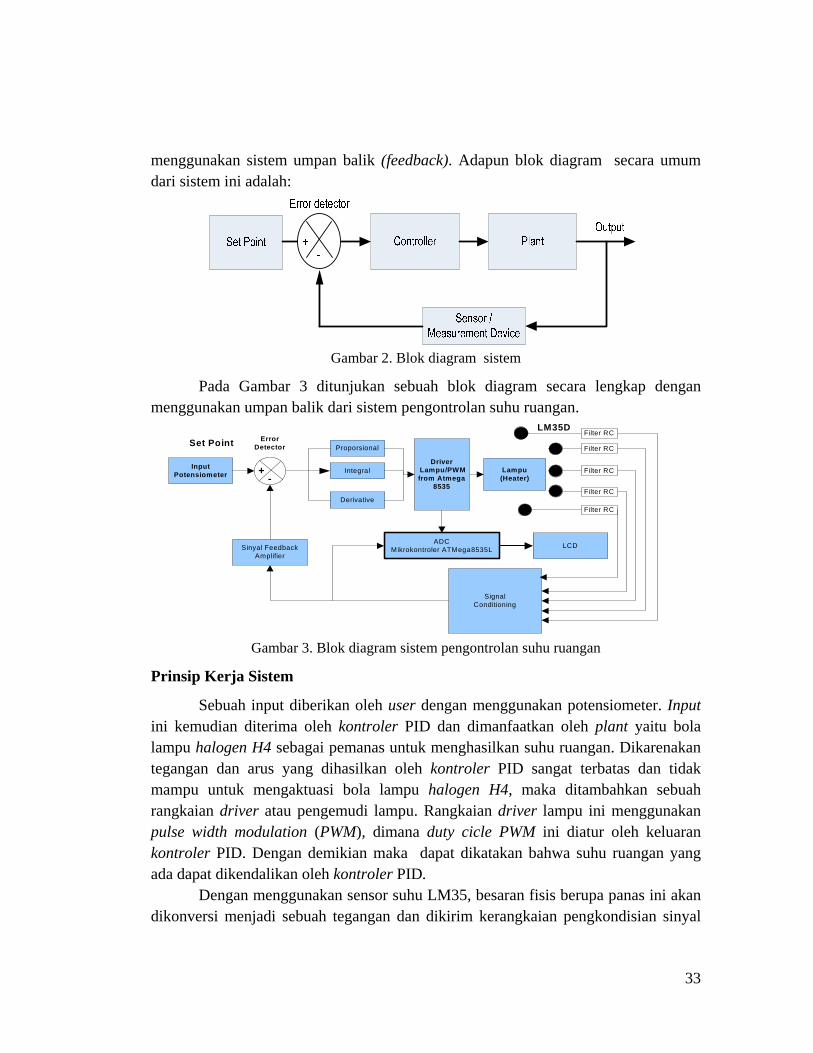
menggunakan sistem umpan balik (feedback). Adapun blok diagram secara umum dari sistem ini adalah:
Gambar 2. Blok diagram sistem
Pada Gambar 3 ditunjukan sebuah blok diagram secara lengkap dengan menggunakan umpan balik dari sistem pengontrolan suhu ruangan.
Gambar 3. Blok diagram sistem pengontrolan suhu ruangan
Prinsip Kerja Sistem
Sebuah input diberikan oleh user dengan menggunakan potensiometer. Input ini kemudian diterima oleh kontroler PID dan dimanfaatkan oleh plant yaitu bola lampu halogen H4 sebagai pemanas untuk menghasilkan suhu ruangan. Dikarenakan tegangan dan arus yang dihasilkan oleh kontroler PID sangat terbatas dan tidak mampu untuk mengaktuasi bola lampu halogen H4, maka ditambahkan sebuah rangkaian driver atau pengemudi lampu. Rangkaian driver lampu ini menggunakan pulse width modulation (PWM), dimana duty cicle PWM ini diatur oleh keluaran kontroler PID. Dengan demikian maka dapat dikatakan bahwa suhu ruangan yang ada dapat dikendalikan oleh kontroler PID.
Dengan menggunakan sensor suhu LM35, besaran fisis berupa panas ini akan dikonversi menjadi sebuah tegangan dan dikirim kerangkaian pengkondisian sinyal
Input Potensiometer
Proporsional
Integral
Derivative
Driver Lampu/PWM from Atmega
8535
Lampu (Heater)
Filter RC
Filter RC
Filter RC
Filter RC
Filter RC
LM35D
Signal Conditioning
Sinyal Feedback Amplifier
ADCMikrokontroler ATMega8535L LCD
+-
Set Point Error Detector

34
setelah melewati rangkaian filter. Output dari signal conditioning merupakan tegangan rata-rata dari jumlah tegangan masing-masing sensor suhu, yang akan digunakan sebagai tegangan umpan balik. Tegangan inilah yang akan diatur dan diolah oleh kontroler PID sehingga, diperoleh keadaan dimana tegangan umpan balik ini nilainya sama atau mendekati dengan set point. Masukan ADC diperoleh dari tegangan rata-rata yang diperkuat kemudian diolah oleh mikrokontroller ATmega8535 sehingga suhu rata-rata ruangan dapat ditampilkan oleh Liquid Crystal Display (LCD).
3. ANALISA DAN PEMBAHASAN
Untuk analisa, maka dilakukan penghitungan data output LM35D dan amplifier secara teori, yaitu sebagai berikut:
( ) TCmVDLMVout *1035 o= (1)
DLMVV outoutAmp 35*5= (2)
Berdasarkan pada persamaan diatas, maka secara teori output LM35D dan amplifier dapat dilihat pada tabel 1
Tabel 1 Perhitungan teori sensor Suhu LM35D Suhu
(Celcius) Vout LM35D / Vrata-rata
(mV) Vout Amplifier
(V) 27 270 1.35 28 280 1.4 29 290 1.45 30 300 1.5 31 310 1.55
Fungsi Alih Sistem
Proses awal untuk mengetahui kemampuan kontroler PID dalam melaksanakan aksi pengontrolan atau pengendalian suhu panas ruangan adalah dengan mengetahui respon sistem yang ditunjukan oleh plant yaitu pemanas dan sensor. Dengan mengetahui respon atau karakteristiknya ini maka kita dapat memberikan parameter kontrol yang sesuai dan dibutuhkan oleh sistem. Respon dari plant ini diambil dengan metode reaksi sistem untaian terbuka (open loop). Secara umum, respon yang dihasilkan dengan metode ini adalah sebuah respon dengan kurva yang dihasilkannya adalah sebagai berikut:

ytsfds
K
Bb
Selanyang ada matidak mutlaksistem tersebfungsi alih, dihasilkan. sistem adala
Keterangan:K = peT = wa
Berdasarkanberikut:
)()(
sRsC
njutnya, untaka dapat kitk akan tetapbut. Sebagamaka paramBerdasarkan
ah orde satu,
erbandingan aktu respon
n keterangan
Gam
1))
+=
TsK
Gambar 4 R
tuk lebih meta perhitungi dapat bermi langkah awmeter yang n respon padengan pers
antara suhupada kondis
n tersebut
mbar 5. Respo
Respon plant u
emudahkan gkan fungsi amanfaatkan uwal untuk mharus diperh
ada Gambarsamaan dari
u dengan tegasi 63.2% dari
maka diten
on untuk men
untaian terbuk
melakukan alih dari planuntuk memp
melakukan phatikan adal
diatas, daporde satu ad
angan (°Celci nilai refere
ntukan kom
nentukan fung
ka
aksi kontront tersebut. F
permudah anenentuan dalah orde darpat diketahudalah sebaga
cius/Volt) ensi
mpoen-komp
gsi alih
ol pada sisteFungsi alih
nalisa terhadan perhitungri sistem yaui bahwa orai berikut:
(
ponen sebag
35
em ini
dap gan ang rde
3)
gai
36
Tegangan setpoint yang diberikan adalah sebesar 10 Volt, sedangkan tegangan awal adalah 5.8 Volt. Suhu yang dihasilkan pada saat respon telah mencapai setpoint adalah 48 °C, sedangkan suhu pada tegangan 5.8 Volt adalah suhu kamar pada saat pengukuran, yaitu sebesar 29 °C. Tegangan awal ini diperoleh dari proses penguatan sebesar 20 kali penguatan terhadap setpoint, seperti yang telah dijelaskan pada bab sebelumnya. Dengan diketahuinya beberapa komponen diatas maka dilakukan perhitungan fungsi alih yaitu sebagai berikut:
1)()(
+=
TsK
sRsC
Keterangan:
5238.42.4
198.510
2948==
−−
=K
( ) ( )[ ][ ]
( )
1204544.8
4544.86544.28.5%2.63*2.48.5%2.63*8.5108.5
%2.63
%)2.63(
%2.63
≈
≈
=+=+=
−+=
TV
VV
maka persamaan fungsi alihnya adalah:
( ) 11205238.4)(
1)()(
+=
+=
ssRsC
TsK
sRsC
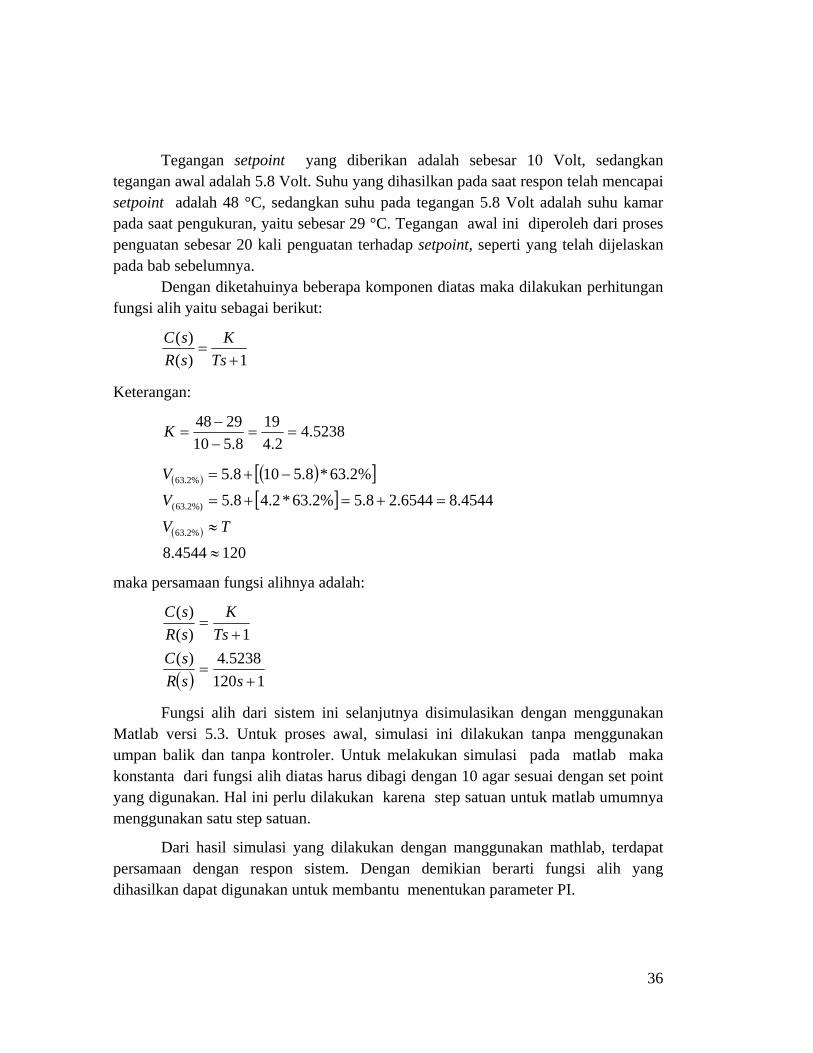
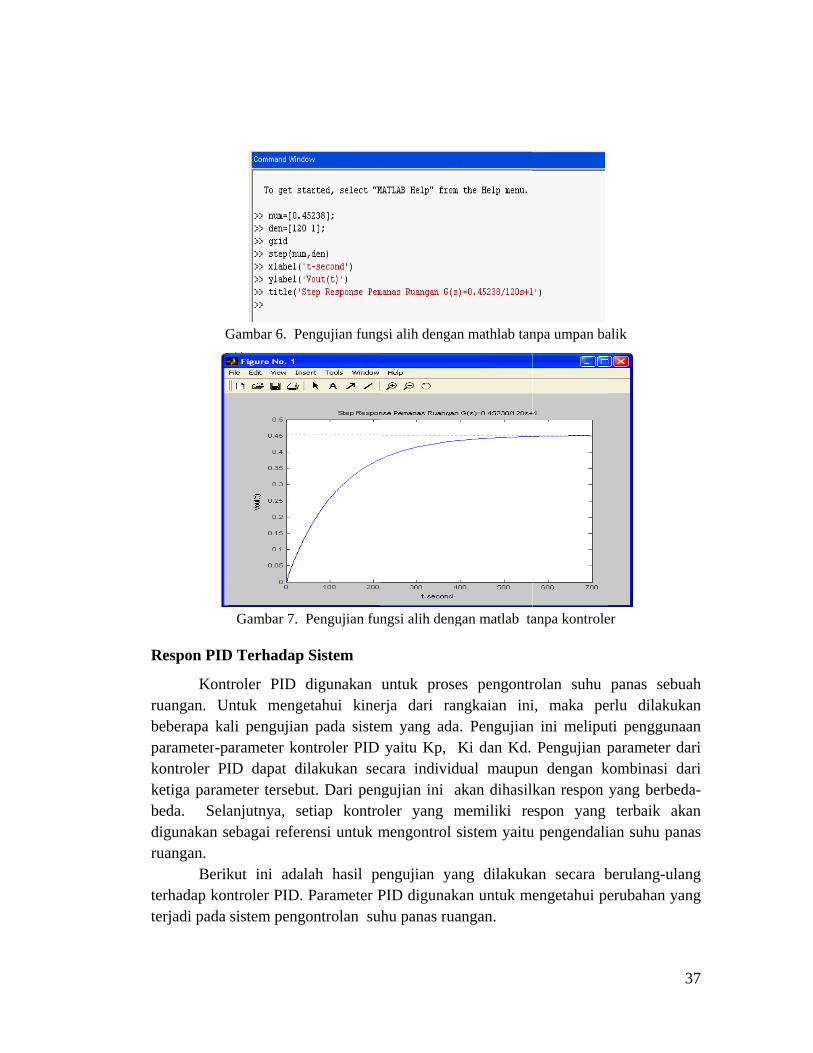
Fungsi alih dari sistem ini selanjutnya disimulasikan dengan menggunakan Matlab versi 5.3. Untuk proses awal, simulasi ini dilakukan tanpa menggunakan umpan balik dan tanpa kontroler. Untuk melakukan simulasi pada matlab maka konstanta dari fungsi alih diatas harus dibagi dengan 10 agar sesuai dengan set point yang digunakan. Hal ini perlu dilakukan karena step satuan untuk matlab umumnya menggunakan satu step satuan.
Dari hasil simulasi yang dilakukan dengan manggunakan mathlab, terdapat persamaan dengan respon sistem. Dengan demikian berarti fungsi alih yang dihasilkan dapat digunakan untuk membantu menentukan parameter PI.
R
rbpkkbdr
tt
G
Respon PID
Kontruangan. Ubeberapa kaparameter-pkontroler PIketiga parambeda. Seladigunakan sruangan.
Berikterhadap konterjadi pada
Gambar 6. Pe
Gambar 7.
D Terhadap
troler PID Untuk mengeali pengujianarameter koID dapat dimeter tersebuanjutnya, seebagai refer
kut ini adalntroler PID. sistem peng
engujian fung
Pengujian fun
Sistem
digunakan etahui kinen pada sisteontroler PIDilakukan secut. Dari penetiap kontrorensi untuk m
lah hasil peParameter P
gontrolan su
gsi alih denga
ngsi alih deng
untuk proserja dari ranm yang adayaitu Kp,
cara individngujian ini aoler yang mmengontrol
engujian yaPID digunak
uhu panas rua
an mathlab tan
gan matlab ta
es pengontrngkaian inia. PengujianKi dan Kd.
dual maupunakan dihasilmemiliki resistem yaitu
ang dilakukakan untuk mangan.
npa umpan ba
anpa kontrole
rolan suhu i, maka pe
n ini melipuPengujian p
n dengan kkan respon
espon yang u pengendali
an secara bengetahui pe
alik
er
panas sebuerlu dilakukti penggunaparameter d
kombinasi dyang berbedterbaik ak
ian suhu pan
berulang-ulaerubahan ya
37
uah kan aan ari ari da-kan nas
ang ang
Gamba
Gamba
Gambar
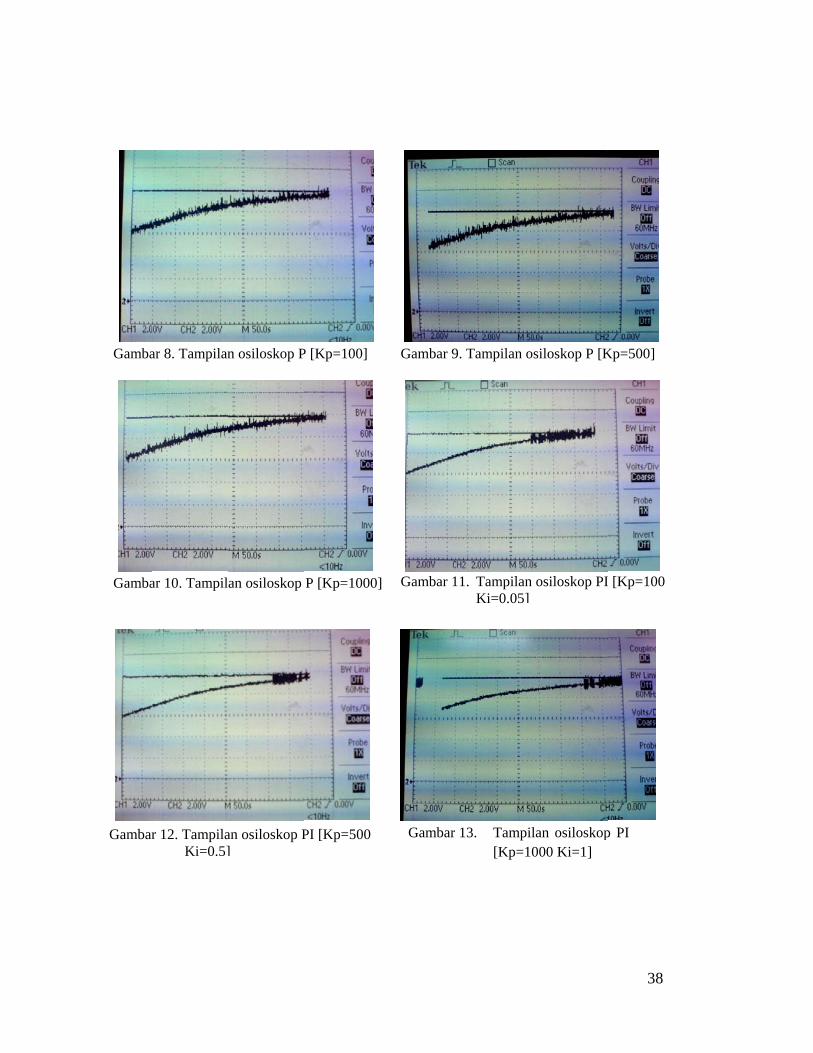
ar 8. Tampilan
ar 10. Tampil
r 12. TampilaKi=0.5]
n osiloskop P
an osiloskop
an osiloskop P]
P [Kp=100]
P [Kp=1000]
PI [Kp=500
Gambar 9
]
Gambar 1
Gambar
9. Tampilan o
11. Tampilan Ki=0.05]
13. Tampil[Kp=10
osiloskop P [K
osiloskop PI
lan osiloskop000 Ki=1]
38
Kp=500]
[Kp=100
p PI
D
T
A
2
3
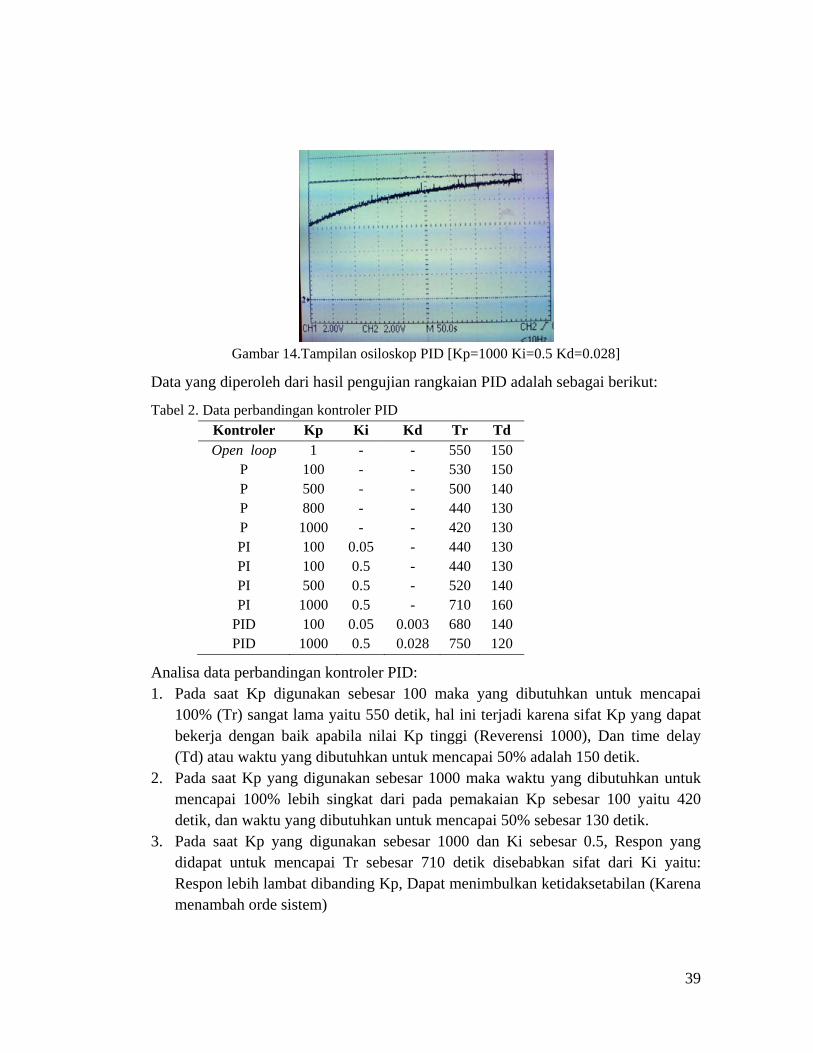
Data yang d
Tabel 2. DataKoOp
Analisa data1. Pada saa
100% (Tbekerja (Td) atau
2. Pada saamencapadetik, da
3. Pada saadidapat Respon lmenamb
Gambar 14.T
iperoleh dar
a perbandingaontroler Kpen loop
P P 5P 8P 1PI PI PI 5PI 1
PID PID 1
a perbandingat Kp digun
Tr) sangat ladengan baiku waktu yanat Kp yang dai 100% leban waktu yanat Kp yang untuk menclebih lambat
bah orde siste
Tampilan osil
ri hasil pengu
an kontroler PKp Ki 1 -
100 - 500 - 800 -
1000 - 100 0.05100 0.5 500 0.5
1000 0.5 100 0.05
1000 0.5
gan kontrolernakan sebes
ama yaitu 55k apabila nig dibutuhkandigunakan s
bih singkat ng dibutuhka
digunakan capai Tr sebt dibanding Kem)
loskop PID [K
ujian rangka
PID Kd T
- 5- 5- 5- 4- 4- 4- 4- 5- 7
0.003 60.028 7
r PID: sar 100 mak50 detik, hal ilai Kp tinggn untuk mensebesar 1000dari pada pan untuk mensebesar 100besar 710 dKp, Dapat m
Kp=1000 Ki=
aian PID ada
Tr Td 50 150 30 150 00 140 40 130 20 130 40 130 40 130 20 140 10 160 80 140 50 120
ka yang dibini terjadi k
gi (Reverenncapai 50% a0 maka wakpemakaian Kncapai 50% 00 dan Ki sdetik disebamenimbulkan
=0.5 Kd=0.02
alah sebagai b
butuhkan unkarena sifat Knsi 1000), Dadalah 150 d
ktu yang dibuKp sebesar
sebesar 130sebesar 0.5, abkan sifat n ketidakseta
8]
berikut:
ntuk mencapKp yang dap
Dan time deldetik. utuhkan unt100 yaitu 4
0 detik. Respon ya
dari Ki yaitabilan (Kare
39
pai pat lay
tuk 420
ang tu:
ena
4. Paunnadesissaa
yang mketika
secarayang sdiinginmaupu
Respo
denganadalahpanas,panas melaktertentlain.
Respo
ada saat Kp ntuk mencapamun waktu tik disebabk
stem yang bat ada perub
Rise Time menjadi refea respon terse
Dari hasil a umum parasignifikan tenkan. Perubaun Kd seper
on PID Terh
Tahap selan memberik
h panas dari, yaitu sumbgangguan.
kukan prosestu dari pem
on Plant Ope
berharga 10pai 100% be
yang dibutkan karena sberosilasi, mahan error.
(Tr) adalah erensi. Sedaebut mencap
pengujian kameter-paramerhadap keceahan respon rti pada data
hadap Gan
anjutnya unkan gangguai sumber yanber panas d
Dari pengus pengontrolanas yang d
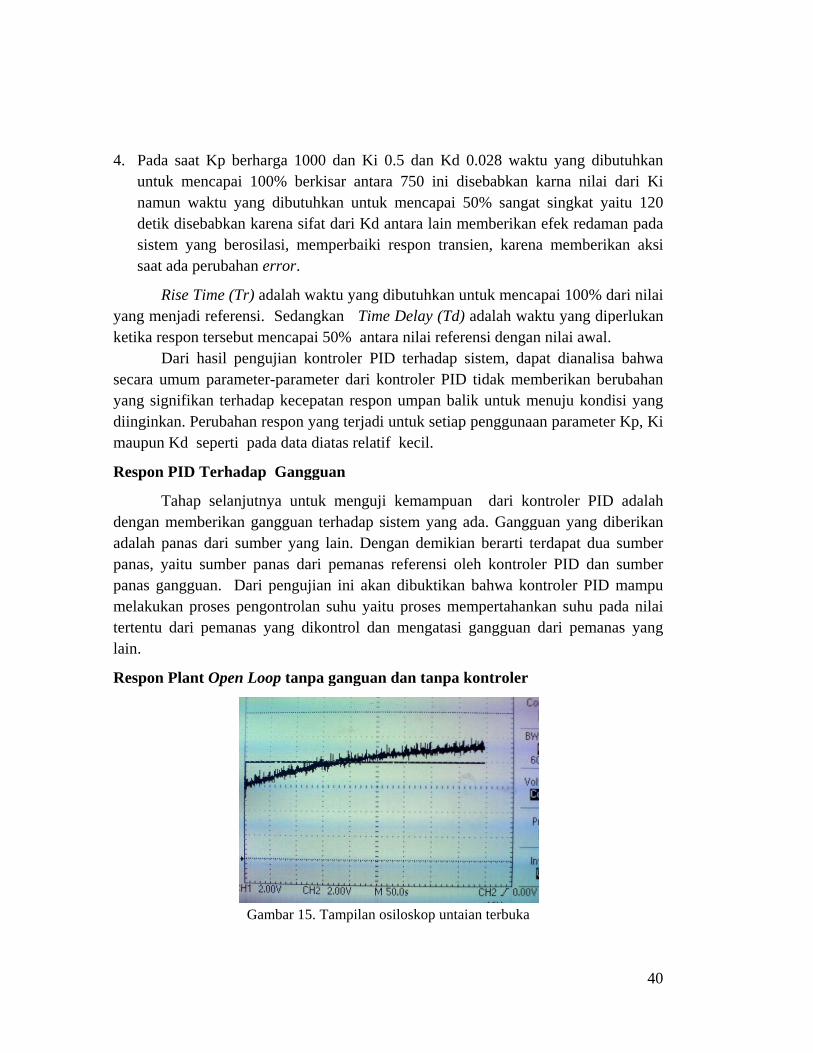
en Loop tan
Gambar 1
000 dan Ki erkisar antatuhkan untukifat dari Kd
memperbaiki
waktu yang angkan Timpai 50% antakontroler PImeter dari kepatan respoyang terjadi
a diatas relat
gguan
ntuk mengujan terhadap sng lain. Den
dari pemanasujian ini akalan suhu yaidikontrol da
npa ganguan
5. Tampilan o
0.5 dan Kdara 750 ini k mencapai antara lain
i respon tran
dibutuhkan me Delay (Tdara nilai refeID terhadapkontroler PIDon umpan bai untuk setiatif kecil.
ji kemampusistem yangngan demikis referensi oan dibuktikaitu proses man mengatas
n dan tanpa
osiloskop unt
d 0.028 wakdisebabkan 50% sanga
memberikannsien, karen
untuk mencd) adalah waerensi dengap sistem, dapD tidak memalik untuk map pengguna
uan dari kog ada. Ganggian berarti toleh kontrolan bahwa komempertahansi gangguan
a kontroler
taian terbuka
ktu yang dibkarna nilai
at singkat yn efek redamna memberik
capai 100% daktu yang dipan nilai awalpat dianalisamberikan be
menuju kondan paramete
ontroler PIDguan yang dterdapat dualer PID danontroler PIDnkan suhu pa
dari peman
40
butuhkan dari Ki
aitu 120 man pada kan aksi
dari nilai perlukan . a bahwa erubahan disi yang er Kp, Ki
D adalah diberikan a sumber n sumber D mampu
ada nilai nas yang
R
s
wKgplgs
K
Respon Plan
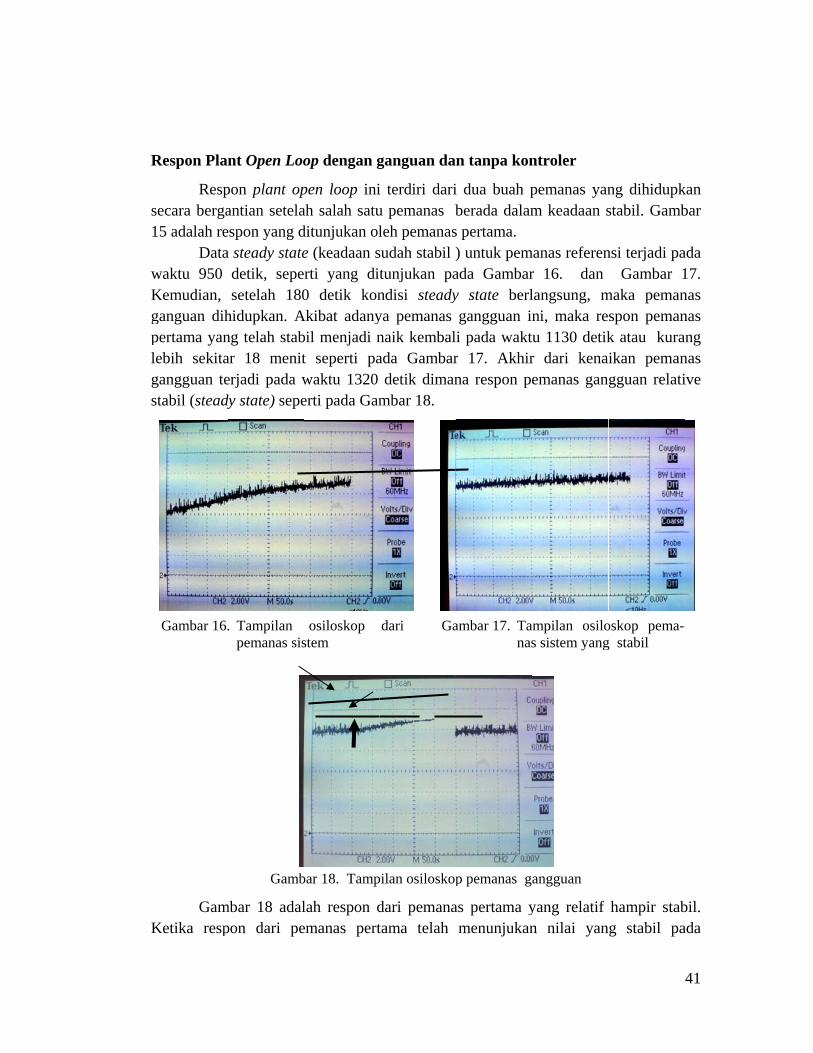
Respsecara berga15 adalah re
Datawaktu 950 Kemudian, ganguan dihpertama yanlebih sekitagangguan testabil (steady
GamKetika resp
Gambar 16.
nt Open Loo
pon plant opantian setelaespon yang da steady state
detik, sepesetelah 180
hidupkan. Ang telah stabar 18 meniterjadi pada wdy state) sepe
Gamb
mbar 18 adalpon dari pe
. Tampilan pemanas sis
op dengan g
pen loop iniah salah satuditunjukan ole (keadaan srti yang dit0 detik kon
Akibat adanybil menjadi nt seperti pawaktu 1320 erti pada Gam
bar 18. Tamp
lah respon demanas pert
osiloskop stem
ganguan dan
i terdiri dariu pemanas bleh pemanassudah stabil )tunjukan pandisi steadyya pemanas naik kembalada Gambar
detik dimanmbar 18.
ilan osiloskop
dari pemanatama telah
dari Ga
n tanpa kon
i dua buah pberada dalam
s pertama. ) untuk pemada Gambary state berlgangguan ini pada waktur 17. Akhirna respon pe
p pemanas g
as pertama ymenunjukan
ambar 17. Tanas
ntroler
pemanas yanm keadaan s
manas referenr 16. dan langsung, mni, maka reu 1130 detikr dari kenaemanas gan
angguan
yang relatif n nilai yan
mpilan osilos sistem yang
ng dihidupkstabil. Gamb
nsi terjadi pa Gambar 1
maka pemanspon pemank atau kuraikan pemangguan relati
hampir stabng stabil pa
oskop pema-g stabil
41
kan bar
ada 17. nas nas ang nas ive
bil. ada
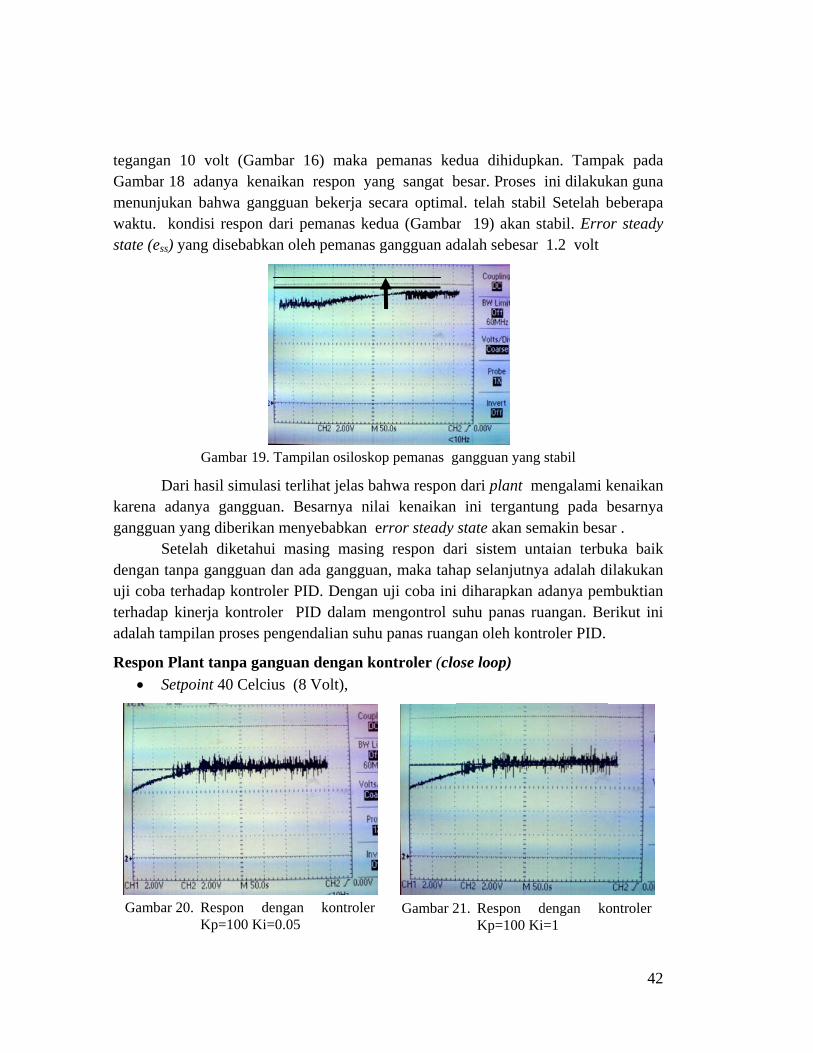
tegangGambmenunwaktustate (
karenagangg denganuji cobterhadadalah
Respo•
Gam
gan 10 voltar 18 adanynjukan bahw
u. kondisi re(ess) yang dis
Gam
Dari hasil a adanya gauan yang dib
Setelah din tanpa gangba terhadap
dap kinerja kh tampilan pr
on Plant tanSetpoint 40
mbar 20. RespKp=1
t (Gambar ya kenaikanwa gangguanespon dari psebabkan ole
mbar 19. Tamp
simulasi terlangguan. Bberikan meniketahui masgguan dan akontroler PI
kontroler Proses pengen
npa ganguan0 Celcius (8
pon dengan 100 Ki=0.05
16) maka pn respon yann bekerja sepemanas kedeh pemanas g
pilan osilosko
lihat jelas baesarnya nila
nyebabkan esing masing
ada gangguanID. Dengan ID dalam mndalian suhu
n dengan ko8 Volt),
kontroler
pemanas keng sangat b
ecara optimadua (Gambagangguan ad
op pemanas g
ahwa responai kenaikan error steady g respon dan, maka tahuji coba ini
mengontrol su panas ruang
ontroler (clo
Gambar 2
dua dihidupbesar. Prosesal. telah stabr 19) akan dalah sebesa
gangguan yan
dari plant mini tergant
state akan sari sistem uap selanjutni diharapkansuhu panas rgan oleh kon
ose loop)
21. Respon Kp=100 K
pkan. Tamps ini dilakukbil Setelah bstabil. Erro
ar 1.2 volt
ng stabil
mengalami ktung pada bemakin besa
untaian terbunya adalah dn adanya pemruangan. Bentroler PID.
dengan koKi=1
42
pak pada kan guna beberapa or steady
kenaikan besarnya ar . uka baik ilakukan
mbuktian erikut ini
ontroler
R
mydg
pg5
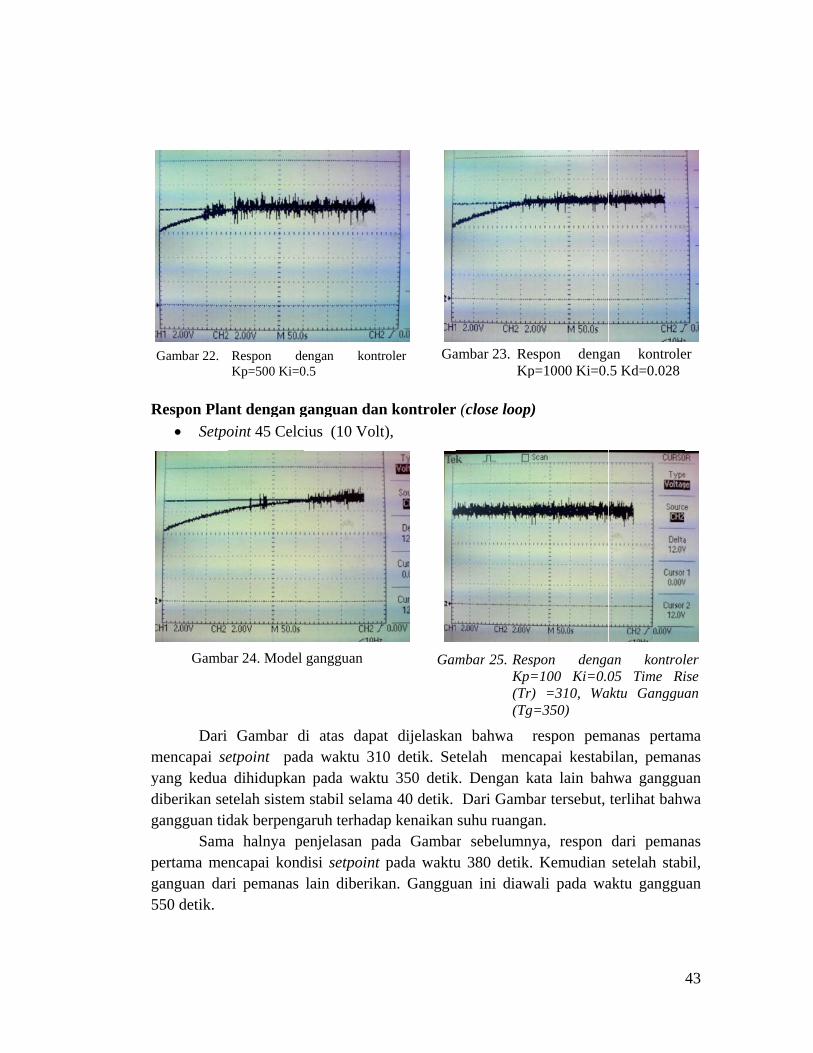
Respon Plan• Setpo
Dari
mencapai seyang kedua diberikan segangguan tid
Samapertama menganguan dar550 detik.
Gambar 22.
Gamba
nt dengan goint 45 Celc
Gambar detpoint pad
dihidupkanetelah sistemdak berpenga halnya pencapai kondri pemanas
Respon deKp=500 Ki=0
ar 24. Model
ganguan danius (10 Volt
di atas dapada waktu 31n pada wakt
m stabil selamaruh terhadaenjelasan padisi setpoint lain diberik
engan kont0.5
gangguan
n kontrolert),
at dijelaskan10 detik. Setu 350 detikma 40 detik. ap kenaikan ada Gambapada waktu
kan. Ganggu
troler Ga
Gam
(close loop)
n bahwa telah menc
k. Dengan k Dari Gambsuhu ruangar sebelumnyu 380 detik.uan ini diaw
ambar 23. ReKp
mbar 25. RespKp=(Tr)(Tg
)
respon pemcapai kestabkata lain bahbar tersebut, an. ya, respon Kemudian
wali pada wa
espon dengap=1000 Ki=0.
spon denga=100 Ki=0.0) =310, Wa
g=350)
manas pertambilan, pemanhwa gangguterlihat bahw
dari pemansetelah stab
aktu ganggu
an kontrole.5 Kd=0.028
an kontrol05 Time Ri
aktu Ganggu
43
ma nas uan wa
nas bil, uan
er
ler ise an
44
(a) (b)
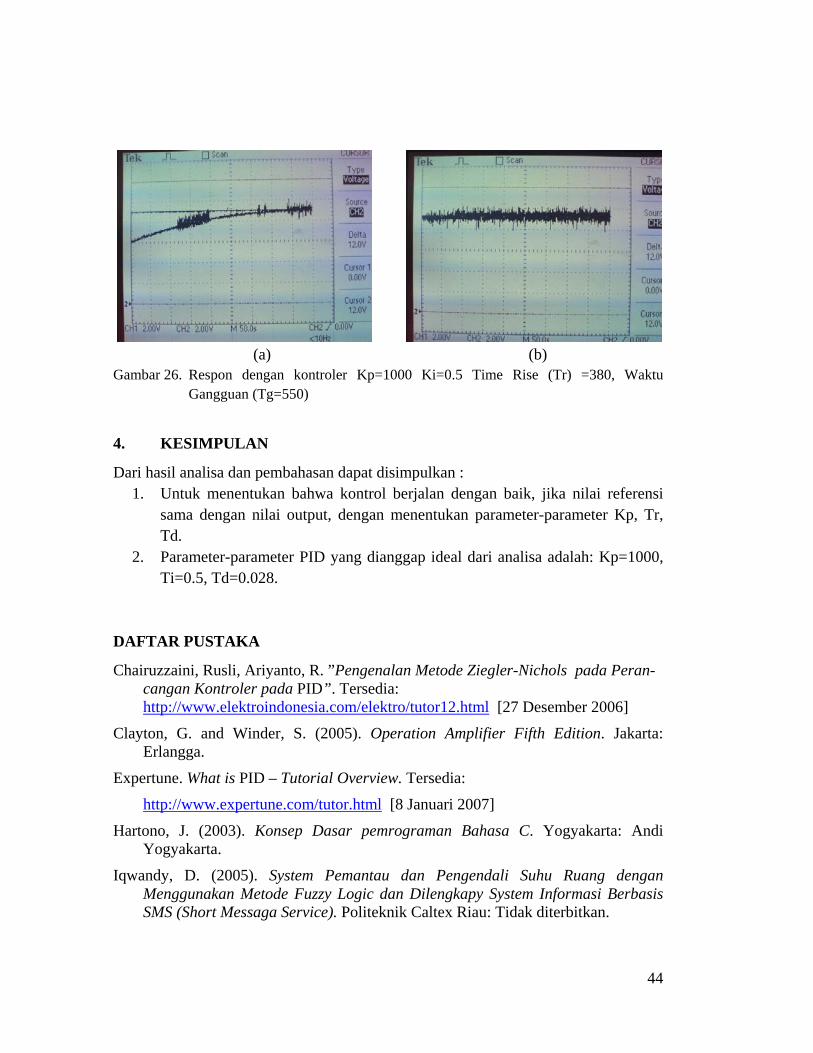
Gambar 26. Respon dengan kontroler Kp=1000 Ki=0.5 Time Rise (Tr) =380, Waktu Gangguan (Tg=550)
4. KESIMPULAN
Dari hasil analisa dan pembahasan dapat disimpulkan : 1. Untuk menentukan bahwa kontrol berjalan dengan baik, jika nilai referensi
sama dengan nilai output, dengan menentukan parameter-parameter Kp, Tr, Td.
2. Parameter-parameter PID yang dianggap ideal dari analisa adalah: Kp=1000, Ti=0.5, Td=0.028.
DAFTAR PUSTAKA
Chairuzzaini, Rusli, Ariyanto, R. ”Pengenalan Metode Ziegler-Nichols pada Peran-cangan Kontroler pada PID”. Tersedia: http://www.elektroindonesia.com/elektro/tutor12.html [27 Desember 2006]
Clayton, G. and Winder, S. (2005). Operation Amplifier Fifth Edition. Jakarta: Erlangga.
Expertune. What is PID – Tutorial Overview. Tersedia:
http://www.expertune.com/tutor.html [8 Januari 2007]
Hartono, J. (2003). Konsep Dasar pemrograman Bahasa C. Yogyakarta: Andi Yogyakarta.
Iqwandy, D. (2005). System Pemantau dan Pengendali Suhu Ruang dengan Menggunakan Metode Fuzzy Logic dan Dilengkapy System Informasi Berbasis SMS (Short Messaga Service). Politeknik Caltex Riau: Tidak diterbitkan.

45
Jurelly, F. (2006). Kontrol Otomatis Kecepatan Putar Motor DC dengan PID. Politeknik Caltex Riau: Tidak diterbitkan.
Malvino, A. (2004). Prinsip-Prinsip Elektronika. Jakarta: Salemba Teknika.
Novita, S. (2004). Rangkaian Elektronika III. Politeknik Caltex Riau: Tidak diterbitkan.
Pitowarno, E. (2006). Robotika: Desain, Kontrol, dan Kecerdasan Buatan. Yogyakarta: Andi Yogyakarta.
Uyanto, S. (2001). Petunjuk Lengkap Pemrograman Komputer dengan Bahasa C. Jakarta: PT. Gramedia Widiasarana.
University of Michigan. Control Tutorial For Mathlab: PID Tutorial, Tersedia: http://www.engin.umich.edu/group/ctm/PID/PID.html [8 Januari 2007]
William, C.D.H. Controller Circuit. Tersedia: http://www.newton.ex.ac.uk/teaching/CDHW/Feedback/DIY-PID.html
[8 Januari 2007)




















